






Línguas
Páginas
Legal


SIMULACAO DAS MALHAS DE CONTROLE DE FREQUENCIA E TENSAO
DE UM GERADOR UTILIZANDO PSCAD
Raquel Mattoso
Projeto de Graduacao apresentado ao Corpo
Docente do Departamento de Engenharia
Eletrica da Escola Politecnica da Universidade
Federal do Rio de Janeiro, como parte dos
requisitos necessarios a obtencao do tıtulo de
Engenheiro Eletricista.
Orientador: Oumar Diene
Rio de Janeiro
Agosto de 2015
SIMULACAO DAS MALHAS DE CONTROLE DE FREQUENCIA E TENSAO
DE UM GERADOR UTILIZANDO PSCAD
Raquel Mattoso
PROJETO DE GRADUACAO SUBMETIDO AO CORPO DOCENTE
DO DEPARTAMENTO DE ENGENHARIA ELETRICA DA ESCOLA
POLITECNICA DA UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
COMO PARTE DOS REQUISITOS NECESSARIOS PARA A OBTENCAO DO
GRAU DE ENGENHEIRO ELETRICISTA.
Examinado por:
Prof. Oumar Diene, D.Sc.
Prof. Glauco Nery Taranto, Ph.D.
Prof. Marcos Vicente de Brito Moreira , D.Sc.
RIO DE JANEIRO, RJ – BRASIL
AGOSTO DE 2015

Mattoso, Raquel
Simulacao das malhas de controle de frequencia e tensao
de um gerador utilizando PSCAD / Raquel Mattoso. – Rio
de Janeiro: UFRJ/Escola Politecnica, 2015.
XVII, 46 p.: il.; 29, 7cm.
Orientador: Oumar Diene
Projeto de Graduacao – UFRJ/Escola Politecnica/
Departamento de Engenharia Eletrica, 2015.
Referencias Bibliograficas: p. 42 – 43.
1. Controle de Tensao. 2. Controle de Frequencia. I.
Diene, Oumar. II. Universidade Federal do Rio de Janeiro,
Escola Politecnica, Departamento de Engenharia Eletrica.
III. Simulacao das malhas de controle de frequencia e
tensao de um gerador utilizando PSCAD.
iii

Para Tania que sempre acreditou
em mim mesmo quando eu nao
acreditava mais. Obrigada por
tudo mae.
iv

O sonho mais difıcil e o realizavel. Aquele que depende de seu empenho e esforco
exclusivo. Aquele que se nao alcancado nao ha a quem culpar se nao a si proprio.
Porem, nao existe sonho mais prazeroso em ser realizado.
Raquel Mattoso
v

Agradecimentos
Primeiramente a Deus por todas as bencaos que proporcionou em minha vida ate
agora e por todas as que ainda virao. E tambem por ter permitido que eu conhecesse
todas as pessoas maravilhosas que serao mencionadas a seguir;
Aos meus pais e minha avo, Jose, Tania e Francisca, que sempre acreditaram e
lutaram por mim e me mantiveram em suas oracoes;
A Cıntia, a quem eu posso chamar de famılia, que ha tantos anos tem me apoiado,
ouvido minhas infindaveis reclamacoes e sendo minha amiga;
Ao Caue, Debora, Natan e Vanessa que foram meus companheiros no ınicio dessa
jornada. Obrigada por todos os bons momentos, pelas risadas necessarias quando
os momentos nao eram de muitos risos. Toda a sorte do mundo pra voces;
Ao Gab, que foi meu amigo quando eu mais precisei, que nao me permitiu desistir;
A Camila, que era definitivamente alguem que eu precisava conhecer, e a Lu
que foram minhas queridas companheiras de alojamento e me ajudaram a manter a
sanidade longe de casa;
A Thamara e sua famılia que abriram a porta de sua casa e sempre foram muito
amaveis comigo;
A Katia que sempre foi muito solicita a mim, mesmo quando por muitas vezes
eu estava sendo apenas folgada;
A Lahis, uma das pessoas mais legais que eu conheco, que igualmente abriu a
porta de sua casa de modo que eu conhecesse sua incrıvel famılia que mora no meu
coracao;
A Mari, quem eu nunca pensei que seria tao importante pra mim, que esteve nes-
ses ultimos perıodos de graduacao sendo paciente e amiga, afinal nos nos entendemos
na nossa propria maneira grosseria de ser;
A Maynara, que possuiu uma quantidade enorme de atividades diarias e mesmo
assim sempre foi uma linda comigo, me ajudando nos mais variados problemas que
a engenharia me trouxe, sendo companheira ideal de laboratorios. Manteremos essa
amizade por mais distante que Itaipu ou Pequim possa parecer de Petropolis;
Ao queridıssimo Nıcolas, que sempre foi pacientıssimo comigo me tirando as
mesmas duvidas em Matlab e em Latex, durante meses;
Aos meus amigos de longa data e a todos os conquistados durante a faculdade
vi
que me ajudaram na correria do dia a dia, que sanaram minhas duvidas, que foram
companheiros de LASP e Burguesao e que me ensinaram que apesar de sermos fortes
sozinhos, juntos somos invencıveis. Estes serao levados por toda a vida;
Ao professor Angelo Marcio que me deu a primeira oportunidade em iniciacao
cientıfica;
A todos os professores do Departamento de Engenharia Eletrica da Poli que
compartilharam seus conhecimentos e experiencias de vida;
Em especial ao professor Oumar Diene por toda a paciencia e por me permitir
fazer parte deste projeto e me orientar;
A todos voces o meu mais sincero muito obrigada;
Por fim, quero agradecer a Universidade Federal do Rio de Janeiro (UFRJ),
ao Conselho Nacional de Pesquisa(CNPq), a Fundacao Coordenacao de Projetos,
Pesquisas e Estudos Tecnologicos(COPPETEC) e a Pro-Reitoria de Pos-Graduacao
e Pesquisa(PR2) pelo auxılio financeiro durante a graduacao e na realizacao deste
trabalho.
vii

Resumo do Projeto de Graduacao apresentado a Escola Politecnica/UFRJ como
parte dos requisitos necessarios para a obtencao do grau de Engenheiro Eletricista
SIMULACAO DAS MALHAS DE CONTROLE DE FREQUENCIA E TENSAO
DE UM GERADOR UTILIZANDO PSCAD
Raquel Mattoso
Agosto/2015
Orientador: Oumar Diene
Departamento: Engenharia Eletrica
Com o objetivo de mostrar a importancia do controle de tensao e frequencia
do sistema eletrico, este trabalho propoe o projeto de controladores proporcional e
integral que sejam capazes de controlar tensao e frequencia mesmo quando ha um
acrescimo instantaneo de carga.
Para realizar o projeto dos controladores os equipamentos sao modelados atraves
de funcoes de transferencia. Para determinar os ganhos que tornam o sistema BIBO
estavel, foram utilizados o criterio de estabilidade de Routh-Hurvitz e o metodo do
Lugar das Raızes.
Todas as simulacoes foram realizadas no programa computacional PSCAD,
utilizando-se de seus blocos de transferencia, bem como de um gerador sıncrono.
viii

Abstract of Graduation Project presented to POLI/UFRJ as a partial fulfillment of
the requirements for the degree of Electrical Engineer
SIMULATION OF FREQUENCY AND VOLTAGE CONTROL SYSTEMS OF
ONE GENERATOR USING PSCAD
Raquel Mattoso
August/2015
Advisor: Oumar Diene
Department: Electrical Engineering
In order to show the importance of voltage and frequency control of electrical
system , this work proposes the project of proportional and integral controllers that
are capable of controlling voltage and frequency even when there is a disturbance.
For the design of the controllers, the equipments are modeled through transfers
functions. In order to determine the controllers gains that turn the system BIBO
stable, we use the Routh - Hurvitz criteria of stability and the Root Locus method.
All simulations were performed in the computer program PSCAD , using its
transfer blocks, as well as a synchronous generator .
ix

Sumario
Lista de Figuras xii
Lista de Tabelas xiv
Lista de Sımbolos xv
Lista de Abreviaturas xvii
1 Introducao 1
1.1 Motivacao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2 Objetivo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.3 Estrutura do projeto . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2 Fundamentos Teoricos para Sistemas de Potencia 5
2.1 Maquinas Eletricas CA . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2.1.1 Torque induzido . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2.1.2 Tensao induzida . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.1.3 Campo girante e frequencia eletrica . . . . . . . . . . . . . . . 8
2.1.4 Geradores Sıncronos . . . . . . . . . . . . . . . . . . . . . . . 9
2.2 Usina Hidreletrica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.2.1 Turbina Hidraulica . . . . . . . . . . . . . . . . . . . . . . . . 12
2.2.2 Distribuidor . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
2.3 Variacao de Carga . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
2.4 Modelos de linhas de transmissao . . . . . . . . . . . . . . . . . . . . 17
2.4.1 Modelo de linha curta . . . . . . . . . . . . . . . . . . . . . . 17
2.4.2 Modelo de linha media - π − nominal . . . . . . . . . . . . . . 18
3 Modelos de controle de Tensao e Frequencia 20
3.1 Controle de Tensao . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
3.1.1 Controlador PI . . . . . . . . . . . . . . . . . . . . . . . . . . 21
3.2 Controle de Frequencia . . . . . . . . . . . . . . . . . . . . . . . . . . 23
3.2.1 Controlador PI . . . . . . . . . . . . . . . . . . . . . . . . . . 24
x

