







Línguas
Páginas
Legal

Modelo de Cameras e Calibração Prof. Dr. Geraldo Braz Junior
Slides baseados em nas notas de aula de Fei-‐Fei li

Cameras reais
2
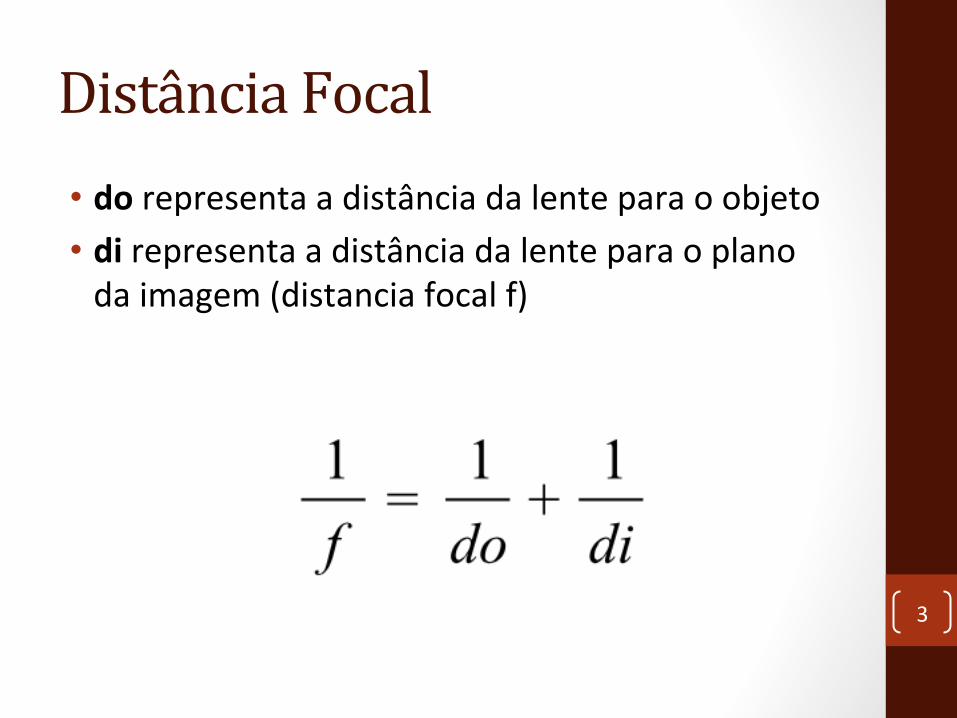
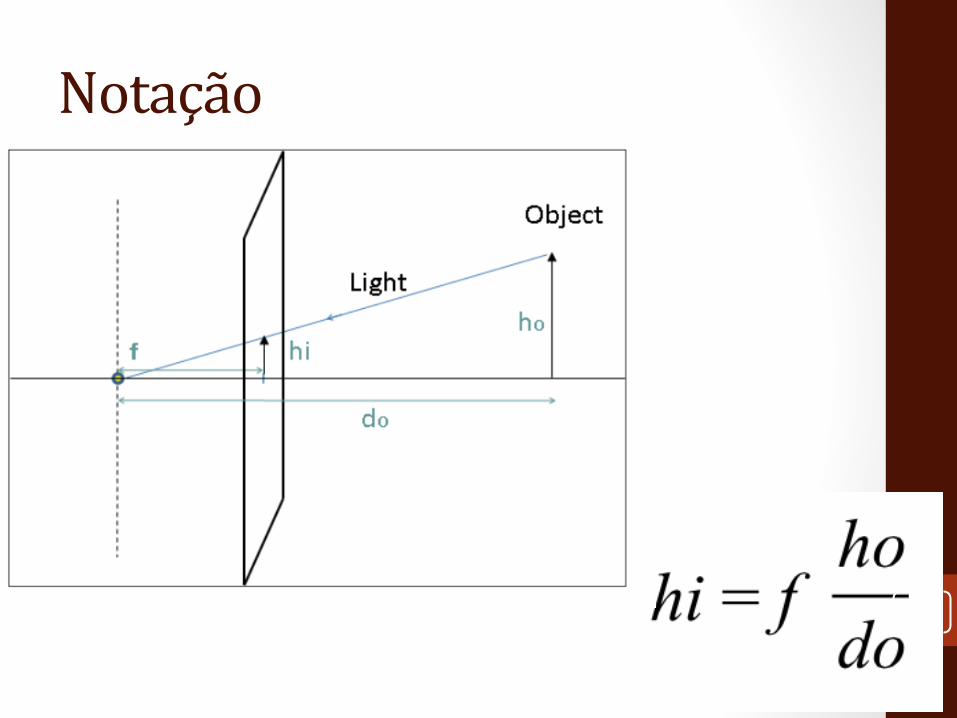
Distância Focal • do representa a distância da lente para o objeto • di representa a distância da lente para o plano da imagem (distancia focal f)
