




Línguas
Páginas
Legal


UNIVERSIDADE FEDERAL DO OESTE DO PARÁ INSTITUTO DE CIÊNCIA DA EDUCAÇÃO
LICENCIATURA PLENA EM FÍSICA AMBIENTAL
Ricardo Mendes de Freitas
Modelagem matemática em ecologia de populações biológicas
Santarém 2013
Ricardo Mendes de Freitas

2
Modelagem matemática em ecologia de populações biológicas
Orientador: Prof. Dr. Rodolfo Maduro Almeida
Monografia apresentada ao Programa
de Física Ambiental da Universidade
Federal do Oeste do Pará, como
Trabalho de Conclusão do Curso de
Licenciatura Plena em Física
Ambiental.
Santarém 2013

3
AGRADECIMENTO
Ao meu Deus por ter me dado sabedoria, força e vontade para vencer as
dificuldades durante o tempo de graduação. Aos meus pais Raimundo Alves de
Freitas e Cleonice Mendes Freitas. Em especial à minha mãe que esteve ao
meu lado, apoiando-me nessa jornada, um exemplo de amor incondicional.
Aos meus amados irmãos: Renan, Renata e Rony vocês são meus amores que
completam a minha vida.
Também agradeço a Luciane Nascimento, da turma de Física Ambiental
2010, que esteve presente nos momentos difíceis e me fez acreditar em minha
capacidade de vencer. Em especial ao orientador professor Rodolfo Maduro
Almeida, que me ajudou com paciência e contribuiu para minha formação
acadêmica.
A todos que diretamente ou indiretamente ajudaram-me nessa jornada,
dedico meus sinceros agradecimentos.

4
RESUMO
O presente trabalho aborda a aplicação de dois paradigmas de modelagem matemática aplicados em ecologia de populações biológicas: a modelagem baseada em equações e a modelagem baseada em agentes para a interação presa-predador. A modelagem baseada em equações se preocupa em descrever o comportamento do fenômeno por meio de um sistema de equações diferenciais que relacionam as densidades populacionais de presas e predadores. O modelo de Lotka-Volterra é o modelo baseado em equações, e o ambiente de computação numérica MATLAB foi utilizado para explorar o modelo por meio de simulações numéricas. Já a modelagem baseada em agentes, parte da descrição do fenômeno a partir de suas partes constituintes. Desta forma, a entidade básica do modelo é o agente, que pode representar uma presa ou um predador, um conjunto de regras que definem o seu comportamento e a interação entre estes. Os agentes interagem em uma representação espacialmente explícita do ambiente. A simulação do modelo baseado em agentes consiste na aplicação das regras ao longo de passos discreto de tempo. Como resultado, temos um comportamento coletivo emergente, caracterizado pelo número de presas e de predadores que varia ao longo do tempo. O ambiente do software NetLogo foi explorado para simulação do modelo baseado em agentes. As simulações mostram que ambos os modelos conseguem representar bem o comportamento oscilatório evidente na dinâmica de interação entre populações de presas e predadores. Por fim, discutimos as vantagens e desvantagens das abordagens e, concluímos que a modelagem baseada em agentes leva vantagem em relação a modelagem baseada em equações, pela melhor capacidade em se incluir mais realismo ao modelo.
Palavras chaves: Modelagem matemática, ecologia de populações, presa-predador.

5
LISTA DE FIGURAS
Figura 2-1: Representação do ambiente onde os agentes interagem. ............. 15
Figura 3-1: Janela principal do MATLAB. ........................................................ 19
Figura 3-2: Valores da população de presas e predadores ao longo do tempo para a condição inicial e os valores dos parâmetros ,
, , . .......................................................................... 21
Figura 3-3: Plano de fases do modelo de Lotka-Volterra para a condição inicial e os valores dos parâmetros , , ,
. ......................................................................................................... 21
Figura 3-4: Flutuações nas populações de lebres (snowshoehare) e seu efeito sobre a população de seu predador, o lince canadense (lynx). O gráfico é baseado em dados registrados pela empresa de comercio de peles de animais Hudson’s Bay Company. .................................................................................. 22
Figura 3-5: Plano de fases do modelo de Lotka-Volterra utilizando os valores de parâmetros , , , e diferentes valores de condições iniciais, conforme indicadas no gráfico. ...................................... 23
Figura 3-6: Valores da população de presas e predadores ao longo do tempo para a condição inicial e valores dos parâmetros ,
, e . ..................................................................................... 24
Figura 3-7: Comportamento da população de presas e predadores para , , , , . ................... 25
Figura 3-8:Comportamento da população de presas e predadores para , , , , . .............................. 25
Figura 3-9:Comportamento da população de presas e predadores para , , , , . .......................... 25
Figura 3-10:Comportamento da população de presas e predadores para a
condição inicial , , , e . ...... 26
Figura 3-11: Janela principal do software NetLogo. ......................................... 27
Figura 3-12: Comportamento da população de presas (linha azul) e predadores (linha vermelha) para uma simulação do modelo baseado em agentes
utilizando os valores de parâmetros , , , e diferentes valores para ( , , e ). .............................................. 28
Figura 3-13: Comportamento da população de presas (linha azul) e predadores (linha vermelha) para uma simulação do modelo baseado em agentes
utilizando os valores de parâmetros , , , , , e diferentes valores para (2%, 3%, 4% e 5%). ...................... 30

6
Figura 3-14: Comportamento da população de presas (linha azul) e predadores (linha vermelha) para uma simulação do modelo baseado em agentes
utilizando os valores de parâmetros , , , ,
, , . ...................................................................... 30

