






Línguas
Páginas
Legal


UNIVERSIDADE FEDERAL DO PARANAacute
ANDREY AUGUSTO ALVES DE OLIVEIRA
MODELAGEM TRIDIMENSIONAL DE SUPERFIacuteCIES UTILIZANDO
IMAGEM TOF - ESTUDO COM A CAcircMARA PMD CAMCUBE 20
CURITIBA
2011
ANDREY AUGUSTO ALVES DE OLIVEIRA
MODELAGEM TRIDIMENSIONAL DE SUPERFIacuteCIES UTILIZANDO
IMAGEM TOF - ESTUDO COM A CAcircMARA PMD CAMCUBE 20
Dissertaccedilatildeo apresentada ao Curso de Poacutes-Graduaccedilatildeo em Ciecircncias Geodeacutesicas Departamento de Geomaacutetica Setor de Ciecircncias da Terra Universidade Federal do Paranaacute como requisito final para obtenccedilatildeo do grau de Mestre em Ciecircncias Geodeacutesicas
Orientador Prof Dr Jorge Antonio Silva Centeno
CURITIBA
2011
O48 Oliveira Andrey Augusto Alves de Modelagem tridimensional de superfiacutecies utilizando imagem TOF
estudo com a cacircmara PMD CamCube 20 Andrey Augusto Alves de Oliveira ndash Curitiba 2011
127f il tabs Impresso Dissertaccedilatildeo (Mestrado) ndash Universidade Federal do Paranaacute Setor de Ciecircncias da Terra Programa de Poacutes-Graduaccedilatildeo em Ciecircncias
Geodeacutesicas Orientador Jorge Antonio Silva Centeno
1 Imagem tridimensional 2 Fotogrametria 3 Projeccedilatildeo ortogonal I
Centeno Jorge Antonio Silva II Tiacutetulo
CDD 526982
iv
Agrave minha famiacutelia em especial meus pais
Dedico este trabalho
v
AGRADECIMENTOS
Aos meus pais familiares namorada e amigos pelo apoio incentivo e
companheirismo
Ao Prof Dr Jorge Antonio Silva Centeno pela orientaccedilatildeo e confianccedila
Aos Professores amigos e colegas do Curso de Poacutes-Graduaccedilatildeo em
Ciecircncias Geodeacutesicas e do Curso de Engenharia Cartograacutefica da Universidade
Federal do Paranaacute pelos momentos compartilhados
Aos colaboradores da UFPR que com seu trabalho e dedicaccedilatildeo fazem a
Universidade funcionar
Ao Conselho Nacional de Desenvolvimento Cientiacutefico e Tecnoloacutegico (CNPq)
pelo fomento
Ao instituto de Fotogrametria e Sensoriamento Remoto da Universidade de
Karlsruhe (KIT ndash Karlsruhe Institute of Tecnology) pela cooperaccedilatildeo e empreacutestimo da
cacircmara PMD CamCube 20 utilizada para obter as imagens TOF analisadas neste
trabalho Ao Prof Dr Jorge A S Centeno pela captaccedilatildeo das imagens na Alemanha
no iniacutecio do ano 2010 e a Fabiana Castro pela aquisiccedilatildeo de novas imagens TOF
Aos componentes da banca avaliadora Prof Dr Antonio Maria Garcia
Tommaselli e Prof Dr Hideo Araki que contribuiacuteram com importantes observaccedilotildees
para a melhora deste trabalho de pesquisa
Muito Obrigado
vi
RESUMO
Neste trabalho estudou-se a modelagem tridimensional de superfiacutecies
utilizando imagens TOF (Time-Of-Flight) para isto avaliou-se a qualidade dos dados
obtidos com a cacircmara PMD[vision]regCamCube 20 Este equipamento calcula a
distacircncia de objetos em relaccedilatildeo ao seu sensor utilizando o princiacutepio TOF Com o
objetivo de corrigir a geometria dos dados contidos na imagem foram calculados
Paracircmetros de Orientaccedilatildeo Interior (POI) atraveacutes do processo de calibraccedilatildeo da
cacircmara Estes paracircmetros definem a geometria interior do sistema de lentes e
permitem fazer as correccedilotildees geomeacutetricas necessaacuterias Outro fator que influenciou na
qualidade dos dados foi agrave presenccedila de ruiacutedo em funccedilatildeo da iluminaccedilatildeo que pode ser
controlada variando o tempo de integraccedilatildeo na aquisiccedilatildeo das imagens Duas opccedilotildees
para a reduccedilatildeo do ruiacutedo foram analisadas filtragem no domiacutenio espacial e no tempo
de integraccedilatildeo Experimentos com os filtros passa-baixas pela meacutedia e mediana
foram realizados a fim de reduzir o ruiacutedo no domiacutenio espacial Com a mesma
finalidade a meacutedia para cada tempo de integraccedilatildeo foi calculada a partir de uma
seacuterie de cinco imagens tomadas com o mesmo ponto de vista A partir destes
experimentos foi determinado o melhor tempo de integraccedilatildeo para a aquisiccedilatildeo da
imagem A etapa seguinte consistiu na segmentaccedilatildeo da imagem para identificar
superfiacutecies do objeto de estudo Em uma primeira abordagem aplicou-se o meacutetodo
de crescimento de regiotildees utilizando a distacircncia do ponto ao plano como criteacuterio de
similaridade A segunda abordagem utilizou o caacutelculo de autovalores locais para
gerar uma nova imagem onde as bordas dos objetos foram evidenciadas Esta nova
imagem foi segmentada para obter superfiacutecies de interesse do objeto atraveacutes do
algoritmo de deslocamento pela meacutedia A partir do arquivo com as distacircncias da
imagem TOF e dos POI piacutexeis da imagem segmentada foram projetados
ortogonalmente gerando uma nuvem de pontos com coordenadas 3D Com isto as
dimensotildees de arestas do objeto foram comparadas com medidas de referecircncia
encontrando-se diferenccedilas na ordem de 2 centiacutemetros Finalizando o estudo as
superfiacutecies do objeto foram modeladas tridimensionalmente
Palavras-chave Imagem TOF Modelagem tridimensional de superfiacutecies
Calibraccedilatildeo de cacircmaras Anaacutelise de ruiacutedo Autovalores Autovetores Projeccedilatildeo
Ortogonal Segmentaccedilatildeo Crescimento de regiotildees em nuvem de pontos 3D
Algoritmo de deslocamento pela meacutedia
vii
ABSTRACT
This work aims at studying the quality of 3D data obtained with a range
camera the PMD[vision]regCamCube 20 and assessing its potential to model object
surfaces The equipment computes the distance to the objects using the Time-Of-
Flight (TOF) principle Initially the equipment was calibrated using camera calibration
methods The Interior Orientation Parameters (IOP) allow reducing geometric
distortion in the images Another factor that influences the quality of data is the
presence of noise caused by illumination conditions which can be controlled by
varying the integration time of the light source Two options to reduce noise were
analyzed spatial filtering with low-pass and median filter and computing the
average of a series of images taken from the same point of view After determining
the best integration time and Interior Orientation Parameters the 3D coordinates of a
point cloud was computes The next step consists in image segmentation to identify
the surfaces of an object In a first approach it is applied a region growing method
using the point-plane distance as similarity parameter The second approach is
based on the calculation of local eigenvalues using small moving windows to
generate a new image where borders are highlighted This new image is segmented
using the mean-shift approach to delineate the surfaces of interest Each interest
pixel of the segmented image was projected for the 3D points cloud The dimensions
of the object are compared with real values The comparison showed differences
around 2cm within the expected range Finally the object surfaces can then be
modeled with the 3D points cloud
Keywords TOF image Range image Three-dimensional modeling surfaces
Camera calibration Noise analysis Eigenvalues Eigenvectors Orthogonal
projection Segmentation Region growing in 3D point clouds Mean Shift Algorithm
viii
LISTA DE FIGURAS
FIGURA 21 ndash Princiacutepio TOF 19
FIGURA 22 ndash Meacutetodo da diferenccedila de fase 20
FIGURA 23 ndash FC utilizada no meacutetodo da diferenccedila de fase 23
FIGURA 24 ndash Informaccedilatildeo das imagens TOF 25
FIGURA 25 ndash Imagem TOF obtida com cacircmara PMD 26
FIGURA 26 ndash Ruiacutedo na nuvem de pontos 3D proveniente de imagem TOF 27
FIGURA 27 ndash Princiacutepio de funcionamento do sistema PMD 28
FIGURA 28 ndash Captaccedilatildeo da carga do sinal em sensores CCD e CMOS 29
FIGURA 29 ndash Representaccedilatildeo de campos de franja 30
FIGURA 210 ndash Princiacutepio de armazenamento de cargas em sensores TOF 31
FIGURA 211 ndash Princiacutepio de captaccedilatildeo de cargas pelo sensor PMD 32
FIGURA 212 ndash Medida da diferenccedila de fase do sinal recebido 33
FIGURA 213 ndash Medida de distacircncia com a cacircmara PMD 35
FIGURA 214 ndash Cacircmara PMD CamCube 20 36
FIGURA 215 ndash Imagem captada com a cacircmara PMD CamCube 20 37
FIGURA 216 ndash Princiacutepio de funcionamento do SBI 39
FIGURA 217 ndash Modelos de cacircmaras TOF 39
FIGURA 218 ndash Nuvem de pontos 3D gerada a partir de imagem TOF 44
FIGURA 219 ndash Colinearidade entre os pontos no espaccedilo imagem e objeto 45
FIGURA 220 ndash Sistemas de coordenadas utilizados em imagens 47
FIGURA 221 ndash Filtro para a definiccedilatildeo de bordas do objeto 51
FIGURA 222 ndash Geometria do filtro para a definiccedilatildeo de bordas 52
FIGURA 223 ndash Autovetores em nuvem de pontos 3D de uma superfiacutecie plana 55
FIGURA 224 ndash Inclinaccedilotildees de superfiacutecies determinadas por autovalores 59
FIGURA 225 ndash Imagem segmentada 66
FIGURA 41 ndash Processamento da imagem TOF 69
FIGURA 42 ndash Filtragem passa-baixas pela meacutedia 80
FIGURA 43 ndash Filtragem pela mediana 80
FIGURA 44 ndash Filtragem utilizando a meacutedia temporal 81
FIGURA 45 ndash Intensificaccedilatildeo de bordas com autovalores 85
FIGURA 46 ndash Imagem com bordas intensificadas 85
FIGURA 51 ndash Imagens do gabarito utilizadas na calibraccedilatildeo da cacircmara 87
FIGURA 52 ndash Orientaccedilatildeo Exterior das fotografias para a calibraccedilatildeo da cacircmara 88
FIGURA 53 ndash Direccedilatildeo das distorccedilotildees nos pontos da imagem TOF 88
ix
FIGURA 54 ndash Correccedilatildeo geomeacutetrica da imagem TOF 90
FIGURA 55 ndash Desvio padratildeo x TI janelas 10x10 93
FIGURA 56 ndash Imagens para TI=500μs e d=130m 93
FIGURA 57 ndash Imagens para TI=2000μs e d=130m 94
FIGURA 58 ndash Imagens para TI=2500μs e d=130m 95
FIGURA 59 ndash Desvios padratildeo para distacircncia x TI 96
FIGURA 510 ndash Desvios padratildeo para janelas com TI=2000μs d=130m 97
FIGURA 511 ndash Janelas de 40x40 piacutexeis TI=2000μs d=130m 97
FIGURA 512 ndash Desvios padratildeo para janelas com TI=5000μs d=130m 98
FIGURA 513 ndash Janelas de 40x40 piacutexeis TI=5000μs d=130m 98
FIGURA 514 ndash Desvios padratildeo para janelas com TI=2000μs d=210m 99
FIGURA 515 ndash Janelas de 40x40 piacutexeis TI=2000μs d=210m 99
FIGURA 516 ndash Desvios padratildeo para janelas com TI=5000μs d=210m 100
FIGURA 517 ndash Janelas de 40x40 piacutexeis TI=5000μs d=210m 100
FIGURA 518 ndash Desvios padratildeo para janelas com TI=7000μs d=210m 101
FIGURA 519 ndash Janelas de 40x40 piacutexeis TI=7000μs d=210m 101
FIGURA 520 ndash Arquivo de intensidades da imagem TOF obtida do objeto 103
FIGURA 521 ndash Arquivo de distacircncias da imagem TOF com geometria corrigida 104
FIGURA 522 ndash Nuvem de pontos vista frontal 104
FIGURA 523 ndash Nuvem de pontos vista perspectiva 3D 105
FIGURA 524 ndash Pontos semente no arquivo de intensidades da imagem TOF 106
FIGURA 525 ndash Crescimento de regiotildees vista frontal 107
FIGURA 526 ndash Crescimento de regiotildees vista perspectiva 3D 107
FIGURA 527 ndash Imagem com bordas intensificadas gerada com 1205821 109
FIGURA 528 ndash Imagem com bordas intensificadas gerada com 1205822 109
FIGURA 529 ndash Imagem com bordas intensificadas gerada com 1205823 109
FIGURA 530 ndash Imagens de intensidade com as bordas do objeto intensificadas 110
FIGURA 531 ndash Imagem com bordas intensificadas segmentada 111
FIGURA 532 ndash Nuvem de pontos da imagem segmentada vista frontal 112
FIGURA 533 ndash Nuvem de pontos da imagem segmentada vista 3D 113
FIGURA 534 ndash Nuvem de pontos 3D segmentada 114
FIGURA 535 ndash Pontos 3D selecionados na nuvem 114
FIGURA 536 ndash Dimensotildees de referecircncia do objeto de estudo 115
FIGURA 537 ndash Nuvem de pontos 3D das superfiacutecies frontal e superior 117
FIGURA 538 ndash Modelagem tridimensional das superfiacutecies frontal e superior 118
x
LISTA DE QUADROS E TABELAS
QUADRO 21 ndash Especificaccedilotildees teacutecnicas da cacircmara PMD CamCube 20 37
QUADRO 22 ndash Especificaccedilotildees teacutecnicas de cacircmaras TOF 40
QUADRO 23 ndash Propriedades de superfiacutecies normais obtidas com autovalores 57
TABELA 51 ndash Paracircmetros de Orientaccedilatildeo Interior calculados 89
TABELA 52 ndash Coordenadas 3D dos pontos e medidas realizadas 116
xi
LISTA DE SIGLAS
Sigla Significado
AMISE Asymptotic Mean Integrated Square Error
CCD Charge Coupled Device
CMOS Complementary Metal Oxide Semiconductor
CP Centro Perspectivo
EDISON Edge Detection and Image SegmentatiON System
FC Funccedilatildeo de Correlaccedilatildeo
FPN Fixed Pattern Noise
FPS Frames Per Second
LASER Light Amplification by Stimulated Emission of Radiation
LED Light Emitting Diode
MDE Modelo Digital de Elevaccedilatildeo
MVC Matriz de Variacircncias e Covariacircncias
PMD Photonic Mixer Device
POE Paracircmetros de Orientaccedilatildeo Exterior
POI Paracircmetros de Orientaccedilatildeo Interior
PP Ponto Principal
SBI Supression of Background Ilumination
TI Tempo de Integraccedilatildeo
TOF Time-Of-Flight
xii
SUMAacuteRIO
1 INTRODUCcedilAtildeO 14
11 OBJETIVO GERAL 16
12 OBJETIVOS ESPECIacuteFICOS 16
13 JUSTIFICATIVA 17
14 ESTRUTURA DA DISSERTACcedilAtildeO 18
2 REVISAtildeO BIBLIOGRAacuteFICA 19
21 MEDIDA DE DISTAcircNCIA COM O PRINCIacutePIO TOF 19
22 IMAGEM TOF 25
23 TEMPO DE INTEGRACcedilAtildeO 26
24 PRINCIacutePIO DE FUNCIONAMENTO DO SENSOR PMD 28
25 CAcircMARAS PMD 34
251 Cacircmara PMD CamCube 20 36
252 Dispositivo SBI 38
253 Modelos de cacircmaras TOF 39
26 ERROS DE MEDIDA 40
261 Erros natildeo-sistemaacuteticos em cacircmaras TOF 41
262 Erros sistemaacuteticos em cacircmaras TOF 41
27 PROJECcedilAtildeO ORTOGONAL DOS PONTOS 45
28 REFINAMENTO DA NUVEM DE PONTOS 3D 50
29 ANAacuteLISE DE SUPERFIacuteCIES POR AUTOVALORES E AUTOVETORES 53
210 ANAacuteLISE DE SUPERFIacuteCIES POR MOMENTOS INVARIANTES 56
211 ALGORITMO DE DESLOCAMENTO PELA MEacuteDIA 60
3 MATERIAIS 67
4 MEacuteTODOS 68
41 CALIBRACcedilAtildeO DA CAcircMARA 69
42 ANAacuteLISE DA PRESENCcedilA DE RUIacuteDO 78
421 Filtragem passa-baixas pela meacutedia 79
422 Filtragem pela mediana 80
423 Filtragem com a meacutedia temporal 81
43 SEGMENTACcedilAtildeO 82
431 Crescimento de regiotildees a partir de superfiacutecies planas e ponto semente 82
xiii
432 Segmentaccedilatildeo por anaacutelise da variaccedilatildeo local de autovalores 84
433 Segmentaccedilatildeo com o algoritmo de deslocamento pela meacutedia 86
5 RESULTADOS E DISCUSSOtildeES 87
51 CALIBRACcedilAtildeO DA CAcircMARA 87
52 EXPERIMENTO 1 ndash ANAacuteLISE DE RUIacuteDO 1 IMAGEM TOF INTEIRA 92
53 EXPERIMENTO 2 ndash ANAacuteLISE DE RUIacuteDO 2 JANELAS DE 40X40 PIacuteXEIS 96
54 EXPERIMENTO 3 ndash PROJECcedilAtildeO ORTOGONAL DOS PONTOS 102
55 EXPERIMENTO 4 ndash SEGMENTACcedilAtildeO 1 CRESCIMENTO DE REGIOtildeES 106
56 EXPERIMENTO 5 ndash SEGMENTACcedilAtildeO 2 ANAacuteLISE COM AUTOVALORES 108
57 EXPERIMENTO 6 ndash ANAacuteLISE DAS MEDIDAS OBTIDAS 113
58 MODELAGEM DAS SUPERFIacuteCIES 3D 117
6 CONCLUSOtildeES RECOMENDACcedilOtildeES E CONSIDERACcedilOtildeES FINAIS 119
61 CONCLUSOtildeES 119
62 RECOMENDACcedilOtildeES 122
63 CONSIDERACcedilOtildeES FINAIS 122
REFEREcircNCIAS BIBLIOGRAacuteFICAS 123
14
1 INTRODUCcedilAtildeO
A informaccedilatildeo meacutetrica para a representaccedilatildeo espacial de objetos eacute uma
necessidade para diferentes aacutereas de estudo Algumas aplicaccedilotildees exigem que o
processo de aquisiccedilatildeo e representaccedilatildeo graacutefica desta informaccedilatildeo seja realizado com
rapidez e qualidade Em Ciecircncias Geodeacutesicas a obtenccedilatildeo desta informaccedilatildeo pode
ser feita atraveacutes de diversas maneiras dentre elas citam-se os levantamentos de
campo e as imagens obtidas por sensores remotos exemplos satildeo teacutecnicas
aplicadas em Topografia e Fotogrametria
Com a Topografia o trabalho pode alcanccedilar alto grau de exatidatildeo
dependendo da teacutecnica e precisatildeo do equipamento utilizado No entanto se gasta
bastante tempo para realizar o levantamento das informaccedilotildees em campo e tambeacutem
para o processamento e organizaccedilatildeo dos dados em escritoacuterio Algumas aplicaccedilotildees
da Topografia estatildeo na locaccedilatildeo de obras como rodovias geraccedilatildeo de perfis de
terrenos e rios monitoramento de deformaccedilotildees na estrutura de barragens pontes e
tambeacutem no levantamento de pontos 3D para representar fachadas de edifiacutecios
Com a Fotogrametria o levantamento das informaccedilotildees tridimensionais de um
objeto pode ser feito em tempo relativamente curto As fotografias satildeo obtidas de
forma instantacircnea No entanto quando se utilizam teacutecnicas convencionais de
Fotogrametria necessita-se de pelo menos duas fotografias com sobreposiccedilatildeo das
aacutereas imageadas para a geraccedilatildeo do modelo fotogrameacutetrico Outra forma eacute a teacutecnica
conhecida por Monorestituiccedilatildeo Digital onde se utiliza uma fotografia digital em
conjunto com um Modelo Digital de Elevaccedilatildeo (MDE) normalmente gerado por uma
nuvem de pontos proveniente de outro equipamento ou sensor (MITISHITA 1997)
Na modalidade terrestre da Fotogrametria eacute possiacutevel determinar pontos 3D
para representar fachadas de preacutedios obras de arte mapeamentos de ruas e
imoacuteveis com a plataforma em movimento dentre outras aplicaccedilotildees
Aleacutem das teacutecnicas convencionais de levantamentos utilizadas em Topografia
e Fotogrametria e com o objetivo de viabilizar a aquisiccedilatildeo da informaccedilatildeo espacial
equipamentos e teacutecnicas tecircm sido constantemente desenvolvidos e aperfeiccediloados
Avanccedilos tecnoloacutegicos tecircm possibilitado a obtenccedilatildeo da informaccedilatildeo tridimensional
para a representaccedilatildeo dos objetos de forma raacutepida e precisa Exemplos satildeo os
sistemas de varredura laser scanner e as cacircmaras TOF (Time-Of-Fligth) tambeacutem
15
conhecidas na literatura por Range Cameras Estas cacircmaras geram imagens com
informaccedilotildees de distacircncia para cada pixel do objeto imageado denominadas
imagens de profundidade distacircncia ou Range Image Neste trabalho seraacute utilizada
preferencialmente a denominaccedilatildeo ldquoimagem TOFrdquo
Nas uacuteltimas deacutecadas os sistemas de varredura laser scanner tecircm sido muito
utilizados para mapeamento Equipamentos com esta tecnologia possibilitam a
obtenccedilatildeo de milhares de pontos por segundo e podem ser instalados em
plataformas aeacutereas ou terrestres No entanto devido a este ser um equipamento
oacuteptico e mecacircnico o alto custo na sua aquisiccedilatildeo torna-o inviaacutevel para algumas
aplicaccedilotildees
Cacircmaras TOF atraem a atenccedilatildeo de diferentes aacutereas que necessitam de
pontos com coordenadas 3D de seus objetos de estudo tais como a Visatildeo
Computacional e a Engenharia de Automaccedilatildeo Um modelo de cacircmara TOF eacute a PMD
CamCube 20 que capta 25 imagens por segundo (Frames Per Secunde - FPS)
Com esta frequecircncia de aquisiccedilatildeo pode obter o movimento dos objetos na cena e de
grande quantidade de informaccedilatildeo tridimensional sobre os mesmos
No entanto a grande quantidade de dados captada deve ter sua qualidade
avaliada A iluminaccedilatildeo exterior ao sistema interfere negativamente Outro fator a ser
observado eacute a configuraccedilatildeo da cena pois interferecircncias satildeo causadas pelas
distacircncias orientaccedilotildees e refletividade das superfiacutecies dos objetos em relaccedilatildeo ao
sensor da cacircmara Em uma mesma cena podem-se apresentar medidas ambiacuteguas
de distacircncia para os pontos devido a erros causados pela iluminaccedilatildeo utilizada no
sistema As influencias causadas por erros sistemaacuteticos assim como ruiacutedos devem
ser observadas para cada tipo de aplicaccedilatildeo (MAY et al 2008)
A cacircmara TOF utilizada para a aquisiccedilatildeo das imagens nesta pesquisa foi a
PMD[vision]regCamCube 20 Esta utiliza um sensor de imageamento PMD (Photonic
Mixer Device) que possibilita armazenar informaccedilatildeo de distacircncia para os piacutexeis de
uma imagem de intensidade O equipamento fornece a imagem TOF que eacute
composta por um arquivo com as intensidades que o sinal retornou para o sensor e
um arquivo com as informaccedilotildees de distacircncia para cada pixel o que possibilita a
percepccedilatildeo da profundidade dos objetos na cena
16
11 OBJETIVO GERAL
O objetivo geral deste trabalho de pesquisa eacute desenvolver uma metodologia
para a modelagem tridimensional das superfiacutecies de objetos a partir da nuvem de
pontos 3D proveniente da imagem TOF
12 OBJETIVOS ESPECIacuteFICOS
Realizar a correccedilatildeo geomeacutetrica dos dados da imagem TOF atraveacutes de
Paracircmetros de Orientaccedilatildeo Interior obtidos com o processo de
calibraccedilatildeo da cacircmara
Testar meacutetodos de filtragem para a reduccedilatildeo de ruiacutedo presente nas
imagens TOF e analisar formas para a aquisiccedilatildeo da imagem TOF
com menor presenccedila de ruiacutedo
Analisar o tempo de integraccedilatildeo para diferentes situaccedilotildees de aquisiccedilatildeo
da imagem TOF
Avaliar meacutetodos para a segmentaccedilatildeo das superfiacutecies de objetos a
partir da imagem TOF
Gerar nuvem de pontos com coordenadas tridimensionais das
superfiacutecies segmentadas e modelar estas superfiacutecies
tridimensionalmente
Avaliar a qualidade das medidas obtidas com a modelagem
tridimensional das superfiacutecies do objeto de estudo
17
13 JUSTIFICATIVA
Com o desenvolvimento e aperfeiccediloamento das cacircmaras TOF acredita-se
na viabilizaccedilatildeo deste equipamento para a medida de distacircncia e modelagem
tridimensional das superfiacutecies de objetos para diferentes finalidades Apresenta as
seguintes vantagens
Recobrimento da aacuterea de forma instantacircnea
Possibilidade de filmar a cena registrando o movimento dos objetos
com frequecircncia de aquisiccedilatildeo de 25 imagens por segundo
Fornece grande quantidade de pontos com coordenadas 3D dos
objetos imageados
Uma imagem eacute suficiente para estimar a distacircncia dos objetos
Informaccedilatildeo na banda espectral do infravermelho
Uma imagem TOF captada instantaneamente disponibiliza informaccedilatildeo sobre
a distacircncia de objetos contidos na cena sendo possiacutevel a geraccedilatildeo de nuvens de
pontos para a representaccedilatildeo tridimensional de objetos sem necessitar de
informaccedilatildeo proveniente de outro sensor Outra vantagem eacute o sistema natildeo precisar
de iluminaccedilatildeo exterior
Algumas aplicaccedilotildees para as imagens TOF foram realizadas nas aacutereas de
prevenccedilatildeo de acidentes automobiliacutesticos e seguranccedila de pedestres (RINGBECK
2007) Visatildeo Computacional (WIEDEMANN et al 2008) mapeamentos
tridimensionais de objetos em ambientes fechados para a movimentaccedilatildeo roboacutetica
(MAY et al 2008) Computaccedilatildeo Graacutefica (KOLB 2009 et al KOCH et al 2009)
realizaccedilatildeo de medidas do corpo humano para a induacutestria de roupas (APUZZO
2009) e anaacutelise de deformaccedilotildees (JAMTSHO 2010)
18
14 ESTRUTURA DA DISSERTACcedilAtildeO
A presente dissertaccedilatildeo foi estruturada em seis capiacutetulos No primeiro
capitulo realiza-se a introduccedilatildeo ao tema descreve-se o objetivo geral e os objetivos
especiacuteficos aleacutem da justificativa para a pesquisa
O segundo capiacutetulo apresenta uma revisatildeo de conceitos sobre medida de
distacircncia utilizando o princiacutepio TOF descriccedilatildeo da imagem TOF e seus arquivos de
intensidades e distacircncias influencia do tempo de integraccedilatildeo (TI) na aquisiccedilatildeo da
imagem TOF princiacutepio de funcionamento do sensor PMD modelos de cacircmaras
TOF erros de medida que podem ocorrer utilizando estas cacircmaras projeccedilatildeo
ortogonal das distacircncias obtidas com a imagem TOF para a geraccedilatildeo da nuvem de
pontos 3D meacutetodo para o refinamento da nuvem de pontos 3D detecccedilatildeo de
superfiacutecies por autovetores e autovalores anaacutelise de superfiacutecies por momentos
invariantes e algoritmo de deslocamento pela meacutedia para a segmentaccedilatildeo de
imagens
No terceiro capitulo descrevem-se os materiais equipamentos e espaccedilo
fiacutesico utilizado para a realizaccedilatildeo do trabalho de pesquisa
Com o quarto capitulo satildeo descritos os meacutetodos utilizados para o
desenvolvimento da pesquisa calibraccedilatildeo da cacircmara filtragens para anaacutelise e
tratamento de ruiacutedo presente nas imagens meacutetodos de segmentaccedilatildeo por
crescimento de regiotildees na nuvem de pontos segmentaccedilatildeo por anaacutelise da variaccedilatildeo
local de autovalores no arquivo de distacircncias da imagem TOF e geraccedilatildeo de imagem
de intensidade com as bordas do objeto intensificadas segmentaccedilatildeo da imagem
com bordas intensificadas utilizando o algoritmo de deslocamento pela meacutedia
Com o quinto capitulo descrevem-se os resultados obtidos tais como
valores dos paracircmetros calculados no processo de calibraccedilatildeo da cacircmara
experimentos realizados para a anaacutelise da presenccedila de ruiacutedo nas imagens TOF
projeccedilatildeo ortogonal dos pontos para a geraccedilatildeo da nuvem de pontos 3D
segmentaccedilatildeo por crescimento de regiotildees segmentaccedilatildeo por anaacutelise da variaccedilatildeo
local de autovalores anaacutelise das medidas obtidas com a nuvem de pontos 3D
segmentada e tambeacutem se realiza a modelagem tridimensional de duas superfiacutecies
do objeto estudado
Finalmente com o sexto capitulo satildeo apresentadas conclusotildees
consideraccedilotildees finais e recomendaccedilotildees para trabalhos futuros de acordo com os
experimentos realizados
19
2 REVISAtildeO BIBLIOGRAacuteFICA
21 MEDIDA DE DISTAcircNCIA COM O PRINCIacutePIO TOF
O princiacutepio TOF (Time-Of-Flight) permite calcular a distacircncia de objetos a
partir da emissatildeo e recepccedilatildeo de um sinal luminoso Com este objetivo utiliza-se um
conjunto de emissor e receptor oacutepticos que mede o tempo necessaacuterio para o sinal
retornar para o sensor apoacutes atingir o alvo com base no conhecimento do valor da
velocidade da luz propagada no vaacutecuo De acordo com Baltsavias (1999) o caacutelculo
da distacircncia com o princiacutepio TOF pode ser realizado atraveacutes de dois meacutetodos
Tempo de percurso de pulsos curtos de energia
Mudanccedila de fase de um sinal modelado na forma de onda contiacutenua
Sistemas que utilizam o primeiro meacutetodo de medida transmitem um pulso e
medem o seu tempo de retorno Isto eacute possiacutevel devido ao retardo de tempo gasto no
percurso do sinal que eacute medido atraveacutes de um ponto no pulso de retorno com
referecircncia no pulso emitido Quanto melhor eacute a medida do tempo melhor a distacircncia
calculada sendo o reloacutegio do sensor um fator de grande importacircncia neste meacutetodo
Para obter precisatildeo meacutetrica necessita-se realizar a medida de tempo em nano
segundos (ƞs) O afastamento e duraccedilatildeo do pulso tambeacutem satildeo fatores importantes
na resoluccedilatildeo da medida de distacircncia com este meacutetodo A Figura 21 Ilustra a medida
de distacircncia com o princiacutepio TOF (LANGE 2000)
FIGURA 21 ndash Princiacutepio TOF
FONTE LANGE (2000)
20
Utilizando pulsos de uma fonte de luz pode-se calcular a distacircncia de um
alvo atraveacutes da Equaccedilatildeo (21)
119863 =119888 119905
2 (21)
onde
119863 ndash Distacircncia entre o sensor e o alvo
119888 ndash Valor constante da velocidade da luz
119905 ndash Variaccedilatildeo de tempo entre emissatildeo e recepccedilatildeo do pulso
O segundo meacutetodo trabalha com a determinaccedilatildeo da mudanccedila de fase do
sinal contido em uma onda contiacutenua modulada Pode ser utilizado para evitar o
problema na medida de tempo com alta precisatildeo O sinal luminoso pode ser emitido
utilizando fontes LED (Light Emitting Diode) ou LASER (Light Amplification by
Stimulated Emission of Radiation) Estas fontes permitem a modulaccedilatildeo direta do
sinal luminoso atraveacutes da voltagem do sistema (LANGE 2000)
Para a utilizaccedilatildeo do meacutetodo da diferenccedila de fase considera-se que o sinal
refletido pelo alvo manteacutem a forma do sinal modulado emitido mas a fase do sinal
emitido eacute diferente da fase do sinal recebido conforme ilustrado com a Figura 22
FIGURA 22 ndash Meacutetodo da diferenccedila de fase
21
Sendo assim a mudanccedila de fase entre os sinais pode ser utilizada para
calcular a distacircncia conforme Equaccedilatildeo (22)
119863 =120593∙119888
4∙120587∙120574 (22)
onde
119863 ndash Distacircncia entre o sensor e o alvo
120593 ndash Diferenccedila de fase entre o sinal emitido e o recebido
119888 ndash Valor constante da velocidade da luz
120574 ndash Frequecircncia de modulaccedilatildeo do sinal
Em cacircmaras TOF a distacircncia entre o sensor e o alvo eacute medida utilizando o
meacutetodo da diferenccedila de fase com uma Funccedilatildeo de Correlaccedilatildeo (FC) entre o sinal
emitido e o refletido As amplitudes dos sinais satildeo moduladas com a mesma
frequecircncia Com isto a iluminaccedilatildeo pode ser feita utilizando diacuteodos emissores de luz
LED tendo-se a vantagem que a FC pode ser obtida com o sensor PMD a partir da
forma senoidal do sinal recebido (RAPP 2007)
A FC eacute calculada atraveacutes do sinal emitido e recebido Estes sinais satildeo
modelados matematicamente com forma senoidal tendo em vista que sua
propagaccedilatildeo ocorre na forma de onda Dado um sinal luminoso emitido 119892 119905 e um
sinal recebido 119904 119905 em um ponto do sensor PMD as amostras 119888 120591 podem ser
calculadas atraveacutes da Equaccedilatildeo (23) Estas amostras satildeo utilizadas para modelar a
FC em um atraso de tempo 120591
119888 120591 = 119904 119905 otimes 119892 119905 = lim119879rarrinfin 119904 119905 ∙ 119892 119905 + 120591 +119879
2
minus119879
2
119889119905 (23)
onde
119904 119905 ndash Funccedilatildeo que modela a forma do sinal luminoso recebido
119892 119905 ndash Funccedilatildeo que modela a forma do sinal luminoso emitido
119905 ndash Variaccedilatildeo de tempo entre a emissatildeo e a recepccedilatildeo do sinal
120591 ndash Atraso de tempo no recebimento do sinal
22
O sinal emitido pode ser expresso com 119892 119905 = cos(120603119905) o recebido eacute
expresso atraveacutes da relaccedilatildeo 119904 119905 = 1 + 119886 ∙ cos(120603119905 minus 120593) Ambos com forma senoidal
amplitude 119886 e diferenccedila de fase 120593 Com isto a FC pode ser apresentada na forma da
Equaccedilatildeo (25)
119888 120591 = 1 + 119886 ∙ 119888119900119904 120603120591 minus 120593 otimes 119888119900119904 120603120591 (24)
119888 120591 = lim119879acuterarrinfin1
119879acute 1 + 119886 ∙ 119888119900119904 120603119905 minus 120593 ∙ 119888119900119904 120603119905 + 120603119905
+119879 acute
2
minus119879 acute
2
119889119905 (25)
119888 120591 =119886
2∙ cos 120593 + 120603119905 (26)
onde
119892 119905 ndash Funccedilatildeo senoidal que modela a forma do sinal emitido
119904 119905 ndash Funccedilatildeo que modela a forma do sinal recebido
119905 ndash Variaccedilatildeo de tempo entre a emissatildeo e recepccedilatildeo do sinal
120591 ndash Atraso no tempo de recebimento do sinal
119886 ndash Amplitude da onda portadora do sinal
120593 ndash Diferenccedila de fase
120603 ndash Referecircncia de fase para o sinal modelado na forma senoidal
Lange (2000) avaliou a FC para fases 120596 119905 preacute-definidas escolhendo quatro
fases 120596 119905 = 0deg 120596 119905 = 90deg 120596 119905 = 180deg 120596 119905 = 270deg Verificou que eacute possiacutevel calcular a
diferenccedila de fase 120593 e a amplitude 119886 do sinal recebido 119904(119905) Considerando que o sinal
recebido tem sobreposiccedilatildeo ao sinal emitido deve-se adicionar uma constante de
deslocamento 119870 conforme a Equaccedilatildeo (27)
119862 120591 = 119888 120591 + 119870 (27)
119862 1205910 = 119888 1205910 + 119870 =119886
2∙ cos 120593 + 119870 (28)
119862 1205911 = 119888 1205911 + 119870 = minus119886
2∙ 119904119890119899 120593 +119870 (29)
119862 1205912 = 119888 1205912 + 119870 = minus119886
2∙ cos 120593 + 119870 (210)
119862 1205913 = 119888 1205913 + 119870 =119886
2∙ 119904119890119899 120593 +119870 (211)
23
Analisando a FC em quatro pontos a diferenccedila de fase 120593 e a amplitude 119886 do
sinal 119904(119905) podem ser calculadas atraveacutes das Equaccedilotildees (212) e (213)
120593 = 119905119892minus1 119862 1205913 minus119862 1205911
119862 1205910 minus119862 1205912 (212)
119886 = 119862 1205913 minus119862 1205911 2+ 119862 1205910 minus119862 1205912 2
2 (213)
Pode-se fazer a simplificaccedilatildeo das Equaccedilotildees (214) agrave (217) para quatro
pontos amostrais que satildeo necessaacuterios na modelagem da FC
119862 1205911 = 1198601 (214)
119862 1205912 = 1198602 (215)
119862 1205913 = 1198603 (216)
119862 1205910 = 1198604 (217)
A anaacutelise da FC entre o sinal oacuteptico e eleacutetrico recebido no dispositivo do
sensor eacute feita utilizando a diferenccedila de fase conforme ilustrado com a Figura 23
FIGURA 23 ndash FC utilizada no meacutetodo da diferenccedila de fase
FONTE Adaptado de LANGE (2000)
A FC permite calcular a distacircncia entre o alvo e a cacircmara utilizando quatro
amostras 11986011198602 1198603 e 1198604 com defasagem de 90ordm A diferenccedila de fase 120593 entre o sinal
24
emitido e o recebido eacute proporcional agrave distacircncia entre o alvo e a cacircmara O valor para
a diferenccedila de fase pode ser calculado atraveacutes da Equaccedilatildeo (218)
120593 = 119886119903119888119905119886119899 1198601minus1198603
1198602 minus1198604 (218)
onde
120593 ndash Diferenccedila de fase entre a onda emitida e a recebida
1198601119860211986031198604 ndash Pontos amostrais utilizados na modelagem da FC
Aleacutem do valor da diferenccedila de fase entre os sinais dois outros valores
podem ser calculados a amplitude 119886 e o valor de intensidade 119887 do sinal recebido
conforme as Equaccedilotildees (219) e (220) respectivamente
119886 = 1198601minus1198603 2+ 1198602 minus1198604 2
2 (219)
119887 =1198601+1198602 +1198603+1198604
4 (220)
onde
119886 ndash Amplitude do sinal recebido
119887 ndash Intensidade do sinal recebido (offset)
A distacircncia 119889 do sensor ao alvo eacute calculada atraveacutes da Equaccedilatildeo (221)
119889 =119888∙120593
4120587∙119891119898119900119889 (221)
onde
119889 ndash Distacircncia entre o sensor e o alvo
119888 ndash Valor constante da velocidade da luz propagada no vaacutecuo
120593 ndash Diferenccedila de fase entre o sinal emitido e o recebido
119891119898119900119889 ndash Frequecircncia de modulaccedilatildeo do sinal luminoso utilizado
A frequecircncia de modulaccedilatildeo do sinal emitido estabelece a distacircncia maacutexima
que poderaacute ser medida para um determinado comprimento de onda Em um sinal
25
modulado com a frequecircncia 119891119898119900119889 = 20119872119867119911 e comprimento de onda 120582119898119900119889 = 15m
conforme a Equaccedilatildeo (222) a distacircncia maacutexima que poderaacute ser medida eacute de 75
metros (MOumlLLER et al 2005)
119889119898119886119909 =120582119898119900119889
2= 75119898 (222)
22 IMAGEM TOF
Os piacutexeis da imagem TOF contecircm informaccedilotildees de distacircncia e intensidade
das superfiacutecies dos objetos Proporcionam a anaacutelise da profundidade dos objetos na
cena aleacutem da informaccedilatildeo de intensidade do sinal captado pelo sensor A Figura 24
ilustra a informaccedilatildeo 3D contida na imagem TOF
FIGURA 24 ndash Informaccedilatildeo das imagens TOF
FONTE Adaptado de RINGBECK (2007)
Com a informaccedilatildeo de profundidade e o posicionamento bidimensional dos
objetos na imagem pode-se realizar o mapeamento destes objetos e estimar suas
dimensotildees As cacircmaras TOF podem captar imagens e viacutedeos para realizar medidas
e detectar movimentos A Figura 25 ilustra os arquivos da imagem TOF
26
FIGURA 25 ndash Imagem TOF obtida com cacircmara PMD
FONTE PMD Technologies (2009)
A Figura 25a ilustra o arquivo com informaccedilatildeo das distacircncias dos objetos
presentes na imagem TOF A Figura 25b ilustra o arquivo com as intensidades que
o sinal retornou para o sensor registrada em cada piacutexel da imagem infravermelha
captada com comprimento de onda de 870nm
23 TEMPO DE INTEGRACcedilAtildeO
O periacuteodo de tempo que o sensor da cacircmara ficou exposto para obter a
imagem eacute chamado de tempo de integraccedilatildeo (TI) A quantidade de energia
eletromagneacutetica captada pelo sensor eacute diretamente influenciada por este tempo
pelas caracteriacutesticas refletivas das superfiacutecies dos objetos e pelo meio em que a
imagem foi tomada Os elementos do sensor podem ser carregados de acordo com
seu intervalo de capacidade do insaturado ao supersaturado Estes valores causam
ruiacutedos na imagem variando de acordo com a distacircncia entre o objeto e o sensor
(CENTENO e JUTZI 2010)
Este pode ser considerado o paracircmetro interno mais criacutetico em uma cacircmara
TOF pois descreve o periacuteodo de tempo que os elementos sensores necessitam
para detectar o sinal luminoso com a finalidade de obter a diferenccedila de fase utilizada
27
para o caacutelculo da distacircncia Quando o TI eacute muito baixo alguns elementos do sensor
podem natildeo ser ativados ocasionando piacutexeis com valor zero natildeo sendo possiacutevel
calcular sua distacircncia Por outro lado se o TI eacute muito elevado o pixel pode ficar
supersaturado o que tambeacutem causa erro na medida da distacircncia Sendo assim eacute
necessaacuterio determinar um TI especiacutefico para cada situaccedilatildeo Nas cacircmaras PMD o
controle do TI eacute realizado atraveacutes de software em outros modelos de cacircmaras TOF
este controle pode ser feito atraveacutes de hardware (WIEDEMANN et al 2008)
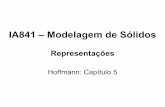
A Figura 26 ilustra a presenccedila de ruiacutedo na imagem TOF influenciada pelo
TI Nesta figura as nuvens de pontos 3D foram geradas com imagens TOF obtidas
com a cacircmara PMD CamCube 20 a partir do mesmo ponto de vista mas com
diferentes TI (140micros 1400micros e 14000micros) isto causou a presenccedila de ruiacutedo com
diferentes comportamentos
FIGURA 26 ndash Ruiacutedo na nuvem de pontos 3D proveniente de imagem TOF
FONTE PMD CamCube Tutorial (2009)
A nuvem de pontos gerada com a imagem obtida com TI de 1400micros
ilustrada com a Figura 26b foi a que melhor representou a forma das superfiacutecies do
objeto A nuvem de pontos da Figura 26a foi gerada a partir da imagem obtida com
TI igual a 140micros considerada com baixa saturaccedilatildeo pois a intensidade do sinal
captado pelo sensor foi pequena A nuvem de pontos da Figura 26c foi gerada com
imagem obtida com TI igual a 14000micros o que causou a saturaccedilatildeo do sinal recebido
pelo sensor e maior presenccedila de ruiacutedo A nuvem de pontos apresentada com a
Figura 26c apresentou-se menos consistente para representar as superfiacutecies do
objeto em questatildeo
28
24 PRINCIacutePIO DE FUNCIONAMENTO DO SENSOR PMD
O dispositivo PMD (Photonic Mixer Device) realiza medidas de distacircncia
utilizando o princiacutepio TOF Com este objetivo o dispositivo emite sinais luminosos
com frequecircncia modulada e o sensor capta a intensidade de retorno do sinal
refletido pelo alvo Informaccedilotildees sobre as fases e intensidades destes sinais satildeo
obtidas com o processamento A Figura 27 ilustra as etapas deste processo
FIGURA 27 ndash Princiacutepio de funcionamento do sistema PMD
FONTE LUAN (2001)
O sinal modulado eacute emitido com uma fase determinada pelo oscilador do
sistema Para que se possa realizar a medida da distacircncia o sinal recebido deve ter
fase diferente da que foi emitido No dispositivo PMD as cargas eleacutetricas do sinal
recebido satildeo separadas de acordo com a voltagem do diodo de leitura tambeacutem
chamado de fotodiodo O arquivo de saiacuteda deste dispositivo conteacutem informaccedilatildeo de
fase e intensidade do sinal recebido o que possibilita obter informaccedilatildeo de distacircncia
e intensidade para cada piacutexel da imagem (LUAN 2001)
O sensor utilizado no imageamento eacute um CMOS (Complementary Metal-
Oxide-Semiconductor) que tem tecnologia similar a dos sensores CCD (Charged-
Coupled Device) O CMOS apresenta a vantagem de ser um circuito integrado com
baixo consumo de energia No CMOS a conversatildeo de voltagem e a amplificaccedilatildeo do
sinal ocorrem em cada fotodiodo e os valores podem ser lidos independentemente
29
A desvantagem eacute que a amplificaccedilatildeo no fotodiodo gera imagens com maior
presenccedila de ruiacutedo (PECHT e FOSSUM 1997)
Quando os foacutetons sensibilizam o sensor CCD a carga eleacutetrica eacute transferida
sequencialmente linha por linha coluna por coluna A conversatildeo de voltagem e
amplificaccedilatildeo do sinal eacute realizada fora da aacuterea do sensor Uma vantagem do sensor
CCD eacute a geraccedilatildeo de imagens mais niacutetidas devido agrave menor complexidade no seu
sistema Por processar as cargas eleacutetricas de forma unificada menores interferecircncias
satildeo causadas diminuindo a presenccedila de ruiacutedo (KEMENY et al 1991)
A diferenccedila no princiacutepio de funcionamento dos sensores CCD e CMOS eacute
Ilustrada com a Figura 28
FIGURA 28 ndash Captaccedilatildeo da carga do sinal em sensores CCD e CMOS
FONTE LANGE (2000)
O princiacutepio de funcionamento do sensor CCD eacute ilustrado com as Figuras
28a e 28c onde a leitura da informaccedilatildeo eacute feita de forma sequencial pelos elementos
do sensor Esta varredura realizada no sensor CCD faz com que a geraccedilatildeo da
30
imagem final seja mais lenta que no sensor CMOS que realiza a conversatildeo foacuteton-
eleacutetron e eleacutetron-voltagem diretamente em cada elemento sensor conforme eacute
ilustrado com as Figuras 28b e 28d Com isto o sensor CMOS tem maior
velocidade de transferecircncia de cargas acumuladas para o conversor analoacutegico-
digital
Fotodiodos satildeo os elementos fotossensiacuteveis utilizados como portas de
entrada para o sinal luminoso em sensores CMOS ou CCD Estes captam cargas
eleacutetricas presentes no sinal e estatildeo inseridos sobre uma placa de Siliacutecio O
transporte das cargas para o interior da placa eacute explicado fisicamente atraveacutes dos
campos de franjas ilustrado com a Figura 29 Os campos de franja estatildeo
representados para diferentes voltagens os elementos do sensor apresentado tem
entradas para trecircs voltagens 10V 5V e 0V
FIGURA 29 ndash Representaccedilatildeo de campos de franja
FONTE THEUWISSEN (1995)
A seccedilatildeo A-A‟ na Figura 29 ilustra os campos de franja gerados mais
proacuteximos agrave superfiacutecie da placa A forma do sinal pode ser modelada de forma
aproximada por segmentos de linhas retas Na seccedilatildeo B-B‟ com profundidade meacutedia
na placa de Siliacutecio a influecircncia do campo eleacutetrico das entradas vizinhas a porta
central de 5V estaacute em seu niacutevel maacuteximo Quanto mais fundo encontra-se a entrada
de cargas na placa de Siliacutecio menor seraacute a interferecircncia dos campos eleacutetricos
gerados pelas portas de entrada das cargas vizinhas conforme pode ser visualizado
na seccedilatildeo C-C‟ Nesta profundidade diferentes portas de entrada estatildeo praticamente
31
agrave mesma distacircncia da superfiacutecie e o valor de dispersatildeo do campo de franja diminui
O campo de franja miacutenimo de uma entrada que tecircm profundidade maacutexima
proporciona ao sensor o maior aproveitamento aumentando assim a velocidade no
transporte de cargas (THEUWISSEN 1995)
Quanto maior a modulaccedilatildeo na voltagem da entrada das cargas maior o
potencial de armazenamento conforme ilustrado com a Figura 210
FIGURA 210 ndash Princiacutepio de armazenamento de cargas em sensores TOF
FONTE LANGE (2000)
O sinal modulado recebido 119904 119905 e a Funccedilatildeo de Correlaccedilatildeo 119891 119905 + 120591 do sinal
modulado emitido satildeo ilustrados com a Figura 210b A Figura 210a ilustra a luz
incidente no sensor com as cargas captadas e armazenadas de acordo com a
modulaccedilatildeo do fotodiodo
O dispositivo PMD utiliza a tecnologia CMOS para o imageamento com dois
elementos fotossensiacuteveis e dois diodos que captam as cargas eleacutetricas do sinal
modulado recebido As informaccedilotildees oacutepticas e eleacutetricas misturadas geram os piacutexeis
da imagem com informaccedilatildeo de distacircncia dos pontos imageados A Figura 211
ilustra este elemento sensor
32
FIGURA 211 ndash Princiacutepio de captaccedilatildeo de cargas pelo sensor PMD
FONTE LUAN (2001)
As placas claras e centrais na Figura 211a correspondem ao circuito de
leitura do sinal oacuteptico estas placas satildeo condutoras e transparentes para possibilitar
a entrada de luz Os diodos satildeo os componentes do circuito de leitura que captam e
direcionam as cargas eleacutetricas recebidas em um determinado sentido satildeo ilustrados
com as placas mais afastadas na Figura 211a As cargas que chegam satildeo
distribuiacutedas de acordo com a voltagem do diodo Uma fina camada de oacutexido isola os
circuitos de leitura do dispositivo
A voltagem da carga que entra no sistema eacute controlada de acordo com a
modulaccedilatildeo do sinal aplicada pelo dispositivo emissor Sendo assim pode ser
captada pelo diodo da direita ou esquerda que registraraacute a quantidade de carga
recebida de acordo com sua voltagem A distribuiccedilatildeo de potencial na regiatildeo
superficial do dispositivo eacute influenciada pela seleccedilatildeo de cargas que faz este sistema
dinacircmico e equilibrado Para valores natildeo nulos a luz modulada recebida e a
diferenccedila de fase podem ser comparadas atraveacutes das cargas eleacutetricas recebidas A
quantidade de carga captada pelos diodos depende diretamente da diferenccedila de
fase entre o sinal modulado emitido e o recebido pelo sensor Esta informaccedilatildeo pode
ser utilizada para calcular a diferenccedila de fase entre o sinal emitido e o recebido pois
33
eacute diretamente proporcional a carga que cada diodo captou Com isto a distacircncia
entre o sensor e o objeto pode ser calculada utilizando o princiacutepio da diferenccedila de
fase No entanto se a luz incidente eacute modulada como um sinal retangular mas sua
fase entre a emissatildeo e a recepccedilatildeo eacute igual a zero a carga seraacute captada por apenas
um dos diodos e a distacircncia resultante seraacute igual a zero (MOumlLLER et al 2005)
A Figura 212 ilustra o comportamento dos diodos de leitura ao receber o
sinal com distacircncia diferente de zero entre o alvo e o sensor Na Figura 212a eacute
ilustrado o sinal luminoso recebido por um elemento fotossensiacutevel Este sinal eacute
captado pela porta de entrada PA do fotodiodo que registra parte desta carga de
acordo com sua modulaccedilatildeo
FIGURA 212 ndash Medida da diferenccedila de fase do sinal recebido
FONTE Adaptado de MOumlLLER et al (2005)
Na Figura 212a o sinal recebido pelo elemento fotossensiacutevel do sensor eacute
ilustrado no momento em que eacute captado pela porta com modulaccedilatildeo A (PmodA) A
carga eacute captada pelos dois fotodiodos com defasagem de meio ciclo com isto cada
um capta parte da carga recebida A Figura 212b ilustra a medida da diferenccedila de
fase do sinal recebido atraveacutes da quantidade de carga que foi captada pelos
fotodiodos com modulaccedilatildeo Mod_A e Mod_B A voltagem do diodo eacute estabelecida de
acordo com a modulaccedilatildeo do sinal luminoso que seraacute emitida pelo dispositivo
34
25 CAcircMARAS PMD
As cacircmaras TOF com tecnologia PMD consistem de um chip sensor fonte
de iluminaccedilatildeo transmissor e receptor oacutepticos aleacutem de perifeacutericos eletrocircnicos e
interface digital de controle realizada atraveacutes de software Dependendo das
exigecircncias de aplicaccedilatildeo os componentes da cacircmara podem ser adaptados Cada
um deles pode afetar os paracircmetros internos da cacircmara tais como o campo de
visatildeo (FOV) taxa de captaccedilatildeo e tempo de integraccedilatildeo para a aquisiccedilatildeo das imagens
A distacircncia da superfiacutecie a ser medida eacute o fator preponderante para a escolha destes
paracircmetros O fato destas cacircmaras serem modulares amplia sua gama de
aplicaccedilotildees Isto eacute possiacutevel levando-se em conta as condiccedilotildees adicionais que cada
aplicaccedilatildeo pode exigir tais como a luz exterior ao sistema e a necessidade de
mudanccedila na fonte de iluminaccedilatildeo utilizada (PMD Technologies 2009)
O sensor PMD proporciona o imageamento instantacircneo dos objetos
utilizando um sensor com tecnologia CMOS adaptado Este sensor eacute um arranjo de
elementos fotossensiacuteveis que permitem a raacutepida detecccedilatildeo e modulaccedilatildeo do sinal
luminoso com suas variaccedilotildees Isto eacute feito de acordo com a distacircncia da superfiacutecie
que atinge do objeto imageado Pode adquirir dados de distacircncia e intensidade
simultaneamente sem precisar de um sistema de digitalizaccedilatildeo mais complexo como
um laser scanner Apresenta a desvantagem de ser muito sensiacutevel agrave luz exterior ao
sistema que interfere causando a presenccedila de ruiacutedo na imagem TOF e consequente
erro na medida de distacircncia (KHONGSAB 2009)
O desempenho do sistema PMD depende da fonte de iluminaccedilatildeo utilizada
capacidade de fornecimento de energia e eficiecircncia oacuteptica na criaccedilatildeo da imagem
Normalmente eacute utilizada fonte de iluminaccedilatildeo LED nas cacircmaras PMD No entanto
outros fabricantes utilizam diodos LASER para a iluminaccedilatildeo isto porque possibilita
realizar medidas de distacircncias maiores O desenvolvimento dos sistemas LED fez
com que sua eficiecircncia de transformaccedilatildeo de energia eleacutetrica em energia oacuteptica seja
de 30 Com a iluminaccedilatildeo LED tem-se um sinal luminoso jaacute modulado devido a
suas caracteriacutesticas eletro-oacutepticas Como uma parte consideraacutevel da luz fica na
borda do feixe isto se torna uma desvantagem pois esta aacuterea normalmente fica fora
do campo de visatildeo do sensor PMD Outra desvantagem diz respeito ao limite de
modulaccedilatildeo dos LED‟s comerciais que trabalham na faixa de 20 MHz agrave 30 MHz Os
diodos LASER tecircm eficiecircncia oacuteptica de ateacute 50 dependendo da potecircncia de saiacuteda
35
utilizada sendo de aproximadamente 100 MHz a modulaccedilatildeo maacutexima da frequecircncia
que pode ser atingida O perfil do feixe LASER pode ser adaptado ao campo de
visatildeo do sensor PMD A desvantagem eacute que este seria um circuito modular mais
complexo e que teria necessidade de um maior nuacutemero de etapas para conseguir
estabilizar a fase da onda portadora do sinal Outra desvantagem eacute que a
implantaccedilatildeo de um sistema LASER necessita de maior atenccedilatildeo agrave seguranccedila dos
olhos do que o sistema LED (RINGBECK 2007)
Com a Figura 213 ilustra-se a medida de distacircncia com a cacircmara TOF
modelo 19k da PMD A fonte de iluminaccedilatildeo LED emite o sinal luminoso em direccedilatildeo
dos objetos que estatildeo no campo visual da cacircmara O retorno deste sinal eacute captado
pelo sensor e possibilita o caacutelculo da diferenccedila de fase entre o sinal emitido e o
recebido
FIGURA 213 ndash Medida de distacircncia com a cacircmara PMD
FONTE MOLLER et al (2005)
36
251 Cacircmara PMD CamCube 20
A cacircmara TOF modelo PMD[VISION]regCamCube 20 funciona em ambientes
internos e externos com sensor de 204x204 piacutexeis que captam os niacuteveis de cinza da
imagem de intensidade Simultaneamente realiza a medida da quantidade de carga
recebida utilizada para determinar a diferenccedila de fase entre o sinal emitido e o
recebido Isto possibilita o caacutelculo da distacircncia entre o sensor e os objetos presentes
na cena A Figura 214 ilustra a cacircmara PMD CamCube 20 com as fontes de
iluminaccedilatildeo LED acopladas em suas laterais
FIGURA 214 ndash Cacircmara PMD CamCube 20
FONTE PMD Technologies (2009)
Este equipamento pode ter seu campo de visatildeo variaacutevel possibilitando a
diminuiccedilatildeo de distorccedilotildees manchas ou outras imperfeiccedilotildees da imagem O software
de interface da cacircmara com o computador apresenta a possibilidade de trabalhar
com dados brutos para o processamento das imagens aleacutem de funcionar em
diferentes canais de frequecircncia Tambeacutem disponibiliza compatibilidade com o
software Matlab para realizar esta interface
A imagem de intensidade captada de uma parede utilizando a cacircmara PMD
CamCube 20 eacute ilustrada com a Figura 215
37
FIGURA 215 ndash Imagem captada com a cacircmara PMD CamCube 20
FONTE CENTENO e JUTZI (2010)
Com a Figura 215a eacute ilustrada a cacircmara PMD CamCube 20 instalada em
um tripeacute sobre uma mesa Na Figura 215b tem-se a imagem infravermelha da
superfiacutecie plana de uma parede obtida com esta cacircmara O Quadro 21 ilustra as
especificaccedilotildees teacutecnicas da cacircmara PMD CamCube 20
PARAcircMETROS VALOR PADRAtildeO OBSERVACcedilOtildeES
Tipo do sensor PhotonICs PMD41k-S (204x204 piacutexeis)
Tamanho efetivo do pixel no sensor igual a 45microm
Distacircncia de mediccedilatildeo 03 ndash 7metros
Precisatildeo na medida de distacircncia (1σ) lt 3mm
Para aacuterea central da imagem obtida agrave 2m do sensor em superfiacutecie com refletividade de 90
Frequecircncia de aquisiccedilatildeo de imagens 25 fps Configuraccedilatildeo padratildeo
Campo de visatildeo (FOV) 40ordmx40ordm f = 128mm
Comprimento de onda da fonte de iluminaccedilatildeo
870nm Infravermelho proacuteximo
Fonte de iluminaccedilatildeo [V] 12 V plusmn 10
Interface USB 20
Temperatura de operaccedilatildeo 0ordmC agrave 50ordmC
Temperatura de armazenamento -20ordmC agrave 85ordmC
QUADRO 21 - Especificaccedilotildees teacutecnicas da cacircmara PMD CamCube 20 FONTE Adaptado de PMD Technologies (2009)
O sensor PhotonICs PMD41k-S utilizado na cacircmara PMD CamCube 20 vem
com um dispositivo SBI para a supressatildeo de cargas provenientes da iluminaccedilatildeo
exterior ao sistema Estas cargas causam a saturaccedilatildeo dos piacutexeis da imagem TOF
38
252 Dispositivo SBI
O dispositivo SBI (Supression of Background Illumination) eacute uma soluccedilatildeo
teacutecnica encontrada para melhorar o contraste das imagens geradas com o sensor
PMD em ambientes com iluminaccedilatildeo exterior A presenccedila desta iluminaccedilatildeo na cena
do objeto imageado causa maior presenccedila de ruiacutedo no sinal captado pelo sensor
Esta iluminaccedilatildeo pode saturar os elementos do sensor fazendo com que
ocorram falhas na medida de distacircncia Este efeito pode ser minimizado utilizando o
tempo de integraccedilatildeo adequado para a tomada das imagens Outros distuacuterbios que
podem ocorrer satildeo devidos agrave corrente negra (DC - Dark Current) Este efeito eacute
causado porque o sensor natildeo capta o valor zero na imagem que seria a falta
completa de iluminaccedilatildeo nas superfiacutecies da cena A corrente negra natildeo pode ser
evitada em dispositivos semicondutores especialmente quando haacute altas
temperaturas Com uma temperatura de 80ordmC a corrente negra pode ser 1000 vezes
maior do que o normal o que afeta significativamente a qualidade das medidas
realizadas Para tornar o dispositivo PMD mais confiaacutevel na medida de distacircncias foi
criado o circuito SBI que suprime instantaneamente a iluminaccedilatildeo de fundo Neste
circuito eacute utilizada uma teacutecnica para a captaccedilatildeo do sinal luminoso minimizando a
interferecircncia de fatores externos Isto possibilita realizar medidas de distacircncia
confiaacuteveis mesmo em ambientes onde o sinal eacute modificado por interferecircncia de
iluminaccedilatildeo externa ou por altas temperaturas O sistema SBI pode ser desativado ou
ateacute mesmo ajustado para que seja possiacutevel realizar medidas de distacircncia com
qualidade em cenas tomadas em diferentes ambientes independente da presenccedila
de iluminaccedilatildeo exterior (MOumlLLER 2005)
O circuito SBI adiciona cargas eleacutetricas de compensaccedilatildeo instantacircnea nos
diodos de leitura minimizando os efeitos de saturaccedilatildeo causados por fatores externos
ao sistema Com o SBI espera-se que o sensor capte apenas o sinal correlacionado
com a medida de distacircncia sem interferecircncia de iluminaccedilatildeo exterior reduzindo
assim a interferecircncia da iluminaccedilatildeo de fundo no sinal recebido
A Figura 216a ilustra um sensor sem o dispositivo SBI a carga captada com
influecircncias externas de iluminaccedilatildeo e calor eacute maior do que a enviada pela fonte de
iluminaccedilatildeo refletida pela superfiacutecie do objeto e recebida pelo sensor Neste caso a
medida de distacircncia estaacute influenciada por fatores externos ao sistema e conteraacute
erros Na Figura 216b as cargas geradas por fatores externos ao sistema satildeo
39
minimizadas pelo dispositivo SBI Com isto tem-se maior quantidade de carga
captada com o sinal recebido eliminando a carga gerada por fatores externos
FIGURA 216 ndash Princiacutepio de funcionamento do SBI
FONTE MOumlLLER et al (2005)
Cacircmaras TOF com iluminaccedilatildeo LED infravermelha utilizam o dispositivo SBI
para a supressatildeo da iluminaccedilatildeo de fundo Outros modelos de cacircmaras TOF utilizam
iluminaccedilatildeo LASER para evitar o problema com a iluminaccedilatildeo exterior
253 Modelos de cacircmaras TOF
Diferentes cacircmaras TOF foram desenvolvidas nos uacuteltimos anos a Figura
217 ilustra alguns modelos destas cacircmaras
FIGURA 217 ndash Modelos de cacircmaras TOF
a) Effector O3D FONTE httpwwwifm-electroniccom
b) PMD[vision] CamCube 20 FONTE httpwwwpmdteccom
c) PMD[vision] 19k FONTE httpwwwpmdteccom
d) SwissRanger SR-3000 FONTE httpwwwmesa-imagingch
40
O Quadro 22 descreve as especificaccedilotildees teacutecnicas destas cacircmaras TOF
a)Effector
O3D
b)PMD[vision]
CamCube 20
c)PMD[vision]
19k
d)SwissRanger
SR-3000
Resoluccedilatildeo (piacutexeis) 64 x 50 204 x 204 160 x 120 176 x 144
Dimensotildees dos piacutexeis (microm) 100 x 100 45 x 45 40 x 40 40 x 40
Distacircncia focal (mm) 86 128 120 80
Fonte de iluminaccedilatildeo 1 matriz LED 2 matrizes LED 2 matrizes LED 1 matriz LED
Modulaccedilatildeo da fonte de
iluminaccedilatildeo (nm) 850 870 870 850
Frequecircncia de modulaccedilatildeo 20 MHz 20 MHz 20 MHz 20 MHz
Frequecircncia na aquisiccedilatildeo de
imagens
Maacuteximo
100 fps
Maacuteximo
25 fps
Maacuteximo
15 fps
Maacuteximo
40 fps
Conexatildeo Ethernet USB 2 Ethernet USB 2
Dimensotildees (mm) 55 x 45 x 85 194 x 60 x 60 220 x 210 x 55 60 x 50 x 65
QUADRO 22 ndash Especificaccedilotildees teacutecnicas de cacircmaras TOF FONTE Adaptado de RAPP (2007)
A partir do Quadro 22 verifica-se que estes modelos de cacircmaras TOF em
sua configuraccedilatildeo padratildeo possuem fonte de iluminaccedilatildeo LED distacircncia focais
variando de 8mm agrave 128mm e apresentam pequenas dimensotildees
26 ERROS DE MEDIDA
Observaccedilotildees realizadas com instrumentos de medida estatildeo acompanhadas
de erros provenientes da falibilidade humana imperfeiccedilatildeo na fabricaccedilatildeo do
equipamento e de interferecircncias causadas pelo ambiente em que o instrumento
utilizado e o objeto estavam no momento em que se realizou a medida Erros de
observaccedilatildeo satildeo tradicionalmente classificados como erros grosseiros sistemaacuteticos e
acidentais Erros grosseiros devem ser detectados e evitados pelo observador com
os devidos cuidados na obtenccedilatildeo da informaccedilatildeo tambeacutem ocorrem devido agrave
presenccedila de ruiacutedo nas observaccedilotildees Erros sistemaacuteticos se repetem seguindo um
determinado padratildeo e podem ser preditos e corrigidos Existem opccedilotildees para evitaacute-
los atraveacutes de teacutecnicas de observaccedilatildeo ou entatildeo eliminaacute-los a posteriori atraveacutes de
foacutermulas especiacuteficas Os erros acidentais ou aleatoacuterios satildeo randocircmicos natildeo
previsiacuteveis e podem ser distribuiacutedos entre o conjunto de observaccedilotildees por teacutecnicas
41
estatiacutesticas Eacute comum o uso da expressatildeo ldquopropriedades estatiacutesticas das
observaccedilotildeesrdquo devido a este erro (GEMAEL 1994)
Erros na medida de distacircncia utilizando cacircmaras TOF tambeacutem podem ser
divididos em natildeo-sistemaacuteticos e sistemaacuteticos conforme descrito nas seccedilotildees 261 e
262 onde seratildeo apresentados 3 erros natildeo-sistemaacuteticos e 7 erros sistemaacuteticos
261 Erros natildeo-sistemaacuteticos em cacircmaras TOF
De acordo com MAY et al (2008) a classificaccedilatildeo de erros natildeo-sistemaacuteticos
na medida de distacircncia utilizando cacircmaras TOF pode ser feita da seguinte maneira
1) Erro devido agrave relaccedilatildeo sinal-ruiacutedo (Signal-to-noise) quando a relaccedilatildeo da
carga recebida com o sinal eacute baixa e o ruiacutedo presente eacute alto haveraacute distorccedilatildeo na
medida de distacircncia que natildeo poderaacute ser corrigida posteriormente Para diminuir este
erro pode-se tomar cuidado com o tempo de exposiccedilatildeo do sensor na aquisiccedilatildeo da
imagem e tambeacutem amplificar a iluminaccedilatildeo do sistema Outra soluccedilatildeo eacute filtrar os
valores medidos com baixas amplitudes no sinal recebido
2) Reflexatildeo do sinal por muacuteltiplos caminhos (Multiple ways reflection) em
objetos com descontinuidade em suas superfiacutecies o sinal emitido pode percorrer
diferentes caminhos antes de retornar ao sensor Exemplos satildeo objetos com
superfiacutecies cocircncavas que podem refletir vaacuterias vezes o sinal e gerar erro na medida
de distacircncia Neste caso o sinal eacute refletido com sobreposiccedilatildeo ou seja pode ser
captado o sinal da uacuteltima superfiacutecie que o refletiu gerando uma distacircncia diferente
do valor esperado
3) Espalhamento da luz (Light scattering) ocorre na lente da cacircmara
causado pela presenccedila de objetos proacuteximos Este efeito e o causado pela reflexatildeo
por muacuteltiplos caminhos satildeo imprevisiacuteveis pois a topologia da cena observada eacute
desconhecida a priori
262 Erros sistemaacuteticos em cacircmaras TOF
Segundo RAPP (2007) nas cacircmaras TOF erros tambeacutem indicam a relaccedilatildeo
entre a variacircncia da distacircncia e a amplitude do sinal captado pelo sensor A relaccedilatildeo
42
estabelecida eacute que a variacircncia dos dados de distacircncia eacute inversamente proporcional agrave
raiz quadrada da amplitude do sinal recebido para realizar a medida Alguns erros
sistemaacuteticos das cacircmaras TOF estudados por RAPP foram
1) Erro devido a uma funccedilatildeo natildeo harmocircnica utilizada para correlacionar o
sinal emitido ao recebido
2) Ruiacutedos relacionados com o tempo de integraccedilatildeo Este tempo pode causar
exposiccedilatildeo insuficiente ou saturaccedilatildeo dos elementos do sensor
3) Erros geomeacutetricos no posicionamento dos piacutexeis devido ao sistema oacuteptico
da cacircmara
O erro devido agrave falta de harmonia na funccedilatildeo de correlaccedilatildeo entre o sinal
emitido e o recebido pode ser causado quando o sistema oacuteptico utilizado emite o
sinal de referecircncia com sua forma inicial e recebe o sinal refletido com forma
diferente Com isto a funccedilatildeo que representa o sinal recebido natildeo teraacute a forma
senoidal teoacuterica do sinal emitido Isto ocorre por conter harmocircnicos de Fourier
iacutempares quando eacute necessaacuteria uma amostra com pelo menos quatro pontos para
definir a FC entre os sinais Este erro tem grande influecircncia no caacutelculo da distacircncia
do objeto pois eacute a FC que possibilita a medida da diferenccedila de fase entre o sinal
emitido e o recebido
A presenccedila de ruiacutedo pode ser notada variando o TI na aquisiccedilatildeo da imagem
O conjunto de dados apresenta maiores distorccedilotildees radiomeacutetricas e geomeacutetricas
quando a presenccedila de ruiacutedo eacute forte Quando o TI eacute aumentado o ruiacutedo observado no
conjunto de dados pode diminuir Poreacutem valores extremamente altos introduzem
erros na mediccedilatildeo por causar saturaccedilatildeo do sensor Com esta informaccedilatildeo procura-se
definir uma funccedilatildeo para a modelagem do ruiacutedo de acordo com o tempo de
integraccedilatildeo Analisando dados obtidos com diferentes TI pode-se especificar qual o
melhor para cada situaccedilatildeo
Erros causados por exposiccedilatildeo insuficiente do sensor natildeo satildeo considerados
sistemaacuteticos poreacutem podem ser preditos Se o valor da amplitude do sinal eacute reduzido
o erro na medida da distacircncia aumenta Para reduzir os piacutexeis obtidos com
exposiccedilatildeo insuficiente pode-se definir um limite no valor da amplitude do sinal
Outra forma de controlar a exposiccedilatildeo eacute com o TI na obtenccedilatildeo da imagem Piacutexeis que
tem amplitude menor que 1 do valor maacuteximo das amplitudes na imagem TOF satildeo
considerados piacutexeis com exposiccedilatildeo insuficiente
43
Erros de posicionamento dos piacutexeis devido ao sistema oacuteptico da cacircmara
podem ser notados quando capta-se a imagem de uma fachada com portas e
janelas As linhas horizontais e verticais que representam estes elementos na
imagem aparecem com curvaturas de acordo com o sistema de lentes utilizado na
cacircmara A distorccedilatildeo de lentes tem um padratildeo fixo em cacircmaras com sensor CMOS
ou CCD e pode ser corrigida geometricamente atraveacutes dos POI da cacircmara que
captou a imagem
Erros sistemaacuteticos em cacircmaras TOF tambeacutem foram estudados por FUCHS e
HIRZINGER (2008) e MAY et al (2008) e foram classificados da seguinte maneira
4) Erro na medida de distacircncia (Distance-related error) este erro eacute causado
devido agrave assimetria da forma do sinal infravermelho recebido pelo sensor
Teoricamente assume-se que este sinal possui forma senoidal e harmocircnica com a
forma do sinal emitido o que na praacutetica pode natildeo acontecer Sendo assim o
pressuposto baacutesico para que se possa calcular o atraso de fase eacute que o sinal
luminoso emitido e o recebido satildeo harmocircnicos e com forma senoidal
Consequentemente se o caacutelculo do atraso de fase do sinal eacute impreciso a distacircncia
entre o objeto e o sensor tambeacutem seraacute calculada de forma imprecisa
5) Erro na amplitude do sinal captado (Amplitude-related error) o sensor natildeo
capta a energia eletromagneacutetica recebida com o sinal perfeitamente Deixando-se a
cacircmara e o objeto na mesma posiccedilatildeo podem-se obter diferentes medidas de
distacircncia devido a esta imperfeiccedilatildeo na fabricaccedilatildeo dos elementos do sensor Este
erro eacute relacionado com a amplitude de valores na captaccedilatildeo da imagem depende da
distacircncia e de caracteriacutesticas como a refletividade das superfiacutecies dos objetos
6) Erro devido agrave latecircncia dos elementos do sensor (Latency-related error) o
atraso de fase do sinal recebido eacute calculado atraveacutes das latecircncias com que o sensor
captou o sinal Estaacute relacionado com propriedades semicondutoras dos materiais
utilizados nos elementos sensores que satildeo responsaacuteveis pela medida da quantidade
de carga recebida Eacute causado quando o sinal emitido e o recebido satildeo
correlacionados diretamente na matriz do sensor Diferentes latecircncias do sinal
devem ser captadas por cada elemento do sensor para possibilitar o caacutelculo da
distacircncia de cada pixel de forma confiaacutevel
7) Ruiacutedo com padratildeo fixo (FPN - Fixed pattern noise) eacute relacionado com o
erro devido agrave latecircncia e ocorre devido agraves propriedades dos materiais utilizados na
fabricaccedilatildeo de cada elemento do sensor CMOS Este eacute um ruiacutedo com padratildeo fixo
44
pode ser corrigido a partir de uma imagem que tenha um pixel com valor constante
que serviraacute como referecircncia para a calibraccedilatildeo dos valores dos piacutexeis vizinhos
Tendo-se como referecircncia um pixel obtido em uma superfiacutecie uniforme de um objeto
pode-se utilizar um padratildeo de similaridade como referecircncia para os outros piacutexeis
Sendo assim a qualidade dos dados depende da posiccedilatildeo do pixel na imagem
Os uacuteltimos quatro erros sistemaacuteticos podem ser corrigidos utilizando o
meacutetodo de calibraccedilatildeo descrito em Fuchs et al (2007) Conforme realizado em
experimento por May et al (2008) os resultados alcanccedilados no mapeamento de uma
sala obtiveram a precisatildeo centimeacutetrica Este experimento foi realizado com o
objetivo de medir paredes opostas de uma sala com o sensor TOF em movimento
instalado em uma plataforma moacutevel O erro encontrado na medida das distacircncias
tambeacutem foi influenciado por erros na estimaccedilatildeo do posicionamento do sensor que eacute
obtido com a Orientaccedilatildeo Exterior da cacircmara no momento de aquisiccedilatildeo das imagens
Durante o registro dos quadros fotograacuteficos o erro em rotaccedilatildeo foi determinado como
sendo igual a 22ordm e o erro de translaccedilatildeo foi de 071m no eixo 119883 004m no eixo 119884 e
de -021m no eixo 119885 A distacircncia calculada entre paredes opostas foi igual a 105m
para a distacircncia de referecircncia de 108m A diferenccedila entre as duas medidas resultou
em 03m o que representa aproximadamente 28 da distacircncia de referecircncia A
nuvem de pontos 3D gerada por MAY et al (2008) eacute ilustrada com a Figura 218
FIGURA 218 ndash Nuvem de pontos 3D gerada a partir de imagem TOF
FONTE MAY et al (2008)
45
27 PROJECcedilAtildeO ORTOGONAL DOS PONTOS
As coordenadas tridimensionais dos pontos da imagem TOF satildeo obtidas
atraveacutes da projeccedilatildeo ortogonal Isto ocorre devido ao fato do equipamento utilizado
calcular as distacircncias dos objetos em um sistema esfeacuterico Esta projeccedilatildeo eacute feita a
partir da colinearidade entre o ponto no espaccedilo objeto o Centro Perspectivo (CP) e
o ponto no espaccedilo imagem conforme eacute ilustrado com a Figura 219
FIGURA 219 ndash Colinearidade entre os pontos no espaccedilo imagem e objeto
FONTE Adaptado de RAPP (2007)
A Figura 219 ilustra os sistemas referenciais adotados nos espaccedilos imagem
e objeto O sistema referencial fotogrameacutetrico (119909119875 119910119875) tem sua origem no CP que eacute
materializado pelo ponto nodal anterior do sistema de lentes da cacircmara Este ponto
projetado no plano da imagem gera o Ponto Principal (PP) A projeccedilatildeo do sistema
referencial fotogrameacutetrico na imagem eacute realizada considerando a simplificaccedilatildeo de
haverem apenas translaccedilotildees entre os eixos deste sistema e o sistema da imagem O
46
sistema referencial de imagem levoacutegiro (119862 119871) tem sua origem no canto superior
esquerdo Atraveacutes das Equaccedilotildees (223) e (224) esta origem pode ser transladada
para o centro da imagem (MACHADO 2006)
119862prime = 119862 minus119899119862minus1
2 (223)
119871prime = 119871 minus119899119871minus1
2 (224)
onde
119862 119871 ndash Sistema referencial de coordenadas da imagem (piacutexeis)
119899119862 119899119871 ndash Nuacutemero total de colunas e linhas da imagem (piacutexeis)
119862prime 119871prime ndash Sistema referencial auxiliar no centro da imagem (piacutexeis)
Para tornar o sistema referencial auxiliar (119862prime 119871prime) de imagem levoacutegiro em um
sistema dextroacutegiro (119909119894119898 119910119894119898 ) pode-se realizar uma reflexatildeo do eixo 119871prime atraveacutes da
Equaccedilatildeo (226)
119909119894119898 = 119862prime (225)
119910119894119898 = minus119871prime (226)
onde
119909119894119898 119910119894119898 ndash Coordenadas de um ponto no sistema referencial dextroacutegiro da
imagem (piacutexeis)
Com isto tem-se um sistema referencial dextroacutegiro centralizado na imagem e
que se relaciona com o sistema referencial fotogrameacutetrico projetado atraveacutes da
translaccedilatildeo de eixos determinada pelas coordenadas (119909119900 119910119900) do PP conforme
ilustrado com a Figura 220
47
FIGURA 220 ndash Sistemas de coordenadas utilizados em imagens
FONTE Adaptado de MACHADO (2006)
A partir do sistema referencial de imagem dextroacutegiro com origem no centro
da imagem e do sistema referencial fotogrameacutetrico projetado com origem no PP
satildeo estabelecidas as relaccedilotildees entre os sistemas de acordo com as Equaccedilotildees (227)
e (228)
119909119894119898 = (119909 minus 1199090) (227)
119910119894119898 = (119910 minus 1199100) (228)
onde
11990901199100 ndash Satildeo as coordenadas do ponto principal no sistema referencial de
imagem (piacutexeis)
119909119910 ndash Coordenadas dos pontos no sistema referencial fotogrameacutetrico
projetado na imagem (piacutexeis)
Os valores das coordenadas dos pontos do sistema fotogrameacutetrico projetado
na imagem estatildeo em piacutexeis A transformaccedilatildeo destes valores para miliacutemetros pode
ser feita multiplicando estas coordenadas pelo tamanho efetivo do pixel nas direccedilotildees
119909 e 119910 da imagem conforme as Equaccedilotildees (229) e (230)
48
119909 = 119909119894119898 ∙ 119875119909 (229)
119910 = 119910119894119898 ∙ 119875119910 (230)
onde
119909119910 ndash Satildeo as coordenadas dos pontos no sistema fotogrameacutetrico projetado
na imagem (miliacutemetros)
119875119909 119875119910 ndash Tamanho efetivo dos piacutexeis nas direccedilotildees 119909 e 119910 (miliacutemetros)
O tamanho efetivo dos piacutexeis nas direccedilotildees 119909 e 119910 satildeo calculados a partir do
fator de escala nestas direccedilotildees conforme Equaccedilotildees (231) e (232)
119875119909 = 119875 ∙ 119904119909 (231)
119875119910 = 119875 ∙ 119904119910 (232)
onde
119875119909 119875119910 ndash Tamanho efetivo dos piacutexeis nas direccedilotildees 119909 e 119910 (miliacutemetros)
119875 ndash Dimensatildeo do pixel obtida no manual do equipamento (miliacutemetros)
119904119909 119904119910 ndash Fatores de escala dos piacutexeis nas direccedilotildees 119909 e 119910
Os fatores de escala dos piacutexeis nas direccedilotildees 119909 e 119910 podem ser calculados
atraveacutes das Equaccedilotildees (233) e (234)
119904119909 =119891
119891119909 (233)
119904119910 =119891
119891119910 (234)
onde
119904119909 119904119910 ndash Fatores de escala dos piacutexeis nas direccedilotildees 119909 e 119910
119891119909 119891119910 ndash Distacircncia focal da cacircmara ao longo dos eixos 119909 e 119910 (miliacutemetros)
119891 ndash Distacircncia focal da cacircmara obtida no manual do equipamento
(miliacutemetros)
49
Quando o valor da distacircncia focal 119891119909 obtido com a calibraccedilatildeo da cacircmara
difere do valor 119891119910 tem-se um indicativo de escalas diferentes nos eixos 119909 e 119910 da
imagem
Realizadas as etapas de Orientaccedilatildeo Interior da imagem podem-se calcular
as coordenadas 3D dos pontos O posicionamento de cada ponto depende da
precisatildeo na determinaccedilatildeo dos acircngulos verticais e horizontais no sistema referencial
de imagem A projeccedilatildeo ortogonal das distacircncias dos pontos coordenada 119885 pode ser
feita atraveacutes da Equaccedilatildeo (235)
119885 = 119889119903 ∙ cos120573 (235)
onde
119885 ndash Distacircncia ortogonal do CP ao ponto observado no espaccedilo objeto
119889119903 ndash Distacircncia radial do CP ao ponto no sistema referencial esfeacuterico
120573 ndash Acircngulo formado entre o eixo que atinge o ponto na imagem partindo do
CP e o eixo principal da cacircmara (CP-PP)
O acircngulo 120573 pode ser calculado atraveacutes da funccedilatildeo trigonomeacutetrica expressa
com a Equaccedilatildeo (236)
tan120573 = 1199092
1198911199092 +
1199102
1198911199102 (236)
onde
119891119909 119891119910 ndash Distacircncia focal da cacircmara ao longo dos eixos 119909 e 119910 (miliacutemetros)
119909119910 ndash Coordenadas dos pontos no sistema referencial fotogrameacutetrico
projetado na imagem (miliacutemetros)
A Expressatildeo (235) relaciona a distacircncia radial 119889119903 com a coordenada 119885 dos
pontos no sistema ortogonal 3D em funccedilatildeo do acircngulo 120573 Substituindo a Equaccedilatildeo
(236) na Equaccedilatildeo (235) podemos explicitar a coordenada 119885 em funccedilatildeo das
distacircncias focais da cacircmara e das coordenadas dos pontos no sistema referencial
fotogrameacutetrico projetado na imagem conforme Equaccedilatildeo (237)
50
119885 = 119889119903 ∙ cos tanminus1 1199092
1198911199092 +
1199102
1198911199102 (237)
onde
119885 ndash Distacircncia ortogonal do CP ao ponto (miliacutemetros)
119889119903 ndash Distacircncia radial do CP ao ponto no sistema esfeacuterico da cacircmara
(miliacutemetros)
119891119909 119891119910 ndash Distacircncia focal da cacircmara ao longo dos eixos 119909 e 119910 (miliacutemetros)
119909119910 ndash Coordenadas dos pontos no sistema referencial fotogrameacutetrico
projetado na imagem (miliacutemetros)
As coordenadas (119883119884) dos pontos no sistema referencial ortogonal podem
entatildeo serem calculadas atraveacutes das Equaccedilotildees (238) e (239)
119883 = 119909 ∙119885
119891119909 (238)
119884 = 119910 ∙119885
119891119910 (239)
28 REFINAMENTO DA NUVEM DE PONTOS 3D
O processo de refinamento da nuvem de pontos 3D obtida com a imagem
TOF compreende a filtragem dos pontos que estejam esparsos devido agrave presenccedila
de ruiacutedo no arquivo de distacircncias da imagem TOF Com a Figura 221a satildeo
ilustrados pontos que natildeo pertencem agraves superfiacutecies do objeto aparecem na aresta
superior direita do objeto O sinal emitido atinge uma aacuterea da superfiacutecie do objeto e
natildeo apenas um ponto Esta aacuterea eacute proporcional agrave distacircncia entre o alvo e o sensor
ocorre devido agrave divergecircncia do feixe de luz emitido Com o princiacutepio TOF o valor da
distacircncia calculada eacute resultado da integraccedilatildeo do sinal recebido de acordo com a
aacuterea iluminada da superfiacutecie Quando o sinal emitido atinge superfiacutecies natildeo
coplanares o valor de distacircncia armazenado eacute um resultado interpolado Este
fenocircmeno ocorre principalmente nas bordas dos objetos e pode ser visto com a
51
Figura 221a que mostra um objeto com trecircs superfiacutecies planas uma base um
plano vertical na direita e um plano na parte superior
FIGURA 221 ndash Filtro para a definiccedilatildeo de bordas do objeto
FONTE MAY et al (2008)
A Figura 221b apresenta a nuvem de pontos 3D apoacutes a aplicaccedilatildeo do filtro
para o refinamento Este eacute um filtro gaussiano utilizado para a definiccedilatildeo de bordas e
desniacuteveis dos objetos eacute tambeacutem uma ferramenta para a remoccedilatildeo de pontos
esparsos provenientes da presenccedila de ruiacutedo nos dados da imagem TOF Funciona
considerando o acircngulo formado entre dois piacutexeis adjacentes na imagem onde o CP
eacute o ponto que completa o triacircngulo sendo o criteacuterio de seleccedilatildeo utilizado a distacircncia
meacutedia dos k pontos vizinhos mais proacuteximos
De acordo com May et al (2008) a distacircncia medida a partir de cacircmaras
TOF pode ser afetada pelo efeito de arredondamento das bordas Isto ocorre pela
suavizaccedilatildeo causada com a transiccedilatildeo entre as superfiacutecies iluminadas Dado um
conjunto de pontos 3D 119875 = 119901119894 119901119894 isin ℝ3 119894 = 1hellip 119873119901 as bordas podem ser
detectadas utilizando a Equaccedilatildeo (240) Esta eacute uma comparaccedilatildeo do acircngulo entre
dois piacutexeis 120585119894 119899 com base em um triacircngulo formado pelo centro perspectivo 119891 = 0 o
ponto 119901119894 e a vizinhanccedila deste ponto 119875119899 = 119901119894 119899 119899 = 1hellip 8 com o acircngulo de
vizinhanccedila 120585119905119893
120585119894 = max arcsin 119901119894 119899
119901119894 119899minus119901119894 ∙ 119904119894119899120593 (240)
52
119869 = 119901119894 120585119894 gt 120585119905119893 (241)
onde
120593 ndash Acircngulo maacuteximo entre dois piacutexeis veacutertice do triacircngulo no ponto 119891 = 0
O triacircngulo utilizado como referecircncia no filtro para a detecccedilatildeo de bordas
com veacutertice no ponto 119891 = 0 eacute ilustrado com a Figura 222
FIGURA 222 ndash Geometria do filtro para a definiccedilatildeo de bordas
FONTE MAY et al (2008)
Um conjunto 119878 de pontos pode ser filtrado atraveacutes da condiccedilatildeo expressa
com a Equaccedilatildeo (243)
119889 119901119894 = 1
119896 119901119894 minus 119901119894 119899 119896119899=1 (242)
119878 = 119901119894 isin 119875 119889 119901119894 lt 119889119905119893 (243)
onde
119889119905119893 ndash Distacircncia de vizinhanccedila constante
O conjunto 119876 de pontos selecionados satildeo os pontos filtrados da nuvem 3D
conforme a condiccedilatildeo da Equaccedilatildeo (244)
119876 = 119902119894 119902119894 isin 119875(119869 cup 119878) (244)
53
29 ANAacuteLISE DE SUPERFIacuteCIES POR AUTOVALORES E AUTOVETORES
A anaacutelise da forma de superfiacutecies pode ser feita pela variaccedilatildeo local de
autovalores que possibilita a classificaccedilatildeo e segmentaccedilatildeo de pontos com
coordenadas tridimensionais (BELTON e LICHTI 2006)
Autovetores e seus respectivos autovalores podem ser obtidos a partir da
Matriz de Variacircncias e Covariacircncias (119872119881119862) de um conjunto de observaccedilotildees O
tamanho relativo e a direccedilatildeo dos autovetores podem indicar propriedades locais
desta superfiacutecie permitindo analisar sua forma (PAULY et al 2002)
De acordo com Johnson e Wichern (1998) a 119872119881119862 pode ser calculada atraveacutes
da Equaccedilatildeo (245)
11987211988111986231199093 =1
119896 119903 119894 minus 119903 119896119894=1 ∙ 119903 119894 minus 119903
119879=
1205901199092 120590119909119910 120590119909119911
120590119909119910 1205901199102 120590119910119911
120590119909119911 120590119910119911 1205901199112
(245)
onde
119872119881119862 ndash Matriz de Variacircncias e Covariacircncias
119903 119894 ndash Vetor com as coordenadas 3D do ponto em questatildeo na amostra
119903 ndash Vetor com as coordenadas do centroacuteide da superfiacutecie
1205901199092120590119910
2 1205901199112 ndash Variacircncias
120590119909119910 120590119909119911 120590119910119911 ndash Covariacircncias
119896 ndash Nuacutemero de pontos da amostra
O vetor com as coordenadas do 119894-eacutesimo ponto da amostra eacute denotado com
119903 119894 pela Expressatildeo (246) A posiccedilatildeo relativa do centroacuteide pode ser calculada atraveacutes
da Equaccedilatildeo (247)
119903 119894 = 119909119894 119910119894 119911119894 119879 (246)
119903 =1
119896 119903 119894119896119894=1 (247)
54
A 119872119881119862 eacute quadrada simeacutetrica positiva-semidefinida e pode ser decomposta
em autovetores 119890 e autovalores 120582 atraveacutes da Equaccedilatildeo (248) Os autovalores 120582119894 satildeo
elementos escalares associados aos respectivos autovetores 119890 119894 (LEON 1998)
119872119881119862 ∙ 119890 = 120582 ∙ 119890 (248)
A partir do teorema de decomposiccedilatildeo espectral (decomposiccedilatildeo de Jordan) a
119872119881119862 pode ser isolada nesta igualdade conforme a Equaccedilatildeo (249) Maiores
detalhes podem ser vistos em Johnson e Wichern (1998) e Shakarji (1998)
119872119881119862 = 120582119894 ∙ 119890 119894 ∙ 119890 1198941198792
119894=0 (249)
onde
119872119881119862 ndash Matriz Variacircncia Covariacircncia
119890 119894 ndash Vetor com os autovetores 119890 119894
120582119894 ndash Matriz com os autovalores 120582119894
Os autovalores satildeo valores reais e os autovetores formam um sistema de
base ortogonal que correspondem aos componentes principais do conjunto de
observaccedilotildees (BELTON 2008)
De acordo com PAULY et al (2002) pode-se adotar a convenccedilatildeo entre os
autovalores da Expressatildeo (250) A partir desta convenccedilatildeo algumas propriedades
para superfiacutecies normais podem ser descritas
1205821 ge 1205822 ge 1205823 (250)
Em um conjunto de pontos 3D que formam uma superfiacutecie plana espera-se
que 1205821 ne 0 1205822 ne 0 e que 1205823 asymp 0 Com isto o menor autovetor 119890 3 apontaraacute na direccedilatildeo
normal a esta superfiacutecie Com a Figura 223 satildeo ilustrados os trecircs autovetores de
uma regiatildeo da superfiacutecie descrita pela nuvem de pontos 3D O terceiro autovetor 119890 3
com o menor autovalor 1205823 eacute ortogonal agrave superfiacutecie plana definida pelos outros dois
autovetores 119890 1 e 119890 2
55
FIGURA 223 ndash Autovetores em nuvem de pontos 3D de uma superfiacutecie plana
Pontos contidos na interseccedilatildeo entre duas superfiacutecies planas podem ser
identificados atraveacutes das relaccedilotildees 1205821 asymp 21205822 e 1205823 asymp 0 O autovetor 119890 1 apontaraacute na
direccedilatildeo da linha limitante da superfiacutecie plana e o autovetor 119890 3 seraacute ortogonal a esta
direccedilatildeo Podem-se encontrar segmentos de retas que limitam a borda de uma
superfiacutecie atraveacutes das relaccedilotildees 1205822 asymp 1205823 e 1205821 asymp 1205822+1205823
Quando os autovalores apresentam valores aproximadamente iguais
1205821 asymp 1205822 asymp 1205823 torna-se possiacutevel encontrar o veacutertice formado por trecircs superfiacutecies
planas
Normalizando os autovalores com a Equaccedilatildeo (251) remove-se a sua
dependecircncia em relaccedilatildeo ao tamanho da amostra utilizada
120582119894prime =
120582119894
1205821+1205822+1205823=
120582119894
119905119903119886 ccedil119900(120582) (251)
Para o autovalor miacutenimo (119894 = 3) pode-se definir o nuacutemero 119873 de pontos para
representar as variaccedilotildees na superfiacutecie atraveacutes da Equaccedilatildeo (252)
119873 =1205823
119905119903119886 ccedil119900(120582) (252)
O valor resultante da Equaccedilatildeo (252) eacute uma medida aproximada de
curvatura local e pode representar a rugosidade da superfiacutecie de forma normalizada
56
210 ANAacuteLISE DE SUPERFIacuteCIES POR MOMENTOS INVARIANTES
Caracteriacutesticas de superfiacutecies planas podem ser obtidas atraveacutes da anaacutelise
de momentos invariantes para isto utiliza-se a 119872119881119862 dos pontos que descrevem esta
superfiacutecie De acordo com MASS e VOSSELMAN (1999) os momentos invariantes
119898119894119895 podem ser calculados atraveacutes da Equaccedilatildeo (253)
119898119894119895 = 119909119894119910119895119891(119909119910)119889119909 1198891199101199102
1199101
1199092
1199091 (253)
onde
119894 119895 ndash Correspondem agrave ordem do momento
119891(119909119910) ndash A coordenada 119911 dos pontos eacute funccedilatildeo das coordenadas planas 119909 e 119910
em um conjunto de pontos que descrevem a superfiacutecie contiacutenua
A Equaccedilatildeo (254) permite determinar o volume de uma esfera unitaacuteria com
raio 119877 em um domiacutenio contiacutenuo 119873 de pontos 3D eacute obtida a partir da Equaccedilatildeo (253)
e possibilita o estudo de propriedades das superfiacutecies com padratildeo planar
119898119894119895119896 = 119909119894119910119895 119911119896119891(119909119910 119911)119889119907119881
(254)
onde
119894 119895119896 ndash Pertencem ao domiacutenio contiacutenuo da funccedilatildeo com 119873 pontos
119894 + 119895 + 119896 ndash Corresponde agrave ordem do momento
119891(119909119910 119911) ndash Eacute o volume da esfera unitaacuteria
Atraveacutes da Equaccedilatildeo (254) GROSS e THONNESSEN (2006) conseguiram
descrever algumas relaccedilotildees entre autovalores e as propriedades de superfiacutecies
normais conforme eacute ilustrado com o Quadro 23
57
ESTRUTURA AUTOVALORES
120640120783 120640120784 120640120785
PONTO ISOLADO
0 0 0
PONTO FINAL DE SEGMENTO
DE RETA
1
12= 0083 0 0
LINHA RETA 1
3= 0333 0 0
12 PLANO 1
4= 025
1
4 1 minus
64
91205872 = 00 0
PLANO 1
4= 025
1
4= 025 0
14 PLANO 1
4 1 minus
2
120587 = 009
1
4+
2
120587minus
32
91205872= 00 0
INTERSECcedilAtildeO DE 2 PLANOS
1
3= 0333
1
8= 0125
1
8minus
8
91205872= 003
INTERSECcedilAtildeO DE 3 PLANOS
1
6 1 minus
1
120587 = 011
1
6 1 minus
1
120587 = 011
1
6 1 +
2
120587 minus
26
331205872= 003
INTERSECcedilAtildeO DE 2 PLANOS
Agrave 30deg 025 01875 001747
QUADRO 23 ndash Propriedades de superfiacutecies normais obtidas com autovalores FONTE GROSS e THOENNESSEN (2006)
Os autovalores do Quadro 23 foram determinados analiticamente a partir da
Equaccedilatildeo (254) e podem ser utilizados como referecircncia para a estimaccedilatildeo da forma
das superfiacutecies que compotildeem a estrutura dos objetos
Restringindo a ordem dos momentos com 119894 + 119895 + 119896 le 2 pode-se calcular o
centro de gravidade da superfiacutecie conforme a Equaccedilatildeo (255) e os elementos da
119872119881119862 podem serem obtidos atraveacutes da Equaccedilatildeo (256)
119909 =119898100
119898000 119910 =
119898010
119898000 119911 =
119898001
119898000 (255)
58
119898 119894119895119896 = 119909119894 minus 119909 119894 119910 minus 119910 119895 119911 minus 119911 119896119891(119909119910 119911)119889119907119881
(256)
Os momentos de 2ordf ordem normalizados para os pontos 3D em um domiacutenio
discreto podem ser calculados atraveacutes da Equaccedilatildeo (257)
119898 119894119895119896 = 119909119897minus119909
119894 119910119897minus119910 119895 119911119897minus119911
119896119873119897=1
119877119894+119895+119896119873 (257)
onde
119898 119894119895119896 ndash Momentos de 2ordf ordem para os pontos 3D
119873 ndash Nuacutemero de pontos da amostra no domiacutenio contiacutenuo da funccedilatildeo
119877 ndash Raio da esfera unitaacuteria considerada para seleccedilatildeo de pontos
Desta forma os valores calculados para os momentos natildeo satildeo influenciados
pelo nuacutemero de pontos unidade fiacutesica das medidas ou peso dos elementos da 119872119881119862
Utilizando momentos de 2ordf ordem a 119872119881119862 pode ser obtida atraveacutes da Equaccedilatildeo
(258)
119872119881119862 =
119898 200 119898 110 119898 101
119898 110 119898 020 119898 011
119898 101 119898 011 119898 002
(258)
O caacutelculo dos autovalores 120582119894 e autovetores 119890 119894 com 119894 = 123 eacute variaacutevel para
cada ponto do conjunto de observaccedilotildees Sendo assim as classes de valores
geradas por GROSS e THONNESSEN (2006) com objetivo de modelar superfiacutecies
com padratildeo planar foram agraves seguintes
O primeiro autovalor 1205821 foi definido constante e igual a 025
O segundo autovalor 1205822 varia de 0125 agrave 025
O terceiro autovalor 1205823 varia de 0 agrave 0125
Com a aproximaccedilatildeo teoacuterica dos valores contidos no Quadro 24 JUTZI e
GROSS (2009) mostraram a possibilidade de determinar matematicamente
inclinaccedilotildees entre as superfiacutecies para os acircngulos de 0ordm 30ordm e 90ordm No entanto
quando satildeo utilizados dados reais para representar as superfiacutecies pequenas
variaccedilotildees nestes valores podem ser percebidas Um exemplo eacute que o terceiro
59
autovalor 1205823 natildeo teraacute valor igual a zero mesmo em uma superfiacutecie plana Isto ocorre
por haverem pequenos desvios entre os pontos desta superfiacutecie que satildeo causados
por ruiacutedo presente no conjunto de dados reais Este fato pode ser observado
calculando o terceiro autovalor que seraacute um valor positivo pequeno mas diferente
de zero Com isto quanto mais proacuteximo de zero o terceiro autovalor 1205823 maior seraacute o
indicativo que a superfiacutecie eacute plana conforme ilustrado com a Figura 224
FIGURA 224 ndash Inclinaccedilotildees de superfiacutecies determinadas por autovalores
FONTE JUTZI e GROSS (2009)
60
211 ALGORITMO DE DESLOCAMENTO PELA MEacuteDIA
O algoritmo de deslocamento pela meacutedia (Mean Shift) pode ser utilizado no
reconhecimento de padrotildees para a segmentaccedilatildeo de imagens A densidade de
pontos vizinhos em relaccedilatildeo a um ponto central pode ser estimada com a meacutedia do
conjunto de dados discretos A anaacutelise espacial de atributos eacute utilizada neste
contexto com o objetivo de extrair informaccedilotildees Para isto utiliza a vizinhanccedila de um
ponto na imagem Com os atributos definidos pode-se encontrar o centro das
regiotildees com as maiores densidades que representam caracteriacutesticas significativas
dos objetos presentes na imagem
Para realizar a anaacutelise espacial de atributos e obterem-se resultados
satisfatoacuterios deve-se reduzir o volume de dados ateacute que se tenham apenas as
caracteriacutesticas significativas distribuiacutedas em um sistema de coordenadas contiacutenuo O
conteuacutedo do espaccedilo de atributos deve ser passiacutevel de modelagem atraveacutes de uma
amostragem com distribuiccedilatildeo multivariada de probabilidade Devido a este
pressuposto eacute necessaacuterio verificar se a condiccedilatildeo de normalidade dos dados eacute
satisfeita em aplicaccedilotildees estatiacutesticas tradicionais que utilizam testes parameacutetricos
Em outras aplicaccedilotildees podem-se utilizar meacutetodos estatiacutesticos natildeo
parameacutetricos com menos restriccedilotildees sobre o comportamento dos dados como por
exemplo natildeo se preocupar com o tipo de distribuiccedilatildeo para as variaacuteveis aleatoacuterias O
conceito de Kernel pode ser empregado em meacutetodos natildeo parameacutetricos para a
estimativa de propriedades Esta eacute uma funccedilatildeo estatiacutestica contiacutenua simeacutetrica e com
limite superior e inferior de integraccedilatildeo definidos cuja integraccedilatildeo resulta na unidade
por conveniecircncia O Kernel atua na imagem como uma janela de convoluccedilatildeo
suavizando as caracteriacutesticas dos pontos analisados (MACHADO 2006)
De acordo com COMANICIU e MEER (2002) o algoritmo de deslocamento
pela meacutedia eacute uma ferramenta versaacutetil para anaacutelises espaciais de feiccedilotildees presentes
em amostras Utiliza o Kernel para a estimaccedilatildeo da densidade dos elementos no
conjunto de dados tendo como referecircncia um ponto fixo na regiatildeo central da
amostra Dado um conjunto de pontos 120169119894=1hellip119899 em um espaccedilo 119877 com dimensatildeo 119889 o
estimador de densidade multivariada por Kernel 119870(120169) e a matriz de paracircmetros 119867
com bandas de dimensatildeo 119889 pode ser calculada com os pontos 120169 Com estes
61
paracircmetros definidos a funccedilatildeo para estimar a densidade multivariada no ponto 120169 eacute
expressa com a Equaccedilatildeo (259)
119891 (120169) =1
119899 119870119867 120169 minus 120169119894 119899119894=1 (259)
119870119867(120169) = 119867 minus1
2119870(119867minus1
2120169) (260)
O Kernel 119870(120169) com dimensatildeo 119889 eacute uma funccedilatildeo para a anaacutelise da densidade
da vizinhanccedila dos pontos expressa atraveacutes das Equaccedilotildees (261) e (262)
119870(120169)119877119889
119889120169 = 1 lim 119909 rarrinfin 120169 119889 119870 120169 = 0 (261)
119909119870(120169)119889120169119877119889
= 0 120169120169119879119870(120169)119889120169119877119889
= 119888119870119868 (262)
Onde 119888119870 eacute uma constante A partir do Kernel univariado 1198701 119909 o Kernel
multivariado pode ser calculado de duas maneiras conforme as Equaccedilotildees (263) e
(264)
119870119875 120169 = 1198701 119909119894 119889119894=1 (263)
119870119878 120169 = 119886119896 1198891198701( 120169119894 ) (264)
Onde 119870119875(120169) eacute obtido com o produto dos Kernels univariados e 119870119878(120169) eacute
obtido rotacionando 1198701(119909) no espaccedilo 119877119889 o que faz 119870119878(120169) ser radialmente simeacutetrico
A constante 119886119896 119889minus1 = 1198701 120169 1198891201691198774
com 119870119878(119909) integrado de 0 agrave 1 O Kernel
radialmente simeacutetrico eacute de interesse em anaacutelises espaciais de imagens desde que
satisfaccedila a condiccedilatildeo da Equaccedilatildeo (265)
119870 119909 = 119888119896 119889119896( 120169 2) (265)
Neste caso define-se a funccedilatildeo de cada elemento do Kernel 119896 119909 para 119909 ge 0
A constante de normalizaccedilatildeo 119888119896 119889 pode ser calculada integrando 119870 120169 de 0 a 1
assumindo-se que eacute positiva A estimaccedilatildeo pode ser parametrizada com a matriz
diagonal de bandas do Kernel 119867 = 1198932119868 = 119889119894119886119892 11989312hellip 119893119889
2 onde 119868 eacute a matriz
identidade com dimensatildeo 119889 Esta matriz apresenta a vantagem de ser determinada
62
utilizando como uacutenico paracircmetro o nuacutemero de bandas 119893 ge 0 do Kernel Empregando
paracircmetros com o nuacutemero de bandas 119893 e dimensatildeo 119899 o estimador de densidade por
Kernel da Equaccedilatildeo (259) pode ser expresso atraveacutes da Equaccedilatildeo (266)
119891 (120169) =1
119899119893119889 119870119867
120169minus120169119894
119893 119899
119894=1 (266)
A qualidade do estimador de densidade por Kernel pode ser analisada
atraveacutes do erro meacutedio quadraacutetico entre a densidade real e a estimada Na praacutetica
somente a aproximaccedilatildeo assintoacutetica das medidas pode ser calculada (AMISE ndash
Asymptotic Mean Integrated Square Error) Para os Kernels multivariados o erro
meacutedio quadraacutetico AMISE eacute minimizado utilizando o Kernel de Epanechnikov
(COMANICIU e MEER 2002)
119896119864 119909 = 1 minus 119909 0 le 119909 le 1
0 119909 gt 0 (267)
119870119864 120169 = 1
2119888119889
minus1 119889 + 2 (1 minus 120169 2) 120169 le 1
0 119888119886119904119900 119888119900119899119905119903aacute119903119894119900 (268)
Onde 119888119889 eacute o volume de uma esfera com raio unitaacuterio e com dimensatildeo 119889 O
elemento do Kernel 119896119873 119909 pode ser calculado utilizando a Equaccedilatildeo (269)
119896119873 119909 = exp minus1
2119909 119909 ge 0 (269)
Para o Kernel multivariado calculado com a Equaccedilatildeo (269) um Kernel
normal 119870119873 pode ser calculado utilizando a Equaccedilatildeo (270)
119870119873 120169 = (2120587)minus1198892exp minus1
2 120169 2 (270)
Sendo o Kernel normal simeacutetrico e admitido finito Para a anaacutelise espacial de
imagens estas duas formas de calcular o Kernel satildeo suficientes e os resultados
obtidos com estas condiccedilotildees impostas satildeo satisfatoacuterios O estimador de densidade
por Kernel da Equaccedilatildeo (259) pode ser reescrito conforme a Equaccedilatildeo (271)
63
119891 119893 119870(120169) =119888119896 119889
119899119893119889 119896
120169minus120169119894
119893
2
119899119894=1 (271)
Para anaacutelise de feiccedilotildees espaciais primeiramente deve-se calcular a
densidade do conjunto de dados e verificar o seu comportamento espacial Isto pode
ser feito calculando o gradiente da funccedilatildeo de densidade 119891(120169) igual a zero nabla119891 120169 = 0
O algoritmo de deslocamento pela meacutedia eacute uma maneira de localizar estes zeros
para estimar a densidade do conjunto de observaccedilotildees Calculando o gradiente da
funccedilatildeo expressa com a Equaccedilatildeo (271) pode-se estimar a densidade atraveacutes da
Equaccedilatildeo (272)
nabla 119891119893 119870(120169) equiv2119888119896 119889
119899119893119889+2 (120169 minus 120169119894)119896prime
120169minus120169119894
119893
2
119899119894=1 (272)
Substituindo 119896prime pela funccedilatildeo 119892(119909) conforme expresso com a Equaccedilatildeo (273)
119892 119909 = 119896prime(119909) (273)
Assumindo que a derivada do Kernel 119896 exista para o conjunto finito de
pontos 119909 isin [0infin) O Kernel 119866(119909) com seus elementos 119892(119909) pode ser definido atraveacutes
da Equaccedilatildeo (274)
119866 119909 = 119888119892 119889119892( 120169 2) (274)
Onde 119888119892119889 corresponde a uma constante de normalizaccedilatildeo O Kernel 119866 119909
pode ser considerado uma aproximaccedilatildeo do Kernel 119870(119909) dependendo do contexto
em que seraacute empregado De forma similar o Kernel de Epanechnikov eacute uma
simplificaccedilatildeo do Kernel uniforme da esfera unitaacuteria com dimensatildeo 119889 Introduzindo
119892(119909) na Equaccedilatildeo (272) tem-se a Equaccedilatildeo (275)
nabla 119891119893 119870 120169 =2119888119896 119889
119899119893119889+2 120169 minus 120169119894 119892
120169minus120169119894
119893
2
119899119894=1 (275)
nabla 119891119893 119870 120169 =2119888119896 119889
119899119893119889+2 119892 120169minus120169119894
119893
2
119899119894=1 ∙
120169119894119892 120169minus120169119894119893
2 119899
119894=1
119892 120169minus120169119894119893
2 119899
119894=1
(276)
64
119892 120169minus120169119894
119893
2
119899119894=1 (277)
Considerando que o resultado da funccedilatildeo expressa com a Equaccedilatildeo (277) eacute
um nuacutemero positivo O primeiro termo da Equaccedilatildeo (276) eacute proporcional agrave densidade
estimada calculada para 120169 com o Kernel 119866 conforme Equaccedilatildeo (271) e expresso
agora em funccedilatildeo de 119892(119909) atraveacutes da Equaccedilatildeo (278)
119891119893 119866 120169 =119888119892 119889
119899119893119889 119892
120169minus120169119894
119893
2
119899119894=1 (278)
O segundo termo da Equaccedilatildeo (276) corresponde ao algoritmo de
deslocamento pela meacutedia conforme Equaccedilatildeo (279)
119898119893 119866 120169 = 120169119894119892
120169minus120169119894119893
2 119899
119894=1
119892 120169minus120169119894119893
2 119899
119894=1
minus 120169 (279)
A Equaccedilatildeo (279) representa a diferenccedila entre as meacutedias ponderadas
utilizando o Kernel 119866 para os pesos e o centro da janela de convoluccedilatildeo em 120169 A
partir das Equaccedilotildees (276) (278) e (279) chega-se as Equaccedilotildees (280) e (281)
nabla 119891119893 119870 120169 = 119891 119893 119866 120169 2119888119896 119889
1198932119888119892 119889119898119893 119866 120169 (280)
119898119893 119866 120169 =1
21198932119888nabla
119891 119893 119870 120169
119891 119893 119866 120169 (281)
Para a posiccedilatildeo 120169 o vetor de deslocamento pela meacutedia calculado com Kernel
119866 eacute proporcional agrave estimaccedilatildeo de densidade normalizada obtida resolvendo a funccedilatildeo
com gradiente igual a zero e Kernel 119870 Eacute a normalizaccedilatildeo da densidade estimada em
119909 calculada com o Kernel 119866
O vetor de deslocamento pela meacutedia aponta na direccedilatildeo de maacuteximo
crescimento da densidade do conjunto de dados A estimaccedilatildeo da densidade de
pontos com mesma caracteriacutestica eacute obtida atraveacutes de interaccedilotildees com sucessivos
caacutelculos do vetor de deslocamento pela meacutedia 119898119893 119866 120169 e translaccedilotildees do Kernel 119866(119909)
sobre a imagem Isto garante a convergecircncia ao redor do ponto de interesse
65
utilizando a Equaccedilatildeo (281) com gradiente igual a zero Regiotildees com baixa
densidade de observaccedilotildees natildeo satildeo interessantes para anaacutelises espaciais com o
algoritmo de deslocamento pela meacutedia pois muitas iteraccedilotildees seriam necessaacuterias
para obtenccedilatildeo de resultados pouco satisfatoacuterios De forma anaacuteloga em locais com
densidade maacutexima poucas iteraccedilotildees satildeo necessaacuterias e a anaacutelise pode atingir bons
resultados (COMANICIU e MEER 2002)
Imagens satildeo representadas matematicamente na forma de matrizes onde
cada posiccedilatildeo da matriz eacute ocupada por vetores com dimensatildeo 119901 onde 119901 = 1 no caso
de imagens em niacuteveis de cinza ou coloridas e 119901 ge 2 no caso de imagens
multiespectrais O posicionamento de cada pixel na matriz imagem estaacute contido no
domiacutenio espacial (Spatial domain) enquanto o valor digital do pixel faz parte do
domiacutenio de caracteriacutesticas da imagem (Range domain) assumindo-se estes
domiacutenios como espaccedilos euclidianos Deste modo o Kernel multivariado pode ser
definido como o produto de dois Kernels radialmente simeacutetricos em um espaccedilo
euclidiano calculado com um paracircmetro de cada domiacutenio atraveacutes da Equaccedilatildeo
(282)
119870119893119904119893119903(119909) =119862
1198931199042119893119903
119901 119896 120169119904
119893119904
2
119896 120169119903
119893119903
2
(282)
onde
120169119904 ndash Corresponde ao domiacutenio espacial
120169119903 ndash Corresponde ao domiacutenio de caracteriacutesticas
119896(119909) ndash Elemento da funccedilatildeo calculado em ambos os domiacutenios
119893119904 119893119903 ndash Paracircmetros das bandas de cada domiacutenio do Kernel empregado
119862 ndash Constante de normalizaccedilatildeo entre as bandas
Na praacutetica o Kernel de Epanechnikov tambeacutem conhecido por Kernel normal
atinge resultados satisfatoacuterios O usuaacuterio deve escolher apenas os paracircmetros das
bandas 119893 = 119893119904 119893119903 e a quantidade miacutenima 119867 de pixels das regiotildees segmentadas na
imagem determinando assim a resoluccedilatildeo na estimaccedilatildeo da densidade A Figura 225
ilustra um exemplo de segmentaccedilatildeo realizada utilizando o algoritmo de
deslocamento pela meacutedia sobre uma imagem em niacuteveis de cinza
66
FIGURA 225 ndash Imagem segmentada FONTE COMANICIU e MEER (2002)
A segmentaccedilatildeo de imagens atraveacutes do algoritmo de deslocamento pela
meacutedia foi implementada no software EDISON (Edge Detection and Image
SegmentatiON System) desenvolvido pela Universidade RUTGER de New Jersey
Este software aleacutem da segmentaccedilatildeo com o algoritmo de deslocamento pela meacutedia
realiza uma filtragem preservando as descontinuidades e detectando os limites dos
objetos contidos na imagem atraveacutes de uma funccedilatildeo gradiente (CHRISTOUDIAS et
al 2002)
67
3 MATERIAIS
Neste trabalho foram utilizadas imagens TOF obtidas com a cacircmara PMD
CamCube 20 que fornece dados de distacircncia e intensidade sob forma de matrizes
de imagem Para realizar os experimentos foram obtidos trecircs conjuntos de imagens
De um gabarito com a forma de um tabuleiro de xadrez para realizar
o processo de calibraccedilatildeo da cacircmara
De uma parede branca com padratildeo planar para anaacutelise de ruiacutedos e
distorccedilotildees geomeacutetricas das imagens e
Do objeto de estudo uma caixa de papelatildeo com superfiacutecies planas e
brancas
Para o processamento das imagens TOF foi utilizado um microcomputador
do laboratoacuterio de Fotogrametria e Sensoriamento Remoto Departamento de
Geomaacutetica da Universidade Federal do Paranaacute com as seguintes caracteriacutesticas
Processador Intelreg Coretrade2 Duo 293GHz
Capacidade do disco riacutegido de 320GB
Memoacuteria principal de 2GB
68
4 MEacuteTODOS
Neste capitulo descreve-se o desenvolvimento metodoloacutegico do presente
trabalho de pesquisa para a aquisiccedilatildeo e processamento da imagem TOF Esta
imagem eacute composta por dois arquivos O primeiro arquivo conteacutem informaccedilatildeo de
intensidade de retorno do sinal captado com iluminaccedilatildeo infravermelha O segundo
arquivo conteacutem informaccedilatildeo de distacircncia (range) para cada pixel gerado com o
sensor da cacircmara TOF
Considerando que as imagens TOF podem apresentar ruiacutedo em funccedilatildeo das
condiccedilotildees de iluminaccedilatildeo e da natureza das superfiacutecies dos objetos estudos para a
reduccedilatildeo do ruiacutedo foram efetuados Para isto utilizaram-se janelas na regiatildeo central
da imagem ao redor do pixel com coordenadas de imagem (102 102) As filtragens
foram realizadas em aacutereas que circundam este pixel central
Apoacutes a anaacutelise do tempo de integraccedilatildeo na aquisiccedilatildeo da imagem
determinaram-se POI atraveacutes do processo de calibraccedilatildeo da cacircmara Os POI
permitiram corrigir a geometria dos dados da imagem TOF Esta correccedilatildeo eacute
necessaacuteria devido agraves distorccedilotildees causadas pelo sistema de lentes da cacircmara
A etapa seguinte consistiu na segmentaccedilatildeo da imagem TOF onde duas
metodologias foram avaliadas
1) Segmentaccedilatildeo do conjunto de dados por crescimento de regiotildees no
espaccedilo tridimensional utilizando pontos semente escolhidos no arquivo de
intensidades da imagem TOF como referecircncia para o posicionamento (119883119884) dos
pontos com distacircncia (119885)
2) Segmentaccedilatildeo utilizando a anaacutelise da variaccedilatildeo local dos autovalores ao
longo do arquivo de distacircncias da imagem TOF Realizada para a geraccedilatildeo de uma
imagem com bordas intensificadas segmentaccedilatildeo desta imagem atraveacutes do
algoritmo de deslocamento pela meacutedia e projeccedilatildeo ortogonal dos pontos
pertencentes agraves aacutereas segmentadas As superfiacutecies segmentadas foram entatildeo
separadas atraveacutes do conjunto de pontos 3D
O passo seguinte consistiu no caacutelculo das coordenadas tridimensionais dos
pontos dos objetos imageados a partir da informaccedilatildeo de distacircncia das coordenadas
dos piacutexeis na imagem de intensidade e dos POI Com isto gerou-se a nuvem de
pontos 3D e tornou-se possiacutevel a modelagem tridimensional das superfiacutecies do
69
objeto de estudo sendo tambeacutem avaliado o resultado obtido A Figura 41 apresenta
as etapas realizadas no processamento das imagens TOF com as duas propostas
de metodologia para a etapa de segmentaccedilatildeo
FIGURA 41 ndash Processamento da imagem TOF
41 CALIBRACcedilAtildeO DA CAcircMARA
A calibraccedilatildeo foi realizada com o objetivo de determinar os Paracircmetros de
Orientaccedilatildeo Interior (POI) da cacircmara Estes paracircmetros possibilitam a reconstruccedilatildeo
do feixe perspectivo que gerou a imagem para o instante em que foi captada
permitindo a correccedilatildeo de sua geometria (ANDRADE 1998)
Com o processo de Orientaccedilatildeo Interior satildeo obtidos os seguintes POI
distacircncia focal calibrada (119891119888 ) posiccedilatildeo do Ponto Principal (1199090 1199100) na imagem
Distorccedilatildeo Radial Simeacutetrica (119870111987021198703) Distorccedilatildeo Descentrada (11987511198752) e os
paracircmetros que indicam falta de afinidade do sensor (119860119861)
IMAGEM TOF
CORRECcedilOtildeES GEOMEacuteTRICAS COM POI
ARQUIVO DE INTENSIDADES
SUPERFIacuteCIE SEMENTE
CRESCIMENTO DE REGIOtildeES COM PONTO SEMENTE
PROJECcedilAtildeO ORTOGONAL
NUVEM DE PONTOS 3D
ARQUIVO DE DISTAcircNCIAS
IMAGEM COM BORDAS INTENSIFICADAS VARIACcedilAtildeO LOCAL DE AUTOVALORES
SEGMENTACcedilAtildeO DA IMAGEM COM BORDAS INTENSIFICADAS
PROJECcedilAtildeO ORTOGONAL
NUVEM DE PONTOS 3D
MODELAGEM 3D DAS SUPERFIacuteCIES
70
Os POI obtidos com o processo de calibraccedilatildeo possibilitam realizar correccedilotildees
geomeacutetricas nos arquivos de intensidades e distacircncias das imagens TOF Com a
calibraccedilatildeo objetiva-se corrigir as distorccedilotildees ocorridas na passagem do raio de luz
pelo sistema de lentes ateacute atingir o plano focal Este erro ocorre pela impossibilidade
na construccedilatildeo de um sistema de lentes perfeito para a cacircmara A correccedilatildeo dos erros
sistemaacuteticos da cacircmara eacute realizada no plano da imagem no ponto onde uma linha
reta passante pelo ponto nodal anterior do sistema de lentes eacute ortogonal a este
plano
O meacutetodo de calibraccedilatildeo fotogrameacutetrica eacute o tradicionalmente utilizado na
determinaccedilatildeo dos POI em Ciecircncias Geodeacutesicas Para isto necessita de pontos de
apoio com coordenadas tridimensionais conhecidas na superfiacutecie de objetos com
correspondentes coordenadas bidimensionais observadas na imagem Relaciona-se
a informaccedilatildeo 3D da cena com a informaccedilatildeo 2D da imagem atraveacutes das equaccedilotildees de
colinearidade fazendo-se uma correspondecircncia entre a posiccedilatildeo dos pontos de
referecircncia 3D e os mesmos pontos reconhecidos na imagem 2D Esta calibraccedilatildeo
pode ser realizada de forma eficiente desde que sejam utilizadas teacutecnicas e campos
de calibraccedilatildeo apropriados para cada tipo de cacircmara e aplicaccedilatildeo que se destina a
imagem Outra teacutecnica que pode ser utilizada para a Orientaccedilatildeo Interior das imagens
eacute conhecida como auto-calibraccedilatildeo na qual natildeo haacute necessidade de pontos com
coordenadas conhecidas no espaccedilo objeto (ZHANG 2000)
A Distorccedilatildeo Radial Simeacutetrica eacute a parcela de refraccedilatildeo natildeo desejaacutevel que um
feixe luminoso sofre ao atravessar um sistema de lentes A Distorccedilatildeo Descentrada eacute
composta pelas distorccedilotildees Tangencial e Radial Assimeacutetrica Eacute causada pela
impossibilidade de alinhar-se perfeitamente o eixo oacuteptico do sistema de lentes que
compotildee a objetiva Correccedilotildees para estas distorccedilotildees podem ser feitas atraveacutes da
Equaccedilatildeo (41) Maiores detalhes podem ser vistos em Andrade (1998)
119909prime119910prime =
119909119910
119900119887119904minus
1199090
1199100 minus
120575119909120575119910 119903119886119889
minus 120575119909120575119910 119889119890119904
minus 120575119909120575119910 119886
(41)
71
onde
119909prime119910prime 119879 ndash Coordenadas corrigidas no sistema referencial de imagem
119909 119910 119900119887119904119879 ndash Coordenadas de imagem observadas
1199090 1199100 119879ndash Coordenadas do PP no sistema referencial de imagem
120575119909 120575119910 119903119886119889119879 ndash Distorccedilatildeo Radial Simeacutetrica
120575119909 120575119910 119889119890119904119879 ndash Distorccedilatildeo Descentrada
120575119909 120575119910 119886119879 ndash Distorccedilatildeo causada pela falta de afinidade entre os eixos do
sensor
Andrade (1998) ilustra algumas correccedilotildees necessaacuterias para as imagens
utilizadas em Fotogrametria e mostra a influencia dos POI nestas correccedilotildees Um
exemplo eacute a correccedilatildeo da distorccedilatildeo Radial Simeacutetrica que pode ser realizada atraveacutes
das Equaccedilotildees (42) e (43)
120575119909119903119886119889 = (1199032 ∙ 1198701 + 1199034 ∙ 1198702 + 1199036 ∙ 1198703) ∙ 119909 (42)
120575119910119903119886119889 = (1199032 ∙ 1198701 + 1199034 ∙ 1198702 + 1199036 ∙ 1198703) ∙ 119910 (43)
onde
119909 = (119909 minus 1199090)
119910 = (119910 minus 1199100)
119909119910 ndash Coordenadas dos pontos com distorccedilotildees no sistema referencial
fotogrameacutetrico projetado na imagem
11990901199100 ndash Coordenadas do Ponto Principal
119870111987021198703 ndash Coeficientes de Distorccedilatildeo Radial Simeacutetrica
72
A distacircncia 119903 entre o ponto com coordenadas na imagem e o Ponto Principal
pode ser calculada atraveacutes da Equaccedilatildeo (44)
119903 = 119909 2 + 119910 2 (44)
A Distorccedilatildeo Descentrada pode entatildeo ser corrigida atraveacutes das Equaccedilotildees
(45) e (46)
120575119909119889119890119904 = [1198751 ∙ (1199032 + 2 ∙ 1199092
) + 2 ∙ 1198752 ∙ 119909 ∙ 119910 ] ∙ (1 + 1198753 + r2 + ⋯ ) (45)
120575119910119889119890119904 = [2 ∙ 1198751 ∙ 119909 ∙ 119910 + 1198752 ∙ (r2 + 2 ∙ 119910 2)] ∙ (1 + 1198753 + r2 + ⋯ ) (46)
onde
119875111987521198753 ndash Coeficientes de Distorccedilatildeo Descentrada
A diferenccedila de escala dos eixos horizontal e vertical da imagem possiacutevel
natildeo ortogonalidade entre os elementos do sensor pode ser modelada utilizando as
Equaccedilotildees (47) e (48) que introduzem correccedilotildees utilizando os paracircmetros de
afinidade 119860 e 119861 (HABIB e MORGAN 2003)
120575119909119886 = 119860 119909 minus 1199090 + 119861(119910minus1199100) (47)
120575119910119886 = 119861(119910minus1199100) (48)
onde
119860119861 ndash Paracircmetros de afinidade
119909119910 ndash Coordenadas dos pontos com distorccedilotildees no sistema referencial
fotogrameacutetrico projetado na imagem
11990901199100 ndash Coordenadas do Ponto Principal
73
A partir da formulaccedilatildeo proposta por Brown (1971) e incluindo os paracircmetros
de afinidade 119860 e 119861 as Equaccedilotildees (49) e (410) possibilitam a correccedilatildeo da imagem
utilizando os coeficientes 119870111987021198703 e 11987511198752
119909prime = 119909 + 119909 ∙ 11987011199032+1198702119903
4+11987031199036 + ⋯ +
+ 1198751 ∙ 1199032 + 2 ∙ 119909
2 + 2 ∙ 1198752 ∙ 119909 ∙ 119910 ∙ 1 + 1198753 ∙ 119903
2 + ⋯ + 119909 119860 + 119910 119861 (49)
119910prime = 119910 + 119910 ∙ 11987011199032+1198702119903
4+11987031199036 + ⋯ +
+ 21198751 ∙ 119909 ∙ 119910 + 1198752 ∙ 1199032 + 2119910 2 ∙ 1 + 1198753 ∙ 119903
2 + ⋯ + 119910 119861 (410)
A Equaccedilatildeo (41) ilustra as correccedilotildees necessaacuterias na geometria da imagem
quando objetiva-se a extraccedilatildeo de informaccedilotildees meacutetricas Eacute um modelo jaacute consagrado
na Fotogrametria e bastante aplicado em Ciecircncias Geodeacutesicas Pode ser utilizado
para o entendimento das correccedilotildees necessaacuterias nas imagens devido agraves distorccedilotildees
causadas pelo sistema de lentes da cacircmara e pela falta de afinidade entre os
elementos do sensor Outros modelos matemaacuteticos para correccedilotildees geomeacutetricas de
imagens satildeo utilizados em aacutereas correlatas como a Visatildeo Computacional Com a
precisatildeo requerida em cada aplicaccedilatildeo alguns POI tecircm maior relevacircncia que outros
podendo haver a supressatildeo de alguns A correlaccedilatildeo entre os paracircmetros deve ser
analisada e evitada
As Equaccedilotildees (49) e (410) podem ser simplificadas para realizar apenas as
correccedilotildees utilizando os coeficientes de Distorccedilatildeo Radial Simeacutetrica 1198961 e 1198962 e os
paracircmetros de afinidade 119860 e 119861 Estes paracircmetros satildeo os mais significativos para a
correccedilatildeo da imagem obtida com cacircmaras digitais de pequeno formato conforme eacute
expresso atraveacutes das Equaccedilotildees (411) e (412)
119909prime = 119909 + 119909 ∙ 11987011199032+1198702119903
4 + 119909 119860 + 119910 119861 (411)
119910prime = 119910 + 119910 ∙ 11987011199032+1198702119903
4 + 119910 119861 (412)
74
onde
119909119910 ndash Coordenadas dos pontos com distorccedilotildees no sistema referencial
fotogrameacutetrico projetado na imagem
119909 = (119909 minus 1199090)
119910 = (119910 minus 1199100)
11990901199100 ndash Coordenadas do Ponto Principal
119860119861 ndash Paracircmetros de afinidade
Cacircmaras digitais de pequeno formato apresentam principalmente a
Distorccedilatildeo Radial Simeacutetrica causada pelo sistema de lentes sendo os coeficientes 1198961
e 1198962 os mais significativos Os paracircmetros de afinidade entre os eixos da imagem 119860
e 119861 tambeacutem podem ser considerados para a correccedilatildeo das imagens obtidas
dependendo da precisatildeo com que o sensor da cacircmara foi construiacutedo pelo fabricante
Alguns softwares calculam os POI de forma raacutepida com soluccedilatildeo aproximada
e dependendo da aplicaccedilatildeo a que se destina a imagem podem ser utilizados sem
maiores restriccedilotildees Um deles eacute o Toolbox CALIB para Matlab utiliza o algoritmo
proposto por Zhang (2000) Este meacutetodo consiste em determinar os POI da cacircmara
tomando diferentes imagens de um gabarito com quadrados pretos e brancos
similar a um tabuleiro de xadrez fixado em uma superfiacutecie riacutegida e com padratildeo
planar Devem ser obtidas imagens do gabarito variando a posiccedilatildeo e orientaccedilatildeo da
cacircmara natildeo sendo necessaacuterio conhecer a trajetoacuteria do seu movimento para a
determinaccedilatildeo dos POI Este algoritmo possibilita o caacutelculo dos POI da cacircmara de
forma aproximada atraveacutes de sucessivas iteraccedilotildees Para sua utilizaccedilatildeo eacute necessaacuterio
conhecer a dimensatildeo dos quadrados do gabarito e indicar os pontos posiccedilotildees dos
veacutertices que seratildeo utilizados como pontos de referecircncia
No algoritmo proposto por Zhang um vetor de pontos 2D eacute denotado por
119898 = [119906 119907]119879 e um vetor de pontos 3D por 119872 = [119883119884119885]119879 De forma similar pode-se
aumentar estes vetores adicionando uma linha com valor igual a 1 sendo os vetores
aumentados 119898 = [119906 119907 1]119879 e 119872 = [119883119884119885 1]119879 A colinearidade entre o ponto no
espaccedilo objeto centro perspectivo e o ponto no espaccedilo imagem eacute utilizada para
75
estabelecer a relaccedilatildeo entre os pontos 3D contidos no vetor 119872 e os pontos na
imagem 2D contidos no vetor 119898 conforme a Equaccedilatildeo (413)
119904119898 = 119860[119877 119905]119872 (413)
onde
119904 ndash Fator de escala
119877 119905 ndash Paracircmetros de Orientaccedilatildeo Exterior (POE) compostos por elementos de
rotaccedilatildeo e translaccedilatildeo que relacionam as coordenadas obtidas no sistema 3D do
espaccedilo objeto com o sistema de coordenadas 2D da imagem
119860 ndash Eacute a matriz com os POI da cacircmara Apresenta as coordenadas 1199060 e 1199070 do
PP 119864120572 e 119864120573 satildeo os fatores de escala na imagem com eixos 119906 e 119907 O paracircmetro 120574
descreve a falta de ortogonalidade entre os eixos do sistema referencial da imagem
A matriz 119860 eacute expressa atraveacutes da Equaccedilatildeo (414)
119860 = 119864120572 120574 1199060
0 119864120573 1199070
0 0 1
(414)
Comparando as Equaccedilotildees (411) e (412) com o modelo proposto por Zhang
expresso atraveacutes da Equaccedilatildeo (413) tecircm-se as seguintes correspondecircncias
119860 e 119861 satildeo os paracircmetros de afinidade das Equaccedilotildees (411) e (412)
que correspondem aos fatores de escala 119864120572 e 119864120573 da Equaccedilatildeo (413)
Sendo que o paracircmetro 120574 acircngulo entre os eixos da imagem pode ser
calculado a partir destes fatores de escala
1199090 e 1199100 satildeo as coordenadas do Ponto Principal expressas com as
Equaccedilotildees (411) e (412) que tem suas correspondecircncias nas
coordenadas 1199060 e 1199070 da Equaccedilatildeo (413)
O caacutelculo dos POI pode ser entatildeo ser realizado atraveacutes da Equaccedilatildeo (415)
119898119894119895 minus119898 119860119877119894 119905119894 119872119895 2119898
119895=1119899119894=1 (415)
76
onde
119898 119860119877119894 119905119894 119872119894 ndash Eacute a projeccedilatildeo do vetor do ponto 119872119895 sobre a imagem 119894
119877119894 ndash Eacute o vetor de rotaccedilatildeo com paracircmetros 119903
O algoritmo proposto por Zhang (2000) utiliza somente os dois primeiros
termos de Distorccedilatildeo Radial Simeacutetrica para a correccedilatildeo da imagem atraveacutes dos
coeficientes 1198961 e 1198962 conforme Equaccedilotildees (416) e (417) Cacircmaras digitais de
pequeno formato normalmente apresentam distorccedilotildees de lentes significantes
especialmente a Distorccedilatildeo Radial Simeacutetrica A funccedilatildeo de distorccedilatildeo eacute fortemente
influenciada pelos componentes radiais principalmente o primeiro termo 1198961 Dadas
as coordenadas de uma imagem (119906 119907) consideradas livres de distorccedilatildeo e as
correspondentes coordenadas de imagem observadas (119906 119907 ) consegue-se projetar
os pontos atraveacutes da relaccedilatildeo de colinearidade entre eles De forma similar (119909119910) satildeo
as coordenadas de imagem consideradas livres de distorccedilatildeo e (119909 119910 ) as coordenadas
que possuem distorccedilatildeo Estas coordenadas tecircm suas escalas compatibilizadas
atraveacutes de uma normalizaccedilatildeo
119909 = 119909 + 119909 1198961 1199092 + 1199102 + 1198962 119909
2 + 1199102 2 (416)
119910 = 119910 + 119910 1198961 1199092 + 1199102 + 1198962 119909
2 + 1199102 2 (417)
onde
11989611198962 ndash Satildeo os coeficientes de Distorccedilatildeo Radial Simeacutetrica O centro desta
distorccedilatildeo encontra-se no Ponto Principal projetado na imagem
Com 119906 = 1199060 + 119886119909 + 120574119910 e 119907 = 1199070 + 120573119910 e assumindo 120574 = 0 em uma imagem
que tem os eixos perpendiculares tem-se a relaccedilatildeo expressa com as Equaccedilotildees
(418) e (419)
119906 = 119906 + 119906 minus 1199060 1198961 1199092 + 1199102 + 1198962 119909
2 + 1199102 2 (418)
119907 = 119907 + 119907 minus 1199070 1198961 1199092 + 1199102 + 1198962 119909
2 + 1199102 2 (419)
Uma opccedilatildeo para estimar os coeficientes 1198961 e 1198962 eacute feita atraveacutes de
sucessivas iteraccedilotildees utilizando as coordenadas 119906 e 119907 dos piacutexeis considerados
77
isentos de erro Com isto tecircm-se duas expressotildees para os pontos da imagem
conforme a Equaccedilatildeo (420)
119906 minus 1199060 119909
2 + 1199102 119906 minus 1199060 1199092 + 1199102 2
119907 minus 1199070 1199092 + 1199102 119907 minus 1199070 119909
2 + 1199102 2 1198961
1198962 =
119906 minus 119906119907 minus 119907
(420)
Dados 119898 pontos em 119899 imagens podemos obter 2 ∙ 119898 ∙ 119899 equaccedilotildees Na forma
matricial 119863119896 = 119889 onde 119896 = 1198961 1198962 119879 A soluccedilatildeo deste sistema de equaccedilotildees eacute
possiacutevel pelo meacutetodo dos miacutenimos quadrados conforme a Equaccedilatildeo (421)
119896 = 119863119879119863 minus1119863119879119889 (421)
Uma vez que 1198961 e 1198962 foram calculados pode-se refinar a estimaccedilatildeo dos
outros paracircmetros resolvendo novamente a Equaccedilatildeo (415) substituindo os valores
de 119898 119860119877119894 119905119894 119872119894 pelos valores calculados com as Equaccedilotildees (418) e (419)
A estimaccedilatildeo do conjunto completo de POI pode ser expressa atraveacutes da
Equaccedilatildeo (422)
119898119894119895 minus119898 1198601198961 1198962119877119894 119905119894 119872119895 2119898
119895=1119899119894=1 (422)
onde
119898 119860 11989611198962119877119894 119905119894 119872119895 - Eacute funccedilatildeo da projeccedilatildeo do vetor do ponto 119872119895 na imagem
119894 de acordo com a Equaccedilatildeo (413)
Com este meacutetodo no miacutenimo duas imagens devem ser adquiridas com
orientaccedilotildees diferentes se os elementos sensores da cacircmara forem quadrados
Zhang (2000) recomenda a aquisiccedilatildeo de pelo menos cinco imagens para obter
melhores resultados com o processo de calibraccedilatildeo Sendo assim os passos para
realizar a calibraccedilatildeo da cacircmara utilizando este meacutetodo satildeo
1 Imprimir o gabarito e fixaacute-lo em uma superfiacutecie plana e riacutegida
2 Tomar imagens do gabarito com diferentes orientaccedilotildees variando a
posiccedilatildeo e orientaccedilatildeo da cacircmara
78
3 Realizar a leitura das coordenadas dos pontos de controle nas
imagens
4 Estimar os POI e POE utilizando soluccedilatildeo aproximada
5 Refinar todos os paracircmetros incluindo os paracircmetros de distorccedilatildeo de
lentes atraveacutes da Equaccedilatildeo (422)
Os passos 4 e 5 satildeo realizados automaticamente pelo Toolbox CALIB do
software Matlab devendo o usuaacuterio apenas inserir as imagens no software e realizar
as leituras dos veacutertices dos quadrados nas imagens do gabarito
42 ANAacuteLISE DA PRESENCcedilA DE RUIacuteDO
Os piacutexeis saturados causados por exposiccedilatildeo prolongada do sensor na
aquisiccedilatildeo da imagem e tambeacutem os piacutexeis com baixa exposiccedilatildeo devem ser
cuidadosamente analisados na imagem pois tambeacutem podem causar erros nas
medidas de distacircncia devido agrave presenccedila de ruiacutedo Quando o sensor capta o sinal
luminoso existe um limite maacuteximo de saturaccedilatildeo que natildeo pode ser diminuiacutedo
posteriormente
Khongsab (2009) utilizou como paracircmetro principal o tempo de integraccedilatildeo na
captaccedilatildeo da imagem para controlar a saturaccedilatildeo dos piacutexeis Como este tempo eacute
aplicado globalmente ao sensor acaba influenciando os valores digitais dos piacutexeis
da imagem de forma equivalente Alguns apresentam erros devido agrave baixa
exposiccedilatildeo pois com a reduccedilatildeo do tempo de integraccedilatildeo natildeo receberam energia
eletromagneacutetica suficiente para sensibilizar o sensor sendo chamados de piacutexeis
insaturados Estes problemas podem ser minimizados definindo-se tempos de
integraccedilatildeo adequados para a obtenccedilatildeo da imagem TOF
O tratamento do ruiacutedo pode ser realizado com diferentes filtragens na
imagem Com este objetivo foram estudados os filtros passa-baixas pela meacutedia e
mediana Outro processo de filtragem realizado foi o caacutelculo da meacutedia dos valores
de distacircncia para diferentes imagens de uma mesma cena com o mesmo tempo de
integraccedilatildeo mas adquiridas em instantes brevemente diferentes
79
421 Filtragem passa-baixas pela meacutedia
O caacutelculo da meacutedia dos valores da vizinhanccedila em torno do pixel de interesse
tem o efeito de suavizar a imagem Este processo conhecido como filtro linear
passa-baixas atenua as altas frequecircncias que no espaccedilo de frequecircncias
correspondem agraves transiccedilotildees raacutepidas Este tipo de variaccedilatildeo caracteriza tambeacutem a
presenccedila de ruiacutedo na imagem A suavizaccedilatildeo tende a minimizar a presenccedila de ruiacutedo
e tecircm o efeito de tornar a imagem menos contrastante O filtro linear passa-baixas
utilizado tem dimensatildeo 3x3 com pesos iguais para os vizinhos Filtros lineares
resultam da convoluccedilatildeo de uma janela moacutevel sobre a imagem A Equaccedilatildeo (423)
representa o modelo matemaacutetico aplicado na filtragem linear passa-baixas pela
meacutedia (CENTENO 2004)
119866 119910 119909 = (119901(119894 119895) ∙ 119868(119910 + 119894 minus 119886 119909 + 119895 minus 119886))119879119895=1
119879119894=1 (423)
onde
119868(119910 119909) ndash Corresponde ao valor do pixel na posiccedilatildeo ldquolinha = 119910rdquo e ldquocoluna = 119909rdquo
119901(119894 119895) ndash Representa o filtro
119879 ndash Tamanho da janela de filtragem
119866(119910 119909) ndash Imagem resultante da filtragem
119886 = 119894119899119905 119879
2 + 1
A Figura 42 Ilustra o filtro linear passa-baixas pela meacutedia a janela central
cinza que estaacute na matriz de uma imagem Este filtro tem dimensatildeo de 3x3 piacutexeis e
atua no valor digital 48 do pixel central O valor digital do pixel apoacutes a filtragem
passa a ser 41222 que corresponde a meacutedia dos valores digitais dos piacutexeis
vizinhos
80
FIGURA 42 ndash Filtragem passa-baixas pela meacutedia
422 Filtragem pela mediana
A filtragem natildeo linear pela mediana consiste na substituiccedilatildeo do valor do pixel
central pelo valor correspondente a mediana da vizinhanccedila Este meacutetodo tambeacutem
suaviza a presenccedila de ruiacutedo A diferenccedila principal em relaccedilatildeo ao filtro da meacutedia eacute
que o filtro da mediana natildeo introduz novos valores na imagem pois substitui o valor
central da vizinhanccedila por um valor jaacute existente na imagem Sendo assim natildeo
degrada as bordas dos objetos de forma extrema A Figura 43 ilustra esta filtragem
que resultaraacute no valor digital 44 para o pixel filtrado que anteriormente apresentava
valor digital 48
FIGURA 43 ndash Filtragem pela mediana
81
423 Filtragem com a meacutedia temporal
A terceira opccedilatildeo eacute a ponderaccedilatildeo dos valores dos piacutexeis ao longo do tempo
Para isto uma seacuterie de imagens foi obtida a partir do mesmo ponto de vista em
instantes diferentes O resultado foi um conjunto de imagens de um uacutenico objeto
desde a mesma perspectiva natildeo sendo a geometria da imagem alterada Assim
cada pixel de uma imagem tem seu equivalente nas outras Assumindo que o ruiacutedo
seja aleatoacuterio eacute esperado que o uso de mais de uma imagem diminua a presenccedila
de ruiacutedo atraveacutes do caacutelculo da meacutedia dos valores observados
A filtragem com a meacutedia temporal eacute ilustrada com a Figura 44 Nesta figura
tem-se a representaccedilatildeo de trecircs imagens com suas matrizes de valores digitais
(Ii=123) e a imagem filtrada (IF) resultante que corresponde a meacutedia das trecircs
imagens originais
FIGURA 44 ndash Filtragem utilizando a meacutedia temporal
82
43 SEGMENTACcedilAtildeO
Com a etapa de segmentaccedilatildeo objetivou-se separar o conjunto de dados em
subconjuntos Estes subconjuntos satildeo compostos por pontos com coordenadas
tridimensionais que descrevem as superfiacutecies de objetos Eacute assumido que estas
superfiacutecies satildeo partes estruturais do objeto a ser identificado Para atingir esta meta
duas alternativas foram desenvolvidas e avaliadas
1) Crescimento de regiotildees a partir de superfiacutecies planas e ponto semente
utilizando o arquivo de intensidades da imagem TOF para selecionar a posiccedilatildeo de
pontos ou regiotildees semente sendo o arquivo de distacircncias utilizado para o
crescimento de regiotildees
2) Segmentaccedilatildeo por anaacutelise da variaccedilatildeo local de autovalores utilizando
somente o arquivo de distacircncias da imagem TOF para gerar uma imagem de
intensidade com bordas intensificadas que posteriormente eacute segmentada em
regiotildees que tecircm seus piacutexeis projetados gerando uma nuvem de pontos 3D destas
superfiacutecies segmentadas A segmentaccedilatildeo da imagem de intensidade com bordas
evidenciadas gerada eacute realizada utilizando o algoritmo de deslocamento pela meacutedia
431 Crescimento de regiotildees a partir de superfiacutecies planas e ponto semente
O primeiro meacutetodo proposto se baseia no crescimento de regiotildees por
agregaccedilatildeo de elementos adjacentes Este meacutetodo utiliza um criteacuterio de similaridade
para avaliar se um ponto pertence a uma determinada regiatildeo A distacircncia de um
ponto a uma superfiacutecie plana e o valor digital de um pixel em uma imagem satildeo
exemplos de criteacuterios de similaridade que podem ser utilizados (GONZALEZ e
WOODS 2000)
Partindo de um subconjunto de pontos adjacentes que pertencem a uma
superfiacutecie plana o processo consiste em buscar na vizinhanccedila outros pontos que
estejam espacialmente proacuteximos a esta superfiacutecie atendendo ao criteacuterio de
coplanaridade Neste criteacuterio a distacircncia ortogonal do ponto a uma superfiacutecie plana eacute
calculada atraveacutes das coordenadas 3D do ponto sendo este ponto considerado
pertencente agrave superfiacutecie quando estaacute dentro do limiar estabelecido A superfiacutecie
plana eacute determinada atraveacutes do autovetor com menor autovalor do conjunto de
83
pontos 3D a distacircncia ortogonal eacute calculada na direccedilatildeo deste autovetor partindo da
superfiacutecie O processo eacute iterativo de forma que o subconjunto inicial cresce
agregando novos elementos em cada iteraccedilatildeo ateacute atingir os limites da superfiacutecie
quando o criteacuterio de coplanaridade natildeo eacute mais satisfeito
O primeiro problema consiste na identificaccedilatildeo de pontos ou regiotildees semente
para dar iniacutecio ao processo de crescimento Uma opccedilatildeo foi identificar visualmente
regiotildees planas no arquivo de intensidades da imagem TOF e realizar a leitura de
coordenadas de pontos nestas regiotildees A partir das coordenadas destes pontos
selecionados na imagem de intensidade e de suas correspondentes no arquivo de
distacircncias da imagem TOF determinou-se a superfiacutecie plana que mais se aproxima
a esta regiatildeo atraveacutes do caacutelculo de seus autovetores e autovalores esta foi
considerada a superfiacutecie semente
A hipoacutetese baacutesica assume que superfiacutecies planas ou pelo menos partes
delas aparecem como regiotildees uniformes na imagem de intensidade devido agraves
condiccedilotildees de iluminaccedilatildeo Esta hipoacutetese nem sempre pode ser verificada e
confirmada Por exemplo se a superfiacutecie eacute coberta por tonalidades com padratildeo
irregular de cor entatildeo o plano pode mostrar valores natildeo uniformes na imagem de
intensidade sendo este um caso extremo Em uma situaccedilatildeo real pode ocorrer que
parte da superfiacutecie plana esteja pintada ou contenha manchas que alterem a sua
