![[ Services ] Grid Computing](https://static.fdocumentos.tips/doc/165x107/5571f1bf49795947648b9f9b/-services-grid-computing.jpg)





Línguas
Páginas
Legal


PROJETO DE UM INVERSOR BIDIRECIONAL APLICADO EM CARREGADORES DE
VEÍCULOS ELÉTRICOS PARA CONFIGURAÇÃO G2V E V2G
Maisa Kashima
Projeto de Graduação apresentado ao curso de
Engenharia Elétrica da Escola Politécnica,
Universidade Federal do Rio de Janeiro, como
Parte dos requisitos necessários à
obtenção do título de Engenheiro.
Orientador: Luís Guilherme Barbosa Rolim
Rio de Janeiro
Março de 2018
PROJETO DE UM INVERSOR BIDIRECIONAL APLICADO EM CARREGADORES DE
VEÍCULOS ELÉTRICOS PARA CONFIGURAÇÃO G2V E V2G
Maisa Kashima
PROJETO DE GRADUAÇÃO SUBMETIDO AO CORPO DOCENTE DO CURSO DE
ENGENHARIA ELÉTRICA DA ESCOLA POLITÉCNICA DA UNIVERSIDADE
FEDERAL DO RIO DE JANEIRO COMO PARTE DOS REQUISITOS NECESSÁRIOS
PARA A OBTENÇÃO DO GRAU DE ENGENHEIRA ELETRICISTA.
Examinada por:
________________________________________________
Prof. Luís Guilherme Barbosa Rolim, Dr.-Ing.
(Orientador)
________________________________________________
Prof. Walter Issamu Suemitsu, Dr. Ing.
________________________________________________
Engª Laís Ferreira Crispino Proença, M.Sc.
RIO DE JANEIRO, RJ – BRASIL
MARÇO DE 2018

iii
Kashima, Maisa
Projeto de um inversor bidirecional aplicado em
carregadores de veículos elétricos para configuração
G2V e V2G/ Maisa Kashima. – Rio de Janeiro: UFRJ/
Escola Politécnica, 2018.
VI,36 p.: il; 29,7 cm.
Orientador: Luís Guilherme Barbosa Rolim
Projeto de Graduação UFRJ/ Escola Politécnica/ Curso
de Engenharia Elétrica, 2018.
Referências Bibliográficas: p. 35-36
1. Inversor Bidirecional. 2. Conversor Bidirecional.
3. V2G. 4. G2V. 5. Veículos Elétricos. 6. Serviços
Ancilares. 7. Vehicle-to-Grid. Grid-to-Vehicle. 8. Smart
Grid. I. Barbosa Rolim, Luís Guilherme. II. Universidade
Federal do Rio de Janeiro, Escola Politécnica, Curso de
Engenharia Elétrica. III. Projeto de um inversor
bidirecional aplicado em carregadores de veículos
elétricos para configuração G2V e V2G.

iv
Resumo do Projeto de Graduação apresentado à Escola Politécnica/ UFRJ como parte
dos requisitos necessários para a obtenção do grau de Engenheiro Eletricista.
PROJETO DE UM INVERSOR BIDIRECIONAL APLICADO EM CARREGADORES DE
VEÍCULOS ELÉTRICOS PARA CONFIGURAÇÃO G2V E V2G
Maisa Kashima
Março/2018
Orientador: Luís Guilherme Barbosa Rolim
Curso: Engenharia Elétrica
A ascensão da utilização dos veículos elétricos torna a manutenção da rede elétrica
necessária para suportar esta adição de demanda de energia. Ao mesmo tempo, com
o aumento da instalação de fontes renováveis à rede, procura-se uma solução de
armazenamento de energia em momentos de alta captação de energia eólica ou solar,
por exemplo, e fornecimento em momentos de baixa captação. Este projeto trata-se de
um inversor bidirecional aplicado em estações de recarga de veículos elétricos para
que seja possível tanto a carga da bateria, como estocar energia ou realizar a
prestação de serviços ancilares à rede a partir da bateria previamente carregada.
Deste modo, com o dispositivo é possível controlar a direção do fluxo de potência na
estação de recarga. O inversor é responsável por regular o fator de potência da rede,
absorver potência reativa da rede, regular as potências ativas e reativas da rede para
valores desejados além de carregar a bateria quando for desejado.
Palavras-chave: Inversor Bidirecional, Conversor Bidirecional, V2G, G2V, Veículos
Elétricos, Serviços Ancilares, Vehicle-to-Grid, Grid-to-Vehicle, Smart Grid.

v
Abstract of Undergraduate Project presented to POLI/UFRJ as a partial fulfillment of
the requirements for degree of Engineer.
PROJECT OF A BIDIRECTIONAL CONVERTER FOR ELECTRIC VEHICLES
CHARGERS TO G2V AND V2G CONFIGURATION
Maisa Kashima
March/2018
Advisor: Luís Guilherme Barbosa Rolim
Course: Electrical Engineering
Due to the ascension of electric vehicles popularity, the electric grid’s maintenance has
become a concern, as it needs to supply additional power to contain its extra demand.
At the same time, with the increasing integration of renewable source power plants into
the grid, energy must be stored for resupply in moments of lower energy production
(e.g.: solar power plants during nighttime). Looking to solving those problems, this
project proposes a bidirectional converter to be applied in electric vehicle recharging
stations making possible to either charge its battery or give support to the grid with a
previously charged battery. This device enables the user to control the direction of the
power flow at a recharge station. The converter can regulate the grid power factor, as
well as absorb reactive power from the grid, regulate both grid active and reactive
powers besides being able to recharge the electric vehicles battery when needed.
Keywords: Bidirectional Converter, V2G, G2V, Electric Vehicles, Ancillary Services,
Vehicle-to-Grid, Grid-to-Vehicle, Smart Grid.

vi
Sumário
1. Introdução ............................................................................................................................ 1
1.1 Objetivo ............................................................................................................................. 1
1.2 Metodologia ..................................................................................................................... 2
1.3 Organização do trabalho ............................................................................................... 2
Capítulo 2..................................................................................................................................... 3
2. Bases Tecnológicas para V2G ......................................................................................... 3
2.1 Redes Inteligentes .......................................................................................................... 3
2.2 Serviços Ancilares .......................................................................................................... 5
2.3 Topologia de conversores bidirecionais ...................................................................... 7
2.4 Armazenamento de Energia ....................................................................................... 10
Capítulo 3................................................................................................................................... 12
3. Projeto ................................................................................................................................ 12
3.1 Análise do circuito elétrico .......................................................................................... 12
3.2 Análise do Sistema de Controle ................................................................................. 13
3.2.1 Circuito de controle do conversor CA-CC............................................................. 13
3.2.2 Circuito de controle do conversor CC-CC ............................................................ 19
3.3 Modelo da Bateria íon-Lítio ......................................................................................... 21
Capítulo 4................................................................................................................................... 26
4. Simulação .......................................................................................................................... 26
4.1 Bateria em Modo de Carga com Q_ref = 0 .............................................................. 28
4.2 Bateria em Modo de Carga com Q_ref = 10k .......................................................... 30
4.3 Caso 1: Bateria em modo de Descarga com Q_ref = 0 e P_ref = 30k ................ 31
4.4 Caso 2: Bateria em modo de Descarga com Q_ref = 10k e P_ref = 30k ............ 32
Capítulo 5................................................................................................................................... 34
5. Conclusão .......................................................................................................................... 34
5.1 Sugestão para trabalhos futuros ................................................................................ 35
Referências Bibliográficas ............................................................................................36
1
Capítulo 1
1. Introdução
Em busca de um meio para reduzir a poluição atmosférica e diminuir a
dependência do petróleo, o uso de veículos elétricos é visto como uma das soluções
para tais problemas. Grande parte das montadoras de carro além de investirem
fortemente em veículos sustentáveis, pretendem deixar de produzir veículos a
combustão [1]. A Inglaterra e a França anunciaram que as vendas de carros movidos a
gasolina e a diesel serão extintas até 2040.
Por outro lado, apesar de novos tratados, medidas internacionais para a
redução de gases de efeito estufa e políticas de desenvolvimento sustentável, em
âmbito nacional as concessionárias de energia podem enfrentar alguns problemas
com o uso massivo de pontos de recarga em determinadas horas do dia.
Considerando que no cotidiano em horário com alta de demanda de energia elétrica
doméstica (entre 17 e 20 horas) um número significante de carros elétricos seriam
carregados quando as pessoas chegassem do serviço, as consequências desta
mudança seriam ruins tanto para a rede como para a geração de energia. O sistema
elétrico atual de cada país não foi desenvolvido para suprir esta demanda adicional e
significante de energia. Entretanto, pesquisas visando suavizar o impacto dos veículos
elétricos (VEs) em massa conectados à rede vêm sendo feitas.
Este trabalho propõe o projeto de um inversor bidirecional a ser instalado em
pontos de recarga de veículos elétricos para que seja possível sua integração com a
rede. O dispositivo permitirá que seja coordenada a direção do fluxo de potência,
podendo ser controlado o momento em que o veículo carregará a sua bateria ou
quando atuará fornecendo um serviço auxiliar à rede. Deste modo, o veículo
conectado com a rede (V2G – Vehicle-to-Grid) pode não apenas contribuir fornecendo
energia em horários de picos de demanda ou falta de energia na região, como também
auxiliar na estabilidade da rede. Ao contribuir para a rede, o usuário pode ser
beneficiado financeiramente. A recarga do VE programada para horários de menor
demanda de energia é positiva tanto para o consumidor que pagará uma tarifa menor,
quanto para a concessionária de energia que terá que suprir um perfil de carga melhor
distribuído ao longo do dia.
1.1 Objetivo
Como objetivo principal deste trabalho, tem-se o desenvolvimento do projeto de
um inversor bidirecional com aplicação em sistemas V2G e G2V (Grid-to-Vechicle). O
projeto é composto pela definição do circuito elétrico, estratégia de controle e
simulação para que o mesmo seja validado ao se comparar a situações da realidade.
Dado o contexto didático no qual o projeto está inserido, também compete a este