7
SUMÁRIO
1 INTRODUÇÃO ............................................................................................ 8
1.1 Introdução do problema ........................................................................ 8
1.2 Objetivo do trabalho ............................................................................ 10
1.3 Organização do texto .......................................................................... 10
2 ABORDAGENS PARA MODELAGEM DA DINÂMICA DE INTERAÇÃO
DO TIPO PREDAÇÃO ..................................................................................... 11
2.1 Modelo baseado em equações ........................................................... 11
2.2 Modelo baseado em agentes .............................................................. 14
3 RESULTADOS E DISCUSSÃO ................................................................ 19
3.1 Simulação do modelo baseado em equações ..................................... 19
3.2 Simulação do modelo baseado em agentes ....................................... 26
4 CONSIDERAÇÕES FINAIS ...................................................................... 31
5 REFERÊNCIAS BIBLIOGRÁFICAS ......................................................... 33
APÊNDICE A - MÉTODO DE RUNGE-KUTTA DE 4ª ORDEM .................... 35

8
1 INTRODUÇÃO
1.1 Introdução do problema
De uma maneira geral população biológica é qualquer grupo de organismos
de mesma espécie. A Ecologia de populações biológicas, com o objeto de
estudo um grupo de organismo, estuda as variáveis que determinam as
abundâncias e distribuições de uma população no tempo e espaço. O ambiente
local, fatores ecológicos e fatores biológicos de populações condicionam a
sobrevivência e a rapidez do seu crescimento (SOLOMON, 1980, ODUM,
1988).
Começaremos com a seguinte situação: imaginemos que queiramos
projetar ou predizer o crescimento de uma população com base em um valor
inicial da mesma e utilizando informações dos fatores que condicionam o seu
comportamento. A principal questão que surge é: que artifícios devem ser
utilizados para alcançarmos esse objetivo? Para respondermos essa questão,
de imediato, devemos estudar a população, identificar e quantificar os fatores
que condicionam o seu comportamento, e como estes fatores se encadeiam e
direcionam o comportamento da população. Em seguida devemos buscar uma
lei ou regra que relaciona ou mapeia, de forma explícita, os fatores
condicionantes com o comportamento da população. Uma questão essencial é
a identificação desse mapa que identifica o estágio anterior as regra ou lei para
condicionar o estágio posterior e este é o objetivo principal da modelagem
matemática em ecologia de populações biológicas.
Entende-se por modelagem o processo de construção de um modelo. Um
modelo é uma representação de um objeto ou fenômeno que necessita ser
estudado. Nesse sentido, o processo de criação de um modelo é uma arte, e
cabe ao modelador buscar os melhores mecanismos para entender o
fenômeno, e em seguida propor uma metodologia para a construção do
modelo. Um modelo, então, imita um fenômeno de situações reais o qual
necessita fazer previsões (ODUM, BARRET, 2011). Logo, um modelo
matemático busca representar, através de uma descrição matemática,
frequentemente definida por meio de uma função ou uma equação, um
fenômeno do mundo real (STEWART, 2009).

9
O presente trabalho abrange um tema relevante e muito explorado por
ecólogos: a modelagem matemática como ferramenta para a criação de
modelos para o estudo da dinâmica de interação entre populações biológicas.
A primeira observação a ser feita é verificar quais fatores limitantes precisam
ser considerados no modelo, com o intuito de que ele se mostre adequado para
representar a dinâmica de interação entre as populações. Ou seja, para que o
modelo consiga aproximar o comportamento real das populações, devemos
basicamente saber como se comporta uma população em função das taxas de
natalidade, mortalidade, emigração e imigração.
O fenômeno definido como objeto de estudo deste trabalho é a interação
entre populações biológicas do tipo predação. O predatismo, ou predação é
uma interação entre espécies biológicas em que um ser vivo, o predador,
captura e mata um outro ser vivo, a presa, com o fim de se alimentar com a
carne dele (ODUM, 1988). Geralmente é uma relação interespecífica, ou seja,
uma relação que ocorre entre espécies diferentes. Os carnívoros são exemplos
de animais predadores. Por exemplo, o leão, o lobo, o tigre e a onça são
predadores que, caçam, matam e comem ovelhas, zebras, coelhos, alces,
capivaras e outros animais. Convêm, aqui, elencar os demais tipos de
interações interespecíficas encontradas na literatura ecológica, que são:
neutralismo, competição (por interferência direta e por recurso), amensalismo,
comensalismo, parasitismo, protocooperação e mutualismo (ODUM, 1988).
Este trabalho explora duas abordagens de modelagem matemática: a
modelagem baseada em equações e a modelagem baseada em agentes.
Ambas são aplicadas na modelagem da interação entre presa e predador em
ecologia de populações biológicas. A modelagem baseada em equações busca
desenvolver um modelo matemático que captura as características do
fenômeno em estudo, identificando grandezas mensuráveis ou variáveis que o
descrevem, e obtendo um sistema de equações diferenciais ou parciais que
estabelecem a relação explícita entre elas (PARUNAK, 1998). Modelos
baseados em equações para a interação entre populações biológicas
quantificam a população em tamanho, normalmente em termos de densidade
populacional ou número de indivíduos. Já a modelagem baseada em agentes,
também conhecida como modelagem baseada em indivíduos, busca