resposta espectral O mesmo pode ocorrer se houverem sombras projetadas de
outros objetos sobre a superfiacutecie Neste caso poreacutem existem outras regiotildees da
superfiacutecie plana que podem aparecer uniformes na imagem de intensidade e serem
utilizadas como regiatildeo semente
Com base nesta suposiccedilatildeo buscaram-se regiotildees uniformes na imagem de
intensidade e verificou-se a possibilidade de formarem superfiacutecies planas que
pudessem ser utilizadas como sementes no arquivo de distacircncias da imagem TOF
A soluccedilatildeo proposta consiste em segmentar a imagem de intensidade em regiotildees
uniformes com atributos de cor Um limite miacutenimo no tamanho das regiotildees deve ser
fixado para evitar que regiotildees muito pequenas sejam incluiacutedas na anaacutelise visto que
estas regiotildees pequenas podem representar locais com curvatura
A chave para o crescimento de regiotildees eacute a definiccedilatildeo do grau de pertinecircncia
de cada ponto agrave superfiacutecie plana Para isto eacute utilizado o conceito de distacircncia
miacutenima do ponto a esta superfiacutecie Para pertencer a uma regiatildeo os pontos devem
84
estar dentro do limite de proximidade ou seja a distacircncia entre o ponto e a
superfiacutecie plana natildeo pode superar o limiar fixado
A qualidade deste processo depende de fatores como o estabelecimento de
correspondecircncia entre os pontos precisatildeo na determinaccedilatildeo da superfiacutecie normal
utilizada remoccedilatildeo de erros grosseiros do conjunto de observaccedilotildees e identificaccedilatildeo
da regiatildeo semente
432 Segmentaccedilatildeo por anaacutelise da variaccedilatildeo local de autovalores
Esta abordagem baseia-se na anaacutelise da variaccedilatildeo local dos autovalores e
autovetores A hipoacutetese baacutesica nesta metodologia foi considerar que ao longo de
uma superfiacutecie plana os autovalores devem apresentar valores similares ou muito
proacuteximos Considerando duas regiotildees adjacentes se estas regiotildees forem
coplanares entatildeo a magnitude relativa de seus autovalores seraacute aproximadamente
igual Se uma destas regiotildees encontra-se em uma borda do objeto os autovetores
seratildeo diferentes A regiatildeo a ser considerada eacute uma janela quadrada em torno do
pixel central Para efetuar esta anaacutelise devem ser calculados os autovalores de uma
regiatildeo em torno de cada pixel no arquivo de distacircncias da imagem TOF Estes
autovalores satildeo armazenados em matrizes que geram trecircs novas imagens digitais
com as bordas dos objetos intensificadas
Com a Figura 45 Ilustra-se a anaacutelise do arquivo de distacircncias da imagem
TOF realizado com o caacutelculo de seus autovalores As bordas dos objetos presentes
podem ser vistas em evidecircncia satildeo representadas com os maiores valores
85
FIGURA 45 ndash Intensificaccedilatildeo de bordas com autovalores
Os autovalores calculados para cada pixel satildeo normalizados na faixa de 0 a
255 utilizando-se 8 bits Assim estes valores podem ser representados como uma
imagem digital passiacutevel de ser analisada com softwares de processamento A Figura
46 ilustra uma imagem com bordas intensificadas proveniente da segmentaccedilatildeo
realizada com a anaacutelise da variaccedilatildeo local dos autovalores
FIGURA 46 ndash Imagem com bordas intensificadas
86
A imagem produzida pode entatildeo ser segmentada utilizando o algoritmo de
deslocamento pela meacutedia Os resultados da segmentaccedilatildeo satildeo regiotildees onde os
autovalores satildeo aproximadamente iguais definindo uma superfiacutecie com padratildeo
planar sendo estas superfiacutecies separadas das regiotildees de bordas
433 Segmentaccedilatildeo com o algoritmo de deslocamento pela meacutedia
A segmentaccedilatildeo com o algoritmo de deslocamento pela meacutedia eacute realizada
utilizando a imagem com as bordas dos objetos intensificadas gerada com a
segmentaccedilatildeo do arquivo de distacircncias da imagem TOF pela anaacutelise da variaccedilatildeo
local dos autovalores
Cada um dos trecircs autovalores calculados gera uma imagem com bordas
intensificadas Sendo assim espera-se que os valores digitais dos piacutexeis nas
superfiacutecies dos objetos sejam similares dentro desta imagem Com isto a
segmentaccedilatildeo proporcionaraacute a seleccedilatildeo das superfiacutecies do objeto
Para realizar a segmentaccedilatildeo da imagem de intensidade com as bordas
intensificadas deve-se escolher os paracircmetros (119893119904 119893119903 119867) mais adequados para a
segmentaccedilatildeo Estes paracircmetros correspondem ao domiacutenio espacial da imagem 119893119904
domiacutenio de caracteriacutesticas dos piacutexeis 119893119903 e o tamanho miacutenimo 119867 que as aacutereas
segmentadas devem possuir O limite miacutenimo na quantidade de piacutexeis deve ser
fixado para evitar que regiotildees muito pequenas sejam incluiacutedas na segmentaccedilatildeo o
que pode prejudicar esta etapa pois se espera que a imagem seja segmentada com
o menor nuacutemero de regiotildees
87
5 RESULTADOS E DISCUSSOtildeES
51 CALIBRACcedilAtildeO DA CAcircMARA
Com o objetivo de calcular os POI o processo de calibraccedilatildeo da cacircmara foi
realizado com o Toolbox CALIB do software Matlab que utiliza o meacutetodo proposto
por ZHANG (2000) O gabarito fotografado foi impresso com 7x9 quadrados com
dimensatildeo de 117x117mm Estas imagens foram captadas a uma distacircncia
aproximada de 25 metros da cacircmara Para que houvesse pontos do gabarito sobre
a aacuterea da imagem foram obtidas 36 imagens com diferentes orientaccedilotildees conforme eacute
ilustrado com a Figura 51
FIGURA 51 ndash Imagens do gabarito utilizadas na calibraccedilatildeo da cacircmara
88
A Orientaccedilatildeo Exterior das imagens em relaccedilatildeo agrave cacircmara para a calibraccedilatildeo eacute
ilustrada com a Figura 52 A cacircmara eacute representada com a piracircmide em linhas
vermelhas e a origem do sistema fotogrameacutetrico eacute representada com a interseccedilatildeo
das linhas representadas com a cor azul no veacutertice da piracircmide
FIGURA 52 ndash Orientaccedilatildeo Exterior das fotografias para a calibraccedilatildeo da cacircmara
A distorccedilatildeo causada pelo sistema de lentes da cacircmara ocorre de forma mais
intensa nas bordas da imagem sendo a regiatildeo central o local com menor presenccedila
desta distorccedilatildeo A Figura 53 comprova este fato onde os vetores representados
com a cor vermelha partem dos pontos de controle na imagem e indicam a direccedilatildeo e
o sentido em que a distorccedilatildeo aumenta
FIGURA 53 ndash Direccedilatildeo das distorccedilotildees nos pontos da imagem TOF
89
Realizada a leitura das coordenadas dos pontos de controle os POI foram
calculados com o processo de calibraccedilatildeo da cacircmara e satildeo apresentados com a
Tabela 51
PARAcircMETROS INICIAIS OBTIDOS COM A LEITURA DAS IMAGENS
PARAcircMETRO VALOR
(piacutexeis) (mm)
Distacircncia focal (119891) (119891119909) (119891119910 )
285 80288 285 80288
1286113 1286113
Coordenadas do Ponto Principal (1199090)
(Origem no canto superior esquerdo) (1199100) 10150000 10150000
456750 456750
PARAcircMETROS DETERMINADOS COM A CALIBRACcedilAtildeO DA CAcircMARA
PARAcircMETRO VALOR DESVIO (3σ)
(piacutexeis) (mm) (piacutexeis) (mm)
Distacircncia focal (119891119888) calibrada (119891119909119888 ) (119891119910119888 )
29240511 29364057
1315823 1321383
plusmn 373164 plusmn 335357
plusmn 0167924 plusmn 0150911
Coordenadas do Ponto Principal (1199090119888 )
(Origem no canto superior esquerdo) (1199100119888 ) 10435253 10022287
4695864 4510029
plusmn 320459 plusmn 336886
plusmn 0144207 plusmn 0151599
1198701 -046768 -0021045 plusmn 003106 plusmn 0001398
1198702 060997 0027449 plusmn 013880 plusmn 0006246
1198703 000107 48150e-5
plusmn 000162 plusmn 72900e-5
1198751 000035 19350e-5
plusmn 000204 plusmn 91800e-5
1198752 000000 0000000 plusmn 000000 plusmn 0000000
Erro em pixel (119864119909 )
(119864119910 ) 049340 042754
0022203 0019239
TABELA 51 ndash Paracircmetros de Orientaccedilatildeo Interior calculados
Com os valores dos POI determinados foram calculados os fatores de escala
dos piacutexeis nas direccedilotildees 119904119909 e 119904119910 conforme as Equaccedilotildees (51) e (52)
119904119909 =119891
119891119909119888=
128119898119898
1315823119898119898= 0972775 (51)
119904119910 =119891
119891119910119888=
128119898119898
1321383119898119898= 0968682 (52)
A partir dos fatores de escala e da dimensatildeo do pixel igual a 45120583119898 das
imagens obtidas com a cacircmara PMD CamCube 20 foi calculado o tamanho efetivo
dos piacutexeis nas direccedilotildees x e y atraveacutes das Equaccedilotildees (53) e (54)
119875119909 = P ∙ 119904119909 = 45120583119898 ∙ 0972775 = 43774875120583119898 cong 44120583119898 (53)
119875119910 = P ∙ 119904119910 = 45120583119898 ∙ 0968682 = 43590690120583119898 cong 44120583119898 (54)
90
Os valores obtidos com as Equaccedilotildees (53) e (54) indicam que os elementos
do sensor podem ser considerados quadrados De acordo com Bazan et al (2009)
quando a diferenccedila de escala entre os lados do piacutexel natildeo eacute fornecida pelo fabricante
da cacircmara o fator de escala calculado para x pode absorver esta diferenccedila
Com a razatildeo entre as distacircncias focais obtidas com a calibraccedilatildeo da cacircmara
pode-se verificar a diferenccedila de escala Para a dimensatildeo do sensor esta diferenccedila
de escala natildeo alcanccedila o tamanho de um pixel conforme Equaccedilatildeo (56)
119863119868119865119864119878119862 =119891119909119888
119891119910119888=
1321383119898119898
1315823119898119898minus 1 = 1004225 minus 1 = 0004225 (55)
119863119868119865119864119878119862 = 0004225 lowast 204 = 08619 lt 1119901119894119909119890119897 (56)
A Equaccedilatildeo (56) indica que a diferenccedila de escala entre os eixos x e y eacute
menor que a dimensatildeo de um pixel isto considerando toda a dimensatildeo da imagem
de 204x204 piacutexeis da cacircmara PMD CamCube 20
Determinados os POI a imagem pode entatildeo ter sua geometria corrigida
conforme eacute ilustrado com a Figura 54b A Figura 54a ilustra a imagem original
obtida do gabarito onde se apresentam curvaturas provenientes da distorccedilatildeo
causada pelo sistema de lentes da cacircmara
FIGURA 54 ndash Correccedilatildeo geomeacutetrica da imagem TOF
91
Para a correccedilatildeo geomeacutetrica de imagens obtidas com cacircmaras de pequeno
formato Zhang (2000) recomenda utilizar somente os paracircmetros de distacircncia focal
calibrada 119891119888 coordenadas do Ponto Principal no plano da imagem 1199090 e 1199100 e os
coeficientes de Distorccedilatildeo Radial Simeacutetrica ateacute o segundo termo 1198701 e 1198702 Isto porque
este modelo de cacircmara apresenta principalmente a Distorccedilatildeo Radial Simeacutetrica
Outro fator diz respeito ao desvio calculado na determinaccedilatildeo de cada um destes
paracircmetros conforme valores apresentados na Tabela 51 o terceiro paracircmetro de
Distorccedilatildeo Radial Simeacutetrica 1198703 e os paracircmetros de Distorccedilatildeo Descentrada 1198751 e 1198752
apresentaram valores de desvios maiores do que os proacuteprios paracircmetros devendo
entatildeo serem desconsiderados para a correccedilatildeo geomeacutetrica da imagem
92
52 EXPERIMENTO 1 ndash ANAacuteLISE DE RUIacuteDO 1 IMAGEM TOF INTEIRA
O objetivo deste experimento consistiu em avaliar a presenccedila de ruiacutedo em
funccedilatildeo do tempo de integraccedilatildeo (TI) na aquisiccedilatildeo das imagens TOF Para sua
realizaccedilatildeo foram utilizadas imagens de uma parede com superfiacutecie plana distante
130m da cacircmara PMD CamCube 20 onde tambeacutem aparece parte de uma porta
Foram tomadas cinco imagens para cada valor de TI que variou entre 500 1000
1500 1700 1800 1900 2000 2500 3000 3500 4000 4500 5000 5300 5500
6000 e 7000μs gerando assim um conjunto de 85 imagens TOF
Com o objetivo de avaliar e reduzir a presenccedila de ruiacutedo nas imagens foram
realizadas as seguintes filtragens
Filtro passa-baixas pela meacutedia
Filtro pela mediana
Caacutelculo da meacutedia dos valores de distacircncia para imagens TOF
adquiridas com mesmo TI em instantes brevemente diferentes
Para cada imagem original foram criadas trecircs novas imagens filtradas com
os procedimentos mencionados
No graacutefico de dispersatildeo ilustrado com a Figura 55 os desvios padratildeo para o
conjunto de observaccedilotildees satildeo mostrados em funccedilatildeo do TI Foram calculados com
referecircncia no pixel central com coordenadas (102 102) e a aacuterea utilizada para o
caacutelculo possui dimensatildeo de 10x10 piacutexeis Escolheu-se esta regiatildeo por apresentar
padratildeo planar da superfiacutecie com menor distorccedilatildeo causada pelo sistema de lentes da
cacircmara tendo-se em vista que nesta etapa natildeo foi realizada a correccedilatildeo geomeacutetrica
dos dados da imagem TOF
Ainda com a Figura 55 verificou-se que o filtro da mediana aplicado nas
imagens gerou os menores desvios para a janela de 10x10 piacutexeis O menor desvio
calculado foi 12mm encontrado utilizando o filtro da mediana para o TI igual a
3000micros Verificou-se tambeacutem que os desvios apresentam valores similares para os
tempos de integraccedilatildeo que variaram entre 1500 agrave 2500micros para as imagens originais e
tambeacutem para as imagens filtradas
93
FIGURA 55 ndash Desvio padratildeo x TI janelas 10x10
A partir do graacutefico de dispersatildeo da Figura 55 escolheram-se imagens
captadas com os tempos de integraccedilatildeo de 500 2000 e 2500micros para realizar os
testes A Figura 56 ilustra superfiacutecies geradas a partir de filtragens realizadas em
imagem TOF obtida com TI igual a 500μs
FIGURA 56 ndash Imagens para TI=500μs e d=130m
94
Com TI de 500μs verificou-se intensa presenccedila de ruiacutedo na imagem original
e tambeacutem nas imagens filtradas Isto ocorreu devido ao baixo tempo de exposiccedilatildeo
do sensor A distorccedilatildeo causada pelo sistema de lentes da cacircmara tambeacutem pode ser
visualizada nestas superfiacutecies geradas com os arquivos de distacircncias da imagem
TOF As imagens foram obtidas de uma parede plana em que aparece parte de uma
porta o que justifica a descontinuidade vista em forma de degrau A anaacutelise
realizada com TI de 2000μs eacute ilustrada com a Figura 57
FIGURA 57 ndash Imagens para TI=2000μs e d=130m
Com TI de 2000μs obtiveram-se resultados melhores do que os obtidos com
TI de 500μs as superfiacutecies apresentaram-se mais suaves confirmando a tendecircncia
demonstrada com o graacutefico de dispersatildeo da Figura 55
A uacuteltima anaacutelise deste experimento foi realizada com o tempo de integraccedilatildeo
de 2500μs conforme pode ser visualizado com as superfiacutecies geradas com os
arquivos de distacircncias da imagem TOF original e das imagens filtradas ilustradas
com a Figura 58
95
FIGURA 58 ndash Imagens para TI=2500μs e d=130m
As imagens filtradas com TI de 2000μs e 2500μs apresentam suavizaccedilotildees
similares nas superfiacutecies geradas com os arquivos de distacircncias da imagem TOF
Verificou-se que o tempo de integraccedilatildeo para a aquisiccedilatildeo das imagens da parede a
13m de distacircncia da cacircmara deve ser um destes valores O TI de 2000μs pode ser
o escolhido e estaacute de acordo com o graacutefico de dispersatildeo ilustrado com a Figura 55
As filtragens de suavizaccedilatildeo com o filtro passa-baixas pela meacutedia e pela
mediana mostraram-se as melhores opccedilotildees a serem utilizadas com estas filtragens
apresentaram-se os menores desvios para a janela central de 10x10 piacutexeis Uma
vantagem da filtragem pela mediana eacute que mantecircm os valores originais de distacircncia
para os piacutexeis da imagem e preserva as bordas do objeto imageado No entanto a
filtragem com a mediana degrada as bordas da imagem devendo ser
cuidadosamente analisada para cada aplicaccedilatildeo
Tambeacutem foram calculados os desvios padratildeo para as imagens inteiras e os
valores obtidos foram de 19cm em meacutedia Este grande valor deveu-se a maior
curvatura ocorrer nas extremidades da imagem e tambeacutem ao fato de haver uma
descontinuidade na superfiacutecie presente na imagem TOF causada pela porta
presente na superfiacutecie da parede
96
53 EXPERIMENTO 2 ndash ANAacuteLISE DE RUIacuteDO 2 JANELAS DE 40X40 PIacuteXEIS
O objetivo deste experimento foi analisar a presenccedila de ruiacutedo em aacutereas
centrais da imagem TOF Para isto escolheram-se janelas com dimensotildees de 40x40
piacutexeis ao redor do pixel central da imagem Calculou-se o desvio padratildeo da distacircncia
de cada pixel em relaccedilatildeo a este pixel central As janelas utilizadas tiveram sua
posiccedilatildeo na imagem variando de (8282) ateacute (122122) e correspondem a aacuterea com
superfiacutecie plana de uma parede presente na cena
Primeiramente utilizaram-se imagens TOF adquiridas agrave distacircncia de 130m
entre a cacircmara e a parede com os tempos de integraccedilatildeo iguais a 2000 e 5000micros
Posteriormente utilizaram-se imagens TOF obtidas a 210m da parede com tempos
de integraccedilatildeo iguais a 2000 5000 e 7000micros
O graacutefico de dispersatildeo da Figura 59 ilustra uma anaacutelise para a captaccedilatildeo de
imagens TOF com diferentes distacircncias e tempos de integraccedilatildeo Os desvios padratildeo
foram calculados para imagens TOF captadas com a cacircmara CamCube 20 onde
variaram-se as distacircncias e os tempos de integraccedilatildeo no momento da aquisiccedilatildeo das
imagens
FIGURA 59 ndash Desvios padratildeo para distacircncia x TI
FONTE CENTENO e JUTZI (2010)
97
Com a Figura 510 eacute apresentado o primeiro resultado deste experimento o
graacutefico de dispersatildeo gerado com a imagem TOF adquirida do objeto agrave distacircncia de
130m da cacircmara com TI igual a 2000micros
FIGURA 510 ndash Desvios padratildeo para janelas com TI=2000μs d=130m
A Figura 511 ilustra as superfiacutecies geradas com o arquivo de distacircncias da
imagem TOF adquirida do objeto agrave distacircncia de 130m da cacircmara com TI igual a
2000micros e com as imagens resultantes das filtragens realizadas
FIGURA 511 ndash Janelas de 40x40 piacutexeis TI=2000μs d=130m
98
Com a Figura 511 conclui-se que os melhores resultados para a suavizaccedilatildeo
dos dados de distacircncia foram obtidos com os filtros passa-baixas pela meacutedia e
mediana
A Figura 512 ilustra o graacutefico de dispersatildeo para a imagem adquirida com TI
igual a 5000μs com distacircncia de 130m entre o objeto imageado e a cacircmara TOF A
Figura 513 ilustra as superfiacutecies geradas com as janelas centrais de 40x40 piacutexeis
FIGURA 512 ndash Desvios padratildeo para janelas com TI=5000μs d=130m
FIGURA 513 ndash Janelas de 40x40 piacutexeis TI=5000μs d=130m
99
O TI de 5000μs utilizado para a aquisiccedilatildeo da imagem saturou os elementos
do sensor e causou maior presenccedila de ruiacutedo nos dados Comparando as Figuras
511 e 513 conclui-se que para a distacircncia de 130m do sensor o tempo de
integraccedilatildeo mais adequado para a aquisiccedilatildeo da imagem foi 2000micros
A Figura 514 ilustra o graacutefico de dispersatildeo gerado para a imagem TOF
obtida com TI igual a 2000μs e distacircncia de 210m As superfiacutecies geradas a partir
das janelas de 40x40 piacutexeis desta imagem satildeo apresentadas com a Figura 515
FIGURA 514 ndash Desvios padratildeo para janelas com TI=2000μs d=210m
FIGURA 515 ndash Janelas de 40x40 piacutexeis TI=2000μs d=210m
100
O graacutefico de dispersatildeo calculado para a imagem adquirida com TI igual a
5000μs e distacircncia de 210m eacute ilustrado com a Figura 516
FIGURA 516 ndash Desvios padratildeo para janelas com TI=5000μs d=210m
Os menores desvios padratildeo foram encontrados na imagem filtrada utilizando
os filtros passa-baixas pela meacutedia e mediana conforme pode ser visualizado com a
Figura 516 Para a janela de 40x40 piacutexeis o desvio padratildeo de 107mm na imagem
original diminuiu para 96mm com a filtragem pela mediana A Figura 517 ilustra as
superfiacutecies geradas para a imagem obtida com distacircncia de 210m e TI de 5000μs
FIGURA 517 ndash Janelas de 40x40 piacutexeis TI=5000μs d=210m
101
Com a Figura 517 observa-se novamente que os melhores resultados para
a suavizaccedilatildeo da imagem foram obtidos com os filtros passa-baixas pela meacutedia e
pela mediana
A Figura 518 ilustra o graacutefico de dispersatildeo e a Figura 519 ilustra as
superfiacutecies geradas para as imagens adquiridas com distacircncia de 210m e TI igual a
7000μs
FIGURA 518 ndash Desvios padratildeo para janelas com TI=7000μs d=210m
FIGURA 519 ndash Janelas de 40x40 piacutexeis TI=7000μs d=210m
102
Com o graacutefico de dispersatildeo ilustrado com a Figura 518 observa-se que os
desvios padratildeo calculados para as imagens obtidas com os filtros passa-baixas pela
meacutedia e mediana satildeo maiores do que os desvios apresentados com o graacutefico de
dispersatildeo ilustrado com a Figura 516 Isto indica que as imagens captadas da
parede plana com TI igual a 7000μs e distacircncia de 210m apresentaram maior ruiacutedo
que as imagens obtidas com 5000μs
Comparando as Figuras 519 e 517 verifica-se que a imagem captada com
TI igual a 5000μs com distacircncia de 210m e filtrada com o filtro passa-baixas pela
meacutedia e tambeacutem com a mediana apresentou-se mais suavizada do que a imagem
obtida com TI igual a 7000μs
Comparando as imagens captadas com tempo de integraccedilatildeo de 2000μs e
5000μs para a distacircncia de 210m conforme Figuras 515 e 517 conclui-se que as
imagens obtidas com TI de 5000μs apresentaram menor presenccedila de ruiacutedo
54 EXPERIMENTO 3 ndash PROJECcedilAtildeO ORTOGONAL DOS PONTOS
Obtidos os POI atraveacutes do processo de calibraccedilatildeo da cacircmara e definido o
melhor TI para a captaccedilatildeo da imagem procedeu-se a um novo experimento no qual
se analisou a imagem de uma caixa com superfiacutecies planas A superfiacutecie do objeto
em questatildeo eacute composta por papel branco riacutegido e refletivo A caixa foi colocada
sobre uma cadeira agrave distacircncia aproximada de 13m da cacircmara Esta cadeira foi
girada enquanto a cacircmara continuou fixa com o mesmo ponto de vista Com base
no estudo da dispersatildeo dos dados em funccedilatildeo da distacircncia ao objeto optou-se por
utilizar o TI de 2000μs para a captaccedilatildeo das imagens Foram entatildeo adquiridas dez
imagens do objeto
Com a distacircncia do objeto em relaccedilatildeo agrave cacircmara igual a 13m e com a
distacircncia focal calibrada da cacircmara de 132mm valor encontrado com a Equaccedilatildeo
(57) calculou-se a escala aproximada das fotografias encontrando-se o valor
aproximado para a escala igual a 1100 conforme Equaccedilatildeo (58)
119891119888 =119891119909119888+119891119910119888
2=
1315823119898119898+1321383119898119898
2= 1318603119898119898 cong 132119898119898 (57)
103
119864 =119889
119863=
119891119888
119885=
132119898119898
13119898=
00132119898
13119898=
1
984848cong
1
100 (58)
Para realizar este experimento selecionou-se a terceira imagem captada por
apresentar vista perspectiva de trecircs superfiacutecies com padratildeo planar no objeto
imageado A Figura 520a ilustra o arquivo de intensidades da imagem TOF sem
correccedilatildeo geomeacutetrica A Figura 520b ilustra o arquivo de intensidade corrigido
geometricamente utilizando as coordenadas do Ponto Principal 1199090 e 1199100 os
coeficientes de distorccedilatildeo Radial Simeacutetrica 1198701 e 1198702 e a distacircncia focal calibrada 119891119888
FIGURA 520 ndash Arquivo de intensidades da imagem TOF obtida do objeto
Apoacutes a correccedilatildeo da geometria da imagem TOF geraram-se as superfiacutecies do
objeto Isto foi feito a partir do arquivo de distacircncias da imagem TOF conforme eacute
ilustrado com a Figura 521 onde se tem as distacircncias dos pontos em relaccedilatildeo ao
sensor representadas com a coordenada Z em metros sobre a imagem TOF com
dimensatildeo de 204x204 piacutexeis
104
FIGURA 521 ndash Arquivo de distacircncias da imagem TOF com geometria corrigida
A partir do arquivo de distacircncias da imagem TOF com a geometria dos
dados corrigida projetaram-se ortogonalmente os pontos gerando a nuvem de
pontos 3D ilustrada com a Figura 522 em vista frontal com o eixo Z ortogonal aos
eixos X e Y representados
FIGURA 522 ndash Nuvem de pontos vista frontal
105
A vista em perspectiva tridimensional da nuvem de pontos do objeto de
estudo eacute ilustrada com a Figura 523 Conteacutem 42025 pontos gerados a partir da
imagem TOF de 204x204 piacutexeis obtida com a cacircmara PMD CamCube 20
FIGURA 523 - Nuvem de pontos vista perspectiva 3D
106
55 EXPERIMENTO 4 ndash SEGMENTACcedilAtildeO 1 CRESCIMENTO DE REGIOtildeES
Realizou-se a segmentaccedilatildeo por crescimento de regiotildees a partir de trecircs
pontos semente Estes pontos foram escolhidos em aacutereas uniformes no arquivo de
intensidades da imagem TOF corrigida geometricamente e foram projetados
ortogonalmente para a nuvem 3D As coordenadas de imagem destes pontos foram
observadas nas posiccedilotildees indicadas com a Figura 524
FIGURA 524 ndash Pontos semente no arquivo de intensidades da imagem TOF
Os pontos semente foram escolhidos em trecircs superfiacutecies planas da caixa em
locais que apresentavam valores de intensidade uniforme As coordenadas de
imagem lidas em piacutexeis para estes trecircs pontos foram Ponto 1 (11681) Ponto 2
(72103) Ponto 3 (113108)
As Figuras 525 e 526 ilustram o crescimento em trecircs regiotildees realizados na
nuvem de pontos 3D Estes pontos correspondem agraves superfiacutecies frontal superior e
lateral da caixa ilustradas com as cores amarela verde e ciano respectivamente
Os trecircs autovetores calculados satildeo ilustrados com a cor azul ortogonais aos pontos
semente escolhidos nas trecircs superfiacutecies da imagem de intensidade
107
FIGURA 525 ndash Crescimento de regiotildees vista frontal
FIGURA 526 ndash Crescimento de regiotildees vista perspectiva 3D
Com as Figuras 525 e 526 verifica-se que o crescimento das regiotildees
ocorreu de forma coerente acompanhando o padratildeo planar das superfiacutecies do
objeto de estudo No entanto nas trecircs superfiacutecies analisadas houve crescimento de
regiotildees para fora dos limites de suas aacutereas Pontos de superfiacutecies ao fundo e abaixo
do objeto foram incluiacutedos nas regiotildees Isto ocorreu devido agrave utilizaccedilatildeo do criteacuterio de
108
similaridade de distacircncia do ponto agrave superfiacutecie plana sendo esta superfiacutecie definida
pelos pontos semente A distacircncia foi medida ao longo do autovetor o que fez com
que pontos de outras superfiacutecies paralelas a superfiacutecie plana em questatildeo fossem
agrupados na mesma regiatildeo Ou seja pontos que estavam orientados na direccedilatildeo da
superfiacutecie plana definida pelo autovalor que passa pelo ponto semente e que
estavam dentro do limiar de distacircncia estabelecido foram incluiacutedos nas regiotildees
mesmo natildeo pertencendo agrave superfiacutecie analisada
56 EXPERIMENTO 5 ndash SEGMENTACcedilAtildeO 2 ANAacuteLISE COM AUTOVALORES
Neste experimento realizou-se a segmentaccedilatildeo da imagem TOF por anaacutelise
da variaccedilatildeo local de autovalores locais de superfiacutecies O arquivo de distacircncias desta
imagem foi utilizado como ponto de partida para o caacutelculo dos autovalores com o
objetivo de intensificar as bordas dos objetos presentes na cena
O processamento consistiu em definir uma pequena vizinhanccedila quadrada
uma janela moacutevel e utilizar as coordenadas tridimensionais dos pontos nesta
vizinhanccedila para o caacutelculo dos autovalores
Apoacutes a normalizaccedilatildeo os autovalores foram armazenados na forma de trecircs
novas imagens conforme pode ser visualizado com as Figuras 527 528 e 529
Para a geraccedilatildeo destas imagens utilizou-se a janela moacutevel com dimensatildeo de 3x3
piacutexeis para o caacutelculo dos autovalores
109
FIGURA 527 ndash Imagem com bordas intensificadas gerada com 1205821
FIGURA 528 ndash Imagem com bordas intensificadas gerada com 1205822
FIGURA 529 ndash Imagem com bordas intensificadas gerada com 1205823
110
A partir da imagem com bordas intensificadas gerada com os autovalores
locais foi possiacutevel criar uma nova imagem de intensidade que tambeacutem estava com
as bordas dos objetos intensificadas A Figura 530 ilustra as imagens de
intensidade com bordas intensificadas que foram geradas utilizando o segundo
autovalor calculado a partir de janelas com as seguintes dimensotildees a)3x3 b)5x5
c)7x7 d)9x9 e)11x11 f)13x13 piacutexeis
FIGURA 530 ndash Imagens de intensidade com as bordas do objeto intensificadas
111
Com as imagens de intensidade ilustradas com a Figura 530 observou-se
que aumentando a quantidade de piacutexeis da janela utilizada para o caacutelculo dos
autovalores da regiatildeo aumentou-se tambeacutem a suavizaccedilatildeo sobre as superfiacutecies
planas e alargaram-se as bordas que limitam os objetos contidos na cena
Para este experimento utilizou-se a imagem gerada com a janela de 3x3
piacutexeis e com o segundo autovalor Esta imagem foi escolhida por apresentar linhas
finas limitando as bordas do objeto A imagem de intensidade com as bordas do
objeto intensificadas foi segmentada utilizando o algoritmo de deslocamento pela
meacutedia O resultado da segmentaccedilatildeo eacute ilustrado com a Figura 531
FIGURA 531 ndash Imagem com bordas intensificadas segmentada
112
A Figura 531a ilustra a imagem com bordas intensificadas a ser
segmentada gerada com o segundo conjunto de autovalores 1205822 Na Figura 531b
tem-se esta imagem suavizada por filtragem A Figura 531c corresponde agrave imagem
segmentada com o algoritmo de deslocamento pela meacutedia A imagem com os limites
das aacutereas segmentadas eacute ilustrada com a Figura 531d
A segmentaccedilatildeo foi realizada utilizando o software EDISON com os
paracircmetros (119893119904 119893119903 119867) = (7 9 300) Estes paracircmetros correspondem ao domiacutenio
espacial da imagem 119893119904 domiacutenio de caracteriacutesticas 119893119903 e tamanho miacutenimo das
regiotildees 119867 em piacutexeis O limite miacutenimo foi fixado para evitar que regiotildees muito
pequenas fossem incluiacutedas na segmentaccedilatildeo
Com a imagem segmentada da Figura 529c foi possiacutevel projetar os pontos
de interesse ortogonalmente gerando a nuvem de pontos 3D Para isto utilizou-se
as coordenadas dos piacutexeis no arquivo de intensidades e seus correspondentes no
arquivo de distacircncias da imagem TOF Estes pontos foram escolhidos sobre as
superfiacutecies da caixa A nuvem de pontos 3D resultante deste experimento eacute
apresentada com as Figuras 532 e 533
FIGURA 532 ndash Nuvem de pontos da imagem segmentada vista frontal
113
FIGURA 533 ndash Nuvem de pontos da imagem segmentada vista 3D
57 EXPERIMENTO 6 ndash ANAacuteLISE DAS MEDIDAS OBTIDAS
Para gerar a nuvem de pontos 3D com as superfiacutecies de interesse
primeiramente corrigiu-se a geometria do arquivo de distacircncias da imagem TOF com
as coordenadas do Ponto Principal 1199090 e 1199100 coeficientes de distorccedilatildeo Radial
Simeacutetrica 1198701 e 1198702 e distacircncia focal calibrada 119891119888 O passo seguinte foi gerar uma
imagem de intensidade com as bordas do objeto intensificadas Com este objetivo
calcularam-se os autovalores para os pontos do arquivo de distacircncias da imagem
TOF e geraram-se trecircs imagens novas correspondendo aos trecircs autovalores
calculados conforme o Experimento 5 O terceiro passo foi a segmentaccedilatildeo da
imagem de intensidade com bordas intensificadas utilizando o algoritmo de
deslocamento pela meacutedia Com a imagem segmentada pocircde-se escolher as
superfiacutecies que teriam seus piacutexeis projetados para a nuvem de pontos 3D
A imagem segmentada com o algoritmo de deslocamento pela meacutedia
apresenta niacuteveis de cinza diferentes para os piacutexeis de cada segmento Com isto foi
possiacutevel separar os pontos que compotildeem as superfiacutecies por seus valores digitais A
Figura 534 apresenta a nuvem de pontos 3D gerada com a imagem TOF corrigida
geometricamente com os pontos da superfiacutecie frontal representados com a cor azul
114
FIGURA 534 ndash Nuvem de pontos 3D segmentada
A superfiacutecie frontal foi projetada com atributo de cor diferenciado por
apresentar a melhor segmentaccedilatildeo na imagem de intensidade e pontos bem
definidos na nuvem 3D A partir desta superfiacutecie escolheram-se os pontos extremos
os veacutertices do objeto para a leitura de suas coordenadas 3D com o objetivo de
calcular o comprimento das arestas Com a Figura 535 satildeo ilustrados os quatro
pontos selecionados
FIGURA 535 ndash Pontos 3D selecionados na nuvem
115
Com as coordenadas destes quatro pontos e atraveacutes da relaccedilatildeo de distacircncia
tridimensional entre eles expressa pela Equaccedilatildeo (59) calcularam-se as dimensotildees
de trecircs arestas do objeto de estudo
119863119894119895 = 119883119894minus119883119895 2
+ 119884119894minus119884119895 2
+ 119885119894minus119885119895 2 (59)
onde
119863119894119895 ndash Distacircncia entre pontos no espaccedilo tridimensional
119883119894 119884119894 119885119894 119890 119883119895 119884119895 119885119895 - Coordenadas dos pontos 119894 e 119895 na nuvem de pontos 3D
Para verificar a confiabilidade das medidas obtidas com a metodologia
proposta compararam-se as medidas das arestas calculadas a partir dos pontos 3D
com as dimensotildees de referecircncia do objeto de estudo As medidas de referecircncia satildeo
ilustradas com o desenho da Figura 536
FIGURA 536 ndash Dimensotildees de referecircncia do objeto de estudo
A partir das coordenadas tridimensionais dos quatro pontos ilustrados com a
Figura 535 foi possiacutevel calcular as distacircncias entre os pontos e comparar-las com
as medidas de referecircncia As diferenccedilas obtidas satildeo ilustradas com a Tabela 52
116
Ponto
Coordenadas Arestas Medida realizada Diferenccedilas
X (cm) Y (cm) Z (cm) Pontos 3D (cm)
Ref (cm)
(cm) ()
1 -131 -136 -1219 Pontos 1-2 236 260 24 92
2 -80 61 -1098 Pontos 2-3 332 350 18 51
3 234 38 -1203 Pontos 2-4 263 210 53 252
4 -125 180 -1328
TABELA 52 ndash Coordenadas 3D dos pontos e medidas realizadas
O melhor resultado foi obtido para a medida realizada sobre a aresta entre
os pontos 2-3 com diferenccedila de aproximadamente 18 cm em relaccedilatildeo agrave medida de
referecircncia o que representa 5 da distacircncia medida O pior resultado foi obtido com
o calculo da aresta entre os pontos 2 e 4 com diferenccedila de aproximadamente
53cm que equivale 25 da medida de referecircncia Com este resultado conclui-se
que os pontos projetados com maior profundidade na nuvem de pontos 3D
apresentaram maior erro de posicionamento Estes pontos descrevem uma
superfiacutecie plana do objeto pouco aparente na imagem encontra-se muito inclinada
em relaccedilatildeo ao plano da imagem motivo pelo qual erros maiores podem ser
esperados Sobre os pontos 1 2 e 3 da superfiacutecie frontal do objeto o erro foi menor
na ordem de 2 centiacutemetros
Conforme o Experimento 1 realizado para a anaacutelise de ruiacutedo o melhor
resultado foi obtido utilizando o filtro da mediana que apresentou o desvio de 13cm
para a distacircncia de 13m medida utilizando tempo de integraccedilatildeo de 2000micros Este
fato indica coerecircncia com a diferenccedila de 2cm encontrada com a medida da aresta
frontal do objeto
117
58 MODELAGEM DAS SUPERFIacuteCIES 3D
Para a modelagem tridimensional das superfiacutecies segmentadas
primeiramente foi analisada a melhor forma de processamento da imagem TOF
Verificou-se com o Experimento 4 que o crescimento de regiotildees utilizando o arquivo
de intensidades da imagem TOF para escolha do ponto semente e o arquivo de
distacircncias para a projeccedilatildeo ortogonal e crescimento de regiotildees a partir deste ponto
natildeo foi satisfatoacuterio Isto porque o crescimento tambeacutem ocorreu em superfiacutecies que
natildeo pertenciam ao objeto analisado
Melhores resultados foram obtidos com a metodologia de segmentaccedilatildeo que
utilizou a imagem com bordas evidenciadas Esta foi gerada com a anaacutelise dos
autovalores locais das superfiacutecies a partir do arquivo de distacircncias da imagem TOF
conforme Experimento 5 A partir desta segmentaccedilatildeo projetaram-se ortogonalmente
os pontos das superfiacutecies frontal e superior do objeto de estudo gerando assim a
nuvem de pontos 3D que eacute ilustrada com a Figura 537
FIGURA 537 ndash Nuvem de pontos 3D das superfiacutecies frontal e superior
A partir da nuvem de pontos 3D realizou-se a modelagem das superfiacutecies
frontal e superior do objeto conforme eacute ilustrado com a Figura 538
118
FIGURA 538 ndash Modelagem tridimensional das superfiacutecies frontal e superior
Analisando a Figura 538 chegou-se a conclusatildeo que a superfiacutecie frontal do
objeto apresentou-se com padratildeo planar e uniforme Eacute a superfiacutecie que melhor
refletiu o sinal para o sensor devido agrave sua posiccedilatildeo em relaccedilatildeo agrave cacircmara TOF A
superfiacutecie superior apresentou-se um pouco inclinada em relaccedilatildeo ao plano da
imagem e com isto maior rugosidade foi observada nesta superfiacutecie Este
fenocircmeno deve-se a menor captaccedilatildeo do sinal refletido pela superfiacutecie do objeto pelo
sensor da cacircmara
119
6 CONCLUSOtildeES RECOMENDACcedilOtildeES E CONSIDERACcedilOtildeES FINAIS
61 CONCLUSOtildeES
Neste trabalho descreveram-se conceitos introdutoacuterios sobre as cacircmaras
TOF Avaliaram-se duas metodologias para a segmentaccedilatildeo da nuvem de pontos 3D
gerada a partir da imagem TOF Apresentou-se uma aplicaccedilatildeo para esta imagem na
extraccedilatildeo de informaccedilotildees meacutetricas do objeto de estudo imageado a distacircncia
aproximada de 13m
Para isto foram abordados os seguintes assuntos calibraccedilatildeo da cacircmara
para a obtenccedilatildeo de POI correccedilatildeo geomeacutetrica da imagem TOF filtragens para
anaacutelise e tratamento de ruiacutedo segmentaccedilatildeo atraveacutes do crescimento de regiotildees a
partir de um ponto semente segmentaccedilatildeo do arquivo de distacircncias da imagem TOF
utilizando autovalores locais para a geraccedilatildeo de uma imagem com bordas
intensificadas segmentaccedilatildeo da imagem com bordas intensificadas atraveacutes do
algoritmo de deslocamento pela meacutedia geraccedilatildeo da nuvem de pontos 3D atraveacutes da
projeccedilatildeo ortogonal dos pontos da imagem de bordas segmentada e por fim a
modelagem tridimensional de superfiacutecies do objeto de estudo
O processo de calibraccedilatildeo da cacircmara foi realizado utilizando o meacutetodo
proposto por Zhang (2000) e possibilitou a determinaccedilatildeo de POI A correccedilatildeo
geomeacutetrica das imagens foi feita atraveacutes das coordenadas 1199090 e 1199100 do Ponto
Principal coeficientes de distorccedilatildeo Radial Simeacutetrica de lentes 1198701 e 1198702 e distacircncia
focal calibrada 119891119888
Com os Experimentos 1 e 2 foram realizadas filtragens para o tratamento de
ruiacutedo das imagens TOF disponiacuteveis Nestes experimentos verificou-se que para a
captaccedilatildeo da imagem TOF agrave distacircncia de 13m entre o objeto e a cacircmara o tempo de
integraccedilatildeo de 2000μs foi o que gerou imagens com menor presenccedila de ruiacutedo Assim
como o tempo de integraccedilatildeo de 5000μs foi o mais adequado para captar imagens agrave
distacircncia de 21m No entanto chegou-se a conclusatildeo que para a geraccedilatildeo da nuvem
de pontos 3D natildeo se deveria utilizar filtragem nos dados pois pequenas alteraccedilotildees
no arquivo de distacircncias da imagem TOF poderiam modificar o posicionamento
tridimensional dos pontos o que afetaria a qualidade das medidas realizadas com os
pontos da nuvem 3D
120
A primeira metodologia proposta para a segmentaccedilatildeo da imagem TOF
mostrou-se insatisfatoacuteria para a soluccedilatildeo do problema Empregou-se o crescimento
de regiotildees a partir de pontos semente escolhidos no arquivo de intensidades desta
imagem projetando-os ortogonalmente para a nuvem de pontos 3D utilizando os
valores obtidos com o arquivo de distacircncias da imagem TOF Notou-se que erros no
crescimento de regiotildees ocorreram devido agrave toleracircncia utilizada para a distacircncia do
ponto agrave superfiacutecie plana Isto ocorreu porque a distacircncia foi calculada ao longo do
autovetor que eacute ortogonal a superfiacutecie no ponto semente Por este motivo alguns
pontos de superfiacutecies adjacentes foram selecionados equivocadamente como
pertencentes a uma mesma regiatildeo na nuvem de pontos 3D pois estavam dentro do
limite fixado no criteacuterio de similaridade utilizado mas na realidade natildeo eram
coplanares Para resolver o problema com esta metodologia seria necessaacuterio
estabelecer um limiar de crescimento lateral natildeo apenas de distacircncia ortogonal a
superfiacutecie plana semente Este limiar poderia ser o valor digital do pixel tendo em
vista que superfiacutecies coplanares apresentam uniformidade na resposta espectral A
rugosidade apresentada na superfiacutecie em que se realizava o crescimento da regiatildeo
tambeacutem influenciou em erros na seleccedilatildeo de pontos pois afetou no caacutelculo dos
autovalores fazendo com que inclinaccedilotildees em relaccedilatildeo a esta superfiacutecie fossem
notadas
A segunda metodologia analisada para a segmentaccedilatildeo da imagem TOF
mostrou-se satisfatoacuteria A segmentaccedilatildeo do arquivo de distacircncias da imagem TOF foi
realizada utilizando autovalores locais para a geraccedilatildeo de uma imagem com bordas
intensificadas segmentaccedilatildeo desta imagem com o algoritmo de deslocamento pela
meacutedia e projeccedilatildeo destes segmentos para a nuvem de pontos 3D A extraccedilatildeo de
informaccedilotildees meacutetricas em arestas do objeto de estudo a partir dos pontos 3D
apresentou diferenccedila na ordem de 2cm com a medida de referecircncia sendo a
imagem TOF adquirida com tempo de integraccedilatildeo de 2000μs a uma distacircncia
aproximada de 13m entre o objeto de estudo e a cacircmara
A Figura 61 ilustra as etapas de processamento a serem realizadas para a
geraccedilatildeo da nuvem de pontos 3D utilizando a segunda metodologia considerada
apropriada para a modelagem tridimensional de superfiacutecies utilizando a imagem
TOF Esta eacute a metodologia proposta como conclusatildeo do presente trabalho de
pesquisa
121
FIGURA 61 ndash Etapas da metodologia de processamento da imagem TOF
Foram encontradas medidas com maior qualidade quando a superfiacutecie do
objeto estava paralela ao plano da imagem Esta qualidade tambeacutem foi afetada pela
distacircncia entre a cacircmara e o objeto pela refletividade das superfiacutecies e pela
iluminaccedilatildeo ambiente Conforme o Experimento 6 realizado a aresta frontal do objeto
entre os pontos 2 e 3 apresentou a menor diferenccedila de medida 18cm que equivale
a 5 da distacircncia de referecircncia
Comparaccedilotildees para a diferenccedila de medida encontrada podem ser realizadas
com os seguintes trabalhos Kahlmann et al (2006) obtiveram exatidatildeo de 1cm nas
medidas com o alvo agrave distacircncia de 25m da cacircmara TOF utilizada Wiedemann et al
(2008) obtiveram exatidatildeo de 4cm com o alvo medido a distacircncia de 4m May et al
(2008) obtiveram erro de 30cm para uma medida de 108m considerada como
referecircncia com as imagens TOF captadas do centro de uma sala girando a cacircmara
360ordm e portanto envolviam tambeacutem Paracircmetros de Orientaccedilatildeo Exterior da cacircmara
Kolb et al (2009) obtiveram erro de 2cm para distacircncias medidas de 10m agrave 45m
Nestes trabalhos foram realizadas correccedilotildees geomeacutetricas nas imagens TOF com
POI determinados com a calibraccedilatildeo da cacircmara
Arquivo de distacircncias da imagem TOF
Correccedilatildeo geomeacutetrica dos dados utilizando POI calculados com o processo de calibraccedilatildeo da cacircmara
Imagem de intensidade com bordas itensificadas calculada com a anaacutelise da variaccedilatildeo local dos autovalores
Segmentaccedilatildeo da imagem com bordas intensificadas utilizando o algoriacutetmo de deslocamento pela meacutedia
Projeccedilatildeo ortogonal das aacutereas segmentadas para a geraccedilatildeo da nuvem de pontos 3D
Modelagem tridimensional das superfiacutecies do objeto
122
62 RECOMENDACcedilOtildeES
Recomenda-se realizar a anaacutelise preacutevia do tempo de integraccedilatildeo para a
aquisiccedilatildeo da imagem TOF com o objetivo de diminuir a presenccedila de ruiacutedo Este
tempo deve ser escolhido de acordo com o ambiente em que seraacute adquirida a
imagem e tambeacutem com as caracteriacutesticas de refletividade da superfiacutecie do objeto
Com este mesmo objetivo e devido ao fato desta imagem ser obtida com iluminaccedilatildeo
LED no comprimento de onda infravermelho recomenda-se analisar as influecircncias
da iluminaccedilatildeo exterior ao sistema de iluminaccedilatildeo da cacircmara
De acordo com a aplicaccedilatildeo a que se destina a imagem TOF recomenda-se
tambeacutem realizar a calibraccedilatildeo da cacircmara com meacutetodo fotogrameacutetrico convencional
Isto possibilitaria a melhora na correccedilatildeo geomeacutetrica da imagem e consequente
aumento na qualidade das medidas realizadas com os pontos da nuvem 3D
Correccedilotildees radiomeacutetricas tambeacutem podem ser aplicadas para melhorar a qualidade
das medidas obtidas com a imagem TOF
63 CONSIDERACcedilOtildeES FINAIS
Nuvens de pontos 3D geradas a partir de imagens TOF satildeo ferramentas
para a modelagem tridimensional das superfiacutecies de objetos Propiciam a obtenccedilatildeo
de informaccedilotildees meacutetricas destes objetos para distacircncias de 03 a 70 metros com
erro centimeacutetrico esperado
Aplicaccedilotildees para as imagens TOF podem ser realizadas para a modelagem
3D de tuacuteneis galerias instalaccedilotildees industriais e fachadas de preacutedios com interesse
de preservaccedilatildeo como patrimocircnio histoacuterico e cultural Com a alta frequecircncia de
aquisiccedilatildeo de imagens das cacircmaras TOF torna-se possiacutevel realizar filmagens e
mapeamentos em movimento
Outras aplicaccedilotildees possiacuteveis para as imagens TOF estatildeo na sua utilizaccedilatildeo
para a criaccedilatildeo de cenaacuterios 3D em jogos eletrocircnicos aquisiccedilatildeo de filmes com
tecnologia 3D modelagem tridimensional de obras de arte Biometria e anaacutelise de
movimentos
123
REFEREcircNCIAS BIBLIOGRAacuteFICAS
ANDRADE J B Fotogrametria 2 ed Curitiba SBEE 1998 274 p APUZZO N D‟ Recent advances in 3D full body scanning with applications to fashion and apparel 10p In Proceedings Optical 3-D Measurement Techniques IX Vienna Austria 2009 BALTSAVIAS E P Airborne laser scanning basic relations and formulas ISPRS - Journal of Photogrammetry amp Remote Sensing v 54 p 199-214 1999 BAZAN W S TOMMASELLI A M G GALO M RUY R S A influecircncia das injunccedilotildees de orientaccedilatildeo relativa na calibraccedilatildeo de um sistema dual de cacircmaras digitais 23p Boletim de Ciecircncias Geodeacutesicas v 15 n 3 Curitiba 2009 BELTON D Improving and extending the information on Principal Component Analysis for local neighborhoods in 3D points clouds 8p The international Archives of the Photogrammetry Remote Sensing and Spatial Information Sciences v XXXVII B5 Beijing 2008 BELTON D LICHTI D Classification and segmentation of terrestrial laser scanner point clouds using local variance information 6p In Proceedings ISPRS Commission V Simposium bdquoImage Engineering and Vision Metrology‟ 2006 BROWN D C Close-Range Camera Calibration Photogrammetric Engineering v 37 nordm 8 p 855-866 1971 CENTENO J A S Sensoriamento Remoto e Processamento de Imagens Digitais Curso de Poacutes-Graduaccedilatildeo em Ciecircncias Geodeacutesicas Curitiba UFPR 2004 209p CENTENO J A S JUTZI B Evaluation of range imaging sensor concerning resolution and illumination 6p In Proceedings The 2010 Canadian Geomatics Conference and Symposium of Commission I ISPRS Calgary Alberta 2010 CHRISTOUDIAS M C GEORGESCU B MEER P Synergism in Low Level Vision IEEE Transactions on Pattern Analysis and Machine Intelligence v 24 n 5 p 603-619 2002
124
COMANICIU D MEER P Mean Shift A Robust Approach Toward Feature Space Analysis 17p IEEE Transactions on Pattern Analysis and Machine Intelligence v 24 n 5 p 603-619 2002 FUCHS S HIRZINGER G Extrinsic and depth calibration of ToF cameras In Proceedings IEEE Conference on Computer Vision and Pattern Recognition (CVPR) Anchorage USA 2008 FUCHS S MAY S Calibration and registration for precise surface reconstruction with ToF cameras In Proceedings of the Dynamic 3D Imaging Workshop in Conjunction with DAGM (Dyn3D) v I Heidelberg Germany 2007 GEMAEL C Introduccedilatildeo ao ajustamento de observaccedilotildees aplicaccedilotildees geodeacutesicas 3 ed Curitiba UFPR 1994 319p GONZALEZ R C WOODS R E Processamento de imagens digitais Satildeo Paulo Edgard Bluumlcher Ltda 2000 509p GROSS H THOENNESSEN U Extraction of lines from laser point clouds p 86-91 In Proceedings Symposium of ISPRS Commission III Photogrammetric Computer Vision PCV06 Eds Foumlrstner W Steffen R International Archives of Photogrammetry Remote Sensing and Spatial Information Sciences 36 (Part 3) 2006 HABIB A MORGAN M Automatic calibration of low-cost digital cameras p 948-955 Journal of Photogrammetric Record 2003 JAMTSHO S Geometric modelling of 3D Range Cameras and their application for structural deformation measurement 174p (Master‟s Thesis Department of Geomatics Engineering) University of Calgary Alberta 2010 JOHNSON R A WICHERN D W Applied multivariate statistical analysis 4 ed New Jersey Pearson Prentice Hall 1998 JUTZI B GROSS H Nearest neighbor classification on laser point clouds to gain object structures from buildings 6p In Proceedings ISPRS Hannover Workshop 2009 High-Resolution Earth Imaging for Geospatial Information Disponiacutevel em lthttpwwwisprsorgproceedingsXXXVIII1_4_7-W5paperpapershtmgt Acesso 16112010
125
KAHLMANN T REMONDINO F INGENSAND H Calibration for increased accuracy of the range imaging camera SwissrangerTM ISPRS Commission V Symposium bdquoImage Engineering and Vision Metrology‟ v XXXVI n 5 2006 KEMENY S E EL-SAYED E MENDIS S FOSSUM E R Update on focal-plane image processing research 8p SPIE v 1447 Charged-Coupled Devices and Solid Optical Sensors II 1991 KHONGSAB P Signal processing and performance evaluation of a PMD camera for space docking 88p (Master‟s Thesis Continuation Courses Space Science and Technology Department of Space Science) Lulea University of Techology Kiruna 2009 KOCH R SCHILLER I BARTCZAK B KELLNER F KOumlSER K MixIn3D 3D mixed reality with ToF camera 16p In Work Programme of the EU‟s 7th Framework program 2009 KOLB A BARTH E KOCH R LARSEN R Time-of-Flight sensors in Computer Graphics 16p In STAR ndash State of The Art Report The Eurographics Association 2009 LANGE R 3D Time-of-Flight distance measurement with custom solid-state image sensors in CMOSCCD-technology 205 p (Dissertation Department of Electrical Engineering and Computer Science at University of Siegen for the degree of Doctor of Technical Sciences) Univesity of Siegen Alemanha 2000 LEON S J Linear Algebra with applications 4 ed Dartmouth Prentice Hall 1998 390p LUAN X Experimental investigation of Photonic Mixer Device and development of TOF 3D ranging systems based on PMD technology A dissertation submitted to the Department of Electrical Engineering and Computer Science at University of Siegen Siegen 2001 MACHADO A M L Extraccedilatildeo automaacutetica de contornos de edificaccedilotildees utilizando imagem gerada por cacircmara digital de pequeno formato e dados LIDAR 201 p Tese apresentada ao Curso de Poacutes-Graduaccedilatildeo em Ciecircncias Geodeacutesicas da Universidade Federal do Paranaacute Curitiba UFPR 2006
126
MASS H G VOSSELMAN Two algorithms for extracting building models from raw laser altimetry data 11p Elsevier Science Photogrammetry amp Remote Sensing 1999 MAY S DROESCHEL D HOLTZ D WIESEN C FUCHS S 3D Pose estimation and mapping with time-of-flight cameras 6p Germany 2008 Disponiacutevel em httpwwwroboticdefileadminroboticfuchsiros08_3dcampdf Acesso em 2510 2010 MITISHITA E A Monorestituiccedilatildeo digital de aerofotos associada com sistema de computaccedilatildeo graacutefica CAD para fins de mapeamento na aacuterea florestal 251p Tese (Doutorado em Engenharia Florestal) ndash Setor de Ciecircncias Agraacuterias Universidade Federal do Paranaacute 1997 MOumlLLER T KRAFT H FREY J ALBRECHT M LANGE R Robust 3D measurement with PMD sensors 2005 PAULY M GROSS M KOBBELT L P Efficient simplification of point-sampled surfaces 8p In VIS ‟02 Proceedings of the Conference on Visualization ‟02 Washington DC USA 2002 IEEE Computer Society PECHT Y FOSSUM E R Wide intrascene dynamic range CMOS APS using dual sampling IEEE Transactions on Electron Devices v 44 n 10 1997 PMD Technologies PMD [vison]regCamCube 20 4p Datasheet n 20090601 Siegen 2009 Disponiacutevel em lthttpwwwpmdteccomproducts-servicespmdvisionr-cameraspmdvisionr-camcube-20gt Acesso em 0103 2010 PMD Technologies PMD [vison]regCamCube 20 Software development tutorial 13p Siegen 2009 Disponiacutevel em lthttpwwwpmdteccomfileadminpmdtecdownloadsdocumentationcamcube_softwaredevelopmenttutorialpdfgt Acesso em 1504 2010 RAPP H Experimental and theoretical investigation of correlating TOF-camera systems 71p Diploma Thesis in Physics Faculty for Physics and Astronomy University of Heidelberg Alemanha 2007 RINGBECK T A 3D Time Of Flight camera for object detection 10p In Proceedings Optical 3D Measurement Techniques Plenary Session 1 Range Imaging I Zuumlrich 2007
127
SHAKARJI C M Least-Squares fitting algorithms of the NIST algorithm testing system 9p Journal of research of the national of standards and technology v 103 n 6 1998 THEUWISSEN A Solid-state imaging with Charge-Coupled Devices PP 34-46 Kluwer Academic Publishers 1995 Disponiacutevel em ltwwwspringerlinkcomgt Acesso em 08072010
WIEDEMANN M SAUER M DRIEWER F SCHILLING K Analysis and characterization of the PMD camera for application in mobile robotics 6p In Proceedings of the 17th World Congress The International Federation of Automatic Control Seoul Korea July 6-11 2008 ZHANG Z A flexible new technique for camera calibration 5p IEEE Transactions on Pattern Analysis and Machine Intelligence November 2000

ANDREY AUGUSTO ALVES DE OLIVEIRA
MODELAGEM TRIDIMENSIONAL DE SUPERFIacuteCIES UTILIZANDO
IMAGEM TOF - ESTUDO COM A CAcircMARA PMD CAMCUBE 20
Dissertaccedilatildeo apresentada ao Curso de Poacutes-Graduaccedilatildeo em Ciecircncias Geodeacutesicas Departamento de Geomaacutetica Setor de Ciecircncias da Terra Universidade Federal do Paranaacute como requisito final para obtenccedilatildeo do grau de Mestre em Ciecircncias Geodeacutesicas
Orientador Prof Dr Jorge Antonio Silva Centeno
CURITIBA
2011
O48 Oliveira Andrey Augusto Alves de Modelagem tridimensional de superfiacutecies utilizando imagem TOF
estudo com a cacircmara PMD CamCube 20 Andrey Augusto Alves de Oliveira ndash Curitiba 2011
127f il tabs Impresso Dissertaccedilatildeo (Mestrado) ndash Universidade Federal do Paranaacute Setor de Ciecircncias da Terra Programa de Poacutes-Graduaccedilatildeo em Ciecircncias
Geodeacutesicas Orientador Jorge Antonio Silva Centeno
1 Imagem tridimensional 2 Fotogrametria 3 Projeccedilatildeo ortogonal I
Centeno Jorge Antonio Silva II Tiacutetulo
CDD 526982
iv
Agrave minha famiacutelia em especial meus pais
Dedico este trabalho
v
AGRADECIMENTOS
Aos meus pais familiares namorada e amigos pelo apoio incentivo e
companheirismo
Ao Prof Dr Jorge Antonio Silva Centeno pela orientaccedilatildeo e confianccedila
Aos Professores amigos e colegas do Curso de Poacutes-Graduaccedilatildeo em
Ciecircncias Geodeacutesicas e do Curso de Engenharia Cartograacutefica da Universidade
Federal do Paranaacute pelos momentos compartilhados
Aos colaboradores da UFPR que com seu trabalho e dedicaccedilatildeo fazem a
Universidade funcionar
Ao Conselho Nacional de Desenvolvimento Cientiacutefico e Tecnoloacutegico (CNPq)
pelo fomento
Ao instituto de Fotogrametria e Sensoriamento Remoto da Universidade de
Karlsruhe (KIT ndash Karlsruhe Institute of Tecnology) pela cooperaccedilatildeo e empreacutestimo da
cacircmara PMD CamCube 20 utilizada para obter as imagens TOF analisadas neste
trabalho Ao Prof Dr Jorge A S Centeno pela captaccedilatildeo das imagens na Alemanha
no iniacutecio do ano 2010 e a Fabiana Castro pela aquisiccedilatildeo de novas imagens TOF
Aos componentes da banca avaliadora Prof Dr Antonio Maria Garcia
Tommaselli e Prof Dr Hideo Araki que contribuiacuteram com importantes observaccedilotildees
para a melhora deste trabalho de pesquisa
Muito Obrigado
vi
RESUMO
Neste trabalho estudou-se a modelagem tridimensional de superfiacutecies
utilizando imagens TOF (Time-Of-Flight) para isto avaliou-se a qualidade dos dados
obtidos com a cacircmara PMD[vision]regCamCube 20 Este equipamento calcula a
distacircncia de objetos em relaccedilatildeo ao seu sensor utilizando o princiacutepio TOF Com o
objetivo de corrigir a geometria dos dados contidos na imagem foram calculados
Paracircmetros de Orientaccedilatildeo Interior (POI) atraveacutes do processo de calibraccedilatildeo da
cacircmara Estes paracircmetros definem a geometria interior do sistema de lentes e
permitem fazer as correccedilotildees geomeacutetricas necessaacuterias Outro fator que influenciou na
qualidade dos dados foi agrave presenccedila de ruiacutedo em funccedilatildeo da iluminaccedilatildeo que pode ser
controlada variando o tempo de integraccedilatildeo na aquisiccedilatildeo das imagens Duas opccedilotildees
para a reduccedilatildeo do ruiacutedo foram analisadas filtragem no domiacutenio espacial e no tempo
de integraccedilatildeo Experimentos com os filtros passa-baixas pela meacutedia e mediana
foram realizados a fim de reduzir o ruiacutedo no domiacutenio espacial Com a mesma
finalidade a meacutedia para cada tempo de integraccedilatildeo foi calculada a partir de uma
seacuterie de cinco imagens tomadas com o mesmo ponto de vista A partir destes
experimentos foi determinado o melhor tempo de integraccedilatildeo para a aquisiccedilatildeo da
imagem A etapa seguinte consistiu na segmentaccedilatildeo da imagem para identificar
superfiacutecies do objeto de estudo Em uma primeira abordagem aplicou-se o meacutetodo
de crescimento de regiotildees utilizando a distacircncia do ponto ao plano como criteacuterio de
similaridade A segunda abordagem utilizou o caacutelculo de autovalores locais para
gerar uma nova imagem onde as bordas dos objetos foram evidenciadas Esta nova
imagem foi segmentada para obter superfiacutecies de interesse do objeto atraveacutes do
algoritmo de deslocamento pela meacutedia A partir do arquivo com as distacircncias da
imagem TOF e dos POI piacutexeis da imagem segmentada foram projetados
ortogonalmente gerando uma nuvem de pontos com coordenadas 3D Com isto as
dimensotildees de arestas do objeto foram comparadas com medidas de referecircncia
encontrando-se diferenccedilas na ordem de 2 centiacutemetros Finalizando o estudo as
superfiacutecies do objeto foram modeladas tridimensionalmente
Palavras-chave Imagem TOF Modelagem tridimensional de superfiacutecies
Calibraccedilatildeo de cacircmaras Anaacutelise de ruiacutedo Autovalores Autovetores Projeccedilatildeo
Ortogonal Segmentaccedilatildeo Crescimento de regiotildees em nuvem de pontos 3D
Algoritmo de deslocamento pela meacutedia
vii
ABSTRACT
This work aims at studying the quality of 3D data obtained with a range
camera the PMD[vision]regCamCube 20 and assessing its potential to model object
surfaces The equipment computes the distance to the objects using the Time-Of-
Flight (TOF) principle Initially the equipment was calibrated using camera calibration
methods The Interior Orientation Parameters (IOP) allow reducing geometric
distortion in the images Another factor that influences the quality of data is the
presence of noise caused by illumination conditions which can be controlled by
varying the integration time of the light source Two options to reduce noise were
analyzed spatial filtering with low-pass and median filter and computing the
average of a series of images taken from the same point of view After determining
the best integration time and Interior Orientation Parameters the 3D coordinates of a
point cloud was computes The next step consists in image segmentation to identify
the surfaces of an object In a first approach it is applied a region growing method
using the point-plane distance as similarity parameter The second approach is
based on the calculation of local eigenvalues using small moving windows to
generate a new image where borders are highlighted This new image is segmented
using the mean-shift approach to delineate the surfaces of interest Each interest
pixel of the segmented image was projected for the 3D points cloud The dimensions
of the object are compared with real values The comparison showed differences
around 2cm within the expected range Finally the object surfaces can then be
modeled with the 3D points cloud
Keywords TOF image Range image Three-dimensional modeling surfaces
Camera calibration Noise analysis Eigenvalues Eigenvectors Orthogonal
projection Segmentation Region growing in 3D point clouds Mean Shift Algorithm
viii
LISTA DE FIGURAS
FIGURA 21 ndash Princiacutepio TOF 19
FIGURA 22 ndash Meacutetodo da diferenccedila de fase 20
FIGURA 23 ndash FC utilizada no meacutetodo da diferenccedila de fase 23
FIGURA 24 ndash Informaccedilatildeo das imagens TOF 25
FIGURA 25 ndash Imagem TOF obtida com cacircmara PMD 26
FIGURA 26 ndash Ruiacutedo na nuvem de pontos 3D proveniente de imagem TOF 27
FIGURA 27 ndash Princiacutepio de funcionamento do sistema PMD 28
FIGURA 28 ndash Captaccedilatildeo da carga do sinal em sensores CCD e CMOS 29
FIGURA 29 ndash Representaccedilatildeo de campos de franja 30
FIGURA 210 ndash Princiacutepio de armazenamento de cargas em sensores TOF 31
FIGURA 211 ndash Princiacutepio de captaccedilatildeo de cargas pelo sensor PMD 32
FIGURA 212 ndash Medida da diferenccedila de fase do sinal recebido 33
FIGURA 213 ndash Medida de distacircncia com a cacircmara PMD 35
FIGURA 214 ndash Cacircmara PMD CamCube 20 36
FIGURA 215 ndash Imagem captada com a cacircmara PMD CamCube 20 37
FIGURA 216 ndash Princiacutepio de funcionamento do SBI 39
FIGURA 217 ndash Modelos de cacircmaras TOF 39
FIGURA 218 ndash Nuvem de pontos 3D gerada a partir de imagem TOF 44
FIGURA 219 ndash Colinearidade entre os pontos no espaccedilo imagem e objeto 45
FIGURA 220 ndash Sistemas de coordenadas utilizados em imagens 47
FIGURA 221 ndash Filtro para a definiccedilatildeo de bordas do objeto 51
FIGURA 222 ndash Geometria do filtro para a definiccedilatildeo de bordas 52
FIGURA 223 ndash Autovetores em nuvem de pontos 3D de uma superfiacutecie plana 55
FIGURA 224 ndash Inclinaccedilotildees de superfiacutecies determinadas por autovalores 59
FIGURA 225 ndash Imagem segmentada 66
FIGURA 41 ndash Processamento da imagem TOF 69
FIGURA 42 ndash Filtragem passa-baixas pela meacutedia 80
FIGURA 43 ndash Filtragem pela mediana 80
FIGURA 44 ndash Filtragem utilizando a meacutedia temporal 81
FIGURA 45 ndash Intensificaccedilatildeo de bordas com autovalores 85
FIGURA 46 ndash Imagem com bordas intensificadas 85
FIGURA 51 ndash Imagens do gabarito utilizadas na calibraccedilatildeo da cacircmara 87
FIGURA 52 ndash Orientaccedilatildeo Exterior das fotografias para a calibraccedilatildeo da cacircmara 88
FIGURA 53 ndash Direccedilatildeo das distorccedilotildees nos pontos da imagem TOF 88
ix
FIGURA 54 ndash Correccedilatildeo geomeacutetrica da imagem TOF 90
FIGURA 55 ndash Desvio padratildeo x TI janelas 10x10 93
FIGURA 56 ndash Imagens para TI=500μs e d=130m 93
FIGURA 57 ndash Imagens para TI=2000μs e d=130m 94
FIGURA 58 ndash Imagens para TI=2500μs e d=130m 95
FIGURA 59 ndash Desvios padratildeo para distacircncia x TI 96
FIGURA 510 ndash Desvios padratildeo para janelas com TI=2000μs d=130m 97
FIGURA 511 ndash Janelas de 40x40 piacutexeis TI=2000μs d=130m 97
FIGURA 512 ndash Desvios padratildeo para janelas com TI=5000μs d=130m 98
FIGURA 513 ndash Janelas de 40x40 piacutexeis TI=5000μs d=130m 98
FIGURA 514 ndash Desvios padratildeo para janelas com TI=2000μs d=210m 99
FIGURA 515 ndash Janelas de 40x40 piacutexeis TI=2000μs d=210m 99
FIGURA 516 ndash Desvios padratildeo para janelas com TI=5000μs d=210m 100
FIGURA 517 ndash Janelas de 40x40 piacutexeis TI=5000μs d=210m 100
FIGURA 518 ndash Desvios padratildeo para janelas com TI=7000μs d=210m 101
FIGURA 519 ndash Janelas de 40x40 piacutexeis TI=7000μs d=210m 101
FIGURA 520 ndash Arquivo de intensidades da imagem TOF obtida do objeto 103
FIGURA 521 ndash Arquivo de distacircncias da imagem TOF com geometria corrigida 104
FIGURA 522 ndash Nuvem de pontos vista frontal 104
FIGURA 523 ndash Nuvem de pontos vista perspectiva 3D 105
FIGURA 524 ndash Pontos semente no arquivo de intensidades da imagem TOF 106
FIGURA 525 ndash Crescimento de regiotildees vista frontal 107
FIGURA 526 ndash Crescimento de regiotildees vista perspectiva 3D 107
FIGURA 527 ndash Imagem com bordas intensificadas gerada com 1205821 109
FIGURA 528 ndash Imagem com bordas intensificadas gerada com 1205822 109
FIGURA 529 ndash Imagem com bordas intensificadas gerada com 1205823 109
FIGURA 530 ndash Imagens de intensidade com as bordas do objeto intensificadas 110
FIGURA 531 ndash Imagem com bordas intensificadas segmentada 111
FIGURA 532 ndash Nuvem de pontos da imagem segmentada vista frontal 112
FIGURA 533 ndash Nuvem de pontos da imagem segmentada vista 3D 113
FIGURA 534 ndash Nuvem de pontos 3D segmentada 114
FIGURA 535 ndash Pontos 3D selecionados na nuvem 114
FIGURA 536 ndash Dimensotildees de referecircncia do objeto de estudo 115
FIGURA 537 ndash Nuvem de pontos 3D das superfiacutecies frontal e superior 117
FIGURA 538 ndash Modelagem tridimensional das superfiacutecies frontal e superior 118
x
LISTA DE QUADROS E TABELAS
QUADRO 21 ndash Especificaccedilotildees teacutecnicas da cacircmara PMD CamCube 20 37
QUADRO 22 ndash Especificaccedilotildees teacutecnicas de cacircmaras TOF 40
QUADRO 23 ndash Propriedades de superfiacutecies normais obtidas com autovalores 57
TABELA 51 ndash Paracircmetros de Orientaccedilatildeo Interior calculados 89
TABELA 52 ndash Coordenadas 3D dos pontos e medidas realizadas 116
xi
LISTA DE SIGLAS
Sigla Significado
AMISE Asymptotic Mean Integrated Square Error
CCD Charge Coupled Device
CMOS Complementary Metal Oxide Semiconductor
CP Centro Perspectivo
EDISON Edge Detection and Image SegmentatiON System
FC Funccedilatildeo de Correlaccedilatildeo
FPN Fixed Pattern Noise
FPS Frames Per Second
LASER Light Amplification by Stimulated Emission of Radiation
LED Light Emitting Diode
MDE Modelo Digital de Elevaccedilatildeo
MVC Matriz de Variacircncias e Covariacircncias
PMD Photonic Mixer Device
POE Paracircmetros de Orientaccedilatildeo Exterior
POI Paracircmetros de Orientaccedilatildeo Interior
PP Ponto Principal
SBI Supression of Background Ilumination
TI Tempo de Integraccedilatildeo
TOF Time-Of-Flight
xii
SUMAacuteRIO
1 INTRODUCcedilAtildeO 14
11 OBJETIVO GERAL 16
12 OBJETIVOS ESPECIacuteFICOS 16
13 JUSTIFICATIVA 17
14 ESTRUTURA DA DISSERTACcedilAtildeO 18
2 REVISAtildeO BIBLIOGRAacuteFICA 19
21 MEDIDA DE DISTAcircNCIA COM O PRINCIacutePIO TOF 19
22 IMAGEM TOF 25
23 TEMPO DE INTEGRACcedilAtildeO 26
24 PRINCIacutePIO DE FUNCIONAMENTO DO SENSOR PMD 28
25 CAcircMARAS PMD 34
251 Cacircmara PMD CamCube 20 36
252 Dispositivo SBI 38
253 Modelos de cacircmaras TOF 39
26 ERROS DE MEDIDA 40
261 Erros natildeo-sistemaacuteticos em cacircmaras TOF 41
262 Erros sistemaacuteticos em cacircmaras TOF 41
27 PROJECcedilAtildeO ORTOGONAL DOS PONTOS 45
28 REFINAMENTO DA NUVEM DE PONTOS 3D 50
29 ANAacuteLISE DE SUPERFIacuteCIES POR AUTOVALORES E AUTOVETORES 53
210 ANAacuteLISE DE SUPERFIacuteCIES POR MOMENTOS INVARIANTES 56
211 ALGORITMO DE DESLOCAMENTO PELA MEacuteDIA 60
3 MATERIAIS 67
4 MEacuteTODOS 68
41 CALIBRACcedilAtildeO DA CAcircMARA 69
42 ANAacuteLISE DA PRESENCcedilA DE RUIacuteDO 78
421 Filtragem passa-baixas pela meacutedia 79
422 Filtragem pela mediana 80
423 Filtragem com a meacutedia temporal 81
43 SEGMENTACcedilAtildeO 82
431 Crescimento de regiotildees a partir de superfiacutecies planas e ponto semente 82
xiii
432 Segmentaccedilatildeo por anaacutelise da variaccedilatildeo local de autovalores 84
433 Segmentaccedilatildeo com o algoritmo de deslocamento pela meacutedia 86
5 RESULTADOS E DISCUSSOtildeES 87
51 CALIBRACcedilAtildeO DA CAcircMARA 87
52 EXPERIMENTO 1 ndash ANAacuteLISE DE RUIacuteDO 1 IMAGEM TOF INTEIRA 92
53 EXPERIMENTO 2 ndash ANAacuteLISE DE RUIacuteDO 2 JANELAS DE 40X40 PIacuteXEIS 96
54 EXPERIMENTO 3 ndash PROJECcedilAtildeO ORTOGONAL DOS PONTOS 102
55 EXPERIMENTO 4 ndash SEGMENTACcedilAtildeO 1 CRESCIMENTO DE REGIOtildeES 106
56 EXPERIMENTO 5 ndash SEGMENTACcedilAtildeO 2 ANAacuteLISE COM AUTOVALORES 108
57 EXPERIMENTO 6 ndash ANAacuteLISE DAS MEDIDAS OBTIDAS 113
58 MODELAGEM DAS SUPERFIacuteCIES 3D 117
6 CONCLUSOtildeES RECOMENDACcedilOtildeES E CONSIDERACcedilOtildeES FINAIS 119
61 CONCLUSOtildeES 119
62 RECOMENDACcedilOtildeES 122
63 CONSIDERACcedilOtildeES FINAIS 122
REFEREcircNCIAS BIBLIOGRAacuteFICAS 123
14
1 INTRODUCcedilAtildeO
A informaccedilatildeo meacutetrica para a representaccedilatildeo espacial de objetos eacute uma
necessidade para diferentes aacutereas de estudo Algumas aplicaccedilotildees exigem que o
processo de aquisiccedilatildeo e representaccedilatildeo graacutefica desta informaccedilatildeo seja realizado com
rapidez e qualidade Em Ciecircncias Geodeacutesicas a obtenccedilatildeo desta informaccedilatildeo pode
ser feita atraveacutes de diversas maneiras dentre elas citam-se os levantamentos de
campo e as imagens obtidas por sensores remotos exemplos satildeo teacutecnicas
aplicadas em Topografia e Fotogrametria
Com a Topografia o trabalho pode alcanccedilar alto grau de exatidatildeo
dependendo da teacutecnica e precisatildeo do equipamento utilizado No entanto se gasta
bastante tempo para realizar o levantamento das informaccedilotildees em campo e tambeacutem
para o processamento e organizaccedilatildeo dos dados em escritoacuterio Algumas aplicaccedilotildees
da Topografia estatildeo na locaccedilatildeo de obras como rodovias geraccedilatildeo de perfis de
terrenos e rios monitoramento de deformaccedilotildees na estrutura de barragens pontes e
tambeacutem no levantamento de pontos 3D para representar fachadas de edifiacutecios
Com a Fotogrametria o levantamento das informaccedilotildees tridimensionais de um
objeto pode ser feito em tempo relativamente curto As fotografias satildeo obtidas de
forma instantacircnea No entanto quando se utilizam teacutecnicas convencionais de
Fotogrametria necessita-se de pelo menos duas fotografias com sobreposiccedilatildeo das
aacutereas imageadas para a geraccedilatildeo do modelo fotogrameacutetrico Outra forma eacute a teacutecnica
conhecida por Monorestituiccedilatildeo Digital onde se utiliza uma fotografia digital em
conjunto com um Modelo Digital de Elevaccedilatildeo (MDE) normalmente gerado por uma
nuvem de pontos proveniente de outro equipamento ou sensor (MITISHITA 1997)
Na modalidade terrestre da Fotogrametria eacute possiacutevel determinar pontos 3D
para representar fachadas de preacutedios obras de arte mapeamentos de ruas e
imoacuteveis com a plataforma em movimento dentre outras aplicaccedilotildees
Aleacutem das teacutecnicas convencionais de levantamentos utilizadas em Topografia
e Fotogrametria e com o objetivo de viabilizar a aquisiccedilatildeo da informaccedilatildeo espacial
equipamentos e teacutecnicas tecircm sido constantemente desenvolvidos e aperfeiccediloados
Avanccedilos tecnoloacutegicos tecircm possibilitado a obtenccedilatildeo da informaccedilatildeo tridimensional
para a representaccedilatildeo dos objetos de forma raacutepida e precisa Exemplos satildeo os
sistemas de varredura laser scanner e as cacircmaras TOF (Time-Of-Fligth) tambeacutem
15
conhecidas na literatura por Range Cameras Estas cacircmaras geram imagens com
informaccedilotildees de distacircncia para cada pixel do objeto imageado denominadas
imagens de profundidade distacircncia ou Range Image Neste trabalho seraacute utilizada
preferencialmente a denominaccedilatildeo ldquoimagem TOFrdquo
Nas uacuteltimas deacutecadas os sistemas de varredura laser scanner tecircm sido muito
utilizados para mapeamento Equipamentos com esta tecnologia possibilitam a
obtenccedilatildeo de milhares de pontos por segundo e podem ser instalados em
plataformas aeacutereas ou terrestres No entanto devido a este ser um equipamento
oacuteptico e mecacircnico o alto custo na sua aquisiccedilatildeo torna-o inviaacutevel para algumas
aplicaccedilotildees
Cacircmaras TOF atraem a atenccedilatildeo de diferentes aacutereas que necessitam de
pontos com coordenadas 3D de seus objetos de estudo tais como a Visatildeo
Computacional e a Engenharia de Automaccedilatildeo Um modelo de cacircmara TOF eacute a PMD
CamCube 20 que capta 25 imagens por segundo (Frames Per Secunde - FPS)
Com esta frequecircncia de aquisiccedilatildeo pode obter o movimento dos objetos na cena e de
grande quantidade de informaccedilatildeo tridimensional sobre os mesmos
No entanto a grande quantidade de dados captada deve ter sua qualidade
avaliada A iluminaccedilatildeo exterior ao sistema interfere negativamente Outro fator a ser
observado eacute a configuraccedilatildeo da cena pois interferecircncias satildeo causadas pelas
distacircncias orientaccedilotildees e refletividade das superfiacutecies dos objetos em relaccedilatildeo ao
sensor da cacircmara Em uma mesma cena podem-se apresentar medidas ambiacuteguas
de distacircncia para os pontos devido a erros causados pela iluminaccedilatildeo utilizada no
sistema As influencias causadas por erros sistemaacuteticos assim como ruiacutedos devem
ser observadas para cada tipo de aplicaccedilatildeo (MAY et al 2008)
A cacircmara TOF utilizada para a aquisiccedilatildeo das imagens nesta pesquisa foi a
PMD[vision]regCamCube 20 Esta utiliza um sensor de imageamento PMD (Photonic
Mixer Device) que possibilita armazenar informaccedilatildeo de distacircncia para os piacutexeis de
uma imagem de intensidade O equipamento fornece a imagem TOF que eacute
composta por um arquivo com as intensidades que o sinal retornou para o sensor e
um arquivo com as informaccedilotildees de distacircncia para cada pixel o que possibilita a
percepccedilatildeo da profundidade dos objetos na cena
16
11 OBJETIVO GERAL
O objetivo geral deste trabalho de pesquisa eacute desenvolver uma metodologia
para a modelagem tridimensional das superfiacutecies de objetos a partir da nuvem de
pontos 3D proveniente da imagem TOF
12 OBJETIVOS ESPECIacuteFICOS
Realizar a correccedilatildeo geomeacutetrica dos dados da imagem TOF atraveacutes de
Paracircmetros de Orientaccedilatildeo Interior obtidos com o processo de
calibraccedilatildeo da cacircmara
Testar meacutetodos de filtragem para a reduccedilatildeo de ruiacutedo presente nas
imagens TOF e analisar formas para a aquisiccedilatildeo da imagem TOF
com menor presenccedila de ruiacutedo
Analisar o tempo de integraccedilatildeo para diferentes situaccedilotildees de aquisiccedilatildeo
da imagem TOF
Avaliar meacutetodos para a segmentaccedilatildeo das superfiacutecies de objetos a
partir da imagem TOF
Gerar nuvem de pontos com coordenadas tridimensionais das
superfiacutecies segmentadas e modelar estas superfiacutecies
tridimensionalmente
Avaliar a qualidade das medidas obtidas com a modelagem
tridimensional das superfiacutecies do objeto de estudo
17
13 JUSTIFICATIVA
Com o desenvolvimento e aperfeiccediloamento das cacircmaras TOF acredita-se
na viabilizaccedilatildeo deste equipamento para a medida de distacircncia e modelagem
tridimensional das superfiacutecies de objetos para diferentes finalidades Apresenta as
seguintes vantagens
Recobrimento da aacuterea de forma instantacircnea
Possibilidade de filmar a cena registrando o movimento dos objetos
com frequecircncia de aquisiccedilatildeo de 25 imagens por segundo
Fornece grande quantidade de pontos com coordenadas 3D dos
objetos imageados
Uma imagem eacute suficiente para estimar a distacircncia dos objetos
Informaccedilatildeo na banda espectral do infravermelho
Uma imagem TOF captada instantaneamente disponibiliza informaccedilatildeo sobre
a distacircncia de objetos contidos na cena sendo possiacutevel a geraccedilatildeo de nuvens de
pontos para a representaccedilatildeo tridimensional de objetos sem necessitar de
informaccedilatildeo proveniente de outro sensor Outra vantagem eacute o sistema natildeo precisar
de iluminaccedilatildeo exterior
Algumas aplicaccedilotildees para as imagens TOF foram realizadas nas aacutereas de
prevenccedilatildeo de acidentes automobiliacutesticos e seguranccedila de pedestres (RINGBECK
2007) Visatildeo Computacional (WIEDEMANN et al 2008) mapeamentos
tridimensionais de objetos em ambientes fechados para a movimentaccedilatildeo roboacutetica
(MAY et al 2008) Computaccedilatildeo Graacutefica (KOLB 2009 et al KOCH et al 2009)
realizaccedilatildeo de medidas do corpo humano para a induacutestria de roupas (APUZZO
2009) e anaacutelise de deformaccedilotildees (JAMTSHO 2010)
18
14 ESTRUTURA DA DISSERTACcedilAtildeO
A presente dissertaccedilatildeo foi estruturada em seis capiacutetulos No primeiro
capitulo realiza-se a introduccedilatildeo ao tema descreve-se o objetivo geral e os objetivos
especiacuteficos aleacutem da justificativa para a pesquisa
O segundo capiacutetulo apresenta uma revisatildeo de conceitos sobre medida de
distacircncia utilizando o princiacutepio TOF descriccedilatildeo da imagem TOF e seus arquivos de
intensidades e distacircncias influencia do tempo de integraccedilatildeo (TI) na aquisiccedilatildeo da
imagem TOF princiacutepio de funcionamento do sensor PMD modelos de cacircmaras
TOF erros de medida que podem ocorrer utilizando estas cacircmaras projeccedilatildeo
ortogonal das distacircncias obtidas com a imagem TOF para a geraccedilatildeo da nuvem de
pontos 3D meacutetodo para o refinamento da nuvem de pontos 3D detecccedilatildeo de
superfiacutecies por autovetores e autovalores anaacutelise de superfiacutecies por momentos
invariantes e algoritmo de deslocamento pela meacutedia para a segmentaccedilatildeo de
imagens
No terceiro capitulo descrevem-se os materiais equipamentos e espaccedilo
fiacutesico utilizado para a realizaccedilatildeo do trabalho de pesquisa
Com o quarto capitulo satildeo descritos os meacutetodos utilizados para o
desenvolvimento da pesquisa calibraccedilatildeo da cacircmara filtragens para anaacutelise e
tratamento de ruiacutedo presente nas imagens meacutetodos de segmentaccedilatildeo por
crescimento de regiotildees na nuvem de pontos segmentaccedilatildeo por anaacutelise da variaccedilatildeo
local de autovalores no arquivo de distacircncias da imagem TOF e geraccedilatildeo de imagem
de intensidade com as bordas do objeto intensificadas segmentaccedilatildeo da imagem
com bordas intensificadas utilizando o algoritmo de deslocamento pela meacutedia
Com o quinto capitulo descrevem-se os resultados obtidos tais como
valores dos paracircmetros calculados no processo de calibraccedilatildeo da cacircmara
experimentos realizados para a anaacutelise da presenccedila de ruiacutedo nas imagens TOF
projeccedilatildeo ortogonal dos pontos para a geraccedilatildeo da nuvem de pontos 3D
segmentaccedilatildeo por crescimento de regiotildees segmentaccedilatildeo por anaacutelise da variaccedilatildeo
local de autovalores anaacutelise das medidas obtidas com a nuvem de pontos 3D
segmentada e tambeacutem se realiza a modelagem tridimensional de duas superfiacutecies
do objeto estudado
Finalmente com o sexto capitulo satildeo apresentadas conclusotildees
consideraccedilotildees finais e recomendaccedilotildees para trabalhos futuros de acordo com os
experimentos realizados
19
2 REVISAtildeO BIBLIOGRAacuteFICA
21 MEDIDA DE DISTAcircNCIA COM O PRINCIacutePIO TOF
O princiacutepio TOF (Time-Of-Flight) permite calcular a distacircncia de objetos a
partir da emissatildeo e recepccedilatildeo de um sinal luminoso Com este objetivo utiliza-se um
conjunto de emissor e receptor oacutepticos que mede o tempo necessaacuterio para o sinal
retornar para o sensor apoacutes atingir o alvo com base no conhecimento do valor da
velocidade da luz propagada no vaacutecuo De acordo com Baltsavias (1999) o caacutelculo
da distacircncia com o princiacutepio TOF pode ser realizado atraveacutes de dois meacutetodos
Tempo de percurso de pulsos curtos de energia
Mudanccedila de fase de um sinal modelado na forma de onda contiacutenua
Sistemas que utilizam o primeiro meacutetodo de medida transmitem um pulso e
medem o seu tempo de retorno Isto eacute possiacutevel devido ao retardo de tempo gasto no
percurso do sinal que eacute medido atraveacutes de um ponto no pulso de retorno com
referecircncia no pulso emitido Quanto melhor eacute a medida do tempo melhor a distacircncia
calculada sendo o reloacutegio do sensor um fator de grande importacircncia neste meacutetodo
Para obter precisatildeo meacutetrica necessita-se realizar a medida de tempo em nano
segundos (ƞs) O afastamento e duraccedilatildeo do pulso tambeacutem satildeo fatores importantes
na resoluccedilatildeo da medida de distacircncia com este meacutetodo A Figura 21 Ilustra a medida
de distacircncia com o princiacutepio TOF (LANGE 2000)
FIGURA 21 ndash Princiacutepio TOF
FONTE LANGE (2000)
20
Utilizando pulsos de uma fonte de luz pode-se calcular a distacircncia de um
alvo atraveacutes da Equaccedilatildeo (21)
119863 =119888 119905
2 (21)
onde
119863 ndash Distacircncia entre o sensor e o alvo
119888 ndash Valor constante da velocidade da luz
119905 ndash Variaccedilatildeo de tempo entre emissatildeo e recepccedilatildeo do pulso
O segundo meacutetodo trabalha com a determinaccedilatildeo da mudanccedila de fase do
sinal contido em uma onda contiacutenua modulada Pode ser utilizado para evitar o
problema na medida de tempo com alta precisatildeo O sinal luminoso pode ser emitido
utilizando fontes LED (Light Emitting Diode) ou LASER (Light Amplification by
Stimulated Emission of Radiation) Estas fontes permitem a modulaccedilatildeo direta do
sinal luminoso atraveacutes da voltagem do sistema (LANGE 2000)
Para a utilizaccedilatildeo do meacutetodo da diferenccedila de fase considera-se que o sinal
refletido pelo alvo manteacutem a forma do sinal modulado emitido mas a fase do sinal
emitido eacute diferente da fase do sinal recebido conforme ilustrado com a Figura 22
FIGURA 22 ndash Meacutetodo da diferenccedila de fase
21
Sendo assim a mudanccedila de fase entre os sinais pode ser utilizada para
calcular a distacircncia conforme Equaccedilatildeo (22)
119863 =120593∙119888
4∙120587∙120574 (22)
onde
119863 ndash Distacircncia entre o sensor e o alvo
120593 ndash Diferenccedila de fase entre o sinal emitido e o recebido
119888 ndash Valor constante da velocidade da luz
120574 ndash Frequecircncia de modulaccedilatildeo do sinal
Em cacircmaras TOF a distacircncia entre o sensor e o alvo eacute medida utilizando o
meacutetodo da diferenccedila de fase com uma Funccedilatildeo de Correlaccedilatildeo (FC) entre o sinal
emitido e o refletido As amplitudes dos sinais satildeo moduladas com a mesma
frequecircncia Com isto a iluminaccedilatildeo pode ser feita utilizando diacuteodos emissores de luz
LED tendo-se a vantagem que a FC pode ser obtida com o sensor PMD a partir da
forma senoidal do sinal recebido (RAPP 2007)
A FC eacute calculada atraveacutes do sinal emitido e recebido Estes sinais satildeo
modelados matematicamente com forma senoidal tendo em vista que sua
propagaccedilatildeo ocorre na forma de onda Dado um sinal luminoso emitido 119892 119905 e um
sinal recebido 119904 119905 em um ponto do sensor PMD as amostras 119888 120591 podem ser
calculadas atraveacutes da Equaccedilatildeo (23) Estas amostras satildeo utilizadas para modelar a
FC em um atraso de tempo 120591
119888 120591 = 119904 119905 otimes 119892 119905 = lim119879rarrinfin 119904 119905 ∙ 119892 119905 + 120591 +119879
2
minus119879
2
119889119905 (23)
onde
119904 119905 ndash Funccedilatildeo que modela a forma do sinal luminoso recebido
119892 119905 ndash Funccedilatildeo que modela a forma do sinal luminoso emitido
119905 ndash Variaccedilatildeo de tempo entre a emissatildeo e a recepccedilatildeo do sinal
120591 ndash Atraso de tempo no recebimento do sinal
22
O sinal emitido pode ser expresso com 119892 119905 = cos(120603119905) o recebido eacute
expresso atraveacutes da relaccedilatildeo 119904 119905 = 1 + 119886 ∙ cos(120603119905 minus 120593) Ambos com forma senoidal
amplitude 119886 e diferenccedila de fase 120593 Com isto a FC pode ser apresentada na forma da
Equaccedilatildeo (25)
119888 120591 = 1 + 119886 ∙ 119888119900119904 120603120591 minus 120593 otimes 119888119900119904 120603120591 (24)
119888 120591 = lim119879acuterarrinfin1
119879acute 1 + 119886 ∙ 119888119900119904 120603119905 minus 120593 ∙ 119888119900119904 120603119905 + 120603119905
+119879 acute
2
minus119879 acute
2
119889119905 (25)
119888 120591 =119886
2∙ cos 120593 + 120603119905 (26)
onde
119892 119905 ndash Funccedilatildeo senoidal que modela a forma do sinal emitido
119904 119905 ndash Funccedilatildeo que modela a forma do sinal recebido
119905 ndash Variaccedilatildeo de tempo entre a emissatildeo e recepccedilatildeo do sinal
120591 ndash Atraso no tempo de recebimento do sinal
119886 ndash Amplitude da onda portadora do sinal
120593 ndash Diferenccedila de fase
120603 ndash Referecircncia de fase para o sinal modelado na forma senoidal
Lange (2000) avaliou a FC para fases 120596 119905 preacute-definidas escolhendo quatro
fases 120596 119905 = 0deg 120596 119905 = 90deg 120596 119905 = 180deg 120596 119905 = 270deg Verificou que eacute possiacutevel calcular a
diferenccedila de fase 120593 e a amplitude 119886 do sinal recebido 119904(119905) Considerando que o sinal
recebido tem sobreposiccedilatildeo ao sinal emitido deve-se adicionar uma constante de
deslocamento 119870 conforme a Equaccedilatildeo (27)
119862 120591 = 119888 120591 + 119870 (27)
119862 1205910 = 119888 1205910 + 119870 =119886
2∙ cos 120593 + 119870 (28)
119862 1205911 = 119888 1205911 + 119870 = minus119886
2∙ 119904119890119899 120593 +119870 (29)
119862 1205912 = 119888 1205912 + 119870 = minus119886
2∙ cos 120593 + 119870 (210)
119862 1205913 = 119888 1205913 + 119870 =119886
2∙ 119904119890119899 120593 +119870 (211)
23
Analisando a FC em quatro pontos a diferenccedila de fase 120593 e a amplitude 119886 do
sinal 119904(119905) podem ser calculadas atraveacutes das Equaccedilotildees (212) e (213)
120593 = 119905119892minus1 119862 1205913 minus119862 1205911
119862 1205910 minus119862 1205912 (212)
119886 = 119862 1205913 minus119862 1205911 2+ 119862 1205910 minus119862 1205912 2
2 (213)
Pode-se fazer a simplificaccedilatildeo das Equaccedilotildees (214) agrave (217) para quatro
pontos amostrais que satildeo necessaacuterios na modelagem da FC
119862 1205911 = 1198601 (214)
119862 1205912 = 1198602 (215)
119862 1205913 = 1198603 (216)
119862 1205910 = 1198604 (217)
A anaacutelise da FC entre o sinal oacuteptico e eleacutetrico recebido no dispositivo do
sensor eacute feita utilizando a diferenccedila de fase conforme ilustrado com a Figura 23
FIGURA 23 ndash FC utilizada no meacutetodo da diferenccedila de fase
FONTE Adaptado de LANGE (2000)
A FC permite calcular a distacircncia entre o alvo e a cacircmara utilizando quatro
amostras 11986011198602 1198603 e 1198604 com defasagem de 90ordm A diferenccedila de fase 120593 entre o sinal
24
emitido e o recebido eacute proporcional agrave distacircncia entre o alvo e a cacircmara O valor para
a diferenccedila de fase pode ser calculado atraveacutes da Equaccedilatildeo (218)
120593 = 119886119903119888119905119886119899 1198601minus1198603
1198602 minus1198604 (218)
onde
120593 ndash Diferenccedila de fase entre a onda emitida e a recebida
1198601119860211986031198604 ndash Pontos amostrais utilizados na modelagem da FC
Aleacutem do valor da diferenccedila de fase entre os sinais dois outros valores
podem ser calculados a amplitude 119886 e o valor de intensidade 119887 do sinal recebido
conforme as Equaccedilotildees (219) e (220) respectivamente
119886 = 1198601minus1198603 2+ 1198602 minus1198604 2
2 (219)
119887 =1198601+1198602 +1198603+1198604
4 (220)
onde
119886 ndash Amplitude do sinal recebido
119887 ndash Intensidade do sinal recebido (offset)
A distacircncia 119889 do sensor ao alvo eacute calculada atraveacutes da Equaccedilatildeo (221)
119889 =119888∙120593
4120587∙119891119898119900119889 (221)
onde
119889 ndash Distacircncia entre o sensor e o alvo
119888 ndash Valor constante da velocidade da luz propagada no vaacutecuo
120593 ndash Diferenccedila de fase entre o sinal emitido e o recebido
119891119898119900119889 ndash Frequecircncia de modulaccedilatildeo do sinal luminoso utilizado
A frequecircncia de modulaccedilatildeo do sinal emitido estabelece a distacircncia maacutexima
que poderaacute ser medida para um determinado comprimento de onda Em um sinal
25
modulado com a frequecircncia 119891119898119900119889 = 20119872119867119911 e comprimento de onda 120582119898119900119889 = 15m
conforme a Equaccedilatildeo (222) a distacircncia maacutexima que poderaacute ser medida eacute de 75
metros (MOumlLLER et al 2005)
119889119898119886119909 =120582119898119900119889
2= 75119898 (222)
22 IMAGEM TOF
Os piacutexeis da imagem TOF contecircm informaccedilotildees de distacircncia e intensidade
das superfiacutecies dos objetos Proporcionam a anaacutelise da profundidade dos objetos na
cena aleacutem da informaccedilatildeo de intensidade do sinal captado pelo sensor A Figura 24
ilustra a informaccedilatildeo 3D contida na imagem TOF
FIGURA 24 ndash Informaccedilatildeo das imagens TOF
FONTE Adaptado de RINGBECK (2007)
Com a informaccedilatildeo de profundidade e o posicionamento bidimensional dos
objetos na imagem pode-se realizar o mapeamento destes objetos e estimar suas
dimensotildees As cacircmaras TOF podem captar imagens e viacutedeos para realizar medidas
e detectar movimentos A Figura 25 ilustra os arquivos da imagem TOF
26
FIGURA 25 ndash Imagem TOF obtida com cacircmara PMD
FONTE PMD Technologies (2009)
A Figura 25a ilustra o arquivo com informaccedilatildeo das distacircncias dos objetos
presentes na imagem TOF A Figura 25b ilustra o arquivo com as intensidades que
o sinal retornou para o sensor registrada em cada piacutexel da imagem infravermelha
captada com comprimento de onda de 870nm
23 TEMPO DE INTEGRACcedilAtildeO
O periacuteodo de tempo que o sensor da cacircmara ficou exposto para obter a
imagem eacute chamado de tempo de integraccedilatildeo (TI) A quantidade de energia
eletromagneacutetica captada pelo sensor eacute diretamente influenciada por este tempo
pelas caracteriacutesticas refletivas das superfiacutecies dos objetos e pelo meio em que a
imagem foi tomada Os elementos do sensor podem ser carregados de acordo com
seu intervalo de capacidade do insaturado ao supersaturado Estes valores causam
ruiacutedos na imagem variando de acordo com a distacircncia entre o objeto e o sensor
(CENTENO e JUTZI 2010)
Este pode ser considerado o paracircmetro interno mais criacutetico em uma cacircmara
TOF pois descreve o periacuteodo de tempo que os elementos sensores necessitam
para detectar o sinal luminoso com a finalidade de obter a diferenccedila de fase utilizada
27
para o caacutelculo da distacircncia Quando o TI eacute muito baixo alguns elementos do sensor
podem natildeo ser ativados ocasionando piacutexeis com valor zero natildeo sendo possiacutevel
calcular sua distacircncia Por outro lado se o TI eacute muito elevado o pixel pode ficar
supersaturado o que tambeacutem causa erro na medida da distacircncia Sendo assim eacute
necessaacuterio determinar um TI especiacutefico para cada situaccedilatildeo Nas cacircmaras PMD o
controle do TI eacute realizado atraveacutes de software em outros modelos de cacircmaras TOF
este controle pode ser feito atraveacutes de hardware (WIEDEMANN et al 2008)
A Figura 26 ilustra a presenccedila de ruiacutedo na imagem TOF influenciada pelo
TI Nesta figura as nuvens de pontos 3D foram geradas com imagens TOF obtidas
com a cacircmara PMD CamCube 20 a partir do mesmo ponto de vista mas com
diferentes TI (140micros 1400micros e 14000micros) isto causou a presenccedila de ruiacutedo com
diferentes comportamentos
FIGURA 26 ndash Ruiacutedo na nuvem de pontos 3D proveniente de imagem TOF
FONTE PMD CamCube Tutorial (2009)
A nuvem de pontos gerada com a imagem obtida com TI de 1400micros
ilustrada com a Figura 26b foi a que melhor representou a forma das superfiacutecies do
objeto A nuvem de pontos da Figura 26a foi gerada a partir da imagem obtida com
TI igual a 140micros considerada com baixa saturaccedilatildeo pois a intensidade do sinal
captado pelo sensor foi pequena A nuvem de pontos da Figura 26c foi gerada com
imagem obtida com TI igual a 14000micros o que causou a saturaccedilatildeo do sinal recebido
pelo sensor e maior presenccedila de ruiacutedo A nuvem de pontos apresentada com a
Figura 26c apresentou-se menos consistente para representar as superfiacutecies do
objeto em questatildeo
28
24 PRINCIacutePIO DE FUNCIONAMENTO DO SENSOR PMD
O dispositivo PMD (Photonic Mixer Device) realiza medidas de distacircncia
utilizando o princiacutepio TOF Com este objetivo o dispositivo emite sinais luminosos
com frequecircncia modulada e o sensor capta a intensidade de retorno do sinal
refletido pelo alvo Informaccedilotildees sobre as fases e intensidades destes sinais satildeo
obtidas com o processamento A Figura 27 ilustra as etapas deste processo
FIGURA 27 ndash Princiacutepio de funcionamento do sistema PMD
FONTE LUAN (2001)
O sinal modulado eacute emitido com uma fase determinada pelo oscilador do
sistema Para que se possa realizar a medida da distacircncia o sinal recebido deve ter
fase diferente da que foi emitido No dispositivo PMD as cargas eleacutetricas do sinal
recebido satildeo separadas de acordo com a voltagem do diodo de leitura tambeacutem
chamado de fotodiodo O arquivo de saiacuteda deste dispositivo conteacutem informaccedilatildeo de
fase e intensidade do sinal recebido o que possibilita obter informaccedilatildeo de distacircncia
e intensidade para cada piacutexel da imagem (LUAN 2001)
O sensor utilizado no imageamento eacute um CMOS (Complementary Metal-
Oxide-Semiconductor) que tem tecnologia similar a dos sensores CCD (Charged-
Coupled Device) O CMOS apresenta a vantagem de ser um circuito integrado com
baixo consumo de energia No CMOS a conversatildeo de voltagem e a amplificaccedilatildeo do
sinal ocorrem em cada fotodiodo e os valores podem ser lidos independentemente
29
A desvantagem eacute que a amplificaccedilatildeo no fotodiodo gera imagens com maior
presenccedila de ruiacutedo (PECHT e FOSSUM 1997)
Quando os foacutetons sensibilizam o sensor CCD a carga eleacutetrica eacute transferida
sequencialmente linha por linha coluna por coluna A conversatildeo de voltagem e
amplificaccedilatildeo do sinal eacute realizada fora da aacuterea do sensor Uma vantagem do sensor
CCD eacute a geraccedilatildeo de imagens mais niacutetidas devido agrave menor complexidade no seu
sistema Por processar as cargas eleacutetricas de forma unificada menores interferecircncias
satildeo causadas diminuindo a presenccedila de ruiacutedo (KEMENY et al 1991)
A diferenccedila no princiacutepio de funcionamento dos sensores CCD e CMOS eacute
Ilustrada com a Figura 28
FIGURA 28 ndash Captaccedilatildeo da carga do sinal em sensores CCD e CMOS
FONTE LANGE (2000)
O princiacutepio de funcionamento do sensor CCD eacute ilustrado com as Figuras
28a e 28c onde a leitura da informaccedilatildeo eacute feita de forma sequencial pelos elementos
do sensor Esta varredura realizada no sensor CCD faz com que a geraccedilatildeo da
30
imagem final seja mais lenta que no sensor CMOS que realiza a conversatildeo foacuteton-
eleacutetron e eleacutetron-voltagem diretamente em cada elemento sensor conforme eacute
ilustrado com as Figuras 28b e 28d Com isto o sensor CMOS tem maior
velocidade de transferecircncia de cargas acumuladas para o conversor analoacutegico-
digital
Fotodiodos satildeo os elementos fotossensiacuteveis utilizados como portas de
entrada para o sinal luminoso em sensores CMOS ou CCD Estes captam cargas
eleacutetricas presentes no sinal e estatildeo inseridos sobre uma placa de Siliacutecio O
transporte das cargas para o interior da placa eacute explicado fisicamente atraveacutes dos
campos de franjas ilustrado com a Figura 29 Os campos de franja estatildeo
representados para diferentes voltagens os elementos do sensor apresentado tem
entradas para trecircs voltagens 10V 5V e 0V
FIGURA 29 ndash Representaccedilatildeo de campos de franja
FONTE THEUWISSEN (1995)
A seccedilatildeo A-A‟ na Figura 29 ilustra os campos de franja gerados mais
proacuteximos agrave superfiacutecie da placa A forma do sinal pode ser modelada de forma
aproximada por segmentos de linhas retas Na seccedilatildeo B-B‟ com profundidade meacutedia
na placa de Siliacutecio a influecircncia do campo eleacutetrico das entradas vizinhas a porta
central de 5V estaacute em seu niacutevel maacuteximo Quanto mais fundo encontra-se a entrada
de cargas na placa de Siliacutecio menor seraacute a interferecircncia dos campos eleacutetricos
gerados pelas portas de entrada das cargas vizinhas conforme pode ser visualizado
na seccedilatildeo C-C‟ Nesta profundidade diferentes portas de entrada estatildeo praticamente
31
agrave mesma distacircncia da superfiacutecie e o valor de dispersatildeo do campo de franja diminui
O campo de franja miacutenimo de uma entrada que tecircm profundidade maacutexima
proporciona ao sensor o maior aproveitamento aumentando assim a velocidade no
transporte de cargas (THEUWISSEN 1995)
Quanto maior a modulaccedilatildeo na voltagem da entrada das cargas maior o
potencial de armazenamento conforme ilustrado com a Figura 210
FIGURA 210 ndash Princiacutepio de armazenamento de cargas em sensores TOF
FONTE LANGE (2000)
O sinal modulado recebido 119904 119905 e a Funccedilatildeo de Correlaccedilatildeo 119891 119905 + 120591 do sinal
modulado emitido satildeo ilustrados com a Figura 210b A Figura 210a ilustra a luz
incidente no sensor com as cargas captadas e armazenadas de acordo com a
modulaccedilatildeo do fotodiodo
O dispositivo PMD utiliza a tecnologia CMOS para o imageamento com dois
elementos fotossensiacuteveis e dois diodos que captam as cargas eleacutetricas do sinal
modulado recebido As informaccedilotildees oacutepticas e eleacutetricas misturadas geram os piacutexeis
da imagem com informaccedilatildeo de distacircncia dos pontos imageados A Figura 211
ilustra este elemento sensor
32
FIGURA 211 ndash Princiacutepio de captaccedilatildeo de cargas pelo sensor PMD
FONTE LUAN (2001)
As placas claras e centrais na Figura 211a correspondem ao circuito de
leitura do sinal oacuteptico estas placas satildeo condutoras e transparentes para possibilitar
a entrada de luz Os diodos satildeo os componentes do circuito de leitura que captam e
direcionam as cargas eleacutetricas recebidas em um determinado sentido satildeo ilustrados
com as placas mais afastadas na Figura 211a As cargas que chegam satildeo
distribuiacutedas de acordo com a voltagem do diodo Uma fina camada de oacutexido isola os
circuitos de leitura do dispositivo
A voltagem da carga que entra no sistema eacute controlada de acordo com a
modulaccedilatildeo do sinal aplicada pelo dispositivo emissor Sendo assim pode ser
captada pelo diodo da direita ou esquerda que registraraacute a quantidade de carga
recebida de acordo com sua voltagem A distribuiccedilatildeo de potencial na regiatildeo
superficial do dispositivo eacute influenciada pela seleccedilatildeo de cargas que faz este sistema
dinacircmico e equilibrado Para valores natildeo nulos a luz modulada recebida e a
diferenccedila de fase podem ser comparadas atraveacutes das cargas eleacutetricas recebidas A
quantidade de carga captada pelos diodos depende diretamente da diferenccedila de
fase entre o sinal modulado emitido e o recebido pelo sensor Esta informaccedilatildeo pode
ser utilizada para calcular a diferenccedila de fase entre o sinal emitido e o recebido pois
33
eacute diretamente proporcional a carga que cada diodo captou Com isto a distacircncia
entre o sensor e o objeto pode ser calculada utilizando o princiacutepio da diferenccedila de
fase No entanto se a luz incidente eacute modulada como um sinal retangular mas sua
fase entre a emissatildeo e a recepccedilatildeo eacute igual a zero a carga seraacute captada por apenas
um dos diodos e a distacircncia resultante seraacute igual a zero (MOumlLLER et al 2005)
A Figura 212 ilustra o comportamento dos diodos de leitura ao receber o
sinal com distacircncia diferente de zero entre o alvo e o sensor Na Figura 212a eacute
ilustrado o sinal luminoso recebido por um elemento fotossensiacutevel Este sinal eacute
captado pela porta de entrada PA do fotodiodo que registra parte desta carga de
acordo com sua modulaccedilatildeo
FIGURA 212 ndash Medida da diferenccedila de fase do sinal recebido
FONTE Adaptado de MOumlLLER et al (2005)
Na Figura 212a o sinal recebido pelo elemento fotossensiacutevel do sensor eacute
ilustrado no momento em que eacute captado pela porta com modulaccedilatildeo A (PmodA) A
carga eacute captada pelos dois fotodiodos com defasagem de meio ciclo com isto cada
um capta parte da carga recebida A Figura 212b ilustra a medida da diferenccedila de
fase do sinal recebido atraveacutes da quantidade de carga que foi captada pelos
fotodiodos com modulaccedilatildeo Mod_A e Mod_B A voltagem do diodo eacute estabelecida de
acordo com a modulaccedilatildeo do sinal luminoso que seraacute emitida pelo dispositivo
34
25 CAcircMARAS PMD
As cacircmaras TOF com tecnologia PMD consistem de um chip sensor fonte
de iluminaccedilatildeo transmissor e receptor oacutepticos aleacutem de perifeacutericos eletrocircnicos e
interface digital de controle realizada atraveacutes de software Dependendo das
exigecircncias de aplicaccedilatildeo os componentes da cacircmara podem ser adaptados Cada
um deles pode afetar os paracircmetros internos da cacircmara tais como o campo de
visatildeo (FOV) taxa de captaccedilatildeo e tempo de integraccedilatildeo para a aquisiccedilatildeo das imagens
A distacircncia da superfiacutecie a ser medida eacute o fator preponderante para a escolha destes
paracircmetros O fato destas cacircmaras serem modulares amplia sua gama de
aplicaccedilotildees Isto eacute possiacutevel levando-se em conta as condiccedilotildees adicionais que cada
aplicaccedilatildeo pode exigir tais como a luz exterior ao sistema e a necessidade de
mudanccedila na fonte de iluminaccedilatildeo utilizada (PMD Technologies 2009)
O sensor PMD proporciona o imageamento instantacircneo dos objetos
utilizando um sensor com tecnologia CMOS adaptado Este sensor eacute um arranjo de
elementos fotossensiacuteveis que permitem a raacutepida detecccedilatildeo e modulaccedilatildeo do sinal
luminoso com suas variaccedilotildees Isto eacute feito de acordo com a distacircncia da superfiacutecie
que atinge do objeto imageado Pode adquirir dados de distacircncia e intensidade
simultaneamente sem precisar de um sistema de digitalizaccedilatildeo mais complexo como
um laser scanner Apresenta a desvantagem de ser muito sensiacutevel agrave luz exterior ao
sistema que interfere causando a presenccedila de ruiacutedo na imagem TOF e consequente
erro na medida de distacircncia (KHONGSAB 2009)
O desempenho do sistema PMD depende da fonte de iluminaccedilatildeo utilizada
capacidade de fornecimento de energia e eficiecircncia oacuteptica na criaccedilatildeo da imagem
Normalmente eacute utilizada fonte de iluminaccedilatildeo LED nas cacircmaras PMD No entanto
outros fabricantes utilizam diodos LASER para a iluminaccedilatildeo isto porque possibilita
realizar medidas de distacircncias maiores O desenvolvimento dos sistemas LED fez
com que sua eficiecircncia de transformaccedilatildeo de energia eleacutetrica em energia oacuteptica seja
de 30 Com a iluminaccedilatildeo LED tem-se um sinal luminoso jaacute modulado devido a
suas caracteriacutesticas eletro-oacutepticas Como uma parte consideraacutevel da luz fica na
borda do feixe isto se torna uma desvantagem pois esta aacuterea normalmente fica fora
do campo de visatildeo do sensor PMD Outra desvantagem diz respeito ao limite de
modulaccedilatildeo dos LED‟s comerciais que trabalham na faixa de 20 MHz agrave 30 MHz Os
diodos LASER tecircm eficiecircncia oacuteptica de ateacute 50 dependendo da potecircncia de saiacuteda
35
utilizada sendo de aproximadamente 100 MHz a modulaccedilatildeo maacutexima da frequecircncia
que pode ser atingida O perfil do feixe LASER pode ser adaptado ao campo de
visatildeo do sensor PMD A desvantagem eacute que este seria um circuito modular mais
complexo e que teria necessidade de um maior nuacutemero de etapas para conseguir
estabilizar a fase da onda portadora do sinal Outra desvantagem eacute que a
implantaccedilatildeo de um sistema LASER necessita de maior atenccedilatildeo agrave seguranccedila dos
olhos do que o sistema LED (RINGBECK 2007)
Com a Figura 213 ilustra-se a medida de distacircncia com a cacircmara TOF
modelo 19k da PMD A fonte de iluminaccedilatildeo LED emite o sinal luminoso em direccedilatildeo
dos objetos que estatildeo no campo visual da cacircmara O retorno deste sinal eacute captado
pelo sensor e possibilita o caacutelculo da diferenccedila de fase entre o sinal emitido e o
recebido
FIGURA 213 ndash Medida de distacircncia com a cacircmara PMD
FONTE MOLLER et al (2005)
36
251 Cacircmara PMD CamCube 20
A cacircmara TOF modelo PMD[VISION]regCamCube 20 funciona em ambientes
internos e externos com sensor de 204x204 piacutexeis que captam os niacuteveis de cinza da
imagem de intensidade Simultaneamente realiza a medida da quantidade de carga
recebida utilizada para determinar a diferenccedila de fase entre o sinal emitido e o
recebido Isto possibilita o caacutelculo da distacircncia entre o sensor e os objetos presentes
na cena A Figura 214 ilustra a cacircmara PMD CamCube 20 com as fontes de
iluminaccedilatildeo LED acopladas em suas laterais
FIGURA 214 ndash Cacircmara PMD CamCube 20
FONTE PMD Technologies (2009)
Este equipamento pode ter seu campo de visatildeo variaacutevel possibilitando a
diminuiccedilatildeo de distorccedilotildees manchas ou outras imperfeiccedilotildees da imagem O software
de interface da cacircmara com o computador apresenta a possibilidade de trabalhar
com dados brutos para o processamento das imagens aleacutem de funcionar em
diferentes canais de frequecircncia Tambeacutem disponibiliza compatibilidade com o
software Matlab para realizar esta interface
A imagem de intensidade captada de uma parede utilizando a cacircmara PMD
CamCube 20 eacute ilustrada com a Figura 215
37
FIGURA 215 ndash Imagem captada com a cacircmara PMD CamCube 20
FONTE CENTENO e JUTZI (2010)
Com a Figura 215a eacute ilustrada a cacircmara PMD CamCube 20 instalada em
um tripeacute sobre uma mesa Na Figura 215b tem-se a imagem infravermelha da
superfiacutecie plana de uma parede obtida com esta cacircmara O Quadro 21 ilustra as
especificaccedilotildees teacutecnicas da cacircmara PMD CamCube 20
PARAcircMETROS VALOR PADRAtildeO OBSERVACcedilOtildeES
Tipo do sensor PhotonICs PMD41k-S (204x204 piacutexeis)
Tamanho efetivo do pixel no sensor igual a 45microm
Distacircncia de mediccedilatildeo 03 ndash 7metros
Precisatildeo na medida de distacircncia (1σ) lt 3mm
Para aacuterea central da imagem obtida agrave 2m do sensor em superfiacutecie com refletividade de 90
Frequecircncia de aquisiccedilatildeo de imagens 25 fps Configuraccedilatildeo padratildeo
Campo de visatildeo (FOV) 40ordmx40ordm f = 128mm
Comprimento de onda da fonte de iluminaccedilatildeo
870nm Infravermelho proacuteximo
Fonte de iluminaccedilatildeo [V] 12 V plusmn 10
Interface USB 20
Temperatura de operaccedilatildeo 0ordmC agrave 50ordmC
Temperatura de armazenamento -20ordmC agrave 85ordmC
QUADRO 21 - Especificaccedilotildees teacutecnicas da cacircmara PMD CamCube 20 FONTE Adaptado de PMD Technologies (2009)
O sensor PhotonICs PMD41k-S utilizado na cacircmara PMD CamCube 20 vem
com um dispositivo SBI para a supressatildeo de cargas provenientes da iluminaccedilatildeo
exterior ao sistema Estas cargas causam a saturaccedilatildeo dos piacutexeis da imagem TOF
38
252 Dispositivo SBI
O dispositivo SBI (Supression of Background Illumination) eacute uma soluccedilatildeo
teacutecnica encontrada para melhorar o contraste das imagens geradas com o sensor
PMD em ambientes com iluminaccedilatildeo exterior A presenccedila desta iluminaccedilatildeo na cena
do objeto imageado causa maior presenccedila de ruiacutedo no sinal captado pelo sensor
Esta iluminaccedilatildeo pode saturar os elementos do sensor fazendo com que
ocorram falhas na medida de distacircncia Este efeito pode ser minimizado utilizando o
tempo de integraccedilatildeo adequado para a tomada das imagens Outros distuacuterbios que
podem ocorrer satildeo devidos agrave corrente negra (DC - Dark Current) Este efeito eacute
causado porque o sensor natildeo capta o valor zero na imagem que seria a falta
completa de iluminaccedilatildeo nas superfiacutecies da cena A corrente negra natildeo pode ser
evitada em dispositivos semicondutores especialmente quando haacute altas
temperaturas Com uma temperatura de 80ordmC a corrente negra pode ser 1000 vezes
maior do que o normal o que afeta significativamente a qualidade das medidas
realizadas Para tornar o dispositivo PMD mais confiaacutevel na medida de distacircncias foi
criado o circuito SBI que suprime instantaneamente a iluminaccedilatildeo de fundo Neste
circuito eacute utilizada uma teacutecnica para a captaccedilatildeo do sinal luminoso minimizando a
interferecircncia de fatores externos Isto possibilita realizar medidas de distacircncia
confiaacuteveis mesmo em ambientes onde o sinal eacute modificado por interferecircncia de
iluminaccedilatildeo externa ou por altas temperaturas O sistema SBI pode ser desativado ou
ateacute mesmo ajustado para que seja possiacutevel realizar medidas de distacircncia com
qualidade em cenas tomadas em diferentes ambientes independente da presenccedila
de iluminaccedilatildeo exterior (MOumlLLER 2005)
O circuito SBI adiciona cargas eleacutetricas de compensaccedilatildeo instantacircnea nos
diodos de leitura minimizando os efeitos de saturaccedilatildeo causados por fatores externos
ao sistema Com o SBI espera-se que o sensor capte apenas o sinal correlacionado
com a medida de distacircncia sem interferecircncia de iluminaccedilatildeo exterior reduzindo
assim a interferecircncia da iluminaccedilatildeo de fundo no sinal recebido
A Figura 216a ilustra um sensor sem o dispositivo SBI a carga captada com
influecircncias externas de iluminaccedilatildeo e calor eacute maior do que a enviada pela fonte de
iluminaccedilatildeo refletida pela superfiacutecie do objeto e recebida pelo sensor Neste caso a
medida de distacircncia estaacute influenciada por fatores externos ao sistema e conteraacute
erros Na Figura 216b as cargas geradas por fatores externos ao sistema satildeo
39
minimizadas pelo dispositivo SBI Com isto tem-se maior quantidade de carga
captada com o sinal recebido eliminando a carga gerada por fatores externos
FIGURA 216 ndash Princiacutepio de funcionamento do SBI
FONTE MOumlLLER et al (2005)
Cacircmaras TOF com iluminaccedilatildeo LED infravermelha utilizam o dispositivo SBI
para a supressatildeo da iluminaccedilatildeo de fundo Outros modelos de cacircmaras TOF utilizam
iluminaccedilatildeo LASER para evitar o problema com a iluminaccedilatildeo exterior
253 Modelos de cacircmaras TOF
Diferentes cacircmaras TOF foram desenvolvidas nos uacuteltimos anos a Figura
217 ilustra alguns modelos destas cacircmaras
FIGURA 217 ndash Modelos de cacircmaras TOF
a) Effector O3D FONTE httpwwwifm-electroniccom
b) PMD[vision] CamCube 20 FONTE httpwwwpmdteccom
c) PMD[vision] 19k FONTE httpwwwpmdteccom
d) SwissRanger SR-3000 FONTE httpwwwmesa-imagingch
40
O Quadro 22 descreve as especificaccedilotildees teacutecnicas destas cacircmaras TOF
a)Effector
O3D
b)PMD[vision]
CamCube 20
c)PMD[vision]
19k
d)SwissRanger
SR-3000
Resoluccedilatildeo (piacutexeis) 64 x 50 204 x 204 160 x 120 176 x 144
Dimensotildees dos piacutexeis (microm) 100 x 100 45 x 45 40 x 40 40 x 40
Distacircncia focal (mm) 86 128 120 80
Fonte de iluminaccedilatildeo 1 matriz LED 2 matrizes LED 2 matrizes LED 1 matriz LED
Modulaccedilatildeo da fonte de
iluminaccedilatildeo (nm) 850 870 870 850
Frequecircncia de modulaccedilatildeo 20 MHz 20 MHz 20 MHz 20 MHz
Frequecircncia na aquisiccedilatildeo de
imagens
Maacuteximo
100 fps
Maacuteximo
25 fps
Maacuteximo
15 fps
Maacuteximo
40 fps
Conexatildeo Ethernet USB 2 Ethernet USB 2
Dimensotildees (mm) 55 x 45 x 85 194 x 60 x 60 220 x 210 x 55 60 x 50 x 65
QUADRO 22 ndash Especificaccedilotildees teacutecnicas de cacircmaras TOF FONTE Adaptado de RAPP (2007)
A partir do Quadro 22 verifica-se que estes modelos de cacircmaras TOF em
sua configuraccedilatildeo padratildeo possuem fonte de iluminaccedilatildeo LED distacircncia focais
variando de 8mm agrave 128mm e apresentam pequenas dimensotildees
26 ERROS DE MEDIDA
Observaccedilotildees realizadas com instrumentos de medida estatildeo acompanhadas
de erros provenientes da falibilidade humana imperfeiccedilatildeo na fabricaccedilatildeo do
equipamento e de interferecircncias causadas pelo ambiente em que o instrumento
utilizado e o objeto estavam no momento em que se realizou a medida Erros de
observaccedilatildeo satildeo tradicionalmente classificados como erros grosseiros sistemaacuteticos e
acidentais Erros grosseiros devem ser detectados e evitados pelo observador com
os devidos cuidados na obtenccedilatildeo da informaccedilatildeo tambeacutem ocorrem devido agrave
presenccedila de ruiacutedo nas observaccedilotildees Erros sistemaacuteticos se repetem seguindo um
determinado padratildeo e podem ser preditos e corrigidos Existem opccedilotildees para evitaacute-
los atraveacutes de teacutecnicas de observaccedilatildeo ou entatildeo eliminaacute-los a posteriori atraveacutes de
foacutermulas especiacuteficas Os erros acidentais ou aleatoacuterios satildeo randocircmicos natildeo
previsiacuteveis e podem ser distribuiacutedos entre o conjunto de observaccedilotildees por teacutecnicas
41
estatiacutesticas Eacute comum o uso da expressatildeo ldquopropriedades estatiacutesticas das
observaccedilotildeesrdquo devido a este erro (GEMAEL 1994)
Erros na medida de distacircncia utilizando cacircmaras TOF tambeacutem podem ser
divididos em natildeo-sistemaacuteticos e sistemaacuteticos conforme descrito nas seccedilotildees 261 e
262 onde seratildeo apresentados 3 erros natildeo-sistemaacuteticos e 7 erros sistemaacuteticos
261 Erros natildeo-sistemaacuteticos em cacircmaras TOF
De acordo com MAY et al (2008) a classificaccedilatildeo de erros natildeo-sistemaacuteticos
na medida de distacircncia utilizando cacircmaras TOF pode ser feita da seguinte maneira
1) Erro devido agrave relaccedilatildeo sinal-ruiacutedo (Signal-to-noise) quando a relaccedilatildeo da
carga recebida com o sinal eacute baixa e o ruiacutedo presente eacute alto haveraacute distorccedilatildeo na
medida de distacircncia que natildeo poderaacute ser corrigida posteriormente Para diminuir este
erro pode-se tomar cuidado com o tempo de exposiccedilatildeo do sensor na aquisiccedilatildeo da
imagem e tambeacutem amplificar a iluminaccedilatildeo do sistema Outra soluccedilatildeo eacute filtrar os
valores medidos com baixas amplitudes no sinal recebido
2) Reflexatildeo do sinal por muacuteltiplos caminhos (Multiple ways reflection) em
objetos com descontinuidade em suas superfiacutecies o sinal emitido pode percorrer
diferentes caminhos antes de retornar ao sensor Exemplos satildeo objetos com
superfiacutecies cocircncavas que podem refletir vaacuterias vezes o sinal e gerar erro na medida
de distacircncia Neste caso o sinal eacute refletido com sobreposiccedilatildeo ou seja pode ser
captado o sinal da uacuteltima superfiacutecie que o refletiu gerando uma distacircncia diferente
do valor esperado
3) Espalhamento da luz (Light scattering) ocorre na lente da cacircmara
causado pela presenccedila de objetos proacuteximos Este efeito e o causado pela reflexatildeo
por muacuteltiplos caminhos satildeo imprevisiacuteveis pois a topologia da cena observada eacute
desconhecida a priori
262 Erros sistemaacuteticos em cacircmaras TOF
Segundo RAPP (2007) nas cacircmaras TOF erros tambeacutem indicam a relaccedilatildeo
entre a variacircncia da distacircncia e a amplitude do sinal captado pelo sensor A relaccedilatildeo
42
estabelecida eacute que a variacircncia dos dados de distacircncia eacute inversamente proporcional agrave
raiz quadrada da amplitude do sinal recebido para realizar a medida Alguns erros
sistemaacuteticos das cacircmaras TOF estudados por RAPP foram
1) Erro devido a uma funccedilatildeo natildeo harmocircnica utilizada para correlacionar o
sinal emitido ao recebido
2) Ruiacutedos relacionados com o tempo de integraccedilatildeo Este tempo pode causar
exposiccedilatildeo insuficiente ou saturaccedilatildeo dos elementos do sensor
3) Erros geomeacutetricos no posicionamento dos piacutexeis devido ao sistema oacuteptico
da cacircmara
O erro devido agrave falta de harmonia na funccedilatildeo de correlaccedilatildeo entre o sinal
emitido e o recebido pode ser causado quando o sistema oacuteptico utilizado emite o
sinal de referecircncia com sua forma inicial e recebe o sinal refletido com forma
diferente Com isto a funccedilatildeo que representa o sinal recebido natildeo teraacute a forma
senoidal teoacuterica do sinal emitido Isto ocorre por conter harmocircnicos de Fourier
iacutempares quando eacute necessaacuteria uma amostra com pelo menos quatro pontos para
definir a FC entre os sinais Este erro tem grande influecircncia no caacutelculo da distacircncia
do objeto pois eacute a FC que possibilita a medida da diferenccedila de fase entre o sinal
emitido e o recebido
A presenccedila de ruiacutedo pode ser notada variando o TI na aquisiccedilatildeo da imagem
O conjunto de dados apresenta maiores distorccedilotildees radiomeacutetricas e geomeacutetricas
quando a presenccedila de ruiacutedo eacute forte Quando o TI eacute aumentado o ruiacutedo observado no
conjunto de dados pode diminuir Poreacutem valores extremamente altos introduzem
erros na mediccedilatildeo por causar saturaccedilatildeo do sensor Com esta informaccedilatildeo procura-se
definir uma funccedilatildeo para a modelagem do ruiacutedo de acordo com o tempo de
integraccedilatildeo Analisando dados obtidos com diferentes TI pode-se especificar qual o
melhor para cada situaccedilatildeo
Erros causados por exposiccedilatildeo insuficiente do sensor natildeo satildeo considerados
sistemaacuteticos poreacutem podem ser preditos Se o valor da amplitude do sinal eacute reduzido
o erro na medida da distacircncia aumenta Para reduzir os piacutexeis obtidos com
exposiccedilatildeo insuficiente pode-se definir um limite no valor da amplitude do sinal
Outra forma de controlar a exposiccedilatildeo eacute com o TI na obtenccedilatildeo da imagem Piacutexeis que
tem amplitude menor que 1 do valor maacuteximo das amplitudes na imagem TOF satildeo
considerados piacutexeis com exposiccedilatildeo insuficiente
43
Erros de posicionamento dos piacutexeis devido ao sistema oacuteptico da cacircmara
podem ser notados quando capta-se a imagem de uma fachada com portas e
janelas As linhas horizontais e verticais que representam estes elementos na
imagem aparecem com curvaturas de acordo com o sistema de lentes utilizado na
cacircmara A distorccedilatildeo de lentes tem um padratildeo fixo em cacircmaras com sensor CMOS
ou CCD e pode ser corrigida geometricamente atraveacutes dos POI da cacircmara que
captou a imagem
Erros sistemaacuteticos em cacircmaras TOF tambeacutem foram estudados por FUCHS e
HIRZINGER (2008) e MAY et al (2008) e foram classificados da seguinte maneira
4) Erro na medida de distacircncia (Distance-related error) este erro eacute causado
devido agrave assimetria da forma do sinal infravermelho recebido pelo sensor
Teoricamente assume-se que este sinal possui forma senoidal e harmocircnica com a
forma do sinal emitido o que na praacutetica pode natildeo acontecer Sendo assim o
pressuposto baacutesico para que se possa calcular o atraso de fase eacute que o sinal
luminoso emitido e o recebido satildeo harmocircnicos e com forma senoidal
Consequentemente se o caacutelculo do atraso de fase do sinal eacute impreciso a distacircncia
entre o objeto e o sensor tambeacutem seraacute calculada de forma imprecisa
5) Erro na amplitude do sinal captado (Amplitude-related error) o sensor natildeo
capta a energia eletromagneacutetica recebida com o sinal perfeitamente Deixando-se a
cacircmara e o objeto na mesma posiccedilatildeo podem-se obter diferentes medidas de
distacircncia devido a esta imperfeiccedilatildeo na fabricaccedilatildeo dos elementos do sensor Este
erro eacute relacionado com a amplitude de valores na captaccedilatildeo da imagem depende da
distacircncia e de caracteriacutesticas como a refletividade das superfiacutecies dos objetos
6) Erro devido agrave latecircncia dos elementos do sensor (Latency-related error) o
atraso de fase do sinal recebido eacute calculado atraveacutes das latecircncias com que o sensor
captou o sinal Estaacute relacionado com propriedades semicondutoras dos materiais
utilizados nos elementos sensores que satildeo responsaacuteveis pela medida da quantidade
de carga recebida Eacute causado quando o sinal emitido e o recebido satildeo
correlacionados diretamente na matriz do sensor Diferentes latecircncias do sinal
devem ser captadas por cada elemento do sensor para possibilitar o caacutelculo da
distacircncia de cada pixel de forma confiaacutevel
7) Ruiacutedo com padratildeo fixo (FPN - Fixed pattern noise) eacute relacionado com o
erro devido agrave latecircncia e ocorre devido agraves propriedades dos materiais utilizados na
fabricaccedilatildeo de cada elemento do sensor CMOS Este eacute um ruiacutedo com padratildeo fixo
44
pode ser corrigido a partir de uma imagem que tenha um pixel com valor constante
que serviraacute como referecircncia para a calibraccedilatildeo dos valores dos piacutexeis vizinhos
Tendo-se como referecircncia um pixel obtido em uma superfiacutecie uniforme de um objeto
pode-se utilizar um padratildeo de similaridade como referecircncia para os outros piacutexeis
Sendo assim a qualidade dos dados depende da posiccedilatildeo do pixel na imagem
Os uacuteltimos quatro erros sistemaacuteticos podem ser corrigidos utilizando o
meacutetodo de calibraccedilatildeo descrito em Fuchs et al (2007) Conforme realizado em
experimento por May et al (2008) os resultados alcanccedilados no mapeamento de uma
sala obtiveram a precisatildeo centimeacutetrica Este experimento foi realizado com o
objetivo de medir paredes opostas de uma sala com o sensor TOF em movimento
instalado em uma plataforma moacutevel O erro encontrado na medida das distacircncias
tambeacutem foi influenciado por erros na estimaccedilatildeo do posicionamento do sensor que eacute
obtido com a Orientaccedilatildeo Exterior da cacircmara no momento de aquisiccedilatildeo das imagens
Durante o registro dos quadros fotograacuteficos o erro em rotaccedilatildeo foi determinado como
sendo igual a 22ordm e o erro de translaccedilatildeo foi de 071m no eixo 119883 004m no eixo 119884 e
de -021m no eixo 119885 A distacircncia calculada entre paredes opostas foi igual a 105m
para a distacircncia de referecircncia de 108m A diferenccedila entre as duas medidas resultou
em 03m o que representa aproximadamente 28 da distacircncia de referecircncia A
nuvem de pontos 3D gerada por MAY et al (2008) eacute ilustrada com a Figura 218
FIGURA 218 ndash Nuvem de pontos 3D gerada a partir de imagem TOF
FONTE MAY et al (2008)
45
27 PROJECcedilAtildeO ORTOGONAL DOS PONTOS
As coordenadas tridimensionais dos pontos da imagem TOF satildeo obtidas
atraveacutes da projeccedilatildeo ortogonal Isto ocorre devido ao fato do equipamento utilizado
calcular as distacircncias dos objetos em um sistema esfeacuterico Esta projeccedilatildeo eacute feita a
partir da colinearidade entre o ponto no espaccedilo objeto o Centro Perspectivo (CP) e
o ponto no espaccedilo imagem conforme eacute ilustrado com a Figura 219
FIGURA 219 ndash Colinearidade entre os pontos no espaccedilo imagem e objeto
FONTE Adaptado de RAPP (2007)
A Figura 219 ilustra os sistemas referenciais adotados nos espaccedilos imagem
e objeto O sistema referencial fotogrameacutetrico (119909119875 119910119875) tem sua origem no CP que eacute
materializado pelo ponto nodal anterior do sistema de lentes da cacircmara Este ponto
projetado no plano da imagem gera o Ponto Principal (PP) A projeccedilatildeo do sistema
referencial fotogrameacutetrico na imagem eacute realizada considerando a simplificaccedilatildeo de
haverem apenas translaccedilotildees entre os eixos deste sistema e o sistema da imagem O
46
sistema referencial de imagem levoacutegiro (119862 119871) tem sua origem no canto superior
esquerdo Atraveacutes das Equaccedilotildees (223) e (224) esta origem pode ser transladada
para o centro da imagem (MACHADO 2006)
119862prime = 119862 minus119899119862minus1
2 (223)
119871prime = 119871 minus119899119871minus1
2 (224)
onde
119862 119871 ndash Sistema referencial de coordenadas da imagem (piacutexeis)
119899119862 119899119871 ndash Nuacutemero total de colunas e linhas da imagem (piacutexeis)
119862prime 119871prime ndash Sistema referencial auxiliar no centro da imagem (piacutexeis)
Para tornar o sistema referencial auxiliar (119862prime 119871prime) de imagem levoacutegiro em um
sistema dextroacutegiro (119909119894119898 119910119894119898 ) pode-se realizar uma reflexatildeo do eixo 119871prime atraveacutes da
Equaccedilatildeo (226)
119909119894119898 = 119862prime (225)
119910119894119898 = minus119871prime (226)
onde
119909119894119898 119910119894119898 ndash Coordenadas de um ponto no sistema referencial dextroacutegiro da
imagem (piacutexeis)
Com isto tem-se um sistema referencial dextroacutegiro centralizado na imagem e
que se relaciona com o sistema referencial fotogrameacutetrico projetado atraveacutes da
translaccedilatildeo de eixos determinada pelas coordenadas (119909119900 119910119900) do PP conforme
ilustrado com a Figura 220
47
FIGURA 220 ndash Sistemas de coordenadas utilizados em imagens
FONTE Adaptado de MACHADO (2006)
A partir do sistema referencial de imagem dextroacutegiro com origem no centro
da imagem e do sistema referencial fotogrameacutetrico projetado com origem no PP
satildeo estabelecidas as relaccedilotildees entre os sistemas de acordo com as Equaccedilotildees (227)
e (228)
119909119894119898 = (119909 minus 1199090) (227)
119910119894119898 = (119910 minus 1199100) (228)
onde
11990901199100 ndash Satildeo as coordenadas do ponto principal no sistema referencial de
imagem (piacutexeis)
119909119910 ndash Coordenadas dos pontos no sistema referencial fotogrameacutetrico
projetado na imagem (piacutexeis)
Os valores das coordenadas dos pontos do sistema fotogrameacutetrico projetado
na imagem estatildeo em piacutexeis A transformaccedilatildeo destes valores para miliacutemetros pode
ser feita multiplicando estas coordenadas pelo tamanho efetivo do pixel nas direccedilotildees
119909 e 119910 da imagem conforme as Equaccedilotildees (229) e (230)
48
119909 = 119909119894119898 ∙ 119875119909 (229)
119910 = 119910119894119898 ∙ 119875119910 (230)
onde
119909119910 ndash Satildeo as coordenadas dos pontos no sistema fotogrameacutetrico projetado
na imagem (miliacutemetros)
119875119909 119875119910 ndash Tamanho efetivo dos piacutexeis nas direccedilotildees 119909 e 119910 (miliacutemetros)
O tamanho efetivo dos piacutexeis nas direccedilotildees 119909 e 119910 satildeo calculados a partir do
fator de escala nestas direccedilotildees conforme Equaccedilotildees (231) e (232)
119875119909 = 119875 ∙ 119904119909 (231)
119875119910 = 119875 ∙ 119904119910 (232)
onde
119875119909 119875119910 ndash Tamanho efetivo dos piacutexeis nas direccedilotildees 119909 e 119910 (miliacutemetros)
119875 ndash Dimensatildeo do pixel obtida no manual do equipamento (miliacutemetros)
119904119909 119904119910 ndash Fatores de escala dos piacutexeis nas direccedilotildees 119909 e 119910
Os fatores de escala dos piacutexeis nas direccedilotildees 119909 e 119910 podem ser calculados
atraveacutes das Equaccedilotildees (233) e (234)
119904119909 =119891
119891119909 (233)
119904119910 =119891
119891119910 (234)
onde
119904119909 119904119910 ndash Fatores de escala dos piacutexeis nas direccedilotildees 119909 e 119910
119891119909 119891119910 ndash Distacircncia focal da cacircmara ao longo dos eixos 119909 e 119910 (miliacutemetros)
119891 ndash Distacircncia focal da cacircmara obtida no manual do equipamento
(miliacutemetros)
49
Quando o valor da distacircncia focal 119891119909 obtido com a calibraccedilatildeo da cacircmara
difere do valor 119891119910 tem-se um indicativo de escalas diferentes nos eixos 119909 e 119910 da
imagem
Realizadas as etapas de Orientaccedilatildeo Interior da imagem podem-se calcular
as coordenadas 3D dos pontos O posicionamento de cada ponto depende da
precisatildeo na determinaccedilatildeo dos acircngulos verticais e horizontais no sistema referencial
de imagem A projeccedilatildeo ortogonal das distacircncias dos pontos coordenada 119885 pode ser
feita atraveacutes da Equaccedilatildeo (235)
119885 = 119889119903 ∙ cos120573 (235)
onde
119885 ndash Distacircncia ortogonal do CP ao ponto observado no espaccedilo objeto
119889119903 ndash Distacircncia radial do CP ao ponto no sistema referencial esfeacuterico
120573 ndash Acircngulo formado entre o eixo que atinge o ponto na imagem partindo do
CP e o eixo principal da cacircmara (CP-PP)
O acircngulo 120573 pode ser calculado atraveacutes da funccedilatildeo trigonomeacutetrica expressa
com a Equaccedilatildeo (236)
tan120573 = 1199092
1198911199092 +
1199102
1198911199102 (236)
onde
119891119909 119891119910 ndash Distacircncia focal da cacircmara ao longo dos eixos 119909 e 119910 (miliacutemetros)
119909119910 ndash Coordenadas dos pontos no sistema referencial fotogrameacutetrico
projetado na imagem (miliacutemetros)
A Expressatildeo (235) relaciona a distacircncia radial 119889119903 com a coordenada 119885 dos
pontos no sistema ortogonal 3D em funccedilatildeo do acircngulo 120573 Substituindo a Equaccedilatildeo
(236) na Equaccedilatildeo (235) podemos explicitar a coordenada 119885 em funccedilatildeo das
distacircncias focais da cacircmara e das coordenadas dos pontos no sistema referencial
fotogrameacutetrico projetado na imagem conforme Equaccedilatildeo (237)
50
119885 = 119889119903 ∙ cos tanminus1 1199092
1198911199092 +
1199102
1198911199102 (237)
onde
119885 ndash Distacircncia ortogonal do CP ao ponto (miliacutemetros)
119889119903 ndash Distacircncia radial do CP ao ponto no sistema esfeacuterico da cacircmara
(miliacutemetros)
119891119909 119891119910 ndash Distacircncia focal da cacircmara ao longo dos eixos 119909 e 119910 (miliacutemetros)
119909119910 ndash Coordenadas dos pontos no sistema referencial fotogrameacutetrico
projetado na imagem (miliacutemetros)
As coordenadas (119883119884) dos pontos no sistema referencial ortogonal podem
entatildeo serem calculadas atraveacutes das Equaccedilotildees (238) e (239)
119883 = 119909 ∙119885
119891119909 (238)
119884 = 119910 ∙119885
119891119910 (239)
28 REFINAMENTO DA NUVEM DE PONTOS 3D
O processo de refinamento da nuvem de pontos 3D obtida com a imagem
TOF compreende a filtragem dos pontos que estejam esparsos devido agrave presenccedila
de ruiacutedo no arquivo de distacircncias da imagem TOF Com a Figura 221a satildeo
ilustrados pontos que natildeo pertencem agraves superfiacutecies do objeto aparecem na aresta
superior direita do objeto O sinal emitido atinge uma aacuterea da superfiacutecie do objeto e
natildeo apenas um ponto Esta aacuterea eacute proporcional agrave distacircncia entre o alvo e o sensor
ocorre devido agrave divergecircncia do feixe de luz emitido Com o princiacutepio TOF o valor da
distacircncia calculada eacute resultado da integraccedilatildeo do sinal recebido de acordo com a
aacuterea iluminada da superfiacutecie Quando o sinal emitido atinge superfiacutecies natildeo
coplanares o valor de distacircncia armazenado eacute um resultado interpolado Este
fenocircmeno ocorre principalmente nas bordas dos objetos e pode ser visto com a
51
Figura 221a que mostra um objeto com trecircs superfiacutecies planas uma base um
plano vertical na direita e um plano na parte superior
FIGURA 221 ndash Filtro para a definiccedilatildeo de bordas do objeto
FONTE MAY et al (2008)
A Figura 221b apresenta a nuvem de pontos 3D apoacutes a aplicaccedilatildeo do filtro
para o refinamento Este eacute um filtro gaussiano utilizado para a definiccedilatildeo de bordas e
desniacuteveis dos objetos eacute tambeacutem uma ferramenta para a remoccedilatildeo de pontos
esparsos provenientes da presenccedila de ruiacutedo nos dados da imagem TOF Funciona
considerando o acircngulo formado entre dois piacutexeis adjacentes na imagem onde o CP
eacute o ponto que completa o triacircngulo sendo o criteacuterio de seleccedilatildeo utilizado a distacircncia
meacutedia dos k pontos vizinhos mais proacuteximos
De acordo com May et al (2008) a distacircncia medida a partir de cacircmaras
TOF pode ser afetada pelo efeito de arredondamento das bordas Isto ocorre pela
suavizaccedilatildeo causada com a transiccedilatildeo entre as superfiacutecies iluminadas Dado um
conjunto de pontos 3D 119875 = 119901119894 119901119894 isin ℝ3 119894 = 1hellip 119873119901 as bordas podem ser
detectadas utilizando a Equaccedilatildeo (240) Esta eacute uma comparaccedilatildeo do acircngulo entre
dois piacutexeis 120585119894 119899 com base em um triacircngulo formado pelo centro perspectivo 119891 = 0 o
ponto 119901119894 e a vizinhanccedila deste ponto 119875119899 = 119901119894 119899 119899 = 1hellip 8 com o acircngulo de
vizinhanccedila 120585119905119893
120585119894 = max arcsin 119901119894 119899
119901119894 119899minus119901119894 ∙ 119904119894119899120593 (240)
52
119869 = 119901119894 120585119894 gt 120585119905119893 (241)
onde
120593 ndash Acircngulo maacuteximo entre dois piacutexeis veacutertice do triacircngulo no ponto 119891 = 0
O triacircngulo utilizado como referecircncia no filtro para a detecccedilatildeo de bordas
com veacutertice no ponto 119891 = 0 eacute ilustrado com a Figura 222
FIGURA 222 ndash Geometria do filtro para a definiccedilatildeo de bordas
FONTE MAY et al (2008)
Um conjunto 119878 de pontos pode ser filtrado atraveacutes da condiccedilatildeo expressa
com a Equaccedilatildeo (243)
119889 119901119894 = 1
119896 119901119894 minus 119901119894 119899 119896119899=1 (242)
119878 = 119901119894 isin 119875 119889 119901119894 lt 119889119905119893 (243)
onde
119889119905119893 ndash Distacircncia de vizinhanccedila constante
O conjunto 119876 de pontos selecionados satildeo os pontos filtrados da nuvem 3D
conforme a condiccedilatildeo da Equaccedilatildeo (244)
119876 = 119902119894 119902119894 isin 119875(119869 cup 119878) (244)
53
29 ANAacuteLISE DE SUPERFIacuteCIES POR AUTOVALORES E AUTOVETORES
A anaacutelise da forma de superfiacutecies pode ser feita pela variaccedilatildeo local de
autovalores que possibilita a classificaccedilatildeo e segmentaccedilatildeo de pontos com
coordenadas tridimensionais (BELTON e LICHTI 2006)
Autovetores e seus respectivos autovalores podem ser obtidos a partir da
Matriz de Variacircncias e Covariacircncias (119872119881119862) de um conjunto de observaccedilotildees O
tamanho relativo e a direccedilatildeo dos autovetores podem indicar propriedades locais
desta superfiacutecie permitindo analisar sua forma (PAULY et al 2002)
De acordo com Johnson e Wichern (1998) a 119872119881119862 pode ser calculada atraveacutes
da Equaccedilatildeo (245)
11987211988111986231199093 =1