4 Simulacoes e Resultados 27
4.1 Com diagrama de blocos . . . . . . . . . . . . . . . . . . . . . . . . . 27
4.2 Com gerador sıncrono do PSCAD . . . . . . . . . . . . . . . . . . . . 32
4.2.1 Entrada de uma carga no sistema . . . . . . . . . . . . . . . . 34
4.2.2 Entrada de duas cargas no sistema . . . . . . . . . . . . . . . 37
5 Conclusoes 40
Referencias Bibliograficas 42
A Regulacao de Velocidade em Geradores Sıncronos 44
A.1 Regulacao Primaria . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
A.2 Regulacao Secundaria . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
A.2.1 Erro de controle de area . . . . . . . . . . . . . . . . . . . . . 46
xi
Lista de Figuras
1.1 Modelo basico de controle de frequencia e tensao em um gerador
sıncrono . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.2 Caso estudado . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2.1 Tensao induzida e campo magnetico produzida por ima . . . . . . . . 6
2.2 Maquina trifasica com rotor cilındrico . . . . . . . . . . . . . . . . . . 10
2.3 Circuito equivalente de um gerador sıncrono . . . . . . . . . . . . . . 11
2.4 Diagrama de blocos de uma Turbina hidraulica e um compensador de
transitorio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2.5 Modelo de Gerador suprindo carga unica . . . . . . . . . . . . . . . . 15
2.6 Diagrama de Blocos que representa um gerador sıncrono para estudo
de estabilidade de frequencia . . . . . . . . . . . . . . . . . . . . . . . 17
2.7 Modelo de linha curta . . . . . . . . . . . . . . . . . . . . . . . . . . 18
2.8 Modelo de linha media . . . . . . . . . . . . . . . . . . . . . . . . . . 18
3.1 Modelo para controle de tensao . . . . . . . . . . . . . . . . . . . . . 20
3.2 Controlador PI . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
3.3 Lugar das Raızes da planta com controlador de tensao . . . . . . . . 23
3.4 Modelo para controle de frequencia . . . . . . . . . . . . . . . . . . . 24
3.5 Lugar das Raızes da planta com controlador de frequencia . . . . . . 25
4.1 Simulacao de diagrama de blocos para tensao . . . . . . . . . . . . . 28
4.2 Simulacao de diagrama de blocos para tensao . . . . . . . . . . . . . 29
4.3 Simulacao de diagrama de blocos para tensao, zoom. . . . . . . . . . 29
4.4 Simulacao de diagrama de blocos para frequencia . . . . . . . . . . . 30
4.5 Simulacao de diagrama de blocos para frequencia . . . . . . . . . . . 31
4.6 Simulacao de diagrama de blocos para frequencia, zoom. . . . . . . . 31
4.7 Simulacao no PSCAD . . . . . . . . . . . . . . . . . . . . . . . . . . 33
4.8 Resultado de Controle de tensao para uma carga . . . . . . . . . . . . 34
4.9 Resultado de Controle de tensao para uma carga, zoom . . . . . . . . 34
4.10 Resultado de Controle de frequencia para uma carga . . . . . . . . . 35
4.11 Resultado de Controle de frequencia para uma carga, zoom . . . . . . 35
xii

4.12 Comparacao de resposta do sistema sem e com controle de tensao
para entrada de uma carga . . . . . . . . . . . . . . . . . . . . . . . . 36
4.13 Comparacao de resposta do sistema sem e com controle de frequencia
para entrada de uma carga . . . . . . . . . . . . . . . . . . . . . . . . 36
4.14 Resultado de Controle de tensao para duas cargas . . . . . . . . . . . 37
4.15 Resultado de Controle de tensao para duas cargas, zoom . . . . . . . 37
4.16 Resultado de Controle de frequencia para duas cargas . . . . . . . . . 38
4.17 Resultado de Controle de frequencia para duas cargas, zoom . . . . . 38
4.18 Comparacao de resposta do sistema sem e com controle de tensao . . 39
4.19 Comparacao de resposta do sistema sem e com controle de frequencia 39
A.1 Diagrama de blocos para regulacao primariaa de velocidade . . . . . . 44
A.2 Diagrama de blocos reduzido para regulacao primaria de velocidade . 45
A.3 Diagrama de blocos de um governor reduzido com referencia de carga 45
A.4 Regulacao primaria de frequencia . . . . . . . . . . . . . . . . . . . . 45
A.5 Regulacao primaria e secundaria de frequencia . . . . . . . . . . . . . 46
xiii

Lista de Tabelas
3.1 Valores das constantes para Regulacao de Tensao . . . . . . . . . . . 22
3.2 Valores dos ganhos do controlador PI para tensao . . . . . . . . . . . 22
3.3 Valores das constantes para Regulacao de frequencia . . . . . . . . . 24
3.4 Valores dos ganhos do controlador PI para frequencia . . . . . . . . . 25
4.1 Valores Nominais dos Componentes da Simulacao . . . . . . . . . . . 32
xiv

Lista de Sımbolos
D Coeficiente de amortecimento, p. 17
J Momento de Inercia, p. 17
KA Constante proporcional do amplificador, p. 22
KE Constante da Excitatriz, p. 22
KG Constante proporcional do gerador, p. 22
KIf Ganho integral para controle de frequencia, p. 25
KIt Ganho integral para controle de tensao, p. 22
Kpf Ganho porporcional para controle de frequencia, p. 25
Kpt Ganho porporcional para controle de tensao, p. 22
M1 Momento de Inercia do Gerador, p. 24
Pe Potencia eletrica, p. 15
Pm Potencia mecanica, p. 15
Te Torque eletrico, p. 15
Tg Constante de tempo do distribuidor, p. 24
Tm Torque mecanico, p. 15
Tw Constate de tempo da agua, p. 24
TA Constante de tempo do amplificador, p. 22
TE Constante de tempo da Excitatriz, p. 22
TG Constante de tempo do gerador, p. 22
µ Permeabilidade, p. 7
xv

ω Velocidade de rotacao mecanica, p. 9
fse Frequencia no estator, p. 9
fsm Frequencia do campo magnetico do estator, p. 9
P polos de uma maquina, p. 9
xvi
Lista de Abreviaturas
CGH Centrais Geradoras Hidreletricas, p. 12
FF Flat Frequency, p. 46
FT Funcao de Transferencia, p. 14
PCH Pequenas Centrais Hidreletricas, p. 12
SEB Sistema Eletrico Brasileiro, p. 2
SIN Sistema Interligado Nacional, p. 2
STATCOM Compensador Sıncrono Estatico, p. 2
TLB Tie Line Bias, p. 46
UHE Usina Hidreletrica, p. 12
xvii

Capıtulo 1
Introducao
1.1 Motivacao
A energia eletrica e considerada hoje necessidade basica de sobrevivencia ja que
a utilizamos para as mais variadas situacoes; como por exemplo ligar aparelhos
eletronicos, eletrodomesticos, carregar celulares e etc. Deste modo, qualquer curto
prazo de tempo sem a energia eletrica e considerado inconveniente, de maneira
que existe um interesse de que a energia fornecida nao sofra interrupcoes. Com o
crescimento do consumo de energia eletrica, em especial no Brasil, esse interesse e
ainda maior. Infelizmente, e inviavel construir um sistema que nao possua falhas,
seja por seu custo ou pela impossibilidade de evitar falhas completamente.
O sistema eletrico engloba tudo que e utilizado na geracao e no “transporte” da
energia eletrica desde a sua geracao ate o consumidor final, e e constituıdo por uma
serie de equipamentos. Esses equipamentos estao sujeitos a falhas e para solucionar
este problema em especıfico utilizamo-nos de sistemas de protecao e manutencao.
Entretanto, nao sao apenas falhas em maquinas e perdas de linhas por curtos circui-
tos que ocasionam as chamadas quedas de luz. O aumento brusco de carga tambem
pode proporcionar tal fenomeno. Diariamente ocorrem pequenos aumentos bruscos
de carga, especialmente no chamado horario de pico, entre dezoito e vinte horas.
Devido a presenca destes aumentos de carga, atualmente, o fornecimento de uma
energia de qualidade e um dos principais desafios do crescimento da oferta de energia
eletrica. Nesse sentido, o estudo dos controles de tensao e frequencia e de extrema
importancia.
1.2 Objetivo
Este trabalho, visa o estudo dos controles de tensao e frequencia de um sistema
de potencia radial, com a presenca de um gerador e duas cargas que entram brus-
1

camente no sistema. Os modelos de controle foram desenvolvidos separadamente e
posteriormente agrupados em um mesmo gerador.
O objetivo destes controles e corrigir variacoes de tensao e frequencia mesmo
quando do aumento de carga supracitado. Ha um modelo para controle de frequencia
que e de ampla utilizacao nas maquinas sıncronas do sistema de geracao brasileiro,
entretanto na realizacao deste trabalho optou-se pela modelagem com o uso de um
controlador PI; tanto para o controle de frequencia quanto para o de tensao. A
representacao desses controles esta na Figura 1.1. O estudo foi embasado em um
modelo padrao de maquina sıncrona e foi utilizado o conhecimento a respeito dos
controles de tensao e frequencia baseados na presenca de cargas na rede.
Figura 1.1: Modelo basico de controle de frequencia e tensao em um gerador sıncrono
Partindo do princıpio que o Sistema Eletrico Brasileiro (SEB) e interligado (SIN)
pode-se afirmar que a frequencia deste sistema e unica. Ou seja, se a carga varia
em qualquer lugar do sistema eletrico, a frequencia ira mudar em todo esse sistema,
dependendo da quantidade de variacao, essa mudanca na frequencia pode ser maior
ou menor. A tensao funciona de forma um pouco diferente, proximo ao aumento de
carga ha afundamento de tensao pontual, para sanar este problema sao utilizados
equipamentos de eletronica de potencia (STATCOM) ou equipamentos estaticos
shunt, como capacitores, de modo que essa tensao seja regulada.
Entretanto, ha interesse que a tensao terminal do gerador esteja dentro de certos
limites e assim como no caso da frequencia, essa tensao e controlada diretamente
no gerador. Conclui-se assim a justificava da utilizacao dos controles de tensao
e frequencia diretamente na maquina sıncrona. Sabe-se que ha diferentes tipos
de geracao de energia eletrica. Entretanto, pela matriz energetica brasileira ser
amplamente hidroeletrica, focou-se este trabalho na modelagem de controle para
2