10
desenvolver um modelo matemático que descreve o fenômeno de estudo a
partir dos seus elementos constituintes e das interações entre estes. Neste
caso, não temos equações que descrevem o comportamento do modelo. A
modelagem baseada em agentes apresenta uma lógica mais natural e intuitiva:
a população é, de fato, uma coleção de entidades discretas, ou indivíduos
(GIACOMINI, 2007). Estes modelos partem de uma representação de cada
indivíduo, a presa e o predador, das regras que definem o seu comportamento,
e de uma representação do espaço onde estes indivíduos interagem.
1.2 Objetivo do trabalho
O objetivo geral deste trabalho é explorar duas abordagens de modelagem
matemática para a dinâmica de interação entre populações biológicas do tipo
predação: a modelagem baseada em equações e a modelagem baseada em
agentes.
Como objetivos específicos, temos:
(i) Definir e delinear as duas abordagens de modelagem e como elas são
empregadas para modelar o fenômeno de estudo;
(ii) Explorar, por meio de simulações computacionais, os modelos
matemáticos visando apontar as vantagens e desvantagens de cada
uma das abordagens de modelagem.
1.3 Organização do texto
A estrutura e organização do texto são definidas pela sequência a seguir.
Os capítulos 1 e 2 apresentam as descrições das abordagens de modelagem
baseada em equações e modelagem baseada em agentes, e como elas são
aplicadas para modelar a dinâmica de interação entre populações do tipo
predação. Os capítulos 3 e 4 apresentam uma análise exploratória dos
modelos desenvolvidos por meio de simulações computacionais. E por fim, no
capítulo 5, a conclusão do trabalho aponta as principais características de cada
abordagem, suas vantagens e desvantagens.

11
2 ABORDAGENS PARA MODELAGEM DA DINÂMICA DE
INTERAÇÃO DO TIPO PREDAÇÃO
2.1 Modelo baseado em equações
A modelagem baseada em equações tem por objetivo principal buscar uma
relação explícita entre as variáveis dependente e independente que descrevem
e quantificam o fenômeno de estudo. Nosso interesse aqui é o de modelar a
dinâmica de populações biológicas. Ou seja, é encontrar uma função que nos
diga qual o tamanho da população ao longo do tempo no futuro: .
O tamanho da população (variável dependente) é função do tempo (variável
independente).
Ao invés de deduzirmos uma função que modele o comportamento da
população, é mais fácil modelar os fatores que levam uma população a
aumentar ou a diminuir de tamanho. A taxa de variação populacional é uma
importante variável que quantifica o comportamento dinâmico de uma
população biológica, e nos fornece o valor da velocidade de desenvolvimento
da população em qualquer instante tempo. É definida matematicamente pela
derivada da função que modela o tamanho da população em relação ao
tempo , . Se a taxa de variação for negativa, significa que a população
diminui ao longo do tempo. Se esta for positiva, significa que a população
aumenta ao longo do tempo. Se esta for nula, temos uma população em
estagnação.
Desta forma, o crescimento populacional pode ser modelado como:
onde e representam, respectivamente, as taxas de natalidade
[nascimentos/tempo] e de mortalidade [mortes/ tempo]. Se assumirmos que
estas taxas sejam proporcionais ao tamanho da população, e
, onde [nascimento/(indivíduo·tempo)] e [mortes/(indivíduo ·
tempo)] são as taxas de natalidade e mortalidade instantâneas, temos:

12
A equação acima é o chamado modelo de crescimento exponencial, e nos
diz que se (taxa de natalidade instantânea excede a taxa de mortalidade
instantânea), a população cresce proporcionalmente a , e quanto maior a
população, mais rapidamente (exponencialmente) ela cresce. Para
encontrarmos a função , que modela o tamanho da população em um
instante de tempo , devemos resolver a equação diferencial.
Conforme se discutiu em essência modelar o comportamento de
populações usando o paradigma de modelagem baseada em equações, em
resposta, está em obter a equação diferencial que relaciona a taxa de variação
da população em função de fatores que influenciam no seu acréscimo ou
decréscimo. Porém, quando estamos lidando com interação do tipo predação,
temos mais de uma população. Além disso, existe uma influência mútua no
comportamento destas populações. A população de predadores depende da
população de presas, pois é de onde ela tira o alimento. A população de
predadores sofre influencia da predação. Assim, o modelo matemático para
representar o comportamento das populações envolvidas compreende um
sistema de equações diferenciais, onde cada equação diferencial modela o
comportamento de uma população.
Suponhamos o caso simples onde temos duas populações, uma
população de presas representada por indivíduos, e uma população de
predadores representada por indivíduos. As taxas de crescimento das presas
e predadores serão função das suas populações:
onde as funções e determinam quais fatores influenciam positivamente ou
negativamente na população de presas e predadores, respectivamente.

13
O modelo de Lotka-Volterra 1 (GOTELLE, 2009) é um sistema de
equações diferenciais de primeira ordem que modela a interação de predação
entre duas populações biológicas, e representa as funções e da seguinte
forma:
Os elementos que constituem as equações são descritos a seguir:
é o número de presas no tempo [indivíduos],
é o número de predadores no tempo [indivíduos],
é a taxa de variação de presas por unidade de tempo
[indivíduos/tempo],
é a taxa de variação de predadores por unidade de tempo
[indivíduos/tempo],
é a taxa de nascimento das presas [indivíduos nascidos/presa/tempo],
é a taxa de mortalidade dos predadores [indivíduos
mortos/predador/tempo],
é a eficiência na predação [indivíduos/presa/predador/tempo]
é a eficiência de conversão da predação sobre a população de
predadores [indivíduos/presa/predador/tempo].
Pela equação que modela o comportamento das presas temos que:
Analisando o primeiro termo da equação, vemos que os predadores são a
única força que limita o crescimento das presas. Ou seja, se , temos
que a população de presas crescerá exponencialmente, onde representa
a taxa intrínseca de crescimento da população das presas. Se fossemos
pensar pelo ponto de vista biológico, é como se a população de presas
tivesse alimentos em grande abundancia e o que controla o crescimento
exponencial de sua população é a ação dos predadores.
1Sistema de equações diferenciais proposto independentemente por Alfred J. Lotka (1880-1949) no ano
de 1925 e VitoVolterra (1860-1940) no ano de 1926.