119896 119903 119894 minus 119903 119896119894=1 ∙ 119903 119894 minus 119903
119879=
1205901199092 120590119909119910 120590119909119911
120590119909119910 1205901199102 120590119910119911
120590119909119911 120590119910119911 1205901199112
(245)
onde
119872119881119862 ndash Matriz de Variacircncias e Covariacircncias
119903 119894 ndash Vetor com as coordenadas 3D do ponto em questatildeo na amostra
119903 ndash Vetor com as coordenadas do centroacuteide da superfiacutecie
1205901199092120590119910
2 1205901199112 ndash Variacircncias
120590119909119910 120590119909119911 120590119910119911 ndash Covariacircncias
119896 ndash Nuacutemero de pontos da amostra
O vetor com as coordenadas do 119894-eacutesimo ponto da amostra eacute denotado com
119903 119894 pela Expressatildeo (246) A posiccedilatildeo relativa do centroacuteide pode ser calculada atraveacutes
da Equaccedilatildeo (247)
119903 119894 = 119909119894 119910119894 119911119894 119879 (246)
119903 =1
119896 119903 119894119896119894=1 (247)
54
A 119872119881119862 eacute quadrada simeacutetrica positiva-semidefinida e pode ser decomposta
em autovetores 119890 e autovalores 120582 atraveacutes da Equaccedilatildeo (248) Os autovalores 120582119894 satildeo
elementos escalares associados aos respectivos autovetores 119890 119894 (LEON 1998)
119872119881119862 ∙ 119890 = 120582 ∙ 119890 (248)
A partir do teorema de decomposiccedilatildeo espectral (decomposiccedilatildeo de Jordan) a
119872119881119862 pode ser isolada nesta igualdade conforme a Equaccedilatildeo (249) Maiores
detalhes podem ser vistos em Johnson e Wichern (1998) e Shakarji (1998)
119872119881119862 = 120582119894 ∙ 119890 119894 ∙ 119890 1198941198792
119894=0 (249)
onde
119872119881119862 ndash Matriz Variacircncia Covariacircncia
119890 119894 ndash Vetor com os autovetores 119890 119894
120582119894 ndash Matriz com os autovalores 120582119894
Os autovalores satildeo valores reais e os autovetores formam um sistema de
base ortogonal que correspondem aos componentes principais do conjunto de
observaccedilotildees (BELTON 2008)
De acordo com PAULY et al (2002) pode-se adotar a convenccedilatildeo entre os
autovalores da Expressatildeo (250) A partir desta convenccedilatildeo algumas propriedades
para superfiacutecies normais podem ser descritas
1205821 ge 1205822 ge 1205823 (250)
Em um conjunto de pontos 3D que formam uma superfiacutecie plana espera-se
que 1205821 ne 0 1205822 ne 0 e que 1205823 asymp 0 Com isto o menor autovetor 119890 3 apontaraacute na direccedilatildeo
normal a esta superfiacutecie Com a Figura 223 satildeo ilustrados os trecircs autovetores de
uma regiatildeo da superfiacutecie descrita pela nuvem de pontos 3D O terceiro autovetor 119890 3
com o menor autovalor 1205823 eacute ortogonal agrave superfiacutecie plana definida pelos outros dois
autovetores 119890 1 e 119890 2
55
FIGURA 223 ndash Autovetores em nuvem de pontos 3D de uma superfiacutecie plana
Pontos contidos na interseccedilatildeo entre duas superfiacutecies planas podem ser
identificados atraveacutes das relaccedilotildees 1205821 asymp 21205822 e 1205823 asymp 0 O autovetor 119890 1 apontaraacute na
direccedilatildeo da linha limitante da superfiacutecie plana e o autovetor 119890 3 seraacute ortogonal a esta
direccedilatildeo Podem-se encontrar segmentos de retas que limitam a borda de uma
superfiacutecie atraveacutes das relaccedilotildees 1205822 asymp 1205823 e 1205821 asymp 1205822+1205823
Quando os autovalores apresentam valores aproximadamente iguais
1205821 asymp 1205822 asymp 1205823 torna-se possiacutevel encontrar o veacutertice formado por trecircs superfiacutecies
planas
Normalizando os autovalores com a Equaccedilatildeo (251) remove-se a sua
dependecircncia em relaccedilatildeo ao tamanho da amostra utilizada
120582119894prime =
120582119894
1205821+1205822+1205823=
120582119894
119905119903119886 ccedil119900(120582) (251)
Para o autovalor miacutenimo (119894 = 3) pode-se definir o nuacutemero 119873 de pontos para
representar as variaccedilotildees na superfiacutecie atraveacutes da Equaccedilatildeo (252)
119873 =1205823
119905119903119886 ccedil119900(120582) (252)
O valor resultante da Equaccedilatildeo (252) eacute uma medida aproximada de
curvatura local e pode representar a rugosidade da superfiacutecie de forma normalizada
56
210 ANAacuteLISE DE SUPERFIacuteCIES POR MOMENTOS INVARIANTES
Caracteriacutesticas de superfiacutecies planas podem ser obtidas atraveacutes da anaacutelise
de momentos invariantes para isto utiliza-se a 119872119881119862 dos pontos que descrevem esta
superfiacutecie De acordo com MASS e VOSSELMAN (1999) os momentos invariantes
119898119894119895 podem ser calculados atraveacutes da Equaccedilatildeo (253)
119898119894119895 = 119909119894119910119895119891(119909119910)119889119909 1198891199101199102
1199101
1199092
1199091 (253)
onde
119894 119895 ndash Correspondem agrave ordem do momento
119891(119909119910) ndash A coordenada 119911 dos pontos eacute funccedilatildeo das coordenadas planas 119909 e 119910
em um conjunto de pontos que descrevem a superfiacutecie contiacutenua
A Equaccedilatildeo (254) permite determinar o volume de uma esfera unitaacuteria com
raio 119877 em um domiacutenio contiacutenuo 119873 de pontos 3D eacute obtida a partir da Equaccedilatildeo (253)
e possibilita o estudo de propriedades das superfiacutecies com padratildeo planar
119898119894119895119896 = 119909119894119910119895 119911119896119891(119909119910 119911)119889119907119881
(254)
onde
119894 119895119896 ndash Pertencem ao domiacutenio contiacutenuo da funccedilatildeo com 119873 pontos
119894 + 119895 + 119896 ndash Corresponde agrave ordem do momento
119891(119909119910 119911) ndash Eacute o volume da esfera unitaacuteria
Atraveacutes da Equaccedilatildeo (254) GROSS e THONNESSEN (2006) conseguiram
descrever algumas relaccedilotildees entre autovalores e as propriedades de superfiacutecies
normais conforme eacute ilustrado com o Quadro 23
57
ESTRUTURA AUTOVALORES
120640120783 120640120784 120640120785
PONTO ISOLADO
0 0 0
PONTO FINAL DE SEGMENTO
DE RETA
1
12= 0083 0 0
LINHA RETA 1
3= 0333 0 0
12 PLANO 1
4= 025
1
4 1 minus
64
91205872 = 00 0
PLANO 1
4= 025
1
4= 025 0
14 PLANO 1
4 1 minus
2
120587 = 009
1
4+
2
120587minus
32
91205872= 00 0
INTERSECcedilAtildeO DE 2 PLANOS
1
3= 0333
1
8= 0125
1
8minus
8
91205872= 003
INTERSECcedilAtildeO DE 3 PLANOS
1
6 1 minus
1
120587 = 011
1
6 1 minus
1
120587 = 011
1
6 1 +
2
120587 minus
26
331205872= 003
INTERSECcedilAtildeO DE 2 PLANOS
Agrave 30deg 025 01875 001747
QUADRO 23 ndash Propriedades de superfiacutecies normais obtidas com autovalores FONTE GROSS e THOENNESSEN (2006)
Os autovalores do Quadro 23 foram determinados analiticamente a partir da
Equaccedilatildeo (254) e podem ser utilizados como referecircncia para a estimaccedilatildeo da forma
das superfiacutecies que compotildeem a estrutura dos objetos
Restringindo a ordem dos momentos com 119894 + 119895 + 119896 le 2 pode-se calcular o
centro de gravidade da superfiacutecie conforme a Equaccedilatildeo (255) e os elementos da
119872119881119862 podem serem obtidos atraveacutes da Equaccedilatildeo (256)
119909 =119898100
119898000 119910 =
119898010
119898000 119911 =
119898001
119898000 (255)
58
119898 119894119895119896 = 119909119894 minus 119909 119894 119910 minus 119910 119895 119911 minus 119911 119896119891(119909119910 119911)119889119907119881
(256)
Os momentos de 2ordf ordem normalizados para os pontos 3D em um domiacutenio
discreto podem ser calculados atraveacutes da Equaccedilatildeo (257)
119898 119894119895119896 = 119909119897minus119909
119894 119910119897minus119910 119895 119911119897minus119911
119896119873119897=1
119877119894+119895+119896119873 (257)
onde
119898 119894119895119896 ndash Momentos de 2ordf ordem para os pontos 3D
119873 ndash Nuacutemero de pontos da amostra no domiacutenio contiacutenuo da funccedilatildeo
119877 ndash Raio da esfera unitaacuteria considerada para seleccedilatildeo de pontos
Desta forma os valores calculados para os momentos natildeo satildeo influenciados
pelo nuacutemero de pontos unidade fiacutesica das medidas ou peso dos elementos da 119872119881119862
Utilizando momentos de 2ordf ordem a 119872119881119862 pode ser obtida atraveacutes da Equaccedilatildeo
(258)
119872119881119862 =
119898 200 119898 110 119898 101
119898 110 119898 020 119898 011
119898 101 119898 011 119898 002
(258)
O caacutelculo dos autovalores 120582119894 e autovetores 119890 119894 com 119894 = 123 eacute variaacutevel para
cada ponto do conjunto de observaccedilotildees Sendo assim as classes de valores
geradas por GROSS e THONNESSEN (2006) com objetivo de modelar superfiacutecies
com padratildeo planar foram agraves seguintes
O primeiro autovalor 1205821 foi definido constante e igual a 025
O segundo autovalor 1205822 varia de 0125 agrave 025
O terceiro autovalor 1205823 varia de 0 agrave 0125
Com a aproximaccedilatildeo teoacuterica dos valores contidos no Quadro 24 JUTZI e
GROSS (2009) mostraram a possibilidade de determinar matematicamente
inclinaccedilotildees entre as superfiacutecies para os acircngulos de 0ordm 30ordm e 90ordm No entanto
quando satildeo utilizados dados reais para representar as superfiacutecies pequenas
variaccedilotildees nestes valores podem ser percebidas Um exemplo eacute que o terceiro
59
autovalor 1205823 natildeo teraacute valor igual a zero mesmo em uma superfiacutecie plana Isto ocorre
por haverem pequenos desvios entre os pontos desta superfiacutecie que satildeo causados
por ruiacutedo presente no conjunto de dados reais Este fato pode ser observado
calculando o terceiro autovalor que seraacute um valor positivo pequeno mas diferente
de zero Com isto quanto mais proacuteximo de zero o terceiro autovalor 1205823 maior seraacute o
indicativo que a superfiacutecie eacute plana conforme ilustrado com a Figura 224
FIGURA 224 ndash Inclinaccedilotildees de superfiacutecies determinadas por autovalores
FONTE JUTZI e GROSS (2009)
60
211 ALGORITMO DE DESLOCAMENTO PELA MEacuteDIA
O algoritmo de deslocamento pela meacutedia (Mean Shift) pode ser utilizado no
reconhecimento de padrotildees para a segmentaccedilatildeo de imagens A densidade de
pontos vizinhos em relaccedilatildeo a um ponto central pode ser estimada com a meacutedia do
conjunto de dados discretos A anaacutelise espacial de atributos eacute utilizada neste
contexto com o objetivo de extrair informaccedilotildees Para isto utiliza a vizinhanccedila de um
ponto na imagem Com os atributos definidos pode-se encontrar o centro das
regiotildees com as maiores densidades que representam caracteriacutesticas significativas
dos objetos presentes na imagem
Para realizar a anaacutelise espacial de atributos e obterem-se resultados
satisfatoacuterios deve-se reduzir o volume de dados ateacute que se tenham apenas as
caracteriacutesticas significativas distribuiacutedas em um sistema de coordenadas contiacutenuo O
conteuacutedo do espaccedilo de atributos deve ser passiacutevel de modelagem atraveacutes de uma
amostragem com distribuiccedilatildeo multivariada de probabilidade Devido a este
pressuposto eacute necessaacuterio verificar se a condiccedilatildeo de normalidade dos dados eacute
satisfeita em aplicaccedilotildees estatiacutesticas tradicionais que utilizam testes parameacutetricos
Em outras aplicaccedilotildees podem-se utilizar meacutetodos estatiacutesticos natildeo
parameacutetricos com menos restriccedilotildees sobre o comportamento dos dados como por
exemplo natildeo se preocupar com o tipo de distribuiccedilatildeo para as variaacuteveis aleatoacuterias O
conceito de Kernel pode ser empregado em meacutetodos natildeo parameacutetricos para a
estimativa de propriedades Esta eacute uma funccedilatildeo estatiacutestica contiacutenua simeacutetrica e com
limite superior e inferior de integraccedilatildeo definidos cuja integraccedilatildeo resulta na unidade
por conveniecircncia O Kernel atua na imagem como uma janela de convoluccedilatildeo
suavizando as caracteriacutesticas dos pontos analisados (MACHADO 2006)
De acordo com COMANICIU e MEER (2002) o algoritmo de deslocamento
pela meacutedia eacute uma ferramenta versaacutetil para anaacutelises espaciais de feiccedilotildees presentes
em amostras Utiliza o Kernel para a estimaccedilatildeo da densidade dos elementos no
conjunto de dados tendo como referecircncia um ponto fixo na regiatildeo central da
amostra Dado um conjunto de pontos 120169119894=1hellip119899 em um espaccedilo 119877 com dimensatildeo 119889 o
estimador de densidade multivariada por Kernel 119870(120169) e a matriz de paracircmetros 119867
com bandas de dimensatildeo 119889 pode ser calculada com os pontos 120169 Com estes
61
paracircmetros definidos a funccedilatildeo para estimar a densidade multivariada no ponto 120169 eacute
expressa com a Equaccedilatildeo (259)
119891 (120169) =1
119899 119870119867 120169 minus 120169119894 119899119894=1 (259)
119870119867(120169) = 119867 minus1
2119870(119867minus1
2120169) (260)
O Kernel 119870(120169) com dimensatildeo 119889 eacute uma funccedilatildeo para a anaacutelise da densidade
da vizinhanccedila dos pontos expressa atraveacutes das Equaccedilotildees (261) e (262)
119870(120169)119877119889
119889120169 = 1 lim 119909 rarrinfin 120169 119889 119870 120169 = 0 (261)
119909119870(120169)119889120169119877119889
= 0 120169120169119879119870(120169)119889120169119877119889
= 119888119870119868 (262)
Onde 119888119870 eacute uma constante A partir do Kernel univariado 1198701 119909 o Kernel
multivariado pode ser calculado de duas maneiras conforme as Equaccedilotildees (263) e
(264)
119870119875 120169 = 1198701 119909119894 119889119894=1 (263)
119870119878 120169 = 119886119896 1198891198701( 120169119894 ) (264)
Onde 119870119875(120169) eacute obtido com o produto dos Kernels univariados e 119870119878(120169) eacute
obtido rotacionando 1198701(119909) no espaccedilo 119877119889 o que faz 119870119878(120169) ser radialmente simeacutetrico
A constante 119886119896 119889minus1 = 1198701 120169 1198891201691198774
com 119870119878(119909) integrado de 0 agrave 1 O Kernel
radialmente simeacutetrico eacute de interesse em anaacutelises espaciais de imagens desde que
satisfaccedila a condiccedilatildeo da Equaccedilatildeo (265)
119870 119909 = 119888119896 119889119896( 120169 2) (265)
Neste caso define-se a funccedilatildeo de cada elemento do Kernel 119896 119909 para 119909 ge 0
A constante de normalizaccedilatildeo 119888119896 119889 pode ser calculada integrando 119870 120169 de 0 a 1
assumindo-se que eacute positiva A estimaccedilatildeo pode ser parametrizada com a matriz
diagonal de bandas do Kernel 119867 = 1198932119868 = 119889119894119886119892 11989312hellip 119893119889
2 onde 119868 eacute a matriz
identidade com dimensatildeo 119889 Esta matriz apresenta a vantagem de ser determinada
62
utilizando como uacutenico paracircmetro o nuacutemero de bandas 119893 ge 0 do Kernel Empregando
paracircmetros com o nuacutemero de bandas 119893 e dimensatildeo 119899 o estimador de densidade por
Kernel da Equaccedilatildeo (259) pode ser expresso atraveacutes da Equaccedilatildeo (266)
119891 (120169) =1
119899119893119889 119870119867
120169minus120169119894
119893 119899
119894=1 (266)
A qualidade do estimador de densidade por Kernel pode ser analisada
atraveacutes do erro meacutedio quadraacutetico entre a densidade real e a estimada Na praacutetica
somente a aproximaccedilatildeo assintoacutetica das medidas pode ser calculada (AMISE ndash
Asymptotic Mean Integrated Square Error) Para os Kernels multivariados o erro
meacutedio quadraacutetico AMISE eacute minimizado utilizando o Kernel de Epanechnikov
(COMANICIU e MEER 2002)
119896119864 119909 = 1 minus 119909 0 le 119909 le 1
0 119909 gt 0 (267)
119870119864 120169 = 1
2119888119889
minus1 119889 + 2 (1 minus 120169 2) 120169 le 1
0 119888119886119904119900 119888119900119899119905119903aacute119903119894119900 (268)
Onde 119888119889 eacute o volume de uma esfera com raio unitaacuterio e com dimensatildeo 119889 O
elemento do Kernel 119896119873 119909 pode ser calculado utilizando a Equaccedilatildeo (269)
119896119873 119909 = exp minus1
2119909 119909 ge 0 (269)
Para o Kernel multivariado calculado com a Equaccedilatildeo (269) um Kernel
normal 119870119873 pode ser calculado utilizando a Equaccedilatildeo (270)
119870119873 120169 = (2120587)minus1198892exp minus1
2 120169 2 (270)
Sendo o Kernel normal simeacutetrico e admitido finito Para a anaacutelise espacial de
imagens estas duas formas de calcular o Kernel satildeo suficientes e os resultados
obtidos com estas condiccedilotildees impostas satildeo satisfatoacuterios O estimador de densidade
por Kernel da Equaccedilatildeo (259) pode ser reescrito conforme a Equaccedilatildeo (271)
63
119891 119893 119870(120169) =119888119896 119889
119899119893119889 119896
120169minus120169119894
119893
2
119899119894=1 (271)
Para anaacutelise de feiccedilotildees espaciais primeiramente deve-se calcular a
densidade do conjunto de dados e verificar o seu comportamento espacial Isto pode
ser feito calculando o gradiente da funccedilatildeo de densidade 119891(120169) igual a zero nabla119891 120169 = 0
O algoritmo de deslocamento pela meacutedia eacute uma maneira de localizar estes zeros
para estimar a densidade do conjunto de observaccedilotildees Calculando o gradiente da
funccedilatildeo expressa com a Equaccedilatildeo (271) pode-se estimar a densidade atraveacutes da
Equaccedilatildeo (272)
nabla 119891119893 119870(120169) equiv2119888119896 119889
119899119893119889+2 (120169 minus 120169119894)119896prime
120169minus120169119894
119893
2
119899119894=1 (272)
Substituindo 119896prime pela funccedilatildeo 119892(119909) conforme expresso com a Equaccedilatildeo (273)
119892 119909 = 119896prime(119909) (273)
Assumindo que a derivada do Kernel 119896 exista para o conjunto finito de
pontos 119909 isin [0infin) O Kernel 119866(119909) com seus elementos 119892(119909) pode ser definido atraveacutes
da Equaccedilatildeo (274)
119866 119909 = 119888119892 119889119892( 120169 2) (274)
Onde 119888119892119889 corresponde a uma constante de normalizaccedilatildeo O Kernel 119866 119909
pode ser considerado uma aproximaccedilatildeo do Kernel 119870(119909) dependendo do contexto
em que seraacute empregado De forma similar o Kernel de Epanechnikov eacute uma
simplificaccedilatildeo do Kernel uniforme da esfera unitaacuteria com dimensatildeo 119889 Introduzindo
119892(119909) na Equaccedilatildeo (272) tem-se a Equaccedilatildeo (275)
nabla 119891119893 119870 120169 =2119888119896 119889
119899119893119889+2 120169 minus 120169119894 119892
120169minus120169119894
119893
2
119899119894=1 (275)
nabla 119891119893 119870 120169 =2119888119896 119889
119899119893119889+2 119892 120169minus120169119894
119893
2
119899119894=1 ∙
120169119894119892 120169minus120169119894119893
2 119899
119894=1
119892 120169minus120169119894119893
2 119899
119894=1
(276)
64
119892 120169minus120169119894
119893
2
119899119894=1 (277)
Considerando que o resultado da funccedilatildeo expressa com a Equaccedilatildeo (277) eacute
um nuacutemero positivo O primeiro termo da Equaccedilatildeo (276) eacute proporcional agrave densidade
estimada calculada para 120169 com o Kernel 119866 conforme Equaccedilatildeo (271) e expresso
agora em funccedilatildeo de 119892(119909) atraveacutes da Equaccedilatildeo (278)
119891119893 119866 120169 =119888119892 119889
119899119893119889 119892
120169minus120169119894
119893
2
119899119894=1 (278)
O segundo termo da Equaccedilatildeo (276) corresponde ao algoritmo de
deslocamento pela meacutedia conforme Equaccedilatildeo (279)
119898119893 119866 120169 = 120169119894119892
120169minus120169119894119893
2 119899
119894=1
119892 120169minus120169119894119893
2 119899
119894=1
minus 120169 (279)
A Equaccedilatildeo (279) representa a diferenccedila entre as meacutedias ponderadas
utilizando o Kernel 119866 para os pesos e o centro da janela de convoluccedilatildeo em 120169 A
partir das Equaccedilotildees (276) (278) e (279) chega-se as Equaccedilotildees (280) e (281)
nabla 119891119893 119870 120169 = 119891 119893 119866 120169 2119888119896 119889
1198932119888119892 119889119898119893 119866 120169 (280)
119898119893 119866 120169 =1
21198932119888nabla
119891 119893 119870 120169
119891 119893 119866 120169 (281)
Para a posiccedilatildeo 120169 o vetor de deslocamento pela meacutedia calculado com Kernel
119866 eacute proporcional agrave estimaccedilatildeo de densidade normalizada obtida resolvendo a funccedilatildeo
com gradiente igual a zero e Kernel 119870 Eacute a normalizaccedilatildeo da densidade estimada em
119909 calculada com o Kernel 119866
O vetor de deslocamento pela meacutedia aponta na direccedilatildeo de maacuteximo
crescimento da densidade do conjunto de dados A estimaccedilatildeo da densidade de
pontos com mesma caracteriacutestica eacute obtida atraveacutes de interaccedilotildees com sucessivos
caacutelculos do vetor de deslocamento pela meacutedia 119898119893 119866 120169 e translaccedilotildees do Kernel 119866(119909)
sobre a imagem Isto garante a convergecircncia ao redor do ponto de interesse
65
utilizando a Equaccedilatildeo (281) com gradiente igual a zero Regiotildees com baixa
densidade de observaccedilotildees natildeo satildeo interessantes para anaacutelises espaciais com o
algoritmo de deslocamento pela meacutedia pois muitas iteraccedilotildees seriam necessaacuterias
para obtenccedilatildeo de resultados pouco satisfatoacuterios De forma anaacuteloga em locais com
densidade maacutexima poucas iteraccedilotildees satildeo necessaacuterias e a anaacutelise pode atingir bons
resultados (COMANICIU e MEER 2002)
Imagens satildeo representadas matematicamente na forma de matrizes onde
cada posiccedilatildeo da matriz eacute ocupada por vetores com dimensatildeo 119901 onde 119901 = 1 no caso
de imagens em niacuteveis de cinza ou coloridas e 119901 ge 2 no caso de imagens
multiespectrais O posicionamento de cada pixel na matriz imagem estaacute contido no
domiacutenio espacial (Spatial domain) enquanto o valor digital do pixel faz parte do
domiacutenio de caracteriacutesticas da imagem (Range domain) assumindo-se estes
domiacutenios como espaccedilos euclidianos Deste modo o Kernel multivariado pode ser
definido como o produto de dois Kernels radialmente simeacutetricos em um espaccedilo
euclidiano calculado com um paracircmetro de cada domiacutenio atraveacutes da Equaccedilatildeo
(282)
119870119893119904119893119903(119909) =119862
1198931199042119893119903
119901 119896 120169119904
119893119904
2
119896 120169119903
119893119903
2
(282)
onde
120169119904 ndash Corresponde ao domiacutenio espacial
120169119903 ndash Corresponde ao domiacutenio de caracteriacutesticas
119896(119909) ndash Elemento da funccedilatildeo calculado em ambos os domiacutenios
119893119904 119893119903 ndash Paracircmetros das bandas de cada domiacutenio do Kernel empregado
119862 ndash Constante de normalizaccedilatildeo entre as bandas
Na praacutetica o Kernel de Epanechnikov tambeacutem conhecido por Kernel normal
atinge resultados satisfatoacuterios O usuaacuterio deve escolher apenas os paracircmetros das
bandas 119893 = 119893119904 119893119903 e a quantidade miacutenima 119867 de pixels das regiotildees segmentadas na
imagem determinando assim a resoluccedilatildeo na estimaccedilatildeo da densidade A Figura 225
ilustra um exemplo de segmentaccedilatildeo realizada utilizando o algoritmo de
deslocamento pela meacutedia sobre uma imagem em niacuteveis de cinza
66
FIGURA 225 ndash Imagem segmentada FONTE COMANICIU e MEER (2002)
A segmentaccedilatildeo de imagens atraveacutes do algoritmo de deslocamento pela
meacutedia foi implementada no software EDISON (Edge Detection and Image
SegmentatiON System) desenvolvido pela Universidade RUTGER de New Jersey
Este software aleacutem da segmentaccedilatildeo com o algoritmo de deslocamento pela meacutedia
realiza uma filtragem preservando as descontinuidades e detectando os limites dos
objetos contidos na imagem atraveacutes de uma funccedilatildeo gradiente (CHRISTOUDIAS et
al 2002)
67
3 MATERIAIS
Neste trabalho foram utilizadas imagens TOF obtidas com a cacircmara PMD
CamCube 20 que fornece dados de distacircncia e intensidade sob forma de matrizes
de imagem Para realizar os experimentos foram obtidos trecircs conjuntos de imagens
De um gabarito com a forma de um tabuleiro de xadrez para realizar
o processo de calibraccedilatildeo da cacircmara
De uma parede branca com padratildeo planar para anaacutelise de ruiacutedos e
distorccedilotildees geomeacutetricas das imagens e
Do objeto de estudo uma caixa de papelatildeo com superfiacutecies planas e
brancas
Para o processamento das imagens TOF foi utilizado um microcomputador
do laboratoacuterio de Fotogrametria e Sensoriamento Remoto Departamento de
Geomaacutetica da Universidade Federal do Paranaacute com as seguintes caracteriacutesticas
Processador Intelreg Coretrade2 Duo 293GHz
Capacidade do disco riacutegido de 320GB
Memoacuteria principal de 2GB
68
4 MEacuteTODOS
Neste capitulo descreve-se o desenvolvimento metodoloacutegico do presente
trabalho de pesquisa para a aquisiccedilatildeo e processamento da imagem TOF Esta
imagem eacute composta por dois arquivos O primeiro arquivo conteacutem informaccedilatildeo de
intensidade de retorno do sinal captado com iluminaccedilatildeo infravermelha O segundo
arquivo conteacutem informaccedilatildeo de distacircncia (range) para cada pixel gerado com o
sensor da cacircmara TOF
Considerando que as imagens TOF podem apresentar ruiacutedo em funccedilatildeo das
condiccedilotildees de iluminaccedilatildeo e da natureza das superfiacutecies dos objetos estudos para a
reduccedilatildeo do ruiacutedo foram efetuados Para isto utilizaram-se janelas na regiatildeo central
da imagem ao redor do pixel com coordenadas de imagem (102 102) As filtragens
foram realizadas em aacutereas que circundam este pixel central
Apoacutes a anaacutelise do tempo de integraccedilatildeo na aquisiccedilatildeo da imagem
determinaram-se POI atraveacutes do processo de calibraccedilatildeo da cacircmara Os POI
permitiram corrigir a geometria dos dados da imagem TOF Esta correccedilatildeo eacute
necessaacuteria devido agraves distorccedilotildees causadas pelo sistema de lentes da cacircmara
A etapa seguinte consistiu na segmentaccedilatildeo da imagem TOF onde duas
metodologias foram avaliadas
1) Segmentaccedilatildeo do conjunto de dados por crescimento de regiotildees no
espaccedilo tridimensional utilizando pontos semente escolhidos no arquivo de
intensidades da imagem TOF como referecircncia para o posicionamento (119883119884) dos
pontos com distacircncia (119885)
2) Segmentaccedilatildeo utilizando a anaacutelise da variaccedilatildeo local dos autovalores ao
longo do arquivo de distacircncias da imagem TOF Realizada para a geraccedilatildeo de uma
imagem com bordas intensificadas segmentaccedilatildeo desta imagem atraveacutes do
algoritmo de deslocamento pela meacutedia e projeccedilatildeo ortogonal dos pontos
pertencentes agraves aacutereas segmentadas As superfiacutecies segmentadas foram entatildeo
separadas atraveacutes do conjunto de pontos 3D
O passo seguinte consistiu no caacutelculo das coordenadas tridimensionais dos
pontos dos objetos imageados a partir da informaccedilatildeo de distacircncia das coordenadas
dos piacutexeis na imagem de intensidade e dos POI Com isto gerou-se a nuvem de
pontos 3D e tornou-se possiacutevel a modelagem tridimensional das superfiacutecies do
69
objeto de estudo sendo tambeacutem avaliado o resultado obtido A Figura 41 apresenta
as etapas realizadas no processamento das imagens TOF com as duas propostas
de metodologia para a etapa de segmentaccedilatildeo
FIGURA 41 ndash Processamento da imagem TOF
41 CALIBRACcedilAtildeO DA CAcircMARA
A calibraccedilatildeo foi realizada com o objetivo de determinar os Paracircmetros de
Orientaccedilatildeo Interior (POI) da cacircmara Estes paracircmetros possibilitam a reconstruccedilatildeo
do feixe perspectivo que gerou a imagem para o instante em que foi captada
permitindo a correccedilatildeo de sua geometria (ANDRADE 1998)
Com o processo de Orientaccedilatildeo Interior satildeo obtidos os seguintes POI
distacircncia focal calibrada (119891119888 ) posiccedilatildeo do Ponto Principal (1199090 1199100) na imagem
Distorccedilatildeo Radial Simeacutetrica (119870111987021198703) Distorccedilatildeo Descentrada (11987511198752) e os
paracircmetros que indicam falta de afinidade do sensor (119860119861)
IMAGEM TOF
CORRECcedilOtildeES GEOMEacuteTRICAS COM POI
ARQUIVO DE INTENSIDADES
SUPERFIacuteCIE SEMENTE
CRESCIMENTO DE REGIOtildeES COM PONTO SEMENTE
PROJECcedilAtildeO ORTOGONAL
NUVEM DE PONTOS 3D
ARQUIVO DE DISTAcircNCIAS
IMAGEM COM BORDAS INTENSIFICADAS VARIACcedilAtildeO LOCAL DE AUTOVALORES
SEGMENTACcedilAtildeO DA IMAGEM COM BORDAS INTENSIFICADAS
PROJECcedilAtildeO ORTOGONAL
NUVEM DE PONTOS 3D
MODELAGEM 3D DAS SUPERFIacuteCIES
70
Os POI obtidos com o processo de calibraccedilatildeo possibilitam realizar correccedilotildees
geomeacutetricas nos arquivos de intensidades e distacircncias das imagens TOF Com a
calibraccedilatildeo objetiva-se corrigir as distorccedilotildees ocorridas na passagem do raio de luz
pelo sistema de lentes ateacute atingir o plano focal Este erro ocorre pela impossibilidade
na construccedilatildeo de um sistema de lentes perfeito para a cacircmara A correccedilatildeo dos erros
sistemaacuteticos da cacircmara eacute realizada no plano da imagem no ponto onde uma linha
reta passante pelo ponto nodal anterior do sistema de lentes eacute ortogonal a este
plano
O meacutetodo de calibraccedilatildeo fotogrameacutetrica eacute o tradicionalmente utilizado na
determinaccedilatildeo dos POI em Ciecircncias Geodeacutesicas Para isto necessita de pontos de
apoio com coordenadas tridimensionais conhecidas na superfiacutecie de objetos com
correspondentes coordenadas bidimensionais observadas na imagem Relaciona-se
a informaccedilatildeo 3D da cena com a informaccedilatildeo 2D da imagem atraveacutes das equaccedilotildees de
colinearidade fazendo-se uma correspondecircncia entre a posiccedilatildeo dos pontos de
referecircncia 3D e os mesmos pontos reconhecidos na imagem 2D Esta calibraccedilatildeo
pode ser realizada de forma eficiente desde que sejam utilizadas teacutecnicas e campos
de calibraccedilatildeo apropriados para cada tipo de cacircmara e aplicaccedilatildeo que se destina a
imagem Outra teacutecnica que pode ser utilizada para a Orientaccedilatildeo Interior das imagens
eacute conhecida como auto-calibraccedilatildeo na qual natildeo haacute necessidade de pontos com
coordenadas conhecidas no espaccedilo objeto (ZHANG 2000)
A Distorccedilatildeo Radial Simeacutetrica eacute a parcela de refraccedilatildeo natildeo desejaacutevel que um
feixe luminoso sofre ao atravessar um sistema de lentes A Distorccedilatildeo Descentrada eacute
composta pelas distorccedilotildees Tangencial e Radial Assimeacutetrica Eacute causada pela
impossibilidade de alinhar-se perfeitamente o eixo oacuteptico do sistema de lentes que
compotildee a objetiva Correccedilotildees para estas distorccedilotildees podem ser feitas atraveacutes da
Equaccedilatildeo (41) Maiores detalhes podem ser vistos em Andrade (1998)
119909prime119910prime =
119909119910
119900119887119904minus
1199090
1199100 minus
120575119909120575119910 119903119886119889
minus 120575119909120575119910 119889119890119904
minus 120575119909120575119910 119886
(41)
71
onde
119909prime119910prime 119879 ndash Coordenadas corrigidas no sistema referencial de imagem
119909 119910 119900119887119904119879 ndash Coordenadas de imagem observadas
1199090 1199100 119879ndash Coordenadas do PP no sistema referencial de imagem
120575119909 120575119910 119903119886119889119879 ndash Distorccedilatildeo Radial Simeacutetrica
120575119909 120575119910 119889119890119904119879 ndash Distorccedilatildeo Descentrada
120575119909 120575119910 119886119879 ndash Distorccedilatildeo causada pela falta de afinidade entre os eixos do
sensor
Andrade (1998) ilustra algumas correccedilotildees necessaacuterias para as imagens
utilizadas em Fotogrametria e mostra a influencia dos POI nestas correccedilotildees Um
exemplo eacute a correccedilatildeo da distorccedilatildeo Radial Simeacutetrica que pode ser realizada atraveacutes
das Equaccedilotildees (42) e (43)
120575119909119903119886119889 = (1199032 ∙ 1198701 + 1199034 ∙ 1198702 + 1199036 ∙ 1198703) ∙ 119909 (42)
120575119910119903119886119889 = (1199032 ∙ 1198701 + 1199034 ∙ 1198702 + 1199036 ∙ 1198703) ∙ 119910 (43)
onde
119909 = (119909 minus 1199090)
119910 = (119910 minus 1199100)
119909119910 ndash Coordenadas dos pontos com distorccedilotildees no sistema referencial
fotogrameacutetrico projetado na imagem
11990901199100 ndash Coordenadas do Ponto Principal
119870111987021198703 ndash Coeficientes de Distorccedilatildeo Radial Simeacutetrica
72
A distacircncia 119903 entre o ponto com coordenadas na imagem e o Ponto Principal
pode ser calculada atraveacutes da Equaccedilatildeo (44)
119903 = 119909 2 + 119910 2 (44)
A Distorccedilatildeo Descentrada pode entatildeo ser corrigida atraveacutes das Equaccedilotildees
(45) e (46)
120575119909119889119890119904 = [1198751 ∙ (1199032 + 2 ∙ 1199092
) + 2 ∙ 1198752 ∙ 119909 ∙ 119910 ] ∙ (1 + 1198753 + r2 + ⋯ ) (45)
120575119910119889119890119904 = [2 ∙ 1198751 ∙ 119909 ∙ 119910 + 1198752 ∙ (r2 + 2 ∙ 119910 2)] ∙ (1 + 1198753 + r2 + ⋯ ) (46)
onde
119875111987521198753 ndash Coeficientes de Distorccedilatildeo Descentrada
A diferenccedila de escala dos eixos horizontal e vertical da imagem possiacutevel
natildeo ortogonalidade entre os elementos do sensor pode ser modelada utilizando as
Equaccedilotildees (47) e (48) que introduzem correccedilotildees utilizando os paracircmetros de
afinidade 119860 e 119861 (HABIB e MORGAN 2003)
120575119909119886 = 119860 119909 minus 1199090 + 119861(119910minus1199100) (47)
120575119910119886 = 119861(119910minus1199100) (48)
onde
119860119861 ndash Paracircmetros de afinidade
119909119910 ndash Coordenadas dos pontos com distorccedilotildees no sistema referencial
fotogrameacutetrico projetado na imagem
11990901199100 ndash Coordenadas do Ponto Principal
73
A partir da formulaccedilatildeo proposta por Brown (1971) e incluindo os paracircmetros
de afinidade 119860 e 119861 as Equaccedilotildees (49) e (410) possibilitam a correccedilatildeo da imagem
utilizando os coeficientes 119870111987021198703 e 11987511198752
119909prime = 119909 + 119909 ∙ 11987011199032+1198702119903
4+11987031199036 + ⋯ +
+ 1198751 ∙ 1199032 + 2 ∙ 119909
2 + 2 ∙ 1198752 ∙ 119909 ∙ 119910 ∙ 1 + 1198753 ∙ 119903
2 + ⋯ + 119909 119860 + 119910 119861 (49)
119910prime = 119910 + 119910 ∙ 11987011199032+1198702119903
4+11987031199036 + ⋯ +
+ 21198751 ∙ 119909 ∙ 119910 + 1198752 ∙ 1199032 + 2119910 2 ∙ 1 + 1198753 ∙ 119903
2 + ⋯ + 119910 119861 (410)
A Equaccedilatildeo (41) ilustra as correccedilotildees necessaacuterias na geometria da imagem
quando objetiva-se a extraccedilatildeo de informaccedilotildees meacutetricas Eacute um modelo jaacute consagrado
na Fotogrametria e bastante aplicado em Ciecircncias Geodeacutesicas Pode ser utilizado
para o entendimento das correccedilotildees necessaacuterias nas imagens devido agraves distorccedilotildees
causadas pelo sistema de lentes da cacircmara e pela falta de afinidade entre os
elementos do sensor Outros modelos matemaacuteticos para correccedilotildees geomeacutetricas de
imagens satildeo utilizados em aacutereas correlatas como a Visatildeo Computacional Com a
precisatildeo requerida em cada aplicaccedilatildeo alguns POI tecircm maior relevacircncia que outros
podendo haver a supressatildeo de alguns A correlaccedilatildeo entre os paracircmetros deve ser
analisada e evitada
As Equaccedilotildees (49) e (410) podem ser simplificadas para realizar apenas as
correccedilotildees utilizando os coeficientes de Distorccedilatildeo Radial Simeacutetrica 1198961 e 1198962 e os
paracircmetros de afinidade 119860 e 119861 Estes paracircmetros satildeo os mais significativos para a
correccedilatildeo da imagem obtida com cacircmaras digitais de pequeno formato conforme eacute
expresso atraveacutes das Equaccedilotildees (411) e (412)
119909prime = 119909 + 119909 ∙ 11987011199032+1198702119903
4 + 119909 119860 + 119910 119861 (411)
119910prime = 119910 + 119910 ∙ 11987011199032+1198702119903
4 + 119910 119861 (412)
74
onde
119909119910 ndash Coordenadas dos pontos com distorccedilotildees no sistema referencial
fotogrameacutetrico projetado na imagem
119909 = (119909 minus 1199090)
119910 = (119910 minus 1199100)
11990901199100 ndash Coordenadas do Ponto Principal
119860119861 ndash Paracircmetros de afinidade
Cacircmaras digitais de pequeno formato apresentam principalmente a
Distorccedilatildeo Radial Simeacutetrica causada pelo sistema de lentes sendo os coeficientes 1198961
e 1198962 os mais significativos Os paracircmetros de afinidade entre os eixos da imagem 119860
e 119861 tambeacutem podem ser considerados para a correccedilatildeo das imagens obtidas
dependendo da precisatildeo com que o sensor da cacircmara foi construiacutedo pelo fabricante
Alguns softwares calculam os POI de forma raacutepida com soluccedilatildeo aproximada
e dependendo da aplicaccedilatildeo a que se destina a imagem podem ser utilizados sem
maiores restriccedilotildees Um deles eacute o Toolbox CALIB para Matlab utiliza o algoritmo
proposto por Zhang (2000) Este meacutetodo consiste em determinar os POI da cacircmara
tomando diferentes imagens de um gabarito com quadrados pretos e brancos
similar a um tabuleiro de xadrez fixado em uma superfiacutecie riacutegida e com padratildeo
planar Devem ser obtidas imagens do gabarito variando a posiccedilatildeo e orientaccedilatildeo da
cacircmara natildeo sendo necessaacuterio conhecer a trajetoacuteria do seu movimento para a
determinaccedilatildeo dos POI Este algoritmo possibilita o caacutelculo dos POI da cacircmara de
forma aproximada atraveacutes de sucessivas iteraccedilotildees Para sua utilizaccedilatildeo eacute necessaacuterio
conhecer a dimensatildeo dos quadrados do gabarito e indicar os pontos posiccedilotildees dos
veacutertices que seratildeo utilizados como pontos de referecircncia
No algoritmo proposto por Zhang um vetor de pontos 2D eacute denotado por
119898 = [119906 119907]119879 e um vetor de pontos 3D por 119872 = [119883119884119885]119879 De forma similar pode-se
aumentar estes vetores adicionando uma linha com valor igual a 1 sendo os vetores
aumentados 119898 = [119906 119907 1]119879 e 119872 = [119883119884119885 1]119879 A colinearidade entre o ponto no
espaccedilo objeto centro perspectivo e o ponto no espaccedilo imagem eacute utilizada para
75
estabelecer a relaccedilatildeo entre os pontos 3D contidos no vetor 119872 e os pontos na
imagem 2D contidos no vetor 119898 conforme a Equaccedilatildeo (413)
119904119898 = 119860[119877 119905]119872 (413)
onde
119904 ndash Fator de escala
119877 119905 ndash Paracircmetros de Orientaccedilatildeo Exterior (POE) compostos por elementos de
rotaccedilatildeo e translaccedilatildeo que relacionam as coordenadas obtidas no sistema 3D do
espaccedilo objeto com o sistema de coordenadas 2D da imagem
119860 ndash Eacute a matriz com os POI da cacircmara Apresenta as coordenadas 1199060 e 1199070 do
PP 119864120572 e 119864120573 satildeo os fatores de escala na imagem com eixos 119906 e 119907 O paracircmetro 120574
descreve a falta de ortogonalidade entre os eixos do sistema referencial da imagem
A matriz 119860 eacute expressa atraveacutes da Equaccedilatildeo (414)
119860 = 119864120572 120574 1199060
0 119864120573 1199070
0 0 1
(414)
Comparando as Equaccedilotildees (411) e (412) com o modelo proposto por Zhang
expresso atraveacutes da Equaccedilatildeo (413) tecircm-se as seguintes correspondecircncias
119860 e 119861 satildeo os paracircmetros de afinidade das Equaccedilotildees (411) e (412)
que correspondem aos fatores de escala 119864120572 e 119864120573 da Equaccedilatildeo (413)
Sendo que o paracircmetro 120574 acircngulo entre os eixos da imagem pode ser
calculado a partir destes fatores de escala
1199090 e 1199100 satildeo as coordenadas do Ponto Principal expressas com as
Equaccedilotildees (411) e (412) que tem suas correspondecircncias nas
coordenadas 1199060 e 1199070 da Equaccedilatildeo (413)
O caacutelculo dos POI pode ser entatildeo ser realizado atraveacutes da Equaccedilatildeo (415)
119898119894119895 minus119898 119860119877119894 119905119894 119872119895 2119898
119895=1119899119894=1 (415)
76
onde
119898 119860119877119894 119905119894 119872119894 ndash Eacute a projeccedilatildeo do vetor do ponto 119872119895 sobre a imagem 119894
119877119894 ndash Eacute o vetor de rotaccedilatildeo com paracircmetros 119903
O algoritmo proposto por Zhang (2000) utiliza somente os dois primeiros
termos de Distorccedilatildeo Radial Simeacutetrica para a correccedilatildeo da imagem atraveacutes dos
coeficientes 1198961 e 1198962 conforme Equaccedilotildees (416) e (417) Cacircmaras digitais de
pequeno formato normalmente apresentam distorccedilotildees de lentes significantes
especialmente a Distorccedilatildeo Radial Simeacutetrica A funccedilatildeo de distorccedilatildeo eacute fortemente
influenciada pelos componentes radiais principalmente o primeiro termo 1198961 Dadas
as coordenadas de uma imagem (119906 119907) consideradas livres de distorccedilatildeo e as
correspondentes coordenadas de imagem observadas (119906 119907 ) consegue-se projetar
os pontos atraveacutes da relaccedilatildeo de colinearidade entre eles De forma similar (119909119910) satildeo
as coordenadas de imagem consideradas livres de distorccedilatildeo e (119909 119910 ) as coordenadas
que possuem distorccedilatildeo Estas coordenadas tecircm suas escalas compatibilizadas
atraveacutes de uma normalizaccedilatildeo
119909 = 119909 + 119909 1198961 1199092 + 1199102 + 1198962 119909
2 + 1199102 2 (416)
119910 = 119910 + 119910 1198961 1199092 + 1199102 + 1198962 119909
2 + 1199102 2 (417)
onde
11989611198962 ndash Satildeo os coeficientes de Distorccedilatildeo Radial Simeacutetrica O centro desta
distorccedilatildeo encontra-se no Ponto Principal projetado na imagem
Com 119906 = 1199060 + 119886119909 + 120574119910 e 119907 = 1199070 + 120573119910 e assumindo 120574 = 0 em uma imagem
que tem os eixos perpendiculares tem-se a relaccedilatildeo expressa com as Equaccedilotildees
(418) e (419)
119906 = 119906 + 119906 minus 1199060 1198961 1199092 + 1199102 + 1198962 119909
2 + 1199102 2 (418)
119907 = 119907 + 119907 minus 1199070 1198961 1199092 + 1199102 + 1198962 119909
2 + 1199102 2 (419)
Uma opccedilatildeo para estimar os coeficientes 1198961 e 1198962 eacute feita atraveacutes de
sucessivas iteraccedilotildees utilizando as coordenadas 119906 e 119907 dos piacutexeis considerados
77
isentos de erro Com isto tecircm-se duas expressotildees para os pontos da imagem
conforme a Equaccedilatildeo (420)
119906 minus 1199060 119909
2 + 1199102 119906 minus 1199060 1199092 + 1199102 2
119907 minus 1199070 1199092 + 1199102 119907 minus 1199070 119909
2 + 1199102 2 1198961
1198962 =
119906 minus 119906119907 minus 119907
(420)
Dados 119898 pontos em 119899 imagens podemos obter 2 ∙ 119898 ∙ 119899 equaccedilotildees Na forma
matricial 119863119896 = 119889 onde 119896 = 1198961 1198962 119879 A soluccedilatildeo deste sistema de equaccedilotildees eacute
possiacutevel pelo meacutetodo dos miacutenimos quadrados conforme a Equaccedilatildeo (421)
119896 = 119863119879119863 minus1119863119879119889 (421)
Uma vez que 1198961 e 1198962 foram calculados pode-se refinar a estimaccedilatildeo dos
outros paracircmetros resolvendo novamente a Equaccedilatildeo (415) substituindo os valores
de 119898 119860119877119894 119905119894 119872119894 pelos valores calculados com as Equaccedilotildees (418) e (419)
A estimaccedilatildeo do conjunto completo de POI pode ser expressa atraveacutes da
Equaccedilatildeo (422)
119898119894119895 minus119898 1198601198961 1198962119877119894 119905119894 119872119895 2119898
119895=1119899119894=1 (422)
onde
119898 119860 11989611198962119877119894 119905119894 119872119895 - Eacute funccedilatildeo da projeccedilatildeo do vetor do ponto 119872119895 na imagem
119894 de acordo com a Equaccedilatildeo (413)
Com este meacutetodo no miacutenimo duas imagens devem ser adquiridas com
orientaccedilotildees diferentes se os elementos sensores da cacircmara forem quadrados
Zhang (2000) recomenda a aquisiccedilatildeo de pelo menos cinco imagens para obter
melhores resultados com o processo de calibraccedilatildeo Sendo assim os passos para
realizar a calibraccedilatildeo da cacircmara utilizando este meacutetodo satildeo
1 Imprimir o gabarito e fixaacute-lo em uma superfiacutecie plana e riacutegida
2 Tomar imagens do gabarito com diferentes orientaccedilotildees variando a
posiccedilatildeo e orientaccedilatildeo da cacircmara
78
3 Realizar a leitura das coordenadas dos pontos de controle nas
imagens
4 Estimar os POI e POE utilizando soluccedilatildeo aproximada
5 Refinar todos os paracircmetros incluindo os paracircmetros de distorccedilatildeo de
lentes atraveacutes da Equaccedilatildeo (422)
Os passos 4 e 5 satildeo realizados automaticamente pelo Toolbox CALIB do
software Matlab devendo o usuaacuterio apenas inserir as imagens no software e realizar
as leituras dos veacutertices dos quadrados nas imagens do gabarito
42 ANAacuteLISE DA PRESENCcedilA DE RUIacuteDO
Os piacutexeis saturados causados por exposiccedilatildeo prolongada do sensor na
aquisiccedilatildeo da imagem e tambeacutem os piacutexeis com baixa exposiccedilatildeo devem ser
cuidadosamente analisados na imagem pois tambeacutem podem causar erros nas
medidas de distacircncia devido agrave presenccedila de ruiacutedo Quando o sensor capta o sinal
luminoso existe um limite maacuteximo de saturaccedilatildeo que natildeo pode ser diminuiacutedo
posteriormente
Khongsab (2009) utilizou como paracircmetro principal o tempo de integraccedilatildeo na
captaccedilatildeo da imagem para controlar a saturaccedilatildeo dos piacutexeis Como este tempo eacute
aplicado globalmente ao sensor acaba influenciando os valores digitais dos piacutexeis
da imagem de forma equivalente Alguns apresentam erros devido agrave baixa
exposiccedilatildeo pois com a reduccedilatildeo do tempo de integraccedilatildeo natildeo receberam energia
eletromagneacutetica suficiente para sensibilizar o sensor sendo chamados de piacutexeis
insaturados Estes problemas podem ser minimizados definindo-se tempos de
integraccedilatildeo adequados para a obtenccedilatildeo da imagem TOF
O tratamento do ruiacutedo pode ser realizado com diferentes filtragens na
imagem Com este objetivo foram estudados os filtros passa-baixas pela meacutedia e
mediana Outro processo de filtragem realizado foi o caacutelculo da meacutedia dos valores
de distacircncia para diferentes imagens de uma mesma cena com o mesmo tempo de
integraccedilatildeo mas adquiridas em instantes brevemente diferentes
79
421 Filtragem passa-baixas pela meacutedia
O caacutelculo da meacutedia dos valores da vizinhanccedila em torno do pixel de interesse
tem o efeito de suavizar a imagem Este processo conhecido como filtro linear
passa-baixas atenua as altas frequecircncias que no espaccedilo de frequecircncias
correspondem agraves transiccedilotildees raacutepidas Este tipo de variaccedilatildeo caracteriza tambeacutem a
presenccedila de ruiacutedo na imagem A suavizaccedilatildeo tende a minimizar a presenccedila de ruiacutedo
e tecircm o efeito de tornar a imagem menos contrastante O filtro linear passa-baixas
utilizado tem dimensatildeo 3x3 com pesos iguais para os vizinhos Filtros lineares
resultam da convoluccedilatildeo de uma janela moacutevel sobre a imagem A Equaccedilatildeo (423)
representa o modelo matemaacutetico aplicado na filtragem linear passa-baixas pela
meacutedia (CENTENO 2004)
119866 119910 119909 = (119901(119894 119895) ∙ 119868(119910 + 119894 minus 119886 119909 + 119895 minus 119886))119879119895=1
119879119894=1 (423)
onde
119868(119910 119909) ndash Corresponde ao valor do pixel na posiccedilatildeo ldquolinha = 119910rdquo e ldquocoluna = 119909rdquo
119901(119894 119895) ndash Representa o filtro
119879 ndash Tamanho da janela de filtragem
119866(119910 119909) ndash Imagem resultante da filtragem
119886 = 119894119899119905 119879
2 + 1
A Figura 42 Ilustra o filtro linear passa-baixas pela meacutedia a janela central
cinza que estaacute na matriz de uma imagem Este filtro tem dimensatildeo de 3x3 piacutexeis e
atua no valor digital 48 do pixel central O valor digital do pixel apoacutes a filtragem
passa a ser 41222 que corresponde a meacutedia dos valores digitais dos piacutexeis
vizinhos
80
FIGURA 42 ndash Filtragem passa-baixas pela meacutedia
422 Filtragem pela mediana
A filtragem natildeo linear pela mediana consiste na substituiccedilatildeo do valor do pixel
central pelo valor correspondente a mediana da vizinhanccedila Este meacutetodo tambeacutem
suaviza a presenccedila de ruiacutedo A diferenccedila principal em relaccedilatildeo ao filtro da meacutedia eacute
que o filtro da mediana natildeo introduz novos valores na imagem pois substitui o valor
central da vizinhanccedila por um valor jaacute existente na imagem Sendo assim natildeo
degrada as bordas dos objetos de forma extrema A Figura 43 ilustra esta filtragem
que resultaraacute no valor digital 44 para o pixel filtrado que anteriormente apresentava
valor digital 48
FIGURA 43 ndash Filtragem pela mediana
81
423 Filtragem com a meacutedia temporal
A terceira opccedilatildeo eacute a ponderaccedilatildeo dos valores dos piacutexeis ao longo do tempo
Para isto uma seacuterie de imagens foi obtida a partir do mesmo ponto de vista em
instantes diferentes O resultado foi um conjunto de imagens de um uacutenico objeto
desde a mesma perspectiva natildeo sendo a geometria da imagem alterada Assim
cada pixel de uma imagem tem seu equivalente nas outras Assumindo que o ruiacutedo
seja aleatoacuterio eacute esperado que o uso de mais de uma imagem diminua a presenccedila
de ruiacutedo atraveacutes do caacutelculo da meacutedia dos valores observados
A filtragem com a meacutedia temporal eacute ilustrada com a Figura 44 Nesta figura
tem-se a representaccedilatildeo de trecircs imagens com suas matrizes de valores digitais
(Ii=123) e a imagem filtrada (IF) resultante que corresponde a meacutedia das trecircs
imagens originais
FIGURA 44 ndash Filtragem utilizando a meacutedia temporal
82
43 SEGMENTACcedilAtildeO
Com a etapa de segmentaccedilatildeo objetivou-se separar o conjunto de dados em
subconjuntos Estes subconjuntos satildeo compostos por pontos com coordenadas
tridimensionais que descrevem as superfiacutecies de objetos Eacute assumido que estas
superfiacutecies satildeo partes estruturais do objeto a ser identificado Para atingir esta meta
duas alternativas foram desenvolvidas e avaliadas
1) Crescimento de regiotildees a partir de superfiacutecies planas e ponto semente
utilizando o arquivo de intensidades da imagem TOF para selecionar a posiccedilatildeo de
pontos ou regiotildees semente sendo o arquivo de distacircncias utilizado para o
crescimento de regiotildees
2) Segmentaccedilatildeo por anaacutelise da variaccedilatildeo local de autovalores utilizando
somente o arquivo de distacircncias da imagem TOF para gerar uma imagem de
intensidade com bordas intensificadas que posteriormente eacute segmentada em
regiotildees que tecircm seus piacutexeis projetados gerando uma nuvem de pontos 3D destas
superfiacutecies segmentadas A segmentaccedilatildeo da imagem de intensidade com bordas
evidenciadas gerada eacute realizada utilizando o algoritmo de deslocamento pela meacutedia
431 Crescimento de regiotildees a partir de superfiacutecies planas e ponto semente
O primeiro meacutetodo proposto se baseia no crescimento de regiotildees por
agregaccedilatildeo de elementos adjacentes Este meacutetodo utiliza um criteacuterio de similaridade
para avaliar se um ponto pertence a uma determinada regiatildeo A distacircncia de um
ponto a uma superfiacutecie plana e o valor digital de um pixel em uma imagem satildeo
exemplos de criteacuterios de similaridade que podem ser utilizados (GONZALEZ e
WOODS 2000)
Partindo de um subconjunto de pontos adjacentes que pertencem a uma
superfiacutecie plana o processo consiste em buscar na vizinhanccedila outros pontos que
estejam espacialmente proacuteximos a esta superfiacutecie atendendo ao criteacuterio de
coplanaridade Neste criteacuterio a distacircncia ortogonal do ponto a uma superfiacutecie plana eacute
calculada atraveacutes das coordenadas 3D do ponto sendo este ponto considerado
pertencente agrave superfiacutecie quando estaacute dentro do limiar estabelecido A superfiacutecie
plana eacute determinada atraveacutes do autovetor com menor autovalor do conjunto de
83
pontos 3D a distacircncia ortogonal eacute calculada na direccedilatildeo deste autovetor partindo da
superfiacutecie O processo eacute iterativo de forma que o subconjunto inicial cresce
agregando novos elementos em cada iteraccedilatildeo ateacute atingir os limites da superfiacutecie
quando o criteacuterio de coplanaridade natildeo eacute mais satisfeito
O primeiro problema consiste na identificaccedilatildeo de pontos ou regiotildees semente
para dar iniacutecio ao processo de crescimento Uma opccedilatildeo foi identificar visualmente
regiotildees planas no arquivo de intensidades da imagem TOF e realizar a leitura de
coordenadas de pontos nestas regiotildees A partir das coordenadas destes pontos
selecionados na imagem de intensidade e de suas correspondentes no arquivo de
distacircncias da imagem TOF determinou-se a superfiacutecie plana que mais se aproxima
a esta regiatildeo atraveacutes do caacutelculo de seus autovetores e autovalores esta foi
considerada a superfiacutecie semente
A hipoacutetese baacutesica assume que superfiacutecies planas ou pelo menos partes
delas aparecem como regiotildees uniformes na imagem de intensidade devido agraves
condiccedilotildees de iluminaccedilatildeo Esta hipoacutetese nem sempre pode ser verificada e
confirmada Por exemplo se a superfiacutecie eacute coberta por tonalidades com padratildeo
irregular de cor entatildeo o plano pode mostrar valores natildeo uniformes na imagem de
intensidade sendo este um caso extremo Em uma situaccedilatildeo real pode ocorrer que
parte da superfiacutecie plana esteja pintada ou contenha manchas que alterem a sua
resposta espectral O mesmo pode ocorrer se houverem sombras projetadas de
outros objetos sobre a superfiacutecie Neste caso poreacutem existem outras regiotildees da
superfiacutecie plana que podem aparecer uniformes na imagem de intensidade e serem
utilizadas como regiatildeo semente
Com base nesta suposiccedilatildeo buscaram-se regiotildees uniformes na imagem de
intensidade e verificou-se a possibilidade de formarem superfiacutecies planas que
pudessem ser utilizadas como sementes no arquivo de distacircncias da imagem TOF
A soluccedilatildeo proposta consiste em segmentar a imagem de intensidade em regiotildees
uniformes com atributos de cor Um limite miacutenimo no tamanho das regiotildees deve ser
fixado para evitar que regiotildees muito pequenas sejam incluiacutedas na anaacutelise visto que
estas regiotildees pequenas podem representar locais com curvatura
A chave para o crescimento de regiotildees eacute a definiccedilatildeo do grau de pertinecircncia
de cada ponto agrave superfiacutecie plana Para isto eacute utilizado o conceito de distacircncia
miacutenima do ponto a esta superfiacutecie Para pertencer a uma regiatildeo os pontos devem
84
estar dentro do limite de proximidade ou seja a distacircncia entre o ponto e a
superfiacutecie plana natildeo pode superar o limiar fixado
A qualidade deste processo depende de fatores como o estabelecimento de
correspondecircncia entre os pontos precisatildeo na determinaccedilatildeo da superfiacutecie normal
utilizada remoccedilatildeo de erros grosseiros do conjunto de observaccedilotildees e identificaccedilatildeo
da regiatildeo semente
432 Segmentaccedilatildeo por anaacutelise da variaccedilatildeo local de autovalores
Esta abordagem baseia-se na anaacutelise da variaccedilatildeo local dos autovalores e
autovetores A hipoacutetese baacutesica nesta metodologia foi considerar que ao longo de
uma superfiacutecie plana os autovalores devem apresentar valores similares ou muito
proacuteximos Considerando duas regiotildees adjacentes se estas regiotildees forem
coplanares entatildeo a magnitude relativa de seus autovalores seraacute aproximadamente
igual Se uma destas regiotildees encontra-se em uma borda do objeto os autovetores
seratildeo diferentes A regiatildeo a ser considerada eacute uma janela quadrada em torno do
pixel central Para efetuar esta anaacutelise devem ser calculados os autovalores de uma
regiatildeo em torno de cada pixel no arquivo de distacircncias da imagem TOF Estes
autovalores satildeo armazenados em matrizes que geram trecircs novas imagens digitais
com as bordas dos objetos intensificadas
Com a Figura 45 Ilustra-se a anaacutelise do arquivo de distacircncias da imagem
TOF realizado com o caacutelculo de seus autovalores As bordas dos objetos presentes
podem ser vistas em evidecircncia satildeo representadas com os maiores valores
85
FIGURA 45 ndash Intensificaccedilatildeo de bordas com autovalores
Os autovalores calculados para cada pixel satildeo normalizados na faixa de 0 a
255 utilizando-se 8 bits Assim estes valores podem ser representados como uma
imagem digital passiacutevel de ser analisada com softwares de processamento A Figura
46 ilustra uma imagem com bordas intensificadas proveniente da segmentaccedilatildeo
realizada com a anaacutelise da variaccedilatildeo local dos autovalores
FIGURA 46 ndash Imagem com bordas intensificadas
86
A imagem produzida pode entatildeo ser segmentada utilizando o algoritmo de
deslocamento pela meacutedia Os resultados da segmentaccedilatildeo satildeo regiotildees onde os
autovalores satildeo aproximadamente iguais definindo uma superfiacutecie com padratildeo
planar sendo estas superfiacutecies separadas das regiotildees de bordas
433 Segmentaccedilatildeo com o algoritmo de deslocamento pela meacutedia
A segmentaccedilatildeo com o algoritmo de deslocamento pela meacutedia eacute realizada
utilizando a imagem com as bordas dos objetos intensificadas gerada com a
segmentaccedilatildeo do arquivo de distacircncias da imagem TOF pela anaacutelise da variaccedilatildeo
local dos autovalores
Cada um dos trecircs autovalores calculados gera uma imagem com bordas
intensificadas Sendo assim espera-se que os valores digitais dos piacutexeis nas
superfiacutecies dos objetos sejam similares dentro desta imagem Com isto a
segmentaccedilatildeo proporcionaraacute a seleccedilatildeo das superfiacutecies do objeto
Para realizar a segmentaccedilatildeo da imagem de intensidade com as bordas
intensificadas deve-se escolher os paracircmetros (119893119904 119893119903 119867) mais adequados para a
segmentaccedilatildeo Estes paracircmetros correspondem ao domiacutenio espacial da imagem 119893119904
domiacutenio de caracteriacutesticas dos piacutexeis 119893119903 e o tamanho miacutenimo 119867 que as aacutereas
segmentadas devem possuir O limite miacutenimo na quantidade de piacutexeis deve ser
fixado para evitar que regiotildees muito pequenas sejam incluiacutedas na segmentaccedilatildeo o
que pode prejudicar esta etapa pois se espera que a imagem seja segmentada com
o menor nuacutemero de regiotildees
87
5 RESULTADOS E DISCUSSOtildeES
51 CALIBRACcedilAtildeO DA CAcircMARA
Com o objetivo de calcular os POI o processo de calibraccedilatildeo da cacircmara foi
realizado com o Toolbox CALIB do software Matlab que utiliza o meacutetodo proposto
por ZHANG (2000) O gabarito fotografado foi impresso com 7x9 quadrados com
dimensatildeo de 117x117mm Estas imagens foram captadas a uma distacircncia
aproximada de 25 metros da cacircmara Para que houvesse pontos do gabarito sobre
a aacuterea da imagem foram obtidas 36 imagens com diferentes orientaccedilotildees conforme eacute
ilustrado com a Figura 51
FIGURA 51 ndash Imagens do gabarito utilizadas na calibraccedilatildeo da cacircmara
88
A Orientaccedilatildeo Exterior das imagens em relaccedilatildeo agrave cacircmara para a calibraccedilatildeo eacute
ilustrada com a Figura 52 A cacircmara eacute representada com a piracircmide em linhas
vermelhas e a origem do sistema fotogrameacutetrico eacute representada com a interseccedilatildeo
das linhas representadas com a cor azul no veacutertice da piracircmide
FIGURA 52 ndash Orientaccedilatildeo Exterior das fotografias para a calibraccedilatildeo da cacircmara
A distorccedilatildeo causada pelo sistema de lentes da cacircmara ocorre de forma mais
intensa nas bordas da imagem sendo a regiatildeo central o local com menor presenccedila
desta distorccedilatildeo A Figura 53 comprova este fato onde os vetores representados
com a cor vermelha partem dos pontos de controle na imagem e indicam a direccedilatildeo e
o sentido em que a distorccedilatildeo aumenta
FIGURA 53 ndash Direccedilatildeo das distorccedilotildees nos pontos da imagem TOF
89
Realizada a leitura das coordenadas dos pontos de controle os POI foram
calculados com o processo de calibraccedilatildeo da cacircmara e satildeo apresentados com a
Tabela 51
PARAcircMETROS INICIAIS OBTIDOS COM A LEITURA DAS IMAGENS
PARAcircMETRO VALOR
(piacutexeis) (mm)
Distacircncia focal (119891) (119891119909) (119891119910 )
285 80288 285 80288
1286113 1286113
Coordenadas do Ponto Principal (1199090)
(Origem no canto superior esquerdo) (1199100) 10150000 10150000
456750 456750
PARAcircMETROS DETERMINADOS COM A CALIBRACcedilAtildeO DA CAcircMARA
PARAcircMETRO VALOR DESVIO (3σ)
(piacutexeis) (mm) (piacutexeis) (mm)
Distacircncia focal (119891119888) calibrada (119891119909119888 ) (119891119910119888 )
29240511 29364057
1315823 1321383
plusmn 373164 plusmn 335357
plusmn 0167924 plusmn 0150911
Coordenadas do Ponto Principal (1199090119888 )
(Origem no canto superior esquerdo) (1199100119888 ) 10435253 10022287
4695864 4510029
plusmn 320459 plusmn 336886
plusmn 0144207 plusmn 0151599
1198701 -046768 -0021045 plusmn 003106 plusmn 0001398
1198702 060997 0027449 plusmn 013880 plusmn 0006246
1198703 000107 48150e-5
plusmn 000162 plusmn 72900e-5
1198751 000035 19350e-5
plusmn 000204 plusmn 91800e-5
1198752 000000 0000000 plusmn 000000 plusmn 0000000
Erro em pixel (119864119909 )
(119864119910 ) 049340 042754
0022203 0019239
TABELA 51 ndash Paracircmetros de Orientaccedilatildeo Interior calculados
Com os valores dos POI determinados foram calculados os fatores de escala
dos piacutexeis nas direccedilotildees 119904119909 e 119904119910 conforme as Equaccedilotildees (51) e (52)
119904119909 =119891
119891119909119888=
128119898119898
1315823119898119898= 0972775 (51)
119904119910 =119891
119891119910119888=
128119898119898
1321383119898119898= 0968682 (52)
A partir dos fatores de escala e da dimensatildeo do pixel igual a 45120583119898 das
imagens obtidas com a cacircmara PMD CamCube 20 foi calculado o tamanho efetivo
dos piacutexeis nas direccedilotildees x e y atraveacutes das Equaccedilotildees (53) e (54)
119875119909 = P ∙ 119904119909 = 45120583119898 ∙ 0972775 = 43774875120583119898 cong 44120583119898 (53)
119875119910 = P ∙ 119904119910 = 45120583119898 ∙ 0968682 = 43590690120583119898 cong 44120583119898 (54)
90
Os valores obtidos com as Equaccedilotildees (53) e (54) indicam que os elementos
do sensor podem ser considerados quadrados De acordo com Bazan et al (2009)
quando a diferenccedila de escala entre os lados do piacutexel natildeo eacute fornecida pelo fabricante
da cacircmara o fator de escala calculado para x pode absorver esta diferenccedila
Com a razatildeo entre as distacircncias focais obtidas com a calibraccedilatildeo da cacircmara
pode-se verificar a diferenccedila de escala Para a dimensatildeo do sensor esta diferenccedila
de escala natildeo alcanccedila o tamanho de um pixel conforme Equaccedilatildeo (56)
119863119868119865119864119878119862 =119891119909119888
119891119910119888=
1321383119898119898
1315823119898119898minus 1 = 1004225 minus 1 = 0004225 (55)
119863119868119865119864119878119862 = 0004225 lowast 204 = 08619 lt 1119901119894119909119890119897 (56)
A Equaccedilatildeo (56) indica que a diferenccedila de escala entre os eixos x e y eacute
menor que a dimensatildeo de um pixel isto considerando toda a dimensatildeo da imagem
de 204x204 piacutexeis da cacircmara PMD CamCube 20
Determinados os POI a imagem pode entatildeo ter sua geometria corrigida
conforme eacute ilustrado com a Figura 54b A Figura 54a ilustra a imagem original
obtida do gabarito onde se apresentam curvaturas provenientes da distorccedilatildeo
causada pelo sistema de lentes da cacircmara
FIGURA 54 ndash Correccedilatildeo geomeacutetrica da imagem TOF
91
Para a correccedilatildeo geomeacutetrica de imagens obtidas com cacircmaras de pequeno
formato Zhang (2000) recomenda utilizar somente os paracircmetros de distacircncia focal
calibrada 119891119888 coordenadas do Ponto Principal no plano da imagem 1199090 e 1199100 e os
coeficientes de Distorccedilatildeo Radial Simeacutetrica ateacute o segundo termo 1198701 e 1198702 Isto porque
este modelo de cacircmara apresenta principalmente a Distorccedilatildeo Radial Simeacutetrica
Outro fator diz respeito ao desvio calculado na determinaccedilatildeo de cada um destes
paracircmetros conforme valores apresentados na Tabela 51 o terceiro paracircmetro de
Distorccedilatildeo Radial Simeacutetrica 1198703 e os paracircmetros de Distorccedilatildeo Descentrada 1198751 e 1198752
apresentaram valores de desvios maiores do que os proacuteprios paracircmetros devendo
entatildeo serem desconsiderados para a correccedilatildeo geomeacutetrica da imagem
92
52 EXPERIMENTO 1 ndash ANAacuteLISE DE RUIacuteDO 1 IMAGEM TOF INTEIRA
O objetivo deste experimento consistiu em avaliar a presenccedila de ruiacutedo em
funccedilatildeo do tempo de integraccedilatildeo (TI) na aquisiccedilatildeo das imagens TOF Para sua
realizaccedilatildeo foram utilizadas imagens de uma parede com superfiacutecie plana distante
130m da cacircmara PMD CamCube 20 onde tambeacutem aparece parte de uma porta
Foram tomadas cinco imagens para cada valor de TI que variou entre 500 1000
1500 1700 1800 1900 2000 2500 3000 3500 4000 4500 5000 5300 5500
6000 e 7000μs gerando assim um conjunto de 85 imagens TOF
Com o objetivo de avaliar e reduzir a presenccedila de ruiacutedo nas imagens foram
realizadas as seguintes filtragens
Filtro passa-baixas pela meacutedia
Filtro pela mediana
Caacutelculo da meacutedia dos valores de distacircncia para imagens TOF
adquiridas com mesmo TI em instantes brevemente diferentes
Para cada imagem original foram criadas trecircs novas imagens filtradas com
os procedimentos mencionados
No graacutefico de dispersatildeo ilustrado com a Figura 55 os desvios padratildeo para o
conjunto de observaccedilotildees satildeo mostrados em funccedilatildeo do TI Foram calculados com
referecircncia no pixel central com coordenadas (102 102) e a aacuterea utilizada para o
caacutelculo possui dimensatildeo de 10x10 piacutexeis Escolheu-se esta regiatildeo por apresentar
padratildeo planar da superfiacutecie com menor distorccedilatildeo causada pelo sistema de lentes da
cacircmara tendo-se em vista que nesta etapa natildeo foi realizada a correccedilatildeo geomeacutetrica
dos dados da imagem TOF
Ainda com a Figura 55 verificou-se que o filtro da mediana aplicado nas
imagens gerou os menores desvios para a janela de 10x10 piacutexeis O menor desvio
calculado foi 12mm encontrado utilizando o filtro da mediana para o TI igual a
3000micros Verificou-se tambeacutem que os desvios apresentam valores similares para os
tempos de integraccedilatildeo que variaram entre 1500 agrave 2500micros para as imagens originais e
tambeacutem para as imagens filtradas
93
FIGURA 55 ndash Desvio padratildeo x TI janelas 10x10
A partir do graacutefico de dispersatildeo da Figura 55 escolheram-se imagens
captadas com os tempos de integraccedilatildeo de 500 2000 e 2500micros para realizar os
testes A Figura 56 ilustra superfiacutecies geradas a partir de filtragens realizadas em
imagem TOF obtida com TI igual a 500μs
FIGURA 56 ndash Imagens para TI=500μs e d=130m
94
Com TI de 500μs verificou-se intensa presenccedila de ruiacutedo na imagem original
e tambeacutem nas imagens filtradas Isto ocorreu devido ao baixo tempo de exposiccedilatildeo
do sensor A distorccedilatildeo causada pelo sistema de lentes da cacircmara tambeacutem pode ser
visualizada nestas superfiacutecies geradas com os arquivos de distacircncias da imagem
TOF As imagens foram obtidas de uma parede plana em que aparece parte de uma
porta o que justifica a descontinuidade vista em forma de degrau A anaacutelise
realizada com TI de 2000μs eacute ilustrada com a Figura 57
FIGURA 57 ndash Imagens para TI=2000μs e d=130m
Com TI de 2000μs obtiveram-se resultados melhores do que os obtidos com
TI de 500μs as superfiacutecies apresentaram-se mais suaves confirmando a tendecircncia
demonstrada com o graacutefico de dispersatildeo da Figura 55
A uacuteltima anaacutelise deste experimento foi realizada com o tempo de integraccedilatildeo
de 2500μs conforme pode ser visualizado com as superfiacutecies geradas com os
arquivos de distacircncias da imagem TOF original e das imagens filtradas ilustradas
com a Figura 58
95
FIGURA 58 ndash Imagens para TI=2500μs e d=130m
As imagens filtradas com TI de 2000μs e 2500μs apresentam suavizaccedilotildees
similares nas superfiacutecies geradas com os arquivos de distacircncias da imagem TOF
Verificou-se que o tempo de integraccedilatildeo para a aquisiccedilatildeo das imagens da parede a
13m de distacircncia da cacircmara deve ser um destes valores O TI de 2000μs pode ser
o escolhido e estaacute de acordo com o graacutefico de dispersatildeo ilustrado com a Figura 55
As filtragens de suavizaccedilatildeo com o filtro passa-baixas pela meacutedia e pela
mediana mostraram-se as melhores opccedilotildees a serem utilizadas com estas filtragens
apresentaram-se os menores desvios para a janela central de 10x10 piacutexeis Uma
vantagem da filtragem pela mediana eacute que mantecircm os valores originais de distacircncia
para os piacutexeis da imagem e preserva as bordas do objeto imageado No entanto a
filtragem com a mediana degrada as bordas da imagem devendo ser
cuidadosamente analisada para cada aplicaccedilatildeo
Tambeacutem foram calculados os desvios padratildeo para as imagens inteiras e os
valores obtidos foram de 19cm em meacutedia Este grande valor deveu-se a maior
curvatura ocorrer nas extremidades da imagem e tambeacutem ao fato de haver uma
descontinuidade na superfiacutecie presente na imagem TOF causada pela porta
presente na superfiacutecie da parede
96
53 EXPERIMENTO 2 ndash ANAacuteLISE DE RUIacuteDO 2 JANELAS DE 40X40 PIacuteXEIS
O objetivo deste experimento foi analisar a presenccedila de ruiacutedo em aacutereas
centrais da imagem TOF Para isto escolheram-se janelas com dimensotildees de 40x40
piacutexeis ao redor do pixel central da imagem Calculou-se o desvio padratildeo da distacircncia
de cada pixel em relaccedilatildeo a este pixel central As janelas utilizadas tiveram sua
posiccedilatildeo na imagem variando de (8282) ateacute (122122) e correspondem a aacuterea com
superfiacutecie plana de uma parede presente na cena
Primeiramente utilizaram-se imagens TOF adquiridas agrave distacircncia de 130m
entre a cacircmara e a parede com os tempos de integraccedilatildeo iguais a 2000 e 5000micros
Posteriormente utilizaram-se imagens TOF obtidas a 210m da parede com tempos
de integraccedilatildeo iguais a 2000 5000 e 7000micros
O graacutefico de dispersatildeo da Figura 59 ilustra uma anaacutelise para a captaccedilatildeo de
imagens TOF com diferentes distacircncias e tempos de integraccedilatildeo Os desvios padratildeo
foram calculados para imagens TOF captadas com a cacircmara CamCube 20 onde
variaram-se as distacircncias e os tempos de integraccedilatildeo no momento da aquisiccedilatildeo das
imagens
FIGURA 59 ndash Desvios padratildeo para distacircncia x TI
FONTE CENTENO e JUTZI (2010)
97
Com a Figura 510 eacute apresentado o primeiro resultado deste experimento o
graacutefico de dispersatildeo gerado com a imagem TOF adquirida do objeto agrave distacircncia de
130m da cacircmara com TI igual a 2000micros
FIGURA 510 ndash Desvios padratildeo para janelas com TI=2000μs d=130m
A Figura 511 ilustra as superfiacutecies geradas com o arquivo de distacircncias da
imagem TOF adquirida do objeto agrave distacircncia de 130m da cacircmara com TI igual a
2000micros e com as imagens resultantes das filtragens realizadas
FIGURA 511 ndash Janelas de 40x40 piacutexeis TI=2000μs d=130m
98
Com a Figura 511 conclui-se que os melhores resultados para a suavizaccedilatildeo
dos dados de distacircncia foram obtidos com os filtros passa-baixas pela meacutedia e
mediana
A Figura 512 ilustra o graacutefico de dispersatildeo para a imagem adquirida com TI
igual a 5000μs com distacircncia de 130m entre o objeto imageado e a cacircmara TOF A
Figura 513 ilustra as superfiacutecies geradas com as janelas centrais de 40x40 piacutexeis
FIGURA 512 ndash Desvios padratildeo para janelas com TI=5000μs d=130m
FIGURA 513 ndash Janelas de 40x40 piacutexeis TI=5000μs d=130m
99
O TI de 5000μs utilizado para a aquisiccedilatildeo da imagem saturou os elementos
do sensor e causou maior presenccedila de ruiacutedo nos dados Comparando as Figuras
511 e 513 conclui-se que para a distacircncia de 130m do sensor o tempo de
integraccedilatildeo mais adequado para a aquisiccedilatildeo da imagem foi 2000micros
A Figura 514 ilustra o graacutefico de dispersatildeo gerado para a imagem TOF
obtida com TI igual a 2000μs e distacircncia de 210m As superfiacutecies geradas a partir
das janelas de 40x40 piacutexeis desta imagem satildeo apresentadas com a Figura 515
FIGURA 514 ndash Desvios padratildeo para janelas com TI=2000μs d=210m
FIGURA 515 ndash Janelas de 40x40 piacutexeis TI=2000μs d=210m
100
O graacutefico de dispersatildeo calculado para a imagem adquirida com TI igual a
5000μs e distacircncia de 210m eacute ilustrado com a Figura 516
FIGURA 516 ndash Desvios padratildeo para janelas com TI=5000μs d=210m
Os menores desvios padratildeo foram encontrados na imagem filtrada utilizando
os filtros passa-baixas pela meacutedia e mediana conforme pode ser visualizado com a
Figura 516 Para a janela de 40x40 piacutexeis o desvio padratildeo de 107mm na imagem
original diminuiu para 96mm com a filtragem pela mediana A Figura 517 ilustra as
superfiacutecies geradas para a imagem obtida com distacircncia de 210m e TI de 5000μs
FIGURA 517 ndash Janelas de 40x40 piacutexeis TI=5000μs d=210m
101
Com a Figura 517 observa-se novamente que os melhores resultados para
a suavizaccedilatildeo da imagem foram obtidos com os filtros passa-baixas pela meacutedia e
pela mediana
A Figura 518 ilustra o graacutefico de dispersatildeo e a Figura 519 ilustra as
superfiacutecies geradas para as imagens adquiridas com distacircncia de 210m e TI igual a
7000μs
FIGURA 518 ndash Desvios padratildeo para janelas com TI=7000μs d=210m
FIGURA 519 ndash Janelas de 40x40 piacutexeis TI=7000μs d=210m
102
Com o graacutefico de dispersatildeo ilustrado com a Figura 518 observa-se que os
desvios padratildeo calculados para as imagens obtidas com os filtros passa-baixas pela
meacutedia e mediana satildeo maiores do que os desvios apresentados com o graacutefico de
dispersatildeo ilustrado com a Figura 516 Isto indica que as imagens captadas da
parede plana com TI igual a 7000μs e distacircncia de 210m apresentaram maior ruiacutedo
que as imagens obtidas com 5000μs
Comparando as Figuras 519 e 517 verifica-se que a imagem captada com
TI igual a 5000μs com distacircncia de 210m e filtrada com o filtro passa-baixas pela
meacutedia e tambeacutem com a mediana apresentou-se mais suavizada do que a imagem
obtida com TI igual a 7000μs
Comparando as imagens captadas com tempo de integraccedilatildeo de 2000μs e
5000μs para a distacircncia de 210m conforme Figuras 515 e 517 conclui-se que as
imagens obtidas com TI de 5000μs apresentaram menor presenccedila de ruiacutedo
54 EXPERIMENTO 3 ndash PROJECcedilAtildeO ORTOGONAL DOS PONTOS
Obtidos os POI atraveacutes do processo de calibraccedilatildeo da cacircmara e definido o
melhor TI para a captaccedilatildeo da imagem procedeu-se a um novo experimento no qual
se analisou a imagem de uma caixa com superfiacutecies planas A superfiacutecie do objeto
em questatildeo eacute composta por papel branco riacutegido e refletivo A caixa foi colocada
sobre uma cadeira agrave distacircncia aproximada de 13m da cacircmara Esta cadeira foi
girada enquanto a cacircmara continuou fixa com o mesmo ponto de vista Com base
no estudo da dispersatildeo dos dados em funccedilatildeo da distacircncia ao objeto optou-se por
utilizar o TI de 2000μs para a captaccedilatildeo das imagens Foram entatildeo adquiridas dez
imagens do objeto
Com a distacircncia do objeto em relaccedilatildeo agrave cacircmara igual a 13m e com a
distacircncia focal calibrada da cacircmara de 132mm valor encontrado com a Equaccedilatildeo
(57) calculou-se a escala aproximada das fotografias encontrando-se o valor
aproximado para a escala igual a 1100 conforme Equaccedilatildeo (58)
119891119888 =119891119909119888+119891119910119888
2=
1315823119898119898+1321383119898119898
2= 1318603119898119898 cong 132119898119898 (57)
103
119864 =119889
119863=
119891119888
119885=
132119898119898
13119898=
00132119898
13119898=
1
984848cong
1
100 (58)
Para realizar este experimento selecionou-se a terceira imagem captada por
apresentar vista perspectiva de trecircs superfiacutecies com padratildeo planar no objeto
imageado A Figura 520a ilustra o arquivo de intensidades da imagem TOF sem
correccedilatildeo geomeacutetrica A Figura 520b ilustra o arquivo de intensidade corrigido
geometricamente utilizando as coordenadas do Ponto Principal 1199090 e 1199100 os
coeficientes de distorccedilatildeo Radial Simeacutetrica 1198701 e 1198702 e a distacircncia focal calibrada 119891119888
FIGURA 520 ndash Arquivo de intensidades da imagem TOF obtida do objeto
Apoacutes a correccedilatildeo da geometria da imagem TOF geraram-se as superfiacutecies do
objeto Isto foi feito a partir do arquivo de distacircncias da imagem TOF conforme eacute
ilustrado com a Figura 521 onde se tem as distacircncias dos pontos em relaccedilatildeo ao
sensor representadas com a coordenada Z em metros sobre a imagem TOF com
dimensatildeo de 204x204 piacutexeis
104
FIGURA 521 ndash Arquivo de distacircncias da imagem TOF com geometria corrigida
A partir do arquivo de distacircncias da imagem TOF com a geometria dos
dados corrigida projetaram-se ortogonalmente os pontos gerando a nuvem de
pontos 3D ilustrada com a Figura 522 em vista frontal com o eixo Z ortogonal aos
eixos X e Y representados
FIGURA 522 ndash Nuvem de pontos vista frontal
105
A vista em perspectiva tridimensional da nuvem de pontos do objeto de
estudo eacute ilustrada com a Figura 523 Conteacutem 42025 pontos gerados a partir da
imagem TOF de 204x204 piacutexeis obtida com a cacircmara PMD CamCube 20
FIGURA 523 - Nuvem de pontos vista perspectiva 3D
106
55 EXPERIMENTO 4 ndash SEGMENTACcedilAtildeO 1 CRESCIMENTO DE REGIOtildeES
Realizou-se a segmentaccedilatildeo por crescimento de regiotildees a partir de trecircs
pontos semente Estes pontos foram escolhidos em aacutereas uniformes no arquivo de
intensidades da imagem TOF corrigida geometricamente e foram projetados
ortogonalmente para a nuvem 3D As coordenadas de imagem destes pontos foram
observadas nas posiccedilotildees indicadas com a Figura 524
FIGURA 524 ndash Pontos semente no arquivo de intensidades da imagem TOF
Os pontos semente foram escolhidos em trecircs superfiacutecies planas da caixa em
locais que apresentavam valores de intensidade uniforme As coordenadas de
imagem lidas em piacutexeis para estes trecircs pontos foram Ponto 1 (11681) Ponto 2
(72103) Ponto 3 (113108)
As Figuras 525 e 526 ilustram o crescimento em trecircs regiotildees realizados na
nuvem de pontos 3D Estes pontos correspondem agraves superfiacutecies frontal superior e
lateral da caixa ilustradas com as cores amarela verde e ciano respectivamente
Os trecircs autovetores calculados satildeo ilustrados com a cor azul ortogonais aos pontos
semente escolhidos nas trecircs superfiacutecies da imagem de intensidade
107
FIGURA 525 ndash Crescimento de regiotildees vista frontal
FIGURA 526 ndash Crescimento de regiotildees vista perspectiva 3D
Com as Figuras 525 e 526 verifica-se que o crescimento das regiotildees
ocorreu de forma coerente acompanhando o padratildeo planar das superfiacutecies do
objeto de estudo No entanto nas trecircs superfiacutecies analisadas houve crescimento de
regiotildees para fora dos limites de suas aacutereas Pontos de superfiacutecies ao fundo e abaixo
do objeto foram incluiacutedos nas regiotildees Isto ocorreu devido agrave utilizaccedilatildeo do criteacuterio de
108
similaridade de distacircncia do ponto agrave superfiacutecie plana sendo esta superfiacutecie definida
pelos pontos semente A distacircncia foi medida ao longo do autovetor o que fez com
que pontos de outras superfiacutecies paralelas a superfiacutecie plana em questatildeo fossem
agrupados na mesma regiatildeo Ou seja pontos que estavam orientados na direccedilatildeo da
superfiacutecie plana definida pelo autovalor que passa pelo ponto semente e que
estavam dentro do limiar de distacircncia estabelecido foram incluiacutedos nas regiotildees
mesmo natildeo pertencendo agrave superfiacutecie analisada
56 EXPERIMENTO 5 ndash SEGMENTACcedilAtildeO 2 ANAacuteLISE COM AUTOVALORES
Neste experimento realizou-se a segmentaccedilatildeo da imagem TOF por anaacutelise
da variaccedilatildeo local de autovalores locais de superfiacutecies O arquivo de distacircncias desta
imagem foi utilizado como ponto de partida para o caacutelculo dos autovalores com o
objetivo de intensificar as bordas dos objetos presentes na cena
O processamento consistiu em definir uma pequena vizinhanccedila quadrada
uma janela moacutevel e utilizar as coordenadas tridimensionais dos pontos nesta
vizinhanccedila para o caacutelculo dos autovalores
Apoacutes a normalizaccedilatildeo os autovalores foram armazenados na forma de trecircs
novas imagens conforme pode ser visualizado com as Figuras 527 528 e 529
Para a geraccedilatildeo destas imagens utilizou-se a janela moacutevel com dimensatildeo de 3x3
piacutexeis para o caacutelculo dos autovalores
109
FIGURA 527 ndash Imagem com bordas intensificadas gerada com 1205821
FIGURA 528 ndash Imagem com bordas intensificadas gerada com 1205822
FIGURA 529 ndash Imagem com bordas intensificadas gerada com 1205823
110
A partir da imagem com bordas intensificadas gerada com os autovalores
locais foi possiacutevel criar uma nova imagem de intensidade que tambeacutem estava com
as bordas dos objetos intensificadas A Figura 530 ilustra as imagens de
intensidade com bordas intensificadas que foram geradas utilizando o segundo
autovalor calculado a partir de janelas com as seguintes dimensotildees a)3x3 b)5x5
c)7x7 d)9x9 e)11x11 f)13x13 piacutexeis
FIGURA 530 ndash Imagens de intensidade com as bordas do objeto intensificadas
111
Com as imagens de intensidade ilustradas com a Figura 530 observou-se
que aumentando a quantidade de piacutexeis da janela utilizada para o caacutelculo dos
autovalores da regiatildeo aumentou-se tambeacutem a suavizaccedilatildeo sobre as superfiacutecies
planas e alargaram-se as bordas que limitam os objetos contidos na cena
Para este experimento utilizou-se a imagem gerada com a janela de 3x3
piacutexeis e com o segundo autovalor Esta imagem foi escolhida por apresentar linhas
finas limitando as bordas do objeto A imagem de intensidade com as bordas do
objeto intensificadas foi segmentada utilizando o algoritmo de deslocamento pela
meacutedia O resultado da segmentaccedilatildeo eacute ilustrado com a Figura 531
FIGURA 531 ndash Imagem com bordas intensificadas segmentada
112
A Figura 531a ilustra a imagem com bordas intensificadas a ser
segmentada gerada com o segundo conjunto de autovalores 1205822 Na Figura 531b
tem-se esta imagem suavizada por filtragem A Figura 531c corresponde agrave imagem
segmentada com o algoritmo de deslocamento pela meacutedia A imagem com os limites
das aacutereas segmentadas eacute ilustrada com a Figura 531d
A segmentaccedilatildeo foi realizada utilizando o software EDISON com os
paracircmetros (119893119904 119893119903 119867) = (7 9 300) Estes paracircmetros correspondem ao domiacutenio
espacial da imagem 119893119904 domiacutenio de caracteriacutesticas 119893119903 e tamanho miacutenimo das
regiotildees 119867 em piacutexeis O limite miacutenimo foi fixado para evitar que regiotildees muito
pequenas fossem incluiacutedas na segmentaccedilatildeo
Com a imagem segmentada da Figura 529c foi possiacutevel projetar os pontos
de interesse ortogonalmente gerando a nuvem de pontos 3D Para isto utilizou-se
as coordenadas dos piacutexeis no arquivo de intensidades e seus correspondentes no
arquivo de distacircncias da imagem TOF Estes pontos foram escolhidos sobre as
superfiacutecies da caixa A nuvem de pontos 3D resultante deste experimento eacute
apresentada com as Figuras 532 e 533
FIGURA 532 ndash Nuvem de pontos da imagem segmentada vista frontal
113
FIGURA 533 ndash Nuvem de pontos da imagem segmentada vista 3D
57 EXPERIMENTO 6 ndash ANAacuteLISE DAS MEDIDAS OBTIDAS
Para gerar a nuvem de pontos 3D com as superfiacutecies de interesse
primeiramente corrigiu-se a geometria do arquivo de distacircncias da imagem TOF com
as coordenadas do Ponto Principal 1199090 e 1199100 coeficientes de distorccedilatildeo Radial
Simeacutetrica 1198701 e 1198702 e distacircncia focal calibrada 119891119888 O passo seguinte foi gerar uma
imagem de intensidade com as bordas do objeto intensificadas Com este objetivo
calcularam-se os autovalores para os pontos do arquivo de distacircncias da imagem
TOF e geraram-se trecircs imagens novas correspondendo aos trecircs autovalores
calculados conforme o Experimento 5 O terceiro passo foi a segmentaccedilatildeo da
imagem de intensidade com bordas intensificadas utilizando o algoritmo de
deslocamento pela meacutedia Com a imagem segmentada pocircde-se escolher as
superfiacutecies que teriam seus piacutexeis projetados para a nuvem de pontos 3D
A imagem segmentada com o algoritmo de deslocamento pela meacutedia
apresenta niacuteveis de cinza diferentes para os piacutexeis de cada segmento Com isto foi
possiacutevel separar os pontos que compotildeem as superfiacutecies por seus valores digitais A
Figura 534 apresenta a nuvem de pontos 3D gerada com a imagem TOF corrigida
geometricamente com os pontos da superfiacutecie frontal representados com a cor azul
114
FIGURA 534 ndash Nuvem de pontos 3D segmentada
A superfiacutecie frontal foi projetada com atributo de cor diferenciado por
apresentar a melhor segmentaccedilatildeo na imagem de intensidade e pontos bem
definidos na nuvem 3D A partir desta superfiacutecie escolheram-se os pontos extremos
os veacutertices do objeto para a leitura de suas coordenadas 3D com o objetivo de
calcular o comprimento das arestas Com a Figura 535 satildeo ilustrados os quatro
pontos selecionados
FIGURA 535 ndash Pontos 3D selecionados na nuvem
115
Com as coordenadas destes quatro pontos e atraveacutes da relaccedilatildeo de distacircncia
tridimensional entre eles expressa pela Equaccedilatildeo (59) calcularam-se as dimensotildees
de trecircs arestas do objeto de estudo
119863119894119895 = 119883119894minus119883119895 2
+ 119884119894minus119884119895 2
+ 119885119894minus119885119895 2 (59)
onde
119863119894119895 ndash Distacircncia entre pontos no espaccedilo tridimensional
119883119894 119884119894 119885119894 119890 119883119895 119884119895 119885119895 - Coordenadas dos pontos 119894 e 119895 na nuvem de pontos 3D
Para verificar a confiabilidade das medidas obtidas com a metodologia
proposta compararam-se as medidas das arestas calculadas a partir dos pontos 3D
com as dimensotildees de referecircncia do objeto de estudo As medidas de referecircncia satildeo
ilustradas com o desenho da Figura 536
FIGURA 536 ndash Dimensotildees de referecircncia do objeto de estudo
A partir das coordenadas tridimensionais dos quatro pontos ilustrados com a
Figura 535 foi possiacutevel calcular as distacircncias entre os pontos e comparar-las com
as medidas de referecircncia As diferenccedilas obtidas satildeo ilustradas com a Tabela 52
116
Ponto
Coordenadas Arestas Medida realizada Diferenccedilas
X (cm) Y (cm) Z (cm) Pontos 3D (cm)
Ref (cm)
(cm) ()
1 -131 -136 -1219 Pontos 1-2 236 260 24 92
2 -80 61 -1098 Pontos 2-3 332 350 18 51
3 234 38 -1203 Pontos 2-4 263 210 53 252
4 -125 180 -1328
TABELA 52 ndash Coordenadas 3D dos pontos e medidas realizadas
O melhor resultado foi obtido para a medida realizada sobre a aresta entre
os pontos 2-3 com diferenccedila de aproximadamente 18 cm em relaccedilatildeo agrave medida de
referecircncia o que representa 5 da distacircncia medida O pior resultado foi obtido com
o calculo da aresta entre os pontos 2 e 4 com diferenccedila de aproximadamente
53cm que equivale 25 da medida de referecircncia Com este resultado conclui-se
que os pontos projetados com maior profundidade na nuvem de pontos 3D
apresentaram maior erro de posicionamento Estes pontos descrevem uma
superfiacutecie plana do objeto pouco aparente na imagem encontra-se muito inclinada
em relaccedilatildeo ao plano da imagem motivo pelo qual erros maiores podem ser
esperados Sobre os pontos 1 2 e 3 da superfiacutecie frontal do objeto o erro foi menor
na ordem de 2 centiacutemetros
Conforme o Experimento 1 realizado para a anaacutelise de ruiacutedo o melhor
resultado foi obtido utilizando o filtro da mediana que apresentou o desvio de 13cm
para a distacircncia de 13m medida utilizando tempo de integraccedilatildeo de 2000micros Este
fato indica coerecircncia com a diferenccedila de 2cm encontrada com a medida da aresta
frontal do objeto
117
58 MODELAGEM DAS SUPERFIacuteCIES 3D
Para a modelagem tridimensional das superfiacutecies segmentadas
primeiramente foi analisada a melhor forma de processamento da imagem TOF
Verificou-se com o Experimento 4 que o crescimento de regiotildees utilizando o arquivo
de intensidades da imagem TOF para escolha do ponto semente e o arquivo de
distacircncias para a projeccedilatildeo ortogonal e crescimento de regiotildees a partir deste ponto
natildeo foi satisfatoacuterio Isto porque o crescimento tambeacutem ocorreu em superfiacutecies que
natildeo pertenciam ao objeto analisado
Melhores resultados foram obtidos com a metodologia de segmentaccedilatildeo que
utilizou a imagem com bordas evidenciadas Esta foi gerada com a anaacutelise dos
autovalores locais das superfiacutecies a partir do arquivo de distacircncias da imagem TOF
conforme Experimento 5 A partir desta segmentaccedilatildeo projetaram-se ortogonalmente
os pontos das superfiacutecies frontal e superior do objeto de estudo gerando assim a
nuvem de pontos 3D que eacute ilustrada com a Figura 537
FIGURA 537 ndash Nuvem de pontos 3D das superfiacutecies frontal e superior
A partir da nuvem de pontos 3D realizou-se a modelagem das superfiacutecies
frontal e superior do objeto conforme eacute ilustrado com a Figura 538
118
FIGURA 538 ndash Modelagem tridimensional das superfiacutecies frontal e superior
Analisando a Figura 538 chegou-se a conclusatildeo que a superfiacutecie frontal do
objeto apresentou-se com padratildeo planar e uniforme Eacute a superfiacutecie que melhor
refletiu o sinal para o sensor devido agrave sua posiccedilatildeo em relaccedilatildeo agrave cacircmara TOF A
superfiacutecie superior apresentou-se um pouco inclinada em relaccedilatildeo ao plano da
imagem e com isto maior rugosidade foi observada nesta superfiacutecie Este
fenocircmeno deve-se a menor captaccedilatildeo do sinal refletido pela superfiacutecie do objeto pelo
sensor da cacircmara
119
6 CONCLUSOtildeES RECOMENDACcedilOtildeES E CONSIDERACcedilOtildeES FINAIS
61 CONCLUSOtildeES
Neste trabalho descreveram-se conceitos introdutoacuterios sobre as cacircmaras
TOF Avaliaram-se duas metodologias para a segmentaccedilatildeo da nuvem de pontos 3D
gerada a partir da imagem TOF Apresentou-se uma aplicaccedilatildeo para esta imagem na
extraccedilatildeo de informaccedilotildees meacutetricas do objeto de estudo imageado a distacircncia
aproximada de 13m
Para isto foram abordados os seguintes assuntos calibraccedilatildeo da cacircmara
para a obtenccedilatildeo de POI correccedilatildeo geomeacutetrica da imagem TOF filtragens para
anaacutelise e tratamento de ruiacutedo segmentaccedilatildeo atraveacutes do crescimento de regiotildees a
partir de um ponto semente segmentaccedilatildeo do arquivo de distacircncias da imagem TOF
utilizando autovalores locais para a geraccedilatildeo de uma imagem com bordas
intensificadas segmentaccedilatildeo da imagem com bordas intensificadas atraveacutes do
algoritmo de deslocamento pela meacutedia geraccedilatildeo da nuvem de pontos 3D atraveacutes da
projeccedilatildeo ortogonal dos pontos da imagem de bordas segmentada e por fim a
modelagem tridimensional de superfiacutecies do objeto de estudo
O processo de calibraccedilatildeo da cacircmara foi realizado utilizando o meacutetodo
proposto por Zhang (2000) e possibilitou a determinaccedilatildeo de POI A correccedilatildeo
geomeacutetrica das imagens foi feita atraveacutes das coordenadas 1199090 e 1199100 do Ponto
Principal coeficientes de distorccedilatildeo Radial Simeacutetrica de lentes 1198701 e 1198702 e distacircncia
focal calibrada 119891119888
Com os Experimentos 1 e 2 foram realizadas filtragens para o tratamento de
ruiacutedo das imagens TOF disponiacuteveis Nestes experimentos verificou-se que para a
captaccedilatildeo da imagem TOF agrave distacircncia de 13m entre o objeto e a cacircmara o tempo de
integraccedilatildeo de 2000μs foi o que gerou imagens com menor presenccedila de ruiacutedo Assim
como o tempo de integraccedilatildeo de 5000μs foi o mais adequado para captar imagens agrave
distacircncia de 21m No entanto chegou-se a conclusatildeo que para a geraccedilatildeo da nuvem
de pontos 3D natildeo se deveria utilizar filtragem nos dados pois pequenas alteraccedilotildees
no arquivo de distacircncias da imagem TOF poderiam modificar o posicionamento
tridimensional dos pontos o que afetaria a qualidade das medidas realizadas com os
pontos da nuvem 3D
120
A primeira metodologia proposta para a segmentaccedilatildeo da imagem TOF
mostrou-se insatisfatoacuteria para a soluccedilatildeo do problema Empregou-se o crescimento
de regiotildees a partir de pontos semente escolhidos no arquivo de intensidades desta
imagem projetando-os ortogonalmente para a nuvem de pontos 3D utilizando os
valores obtidos com o arquivo de distacircncias da imagem TOF Notou-se que erros no
crescimento de regiotildees ocorreram devido agrave toleracircncia utilizada para a distacircncia do
ponto agrave superfiacutecie plana Isto ocorreu porque a distacircncia foi calculada ao longo do
autovetor que eacute ortogonal a superfiacutecie no ponto semente Por este motivo alguns
pontos de superfiacutecies adjacentes foram selecionados equivocadamente como
pertencentes a uma mesma regiatildeo na nuvem de pontos 3D pois estavam dentro do
limite fixado no criteacuterio de similaridade utilizado mas na realidade natildeo eram
coplanares Para resolver o problema com esta metodologia seria necessaacuterio
estabelecer um limiar de crescimento lateral natildeo apenas de distacircncia ortogonal a
superfiacutecie plana semente Este limiar poderia ser o valor digital do pixel tendo em
vista que superfiacutecies coplanares apresentam uniformidade na resposta espectral A
rugosidade apresentada na superfiacutecie em que se realizava o crescimento da regiatildeo
tambeacutem influenciou em erros na seleccedilatildeo de pontos pois afetou no caacutelculo dos
autovalores fazendo com que inclinaccedilotildees em relaccedilatildeo a esta superfiacutecie fossem
notadas
A segunda metodologia analisada para a segmentaccedilatildeo da imagem TOF
mostrou-se satisfatoacuteria A segmentaccedilatildeo do arquivo de distacircncias da imagem TOF foi
realizada utilizando autovalores locais para a geraccedilatildeo de uma imagem com bordas
intensificadas segmentaccedilatildeo desta imagem com o algoritmo de deslocamento pela
meacutedia e projeccedilatildeo destes segmentos para a nuvem de pontos 3D A extraccedilatildeo de
informaccedilotildees meacutetricas em arestas do objeto de estudo a partir dos pontos 3D
apresentou diferenccedila na ordem de 2cm com a medida de referecircncia sendo a
imagem TOF adquirida com tempo de integraccedilatildeo de 2000μs a uma distacircncia
aproximada de 13m entre o objeto de estudo e a cacircmara
A Figura 61 ilustra as etapas de processamento a serem realizadas para a
geraccedilatildeo da nuvem de pontos 3D utilizando a segunda metodologia considerada
apropriada para a modelagem tridimensional de superfiacutecies utilizando a imagem
TOF Esta eacute a metodologia proposta como conclusatildeo do presente trabalho de
pesquisa
121
FIGURA 61 ndash Etapas da metodologia de processamento da imagem TOF
Foram encontradas medidas com maior qualidade quando a superfiacutecie do
objeto estava paralela ao plano da imagem Esta qualidade tambeacutem foi afetada pela
distacircncia entre a cacircmara e o objeto pela refletividade das superfiacutecies e pela
iluminaccedilatildeo ambiente Conforme o Experimento 6 realizado a aresta frontal do objeto
entre os pontos 2 e 3 apresentou a menor diferenccedila de medida 18cm que equivale
a 5 da distacircncia de referecircncia
Comparaccedilotildees para a diferenccedila de medida encontrada podem ser realizadas
com os seguintes trabalhos Kahlmann et al (2006) obtiveram exatidatildeo de 1cm nas
medidas com o alvo agrave distacircncia de 25m da cacircmara TOF utilizada Wiedemann et al
(2008) obtiveram exatidatildeo de 4cm com o alvo medido a distacircncia de 4m May et al
(2008) obtiveram erro de 30cm para uma medida de 108m considerada como
referecircncia com as imagens TOF captadas do centro de uma sala girando a cacircmara
360ordm e portanto envolviam tambeacutem Paracircmetros de Orientaccedilatildeo Exterior da cacircmara
Kolb et al (2009) obtiveram erro de 2cm para distacircncias medidas de 10m agrave 45m
Nestes trabalhos foram realizadas correccedilotildees geomeacutetricas nas imagens TOF com
POI determinados com a calibraccedilatildeo da cacircmara
Arquivo de distacircncias da imagem TOF
Correccedilatildeo geomeacutetrica dos dados utilizando POI calculados com o processo de calibraccedilatildeo da cacircmara
Imagem de intensidade com bordas itensificadas calculada com a anaacutelise da variaccedilatildeo local dos autovalores
Segmentaccedilatildeo da imagem com bordas intensificadas utilizando o algoriacutetmo de deslocamento pela meacutedia
Projeccedilatildeo ortogonal das aacutereas segmentadas para a geraccedilatildeo da nuvem de pontos 3D
Modelagem tridimensional das superfiacutecies do objeto
122
62 RECOMENDACcedilOtildeES
Recomenda-se realizar a anaacutelise preacutevia do tempo de integraccedilatildeo para a
aquisiccedilatildeo da imagem TOF com o objetivo de diminuir a presenccedila de ruiacutedo Este
tempo deve ser escolhido de acordo com o ambiente em que seraacute adquirida a
imagem e tambeacutem com as caracteriacutesticas de refletividade da superfiacutecie do objeto
Com este mesmo objetivo e devido ao fato desta imagem ser obtida com iluminaccedilatildeo
LED no comprimento de onda infravermelho recomenda-se analisar as influecircncias
da iluminaccedilatildeo exterior ao sistema de iluminaccedilatildeo da cacircmara
De acordo com a aplicaccedilatildeo a que se destina a imagem TOF recomenda-se
tambeacutem realizar a calibraccedilatildeo da cacircmara com meacutetodo fotogrameacutetrico convencional
Isto possibilitaria a melhora na correccedilatildeo geomeacutetrica da imagem e consequente
aumento na qualidade das medidas realizadas com os pontos da nuvem 3D
Correccedilotildees radiomeacutetricas tambeacutem podem ser aplicadas para melhorar a qualidade
das medidas obtidas com a imagem TOF
63 CONSIDERACcedilOtildeES FINAIS
Nuvens de pontos 3D geradas a partir de imagens TOF satildeo ferramentas
para a modelagem tridimensional das superfiacutecies de objetos Propiciam a obtenccedilatildeo
de informaccedilotildees meacutetricas destes objetos para distacircncias de 03 a 70 metros com
erro centimeacutetrico esperado
Aplicaccedilotildees para as imagens TOF podem ser realizadas para a modelagem
3D de tuacuteneis galerias instalaccedilotildees industriais e fachadas de preacutedios com interesse
de preservaccedilatildeo como patrimocircnio histoacuterico e cultural Com a alta frequecircncia de
aquisiccedilatildeo de imagens das cacircmaras TOF torna-se possiacutevel realizar filmagens e
mapeamentos em movimento
Outras aplicaccedilotildees possiacuteveis para as imagens TOF estatildeo na sua utilizaccedilatildeo
para a criaccedilatildeo de cenaacuterios 3D em jogos eletrocircnicos aquisiccedilatildeo de filmes com
tecnologia 3D modelagem tridimensional de obras de arte Biometria e anaacutelise de
movimentos
123
REFEREcircNCIAS BIBLIOGRAacuteFICAS
ANDRADE J B Fotogrametria 2 ed Curitiba SBEE 1998 274 p APUZZO N D‟ Recent advances in 3D full body scanning with applications to fashion and apparel 10p In Proceedings Optical 3-D Measurement Techniques IX Vienna Austria 2009 BALTSAVIAS E P Airborne laser scanning basic relations and formulas ISPRS - Journal of Photogrammetry amp Remote Sensing v 54 p 199-214 1999 BAZAN W S TOMMASELLI A M G GALO M RUY R S A influecircncia das injunccedilotildees de orientaccedilatildeo relativa na calibraccedilatildeo de um sistema dual de cacircmaras digitais 23p Boletim de Ciecircncias Geodeacutesicas v 15 n 3 Curitiba 2009 BELTON D Improving and extending the information on Principal Component Analysis for local neighborhoods in 3D points clouds 8p The international Archives of the Photogrammetry Remote Sensing and Spatial Information Sciences v XXXVII B5 Beijing 2008 BELTON D LICHTI D Classification and segmentation of terrestrial laser scanner point clouds using local variance information 6p In Proceedings ISPRS Commission V Simposium bdquoImage Engineering and Vision Metrology‟ 2006 BROWN D C Close-Range Camera Calibration Photogrammetric Engineering v 37 nordm 8 p 855-866 1971 CENTENO J A S Sensoriamento Remoto e Processamento de Imagens Digitais Curso de Poacutes-Graduaccedilatildeo em Ciecircncias Geodeacutesicas Curitiba UFPR 2004 209p CENTENO J A S JUTZI B Evaluation of range imaging sensor concerning resolution and illumination 6p In Proceedings The 2010 Canadian Geomatics Conference and Symposium of Commission I ISPRS Calgary Alberta 2010 CHRISTOUDIAS M C GEORGESCU B MEER P Synergism in Low Level Vision IEEE Transactions on Pattern Analysis and Machine Intelligence v 24 n 5 p 603-619 2002
124
COMANICIU D MEER P Mean Shift A Robust Approach Toward Feature Space Analysis 17p IEEE Transactions on Pattern Analysis and Machine Intelligence v 24 n 5 p 603-619 2002 FUCHS S HIRZINGER G Extrinsic and depth calibration of ToF cameras In Proceedings IEEE Conference on Computer Vision and Pattern Recognition (CVPR) Anchorage USA 2008 FUCHS S MAY S Calibration and registration for precise surface reconstruction with ToF cameras In Proceedings of the Dynamic 3D Imaging Workshop in Conjunction with DAGM (Dyn3D) v I Heidelberg Germany 2007 GEMAEL C Introduccedilatildeo ao ajustamento de observaccedilotildees aplicaccedilotildees geodeacutesicas 3 ed Curitiba UFPR 1994 319p GONZALEZ R C WOODS R E Processamento de imagens digitais Satildeo Paulo Edgard Bluumlcher Ltda 2000 509p GROSS H THOENNESSEN U Extraction of lines from laser point clouds p 86-91 In Proceedings Symposium of ISPRS Commission III Photogrammetric Computer Vision PCV06 Eds Foumlrstner W Steffen R International Archives of Photogrammetry Remote Sensing and Spatial Information Sciences 36 (Part 3) 2006 HABIB A MORGAN M Automatic calibration of low-cost digital cameras p 948-955 Journal of Photogrammetric Record 2003 JAMTSHO S Geometric modelling of 3D Range Cameras and their application for structural deformation measurement 174p (Master‟s Thesis Department of Geomatics Engineering) University of Calgary Alberta 2010 JOHNSON R A WICHERN D W Applied multivariate statistical analysis 4 ed New Jersey Pearson Prentice Hall 1998 JUTZI B GROSS H Nearest neighbor classification on laser point clouds to gain object structures from buildings 6p In Proceedings ISPRS Hannover Workshop 2009 High-Resolution Earth Imaging for Geospatial Information Disponiacutevel em lthttpwwwisprsorgproceedingsXXXVIII1_4_7-W5paperpapershtmgt Acesso 16112010
125
KAHLMANN T REMONDINO F INGENSAND H Calibration for increased accuracy of the range imaging camera SwissrangerTM ISPRS Commission V Symposium bdquoImage Engineering and Vision Metrology‟ v XXXVI n 5 2006 KEMENY S E EL-SAYED E MENDIS S FOSSUM E R Update on focal-plane image processing research 8p SPIE v 1447 Charged-Coupled Devices and Solid Optical Sensors II 1991 KHONGSAB P Signal processing and performance evaluation of a PMD camera for space docking 88p (Master‟s Thesis Continuation Courses Space Science and Technology Department of Space Science) Lulea University of Techology Kiruna 2009 KOCH R SCHILLER I BARTCZAK B KELLNER F KOumlSER K MixIn3D 3D mixed reality with ToF camera 16p In Work Programme of the EU‟s 7th Framework program 2009 KOLB A BARTH E KOCH R LARSEN R Time-of-Flight sensors in Computer Graphics 16p In STAR ndash State of The Art Report The Eurographics Association 2009 LANGE R 3D Time-of-Flight distance measurement with custom solid-state image sensors in CMOSCCD-technology 205 p (Dissertation Department of Electrical Engineering and Computer Science at University of Siegen for the degree of Doctor of Technical Sciences) Univesity of Siegen Alemanha 2000 LEON S J Linear Algebra with applications 4 ed Dartmouth Prentice Hall 1998 390p LUAN X Experimental investigation of Photonic Mixer Device and development of TOF 3D ranging systems based on PMD technology A dissertation submitted to the Department of Electrical Engineering and Computer Science at University of Siegen Siegen 2001 MACHADO A M L Extraccedilatildeo automaacutetica de contornos de edificaccedilotildees utilizando imagem gerada por cacircmara digital de pequeno formato e dados LIDAR 201 p Tese apresentada ao Curso de Poacutes-Graduaccedilatildeo em Ciecircncias Geodeacutesicas da Universidade Federal do Paranaacute Curitiba UFPR 2006
126
MASS H G VOSSELMAN Two algorithms for extracting building models from raw laser altimetry data 11p Elsevier Science Photogrammetry amp Remote Sensing 1999 MAY S DROESCHEL D HOLTZ D WIESEN C FUCHS S 3D Pose estimation and mapping with time-of-flight cameras 6p Germany 2008 Disponiacutevel em httpwwwroboticdefileadminroboticfuchsiros08_3dcampdf Acesso em 2510 2010 MITISHITA E A Monorestituiccedilatildeo digital de aerofotos associada com sistema de computaccedilatildeo graacutefica CAD para fins de mapeamento na aacuterea florestal 251p Tese (Doutorado em Engenharia Florestal) ndash Setor de Ciecircncias Agraacuterias Universidade Federal do Paranaacute 1997 MOumlLLER T KRAFT H FREY J ALBRECHT M LANGE R Robust 3D measurement with PMD sensors 2005 PAULY M GROSS M KOBBELT L P Efficient simplification of point-sampled surfaces 8p In VIS ‟02 Proceedings of the Conference on Visualization ‟02 Washington DC USA 2002 IEEE Computer Society PECHT Y FOSSUM E R Wide intrascene dynamic range CMOS APS using dual sampling IEEE Transactions on Electron Devices v 44 n 10 1997 PMD Technologies PMD [vison]regCamCube 20 4p Datasheet n 20090601 Siegen 2009 Disponiacutevel em lthttpwwwpmdteccomproducts-servicespmdvisionr-cameraspmdvisionr-camcube-20gt Acesso em 0103 2010 PMD Technologies PMD [vison]regCamCube 20 Software development tutorial 13p Siegen 2009 Disponiacutevel em lthttpwwwpmdteccomfileadminpmdtecdownloadsdocumentationcamcube_softwaredevelopmenttutorialpdfgt Acesso em 1504 2010 RAPP H Experimental and theoretical investigation of correlating TOF-camera systems 71p Diploma Thesis in Physics Faculty for Physics and Astronomy University of Heidelberg Alemanha 2007 RINGBECK T A 3D Time Of Flight camera for object detection 10p In Proceedings Optical 3D Measurement Techniques Plenary Session 1 Range Imaging I Zuumlrich 2007
127
SHAKARJI C M Least-Squares fitting algorithms of the NIST algorithm testing system 9p Journal of research of the national of standards and technology v 103 n 6 1998 THEUWISSEN A Solid-state imaging with Charge-Coupled Devices PP 34-46 Kluwer Academic Publishers 1995 Disponiacutevel em ltwwwspringerlinkcomgt Acesso em 08072010
WIEDEMANN M SAUER M DRIEWER F SCHILLING K Analysis and characterization of the PMD camera for application in mobile robotics 6p In Proceedings of the 17th World Congress The International Federation of Automatic Control Seoul Korea July 6-11 2008 ZHANG Z A flexible new technique for camera calibration 5p IEEE Transactions on Pattern Analysis and Machine Intelligence November 2000

O48 Oliveira Andrey Augusto Alves de Modelagem tridimensional de superfiacutecies utilizando imagem TOF
estudo com a cacircmara PMD CamCube 20 Andrey Augusto Alves de Oliveira ndash Curitiba 2011
127f il tabs Impresso Dissertaccedilatildeo (Mestrado) ndash Universidade Federal do Paranaacute Setor de Ciecircncias da Terra Programa de Poacutes-Graduaccedilatildeo em Ciecircncias
Geodeacutesicas Orientador Jorge Antonio Silva Centeno
1 Imagem tridimensional 2 Fotogrametria 3 Projeccedilatildeo ortogonal I
Centeno Jorge Antonio Silva II Tiacutetulo
CDD 526982
iv
Agrave minha famiacutelia em especial meus pais
Dedico este trabalho
v
AGRADECIMENTOS
Aos meus pais familiares namorada e amigos pelo apoio incentivo e
companheirismo
Ao Prof Dr Jorge Antonio Silva Centeno pela orientaccedilatildeo e confianccedila
Aos Professores amigos e colegas do Curso de Poacutes-Graduaccedilatildeo em
Ciecircncias Geodeacutesicas e do Curso de Engenharia Cartograacutefica da Universidade
Federal do Paranaacute pelos momentos compartilhados
Aos colaboradores da UFPR que com seu trabalho e dedicaccedilatildeo fazem a
Universidade funcionar
Ao Conselho Nacional de Desenvolvimento Cientiacutefico e Tecnoloacutegico (CNPq)
pelo fomento
Ao instituto de Fotogrametria e Sensoriamento Remoto da Universidade de
Karlsruhe (KIT ndash Karlsruhe Institute of Tecnology) pela cooperaccedilatildeo e empreacutestimo da
cacircmara PMD CamCube 20 utilizada para obter as imagens TOF analisadas neste
trabalho Ao Prof Dr Jorge A S Centeno pela captaccedilatildeo das imagens na Alemanha
no iniacutecio do ano 2010 e a Fabiana Castro pela aquisiccedilatildeo de novas imagens TOF
Aos componentes da banca avaliadora Prof Dr Antonio Maria Garcia
Tommaselli e Prof Dr Hideo Araki que contribuiacuteram com importantes observaccedilotildees
para a melhora deste trabalho de pesquisa
Muito Obrigado
vi
RESUMO
Neste trabalho estudou-se a modelagem tridimensional de superfiacutecies
utilizando imagens TOF (Time-Of-Flight) para isto avaliou-se a qualidade dos dados
obtidos com a cacircmara PMD[vision]regCamCube 20 Este equipamento calcula a
distacircncia de objetos em relaccedilatildeo ao seu sensor utilizando o princiacutepio TOF Com o
objetivo de corrigir a geometria dos dados contidos na imagem foram calculados
Paracircmetros de Orientaccedilatildeo Interior (POI) atraveacutes do processo de calibraccedilatildeo da
cacircmara Estes paracircmetros definem a geometria interior do sistema de lentes e
permitem fazer as correccedilotildees geomeacutetricas necessaacuterias Outro fator que influenciou na
qualidade dos dados foi agrave presenccedila de ruiacutedo em funccedilatildeo da iluminaccedilatildeo que pode ser
controlada variando o tempo de integraccedilatildeo na aquisiccedilatildeo das imagens Duas opccedilotildees
para a reduccedilatildeo do ruiacutedo foram analisadas filtragem no domiacutenio espacial e no tempo
de integraccedilatildeo Experimentos com os filtros passa-baixas pela meacutedia e mediana
foram realizados a fim de reduzir o ruiacutedo no domiacutenio espacial Com a mesma
finalidade a meacutedia para cada tempo de integraccedilatildeo foi calculada a partir de uma
seacuterie de cinco imagens tomadas com o mesmo ponto de vista A partir destes
experimentos foi determinado o melhor tempo de integraccedilatildeo para a aquisiccedilatildeo da
imagem A etapa seguinte consistiu na segmentaccedilatildeo da imagem para identificar
superfiacutecies do objeto de estudo Em uma primeira abordagem aplicou-se o meacutetodo
de crescimento de regiotildees utilizando a distacircncia do ponto ao plano como criteacuterio de
similaridade A segunda abordagem utilizou o caacutelculo de autovalores locais para
gerar uma nova imagem onde as bordas dos objetos foram evidenciadas Esta nova
imagem foi segmentada para obter superfiacutecies de interesse do objeto atraveacutes do
algoritmo de deslocamento pela meacutedia A partir do arquivo com as distacircncias da
imagem TOF e dos POI piacutexeis da imagem segmentada foram projetados
ortogonalmente gerando uma nuvem de pontos com coordenadas 3D Com isto as
dimensotildees de arestas do objeto foram comparadas com medidas de referecircncia
encontrando-se diferenccedilas na ordem de 2 centiacutemetros Finalizando o estudo as
superfiacutecies do objeto foram modeladas tridimensionalmente
Palavras-chave Imagem TOF Modelagem tridimensional de superfiacutecies
Calibraccedilatildeo de cacircmaras Anaacutelise de ruiacutedo Autovalores Autovetores Projeccedilatildeo
Ortogonal Segmentaccedilatildeo Crescimento de regiotildees em nuvem de pontos 3D
Algoritmo de deslocamento pela meacutedia
vii
ABSTRACT
This work aims at studying the quality of 3D data obtained with a range
camera the PMD[vision]regCamCube 20 and assessing its potential to model object
surfaces The equipment computes the distance to the objects using the Time-Of-
Flight (TOF) principle Initially the equipment was calibrated using camera calibration
methods The Interior Orientation Parameters (IOP) allow reducing geometric
distortion in the images Another factor that influences the quality of data is the
presence of noise caused by illumination conditions which can be controlled by
varying the integration time of the light source Two options to reduce noise were
analyzed spatial filtering with low-pass and median filter and computing the
average of a series of images taken from the same point of view After determining
the best integration time and Interior Orientation Parameters the 3D coordinates of a
point cloud was computes The next step consists in image segmentation to identify
the surfaces of an object In a first approach it is applied a region growing method
using the point-plane distance as similarity parameter The second approach is
based on the calculation of local eigenvalues using small moving windows to
generate a new image where borders are highlighted This new image is segmented
using the mean-shift approach to delineate the surfaces of interest Each interest
pixel of the segmented image was projected for the 3D points cloud The dimensions
of the object are compared with real values The comparison showed differences
around 2cm within the expected range Finally the object surfaces can then be
modeled with the 3D points cloud
Keywords TOF image Range image Three-dimensional modeling surfaces
Camera calibration Noise analysis Eigenvalues Eigenvectors Orthogonal
projection Segmentation Region growing in 3D point clouds Mean Shift Algorithm
viii
LISTA DE FIGURAS
FIGURA 21 ndash Princiacutepio TOF 19
FIGURA 22 ndash Meacutetodo da diferenccedila de fase 20
FIGURA 23 ndash FC utilizada no meacutetodo da diferenccedila de fase 23
FIGURA 24 ndash Informaccedilatildeo das imagens TOF 25
FIGURA 25 ndash Imagem TOF obtida com cacircmara PMD 26
FIGURA 26 ndash Ruiacutedo na nuvem de pontos 3D proveniente de imagem TOF 27
FIGURA 27 ndash Princiacutepio de funcionamento do sistema PMD 28
FIGURA 28 ndash Captaccedilatildeo da carga do sinal em sensores CCD e CMOS 29
FIGURA 29 ndash Representaccedilatildeo de campos de franja 30
FIGURA 210 ndash Princiacutepio de armazenamento de cargas em sensores TOF 31
FIGURA 211 ndash Princiacutepio de captaccedilatildeo de cargas pelo sensor PMD 32
FIGURA 212 ndash Medida da diferenccedila de fase do sinal recebido 33
FIGURA 213 ndash Medida de distacircncia com a cacircmara PMD 35
FIGURA 214 ndash Cacircmara PMD CamCube 20 36
FIGURA 215 ndash Imagem captada com a cacircmara PMD CamCube 20 37
FIGURA 216 ndash Princiacutepio de funcionamento do SBI 39
FIGURA 217 ndash Modelos de cacircmaras TOF 39
FIGURA 218 ndash Nuvem de pontos 3D gerada a partir de imagem TOF 44
FIGURA 219 ndash Colinearidade entre os pontos no espaccedilo imagem e objeto 45
FIGURA 220 ndash Sistemas de coordenadas utilizados em imagens 47
FIGURA 221 ndash Filtro para a definiccedilatildeo de bordas do objeto 51
FIGURA 222 ndash Geometria do filtro para a definiccedilatildeo de bordas 52
FIGURA 223 ndash Autovetores em nuvem de pontos 3D de uma superfiacutecie plana 55
FIGURA 224 ndash Inclinaccedilotildees de superfiacutecies determinadas por autovalores 59
FIGURA 225 ndash Imagem segmentada 66
FIGURA 41 ndash Processamento da imagem TOF 69
FIGURA 42 ndash Filtragem passa-baixas pela meacutedia 80
FIGURA 43 ndash Filtragem pela mediana 80
FIGURA 44 ndash Filtragem utilizando a meacutedia temporal 81
FIGURA 45 ndash Intensificaccedilatildeo de bordas com autovalores 85
FIGURA 46 ndash Imagem com bordas intensificadas 85
FIGURA 51 ndash Imagens do gabarito utilizadas na calibraccedilatildeo da cacircmara 87
FIGURA 52 ndash Orientaccedilatildeo Exterior das fotografias para a calibraccedilatildeo da cacircmara 88
FIGURA 53 ndash Direccedilatildeo das distorccedilotildees nos pontos da imagem TOF 88
ix
FIGURA 54 ndash Correccedilatildeo geomeacutetrica da imagem TOF 90
FIGURA 55 ndash Desvio padratildeo x TI janelas 10x10 93
FIGURA 56 ndash Imagens para TI=500μs e d=130m 93
FIGURA 57 ndash Imagens para TI=2000μs e d=130m 94
FIGURA 58 ndash Imagens para TI=2500μs e d=130m 95
FIGURA 59 ndash Desvios padratildeo para distacircncia x TI 96
FIGURA 510 ndash Desvios padratildeo para janelas com TI=2000μs d=130m 97
FIGURA 511 ndash Janelas de 40x40 piacutexeis TI=2000μs d=130m 97
FIGURA 512 ndash Desvios padratildeo para janelas com TI=5000μs d=130m 98
FIGURA 513 ndash Janelas de 40x40 piacutexeis TI=5000μs d=130m 98
FIGURA 514 ndash Desvios padratildeo para janelas com TI=2000μs d=210m 99
FIGURA 515 ndash Janelas de 40x40 piacutexeis TI=2000μs d=210m 99
FIGURA 516 ndash Desvios padratildeo para janelas com TI=5000μs d=210m 100
FIGURA 517 ndash Janelas de 40x40 piacutexeis TI=5000μs d=210m 100
FIGURA 518 ndash Desvios padratildeo para janelas com TI=7000μs d=210m 101
FIGURA 519 ndash Janelas de 40x40 piacutexeis TI=7000μs d=210m 101
FIGURA 520 ndash Arquivo de intensidades da imagem TOF obtida do objeto 103
FIGURA 521 ndash Arquivo de distacircncias da imagem TOF com geometria corrigida 104
FIGURA 522 ndash Nuvem de pontos vista frontal 104
FIGURA 523 ndash Nuvem de pontos vista perspectiva 3D 105
FIGURA 524 ndash Pontos semente no arquivo de intensidades da imagem TOF 106
FIGURA 525 ndash Crescimento de regiotildees vista frontal 107
FIGURA 526 ndash Crescimento de regiotildees vista perspectiva 3D 107
FIGURA 527 ndash Imagem com bordas intensificadas gerada com 1205821 109
FIGURA 528 ndash Imagem com bordas intensificadas gerada com 1205822 109
FIGURA 529 ndash Imagem com bordas intensificadas gerada com 1205823 109
FIGURA 530 ndash Imagens de intensidade com as bordas do objeto intensificadas 110
FIGURA 531 ndash Imagem com bordas intensificadas segmentada 111
FIGURA 532 ndash Nuvem de pontos da imagem segmentada vista frontal 112
FIGURA 533 ndash Nuvem de pontos da imagem segmentada vista 3D 113
FIGURA 534 ndash Nuvem de pontos 3D segmentada 114
FIGURA 535 ndash Pontos 3D selecionados na nuvem 114
FIGURA 536 ndash Dimensotildees de referecircncia do objeto de estudo 115
FIGURA 537 ndash Nuvem de pontos 3D das superfiacutecies frontal e superior 117
FIGURA 538 ndash Modelagem tridimensional das superfiacutecies frontal e superior 118
x
LISTA DE QUADROS E TABELAS
QUADRO 21 ndash Especificaccedilotildees teacutecnicas da cacircmara PMD CamCube 20 37
QUADRO 22 ndash Especificaccedilotildees teacutecnicas de cacircmaras TOF 40
QUADRO 23 ndash Propriedades de superfiacutecies normais obtidas com autovalores 57
TABELA 51 ndash Paracircmetros de Orientaccedilatildeo Interior calculados 89
TABELA 52 ndash Coordenadas 3D dos pontos e medidas realizadas 116
xi
LISTA DE SIGLAS
Sigla Significado
AMISE Asymptotic Mean Integrated Square Error
CCD Charge Coupled Device
CMOS Complementary Metal Oxide Semiconductor
CP Centro Perspectivo
EDISON Edge Detection and Image SegmentatiON System
FC Funccedilatildeo de Correlaccedilatildeo
FPN Fixed Pattern Noise
FPS Frames Per Second
LASER Light Amplification by Stimulated Emission of Radiation
LED Light Emitting Diode
MDE Modelo Digital de Elevaccedilatildeo
MVC Matriz de Variacircncias e Covariacircncias
PMD Photonic Mixer Device
POE Paracircmetros de Orientaccedilatildeo Exterior
POI Paracircmetros de Orientaccedilatildeo Interior
PP Ponto Principal
SBI Supression of Background Ilumination
TI Tempo de Integraccedilatildeo
TOF Time-Of-Flight
xii
SUMAacuteRIO
1 INTRODUCcedilAtildeO 14
11 OBJETIVO GERAL 16
12 OBJETIVOS ESPECIacuteFICOS 16
13 JUSTIFICATIVA 17
14 ESTRUTURA DA DISSERTACcedilAtildeO 18
2 REVISAtildeO BIBLIOGRAacuteFICA 19
21 MEDIDA DE DISTAcircNCIA COM O PRINCIacutePIO TOF 19
22 IMAGEM TOF 25
23 TEMPO DE INTEGRACcedilAtildeO 26
24 PRINCIacutePIO DE FUNCIONAMENTO DO SENSOR PMD 28
25 CAcircMARAS PMD 34
251 Cacircmara PMD CamCube 20 36
252 Dispositivo SBI 38
253 Modelos de cacircmaras TOF 39
26 ERROS DE MEDIDA 40
261 Erros natildeo-sistemaacuteticos em cacircmaras TOF 41
262 Erros sistemaacuteticos em cacircmaras TOF 41
27 PROJECcedilAtildeO ORTOGONAL DOS PONTOS 45
28 REFINAMENTO DA NUVEM DE PONTOS 3D 50
29 ANAacuteLISE DE SUPERFIacuteCIES POR AUTOVALORES E AUTOVETORES 53
210 ANAacuteLISE DE SUPERFIacuteCIES POR MOMENTOS INVARIANTES 56
211 ALGORITMO DE DESLOCAMENTO PELA MEacuteDIA 60
3 MATERIAIS 67
4 MEacuteTODOS 68
41 CALIBRACcedilAtildeO DA CAcircMARA 69
42 ANAacuteLISE DA PRESENCcedilA DE RUIacuteDO 78
421 Filtragem passa-baixas pela meacutedia 79
422 Filtragem pela mediana 80
423 Filtragem com a meacutedia temporal 81
43 SEGMENTACcedilAtildeO 82
431 Crescimento de regiotildees a partir de superfiacutecies planas e ponto semente 82
xiii
432 Segmentaccedilatildeo por anaacutelise da variaccedilatildeo local de autovalores 84
433 Segmentaccedilatildeo com o algoritmo de deslocamento pela meacutedia 86
5 RESULTADOS E DISCUSSOtildeES 87
51 CALIBRACcedilAtildeO DA CAcircMARA 87
52 EXPERIMENTO 1 ndash ANAacuteLISE DE RUIacuteDO 1 IMAGEM TOF INTEIRA 92
53 EXPERIMENTO 2 ndash ANAacuteLISE DE RUIacuteDO 2 JANELAS DE 40X40 PIacuteXEIS 96
54 EXPERIMENTO 3 ndash PROJECcedilAtildeO ORTOGONAL DOS PONTOS 102
55 EXPERIMENTO 4 ndash SEGMENTACcedilAtildeO 1 CRESCIMENTO DE REGIOtildeES 106
56 EXPERIMENTO 5 ndash SEGMENTACcedilAtildeO 2 ANAacuteLISE COM AUTOVALORES 108
57 EXPERIMENTO 6 ndash ANAacuteLISE DAS MEDIDAS OBTIDAS 113
58 MODELAGEM DAS SUPERFIacuteCIES 3D 117
6 CONCLUSOtildeES RECOMENDACcedilOtildeES E CONSIDERACcedilOtildeES FINAIS 119
61 CONCLUSOtildeES 119
62 RECOMENDACcedilOtildeES 122
63 CONSIDERACcedilOtildeES FINAIS 122
REFEREcircNCIAS BIBLIOGRAacuteFICAS 123
14
1 INTRODUCcedilAtildeO
A informaccedilatildeo meacutetrica para a representaccedilatildeo espacial de objetos eacute uma
necessidade para diferentes aacutereas de estudo Algumas aplicaccedilotildees exigem que o
processo de aquisiccedilatildeo e representaccedilatildeo graacutefica desta informaccedilatildeo seja realizado com
rapidez e qualidade Em Ciecircncias Geodeacutesicas a obtenccedilatildeo desta informaccedilatildeo pode
ser feita atraveacutes de diversas maneiras dentre elas citam-se os levantamentos de
campo e as imagens obtidas por sensores remotos exemplos satildeo teacutecnicas
aplicadas em Topografia e Fotogrametria
Com a Topografia o trabalho pode alcanccedilar alto grau de exatidatildeo
dependendo da teacutecnica e precisatildeo do equipamento utilizado No entanto se gasta
bastante tempo para realizar o levantamento das informaccedilotildees em campo e tambeacutem
para o processamento e organizaccedilatildeo dos dados em escritoacuterio Algumas aplicaccedilotildees
da Topografia estatildeo na locaccedilatildeo de obras como rodovias geraccedilatildeo de perfis de
terrenos e rios monitoramento de deformaccedilotildees na estrutura de barragens pontes e
tambeacutem no levantamento de pontos 3D para representar fachadas de edifiacutecios
Com a Fotogrametria o levantamento das informaccedilotildees tridimensionais de um
objeto pode ser feito em tempo relativamente curto As fotografias satildeo obtidas de
forma instantacircnea No entanto quando se utilizam teacutecnicas convencionais de
Fotogrametria necessita-se de pelo menos duas fotografias com sobreposiccedilatildeo das
aacutereas imageadas para a geraccedilatildeo do modelo fotogrameacutetrico Outra forma eacute a teacutecnica
conhecida por Monorestituiccedilatildeo Digital onde se utiliza uma fotografia digital em
conjunto com um Modelo Digital de Elevaccedilatildeo (MDE) normalmente gerado por uma
nuvem de pontos proveniente de outro equipamento ou sensor (MITISHITA 1997)
Na modalidade terrestre da Fotogrametria eacute possiacutevel determinar pontos 3D
para representar fachadas de preacutedios obras de arte mapeamentos de ruas e
imoacuteveis com a plataforma em movimento dentre outras aplicaccedilotildees
Aleacutem das teacutecnicas convencionais de levantamentos utilizadas em Topografia
e Fotogrametria e com o objetivo de viabilizar a aquisiccedilatildeo da informaccedilatildeo espacial
equipamentos e teacutecnicas tecircm sido constantemente desenvolvidos e aperfeiccediloados
Avanccedilos tecnoloacutegicos tecircm possibilitado a obtenccedilatildeo da informaccedilatildeo tridimensional
para a representaccedilatildeo dos objetos de forma raacutepida e precisa Exemplos satildeo os
sistemas de varredura laser scanner e as cacircmaras TOF (Time-Of-Fligth) tambeacutem
15
conhecidas na literatura por Range Cameras Estas cacircmaras geram imagens com
informaccedilotildees de distacircncia para cada pixel do objeto imageado denominadas
imagens de profundidade distacircncia ou Range Image Neste trabalho seraacute utilizada
preferencialmente a denominaccedilatildeo ldquoimagem TOFrdquo
Nas uacuteltimas deacutecadas os sistemas de varredura laser scanner tecircm sido muito
utilizados para mapeamento Equipamentos com esta tecnologia possibilitam a
obtenccedilatildeo de milhares de pontos por segundo e podem ser instalados em
plataformas aeacutereas ou terrestres No entanto devido a este ser um equipamento
oacuteptico e mecacircnico o alto custo na sua aquisiccedilatildeo torna-o inviaacutevel para algumas
aplicaccedilotildees
Cacircmaras TOF atraem a atenccedilatildeo de diferentes aacutereas que necessitam de
pontos com coordenadas 3D de seus objetos de estudo tais como a Visatildeo
Computacional e a Engenharia de Automaccedilatildeo Um modelo de cacircmara TOF eacute a PMD
CamCube 20 que capta 25 imagens por segundo (Frames Per Secunde - FPS)
Com esta frequecircncia de aquisiccedilatildeo pode obter o movimento dos objetos na cena e de
grande quantidade de informaccedilatildeo tridimensional sobre os mesmos
No entanto a grande quantidade de dados captada deve ter sua qualidade
avaliada A iluminaccedilatildeo exterior ao sistema interfere negativamente Outro fator a ser
observado eacute a configuraccedilatildeo da cena pois interferecircncias satildeo causadas pelas
distacircncias orientaccedilotildees e refletividade das superfiacutecies dos objetos em relaccedilatildeo ao
sensor da cacircmara Em uma mesma cena podem-se apresentar medidas ambiacuteguas
de distacircncia para os pontos devido a erros causados pela iluminaccedilatildeo utilizada no
sistema As influencias causadas por erros sistemaacuteticos assim como ruiacutedos devem
ser observadas para cada tipo de aplicaccedilatildeo (MAY et al 2008)
A cacircmara TOF utilizada para a aquisiccedilatildeo das imagens nesta pesquisa foi a
PMD[vision]regCamCube 20 Esta utiliza um sensor de imageamento PMD (Photonic
Mixer Device) que possibilita armazenar informaccedilatildeo de distacircncia para os piacutexeis de
uma imagem de intensidade O equipamento fornece a imagem TOF que eacute
composta por um arquivo com as intensidades que o sinal retornou para o sensor e
um arquivo com as informaccedilotildees de distacircncia para cada pixel o que possibilita a
percepccedilatildeo da profundidade dos objetos na cena
16
11 OBJETIVO GERAL
O objetivo geral deste trabalho de pesquisa eacute desenvolver uma metodologia
para a modelagem tridimensional das superfiacutecies de objetos a partir da nuvem de
pontos 3D proveniente da imagem TOF
12 OBJETIVOS ESPECIacuteFICOS
Realizar a correccedilatildeo geomeacutetrica dos dados da imagem TOF atraveacutes de
Paracircmetros de Orientaccedilatildeo Interior obtidos com o processo de
calibraccedilatildeo da cacircmara
Testar meacutetodos de filtragem para a reduccedilatildeo de ruiacutedo presente nas
imagens TOF e analisar formas para a aquisiccedilatildeo da imagem TOF
com menor presenccedila de ruiacutedo
Analisar o tempo de integraccedilatildeo para diferentes situaccedilotildees de aquisiccedilatildeo
da imagem TOF
Avaliar meacutetodos para a segmentaccedilatildeo das superfiacutecies de objetos a
partir da imagem TOF
Gerar nuvem de pontos com coordenadas tridimensionais das
superfiacutecies segmentadas e modelar estas superfiacutecies
tridimensionalmente
Avaliar a qualidade das medidas obtidas com a modelagem
tridimensional das superfiacutecies do objeto de estudo
17
13 JUSTIFICATIVA
Com o desenvolvimento e aperfeiccediloamento das cacircmaras TOF acredita-se
na viabilizaccedilatildeo deste equipamento para a medida de distacircncia e modelagem
tridimensional das superfiacutecies de objetos para diferentes finalidades Apresenta as
seguintes vantagens
Recobrimento da aacuterea de forma instantacircnea
Possibilidade de filmar a cena registrando o movimento dos objetos
com frequecircncia de aquisiccedilatildeo de 25 imagens por segundo
Fornece grande quantidade de pontos com coordenadas 3D dos
objetos imageados
Uma imagem eacute suficiente para estimar a distacircncia dos objetos
Informaccedilatildeo na banda espectral do infravermelho
Uma imagem TOF captada instantaneamente disponibiliza informaccedilatildeo sobre
a distacircncia de objetos contidos na cena sendo possiacutevel a geraccedilatildeo de nuvens de
pontos para a representaccedilatildeo tridimensional de objetos sem necessitar de
informaccedilatildeo proveniente de outro sensor Outra vantagem eacute o sistema natildeo precisar
de iluminaccedilatildeo exterior
Algumas aplicaccedilotildees para as imagens TOF foram realizadas nas aacutereas de
prevenccedilatildeo de acidentes automobiliacutesticos e seguranccedila de pedestres (RINGBECK
2007) Visatildeo Computacional (WIEDEMANN et al 2008) mapeamentos
tridimensionais de objetos em ambientes fechados para a movimentaccedilatildeo roboacutetica
(MAY et al 2008) Computaccedilatildeo Graacutefica (KOLB 2009 et al KOCH et al 2009)
realizaccedilatildeo de medidas do corpo humano para a induacutestria de roupas (APUZZO
2009) e anaacutelise de deformaccedilotildees (JAMTSHO 2010)
18
14 ESTRUTURA DA DISSERTACcedilAtildeO
A presente dissertaccedilatildeo foi estruturada em seis capiacutetulos No primeiro
capitulo realiza-se a introduccedilatildeo ao tema descreve-se o objetivo geral e os objetivos
especiacuteficos aleacutem da justificativa para a pesquisa
O segundo capiacutetulo apresenta uma revisatildeo de conceitos sobre medida de
distacircncia utilizando o princiacutepio TOF descriccedilatildeo da imagem TOF e seus arquivos de
intensidades e distacircncias influencia do tempo de integraccedilatildeo (TI) na aquisiccedilatildeo da
imagem TOF princiacutepio de funcionamento do sensor PMD modelos de cacircmaras
TOF erros de medida que podem ocorrer utilizando estas cacircmaras projeccedilatildeo
ortogonal das distacircncias obtidas com a imagem TOF para a geraccedilatildeo da nuvem de
pontos 3D meacutetodo para o refinamento da nuvem de pontos 3D detecccedilatildeo de
superfiacutecies por autovetores e autovalores anaacutelise de superfiacutecies por momentos
invariantes e algoritmo de deslocamento pela meacutedia para a segmentaccedilatildeo de
imagens
No terceiro capitulo descrevem-se os materiais equipamentos e espaccedilo
fiacutesico utilizado para a realizaccedilatildeo do trabalho de pesquisa
Com o quarto capitulo satildeo descritos os meacutetodos utilizados para o
desenvolvimento da pesquisa calibraccedilatildeo da cacircmara filtragens para anaacutelise e
tratamento de ruiacutedo presente nas imagens meacutetodos de segmentaccedilatildeo por
crescimento de regiotildees na nuvem de pontos segmentaccedilatildeo por anaacutelise da variaccedilatildeo
local de autovalores no arquivo de distacircncias da imagem TOF e geraccedilatildeo de imagem
de intensidade com as bordas do objeto intensificadas segmentaccedilatildeo da imagem
com bordas intensificadas utilizando o algoritmo de deslocamento pela meacutedia
Com o quinto capitulo descrevem-se os resultados obtidos tais como
valores dos paracircmetros calculados no processo de calibraccedilatildeo da cacircmara
experimentos realizados para a anaacutelise da presenccedila de ruiacutedo nas imagens TOF
projeccedilatildeo ortogonal dos pontos para a geraccedilatildeo da nuvem de pontos 3D
segmentaccedilatildeo por crescimento de regiotildees segmentaccedilatildeo por anaacutelise da variaccedilatildeo
local de autovalores anaacutelise das medidas obtidas com a nuvem de pontos 3D
segmentada e tambeacutem se realiza a modelagem tridimensional de duas superfiacutecies
do objeto estudado
Finalmente com o sexto capitulo satildeo apresentadas conclusotildees
consideraccedilotildees finais e recomendaccedilotildees para trabalhos futuros de acordo com os
experimentos realizados
19
2 REVISAtildeO BIBLIOGRAacuteFICA
21 MEDIDA DE DISTAcircNCIA COM O PRINCIacutePIO TOF
O princiacutepio TOF (Time-Of-Flight) permite calcular a distacircncia de objetos a
partir da emissatildeo e recepccedilatildeo de um sinal luminoso Com este objetivo utiliza-se um
conjunto de emissor e receptor oacutepticos que mede o tempo necessaacuterio para o sinal
retornar para o sensor apoacutes atingir o alvo com base no conhecimento do valor da
velocidade da luz propagada no vaacutecuo De acordo com Baltsavias (1999) o caacutelculo
da distacircncia com o princiacutepio TOF pode ser realizado atraveacutes de dois meacutetodos
Tempo de percurso de pulsos curtos de energia
Mudanccedila de fase de um sinal modelado na forma de onda contiacutenua
Sistemas que utilizam o primeiro meacutetodo de medida transmitem um pulso e
medem o seu tempo de retorno Isto eacute possiacutevel devido ao retardo de tempo gasto no
percurso do sinal que eacute medido atraveacutes de um ponto no pulso de retorno com
referecircncia no pulso emitido Quanto melhor eacute a medida do tempo melhor a distacircncia
calculada sendo o reloacutegio do sensor um fator de grande importacircncia neste meacutetodo
Para obter precisatildeo meacutetrica necessita-se realizar a medida de tempo em nano
segundos (ƞs) O afastamento e duraccedilatildeo do pulso tambeacutem satildeo fatores importantes
na resoluccedilatildeo da medida de distacircncia com este meacutetodo A Figura 21 Ilustra a medida
de distacircncia com o princiacutepio TOF (LANGE 2000)
FIGURA 21 ndash Princiacutepio TOF
FONTE LANGE (2000)
20
Utilizando pulsos de uma fonte de luz pode-se calcular a distacircncia de um
alvo atraveacutes da Equaccedilatildeo (21)
119863 =119888 119905
2 (21)
onde
119863 ndash Distacircncia entre o sensor e o alvo
119888 ndash Valor constante da velocidade da luz
119905 ndash Variaccedilatildeo de tempo entre emissatildeo e recepccedilatildeo do pulso
O segundo meacutetodo trabalha com a determinaccedilatildeo da mudanccedila de fase do
sinal contido em uma onda contiacutenua modulada Pode ser utilizado para evitar o
problema na medida de tempo com alta precisatildeo O sinal luminoso pode ser emitido
utilizando fontes LED (Light Emitting Diode) ou LASER (Light Amplification by
Stimulated Emission of Radiation) Estas fontes permitem a modulaccedilatildeo direta do