uma Usina Hidreletrica, ou seja, para geracao atraves de um gerador acoplado em
uma turbina hidraulica. Para cada tipo de Usina existe um tipo de controle especıfico
que pode funcionar de formas distintas.
Figura 1.2: Caso estudado
A Figura 1.2 apresenta o caso estudado neste trabalho. Como dito anteriormente,
e um sistema radial em que um gerador sıncrono acoplado ha uma turbina hidraulica
esta suprindo duas cargas ligadas a ele atraves de duas linhas de transmissao de
100km, cada.
1.3 Estrutura do projeto
Este trabalho esta estruturado da seguinte forma:
• Capıtulo 1 - Introducao
O capıtulo introdutorio mostra uma dimensao do assunto que sera tratado e dos
objetivos e caracterısticas do projeto em si.
• Capıtulo 2 - Fundamentos Teoricos
No capıtulo 2 e apresentada uma introducao sobre maquinas de corrente alter-
nada, em especial geradores sıncronos, modelos matematicos de geradores e turbinas
hidraulicas e tambem uma pequena discussao sobre variacao de carga e modelos de
linha de transmissao.
• Capıtulo 3 - Modelos de Controle de Tensao e Frequencia
Neste capıtulo serao abordados os modelos de controle de tensao e frequencia para
um gerador ligado a uma turbina hiraulica caracterizando uma Usina Hidreletrica.
• Capıtulo 4 - Simulacao e Resultados
3

Neste capıtulo sao apresentados a simulacao realizada bem como os resultados
obtidos.
• Capıtulo 5 - Conclusoes
Por fim, neste capıtulo, apresentam-se todas as conclusoes deste projeto de con-
clusao de curso.
4
Capıtulo 2
Fundamentos Teoricos para
Sistemas de Potencia
Um sistema eletrico de potencia e um conjunto de uma serie de equipamentos:
maquinas eletricas, transformadores, linhas de transmissao, aparelhos estaticos e
de eletronica de potencia, etc. Para garantir o funcionamento apropriado desse
sistema eletrico algumas acoes sao necessarias. Os controles de tensao e frequencia
aparecem como uma dessas acoes. O controle de tensao e feito, inicialmente,
no proprio gerador. Entretanto, cabe dizer que tambem pode-se controlar valores
de tensao atraves de equipamentos estaticos ao longo das linhas de transmissao
aplicando energia reativa na rede eletrica. Por outro lado, o controle de frequencia
e feito unicamente nos geradores sıncronos, caso do Sistema Eletrico Brasileiro.
Para compreensao dos controles de tensao e frequencia e preciso entender o fun-
cionamento de uma maquina sıncrona e da variacao de carga que ocorre na rede
eletrica. Nas secoes seguintes serao apresentados os conceitos de maquinas eletricas
sıncronas e variacao de carga.
2.1 Maquinas Eletricas CA
Existem dois tipos de maquinas eletricas: de corrente alternada, CA, e de cor-
rente contınua, CC. Amplamente usadas no mundo, as maquinas eletricas que usam
corrente alternada, CA, sao de grande importancia, pois sao capazes de realizar
inumeras tarefas; desde o funcionamento de um ventilador ate a geracao de energia
eletrica. Tais maquinas podem ser de inducao ou sıncronas. Independentemente da
sua classificacao, o principio basico de funcionamento da maquina CA e o mesmo.
Para esse funcionamento, pode-se pensar em um ıma que produz um campo
magnetico constante, B. Neste campo magnetico insere-se uma espira em formato
retangular, Figura 2.1(a), de cobre. A Lei de Lenz afirma que o sentido da corrente
5

em um condutor e oposto ao da variacao do campo magnetico que a originou. Esta
corrente induz um novo campo magnetico e na presenca deste, e produzido um
torque induzido que faz com que a espira gire em uma velocidade ω, Figura 2.1(b)
o que produzira uma tensao induzida e0 [3].
(a) Espira de cobre (b) Campo Magnetico produzido por ima
Figura 2.1: Tensao induzida e campo magnetico produzida por ima
2.1.1 Torque induzido
A tensao induzida e0 foi encontrada, agora se faz necessario a definicao do torque τ
da maquina. Considerando ainda a espira da Figura 2.1(a) e que torque e o produto
entre forca aplicada e a distancia perpendicular ao ponto que a forca e aplicada,
admite-se que a equacao 2.1 e uma forma generica para o calculo de τ .
τ = Frsenθ → τ = irlBsenθ, (2.1)
em que ~F = i(~l × ~B).
E o valor do torque total para esta espira pode ser dado pela equacao 2.2:
τTotal = τab + τbc + τcd + τda, (2.2)
em que τab, τbc, τcd e τda sao, respectivamente, os torques induzidos nos lados
ab, bc, cd e da da espira quadrada da Figura 2.1(a).
Na Figura 2.1(b) a corrente esta entrando na pagina, no segmento a, b e saindo
da pagina no segmento c, d. Para o segmento b, c, τbc e igual a zero, pois r e l sao
paralelos fazendo o angulo θbc = 0. O mesmo acontece para o segmento d, a no qual
o angulo θda = 0, de modo que τda = 0. Para os segmentos a, b e c, d os valores de
torque sao respectivamente, τab = irlBsenθab e τcd = irlBsenθcd. Ambos estao em
sentido horario e os angulos θab e θcd sao iguais. Assim, o torque total e dado pela
equacao 2.3:
6

τTotal = 2irlBsenθ (2.3)
Em uma maquina eletrica real, a corrente i que atravessa a espira, tambem
produz um campo magnetico Besp que e perpendicular a direcao de i e definido pela
equacao 2.4.
Besp =µi
G, (2.4)
em que:
µ e a permeabilidade do material,
G e um fator que depende da geometria da espira,
Explicitando, a corrente i e dada por:
i =GBesp
µ(2.5)
Como visto, o valor 2rl corresponde a area A da espira, e fazendo as substituicoes
acima mencionadas na equacao 2.3, tem-se:
τTotal =AG
µBespBssenθ (2.6)
Pode-se ainda substituir a fracao AGµ
por uma constante k e como θ sera sempre
90o, senθ = 1, de modo a chegar a equacao final de torque [3]:
τTotal = k ~Besp × ~B (2.7)
2.1.2 Tensao induzida
O calculo da tensao em cada lado da espira retangular da Figura 2.1(a) e dado
pela equacao 2.8:
e = (v ×B).l, (2.8)
em que:
v e a velocidade tangencial da espira,
B e o campo magnetico produzido pelo ıma,
l e o comprimento da espira,
e que a tensao induzida e0 e a soma destas tensoes, como mostra a equacao 2.9:
e0 = eba + ecb + edc + ead. (2.9)
De acordo com a equacao 2.8, sao encontrados os valores teoricos para as tensoes
7

em cada lado da espira. Nos casos de ecb e ead a quantidade (~v× ~B) e perpendicular
ao vetor comprimento ~l de modo que seu produto interno e igual a zero, (~v× ~B).~l = 0.
Por outro lado as tensoes induzidas, eba e edc, sao diferentes de zero, uma vez que o
vetor ( ~v ×B) e paralela ao vetor ~l fazendo com que o produto escalar seja igual a
vBlsenθab e vBlsenθcd, respectivamente.
Usando a propriedade trigonometrica senθ = sen(180o − θ) e substituindo os
valores acima encontrados na equacao 2.9, obtem-se a tensao induzida e0 como esta
na equacao 2.10.
e0 = 2vBlsenθ (2.10)
Em uma maquina eletrica real, o angulo θ e a velocidade v irao variar com o
tempo. Suas relacoes com a velocidade angular, ω, sao mostradas a seguir:
θ = ωt (2.11)
v = rω (2.12)
Substituindo as equacoes 2.11 e 2.12 em 2.10, e que o fluxo maximo (φmax) sera
dado quando a espira e perpendicular ao campo magnetico ~B, pode-se concluir que
este fluxo maximo e numericamente igual ao produto A.B. Sendo assim, a tensao
induzida final e:
e0 = φmaxωsenωt (2.13)
2.1.3 Campo girante e frequencia eletrica
Em uma maquina CA existem duas partes principais. Uma estacionaria, chamada
tambem de estator, e a uma outra rotorica, conhecida como rotor da maquina.
Considerado ainda a Figura 2.1(b), substitui-se o ıma por espiras trifasicas que
agora sao as responsaveis pelo campo magnetico e no lugar da espira retangular
entram as espiras do rotor. Sabe-se que existe um campo magnetico associado ao
rotor da maquina ~Besp e um outro campo ~B associado ao estator da maquina. Deste
modo, um campo e induzido no rotor que gira para que seu proprio campo se alinhe
com o campo magnetico do estator, de acordo com o fenomeno fısico explicado pela
Lei de Lenz [4] e pelo princıpio de conservacao de energia.
O principio fundamental de funcionamento de uma maquina CA e que se existem
tres correntes defasadas em 120o eletricos que passam por tres bobinas espacadas
em 120o mecanicos, e induzem um campo magnetico. Este campo magnetico, H,
e girante e constante. O campo magnetico do estator e girante e o rotor gira pro-
8