2
trabalho introduzir os alunos às aplicações de conceitos ensinados durante o curso de
Engenharia Elétrica da UFRJ.
Espera-se realizar os objetivos propostos através das seguintes metas
específicas:
Realizar a pesquisa da topologia que melhor se aplica a um sistema de
potência e que cumpre com a função do inversor bidirecional proposta;
Pesquisar uma estratégia de controle para a topologia escolhida;
Realizar o cálculo dos parâmetros necessários para a estratégia de controle
escolhida;
Modelar uma bateria de um veículo elétrico partindo de parâmetros reais
fornecidos pelo fabricante;
Realizar a simulação do projeto acoplado à rede e à bateria de um veículo
elétrico para diferentes situações;
Descrever com detalhes as ferramentas utilizadas para que futuros projetos
possam ser executados tomando este como base;
1.2 Metodologia
Primeiramente, com o conhecimento obtido durante o curso de Engenharia
Elétrica da UFRJ foi estudado e desenvolvido o circuito elétrico do inversor
bidirecional. Em seguida, foi feita a análise da estratégia de controle para ambos os
sentidos do fluxo de potência, o da bateria sendo carregada e o da bateria sendo
descarregada, fornecendo serviços à rede. Com o controle definido, cálculos foram
feitos para a obtenção de parâmetros dos controladores aplicados ao circuito
desenvolvido. Para que a simulação fosse o mais fiel possível da realidade, modelou-
se também a bateria íon-Lítio do VE Nissan Leaf, o VE mais popular em 2017 [2].
Finalmente a simulação do inversor bidirecional conectado à rede e à bateria
foi realizada para diferentes casos com o intuito de que fosse validado seu
funcionamento de acordo com o que se esperava em cada caso. Para isto utilizou-se o
PSIM, programa para simulação de circuitos de eletrônica de potência.
1.3 Organização do trabalho
No Capítulo 2 são apresentados os conceitos necessários para o
embasamento do projeto. No Capítulo 3 são dadas as informações sobre o presente
projeto e detalhes para que este fosse realizado. Em seguida, no Capítulo 4 os
resultados das simulações foram apresentados e analisados. Por fim, a conclusão e
sugestões para trabalhos futuros podem ser vistos no Capítulo 5.

3
Capítulo 2
2. Bases Tecnológicas para V2G
2.1 Redes Inteligentes
Em 2016 havia cerca de 18 mil VEs da Nissan em circulação no Reino Unido,
se todos estivessem ligados à rede elétrica iriam produzir o mesmo que uma central
elétrica de 180 MW. Supondo um cenário em que todos os veículos do Reino Unido
fossem VEs, a capacidade de geração seria equivalente a de uma central elétrica de
370 GW, energia suficiente para abastecer o Reino Unido, a Alemanha e a França [3].
Um carro permanece estacionado em cerca de 95% de sua vida útil, e um VE
necessita de menos de 80% da capacidade de sua bateria para realizar trajetos
cotidianos [4]. Pensando nisto, os veículos elétricos são vistos como uma solução
quando aliados a redes inteligentes, conhecidas mundialmente como Smart Grids. A
rede inteligente utiliza a tecnologia da informação para melhorar a eficiência tanto
econômica como energética, torná-la mais confiável e sustentável. A vantagem disto
em relação a uma rede elétrica convencional é a possibilidade de prever o momento
conveniente, tanto ao cliente como para o fornecedor de energia, de recarregar a
bateria do VE ou de prestar serviços ancilares à rede. Na Figura 2-1, a área azul
corresponde a uma típica curva de carga residencial em que há um pico de demanda
tanto pela manhã, entre 7 e 9 horas, quanto ao entardecer, entre 17 e 20 horas.
Durante períodos em que o carro encontra-se estacionado, este é capaz de fornecer
energia em caso de sobrecarga na rede (área verde indicada no gráfico da Figura 2-1),
conceito denominado de Vehicle to Grid (V2G). A área laranja do gráfico corresponde
aos momentos nos quais seria conveniente a carga das baterias dos veículos
elétricos. Como resultado, tem-se uma curva de demanda achatada devido aos
serviços ancilares prestados pelos veículos. Como as redes elétricas em geral não
apresentam unidades de armazenamento, a geração e transmissão do sistema devem
suprir instantaneamente a demanda, sendo a regulação de energia feita pelo
ligamento ou desligamento de geradores.

4
Figura 2-1 - Gráfico da Demanda de Energia, a utilização do VE em carga durante o dia e como estoque de energia durante o horário de pico.
Com a crescente instalação de fontes renováveis, que produzem energia com
frequência variável de acordo com as condições climáticas, a necessidade de
armazenamento tem sido ainda maior. Neste contexto os VEs são vistos como uma
alternativa de armazenamento móvel de energia. A Figura 2-2 apresenta o perfil da
captação de energia solar durante o dia e a carga de uma residência em um dia
comum. Nota-se que o pico de produção não coincide com o de consumo. Nesse
caso, ao conectar um VE com tecnologia V2G à rede, sua bateria seria carregada no
momento do pico de produção de energia solar, para que mais tarde, quando a
demanda de energia for maior que a produção, o carro possa compensar a deficiência,
como é mostrado na Figura 2-3.
Figura 2-2 - Gráfico da Demanda de Energia Residencial Típica ao longo do dia e da Produção de Energia Solar.