3
Simpli8icações • do >> di • plano da imagem pode ficar localizado sobre a distância focal
• Simplificação: posiciona o plano da imagem sobre o plano da lente para não obter imagens inverIdas • inverte o sinal de f
4
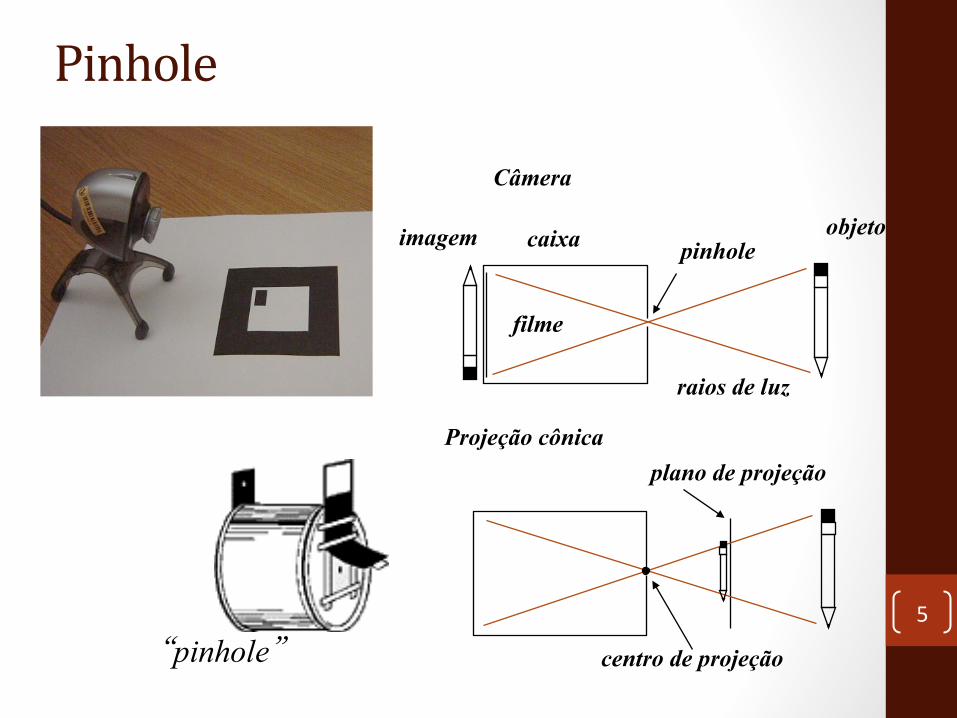
Pinhole
5
plano de projeção
centro de projeção
Projeção cônica
caixa
filme
objeto pinhole
raios de luz