14
Analisando o segundo termo da equação, vemos que o potencial de
crescimento exponencial é contrabalanceado (sinal negativo) pelas perdas
que ocorrem na predação. O coeficiente mede a eficiência na captura da
presa. O produto é a resposta funcional do predador, que é a taxa de
captura de presas por predador.
Pela equação que modela o comportamento dos predadores temos que:
Analisando o segundo termo da equação, vemos que o predador se
alimenta somente das presas e não dispõem de outra fonte de alimentação.
Na ausência de presas, , a população de predadores decresce
exponencialmente, onde é a taxa de mortalidade.
Analisando o primeiro termo da equação, vemos que se observa
crescimento positivo somente quando a população de presas está presente.
O coeficiente é uma medida da eficiência da conversão. O produto
reflete a resposta das atividades de predação sobre a população de
predadores, ou seja, é a taxa de crescimento da população de predadores
em função da abundância de presas.
2.2 Modelo baseado em agentes
A modelagem baseada em equações preocupa-se em modelar a
dinâmica de populações a partir de um ponto de vista agregado ou holístico,
onde uma equação diferencial descreve a taxa de crescimento da população.
Já a modelagem baseada em agentes destina-se em modelar o fenômeno a
partir de uma perspectiva desagregada, dando ênfase nas partes constituintes,
como se comportam e se influenciam para definir o comportamento coletivo
(PARUNAK,1998).
A modelagem baseada em agentes tem suas raízes na Teoria de
Sistemas Multiagentes, uma subárea da Inteligência Artificial Distribuída (Macal
e North, 2009). É um paradigma de modelagem que descreve o fenômeno por
meio de uma estrutura de entidades que se relacionam dentro de um ambiente.
Cada entidade recebe o nome de agente. Segundo a definição de Russel e
Norvig (2004), um agente é uma entidade que pode perceber seu ambiente por
meio de sensores e agir sobre este por meio de atuadores. O agente possui um
conjunto de capacidades comportamentais que definem suas competências, e

15
a autonomia necessária para utilizar suas capacidades comportamentais a fim
de se alcançar seus objetivos. O ambiente define a região ou espaço onde
estes agentes coexistem se relacionam e atuam. Um conjunto de regras define
o comportamento dos agentes e como eles interagem e atuam sobre o
ambiente onde coexistem.
Na modelagem da dinâmica e interação do tipo predação, temos dois
tipos de agente: o agente-presa e o agente-predador. O mundo ou ambiente
onde eles coexistem é representado por uma grade quadrada, conforme ilustra
a Figura 2-1. O mundo é povoado por um número predefinido de presas e
predadores. Os agentes podem mover-se livremente ao longo da grade. Em
cada quadrado podem coexistir uma ou mais presas ou predadores. Cada
agente possui um conjunto de regras que definem o seu comportamento.
O tempo é caracterizado por iterações ou passos discretos de tempo.
Para cada iteração , um conjunto de regras que define o
comportamento dos agentes é executado sistematicamente. Inicialmente,
quando , as populações de presas e de predadores são distribuídas
aleatoriamente ao longo do ambiente. Para uma dada iteração , as
seguintes regras sequenciais são executadas: busca por alimentos,
reprodução, morte e movimento. Inicialmente presas e predadores buscam por
alimentos no ambiente. Os predadores se alimentam de presas. As presas
podem se alimentar de algum tipo de alimento disponível no ambiente. Em
Figura 2-1: Representação do ambiente onde os agentes interagem.

16
seguida, as regras que definem a reprodução e a morte são executadas. Por
último, presas e predadores se movimentam. Presas e predadores
movimentam-se aleatoriamente ao longo das quadrículas que constituem a
grade. Dado que esteja em uma quadrícula, a presa ou o predador pode
mover-se para qualquer uma das quadrículas vizinhas. A escolha da quadrícula
vizinha é aleatória.
O modelo baseado em agentes, aqui explorado é o proposto por
Wilensky e Reisman (1997), e pode ser encontrado junto aos modelos de
exemplos contidos na documentação do NetLogo. Este modelo apresenta duas
variações:
Na sua primeira variação, os predadores e as presas percorrem
aleatoriamente um-a-um os pontos da grade, enquanto que os predadores
buscam por presas para se alimentar. Se, em uma dada iteração, o
predador se encontrar com uma presa no mesmo quadrado, ele a come. Ao
se alimentar de uma presa, o predador acumula uma energia, que o
mantém vivo. Esta energia acumulada definide um número máximo de
iterações que o predador pode ficar sem se alimentar. A cada iteração sem
comer, esta energia reduz-se. Se, a energia se esgotar, o predador morre.
Para representar o processo de natalidade, a cada iteração, cada presa e
cada predador possuem uma probabilidade para gerar um descendente.
Esta primeira variação de modelo apresenta um comportamento dinamico
interessante, porém, é instável.
A segunda variação do modelo inclui um alimento essencial para a
sobrevivencia das presas. Os quadrados da grade são preenchidos com
uma vegetação que é o alimento das presas. Ao comer a vegetação, a
presa acumula uma energia que a mantem viva. A cada iteração sem
comer, esta energia diminui. Quando a energia se esgota, a presa morre.
Se a vegetação de um quadrado foi consumida, ela rebrotará após um
determinado tempo. O comportamento do predador é o mesmo da variação
anterior. Esta variação apresenta-se mais complexa do que a primeira, e é
estável. Em ambas variações, há uma presa ou há um predador que acaba
de nascer, é atribuido um valor aleatório de energia inicial. Na inicialização,

