




Línguas
Páginas
Legal


PRÁTICAS DE LABORATÓRIO
TRATAMENTO E APRESENTAÇÃO DE DADOS
EXPERIMENTAIS
M. Ribeiro da Silva
Instituto Superior TécnicoDepartamento de Física
1997

i
Práticas de Laboratório - M. R. Silva
Índice
Introdução 11.0 - Tratamento de dados experimentais e erros associados 2 1.1 - Erros das medições 2 1.2 - Distribuição normal dos erros 5 1.2.1 - Erros e média aritmética 5 1.2.2 - Média, média quadrática, erro provável de uma medição 7 1.2.3 - Erro máximo (majorante) de uma medição 8 1.3 - Erros das medições e precisão dos instrumentos de medida 132.0 - Registo das observações e apresentação dos dados 13 2.1 - Registos das observações, cálculos e algarismos significativos 13 2.2 - Representação gráfica dos resultados 15 2.2.1 - Normas para gráficos 16 2.2.2 - Tipos de papel para gráficos 17 2.2.3 - Barras de erro e rectângulo de precisão 18 2.2.4 - Limite superior do erro de uma recta ajustada a pontos - método gráfico 18 2.2.5 - Ajuste de uma recta a pontos experimentais - método analítico 203.0 - Instrumentos de medida 21 3.1 - Nónios lineares e circulares 21 3.2 - Multímetro analógico 23 3.2.1 - Descrição do funcionamento 23 3.2.2 - Controles e precisão de operação 24 3.3 - Multímetro digital 25 3.3.1 - Descrição do funcionamento 25 3.3.2 - Medição de valores eficazes (RMS) 26 3.3.3 - Controles e precisão de operação 27 3.4 - Osciloscópio 28 3.4.1 - Funcionamento do tubo de raios catódicos (CRT) 29 3.4.2 - Sumário das funções, modos de operação e controles 30 3.4.2.1 - Banda passante e tempo de subida do sinal 31 3.4.2.2 - Controles e modos de operação 32
Apêndice - Aspectos matemáticos do cálculo do valor eficaz (RMS) 34

1
Práticas de Laboratório - M. R. Silva
INTRODUÇÃO
A física, um dos mais importantes ramos do conhecimento humano desenvolveu-se como uma ciência fundamen-talmente ligada à experimentação.
O primeiro passo para o estabelecimento das leis da física é a observação. A observação científi ca não é no entanto uma tarefa fácil. Para o esclarecimento das leis de um determinado fenómeno físico é necessário saber distinguir os seus elementos principais e, se possível, modifi car as condições em que se desenvolve o fenómeno isto é, passar da simples observação para a experiência controlada. Torna-se assim fundamental encontrar características quantitativas do fenómeno (que possam ser medidas) e estabelecer de que maneira, e com que aparelhos, mediremos estas determi-nadas características. Só depois podemos estabelecer leis quantitativas que demonstrem como se modifi cará um dos parâmetros medidos em função da variação dos outros parâmetros.
Na sua defi nição mais abrangente, a experiência é uma parte necessária em qualquer processo do conhecimento científi co que, na generalidade, se pode considerar como dividido em três partes fundamentais: 1. Conhecimento - estudo primário do fenómeno através da observação; 2. Generalização - construção da hipótese que ligará os resultados individuais obtidos na observação, tanto entre eles com outros resultados e leis já anteriormente conhecidas (na física fundamentalmente quantita- tivas). Durante esta parte do processo do conhecimento serão eliminados os factores de interferência de maneira a salientar o verdadeiramente essencial no fenómeno em estudo. Nesta altura são frequentemen- te necessários dados complementares para a obtenção dos quais terão de ser feitas novas observações ou lançadas novas experiências; 3. Verifi cação da veracidade da hipótese - experimentação em condições reais, considerando todos os fac- tores secundários anteriormente eliminados. No caso de a resposta ser positiva esta verifi cação eleva a hipótese à categoria de teoria e as relações por ela estabelecidas à categoria de leis.
Será contudo errado considerar que com a verifi cação da hipótese pela experiência termina o processo do conheci-mento científi co de um determinado fenómeno. Passado algum tempo é possível que novas observações, novas expe-riências apareçam em contradição com a teoria anteriormente desenvolvida e obriguem a uma revisão do conjunto dos factos conhecidos, seguindo novos pontos de vista. Este mecanismo possibilita o aparecimento, numa dada fase do desenvolvimento científi co, de uma teoria mais completa que por seu turno será substituída por outra mais avançada e assim sucessivamente. O processo do conhecimento desenvolve-se continuamente.
Daqui se pode concluir que embora a experiência não seja o único meio ao alcance da investigação científi ca o seu papel é decisivo, sobretudo como fonte e critério de veracidade. O experimentador tem por isso uma grande responsa-bilidade não só na correcta obtenção dos resultados mas também na própria interpretação da experiência.
O trabalho experimental deverá ser organizado de tal maneira que não só não permita erros como não permita diferentes interpretações dos resultados obtidos.
Mas a experimentação em física não esgota todas as suas possibilidades no conhecimento científi co, pode também estender a sua infl uência a outros campos da actividade humana.
O desenvolvimento da física é completamente determinado pelo desenvolvimento das técnicas e tecnologias do seu tempo mas o contrário também é verdadeiro: o desenvolvimento de técnicas e tecnologias avançadas, por sua vez, é só possível numa base de desenvolvimento das ciências exactas e, por conseguinte, da física. Efectivamente, toda uma série de tecnologias avançadas foram criadas em resultado do desenvolvimento de diferentes domínios da física como, por exemplo, a energia atómica, o laser e a microelectrónica. Neste processo da penetração da física na tecnologia à experimentação está atribuído o papel de árbitro ao possibilitar a verifi cação, em condições reais, da aplicabilidade das teorias a casos concretos.
Convêm ainda salientar que a experimentação física também têm actualmente uma importância fundamental em mui-Convêm ainda salientar que a experimentação física também têm actualmente uma importância fundamental em mui-Convêm ainda salientar que a experimentação física
tas áreas mistas das ciências da natureza como a química, a biologia, medicina, electrónica e ciência dos materiais.

2
Práticas de Laboratório - M. R. Silva
1.0 TRATAMENTO DE DADOS EXPERIMENTAIS
E ERROS ASSOCIADOS
No início de um curso de engenharia os trabalhos práticos de física tem uma fi nalidade dupla: primeiro, dar ao estu-
dante a possibilidade de manipular aparelhos e instalações básicas de um laboratório enquanto adquire conhecimentos
básicos de medições em física; segundo, dar a possibilidade de um conhecimento mais profundo e ao mesmo tempo
prático de certos fenómenos e leis da natureza expostos nos cursos teóricos. Os trabalhos do segundo tipo, embora
tenham uma componente de medição, serão mais dedicados à discussão e estudo dos fenómenos físicos envolvidos.
Medir uma grandeza qualquer signifi ca determinar quantas vezes uma grandeza semelhante, a unidade de medida,
“cabe” nela. A medição directa de uma determinada grandeza em física é relativamente rara (um comprimento com
uma régua ou uma tensão com um voltímetro, p.e.). Na grande maioria dos casos não é a grandeza a determinar que
será directamente medida mas sim um conjunto de outras grandezas com ela relacionadas por relações e fórmulas
conhecidas, derivadas das leis físicas do fenómeno estudado. A aplicação a essas fórmulas dos valores medidos per-
mitirá então calcular o valor da grandeza a determinar. Por exemplo, a aceleração da força da gravidade poderá ser
determinada através de uma formula onde fi gurem o comprimento de um pêndulo e período de oscilação a partir das
conhecidas fórmulas do pêndulo; a velocidade da luz poderá ser determinada pela diferença de fase entre dois raios
laser, o emitido e o refl ectido.
1.1 ERROS DAS MEDIÇÕES
Os aparelhos de medida, por mais sofi sticados que sejam, nunca terão uma precisão absoluta. Por outro lado os
nossos órgãos dos sentidos são imperfeitos e as suas capacidades variam de pessoa para pessoa. Estes dois factores
combinados levam a que todas as medições só poderão ser feitas com um certo grau fi nito de precisãoas medições só poderão ser feitas com um certo grau fi nito de precisão. Por isso os
resultados das medições fornecem-nos não o verdadeiro valor da grandeza a medir, mas somente um valor mais ou
menos aproximado.
Uma boa medida é aquela em que se atinge a maior precisão permitida pelo aparelho ou instalação de medida
utilizados. A precisão duma medida depende dos instrumentos utilizados e dos próprios métodos de medição e, nestas
condições tentar ultrapassar este limite de precisão seria um gasto de tempo verdadeiramente inútil. Num bom laboratório
de física não é difícil atingir precisões da ordem dos 0,1%, mas já nas técnicas de engenharia são aceites precisões da
ordem de 1-4 % para muitos trabalhos. Em alguns casos pode ser obtida uma precisão muito mais elevada: ao pesar
um corpo com uma massa de cerca de 200 gr numa boa balança de laboratório é corrente atingir-se um erro de 0,1 mg,
isto é, uma precisão de 0,00005%. Noutros casos 5% é já um bom resultado, por exemplo medir uma temperatura de
um líquido que se encontra a 10°C com um vulgar termómetro de álcool (valor da menor divisão da escala = 0,5°C).
Daqui podemos concluir que mesmo antes de iniciar uma medição é conveniente identifi car os limites de precisão identifi car os limites de precisão
que poderão ser obtidos com os instrumentos utilizadosque poderão ser obtidos com os instrumentos utilizados.
Se ao longo de uma experiência for necessário medir grandezas diferentes com aparelhos de medida de níveis de
precisão diferentes então a precisão fi nal pode ser limitada pelos valores obtidos com o aparelho de menor precisão.
Por exemplo, em medições calorimétricas a determinação da massa de água e do calorímetro pode ser feita por pesa-
gem com uma precisão de ≈ 0,0001%. Contudo, neste caso, podemo-nos limitar a uma pesagem muito menos precisa
(por exemplo 0,1%) uma vez que a medição da temperatura do calorímetro só poderá ser feita com uma precisão da
ordem de 1 a 2%.

3
Práticas de Laboratório - M. R. Silva
Uma maneira de aumentar a precisão do resultado fi nal será efectuar as medições físicas não uma vez, mas várias
vezes para as mesmas condições experimentaispara as mesmas condições experimentais. Com efeito, nas medições e leituras cometemos sempre erros, mais
ou menos importantes. Estes erros, segundo a sua origem, são classifi cados em dois grupos: os erros sistemáticos e os
erros aleatórios.
Erros sistemáticos - são o resultado de causas permanentes como o estado defi ciente ou má calibragem dos apa-
relhos de medida, incorrecção do próprio método de medida ou falhas regulares no processo de observação por parte
do próprio experimentador. Regra geral dão sempre o mesmo resultado e é evidente que, sem mudar de método ou de
aparelho, o aumento do número de observações por um mesmo observador não conduz à diminuição destes erros.
É possível evitá-los (ou pelo menos diminuir a sua infl uência) através de uma aproximação crítica do método de
medida, da verifi cação do bom funcionamento dos aparelhos de medida e do cumprimento rigoroso das regras de
execução dos trabalhos.
Erros aleatórios - acidentais, impossíveis de prever, podem ser devidos quer à imperfeição dos nossos órgãos dos
sentidos (imprecisão das leituras que involuntariamente o experimentador possa introduzir no trabalho) quer a fl utuações
de estabilidade no funcionamento dos próprios aparelhos de medida.
Os erros aleatórios obedecem às leis da probabilidade. Isto signifi ca que se numa qualquer medição o resultado
obtido foi superior ao verdadeiro valor então numa qualquer medição seguinte teremos a mesma probabilidade de obter
um resultado inferior ao verdadeiro. É evidente que neste caso a repetição da mesma medição diminui a infl uência dos
erros aleatórios pois não existe argumento para que se possa considerar o desvio do valor verdadeiro mais provável
para um lado do que para outro. Assim a média aritmética de um grande número de resultados é sem dúvida muito
mais próxima do verdadeiro valor da grandeza medida do que a medição única.
A teoria das probabilidades permite calcular o erro provável do resultado médio (média) através dos desvios de
medições individuais em relação ao valor médio.
Apresentamos em seguida um resumo de regras úteis para a determinação da precisão do resultado obtidos (erro
provável).
Sejam por exemplo N1N1N , N2, N2, N ,…, Nk,…, Nk,…, N os resultados de k - medições individuais de uma determinada grandeza. Então o k os resultados de k - medições individuais de uma determinada grandeza. Então o k
valor da média aritmética, N,
N N N Nk
k= + +N N+ +N N ⋅ ⋅ ⋅ +1 2N N1 2N N+ +1 2+ +N N+ +N N1 2N N+ +N N (1.1)
representa o valor mais próximo do verdadeiro valor da grandeza medida. Os desvios ∆Nrepresenta o valor mais próximo do verdadeiro valor da grandeza medida. Os desvios ∆Nrepresenta o valor mais próximo do verdadeiro valor da grandeza medida. Os desvios ∆ iNiN de cada medição indivi-
dual em relação a este valor médio, isto é, as grandezas
N-N1N-N1N-N = ∆N = ∆N = ∆ 1N1N , N-N2 , N-N2 , N-N = ∆N = ∆N = ∆ 2N2N , … ,
defi nem os erros absolutos de cada medições individual, em relação ao valor médio. Estes erros podem ter sinais dife-
rentes mas, de momento, só nos interessam os seus valores numéricos absolutos.
A média aritmética dos valores numéricos de erros individuais - |∆NA média aritmética dos valores numéricos de erros individuais - |∆NA média aritmética dos valores numéricos de erros individuais - |∆ | - tem o nome de erro médio absoluto de uma
medição isolada,
∆ NN NN N N
k=
+ ++ +N N+ +N NN N+ +N N ⋅ ⋅ ⋅ +1 21 2N N1 2N NN N1 2N N+ +1 2+ ++ +1 2+ +N N+ +N N1 2N N+ +N NN N+ +N N1 2N N+ +N N (1.2)
As relações ∆NAs relações ∆NAs relações ∆ 1 /N1, ∆N, ∆N, ∆ 2 N2 N /N2/N2/N , … são defi nidas como o erro relativo de uma medição isolada (os erros relativos são
frequentemente expressos em percentagem), e fi nalmente a razão entre o erro médio absoluto ∆Nfrequentemente expressos em percentagem), e fi nalmente a razão entre o erro médio absoluto ∆Nfrequentemente expressos em percentagem), e fi nalmente a razão entre o erro médio absoluto ∆ e o valor médio da N e o valor médio da N
grandeza medida, N, chama-se erro médio relativo da medição, E,
∆N / N = ± E∆N / N = ± E∆ geralmente expresso em percentagem ± N / N = ± E geralmente expresso em percentagem ± N / N = ± E E . 100 (%) (1.3)E . 100 (%) (1.3)E