5
Figura 2-3 - Durante o dia a bateria é carregada com a captação de energia solar e em horários de pico ocorre a descarga
da bateria para compensar a alta demanda.
Ao conectar um VE a uma casa, este também pode funcionar como um
estoque de energia. Assim, o usuário não estará sujeito a mudanças tarifárias em
horários de pico (17 a 20 horas), consumindo energia da rede apenas quando a tarifa
é normalizada. O suporte fornecido pelo veículo elétrico através da prestação de
serviços ancilares deve ser controlado de acordo com o perfil de utilização do VE de
cada usuário, para isto é necessário a utilização de medidores inteligentes que serão
melhor explicados na seção seguinte.
Em outro caso, na ocorrência da falta de energia na região devido ao corte de
carga ou catástrofe natural, um VE seria capaz de fornecer cerca de 30 kWh [5], o
suficiente para suprir a demanda de dois dias em uma residência. O VE utilizado como
suporte à casa é conhecido como Vehicle to Home (V2H). Este conceito foi criado em
resposta ao desastre nuclear ocorrido no Japão em Fukushima, quando os reatores
nucleares responsáveis pela produção de quase um terço da eletricidade do Japão
foram desativados para impedir que catástrofes ainda maiores pudessem ocorrer.
Depois do terremoto que causou o desastre nuclear, ocorreram diversos apagões,
então muitos proprietários de VEs os utilizaram como fonte emergencial de energia.
Desde então, não apenas empresas japonesas como europeias e americanas têm
investido em pesquisas de desenvolvimento da tecnologia V2H. A Mitsubishi ofereceu
a seus clientes japoneses do VE iMiEV a opção de comprar um adaptador que torna o
veículo capaz de fornecer energia para uma casa por mais de 24 horas.
Além disso em 2015 durante a 21ª Conferência das Nações Unidas sobre
Alterações Climáticas (COP21), a Nissan e a Enel anunciaram que iriam proporcionar
aos proprietários de VEs da Nissan no Reino Unido a possibilidade de os conectarem
à rede podendo vender a energia armazenada na bateria [3]. Em 2016 foram
instaladas 40 unidades que possibilitassem a interação V2G na Dinamarca.
2.2 Serviços Ancilares
Os serviços ancilares são operações além da geração e transmissão de
energia que são responsáveis por manter a estabilidade e segurança da rede. Estes
serviços mantém regulares o fluxo e a direção do fluxo de potência, mantém o
6
equilíbrio entre o fornecimento e a demanda e ajudam a recuperar o sistema depois de
uma possível falha ou manutenção.
No Brasil os procedimentos para a prestação de serviços ancilares são
previstos pela Resolução Nº 265/03 da ANEEL [6], sendo que os serviços estão
definidos no Artigo 2º. O Módulo 14 do Procedimento de Rede (PROREDE, 2009) e o
Módulo 8 do Procedimento de Distribuição (PRODIST, 2010) [7] foram originados de
acordo com esta resolução. A contratação e a administração destes serviços são
responsabilidade do ONS (Operador Nacional do Sistema Elétrico).
A seguir serão apresentados os tipos de serviços ancilares que são
determinados pela característica a ser regulada.
Regulação de Frequência
A frequência da rede é alterada quando há, por exemplo, um aumento de carga
no sistema sem que haja um aumento do fluxo de potência e assim os geradores
reduzem a velocidade de rotação. Devido a isto, a frequência do sistema é medida
através do balanço de potência ativa. A alteração na frequência da rede pode ser
evitada se houver reservas de potência ativa. No Brasil, as unidades geradoras
conectadas ao sistema de distribuição devem estar em uma frequência de 59,9 a
60,1 Hz [7].
Regulação de Tensão
A variação da amplitude da tensão é classificada em dois tipos: sobretensão ou
subtensão. A sobretensão é causada devido a descargas atmosféricas, redução
repentina na carga total do sistema, curto-circuitos e operações de chaveamento. As
subtensões podem ser causadas por defeitos na rede, partida de motores robustos ou
problemas de falta de energia originados nas distribuidoras.
A regulação da potência reativa do sistema pode ser usada para compensar a
queda de tensão, sendo esta potência injetada ou absorvida por geradores,
equipamentos de transmissão ou equipamentos conectados à rede de distribuição.
Este serviço também é conhecido como “Suporte de Reativos”.
Balanço de Demanda
O balanço de demanda é feito a partir da determinação da demanda dos
consumidores, que varia constantemente. Então a estimação pode ser probabilística
(demanda em um certo período) ou considerando as flutuações devido a ações
individuais e diferenças na eficiência da transmissão de energia. O equilíbrio entre a
geração e consumo se dá através do nivelamento da curva de carga, suprimento de
picos de demanda e corte de carga.
O nivelamento da curva de carga consiste em deslocar cargas para horários
em que a demanda esteja mais baixa para que a geração existente consiga atender às
cargas o tempo todo.
7
O suprimento de picos demanda se dá através do armazenamento de energia
durante períodos em que a carga esteja leve para que seja despachada durante
horários de pico.
Por fim, o corte de carga consiste na redução da demanda em horários de pico
para evitar a expansão da capacidade da instalação.
A implementação de VEs para prestação de serviços ancilares é possível com
o inversor bidirecional projetado no presente trabalho. Para que a estabilidade da rede
seja atingida de maneira mais autônoma, pode ser feita a instalação de medidores
inteligentes (smart meters). Um medidor inteligente (Figura 2-4) é um dispositivo
eletrônico que transmite em tempo real informações da rede elétrica.
Figura 2-4 - Medidores inteligentes (smart meters). (Retirada de [8]).
Com isto, quando o VE estiver configurado pelo proprietário como em prontidão
para prestar um serviço ancilar, automaticamente pode ser regulada pela
concessionária de energia a característica da rede a qual o inversor bidirecional deve
influenciar.
2.3 Topologias de conversores bidirecionais
Diferentes topologias para conversores bidirecionais têm sido estudadas para o
uso em carregadores de veículos elétricos. A principal questão a se levantar ao
estudar a melhor topologia para este uso é se o conversor é capaz de controlar
bidirecionalmente o fluxo de potência e regular tanto a carga como a descarga da
bateria sem apresentar desvantagens impactantes ao sistema elétrico. Os conversores
bidirecionais podem estar em um sistema embarcado, em um circuito dentro do carro,
ou em um sistema desembarcado, ou seja, numa estação de recarga. Este trabalho
terá foco em um sistema desembarcado, que poderá ser instalado em estações
8
públicas ou particulares de recarga, deste modo o inversor bidirecional poderá ser
mais frequentemente utilizado dependendo apenas da compatibilidade do veículo com
a estação de recarga.
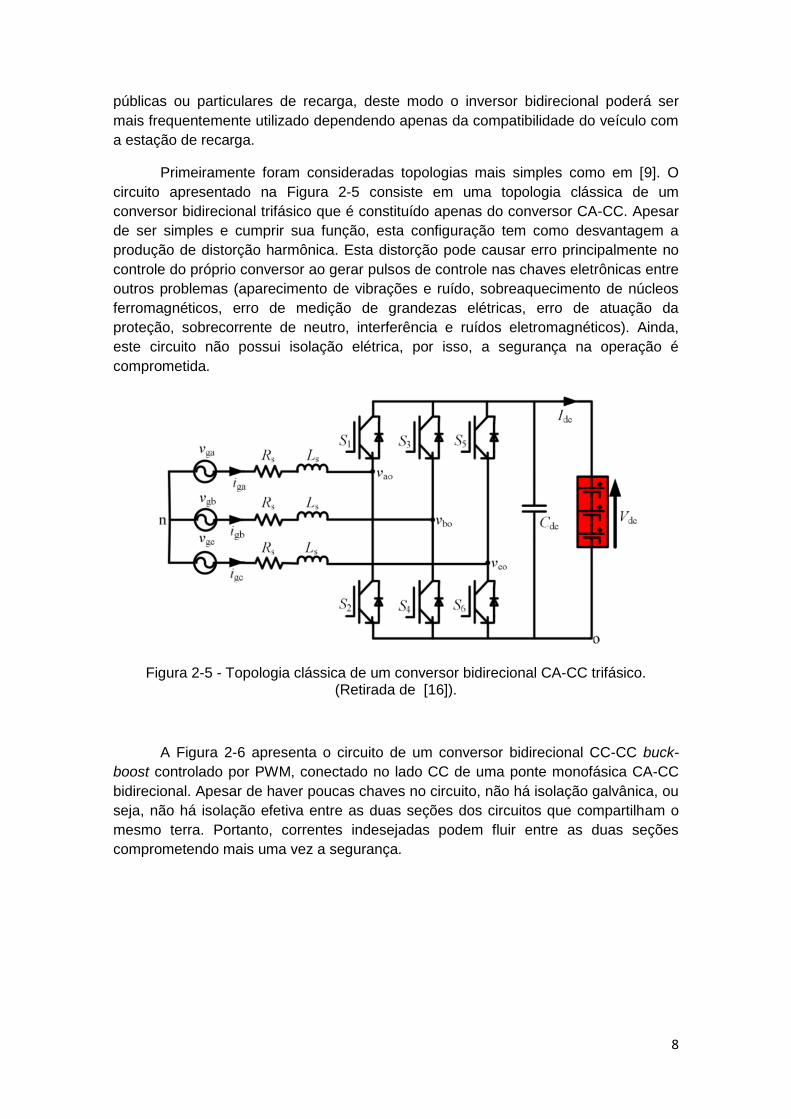
Primeiramente foram consideradas topologias mais simples como em [9]. O
circuito apresentado na Figura 2-5 consiste em uma topologia clássica de um
conversor bidirecional trifásico que é constituído apenas do conversor CA-CC. Apesar
de ser simples e cumprir sua função, esta configuração tem como desvantagem a
produção de distorção harmônica. Esta distorção pode causar erro principalmente no
controle do próprio conversor ao gerar pulsos de controle nas chaves eletrônicas entre
outros problemas (aparecimento de vibrações e ruído, sobreaquecimento de núcleos
ferromagnéticos, erro de medição de grandezas elétricas, erro de atuação da
proteção, sobrecorrente de neutro, interferência e ruídos eletromagnéticos). Ainda,
este circuito não possui isolação elétrica, por isso, a segurança na operação é
comprometida.
Figura 2-5 - Topologia clássica de um conversor bidirecional CA-CC trifásico. (Retirada de [16]).
A Figura 2-6 apresenta o circuito de um conversor bidirecional CC-CC buck-
boost controlado por PWM, conectado no lado CC de uma ponte monofásica CA-CC
bidirecional. Apesar de haver poucas chaves no circuito, não há isolação galvânica, ou
seja, não há isolação efetiva entre as duas seções dos circuitos que compartilham o
mesmo terra. Portanto, correntes indesejadas podem fluir entre as duas seções
comprometendo mais uma vez a segurança.

9
Figura 2-6 - Circuito de um conversor bidirecional CC-CC buck-boost controlado por PWM com estágio CA-CC bidirecional em ponte. (Retirada de [10]).
O circuito da Figura 2-7, retirada de [10], é uma topologia de dois estágios: um
conversor monofásico CA-CC e uma dual-active-bridge (DAB) com isolação pelo
transformador de alta frequência. Com este tipo de transformador, há um aumento de
segurança em comparação às outras configurações e redução no tamanho do
conversor. O conversor CC-CC determina a direção do fluxo de potência através do
método de controle por diferença de fase entre as tensões do primário e secundário do
transformador.
Figura 2-7 - Conversor bidirecional de dois estágios: monofásico CA-CC e uma dual-active-bridge (DAB) com isolação. (Retirada de [10]).
Entre as topologias apresentadas e as demais consideradas na pesquisa, o
circuito da Figura 2-8 adaptada de [11] foi considerado o mais vantajoso devido à
isolação elétrica, menor stress de chaveamento e a possibilidade de ser aplicado à
conexão de VEs com a rede, ou seja, em sistemas de alta potência. O stress de
chaveamento contribui para a redução de vida útil das chaves, especialmente na
comutação quando elas ficam sujeitas a picos de potência.
A maioria dos conversores CC-CC isolados exigem uma frequência de
chaveamento elevada e permite que baixas potências sejam transmitidas, por isso
estes não são adequados para sistemas de alta potência. Por outro lado, a

10
configuração escolhida dual-active-bridge (DAB) além ser um conversor CC isolado,
tem baixo stress de chaveamento, então a comutação é feita suavemente.
Conversores monofásicos são adequados para sistemas de baixa potência,
para sistemas de alta potência, são empregados os conversores trifásicos. Ao utilizar
um conversor trifásico ao invés de três conversores monofásicos, há maior equilíbrio
entre as fases e a operação é balanceada.
Figura 2-8 - Topologia escolhida para o Projeto.
No Capítulo 3 a seguir será visto com mais detalhes o funcionamento da
topologia escolhida para o projeto do inversor bidirecional.
2.4 Armazenamento de Energia
As baterias de veículos elétricos são projetadas para fornecer energia por
longos períodos, portanto são chamadas de baterias de ciclo profundo. Devido a esta
característica, as baterias de VEs diferem das baterias utilizadas para a partida,
ignição e iluminação em veículos a combustão. A capacidade da bateria, medida em
ampère-hora, deve ser alta, pois é projetada para dar tração ao veículo.
A maioria dos VEs desenvolvidos e fabricados atualmente possuem a bateria
de íon-Lítio devido à sua alta eficiência de carga e descarga (entre 80% e 90%) [12].
Montadoras de veículos elétricos têm investido fortemente neste tipo de bateria devido
à relação entre sua alta densidade de energia por menor custo ao ser comparada aos
demais tipos de bateria existentes [13].
Com sua alta eficiência em realizar carga e descarga, as baterias de veículos
elétricos podem ser utilizadas em sistemas integrados com a rede, como na tecnologia
V2G. Ainda, após a utilização nos VEs, uma “segunda vida útil” das baterias tem sido
objetivo de pesquisas feitas recentemente. Uma bateria de VE descartada ainda
consegue recarregar até 80% de sua capacidade, portanto estuda-se sua

11
recomposição para que possa ser utilizada para outros fins que não em veículos
elétricos, como armazenamento estático de energia em uma residência, por exemplo
[21].