imagem
Câmera
“pinhole”
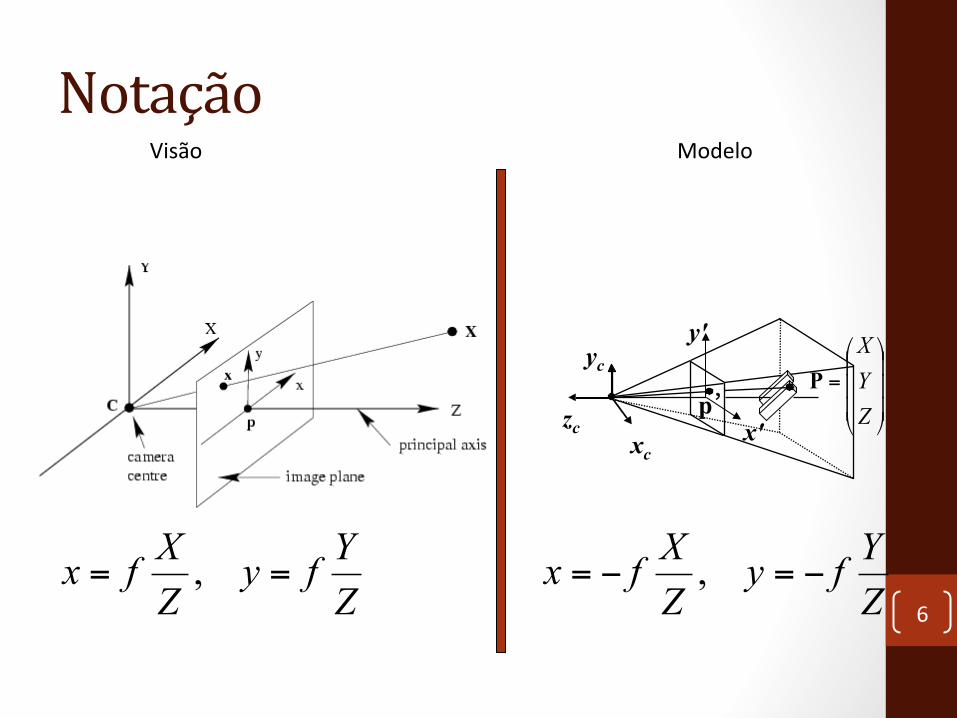
Notação
6 ZYfy
ZXfx == ,
xc
yc
zc p’ ⎟
⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
=
ZYX
P
y'
x'
ZYfy
ZXfx −=−= ,
Modelo Visão
Notação
7
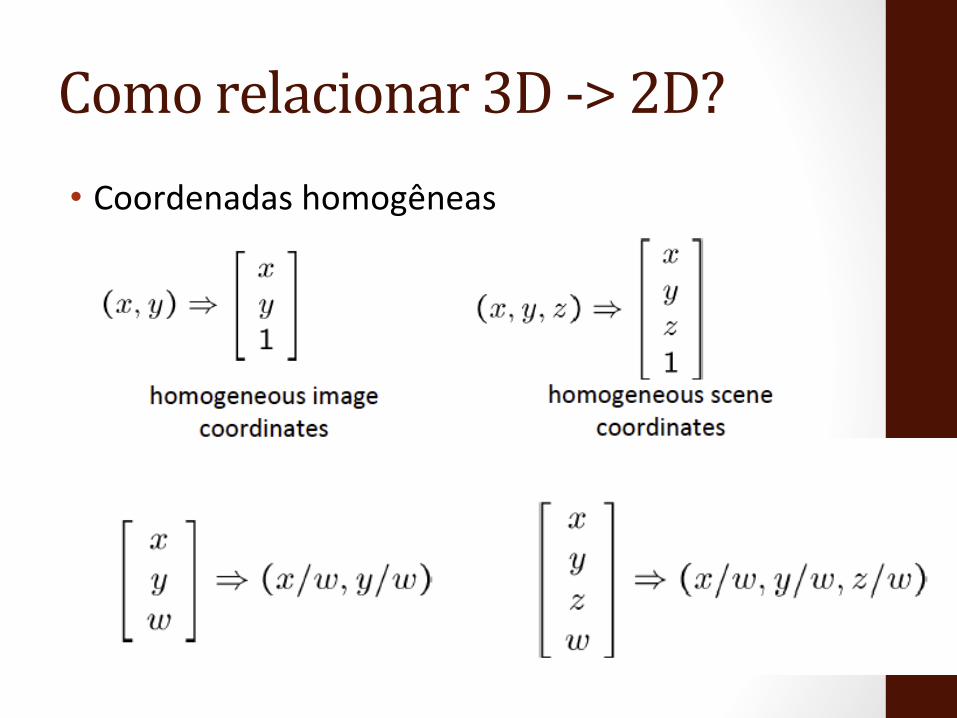
Como relacionar 3D -‐> 2D? • Coordenadas homogêneas
8
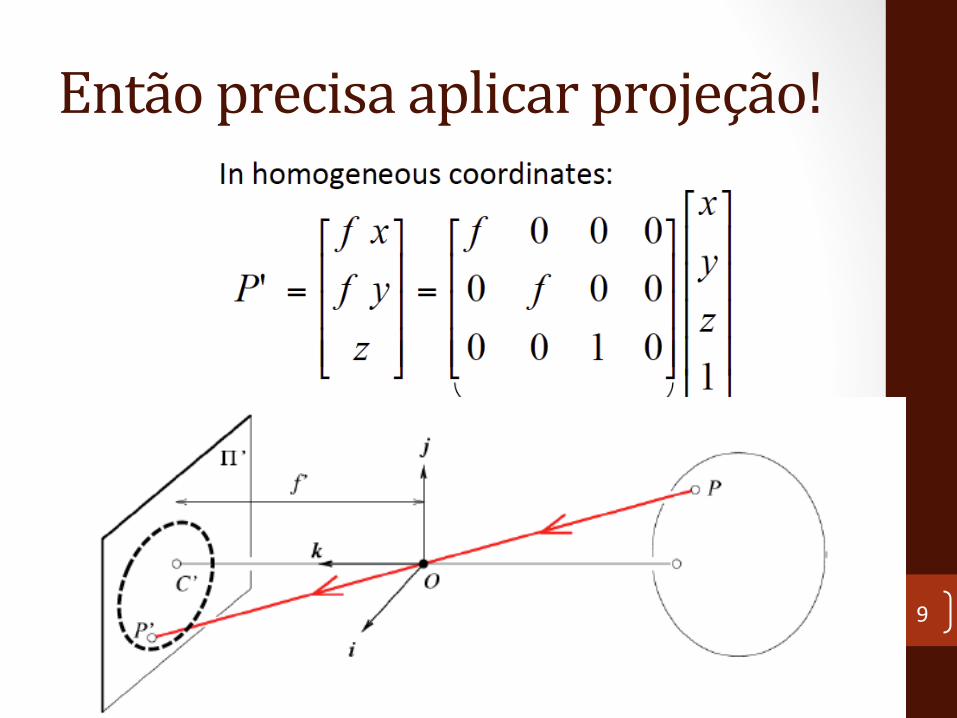
Então precisa aplicar projeção!
