





Línguas
Páginas
Legal


Faculdade de Engenharia da Universidade do Porto
Ortóteses de Membro Inferior: Estado da Arte e
Simulação Estática
José António Luz Viegas
Relatório realizado no âmbito da disciplina de Trabalhos Práticos
Mestrado em Engenharia Biomédica
VERSÃO FINAL
Orientador: Professor Doutor João Manuel R. S. Tavares
Porto, 12 de junho de 2016

© José António Luz Viegas, 2016

i
Resumo
O presente relatório tem como objectivo descrever o trabalho desenvolvido durante o
2º semestre do actual ano lectivo, no âmbito da unidade curricular de Trabalhos Práticos.
Com a realização deste trabalho procurou-se conhecer conceitos e técnicas associadas
a ortóteses de membro inferior, tipo ankle-foot orthosis, AFO.
Este trabalho encontra-se dividido em duas partes. A primeira fase realizou-se uma
revisão bibliográfica, de forma a perceber os fundamentos teóricos do trabalho na segunda
fase procedeu-se à experimentação e parte prática de simulação biomecânica do
dispositivo.
Foram então clarificados os principais conceitos relacionados com as ortóteses, ao nível
da funcionalidade, objectivos, tipologia, classificação e biomecânica. Foram abordadas
conceitos como a anatomia e fisiologia, ciclo de marcha e patologias e doenças que
afectam o membro inferior e levam a utilização deste tipo de dispositivo.
Na parte prática do trabalho, foi realizada a simulação mecânica de um dispositivo tipo
através da utilização do software SOLIDWORKS Simulation. Neste experimento foram
aplicados diferentes tipos de materiais, todos eles classificados como polímeros
termoplásticos, de forma a verificar que tipo de material apresenta melhores
características, principalmente ao nível de resistividade e deformidade para aplicação
deste tipo de ortóteses. Para cada material foram realizados 2 casos diferentes, cada um
deles relacionado com uma fase do ciclo de marcha.
Na realização de futuros trabalhos sobre a temática seria necessário realizar simulações
com diferentes materiais, como fibras de carbono e ter em conta o design e espessura
seleccionada para o dispositivo.


iii
Abstract
This report aims to describe the work done during the 2nd semester of the current
academic year, within the course of Practical Work.
With this work we tried to understand concepts and techniques associated with lower limb
orthoses, ankle-foot orthosis type AFO.
This work is divided into two phases. The first phase was carried out a literature review,
in order to understand the theoretical fundamentals of the work in the second phase
proceeded to trial and practical part of biomechanics simulation device.
The keys concepts were clarified the related to the orthoses, the level of functionality,
objectives, typology, classification and biomechanics. Other concepts were approached as
the anatomy and physiology, gait cycle and disorders and diseases affecting the lower
limbs lead to use of this type of device.
In the practice of the work, the mechanical simulation of a device type was performed by
using the SOLIDWORKS Simulation software. In this experiment we were applied different
types of materials, all of them classified as thermoplastic polymers, in order to verify
what type of material presents better characteristics, especially at the level of resistivity
and deformity for the application of this type of orthoses. For each material were made 2
different cases, each associated with a phase of the gait cycle.
In future work on the subject it would be necessary to carry out simulations with
different materials such as carbon fiber and take into account the design and thickness
selected for the device.


v
Agradecimentos
A realização deste trabalho contou com o importante apoio do Professor Doutor
João Manuel R. S. Tavares, não só pela orientação que proporcionou ao longo do semestre,
como também pela flexibilidade na selecção da temática abordar na unidade curricular de
trabalhos práticos como também para preparação da dissertação.


vii
Índice
Lista de figuras.................................................................................... ix
Lista de tabelas ................................................................................... xi
Abreviaturas e Símbolos ....................................................................... xii
Capítulo 1 ........................................................................................... 1
Introdução .......................................................................................... 1
1.1. Objetivo Geral ............................................................................................ 2
1.2. Estrutura ................................................................................................... 2
Capítulo 2 ........................................................................................... 3
Fundamentação Teórica ......................................................................... 3
2.1. Anatomia e Fisiologia do Membro Inferior ........................................................... 3
2.2. Ciclo de Marcha ........................................................................................... 7 2.2.1. Ciclo de Marcha “Normal” ..................................................................... 8 2.2.2. Anormalidades no Ciclo de Marcha ........................................................ 11
2.3. Patologias e Doenças do Membro Inferior .......................................................... 12
2.4. Ortóteses................................................................................................. 14 2.4.1. Funcionalidade e Objectivos das Ortóteses .............................................. 15 2.4.2. Tipologia e Classificação das Ortóteses ................................................... 15 2.4.3. Ortóteses Ankle-Foot Orthosis (AFO’s) ................................................... 16 2.4.4. Biomecânica das AFO’s ....................................................................... 20 2.4.5. Processo de Fabrico ........................................................................... 23
2.4.5.1. Fabrico Tradicional ou Convencional .............................................. 24 2.4.5.2. Fabrico Aditivo .......................................................................... 25
Capítulo 3 ......................................................................................... 27
Trabalho Experimental ......................................................................... 27
3.1. Materiais ................................................................................................. 27
3.2. Métodos e Procedimentos ............................................................................. 29
3.3. Análise Estrutural com Elementos Finitos (FEA) e Simulação .................................. 31
3.4. Resultados ............................................................................................... 32
3.5. Discussão e Conclusão ................................................................................. 37

viii
Capítulo 4 ......................................................................................... 39
Conclusões e Trabalho Futuro ................................................................ 39
4.1. Conclusões ............................................................................................... 39
4.2. Trabalho Futuro ........................................................................................ 40
Referências Bibliográficas ..................................................................... 41

ix
Lista de figuras
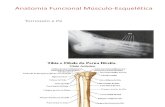
Figura 1 – Estrutura óssea do tornozelo e pé. (a) Vista Horizontal e (b) Vista sagital (Seeley, 2003)…4
Figura 2 – Estrutura articular do tornozelo e pé (Seeley, Stephens, & Tate,
2003)……………………………………………………………………………………………………………………………………………………4
Figura 3 – Estrutura muscular do tornozelo e pé. (a) Vista frontal; (b) Vista sagital; (c) Vista
horizontal (Seeley et al., 2003)……………………………………………………………………………………………………………5
Figura 4 – Representação dos movimentos dos pés. (a) Flexão dorsal e plantar; (b) Eversão e
inversão; (c) Abdução e adução (R. S. Q. Rodrigues, 2012)…………………………………………………………………7
Figura 5 – Ciclo de marcha humana com as principais fases (C. Alves, 2013)………………………………………9
Figura 6 – Ciclo de marcha humana com as subfases e pressões ao nível plantar (Standring, 2008)…10
Figura 7 – Parâmetros dimensionais do ciclo de marcha (Completo & Fonseca, 2011)………………………11
Figura 8 – Classificação das ortóteses segundo as partes anatómicas envolvidas. (a) Ortóteses
aplicadas apenas no MI. (b) RGO (Pinto, 2009; I. Rodrigues, 2012)……………………………………………………16
Figura 9 – Ortótese AFO convencional (Pocwausau, 2016) …………………………………………………………………18
Figura 10 – Ortótese AFO Plástico (Pocwausau, 2016)…………………………………………………………………………18
Figura 11 – Ortótese AFO Plástico Articulado (Pocwausau, 2016)………………………………………………………19
Figura 12 – Ortótese AFO estilo Arizona (Pocwausau, 2016)………………………………………………………………19
Figura 13 – Ortótese AFO em Fibra de Carbono [Pocwausau, 2016]……………………………………………………20
Figura 14 – Sistema de forças de 3PP (A) Flexão dorsal; (B) Flexão plantar; (C) Inversão; (D) Eversão;
(E) Abdução; (F) Adução (Silva, 2014)…………………………………………………………………………………………………22
Figura 15 – Sistema de 3PP numa ortótese pé-tornozelo; FRS é a força de reacção ao solo passando
por trás do tornozelo e pelo eixo do joelho; A é a força direccionada anteriormente; P1 e P2 são
forças direccionadas posteriormente (Edelstein & Brucker,
2006)……………………………………………………………………………………………………………………………………………………23
Figura 16 - Sistema GRF; (A) Marcha normal; (B) Flexão plantar do tornozelo; (C) Flexão do joelho
(Ortho, 2014)………………………………………………………………………………………………………………………………………24
Figura 17 – Dispositivo dividido em Secções A, região superior; secção B, região medial; secção C,
região inferior………………………………………………………………………………………………………………………………………28

x
Figura 18 – Criação de novo estudo em SOLIDWORKS………………………………………………………………………29
Figura 19 – Resultados do caso 1 para o material HDPE. a) Tensão do HDPE; b) Deslocamento do
HDPE…………………………………………………………………………………………………………………………………………………32
Figura 20 – Resultados do caso 1 para o material LDPE. a) Tensão do LDPE; b) Deslocamento do
LDPE……………………………………………………………………………………………………………………………………………………33
Figura 21 – Resultados do caso 1 para o material PP-B. a) Tensão do PP-B; b) Deslocamento do PP-
B.…………………………………………………………………………………………………………………………………………………………34
Figura 22 – Resultados do caso 1 para o material PP-H. a) Tensão do PP-H; b) Deslocamento do PP-
H…………………………………………………………………………………………………………………………………………………………34
Figura 23 – Resultados do caso 2 para o material HDPE. a) Tensão do HDPE; b) Deslocamento do
HDPE …………………………………………………………………………………………………………………………………………………35
Figura 24 – Resultados do caso 2 para o material LDPE. a) Tensão do LDPE; b) Deslocamento do
LDPE …………………………………………………………………………………………………………………………………………………35
Figura 25 – Resultados do caso 2 para o material PP-B. a) Tensão do PP-B; b) Deslocamento do PP-
B…………………………………………………………………………………………………………………………………………………………36
Figura 26 – Resultados do caso 2 para o material PP-H. a) Tensão do PP-H; b) Deslocamento do PP-
H …………………………………………………………………………………………………………………………………………………………37

xi
Lista de tabelas
Tabela 1 – Valores de posição, velocidade e aceleração do centro gravitacional, da parte região superior da
perna (Vaughan et al., 1999)………………………………………………………………………………………………………………………………30

xii
Abreviaturas e Símbolos
3D Dimensões
3PP 3 Pontos de Pressão
AFO Ankle-Foot Orthosis
AO Ankle Orthosis
AVC Acidente Vascular Cerebral
FEA Finite Elemental Analysis
FO Foot Orthosis
FOS Factor of Safety
FRS Força de Reacção ao Solo
FDM Fused Deposited Modeling
GRF Ground Control Force
HKAFO Hip-Knee-Ankle-Foot Orthosis
HDPE High Density Polyethylene
HO Hip Orthosis
KAFO Knee-Ankle-Foot Orthosis
KO Knee Orthosis
MI Membro Inferior
LDPE Low Density Polyethylene
NP Neuropatia Periférica
ISO Organization for Standardization
PE Polietileno
PP Polipropileno
PP-B Polipropileno Copolímero
PP-H Polipropileno Homopolímero
RGO Reciprocating Gait Orthosis
SLS Selective Laser Sintering
SNC Sistema Nervoso Central

xiii
SNP Sistema Nervoso Periférico
TCE Traumatismo Crânio-Encefálico
TR Traumatismo Raquimedular


Fundamentação Teórica 1
1
Capítulo 1
Introdução
As ortóteses são dispositivos médicos aplicados exteriormente ao corpo humano,
utilizadas para modificações das características estruturais ou funcionais do sistema neuro-
musculo-esqueléticos. O objectivo destes dispositivos é de restaurar ou melhorar a
funcionalidade e quando não é possível manter e proporcionar segurança (Herrero et al.,
2004).
Existe então a necessidade de estudar este tipo de dispositivos, de forma a
compreender a sua utilidade nas diversas patologias que estejam relacionadas com a
fraqueza muscular, limitação articular, sensibilidade, alinhamento e mobilidade de um
determinado segmento corporal antes e depois de se aplicar o dispositivo (Periago, 2009).
Para o melhoramento da qualidade de vida de um individuo com dificuldades de
locomoção é necessário desenvolver um dispositivo personalizado, prático e cómodo.
O objectivo de estudar estes dispositivos é saber como melhorar e determinar a melhor
hipótese aplicar tendo em conta o historial clínico do indivíduo e possíveis evoluções da
patologia. Para tal é necessário seleccionar o melhor material a aplicar, espessura do
material, a forma do material e a para que finalidade o dispositivo seria aplicado. Em
relação ao material a usar é necessário conhecer as suas propriedades e os seus limites.
O trabalho em equipa multidisciplinar é importante para o melhoramento dos
resultados na reabilitação dos indivíduos, na aplicação de dispositivos ortésicos, com a
colaboração de médicos, profissionais de saúde e os engenheiros.