4
Práticas de Laboratório - M. R. Silva
Como já foi referido, os resultados fi nais de um trabalho experimental só raramente se obtém através da medição
directa da grandeza física a determinar. Na grande maioria dos casos este valor fi nal é determinado através de uma
função em que entram as várias grandezas físicas medidas. Nesta situação os diferentes erros individuais “actuam entre
si”. Estamos na situação de “propagação de erros” e o erro fi nal pode ser de determinação complexa.
Por exemplo, na determinação da gravidade terrestre pelo método das oscilações do pêndulo mede-se o período das
oscilações simples, T, e o comprimento do fi o de suspensão, l, sendo o valor da aceleração g determinado como uma
função destes dois argumentos, combinados na fórmula
g lT
= π 2
2.
O erro de g será então uma combinação nem evidente e nem simples dos erros de π, l e l e l T. Generalizando vemos
assim a necessidade de estabelecer regras que nos auxiliem na determinação dos erros a atribuir a funções elementares
de uma variável.
Apresentámos exemplos de determinação de alguns casos particulares de erros absolutos e relativos de funções de
uma variável:
1.- Função exponencial
Suponhamos a função N = An, onde A representa o valor medido e n - um número inteiro e designemos por ∆A - um número inteiro e designemos por ∆A - um número inteiro e designemos por ∆ o
erro absoluto da grandeza A. Então o erro absoluto da grandeza medida N será
∆N = (A + ∆N = (A + ∆ ∆ A)∆ A)∆ n - An
Desenvolvendo a expressão e desprezando os termos em ∆ADesenvolvendo a expressão e desprezando os termos em ∆ADesenvolvendo a expressão e desprezando os termos em ∆ com expoente igual ou superior a dois (uma vez que na generalidade ∆Ana generalidade ∆Ana generalidade ∆ << A) obtemos a seguinte expressão para o erro absoluto de N
∆N = n . A∆N = n . A∆ n-1∆ A∆ A∆ (1.4)
O erro relativo E da grandeza E da grandeza E N será expresso porN será expresso porN
E NN
n AA
= == =∆ ∆N∆ ∆N (1.5)
isto é, o erro relativo de uma função exponencial será igual ao erro relativo do argumento (valor medido) multiplicado pelo expoente da função.
No caso da raiz de potência n de uma função teremos
N AN A N N A An nn nN An nN AN An nN A N Nn nN N= +N A= +N AN A= +N A N N= +N Nn n= +n nN An nN A= +N An nN AN An nN A= +N An nN A N Nn nN N= +N Nn nN Ne= +e= +n n= +n nen n= +n n∆ ∆∆ ∆N N∆ ∆N N A A∆ ∆A An n∆ ∆n nN Nn nN N∆ ∆N Nn nN N = +∆ ∆= += +∆ ∆= +A A= +A A∆ ∆A A= +A An n= +n n∆ ∆n n= +n n (1.4a)
Elevando à potência n ambos os termos da expressão anterior obtemos
A An( )N N( )N NN N+N N( )N N+N N∆ ∆A A∆ ∆A An∆ ∆n( )∆ ∆( )N N( )N N∆ ∆N N( )N N = +∆ ∆= +A A= +A A∆ ∆A A= +A A
e desprezando as potências de ∆Ne desprezando as potências de ∆Ne desprezando as potências de ∆ de ordem superior temosN de ordem superior temosN
N nN N A An nN nn nN nN Nn nN N+ =N n+ =N nN N+ =N Nn n+ =n nN nn nN n+ =N nn nN nN Nn nN N+ =N Nn nN N−1N N1N NN N+ =N N1N N+ =N N∆ ∆N N∆ ∆N N A A∆ ∆A A+ =∆ ∆+ =N N+ =N N∆ ∆N N+ =N N A A+A A∆ ∆A A+A Ae consequentemente o erro absoluto
∆ ∆N AnN
A AA AnAn
nA AnA A= == =−1 e o correspondente erro relativooo E NN n
AA
= == =∆ ∆N∆ ∆N∆ ∆1∆ ∆ (1.5a)
2.- Funções trigonométricas
Consideremos a expressão N = sin N = sin N α , em que α representa um valor medido de uma grandeza física. Como é
resultado de uma medição o valor do ângulo α está sujeito a erro e então teremos
N + ∆N + ∆N N + ∆N + ∆ = sin (N = sin (N α + ∆α + ∆α + ∆ ) (1.6)
onde ∆αonde ∆αonde ∆ representa o erro absoluto da medida do ângulo α. Desenvolvendo em série a expressão e considerando como anteriormente que o erro ∆αcomo anteriormente que o erro ∆αcomo anteriormente que o erro ∆ é pequeno temos cos ∆α é pequeno temos cos ∆α é pequeno temos cos ∆ ≈ 1 e sin ∆α ≈ 1 e sin ∆α ≈ 1 e sin ∆ ≈ ∆α ≈ ∆α ≈ ∆ e, substituindo na expressão (1.6)

5
Práticas de Laboratório - M. R. Silva
obtemos
N + ∆N + ∆N N + ∆N + ∆ = sin N = sin N α + cos α . ∆α . ∆α . ∆
e logo ∆Ne logo ∆Ne logo ∆ = cos N = cos N α . ∆α . ∆α . ∆ (erro absoluto) (1.7)
e ainda E = ∆E = ∆E N/N = ∆N/N = ∆ = ctg N/N = ctg N/N α . α (erro relativo) (1.8)
De maneira análoga é possível calcular os erros absoluto e relativo para as outras funções trigonométricas.
3. - Funções compostas
Vejamos agora o caso de uma função complexa qualquer. Na generalidade, os erros das medições são sufi cientemente
pequenos quando comparados com as grandezas medidas e por este facto podem ser desprezados as suas potências de
ordem superior à unidade (quadrados, cubos, etc.). Esta simplifi cação permite utilizar o cálculo diferencial na deter-
minação dos erros de medição.
Por exemplo, seja o valor N resultado da medição de uma única grandeza N resultado da medição de uma única grandeza N x relacionada com x relacionada com x N por uma relação N por uma relação N
funcional:
N = f(x) (1.9)
Suponhamos também que o erro médio absoluto da medição de x é ±x é ±x dx ; este erro produz um erro correspondente de dx ; este erro produz um erro correspondente de dx
± N na grandeza a determinar. AssimN na grandeza a determinar. AssimN
N ± dN = f(N ± dN = f(N ± dN = f x ± dx) (1.10)
Decompondo a expressão (1.10) em série de Taylor obtemos
N dN fN dN fN d x dxx dxx d dfdx
d fdx
N d± =N dN f± =N fN dN fN d± =N dN fN d ( )x d( )x d± ⋅x d± ⋅x dx± ⋅xx dxx d± ⋅x dxx d ± ( )dx( )dx⋅ ±⋅ ±d f⋅ ±d f ⋅ ⋅ ⋅( )x( )x
!( )x( )x⋅ ±( )⋅ ±x⋅ ±x( )x⋅ ±x2 2d f2d f2⋅ ±2⋅ ±
2
e desprezando os termos em dx com expoente superior à unidade simplifi camosdx com expoente superior à unidade simplifi camosdx
N dN fN dN fN d x dxx dxx d dfdx
N d± =N dN f± =N fN dN fN d± =N dN fN d ( )x d( )x dx d±x d ( )x( )x
Tendo em conta a expressão (1.9) obteremos para o valor do erro absoluto:
dN dx dfdx
= ± ( )x( )x (1.11)
Generalizando: o erro absoluto duma função (composta) é igual ao erro do argumento multiplicado pela derivada dessa
mesma função. O erro relativo dessa mesma medição será determinado pela expressão
E dNN
E dxf x
dfdx
= ± = ( )f x( )f x⋅ou ainda ( )x( )x
(1.12)
No ponto (1.2.3) estudaremos o caso mais geral de funções compostas por várias variáveis independentes do tipo
f(f(f xi), com i = 1,2,...,n .
1.2 DISTRIBUIÇÃO NORMAL DOS ERROS
1.2.1 ERROS E MÉDIA ARITMÉTICA
Ao considerar os erros acidentais, inevitáveis na prática laboratorial, como um caso particular dos acontecimentos
aleatórios, Gauss formulou a lei da distribuição normal dos erros partindo dos postulados:
1º - em observações de igual confi ança o valor mais provável é a média aritmética;
2º - a probabilidade de se cometer um erro x é função x é função x f (x) desse mesmo erro;

6
Práticas de Laboratório - M. R. Silva
3º - a probabilidade de se cometer um erro muito grande é muito pequena e o sinais positivo ou negativo do
erro são igualmente prováveis.
4º - a probabilidade de se cometer um erro entre x e (x e (x x+dx) é dada pela expressão f (x).dx.
Considerando estes postulados a quantidade de erros com um determinado valor para uma dada grandeza deverá
ser uma função decrescente e simétrica do valor do erro aleatório:
∆ ∆ ∆n n∆ ∆n n∆ ∆f x∆ ∆f x∆ ∆x n hn
e x∆e x∆h xe xh xe x∆ ∆= ⋅∆ ∆∆ ∆n n∆ ∆= ⋅∆ ∆n n∆ ∆( )∆ ∆( )∆ ∆f x( )f x∆ ∆f x∆ ∆( )∆ ∆f x∆ ∆⋅ =∆ ∆⋅ =∆ ∆x n⋅ =x n ⋅ ⋅⋅ ⋅ e x⋅e x− ⋅h x− ⋅h x2 2h x2 2h x (1.13)
onde x - é valor do erro, ∆x - é valor do erro, ∆x n - é valor do erro, ∆n - é valor do erro, ∆ = (n . f (x) . ∆x) . ∆x) . ∆ ) - quantidade de medições para as quais o valor do erro está contido no intervalo [x, x+dx e n - quantidade global de experiências realizadas. A curva y = f (x) é designada por curva de Gauss ou curva da distribuição normal dos erros. O parâmetro “h” é defi nido como a “medida da precisão”. A curva de Gauss é geralmente normalizada de modo a que se cumpra a condição
f x d x( )f x( )f x ( )d x( )d x =−∞
+∞
∫ 1 (1.14)
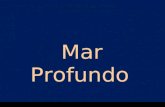
Na Fig.1.1 estão representadas curvas de Gauss para diferentes valores do parâmetro h. Quanto maior for a precisão
da medida mais rapidamente decresce o valor da função com o crescimento de x (ou, em termos práticos, tanto menor x (ou, em termos práticos, tanto menor x
é o número de medidas com grandes erros)
Suponhamos que foram feitas n medições de uma certa grandeza A0 e que foram obtidos os valores N1, N2, N2, N , N3, N3, N , … .
Então o erro das medições individuais será
x A Nx A N1 0x A1 0x A 12 0x A2 0x A 2
= −x A= −x A1 0= −1 0x A1 0x A= −x A1 0x A= −x A= −x A2 0= −2 0x A2 0x A= −x A2 0x A
⋅ ⋅ ⋅ = ⋅ ⋅ ⋅ − ⋅ ⋅ ⋅ (1.15)
A probabilidade de aparecimento de erros com um valor compreendido entre x1 e (x1+dx1) é igual à relação entre o
número de medidas efectuadas com esse mesmo erro e a quantidade total de medidas, isto é,
P y dx h e dxe dxe dh xe dh xe d1P y1P y1 1dx1 1dx 1
2h x2h xe d1e d2
= ⋅P y= ⋅P y1 1= ⋅1 1 = ⋅= ⋅= ⋅ e d⋅e d− ⋅e d− ⋅e dh x− ⋅h xe dh xe d− ⋅e dh xe dπ (1.16 )
A teoria das probabilidades permite afi rmar que a probabilidade de aparecimento simultâneo de acontecimentos inde-
pendentes é igual ao produto das probabilidades destes acontecimentos. Assim a probabilidade de aparecimento de um
y
0 x
h >1 h >2 h 3
P1
dx1
h 2
h 1
h 3
Fig.1.1 - Representação da função de Gauss para diferentes valores do parâmetro h

7
Práticas de Laboratório - M. R. Silva
conjunto de medidas com as probabilidades x1, x2, x3, … pode ser escrita sob a forma
P h e dx de dx de dn
h=
⋅ ⋅e d⋅ ⋅e dx d⋅x d− ( )e d( )e d
x x x( )x x x x( )xn( )ne dne d( )e dne de d⋅ ⋅e d( )e d⋅ ⋅e d+ + +( )+ + +x x x+ + +x x x( )x x x+ + +x x x ⋅⋅⋅( )⋅⋅⋅+( )+
π
2 ( )1( )e d( )e d1e d( )e dx x x( )x x x1x x x( )x x x( )2( )( )2( )e d( )e d2e d( )e dx x x( )x x x2x x x( )x x xx x x+ + +x x x( )x x x+ + +x x x2x x x+ + +x x x( )x x x+ + +x x x( )2( )+ + +( )+ + +2+ + +( )+ + +( )3( )e d( )e d3e d( )e d
+ + +( )+ + +3+ + +( )+ + +( )2 2( )+ + +( )+ + +2 2+ + +( )+ + + +( )+2 2+( )+1x d1x dx dx dx dx dxx dxx dxx dx dx dxx d x dx dx dx d xx dxx d n2 3x d2 3x dx d2 3x dx dx dx d2 3x dx dx dx d⋅x dx d2 3x d⋅x d2 3x dx d⋅ ⋅ ⋅ ⋅x d (1.17)
O valor mais provável da grandeza medida (identifi cado pela letra A) pode ser determinado a partir das relações
anteriores. Não é demais salientar que este valor não é igual ao valor exacto A0, mas sim representa o valor mais provável
(ou seja o mais próximo do verdadeiro) calculado através dos resultados das medições. A este valor A corresponde o
valor máximo da probabilidade P e por conseguinte o menor valor da soma
x x x x xn ix xn ix xi
n
1x x x1x x x22x x x2x x x2
32 2 2
1+ + +x x x+ + +x x xx x x2x x x+ + +x x x2x x x2+ + +2
3+ + +32 2+ + +2 2⋅ ⋅ ⋅ + =x x+ =x xx xn ix x+ =x xn ix x2 2+ =2 2
=∑x x∑x xn i∑n ix xn ix x∑x xn ix x
Para a determinar o valor de A exprimimos o somatório de através de A e n1, n2, …, tendo em conta a equação
(1.17) e substituindo ao mesmo tempo o valor desconhecido de A0 por A. Obtemos assim
z A x Ai ix Ai ix Ai
n( )z A( )z A = = ( )x A( )x A N( )Ni i( )i ix Ai ix A( )x Ai ix A Ni iN( )Ni iN−( )−i i−i i( )i i−i i∑ ∑x A∑ ∑x Ai i∑ ∑i ix Ai ix A∑ ∑x Ai ix A= =∑ ∑= =x A= =x A∑ ∑x A= =x Ax Ai ix A= =x Ai ix A∑ ∑x Ai ix A= =x Ai ix A
=
2∑ ∑2∑ ∑x A∑ ∑x A2x A∑ ∑x A 2
1 (1.18 )
e o valor de A será escolhido de maneira a obtermos um mínimo para a função z(A), o que acontece quando se verifi ca
a condição
dzdA
AN
ni
ni= −( )A N( )A Ni( )i= −( )= −A N= −A N( )A N= −A N = =A= =A= =
=∑= −∑= − ∑2
10= =0= = e assi= =e assi= =m= =m= = (1.19)
A teoria de Gauss permite assim confi rmar o postulado da média aritmética: “o valor mais provável da grandeza
A0, calculado a partir de séries de valores medidos N1, N2, N2, N , N3, N3, N , … é a média aritmética destes valores”.
E ainda: “o valor médio aritmético de uma grandeza distingue-se dos outros tipos de valores médios pelo facto de ser
mínima a soma dos quadrados dos seus erros”.
1.2.2 MÉDIA, MÉDIA QUADRÁTICA, ERRO PROVÁVEL DE UMA MEDIÇÃO
Na teoria gaussiana do erro a precisão de uma medida é completamente determinada pela “medida da precisão, h”.
Este valor pode ser calculado se for construída a curva y = f (x). Contudo na teoria dos erros é normal caracterizar a
precisão de uma medida através de uma das três seguintes gran-
dezas: erro médio ρ, erro médio quadrático (desvio padrão) σ
e erro provável da medição η. Evidentemente cada uma destas
grandezas pode ser expressa através de h.
Por defi nição o erro médio ρ é igual a (ver Fig.1.2)
ρ = ± =∑ x
n
ii
n
1
e, utilizando a expressão (1.14) obtemos imediatamente
ρπ ππ π
= ⋅ ⋅ =π π⋅π π
∞− ⋅∫2= ⋅2= ⋅ 1
0
2 2x h e d⋅ =e d⋅ =− ⋅e d− ⋅ x⋅ =x⋅ =e dxe d⋅ =e d⋅ =x⋅ =e d⋅ =
hπ πhπ πh x− ⋅h x− ⋅2 2h x2 2
e dh xe d− ⋅e d− ⋅h x− ⋅e d− ⋅
(1.20)
O erro médio quadrático ou desvio padrão - σ é defi nido pela σ é defi nido pela σ
expressão
x
y
0
ρ
σ
η−η
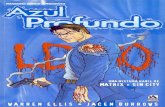
Fig.1.2 - Erro quadrático médio - σ e erro provável - σ e erro provável - σ η