sinal luminoso atraveacutes da voltagem do sistema (LANGE 2000)
Para a utilizaccedilatildeo do meacutetodo da diferenccedila de fase considera-se que o sinal
refletido pelo alvo manteacutem a forma do sinal modulado emitido mas a fase do sinal
emitido eacute diferente da fase do sinal recebido conforme ilustrado com a Figura 22
FIGURA 22 ndash Meacutetodo da diferenccedila de fase
21
Sendo assim a mudanccedila de fase entre os sinais pode ser utilizada para
calcular a distacircncia conforme Equaccedilatildeo (22)
119863 =120593∙119888
4∙120587∙120574 (22)
onde
119863 ndash Distacircncia entre o sensor e o alvo
120593 ndash Diferenccedila de fase entre o sinal emitido e o recebido
119888 ndash Valor constante da velocidade da luz
120574 ndash Frequecircncia de modulaccedilatildeo do sinal
Em cacircmaras TOF a distacircncia entre o sensor e o alvo eacute medida utilizando o
meacutetodo da diferenccedila de fase com uma Funccedilatildeo de Correlaccedilatildeo (FC) entre o sinal
emitido e o refletido As amplitudes dos sinais satildeo moduladas com a mesma
frequecircncia Com isto a iluminaccedilatildeo pode ser feita utilizando diacuteodos emissores de luz
LED tendo-se a vantagem que a FC pode ser obtida com o sensor PMD a partir da
forma senoidal do sinal recebido (RAPP 2007)
A FC eacute calculada atraveacutes do sinal emitido e recebido Estes sinais satildeo
modelados matematicamente com forma senoidal tendo em vista que sua
propagaccedilatildeo ocorre na forma de onda Dado um sinal luminoso emitido 119892 119905 e um
sinal recebido 119904 119905 em um ponto do sensor PMD as amostras 119888 120591 podem ser
calculadas atraveacutes da Equaccedilatildeo (23) Estas amostras satildeo utilizadas para modelar a
FC em um atraso de tempo 120591
119888 120591 = 119904 119905 otimes 119892 119905 = lim119879rarrinfin 119904 119905 ∙ 119892 119905 + 120591 +119879
2
minus119879
2
119889119905 (23)
onde
119904 119905 ndash Funccedilatildeo que modela a forma do sinal luminoso recebido
119892 119905 ndash Funccedilatildeo que modela a forma do sinal luminoso emitido
119905 ndash Variaccedilatildeo de tempo entre a emissatildeo e a recepccedilatildeo do sinal
120591 ndash Atraso de tempo no recebimento do sinal
22
O sinal emitido pode ser expresso com 119892 119905 = cos(120603119905) o recebido eacute
expresso atraveacutes da relaccedilatildeo 119904 119905 = 1 + 119886 ∙ cos(120603119905 minus 120593) Ambos com forma senoidal
amplitude 119886 e diferenccedila de fase 120593 Com isto a FC pode ser apresentada na forma da
Equaccedilatildeo (25)
119888 120591 = 1 + 119886 ∙ 119888119900119904 120603120591 minus 120593 otimes 119888119900119904 120603120591 (24)
119888 120591 = lim119879acuterarrinfin1
119879acute 1 + 119886 ∙ 119888119900119904 120603119905 minus 120593 ∙ 119888119900119904 120603119905 + 120603119905
+119879 acute
2
minus119879 acute
2
119889119905 (25)
119888 120591 =119886
2∙ cos 120593 + 120603119905 (26)
onde
119892 119905 ndash Funccedilatildeo senoidal que modela a forma do sinal emitido
119904 119905 ndash Funccedilatildeo que modela a forma do sinal recebido
119905 ndash Variaccedilatildeo de tempo entre a emissatildeo e recepccedilatildeo do sinal
120591 ndash Atraso no tempo de recebimento do sinal
119886 ndash Amplitude da onda portadora do sinal
120593 ndash Diferenccedila de fase
120603 ndash Referecircncia de fase para o sinal modelado na forma senoidal
Lange (2000) avaliou a FC para fases 120596 119905 preacute-definidas escolhendo quatro
fases 120596 119905 = 0deg 120596 119905 = 90deg 120596 119905 = 180deg 120596 119905 = 270deg Verificou que eacute possiacutevel calcular a
diferenccedila de fase 120593 e a amplitude 119886 do sinal recebido 119904(119905) Considerando que o sinal
recebido tem sobreposiccedilatildeo ao sinal emitido deve-se adicionar uma constante de
deslocamento 119870 conforme a Equaccedilatildeo (27)
119862 120591 = 119888 120591 + 119870 (27)
119862 1205910 = 119888 1205910 + 119870 =119886
2∙ cos 120593 + 119870 (28)
119862 1205911 = 119888 1205911 + 119870 = minus119886
2∙ 119904119890119899 120593 +119870 (29)
119862 1205912 = 119888 1205912 + 119870 = minus119886
2∙ cos 120593 + 119870 (210)
119862 1205913 = 119888 1205913 + 119870 =119886
2∙ 119904119890119899 120593 +119870 (211)
23
Analisando a FC em quatro pontos a diferenccedila de fase 120593 e a amplitude 119886 do
sinal 119904(119905) podem ser calculadas atraveacutes das Equaccedilotildees (212) e (213)
120593 = 119905119892minus1 119862 1205913 minus119862 1205911
119862 1205910 minus119862 1205912 (212)
119886 = 119862 1205913 minus119862 1205911 2+ 119862 1205910 minus119862 1205912 2
2 (213)
Pode-se fazer a simplificaccedilatildeo das Equaccedilotildees (214) agrave (217) para quatro
pontos amostrais que satildeo necessaacuterios na modelagem da FC
119862 1205911 = 1198601 (214)
119862 1205912 = 1198602 (215)
119862 1205913 = 1198603 (216)
119862 1205910 = 1198604 (217)
A anaacutelise da FC entre o sinal oacuteptico e eleacutetrico recebido no dispositivo do
sensor eacute feita utilizando a diferenccedila de fase conforme ilustrado com a Figura 23
FIGURA 23 ndash FC utilizada no meacutetodo da diferenccedila de fase
FONTE Adaptado de LANGE (2000)
A FC permite calcular a distacircncia entre o alvo e a cacircmara utilizando quatro
amostras 11986011198602 1198603 e 1198604 com defasagem de 90ordm A diferenccedila de fase 120593 entre o sinal
24
emitido e o recebido eacute proporcional agrave distacircncia entre o alvo e a cacircmara O valor para
a diferenccedila de fase pode ser calculado atraveacutes da Equaccedilatildeo (218)
120593 = 119886119903119888119905119886119899 1198601minus1198603
1198602 minus1198604 (218)
onde
120593 ndash Diferenccedila de fase entre a onda emitida e a recebida
1198601119860211986031198604 ndash Pontos amostrais utilizados na modelagem da FC
Aleacutem do valor da diferenccedila de fase entre os sinais dois outros valores
podem ser calculados a amplitude 119886 e o valor de intensidade 119887 do sinal recebido
conforme as Equaccedilotildees (219) e (220) respectivamente
119886 = 1198601minus1198603 2+ 1198602 minus1198604 2
2 (219)
119887 =1198601+1198602 +1198603+1198604
4 (220)
onde
119886 ndash Amplitude do sinal recebido
119887 ndash Intensidade do sinal recebido (offset)
A distacircncia 119889 do sensor ao alvo eacute calculada atraveacutes da Equaccedilatildeo (221)
119889 =119888∙120593
4120587∙119891119898119900119889 (221)
onde
119889 ndash Distacircncia entre o sensor e o alvo
119888 ndash Valor constante da velocidade da luz propagada no vaacutecuo
120593 ndash Diferenccedila de fase entre o sinal emitido e o recebido
119891119898119900119889 ndash Frequecircncia de modulaccedilatildeo do sinal luminoso utilizado
A frequecircncia de modulaccedilatildeo do sinal emitido estabelece a distacircncia maacutexima
que poderaacute ser medida para um determinado comprimento de onda Em um sinal
25
modulado com a frequecircncia 119891119898119900119889 = 20119872119867119911 e comprimento de onda 120582119898119900119889 = 15m
conforme a Equaccedilatildeo (222) a distacircncia maacutexima que poderaacute ser medida eacute de 75
metros (MOumlLLER et al 2005)
119889119898119886119909 =120582119898119900119889
2= 75119898 (222)
22 IMAGEM TOF
Os piacutexeis da imagem TOF contecircm informaccedilotildees de distacircncia e intensidade
das superfiacutecies dos objetos Proporcionam a anaacutelise da profundidade dos objetos na
cena aleacutem da informaccedilatildeo de intensidade do sinal captado pelo sensor A Figura 24
ilustra a informaccedilatildeo 3D contida na imagem TOF
FIGURA 24 ndash Informaccedilatildeo das imagens TOF
FONTE Adaptado de RINGBECK (2007)
Com a informaccedilatildeo de profundidade e o posicionamento bidimensional dos
objetos na imagem pode-se realizar o mapeamento destes objetos e estimar suas
dimensotildees As cacircmaras TOF podem captar imagens e viacutedeos para realizar medidas
e detectar movimentos A Figura 25 ilustra os arquivos da imagem TOF
26
FIGURA 25 ndash Imagem TOF obtida com cacircmara PMD
FONTE PMD Technologies (2009)
A Figura 25a ilustra o arquivo com informaccedilatildeo das distacircncias dos objetos
presentes na imagem TOF A Figura 25b ilustra o arquivo com as intensidades que
o sinal retornou para o sensor registrada em cada piacutexel da imagem infravermelha
captada com comprimento de onda de 870nm
23 TEMPO DE INTEGRACcedilAtildeO
O periacuteodo de tempo que o sensor da cacircmara ficou exposto para obter a
imagem eacute chamado de tempo de integraccedilatildeo (TI) A quantidade de energia
eletromagneacutetica captada pelo sensor eacute diretamente influenciada por este tempo
pelas caracteriacutesticas refletivas das superfiacutecies dos objetos e pelo meio em que a
imagem foi tomada Os elementos do sensor podem ser carregados de acordo com
seu intervalo de capacidade do insaturado ao supersaturado Estes valores causam
ruiacutedos na imagem variando de acordo com a distacircncia entre o objeto e o sensor
(CENTENO e JUTZI 2010)
Este pode ser considerado o paracircmetro interno mais criacutetico em uma cacircmara
TOF pois descreve o periacuteodo de tempo que os elementos sensores necessitam
para detectar o sinal luminoso com a finalidade de obter a diferenccedila de fase utilizada
27
para o caacutelculo da distacircncia Quando o TI eacute muito baixo alguns elementos do sensor
podem natildeo ser ativados ocasionando piacutexeis com valor zero natildeo sendo possiacutevel
calcular sua distacircncia Por outro lado se o TI eacute muito elevado o pixel pode ficar
supersaturado o que tambeacutem causa erro na medida da distacircncia Sendo assim eacute
necessaacuterio determinar um TI especiacutefico para cada situaccedilatildeo Nas cacircmaras PMD o
controle do TI eacute realizado atraveacutes de software em outros modelos de cacircmaras TOF
este controle pode ser feito atraveacutes de hardware (WIEDEMANN et al 2008)
A Figura 26 ilustra a presenccedila de ruiacutedo na imagem TOF influenciada pelo
TI Nesta figura as nuvens de pontos 3D foram geradas com imagens TOF obtidas
com a cacircmara PMD CamCube 20 a partir do mesmo ponto de vista mas com
diferentes TI (140micros 1400micros e 14000micros) isto causou a presenccedila de ruiacutedo com
diferentes comportamentos
FIGURA 26 ndash Ruiacutedo na nuvem de pontos 3D proveniente de imagem TOF
FONTE PMD CamCube Tutorial (2009)
A nuvem de pontos gerada com a imagem obtida com TI de 1400micros
ilustrada com a Figura 26b foi a que melhor representou a forma das superfiacutecies do
objeto A nuvem de pontos da Figura 26a foi gerada a partir da imagem obtida com
TI igual a 140micros considerada com baixa saturaccedilatildeo pois a intensidade do sinal
captado pelo sensor foi pequena A nuvem de pontos da Figura 26c foi gerada com
imagem obtida com TI igual a 14000micros o que causou a saturaccedilatildeo do sinal recebido
pelo sensor e maior presenccedila de ruiacutedo A nuvem de pontos apresentada com a
Figura 26c apresentou-se menos consistente para representar as superfiacutecies do
objeto em questatildeo
28
24 PRINCIacutePIO DE FUNCIONAMENTO DO SENSOR PMD
O dispositivo PMD (Photonic Mixer Device) realiza medidas de distacircncia
utilizando o princiacutepio TOF Com este objetivo o dispositivo emite sinais luminosos
com frequecircncia modulada e o sensor capta a intensidade de retorno do sinal
refletido pelo alvo Informaccedilotildees sobre as fases e intensidades destes sinais satildeo
obtidas com o processamento A Figura 27 ilustra as etapas deste processo
FIGURA 27 ndash Princiacutepio de funcionamento do sistema PMD
FONTE LUAN (2001)
O sinal modulado eacute emitido com uma fase determinada pelo oscilador do
sistema Para que se possa realizar a medida da distacircncia o sinal recebido deve ter
fase diferente da que foi emitido No dispositivo PMD as cargas eleacutetricas do sinal
recebido satildeo separadas de acordo com a voltagem do diodo de leitura tambeacutem
chamado de fotodiodo O arquivo de saiacuteda deste dispositivo conteacutem informaccedilatildeo de
fase e intensidade do sinal recebido o que possibilita obter informaccedilatildeo de distacircncia
e intensidade para cada piacutexel da imagem (LUAN 2001)
O sensor utilizado no imageamento eacute um CMOS (Complementary Metal-
Oxide-Semiconductor) que tem tecnologia similar a dos sensores CCD (Charged-
Coupled Device) O CMOS apresenta a vantagem de ser um circuito integrado com
baixo consumo de energia No CMOS a conversatildeo de voltagem e a amplificaccedilatildeo do
sinal ocorrem em cada fotodiodo e os valores podem ser lidos independentemente
29
A desvantagem eacute que a amplificaccedilatildeo no fotodiodo gera imagens com maior
presenccedila de ruiacutedo (PECHT e FOSSUM 1997)
Quando os foacutetons sensibilizam o sensor CCD a carga eleacutetrica eacute transferida
sequencialmente linha por linha coluna por coluna A conversatildeo de voltagem e
amplificaccedilatildeo do sinal eacute realizada fora da aacuterea do sensor Uma vantagem do sensor
CCD eacute a geraccedilatildeo de imagens mais niacutetidas devido agrave menor complexidade no seu
sistema Por processar as cargas eleacutetricas de forma unificada menores interferecircncias
satildeo causadas diminuindo a presenccedila de ruiacutedo (KEMENY et al 1991)
A diferenccedila no princiacutepio de funcionamento dos sensores CCD e CMOS eacute
Ilustrada com a Figura 28
FIGURA 28 ndash Captaccedilatildeo da carga do sinal em sensores CCD e CMOS
FONTE LANGE (2000)
O princiacutepio de funcionamento do sensor CCD eacute ilustrado com as Figuras
28a e 28c onde a leitura da informaccedilatildeo eacute feita de forma sequencial pelos elementos
do sensor Esta varredura realizada no sensor CCD faz com que a geraccedilatildeo da
30
imagem final seja mais lenta que no sensor CMOS que realiza a conversatildeo foacuteton-
eleacutetron e eleacutetron-voltagem diretamente em cada elemento sensor conforme eacute
ilustrado com as Figuras 28b e 28d Com isto o sensor CMOS tem maior
velocidade de transferecircncia de cargas acumuladas para o conversor analoacutegico-
digital
Fotodiodos satildeo os elementos fotossensiacuteveis utilizados como portas de
entrada para o sinal luminoso em sensores CMOS ou CCD Estes captam cargas
eleacutetricas presentes no sinal e estatildeo inseridos sobre uma placa de Siliacutecio O
transporte das cargas para o interior da placa eacute explicado fisicamente atraveacutes dos
campos de franjas ilustrado com a Figura 29 Os campos de franja estatildeo
representados para diferentes voltagens os elementos do sensor apresentado tem
entradas para trecircs voltagens 10V 5V e 0V
FIGURA 29 ndash Representaccedilatildeo de campos de franja
FONTE THEUWISSEN (1995)
A seccedilatildeo A-A‟ na Figura 29 ilustra os campos de franja gerados mais
proacuteximos agrave superfiacutecie da placa A forma do sinal pode ser modelada de forma
aproximada por segmentos de linhas retas Na seccedilatildeo B-B‟ com profundidade meacutedia
na placa de Siliacutecio a influecircncia do campo eleacutetrico das entradas vizinhas a porta
central de 5V estaacute em seu niacutevel maacuteximo Quanto mais fundo encontra-se a entrada
de cargas na placa de Siliacutecio menor seraacute a interferecircncia dos campos eleacutetricos
gerados pelas portas de entrada das cargas vizinhas conforme pode ser visualizado
na seccedilatildeo C-C‟ Nesta profundidade diferentes portas de entrada estatildeo praticamente
31
agrave mesma distacircncia da superfiacutecie e o valor de dispersatildeo do campo de franja diminui
O campo de franja miacutenimo de uma entrada que tecircm profundidade maacutexima
proporciona ao sensor o maior aproveitamento aumentando assim a velocidade no
transporte de cargas (THEUWISSEN 1995)
Quanto maior a modulaccedilatildeo na voltagem da entrada das cargas maior o
potencial de armazenamento conforme ilustrado com a Figura 210
FIGURA 210 ndash Princiacutepio de armazenamento de cargas em sensores TOF
FONTE LANGE (2000)
O sinal modulado recebido 119904 119905 e a Funccedilatildeo de Correlaccedilatildeo 119891 119905 + 120591 do sinal
modulado emitido satildeo ilustrados com a Figura 210b A Figura 210a ilustra a luz
incidente no sensor com as cargas captadas e armazenadas de acordo com a
modulaccedilatildeo do fotodiodo
O dispositivo PMD utiliza a tecnologia CMOS para o imageamento com dois
elementos fotossensiacuteveis e dois diodos que captam as cargas eleacutetricas do sinal
modulado recebido As informaccedilotildees oacutepticas e eleacutetricas misturadas geram os piacutexeis
da imagem com informaccedilatildeo de distacircncia dos pontos imageados A Figura 211
ilustra este elemento sensor
32
FIGURA 211 ndash Princiacutepio de captaccedilatildeo de cargas pelo sensor PMD
FONTE LUAN (2001)
As placas claras e centrais na Figura 211a correspondem ao circuito de
leitura do sinal oacuteptico estas placas satildeo condutoras e transparentes para possibilitar
a entrada de luz Os diodos satildeo os componentes do circuito de leitura que captam e
direcionam as cargas eleacutetricas recebidas em um determinado sentido satildeo ilustrados
com as placas mais afastadas na Figura 211a As cargas que chegam satildeo
distribuiacutedas de acordo com a voltagem do diodo Uma fina camada de oacutexido isola os
circuitos de leitura do dispositivo
A voltagem da carga que entra no sistema eacute controlada de acordo com a
modulaccedilatildeo do sinal aplicada pelo dispositivo emissor Sendo assim pode ser
captada pelo diodo da direita ou esquerda que registraraacute a quantidade de carga
recebida de acordo com sua voltagem A distribuiccedilatildeo de potencial na regiatildeo
superficial do dispositivo eacute influenciada pela seleccedilatildeo de cargas que faz este sistema
dinacircmico e equilibrado Para valores natildeo nulos a luz modulada recebida e a
diferenccedila de fase podem ser comparadas atraveacutes das cargas eleacutetricas recebidas A
quantidade de carga captada pelos diodos depende diretamente da diferenccedila de
fase entre o sinal modulado emitido e o recebido pelo sensor Esta informaccedilatildeo pode
ser utilizada para calcular a diferenccedila de fase entre o sinal emitido e o recebido pois
33
eacute diretamente proporcional a carga que cada diodo captou Com isto a distacircncia
entre o sensor e o objeto pode ser calculada utilizando o princiacutepio da diferenccedila de
fase No entanto se a luz incidente eacute modulada como um sinal retangular mas sua
fase entre a emissatildeo e a recepccedilatildeo eacute igual a zero a carga seraacute captada por apenas
um dos diodos e a distacircncia resultante seraacute igual a zero (MOumlLLER et al 2005)
A Figura 212 ilustra o comportamento dos diodos de leitura ao receber o
sinal com distacircncia diferente de zero entre o alvo e o sensor Na Figura 212a eacute
ilustrado o sinal luminoso recebido por um elemento fotossensiacutevel Este sinal eacute
captado pela porta de entrada PA do fotodiodo que registra parte desta carga de
acordo com sua modulaccedilatildeo
FIGURA 212 ndash Medida da diferenccedila de fase do sinal recebido
FONTE Adaptado de MOumlLLER et al (2005)
Na Figura 212a o sinal recebido pelo elemento fotossensiacutevel do sensor eacute
ilustrado no momento em que eacute captado pela porta com modulaccedilatildeo A (PmodA) A
carga eacute captada pelos dois fotodiodos com defasagem de meio ciclo com isto cada
um capta parte da carga recebida A Figura 212b ilustra a medida da diferenccedila de
fase do sinal recebido atraveacutes da quantidade de carga que foi captada pelos
fotodiodos com modulaccedilatildeo Mod_A e Mod_B A voltagem do diodo eacute estabelecida de
acordo com a modulaccedilatildeo do sinal luminoso que seraacute emitida pelo dispositivo
34
25 CAcircMARAS PMD
As cacircmaras TOF com tecnologia PMD consistem de um chip sensor fonte
de iluminaccedilatildeo transmissor e receptor oacutepticos aleacutem de perifeacutericos eletrocircnicos e
interface digital de controle realizada atraveacutes de software Dependendo das
exigecircncias de aplicaccedilatildeo os componentes da cacircmara podem ser adaptados Cada
um deles pode afetar os paracircmetros internos da cacircmara tais como o campo de
visatildeo (FOV) taxa de captaccedilatildeo e tempo de integraccedilatildeo para a aquisiccedilatildeo das imagens
A distacircncia da superfiacutecie a ser medida eacute o fator preponderante para a escolha destes
paracircmetros O fato destas cacircmaras serem modulares amplia sua gama de
aplicaccedilotildees Isto eacute possiacutevel levando-se em conta as condiccedilotildees adicionais que cada
aplicaccedilatildeo pode exigir tais como a luz exterior ao sistema e a necessidade de
mudanccedila na fonte de iluminaccedilatildeo utilizada (PMD Technologies 2009)
O sensor PMD proporciona o imageamento instantacircneo dos objetos
utilizando um sensor com tecnologia CMOS adaptado Este sensor eacute um arranjo de
elementos fotossensiacuteveis que permitem a raacutepida detecccedilatildeo e modulaccedilatildeo do sinal
luminoso com suas variaccedilotildees Isto eacute feito de acordo com a distacircncia da superfiacutecie
que atinge do objeto imageado Pode adquirir dados de distacircncia e intensidade
simultaneamente sem precisar de um sistema de digitalizaccedilatildeo mais complexo como
um laser scanner Apresenta a desvantagem de ser muito sensiacutevel agrave luz exterior ao
sistema que interfere causando a presenccedila de ruiacutedo na imagem TOF e consequente
erro na medida de distacircncia (KHONGSAB 2009)
O desempenho do sistema PMD depende da fonte de iluminaccedilatildeo utilizada
capacidade de fornecimento de energia e eficiecircncia oacuteptica na criaccedilatildeo da imagem
Normalmente eacute utilizada fonte de iluminaccedilatildeo LED nas cacircmaras PMD No entanto
outros fabricantes utilizam diodos LASER para a iluminaccedilatildeo isto porque possibilita
realizar medidas de distacircncias maiores O desenvolvimento dos sistemas LED fez
com que sua eficiecircncia de transformaccedilatildeo de energia eleacutetrica em energia oacuteptica seja
de 30 Com a iluminaccedilatildeo LED tem-se um sinal luminoso jaacute modulado devido a
suas caracteriacutesticas eletro-oacutepticas Como uma parte consideraacutevel da luz fica na
borda do feixe isto se torna uma desvantagem pois esta aacuterea normalmente fica fora
do campo de visatildeo do sensor PMD Outra desvantagem diz respeito ao limite de
modulaccedilatildeo dos LED‟s comerciais que trabalham na faixa de 20 MHz agrave 30 MHz Os
diodos LASER tecircm eficiecircncia oacuteptica de ateacute 50 dependendo da potecircncia de saiacuteda
35
utilizada sendo de aproximadamente 100 MHz a modulaccedilatildeo maacutexima da frequecircncia
que pode ser atingida O perfil do feixe LASER pode ser adaptado ao campo de
visatildeo do sensor PMD A desvantagem eacute que este seria um circuito modular mais
complexo e que teria necessidade de um maior nuacutemero de etapas para conseguir
estabilizar a fase da onda portadora do sinal Outra desvantagem eacute que a
implantaccedilatildeo de um sistema LASER necessita de maior atenccedilatildeo agrave seguranccedila dos
olhos do que o sistema LED (RINGBECK 2007)
Com a Figura 213 ilustra-se a medida de distacircncia com a cacircmara TOF
modelo 19k da PMD A fonte de iluminaccedilatildeo LED emite o sinal luminoso em direccedilatildeo
dos objetos que estatildeo no campo visual da cacircmara O retorno deste sinal eacute captado
pelo sensor e possibilita o caacutelculo da diferenccedila de fase entre o sinal emitido e o
recebido
FIGURA 213 ndash Medida de distacircncia com a cacircmara PMD
FONTE MOLLER et al (2005)
36
251 Cacircmara PMD CamCube 20
A cacircmara TOF modelo PMD[VISION]regCamCube 20 funciona em ambientes
internos e externos com sensor de 204x204 piacutexeis que captam os niacuteveis de cinza da
imagem de intensidade Simultaneamente realiza a medida da quantidade de carga
recebida utilizada para determinar a diferenccedila de fase entre o sinal emitido e o
recebido Isto possibilita o caacutelculo da distacircncia entre o sensor e os objetos presentes
na cena A Figura 214 ilustra a cacircmara PMD CamCube 20 com as fontes de
iluminaccedilatildeo LED acopladas em suas laterais
FIGURA 214 ndash Cacircmara PMD CamCube 20
FONTE PMD Technologies (2009)
Este equipamento pode ter seu campo de visatildeo variaacutevel possibilitando a
diminuiccedilatildeo de distorccedilotildees manchas ou outras imperfeiccedilotildees da imagem O software
de interface da cacircmara com o computador apresenta a possibilidade de trabalhar
com dados brutos para o processamento das imagens aleacutem de funcionar em
diferentes canais de frequecircncia Tambeacutem disponibiliza compatibilidade com o
software Matlab para realizar esta interface
A imagem de intensidade captada de uma parede utilizando a cacircmara PMD
CamCube 20 eacute ilustrada com a Figura 215
37
FIGURA 215 ndash Imagem captada com a cacircmara PMD CamCube 20
FONTE CENTENO e JUTZI (2010)
Com a Figura 215a eacute ilustrada a cacircmara PMD CamCube 20 instalada em
um tripeacute sobre uma mesa Na Figura 215b tem-se a imagem infravermelha da
superfiacutecie plana de uma parede obtida com esta cacircmara O Quadro 21 ilustra as
especificaccedilotildees teacutecnicas da cacircmara PMD CamCube 20
PARAcircMETROS VALOR PADRAtildeO OBSERVACcedilOtildeES
Tipo do sensor PhotonICs PMD41k-S (204x204 piacutexeis)
Tamanho efetivo do pixel no sensor igual a 45microm
Distacircncia de mediccedilatildeo 03 ndash 7metros
Precisatildeo na medida de distacircncia (1σ) lt 3mm
Para aacuterea central da imagem obtida agrave 2m do sensor em superfiacutecie com refletividade de 90
Frequecircncia de aquisiccedilatildeo de imagens 25 fps Configuraccedilatildeo padratildeo
Campo de visatildeo (FOV) 40ordmx40ordm f = 128mm
Comprimento de onda da fonte de iluminaccedilatildeo
870nm Infravermelho proacuteximo
Fonte de iluminaccedilatildeo [V] 12 V plusmn 10
Interface USB 20
Temperatura de operaccedilatildeo 0ordmC agrave 50ordmC
Temperatura de armazenamento -20ordmC agrave 85ordmC
QUADRO 21 - Especificaccedilotildees teacutecnicas da cacircmara PMD CamCube 20 FONTE Adaptado de PMD Technologies (2009)
O sensor PhotonICs PMD41k-S utilizado na cacircmara PMD CamCube 20 vem
com um dispositivo SBI para a supressatildeo de cargas provenientes da iluminaccedilatildeo
exterior ao sistema Estas cargas causam a saturaccedilatildeo dos piacutexeis da imagem TOF
38
252 Dispositivo SBI
O dispositivo SBI (Supression of Background Illumination) eacute uma soluccedilatildeo
teacutecnica encontrada para melhorar o contraste das imagens geradas com o sensor
PMD em ambientes com iluminaccedilatildeo exterior A presenccedila desta iluminaccedilatildeo na cena
do objeto imageado causa maior presenccedila de ruiacutedo no sinal captado pelo sensor
Esta iluminaccedilatildeo pode saturar os elementos do sensor fazendo com que
ocorram falhas na medida de distacircncia Este efeito pode ser minimizado utilizando o
tempo de integraccedilatildeo adequado para a tomada das imagens Outros distuacuterbios que
podem ocorrer satildeo devidos agrave corrente negra (DC - Dark Current) Este efeito eacute
causado porque o sensor natildeo capta o valor zero na imagem que seria a falta
completa de iluminaccedilatildeo nas superfiacutecies da cena A corrente negra natildeo pode ser
evitada em dispositivos semicondutores especialmente quando haacute altas
temperaturas Com uma temperatura de 80ordmC a corrente negra pode ser 1000 vezes
maior do que o normal o que afeta significativamente a qualidade das medidas
realizadas Para tornar o dispositivo PMD mais confiaacutevel na medida de distacircncias foi
criado o circuito SBI que suprime instantaneamente a iluminaccedilatildeo de fundo Neste
circuito eacute utilizada uma teacutecnica para a captaccedilatildeo do sinal luminoso minimizando a
interferecircncia de fatores externos Isto possibilita realizar medidas de distacircncia
confiaacuteveis mesmo em ambientes onde o sinal eacute modificado por interferecircncia de
iluminaccedilatildeo externa ou por altas temperaturas O sistema SBI pode ser desativado ou
ateacute mesmo ajustado para que seja possiacutevel realizar medidas de distacircncia com
qualidade em cenas tomadas em diferentes ambientes independente da presenccedila
de iluminaccedilatildeo exterior (MOumlLLER 2005)
O circuito SBI adiciona cargas eleacutetricas de compensaccedilatildeo instantacircnea nos
diodos de leitura minimizando os efeitos de saturaccedilatildeo causados por fatores externos
ao sistema Com o SBI espera-se que o sensor capte apenas o sinal correlacionado
com a medida de distacircncia sem interferecircncia de iluminaccedilatildeo exterior reduzindo
assim a interferecircncia da iluminaccedilatildeo de fundo no sinal recebido
A Figura 216a ilustra um sensor sem o dispositivo SBI a carga captada com
influecircncias externas de iluminaccedilatildeo e calor eacute maior do que a enviada pela fonte de
iluminaccedilatildeo refletida pela superfiacutecie do objeto e recebida pelo sensor Neste caso a
medida de distacircncia estaacute influenciada por fatores externos ao sistema e conteraacute
erros Na Figura 216b as cargas geradas por fatores externos ao sistema satildeo
39
minimizadas pelo dispositivo SBI Com isto tem-se maior quantidade de carga
captada com o sinal recebido eliminando a carga gerada por fatores externos
FIGURA 216 ndash Princiacutepio de funcionamento do SBI
FONTE MOumlLLER et al (2005)
Cacircmaras TOF com iluminaccedilatildeo LED infravermelha utilizam o dispositivo SBI
para a supressatildeo da iluminaccedilatildeo de fundo Outros modelos de cacircmaras TOF utilizam
iluminaccedilatildeo LASER para evitar o problema com a iluminaccedilatildeo exterior
253 Modelos de cacircmaras TOF
Diferentes cacircmaras TOF foram desenvolvidas nos uacuteltimos anos a Figura
217 ilustra alguns modelos destas cacircmaras
FIGURA 217 ndash Modelos de cacircmaras TOF
a) Effector O3D FONTE httpwwwifm-electroniccom
b) PMD[vision] CamCube 20 FONTE httpwwwpmdteccom
c) PMD[vision] 19k FONTE httpwwwpmdteccom
d) SwissRanger SR-3000 FONTE httpwwwmesa-imagingch
40
O Quadro 22 descreve as especificaccedilotildees teacutecnicas destas cacircmaras TOF
a)Effector
O3D
b)PMD[vision]
CamCube 20
c)PMD[vision]
19k
d)SwissRanger
SR-3000
Resoluccedilatildeo (piacutexeis) 64 x 50 204 x 204 160 x 120 176 x 144
Dimensotildees dos piacutexeis (microm) 100 x 100 45 x 45 40 x 40 40 x 40
Distacircncia focal (mm) 86 128 120 80
Fonte de iluminaccedilatildeo 1 matriz LED 2 matrizes LED 2 matrizes LED 1 matriz LED
Modulaccedilatildeo da fonte de
iluminaccedilatildeo (nm) 850 870 870 850
Frequecircncia de modulaccedilatildeo 20 MHz 20 MHz 20 MHz 20 MHz
Frequecircncia na aquisiccedilatildeo de
imagens
Maacuteximo
100 fps
Maacuteximo
25 fps
Maacuteximo
15 fps
Maacuteximo
40 fps
Conexatildeo Ethernet USB 2 Ethernet USB 2
Dimensotildees (mm) 55 x 45 x 85 194 x 60 x 60 220 x 210 x 55 60 x 50 x 65
QUADRO 22 ndash Especificaccedilotildees teacutecnicas de cacircmaras TOF FONTE Adaptado de RAPP (2007)
A partir do Quadro 22 verifica-se que estes modelos de cacircmaras TOF em
sua configuraccedilatildeo padratildeo possuem fonte de iluminaccedilatildeo LED distacircncia focais
variando de 8mm agrave 128mm e apresentam pequenas dimensotildees
26 ERROS DE MEDIDA
Observaccedilotildees realizadas com instrumentos de medida estatildeo acompanhadas
de erros provenientes da falibilidade humana imperfeiccedilatildeo na fabricaccedilatildeo do
equipamento e de interferecircncias causadas pelo ambiente em que o instrumento
utilizado e o objeto estavam no momento em que se realizou a medida Erros de
observaccedilatildeo satildeo tradicionalmente classificados como erros grosseiros sistemaacuteticos e
acidentais Erros grosseiros devem ser detectados e evitados pelo observador com
os devidos cuidados na obtenccedilatildeo da informaccedilatildeo tambeacutem ocorrem devido agrave
presenccedila de ruiacutedo nas observaccedilotildees Erros sistemaacuteticos se repetem seguindo um
determinado padratildeo e podem ser preditos e corrigidos Existem opccedilotildees para evitaacute-
los atraveacutes de teacutecnicas de observaccedilatildeo ou entatildeo eliminaacute-los a posteriori atraveacutes de
foacutermulas especiacuteficas Os erros acidentais ou aleatoacuterios satildeo randocircmicos natildeo
previsiacuteveis e podem ser distribuiacutedos entre o conjunto de observaccedilotildees por teacutecnicas
41
estatiacutesticas Eacute comum o uso da expressatildeo ldquopropriedades estatiacutesticas das
observaccedilotildeesrdquo devido a este erro (GEMAEL 1994)
Erros na medida de distacircncia utilizando cacircmaras TOF tambeacutem podem ser
divididos em natildeo-sistemaacuteticos e sistemaacuteticos conforme descrito nas seccedilotildees 261 e
262 onde seratildeo apresentados 3 erros natildeo-sistemaacuteticos e 7 erros sistemaacuteticos
261 Erros natildeo-sistemaacuteticos em cacircmaras TOF
De acordo com MAY et al (2008) a classificaccedilatildeo de erros natildeo-sistemaacuteticos
na medida de distacircncia utilizando cacircmaras TOF pode ser feita da seguinte maneira
1) Erro devido agrave relaccedilatildeo sinal-ruiacutedo (Signal-to-noise) quando a relaccedilatildeo da
carga recebida com o sinal eacute baixa e o ruiacutedo presente eacute alto haveraacute distorccedilatildeo na
medida de distacircncia que natildeo poderaacute ser corrigida posteriormente Para diminuir este
erro pode-se tomar cuidado com o tempo de exposiccedilatildeo do sensor na aquisiccedilatildeo da
imagem e tambeacutem amplificar a iluminaccedilatildeo do sistema Outra soluccedilatildeo eacute filtrar os
valores medidos com baixas amplitudes no sinal recebido
2) Reflexatildeo do sinal por muacuteltiplos caminhos (Multiple ways reflection) em
objetos com descontinuidade em suas superfiacutecies o sinal emitido pode percorrer
diferentes caminhos antes de retornar ao sensor Exemplos satildeo objetos com
superfiacutecies cocircncavas que podem refletir vaacuterias vezes o sinal e gerar erro na medida
de distacircncia Neste caso o sinal eacute refletido com sobreposiccedilatildeo ou seja pode ser
captado o sinal da uacuteltima superfiacutecie que o refletiu gerando uma distacircncia diferente
do valor esperado
3) Espalhamento da luz (Light scattering) ocorre na lente da cacircmara
causado pela presenccedila de objetos proacuteximos Este efeito e o causado pela reflexatildeo
por muacuteltiplos caminhos satildeo imprevisiacuteveis pois a topologia da cena observada eacute
desconhecida a priori
262 Erros sistemaacuteticos em cacircmaras TOF
Segundo RAPP (2007) nas cacircmaras TOF erros tambeacutem indicam a relaccedilatildeo
entre a variacircncia da distacircncia e a amplitude do sinal captado pelo sensor A relaccedilatildeo
42
estabelecida eacute que a variacircncia dos dados de distacircncia eacute inversamente proporcional agrave
raiz quadrada da amplitude do sinal recebido para realizar a medida Alguns erros
sistemaacuteticos das cacircmaras TOF estudados por RAPP foram
1) Erro devido a uma funccedilatildeo natildeo harmocircnica utilizada para correlacionar o
sinal emitido ao recebido
2) Ruiacutedos relacionados com o tempo de integraccedilatildeo Este tempo pode causar
exposiccedilatildeo insuficiente ou saturaccedilatildeo dos elementos do sensor
3) Erros geomeacutetricos no posicionamento dos piacutexeis devido ao sistema oacuteptico
da cacircmara
O erro devido agrave falta de harmonia na funccedilatildeo de correlaccedilatildeo entre o sinal
emitido e o recebido pode ser causado quando o sistema oacuteptico utilizado emite o
sinal de referecircncia com sua forma inicial e recebe o sinal refletido com forma
diferente Com isto a funccedilatildeo que representa o sinal recebido natildeo teraacute a forma
senoidal teoacuterica do sinal emitido Isto ocorre por conter harmocircnicos de Fourier
iacutempares quando eacute necessaacuteria uma amostra com pelo menos quatro pontos para
definir a FC entre os sinais Este erro tem grande influecircncia no caacutelculo da distacircncia
do objeto pois eacute a FC que possibilita a medida da diferenccedila de fase entre o sinal
emitido e o recebido
A presenccedila de ruiacutedo pode ser notada variando o TI na aquisiccedilatildeo da imagem
O conjunto de dados apresenta maiores distorccedilotildees radiomeacutetricas e geomeacutetricas
quando a presenccedila de ruiacutedo eacute forte Quando o TI eacute aumentado o ruiacutedo observado no
conjunto de dados pode diminuir Poreacutem valores extremamente altos introduzem
erros na mediccedilatildeo por causar saturaccedilatildeo do sensor Com esta informaccedilatildeo procura-se
definir uma funccedilatildeo para a modelagem do ruiacutedo de acordo com o tempo de
integraccedilatildeo Analisando dados obtidos com diferentes TI pode-se especificar qual o
melhor para cada situaccedilatildeo
Erros causados por exposiccedilatildeo insuficiente do sensor natildeo satildeo considerados
sistemaacuteticos poreacutem podem ser preditos Se o valor da amplitude do sinal eacute reduzido
o erro na medida da distacircncia aumenta Para reduzir os piacutexeis obtidos com
exposiccedilatildeo insuficiente pode-se definir um limite no valor da amplitude do sinal
Outra forma de controlar a exposiccedilatildeo eacute com o TI na obtenccedilatildeo da imagem Piacutexeis que
tem amplitude menor que 1 do valor maacuteximo das amplitudes na imagem TOF satildeo
considerados piacutexeis com exposiccedilatildeo insuficiente
43
Erros de posicionamento dos piacutexeis devido ao sistema oacuteptico da cacircmara
podem ser notados quando capta-se a imagem de uma fachada com portas e
janelas As linhas horizontais e verticais que representam estes elementos na
imagem aparecem com curvaturas de acordo com o sistema de lentes utilizado na
cacircmara A distorccedilatildeo de lentes tem um padratildeo fixo em cacircmaras com sensor CMOS
ou CCD e pode ser corrigida geometricamente atraveacutes dos POI da cacircmara que
captou a imagem
Erros sistemaacuteticos em cacircmaras TOF tambeacutem foram estudados por FUCHS e
HIRZINGER (2008) e MAY et al (2008) e foram classificados da seguinte maneira
4) Erro na medida de distacircncia (Distance-related error) este erro eacute causado
devido agrave assimetria da forma do sinal infravermelho recebido pelo sensor
Teoricamente assume-se que este sinal possui forma senoidal e harmocircnica com a
forma do sinal emitido o que na praacutetica pode natildeo acontecer Sendo assim o
pressuposto baacutesico para que se possa calcular o atraso de fase eacute que o sinal
luminoso emitido e o recebido satildeo harmocircnicos e com forma senoidal
Consequentemente se o caacutelculo do atraso de fase do sinal eacute impreciso a distacircncia
entre o objeto e o sensor tambeacutem seraacute calculada de forma imprecisa
5) Erro na amplitude do sinal captado (Amplitude-related error) o sensor natildeo
capta a energia eletromagneacutetica recebida com o sinal perfeitamente Deixando-se a
cacircmara e o objeto na mesma posiccedilatildeo podem-se obter diferentes medidas de
distacircncia devido a esta imperfeiccedilatildeo na fabricaccedilatildeo dos elementos do sensor Este
erro eacute relacionado com a amplitude de valores na captaccedilatildeo da imagem depende da
distacircncia e de caracteriacutesticas como a refletividade das superfiacutecies dos objetos
6) Erro devido agrave latecircncia dos elementos do sensor (Latency-related error) o
atraso de fase do sinal recebido eacute calculado atraveacutes das latecircncias com que o sensor
captou o sinal Estaacute relacionado com propriedades semicondutoras dos materiais
utilizados nos elementos sensores que satildeo responsaacuteveis pela medida da quantidade
de carga recebida Eacute causado quando o sinal emitido e o recebido satildeo
correlacionados diretamente na matriz do sensor Diferentes latecircncias do sinal
devem ser captadas por cada elemento do sensor para possibilitar o caacutelculo da
distacircncia de cada pixel de forma confiaacutevel
7) Ruiacutedo com padratildeo fixo (FPN - Fixed pattern noise) eacute relacionado com o
erro devido agrave latecircncia e ocorre devido agraves propriedades dos materiais utilizados na
fabricaccedilatildeo de cada elemento do sensor CMOS Este eacute um ruiacutedo com padratildeo fixo
44
pode ser corrigido a partir de uma imagem que tenha um pixel com valor constante
que serviraacute como referecircncia para a calibraccedilatildeo dos valores dos piacutexeis vizinhos
Tendo-se como referecircncia um pixel obtido em uma superfiacutecie uniforme de um objeto
pode-se utilizar um padratildeo de similaridade como referecircncia para os outros piacutexeis
Sendo assim a qualidade dos dados depende da posiccedilatildeo do pixel na imagem
Os uacuteltimos quatro erros sistemaacuteticos podem ser corrigidos utilizando o
meacutetodo de calibraccedilatildeo descrito em Fuchs et al (2007) Conforme realizado em
experimento por May et al (2008) os resultados alcanccedilados no mapeamento de uma
sala obtiveram a precisatildeo centimeacutetrica Este experimento foi realizado com o
objetivo de medir paredes opostas de uma sala com o sensor TOF em movimento
instalado em uma plataforma moacutevel O erro encontrado na medida das distacircncias
tambeacutem foi influenciado por erros na estimaccedilatildeo do posicionamento do sensor que eacute
obtido com a Orientaccedilatildeo Exterior da cacircmara no momento de aquisiccedilatildeo das imagens
Durante o registro dos quadros fotograacuteficos o erro em rotaccedilatildeo foi determinado como
sendo igual a 22ordm e o erro de translaccedilatildeo foi de 071m no eixo 119883 004m no eixo 119884 e
de -021m no eixo 119885 A distacircncia calculada entre paredes opostas foi igual a 105m
para a distacircncia de referecircncia de 108m A diferenccedila entre as duas medidas resultou
em 03m o que representa aproximadamente 28 da distacircncia de referecircncia A
nuvem de pontos 3D gerada por MAY et al (2008) eacute ilustrada com a Figura 218
FIGURA 218 ndash Nuvem de pontos 3D gerada a partir de imagem TOF
FONTE MAY et al (2008)
45
27 PROJECcedilAtildeO ORTOGONAL DOS PONTOS
As coordenadas tridimensionais dos pontos da imagem TOF satildeo obtidas
atraveacutes da projeccedilatildeo ortogonal Isto ocorre devido ao fato do equipamento utilizado
calcular as distacircncias dos objetos em um sistema esfeacuterico Esta projeccedilatildeo eacute feita a
partir da colinearidade entre o ponto no espaccedilo objeto o Centro Perspectivo (CP) e
o ponto no espaccedilo imagem conforme eacute ilustrado com a Figura 219
FIGURA 219 ndash Colinearidade entre os pontos no espaccedilo imagem e objeto
FONTE Adaptado de RAPP (2007)
A Figura 219 ilustra os sistemas referenciais adotados nos espaccedilos imagem
e objeto O sistema referencial fotogrameacutetrico (119909119875 119910119875) tem sua origem no CP que eacute
materializado pelo ponto nodal anterior do sistema de lentes da cacircmara Este ponto
projetado no plano da imagem gera o Ponto Principal (PP) A projeccedilatildeo do sistema
referencial fotogrameacutetrico na imagem eacute realizada considerando a simplificaccedilatildeo de
haverem apenas translaccedilotildees entre os eixos deste sistema e o sistema da imagem O
46
sistema referencial de imagem levoacutegiro (119862 119871) tem sua origem no canto superior
esquerdo Atraveacutes das Equaccedilotildees (223) e (224) esta origem pode ser transladada
para o centro da imagem (MACHADO 2006)
119862prime = 119862 minus119899119862minus1
2 (223)
119871prime = 119871 minus119899119871minus1
2 (224)
onde
119862 119871 ndash Sistema referencial de coordenadas da imagem (piacutexeis)
119899119862 119899119871 ndash Nuacutemero total de colunas e linhas da imagem (piacutexeis)
119862prime 119871prime ndash Sistema referencial auxiliar no centro da imagem (piacutexeis)
Para tornar o sistema referencial auxiliar (119862prime 119871prime) de imagem levoacutegiro em um
sistema dextroacutegiro (119909119894119898 119910119894119898 ) pode-se realizar uma reflexatildeo do eixo 119871prime atraveacutes da
Equaccedilatildeo (226)
119909119894119898 = 119862prime (225)
119910119894119898 = minus119871prime (226)
onde
119909119894119898 119910119894119898 ndash Coordenadas de um ponto no sistema referencial dextroacutegiro da
imagem (piacutexeis)
Com isto tem-se um sistema referencial dextroacutegiro centralizado na imagem e
que se relaciona com o sistema referencial fotogrameacutetrico projetado atraveacutes da
translaccedilatildeo de eixos determinada pelas coordenadas (119909119900 119910119900) do PP conforme
ilustrado com a Figura 220
47
FIGURA 220 ndash Sistemas de coordenadas utilizados em imagens
FONTE Adaptado de MACHADO (2006)
A partir do sistema referencial de imagem dextroacutegiro com origem no centro
da imagem e do sistema referencial fotogrameacutetrico projetado com origem no PP
satildeo estabelecidas as relaccedilotildees entre os sistemas de acordo com as Equaccedilotildees (227)
e (228)
119909119894119898 = (119909 minus 1199090) (227)
119910119894119898 = (119910 minus 1199100) (228)
onde
11990901199100 ndash Satildeo as coordenadas do ponto principal no sistema referencial de
imagem (piacutexeis)
119909119910 ndash Coordenadas dos pontos no sistema referencial fotogrameacutetrico
projetado na imagem (piacutexeis)
Os valores das coordenadas dos pontos do sistema fotogrameacutetrico projetado
na imagem estatildeo em piacutexeis A transformaccedilatildeo destes valores para miliacutemetros pode
ser feita multiplicando estas coordenadas pelo tamanho efetivo do pixel nas direccedilotildees
119909 e 119910 da imagem conforme as Equaccedilotildees (229) e (230)
48
119909 = 119909119894119898 ∙ 119875119909 (229)
119910 = 119910119894119898 ∙ 119875119910 (230)
onde
119909119910 ndash Satildeo as coordenadas dos pontos no sistema fotogrameacutetrico projetado
na imagem (miliacutemetros)
119875119909 119875119910 ndash Tamanho efetivo dos piacutexeis nas direccedilotildees 119909 e 119910 (miliacutemetros)
O tamanho efetivo dos piacutexeis nas direccedilotildees 119909 e 119910 satildeo calculados a partir do
fator de escala nestas direccedilotildees conforme Equaccedilotildees (231) e (232)
119875119909 = 119875 ∙ 119904119909 (231)
119875119910 = 119875 ∙ 119904119910 (232)
onde
119875119909 119875119910 ndash Tamanho efetivo dos piacutexeis nas direccedilotildees 119909 e 119910 (miliacutemetros)
119875 ndash Dimensatildeo do pixel obtida no manual do equipamento (miliacutemetros)
119904119909 119904119910 ndash Fatores de escala dos piacutexeis nas direccedilotildees 119909 e 119910
Os fatores de escala dos piacutexeis nas direccedilotildees 119909 e 119910 podem ser calculados
atraveacutes das Equaccedilotildees (233) e (234)
119904119909 =119891
119891119909 (233)
119904119910 =119891
119891119910 (234)
onde
119904119909 119904119910 ndash Fatores de escala dos piacutexeis nas direccedilotildees 119909 e 119910
119891119909 119891119910 ndash Distacircncia focal da cacircmara ao longo dos eixos 119909 e 119910 (miliacutemetros)
119891 ndash Distacircncia focal da cacircmara obtida no manual do equipamento
(miliacutemetros)
49
Quando o valor da distacircncia focal 119891119909 obtido com a calibraccedilatildeo da cacircmara
difere do valor 119891119910 tem-se um indicativo de escalas diferentes nos eixos 119909 e 119910 da
imagem
Realizadas as etapas de Orientaccedilatildeo Interior da imagem podem-se calcular
as coordenadas 3D dos pontos O posicionamento de cada ponto depende da
precisatildeo na determinaccedilatildeo dos acircngulos verticais e horizontais no sistema referencial
de imagem A projeccedilatildeo ortogonal das distacircncias dos pontos coordenada 119885 pode ser
feita atraveacutes da Equaccedilatildeo (235)
119885 = 119889119903 ∙ cos120573 (235)
onde
119885 ndash Distacircncia ortogonal do CP ao ponto observado no espaccedilo objeto
119889119903 ndash Distacircncia radial do CP ao ponto no sistema referencial esfeacuterico
120573 ndash Acircngulo formado entre o eixo que atinge o ponto na imagem partindo do
CP e o eixo principal da cacircmara (CP-PP)
O acircngulo 120573 pode ser calculado atraveacutes da funccedilatildeo trigonomeacutetrica expressa
com a Equaccedilatildeo (236)
tan120573 = 1199092
1198911199092 +
1199102
1198911199102 (236)
onde
119891119909 119891119910 ndash Distacircncia focal da cacircmara ao longo dos eixos 119909 e 119910 (miliacutemetros)
119909119910 ndash Coordenadas dos pontos no sistema referencial fotogrameacutetrico
projetado na imagem (miliacutemetros)
A Expressatildeo (235) relaciona a distacircncia radial 119889119903 com a coordenada 119885 dos
pontos no sistema ortogonal 3D em funccedilatildeo do acircngulo 120573 Substituindo a Equaccedilatildeo
(236) na Equaccedilatildeo (235) podemos explicitar a coordenada 119885 em funccedilatildeo das
distacircncias focais da cacircmara e das coordenadas dos pontos no sistema referencial
fotogrameacutetrico projetado na imagem conforme Equaccedilatildeo (237)
50
119885 = 119889119903 ∙ cos tanminus1 1199092
1198911199092 +
1199102
1198911199102 (237)
onde
119885 ndash Distacircncia ortogonal do CP ao ponto (miliacutemetros)
119889119903 ndash Distacircncia radial do CP ao ponto no sistema esfeacuterico da cacircmara
(miliacutemetros)
119891119909 119891119910 ndash Distacircncia focal da cacircmara ao longo dos eixos 119909 e 119910 (miliacutemetros)
119909119910 ndash Coordenadas dos pontos no sistema referencial fotogrameacutetrico
projetado na imagem (miliacutemetros)
As coordenadas (119883119884) dos pontos no sistema referencial ortogonal podem
entatildeo serem calculadas atraveacutes das Equaccedilotildees (238) e (239)
119883 = 119909 ∙119885
119891119909 (238)
119884 = 119910 ∙119885
119891119910 (239)
28 REFINAMENTO DA NUVEM DE PONTOS 3D
O processo de refinamento da nuvem de pontos 3D obtida com a imagem
TOF compreende a filtragem dos pontos que estejam esparsos devido agrave presenccedila
de ruiacutedo no arquivo de distacircncias da imagem TOF Com a Figura 221a satildeo
ilustrados pontos que natildeo pertencem agraves superfiacutecies do objeto aparecem na aresta
superior direita do objeto O sinal emitido atinge uma aacuterea da superfiacutecie do objeto e
natildeo apenas um ponto Esta aacuterea eacute proporcional agrave distacircncia entre o alvo e o sensor
ocorre devido agrave divergecircncia do feixe de luz emitido Com o princiacutepio TOF o valor da
distacircncia calculada eacute resultado da integraccedilatildeo do sinal recebido de acordo com a
aacuterea iluminada da superfiacutecie Quando o sinal emitido atinge superfiacutecies natildeo
coplanares o valor de distacircncia armazenado eacute um resultado interpolado Este
fenocircmeno ocorre principalmente nas bordas dos objetos e pode ser visto com a
51
Figura 221a que mostra um objeto com trecircs superfiacutecies planas uma base um
plano vertical na direita e um plano na parte superior
FIGURA 221 ndash Filtro para a definiccedilatildeo de bordas do objeto
FONTE MAY et al (2008)
A Figura 221b apresenta a nuvem de pontos 3D apoacutes a aplicaccedilatildeo do filtro
para o refinamento Este eacute um filtro gaussiano utilizado para a definiccedilatildeo de bordas e
desniacuteveis dos objetos eacute tambeacutem uma ferramenta para a remoccedilatildeo de pontos
esparsos provenientes da presenccedila de ruiacutedo nos dados da imagem TOF Funciona
considerando o acircngulo formado entre dois piacutexeis adjacentes na imagem onde o CP
eacute o ponto que completa o triacircngulo sendo o criteacuterio de seleccedilatildeo utilizado a distacircncia
meacutedia dos k pontos vizinhos mais proacuteximos
De acordo com May et al (2008) a distacircncia medida a partir de cacircmaras
TOF pode ser afetada pelo efeito de arredondamento das bordas Isto ocorre pela
suavizaccedilatildeo causada com a transiccedilatildeo entre as superfiacutecies iluminadas Dado um
conjunto de pontos 3D 119875 = 119901119894 119901119894 isin ℝ3 119894 = 1hellip 119873119901 as bordas podem ser
detectadas utilizando a Equaccedilatildeo (240) Esta eacute uma comparaccedilatildeo do acircngulo entre
dois piacutexeis 120585119894 119899 com base em um triacircngulo formado pelo centro perspectivo 119891 = 0 o
ponto 119901119894 e a vizinhanccedila deste ponto 119875119899 = 119901119894 119899 119899 = 1hellip 8 com o acircngulo de
vizinhanccedila 120585119905119893
120585119894 = max arcsin 119901119894 119899
119901119894 119899minus119901119894 ∙ 119904119894119899120593 (240)
52
119869 = 119901119894 120585119894 gt 120585119905119893 (241)
onde
120593 ndash Acircngulo maacuteximo entre dois piacutexeis veacutertice do triacircngulo no ponto 119891 = 0
O triacircngulo utilizado como referecircncia no filtro para a detecccedilatildeo de bordas
com veacutertice no ponto 119891 = 0 eacute ilustrado com a Figura 222
FIGURA 222 ndash Geometria do filtro para a definiccedilatildeo de bordas
FONTE MAY et al (2008)
Um conjunto 119878 de pontos pode ser filtrado atraveacutes da condiccedilatildeo expressa
com a Equaccedilatildeo (243)
119889 119901119894 = 1
119896 119901119894 minus 119901119894 119899 119896119899=1 (242)
119878 = 119901119894 isin 119875 119889 119901119894 lt 119889119905119893 (243)
onde
119889119905119893 ndash Distacircncia de vizinhanccedila constante
O conjunto 119876 de pontos selecionados satildeo os pontos filtrados da nuvem 3D
conforme a condiccedilatildeo da Equaccedilatildeo (244)
119876 = 119902119894 119902119894 isin 119875(119869 cup 119878) (244)
53
29 ANAacuteLISE DE SUPERFIacuteCIES POR AUTOVALORES E AUTOVETORES
A anaacutelise da forma de superfiacutecies pode ser feita pela variaccedilatildeo local de
autovalores que possibilita a classificaccedilatildeo e segmentaccedilatildeo de pontos com
coordenadas tridimensionais (BELTON e LICHTI 2006)
Autovetores e seus respectivos autovalores podem ser obtidos a partir da
Matriz de Variacircncias e Covariacircncias (119872119881119862) de um conjunto de observaccedilotildees O
tamanho relativo e a direccedilatildeo dos autovetores podem indicar propriedades locais
desta superfiacutecie permitindo analisar sua forma (PAULY et al 2002)
De acordo com Johnson e Wichern (1998) a 119872119881119862 pode ser calculada atraveacutes
da Equaccedilatildeo (245)
11987211988111986231199093 =1
119896 119903 119894 minus 119903 119896119894=1 ∙ 119903 119894 minus 119903
119879=
1205901199092 120590119909119910 120590119909119911
120590119909119910 1205901199102 120590119910119911
120590119909119911 120590119910119911 1205901199112
(245)
onde
119872119881119862 ndash Matriz de Variacircncias e Covariacircncias
119903 119894 ndash Vetor com as coordenadas 3D do ponto em questatildeo na amostra
119903 ndash Vetor com as coordenadas do centroacuteide da superfiacutecie
1205901199092120590119910
2 1205901199112 ndash Variacircncias
120590119909119910 120590119909119911 120590119910119911 ndash Covariacircncias
119896 ndash Nuacutemero de pontos da amostra
O vetor com as coordenadas do 119894-eacutesimo ponto da amostra eacute denotado com
119903 119894 pela Expressatildeo (246) A posiccedilatildeo relativa do centroacuteide pode ser calculada atraveacutes
da Equaccedilatildeo (247)
119903 119894 = 119909119894 119910119894 119911119894 119879 (246)
119903 =1
119896 119903 119894119896119894=1 (247)
54
A 119872119881119862 eacute quadrada simeacutetrica positiva-semidefinida e pode ser decomposta
em autovetores 119890 e autovalores 120582 atraveacutes da Equaccedilatildeo (248) Os autovalores 120582119894 satildeo
elementos escalares associados aos respectivos autovetores 119890 119894 (LEON 1998)
119872119881119862 ∙ 119890 = 120582 ∙ 119890 (248)
A partir do teorema de decomposiccedilatildeo espectral (decomposiccedilatildeo de Jordan) a
119872119881119862 pode ser isolada nesta igualdade conforme a Equaccedilatildeo (249) Maiores
detalhes podem ser vistos em Johnson e Wichern (1998) e Shakarji (1998)
119872119881119862 = 120582119894 ∙ 119890 119894 ∙ 119890 1198941198792
119894=0 (249)
onde
119872119881119862 ndash Matriz Variacircncia Covariacircncia
119890 119894 ndash Vetor com os autovetores 119890 119894
120582119894 ndash Matriz com os autovalores 120582119894
Os autovalores satildeo valores reais e os autovetores formam um sistema de
base ortogonal que correspondem aos componentes principais do conjunto de
observaccedilotildees (BELTON 2008)
De acordo com PAULY et al (2002) pode-se adotar a convenccedilatildeo entre os
autovalores da Expressatildeo (250) A partir desta convenccedilatildeo algumas propriedades
para superfiacutecies normais podem ser descritas
1205821 ge 1205822 ge 1205823 (250)
Em um conjunto de pontos 3D que formam uma superfiacutecie plana espera-se
que 1205821 ne 0 1205822 ne 0 e que 1205823 asymp 0 Com isto o menor autovetor 119890 3 apontaraacute na direccedilatildeo
normal a esta superfiacutecie Com a Figura 223 satildeo ilustrados os trecircs autovetores de
uma regiatildeo da superfiacutecie descrita pela nuvem de pontos 3D O terceiro autovetor 119890 3
com o menor autovalor 1205823 eacute ortogonal agrave superfiacutecie plana definida pelos outros dois
autovetores 119890 1 e 119890 2
55
FIGURA 223 ndash Autovetores em nuvem de pontos 3D de uma superfiacutecie plana
Pontos contidos na interseccedilatildeo entre duas superfiacutecies planas podem ser
identificados atraveacutes das relaccedilotildees 1205821 asymp 21205822 e 1205823 asymp 0 O autovetor 119890 1 apontaraacute na
direccedilatildeo da linha limitante da superfiacutecie plana e o autovetor 119890 3 seraacute ortogonal a esta
direccedilatildeo Podem-se encontrar segmentos de retas que limitam a borda de uma
superfiacutecie atraveacutes das relaccedilotildees 1205822 asymp 1205823 e 1205821 asymp 1205822+1205823
Quando os autovalores apresentam valores aproximadamente iguais
1205821 asymp 1205822 asymp 1205823 torna-se possiacutevel encontrar o veacutertice formado por trecircs superfiacutecies
planas
Normalizando os autovalores com a Equaccedilatildeo (251) remove-se a sua
dependecircncia em relaccedilatildeo ao tamanho da amostra utilizada
120582119894prime =
120582119894
1205821+1205822+1205823=
120582119894
119905119903119886 ccedil119900(120582) (251)
Para o autovalor miacutenimo (119894 = 3) pode-se definir o nuacutemero 119873 de pontos para
representar as variaccedilotildees na superfiacutecie atraveacutes da Equaccedilatildeo (252)
119873 =1205823
119905119903119886 ccedil119900(120582) (252)
O valor resultante da Equaccedilatildeo (252) eacute uma medida aproximada de
curvatura local e pode representar a rugosidade da superfiacutecie de forma normalizada
56
210 ANAacuteLISE DE SUPERFIacuteCIES POR MOMENTOS INVARIANTES
Caracteriacutesticas de superfiacutecies planas podem ser obtidas atraveacutes da anaacutelise
de momentos invariantes para isto utiliza-se a 119872119881119862 dos pontos que descrevem esta
superfiacutecie De acordo com MASS e VOSSELMAN (1999) os momentos invariantes
119898119894119895 podem ser calculados atraveacutes da Equaccedilatildeo (253)
119898119894119895 = 119909119894119910119895119891(119909119910)119889119909 1198891199101199102
1199101
1199092
1199091 (253)
onde
119894 119895 ndash Correspondem agrave ordem do momento
119891(119909119910) ndash A coordenada 119911 dos pontos eacute funccedilatildeo das coordenadas planas 119909 e 119910
em um conjunto de pontos que descrevem a superfiacutecie contiacutenua
A Equaccedilatildeo (254) permite determinar o volume de uma esfera unitaacuteria com
raio 119877 em um domiacutenio contiacutenuo 119873 de pontos 3D eacute obtida a partir da Equaccedilatildeo (253)
e possibilita o estudo de propriedades das superfiacutecies com padratildeo planar
119898119894119895119896 = 119909119894119910119895 119911119896119891(119909119910 119911)119889119907119881
(254)
onde
119894 119895119896 ndash Pertencem ao domiacutenio contiacutenuo da funccedilatildeo com 119873 pontos
119894 + 119895 + 119896 ndash Corresponde agrave ordem do momento
119891(119909119910 119911) ndash Eacute o volume da esfera unitaacuteria
Atraveacutes da Equaccedilatildeo (254) GROSS e THONNESSEN (2006) conseguiram
descrever algumas relaccedilotildees entre autovalores e as propriedades de superfiacutecies
normais conforme eacute ilustrado com o Quadro 23
57
ESTRUTURA AUTOVALORES
120640120783 120640120784 120640120785
PONTO ISOLADO
0 0 0
PONTO FINAL DE SEGMENTO
DE RETA
1
12= 0083 0 0
LINHA RETA 1
3= 0333 0 0
12 PLANO 1
4= 025
1
4 1 minus
64
91205872 = 00 0
PLANO 1
4= 025
1
4= 025 0
14 PLANO 1
4 1 minus
2
120587 = 009
1
4+
2
120587minus
32
91205872= 00 0
INTERSECcedilAtildeO DE 2 PLANOS
1
3= 0333
1
8= 0125
1
8minus
8
91205872= 003
INTERSECcedilAtildeO DE 3 PLANOS
1
6 1 minus
1
120587 = 011
1
6 1 minus
1
120587 = 011
1
6 1 +
2
120587 minus
26
331205872= 003
INTERSECcedilAtildeO DE 2 PLANOS
Agrave 30deg 025 01875 001747
QUADRO 23 ndash Propriedades de superfiacutecies normais obtidas com autovalores FONTE GROSS e THOENNESSEN (2006)
Os autovalores do Quadro 23 foram determinados analiticamente a partir da
Equaccedilatildeo (254) e podem ser utilizados como referecircncia para a estimaccedilatildeo da forma
das superfiacutecies que compotildeem a estrutura dos objetos
Restringindo a ordem dos momentos com 119894 + 119895 + 119896 le 2 pode-se calcular o
centro de gravidade da superfiacutecie conforme a Equaccedilatildeo (255) e os elementos da
119872119881119862 podem serem obtidos atraveacutes da Equaccedilatildeo (256)
119909 =119898100
119898000 119910 =
119898010
119898000 119911 =
119898001
119898000 (255)
58
119898 119894119895119896 = 119909119894 minus 119909 119894 119910 minus 119910 119895 119911 minus 119911 119896119891(119909119910 119911)119889119907119881
(256)
Os momentos de 2ordf ordem normalizados para os pontos 3D em um domiacutenio
discreto podem ser calculados atraveacutes da Equaccedilatildeo (257)
119898 119894119895119896 = 119909119897minus119909
119894 119910119897minus119910 119895 119911119897minus119911
119896119873119897=1
119877119894+119895+119896119873 (257)
onde
119898 119894119895119896 ndash Momentos de 2ordf ordem para os pontos 3D
119873 ndash Nuacutemero de pontos da amostra no domiacutenio contiacutenuo da funccedilatildeo
119877 ndash Raio da esfera unitaacuteria considerada para seleccedilatildeo de pontos
Desta forma os valores calculados para os momentos natildeo satildeo influenciados
pelo nuacutemero de pontos unidade fiacutesica das medidas ou peso dos elementos da 119872119881119862
Utilizando momentos de 2ordf ordem a 119872119881119862 pode ser obtida atraveacutes da Equaccedilatildeo
(258)
119872119881119862 =
119898 200 119898 110 119898 101
119898 110 119898 020 119898 011
119898 101 119898 011 119898 002
(258)
O caacutelculo dos autovalores 120582119894 e autovetores 119890 119894 com 119894 = 123 eacute variaacutevel para
cada ponto do conjunto de observaccedilotildees Sendo assim as classes de valores
geradas por GROSS e THONNESSEN (2006) com objetivo de modelar superfiacutecies
com padratildeo planar foram agraves seguintes
O primeiro autovalor 1205821 foi definido constante e igual a 025
O segundo autovalor 1205822 varia de 0125 agrave 025
O terceiro autovalor 1205823 varia de 0 agrave 0125
Com a aproximaccedilatildeo teoacuterica dos valores contidos no Quadro 24 JUTZI e
GROSS (2009) mostraram a possibilidade de determinar matematicamente
inclinaccedilotildees entre as superfiacutecies para os acircngulos de 0ordm 30ordm e 90ordm No entanto
quando satildeo utilizados dados reais para representar as superfiacutecies pequenas
variaccedilotildees nestes valores podem ser percebidas Um exemplo eacute que o terceiro
59
autovalor 1205823 natildeo teraacute valor igual a zero mesmo em uma superfiacutecie plana Isto ocorre
por haverem pequenos desvios entre os pontos desta superfiacutecie que satildeo causados
por ruiacutedo presente no conjunto de dados reais Este fato pode ser observado
calculando o terceiro autovalor que seraacute um valor positivo pequeno mas diferente
de zero Com isto quanto mais proacuteximo de zero o terceiro autovalor 1205823 maior seraacute o
indicativo que a superfiacutecie eacute plana conforme ilustrado com a Figura 224
FIGURA 224 ndash Inclinaccedilotildees de superfiacutecies determinadas por autovalores
FONTE JUTZI e GROSS (2009)
60
211 ALGORITMO DE DESLOCAMENTO PELA MEacuteDIA
O algoritmo de deslocamento pela meacutedia (Mean Shift) pode ser utilizado no
reconhecimento de padrotildees para a segmentaccedilatildeo de imagens A densidade de
pontos vizinhos em relaccedilatildeo a um ponto central pode ser estimada com a meacutedia do
conjunto de dados discretos A anaacutelise espacial de atributos eacute utilizada neste
contexto com o objetivo de extrair informaccedilotildees Para isto utiliza a vizinhanccedila de um
ponto na imagem Com os atributos definidos pode-se encontrar o centro das
regiotildees com as maiores densidades que representam caracteriacutesticas significativas
dos objetos presentes na imagem
Para realizar a anaacutelise espacial de atributos e obterem-se resultados
satisfatoacuterios deve-se reduzir o volume de dados ateacute que se tenham apenas as
caracteriacutesticas significativas distribuiacutedas em um sistema de coordenadas contiacutenuo O
conteuacutedo do espaccedilo de atributos deve ser passiacutevel de modelagem atraveacutes de uma
amostragem com distribuiccedilatildeo multivariada de probabilidade Devido a este
pressuposto eacute necessaacuterio verificar se a condiccedilatildeo de normalidade dos dados eacute
satisfeita em aplicaccedilotildees estatiacutesticas tradicionais que utilizam testes parameacutetricos
Em outras aplicaccedilotildees podem-se utilizar meacutetodos estatiacutesticos natildeo
parameacutetricos com menos restriccedilotildees sobre o comportamento dos dados como por
exemplo natildeo se preocupar com o tipo de distribuiccedilatildeo para as variaacuteveis aleatoacuterias O
conceito de Kernel pode ser empregado em meacutetodos natildeo parameacutetricos para a
estimativa de propriedades Esta eacute uma funccedilatildeo estatiacutestica contiacutenua simeacutetrica e com
limite superior e inferior de integraccedilatildeo definidos cuja integraccedilatildeo resulta na unidade
por conveniecircncia O Kernel atua na imagem como uma janela de convoluccedilatildeo
suavizando as caracteriacutesticas dos pontos analisados (MACHADO 2006)
De acordo com COMANICIU e MEER (2002) o algoritmo de deslocamento
pela meacutedia eacute uma ferramenta versaacutetil para anaacutelises espaciais de feiccedilotildees presentes
em amostras Utiliza o Kernel para a estimaccedilatildeo da densidade dos elementos no
conjunto de dados tendo como referecircncia um ponto fixo na regiatildeo central da
amostra Dado um conjunto de pontos 120169119894=1hellip119899 em um espaccedilo 119877 com dimensatildeo 119889 o
estimador de densidade multivariada por Kernel 119870(120169) e a matriz de paracircmetros 119867
com bandas de dimensatildeo 119889 pode ser calculada com os pontos 120169 Com estes
61
paracircmetros definidos a funccedilatildeo para estimar a densidade multivariada no ponto 120169 eacute
expressa com a Equaccedilatildeo (259)
119891 (120169) =1
119899 119870119867 120169 minus 120169119894 119899119894=1 (259)
119870119867(120169) = 119867 minus1
2119870(119867minus1
2120169) (260)
O Kernel 119870(120169) com dimensatildeo 119889 eacute uma funccedilatildeo para a anaacutelise da densidade
da vizinhanccedila dos pontos expressa atraveacutes das Equaccedilotildees (261) e (262)
119870(120169)119877119889
119889120169 = 1 lim 119909 rarrinfin 120169 119889 119870 120169 = 0 (261)
119909119870(120169)119889120169119877119889
= 0 120169120169119879119870(120169)119889120169119877119889
= 119888119870119868 (262)
Onde 119888119870 eacute uma constante A partir do Kernel univariado 1198701 119909 o Kernel
multivariado pode ser calculado de duas maneiras conforme as Equaccedilotildees (263) e
(264)
119870119875 120169 = 1198701 119909119894 119889119894=1 (263)
119870119878 120169 = 119886119896 1198891198701( 120169119894 ) (264)
Onde 119870119875(120169) eacute obtido com o produto dos Kernels univariados e 119870119878(120169) eacute
obtido rotacionando 1198701(119909) no espaccedilo 119877119889 o que faz 119870119878(120169) ser radialmente simeacutetrico
A constante 119886119896 119889minus1 = 1198701 120169 1198891201691198774
com 119870119878(119909) integrado de 0 agrave 1 O Kernel
radialmente simeacutetrico eacute de interesse em anaacutelises espaciais de imagens desde que
satisfaccedila a condiccedilatildeo da Equaccedilatildeo (265)
119870 119909 = 119888119896 119889119896( 120169 2) (265)
Neste caso define-se a funccedilatildeo de cada elemento do Kernel 119896 119909 para 119909 ge 0
A constante de normalizaccedilatildeo 119888119896 119889 pode ser calculada integrando 119870 120169 de 0 a 1
assumindo-se que eacute positiva A estimaccedilatildeo pode ser parametrizada com a matriz
diagonal de bandas do Kernel 119867 = 1198932119868 = 119889119894119886119892 11989312hellip 119893119889
2 onde 119868 eacute a matriz
identidade com dimensatildeo 119889 Esta matriz apresenta a vantagem de ser determinada
62
utilizando como uacutenico paracircmetro o nuacutemero de bandas 119893 ge 0 do Kernel Empregando
paracircmetros com o nuacutemero de bandas 119893 e dimensatildeo 119899 o estimador de densidade por
Kernel da Equaccedilatildeo (259) pode ser expresso atraveacutes da Equaccedilatildeo (266)
119891 (120169) =1
119899119893119889 119870119867
120169minus120169119894
119893 119899
119894=1 (266)
A qualidade do estimador de densidade por Kernel pode ser analisada
atraveacutes do erro meacutedio quadraacutetico entre a densidade real e a estimada Na praacutetica
somente a aproximaccedilatildeo assintoacutetica das medidas pode ser calculada (AMISE ndash
Asymptotic Mean Integrated Square Error) Para os Kernels multivariados o erro
meacutedio quadraacutetico AMISE eacute minimizado utilizando o Kernel de Epanechnikov
(COMANICIU e MEER 2002)
119896119864 119909 = 1 minus 119909 0 le 119909 le 1
0 119909 gt 0 (267)
119870119864 120169 = 1
2119888119889
minus1 119889 + 2 (1 minus 120169 2) 120169 le 1
0 119888119886119904119900 119888119900119899119905119903aacute119903119894119900 (268)
Onde 119888119889 eacute o volume de uma esfera com raio unitaacuterio e com dimensatildeo 119889 O
elemento do Kernel 119896119873 119909 pode ser calculado utilizando a Equaccedilatildeo (269)
119896119873 119909 = exp minus1
2119909 119909 ge 0 (269)
Para o Kernel multivariado calculado com a Equaccedilatildeo (269) um Kernel
normal 119870119873 pode ser calculado utilizando a Equaccedilatildeo (270)
119870119873 120169 = (2120587)minus1198892exp minus1
2 120169 2 (270)
Sendo o Kernel normal simeacutetrico e admitido finito Para a anaacutelise espacial de
imagens estas duas formas de calcular o Kernel satildeo suficientes e os resultados
obtidos com estas condiccedilotildees impostas satildeo satisfatoacuterios O estimador de densidade
por Kernel da Equaccedilatildeo (259) pode ser reescrito conforme a Equaccedilatildeo (271)
63
119891 119893 119870(120169) =119888119896 119889
119899119893119889 119896
120169minus120169119894
119893
2
119899119894=1 (271)
Para anaacutelise de feiccedilotildees espaciais primeiramente deve-se calcular a
densidade do conjunto de dados e verificar o seu comportamento espacial Isto pode
ser feito calculando o gradiente da funccedilatildeo de densidade 119891(120169) igual a zero nabla119891 120169 = 0
O algoritmo de deslocamento pela meacutedia eacute uma maneira de localizar estes zeros
para estimar a densidade do conjunto de observaccedilotildees Calculando o gradiente da
funccedilatildeo expressa com a Equaccedilatildeo (271) pode-se estimar a densidade atraveacutes da
Equaccedilatildeo (272)
nabla 119891119893 119870(120169) equiv2119888119896 119889
119899119893119889+2 (120169 minus 120169119894)119896prime
120169minus120169119894
119893
2
119899119894=1 (272)
Substituindo 119896prime pela funccedilatildeo 119892(119909) conforme expresso com a Equaccedilatildeo (273)
119892 119909 = 119896prime(119909) (273)
Assumindo que a derivada do Kernel 119896 exista para o conjunto finito de
pontos 119909 isin [0infin) O Kernel 119866(119909) com seus elementos 119892(119909) pode ser definido atraveacutes
da Equaccedilatildeo (274)
119866 119909 = 119888119892 119889119892( 120169 2) (274)
Onde 119888119892119889 corresponde a uma constante de normalizaccedilatildeo O Kernel 119866 119909
pode ser considerado uma aproximaccedilatildeo do Kernel 119870(119909) dependendo do contexto
em que seraacute empregado De forma similar o Kernel de Epanechnikov eacute uma
simplificaccedilatildeo do Kernel uniforme da esfera unitaacuteria com dimensatildeo 119889 Introduzindo
119892(119909) na Equaccedilatildeo (272) tem-se a Equaccedilatildeo (275)
nabla 119891119893 119870 120169 =2119888119896 119889
119899119893119889+2 120169 minus 120169119894 119892
120169minus120169119894
119893
2
119899119894=1 (275)
nabla 119891119893 119870 120169 =2119888119896 119889
119899119893119889+2 119892 120169minus120169119894
119893
2
119899119894=1 ∙
120169119894119892 120169minus120169119894119893
2 119899
119894=1
119892 120169minus120169119894119893
2 119899
119894=1
(276)
64
119892 120169minus120169119894
119893
2
119899119894=1 (277)
Considerando que o resultado da funccedilatildeo expressa com a Equaccedilatildeo (277) eacute
um nuacutemero positivo O primeiro termo da Equaccedilatildeo (276) eacute proporcional agrave densidade
estimada calculada para 120169 com o Kernel 119866 conforme Equaccedilatildeo (271) e expresso
agora em funccedilatildeo de 119892(119909) atraveacutes da Equaccedilatildeo (278)
119891119893 119866 120169 =119888119892 119889
119899119893119889 119892
120169minus120169119894
119893
2
119899119894=1 (278)
O segundo termo da Equaccedilatildeo (276) corresponde ao algoritmo de
deslocamento pela meacutedia conforme Equaccedilatildeo (279)
119898119893 119866 120169 = 120169119894119892
120169minus120169119894119893
2 119899
119894=1
119892 120169minus120169119894119893
2 119899
119894=1
minus 120169 (279)
A Equaccedilatildeo (279) representa a diferenccedila entre as meacutedias ponderadas
utilizando o Kernel 119866 para os pesos e o centro da janela de convoluccedilatildeo em 120169 A
partir das Equaccedilotildees (276) (278) e (279) chega-se as Equaccedilotildees (280) e (281)
nabla 119891119893 119870 120169 = 119891 119893 119866 120169 2119888119896 119889
1198932119888119892 119889119898119893 119866 120169 (280)
119898119893 119866 120169 =1
21198932119888nabla
119891 119893 119870 120169
119891 119893 119866 120169 (281)
Para a posiccedilatildeo 120169 o vetor de deslocamento pela meacutedia calculado com Kernel
119866 eacute proporcional agrave estimaccedilatildeo de densidade normalizada obtida resolvendo a funccedilatildeo
com gradiente igual a zero e Kernel 119870 Eacute a normalizaccedilatildeo da densidade estimada em
119909 calculada com o Kernel 119866
O vetor de deslocamento pela meacutedia aponta na direccedilatildeo de maacuteximo
crescimento da densidade do conjunto de dados A estimaccedilatildeo da densidade de
pontos com mesma caracteriacutestica eacute obtida atraveacutes de interaccedilotildees com sucessivos
caacutelculos do vetor de deslocamento pela meacutedia 119898119893 119866 120169 e translaccedilotildees do Kernel 119866(119909)
sobre a imagem Isto garante a convergecircncia ao redor do ponto de interesse
65
utilizando a Equaccedilatildeo (281) com gradiente igual a zero Regiotildees com baixa
densidade de observaccedilotildees natildeo satildeo interessantes para anaacutelises espaciais com o
algoritmo de deslocamento pela meacutedia pois muitas iteraccedilotildees seriam necessaacuterias
para obtenccedilatildeo de resultados pouco satisfatoacuterios De forma anaacuteloga em locais com
densidade maacutexima poucas iteraccedilotildees satildeo necessaacuterias e a anaacutelise pode atingir bons
resultados (COMANICIU e MEER 2002)
Imagens satildeo representadas matematicamente na forma de matrizes onde
cada posiccedilatildeo da matriz eacute ocupada por vetores com dimensatildeo 119901 onde 119901 = 1 no caso
de imagens em niacuteveis de cinza ou coloridas e 119901 ge 2 no caso de imagens
multiespectrais O posicionamento de cada pixel na matriz imagem estaacute contido no
domiacutenio espacial (Spatial domain) enquanto o valor digital do pixel faz parte do
domiacutenio de caracteriacutesticas da imagem (Range domain) assumindo-se estes
domiacutenios como espaccedilos euclidianos Deste modo o Kernel multivariado pode ser
definido como o produto de dois Kernels radialmente simeacutetricos em um espaccedilo
euclidiano calculado com um paracircmetro de cada domiacutenio atraveacutes da Equaccedilatildeo
(282)
119870119893119904119893119903(119909) =119862
1198931199042119893119903
119901 119896 120169119904
119893119904
2
119896 120169119903
119893119903
2
(282)
onde
120169119904 ndash Corresponde ao domiacutenio espacial
120169119903 ndash Corresponde ao domiacutenio de caracteriacutesticas
119896(119909) ndash Elemento da funccedilatildeo calculado em ambos os domiacutenios
119893119904 119893119903 ndash Paracircmetros das bandas de cada domiacutenio do Kernel empregado
119862 ndash Constante de normalizaccedilatildeo entre as bandas
Na praacutetica o Kernel de Epanechnikov tambeacutem conhecido por Kernel normal
atinge resultados satisfatoacuterios O usuaacuterio deve escolher apenas os paracircmetros das
bandas 119893 = 119893119904 119893119903 e a quantidade miacutenima 119867 de pixels das regiotildees segmentadas na
imagem determinando assim a resoluccedilatildeo na estimaccedilatildeo da densidade A Figura 225
ilustra um exemplo de segmentaccedilatildeo realizada utilizando o algoritmo de
deslocamento pela meacutedia sobre uma imagem em niacuteveis de cinza
66
FIGURA 225 ndash Imagem segmentada FONTE COMANICIU e MEER (2002)
A segmentaccedilatildeo de imagens atraveacutes do algoritmo de deslocamento pela
meacutedia foi implementada no software EDISON (Edge Detection and Image
SegmentatiON System) desenvolvido pela Universidade RUTGER de New Jersey
Este software aleacutem da segmentaccedilatildeo com o algoritmo de deslocamento pela meacutedia
realiza uma filtragem preservando as descontinuidades e detectando os limites dos
objetos contidos na imagem atraveacutes de uma funccedilatildeo gradiente (CHRISTOUDIAS et
al 2002)
67
3 MATERIAIS
Neste trabalho foram utilizadas imagens TOF obtidas com a cacircmara PMD
CamCube 20 que fornece dados de distacircncia e intensidade sob forma de matrizes
de imagem Para realizar os experimentos foram obtidos trecircs conjuntos de imagens
De um gabarito com a forma de um tabuleiro de xadrez para realizar
o processo de calibraccedilatildeo da cacircmara
De uma parede branca com padratildeo planar para anaacutelise de ruiacutedos e
distorccedilotildees geomeacutetricas das imagens e
Do objeto de estudo uma caixa de papelatildeo com superfiacutecies planas e
brancas
Para o processamento das imagens TOF foi utilizado um microcomputador
do laboratoacuterio de Fotogrametria e Sensoriamento Remoto Departamento de
Geomaacutetica da Universidade Federal do Paranaacute com as seguintes caracteriacutesticas
Processador Intelreg Coretrade2 Duo 293GHz
Capacidade do disco riacutegido de 320GB
Memoacuteria principal de 2GB
68
4 MEacuteTODOS
Neste capitulo descreve-se o desenvolvimento metodoloacutegico do presente
trabalho de pesquisa para a aquisiccedilatildeo e processamento da imagem TOF Esta
imagem eacute composta por dois arquivos O primeiro arquivo conteacutem informaccedilatildeo de
intensidade de retorno do sinal captado com iluminaccedilatildeo infravermelha O segundo
arquivo conteacutem informaccedilatildeo de distacircncia (range) para cada pixel gerado com o
sensor da cacircmara TOF
Considerando que as imagens TOF podem apresentar ruiacutedo em funccedilatildeo das
condiccedilotildees de iluminaccedilatildeo e da natureza das superfiacutecies dos objetos estudos para a
reduccedilatildeo do ruiacutedo foram efetuados Para isto utilizaram-se janelas na regiatildeo central
da imagem ao redor do pixel com coordenadas de imagem (102 102) As filtragens
foram realizadas em aacutereas que circundam este pixel central
Apoacutes a anaacutelise do tempo de integraccedilatildeo na aquisiccedilatildeo da imagem
determinaram-se POI atraveacutes do processo de calibraccedilatildeo da cacircmara Os POI
permitiram corrigir a geometria dos dados da imagem TOF Esta correccedilatildeo eacute
necessaacuteria devido agraves distorccedilotildees causadas pelo sistema de lentes da cacircmara
A etapa seguinte consistiu na segmentaccedilatildeo da imagem TOF onde duas
metodologias foram avaliadas
1) Segmentaccedilatildeo do conjunto de dados por crescimento de regiotildees no
espaccedilo tridimensional utilizando pontos semente escolhidos no arquivo de
intensidades da imagem TOF como referecircncia para o posicionamento (119883119884) dos
pontos com distacircncia (119885)
2) Segmentaccedilatildeo utilizando a anaacutelise da variaccedilatildeo local dos autovalores ao
longo do arquivo de distacircncias da imagem TOF Realizada para a geraccedilatildeo de uma
imagem com bordas intensificadas segmentaccedilatildeo desta imagem atraveacutes do
algoritmo de deslocamento pela meacutedia e projeccedilatildeo ortogonal dos pontos
pertencentes agraves aacutereas segmentadas As superfiacutecies segmentadas foram entatildeo
separadas atraveacutes do conjunto de pontos 3D
O passo seguinte consistiu no caacutelculo das coordenadas tridimensionais dos
pontos dos objetos imageados a partir da informaccedilatildeo de distacircncia das coordenadas
dos piacutexeis na imagem de intensidade e dos POI Com isto gerou-se a nuvem de
pontos 3D e tornou-se possiacutevel a modelagem tridimensional das superfiacutecies do
69
objeto de estudo sendo tambeacutem avaliado o resultado obtido A Figura 41 apresenta
as etapas realizadas no processamento das imagens TOF com as duas propostas
de metodologia para a etapa de segmentaccedilatildeo
FIGURA 41 ndash Processamento da imagem TOF
41 CALIBRACcedilAtildeO DA CAcircMARA
A calibraccedilatildeo foi realizada com o objetivo de determinar os Paracircmetros de
Orientaccedilatildeo Interior (POI) da cacircmara Estes paracircmetros possibilitam a reconstruccedilatildeo
do feixe perspectivo que gerou a imagem para o instante em que foi captada
permitindo a correccedilatildeo de sua geometria (ANDRADE 1998)
Com o processo de Orientaccedilatildeo Interior satildeo obtidos os seguintes POI
distacircncia focal calibrada (119891119888 ) posiccedilatildeo do Ponto Principal (1199090 1199100) na imagem
Distorccedilatildeo Radial Simeacutetrica (119870111987021198703) Distorccedilatildeo Descentrada (11987511198752) e os
paracircmetros que indicam falta de afinidade do sensor (119860119861)
IMAGEM TOF
CORRECcedilOtildeES GEOMEacuteTRICAS COM POI
ARQUIVO DE INTENSIDADES
SUPERFIacuteCIE SEMENTE
CRESCIMENTO DE REGIOtildeES COM PONTO SEMENTE
PROJECcedilAtildeO ORTOGONAL
NUVEM DE PONTOS 3D
ARQUIVO DE DISTAcircNCIAS
IMAGEM COM BORDAS INTENSIFICADAS VARIACcedilAtildeO LOCAL DE AUTOVALORES
SEGMENTACcedilAtildeO DA IMAGEM COM BORDAS INTENSIFICADAS
PROJECcedilAtildeO ORTOGONAL
NUVEM DE PONTOS 3D
MODELAGEM 3D DAS SUPERFIacuteCIES
70
Os POI obtidos com o processo de calibraccedilatildeo possibilitam realizar correccedilotildees
geomeacutetricas nos arquivos de intensidades e distacircncias das imagens TOF Com a
calibraccedilatildeo objetiva-se corrigir as distorccedilotildees ocorridas na passagem do raio de luz
pelo sistema de lentes ateacute atingir o plano focal Este erro ocorre pela impossibilidade
na construccedilatildeo de um sistema de lentes perfeito para a cacircmara A correccedilatildeo dos erros
sistemaacuteticos da cacircmara eacute realizada no plano da imagem no ponto onde uma linha
reta passante pelo ponto nodal anterior do sistema de lentes eacute ortogonal a este
plano
O meacutetodo de calibraccedilatildeo fotogrameacutetrica eacute o tradicionalmente utilizado na
determinaccedilatildeo dos POI em Ciecircncias Geodeacutesicas Para isto necessita de pontos de
apoio com coordenadas tridimensionais conhecidas na superfiacutecie de objetos com
correspondentes coordenadas bidimensionais observadas na imagem Relaciona-se
a informaccedilatildeo 3D da cena com a informaccedilatildeo 2D da imagem atraveacutes das equaccedilotildees de
colinearidade fazendo-se uma correspondecircncia entre a posiccedilatildeo dos pontos de
referecircncia 3D e os mesmos pontos reconhecidos na imagem 2D Esta calibraccedilatildeo
pode ser realizada de forma eficiente desde que sejam utilizadas teacutecnicas e campos
de calibraccedilatildeo apropriados para cada tipo de cacircmara e aplicaccedilatildeo que se destina a
imagem Outra teacutecnica que pode ser utilizada para a Orientaccedilatildeo Interior das imagens
eacute conhecida como auto-calibraccedilatildeo na qual natildeo haacute necessidade de pontos com
coordenadas conhecidas no espaccedilo objeto (ZHANG 2000)
A Distorccedilatildeo Radial Simeacutetrica eacute a parcela de refraccedilatildeo natildeo desejaacutevel que um
feixe luminoso sofre ao atravessar um sistema de lentes A Distorccedilatildeo Descentrada eacute
composta pelas distorccedilotildees Tangencial e Radial Assimeacutetrica Eacute causada pela
impossibilidade de alinhar-se perfeitamente o eixo oacuteptico do sistema de lentes que
compotildee a objetiva Correccedilotildees para estas distorccedilotildees podem ser feitas atraveacutes da
Equaccedilatildeo (41) Maiores detalhes podem ser vistos em Andrade (1998)
119909prime119910prime =
119909119910
119900119887119904minus
1199090
1199100 minus
120575119909120575119910 119903119886119889
minus 120575119909120575119910 119889119890119904
minus 120575119909120575119910 119886
(41)
71
onde
119909prime119910prime 119879 ndash Coordenadas corrigidas no sistema referencial de imagem
119909 119910 119900119887119904119879 ndash Coordenadas de imagem observadas
1199090 1199100 119879ndash Coordenadas do PP no sistema referencial de imagem
120575119909 120575119910 119903119886119889119879 ndash Distorccedilatildeo Radial Simeacutetrica
120575119909 120575119910 119889119890119904119879 ndash Distorccedilatildeo Descentrada
120575119909 120575119910 119886119879 ndash Distorccedilatildeo causada pela falta de afinidade entre os eixos do
sensor
Andrade (1998) ilustra algumas correccedilotildees necessaacuterias para as imagens
utilizadas em Fotogrametria e mostra a influencia dos POI nestas correccedilotildees Um
exemplo eacute a correccedilatildeo da distorccedilatildeo Radial Simeacutetrica que pode ser realizada atraveacutes
das Equaccedilotildees (42) e (43)
120575119909119903119886119889 = (1199032 ∙ 1198701 + 1199034 ∙ 1198702 + 1199036 ∙ 1198703) ∙ 119909 (42)
120575119910119903119886119889 = (1199032 ∙ 1198701 + 1199034 ∙ 1198702 + 1199036 ∙ 1198703) ∙ 119910 (43)
onde
119909 = (119909 minus 1199090)
119910 = (119910 minus 1199100)
119909119910 ndash Coordenadas dos pontos com distorccedilotildees no sistema referencial
fotogrameacutetrico projetado na imagem
11990901199100 ndash Coordenadas do Ponto Principal
119870111987021198703 ndash Coeficientes de Distorccedilatildeo Radial Simeacutetrica
72
A distacircncia 119903 entre o ponto com coordenadas na imagem e o Ponto Principal
pode ser calculada atraveacutes da Equaccedilatildeo (44)
119903 = 119909 2 + 119910 2 (44)
A Distorccedilatildeo Descentrada pode entatildeo ser corrigida atraveacutes das Equaccedilotildees
(45) e (46)
120575119909119889119890119904 = [1198751 ∙ (1199032 + 2 ∙ 1199092
) + 2 ∙ 1198752 ∙ 119909 ∙ 119910 ] ∙ (1 + 1198753 + r2 + ⋯ ) (45)
120575119910119889119890119904 = [2 ∙ 1198751 ∙ 119909 ∙ 119910 + 1198752 ∙ (r2 + 2 ∙ 119910 2)] ∙ (1 + 1198753 + r2 + ⋯ ) (46)
onde
119875111987521198753 ndash Coeficientes de Distorccedilatildeo Descentrada
A diferenccedila de escala dos eixos horizontal e vertical da imagem possiacutevel
natildeo ortogonalidade entre os elementos do sensor pode ser modelada utilizando as
Equaccedilotildees (47) e (48) que introduzem correccedilotildees utilizando os paracircmetros de
afinidade 119860 e 119861 (HABIB e MORGAN 2003)
120575119909119886 = 119860 119909 minus 1199090 + 119861(119910minus1199100) (47)
120575119910119886 = 119861(119910minus1199100) (48)
onde
119860119861 ndash Paracircmetros de afinidade
119909119910 ndash Coordenadas dos pontos com distorccedilotildees no sistema referencial
fotogrameacutetrico projetado na imagem
11990901199100 ndash Coordenadas do Ponto Principal
73
A partir da formulaccedilatildeo proposta por Brown (1971) e incluindo os paracircmetros
de afinidade 119860 e 119861 as Equaccedilotildees (49) e (410) possibilitam a correccedilatildeo da imagem
utilizando os coeficientes 119870111987021198703 e 11987511198752
119909prime = 119909 + 119909 ∙ 11987011199032+1198702119903
4+11987031199036 + ⋯ +
+ 1198751 ∙ 1199032 + 2 ∙ 119909
2 + 2 ∙ 1198752 ∙ 119909 ∙ 119910 ∙ 1 + 1198753 ∙ 119903
2 + ⋯ + 119909 119860 + 119910 119861 (49)
119910prime = 119910 + 119910 ∙ 11987011199032+1198702119903
4+11987031199036 + ⋯ +
+ 21198751 ∙ 119909 ∙ 119910 + 1198752 ∙ 1199032 + 2119910 2 ∙ 1 + 1198753 ∙ 119903
2 + ⋯ + 119910 119861 (410)
A Equaccedilatildeo (41) ilustra as correccedilotildees necessaacuterias na geometria da imagem
quando objetiva-se a extraccedilatildeo de informaccedilotildees meacutetricas Eacute um modelo jaacute consagrado
na Fotogrametria e bastante aplicado em Ciecircncias Geodeacutesicas Pode ser utilizado
para o entendimento das correccedilotildees necessaacuterias nas imagens devido agraves distorccedilotildees
causadas pelo sistema de lentes da cacircmara e pela falta de afinidade entre os
elementos do sensor Outros modelos matemaacuteticos para correccedilotildees geomeacutetricas de
imagens satildeo utilizados em aacutereas correlatas como a Visatildeo Computacional Com a
precisatildeo requerida em cada aplicaccedilatildeo alguns POI tecircm maior relevacircncia que outros
podendo haver a supressatildeo de alguns A correlaccedilatildeo entre os paracircmetros deve ser
analisada e evitada
As Equaccedilotildees (49) e (410) podem ser simplificadas para realizar apenas as
correccedilotildees utilizando os coeficientes de Distorccedilatildeo Radial Simeacutetrica 1198961 e 1198962 e os
paracircmetros de afinidade 119860 e 119861 Estes paracircmetros satildeo os mais significativos para a
correccedilatildeo da imagem obtida com cacircmaras digitais de pequeno formato conforme eacute
expresso atraveacutes das Equaccedilotildees (411) e (412)
119909prime = 119909 + 119909 ∙ 11987011199032+1198702119903
4 + 119909 119860 + 119910 119861 (411)
119910prime = 119910 + 119910 ∙ 11987011199032+1198702119903
4 + 119910 119861 (412)
74
onde
119909119910 ndash Coordenadas dos pontos com distorccedilotildees no sistema referencial
fotogrameacutetrico projetado na imagem
119909 = (119909 minus 1199090)
119910 = (119910 minus 1199100)
11990901199100 ndash Coordenadas do Ponto Principal
119860119861 ndash Paracircmetros de afinidade
Cacircmaras digitais de pequeno formato apresentam principalmente a
Distorccedilatildeo Radial Simeacutetrica causada pelo sistema de lentes sendo os coeficientes 1198961
e 1198962 os mais significativos Os paracircmetros de afinidade entre os eixos da imagem 119860
e 119861 tambeacutem podem ser considerados para a correccedilatildeo das imagens obtidas
dependendo da precisatildeo com que o sensor da cacircmara foi construiacutedo pelo fabricante
Alguns softwares calculam os POI de forma raacutepida com soluccedilatildeo aproximada
e dependendo da aplicaccedilatildeo a que se destina a imagem podem ser utilizados sem
maiores restriccedilotildees Um deles eacute o Toolbox CALIB para Matlab utiliza o algoritmo
proposto por Zhang (2000) Este meacutetodo consiste em determinar os POI da cacircmara
tomando diferentes imagens de um gabarito com quadrados pretos e brancos
similar a um tabuleiro de xadrez fixado em uma superfiacutecie riacutegida e com padratildeo
planar Devem ser obtidas imagens do gabarito variando a posiccedilatildeo e orientaccedilatildeo da
cacircmara natildeo sendo necessaacuterio conhecer a trajetoacuteria do seu movimento para a
determinaccedilatildeo dos POI Este algoritmo possibilita o caacutelculo dos POI da cacircmara de
forma aproximada atraveacutes de sucessivas iteraccedilotildees Para sua utilizaccedilatildeo eacute necessaacuterio
conhecer a dimensatildeo dos quadrados do gabarito e indicar os pontos posiccedilotildees dos
veacutertices que seratildeo utilizados como pontos de referecircncia
No algoritmo proposto por Zhang um vetor de pontos 2D eacute denotado por
119898 = [119906 119907]119879 e um vetor de pontos 3D por 119872 = [119883119884119885]119879 De forma similar pode-se
aumentar estes vetores adicionando uma linha com valor igual a 1 sendo os vetores
aumentados 119898 = [119906 119907 1]119879 e 119872 = [119883119884119885 1]119879 A colinearidade entre o ponto no
espaccedilo objeto centro perspectivo e o ponto no espaccedilo imagem eacute utilizada para
75
estabelecer a relaccedilatildeo entre os pontos 3D contidos no vetor 119872 e os pontos na
imagem 2D contidos no vetor 119898 conforme a Equaccedilatildeo (413)
119904119898 = 119860[119877 119905]119872 (413)
onde
119904 ndash Fator de escala
119877 119905 ndash Paracircmetros de Orientaccedilatildeo Exterior (POE) compostos por elementos de
rotaccedilatildeo e translaccedilatildeo que relacionam as coordenadas obtidas no sistema 3D do
espaccedilo objeto com o sistema de coordenadas 2D da imagem
119860 ndash Eacute a matriz com os POI da cacircmara Apresenta as coordenadas 1199060 e 1199070 do
PP 119864120572 e 119864120573 satildeo os fatores de escala na imagem com eixos 119906 e 119907 O paracircmetro 120574
descreve a falta de ortogonalidade entre os eixos do sistema referencial da imagem
A matriz 119860 eacute expressa atraveacutes da Equaccedilatildeo (414)
119860 = 119864120572 120574 1199060
0 119864120573 1199070
0 0 1
(414)
Comparando as Equaccedilotildees (411) e (412) com o modelo proposto por Zhang
expresso atraveacutes da Equaccedilatildeo (413) tecircm-se as seguintes correspondecircncias
119860 e 119861 satildeo os paracircmetros de afinidade das Equaccedilotildees (411) e (412)
que correspondem aos fatores de escala 119864120572 e 119864120573 da Equaccedilatildeo (413)
Sendo que o paracircmetro 120574 acircngulo entre os eixos da imagem pode ser
calculado a partir destes fatores de escala
1199090 e 1199100 satildeo as coordenadas do Ponto Principal expressas com as
Equaccedilotildees (411) e (412) que tem suas correspondecircncias nas
coordenadas 1199060 e 1199070 da Equaccedilatildeo (413)
O caacutelculo dos POI pode ser entatildeo ser realizado atraveacutes da Equaccedilatildeo (415)
119898119894119895 minus119898 119860119877119894 119905119894 119872119895 2119898
119895=1119899119894=1 (415)
76
onde
119898 119860119877119894 119905119894 119872119894 ndash Eacute a projeccedilatildeo do vetor do ponto 119872119895 sobre a imagem 119894
119877119894 ndash Eacute o vetor de rotaccedilatildeo com paracircmetros 119903
O algoritmo proposto por Zhang (2000) utiliza somente os dois primeiros
termos de Distorccedilatildeo Radial Simeacutetrica para a correccedilatildeo da imagem atraveacutes dos
coeficientes 1198961 e 1198962 conforme Equaccedilotildees (416) e (417) Cacircmaras digitais de
pequeno formato normalmente apresentam distorccedilotildees de lentes significantes
especialmente a Distorccedilatildeo Radial Simeacutetrica A funccedilatildeo de distorccedilatildeo eacute fortemente
influenciada pelos componentes radiais principalmente o primeiro termo 1198961 Dadas
as coordenadas de uma imagem (119906 119907) consideradas livres de distorccedilatildeo e as
correspondentes coordenadas de imagem observadas (119906 119907 ) consegue-se projetar
os pontos atraveacutes da relaccedilatildeo de colinearidade entre eles De forma similar (119909119910) satildeo
as coordenadas de imagem consideradas livres de distorccedilatildeo e (119909 119910 ) as coordenadas
que possuem distorccedilatildeo Estas coordenadas tecircm suas escalas compatibilizadas
atraveacutes de uma normalizaccedilatildeo
119909 = 119909 + 119909 1198961 1199092 + 1199102 + 1198962 119909
2 + 1199102 2 (416)
119910 = 119910 + 119910 1198961 1199092 + 1199102 + 1198962 119909
2 + 1199102 2 (417)
onde
11989611198962 ndash Satildeo os coeficientes de Distorccedilatildeo Radial Simeacutetrica O centro desta
distorccedilatildeo encontra-se no Ponto Principal projetado na imagem
Com 119906 = 1199060 + 119886119909 + 120574119910 e 119907 = 1199070 + 120573119910 e assumindo 120574 = 0 em uma imagem
que tem os eixos perpendiculares tem-se a relaccedilatildeo expressa com as Equaccedilotildees
(418) e (419)
119906 = 119906 + 119906 minus 1199060 1198961 1199092 + 1199102 + 1198962 119909
2 + 1199102 2 (418)
119907 = 119907 + 119907 minus 1199070 1198961 1199092 + 1199102 + 1198962 119909
2 + 1199102 2 (419)
Uma opccedilatildeo para estimar os coeficientes 1198961 e 1198962 eacute feita atraveacutes de
sucessivas iteraccedilotildees utilizando as coordenadas 119906 e 119907 dos piacutexeis considerados
77
isentos de erro Com isto tecircm-se duas expressotildees para os pontos da imagem
conforme a Equaccedilatildeo (420)
119906 minus 1199060 119909
2 + 1199102 119906 minus 1199060 1199092 + 1199102 2
119907 minus 1199070 1199092 + 1199102 119907 minus 1199070 119909
2 + 1199102 2 1198961
1198962 =
119906 minus 119906119907 minus 119907
(420)
Dados 119898 pontos em 119899 imagens podemos obter 2 ∙ 119898 ∙ 119899 equaccedilotildees Na forma
matricial 119863119896 = 119889 onde 119896 = 1198961 1198962 119879 A soluccedilatildeo deste sistema de equaccedilotildees eacute
possiacutevel pelo meacutetodo dos miacutenimos quadrados conforme a Equaccedilatildeo (421)
119896 = 119863119879119863 minus1119863119879119889 (421)
Uma vez que 1198961 e 1198962 foram calculados pode-se refinar a estimaccedilatildeo dos
outros paracircmetros resolvendo novamente a Equaccedilatildeo (415) substituindo os valores
de 119898 119860119877119894 119905119894 119872119894 pelos valores calculados com as Equaccedilotildees (418) e (419)
A estimaccedilatildeo do conjunto completo de POI pode ser expressa atraveacutes da
Equaccedilatildeo (422)
119898119894119895 minus119898 1198601198961 1198962119877119894 119905119894 119872119895 2119898
119895=1119899119894=1 (422)
onde
119898 119860 11989611198962119877119894 119905119894 119872119895 - Eacute funccedilatildeo da projeccedilatildeo do vetor do ponto 119872119895 na imagem
119894 de acordo com a Equaccedilatildeo (413)
Com este meacutetodo no miacutenimo duas imagens devem ser adquiridas com
orientaccedilotildees diferentes se os elementos sensores da cacircmara forem quadrados
Zhang (2000) recomenda a aquisiccedilatildeo de pelo menos cinco imagens para obter
melhores resultados com o processo de calibraccedilatildeo Sendo assim os passos para
realizar a calibraccedilatildeo da cacircmara utilizando este meacutetodo satildeo
1 Imprimir o gabarito e fixaacute-lo em uma superfiacutecie plana e riacutegida
2 Tomar imagens do gabarito com diferentes orientaccedilotildees variando a
posiccedilatildeo e orientaccedilatildeo da cacircmara
78
3 Realizar a leitura das coordenadas dos pontos de controle nas
imagens
4 Estimar os POI e POE utilizando soluccedilatildeo aproximada
5 Refinar todos os paracircmetros incluindo os paracircmetros de distorccedilatildeo de
lentes atraveacutes da Equaccedilatildeo (422)
Os passos 4 e 5 satildeo realizados automaticamente pelo Toolbox CALIB do
software Matlab devendo o usuaacuterio apenas inserir as imagens no software e realizar
as leituras dos veacutertices dos quadrados nas imagens do gabarito
42 ANAacuteLISE DA PRESENCcedilA DE RUIacuteDO
Os piacutexeis saturados causados por exposiccedilatildeo prolongada do sensor na
aquisiccedilatildeo da imagem e tambeacutem os piacutexeis com baixa exposiccedilatildeo devem ser
cuidadosamente analisados na imagem pois tambeacutem podem causar erros nas
medidas de distacircncia devido agrave presenccedila de ruiacutedo Quando o sensor capta o sinal
luminoso existe um limite maacuteximo de saturaccedilatildeo que natildeo pode ser diminuiacutedo
posteriormente
Khongsab (2009) utilizou como paracircmetro principal o tempo de integraccedilatildeo na
captaccedilatildeo da imagem para controlar a saturaccedilatildeo dos piacutexeis Como este tempo eacute
aplicado globalmente ao sensor acaba influenciando os valores digitais dos piacutexeis
da imagem de forma equivalente Alguns apresentam erros devido agrave baixa
exposiccedilatildeo pois com a reduccedilatildeo do tempo de integraccedilatildeo natildeo receberam energia
eletromagneacutetica suficiente para sensibilizar o sensor sendo chamados de piacutexeis
insaturados Estes problemas podem ser minimizados definindo-se tempos de
integraccedilatildeo adequados para a obtenccedilatildeo da imagem TOF
O tratamento do ruiacutedo pode ser realizado com diferentes filtragens na
imagem Com este objetivo foram estudados os filtros passa-baixas pela meacutedia e
mediana Outro processo de filtragem realizado foi o caacutelculo da meacutedia dos valores
de distacircncia para diferentes imagens de uma mesma cena com o mesmo tempo de
integraccedilatildeo mas adquiridas em instantes brevemente diferentes
79
421 Filtragem passa-baixas pela meacutedia
O caacutelculo da meacutedia dos valores da vizinhanccedila em torno do pixel de interesse
tem o efeito de suavizar a imagem Este processo conhecido como filtro linear
passa-baixas atenua as altas frequecircncias que no espaccedilo de frequecircncias
correspondem agraves transiccedilotildees raacutepidas Este tipo de variaccedilatildeo caracteriza tambeacutem a
presenccedila de ruiacutedo na imagem A suavizaccedilatildeo tende a minimizar a presenccedila de ruiacutedo
e tecircm o efeito de tornar a imagem menos contrastante O filtro linear passa-baixas
utilizado tem dimensatildeo 3x3 com pesos iguais para os vizinhos Filtros lineares
resultam da convoluccedilatildeo de uma janela moacutevel sobre a imagem A Equaccedilatildeo (423)
representa o modelo matemaacutetico aplicado na filtragem linear passa-baixas pela
meacutedia (CENTENO 2004)
119866 119910 119909 = (119901(119894 119895) ∙ 119868(119910 + 119894 minus 119886 119909 + 119895 minus 119886))119879119895=1
119879119894=1 (423)
onde
119868(119910 119909) ndash Corresponde ao valor do pixel na posiccedilatildeo ldquolinha = 119910rdquo e ldquocoluna = 119909rdquo
119901(119894 119895) ndash Representa o filtro
119879 ndash Tamanho da janela de filtragem
119866(119910 119909) ndash Imagem resultante da filtragem
119886 = 119894119899119905 119879
2 + 1
A Figura 42 Ilustra o filtro linear passa-baixas pela meacutedia a janela central
cinza que estaacute na matriz de uma imagem Este filtro tem dimensatildeo de 3x3 piacutexeis e
atua no valor digital 48 do pixel central O valor digital do pixel apoacutes a filtragem
passa a ser 41222 que corresponde a meacutedia dos valores digitais dos piacutexeis
vizinhos
80
FIGURA 42 ndash Filtragem passa-baixas pela meacutedia
422 Filtragem pela mediana
A filtragem natildeo linear pela mediana consiste na substituiccedilatildeo do valor do pixel
central pelo valor correspondente a mediana da vizinhanccedila Este meacutetodo tambeacutem
suaviza a presenccedila de ruiacutedo A diferenccedila principal em relaccedilatildeo ao filtro da meacutedia eacute
que o filtro da mediana natildeo introduz novos valores na imagem pois substitui o valor
central da vizinhanccedila por um valor jaacute existente na imagem Sendo assim natildeo
degrada as bordas dos objetos de forma extrema A Figura 43 ilustra esta filtragem
que resultaraacute no valor digital 44 para o pixel filtrado que anteriormente apresentava
valor digital 48
FIGURA 43 ndash Filtragem pela mediana
81
423 Filtragem com a meacutedia temporal
A terceira opccedilatildeo eacute a ponderaccedilatildeo dos valores dos piacutexeis ao longo do tempo
Para isto uma seacuterie de imagens foi obtida a partir do mesmo ponto de vista em
instantes diferentes O resultado foi um conjunto de imagens de um uacutenico objeto
desde a mesma perspectiva natildeo sendo a geometria da imagem alterada Assim
cada pixel de uma imagem tem seu equivalente nas outras Assumindo que o ruiacutedo
seja aleatoacuterio eacute esperado que o uso de mais de uma imagem diminua a presenccedila
de ruiacutedo atraveacutes do caacutelculo da meacutedia dos valores observados
A filtragem com a meacutedia temporal eacute ilustrada com a Figura 44 Nesta figura
tem-se a representaccedilatildeo de trecircs imagens com suas matrizes de valores digitais
(Ii=123) e a imagem filtrada (IF) resultante que corresponde a meacutedia das trecircs
imagens originais
FIGURA 44 ndash Filtragem utilizando a meacutedia temporal
82
43 SEGMENTACcedilAtildeO
Com a etapa de segmentaccedilatildeo objetivou-se separar o conjunto de dados em
subconjuntos Estes subconjuntos satildeo compostos por pontos com coordenadas
tridimensionais que descrevem as superfiacutecies de objetos Eacute assumido que estas
superfiacutecies satildeo partes estruturais do objeto a ser identificado Para atingir esta meta
duas alternativas foram desenvolvidas e avaliadas
1) Crescimento de regiotildees a partir de superfiacutecies planas e ponto semente
utilizando o arquivo de intensidades da imagem TOF para selecionar a posiccedilatildeo de
pontos ou regiotildees semente sendo o arquivo de distacircncias utilizado para o
crescimento de regiotildees
2) Segmentaccedilatildeo por anaacutelise da variaccedilatildeo local de autovalores utilizando
somente o arquivo de distacircncias da imagem TOF para gerar uma imagem de
intensidade com bordas intensificadas que posteriormente eacute segmentada em
regiotildees que tecircm seus piacutexeis projetados gerando uma nuvem de pontos 3D destas
superfiacutecies segmentadas A segmentaccedilatildeo da imagem de intensidade com bordas
evidenciadas gerada eacute realizada utilizando o algoritmo de deslocamento pela meacutedia
431 Crescimento de regiotildees a partir de superfiacutecies planas e ponto semente
O primeiro meacutetodo proposto se baseia no crescimento de regiotildees por
agregaccedilatildeo de elementos adjacentes Este meacutetodo utiliza um criteacuterio de similaridade
para avaliar se um ponto pertence a uma determinada regiatildeo A distacircncia de um
ponto a uma superfiacutecie plana e o valor digital de um pixel em uma imagem satildeo
exemplos de criteacuterios de similaridade que podem ser utilizados (GONZALEZ e
WOODS 2000)
Partindo de um subconjunto de pontos adjacentes que pertencem a uma
superfiacutecie plana o processo consiste em buscar na vizinhanccedila outros pontos que
estejam espacialmente proacuteximos a esta superfiacutecie atendendo ao criteacuterio de
coplanaridade Neste criteacuterio a distacircncia ortogonal do ponto a uma superfiacutecie plana eacute
calculada atraveacutes das coordenadas 3D do ponto sendo este ponto considerado
pertencente agrave superfiacutecie quando estaacute dentro do limiar estabelecido A superfiacutecie
plana eacute determinada atraveacutes do autovetor com menor autovalor do conjunto de
83
pontos 3D a distacircncia ortogonal eacute calculada na direccedilatildeo deste autovetor partindo da
superfiacutecie O processo eacute iterativo de forma que o subconjunto inicial cresce
agregando novos elementos em cada iteraccedilatildeo ateacute atingir os limites da superfiacutecie
quando o criteacuterio de coplanaridade natildeo eacute mais satisfeito
O primeiro problema consiste na identificaccedilatildeo de pontos ou regiotildees semente
para dar iniacutecio ao processo de crescimento Uma opccedilatildeo foi identificar visualmente
regiotildees planas no arquivo de intensidades da imagem TOF e realizar a leitura de
coordenadas de pontos nestas regiotildees A partir das coordenadas destes pontos
selecionados na imagem de intensidade e de suas correspondentes no arquivo de
distacircncias da imagem TOF determinou-se a superfiacutecie plana que mais se aproxima
a esta regiatildeo atraveacutes do caacutelculo de seus autovetores e autovalores esta foi
considerada a superfiacutecie semente
A hipoacutetese baacutesica assume que superfiacutecies planas ou pelo menos partes
delas aparecem como regiotildees uniformes na imagem de intensidade devido agraves
condiccedilotildees de iluminaccedilatildeo Esta hipoacutetese nem sempre pode ser verificada e
confirmada Por exemplo se a superfiacutecie eacute coberta por tonalidades com padratildeo
irregular de cor entatildeo o plano pode mostrar valores natildeo uniformes na imagem de
intensidade sendo este um caso extremo Em uma situaccedilatildeo real pode ocorrer que
parte da superfiacutecie plana esteja pintada ou contenha manchas que alterem a sua
resposta espectral O mesmo pode ocorrer se houverem sombras projetadas de
outros objetos sobre a superfiacutecie Neste caso poreacutem existem outras regiotildees da
superfiacutecie plana que podem aparecer uniformes na imagem de intensidade e serem
utilizadas como regiatildeo semente
Com base nesta suposiccedilatildeo buscaram-se regiotildees uniformes na imagem de
intensidade e verificou-se a possibilidade de formarem superfiacutecies planas que
pudessem ser utilizadas como sementes no arquivo de distacircncias da imagem TOF
A soluccedilatildeo proposta consiste em segmentar a imagem de intensidade em regiotildees
uniformes com atributos de cor Um limite miacutenimo no tamanho das regiotildees deve ser
fixado para evitar que regiotildees muito pequenas sejam incluiacutedas na anaacutelise visto que
estas regiotildees pequenas podem representar locais com curvatura
A chave para o crescimento de regiotildees eacute a definiccedilatildeo do grau de pertinecircncia
de cada ponto agrave superfiacutecie plana Para isto eacute utilizado o conceito de distacircncia
miacutenima do ponto a esta superfiacutecie Para pertencer a uma regiatildeo os pontos devem
84
estar dentro do limite de proximidade ou seja a distacircncia entre o ponto e a
superfiacutecie plana natildeo pode superar o limiar fixado
A qualidade deste processo depende de fatores como o estabelecimento de
correspondecircncia entre os pontos precisatildeo na determinaccedilatildeo da superfiacutecie normal
utilizada remoccedilatildeo de erros grosseiros do conjunto de observaccedilotildees e identificaccedilatildeo
da regiatildeo semente
432 Segmentaccedilatildeo por anaacutelise da variaccedilatildeo local de autovalores
Esta abordagem baseia-se na anaacutelise da variaccedilatildeo local dos autovalores e
autovetores A hipoacutetese baacutesica nesta metodologia foi considerar que ao longo de
uma superfiacutecie plana os autovalores devem apresentar valores similares ou muito
proacuteximos Considerando duas regiotildees adjacentes se estas regiotildees forem
coplanares entatildeo a magnitude relativa de seus autovalores seraacute aproximadamente
igual Se uma destas regiotildees encontra-se em uma borda do objeto os autovetores
seratildeo diferentes A regiatildeo a ser considerada eacute uma janela quadrada em torno do
pixel central Para efetuar esta anaacutelise devem ser calculados os autovalores de uma
regiatildeo em torno de cada pixel no arquivo de distacircncias da imagem TOF Estes
autovalores satildeo armazenados em matrizes que geram trecircs novas imagens digitais
com as bordas dos objetos intensificadas
Com a Figura 45 Ilustra-se a anaacutelise do arquivo de distacircncias da imagem
TOF realizado com o caacutelculo de seus autovalores As bordas dos objetos presentes
podem ser vistas em evidecircncia satildeo representadas com os maiores valores
85
FIGURA 45 ndash Intensificaccedilatildeo de bordas com autovalores
Os autovalores calculados para cada pixel satildeo normalizados na faixa de 0 a
255 utilizando-se 8 bits Assim estes valores podem ser representados como uma
imagem digital passiacutevel de ser analisada com softwares de processamento A Figura
46 ilustra uma imagem com bordas intensificadas proveniente da segmentaccedilatildeo
realizada com a anaacutelise da variaccedilatildeo local dos autovalores
FIGURA 46 ndash Imagem com bordas intensificadas
86
A imagem produzida pode entatildeo ser segmentada utilizando o algoritmo de
deslocamento pela meacutedia Os resultados da segmentaccedilatildeo satildeo regiotildees onde os
autovalores satildeo aproximadamente iguais definindo uma superfiacutecie com padratildeo
planar sendo estas superfiacutecies separadas das regiotildees de bordas
433 Segmentaccedilatildeo com o algoritmo de deslocamento pela meacutedia
A segmentaccedilatildeo com o algoritmo de deslocamento pela meacutedia eacute realizada
utilizando a imagem com as bordas dos objetos intensificadas gerada com a
segmentaccedilatildeo do arquivo de distacircncias da imagem TOF pela anaacutelise da variaccedilatildeo
local dos autovalores
Cada um dos trecircs autovalores calculados gera uma imagem com bordas
intensificadas Sendo assim espera-se que os valores digitais dos piacutexeis nas
superfiacutecies dos objetos sejam similares dentro desta imagem Com isto a
segmentaccedilatildeo proporcionaraacute a seleccedilatildeo das superfiacutecies do objeto
Para realizar a segmentaccedilatildeo da imagem de intensidade com as bordas
intensificadas deve-se escolher os paracircmetros (119893119904 119893119903 119867) mais adequados para a
segmentaccedilatildeo Estes paracircmetros correspondem ao domiacutenio espacial da imagem 119893119904
domiacutenio de caracteriacutesticas dos piacutexeis 119893119903 e o tamanho miacutenimo 119867 que as aacutereas
segmentadas devem possuir O limite miacutenimo na quantidade de piacutexeis deve ser
fixado para evitar que regiotildees muito pequenas sejam incluiacutedas na segmentaccedilatildeo o
que pode prejudicar esta etapa pois se espera que a imagem seja segmentada com
o menor nuacutemero de regiotildees
87
5 RESULTADOS E DISCUSSOtildeES
51 CALIBRACcedilAtildeO DA CAcircMARA
Com o objetivo de calcular os POI o processo de calibraccedilatildeo da cacircmara foi
realizado com o Toolbox CALIB do software Matlab que utiliza o meacutetodo proposto
por ZHANG (2000) O gabarito fotografado foi impresso com 7x9 quadrados com
dimensatildeo de 117x117mm Estas imagens foram captadas a uma distacircncia
aproximada de 25 metros da cacircmara Para que houvesse pontos do gabarito sobre
a aacuterea da imagem foram obtidas 36 imagens com diferentes orientaccedilotildees conforme eacute
ilustrado com a Figura 51
FIGURA 51 ndash Imagens do gabarito utilizadas na calibraccedilatildeo da cacircmara
88
A Orientaccedilatildeo Exterior das imagens em relaccedilatildeo agrave cacircmara para a calibraccedilatildeo eacute
ilustrada com a Figura 52 A cacircmara eacute representada com a piracircmide em linhas
vermelhas e a origem do sistema fotogrameacutetrico eacute representada com a interseccedilatildeo
das linhas representadas com a cor azul no veacutertice da piracircmide
FIGURA 52 ndash Orientaccedilatildeo Exterior das fotografias para a calibraccedilatildeo da cacircmara
A distorccedilatildeo causada pelo sistema de lentes da cacircmara ocorre de forma mais
intensa nas bordas da imagem sendo a regiatildeo central o local com menor presenccedila
desta distorccedilatildeo A Figura 53 comprova este fato onde os vetores representados
com a cor vermelha partem dos pontos de controle na imagem e indicam a direccedilatildeo e
o sentido em que a distorccedilatildeo aumenta
FIGURA 53 ndash Direccedilatildeo das distorccedilotildees nos pontos da imagem TOF
89
Realizada a leitura das coordenadas dos pontos de controle os POI foram
calculados com o processo de calibraccedilatildeo da cacircmara e satildeo apresentados com a
Tabela 51
PARAcircMETROS INICIAIS OBTIDOS COM A LEITURA DAS IMAGENS
PARAcircMETRO VALOR
(piacutexeis) (mm)
Distacircncia focal (119891) (119891119909) (119891119910 )
285 80288 285 80288
1286113 1286113
Coordenadas do Ponto Principal (1199090)
(Origem no canto superior esquerdo) (1199100) 10150000 10150000
456750 456750
PARAcircMETROS DETERMINADOS COM A CALIBRACcedilAtildeO DA CAcircMARA
PARAcircMETRO VALOR DESVIO (3σ)
(piacutexeis) (mm) (piacutexeis) (mm)
Distacircncia focal (119891119888) calibrada (119891119909119888 ) (119891119910119888 )
29240511 29364057
1315823 1321383
plusmn 373164 plusmn 335357
plusmn 0167924 plusmn 0150911
Coordenadas do Ponto Principal (1199090119888 )
(Origem no canto superior esquerdo) (1199100119888 ) 10435253 10022287
4695864 4510029
plusmn 320459 plusmn 336886
plusmn 0144207 plusmn 0151599
1198701 -046768 -0021045 plusmn 003106 plusmn 0001398
1198702 060997 0027449 plusmn 013880 plusmn 0006246
1198703 000107 48150e-5
plusmn 000162 plusmn 72900e-5
1198751 000035 19350e-5
plusmn 000204 plusmn 91800e-5
1198752 000000 0000000 plusmn 000000 plusmn 0000000
Erro em pixel (119864119909 )
(119864119910 ) 049340 042754
0022203 0019239
TABELA 51 ndash Paracircmetros de Orientaccedilatildeo Interior calculados
Com os valores dos POI determinados foram calculados os fatores de escala
dos piacutexeis nas direccedilotildees 119904119909 e 119904119910 conforme as Equaccedilotildees (51) e (52)
119904119909 =119891
119891119909119888=
128119898119898
1315823119898119898= 0972775 (51)
119904119910 =119891
119891119910119888=
128119898119898
1321383119898119898= 0968682 (52)
A partir dos fatores de escala e da dimensatildeo do pixel igual a 45120583119898 das
imagens obtidas com a cacircmara PMD CamCube 20 foi calculado o tamanho efetivo
dos piacutexeis nas direccedilotildees x e y atraveacutes das Equaccedilotildees (53) e (54)
119875119909 = P ∙ 119904119909 = 45120583119898 ∙ 0972775 = 43774875120583119898 cong 44120583119898 (53)
119875119910 = P ∙ 119904119910 = 45120583119898 ∙ 0968682 = 43590690120583119898 cong 44120583119898 (54)
90
Os valores obtidos com as Equaccedilotildees (53) e (54) indicam que os elementos
do sensor podem ser considerados quadrados De acordo com Bazan et al (2009)
quando a diferenccedila de escala entre os lados do piacutexel natildeo eacute fornecida pelo fabricante
da cacircmara o fator de escala calculado para x pode absorver esta diferenccedila
Com a razatildeo entre as distacircncias focais obtidas com a calibraccedilatildeo da cacircmara
pode-se verificar a diferenccedila de escala Para a dimensatildeo do sensor esta diferenccedila
de escala natildeo alcanccedila o tamanho de um pixel conforme Equaccedilatildeo (56)
119863119868119865119864119878119862 =119891119909119888
119891119910119888=
1321383119898119898
1315823119898119898minus 1 = 1004225 minus 1 = 0004225 (55)
119863119868119865119864119878119862 = 0004225 lowast 204 = 08619 lt 1119901119894119909119890119897 (56)
A Equaccedilatildeo (56) indica que a diferenccedila de escala entre os eixos x e y eacute
menor que a dimensatildeo de um pixel isto considerando toda a dimensatildeo da imagem
de 204x204 piacutexeis da cacircmara PMD CamCube 20
Determinados os POI a imagem pode entatildeo ter sua geometria corrigida
conforme eacute ilustrado com a Figura 54b A Figura 54a ilustra a imagem original
obtida do gabarito onde se apresentam curvaturas provenientes da distorccedilatildeo
causada pelo sistema de lentes da cacircmara
FIGURA 54 ndash Correccedilatildeo geomeacutetrica da imagem TOF
91
Para a correccedilatildeo geomeacutetrica de imagens obtidas com cacircmaras de pequeno
formato Zhang (2000) recomenda utilizar somente os paracircmetros de distacircncia focal
calibrada 119891119888 coordenadas do Ponto Principal no plano da imagem 1199090 e 1199100 e os
coeficientes de Distorccedilatildeo Radial Simeacutetrica ateacute o segundo termo 1198701 e 1198702 Isto porque
este modelo de cacircmara apresenta principalmente a Distorccedilatildeo Radial Simeacutetrica
Outro fator diz respeito ao desvio calculado na determinaccedilatildeo de cada um destes
paracircmetros conforme valores apresentados na Tabela 51 o terceiro paracircmetro de
Distorccedilatildeo Radial Simeacutetrica 1198703 e os paracircmetros de Distorccedilatildeo Descentrada 1198751 e 1198752
apresentaram valores de desvios maiores do que os proacuteprios paracircmetros devendo
entatildeo serem desconsiderados para a correccedilatildeo geomeacutetrica da imagem
92
52 EXPERIMENTO 1 ndash ANAacuteLISE DE RUIacuteDO 1 IMAGEM TOF INTEIRA
O objetivo deste experimento consistiu em avaliar a presenccedila de ruiacutedo em
funccedilatildeo do tempo de integraccedilatildeo (TI) na aquisiccedilatildeo das imagens TOF Para sua
realizaccedilatildeo foram utilizadas imagens de uma parede com superfiacutecie plana distante
130m da cacircmara PMD CamCube 20 onde tambeacutem aparece parte de uma porta
Foram tomadas cinco imagens para cada valor de TI que variou entre 500 1000
1500 1700 1800 1900 2000 2500 3000 3500 4000 4500 5000 5300 5500
6000 e 7000μs gerando assim um conjunto de 85 imagens TOF
Com o objetivo de avaliar e reduzir a presenccedila de ruiacutedo nas imagens foram
realizadas as seguintes filtragens
Filtro passa-baixas pela meacutedia
Filtro pela mediana
Caacutelculo da meacutedia dos valores de distacircncia para imagens TOF
adquiridas com mesmo TI em instantes brevemente diferentes
Para cada imagem original foram criadas trecircs novas imagens filtradas com
os procedimentos mencionados
No graacutefico de dispersatildeo ilustrado com a Figura 55 os desvios padratildeo para o
conjunto de observaccedilotildees satildeo mostrados em funccedilatildeo do TI Foram calculados com
referecircncia no pixel central com coordenadas (102 102) e a aacuterea utilizada para o
caacutelculo possui dimensatildeo de 10x10 piacutexeis Escolheu-se esta regiatildeo por apresentar
padratildeo planar da superfiacutecie com menor distorccedilatildeo causada pelo sistema de lentes da
cacircmara tendo-se em vista que nesta etapa natildeo foi realizada a correccedilatildeo geomeacutetrica
dos dados da imagem TOF
Ainda com a Figura 55 verificou-se que o filtro da mediana aplicado nas
imagens gerou os menores desvios para a janela de 10x10 piacutexeis O menor desvio
calculado foi 12mm encontrado utilizando o filtro da mediana para o TI igual a
3000micros Verificou-se tambeacutem que os desvios apresentam valores similares para os
tempos de integraccedilatildeo que variaram entre 1500 agrave 2500micros para as imagens originais e
tambeacutem para as imagens filtradas
93
FIGURA 55 ndash Desvio padratildeo x TI janelas 10x10
A partir do graacutefico de dispersatildeo da Figura 55 escolheram-se imagens
captadas com os tempos de integraccedilatildeo de 500 2000 e 2500micros para realizar os
testes A Figura 56 ilustra superfiacutecies geradas a partir de filtragens realizadas em
imagem TOF obtida com TI igual a 500μs
FIGURA 56 ndash Imagens para TI=500μs e d=130m
94
Com TI de 500μs verificou-se intensa presenccedila de ruiacutedo na imagem original
e tambeacutem nas imagens filtradas Isto ocorreu devido ao baixo tempo de exposiccedilatildeo
do sensor A distorccedilatildeo causada pelo sistema de lentes da cacircmara tambeacutem pode ser
visualizada nestas superfiacutecies geradas com os arquivos de distacircncias da imagem
TOF As imagens foram obtidas de uma parede plana em que aparece parte de uma
porta o que justifica a descontinuidade vista em forma de degrau A anaacutelise
realizada com TI de 2000μs eacute ilustrada com a Figura 57
FIGURA 57 ndash Imagens para TI=2000μs e d=130m
Com TI de 2000μs obtiveram-se resultados melhores do que os obtidos com
TI de 500μs as superfiacutecies apresentaram-se mais suaves confirmando a tendecircncia
demonstrada com o graacutefico de dispersatildeo da Figura 55
A uacuteltima anaacutelise deste experimento foi realizada com o tempo de integraccedilatildeo
de 2500μs conforme pode ser visualizado com as superfiacutecies geradas com os
arquivos de distacircncias da imagem TOF original e das imagens filtradas ilustradas
com a Figura 58
95
FIGURA 58 ndash Imagens para TI=2500μs e d=130m
As imagens filtradas com TI de 2000μs e 2500μs apresentam suavizaccedilotildees
similares nas superfiacutecies geradas com os arquivos de distacircncias da imagem TOF
Verificou-se que o tempo de integraccedilatildeo para a aquisiccedilatildeo das imagens da parede a
13m de distacircncia da cacircmara deve ser um destes valores O TI de 2000μs pode ser
o escolhido e estaacute de acordo com o graacutefico de dispersatildeo ilustrado com a Figura 55
As filtragens de suavizaccedilatildeo com o filtro passa-baixas pela meacutedia e pela
mediana mostraram-se as melhores opccedilotildees a serem utilizadas com estas filtragens
apresentaram-se os menores desvios para a janela central de 10x10 piacutexeis Uma
vantagem da filtragem pela mediana eacute que mantecircm os valores originais de distacircncia
para os piacutexeis da imagem e preserva as bordas do objeto imageado No entanto a
filtragem com a mediana degrada as bordas da imagem devendo ser
cuidadosamente analisada para cada aplicaccedilatildeo
Tambeacutem foram calculados os desvios padratildeo para as imagens inteiras e os
valores obtidos foram de 19cm em meacutedia Este grande valor deveu-se a maior
curvatura ocorrer nas extremidades da imagem e tambeacutem ao fato de haver uma
descontinuidade na superfiacutecie presente na imagem TOF causada pela porta
presente na superfiacutecie da parede
96
53 EXPERIMENTO 2 ndash ANAacuteLISE DE RUIacuteDO 2 JANELAS DE 40X40 PIacuteXEIS
O objetivo deste experimento foi analisar a presenccedila de ruiacutedo em aacutereas
centrais da imagem TOF Para isto escolheram-se janelas com dimensotildees de 40x40
piacutexeis ao redor do pixel central da imagem Calculou-se o desvio padratildeo da distacircncia
de cada pixel em relaccedilatildeo a este pixel central As janelas utilizadas tiveram sua
posiccedilatildeo na imagem variando de (8282) ateacute (122122) e correspondem a aacuterea com
superfiacutecie plana de uma parede presente na cena
Primeiramente utilizaram-se imagens TOF adquiridas agrave distacircncia de 130m
entre a cacircmara e a parede com os tempos de integraccedilatildeo iguais a 2000 e 5000micros
Posteriormente utilizaram-se imagens TOF obtidas a 210m da parede com tempos
de integraccedilatildeo iguais a 2000 5000 e 7000micros
O graacutefico de dispersatildeo da Figura 59 ilustra uma anaacutelise para a captaccedilatildeo de
imagens TOF com diferentes distacircncias e tempos de integraccedilatildeo Os desvios padratildeo
foram calculados para imagens TOF captadas com a cacircmara CamCube 20 onde
variaram-se as distacircncias e os tempos de integraccedilatildeo no momento da aquisiccedilatildeo das
imagens
FIGURA 59 ndash Desvios padratildeo para distacircncia x TI
FONTE CENTENO e JUTZI (2010)
97
Com a Figura 510 eacute apresentado o primeiro resultado deste experimento o
graacutefico de dispersatildeo gerado com a imagem TOF adquirida do objeto agrave distacircncia de
130m da cacircmara com TI igual a 2000micros
FIGURA 510 ndash Desvios padratildeo para janelas com TI=2000μs d=130m
A Figura 511 ilustra as superfiacutecies geradas com o arquivo de distacircncias da
imagem TOF adquirida do objeto agrave distacircncia de 130m da cacircmara com TI igual a
2000micros e com as imagens resultantes das filtragens realizadas
FIGURA 511 ndash Janelas de 40x40 piacutexeis TI=2000μs d=130m
98
Com a Figura 511 conclui-se que os melhores resultados para a suavizaccedilatildeo
dos dados de distacircncia foram obtidos com os filtros passa-baixas pela meacutedia e
mediana
A Figura 512 ilustra o graacutefico de dispersatildeo para a imagem adquirida com TI
igual a 5000μs com distacircncia de 130m entre o objeto imageado e a cacircmara TOF A
Figura 513 ilustra as superfiacutecies geradas com as janelas centrais de 40x40 piacutexeis
FIGURA 512 ndash Desvios padratildeo para janelas com TI=5000μs d=130m
FIGURA 513 ndash Janelas de 40x40 piacutexeis TI=5000μs d=130m
99
O TI de 5000μs utilizado para a aquisiccedilatildeo da imagem saturou os elementos
do sensor e causou maior presenccedila de ruiacutedo nos dados Comparando as Figuras
511 e 513 conclui-se que para a distacircncia de 130m do sensor o tempo de
integraccedilatildeo mais adequado para a aquisiccedilatildeo da imagem foi 2000micros
A Figura 514 ilustra o graacutefico de dispersatildeo gerado para a imagem TOF
obtida com TI igual a 2000μs e distacircncia de 210m As superfiacutecies geradas a partir
das janelas de 40x40 piacutexeis desta imagem satildeo apresentadas com a Figura 515
FIGURA 514 ndash Desvios padratildeo para janelas com TI=2000μs d=210m
FIGURA 515 ndash Janelas de 40x40 piacutexeis TI=2000μs d=210m
100
O graacutefico de dispersatildeo calculado para a imagem adquirida com TI igual a
5000μs e distacircncia de 210m eacute ilustrado com a Figura 516
FIGURA 516 ndash Desvios padratildeo para janelas com TI=5000μs d=210m
Os menores desvios padratildeo foram encontrados na imagem filtrada utilizando
os filtros passa-baixas pela meacutedia e mediana conforme pode ser visualizado com a
Figura 516 Para a janela de 40x40 piacutexeis o desvio padratildeo de 107mm na imagem
original diminuiu para 96mm com a filtragem pela mediana A Figura 517 ilustra as
superfiacutecies geradas para a imagem obtida com distacircncia de 210m e TI de 5000μs
FIGURA 517 ndash Janelas de 40x40 piacutexeis TI=5000μs d=210m
101
Com a Figura 517 observa-se novamente que os melhores resultados para
a suavizaccedilatildeo da imagem foram obtidos com os filtros passa-baixas pela meacutedia e
pela mediana
A Figura 518 ilustra o graacutefico de dispersatildeo e a Figura 519 ilustra as
superfiacutecies geradas para as imagens adquiridas com distacircncia de 210m e TI igual a
7000μs
FIGURA 518 ndash Desvios padratildeo para janelas com TI=7000μs d=210m
FIGURA 519 ndash Janelas de 40x40 piacutexeis TI=7000μs d=210m
102
Com o graacutefico de dispersatildeo ilustrado com a Figura 518 observa-se que os
desvios padratildeo calculados para as imagens obtidas com os filtros passa-baixas pela
meacutedia e mediana satildeo maiores do que os desvios apresentados com o graacutefico de
dispersatildeo ilustrado com a Figura 516 Isto indica que as imagens captadas da
parede plana com TI igual a 7000μs e distacircncia de 210m apresentaram maior ruiacutedo
que as imagens obtidas com 5000μs
Comparando as Figuras 519 e 517 verifica-se que a imagem captada com
TI igual a 5000μs com distacircncia de 210m e filtrada com o filtro passa-baixas pela
meacutedia e tambeacutem com a mediana apresentou-se mais suavizada do que a imagem
obtida com TI igual a 7000μs
Comparando as imagens captadas com tempo de integraccedilatildeo de 2000μs e
5000μs para a distacircncia de 210m conforme Figuras 515 e 517 conclui-se que as
imagens obtidas com TI de 5000μs apresentaram menor presenccedila de ruiacutedo
54 EXPERIMENTO 3 ndash PROJECcedilAtildeO ORTOGONAL DOS PONTOS
Obtidos os POI atraveacutes do processo de calibraccedilatildeo da cacircmara e definido o
melhor TI para a captaccedilatildeo da imagem procedeu-se a um novo experimento no qual
se analisou a imagem de uma caixa com superfiacutecies planas A superfiacutecie do objeto
em questatildeo eacute composta por papel branco riacutegido e refletivo A caixa foi colocada
sobre uma cadeira agrave distacircncia aproximada de 13m da cacircmara Esta cadeira foi
girada enquanto a cacircmara continuou fixa com o mesmo ponto de vista Com base
no estudo da dispersatildeo dos dados em funccedilatildeo da distacircncia ao objeto optou-se por
utilizar o TI de 2000μs para a captaccedilatildeo das imagens Foram entatildeo adquiridas dez
imagens do objeto
Com a distacircncia do objeto em relaccedilatildeo agrave cacircmara igual a 13m e com a
distacircncia focal calibrada da cacircmara de 132mm valor encontrado com a Equaccedilatildeo
(57) calculou-se a escala aproximada das fotografias encontrando-se o valor
aproximado para a escala igual a 1100 conforme Equaccedilatildeo (58)
119891119888 =119891119909119888+119891119910119888
2=
1315823119898119898+1321383119898119898
2= 1318603119898119898 cong 132119898119898 (57)
103
119864 =119889
119863=
119891119888
119885=
132119898119898
13119898=
00132119898
13119898=
1
984848cong
1
100 (58)
Para realizar este experimento selecionou-se a terceira imagem captada por
apresentar vista perspectiva de trecircs superfiacutecies com padratildeo planar no objeto
imageado A Figura 520a ilustra o arquivo de intensidades da imagem TOF sem
correccedilatildeo geomeacutetrica A Figura 520b ilustra o arquivo de intensidade corrigido
geometricamente utilizando as coordenadas do Ponto Principal 1199090 e 1199100 os
coeficientes de distorccedilatildeo Radial Simeacutetrica 1198701 e 1198702 e a distacircncia focal calibrada 119891119888
FIGURA 520 ndash Arquivo de intensidades da imagem TOF obtida do objeto
Apoacutes a correccedilatildeo da geometria da imagem TOF geraram-se as superfiacutecies do
objeto Isto foi feito a partir do arquivo de distacircncias da imagem TOF conforme eacute
ilustrado com a Figura 521 onde se tem as distacircncias dos pontos em relaccedilatildeo ao
sensor representadas com a coordenada Z em metros sobre a imagem TOF com
dimensatildeo de 204x204 piacutexeis
104
FIGURA 521 ndash Arquivo de distacircncias da imagem TOF com geometria corrigida
A partir do arquivo de distacircncias da imagem TOF com a geometria dos
dados corrigida projetaram-se ortogonalmente os pontos gerando a nuvem de
pontos 3D ilustrada com a Figura 522 em vista frontal com o eixo Z ortogonal aos
eixos X e Y representados
FIGURA 522 ndash Nuvem de pontos vista frontal
105
A vista em perspectiva tridimensional da nuvem de pontos do objeto de
estudo eacute ilustrada com a Figura 523 Conteacutem 42025 pontos gerados a partir da
imagem TOF de 204x204 piacutexeis obtida com a cacircmara PMD CamCube 20
FIGURA 523 - Nuvem de pontos vista perspectiva 3D
106
55 EXPERIMENTO 4 ndash SEGMENTACcedilAtildeO 1 CRESCIMENTO DE REGIOtildeES
Realizou-se a segmentaccedilatildeo por crescimento de regiotildees a partir de trecircs
pontos semente Estes pontos foram escolhidos em aacutereas uniformes no arquivo de
intensidades da imagem TOF corrigida geometricamente e foram projetados
ortogonalmente para a nuvem 3D As coordenadas de imagem destes pontos foram
observadas nas posiccedilotildees indicadas com a Figura 524
FIGURA 524 ndash Pontos semente no arquivo de intensidades da imagem TOF
Os pontos semente foram escolhidos em trecircs superfiacutecies planas da caixa em
locais que apresentavam valores de intensidade uniforme As coordenadas de
imagem lidas em piacutexeis para estes trecircs pontos foram Ponto 1 (11681) Ponto 2
(72103) Ponto 3 (113108)
As Figuras 525 e 526 ilustram o crescimento em trecircs regiotildees realizados na
nuvem de pontos 3D Estes pontos correspondem agraves superfiacutecies frontal superior e
lateral da caixa ilustradas com as cores amarela verde e ciano respectivamente
Os trecircs autovetores calculados satildeo ilustrados com a cor azul ortogonais aos pontos
semente escolhidos nas trecircs superfiacutecies da imagem de intensidade
107
FIGURA 525 ndash Crescimento de regiotildees vista frontal
FIGURA 526 ndash Crescimento de regiotildees vista perspectiva 3D
Com as Figuras 525 e 526 verifica-se que o crescimento das regiotildees
ocorreu de forma coerente acompanhando o padratildeo planar das superfiacutecies do
objeto de estudo No entanto nas trecircs superfiacutecies analisadas houve crescimento de
regiotildees para fora dos limites de suas aacutereas Pontos de superfiacutecies ao fundo e abaixo
do objeto foram incluiacutedos nas regiotildees Isto ocorreu devido agrave utilizaccedilatildeo do criteacuterio de
108
similaridade de distacircncia do ponto agrave superfiacutecie plana sendo esta superfiacutecie definida
pelos pontos semente A distacircncia foi medida ao longo do autovetor o que fez com
que pontos de outras superfiacutecies paralelas a superfiacutecie plana em questatildeo fossem
agrupados na mesma regiatildeo Ou seja pontos que estavam orientados na direccedilatildeo da
superfiacutecie plana definida pelo autovalor que passa pelo ponto semente e que
estavam dentro do limiar de distacircncia estabelecido foram incluiacutedos nas regiotildees
mesmo natildeo pertencendo agrave superfiacutecie analisada
56 EXPERIMENTO 5 ndash SEGMENTACcedilAtildeO 2 ANAacuteLISE COM AUTOVALORES
Neste experimento realizou-se a segmentaccedilatildeo da imagem TOF por anaacutelise
da variaccedilatildeo local de autovalores locais de superfiacutecies O arquivo de distacircncias desta
imagem foi utilizado como ponto de partida para o caacutelculo dos autovalores com o
objetivo de intensificar as bordas dos objetos presentes na cena
O processamento consistiu em definir uma pequena vizinhanccedila quadrada
uma janela moacutevel e utilizar as coordenadas tridimensionais dos pontos nesta
vizinhanccedila para o caacutelculo dos autovalores
Apoacutes a normalizaccedilatildeo os autovalores foram armazenados na forma de trecircs
novas imagens conforme pode ser visualizado com as Figuras 527 528 e 529
Para a geraccedilatildeo destas imagens utilizou-se a janela moacutevel com dimensatildeo de 3x3
piacutexeis para o caacutelculo dos autovalores
109
FIGURA 527 ndash Imagem com bordas intensificadas gerada com 1205821