curando sempre se alinhar com esse campo de modo que a maquina funcione. A
densidade de fluxo magnetico referente a este campo e dada pela equacao 2.14 [3].
B = µH (2.14)
No caso mais simples de maquina, tem-se tres bobinas no estator da maquina. Como
cada bobina possui dois polos, P , (norte e sul) diz-se que esta e uma maquina de
dois polos.
A direcao do campo magnetico girante pode ser representado por dois polos:
norte, onde o fluxo magnetico sai do estator, e sul, onde o fluxo magnetico entra no
estator. A cada ciclo da corrente aplicada, os polos completam uma volta mecanica
em torno do estator. Entao, a velocidade de rotacao mecanica do campo magnetico
em radianos por segundo e igual a frequencia eletrica em Hertz. Ou seja, fsm =
ωsm = ωse = fse, em que os ındices “se′′ e “sm′′ sao referentes as correntes no estator
e ao campo magnetico do estator, respectivamente [3].
Para o caso de uma maquina com quatro polos, para cada ciclo eletrico os polos
giram mecanicamente em volta do estator apenas meia vez, fazendo com que a
relacao entre os angulos mecanico e eletrico para essa maquina seja:
θse = 2θsm (2.15)
Por conseguinte as relacoes entre frequencia eletrica e mecanica entao sao da-
das por: fse = 2fsm e ωse = 2ωsm. A partir disto encontra-se uma relacao entre
frequencia, numero de polos da maquina e velocidade do campo magnetico [3]:
θse =P
2θsm (2.16)
fse =P
2fsm (2.17)
ωse =P
2ωsm (2.18)
2.1.4 Geradores Sıncronos
Geradores sıncronos sao maquinas CA capazes de transformar energia mecanica
em energia eletrica. Assim como outras maquinas CA, possuem duas estruturas
ferromagneticas: uma estacionaria que e essencialmente um cilindro oco, chamado
de estator ou armadura; e uma outra que e o rotor, montado dentro do espaco oco
do estator, como pode ser observado na Figura 2.2 [5].
9

Figura 2.2: Maquina trifasica com rotor cilındrico
O campo magnetico e gerado pelo enrolamento de armadura que localiza-se no
estator. O rotor pode ser um ıma permanente ou ser composto por enrolamentos de
campo que excitados por uma corrente contınua produzem um eletroıma. O rotor e
ligado e movido por um prime mover, que pode ser uma turbina hidraulica ou a vapor
[5], ambos casos serao estudados neste trabalho. Este movimento gera um campo
magnetico girante na maquina, que por sua vez induz tensao nos enrolamentos do
estator do gerador.
Tensao gerada
A tensao interna gerada (Ea) em um gerador sıncrono depende do fluxo (φ) na
maquina, da frequencia (f) ou velocidade de rotacao (ω) e da construcao da propria
maquina. A tensao gerada pode ser associada a equacao 2.13 vista anteriormente.
Sendo assim, pode-se definir a magnitude da tensao gerada como [3]:
Ea = Kφω, (2.19)
em que:
K e a constante de construcao da maquina.
Condicoes para K:
se ω e expressa em radianos eletricos por segundo entao: K = N√2;
se ω for expressa em radianos mecanicos por segundos, K = NP√2
.
N e o numero de espiras presentes nas bobinas do rotor e ω pode ser substituıdo
por 2πf e assim tem-se relacao entre a tensao gerada e a frequencia.
O interesse deste trabalho esta na tensao terminal, Vt, do gerador. Segundo a
Figura 2.3 pode-se associar Vt a tensao gerada interna, Ea, pela equacao 2.20:
Vt = Ea − (Ra + jXs)Ia (2.20)
10

Figura 2.3: Circuito equivalente de um gerador sıncrono
Rotacao e frequencia
Para ser considerado sıncrono e preciso que a frequencia produzida de um gerador
esteja sincronizada com a velocidade de seu rotor. A relacao entre a rotacao do
campo magnetico do rotor com a frequencia eletrica do rotor e dada pela equacao
2.21 [3].
f =nmP
120, (2.21)
em que:
f = frequencia em Hz;
nm = velocidade mecanica do campo magnetico em rot/min;
P = numero de polos.
No estudo de sistemas de potencia e muito utilizado sistema por unidade, pu.
Este sistema consiste em transformar quantidades eletricas em quantidades pu
atraves da divisao da quantidade pela base de interesse escolhida para cada me-
dida. Por exemplo, considera-se que a corrente base (Ibase) de um determinado
sistema e 2A. Neste mesmo sistema uma corrente de 1A pode ser dita como sendo
de 0.5pu.
Em sistemas pu, a frequencia e numericamente igual a velocidade angular da
maquina. Ou seja, desconsidera caracterısticas especificas da maquina, como numero
de polos.
2.2 Usina Hidreletrica
As Usinas Hidreletricas podem ser caracterizadas da seguinte maneira: o curso
normal de um determinado rio e interrompido atraves de uma barragem que provoca
a formacao de um reservatorio, e assim o potencial hidreletrico do rio e aproveitado.
A agua captada no reservatorio e conduzida ate a casa de forca atraves de canais,
11

tuneis e/ou condutos metalicos. Apos passar pela turbina hidraulica, na casa de
forca, a agua e restituıda ao leito natural do rio, atraves do canal de fuga.
Dessa forma, a potencia hidraulica e transformada em potencia mecanica quando
a agua passa pela turbina. No gerador, que tambem gira acoplado mecanicamente a
turbina, a potencia mecanica e transformada em potencia eletrica, que e transmitida
pelas linhas de transmissao ate o consumidor final. [6]
A capacidade hidreletrica instalada brasileira e estimada em cerca de 92 GW,
divididos em Usinas Hidreletricas(UHE), Centrais Geradoras Hidreletricas(CGH) e
Pequenas Centrais Hidreletricas(PCH) [7].
Figura 2.4: Diagrama de blocos de uma Turbina hidraulica e um compensador detransitorio
Na Figura 2.4 esta representado o funcionamento basico de uma Usina Hi-
dreletrica. Ha um conduto forcado de comprimento L, por onde a agua passa ate
chegar a turbina que esta no mesmo eixo que o gerador.
2.2.1 Turbina Hidraulica
A representacao para uma turbina hidraulica e baseada nas seguintes suposicoes
[8]:
1. A resistencia hidraulica e desprezıvel;
12

2. O conduto forcado nao aumenta de tamanho e a agua e incompressıvel;
3. A velocidade da agua varia diretamente com a abertura do distribuidor e com
a raiz quadrada do momento de inercia da maquina;
4. A potencia de saıda da turbina e proporcional ao produto entre momento de
inercia e volume do fluxo de agua
A velocidade da agua no conduto forcado e dada, de acordo com [8], por:
U = KuG√h, (2.22)
em que:
U e a velocidade da agua,
G e a posicao do distribuidor,
h e altura da queda d’agua,
Ku e uma constante de proporcionalidade.
Para pequenas variacoes em torno de um ponto de operacao, a variacao ∆U e
dada por:
∆U =∂U
∂h∆h+
∂U
∂G∆G (2.23)
Resolvendo-se as derivadas parciais e normalizando ao dividir por U0 =
KuG0
√h0, ou seja, linearizando[9] e [10] a equacao 2.23 obtem-se:
∆U =1
2∆h+ ∆G (2.24)
A potencia mecanica da turbina e proporcional ao produto entre pressao e fluxo
de agua, ou seja, igual ao produto vezes uma constante de proporcionalidade Kp, de
modo que pode ser definida como:
Pm = KphU (2.25)
Novamente linearizando ao considerar pequenas variacoes e normalizando ao
dividir por Pm0 = Kph0U0, tem-se:
∆Pm = ∆h+ ∆U (2.26)
Substituindo 2.24 em 2.26, encontra-se:
∆Pm = 3∆U − 2∆G (2.27)
A aceleracao da coluna de agua pode ser expressa atraves da segunda Lei de
Newton, da seguinte maneira:
13