8
Práticas de Laboratório - M. R. Silva
σπ
ρ= = ⋅ ⋅ = = ⋅∑ ∫∞
−xn
x h e dxh
i h x2
2
02 1
21 25
2 2,
(1.21)
Finalmente o erro provável (η) de uma medida individual é defi nido como o valor que divide n erros aleatórios
de n medições em duas partes iguais: uma metade das medições tem erros menores que h e a outra metade - maiores
que h. Isto signifi ca que h é igual à abcissa da curva de Gauss para a qual a área delimitada pela curva e compreendida
entreos limites ± h é igual a metade da área total
h e dxe dxe dh
h xe dh xe dπ
ηη
η⋅ =e d⋅ =e dx⋅ =xe dxe d⋅ =e dxe d⋅ =e d−e d−
+
∫⋅ =∫⋅ =2 2h x2 2h x 1
20 6745 1
20 6 ,η ,η 0 ,0 , ,0 6 ,0 6e assi ,e assi ,m 7m 7ηm 7η = =m 7= == =m 7= == =m 7= == =m 7= =0m 70= =0= =m 7= =0= =6745m 76745= =6745= =m 7= =6745= =1m 71 0 6m 70 6 ,m 7 ,η ,ηm 7η ,η 0 ,0m 70 ,0 ,m 7 , ,m 7 ,0 6 ,0 6m 70 6 ,0 6745m 7745m 7 ⋅σ (1.22)
Chamamos a atenção para o facto de nas fórmulas (1.15) xi aparecer como a diferença entre a i-nésima medida e o
valor verdadeiro da grandeza a medir. No entanto o valor calculado da diferença é-lhe sempre próximo mas nunca igual
pois representa a diferença entre um valor médio A e o valor medido da grandeza. Este facto leva a que no denominador
da fórmula (1.19) o denominador n seja substituído por (n-1) e desta maneira obtemos
σ = ±−
∑ xn
i2
1 1.23)
Da Fig(1.2) podemos tirar algum sentido físico para as grandezas ρ, σ e σ e σ η.
As ordenadas correspondentes a estes pontos defi nem duas áreas iguais, dentro da curva de Gauss, correspondentes
ao erro provável ±η e não iguais para ρ e σ. A parte tracejada indica qual a fracção do total das medidas que apresenta
valores afastando-se da média aritmética num valor de x, com x<η.
Esta área indica qual a probabilidade α de um erro de medição menor ou igual a η (ou ρ ou σ). Tendo em conta a
normalização da curva de Gauss este valor é sempre inferior a 1.
Ao valor desta probabilidade, α, é dado o nome de coefi ciente de fi abilidade.
Para uma quantidade de medições elevada:
erro provável η = 0,5
erro médio aritmético ρ = 0,57
erro quadrático médio σ = 0,68.
Devemos salientar que o acima exposto é verdadeiro se o número de medições for sufi cientemente elevado uma vez
que de n medições calculamos, não valores exactos mas sim, σn, ρn e ηn e o coefi ciente α para estes valores diminui
com a diminuição de n.
1.2.3 ERRO MÁXIMO (MAJORANTE) DE UMA MEDIÇÃO
Como alternativa à determinação do erro pelos processos anteriores podemos ainda utilizar o conceito de erro
máximo ou majorante no caso de funções de mais de uma variável. Para isso é calculado o erro máximo na medição
da grandeza N(N(N x,y,z) considerando que todos os erros na determinação dos valores de x, y e z modifi cam o valor de N
num mesmo sentido.
Alguns exemplos :
1.- Erro máximo absoluto e relativo para os valores de uma soma (ou diferença) de duas grandezas medidas N = A ± B .
Suponhamos que o erro absoluto da grandeza A é ∆A é ∆A é ∆ e que o erro absoluto da grandeza B é ∆B é ∆B é ∆ . Então
N ± ∆N ± ∆N N ± ∆N ± ∆ = (N = (N A ± ∆A ± ∆A ± ∆ ) ± (B ± ∆B ± ∆B ± ∆ ) . (1.24)
O sinal dos erros ∆AO sinal dos erros ∆AO sinal dos erros ∆ e ∆B e ∆B e ∆ pode ser qualquer. Consideremos o caso mais desfavorável, quando os erros de medição

9
Práticas de Laboratório - M. R. Silva
sejam os maiores. No cálculo da soma de duas grandezas medidas, A e B, o erro será máximo (majorado) se o erro da
grandeza A e o erro da grandeza B forem do mesmo sinal (no caso da diferença das grandezas A e B o erro será máximo
se o sinal dos seus erros for de sentido contrário). Em ambos os casos o erro máximo absoluto ∆Nse o sinal dos seus erros for de sentido contrário). Em ambos os casos o erro máximo absoluto ∆Nse o sinal dos seus erros for de sentido contrário). Em ambos os casos o erro máximo absoluto ∆ da grandeza N da grandeza N N será N será N
igual à soma dos erros absolutos das medidas das grandezas A e B :
± ∆N± ∆N± ∆ = ± (∆N = ± (∆N A = ± (∆A = ± (∆ + ∆B + ∆B + ∆ ) (1.25)
Os erros relativos (E) das medições serão expressos através das fórmulas:
para a soma E NN
A BA B
= == = A B+A BA B+A B
∆ ∆N∆ ∆N ∆A B∆A B (1.26)
para a diferença E A BA B
=A B−A B
∆ ∆A B∆ ∆A BA B+A B∆ ∆A B+A B (1.27)
De notar que num cálculo em que o resultado seja dependente da diferença de duas grandezas medidas o erro relativo
da medição será tanto maior quanto mais próximo estiverem os valores das grandezas medidas.
2.- Erro máximo absoluto e erro relativo para os valores do produto (ou quociente) de duas grandezas N = A.B (ou
N = A/B). Se A for medido com o erro ± ∆A for medido com o erro ± ∆A for medido com o erro ± ∆ e B com o erro ± ∆B com o erro ± ∆B com o erro ± ∆ então
N ± ∆N ± ∆N N ± ∆N ± ∆ = (N = (N A ± ∆A ± ∆A ± ∆ ).(B ± ∆B± ∆B± ∆ ) = A.B ± A.∆B .∆B .∆ ± B.∆A .∆A .∆ ± ∆A± ∆A± ∆ .∆B.∆B.∆ (1.28)
Uma vez que ∆A Uma vez que ∆A Uma vez que ∆ e ∆Be ∆Be ∆ são pequenos em relação aos valores de A e B o produto ∆Ao produto ∆Ao produto ∆ .∆B .∆B .∆ pode ser desprezado como
grandeza de 2ª ordem, [(∆Agrandeza de 2ª ordem, [(∆Agrandeza de 2ª ordem, [(∆ .∆B.∆B.∆ ) « A,B] e assim
∆N = A∆N = A∆ .∆B .∆B .∆ + B.∆A.∆A.∆ (1.29)
Como anteriormente, devemos ter em conta o caso mais desfavorável, isto é, quando ambos os erros tiverem o
mesmo sinal. Deste modo o erro máximo absoluto de um produto é igual à soma do produto do erro absoluto do pri-
meiro multiplicador pelo segundo multiplicador e do erro do segundo multiplicador pelo primeiro. Daqui obtemos
para o erro relativo
E NN
A B B AA B
AA
BB
= == = ⋅ +A B⋅ +A B B A⋅B AA B⋅A B
= += +∆ ∆N∆ ∆N A B∆ ∆A BA B⋅ +A B∆ ∆A B⋅ +A B ∆ ∆B A∆ ∆B A ∆ (1.30)
O erro relativo do produto é igual à soma dos erros relativos dos multiplicadores.
Analogamente, se N = A/B então
N N A AB B B B
AB B A± =N N± =N N A A±A AB B±B B
= ( )A A( )A AA A+A A( )A A+A A ( )B B( )B B
B B−B B( )B B( )B B= ± ⋅B A± ⋅B A∆N N∆N NN N± =N N∆N N± =N N ∆A A∆A A
∆B B∆B B∆ ∆( )∆ ∆( )A A( )A A∆ ∆A A( )A A ⋅ +∆ ∆⋅ +( )∆ ∆( )B B( )B B∆ ∆B B( )B B⋅ +( )⋅ +∆ ∆⋅ +( )⋅ +B B⋅ +B B( )B B⋅ +B B∆ ∆B B⋅ +B B( )B B⋅ +B B
( )∆( )B B( )B B∆B B( )B B∆B A∆B A
2B B2B B 2± ⋅±± ⋅± A B± ⋅A B± ⋅
B∆A B∆A B
2 (1.31)
Novamente são desprezados os termos de ordem superior dos erros (quadrados e produtos) e consideramos o caso
mais desfavorável isto é, quando o erro do numerador e o erro do denominador tem sinais contrários. Assim
∆ ∆ ∆N B A∆ ∆B A∆ ∆A B∆ ∆A B∆ ∆B
= ∆ ∆⋅ +∆ ∆B A⋅ +B A∆ ∆B A∆ ∆⋅ +∆ ∆B A∆ ∆∆ ∆A B∆ ∆⋅∆ ∆A B∆ ∆2 (1.32)
O erro máximo absoluto de um quociente é igual à soma dos produtos do erro absoluto do numerador pelo deno-
minador e do erro absoluto do denominador pelo numerador, dividida pelo quadrado do denominador. O erro relativo
de um quociente é igual à soma dos erros relativos do numerador e do denominador. Efectivamente
E NN A
A B B AB
AA
BB
= == = ⋅ ⋅ +A B⋅ +A B B A⋅B A = += +∆ ∆N∆ ∆N B∆ ∆B A B∆ ∆A BA B⋅ +A B∆ ∆A B⋅ +A B ∆ ∆B A∆ ∆B A ∆2
(1.33)
NOTAR BEM - É necessário ter sempre em conta que a utilização automática destas regras pode conduzir
a erros de cálculo nos casos em que a grandeza medida entra mais do que uma vez na fórmula
de cálculo do resultado.

10
Práticas de Laboratório - M. R. Silva
Por exemplo, consideremos a expressão N=(N=(N A+B)/B)/B)/ à qual podem ser automaticamente aplicadas as fórmulas
anteriores, considerando o quociente da divisão de duas grandezas: C = (C = (C A+B) e B.
Então ∆ ∆ ∆N B C∆ ∆B C∆ ∆C B∆ ∆C B∆ ∆B
= ∆ ∆⋅ +∆ ∆B C⋅ +B C∆ ∆B C∆ ∆⋅ +∆ ∆B C∆ ∆∆ ∆C B∆ ∆⋅∆ ∆C B∆ ∆2
mas como ∆C = ∆A+∆B
teremos assim ∆∆ ∆ ∆
NB A B A B B∆ ∆B B∆ ∆
BB A∆ ∆B A∆ ∆ B
B=
B A⋅ +B A( )∆ ∆( )∆ ∆B A( )B A∆ ∆B A∆ ∆( )∆ ∆B A∆ ∆B A( )B A∆ ∆⋅ +∆ ∆( )∆ ∆⋅ +∆ ∆B A⋅ +B A( )B A⋅ +B A∆ ∆B A∆ ∆⋅ +∆ ∆B A∆ ∆( )∆ ∆B A∆ ∆⋅ +∆ ∆B A∆ ∆B A+ +B A( )B A( )B A B B( )B B+ +( )+ +B A+ +B A( )B A+ +B A B B⋅B B=
⋅ +B A⋅ +B A∆ ∆B A∆ ∆⋅ +∆ ∆B A∆ ∆ ( )A B( )A BA B+A B( )A B+A B ⋅2 2B2 2B
( )2( )A B( )A B2A B( )A B (1.34)
Por outro lado, é evidente que
∆N = (B.∆A+A.∆B) /B2 (1.35)
pois N pode ser representado por N pode ser representado por N N=(A/B) +1.
O erro introduzido pelo primeiro processo de cálculo é devido ao facto de termos considerado diferentes o sinal
do erro absoluto da medição que é repetido no numerador e no denominador da fórmula de B, analogamente ao que é
feito para o cálculo do erro do quociente de duas grandezas independentes. Neste caso é evidente que o erro absoluto
∆B no denominador e no numerador teria de ser considerado com o mesmo sinal.
Assim, no caso de repetição de algumas grandezas nas fórmulas é necessário calcular o erro máximo médio da
medição em cada caso individual.
Como método geral para o cálculo do erro majorante ∆NComo método geral para o cálculo do erro majorante ∆NComo método geral para o cálculo do erro majorante ∆ de uma função defi nida por N de uma função defi nida por N n parâmetros mensuráveis,
N=f(xi) com i=1,...n podemos aplicar a fórmula geral de propagação de erros, derivada do cálculo diferencial:
dN dx Nx
dx Nx
dx Nxn
n= ± ⋅ ∂
∂+ ⋅+ ⋅dx+ ⋅dx ∂
∂+ ⋅ ⋅ ⋅ + ⋅+ ⋅dx+ ⋅dxn+ ⋅n
∂∂
1
12+ ⋅2+ ⋅
2
∆ ∆∆ ∆N xN x∆ ∆N x∆ ∆∆ ∆N x∆ ∆ i Nxii
n= ⋅= ⋅N x= ⋅N x∆ ∆N x∆ ∆= ⋅∆ ∆N x∆ ∆∆ ∆N x∆ ∆= ⋅∆ ∆N x∆ ∆ i= ⋅i∆ ∆N x∆ ∆= ⋅∆ ∆N x∆ ∆ ∂
∂
∆ ∆
∆ ∆∆ ∆N x∆ ∆
∆ ∆N x∆ ∆
N x
N x∆ ∆N x∆ ∆
∆ ∆N x∆ ∆∆ ∆N x∆ ∆∆ ∆N x∆ ∆∆ ∆N x∆ ∆= ⋅∆ ∆N x∆ ∆∆ ∆N x∆ ∆= ⋅∆ ∆N x∆ ∆∆ ∆N x∆ ∆
∆ ∆N x∆ ∆∆ ∆N x∆ ∆
∆ ∆N x∆ ∆
N x
N xN x
N x∆ ∆N x∆ ∆
∆ ∆N x∆ ∆∆ ∆N x∆ ∆
∆ ∆N x∆ ∆
=∑∆ ∆∑∆ ∆∆ ∆N x∆ ∆∑∆ ∆N x∆ ∆∑N x∑N x∆ ∆N x∆ ∆∑∆ ∆N x∆ ∆∆ ∆N x∆ ∆= ⋅∆ ∆N x∆ ∆∑∆ ∆N x∆ ∆= ⋅∆ ∆N x∆ ∆
1 (1.36)
Ao calcular o erro máximo é necessário ter em conta que, se a grandeza a defi nir for determinada por medidas de
uma série de outras grandezas então, o erro calculado fi ca na prática fortemente majorado pois a probabilidade que os
erros de todas as grandezas medidas tenham um sinal tal que torne máximo o erro do resultado é tanto menor, quanto
maior for a quantidade de grandezas medidas. Por outro lado, se tanto a quantidade de grandezas medidas como o nú-
mero de medições forem muito pequenas então a utilização das fórmulas baseadas na distribuição de Gauss dará uma
precisão do resultado demasiado optimista. Neste caso é usual utilizar de fórmulas derivadas de outras distribuições
estatísticas (Fisher-Student, p.e.) de derivação mais complexa.

11
Práticas de Laboratório - M. R. Silva
Valor médio aritmético de uma grandeza N N N N Nn
n0
1 2N N1 2N N 3N N3N N= + +N N+ +N N1 2+ +1 2N N1 2N N+ +N N1 2N N N N+N NN N⋅ ⋅ ⋅N NN N+N N
Erro médio absoluto de uma medição ρn
ii
n
NN NiN Ni
n= =N= =N
N N−N N=∑
∆N∆N= =∆= =N= =N∆N= =N0N N0N N
1
Erro relativo de uma medida isolada E NN
= ∆N∆N
Erro médio quadrático de uma mediçãoσn
i
n
n=
( )i( )iN N( )N NN N−N N( )N N−N N=∑( )0( )N N( )N N0N N( )N N 2
1
Erro provável de uma medição.Relação entre σ e σ e σ ρ : σn = 1,25 ρ
η para n > 30 ηn
i
n
n= ⋅
( )i( )iN N( )N NiN Ni( )iN NiN N−N N( )N N−N N=∑
0= ⋅0= ⋅6745= ⋅6745= ⋅( )0( )N N( )N N0N N( )N N 2
1,
Erro quadrático médio da média aritmética σ σN
i
n
n n n0
2
1= == =( )i( )iN N( )N NiN Ni( )iN Ni0( )0N N0N N( )N N0N NN N−N N( )N N−N N
( )n n( )n n 1( )1−( )−=∑
Erro absoluto de uma função de uma só variável dN dx dfdx
= ± ⋅ ( )x( )x
Erro relativo de uma função de uma só variável E dNN
dxf x
dfdx
= == =( )f x( )f x
⋅ ( )x( )x
Erro médio quadrático de uma função de várias variáveis independentes σ σσ σσ σ σσ σ=σ σ∂
∂σ σ
∂σ σσ σ⋅σ σσ σσ σ
σ σ
σ σσ σσ σ
σ σσ σσ σσ σ
σ σ
σ σσ σ
σ σ
+ ∂∂
⋅
+ ⋅ ⋅ ⋅fσ σfσ σ∂f∂x
f∂f∂yx yσx yσ
x yx y+x y+
∂x y∂x yx y yx yy
2 2
Erro máximo de uma função de várias variáveis independentes
∆N fx
dx fy
dymax = ∂f∂f∂
+ ∂f∂f∂
+ ⋅ ⋅ ⋅
Coefi ciente de fi abilidade para ρ, σ e σ e σ ηno caso de um grande número de medições :
α
αα
ρ
η
σ
= 0,57
= 0,50 = 0,68
Tabela 1 - Compilação de fórmulas de erros e valores médios de medições