12
Capítulo 3
3. Projeto
3.1 Análise do circuito elétrico
A topologia do inversor bidirecional elaborado neste projeto constitui-se em
duas partes: um conversor CA-CC que atua principalmente no controle de potência da
rede e um conversor bidirecional isolado CC-CC responsável por determinar o estado
de carga ou descarga da bateria. O circuito elétrico do inversor bidirecional acoplado à
rede e à bateria é apresentado na Figura 3-1. Serão utilizados os nomes: lado CA,
correspondente à rede elétrica, lado CC, referente ao elo CC que conecta os dois
conversores e o lado da bateria propriamente dito.
Figura 3-1 - Circuito elétrico do Projeto.
No lado CA, a rede elétrica é representada pelas correntes (ia, ib e ic) e
tensões (va, vb e vc) trifásicas, R é a resistência equivalente do conversor (resistência
das chaves) e dos fios, L é um filtro indutivo e dispositivo essencial para o controle de
potência com caráter bidirecional no conversor. Em ambos os conversores, CA e CC,
são empregados IGBTs (Insulated Gate Bipolar Transistor ou Transistor Bipolar de
Porta Isolada) no chaveamento, devido a sua boa durabilidade, tolerância à
sobrecarga e velocidade de chaveamento, quando comparadas com as características
dos MOSFETs (Metal Oxide Semiconductor Field Effect Transistor). Além disto, os
MOSFETs, apesar de operarem em frequências de chaveamento mais altas, possuem
limitações tecnológicas para que sejam fabricados com capacidade de tensão e

13
corrente concomitantemente elevadas. Os IGBTs estão indicados no circuito como
Ta1, Ta2, Tb1, Tb2, Tc1, Tc2, S1, S2, S3, S4, Q1, Q2, Q3 e Q4.
No lado CC, C1 corresponde a um filtro capacitivo e Vcc é a tensão nos seus
terminais. O conversor CC é constituído por duas pontes H conectadas através de um
transformador de alta frequência com relação de transformação n:1. Lr é o um indutor
equivalente da dispersão do transformador e das indutâncias em série adicionais.
Sendo o conversor CC assim configurado, pode-se garantir que o fluxo de potência
flua para os dois lados, o CA e o da bateria.
A bateria da Figura 3-1 é uma representação simplificada da bateria de íon-
Lítio de um veículo elétrico. Mais adiante na Seção 5.3 serão explicados com mais
detalhes o modelo de controle utilizado, bem como seu circuito elétrico. C2 é o filtro
capacitivo, Iba é a corrente e Vba é a tensão no lado da bateria.
O inversor bidirecional foi projetado para que fosse possível o controle da
direção do fluxo de potência. Assim, quando o fluxo parte do lado CA em direção ao
lado da bateria, o inversor opera carregando a bateria e pode absorver o excedente de
potência reativa da rede. Neste modo, o conversor CA-CC funciona como um
retificador ativo e o conversor CC-CC é responsável por fornecer corrente e tensão
constantes, característica essencial para que a bateria seja carregada. Quando o fluxo
parte do lado da bateria em direção ao lado CA, o inversor opera descarregando a
bateria e compensando a potência ativa e/ou reativa da rede. Nesta configuração, o
conversor CA-CC funciona como um inversor.
3.2 Análise do Sistema de Controle
Os circuitos de controle que constituem este projeto do inversor bidirecional
são: um para o conversor CA-CC e outro para o conversor CC-CC.
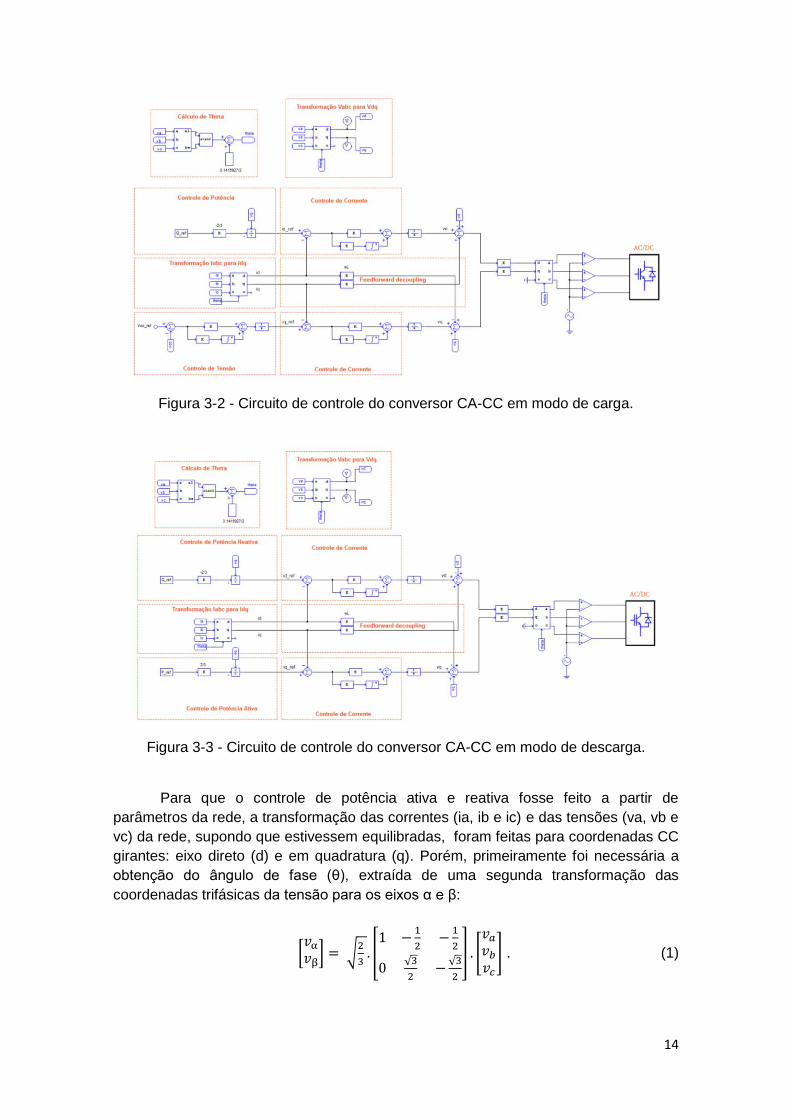
3.2.1 Circuito de controle do conversor CA-CC
Para o conversor CA-CC foi desenvolvido um circuito duplo e fechado de
controle. A Figura 3-2 mostra o diagrama de blocos para o modo de carga da bateria,
enquanto a Figura 3-3 apresenta o diagrama de controle para o modo de descarga.
14
Figura 3-2 - Circuito de controle do conversor CA-CC em modo de carga.
Figura 3-3 - Circuito de controle do conversor CA-CC em modo de descarga.
Para que o controle de potência ativa e reativa fosse feito a partir de
parâmetros da rede, a transformação das correntes (ia, ib e ic) e das tensões (va, vb e
vc) da rede, supondo que estivessem equilibradas, foram feitas para coordenadas CC
girantes: eixo direto (d) e em quadratura (q). Porém, primeiramente foi necessária a
obtenção do ângulo de fase (θ), extraída de uma segunda transformação das
coordenadas trifásicas da tensão para os eixos α e β:
[𝑣α
𝑣β] = √
2
3 . [
1 −1
2−
1
2
0√3
2−
√3
2
] . [
𝑣𝑎
𝑣𝑏
𝑣𝑐
] . (1)

15
A partir da seguinte expressão obteve-se o ângulo de fase desejado em radianos:
𝜃 = tan−1 (𝑣β
𝑣α) +
2. (2)
Com isto, é possível realizar a transformação de eixos abc para dq0:
[
𝑣𝑑
𝑣𝑞
𝑣0
] = 2
3.
[ 𝑐𝑜𝑠 𝜃 cos (𝜃 −
2
3) cos ( 𝜃 +
2
3)
𝑠𝑒𝑛 𝜃 𝑠𝑒𝑛 (𝜃 −2
3) sen (𝜃 +
2
3)
1
2
1
2
1
2 ]
. [
𝑣𝑎
𝑣𝑏
𝑣𝑐
] ; (3)
[
𝑖𝑑𝑖𝑞𝑖0
] = 2
3.
[ 𝑐𝑜𝑠 𝜃 cos (𝜃 −
2
3) cos ( 𝜃 +
2
3)
𝑠𝑒𝑛 𝜃 𝑠𝑒𝑛 (𝜃 −2
3) sen (𝜃 +
2
3)
1
2
1
2
1
2 ]
. [
𝑖𝑎𝑖𝑏𝑖𝑐
]. (4)
Assim, fez-se a decomposição em eixo direto e em quadratura sincronizadas
com a frequência fundamental da rede obtendo iq, id, vd e vq. O eixo em q
corresponde a componentes relacionadas à potência ativa enquanto o eixo d
relaciona-se à potência reativa.
Na Figura 3-2, o fluxo de potência é controlado no sentido de carga da bateria.
A tensão Vcc do lado CC e uma tensão de referência (Vcc_ref), que é um valor de
entrada do loop de tensão, são comparadas para a atuação do controlador
proporcional-integral (PI) e cálculo da corrente iq_ref. Esta corrente, iq_ref, é
comparada à variável de entrada do loop de corrente (iq), obtida com o feedback da
rede. A corrente de referência do eixo d (id_ref) é calculada a partir da determinação
de um valor de potência reativa de referência (Q_ref) comparada à corrente de
feedback da rede id, assim como no loop de corrente. Os laços de controle de corrente
em ambos os eixos são simétricos, o que significa que seus controladores PIs têm os
mesmos parâmetros, os quais serão apresentados mais adiante nesta mesma Seção.
Devido ao acoplamento entre as correntes Iq e Id, um circuito de realimentação de
desacoplamento das variáveis é utilizado (feedforward decoupling). As variáveis de
saída do controlador de corrente (vq_ref e vd_ref) são relacionadas com a tensão de
feedback da rede (vq e vd) e com as tensões oriundas da realimentação de
desacoplamento através das equações (5):
{𝑣𝑞𝑟𝑒 = 𝑣𝑞 − 𝑣𝑞𝑟𝑒𝑓
− 𝐿𝜔𝑖𝑑;
𝑣𝑑𝑟𝑒 = 𝑣𝑑 − 𝑣𝑑𝑟𝑒𝑓+ 𝐿𝜔𝑖𝑞 .
(5)
Contudo, no controle feito com sentido de carga da bateria configura-se um valor de
potência reativa de referência que se deseja absorver da rede. Por exemplo, ao
configurarmos Q_ref = 0, temos que id = 0 e, consequentemente, a potência reativa
absorvida será nula. Se Q_ref ≠ 0, então o inversor será capaz de absorver potência
reativa da rede.