17
o alimento das presas é distribuido aleatoriamente sobre a grade, na
proporção de 50%.
A Tabela 2-1 exibe os parâmetros do modelo, seus símbolos, e suas
respectivas descrições.
Tabela 2-1: Descrição dos parâmetros do modelo baseado em agentes.
Parâmetro Símbolo Descrição
Vegetação?
(sim ou não) veg
Define a variação do modelo: variação 1
(sem vegetação) e variação 2 (com
vegetação).
População inicial de
presas (indivíduos) Define a população inicial de presas.
População inicial de
predadores (indivíduos) Define a população inicial depredadores.
Ganho de energia do
predador (iterações)
Define o número máximo de iterações em
que um predador pode ficar sem se
alimentar.
Ganho de energia da
presa (iterações)
Define o número máximo de iterações em
que uma presa pode ficar sem se
alimentar.
Taxa de reprodução de
predadores
(probabilidade/iteração)
Define a probabilidade, por iteração, em
que um predador pode dar origem a uma
nova espécie.
Taxa de reprodução de
presas
(probabilidade/iteração)
Define a probabilidade, por iteração, em
que uma presa pode dar origem a uma
nova espécie.
Tempo de rebrota da
grama (iterações)
Tempo de rebrota da grama em uma
quadrícula que foi pastoreada pela presa.
O modelo baseado em agentes busca representar, de maneira mais
simplificada e minimalista possível, a dinâmica da interação entre presas e
predadores do mundo real. Como resultado das regras que definem o

18
comportamento dos agentes e a interação entre eles, um comportamento
coletivo emerge. O comportamento do modelo é caracterizado pelo tamanho da
população de presas e da população de predadores, em número de indivíduos,
evoluindo ao longo das iterações.

19
3 RESULTADOS E DISCUSSÃO
3.1 Simulação do modelo baseado em equações
Um estudo qualitativo do comportamento dinâmico do modelo de Lotka-
Volterra pode ser realizado utilizando a teoria dos sistemas dinâmicos
(FERRARA, 1995; BOYCE, 1999; SAVI, 2004). Neste trabalho iremos nos ater
apenas em simular o comportamento do modelo, ou seja, resolver as equações
do modelo, e obter os valores das populações de presas e predadores ao longo
do tempo.
A resolução do modelo de Lotka-Volterra é realizada via métodos
numéricos. Dentre os métodos numéricos testados, para resolvermos o sistema
de equações diferenciais ordinárias do modelo de Lotka-Volterra, escolhemos o
método numérico de Runge-Kutta de 4ª ordem. O APÊNDICE A traz uma breve
descrição deste método, aplicado na solução de um sistema de equações
diferenciais ordinárias de primeira ordem. Em todas as simulações realizadas
neste trabalho, foi utilizado o valor de passo de integração . A figura
3-1 apresenta o software MATLAB, versão 7.10.0, cujo ambiente de
computação numérica foi utilizado para a aplicação do método de Runge-Kutta
e visualização dos resultados. O MATLAB é um software de computação
numérica que realiza operações matriciais, constrói gráficos em duas ou três
dimensões, auxilia no processamento de sinais, além de possuir uma
linguagem de programação de alto nível que possui muitas bibliotecas de
funções especializadas.
Figura 3-1: Janela principal do MATLAB.

20
Na solução numérica do modelo de Lotka-Volterra, partimos de valores
iniciais da população e um dado conjunto de valores dos parâmetros, e
obtemos os valores do tamanho da população de presas e predadores em
função do tempo. Tanto o tempo, quanto o tamanho da população são
expressos em valores adimensionais.
A Figura 3-2 mostra a solução do sistema para a condição inicial
e os valores dos parâmetros , , ,
. A solução mostra que o modelo de Lotka-Volterra capta a interação
entre as espécies por meio de flutuações, onde a dinâmica da população de
predadores é o reflexo da dinâmica da população de presas. O que determina
se uma população vai diminuir ou aumentar é o tamanho da outra população.
Um crescimento na população de presas é seguido por um crescimento na
população de predadores. Similarmente, um decréscimo na população de
presas é seguido por um decréscimo na população de predadores. O aumento
na população de presas reflete em uma abundância de alimentos para a
população de predadores, criando condições favoráveis para o aumento na
população de predadores. O aumento na população de predadores reflete uma
demanda maior por presas, a predação torna-se mais intensa e,
consequentemente, a população de presas tende a diminuir.
O comportamento cíclico de aumento e diminuição da população de
presas e predadores também pode ser caracterizado no gráfico da população
de predadores (eixo vertical) em função da população de presas (eixo
horizontal), denominado plano de fases. A Figura 3-53 mostra o plano de fases
para a condição inicial e os valores dos parâmetros ,
, , . O comportamento periódico da Figura 3-2 é
definido no plano de fases por uma trajetória fechada, chamada de ciclo limite,
e é centrado em torno do ponto de equilíbrio (
), que é a solução
para
e
.