12
Práticas de Laboratório - M. R. Silva
Tabela 2 - Fórmulas para o erro absoluto e relativo para diferentes funções
Operação matemática Erro
absoluto ± relativo (%)Funções de uma só variável
N AnN A=N A
N AN AnN AnN AN A=N A
N AN A=N A( )N A( )N AsiN AsiN AN An N A
N AN A=N A( )N A( )N AN AcoN AN As N A
N tg AN t=N t ( )g A( )g A
N ctg= ( )A( )A
± −nA An 1∆A∆A
±−1 1 1
nA AA AnA A∆A A∆A A
± ( )cos A A( )A A( ) ⋅A A⋅ ∆A A∆A A
± ( )sin A A( )A A( ) ⋅A A⋅ ∆A A∆A A
±( )cos
∆A∆A∆( )A( )2
±( )sin
∆A∆A∆( )A( )2
n AA
⋅ ∆A∆A
1n
AA
⋅ ∆A∆A
tg A A( )A A( )A A⋅ ∆A A⋅ ∆A A
2 ⋅( )2( )2∆A∆A∆( )A( )sin
2 ⋅( )2( )2∆A∆A∆( )A( )sin
Funções de mais de uma variável - erro máximo
N A B C= + +N A= + +N A B C= + +B C + ⋅ ⋅ ⋅
N A B= −N A= −N A
N A B= ⋅N A= ⋅N A
N A B C= ⋅N A= ⋅N A B C⋅B C
N AB
=
± +( )± +( )± + + +( )+ +( )∆ ∆( )± +( )± +∆ ∆± +( )± +( )∆( )+ +( )+ +∆+ +( )+ +( )A B( )( )∆ ∆( )A B( )∆ ∆( )± +( )± +∆ ∆± +( )± +A B± +( )± +∆ ∆± +( )± +( )C( )+ +( )+ +C+ +( )+ +( )L( )
± +( )± +( )± +( )∆ ∆( )± +( )± +∆ ∆± +( )± +( )A B( )( )∆ ∆( )A B( )∆ ∆( )± +( )± +∆ ∆± +( )± +A B± +( )± +∆ ∆± +( )± +
± +( )± +( )± +( )B A( )± +( )± +B A± +( )± +( )A B( )( )∆ ∆( )± +( )± +∆ ∆± +( )± +( )B A( )∆ ∆( )B A( )± +( )± +B A± +( )± +∆ ∆± +( )± +B A± +( )± +( )A B( )∆ ∆( )A B( )
± +( )± +( )± + +( )+( )BC( )± +( )± +BC± +( )± +( )C B( )( )AB( )( )C( )( )∆ ∆( )± +( )± +∆ ∆± +( )± +( )BC( )∆ ∆( )BC( )± +( )± +BC± +( )± +∆ ∆± +( )± +BC± +( )± +( )A A( )∆ ∆( )A A( )± +( )± +A A± +( )± +∆ ∆± +( )± +A A± +( )± +( )C B( )∆ ∆( )C B( )( )∆( )
± A B B AB
∆ ∆+∆ ∆+A B∆ ∆A B B A∆ ∆B A2
∆ ∆ ∆A B∆ ∆A B∆ ∆ CA B C+ +A B+ +A B∆ ∆A B∆ ∆+ +∆ ∆A B∆ ∆ ++ +A B+ +A B +
L
L
∆ ∆A B∆ ∆A B∆ ∆A B
∆ ∆A B∆ ∆+∆ ∆A B∆ ∆A B−A B
∆ ∆∆ ∆A∆ ∆A
B∆ ∆B∆ ∆B
+
∆ ∆ ∆∆ ∆A∆ ∆A
B∆ ∆B∆ ∆B
CC
+ ++ +
∆ ∆∆ ∆A∆ ∆A
B∆ ∆B∆ ∆B
+
Funções de mais de uma variável - erro médio quadrático
N A B C= + +N A= + +N A B C= + +B C + ⋅ ⋅ ⋅
N A B= −N A= −N A
N A B C= ⋅N A= ⋅N A B C⋅B C
N AB
=
± +± + + +σ σ± +σ σ± + σ+ +σ+ +A Bσ σA Bσ σ± +σ σ± +A B± +σ σ± + C+ +C+ +2 2± +2 2± +σ σ2 2σ σ± +σ σ± +2 2± +σ σ± + 2+ +2+ +L
± +± +σ σ± +σ σ± +A Bσ σA Bσ σ± +σ σ± +A B± +σ σ± +2 2± +2 2± +σ σ2 2σ σ± +σ σ± +2 2± +σ σ± +
± ( ) + ( ) + ( )( )BC( ) ( )AC( ) ( )AB( )A B( )A B( ) ( )A B( ) ( )C( )( )σ σ( )σ σ( )σ σ( ) +σ σ+ ( )σ σ( )( )AC( )σ σ( )AC( )A Bσ σA B( )A B( )σ σ( )A B( ) +A B+σ σ+A B+ ( )A B( )σ σ( )A B( )( )AC( )A B( )AC( )σ σ( )AC( )A B( )AC( ) ( )σ( )2 2( )2 2( )( )AC( )2 2( )AC( ) 2
± +± +± +
⋅
σσA± +A± + BB
AB
2
2 2± +2 2± + 2 2 B2 2B
22
σ σ σA Bσ σA Bσ σ B
A B C
2 2σ σ2 2σ σ 2+ + +σ σ+ + +σ σ σ+ + +σA B+ + +A Bσ σA Bσ σ+ + +σ σA Bσ σ B+ + +B2 2+ + +2 2σ σ2 2σ σ+ + +σ σ2 2σ σ 2+ + +2
+ +A B+ +A B +L
L
σ σA Bσ σA Bσ σA B
2 2σ σ2 2σ σσ σ+σ σσ σA Bσ σ+σ σA Bσ σ2 2+2 2σ σ2 2σ σ+σ σ2 2σ σA B−A B
σ σ σA Bσ σA Bσ σ C
A B C
2σ σ2σ σ2A B2A B
2
2
2
2+ ++ +A B+ +A B2+ +2
σ σA Bσ σA Bσ σA B
2σ σ2σ σ2A B2A B
2
2+A B+A B
ctg A A ( ) ⋅ ∆

13
Práticas de Laboratório - M. R. Silva
1.3 ERRO DAS MEDIÇÕES E PRECISÃO DOS INSTRUMENTOS DE MEDIDA
A repetição de medições para a eliminação dos erros aleatórios só tem sentido se os erros aleatórios de medições
individuais forem superiores ao erro introduzido pelo próprio aparelho de medida.
A precisão do aparelho de medida (se a sua utilização não introduzir novos erros) é basicamente determinada pelas
características da sua construção e pela graduação da escala. Como regra geral, a precisão do mecanismo do aparelho
de medida é inferior à precisão da leitura feitas nas suas escalas. A precisão do aparelho de medida pode tanto ser
indicada no próprio aparelho como nas instrucções técnicas que o acompanham.
Alguns exemplos:
a) Ao medir um comprimento com uma régua não é difícil avaliar à vista alguns décimos de milímetro mas uma
régua vulgar nunca é construida com uma precisão tão elevada. Mesmo que repetíssemos as medições muitas vezes a
precisão do resultado obtido não pode ser melhor que a precisão com que foi fabricada a régua. Por outro lado, mes-
mo que as divisões correspondentes aos milímetros fossem gravadas com extrema precisão (digamos 0,001 mm) este
facto não se refl ectiria na medição efectuada pelo observador. Neste caso o factor limitativo seria a acuidade visual do
experimentador e a precisão da medição com a régua será determinada pela precisão de leitura visual que, como regra,
não ultrapassa no melhor dos casos 0,1 do valor da menor divisão da escala.
b) Ao medir uma resistência de algumas centenas de Ohms com um ohmímetro digital de precisão (resolução de
0,01 Ω, p.e.) as diferenças entre os valores de cada medição podem atingir alguns Ohms devido aos erros aleatórios
das medições (maus contactos das pontas de prova, fl utuações da corrente de prova, etc.). Neste caso a medição deverá
ser repetida o número de vezes sufi ciente de maneira a permitir que o erro médio absoluto se aproxime do limite de
precisão do aparelho de medida (0,01 Ω).
Como regra, ao efectuar as medições deverá fazer-se o possível para que a precisão das medições se aproxime da
precisão nominal do aparelho de medida. Se medições sucessivas indicarem, ou o mesmo valor ou valores tão pouco
diferentes que a sua dispersão seja inferior à precisão nominal do aparelho de medida, então no cálculo da precisão do
resultado em lugar do erro absoluto dos diferentes valores medidos devemos escrever o valor da precisão do aparelho
de medida.
2 - REGISTO DAS OBSERVAÇÕES E APRESENTAÇÃO DE DADOS
2.1 - REGISTO DAS OBSERVAÇÕES, CÁLCULOS E ALGARISMOS SIGNIFICATIVOS
De uma maneira geral, no registo de observações (relatório) devem ser inscritos:
- a indicação da medida ou experiência a efectuar e o método e/ou fórmulas necessárias;
- o(s) nome(s) do(s) operador(es) ( ou alunos) que realizam a experiência e a data;
- se conveniente, a lista de aparelhos de medida que terão de ser empregues com a indicação da sua precisão
de medida nominal;
- se a experiência o permitir devem ser intoduzidos no relatório esquemas da montagem e/ou esquemas
simplifi cados das ligações eléctricas necessárias às medições;
- as observações (medidas), que devem ser expostas de forma clara e não ambígua, com as respectivas

14
Práticas de Laboratório - M. R. Silva
unidades bem identifi cadas. Sempre que possível as medições devem ser expostas sob a forma de tabelas
que incluirão as unidades de medida, factores de escala e precisão do aparelho ou método com que foram
obtidas.
Antes de começar os cálculos convém refl ectir sobre a sua estrutura e que tipo de resultados parciais, se necessário,
será fundamental conservar. Em geral, convém dispor os resultados parciais e fi nais sob a forma de tabelas de modo a fa-
cilitar a sua inspecção e verifi cação posterior mesmo por pessoas que não tenham directamente realizado o trabalho.
Devido à capacidade de cálculo das máquinas de calcular actuais a quantidade de dígitos disponíveis depois de
qualquer cálculo pode facilmente atingir 9 unidades ou mais. É óbvio que na grande maioria dos cálculos em engenharia,
e mesmo na física, nem todos este dígitos tem signifi cado real. Assim, é necessário estabelecer critérios e regras que
permitam a eliminação dos algarismos não signifi cativos, que só vão difi cultar a leitura dos resultados da experiência
e compreensão dos cálculos.
De uma maneira geral podemos considerar 3 casos na aproximação dos resultados obtidos nos cálculos:
1º - basta conhecer a ordem de grandeza dos resultados (isto signifi ca uma aproximação de 50 - 100%). Esta situa-
ção é típica daqueles casos de engenharia em que se tomam, por exemplo, factores de segurança duas, três, ou
mais vezes maiores que o valor calculado.
2º - basta conhecer o resultado com uma aproximação de 1 - 10%. Neste grupo está incluída a grande maioria dos
cálculos técnicos e mesmo físicos.
3º - cálculos de precisão 0,5% ou mesmo superior. Neste caso estão normalmente incluídas as medidas efectuadas num
bom laboratório de física e medidas de calibragem de instrumentação, típicas em laboratórios de controlo de
qualidade e certifi cação.
Mas atenção, os resultados de uma medida tem fraco valor prático enquanto não soubermos qual o erro que lhe está
associado.
Será também o valor do erro, calculado ou esperado, que nos permitirá determinar, na generalidade, a quantidade de
algarismos signifi cativos a apresentar num resultado. É claro que será inútil apresentar um resultado com 9 algarismos
se a precisão for de 1%, valor que só garante 3 algarismos signifi cativos.
São geralmente aceites dois critérios para a determinação dos algarismos signifi cativos:
1º - o resultado numérico é dado com 1 algarismo signifi cativo a mais além dos exactos, ou seja o penúltimo algaris-
mo é correcto mas o último pode estar errado em várias unidades. Por exemplo, o resultado 137,43 signifi ca que
o valor numérico exacto está entre 137,4 e 137,5. Este método é usado em física e, de uma maneira geral, nas
ciências exactas.
2º - o resultado é dado com tantos algarismos signifi cativos quantos o rigor do cálculo permite, isto é, o último alga-
rismo signifi cativo é provavelmente correcto com a aproximação de 1/2 unidade (arredondamento). Neste caso,
os cálculos tem de ser levados a mais uma casa decimal além daquela esperada para o resultado. Por exemplo, o
resultado 86 signifi ca um valor entre 85,5 e 86,5 e o resultado 86,0 signifi ca um valor entre 85,95 e 86,05.
Notar bem a importância dos zeros à direita que podem representar valores exactos ou, pelo menos, signifi cativos. Este
método é geralmente usado em engenharia.
Ao escrever números de valor muito elevado ou muito baixo mas de precisão média ou reduzida convém utilizar uma
representação com potências de 10, por exemplo 25 600 00 deverá escrever-se 256.105 ou melhor ainda 2,56.107.
Por último, nos arredondamentos dos resultados numéricos deverá usar-se a regra do arredondamento para o dígito
imediatamente inferior ou superior conforme o valor a arredondar seja inferior a 5 ou igual ou superior a 5, respecti-
vamente p.e. 86,93 arredonda para 86,9 e 86,96 arredonda para 87,0.

15
Práticas de Laboratório - M. R. Silva
Regras práticas para a fi xação dos algarismos signifi cativos:
a) quando se apresenta um erro provável duma medição ou cálculo basta conservar um algarismo signifi cativo ou no
máximo dois, depois do arredondamento (p.e., o mesmo erro pode ser representado por ±0,3 ou 0,28).
b) nos valores médios calculados ou nos valores fi nais encontrados conservam-se tantos algarismos signifi cativos
quantos os correspondentes ao último algarismo signifi cativo do erro. Assim se a máquina de calcular apresentar o
valor 225,638427 e o erro for ± 0,28 deve-se apresentar apenas o valor (225,64 ± 0,28) como resultado.
c) nos cálculos efectuados à mão deve-se conservar apenas o número de algarismos signifi cativos sufi ciente para apre-
sentar o resultado com a aproximação de uma unidade no último algarismo signifi cativo. Por exemplo, para somar
(3,30±0,25) com (74,2873±0,0017) tomaremos os valores 3,30 e 74,30; o erro fi nal será calculado separadamente,
com o auxílio de regras próprias (ver § 1.2.3).
Nas multiplicações e divisões manuais, como regra prática podemos aceitar que, se a precisão esperada for:
10% ou mais se tome 3 algarismos signifi cativos
entre 10% e 1% se tome 4 algarismos signifi cativos
entre 1% e 0,1% se tome 5 algarismos signifi cativos
etc.
d) nos cálculos encadeados feitos com máquina de calcular não é necessário proceder a arredondamentos entre cada
cálculo, e mesmo entre cálculos diferentes, desde que os valores intermédios sejam conservados em memória. No
entanto, se tivermos de passar para o papel algum resultado intermédio, as convenções anteriores são para seguir.
NOTA - No caso de termos de indicar unidades de medida para um valor sujeito a erro devemos adoptar a seguinte
convenção de escrita:
( 5,34 ± 0,02 ) cm/s ou, no caso de potências, ( 5,34 ± 0,02 ).10-2 m/s
isto é, no caso de existirem, as unidades abrangem ambos os valores, o calculado e o respectivo erro.
2.2 - REPRESENTAÇÃO GRÁFICA DOS RESULTADOS
A experiência foi feita, registaram-se valores de grandezas físicas, mas nada disto terá valor se não conseguirmos
“mostrar” o que aconteceu, se não conseguirmos tirar conclusões daquilo que medimos. Normalmente as conclusões,
sejam elas de natureza quantitativa ou somente qualitativa, implicam o estabelecimento de relações entre as variações
de uma ou mais grandezas - a “causa” - e a correspondente modifi cação de um valor, medido ou calculado, - o “efei-
to”. Esta relação pode e é muitas vezes apresentada sob a forma de tabela numérica de duas (ou mais) variáveis: y - o
“efeito” função de x - a “causa”.
Uma boa representação gráfi ca dos valores experimentais (resultado de uma medição directa ou do cálculo) não
só evidencia os aspectos particulares da dependência das grandezas permitindo uma análise rápida (e relativamente
precisa) como, em muitos casos, é a melhor hipótese que se apresenta ao investigador para solucionar o problema.
Algumas das vantagens de um gráfi co :
- apresenta conjuntos extensos de dados de uma maneira compacta, num só “golpe de vista”;
- mostra rápida e claramente a maior ou menor concordância dos resultados com o esperado e sugere ao mesmo
tempo o tipo de função que melhor representa o fenómeno físico;
- é um método rápido e fácil para obtenção de resultados intermédios por interpolação entre dois pontos medidos
ou de resultados fora do domínio medido, por extrapolação.