(ρLA)d∆U
dt= −A(ρag)∆h, (2.28)
em que:
L e o tamanho do conduto forcado,
A e a area do conduto,
ρ e a densidade da agua,
ag e a aceleracao da gravidade,
ρag∆H e a mudanca incremental da pressao no distribuidor,
t e o tempo em segundos.
Dividindo ambos os lados por Aρagh0U0, a equacao e normalizada na forma de:
LU0
agh0
d
dt
∆U
U0
=−∆h
h0⇔ Tw
d∆U
dt= −∆h, (2.29)
em que Tw e chamado de tempo de inıcio da agua. Este tempo corresponde ao
necessario para que a turbina acelere a uma velocidade U0.
A partir das equacoes 2.24 e 2.29, pode-se expressar a relacao entre variacao de
velocidade e mudanca na posicao do distribuidor:
Twd∆U
dt= 2(∆G−∆U) (2.30)
Substituindo d/dt pelo operador de Laplace s, ∆U pela equacao 2.27 e reorga-
nizando, tem-se[8]:
∆Pm
∆G=
1− Tws1 + 1
2Tws
(2.31)
A equacao 2.31 corresponde ao funcao de transferencia (FT) de uma turbina
hidraulica ideal. No proximo capıtulo deste trabalho essa funcao de transferencia
sera usada.
2.2.2 Distribuidor
O distribuidor e responsavel pela quantidade de agua que passa, de fato, pela
turbina em uma Usina Hidreletrica. Esta localizado conforme mostra a Figura
2.4, entre o conduto forcado e a turbina. Matematicamente, o distribuidor, tambem
chamado de servo-motor, e representado por uma funcao de transferencia de primeira
ordem, que relaciona a velocidade mecanica ∆ωm com o seu angulo de abertura, ∆G,
como segue abaixo:
∆G
∆ωm(s) =
1
1 + Tgs(2.32)
14

em que Tg e a constante de tempo associado ao tempo que o distribuidor leva para
abrir ou fechar, de acordo com o comando dado.
2.3 Variacao de Carga
A variacao de carga pode ser dada continuamente ou instantaneamente. No caso
contınuo, ocorre um aumento gradual de carga na passagem de tempo. Este aumento
pode ser representado por uma rampa. Por outro lado, um aumento instantaneo
pode ser descrito como um degrau e e esta variacao instantanea que sera estudada
neste trabalho.
Figura 2.5: Modelo de Gerador suprindo carga unica
Com o objetivo de ilustrar como a variacao de carga esta envolvida no controle
de frequencia, considera-se o modelo da Figura 2.5 no qual uma unidade geradora
isolada esta ligada a uma unica carga. Neste caso, os torques e potencias mecanicos
e eletricos, respectivamente, Tm, Te, Pm e Pe, estao representados. Tambem sao
representados o regulador de velocidade, que sera discutido amplamente no capıtulo
3; o distribuidor que tem o papel de regular a quantidade de agua que entra na
turbina da maquina; a propria turbina na qual o trabalho e realizado pela agua e
transformado em torque mecanico Tm; e o gerador sıncrono onde a potencia mecanica
do sistema se torna potencia eletrica.
15

Resposta de um gerador a variacao de carga
Uma mudanca na quantidade de carga na rede e refletida instantaneamente no
torque eletrico Te do gerador, o que ocasiona um desencontro entre os torques eletrico
e mecanico de modo que a velocidade da maquina sofre variacoes e por conseguinte,
a frequencia oscila [8].
Este fenomeno fısico pode ser modelado atraves da Segunda Lei de Newton [11],
como se segue:
ΣF = M × a, (2.33)
em que:
M e a massa;
a e a aceleracao da gravidade;
ΣF e a forca.
Ou, para o casos rotacionais:
ΣT = J × α (2.34)
em que:
J e o momento de inercia da maquina;
ΣT e a soma dos torques envolvidos no movimento;
α e a aceleracao angular.
Tendo como objetivo o estudo da variacao de frequencia com mudanca na carga,
e preferıvel que as relacoes sejam entre potencias e a velocidade angular. A relacao
entre potencia e torque e linear e dada pela equacao abaixo[8]:
P = ωrT (2.35)
Usando a equacao 2.35 e considerando um valor inicial denotado com os ındices
P0, T0 e w0, e uma pequena variacao (∆), para ω, T e P , tem-se :
P0 + ∆P = (ω0 + ∆ωr)(T0 + ∆T ) (2.36)
P0 + ∆P = ω0T0 + ω0∆T + ∆ωrT0 + ∆2ωrT (2.37)
Desconsiderando da equacao 2.37 o termo de segundo grau e substituindo ∆T
por ∆Tm −∆Te e ∆P por ∆Pm −∆Pe, encontra-se:
∆Pm −∆Pe = ω0(∆Tm −∆Te) + (Tm0 − Te0)∆ωr (2.38)
Sabendo que inicialmente os torques Tm0 e Te0 sao iguais e que a velocidade
16

angular ω0 e nominal, igual a 1 pu. Entao,
∆Pm −∆Pe = ∆Tm −∆Te (2.39)
Substitui-se a equacao 2.39 na equacao 2.34. Existe ainda uma potencia perdida
por atrito nesse sistema que e dada por Patrito = Dω, logo a equacao 2.34, torna-se:
Pm − Pe − Patrito = Jdω
dt⇔ Pm − Pe = J
dω
dt+Dω (2.40)
Sabendo que a entrada do gerador e Pm−Pe pode-se modelar a planta do gerador
sıncrono como e apresentado abaixo utilizando transformada de Laplace.
Pm − Pe − Patrito = Jdω
dt+Dω ⇔ ω =
Pm − PeJs+D
(2.41)
E na Figura 2.6 esta representado o diagrama de blocos obtido.
Figura 2.6: Diagrama de Blocos que representa um gerador sıncrono para estudo deestabilidade de frequencia
Os valores de D sao dados em porcentagem.
2.4 Modelos de linhas de transmissao
Existem alguns modelos para linhas que consideram o tamanho delas, de modo
que efeitos capacitivos, indutivos, resistivos e condutivos da linha sejam adicionados
ou nao. Os modelos sao abordados a seguir.
2.4.1 Modelo de linha curta
Linhas curtas sao aquelas de comprimento de ate 80km. Devido ao seu tamanho
as contribuicoes capacitivas da linha podem ser desconsideradas sem que isso mude
a acuracia do resultado. Na Figura 2.7 esta o modelo para linha curta.
em que:
VR e a tensao recebida no final da linha;
Vs e a tensao enviada no inıcio da linha;
17

Figura 2.7: Modelo de linha curta
IR e a corrente recebida no final da linha;
Is e a corrente enviada no inıcio da linha;
Z = R + jωL e a impedancia serie total da linha.
Da Figura 2.7, conclui-se que:
Ir = Is, entao a equacao de tensao para esse tipo de linha e dado por:
VR = Vs − Is × Z (2.42)
2.4.2 Modelo de linha media - π − nominal
Para linhas medias, com comprimento entre 80km e 240km, o modelo considera
as capacitancias da linhas de transmissao, tambem chamadas de admitancias shunt.
Se essa admitancia e divida em duas partes iguais, uma colocada no inıcio da linha
e a outra no final, obtem-se o modelo chamado pi−nominal, como mostra a Figura
2.8. Esse modelo e o que sera utilizado neste trabalho.
Figura 2.8: Modelo de linha media
em que:Yc2
e a metade da capacitancia total da linha.
De acordo com a Figura 2.8, tem-se que a corrente que passa pela admitancia
em paralelo a carga e VRYc2
, a corrente que passa pela impedancia Z e IR + VRYc2
. E a
18

corrente que passa na admitancia shunt do lado de envio de tensao e VsYc2
, assim[5]
Vs = (VRYc2
+ IR)Z + VR (2.43)
Vs = (ZYc
2+ 1)VR + ZIR (2.44)
Is = VsYc2
+ VRYc2
+ IR (2.45)
Substituindo Vs como dado na equacao 2.44 na equacao 2.45, obtem-se:
Is = VRYc(ZYc
4+ 1) + IR(
ZYc2
+ 1) (2.46)
As equacoes 2.44 e 2.46 podem ser expressas de forma mais geral como:
Vs = AVR +BIR, (2.47)
Is = CVR +DIR, (2.48)
em que:
A = D = ZYc2
+ 1
B = Z
C = Y (ZYc4
+ 1)
As constantes A, B, C e D sao conhecidas como quadripolo e sao utilizadas para
facilitar as contas envolvidas para o calculo de correntes e tensoes em linhas de
transmissao.
Ha ainda um modelo para linhas longas, acima de 240km. Tal modelo de linha e
determinado considerando-se os parametros da linha distribuıdos, o que resulta em
equacoes diferenciais parciais as quais sao ajustadas a um modelo πequivalente[12].
19

Capıtulo 3
Modelos de controle de Tensao e
Frequencia
Neste capıtulo serao abordados os dois modelos de controle utilizados para controle
de tensao e frequencia. Em ambos casos serao modelados controladores do tipo
proporcional e integral.
3.1 Controle de Tensao
A tensao terminal do gerador varia de acordo com a quantidade de energia reativa
na rede, de modo que quando ha aumento de carga, uma carga que nao e apenas
resistiva, existe entao mudanca na quantidade de reativo fazendo com que a tensao
diminua.
A tensao terminal e a tensao gerada menos uma queda de tensao devido a
reatancias presentes nos enrolamentos do gerador, conforme mostra a equacao 2.20.
Figura 3.1: Modelo para controle de tensao
Neste trabalho sao utilizados dois modelos de gerador em funcao de transferencia.
Um para controle de tensao e outro para controle de frequencia; isto porque os con-
troles foram desenvolvidos separadamente. Como equivalente ao gerador no ambito
de tensao, uma FT de primeira ordem e dada por:
20