Introdução 2
Neste relatório houve a necessidade de fundamentar teoricamente os conceitos
relacionados com as ortóteses como a descrição do trabalho prático realizado. Foram
realizados testes de simulação estática de forma a observar os deslocamentos realizados e
o stress obtidos em diferentes tipos de materiais.
1.1. Objetivo Geral
O principal objective deste trabalho foi adquirir conhecimento sobre diversas
temáticas, conceitos relacionados com as ortóteses, tal como a anatomia e fisiologia, ciclo
de marcha e patologias e doenças a que se aplicam este tipo de dispositivo médico.
Com este trabalho espera-se conseguir analisar e verificar que tipo de material é o mais
apropriado para este tipo de material, tendo em conta as suas características, através de
simulação computacional. Para isso foi utilizado o software SOLIDWORKS Simulation, de
forma a obter os resultados através de pressões.
1.2. Estrutura
Este relatório encontra-se organizado por quatro capítulos. Sendo o primeiro capítulo a
introdução do trabalho que se baseia no enquadramento do conteúdo do trabalho e
apresentação do objectivo geral do mesmo. O segundo capítulo apresenta e descreve a
fundamentação teórica desenvolvida de forma a dar seguimento ao do objectivo proposto.
No terceiro capítulo é descrito o trabalho experimental realizado ao longo do semestre,
abordando todas as etapas realizadas para concretização do objectivo do trabalho e os
resultados obtidos. No último capítulo são apresentadas algumas conclusões e possíveis
trabalhos a desenvolver futuramente e de que forma este será desenvolvido.

Fundamentação Teórica 3
3
Capítulo 2
Fundamentação Teórica
2.1. Anatomia e Fisiologia do Membro Inferior
Os membros inferiores (MI) funcionam como o suporte do corpo humano e são
essenciais para o ser humano se colocar em posição ortostática e realização da marcha. O
MI está ligado ao corpo através da cintura pélvica, estrutura bastante firme. O MI é a
estrutura do corpo humano que apresenta a função de suportar e realizar o movimento do
corpo (Seeley, R., Stephens, T., & Tate, P., 2003; Muscolino, J., 2006; Correia, P. P.,
2012).
Nesta secção vão ser abordados apenas as estruturas anatómicas distais do MI, a
articulação tibiotársica (tornozelo) e a região do pé, tanto ao nível ósseo, dos ligamentos,
muscular como ao nível da circulação e inervação.
A articulação tibiotársica é a articulação do corpo humano que é constituída por uma
face interna, formada a partir da extremidade distal da tíbia alargada que forma o maléolo
interno (medial), e uma face externa, formada da extremidade distal do perónio alargada
que forma o maléolo externo (lateral). Em relação à estrutura óssea do pé, este é
constituído por 26 ossos, distribuídos pela seguinte forma: os 7 ossos do tarso (calcâneo,
astrágalo, cubóide, escafóide e 1º,2º e 3º cuneiforme), os 5 ossos do metatarso e os 14
ossos das falanges (falange proximal, medial e distal para cada dedo, excepto o hálux,
dedo grande, que apresenta apenas duas falanges) (Seeley, Stephens, & Tate, 2003;
Muscolino, 2006).

4 Fundametação Teórica
Figura 1 – Estrutura óssea do tornozelo e pé. (a) Vista Horizontal e (b) Vista sagital (Seeley et. al., 2003).
Os ossos do pé são unidos pelos ligamentos que compõem as articulações, estas são
constituídas pelos seguintes ligamentos: articulação superior do tibiotársico, articulação
subtalar, articulação transversa do tarso, articulações tarsometatársicas, articulações
metatarso-falângicas e articulações interfalanges (Muscolino, 2006).
Figura 2 – Estrutura articular do tornozelo e pé (Seeley et al., 2003).
A mobilidade da estrutura do pé este é capaz de realizar movimentos como a flexão
plantar e flexão dorsal; eversão e inversão; rotação interna e rotação externa; flexão e
extensão dos dedos; e adução e abdução dos dedos. Estes movimentos são possíveis devido
à sinergia entre os músculos presentes no MI. Estes músculos podem ser divididos em
músculos extrínsecos, realizam flexão plantar/dorsal, eversão/inversão e rotação

Trabalho Experimental 5
interna/externa do pé; e os intrínsecos, realizam a flexão/extensão e adução/abdução dos
dedos.
Os músculos extrínsecos são divididos em 3 grupos: compartimento anterior (extensor
comum dos dedos e próprio do hálux, tibial anterior e peronial anterior); compartimento
posterior (músculos superficiais: gémeos, plantar delgado, solhar; músculos profundos:
longo flexor comum dos dedos e do hálux, poplíteo e tibial posterior); compartimento
externo (curto e longo peronial lateral);
Os músculos intrínsecos localizados na região plantar do próprio pé: abdutor do 5º dedo
e hálux, adutor do hálux, curto extensor dos dedos, curto flexor do 5º dedo, hálux e
comum dos dedos, interósseos dorsais e plantares, lombricóides e o quadrado de Sylvius
(longo flexor comum dos dedos) (Muscolino, 2006; Seeley et al., 2003).
(c)
Figura 3 – Estrutura muscular do tornozelo e pé. (a) Vista frontal; (b) Vista sagital; (c) Vista horizontal (Seeley et al., 2003).
Em relação a irrigação do pé e tornozelo é efectuada por duas artérias principais: a
artéria tibial anterior e artéria tibial posterior. A artéria tibial posterior divide-se em
artérias plantares medial e lateral, para fazer a circulação do sangue na região plantar do

6 Fundametação Teórica
pé, esta artéria fornece a artéria peronial que realiza a irrigação dos músculos que
constituem a região lateral da perna. Enquanto a artéria tibial anterior irriga os músculos
da região anterior da perna e passa na região frontal da articulação tibiotársica
terminando no dorso do pé, como artéria dorsal ou pediosa (Muscolino, 2006; Pina, 1999;
Seeley et al., 2003).
O sistema nervoso na região tibiotársica e pé possií 3 nervos principais, nervo tibial,
peronial, safeno. Estes nervos fazem a inervação dos músculos da perna e pé para
realização dos movimentos do tornozelo e dedos, captando mensagens sensoriais através
de receptores nervosos localizados na superfície do pé (Muscolino, 2006; Pina, 1999; Seeley
et al., 2003).
O nervo tibial é dividido em nervo plantar medial e nervo plantar lateral. O primeiro
inerva a região plantar do pé (pele) e os músculos próximos do hálux e o segundo inerva a
pele e os músculos dos quatro dedos comuns do pé. O nervo peroneal permite a receção de
sensações da parte anterior da perna e do pé e controla também os músculos que
permitem a flexão dorsal (Muscolino, 2006; Seeley et al., 2003).
Os movimentos do pé, anteriormente referidos, são definidos como:
Flexão dorsal – movimento dos pés na direcção da região anterior da perna (flexão);
Flexão plantar – movimento dos pés na direcção da região posterior da perna
(extensão);
Eversão – movimento do pé que consiste em virar a região tibiotársica, de modo a
que a superfície plantar fique voltada para a zona medial;
Inversão – movimento do pé que consiste em virar a região tibiotársica, de modo a
que a superfície plantar fique voltada para a zona lateral;
Adução – movimento em direcção da linha mediana em plano transversal;
Abdução – movimento de afastamento da linha mediana em plano transversal
(Correia, 2012; Muscolino, 2006; Pina, 1999).

Trabalho Experimental 7
(a) (b)
(c)
Figura 4 – Representação dos movimentos dos pés. (a) Flexão dorsal e plantar; (b) Eversão e inversão; (c) Abdução e adução (R. S. Q. Rodrigues, 2012).
O pé pode ainda realizar um outro tipo de movimento ao nível da articulação astrágalo-
calcaneana, num plano oblíquo e composto por três tipos de movimento referidos
anteriormente, realização de pronação do pé, sendo a junção dos movimentos de eversão,
flexão dorsal e abdução do pé; e supinação, junção dos movimentos de inversão, flexão
plantar e adução (Correia, 2012; Muscolino, 2006; Pina, 1999).
2.2. Ciclo de Marcha
O estudo do movimento humano é realizado desde há muito tempo, suscitando
interesse a grandes nomes da história, deste o tempo de Aristóteles a Galileu que
evidenciaram curiosidade sobre a temática. Apesar de ter sido durante a metade do século
XX, que ocorreu a necessidade de realizar estudos aprofundados relativamente a
locomoção humana, de forma a reabilitar e de fornecer tratamento a veteranos da II
Guerra Mundial (Completo & Fonseca, 2011; Gafaniz, Lopes, & Pires, 2005).
Para o desenvolvimento de um dispositivo ortésico de pé-tornozelo, é necessário
perceber os movimentos normalmente efectuados pelo pé e tornozelo, como também o
estudo e análise do ciclo de marcha humano, de forma a entender em que fases do ciclo de
marcha existe maior e menor esforço do dispositivo e como adaptar o mesmo às forças

8 Fundametação Teórica
exercidas no ciclo de marcha bem como seleccionar o melhor material para suportar o
esforço exigido e que permite o melhor conforto ao individuo necessitado. Para além do
ciclo de macha ser uma ferramenta de elevada importância no diagnóstico e avaliação de
determinadas patologias, como avaliação clínica e seguimento de doenças e lesões, de
forma a compreender a gravidade da mesma, de forma a desenvolver uma ortótese o mais
funcional e estético possível para o individuo lesado (Sousa, 2008).
Ao realizar uma análise cuidadosa ao ciclo de marcha é necessário retirar dados
observados e documentá-los, de forma a retirar informações importantes para melhor
compreensão dos parâmetros da marcha de cada individuo e comparar de forma objectiva,
quantitativa e qualitativa a eventuais doenças e lesões neuromusculares e músculo-
esqueléticas com os parâmetros comuns e considerados os normais da marcha. Com essas
informações é possível realizar uma melhor decisão terapêutica e proporcionar um
tratamento devidamente fundamentado e apropriado para cada tipo de individuo. Com
isto, é possível afirmar que a análise da marcha e movimento humano é importante para
desenvolver estratégias terapêuticas e demonstrar ser uma ferramenta com bastante
utilidade para o estudo das diversas patologias e doenças que afectam a marcha, avaliação
da utilidade de dispositivos ortésicos e protésicos para reabilitação como também ao nível
desportivo para amputados e indivíduos com necessidade de dispositivos de auxílio de
marcha e ortésicos (Ribeiro, 2006).
A marcha consiste na sucessão de movimentos rítmicos e alternados dos MI’s e tronco,
provocando um movimento anterior do centro de gravidade do corpo (Calhau, Pisco,
Valente, & Santos, 2007). Movimento este que é desenvolvido nos primeiros anos de vida e
com o passar do tempo o sistema sensoriomotor vai se adaptar ao movimento e
automaticamente, permite caminhar sem esforço consciente, resultando assim num
processo simples e necessário para as actividades de vida diária(Mann, Teixeira, & Mota,
2008; Winter, 1990). Esta consiste num deslocamento seguro do individuo numa posição
bípede e postura erecta com uma estabilidade adequada e com o menor gasto energético
possível (Ribeiro, 2006).
2.2.1. Ciclo de Marcha “Normal”
O ciclo de marcha com padrões de marcha normais quando este se compreende num
intervalo ou sucessão de movimentos que ocorrem em cada passada, ou seja, no espaço
temporal entre o contacto inicial do membro de referência no solo até ao novo contacto
desse mesmo membro no solo. Este acontecimento é composto por duas fases: a fase de
apoio e a fase de balanço, que por sua vez podem ser subdivididas e analisadas em diversos
momentos (Completo & Fonseca, 2011).
O estudo do ciclo de marcha começa sempre quando a pessoa se encontra em posição
ortostática e é iniciado quando ocorre o primeiro contacto do calcanhar do pé ao solo,