FIGURA 528 ndash Imagem com bordas intensificadas gerada com 1205822
FIGURA 529 ndash Imagem com bordas intensificadas gerada com 1205823
110
A partir da imagem com bordas intensificadas gerada com os autovalores
locais foi possiacutevel criar uma nova imagem de intensidade que tambeacutem estava com
as bordas dos objetos intensificadas A Figura 530 ilustra as imagens de
intensidade com bordas intensificadas que foram geradas utilizando o segundo
autovalor calculado a partir de janelas com as seguintes dimensotildees a)3x3 b)5x5
c)7x7 d)9x9 e)11x11 f)13x13 piacutexeis
FIGURA 530 ndash Imagens de intensidade com as bordas do objeto intensificadas
111
Com as imagens de intensidade ilustradas com a Figura 530 observou-se
que aumentando a quantidade de piacutexeis da janela utilizada para o caacutelculo dos
autovalores da regiatildeo aumentou-se tambeacutem a suavizaccedilatildeo sobre as superfiacutecies
planas e alargaram-se as bordas que limitam os objetos contidos na cena
Para este experimento utilizou-se a imagem gerada com a janela de 3x3
piacutexeis e com o segundo autovalor Esta imagem foi escolhida por apresentar linhas
finas limitando as bordas do objeto A imagem de intensidade com as bordas do
objeto intensificadas foi segmentada utilizando o algoritmo de deslocamento pela
meacutedia O resultado da segmentaccedilatildeo eacute ilustrado com a Figura 531
FIGURA 531 ndash Imagem com bordas intensificadas segmentada
112
A Figura 531a ilustra a imagem com bordas intensificadas a ser
segmentada gerada com o segundo conjunto de autovalores 1205822 Na Figura 531b
tem-se esta imagem suavizada por filtragem A Figura 531c corresponde agrave imagem
segmentada com o algoritmo de deslocamento pela meacutedia A imagem com os limites
das aacutereas segmentadas eacute ilustrada com a Figura 531d
A segmentaccedilatildeo foi realizada utilizando o software EDISON com os
paracircmetros (119893119904 119893119903 119867) = (7 9 300) Estes paracircmetros correspondem ao domiacutenio
espacial da imagem 119893119904 domiacutenio de caracteriacutesticas 119893119903 e tamanho miacutenimo das
regiotildees 119867 em piacutexeis O limite miacutenimo foi fixado para evitar que regiotildees muito
pequenas fossem incluiacutedas na segmentaccedilatildeo
Com a imagem segmentada da Figura 529c foi possiacutevel projetar os pontos
de interesse ortogonalmente gerando a nuvem de pontos 3D Para isto utilizou-se
as coordenadas dos piacutexeis no arquivo de intensidades e seus correspondentes no
arquivo de distacircncias da imagem TOF Estes pontos foram escolhidos sobre as
superfiacutecies da caixa A nuvem de pontos 3D resultante deste experimento eacute
apresentada com as Figuras 532 e 533
FIGURA 532 ndash Nuvem de pontos da imagem segmentada vista frontal
113
FIGURA 533 ndash Nuvem de pontos da imagem segmentada vista 3D
57 EXPERIMENTO 6 ndash ANAacuteLISE DAS MEDIDAS OBTIDAS
Para gerar a nuvem de pontos 3D com as superfiacutecies de interesse
primeiramente corrigiu-se a geometria do arquivo de distacircncias da imagem TOF com
as coordenadas do Ponto Principal 1199090 e 1199100 coeficientes de distorccedilatildeo Radial
Simeacutetrica 1198701 e 1198702 e distacircncia focal calibrada 119891119888 O passo seguinte foi gerar uma
imagem de intensidade com as bordas do objeto intensificadas Com este objetivo
calcularam-se os autovalores para os pontos do arquivo de distacircncias da imagem
TOF e geraram-se trecircs imagens novas correspondendo aos trecircs autovalores
calculados conforme o Experimento 5 O terceiro passo foi a segmentaccedilatildeo da
imagem de intensidade com bordas intensificadas utilizando o algoritmo de
deslocamento pela meacutedia Com a imagem segmentada pocircde-se escolher as
superfiacutecies que teriam seus piacutexeis projetados para a nuvem de pontos 3D
A imagem segmentada com o algoritmo de deslocamento pela meacutedia
apresenta niacuteveis de cinza diferentes para os piacutexeis de cada segmento Com isto foi
possiacutevel separar os pontos que compotildeem as superfiacutecies por seus valores digitais A
Figura 534 apresenta a nuvem de pontos 3D gerada com a imagem TOF corrigida
geometricamente com os pontos da superfiacutecie frontal representados com a cor azul
114
FIGURA 534 ndash Nuvem de pontos 3D segmentada
A superfiacutecie frontal foi projetada com atributo de cor diferenciado por
apresentar a melhor segmentaccedilatildeo na imagem de intensidade e pontos bem
definidos na nuvem 3D A partir desta superfiacutecie escolheram-se os pontos extremos
os veacutertices do objeto para a leitura de suas coordenadas 3D com o objetivo de
calcular o comprimento das arestas Com a Figura 535 satildeo ilustrados os quatro
pontos selecionados
FIGURA 535 ndash Pontos 3D selecionados na nuvem
115
Com as coordenadas destes quatro pontos e atraveacutes da relaccedilatildeo de distacircncia
tridimensional entre eles expressa pela Equaccedilatildeo (59) calcularam-se as dimensotildees
de trecircs arestas do objeto de estudo
119863119894119895 = 119883119894minus119883119895 2
+ 119884119894minus119884119895 2
+ 119885119894minus119885119895 2 (59)
onde
119863119894119895 ndash Distacircncia entre pontos no espaccedilo tridimensional
119883119894 119884119894 119885119894 119890 119883119895 119884119895 119885119895 - Coordenadas dos pontos 119894 e 119895 na nuvem de pontos 3D
Para verificar a confiabilidade das medidas obtidas com a metodologia
proposta compararam-se as medidas das arestas calculadas a partir dos pontos 3D
com as dimensotildees de referecircncia do objeto de estudo As medidas de referecircncia satildeo
ilustradas com o desenho da Figura 536
FIGURA 536 ndash Dimensotildees de referecircncia do objeto de estudo
A partir das coordenadas tridimensionais dos quatro pontos ilustrados com a
Figura 535 foi possiacutevel calcular as distacircncias entre os pontos e comparar-las com
as medidas de referecircncia As diferenccedilas obtidas satildeo ilustradas com a Tabela 52
116
Ponto
Coordenadas Arestas Medida realizada Diferenccedilas
X (cm) Y (cm) Z (cm) Pontos 3D (cm)
Ref (cm)
(cm) ()
1 -131 -136 -1219 Pontos 1-2 236 260 24 92
2 -80 61 -1098 Pontos 2-3 332 350 18 51
3 234 38 -1203 Pontos 2-4 263 210 53 252
4 -125 180 -1328
TABELA 52 ndash Coordenadas 3D dos pontos e medidas realizadas
O melhor resultado foi obtido para a medida realizada sobre a aresta entre
os pontos 2-3 com diferenccedila de aproximadamente 18 cm em relaccedilatildeo agrave medida de
referecircncia o que representa 5 da distacircncia medida O pior resultado foi obtido com
o calculo da aresta entre os pontos 2 e 4 com diferenccedila de aproximadamente
53cm que equivale 25 da medida de referecircncia Com este resultado conclui-se
que os pontos projetados com maior profundidade na nuvem de pontos 3D
apresentaram maior erro de posicionamento Estes pontos descrevem uma
superfiacutecie plana do objeto pouco aparente na imagem encontra-se muito inclinada
em relaccedilatildeo ao plano da imagem motivo pelo qual erros maiores podem ser
esperados Sobre os pontos 1 2 e 3 da superfiacutecie frontal do objeto o erro foi menor
na ordem de 2 centiacutemetros
Conforme o Experimento 1 realizado para a anaacutelise de ruiacutedo o melhor
resultado foi obtido utilizando o filtro da mediana que apresentou o desvio de 13cm
para a distacircncia de 13m medida utilizando tempo de integraccedilatildeo de 2000micros Este
fato indica coerecircncia com a diferenccedila de 2cm encontrada com a medida da aresta
frontal do objeto
117
58 MODELAGEM DAS SUPERFIacuteCIES 3D
Para a modelagem tridimensional das superfiacutecies segmentadas
primeiramente foi analisada a melhor forma de processamento da imagem TOF
Verificou-se com o Experimento 4 que o crescimento de regiotildees utilizando o arquivo
de intensidades da imagem TOF para escolha do ponto semente e o arquivo de
distacircncias para a projeccedilatildeo ortogonal e crescimento de regiotildees a partir deste ponto
natildeo foi satisfatoacuterio Isto porque o crescimento tambeacutem ocorreu em superfiacutecies que
natildeo pertenciam ao objeto analisado
Melhores resultados foram obtidos com a metodologia de segmentaccedilatildeo que
utilizou a imagem com bordas evidenciadas Esta foi gerada com a anaacutelise dos
autovalores locais das superfiacutecies a partir do arquivo de distacircncias da imagem TOF
conforme Experimento 5 A partir desta segmentaccedilatildeo projetaram-se ortogonalmente
os pontos das superfiacutecies frontal e superior do objeto de estudo gerando assim a
nuvem de pontos 3D que eacute ilustrada com a Figura 537
FIGURA 537 ndash Nuvem de pontos 3D das superfiacutecies frontal e superior
A partir da nuvem de pontos 3D realizou-se a modelagem das superfiacutecies
frontal e superior do objeto conforme eacute ilustrado com a Figura 538
118
FIGURA 538 ndash Modelagem tridimensional das superfiacutecies frontal e superior
Analisando a Figura 538 chegou-se a conclusatildeo que a superfiacutecie frontal do
objeto apresentou-se com padratildeo planar e uniforme Eacute a superfiacutecie que melhor
refletiu o sinal para o sensor devido agrave sua posiccedilatildeo em relaccedilatildeo agrave cacircmara TOF A
superfiacutecie superior apresentou-se um pouco inclinada em relaccedilatildeo ao plano da
imagem e com isto maior rugosidade foi observada nesta superfiacutecie Este
fenocircmeno deve-se a menor captaccedilatildeo do sinal refletido pela superfiacutecie do objeto pelo
sensor da cacircmara
119
6 CONCLUSOtildeES RECOMENDACcedilOtildeES E CONSIDERACcedilOtildeES FINAIS
61 CONCLUSOtildeES
Neste trabalho descreveram-se conceitos introdutoacuterios sobre as cacircmaras
TOF Avaliaram-se duas metodologias para a segmentaccedilatildeo da nuvem de pontos 3D
gerada a partir da imagem TOF Apresentou-se uma aplicaccedilatildeo para esta imagem na
extraccedilatildeo de informaccedilotildees meacutetricas do objeto de estudo imageado a distacircncia
aproximada de 13m
Para isto foram abordados os seguintes assuntos calibraccedilatildeo da cacircmara
para a obtenccedilatildeo de POI correccedilatildeo geomeacutetrica da imagem TOF filtragens para
anaacutelise e tratamento de ruiacutedo segmentaccedilatildeo atraveacutes do crescimento de regiotildees a
partir de um ponto semente segmentaccedilatildeo do arquivo de distacircncias da imagem TOF
utilizando autovalores locais para a geraccedilatildeo de uma imagem com bordas
intensificadas segmentaccedilatildeo da imagem com bordas intensificadas atraveacutes do
algoritmo de deslocamento pela meacutedia geraccedilatildeo da nuvem de pontos 3D atraveacutes da
projeccedilatildeo ortogonal dos pontos da imagem de bordas segmentada e por fim a
modelagem tridimensional de superfiacutecies do objeto de estudo
O processo de calibraccedilatildeo da cacircmara foi realizado utilizando o meacutetodo
proposto por Zhang (2000) e possibilitou a determinaccedilatildeo de POI A correccedilatildeo
geomeacutetrica das imagens foi feita atraveacutes das coordenadas 1199090 e 1199100 do Ponto
Principal coeficientes de distorccedilatildeo Radial Simeacutetrica de lentes 1198701 e 1198702 e distacircncia
focal calibrada 119891119888
Com os Experimentos 1 e 2 foram realizadas filtragens para o tratamento de
ruiacutedo das imagens TOF disponiacuteveis Nestes experimentos verificou-se que para a
captaccedilatildeo da imagem TOF agrave distacircncia de 13m entre o objeto e a cacircmara o tempo de
integraccedilatildeo de 2000μs foi o que gerou imagens com menor presenccedila de ruiacutedo Assim
como o tempo de integraccedilatildeo de 5000μs foi o mais adequado para captar imagens agrave
distacircncia de 21m No entanto chegou-se a conclusatildeo que para a geraccedilatildeo da nuvem
de pontos 3D natildeo se deveria utilizar filtragem nos dados pois pequenas alteraccedilotildees
no arquivo de distacircncias da imagem TOF poderiam modificar o posicionamento
tridimensional dos pontos o que afetaria a qualidade das medidas realizadas com os
pontos da nuvem 3D
120
A primeira metodologia proposta para a segmentaccedilatildeo da imagem TOF
mostrou-se insatisfatoacuteria para a soluccedilatildeo do problema Empregou-se o crescimento
de regiotildees a partir de pontos semente escolhidos no arquivo de intensidades desta
imagem projetando-os ortogonalmente para a nuvem de pontos 3D utilizando os
valores obtidos com o arquivo de distacircncias da imagem TOF Notou-se que erros no
crescimento de regiotildees ocorreram devido agrave toleracircncia utilizada para a distacircncia do
ponto agrave superfiacutecie plana Isto ocorreu porque a distacircncia foi calculada ao longo do
autovetor que eacute ortogonal a superfiacutecie no ponto semente Por este motivo alguns
pontos de superfiacutecies adjacentes foram selecionados equivocadamente como
pertencentes a uma mesma regiatildeo na nuvem de pontos 3D pois estavam dentro do
limite fixado no criteacuterio de similaridade utilizado mas na realidade natildeo eram
coplanares Para resolver o problema com esta metodologia seria necessaacuterio
estabelecer um limiar de crescimento lateral natildeo apenas de distacircncia ortogonal a
superfiacutecie plana semente Este limiar poderia ser o valor digital do pixel tendo em
vista que superfiacutecies coplanares apresentam uniformidade na resposta espectral A
rugosidade apresentada na superfiacutecie em que se realizava o crescimento da regiatildeo
tambeacutem influenciou em erros na seleccedilatildeo de pontos pois afetou no caacutelculo dos
autovalores fazendo com que inclinaccedilotildees em relaccedilatildeo a esta superfiacutecie fossem
notadas
A segunda metodologia analisada para a segmentaccedilatildeo da imagem TOF
mostrou-se satisfatoacuteria A segmentaccedilatildeo do arquivo de distacircncias da imagem TOF foi
realizada utilizando autovalores locais para a geraccedilatildeo de uma imagem com bordas
intensificadas segmentaccedilatildeo desta imagem com o algoritmo de deslocamento pela
meacutedia e projeccedilatildeo destes segmentos para a nuvem de pontos 3D A extraccedilatildeo de
informaccedilotildees meacutetricas em arestas do objeto de estudo a partir dos pontos 3D
apresentou diferenccedila na ordem de 2cm com a medida de referecircncia sendo a
imagem TOF adquirida com tempo de integraccedilatildeo de 2000μs a uma distacircncia
aproximada de 13m entre o objeto de estudo e a cacircmara
A Figura 61 ilustra as etapas de processamento a serem realizadas para a
geraccedilatildeo da nuvem de pontos 3D utilizando a segunda metodologia considerada
apropriada para a modelagem tridimensional de superfiacutecies utilizando a imagem
TOF Esta eacute a metodologia proposta como conclusatildeo do presente trabalho de
pesquisa
121
FIGURA 61 ndash Etapas da metodologia de processamento da imagem TOF
Foram encontradas medidas com maior qualidade quando a superfiacutecie do
objeto estava paralela ao plano da imagem Esta qualidade tambeacutem foi afetada pela
distacircncia entre a cacircmara e o objeto pela refletividade das superfiacutecies e pela
iluminaccedilatildeo ambiente Conforme o Experimento 6 realizado a aresta frontal do objeto
entre os pontos 2 e 3 apresentou a menor diferenccedila de medida 18cm que equivale
a 5 da distacircncia de referecircncia
Comparaccedilotildees para a diferenccedila de medida encontrada podem ser realizadas
com os seguintes trabalhos Kahlmann et al (2006) obtiveram exatidatildeo de 1cm nas
medidas com o alvo agrave distacircncia de 25m da cacircmara TOF utilizada Wiedemann et al
(2008) obtiveram exatidatildeo de 4cm com o alvo medido a distacircncia de 4m May et al
(2008) obtiveram erro de 30cm para uma medida de 108m considerada como
referecircncia com as imagens TOF captadas do centro de uma sala girando a cacircmara
360ordm e portanto envolviam tambeacutem Paracircmetros de Orientaccedilatildeo Exterior da cacircmara
Kolb et al (2009) obtiveram erro de 2cm para distacircncias medidas de 10m agrave 45m
Nestes trabalhos foram realizadas correccedilotildees geomeacutetricas nas imagens TOF com
POI determinados com a calibraccedilatildeo da cacircmara
Arquivo de distacircncias da imagem TOF
Correccedilatildeo geomeacutetrica dos dados utilizando POI calculados com o processo de calibraccedilatildeo da cacircmara
Imagem de intensidade com bordas itensificadas calculada com a anaacutelise da variaccedilatildeo local dos autovalores
Segmentaccedilatildeo da imagem com bordas intensificadas utilizando o algoriacutetmo de deslocamento pela meacutedia
Projeccedilatildeo ortogonal das aacutereas segmentadas para a geraccedilatildeo da nuvem de pontos 3D
Modelagem tridimensional das superfiacutecies do objeto
122
62 RECOMENDACcedilOtildeES
Recomenda-se realizar a anaacutelise preacutevia do tempo de integraccedilatildeo para a
aquisiccedilatildeo da imagem TOF com o objetivo de diminuir a presenccedila de ruiacutedo Este
tempo deve ser escolhido de acordo com o ambiente em que seraacute adquirida a
imagem e tambeacutem com as caracteriacutesticas de refletividade da superfiacutecie do objeto
Com este mesmo objetivo e devido ao fato desta imagem ser obtida com iluminaccedilatildeo
LED no comprimento de onda infravermelho recomenda-se analisar as influecircncias
da iluminaccedilatildeo exterior ao sistema de iluminaccedilatildeo da cacircmara
De acordo com a aplicaccedilatildeo a que se destina a imagem TOF recomenda-se
tambeacutem realizar a calibraccedilatildeo da cacircmara com meacutetodo fotogrameacutetrico convencional
Isto possibilitaria a melhora na correccedilatildeo geomeacutetrica da imagem e consequente
aumento na qualidade das medidas realizadas com os pontos da nuvem 3D
Correccedilotildees radiomeacutetricas tambeacutem podem ser aplicadas para melhorar a qualidade
das medidas obtidas com a imagem TOF
63 CONSIDERACcedilOtildeES FINAIS
Nuvens de pontos 3D geradas a partir de imagens TOF satildeo ferramentas
para a modelagem tridimensional das superfiacutecies de objetos Propiciam a obtenccedilatildeo
de informaccedilotildees meacutetricas destes objetos para distacircncias de 03 a 70 metros com
erro centimeacutetrico esperado
Aplicaccedilotildees para as imagens TOF podem ser realizadas para a modelagem
3D de tuacuteneis galerias instalaccedilotildees industriais e fachadas de preacutedios com interesse
de preservaccedilatildeo como patrimocircnio histoacuterico e cultural Com a alta frequecircncia de
aquisiccedilatildeo de imagens das cacircmaras TOF torna-se possiacutevel realizar filmagens e
mapeamentos em movimento
Outras aplicaccedilotildees possiacuteveis para as imagens TOF estatildeo na sua utilizaccedilatildeo
para a criaccedilatildeo de cenaacuterios 3D em jogos eletrocircnicos aquisiccedilatildeo de filmes com
tecnologia 3D modelagem tridimensional de obras de arte Biometria e anaacutelise de
movimentos
123
REFEREcircNCIAS BIBLIOGRAacuteFICAS
ANDRADE J B Fotogrametria 2 ed Curitiba SBEE 1998 274 p APUZZO N D‟ Recent advances in 3D full body scanning with applications to fashion and apparel 10p In Proceedings Optical 3-D Measurement Techniques IX Vienna Austria 2009 BALTSAVIAS E P Airborne laser scanning basic relations and formulas ISPRS - Journal of Photogrammetry amp Remote Sensing v 54 p 199-214 1999 BAZAN W S TOMMASELLI A M G GALO M RUY R S A influecircncia das injunccedilotildees de orientaccedilatildeo relativa na calibraccedilatildeo de um sistema dual de cacircmaras digitais 23p Boletim de Ciecircncias Geodeacutesicas v 15 n 3 Curitiba 2009 BELTON D Improving and extending the information on Principal Component Analysis for local neighborhoods in 3D points clouds 8p The international Archives of the Photogrammetry Remote Sensing and Spatial Information Sciences v XXXVII B5 Beijing 2008 BELTON D LICHTI D Classification and segmentation of terrestrial laser scanner point clouds using local variance information 6p In Proceedings ISPRS Commission V Simposium bdquoImage Engineering and Vision Metrology‟ 2006 BROWN D C Close-Range Camera Calibration Photogrammetric Engineering v 37 nordm 8 p 855-866 1971 CENTENO J A S Sensoriamento Remoto e Processamento de Imagens Digitais Curso de Poacutes-Graduaccedilatildeo em Ciecircncias Geodeacutesicas Curitiba UFPR 2004 209p CENTENO J A S JUTZI B Evaluation of range imaging sensor concerning resolution and illumination 6p In Proceedings The 2010 Canadian Geomatics Conference and Symposium of Commission I ISPRS Calgary Alberta 2010 CHRISTOUDIAS M C GEORGESCU B MEER P Synergism in Low Level Vision IEEE Transactions on Pattern Analysis and Machine Intelligence v 24 n 5 p 603-619 2002
124
COMANICIU D MEER P Mean Shift A Robust Approach Toward Feature Space Analysis 17p IEEE Transactions on Pattern Analysis and Machine Intelligence v 24 n 5 p 603-619 2002 FUCHS S HIRZINGER G Extrinsic and depth calibration of ToF cameras In Proceedings IEEE Conference on Computer Vision and Pattern Recognition (CVPR) Anchorage USA 2008 FUCHS S MAY S Calibration and registration for precise surface reconstruction with ToF cameras In Proceedings of the Dynamic 3D Imaging Workshop in Conjunction with DAGM (Dyn3D) v I Heidelberg Germany 2007 GEMAEL C Introduccedilatildeo ao ajustamento de observaccedilotildees aplicaccedilotildees geodeacutesicas 3 ed Curitiba UFPR 1994 319p GONZALEZ R C WOODS R E Processamento de imagens digitais Satildeo Paulo Edgard Bluumlcher Ltda 2000 509p GROSS H THOENNESSEN U Extraction of lines from laser point clouds p 86-91 In Proceedings Symposium of ISPRS Commission III Photogrammetric Computer Vision PCV06 Eds Foumlrstner W Steffen R International Archives of Photogrammetry Remote Sensing and Spatial Information Sciences 36 (Part 3) 2006 HABIB A MORGAN M Automatic calibration of low-cost digital cameras p 948-955 Journal of Photogrammetric Record 2003 JAMTSHO S Geometric modelling of 3D Range Cameras and their application for structural deformation measurement 174p (Master‟s Thesis Department of Geomatics Engineering) University of Calgary Alberta 2010 JOHNSON R A WICHERN D W Applied multivariate statistical analysis 4 ed New Jersey Pearson Prentice Hall 1998 JUTZI B GROSS H Nearest neighbor classification on laser point clouds to gain object structures from buildings 6p In Proceedings ISPRS Hannover Workshop 2009 High-Resolution Earth Imaging for Geospatial Information Disponiacutevel em lthttpwwwisprsorgproceedingsXXXVIII1_4_7-W5paperpapershtmgt Acesso 16112010
125
KAHLMANN T REMONDINO F INGENSAND H Calibration for increased accuracy of the range imaging camera SwissrangerTM ISPRS Commission V Symposium bdquoImage Engineering and Vision Metrology‟ v XXXVI n 5 2006 KEMENY S E EL-SAYED E MENDIS S FOSSUM E R Update on focal-plane image processing research 8p SPIE v 1447 Charged-Coupled Devices and Solid Optical Sensors II 1991 KHONGSAB P Signal processing and performance evaluation of a PMD camera for space docking 88p (Master‟s Thesis Continuation Courses Space Science and Technology Department of Space Science) Lulea University of Techology Kiruna 2009 KOCH R SCHILLER I BARTCZAK B KELLNER F KOumlSER K MixIn3D 3D mixed reality with ToF camera 16p In Work Programme of the EU‟s 7th Framework program 2009 KOLB A BARTH E KOCH R LARSEN R Time-of-Flight sensors in Computer Graphics 16p In STAR ndash State of The Art Report The Eurographics Association 2009 LANGE R 3D Time-of-Flight distance measurement with custom solid-state image sensors in CMOSCCD-technology 205 p (Dissertation Department of Electrical Engineering and Computer Science at University of Siegen for the degree of Doctor of Technical Sciences) Univesity of Siegen Alemanha 2000 LEON S J Linear Algebra with applications 4 ed Dartmouth Prentice Hall 1998 390p LUAN X Experimental investigation of Photonic Mixer Device and development of TOF 3D ranging systems based on PMD technology A dissertation submitted to the Department of Electrical Engineering and Computer Science at University of Siegen Siegen 2001 MACHADO A M L Extraccedilatildeo automaacutetica de contornos de edificaccedilotildees utilizando imagem gerada por cacircmara digital de pequeno formato e dados LIDAR 201 p Tese apresentada ao Curso de Poacutes-Graduaccedilatildeo em Ciecircncias Geodeacutesicas da Universidade Federal do Paranaacute Curitiba UFPR 2006
126
MASS H G VOSSELMAN Two algorithms for extracting building models from raw laser altimetry data 11p Elsevier Science Photogrammetry amp Remote Sensing 1999 MAY S DROESCHEL D HOLTZ D WIESEN C FUCHS S 3D Pose estimation and mapping with time-of-flight cameras 6p Germany 2008 Disponiacutevel em httpwwwroboticdefileadminroboticfuchsiros08_3dcampdf Acesso em 2510 2010 MITISHITA E A Monorestituiccedilatildeo digital de aerofotos associada com sistema de computaccedilatildeo graacutefica CAD para fins de mapeamento na aacuterea florestal 251p Tese (Doutorado em Engenharia Florestal) ndash Setor de Ciecircncias Agraacuterias Universidade Federal do Paranaacute 1997 MOumlLLER T KRAFT H FREY J ALBRECHT M LANGE R Robust 3D measurement with PMD sensors 2005 PAULY M GROSS M KOBBELT L P Efficient simplification of point-sampled surfaces 8p In VIS ‟02 Proceedings of the Conference on Visualization ‟02 Washington DC USA 2002 IEEE Computer Society PECHT Y FOSSUM E R Wide intrascene dynamic range CMOS APS using dual sampling IEEE Transactions on Electron Devices v 44 n 10 1997 PMD Technologies PMD [vison]regCamCube 20 4p Datasheet n 20090601 Siegen 2009 Disponiacutevel em lthttpwwwpmdteccomproducts-servicespmdvisionr-cameraspmdvisionr-camcube-20gt Acesso em 0103 2010 PMD Technologies PMD [vison]regCamCube 20 Software development tutorial 13p Siegen 2009 Disponiacutevel em lthttpwwwpmdteccomfileadminpmdtecdownloadsdocumentationcamcube_softwaredevelopmenttutorialpdfgt Acesso em 1504 2010 RAPP H Experimental and theoretical investigation of correlating TOF-camera systems 71p Diploma Thesis in Physics Faculty for Physics and Astronomy University of Heidelberg Alemanha 2007 RINGBECK T A 3D Time Of Flight camera for object detection 10p In Proceedings Optical 3D Measurement Techniques Plenary Session 1 Range Imaging I Zuumlrich 2007
127
SHAKARJI C M Least-Squares fitting algorithms of the NIST algorithm testing system 9p Journal of research of the national of standards and technology v 103 n 6 1998 THEUWISSEN A Solid-state imaging with Charge-Coupled Devices PP 34-46 Kluwer Academic Publishers 1995 Disponiacutevel em ltwwwspringerlinkcomgt Acesso em 08072010
WIEDEMANN M SAUER M DRIEWER F SCHILLING K Analysis and characterization of the PMD camera for application in mobile robotics 6p In Proceedings of the 17th World Congress The International Federation of Automatic Control Seoul Korea July 6-11 2008 ZHANG Z A flexible new technique for camera calibration 5p IEEE Transactions on Pattern Analysis and Machine Intelligence November 2000

iv
Agrave minha famiacutelia em especial meus pais
Dedico este trabalho
v
AGRADECIMENTOS
Aos meus pais familiares namorada e amigos pelo apoio incentivo e
companheirismo
Ao Prof Dr Jorge Antonio Silva Centeno pela orientaccedilatildeo e confianccedila
Aos Professores amigos e colegas do Curso de Poacutes-Graduaccedilatildeo em
Ciecircncias Geodeacutesicas e do Curso de Engenharia Cartograacutefica da Universidade
Federal do Paranaacute pelos momentos compartilhados
Aos colaboradores da UFPR que com seu trabalho e dedicaccedilatildeo fazem a
Universidade funcionar
Ao Conselho Nacional de Desenvolvimento Cientiacutefico e Tecnoloacutegico (CNPq)
pelo fomento
Ao instituto de Fotogrametria e Sensoriamento Remoto da Universidade de
Karlsruhe (KIT ndash Karlsruhe Institute of Tecnology) pela cooperaccedilatildeo e empreacutestimo da
cacircmara PMD CamCube 20 utilizada para obter as imagens TOF analisadas neste
trabalho Ao Prof Dr Jorge A S Centeno pela captaccedilatildeo das imagens na Alemanha
no iniacutecio do ano 2010 e a Fabiana Castro pela aquisiccedilatildeo de novas imagens TOF
Aos componentes da banca avaliadora Prof Dr Antonio Maria Garcia
Tommaselli e Prof Dr Hideo Araki que contribuiacuteram com importantes observaccedilotildees
para a melhora deste trabalho de pesquisa
Muito Obrigado
vi
RESUMO
Neste trabalho estudou-se a modelagem tridimensional de superfiacutecies
utilizando imagens TOF (Time-Of-Flight) para isto avaliou-se a qualidade dos dados
obtidos com a cacircmara PMD[vision]regCamCube 20 Este equipamento calcula a
distacircncia de objetos em relaccedilatildeo ao seu sensor utilizando o princiacutepio TOF Com o
objetivo de corrigir a geometria dos dados contidos na imagem foram calculados
Paracircmetros de Orientaccedilatildeo Interior (POI) atraveacutes do processo de calibraccedilatildeo da
cacircmara Estes paracircmetros definem a geometria interior do sistema de lentes e
permitem fazer as correccedilotildees geomeacutetricas necessaacuterias Outro fator que influenciou na
qualidade dos dados foi agrave presenccedila de ruiacutedo em funccedilatildeo da iluminaccedilatildeo que pode ser
controlada variando o tempo de integraccedilatildeo na aquisiccedilatildeo das imagens Duas opccedilotildees
para a reduccedilatildeo do ruiacutedo foram analisadas filtragem no domiacutenio espacial e no tempo
de integraccedilatildeo Experimentos com os filtros passa-baixas pela meacutedia e mediana
foram realizados a fim de reduzir o ruiacutedo no domiacutenio espacial Com a mesma
finalidade a meacutedia para cada tempo de integraccedilatildeo foi calculada a partir de uma
seacuterie de cinco imagens tomadas com o mesmo ponto de vista A partir destes
experimentos foi determinado o melhor tempo de integraccedilatildeo para a aquisiccedilatildeo da
imagem A etapa seguinte consistiu na segmentaccedilatildeo da imagem para identificar
superfiacutecies do objeto de estudo Em uma primeira abordagem aplicou-se o meacutetodo
de crescimento de regiotildees utilizando a distacircncia do ponto ao plano como criteacuterio de
similaridade A segunda abordagem utilizou o caacutelculo de autovalores locais para
gerar uma nova imagem onde as bordas dos objetos foram evidenciadas Esta nova
imagem foi segmentada para obter superfiacutecies de interesse do objeto atraveacutes do
algoritmo de deslocamento pela meacutedia A partir do arquivo com as distacircncias da
imagem TOF e dos POI piacutexeis da imagem segmentada foram projetados
ortogonalmente gerando uma nuvem de pontos com coordenadas 3D Com isto as
dimensotildees de arestas do objeto foram comparadas com medidas de referecircncia
encontrando-se diferenccedilas na ordem de 2 centiacutemetros Finalizando o estudo as
superfiacutecies do objeto foram modeladas tridimensionalmente
Palavras-chave Imagem TOF Modelagem tridimensional de superfiacutecies
Calibraccedilatildeo de cacircmaras Anaacutelise de ruiacutedo Autovalores Autovetores Projeccedilatildeo
Ortogonal Segmentaccedilatildeo Crescimento de regiotildees em nuvem de pontos 3D
Algoritmo de deslocamento pela meacutedia
vii
ABSTRACT
This work aims at studying the quality of 3D data obtained with a range
camera the PMD[vision]regCamCube 20 and assessing its potential to model object
surfaces The equipment computes the distance to the objects using the Time-Of-
Flight (TOF) principle Initially the equipment was calibrated using camera calibration
methods The Interior Orientation Parameters (IOP) allow reducing geometric
distortion in the images Another factor that influences the quality of data is the
presence of noise caused by illumination conditions which can be controlled by
varying the integration time of the light source Two options to reduce noise were
analyzed spatial filtering with low-pass and median filter and computing the
average of a series of images taken from the same point of view After determining
the best integration time and Interior Orientation Parameters the 3D coordinates of a
point cloud was computes The next step consists in image segmentation to identify
the surfaces of an object In a first approach it is applied a region growing method
using the point-plane distance as similarity parameter The second approach is
based on the calculation of local eigenvalues using small moving windows to
generate a new image where borders are highlighted This new image is segmented
using the mean-shift approach to delineate the surfaces of interest Each interest
pixel of the segmented image was projected for the 3D points cloud The dimensions
of the object are compared with real values The comparison showed differences
around 2cm within the expected range Finally the object surfaces can then be
modeled with the 3D points cloud
Keywords TOF image Range image Three-dimensional modeling surfaces
Camera calibration Noise analysis Eigenvalues Eigenvectors Orthogonal
projection Segmentation Region growing in 3D point clouds Mean Shift Algorithm
viii
LISTA DE FIGURAS
FIGURA 21 ndash Princiacutepio TOF 19
FIGURA 22 ndash Meacutetodo da diferenccedila de fase 20
FIGURA 23 ndash FC utilizada no meacutetodo da diferenccedila de fase 23
FIGURA 24 ndash Informaccedilatildeo das imagens TOF 25
FIGURA 25 ndash Imagem TOF obtida com cacircmara PMD 26
FIGURA 26 ndash Ruiacutedo na nuvem de pontos 3D proveniente de imagem TOF 27
FIGURA 27 ndash Princiacutepio de funcionamento do sistema PMD 28
FIGURA 28 ndash Captaccedilatildeo da carga do sinal em sensores CCD e CMOS 29
FIGURA 29 ndash Representaccedilatildeo de campos de franja 30
FIGURA 210 ndash Princiacutepio de armazenamento de cargas em sensores TOF 31
FIGURA 211 ndash Princiacutepio de captaccedilatildeo de cargas pelo sensor PMD 32
FIGURA 212 ndash Medida da diferenccedila de fase do sinal recebido 33
FIGURA 213 ndash Medida de distacircncia com a cacircmara PMD 35
FIGURA 214 ndash Cacircmara PMD CamCube 20 36
FIGURA 215 ndash Imagem captada com a cacircmara PMD CamCube 20 37
FIGURA 216 ndash Princiacutepio de funcionamento do SBI 39
FIGURA 217 ndash Modelos de cacircmaras TOF 39
FIGURA 218 ndash Nuvem de pontos 3D gerada a partir de imagem TOF 44
FIGURA 219 ndash Colinearidade entre os pontos no espaccedilo imagem e objeto 45
FIGURA 220 ndash Sistemas de coordenadas utilizados em imagens 47
FIGURA 221 ndash Filtro para a definiccedilatildeo de bordas do objeto 51
FIGURA 222 ndash Geometria do filtro para a definiccedilatildeo de bordas 52
FIGURA 223 ndash Autovetores em nuvem de pontos 3D de uma superfiacutecie plana 55
FIGURA 224 ndash Inclinaccedilotildees de superfiacutecies determinadas por autovalores 59
FIGURA 225 ndash Imagem segmentada 66
FIGURA 41 ndash Processamento da imagem TOF 69
FIGURA 42 ndash Filtragem passa-baixas pela meacutedia 80
FIGURA 43 ndash Filtragem pela mediana 80
FIGURA 44 ndash Filtragem utilizando a meacutedia temporal 81
FIGURA 45 ndash Intensificaccedilatildeo de bordas com autovalores 85
FIGURA 46 ndash Imagem com bordas intensificadas 85
FIGURA 51 ndash Imagens do gabarito utilizadas na calibraccedilatildeo da cacircmara 87
FIGURA 52 ndash Orientaccedilatildeo Exterior das fotografias para a calibraccedilatildeo da cacircmara 88
FIGURA 53 ndash Direccedilatildeo das distorccedilotildees nos pontos da imagem TOF 88
ix
FIGURA 54 ndash Correccedilatildeo geomeacutetrica da imagem TOF 90
FIGURA 55 ndash Desvio padratildeo x TI janelas 10x10 93
FIGURA 56 ndash Imagens para TI=500μs e d=130m 93
FIGURA 57 ndash Imagens para TI=2000μs e d=130m 94
FIGURA 58 ndash Imagens para TI=2500μs e d=130m 95
FIGURA 59 ndash Desvios padratildeo para distacircncia x TI 96
FIGURA 510 ndash Desvios padratildeo para janelas com TI=2000μs d=130m 97
FIGURA 511 ndash Janelas de 40x40 piacutexeis TI=2000μs d=130m 97
FIGURA 512 ndash Desvios padratildeo para janelas com TI=5000μs d=130m 98
FIGURA 513 ndash Janelas de 40x40 piacutexeis TI=5000μs d=130m 98
FIGURA 514 ndash Desvios padratildeo para janelas com TI=2000μs d=210m 99
FIGURA 515 ndash Janelas de 40x40 piacutexeis TI=2000μs d=210m 99
FIGURA 516 ndash Desvios padratildeo para janelas com TI=5000μs d=210m 100
FIGURA 517 ndash Janelas de 40x40 piacutexeis TI=5000μs d=210m 100
FIGURA 518 ndash Desvios padratildeo para janelas com TI=7000μs d=210m 101
FIGURA 519 ndash Janelas de 40x40 piacutexeis TI=7000μs d=210m 101
FIGURA 520 ndash Arquivo de intensidades da imagem TOF obtida do objeto 103
FIGURA 521 ndash Arquivo de distacircncias da imagem TOF com geometria corrigida 104
FIGURA 522 ndash Nuvem de pontos vista frontal 104
FIGURA 523 ndash Nuvem de pontos vista perspectiva 3D 105
FIGURA 524 ndash Pontos semente no arquivo de intensidades da imagem TOF 106
FIGURA 525 ndash Crescimento de regiotildees vista frontal 107
FIGURA 526 ndash Crescimento de regiotildees vista perspectiva 3D 107
FIGURA 527 ndash Imagem com bordas intensificadas gerada com 1205821 109
FIGURA 528 ndash Imagem com bordas intensificadas gerada com 1205822 109
FIGURA 529 ndash Imagem com bordas intensificadas gerada com 1205823 109
FIGURA 530 ndash Imagens de intensidade com as bordas do objeto intensificadas 110
FIGURA 531 ndash Imagem com bordas intensificadas segmentada 111
FIGURA 532 ndash Nuvem de pontos da imagem segmentada vista frontal 112
FIGURA 533 ndash Nuvem de pontos da imagem segmentada vista 3D 113
FIGURA 534 ndash Nuvem de pontos 3D segmentada 114
FIGURA 535 ndash Pontos 3D selecionados na nuvem 114
FIGURA 536 ndash Dimensotildees de referecircncia do objeto de estudo 115
FIGURA 537 ndash Nuvem de pontos 3D das superfiacutecies frontal e superior 117
FIGURA 538 ndash Modelagem tridimensional das superfiacutecies frontal e superior 118
x
LISTA DE QUADROS E TABELAS
QUADRO 21 ndash Especificaccedilotildees teacutecnicas da cacircmara PMD CamCube 20 37
QUADRO 22 ndash Especificaccedilotildees teacutecnicas de cacircmaras TOF 40
QUADRO 23 ndash Propriedades de superfiacutecies normais obtidas com autovalores 57
TABELA 51 ndash Paracircmetros de Orientaccedilatildeo Interior calculados 89
TABELA 52 ndash Coordenadas 3D dos pontos e medidas realizadas 116
xi
LISTA DE SIGLAS
Sigla Significado
AMISE Asymptotic Mean Integrated Square Error
CCD Charge Coupled Device
CMOS Complementary Metal Oxide Semiconductor
CP Centro Perspectivo
EDISON Edge Detection and Image SegmentatiON System
FC Funccedilatildeo de Correlaccedilatildeo
FPN Fixed Pattern Noise
FPS Frames Per Second
LASER Light Amplification by Stimulated Emission of Radiation
LED Light Emitting Diode
MDE Modelo Digital de Elevaccedilatildeo
MVC Matriz de Variacircncias e Covariacircncias
PMD Photonic Mixer Device
POE Paracircmetros de Orientaccedilatildeo Exterior
POI Paracircmetros de Orientaccedilatildeo Interior
PP Ponto Principal
SBI Supression of Background Ilumination
TI Tempo de Integraccedilatildeo
TOF Time-Of-Flight
xii
SUMAacuteRIO
1 INTRODUCcedilAtildeO 14
11 OBJETIVO GERAL 16
12 OBJETIVOS ESPECIacuteFICOS 16
13 JUSTIFICATIVA 17
14 ESTRUTURA DA DISSERTACcedilAtildeO 18
2 REVISAtildeO BIBLIOGRAacuteFICA 19
21 MEDIDA DE DISTAcircNCIA COM O PRINCIacutePIO TOF 19
22 IMAGEM TOF 25
23 TEMPO DE INTEGRACcedilAtildeO 26
24 PRINCIacutePIO DE FUNCIONAMENTO DO SENSOR PMD 28
25 CAcircMARAS PMD 34
251 Cacircmara PMD CamCube 20 36
252 Dispositivo SBI 38
253 Modelos de cacircmaras TOF 39
26 ERROS DE MEDIDA 40
261 Erros natildeo-sistemaacuteticos em cacircmaras TOF 41
262 Erros sistemaacuteticos em cacircmaras TOF 41
27 PROJECcedilAtildeO ORTOGONAL DOS PONTOS 45
28 REFINAMENTO DA NUVEM DE PONTOS 3D 50
29 ANAacuteLISE DE SUPERFIacuteCIES POR AUTOVALORES E AUTOVETORES 53
210 ANAacuteLISE DE SUPERFIacuteCIES POR MOMENTOS INVARIANTES 56
211 ALGORITMO DE DESLOCAMENTO PELA MEacuteDIA 60
3 MATERIAIS 67
4 MEacuteTODOS 68
41 CALIBRACcedilAtildeO DA CAcircMARA 69
42 ANAacuteLISE DA PRESENCcedilA DE RUIacuteDO 78
421 Filtragem passa-baixas pela meacutedia 79
422 Filtragem pela mediana 80
423 Filtragem com a meacutedia temporal 81
43 SEGMENTACcedilAtildeO 82
431 Crescimento de regiotildees a partir de superfiacutecies planas e ponto semente 82
xiii
432 Segmentaccedilatildeo por anaacutelise da variaccedilatildeo local de autovalores 84
433 Segmentaccedilatildeo com o algoritmo de deslocamento pela meacutedia 86
5 RESULTADOS E DISCUSSOtildeES 87
51 CALIBRACcedilAtildeO DA CAcircMARA 87
52 EXPERIMENTO 1 ndash ANAacuteLISE DE RUIacuteDO 1 IMAGEM TOF INTEIRA 92
53 EXPERIMENTO 2 ndash ANAacuteLISE DE RUIacuteDO 2 JANELAS DE 40X40 PIacuteXEIS 96
54 EXPERIMENTO 3 ndash PROJECcedilAtildeO ORTOGONAL DOS PONTOS 102
55 EXPERIMENTO 4 ndash SEGMENTACcedilAtildeO 1 CRESCIMENTO DE REGIOtildeES 106
56 EXPERIMENTO 5 ndash SEGMENTACcedilAtildeO 2 ANAacuteLISE COM AUTOVALORES 108
57 EXPERIMENTO 6 ndash ANAacuteLISE DAS MEDIDAS OBTIDAS 113
58 MODELAGEM DAS SUPERFIacuteCIES 3D 117
6 CONCLUSOtildeES RECOMENDACcedilOtildeES E CONSIDERACcedilOtildeES FINAIS 119
61 CONCLUSOtildeES 119
62 RECOMENDACcedilOtildeES 122
63 CONSIDERACcedilOtildeES FINAIS 122
REFEREcircNCIAS BIBLIOGRAacuteFICAS 123
14
1 INTRODUCcedilAtildeO
A informaccedilatildeo meacutetrica para a representaccedilatildeo espacial de objetos eacute uma
necessidade para diferentes aacutereas de estudo Algumas aplicaccedilotildees exigem que o
processo de aquisiccedilatildeo e representaccedilatildeo graacutefica desta informaccedilatildeo seja realizado com
rapidez e qualidade Em Ciecircncias Geodeacutesicas a obtenccedilatildeo desta informaccedilatildeo pode
ser feita atraveacutes de diversas maneiras dentre elas citam-se os levantamentos de
campo e as imagens obtidas por sensores remotos exemplos satildeo teacutecnicas
aplicadas em Topografia e Fotogrametria
Com a Topografia o trabalho pode alcanccedilar alto grau de exatidatildeo
dependendo da teacutecnica e precisatildeo do equipamento utilizado No entanto se gasta
bastante tempo para realizar o levantamento das informaccedilotildees em campo e tambeacutem
para o processamento e organizaccedilatildeo dos dados em escritoacuterio Algumas aplicaccedilotildees
da Topografia estatildeo na locaccedilatildeo de obras como rodovias geraccedilatildeo de perfis de
terrenos e rios monitoramento de deformaccedilotildees na estrutura de barragens pontes e
tambeacutem no levantamento de pontos 3D para representar fachadas de edifiacutecios
Com a Fotogrametria o levantamento das informaccedilotildees tridimensionais de um
objeto pode ser feito em tempo relativamente curto As fotografias satildeo obtidas de
forma instantacircnea No entanto quando se utilizam teacutecnicas convencionais de
Fotogrametria necessita-se de pelo menos duas fotografias com sobreposiccedilatildeo das
aacutereas imageadas para a geraccedilatildeo do modelo fotogrameacutetrico Outra forma eacute a teacutecnica
conhecida por Monorestituiccedilatildeo Digital onde se utiliza uma fotografia digital em
conjunto com um Modelo Digital de Elevaccedilatildeo (MDE) normalmente gerado por uma
nuvem de pontos proveniente de outro equipamento ou sensor (MITISHITA 1997)
Na modalidade terrestre da Fotogrametria eacute possiacutevel determinar pontos 3D
para representar fachadas de preacutedios obras de arte mapeamentos de ruas e
imoacuteveis com a plataforma em movimento dentre outras aplicaccedilotildees
Aleacutem das teacutecnicas convencionais de levantamentos utilizadas em Topografia
e Fotogrametria e com o objetivo de viabilizar a aquisiccedilatildeo da informaccedilatildeo espacial
equipamentos e teacutecnicas tecircm sido constantemente desenvolvidos e aperfeiccediloados
Avanccedilos tecnoloacutegicos tecircm possibilitado a obtenccedilatildeo da informaccedilatildeo tridimensional
para a representaccedilatildeo dos objetos de forma raacutepida e precisa Exemplos satildeo os
sistemas de varredura laser scanner e as cacircmaras TOF (Time-Of-Fligth) tambeacutem
15
conhecidas na literatura por Range Cameras Estas cacircmaras geram imagens com
informaccedilotildees de distacircncia para cada pixel do objeto imageado denominadas
imagens de profundidade distacircncia ou Range Image Neste trabalho seraacute utilizada
preferencialmente a denominaccedilatildeo ldquoimagem TOFrdquo
Nas uacuteltimas deacutecadas os sistemas de varredura laser scanner tecircm sido muito
utilizados para mapeamento Equipamentos com esta tecnologia possibilitam a
obtenccedilatildeo de milhares de pontos por segundo e podem ser instalados em
plataformas aeacutereas ou terrestres No entanto devido a este ser um equipamento
oacuteptico e mecacircnico o alto custo na sua aquisiccedilatildeo torna-o inviaacutevel para algumas
aplicaccedilotildees
Cacircmaras TOF atraem a atenccedilatildeo de diferentes aacutereas que necessitam de
pontos com coordenadas 3D de seus objetos de estudo tais como a Visatildeo
Computacional e a Engenharia de Automaccedilatildeo Um modelo de cacircmara TOF eacute a PMD
CamCube 20 que capta 25 imagens por segundo (Frames Per Secunde - FPS)
Com esta frequecircncia de aquisiccedilatildeo pode obter o movimento dos objetos na cena e de
grande quantidade de informaccedilatildeo tridimensional sobre os mesmos
No entanto a grande quantidade de dados captada deve ter sua qualidade
avaliada A iluminaccedilatildeo exterior ao sistema interfere negativamente Outro fator a ser
observado eacute a configuraccedilatildeo da cena pois interferecircncias satildeo causadas pelas
distacircncias orientaccedilotildees e refletividade das superfiacutecies dos objetos em relaccedilatildeo ao
sensor da cacircmara Em uma mesma cena podem-se apresentar medidas ambiacuteguas
de distacircncia para os pontos devido a erros causados pela iluminaccedilatildeo utilizada no
sistema As influencias causadas por erros sistemaacuteticos assim como ruiacutedos devem
ser observadas para cada tipo de aplicaccedilatildeo (MAY et al 2008)
A cacircmara TOF utilizada para a aquisiccedilatildeo das imagens nesta pesquisa foi a
PMD[vision]regCamCube 20 Esta utiliza um sensor de imageamento PMD (Photonic
Mixer Device) que possibilita armazenar informaccedilatildeo de distacircncia para os piacutexeis de
uma imagem de intensidade O equipamento fornece a imagem TOF que eacute
composta por um arquivo com as intensidades que o sinal retornou para o sensor e
um arquivo com as informaccedilotildees de distacircncia para cada pixel o que possibilita a
percepccedilatildeo da profundidade dos objetos na cena
16
11 OBJETIVO GERAL
O objetivo geral deste trabalho de pesquisa eacute desenvolver uma metodologia
para a modelagem tridimensional das superfiacutecies de objetos a partir da nuvem de
pontos 3D proveniente da imagem TOF
12 OBJETIVOS ESPECIacuteFICOS
Realizar a correccedilatildeo geomeacutetrica dos dados da imagem TOF atraveacutes de
Paracircmetros de Orientaccedilatildeo Interior obtidos com o processo de
calibraccedilatildeo da cacircmara
Testar meacutetodos de filtragem para a reduccedilatildeo de ruiacutedo presente nas
imagens TOF e analisar formas para a aquisiccedilatildeo da imagem TOF
com menor presenccedila de ruiacutedo
Analisar o tempo de integraccedilatildeo para diferentes situaccedilotildees de aquisiccedilatildeo
da imagem TOF
Avaliar meacutetodos para a segmentaccedilatildeo das superfiacutecies de objetos a
partir da imagem TOF
Gerar nuvem de pontos com coordenadas tridimensionais das
superfiacutecies segmentadas e modelar estas superfiacutecies
tridimensionalmente
Avaliar a qualidade das medidas obtidas com a modelagem
tridimensional das superfiacutecies do objeto de estudo
17
13 JUSTIFICATIVA
Com o desenvolvimento e aperfeiccediloamento das cacircmaras TOF acredita-se
na viabilizaccedilatildeo deste equipamento para a medida de distacircncia e modelagem
tridimensional das superfiacutecies de objetos para diferentes finalidades Apresenta as
seguintes vantagens
Recobrimento da aacuterea de forma instantacircnea
Possibilidade de filmar a cena registrando o movimento dos objetos
com frequecircncia de aquisiccedilatildeo de 25 imagens por segundo
Fornece grande quantidade de pontos com coordenadas 3D dos
objetos imageados
Uma imagem eacute suficiente para estimar a distacircncia dos objetos
Informaccedilatildeo na banda espectral do infravermelho
Uma imagem TOF captada instantaneamente disponibiliza informaccedilatildeo sobre
a distacircncia de objetos contidos na cena sendo possiacutevel a geraccedilatildeo de nuvens de
pontos para a representaccedilatildeo tridimensional de objetos sem necessitar de
informaccedilatildeo proveniente de outro sensor Outra vantagem eacute o sistema natildeo precisar
de iluminaccedilatildeo exterior
Algumas aplicaccedilotildees para as imagens TOF foram realizadas nas aacutereas de
prevenccedilatildeo de acidentes automobiliacutesticos e seguranccedila de pedestres (RINGBECK
2007) Visatildeo Computacional (WIEDEMANN et al 2008) mapeamentos
tridimensionais de objetos em ambientes fechados para a movimentaccedilatildeo roboacutetica
(MAY et al 2008) Computaccedilatildeo Graacutefica (KOLB 2009 et al KOCH et al 2009)
realizaccedilatildeo de medidas do corpo humano para a induacutestria de roupas (APUZZO
2009) e anaacutelise de deformaccedilotildees (JAMTSHO 2010)
18
14 ESTRUTURA DA DISSERTACcedilAtildeO
A presente dissertaccedilatildeo foi estruturada em seis capiacutetulos No primeiro
capitulo realiza-se a introduccedilatildeo ao tema descreve-se o objetivo geral e os objetivos
especiacuteficos aleacutem da justificativa para a pesquisa
O segundo capiacutetulo apresenta uma revisatildeo de conceitos sobre medida de
distacircncia utilizando o princiacutepio TOF descriccedilatildeo da imagem TOF e seus arquivos de
intensidades e distacircncias influencia do tempo de integraccedilatildeo (TI) na aquisiccedilatildeo da
imagem TOF princiacutepio de funcionamento do sensor PMD modelos de cacircmaras
TOF erros de medida que podem ocorrer utilizando estas cacircmaras projeccedilatildeo
ortogonal das distacircncias obtidas com a imagem TOF para a geraccedilatildeo da nuvem de
pontos 3D meacutetodo para o refinamento da nuvem de pontos 3D detecccedilatildeo de
superfiacutecies por autovetores e autovalores anaacutelise de superfiacutecies por momentos
invariantes e algoritmo de deslocamento pela meacutedia para a segmentaccedilatildeo de
imagens
No terceiro capitulo descrevem-se os materiais equipamentos e espaccedilo
fiacutesico utilizado para a realizaccedilatildeo do trabalho de pesquisa
Com o quarto capitulo satildeo descritos os meacutetodos utilizados para o
desenvolvimento da pesquisa calibraccedilatildeo da cacircmara filtragens para anaacutelise e
tratamento de ruiacutedo presente nas imagens meacutetodos de segmentaccedilatildeo por
crescimento de regiotildees na nuvem de pontos segmentaccedilatildeo por anaacutelise da variaccedilatildeo
local de autovalores no arquivo de distacircncias da imagem TOF e geraccedilatildeo de imagem
de intensidade com as bordas do objeto intensificadas segmentaccedilatildeo da imagem
com bordas intensificadas utilizando o algoritmo de deslocamento pela meacutedia
Com o quinto capitulo descrevem-se os resultados obtidos tais como
valores dos paracircmetros calculados no processo de calibraccedilatildeo da cacircmara
experimentos realizados para a anaacutelise da presenccedila de ruiacutedo nas imagens TOF
projeccedilatildeo ortogonal dos pontos para a geraccedilatildeo da nuvem de pontos 3D
segmentaccedilatildeo por crescimento de regiotildees segmentaccedilatildeo por anaacutelise da variaccedilatildeo
local de autovalores anaacutelise das medidas obtidas com a nuvem de pontos 3D
segmentada e tambeacutem se realiza a modelagem tridimensional de duas superfiacutecies
do objeto estudado
Finalmente com o sexto capitulo satildeo apresentadas conclusotildees
consideraccedilotildees finais e recomendaccedilotildees para trabalhos futuros de acordo com os
experimentos realizados
19
2 REVISAtildeO BIBLIOGRAacuteFICA
21 MEDIDA DE DISTAcircNCIA COM O PRINCIacutePIO TOF
O princiacutepio TOF (Time-Of-Flight) permite calcular a distacircncia de objetos a
partir da emissatildeo e recepccedilatildeo de um sinal luminoso Com este objetivo utiliza-se um
conjunto de emissor e receptor oacutepticos que mede o tempo necessaacuterio para o sinal
retornar para o sensor apoacutes atingir o alvo com base no conhecimento do valor da
velocidade da luz propagada no vaacutecuo De acordo com Baltsavias (1999) o caacutelculo
da distacircncia com o princiacutepio TOF pode ser realizado atraveacutes de dois meacutetodos
Tempo de percurso de pulsos curtos de energia
Mudanccedila de fase de um sinal modelado na forma de onda contiacutenua
Sistemas que utilizam o primeiro meacutetodo de medida transmitem um pulso e
medem o seu tempo de retorno Isto eacute possiacutevel devido ao retardo de tempo gasto no
percurso do sinal que eacute medido atraveacutes de um ponto no pulso de retorno com
referecircncia no pulso emitido Quanto melhor eacute a medida do tempo melhor a distacircncia
calculada sendo o reloacutegio do sensor um fator de grande importacircncia neste meacutetodo
Para obter precisatildeo meacutetrica necessita-se realizar a medida de tempo em nano
segundos (ƞs) O afastamento e duraccedilatildeo do pulso tambeacutem satildeo fatores importantes
na resoluccedilatildeo da medida de distacircncia com este meacutetodo A Figura 21 Ilustra a medida
de distacircncia com o princiacutepio TOF (LANGE 2000)
FIGURA 21 ndash Princiacutepio TOF
FONTE LANGE (2000)
20
Utilizando pulsos de uma fonte de luz pode-se calcular a distacircncia de um
alvo atraveacutes da Equaccedilatildeo (21)
119863 =119888 119905
2 (21)
onde
119863 ndash Distacircncia entre o sensor e o alvo
119888 ndash Valor constante da velocidade da luz
119905 ndash Variaccedilatildeo de tempo entre emissatildeo e recepccedilatildeo do pulso
O segundo meacutetodo trabalha com a determinaccedilatildeo da mudanccedila de fase do
sinal contido em uma onda contiacutenua modulada Pode ser utilizado para evitar o
problema na medida de tempo com alta precisatildeo O sinal luminoso pode ser emitido
utilizando fontes LED (Light Emitting Diode) ou LASER (Light Amplification by
Stimulated Emission of Radiation) Estas fontes permitem a modulaccedilatildeo direta do
sinal luminoso atraveacutes da voltagem do sistema (LANGE 2000)
Para a utilizaccedilatildeo do meacutetodo da diferenccedila de fase considera-se que o sinal
refletido pelo alvo manteacutem a forma do sinal modulado emitido mas a fase do sinal
emitido eacute diferente da fase do sinal recebido conforme ilustrado com a Figura 22
FIGURA 22 ndash Meacutetodo da diferenccedila de fase
21
Sendo assim a mudanccedila de fase entre os sinais pode ser utilizada para
calcular a distacircncia conforme Equaccedilatildeo (22)
119863 =120593∙119888
4∙120587∙120574 (22)
onde
119863 ndash Distacircncia entre o sensor e o alvo
120593 ndash Diferenccedila de fase entre o sinal emitido e o recebido
119888 ndash Valor constante da velocidade da luz
120574 ndash Frequecircncia de modulaccedilatildeo do sinal
Em cacircmaras TOF a distacircncia entre o sensor e o alvo eacute medida utilizando o
meacutetodo da diferenccedila de fase com uma Funccedilatildeo de Correlaccedilatildeo (FC) entre o sinal
emitido e o refletido As amplitudes dos sinais satildeo moduladas com a mesma
frequecircncia Com isto a iluminaccedilatildeo pode ser feita utilizando diacuteodos emissores de luz
LED tendo-se a vantagem que a FC pode ser obtida com o sensor PMD a partir da
forma senoidal do sinal recebido (RAPP 2007)
A FC eacute calculada atraveacutes do sinal emitido e recebido Estes sinais satildeo
modelados matematicamente com forma senoidal tendo em vista que sua
propagaccedilatildeo ocorre na forma de onda Dado um sinal luminoso emitido 119892 119905 e um
sinal recebido 119904 119905 em um ponto do sensor PMD as amostras 119888 120591 podem ser
calculadas atraveacutes da Equaccedilatildeo (23) Estas amostras satildeo utilizadas para modelar a
FC em um atraso de tempo 120591
119888 120591 = 119904 119905 otimes 119892 119905 = lim119879rarrinfin 119904 119905 ∙ 119892 119905 + 120591 +119879
2
minus119879
2
119889119905 (23)
onde
119904 119905 ndash Funccedilatildeo que modela a forma do sinal luminoso recebido
119892 119905 ndash Funccedilatildeo que modela a forma do sinal luminoso emitido
119905 ndash Variaccedilatildeo de tempo entre a emissatildeo e a recepccedilatildeo do sinal
120591 ndash Atraso de tempo no recebimento do sinal
22
O sinal emitido pode ser expresso com 119892 119905 = cos(120603119905) o recebido eacute
expresso atraveacutes da relaccedilatildeo 119904 119905 = 1 + 119886 ∙ cos(120603119905 minus 120593) Ambos com forma senoidal
amplitude 119886 e diferenccedila de fase 120593 Com isto a FC pode ser apresentada na forma da
Equaccedilatildeo (25)
119888 120591 = 1 + 119886 ∙ 119888119900119904 120603120591 minus 120593 otimes 119888119900119904 120603120591 (24)
119888 120591 = lim119879acuterarrinfin1
119879acute 1 + 119886 ∙ 119888119900119904 120603119905 minus 120593 ∙ 119888119900119904 120603119905 + 120603119905
+119879 acute
2
minus119879 acute
2
119889119905 (25)
119888 120591 =119886
2∙ cos 120593 + 120603119905 (26)
onde
119892 119905 ndash Funccedilatildeo senoidal que modela a forma do sinal emitido
119904 119905 ndash Funccedilatildeo que modela a forma do sinal recebido
119905 ndash Variaccedilatildeo de tempo entre a emissatildeo e recepccedilatildeo do sinal
120591 ndash Atraso no tempo de recebimento do sinal
119886 ndash Amplitude da onda portadora do sinal
120593 ndash Diferenccedila de fase
120603 ndash Referecircncia de fase para o sinal modelado na forma senoidal
Lange (2000) avaliou a FC para fases 120596 119905 preacute-definidas escolhendo quatro
fases 120596 119905 = 0deg 120596 119905 = 90deg 120596 119905 = 180deg 120596 119905 = 270deg Verificou que eacute possiacutevel calcular a
diferenccedila de fase 120593 e a amplitude 119886 do sinal recebido 119904(119905) Considerando que o sinal
recebido tem sobreposiccedilatildeo ao sinal emitido deve-se adicionar uma constante de
deslocamento 119870 conforme a Equaccedilatildeo (27)
119862 120591 = 119888 120591 + 119870 (27)
119862 1205910 = 119888 1205910 + 119870 =119886
2∙ cos 120593 + 119870 (28)
119862 1205911 = 119888 1205911 + 119870 = minus119886
2∙ 119904119890119899 120593 +119870 (29)
119862 1205912 = 119888 1205912 + 119870 = minus119886
2∙ cos 120593 + 119870 (210)
119862 1205913 = 119888 1205913 + 119870 =119886
2∙ 119904119890119899 120593 +119870 (211)
23
Analisando a FC em quatro pontos a diferenccedila de fase 120593 e a amplitude 119886 do
sinal 119904(119905) podem ser calculadas atraveacutes das Equaccedilotildees (212) e (213)
120593 = 119905119892minus1 119862 1205913 minus119862 1205911
119862 1205910 minus119862 1205912 (212)
119886 = 119862 1205913 minus119862 1205911 2+ 119862 1205910 minus119862 1205912 2
2 (213)
Pode-se fazer a simplificaccedilatildeo das Equaccedilotildees (214) agrave (217) para quatro
pontos amostrais que satildeo necessaacuterios na modelagem da FC
119862 1205911 = 1198601 (214)
119862 1205912 = 1198602 (215)
119862 1205913 = 1198603 (216)
119862 1205910 = 1198604 (217)
A anaacutelise da FC entre o sinal oacuteptico e eleacutetrico recebido no dispositivo do
sensor eacute feita utilizando a diferenccedila de fase conforme ilustrado com a Figura 23
FIGURA 23 ndash FC utilizada no meacutetodo da diferenccedila de fase
FONTE Adaptado de LANGE (2000)
A FC permite calcular a distacircncia entre o alvo e a cacircmara utilizando quatro
amostras 11986011198602 1198603 e 1198604 com defasagem de 90ordm A diferenccedila de fase 120593 entre o sinal
24
emitido e o recebido eacute proporcional agrave distacircncia entre o alvo e a cacircmara O valor para
a diferenccedila de fase pode ser calculado atraveacutes da Equaccedilatildeo (218)
120593 = 119886119903119888119905119886119899 1198601minus1198603
1198602 minus1198604 (218)
onde
120593 ndash Diferenccedila de fase entre a onda emitida e a recebida
1198601119860211986031198604 ndash Pontos amostrais utilizados na modelagem da FC
Aleacutem do valor da diferenccedila de fase entre os sinais dois outros valores
podem ser calculados a amplitude 119886 e o valor de intensidade 119887 do sinal recebido
conforme as Equaccedilotildees (219) e (220) respectivamente
119886 = 1198601minus1198603 2+ 1198602 minus1198604 2
2 (219)
119887 =1198601+1198602 +1198603+1198604
4 (220)
onde
119886 ndash Amplitude do sinal recebido
119887 ndash Intensidade do sinal recebido (offset)
A distacircncia 119889 do sensor ao alvo eacute calculada atraveacutes da Equaccedilatildeo (221)
119889 =119888∙120593
4120587∙119891119898119900119889 (221)
onde
119889 ndash Distacircncia entre o sensor e o alvo
119888 ndash Valor constante da velocidade da luz propagada no vaacutecuo
120593 ndash Diferenccedila de fase entre o sinal emitido e o recebido
119891119898119900119889 ndash Frequecircncia de modulaccedilatildeo do sinal luminoso utilizado
A frequecircncia de modulaccedilatildeo do sinal emitido estabelece a distacircncia maacutexima
que poderaacute ser medida para um determinado comprimento de onda Em um sinal
25
modulado com a frequecircncia 119891119898119900119889 = 20119872119867119911 e comprimento de onda 120582119898119900119889 = 15m
conforme a Equaccedilatildeo (222) a distacircncia maacutexima que poderaacute ser medida eacute de 75
metros (MOumlLLER et al 2005)
119889119898119886119909 =120582119898119900119889
2= 75119898 (222)
22 IMAGEM TOF
Os piacutexeis da imagem TOF contecircm informaccedilotildees de distacircncia e intensidade
das superfiacutecies dos objetos Proporcionam a anaacutelise da profundidade dos objetos na
cena aleacutem da informaccedilatildeo de intensidade do sinal captado pelo sensor A Figura 24
ilustra a informaccedilatildeo 3D contida na imagem TOF
FIGURA 24 ndash Informaccedilatildeo das imagens TOF
FONTE Adaptado de RINGBECK (2007)
Com a informaccedilatildeo de profundidade e o posicionamento bidimensional dos
objetos na imagem pode-se realizar o mapeamento destes objetos e estimar suas
dimensotildees As cacircmaras TOF podem captar imagens e viacutedeos para realizar medidas
e detectar movimentos A Figura 25 ilustra os arquivos da imagem TOF
26
FIGURA 25 ndash Imagem TOF obtida com cacircmara PMD
FONTE PMD Technologies (2009)
A Figura 25a ilustra o arquivo com informaccedilatildeo das distacircncias dos objetos
presentes na imagem TOF A Figura 25b ilustra o arquivo com as intensidades que
o sinal retornou para o sensor registrada em cada piacutexel da imagem infravermelha
captada com comprimento de onda de 870nm
23 TEMPO DE INTEGRACcedilAtildeO
O periacuteodo de tempo que o sensor da cacircmara ficou exposto para obter a
imagem eacute chamado de tempo de integraccedilatildeo (TI) A quantidade de energia
eletromagneacutetica captada pelo sensor eacute diretamente influenciada por este tempo
pelas caracteriacutesticas refletivas das superfiacutecies dos objetos e pelo meio em que a
imagem foi tomada Os elementos do sensor podem ser carregados de acordo com
seu intervalo de capacidade do insaturado ao supersaturado Estes valores causam
ruiacutedos na imagem variando de acordo com a distacircncia entre o objeto e o sensor
(CENTENO e JUTZI 2010)
Este pode ser considerado o paracircmetro interno mais criacutetico em uma cacircmara
TOF pois descreve o periacuteodo de tempo que os elementos sensores necessitam
para detectar o sinal luminoso com a finalidade de obter a diferenccedila de fase utilizada
27
para o caacutelculo da distacircncia Quando o TI eacute muito baixo alguns elementos do sensor
podem natildeo ser ativados ocasionando piacutexeis com valor zero natildeo sendo possiacutevel
calcular sua distacircncia Por outro lado se o TI eacute muito elevado o pixel pode ficar
supersaturado o que tambeacutem causa erro na medida da distacircncia Sendo assim eacute
necessaacuterio determinar um TI especiacutefico para cada situaccedilatildeo Nas cacircmaras PMD o
controle do TI eacute realizado atraveacutes de software em outros modelos de cacircmaras TOF
este controle pode ser feito atraveacutes de hardware (WIEDEMANN et al 2008)
A Figura 26 ilustra a presenccedila de ruiacutedo na imagem TOF influenciada pelo
TI Nesta figura as nuvens de pontos 3D foram geradas com imagens TOF obtidas
com a cacircmara PMD CamCube 20 a partir do mesmo ponto de vista mas com
diferentes TI (140micros 1400micros e 14000micros) isto causou a presenccedila de ruiacutedo com
diferentes comportamentos
FIGURA 26 ndash Ruiacutedo na nuvem de pontos 3D proveniente de imagem TOF
FONTE PMD CamCube Tutorial (2009)
A nuvem de pontos gerada com a imagem obtida com TI de 1400micros
ilustrada com a Figura 26b foi a que melhor representou a forma das superfiacutecies do
objeto A nuvem de pontos da Figura 26a foi gerada a partir da imagem obtida com
TI igual a 140micros considerada com baixa saturaccedilatildeo pois a intensidade do sinal
captado pelo sensor foi pequena A nuvem de pontos da Figura 26c foi gerada com
imagem obtida com TI igual a 14000micros o que causou a saturaccedilatildeo do sinal recebido
pelo sensor e maior presenccedila de ruiacutedo A nuvem de pontos apresentada com a
Figura 26c apresentou-se menos consistente para representar as superfiacutecies do
objeto em questatildeo
28
24 PRINCIacutePIO DE FUNCIONAMENTO DO SENSOR PMD
O dispositivo PMD (Photonic Mixer Device) realiza medidas de distacircncia
utilizando o princiacutepio TOF Com este objetivo o dispositivo emite sinais luminosos
com frequecircncia modulada e o sensor capta a intensidade de retorno do sinal
refletido pelo alvo Informaccedilotildees sobre as fases e intensidades destes sinais satildeo
obtidas com o processamento A Figura 27 ilustra as etapas deste processo
FIGURA 27 ndash Princiacutepio de funcionamento do sistema PMD
FONTE LUAN (2001)
O sinal modulado eacute emitido com uma fase determinada pelo oscilador do
sistema Para que se possa realizar a medida da distacircncia o sinal recebido deve ter
fase diferente da que foi emitido No dispositivo PMD as cargas eleacutetricas do sinal
recebido satildeo separadas de acordo com a voltagem do diodo de leitura tambeacutem
chamado de fotodiodo O arquivo de saiacuteda deste dispositivo conteacutem informaccedilatildeo de
fase e intensidade do sinal recebido o que possibilita obter informaccedilatildeo de distacircncia
e intensidade para cada piacutexel da imagem (LUAN 2001)
O sensor utilizado no imageamento eacute um CMOS (Complementary Metal-
Oxide-Semiconductor) que tem tecnologia similar a dos sensores CCD (Charged-
Coupled Device) O CMOS apresenta a vantagem de ser um circuito integrado com
baixo consumo de energia No CMOS a conversatildeo de voltagem e a amplificaccedilatildeo do
sinal ocorrem em cada fotodiodo e os valores podem ser lidos independentemente
29
A desvantagem eacute que a amplificaccedilatildeo no fotodiodo gera imagens com maior
presenccedila de ruiacutedo (PECHT e FOSSUM 1997)
Quando os foacutetons sensibilizam o sensor CCD a carga eleacutetrica eacute transferida
sequencialmente linha por linha coluna por coluna A conversatildeo de voltagem e
amplificaccedilatildeo do sinal eacute realizada fora da aacuterea do sensor Uma vantagem do sensor
CCD eacute a geraccedilatildeo de imagens mais niacutetidas devido agrave menor complexidade no seu
sistema Por processar as cargas eleacutetricas de forma unificada menores interferecircncias
satildeo causadas diminuindo a presenccedila de ruiacutedo (KEMENY et al 1991)
A diferenccedila no princiacutepio de funcionamento dos sensores CCD e CMOS eacute
Ilustrada com a Figura 28
FIGURA 28 ndash Captaccedilatildeo da carga do sinal em sensores CCD e CMOS
FONTE LANGE (2000)
O princiacutepio de funcionamento do sensor CCD eacute ilustrado com as Figuras
28a e 28c onde a leitura da informaccedilatildeo eacute feita de forma sequencial pelos elementos
do sensor Esta varredura realizada no sensor CCD faz com que a geraccedilatildeo da
30
imagem final seja mais lenta que no sensor CMOS que realiza a conversatildeo foacuteton-
eleacutetron e eleacutetron-voltagem diretamente em cada elemento sensor conforme eacute
ilustrado com as Figuras 28b e 28d Com isto o sensor CMOS tem maior
velocidade de transferecircncia de cargas acumuladas para o conversor analoacutegico-
digital
Fotodiodos satildeo os elementos fotossensiacuteveis utilizados como portas de
entrada para o sinal luminoso em sensores CMOS ou CCD Estes captam cargas
eleacutetricas presentes no sinal e estatildeo inseridos sobre uma placa de Siliacutecio O
transporte das cargas para o interior da placa eacute explicado fisicamente atraveacutes dos
campos de franjas ilustrado com a Figura 29 Os campos de franja estatildeo
representados para diferentes voltagens os elementos do sensor apresentado tem
entradas para trecircs voltagens 10V 5V e 0V
FIGURA 29 ndash Representaccedilatildeo de campos de franja
FONTE THEUWISSEN (1995)
A seccedilatildeo A-A‟ na Figura 29 ilustra os campos de franja gerados mais
proacuteximos agrave superfiacutecie da placa A forma do sinal pode ser modelada de forma
aproximada por segmentos de linhas retas Na seccedilatildeo B-B‟ com profundidade meacutedia
na placa de Siliacutecio a influecircncia do campo eleacutetrico das entradas vizinhas a porta
central de 5V estaacute em seu niacutevel maacuteximo Quanto mais fundo encontra-se a entrada
de cargas na placa de Siliacutecio menor seraacute a interferecircncia dos campos eleacutetricos
gerados pelas portas de entrada das cargas vizinhas conforme pode ser visualizado
na seccedilatildeo C-C‟ Nesta profundidade diferentes portas de entrada estatildeo praticamente
31
agrave mesma distacircncia da superfiacutecie e o valor de dispersatildeo do campo de franja diminui
O campo de franja miacutenimo de uma entrada que tecircm profundidade maacutexima
proporciona ao sensor o maior aproveitamento aumentando assim a velocidade no
transporte de cargas (THEUWISSEN 1995)
Quanto maior a modulaccedilatildeo na voltagem da entrada das cargas maior o
potencial de armazenamento conforme ilustrado com a Figura 210
FIGURA 210 ndash Princiacutepio de armazenamento de cargas em sensores TOF
FONTE LANGE (2000)
O sinal modulado recebido 119904 119905 e a Funccedilatildeo de Correlaccedilatildeo 119891 119905 + 120591 do sinal
modulado emitido satildeo ilustrados com a Figura 210b A Figura 210a ilustra a luz
incidente no sensor com as cargas captadas e armazenadas de acordo com a
modulaccedilatildeo do fotodiodo
O dispositivo PMD utiliza a tecnologia CMOS para o imageamento com dois
elementos fotossensiacuteveis e dois diodos que captam as cargas eleacutetricas do sinal
modulado recebido As informaccedilotildees oacutepticas e eleacutetricas misturadas geram os piacutexeis
da imagem com informaccedilatildeo de distacircncia dos pontos imageados A Figura 211
ilustra este elemento sensor
32
FIGURA 211 ndash Princiacutepio de captaccedilatildeo de cargas pelo sensor PMD
FONTE LUAN (2001)
As placas claras e centrais na Figura 211a correspondem ao circuito de
leitura do sinal oacuteptico estas placas satildeo condutoras e transparentes para possibilitar
a entrada de luz Os diodos satildeo os componentes do circuito de leitura que captam e
direcionam as cargas eleacutetricas recebidas em um determinado sentido satildeo ilustrados
com as placas mais afastadas na Figura 211a As cargas que chegam satildeo
distribuiacutedas de acordo com a voltagem do diodo Uma fina camada de oacutexido isola os
circuitos de leitura do dispositivo
A voltagem da carga que entra no sistema eacute controlada de acordo com a
modulaccedilatildeo do sinal aplicada pelo dispositivo emissor Sendo assim pode ser
captada pelo diodo da direita ou esquerda que registraraacute a quantidade de carga
recebida de acordo com sua voltagem A distribuiccedilatildeo de potencial na regiatildeo
superficial do dispositivo eacute influenciada pela seleccedilatildeo de cargas que faz este sistema
dinacircmico e equilibrado Para valores natildeo nulos a luz modulada recebida e a
diferenccedila de fase podem ser comparadas atraveacutes das cargas eleacutetricas recebidas A
quantidade de carga captada pelos diodos depende diretamente da diferenccedila de
fase entre o sinal modulado emitido e o recebido pelo sensor Esta informaccedilatildeo pode
ser utilizada para calcular a diferenccedila de fase entre o sinal emitido e o recebido pois
33
eacute diretamente proporcional a carga que cada diodo captou Com isto a distacircncia
entre o sensor e o objeto pode ser calculada utilizando o princiacutepio da diferenccedila de
fase No entanto se a luz incidente eacute modulada como um sinal retangular mas sua
fase entre a emissatildeo e a recepccedilatildeo eacute igual a zero a carga seraacute captada por apenas
um dos diodos e a distacircncia resultante seraacute igual a zero (MOumlLLER et al 2005)
A Figura 212 ilustra o comportamento dos diodos de leitura ao receber o
sinal com distacircncia diferente de zero entre o alvo e o sensor Na Figura 212a eacute
ilustrado o sinal luminoso recebido por um elemento fotossensiacutevel Este sinal eacute
captado pela porta de entrada PA do fotodiodo que registra parte desta carga de
acordo com sua modulaccedilatildeo
FIGURA 212 ndash Medida da diferenccedila de fase do sinal recebido
FONTE Adaptado de MOumlLLER et al (2005)
Na Figura 212a o sinal recebido pelo elemento fotossensiacutevel do sensor eacute
ilustrado no momento em que eacute captado pela porta com modulaccedilatildeo A (PmodA) A
carga eacute captada pelos dois fotodiodos com defasagem de meio ciclo com isto cada
um capta parte da carga recebida A Figura 212b ilustra a medida da diferenccedila de
fase do sinal recebido atraveacutes da quantidade de carga que foi captada pelos
fotodiodos com modulaccedilatildeo Mod_A e Mod_B A voltagem do diodo eacute estabelecida de
acordo com a modulaccedilatildeo do sinal luminoso que seraacute emitida pelo dispositivo
34
25 CAcircMARAS PMD
As cacircmaras TOF com tecnologia PMD consistem de um chip sensor fonte
de iluminaccedilatildeo transmissor e receptor oacutepticos aleacutem de perifeacutericos eletrocircnicos e
interface digital de controle realizada atraveacutes de software Dependendo das
exigecircncias de aplicaccedilatildeo os componentes da cacircmara podem ser adaptados Cada
um deles pode afetar os paracircmetros internos da cacircmara tais como o campo de
visatildeo (FOV) taxa de captaccedilatildeo e tempo de integraccedilatildeo para a aquisiccedilatildeo das imagens
A distacircncia da superfiacutecie a ser medida eacute o fator preponderante para a escolha destes
paracircmetros O fato destas cacircmaras serem modulares amplia sua gama de
aplicaccedilotildees Isto eacute possiacutevel levando-se em conta as condiccedilotildees adicionais que cada
aplicaccedilatildeo pode exigir tais como a luz exterior ao sistema e a necessidade de
mudanccedila na fonte de iluminaccedilatildeo utilizada (PMD Technologies 2009)
O sensor PMD proporciona o imageamento instantacircneo dos objetos
utilizando um sensor com tecnologia CMOS adaptado Este sensor eacute um arranjo de
elementos fotossensiacuteveis que permitem a raacutepida detecccedilatildeo e modulaccedilatildeo do sinal
luminoso com suas variaccedilotildees Isto eacute feito de acordo com a distacircncia da superfiacutecie
que atinge do objeto imageado Pode adquirir dados de distacircncia e intensidade
simultaneamente sem precisar de um sistema de digitalizaccedilatildeo mais complexo como
um laser scanner Apresenta a desvantagem de ser muito sensiacutevel agrave luz exterior ao
sistema que interfere causando a presenccedila de ruiacutedo na imagem TOF e consequente
erro na medida de distacircncia (KHONGSAB 2009)
O desempenho do sistema PMD depende da fonte de iluminaccedilatildeo utilizada
capacidade de fornecimento de energia e eficiecircncia oacuteptica na criaccedilatildeo da imagem
Normalmente eacute utilizada fonte de iluminaccedilatildeo LED nas cacircmaras PMD No entanto
outros fabricantes utilizam diodos LASER para a iluminaccedilatildeo isto porque possibilita
realizar medidas de distacircncias maiores O desenvolvimento dos sistemas LED fez
com que sua eficiecircncia de transformaccedilatildeo de energia eleacutetrica em energia oacuteptica seja
de 30 Com a iluminaccedilatildeo LED tem-se um sinal luminoso jaacute modulado devido a
suas caracteriacutesticas eletro-oacutepticas Como uma parte consideraacutevel da luz fica na
borda do feixe isto se torna uma desvantagem pois esta aacuterea normalmente fica fora
do campo de visatildeo do sensor PMD Outra desvantagem diz respeito ao limite de
modulaccedilatildeo dos LED‟s comerciais que trabalham na faixa de 20 MHz agrave 30 MHz Os
diodos LASER tecircm eficiecircncia oacuteptica de ateacute 50 dependendo da potecircncia de saiacuteda
35
utilizada sendo de aproximadamente 100 MHz a modulaccedilatildeo maacutexima da frequecircncia
que pode ser atingida O perfil do feixe LASER pode ser adaptado ao campo de
visatildeo do sensor PMD A desvantagem eacute que este seria um circuito modular mais
complexo e que teria necessidade de um maior nuacutemero de etapas para conseguir
estabilizar a fase da onda portadora do sinal Outra desvantagem eacute que a
implantaccedilatildeo de um sistema LASER necessita de maior atenccedilatildeo agrave seguranccedila dos
olhos do que o sistema LED (RINGBECK 2007)
Com a Figura 213 ilustra-se a medida de distacircncia com a cacircmara TOF
modelo 19k da PMD A fonte de iluminaccedilatildeo LED emite o sinal luminoso em direccedilatildeo
dos objetos que estatildeo no campo visual da cacircmara O retorno deste sinal eacute captado
pelo sensor e possibilita o caacutelculo da diferenccedila de fase entre o sinal emitido e o
recebido
FIGURA 213 ndash Medida de distacircncia com a cacircmara PMD
FONTE MOLLER et al (2005)
36
251 Cacircmara PMD CamCube 20
A cacircmara TOF modelo PMD[VISION]regCamCube 20 funciona em ambientes
internos e externos com sensor de 204x204 piacutexeis que captam os niacuteveis de cinza da
imagem de intensidade Simultaneamente realiza a medida da quantidade de carga
recebida utilizada para determinar a diferenccedila de fase entre o sinal emitido e o
recebido Isto possibilita o caacutelculo da distacircncia entre o sensor e os objetos presentes
na cena A Figura 214 ilustra a cacircmara PMD CamCube 20 com as fontes de
iluminaccedilatildeo LED acopladas em suas laterais
FIGURA 214 ndash Cacircmara PMD CamCube 20
FONTE PMD Technologies (2009)
Este equipamento pode ter seu campo de visatildeo variaacutevel possibilitando a
diminuiccedilatildeo de distorccedilotildees manchas ou outras imperfeiccedilotildees da imagem O software
de interface da cacircmara com o computador apresenta a possibilidade de trabalhar
com dados brutos para o processamento das imagens aleacutem de funcionar em
diferentes canais de frequecircncia Tambeacutem disponibiliza compatibilidade com o
software Matlab para realizar esta interface
A imagem de intensidade captada de uma parede utilizando a cacircmara PMD
CamCube 20 eacute ilustrada com a Figura 215
37
FIGURA 215 ndash Imagem captada com a cacircmara PMD CamCube 20
FONTE CENTENO e JUTZI (2010)
Com a Figura 215a eacute ilustrada a cacircmara PMD CamCube 20 instalada em
um tripeacute sobre uma mesa Na Figura 215b tem-se a imagem infravermelha da
superfiacutecie plana de uma parede obtida com esta cacircmara O Quadro 21 ilustra as
especificaccedilotildees teacutecnicas da cacircmara PMD CamCube 20
PARAcircMETROS VALOR PADRAtildeO OBSERVACcedilOtildeES
Tipo do sensor PhotonICs PMD41k-S (204x204 piacutexeis)
Tamanho efetivo do pixel no sensor igual a 45microm
Distacircncia de mediccedilatildeo 03 ndash 7metros
Precisatildeo na medida de distacircncia (1σ) lt 3mm
Para aacuterea central da imagem obtida agrave 2m do sensor em superfiacutecie com refletividade de 90
Frequecircncia de aquisiccedilatildeo de imagens 25 fps Configuraccedilatildeo padratildeo
Campo de visatildeo (FOV) 40ordmx40ordm f = 128mm
Comprimento de onda da fonte de iluminaccedilatildeo
870nm Infravermelho proacuteximo
Fonte de iluminaccedilatildeo [V] 12 V plusmn 10
Interface USB 20
Temperatura de operaccedilatildeo 0ordmC agrave 50ordmC
Temperatura de armazenamento -20ordmC agrave 85ordmC
QUADRO 21 - Especificaccedilotildees teacutecnicas da cacircmara PMD CamCube 20 FONTE Adaptado de PMD Technologies (2009)
O sensor PhotonICs PMD41k-S utilizado na cacircmara PMD CamCube 20 vem
com um dispositivo SBI para a supressatildeo de cargas provenientes da iluminaccedilatildeo
exterior ao sistema Estas cargas causam a saturaccedilatildeo dos piacutexeis da imagem TOF
38
252 Dispositivo SBI
O dispositivo SBI (Supression of Background Illumination) eacute uma soluccedilatildeo
teacutecnica encontrada para melhorar o contraste das imagens geradas com o sensor
PMD em ambientes com iluminaccedilatildeo exterior A presenccedila desta iluminaccedilatildeo na cena
do objeto imageado causa maior presenccedila de ruiacutedo no sinal captado pelo sensor
Esta iluminaccedilatildeo pode saturar os elementos do sensor fazendo com que
ocorram falhas na medida de distacircncia Este efeito pode ser minimizado utilizando o
tempo de integraccedilatildeo adequado para a tomada das imagens Outros distuacuterbios que
podem ocorrer satildeo devidos agrave corrente negra (DC - Dark Current) Este efeito eacute
causado porque o sensor natildeo capta o valor zero na imagem que seria a falta
completa de iluminaccedilatildeo nas superfiacutecies da cena A corrente negra natildeo pode ser
evitada em dispositivos semicondutores especialmente quando haacute altas
temperaturas Com uma temperatura de 80ordmC a corrente negra pode ser 1000 vezes
maior do que o normal o que afeta significativamente a qualidade das medidas
realizadas Para tornar o dispositivo PMD mais confiaacutevel na medida de distacircncias foi
criado o circuito SBI que suprime instantaneamente a iluminaccedilatildeo de fundo Neste
circuito eacute utilizada uma teacutecnica para a captaccedilatildeo do sinal luminoso minimizando a
interferecircncia de fatores externos Isto possibilita realizar medidas de distacircncia
confiaacuteveis mesmo em ambientes onde o sinal eacute modificado por interferecircncia de
iluminaccedilatildeo externa ou por altas temperaturas O sistema SBI pode ser desativado ou
ateacute mesmo ajustado para que seja possiacutevel realizar medidas de distacircncia com
qualidade em cenas tomadas em diferentes ambientes independente da presenccedila
de iluminaccedilatildeo exterior (MOumlLLER 2005)
O circuito SBI adiciona cargas eleacutetricas de compensaccedilatildeo instantacircnea nos
diodos de leitura minimizando os efeitos de saturaccedilatildeo causados por fatores externos
ao sistema Com o SBI espera-se que o sensor capte apenas o sinal correlacionado
com a medida de distacircncia sem interferecircncia de iluminaccedilatildeo exterior reduzindo
assim a interferecircncia da iluminaccedilatildeo de fundo no sinal recebido
A Figura 216a ilustra um sensor sem o dispositivo SBI a carga captada com
influecircncias externas de iluminaccedilatildeo e calor eacute maior do que a enviada pela fonte de
iluminaccedilatildeo refletida pela superfiacutecie do objeto e recebida pelo sensor Neste caso a
medida de distacircncia estaacute influenciada por fatores externos ao sistema e conteraacute
erros Na Figura 216b as cargas geradas por fatores externos ao sistema satildeo
39
minimizadas pelo dispositivo SBI Com isto tem-se maior quantidade de carga
captada com o sinal recebido eliminando a carga gerada por fatores externos
FIGURA 216 ndash Princiacutepio de funcionamento do SBI
FONTE MOumlLLER et al (2005)
Cacircmaras TOF com iluminaccedilatildeo LED infravermelha utilizam o dispositivo SBI
para a supressatildeo da iluminaccedilatildeo de fundo Outros modelos de cacircmaras TOF utilizam
iluminaccedilatildeo LASER para evitar o problema com a iluminaccedilatildeo exterior
253 Modelos de cacircmaras TOF
Diferentes cacircmaras TOF foram desenvolvidas nos uacuteltimos anos a Figura
217 ilustra alguns modelos destas cacircmaras
FIGURA 217 ndash Modelos de cacircmaras TOF
a) Effector O3D FONTE httpwwwifm-electroniccom
b) PMD[vision] CamCube 20 FONTE httpwwwpmdteccom
c) PMD[vision] 19k FONTE httpwwwpmdteccom
d) SwissRanger SR-3000 FONTE httpwwwmesa-imagingch
40
O Quadro 22 descreve as especificaccedilotildees teacutecnicas destas cacircmaras TOF
a)Effector
O3D
b)PMD[vision]
CamCube 20
c)PMD[vision]
19k
d)SwissRanger
SR-3000
Resoluccedilatildeo (piacutexeis) 64 x 50 204 x 204 160 x 120 176 x 144
Dimensotildees dos piacutexeis (microm) 100 x 100 45 x 45 40 x 40 40 x 40
Distacircncia focal (mm) 86 128 120 80
Fonte de iluminaccedilatildeo 1 matriz LED 2 matrizes LED 2 matrizes LED 1 matriz LED
Modulaccedilatildeo da fonte de
iluminaccedilatildeo (nm) 850 870 870 850
Frequecircncia de modulaccedilatildeo 20 MHz 20 MHz 20 MHz 20 MHz
Frequecircncia na aquisiccedilatildeo de
imagens
Maacuteximo
100 fps
Maacuteximo
25 fps
Maacuteximo
15 fps
Maacuteximo
40 fps
Conexatildeo Ethernet USB 2 Ethernet USB 2
Dimensotildees (mm) 55 x 45 x 85 194 x 60 x 60 220 x 210 x 55 60 x 50 x 65
QUADRO 22 ndash Especificaccedilotildees teacutecnicas de cacircmaras TOF FONTE Adaptado de RAPP (2007)
A partir do Quadro 22 verifica-se que estes modelos de cacircmaras TOF em
sua configuraccedilatildeo padratildeo possuem fonte de iluminaccedilatildeo LED distacircncia focais
variando de 8mm agrave 128mm e apresentam pequenas dimensotildees
26 ERROS DE MEDIDA
Observaccedilotildees realizadas com instrumentos de medida estatildeo acompanhadas
de erros provenientes da falibilidade humana imperfeiccedilatildeo na fabricaccedilatildeo do
equipamento e de interferecircncias causadas pelo ambiente em que o instrumento
utilizado e o objeto estavam no momento em que se realizou a medida Erros de
observaccedilatildeo satildeo tradicionalmente classificados como erros grosseiros sistemaacuteticos e
acidentais Erros grosseiros devem ser detectados e evitados pelo observador com
os devidos cuidados na obtenccedilatildeo da informaccedilatildeo tambeacutem ocorrem devido agrave
presenccedila de ruiacutedo nas observaccedilotildees Erros sistemaacuteticos se repetem seguindo um
determinado padratildeo e podem ser preditos e corrigidos Existem opccedilotildees para evitaacute-
los atraveacutes de teacutecnicas de observaccedilatildeo ou entatildeo eliminaacute-los a posteriori atraveacutes de
foacutermulas especiacuteficas Os erros acidentais ou aleatoacuterios satildeo randocircmicos natildeo
previsiacuteveis e podem ser distribuiacutedos entre o conjunto de observaccedilotildees por teacutecnicas
41
estatiacutesticas Eacute comum o uso da expressatildeo ldquopropriedades estatiacutesticas das
observaccedilotildeesrdquo devido a este erro (GEMAEL 1994)
Erros na medida de distacircncia utilizando cacircmaras TOF tambeacutem podem ser
divididos em natildeo-sistemaacuteticos e sistemaacuteticos conforme descrito nas seccedilotildees 261 e
262 onde seratildeo apresentados 3 erros natildeo-sistemaacuteticos e 7 erros sistemaacuteticos
261 Erros natildeo-sistemaacuteticos em cacircmaras TOF
De acordo com MAY et al (2008) a classificaccedilatildeo de erros natildeo-sistemaacuteticos
na medida de distacircncia utilizando cacircmaras TOF pode ser feita da seguinte maneira
1) Erro devido agrave relaccedilatildeo sinal-ruiacutedo (Signal-to-noise) quando a relaccedilatildeo da
carga recebida com o sinal eacute baixa e o ruiacutedo presente eacute alto haveraacute distorccedilatildeo na
medida de distacircncia que natildeo poderaacute ser corrigida posteriormente Para diminuir este
erro pode-se tomar cuidado com o tempo de exposiccedilatildeo do sensor na aquisiccedilatildeo da
imagem e tambeacutem amplificar a iluminaccedilatildeo do sistema Outra soluccedilatildeo eacute filtrar os
valores medidos com baixas amplitudes no sinal recebido
2) Reflexatildeo do sinal por muacuteltiplos caminhos (Multiple ways reflection) em
objetos com descontinuidade em suas superfiacutecies o sinal emitido pode percorrer
diferentes caminhos antes de retornar ao sensor Exemplos satildeo objetos com
superfiacutecies cocircncavas que podem refletir vaacuterias vezes o sinal e gerar erro na medida
de distacircncia Neste caso o sinal eacute refletido com sobreposiccedilatildeo ou seja pode ser
captado o sinal da uacuteltima superfiacutecie que o refletiu gerando uma distacircncia diferente
do valor esperado
3) Espalhamento da luz (Light scattering) ocorre na lente da cacircmara
causado pela presenccedila de objetos proacuteximos Este efeito e o causado pela reflexatildeo
por muacuteltiplos caminhos satildeo imprevisiacuteveis pois a topologia da cena observada eacute
desconhecida a priori
262 Erros sistemaacuteticos em cacircmaras TOF
Segundo RAPP (2007) nas cacircmaras TOF erros tambeacutem indicam a relaccedilatildeo
entre a variacircncia da distacircncia e a amplitude do sinal captado pelo sensor A relaccedilatildeo
42
estabelecida eacute que a variacircncia dos dados de distacircncia eacute inversamente proporcional agrave
raiz quadrada da amplitude do sinal recebido para realizar a medida Alguns erros
sistemaacuteticos das cacircmaras TOF estudados por RAPP foram
1) Erro devido a uma funccedilatildeo natildeo harmocircnica utilizada para correlacionar o
sinal emitido ao recebido
2) Ruiacutedos relacionados com o tempo de integraccedilatildeo Este tempo pode causar
exposiccedilatildeo insuficiente ou saturaccedilatildeo dos elementos do sensor
3) Erros geomeacutetricos no posicionamento dos piacutexeis devido ao sistema oacuteptico
da cacircmara
O erro devido agrave falta de harmonia na funccedilatildeo de correlaccedilatildeo entre o sinal
emitido e o recebido pode ser causado quando o sistema oacuteptico utilizado emite o
sinal de referecircncia com sua forma inicial e recebe o sinal refletido com forma
diferente Com isto a funccedilatildeo que representa o sinal recebido natildeo teraacute a forma
senoidal teoacuterica do sinal emitido Isto ocorre por conter harmocircnicos de Fourier
iacutempares quando eacute necessaacuteria uma amostra com pelo menos quatro pontos para
definir a FC entre os sinais Este erro tem grande influecircncia no caacutelculo da distacircncia
do objeto pois eacute a FC que possibilita a medida da diferenccedila de fase entre o sinal
emitido e o recebido
A presenccedila de ruiacutedo pode ser notada variando o TI na aquisiccedilatildeo da imagem
O conjunto de dados apresenta maiores distorccedilotildees radiomeacutetricas e geomeacutetricas
quando a presenccedila de ruiacutedo eacute forte Quando o TI eacute aumentado o ruiacutedo observado no
conjunto de dados pode diminuir Poreacutem valores extremamente altos introduzem
erros na mediccedilatildeo por causar saturaccedilatildeo do sensor Com esta informaccedilatildeo procura-se
definir uma funccedilatildeo para a modelagem do ruiacutedo de acordo com o tempo de
integraccedilatildeo Analisando dados obtidos com diferentes TI pode-se especificar qual o
melhor para cada situaccedilatildeo
Erros causados por exposiccedilatildeo insuficiente do sensor natildeo satildeo considerados
sistemaacuteticos poreacutem podem ser preditos Se o valor da amplitude do sinal eacute reduzido
o erro na medida da distacircncia aumenta Para reduzir os piacutexeis obtidos com
exposiccedilatildeo insuficiente pode-se definir um limite no valor da amplitude do sinal
Outra forma de controlar a exposiccedilatildeo eacute com o TI na obtenccedilatildeo da imagem Piacutexeis que
tem amplitude menor que 1 do valor maacuteximo das amplitudes na imagem TOF satildeo
considerados piacutexeis com exposiccedilatildeo insuficiente
43
Erros de posicionamento dos piacutexeis devido ao sistema oacuteptico da cacircmara
podem ser notados quando capta-se a imagem de uma fachada com portas e
janelas As linhas horizontais e verticais que representam estes elementos na
imagem aparecem com curvaturas de acordo com o sistema de lentes utilizado na
cacircmara A distorccedilatildeo de lentes tem um padratildeo fixo em cacircmaras com sensor CMOS
ou CCD e pode ser corrigida geometricamente atraveacutes dos POI da cacircmara que
captou a imagem
Erros sistemaacuteticos em cacircmaras TOF tambeacutem foram estudados por FUCHS e
HIRZINGER (2008) e MAY et al (2008) e foram classificados da seguinte maneira
4) Erro na medida de distacircncia (Distance-related error) este erro eacute causado
devido agrave assimetria da forma do sinal infravermelho recebido pelo sensor
Teoricamente assume-se que este sinal possui forma senoidal e harmocircnica com a
forma do sinal emitido o que na praacutetica pode natildeo acontecer Sendo assim o
pressuposto baacutesico para que se possa calcular o atraso de fase eacute que o sinal
luminoso emitido e o recebido satildeo harmocircnicos e com forma senoidal
Consequentemente se o caacutelculo do atraso de fase do sinal eacute impreciso a distacircncia
entre o objeto e o sensor tambeacutem seraacute calculada de forma imprecisa
5) Erro na amplitude do sinal captado (Amplitude-related error) o sensor natildeo
capta a energia eletromagneacutetica recebida com o sinal perfeitamente Deixando-se a
cacircmara e o objeto na mesma posiccedilatildeo podem-se obter diferentes medidas de
distacircncia devido a esta imperfeiccedilatildeo na fabricaccedilatildeo dos elementos do sensor Este
erro eacute relacionado com a amplitude de valores na captaccedilatildeo da imagem depende da
distacircncia e de caracteriacutesticas como a refletividade das superfiacutecies dos objetos
6) Erro devido agrave latecircncia dos elementos do sensor (Latency-related error) o
atraso de fase do sinal recebido eacute calculado atraveacutes das latecircncias com que o sensor
captou o sinal Estaacute relacionado com propriedades semicondutoras dos materiais
utilizados nos elementos sensores que satildeo responsaacuteveis pela medida da quantidade
de carga recebida Eacute causado quando o sinal emitido e o recebido satildeo
correlacionados diretamente na matriz do sensor Diferentes latecircncias do sinal
devem ser captadas por cada elemento do sensor para possibilitar o caacutelculo da
distacircncia de cada pixel de forma confiaacutevel
7) Ruiacutedo com padratildeo fixo (FPN - Fixed pattern noise) eacute relacionado com o
erro devido agrave latecircncia e ocorre devido agraves propriedades dos materiais utilizados na
fabricaccedilatildeo de cada elemento do sensor CMOS Este eacute um ruiacutedo com padratildeo fixo
44
pode ser corrigido a partir de uma imagem que tenha um pixel com valor constante
que serviraacute como referecircncia para a calibraccedilatildeo dos valores dos piacutexeis vizinhos
Tendo-se como referecircncia um pixel obtido em uma superfiacutecie uniforme de um objeto
pode-se utilizar um padratildeo de similaridade como referecircncia para os outros piacutexeis
Sendo assim a qualidade dos dados depende da posiccedilatildeo do pixel na imagem
Os uacuteltimos quatro erros sistemaacuteticos podem ser corrigidos utilizando o
meacutetodo de calibraccedilatildeo descrito em Fuchs et al (2007) Conforme realizado em
experimento por May et al (2008) os resultados alcanccedilados no mapeamento de uma
sala obtiveram a precisatildeo centimeacutetrica Este experimento foi realizado com o
objetivo de medir paredes opostas de uma sala com o sensor TOF em movimento
instalado em uma plataforma moacutevel O erro encontrado na medida das distacircncias
tambeacutem foi influenciado por erros na estimaccedilatildeo do posicionamento do sensor que eacute
obtido com a Orientaccedilatildeo Exterior da cacircmara no momento de aquisiccedilatildeo das imagens
Durante o registro dos quadros fotograacuteficos o erro em rotaccedilatildeo foi determinado como
sendo igual a 22ordm e o erro de translaccedilatildeo foi de 071m no eixo 119883 004m no eixo 119884 e
de -021m no eixo 119885 A distacircncia calculada entre paredes opostas foi igual a 105m
para a distacircncia de referecircncia de 108m A diferenccedila entre as duas medidas resultou
em 03m o que representa aproximadamente 28 da distacircncia de referecircncia A
nuvem de pontos 3D gerada por MAY et al (2008) eacute ilustrada com a Figura 218
FIGURA 218 ndash Nuvem de pontos 3D gerada a partir de imagem TOF
FONTE MAY et al (2008)
45
27 PROJECcedilAtildeO ORTOGONAL DOS PONTOS
As coordenadas tridimensionais dos pontos da imagem TOF satildeo obtidas
atraveacutes da projeccedilatildeo ortogonal Isto ocorre devido ao fato do equipamento utilizado
calcular as distacircncias dos objetos em um sistema esfeacuterico Esta projeccedilatildeo eacute feita a
partir da colinearidade entre o ponto no espaccedilo objeto o Centro Perspectivo (CP) e
o ponto no espaccedilo imagem conforme eacute ilustrado com a Figura 219
FIGURA 219 ndash Colinearidade entre os pontos no espaccedilo imagem e objeto
FONTE Adaptado de RAPP (2007)
A Figura 219 ilustra os sistemas referenciais adotados nos espaccedilos imagem
e objeto O sistema referencial fotogrameacutetrico (119909119875 119910119875) tem sua origem no CP que eacute
materializado pelo ponto nodal anterior do sistema de lentes da cacircmara Este ponto
projetado no plano da imagem gera o Ponto Principal (PP) A projeccedilatildeo do sistema
referencial fotogrameacutetrico na imagem eacute realizada considerando a simplificaccedilatildeo de
haverem apenas translaccedilotildees entre os eixos deste sistema e o sistema da imagem O
46
sistema referencial de imagem levoacutegiro (119862 119871) tem sua origem no canto superior
esquerdo Atraveacutes das Equaccedilotildees (223) e (224) esta origem pode ser transladada
para o centro da imagem (MACHADO 2006)
119862prime = 119862 minus119899119862minus1
2 (223)
119871prime = 119871 minus119899119871minus1
2 (224)
onde
119862 119871 ndash Sistema referencial de coordenadas da imagem (piacutexeis)
119899119862 119899119871 ndash Nuacutemero total de colunas e linhas da imagem (piacutexeis)
119862prime 119871prime ndash Sistema referencial auxiliar no centro da imagem (piacutexeis)
Para tornar o sistema referencial auxiliar (119862prime 119871prime) de imagem levoacutegiro em um
sistema dextroacutegiro (119909119894119898 119910119894119898 ) pode-se realizar uma reflexatildeo do eixo 119871prime atraveacutes da
Equaccedilatildeo (226)
119909119894119898 = 119862prime (225)
119910119894119898 = minus119871prime (226)
onde
119909119894119898 119910119894119898 ndash Coordenadas de um ponto no sistema referencial dextroacutegiro da
imagem (piacutexeis)
Com isto tem-se um sistema referencial dextroacutegiro centralizado na imagem e
que se relaciona com o sistema referencial fotogrameacutetrico projetado atraveacutes da
translaccedilatildeo de eixos determinada pelas coordenadas (119909119900 119910119900) do PP conforme
ilustrado com a Figura 220
47
FIGURA 220 ndash Sistemas de coordenadas utilizados em imagens
FONTE Adaptado de MACHADO (2006)
A partir do sistema referencial de imagem dextroacutegiro com origem no centro
da imagem e do sistema referencial fotogrameacutetrico projetado com origem no PP
satildeo estabelecidas as relaccedilotildees entre os sistemas de acordo com as Equaccedilotildees (227)
e (228)
119909119894119898 = (119909 minus 1199090) (227)
119910119894119898 = (119910 minus 1199100) (228)
onde
11990901199100 ndash Satildeo as coordenadas do ponto principal no sistema referencial de
imagem (piacutexeis)
119909119910 ndash Coordenadas dos pontos no sistema referencial fotogrameacutetrico
projetado na imagem (piacutexeis)
Os valores das coordenadas dos pontos do sistema fotogrameacutetrico projetado
na imagem estatildeo em piacutexeis A transformaccedilatildeo destes valores para miliacutemetros pode
ser feita multiplicando estas coordenadas pelo tamanho efetivo do pixel nas direccedilotildees
119909 e 119910 da imagem conforme as Equaccedilotildees (229) e (230)
48
119909 = 119909119894119898 ∙ 119875119909 (229)
119910 = 119910119894119898 ∙ 119875119910 (230)
onde
119909119910 ndash Satildeo as coordenadas dos pontos no sistema fotogrameacutetrico projetado
na imagem (miliacutemetros)
119875119909 119875119910 ndash Tamanho efetivo dos piacutexeis nas direccedilotildees 119909 e 119910 (miliacutemetros)
O tamanho efetivo dos piacutexeis nas direccedilotildees 119909 e 119910 satildeo calculados a partir do
fator de escala nestas direccedilotildees conforme Equaccedilotildees (231) e (232)
119875119909 = 119875 ∙ 119904119909 (231)
119875119910 = 119875 ∙ 119904119910 (232)
onde
119875119909 119875119910 ndash Tamanho efetivo dos piacutexeis nas direccedilotildees 119909 e 119910 (miliacutemetros)
119875 ndash Dimensatildeo do pixel obtida no manual do equipamento (miliacutemetros)
119904119909 119904119910 ndash Fatores de escala dos piacutexeis nas direccedilotildees 119909 e 119910
Os fatores de escala dos piacutexeis nas direccedilotildees 119909 e 119910 podem ser calculados
atraveacutes das Equaccedilotildees (233) e (234)
119904119909 =119891
119891119909 (233)
119904119910 =119891
119891119910 (234)
onde
119904119909 119904119910 ndash Fatores de escala dos piacutexeis nas direccedilotildees 119909 e 119910
119891119909 119891119910 ndash Distacircncia focal da cacircmara ao longo dos eixos 119909 e 119910 (miliacutemetros)
119891 ndash Distacircncia focal da cacircmara obtida no manual do equipamento
(miliacutemetros)
49
Quando o valor da distacircncia focal 119891119909 obtido com a calibraccedilatildeo da cacircmara
difere do valor 119891119910 tem-se um indicativo de escalas diferentes nos eixos 119909 e 119910 da
imagem
Realizadas as etapas de Orientaccedilatildeo Interior da imagem podem-se calcular
as coordenadas 3D dos pontos O posicionamento de cada ponto depende da
precisatildeo na determinaccedilatildeo dos acircngulos verticais e horizontais no sistema referencial
de imagem A projeccedilatildeo ortogonal das distacircncias dos pontos coordenada 119885 pode ser
feita atraveacutes da Equaccedilatildeo (235)
119885 = 119889119903 ∙ cos120573 (235)
onde
119885 ndash Distacircncia ortogonal do CP ao ponto observado no espaccedilo objeto
119889119903 ndash Distacircncia radial do CP ao ponto no sistema referencial esfeacuterico
120573 ndash Acircngulo formado entre o eixo que atinge o ponto na imagem partindo do
CP e o eixo principal da cacircmara (CP-PP)
O acircngulo 120573 pode ser calculado atraveacutes da funccedilatildeo trigonomeacutetrica expressa
com a Equaccedilatildeo (236)
tan120573 = 1199092
1198911199092 +
1199102
1198911199102 (236)
onde
119891119909 119891119910 ndash Distacircncia focal da cacircmara ao longo dos eixos 119909 e 119910 (miliacutemetros)
119909119910 ndash Coordenadas dos pontos no sistema referencial fotogrameacutetrico
projetado na imagem (miliacutemetros)
A Expressatildeo (235) relaciona a distacircncia radial 119889119903 com a coordenada 119885 dos
pontos no sistema ortogonal 3D em funccedilatildeo do acircngulo 120573 Substituindo a Equaccedilatildeo
(236) na Equaccedilatildeo (235) podemos explicitar a coordenada 119885 em funccedilatildeo das
distacircncias focais da cacircmara e das coordenadas dos pontos no sistema referencial
fotogrameacutetrico projetado na imagem conforme Equaccedilatildeo (237)
50
119885 = 119889119903 ∙ cos tanminus1 1199092
1198911199092 +
1199102
1198911199102 (237)
onde
119885 ndash Distacircncia ortogonal do CP ao ponto (miliacutemetros)
119889119903 ndash Distacircncia radial do CP ao ponto no sistema esfeacuterico da cacircmara
(miliacutemetros)
119891119909 119891119910 ndash Distacircncia focal da cacircmara ao longo dos eixos 119909 e 119910 (miliacutemetros)
119909119910 ndash Coordenadas dos pontos no sistema referencial fotogrameacutetrico
projetado na imagem (miliacutemetros)
As coordenadas (119883119884) dos pontos no sistema referencial ortogonal podem
entatildeo serem calculadas atraveacutes das Equaccedilotildees (238) e (239)
119883 = 119909 ∙119885
119891119909 (238)
119884 = 119910 ∙119885
119891119910 (239)
28 REFINAMENTO DA NUVEM DE PONTOS 3D
O processo de refinamento da nuvem de pontos 3D obtida com a imagem
TOF compreende a filtragem dos pontos que estejam esparsos devido agrave presenccedila
de ruiacutedo no arquivo de distacircncias da imagem TOF Com a Figura 221a satildeo
ilustrados pontos que natildeo pertencem agraves superfiacutecies do objeto aparecem na aresta
superior direita do objeto O sinal emitido atinge uma aacuterea da superfiacutecie do objeto e
natildeo apenas um ponto Esta aacuterea eacute proporcional agrave distacircncia entre o alvo e o sensor
ocorre devido agrave divergecircncia do feixe de luz emitido Com o princiacutepio TOF o valor da
distacircncia calculada eacute resultado da integraccedilatildeo do sinal recebido de acordo com a
aacuterea iluminada da superfiacutecie Quando o sinal emitido atinge superfiacutecies natildeo
coplanares o valor de distacircncia armazenado eacute um resultado interpolado Este
fenocircmeno ocorre principalmente nas bordas dos objetos e pode ser visto com a
51
Figura 221a que mostra um objeto com trecircs superfiacutecies planas uma base um
plano vertical na direita e um plano na parte superior
FIGURA 221 ndash Filtro para a definiccedilatildeo de bordas do objeto
FONTE MAY et al (2008)
A Figura 221b apresenta a nuvem de pontos 3D apoacutes a aplicaccedilatildeo do filtro
para o refinamento Este eacute um filtro gaussiano utilizado para a definiccedilatildeo de bordas e
desniacuteveis dos objetos eacute tambeacutem uma ferramenta para a remoccedilatildeo de pontos
esparsos provenientes da presenccedila de ruiacutedo nos dados da imagem TOF Funciona
considerando o acircngulo formado entre dois piacutexeis adjacentes na imagem onde o CP
eacute o ponto que completa o triacircngulo sendo o criteacuterio de seleccedilatildeo utilizado a distacircncia
meacutedia dos k pontos vizinhos mais proacuteximos
De acordo com May et al (2008) a distacircncia medida a partir de cacircmaras
TOF pode ser afetada pelo efeito de arredondamento das bordas Isto ocorre pela
suavizaccedilatildeo causada com a transiccedilatildeo entre as superfiacutecies iluminadas Dado um
conjunto de pontos 3D 119875 = 119901119894 119901119894 isin ℝ3 119894 = 1hellip 119873119901 as bordas podem ser
detectadas utilizando a Equaccedilatildeo (240) Esta eacute uma comparaccedilatildeo do acircngulo entre
dois piacutexeis 120585119894 119899 com base em um triacircngulo formado pelo centro perspectivo 119891 = 0 o
ponto 119901119894 e a vizinhanccedila deste ponto 119875119899 = 119901119894 119899 119899 = 1hellip 8 com o acircngulo de
vizinhanccedila 120585119905119893
120585119894 = max arcsin 119901119894 119899
119901119894 119899minus119901119894 ∙ 119904119894119899120593 (240)
52
119869 = 119901119894 120585119894 gt 120585119905119893 (241)
onde
120593 ndash Acircngulo maacuteximo entre dois piacutexeis veacutertice do triacircngulo no ponto 119891 = 0
O triacircngulo utilizado como referecircncia no filtro para a detecccedilatildeo de bordas
com veacutertice no ponto 119891 = 0 eacute ilustrado com a Figura 222
FIGURA 222 ndash Geometria do filtro para a definiccedilatildeo de bordas
FONTE MAY et al (2008)
Um conjunto 119878 de pontos pode ser filtrado atraveacutes da condiccedilatildeo expressa
com a Equaccedilatildeo (243)
119889 119901119894 = 1
119896 119901119894 minus 119901119894 119899 119896119899=1 (242)
119878 = 119901119894 isin 119875 119889 119901119894 lt 119889119905119893 (243)
onde
119889119905119893 ndash Distacircncia de vizinhanccedila constante
O conjunto 119876 de pontos selecionados satildeo os pontos filtrados da nuvem 3D
conforme a condiccedilatildeo da Equaccedilatildeo (244)
119876 = 119902119894 119902119894 isin 119875(119869 cup 119878) (244)
53
29 ANAacuteLISE DE SUPERFIacuteCIES POR AUTOVALORES E AUTOVETORES
A anaacutelise da forma de superfiacutecies pode ser feita pela variaccedilatildeo local de
autovalores que possibilita a classificaccedilatildeo e segmentaccedilatildeo de pontos com
coordenadas tridimensionais (BELTON e LICHTI 2006)
Autovetores e seus respectivos autovalores podem ser obtidos a partir da
Matriz de Variacircncias e Covariacircncias (119872119881119862) de um conjunto de observaccedilotildees O
tamanho relativo e a direccedilatildeo dos autovetores podem indicar propriedades locais
desta superfiacutecie permitindo analisar sua forma (PAULY et al 2002)
De acordo com Johnson e Wichern (1998) a 119872119881119862 pode ser calculada atraveacutes
da Equaccedilatildeo (245)
11987211988111986231199093 =1
119896 119903 119894 minus 119903 119896119894=1 ∙ 119903 119894 minus 119903
119879=
1205901199092 120590119909119910 120590119909119911
120590119909119910 1205901199102 120590119910119911
120590119909119911 120590119910119911 1205901199112
(245)
onde
119872119881119862 ndash Matriz de Variacircncias e Covariacircncias
119903 119894 ndash Vetor com as coordenadas 3D do ponto em questatildeo na amostra
119903 ndash Vetor com as coordenadas do centroacuteide da superfiacutecie
1205901199092120590119910
2 1205901199112 ndash Variacircncias
120590119909119910 120590119909119911 120590119910119911 ndash Covariacircncias
119896 ndash Nuacutemero de pontos da amostra
O vetor com as coordenadas do 119894-eacutesimo ponto da amostra eacute denotado com
119903 119894 pela Expressatildeo (246) A posiccedilatildeo relativa do centroacuteide pode ser calculada atraveacutes
da Equaccedilatildeo (247)
119903 119894 = 119909119894 119910119894 119911119894 119879 (246)
119903 =1
119896 119903 119894119896119894=1 (247)
54
A 119872119881119862 eacute quadrada simeacutetrica positiva-semidefinida e pode ser decomposta
em autovetores 119890 e autovalores 120582 atraveacutes da Equaccedilatildeo (248) Os autovalores 120582119894 satildeo
elementos escalares associados aos respectivos autovetores 119890 119894 (LEON 1998)
119872119881119862 ∙ 119890 = 120582 ∙ 119890 (248)
A partir do teorema de decomposiccedilatildeo espectral (decomposiccedilatildeo de Jordan) a
119872119881119862 pode ser isolada nesta igualdade conforme a Equaccedilatildeo (249) Maiores
detalhes podem ser vistos em Johnson e Wichern (1998) e Shakarji (1998)
119872119881119862 = 120582119894 ∙ 119890 119894 ∙ 119890 1198941198792
119894=0 (249)
onde
119872119881119862 ndash Matriz Variacircncia Covariacircncia
119890 119894 ndash Vetor com os autovetores 119890 119894
120582119894 ndash Matriz com os autovalores 120582119894
Os autovalores satildeo valores reais e os autovetores formam um sistema de
base ortogonal que correspondem aos componentes principais do conjunto de
observaccedilotildees (BELTON 2008)
De acordo com PAULY et al (2002) pode-se adotar a convenccedilatildeo entre os
autovalores da Expressatildeo (250) A partir desta convenccedilatildeo algumas propriedades
para superfiacutecies normais podem ser descritas
1205821 ge 1205822 ge 1205823 (250)
Em um conjunto de pontos 3D que formam uma superfiacutecie plana espera-se
que 1205821 ne 0 1205822 ne 0 e que 1205823 asymp 0 Com isto o menor autovetor 119890 3 apontaraacute na direccedilatildeo
normal a esta superfiacutecie Com a Figura 223 satildeo ilustrados os trecircs autovetores de
uma regiatildeo da superfiacutecie descrita pela nuvem de pontos 3D O terceiro autovetor 119890 3
com o menor autovalor 1205823 eacute ortogonal agrave superfiacutecie plana definida pelos outros dois
autovetores 119890 1 e 119890 2
55
FIGURA 223 ndash Autovetores em nuvem de pontos 3D de uma superfiacutecie plana
Pontos contidos na interseccedilatildeo entre duas superfiacutecies planas podem ser
identificados atraveacutes das relaccedilotildees 1205821 asymp 21205822 e 1205823 asymp 0 O autovetor 119890 1 apontaraacute na
direccedilatildeo da linha limitante da superfiacutecie plana e o autovetor 119890 3 seraacute ortogonal a esta
direccedilatildeo Podem-se encontrar segmentos de retas que limitam a borda de uma
superfiacutecie atraveacutes das relaccedilotildees 1205822 asymp 1205823 e 1205821 asymp 1205822+1205823
Quando os autovalores apresentam valores aproximadamente iguais
1205821 asymp 1205822 asymp 1205823 torna-se possiacutevel encontrar o veacutertice formado por trecircs superfiacutecies
planas
Normalizando os autovalores com a Equaccedilatildeo (251) remove-se a sua
dependecircncia em relaccedilatildeo ao tamanho da amostra utilizada
120582119894prime =
120582119894
1205821+1205822+1205823=
120582119894
119905119903119886 ccedil119900(120582) (251)
Para o autovalor miacutenimo (119894 = 3) pode-se definir o nuacutemero 119873 de pontos para
representar as variaccedilotildees na superfiacutecie atraveacutes da Equaccedilatildeo (252)
119873 =1205823
119905119903119886 ccedil119900(120582) (252)
O valor resultante da Equaccedilatildeo (252) eacute uma medida aproximada de
curvatura local e pode representar a rugosidade da superfiacutecie de forma normalizada
56
210 ANAacuteLISE DE SUPERFIacuteCIES POR MOMENTOS INVARIANTES
Caracteriacutesticas de superfiacutecies planas podem ser obtidas atraveacutes da anaacutelise
de momentos invariantes para isto utiliza-se a 119872119881119862 dos pontos que descrevem esta
superfiacutecie De acordo com MASS e VOSSELMAN (1999) os momentos invariantes
119898119894119895 podem ser calculados atraveacutes da Equaccedilatildeo (253)
119898119894119895 = 119909119894119910119895119891(119909119910)119889119909 1198891199101199102
1199101
1199092
1199091 (253)
onde
119894 119895 ndash Correspondem agrave ordem do momento
119891(119909119910) ndash A coordenada 119911 dos pontos eacute funccedilatildeo das coordenadas planas 119909 e 119910
em um conjunto de pontos que descrevem a superfiacutecie contiacutenua
A Equaccedilatildeo (254) permite determinar o volume de uma esfera unitaacuteria com
raio 119877 em um domiacutenio contiacutenuo 119873 de pontos 3D eacute obtida a partir da Equaccedilatildeo (253)
e possibilita o estudo de propriedades das superfiacutecies com padratildeo planar
119898119894119895119896 = 119909119894119910119895 119911119896119891(119909119910 119911)119889119907119881
(254)
onde
119894 119895119896 ndash Pertencem ao domiacutenio contiacutenuo da funccedilatildeo com 119873 pontos
119894 + 119895 + 119896 ndash Corresponde agrave ordem do momento
119891(119909119910 119911) ndash Eacute o volume da esfera unitaacuteria
Atraveacutes da Equaccedilatildeo (254) GROSS e THONNESSEN (2006) conseguiram
descrever algumas relaccedilotildees entre autovalores e as propriedades de superfiacutecies
normais conforme eacute ilustrado com o Quadro 23
57
ESTRUTURA AUTOVALORES
120640120783 120640120784 120640120785
PONTO ISOLADO
0 0 0
PONTO FINAL DE SEGMENTO
DE RETA
1
12= 0083 0 0
LINHA RETA 1
3= 0333 0 0
12 PLANO 1
4= 025
1
4 1 minus
64
91205872 = 00 0
PLANO 1
4= 025
1
4= 025 0
14 PLANO 1
4 1 minus
2
120587 = 009
1
4+
2
120587minus
32
91205872= 00 0
INTERSECcedilAtildeO DE 2 PLANOS
1
3= 0333
1
8= 0125
1
8minus
8
91205872= 003
INTERSECcedilAtildeO DE 3 PLANOS
1
6 1 minus
1
120587 = 011
1
6 1 minus
1
120587 = 011
1
6 1 +
2
120587 minus
26
331205872= 003
INTERSECcedilAtildeO DE 2 PLANOS
Agrave 30deg 025 01875 001747
QUADRO 23 ndash Propriedades de superfiacutecies normais obtidas com autovalores FONTE GROSS e THOENNESSEN (2006)
Os autovalores do Quadro 23 foram determinados analiticamente a partir da
Equaccedilatildeo (254) e podem ser utilizados como referecircncia para a estimaccedilatildeo da forma
das superfiacutecies que compotildeem a estrutura dos objetos
Restringindo a ordem dos momentos com 119894 + 119895 + 119896 le 2 pode-se calcular o
centro de gravidade da superfiacutecie conforme a Equaccedilatildeo (255) e os elementos da
119872119881119862 podem serem obtidos atraveacutes da Equaccedilatildeo (256)
119909 =119898100
119898000 119910 =
119898010
119898000 119911 =
119898001
119898000 (255)
58
119898 119894119895119896 = 119909119894 minus 119909 119894 119910 minus 119910 119895 119911 minus 119911 119896119891(119909119910 119911)119889119907119881
(256)
Os momentos de 2ordf ordem normalizados para os pontos 3D em um domiacutenio
discreto podem ser calculados atraveacutes da Equaccedilatildeo (257)
119898 119894119895119896 = 119909119897minus119909
119894 119910119897minus119910 119895 119911119897minus119911
119896119873119897=1
119877119894+119895+119896119873 (257)
onde
119898 119894119895119896 ndash Momentos de 2ordf ordem para os pontos 3D
119873 ndash Nuacutemero de pontos da amostra no domiacutenio contiacutenuo da funccedilatildeo
119877 ndash Raio da esfera unitaacuteria considerada para seleccedilatildeo de pontos
Desta forma os valores calculados para os momentos natildeo satildeo influenciados
pelo nuacutemero de pontos unidade fiacutesica das medidas ou peso dos elementos da 119872119881119862
Utilizando momentos de 2ordf ordem a 119872119881119862 pode ser obtida atraveacutes da Equaccedilatildeo
(258)
119872119881119862 =
119898 200 119898 110 119898 101
119898 110 119898 020 119898 011
119898 101 119898 011 119898 002
(258)
O caacutelculo dos autovalores 120582119894 e autovetores 119890 119894 com 119894 = 123 eacute variaacutevel para
cada ponto do conjunto de observaccedilotildees Sendo assim as classes de valores
geradas por GROSS e THONNESSEN (2006) com objetivo de modelar superfiacutecies
com padratildeo planar foram agraves seguintes
O primeiro autovalor 1205821 foi definido constante e igual a 025
O segundo autovalor 1205822 varia de 0125 agrave 025
O terceiro autovalor 1205823 varia de 0 agrave 0125
Com a aproximaccedilatildeo teoacuterica dos valores contidos no Quadro 24 JUTZI e
GROSS (2009) mostraram a possibilidade de determinar matematicamente
inclinaccedilotildees entre as superfiacutecies para os acircngulos de 0ordm 30ordm e 90ordm No entanto
quando satildeo utilizados dados reais para representar as superfiacutecies pequenas
variaccedilotildees nestes valores podem ser percebidas Um exemplo eacute que o terceiro
59
autovalor 1205823 natildeo teraacute valor igual a zero mesmo em uma superfiacutecie plana Isto ocorre
por haverem pequenos desvios entre os pontos desta superfiacutecie que satildeo causados
por ruiacutedo presente no conjunto de dados reais Este fato pode ser observado
calculando o terceiro autovalor que seraacute um valor positivo pequeno mas diferente
de zero Com isto quanto mais proacuteximo de zero o terceiro autovalor 1205823 maior seraacute o
indicativo que a superfiacutecie eacute plana conforme ilustrado com a Figura 224
FIGURA 224 ndash Inclinaccedilotildees de superfiacutecies determinadas por autovalores
FONTE JUTZI e GROSS (2009)
60
211 ALGORITMO DE DESLOCAMENTO PELA MEacuteDIA
O algoritmo de deslocamento pela meacutedia (Mean Shift) pode ser utilizado no
reconhecimento de padrotildees para a segmentaccedilatildeo de imagens A densidade de
pontos vizinhos em relaccedilatildeo a um ponto central pode ser estimada com a meacutedia do
conjunto de dados discretos A anaacutelise espacial de atributos eacute utilizada neste
contexto com o objetivo de extrair informaccedilotildees Para isto utiliza a vizinhanccedila de um
ponto na imagem Com os atributos definidos pode-se encontrar o centro das
regiotildees com as maiores densidades que representam caracteriacutesticas significativas
dos objetos presentes na imagem
Para realizar a anaacutelise espacial de atributos e obterem-se resultados
satisfatoacuterios deve-se reduzir o volume de dados ateacute que se tenham apenas as
caracteriacutesticas significativas distribuiacutedas em um sistema de coordenadas contiacutenuo O
conteuacutedo do espaccedilo de atributos deve ser passiacutevel de modelagem atraveacutes de uma
amostragem com distribuiccedilatildeo multivariada de probabilidade Devido a este
pressuposto eacute necessaacuterio verificar se a condiccedilatildeo de normalidade dos dados eacute
satisfeita em aplicaccedilotildees estatiacutesticas tradicionais que utilizam testes parameacutetricos
Em outras aplicaccedilotildees podem-se utilizar meacutetodos estatiacutesticos natildeo
parameacutetricos com menos restriccedilotildees sobre o comportamento dos dados como por
exemplo natildeo se preocupar com o tipo de distribuiccedilatildeo para as variaacuteveis aleatoacuterias O
conceito de Kernel pode ser empregado em meacutetodos natildeo parameacutetricos para a
estimativa de propriedades Esta eacute uma funccedilatildeo estatiacutestica contiacutenua simeacutetrica e com
limite superior e inferior de integraccedilatildeo definidos cuja integraccedilatildeo resulta na unidade
por conveniecircncia O Kernel atua na imagem como uma janela de convoluccedilatildeo
suavizando as caracteriacutesticas dos pontos analisados (MACHADO 2006)
De acordo com COMANICIU e MEER (2002) o algoritmo de deslocamento
pela meacutedia eacute uma ferramenta versaacutetil para anaacutelises espaciais de feiccedilotildees presentes
em amostras Utiliza o Kernel para a estimaccedilatildeo da densidade dos elementos no
conjunto de dados tendo como referecircncia um ponto fixo na regiatildeo central da
amostra Dado um conjunto de pontos 120169119894=1hellip119899 em um espaccedilo 119877 com dimensatildeo 119889 o
estimador de densidade multivariada por Kernel 119870(120169) e a matriz de paracircmetros 119867
com bandas de dimensatildeo 119889 pode ser calculada com os pontos 120169 Com estes
61
paracircmetros definidos a funccedilatildeo para estimar a densidade multivariada no ponto 120169 eacute
expressa com a Equaccedilatildeo (259)
119891 (120169) =1
119899 119870119867 120169 minus 120169119894 119899119894=1 (259)
119870119867(120169) = 119867 minus1
2119870(119867minus1
2120169) (260)
O Kernel 119870(120169) com dimensatildeo 119889 eacute uma funccedilatildeo para a anaacutelise da densidade
da vizinhanccedila dos pontos expressa atraveacutes das Equaccedilotildees (261) e (262)
119870(120169)119877119889
119889120169 = 1 lim 119909 rarrinfin 120169 119889 119870 120169 = 0 (261)
119909119870(120169)119889120169119877119889
= 0 120169120169119879119870(120169)119889120169119877119889
= 119888119870119868 (262)
Onde 119888119870 eacute uma constante A partir do Kernel univariado 1198701 119909 o Kernel
multivariado pode ser calculado de duas maneiras conforme as Equaccedilotildees (263) e
(264)
119870119875 120169 = 1198701 119909119894 119889119894=1 (263)
119870119878 120169 = 119886119896 1198891198701( 120169119894 ) (264)
Onde 119870119875(120169) eacute obtido com o produto dos Kernels univariados e 119870119878(120169) eacute
obtido rotacionando 1198701(119909) no espaccedilo 119877119889 o que faz 119870119878(120169) ser radialmente simeacutetrico
A constante 119886119896 119889minus1 = 1198701 120169 1198891201691198774
com 119870119878(119909) integrado de 0 agrave 1 O Kernel
radialmente simeacutetrico eacute de interesse em anaacutelises espaciais de imagens desde que
satisfaccedila a condiccedilatildeo da Equaccedilatildeo (265)
119870 119909 = 119888119896 119889119896( 120169 2) (265)
Neste caso define-se a funccedilatildeo de cada elemento do Kernel 119896 119909 para 119909 ge 0
A constante de normalizaccedilatildeo 119888119896 119889 pode ser calculada integrando 119870 120169 de 0 a 1
assumindo-se que eacute positiva A estimaccedilatildeo pode ser parametrizada com a matriz
diagonal de bandas do Kernel 119867 = 1198932119868 = 119889119894119886119892 11989312hellip 119893119889
2 onde 119868 eacute a matriz
identidade com dimensatildeo 119889 Esta matriz apresenta a vantagem de ser determinada
62
utilizando como uacutenico paracircmetro o nuacutemero de bandas 119893 ge 0 do Kernel Empregando
paracircmetros com o nuacutemero de bandas 119893 e dimensatildeo 119899 o estimador de densidade por
Kernel da Equaccedilatildeo (259) pode ser expresso atraveacutes da Equaccedilatildeo (266)
119891 (120169) =1
119899119893119889 119870119867
120169minus120169119894
119893 119899
119894=1 (266)
A qualidade do estimador de densidade por Kernel pode ser analisada
atraveacutes do erro meacutedio quadraacutetico entre a densidade real e a estimada Na praacutetica
somente a aproximaccedilatildeo assintoacutetica das medidas pode ser calculada (AMISE ndash
Asymptotic Mean Integrated Square Error) Para os Kernels multivariados o erro
meacutedio quadraacutetico AMISE eacute minimizado utilizando o Kernel de Epanechnikov
(COMANICIU e MEER 2002)
119896119864 119909 = 1 minus 119909 0 le 119909 le 1
0 119909 gt 0 (267)
119870119864 120169 = 1
2119888119889
minus1 119889 + 2 (1 minus 120169 2) 120169 le 1
0 119888119886119904119900 119888119900119899119905119903aacute119903119894119900 (268)
Onde 119888119889 eacute o volume de uma esfera com raio unitaacuterio e com dimensatildeo 119889 O
elemento do Kernel 119896119873 119909 pode ser calculado utilizando a Equaccedilatildeo (269)
119896119873 119909 = exp minus1
2119909 119909 ge 0 (269)
Para o Kernel multivariado calculado com a Equaccedilatildeo (269) um Kernel
normal 119870119873 pode ser calculado utilizando a Equaccedilatildeo (270)
119870119873 120169 = (2120587)minus1198892exp minus1
2 120169 2 (270)
Sendo o Kernel normal simeacutetrico e admitido finito Para a anaacutelise espacial de
imagens estas duas formas de calcular o Kernel satildeo suficientes e os resultados
obtidos com estas condiccedilotildees impostas satildeo satisfatoacuterios O estimador de densidade
por Kernel da Equaccedilatildeo (259) pode ser reescrito conforme a Equaccedilatildeo (271)
63
119891 119893 119870(120169) =119888119896 119889
119899119893119889 119896
120169minus120169119894
119893
2
119899119894=1 (271)
Para anaacutelise de feiccedilotildees espaciais primeiramente deve-se calcular a
densidade do conjunto de dados e verificar o seu comportamento espacial Isto pode
ser feito calculando o gradiente da funccedilatildeo de densidade 119891(120169) igual a zero nabla119891 120169 = 0
O algoritmo de deslocamento pela meacutedia eacute uma maneira de localizar estes zeros
para estimar a densidade do conjunto de observaccedilotildees Calculando o gradiente da
funccedilatildeo expressa com a Equaccedilatildeo (271) pode-se estimar a densidade atraveacutes da
Equaccedilatildeo (272)
nabla 119891119893 119870(120169) equiv2119888119896 119889
119899119893119889+2 (120169 minus 120169119894)119896prime
120169minus120169119894
119893
2
119899119894=1 (272)
Substituindo 119896prime pela funccedilatildeo 119892(119909) conforme expresso com a Equaccedilatildeo (273)
119892 119909 = 119896prime(119909) (273)
Assumindo que a derivada do Kernel 119896 exista para o conjunto finito de
pontos 119909 isin [0infin) O Kernel 119866(119909) com seus elementos 119892(119909) pode ser definido atraveacutes
da Equaccedilatildeo (274)
119866 119909 = 119888119892 119889119892( 120169 2) (274)
Onde 119888119892119889 corresponde a uma constante de normalizaccedilatildeo O Kernel 119866 119909
pode ser considerado uma aproximaccedilatildeo do Kernel 119870(119909) dependendo do contexto
em que seraacute empregado De forma similar o Kernel de Epanechnikov eacute uma
simplificaccedilatildeo do Kernel uniforme da esfera unitaacuteria com dimensatildeo 119889 Introduzindo
119892(119909) na Equaccedilatildeo (272) tem-se a Equaccedilatildeo (275)
nabla 119891119893 119870 120169 =2119888119896 119889
119899119893119889+2 120169 minus 120169119894 119892
120169minus120169119894
119893
2
119899119894=1 (275)
nabla 119891119893 119870 120169 =2119888119896 119889
119899119893119889+2 119892 120169minus120169119894
119893
2
119899119894=1 ∙
120169119894119892 120169minus120169119894119893
2 119899
119894=1
119892 120169minus120169119894119893
2 119899
119894=1
(276)
64
119892 120169minus120169119894
119893
2
119899119894=1 (277)
Considerando que o resultado da funccedilatildeo expressa com a Equaccedilatildeo (277) eacute
um nuacutemero positivo O primeiro termo da Equaccedilatildeo (276) eacute proporcional agrave densidade
estimada calculada para 120169 com o Kernel 119866 conforme Equaccedilatildeo (271) e expresso
agora em funccedilatildeo de 119892(119909) atraveacutes da Equaccedilatildeo (278)
119891119893 119866 120169 =119888119892 119889
119899119893119889 119892
120169minus120169119894
119893
2
119899119894=1 (278)
O segundo termo da Equaccedilatildeo (276) corresponde ao algoritmo de
deslocamento pela meacutedia conforme Equaccedilatildeo (279)
119898119893 119866 120169 = 120169119894119892
120169minus120169119894119893
2 119899
119894=1
119892 120169minus120169119894119893
2 119899
119894=1
minus 120169 (279)
A Equaccedilatildeo (279) representa a diferenccedila entre as meacutedias ponderadas
utilizando o Kernel 119866 para os pesos e o centro da janela de convoluccedilatildeo em 120169 A
partir das Equaccedilotildees (276) (278) e (279) chega-se as Equaccedilotildees (280) e (281)
nabla 119891119893 119870 120169 = 119891 119893 119866 120169 2119888119896 119889
1198932119888119892 119889119898119893 119866 120169 (280)
119898119893 119866 120169 =1
21198932119888nabla
119891 119893 119870 120169
119891 119893 119866 120169 (281)
Para a posiccedilatildeo 120169 o vetor de deslocamento pela meacutedia calculado com Kernel
119866 eacute proporcional agrave estimaccedilatildeo de densidade normalizada obtida resolvendo a funccedilatildeo
com gradiente igual a zero e Kernel 119870 Eacute a normalizaccedilatildeo da densidade estimada em
119909 calculada com o Kernel 119866
O vetor de deslocamento pela meacutedia aponta na direccedilatildeo de maacuteximo
crescimento da densidade do conjunto de dados A estimaccedilatildeo da densidade de
pontos com mesma caracteriacutestica eacute obtida atraveacutes de interaccedilotildees com sucessivos
caacutelculos do vetor de deslocamento pela meacutedia 119898119893 119866 120169 e translaccedilotildees do Kernel 119866(119909)
sobre a imagem Isto garante a convergecircncia ao redor do ponto de interesse
65
utilizando a Equaccedilatildeo (281) com gradiente igual a zero Regiotildees com baixa
densidade de observaccedilotildees natildeo satildeo interessantes para anaacutelises espaciais com o
algoritmo de deslocamento pela meacutedia pois muitas iteraccedilotildees seriam necessaacuterias
para obtenccedilatildeo de resultados pouco satisfatoacuterios De forma anaacuteloga em locais com
densidade maacutexima poucas iteraccedilotildees satildeo necessaacuterias e a anaacutelise pode atingir bons
resultados (COMANICIU e MEER 2002)
Imagens satildeo representadas matematicamente na forma de matrizes onde
cada posiccedilatildeo da matriz eacute ocupada por vetores com dimensatildeo 119901 onde 119901 = 1 no caso
de imagens em niacuteveis de cinza ou coloridas e 119901 ge 2 no caso de imagens
multiespectrais O posicionamento de cada pixel na matriz imagem estaacute contido no
domiacutenio espacial (Spatial domain) enquanto o valor digital do pixel faz parte do
domiacutenio de caracteriacutesticas da imagem (Range domain) assumindo-se estes
domiacutenios como espaccedilos euclidianos Deste modo o Kernel multivariado pode ser
definido como o produto de dois Kernels radialmente simeacutetricos em um espaccedilo
euclidiano calculado com um paracircmetro de cada domiacutenio atraveacutes da Equaccedilatildeo
(282)
119870119893119904119893119903(119909) =119862
1198931199042119893119903
119901 119896 120169119904
119893119904
2
119896 120169119903
119893119903
2
(282)
onde
120169119904 ndash Corresponde ao domiacutenio espacial
120169119903 ndash Corresponde ao domiacutenio de caracteriacutesticas
119896(119909) ndash Elemento da funccedilatildeo calculado em ambos os domiacutenios
119893119904 119893119903 ndash Paracircmetros das bandas de cada domiacutenio do Kernel empregado
119862 ndash Constante de normalizaccedilatildeo entre as bandas
Na praacutetica o Kernel de Epanechnikov tambeacutem conhecido por Kernel normal
atinge resultados satisfatoacuterios O usuaacuterio deve escolher apenas os paracircmetros das
bandas 119893 = 119893119904 119893119903 e a quantidade miacutenima 119867 de pixels das regiotildees segmentadas na
imagem determinando assim a resoluccedilatildeo na estimaccedilatildeo da densidade A Figura 225
ilustra um exemplo de segmentaccedilatildeo realizada utilizando o algoritmo de
deslocamento pela meacutedia sobre uma imagem em niacuteveis de cinza
66
FIGURA 225 ndash Imagem segmentada FONTE COMANICIU e MEER (2002)
A segmentaccedilatildeo de imagens atraveacutes do algoritmo de deslocamento pela
meacutedia foi implementada no software EDISON (Edge Detection and Image
SegmentatiON System) desenvolvido pela Universidade RUTGER de New Jersey
Este software aleacutem da segmentaccedilatildeo com o algoritmo de deslocamento pela meacutedia
realiza uma filtragem preservando as descontinuidades e detectando os limites dos
objetos contidos na imagem atraveacutes de uma funccedilatildeo gradiente (CHRISTOUDIAS et
al 2002)
67
3 MATERIAIS
Neste trabalho foram utilizadas imagens TOF obtidas com a cacircmara PMD
CamCube 20 que fornece dados de distacircncia e intensidade sob forma de matrizes
de imagem Para realizar os experimentos foram obtidos trecircs conjuntos de imagens
De um gabarito com a forma de um tabuleiro de xadrez para realizar
o processo de calibraccedilatildeo da cacircmara
De uma parede branca com padratildeo planar para anaacutelise de ruiacutedos e
distorccedilotildees geomeacutetricas das imagens e
Do objeto de estudo uma caixa de papelatildeo com superfiacutecies planas e
brancas
Para o processamento das imagens TOF foi utilizado um microcomputador
do laboratoacuterio de Fotogrametria e Sensoriamento Remoto Departamento de
Geomaacutetica da Universidade Federal do Paranaacute com as seguintes caracteriacutesticas
Processador Intelreg Coretrade2 Duo 293GHz
Capacidade do disco riacutegido de 320GB
Memoacuteria principal de 2GB
68
4 MEacuteTODOS
Neste capitulo descreve-se o desenvolvimento metodoloacutegico do presente
trabalho de pesquisa para a aquisiccedilatildeo e processamento da imagem TOF Esta
imagem eacute composta por dois arquivos O primeiro arquivo conteacutem informaccedilatildeo de
intensidade de retorno do sinal captado com iluminaccedilatildeo infravermelha O segundo
arquivo conteacutem informaccedilatildeo de distacircncia (range) para cada pixel gerado com o
sensor da cacircmara TOF
Considerando que as imagens TOF podem apresentar ruiacutedo em funccedilatildeo das
condiccedilotildees de iluminaccedilatildeo e da natureza das superfiacutecies dos objetos estudos para a
reduccedilatildeo do ruiacutedo foram efetuados Para isto utilizaram-se janelas na regiatildeo central
da imagem ao redor do pixel com coordenadas de imagem (102 102) As filtragens
foram realizadas em aacutereas que circundam este pixel central
Apoacutes a anaacutelise do tempo de integraccedilatildeo na aquisiccedilatildeo da imagem
determinaram-se POI atraveacutes do processo de calibraccedilatildeo da cacircmara Os POI
permitiram corrigir a geometria dos dados da imagem TOF Esta correccedilatildeo eacute
necessaacuteria devido agraves distorccedilotildees causadas pelo sistema de lentes da cacircmara
A etapa seguinte consistiu na segmentaccedilatildeo da imagem TOF onde duas
metodologias foram avaliadas
1) Segmentaccedilatildeo do conjunto de dados por crescimento de regiotildees no
espaccedilo tridimensional utilizando pontos semente escolhidos no arquivo de
intensidades da imagem TOF como referecircncia para o posicionamento (119883119884) dos
pontos com distacircncia (119885)
2) Segmentaccedilatildeo utilizando a anaacutelise da variaccedilatildeo local dos autovalores ao
longo do arquivo de distacircncias da imagem TOF Realizada para a geraccedilatildeo de uma
imagem com bordas intensificadas segmentaccedilatildeo desta imagem atraveacutes do
algoritmo de deslocamento pela meacutedia e projeccedilatildeo ortogonal dos pontos
pertencentes agraves aacutereas segmentadas As superfiacutecies segmentadas foram entatildeo
separadas atraveacutes do conjunto de pontos 3D
O passo seguinte consistiu no caacutelculo das coordenadas tridimensionais dos
pontos dos objetos imageados a partir da informaccedilatildeo de distacircncia das coordenadas
dos piacutexeis na imagem de intensidade e dos POI Com isto gerou-se a nuvem de
pontos 3D e tornou-se possiacutevel a modelagem tridimensional das superfiacutecies do
69
objeto de estudo sendo tambeacutem avaliado o resultado obtido A Figura 41 apresenta
as etapas realizadas no processamento das imagens TOF com as duas propostas
de metodologia para a etapa de segmentaccedilatildeo
FIGURA 41 ndash Processamento da imagem TOF
41 CALIBRACcedilAtildeO DA CAcircMARA
A calibraccedilatildeo foi realizada com o objetivo de determinar os Paracircmetros de
Orientaccedilatildeo Interior (POI) da cacircmara Estes paracircmetros possibilitam a reconstruccedilatildeo
do feixe perspectivo que gerou a imagem para o instante em que foi captada
permitindo a correccedilatildeo de sua geometria (ANDRADE 1998)
Com o processo de Orientaccedilatildeo Interior satildeo obtidos os seguintes POI
distacircncia focal calibrada (119891119888 ) posiccedilatildeo do Ponto Principal (1199090 1199100) na imagem
Distorccedilatildeo Radial Simeacutetrica (119870111987021198703) Distorccedilatildeo Descentrada (11987511198752) e os
paracircmetros que indicam falta de afinidade do sensor (119860119861)
IMAGEM TOF
CORRECcedilOtildeES GEOMEacuteTRICAS COM POI
ARQUIVO DE INTENSIDADES
SUPERFIacuteCIE SEMENTE
CRESCIMENTO DE REGIOtildeES COM PONTO SEMENTE
PROJECcedilAtildeO ORTOGONAL
NUVEM DE PONTOS 3D
ARQUIVO DE DISTAcircNCIAS
IMAGEM COM BORDAS INTENSIFICADAS VARIACcedilAtildeO LOCAL DE AUTOVALORES
SEGMENTACcedilAtildeO DA IMAGEM COM BORDAS INTENSIFICADAS
PROJECcedilAtildeO ORTOGONAL
NUVEM DE PONTOS 3D
MODELAGEM 3D DAS SUPERFIacuteCIES
70
Os POI obtidos com o processo de calibraccedilatildeo possibilitam realizar correccedilotildees
geomeacutetricas nos arquivos de intensidades e distacircncias das imagens TOF Com a
calibraccedilatildeo objetiva-se corrigir as distorccedilotildees ocorridas na passagem do raio de luz