9
M é a matriz ideal • Assume que: • tamanho de pixel uniforme • centro óIco em (0,0) • sem distorções • sem rotações • camera em (0,0,0)
10
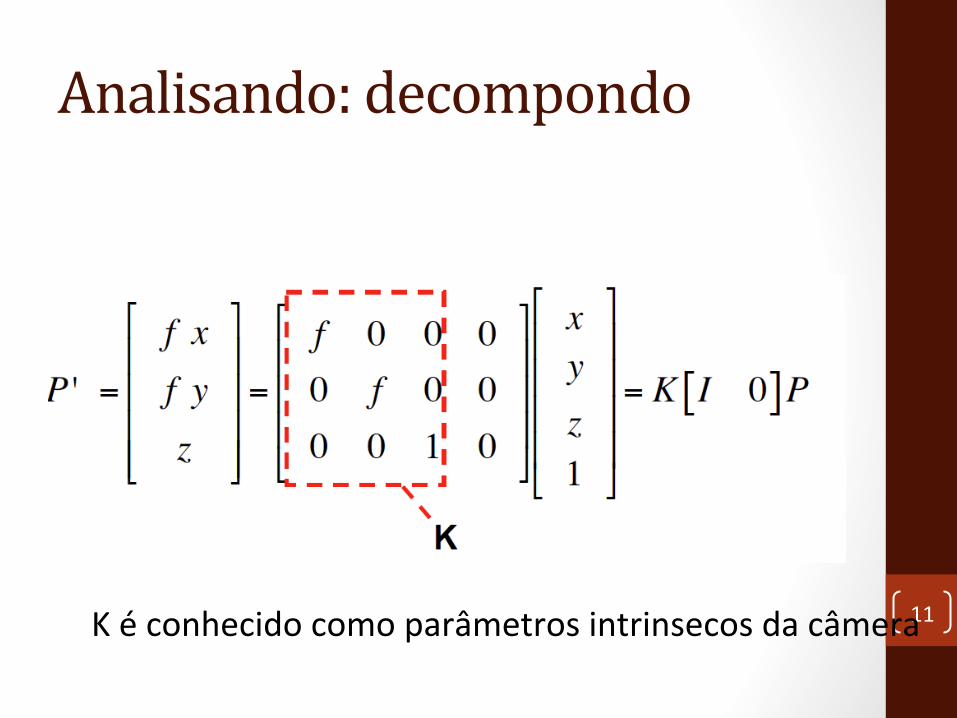
Analisando: decompondo
11 K é conhecido como parâmetros intrinsecos da câmera
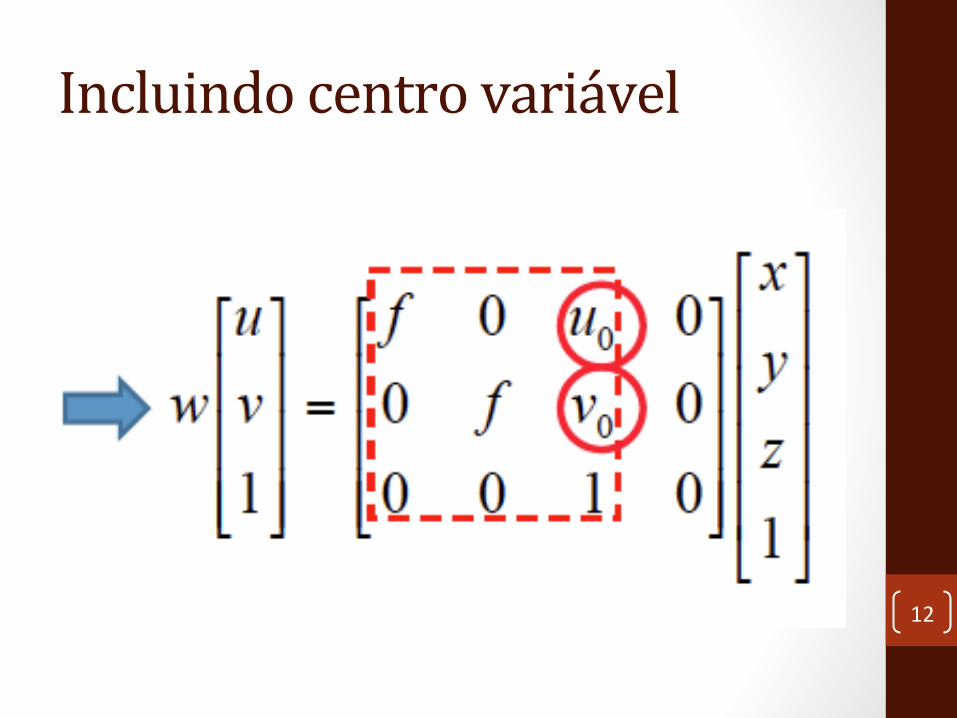
Incluindo centro variável
12
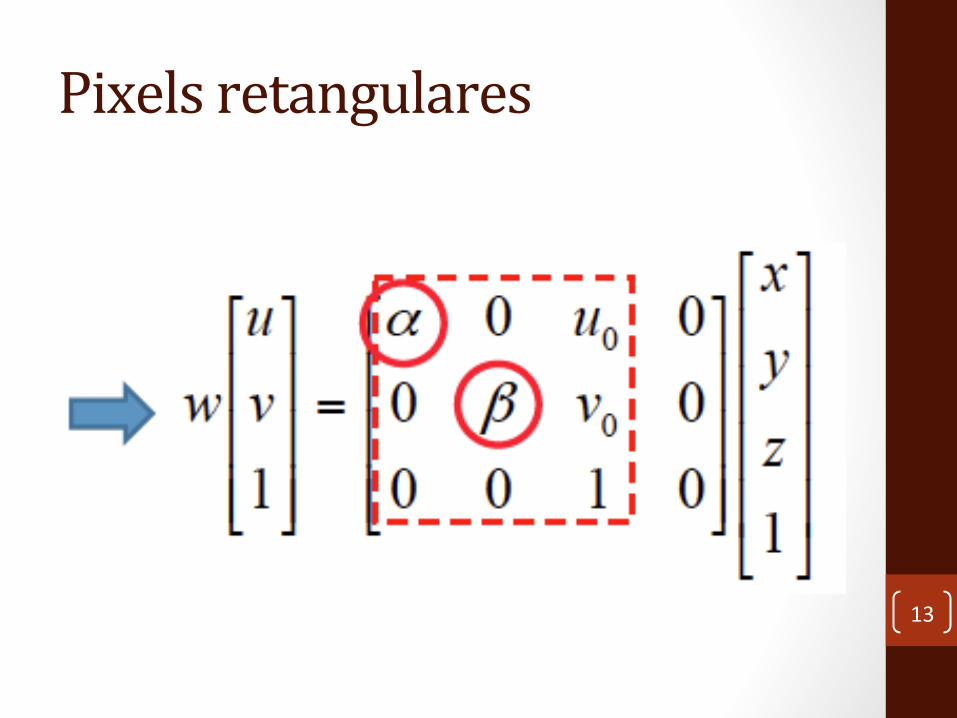
Pixels retangulares
13
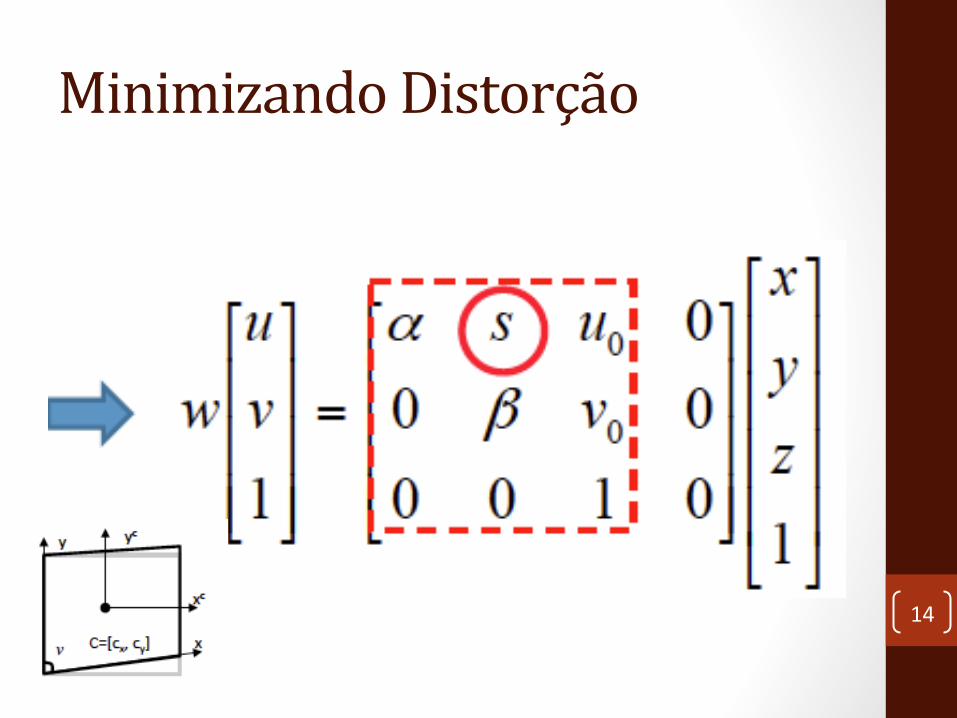
Minimizando Distorção
14
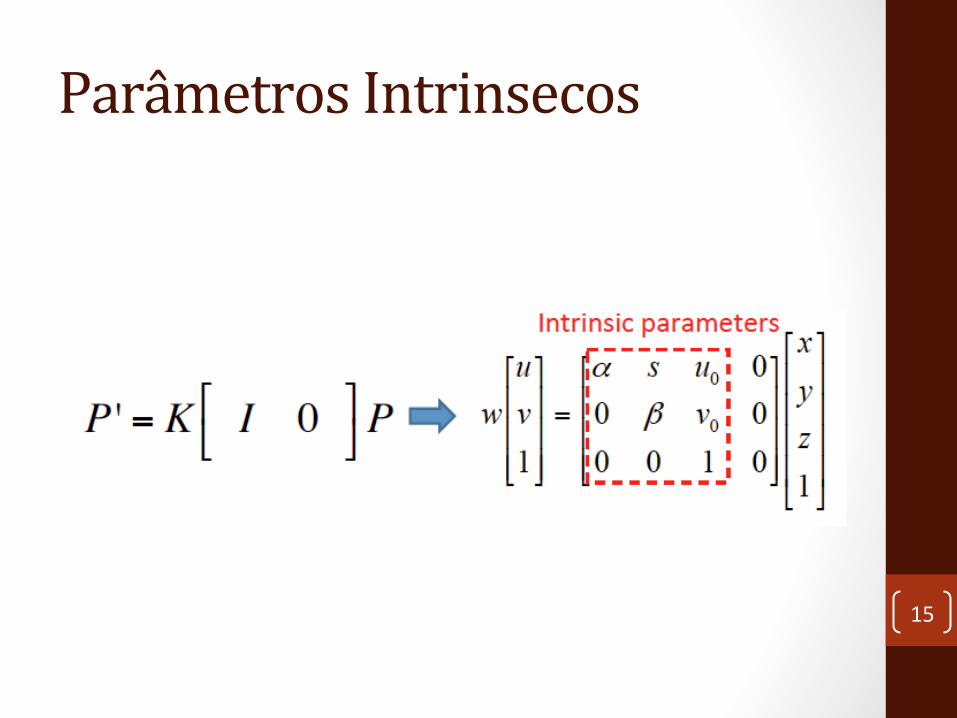
Parâmetros Intrinsecos
15

Parâmetros Extrínsecos: Rotação e Translação
16