Trabalho Experimental 9
como exemplo o pé direito, e termina quando esse mesmo pé entra novamente em
contacto com o solo, com uma duração aproximadamente de 1 segundo (Sebastião, 2009),
no qual se pode denominar de passada ou metade da passada por passo (Completo &
Fonseca, 2011). Como o ciclo de marcha é limitado por dois contactos iniciais que envolve
o mesmo pé, quer seja pé direito ou esquerdo.
Apesar da existência de um padrão de movimentos comuns no ciclo de marcha, cada
indivíduo possui determinadas características que são próprias na sua locomoção, tais
como o comprimento do passo, a velocidade, a cadência, a amplitude do movimento, entre
outras. Apesar de cada indivíduo possuir características próprias na sua locomoção, todas
têm em comum a realização da marcha com o menor gasto energético possível (Completo
& Fonseca, 2011).
Como referido anteriormente o ciclo de marcha é composto por 2 fases principais que
podem ser divididas em subfases, sendo composto por diversos eventos específicos,
permitindo assim a sua divisão. Na primeira fase, fase de apoio, o pé está em contacto
com a superfície de apoio, cerca de 60% do ciclo de marcha e a fase de balanço, o pé
encontra-se suspenso, ocorrendo a flexão do joelho, desde o momento que deixou a
superfície de apoio até ao novo contacto na superfície de apoio com o joelho em extensão,
correspondendo a 40% do ciclo de marcha. A fase de apoio é dividida em 4 subfases e a
fase de balanço pode ser dividida em 3 subfases.
Figura 5 – Ciclo de marcha humana com as principais fases (C. Alves, 2013).
A fase de apoio é subdividida em apoio simples e apoio duplo, este engloba o apoio
duplo inicial e o apoio duplo final. Nesta última subfase, ambos os pés estão em contacto
com o solo, sendo a velocidade da marcha consideravelmente normal, correspondendo a
cerca de 20% da percentagem total do ciclo de marcha, sendo dividido em 10% para cada
membro inferior. A duração desta subfase tende a diminuir com o aumento da velocidade,
sendo inexistente na realização de corrida. Em relação a subfase de apoio simples esta
representa cerca de 40% do ciclo de marcha completo. Nesta subfase ocorre a diminuição
repentina da carga sobre o membro apoiado e a sua preparação para a fase de balanço
(Sebastião, 2009). Com a fase de apoio ocorre:

10 Fundametação Teórica
1. Contacto inicial, momento exacto em que o pé toca o solo;
2. Resposta de carga, que é prolongado até o retirar do pé oposto do solo;
3. Apoio médio, que se inicia com a saída do pé contra lateral do solo e continua
até que o peso corporal se encontre na região anterior do pé apoiado;
4. Apoio final, iniciado com a elevação do calcanhar do pé apoiado e estende-se
até o contacto inicial do pé oposto;
5. Pré-balanço, começando com o contacto do pé inicial do pé oposto e se estende
até o retirar do pé apoiado.
No seguimento do ciclo de marcha, a fase de balanço é subdividida nas seguintes
subfases:
1. Balanço inicial é o momento que o apoio perde o contacto com o solo e
ocorre aceleração do MI no sentido do movimento, devido a flexão das
articulações da anca e joelho ocorrendo simultaneamente uma flexão dorsal
da articulação do tornozelo;
2. Balanço médio é o momento que o MI em aceleração se encontra alinhado
com o MI de apoio;
3. Balanço final, momento de desaceleração do MI, ocorrendo uma preparação
para o contacto com o solo (Sebastião, 2009).
Figura 6 – Ciclo de marcha humana com as subfases e pressões ao nível plantar (Standring, 2008).
No ciclo de marcha denomina-se de comprimento da passada a distância média entre
dois apoios consecutivos do mesmo membro e a distância medida na direcção da
progressão que separa o apoio inicial do pé direito do apoio inicial do pé esquerdo, é
denominado por comprimento do passo esquerdo. Sendo realizado o passo direito da
mesma forma e a soma destes dois passos proporciona o comprimento da passada.
Relativamente ao tempo do passo, exemplo esquerdo, é o tempo ocorrido obtido do
passo esquerdo, isto significa que é o tempo entre o contacto inicial do pé direito e o

Trabalho Experimental 11
contacto inicial do pé esquerdo, sendo igual à soma do tempo de balanço esquerdo e o
tempo de duplo apoio seguinte, o que corresponde à fase de descolagem do pé esquerdo.
Na locomoção humana a cadência é compreendida como o número de passos realizados
num intervalo de tempo, com uma unidade de passo por minuto. Por sua vez a velocidade
da marcha é a distância percorrida pelo individuo por uma unidade de tempo numa
determinada direcção. A velocidade média é calculada pelo produto da cadência com
comprimento do passo (Rico, 2014).
A duração de um ciclo de marcha ou o intervalo de tempo em que se dá as fases de
apoio e balanço podem ser determinados a partir da cadência. O ciclo de marcha pode ser
caracterizado através de algumas variáveis relacionadas com o tempo e a distância, como
por exemplo o comprimento do passo, o comprimento da passada, a largura do passo e
mesmo a velocidade de avanço linear (Completo & Fonseca, 2011).
Figura 7 – Parâmetros dimensionais do ciclo de marcha (Completo & Fonseca, 2011).
2.2.2. Anormalidades no Ciclo de Marcha
O ciclo de marcha que possua padrões de marcha fora do “normal”, ou seja padrões
incomuns e incontroláveis, surgem como consequência de doenças e/ou lesão ao nível
muscular dos MI ou mesmo ao nível do sistema nervoso central (SNC), cérebro, espinhal
medula (Alves, J. R., 2015).
O individuo que tenha uma locomoção que não está dentro dos parâmetros normais da
marcha deve consultar um especialista da área que deve ser examinado, através da
marcha, realizada as vezes necessárias, estando o examinador no plano frontal da marcha
(Alves, C., 2013)
Com o desenvolvimento da análise da marcha quantitativa ocorre um contributo na
avaliação de deficiências músculo-esqueléticas e neurológicas associadas ao MI. A análise
do movimento quantificada em 3 dimensões (3D) do pé e tornozelo durante a locomoção
proporciona a avaliação da patologia do individuo no pré-operatório e avaliação da eficácia
da intervenção no pós-operatório.

12 Fundametação Teórica
O pé é o segmento corporal que fornece o suporte do restante corpo através da
distribuição de cargas gravitacionais e inerciais. As anormalidades do pé e/ou tornozelo
podem causar dor e carga irregulares nas regiões proximais do corpo. Os métodos actuais
de análise do pé e tornozelo incluem exame físico, observacional e radiografia. Os modelos
mais descritivos necessitam do reconhecimento e definição dos principais segmentos e
articulações. Para uma melhor descrição dos padrões de movimento intersegmentar do pé
e tornozelo na marcha, o sistema de análise deve captar com a precisão os dados
multisegmentares, durante a fase de apoio e balanço (Alves, J.R., 2015).
O modelo tradicional de análise do pé utiliza dois marcadores reais (um no dorso do
ante pé tradicionalmente entre o segundo e terceiro metatársicos e um na parte traseira
do calcâneo) e um marcador virtual (centro da articulação do tornozelo). Contudo, este
conjunto de marcadores não pode ser usado para determinar orientações de pronação e
supinação do pé, em pacientes com pés pequenos ou de baixo arco, pois os três
marcadores podem tornar-se colineares. Outro conjunto de marcadores tradicionais utiliza
três marcadores no ante pé (Harris, Smith, & Marks, 2008). A análise da marcha clínica é
assim, uma ferramenta de avaliação que permite ao médico determinar a extensão em que
a marcha de um indivíduo tem sido afectada por uma doença já diagnosticada.
2.3. Patologias e Doenças do Membro Inferior
Existem diversas patologias e condições fisiológicas tanto a nível neurológico como
muscular e ósseo, que afectam o pé e tornozelo e podem levar a aplicação de dispositivos
ortésicos para o segmento corporal afectado.
Ao nível de patologias que afectam as estruturas musculares e ósseas, englobam-se as
seguintes:
Artrite reumatóide: doença crónica, provoca inflamação nas articulações originando
inchaços dolorosos e pode resultar na destruição ou deformidade articular,
aparecimento comum em articulações de pequenas dimensões como das mãos e pés
(Gatt, Formosa, & Otter, 2016);
Dedos em garra: é a flexão de uma ou duas articulações dos dedos comuns,
causando rigidez, sendo uma flexão anormal que cria uma pressão dolorosa no pé
em conjunto com o calçado dificultando a marcha e afectar esteticamente e
provocar desconforto (Hospital, 2016);
Disfunção do tendão tibial posterior: distúrbio que ocorre devido a inflamação do
tendão tibial posterior, esta disfunção pode causar pé plano devido ao tendão não
conseguir sustentar o arco do pé (Martel, 2012);

Trabalho Experimental 13
Esporão do calcâneo: saliência óssea do calcanhar que pode ser consequência de
uma tensão excessiva no calcâneo por parte dos tendões ou fáscia plantar
(Pinheiro, 2015);
Fascite plantar: inflamação do tecido denominado de fáscia plantar que cobre a
musculatura do pé, que vai desde o calcâneo até os dedos, provocando dores no
calcanhar (Cottom, Maker, Richardson, & Baker, 2016);
Joanetes: crescimento ósseo se forma devido ao desvio do hálux, provocando
inflamação e dor no pé (Scharer & Devries, 2016);
Lesões, entorses e contusões: fraqueza muscular torna o membro incapaz de
realizar determinados movimentos, o entorse ocorre quando se ultrapassa o limite
normal do movimento articular, a contusão resulta de um forte impacto superficial
do corpo, pode então provocar lesões nos tecidos moles da superfície (Vieira,
2014);
Metatarsalgia: termo utilizado para designar dores que ocorrem na região dos
metatarsos (Arie et al., 2015);
Miopatia: termo utilizado para doenças musculares, devido ao mau funcionamento
das fibras musculares que resulta na fraqueza muscular (A. Alves & Carvalho, 2005);
Neuroma de Moton: lesão ou inflamação que ocorre no nervo digital do pé, comum
entre o 3º e 4º dedo do pé (Mahadevan et al., 2016);
Pé cavo: ocorre um aumento da curvatura do arco plantar, ocorrendo uma
diminuição da área da superfície plantar, cuja função é dar apoio (f. manual, n.d.);
Pé diabético: é a complicação mais comum em indivíduos com neuropatia diabética
sendo uma complicação da diabetes mellitus provoca um possível aparecimento de
úlceras por pressão (Chand, Mishra, Kumar, & Agarwal, 2012);
Poliomielite: afecta os nervos e pode provocar paralisia parcial ou total e
eventualmente deformações (Frazão, 2015);
Pé plano: alteração estrutural do pé, no qual ocorre a diminuição ou ausência da
curvatura ou arco longitudinal do pé, provocando alterações no pé devido à
pronação excessiva (Andrews & Manole, 2000);
Pé valgo: projecção do calcâneo para fora do corpo, projectando o tendão de
Aquiles para a região externa do corpo (Andrews & Manole, 2000);
Pé varo: projecção do calcâneo para dentro, projectando o tendão de Aquiles para
a região interna do corpo (Andrews & Manole, 2000).
Em relação às patologias de nível neurológico que influenciam o uso de dispositivos
ortésicos, podem se englobar:

14 Fundametação Teórica
Acidente Vascular Cerebral (AVC): devido ao rompimento ou entupimento de um
vaso sanguíneo no cérebro, que vai levar a um comprometimento das
funcionalidades neurológicas (Reabilitação, 2015);
Lesão do nervo Ciático Poplíteo Externo: resulta de uma hérnia, que comprime o
nervo, dificultando ou impossibilitando o movimento de flexão dorsal do pé,
alterando assim a marcha (Bechelli, n.d.);
Neuropatia Periférica (NP): distúrbio funcional do sistema nervoso periférico (SNP),
levando a alterações funcionais sensitivas e motoras, resultando numa perda de
coordenação muscular(Chand et al., 2012);
Pé pendente: termo geral para designar a dificuldade em levantar a parte frontal
do pé, ou seja, posicionar o pé na posição neutra, 90º, levando ao arrastamento
dos dedos na marcha(Ismail, Harun, & Omar, 2015);
Traumatismo Crânio-Encefálico (TCE): é quando uma força externa causa ferimento
traumático no cérebro, podendo causar danos físicos, cognitivos, sociais,
emocionais e comportamentais, resultando numa perda de funcionalidade e
capacidades neurológicas (Reabilitação, 2015);
Traumatismo Raquimedular (TR): lesão devido a forças externas na coluna
vertebral, que pode incluir ou não a medula e as raízes nervosas em qualquer
segmento (Paiva & Brock, 2011).
2.4. Ortóteses
As ortóteses foram desenvolvidas há milhares de anos com o objectivo de proporcionar
funcionalidade a um indivíduo lesado. Este tipo de dispositivos permitiu um
aperfeiçoamento na ligação entre a área da medicina e a tecnologia. Inicialmente este tipo
de dispositivos era fabricado de forma artesanal e sem princípios técnicos bem definidos.
No entanto, actualmente têm-se vindo a realizar pesquisas em diversas áreas, como
robótica, biomecânica e materiais de forma a desenvolver e conceber soluções de acordo
com as necessidades de cada individuo (Cooper, Ohnabe, & Hobson, 2000; Herrero et al.,
2004; Periago, 2009).
Estes dispositivos desempenham um papel crucial na reabilitação de pacientes das
diversas faixas etárias, no qual inclui a interacção entre os devidos profissionais de saúde,
família e o indivíduo. Estas devem ser capazes de melhorar as capacidades e as
funcionalidades dos indivíduos lesados (Cooper et al., 2000; Herrero et al., 2004; Periago,
2009).
A etimologia do termo ortótese, orthósis, é uma palavra de origem grega, formada por
“orthos”, cujo significado é direito ou recto e o seu sufixo “-sis” pode ser interpretado

Trabalho Experimental 15
como acção ou qualidade. A palavra em si pode ser traduzida como uma acção de
rectificação do segmento afectado, torna-lo recto (Cooper et al., 2000; Herrero et al.,
2004; Periago, 2009; Silva, 2014).
Segundo a Internacional Organization for Standardization (ISO), a ortótese é um
dispositivo ou apoio externo aplicado ao corpo com a finalidade de mudar os aspectos
estruturais e funcionais do sistema neuro-musculo-esquelético de forma a obter uma certa
vantagem mecânica ou ortopédica (“Organization for Standardization,” 2016).
2.4.1. Funcionalidade e Objectivos das Ortóteses
As ortóteses têm como principais funções: proporcionar estabilização, imobilização ou
promoção de repouso ao nível articular e muscular; manter um determinado alinhamento
ósseo; evitar o aparecimento de deformidades e contracturas no segmento afectado;
redução de movimentos involuntários, de forma a evitar movimentos indesejados; redução
gradual de contracturas, para aumentar a amplitude do movimento articular desse
segmento; promoção do alongamento muscular e tecidos moldes; substituir ou auxiliar a
função muscular perdida ou debilitada; alívio de dor, através da transferência de carga
para outras áreas; simulação de resultados cirúrgicos e restauração da função; e auxilio nas
melhorias obtidas após tratamento cirúrgico, de forma correctora (Cooper et al., 2000;
Herrero et al., 2004; Periago, 2009).
2.4.2. Tipologia e Classificação das Ortóteses
A classificação mais comum e utilizada ao nível das ortóteses MI é segundo as
áreas anatómicas envolvidas:
Foot Orthosis (FO): ortóteses aplicadas a nível do pé, conhecidas como ortóteses
plantares (palmilhas), com a função de controlar o pé e articulação subtalar;
Ankle-Foot Orthosis (AFO): ortóteses aplicadas a nível do tornozelo e pé para
controlarem o alinhamento e mobilidade destes segmentos;
Knee-Ankle-Foot Orthosis (KAFO): ortóteses aplicadas ao nível do joelho, tornozelo
e pé, utilizadas param o controlo de grandes instabilidades do MI, alinhamento e
controlo da mobilidade do membro;
Hip-Knee-Ankle-Foot Orthosis (HKAFO): ortóteses que são aplicadas desde a
articulação da anca e pélvis até os pés de forma a proporcionar uma maior
estabilidade da anca e do restante MI;
Reciprocating Gait Orthosis (RGO): ortóteses de reciprocação, dispositivos que vão
desde o tronco até o pé, colocadas devidamente e de forma seguram em todos os
segmentos de formar a estabilizar e proporcionar maior segurança.

16 Fundametação Teórica
Apesar de esta ser a principal classificação ainda existem outros tipos segundo as áreas
anatómicas como ortóteses de tornozelo (ankle orthosis – AO), ortóteses de joelho (knee
orthosis – KO) e as ortóteses de anca (hip orthosis – HO) (Herrero et al., 2004; Periago,
2009).
(a) (b)
Figura 8 – Classificação das ortóteses segundo as partes anatómicas envolvidas. (a) Ortóteses aplicadas apenas no MI. (b) RGO (Pinto, 2009; I. Rodrigues, 2012).
2.4.3. Ortóteses Ankle-Foot Orthosis (AFO’s)
As AFO’s são dispositivos ortésicos, que como referidos anteriormente, são aplicados ao
nível do tornozelo e pé, com a função de controlar e auxiliar os movimentos do tornozelo,
controlo do pé e ainda efectua o controlo meio-lateral para evitar a eversão e inversão
excessiva do pé. Em relação aos seus limites estruturais o nível superior deve se situar
abaixo da cabeça do perónio, aproximadamente entre 2,5 a 5 cm abaixo, podendo ser
encerrada tanto a nível anterior como posterior dependendo do tipo de ortótese, para
estabilização e ao nível inferior o dispositivo deve cobrir toda a região plantar do pé
(Pinto, 2009; I. Rodrigues, 2012).
Este dispositivo é utilizado para casos de necessidade de controlar o tornozelo e
articulações subtalares com a finalidade de manter o pé numa posição neutra ou mesmo
com um leve grau de flexão dorsal, que influencia a marcha e a manutenção de grupos
musculares, de forma a evitar deformidades do tornozelo e do pé melhorando a
estabilidade da articulação do tornozelo (Oliveira, Ballarino, Monteiro, Pinto, & Pires,
2010).

Trabalho Experimental 17
As AFO’s podem ser classificadas ou qualificadas segundo as suas capacidades como
rígidas ou passivas, semi-rígidas, articuladas e dinâmicas ou de reacção ao solo e devem
ser utilizadas segundo as necessidades do utilizador (Herrero et al., 2004; Periago, 2009):
As AFO’s rígidas ou passivas, são os dispositivos que não permitem qualquer
mobilidade ao nível da articulação to tornozelo, normalmente indicadas para
indivíduos com casos de espasticidade grave ou situações de deformidades já
existentes, como o equino ou equino varo;
As AFO’s semi-rígidas permitem um certo grau de flexão dorsal e limita ao máximo
a flexão plantar, de forma a manter a articulação do tornozelo numa posição
neutra, sendo indicadas para indivíduos com espasticidade leve ou moderada e que
apresentem casos de deformidades equino e equino varo leves ou moderadas;
As AFO’s articuladas, ou seja dispositivo que possua uma articulação ao nível do
tornozelo para ligar o pé à perna e são os dispositivos que permitem movimentos
controlados de flexão plantar e dorsal indicado para indivíduos que apresentam
movimentos de flexão dorsal limitada;
As AFO’s dinâmicas ou de reacção ao solo apresentam normalmente uma certa
rigidez na região do antepé, região do tornozelo m posição neutra ou com uma
pequena flexão plantar e apoio na região anterior da perna, indicado para
indivíduos que apresentam uma marcha com o tornozelo em flexão plantar,
designada por marcha em tesoura.
Estes dispositivos podem ainda ser classificados de acordo com os materiais principais
pelos quais são realizados:
AFO’s convencionais: compostas por armação metálica (duralumínio), com tiras de coro
ligados aos sapatos. Este tipo de ortótese foi dos primeiros tipos de ortóteses criadas, é
ainda utilizada em indivíduos onde existe uma preocupação da integridade da pele ou a
falta de sensação, como em casos de ulceras devido a diabetes, tornozelos com artrite e
indivíduos que apresentem pé pendente, entre outros. As AFO’s convencionais apresentam
uma elevada durabilidade, força e articulações versáteis, apesar de peso elevado, a sua
ligação ao sapato, propensas a ruídos ou rangidos e controlo de forças têm que ser
realizado por correias (Herrero et al., 2004; Periago, 2009).

18 Fundametação Teórica
Figura 9 – Ortótese AFO convencional [Pocwausau, 2016].
AFO’s de plástico: são o tipo de AFO mais comum e são produzidas por matérias
termoplásticos, como o polipropileno (PP) ou o polietileno (PE), como componentes
estruturais e utilização de velcros para melhor contacto, permite maior estabilização e
proporciona maior apoio comparativamente com as convencionais.
Estas AFO’s são utilizadas para aumentar o suporte da perna em casos de fraqueza
articular, tornozelo e joelho, espasticidade e para suporte de posicionamento. Podem ser
usadas para a imobilização do tornozelo e pé, curar fracturas e diminuir dor de artrite.
Este tipo de dispositivo ortésico apresenta diversas vantagens, desde a adaptabilidade,
o ajuste personalizado, de peso leve e um bom suporte a nível da articulação do tornozelo.
No entanto inibem a mobilidade do tornozelo e pé e pode ser necessário um sapato
espaçoso (Herrero et al., 2004; Periago, 2009).
Figura 10 – Ortótese AFO Plástico [Pocwausau, 2016].
Estas ortóteses podem incorporar uma articulação no tornozelo, em determinados
casos, de forma a permitir movimento do tornozelo e dependendo do objectivo da ortótese
e de como é usada, é então escolhida a articulação do joelho mais adequada.