16
Práticas de Laboratório - M. R. Silva
2.2.1- NORMAS PARA GRÁFICOS
Para ser efectivo um gráfi co tem de ser funcional, objectivo e estritamente adaptado às dimensões e características
do fenómeno a descrever. Além disso, para poder ser comparado com outros gráfi cos e lido por diferentes pessoas
(mesmo pouco ao corrente do problema específi co representado) o gráfi co tem de apresentar uma informação simples
de apreender, inequívoca, completa e de preferência normalizada.
Suponhamos um conjunto de valores numéricos que representam a variação de y - variável independente, com x
- variável dependente. Então como regra :
1º - os valores da variável independente y serão representados em abcissa. Junto a cada eixo deverá ser inequivoca-
mente caracterizada a grandeza correspondente, assim como as respectivas unidades de medida de preferência no
sistema SI. A grandeza pode ser simples: temperatura T, comprimento L, etc. ou complexa: período de oscilação
T=2π.√(l/g)π.√(l/g)π.√ .
Dentro de um mesmo trabalho manter constante, sempre que possível, a área ocupada pelos diferentes gráfi cos :
1/4, 1/3 ou 1/2 do formato A4; utilizar formatos maiores só em caso de absoluta necessidade. Não esquecer que a
apresentação de um gráfi co é equivalente a um “texto” e por isso devem ser previstas no papel margens em branco
de tamanho sufi ciente, como se tratasse de um texto corrente.
2º - as escalas devem ser escolhidas em função da gama de valores numéricos das variáveis a representar de maneira a
que possa ser feita uma leitura directa e fácil dos gráfi cos. No geral, as escalas devem permitir a obtenção da mesma
precisão que a das observações experimentais registadas, quer durante a construção, quer na leitura posterior do
gráfi co. As escalas não tem, necessariamente, de incluir a origem do referencial (0,0), Fig.2.1.a.
O número de algarismos utilizados nas divisões das escalas deve estar adaptado às dimensões dos gráfi cos e permitir
uma leitura rápida, não se sobrepondo (Fig. 2.1.c); empregar sempre que necessário a factorização por potências de
10 (Fig.2.1.b). Este facto implica cuidado na adopção da relação de escala de modo a permitir uma leitura fácil dos
valores intermédios, p.e. - escalas de 1:3, 1:2, 2:1, 1:10, p.e. (será completamente a evitar as escalas “complicadas”
como, p.e., 1:4,6 ou 1:7, etc.).
3º - Os pares de valores (y,x) deverão ser assinalados no gráfi co por um símbolo pequeno (+, *, o, ∆ , x, etc.). No caso
de ser necessário representar no mesmo gráfi co mais do que uma série de pontos, os pontos correspondentes a
cada série serão sinalizados com símbolos diferentes. A dimensão dos símbolos deve permitir a visibilidade da sua
forma mesmo que seja necessário traçar qualquer curva sobre eles.
Velocidadedo foguete
Bemb) c)a) Mal Mal
70000
60000
50000
40000106 8 121416106 8 12 14 t(s)
106 8 12 14 t
40
6050
10
3020
02 40
V/103V (10 .m)3
40
60
50
Figura 2.1 - Exemplos de escalas e construção de gráfi cos

17
Práticas de Laboratório - M. R. Silva
Nos eixos serão indicados somente os valores que defi nem a escala. Nunca serão indicados nos eixos os valores dos
pontos do gráfi co, assim como não serão desenhadas as linhas cujo cruzamento defi na qualquer ponto experimental
a assinalar.
Através de uma escolha criteriosa das escalas deve-se evitar que as curvas ou grupos de pontos se desenvolvam
quase paralelos aos eixos coordenados (Fig. 3.1.c), a não ser que a função representada seja mesmo quase cons-
tante.
4º - Todos os gráfi cos devem ter uma legenda (eventualmente acrescida de um número de ordem) que identifi que
completamente o seu conteúdo e que pode ser colocada por baixo do eixo das abcissas ou alternativamente num
espaço livre dentro do próprio gráfi co (Fig. 2.1.b).
5º - Se for necessário traçar uma linha que melhor ajuste os pontos experimentais (muitas vezes só para “guiar a vista”)
devemos procurar traçá-la de maneira a representar o andamento geral do conjunto de pontos e não é absolutamente
necessário que passe por todos os pontos, (Fig. 2.1.b). Não esquecer que, de um modo geral, as leis da física tem
variações regulares (suaves) sem “bicos” e mudanças bruscas de direcção (Fig 2.1.a).
2.2.2 - TIPOS DE PAPEL PARA GRÁFICOS
Existem vários tipos de papel para a representação de gráfi cos. Os mais utilizados tem duas escalas lineares perpen-
diculares (papel milimétrico ou lin-lin) ou uma escala linear e outra logarítmica (semilog ou log-lin). Existem ainda
muitos outros tipos de papel especifi camente adaptados à resolução gráfi ca de certos problemas : ambas as escalas
logarítmicas (papel log-log), escalas linear-polar, escalas estereográfi cas, escala triplas, etc..
Para a representação dos fenómenos físicos pode ser utilizada uma grande variedade de funções matemáticas.
Vejamos alguns casos típicos que ilustram o tipo de papel a utilizar:
1º - um grande número de fenómenos físicos podem ser representados por relações do tipo linear (y = kx + a).
Por exemplo:
Lei do movimento rectilínio e uniforme s = s0 + v . t (2.1)
Velocidade de um corpo deslizando por um plano inclinado v = v0 + (g . sinα) . t
Lei de Ohm V = R . I , etc.;V = R . I , etc.;V = R . I
para relações lineares o papel milimétrico (Fig 2.2.a) é o mais indicado para a representação gráfi ca deste tipo de
funções;
2º - outras leis físicas existem em que as relações entre as variáveis são do tipo exponencial
Lei do movimento acelerado e = 1/2 . j . t 2 ou, por exemplo (2.2)
Amortecimento de oscilações y = y0 . e-ax
Potência absorvida Ena espessura L
40 2 6 L(m)
log E(W)
2
3
4
1
0
c)
Potência absorvida Ena espessura L
40 2 6 L(m)
400060008000
2000
10000
0
b)
E (W)Potência absorvida Ena espessura L
40 2 6 L(m)
E (W)
a)
104
103
102
101
100
Figura 2.2 - Exemplos de utilização de diferentes papéis para gráfi cos

18
Práticas de Laboratório - M. R. Silva
Representar funções deste tipo em papel milimétrico levaria rapidamente a dimensões excessivas do gráfi co e/ou
à impossibilidade de uma leitura correcta (Fig.2.2.b). Nestes casos justifi ca-se a utilização de papéis logarítmicos
“log-lin” ou mesmo “log-log”.
A representação em papel log-lin é equivalente à logaritmização das expressões representadas:
e = 1/2 . j . t 2 → log e = 0,301+ log j + 2 log t (2.3)+ log j + 2 log t (2.3)+ log j + 2 log t
e y = y0 . e-ax → ln y = ln y0 - a x → equação de uma recta Y = Y0Y = Y0Y = Y + BX
Deste modo as curvas originais fi cam linearizadas e os respectivos gráfi cos em papel log-lin são aproximados a rectas
com declive igual ao coefi ciente de x (x (x B) e de ordenada na origem igual ao termo constante (Y0Y0Y ) (Fig.2.2.c) . Analiti-
camente o declive B.
B y yx x
yy
x x
yy= = =ln lny ylny y
ln , log2 1y y2 1y yy y−y y2 1y y−y yy ylny y2 1y ylny y
2 1x x2 1x xx x−x x2 1x x−x x
2
1
2 1x x2 1x xx x−x x2 1x x−x x
2
12 3026, 3026,
x xxx xx2 1x x2 1x xx x2 1x x−x x2 1x x (2.4)
2.2.3 - BARRAS DE ERRO E RECTÂNGULO DE PRECISÃO
O resultado de toda e qualquer medição nunca é um valor exacto, tem sempre associado um certo erro (erro de
leitura, erro padrão, erro sistemático, etc.) ou seja, sendo G uma grandeza experimental a sua medida será G uma grandeza experimental a sua medida será G G = g ±∆g
, em que g é a medição e ∆g o erro associado. Isto signifi ca que o valor mais provável de G estará situado no intervalo
[g -∆g , g+∆g] .
Desde que a escala o permita, um gráfi co deve sempre revelar este facto, completando-se com as “barras de erro”
correspondentes a cada ponto representado, seja ele calculado ou experimentalmente medido. Tipicamente as barras
de erro são grafi camente representadas por pequenos segmentos de recta de comprimento 2.∆g centrados nos pontos
de ordenada g (Fig. 2.2). No caso geral a cada ponto estão associadas duas barras de erro, uma paralela ao eixo das
abcissas e a outra paralela ao eixo das ordenadas. Quando existam simultaneamente, estas duas barras de erro defi nem
o chamado “rectângulo de precisão” do ponto experimental.
Em muitos casos um dos erros, geralmente o correspondente às abcissas, pode ser desprezado em face do valor do
outro. Nesta situação o rectângulo de precisão reduz-se a uma única barra de erro ou, no caso limite de a escala não o
permitir, não haverá lugar a representação da dimensão do erro.
2.2.4 - LIMITE SUPERIOR DO ERRO DE UMA RECTA AJUSTADA A PONTOS - MÉTODO GRÁFICO
Consideremos duas grandezas cuja interdependência possa ser defi nida por uma expressão do tipo linear y = α + k.x
em que α - ordenada na origem, e k- coefi ciente angular da recta, são constantes, e a quantidade de pares de pontos
experimentais (xi , yi) que a representam igual a n. Os erros experimentais fazem com que estes pontos não se distri-
buam obrigatoriamente sobre uma recta. Neste caso podemos ajustar grafi camente uma recta que melhor represente
a variação de y com x, procurando que os pontos que se situem “acima” da recta de ajuste sejam compensados pelos
que se situem por “baixo” (Fig.2.3).
Mesmo neste caso aproximado podemos (e devemos) determinar os limites superiores do erro para a ordenada na
origem, α, e para o coefi ciente angular da recta, k, que defi nem o erro total da recta ajustada.

19
Práticas de Laboratório - M. R. Silva
NOTA:- o uso de uma régua transparente para o fazer é conveniente. Assim teremos uma visão global do conjunto dos
pontos experimentais;
- a descrição simplifi cada dos métodos de ajuste analítico rigoroso (mínimos quadrados, χ2, etc.) e a
avaliação dos respectivos erros será feita separadamente.
Procedimento:
1º - suponhamos que a recta de melhor ajuste R0, traçada de maneira a obtermos uma quantidade equilibrada de pontos
por “cima” e por “baixo” da recta, é defi nida pelos parâmetros α0, coefi ciente angular e k0k0k , ordenada na origem;
2º - desenham-se duas rectas paralelas a R0 que passem pelos pontos experimentais mais afastados, por cima e por
baixo de R0 (1-2 e 3-4).
Nota - em primeira aproximação, um ou outro ponto excepcionalmente afastado da recta média poderá não ser
considerado pois a probabilidade de corresponder a uma medida incorrecta é grande;
Estas rectas serão intersectadas por duas paralelas ao eixo dos yy (1-4 e 2-3) que contém o primeiro e o último
ponto experimental representado. Os quatro pontos assim determinados (1,2,3,4) defi nem o “paralelogramo de
incerteza”.
3º - desenham-se as diagonais do paralelogramo de incerteza, R1 e R2; determinam-se os parâmetros α e k para as três k para as três k
rectas R0, R1 e R2. Com estes valores é calculado o limite superior do erro do coefi ciente angular (∆α) e da ordenada
na origem (∆kna origem (∆kna origem (∆ ) para a recta de ajuste R0 :
∆ ∆α = ( )∆( )∆α( )α−
= ( )∆( )∆* *( )* *( )n
k ( )k( )n2 22 2−2 2−n2 2n (2.5)
em que : (∆α)* é o valor da maior das diferenças (α1 - α0) e (α2 - α0)
(∆k (∆k (∆ )* é o valor da maior das diferenças (k1 - k0) e (k2 - k0k0k ) .
Caso particular:
Em muitos trabalhos experimentais é frequente a dependência entre duas grandezas ser representada por uma re-
lação linear em que a ordenada na origem, α , é igual a zero e então a equação linear fi ca reduzida a y = k.x com y = k.x com y = k.x
o parâmetro k - constante.k - constante.k
Como no caso geral, para n pares de pontos (xi ,yi ) serão determinadas as rectas R0, R1 e R2 só que, devido ao tipo da
equação, terão de obrigatoriamente de passar pela origem das coordenadas (0,0).
Ter em atenção que:
a) a origem das coordenadas não é obrigatoriamente a origem dos eixos coordenados;
b) em primeira aproximação, um ou outro ponto excepcionalmente afastado da recta média não será considerado pois
0 X
V
2xx10
R1
2RR0y1
y231
2
4
R1
2RR0
V
X
α0α2
α1
Figura 2.3 - Limites superiores do erro de uma recta ajustada

20
Práticas de Laboratório - M. R. Silva
a probabilidade de corresponder a uma medida incorrecta é muito grande;
c) este método faz depender o valor do limite superior do erro do coefi ciente angular k, do valor adoptado para as
escalas : ampliando as escalas melhora a avaliação do erro.
Os coefi cientes angulares de R1 e R2 serão respectivamente
k yx
k yx1
1
12
2
2= == =k= =k2= =2 (2.6 )
O limite superior do erro do coefi ciente angular, (∆k O limite superior do erro do coefi ciente angular, (∆k O limite superior do erro do coefi ciente angular, (∆ ), será então o maior dos valores obtidos nas diferenças (k1 - k0 - k0 - k )
e (k2 - k0k0k ).
d) se dentro da precisão da representação gráfi ca os pontos experimentais estiverem alinhados sobre a mesma recta, o li-
mite do erro do coefi ciente angular será tomado como o limite superior dos erros de leitura de x e de x e de x y no gráfi co.
2.2.5 - AJUSTE DE UMA RECTA A PONTOS EXPERIMENTAIS - MÉTODO ANALÍTICO
Consideremos um conjunto de pares de pontos experimentais (xi,yi) representando duas grandezas cuja interdepen-
dência possa ser defi nida por uma expressão do tipo linear y = α + k . x em que: α - ordenada na origem e + k . x em que: α - ordenada na origem e + k . x k- coefi -
ciente angular da recta são constantes. Os erros experimentais inerentes às medições fazem com que estes pontos não
se distribuam obrigatoriamente sobre uma recta perfeita. Teremos então que encontrar uma recta que melhor descreva
a distribuição espacial dos pontos.
De entre os vários métodos analíticos que permitem fazer este ajuste descrevemos o método da “regressão linear”.
Método da Regressão Linear
A justifi cação matemática deste método baseia-se no método dos mínimos quadráticos: o ajuste da recta é efectuado
de modo a minimizar o somatório dos quadrados dos desvios dos pontos experimentais em relação à recta de ajuste.
Admitamos que medimos n pontos experimentais. Então os parâmetros da recta de ajuste
y = a . x + b (2.7)
são dados pelas expressões:
a C C C CD
b C C C CD
= ⋅ −C C⋅ −C C C C⋅C C = ⋅ −C C⋅ −C C C C⋅C C1 5C C1 5C C⋅ −1 5⋅ −C C⋅ −C C1 5C C⋅ −C C 3 4C C3 4C CC C⋅C C3 4C C⋅C C 2 4C C2 4C C⋅ −2 4⋅ −C C⋅ −C C2 4C C⋅ −C C 1 3C C1 3C CC C⋅C C1 3C C⋅C C(2.8)
onde D C C C= ⋅D C= ⋅D C C C−C C2 5C C2 5C C= ⋅2 5= ⋅ 32
eC x x C y
i
n
i
n
i
n
ii
n
i1C x1C x1
2x C2x C1
31 1
C x= ⋅C x = =x C= =x C3= =3= =i= =i= =1= =1 = =i= =i= =1= =1∑ ∑C x∑ ∑C x y C∑ ∑y Ci i∑ ∑i iy Ci iy C∑ ∑y Ci iy C2∑ ∑2= ⋅∑ ∑= ⋅C x= ⋅C x∑ ∑C x= ⋅C xi i= ⋅i i∑ ∑i i= ⋅i i = =∑ ∑= = ∑ ∑x C∑ ∑x Ci∑ ∑ix Cix C∑ ∑x Cix C4∑ ∑4 =∑ ∑=∑ ∑∑∑ ∑ C n=C n=5C n5C n
Os erros associados aos valores do declive “a” e ordenada na origem “b” são dados por:
σ σσ σσ σaσ σaσ σiσ σiσ σ
n
bi
n
nn
nCD
σ σ=σ σ( )
−⋅ =σ σ⋅ =σ σσ σ⋅ =σ σb⋅ =b
( )i( )iy y( )y yy y−y y( )y y−y y⋅= == =i= =in= =n= =
∑ ∑∑ ∑∑ ∑( )∑ ∑( )i( )i∑ ∑i( )iy y( )y y∑ ∑y y( )y yy y−y y( )y y−y y∑ ∑y y−y y( )y y−y y 2∑ ∑2∑ ∑1σ σ1σ σ= =1= =
2
1 2C1 2C2 22 2b2 2bD2 2D n2 2n −2 2−
(2.9)
O valor de yi é obtido pela recta de ajuste para a abcissa xi .
A qualidade do ajuste obtido pode ser defi nida por uma expressão matemática chamada “coefi ciente de correlação - r”.
De acordo com o seu valor (r ≤1), podemos avaliar a qualidade do ajuste (muito boa com r ≈ 1) e eventualmente decidir por
um ajuste a um outro tipo de equação ou concluir que é necessário recolher outro conjunto de dados experimentais.