16
Na Figura 3-3, o fluxo de potência segue no sentido de descarga da bateria e o
intuito do controle é estabelecer determinado valor de fator de potência para a rede.
Logo, controla-se a potência ativa e reativa, o ângulo de fase da corrente trifásica e
consequentemente seu fator de potência. Diferentemente do circuito de controle da
Figura 3-2, no qual iq_ref é obtido a partir do controle da tensão do elo CC, no
controle em modo de descarga, apresentado na Figura 3-3, a referência para a
corrente no eixo d é calculada a partir da potência ativa de referência (P_ref). As
expressões utilizadas para determinar iq_ref e id_ref são apresentadas a seguir:
{𝑃𝑟𝑒𝑓 =
3
2𝑣𝑞𝑖𝑞𝑟𝑒𝑓;
𝑄𝑟𝑒𝑓 = −3
2𝑣𝑞𝑖𝑑𝑟𝑒𝑓.
(6)
Observe que no controle de potências, a tensão utilizada para tal corresponde a vq
proveniente da rede. Os controladores PIs de corrente desenvolvidos para ambos os
circuitos de controle, da Figura 3-2 e da Figura 3-3, possuem os mesmos parâmetros.
A seguir será visto com mais detalhes sobre o desenvolvimento do modelo do circuito
de controle do conversor CA-CC. Foi utilizada como referência a bibliografia indicada
em [14].
Um circuito elétrico simplificado do conversor CA-CC considerando apenas a
fase a da rede foi utilizado para facilitar os cálculos de seus parâmetros (Figura 3-4).
Figura 3-4 - Circuito elétrico simplificado do conversor CA-CC, apenas com a fase a.
A dinâmica da corrente no lado CA é descrita por:
𝒗𝒂(𝒕) − 𝒗𝒕(𝒕) = 𝑹. 𝒊(𝒕) + 𝑳𝒅𝒊
𝒅𝒕; (7)
𝒗𝒕(𝒕) =𝑽𝒅𝒄
𝟐𝒎. (8)
Sendo que 𝑣𝑡 é a tensão indicada no circuito da Figura 3-4 e m é um sinal modulado
menor ou igual a 1 que é enviado para os IGBTs. As equações (7) e (8) podem ser
descritas pelo diagrama de blocos na Figura 3-5.

17
Figura 3-5 - Diagrama de blocos do Conversor CA-CC.
Aplicando a transformada de Laplace na equação (1), temos:
𝐼(𝑠). (𝑅 + 𝐿. 𝑠) = 𝑉𝑡(𝑠) − 𝑉𝑎(𝑠). (9)
Com isto, obtemos a função de transferência do conversor CA-CC:
𝐹𝑇𝐶𝑜𝑛𝑣 𝐶𝐴 = 1
(𝐿.𝑠+𝑅). (10)
Considere o sistema fechado da Figura 3-6 em que a corrente i é a variável a
ser controlada para seguir uma corrente de referência especificada. Quando ambas as
correntes são comparadas, um sinal de erro e é gerado, então o compensador K(s)
processa este erro e envia um sinal u. A divisão do sinal gerado u por 𝑉𝑑𝑐
2 serve para
compensar o ganho de tensão no conversor descrito na Figura 3-5.
Figura 3-6 - Diagrama de blocos do controlador e do conversor CA-CC.
Como um controlador PI foi escolhido para realizar o controle de corrente,
temos a seguinte função de transferência:
𝐾(𝑠) = 𝐾𝑝.𝑠+𝐾𝑖
𝑠. (11)
Assim, a função de transferência de malha aberta do sistema (G) apresentado na
Figura 3-6 será:
𝐺(𝑠) = 𝑒(𝑠).𝐾(𝑠).(
1
𝐿.𝑠+𝑅)
𝑒(𝑠)=
𝐾𝑝(𝑠+𝐾𝑖𝐾𝑝
)
𝐿.𝑠(𝑠+𝑅
𝐿). (12)
Ao observarmos o denominador do ganho do sistema, podemos analisar os
dois pólos. Conclui-se que um dos pólos está em zero e o outro em –R/L, o que
significa que o tempo de acomodação do sistema é alto. Para que o tempo de

18
acomodação seja menor, o zero do ganho deve ter mesmo valor que o polo, logo
(𝑠 +𝐾𝑖
𝐾𝑝) = (𝑠 +
𝑅
𝐿). Então:
𝐺(𝑠) = 𝐾𝑝
𝐿.𝑠;
𝐾𝑖
𝐾𝑝=
𝑅
𝐿; (13)
𝑖(𝑠) = 𝑒(𝑠). 𝐺(𝑠).
Portanto a função de transferência em malha fechada do sistema de controle de
corrente do conversor CA-CC resulta em:
𝐹𝑇𝑐𝑜𝑟𝑟𝑒𝑛𝑡𝑒 =1
𝐿.𝑠
𝐾𝑝+1
. (14)
Comparando a função de transferência obtida com a fórmula genérica da
função de transferência de primeira ordem, sendo 𝜏 o tempo desejado de
acomodação, vemos que:
𝐿
𝐾𝑝= 𝜏 . (15)
Estabelecendo 𝜏 = 0,5 𝑚𝑠, das equações (15) e (17) os parâmetros do controlador CA-
CC são obtidos: 𝐾𝑝 = 8 e 𝐾𝑖 = 200.
A seguir será detalhado o desenvolvimento do controle de tensão no conversor CA-
CC. De acordo com a Figura 3-1, temos:
𝑉𝑐𝑐(𝑡) =1
𝐶1∫ 𝑖 𝑑𝑡. (16)
Aplicando a transformada de Laplace e organizando a equação, obtemos a função de
transferência da planta:
𝑉𝑐𝑐
𝐼𝑐𝑐=
1
𝑠.𝐶1. (17)
A planta juntamente ao controlador de tensão constituem o seguinte sistema
apresentado na Figura 3-7.
Figura 3-7 - Diagrama de blocos do controle de tensão no elo CC e da planta.

19
Assim, a função de transferência de malha aberta do sistema (𝐺2) apresentado na
Figura 3-7 será:
𝐺2(𝑠) = 𝑒2(𝑠).𝐾2(𝑠).(
1
𝑠.𝐶)
𝑒2(𝑠)=
𝐾𝑝2.𝑠+𝐾𝑖2
𝑠².𝐶. (18)
Então a função de transferência de malha fechada do sistema de controle de tensão
do conversor CA-CC resulta em:
𝐹𝑇𝑡𝑒𝑛𝑠ã𝑜 =𝑒2(𝑠).𝐺2(𝑠)
𝑒2(𝑠)+𝑒2(𝑠).𝐺2(𝑠)=
𝐾𝑝2.𝑠+𝐾𝑖2
𝑠².𝐶+𝐾𝑝2.𝑠+𝐾𝑖2 . (19)
Esta função de transferência de segunda ordem pode estar em função de seus zero
(𝑧) e polos (𝜎1 𝑒 𝜎2):
𝐹𝑇𝑡𝑒𝑛𝑠ã𝑜 =𝐾3(𝑠+𝑧)
(𝑠+𝜎1 ).(𝑠+𝜎2) . (20)
Considerando o sistema sobreamortecido (𝜉 = 2), tem-se dois polos reais em
que um deles encontra-se suficientemente afastado do ponto de operação, 𝜎2,
tornando seu efeito desprezível. Portanto, o sistema se comportará como um sistema
de 1ª ordem, com banda de tolerância de 2%:
𝜏2 =4
𝜉.𝜔𝑛 . (21)
Sendo 𝜔𝑛 a frequência natural do sistema, estabelecendo 𝜏2 = 0,2 𝑠, tem-se 𝜔𝑛 =
10 𝐻𝑧. Com isto, é possível calcular as constantes 𝐾𝑝2 𝑒 𝐾𝑖2 do controlador de tensão.
𝜔𝑛 = √𝐾𝑖2
𝐶; (22)
𝐾𝑖2 = 0,33;
𝜉 = 𝐾𝑝2
2.𝐶√
𝐶
𝐾𝑖2; (23)
𝐾𝑝2 = 0,132.
3.2.2 Circuito de controle do conversor CC-CC
O propósito do conversor CC-CC é definir o sentido do fluxo de potência, sendo
ele no sentido de carga ou descarga da bateria. Os IGBTs em ambos os lados da
ponte H são modulados por PWM bipolar. O controle do conversor CC-CC é feito pelo
ângulo de diferença de fase (𝜑) entre as tensões alternadas no primário e no
secundário do transformador, produzidas por pares de IGBTs diagonais. Quando há
diferença de fase entre o ângulo do primário e secundário do transformador, pode-se
ajustar 𝜑 através do controle de corrente e tensão que ocorrem no indutor Lr.

20
Caso o primário do transformador esteja adiantado em relação ao secundário,
𝜑 > 0, o fluxo de potência flui do lado CA para o lado da bateria, carregando-a. Iba e
Vba são usados como feedback nos circuito de controle para que sejam estabilizados.
Já quando o primário do transformador está atrasado em relação ao secundário, 𝜑 <
0, e o fluxo de potência flui do lado da bateria para a rede, descarregando-a. Neste
caso, Vcc é usado como feedback no circuito de controle de tensão para que seja
estabilizada. Esta estratégia de controle é denominada de modulação phase-shift, a
qual torna com isto é possível obter a bidirecionalidade atuando somente na
defasagem entre os pulsos de modulação enviadas aos IGBTs (Figura 3-8).
Figura 3-8 - Controle por diferença de fase.
A transmissão de potência do conversor CC-CC quando controlado pela
modulação por diferença de fase é mostrada em:
𝑃 =𝑛.𝑉𝑐𝑐.𝑉𝑏𝑎.𝜑.(𝜋−𝜑)
2.𝜋².𝑓𝑠.𝐿𝑟; (24)
Onde:
𝑓𝑠: frequência de chaveamento;
𝑛: relação de transformação do transformador;
𝑉𝑐𝑐: tensão no lado CC;
𝑉𝑏𝑎: tensão no lado da bateria;
𝜑: ângulo de diferença de fase;
𝐿𝑟: Soma das indutâncias série e dispersão do transformador.