Trabalho Experimental 19
São ortóteses leves, ajustáveis, usadas para auxiliar o movimento de flexão dorsal,
apesar de quando são mal aplicadas podem aumentar a espasticidade, para além de ser
necessário um sapato espaçoso (Herrero et al., 2004; Periago, 2009).
Figura 11 – Ortótese AFO Plástico Articulado [Pocwausau, 2016].
Ainda dentro das ortóteses em plástico é possível encontrar as AFO’s estilo Arizona,
denominadas por “ molded ankle Gauntlet”. A sua constituição passa por duas camadas de
couro macio e acolchoamento nas áreas ósseas, sendo a camada exterior revestida por
couro mais duro e mais durável. São utilizadas para casos de elevada imobilização, sendo
possível adaptar às preferências do utilizador e ajustáveis. Apresentam a mesma
desvantagem ao nível do calçado e possuem a particularidade de serem muito quentes o
que pode provocar eventualmente mal-estar (Herrero et al., 2004; Periago, 2009).
Figura 12 – Ortótese AFO estilo Arizona [Pocwausau, 2016].
AFO’s de fibra de carbono (pré-fabricadas): AFO’s bastante na última década,
apresentam vantagens em termos do peso bastante leve e pouco intrusa, apesar de
bastante rígida que pode se tornar desconfortável, são facilmente colocadas nos calçados,
apesar de não ajustáveis.

20 Fundametação Teórica
As ortóteses de fibra de carbono permitem evitar deformidades do tornozelo e do pé,
tal como melhorar a estabilidade do tornozelo e joelho, bastante usadas em casos de
compromisso na flexão dorsal do pé, aplicado em patologias como a poliomielite,
acidentes vasculares cerebrais (AVC), paralisia cerebral (PC), lesões medulares, fracturas,
artrites entre outros (Herrero et al., 2004; Periago, 2009).
Figura 13 – Ortótese AFO em Fibra de Carbono [Pocwausau, 2016].
2.4.4. Biomecânica das AFO’s
Toda a ortótese que existe aplica forças sobre o corpo cujo efeito terapêutico consiste
em proporcionar resistência ou auxiliar o movimento, transferir forças ou proteger um
determinado segmento corporal. O conforto do dispositivo é influenciado directamente
pela quantidade e pela região do corpo submetida às forças nelas aplicadas (Alves, J.R.,
2015; Edelstein & Brucker, 2006).
Ao nível de benefícios terapêuticos estas realizam limitação do movimento, de forma a
controlar os movimentos excessivos ou indesejados, limitando a amplitude e mantendo o
devido alinhamento do MI; a assistência do movimento, as ortóteses proporcionam apoio
aos músculos inactivos ou em fraqueza, para uma função específica que o indivíduo
necessite; a transferência de força permite às ortóteses transferir forças de uma parte
corporal para outra, projectando desta forma o dispositivo; por último a protecção dos
segmentos corporais de forma a evitar eventuais lesões ou deformidades (Edelstein &
Brucker, 2006).
Para este tipo de dispositivo deve apresentar para além das suas finalidades o maior
conforto possível, de forma a não irritar nem lesar a pele e estruturas envolvidas. Desta
forma é necessário ter atenção às áreas de maior pressão, maximizando a área envolvida
pela ortótese. Outra forma de aumentar o conforto consiste em proporcionar um efeito de
alavanca suficiente pelo qual os segmentos longitudinais da ortótese aplicam a força
(Alves, J.D., 2015).

Trabalho Experimental 21
Com a maximização da área a pressão exercida por unidade de área vai ser menor
quanto maior a porção do segmento corporal envolvido. Contudo é preciso ter em conta
que com uma parte extensa do corpo pode não ocorrer dissipação do calor
instantaneamente, tornando-se desconfortável o que pode levar a transpiração que é
acumulada na ortótese e que por sua vez pode provocar lesões na pele, sendo necessário a
utilização de um interface de algodão para evitar eventuais deformidades (Edelstein &
Brucker, 2006).
Independentemente da forma ou tipo do material aplicado o dispositivo deve se
encontrar em contacto com a pele. O contacto deve ser confortável e não causar atrito,
pois a utilização de correia que realize uma pressão excessiva pode causar lesões ao nível
dos vasos sanguíneos, no entanto o contacto não deve ser demasiado folgado. O dispositivo
ortésico deve proporcionar o efeito de alavanca, ou seja, quanto maior o segmento
longitudinal da ortótese menor será a pressão exercida em cada extremidade para
proporcionar benefícios a um nível funcional (Alves, J.R., 2015; Edelstein & Brucker, 2006)
Para que haja uma maior eficácia da ortótese e permitir benefícios terapêuticos o
dispositivo deve aplicar forças de forma eficaz. A ortótese deve ser capaz de aplicar forças
para correcção de forças num segmento corporal desalinhado de forma a reduzir a
deformidade. Se não for possível reduzir passivamente a deformidade a ortótese deve
então adaptar-se ao desalinhamento.
A aplicação de forças de uma ortótese deve ser realizada pelo sistema de 3 pontos de
pressão (3PP). Este sistema baseia-se na aplicação de uma força principal exercida numa
direcção, aplicada sempre no lado convexo da deformidade (F1) e duas forças contrárias,
forças estabilizadoras no lado côncavo (F2 e F3), exercidas numa localização proximal e
distal da força principal. Este sistema consiste no bloqueio ou restringimento do
movimento rotacional de dois segmentos do corpo sobre a articulação anatómica. Estas
ortóteses são aplicadas de forma a proporcionar resistência/controlo dos movimentos do
pé e tornozelo, como é demonstrado na figura 14 (Cooper et al., 2000; Herrero et al.,
2004; Periago, 2009)
Existe ainda uma outra força que é exercida sobre o corpo em resposta à força que o
indivíduo exerce sobre o chão, denominada de força de reacção ao solo (FRS). Esta força é
igual a quantidade oposta em direcção à força aplicada sobre o indivíduo, ou seja quando
alguém caminha esta força é a resultante da força vertical, representando a interacção
entre a gravidade e a aceleração; a força horizontal é a tendência do pé deslizar para a
frente; a força rotacional é a força que evita o movimento de torção da perna. Quando o
calcanhar entra em contacto com o solo, a FRS passa para trás do tornozelo, causando a
flexão plantar produzida pelo momento da força (Herrero et al., 2004; Silva, 2014).

22 Fundametação Teórica
Seguindo o princípio de que a pressão exercida é o resultado do cociente da força total
aplicada, dividida pela área da força aplicada, o objectivo é distribuir as forças sobre uma
superfície mais ampla, de forma a reduzir as pressões realizadas, evitando as regiões de
proeminência óssea, para que a efectividade das forças três pontos seja adequada e
realize os seus objectivos (Herrero et al., 2004; Periago, 2009).
Segundo a sistematização de Boweker, as ortóteses baseiam-se em 4 formas diferentes
de acção, de forma a perceber o sistema de momentos e forças externas que actuam sobre
a articulação: restringimento da rotação, através de sistemas de forças equilibradas em 3
pontos, pois segundo o seu desenho, controlando a nível médio-lateral, ântero-posterior ou
rotacional; redução das tensões de corte dos movimentos de translação intra-articulares
produzidos por essas forças; redução da carga axial provocada pelo peso corporal, que se
transmite através das estruturas ósseas e articulares; controlo da linha de acção de forças
de reacção ao solo nos três planos do espaço (Herrero et al., 2004; Silva, 2014).
Figura 14 – Sistema de forças de 3PP (A) Flexão dorsal; (B) Flexão plantar; (C) Inversão; (D) Eversão; (E) Abdução; (F) Adução (Silva, 2014).
Figura 15 – Sistema de 3PP numa ortótese pé-tornozelo; FRS é a força de reacção ao solo passando por trás do tornozelo e pelo eixo do joelho; A é a força direccionada anteriormente; P1 e P2 são forças
direccionadas posteriormente (Edelstein & Brucker, 2006).

Trabalho Experimental 23
Existe ainda o sistema Ground Control Force (GRF) têm como intuito a correcção
movimento do segmento corporal através do uso ou não de um dispositivo ortésico durante
a fase de apoio. Este sistema baseia-se nos momentos criados pela força da reacção ao
solo, sobre as articulações, quando os pés contactam com o solo.
Durante a realização da marcha ao colocar o calcanhar toca o chão, é gerado uma força
com intensidade igual, de sentido oposto. No caso da carga total do corpo não estar
alinhada com a articulação do tornozelo, este sistema vai criar um momento de flexão
plantar do tornozelo. No caso de indivíduos que sofram de pé pendente, não conseguem
realizar a flexão dorsal sendo necessário as AFO’s para colocar numa posição neutra e
restringir a flexão plantar no contacto inicial da marcha e o GRF é transferido para o
conjunto livre mais próximo da cadeia cinemática, a articulação do joelho. Assim é criado
um momento de flexão de forma a prevenir o movimento de hiperextensão do joelho
(Silva, 2014).
Figura 16 - Sistema GRF; (A) Marcha normal; (B) Flexão plantar do tornozelo; (C) Flexão do joelho [Ortho, 2014].
2.4.5. Processo de Fabrico
Antes de se fabricar qualquer dispositivo ortésico é necessário realizar um exame
clínico, no qual inicialmente se deve analisar o segmento corporal afectado, observar a
locomoção destes indivíduos, para se examinar até que ponto se pode corrigir a lesão ou a
patologia. Deve-se anotar os dados do indivíduo, desde o histórico clínico até às medidas
do segmento, informação sobre o desenho do dispositivo, medidas, materiais,
componentes e acessórios (Herrero et al., 2004; Periago, 2009).

24 Fundametação Teórica
Existem duas formas de fabricar este tipo de dispositivos, o fabrico tradicional ou
convencional e o fabrico aditivo.
2.4.5.1. Fabrico Tradicional ou Convencional
O fabrico pelo meio tradicional é realizado primariamente pela tiragem de medidas
(comprimentos, circunferências e dimensões médio-lateral e ântero-posterior), do
tornozelo e pé.
Após a primeira etapa é feito o molde negativo desde a região abaixo da cabeça do
perónio, aproximadamente 2 cm até a planta do pé. Antes de se realizar toma do molde é
colocado um interface de meia tubular de forma a proteger a pele e controlo posicional,
havendo o cuidado de manter a superfície da meia sem irregularidades, é também nesta
meia tubular que são marcados os principais pontos anatómicos (1ª e 5ª cabeça dos
metatarsos, maléolo medial e lateral, e 2 cm abaixo da cabeça do perónio). Depois de
marcar os pontos anatómicos é colocado um tubo de látex na região aberta do dispositivo e
colocado então as ligaduras de gesso, devidamente húmidas, no qual o indivíduo deve
manter o membro fixo e numa posição neutra enquanto o profissional que tira o molde
negativo deve exercer alguma pressão e contornar os bordos do molde de forma a
distribuir as pressões e quando o gesso solidificar deve-se cortar o molde pelo tubo de
latex.
Com o molde negativo realizado é possível realizar o molde positivo no qual é realizado
através de encerramento da região cortada e é colocado gesso no seu interior e espera-se
até endurecer, e assim que estiver pronto retira-se as ligaduras de gesso. Depois de retirar
as ligaduras é possível tratar do molde positivo onde é acrescentado mais gesso nas regiões
de proeminências ósseas para aliviar pressões e é retirado gesso nas zonas onde se irão
aplicar forças adicionais. Antes de terminar é necessário polir o gesso e deixar o mais
regular possível.
Depois de se terminar o molde positivo deve-se colocar o molde numa máquina de
vácuo e escolher o termoplástico, normalmente ou polipropileno (PP) ou polietileno (PE)
ou o copolímero (PP-PE), colocando o plástico num forno e esperar até atingir o estado
plástico, e em seguida colocar sobre o molde positivo e realizar o vácuo de forma a moldar
o material ao molde positivo e esperar que o molde volte ao estado sólido e arrefecido.
Para terminar o dispositivo é geralmente recortado com a forma que se pretende
proporcionar ao dispositivo, depois de se desbastar e rectificar através de fresadoras, é
então testada ao indivíduo e se tudo estiver de acordo com o que é pretendido realiza-se
os acabamentos, meios de fixação ao segmento, como velcros e entregue ao indivíduo
(Herrero et al., 2004; Yu-an Jin, Plott, Chen, Wensman, & Shih, 2015).