pelo sistema de lentes ateacute atingir o plano focal Este erro ocorre pela impossibilidade
na construccedilatildeo de um sistema de lentes perfeito para a cacircmara A correccedilatildeo dos erros
sistemaacuteticos da cacircmara eacute realizada no plano da imagem no ponto onde uma linha
reta passante pelo ponto nodal anterior do sistema de lentes eacute ortogonal a este
plano
O meacutetodo de calibraccedilatildeo fotogrameacutetrica eacute o tradicionalmente utilizado na
determinaccedilatildeo dos POI em Ciecircncias Geodeacutesicas Para isto necessita de pontos de
apoio com coordenadas tridimensionais conhecidas na superfiacutecie de objetos com
correspondentes coordenadas bidimensionais observadas na imagem Relaciona-se
a informaccedilatildeo 3D da cena com a informaccedilatildeo 2D da imagem atraveacutes das equaccedilotildees de
colinearidade fazendo-se uma correspondecircncia entre a posiccedilatildeo dos pontos de
referecircncia 3D e os mesmos pontos reconhecidos na imagem 2D Esta calibraccedilatildeo
pode ser realizada de forma eficiente desde que sejam utilizadas teacutecnicas e campos
de calibraccedilatildeo apropriados para cada tipo de cacircmara e aplicaccedilatildeo que se destina a
imagem Outra teacutecnica que pode ser utilizada para a Orientaccedilatildeo Interior das imagens
eacute conhecida como auto-calibraccedilatildeo na qual natildeo haacute necessidade de pontos com
coordenadas conhecidas no espaccedilo objeto (ZHANG 2000)
A Distorccedilatildeo Radial Simeacutetrica eacute a parcela de refraccedilatildeo natildeo desejaacutevel que um
feixe luminoso sofre ao atravessar um sistema de lentes A Distorccedilatildeo Descentrada eacute
composta pelas distorccedilotildees Tangencial e Radial Assimeacutetrica Eacute causada pela
impossibilidade de alinhar-se perfeitamente o eixo oacuteptico do sistema de lentes que
compotildee a objetiva Correccedilotildees para estas distorccedilotildees podem ser feitas atraveacutes da
Equaccedilatildeo (41) Maiores detalhes podem ser vistos em Andrade (1998)
119909prime119910prime =
119909119910
119900119887119904minus
1199090
1199100 minus
120575119909120575119910 119903119886119889
minus 120575119909120575119910 119889119890119904
minus 120575119909120575119910 119886
(41)
71
onde
119909prime119910prime 119879 ndash Coordenadas corrigidas no sistema referencial de imagem
119909 119910 119900119887119904119879 ndash Coordenadas de imagem observadas
1199090 1199100 119879ndash Coordenadas do PP no sistema referencial de imagem
120575119909 120575119910 119903119886119889119879 ndash Distorccedilatildeo Radial Simeacutetrica
120575119909 120575119910 119889119890119904119879 ndash Distorccedilatildeo Descentrada
120575119909 120575119910 119886119879 ndash Distorccedilatildeo causada pela falta de afinidade entre os eixos do
sensor
Andrade (1998) ilustra algumas correccedilotildees necessaacuterias para as imagens
utilizadas em Fotogrametria e mostra a influencia dos POI nestas correccedilotildees Um
exemplo eacute a correccedilatildeo da distorccedilatildeo Radial Simeacutetrica que pode ser realizada atraveacutes
das Equaccedilotildees (42) e (43)
120575119909119903119886119889 = (1199032 ∙ 1198701 + 1199034 ∙ 1198702 + 1199036 ∙ 1198703) ∙ 119909 (42)
120575119910119903119886119889 = (1199032 ∙ 1198701 + 1199034 ∙ 1198702 + 1199036 ∙ 1198703) ∙ 119910 (43)
onde
119909 = (119909 minus 1199090)
119910 = (119910 minus 1199100)
119909119910 ndash Coordenadas dos pontos com distorccedilotildees no sistema referencial
fotogrameacutetrico projetado na imagem
11990901199100 ndash Coordenadas do Ponto Principal
119870111987021198703 ndash Coeficientes de Distorccedilatildeo Radial Simeacutetrica
72
A distacircncia 119903 entre o ponto com coordenadas na imagem e o Ponto Principal
pode ser calculada atraveacutes da Equaccedilatildeo (44)
119903 = 119909 2 + 119910 2 (44)
A Distorccedilatildeo Descentrada pode entatildeo ser corrigida atraveacutes das Equaccedilotildees
(45) e (46)
120575119909119889119890119904 = [1198751 ∙ (1199032 + 2 ∙ 1199092
) + 2 ∙ 1198752 ∙ 119909 ∙ 119910 ] ∙ (1 + 1198753 + r2 + ⋯ ) (45)
120575119910119889119890119904 = [2 ∙ 1198751 ∙ 119909 ∙ 119910 + 1198752 ∙ (r2 + 2 ∙ 119910 2)] ∙ (1 + 1198753 + r2 + ⋯ ) (46)
onde
119875111987521198753 ndash Coeficientes de Distorccedilatildeo Descentrada
A diferenccedila de escala dos eixos horizontal e vertical da imagem possiacutevel
natildeo ortogonalidade entre os elementos do sensor pode ser modelada utilizando as
Equaccedilotildees (47) e (48) que introduzem correccedilotildees utilizando os paracircmetros de
afinidade 119860 e 119861 (HABIB e MORGAN 2003)
120575119909119886 = 119860 119909 minus 1199090 + 119861(119910minus1199100) (47)
120575119910119886 = 119861(119910minus1199100) (48)
onde
119860119861 ndash Paracircmetros de afinidade
119909119910 ndash Coordenadas dos pontos com distorccedilotildees no sistema referencial
fotogrameacutetrico projetado na imagem
11990901199100 ndash Coordenadas do Ponto Principal
73
A partir da formulaccedilatildeo proposta por Brown (1971) e incluindo os paracircmetros
de afinidade 119860 e 119861 as Equaccedilotildees (49) e (410) possibilitam a correccedilatildeo da imagem
utilizando os coeficientes 119870111987021198703 e 11987511198752
119909prime = 119909 + 119909 ∙ 11987011199032+1198702119903
4+11987031199036 + ⋯ +
+ 1198751 ∙ 1199032 + 2 ∙ 119909
2 + 2 ∙ 1198752 ∙ 119909 ∙ 119910 ∙ 1 + 1198753 ∙ 119903
2 + ⋯ + 119909 119860 + 119910 119861 (49)
119910prime = 119910 + 119910 ∙ 11987011199032+1198702119903
4+11987031199036 + ⋯ +
+ 21198751 ∙ 119909 ∙ 119910 + 1198752 ∙ 1199032 + 2119910 2 ∙ 1 + 1198753 ∙ 119903
2 + ⋯ + 119910 119861 (410)
A Equaccedilatildeo (41) ilustra as correccedilotildees necessaacuterias na geometria da imagem
quando objetiva-se a extraccedilatildeo de informaccedilotildees meacutetricas Eacute um modelo jaacute consagrado
na Fotogrametria e bastante aplicado em Ciecircncias Geodeacutesicas Pode ser utilizado
para o entendimento das correccedilotildees necessaacuterias nas imagens devido agraves distorccedilotildees
causadas pelo sistema de lentes da cacircmara e pela falta de afinidade entre os
elementos do sensor Outros modelos matemaacuteticos para correccedilotildees geomeacutetricas de
imagens satildeo utilizados em aacutereas correlatas como a Visatildeo Computacional Com a
precisatildeo requerida em cada aplicaccedilatildeo alguns POI tecircm maior relevacircncia que outros
podendo haver a supressatildeo de alguns A correlaccedilatildeo entre os paracircmetros deve ser
analisada e evitada
As Equaccedilotildees (49) e (410) podem ser simplificadas para realizar apenas as
correccedilotildees utilizando os coeficientes de Distorccedilatildeo Radial Simeacutetrica 1198961 e 1198962 e os
paracircmetros de afinidade 119860 e 119861 Estes paracircmetros satildeo os mais significativos para a
correccedilatildeo da imagem obtida com cacircmaras digitais de pequeno formato conforme eacute
expresso atraveacutes das Equaccedilotildees (411) e (412)
119909prime = 119909 + 119909 ∙ 11987011199032+1198702119903
4 + 119909 119860 + 119910 119861 (411)
119910prime = 119910 + 119910 ∙ 11987011199032+1198702119903
4 + 119910 119861 (412)
74
onde
119909119910 ndash Coordenadas dos pontos com distorccedilotildees no sistema referencial
fotogrameacutetrico projetado na imagem
119909 = (119909 minus 1199090)
119910 = (119910 minus 1199100)
11990901199100 ndash Coordenadas do Ponto Principal
119860119861 ndash Paracircmetros de afinidade
Cacircmaras digitais de pequeno formato apresentam principalmente a
Distorccedilatildeo Radial Simeacutetrica causada pelo sistema de lentes sendo os coeficientes 1198961
e 1198962 os mais significativos Os paracircmetros de afinidade entre os eixos da imagem 119860
e 119861 tambeacutem podem ser considerados para a correccedilatildeo das imagens obtidas
dependendo da precisatildeo com que o sensor da cacircmara foi construiacutedo pelo fabricante
Alguns softwares calculam os POI de forma raacutepida com soluccedilatildeo aproximada
e dependendo da aplicaccedilatildeo a que se destina a imagem podem ser utilizados sem
maiores restriccedilotildees Um deles eacute o Toolbox CALIB para Matlab utiliza o algoritmo
proposto por Zhang (2000) Este meacutetodo consiste em determinar os POI da cacircmara
tomando diferentes imagens de um gabarito com quadrados pretos e brancos
similar a um tabuleiro de xadrez fixado em uma superfiacutecie riacutegida e com padratildeo
planar Devem ser obtidas imagens do gabarito variando a posiccedilatildeo e orientaccedilatildeo da
cacircmara natildeo sendo necessaacuterio conhecer a trajetoacuteria do seu movimento para a
determinaccedilatildeo dos POI Este algoritmo possibilita o caacutelculo dos POI da cacircmara de
forma aproximada atraveacutes de sucessivas iteraccedilotildees Para sua utilizaccedilatildeo eacute necessaacuterio
conhecer a dimensatildeo dos quadrados do gabarito e indicar os pontos posiccedilotildees dos
veacutertices que seratildeo utilizados como pontos de referecircncia
No algoritmo proposto por Zhang um vetor de pontos 2D eacute denotado por
119898 = [119906 119907]119879 e um vetor de pontos 3D por 119872 = [119883119884119885]119879 De forma similar pode-se
aumentar estes vetores adicionando uma linha com valor igual a 1 sendo os vetores
aumentados 119898 = [119906 119907 1]119879 e 119872 = [119883119884119885 1]119879 A colinearidade entre o ponto no
espaccedilo objeto centro perspectivo e o ponto no espaccedilo imagem eacute utilizada para
75
estabelecer a relaccedilatildeo entre os pontos 3D contidos no vetor 119872 e os pontos na
imagem 2D contidos no vetor 119898 conforme a Equaccedilatildeo (413)
119904119898 = 119860[119877 119905]119872 (413)
onde
119904 ndash Fator de escala
119877 119905 ndash Paracircmetros de Orientaccedilatildeo Exterior (POE) compostos por elementos de
rotaccedilatildeo e translaccedilatildeo que relacionam as coordenadas obtidas no sistema 3D do
espaccedilo objeto com o sistema de coordenadas 2D da imagem
119860 ndash Eacute a matriz com os POI da cacircmara Apresenta as coordenadas 1199060 e 1199070 do
PP 119864120572 e 119864120573 satildeo os fatores de escala na imagem com eixos 119906 e 119907 O paracircmetro 120574
descreve a falta de ortogonalidade entre os eixos do sistema referencial da imagem
A matriz 119860 eacute expressa atraveacutes da Equaccedilatildeo (414)
119860 = 119864120572 120574 1199060
0 119864120573 1199070
0 0 1
(414)
Comparando as Equaccedilotildees (411) e (412) com o modelo proposto por Zhang
expresso atraveacutes da Equaccedilatildeo (413) tecircm-se as seguintes correspondecircncias
119860 e 119861 satildeo os paracircmetros de afinidade das Equaccedilotildees (411) e (412)
que correspondem aos fatores de escala 119864120572 e 119864120573 da Equaccedilatildeo (413)
Sendo que o paracircmetro 120574 acircngulo entre os eixos da imagem pode ser
calculado a partir destes fatores de escala
1199090 e 1199100 satildeo as coordenadas do Ponto Principal expressas com as
Equaccedilotildees (411) e (412) que tem suas correspondecircncias nas
coordenadas 1199060 e 1199070 da Equaccedilatildeo (413)
O caacutelculo dos POI pode ser entatildeo ser realizado atraveacutes da Equaccedilatildeo (415)
119898119894119895 minus119898 119860119877119894 119905119894 119872119895 2119898
119895=1119899119894=1 (415)
76
onde
119898 119860119877119894 119905119894 119872119894 ndash Eacute a projeccedilatildeo do vetor do ponto 119872119895 sobre a imagem 119894
119877119894 ndash Eacute o vetor de rotaccedilatildeo com paracircmetros 119903
O algoritmo proposto por Zhang (2000) utiliza somente os dois primeiros
termos de Distorccedilatildeo Radial Simeacutetrica para a correccedilatildeo da imagem atraveacutes dos
coeficientes 1198961 e 1198962 conforme Equaccedilotildees (416) e (417) Cacircmaras digitais de
pequeno formato normalmente apresentam distorccedilotildees de lentes significantes
especialmente a Distorccedilatildeo Radial Simeacutetrica A funccedilatildeo de distorccedilatildeo eacute fortemente
influenciada pelos componentes radiais principalmente o primeiro termo 1198961 Dadas
as coordenadas de uma imagem (119906 119907) consideradas livres de distorccedilatildeo e as
correspondentes coordenadas de imagem observadas (119906 119907 ) consegue-se projetar
os pontos atraveacutes da relaccedilatildeo de colinearidade entre eles De forma similar (119909119910) satildeo
as coordenadas de imagem consideradas livres de distorccedilatildeo e (119909 119910 ) as coordenadas
que possuem distorccedilatildeo Estas coordenadas tecircm suas escalas compatibilizadas
atraveacutes de uma normalizaccedilatildeo
119909 = 119909 + 119909 1198961 1199092 + 1199102 + 1198962 119909
2 + 1199102 2 (416)
119910 = 119910 + 119910 1198961 1199092 + 1199102 + 1198962 119909
2 + 1199102 2 (417)
onde
11989611198962 ndash Satildeo os coeficientes de Distorccedilatildeo Radial Simeacutetrica O centro desta
distorccedilatildeo encontra-se no Ponto Principal projetado na imagem
Com 119906 = 1199060 + 119886119909 + 120574119910 e 119907 = 1199070 + 120573119910 e assumindo 120574 = 0 em uma imagem
que tem os eixos perpendiculares tem-se a relaccedilatildeo expressa com as Equaccedilotildees
(418) e (419)
119906 = 119906 + 119906 minus 1199060 1198961 1199092 + 1199102 + 1198962 119909
2 + 1199102 2 (418)
119907 = 119907 + 119907 minus 1199070 1198961 1199092 + 1199102 + 1198962 119909
2 + 1199102 2 (419)
Uma opccedilatildeo para estimar os coeficientes 1198961 e 1198962 eacute feita atraveacutes de
sucessivas iteraccedilotildees utilizando as coordenadas 119906 e 119907 dos piacutexeis considerados
77
isentos de erro Com isto tecircm-se duas expressotildees para os pontos da imagem
conforme a Equaccedilatildeo (420)
119906 minus 1199060 119909
2 + 1199102 119906 minus 1199060 1199092 + 1199102 2
119907 minus 1199070 1199092 + 1199102 119907 minus 1199070 119909
2 + 1199102 2 1198961
1198962 =
119906 minus 119906119907 minus 119907
(420)
Dados 119898 pontos em 119899 imagens podemos obter 2 ∙ 119898 ∙ 119899 equaccedilotildees Na forma
matricial 119863119896 = 119889 onde 119896 = 1198961 1198962 119879 A soluccedilatildeo deste sistema de equaccedilotildees eacute
possiacutevel pelo meacutetodo dos miacutenimos quadrados conforme a Equaccedilatildeo (421)
119896 = 119863119879119863 minus1119863119879119889 (421)
Uma vez que 1198961 e 1198962 foram calculados pode-se refinar a estimaccedilatildeo dos
outros paracircmetros resolvendo novamente a Equaccedilatildeo (415) substituindo os valores
de 119898 119860119877119894 119905119894 119872119894 pelos valores calculados com as Equaccedilotildees (418) e (419)
A estimaccedilatildeo do conjunto completo de POI pode ser expressa atraveacutes da
Equaccedilatildeo (422)
119898119894119895 minus119898 1198601198961 1198962119877119894 119905119894 119872119895 2119898
119895=1119899119894=1 (422)
onde
119898 119860 11989611198962119877119894 119905119894 119872119895 - Eacute funccedilatildeo da projeccedilatildeo do vetor do ponto 119872119895 na imagem
119894 de acordo com a Equaccedilatildeo (413)
Com este meacutetodo no miacutenimo duas imagens devem ser adquiridas com
orientaccedilotildees diferentes se os elementos sensores da cacircmara forem quadrados
Zhang (2000) recomenda a aquisiccedilatildeo de pelo menos cinco imagens para obter
melhores resultados com o processo de calibraccedilatildeo Sendo assim os passos para
realizar a calibraccedilatildeo da cacircmara utilizando este meacutetodo satildeo
1 Imprimir o gabarito e fixaacute-lo em uma superfiacutecie plana e riacutegida
2 Tomar imagens do gabarito com diferentes orientaccedilotildees variando a
posiccedilatildeo e orientaccedilatildeo da cacircmara
78
3 Realizar a leitura das coordenadas dos pontos de controle nas
imagens
4 Estimar os POI e POE utilizando soluccedilatildeo aproximada
5 Refinar todos os paracircmetros incluindo os paracircmetros de distorccedilatildeo de
lentes atraveacutes da Equaccedilatildeo (422)
Os passos 4 e 5 satildeo realizados automaticamente pelo Toolbox CALIB do
software Matlab devendo o usuaacuterio apenas inserir as imagens no software e realizar
as leituras dos veacutertices dos quadrados nas imagens do gabarito
42 ANAacuteLISE DA PRESENCcedilA DE RUIacuteDO
Os piacutexeis saturados causados por exposiccedilatildeo prolongada do sensor na
aquisiccedilatildeo da imagem e tambeacutem os piacutexeis com baixa exposiccedilatildeo devem ser
cuidadosamente analisados na imagem pois tambeacutem podem causar erros nas
medidas de distacircncia devido agrave presenccedila de ruiacutedo Quando o sensor capta o sinal
luminoso existe um limite maacuteximo de saturaccedilatildeo que natildeo pode ser diminuiacutedo
posteriormente
Khongsab (2009) utilizou como paracircmetro principal o tempo de integraccedilatildeo na
captaccedilatildeo da imagem para controlar a saturaccedilatildeo dos piacutexeis Como este tempo eacute
aplicado globalmente ao sensor acaba influenciando os valores digitais dos piacutexeis
da imagem de forma equivalente Alguns apresentam erros devido agrave baixa
exposiccedilatildeo pois com a reduccedilatildeo do tempo de integraccedilatildeo natildeo receberam energia
eletromagneacutetica suficiente para sensibilizar o sensor sendo chamados de piacutexeis
insaturados Estes problemas podem ser minimizados definindo-se tempos de
integraccedilatildeo adequados para a obtenccedilatildeo da imagem TOF
O tratamento do ruiacutedo pode ser realizado com diferentes filtragens na
imagem Com este objetivo foram estudados os filtros passa-baixas pela meacutedia e
mediana Outro processo de filtragem realizado foi o caacutelculo da meacutedia dos valores
de distacircncia para diferentes imagens de uma mesma cena com o mesmo tempo de
integraccedilatildeo mas adquiridas em instantes brevemente diferentes
79
421 Filtragem passa-baixas pela meacutedia
O caacutelculo da meacutedia dos valores da vizinhanccedila em torno do pixel de interesse
tem o efeito de suavizar a imagem Este processo conhecido como filtro linear
passa-baixas atenua as altas frequecircncias que no espaccedilo de frequecircncias
correspondem agraves transiccedilotildees raacutepidas Este tipo de variaccedilatildeo caracteriza tambeacutem a
presenccedila de ruiacutedo na imagem A suavizaccedilatildeo tende a minimizar a presenccedila de ruiacutedo
e tecircm o efeito de tornar a imagem menos contrastante O filtro linear passa-baixas
utilizado tem dimensatildeo 3x3 com pesos iguais para os vizinhos Filtros lineares
resultam da convoluccedilatildeo de uma janela moacutevel sobre a imagem A Equaccedilatildeo (423)
representa o modelo matemaacutetico aplicado na filtragem linear passa-baixas pela
meacutedia (CENTENO 2004)
119866 119910 119909 = (119901(119894 119895) ∙ 119868(119910 + 119894 minus 119886 119909 + 119895 minus 119886))119879119895=1
119879119894=1 (423)
onde
119868(119910 119909) ndash Corresponde ao valor do pixel na posiccedilatildeo ldquolinha = 119910rdquo e ldquocoluna = 119909rdquo
119901(119894 119895) ndash Representa o filtro
119879 ndash Tamanho da janela de filtragem
119866(119910 119909) ndash Imagem resultante da filtragem
119886 = 119894119899119905 119879
2 + 1
A Figura 42 Ilustra o filtro linear passa-baixas pela meacutedia a janela central
cinza que estaacute na matriz de uma imagem Este filtro tem dimensatildeo de 3x3 piacutexeis e
atua no valor digital 48 do pixel central O valor digital do pixel apoacutes a filtragem
passa a ser 41222 que corresponde a meacutedia dos valores digitais dos piacutexeis
vizinhos
80
FIGURA 42 ndash Filtragem passa-baixas pela meacutedia
422 Filtragem pela mediana
A filtragem natildeo linear pela mediana consiste na substituiccedilatildeo do valor do pixel
central pelo valor correspondente a mediana da vizinhanccedila Este meacutetodo tambeacutem
suaviza a presenccedila de ruiacutedo A diferenccedila principal em relaccedilatildeo ao filtro da meacutedia eacute
que o filtro da mediana natildeo introduz novos valores na imagem pois substitui o valor
central da vizinhanccedila por um valor jaacute existente na imagem Sendo assim natildeo
degrada as bordas dos objetos de forma extrema A Figura 43 ilustra esta filtragem
que resultaraacute no valor digital 44 para o pixel filtrado que anteriormente apresentava
valor digital 48
FIGURA 43 ndash Filtragem pela mediana
81
423 Filtragem com a meacutedia temporal
A terceira opccedilatildeo eacute a ponderaccedilatildeo dos valores dos piacutexeis ao longo do tempo
Para isto uma seacuterie de imagens foi obtida a partir do mesmo ponto de vista em
instantes diferentes O resultado foi um conjunto de imagens de um uacutenico objeto
desde a mesma perspectiva natildeo sendo a geometria da imagem alterada Assim
cada pixel de uma imagem tem seu equivalente nas outras Assumindo que o ruiacutedo
seja aleatoacuterio eacute esperado que o uso de mais de uma imagem diminua a presenccedila
de ruiacutedo atraveacutes do caacutelculo da meacutedia dos valores observados
A filtragem com a meacutedia temporal eacute ilustrada com a Figura 44 Nesta figura
tem-se a representaccedilatildeo de trecircs imagens com suas matrizes de valores digitais
(Ii=123) e a imagem filtrada (IF) resultante que corresponde a meacutedia das trecircs
imagens originais
FIGURA 44 ndash Filtragem utilizando a meacutedia temporal
82
43 SEGMENTACcedilAtildeO
Com a etapa de segmentaccedilatildeo objetivou-se separar o conjunto de dados em
subconjuntos Estes subconjuntos satildeo compostos por pontos com coordenadas
tridimensionais que descrevem as superfiacutecies de objetos Eacute assumido que estas
superfiacutecies satildeo partes estruturais do objeto a ser identificado Para atingir esta meta
duas alternativas foram desenvolvidas e avaliadas
1) Crescimento de regiotildees a partir de superfiacutecies planas e ponto semente
utilizando o arquivo de intensidades da imagem TOF para selecionar a posiccedilatildeo de
pontos ou regiotildees semente sendo o arquivo de distacircncias utilizado para o
crescimento de regiotildees
2) Segmentaccedilatildeo por anaacutelise da variaccedilatildeo local de autovalores utilizando
somente o arquivo de distacircncias da imagem TOF para gerar uma imagem de
intensidade com bordas intensificadas que posteriormente eacute segmentada em
regiotildees que tecircm seus piacutexeis projetados gerando uma nuvem de pontos 3D destas
superfiacutecies segmentadas A segmentaccedilatildeo da imagem de intensidade com bordas
evidenciadas gerada eacute realizada utilizando o algoritmo de deslocamento pela meacutedia
431 Crescimento de regiotildees a partir de superfiacutecies planas e ponto semente
O primeiro meacutetodo proposto se baseia no crescimento de regiotildees por
agregaccedilatildeo de elementos adjacentes Este meacutetodo utiliza um criteacuterio de similaridade
para avaliar se um ponto pertence a uma determinada regiatildeo A distacircncia de um
ponto a uma superfiacutecie plana e o valor digital de um pixel em uma imagem satildeo
exemplos de criteacuterios de similaridade que podem ser utilizados (GONZALEZ e
WOODS 2000)
Partindo de um subconjunto de pontos adjacentes que pertencem a uma
superfiacutecie plana o processo consiste em buscar na vizinhanccedila outros pontos que
estejam espacialmente proacuteximos a esta superfiacutecie atendendo ao criteacuterio de
coplanaridade Neste criteacuterio a distacircncia ortogonal do ponto a uma superfiacutecie plana eacute
calculada atraveacutes das coordenadas 3D do ponto sendo este ponto considerado
pertencente agrave superfiacutecie quando estaacute dentro do limiar estabelecido A superfiacutecie
plana eacute determinada atraveacutes do autovetor com menor autovalor do conjunto de
83
pontos 3D a distacircncia ortogonal eacute calculada na direccedilatildeo deste autovetor partindo da
superfiacutecie O processo eacute iterativo de forma que o subconjunto inicial cresce
agregando novos elementos em cada iteraccedilatildeo ateacute atingir os limites da superfiacutecie
quando o criteacuterio de coplanaridade natildeo eacute mais satisfeito
O primeiro problema consiste na identificaccedilatildeo de pontos ou regiotildees semente
para dar iniacutecio ao processo de crescimento Uma opccedilatildeo foi identificar visualmente
regiotildees planas no arquivo de intensidades da imagem TOF e realizar a leitura de
coordenadas de pontos nestas regiotildees A partir das coordenadas destes pontos
selecionados na imagem de intensidade e de suas correspondentes no arquivo de
distacircncias da imagem TOF determinou-se a superfiacutecie plana que mais se aproxima
a esta regiatildeo atraveacutes do caacutelculo de seus autovetores e autovalores esta foi
considerada a superfiacutecie semente
A hipoacutetese baacutesica assume que superfiacutecies planas ou pelo menos partes
delas aparecem como regiotildees uniformes na imagem de intensidade devido agraves
condiccedilotildees de iluminaccedilatildeo Esta hipoacutetese nem sempre pode ser verificada e
confirmada Por exemplo se a superfiacutecie eacute coberta por tonalidades com padratildeo
irregular de cor entatildeo o plano pode mostrar valores natildeo uniformes na imagem de
intensidade sendo este um caso extremo Em uma situaccedilatildeo real pode ocorrer que
parte da superfiacutecie plana esteja pintada ou contenha manchas que alterem a sua
resposta espectral O mesmo pode ocorrer se houverem sombras projetadas de
outros objetos sobre a superfiacutecie Neste caso poreacutem existem outras regiotildees da
superfiacutecie plana que podem aparecer uniformes na imagem de intensidade e serem
utilizadas como regiatildeo semente
Com base nesta suposiccedilatildeo buscaram-se regiotildees uniformes na imagem de
intensidade e verificou-se a possibilidade de formarem superfiacutecies planas que
pudessem ser utilizadas como sementes no arquivo de distacircncias da imagem TOF
A soluccedilatildeo proposta consiste em segmentar a imagem de intensidade em regiotildees
uniformes com atributos de cor Um limite miacutenimo no tamanho das regiotildees deve ser
fixado para evitar que regiotildees muito pequenas sejam incluiacutedas na anaacutelise visto que
estas regiotildees pequenas podem representar locais com curvatura
A chave para o crescimento de regiotildees eacute a definiccedilatildeo do grau de pertinecircncia
de cada ponto agrave superfiacutecie plana Para isto eacute utilizado o conceito de distacircncia
miacutenima do ponto a esta superfiacutecie Para pertencer a uma regiatildeo os pontos devem
84
estar dentro do limite de proximidade ou seja a distacircncia entre o ponto e a
superfiacutecie plana natildeo pode superar o limiar fixado
A qualidade deste processo depende de fatores como o estabelecimento de
correspondecircncia entre os pontos precisatildeo na determinaccedilatildeo da superfiacutecie normal
utilizada remoccedilatildeo de erros grosseiros do conjunto de observaccedilotildees e identificaccedilatildeo
da regiatildeo semente
432 Segmentaccedilatildeo por anaacutelise da variaccedilatildeo local de autovalores
Esta abordagem baseia-se na anaacutelise da variaccedilatildeo local dos autovalores e
autovetores A hipoacutetese baacutesica nesta metodologia foi considerar que ao longo de
uma superfiacutecie plana os autovalores devem apresentar valores similares ou muito
proacuteximos Considerando duas regiotildees adjacentes se estas regiotildees forem
coplanares entatildeo a magnitude relativa de seus autovalores seraacute aproximadamente
igual Se uma destas regiotildees encontra-se em uma borda do objeto os autovetores
seratildeo diferentes A regiatildeo a ser considerada eacute uma janela quadrada em torno do
pixel central Para efetuar esta anaacutelise devem ser calculados os autovalores de uma
regiatildeo em torno de cada pixel no arquivo de distacircncias da imagem TOF Estes
autovalores satildeo armazenados em matrizes que geram trecircs novas imagens digitais
com as bordas dos objetos intensificadas
Com a Figura 45 Ilustra-se a anaacutelise do arquivo de distacircncias da imagem
TOF realizado com o caacutelculo de seus autovalores As bordas dos objetos presentes
podem ser vistas em evidecircncia satildeo representadas com os maiores valores
85
FIGURA 45 ndash Intensificaccedilatildeo de bordas com autovalores
Os autovalores calculados para cada pixel satildeo normalizados na faixa de 0 a
255 utilizando-se 8 bits Assim estes valores podem ser representados como uma
imagem digital passiacutevel de ser analisada com softwares de processamento A Figura
46 ilustra uma imagem com bordas intensificadas proveniente da segmentaccedilatildeo
realizada com a anaacutelise da variaccedilatildeo local dos autovalores
FIGURA 46 ndash Imagem com bordas intensificadas
86
A imagem produzida pode entatildeo ser segmentada utilizando o algoritmo de
deslocamento pela meacutedia Os resultados da segmentaccedilatildeo satildeo regiotildees onde os
autovalores satildeo aproximadamente iguais definindo uma superfiacutecie com padratildeo
planar sendo estas superfiacutecies separadas das regiotildees de bordas
433 Segmentaccedilatildeo com o algoritmo de deslocamento pela meacutedia
A segmentaccedilatildeo com o algoritmo de deslocamento pela meacutedia eacute realizada
utilizando a imagem com as bordas dos objetos intensificadas gerada com a
segmentaccedilatildeo do arquivo de distacircncias da imagem TOF pela anaacutelise da variaccedilatildeo
local dos autovalores
Cada um dos trecircs autovalores calculados gera uma imagem com bordas
intensificadas Sendo assim espera-se que os valores digitais dos piacutexeis nas
superfiacutecies dos objetos sejam similares dentro desta imagem Com isto a
segmentaccedilatildeo proporcionaraacute a seleccedilatildeo das superfiacutecies do objeto
Para realizar a segmentaccedilatildeo da imagem de intensidade com as bordas
intensificadas deve-se escolher os paracircmetros (119893119904 119893119903 119867) mais adequados para a
segmentaccedilatildeo Estes paracircmetros correspondem ao domiacutenio espacial da imagem 119893119904
domiacutenio de caracteriacutesticas dos piacutexeis 119893119903 e o tamanho miacutenimo 119867 que as aacutereas
segmentadas devem possuir O limite miacutenimo na quantidade de piacutexeis deve ser
fixado para evitar que regiotildees muito pequenas sejam incluiacutedas na segmentaccedilatildeo o
que pode prejudicar esta etapa pois se espera que a imagem seja segmentada com
o menor nuacutemero de regiotildees
87
5 RESULTADOS E DISCUSSOtildeES
51 CALIBRACcedilAtildeO DA CAcircMARA
Com o objetivo de calcular os POI o processo de calibraccedilatildeo da cacircmara foi
realizado com o Toolbox CALIB do software Matlab que utiliza o meacutetodo proposto
por ZHANG (2000) O gabarito fotografado foi impresso com 7x9 quadrados com
dimensatildeo de 117x117mm Estas imagens foram captadas a uma distacircncia
aproximada de 25 metros da cacircmara Para que houvesse pontos do gabarito sobre
a aacuterea da imagem foram obtidas 36 imagens com diferentes orientaccedilotildees conforme eacute
ilustrado com a Figura 51
FIGURA 51 ndash Imagens do gabarito utilizadas na calibraccedilatildeo da cacircmara
88
A Orientaccedilatildeo Exterior das imagens em relaccedilatildeo agrave cacircmara para a calibraccedilatildeo eacute
ilustrada com a Figura 52 A cacircmara eacute representada com a piracircmide em linhas
vermelhas e a origem do sistema fotogrameacutetrico eacute representada com a interseccedilatildeo
das linhas representadas com a cor azul no veacutertice da piracircmide
FIGURA 52 ndash Orientaccedilatildeo Exterior das fotografias para a calibraccedilatildeo da cacircmara
A distorccedilatildeo causada pelo sistema de lentes da cacircmara ocorre de forma mais
intensa nas bordas da imagem sendo a regiatildeo central o local com menor presenccedila
desta distorccedilatildeo A Figura 53 comprova este fato onde os vetores representados
com a cor vermelha partem dos pontos de controle na imagem e indicam a direccedilatildeo e
o sentido em que a distorccedilatildeo aumenta
FIGURA 53 ndash Direccedilatildeo das distorccedilotildees nos pontos da imagem TOF
89
Realizada a leitura das coordenadas dos pontos de controle os POI foram
calculados com o processo de calibraccedilatildeo da cacircmara e satildeo apresentados com a
Tabela 51
PARAcircMETROS INICIAIS OBTIDOS COM A LEITURA DAS IMAGENS
PARAcircMETRO VALOR
(piacutexeis) (mm)
Distacircncia focal (119891) (119891119909) (119891119910 )
285 80288 285 80288
1286113 1286113
Coordenadas do Ponto Principal (1199090)
(Origem no canto superior esquerdo) (1199100) 10150000 10150000
456750 456750
PARAcircMETROS DETERMINADOS COM A CALIBRACcedilAtildeO DA CAcircMARA
PARAcircMETRO VALOR DESVIO (3σ)
(piacutexeis) (mm) (piacutexeis) (mm)
Distacircncia focal (119891119888) calibrada (119891119909119888 ) (119891119910119888 )
29240511 29364057
1315823 1321383
plusmn 373164 plusmn 335357
plusmn 0167924 plusmn 0150911
Coordenadas do Ponto Principal (1199090119888 )
(Origem no canto superior esquerdo) (1199100119888 ) 10435253 10022287
4695864 4510029
plusmn 320459 plusmn 336886
plusmn 0144207 plusmn 0151599
1198701 -046768 -0021045 plusmn 003106 plusmn 0001398
1198702 060997 0027449 plusmn 013880 plusmn 0006246
1198703 000107 48150e-5
plusmn 000162 plusmn 72900e-5
1198751 000035 19350e-5
plusmn 000204 plusmn 91800e-5
1198752 000000 0000000 plusmn 000000 plusmn 0000000
Erro em pixel (119864119909 )
(119864119910 ) 049340 042754
0022203 0019239
TABELA 51 ndash Paracircmetros de Orientaccedilatildeo Interior calculados
Com os valores dos POI determinados foram calculados os fatores de escala
dos piacutexeis nas direccedilotildees 119904119909 e 119904119910 conforme as Equaccedilotildees (51) e (52)
119904119909 =119891
119891119909119888=
128119898119898
1315823119898119898= 0972775 (51)
119904119910 =119891
119891119910119888=
128119898119898
1321383119898119898= 0968682 (52)
A partir dos fatores de escala e da dimensatildeo do pixel igual a 45120583119898 das
imagens obtidas com a cacircmara PMD CamCube 20 foi calculado o tamanho efetivo
dos piacutexeis nas direccedilotildees x e y atraveacutes das Equaccedilotildees (53) e (54)
119875119909 = P ∙ 119904119909 = 45120583119898 ∙ 0972775 = 43774875120583119898 cong 44120583119898 (53)
119875119910 = P ∙ 119904119910 = 45120583119898 ∙ 0968682 = 43590690120583119898 cong 44120583119898 (54)
90
Os valores obtidos com as Equaccedilotildees (53) e (54) indicam que os elementos
do sensor podem ser considerados quadrados De acordo com Bazan et al (2009)
quando a diferenccedila de escala entre os lados do piacutexel natildeo eacute fornecida pelo fabricante
da cacircmara o fator de escala calculado para x pode absorver esta diferenccedila
Com a razatildeo entre as distacircncias focais obtidas com a calibraccedilatildeo da cacircmara
pode-se verificar a diferenccedila de escala Para a dimensatildeo do sensor esta diferenccedila
de escala natildeo alcanccedila o tamanho de um pixel conforme Equaccedilatildeo (56)
119863119868119865119864119878119862 =119891119909119888
119891119910119888=
1321383119898119898
1315823119898119898minus 1 = 1004225 minus 1 = 0004225 (55)
119863119868119865119864119878119862 = 0004225 lowast 204 = 08619 lt 1119901119894119909119890119897 (56)
A Equaccedilatildeo (56) indica que a diferenccedila de escala entre os eixos x e y eacute
menor que a dimensatildeo de um pixel isto considerando toda a dimensatildeo da imagem
de 204x204 piacutexeis da cacircmara PMD CamCube 20
Determinados os POI a imagem pode entatildeo ter sua geometria corrigida
conforme eacute ilustrado com a Figura 54b A Figura 54a ilustra a imagem original
obtida do gabarito onde se apresentam curvaturas provenientes da distorccedilatildeo
causada pelo sistema de lentes da cacircmara
FIGURA 54 ndash Correccedilatildeo geomeacutetrica da imagem TOF
91
Para a correccedilatildeo geomeacutetrica de imagens obtidas com cacircmaras de pequeno
formato Zhang (2000) recomenda utilizar somente os paracircmetros de distacircncia focal
calibrada 119891119888 coordenadas do Ponto Principal no plano da imagem 1199090 e 1199100 e os
coeficientes de Distorccedilatildeo Radial Simeacutetrica ateacute o segundo termo 1198701 e 1198702 Isto porque
este modelo de cacircmara apresenta principalmente a Distorccedilatildeo Radial Simeacutetrica
Outro fator diz respeito ao desvio calculado na determinaccedilatildeo de cada um destes
paracircmetros conforme valores apresentados na Tabela 51 o terceiro paracircmetro de
Distorccedilatildeo Radial Simeacutetrica 1198703 e os paracircmetros de Distorccedilatildeo Descentrada 1198751 e 1198752
apresentaram valores de desvios maiores do que os proacuteprios paracircmetros devendo
entatildeo serem desconsiderados para a correccedilatildeo geomeacutetrica da imagem
92
52 EXPERIMENTO 1 ndash ANAacuteLISE DE RUIacuteDO 1 IMAGEM TOF INTEIRA
O objetivo deste experimento consistiu em avaliar a presenccedila de ruiacutedo em
funccedilatildeo do tempo de integraccedilatildeo (TI) na aquisiccedilatildeo das imagens TOF Para sua
realizaccedilatildeo foram utilizadas imagens de uma parede com superfiacutecie plana distante
130m da cacircmara PMD CamCube 20 onde tambeacutem aparece parte de uma porta
Foram tomadas cinco imagens para cada valor de TI que variou entre 500 1000
1500 1700 1800 1900 2000 2500 3000 3500 4000 4500 5000 5300 5500
6000 e 7000μs gerando assim um conjunto de 85 imagens TOF
Com o objetivo de avaliar e reduzir a presenccedila de ruiacutedo nas imagens foram
realizadas as seguintes filtragens
Filtro passa-baixas pela meacutedia
Filtro pela mediana
Caacutelculo da meacutedia dos valores de distacircncia para imagens TOF
adquiridas com mesmo TI em instantes brevemente diferentes
Para cada imagem original foram criadas trecircs novas imagens filtradas com
os procedimentos mencionados
No graacutefico de dispersatildeo ilustrado com a Figura 55 os desvios padratildeo para o
conjunto de observaccedilotildees satildeo mostrados em funccedilatildeo do TI Foram calculados com
referecircncia no pixel central com coordenadas (102 102) e a aacuterea utilizada para o
caacutelculo possui dimensatildeo de 10x10 piacutexeis Escolheu-se esta regiatildeo por apresentar
padratildeo planar da superfiacutecie com menor distorccedilatildeo causada pelo sistema de lentes da
cacircmara tendo-se em vista que nesta etapa natildeo foi realizada a correccedilatildeo geomeacutetrica
dos dados da imagem TOF
Ainda com a Figura 55 verificou-se que o filtro da mediana aplicado nas
imagens gerou os menores desvios para a janela de 10x10 piacutexeis O menor desvio
calculado foi 12mm encontrado utilizando o filtro da mediana para o TI igual a
3000micros Verificou-se tambeacutem que os desvios apresentam valores similares para os
tempos de integraccedilatildeo que variaram entre 1500 agrave 2500micros para as imagens originais e
tambeacutem para as imagens filtradas
93
FIGURA 55 ndash Desvio padratildeo x TI janelas 10x10
A partir do graacutefico de dispersatildeo da Figura 55 escolheram-se imagens
captadas com os tempos de integraccedilatildeo de 500 2000 e 2500micros para realizar os
testes A Figura 56 ilustra superfiacutecies geradas a partir de filtragens realizadas em
imagem TOF obtida com TI igual a 500μs
FIGURA 56 ndash Imagens para TI=500μs e d=130m
94
Com TI de 500μs verificou-se intensa presenccedila de ruiacutedo na imagem original
e tambeacutem nas imagens filtradas Isto ocorreu devido ao baixo tempo de exposiccedilatildeo
do sensor A distorccedilatildeo causada pelo sistema de lentes da cacircmara tambeacutem pode ser
visualizada nestas superfiacutecies geradas com os arquivos de distacircncias da imagem
TOF As imagens foram obtidas de uma parede plana em que aparece parte de uma
porta o que justifica a descontinuidade vista em forma de degrau A anaacutelise
realizada com TI de 2000μs eacute ilustrada com a Figura 57
FIGURA 57 ndash Imagens para TI=2000μs e d=130m
Com TI de 2000μs obtiveram-se resultados melhores do que os obtidos com
TI de 500μs as superfiacutecies apresentaram-se mais suaves confirmando a tendecircncia
demonstrada com o graacutefico de dispersatildeo da Figura 55
A uacuteltima anaacutelise deste experimento foi realizada com o tempo de integraccedilatildeo
de 2500μs conforme pode ser visualizado com as superfiacutecies geradas com os
arquivos de distacircncias da imagem TOF original e das imagens filtradas ilustradas
com a Figura 58
95
FIGURA 58 ndash Imagens para TI=2500μs e d=130m
As imagens filtradas com TI de 2000μs e 2500μs apresentam suavizaccedilotildees
similares nas superfiacutecies geradas com os arquivos de distacircncias da imagem TOF
Verificou-se que o tempo de integraccedilatildeo para a aquisiccedilatildeo das imagens da parede a
13m de distacircncia da cacircmara deve ser um destes valores O TI de 2000μs pode ser
o escolhido e estaacute de acordo com o graacutefico de dispersatildeo ilustrado com a Figura 55
As filtragens de suavizaccedilatildeo com o filtro passa-baixas pela meacutedia e pela
mediana mostraram-se as melhores opccedilotildees a serem utilizadas com estas filtragens
apresentaram-se os menores desvios para a janela central de 10x10 piacutexeis Uma
vantagem da filtragem pela mediana eacute que mantecircm os valores originais de distacircncia
para os piacutexeis da imagem e preserva as bordas do objeto imageado No entanto a
filtragem com a mediana degrada as bordas da imagem devendo ser
cuidadosamente analisada para cada aplicaccedilatildeo
Tambeacutem foram calculados os desvios padratildeo para as imagens inteiras e os
valores obtidos foram de 19cm em meacutedia Este grande valor deveu-se a maior
curvatura ocorrer nas extremidades da imagem e tambeacutem ao fato de haver uma
descontinuidade na superfiacutecie presente na imagem TOF causada pela porta
presente na superfiacutecie da parede
96
53 EXPERIMENTO 2 ndash ANAacuteLISE DE RUIacuteDO 2 JANELAS DE 40X40 PIacuteXEIS
O objetivo deste experimento foi analisar a presenccedila de ruiacutedo em aacutereas
centrais da imagem TOF Para isto escolheram-se janelas com dimensotildees de 40x40
piacutexeis ao redor do pixel central da imagem Calculou-se o desvio padratildeo da distacircncia
de cada pixel em relaccedilatildeo a este pixel central As janelas utilizadas tiveram sua
posiccedilatildeo na imagem variando de (8282) ateacute (122122) e correspondem a aacuterea com
superfiacutecie plana de uma parede presente na cena
Primeiramente utilizaram-se imagens TOF adquiridas agrave distacircncia de 130m
entre a cacircmara e a parede com os tempos de integraccedilatildeo iguais a 2000 e 5000micros
Posteriormente utilizaram-se imagens TOF obtidas a 210m da parede com tempos
de integraccedilatildeo iguais a 2000 5000 e 7000micros
O graacutefico de dispersatildeo da Figura 59 ilustra uma anaacutelise para a captaccedilatildeo de
imagens TOF com diferentes distacircncias e tempos de integraccedilatildeo Os desvios padratildeo
foram calculados para imagens TOF captadas com a cacircmara CamCube 20 onde
variaram-se as distacircncias e os tempos de integraccedilatildeo no momento da aquisiccedilatildeo das
imagens
FIGURA 59 ndash Desvios padratildeo para distacircncia x TI
FONTE CENTENO e JUTZI (2010)
97
Com a Figura 510 eacute apresentado o primeiro resultado deste experimento o
graacutefico de dispersatildeo gerado com a imagem TOF adquirida do objeto agrave distacircncia de
130m da cacircmara com TI igual a 2000micros
FIGURA 510 ndash Desvios padratildeo para janelas com TI=2000μs d=130m
A Figura 511 ilustra as superfiacutecies geradas com o arquivo de distacircncias da
imagem TOF adquirida do objeto agrave distacircncia de 130m da cacircmara com TI igual a
2000micros e com as imagens resultantes das filtragens realizadas
FIGURA 511 ndash Janelas de 40x40 piacutexeis TI=2000μs d=130m
98
Com a Figura 511 conclui-se que os melhores resultados para a suavizaccedilatildeo
dos dados de distacircncia foram obtidos com os filtros passa-baixas pela meacutedia e
mediana
A Figura 512 ilustra o graacutefico de dispersatildeo para a imagem adquirida com TI
igual a 5000μs com distacircncia de 130m entre o objeto imageado e a cacircmara TOF A
Figura 513 ilustra as superfiacutecies geradas com as janelas centrais de 40x40 piacutexeis
FIGURA 512 ndash Desvios padratildeo para janelas com TI=5000μs d=130m
FIGURA 513 ndash Janelas de 40x40 piacutexeis TI=5000μs d=130m
99
O TI de 5000μs utilizado para a aquisiccedilatildeo da imagem saturou os elementos
do sensor e causou maior presenccedila de ruiacutedo nos dados Comparando as Figuras
511 e 513 conclui-se que para a distacircncia de 130m do sensor o tempo de
integraccedilatildeo mais adequado para a aquisiccedilatildeo da imagem foi 2000micros
A Figura 514 ilustra o graacutefico de dispersatildeo gerado para a imagem TOF
obtida com TI igual a 2000μs e distacircncia de 210m As superfiacutecies geradas a partir
das janelas de 40x40 piacutexeis desta imagem satildeo apresentadas com a Figura 515
FIGURA 514 ndash Desvios padratildeo para janelas com TI=2000μs d=210m
FIGURA 515 ndash Janelas de 40x40 piacutexeis TI=2000μs d=210m
100
O graacutefico de dispersatildeo calculado para a imagem adquirida com TI igual a
5000μs e distacircncia de 210m eacute ilustrado com a Figura 516
FIGURA 516 ndash Desvios padratildeo para janelas com TI=5000μs d=210m
Os menores desvios padratildeo foram encontrados na imagem filtrada utilizando
os filtros passa-baixas pela meacutedia e mediana conforme pode ser visualizado com a
Figura 516 Para a janela de 40x40 piacutexeis o desvio padratildeo de 107mm na imagem
original diminuiu para 96mm com a filtragem pela mediana A Figura 517 ilustra as
superfiacutecies geradas para a imagem obtida com distacircncia de 210m e TI de 5000μs
FIGURA 517 ndash Janelas de 40x40 piacutexeis TI=5000μs d=210m
101
Com a Figura 517 observa-se novamente que os melhores resultados para
a suavizaccedilatildeo da imagem foram obtidos com os filtros passa-baixas pela meacutedia e
pela mediana
A Figura 518 ilustra o graacutefico de dispersatildeo e a Figura 519 ilustra as
superfiacutecies geradas para as imagens adquiridas com distacircncia de 210m e TI igual a
7000μs
FIGURA 518 ndash Desvios padratildeo para janelas com TI=7000μs d=210m
FIGURA 519 ndash Janelas de 40x40 piacutexeis TI=7000μs d=210m
102
Com o graacutefico de dispersatildeo ilustrado com a Figura 518 observa-se que os
desvios padratildeo calculados para as imagens obtidas com os filtros passa-baixas pela
meacutedia e mediana satildeo maiores do que os desvios apresentados com o graacutefico de
dispersatildeo ilustrado com a Figura 516 Isto indica que as imagens captadas da
parede plana com TI igual a 7000μs e distacircncia de 210m apresentaram maior ruiacutedo
que as imagens obtidas com 5000μs
Comparando as Figuras 519 e 517 verifica-se que a imagem captada com
TI igual a 5000μs com distacircncia de 210m e filtrada com o filtro passa-baixas pela
meacutedia e tambeacutem com a mediana apresentou-se mais suavizada do que a imagem
obtida com TI igual a 7000μs
Comparando as imagens captadas com tempo de integraccedilatildeo de 2000μs e
5000μs para a distacircncia de 210m conforme Figuras 515 e 517 conclui-se que as
imagens obtidas com TI de 5000μs apresentaram menor presenccedila de ruiacutedo
54 EXPERIMENTO 3 ndash PROJECcedilAtildeO ORTOGONAL DOS PONTOS
Obtidos os POI atraveacutes do processo de calibraccedilatildeo da cacircmara e definido o
melhor TI para a captaccedilatildeo da imagem procedeu-se a um novo experimento no qual
se analisou a imagem de uma caixa com superfiacutecies planas A superfiacutecie do objeto
em questatildeo eacute composta por papel branco riacutegido e refletivo A caixa foi colocada
sobre uma cadeira agrave distacircncia aproximada de 13m da cacircmara Esta cadeira foi
girada enquanto a cacircmara continuou fixa com o mesmo ponto de vista Com base
no estudo da dispersatildeo dos dados em funccedilatildeo da distacircncia ao objeto optou-se por
utilizar o TI de 2000μs para a captaccedilatildeo das imagens Foram entatildeo adquiridas dez
imagens do objeto
Com a distacircncia do objeto em relaccedilatildeo agrave cacircmara igual a 13m e com a
distacircncia focal calibrada da cacircmara de 132mm valor encontrado com a Equaccedilatildeo
(57) calculou-se a escala aproximada das fotografias encontrando-se o valor
aproximado para a escala igual a 1100 conforme Equaccedilatildeo (58)
119891119888 =119891119909119888+119891119910119888
2=
1315823119898119898+1321383119898119898
2= 1318603119898119898 cong 132119898119898 (57)
103
119864 =119889
119863=
119891119888
119885=
132119898119898
13119898=
00132119898
13119898=
1
984848cong
1
100 (58)
Para realizar este experimento selecionou-se a terceira imagem captada por
apresentar vista perspectiva de trecircs superfiacutecies com padratildeo planar no objeto
imageado A Figura 520a ilustra o arquivo de intensidades da imagem TOF sem
correccedilatildeo geomeacutetrica A Figura 520b ilustra o arquivo de intensidade corrigido
geometricamente utilizando as coordenadas do Ponto Principal 1199090 e 1199100 os
coeficientes de distorccedilatildeo Radial Simeacutetrica 1198701 e 1198702 e a distacircncia focal calibrada 119891119888
FIGURA 520 ndash Arquivo de intensidades da imagem TOF obtida do objeto
Apoacutes a correccedilatildeo da geometria da imagem TOF geraram-se as superfiacutecies do
objeto Isto foi feito a partir do arquivo de distacircncias da imagem TOF conforme eacute
ilustrado com a Figura 521 onde se tem as distacircncias dos pontos em relaccedilatildeo ao
sensor representadas com a coordenada Z em metros sobre a imagem TOF com
dimensatildeo de 204x204 piacutexeis
104
FIGURA 521 ndash Arquivo de distacircncias da imagem TOF com geometria corrigida
A partir do arquivo de distacircncias da imagem TOF com a geometria dos
dados corrigida projetaram-se ortogonalmente os pontos gerando a nuvem de
pontos 3D ilustrada com a Figura 522 em vista frontal com o eixo Z ortogonal aos
eixos X e Y representados
FIGURA 522 ndash Nuvem de pontos vista frontal
105
A vista em perspectiva tridimensional da nuvem de pontos do objeto de
estudo eacute ilustrada com a Figura 523 Conteacutem 42025 pontos gerados a partir da
imagem TOF de 204x204 piacutexeis obtida com a cacircmara PMD CamCube 20
FIGURA 523 - Nuvem de pontos vista perspectiva 3D
106
55 EXPERIMENTO 4 ndash SEGMENTACcedilAtildeO 1 CRESCIMENTO DE REGIOtildeES
Realizou-se a segmentaccedilatildeo por crescimento de regiotildees a partir de trecircs
pontos semente Estes pontos foram escolhidos em aacutereas uniformes no arquivo de
intensidades da imagem TOF corrigida geometricamente e foram projetados
ortogonalmente para a nuvem 3D As coordenadas de imagem destes pontos foram
observadas nas posiccedilotildees indicadas com a Figura 524
FIGURA 524 ndash Pontos semente no arquivo de intensidades da imagem TOF
Os pontos semente foram escolhidos em trecircs superfiacutecies planas da caixa em
locais que apresentavam valores de intensidade uniforme As coordenadas de
imagem lidas em piacutexeis para estes trecircs pontos foram Ponto 1 (11681) Ponto 2
(72103) Ponto 3 (113108)
As Figuras 525 e 526 ilustram o crescimento em trecircs regiotildees realizados na
nuvem de pontos 3D Estes pontos correspondem agraves superfiacutecies frontal superior e
lateral da caixa ilustradas com as cores amarela verde e ciano respectivamente
Os trecircs autovetores calculados satildeo ilustrados com a cor azul ortogonais aos pontos
semente escolhidos nas trecircs superfiacutecies da imagem de intensidade
107
FIGURA 525 ndash Crescimento de regiotildees vista frontal
FIGURA 526 ndash Crescimento de regiotildees vista perspectiva 3D
Com as Figuras 525 e 526 verifica-se que o crescimento das regiotildees
ocorreu de forma coerente acompanhando o padratildeo planar das superfiacutecies do
objeto de estudo No entanto nas trecircs superfiacutecies analisadas houve crescimento de
regiotildees para fora dos limites de suas aacutereas Pontos de superfiacutecies ao fundo e abaixo
do objeto foram incluiacutedos nas regiotildees Isto ocorreu devido agrave utilizaccedilatildeo do criteacuterio de
108
similaridade de distacircncia do ponto agrave superfiacutecie plana sendo esta superfiacutecie definida
pelos pontos semente A distacircncia foi medida ao longo do autovetor o que fez com
que pontos de outras superfiacutecies paralelas a superfiacutecie plana em questatildeo fossem
agrupados na mesma regiatildeo Ou seja pontos que estavam orientados na direccedilatildeo da
superfiacutecie plana definida pelo autovalor que passa pelo ponto semente e que
estavam dentro do limiar de distacircncia estabelecido foram incluiacutedos nas regiotildees
mesmo natildeo pertencendo agrave superfiacutecie analisada
56 EXPERIMENTO 5 ndash SEGMENTACcedilAtildeO 2 ANAacuteLISE COM AUTOVALORES
Neste experimento realizou-se a segmentaccedilatildeo da imagem TOF por anaacutelise
da variaccedilatildeo local de autovalores locais de superfiacutecies O arquivo de distacircncias desta
imagem foi utilizado como ponto de partida para o caacutelculo dos autovalores com o
objetivo de intensificar as bordas dos objetos presentes na cena
O processamento consistiu em definir uma pequena vizinhanccedila quadrada
uma janela moacutevel e utilizar as coordenadas tridimensionais dos pontos nesta
vizinhanccedila para o caacutelculo dos autovalores
Apoacutes a normalizaccedilatildeo os autovalores foram armazenados na forma de trecircs
novas imagens conforme pode ser visualizado com as Figuras 527 528 e 529
Para a geraccedilatildeo destas imagens utilizou-se a janela moacutevel com dimensatildeo de 3x3
piacutexeis para o caacutelculo dos autovalores
109
FIGURA 527 ndash Imagem com bordas intensificadas gerada com 1205821
FIGURA 528 ndash Imagem com bordas intensificadas gerada com 1205822
FIGURA 529 ndash Imagem com bordas intensificadas gerada com 1205823
110
A partir da imagem com bordas intensificadas gerada com os autovalores
locais foi possiacutevel criar uma nova imagem de intensidade que tambeacutem estava com
as bordas dos objetos intensificadas A Figura 530 ilustra as imagens de
intensidade com bordas intensificadas que foram geradas utilizando o segundo
autovalor calculado a partir de janelas com as seguintes dimensotildees a)3x3 b)5x5
c)7x7 d)9x9 e)11x11 f)13x13 piacutexeis
FIGURA 530 ndash Imagens de intensidade com as bordas do objeto intensificadas
111
Com as imagens de intensidade ilustradas com a Figura 530 observou-se
que aumentando a quantidade de piacutexeis da janela utilizada para o caacutelculo dos
autovalores da regiatildeo aumentou-se tambeacutem a suavizaccedilatildeo sobre as superfiacutecies
planas e alargaram-se as bordas que limitam os objetos contidos na cena
Para este experimento utilizou-se a imagem gerada com a janela de 3x3
piacutexeis e com o segundo autovalor Esta imagem foi escolhida por apresentar linhas
finas limitando as bordas do objeto A imagem de intensidade com as bordas do
objeto intensificadas foi segmentada utilizando o algoritmo de deslocamento pela
meacutedia O resultado da segmentaccedilatildeo eacute ilustrado com a Figura 531
FIGURA 531 ndash Imagem com bordas intensificadas segmentada
112
A Figura 531a ilustra a imagem com bordas intensificadas a ser
segmentada gerada com o segundo conjunto de autovalores 1205822 Na Figura 531b
tem-se esta imagem suavizada por filtragem A Figura 531c corresponde agrave imagem
segmentada com o algoritmo de deslocamento pela meacutedia A imagem com os limites
das aacutereas segmentadas eacute ilustrada com a Figura 531d
A segmentaccedilatildeo foi realizada utilizando o software EDISON com os
paracircmetros (119893119904 119893119903 119867) = (7 9 300) Estes paracircmetros correspondem ao domiacutenio
espacial da imagem 119893119904 domiacutenio de caracteriacutesticas 119893119903 e tamanho miacutenimo das
regiotildees 119867 em piacutexeis O limite miacutenimo foi fixado para evitar que regiotildees muito
pequenas fossem incluiacutedas na segmentaccedilatildeo
Com a imagem segmentada da Figura 529c foi possiacutevel projetar os pontos
de interesse ortogonalmente gerando a nuvem de pontos 3D Para isto utilizou-se
as coordenadas dos piacutexeis no arquivo de intensidades e seus correspondentes no
arquivo de distacircncias da imagem TOF Estes pontos foram escolhidos sobre as
superfiacutecies da caixa A nuvem de pontos 3D resultante deste experimento eacute
apresentada com as Figuras 532 e 533
FIGURA 532 ndash Nuvem de pontos da imagem segmentada vista frontal
113
FIGURA 533 ndash Nuvem de pontos da imagem segmentada vista 3D
57 EXPERIMENTO 6 ndash ANAacuteLISE DAS MEDIDAS OBTIDAS
Para gerar a nuvem de pontos 3D com as superfiacutecies de interesse
primeiramente corrigiu-se a geometria do arquivo de distacircncias da imagem TOF com
as coordenadas do Ponto Principal 1199090 e 1199100 coeficientes de distorccedilatildeo Radial
Simeacutetrica 1198701 e 1198702 e distacircncia focal calibrada 119891119888 O passo seguinte foi gerar uma
imagem de intensidade com as bordas do objeto intensificadas Com este objetivo
calcularam-se os autovalores para os pontos do arquivo de distacircncias da imagem
TOF e geraram-se trecircs imagens novas correspondendo aos trecircs autovalores
calculados conforme o Experimento 5 O terceiro passo foi a segmentaccedilatildeo da
imagem de intensidade com bordas intensificadas utilizando o algoritmo de
deslocamento pela meacutedia Com a imagem segmentada pocircde-se escolher as
superfiacutecies que teriam seus piacutexeis projetados para a nuvem de pontos 3D
A imagem segmentada com o algoritmo de deslocamento pela meacutedia
apresenta niacuteveis de cinza diferentes para os piacutexeis de cada segmento Com isto foi
possiacutevel separar os pontos que compotildeem as superfiacutecies por seus valores digitais A
Figura 534 apresenta a nuvem de pontos 3D gerada com a imagem TOF corrigida
geometricamente com os pontos da superfiacutecie frontal representados com a cor azul
114
FIGURA 534 ndash Nuvem de pontos 3D segmentada
A superfiacutecie frontal foi projetada com atributo de cor diferenciado por
apresentar a melhor segmentaccedilatildeo na imagem de intensidade e pontos bem
definidos na nuvem 3D A partir desta superfiacutecie escolheram-se os pontos extremos
os veacutertices do objeto para a leitura de suas coordenadas 3D com o objetivo de
calcular o comprimento das arestas Com a Figura 535 satildeo ilustrados os quatro
pontos selecionados
FIGURA 535 ndash Pontos 3D selecionados na nuvem
115
Com as coordenadas destes quatro pontos e atraveacutes da relaccedilatildeo de distacircncia
tridimensional entre eles expressa pela Equaccedilatildeo (59) calcularam-se as dimensotildees
de trecircs arestas do objeto de estudo
119863119894119895 = 119883119894minus119883119895 2
+ 119884119894minus119884119895 2
+ 119885119894minus119885119895 2 (59)
onde
119863119894119895 ndash Distacircncia entre pontos no espaccedilo tridimensional
119883119894 119884119894 119885119894 119890 119883119895 119884119895 119885119895 - Coordenadas dos pontos 119894 e 119895 na nuvem de pontos 3D
Para verificar a confiabilidade das medidas obtidas com a metodologia
proposta compararam-se as medidas das arestas calculadas a partir dos pontos 3D
com as dimensotildees de referecircncia do objeto de estudo As medidas de referecircncia satildeo
ilustradas com o desenho da Figura 536
FIGURA 536 ndash Dimensotildees de referecircncia do objeto de estudo
A partir das coordenadas tridimensionais dos quatro pontos ilustrados com a
Figura 535 foi possiacutevel calcular as distacircncias entre os pontos e comparar-las com
as medidas de referecircncia As diferenccedilas obtidas satildeo ilustradas com a Tabela 52
116
Ponto
Coordenadas Arestas Medida realizada Diferenccedilas
X (cm) Y (cm) Z (cm) Pontos 3D (cm)
Ref (cm)
(cm) ()
1 -131 -136 -1219 Pontos 1-2 236 260 24 92
2 -80 61 -1098 Pontos 2-3 332 350 18 51
3 234 38 -1203 Pontos 2-4 263 210 53 252
4 -125 180 -1328
TABELA 52 ndash Coordenadas 3D dos pontos e medidas realizadas
O melhor resultado foi obtido para a medida realizada sobre a aresta entre
os pontos 2-3 com diferenccedila de aproximadamente 18 cm em relaccedilatildeo agrave medida de
referecircncia o que representa 5 da distacircncia medida O pior resultado foi obtido com
o calculo da aresta entre os pontos 2 e 4 com diferenccedila de aproximadamente
53cm que equivale 25 da medida de referecircncia Com este resultado conclui-se
que os pontos projetados com maior profundidade na nuvem de pontos 3D
apresentaram maior erro de posicionamento Estes pontos descrevem uma
superfiacutecie plana do objeto pouco aparente na imagem encontra-se muito inclinada
em relaccedilatildeo ao plano da imagem motivo pelo qual erros maiores podem ser
esperados Sobre os pontos 1 2 e 3 da superfiacutecie frontal do objeto o erro foi menor
na ordem de 2 centiacutemetros
Conforme o Experimento 1 realizado para a anaacutelise de ruiacutedo o melhor
resultado foi obtido utilizando o filtro da mediana que apresentou o desvio de 13cm
para a distacircncia de 13m medida utilizando tempo de integraccedilatildeo de 2000micros Este
fato indica coerecircncia com a diferenccedila de 2cm encontrada com a medida da aresta
frontal do objeto
117
58 MODELAGEM DAS SUPERFIacuteCIES 3D
Para a modelagem tridimensional das superfiacutecies segmentadas
primeiramente foi analisada a melhor forma de processamento da imagem TOF
Verificou-se com o Experimento 4 que o crescimento de regiotildees utilizando o arquivo
de intensidades da imagem TOF para escolha do ponto semente e o arquivo de
distacircncias para a projeccedilatildeo ortogonal e crescimento de regiotildees a partir deste ponto
natildeo foi satisfatoacuterio Isto porque o crescimento tambeacutem ocorreu em superfiacutecies que
natildeo pertenciam ao objeto analisado
Melhores resultados foram obtidos com a metodologia de segmentaccedilatildeo que
utilizou a imagem com bordas evidenciadas Esta foi gerada com a anaacutelise dos
autovalores locais das superfiacutecies a partir do arquivo de distacircncias da imagem TOF
conforme Experimento 5 A partir desta segmentaccedilatildeo projetaram-se ortogonalmente
os pontos das superfiacutecies frontal e superior do objeto de estudo gerando assim a
nuvem de pontos 3D que eacute ilustrada com a Figura 537
FIGURA 537 ndash Nuvem de pontos 3D das superfiacutecies frontal e superior
A partir da nuvem de pontos 3D realizou-se a modelagem das superfiacutecies
frontal e superior do objeto conforme eacute ilustrado com a Figura 538
118
FIGURA 538 ndash Modelagem tridimensional das superfiacutecies frontal e superior
Analisando a Figura 538 chegou-se a conclusatildeo que a superfiacutecie frontal do
objeto apresentou-se com padratildeo planar e uniforme Eacute a superfiacutecie que melhor
refletiu o sinal para o sensor devido agrave sua posiccedilatildeo em relaccedilatildeo agrave cacircmara TOF A
superfiacutecie superior apresentou-se um pouco inclinada em relaccedilatildeo ao plano da
imagem e com isto maior rugosidade foi observada nesta superfiacutecie Este
fenocircmeno deve-se a menor captaccedilatildeo do sinal refletido pela superfiacutecie do objeto pelo
sensor da cacircmara
119
6 CONCLUSOtildeES RECOMENDACcedilOtildeES E CONSIDERACcedilOtildeES FINAIS
61 CONCLUSOtildeES
Neste trabalho descreveram-se conceitos introdutoacuterios sobre as cacircmaras
TOF Avaliaram-se duas metodologias para a segmentaccedilatildeo da nuvem de pontos 3D
gerada a partir da imagem TOF Apresentou-se uma aplicaccedilatildeo para esta imagem na
extraccedilatildeo de informaccedilotildees meacutetricas do objeto de estudo imageado a distacircncia
aproximada de 13m
Para isto foram abordados os seguintes assuntos calibraccedilatildeo da cacircmara
para a obtenccedilatildeo de POI correccedilatildeo geomeacutetrica da imagem TOF filtragens para
anaacutelise e tratamento de ruiacutedo segmentaccedilatildeo atraveacutes do crescimento de regiotildees a
partir de um ponto semente segmentaccedilatildeo do arquivo de distacircncias da imagem TOF
utilizando autovalores locais para a geraccedilatildeo de uma imagem com bordas
intensificadas segmentaccedilatildeo da imagem com bordas intensificadas atraveacutes do
algoritmo de deslocamento pela meacutedia geraccedilatildeo da nuvem de pontos 3D atraveacutes da
projeccedilatildeo ortogonal dos pontos da imagem de bordas segmentada e por fim a
modelagem tridimensional de superfiacutecies do objeto de estudo
O processo de calibraccedilatildeo da cacircmara foi realizado utilizando o meacutetodo
proposto por Zhang (2000) e possibilitou a determinaccedilatildeo de POI A correccedilatildeo
geomeacutetrica das imagens foi feita atraveacutes das coordenadas 1199090 e 1199100 do Ponto
Principal coeficientes de distorccedilatildeo Radial Simeacutetrica de lentes 1198701 e 1198702 e distacircncia
focal calibrada 119891119888
Com os Experimentos 1 e 2 foram realizadas filtragens para o tratamento de
ruiacutedo das imagens TOF disponiacuteveis Nestes experimentos verificou-se que para a
captaccedilatildeo da imagem TOF agrave distacircncia de 13m entre o objeto e a cacircmara o tempo de
integraccedilatildeo de 2000μs foi o que gerou imagens com menor presenccedila de ruiacutedo Assim
como o tempo de integraccedilatildeo de 5000μs foi o mais adequado para captar imagens agrave
distacircncia de 21m No entanto chegou-se a conclusatildeo que para a geraccedilatildeo da nuvem
de pontos 3D natildeo se deveria utilizar filtragem nos dados pois pequenas alteraccedilotildees
no arquivo de distacircncias da imagem TOF poderiam modificar o posicionamento
tridimensional dos pontos o que afetaria a qualidade das medidas realizadas com os
pontos da nuvem 3D
120
A primeira metodologia proposta para a segmentaccedilatildeo da imagem TOF
mostrou-se insatisfatoacuteria para a soluccedilatildeo do problema Empregou-se o crescimento
de regiotildees a partir de pontos semente escolhidos no arquivo de intensidades desta
imagem projetando-os ortogonalmente para a nuvem de pontos 3D utilizando os
valores obtidos com o arquivo de distacircncias da imagem TOF Notou-se que erros no
crescimento de regiotildees ocorreram devido agrave toleracircncia utilizada para a distacircncia do
ponto agrave superfiacutecie plana Isto ocorreu porque a distacircncia foi calculada ao longo do
autovetor que eacute ortogonal a superfiacutecie no ponto semente Por este motivo alguns
pontos de superfiacutecies adjacentes foram selecionados equivocadamente como
pertencentes a uma mesma regiatildeo na nuvem de pontos 3D pois estavam dentro do
limite fixado no criteacuterio de similaridade utilizado mas na realidade natildeo eram
coplanares Para resolver o problema com esta metodologia seria necessaacuterio
estabelecer um limiar de crescimento lateral natildeo apenas de distacircncia ortogonal a
superfiacutecie plana semente Este limiar poderia ser o valor digital do pixel tendo em
vista que superfiacutecies coplanares apresentam uniformidade na resposta espectral A
rugosidade apresentada na superfiacutecie em que se realizava o crescimento da regiatildeo
tambeacutem influenciou em erros na seleccedilatildeo de pontos pois afetou no caacutelculo dos
autovalores fazendo com que inclinaccedilotildees em relaccedilatildeo a esta superfiacutecie fossem
notadas
A segunda metodologia analisada para a segmentaccedilatildeo da imagem TOF
mostrou-se satisfatoacuteria A segmentaccedilatildeo do arquivo de distacircncias da imagem TOF foi
realizada utilizando autovalores locais para a geraccedilatildeo de uma imagem com bordas
intensificadas segmentaccedilatildeo desta imagem com o algoritmo de deslocamento pela
meacutedia e projeccedilatildeo destes segmentos para a nuvem de pontos 3D A extraccedilatildeo de
informaccedilotildees meacutetricas em arestas do objeto de estudo a partir dos pontos 3D
apresentou diferenccedila na ordem de 2cm com a medida de referecircncia sendo a
imagem TOF adquirida com tempo de integraccedilatildeo de 2000μs a uma distacircncia
aproximada de 13m entre o objeto de estudo e a cacircmara
A Figura 61 ilustra as etapas de processamento a serem realizadas para a
geraccedilatildeo da nuvem de pontos 3D utilizando a segunda metodologia considerada
apropriada para a modelagem tridimensional de superfiacutecies utilizando a imagem
TOF Esta eacute a metodologia proposta como conclusatildeo do presente trabalho de
pesquisa
121
FIGURA 61 ndash Etapas da metodologia de processamento da imagem TOF
Foram encontradas medidas com maior qualidade quando a superfiacutecie do
objeto estava paralela ao plano da imagem Esta qualidade tambeacutem foi afetada pela
distacircncia entre a cacircmara e o objeto pela refletividade das superfiacutecies e pela
iluminaccedilatildeo ambiente Conforme o Experimento 6 realizado a aresta frontal do objeto
entre os pontos 2 e 3 apresentou a menor diferenccedila de medida 18cm que equivale
a 5 da distacircncia de referecircncia
Comparaccedilotildees para a diferenccedila de medida encontrada podem ser realizadas
com os seguintes trabalhos Kahlmann et al (2006) obtiveram exatidatildeo de 1cm nas
medidas com o alvo agrave distacircncia de 25m da cacircmara TOF utilizada Wiedemann et al
(2008) obtiveram exatidatildeo de 4cm com o alvo medido a distacircncia de 4m May et al
(2008) obtiveram erro de 30cm para uma medida de 108m considerada como
referecircncia com as imagens TOF captadas do centro de uma sala girando a cacircmara
360ordm e portanto envolviam tambeacutem Paracircmetros de Orientaccedilatildeo Exterior da cacircmara
Kolb et al (2009) obtiveram erro de 2cm para distacircncias medidas de 10m agrave 45m
Nestes trabalhos foram realizadas correccedilotildees geomeacutetricas nas imagens TOF com
POI determinados com a calibraccedilatildeo da cacircmara
Arquivo de distacircncias da imagem TOF
Correccedilatildeo geomeacutetrica dos dados utilizando POI calculados com o processo de calibraccedilatildeo da cacircmara
Imagem de intensidade com bordas itensificadas calculada com a anaacutelise da variaccedilatildeo local dos autovalores
Segmentaccedilatildeo da imagem com bordas intensificadas utilizando o algoriacutetmo de deslocamento pela meacutedia
Projeccedilatildeo ortogonal das aacutereas segmentadas para a geraccedilatildeo da nuvem de pontos 3D
Modelagem tridimensional das superfiacutecies do objeto
122
62 RECOMENDACcedilOtildeES
Recomenda-se realizar a anaacutelise preacutevia do tempo de integraccedilatildeo para a
aquisiccedilatildeo da imagem TOF com o objetivo de diminuir a presenccedila de ruiacutedo Este
tempo deve ser escolhido de acordo com o ambiente em que seraacute adquirida a
imagem e tambeacutem com as caracteriacutesticas de refletividade da superfiacutecie do objeto
Com este mesmo objetivo e devido ao fato desta imagem ser obtida com iluminaccedilatildeo
LED no comprimento de onda infravermelho recomenda-se analisar as influecircncias
da iluminaccedilatildeo exterior ao sistema de iluminaccedilatildeo da cacircmara
De acordo com a aplicaccedilatildeo a que se destina a imagem TOF recomenda-se
tambeacutem realizar a calibraccedilatildeo da cacircmara com meacutetodo fotogrameacutetrico convencional
Isto possibilitaria a melhora na correccedilatildeo geomeacutetrica da imagem e consequente
aumento na qualidade das medidas realizadas com os pontos da nuvem 3D
Correccedilotildees radiomeacutetricas tambeacutem podem ser aplicadas para melhorar a qualidade
das medidas obtidas com a imagem TOF
63 CONSIDERACcedilOtildeES FINAIS
Nuvens de pontos 3D geradas a partir de imagens TOF satildeo ferramentas
para a modelagem tridimensional das superfiacutecies de objetos Propiciam a obtenccedilatildeo
de informaccedilotildees meacutetricas destes objetos para distacircncias de 03 a 70 metros com
erro centimeacutetrico esperado
Aplicaccedilotildees para as imagens TOF podem ser realizadas para a modelagem
3D de tuacuteneis galerias instalaccedilotildees industriais e fachadas de preacutedios com interesse
de preservaccedilatildeo como patrimocircnio histoacuterico e cultural Com a alta frequecircncia de
aquisiccedilatildeo de imagens das cacircmaras TOF torna-se possiacutevel realizar filmagens e
mapeamentos em movimento
Outras aplicaccedilotildees possiacuteveis para as imagens TOF estatildeo na sua utilizaccedilatildeo
para a criaccedilatildeo de cenaacuterios 3D em jogos eletrocircnicos aquisiccedilatildeo de filmes com
tecnologia 3D modelagem tridimensional de obras de arte Biometria e anaacutelise de
movimentos
123
REFEREcircNCIAS BIBLIOGRAacuteFICAS
ANDRADE J B Fotogrametria 2 ed Curitiba SBEE 1998 274 p APUZZO N D‟ Recent advances in 3D full body scanning with applications to fashion and apparel 10p In Proceedings Optical 3-D Measurement Techniques IX Vienna Austria 2009 BALTSAVIAS E P Airborne laser scanning basic relations and formulas ISPRS - Journal of Photogrammetry amp Remote Sensing v 54 p 199-214 1999 BAZAN W S TOMMASELLI A M G GALO M RUY R S A influecircncia das injunccedilotildees de orientaccedilatildeo relativa na calibraccedilatildeo de um sistema dual de cacircmaras digitais 23p Boletim de Ciecircncias Geodeacutesicas v 15 n 3 Curitiba 2009 BELTON D Improving and extending the information on Principal Component Analysis for local neighborhoods in 3D points clouds 8p The international Archives of the Photogrammetry Remote Sensing and Spatial Information Sciences v XXXVII B5 Beijing 2008 BELTON D LICHTI D Classification and segmentation of terrestrial laser scanner point clouds using local variance information 6p In Proceedings ISPRS Commission V Simposium bdquoImage Engineering and Vision Metrology‟ 2006 BROWN D C Close-Range Camera Calibration Photogrammetric Engineering v 37 nordm 8 p 855-866 1971 CENTENO J A S Sensoriamento Remoto e Processamento de Imagens Digitais Curso de Poacutes-Graduaccedilatildeo em Ciecircncias Geodeacutesicas Curitiba UFPR 2004 209p CENTENO J A S JUTZI B Evaluation of range imaging sensor concerning resolution and illumination 6p In Proceedings The 2010 Canadian Geomatics Conference and Symposium of Commission I ISPRS Calgary Alberta 2010 CHRISTOUDIAS M C GEORGESCU B MEER P Synergism in Low Level Vision IEEE Transactions on Pattern Analysis and Machine Intelligence v 24 n 5 p 603-619 2002
124
COMANICIU D MEER P Mean Shift A Robust Approach Toward Feature Space Analysis 17p IEEE Transactions on Pattern Analysis and Machine Intelligence v 24 n 5 p 603-619 2002 FUCHS S HIRZINGER G Extrinsic and depth calibration of ToF cameras In Proceedings IEEE Conference on Computer Vision and Pattern Recognition (CVPR) Anchorage USA 2008 FUCHS S MAY S Calibration and registration for precise surface reconstruction with ToF cameras In Proceedings of the Dynamic 3D Imaging Workshop in Conjunction with DAGM (Dyn3D) v I Heidelberg Germany 2007 GEMAEL C Introduccedilatildeo ao ajustamento de observaccedilotildees aplicaccedilotildees geodeacutesicas 3 ed Curitiba UFPR 1994 319p GONZALEZ R C WOODS R E Processamento de imagens digitais Satildeo Paulo Edgard Bluumlcher Ltda 2000 509p GROSS H THOENNESSEN U Extraction of lines from laser point clouds p 86-91 In Proceedings Symposium of ISPRS Commission III Photogrammetric Computer Vision PCV06 Eds Foumlrstner W Steffen R International Archives of Photogrammetry Remote Sensing and Spatial Information Sciences 36 (Part 3) 2006 HABIB A MORGAN M Automatic calibration of low-cost digital cameras p 948-955 Journal of Photogrammetric Record 2003 JAMTSHO S Geometric modelling of 3D Range Cameras and their application for structural deformation measurement 174p (Master‟s Thesis Department of Geomatics Engineering) University of Calgary Alberta 2010 JOHNSON R A WICHERN D W Applied multivariate statistical analysis 4 ed New Jersey Pearson Prentice Hall 1998 JUTZI B GROSS H Nearest neighbor classification on laser point clouds to gain object structures from buildings 6p In Proceedings ISPRS Hannover Workshop 2009 High-Resolution Earth Imaging for Geospatial Information Disponiacutevel em lthttpwwwisprsorgproceedingsXXXVIII1_4_7-W5paperpapershtmgt Acesso 16112010
125
KAHLMANN T REMONDINO F INGENSAND H Calibration for increased accuracy of the range imaging camera SwissrangerTM ISPRS Commission V Symposium bdquoImage Engineering and Vision Metrology‟ v XXXVI n 5 2006 KEMENY S E EL-SAYED E MENDIS S FOSSUM E R Update on focal-plane image processing research 8p SPIE v 1447 Charged-Coupled Devices and Solid Optical Sensors II 1991 KHONGSAB P Signal processing and performance evaluation of a PMD camera for space docking 88p (Master‟s Thesis Continuation Courses Space Science and Technology Department of Space Science) Lulea University of Techology Kiruna 2009 KOCH R SCHILLER I BARTCZAK B KELLNER F KOumlSER K MixIn3D 3D mixed reality with ToF camera 16p In Work Programme of the EU‟s 7th Framework program 2009 KOLB A BARTH E KOCH R LARSEN R Time-of-Flight sensors in Computer Graphics 16p In STAR ndash State of The Art Report The Eurographics Association 2009 LANGE R 3D Time-of-Flight distance measurement with custom solid-state image sensors in CMOSCCD-technology 205 p (Dissertation Department of Electrical Engineering and Computer Science at University of Siegen for the degree of Doctor of Technical Sciences) Univesity of Siegen Alemanha 2000 LEON S J Linear Algebra with applications 4 ed Dartmouth Prentice Hall 1998 390p LUAN X Experimental investigation of Photonic Mixer Device and development of TOF 3D ranging systems based on PMD technology A dissertation submitted to the Department of Electrical Engineering and Computer Science at University of Siegen Siegen 2001 MACHADO A M L Extraccedilatildeo automaacutetica de contornos de edificaccedilotildees utilizando imagem gerada por cacircmara digital de pequeno formato e dados LIDAR 201 p Tese apresentada ao Curso de Poacutes-Graduaccedilatildeo em Ciecircncias Geodeacutesicas da Universidade Federal do Paranaacute Curitiba UFPR 2006
126
MASS H G VOSSELMAN Two algorithms for extracting building models from raw laser altimetry data 11p Elsevier Science Photogrammetry amp Remote Sensing 1999 MAY S DROESCHEL D HOLTZ D WIESEN C FUCHS S 3D Pose estimation and mapping with time-of-flight cameras 6p Germany 2008 Disponiacutevel em httpwwwroboticdefileadminroboticfuchsiros08_3dcampdf Acesso em 2510 2010 MITISHITA E A Monorestituiccedilatildeo digital de aerofotos associada com sistema de computaccedilatildeo graacutefica CAD para fins de mapeamento na aacuterea florestal 251p Tese (Doutorado em Engenharia Florestal) ndash Setor de Ciecircncias Agraacuterias Universidade Federal do Paranaacute 1997 MOumlLLER T KRAFT H FREY J ALBRECHT M LANGE R Robust 3D measurement with PMD sensors 2005 PAULY M GROSS M KOBBELT L P Efficient simplification of point-sampled surfaces 8p In VIS ‟02 Proceedings of the Conference on Visualization ‟02 Washington DC USA 2002 IEEE Computer Society PECHT Y FOSSUM E R Wide intrascene dynamic range CMOS APS using dual sampling IEEE Transactions on Electron Devices v 44 n 10 1997 PMD Technologies PMD [vison]regCamCube 20 4p Datasheet n 20090601 Siegen 2009 Disponiacutevel em lthttpwwwpmdteccomproducts-servicespmdvisionr-cameraspmdvisionr-camcube-20gt Acesso em 0103 2010 PMD Technologies PMD [vison]regCamCube 20 Software development tutorial 13p Siegen 2009 Disponiacutevel em lthttpwwwpmdteccomfileadminpmdtecdownloadsdocumentationcamcube_softwaredevelopmenttutorialpdfgt Acesso em 1504 2010 RAPP H Experimental and theoretical investigation of correlating TOF-camera systems 71p Diploma Thesis in Physics Faculty for Physics and Astronomy University of Heidelberg Alemanha 2007 RINGBECK T A 3D Time Of Flight camera for object detection 10p In Proceedings Optical 3D Measurement Techniques Plenary Session 1 Range Imaging I Zuumlrich 2007
127
SHAKARJI C M Least-Squares fitting algorithms of the NIST algorithm testing system 9p Journal of research of the national of standards and technology v 103 n 6 1998 THEUWISSEN A Solid-state imaging with Charge-Coupled Devices PP 34-46 Kluwer Academic Publishers 1995 Disponiacutevel em ltwwwspringerlinkcomgt Acesso em 08072010
WIEDEMANN M SAUER M DRIEWER F SCHILLING K Analysis and characterization of the PMD camera for application in mobile robotics 6p In Proceedings of the 17th World Congress The International Federation of Automatic Control Seoul Korea July 6-11 2008 ZHANG Z A flexible new technique for camera calibration 5p IEEE Transactions on Pattern Analysis and Machine Intelligence November 2000

v
AGRADECIMENTOS
Aos meus pais familiares namorada e amigos pelo apoio incentivo e
companheirismo
Ao Prof Dr Jorge Antonio Silva Centeno pela orientaccedilatildeo e confianccedila
Aos Professores amigos e colegas do Curso de Poacutes-Graduaccedilatildeo em
Ciecircncias Geodeacutesicas e do Curso de Engenharia Cartograacutefica da Universidade
Federal do Paranaacute pelos momentos compartilhados
Aos colaboradores da UFPR que com seu trabalho e dedicaccedilatildeo fazem a
Universidade funcionar
Ao Conselho Nacional de Desenvolvimento Cientiacutefico e Tecnoloacutegico (CNPq)
pelo fomento
Ao instituto de Fotogrametria e Sensoriamento Remoto da Universidade de
Karlsruhe (KIT ndash Karlsruhe Institute of Tecnology) pela cooperaccedilatildeo e empreacutestimo da
cacircmara PMD CamCube 20 utilizada para obter as imagens TOF analisadas neste
trabalho Ao Prof Dr Jorge A S Centeno pela captaccedilatildeo das imagens na Alemanha
no iniacutecio do ano 2010 e a Fabiana Castro pela aquisiccedilatildeo de novas imagens TOF
Aos componentes da banca avaliadora Prof Dr Antonio Maria Garcia
Tommaselli e Prof Dr Hideo Araki que contribuiacuteram com importantes observaccedilotildees
para a melhora deste trabalho de pesquisa
Muito Obrigado
vi
RESUMO
Neste trabalho estudou-se a modelagem tridimensional de superfiacutecies
utilizando imagens TOF (Time-Of-Flight) para isto avaliou-se a qualidade dos dados
obtidos com a cacircmara PMD[vision]regCamCube 20 Este equipamento calcula a
distacircncia de objetos em relaccedilatildeo ao seu sensor utilizando o princiacutepio TOF Com o
objetivo de corrigir a geometria dos dados contidos na imagem foram calculados
Paracircmetros de Orientaccedilatildeo Interior (POI) atraveacutes do processo de calibraccedilatildeo da
cacircmara Estes paracircmetros definem a geometria interior do sistema de lentes e
permitem fazer as correccedilotildees geomeacutetricas necessaacuterias Outro fator que influenciou na
qualidade dos dados foi agrave presenccedila de ruiacutedo em funccedilatildeo da iluminaccedilatildeo que pode ser
controlada variando o tempo de integraccedilatildeo na aquisiccedilatildeo das imagens Duas opccedilotildees
para a reduccedilatildeo do ruiacutedo foram analisadas filtragem no domiacutenio espacial e no tempo
de integraccedilatildeo Experimentos com os filtros passa-baixas pela meacutedia e mediana
foram realizados a fim de reduzir o ruiacutedo no domiacutenio espacial Com a mesma
finalidade a meacutedia para cada tempo de integraccedilatildeo foi calculada a partir de uma
seacuterie de cinco imagens tomadas com o mesmo ponto de vista A partir destes
experimentos foi determinado o melhor tempo de integraccedilatildeo para a aquisiccedilatildeo da
imagem A etapa seguinte consistiu na segmentaccedilatildeo da imagem para identificar
superfiacutecies do objeto de estudo Em uma primeira abordagem aplicou-se o meacutetodo
de crescimento de regiotildees utilizando a distacircncia do ponto ao plano como criteacuterio de
similaridade A segunda abordagem utilizou o caacutelculo de autovalores locais para
gerar uma nova imagem onde as bordas dos objetos foram evidenciadas Esta nova
imagem foi segmentada para obter superfiacutecies de interesse do objeto atraveacutes do
algoritmo de deslocamento pela meacutedia A partir do arquivo com as distacircncias da
imagem TOF e dos POI piacutexeis da imagem segmentada foram projetados
ortogonalmente gerando uma nuvem de pontos com coordenadas 3D Com isto as
dimensotildees de arestas do objeto foram comparadas com medidas de referecircncia
encontrando-se diferenccedilas na ordem de 2 centiacutemetros Finalizando o estudo as
superfiacutecies do objeto foram modeladas tridimensionalmente
Palavras-chave Imagem TOF Modelagem tridimensional de superfiacutecies
Calibraccedilatildeo de cacircmaras Anaacutelise de ruiacutedo Autovalores Autovetores Projeccedilatildeo
Ortogonal Segmentaccedilatildeo Crescimento de regiotildees em nuvem de pontos 3D
Algoritmo de deslocamento pela meacutedia
vii
ABSTRACT
This work aims at studying the quality of 3D data obtained with a range
camera the PMD[vision]regCamCube 20 and assessing its potential to model object
surfaces The equipment computes the distance to the objects using the Time-Of-
Flight (TOF) principle Initially the equipment was calibrated using camera calibration
methods The Interior Orientation Parameters (IOP) allow reducing geometric
distortion in the images Another factor that influences the quality of data is the
presence of noise caused by illumination conditions which can be controlled by
varying the integration time of the light source Two options to reduce noise were
analyzed spatial filtering with low-pass and median filter and computing the
average of a series of images taken from the same point of view After determining
the best integration time and Interior Orientation Parameters the 3D coordinates of a
point cloud was computes The next step consists in image segmentation to identify
the surfaces of an object In a first approach it is applied a region growing method
using the point-plane distance as similarity parameter The second approach is
based on the calculation of local eigenvalues using small moving windows to
generate a new image where borders are highlighted This new image is segmented
using the mean-shift approach to delineate the surfaces of interest Each interest
pixel of the segmented image was projected for the 3D points cloud The dimensions
of the object are compared with real values The comparison showed differences
around 2cm within the expected range Finally the object surfaces can then be
modeled with the 3D points cloud
Keywords TOF image Range image Three-dimensional modeling surfaces
Camera calibration Noise analysis Eigenvalues Eigenvectors Orthogonal
projection Segmentation Region growing in 3D point clouds Mean Shift Algorithm
viii
LISTA DE FIGURAS
FIGURA 21 ndash Princiacutepio TOF 19
FIGURA 22 ndash Meacutetodo da diferenccedila de fase 20
FIGURA 23 ndash FC utilizada no meacutetodo da diferenccedila de fase 23
FIGURA 24 ndash Informaccedilatildeo das imagens TOF 25
FIGURA 25 ndash Imagem TOF obtida com cacircmara PMD 26
FIGURA 26 ndash Ruiacutedo na nuvem de pontos 3D proveniente de imagem TOF 27
FIGURA 27 ndash Princiacutepio de funcionamento do sistema PMD 28
FIGURA 28 ndash Captaccedilatildeo da carga do sinal em sensores CCD e CMOS 29
FIGURA 29 ndash Representaccedilatildeo de campos de franja 30
FIGURA 210 ndash Princiacutepio de armazenamento de cargas em sensores TOF 31
FIGURA 211 ndash Princiacutepio de captaccedilatildeo de cargas pelo sensor PMD 32
FIGURA 212 ndash Medida da diferenccedila de fase do sinal recebido 33
FIGURA 213 ndash Medida de distacircncia com a cacircmara PMD 35
FIGURA 214 ndash Cacircmara PMD CamCube 20 36
FIGURA 215 ndash Imagem captada com a cacircmara PMD CamCube 20 37
FIGURA 216 ndash Princiacutepio de funcionamento do SBI 39
FIGURA 217 ndash Modelos de cacircmaras TOF 39
FIGURA 218 ndash Nuvem de pontos 3D gerada a partir de imagem TOF 44
FIGURA 219 ndash Colinearidade entre os pontos no espaccedilo imagem e objeto 45
FIGURA 220 ndash Sistemas de coordenadas utilizados em imagens 47
FIGURA 221 ndash Filtro para a definiccedilatildeo de bordas do objeto 51
FIGURA 222 ndash Geometria do filtro para a definiccedilatildeo de bordas 52
FIGURA 223 ndash Autovetores em nuvem de pontos 3D de uma superfiacutecie plana 55
FIGURA 224 ndash Inclinaccedilotildees de superfiacutecies determinadas por autovalores 59
FIGURA 225 ndash Imagem segmentada 66
FIGURA 41 ndash Processamento da imagem TOF 69
FIGURA 42 ndash Filtragem passa-baixas pela meacutedia 80
FIGURA 43 ndash Filtragem pela mediana 80
FIGURA 44 ndash Filtragem utilizando a meacutedia temporal 81
FIGURA 45 ndash Intensificaccedilatildeo de bordas com autovalores 85
FIGURA 46 ndash Imagem com bordas intensificadas 85
FIGURA 51 ndash Imagens do gabarito utilizadas na calibraccedilatildeo da cacircmara 87
FIGURA 52 ndash Orientaccedilatildeo Exterior das fotografias para a calibraccedilatildeo da cacircmara 88
FIGURA 53 ndash Direccedilatildeo das distorccedilotildees nos pontos da imagem TOF 88
ix
FIGURA 54 ndash Correccedilatildeo geomeacutetrica da imagem TOF 90
FIGURA 55 ndash Desvio padratildeo x TI janelas 10x10 93
FIGURA 56 ndash Imagens para TI=500μs e d=130m 93
FIGURA 57 ndash Imagens para TI=2000μs e d=130m 94
FIGURA 58 ndash Imagens para TI=2500μs e d=130m 95
FIGURA 59 ndash Desvios padratildeo para distacircncia x TI 96
FIGURA 510 ndash Desvios padratildeo para janelas com TI=2000μs d=130m 97
FIGURA 511 ndash Janelas de 40x40 piacutexeis TI=2000μs d=130m 97
FIGURA 512 ndash Desvios padratildeo para janelas com TI=5000μs d=130m 98
FIGURA 513 ndash Janelas de 40x40 piacutexeis TI=5000μs d=130m 98
FIGURA 514 ndash Desvios padratildeo para janelas com TI=2000μs d=210m 99
FIGURA 515 ndash Janelas de 40x40 piacutexeis TI=2000μs d=210m 99
FIGURA 516 ndash Desvios padratildeo para janelas com TI=5000μs d=210m 100
FIGURA 517 ndash Janelas de 40x40 piacutexeis TI=5000μs d=210m 100
FIGURA 518 ndash Desvios padratildeo para janelas com TI=7000μs d=210m 101
FIGURA 519 ndash Janelas de 40x40 piacutexeis TI=7000μs d=210m 101
FIGURA 520 ndash Arquivo de intensidades da imagem TOF obtida do objeto 103
FIGURA 521 ndash Arquivo de distacircncias da imagem TOF com geometria corrigida 104
FIGURA 522 ndash Nuvem de pontos vista frontal 104
FIGURA 523 ndash Nuvem de pontos vista perspectiva 3D 105
FIGURA 524 ndash Pontos semente no arquivo de intensidades da imagem TOF 106
FIGURA 525 ndash Crescimento de regiotildees vista frontal 107
FIGURA 526 ndash Crescimento de regiotildees vista perspectiva 3D 107
FIGURA 527 ndash Imagem com bordas intensificadas gerada com 1205821 109
FIGURA 528 ndash Imagem com bordas intensificadas gerada com 1205822 109
FIGURA 529 ndash Imagem com bordas intensificadas gerada com 1205823 109
FIGURA 530 ndash Imagens de intensidade com as bordas do objeto intensificadas 110
FIGURA 531 ndash Imagem com bordas intensificadas segmentada 111
FIGURA 532 ndash Nuvem de pontos da imagem segmentada vista frontal 112
FIGURA 533 ndash Nuvem de pontos da imagem segmentada vista 3D 113
FIGURA 534 ndash Nuvem de pontos 3D segmentada 114
FIGURA 535 ndash Pontos 3D selecionados na nuvem 114
FIGURA 536 ndash Dimensotildees de referecircncia do objeto de estudo 115
FIGURA 537 ndash Nuvem de pontos 3D das superfiacutecies frontal e superior 117
FIGURA 538 ndash Modelagem tridimensional das superfiacutecies frontal e superior 118
x
LISTA DE QUADROS E TABELAS
QUADRO 21 ndash Especificaccedilotildees teacutecnicas da cacircmara PMD CamCube 20 37
QUADRO 22 ndash Especificaccedilotildees teacutecnicas de cacircmaras TOF 40
QUADRO 23 ndash Propriedades de superfiacutecies normais obtidas com autovalores 57
TABELA 51 ndash Paracircmetros de Orientaccedilatildeo Interior calculados 89
TABELA 52 ndash Coordenadas 3D dos pontos e medidas realizadas 116
xi
LISTA DE SIGLAS
Sigla Significado
AMISE Asymptotic Mean Integrated Square Error
CCD Charge Coupled Device
CMOS Complementary Metal Oxide Semiconductor
CP Centro Perspectivo
EDISON Edge Detection and Image SegmentatiON System
FC Funccedilatildeo de Correlaccedilatildeo
FPN Fixed Pattern Noise
FPS Frames Per Second
LASER Light Amplification by Stimulated Emission of Radiation
LED Light Emitting Diode
MDE Modelo Digital de Elevaccedilatildeo
MVC Matriz de Variacircncias e Covariacircncias
PMD Photonic Mixer Device
POE Paracircmetros de Orientaccedilatildeo Exterior
POI Paracircmetros de Orientaccedilatildeo Interior
PP Ponto Principal
SBI Supression of Background Ilumination
TI Tempo de Integraccedilatildeo
TOF Time-Of-Flight
xii
SUMAacuteRIO
1 INTRODUCcedilAtildeO 14
11 OBJETIVO GERAL 16
12 OBJETIVOS ESPECIacuteFICOS 16
13 JUSTIFICATIVA 17
14 ESTRUTURA DA DISSERTACcedilAtildeO 18
2 REVISAtildeO BIBLIOGRAacuteFICA 19
21 MEDIDA DE DISTAcircNCIA COM O PRINCIacutePIO TOF 19
22 IMAGEM TOF 25
23 TEMPO DE INTEGRACcedilAtildeO 26
24 PRINCIacutePIO DE FUNCIONAMENTO DO SENSOR PMD 28
25 CAcircMARAS PMD 34
251 Cacircmara PMD CamCube 20 36
252 Dispositivo SBI 38
253 Modelos de cacircmaras TOF 39
26 ERROS DE MEDIDA 40
261 Erros natildeo-sistemaacuteticos em cacircmaras TOF 41
262 Erros sistemaacuteticos em cacircmaras TOF 41
27 PROJECcedilAtildeO ORTOGONAL DOS PONTOS 45
28 REFINAMENTO DA NUVEM DE PONTOS 3D 50
29 ANAacuteLISE DE SUPERFIacuteCIES POR AUTOVALORES E AUTOVETORES 53
210 ANAacuteLISE DE SUPERFIacuteCIES POR MOMENTOS INVARIANTES 56
211 ALGORITMO DE DESLOCAMENTO PELA MEacuteDIA 60
3 MATERIAIS 67
4 MEacuteTODOS 68
41 CALIBRACcedilAtildeO DA CAcircMARA 69
42 ANAacuteLISE DA PRESENCcedilA DE RUIacuteDO 78
421 Filtragem passa-baixas pela meacutedia 79
422 Filtragem pela mediana 80
423 Filtragem com a meacutedia temporal 81
43 SEGMENTACcedilAtildeO 82
431 Crescimento de regiotildees a partir de superfiacutecies planas e ponto semente 82
xiii
432 Segmentaccedilatildeo por anaacutelise da variaccedilatildeo local de autovalores 84
433 Segmentaccedilatildeo com o algoritmo de deslocamento pela meacutedia 86
5 RESULTADOS E DISCUSSOtildeES 87
51 CALIBRACcedilAtildeO DA CAcircMARA 87
52 EXPERIMENTO 1 ndash ANAacuteLISE DE RUIacuteDO 1 IMAGEM TOF INTEIRA 92
53 EXPERIMENTO 2 ndash ANAacuteLISE DE RUIacuteDO 2 JANELAS DE 40X40 PIacuteXEIS 96
54 EXPERIMENTO 3 ndash PROJECcedilAtildeO ORTOGONAL DOS PONTOS 102
55 EXPERIMENTO 4 ndash SEGMENTACcedilAtildeO 1 CRESCIMENTO DE REGIOtildeES 106
56 EXPERIMENTO 5 ndash SEGMENTACcedilAtildeO 2 ANAacuteLISE COM AUTOVALORES 108
57 EXPERIMENTO 6 ndash ANAacuteLISE DAS MEDIDAS OBTIDAS 113
58 MODELAGEM DAS SUPERFIacuteCIES 3D 117
6 CONCLUSOtildeES RECOMENDACcedilOtildeES E CONSIDERACcedilOtildeES FINAIS 119
61 CONCLUSOtildeES 119
62 RECOMENDACcedilOtildeES 122
63 CONSIDERACcedilOtildeES FINAIS 122
REFEREcircNCIAS BIBLIOGRAacuteFICAS 123
14
1 INTRODUCcedilAtildeO
A informaccedilatildeo meacutetrica para a representaccedilatildeo espacial de objetos eacute uma
necessidade para diferentes aacutereas de estudo Algumas aplicaccedilotildees exigem que o
processo de aquisiccedilatildeo e representaccedilatildeo graacutefica desta informaccedilatildeo seja realizado com
rapidez e qualidade Em Ciecircncias Geodeacutesicas a obtenccedilatildeo desta informaccedilatildeo pode
ser feita atraveacutes de diversas maneiras dentre elas citam-se os levantamentos de
campo e as imagens obtidas por sensores remotos exemplos satildeo teacutecnicas
aplicadas em Topografia e Fotogrametria
Com a Topografia o trabalho pode alcanccedilar alto grau de exatidatildeo
dependendo da teacutecnica e precisatildeo do equipamento utilizado No entanto se gasta
bastante tempo para realizar o levantamento das informaccedilotildees em campo e tambeacutem
para o processamento e organizaccedilatildeo dos dados em escritoacuterio Algumas aplicaccedilotildees
da Topografia estatildeo na locaccedilatildeo de obras como rodovias geraccedilatildeo de perfis de
terrenos e rios monitoramento de deformaccedilotildees na estrutura de barragens pontes e
tambeacutem no levantamento de pontos 3D para representar fachadas de edifiacutecios
Com a Fotogrametria o levantamento das informaccedilotildees tridimensionais de um
objeto pode ser feito em tempo relativamente curto As fotografias satildeo obtidas de
forma instantacircnea No entanto quando se utilizam teacutecnicas convencionais de
Fotogrametria necessita-se de pelo menos duas fotografias com sobreposiccedilatildeo das
aacutereas imageadas para a geraccedilatildeo do modelo fotogrameacutetrico Outra forma eacute a teacutecnica
conhecida por Monorestituiccedilatildeo Digital onde se utiliza uma fotografia digital em
conjunto com um Modelo Digital de Elevaccedilatildeo (MDE) normalmente gerado por uma
nuvem de pontos proveniente de outro equipamento ou sensor (MITISHITA 1997)
Na modalidade terrestre da Fotogrametria eacute possiacutevel determinar pontos 3D
para representar fachadas de preacutedios obras de arte mapeamentos de ruas e
imoacuteveis com a plataforma em movimento dentre outras aplicaccedilotildees
Aleacutem das teacutecnicas convencionais de levantamentos utilizadas em Topografia
e Fotogrametria e com o objetivo de viabilizar a aquisiccedilatildeo da informaccedilatildeo espacial
equipamentos e teacutecnicas tecircm sido constantemente desenvolvidos e aperfeiccediloados
Avanccedilos tecnoloacutegicos tecircm possibilitado a obtenccedilatildeo da informaccedilatildeo tridimensional
para a representaccedilatildeo dos objetos de forma raacutepida e precisa Exemplos satildeo os
sistemas de varredura laser scanner e as cacircmaras TOF (Time-Of-Fligth) tambeacutem
15
conhecidas na literatura por Range Cameras Estas cacircmaras geram imagens com
informaccedilotildees de distacircncia para cada pixel do objeto imageado denominadas
imagens de profundidade distacircncia ou Range Image Neste trabalho seraacute utilizada
preferencialmente a denominaccedilatildeo ldquoimagem TOFrdquo
Nas uacuteltimas deacutecadas os sistemas de varredura laser scanner tecircm sido muito
utilizados para mapeamento Equipamentos com esta tecnologia possibilitam a
obtenccedilatildeo de milhares de pontos por segundo e podem ser instalados em
plataformas aeacutereas ou terrestres No entanto devido a este ser um equipamento
oacuteptico e mecacircnico o alto custo na sua aquisiccedilatildeo torna-o inviaacutevel para algumas
aplicaccedilotildees
Cacircmaras TOF atraem a atenccedilatildeo de diferentes aacutereas que necessitam de
pontos com coordenadas 3D de seus objetos de estudo tais como a Visatildeo
Computacional e a Engenharia de Automaccedilatildeo Um modelo de cacircmara TOF eacute a PMD
CamCube 20 que capta 25 imagens por segundo (Frames Per Secunde - FPS)
Com esta frequecircncia de aquisiccedilatildeo pode obter o movimento dos objetos na cena e de
grande quantidade de informaccedilatildeo tridimensional sobre os mesmos
No entanto a grande quantidade de dados captada deve ter sua qualidade
avaliada A iluminaccedilatildeo exterior ao sistema interfere negativamente Outro fator a ser
observado eacute a configuraccedilatildeo da cena pois interferecircncias satildeo causadas pelas
distacircncias orientaccedilotildees e refletividade das superfiacutecies dos objetos em relaccedilatildeo ao
sensor da cacircmara Em uma mesma cena podem-se apresentar medidas ambiacuteguas
de distacircncia para os pontos devido a erros causados pela iluminaccedilatildeo utilizada no
sistema As influencias causadas por erros sistemaacuteticos assim como ruiacutedos devem
ser observadas para cada tipo de aplicaccedilatildeo (MAY et al 2008)
A cacircmara TOF utilizada para a aquisiccedilatildeo das imagens nesta pesquisa foi a
PMD[vision]regCamCube 20 Esta utiliza um sensor de imageamento PMD (Photonic
Mixer Device) que possibilita armazenar informaccedilatildeo de distacircncia para os piacutexeis de
uma imagem de intensidade O equipamento fornece a imagem TOF que eacute
composta por um arquivo com as intensidades que o sinal retornou para o sensor e
um arquivo com as informaccedilotildees de distacircncia para cada pixel o que possibilita a
percepccedilatildeo da profundidade dos objetos na cena
16
11 OBJETIVO GERAL
O objetivo geral deste trabalho de pesquisa eacute desenvolver uma metodologia
para a modelagem tridimensional das superfiacutecies de objetos a partir da nuvem de
pontos 3D proveniente da imagem TOF
12 OBJETIVOS ESPECIacuteFICOS
Realizar a correccedilatildeo geomeacutetrica dos dados da imagem TOF atraveacutes de
Paracircmetros de Orientaccedilatildeo Interior obtidos com o processo de
calibraccedilatildeo da cacircmara
Testar meacutetodos de filtragem para a reduccedilatildeo de ruiacutedo presente nas
imagens TOF e analisar formas para a aquisiccedilatildeo da imagem TOF
com menor presenccedila de ruiacutedo
Analisar o tempo de integraccedilatildeo para diferentes situaccedilotildees de aquisiccedilatildeo
da imagem TOF
Avaliar meacutetodos para a segmentaccedilatildeo das superfiacutecies de objetos a
partir da imagem TOF
Gerar nuvem de pontos com coordenadas tridimensionais das
superfiacutecies segmentadas e modelar estas superfiacutecies
tridimensionalmente
Avaliar a qualidade das medidas obtidas com a modelagem
tridimensional das superfiacutecies do objeto de estudo
17
13 JUSTIFICATIVA
Com o desenvolvimento e aperfeiccediloamento das cacircmaras TOF acredita-se
na viabilizaccedilatildeo deste equipamento para a medida de distacircncia e modelagem
tridimensional das superfiacutecies de objetos para diferentes finalidades Apresenta as
seguintes vantagens
Recobrimento da aacuterea de forma instantacircnea
Possibilidade de filmar a cena registrando o movimento dos objetos
com frequecircncia de aquisiccedilatildeo de 25 imagens por segundo
Fornece grande quantidade de pontos com coordenadas 3D dos
objetos imageados
Uma imagem eacute suficiente para estimar a distacircncia dos objetos
Informaccedilatildeo na banda espectral do infravermelho
Uma imagem TOF captada instantaneamente disponibiliza informaccedilatildeo sobre
a distacircncia de objetos contidos na cena sendo possiacutevel a geraccedilatildeo de nuvens de
pontos para a representaccedilatildeo tridimensional de objetos sem necessitar de
informaccedilatildeo proveniente de outro sensor Outra vantagem eacute o sistema natildeo precisar
de iluminaccedilatildeo exterior
Algumas aplicaccedilotildees para as imagens TOF foram realizadas nas aacutereas de
prevenccedilatildeo de acidentes automobiliacutesticos e seguranccedila de pedestres (RINGBECK
2007) Visatildeo Computacional (WIEDEMANN et al 2008) mapeamentos
tridimensionais de objetos em ambientes fechados para a movimentaccedilatildeo roboacutetica
(MAY et al 2008) Computaccedilatildeo Graacutefica (KOLB 2009 et al KOCH et al 2009)
realizaccedilatildeo de medidas do corpo humano para a induacutestria de roupas (APUZZO
2009) e anaacutelise de deformaccedilotildees (JAMTSHO 2010)
18
14 ESTRUTURA DA DISSERTACcedilAtildeO
A presente dissertaccedilatildeo foi estruturada em seis capiacutetulos No primeiro
capitulo realiza-se a introduccedilatildeo ao tema descreve-se o objetivo geral e os objetivos
especiacuteficos aleacutem da justificativa para a pesquisa
O segundo capiacutetulo apresenta uma revisatildeo de conceitos sobre medida de
distacircncia utilizando o princiacutepio TOF descriccedilatildeo da imagem TOF e seus arquivos de
intensidades e distacircncias influencia do tempo de integraccedilatildeo (TI) na aquisiccedilatildeo da
imagem TOF princiacutepio de funcionamento do sensor PMD modelos de cacircmaras
TOF erros de medida que podem ocorrer utilizando estas cacircmaras projeccedilatildeo
ortogonal das distacircncias obtidas com a imagem TOF para a geraccedilatildeo da nuvem de
pontos 3D meacutetodo para o refinamento da nuvem de pontos 3D detecccedilatildeo de
superfiacutecies por autovetores e autovalores anaacutelise de superfiacutecies por momentos
invariantes e algoritmo de deslocamento pela meacutedia para a segmentaccedilatildeo de
imagens
No terceiro capitulo descrevem-se os materiais equipamentos e espaccedilo
fiacutesico utilizado para a realizaccedilatildeo do trabalho de pesquisa
Com o quarto capitulo satildeo descritos os meacutetodos utilizados para o
desenvolvimento da pesquisa calibraccedilatildeo da cacircmara filtragens para anaacutelise e
tratamento de ruiacutedo presente nas imagens meacutetodos de segmentaccedilatildeo por
crescimento de regiotildees na nuvem de pontos segmentaccedilatildeo por anaacutelise da variaccedilatildeo
local de autovalores no arquivo de distacircncias da imagem TOF e geraccedilatildeo de imagem
de intensidade com as bordas do objeto intensificadas segmentaccedilatildeo da imagem
com bordas intensificadas utilizando o algoritmo de deslocamento pela meacutedia
Com o quinto capitulo descrevem-se os resultados obtidos tais como
valores dos paracircmetros calculados no processo de calibraccedilatildeo da cacircmara
experimentos realizados para a anaacutelise da presenccedila de ruiacutedo nas imagens TOF
projeccedilatildeo ortogonal dos pontos para a geraccedilatildeo da nuvem de pontos 3D
segmentaccedilatildeo por crescimento de regiotildees segmentaccedilatildeo por anaacutelise da variaccedilatildeo
local de autovalores anaacutelise das medidas obtidas com a nuvem de pontos 3D
segmentada e tambeacutem se realiza a modelagem tridimensional de duas superfiacutecies
do objeto estudado
Finalmente com o sexto capitulo satildeo apresentadas conclusotildees
consideraccedilotildees finais e recomendaccedilotildees para trabalhos futuros de acordo com os
experimentos realizados
19
2 REVISAtildeO BIBLIOGRAacuteFICA
21 MEDIDA DE DISTAcircNCIA COM O PRINCIacutePIO TOF
O princiacutepio TOF (Time-Of-Flight) permite calcular a distacircncia de objetos a
partir da emissatildeo e recepccedilatildeo de um sinal luminoso Com este objetivo utiliza-se um
conjunto de emissor e receptor oacutepticos que mede o tempo necessaacuterio para o sinal
retornar para o sensor apoacutes atingir o alvo com base no conhecimento do valor da
velocidade da luz propagada no vaacutecuo De acordo com Baltsavias (1999) o caacutelculo
da distacircncia com o princiacutepio TOF pode ser realizado atraveacutes de dois meacutetodos
Tempo de percurso de pulsos curtos de energia
Mudanccedila de fase de um sinal modelado na forma de onda contiacutenua
Sistemas que utilizam o primeiro meacutetodo de medida transmitem um pulso e
medem o seu tempo de retorno Isto eacute possiacutevel devido ao retardo de tempo gasto no
percurso do sinal que eacute medido atraveacutes de um ponto no pulso de retorno com
referecircncia no pulso emitido Quanto melhor eacute a medida do tempo melhor a distacircncia
calculada sendo o reloacutegio do sensor um fator de grande importacircncia neste meacutetodo
Para obter precisatildeo meacutetrica necessita-se realizar a medida de tempo em nano
segundos (ƞs) O afastamento e duraccedilatildeo do pulso tambeacutem satildeo fatores importantes
na resoluccedilatildeo da medida de distacircncia com este meacutetodo A Figura 21 Ilustra a medida
de distacircncia com o princiacutepio TOF (LANGE 2000)
FIGURA 21 ndash Princiacutepio TOF
FONTE LANGE (2000)
20
Utilizando pulsos de uma fonte de luz pode-se calcular a distacircncia de um
alvo atraveacutes da Equaccedilatildeo (21)
119863 =119888 119905
2 (21)
onde
119863 ndash Distacircncia entre o sensor e o alvo
119888 ndash Valor constante da velocidade da luz
119905 ndash Variaccedilatildeo de tempo entre emissatildeo e recepccedilatildeo do pulso
O segundo meacutetodo trabalha com a determinaccedilatildeo da mudanccedila de fase do
sinal contido em uma onda contiacutenua modulada Pode ser utilizado para evitar o
problema na medida de tempo com alta precisatildeo O sinal luminoso pode ser emitido
utilizando fontes LED (Light Emitting Diode) ou LASER (Light Amplification by
Stimulated Emission of Radiation) Estas fontes permitem a modulaccedilatildeo direta do
sinal luminoso atraveacutes da voltagem do sistema (LANGE 2000)
Para a utilizaccedilatildeo do meacutetodo da diferenccedila de fase considera-se que o sinal
refletido pelo alvo manteacutem a forma do sinal modulado emitido mas a fase do sinal
emitido eacute diferente da fase do sinal recebido conforme ilustrado com a Figura 22
FIGURA 22 ndash Meacutetodo da diferenccedila de fase
21
Sendo assim a mudanccedila de fase entre os sinais pode ser utilizada para
calcular a distacircncia conforme Equaccedilatildeo (22)
119863 =120593∙119888
4∙120587∙120574 (22)
onde
119863 ndash Distacircncia entre o sensor e o alvo
120593 ndash Diferenccedila de fase entre o sinal emitido e o recebido
119888 ndash Valor constante da velocidade da luz
120574 ndash Frequecircncia de modulaccedilatildeo do sinal
Em cacircmaras TOF a distacircncia entre o sensor e o alvo eacute medida utilizando o
meacutetodo da diferenccedila de fase com uma Funccedilatildeo de Correlaccedilatildeo (FC) entre o sinal
emitido e o refletido As amplitudes dos sinais satildeo moduladas com a mesma
frequecircncia Com isto a iluminaccedilatildeo pode ser feita utilizando diacuteodos emissores de luz
LED tendo-se a vantagem que a FC pode ser obtida com o sensor PMD a partir da
forma senoidal do sinal recebido (RAPP 2007)
A FC eacute calculada atraveacutes do sinal emitido e recebido Estes sinais satildeo
modelados matematicamente com forma senoidal tendo em vista que sua
propagaccedilatildeo ocorre na forma de onda Dado um sinal luminoso emitido 119892 119905 e um
sinal recebido 119904 119905 em um ponto do sensor PMD as amostras 119888 120591 podem ser
calculadas atraveacutes da Equaccedilatildeo (23) Estas amostras satildeo utilizadas para modelar a
FC em um atraso de tempo 120591
119888 120591 = 119904 119905 otimes 119892 119905 = lim119879rarrinfin 119904 119905 ∙ 119892 119905 + 120591 +119879
2
minus119879
2
119889119905 (23)
onde
119904 119905 ndash Funccedilatildeo que modela a forma do sinal luminoso recebido
119892 119905 ndash Funccedilatildeo que modela a forma do sinal luminoso emitido
119905 ndash Variaccedilatildeo de tempo entre a emissatildeo e a recepccedilatildeo do sinal
120591 ndash Atraso de tempo no recebimento do sinal
22
O sinal emitido pode ser expresso com 119892 119905 = cos(120603119905) o recebido eacute
expresso atraveacutes da relaccedilatildeo 119904 119905 = 1 + 119886 ∙ cos(120603119905 minus 120593) Ambos com forma senoidal
amplitude 119886 e diferenccedila de fase 120593 Com isto a FC pode ser apresentada na forma da
Equaccedilatildeo (25)
119888 120591 = 1 + 119886 ∙ 119888119900119904 120603120591 minus 120593 otimes 119888119900119904 120603120591 (24)
119888 120591 = lim119879acuterarrinfin1
119879acute 1 + 119886 ∙ 119888119900119904 120603119905 minus 120593 ∙ 119888119900119904 120603119905 + 120603119905
+119879 acute
2
minus119879 acute
2
119889119905 (25)
119888 120591 =119886
2∙ cos 120593 + 120603119905 (26)
onde
119892 119905 ndash Funccedilatildeo senoidal que modela a forma do sinal emitido
119904 119905 ndash Funccedilatildeo que modela a forma do sinal recebido
119905 ndash Variaccedilatildeo de tempo entre a emissatildeo e recepccedilatildeo do sinal
120591 ndash Atraso no tempo de recebimento do sinal
119886 ndash Amplitude da onda portadora do sinal
120593 ndash Diferenccedila de fase
120603 ndash Referecircncia de fase para o sinal modelado na forma senoidal
Lange (2000) avaliou a FC para fases 120596 119905 preacute-definidas escolhendo quatro
fases 120596 119905 = 0deg 120596 119905 = 90deg 120596 119905 = 180deg 120596 119905 = 270deg Verificou que eacute possiacutevel calcular a
diferenccedila de fase 120593 e a amplitude 119886 do sinal recebido 119904(119905) Considerando que o sinal
recebido tem sobreposiccedilatildeo ao sinal emitido deve-se adicionar uma constante de
deslocamento 119870 conforme a Equaccedilatildeo (27)
119862 120591 = 119888 120591 + 119870 (27)
119862 1205910 = 119888 1205910 + 119870 =119886
2∙ cos 120593 + 119870 (28)
119862 1205911 = 119888 1205911 + 119870 = minus119886
2∙ 119904119890119899 120593 +119870 (29)
119862 1205912 = 119888 1205912 + 119870 = minus119886
2∙ cos 120593 + 119870 (210)
119862 1205913 = 119888 1205913 + 119870 =119886
2∙ 119904119890119899 120593 +119870 (211)
23
Analisando a FC em quatro pontos a diferenccedila de fase 120593 e a amplitude 119886 do
sinal 119904(119905) podem ser calculadas atraveacutes das Equaccedilotildees (212) e (213)
120593 = 119905119892minus1 119862 1205913 minus119862 1205911
119862 1205910 minus119862 1205912 (212)
119886 = 119862 1205913 minus119862 1205911 2+ 119862 1205910 minus119862 1205912 2
2 (213)
Pode-se fazer a simplificaccedilatildeo das Equaccedilotildees (214) agrave (217) para quatro
pontos amostrais que satildeo necessaacuterios na modelagem da FC
119862 1205911 = 1198601 (214)
119862 1205912 = 1198602 (215)
119862 1205913 = 1198603 (216)
119862 1205910 = 1198604 (217)
A anaacutelise da FC entre o sinal oacuteptico e eleacutetrico recebido no dispositivo do
sensor eacute feita utilizando a diferenccedila de fase conforme ilustrado com a Figura 23
FIGURA 23 ndash FC utilizada no meacutetodo da diferenccedila de fase
FONTE Adaptado de LANGE (2000)
A FC permite calcular a distacircncia entre o alvo e a cacircmara utilizando quatro
amostras 11986011198602 1198603 e 1198604 com defasagem de 90ordm A diferenccedila de fase 120593 entre o sinal
24
emitido e o recebido eacute proporcional agrave distacircncia entre o alvo e a cacircmara O valor para
a diferenccedila de fase pode ser calculado atraveacutes da Equaccedilatildeo (218)
120593 = 119886119903119888119905119886119899 1198601minus1198603
1198602 minus1198604 (218)
onde
120593 ndash Diferenccedila de fase entre a onda emitida e a recebida
1198601119860211986031198604 ndash Pontos amostrais utilizados na modelagem da FC
Aleacutem do valor da diferenccedila de fase entre os sinais dois outros valores
podem ser calculados a amplitude 119886 e o valor de intensidade 119887 do sinal recebido
conforme as Equaccedilotildees (219) e (220) respectivamente
119886 = 1198601minus1198603 2+ 1198602 minus1198604 2
2 (219)
119887 =1198601+1198602 +1198603+1198604
4 (220)
onde
119886 ndash Amplitude do sinal recebido
119887 ndash Intensidade do sinal recebido (offset)
A distacircncia 119889 do sensor ao alvo eacute calculada atraveacutes da Equaccedilatildeo (221)
119889 =119888∙120593
4120587∙119891119898119900119889 (221)
onde
119889 ndash Distacircncia entre o sensor e o alvo
119888 ndash Valor constante da velocidade da luz propagada no vaacutecuo
120593 ndash Diferenccedila de fase entre o sinal emitido e o recebido
119891119898119900119889 ndash Frequecircncia de modulaccedilatildeo do sinal luminoso utilizado
A frequecircncia de modulaccedilatildeo do sinal emitido estabelece a distacircncia maacutexima
que poderaacute ser medida para um determinado comprimento de onda Em um sinal
25
modulado com a frequecircncia 119891119898119900119889 = 20119872119867119911 e comprimento de onda 120582119898119900119889 = 15m
conforme a Equaccedilatildeo (222) a distacircncia maacutexima que poderaacute ser medida eacute de 75
metros (MOumlLLER et al 2005)
119889119898119886119909 =120582119898119900119889
2= 75119898 (222)
22 IMAGEM TOF
Os piacutexeis da imagem TOF contecircm informaccedilotildees de distacircncia e intensidade
das superfiacutecies dos objetos Proporcionam a anaacutelise da profundidade dos objetos na
cena aleacutem da informaccedilatildeo de intensidade do sinal captado pelo sensor A Figura 24
ilustra a informaccedilatildeo 3D contida na imagem TOF
FIGURA 24 ndash Informaccedilatildeo das imagens TOF
FONTE Adaptado de RINGBECK (2007)
Com a informaccedilatildeo de profundidade e o posicionamento bidimensional dos
objetos na imagem pode-se realizar o mapeamento destes objetos e estimar suas
dimensotildees As cacircmaras TOF podem captar imagens e viacutedeos para realizar medidas
e detectar movimentos A Figura 25 ilustra os arquivos da imagem TOF
26
FIGURA 25 ndash Imagem TOF obtida com cacircmara PMD
FONTE PMD Technologies (2009)
A Figura 25a ilustra o arquivo com informaccedilatildeo das distacircncias dos objetos
presentes na imagem TOF A Figura 25b ilustra o arquivo com as intensidades que
o sinal retornou para o sensor registrada em cada piacutexel da imagem infravermelha
captada com comprimento de onda de 870nm
23 TEMPO DE INTEGRACcedilAtildeO
O periacuteodo de tempo que o sensor da cacircmara ficou exposto para obter a
imagem eacute chamado de tempo de integraccedilatildeo (TI) A quantidade de energia
eletromagneacutetica captada pelo sensor eacute diretamente influenciada por este tempo
pelas caracteriacutesticas refletivas das superfiacutecies dos objetos e pelo meio em que a
imagem foi tomada Os elementos do sensor podem ser carregados de acordo com
seu intervalo de capacidade do insaturado ao supersaturado Estes valores causam
ruiacutedos na imagem variando de acordo com a distacircncia entre o objeto e o sensor
(CENTENO e JUTZI 2010)
Este pode ser considerado o paracircmetro interno mais criacutetico em uma cacircmara
TOF pois descreve o periacuteodo de tempo que os elementos sensores necessitam
para detectar o sinal luminoso com a finalidade de obter a diferenccedila de fase utilizada
27
para o caacutelculo da distacircncia Quando o TI eacute muito baixo alguns elementos do sensor
podem natildeo ser ativados ocasionando piacutexeis com valor zero natildeo sendo possiacutevel
calcular sua distacircncia Por outro lado se o TI eacute muito elevado o pixel pode ficar
supersaturado o que tambeacutem causa erro na medida da distacircncia Sendo assim eacute
necessaacuterio determinar um TI especiacutefico para cada situaccedilatildeo Nas cacircmaras PMD o
controle do TI eacute realizado atraveacutes de software em outros modelos de cacircmaras TOF
este controle pode ser feito atraveacutes de hardware (WIEDEMANN et al 2008)
A Figura 26 ilustra a presenccedila de ruiacutedo na imagem TOF influenciada pelo
TI Nesta figura as nuvens de pontos 3D foram geradas com imagens TOF obtidas
com a cacircmara PMD CamCube 20 a partir do mesmo ponto de vista mas com
diferentes TI (140micros 1400micros e 14000micros) isto causou a presenccedila de ruiacutedo com
diferentes comportamentos
FIGURA 26 ndash Ruiacutedo na nuvem de pontos 3D proveniente de imagem TOF
FONTE PMD CamCube Tutorial (2009)
A nuvem de pontos gerada com a imagem obtida com TI de 1400micros
ilustrada com a Figura 26b foi a que melhor representou a forma das superfiacutecies do
objeto A nuvem de pontos da Figura 26a foi gerada a partir da imagem obtida com
TI igual a 140micros considerada com baixa saturaccedilatildeo pois a intensidade do sinal
captado pelo sensor foi pequena A nuvem de pontos da Figura 26c foi gerada com
imagem obtida com TI igual a 14000micros o que causou a saturaccedilatildeo do sinal recebido
pelo sensor e maior presenccedila de ruiacutedo A nuvem de pontos apresentada com a
Figura 26c apresentou-se menos consistente para representar as superfiacutecies do
objeto em questatildeo
28
24 PRINCIacutePIO DE FUNCIONAMENTO DO SENSOR PMD
O dispositivo PMD (Photonic Mixer Device) realiza medidas de distacircncia
utilizando o princiacutepio TOF Com este objetivo o dispositivo emite sinais luminosos
com frequecircncia modulada e o sensor capta a intensidade de retorno do sinal
refletido pelo alvo Informaccedilotildees sobre as fases e intensidades destes sinais satildeo
obtidas com o processamento A Figura 27 ilustra as etapas deste processo
FIGURA 27 ndash Princiacutepio de funcionamento do sistema PMD
FONTE LUAN (2001)
O sinal modulado eacute emitido com uma fase determinada pelo oscilador do
sistema Para que se possa realizar a medida da distacircncia o sinal recebido deve ter
fase diferente da que foi emitido No dispositivo PMD as cargas eleacutetricas do sinal
recebido satildeo separadas de acordo com a voltagem do diodo de leitura tambeacutem
chamado de fotodiodo O arquivo de saiacuteda deste dispositivo conteacutem informaccedilatildeo de
fase e intensidade do sinal recebido o que possibilita obter informaccedilatildeo de distacircncia
e intensidade para cada piacutexel da imagem (LUAN 2001)
O sensor utilizado no imageamento eacute um CMOS (Complementary Metal-
Oxide-Semiconductor) que tem tecnologia similar a dos sensores CCD (Charged-
Coupled Device) O CMOS apresenta a vantagem de ser um circuito integrado com
baixo consumo de energia No CMOS a conversatildeo de voltagem e a amplificaccedilatildeo do
sinal ocorrem em cada fotodiodo e os valores podem ser lidos independentemente
29
A desvantagem eacute que a amplificaccedilatildeo no fotodiodo gera imagens com maior
presenccedila de ruiacutedo (PECHT e FOSSUM 1997)
Quando os foacutetons sensibilizam o sensor CCD a carga eleacutetrica eacute transferida
sequencialmente linha por linha coluna por coluna A conversatildeo de voltagem e
amplificaccedilatildeo do sinal eacute realizada fora da aacuterea do sensor Uma vantagem do sensor
CCD eacute a geraccedilatildeo de imagens mais niacutetidas devido agrave menor complexidade no seu
sistema Por processar as cargas eleacutetricas de forma unificada menores interferecircncias
satildeo causadas diminuindo a presenccedila de ruiacutedo (KEMENY et al 1991)
A diferenccedila no princiacutepio de funcionamento dos sensores CCD e CMOS eacute
Ilustrada com a Figura 28
FIGURA 28 ndash Captaccedilatildeo da carga do sinal em sensores CCD e CMOS
FONTE LANGE (2000)
O princiacutepio de funcionamento do sensor CCD eacute ilustrado com as Figuras
28a e 28c onde a leitura da informaccedilatildeo eacute feita de forma sequencial pelos elementos
do sensor Esta varredura realizada no sensor CCD faz com que a geraccedilatildeo da
30
imagem final seja mais lenta que no sensor CMOS que realiza a conversatildeo foacuteton-
eleacutetron e eleacutetron-voltagem diretamente em cada elemento sensor conforme eacute
ilustrado com as Figuras 28b e 28d Com isto o sensor CMOS tem maior
velocidade de transferecircncia de cargas acumuladas para o conversor analoacutegico-
digital
Fotodiodos satildeo os elementos fotossensiacuteveis utilizados como portas de
entrada para o sinal luminoso em sensores CMOS ou CCD Estes captam cargas
eleacutetricas presentes no sinal e estatildeo inseridos sobre uma placa de Siliacutecio O
transporte das cargas para o interior da placa eacute explicado fisicamente atraveacutes dos
campos de franjas ilustrado com a Figura 29 Os campos de franja estatildeo
representados para diferentes voltagens os elementos do sensor apresentado tem
entradas para trecircs voltagens 10V 5V e 0V
FIGURA 29 ndash Representaccedilatildeo de campos de franja
FONTE THEUWISSEN (1995)
A seccedilatildeo A-A‟ na Figura 29 ilustra os campos de franja gerados mais
proacuteximos agrave superfiacutecie da placa A forma do sinal pode ser modelada de forma
aproximada por segmentos de linhas retas Na seccedilatildeo B-B‟ com profundidade meacutedia
na placa de Siliacutecio a influecircncia do campo eleacutetrico das entradas vizinhas a porta
central de 5V estaacute em seu niacutevel maacuteximo Quanto mais fundo encontra-se a entrada
de cargas na placa de Siliacutecio menor seraacute a interferecircncia dos campos eleacutetricos
gerados pelas portas de entrada das cargas vizinhas conforme pode ser visualizado
na seccedilatildeo C-C‟ Nesta profundidade diferentes portas de entrada estatildeo praticamente
31
agrave mesma distacircncia da superfiacutecie e o valor de dispersatildeo do campo de franja diminui
O campo de franja miacutenimo de uma entrada que tecircm profundidade maacutexima
proporciona ao sensor o maior aproveitamento aumentando assim a velocidade no
transporte de cargas (THEUWISSEN 1995)
Quanto maior a modulaccedilatildeo na voltagem da entrada das cargas maior o
potencial de armazenamento conforme ilustrado com a Figura 210
FIGURA 210 ndash Princiacutepio de armazenamento de cargas em sensores TOF
FONTE LANGE (2000)
O sinal modulado recebido 119904 119905 e a Funccedilatildeo de Correlaccedilatildeo 119891 119905 + 120591 do sinal
modulado emitido satildeo ilustrados com a Figura 210b A Figura 210a ilustra a luz
incidente no sensor com as cargas captadas e armazenadas de acordo com a
modulaccedilatildeo do fotodiodo
O dispositivo PMD utiliza a tecnologia CMOS para o imageamento com dois
elementos fotossensiacuteveis e dois diodos que captam as cargas eleacutetricas do sinal
modulado recebido As informaccedilotildees oacutepticas e eleacutetricas misturadas geram os piacutexeis
da imagem com informaccedilatildeo de distacircncia dos pontos imageados A Figura 211
ilustra este elemento sensor
32
FIGURA 211 ndash Princiacutepio de captaccedilatildeo de cargas pelo sensor PMD
FONTE LUAN (2001)
As placas claras e centrais na Figura 211a correspondem ao circuito de
leitura do sinal oacuteptico estas placas satildeo condutoras e transparentes para possibilitar
a entrada de luz Os diodos satildeo os componentes do circuito de leitura que captam e
direcionam as cargas eleacutetricas recebidas em um determinado sentido satildeo ilustrados
com as placas mais afastadas na Figura 211a As cargas que chegam satildeo
distribuiacutedas de acordo com a voltagem do diodo Uma fina camada de oacutexido isola os
circuitos de leitura do dispositivo
A voltagem da carga que entra no sistema eacute controlada de acordo com a
modulaccedilatildeo do sinal aplicada pelo dispositivo emissor Sendo assim pode ser
captada pelo diodo da direita ou esquerda que registraraacute a quantidade de carga
recebida de acordo com sua voltagem A distribuiccedilatildeo de potencial na regiatildeo
superficial do dispositivo eacute influenciada pela seleccedilatildeo de cargas que faz este sistema
dinacircmico e equilibrado Para valores natildeo nulos a luz modulada recebida e a
diferenccedila de fase podem ser comparadas atraveacutes das cargas eleacutetricas recebidas A
quantidade de carga captada pelos diodos depende diretamente da diferenccedila de
fase entre o sinal modulado emitido e o recebido pelo sensor Esta informaccedilatildeo pode
ser utilizada para calcular a diferenccedila de fase entre o sinal emitido e o recebido pois
33
eacute diretamente proporcional a carga que cada diodo captou Com isto a distacircncia
entre o sensor e o objeto pode ser calculada utilizando o princiacutepio da diferenccedila de
fase No entanto se a luz incidente eacute modulada como um sinal retangular mas sua
fase entre a emissatildeo e a recepccedilatildeo eacute igual a zero a carga seraacute captada por apenas
um dos diodos e a distacircncia resultante seraacute igual a zero (MOumlLLER et al 2005)
A Figura 212 ilustra o comportamento dos diodos de leitura ao receber o
sinal com distacircncia diferente de zero entre o alvo e o sensor Na Figura 212a eacute
ilustrado o sinal luminoso recebido por um elemento fotossensiacutevel Este sinal eacute
captado pela porta de entrada PA do fotodiodo que registra parte desta carga de
acordo com sua modulaccedilatildeo
FIGURA 212 ndash Medida da diferenccedila de fase do sinal recebido
FONTE Adaptado de MOumlLLER et al (2005)
Na Figura 212a o sinal recebido pelo elemento fotossensiacutevel do sensor eacute
ilustrado no momento em que eacute captado pela porta com modulaccedilatildeo A (PmodA) A
carga eacute captada pelos dois fotodiodos com defasagem de meio ciclo com isto cada
um capta parte da carga recebida A Figura 212b ilustra a medida da diferenccedila de
fase do sinal recebido atraveacutes da quantidade de carga que foi captada pelos
fotodiodos com modulaccedilatildeo Mod_A e Mod_B A voltagem do diodo eacute estabelecida de
acordo com a modulaccedilatildeo do sinal luminoso que seraacute emitida pelo dispositivo
34
25 CAcircMARAS PMD
As cacircmaras TOF com tecnologia PMD consistem de um chip sensor fonte
de iluminaccedilatildeo transmissor e receptor oacutepticos aleacutem de perifeacutericos eletrocircnicos e
interface digital de controle realizada atraveacutes de software Dependendo das
exigecircncias de aplicaccedilatildeo os componentes da cacircmara podem ser adaptados Cada
um deles pode afetar os paracircmetros internos da cacircmara tais como o campo de
visatildeo (FOV) taxa de captaccedilatildeo e tempo de integraccedilatildeo para a aquisiccedilatildeo das imagens
A distacircncia da superfiacutecie a ser medida eacute o fator preponderante para a escolha destes
paracircmetros O fato destas cacircmaras serem modulares amplia sua gama de
aplicaccedilotildees Isto eacute possiacutevel levando-se em conta as condiccedilotildees adicionais que cada
aplicaccedilatildeo pode exigir tais como a luz exterior ao sistema e a necessidade de
mudanccedila na fonte de iluminaccedilatildeo utilizada (PMD Technologies 2009)
O sensor PMD proporciona o imageamento instantacircneo dos objetos
utilizando um sensor com tecnologia CMOS adaptado Este sensor eacute um arranjo de
elementos fotossensiacuteveis que permitem a raacutepida detecccedilatildeo e modulaccedilatildeo do sinal
luminoso com suas variaccedilotildees Isto eacute feito de acordo com a distacircncia da superfiacutecie
que atinge do objeto imageado Pode adquirir dados de distacircncia e intensidade
simultaneamente sem precisar de um sistema de digitalizaccedilatildeo mais complexo como
um laser scanner Apresenta a desvantagem de ser muito sensiacutevel agrave luz exterior ao
sistema que interfere causando a presenccedila de ruiacutedo na imagem TOF e consequente
erro na medida de distacircncia (KHONGSAB 2009)
O desempenho do sistema PMD depende da fonte de iluminaccedilatildeo utilizada
capacidade de fornecimento de energia e eficiecircncia oacuteptica na criaccedilatildeo da imagem
Normalmente eacute utilizada fonte de iluminaccedilatildeo LED nas cacircmaras PMD No entanto
outros fabricantes utilizam diodos LASER para a iluminaccedilatildeo isto porque possibilita
realizar medidas de distacircncias maiores O desenvolvimento dos sistemas LED fez
com que sua eficiecircncia de transformaccedilatildeo de energia eleacutetrica em energia oacuteptica seja
de 30 Com a iluminaccedilatildeo LED tem-se um sinal luminoso jaacute modulado devido a
suas caracteriacutesticas eletro-oacutepticas Como uma parte consideraacutevel da luz fica na
borda do feixe isto se torna uma desvantagem pois esta aacuterea normalmente fica fora
do campo de visatildeo do sensor PMD Outra desvantagem diz respeito ao limite de
modulaccedilatildeo dos LED‟s comerciais que trabalham na faixa de 20 MHz agrave 30 MHz Os
diodos LASER tecircm eficiecircncia oacuteptica de ateacute 50 dependendo da potecircncia de saiacuteda
35
utilizada sendo de aproximadamente 100 MHz a modulaccedilatildeo maacutexima da frequecircncia
que pode ser atingida O perfil do feixe LASER pode ser adaptado ao campo de
visatildeo do sensor PMD A desvantagem eacute que este seria um circuito modular mais
complexo e que teria necessidade de um maior nuacutemero de etapas para conseguir
estabilizar a fase da onda portadora do sinal Outra desvantagem eacute que a
implantaccedilatildeo de um sistema LASER necessita de maior atenccedilatildeo agrave seguranccedila dos
olhos do que o sistema LED (RINGBECK 2007)
Com a Figura 213 ilustra-se a medida de distacircncia com a cacircmara TOF
modelo 19k da PMD A fonte de iluminaccedilatildeo LED emite o sinal luminoso em direccedilatildeo
dos objetos que estatildeo no campo visual da cacircmara O retorno deste sinal eacute captado
pelo sensor e possibilita o caacutelculo da diferenccedila de fase entre o sinal emitido e o
recebido
FIGURA 213 ndash Medida de distacircncia com a cacircmara PMD
FONTE MOLLER et al (2005)
36
251 Cacircmara PMD CamCube 20
A cacircmara TOF modelo PMD[VISION]regCamCube 20 funciona em ambientes
internos e externos com sensor de 204x204 piacutexeis que captam os niacuteveis de cinza da
imagem de intensidade Simultaneamente realiza a medida da quantidade de carga
recebida utilizada para determinar a diferenccedila de fase entre o sinal emitido e o
recebido Isto possibilita o caacutelculo da distacircncia entre o sensor e os objetos presentes
na cena A Figura 214 ilustra a cacircmara PMD CamCube 20 com as fontes de
iluminaccedilatildeo LED acopladas em suas laterais
FIGURA 214 ndash Cacircmara PMD CamCube 20
FONTE PMD Technologies (2009)
Este equipamento pode ter seu campo de visatildeo variaacutevel possibilitando a
diminuiccedilatildeo de distorccedilotildees manchas ou outras imperfeiccedilotildees da imagem O software
de interface da cacircmara com o computador apresenta a possibilidade de trabalhar
com dados brutos para o processamento das imagens aleacutem de funcionar em
diferentes canais de frequecircncia Tambeacutem disponibiliza compatibilidade com o
software Matlab para realizar esta interface
A imagem de intensidade captada de uma parede utilizando a cacircmara PMD
CamCube 20 eacute ilustrada com a Figura 215
37
FIGURA 215 ndash Imagem captada com a cacircmara PMD CamCube 20
FONTE CENTENO e JUTZI (2010)
Com a Figura 215a eacute ilustrada a cacircmara PMD CamCube 20 instalada em
um tripeacute sobre uma mesa Na Figura 215b tem-se a imagem infravermelha da
superfiacutecie plana de uma parede obtida com esta cacircmara O Quadro 21 ilustra as
especificaccedilotildees teacutecnicas da cacircmara PMD CamCube 20
PARAcircMETROS VALOR PADRAtildeO OBSERVACcedilOtildeES
Tipo do sensor PhotonICs PMD41k-S (204x204 piacutexeis)
Tamanho efetivo do pixel no sensor igual a 45microm
Distacircncia de mediccedilatildeo 03 ndash 7metros
Precisatildeo na medida de distacircncia (1σ) lt 3mm
Para aacuterea central da imagem obtida agrave 2m do sensor em superfiacutecie com refletividade de 90
Frequecircncia de aquisiccedilatildeo de imagens 25 fps Configuraccedilatildeo padratildeo
Campo de visatildeo (FOV) 40ordmx40ordm f = 128mm
Comprimento de onda da fonte de iluminaccedilatildeo
870nm Infravermelho proacuteximo
Fonte de iluminaccedilatildeo [V] 12 V plusmn 10
Interface USB 20
Temperatura de operaccedilatildeo 0ordmC agrave 50ordmC
Temperatura de armazenamento -20ordmC agrave 85ordmC
QUADRO 21 - Especificaccedilotildees teacutecnicas da cacircmara PMD CamCube 20 FONTE Adaptado de PMD Technologies (2009)
O sensor PhotonICs PMD41k-S utilizado na cacircmara PMD CamCube 20 vem
com um dispositivo SBI para a supressatildeo de cargas provenientes da iluminaccedilatildeo
exterior ao sistema Estas cargas causam a saturaccedilatildeo dos piacutexeis da imagem TOF
38
252 Dispositivo SBI
O dispositivo SBI (Supression of Background Illumination) eacute uma soluccedilatildeo
teacutecnica encontrada para melhorar o contraste das imagens geradas com o sensor
PMD em ambientes com iluminaccedilatildeo exterior A presenccedila desta iluminaccedilatildeo na cena
do objeto imageado causa maior presenccedila de ruiacutedo no sinal captado pelo sensor
Esta iluminaccedilatildeo pode saturar os elementos do sensor fazendo com que
ocorram falhas na medida de distacircncia Este efeito pode ser minimizado utilizando o
tempo de integraccedilatildeo adequado para a tomada das imagens Outros distuacuterbios que
podem ocorrer satildeo devidos agrave corrente negra (DC - Dark Current) Este efeito eacute
causado porque o sensor natildeo capta o valor zero na imagem que seria a falta
completa de iluminaccedilatildeo nas superfiacutecies da cena A corrente negra natildeo pode ser
evitada em dispositivos semicondutores especialmente quando haacute altas
temperaturas Com uma temperatura de 80ordmC a corrente negra pode ser 1000 vezes
maior do que o normal o que afeta significativamente a qualidade das medidas
realizadas Para tornar o dispositivo PMD mais confiaacutevel na medida de distacircncias foi
criado o circuito SBI que suprime instantaneamente a iluminaccedilatildeo de fundo Neste
circuito eacute utilizada uma teacutecnica para a captaccedilatildeo do sinal luminoso minimizando a
interferecircncia de fatores externos Isto possibilita realizar medidas de distacircncia
confiaacuteveis mesmo em ambientes onde o sinal eacute modificado por interferecircncia de
iluminaccedilatildeo externa ou por altas temperaturas O sistema SBI pode ser desativado ou
ateacute mesmo ajustado para que seja possiacutevel realizar medidas de distacircncia com
qualidade em cenas tomadas em diferentes ambientes independente da presenccedila
de iluminaccedilatildeo exterior (MOumlLLER 2005)
O circuito SBI adiciona cargas eleacutetricas de compensaccedilatildeo instantacircnea nos
diodos de leitura minimizando os efeitos de saturaccedilatildeo causados por fatores externos
ao sistema Com o SBI espera-se que o sensor capte apenas o sinal correlacionado
com a medida de distacircncia sem interferecircncia de iluminaccedilatildeo exterior reduzindo
assim a interferecircncia da iluminaccedilatildeo de fundo no sinal recebido
A Figura 216a ilustra um sensor sem o dispositivo SBI a carga captada com
influecircncias externas de iluminaccedilatildeo e calor eacute maior do que a enviada pela fonte de
iluminaccedilatildeo refletida pela superfiacutecie do objeto e recebida pelo sensor Neste caso a
medida de distacircncia estaacute influenciada por fatores externos ao sistema e conteraacute
erros Na Figura 216b as cargas geradas por fatores externos ao sistema satildeo
39
minimizadas pelo dispositivo SBI Com isto tem-se maior quantidade de carga
captada com o sinal recebido eliminando a carga gerada por fatores externos
FIGURA 216 ndash Princiacutepio de funcionamento do SBI
FONTE MOumlLLER et al (2005)
Cacircmaras TOF com iluminaccedilatildeo LED infravermelha utilizam o dispositivo SBI
para a supressatildeo da iluminaccedilatildeo de fundo Outros modelos de cacircmaras TOF utilizam
iluminaccedilatildeo LASER para evitar o problema com a iluminaccedilatildeo exterior
253 Modelos de cacircmaras TOF
Diferentes cacircmaras TOF foram desenvolvidas nos uacuteltimos anos a Figura
217 ilustra alguns modelos destas cacircmaras
FIGURA 217 ndash Modelos de cacircmaras TOF
a) Effector O3D FONTE httpwwwifm-electroniccom
b) PMD[vision] CamCube 20 FONTE httpwwwpmdteccom
c) PMD[vision] 19k FONTE httpwwwpmdteccom