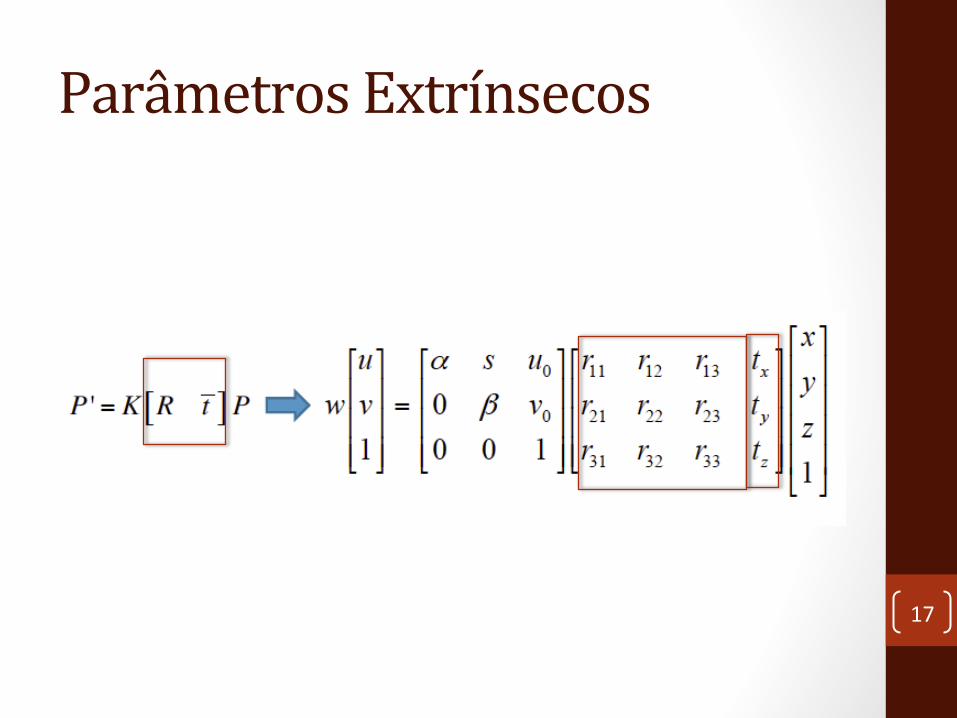
Parâmetros Extrínsecos
17
Como estimar?
• São ao todo 5+9+3 variáveis • Simplificações aplicáveis?
18
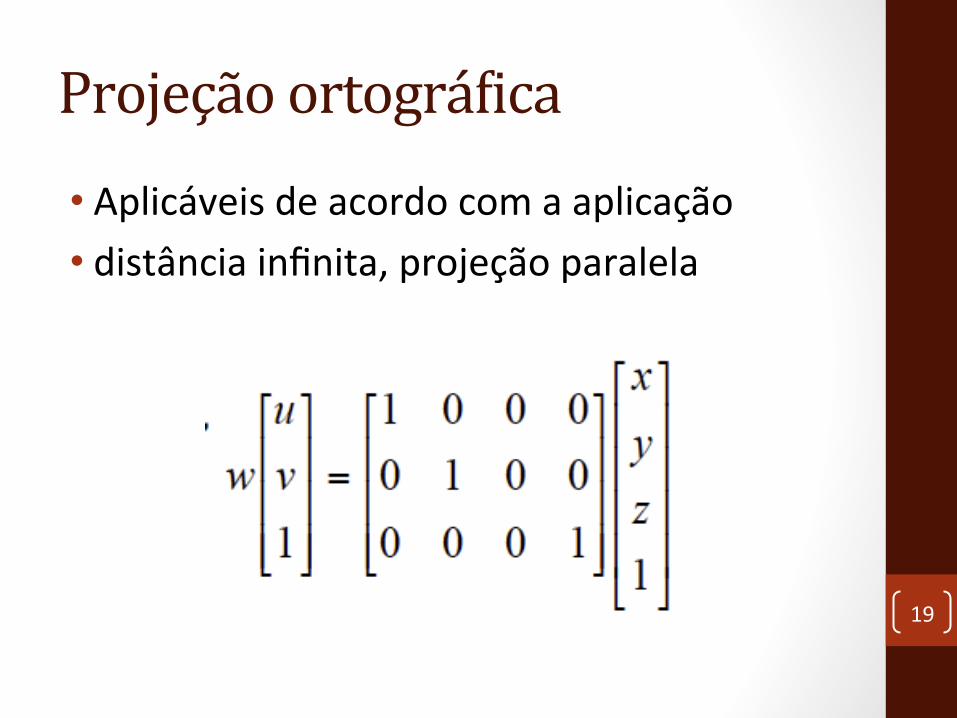
Projeção ortográ8ica • Aplicáveis de acordo com a aplicação • distância infinita, projeção paralela
19

Projeção Ortográ8ica Escalada • Dimensões dos objetos são pequenas se comparadas com a distância • paralela
20
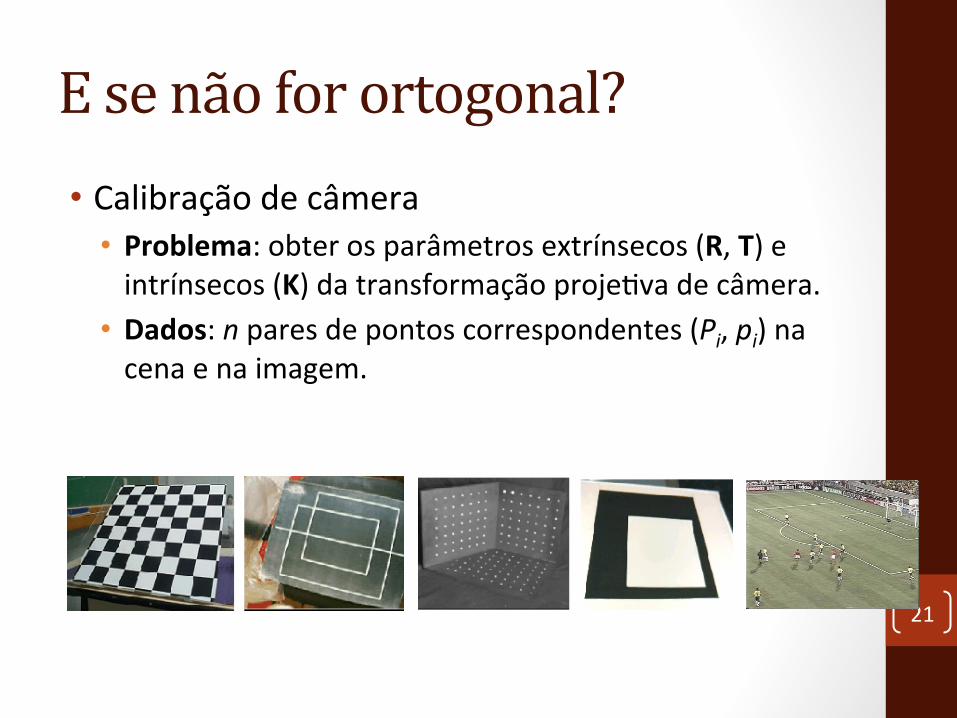
E se não for ortogonal? • Calibração de câmera • Problema: obter os parâmetros extrínsecos (R, T) e intrínsecos (K) da transformação projeIva de câmera. • Dados: n pares de pontos correspondentes (Pi, pi) na cena e na imagem.