21
3.3 Modelo da Bateria íon-Lítio
Diversos modelos para a bateria íon-Lítio com aplicação em veículos elétricos
vêm sendo estudados, e quanto ao seu aspecto dinâmico podemos destacar os
modelos RC de primeira e segunda ordem. Porém por simplicidade e disponibilidade
de dados, o modelo utilizado neste trabalho segue as instruções de [15]. A bateria a
ser modelada corresponde à do veículo elétrico Nissan Leaf. Como pode ser visto na
Figura 3-9, o modelo consiste em uma resistência interna em série com uma fonte de
tensão controlada. O estado de carga (SOC) é estimado pelo método da integral, que
apesar de pouco preciso, é suficiente para garantir que o modelo esteja de acordo
com o esperado em termos qualitativos.
Figura 3-9 - Modelo da bateria íon-Lítio.
O controle de tensão é descrito pela equação:
𝐸 = 𝐸0 − 𝑘.𝑄
𝑄−𝑖𝑡+ 𝐴. 𝑒(−𝐵.𝑖𝑡); (25)
Onde:
E: tensão sem carga (V);
𝐸0: tensão constante da bateria (V);
k: tensão de polarização (V);
Q: capacidade da bateria (Ah);
𝑖𝑡: carga atual da bateria (Ah);
A: amplitude da zona exponencial (V);
B: inverso da constante de tempo da zona exponencial (𝐴ℎ−1).

22
Alguns dados da equação podem ser retirados do gráfico de descarga da
bateria, normalmente fornecido pelo fabricante. A Figura 3-10 apresenta um gráfico
genérico de descarga em tensão por capacidade (Ah), indicando os pontos
necessários para o cálculo dos parâmetros da equação do modelo: tensão no
momento em que bateria encontra-se totalmente carregada (𝐸𝑐𝑎𝑟𝑟𝑒𝑔𝑎𝑑𝑎), tensão no fim
da zona exponencial (𝐸𝑒𝑥𝑝), tensão no fim da zona nominal (𝐸𝑛𝑜𝑚), bem como a
capacidade correspondente a cada parâmetro de tensão (𝑄𝑒𝑥𝑝 𝑒 𝑄𝑛𝑜𝑚).
Figura 3-10 - Gráfico genérico de uma bateria em descarga.
O fabricante [16] da bateria de íon-Lítio do Nissan Leaf forneceu os dados
necessários para a obtenção e validação do modelo de bateria em questão. Porém,
como o gráfico de descarga disponível correspondia ao da célula da bateria
(Figura 3-11), os cálculos primeiramente foram feitos para a célula e em seguida
ajustados para a obtenção do modelo do pack.

23
Figura 3-11 - Especificações gerais e Gráfico de descarga de uma célula da bateria. (Retirada de [16]).
Foi considerada uma resistência interna da célula 𝑅𝑖𝑛𝑡𝑒𝑟𝑛𝑎𝑐é𝑙𝑢𝑙𝑎 = 0,0015 𝛺. A curva
escolhida da Figura 3-11 foi a de corrente contínua de 60 A. A tensão nominal da
célula 𝑉𝑛𝑜𝑚𝑐é𝑙𝑢𝑙𝑎 = 3,75 𝑉 e capacidade da célula 𝑄𝑐é𝑙𝑢𝑙𝑎 = 32,5 𝐴ℎ foram fornecidas pelo
fabricante [16]. Através da Figura 3-11, pela curva de 60 A, temos:
𝐸𝑐𝑎𝑟𝑟𝑒𝑔𝑎𝑑𝑎𝑐é𝑙𝑢𝑙𝑎 = 4,1 𝑉;
𝐸𝑒𝑥𝑝𝑐é𝑙𝑢𝑙𝑎 = 3,9 𝑉;
𝐸𝑛𝑜𝑚𝑐é𝑙𝑢𝑙𝑎 = 3,6 𝑉;
𝑄𝑒𝑥𝑝𝑐é𝑙𝑢𝑙𝑎 = 6 𝐴ℎ;
𝑄𝑛𝑜𝑚𝑐é𝑙𝑢𝑙𝑎 = 26 𝐴ℎ.
É importante destacar que a tensão nominal da célula fornecida pela tabela do
fabricante, 𝑉𝑛𝑜𝑚𝑐é𝑙𝑢𝑙𝑎 , é diferente da tensão utilizada para o modelo da bateria 𝐸𝑒𝑥𝑝
𝑐é𝑙𝑢𝑙𝑎,
obtida pelo gráfico de 60 A de descarga da célula. Calculando os parâmetros da
equação de controle da bateria:
𝐴𝑐é𝑙𝑢𝑙𝑎 = 𝐸𝑐𝑎𝑟𝑟𝑒𝑔𝑎𝑑𝑎𝑐é𝑙𝑢𝑙𝑎 − 𝐸𝑒𝑥𝑝
𝑐é𝑙𝑢𝑙𝑎 = 0,2 𝑉; (26)
𝐵𝑐é𝑙𝑢𝑙𝑎 =3
𝑄𝑒𝑥𝑝𝑐é𝑙𝑢𝑙𝑎 = 0,5 𝐴ℎ−1 ; (27)
𝑘𝑐é𝑙𝑢𝑙𝑎 =[𝐸𝑐𝑎𝑟𝑟𝑒𝑔𝑎𝑑𝑎
𝑐é𝑙𝑢𝑙𝑎 −𝐸𝑛𝑜𝑚𝑐é𝑙𝑢𝑙𝑎+𝐴𝑐é𝑙𝑢𝑙𝑎(𝑒−𝐵𝑐é𝑙𝑢𝑙𝑎.𝑄𝑛𝑜𝑚
𝑐é𝑙𝑢𝑙𝑎−1)](𝑄𝑐é𝑙𝑢𝑙𝑎−𝑄𝑛𝑜𝑚
𝑐é𝑙𝑢𝑙𝑎)
𝑄𝑛𝑜𝑚𝑐é𝑙𝑢𝑙𝑎 ; (28)
𝑘𝑐é𝑙𝑢𝑙𝑎 = 0,075 𝑉;

24
𝐸0𝑐é𝑙𝑢𝑙𝑎 = 𝐸𝑐𝑎𝑟𝑟𝑒𝑔𝑎𝑑𝑎
𝑐é𝑙𝑢𝑙𝑎 + 𝑘𝑐é𝑙𝑢𝑙𝑎 + 𝑅𝑐é𝑙𝑢𝑙𝑎𝑖𝑛𝑡𝑒𝑟𝑛𝑎. 𝑖 − 𝐴𝑐é𝑙𝑢𝑙𝑎 = 4,065 𝑉. (29)
Com os parâmetros do modelo de bateria foi possível verificar, através do gráfico de
descarga da simulação (Figura 3-12), a compatibilidade com o gráfico fornecido pelo
fabricante (Figura 3-11).
Figura 3-12 - Gráfico de descarga da célula da bateria a partir da simulação.
A Automotive Energy Supply Corporation [16] menciona que um módulo da
bateria é composto por 4 células 2-série e 2-paralelo, e que o pack constitui-se de 48
módulos em série, resultando portando na configuração da Figura 3-13. A partir desta
configuração, podemos concluir que o módulo possui uma resistência equivalente
(𝑅𝑖𝑛𝑡𝑒𝑟𝑛𝑎𝑚ó𝑑𝑢𝑙𝑜) de mesmo valor que a resistência de uma célula, 𝑅𝑖𝑛𝑡𝑒𝑟𝑛𝑎
𝑚ó𝑑𝑢𝑙𝑜 = 𝑅𝑖𝑛𝑡𝑒𝑟𝑛𝑎𝑐é𝑙𝑢𝑙𝑎 , então a
resistência equivalente do pack é igual a 𝑅𝑖𝑛𝑡𝑒𝑟𝑛𝑎𝑝𝑎𝑐𝑘
= 48.𝑅𝑖𝑛𝑡𝑒𝑟𝑛𝑎𝑐é𝑙𝑢𝑙𝑎 = 0,072 𝛺. A tensão
nominal do módulo 𝐸𝑛𝑜𝑚𝑚ó𝑑𝑢𝑙𝑜 = 2. 𝐸𝑛𝑜𝑚
𝑐é𝑙𝑢𝑙𝑎 e a tensão nominal do pack é igual a 𝐸𝑛𝑜𝑚𝑝𝑎𝑐𝑘
=
48.2. 𝐸𝑛𝑜𝑚𝑐é𝑙𝑢𝑙𝑎 = 345,6 𝑉. A capacidade do pack corresponde ao dobro da capacidade da
célula, então 𝑄𝑝𝑎𝑐𝑘 = 65 𝐴ℎ.

25
Figura 3-13 - Configuração da célula, do módulo e do pack da bateria.
Repetindo os mesmos cálculos de parâmetros das equações 29 à 32, porém com
dados do pack, temos que:
𝐴𝑝𝑎𝑐𝑘 = 19,2 𝑉;
𝐵𝑝𝑎𝑐𝑘 = 0,25 𝐴ℎ−1;
𝑘𝑝𝑎𝑐𝑘 = 7,2 𝑉;
𝐸0𝑝𝑎𝑐𝑘
= 385,92 𝑉.

26
Capítulo 4
4. Simulação
Com a topologia do circuito elétrico e o sistema de controle definidos, a
simulação de diferentes casos é feita através do PSIM. Na Figura 4-1 pode ser visto o
sistema completo do inversor bidirecional, a rede e a bateria modelada.
Note que um circuito de comando (no canto inferior direito da Figura 4-1) foi
adicionado, trata-se de um sistema com um botão para que seja determinado o modo
de carga ou descarga. Então, selecionando “ON” para o modo de carga,
automaticamente o ângulo de atraso do secundário do transformador será de 60° e o
circuito de controle com o loop de tensão será selecionado, enquanto o circuito de
controle de potência ativa será desativado. Por outro lado, selecionando “OFF” no
botão para o modo de descarga, o ângulo de atraso do secundário do transformador
será de -60° e o circuito de controle de potência ativa estará ativo, enquanto o do loop
de tensão estará inativo. O usuário deverá também inserir as referências desejadas,
quando for conveniente: Potência reativa (Q_ref) e Potência ativa (P_ref).
Foram realizadas simulações no modo de carga e descarga da bateria.
Primeiramente o teste foi feito para a situação de carga com a potência reativa de
entrada igual a zero (Q_ref = 0 kvar) e em seguida para a potência reativa de entrada
com um valor diferente de zero (Q_ref = 10 kvar). Para o modo de descarga, a
simulação ocorreu em três diferentes casos: Caso 1 (P_ref = 30 kW, Q_ref = 0 kvar),
Caso 2 (P_ref = 30 kW, Q_ref = 10kvar) e Caso 3 (P_ref = 10 kW, Q_ref = 30 kvar). Os
parâmetros utilizados tanto para os cálculos demonstrados anteriormente, como para
a simulação apresentam-se na Tabela 4-1. Para resultados correspondentes aos
dados da bateria obtidos na simulação, devido ao modelo escolhido, foi considerado
também que 1 segundo da simulação corresponde a 1 hora na realidade.