d) SwissRanger SR-3000 FONTE httpwwwmesa-imagingch
40
O Quadro 22 descreve as especificaccedilotildees teacutecnicas destas cacircmaras TOF
a)Effector
O3D
b)PMD[vision]
CamCube 20
c)PMD[vision]
19k
d)SwissRanger
SR-3000
Resoluccedilatildeo (piacutexeis) 64 x 50 204 x 204 160 x 120 176 x 144
Dimensotildees dos piacutexeis (microm) 100 x 100 45 x 45 40 x 40 40 x 40
Distacircncia focal (mm) 86 128 120 80
Fonte de iluminaccedilatildeo 1 matriz LED 2 matrizes LED 2 matrizes LED 1 matriz LED
Modulaccedilatildeo da fonte de
iluminaccedilatildeo (nm) 850 870 870 850
Frequecircncia de modulaccedilatildeo 20 MHz 20 MHz 20 MHz 20 MHz
Frequecircncia na aquisiccedilatildeo de
imagens
Maacuteximo
100 fps
Maacuteximo
25 fps
Maacuteximo
15 fps
Maacuteximo
40 fps
Conexatildeo Ethernet USB 2 Ethernet USB 2
Dimensotildees (mm) 55 x 45 x 85 194 x 60 x 60 220 x 210 x 55 60 x 50 x 65
QUADRO 22 ndash Especificaccedilotildees teacutecnicas de cacircmaras TOF FONTE Adaptado de RAPP (2007)
A partir do Quadro 22 verifica-se que estes modelos de cacircmaras TOF em
sua configuraccedilatildeo padratildeo possuem fonte de iluminaccedilatildeo LED distacircncia focais
variando de 8mm agrave 128mm e apresentam pequenas dimensotildees
26 ERROS DE MEDIDA
Observaccedilotildees realizadas com instrumentos de medida estatildeo acompanhadas
de erros provenientes da falibilidade humana imperfeiccedilatildeo na fabricaccedilatildeo do
equipamento e de interferecircncias causadas pelo ambiente em que o instrumento
utilizado e o objeto estavam no momento em que se realizou a medida Erros de
observaccedilatildeo satildeo tradicionalmente classificados como erros grosseiros sistemaacuteticos e
acidentais Erros grosseiros devem ser detectados e evitados pelo observador com
os devidos cuidados na obtenccedilatildeo da informaccedilatildeo tambeacutem ocorrem devido agrave
presenccedila de ruiacutedo nas observaccedilotildees Erros sistemaacuteticos se repetem seguindo um
determinado padratildeo e podem ser preditos e corrigidos Existem opccedilotildees para evitaacute-
los atraveacutes de teacutecnicas de observaccedilatildeo ou entatildeo eliminaacute-los a posteriori atraveacutes de
foacutermulas especiacuteficas Os erros acidentais ou aleatoacuterios satildeo randocircmicos natildeo
previsiacuteveis e podem ser distribuiacutedos entre o conjunto de observaccedilotildees por teacutecnicas
41
estatiacutesticas Eacute comum o uso da expressatildeo ldquopropriedades estatiacutesticas das
observaccedilotildeesrdquo devido a este erro (GEMAEL 1994)
Erros na medida de distacircncia utilizando cacircmaras TOF tambeacutem podem ser
divididos em natildeo-sistemaacuteticos e sistemaacuteticos conforme descrito nas seccedilotildees 261 e
262 onde seratildeo apresentados 3 erros natildeo-sistemaacuteticos e 7 erros sistemaacuteticos
261 Erros natildeo-sistemaacuteticos em cacircmaras TOF
De acordo com MAY et al (2008) a classificaccedilatildeo de erros natildeo-sistemaacuteticos
na medida de distacircncia utilizando cacircmaras TOF pode ser feita da seguinte maneira
1) Erro devido agrave relaccedilatildeo sinal-ruiacutedo (Signal-to-noise) quando a relaccedilatildeo da
carga recebida com o sinal eacute baixa e o ruiacutedo presente eacute alto haveraacute distorccedilatildeo na
medida de distacircncia que natildeo poderaacute ser corrigida posteriormente Para diminuir este
erro pode-se tomar cuidado com o tempo de exposiccedilatildeo do sensor na aquisiccedilatildeo da
imagem e tambeacutem amplificar a iluminaccedilatildeo do sistema Outra soluccedilatildeo eacute filtrar os
valores medidos com baixas amplitudes no sinal recebido
2) Reflexatildeo do sinal por muacuteltiplos caminhos (Multiple ways reflection) em
objetos com descontinuidade em suas superfiacutecies o sinal emitido pode percorrer
diferentes caminhos antes de retornar ao sensor Exemplos satildeo objetos com
superfiacutecies cocircncavas que podem refletir vaacuterias vezes o sinal e gerar erro na medida
de distacircncia Neste caso o sinal eacute refletido com sobreposiccedilatildeo ou seja pode ser
captado o sinal da uacuteltima superfiacutecie que o refletiu gerando uma distacircncia diferente
do valor esperado
3) Espalhamento da luz (Light scattering) ocorre na lente da cacircmara
causado pela presenccedila de objetos proacuteximos Este efeito e o causado pela reflexatildeo
por muacuteltiplos caminhos satildeo imprevisiacuteveis pois a topologia da cena observada eacute
desconhecida a priori
262 Erros sistemaacuteticos em cacircmaras TOF
Segundo RAPP (2007) nas cacircmaras TOF erros tambeacutem indicam a relaccedilatildeo
entre a variacircncia da distacircncia e a amplitude do sinal captado pelo sensor A relaccedilatildeo
42
estabelecida eacute que a variacircncia dos dados de distacircncia eacute inversamente proporcional agrave
raiz quadrada da amplitude do sinal recebido para realizar a medida Alguns erros
sistemaacuteticos das cacircmaras TOF estudados por RAPP foram
1) Erro devido a uma funccedilatildeo natildeo harmocircnica utilizada para correlacionar o
sinal emitido ao recebido
2) Ruiacutedos relacionados com o tempo de integraccedilatildeo Este tempo pode causar
exposiccedilatildeo insuficiente ou saturaccedilatildeo dos elementos do sensor
3) Erros geomeacutetricos no posicionamento dos piacutexeis devido ao sistema oacuteptico
da cacircmara
O erro devido agrave falta de harmonia na funccedilatildeo de correlaccedilatildeo entre o sinal
emitido e o recebido pode ser causado quando o sistema oacuteptico utilizado emite o
sinal de referecircncia com sua forma inicial e recebe o sinal refletido com forma
diferente Com isto a funccedilatildeo que representa o sinal recebido natildeo teraacute a forma
senoidal teoacuterica do sinal emitido Isto ocorre por conter harmocircnicos de Fourier
iacutempares quando eacute necessaacuteria uma amostra com pelo menos quatro pontos para
definir a FC entre os sinais Este erro tem grande influecircncia no caacutelculo da distacircncia
do objeto pois eacute a FC que possibilita a medida da diferenccedila de fase entre o sinal
emitido e o recebido
A presenccedila de ruiacutedo pode ser notada variando o TI na aquisiccedilatildeo da imagem
O conjunto de dados apresenta maiores distorccedilotildees radiomeacutetricas e geomeacutetricas
quando a presenccedila de ruiacutedo eacute forte Quando o TI eacute aumentado o ruiacutedo observado no
conjunto de dados pode diminuir Poreacutem valores extremamente altos introduzem
erros na mediccedilatildeo por causar saturaccedilatildeo do sensor Com esta informaccedilatildeo procura-se
definir uma funccedilatildeo para a modelagem do ruiacutedo de acordo com o tempo de
integraccedilatildeo Analisando dados obtidos com diferentes TI pode-se especificar qual o
melhor para cada situaccedilatildeo
Erros causados por exposiccedilatildeo insuficiente do sensor natildeo satildeo considerados
sistemaacuteticos poreacutem podem ser preditos Se o valor da amplitude do sinal eacute reduzido
o erro na medida da distacircncia aumenta Para reduzir os piacutexeis obtidos com
exposiccedilatildeo insuficiente pode-se definir um limite no valor da amplitude do sinal
Outra forma de controlar a exposiccedilatildeo eacute com o TI na obtenccedilatildeo da imagem Piacutexeis que
tem amplitude menor que 1 do valor maacuteximo das amplitudes na imagem TOF satildeo
considerados piacutexeis com exposiccedilatildeo insuficiente
43
Erros de posicionamento dos piacutexeis devido ao sistema oacuteptico da cacircmara
podem ser notados quando capta-se a imagem de uma fachada com portas e
janelas As linhas horizontais e verticais que representam estes elementos na
imagem aparecem com curvaturas de acordo com o sistema de lentes utilizado na
cacircmara A distorccedilatildeo de lentes tem um padratildeo fixo em cacircmaras com sensor CMOS
ou CCD e pode ser corrigida geometricamente atraveacutes dos POI da cacircmara que
captou a imagem
Erros sistemaacuteticos em cacircmaras TOF tambeacutem foram estudados por FUCHS e
HIRZINGER (2008) e MAY et al (2008) e foram classificados da seguinte maneira
4) Erro na medida de distacircncia (Distance-related error) este erro eacute causado
devido agrave assimetria da forma do sinal infravermelho recebido pelo sensor
Teoricamente assume-se que este sinal possui forma senoidal e harmocircnica com a
forma do sinal emitido o que na praacutetica pode natildeo acontecer Sendo assim o
pressuposto baacutesico para que se possa calcular o atraso de fase eacute que o sinal
luminoso emitido e o recebido satildeo harmocircnicos e com forma senoidal
Consequentemente se o caacutelculo do atraso de fase do sinal eacute impreciso a distacircncia
entre o objeto e o sensor tambeacutem seraacute calculada de forma imprecisa
5) Erro na amplitude do sinal captado (Amplitude-related error) o sensor natildeo
capta a energia eletromagneacutetica recebida com o sinal perfeitamente Deixando-se a
cacircmara e o objeto na mesma posiccedilatildeo podem-se obter diferentes medidas de
distacircncia devido a esta imperfeiccedilatildeo na fabricaccedilatildeo dos elementos do sensor Este
erro eacute relacionado com a amplitude de valores na captaccedilatildeo da imagem depende da
distacircncia e de caracteriacutesticas como a refletividade das superfiacutecies dos objetos
6) Erro devido agrave latecircncia dos elementos do sensor (Latency-related error) o
atraso de fase do sinal recebido eacute calculado atraveacutes das latecircncias com que o sensor
captou o sinal Estaacute relacionado com propriedades semicondutoras dos materiais
utilizados nos elementos sensores que satildeo responsaacuteveis pela medida da quantidade
de carga recebida Eacute causado quando o sinal emitido e o recebido satildeo
correlacionados diretamente na matriz do sensor Diferentes latecircncias do sinal
devem ser captadas por cada elemento do sensor para possibilitar o caacutelculo da
distacircncia de cada pixel de forma confiaacutevel
7) Ruiacutedo com padratildeo fixo (FPN - Fixed pattern noise) eacute relacionado com o
erro devido agrave latecircncia e ocorre devido agraves propriedades dos materiais utilizados na
fabricaccedilatildeo de cada elemento do sensor CMOS Este eacute um ruiacutedo com padratildeo fixo
44
pode ser corrigido a partir de uma imagem que tenha um pixel com valor constante
que serviraacute como referecircncia para a calibraccedilatildeo dos valores dos piacutexeis vizinhos
Tendo-se como referecircncia um pixel obtido em uma superfiacutecie uniforme de um objeto
pode-se utilizar um padratildeo de similaridade como referecircncia para os outros piacutexeis
Sendo assim a qualidade dos dados depende da posiccedilatildeo do pixel na imagem
Os uacuteltimos quatro erros sistemaacuteticos podem ser corrigidos utilizando o
meacutetodo de calibraccedilatildeo descrito em Fuchs et al (2007) Conforme realizado em
experimento por May et al (2008) os resultados alcanccedilados no mapeamento de uma
sala obtiveram a precisatildeo centimeacutetrica Este experimento foi realizado com o
objetivo de medir paredes opostas de uma sala com o sensor TOF em movimento
instalado em uma plataforma moacutevel O erro encontrado na medida das distacircncias
tambeacutem foi influenciado por erros na estimaccedilatildeo do posicionamento do sensor que eacute
obtido com a Orientaccedilatildeo Exterior da cacircmara no momento de aquisiccedilatildeo das imagens
Durante o registro dos quadros fotograacuteficos o erro em rotaccedilatildeo foi determinado como
sendo igual a 22ordm e o erro de translaccedilatildeo foi de 071m no eixo 119883 004m no eixo 119884 e
de -021m no eixo 119885 A distacircncia calculada entre paredes opostas foi igual a 105m
para a distacircncia de referecircncia de 108m A diferenccedila entre as duas medidas resultou
em 03m o que representa aproximadamente 28 da distacircncia de referecircncia A
nuvem de pontos 3D gerada por MAY et al (2008) eacute ilustrada com a Figura 218
FIGURA 218 ndash Nuvem de pontos 3D gerada a partir de imagem TOF
FONTE MAY et al (2008)
45
27 PROJECcedilAtildeO ORTOGONAL DOS PONTOS
As coordenadas tridimensionais dos pontos da imagem TOF satildeo obtidas
atraveacutes da projeccedilatildeo ortogonal Isto ocorre devido ao fato do equipamento utilizado
calcular as distacircncias dos objetos em um sistema esfeacuterico Esta projeccedilatildeo eacute feita a
partir da colinearidade entre o ponto no espaccedilo objeto o Centro Perspectivo (CP) e
o ponto no espaccedilo imagem conforme eacute ilustrado com a Figura 219
FIGURA 219 ndash Colinearidade entre os pontos no espaccedilo imagem e objeto
FONTE Adaptado de RAPP (2007)
A Figura 219 ilustra os sistemas referenciais adotados nos espaccedilos imagem
e objeto O sistema referencial fotogrameacutetrico (119909119875 119910119875) tem sua origem no CP que eacute
materializado pelo ponto nodal anterior do sistema de lentes da cacircmara Este ponto
projetado no plano da imagem gera o Ponto Principal (PP) A projeccedilatildeo do sistema
referencial fotogrameacutetrico na imagem eacute realizada considerando a simplificaccedilatildeo de
haverem apenas translaccedilotildees entre os eixos deste sistema e o sistema da imagem O
46
sistema referencial de imagem levoacutegiro (119862 119871) tem sua origem no canto superior
esquerdo Atraveacutes das Equaccedilotildees (223) e (224) esta origem pode ser transladada
para o centro da imagem (MACHADO 2006)
119862prime = 119862 minus119899119862minus1
2 (223)
119871prime = 119871 minus119899119871minus1
2 (224)
onde
119862 119871 ndash Sistema referencial de coordenadas da imagem (piacutexeis)
119899119862 119899119871 ndash Nuacutemero total de colunas e linhas da imagem (piacutexeis)
119862prime 119871prime ndash Sistema referencial auxiliar no centro da imagem (piacutexeis)
Para tornar o sistema referencial auxiliar (119862prime 119871prime) de imagem levoacutegiro em um
sistema dextroacutegiro (119909119894119898 119910119894119898 ) pode-se realizar uma reflexatildeo do eixo 119871prime atraveacutes da
Equaccedilatildeo (226)
119909119894119898 = 119862prime (225)
119910119894119898 = minus119871prime (226)
onde
119909119894119898 119910119894119898 ndash Coordenadas de um ponto no sistema referencial dextroacutegiro da
imagem (piacutexeis)
Com isto tem-se um sistema referencial dextroacutegiro centralizado na imagem e
que se relaciona com o sistema referencial fotogrameacutetrico projetado atraveacutes da
translaccedilatildeo de eixos determinada pelas coordenadas (119909119900 119910119900) do PP conforme
ilustrado com a Figura 220
47
FIGURA 220 ndash Sistemas de coordenadas utilizados em imagens
FONTE Adaptado de MACHADO (2006)
A partir do sistema referencial de imagem dextroacutegiro com origem no centro
da imagem e do sistema referencial fotogrameacutetrico projetado com origem no PP
satildeo estabelecidas as relaccedilotildees entre os sistemas de acordo com as Equaccedilotildees (227)
e (228)
119909119894119898 = (119909 minus 1199090) (227)
119910119894119898 = (119910 minus 1199100) (228)
onde
11990901199100 ndash Satildeo as coordenadas do ponto principal no sistema referencial de
imagem (piacutexeis)
119909119910 ndash Coordenadas dos pontos no sistema referencial fotogrameacutetrico
projetado na imagem (piacutexeis)
Os valores das coordenadas dos pontos do sistema fotogrameacutetrico projetado
na imagem estatildeo em piacutexeis A transformaccedilatildeo destes valores para miliacutemetros pode
ser feita multiplicando estas coordenadas pelo tamanho efetivo do pixel nas direccedilotildees
119909 e 119910 da imagem conforme as Equaccedilotildees (229) e (230)
48
119909 = 119909119894119898 ∙ 119875119909 (229)
119910 = 119910119894119898 ∙ 119875119910 (230)
onde
119909119910 ndash Satildeo as coordenadas dos pontos no sistema fotogrameacutetrico projetado
na imagem (miliacutemetros)
119875119909 119875119910 ndash Tamanho efetivo dos piacutexeis nas direccedilotildees 119909 e 119910 (miliacutemetros)
O tamanho efetivo dos piacutexeis nas direccedilotildees 119909 e 119910 satildeo calculados a partir do
fator de escala nestas direccedilotildees conforme Equaccedilotildees (231) e (232)
119875119909 = 119875 ∙ 119904119909 (231)
119875119910 = 119875 ∙ 119904119910 (232)
onde
119875119909 119875119910 ndash Tamanho efetivo dos piacutexeis nas direccedilotildees 119909 e 119910 (miliacutemetros)
119875 ndash Dimensatildeo do pixel obtida no manual do equipamento (miliacutemetros)
119904119909 119904119910 ndash Fatores de escala dos piacutexeis nas direccedilotildees 119909 e 119910
Os fatores de escala dos piacutexeis nas direccedilotildees 119909 e 119910 podem ser calculados
atraveacutes das Equaccedilotildees (233) e (234)
119904119909 =119891
119891119909 (233)
119904119910 =119891
119891119910 (234)
onde
119904119909 119904119910 ndash Fatores de escala dos piacutexeis nas direccedilotildees 119909 e 119910
119891119909 119891119910 ndash Distacircncia focal da cacircmara ao longo dos eixos 119909 e 119910 (miliacutemetros)
119891 ndash Distacircncia focal da cacircmara obtida no manual do equipamento
(miliacutemetros)
49
Quando o valor da distacircncia focal 119891119909 obtido com a calibraccedilatildeo da cacircmara
difere do valor 119891119910 tem-se um indicativo de escalas diferentes nos eixos 119909 e 119910 da
imagem
Realizadas as etapas de Orientaccedilatildeo Interior da imagem podem-se calcular
as coordenadas 3D dos pontos O posicionamento de cada ponto depende da
precisatildeo na determinaccedilatildeo dos acircngulos verticais e horizontais no sistema referencial
de imagem A projeccedilatildeo ortogonal das distacircncias dos pontos coordenada 119885 pode ser
feita atraveacutes da Equaccedilatildeo (235)
119885 = 119889119903 ∙ cos120573 (235)
onde
119885 ndash Distacircncia ortogonal do CP ao ponto observado no espaccedilo objeto
119889119903 ndash Distacircncia radial do CP ao ponto no sistema referencial esfeacuterico
120573 ndash Acircngulo formado entre o eixo que atinge o ponto na imagem partindo do
CP e o eixo principal da cacircmara (CP-PP)
O acircngulo 120573 pode ser calculado atraveacutes da funccedilatildeo trigonomeacutetrica expressa
com a Equaccedilatildeo (236)
tan120573 = 1199092
1198911199092 +
1199102
1198911199102 (236)
onde
119891119909 119891119910 ndash Distacircncia focal da cacircmara ao longo dos eixos 119909 e 119910 (miliacutemetros)
119909119910 ndash Coordenadas dos pontos no sistema referencial fotogrameacutetrico
projetado na imagem (miliacutemetros)
A Expressatildeo (235) relaciona a distacircncia radial 119889119903 com a coordenada 119885 dos
pontos no sistema ortogonal 3D em funccedilatildeo do acircngulo 120573 Substituindo a Equaccedilatildeo
(236) na Equaccedilatildeo (235) podemos explicitar a coordenada 119885 em funccedilatildeo das
distacircncias focais da cacircmara e das coordenadas dos pontos no sistema referencial
fotogrameacutetrico projetado na imagem conforme Equaccedilatildeo (237)
50
119885 = 119889119903 ∙ cos tanminus1 1199092
1198911199092 +
1199102
1198911199102 (237)
onde
119885 ndash Distacircncia ortogonal do CP ao ponto (miliacutemetros)
119889119903 ndash Distacircncia radial do CP ao ponto no sistema esfeacuterico da cacircmara
(miliacutemetros)
119891119909 119891119910 ndash Distacircncia focal da cacircmara ao longo dos eixos 119909 e 119910 (miliacutemetros)
119909119910 ndash Coordenadas dos pontos no sistema referencial fotogrameacutetrico
projetado na imagem (miliacutemetros)
As coordenadas (119883119884) dos pontos no sistema referencial ortogonal podem
entatildeo serem calculadas atraveacutes das Equaccedilotildees (238) e (239)
119883 = 119909 ∙119885
119891119909 (238)
119884 = 119910 ∙119885
119891119910 (239)
28 REFINAMENTO DA NUVEM DE PONTOS 3D
O processo de refinamento da nuvem de pontos 3D obtida com a imagem
TOF compreende a filtragem dos pontos que estejam esparsos devido agrave presenccedila
de ruiacutedo no arquivo de distacircncias da imagem TOF Com a Figura 221a satildeo
ilustrados pontos que natildeo pertencem agraves superfiacutecies do objeto aparecem na aresta
superior direita do objeto O sinal emitido atinge uma aacuterea da superfiacutecie do objeto e
natildeo apenas um ponto Esta aacuterea eacute proporcional agrave distacircncia entre o alvo e o sensor
ocorre devido agrave divergecircncia do feixe de luz emitido Com o princiacutepio TOF o valor da
distacircncia calculada eacute resultado da integraccedilatildeo do sinal recebido de acordo com a
aacuterea iluminada da superfiacutecie Quando o sinal emitido atinge superfiacutecies natildeo
coplanares o valor de distacircncia armazenado eacute um resultado interpolado Este
fenocircmeno ocorre principalmente nas bordas dos objetos e pode ser visto com a
51
Figura 221a que mostra um objeto com trecircs superfiacutecies planas uma base um
plano vertical na direita e um plano na parte superior
FIGURA 221 ndash Filtro para a definiccedilatildeo de bordas do objeto
FONTE MAY et al (2008)
A Figura 221b apresenta a nuvem de pontos 3D apoacutes a aplicaccedilatildeo do filtro
para o refinamento Este eacute um filtro gaussiano utilizado para a definiccedilatildeo de bordas e
desniacuteveis dos objetos eacute tambeacutem uma ferramenta para a remoccedilatildeo de pontos
esparsos provenientes da presenccedila de ruiacutedo nos dados da imagem TOF Funciona
considerando o acircngulo formado entre dois piacutexeis adjacentes na imagem onde o CP
eacute o ponto que completa o triacircngulo sendo o criteacuterio de seleccedilatildeo utilizado a distacircncia
meacutedia dos k pontos vizinhos mais proacuteximos
De acordo com May et al (2008) a distacircncia medida a partir de cacircmaras
TOF pode ser afetada pelo efeito de arredondamento das bordas Isto ocorre pela
suavizaccedilatildeo causada com a transiccedilatildeo entre as superfiacutecies iluminadas Dado um
conjunto de pontos 3D 119875 = 119901119894 119901119894 isin ℝ3 119894 = 1hellip 119873119901 as bordas podem ser
detectadas utilizando a Equaccedilatildeo (240) Esta eacute uma comparaccedilatildeo do acircngulo entre
dois piacutexeis 120585119894 119899 com base em um triacircngulo formado pelo centro perspectivo 119891 = 0 o
ponto 119901119894 e a vizinhanccedila deste ponto 119875119899 = 119901119894 119899 119899 = 1hellip 8 com o acircngulo de
vizinhanccedila 120585119905119893
120585119894 = max arcsin 119901119894 119899
119901119894 119899minus119901119894 ∙ 119904119894119899120593 (240)
52
119869 = 119901119894 120585119894 gt 120585119905119893 (241)
onde
120593 ndash Acircngulo maacuteximo entre dois piacutexeis veacutertice do triacircngulo no ponto 119891 = 0
O triacircngulo utilizado como referecircncia no filtro para a detecccedilatildeo de bordas
com veacutertice no ponto 119891 = 0 eacute ilustrado com a Figura 222
FIGURA 222 ndash Geometria do filtro para a definiccedilatildeo de bordas
FONTE MAY et al (2008)
Um conjunto 119878 de pontos pode ser filtrado atraveacutes da condiccedilatildeo expressa
com a Equaccedilatildeo (243)
119889 119901119894 = 1
119896 119901119894 minus 119901119894 119899 119896119899=1 (242)
119878 = 119901119894 isin 119875 119889 119901119894 lt 119889119905119893 (243)
onde
119889119905119893 ndash Distacircncia de vizinhanccedila constante
O conjunto 119876 de pontos selecionados satildeo os pontos filtrados da nuvem 3D
conforme a condiccedilatildeo da Equaccedilatildeo (244)
119876 = 119902119894 119902119894 isin 119875(119869 cup 119878) (244)
53
29 ANAacuteLISE DE SUPERFIacuteCIES POR AUTOVALORES E AUTOVETORES
A anaacutelise da forma de superfiacutecies pode ser feita pela variaccedilatildeo local de
autovalores que possibilita a classificaccedilatildeo e segmentaccedilatildeo de pontos com
coordenadas tridimensionais (BELTON e LICHTI 2006)
Autovetores e seus respectivos autovalores podem ser obtidos a partir da
Matriz de Variacircncias e Covariacircncias (119872119881119862) de um conjunto de observaccedilotildees O
tamanho relativo e a direccedilatildeo dos autovetores podem indicar propriedades locais
desta superfiacutecie permitindo analisar sua forma (PAULY et al 2002)
De acordo com Johnson e Wichern (1998) a 119872119881119862 pode ser calculada atraveacutes
da Equaccedilatildeo (245)
11987211988111986231199093 =1
119896 119903 119894 minus 119903 119896119894=1 ∙ 119903 119894 minus 119903
119879=
1205901199092 120590119909119910 120590119909119911
120590119909119910 1205901199102 120590119910119911
120590119909119911 120590119910119911 1205901199112
(245)
onde
119872119881119862 ndash Matriz de Variacircncias e Covariacircncias
119903 119894 ndash Vetor com as coordenadas 3D do ponto em questatildeo na amostra
119903 ndash Vetor com as coordenadas do centroacuteide da superfiacutecie
1205901199092120590119910
2 1205901199112 ndash Variacircncias
120590119909119910 120590119909119911 120590119910119911 ndash Covariacircncias
119896 ndash Nuacutemero de pontos da amostra
O vetor com as coordenadas do 119894-eacutesimo ponto da amostra eacute denotado com
119903 119894 pela Expressatildeo (246) A posiccedilatildeo relativa do centroacuteide pode ser calculada atraveacutes
da Equaccedilatildeo (247)
119903 119894 = 119909119894 119910119894 119911119894 119879 (246)
119903 =1
119896 119903 119894119896119894=1 (247)
54
A 119872119881119862 eacute quadrada simeacutetrica positiva-semidefinida e pode ser decomposta
em autovetores 119890 e autovalores 120582 atraveacutes da Equaccedilatildeo (248) Os autovalores 120582119894 satildeo
elementos escalares associados aos respectivos autovetores 119890 119894 (LEON 1998)
119872119881119862 ∙ 119890 = 120582 ∙ 119890 (248)
A partir do teorema de decomposiccedilatildeo espectral (decomposiccedilatildeo de Jordan) a
119872119881119862 pode ser isolada nesta igualdade conforme a Equaccedilatildeo (249) Maiores
detalhes podem ser vistos em Johnson e Wichern (1998) e Shakarji (1998)
119872119881119862 = 120582119894 ∙ 119890 119894 ∙ 119890 1198941198792
119894=0 (249)
onde
119872119881119862 ndash Matriz Variacircncia Covariacircncia
119890 119894 ndash Vetor com os autovetores 119890 119894
120582119894 ndash Matriz com os autovalores 120582119894
Os autovalores satildeo valores reais e os autovetores formam um sistema de
base ortogonal que correspondem aos componentes principais do conjunto de
observaccedilotildees (BELTON 2008)
De acordo com PAULY et al (2002) pode-se adotar a convenccedilatildeo entre os
autovalores da Expressatildeo (250) A partir desta convenccedilatildeo algumas propriedades
para superfiacutecies normais podem ser descritas
1205821 ge 1205822 ge 1205823 (250)
Em um conjunto de pontos 3D que formam uma superfiacutecie plana espera-se
que 1205821 ne 0 1205822 ne 0 e que 1205823 asymp 0 Com isto o menor autovetor 119890 3 apontaraacute na direccedilatildeo
normal a esta superfiacutecie Com a Figura 223 satildeo ilustrados os trecircs autovetores de
uma regiatildeo da superfiacutecie descrita pela nuvem de pontos 3D O terceiro autovetor 119890 3
com o menor autovalor 1205823 eacute ortogonal agrave superfiacutecie plana definida pelos outros dois
autovetores 119890 1 e 119890 2
55
FIGURA 223 ndash Autovetores em nuvem de pontos 3D de uma superfiacutecie plana
Pontos contidos na interseccedilatildeo entre duas superfiacutecies planas podem ser
identificados atraveacutes das relaccedilotildees 1205821 asymp 21205822 e 1205823 asymp 0 O autovetor 119890 1 apontaraacute na
direccedilatildeo da linha limitante da superfiacutecie plana e o autovetor 119890 3 seraacute ortogonal a esta
direccedilatildeo Podem-se encontrar segmentos de retas que limitam a borda de uma
superfiacutecie atraveacutes das relaccedilotildees 1205822 asymp 1205823 e 1205821 asymp 1205822+1205823
Quando os autovalores apresentam valores aproximadamente iguais
1205821 asymp 1205822 asymp 1205823 torna-se possiacutevel encontrar o veacutertice formado por trecircs superfiacutecies
planas
Normalizando os autovalores com a Equaccedilatildeo (251) remove-se a sua
dependecircncia em relaccedilatildeo ao tamanho da amostra utilizada
120582119894prime =
120582119894
1205821+1205822+1205823=
120582119894
119905119903119886 ccedil119900(120582) (251)
Para o autovalor miacutenimo (119894 = 3) pode-se definir o nuacutemero 119873 de pontos para
representar as variaccedilotildees na superfiacutecie atraveacutes da Equaccedilatildeo (252)
119873 =1205823
119905119903119886 ccedil119900(120582) (252)
O valor resultante da Equaccedilatildeo (252) eacute uma medida aproximada de
curvatura local e pode representar a rugosidade da superfiacutecie de forma normalizada
56
210 ANAacuteLISE DE SUPERFIacuteCIES POR MOMENTOS INVARIANTES
Caracteriacutesticas de superfiacutecies planas podem ser obtidas atraveacutes da anaacutelise
de momentos invariantes para isto utiliza-se a 119872119881119862 dos pontos que descrevem esta
superfiacutecie De acordo com MASS e VOSSELMAN (1999) os momentos invariantes
119898119894119895 podem ser calculados atraveacutes da Equaccedilatildeo (253)
119898119894119895 = 119909119894119910119895119891(119909119910)119889119909 1198891199101199102
1199101
1199092
1199091 (253)
onde
119894 119895 ndash Correspondem agrave ordem do momento
119891(119909119910) ndash A coordenada 119911 dos pontos eacute funccedilatildeo das coordenadas planas 119909 e 119910
em um conjunto de pontos que descrevem a superfiacutecie contiacutenua
A Equaccedilatildeo (254) permite determinar o volume de uma esfera unitaacuteria com
raio 119877 em um domiacutenio contiacutenuo 119873 de pontos 3D eacute obtida a partir da Equaccedilatildeo (253)
e possibilita o estudo de propriedades das superfiacutecies com padratildeo planar
119898119894119895119896 = 119909119894119910119895 119911119896119891(119909119910 119911)119889119907119881
(254)
onde
119894 119895119896 ndash Pertencem ao domiacutenio contiacutenuo da funccedilatildeo com 119873 pontos
119894 + 119895 + 119896 ndash Corresponde agrave ordem do momento
119891(119909119910 119911) ndash Eacute o volume da esfera unitaacuteria
Atraveacutes da Equaccedilatildeo (254) GROSS e THONNESSEN (2006) conseguiram
descrever algumas relaccedilotildees entre autovalores e as propriedades de superfiacutecies
normais conforme eacute ilustrado com o Quadro 23
57
ESTRUTURA AUTOVALORES
120640120783 120640120784 120640120785
PONTO ISOLADO
0 0 0
PONTO FINAL DE SEGMENTO
DE RETA
1
12= 0083 0 0
LINHA RETA 1
3= 0333 0 0
12 PLANO 1
4= 025
1
4 1 minus
64
91205872 = 00 0
PLANO 1
4= 025
1
4= 025 0
14 PLANO 1
4 1 minus
2
120587 = 009
1
4+
2
120587minus
32
91205872= 00 0
INTERSECcedilAtildeO DE 2 PLANOS
1
3= 0333
1
8= 0125
1
8minus
8
91205872= 003
INTERSECcedilAtildeO DE 3 PLANOS
1
6 1 minus
1
120587 = 011
1
6 1 minus
1
120587 = 011
1
6 1 +
2
120587 minus
26
331205872= 003
INTERSECcedilAtildeO DE 2 PLANOS
Agrave 30deg 025 01875 001747
QUADRO 23 ndash Propriedades de superfiacutecies normais obtidas com autovalores FONTE GROSS e THOENNESSEN (2006)
Os autovalores do Quadro 23 foram determinados analiticamente a partir da
Equaccedilatildeo (254) e podem ser utilizados como referecircncia para a estimaccedilatildeo da forma
das superfiacutecies que compotildeem a estrutura dos objetos
Restringindo a ordem dos momentos com 119894 + 119895 + 119896 le 2 pode-se calcular o
centro de gravidade da superfiacutecie conforme a Equaccedilatildeo (255) e os elementos da
119872119881119862 podem serem obtidos atraveacutes da Equaccedilatildeo (256)
119909 =119898100
119898000 119910 =
119898010
119898000 119911 =
119898001
119898000 (255)
58
119898 119894119895119896 = 119909119894 minus 119909 119894 119910 minus 119910 119895 119911 minus 119911 119896119891(119909119910 119911)119889119907119881
(256)
Os momentos de 2ordf ordem normalizados para os pontos 3D em um domiacutenio
discreto podem ser calculados atraveacutes da Equaccedilatildeo (257)
119898 119894119895119896 = 119909119897minus119909
119894 119910119897minus119910 119895 119911119897minus119911
119896119873119897=1
119877119894+119895+119896119873 (257)
onde
119898 119894119895119896 ndash Momentos de 2ordf ordem para os pontos 3D
119873 ndash Nuacutemero de pontos da amostra no domiacutenio contiacutenuo da funccedilatildeo
119877 ndash Raio da esfera unitaacuteria considerada para seleccedilatildeo de pontos
Desta forma os valores calculados para os momentos natildeo satildeo influenciados
pelo nuacutemero de pontos unidade fiacutesica das medidas ou peso dos elementos da 119872119881119862
Utilizando momentos de 2ordf ordem a 119872119881119862 pode ser obtida atraveacutes da Equaccedilatildeo
(258)
119872119881119862 =
119898 200 119898 110 119898 101
119898 110 119898 020 119898 011
119898 101 119898 011 119898 002
(258)
O caacutelculo dos autovalores 120582119894 e autovetores 119890 119894 com 119894 = 123 eacute variaacutevel para
cada ponto do conjunto de observaccedilotildees Sendo assim as classes de valores
geradas por GROSS e THONNESSEN (2006) com objetivo de modelar superfiacutecies
com padratildeo planar foram agraves seguintes
O primeiro autovalor 1205821 foi definido constante e igual a 025
O segundo autovalor 1205822 varia de 0125 agrave 025
O terceiro autovalor 1205823 varia de 0 agrave 0125
Com a aproximaccedilatildeo teoacuterica dos valores contidos no Quadro 24 JUTZI e
GROSS (2009) mostraram a possibilidade de determinar matematicamente
inclinaccedilotildees entre as superfiacutecies para os acircngulos de 0ordm 30ordm e 90ordm No entanto
quando satildeo utilizados dados reais para representar as superfiacutecies pequenas
variaccedilotildees nestes valores podem ser percebidas Um exemplo eacute que o terceiro
59
autovalor 1205823 natildeo teraacute valor igual a zero mesmo em uma superfiacutecie plana Isto ocorre
por haverem pequenos desvios entre os pontos desta superfiacutecie que satildeo causados
por ruiacutedo presente no conjunto de dados reais Este fato pode ser observado
calculando o terceiro autovalor que seraacute um valor positivo pequeno mas diferente
de zero Com isto quanto mais proacuteximo de zero o terceiro autovalor 1205823 maior seraacute o
indicativo que a superfiacutecie eacute plana conforme ilustrado com a Figura 224
FIGURA 224 ndash Inclinaccedilotildees de superfiacutecies determinadas por autovalores
FONTE JUTZI e GROSS (2009)
60
211 ALGORITMO DE DESLOCAMENTO PELA MEacuteDIA
O algoritmo de deslocamento pela meacutedia (Mean Shift) pode ser utilizado no
reconhecimento de padrotildees para a segmentaccedilatildeo de imagens A densidade de
pontos vizinhos em relaccedilatildeo a um ponto central pode ser estimada com a meacutedia do
conjunto de dados discretos A anaacutelise espacial de atributos eacute utilizada neste
contexto com o objetivo de extrair informaccedilotildees Para isto utiliza a vizinhanccedila de um
ponto na imagem Com os atributos definidos pode-se encontrar o centro das
regiotildees com as maiores densidades que representam caracteriacutesticas significativas
dos objetos presentes na imagem
Para realizar a anaacutelise espacial de atributos e obterem-se resultados
satisfatoacuterios deve-se reduzir o volume de dados ateacute que se tenham apenas as
caracteriacutesticas significativas distribuiacutedas em um sistema de coordenadas contiacutenuo O
conteuacutedo do espaccedilo de atributos deve ser passiacutevel de modelagem atraveacutes de uma
amostragem com distribuiccedilatildeo multivariada de probabilidade Devido a este
pressuposto eacute necessaacuterio verificar se a condiccedilatildeo de normalidade dos dados eacute
satisfeita em aplicaccedilotildees estatiacutesticas tradicionais que utilizam testes parameacutetricos
Em outras aplicaccedilotildees podem-se utilizar meacutetodos estatiacutesticos natildeo
parameacutetricos com menos restriccedilotildees sobre o comportamento dos dados como por
exemplo natildeo se preocupar com o tipo de distribuiccedilatildeo para as variaacuteveis aleatoacuterias O
conceito de Kernel pode ser empregado em meacutetodos natildeo parameacutetricos para a
estimativa de propriedades Esta eacute uma funccedilatildeo estatiacutestica contiacutenua simeacutetrica e com
limite superior e inferior de integraccedilatildeo definidos cuja integraccedilatildeo resulta na unidade
por conveniecircncia O Kernel atua na imagem como uma janela de convoluccedilatildeo
suavizando as caracteriacutesticas dos pontos analisados (MACHADO 2006)
De acordo com COMANICIU e MEER (2002) o algoritmo de deslocamento
pela meacutedia eacute uma ferramenta versaacutetil para anaacutelises espaciais de feiccedilotildees presentes
em amostras Utiliza o Kernel para a estimaccedilatildeo da densidade dos elementos no
conjunto de dados tendo como referecircncia um ponto fixo na regiatildeo central da
amostra Dado um conjunto de pontos 120169119894=1hellip119899 em um espaccedilo 119877 com dimensatildeo 119889 o
estimador de densidade multivariada por Kernel 119870(120169) e a matriz de paracircmetros 119867
com bandas de dimensatildeo 119889 pode ser calculada com os pontos 120169 Com estes
61
paracircmetros definidos a funccedilatildeo para estimar a densidade multivariada no ponto 120169 eacute
expressa com a Equaccedilatildeo (259)
119891 (120169) =1
119899 119870119867 120169 minus 120169119894 119899119894=1 (259)
119870119867(120169) = 119867 minus1
2119870(119867minus1
2120169) (260)
O Kernel 119870(120169) com dimensatildeo 119889 eacute uma funccedilatildeo para a anaacutelise da densidade
da vizinhanccedila dos pontos expressa atraveacutes das Equaccedilotildees (261) e (262)
119870(120169)119877119889
119889120169 = 1 lim 119909 rarrinfin 120169 119889 119870 120169 = 0 (261)
119909119870(120169)119889120169119877119889
= 0 120169120169119879119870(120169)119889120169119877119889
= 119888119870119868 (262)
Onde 119888119870 eacute uma constante A partir do Kernel univariado 1198701 119909 o Kernel
multivariado pode ser calculado de duas maneiras conforme as Equaccedilotildees (263) e
(264)
119870119875 120169 = 1198701 119909119894 119889119894=1 (263)
119870119878 120169 = 119886119896 1198891198701( 120169119894 ) (264)
Onde 119870119875(120169) eacute obtido com o produto dos Kernels univariados e 119870119878(120169) eacute
obtido rotacionando 1198701(119909) no espaccedilo 119877119889 o que faz 119870119878(120169) ser radialmente simeacutetrico
A constante 119886119896 119889minus1 = 1198701 120169 1198891201691198774
com 119870119878(119909) integrado de 0 agrave 1 O Kernel
radialmente simeacutetrico eacute de interesse em anaacutelises espaciais de imagens desde que
satisfaccedila a condiccedilatildeo da Equaccedilatildeo (265)
119870 119909 = 119888119896 119889119896( 120169 2) (265)
Neste caso define-se a funccedilatildeo de cada elemento do Kernel 119896 119909 para 119909 ge 0
A constante de normalizaccedilatildeo 119888119896 119889 pode ser calculada integrando 119870 120169 de 0 a 1
assumindo-se que eacute positiva A estimaccedilatildeo pode ser parametrizada com a matriz
diagonal de bandas do Kernel 119867 = 1198932119868 = 119889119894119886119892 11989312hellip 119893119889
2 onde 119868 eacute a matriz
identidade com dimensatildeo 119889 Esta matriz apresenta a vantagem de ser determinada
62
utilizando como uacutenico paracircmetro o nuacutemero de bandas 119893 ge 0 do Kernel Empregando
paracircmetros com o nuacutemero de bandas 119893 e dimensatildeo 119899 o estimador de densidade por
Kernel da Equaccedilatildeo (259) pode ser expresso atraveacutes da Equaccedilatildeo (266)
119891 (120169) =1
119899119893119889 119870119867
120169minus120169119894
119893 119899
119894=1 (266)
A qualidade do estimador de densidade por Kernel pode ser analisada
atraveacutes do erro meacutedio quadraacutetico entre a densidade real e a estimada Na praacutetica
somente a aproximaccedilatildeo assintoacutetica das medidas pode ser calculada (AMISE ndash
Asymptotic Mean Integrated Square Error) Para os Kernels multivariados o erro
meacutedio quadraacutetico AMISE eacute minimizado utilizando o Kernel de Epanechnikov
(COMANICIU e MEER 2002)
119896119864 119909 = 1 minus 119909 0 le 119909 le 1
0 119909 gt 0 (267)
119870119864 120169 = 1
2119888119889
minus1 119889 + 2 (1 minus 120169 2) 120169 le 1
0 119888119886119904119900 119888119900119899119905119903aacute119903119894119900 (268)
Onde 119888119889 eacute o volume de uma esfera com raio unitaacuterio e com dimensatildeo 119889 O
elemento do Kernel 119896119873 119909 pode ser calculado utilizando a Equaccedilatildeo (269)
119896119873 119909 = exp minus1
2119909 119909 ge 0 (269)
Para o Kernel multivariado calculado com a Equaccedilatildeo (269) um Kernel
normal 119870119873 pode ser calculado utilizando a Equaccedilatildeo (270)
119870119873 120169 = (2120587)minus1198892exp minus1
2 120169 2 (270)
Sendo o Kernel normal simeacutetrico e admitido finito Para a anaacutelise espacial de
imagens estas duas formas de calcular o Kernel satildeo suficientes e os resultados
obtidos com estas condiccedilotildees impostas satildeo satisfatoacuterios O estimador de densidade
por Kernel da Equaccedilatildeo (259) pode ser reescrito conforme a Equaccedilatildeo (271)
63
119891 119893 119870(120169) =119888119896 119889
119899119893119889 119896
120169minus120169119894
119893
2
119899119894=1 (271)
Para anaacutelise de feiccedilotildees espaciais primeiramente deve-se calcular a
densidade do conjunto de dados e verificar o seu comportamento espacial Isto pode
ser feito calculando o gradiente da funccedilatildeo de densidade 119891(120169) igual a zero nabla119891 120169 = 0
O algoritmo de deslocamento pela meacutedia eacute uma maneira de localizar estes zeros
para estimar a densidade do conjunto de observaccedilotildees Calculando o gradiente da
funccedilatildeo expressa com a Equaccedilatildeo (271) pode-se estimar a densidade atraveacutes da
Equaccedilatildeo (272)
nabla 119891119893 119870(120169) equiv2119888119896 119889
119899119893119889+2 (120169 minus 120169119894)119896prime
120169minus120169119894
119893
2
119899119894=1 (272)
Substituindo 119896prime pela funccedilatildeo 119892(119909) conforme expresso com a Equaccedilatildeo (273)
119892 119909 = 119896prime(119909) (273)
Assumindo que a derivada do Kernel 119896 exista para o conjunto finito de
pontos 119909 isin [0infin) O Kernel 119866(119909) com seus elementos 119892(119909) pode ser definido atraveacutes
da Equaccedilatildeo (274)
119866 119909 = 119888119892 119889119892( 120169 2) (274)
Onde 119888119892119889 corresponde a uma constante de normalizaccedilatildeo O Kernel 119866 119909
pode ser considerado uma aproximaccedilatildeo do Kernel 119870(119909) dependendo do contexto
em que seraacute empregado De forma similar o Kernel de Epanechnikov eacute uma
simplificaccedilatildeo do Kernel uniforme da esfera unitaacuteria com dimensatildeo 119889 Introduzindo
119892(119909) na Equaccedilatildeo (272) tem-se a Equaccedilatildeo (275)
nabla 119891119893 119870 120169 =2119888119896 119889
119899119893119889+2 120169 minus 120169119894 119892
120169minus120169119894
119893
2
119899119894=1 (275)
nabla 119891119893 119870 120169 =2119888119896 119889
119899119893119889+2 119892 120169minus120169119894
119893
2
119899119894=1 ∙
120169119894119892 120169minus120169119894119893
2 119899
119894=1
119892 120169minus120169119894119893
2 119899
119894=1
(276)
64
119892 120169minus120169119894
119893
2
119899119894=1 (277)
Considerando que o resultado da funccedilatildeo expressa com a Equaccedilatildeo (277) eacute
um nuacutemero positivo O primeiro termo da Equaccedilatildeo (276) eacute proporcional agrave densidade
estimada calculada para 120169 com o Kernel 119866 conforme Equaccedilatildeo (271) e expresso
agora em funccedilatildeo de 119892(119909) atraveacutes da Equaccedilatildeo (278)
119891119893 119866 120169 =119888119892 119889
119899119893119889 119892
120169minus120169119894
119893
2
119899119894=1 (278)
O segundo termo da Equaccedilatildeo (276) corresponde ao algoritmo de
deslocamento pela meacutedia conforme Equaccedilatildeo (279)
119898119893 119866 120169 = 120169119894119892
120169minus120169119894119893
2 119899
119894=1
119892 120169minus120169119894119893
2 119899
119894=1
minus 120169 (279)
A Equaccedilatildeo (279) representa a diferenccedila entre as meacutedias ponderadas
utilizando o Kernel 119866 para os pesos e o centro da janela de convoluccedilatildeo em 120169 A
partir das Equaccedilotildees (276) (278) e (279) chega-se as Equaccedilotildees (280) e (281)
nabla 119891119893 119870 120169 = 119891 119893 119866 120169 2119888119896 119889
1198932119888119892 119889119898119893 119866 120169 (280)
119898119893 119866 120169 =1
21198932119888nabla
119891 119893 119870 120169
119891 119893 119866 120169 (281)
Para a posiccedilatildeo 120169 o vetor de deslocamento pela meacutedia calculado com Kernel
119866 eacute proporcional agrave estimaccedilatildeo de densidade normalizada obtida resolvendo a funccedilatildeo
com gradiente igual a zero e Kernel 119870 Eacute a normalizaccedilatildeo da densidade estimada em
119909 calculada com o Kernel 119866
O vetor de deslocamento pela meacutedia aponta na direccedilatildeo de maacuteximo
crescimento da densidade do conjunto de dados A estimaccedilatildeo da densidade de
pontos com mesma caracteriacutestica eacute obtida atraveacutes de interaccedilotildees com sucessivos
caacutelculos do vetor de deslocamento pela meacutedia 119898119893 119866 120169 e translaccedilotildees do Kernel 119866(119909)
sobre a imagem Isto garante a convergecircncia ao redor do ponto de interesse
65
utilizando a Equaccedilatildeo (281) com gradiente igual a zero Regiotildees com baixa
densidade de observaccedilotildees natildeo satildeo interessantes para anaacutelises espaciais com o
algoritmo de deslocamento pela meacutedia pois muitas iteraccedilotildees seriam necessaacuterias
para obtenccedilatildeo de resultados pouco satisfatoacuterios De forma anaacuteloga em locais com
densidade maacutexima poucas iteraccedilotildees satildeo necessaacuterias e a anaacutelise pode atingir bons
resultados (COMANICIU e MEER 2002)
Imagens satildeo representadas matematicamente na forma de matrizes onde
cada posiccedilatildeo da matriz eacute ocupada por vetores com dimensatildeo 119901 onde 119901 = 1 no caso
de imagens em niacuteveis de cinza ou coloridas e 119901 ge 2 no caso de imagens
multiespectrais O posicionamento de cada pixel na matriz imagem estaacute contido no
domiacutenio espacial (Spatial domain) enquanto o valor digital do pixel faz parte do
domiacutenio de caracteriacutesticas da imagem (Range domain) assumindo-se estes
domiacutenios como espaccedilos euclidianos Deste modo o Kernel multivariado pode ser
definido como o produto de dois Kernels radialmente simeacutetricos em um espaccedilo
euclidiano calculado com um paracircmetro de cada domiacutenio atraveacutes da Equaccedilatildeo
(282)
119870119893119904119893119903(119909) =119862
1198931199042119893119903
119901 119896 120169119904
119893119904
2
119896 120169119903
119893119903
2
(282)
onde
120169119904 ndash Corresponde ao domiacutenio espacial
120169119903 ndash Corresponde ao domiacutenio de caracteriacutesticas
119896(119909) ndash Elemento da funccedilatildeo calculado em ambos os domiacutenios
119893119904 119893119903 ndash Paracircmetros das bandas de cada domiacutenio do Kernel empregado
119862 ndash Constante de normalizaccedilatildeo entre as bandas
Na praacutetica o Kernel de Epanechnikov tambeacutem conhecido por Kernel normal
atinge resultados satisfatoacuterios O usuaacuterio deve escolher apenas os paracircmetros das
bandas 119893 = 119893119904 119893119903 e a quantidade miacutenima 119867 de pixels das regiotildees segmentadas na
imagem determinando assim a resoluccedilatildeo na estimaccedilatildeo da densidade A Figura 225
ilustra um exemplo de segmentaccedilatildeo realizada utilizando o algoritmo de
deslocamento pela meacutedia sobre uma imagem em niacuteveis de cinza
66
FIGURA 225 ndash Imagem segmentada FONTE COMANICIU e MEER (2002)
A segmentaccedilatildeo de imagens atraveacutes do algoritmo de deslocamento pela
meacutedia foi implementada no software EDISON (Edge Detection and Image
SegmentatiON System) desenvolvido pela Universidade RUTGER de New Jersey
Este software aleacutem da segmentaccedilatildeo com o algoritmo de deslocamento pela meacutedia
realiza uma filtragem preservando as descontinuidades e detectando os limites dos
objetos contidos na imagem atraveacutes de uma funccedilatildeo gradiente (CHRISTOUDIAS et
al 2002)
67
3 MATERIAIS
Neste trabalho foram utilizadas imagens TOF obtidas com a cacircmara PMD
CamCube 20 que fornece dados de distacircncia e intensidade sob forma de matrizes
de imagem Para realizar os experimentos foram obtidos trecircs conjuntos de imagens
De um gabarito com a forma de um tabuleiro de xadrez para realizar
o processo de calibraccedilatildeo da cacircmara
De uma parede branca com padratildeo planar para anaacutelise de ruiacutedos e
distorccedilotildees geomeacutetricas das imagens e
Do objeto de estudo uma caixa de papelatildeo com superfiacutecies planas e
brancas
Para o processamento das imagens TOF foi utilizado um microcomputador
do laboratoacuterio de Fotogrametria e Sensoriamento Remoto Departamento de
Geomaacutetica da Universidade Federal do Paranaacute com as seguintes caracteriacutesticas
Processador Intelreg Coretrade2 Duo 293GHz
Capacidade do disco riacutegido de 320GB
Memoacuteria principal de 2GB
68
4 MEacuteTODOS
Neste capitulo descreve-se o desenvolvimento metodoloacutegico do presente
trabalho de pesquisa para a aquisiccedilatildeo e processamento da imagem TOF Esta
imagem eacute composta por dois arquivos O primeiro arquivo conteacutem informaccedilatildeo de
intensidade de retorno do sinal captado com iluminaccedilatildeo infravermelha O segundo
arquivo conteacutem informaccedilatildeo de distacircncia (range) para cada pixel gerado com o
sensor da cacircmara TOF
Considerando que as imagens TOF podem apresentar ruiacutedo em funccedilatildeo das
condiccedilotildees de iluminaccedilatildeo e da natureza das superfiacutecies dos objetos estudos para a
reduccedilatildeo do ruiacutedo foram efetuados Para isto utilizaram-se janelas na regiatildeo central
da imagem ao redor do pixel com coordenadas de imagem (102 102) As filtragens
foram realizadas em aacutereas que circundam este pixel central
Apoacutes a anaacutelise do tempo de integraccedilatildeo na aquisiccedilatildeo da imagem
determinaram-se POI atraveacutes do processo de calibraccedilatildeo da cacircmara Os POI
permitiram corrigir a geometria dos dados da imagem TOF Esta correccedilatildeo eacute
necessaacuteria devido agraves distorccedilotildees causadas pelo sistema de lentes da cacircmara
A etapa seguinte consistiu na segmentaccedilatildeo da imagem TOF onde duas
metodologias foram avaliadas
1) Segmentaccedilatildeo do conjunto de dados por crescimento de regiotildees no
espaccedilo tridimensional utilizando pontos semente escolhidos no arquivo de
intensidades da imagem TOF como referecircncia para o posicionamento (119883119884) dos
pontos com distacircncia (119885)
2) Segmentaccedilatildeo utilizando a anaacutelise da variaccedilatildeo local dos autovalores ao
longo do arquivo de distacircncias da imagem TOF Realizada para a geraccedilatildeo de uma
imagem com bordas intensificadas segmentaccedilatildeo desta imagem atraveacutes do
algoritmo de deslocamento pela meacutedia e projeccedilatildeo ortogonal dos pontos
pertencentes agraves aacutereas segmentadas As superfiacutecies segmentadas foram entatildeo
separadas atraveacutes do conjunto de pontos 3D
O passo seguinte consistiu no caacutelculo das coordenadas tridimensionais dos
pontos dos objetos imageados a partir da informaccedilatildeo de distacircncia das coordenadas
dos piacutexeis na imagem de intensidade e dos POI Com isto gerou-se a nuvem de
pontos 3D e tornou-se possiacutevel a modelagem tridimensional das superfiacutecies do
69
objeto de estudo sendo tambeacutem avaliado o resultado obtido A Figura 41 apresenta
as etapas realizadas no processamento das imagens TOF com as duas propostas
de metodologia para a etapa de segmentaccedilatildeo
FIGURA 41 ndash Processamento da imagem TOF
41 CALIBRACcedilAtildeO DA CAcircMARA
A calibraccedilatildeo foi realizada com o objetivo de determinar os Paracircmetros de
Orientaccedilatildeo Interior (POI) da cacircmara Estes paracircmetros possibilitam a reconstruccedilatildeo
do feixe perspectivo que gerou a imagem para o instante em que foi captada
permitindo a correccedilatildeo de sua geometria (ANDRADE 1998)
Com o processo de Orientaccedilatildeo Interior satildeo obtidos os seguintes POI
distacircncia focal calibrada (119891119888 ) posiccedilatildeo do Ponto Principal (1199090 1199100) na imagem
Distorccedilatildeo Radial Simeacutetrica (119870111987021198703) Distorccedilatildeo Descentrada (11987511198752) e os
paracircmetros que indicam falta de afinidade do sensor (119860119861)
IMAGEM TOF
CORRECcedilOtildeES GEOMEacuteTRICAS COM POI
ARQUIVO DE INTENSIDADES
SUPERFIacuteCIE SEMENTE
CRESCIMENTO DE REGIOtildeES COM PONTO SEMENTE
PROJECcedilAtildeO ORTOGONAL
NUVEM DE PONTOS 3D
ARQUIVO DE DISTAcircNCIAS
IMAGEM COM BORDAS INTENSIFICADAS VARIACcedilAtildeO LOCAL DE AUTOVALORES
SEGMENTACcedilAtildeO DA IMAGEM COM BORDAS INTENSIFICADAS
PROJECcedilAtildeO ORTOGONAL
NUVEM DE PONTOS 3D
MODELAGEM 3D DAS SUPERFIacuteCIES
70
Os POI obtidos com o processo de calibraccedilatildeo possibilitam realizar correccedilotildees
geomeacutetricas nos arquivos de intensidades e distacircncias das imagens TOF Com a
calibraccedilatildeo objetiva-se corrigir as distorccedilotildees ocorridas na passagem do raio de luz
pelo sistema de lentes ateacute atingir o plano focal Este erro ocorre pela impossibilidade
na construccedilatildeo de um sistema de lentes perfeito para a cacircmara A correccedilatildeo dos erros
sistemaacuteticos da cacircmara eacute realizada no plano da imagem no ponto onde uma linha
reta passante pelo ponto nodal anterior do sistema de lentes eacute ortogonal a este
plano
O meacutetodo de calibraccedilatildeo fotogrameacutetrica eacute o tradicionalmente utilizado na
determinaccedilatildeo dos POI em Ciecircncias Geodeacutesicas Para isto necessita de pontos de
apoio com coordenadas tridimensionais conhecidas na superfiacutecie de objetos com
correspondentes coordenadas bidimensionais observadas na imagem Relaciona-se
a informaccedilatildeo 3D da cena com a informaccedilatildeo 2D da imagem atraveacutes das equaccedilotildees de
colinearidade fazendo-se uma correspondecircncia entre a posiccedilatildeo dos pontos de
referecircncia 3D e os mesmos pontos reconhecidos na imagem 2D Esta calibraccedilatildeo
pode ser realizada de forma eficiente desde que sejam utilizadas teacutecnicas e campos
de calibraccedilatildeo apropriados para cada tipo de cacircmara e aplicaccedilatildeo que se destina a
imagem Outra teacutecnica que pode ser utilizada para a Orientaccedilatildeo Interior das imagens
eacute conhecida como auto-calibraccedilatildeo na qual natildeo haacute necessidade de pontos com
coordenadas conhecidas no espaccedilo objeto (ZHANG 2000)
A Distorccedilatildeo Radial Simeacutetrica eacute a parcela de refraccedilatildeo natildeo desejaacutevel que um
feixe luminoso sofre ao atravessar um sistema de lentes A Distorccedilatildeo Descentrada eacute
composta pelas distorccedilotildees Tangencial e Radial Assimeacutetrica Eacute causada pela
impossibilidade de alinhar-se perfeitamente o eixo oacuteptico do sistema de lentes que
compotildee a objetiva Correccedilotildees para estas distorccedilotildees podem ser feitas atraveacutes da
Equaccedilatildeo (41) Maiores detalhes podem ser vistos em Andrade (1998)
119909prime119910prime =
119909119910
119900119887119904minus
1199090
1199100 minus
120575119909120575119910 119903119886119889
minus 120575119909120575119910 119889119890119904
minus 120575119909120575119910 119886
(41)
71
onde
119909prime119910prime 119879 ndash Coordenadas corrigidas no sistema referencial de imagem
119909 119910 119900119887119904119879 ndash Coordenadas de imagem observadas
1199090 1199100 119879ndash Coordenadas do PP no sistema referencial de imagem
120575119909 120575119910 119903119886119889119879 ndash Distorccedilatildeo Radial Simeacutetrica
120575119909 120575119910 119889119890119904119879 ndash Distorccedilatildeo Descentrada
120575119909 120575119910 119886119879 ndash Distorccedilatildeo causada pela falta de afinidade entre os eixos do
sensor
Andrade (1998) ilustra algumas correccedilotildees necessaacuterias para as imagens
utilizadas em Fotogrametria e mostra a influencia dos POI nestas correccedilotildees Um
exemplo eacute a correccedilatildeo da distorccedilatildeo Radial Simeacutetrica que pode ser realizada atraveacutes
das Equaccedilotildees (42) e (43)
120575119909119903119886119889 = (1199032 ∙ 1198701 + 1199034 ∙ 1198702 + 1199036 ∙ 1198703) ∙ 119909 (42)
120575119910119903119886119889 = (1199032 ∙ 1198701 + 1199034 ∙ 1198702 + 1199036 ∙ 1198703) ∙ 119910 (43)
onde
119909 = (119909 minus 1199090)
119910 = (119910 minus 1199100)
119909119910 ndash Coordenadas dos pontos com distorccedilotildees no sistema referencial
fotogrameacutetrico projetado na imagem
11990901199100 ndash Coordenadas do Ponto Principal
119870111987021198703 ndash Coeficientes de Distorccedilatildeo Radial Simeacutetrica
72
A distacircncia 119903 entre o ponto com coordenadas na imagem e o Ponto Principal
pode ser calculada atraveacutes da Equaccedilatildeo (44)
119903 = 119909 2 + 119910 2 (44)
A Distorccedilatildeo Descentrada pode entatildeo ser corrigida atraveacutes das Equaccedilotildees
(45) e (46)
120575119909119889119890119904 = [1198751 ∙ (1199032 + 2 ∙ 1199092
) + 2 ∙ 1198752 ∙ 119909 ∙ 119910 ] ∙ (1 + 1198753 + r2 + ⋯ ) (45)
120575119910119889119890119904 = [2 ∙ 1198751 ∙ 119909 ∙ 119910 + 1198752 ∙ (r2 + 2 ∙ 119910 2)] ∙ (1 + 1198753 + r2 + ⋯ ) (46)
onde
119875111987521198753 ndash Coeficientes de Distorccedilatildeo Descentrada
A diferenccedila de escala dos eixos horizontal e vertical da imagem possiacutevel
natildeo ortogonalidade entre os elementos do sensor pode ser modelada utilizando as
Equaccedilotildees (47) e (48) que introduzem correccedilotildees utilizando os paracircmetros de
afinidade 119860 e 119861 (HABIB e MORGAN 2003)
120575119909119886 = 119860 119909 minus 1199090 + 119861(119910minus1199100) (47)
120575119910119886 = 119861(119910minus1199100) (48)
onde
119860119861 ndash Paracircmetros de afinidade
119909119910 ndash Coordenadas dos pontos com distorccedilotildees no sistema referencial
fotogrameacutetrico projetado na imagem
11990901199100 ndash Coordenadas do Ponto Principal
73
A partir da formulaccedilatildeo proposta por Brown (1971) e incluindo os paracircmetros
de afinidade 119860 e 119861 as Equaccedilotildees (49) e (410) possibilitam a correccedilatildeo da imagem
utilizando os coeficientes 119870111987021198703 e 11987511198752
119909prime = 119909 + 119909 ∙ 11987011199032+1198702119903
4+11987031199036 + ⋯ +
+ 1198751 ∙ 1199032 + 2 ∙ 119909
2 + 2 ∙ 1198752 ∙ 119909 ∙ 119910 ∙ 1 + 1198753 ∙ 119903
2 + ⋯ + 119909 119860 + 119910 119861 (49)
119910prime = 119910 + 119910 ∙ 11987011199032+1198702119903
4+11987031199036 + ⋯ +
+ 21198751 ∙ 119909 ∙ 119910 + 1198752 ∙ 1199032 + 2119910 2 ∙ 1 + 1198753 ∙ 119903
2 + ⋯ + 119910 119861 (410)
A Equaccedilatildeo (41) ilustra as correccedilotildees necessaacuterias na geometria da imagem
quando objetiva-se a extraccedilatildeo de informaccedilotildees meacutetricas Eacute um modelo jaacute consagrado
na Fotogrametria e bastante aplicado em Ciecircncias Geodeacutesicas Pode ser utilizado
para o entendimento das correccedilotildees necessaacuterias nas imagens devido agraves distorccedilotildees
causadas pelo sistema de lentes da cacircmara e pela falta de afinidade entre os
elementos do sensor Outros modelos matemaacuteticos para correccedilotildees geomeacutetricas de
imagens satildeo utilizados em aacutereas correlatas como a Visatildeo Computacional Com a
precisatildeo requerida em cada aplicaccedilatildeo alguns POI tecircm maior relevacircncia que outros
podendo haver a supressatildeo de alguns A correlaccedilatildeo entre os paracircmetros deve ser
analisada e evitada
As Equaccedilotildees (49) e (410) podem ser simplificadas para realizar apenas as
correccedilotildees utilizando os coeficientes de Distorccedilatildeo Radial Simeacutetrica 1198961 e 1198962 e os
paracircmetros de afinidade 119860 e 119861 Estes paracircmetros satildeo os mais significativos para a
correccedilatildeo da imagem obtida com cacircmaras digitais de pequeno formato conforme eacute
expresso atraveacutes das Equaccedilotildees (411) e (412)
119909prime = 119909 + 119909 ∙ 11987011199032+1198702119903
4 + 119909 119860 + 119910 119861 (411)
119910prime = 119910 + 119910 ∙ 11987011199032+1198702119903
4 + 119910 119861 (412)
74
onde
119909119910 ndash Coordenadas dos pontos com distorccedilotildees no sistema referencial
fotogrameacutetrico projetado na imagem
119909 = (119909 minus 1199090)
119910 = (119910 minus 1199100)
11990901199100 ndash Coordenadas do Ponto Principal
119860119861 ndash Paracircmetros de afinidade
Cacircmaras digitais de pequeno formato apresentam principalmente a
Distorccedilatildeo Radial Simeacutetrica causada pelo sistema de lentes sendo os coeficientes 1198961
e 1198962 os mais significativos Os paracircmetros de afinidade entre os eixos da imagem 119860
e 119861 tambeacutem podem ser considerados para a correccedilatildeo das imagens obtidas
dependendo da precisatildeo com que o sensor da cacircmara foi construiacutedo pelo fabricante
Alguns softwares calculam os POI de forma raacutepida com soluccedilatildeo aproximada
e dependendo da aplicaccedilatildeo a que se destina a imagem podem ser utilizados sem
maiores restriccedilotildees Um deles eacute o Toolbox CALIB para Matlab utiliza o algoritmo
proposto por Zhang (2000) Este meacutetodo consiste em determinar os POI da cacircmara
tomando diferentes imagens de um gabarito com quadrados pretos e brancos
similar a um tabuleiro de xadrez fixado em uma superfiacutecie riacutegida e com padratildeo
planar Devem ser obtidas imagens do gabarito variando a posiccedilatildeo e orientaccedilatildeo da
cacircmara natildeo sendo necessaacuterio conhecer a trajetoacuteria do seu movimento para a
determinaccedilatildeo dos POI Este algoritmo possibilita o caacutelculo dos POI da cacircmara de
forma aproximada atraveacutes de sucessivas iteraccedilotildees Para sua utilizaccedilatildeo eacute necessaacuterio
conhecer a dimensatildeo dos quadrados do gabarito e indicar os pontos posiccedilotildees dos
veacutertices que seratildeo utilizados como pontos de referecircncia
No algoritmo proposto por Zhang um vetor de pontos 2D eacute denotado por
119898 = [119906 119907]119879 e um vetor de pontos 3D por 119872 = [119883119884119885]119879 De forma similar pode-se
aumentar estes vetores adicionando uma linha com valor igual a 1 sendo os vetores
aumentados 119898 = [119906 119907 1]119879 e 119872 = [119883119884119885 1]119879 A colinearidade entre o ponto no
espaccedilo objeto centro perspectivo e o ponto no espaccedilo imagem eacute utilizada para
75
estabelecer a relaccedilatildeo entre os pontos 3D contidos no vetor 119872 e os pontos na
imagem 2D contidos no vetor 119898 conforme a Equaccedilatildeo (413)
119904119898 = 119860[119877 119905]119872 (413)
onde
119904 ndash Fator de escala
119877 119905 ndash Paracircmetros de Orientaccedilatildeo Exterior (POE) compostos por elementos de
rotaccedilatildeo e translaccedilatildeo que relacionam as coordenadas obtidas no sistema 3D do
espaccedilo objeto com o sistema de coordenadas 2D da imagem
119860 ndash Eacute a matriz com os POI da cacircmara Apresenta as coordenadas 1199060 e 1199070 do
PP 119864120572 e 119864120573 satildeo os fatores de escala na imagem com eixos 119906 e 119907 O paracircmetro 120574
descreve a falta de ortogonalidade entre os eixos do sistema referencial da imagem
A matriz 119860 eacute expressa atraveacutes da Equaccedilatildeo (414)
119860 = 119864120572 120574 1199060
0 119864120573 1199070
0 0 1
(414)
Comparando as Equaccedilotildees (411) e (412) com o modelo proposto por Zhang
expresso atraveacutes da Equaccedilatildeo (413) tecircm-se as seguintes correspondecircncias
119860 e 119861 satildeo os paracircmetros de afinidade das Equaccedilotildees (411) e (412)
que correspondem aos fatores de escala 119864120572 e 119864120573 da Equaccedilatildeo (413)
Sendo que o paracircmetro 120574 acircngulo entre os eixos da imagem pode ser
calculado a partir destes fatores de escala
1199090 e 1199100 satildeo as coordenadas do Ponto Principal expressas com as
Equaccedilotildees (411) e (412) que tem suas correspondecircncias nas
coordenadas 1199060 e 1199070 da Equaccedilatildeo (413)
O caacutelculo dos POI pode ser entatildeo ser realizado atraveacutes da Equaccedilatildeo (415)
119898119894119895 minus119898 119860119877119894 119905119894 119872119895 2119898
119895=1119899119894=1 (415)
76
onde
119898 119860119877119894 119905119894 119872119894 ndash Eacute a projeccedilatildeo do vetor do ponto 119872119895 sobre a imagem 119894
119877119894 ndash Eacute o vetor de rotaccedilatildeo com paracircmetros 119903
O algoritmo proposto por Zhang (2000) utiliza somente os dois primeiros
termos de Distorccedilatildeo Radial Simeacutetrica para a correccedilatildeo da imagem atraveacutes dos
coeficientes 1198961 e 1198962 conforme Equaccedilotildees (416) e (417) Cacircmaras digitais de
pequeno formato normalmente apresentam distorccedilotildees de lentes significantes
especialmente a Distorccedilatildeo Radial Simeacutetrica A funccedilatildeo de distorccedilatildeo eacute fortemente
influenciada pelos componentes radiais principalmente o primeiro termo 1198961 Dadas
as coordenadas de uma imagem (119906 119907) consideradas livres de distorccedilatildeo e as
correspondentes coordenadas de imagem observadas (119906 119907 ) consegue-se projetar
os pontos atraveacutes da relaccedilatildeo de colinearidade entre eles De forma similar (119909119910) satildeo
as coordenadas de imagem consideradas livres de distorccedilatildeo e (119909 119910 ) as coordenadas
que possuem distorccedilatildeo Estas coordenadas tecircm suas escalas compatibilizadas
atraveacutes de uma normalizaccedilatildeo
119909 = 119909 + 119909 1198961 1199092 + 1199102 + 1198962 119909
2 + 1199102 2 (416)
119910 = 119910 + 119910 1198961 1199092 + 1199102 + 1198962 119909
2 + 1199102 2 (417)
onde
11989611198962 ndash Satildeo os coeficientes de Distorccedilatildeo Radial Simeacutetrica O centro desta
distorccedilatildeo encontra-se no Ponto Principal projetado na imagem
Com 119906 = 1199060 + 119886119909 + 120574119910 e 119907 = 1199070 + 120573119910 e assumindo 120574 = 0 em uma imagem
que tem os eixos perpendiculares tem-se a relaccedilatildeo expressa com as Equaccedilotildees
(418) e (419)
119906 = 119906 + 119906 minus 1199060 1198961 1199092 + 1199102 + 1198962 119909
2 + 1199102 2 (418)
119907 = 119907 + 119907 minus 1199070 1198961 1199092 + 1199102 + 1198962 119909
2 + 1199102 2 (419)
Uma opccedilatildeo para estimar os coeficientes 1198961 e 1198962 eacute feita atraveacutes de
sucessivas iteraccedilotildees utilizando as coordenadas 119906 e 119907 dos piacutexeis considerados
77
isentos de erro Com isto tecircm-se duas expressotildees para os pontos da imagem
conforme a Equaccedilatildeo (420)
119906 minus 1199060 119909
2 + 1199102 119906 minus 1199060 1199092 + 1199102 2
119907 minus 1199070 1199092 + 1199102 119907 minus 1199070 119909
2 + 1199102 2 1198961
1198962 =
119906 minus 119906119907 minus 119907
(420)
Dados 119898 pontos em 119899 imagens podemos obter 2 ∙ 119898 ∙ 119899 equaccedilotildees Na forma
matricial 119863119896 = 119889 onde 119896 = 1198961 1198962 119879 A soluccedilatildeo deste sistema de equaccedilotildees eacute
possiacutevel pelo meacutetodo dos miacutenimos quadrados conforme a Equaccedilatildeo (421)
119896 = 119863119879119863 minus1119863119879119889 (421)
Uma vez que 1198961 e 1198962 foram calculados pode-se refinar a estimaccedilatildeo dos
outros paracircmetros resolvendo novamente a Equaccedilatildeo (415) substituindo os valores
de 119898 119860119877119894 119905119894 119872119894 pelos valores calculados com as Equaccedilotildees (418) e (419)
A estimaccedilatildeo do conjunto completo de POI pode ser expressa atraveacutes da
Equaccedilatildeo (422)
119898119894119895 minus119898 1198601198961 1198962119877119894 119905119894 119872119895 2119898
119895=1119899119894=1 (422)
onde
119898 119860 11989611198962119877119894 119905119894 119872119895 - Eacute funccedilatildeo da projeccedilatildeo do vetor do ponto 119872119895 na imagem
119894 de acordo com a Equaccedilatildeo (413)
Com este meacutetodo no miacutenimo duas imagens devem ser adquiridas com
orientaccedilotildees diferentes se os elementos sensores da cacircmara forem quadrados
Zhang (2000) recomenda a aquisiccedilatildeo de pelo menos cinco imagens para obter
melhores resultados com o processo de calibraccedilatildeo Sendo assim os passos para
realizar a calibraccedilatildeo da cacircmara utilizando este meacutetodo satildeo
1 Imprimir o gabarito e fixaacute-lo em uma superfiacutecie plana e riacutegida
2 Tomar imagens do gabarito com diferentes orientaccedilotildees variando a
posiccedilatildeo e orientaccedilatildeo da cacircmara
78
3 Realizar a leitura das coordenadas dos pontos de controle nas
imagens
4 Estimar os POI e POE utilizando soluccedilatildeo aproximada
5 Refinar todos os paracircmetros incluindo os paracircmetros de distorccedilatildeo de
lentes atraveacutes da Equaccedilatildeo (422)
Os passos 4 e 5 satildeo realizados automaticamente pelo Toolbox CALIB do
software Matlab devendo o usuaacuterio apenas inserir as imagens no software e realizar
as leituras dos veacutertices dos quadrados nas imagens do gabarito
42 ANAacuteLISE DA PRESENCcedilA DE RUIacuteDO
Os piacutexeis saturados causados por exposiccedilatildeo prolongada do sensor na
aquisiccedilatildeo da imagem e tambeacutem os piacutexeis com baixa exposiccedilatildeo devem ser
cuidadosamente analisados na imagem pois tambeacutem podem causar erros nas
medidas de distacircncia devido agrave presenccedila de ruiacutedo Quando o sensor capta o sinal
luminoso existe um limite maacuteximo de saturaccedilatildeo que natildeo pode ser diminuiacutedo
posteriormente
Khongsab (2009) utilizou como paracircmetro principal o tempo de integraccedilatildeo na
captaccedilatildeo da imagem para controlar a saturaccedilatildeo dos piacutexeis Como este tempo eacute
aplicado globalmente ao sensor acaba influenciando os valores digitais dos piacutexeis
da imagem de forma equivalente Alguns apresentam erros devido agrave baixa
exposiccedilatildeo pois com a reduccedilatildeo do tempo de integraccedilatildeo natildeo receberam energia
eletromagneacutetica suficiente para sensibilizar o sensor sendo chamados de piacutexeis
insaturados Estes problemas podem ser minimizados definindo-se tempos de
integraccedilatildeo adequados para a obtenccedilatildeo da imagem TOF
O tratamento do ruiacutedo pode ser realizado com diferentes filtragens na
imagem Com este objetivo foram estudados os filtros passa-baixas pela meacutedia e
mediana Outro processo de filtragem realizado foi o caacutelculo da meacutedia dos valores
de distacircncia para diferentes imagens de uma mesma cena com o mesmo tempo de
integraccedilatildeo mas adquiridas em instantes brevemente diferentes
79
421 Filtragem passa-baixas pela meacutedia
O caacutelculo da meacutedia dos valores da vizinhanccedila em torno do pixel de interesse
tem o efeito de suavizar a imagem Este processo conhecido como filtro linear
passa-baixas atenua as altas frequecircncias que no espaccedilo de frequecircncias
correspondem agraves transiccedilotildees raacutepidas Este tipo de variaccedilatildeo caracteriza tambeacutem a
presenccedila de ruiacutedo na imagem A suavizaccedilatildeo tende a minimizar a presenccedila de ruiacutedo
e tecircm o efeito de tornar a imagem menos contrastante O filtro linear passa-baixas
utilizado tem dimensatildeo 3x3 com pesos iguais para os vizinhos Filtros lineares
resultam da convoluccedilatildeo de uma janela moacutevel sobre a imagem A Equaccedilatildeo (423)
representa o modelo matemaacutetico aplicado na filtragem linear passa-baixas pela
meacutedia (CENTENO 2004)
119866 119910 119909 = (119901(119894 119895) ∙ 119868(119910 + 119894 minus 119886 119909 + 119895 minus 119886))119879119895=1
119879119894=1 (423)
onde
119868(119910 119909) ndash Corresponde ao valor do pixel na posiccedilatildeo ldquolinha = 119910rdquo e ldquocoluna = 119909rdquo
119901(119894 119895) ndash Representa o filtro
119879 ndash Tamanho da janela de filtragem
119866(119910 119909) ndash Imagem resultante da filtragem
119886 = 119894119899119905 119879
2 + 1
A Figura 42 Ilustra o filtro linear passa-baixas pela meacutedia a janela central
cinza que estaacute na matriz de uma imagem Este filtro tem dimensatildeo de 3x3 piacutexeis e
atua no valor digital 48 do pixel central O valor digital do pixel apoacutes a filtragem
passa a ser 41222 que corresponde a meacutedia dos valores digitais dos piacutexeis
vizinhos
80
FIGURA 42 ndash Filtragem passa-baixas pela meacutedia
422 Filtragem pela mediana
A filtragem natildeo linear pela mediana consiste na substituiccedilatildeo do valor do pixel
central pelo valor correspondente a mediana da vizinhanccedila Este meacutetodo tambeacutem
suaviza a presenccedila de ruiacutedo A diferenccedila principal em relaccedilatildeo ao filtro da meacutedia eacute
que o filtro da mediana natildeo introduz novos valores na imagem pois substitui o valor
central da vizinhanccedila por um valor jaacute existente na imagem Sendo assim natildeo
degrada as bordas dos objetos de forma extrema A Figura 43 ilustra esta filtragem
que resultaraacute no valor digital 44 para o pixel filtrado que anteriormente apresentava
valor digital 48
FIGURA 43 ndash Filtragem pela mediana
81
423 Filtragem com a meacutedia temporal
A terceira opccedilatildeo eacute a ponderaccedilatildeo dos valores dos piacutexeis ao longo do tempo
Para isto uma seacuterie de imagens foi obtida a partir do mesmo ponto de vista em
instantes diferentes O resultado foi um conjunto de imagens de um uacutenico objeto
desde a mesma perspectiva natildeo sendo a geometria da imagem alterada Assim
cada pixel de uma imagem tem seu equivalente nas outras Assumindo que o ruiacutedo
seja aleatoacuterio eacute esperado que o uso de mais de uma imagem diminua a presenccedila
de ruiacutedo atraveacutes do caacutelculo da meacutedia dos valores observados
A filtragem com a meacutedia temporal eacute ilustrada com a Figura 44 Nesta figura
tem-se a representaccedilatildeo de trecircs imagens com suas matrizes de valores digitais
(Ii=123) e a imagem filtrada (IF) resultante que corresponde a meacutedia das trecircs
imagens originais
FIGURA 44 ndash Filtragem utilizando a meacutedia temporal
82
43 SEGMENTACcedilAtildeO
Com a etapa de segmentaccedilatildeo objetivou-se separar o conjunto de dados em
subconjuntos Estes subconjuntos satildeo compostos por pontos com coordenadas
tridimensionais que descrevem as superfiacutecies de objetos Eacute assumido que estas
superfiacutecies satildeo partes estruturais do objeto a ser identificado Para atingir esta meta
duas alternativas foram desenvolvidas e avaliadas
1) Crescimento de regiotildees a partir de superfiacutecies planas e ponto semente
utilizando o arquivo de intensidades da imagem TOF para selecionar a posiccedilatildeo de
pontos ou regiotildees semente sendo o arquivo de distacircncias utilizado para o
crescimento de regiotildees
2) Segmentaccedilatildeo por anaacutelise da variaccedilatildeo local de autovalores utilizando
somente o arquivo de distacircncias da imagem TOF para gerar uma imagem de
intensidade com bordas intensificadas que posteriormente eacute segmentada em
regiotildees que tecircm seus piacutexeis projetados gerando uma nuvem de pontos 3D destas
superfiacutecies segmentadas A segmentaccedilatildeo da imagem de intensidade com bordas
evidenciadas gerada eacute realizada utilizando o algoritmo de deslocamento pela meacutedia
431 Crescimento de regiotildees a partir de superfiacutecies planas e ponto semente
O primeiro meacutetodo proposto se baseia no crescimento de regiotildees por
agregaccedilatildeo de elementos adjacentes Este meacutetodo utiliza um criteacuterio de similaridade
para avaliar se um ponto pertence a uma determinada regiatildeo A distacircncia de um
ponto a uma superfiacutecie plana e o valor digital de um pixel em uma imagem satildeo
exemplos de criteacuterios de similaridade que podem ser utilizados (GONZALEZ e
WOODS 2000)
Partindo de um subconjunto de pontos adjacentes que pertencem a uma
superfiacutecie plana o processo consiste em buscar na vizinhanccedila outros pontos que
estejam espacialmente proacuteximos a esta superfiacutecie atendendo ao criteacuterio de
coplanaridade Neste criteacuterio a distacircncia ortogonal do ponto a uma superfiacutecie plana eacute
calculada atraveacutes das coordenadas 3D do ponto sendo este ponto considerado
pertencente agrave superfiacutecie quando estaacute dentro do limiar estabelecido A superfiacutecie
plana eacute determinada atraveacutes do autovetor com menor autovalor do conjunto de
83
pontos 3D a distacircncia ortogonal eacute calculada na direccedilatildeo deste autovetor partindo da
superfiacutecie O processo eacute iterativo de forma que o subconjunto inicial cresce
agregando novos elementos em cada iteraccedilatildeo ateacute atingir os limites da superfiacutecie
quando o criteacuterio de coplanaridade natildeo eacute mais satisfeito
O primeiro problema consiste na identificaccedilatildeo de pontos ou regiotildees semente
para dar iniacutecio ao processo de crescimento Uma opccedilatildeo foi identificar visualmente
regiotildees planas no arquivo de intensidades da imagem TOF e realizar a leitura de
coordenadas de pontos nestas regiotildees A partir das coordenadas destes pontos
selecionados na imagem de intensidade e de suas correspondentes no arquivo de
distacircncias da imagem TOF determinou-se a superfiacutecie plana que mais se aproxima
a esta regiatildeo atraveacutes do caacutelculo de seus autovetores e autovalores esta foi
considerada a superfiacutecie semente
A hipoacutetese baacutesica assume que superfiacutecies planas ou pelo menos partes
delas aparecem como regiotildees uniformes na imagem de intensidade devido agraves
condiccedilotildees de iluminaccedilatildeo Esta hipoacutetese nem sempre pode ser verificada e
confirmada Por exemplo se a superfiacutecie eacute coberta por tonalidades com padratildeo
irregular de cor entatildeo o plano pode mostrar valores natildeo uniformes na imagem de
intensidade sendo este um caso extremo Em uma situaccedilatildeo real pode ocorrer que
parte da superfiacutecie plana esteja pintada ou contenha manchas que alterem a sua
resposta espectral O mesmo pode ocorrer se houverem sombras projetadas de
outros objetos sobre a superfiacutecie Neste caso poreacutem existem outras regiotildees da
superfiacutecie plana que podem aparecer uniformes na imagem de intensidade e serem
utilizadas como regiatildeo semente
Com base nesta suposiccedilatildeo buscaram-se regiotildees uniformes na imagem de
intensidade e verificou-se a possibilidade de formarem superfiacutecies planas que
pudessem ser utilizadas como sementes no arquivo de distacircncias da imagem TOF
A soluccedilatildeo proposta consiste em segmentar a imagem de intensidade em regiotildees
uniformes com atributos de cor Um limite miacutenimo no tamanho das regiotildees deve ser
fixado para evitar que regiotildees muito pequenas sejam incluiacutedas na anaacutelise visto que
estas regiotildees pequenas podem representar locais com curvatura
A chave para o crescimento de regiotildees eacute a definiccedilatildeo do grau de pertinecircncia
de cada ponto agrave superfiacutecie plana Para isto eacute utilizado o conceito de distacircncia
miacutenima do ponto a esta superfiacutecie Para pertencer a uma regiatildeo os pontos devem
84
estar dentro do limite de proximidade ou seja a distacircncia entre o ponto e a
superfiacutecie plana natildeo pode superar o limiar fixado
A qualidade deste processo depende de fatores como o estabelecimento de
correspondecircncia entre os pontos precisatildeo na determinaccedilatildeo da superfiacutecie normal
utilizada remoccedilatildeo de erros grosseiros do conjunto de observaccedilotildees e identificaccedilatildeo
da regiatildeo semente
432 Segmentaccedilatildeo por anaacutelise da variaccedilatildeo local de autovalores
Esta abordagem baseia-se na anaacutelise da variaccedilatildeo local dos autovalores e
autovetores A hipoacutetese baacutesica nesta metodologia foi considerar que ao longo de
uma superfiacutecie plana os autovalores devem apresentar valores similares ou muito
proacuteximos Considerando duas regiotildees adjacentes se estas regiotildees forem
coplanares entatildeo a magnitude relativa de seus autovalores seraacute aproximadamente
igual Se uma destas regiotildees encontra-se em uma borda do objeto os autovetores
seratildeo diferentes A regiatildeo a ser considerada eacute uma janela quadrada em torno do
pixel central Para efetuar esta anaacutelise devem ser calculados os autovalores de uma
regiatildeo em torno de cada pixel no arquivo de distacircncias da imagem TOF Estes
autovalores satildeo armazenados em matrizes que geram trecircs novas imagens digitais
com as bordas dos objetos intensificadas
Com a Figura 45 Ilustra-se a anaacutelise do arquivo de distacircncias da imagem
TOF realizado com o caacutelculo de seus autovalores As bordas dos objetos presentes
podem ser vistas em evidecircncia satildeo representadas com os maiores valores
85
FIGURA 45 ndash Intensificaccedilatildeo de bordas com autovalores
Os autovalores calculados para cada pixel satildeo normalizados na faixa de 0 a
255 utilizando-se 8 bits Assim estes valores podem ser representados como uma
imagem digital passiacutevel de ser analisada com softwares de processamento A Figura
46 ilustra uma imagem com bordas intensificadas proveniente da segmentaccedilatildeo
realizada com a anaacutelise da variaccedilatildeo local dos autovalores
FIGURA 46 ndash Imagem com bordas intensificadas
86
A imagem produzida pode entatildeo ser segmentada utilizando o algoritmo de
deslocamento pela meacutedia Os resultados da segmentaccedilatildeo satildeo regiotildees onde os
autovalores satildeo aproximadamente iguais definindo uma superfiacutecie com padratildeo
planar sendo estas superfiacutecies separadas das regiotildees de bordas
433 Segmentaccedilatildeo com o algoritmo de deslocamento pela meacutedia
A segmentaccedilatildeo com o algoritmo de deslocamento pela meacutedia eacute realizada
utilizando a imagem com as bordas dos objetos intensificadas gerada com a
segmentaccedilatildeo do arquivo de distacircncias da imagem TOF pela anaacutelise da variaccedilatildeo
local dos autovalores
Cada um dos trecircs autovalores calculados gera uma imagem com bordas
intensificadas Sendo assim espera-se que os valores digitais dos piacutexeis nas
superfiacutecies dos objetos sejam similares dentro desta imagem Com isto a
segmentaccedilatildeo proporcionaraacute a seleccedilatildeo das superfiacutecies do objeto
Para realizar a segmentaccedilatildeo da imagem de intensidade com as bordas
intensificadas deve-se escolher os paracircmetros (119893119904 119893119903 119867) mais adequados para a
segmentaccedilatildeo Estes paracircmetros correspondem ao domiacutenio espacial da imagem 119893119904
domiacutenio de caracteriacutesticas dos piacutexeis 119893119903 e o tamanho miacutenimo 119867 que as aacutereas
segmentadas devem possuir O limite miacutenimo na quantidade de piacutexeis deve ser
fixado para evitar que regiotildees muito pequenas sejam incluiacutedas na segmentaccedilatildeo o
que pode prejudicar esta etapa pois se espera que a imagem seja segmentada com
o menor nuacutemero de regiotildees
87
5 RESULTADOS E DISCUSSOtildeES
51 CALIBRACcedilAtildeO DA CAcircMARA
Com o objetivo de calcular os POI o processo de calibraccedilatildeo da cacircmara foi
realizado com o Toolbox CALIB do software Matlab que utiliza o meacutetodo proposto
por ZHANG (2000) O gabarito fotografado foi impresso com 7x9 quadrados com
dimensatildeo de 117x117mm Estas imagens foram captadas a uma distacircncia
aproximada de 25 metros da cacircmara Para que houvesse pontos do gabarito sobre
a aacuterea da imagem foram obtidas 36 imagens com diferentes orientaccedilotildees conforme eacute
ilustrado com a Figura 51
FIGURA 51 ndash Imagens do gabarito utilizadas na calibraccedilatildeo da cacircmara
88
A Orientaccedilatildeo Exterior das imagens em relaccedilatildeo agrave cacircmara para a calibraccedilatildeo eacute
ilustrada com a Figura 52 A cacircmara eacute representada com a piracircmide em linhas
vermelhas e a origem do sistema fotogrameacutetrico eacute representada com a interseccedilatildeo
das linhas representadas com a cor azul no veacutertice da piracircmide
FIGURA 52 ndash Orientaccedilatildeo Exterior das fotografias para a calibraccedilatildeo da cacircmara
A distorccedilatildeo causada pelo sistema de lentes da cacircmara ocorre de forma mais
intensa nas bordas da imagem sendo a regiatildeo central o local com menor presenccedila
desta distorccedilatildeo A Figura 53 comprova este fato onde os vetores representados
com a cor vermelha partem dos pontos de controle na imagem e indicam a direccedilatildeo e
o sentido em que a distorccedilatildeo aumenta
FIGURA 53 ndash Direccedilatildeo das distorccedilotildees nos pontos da imagem TOF
89
Realizada a leitura das coordenadas dos pontos de controle os POI foram
calculados com o processo de calibraccedilatildeo da cacircmara e satildeo apresentados com a
Tabela 51
PARAcircMETROS INICIAIS OBTIDOS COM A LEITURA DAS IMAGENS
PARAcircMETRO VALOR
(piacutexeis) (mm)
Distacircncia focal (119891) (119891119909) (119891119910 )
285 80288 285 80288
1286113 1286113
Coordenadas do Ponto Principal (1199090)
(Origem no canto superior esquerdo) (1199100) 10150000 10150000
456750 456750
PARAcircMETROS DETERMINADOS COM A CALIBRACcedilAtildeO DA CAcircMARA
PARAcircMETRO VALOR DESVIO (3σ)
(piacutexeis) (mm) (piacutexeis) (mm)
Distacircncia focal (119891119888) calibrada (119891119909119888 ) (119891119910119888 )
29240511 29364057
1315823 1321383
plusmn 373164 plusmn 335357
plusmn 0167924 plusmn 0150911
Coordenadas do Ponto Principal (1199090119888 )
(Origem no canto superior esquerdo) (1199100119888 ) 10435253 10022287
4695864 4510029
plusmn 320459 plusmn 336886
plusmn 0144207 plusmn 0151599
1198701 -046768 -0021045 plusmn 003106 plusmn 0001398
1198702 060997 0027449 plusmn 013880 plusmn 0006246
1198703 000107 48150e-5
plusmn 000162 plusmn 72900e-5
1198751 000035 19350e-5
plusmn 000204 plusmn 91800e-5
1198752 000000 0000000 plusmn 000000 plusmn 0000000
Erro em pixel (119864119909 )
(119864119910 ) 049340 042754
0022203 0019239
TABELA 51 ndash Paracircmetros de Orientaccedilatildeo Interior calculados
Com os valores dos POI determinados foram calculados os fatores de escala
dos piacutexeis nas direccedilotildees 119904119909 e 119904119910 conforme as Equaccedilotildees (51) e (52)
119904119909 =119891
119891119909119888=
128119898119898
1315823119898119898= 0972775 (51)
119904119910 =119891
119891119910119888=
128119898119898
1321383119898119898= 0968682 (52)
A partir dos fatores de escala e da dimensatildeo do pixel igual a 45120583119898 das
imagens obtidas com a cacircmara PMD CamCube 20 foi calculado o tamanho efetivo
dos piacutexeis nas direccedilotildees x e y atraveacutes das Equaccedilotildees (53) e (54)
119875119909 = P ∙ 119904119909 = 45120583119898 ∙ 0972775 = 43774875120583119898 cong 44120583119898 (53)
119875119910 = P ∙ 119904119910 = 45120583119898 ∙ 0968682 = 43590690120583119898 cong 44120583119898 (54)
90
Os valores obtidos com as Equaccedilotildees (53) e (54) indicam que os elementos
do sensor podem ser considerados quadrados De acordo com Bazan et al (2009)
quando a diferenccedila de escala entre os lados do piacutexel natildeo eacute fornecida pelo fabricante
da cacircmara o fator de escala calculado para x pode absorver esta diferenccedila
Com a razatildeo entre as distacircncias focais obtidas com a calibraccedilatildeo da cacircmara
pode-se verificar a diferenccedila de escala Para a dimensatildeo do sensor esta diferenccedila
de escala natildeo alcanccedila o tamanho de um pixel conforme Equaccedilatildeo (56)
119863119868119865119864119878119862 =119891119909119888
119891119910119888=
1321383119898119898
1315823119898119898minus 1 = 1004225 minus 1 = 0004225 (55)
119863119868119865119864119878119862 = 0004225 lowast 204 = 08619 lt 1119901119894119909119890119897 (56)
A Equaccedilatildeo (56) indica que a diferenccedila de escala entre os eixos x e y eacute
menor que a dimensatildeo de um pixel isto considerando toda a dimensatildeo da imagem
de 204x204 piacutexeis da cacircmara PMD CamCube 20
Determinados os POI a imagem pode entatildeo ter sua geometria corrigida
conforme eacute ilustrado com a Figura 54b A Figura 54a ilustra a imagem original
obtida do gabarito onde se apresentam curvaturas provenientes da distorccedilatildeo
causada pelo sistema de lentes da cacircmara
FIGURA 54 ndash Correccedilatildeo geomeacutetrica da imagem TOF
91
Para a correccedilatildeo geomeacutetrica de imagens obtidas com cacircmaras de pequeno
formato Zhang (2000) recomenda utilizar somente os paracircmetros de distacircncia focal
calibrada 119891119888 coordenadas do Ponto Principal no plano da imagem 1199090 e 1199100 e os
coeficientes de Distorccedilatildeo Radial Simeacutetrica ateacute o segundo termo 1198701 e 1198702 Isto porque
este modelo de cacircmara apresenta principalmente a Distorccedilatildeo Radial Simeacutetrica
Outro fator diz respeito ao desvio calculado na determinaccedilatildeo de cada um destes
paracircmetros conforme valores apresentados na Tabela 51 o terceiro paracircmetro de
Distorccedilatildeo Radial Simeacutetrica 1198703 e os paracircmetros de Distorccedilatildeo Descentrada 1198751 e 1198752
apresentaram valores de desvios maiores do que os proacuteprios paracircmetros devendo
entatildeo serem desconsiderados para a correccedilatildeo geomeacutetrica da imagem
92
52 EXPERIMENTO 1 ndash ANAacuteLISE DE RUIacuteDO 1 IMAGEM TOF INTEIRA
O objetivo deste experimento consistiu em avaliar a presenccedila de ruiacutedo em
funccedilatildeo do tempo de integraccedilatildeo (TI) na aquisiccedilatildeo das imagens TOF Para sua
realizaccedilatildeo foram utilizadas imagens de uma parede com superfiacutecie plana distante
130m da cacircmara PMD CamCube 20 onde tambeacutem aparece parte de uma porta
Foram tomadas cinco imagens para cada valor de TI que variou entre 500 1000
1500 1700 1800 1900 2000 2500 3000 3500 4000 4500 5000 5300 5500
6000 e 7000μs gerando assim um conjunto de 85 imagens TOF
Com o objetivo de avaliar e reduzir a presenccedila de ruiacutedo nas imagens foram
realizadas as seguintes filtragens
Filtro passa-baixas pela meacutedia
Filtro pela mediana
Caacutelculo da meacutedia dos valores de distacircncia para imagens TOF
adquiridas com mesmo TI em instantes brevemente diferentes
Para cada imagem original foram criadas trecircs novas imagens filtradas com
os procedimentos mencionados
No graacutefico de dispersatildeo ilustrado com a Figura 55 os desvios padratildeo para o
conjunto de observaccedilotildees satildeo mostrados em funccedilatildeo do TI Foram calculados com
referecircncia no pixel central com coordenadas (102 102) e a aacuterea utilizada para o
caacutelculo possui dimensatildeo de 10x10 piacutexeis Escolheu-se esta regiatildeo por apresentar
padratildeo planar da superfiacutecie com menor distorccedilatildeo causada pelo sistema de lentes da
cacircmara tendo-se em vista que nesta etapa natildeo foi realizada a correccedilatildeo geomeacutetrica
dos dados da imagem TOF
Ainda com a Figura 55 verificou-se que o filtro da mediana aplicado nas
imagens gerou os menores desvios para a janela de 10x10 piacutexeis O menor desvio
calculado foi 12mm encontrado utilizando o filtro da mediana para o TI igual a
3000micros Verificou-se tambeacutem que os desvios apresentam valores similares para os
tempos de integraccedilatildeo que variaram entre 1500 agrave 2500micros para as imagens originais e
tambeacutem para as imagens filtradas
93
FIGURA 55 ndash Desvio padratildeo x TI janelas 10x10
A partir do graacutefico de dispersatildeo da Figura 55 escolheram-se imagens
captadas com os tempos de integraccedilatildeo de 500 2000 e 2500micros para realizar os
testes A Figura 56 ilustra superfiacutecies geradas a partir de filtragens realizadas em
imagem TOF obtida com TI igual a 500μs
FIGURA 56 ndash Imagens para TI=500μs e d=130m
94
Com TI de 500μs verificou-se intensa presenccedila de ruiacutedo na imagem original
e tambeacutem nas imagens filtradas Isto ocorreu devido ao baixo tempo de exposiccedilatildeo
do sensor A distorccedilatildeo causada pelo sistema de lentes da cacircmara tambeacutem pode ser
visualizada nestas superfiacutecies geradas com os arquivos de distacircncias da imagem
TOF As imagens foram obtidas de uma parede plana em que aparece parte de uma
porta o que justifica a descontinuidade vista em forma de degrau A anaacutelise
realizada com TI de 2000μs eacute ilustrada com a Figura 57
FIGURA 57 ndash Imagens para TI=2000μs e d=130m
Com TI de 2000μs obtiveram-se resultados melhores do que os obtidos com
TI de 500μs as superfiacutecies apresentaram-se mais suaves confirmando a tendecircncia
demonstrada com o graacutefico de dispersatildeo da Figura 55
A uacuteltima anaacutelise deste experimento foi realizada com o tempo de integraccedilatildeo
de 2500μs conforme pode ser visualizado com as superfiacutecies geradas com os
arquivos de distacircncias da imagem TOF original e das imagens filtradas ilustradas
com a Figura 58
95
FIGURA 58 ndash Imagens para TI=2500μs e d=130m
As imagens filtradas com TI de 2000μs e 2500μs apresentam suavizaccedilotildees
similares nas superfiacutecies geradas com os arquivos de distacircncias da imagem TOF
Verificou-se que o tempo de integraccedilatildeo para a aquisiccedilatildeo das imagens da parede a
13m de distacircncia da cacircmara deve ser um destes valores O TI de 2000μs pode ser
o escolhido e estaacute de acordo com o graacutefico de dispersatildeo ilustrado com a Figura 55
As filtragens de suavizaccedilatildeo com o filtro passa-baixas pela meacutedia e pela
mediana mostraram-se as melhores opccedilotildees a serem utilizadas com estas filtragens
apresentaram-se os menores desvios para a janela central de 10x10 piacutexeis Uma
vantagem da filtragem pela mediana eacute que mantecircm os valores originais de distacircncia
para os piacutexeis da imagem e preserva as bordas do objeto imageado No entanto a
filtragem com a mediana degrada as bordas da imagem devendo ser
cuidadosamente analisada para cada aplicaccedilatildeo
Tambeacutem foram calculados os desvios padratildeo para as imagens inteiras e os
valores obtidos foram de 19cm em meacutedia Este grande valor deveu-se a maior
curvatura ocorrer nas extremidades da imagem e tambeacutem ao fato de haver uma
descontinuidade na superfiacutecie presente na imagem TOF causada pela porta
presente na superfiacutecie da parede
96
53 EXPERIMENTO 2 ndash ANAacuteLISE DE RUIacuteDO 2 JANELAS DE 40X40 PIacuteXEIS
O objetivo deste experimento foi analisar a presenccedila de ruiacutedo em aacutereas
centrais da imagem TOF Para isto escolheram-se janelas com dimensotildees de 40x40
piacutexeis ao redor do pixel central da imagem Calculou-se o desvio padratildeo da distacircncia
de cada pixel em relaccedilatildeo a este pixel central As janelas utilizadas tiveram sua
posiccedilatildeo na imagem variando de (8282) ateacute (122122) e correspondem a aacuterea com
superfiacutecie plana de uma parede presente na cena
Primeiramente utilizaram-se imagens TOF adquiridas agrave distacircncia de 130m
entre a cacircmara e a parede com os tempos de integraccedilatildeo iguais a 2000 e 5000micros
Posteriormente utilizaram-se imagens TOF obtidas a 210m da parede com tempos
de integraccedilatildeo iguais a 2000 5000 e 7000micros
O graacutefico de dispersatildeo da Figura 59 ilustra uma anaacutelise para a captaccedilatildeo de
imagens TOF com diferentes distacircncias e tempos de integraccedilatildeo Os desvios padratildeo
foram calculados para imagens TOF captadas com a cacircmara CamCube 20 onde
variaram-se as distacircncias e os tempos de integraccedilatildeo no momento da aquisiccedilatildeo das
imagens
FIGURA 59 ndash Desvios padratildeo para distacircncia x TI
FONTE CENTENO e JUTZI (2010)
97
Com a Figura 510 eacute apresentado o primeiro resultado deste experimento o
graacutefico de dispersatildeo gerado com a imagem TOF adquirida do objeto agrave distacircncia de
130m da cacircmara com TI igual a 2000micros
FIGURA 510 ndash Desvios padratildeo para janelas com TI=2000μs d=130m
A Figura 511 ilustra as superfiacutecies geradas com o arquivo de distacircncias da
imagem TOF adquirida do objeto agrave distacircncia de 130m da cacircmara com TI igual a
2000micros e com as imagens resultantes das filtragens realizadas
FIGURA 511 ndash Janelas de 40x40 piacutexeis TI=2000μs d=130m
98
Com a Figura 511 conclui-se que os melhores resultados para a suavizaccedilatildeo
dos dados de distacircncia foram obtidos com os filtros passa-baixas pela meacutedia e
mediana
A Figura 512 ilustra o graacutefico de dispersatildeo para a imagem adquirida com TI
igual a 5000μs com distacircncia de 130m entre o objeto imageado e a cacircmara TOF A
Figura 513 ilustra as superfiacutecies geradas com as janelas centrais de 40x40 piacutexeis
FIGURA 512 ndash Desvios padratildeo para janelas com TI=5000μs d=130m
FIGURA 513 ndash Janelas de 40x40 piacutexeis TI=5000μs d=130m
99
O TI de 5000μs utilizado para a aquisiccedilatildeo da imagem saturou os elementos
do sensor e causou maior presenccedila de ruiacutedo nos dados Comparando as Figuras
511 e 513 conclui-se que para a distacircncia de 130m do sensor o tempo de
integraccedilatildeo mais adequado para a aquisiccedilatildeo da imagem foi 2000micros
A Figura 514 ilustra o graacutefico de dispersatildeo gerado para a imagem TOF
obtida com TI igual a 2000μs e distacircncia de 210m As superfiacutecies geradas a partir
das janelas de 40x40 piacutexeis desta imagem satildeo apresentadas com a Figura 515
FIGURA 514 ndash Desvios padratildeo para janelas com TI=2000μs d=210m
FIGURA 515 ndash Janelas de 40x40 piacutexeis TI=2000μs d=210m
100
O graacutefico de dispersatildeo calculado para a imagem adquirida com TI igual a
5000μs e distacircncia de 210m eacute ilustrado com a Figura 516
FIGURA 516 ndash Desvios padratildeo para janelas com TI=5000μs d=210m
Os menores desvios padratildeo foram encontrados na imagem filtrada utilizando
os filtros passa-baixas pela meacutedia e mediana conforme pode ser visualizado com a
Figura 516 Para a janela de 40x40 piacutexeis o desvio padratildeo de 107mm na imagem
original diminuiu para 96mm com a filtragem pela mediana A Figura 517 ilustra as
superfiacutecies geradas para a imagem obtida com distacircncia de 210m e TI de 5000μs
FIGURA 517 ndash Janelas de 40x40 piacutexeis TI=5000μs d=210m
101
Com a Figura 517 observa-se novamente que os melhores resultados para
a suavizaccedilatildeo da imagem foram obtidos com os filtros passa-baixas pela meacutedia e
pela mediana
A Figura 518 ilustra o graacutefico de dispersatildeo e a Figura 519 ilustra as
superfiacutecies geradas para as imagens adquiridas com distacircncia de 210m e TI igual a
7000μs
FIGURA 518 ndash Desvios padratildeo para janelas com TI=7000μs d=210m
FIGURA 519 ndash Janelas de 40x40 piacutexeis TI=7000μs d=210m
102
Com o graacutefico de dispersatildeo ilustrado com a Figura 518 observa-se que os
desvios padratildeo calculados para as imagens obtidas com os filtros passa-baixas pela
meacutedia e mediana satildeo maiores do que os desvios apresentados com o graacutefico de
dispersatildeo ilustrado com a Figura 516 Isto indica que as imagens captadas da
parede plana com TI igual a 7000μs e distacircncia de 210m apresentaram maior ruiacutedo
que as imagens obtidas com 5000μs
Comparando as Figuras 519 e 517 verifica-se que a imagem captada com
TI igual a 5000μs com distacircncia de 210m e filtrada com o filtro passa-baixas pela
meacutedia e tambeacutem com a mediana apresentou-se mais suavizada do que a imagem
obtida com TI igual a 7000μs
Comparando as imagens captadas com tempo de integraccedilatildeo de 2000μs e
5000μs para a distacircncia de 210m conforme Figuras 515 e 517 conclui-se que as
imagens obtidas com TI de 5000μs apresentaram menor presenccedila de ruiacutedo
54 EXPERIMENTO 3 ndash PROJECcedilAtildeO ORTOGONAL DOS PONTOS
Obtidos os POI atraveacutes do processo de calibraccedilatildeo da cacircmara e definido o
melhor TI para a captaccedilatildeo da imagem procedeu-se a um novo experimento no qual
se analisou a imagem de uma caixa com superfiacutecies planas A superfiacutecie do objeto
em questatildeo eacute composta por papel branco riacutegido e refletivo A caixa foi colocada
sobre uma cadeira agrave distacircncia aproximada de 13m da cacircmara Esta cadeira foi
girada enquanto a cacircmara continuou fixa com o mesmo ponto de vista Com base
no estudo da dispersatildeo dos dados em funccedilatildeo da distacircncia ao objeto optou-se por
utilizar o TI de 2000μs para a captaccedilatildeo das imagens Foram entatildeo adquiridas dez
imagens do objeto
Com a distacircncia do objeto em relaccedilatildeo agrave cacircmara igual a 13m e com a
distacircncia focal calibrada da cacircmara de 132mm valor encontrado com a Equaccedilatildeo
(57) calculou-se a escala aproximada das fotografias encontrando-se o valor
aproximado para a escala igual a 1100 conforme Equaccedilatildeo (58)
119891119888 =119891119909119888+119891119910119888
2=
1315823119898119898+1321383119898119898
2= 1318603119898119898 cong 132119898119898 (57)
103
119864 =119889
119863=
119891119888
119885=
132119898119898
13119898=
00132119898
13119898=
1
984848cong
1
100 (58)
Para realizar este experimento selecionou-se a terceira imagem captada por
apresentar vista perspectiva de trecircs superfiacutecies com padratildeo planar no objeto
imageado A Figura 520a ilustra o arquivo de intensidades da imagem TOF sem
correccedilatildeo geomeacutetrica A Figura 520b ilustra o arquivo de intensidade corrigido
geometricamente utilizando as coordenadas do Ponto Principal 1199090 e 1199100 os
coeficientes de distorccedilatildeo Radial Simeacutetrica 1198701 e 1198702 e a distacircncia focal calibrada 119891119888
FIGURA 520 ndash Arquivo de intensidades da imagem TOF obtida do objeto
Apoacutes a correccedilatildeo da geometria da imagem TOF geraram-se as superfiacutecies do
objeto Isto foi feito a partir do arquivo de distacircncias da imagem TOF conforme eacute
ilustrado com a Figura 521 onde se tem as distacircncias dos pontos em relaccedilatildeo ao
sensor representadas com a coordenada Z em metros sobre a imagem TOF com
dimensatildeo de 204x204 piacutexeis
104
FIGURA 521 ndash Arquivo de distacircncias da imagem TOF com geometria corrigida
A partir do arquivo de distacircncias da imagem TOF com a geometria dos
dados corrigida projetaram-se ortogonalmente os pontos gerando a nuvem de
pontos 3D ilustrada com a Figura 522 em vista frontal com o eixo Z ortogonal aos
eixos X e Y representados
FIGURA 522 ndash Nuvem de pontos vista frontal
105
A vista em perspectiva tridimensional da nuvem de pontos do objeto de
estudo eacute ilustrada com a Figura 523 Conteacutem 42025 pontos gerados a partir da
imagem TOF de 204x204 piacutexeis obtida com a cacircmara PMD CamCube 20
FIGURA 523 - Nuvem de pontos vista perspectiva 3D
106
55 EXPERIMENTO 4 ndash SEGMENTACcedilAtildeO 1 CRESCIMENTO DE REGIOtildeES
Realizou-se a segmentaccedilatildeo por crescimento de regiotildees a partir de trecircs
pontos semente Estes pontos foram escolhidos em aacutereas uniformes no arquivo de
intensidades da imagem TOF corrigida geometricamente e foram projetados
ortogonalmente para a nuvem 3D As coordenadas de imagem destes pontos foram
observadas nas posiccedilotildees indicadas com a Figura 524
FIGURA 524 ndash Pontos semente no arquivo de intensidades da imagem TOF
Os pontos semente foram escolhidos em trecircs superfiacutecies planas da caixa em
locais que apresentavam valores de intensidade uniforme As coordenadas de
imagem lidas em piacutexeis para estes trecircs pontos foram Ponto 1 (11681) Ponto 2
(72103) Ponto 3 (113108)
As Figuras 525 e 526 ilustram o crescimento em trecircs regiotildees realizados na
nuvem de pontos 3D Estes pontos correspondem agraves superfiacutecies frontal superior e
lateral da caixa ilustradas com as cores amarela verde e ciano respectivamente
Os trecircs autovetores calculados satildeo ilustrados com a cor azul ortogonais aos pontos
semente escolhidos nas trecircs superfiacutecies da imagem de intensidade
107
FIGURA 525 ndash Crescimento de regiotildees vista frontal
FIGURA 526 ndash Crescimento de regiotildees vista perspectiva 3D
Com as Figuras 525 e 526 verifica-se que o crescimento das regiotildees
ocorreu de forma coerente acompanhando o padratildeo planar das superfiacutecies do
objeto de estudo No entanto nas trecircs superfiacutecies analisadas houve crescimento de
regiotildees para fora dos limites de suas aacutereas Pontos de superfiacutecies ao fundo e abaixo
do objeto foram incluiacutedos nas regiotildees Isto ocorreu devido agrave utilizaccedilatildeo do criteacuterio de
108
similaridade de distacircncia do ponto agrave superfiacutecie plana sendo esta superfiacutecie definida
pelos pontos semente A distacircncia foi medida ao longo do autovetor o que fez com
que pontos de outras superfiacutecies paralelas a superfiacutecie plana em questatildeo fossem
agrupados na mesma regiatildeo Ou seja pontos que estavam orientados na direccedilatildeo da
superfiacutecie plana definida pelo autovalor que passa pelo ponto semente e que
estavam dentro do limiar de distacircncia estabelecido foram incluiacutedos nas regiotildees
mesmo natildeo pertencendo agrave superfiacutecie analisada
56 EXPERIMENTO 5 ndash SEGMENTACcedilAtildeO 2 ANAacuteLISE COM AUTOVALORES
Neste experimento realizou-se a segmentaccedilatildeo da imagem TOF por anaacutelise
da variaccedilatildeo local de autovalores locais de superfiacutecies O arquivo de distacircncias desta
imagem foi utilizado como ponto de partida para o caacutelculo dos autovalores com o
objetivo de intensificar as bordas dos objetos presentes na cena
O processamento consistiu em definir uma pequena vizinhanccedila quadrada
uma janela moacutevel e utilizar as coordenadas tridimensionais dos pontos nesta
vizinhanccedila para o caacutelculo dos autovalores
Apoacutes a normalizaccedilatildeo os autovalores foram armazenados na forma de trecircs
novas imagens conforme pode ser visualizado com as Figuras 527 528 e 529
Para a geraccedilatildeo destas imagens utilizou-se a janela moacutevel com dimensatildeo de 3x3
piacutexeis para o caacutelculo dos autovalores
109
FIGURA 527 ndash Imagem com bordas intensificadas gerada com 1205821
FIGURA 528 ndash Imagem com bordas intensificadas gerada com 1205822
FIGURA 529 ndash Imagem com bordas intensificadas gerada com 1205823
110
A partir da imagem com bordas intensificadas gerada com os autovalores
locais foi possiacutevel criar uma nova imagem de intensidade que tambeacutem estava com
as bordas dos objetos intensificadas A Figura 530 ilustra as imagens de
intensidade com bordas intensificadas que foram geradas utilizando o segundo
autovalor calculado a partir de janelas com as seguintes dimensotildees a)3x3 b)5x5
c)7x7 d)9x9 e)11x11 f)13x13 piacutexeis
FIGURA 530 ndash Imagens de intensidade com as bordas do objeto intensificadas
111
Com as imagens de intensidade ilustradas com a Figura 530 observou-se
que aumentando a quantidade de piacutexeis da janela utilizada para o caacutelculo dos
autovalores da regiatildeo aumentou-se tambeacutem a suavizaccedilatildeo sobre as superfiacutecies
planas e alargaram-se as bordas que limitam os objetos contidos na cena
Para este experimento utilizou-se a imagem gerada com a janela de 3x3
piacutexeis e com o segundo autovalor Esta imagem foi escolhida por apresentar linhas
finas limitando as bordas do objeto A imagem de intensidade com as bordas do
objeto intensificadas foi segmentada utilizando o algoritmo de deslocamento pela
meacutedia O resultado da segmentaccedilatildeo eacute ilustrado com a Figura 531
FIGURA 531 ndash Imagem com bordas intensificadas segmentada
112
A Figura 531a ilustra a imagem com bordas intensificadas a ser
segmentada gerada com o segundo conjunto de autovalores 1205822 Na Figura 531b
tem-se esta imagem suavizada por filtragem A Figura 531c corresponde agrave imagem
segmentada com o algoritmo de deslocamento pela meacutedia A imagem com os limites
das aacutereas segmentadas eacute ilustrada com a Figura 531d
A segmentaccedilatildeo foi realizada utilizando o software EDISON com os
paracircmetros (119893119904 119893119903 119867) = (7 9 300) Estes paracircmetros correspondem ao domiacutenio
espacial da imagem 119893119904 domiacutenio de caracteriacutesticas 119893119903 e tamanho miacutenimo das
regiotildees 119867 em piacutexeis O limite miacutenimo foi fixado para evitar que regiotildees muito
pequenas fossem incluiacutedas na segmentaccedilatildeo
Com a imagem segmentada da Figura 529c foi possiacutevel projetar os pontos
de interesse ortogonalmente gerando a nuvem de pontos 3D Para isto utilizou-se
as coordenadas dos piacutexeis no arquivo de intensidades e seus correspondentes no
arquivo de distacircncias da imagem TOF Estes pontos foram escolhidos sobre as
superfiacutecies da caixa A nuvem de pontos 3D resultante deste experimento eacute
apresentada com as Figuras 532 e 533
FIGURA 532 ndash Nuvem de pontos da imagem segmentada vista frontal
113
FIGURA 533 ndash Nuvem de pontos da imagem segmentada vista 3D
57 EXPERIMENTO 6 ndash ANAacuteLISE DAS MEDIDAS OBTIDAS
Para gerar a nuvem de pontos 3D com as superfiacutecies de interesse
primeiramente corrigiu-se a geometria do arquivo de distacircncias da imagem TOF com
as coordenadas do Ponto Principal 1199090 e 1199100 coeficientes de distorccedilatildeo Radial
Simeacutetrica 1198701 e 1198702 e distacircncia focal calibrada 119891119888 O passo seguinte foi gerar uma
imagem de intensidade com as bordas do objeto intensificadas Com este objetivo
calcularam-se os autovalores para os pontos do arquivo de distacircncias da imagem
TOF e geraram-se trecircs imagens novas correspondendo aos trecircs autovalores
calculados conforme o Experimento 5 O terceiro passo foi a segmentaccedilatildeo da
imagem de intensidade com bordas intensificadas utilizando o algoritmo de
deslocamento pela meacutedia Com a imagem segmentada pocircde-se escolher as
superfiacutecies que teriam seus piacutexeis projetados para a nuvem de pontos 3D
A imagem segmentada com o algoritmo de deslocamento pela meacutedia
apresenta niacuteveis de cinza diferentes para os piacutexeis de cada segmento Com isto foi
possiacutevel separar os pontos que compotildeem as superfiacutecies por seus valores digitais A
Figura 534 apresenta a nuvem de pontos 3D gerada com a imagem TOF corrigida
geometricamente com os pontos da superfiacutecie frontal representados com a cor azul
114
FIGURA 534 ndash Nuvem de pontos 3D segmentada
A superfiacutecie frontal foi projetada com atributo de cor diferenciado por
apresentar a melhor segmentaccedilatildeo na imagem de intensidade e pontos bem
definidos na nuvem 3D A partir desta superfiacutecie escolheram-se os pontos extremos
os veacutertices do objeto para a leitura de suas coordenadas 3D com o objetivo de
calcular o comprimento das arestas Com a Figura 535 satildeo ilustrados os quatro
pontos selecionados
FIGURA 535 ndash Pontos 3D selecionados na nuvem
115
Com as coordenadas destes quatro pontos e atraveacutes da relaccedilatildeo de distacircncia
tridimensional entre eles expressa pela Equaccedilatildeo (59) calcularam-se as dimensotildees
de trecircs arestas do objeto de estudo
119863119894119895 = 119883119894minus119883119895 2
+ 119884119894minus119884119895 2
+ 119885119894minus119885119895 2 (59)
onde
119863119894119895 ndash Distacircncia entre pontos no espaccedilo tridimensional
119883119894 119884119894 119885119894 119890 119883119895 119884119895 119885119895 - Coordenadas dos pontos 119894 e 119895 na nuvem de pontos 3D
Para verificar a confiabilidade das medidas obtidas com a metodologia
proposta compararam-se as medidas das arestas calculadas a partir dos pontos 3D
com as dimensotildees de referecircncia do objeto de estudo As medidas de referecircncia satildeo
ilustradas com o desenho da Figura 536
FIGURA 536 ndash Dimensotildees de referecircncia do objeto de estudo
A partir das coordenadas tridimensionais dos quatro pontos ilustrados com a
Figura 535 foi possiacutevel calcular as distacircncias entre os pontos e comparar-las com
as medidas de referecircncia As diferenccedilas obtidas satildeo ilustradas com a Tabela 52
116
Ponto
Coordenadas Arestas Medida realizada Diferenccedilas
X (cm) Y (cm) Z (cm) Pontos 3D (cm)
Ref (cm)
(cm) ()
1 -131 -136 -1219 Pontos 1-2 236 260 24 92
2 -80 61 -1098 Pontos 2-3 332 350 18 51
3 234 38 -1203 Pontos 2-4 263 210 53 252
4 -125 180 -1328
TABELA 52 ndash Coordenadas 3D dos pontos e medidas realizadas
O melhor resultado foi obtido para a medida realizada sobre a aresta entre
os pontos 2-3 com diferenccedila de aproximadamente 18 cm em relaccedilatildeo agrave medida de
referecircncia o que representa 5 da distacircncia medida O pior resultado foi obtido com
o calculo da aresta entre os pontos 2 e 4 com diferenccedila de aproximadamente
53cm que equivale 25 da medida de referecircncia Com este resultado conclui-se
que os pontos projetados com maior profundidade na nuvem de pontos 3D
apresentaram maior erro de posicionamento Estes pontos descrevem uma
superfiacutecie plana do objeto pouco aparente na imagem encontra-se muito inclinada
em relaccedilatildeo ao plano da imagem motivo pelo qual erros maiores podem ser
esperados Sobre os pontos 1 2 e 3 da superfiacutecie frontal do objeto o erro foi menor
na ordem de 2 centiacutemetros
Conforme o Experimento 1 realizado para a anaacutelise de ruiacutedo o melhor
resultado foi obtido utilizando o filtro da mediana que apresentou o desvio de 13cm
para a distacircncia de 13m medida utilizando tempo de integraccedilatildeo de 2000micros Este
fato indica coerecircncia com a diferenccedila de 2cm encontrada com a medida da aresta
frontal do objeto
117
58 MODELAGEM DAS SUPERFIacuteCIES 3D
Para a modelagem tridimensional das superfiacutecies segmentadas
primeiramente foi analisada a melhor forma de processamento da imagem TOF
Verificou-se com o Experimento 4 que o crescimento de regiotildees utilizando o arquivo
de intensidades da imagem TOF para escolha do ponto semente e o arquivo de
distacircncias para a projeccedilatildeo ortogonal e crescimento de regiotildees a partir deste ponto
natildeo foi satisfatoacuterio Isto porque o crescimento tambeacutem ocorreu em superfiacutecies que
natildeo pertenciam ao objeto analisado
Melhores resultados foram obtidos com a metodologia de segmentaccedilatildeo que
utilizou a imagem com bordas evidenciadas Esta foi gerada com a anaacutelise dos
autovalores locais das superfiacutecies a partir do arquivo de distacircncias da imagem TOF
conforme Experimento 5 A partir desta segmentaccedilatildeo projetaram-se ortogonalmente
os pontos das superfiacutecies frontal e superior do objeto de estudo gerando assim a
nuvem de pontos 3D que eacute ilustrada com a Figura 537
FIGURA 537 ndash Nuvem de pontos 3D das superfiacutecies frontal e superior
A partir da nuvem de pontos 3D realizou-se a modelagem das superfiacutecies
frontal e superior do objeto conforme eacute ilustrado com a Figura 538
118
FIGURA 538 ndash Modelagem tridimensional das superfiacutecies frontal e superior
Analisando a Figura 538 chegou-se a conclusatildeo que a superfiacutecie frontal do
objeto apresentou-se com padratildeo planar e uniforme Eacute a superfiacutecie que melhor
refletiu o sinal para o sensor devido agrave sua posiccedilatildeo em relaccedilatildeo agrave cacircmara TOF A
superfiacutecie superior apresentou-se um pouco inclinada em relaccedilatildeo ao plano da
imagem e com isto maior rugosidade foi observada nesta superfiacutecie Este
fenocircmeno deve-se a menor captaccedilatildeo do sinal refletido pela superfiacutecie do objeto pelo
sensor da cacircmara
119
6 CONCLUSOtildeES RECOMENDACcedilOtildeES E CONSIDERACcedilOtildeES FINAIS
61 CONCLUSOtildeES
Neste trabalho descreveram-se conceitos introdutoacuterios sobre as cacircmaras
TOF Avaliaram-se duas metodologias para a segmentaccedilatildeo da nuvem de pontos 3D
gerada a partir da imagem TOF Apresentou-se uma aplicaccedilatildeo para esta imagem na
extraccedilatildeo de informaccedilotildees meacutetricas do objeto de estudo imageado a distacircncia
aproximada de 13m
Para isto foram abordados os seguintes assuntos calibraccedilatildeo da cacircmara
para a obtenccedilatildeo de POI correccedilatildeo geomeacutetrica da imagem TOF filtragens para
anaacutelise e tratamento de ruiacutedo segmentaccedilatildeo atraveacutes do crescimento de regiotildees a
partir de um ponto semente segmentaccedilatildeo do arquivo de distacircncias da imagem TOF
utilizando autovalores locais para a geraccedilatildeo de uma imagem com bordas
intensificadas segmentaccedilatildeo da imagem com bordas intensificadas atraveacutes do
algoritmo de deslocamento pela meacutedia geraccedilatildeo da nuvem de pontos 3D atraveacutes da
projeccedilatildeo ortogonal dos pontos da imagem de bordas segmentada e por fim a
modelagem tridimensional de superfiacutecies do objeto de estudo
O processo de calibraccedilatildeo da cacircmara foi realizado utilizando o meacutetodo
proposto por Zhang (2000) e possibilitou a determinaccedilatildeo de POI A correccedilatildeo
geomeacutetrica das imagens foi feita atraveacutes das coordenadas 1199090 e 1199100 do Ponto
Principal coeficientes de distorccedilatildeo Radial Simeacutetrica de lentes 1198701 e 1198702 e distacircncia
focal calibrada 119891119888
Com os Experimentos 1 e 2 foram realizadas filtragens para o tratamento de
ruiacutedo das imagens TOF disponiacuteveis Nestes experimentos verificou-se que para a
captaccedilatildeo da imagem TOF agrave distacircncia de 13m entre o objeto e a cacircmara o tempo de
integraccedilatildeo de 2000μs foi o que gerou imagens com menor presenccedila de ruiacutedo Assim
como o tempo de integraccedilatildeo de 5000μs foi o mais adequado para captar imagens agrave
distacircncia de 21m No entanto chegou-se a conclusatildeo que para a geraccedilatildeo da nuvem
de pontos 3D natildeo se deveria utilizar filtragem nos dados pois pequenas alteraccedilotildees
no arquivo de distacircncias da imagem TOF poderiam modificar o posicionamento
tridimensional dos pontos o que afetaria a qualidade das medidas realizadas com os
pontos da nuvem 3D
120
A primeira metodologia proposta para a segmentaccedilatildeo da imagem TOF
mostrou-se insatisfatoacuteria para a soluccedilatildeo do problema Empregou-se o crescimento
de regiotildees a partir de pontos semente escolhidos no arquivo de intensidades desta
imagem projetando-os ortogonalmente para a nuvem de pontos 3D utilizando os
valores obtidos com o arquivo de distacircncias da imagem TOF Notou-se que erros no
crescimento de regiotildees ocorreram devido agrave toleracircncia utilizada para a distacircncia do
ponto agrave superfiacutecie plana Isto ocorreu porque a distacircncia foi calculada ao longo do
autovetor que eacute ortogonal a superfiacutecie no ponto semente Por este motivo alguns
pontos de superfiacutecies adjacentes foram selecionados equivocadamente como
pertencentes a uma mesma regiatildeo na nuvem de pontos 3D pois estavam dentro do
limite fixado no criteacuterio de similaridade utilizado mas na realidade natildeo eram
coplanares Para resolver o problema com esta metodologia seria necessaacuterio
estabelecer um limiar de crescimento lateral natildeo apenas de distacircncia ortogonal a
superfiacutecie plana semente Este limiar poderia ser o valor digital do pixel tendo em
vista que superfiacutecies coplanares apresentam uniformidade na resposta espectral A
rugosidade apresentada na superfiacutecie em que se realizava o crescimento da regiatildeo
tambeacutem influenciou em erros na seleccedilatildeo de pontos pois afetou no caacutelculo dos
autovalores fazendo com que inclinaccedilotildees em relaccedilatildeo a esta superfiacutecie fossem
notadas
A segunda metodologia analisada para a segmentaccedilatildeo da imagem TOF
mostrou-se satisfatoacuteria A segmentaccedilatildeo do arquivo de distacircncias da imagem TOF foi
realizada utilizando autovalores locais para a geraccedilatildeo de uma imagem com bordas
intensificadas segmentaccedilatildeo desta imagem com o algoritmo de deslocamento pela
meacutedia e projeccedilatildeo destes segmentos para a nuvem de pontos 3D A extraccedilatildeo de
informaccedilotildees meacutetricas em arestas do objeto de estudo a partir dos pontos 3D
apresentou diferenccedila na ordem de 2cm com a medida de referecircncia sendo a
imagem TOF adquirida com tempo de integraccedilatildeo de 2000μs a uma distacircncia
aproximada de 13m entre o objeto de estudo e a cacircmara
A Figura 61 ilustra as etapas de processamento a serem realizadas para a
geraccedilatildeo da nuvem de pontos 3D utilizando a segunda metodologia considerada
apropriada para a modelagem tridimensional de superfiacutecies utilizando a imagem
TOF Esta eacute a metodologia proposta como conclusatildeo do presente trabalho de
pesquisa
121
FIGURA 61 ndash Etapas da metodologia de processamento da imagem TOF
Foram encontradas medidas com maior qualidade quando a superfiacutecie do
objeto estava paralela ao plano da imagem Esta qualidade tambeacutem foi afetada pela
distacircncia entre a cacircmara e o objeto pela refletividade das superfiacutecies e pela
iluminaccedilatildeo ambiente Conforme o Experimento 6 realizado a aresta frontal do objeto
entre os pontos 2 e 3 apresentou a menor diferenccedila de medida 18cm que equivale
a 5 da distacircncia de referecircncia
Comparaccedilotildees para a diferenccedila de medida encontrada podem ser realizadas
com os seguintes trabalhos Kahlmann et al (2006) obtiveram exatidatildeo de 1cm nas
medidas com o alvo agrave distacircncia de 25m da cacircmara TOF utilizada Wiedemann et al
(2008) obtiveram exatidatildeo de 4cm com o alvo medido a distacircncia de 4m May et al
(2008) obtiveram erro de 30cm para uma medida de 108m considerada como
referecircncia com as imagens TOF captadas do centro de uma sala girando a cacircmara
360ordm e portanto envolviam tambeacutem Paracircmetros de Orientaccedilatildeo Exterior da cacircmara
Kolb et al (2009) obtiveram erro de 2cm para distacircncias medidas de 10m agrave 45m
Nestes trabalhos foram realizadas correccedilotildees geomeacutetricas nas imagens TOF com
POI determinados com a calibraccedilatildeo da cacircmara
Arquivo de distacircncias da imagem TOF
Correccedilatildeo geomeacutetrica dos dados utilizando POI calculados com o processo de calibraccedilatildeo da cacircmara
Imagem de intensidade com bordas itensificadas calculada com a anaacutelise da variaccedilatildeo local dos autovalores
Segmentaccedilatildeo da imagem com bordas intensificadas utilizando o algoriacutetmo de deslocamento pela meacutedia
Projeccedilatildeo ortogonal das aacutereas segmentadas para a geraccedilatildeo da nuvem de pontos 3D
Modelagem tridimensional das superfiacutecies do objeto
122
62 RECOMENDACcedilOtildeES
Recomenda-se realizar a anaacutelise preacutevia do tempo de integraccedilatildeo para a
aquisiccedilatildeo da imagem TOF com o objetivo de diminuir a presenccedila de ruiacutedo Este
tempo deve ser escolhido de acordo com o ambiente em que seraacute adquirida a
imagem e tambeacutem com as caracteriacutesticas de refletividade da superfiacutecie do objeto
Com este mesmo objetivo e devido ao fato desta imagem ser obtida com iluminaccedilatildeo
LED no comprimento de onda infravermelho recomenda-se analisar as influecircncias
da iluminaccedilatildeo exterior ao sistema de iluminaccedilatildeo da cacircmara
De acordo com a aplicaccedilatildeo a que se destina a imagem TOF recomenda-se
tambeacutem realizar a calibraccedilatildeo da cacircmara com meacutetodo fotogrameacutetrico convencional
Isto possibilitaria a melhora na correccedilatildeo geomeacutetrica da imagem e consequente
aumento na qualidade das medidas realizadas com os pontos da nuvem 3D
Correccedilotildees radiomeacutetricas tambeacutem podem ser aplicadas para melhorar a qualidade
das medidas obtidas com a imagem TOF
63 CONSIDERACcedilOtildeES FINAIS
Nuvens de pontos 3D geradas a partir de imagens TOF satildeo ferramentas
para a modelagem tridimensional das superfiacutecies de objetos Propiciam a obtenccedilatildeo
de informaccedilotildees meacutetricas destes objetos para distacircncias de 03 a 70 metros com
erro centimeacutetrico esperado
Aplicaccedilotildees para as imagens TOF podem ser realizadas para a modelagem
3D de tuacuteneis galerias instalaccedilotildees industriais e fachadas de preacutedios com interesse
de preservaccedilatildeo como patrimocircnio histoacuterico e cultural Com a alta frequecircncia de
aquisiccedilatildeo de imagens das cacircmaras TOF torna-se possiacutevel realizar filmagens e
mapeamentos em movimento
Outras aplicaccedilotildees possiacuteveis para as imagens TOF estatildeo na sua utilizaccedilatildeo
para a criaccedilatildeo de cenaacuterios 3D em jogos eletrocircnicos aquisiccedilatildeo de filmes com
tecnologia 3D modelagem tridimensional de obras de arte Biometria e anaacutelise de
movimentos
123
REFEREcircNCIAS BIBLIOGRAacuteFICAS
ANDRADE J B Fotogrametria 2 ed Curitiba SBEE 1998 274 p APUZZO N D‟ Recent advances in 3D full body scanning with applications to fashion and apparel 10p In Proceedings Optical 3-D Measurement Techniques IX Vienna Austria 2009 BALTSAVIAS E P Airborne laser scanning basic relations and formulas ISPRS - Journal of Photogrammetry amp Remote Sensing v 54 p 199-214 1999 BAZAN W S TOMMASELLI A M G GALO M RUY R S A influecircncia das injunccedilotildees de orientaccedilatildeo relativa na calibraccedilatildeo de um sistema dual de cacircmaras digitais 23p Boletim de Ciecircncias Geodeacutesicas v 15 n 3 Curitiba 2009 BELTON D Improving and extending the information on Principal Component Analysis for local neighborhoods in 3D points clouds 8p The international Archives of the Photogrammetry Remote Sensing and Spatial Information Sciences v XXXVII B5 Beijing 2008 BELTON D LICHTI D Classification and segmentation of terrestrial laser scanner point clouds using local variance information 6p In Proceedings ISPRS Commission V Simposium bdquoImage Engineering and Vision Metrology‟ 2006 BROWN D C Close-Range Camera Calibration Photogrammetric Engineering v 37 nordm 8 p 855-866 1971 CENTENO J A S Sensoriamento Remoto e Processamento de Imagens Digitais Curso de Poacutes-Graduaccedilatildeo em Ciecircncias Geodeacutesicas Curitiba UFPR 2004 209p CENTENO J A S JUTZI B Evaluation of range imaging sensor concerning resolution and illumination 6p In Proceedings The 2010 Canadian Geomatics Conference and Symposium of Commission I ISPRS Calgary Alberta 2010 CHRISTOUDIAS M C GEORGESCU B MEER P Synergism in Low Level Vision IEEE Transactions on Pattern Analysis and Machine Intelligence v 24 n 5 p 603-619 2002
124
COMANICIU D MEER P Mean Shift A Robust Approach Toward Feature Space Analysis 17p IEEE Transactions on Pattern Analysis and Machine Intelligence v 24 n 5 p 603-619 2002 FUCHS S HIRZINGER G Extrinsic and depth calibration of ToF cameras In Proceedings IEEE Conference on Computer Vision and Pattern Recognition (CVPR) Anchorage USA 2008 FUCHS S MAY S Calibration and registration for precise surface reconstruction with ToF cameras In Proceedings of the Dynamic 3D Imaging Workshop in Conjunction with DAGM (Dyn3D) v I Heidelberg Germany 2007 GEMAEL C Introduccedilatildeo ao ajustamento de observaccedilotildees aplicaccedilotildees geodeacutesicas 3 ed Curitiba UFPR 1994 319p GONZALEZ R C WOODS R E Processamento de imagens digitais Satildeo Paulo Edgard Bluumlcher Ltda 2000 509p GROSS H THOENNESSEN U Extraction of lines from laser point clouds p 86-91 In Proceedings Symposium of ISPRS Commission III Photogrammetric Computer Vision PCV06 Eds Foumlrstner W Steffen R International Archives of Photogrammetry Remote Sensing and Spatial Information Sciences 36 (Part 3) 2006 HABIB A MORGAN M Automatic calibration of low-cost digital cameras p 948-955 Journal of Photogrammetric Record 2003 JAMTSHO S Geometric modelling of 3D Range Cameras and their application for structural deformation measurement 174p (Master‟s Thesis Department of Geomatics Engineering) University of Calgary Alberta 2010 JOHNSON R A WICHERN D W Applied multivariate statistical analysis 4 ed New Jersey Pearson Prentice Hall 1998 JUTZI B GROSS H Nearest neighbor classification on laser point clouds to gain object structures from buildings 6p In Proceedings ISPRS Hannover Workshop 2009 High-Resolution Earth Imaging for Geospatial Information Disponiacutevel em lthttpwwwisprsorgproceedingsXXXVIII1_4_7-W5paperpapershtmgt Acesso 16112010
125
KAHLMANN T REMONDINO F INGENSAND H Calibration for increased accuracy of the range imaging camera SwissrangerTM ISPRS Commission V Symposium bdquoImage Engineering and Vision Metrology‟ v XXXVI n 5 2006 KEMENY S E EL-SAYED E MENDIS S FOSSUM E R Update on focal-plane image processing research 8p SPIE v 1447 Charged-Coupled Devices and Solid Optical Sensors II 1991 KHONGSAB P Signal processing and performance evaluation of a PMD camera for space docking 88p (Master‟s Thesis Continuation Courses Space Science and Technology Department of Space Science) Lulea University of Techology Kiruna 2009 KOCH R SCHILLER I BARTCZAK B KELLNER F KOumlSER K MixIn3D 3D mixed reality with ToF camera 16p In Work Programme of the EU‟s 7th Framework program 2009 KOLB A BARTH E KOCH R LARSEN R Time-of-Flight sensors in Computer Graphics 16p In STAR ndash State of The Art Report The Eurographics Association 2009 LANGE R 3D Time-of-Flight distance measurement with custom solid-state image sensors in CMOSCCD-technology 205 p (Dissertation Department of Electrical Engineering and Computer Science at University of Siegen for the degree of Doctor of Technical Sciences) Univesity of Siegen Alemanha 2000 LEON S J Linear Algebra with applications 4 ed Dartmouth Prentice Hall 1998 390p LUAN X Experimental investigation of Photonic Mixer Device and development of TOF 3D ranging systems based on PMD technology A dissertation submitted to the Department of Electrical Engineering and Computer Science at University of Siegen Siegen 2001 MACHADO A M L Extraccedilatildeo automaacutetica de contornos de edificaccedilotildees utilizando imagem gerada por cacircmara digital de pequeno formato e dados LIDAR 201 p Tese apresentada ao Curso de Poacutes-Graduaccedilatildeo em Ciecircncias Geodeacutesicas da Universidade Federal do Paranaacute Curitiba UFPR 2006
126
MASS H G VOSSELMAN Two algorithms for extracting building models from raw laser altimetry data 11p Elsevier Science Photogrammetry amp Remote Sensing 1999 MAY S DROESCHEL D HOLTZ D WIESEN C FUCHS S 3D Pose estimation and mapping with time-of-flight cameras 6p Germany 2008 Disponiacutevel em httpwwwroboticdefileadminroboticfuchsiros08_3dcampdf Acesso em 2510 2010 MITISHITA E A Monorestituiccedilatildeo digital de aerofotos associada com sistema de computaccedilatildeo graacutefica CAD para fins de mapeamento na aacuterea florestal 251p Tese (Doutorado em Engenharia Florestal) ndash Setor de Ciecircncias Agraacuterias Universidade Federal do Paranaacute 1997 MOumlLLER T KRAFT H FREY J ALBRECHT M LANGE R Robust 3D measurement with PMD sensors 2005 PAULY M GROSS M KOBBELT L P Efficient simplification of point-sampled surfaces 8p In VIS ‟02 Proceedings of the Conference on Visualization ‟02 Washington DC USA 2002 IEEE Computer Society PECHT Y FOSSUM E R Wide intrascene dynamic range CMOS APS using dual sampling IEEE Transactions on Electron Devices v 44 n 10 1997 PMD Technologies PMD [vison]regCamCube 20 4p Datasheet n 20090601 Siegen 2009 Disponiacutevel em lthttpwwwpmdteccomproducts-servicespmdvisionr-cameraspmdvisionr-camcube-20gt Acesso em 0103 2010 PMD Technologies PMD [vison]regCamCube 20 Software development tutorial 13p Siegen 2009 Disponiacutevel em lthttpwwwpmdteccomfileadminpmdtecdownloadsdocumentationcamcube_softwaredevelopmenttutorialpdfgt Acesso em 1504 2010 RAPP H Experimental and theoretical investigation of correlating TOF-camera systems 71p Diploma Thesis in Physics Faculty for Physics and Astronomy University of Heidelberg Alemanha 2007 RINGBECK T A 3D Time Of Flight camera for object detection 10p In Proceedings Optical 3D Measurement Techniques Plenary Session 1 Range Imaging I Zuumlrich 2007
127
SHAKARJI C M Least-Squares fitting algorithms of the NIST algorithm testing system 9p Journal of research of the national of standards and technology v 103 n 6 1998 THEUWISSEN A Solid-state imaging with Charge-Coupled Devices PP 34-46 Kluwer Academic Publishers 1995 Disponiacutevel em ltwwwspringerlinkcomgt Acesso em 08072010
WIEDEMANN M SAUER M DRIEWER F SCHILLING K Analysis and characterization of the PMD camera for application in mobile robotics 6p In Proceedings of the 17th World Congress The International Federation of Automatic Control Seoul Korea July 6-11 2008 ZHANG Z A flexible new technique for camera calibration 5p IEEE Transactions on Pattern Analysis and Machine Intelligence November 2000

vi
RESUMO
Neste trabalho estudou-se a modelagem tridimensional de superfiacutecies
utilizando imagens TOF (Time-Of-Flight) para isto avaliou-se a qualidade dos dados
obtidos com a cacircmara PMD[vision]regCamCube 20 Este equipamento calcula a
distacircncia de objetos em relaccedilatildeo ao seu sensor utilizando o princiacutepio TOF Com o
objetivo de corrigir a geometria dos dados contidos na imagem foram calculados
Paracircmetros de Orientaccedilatildeo Interior (POI) atraveacutes do processo de calibraccedilatildeo da
cacircmara Estes paracircmetros definem a geometria interior do sistema de lentes e
permitem fazer as correccedilotildees geomeacutetricas necessaacuterias Outro fator que influenciou na
qualidade dos dados foi agrave presenccedila de ruiacutedo em funccedilatildeo da iluminaccedilatildeo que pode ser
controlada variando o tempo de integraccedilatildeo na aquisiccedilatildeo das imagens Duas opccedilotildees
para a reduccedilatildeo do ruiacutedo foram analisadas filtragem no domiacutenio espacial e no tempo
de integraccedilatildeo Experimentos com os filtros passa-baixas pela meacutedia e mediana
foram realizados a fim de reduzir o ruiacutedo no domiacutenio espacial Com a mesma
finalidade a meacutedia para cada tempo de integraccedilatildeo foi calculada a partir de uma
seacuterie de cinco imagens tomadas com o mesmo ponto de vista A partir destes
experimentos foi determinado o melhor tempo de integraccedilatildeo para a aquisiccedilatildeo da
imagem A etapa seguinte consistiu na segmentaccedilatildeo da imagem para identificar
superfiacutecies do objeto de estudo Em uma primeira abordagem aplicou-se o meacutetodo
de crescimento de regiotildees utilizando a distacircncia do ponto ao plano como criteacuterio de
similaridade A segunda abordagem utilizou o caacutelculo de autovalores locais para
gerar uma nova imagem onde as bordas dos objetos foram evidenciadas Esta nova
imagem foi segmentada para obter superfiacutecies de interesse do objeto atraveacutes do
algoritmo de deslocamento pela meacutedia A partir do arquivo com as distacircncias da
imagem TOF e dos POI piacutexeis da imagem segmentada foram projetados
ortogonalmente gerando uma nuvem de pontos com coordenadas 3D Com isto as
dimensotildees de arestas do objeto foram comparadas com medidas de referecircncia
encontrando-se diferenccedilas na ordem de 2 centiacutemetros Finalizando o estudo as
superfiacutecies do objeto foram modeladas tridimensionalmente
Palavras-chave Imagem TOF Modelagem tridimensional de superfiacutecies
Calibraccedilatildeo de cacircmaras Anaacutelise de ruiacutedo Autovalores Autovetores Projeccedilatildeo
Ortogonal Segmentaccedilatildeo Crescimento de regiotildees em nuvem de pontos 3D
Algoritmo de deslocamento pela meacutedia
vii
ABSTRACT
This work aims at studying the quality of 3D data obtained with a range
camera the PMD[vision]regCamCube 20 and assessing its potential to model object
surfaces The equipment computes the distance to the objects using the Time-Of-
Flight (TOF) principle Initially the equipment was calibrated using camera calibration
methods The Interior Orientation Parameters (IOP) allow reducing geometric
distortion in the images Another factor that influences the quality of data is the
presence of noise caused by illumination conditions which can be controlled by