21
Figura 3-2: Valores da população de presas e predadores ao longo do tempo
para a condição inicial e os valores dos parâmetros ,
, , .
Figura 3-3: Plano de fases do modelo de Lotka-Volterra para a condição inicial
e os valores dos parâmetros , , ,
.
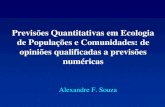
O artigo de Elton e Nicholson (1942) publica e analisa dados reais da
dinâmica de interação entre as populações do lince canadense e da lebre, que
foram observados desde 1820 até as primeiras décadas de 1900. Estes dados,
que foram registrados pela empresa de comércio de peles de animais Hudson’s
Bay Company, são um exemplo clássico do comportamento real da dinâmica
de interação entre presas (lebre) e predadores (lince canadense). A análise dos
dados mostra que a população de linces aumenta e diminui em resposta às
flutuações na população de lebres. Assim, quando as lebres são abundantes, a
população de linces se expande. Quando a população de lebres é reduzida,
1 1.5 2 2.5 3 3.5 4 4.5 5 5.51
1.5
2
2.5
3
3.5
numero de presas
num
ero
de p
red
ad
ore
s

22
linces são obrigados a caçar outros animais. Embora sejam capazes de se
alimentar de outros animais como esquilos, veados e raposas, o fato de serem
obrigados a caçar animais diferentes de lebres traz consequências sobre a
população de linces, que se reduz. A Figura 3-4 ilustra estes dados.
Figura 3-4: Flutuações nas populações de lebres (snowshoehare) e seu efeito
sobre a população de seu predador, o lince canadense (lynx). O gráfico é
baseado em dados registrados pela empresa de comercio de peles de animais
Hudson’s Bay Company.
No modelo de Lotka-Volterra, a amplitude das oscilações no
comportamento das populações de presas e predadores depende do valor da
condição inicial. Podemos perceber isto, realizando várias simulações do
modelo utilizando diferentes condições iniciais, para um mesmo conjunto de
valores de parâmetros. A Figura 3-5 mostra os ciclos limites do plano de fases
para diferentes condições iniciais e valores de parâmetros , ,
, . Os ciclos são centrados em (
) .

23
Figura 3-5: Plano de fases do modelo de Lotka-Volterra utilizando os
valores de parâmetros , , , e diferentes valores
de condições iniciais, conforme indicadas no gráfico.
Uma crítica ao modelo de Lotka-Volterra é o fato de se assumir que, na
ausência de predação, a população das presas cresce exponencialmente, pois
possuem abundancia de alimentos. Modificações podem ser introduzidas para
reverter este problema. Uma delas consiste em introduzir no modelo um fator
inibidor, denominado capacidade de suporte, que representa a disponibilidade
de recursos limitados para a sobrevivência das presas.A
Figura 3-6, mostra o resultado de uma simulação do modelo utilizando a
condição inicial e os parâmetros , , e
. Na ausência de predação, , a população de presas cresce,
sem cessar, a uma taxa , e a população de predadores decresce a uma
taxa de , até se extinguir.

24
Figura 3-6: Valores da população de presas e predadores ao longo do tempo
para a condição inicial e valores dos parâmetros ,
, e .
Como observado nas Figuras 3-7,3-8 e 3-9 se modificarmos a taxa de
natalidade das presas ( , e ), e mantermos constantes as
condições iniciais das populações, , e os demais parâmetros
( , , , o aumento no valor de , influenciaria na
abundância de alimento para os predadores, e, consequentemente,
influenciaria no aumento da população de predadores. As oscilações das três
figuras mostram-se com amplitudes diferentes, sendo maiores quando a taxa
de nascimento das presas é maior.
Com a ausência de mortes na população de predadores, com o passar
do tempo, a população de predadores tende a se estagnar, e a população de
presas se extingue. A Figura 3-10 mostra este comportamento para as
condições iniciais , e parâmetros , , e
. Partindo de um valor inicial , e sem mortalidade ( ), a
população de predadores responde à abundância de presas, até se estagnar.
Com a ação constante da predação, sem que haja um fator limitante, a
população de presas se extingue após certo tempo.

25
Figura 3-7: Comportamento da população de presas e predadores para , , , , .
Figura 3-8:Comportamento da população de presas e predadores para , , , , .
Figura 3-9:Comportamento da população de presas e predadores para , , , , .

26
Figura 3-10:Comportamento da população de presas e predadores para a
condição inicial , , , e .
3.2 Simulação do modelo baseado em agentes
A simulação do modelo baseado em agentes é realizada utilizando o
software NetLogo (WILENSKY,1999), um software que possibilita a
representação computacional e simulação de modelos baseados em agentes,
utilizando uma linguagem de alto-nível para descrição dos modelos. A
linguagem de programação permite o fácil desenvolvimento de interfaces
gráficas como botões e barras que possibilitam o ajuste dos parâmetros do
modelo, uma janela que permite visualizar o comportamento do modelo, e
gráficos que exibem os resultados do modelo. A Figura 3-11 exibe a janela
principal do NetLogo.
Conforme descrito na Seção 2.2, existem duas variações para o modelo
baseado em agentes utilizados neste trabalho. Na primeira variação, a
dinâmica de população de presas é condicionada apenas pela taxa de
natalidade das presas, e pela ação da predação. Já a dinâmica de população
de predadores é condicionada pela taxa de natalidade dos predadores, e pelo
consumo de presas.