27
Fig
ura
4-1
- S
iste
ma
com
ple
to d
o in
ve
rso
r b
idirecio
na
l, r
ede e
bate
ria fe
ito
no
PS
IM.

28
Tabela 4-1 - Parâmetros utilizados no Projeto.
Conversor CA-CC
Tensão RMS de fase (va, vb, vc) 220 V
Tensão do lado CC (Vcc) 700 V
Indutância por fase no lado CA (L) 4 mH
Resistência equivalente por fase do lado CA (R) 0,1 Ω
Capacitância do lado CC (C1) 3300 μF
Frequência de chaveamento 20 kHz
Conversor CC-CC
Soma das indutâncias série e dispersão do transformador (Lr) 80 μH
Relação de transformação (n:1) 70/39
Capacitância no lado da bateria (C2) 2200 μF
Tensão no lado da bateria (Vba) 390 V
Frequência de chaveamento 20 kHz
Bateria
Capacidade 65 Ah
Tensão nominal (carregando) 390 V
Potência máxima de saída 90 kW
Resistência interna 0,072 Ω
4.1 Bateria em Modo de Carga com Q_ref = 0 kvar
O cenário presente representa uma simples situação em que se deseja apenas
carregar a bateria do veículo elétrico. O resultado obtido pode ser visto na Figura 4-2,
na Figura 4-3 e na Figura 4-4.
Figura 4-2 - Gráfico da tensão Vba da bateria durante a carga com Q_ref = 0 kvar.

29
O gráfico de tensão da bateria da Figura 4-2 está compatível com o perfil de
carregamento típico de uma bateria íon-Lítio, bem como com seu parâmetro visível no
gráfico, a tensão da bateria carregada aproximadamente igual a: 𝐸𝑐𝑎𝑟𝑟𝑒𝑔𝑎𝑑𝑎𝑝𝑎𝑐𝑘
=
48.2.4,1 𝑉 = 393,6 𝑉. Como a simulação foi iniciada no tempo 0,5 segundos e o
carregamento se deu em 1,5 segundos, o tempo de carregamento da bateria durou 1
segundo, o que equivale a 1 hora.
No gráfico da Figura 4-3 é apresentado o estado de carga da bateria (SOC –
State of Charge) em porcentagem. O processo de carga da bateria é cortado quando é
atingido aproximadamente 90% do carregamento total.
Figura 4-3 - Gráfico do estado de carga (SOC) da bateria com Q_ref = 0 kvar.
Com o Q_ref = 0 kvar e como a rede estava inicialmente com o fator de
potência igual a 1 (FP = 1), não há absorção de reativos e portanto o fator de potência
mantém seu valor. Como pode ser visto na Figura 4-4.
Figura 4-4 - Gráfico da corrente ia e tensão va da rede durante a carga com Q_ref = 0 kvar.

30
4.2 Bateria em Modo de Carga com Q_ref = 10 kW
Configurando Qref = 10 kW, observa-se pela Figura 4-5 e Figura 4-6 que os
gráficos de tensão da bateria e do SOC não se alteram, como esperado. Neste caso, a
bateria deve ser carregada enquanto absorve uma potência reativa de
10 kvar. O resultado obtido na Figura 4-7 mostra que o fator de potência (FP = 0,87)
da rede mudou comparado com o inicial da Figura 4-4 (FP = 1).
Figura 4-5 - Gráfico da tensão Vba da bateria durante a carga com Q_ref = 10 kvar.
Figura 4-6 - Gráfico do estado de carga (SOC) da bateria com Q_ref = 10 kvar.

31
Figura 4-7 - Gráfico da corrente ia e tensão va da rede durante a carga com Q_ref = 10 kvar, FP = 0,87.
4.3 Caso 1: Bateria em modo de Descarga com Q_ref = 0
kvar e P_ref = 30 kW
O caso representa uma situação em que se deseja fornecer à rede uma
potência ativa de 30 kW. O resultado obtido pode ser visto na Figura 4-8 e na
Figura 4-9. O Gráfico de tensão da Figura 4-8 pode ser comparado ao da Figura 3-11
para verificar a validade do projeto do inversor durante a descarga da bateria. Para
todos os demais casos mais adiante (Caso 2 e Caso 3) os gráficos de tensão da
bateria obtidos são idênticos, por isso não convém apresentá-los.
Figura 4-8 - Gráfico da tensão Vba da bateria durante a descarga com Q_ref = 0 kvar e P_ref = 30 kW.
32
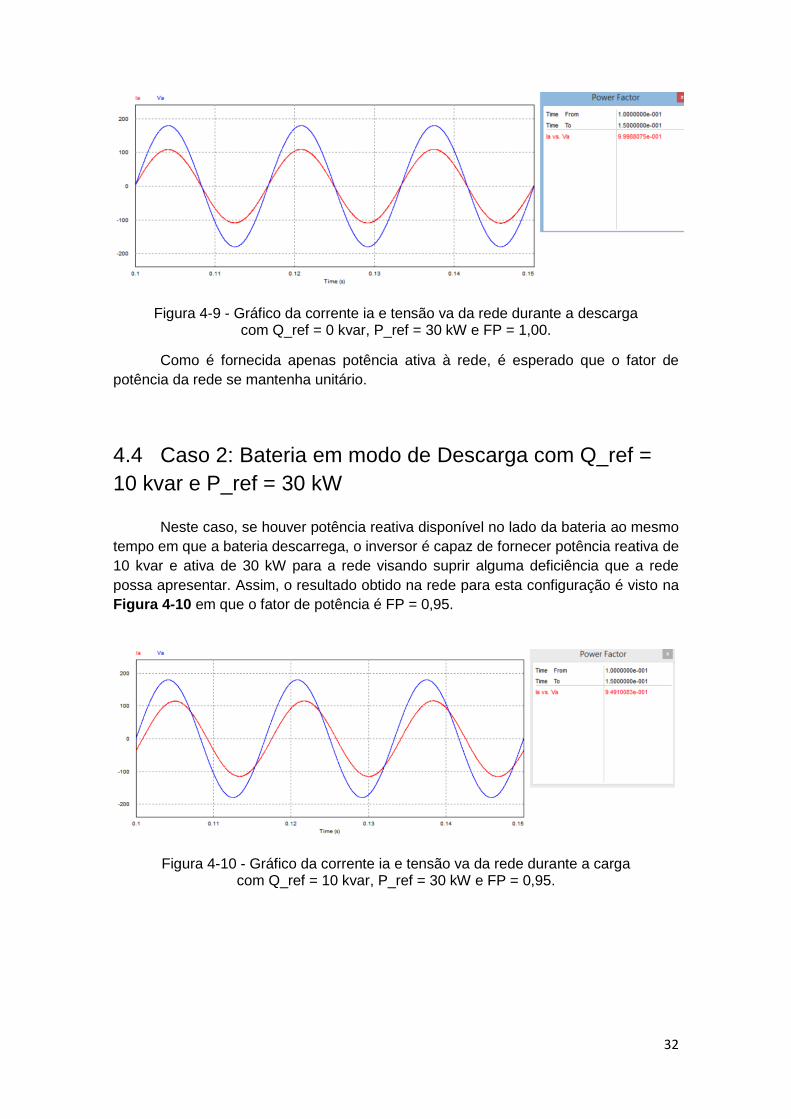
Figura 4-9 - Gráfico da corrente ia e tensão va da rede durante a descarga com Q_ref = 0 kvar, P_ref = 30 kW e FP = 1,00.
Como é fornecida apenas potência ativa à rede, é esperado que o fator de
potência da rede se mantenha unitário.
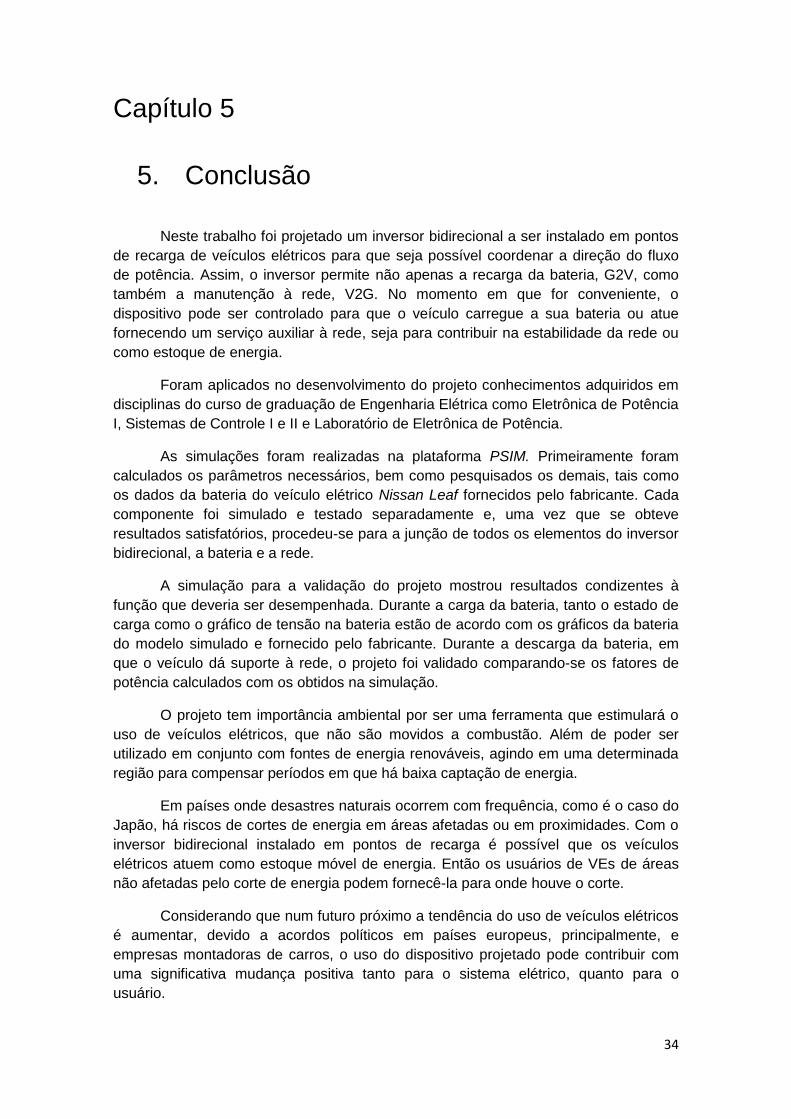
4.4 Caso 2: Bateria em modo de Descarga com Q_ref =
10 kvar e P_ref = 30 kW
Neste caso, se houver potência reativa disponível no lado da bateria ao mesmo
tempo em que a bateria descarrega, o inversor é capaz de fornecer potência reativa de
10 kvar e ativa de 30 kW para a rede visando suprir alguma deficiência que a rede
possa apresentar. Assim, o resultado obtido na rede para esta configuração é visto na
Figura 4-10 em que o fator de potência é FP = 0,95.
Figura 4-10 - Gráfico da corrente ia e tensão va da rede durante a carga com Q_ref = 10 kvar, P_ref = 30 kW e FP = 0,95.