21
Práticas de Laboratório - M. R. Silva
O coefi ciente de correlação é calculado pela seguinte fórmula:
r C C C C
D CC yi
i
n= ⋅ −C C⋅ −C C C C⋅C C
D C⋅ ⋅D C( )D C( )D C C C( )C C⋅ ⋅( )⋅ ⋅D C⋅ ⋅D C( )D C⋅ ⋅D C C C−C C( )C C−C CC y=C y
=∑C y∑C y1 5C C1 5C C⋅ −1 5⋅ −C C⋅ −C C1 5C C⋅ −C C 3 4C C3 4C CC C⋅C C3 4C C⋅C C
( )5 6( )C C( )C C5 6C C( )C C⋅ ⋅( )⋅ ⋅5 6⋅ ⋅( )⋅ ⋅( )4( )( )2( ) 6C y6C y2
1onde (2.10).
Nota - A grande maioria das calculadoras científi cas de bolso actuais tem capacidade para fazer estes cálculos
(recta de ajuste, erros dos parâmetros de ajuste e coefi ciente de correlação), sendo para isso só necessário
introduzir os valores dos pares de pontos (xi , yi).
3 - INSTRUMENTOS DE MEDIDA
Em paralelo com os métodos clássicos “mecânicos” são cada vez mais utilizados métodos e sistemas eléctricos e
electrónicos de medição nas medições efectuadas nos trabalhos de engenharia, e por maioria de razão nos laboratórios
de física,. Esta extensão dos métodos electrónicos de medição atinge domínios dantes tradicionalmente “mecânicos”
como a pressão, tempo, temperatura, etc..
Outras medições há que necessariamente são feitas directamente sobre parâmetros eléctricos: tensão e corrente
eléctrica, resistência, etc.. Actualmente a tendência para a digitalização das medições conduz ao facto de numa maioria
de situações o processo de medição ser reduzido à medição digital de uma tensão contínua ou variável, através de um
“detector” adequado e isto para as diferentes variáveis físicas a avaliar.
Nos pontos seguintes apresentamos os instrumentos de medição mais básicos, presentes em qualquer laboratório:
réguas com nónios para medições de comprimentos; multímetros para a medição básica de tensões, correntes e resis-
tências; osciloscópios para a medição e visualização de sinais eléctricos.
3.1 Nónios lineares e circulares
As medições de dimensões lineares são geralmente feitas com réguas ou fi tas métricas. A precisão destas medidas
é geralmente baixa, muitas vezes não ultrapassando o milímetro. O nónio (pequenas escalas auxiliares que permitem
medir fracções da menor divisão da escala principal, tipicamente 1/10 ou 1/20) representa uma modifi cação muito
conveniente da régua (metálica), que aumenta de muito a sua precisão. Quando bem utilizado nos instrumentos apro-
priados (micrómetro, p.e.) a precisão das medidas pode atingir 0,005 mm.
Na prática, o conceito de nónio é utilizado em instrumentos de medida de dimensões lineares ou angulares como
paquímetros, micrómetros, esferómetros, teodolitos, goniómetros, com os quais se podem atingir precisões absolutas
de décimos e mesmo de centésimos de milímetro e para os ângulos a precisão de minutos ou fracções de minuto.
Fundamentalmente, o “nónio linear” (Fig.3.1) é constituído por uma régua de pequenas dimensões, com divisões,
que desliza sobre uma outra régua de maiores dimensões - a “escala”, também com divisões gravadas.
........
10
m
m-1
0
0
105
5.........
Escala
Nónio
Fig 3.1 - Princípio do nónio

22
Práticas de Laboratório - M. R. Silva
As divisões da escala do nónio são gravadas de tal maneira que uma divisão do nónio seja igual a uma divisão da
escala multiplicada por um factor igual a
mm m−
m mm mm mm mm mm m
= −= −= −m mm m
= −
= −= −= −= −= −= −= −m mm mm mm m
= −
= −= −
= −
1 1= −1= − 1 (3.1)
em que m representa o número de divisões do nónio. A justifi cação do funcionamento do nónio é a seguinte.
Sendo y a distância entre dois traços consecutivos da escala e x a distância entre dois traços consecutivos do nónio, x a distância entre dois traços consecutivos do nónio, xpodemos escrever x = x = x y - (y/m) ou m.x = (m.x = (m.x m-1).y
A grandeza
∆x y x ym
= −x y= −x y = (3.1)
é designada por “precisão do nónio” e determina o valor do erro máximo do nónio. Além disso, qualquer que seja a
posição do nónio em relação à escala há sempre uma divisão deste que coincide com alguma outra divisão da escala.
O funcionamento do nónio pode ser demonstrado do seguinte modo:seja L o comprimento da peça a medir (Fig.3.2); fazemos coincidir o início da peça com o início (zero) da escala e L o comprimento da peça a medir (Fig.3.2); fazemos coincidir o início da peça com o início (zero) da escala e Lsuponhamos que o outro extremo da peça se situa entre as divisões k e (k e (k k+1) da escala.Podemos escrever
L k y L= ⋅L k= ⋅L k + ∆y L+ ∆y L
em que ΔL - é uma fracção (por enquanto desconhecida) da menor divisão da escala. Encostamos agora o início (zero) L - é uma fracção (por enquanto desconhecida) da menor divisão da escala. Encostamos agora o início (zero) Lda escala nónio ao fi m da peça a medir. Como o intervalo entre as divisões do nónio é menor que o das divisões da escala encontramos (sempre !) uma divisão no nónio, n, que se aproxima o máximo (pode coincidir) da divisão (k+n) da escala.
Então ∆ ∆L n∆ ∆L n∆ ∆y n∆ ∆y n∆ ∆x n∆ ∆x n∆ ∆n x∆ ∆n x∆ ∆∆ ∆= ⋅∆ ∆∆ ∆L n∆ ∆= ⋅∆ ∆L n∆ ∆∆ ∆− ⋅∆ ∆∆ ∆y n∆ ∆− ⋅∆ ∆y n∆ ∆∆ ∆= ⋅∆ ∆∆ ∆x n∆ ∆= ⋅∆ ∆x n∆ ∆( )∆ ∆( )∆ ∆y x( )y x∆ ∆y x∆ ∆( )∆ ∆y x∆ ∆∆ ∆y x∆ ∆−∆ ∆y x∆ ∆( )∆ ∆y x∆ ∆−∆ ∆y x∆ ∆∆ ∆= ⋅∆ ∆∆ ∆n x∆ ∆= ⋅∆ ∆n x∆ ∆
e por conseguinte o comprimento total da peça será dado por
L k y n x= ⋅L k= ⋅L k + ⋅y n+ ⋅y n ∆
ou ainda, tendo em conta a expressão (3.1),
L k y n ym
= ⋅L k= ⋅L k + ⋅y n+ ⋅y n (3.2)
ou seja: “o comprimento de uma peça medida com uma escala com nónio é igual ao número de divisões inteiras da
escala adicionado ao valor obtido na multiplicação da precisão do nónio pelo número da divisão do nónio que coincide
com alguma das divisões da escala”.
Neste tipo de medição o erro cometido será o correspondente à maior ou menor correspondência dos traços do
nónio com os da escala e, evidentemente, não será superior a (0,5.∆xnónio com os da escala e, evidentemente, não será superior a (0,5.∆xnónio com os da escala e, evidentemente, não será superior a (0,5.∆ ), em ∆x), em ∆x), em ∆ - é a precisão do nónio: “o erro do nónio x - é a precisão do nónio: “o erro do nónio x
é igual a metade da sua precisão”.
Não é difícil de estender este tipo de medição linear com o nónio à medição de valores angulares (Fig.3.3).
Escala
Nónio0
k+1
L
n....
k+n1005
.........
k
L
Fig. 3.2 - Demonstração do funcionamento do nónio

23
Práticas de Laboratório - M. R. Silva
Neste caso um pequeno sector circular, equivalente ao nónio - o “limbo”, desliza em frente a uma escala circular,
graduada em graus, grados ou outra unidade angular conveniente. Também aqui m divisões da escala correspondem a
(m-1) divisões do limbo e, de uma maneira similar,
m mm m⋅ =m m( )α βm mα βm mm m⋅ =m mα βm m⋅ =m m( )α β( )m m( )m mα βm m( )m m −( )−α β−( )− ⋅α β⋅( )α β( )1( )α β( )
onde α e β - representam respectivamente, a menor divisão da escala e a menor divisão do limbo. A precisão de um nónio angular será também calculada por uma fórmula semelhante,
∆α β=m
O valor de um ângulo (ψ) medido a partir do zero do limbo também será calculado por uma fórmula equivalente
ϕ β αϕ β= ⋅ϕ β + ⋅k nϕ βk nϕ βϕ β= ⋅ϕ βk nϕ β= ⋅ϕ β + ⋅k n+ ⋅ ∆ (3.3)
3.2 - MULTÍMETRO ANALÓGICO
Os multímetros analógicos são bastante simples no seu princípio de funcionamento: dependem do equilíbrio entre
a força de uma mola e a força gerada pela interacção de uma corrente com um campo magnético.
No geral, os multímetros analógicos estão confi gurados para permitir a medida de diferentes parâmetros eléctricos:
tensões, correntes, resistências, características de transistores, no entanto, internamente, o seu funcionamento baseia-se
só na avaliação das correntes que os atravessam. Com efeito, tecnologicamente, a medição analógica directa de tensões
não é um processo acessível, mas já avaliar uma corrente ou o seu efeito ao atravessar uma resistência calibrada R
(relacionada com a tensão a medir através da lei de Ohm: V = V = V R.I ) é mais fácil.
3.2.1 - DESCRIÇÃO DO FUNCIONAMENTO
O princípio físico de funcionamento de um aparelho de medição
de corrente baseia-se na interacção entre o campo magnético pro-
duzido numa bobina pela corrente que é medida e um campo mag-
nético exterior, permanente ou não. O valor do binário produzido, e
que desloca a agulha, está directamente relacionado com a corrente
que passa através do aparelho (Fig,3.4). Este funcionamento pode
ser descrito, de um modo muito simplifi cado, pela equação
F = F = F n.B.i.L (3.4)n.B.i.L (3.4)n.B.i.L
k k+1
0 n
k+n
∆ϕ
0 1 2
ϕ
Fig. 3.3 - Demonstração do funcionamento do nónio circular
Fig. 3.4 - Princípio de um aparelho de bobina móvel
i
B
F
F

24
Práticas de Laboratório - M. R. Silva
em que
F - força exercida sobre a bobina pelo campo magnético; F - força exercida sobre a bobina pelo campo magnético; F
B - intensidade do campo magnético permanente;
n - número de espiras da bobina;
L - perímetro de uma espira;L - perímetro de uma espira;L
i - corrente a medir que percorre a bobina.
A força F pode ser medida, p.e., observando a defl exão de uma agulha acoplada a uma mola, por sua vez rigidamente F pode ser medida, p.e., observando a defl exão de uma agulha acoplada a uma mola, por sua vez rigidamente F
ligada à bobine. Este tipo de construção é conhecido como aparelho de medida de agulha e bobina móvel do tipo
d’Arsonoval, inventada à mais de um século (Fig.3.5.a).
3.2.2 - CONTROLES E PRECISÃO DE OPERAÇÃO
A maioria dos multímetros de laboratório tem as seguintes fi chas de entrada de sinal e botões de controle, Fig.3.5 (esta
descrição corresponde a um multímetro tipo, podendo não corresponder “exactamente” a nenhum aparelho real):
Entradas de sinalCOM - terminal comum; a ponta de prova preta é sempre ligada a este terminal para todo o tipo de medições (tensões, correntes, resistências, etc.) em todas as gamas;DC10A - a ponta de prova vermelha é ligada a este terminal para medição de correntes na escala de 10A em DC;V_Ω_A - a ponta de prova vermelha é ligada a este terminal para medição de todo o tipo de tensões (AC ou DC), resistências e teste de continuidade e correntes contínuas de baixa intensidade;SELECTOR DE GAMA - este botão, normalmente rotativo, selecciona o tipo de medição e respectiva gama; tem frequentemente associada a função ON/OFF;0Ω ADJUST- ajuste do zero da escala (eléctrica) para medições de resistências;-/+ (inversão de polaridade) - este botão permite a inversão da polaridade do sinal nas medições DC ou de resistências;DEFLEXÃO NULA - botão do tipo “cabeça de parafuso”, colocado em baixo e ao centro do mostrador, para ajuste do zero da agulha da escala mecânica;
Precisão de medida (estes dados podem ter variações em função dos tipos e modelos de aparelho)
O uso dos multímetros analógicos está limitado pela precisão que permite a leitura da posição da agulha do indicador
em face à escala (nos bons multímetros a agulha é a mais fi na possível e desloca-se em frente a um espelho inserido na
b)
1 - Mostrador com as escalas
2 - Mecanismo da agulha
3 -Selector de gama de medida
4 -Ficha para medidas V, Ω, A
5 - Terminal comum (ponta de prova COM)
6 -Terminal para medidas DC-10 ampéres
7 - Ficha para verifi cação de transistores
8 - Ajuste do “zero” para escala de Ω
9 - +/- (inversão de polaridade)
Fig. 3.5 - Esquema de funcionamento (a) e multímetro analógico típico (b)
rr
①①
mm
oo
kk
ll
nn
pp
a)

25
Práticas de Laboratório - M. R. Silva
escala). Aparece aqui um factor de erro importante, a paralaxe, variável de observador para observador.
Função Escala Precisão
DC_V todas ± 3% DC da escala completa
AC_V todas ± 4% AC da escala completa
DC_A até 10 A ± 3% da escala completa
Ω até 20 MΩ ± 3% da escala completa em graus
3.3 - MULTÍMETRO DIGITAL
Até à última década ou década e meia as medidas de tensão eram vulgarmente feitas com aparelhos de medida de
agulha e bobina móvel . Hoje, em quase todas as aplicações foram ou estão em vias de ser substituídos por voltímetros
ou multímetros digitais.
Uma das vantagens dos multímetros digitais sobre os analógicos é a sua facilidade de utilização. De facto o valor
medido é directamente apresentado como uma série de dígitos facilmente legíveis o que permite sempre a mesma
interpretação, independentemente do observador (não há paralaxe!). Além disso, estes multímetros possuem posicio-
namento automático da vírgula, detecção automática da polaridade e, frequentemente, busca e mudança automatica
da escala de medida.
A mudança automática de escala é importante na medida em que permite ao multímetro realizar medições sempre
com a resolução optimizada, sem a intervenção do operador, quaisquer que forem as circunstâncias. Vamos esclarecer
este ponto:
tomemos por exemplo um voltímetro digital com um mostrador de 3 1/2 dígitos (ou seja em que o máximo da leitura
permitido no mostrador é 1999). Este máximo implica que para valores medidos superiores a 1999 a escala tem de
ser reduzida por um factor de 10 antes de estes serem apresentados (p.e. 201 mV serão apresentados como 0201 mV).
Por outro lado qualquer valor medido abaixo de 0200 pode ser apresentado com uma resolução multiplicada por um
factor de 10 (p.e. 195 mV será apresentado como 195,0 mV). resumindo, se o mostrador não alcança o valor de 0200
automaticamente a escala muda para uma outra mais sensível e, inversamente, se ultrapassar 1999 a escala de medida
é automaticamente mudada para uma menos sensível.
Devido à própria natureza do processo utilizado na conversão do sinal para leitura a precisão dos multímetros di-
gitais pode ser muito facilmente superior à dos analógicos e também tem uma grande vantagem sobre os analógicos:
apresentarem uma grande resistência de entrada (≈ 108 a 1012 Ω). Este facto permite praticamente eliminar a infl uência
do aparelho de medida no valor obtido para as medições correntes.
3.3.1 - DESCRIÇÃO DO FUNCIONAMENTO
Uma propriedade fundamental dos multímetros digitais é o facto de só medirem tensões directamente (recordamos
que os analógicos directamente medem correntes). Um voltímetro digital, na sua forma mais simples , reduz-se a um
circuito integrado que inclui um conversor do tipo ADC - “conversor analógico-digital”, uma alimentação externa de
baixa tensão ou bateria e um visor de cristais líquidos ou LED’s. O coração do circuito integrado, e por maioria de
razão do multímetro, é o conversor ADC, que converte a tensão do sinal analógico de entrada em impulsos regulares de
amplitude fi xa que podem ser contados e cujo número é proporcional ao valor da tensão. É esta contagem que acaba
depois por ser convertida em caracteres alfanuméricos e apresentada no visor.