Trabalho Experimental 25
2.4.5.2. Fabrico Aditivo
A fabricação através do fabrico aditivo é o método mais recente no fabrico de
dispositivos ortésicos (Yu-an Jin et al., 2015).
O primeiro passo neste método de fabrico é a digitalização a 3 dimensões (3D) do
tornozelo e pé, incluindo a superfície plantar, podendo se utilizar também caixa de
impressão em espuma para obter a superfície plantar.
No segundo passo é realizado o processamento da digitalização, sendo possível integrar
duas digitalizações, caso se tenha realizado uma para o pé e tornozelo e região da tíbia e
outra pela caixa de impressão de espuma, sendo necessário realizar o alinhamento por três
pontos da espuma. As linhas de corte da AFO são criadas e suavizadas manualmente (Yuan
Jin, He, & Shih, 2016; Yu-an Jin et al., 2015).
Numa terceira etapa é utilizado um dos métodos de fabricação aditiva existente, a
Fused Deposited Modeling (FDM) ou a Selective Laser Sintering (SLS).
O processo através de FDM, a modelação por extrusão de plástico, consiste na
fabricação de protótipos por adição de material em camadas, formadas pela extrusão de
materiais termoplásticos. O termoplástico encontra-se na forma de fio, alimentado por
uma bobine. Ocorre então a extrusão do material através da cabeça extrusora, que
deposita o material em camadas muito finas, unindo a camada depositada à camada
anterior durante a solidificação.
O método de SLS, a sinterização selectiva por laser, este tipo de fabricação consiste na
utilização de pós finos de materiais de plástico, compósitos com matriz polimérica, metais
revestidos a termoplásticos ou ligas metálicas no qual são ligados entre si através de
varrimento por feixe laser. A câmara de construção é pré-aquecida, é laminada uma
camada em pó que corresponde à espessura de cada camada de construção, utilizando
sistemas electromagnéticos de precisão. O feixe ao incidir nas partículas provoca a fusão
parcial das interfaces dos pós, obtendo uma estrutura sólida (F. J. L. Alves et al., 2001).
A fabricação aditiva demonstrou ser de fácil implementação e pode ser utilizado em
quase todos os materiais do tipo termoplástico. Neste tipo de processo de fabricação
existe a necessidade de criar uma estrutura de suporte que permita realizar a construção
do dispositivo adequada. Dos dois processos de fabricação aditiva apresentados, o método
que apresenta valores mais satisfatórios ao nível de força e rigidez do dispositivo são os
dispositivos fabricados pelo FDM.
A última etapa tal como no método de fabrico convencional é testar no indivíduo e caso
seja necessário realizar os últimos acabamentos e realiza-se a entrega do dispositivo ao
indivíduo (Yuan Jin et al., 2016; Yu-an Jin et al., 2015).


Trabalho Experimental 27
27
Capítulo 3
Trabalho Experimental
3.1. Materiais
No desenvolvimento prático desta unidade curricular e de acordo com a temática
abordada no presente relatório, foi proposto a realização de testes mecânicos a uma
ortótese, AFO. Ao nível do desenho do dispositivo, este foi realizado anteriormente por
uma antiga estudante e os testes foram realizados através do software SOLIDWORKS.
Na realização prática efectuou-se uma pesquisa e foram seleccionados os materiais
mais utilizados para a produção de ortóteses, polímeros termoplásticos, que são aquecidos
e moldados para produzir o dispositivo final. Os termoplásticos são formados por
macromoléculas lineares que quando submetidos a temperaturas elevadas vão amolecer
(estado plástico) e vai solidificar novamente quando arrefecido, sem perder as suas
características.
De uma forma geral os termoplásticos apresentam características específicas que os
tornam uma boa escolha para as ortóteses. Os termoplásticos são materiais que
apresentam uma resistência excepcional a rupturas e fadigas, resistência química, boa
resistência a impactos, baixo peso e de fácil manutenção (González-Viñas & Mancini,
2003).
Os quatro termoplásticos utilizados foram o polipropileno homopolímero (PP-H),
polipropileno copolímero (PP-B), o polietileno de baixa densidade (LDPE) e polietileno de
alta densidade (HDPE).
O polipropileno (PP) é um termoplástico semi-cristalino, que pode ser processado
por extrusão, termoformação sopro e injecção. Este tipo de termoplástico pode ser

28 Trabalho Experimental
reciclável que pode ser moldado através do aquecimento. Possui um ponto de
amolecimento mais elevado que outros termoplásticos como o polietileno. Este apresenta
como principais propriedades fácil moldagem, elevada resistência química, elevada
resistência a roturas por movimentos de flexão ou fadiga, boa resistência a impactos acima
dos 15ºC, boa estabilidade térmica e baixo custo. O PP-H é o material base de todos os
tipos de PP, possuí uma elevada rigidez e resistência a temperaturas e a sua principal
limitação é a baixa resistência ao impacto a temperaturas negativas. O PP-B é um material
caracterizado pela sua elevada rigidez tal como a resistência ao impacto de baixas
temperaturas (Poliversal, 2012).
Os polietilenos (PE) por sua vez são um termoplástico parcialmente cristalino,
flexível e praticamente inertes face à maioria dos produtos químicos comuns. Este
material pode ser classificado segundo a sua densidade, classificados como LDPE e HDPE.
Estes dois tipos de PE apresentam aplicações semelhantes, no entanto o LDPE apresenta
melhores características ao nível de flexibilidade e de transparência e o HDPE apresenta
características mais ao nível a resistência e de dureza (Coutinho, Mello, & Maria, 2003).
O dispositivo foi dividido em três secções, secção A, secção B e secção C,
assinalados na figura 17. A secção A é a região onde é fixado o dispositivo ao membro do
indivíduo e onde é exercida parte das forças realizadas pelo portador do dispositivo
durante a marcha; a secção B é de extrema importância devido a esta apresentar alguns
riscos, pois a sua largura é menor, devido às aberturas realizadas para tornar o dispositivo
mais leve; e a secção C é a região de pressão constante, devido ao funcionamento de
suporte plantar do indivíduo.
Figura 17 – Dispositivo dividido em Secções A, região superior; secção B, região medial; secção C, região
inferior.
Secção A
Secção C
Secção B

Trabalho Experimental 29
3.2. Métodos e Procedimentos
Na realização dos testes mecânicos do dispositivo foi então necessário adicionar a
aplicação SOLIDWORKS Simulation, no programa. Após se adicionar esta aplicação foi
necessário criar um novo estudo, tal como é mostrado na figura 18, através dos seguintes
passos: 1º Simulation; 2º Study Advisor; 3º New Study; 4º Seleccionar o tipo de estudo,
neste caso foi seleccionado o Static; e 5º Name, colocando o nome que se pretende
estabelecer ao estudo.
Figura 18 – Criação de novo estudo em SOLIDWORKS.
Após a criação do estudo é possível verificar as funcionalidades do estudo é possível
verificar as funcionalidades que o este tipo de teste permite. Neste tipo de estudo
existem algumas funções como Apply Material, que nos permite escolher o material que
queremos aplicar no dispositivo e onde podemos verificar as suas propriedades, valores e
unidades; Connections, permite a interacção entre diferentes dispositivos ou partes,
neste caso só temos dispositivo, tornando-se uma função não aplicável no estudo;
Features, função que permite a selecção de regiões para fixação numa determinada zona
geométrica do dispositivo a estudar; External Loads, é a função de aplicação de qualquer
tipo de carga externa (força, pressão, momento rotacional, etc.) numa determinada zona
geométrica do dispositivo a estudar; Mesh, função que permite realizar o estudo

30 Trabalho Experimental
pretendido através das condições seleccionadas anteriormente (Simulation & Drive,
2012).
Com a iniciação do trabalho experimental averiguou-se o problema de determinar as
cargas e as restrições que se devem aplicar nas ortóteses. Apesar da existência de
estudos que analisam as forças presentes na locomoção é necessário entender a
complexidade da interacção entre o pé, perna e ortótese. Para este contexto, foi
considerada uma determinada carga de força aplicada na secção A, região superior e
inferior da perna segundo o estudo Christopher Vaughan(Vaughan, Davis, & C., 1999).
O teste realizado teve como objectivo analisar o comportamento da ortótese ao se
exercer uma força na região superior da perna. Segundo a 2ª Lei de Newton, massa e
aceleração “A aceleração de um corpo é proporcional à força que a produz e ocorre na
direcção em que a força actua.”. A fórmula usada para calcular a força exercida é dado
pela fórmula, F = m x a, [F] representa a força, [m] representa a massa e [a] representa a
aceleração.
Através da análise da tabela 1 onde estão apresentados valores de posição, velocidade
e aceleração dos centros de gravidade da perna e pé, verificou-se então que a aceleração
máxima na direcção x, na região superior da perna é de 9.2m/s2 e a aceleração máxima
na direcção z, na região inferior é de 3.3 m/s2. Esta aceleração será utilizada para o
cálculo da força horizontal aplicada na ortótese e que vai traduzir no momento máximo a
que vai estar sujeito o eixo do tornozelo para o cálculo estrutural das ortóteses.
Tabela 1 – Valores de posição, velocidade e aceleração do centro gravitacional, da parte região superior
da perna (Vaughan et al., 1999).
Em relação à massa a aplicar foi feita uma pesquisa de forma a obter o peso médio de
um cidadão europeu, através do “Eurobarómetro” – estudo elaborado pela TNS Euroteste
para a Comissão Europeia. Foi verificado que o valor médio do peso de um cidadão
europeu é de aproximadamente 72 Kg (Anunciweb, 2016).
Realizando então os cálculos segundo a 2ª Lei de Newton para o cálculo da força na
região superior, Frs e inferior, Fri com um valor de massa de 72 Kg e acelerações na
direcção x e direcção z do centro gravitacional de 9.2 m/s2 e 3.3 m/s2 respectivamente:

Trabalho Experimental 31
𝐅 = 𝐦 ∗ 𝐚
𝐅𝐫𝐬 = 𝟕𝟐𝐊𝐠 ∗ 𝟗. 𝟐𝐦/𝐬𝟐 = 𝟔𝟔𝟐. 𝟒𝐍
𝐅𝐫𝐢 = 𝟕𝟐𝐊𝐠 ∗ 𝟑. 𝟑 𝐦 𝐬𝟐⁄ = 𝟐𝟑𝟕. 𝟔𝐍
Para o cálculo do momento, utilizado de forma a avaliar o comportamento do
dispositivo, uma vez que este contribuiu no apoio do pé para rotação controlada da
articulação do tornozelo, ocorrendo uma redução da carga no respectivo momento,
aplicado no eixo do tornozelo:
𝐌 = 𝐅 ∗ 𝐝
𝐌 = 𝐅𝐫𝐬 ∗ 𝐝 = 𝟔𝟔𝟐. 𝟒𝐍 ∗ 𝟎. 𝟐𝐦 = 𝟏𝟑𝟐. 𝟓𝐍𝐦
𝐌 = 𝐅𝐫𝐢 ∗ 𝐝 = 𝟐𝟑𝟕. 𝟔𝐍 ∗ 𝟎. 𝟐𝐦 = 𝟒𝟕. 𝟓𝟐𝐍𝐦
3.3. Análise Estrutural com Elementos Finitos (FEA) e Simulação
A análise estrutural da ortótese foi realizada através da análise por elementos finitos
(FEA – Finite Elemental Analysis) inseridos na aplicação Simulation do software
SOLIDWORKS (Simulation & Drive, 2012). A utilização deste método é o mais comum e o
mais adaptado para este tipo de análises.
Com este método pretende-se explicar que este tipo de análise computacional é
vantajoso na concepção do dispositivo, por permitir optimizar e analisar não só ao nível
de testes mecânicos como também do design do dispositivo de forma a tomar uma
posição final em relação ao desenvolvimento do dispositivo.
Antes de se realizar a análise deve-se então escolher os materiais que queremos
aplicar, localizar as restrições e fixações em determinados pontos e colocar as cargas
com valores determinados e prosseguir com criação de uma malha de elementos finitos,
Mesh, elementos triangulares usados pelo processador para calcular os parâmetros
desejados.
Relativamente a simulação foi aplicado o critério de Von Mises para os materiais
aplicados, calculando desta forma as tensões, deformação unitária e o factor de
segurança (FOS – Factor of Safety) do dispositivo. As simplificações de cálculo foram: a
carga estática, o comportamento linear do material e o critério de falha Von Mises.