33
4.5 Caso 3: Bateria em modo de Descarga com Q_ref =
30 kvar e P_ref = 10 kW
Diferentes configurações foram testadas para que fosse comprovado que o
inversor é capaz de atuar conforme o usuário desejar. Nesta última situação foi
configurado que o inversor fornecesse uma potência reativa de 30 kvar e ativa de 10
kW, obtendo um resultado calculado de fator de potência igual a FP = 0,32. Na
simulação (Figura 4-11) resultou em um fator de potência FP = 0,3.
Figura 4-11 - Gráfico da corrente ia e tensão va da rede durante a descarga com Q_ref = 30 kvar, P_ref = 10 kW e FP = 0,3.
A seguir será apresentada a Tabela 4-2 com os valores obtidos na simulação
nos casos de descarga e também os valores calculados a partir de cada P_ref e Q_ref
escolhidos.
Tabela 4-2 - Comparação entre valores de fator de potência calculado e obtido com a simulação.
P_ref Q_ref FP calculado FP da simulação
30 kW 0 1,00 1,00
30 kW 10 kvar 0,95 0,95
10 kW 30 kvar 0,32 0,30
Com as simulações, pôde-se concluir que o inversor bidirecional é capaz de
carregar corretamente a bateria, absorvendo potência reativa da rede ou não. O
inversor projetado também pode transferir potência ativa e reativa da bateria para
compensar a demanda da rede e regular o fator de potência da rede.
34
Capítulo 5
5. Conclusão
Neste trabalho foi projetado um inversor bidirecional a ser instalado em pontos
de recarga de veículos elétricos para que seja possível coordenar a direção do fluxo
de potência. Assim, o inversor permite não apenas a recarga da bateria, G2V, como
também a manutenção à rede, V2G. No momento em que for conveniente, o
dispositivo pode ser controlado para que o veículo carregue a sua bateria ou atue
fornecendo um serviço auxiliar à rede, seja para contribuir na estabilidade da rede ou
como estoque de energia.
Foram aplicados no desenvolvimento do projeto conhecimentos adquiridos em
disciplinas do curso de graduação de Engenharia Elétrica como Eletrônica de Potência
I, Sistemas de Controle I e II e Laboratório de Eletrônica de Potência.
As simulações foram realizadas na plataforma PSIM. Primeiramente foram
calculados os parâmetros necessários, bem como pesquisados os demais, tais como
os dados da bateria do veículo elétrico Nissan Leaf fornecidos pelo fabricante. Cada
componente foi simulado e testado separadamente e, uma vez que se obteve
resultados satisfatórios, procedeu-se para a junção de todos os elementos do inversor
bidirecional, a bateria e a rede.
A simulação para a validação do projeto mostrou resultados condizentes à
função que deveria ser desempenhada. Durante a carga da bateria, tanto o estado de
carga como o gráfico de tensão na bateria estão de acordo com os gráficos da bateria
do modelo simulado e fornecido pelo fabricante. Durante a descarga da bateria, em
que o veículo dá suporte à rede, o projeto foi validado comparando-se os fatores de
potência calculados com os obtidos na simulação.
O projeto tem importância ambiental por ser uma ferramenta que estimulará o
uso de veículos elétricos, que não são movidos a combustão. Além de poder ser
utilizado em conjunto com fontes de energia renováveis, agindo em uma determinada
região para compensar períodos em que há baixa captação de energia.
Em países onde desastres naturais ocorrem com frequência, como é o caso do
Japão, há riscos de cortes de energia em áreas afetadas ou em proximidades. Com o
inversor bidirecional instalado em pontos de recarga é possível que os veículos
elétricos atuem como estoque móvel de energia. Então os usuários de VEs de áreas
não afetadas pelo corte de energia podem fornecê-la para onde houve o corte.
Considerando que num futuro próximo a tendência do uso de veículos elétricos
é aumentar, devido a acordos políticos em países europeus, principalmente, e
empresas montadoras de carros, o uso do dispositivo projetado pode contribuir com
uma significativa mudança positiva tanto para o sistema elétrico, quanto para o
usuário.

35
5.1 Sugestão para trabalhos futuros
Para trabalhos futuros, sugere-se:
A implementação de um protótipo do projeto em um laboratório utilizando uma
bateria semelhante a de um veículo elétrico;
O projeto da planta de uma residência com um sistema com captação de
energia solar fotovoltaica que utiliza o dispositivo projetado em seu
estacionamento. Assim, o carro será utilizado como estoque de energia e
fornecimento em horários de alta demanda e baixa captação.

36
Referências Bibliográficas
[1] Climainfo. Uma breve história dos veículos elétricos.
http://climainfo.org.br/2017/09/25/uma-breve-historia-dos-veiculos-eletricos/. Acesso
em Janeiro de 2018.
[2] Nissan. Nissan leaf, veículo 100% elétrico e líder mundial de vendas, recebe
prêmio “Carro Verde do Ano FIPA 2018”. https://www.nissan.com.br/experiencia-
nissan/noticias-e-eventos/nissan-leaf-ve-culo-100-el-trico-e-l-der-mundial-de-vendas-
recebe-pr-mio-carro-verde-do-ano-fipa.html. Acesso em Janeiro de 2018.
[3] Revista Veículos Elétricos. Nissan e ENEL iniciam testes V2G no Reino Unido.
http://revistaveiculoseletricos.pt/2016/05/16/nissan-e-enel-iniciam-testes-v2g-no-reino-
unido/. Acesso em Janeiro de 2018.
[4] The Agility Effect. Stocker de l’énergie grâce au véhicule électrique.
https://www.theagilityeffect.com/fr/article/stocker-de-lenergie-grace-au-vehicule-
electrique/. Acesso em Fevereiro de 2018.
[5] Engadget. Nissan wants you to use its LeafEV like Tesla Powerwall.
https://www.engadget.com/2015/12/09/nissan-enel-vehicle-2-grid-trial/. Acesso em
Fevereiro de 2018.
[6] ANEEL, 2003. Agência Nacional de Energia Elétrica, Resolução ANEEL Nº 265.
[7] Agência Nacional de Energia Elétrica – ANEEL, Procedimentos de Distribuição
(PRODIST), 2015. Disponível em:
http://www.aneel.gov.br/arquivos/PDF/M%C3%B3dulo8_Revis%C3%A3o_6_Retifica%
C3%A7%C3%A3o_1.pdf. Acesso em Fevereiro de 2018.
[8] WEG. Medidores inteligentes de energia WEG no maior projeto de Smart Grid do
Brasil. http://www.weg.net/institutional/BR/pt/news/produtos-e-solucoes/medidores-
inteligentes-de-energia-weg-no-maior-projeto-de-smart-grid-do-brasil. Acesso em
Janeiro de 2018.
[9] PARVEZ, M. et al. Model predictive control of a bidirectional AC-DC converter
for V2G and G2V applications in electric vehicle battery charger. In: Transportation
Electrification Conference and Expo (ITEC), 2014 IEEE. IEEE, 2014. p. 1-6.
[10] JIANG, Jiuchun; BAO, Yan; WANG YI, Le. Topology of a Bidirectional
Converter for Energy Interaction between Electric Vehicles and the Grid. p. 4862-
4863.
[11] XU, Bowen; WANG, Hui; SUN, Huizhong; WANG, Yubin. Design of a
Bidirectional Power Converter for Charging Pile based on V2G. p. 527-531.
[12] Wikipedia. Electric-vehicle battery. https://en.wikipedia.org/wiki/Electric-
vehicle_battery. Acesso em Fevereiro de 2018.

37
[13] Greenfleet. The Latest Developments in EV Battery Technology.
http://www.greenfleetmagazine.com/channel/electric/article/story/2013/12/the-latest-
developments-in-ev-battery-technology-grn.aspx. Acesso em Fevereiro de 2018.
[14] YAZDANI, Amirnaser; IRAVANI, Reza. Voltage-Sourced Converters in Power
Systems – Modeling, Control and Applications. Wiley, IEEE press.
[15] TREMBLAY, Olivier; DESSAINT, Louis A.; DEKKICHE, Abdel Illah. A Generic
Battery Model for the Dynamic Simulation of Hybrid Electric Vehicles.
[16] Automotive Energy Supply Corporation. Cell, Module, and Pack for EV
Applications. Disponível em: http://www.eco-aesc-lb.com/en/product/liion_ev/. Acesso
em Novembro de 2017.
[17] DE BREY, Baerte. Smart Solar Charging: Bi-Directional AC Charging (V2G) in
the Netherlands. Journal of Energy and Power Engineering. v. 11, n. 7, p.484, 2017.
[18] DORF, Richard C.; BISHOP, Robert H. Modern Control Systems. 5ª Edição.
Pearson.
[19] GOLNARAGHI, Farid; KUO, Benjamin C. Automatic Control Systems. 9ª
Edição. Wiley
[20] Powersim Inc. PSIM User’s Guide. Version 11.0
[21] Ecogeneration. Relectrify offers electric vehicle batteries a second life.
http://www.ecogeneration.com.au/relectrify-offers-electric-vehicle-batteries-a-second-
life/. Acesso em Fevereiro de 2018.