26
Práticas de Laboratório - M. R. Silva
Um multímetro, como o nome indica, também mede outros sinais correspondentes a tensões alternas, correntes con-
tínuas ou alternas, resistências, mas como o conversor ADC só pode converter sinais de tensão contínua o valor destes
parâmetros terão que ser transformados analogicamente em tensões contínuas, através de conversores adequados.
Os conversores básicos integrados na maioria dos multímetros são: atenuador CC, conversor corrente-tensão,
conversor AC-DC e conversor resistência tensão.
- Atenuador CC
Os sinais que podem ser recebidos na entrada do conversor ADC estão geralmente limitados a um máximo de 10
V. Isto signifi ca que tensões contínuas superiores a este limite tem de ser atenuadas antes de analisadas pelo ADC.
Electronicamente esta operação é realizada com divisores de tensão com resistências calibradas (Fig.3.6).
- Conversor Corrente-Tensão
Na medição de correntes contínuas estas terão de ser primeiro convertidas em tensões. Electronicamente esta ope-
ração pode ser realizada com “shunts” (resistências calibradas, em paralelo) de modo que a tensão nos terminais do
shunt para o máximo da escala seja a mesma para todas as escalas e o mais baixo possível (Fig.3.6).
- Conversor AC-CC
Como a electrónica do ADC só trabalha com níveis de tensão contínua, no caso da medição sinais de corrente e/ou
tensão alternas temos primeiro de modifi car o sinal num processo de conversão AC-CC. Esta conversão pode ser feita
através de um circuito detector de média simples ou com conversores RMS (média quadrática do sinal), electrónica
mais complexa baseada em amplifi cadores operacionais.
- Conversor Resistência-Tensão
O valor das resistências é medido fazendo passar uma corrente constante, conhecida, através da resistência, desco-
nhecida, e medindo a tensão resultante. Electronicamente é realizado por meio de circuitos relativamente complexos,
incluindo fontes de corrente contínua estabilizada e amplifi cadores operacionais.
3.3.2 - MEDIÇÃO DE VALORES EFICAZES (RMS)
Praticamente todas as medições de tensões e correntes alternas (variáveis no tempo) são hoje realizadas com ins-
trumentos electrónicos que avaliam o valor pico a pico (osciloscópios) ou o valor efi caz -RMS (multímetros).
Se uma quantidade física escalar é constante em relação ao tempo a defi nição dessa quantidade necessita de um
Fig. 3.6 - Atenuador CC (a) e conversor Corrente-Tensão (b)
1 k
9 M
0,9 M
90 k
10 k
2000 V
200 V
20 V
200 mV/2V
saíd
a pa
ra A
DC
entrada
200 mA
20 mA
2 mA
entrada
saíd
a pa
ra A
DC
0,9 Ω
9 Ω
90 Ω
900 Ω
2 A
0,1 Ω
200 µA
b)a)

27
Práticas de Laboratório - M. R. Silva
só parâmetro, p.e. uma tensão constante de 1,5 V fi ca absolutamente defi nida por este valor. No caso de quantidades
físicas periodicamente variáveis no tempo a situação é mais complexa e esta simplicidade já não é válida. Suponhamos
a tensão sinusoidal da Fig.3.7 .
Também é possível descreve-la por um único número mas nem todos são válidos. Podíamos por exemplo tentar
descreve-la pela média do sinal mas, para um intervalo de tempo sufi cientemente longo esta média é igual a zero (ou ≈
0) qualquer que seja a amplitude do sinal. Uma outra maneira seria defi ni-la pela tensão pico a pico (diferença entre o
máximo e o mínimo da onda) mas outras formas de onda apresentam o mesmo valor pico a pico (Fig.3.7) e certamente
efeitos físicos muito diferentes.
O valor efi caz (ou RMS - root mean square) é um valor que caracteriza com signifi cado físico quantidades perio-
dicamente variáveis no tempo.
Defi nindo: o valor efi caz de uma tensão alterna é defi nido como o valor equivalente em tensão contínua que produza
a mesma quantidade de energia no mesmo intervalo de tempo.
Para uma onda de tensão sinusoidal simétrica o cálculo (ver Apêndice) mostra que o valor efi caz da tensão será
V VRMVRMV SRMSRM = maVmaV x
2 (3.5)
em que VRMSVRMSV - valor efi caz do sinal e Vmax - valor máximo (de pico) atingido pelo sinal.
No caso de um sinal de tensão rectangular simétrico teremos
V VT
T TRMV VRMV VSV VSV VRMSRMV VRMV VSV VRMV V pTpT
pT TpT T= ⋅V V= ⋅V V
T T−T TmaV VmaV V x (3.6)
em que, além das defi nições anteriores temos: T - período do sinal e T - período do sinal e T Tp - largura do sinal.
3.3.3 - CONTROLES E PRECISÃO DE OPERAÇÃO
Um multímetro digital genérico utilizado em laboratórios terá as seguintes fi chas de entrada de sinal e botões de
controle, como indicado na Fig. 3.8 (notar bem que esta descrição corresponde a um multímetro tipo, podendo não
corresponder “exactamente” a nenhum aparelho real):
Entradas de sinal
COM - terminal comum; a ponta de prova preta é sempre ligada a este terminal para todo o tipo de medições
(tensões, correntes e resistências, etc.);
A - a ponta de prova vermelha é ligada a este terminal para medição de correntes nas escalas de 2A e 10A, quer
em AC ou em DC;
Fig. 3.7 - Formas de tensão variável: sinusoidal, (a) e rectangular, (b)
T/2 T t
V
pV
0Vpp
V
t
pV
0Vpp
T
Tp

28
Práticas de Laboratório - M. R. Silva
mAµA - a ponta de prova vermelha é ligada a este terminal
para medição de correntes nas escalas de mA ou µA,
quer em AC ou em DC (geralmente até a um máximo
de 1 ampère);
V_Ω - a ponta de prova vermelha é ligada a este terminal
para medição de todo o tipo de tensões (AC ou DC),
resistências e teste de continuidade;
Botões de controle
ON/OFF - este botão liga e desliga o multímetro;
HOLD - quando existe, este botão congela a leitura no visor
do multímetro, para todas as funções e escalas;
SELECTOR - botão único rotativo ou vários botões individu-
ais que permitem seleccionar as várias funções e
escalas de operação.
Precisão de medida
(estes dados são típicos e podem apresentar variações, conforme
os modelos de aparelho)
Função Escala Precisão
DC_V todas ± 0,5% da leitura, ± 1 dígito
AC_V até 200 V ± 0,8% da leitura, ± 3 dígitos
DC_A até 2 A ± 0,8% da leitura, ± 3 dígitos
AC_A até 2 A ± 1,0% da leitura, ± 3 dígitos
Ω até 2 MΩ ± 0,5% da leitura, ± 1 dígito
Nota - nos multímetros digitais, independentemente da precisão de conversão obtida no “conversor analógico-
digital”, temos ainda de considerar a precisão do visor, ou seja o último dígito à direita do visor é sempre
conhecido com um erro de, no mínimo, ± 1 dígito (representa o arredondamento do valor internamente
convertido). Daí a necessidade de fazer as medições com um máximo de sensibilidade para diminuir a
infl uência deste erro no cômputo global dos erros da medição.
3.4 - OSCILOSCÓPIO
O osciloscópio é um dos mais úteis e versáteis instrumentos de medida utilizados no laboratório. Na grande maioria
das aplicações o osciloscópio, apesar da sua evidente complexidade, pode ser considerado como um voltímetro de
precisão que não só permite a medida de amplitudes de tensões, como também permite ver a variação e evolução da
forma dessa mesma tensão ao longo do tempo. Passamos a descrever sumariamente os blocos constituintes e funções
do osciloscópio.
Fig. 3.8 - Multímetro digital típico 1 - botão Ligar_Desligar ; 2 - terminal de corrente (até 1A) 3 - terminal 20 ampéres ; 4 - terminal V_Ω 5 - terminal comum COM; 6 - selector de gama de medida 7 - mostrador digital (3 1/2 dígitos)
m
o
l
k
p
n
j

29
Práticas de Laboratório - M. R. Silva
3.4.1 -FUNCIONAMENTO DO TUBO DE RAIOS CATÓDICOS (CRT)
O esquema dos componentes fundamentais que constituem um tubo de raios catódicos é representado na Fig.3.9.
No interior do tubo de raios catódicos é feito um vácuo de muito boa qualidade, que se mantém ao longo da vida útil do
tubo. A função do canhão de electrões é produzir um feixe intenso e estreito de electrões; constituem este módulo este
módulo: o cátodo - fonte de electrões, aquecido por resistência eléctrica, o ânodo - conjunto de eléctrodos cilíndricos,
que focam o feixe e o aceleram em direcção à superfície fosforecente. Quando esta superfície é atingida pelo feixe
produz uma imagem luminosa. Internamente o tubo é revestido por uma camada condutora para permitir o retorno ao
cátodo dos electrões que embatem na superfície frontal do tubo pois, caso contrário, esta superfície acumularia uma
carga negativa tal que eventualmente repeliria os electrões do feixe.
Dentro do tubo estão ainda colocados dois pares de placas defl ectoras - verticais e horizontais que permitem con-
trolar espacialmente o feixe, permitindo o funcionamento do tubo como instrumento de medida. Se for estabelecida
uma diferença de potencial entre qualquer par de placas defl ectoras ou em ambos os pares, o feixe electrónico será
defl ectido. Assim, se um sinal com a forma de uma tensão variável for aplicado a um dos pares de placas o feixe será
defl ectido de acordo com a variação do sinal o que implica o desvio da mancha fosforecente na superfície frontal do
tubo - a mancha é controlada pelo sinal. É este o princípio da defl exão electrostática.
Observando este sistema mais em detalhe, podemos considerar como primeira aproximação que o afastamento entre
os vários electrões no interior do feixe é sufi cientemente grande para os estes não interagirem entre si. No estudo da
defl exão electrostática vamos utilizar o esquema da Fig.3.10 com o respectivo sistema de coordenadas: eixo dos xx - xx - xx
Fig.3.9 - Esquema do tubo de raios catódicos
Cátodo quente
H
VPlacas deflectoras
do feixe de electrões
Capa conductora
Feixe de electrões
Superfíciefosforecente
Pontoluminoso
Ánodo extractor(canhão de electrões)
Fig.3.10 - Esquema do sistema de defl exão electrostática
Canhão de electrões
Placas deflectoras
- +
0 AP
y
x
Alvod
h
b
Va
L

30
Práticas de Laboratório - M. R. Silva
paralelo às placas defl ectoras e o início das coordenadas está localizado no extremo esquerdo destas placas. Assume-se
ainda que o campo eléctrico criado pelas placas é uniforme e só existe no interior do espaço por estas defi nido.
No canhão de electrões estes são acelerados pelo potencial Va e, se desprezarmos efeitos relativistas, o valor da
velocidade dos electrões ao abandonar o canhão será
V V emxVxV aV eaV e= V e⋅V e2 (3.8)
Ao passar entre as placas os electrões sofrem uma aceleração no sentido do eixo dos yy. Se a placa superior for
positiva em relação à inferior e o potencial entre elas igual a VdVdV o campo eléctrico será igual ad o campo eléctrico será igual ad
E VdyEyE dVdV= − (3.9)
e a aceleração exercida sobre os electrões
ae E
mem
Vdy
ye Eye E dVdV= −e E⋅e E
= ⋅= ⋅ (3.10)
A velocidade dos electrões depois de abandonar o canhão, vx, é constante na direcção do eixo dos xx e por isso os xx e por isso os xx
electrões fi cam na região compreendida entre as placas durante o tempo T
T bV
b mV mx ax aVx aV V mx aV m
= == = ⋅V m⋅V m2 x a2 x a (3.11)
Combinando estas expressões vemos que o electrão ao deixar a região espacial defi nida pela placas terá uma compo-
nente de velocidade e um deslocamento segundo y respectivamente iguais a
vy = ay.T e ey = 1/2 . ay .T2.T2.T
e assim, no ponto P da (Fig.3.10)
V V bd
mV m
y VV
bdyPV VyPV VdV VdV V
aV maV m PdVdV
aVaV= ⋅V V= ⋅V Vd= ⋅dV VdV V= ⋅V VdV V ⋅ = ⋅= ⋅d= ⋅d
2 4V m2 4V my
2 4y
V2 4VV maV m2 4V maV m P2 4Pa2 4aVaV2 4VaVV m⋅V m2 4V m⋅V m
2
(3.11)
Assumindo que o campo eléctrico é igual a zero em todo o espaço exterior às placas temos que os electrões se
deslocam sobre uma trajectória recta uma vez abandonado o espaço entre as placas. A pendente da trajectória dessa
recta será igual ννyP
xConsiderando que o centro das placas está à distância L da face do tubo podemos afi rmar que o deslocamento total L da face do tubo podemos afi rmar que o deslocamento total L
dos electrões, h , será determinado pela expressão
V V bd
mV m
y VV
bdyPV VyPV VdV VdV V
aV maV m PdVdV
aVaV= ⋅V V= ⋅V Vd= ⋅dV VdV V= ⋅V VdV V ⋅ = ⋅= ⋅d= ⋅d
2 4V m2 4V my
2 4y
V2 4VV maV m2 4V maV m P2 4Pa2 4aVaV2 4VaVV m⋅V m2 4V m⋅V m
2
(3.12)
substituindo nas equações anteriores e com alguma manipulação temos fi nalmente
h L b VV
yyPVyPV
xVxV P= −h L= −h Lh Lh Lh L= −h Lh L= −h L
h L
h Lh L= −h L
h L= −h Lh L= −h Lh L= −h Lh Lh Lh Lh Lh L= −h Lh L= −h Lh L= −h Lh L= −h L
h L
h Lh L
h Lh L= −h L
h L= −h Lh L= −h L
h L= −h L
⋅ +⋅ +yP⋅ +yP
2 (3.13)
Na maioria dos casos o tubo de raios catódicos funciona com todas as suas tensões constantes excepto VdVdV , que d , que d
varia segundo um determinado potencial aplicado. Então a defl exão será proporcional ao sinal Vd Vd V . A equação anterior
mostra isso mesmo.
3.4.2 - SUMÁRIO DAS FUNÇÕES, MODOS DE OPERAÇÃO E CONTROLES
A representação visual do sinal analisado no osciloscópio é feita no tubo de raios catódicos - CRT (Fig.3.11) com
o auxílio de dois pares de placas-eléctrodos que controlam o deslocamento do feixe de electrões no tubo segundo os
eixos horizontal e vertical (respectivamente base de tempo e amplifi cador de sinal).

31
Práticas de Laboratório - M. R. Silva
Quando um sinal é introduzido na entrada de um qualquer dos canais do osciloscópio ele é inicialmente amplifi cado
e depois dividido em duas partes. Uma das partes é aplicada às placas de defl exão vertical enquanto a outra é aplicada
ao circuito de arranque do gerador, que fornece uma tensão em forma de dente de serra (rampa linear não simétrica)
às placas de defl exão horizontal. É esta tensão que obriga o feixe de electrões a varrer o visor, horizontalmente e com
uma velocidade constante. Simultaneamente o feixe é defl ectido verticalmente, proporcionalmente à amplitude do sinal
de entrada. É este conjunto de deslocações que produz no CRT uma linha que representa a variação do sinal de entrada
em função do tempo. Este é o princípio básico de funcionamento do osciloscópio.
3.4.2.1 - Banda passante e tempo de subida do sinal
A característica mais importante do amplifi cador vertical ( amplifi cação do sinal de entrada) é a sua banda passante,
que está intimamente ligada ao tempo de subida do sinal reproduzido. Este parâmetro fundamental defi ne qual a veloci-
dade de variação máxima que pode ter o sinal de entrada para que ainda seja correctamente reproduzido, sem distorção,
pelo osciloscópio. Na prática de um laboratório de Física básica podemos considerar 40 MHz de banda passante como
sufi cientes para as medições usuais.
Cada osciloscópio tem um tempo próprio de subida de sinal, ou seja, um sinal com uma frente de subida ideal (tem-
po de subida = 0 segundos) será reproduzido como um sinal com uma frente de subida fi nita tosc. Na prática podemos
utilizar a seguinte relação aproximada para o tempo de subida do osciloscópio tosc (em nanosegundos)
tf Mosc
dBf MdBf M= [ ]f M[ ]f MHz[ ]Hzf MHzf M[ ]f MHzf M
3503f M3f M
(ns) (3.14)
onde f3dBf3dBf representa a largura de banda passante do osciloscópio, em MHz.
Fig. 3.11 - Diagrama de funcionamento do osciloscópio
Triggerexterno
Canal 1
Canal 2
X externo
Base detempo
Sincronização(trigger)
Comutadorelectrónico
placas deflectorashorizontais
placas deflectorasverticais
atraso
CRT
~~
~