∆V (s)
∆IF (s)=
KG
1 + TGs(3.1)
em que:
KG e TG sao as constantes proporcionais e de tempo referentes ao
gerador
∆IF e a variacao da corrente de campo do gerador.
A tensao deve ser mantida constante e dentro dos limites permitidos, sendo esse
limite, em geral, em torno de 5%, conforme previsto pelo ONS. Neste sentido, o
controle de tensao se faz necessario para que a tensao de saıda do gerador seja
sempre proxima a nominal.
Para operar como controle da tensao do gerador foi projetada uma malha con-
forme mostra a Figura 3.1. A malha e composta pelo modelo para gerador dado
pela equacao 3.1, por um amplificador de sinais e a excitatriz da maquina, ambos
representados por funcoes de transferencia de primeira ordem; e um controlador PI
que sera discutido a frente.
O objetivo e que a partir do sistema representado na Figura 3.1 se projete um
controlador PI de tal forma que a tensao fique dentro dos limites permitidos.
3.1.1 Controlador PI
Um controlador proporcional e integral (PI) e composto por uma acao proporci-
onal e uma acao integral, como pode ser visto na Figura 3.2. O objetivo da parte
integral e levar o erro em regime permanente ate zero e o proporcional tem como
papel diminuir a quantidade de oscilacoes do resultado.
Figura 3.2: Controlador PI
Na Tabela 3.1 estao os valores das constantes utilizadas na malha da Figura
3.1, estes foram escolhidos de acordo com faixas de valores habituais contidas na
literatura [8].
21

Tabela 3.1: Valores das constantes para Regulacao de TensaoRegulacao de TensaoKE 1KA 30KG 1TE 1sTA 0.13sTG 1s
Para determinacao dos ganhos do controlador PI para controle de tensao foi
obtida a equacao caracterıstica atraves da realimentacao da malha da Figura 3.1 em
malha fechada, obtendo a equacao 3.2:
0.052s4 + 0.582s3 + 1.53s2 + (1 + 30kpt)s+ 30kIt = 0 (3.2)
Tendo como objetivo que o sistema estudado seja BIBO estavel, ou seja possua
entrada limitada e saıda limitada, a equacao 3.2 aplicou-se o criterio de estabilidade
de Routh-Hurvitz [17]. Atraves desse criterio encontraram-se faixas para os possıveis
valores de kpt e kIt , que seguem:
• kIt > 0;
• kpt < 0, 537
A partir destas faixas e por metodo de inspecao, escolheu-se os valores da Tabela
3.2 para serem utilizados no controlador PI de tensao.
Tabela 3.2: Valores dos ganhos do controlador PI para tensaoGanhos do PIKpt 0.2KIt 0.15
Os valores de kpt e kIt foram substituıdos no diagrama de blocos da Figura 3.1,
obtendo a FT abaixo:
T (s)
U(s)=
6s+ 4.5
0.13s4 + 1.26s3 + 2.13s2 + s(3.3)
A esta equacao foi aplicada a funcao rlocus do programa computacional Matlab,
para que fosse obtido o diagrama de lugar das raızes [17] desse sistema, com o
objetivo de verificar a estabilidade do mesmo. Este metodo leva em consideracao a
estabilidade da planta em malha aberta, mesmo assim o resultado obtido pode ser
considerado para o sistema em malha fechada porque os polos da planta nao sao
alterados. O diagrama e apresentado na Figura 3.3
22

Figura 3.3: Lugar das Raızes da planta com controlador de tensao
Conforme mostra o diagrama de Lugar das Raızes da Figura 3.3, o sistema e
estavel, uma vez que nao apresenta polos no semi plano da direita. Assim, pode-se
afirmar pela utilizacao de dois metodos distintos que o sistema e estavel para os
valores de kpt e kIt escolhidos.
3.2 Controle de Frequencia
Diferentemente da tensao, que e pontual; a frequencia e unica em todo o sistema.
Deste modo, e importante que seja controlada de maneira efetiva em todo o sis-
tema eletrico. Para os objetivos deste trabalho sera discutido controle de frequencia
levando em conta apenas uma maquina, o que difere do SEB que e um sistema
multi-maquinas. Para o caso do SEB seria necessario ainda a aplicacao do CAG
- Controle Automatico de Geracao. O CAG tem carater de controle de segunda
ordem. Pode-se repetir os controles aqui desenvolvidos e a eles adicionar o CAG
de modo que se represente melhor o SEB. Desse modo, o controle nao sera apenas
local, como tambem considerara o sistema como um todo, possuindo centenas de
maquinas sıncronas de geracao, A.
Quando ha aumento ou diminuicao de carga na rede, a frequencia diminiu e
aumenta, respectivamente. E aceito uma variacao de 1.5Hz para mais ou para
23

menos em relacao ao valor nominal da frequencia, 60Hz.
3.2.1 Controlador PI
Para controle de frequencia foi utilizado um controlador PI exatamente igual
ao para controle de tensao. Na Figura 3.4 esta representada a malha de controle
considerada. Os valores para as constantes de tempo e os ganhos da malha de
controle de frequencia, estao na Tabela 3.3, novamente, estes foram retirados de
faixas de valores usuais na literatura [8].
Figura 3.4: Modelo para controle de frequencia
Tabela 3.3: Valores das constantes para Regulacao de frequenciaRegulacao de FrequenciaTw 1.5sTg 0.9sM 5.5sD 2.4167%
Para determinacao dos ganhos do controlador PI para controle de frequencia foi
obtida a equacao caracterıstica atraves da realimentacao da malha da Figura 3.4 em
malha fechada, obtendo a equacao 3.4:
7.425s4 + 19.78s3 + (15− 1.5Kpf )s2 + (2.43 +Kpf − 1.5KIf )s+KIf = 0 (3.4)
Tendo como objetivo que o sistema estudado seja novamente BIBO estavel, a
equacao 3.4 aplicou-se o criterio de estabilidade de Routh-Hurvitz [17]. Atraves desse
criterio encontraram-se faixas para os possıveis valores de kpf e kIf , que seguem:
• kIf > 0;
• 1, 88kpf − 0, 5632kIf < 14, 09
24

A partir destas faixas e por inspecao, escolheu-se os valores da Tabela 3.4 para
serem utilizados no controlador PI de tensao.
Tabela 3.4: Valores dos ganhos do controlador PI para frequenciaGanhos do PIKpf 2KIf 0.033
Os valores de kpf e kIf foram substituıdos no diagrama de blocos da Figura 3.4,
obtendo a FT abaixo:
F (s)
U(s)=
−3s2 + 1.966s+ 0.023
7.425s4 + 19.78s3 + 14.99s2 + 2.417s(3.5)
A equacao 3.5 foi aplicada a funcao rlocus do programa computacional Matlab,
para que fosse obtido o diagrama de lugar das raızes [17] desse sistema, com o
objetivo de verificar a estabilidade do mesmo. O diagrama e apresentado na Figura
3.3
Figura 3.5: Lugar das Raızes da planta com controlador de frequencia
Conforme mostra o diagrama de Lugar das Raızes da Figura 3.5, o sistema e
estavel, apesar da presenca de um zero no semi plano da direita, o que e considerado
neste metodo e a presenca de polos em tal plano; o que nao ocorre. Assim, pode-se
25

afirmar pela utilizacao de dois metodos distintos que o sistema e estavel para os
valores de kpf e kIf escolhidos.
No proximo capıtulo sao realizadas as simulacoes de um sistema eletrico radial
considerando os controladores PI projetados neste capıtulo.
26

Capıtulo 4
Simulacoes e Resultados
Neste capıtulo sao apresentadas as simulacoes e os resultados obtidos, referente
aos controladores PI projetados no capıtulo 3. Foram realizadas tres simulacoes
distintas:
1. A primeira, considerou apenas os diagramas de blocos formados pelas funcoes
de transferencia e a resposta deste sistema quando uma perturbacao ocorre.
2. A segunda, ja utilizando um modelo de gerador do PSCAD, considera a en-
trada de uma carga de 100MVA no tempo de 50s e como o sistema se comporta
apos esta perturbacao.
3. A terceira, ainda com o modelo de gerador sıncrono acima citado, conta com
a entrada de duas cargas de 100MVA no sistema. Uma em 50s e a outra em
100s.
A descricao detalhada e os resultados de todas essas simulacoes estao nas secoes
que seguem.
4.1 Com diagrama de blocos
A partir dos diagramas de blocos das Figuras 3.1 e 3.4, foi feita uma primeira
simulacao no software computacional PSCAD. Nesta simulacao foram considerados
apenas os diagramas de blocos, separadamente, para tensao e frequencia, respecti-
vamente, Figuras 4.1 e 4.4; e foi adicionado um degrau de 0.1 como perturbacao ao
sistema no tempo de 50s.
27