32 Trabalho Experimental
3.4. Resultados
Tal como foi referido na secção 3.2. Métodos e Procedimentos, foram verificados dois
tipos de aceleração, um na direcção de x e outro na direcção de z, que deu origem a
simulação estática da ortótese em dois casos diferentes.
Nas seguintes simulações as forças aplicadas na ortótese estão representadas pelas
setas de cor rosa e os pontos fixos estão representados pelas setas verdes.
No primeiro caso, simulação na direcção de x, foi utilizado uma força de 662.4 N,
devido ao resultado obtido pela massa e aceleração em x. Com este valor de força
calculado foi possível simular pela aplicação de Simulation do software SOLIDWORKS, que
proporcionou os seguintes resultados, nos quatro materiais estudados:
Figura 19 – Resultados do caso 1 para o material HDPE. a) Tensão do HDPE; b) Deslocamento do HDPE.
a) b)

Trabalho Experimental 33
Figura 20 – Resultados do caso 1 para o material LDPE. a) Tensão do LDPE; b) Deslocamento do LDPE.
Foi então verificado na gama dos polietilenos, no primeiro caso, o valor de tensão
máximo obtido pelo HDPE é de 1.124x109 N/m2 e o valor mínimo de 6.619x102 N/m2 e
relativamente ao deslocamento o seu valor máximo chega a 7.594x103 mm e o valor
mínimo de 1.0x10-30 mm, sendo este valor fixo para todos materiais e casos aplicados. Em
relação ao valor máximo da tensão obtido pelo LDPE é de 1.118x109 N/m2 e valor mínimo
de 9.042x102 N/m2 e relativamente ao valor do deslocamento máximo 4.695x104 mm.
a) b)

34 Trabalho Experimental
Figura 21 – Resultados do caso 1 para o material PP-B. a) Tensão do PP-B; b) Deslocamento do PP-B.
Figura 22 – Resultados do caso 1 para o material PP-H. a) Tensão do PP-H; b) Deslocamento do PP-H.
De seguida na gama dos polipropilenos, neste primeiro caso, o valor de tensão máximo
observado pelo PP-B é 1.124x109 N/m2 e o valor mínimo de 6.872x102 N/m2 e
relativamente ao deslocamento o valor máximo obtido foi 9.069x103 mm. Quanto ao PP-H,
a) b)
a) b)

Trabalho Experimental 35
este apresenta um valor máximo de tensão de 1.431x109 N/m2 e valor mínimo de
2.194x102 N/m2 e relativamente ao valor do deslocamento máximo 4.314x103 mm.
No segundo caso, a simulação na direcção z, foi utilizada uma força de 237.6 N, devido
ao resultado, pela massa e aceleração em z. Com este valor de força calculado foi possível
simular através da aplicação de Simulation do software SOLIDWORKS, o que proporcionou
os seguintes resultados, nos quatro materiais estudados:
Figura 23 – Resultados do caso 2 para o material HDPE. a) Tensão do HDPE; b) Deslocamento do HDPE.
Figura 24 – Resultados do caso 2 para o material LDPE. a) Tensão do LDPE; b) Deslocamento do LDPE.
a) b)
a) b)

36 Trabalho Experimental
Novamente foi verificado na gama dos polietilenos, no segundo caso, o valor de tensão
máximo obtido pelo HDPE é de 6.480x108 N/m2 e o valor mínimo de 1.093x101 N/m2 e
relativamente ao deslocamento o seu valor máximo chega a 4.539x103 mm. Em relação ao
valor máximo da tensão obtido pelo LDPE é de 6.440x108 N/m2 e valor mínimo de
6.196x100 N/m2 e relativamente ao valor do deslocamento máximo 2.822x104 mm.
Figura 25 – Resultados do caso 2 para o material PP-B. a) Tensão do PP-B; b) Deslocamento do PP-B.
a) b)

Trabalho Experimental 37
Figura 26 – Resultados do caso 2 para o material PP-H. a) Tensão do PP-H; b) Deslocamento do PP-H.
De forma a terminar os resultados obtidos na gama dos polipropilenos, para este
segundo caso, observou-se o valor de tensão máxima no PP-B de 6.480x108 N/m2 e o valor
mínimo de 1.508x100 N/m2 e relativamente ao deslocamento o valor máximo obtido foi
5.420x103 mm. Quanto ao PP-H, este apresenta um valor máximo de tensão de 6.828x108
N/m2 e valor mínimo de 1.792x100 N/m2 e relativamente ao valor do deslocamento
máximo 2.448x103 mm.
3.5. Discussão e Conclusão
Com os resultados obtidos pode-se verificar evidentemente que para o primeiro caso a
secção A, para todos os materiais vai demonstrar as tensões sofridas e os deslocamentos
que ocorrem para a força que foi aplicada. No segundo caso, a secção C é a região que vai
sofrer as principais tensões e deslocamentos de acordo a força que foi mencionada
anteriormente e aplicada.
Ao observar os dois casos pode-se observar que a secção B é a secção que sofre de
maiores tensões para ambos os casos, mas com maior proeminência no segundo por este
apresentar maior nível de tensão nos bordos da secção principalmente ao nível anterior
onde se localiza os maléolos (interno e externo) e nos bordos da região posterior onde a
ortótese se encontra aberta, enquanto o primeiro caso demonstra apenas algum nível de
tensão nos bordos anteriores, na região inferior, da secção B. Esta região é importante por
ser a região da articulação do tornozelo, ou seja, na realização de marcha é necessário que
haja alguma resistência e flexibilidade da estrutura na acção de flexão plantar e dorsal
a) b)

38 Trabalho Experimental
proporcionada pela articulação. Dos materiais aplicados um deles se destacou ao nível das
tensões aplicadas na secção B com melhor resposta ao nível da ligação de resistência e
flexibilidade que foi polipropileno homopolímero que para ambos os casos apresentou
valores de tensão inferiores nessa região seguido do polipropileno copolímero e polietileno
de alta densidade, polímeros que apresentaram resultados bastante semelhantes e por fim
o polietileno de baixa densidade que apresentou os valores mais altos nesta região.
Em relação ao deslocamento máximo observado devido às forças realizadas
demonstram que e novamente para ambos os casos, o LDPE é o material que deforma mais
seguido do PP-B, por sua vez o HDPE e por fim o PP-H. Isto significa que o PP-H é um
material resistente e com menor grau de deformidade comparativamente com os restantes
materiais e comparativamente com o LDPE que demonstra ser mais flexível nas
extremidades da ortótese, onde foram aplicadas as forças.
O comportamento mecânico destes materiais termoplásticos é muito semelhante entre
eles. Analisando os valores retirados e pelo estudo bibliográfico realizado podemos concluir
que o LDPE é um material que possui características inferiores aos restantes materiais, o
CC-B e HDPE apresentam características muito semelhantes, mas é PP-H que apresenta os
melhores valores e características, este é o material de maior interesse a aplicar nas
ortóteses, principalmente em termos funcionais.
Nestes estudos existem mais factores a ter em conta para além do tipo de material a
aplicar, como por exemplo a espessura do material, o seu peso e até mesmo o design da
ortótese são factores que podem influenciar o sucesso da aplicação deste tipo de
dispositivo. Outros factores a ter em conta na selecção do material e que não foram
abordados mas que influência a escolha material é o custo do material e restantes
componentes para o seu fabrico como também o factor ambiental.
Esta é uma área com a necessidade de personalizar ao máximo o dispositivo médico,
sendo a maioria de aplicação de termoplásticos e apesar de nos dias de hoje existirem mais
materiais, como fibras de carbono, estas ainda apresentam um grau de rigidez superior aos
termoplásticos e a maioria delas são de forma standard.

Conclusões e Trabalho Futuro 39
39
Capítulo 4
Conclusões e Trabalho Futuro
4.1. Conclusões
O objectivo principal proposto nesta unidade curricular Trabalhos Práticos foi
alcançado. Foi possível realizar e coligar os fundamentos teóricos e aplicar e observar um
método de trabalho para uma simulação estática de uma ortótese.
Inicialmente foi realizado a fundamentação teórica a anatomia e fisiologia do MI. Com
esta fundamentação pretende-se compreender a constituição do membro inferior e as
suas características de forma a compreender que tipos de movimentos o MI realiza e a
sua contribuição na locomoção. Com isto destaca-se a marcha humana, que para um
individuo que sofra de alguma lesão ou patologia, pode-se tornar uma luta constante,
afectando a sua qualidade de vida, algo que para alguém que não sofra de qualquer
distúrbio nem se percebe da importância desta actividade. Foram ainda identificadas
algumas das lesões, umas mais graves que outras, mas todas elas afectam a locomoção de
uma certa forma e levam a necessidade de aplicação de dispositivos médicos como as
ortóteses. Em relação a estas ortóteses, e como foi referido anteriormente ao longo do
relatório, existem diversos tipos de ortóteses, cada uma com a sua funcionalidade
específica e tendo este conhecimento prévio deve se fabricar estes dispositivos de acordo
a necessidade de cada indivíduo lesado. Deve se compreender qual o melhor material a
aplicar e tratamento e tipo de fabricação do dispositivo até a entrega e realização de
testes para observação da interacção entre o segmento corporal afectado do indivíduo
lesado com o dispositivo fabricado e de certa forma perceber que melhorias se deve
realizar para personalizar e acomodar ao indivíduo. Neste caso foi estudado um

40 Conclusão e Trabalho Futuro
dispositivo de pé e tornozelo, AFO, como teoricamente a sua aplicação biomecânica com
a interacção com o segmento corporal onde foram apresentados alguns modelos deste
tipo de ortótese, sendo o modelo trabalhado no trabalho experimental uma AFO
dinâmica.
No trabalho experimental recorreu-se ao software SOLIDWORKS com a finalidade de
realizar um teste mecânico, simulação estática, de forma a avaliar a resistência do
dispositivo em diferentes materiais. Todos os materiais simulados são da família dos
polímeros termoplásticos, por serem hoje em dia o tipo de materiais mais utilizados no
fabrico de AFO’s, apesar de existir outros materiais como a fibra de carbono, que apesar
de existir indivíduos a utilizar este tipo de material, este apresenta duas desvantagens,
maioritariamente são dispositivos pré-fabricados e de aplicação standard e por serem um
material muito rígido que para muitas das deformações ou patologias torna-se um
incómodo para o lesado.
Com este trabalho houve a oportunidade de conhecer um novo método de trabalho e a
oportunidade de abordá-lo, sendo uma área de grande interesse, havendo a necessidade
de conhecimento a nível não só biomecânico como a união de conhecimentos de área de
engenharia como da área de saúde, com bastante importância nesta área.
4.2. Trabalho Futuro
Com a realização deste trabalho no âmbito da unidade curricular de Trabalhos Práticos,
foram identificadas algumas questões que são de interesse em abordar me futuros
trabalhos como por exemplo:
Realização de um estudo estrutural mais aprofundado e preciso ao nível das forças
aplicadas na ortótese;
Comparação de estudos realizados na área em diferentes regiões europeias ou até a
uma escala mundial;
Realização de testes não só no ciclo de marcha do indivíduo mas na realização de
outras actividades como subir e descer escadas ou rampas ou mesmo a um nível
postural (posição ortostática) e num laboratório de biomecânica e avaliar a
eficiência deste tipo de dispositivo, de forma a mostrar as variáveis aplicadas,
criando uma biblioteca com as diversas patologias e padrões de marcha;
Quando fabricado e aplicado este tipo de ortótese obter o feedback dos indivíduos
com a finalidade de melhorar não só o design do dispositivo como proporcionar o
maior conforto possível.