21

Calibração de câmeras • Calibração ↔ esImação de parâmetros → oImização • Alguns métodos: Tsai, Zhang
22
2,,
,,|)(|min iTRKi
TRKPfp −∑
pontos da cena
pontos da imagem
projeção (função não linear)

Calibração com Opecv • Usa uma função básica com o padrão de um tabuleiro de xadrez (marcador) • Necessita de várias projeções (Zhang)
23
Detectando o tabuleiro vector<cv::Point2f> imageCorners; Size boardSize(6,4);
bool found = findChessboardCorners(image, boardSize, imageCorners); -‐> imagem com o tabuleiro num ponto de vista -‐> boardSize: quantos cantos deseja detectar
24

Detectando o tabuleiro • drawChessboardCorners (image, boardSize, imageCorners, found)
25
Para calibrar • Deve inserir um conjunto de imagens como esta
• Duas listas 1. pontos num modelo ideal em 3D 2. pontos localizados na imagem
• As duas configuram a correspondência do modelo para a imagem
26
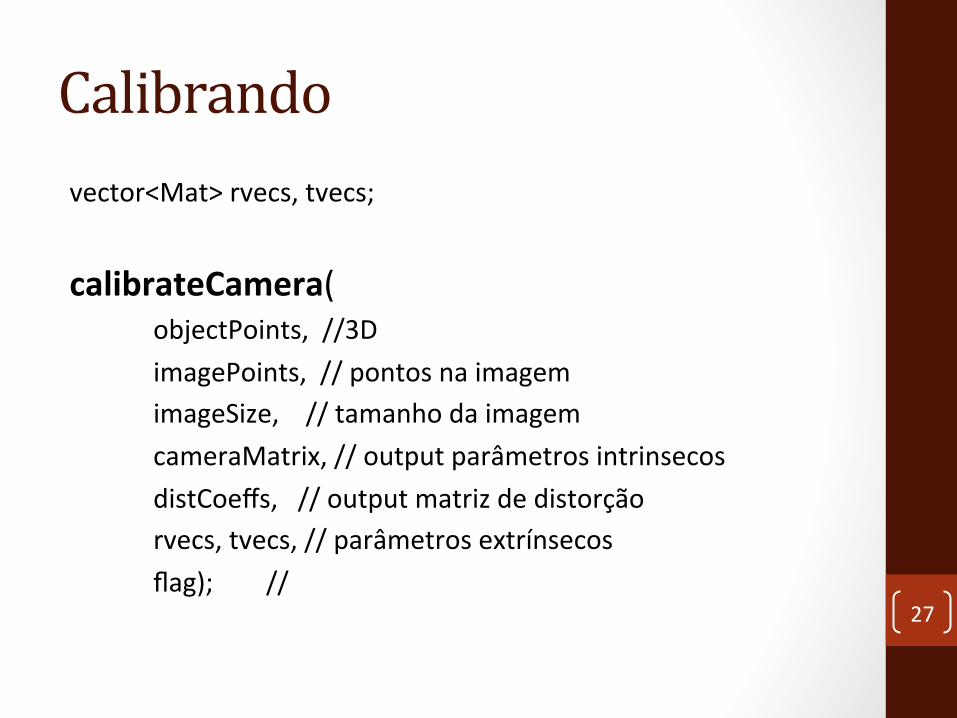
Calibrando vector<Mat> rvecs, tvecs;
calibrateCamera( objectPoints, //3D imagePoints, // pontos na imagem imageSize, // tamanho da imagem cameraMatrix, // output parâmetros intrinsecos distCoeffs, // output matriz de distorção rvecs, tvecs, // parâmetros extrínsecos flag); //