Figura 4.1: Simulacao de diagrama de blocos para tensao
28

Figura 4.2: Simulacao de diagrama de blocos para tensao
A Figura 4.2 mostra o resultado obtido para tensao. No inıcio ocorre uma grande
oscilacao, mas isto e caracterıstico da inicializacao do sistema. E no tempo de 50s ao
entrar a perturbacao, carga, pode ser observado uma pequena alteracao na tensao.
Para facilitar a visualizacao dessa alteracao, plotou-se o grafico da Figura 4.6, com
um escala mais apropriada.
Figura 4.3: Simulacao de diagrama de blocos para tensao, zoom.
29
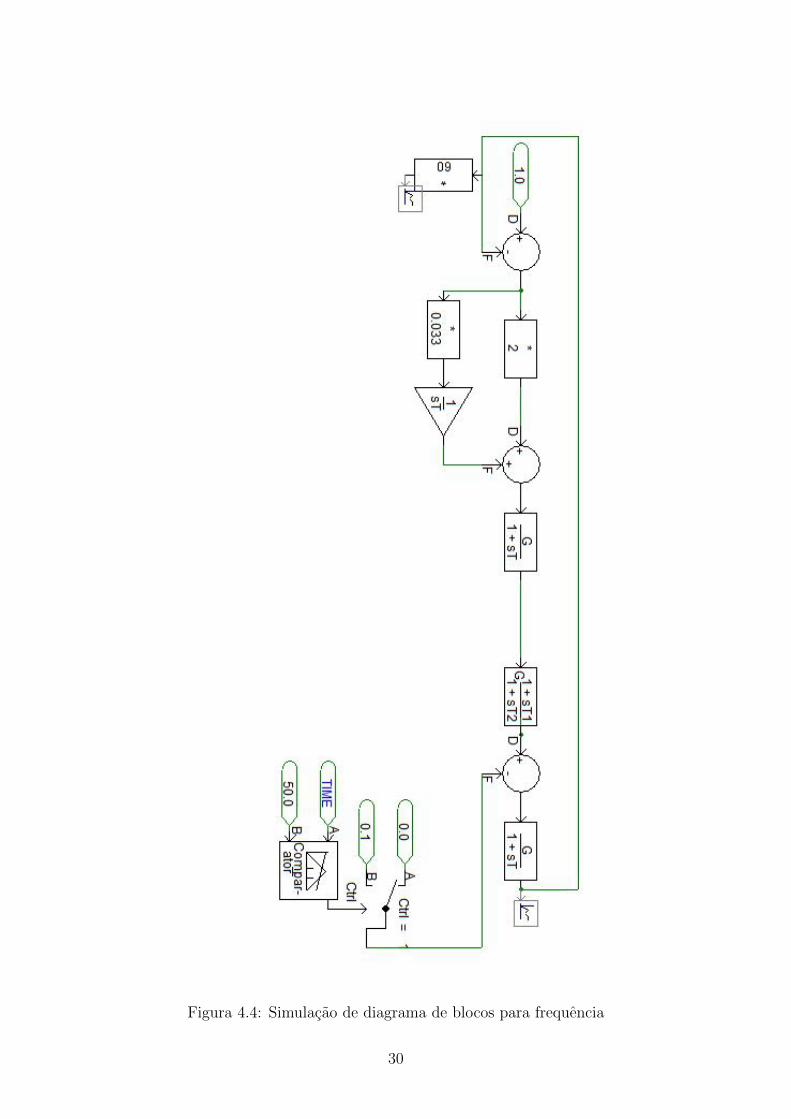
Figura 4.4: Simulacao de diagrama de blocos para frequencia
30

Figura 4.5: Simulacao de diagrama de blocos para frequencia
Os resultados obtidos para frequencia estao nas Figuras 4.5 e 4.6, com escala
normal e com escala em zoom para melhorar a visualizacao da perturbacao ocorrida.
Figura 4.6: Simulacao de diagrama de blocos para frequencia, zoom.
Em ambos os casos a tensao e a frequencia ficaram nos limites propostos pelo
ONS, melhor observado nas Figuras 4.3 e 4.6. No inıcio ocorre uma grande variacao
no valor nominal, mas isto por causa da iniciacao do sistema, como justificado
31

anteriormente, entao pode ser desconsiderado.
4.2 Com gerador sıncrono do PSCAD
Com o objetivo de chegar mais proximo a um modelo real, as funcoes de trans-
ferencia dos Geradores para os casos de tensao e frequencia, foram substituıdos por
um gerador sıncrono da biblioteca do PSCAD. Tambem foram utilizados os valo-
res das constantes das Tabelas 3.1 e 3.3. Na Figura 4.7 pode ser visto o modelo
completo do que foi simulado.
Considera-se inicialmente um gerador sıncrono em vazio. A ele estao conectadas
atraves de duas linhas de transmissao de 100km de comprimento, duas cargas de
100MVA. Foram utilizados dois transformadores em cada linha. Na Tabela 4.1
estao discriminados os valores nominais utilizados em cada um dos componentes da
simulacao.
Tabela 4.1: Valores Nominais dos Componentes da SimulacaoComponente S(MVA) V (kV )
Gerador 1000 13.8Transformadores 1 e 2 100 13.8/230Transformadores 3 e 4 100 230/13.8
Carga 1 e 2 100 13.8
Os primeiros transformadores sao para aumentar a tensao na saıda do gerador,
para que as perdas de transmissao fossem menores e os antes da carga sao para que
a tensao retorne ao valor correto para atender a carga.
Cabe comentar que olhos mais acostumados ao Matlab podem estranhar as fi-
guras que mostram os sistemas simulados, uma vez que o PSCAD nao mostra os
valores dos ganhos que estao sendo utilizados. Por exemplo, no caso das Figuras 4.4
e 4.7, o bloco que representa a Turbina hidraulica, nao aparece como uma funcao
de transferencia de fase nao mınima. Entretanto, dentro dos blocos os valores estao
representados corretamente, de modo que as simulacoes e seus respectivos resultados
sao confiaveis.
32

Figura 4.7: Simulacao no PSCAD
33

4.2.1 Entrada de uma carga no sistema
Primeiramente, sera considerada a entrada instantanea de uma carga no tempo
de 50s. Por ser uma carga grande, apesar de equivaler a apenas 10% da capacidade
do gerador, esta carga causa uma perturbacao consideravel.
Figura 4.8: Resultado de Controle de tensao para uma carga
Figura 4.9: Resultado de Controle de tensao para uma carga, zoom
Foram obtidos como resultados os graficos das Figuras 4.8 e 4.10, respectiva-
mente para tensao e frequencia. Com o objetivo de uma analise melhor, novamente
34

foi utilizado o recurso zoom no grafico, de modo que que as Figuras 4.9 e 4.11,
apresentam a escala dos graficos de acordo com os limites do permitidos pelo ONS.
Figura 4.10: Resultado de Controle de frequencia para uma carga
Figura 4.11: Resultado de Controle de frequencia para uma carga, zoom
Para melhor visualizar a diferenca que a presenca de um controlador causa no
sistema, foram plotados os graficos das Figuras 4.12 e 4.13. Para o caso da tensao
a diferenca e bastante pequena, o que era de se esperar, porque a tensao tem uma
regulacao melhor, especialmente neste caso no qual a carga e bem menor do que
35

o gerador. Entretanto, no caso da frequencia, mesmo o gerador tendo capacidade
muito superior a exigida, o controle e extremamente necessario.
Figura 4.12: Comparacao de resposta do sistema sem e com controle de tensao paraentrada de uma carga
Figura 4.13: Comparacao de resposta do sistema sem e com controle de frequenciapara entrada de uma carga
36
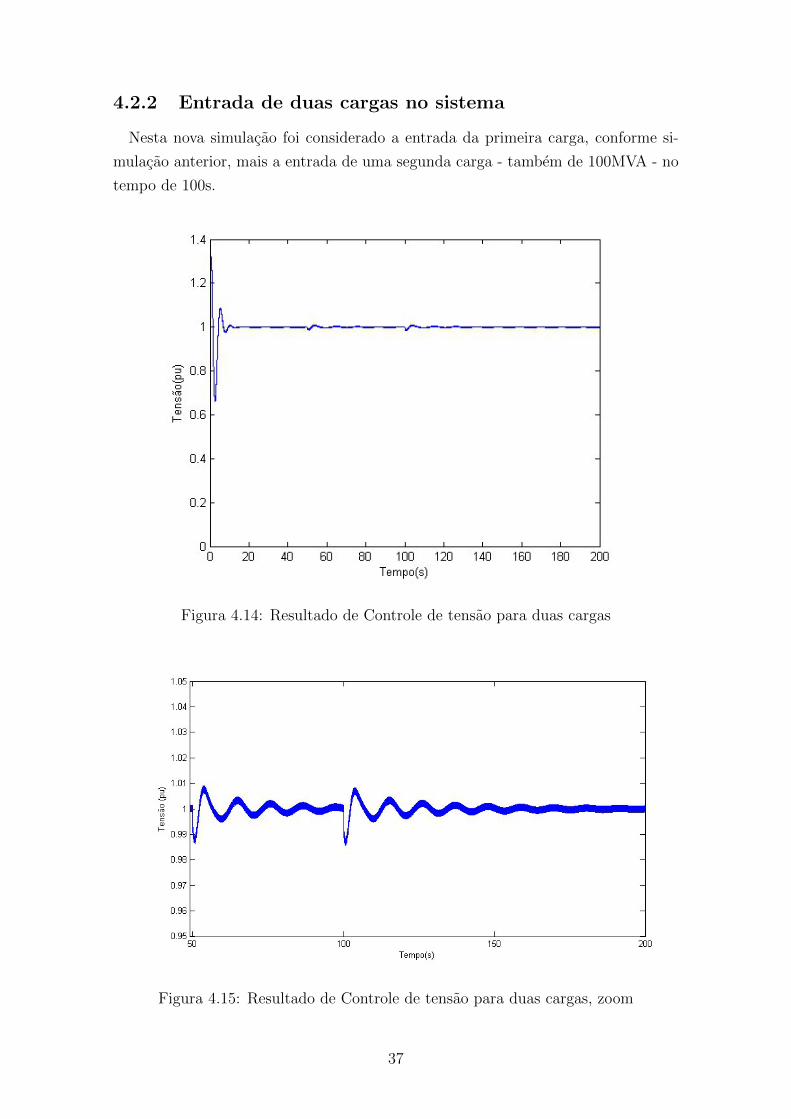
4.2.2 Entrada de duas cargas no sistema
Nesta nova simulacao foi considerado a entrada da primeira carga, conforme si-
mulacao anterior, mais a entrada de uma segunda carga - tambem de 100MVA - no
tempo de 100s.
Figura 4.14: Resultado de Controle de tensao para duas cargas
Figura 4.15: Resultado de Controle de tensao para duas cargas, zoom
37