27
Figura 3-11: Janela principal do software NetLogo.
De modo geral, esta variação apresenta dois comportamentos distintos:
no primeiro, após um certo tempo, a população de presas se extingue e,
imediatamente, a população de predadores se extingue; e no segundo, a
população de presas e de predadores crescem exponencialmente. Este
comportamento pode ser evidenciado observando os gráficos da Figura 3-12,
onde foram realizadas um total de quatro simulações, utilizando diferentes
valores da taxa de reprodução de presas. Para as simulações foram utilizadas
as condições iniciais das populações de presas , e de predadores
, os predadores se reproduzem a uma taxa e possuem ganho
de energia por presa comida de , e diferentes valores da taxa de
reprodução das presas, que são, , , e .
Percebe-se nas simulações que existe um limiar de taxa de nascimento
das presas, acima do qual, ocorre a superpopulação. Para valores abaixo deste
limiar, que são , e , a população de predadores
responde ao crescimento da população de presas, porém, a ação predatória
induz a extinção da população de presas. Já para um valor de taxa de
reprodução de presas acima deste limiar, que é , ocorre o fenômeno
de superpopulação, onde a população de presas consegue suportar a ação
predatória e ambas crescem exponencialmente.

28
(a) (b)
(c) (d)
Figura 3-12: Comportamento da população de presas (linha azul) e predadores
(linha vermelha) para uma simulação do modelo baseado em agentes
utilizando os valores de parâmetros , , , e
diferentes valores para ( , , e ).
Este eminente comportamento instável da primeira variação do modelo se
dá pela ausência de uma característica essencial para a dinâmica de
populações biológicas, a chamada capacidade de suporte. A capacidade
suporte é um fator que limita o crescimento populacional descontrolado de uma
população, assumindo que o habitat possui recursos limitados para suportá-la.
Desta forma, ao incluirmos a capacidade de suporte no modelo, a competição
por comida é um fator que limita o crescimento das populações, mantendo-a
estabilizada, controlando a possibilidade de superpopulação.
A segunda variação do modelo baseado em agentes inclui a capacidade de
suporte. Supõe-se que a grama seja a única fonte de alimento das presas. Se
uma presa encontra grama em um dado quadrado, ela a consome, e
incrementa sua energia, de acordo com o parâmetro ganho de energia da
presa ( ). A grama possui uma dinâmica de rebrota, controlada pelo
parâmetro tempo de rebrota da grama ( ). Desta forma, quando a população
de presas começa a crescer, a demanda por grama cresce, as presas passam

29
a consumir cada vez mais este recurso, que é limitado. À medida que se torna
mais escasso, consequentemente, a população de presas decresce, pois
começam a morrer de fome. A população de predadores oscila sempre em
resposta à quantidade de presas disponíveis. Quanto mais presas disponíveis,
a população de predadores encontra condições de crescer. Quando se tornam
mais escassas, a população de predadores decresce, pois a escassez de
alimentos a reduz.
Para avaliarmos o efeito da capacidade de suporte, utilizamos os mesmos
valores de parâmetros das simulações apresentadas na Figura 3-12, utilizando
diferentes valores da taxa de reprodução de presas, incluindo a capacidade de
suporte, que é presença de grama, o alimento essencial para sobrevivência
das presas. O tempo de rebrota da grama é de iterações. Na
inicialização, a grama é distribuída aleatoriamente ao longo dos quadrados da
grade, ocupando 50% do habitat. Ao consumir uma grama, a presa recebe um
ganho de energia de iterações. A Figura 3-13 exibe os resultados das
simulações.
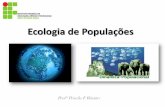
Percebe-se nas simulações apresentadas na Figura 3-13, que a estabilidade
das populações ocorre para um valor de taxa de reprodução acima de um
limiar. Existe um limiar para , que define as chances da população de
predadores se manter. O valor de relaciona-se com a abundância mínima de
presas. Dependendo do valor de , pode haver uma quantidade tão baixa de
presas que, consequentemente, a população de predadores entra em extinção,
por escassez de alimento. Para valores abaixo deste limiar, por exemplo, para
(Figura 3-13(a)) e (Figura 3-13(b)), existe possibilidade da
população de predadores se extinguir. Quando , a população de
predadores se extinguiu imediatamente após à abundancia mínima de presas
ser atingida. Quando , as chances da população de predadores se
extinguir foram menores que no caso para , porém, a população de
predadores se extinguiu após o terceiro ciclo populacional. Acima deste valor
limiar para , por exemplo, para (Figura 3-13(c)) e (Figura
3-13(d)), os ciclos populacionais se mantêm estáveis ao longo do tempo. Para
todas as simulações, tanto na presença, quanto na ausência de predadores, a

30
população de presas manteve-se estabilizada, controlada pela capacidade de
suporte do habitat. Mesmo com um valor elevado de taxa de reprodução das
presas, por exemplo, , a estabilidade dos ciclos populacionais se
mantém, conforme podemos observar no gráfico da Figura 3-14. Isto mostra a
importância da capacidade de suporte para controlar a estabilidade da
dinâmica de populações biológicas.
(a) (b)
(c) (d)
Figura 3-13: Comportamento da população de presas (linha azul) e predadores (linha
vermelha) para uma simulação do modelo baseado em agentes utilizando os valores
de parâmetros , , , , , e diferentes
valores para (2%, 3%, 4% e 5%).
Figura 3-14: Comportamento da população de presas (linha azul) e predadores
(linha vermelha) para uma simulação do modelo baseado em agentes
utilizando os valores de parâmetros , , , ,
, , .