32
Práticas de Laboratório - M. R. Silva
O tempo de subida visualizado para um sinal (impulso) de tempo de subida timp será então uma combinação do tempo
de subida próprio do sinal e do tempo de subida ou reacção do osciloscópio. Para determinar o tempo de subida tvistvist do
sinal visualizado pode ser utilizada a fórmula
t t tvit tvit ts it ts it t mp osc2 2t t2 2t t 2= +t t= +t ts i= +s it ts it t= +t ts it t mp= +mp2 2= +2 2t t2 2t t= +t t2 2t t (3.15).
Por exemplo, num osciloscópio de 40 MHz de banda passante (tempo de subida = 8,75 ns) , um impulso com o
tempo de subida de 10 ns será visualizado como um impulso de 13,3 ns de tempo de subida. Inversamente, se com o
mesmo osciloscópio é medido um tempo de subida de 21 ns, então o verdadeiro tempo de subida do sinal será
timpimpim = −= −21= −21= − 8 75 1=5 1= 9 12 28 72 28 75 12 25 1, ,8 7, ,8 75 1, ,5 19 1, ,9 1 ns
3.4.2.2- Controles e modos de operação
Modos de entrada de sinal
A maioria dos osciloscópios dos laboratórios básicos tem duas entradas de sinal que permitem a visualização de
dois sinais em simultâneo. A impedância de entrada dos canais do osciloscópio é muito elevada, usualmente 1 MΩ em
paralelo com uma capacidade de entrada pequena, 10 - 20 pF.
Para cada entrada podemos escolher o modo de acoplamento para o sinal:
AC - neste modo todo e qualquer nível de tensão constante (dc) será suprimido e só sinais variáveis (ac) serão
visualizados;
DC - neste modo, quer os níveis de tensão constante (dc), quer os sinais de tensão variável (ac) podem ser
visualizados. Podemos assim observar níveis de tensão constante sobrepostos a sinais de tensão variável;
GND - neste modo a entrada do osciloscópio é directamente ligada à massa. Este modo é útil para calibrar o nível
“zero” no tubo do osciloscópio.
Sensibilidade horizontal e vertical
VERTICAL SENSIVITY ( Amplifi cação vertical) - este controle determina o valor da escala vertical. Na maioria
dos osciloscópios existe acoplado a este botão um outro de controle “fi no”, que permite um ajuste
contínuo entre marcas de escala. Notar que as marcas de valor de escala só são válidas quando o botão
de controle fi no está na posição de “calibrated”!
TIME (Tempo) - este botão determina a velocidade com que é efectuado o varrimento horizontal pelo feixe
electrónico (escala horizontal - graduada em “unidade de tempo/cm”). Mais uma vez, notar que as
marcas de valor de escala só são válidas quando o botão de controle fi no está na posição de “calibrated”!
Aos dois controles anteriores estão associados dois botões de deslocamento global, vertical e horizontal,
da imagem no CRT ( ⇑⇓ e ⇔ ).
DELAYED SWEEP (Varrimento retardado) - neste modo o varrimento é iniciado só depois de um tempo de atraso
determinado pela posição do botão de "delay".
EXTERNAL X (X externo) - nesta posição o gerador da base de tempo é desligado, permitindo que a defl exão
horizontal do feixe seja controlada por uma tensão externa aplicada no "Canal 2" ou numa entrada de
sinal especial EXT-X.
Triggering (Sincronização)
A sincronização é o ajuste mais importante a fazer para uma correcta utilização do osciloscópio. No osciloscópio o
varrimento horizontal do feixe de electrões é activado só quando existe um sinal de sincronização que satisfaça algumas

33
Práticas de Laboratório - M. R. Silva
condições específi cas. Em função do modo de funcionamento escolhido este sinal de sincronização pode ser o próprio
sinal de entrada ou qualquer outro tipo de sinal externo adequado. Os parâmetros que defi nem o sinal de sincronização
são a sua pendente (+ ou -) e amplitude. O ajuste da sincronização permite que um ponto específi co do sinal de entrada
seja escolhido para início do varrimento. Para um sinal repetitivo, por exemplo uma onda sinusoidal, um bom ajuste
produz uma imagem estável no tubo de raios catódicos, com a curva a começar sempre no mesmo ponto.
Fonte do sinal de sincronização
INTERNAL - a sincronização é feita pelo próprio sinal de entrada. Este é o modo de operação mais corrente.
EXTERNAL - a sincronização é controlada através de um sinal externo aplicado na entrada de sincronização EXT.
LINE - a sincronização é feita com a frequência da corrente alterna do sector, 50Hz.
Condições de sincronização
SLOPE - selecciona a pendente do sinal no ponto em que a sincronização vai ser feita. Como norma sinais
positivos são sincronizados na sua pendente positiva e sinais negativos são sincronizados na sua pendente
negativa.
LEVEL / THRESHOLD - o controle defi ne o nível de tensão a partir do qual arranca a sincronização. Deste modo
os sinais que não atinjam esta amplitude não serão visualizados (este é geralmente o ponto mais crítico para
quem começa a trabalhar com o osciloscópio).
CHANNEL 1 - admite como sincronizador o sinal presente na entrada do “Canal 1”
CHANNEL 2 - admite como sincronizador o sinal presente na entrada do “Canal 2”
Modos de sincronização
NORMAL - neste modo não há varrimento horizontal a não ser que esteja presente para sincronização
um sinal com parâmetros predefi nidos. Se não existir esse sinal o monitor fi ca sem imagem.
AUTO - um varrimento contínuo é efectuado mesmo que
não haja sinal de entrada em qualquer um dos
canais.
Esta posição é útil para calibrar (nível de sinal
“zero”) e posicionar a traça no monitor. Quan-
do existe sinal à entrada este modo é em todo
equivalente ao modo anterior.
SINGLE SWEEP - é feito um varrimento único, não repetido.
Em muitos osciloscópios pode também ser
iniciado manualmente.
EXTERNAL ou X-input - nesta posição o gerador de rampa
interno é desligado e o movimento horizontal do feixe de electrões é controlado pela tensão aplicada
na entrada X-input (em alguns modelos pode coincidir com o “Canal 2” do osciloscópio).
Modos de visualização
CHANNEL 1 - mostra só o sinal presente na entrada do “Canal 1”
CHANNEL 2 - mostra só o sinal presente na entrada do “Canal 2”
ALTERNATE - mostra os sinais presentes nas entradas do “Canal 1” e do “Canal 2” em varrimentos alternados, isto é,
um varrimento completo é efectuado alternadamente para cada canal. Esta posição é útil para comparar
Fig.3.12 Visualização normal de sinais
Mode: Normal ou Auto
Monitor: Ch1 Sinal
Tempo
Sincro.: Ch1Source: Internal
Ch2 Ch1

34
Práticas de Laboratório - M. R. Silva
dois sinais quando a frequência dos sinais é média ou elevada.
CHOP - neste modo, dentro do mesmo varrimento, ambos os sinais são mostrados em “fatias” fi nas de alta
frequência (usualmente 500 kHz). A aparência para o observador é, no entanto, de continuidade para os dois
sinais. Esta posição é útil para comparar dois sinais quando a frequência dos sinais é baixa.
ADD - a amplitude dos sinais dos canais 1 e 2 é adicionada e combinada numa só traça.
A Fig.3.12 mostra o esquema normalmente utilizado para visualizar sinais singulares.
Para comparar sinais em tempo e amplitude pode ser usado o esquema da Fig.3.13. O varrimento no osciloscópio é
sincronizado quer pelo sinal do “Canal 1” quer pelo “Canal 2”, conforme o escolhido nas condições de sincronização.
Com o monitor em ALTERNATE podem ser comparados os sinais. Se osciloscópio não tiver dois canais pode ser
utilizado o sistema alternativo da Fig.3.14 com sincronização externa.
Exemplos e Notas:
Se não for observada nenhuma traça no monitor convém verifi car os seguintes pontos (não obrigatoriamente se-
gundo esta ordem):
1) Verifi car se o feixe de electrões tem intensidade sufi ciente para ser visto no CRT (botões “Intensity” e “Focus”)
2) Verifi car a SLOPE e o LEVEL da sincronização;
3) Verifi car se a sincronização está na posição INTERNAL (ou EXTERNAL se for o caso);
4) Estará a traça do sinal visível dentro da área útil do monitor? Pôr a sincronização em AUTO e posicionar a traça
com os botões de controle vertical e horizontal;
5) Verifi car as escalas horizontal e vertical. Estarão os factores de amplifi cação compatíveis com o sinal que se
espera observar?
6) Verifi car que o botão de selecção do tipo de entrada não esteja na posição GND.
7) Tem a certeza de que tem sinal? Verifi car o funcionamento com um sinal conhecido; pode ser o sinal de
autocalibragem fornecido pelo próprio osciloscópio.
Fig.3.13 Comparação de sinais Fig.3.14 Comparação de sinais com EXT. trigger
Mode: Normal
Monitor: Alt Sinais
Tempo
Sincro.: Ch1 ou Ch2Source: Internal Mode: Normal
Sincr.: Ext
SinalMonitor: Alt
Tempo
Sinal sincro.:Ext Trigger
Ch2 Ch1 Ch2 Ch1

35
Práticas de Laboratório - M. R. Silva
Apêndice
Aspectos matemáticos do cálculo do valor efi caz (RMS)
Se aplicarmos uma tensão contínua , V , a uma resistência, V , a uma resistência, V R , esta vai aquecer por passagem de uma corrente,
segundo a lei de Ohm, V = R.I .V = R.I .V = R.I
A quantidade total de energia libertada, E , pode ser calculada pela lei de JouleE , pode ser calculada pela lei de JouleE
T bV
b mV mx ax aVx aV V mx aV m
= == = ⋅V m⋅V m2 x a2 x a (A.1)
Para tensões , v , função do tempo podemos considerar t como infi nitésimal e escrever a equação diferencialt como infi nitésimal e escrever a equação diferencialt
dER
dt= ⋅= ⋅ν2
(A.2)
e então a quantidade total de calor liberto durante o intervalo de tempo, T , por uma tensão, T , por uma tensão, T v , com uma forma qual-
quer, será dada pelo integral
ER
dtT
= ⋅= ⋅ ⋅∫1 2
0ν
(A.3)
O integral (A.3), se aplicado a uma tensão contínua, VCCVCCV , conduz ao resultadoCC , conduz ao resultadoCC
E VR
TCCVCCV= ⋅= ⋅CC= ⋅CC2
(A.4)
Considerando a defi nição de tensão efi caz (RMS) dada na pag.25,”o valor efi caz de uma tensão alterna é defi nido
como o valor equivalente em tensão contínua que produza a mesma quantidade de energia no mesmo intervalo de
tempo”, podemos escrever, para uma tensão qualquer v ,
1 2
0
2
Rdt V
RT
TCCVCCV⋅ ⋅ = ⋅= ⋅CC= ⋅CC∫⋅ ⋅∫⋅ ⋅ν⋅ ⋅ν⋅ ⋅
(A.5)
Mas, por defi nição de valor efi caz (RMS) VCC = VRMS , e então
ν2
0
2T
RMSRMSRMdt V T2V T2RMV TRMSV TSRMSRMV TRMSRM∫ ⋅ =dt⋅ =dt V T⋅V T
e fi nalmente
VT
dtRMVRMV SRMSRM
T= ⋅= ⋅= ⋅ ⋅∫
1 2
0ν
(A.6)
Alguns exemplos simples:
1 - Tensão sinusoidal pura
Por defi nição a tensão sinusoidal com um valor de pico Vp , (Fig.A.1) pode ser escrita como
ν ω ω πν ω= ⋅ν ω( ) ω π⋅ =ω πV tν ωV tν ων ω= ⋅ν ωV tν ω= ⋅ν ω( )V t( )ν ω( )ν ωV tν ω( )ν ω Tω πTω πω π⋅ =ω πTω π⋅ =ω πpν ωV tν ωpν ωV tν ωsiV tsiV tν ωV tν ωsiν ωV tν ωn c( )n c( )ν ωV tν ωn cν ωV tν ω( )V t( )n c( )V t( )ν ω( )ν ωV tν ω( )ν ωn cν ω( )ν ωV tν ω( )ν ω ⋅( )⋅V t⋅( )⋅n c⋅( )⋅V t⋅( )⋅ om 2ω π2ω π (A.7)
e então
VVT
t dtRMVRMV SRMSRMpVpV T
= ⋅= ⋅= ⋅ ( )t d( )t d⋅( )⋅ t d⋅t d∫2
2
0sin ( )ω( )

36
Práticas de Laboratório - M. R. Silva
ou ainda
V VT
t tt t VT
TRMV VRMV VS pV VS pV VRMS pRMV VRMV VS pV VRMV V
T
pVpV= ⋅V V= ⋅V VS p= ⋅S pV VS pV V= ⋅V VS pV V ⋅ −⋅ −t t⋅ −t t⋅ − ( )t t( )t tt t⋅t t( )t t⋅t t⋅ −⋅ −
⋅ −
⋅ −⋅ −⋅ −⋅ −⋅ −⋅ −⋅ −
⋅ −
⋅ −⋅ −
⋅ −
= 2
0
1 11 11 1
212
( )2( )t t( )t t2t t( )t t 12
sit tsit tt tnt t( )ω( )t t( )t tωt t( )t t
e fi nalmente
VV
RMVRMV SRMSRMpVpV
=2 (A.8)
2- Tensão do tipo impulso rectangular
Para uma tensão simétrica em relação a V = 0 , mas não em relação a t (ver Fig.A.1 para defi nição dos parâmetros), t (ver Fig.A.1 para defi nição dos parâmetros), tteremos
V Tp pV Tp pV T p p⋅ =V T⋅ =V T ( )V V( )V Vpp( )ppV VppV V( )V VppV Vp p( )p pV Vp pV V( )V Vp pV VV V−V V( )V V−V V ⋅ −( )T T( )T Tp p( )p pT Tp pT T( )T Tp pT T⋅ −( )⋅ −T T⋅ −T T( )T T⋅ −T T (A.9)
ou
V V TT TppV VppV VpV VpV V
pT TpT T= ⋅V V= ⋅V V
T T−T T (A.10)
e daqui
VT T
V dt V V dtRMVRMV SRMSRM
T
p pV dp pV dt Vp pt VT
TpTpT
= ⋅= ⋅= ⋅ ⋅ +V d⋅ +V dt V⋅ +t Vp p⋅ +p pV dp pV d⋅ +V dp pV dt Vp pt V⋅ +t Vp pt V( )t V( )t V V d( )V dp p( )p pt Vp pt V( )t Vp pt V p p( )p pV dp pV d( )V dp pV d−( )− V d⋅V d∫ ∫∫ ∫dt∫ ∫dtT∫ ∫T
⋅ =∫ ∫⋅ =dt⋅ =dt∫ ∫dt⋅ =dt1 1T1 1T
∫ ∫1 1
∫ ∫dt∫ ∫dt1 1dt∫ ∫dt∫ ∫1 1
∫ ∫∫ ∫2∫ ∫1 121 1
∫ ∫1 1
∫ ∫2∫ ∫1 1
∫ ∫0
2V d2V d0
2∫ ∫ν∫ ∫∫ ∫
1 1∫ ∫
1 1∫ ∫
pppTpTpTpT
p
p
T
pTpTp
TpTp
T
TV VV VpV Vp
pV Vp V t∫t V∫t Vp p∫p pt Vp pt V∫t Vp pt V
∫ ∫∫ ∫
∫ ∫∫ ∫∫ ∫∫ ∫∫ ∫∫ ∫
= +V V= +V VV V= +V VpV Vp= +pV Vp
pV Vp= +pV Vp= += += + ( )pp( )pp p( )pV V( )V VppV Vpp( )ppV Vpp V t( )V tpV tp( )pV tp−( )−
= += +
= +
= +
= += +
= += +
1 2V V2V VV V= +V V2V V= +V V0
2= +
e considerando a fórmula (A.10)
VT
V TT
T TV TRMVRMV S pTS pT
V TS pV TRMS pRM pV TpV T pTpT
pT TpT T p pV Tp pV T= ⋅V T= ⋅V TS p= ⋅S pV TS pV T= ⋅V TS pV T= ⋅= ⋅S p= ⋅S pS p= ⋅S p +T T−T T
⋅ −V T⋅ −V T( )V T( )V T T( )Tp p( )p pV Tp pV T( )V Tp pV T Tp pT( )Tp pT⋅ −( )⋅ −V T⋅ −V T( )V T⋅ −V T
= ⋅= ⋅
S pS pS p= ⋅S pS p= ⋅S p
= ⋅= ⋅= ⋅= ⋅S p= ⋅S p
S p= ⋅S pS p= ⋅S p
S p= ⋅S p
1 2V T2V T2
2V T2V TS p= ⋅S p= ⋅S p
e fi nalmente
VT
T TRMVRMV SRMSRMpTpT
pT TpT T=
T T−T T A.11)
Nota - VRMSVRMSV será igual a RMS será igual a RMS Vp = Vmax quando o sinal for simétrico também em relação ao tempo, Tp = 1/2.T
3 - Sinal periódico com componente contínua
Para um sinal de tensão V , periódico e simétrico em relação a V , periódico e simétrico em relação a V V = 0 a potência desenvolvida por unidade de tempo V = 0 a potência desenvolvida por unidade de tempo V
numa resistência com o valor R será
Fig. A.1- Formas de tensão variável: sinusoidal, (a) e rectangular, (b)
T/2 T t
V
pV
0Vpp
V
t
pV
0Vpp
T
Tp

37
Práticas de Laboratório - M. R. Silva
P VRt
RMS=2
Se o sinal contiver uma componente contínua VCCVCCV , sobreposta à componente CC , sobreposta à componente CC variável VACVACV , a componente contínua AC , a componente contínua AC
terá de ser adicionada ao valor efi caz (RMS), mas não linearmente
P VR
VRtPtP CCVCCV RMVRMV S ARMS ARM C= += +CC= +CC
= += +
S A−S A2 2V2 2V
ou seja para o valor efi caz total, VRMS_TVRMS_TV
V V VRMV VRMV VS TV VS TV VRMS TRMV VRMV VS TV VRMV VCCV VCCV V RMVRMV S ARMS ARM C− −S T− −S T CC− −CC RM− −RMS A− −S ARMS ARM− −RMS ARM= +V V= +V VCC= +CCV VCCV V= +V VCCV V2 2V V2 2V V= +2 2= +V V= +V V2 2V V= +V V 2 (A.12)