Figura 4.16: Resultado de Controle de frequencia para duas cargas
Figura 4.17: Resultado de Controle de frequencia para duas cargas, zoom
38

Nas Figuras 4.18 e 4.19 esta a comparacao entre os sistemas com e sem a presenca
dos controladores PI, respectivamente para tensao e frequencia. Aqui sao aplicadas
as mesmas justificativas dadas no caso anterior.
Figura 4.18: Comparacao de resposta do sistema sem e com controle de tensao
Figura 4.19: Comparacao de resposta do sistema sem e com controle de frequencia
Para ambos os casos os controladores PI desenvolvidos funcionaram de acordo com
as especificacoes propostas no capıtulo 3, considerando a estabilidade do sistema; e
mantendo-se nos limites para tensao e frequencia usuais no sistema eletrico brasileiro,
previstos pelo ONS.
39

Capıtulo 5
Conclusoes
Sabe-se da importancia do controle nos mais diversos tipos de equipamentos e
sistemas que utilizamos regularmente no nosso dia a dia. Com o sistema eletrico nao
pode ser diferente. e ate, mais importante que exista um controle sobre as variaveis
deste sistema. Nesse caso especıfico, tensao e frequencia sao de extrema importancia
pois o bom funcionamento dos aparelhos eletricos depende de sua constancia.
Nesse sentido, entrou a proposta deste trabalho: simular um sistema de potencia
radial e nele controlar tensao e frequencia atraves de controladores PI e observar
como este se comporta com a presenca de perturbacoes.
Foram projetados controladores PI, um para tensao e outro para frequencia,
sempre respeitando sua modelagem de acordo com as funcoes de transferencia rela-
cionadas e visando a estabilidade do sistema. Para cada planta controlada obteve-se
os respectivos diagramas de lugar das raızes que mostraram um resultado bastante
positivo, uma vez que ambos os sistemas eram estaveis com os valores de ganhos
escolhidos por inspecao.
Os resultados obtidos com as simulacoes foram bastante bons. Tanto para o
primeiro caso, em que apenas funcoes de transferencia representam o gerador, para
tensao e frequencia, de forma distinta e separada; quanto para as simulacoes em que
os controles sao realizados em conjunto ligados a um modelo de gerador sıncrono
do PSCAD. Este modelo de gerador tem planta bastante semelhante aos modelos
utilizados como funcao de transferencia representativa, de modo que os resultados
obtidos podem ser comparados.
No geral, para tensao, todos os resultados foram bastante satisfatorios. Ocorreu
pouca variacao durante as perturbacoes e em pequeno prazo de tempo, cerca de 5
segundos, o valor da tensao era o nominal novamente.
Para frequencia, apesar de sempre respeitar os limites propostos pelo ONS, ela foi
bastante sensıvel ao aumento de carga, o que e normal, especialmente se tratando
de uma entrada instantanea de uma carga tao grande. Entretanto, houve muita
oscilacao e uma demora bastante consideravel para que chegasse mais proxima do
40

valor nominal de 60Hz. Tendo em vista este ocorrido e recomendavel que para
frequencia seja desenvolvido um controlador PID, com a presenca do derivativo este
controle obtera melhores resultados, se comparado com o controlador PI.
41

Referencias Bibliograficas
[1] “Portal Brasil”. nov. 2014. Disponıvel em: <http://www.brasil.gov.br/>.
[2] FITZGERALD, A. E., JR., C. K., UMANS, S. D. Maquinas Eletricas. Bookman,
2008.
[3] CHAPMAN, S. J. Electric Machinery Fundamentls. McGraw Hill, Inc, 2012.
[4] YOUNG, D. H., FREEDMAN, R. A. Eletromagnetismo. Pearson, 2009.
[5] GRAINGER, J. J., STEVENSON, W. D. Power System Analysis. McGraw Hill,
Inc, 1994.
[6] ONS. “Operador Nacional do Sistema - ONS”. nov. 2014. Disponıvel em:
<http://www.ons.org.br/>.
[7] ANEEL. “Agencia Nacional de Energia Eletrica”. nov. 2014. Disponıvel em:
<http://www.aneel.gov.br/>.
[8] KUNDUR, P., BALU, N., LAUBY, M. Power system stability and con-
trol. EPRI power system engineering series. McGraw-Hill, 1994.
ISBN: 9780070359581. Disponıvel em: <http://books.google.com.br/
books?id=wOlSAAAAMAAJ>.
[9] BOLDRINI, J. Algebra linear. HARBRA, 1986. ISBN: 9788529402024.
Disponıvel em: <https://books.google.com.br/books?id=
M8CNGwAACAAJ>.
[10] CHEN, C. Linear System Theory and Design. Oxford series in electri-
cal and computer engineering. Oxford University Press, 1984. ISBN:
9780195115956. Disponıvel em: <https://books.google.com.br/
books?id=_6yOc7WWziEC>.
[11] YOUNG, D. H., FREEDMAN, R. A. Mecanica. Pearson, 2009.
[12] BORGES, P. C. L. T. “Analise de Sistemas de Potencia”, 2005.
42
[13] MONTICELLI, A. J. Fluxo de Carga em Redes de Energia Eletrica. E. Blucher,
1983.
[14] ANDERSON, P. M. Power system protection, v. 1307. McGraw-Hill New York,
1999.
[15] DE O. S. E SOUSA, F. Analise Dinamica em Distribuidor de Turbina Kaplan
Abordagens Multicorpo e Estocastica. Dissertacao de M.Sc, Programa de
Pos Graduacao em Ciencias Mecanicas - Universidade de Brasılia, 8 2011.
[16] COSTA, A. S., E SILVA, A. S. “Controle e Estabilidade de Sistemas de
Potencia”, 2002.
[17] OGATA, K. Modern Control Engineering. Instrumentation and controls series.
Prentice Hall, 2010. ISBN: 9780136156734. Disponıvel em: <https:
//books.google.com.br/books?id=Wu5GpNAelzkC>.
[18] DE ALMEIDA, L. P. Analise de desempenho do controle automatico de
geracao e do controle secundario de tensao. Dissertacao de M.Sc, Ins-
tituto Alberto Luiz Coimbra de Pos-Graducao e Pesquisa de Engenharia
- COPPE/UFRJ, 3 2004.
43

Apendice A
Regulacao de Velocidade em
Geradores Sıncronos
O modelo de regulacao de velocidade em Geradores Sıncronos utilizado atualmente
no SIN constitui-se por duas regulacoes: Primaria e Secundaria.
A.1 Regulacao Primaria
A regulacao primaria leva em consideracao o estatismo do gerador, cada maquina
possui esta caracterıstica. O estatismo e a capacidade do gerador de assumir maior
quantidade de carga. Quanto menor o estatismo de um gerador mais carga ele pode
assumir.
Uma representacao matematica para regulacao primaria esta na Figura A.1, que
consiste em uma realimentacao caracterizando um controlador proporcional com
ganho de 1R
[8]; e na reducao da Figura A.2. A saıda ∆ nos diagramas de blocos
das Figuras A.1 e A.2, e um incremento que funciona como sinal para o resto do
controle que e apresentado na sequencia. Viu-se no Capitulo 2 deste trabalho que a
frequencia esta diretamente relacionada a velocidade angular do gerador.
Figura A.1: Diagrama de blocos para regulacao primariaa de velocidade
44

Figura A.2: Diagrama de blocos reduzido para regulacao primaria de velocidade
Geradores com a caracterıstica apresentada na Figura A.2 sao chamados de go-
vernors e, em geral, possuem ainda uma entrada de referencia da carga para que
o controle de frequencia seja mais eficiente, como pode ser visto no diagrama da
Figura A.3.
Figura A.3: Diagrama de blocos de um governor reduzido com referencia de carga
A Figura A.4 mostra o diagrama de blocos da modelagem basica da planta de
uma Usina Hidreletrica. Neste diagrama apresenta-se apenas a regulacao primaria.
Tambem estao representados os modelos usados para reguladores de frequencia,
turbina hidraulica e para o rotor da maquina.
Figura A.4: Regulacao primaria de frequencia
45

A.2 Regulacao Secundaria
A regulacao secundaria e relacionado ao Controle Automatico de Geracao (CAG),
e e um controle mais lento do que o controle realizado pela regulacao primaria. E
e responsavel pelo intercambio entre areas de geracao. A regulacao secundaria esta
relacionada com o integrador K e neste trabalho e apresentada como sendo Tie Line
Bias (TLB), este tipo de regulacao limita a zero o intercambio de potencia entre area
em regime permanente, quando a frequencia for a nominal novamente. O controle
TLB esta representado na Figura A.5.
Figura A.5: Regulacao primaria e secundaria de frequencia
β =1
R+D (A.1)
Esse tipo de regulacao utiliza o ganho Bias, que deve ter relacao com a carac-
terıstica natural, definida pela equacao A.1 do gerador, β.
A regulacao secundaria pode ser Flat Frequency (FF) que nao limita a quantidade
de potencia de intercambio.
A.2.1 Erro de controle de area
O Erro de Controle de Area(ECA) e uma das caracterısticas da regulacao se-
cundaria TLB. Na realidade, e o que a caracteriza como um controle integral. Uma
vez que o erro e rastreado para que se torne zero. O integrador K na regulacao de
frequencia e o ganho deste controle e deve ser zero em regime permanente para que
nao exista intercambio entre areas de geracao.
46
Top Related