Referências Bibliográficas 41
41
Referências Bibliográficas
Alshahrani, A., Bussell, M., Johnson, E., & Tsao, B. (2016). Effects of a Novel Therapeutic Intervention in Patients With Diabetic Peripheral Neuropathy. Archives of Physical Medicine and Rehabilitation, 97(5), 733–738. http://doi.org/10.1016/j.apmr.2015.12.026
Alves, A., & Carvalho, D. S. (2005). Miopatias. Revista Neurociências, 3. Retrieved from http://www.revistaneurociencias.com.br/edicoes/2005/RN 13 SUPLEMENTO/Pages from RN 13 SUPLEMENTO-9.pdf
Alves, C. (2013). Avaliação eletromiográfica de amputados transfemorais para ativação de membros artificiais". Universidade de Brasília.
Alves, F. J. L., Braga, F. J. S., Simão, M. S., Neto, R. J. L., & Duarte, T. M. G. P. (2001). ProtoClick! Prototipagem Rápida.
Alves, J. R. (2015). Avaliação e Certificação de Dispositivos Protéticos e Ortéticos para Membro Inferior. Universidade do Porto.
Andrews & Manole. (2000). Desvios Posturais de Membros Inferiores. Retrieved May 7, 2016, from http://www.cdof.com.br/fisiote3.htm
Anunciweb. (2016). Portugueses são dos mais baicos e menos pesado da Europa. Retrieved June 5, 2016, from http://www.anunciweb.pt/html/article.php?sid=196
Arie, E. K., Sueli, N., Moreira, A., Freire, G. S., Schifer, B., & Yi, L. C. (2015). Study of the metatarsal formula in patient with primary metatarsalgia. Revista Brasileira de Ortopedia, 50(4), 438–444. http://doi.org/10.1016/j.rboe.2015.06.018
Bechelli, L. M. (n.d.). O COMPROMETIMENTO DO CIÁTICO POPLITEO EXTERNO NOS DOENTES DE LEPRA : ESTUDO CLÍNICO.
Calhau, A., Pisco, A., Valente, L., & Santos, N. (2007). ”Análise cinemática da marcha”. Relatório de Biomecânica do movimento.
Chand, G., Mishra, A. K., Kumar, S., & Agarwal, A. (2012). Clinical Queries : Nephrology Diabetic foot. Clinical Queries Nephrology, 1(2), 144–150. http://doi.org/10.1016/S2211-9477(12)70009-2
Completo, A., & Fonseca, F. (2011). Fundamentos de Biomecânica Músculo-Esquelética e Ortopédica. (Publindústria, Ed.).
Cooper, R., Ohnabe, H., & Hobson, D. (2000). An Introduction to Rehabilitation Engineering. Taylor & Francis Group.
Correia, P. P. (2012). Aparelho Locomotor: Função Neuromuscular e Adaptações à Atividade Física. (F. de M. Humana, Ed.) (1a Edição). Cruz Quebrada.
Cottom, J. M., Maker, J. M., Richardson, P., & Baker, J. S. (2016). Endoscopic Debridement for Treatment of Chronic Plantar Fasciitis : An Innovative Technique and Prospective Study of 46 Consecutive Patients. The Journal of Foot & Ankle Surgery, 1–5. http://doi.org/10.1053/j.jfas.2016.02.005
Coutinho, F. M. B., Mello, I. L., & Maria, L. C. D. S. (2003). Polietileno : Principais Tipos , Propriedades e Aplicações, 13, 1–13.
Edelstein, J., & Brucker, J. (2006). Órteses. Abordagem Clínica. Lab.

42 Referências Bibliográficas
f. manual. (n.d.). Pé cavo: o que é, como surge, qual o tratamento? Retrieved May 7, 2016, from http://fisioterapiamanual.com.br/blog/artigos/pe-cavo-tratamento/
Frazão, A. (2015). Poliomielite. Retrieved May 7, 2016, from http://www.tuasaude.com/poliomielite/
Gafaniz, A., Lopes, G., & Pires, P. (2005). “Análise Biomecânica da marcha”. Relatório de Biomecânica do Movimento.
Gatt, A., Formosa, C., & Otter, S. (2016). The Foot Foot orthoses in the management of chronic subtalar and talo crural joint pain in rheumatoid arthritis. The Foot, 27, 27–31. http://doi.org/10.1016/j.foot.2016.03.004
González-Viñas, W., & Mancini, H. L. (2003). Introduction of Materials Science. New Jersey: Princeton University Press.
Harris, G. F., Smith, P. A., & Marks, R. M. (2008). Foot and Ankle Motion Analysis. (T. & F. Group, Ed.). Boca Raton.
Herrero, E. V., Guillem, R. B., Moya, M. F. P., Gracia, C. S., Pastor, J. M. P., Fabregat, A. C., … Bertomeu, J. M. B. (2004). Guía de uso y prescripción de productos ortoprotésicos a medida. Valencia: Instituto de Biomecánica de Valencia.
Hospital, C. P. (2016). Dedos em garra. Retrieved May 7, 2016, from https://www.saudecuf.pt/porto-hospital/mais-saude/doencas-a-z/dedos-em-garra
Ismail, S., Harun, M. N., & Omar, A. H. (2015). Functional Electrical Stimulation for Foot Drop Injury Based on the Arm Swing Motion. Procedia Manufacturing, 2, 490–494. http://doi.org/10.1016/j.promfg.2015.07.084
Jin, Y., He, Y., & Shih, A. (2016). Process Planning for the Fuse Deposition Modeling of Ankle-Foot-Othoses. Procedia CIRP, 42(Isem Xviii), 760–765. http://doi.org/10.1016/j.procir.2016.02.315
Jin, Y., Plott, J., Chen, R., Wensman, J., & Shih, A. (2015). Additive Manufacturing of Custom Orthoses and Prostheses – A Review. Procedia CIRP, 36, 199–204. http://doi.org/10.1016/j.procir.2015.02.125
Mahadevan, D., Tr, F., Salmasi, M., Whybra, N., Nanda, A., Gaba, S., & Mangwani, J. (2016). Foot and Ankle Surgery What factors predict the need for further intervention following corticosteroid injection of Morton ’ s neuroma ? Foot and Ankle Surgery, 22(1), 9–11. http://doi.org/10.1016/j.fas.2015.03.007
Mann, L., Teixeira, C. S., & Mota, C. B. (2008). “A marcha humana: interferências de cargas e de diferentes situações.” Arq. Ciênc. Saúde Unipar, 12(3).
Martel, J. (2012). Disfunção do tendão tibial posterior (Disfunção do nervo tibial. Retrieved May 7, 2016, from http://pt.healthline.com/health/disfuncao-do-tendao-tibial-posterior-disfuncao-do-nervo-tibial#Panoramageral1
Muscolino, J. (2006). Cinesiologia, O Sistema Esquelético e a Função Muscular. (Lusodidacta, Ed.) (1a Edição). Camarate.
Oliveira, A. C. T., Ballarino, H., Monteiro, M. R., Pinto, N. A., & Pires, E. L. S. . (2010). “Análise da visão e forma de colocação de órtese tornozelo-pé pelos pais ou cuidadores de pacientes com paralisia cerebral”. Revista Brasileira Clínica Médica.
Organization for Standardization. (2016). Retrieved April 9, 2016, from https://www.iso.org/obp/ui/#iso:std:iso:22523:ed-1:v1:en
Paiva, W., & Brock, R. (2011). Traumatismo Raquimedular. Retrieved May 7, 2016, from http://www.medicinanet.com.br/conteudos/revisoes/2266/traumatismo_raquimedular.htm
Periago, R. Z. (2009). Prótesis, ortesis y ayudas técnicas. Barcelona: ELSEVIER MASSON. Pina, E. (1999). Anatomia Humana da Locomoção. (LIDEL, Ed.) (3a Edição). Lousã. Pinheiro, P. (2015). Esporão do Calcaneo - Dor no Calcanhar. Retrieved May 7, 2016, from
http://www.mdsaude.com/2012/09/esporao-calcaneo.html Pinto, D. C. (2009). ).” Órteses de membros inferiores e auxiliares de locomoção em
pacientes com síndrome pós-poliomielite (spp): a história revisada e considerações críticas”. Universidade Federal de São Paulo.

Referências Bibliográficas 43
Poliversal. (2012). PP - Polipropileno. Retrieved June 4, 2016, from http://www.poliversal.pt/pt/landing-pages/tipos-de-plasticos/pp---polipropileno-36.html
Prosthetic and Orthesic Center. (2016). Retrieved April 9, 2016, from http://pocwausau.com/
Reabilitação, S. P. de M. F. e de. (2015). Doenças Neurológicas. Retrieved May 7, 2016, from http://www.spmfr.org/doencas-comuns-em-fisiatria/patologias-comuns/
Ribeiro, R. C. S. (2006). “Analise computadorizada da marcha em adultos jovens saudáveis.” Universidade Católica de Góias.
Rico, C. L. (2014). “Marcha Normal e Patológica: Estudo Teórico e Experimental de uma Ortótese de Tornozelo e Pé.” Universidade do Porto.
Rodrigues, I. (2012). “ORTODESIGN-Redesign de Ortótese para Paralisia do Nervo Radial.” Universidade de Lisboa.
Rodrigues, R. S. Q. (2012). Design na usabilidade de dispositivos médicos - Ortóteses para o pé e tornozelo. Universidade do Porto.
Scharer, B. M., & Devries, J. G. (2016). Comparison of Chevron and Distal Oblique Osteotomy for Bunion Correction. The Journal of Foot & Ankle Surgery, 1–5. http://doi.org/10.1053/j.jfas.2016.01.036
Sebastião, R. (2009). “Análise Cinética da Marcha: Estudo Comparativo entre Membros Amputado e Membro Remanescente de Amputados Transfemorais.” Universidade do Porto.
Seeley, R., Stephens, T., & Tate, P. (2003). Anatomia & Fisiologia. (Lusociência, Ed.) (6th editio). Loures.
Silva, M. (2014). DA IDEIA AO MERCADO : CONCEÇÃO E PRODUÇÃO DE ORTÓTESES PARA O MEMBRO INFERIOR. Universidade do Porto.
Simulation, S., & Drive, H. T. (2012). SolidWorks ® 2012 - SolidWorks Simulation Hands-on Test Drive. Waltham.
Sousa, D. S. S. (2008). Seguimento do Movimento Humano Usando Visão Computacional – Aplicação na Análise da Marcha. Universidade do Porto.
Standring, S. (2008). “Gray’s Anatomy - The Anatomical Basis of Clinical Practice.” Elsevier Churchill Livingstone.
Vaughan, C. L., Davis, B. L., & C., O. J. (1999). DYNAMICS OF HUMAN GAIT (2a Edição). Cape Town: Kiboho Publishers.
Vieira, T. (2014). Lesão Entorse Fratura e Contusão. Retrieved May 14, 2016, from http://pt.slideshare.net/thiagovieira96592/leso-entorse-fratura-e-contuso
Winter, D. A. (1990). “Biomechanics and motor control of human movement.” (W.-I. Publication, Ed.) (2o ed.).
Top Related