27
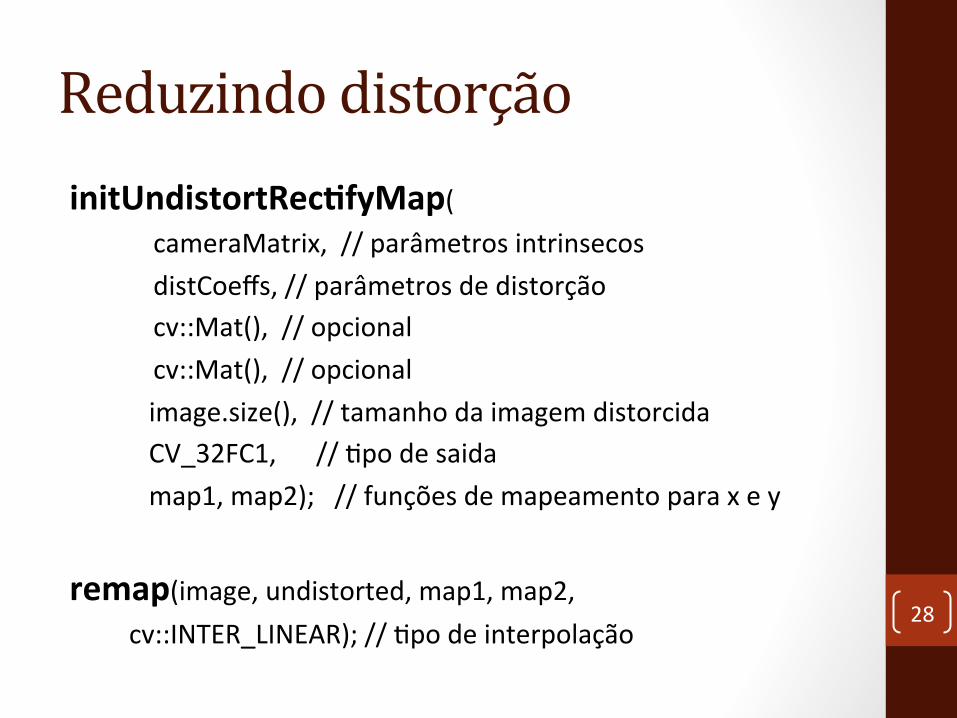
Reduzindo distorção initUndistortRec9fyMap(
cameraMatrix, // parâmetros intrinsecos distCoeffs, // parâmetros de distorção cv::Mat(), // opcional cv::Mat(), // opcional
image.size(), // tamanho da imagem distorcida CV_32FC1, // Ipo de saida map1, map2); // funções de mapeamento para x e y
remap(image, undistorted, map1, map2, cv::INTER_LINEAR); // Ipo de interpolação
28

29
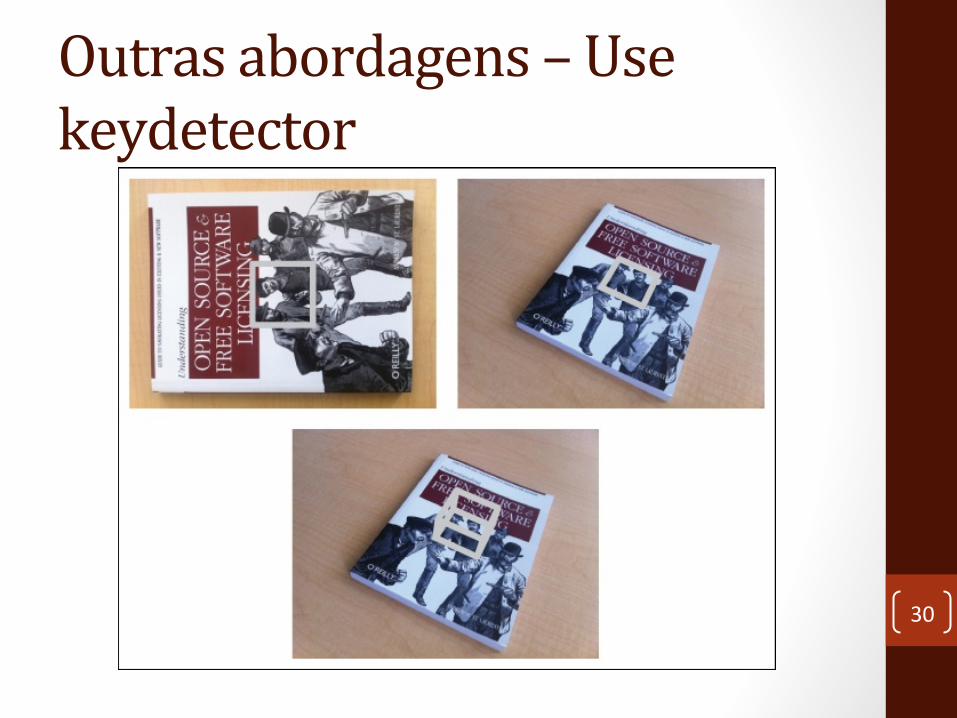
Outras abordagens – Use keydetector
30

Some o Opengl
31
Top Related