31
4 CONSIDERAÇÕES FINAIS
O objetivo deste trabalho foi apresentar e comparar duas abordagens de
modelagem matemática para a dinâmica de interação entre populações
biológicas do tipo predação. As duas abordagens possuem enfoques
diferentes. A modelagem baseada em equações se fundamenta em um
enfoque holístico e agregado, onde um sistema de equações diferenciais
descreve o comportamento das populações biológicas, que é representada por
variáveis de estado contínuas (as densidades populacionais de presas e de
predadores). Já a modelagem baseada em agentes fundamenta-se em um
enfoque discreto, explícito e desagregado, onde a dinâmica das populações
biológicas é descrita a partir das representações dos indivíduos envolvidos no
processo (presas e predadores), das regras que definem os seus
comportamentos, e das regras que definem a interação entre eles.
Pudemos observar que ambas as abordagens conseguem descrever o
comportamento cíclico da dinâmica de interação entre presas e predadores.
Para GIACOMINI(2007), modelos simples, como aqueles derivados de Lotka-
Volterra, embora sejam matematicamente tratáveis, são úteis para uma
investigação teórica inicial. A ecologia demanda por modelos mais realistas,
voltados para o complexo conjunto de objetos estudados pela Ecologia. Neste
sentido, os modelos baseados em agentes são promissores para a realização
desta tarefa, pois são extremamente flexíveis e conceitualmente poderosos.
Embora o modelo baseado em equações de Lotka-Volterra apresente
limitações, existem inúmeras parametrizações e modificações que possibilitam
superá-las, incluindo mais realismo no seu comportamento (GIACOMINI,
2007). No entanto, quanto mais realismo é introduzido nas equações, o
tratamento matemático torna-se mais difícil. Outro limitação é a dependência
de um método numérico para solucionar suas equações. Dependendo do nível
de realismo introduzido, podem aparecer instabilidades no processo de solução
numérica das equações.
Por ser de natureza explícita e desagregada, a modelagem baseada em
agentes leva uma vantagem sobre a modelagem baseada em equações. Os
modelos baseados em agentes são modelos de simulação. A simulação
consiste na execução das regras que o definem e esta independe de métodos

32
numéricos. Além de descrevemos os indivíduos como são, por meio de
parâmetros, regras de comportamento e regras de interação, a representação
espacialmente explícita do habitat facilita a inclusão de realismo biológico no
modelo. Poderíamos investigar o efeito da ação antrópica sobre a dinâmica de
interação das populações biológicas, explicitando a ação do homem
interferindo na abundancia de presas, como por exemplo, o caso da caça.
Poderíamos avaliar o efeito da construção de uma estrada, onde a paisagem
resultante torna-se fragmentada, e os animais podem morrer ao tentar
atravessá-la. Desta forma, dependendo da natureza do problema que se
deseja modelar, os modelos baseados em agentes são mais propensos às
modificações visando sofisticação na representação da realidade, mostrando-
se, portanto, mais adequados.

33
5 REFERÊNCIAS BIBLIOGRÁFICAS
Boyce e DiPrima. Equações Diferenciais Elementares e Problemas de Valores de Contorno, editora LTC, 9ª edição, 2010.
ELTON, Charles e NICHOLSON, Mary. The Ten-Year Cycle in Numbers of the Lynx in Canada. Journal of Animal Ecology, Vol. 11, No. 2 (Nov., 1942), pp. 215-244.
FERRARA, Nelson Fiedler; PRADO, Carmen P. Cintra do. Caos: uma introdução. São Paulo: Editora Edgard Blucher LTA, 1995.
GIACOMINI, Henrique C. Sete motivações teóricas para o uso da modelagem baseada no indivíduo em ecologia. Acta Amazonica, vol. 37 (3), 2007.
GOMES, M.C. Interações entre espécies: predação. Disponível em: < http://webpages.fc.ul.pt/~mcgomes/aulas/biopop/Mod4/Competicao.pdf> Acessado em: 20 de janeiro de 2013.
GOTELLI, Nicholas J. Ecologia.Universidade de Vermont. Londrina: Ed. Planta, quarta edição, 2009.
ODUM, Eugene P. Ecologia, Rio de Janeiro: Ed. Guanabara, 1988.
PARUNAK, H. V. D., SAVIT, R.,RIOLO, R. L. Agent-Based Modeling vs. Equation-Based Modeling: A Case Study and Users' Guide. In: Proceedings of the First International Workshop on Multi-Agent Systems and Agent-Based Simulation, SICHMAN, S. S., CONTE, R., GILBERT, N. (Eds.). Springer-Verlag, London, UK, 10-25, 1998.
RUSSEL, Stuart; NORVIG, Peter. Inteligência artificial. Rio de Janeiro: Elsevier, 2004. Pag. 1021.
SOLOMON, Maurice E. Dinâmica de populações.São Paulo: Ed. E.P.U.2008. Coleção temas de biologia, vol. 3.
WILENSKY, U. (1999). NetLogo. http://ccl.northwestern.edu/netlogo/. Center for Connected Learning and Computer-Based Modeling, Northwestern University, Evanston, IL.
WILENSKY, U. NetLogo Wolf Sheep Predation model.Center for Connected Learning and Computter-Based Modeling, Northwestem University, Evanston IL, 1997. Disponível em: <http://ccl.northwestern.edu/netlogo/models/WolfSheepPredation>. Acessado em: 21 de fevereiro de 2013.
MACAL, Charles M; NORTHN, Michael J. Introduction to Agent- based Modeling and Simulation. Argonne National Laboratory, USA, 2006.

34
ODUM, Eugene P; BARRET, Gary W. Fundamentos de Ecologia. São Paulo: Ed. Cengage Learning, 5ª edição, 2011.
STWART, James. Cálculo: volume I. São Paulo: Ed. Pioneira Thomson Learning, 5ª edição, 2006.

35
APÊNDICE A - MÉTODO DE RUNGE-KUTTA DE 4ª ORDEM
Dados Defina o intervalo de integração h e o número de iterações do k;
Para n = 1,2,...,k faça:
)
)
)
)
Top Related