varying the integration time of the light source Two options to reduce noise were
analyzed spatial filtering with low-pass and median filter and computing the
average of a series of images taken from the same point of view After determining
the best integration time and Interior Orientation Parameters the 3D coordinates of a
point cloud was computes The next step consists in image segmentation to identify
the surfaces of an object In a first approach it is applied a region growing method
using the point-plane distance as similarity parameter The second approach is
based on the calculation of local eigenvalues using small moving windows to
generate a new image where borders are highlighted This new image is segmented
using the mean-shift approach to delineate the surfaces of interest Each interest
pixel of the segmented image was projected for the 3D points cloud The dimensions
of the object are compared with real values The comparison showed differences
around 2cm within the expected range Finally the object surfaces can then be
modeled with the 3D points cloud
Keywords TOF image Range image Three-dimensional modeling surfaces
Camera calibration Noise analysis Eigenvalues Eigenvectors Orthogonal
projection Segmentation Region growing in 3D point clouds Mean Shift Algorithm
viii
LISTA DE FIGURAS
FIGURA 21 ndash Princiacutepio TOF 19
FIGURA 22 ndash Meacutetodo da diferenccedila de fase 20
FIGURA 23 ndash FC utilizada no meacutetodo da diferenccedila de fase 23
FIGURA 24 ndash Informaccedilatildeo das imagens TOF 25
FIGURA 25 ndash Imagem TOF obtida com cacircmara PMD 26
FIGURA 26 ndash Ruiacutedo na nuvem de pontos 3D proveniente de imagem TOF 27
FIGURA 27 ndash Princiacutepio de funcionamento do sistema PMD 28
FIGURA 28 ndash Captaccedilatildeo da carga do sinal em sensores CCD e CMOS 29
FIGURA 29 ndash Representaccedilatildeo de campos de franja 30
FIGURA 210 ndash Princiacutepio de armazenamento de cargas em sensores TOF 31
FIGURA 211 ndash Princiacutepio de captaccedilatildeo de cargas pelo sensor PMD 32
FIGURA 212 ndash Medida da diferenccedila de fase do sinal recebido 33
FIGURA 213 ndash Medida de distacircncia com a cacircmara PMD 35
FIGURA 214 ndash Cacircmara PMD CamCube 20 36
FIGURA 215 ndash Imagem captada com a cacircmara PMD CamCube 20 37
FIGURA 216 ndash Princiacutepio de funcionamento do SBI 39
FIGURA 217 ndash Modelos de cacircmaras TOF 39
FIGURA 218 ndash Nuvem de pontos 3D gerada a partir de imagem TOF 44
FIGURA 219 ndash Colinearidade entre os pontos no espaccedilo imagem e objeto 45
FIGURA 220 ndash Sistemas de coordenadas utilizados em imagens 47
FIGURA 221 ndash Filtro para a definiccedilatildeo de bordas do objeto 51
FIGURA 222 ndash Geometria do filtro para a definiccedilatildeo de bordas 52
FIGURA 223 ndash Autovetores em nuvem de pontos 3D de uma superfiacutecie plana 55
FIGURA 224 ndash Inclinaccedilotildees de superfiacutecies determinadas por autovalores 59
FIGURA 225 ndash Imagem segmentada 66
FIGURA 41 ndash Processamento da imagem TOF 69
FIGURA 42 ndash Filtragem passa-baixas pela meacutedia 80
FIGURA 43 ndash Filtragem pela mediana 80
FIGURA 44 ndash Filtragem utilizando a meacutedia temporal 81
FIGURA 45 ndash Intensificaccedilatildeo de bordas com autovalores 85
FIGURA 46 ndash Imagem com bordas intensificadas 85
FIGURA 51 ndash Imagens do gabarito utilizadas na calibraccedilatildeo da cacircmara 87
FIGURA 52 ndash Orientaccedilatildeo Exterior das fotografias para a calibraccedilatildeo da cacircmara 88
FIGURA 53 ndash Direccedilatildeo das distorccedilotildees nos pontos da imagem TOF 88
ix
FIGURA 54 ndash Correccedilatildeo geomeacutetrica da imagem TOF 90
FIGURA 55 ndash Desvio padratildeo x TI janelas 10x10 93
FIGURA 56 ndash Imagens para TI=500μs e d=130m 93
FIGURA 57 ndash Imagens para TI=2000μs e d=130m 94
FIGURA 58 ndash Imagens para TI=2500μs e d=130m 95
FIGURA 59 ndash Desvios padratildeo para distacircncia x TI 96
FIGURA 510 ndash Desvios padratildeo para janelas com TI=2000μs d=130m 97
FIGURA 511 ndash Janelas de 40x40 piacutexeis TI=2000μs d=130m 97
FIGURA 512 ndash Desvios padratildeo para janelas com TI=5000μs d=130m 98
FIGURA 513 ndash Janelas de 40x40 piacutexeis TI=5000μs d=130m 98
FIGURA 514 ndash Desvios padratildeo para janelas com TI=2000μs d=210m 99
FIGURA 515 ndash Janelas de 40x40 piacutexeis TI=2000μs d=210m 99
FIGURA 516 ndash Desvios padratildeo para janelas com TI=5000μs d=210m 100
FIGURA 517 ndash Janelas de 40x40 piacutexeis TI=5000μs d=210m 100
FIGURA 518 ndash Desvios padratildeo para janelas com TI=7000μs d=210m 101
FIGURA 519 ndash Janelas de 40x40 piacutexeis TI=7000μs d=210m 101
FIGURA 520 ndash Arquivo de intensidades da imagem TOF obtida do objeto 103
FIGURA 521 ndash Arquivo de distacircncias da imagem TOF com geometria corrigida 104
FIGURA 522 ndash Nuvem de pontos vista frontal 104
FIGURA 523 ndash Nuvem de pontos vista perspectiva 3D 105
FIGURA 524 ndash Pontos semente no arquivo de intensidades da imagem TOF 106
FIGURA 525 ndash Crescimento de regiotildees vista frontal 107
FIGURA 526 ndash Crescimento de regiotildees vista perspectiva 3D 107
FIGURA 527 ndash Imagem com bordas intensificadas gerada com 1205821 109
FIGURA 528 ndash Imagem com bordas intensificadas gerada com 1205822 109
FIGURA 529 ndash Imagem com bordas intensificadas gerada com 1205823 109
FIGURA 530 ndash Imagens de intensidade com as bordas do objeto intensificadas 110
FIGURA 531 ndash Imagem com bordas intensificadas segmentada 111
FIGURA 532 ndash Nuvem de pontos da imagem segmentada vista frontal 112
FIGURA 533 ndash Nuvem de pontos da imagem segmentada vista 3D 113
FIGURA 534 ndash Nuvem de pontos 3D segmentada 114
FIGURA 535 ndash Pontos 3D selecionados na nuvem 114
FIGURA 536 ndash Dimensotildees de referecircncia do objeto de estudo 115
FIGURA 537 ndash Nuvem de pontos 3D das superfiacutecies frontal e superior 117
FIGURA 538 ndash Modelagem tridimensional das superfiacutecies frontal e superior 118
x
LISTA DE QUADROS E TABELAS
QUADRO 21 ndash Especificaccedilotildees teacutecnicas da cacircmara PMD CamCube 20 37
QUADRO 22 ndash Especificaccedilotildees teacutecnicas de cacircmaras TOF 40
QUADRO 23 ndash Propriedades de superfiacutecies normais obtidas com autovalores 57
TABELA 51 ndash Paracircmetros de Orientaccedilatildeo Interior calculados 89
TABELA 52 ndash Coordenadas 3D dos pontos e medidas realizadas 116
xi
LISTA DE SIGLAS
Sigla Significado
AMISE Asymptotic Mean Integrated Square Error
CCD Charge Coupled Device
CMOS Complementary Metal Oxide Semiconductor
CP Centro Perspectivo
EDISON Edge Detection and Image SegmentatiON System
FC Funccedilatildeo de Correlaccedilatildeo
FPN Fixed Pattern Noise
FPS Frames Per Second
LASER Light Amplification by Stimulated Emission of Radiation
LED Light Emitting Diode
MDE Modelo Digital de Elevaccedilatildeo
MVC Matriz de Variacircncias e Covariacircncias
PMD Photonic Mixer Device
POE Paracircmetros de Orientaccedilatildeo Exterior
POI Paracircmetros de Orientaccedilatildeo Interior
PP Ponto Principal
SBI Supression of Background Ilumination
TI Tempo de Integraccedilatildeo
TOF Time-Of-Flight
xii
SUMAacuteRIO
1 INTRODUCcedilAtildeO 14
11 OBJETIVO GERAL 16
12 OBJETIVOS ESPECIacuteFICOS 16
13 JUSTIFICATIVA 17
14 ESTRUTURA DA DISSERTACcedilAtildeO 18
2 REVISAtildeO BIBLIOGRAacuteFICA 19
21 MEDIDA DE DISTAcircNCIA COM O PRINCIacutePIO TOF 19
22 IMAGEM TOF 25
23 TEMPO DE INTEGRACcedilAtildeO 26
24 PRINCIacutePIO DE FUNCIONAMENTO DO SENSOR PMD 28
25 CAcircMARAS PMD 34
251 Cacircmara PMD CamCube 20 36
252 Dispositivo SBI 38
253 Modelos de cacircmaras TOF 39
26 ERROS DE MEDIDA 40
261 Erros natildeo-sistemaacuteticos em cacircmaras TOF 41
262 Erros sistemaacuteticos em cacircmaras TOF 41
27 PROJECcedilAtildeO ORTOGONAL DOS PONTOS 45
28 REFINAMENTO DA NUVEM DE PONTOS 3D 50
29 ANAacuteLISE DE SUPERFIacuteCIES POR AUTOVALORES E AUTOVETORES 53
210 ANAacuteLISE DE SUPERFIacuteCIES POR MOMENTOS INVARIANTES 56
211 ALGORITMO DE DESLOCAMENTO PELA MEacuteDIA 60
3 MATERIAIS 67
4 MEacuteTODOS 68
41 CALIBRACcedilAtildeO DA CAcircMARA 69
42 ANAacuteLISE DA PRESENCcedilA DE RUIacuteDO 78
421 Filtragem passa-baixas pela meacutedia 79
422 Filtragem pela mediana 80
423 Filtragem com a meacutedia temporal 81
43 SEGMENTACcedilAtildeO 82
431 Crescimento de regiotildees a partir de superfiacutecies planas e ponto semente 82
xiii
432 Segmentaccedilatildeo por anaacutelise da variaccedilatildeo local de autovalores 84
433 Segmentaccedilatildeo com o algoritmo de deslocamento pela meacutedia 86
5 RESULTADOS E DISCUSSOtildeES 87
51 CALIBRACcedilAtildeO DA CAcircMARA 87
52 EXPERIMENTO 1 ndash ANAacuteLISE DE RUIacuteDO 1 IMAGEM TOF INTEIRA 92
53 EXPERIMENTO 2 ndash ANAacuteLISE DE RUIacuteDO 2 JANELAS DE 40X40 PIacuteXEIS 96
54 EXPERIMENTO 3 ndash PROJECcedilAtildeO ORTOGONAL DOS PONTOS 102
55 EXPERIMENTO 4 ndash SEGMENTACcedilAtildeO 1 CRESCIMENTO DE REGIOtildeES 106
56 EXPERIMENTO 5 ndash SEGMENTACcedilAtildeO 2 ANAacuteLISE COM AUTOVALORES 108
57 EXPERIMENTO 6 ndash ANAacuteLISE DAS MEDIDAS OBTIDAS 113
58 MODELAGEM DAS SUPERFIacuteCIES 3D 117
6 CONCLUSOtildeES RECOMENDACcedilOtildeES E CONSIDERACcedilOtildeES FINAIS 119
61 CONCLUSOtildeES 119
62 RECOMENDACcedilOtildeES 122
63 CONSIDERACcedilOtildeES FINAIS 122
REFEREcircNCIAS BIBLIOGRAacuteFICAS 123
14
1 INTRODUCcedilAtildeO
A informaccedilatildeo meacutetrica para a representaccedilatildeo espacial de objetos eacute uma
necessidade para diferentes aacutereas de estudo Algumas aplicaccedilotildees exigem que o
processo de aquisiccedilatildeo e representaccedilatildeo graacutefica desta informaccedilatildeo seja realizado com
rapidez e qualidade Em Ciecircncias Geodeacutesicas a obtenccedilatildeo desta informaccedilatildeo pode
ser feita atraveacutes de diversas maneiras dentre elas citam-se os levantamentos de
campo e as imagens obtidas por sensores remotos exemplos satildeo teacutecnicas
aplicadas em Topografia e Fotogrametria
Com a Topografia o trabalho pode alcanccedilar alto grau de exatidatildeo
dependendo da teacutecnica e precisatildeo do equipamento utilizado No entanto se gasta
bastante tempo para realizar o levantamento das informaccedilotildees em campo e tambeacutem
para o processamento e organizaccedilatildeo dos dados em escritoacuterio Algumas aplicaccedilotildees
da Topografia estatildeo na locaccedilatildeo de obras como rodovias geraccedilatildeo de perfis de
terrenos e rios monitoramento de deformaccedilotildees na estrutura de barragens pontes e
tambeacutem no levantamento de pontos 3D para representar fachadas de edifiacutecios
Com a Fotogrametria o levantamento das informaccedilotildees tridimensionais de um
objeto pode ser feito em tempo relativamente curto As fotografias satildeo obtidas de
forma instantacircnea No entanto quando se utilizam teacutecnicas convencionais de
Fotogrametria necessita-se de pelo menos duas fotografias com sobreposiccedilatildeo das
aacutereas imageadas para a geraccedilatildeo do modelo fotogrameacutetrico Outra forma eacute a teacutecnica
conhecida por Monorestituiccedilatildeo Digital onde se utiliza uma fotografia digital em
conjunto com um Modelo Digital de Elevaccedilatildeo (MDE) normalmente gerado por uma
nuvem de pontos proveniente de outro equipamento ou sensor (MITISHITA 1997)
Na modalidade terrestre da Fotogrametria eacute possiacutevel determinar pontos 3D
para representar fachadas de preacutedios obras de arte mapeamentos de ruas e
imoacuteveis com a plataforma em movimento dentre outras aplicaccedilotildees
Aleacutem das teacutecnicas convencionais de levantamentos utilizadas em Topografia
e Fotogrametria e com o objetivo de viabilizar a aquisiccedilatildeo da informaccedilatildeo espacial
equipamentos e teacutecnicas tecircm sido constantemente desenvolvidos e aperfeiccediloados
Avanccedilos tecnoloacutegicos tecircm possibilitado a obtenccedilatildeo da informaccedilatildeo tridimensional
para a representaccedilatildeo dos objetos de forma raacutepida e precisa Exemplos satildeo os
sistemas de varredura laser scanner e as cacircmaras TOF (Time-Of-Fligth) tambeacutem
15
conhecidas na literatura por Range Cameras Estas cacircmaras geram imagens com
informaccedilotildees de distacircncia para cada pixel do objeto imageado denominadas
imagens de profundidade distacircncia ou Range Image Neste trabalho seraacute utilizada
preferencialmente a denominaccedilatildeo ldquoimagem TOFrdquo
Nas uacuteltimas deacutecadas os sistemas de varredura laser scanner tecircm sido muito
utilizados para mapeamento Equipamentos com esta tecnologia possibilitam a
obtenccedilatildeo de milhares de pontos por segundo e podem ser instalados em
plataformas aeacutereas ou terrestres No entanto devido a este ser um equipamento
oacuteptico e mecacircnico o alto custo na sua aquisiccedilatildeo torna-o inviaacutevel para algumas
aplicaccedilotildees
Cacircmaras TOF atraem a atenccedilatildeo de diferentes aacutereas que necessitam de
pontos com coordenadas 3D de seus objetos de estudo tais como a Visatildeo
Computacional e a Engenharia de Automaccedilatildeo Um modelo de cacircmara TOF eacute a PMD
CamCube 20 que capta 25 imagens por segundo (Frames Per Secunde - FPS)
Com esta frequecircncia de aquisiccedilatildeo pode obter o movimento dos objetos na cena e de
grande quantidade de informaccedilatildeo tridimensional sobre os mesmos
No entanto a grande quantidade de dados captada deve ter sua qualidade
avaliada A iluminaccedilatildeo exterior ao sistema interfere negativamente Outro fator a ser
observado eacute a configuraccedilatildeo da cena pois interferecircncias satildeo causadas pelas
distacircncias orientaccedilotildees e refletividade das superfiacutecies dos objetos em relaccedilatildeo ao
sensor da cacircmara Em uma mesma cena podem-se apresentar medidas ambiacuteguas
de distacircncia para os pontos devido a erros causados pela iluminaccedilatildeo utilizada no
sistema As influencias causadas por erros sistemaacuteticos assim como ruiacutedos devem
ser observadas para cada tipo de aplicaccedilatildeo (MAY et al 2008)
A cacircmara TOF utilizada para a aquisiccedilatildeo das imagens nesta pesquisa foi a
PMD[vision]regCamCube 20 Esta utiliza um sensor de imageamento PMD (Photonic
Mixer Device) que possibilita armazenar informaccedilatildeo de distacircncia para os piacutexeis de
uma imagem de intensidade O equipamento fornece a imagem TOF que eacute
composta por um arquivo com as intensidades que o sinal retornou para o sensor e
um arquivo com as informaccedilotildees de distacircncia para cada pixel o que possibilita a
percepccedilatildeo da profundidade dos objetos na cena
16
11 OBJETIVO GERAL
O objetivo geral deste trabalho de pesquisa eacute desenvolver uma metodologia
para a modelagem tridimensional das superfiacutecies de objetos a partir da nuvem de
pontos 3D proveniente da imagem TOF
12 OBJETIVOS ESPECIacuteFICOS
Realizar a correccedilatildeo geomeacutetrica dos dados da imagem TOF atraveacutes de
Paracircmetros de Orientaccedilatildeo Interior obtidos com o processo de
calibraccedilatildeo da cacircmara
Testar meacutetodos de filtragem para a reduccedilatildeo de ruiacutedo presente nas
imagens TOF e analisar formas para a aquisiccedilatildeo da imagem TOF
com menor presenccedila de ruiacutedo
Analisar o tempo de integraccedilatildeo para diferentes situaccedilotildees de aquisiccedilatildeo
da imagem TOF
Avaliar meacutetodos para a segmentaccedilatildeo das superfiacutecies de objetos a
partir da imagem TOF
Gerar nuvem de pontos com coordenadas tridimensionais das
superfiacutecies segmentadas e modelar estas superfiacutecies
tridimensionalmente
Avaliar a qualidade das medidas obtidas com a modelagem
tridimensional das superfiacutecies do objeto de estudo
17
13 JUSTIFICATIVA
Com o desenvolvimento e aperfeiccediloamento das cacircmaras TOF acredita-se
na viabilizaccedilatildeo deste equipamento para a medida de distacircncia e modelagem
tridimensional das superfiacutecies de objetos para diferentes finalidades Apresenta as
seguintes vantagens
Recobrimento da aacuterea de forma instantacircnea
Possibilidade de filmar a cena registrando o movimento dos objetos
com frequecircncia de aquisiccedilatildeo de 25 imagens por segundo
Fornece grande quantidade de pontos com coordenadas 3D dos
objetos imageados
Uma imagem eacute suficiente para estimar a distacircncia dos objetos
Informaccedilatildeo na banda espectral do infravermelho
Uma imagem TOF captada instantaneamente disponibiliza informaccedilatildeo sobre
a distacircncia de objetos contidos na cena sendo possiacutevel a geraccedilatildeo de nuvens de
pontos para a representaccedilatildeo tridimensional de objetos sem necessitar de
informaccedilatildeo proveniente de outro sensor Outra vantagem eacute o sistema natildeo precisar
de iluminaccedilatildeo exterior
Algumas aplicaccedilotildees para as imagens TOF foram realizadas nas aacutereas de
prevenccedilatildeo de acidentes automobiliacutesticos e seguranccedila de pedestres (RINGBECK
2007) Visatildeo Computacional (WIEDEMANN et al 2008) mapeamentos
tridimensionais de objetos em ambientes fechados para a movimentaccedilatildeo roboacutetica
(MAY et al 2008) Computaccedilatildeo Graacutefica (KOLB 2009 et al KOCH et al 2009)
realizaccedilatildeo de medidas do corpo humano para a induacutestria de roupas (APUZZO
2009) e anaacutelise de deformaccedilotildees (JAMTSHO 2010)
18
14 ESTRUTURA DA DISSERTACcedilAtildeO
A presente dissertaccedilatildeo foi estruturada em seis capiacutetulos No primeiro
capitulo realiza-se a introduccedilatildeo ao tema descreve-se o objetivo geral e os objetivos
especiacuteficos aleacutem da justificativa para a pesquisa
O segundo capiacutetulo apresenta uma revisatildeo de conceitos sobre medida de
distacircncia utilizando o princiacutepio TOF descriccedilatildeo da imagem TOF e seus arquivos de
intensidades e distacircncias influencia do tempo de integraccedilatildeo (TI) na aquisiccedilatildeo da
imagem TOF princiacutepio de funcionamento do sensor PMD modelos de cacircmaras
TOF erros de medida que podem ocorrer utilizando estas cacircmaras projeccedilatildeo
ortogonal das distacircncias obtidas com a imagem TOF para a geraccedilatildeo da nuvem de
pontos 3D meacutetodo para o refinamento da nuvem de pontos 3D detecccedilatildeo de
superfiacutecies por autovetores e autovalores anaacutelise de superfiacutecies por momentos
invariantes e algoritmo de deslocamento pela meacutedia para a segmentaccedilatildeo de
imagens
No terceiro capitulo descrevem-se os materiais equipamentos e espaccedilo
fiacutesico utilizado para a realizaccedilatildeo do trabalho de pesquisa
Com o quarto capitulo satildeo descritos os meacutetodos utilizados para o
desenvolvimento da pesquisa calibraccedilatildeo da cacircmara filtragens para anaacutelise e
tratamento de ruiacutedo presente nas imagens meacutetodos de segmentaccedilatildeo por
crescimento de regiotildees na nuvem de pontos segmentaccedilatildeo por anaacutelise da variaccedilatildeo
local de autovalores no arquivo de distacircncias da imagem TOF e geraccedilatildeo de imagem
de intensidade com as bordas do objeto intensificadas segmentaccedilatildeo da imagem
com bordas intensificadas utilizando o algoritmo de deslocamento pela meacutedia
Com o quinto capitulo descrevem-se os resultados obtidos tais como
valores dos paracircmetros calculados no processo de calibraccedilatildeo da cacircmara
experimentos realizados para a anaacutelise da presenccedila de ruiacutedo nas imagens TOF
projeccedilatildeo ortogonal dos pontos para a geraccedilatildeo da nuvem de pontos 3D
segmentaccedilatildeo por crescimento de regiotildees segmentaccedilatildeo por anaacutelise da variaccedilatildeo
local de autovalores anaacutelise das medidas obtidas com a nuvem de pontos 3D
segmentada e tambeacutem se realiza a modelagem tridimensional de duas superfiacutecies
do objeto estudado
Finalmente com o sexto capitulo satildeo apresentadas conclusotildees
consideraccedilotildees finais e recomendaccedilotildees para trabalhos futuros de acordo com os
experimentos realizados
19
2 REVISAtildeO BIBLIOGRAacuteFICA
21 MEDIDA DE DISTAcircNCIA COM O PRINCIacutePIO TOF
O princiacutepio TOF (Time-Of-Flight) permite calcular a distacircncia de objetos a
partir da emissatildeo e recepccedilatildeo de um sinal luminoso Com este objetivo utiliza-se um
conjunto de emissor e receptor oacutepticos que mede o tempo necessaacuterio para o sinal
retornar para o sensor apoacutes atingir o alvo com base no conhecimento do valor da
velocidade da luz propagada no vaacutecuo De acordo com Baltsavias (1999) o caacutelculo
da distacircncia com o princiacutepio TOF pode ser realizado atraveacutes de dois meacutetodos
Tempo de percurso de pulsos curtos de energia
Mudanccedila de fase de um sinal modelado na forma de onda contiacutenua
Sistemas que utilizam o primeiro meacutetodo de medida transmitem um pulso e
medem o seu tempo de retorno Isto eacute possiacutevel devido ao retardo de tempo gasto no
percurso do sinal que eacute medido atraveacutes de um ponto no pulso de retorno com
referecircncia no pulso emitido Quanto melhor eacute a medida do tempo melhor a distacircncia
calculada sendo o reloacutegio do sensor um fator de grande importacircncia neste meacutetodo
Para obter precisatildeo meacutetrica necessita-se realizar a medida de tempo em nano
segundos (ƞs) O afastamento e duraccedilatildeo do pulso tambeacutem satildeo fatores importantes
na resoluccedilatildeo da medida de distacircncia com este meacutetodo A Figura 21 Ilustra a medida
de distacircncia com o princiacutepio TOF (LANGE 2000)
FIGURA 21 ndash Princiacutepio TOF
FONTE LANGE (2000)
20
Utilizando pulsos de uma fonte de luz pode-se calcular a distacircncia de um
alvo atraveacutes da Equaccedilatildeo (21)
119863 =119888 119905
2 (21)
onde
119863 ndash Distacircncia entre o sensor e o alvo
119888 ndash Valor constante da velocidade da luz
119905 ndash Variaccedilatildeo de tempo entre emissatildeo e recepccedilatildeo do pulso
O segundo meacutetodo trabalha com a determinaccedilatildeo da mudanccedila de fase do
sinal contido em uma onda contiacutenua modulada Pode ser utilizado para evitar o
problema na medida de tempo com alta precisatildeo O sinal luminoso pode ser emitido
utilizando fontes LED (Light Emitting Diode) ou LASER (Light Amplification by
Stimulated Emission of Radiation) Estas fontes permitem a modulaccedilatildeo direta do
sinal luminoso atraveacutes da voltagem do sistema (LANGE 2000)
Para a utilizaccedilatildeo do meacutetodo da diferenccedila de fase considera-se que o sinal
refletido pelo alvo manteacutem a forma do sinal modulado emitido mas a fase do sinal
emitido eacute diferente da fase do sinal recebido conforme ilustrado com a Figura 22
FIGURA 22 ndash Meacutetodo da diferenccedila de fase
21
Sendo assim a mudanccedila de fase entre os sinais pode ser utilizada para
calcular a distacircncia conforme Equaccedilatildeo (22)
119863 =120593∙119888
4∙120587∙120574 (22)
onde
119863 ndash Distacircncia entre o sensor e o alvo
120593 ndash Diferenccedila de fase entre o sinal emitido e o recebido
119888 ndash Valor constante da velocidade da luz
120574 ndash Frequecircncia de modulaccedilatildeo do sinal
Em cacircmaras TOF a distacircncia entre o sensor e o alvo eacute medida utilizando o
meacutetodo da diferenccedila de fase com uma Funccedilatildeo de Correlaccedilatildeo (FC) entre o sinal
emitido e o refletido As amplitudes dos sinais satildeo moduladas com a mesma
frequecircncia Com isto a iluminaccedilatildeo pode ser feita utilizando diacuteodos emissores de luz
LED tendo-se a vantagem que a FC pode ser obtida com o sensor PMD a partir da
forma senoidal do sinal recebido (RAPP 2007)
A FC eacute calculada atraveacutes do sinal emitido e recebido Estes sinais satildeo
modelados matematicamente com forma senoidal tendo em vista que sua
propagaccedilatildeo ocorre na forma de onda Dado um sinal luminoso emitido 119892 119905 e um
sinal recebido 119904 119905 em um ponto do sensor PMD as amostras 119888 120591 podem ser
calculadas atraveacutes da Equaccedilatildeo (23) Estas amostras satildeo utilizadas para modelar a
FC em um atraso de tempo 120591
119888 120591 = 119904 119905 otimes 119892 119905 = lim119879rarrinfin 119904 119905 ∙ 119892 119905 + 120591 +119879
2
minus119879
2
119889119905 (23)
onde
119904 119905 ndash Funccedilatildeo que modela a forma do sinal luminoso recebido
119892 119905 ndash Funccedilatildeo que modela a forma do sinal luminoso emitido
119905 ndash Variaccedilatildeo de tempo entre a emissatildeo e a recepccedilatildeo do sinal
120591 ndash Atraso de tempo no recebimento do sinal
22
O sinal emitido pode ser expresso com 119892 119905 = cos(120603119905) o recebido eacute
expresso atraveacutes da relaccedilatildeo 119904 119905 = 1 + 119886 ∙ cos(120603119905 minus 120593) Ambos com forma senoidal
amplitude 119886 e diferenccedila de fase 120593 Com isto a FC pode ser apresentada na forma da
Equaccedilatildeo (25)
119888 120591 = 1 + 119886 ∙ 119888119900119904 120603120591 minus 120593 otimes 119888119900119904 120603120591 (24)
119888 120591 = lim119879acuterarrinfin1
119879acute 1 + 119886 ∙ 119888119900119904 120603119905 minus 120593 ∙ 119888119900119904 120603119905 + 120603119905
+119879 acute
2
minus119879 acute
2
119889119905 (25)
119888 120591 =119886
2∙ cos 120593 + 120603119905 (26)
onde
119892 119905 ndash Funccedilatildeo senoidal que modela a forma do sinal emitido
119904 119905 ndash Funccedilatildeo que modela a forma do sinal recebido
119905 ndash Variaccedilatildeo de tempo entre a emissatildeo e recepccedilatildeo do sinal
120591 ndash Atraso no tempo de recebimento do sinal
119886 ndash Amplitude da onda portadora do sinal
120593 ndash Diferenccedila de fase
120603 ndash Referecircncia de fase para o sinal modelado na forma senoidal
Lange (2000) avaliou a FC para fases 120596 119905 preacute-definidas escolhendo quatro
fases 120596 119905 = 0deg 120596 119905 = 90deg 120596 119905 = 180deg 120596 119905 = 270deg Verificou que eacute possiacutevel calcular a
diferenccedila de fase 120593 e a amplitude 119886 do sinal recebido 119904(119905) Considerando que o sinal
recebido tem sobreposiccedilatildeo ao sinal emitido deve-se adicionar uma constante de
deslocamento 119870 conforme a Equaccedilatildeo (27)
119862 120591 = 119888 120591 + 119870 (27)
119862 1205910 = 119888 1205910 + 119870 =119886
2∙ cos 120593 + 119870 (28)
119862 1205911 = 119888 1205911 + 119870 = minus119886
2∙ 119904119890119899 120593 +119870 (29)
119862 1205912 = 119888 1205912 + 119870 = minus119886
2∙ cos 120593 + 119870 (210)
119862 1205913 = 119888 1205913 + 119870 =119886
2∙ 119904119890119899 120593 +119870 (211)
23
Analisando a FC em quatro pontos a diferenccedila de fase 120593 e a amplitude 119886 do
sinal 119904(119905) podem ser calculadas atraveacutes das Equaccedilotildees (212) e (213)
120593 = 119905119892minus1 119862 1205913 minus119862 1205911
119862 1205910 minus119862 1205912 (212)
119886 = 119862 1205913 minus119862 1205911 2+ 119862 1205910 minus119862 1205912 2
2 (213)
Pode-se fazer a simplificaccedilatildeo das Equaccedilotildees (214) agrave (217) para quatro
pontos amostrais que satildeo necessaacuterios na modelagem da FC
119862 1205911 = 1198601 (214)
119862 1205912 = 1198602 (215)
119862 1205913 = 1198603 (216)
119862 1205910 = 1198604 (217)
A anaacutelise da FC entre o sinal oacuteptico e eleacutetrico recebido no dispositivo do
sensor eacute feita utilizando a diferenccedila de fase conforme ilustrado com a Figura 23
FIGURA 23 ndash FC utilizada no meacutetodo da diferenccedila de fase
FONTE Adaptado de LANGE (2000)
A FC permite calcular a distacircncia entre o alvo e a cacircmara utilizando quatro
amostras 11986011198602 1198603 e 1198604 com defasagem de 90ordm A diferenccedila de fase 120593 entre o sinal
24
emitido e o recebido eacute proporcional agrave distacircncia entre o alvo e a cacircmara O valor para
a diferenccedila de fase pode ser calculado atraveacutes da Equaccedilatildeo (218)
120593 = 119886119903119888119905119886119899 1198601minus1198603
1198602 minus1198604 (218)
onde
120593 ndash Diferenccedila de fase entre a onda emitida e a recebida
1198601119860211986031198604 ndash Pontos amostrais utilizados na modelagem da FC
Aleacutem do valor da diferenccedila de fase entre os sinais dois outros valores
podem ser calculados a amplitude 119886 e o valor de intensidade 119887 do sinal recebido
conforme as Equaccedilotildees (219) e (220) respectivamente
119886 = 1198601minus1198603 2+ 1198602 minus1198604 2
2 (219)
119887 =1198601+1198602 +1198603+1198604
4 (220)
onde
119886 ndash Amplitude do sinal recebido
119887 ndash Intensidade do sinal recebido (offset)
A distacircncia 119889 do sensor ao alvo eacute calculada atraveacutes da Equaccedilatildeo (221)
119889 =119888∙120593
4120587∙119891119898119900119889 (221)
onde
119889 ndash Distacircncia entre o sensor e o alvo
119888 ndash Valor constante da velocidade da luz propagada no vaacutecuo
120593 ndash Diferenccedila de fase entre o sinal emitido e o recebido
119891119898119900119889 ndash Frequecircncia de modulaccedilatildeo do sinal luminoso utilizado
A frequecircncia de modulaccedilatildeo do sinal emitido estabelece a distacircncia maacutexima
que poderaacute ser medida para um determinado comprimento de onda Em um sinal
25
modulado com a frequecircncia 119891119898119900119889 = 20119872119867119911 e comprimento de onda 120582119898119900119889 = 15m
conforme a Equaccedilatildeo (222) a distacircncia maacutexima que poderaacute ser medida eacute de 75
metros (MOumlLLER et al 2005)
119889119898119886119909 =120582119898119900119889
2= 75119898 (222)
22 IMAGEM TOF
Os piacutexeis da imagem TOF contecircm informaccedilotildees de distacircncia e intensidade
das superfiacutecies dos objetos Proporcionam a anaacutelise da profundidade dos objetos na
cena aleacutem da informaccedilatildeo de intensidade do sinal captado pelo sensor A Figura 24
ilustra a informaccedilatildeo 3D contida na imagem TOF
FIGURA 24 ndash Informaccedilatildeo das imagens TOF
FONTE Adaptado de RINGBECK (2007)
Com a informaccedilatildeo de profundidade e o posicionamento bidimensional dos
objetos na imagem pode-se realizar o mapeamento destes objetos e estimar suas
dimensotildees As cacircmaras TOF podem captar imagens e viacutedeos para realizar medidas
e detectar movimentos A Figura 25 ilustra os arquivos da imagem TOF
26
FIGURA 25 ndash Imagem TOF obtida com cacircmara PMD
FONTE PMD Technologies (2009)
A Figura 25a ilustra o arquivo com informaccedilatildeo das distacircncias dos objetos
presentes na imagem TOF A Figura 25b ilustra o arquivo com as intensidades que
o sinal retornou para o sensor registrada em cada piacutexel da imagem infravermelha
captada com comprimento de onda de 870nm
23 TEMPO DE INTEGRACcedilAtildeO
O periacuteodo de tempo que o sensor da cacircmara ficou exposto para obter a
imagem eacute chamado de tempo de integraccedilatildeo (TI) A quantidade de energia
eletromagneacutetica captada pelo sensor eacute diretamente influenciada por este tempo
pelas caracteriacutesticas refletivas das superfiacutecies dos objetos e pelo meio em que a
imagem foi tomada Os elementos do sensor podem ser carregados de acordo com
seu intervalo de capacidade do insaturado ao supersaturado Estes valores causam
ruiacutedos na imagem variando de acordo com a distacircncia entre o objeto e o sensor
(CENTENO e JUTZI 2010)
Este pode ser considerado o paracircmetro interno mais criacutetico em uma cacircmara
TOF pois descreve o periacuteodo de tempo que os elementos sensores necessitam
para detectar o sinal luminoso com a finalidade de obter a diferenccedila de fase utilizada
27
para o caacutelculo da distacircncia Quando o TI eacute muito baixo alguns elementos do sensor
podem natildeo ser ativados ocasionando piacutexeis com valor zero natildeo sendo possiacutevel
calcular sua distacircncia Por outro lado se o TI eacute muito elevado o pixel pode ficar
supersaturado o que tambeacutem causa erro na medida da distacircncia Sendo assim eacute
necessaacuterio determinar um TI especiacutefico para cada situaccedilatildeo Nas cacircmaras PMD o
controle do TI eacute realizado atraveacutes de software em outros modelos de cacircmaras TOF
este controle pode ser feito atraveacutes de hardware (WIEDEMANN et al 2008)
A Figura 26 ilustra a presenccedila de ruiacutedo na imagem TOF influenciada pelo
TI Nesta figura as nuvens de pontos 3D foram geradas com imagens TOF obtidas
com a cacircmara PMD CamCube 20 a partir do mesmo ponto de vista mas com
diferentes TI (140micros 1400micros e 14000micros) isto causou a presenccedila de ruiacutedo com
diferentes comportamentos
FIGURA 26 ndash Ruiacutedo na nuvem de pontos 3D proveniente de imagem TOF
FONTE PMD CamCube Tutorial (2009)
A nuvem de pontos gerada com a imagem obtida com TI de 1400micros
ilustrada com a Figura 26b foi a que melhor representou a forma das superfiacutecies do
objeto A nuvem de pontos da Figura 26a foi gerada a partir da imagem obtida com
TI igual a 140micros considerada com baixa saturaccedilatildeo pois a intensidade do sinal
captado pelo sensor foi pequena A nuvem de pontos da Figura 26c foi gerada com
imagem obtida com TI igual a 14000micros o que causou a saturaccedilatildeo do sinal recebido
pelo sensor e maior presenccedila de ruiacutedo A nuvem de pontos apresentada com a
Figura 26c apresentou-se menos consistente para representar as superfiacutecies do
objeto em questatildeo
28
24 PRINCIacutePIO DE FUNCIONAMENTO DO SENSOR PMD
O dispositivo PMD (Photonic Mixer Device) realiza medidas de distacircncia
utilizando o princiacutepio TOF Com este objetivo o dispositivo emite sinais luminosos
com frequecircncia modulada e o sensor capta a intensidade de retorno do sinal
refletido pelo alvo Informaccedilotildees sobre as fases e intensidades destes sinais satildeo
obtidas com o processamento A Figura 27 ilustra as etapas deste processo
FIGURA 27 ndash Princiacutepio de funcionamento do sistema PMD
FONTE LUAN (2001)
O sinal modulado eacute emitido com uma fase determinada pelo oscilador do
sistema Para que se possa realizar a medida da distacircncia o sinal recebido deve ter
fase diferente da que foi emitido No dispositivo PMD as cargas eleacutetricas do sinal
recebido satildeo separadas de acordo com a voltagem do diodo de leitura tambeacutem
chamado de fotodiodo O arquivo de saiacuteda deste dispositivo conteacutem informaccedilatildeo de
fase e intensidade do sinal recebido o que possibilita obter informaccedilatildeo de distacircncia
e intensidade para cada piacutexel da imagem (LUAN 2001)
O sensor utilizado no imageamento eacute um CMOS (Complementary Metal-
Oxide-Semiconductor) que tem tecnologia similar a dos sensores CCD (Charged-
Coupled Device) O CMOS apresenta a vantagem de ser um circuito integrado com
baixo consumo de energia No CMOS a conversatildeo de voltagem e a amplificaccedilatildeo do
sinal ocorrem em cada fotodiodo e os valores podem ser lidos independentemente
29
A desvantagem eacute que a amplificaccedilatildeo no fotodiodo gera imagens com maior
presenccedila de ruiacutedo (PECHT e FOSSUM 1997)
Quando os foacutetons sensibilizam o sensor CCD a carga eleacutetrica eacute transferida
sequencialmente linha por linha coluna por coluna A conversatildeo de voltagem e
amplificaccedilatildeo do sinal eacute realizada fora da aacuterea do sensor Uma vantagem do sensor
CCD eacute a geraccedilatildeo de imagens mais niacutetidas devido agrave menor complexidade no seu
sistema Por processar as cargas eleacutetricas de forma unificada menores interferecircncias
satildeo causadas diminuindo a presenccedila de ruiacutedo (KEMENY et al 1991)
A diferenccedila no princiacutepio de funcionamento dos sensores CCD e CMOS eacute
Ilustrada com a Figura 28
FIGURA 28 ndash Captaccedilatildeo da carga do sinal em sensores CCD e CMOS
FONTE LANGE (2000)
O princiacutepio de funcionamento do sensor CCD eacute ilustrado com as Figuras
28a e 28c onde a leitura da informaccedilatildeo eacute feita de forma sequencial pelos elementos
do sensor Esta varredura realizada no sensor CCD faz com que a geraccedilatildeo da
30
imagem final seja mais lenta que no sensor CMOS que realiza a conversatildeo foacuteton-
eleacutetron e eleacutetron-voltagem diretamente em cada elemento sensor conforme eacute
ilustrado com as Figuras 28b e 28d Com isto o sensor CMOS tem maior
velocidade de transferecircncia de cargas acumuladas para o conversor analoacutegico-
digital
Fotodiodos satildeo os elementos fotossensiacuteveis utilizados como portas de
entrada para o sinal luminoso em sensores CMOS ou CCD Estes captam cargas
eleacutetricas presentes no sinal e estatildeo inseridos sobre uma placa de Siliacutecio O
transporte das cargas para o interior da placa eacute explicado fisicamente atraveacutes dos
campos de franjas ilustrado com a Figura 29 Os campos de franja estatildeo
representados para diferentes voltagens os elementos do sensor apresentado tem
entradas para trecircs voltagens 10V 5V e 0V
FIGURA 29 ndash Representaccedilatildeo de campos de franja
FONTE THEUWISSEN (1995)
A seccedilatildeo A-A‟ na Figura 29 ilustra os campos de franja gerados mais
proacuteximos agrave superfiacutecie da placa A forma do sinal pode ser modelada de forma
aproximada por segmentos de linhas retas Na seccedilatildeo B-B‟ com profundidade meacutedia
na placa de Siliacutecio a influecircncia do campo eleacutetrico das entradas vizinhas a porta
central de 5V estaacute em seu niacutevel maacuteximo Quanto mais fundo encontra-se a entrada
de cargas na placa de Siliacutecio menor seraacute a interferecircncia dos campos eleacutetricos
gerados pelas portas de entrada das cargas vizinhas conforme pode ser visualizado
na seccedilatildeo C-C‟ Nesta profundidade diferentes portas de entrada estatildeo praticamente
31
agrave mesma distacircncia da superfiacutecie e o valor de dispersatildeo do campo de franja diminui
O campo de franja miacutenimo de uma entrada que tecircm profundidade maacutexima
proporciona ao sensor o maior aproveitamento aumentando assim a velocidade no
transporte de cargas (THEUWISSEN 1995)
Quanto maior a modulaccedilatildeo na voltagem da entrada das cargas maior o
potencial de armazenamento conforme ilustrado com a Figura 210
FIGURA 210 ndash Princiacutepio de armazenamento de cargas em sensores TOF
FONTE LANGE (2000)
O sinal modulado recebido 119904 119905 e a Funccedilatildeo de Correlaccedilatildeo 119891 119905 + 120591 do sinal
modulado emitido satildeo ilustrados com a Figura 210b A Figura 210a ilustra a luz
incidente no sensor com as cargas captadas e armazenadas de acordo com a
modulaccedilatildeo do fotodiodo
O dispositivo PMD utiliza a tecnologia CMOS para o imageamento com dois
elementos fotossensiacuteveis e dois diodos que captam as cargas eleacutetricas do sinal
modulado recebido As informaccedilotildees oacutepticas e eleacutetricas misturadas geram os piacutexeis
da imagem com informaccedilatildeo de distacircncia dos pontos imageados A Figura 211
ilustra este elemento sensor
32
FIGURA 211 ndash Princiacutepio de captaccedilatildeo de cargas pelo sensor PMD
FONTE LUAN (2001)
As placas claras e centrais na Figura 211a correspondem ao circuito de
leitura do sinal oacuteptico estas placas satildeo condutoras e transparentes para possibilitar
a entrada de luz Os diodos satildeo os componentes do circuito de leitura que captam e
direcionam as cargas eleacutetricas recebidas em um determinado sentido satildeo ilustrados
com as placas mais afastadas na Figura 211a As cargas que chegam satildeo
distribuiacutedas de acordo com a voltagem do diodo Uma fina camada de oacutexido isola os
circuitos de leitura do dispositivo
A voltagem da carga que entra no sistema eacute controlada de acordo com a
modulaccedilatildeo do sinal aplicada pelo dispositivo emissor Sendo assim pode ser
captada pelo diodo da direita ou esquerda que registraraacute a quantidade de carga
recebida de acordo com sua voltagem A distribuiccedilatildeo de potencial na regiatildeo
superficial do dispositivo eacute influenciada pela seleccedilatildeo de cargas que faz este sistema
dinacircmico e equilibrado Para valores natildeo nulos a luz modulada recebida e a
diferenccedila de fase podem ser comparadas atraveacutes das cargas eleacutetricas recebidas A
quantidade de carga captada pelos diodos depende diretamente da diferenccedila de
fase entre o sinal modulado emitido e o recebido pelo sensor Esta informaccedilatildeo pode
ser utilizada para calcular a diferenccedila de fase entre o sinal emitido e o recebido pois
33
eacute diretamente proporcional a carga que cada diodo captou Com isto a distacircncia
entre o sensor e o objeto pode ser calculada utilizando o princiacutepio da diferenccedila de
fase No entanto se a luz incidente eacute modulada como um sinal retangular mas sua
fase entre a emissatildeo e a recepccedilatildeo eacute igual a zero a carga seraacute captada por apenas
um dos diodos e a distacircncia resultante seraacute igual a zero (MOumlLLER et al 2005)
A Figura 212 ilustra o comportamento dos diodos de leitura ao receber o
sinal com distacircncia diferente de zero entre o alvo e o sensor Na Figura 212a eacute
ilustrado o sinal luminoso recebido por um elemento fotossensiacutevel Este sinal eacute
captado pela porta de entrada PA do fotodiodo que registra parte desta carga de
acordo com sua modulaccedilatildeo
FIGURA 212 ndash Medida da diferenccedila de fase do sinal recebido
FONTE Adaptado de MOumlLLER et al (2005)
Na Figura 212a o sinal recebido pelo elemento fotossensiacutevel do sensor eacute
ilustrado no momento em que eacute captado pela porta com modulaccedilatildeo A (PmodA) A
carga eacute captada pelos dois fotodiodos com defasagem de meio ciclo com isto cada
um capta parte da carga recebida A Figura 212b ilustra a medida da diferenccedila de
fase do sinal recebido atraveacutes da quantidade de carga que foi captada pelos
fotodiodos com modulaccedilatildeo Mod_A e Mod_B A voltagem do diodo eacute estabelecida de
acordo com a modulaccedilatildeo do sinal luminoso que seraacute emitida pelo dispositivo
34
25 CAcircMARAS PMD
As cacircmaras TOF com tecnologia PMD consistem de um chip sensor fonte
de iluminaccedilatildeo transmissor e receptor oacutepticos aleacutem de perifeacutericos eletrocircnicos e
interface digital de controle realizada atraveacutes de software Dependendo das
exigecircncias de aplicaccedilatildeo os componentes da cacircmara podem ser adaptados Cada
um deles pode afetar os paracircmetros internos da cacircmara tais como o campo de
visatildeo (FOV) taxa de captaccedilatildeo e tempo de integraccedilatildeo para a aquisiccedilatildeo das imagens
A distacircncia da superfiacutecie a ser medida eacute o fator preponderante para a escolha destes
paracircmetros O fato destas cacircmaras serem modulares amplia sua gama de
aplicaccedilotildees Isto eacute possiacutevel levando-se em conta as condiccedilotildees adicionais que cada
aplicaccedilatildeo pode exigir tais como a luz exterior ao sistema e a necessidade de
mudanccedila na fonte de iluminaccedilatildeo utilizada (PMD Technologies 2009)
O sensor PMD proporciona o imageamento instantacircneo dos objetos
utilizando um sensor com tecnologia CMOS adaptado Este sensor eacute um arranjo de
elementos fotossensiacuteveis que permitem a raacutepida detecccedilatildeo e modulaccedilatildeo do sinal
luminoso com suas variaccedilotildees Isto eacute feito de acordo com a distacircncia da superfiacutecie
que atinge do objeto imageado Pode adquirir dados de distacircncia e intensidade
simultaneamente sem precisar de um sistema de digitalizaccedilatildeo mais complexo como
um laser scanner Apresenta a desvantagem de ser muito sensiacutevel agrave luz exterior ao
sistema que interfere causando a presenccedila de ruiacutedo na imagem TOF e consequente
erro na medida de distacircncia (KHONGSAB 2009)
O desempenho do sistema PMD depende da fonte de iluminaccedilatildeo utilizada
capacidade de fornecimento de energia e eficiecircncia oacuteptica na criaccedilatildeo da imagem
Normalmente eacute utilizada fonte de iluminaccedilatildeo LED nas cacircmaras PMD No entanto
outros fabricantes utilizam diodos LASER para a iluminaccedilatildeo isto porque possibilita
realizar medidas de distacircncias maiores O desenvolvimento dos sistemas LED fez
com que sua eficiecircncia de transformaccedilatildeo de energia eleacutetrica em energia oacuteptica seja
de 30 Com a iluminaccedilatildeo LED tem-se um sinal luminoso jaacute modulado devido a
suas caracteriacutesticas eletro-oacutepticas Como uma parte consideraacutevel da luz fica na
borda do feixe isto se torna uma desvantagem pois esta aacuterea normalmente fica fora
do campo de visatildeo do sensor PMD Outra desvantagem diz respeito ao limite de
modulaccedilatildeo dos LED‟s comerciais que trabalham na faixa de 20 MHz agrave 30 MHz Os
diodos LASER tecircm eficiecircncia oacuteptica de ateacute 50 dependendo da potecircncia de saiacuteda
35
utilizada sendo de aproximadamente 100 MHz a modulaccedilatildeo maacutexima da frequecircncia
que pode ser atingida O perfil do feixe LASER pode ser adaptado ao campo de
visatildeo do sensor PMD A desvantagem eacute que este seria um circuito modular mais
complexo e que teria necessidade de um maior nuacutemero de etapas para conseguir
estabilizar a fase da onda portadora do sinal Outra desvantagem eacute que a
implantaccedilatildeo de um sistema LASER necessita de maior atenccedilatildeo agrave seguranccedila dos
olhos do que o sistema LED (RINGBECK 2007)
Com a Figura 213 ilustra-se a medida de distacircncia com a cacircmara TOF
modelo 19k da PMD A fonte de iluminaccedilatildeo LED emite o sinal luminoso em direccedilatildeo
dos objetos que estatildeo no campo visual da cacircmara O retorno deste sinal eacute captado
pelo sensor e possibilita o caacutelculo da diferenccedila de fase entre o sinal emitido e o
recebido
FIGURA 213 ndash Medida de distacircncia com a cacircmara PMD
FONTE MOLLER et al (2005)
36
251 Cacircmara PMD CamCube 20
A cacircmara TOF modelo PMD[VISION]regCamCube 20 funciona em ambientes
internos e externos com sensor de 204x204 piacutexeis que captam os niacuteveis de cinza da
imagem de intensidade Simultaneamente realiza a medida da quantidade de carga
recebida utilizada para determinar a diferenccedila de fase entre o sinal emitido e o
recebido Isto possibilita o caacutelculo da distacircncia entre o sensor e os objetos presentes
na cena A Figura 214 ilustra a cacircmara PMD CamCube 20 com as fontes de
iluminaccedilatildeo LED acopladas em suas laterais
FIGURA 214 ndash Cacircmara PMD CamCube 20
FONTE PMD Technologies (2009)
Este equipamento pode ter seu campo de visatildeo variaacutevel possibilitando a
diminuiccedilatildeo de distorccedilotildees manchas ou outras imperfeiccedilotildees da imagem O software
de interface da cacircmara com o computador apresenta a possibilidade de trabalhar
com dados brutos para o processamento das imagens aleacutem de funcionar em
diferentes canais de frequecircncia Tambeacutem disponibiliza compatibilidade com o
software Matlab para realizar esta interface
A imagem de intensidade captada de uma parede utilizando a cacircmara PMD
CamCube 20 eacute ilustrada com a Figura 215
37
FIGURA 215 ndash Imagem captada com a cacircmara PMD CamCube 20
FONTE CENTENO e JUTZI (2010)
Com a Figura 215a eacute ilustrada a cacircmara PMD CamCube 20 instalada em
um tripeacute sobre uma mesa Na Figura 215b tem-se a imagem infravermelha da
superfiacutecie plana de uma parede obtida com esta cacircmara O Quadro 21 ilustra as
especificaccedilotildees teacutecnicas da cacircmara PMD CamCube 20
PARAcircMETROS VALOR PADRAtildeO OBSERVACcedilOtildeES
Tipo do sensor PhotonICs PMD41k-S (204x204 piacutexeis)
Tamanho efetivo do pixel no sensor igual a 45microm
Distacircncia de mediccedilatildeo 03 ndash 7metros
Precisatildeo na medida de distacircncia (1σ) lt 3mm
Para aacuterea central da imagem obtida agrave 2m do sensor em superfiacutecie com refletividade de 90
Frequecircncia de aquisiccedilatildeo de imagens 25 fps Configuraccedilatildeo padratildeo
Campo de visatildeo (FOV) 40ordmx40ordm f = 128mm
Comprimento de onda da fonte de iluminaccedilatildeo
870nm Infravermelho proacuteximo
Fonte de iluminaccedilatildeo [V] 12 V plusmn 10
Interface USB 20
Temperatura de operaccedilatildeo 0ordmC agrave 50ordmC
Temperatura de armazenamento -20ordmC agrave 85ordmC
QUADRO 21 - Especificaccedilotildees teacutecnicas da cacircmara PMD CamCube 20 FONTE Adaptado de PMD Technologies (2009)
O sensor PhotonICs PMD41k-S utilizado na cacircmara PMD CamCube 20 vem
com um dispositivo SBI para a supressatildeo de cargas provenientes da iluminaccedilatildeo
exterior ao sistema Estas cargas causam a saturaccedilatildeo dos piacutexeis da imagem TOF
38
252 Dispositivo SBI
O dispositivo SBI (Supression of Background Illumination) eacute uma soluccedilatildeo
teacutecnica encontrada para melhorar o contraste das imagens geradas com o sensor
PMD em ambientes com iluminaccedilatildeo exterior A presenccedila desta iluminaccedilatildeo na cena
do objeto imageado causa maior presenccedila de ruiacutedo no sinal captado pelo sensor
Esta iluminaccedilatildeo pode saturar os elementos do sensor fazendo com que
ocorram falhas na medida de distacircncia Este efeito pode ser minimizado utilizando o
tempo de integraccedilatildeo adequado para a tomada das imagens Outros distuacuterbios que
podem ocorrer satildeo devidos agrave corrente negra (DC - Dark Current) Este efeito eacute
causado porque o sensor natildeo capta o valor zero na imagem que seria a falta
completa de iluminaccedilatildeo nas superfiacutecies da cena A corrente negra natildeo pode ser
evitada em dispositivos semicondutores especialmente quando haacute altas
temperaturas Com uma temperatura de 80ordmC a corrente negra pode ser 1000 vezes
maior do que o normal o que afeta significativamente a qualidade das medidas
realizadas Para tornar o dispositivo PMD mais confiaacutevel na medida de distacircncias foi
criado o circuito SBI que suprime instantaneamente a iluminaccedilatildeo de fundo Neste
circuito eacute utilizada uma teacutecnica para a captaccedilatildeo do sinal luminoso minimizando a
interferecircncia de fatores externos Isto possibilita realizar medidas de distacircncia
confiaacuteveis mesmo em ambientes onde o sinal eacute modificado por interferecircncia de
iluminaccedilatildeo externa ou por altas temperaturas O sistema SBI pode ser desativado ou
ateacute mesmo ajustado para que seja possiacutevel realizar medidas de distacircncia com
qualidade em cenas tomadas em diferentes ambientes independente da presenccedila
de iluminaccedilatildeo exterior (MOumlLLER 2005)
O circuito SBI adiciona cargas eleacutetricas de compensaccedilatildeo instantacircnea nos
diodos de leitura minimizando os efeitos de saturaccedilatildeo causados por fatores externos
ao sistema Com o SBI espera-se que o sensor capte apenas o sinal correlacionado
com a medida de distacircncia sem interferecircncia de iluminaccedilatildeo exterior reduzindo
assim a interferecircncia da iluminaccedilatildeo de fundo no sinal recebido
A Figura 216a ilustra um sensor sem o dispositivo SBI a carga captada com
influecircncias externas de iluminaccedilatildeo e calor eacute maior do que a enviada pela fonte de
iluminaccedilatildeo refletida pela superfiacutecie do objeto e recebida pelo sensor Neste caso a
medida de distacircncia estaacute influenciada por fatores externos ao sistema e conteraacute
erros Na Figura 216b as cargas geradas por fatores externos ao sistema satildeo
39
minimizadas pelo dispositivo SBI Com isto tem-se maior quantidade de carga
captada com o sinal recebido eliminando a carga gerada por fatores externos
FIGURA 216 ndash Princiacutepio de funcionamento do SBI
FONTE MOumlLLER et al (2005)
Cacircmaras TOF com iluminaccedilatildeo LED infravermelha utilizam o dispositivo SBI
para a supressatildeo da iluminaccedilatildeo de fundo Outros modelos de cacircmaras TOF utilizam
iluminaccedilatildeo LASER para evitar o problema com a iluminaccedilatildeo exterior
253 Modelos de cacircmaras TOF
Diferentes cacircmaras TOF foram desenvolvidas nos uacuteltimos anos a Figura
217 ilustra alguns modelos destas cacircmaras
FIGURA 217 ndash Modelos de cacircmaras TOF
a) Effector O3D FONTE httpwwwifm-electroniccom
b) PMD[vision] CamCube 20 FONTE httpwwwpmdteccom
c) PMD[vision] 19k FONTE httpwwwpmdteccom
d) SwissRanger SR-3000 FONTE httpwwwmesa-imagingch
40
O Quadro 22 descreve as especificaccedilotildees teacutecnicas destas cacircmaras TOF
a)Effector
O3D
b)PMD[vision]
CamCube 20
c)PMD[vision]
19k
d)SwissRanger
SR-3000
Resoluccedilatildeo (piacutexeis) 64 x 50 204 x 204 160 x 120 176 x 144
Dimensotildees dos piacutexeis (microm) 100 x 100 45 x 45 40 x 40 40 x 40
Distacircncia focal (mm) 86 128 120 80
Fonte de iluminaccedilatildeo 1 matriz LED 2 matrizes LED 2 matrizes LED 1 matriz LED
Modulaccedilatildeo da fonte de
iluminaccedilatildeo (nm) 850 870 870 850
Frequecircncia de modulaccedilatildeo 20 MHz 20 MHz 20 MHz 20 MHz
Frequecircncia na aquisiccedilatildeo de
imagens
Maacuteximo
100 fps
Maacuteximo
25 fps
Maacuteximo
15 fps
Maacuteximo
40 fps
Conexatildeo Ethernet USB 2 Ethernet USB 2
Dimensotildees (mm) 55 x 45 x 85 194 x 60 x 60 220 x 210 x 55 60 x 50 x 65
QUADRO 22 ndash Especificaccedilotildees teacutecnicas de cacircmaras TOF FONTE Adaptado de RAPP (2007)
A partir do Quadro 22 verifica-se que estes modelos de cacircmaras TOF em
sua configuraccedilatildeo padratildeo possuem fonte de iluminaccedilatildeo LED distacircncia focais
variando de 8mm agrave 128mm e apresentam pequenas dimensotildees
26 ERROS DE MEDIDA
Observaccedilotildees realizadas com instrumentos de medida estatildeo acompanhadas
de erros provenientes da falibilidade humana imperfeiccedilatildeo na fabricaccedilatildeo do
equipamento e de interferecircncias causadas pelo ambiente em que o instrumento
utilizado e o objeto estavam no momento em que se realizou a medida Erros de
observaccedilatildeo satildeo tradicionalmente classificados como erros grosseiros sistemaacuteticos e
acidentais Erros grosseiros devem ser detectados e evitados pelo observador com
os devidos cuidados na obtenccedilatildeo da informaccedilatildeo tambeacutem ocorrem devido agrave
presenccedila de ruiacutedo nas observaccedilotildees Erros sistemaacuteticos se repetem seguindo um
determinado padratildeo e podem ser preditos e corrigidos Existem opccedilotildees para evitaacute-
los atraveacutes de teacutecnicas de observaccedilatildeo ou entatildeo eliminaacute-los a posteriori atraveacutes de
foacutermulas especiacuteficas Os erros acidentais ou aleatoacuterios satildeo randocircmicos natildeo
previsiacuteveis e podem ser distribuiacutedos entre o conjunto de observaccedilotildees por teacutecnicas
41
estatiacutesticas Eacute comum o uso da expressatildeo ldquopropriedades estatiacutesticas das
observaccedilotildeesrdquo devido a este erro (GEMAEL 1994)
Erros na medida de distacircncia utilizando cacircmaras TOF tambeacutem podem ser
divididos em natildeo-sistemaacuteticos e sistemaacuteticos conforme descrito nas seccedilotildees 261 e
262 onde seratildeo apresentados 3 erros natildeo-sistemaacuteticos e 7 erros sistemaacuteticos
261 Erros natildeo-sistemaacuteticos em cacircmaras TOF
De acordo com MAY et al (2008) a classificaccedilatildeo de erros natildeo-sistemaacuteticos
na medida de distacircncia utilizando cacircmaras TOF pode ser feita da seguinte maneira
1) Erro devido agrave relaccedilatildeo sinal-ruiacutedo (Signal-to-noise) quando a relaccedilatildeo da
carga recebida com o sinal eacute baixa e o ruiacutedo presente eacute alto haveraacute distorccedilatildeo na
medida de distacircncia que natildeo poderaacute ser corrigida posteriormente Para diminuir este
erro pode-se tomar cuidado com o tempo de exposiccedilatildeo do sensor na aquisiccedilatildeo da
imagem e tambeacutem amplificar a iluminaccedilatildeo do sistema Outra soluccedilatildeo eacute filtrar os
valores medidos com baixas amplitudes no sinal recebido
2) Reflexatildeo do sinal por muacuteltiplos caminhos (Multiple ways reflection) em
objetos com descontinuidade em suas superfiacutecies o sinal emitido pode percorrer
diferentes caminhos antes de retornar ao sensor Exemplos satildeo objetos com
superfiacutecies cocircncavas que podem refletir vaacuterias vezes o sinal e gerar erro na medida
de distacircncia Neste caso o sinal eacute refletido com sobreposiccedilatildeo ou seja pode ser
captado o sinal da uacuteltima superfiacutecie que o refletiu gerando uma distacircncia diferente
do valor esperado
3) Espalhamento da luz (Light scattering) ocorre na lente da cacircmara
causado pela presenccedila de objetos proacuteximos Este efeito e o causado pela reflexatildeo
por muacuteltiplos caminhos satildeo imprevisiacuteveis pois a topologia da cena observada eacute
desconhecida a priori
262 Erros sistemaacuteticos em cacircmaras TOF
Segundo RAPP (2007) nas cacircmaras TOF erros tambeacutem indicam a relaccedilatildeo
entre a variacircncia da distacircncia e a amplitude do sinal captado pelo sensor A relaccedilatildeo
42
estabelecida eacute que a variacircncia dos dados de distacircncia eacute inversamente proporcional agrave
raiz quadrada da amplitude do sinal recebido para realizar a medida Alguns erros
sistemaacuteticos das cacircmaras TOF estudados por RAPP foram
1) Erro devido a uma funccedilatildeo natildeo harmocircnica utilizada para correlacionar o
sinal emitido ao recebido
2) Ruiacutedos relacionados com o tempo de integraccedilatildeo Este tempo pode causar
exposiccedilatildeo insuficiente ou saturaccedilatildeo dos elementos do sensor
3) Erros geomeacutetricos no posicionamento dos piacutexeis devido ao sistema oacuteptico
da cacircmara
O erro devido agrave falta de harmonia na funccedilatildeo de correlaccedilatildeo entre o sinal
emitido e o recebido pode ser causado quando o sistema oacuteptico utilizado emite o
sinal de referecircncia com sua forma inicial e recebe o sinal refletido com forma
diferente Com isto a funccedilatildeo que representa o sinal recebido natildeo teraacute a forma
senoidal teoacuterica do sinal emitido Isto ocorre por conter harmocircnicos de Fourier
iacutempares quando eacute necessaacuteria uma amostra com pelo menos quatro pontos para
definir a FC entre os sinais Este erro tem grande influecircncia no caacutelculo da distacircncia
do objeto pois eacute a FC que possibilita a medida da diferenccedila de fase entre o sinal
emitido e o recebido
A presenccedila de ruiacutedo pode ser notada variando o TI na aquisiccedilatildeo da imagem
O conjunto de dados apresenta maiores distorccedilotildees radiomeacutetricas e geomeacutetricas
quando a presenccedila de ruiacutedo eacute forte Quando o TI eacute aumentado o ruiacutedo observado no
conjunto de dados pode diminuir Poreacutem valores extremamente altos introduzem
erros na mediccedilatildeo por causar saturaccedilatildeo do sensor Com esta informaccedilatildeo procura-se
definir uma funccedilatildeo para a modelagem do ruiacutedo de acordo com o tempo de
integraccedilatildeo Analisando dados obtidos com diferentes TI pode-se especificar qual o
melhor para cada situaccedilatildeo
Erros causados por exposiccedilatildeo insuficiente do sensor natildeo satildeo considerados
sistemaacuteticos poreacutem podem ser preditos Se o valor da amplitude do sinal eacute reduzido
o erro na medida da distacircncia aumenta Para reduzir os piacutexeis obtidos com
exposiccedilatildeo insuficiente pode-se definir um limite no valor da amplitude do sinal
Outra forma de controlar a exposiccedilatildeo eacute com o TI na obtenccedilatildeo da imagem Piacutexeis que
tem amplitude menor que 1 do valor maacuteximo das amplitudes na imagem TOF satildeo
considerados piacutexeis com exposiccedilatildeo insuficiente
43
Erros de posicionamento dos piacutexeis devido ao sistema oacuteptico da cacircmara
podem ser notados quando capta-se a imagem de uma fachada com portas e
janelas As linhas horizontais e verticais que representam estes elementos na
imagem aparecem com curvaturas de acordo com o sistema de lentes utilizado na
cacircmara A distorccedilatildeo de lentes tem um padratildeo fixo em cacircmaras com sensor CMOS
ou CCD e pode ser corrigida geometricamente atraveacutes dos POI da cacircmara que
captou a imagem
Erros sistemaacuteticos em cacircmaras TOF tambeacutem foram estudados por FUCHS e
HIRZINGER (2008) e MAY et al (2008) e foram classificados da seguinte maneira
4) Erro na medida de distacircncia (Distance-related error) este erro eacute causado
devido agrave assimetria da forma do sinal infravermelho recebido pelo sensor
Teoricamente assume-se que este sinal possui forma senoidal e harmocircnica com a
forma do sinal emitido o que na praacutetica pode natildeo acontecer Sendo assim o
pressuposto baacutesico para que se possa calcular o atraso de fase eacute que o sinal
luminoso emitido e o recebido satildeo harmocircnicos e com forma senoidal
Consequentemente se o caacutelculo do atraso de fase do sinal eacute impreciso a distacircncia
entre o objeto e o sensor tambeacutem seraacute calculada de forma imprecisa
5) Erro na amplitude do sinal captado (Amplitude-related error) o sensor natildeo
capta a energia eletromagneacutetica recebida com o sinal perfeitamente Deixando-se a
cacircmara e o objeto na mesma posiccedilatildeo podem-se obter diferentes medidas de
distacircncia devido a esta imperfeiccedilatildeo na fabricaccedilatildeo dos elementos do sensor Este
erro eacute relacionado com a amplitude de valores na captaccedilatildeo da imagem depende da
distacircncia e de caracteriacutesticas como a refletividade das superfiacutecies dos objetos
6) Erro devido agrave latecircncia dos elementos do sensor (Latency-related error) o
atraso de fase do sinal recebido eacute calculado atraveacutes das latecircncias com que o sensor
captou o sinal Estaacute relacionado com propriedades semicondutoras dos materiais
utilizados nos elementos sensores que satildeo responsaacuteveis pela medida da quantidade
de carga recebida Eacute causado quando o sinal emitido e o recebido satildeo
correlacionados diretamente na matriz do sensor Diferentes latecircncias do sinal
devem ser captadas por cada elemento do sensor para possibilitar o caacutelculo da
distacircncia de cada pixel de forma confiaacutevel
7) Ruiacutedo com padratildeo fixo (FPN - Fixed pattern noise) eacute relacionado com o
erro devido agrave latecircncia e ocorre devido agraves propriedades dos materiais utilizados na
fabricaccedilatildeo de cada elemento do sensor CMOS Este eacute um ruiacutedo com padratildeo fixo
44
pode ser corrigido a partir de uma imagem que tenha um pixel com valor constante
que serviraacute como referecircncia para a calibraccedilatildeo dos valores dos piacutexeis vizinhos
Tendo-se como referecircncia um pixel obtido em uma superfiacutecie uniforme de um objeto
pode-se utilizar um padratildeo de similaridade como referecircncia para os outros piacutexeis
Sendo assim a qualidade dos dados depende da posiccedilatildeo do pixel na imagem
Os uacuteltimos quatro erros sistemaacuteticos podem ser corrigidos utilizando o
meacutetodo de calibraccedilatildeo descrito em Fuchs et al (2007) Conforme realizado em
experimento por May et al (2008) os resultados alcanccedilados no mapeamento de uma
sala obtiveram a precisatildeo centimeacutetrica Este experimento foi realizado com o
objetivo de medir paredes opostas de uma sala com o sensor TOF em movimento
instalado em uma plataforma moacutevel O erro encontrado na medida das distacircncias
tambeacutem foi influenciado por erros na estimaccedilatildeo do posicionamento do sensor que eacute
obtido com a Orientaccedilatildeo Exterior da cacircmara no momento de aquisiccedilatildeo das imagens
Durante o registro dos quadros fotograacuteficos o erro em rotaccedilatildeo foi determinado como
sendo igual a 22ordm e o erro de translaccedilatildeo foi de 071m no eixo 119883 004m no eixo 119884 e
de -021m no eixo 119885 A distacircncia calculada entre paredes opostas foi igual a 105m
para a distacircncia de referecircncia de 108m A diferenccedila entre as duas medidas resultou
em 03m o que representa aproximadamente 28 da distacircncia de referecircncia A
nuvem de pontos 3D gerada por MAY et al (2008) eacute ilustrada com a Figura 218
FIGURA 218 ndash Nuvem de pontos 3D gerada a partir de imagem TOF
FONTE MAY et al (2008)
45
27 PROJECcedilAtildeO ORTOGONAL DOS PONTOS
As coordenadas tridimensionais dos pontos da imagem TOF satildeo obtidas
atraveacutes da projeccedilatildeo ortogonal Isto ocorre devido ao fato do equipamento utilizado
calcular as distacircncias dos objetos em um sistema esfeacuterico Esta projeccedilatildeo eacute feita a
partir da colinearidade entre o ponto no espaccedilo objeto o Centro Perspectivo (CP) e
o ponto no espaccedilo imagem conforme eacute ilustrado com a Figura 219
FIGURA 219 ndash Colinearidade entre os pontos no espaccedilo imagem e objeto
FONTE Adaptado de RAPP (2007)
A Figura 219 ilustra os sistemas referenciais adotados nos espaccedilos imagem
e objeto O sistema referencial fotogrameacutetrico (119909119875 119910119875) tem sua origem no CP que eacute
materializado pelo ponto nodal anterior do sistema de lentes da cacircmara Este ponto
projetado no plano da imagem gera o Ponto Principal (PP) A projeccedilatildeo do sistema
referencial fotogrameacutetrico na imagem eacute realizada considerando a simplificaccedilatildeo de
haverem apenas translaccedilotildees entre os eixos deste sistema e o sistema da imagem O
46
sistema referencial de imagem levoacutegiro (119862 119871) tem sua origem no canto superior
esquerdo Atraveacutes das Equaccedilotildees (223) e (224) esta origem pode ser transladada
para o centro da imagem (MACHADO 2006)
119862prime = 119862 minus119899119862minus1
2 (223)
119871prime = 119871 minus119899119871minus1
2 (224)
onde
119862 119871 ndash Sistema referencial de coordenadas da imagem (piacutexeis)
119899119862 119899119871 ndash Nuacutemero total de colunas e linhas da imagem (piacutexeis)
119862prime 119871prime ndash Sistema referencial auxiliar no centro da imagem (piacutexeis)
Para tornar o sistema referencial auxiliar (119862prime 119871prime) de imagem levoacutegiro em um
sistema dextroacutegiro (119909119894119898 119910119894119898 ) pode-se realizar uma reflexatildeo do eixo 119871prime atraveacutes da
Equaccedilatildeo (226)
119909119894119898 = 119862prime (225)
119910119894119898 = minus119871prime (226)
onde
119909119894119898 119910119894119898 ndash Coordenadas de um ponto no sistema referencial dextroacutegiro da
imagem (piacutexeis)
Com isto tem-se um sistema referencial dextroacutegiro centralizado na imagem e
que se relaciona com o sistema referencial fotogrameacutetrico projetado atraveacutes da
translaccedilatildeo de eixos determinada pelas coordenadas (119909119900 119910119900) do PP conforme
ilustrado com a Figura 220
47
FIGURA 220 ndash Sistemas de coordenadas utilizados em imagens
FONTE Adaptado de MACHADO (2006)
A partir do sistema referencial de imagem dextroacutegiro com origem no centro
da imagem e do sistema referencial fotogrameacutetrico projetado com origem no PP
satildeo estabelecidas as relaccedilotildees entre os sistemas de acordo com as Equaccedilotildees (227)
e (228)
119909119894119898 = (119909 minus 1199090) (227)
119910119894119898 = (119910 minus 1199100) (228)
onde
11990901199100 ndash Satildeo as coordenadas do ponto principal no sistema referencial de
imagem (piacutexeis)
119909119910 ndash Coordenadas dos pontos no sistema referencial fotogrameacutetrico
projetado na imagem (piacutexeis)
Os valores das coordenadas dos pontos do sistema fotogrameacutetrico projetado
na imagem estatildeo em piacutexeis A transformaccedilatildeo destes valores para miliacutemetros pode
ser feita multiplicando estas coordenadas pelo tamanho efetivo do pixel nas direccedilotildees
119909 e 119910 da imagem conforme as Equaccedilotildees (229) e (230)
48
119909 = 119909119894119898 ∙ 119875119909 (229)
119910 = 119910119894119898 ∙ 119875119910 (230)
onde
119909119910 ndash Satildeo as coordenadas dos pontos no sistema fotogrameacutetrico projetado
na imagem (miliacutemetros)
119875119909 119875119910 ndash Tamanho efetivo dos piacutexeis nas direccedilotildees 119909 e 119910 (miliacutemetros)
O tamanho efetivo dos piacutexeis nas direccedilotildees 119909 e 119910 satildeo calculados a partir do
fator de escala nestas direccedilotildees conforme Equaccedilotildees (231) e (232)
119875119909 = 119875 ∙ 119904119909 (231)
119875119910 = 119875 ∙ 119904119910 (232)
onde
119875119909 119875119910 ndash Tamanho efetivo dos piacutexeis nas direccedilotildees 119909 e 119910 (miliacutemetros)
119875 ndash Dimensatildeo do pixel obtida no manual do equipamento (miliacutemetros)
119904119909 119904119910 ndash Fatores de escala dos piacutexeis nas direccedilotildees 119909 e 119910
Os fatores de escala dos piacutexeis nas direccedilotildees 119909 e 119910 podem ser calculados
atraveacutes das Equaccedilotildees (233) e (234)
119904119909 =119891
119891119909 (233)
119904119910 =119891
119891119910 (234)
onde
119904119909 119904119910 ndash Fatores de escala dos piacutexeis nas direccedilotildees 119909 e 119910
119891119909 119891119910 ndash Distacircncia focal da cacircmara ao longo dos eixos 119909 e 119910 (miliacutemetros)
119891 ndash Distacircncia focal da cacircmara obtida no manual do equipamento
(miliacutemetros)
49
Quando o valor da distacircncia focal 119891119909 obtido com a calibraccedilatildeo da cacircmara
difere do valor 119891119910 tem-se um indicativo de escalas diferentes nos eixos 119909 e 119910 da
imagem
Realizadas as etapas de Orientaccedilatildeo Interior da imagem podem-se calcular
as coordenadas 3D dos pontos O posicionamento de cada ponto depende da
precisatildeo na determinaccedilatildeo dos acircngulos verticais e horizontais no sistema referencial
de imagem A projeccedilatildeo ortogonal das distacircncias dos pontos coordenada 119885 pode ser
feita atraveacutes da Equaccedilatildeo (235)
119885 = 119889119903 ∙ cos120573 (235)
onde
119885 ndash Distacircncia ortogonal do CP ao ponto observado no espaccedilo objeto
119889119903 ndash Distacircncia radial do CP ao ponto no sistema referencial esfeacuterico
120573 ndash Acircngulo formado entre o eixo que atinge o ponto na imagem partindo do
CP e o eixo principal da cacircmara (CP-PP)
O acircngulo 120573 pode ser calculado atraveacutes da funccedilatildeo trigonomeacutetrica expressa
com a Equaccedilatildeo (236)
tan120573 = 1199092
1198911199092 +
1199102
1198911199102 (236)
onde
119891119909 119891119910 ndash Distacircncia focal da cacircmara ao longo dos eixos 119909 e 119910 (miliacutemetros)
119909119910 ndash Coordenadas dos pontos no sistema referencial fotogrameacutetrico
projetado na imagem (miliacutemetros)
A Expressatildeo (235) relaciona a distacircncia radial 119889119903 com a coordenada 119885 dos
pontos no sistema ortogonal 3D em funccedilatildeo do acircngulo 120573 Substituindo a Equaccedilatildeo
(236) na Equaccedilatildeo (235) podemos explicitar a coordenada 119885 em funccedilatildeo das
distacircncias focais da cacircmara e das coordenadas dos pontos no sistema referencial
fotogrameacutetrico projetado na imagem conforme Equaccedilatildeo (237)
50
119885 = 119889119903 ∙ cos tanminus1 1199092
1198911199092 +
1199102
1198911199102 (237)
onde
119885 ndash Distacircncia ortogonal do CP ao ponto (miliacutemetros)
119889119903 ndash Distacircncia radial do CP ao ponto no sistema esfeacuterico da cacircmara
(miliacutemetros)
119891119909 119891119910 ndash Distacircncia focal da cacircmara ao longo dos eixos 119909 e 119910 (miliacutemetros)
119909119910 ndash Coordenadas dos pontos no sistema referencial fotogrameacutetrico
projetado na imagem (miliacutemetros)
As coordenadas (119883119884) dos pontos no sistema referencial ortogonal podem
entatildeo serem calculadas atraveacutes das Equaccedilotildees (238) e (239)
119883 = 119909 ∙119885
119891119909 (238)
119884 = 119910 ∙119885
119891119910 (239)
28 REFINAMENTO DA NUVEM DE PONTOS 3D
O processo de refinamento da nuvem de pontos 3D obtida com a imagem
TOF compreende a filtragem dos pontos que estejam esparsos devido agrave presenccedila
de ruiacutedo no arquivo de distacircncias da imagem TOF Com a Figura 221a satildeo
ilustrados pontos que natildeo pertencem agraves superfiacutecies do objeto aparecem na aresta
superior direita do objeto O sinal emitido atinge uma aacuterea da superfiacutecie do objeto e
natildeo apenas um ponto Esta aacuterea eacute proporcional agrave distacircncia entre o alvo e o sensor
ocorre devido agrave divergecircncia do feixe de luz emitido Com o princiacutepio TOF o valor da
distacircncia calculada eacute resultado da integraccedilatildeo do sinal recebido de acordo com a
aacuterea iluminada da superfiacutecie Quando o sinal emitido atinge superfiacutecies natildeo
coplanares o valor de distacircncia armazenado eacute um resultado interpolado Este
fenocircmeno ocorre principalmente nas bordas dos objetos e pode ser visto com a
51
Figura 221a que mostra um objeto com trecircs superfiacutecies planas uma base um
plano vertical na direita e um plano na parte superior
FIGURA 221 ndash Filtro para a definiccedilatildeo de bordas do objeto
FONTE MAY et al (2008)
A Figura 221b apresenta a nuvem de pontos 3D apoacutes a aplicaccedilatildeo do filtro
para o refinamento Este eacute um filtro gaussiano utilizado para a definiccedilatildeo de bordas e
desniacuteveis dos objetos eacute tambeacutem uma ferramenta para a remoccedilatildeo de pontos
esparsos provenientes da presenccedila de ruiacutedo nos dados da imagem TOF Funciona
considerando o acircngulo formado entre dois piacutexeis adjacentes na imagem onde o CP
eacute o ponto que completa o triacircngulo sendo o criteacuterio de seleccedilatildeo utilizado a distacircncia
meacutedia dos k pontos vizinhos mais proacuteximos
De acordo com May et al (2008) a distacircncia medida a partir de cacircmaras
TOF pode ser afetada pelo efeito de arredondamento das bordas Isto ocorre pela
suavizaccedilatildeo causada com a transiccedilatildeo entre as superfiacutecies iluminadas Dado um
conjunto de pontos 3D 119875 = 119901119894 119901119894 isin ℝ3 119894 = 1hellip 119873119901 as bordas podem ser
detectadas utilizando a Equaccedilatildeo (240) Esta eacute uma comparaccedilatildeo do acircngulo entre
dois piacutexeis 120585119894 119899 com base em um triacircngulo formado pelo centro perspectivo 119891 = 0 o
ponto 119901119894 e a vizinhanccedila deste ponto 119875119899 = 119901119894 119899 119899 = 1hellip 8 com o acircngulo de
vizinhanccedila 120585119905119893
120585119894 = max arcsin 119901119894 119899
119901119894 119899minus119901119894 ∙ 119904119894119899120593 (240)
52
119869 = 119901119894 120585119894 gt 120585119905119893 (241)
onde
120593 ndash Acircngulo maacuteximo entre dois piacutexeis veacutertice do triacircngulo no ponto 119891 = 0
O triacircngulo utilizado como referecircncia no filtro para a detecccedilatildeo de bordas
com veacutertice no ponto 119891 = 0 eacute ilustrado com a Figura 222
FIGURA 222 ndash Geometria do filtro para a definiccedilatildeo de bordas
FONTE MAY et al (2008)
Um conjunto 119878 de pontos pode ser filtrado atraveacutes da condiccedilatildeo expressa
com a Equaccedilatildeo (243)
119889 119901119894 = 1
119896 119901119894 minus 119901119894 119899 119896119899=1 (242)
119878 = 119901119894 isin 119875 119889 119901119894 lt 119889119905119893 (243)
onde
119889119905119893 ndash Distacircncia de vizinhanccedila constante
O conjunto 119876 de pontos selecionados satildeo os pontos filtrados da nuvem 3D
conforme a condiccedilatildeo da Equaccedilatildeo (244)
119876 = 119902119894 119902119894 isin 119875(119869 cup 119878) (244)
53
29 ANAacuteLISE DE SUPERFIacuteCIES POR AUTOVALORES E AUTOVETORES
A anaacutelise da forma de superfiacutecies pode ser feita pela variaccedilatildeo local de
autovalores que possibilita a classificaccedilatildeo e segmentaccedilatildeo de pontos com
coordenadas tridimensionais (BELTON e LICHTI 2006)
Autovetores e seus respectivos autovalores podem ser obtidos a partir da
Matriz de Variacircncias e Covariacircncias (119872119881119862) de um conjunto de observaccedilotildees O
tamanho relativo e a direccedilatildeo dos autovetores podem indicar propriedades locais
desta superfiacutecie permitindo analisar sua forma (PAULY et al 2002)
De acordo com Johnson e Wichern (1998) a 119872119881119862 pode ser calculada atraveacutes
da Equaccedilatildeo (245)
11987211988111986231199093 =1
119896 119903 119894 minus 119903 119896119894=1 ∙ 119903 119894 minus 119903
119879=
1205901199092 120590119909119910 120590119909119911
120590119909119910 1205901199102 120590119910119911
120590119909119911 120590119910119911 1205901199112
(245)
onde
119872119881119862 ndash Matriz de Variacircncias e Covariacircncias
119903 119894 ndash Vetor com as coordenadas 3D do ponto em questatildeo na amostra
119903 ndash Vetor com as coordenadas do centroacuteide da superfiacutecie
1205901199092120590119910
2 1205901199112 ndash Variacircncias
120590119909119910 120590119909119911 120590119910119911 ndash Covariacircncias
119896 ndash Nuacutemero de pontos da amostra
O vetor com as coordenadas do 119894-eacutesimo ponto da amostra eacute denotado com
119903 119894 pela Expressatildeo (246) A posiccedilatildeo relativa do centroacuteide pode ser calculada atraveacutes
da Equaccedilatildeo (247)
119903 119894 = 119909119894 119910119894 119911119894 119879 (246)
119903 =1
119896 119903 119894119896119894=1 (247)
54
A 119872119881119862 eacute quadrada simeacutetrica positiva-semidefinida e pode ser decomposta
em autovetores 119890 e autovalores 120582 atraveacutes da Equaccedilatildeo (248) Os autovalores 120582119894 satildeo
elementos escalares associados aos respectivos autovetores 119890 119894 (LEON 1998)
119872119881119862 ∙ 119890 = 120582 ∙ 119890 (248)
A partir do teorema de decomposiccedilatildeo espectral (decomposiccedilatildeo de Jordan) a
119872119881119862 pode ser isolada nesta igualdade conforme a Equaccedilatildeo (249) Maiores
detalhes podem ser vistos em Johnson e Wichern (1998) e Shakarji (1998)
119872119881119862 = 120582119894 ∙ 119890 119894 ∙ 119890 1198941198792
119894=0 (249)
onde
119872119881119862 ndash Matriz Variacircncia Covariacircncia
119890 119894 ndash Vetor com os autovetores 119890 119894
120582119894 ndash Matriz com os autovalores 120582119894
Os autovalores satildeo valores reais e os autovetores formam um sistema de
base ortogonal que correspondem aos componentes principais do conjunto de
observaccedilotildees (BELTON 2008)
De acordo com PAULY et al (2002) pode-se adotar a convenccedilatildeo entre os
autovalores da Expressatildeo (250) A partir desta convenccedilatildeo algumas propriedades
para superfiacutecies normais podem ser descritas
1205821 ge 1205822 ge 1205823 (250)
Em um conjunto de pontos 3D que formam uma superfiacutecie plana espera-se
que 1205821 ne 0 1205822 ne 0 e que 1205823 asymp 0 Com isto o menor autovetor 119890 3 apontaraacute na direccedilatildeo
normal a esta superfiacutecie Com a Figura 223 satildeo ilustrados os trecircs autovetores de
uma regiatildeo da superfiacutecie descrita pela nuvem de pontos 3D O terceiro autovetor 119890 3
com o menor autovalor 1205823 eacute ortogonal agrave superfiacutecie plana definida pelos outros dois
autovetores 119890 1 e 119890 2
55
FIGURA 223 ndash Autovetores em nuvem de pontos 3D de uma superfiacutecie plana
Pontos contidos na interseccedilatildeo entre duas superfiacutecies planas podem ser
identificados atraveacutes das relaccedilotildees 1205821 asymp 21205822 e 1205823 asymp 0 O autovetor 119890 1 apontaraacute na
direccedilatildeo da linha limitante da superfiacutecie plana e o autovetor 119890 3 seraacute ortogonal a esta
direccedilatildeo Podem-se encontrar segmentos de retas que limitam a borda de uma
superfiacutecie atraveacutes das relaccedilotildees 1205822 asymp 1205823 e 1205821 asymp 1205822+1205823
Quando os autovalores apresentam valores aproximadamente iguais
1205821 asymp 1205822 asymp 1205823 torna-se possiacutevel encontrar o veacutertice formado por trecircs superfiacutecies
planas
Normalizando os autovalores com a Equaccedilatildeo (251) remove-se a sua
dependecircncia em relaccedilatildeo ao tamanho da amostra utilizada
120582119894prime =
120582119894
1205821+1205822+1205823=
120582119894
119905119903119886 ccedil119900(120582) (251)
Para o autovalor miacutenimo (119894 = 3) pode-se definir o nuacutemero 119873 de pontos para
representar as variaccedilotildees na superfiacutecie atraveacutes da Equaccedilatildeo (252)
119873 =1205823
119905119903119886 ccedil119900(120582) (252)
O valor resultante da Equaccedilatildeo (252) eacute uma medida aproximada de
curvatura local e pode representar a rugosidade da superfiacutecie de forma normalizada
56
210 ANAacuteLISE DE SUPERFIacuteCIES POR MOMENTOS INVARIANTES
Caracteriacutesticas de superfiacutecies planas podem ser obtidas atraveacutes da anaacutelise
de momentos invariantes para isto utiliza-se a 119872119881119862 dos pontos que descrevem esta
superfiacutecie De acordo com MASS e VOSSELMAN (1999) os momentos invariantes
119898119894119895 podem ser calculados atraveacutes da Equaccedilatildeo (253)
119898119894119895 = 119909119894119910119895119891(119909119910)119889119909 1198891199101199102
1199101
1199092
1199091 (253)
onde
119894 119895 ndash Correspondem agrave ordem do momento
119891(119909119910) ndash A coordenada 119911 dos pontos eacute funccedilatildeo das coordenadas planas 119909 e 119910
em um conjunto de pontos que descrevem a superfiacutecie contiacutenua
A Equaccedilatildeo (254) permite determinar o volume de uma esfera unitaacuteria com
raio 119877 em um domiacutenio contiacutenuo 119873 de pontos 3D eacute obtida a partir da Equaccedilatildeo (253)
e possibilita o estudo de propriedades das superfiacutecies com padratildeo planar
119898119894119895119896 = 119909119894119910119895 119911119896119891(119909119910 119911)119889119907119881
(254)
onde
119894 119895119896 ndash Pertencem ao domiacutenio contiacutenuo da funccedilatildeo com 119873 pontos
119894 + 119895 + 119896 ndash Corresponde agrave ordem do momento
119891(119909119910 119911) ndash Eacute o volume da esfera unitaacuteria
Atraveacutes da Equaccedilatildeo (254) GROSS e THONNESSEN (2006) conseguiram
descrever algumas relaccedilotildees entre autovalores e as propriedades de superfiacutecies
normais conforme eacute ilustrado com o Quadro 23
57
ESTRUTURA AUTOVALORES
120640120783 120640120784 120640120785
PONTO ISOLADO
0 0 0
PONTO FINAL DE SEGMENTO
DE RETA
1
12= 0083 0 0
LINHA RETA 1
3= 0333 0 0
12 PLANO 1
4= 025
1
4 1 minus
64
91205872 = 00 0
PLANO 1
4= 025
1
4= 025 0
14 PLANO 1
4 1 minus
2
120587 = 009
1
4+
2
120587minus
32
91205872= 00 0
INTERSECcedilAtildeO DE 2 PLANOS
1
3= 0333
1
8= 0125
1
8minus
8
91205872= 003
INTERSECcedilAtildeO DE 3 PLANOS
1
6 1 minus
1
120587 = 011
1
6 1 minus
1
120587 = 011
1
6 1 +
2
120587 minus
26
331205872= 003
INTERSECcedilAtildeO DE 2 PLANOS
Agrave 30deg 025 01875 001747
QUADRO 23 ndash Propriedades de superfiacutecies normais obtidas com autovalores FONTE GROSS e THOENNESSEN (2006)
Os autovalores do Quadro 23 foram determinados analiticamente a partir da
Equaccedilatildeo (254) e podem ser utilizados como referecircncia para a estimaccedilatildeo da forma
das superfiacutecies que compotildeem a estrutura dos objetos
Restringindo a ordem dos momentos com 119894 + 119895 + 119896 le 2 pode-se calcular o
centro de gravidade da superfiacutecie conforme a Equaccedilatildeo (255) e os elementos da
119872119881119862 podem serem obtidos atraveacutes da Equaccedilatildeo (256)
119909 =119898100
119898000 119910 =
119898010
119898000 119911 =
119898001
119898000 (255)
58
119898 119894119895119896 = 119909119894 minus 119909 119894 119910 minus 119910 119895 119911 minus 119911 119896119891(119909119910 119911)119889119907119881
(256)
Os momentos de 2ordf ordem normalizados para os pontos 3D em um domiacutenio
discreto podem ser calculados atraveacutes da Equaccedilatildeo (257)
119898 119894119895119896 = 119909119897minus119909
119894 119910119897minus119910 119895 119911119897minus119911
119896119873119897=1
119877119894+119895+119896119873 (257)
onde
119898 119894119895119896 ndash Momentos de 2ordf ordem para os pontos 3D
119873 ndash Nuacutemero de pontos da amostra no domiacutenio contiacutenuo da funccedilatildeo
119877 ndash Raio da esfera unitaacuteria considerada para seleccedilatildeo de pontos
Desta forma os valores calculados para os momentos natildeo satildeo influenciados
pelo nuacutemero de pontos unidade fiacutesica das medidas ou peso dos elementos da 119872119881119862
Utilizando momentos de 2ordf ordem a 119872119881119862 pode ser obtida atraveacutes da Equaccedilatildeo
(258)
119872119881119862 =
119898 200 119898 110 119898 101
119898 110 119898 020 119898 011
119898 101 119898 011 119898 002
(258)
O caacutelculo dos autovalores 120582119894 e autovetores 119890 119894 com 119894 = 123 eacute variaacutevel para
cada ponto do conjunto de observaccedilotildees Sendo assim as classes de valores
geradas por GROSS e THONNESSEN (2006) com objetivo de modelar superfiacutecies
com padratildeo planar foram agraves seguintes
O primeiro autovalor 1205821 foi definido constante e igual a 025
O segundo autovalor 1205822 varia de 0125 agrave 025
O terceiro autovalor 1205823 varia de 0 agrave 0125
Com a aproximaccedilatildeo teoacuterica dos valores contidos no Quadro 24 JUTZI e
GROSS (2009) mostraram a possibilidade de determinar matematicamente
inclinaccedilotildees entre as superfiacutecies para os acircngulos de 0ordm 30ordm e 90ordm No entanto
quando satildeo utilizados dados reais para representar as superfiacutecies pequenas
variaccedilotildees nestes valores podem ser percebidas Um exemplo eacute que o terceiro
59
autovalor 1205823 natildeo teraacute valor igual a zero mesmo em uma superfiacutecie plana Isto ocorre
por haverem pequenos desvios entre os pontos desta superfiacutecie que satildeo causados
por ruiacutedo presente no conjunto de dados reais Este fato pode ser observado
calculando o terceiro autovalor que seraacute um valor positivo pequeno mas diferente
de zero Com isto quanto mais proacuteximo de zero o terceiro autovalor 1205823 maior seraacute o
indicativo que a superfiacutecie eacute plana conforme ilustrado com a Figura 224
FIGURA 224 ndash Inclinaccedilotildees de superfiacutecies determinadas por autovalores
FONTE JUTZI e GROSS (2009)
60
211 ALGORITMO DE DESLOCAMENTO PELA MEacuteDIA
O algoritmo de deslocamento pela meacutedia (Mean Shift) pode ser utilizado no
reconhecimento de padrotildees para a segmentaccedilatildeo de imagens A densidade de
pontos vizinhos em relaccedilatildeo a um ponto central pode ser estimada com a meacutedia do
conjunto de dados discretos A anaacutelise espacial de atributos eacute utilizada neste
contexto com o objetivo de extrair informaccedilotildees Para isto utiliza a vizinhanccedila de um
ponto na imagem Com os atributos definidos pode-se encontrar o centro das
regiotildees com as maiores densidades que representam caracteriacutesticas significativas
dos objetos presentes na imagem
Para realizar a anaacutelise espacial de atributos e obterem-se resultados
satisfatoacuterios deve-se reduzir o volume de dados ateacute que se tenham apenas as
caracteriacutesticas significativas distribuiacutedas em um sistema de coordenadas contiacutenuo O
conteuacutedo do espaccedilo de atributos deve ser passiacutevel de modelagem atraveacutes de uma
amostragem com distribuiccedilatildeo multivariada de probabilidade Devido a este
pressuposto eacute necessaacuterio verificar se a condiccedilatildeo de normalidade dos dados eacute
satisfeita em aplicaccedilotildees estatiacutesticas tradicionais que utilizam testes parameacutetricos
Em outras aplicaccedilotildees podem-se utilizar meacutetodos estatiacutesticos natildeo
parameacutetricos com menos restriccedilotildees sobre o comportamento dos dados como por
exemplo natildeo se preocupar com o tipo de distribuiccedilatildeo para as variaacuteveis aleatoacuterias O
conceito de Kernel pode ser empregado em meacutetodos natildeo parameacutetricos para a
estimativa de propriedades Esta eacute uma funccedilatildeo estatiacutestica contiacutenua simeacutetrica e com
limite superior e inferior de integraccedilatildeo definidos cuja integraccedilatildeo resulta na unidade
por conveniecircncia O Kernel atua na imagem como uma janela de convoluccedilatildeo
suavizando as caracteriacutesticas dos pontos analisados (MACHADO 2006)
De acordo com COMANICIU e MEER (2002) o algoritmo de deslocamento
pela meacutedia eacute uma ferramenta versaacutetil para anaacutelises espaciais de feiccedilotildees presentes
em amostras Utiliza o Kernel para a estimaccedilatildeo da densidade dos elementos no
conjunto de dados tendo como referecircncia um ponto fixo na regiatildeo central da
amostra Dado um conjunto de pontos 120169119894=1hellip119899 em um espaccedilo 119877 com dimensatildeo 119889 o
estimador de densidade multivariada por Kernel 119870(120169) e a matriz de paracircmetros 119867
com bandas de dimensatildeo 119889 pode ser calculada com os pontos 120169 Com estes
61
paracircmetros definidos a funccedilatildeo para estimar a densidade multivariada no ponto 120169 eacute
expressa com a Equaccedilatildeo (259)
119891 (120169) =1
119899 119870119867 120169 minus 120169119894 119899119894=1 (259)
119870119867(120169) = 119867 minus1
2119870(119867minus1
2120169) (260)
O Kernel 119870(120169) com dimensatildeo 119889 eacute uma funccedilatildeo para a anaacutelise da densidade
da vizinhanccedila dos pontos expressa atraveacutes das Equaccedilotildees (261) e (262)
119870(120169)119877119889
119889120169 = 1 lim 119909 rarrinfin 120169 119889 119870 120169 = 0 (261)
119909119870(120169)119889120169119877119889
= 0 120169120169119879119870(120169)119889120169119877119889
= 119888119870119868 (262)
Onde 119888119870 eacute uma constante A partir do Kernel univariado 1198701 119909 o Kernel
multivariado pode ser calculado de duas maneiras conforme as Equaccedilotildees (263) e
(264)
119870119875 120169 = 1198701 119909119894 119889119894=1 (263)
119870119878 120169 = 119886119896 1198891198701( 120169119894 ) (264)
Onde 119870119875(120169) eacute obtido com o produto dos Kernels univariados e 119870119878(120169) eacute
obtido rotacionando 1198701(119909) no espaccedilo 119877119889 o que faz 119870119878(120169) ser radialmente simeacutetrico
A constante 119886119896 119889minus1 = 1198701 120169 1198891201691198774
com 119870119878(119909) integrado de 0 agrave 1 O Kernel
radialmente simeacutetrico eacute de interesse em anaacutelises espaciais de imagens desde que
satisfaccedila a condiccedilatildeo da Equaccedilatildeo (265)
119870 119909 = 119888119896 119889119896( 120169 2) (265)
Neste caso define-se a funccedilatildeo de cada elemento do Kernel 119896 119909 para 119909 ge 0
A constante de normalizaccedilatildeo 119888119896 119889 pode ser calculada integrando 119870 120169 de 0 a 1
assumindo-se que eacute positiva A estimaccedilatildeo pode ser parametrizada com a matriz
diagonal de bandas do Kernel 119867 = 1198932119868 = 119889119894119886119892 11989312hellip 119893119889
2 onde 119868 eacute a matriz
identidade com dimensatildeo 119889 Esta matriz apresenta a vantagem de ser determinada
62
utilizando como uacutenico paracircmetro o nuacutemero de bandas 119893 ge 0 do Kernel Empregando
paracircmetros com o nuacutemero de bandas 119893 e dimensatildeo 119899 o estimador de densidade por
Kernel da Equaccedilatildeo (259) pode ser expresso atraveacutes da Equaccedilatildeo (266)
119891 (120169) =1
119899119893119889 119870119867
120169minus120169119894
119893 119899
119894=1 (266)
A qualidade do estimador de densidade por Kernel pode ser analisada
atraveacutes do erro meacutedio quadraacutetico entre a densidade real e a estimada Na praacutetica
somente a aproximaccedilatildeo assintoacutetica das medidas pode ser calculada (AMISE ndash
Asymptotic Mean Integrated Square Error) Para os Kernels multivariados o erro
meacutedio quadraacutetico AMISE eacute minimizado utilizando o Kernel de Epanechnikov
(COMANICIU e MEER 2002)
119896119864 119909 = 1 minus 119909 0 le 119909 le 1
0 119909 gt 0 (267)
119870119864 120169 = 1
2119888119889
minus1 119889 + 2 (1 minus 120169 2) 120169 le 1
0 119888119886119904119900 119888119900119899119905119903aacute119903119894119900 (268)
Onde 119888119889 eacute o volume de uma esfera com raio unitaacuterio e com dimensatildeo 119889 O
elemento do Kernel 119896119873 119909 pode ser calculado utilizando a Equaccedilatildeo (269)
119896119873 119909 = exp minus1
2119909 119909 ge 0 (269)
Para o Kernel multivariado calculado com a Equaccedilatildeo (269) um Kernel
normal 119870119873 pode ser calculado utilizando a Equaccedilatildeo (270)
119870119873 120169 = (2120587)minus1198892exp minus1
2 120169 2 (270)
Sendo o Kernel normal simeacutetrico e admitido finito Para a anaacutelise espacial de
imagens estas duas formas de calcular o Kernel satildeo suficientes e os resultados
obtidos com estas condiccedilotildees impostas satildeo satisfatoacuterios O estimador de densidade
por Kernel da Equaccedilatildeo (259) pode ser reescrito conforme a Equaccedilatildeo (271)
63
119891 119893 119870(120169) =119888119896 119889
119899119893119889 119896
120169minus120169119894
119893
2
119899119894=1 (271)
Para anaacutelise de feiccedilotildees espaciais primeiramente deve-se calcular a
densidade do conjunto de dados e verificar o seu comportamento espacial Isto pode
ser feito calculando o gradiente da funccedilatildeo de densidade 119891(120169) igual a zero nabla119891 120169 = 0
O algoritmo de deslocamento pela meacutedia eacute uma maneira de localizar estes zeros
para estimar a densidade do conjunto de observaccedilotildees Calculando o gradiente da
funccedilatildeo expressa com a Equaccedilatildeo (271) pode-se estimar a densidade atraveacutes da
Equaccedilatildeo (272)
nabla 119891119893 119870(120169) equiv2119888119896 119889
119899119893119889+2 (120169 minus 120169119894)119896prime
120169minus120169119894
119893
2
119899119894=1 (272)
Substituindo 119896prime pela funccedilatildeo 119892(119909) conforme expresso com a Equaccedilatildeo (273)
119892 119909 = 119896prime(119909) (273)
Assumindo que a derivada do Kernel 119896 exista para o conjunto finito de
pontos 119909 isin [0infin) O Kernel 119866(119909) com seus elementos 119892(119909) pode ser definido atraveacutes
da Equaccedilatildeo (274)
119866 119909 = 119888119892 119889119892( 120169 2) (274)
Onde 119888119892119889 corresponde a uma constante de normalizaccedilatildeo O Kernel 119866 119909
pode ser considerado uma aproximaccedilatildeo do Kernel 119870(119909) dependendo do contexto
em que seraacute empregado De forma similar o Kernel de Epanechnikov eacute uma
simplificaccedilatildeo do Kernel uniforme da esfera unitaacuteria com dimensatildeo 119889 Introduzindo
119892(119909) na Equaccedilatildeo (272) tem-se a Equaccedilatildeo (275)
nabla 119891119893 119870 120169 =2119888119896 119889
119899119893119889+2 120169 minus 120169119894 119892
120169minus120169119894
119893
2
119899119894=1 (275)
nabla 119891119893 119870 120169 =2119888119896 119889
119899119893119889+2 119892 120169minus120169119894
119893
2
119899119894=1 ∙
120169119894119892 120169minus120169119894119893
2 119899
119894=1
119892 120169minus120169119894119893
2 119899
119894=1
(276)
64
119892 120169minus120169119894
119893
2
119899119894=1 (277)
Considerando que o resultado da funccedilatildeo expressa com a Equaccedilatildeo (277) eacute
um nuacutemero positivo O primeiro termo da Equaccedilatildeo (276) eacute proporcional agrave densidade
estimada calculada para 120169 com o Kernel 119866 conforme Equaccedilatildeo (271) e expresso
agora em funccedilatildeo de 119892(119909) atraveacutes da Equaccedilatildeo (278)
119891119893 119866 120169 =119888119892 119889
119899119893119889 119892
120169minus120169119894
119893
2
119899119894=1 (278)
O segundo termo da Equaccedilatildeo (276) corresponde ao algoritmo de
deslocamento pela meacutedia conforme Equaccedilatildeo (279)
119898119893 119866 120169 = 120169119894119892
120169minus120169119894119893
2 119899
119894=1
119892 120169minus120169119894119893
2 119899
119894=1
minus 120169 (279)
A Equaccedilatildeo (279) representa a diferenccedila entre as meacutedias ponderadas
utilizando o Kernel 119866 para os pesos e o centro da janela de convoluccedilatildeo em 120169 A
partir das Equaccedilotildees (276) (278) e (279) chega-se as Equaccedilotildees (280) e (281)
nabla 119891119893 119870 120169 = 119891 119893 119866 120169 2119888119896 119889
1198932119888119892 119889119898119893 119866 120169 (280)
119898119893 119866 120169 =1
21198932119888nabla
119891 119893 119870 120169
119891 119893 119866 120169 (281)
Para a posiccedilatildeo 120169 o vetor de deslocamento pela meacutedia calculado com Kernel
119866 eacute proporcional agrave estimaccedilatildeo de densidade normalizada obtida resolvendo a funccedilatildeo
com gradiente igual a zero e Kernel 119870 Eacute a normalizaccedilatildeo da densidade estimada em
119909 calculada com o Kernel 119866
O vetor de deslocamento pela meacutedia aponta na direccedilatildeo de maacuteximo
crescimento da densidade do conjunto de dados A estimaccedilatildeo da densidade de
pontos com mesma caracteriacutestica eacute obtida atraveacutes de interaccedilotildees com sucessivos
caacutelculos do vetor de deslocamento pela meacutedia 119898119893 119866 120169 e translaccedilotildees do Kernel 119866(119909)
sobre a imagem Isto garante a convergecircncia ao redor do ponto de interesse
65
utilizando a Equaccedilatildeo (281) com gradiente igual a zero Regiotildees com baixa
densidade de observaccedilotildees natildeo satildeo interessantes para anaacutelises espaciais com o
algoritmo de deslocamento pela meacutedia pois muitas iteraccedilotildees seriam necessaacuterias
para obtenccedilatildeo de resultados pouco satisfatoacuterios De forma anaacuteloga em locais com
densidade maacutexima poucas iteraccedilotildees satildeo necessaacuterias e a anaacutelise pode atingir bons
resultados (COMANICIU e MEER 2002)
Imagens satildeo representadas matematicamente na forma de matrizes onde
cada posiccedilatildeo da matriz eacute ocupada por vetores com dimensatildeo 119901 onde 119901 = 1 no caso
de imagens em niacuteveis de cinza ou coloridas e 119901 ge 2 no caso de imagens
multiespectrais O posicionamento de cada pixel na matriz imagem estaacute contido no
domiacutenio espacial (Spatial domain) enquanto o valor digital do pixel faz parte do
domiacutenio de caracteriacutesticas da imagem (Range domain) assumindo-se estes
domiacutenios como espaccedilos euclidianos Deste modo o Kernel multivariado pode ser
definido como o produto de dois Kernels radialmente simeacutetricos em um espaccedilo
euclidiano calculado com um paracircmetro de cada domiacutenio atraveacutes da Equaccedilatildeo
(282)
119870119893119904119893119903(119909) =119862
1198931199042119893119903
119901 119896 120169119904
119893119904
2
119896 120169119903
119893119903
2
(282)
onde
120169119904 ndash Corresponde ao domiacutenio espacial
120169119903 ndash Corresponde ao domiacutenio de caracteriacutesticas
119896(119909) ndash Elemento da funccedilatildeo calculado em ambos os domiacutenios
119893119904 119893119903 ndash Paracircmetros das bandas de cada domiacutenio do Kernel empregado
119862 ndash Constante de normalizaccedilatildeo entre as bandas
Na praacutetica o Kernel de Epanechnikov tambeacutem conhecido por Kernel normal
atinge resultados satisfatoacuterios O usuaacuterio deve escolher apenas os paracircmetros das
bandas 119893 = 119893119904 119893119903 e a quantidade miacutenima 119867 de pixels das regiotildees segmentadas na
imagem determinando assim a resoluccedilatildeo na estimaccedilatildeo da densidade A Figura 225
ilustra um exemplo de segmentaccedilatildeo realizada utilizando o algoritmo de
deslocamento pela meacutedia sobre uma imagem em niacuteveis de cinza
66
FIGURA 225 ndash Imagem segmentada FONTE COMANICIU e MEER (2002)
A segmentaccedilatildeo de imagens atraveacutes do algoritmo de deslocamento pela
meacutedia foi implementada no software EDISON (Edge Detection and Image
SegmentatiON System) desenvolvido pela Universidade RUTGER de New Jersey
Este software aleacutem da segmentaccedilatildeo com o algoritmo de deslocamento pela meacutedia
realiza uma filtragem preservando as descontinuidades e detectando os limites dos
objetos contidos na imagem atraveacutes de uma funccedilatildeo gradiente (CHRISTOUDIAS et
al 2002)
67
3 MATERIAIS
Neste trabalho foram utilizadas imagens TOF obtidas com a cacircmara PMD
CamCube 20 que fornece dados de distacircncia e intensidade sob forma de matrizes
de imagem Para realizar os experimentos foram obtidos trecircs conjuntos de imagens
De um gabarito com a forma de um tabuleiro de xadrez para realizar
o processo de calibraccedilatildeo da cacircmara
De uma parede branca com padratildeo planar para anaacutelise de ruiacutedos e
distorccedilotildees geomeacutetricas das imagens e
Do objeto de estudo uma caixa de papelatildeo com superfiacutecies planas e
brancas
Para o processamento das imagens TOF foi utilizado um microcomputador
do laboratoacuterio de Fotogrametria e Sensoriamento Remoto Departamento de
Geomaacutetica da Universidade Federal do Paranaacute com as seguintes caracteriacutesticas
Processador Intelreg Coretrade2 Duo 293GHz
Capacidade do disco riacutegido de 320GB
Memoacuteria principal de 2GB
68
4 MEacuteTODOS
Neste capitulo descreve-se o desenvolvimento metodoloacutegico do presente
trabalho de pesquisa para a aquisiccedilatildeo e processamento da imagem TOF Esta
imagem eacute composta por dois arquivos O primeiro arquivo conteacutem informaccedilatildeo de
intensidade de retorno do sinal captado com iluminaccedilatildeo infravermelha O segundo
arquivo conteacutem informaccedilatildeo de distacircncia (range) para cada pixel gerado com o
sensor da cacircmara TOF
Considerando que as imagens TOF podem apresentar ruiacutedo em funccedilatildeo das
condiccedilotildees de iluminaccedilatildeo e da natureza das superfiacutecies dos objetos estudos para a
reduccedilatildeo do ruiacutedo foram efetuados Para isto utilizaram-se janelas na regiatildeo central
da imagem ao redor do pixel com coordenadas de imagem (102 102) As filtragens
foram realizadas em aacutereas que circundam este pixel central
Apoacutes a anaacutelise do tempo de integraccedilatildeo na aquisiccedilatildeo da imagem
determinaram-se POI atraveacutes do processo de calibraccedilatildeo da cacircmara Os POI
permitiram corrigir a geometria dos dados da imagem TOF Esta correccedilatildeo eacute
necessaacuteria devido agraves distorccedilotildees causadas pelo sistema de lentes da cacircmara
A etapa seguinte consistiu na segmentaccedilatildeo da imagem TOF onde duas
metodologias foram avaliadas
1) Segmentaccedilatildeo do conjunto de dados por crescimento de regiotildees no
espaccedilo tridimensional utilizando pontos semente escolhidos no arquivo de
intensidades da imagem TOF como referecircncia para o posicionamento (119883119884) dos
pontos com distacircncia (119885)
2) Segmentaccedilatildeo utilizando a anaacutelise da variaccedilatildeo local dos autovalores ao
longo do arquivo de distacircncias da imagem TOF Realizada para a geraccedilatildeo de uma
imagem com bordas intensificadas segmentaccedilatildeo desta imagem atraveacutes do
algoritmo de deslocamento pela meacutedia e projeccedilatildeo ortogonal dos pontos
pertencentes agraves aacutereas segmentadas As superfiacutecies segmentadas foram entatildeo
separadas atraveacutes do conjunto de pontos 3D
O passo seguinte consistiu no caacutelculo das coordenadas tridimensionais dos
pontos dos objetos imageados a partir da informaccedilatildeo de distacircncia das coordenadas
dos piacutexeis na imagem de intensidade e dos POI Com isto gerou-se a nuvem de
pontos 3D e tornou-se possiacutevel a modelagem tridimensional das superfiacutecies do
69
objeto de estudo sendo tambeacutem avaliado o resultado obtido A Figura 41 apresenta
as etapas realizadas no processamento das imagens TOF com as duas propostas
de metodologia para a etapa de segmentaccedilatildeo
FIGURA 41 ndash Processamento da imagem TOF
41 CALIBRACcedilAtildeO DA CAcircMARA
A calibraccedilatildeo foi realizada com o objetivo de determinar os Paracircmetros de
Orientaccedilatildeo Interior (POI) da cacircmara Estes paracircmetros possibilitam a reconstruccedilatildeo
do feixe perspectivo que gerou a imagem para o instante em que foi captada
permitindo a correccedilatildeo de sua geometria (ANDRADE 1998)
Com o processo de Orientaccedilatildeo Interior satildeo obtidos os seguintes POI
distacircncia focal calibrada (119891119888 ) posiccedilatildeo do Ponto Principal (1199090 1199100) na imagem
Distorccedilatildeo Radial Simeacutetrica (119870111987021198703) Distorccedilatildeo Descentrada (11987511198752) e os
paracircmetros que indicam falta de afinidade do sensor (119860119861)
IMAGEM TOF
CORRECcedilOtildeES GEOMEacuteTRICAS COM POI
ARQUIVO DE INTENSIDADES
SUPERFIacuteCIE SEMENTE
CRESCIMENTO DE REGIOtildeES COM PONTO SEMENTE
PROJECcedilAtildeO ORTOGONAL
NUVEM DE PONTOS 3D
ARQUIVO DE DISTAcircNCIAS
IMAGEM COM BORDAS INTENSIFICADAS VARIACcedilAtildeO LOCAL DE AUTOVALORES
SEGMENTACcedilAtildeO DA IMAGEM COM BORDAS INTENSIFICADAS
PROJECcedilAtildeO ORTOGONAL
NUVEM DE PONTOS 3D
MODELAGEM 3D DAS SUPERFIacuteCIES
70
Os POI obtidos com o processo de calibraccedilatildeo possibilitam realizar correccedilotildees
geomeacutetricas nos arquivos de intensidades e distacircncias das imagens TOF Com a
calibraccedilatildeo objetiva-se corrigir as distorccedilotildees ocorridas na passagem do raio de luz
pelo sistema de lentes ateacute atingir o plano focal Este erro ocorre pela impossibilidade
na construccedilatildeo de um sistema de lentes perfeito para a cacircmara A correccedilatildeo dos erros
sistemaacuteticos da cacircmara eacute realizada no plano da imagem no ponto onde uma linha
reta passante pelo ponto nodal anterior do sistema de lentes eacute ortogonal a este
plano
O meacutetodo de calibraccedilatildeo fotogrameacutetrica eacute o tradicionalmente utilizado na
determinaccedilatildeo dos POI em Ciecircncias Geodeacutesicas Para isto necessita de pontos de
apoio com coordenadas tridimensionais conhecidas na superfiacutecie de objetos com
correspondentes coordenadas bidimensionais observadas na imagem Relaciona-se
a informaccedilatildeo 3D da cena com a informaccedilatildeo 2D da imagem atraveacutes das equaccedilotildees de
colinearidade fazendo-se uma correspondecircncia entre a posiccedilatildeo dos pontos de
referecircncia 3D e os mesmos pontos reconhecidos na imagem 2D Esta calibraccedilatildeo
pode ser realizada de forma eficiente desde que sejam utilizadas teacutecnicas e campos
de calibraccedilatildeo apropriados para cada tipo de cacircmara e aplicaccedilatildeo que se destina a
imagem Outra teacutecnica que pode ser utilizada para a Orientaccedilatildeo Interior das imagens
eacute conhecida como auto-calibraccedilatildeo na qual natildeo haacute necessidade de pontos com
coordenadas conhecidas no espaccedilo objeto (ZHANG 2000)
A Distorccedilatildeo Radial Simeacutetrica eacute a parcela de refraccedilatildeo natildeo desejaacutevel que um
feixe luminoso sofre ao atravessar um sistema de lentes A Distorccedilatildeo Descentrada eacute
composta pelas distorccedilotildees Tangencial e Radial Assimeacutetrica Eacute causada pela
impossibilidade de alinhar-se perfeitamente o eixo oacuteptico do sistema de lentes que
compotildee a objetiva Correccedilotildees para estas distorccedilotildees podem ser feitas atraveacutes da
Equaccedilatildeo (41) Maiores detalhes podem ser vistos em Andrade (1998)
119909prime119910prime =
119909119910
119900119887119904minus
1199090
1199100 minus
120575119909120575119910 119903119886119889
minus 120575119909120575119910 119889119890119904
minus 120575119909120575119910 119886
(41)
71
onde
119909prime119910prime 119879 ndash Coordenadas corrigidas no sistema referencial de imagem
119909 119910 119900119887119904119879 ndash Coordenadas de imagem observadas
1199090 1199100 119879ndash Coordenadas do PP no sistema referencial de imagem
120575119909 120575119910 119903119886119889119879 ndash Distorccedilatildeo Radial Simeacutetrica
120575119909 120575119910 119889119890119904119879 ndash Distorccedilatildeo Descentrada
120575119909 120575119910 119886119879 ndash Distorccedilatildeo causada pela falta de afinidade entre os eixos do
sensor
Andrade (1998) ilustra algumas correccedilotildees necessaacuterias para as imagens
utilizadas em Fotogrametria e mostra a influencia dos POI nestas correccedilotildees Um
exemplo eacute a correccedilatildeo da distorccedilatildeo Radial Simeacutetrica que pode ser realizada atraveacutes
das Equaccedilotildees (42) e (43)
120575119909119903119886119889 = (1199032 ∙ 1198701 + 1199034 ∙ 1198702 + 1199036 ∙ 1198703) ∙ 119909 (42)
120575119910119903119886119889 = (1199032 ∙ 1198701 + 1199034 ∙ 1198702 + 1199036 ∙ 1198703) ∙ 119910 (43)
onde
119909 = (119909 minus 1199090)
119910 = (119910 minus 1199100)
119909119910 ndash Coordenadas dos pontos com distorccedilotildees no sistema referencial
fotogrameacutetrico projetado na imagem
11990901199100 ndash Coordenadas do Ponto Principal
119870111987021198703 ndash Coeficientes de Distorccedilatildeo Radial Simeacutetrica
72
A distacircncia 119903 entre o ponto com coordenadas na imagem e o Ponto Principal
pode ser calculada atraveacutes da Equaccedilatildeo (44)
119903 = 119909 2 + 119910 2 (44)
A Distorccedilatildeo Descentrada pode entatildeo ser corrigida atraveacutes das Equaccedilotildees
(45) e (46)
120575119909119889119890119904 = [1198751 ∙ (1199032 + 2 ∙ 1199092
) + 2 ∙ 1198752 ∙ 119909 ∙ 119910 ] ∙ (1 + 1198753 + r2 + ⋯ ) (45)
120575119910119889119890119904 = [2 ∙ 1198751 ∙ 119909 ∙ 119910 + 1198752 ∙ (r2 + 2 ∙ 119910 2)] ∙ (1 + 1198753 + r2 + ⋯ ) (46)
onde
119875111987521198753 ndash Coeficientes de Distorccedilatildeo Descentrada
A diferenccedila de escala dos eixos horizontal e vertical da imagem possiacutevel
natildeo ortogonalidade entre os elementos do sensor pode ser modelada utilizando as
Equaccedilotildees (47) e (48) que introduzem correccedilotildees utilizando os paracircmetros de
afinidade 119860 e 119861 (HABIB e MORGAN 2003)
120575119909119886 = 119860 119909 minus 1199090 + 119861(119910minus1199100) (47)
120575119910119886 = 119861(119910minus1199100) (48)
onde
119860119861 ndash Paracircmetros de afinidade
119909119910 ndash Coordenadas dos pontos com distorccedilotildees no sistema referencial
fotogrameacutetrico projetado na imagem
11990901199100 ndash Coordenadas do Ponto Principal
73
A partir da formulaccedilatildeo proposta por Brown (1971) e incluindo os paracircmetros
de afinidade 119860 e 119861 as Equaccedilotildees (49) e (410) possibilitam a correccedilatildeo da imagem
utilizando os coeficientes 119870111987021198703 e 11987511198752
119909prime = 119909 + 119909 ∙ 11987011199032+1198702119903
4+11987031199036 + ⋯ +
+ 1198751 ∙ 1199032 + 2 ∙ 119909
2 + 2 ∙ 1198752 ∙ 119909 ∙ 119910 ∙ 1 + 1198753 ∙ 119903
2 + ⋯ + 119909 119860 + 119910 119861 (49)
119910prime = 119910 + 119910 ∙ 11987011199032+1198702119903
4+11987031199036 + ⋯ +
+ 21198751 ∙ 119909 ∙ 119910 + 1198752 ∙ 1199032 + 2119910 2 ∙ 1 + 1198753 ∙ 119903
2 + ⋯ + 119910 119861 (410)
A Equaccedilatildeo (41) ilustra as correccedilotildees necessaacuterias na geometria da imagem
quando objetiva-se a extraccedilatildeo de informaccedilotildees meacutetricas Eacute um modelo jaacute consagrado
na Fotogrametria e bastante aplicado em Ciecircncias Geodeacutesicas Pode ser utilizado
para o entendimento das correccedilotildees necessaacuterias nas imagens devido agraves distorccedilotildees
causadas pelo sistema de lentes da cacircmara e pela falta de afinidade entre os
elementos do sensor Outros modelos matemaacuteticos para correccedilotildees geomeacutetricas de
imagens satildeo utilizados em aacutereas correlatas como a Visatildeo Computacional Com a
precisatildeo requerida em cada aplicaccedilatildeo alguns POI tecircm maior relevacircncia que outros
podendo haver a supressatildeo de alguns A correlaccedilatildeo entre os paracircmetros deve ser
analisada e evitada
As Equaccedilotildees (49) e (410) podem ser simplificadas para realizar apenas as
correccedilotildees utilizando os coeficientes de Distorccedilatildeo Radial Simeacutetrica 1198961 e 1198962 e os
paracircmetros de afinidade 119860 e 119861 Estes paracircmetros satildeo os mais significativos para a
correccedilatildeo da imagem obtida com cacircmaras digitais de pequeno formato conforme eacute
expresso atraveacutes das Equaccedilotildees (411) e (412)
119909prime = 119909 + 119909 ∙ 11987011199032+1198702119903
4 + 119909 119860 + 119910 119861 (411)
119910prime = 119910 + 119910 ∙ 11987011199032+1198702119903
4 + 119910 119861 (412)
74
onde
119909119910 ndash Coordenadas dos pontos com distorccedilotildees no sistema referencial
fotogrameacutetrico projetado na imagem
119909 = (119909 minus 1199090)
119910 = (119910 minus 1199100)
11990901199100 ndash Coordenadas do Ponto Principal
119860119861 ndash Paracircmetros de afinidade
Cacircmaras digitais de pequeno formato apresentam principalmente a
Distorccedilatildeo Radial Simeacutetrica causada pelo sistema de lentes sendo os coeficientes 1198961
e 1198962 os mais significativos Os paracircmetros de afinidade entre os eixos da imagem 119860
e 119861 tambeacutem podem ser considerados para a correccedilatildeo das imagens obtidas
dependendo da precisatildeo com que o sensor da cacircmara foi construiacutedo pelo fabricante
Alguns softwares calculam os POI de forma raacutepida com soluccedilatildeo aproximada
e dependendo da aplicaccedilatildeo a que se destina a imagem podem ser utilizados sem
maiores restriccedilotildees Um deles eacute o Toolbox CALIB para Matlab utiliza o algoritmo
proposto por Zhang (2000) Este meacutetodo consiste em determinar os POI da cacircmara
tomando diferentes imagens de um gabarito com quadrados pretos e brancos
similar a um tabuleiro de xadrez fixado em uma superfiacutecie riacutegida e com padratildeo
planar Devem ser obtidas imagens do gabarito variando a posiccedilatildeo e orientaccedilatildeo da
cacircmara natildeo sendo necessaacuterio conhecer a trajetoacuteria do seu movimento para a
determinaccedilatildeo dos POI Este algoritmo possibilita o caacutelculo dos POI da cacircmara de
forma aproximada atraveacutes de sucessivas iteraccedilotildees Para sua utilizaccedilatildeo eacute necessaacuterio
conhecer a dimensatildeo dos quadrados do gabarito e indicar os pontos posiccedilotildees dos
veacutertices que seratildeo utilizados como pontos de referecircncia
No algoritmo proposto por Zhang um vetor de pontos 2D eacute denotado por
119898 = [119906 119907]119879 e um vetor de pontos 3D por 119872 = [119883119884119885]119879 De forma similar pode-se
aumentar estes vetores adicionando uma linha com valor igual a 1 sendo os vetores
aumentados 119898 = [119906 119907 1]119879 e 119872 = [119883119884119885 1]119879 A colinearidade entre o ponto no
espaccedilo objeto centro perspectivo e o ponto no espaccedilo imagem eacute utilizada para
75
estabelecer a relaccedilatildeo entre os pontos 3D contidos no vetor 119872 e os pontos na
imagem 2D contidos no vetor 119898 conforme a Equaccedilatildeo (413)
119904119898 = 119860[119877 119905]119872 (413)
onde
119904 ndash Fator de escala
119877 119905 ndash Paracircmetros de Orientaccedilatildeo Exterior (POE) compostos por elementos de
rotaccedilatildeo e translaccedilatildeo que relacionam as coordenadas obtidas no sistema 3D do
espaccedilo objeto com o sistema de coordenadas 2D da imagem
119860 ndash Eacute a matriz com os POI da cacircmara Apresenta as coordenadas 1199060 e 1199070 do
PP 119864120572 e 119864120573 satildeo os fatores de escala na imagem com eixos 119906 e 119907 O paracircmetro 120574
descreve a falta de ortogonalidade entre os eixos do sistema referencial da imagem
A matriz 119860 eacute expressa atraveacutes da Equaccedilatildeo (414)
119860 = 119864120572 120574 1199060
0 119864120573 1199070
0 0 1
(414)
Comparando as Equaccedilotildees (411) e (412) com o modelo proposto por Zhang
expresso atraveacutes da Equaccedilatildeo (413) tecircm-se as seguintes correspondecircncias
119860 e 119861 satildeo os paracircmetros de afinidade das Equaccedilotildees (411) e (412)
que correspondem aos fatores de escala 119864120572 e 119864120573 da Equaccedilatildeo (413)
Sendo que o paracircmetro 120574 acircngulo entre os eixos da imagem pode ser
calculado a partir destes fatores de escala
1199090 e 1199100 satildeo as coordenadas do Ponto Principal expressas com as
Equaccedilotildees (411) e (412) que tem suas correspondecircncias nas
coordenadas 1199060 e 1199070 da Equaccedilatildeo (413)
O caacutelculo dos POI pode ser entatildeo ser realizado atraveacutes da Equaccedilatildeo (415)
119898119894119895 minus119898 119860119877119894 119905119894 119872119895 2119898
119895=1119899119894=1 (415)
76
onde
119898 119860119877119894 119905119894 119872119894 ndash Eacute a projeccedilatildeo do vetor do ponto 119872119895 sobre a imagem 119894
119877119894 ndash Eacute o vetor de rotaccedilatildeo com paracircmetros 119903
O algoritmo proposto por Zhang (2000) utiliza somente os dois primeiros
termos de Distorccedilatildeo Radial Simeacutetrica para a correccedilatildeo da imagem atraveacutes dos
coeficientes 1198961 e 1198962 conforme Equaccedilotildees (416) e (417) Cacircmaras digitais de
pequeno formato normalmente apresentam distorccedilotildees de lentes significantes
especialmente a Distorccedilatildeo Radial Simeacutetrica A funccedilatildeo de distorccedilatildeo eacute fortemente
influenciada pelos componentes radiais principalmente o primeiro termo 1198961 Dadas
as coordenadas de uma imagem (119906 119907) consideradas livres de distorccedilatildeo e as
correspondentes coordenadas de imagem observadas (119906 119907 ) consegue-se projetar
os pontos atraveacutes da relaccedilatildeo de colinearidade entre eles De forma similar (119909119910) satildeo
as coordenadas de imagem consideradas livres de distorccedilatildeo e (119909 119910 ) as coordenadas
que possuem distorccedilatildeo Estas coordenadas tecircm suas escalas compatibilizadas
atraveacutes de uma normalizaccedilatildeo
119909 = 119909 + 119909 1198961 1199092 + 1199102 + 1198962 119909
2 + 1199102 2 (416)
119910 = 119910 + 119910 1198961 1199092 + 1199102 + 1198962 119909
2 + 1199102 2 (417)
onde
11989611198962 ndash Satildeo os coeficientes de Distorccedilatildeo Radial Simeacutetrica O centro desta
distorccedilatildeo encontra-se no Ponto Principal projetado na imagem
Com 119906 = 1199060 + 119886119909 + 120574119910 e 119907 = 1199070 + 120573119910 e assumindo 120574 = 0 em uma imagem
que tem os eixos perpendiculares tem-se a relaccedilatildeo expressa com as Equaccedilotildees
(418) e (419)
119906 = 119906 + 119906 minus 1199060 1198961 1199092 + 1199102 + 1198962 119909
2 + 1199102 2 (418)
119907 = 119907 + 119907 minus 1199070 1198961 1199092 + 1199102 + 1198962 119909
2 + 1199102 2 (419)
Uma opccedilatildeo para estimar os coeficientes 1198961 e 1198962 eacute feita atraveacutes de
sucessivas iteraccedilotildees utilizando as coordenadas 119906 e 119907 dos piacutexeis considerados
77
isentos de erro Com isto tecircm-se duas expressotildees para os pontos da imagem
conforme a Equaccedilatildeo (420)
119906 minus 1199060 119909
2 + 1199102 119906 minus 1199060 1199092 + 1199102 2
119907 minus 1199070 1199092 + 1199102 119907 minus 1199070 119909
2 + 1199102 2 1198961
1198962 =
119906 minus 119906119907 minus 119907
(420)
Dados 119898 pontos em 119899 imagens podemos obter 2 ∙ 119898 ∙ 119899 equaccedilotildees Na forma
matricial 119863119896 = 119889 onde 119896 = 1198961 1198962 119879 A soluccedilatildeo deste sistema de equaccedilotildees eacute
possiacutevel pelo meacutetodo dos miacutenimos quadrados conforme a Equaccedilatildeo (421)
119896 = 119863119879119863 minus1119863119879119889 (421)
Uma vez que 1198961 e 1198962 foram calculados pode-se refinar a estimaccedilatildeo dos
outros paracircmetros resolvendo novamente a Equaccedilatildeo (415) substituindo os valores
de 119898 119860119877119894 119905119894 119872119894 pelos valores calculados com as Equaccedilotildees (418) e (419)
A estimaccedilatildeo do conjunto completo de POI pode ser expressa atraveacutes da
Equaccedilatildeo (422)
119898119894119895 minus119898 1198601198961 1198962119877119894 119905119894 119872119895 2119898
119895=1119899119894=1 (422)
onde
119898 119860 11989611198962119877119894 119905119894 119872119895 - Eacute funccedilatildeo da projeccedilatildeo do vetor do ponto 119872119895 na imagem
119894 de acordo com a Equaccedilatildeo (413)
Com este meacutetodo no miacutenimo duas imagens devem ser adquiridas com
orientaccedilotildees diferentes se os elementos sensores da cacircmara forem quadrados
Zhang (2000) recomenda a aquisiccedilatildeo de pelo menos cinco imagens para obter
melhores resultados com o processo de calibraccedilatildeo Sendo assim os passos para
realizar a calibraccedilatildeo da cacircmara utilizando este meacutetodo satildeo
1 Imprimir o gabarito e fixaacute-lo em uma superfiacutecie plana e riacutegida
2 Tomar imagens do gabarito com diferentes orientaccedilotildees variando a
posiccedilatildeo e orientaccedilatildeo da cacircmara
78
3 Realizar a leitura das coordenadas dos pontos de controle nas
imagens
4 Estimar os POI e POE utilizando soluccedilatildeo aproximada
5 Refinar todos os paracircmetros incluindo os paracircmetros de distorccedilatildeo de
lentes atraveacutes da Equaccedilatildeo (422)
Os passos 4 e 5 satildeo realizados automaticamente pelo Toolbox CALIB do
software Matlab devendo o usuaacuterio apenas inserir as imagens no software e realizar
as leituras dos veacutertices dos quadrados nas imagens do gabarito
42 ANAacuteLISE DA PRESENCcedilA DE RUIacuteDO
Os piacutexeis saturados causados por exposiccedilatildeo prolongada do sensor na
aquisiccedilatildeo da imagem e tambeacutem os piacutexeis com baixa exposiccedilatildeo devem ser
cuidadosamente analisados na imagem pois tambeacutem podem causar erros nas
medidas de distacircncia devido agrave presenccedila de ruiacutedo Quando o sensor capta o sinal
luminoso existe um limite maacuteximo de saturaccedilatildeo que natildeo pode ser diminuiacutedo
posteriormente
Khongsab (2009) utilizou como paracircmetro principal o tempo de integraccedilatildeo na
captaccedilatildeo da imagem para controlar a saturaccedilatildeo dos piacutexeis Como este tempo eacute
aplicado globalmente ao sensor acaba influenciando os valores digitais dos piacutexeis
da imagem de forma equivalente Alguns apresentam erros devido agrave baixa
exposiccedilatildeo pois com a reduccedilatildeo do tempo de integraccedilatildeo natildeo receberam energia
eletromagneacutetica suficiente para sensibilizar o sensor sendo chamados de piacutexeis
insaturados Estes problemas podem ser minimizados definindo-se tempos de
integraccedilatildeo adequados para a obtenccedilatildeo da imagem TOF
O tratamento do ruiacutedo pode ser realizado com diferentes filtragens na
imagem Com este objetivo foram estudados os filtros passa-baixas pela meacutedia e
mediana Outro processo de filtragem realizado foi o caacutelculo da meacutedia dos valores
de distacircncia para diferentes imagens de uma mesma cena com o mesmo tempo de
integraccedilatildeo mas adquiridas em instantes brevemente diferentes
79
421 Filtragem passa-baixas pela meacutedia
O caacutelculo da meacutedia dos valores da vizinhanccedila em torno do pixel de interesse
tem o efeito de suavizar a imagem Este processo conhecido como filtro linear
passa-baixas atenua as altas frequecircncias que no espaccedilo de frequecircncias
correspondem agraves transiccedilotildees raacutepidas Este tipo de variaccedilatildeo caracteriza tambeacutem a
presenccedila de ruiacutedo na imagem A suavizaccedilatildeo tende a minimizar a presenccedila de ruiacutedo
e tecircm o efeito de tornar a imagem menos contrastante O filtro linear passa-baixas
utilizado tem dimensatildeo 3x3 com pesos iguais para os vizinhos Filtros lineares
resultam da convoluccedilatildeo de uma janela moacutevel sobre a imagem A Equaccedilatildeo (423)
representa o modelo matemaacutetico aplicado na filtragem linear passa-baixas pela
meacutedia (CENTENO 2004)
119866 119910 119909 = (119901(119894 119895) ∙ 119868(119910 + 119894 minus 119886 119909 + 119895 minus 119886))119879119895=1
119879119894=1 (423)
onde
119868(119910 119909) ndash Corresponde ao valor do pixel na posiccedilatildeo ldquolinha = 119910rdquo e ldquocoluna = 119909rdquo
119901(119894 119895) ndash Representa o filtro
119879 ndash Tamanho da janela de filtragem
119866(119910 119909) ndash Imagem resultante da filtragem
119886 = 119894119899119905 119879
2 + 1
A Figura 42 Ilustra o filtro linear passa-baixas pela meacutedia a janela central
cinza que estaacute na matriz de uma imagem Este filtro tem dimensatildeo de 3x3 piacutexeis e
atua no valor digital 48 do pixel central O valor digital do pixel apoacutes a filtragem
passa a ser 41222 que corresponde a meacutedia dos valores digitais dos piacutexeis
vizinhos
80
FIGURA 42 ndash Filtragem passa-baixas pela meacutedia
422 Filtragem pela mediana
A filtragem natildeo linear pela mediana consiste na substituiccedilatildeo do valor do pixel
central pelo valor correspondente a mediana da vizinhanccedila Este meacutetodo tambeacutem
suaviza a presenccedila de ruiacutedo A diferenccedila principal em relaccedilatildeo ao filtro da meacutedia eacute
que o filtro da mediana natildeo introduz novos valores na imagem pois substitui o valor
central da vizinhanccedila por um valor jaacute existente na imagem Sendo assim natildeo
degrada as bordas dos objetos de forma extrema A Figura 43 ilustra esta filtragem
que resultaraacute no valor digital 44 para o pixel filtrado que anteriormente apresentava
valor digital 48
FIGURA 43 ndash Filtragem pela mediana
81
423 Filtragem com a meacutedia temporal
A terceira opccedilatildeo eacute a ponderaccedilatildeo dos valores dos piacutexeis ao longo do tempo
Para isto uma seacuterie de imagens foi obtida a partir do mesmo ponto de vista em
instantes diferentes O resultado foi um conjunto de imagens de um uacutenico objeto
desde a mesma perspectiva natildeo sendo a geometria da imagem alterada Assim
cada pixel de uma imagem tem seu equivalente nas outras Assumindo que o ruiacutedo
seja aleatoacuterio eacute esperado que o uso de mais de uma imagem diminua a presenccedila
de ruiacutedo atraveacutes do caacutelculo da meacutedia dos valores observados
A filtragem com a meacutedia temporal eacute ilustrada com a Figura 44 Nesta figura
tem-se a representaccedilatildeo de trecircs imagens com suas matrizes de valores digitais
(Ii=123) e a imagem filtrada (IF) resultante que corresponde a meacutedia das trecircs
imagens originais
FIGURA 44 ndash Filtragem utilizando a meacutedia temporal
82
43 SEGMENTACcedilAtildeO
Com a etapa de segmentaccedilatildeo objetivou-se separar o conjunto de dados em
subconjuntos Estes subconjuntos satildeo compostos por pontos com coordenadas
tridimensionais que descrevem as superfiacutecies de objetos Eacute assumido que estas
superfiacutecies satildeo partes estruturais do objeto a ser identificado Para atingir esta meta
duas alternativas foram desenvolvidas e avaliadas
1) Crescimento de regiotildees a partir de superfiacutecies planas e ponto semente
utilizando o arquivo de intensidades da imagem TOF para selecionar a posiccedilatildeo de
pontos ou regiotildees semente sendo o arquivo de distacircncias utilizado para o
crescimento de regiotildees
2) Segmentaccedilatildeo por anaacutelise da variaccedilatildeo local de autovalores utilizando
somente o arquivo de distacircncias da imagem TOF para gerar uma imagem de
intensidade com bordas intensificadas que posteriormente eacute segmentada em
regiotildees que tecircm seus piacutexeis projetados gerando uma nuvem de pontos 3D destas
superfiacutecies segmentadas A segmentaccedilatildeo da imagem de intensidade com bordas
evidenciadas gerada eacute realizada utilizando o algoritmo de deslocamento pela meacutedia
431 Crescimento de regiotildees a partir de superfiacutecies planas e ponto semente
O primeiro meacutetodo proposto se baseia no crescimento de regiotildees por
agregaccedilatildeo de elementos adjacentes Este meacutetodo utiliza um criteacuterio de similaridade
para avaliar se um ponto pertence a uma determinada regiatildeo A distacircncia de um
ponto a uma superfiacutecie plana e o valor digital de um pixel em uma imagem satildeo
exemplos de criteacuterios de similaridade que podem ser utilizados (GONZALEZ e
WOODS 2000)
Partindo de um subconjunto de pontos adjacentes que pertencem a uma
superfiacutecie plana o processo consiste em buscar na vizinhanccedila outros pontos que
estejam espacialmente proacuteximos a esta superfiacutecie atendendo ao criteacuterio de
coplanaridade Neste criteacuterio a distacircncia ortogonal do ponto a uma superfiacutecie plana eacute
calculada atraveacutes das coordenadas 3D do ponto sendo este ponto considerado
pertencente agrave superfiacutecie quando estaacute dentro do limiar estabelecido A superfiacutecie
plana eacute determinada atraveacutes do autovetor com menor autovalor do conjunto de
83
pontos 3D a distacircncia ortogonal eacute calculada na direccedilatildeo deste autovetor partindo da
superfiacutecie O processo eacute iterativo de forma que o subconjunto inicial cresce
agregando novos elementos em cada iteraccedilatildeo ateacute atingir os limites da superfiacutecie
quando o criteacuterio de coplanaridade natildeo eacute mais satisfeito
O primeiro problema consiste na identificaccedilatildeo de pontos ou regiotildees semente
para dar iniacutecio ao processo de crescimento Uma opccedilatildeo foi identificar visualmente
regiotildees planas no arquivo de intensidades da imagem TOF e realizar a leitura de
coordenadas de pontos nestas regiotildees A partir das coordenadas destes pontos
selecionados na imagem de intensidade e de suas correspondentes no arquivo de
distacircncias da imagem TOF determinou-se a superfiacutecie plana que mais se aproxima
a esta regiatildeo atraveacutes do caacutelculo de seus autovetores e autovalores esta foi
considerada a superfiacutecie semente
A hipoacutetese baacutesica assume que superfiacutecies planas ou pelo menos partes
delas aparecem como regiotildees uniformes na imagem de intensidade devido agraves
condiccedilotildees de iluminaccedilatildeo Esta hipoacutetese nem sempre pode ser verificada e
confirmada Por exemplo se a superfiacutecie eacute coberta por tonalidades com padratildeo
irregular de cor entatildeo o plano pode mostrar valores natildeo uniformes na imagem de
intensidade sendo este um caso extremo Em uma situaccedilatildeo real pode ocorrer que
parte da superfiacutecie plana esteja pintada ou contenha manchas que alterem a sua
resposta espectral O mesmo pode ocorrer se houverem sombras projetadas de
outros objetos sobre a superfiacutecie Neste caso poreacutem existem outras regiotildees da
superfiacutecie plana que podem aparecer uniformes na imagem de intensidade e serem
utilizadas como regiatildeo semente
Com base nesta suposiccedilatildeo buscaram-se regiotildees uniformes na imagem de
intensidade e verificou-se a possibilidade de formarem superfiacutecies planas que
pudessem ser utilizadas como sementes no arquivo de distacircncias da imagem TOF
A soluccedilatildeo proposta consiste em segmentar a imagem de intensidade em regiotildees
uniformes com atributos de cor Um limite miacutenimo no tamanho das regiotildees deve ser
fixado para evitar que regiotildees muito pequenas sejam incluiacutedas na anaacutelise visto que
estas regiotildees pequenas podem representar locais com curvatura
A chave para o crescimento de regiotildees eacute a definiccedilatildeo do grau de pertinecircncia
de cada ponto agrave superfiacutecie plana Para isto eacute utilizado o conceito de distacircncia
miacutenima do ponto a esta superfiacutecie Para pertencer a uma regiatildeo os pontos devem
84
estar dentro do limite de proximidade ou seja a distacircncia entre o ponto e a
superfiacutecie plana natildeo pode superar o limiar fixado
A qualidade deste processo depende de fatores como o estabelecimento de
correspondecircncia entre os pontos precisatildeo na determinaccedilatildeo da superfiacutecie normal
utilizada remoccedilatildeo de erros grosseiros do conjunto de observaccedilotildees e identificaccedilatildeo
da regiatildeo semente
432 Segmentaccedilatildeo por anaacutelise da variaccedilatildeo local de autovalores
Esta abordagem baseia-se na anaacutelise da variaccedilatildeo local dos autovalores e
autovetores A hipoacutetese baacutesica nesta metodologia foi considerar que ao longo de
uma superfiacutecie plana os autovalores devem apresentar valores similares ou muito
proacuteximos Considerando duas regiotildees adjacentes se estas regiotildees forem
coplanares entatildeo a magnitude relativa de seus autovalores seraacute aproximadamente
igual Se uma destas regiotildees encontra-se em uma borda do objeto os autovetores
seratildeo diferentes A regiatildeo a ser considerada eacute uma janela quadrada em torno do
pixel central Para efetuar esta anaacutelise devem ser calculados os autovalores de uma
regiatildeo em torno de cada pixel no arquivo de distacircncias da imagem TOF Estes
autovalores satildeo armazenados em matrizes que geram trecircs novas imagens digitais
com as bordas dos objetos intensificadas
Com a Figura 45 Ilustra-se a anaacutelise do arquivo de distacircncias da imagem
TOF realizado com o caacutelculo de seus autovalores As bordas dos objetos presentes
podem ser vistas em evidecircncia satildeo representadas com os maiores valores
85
FIGURA 45 ndash Intensificaccedilatildeo de bordas com autovalores
Os autovalores calculados para cada pixel satildeo normalizados na faixa de 0 a
255 utilizando-se 8 bits Assim estes valores podem ser representados como uma
imagem digital passiacutevel de ser analisada com softwares de processamento A Figura
46 ilustra uma imagem com bordas intensificadas proveniente da segmentaccedilatildeo
realizada com a anaacutelise da variaccedilatildeo local dos autovalores
FIGURA 46 ndash Imagem com bordas intensificadas
86
A imagem produzida pode entatildeo ser segmentada utilizando o algoritmo de
deslocamento pela meacutedia Os resultados da segmentaccedilatildeo satildeo regiotildees onde os
autovalores satildeo aproximadamente iguais definindo uma superfiacutecie com padratildeo
planar sendo estas superfiacutecies separadas das regiotildees de bordas
433 Segmentaccedilatildeo com o algoritmo de deslocamento pela meacutedia
A segmentaccedilatildeo com o algoritmo de deslocamento pela meacutedia eacute realizada
utilizando a imagem com as bordas dos objetos intensificadas gerada com a
segmentaccedilatildeo do arquivo de distacircncias da imagem TOF pela anaacutelise da variaccedilatildeo
local dos autovalores
Cada um dos trecircs autovalores calculados gera uma imagem com bordas
intensificadas Sendo assim espera-se que os valores digitais dos piacutexeis nas
superfiacutecies dos objetos sejam similares dentro desta imagem Com isto a
segmentaccedilatildeo proporcionaraacute a seleccedilatildeo das superfiacutecies do objeto
Para realizar a segmentaccedilatildeo da imagem de intensidade com as bordas
intensificadas deve-se escolher os paracircmetros (119893119904 119893119903 119867) mais adequados para a
segmentaccedilatildeo Estes paracircmetros correspondem ao domiacutenio espacial da imagem 119893119904
domiacutenio de caracteriacutesticas dos piacutexeis 119893119903 e o tamanho miacutenimo 119867 que as aacutereas
segmentadas devem possuir O limite miacutenimo na quantidade de piacutexeis deve ser
fixado para evitar que regiotildees muito pequenas sejam incluiacutedas na segmentaccedilatildeo o
que pode prejudicar esta etapa pois se espera que a imagem seja segmentada com
o menor nuacutemero de regiotildees
87
5 RESULTADOS E DISCUSSOtildeES
51 CALIBRACcedilAtildeO DA CAcircMARA
Com o objetivo de calcular os POI o processo de calibraccedilatildeo da cacircmara foi
realizado com o Toolbox CALIB do software Matlab que utiliza o meacutetodo proposto
por ZHANG (2000) O gabarito fotografado foi impresso com 7x9 quadrados com
dimensatildeo de 117x117mm Estas imagens foram captadas a uma distacircncia
aproximada de 25 metros da cacircmara Para que houvesse pontos do gabarito sobre
a aacuterea da imagem foram obtidas 36 imagens com diferentes orientaccedilotildees conforme eacute
ilustrado com a Figura 51
FIGURA 51 ndash Imagens do gabarito utilizadas na calibraccedilatildeo da cacircmara
88
A Orientaccedilatildeo Exterior das imagens em relaccedilatildeo agrave cacircmara para a calibraccedilatildeo eacute
ilustrada com a Figura 52 A cacircmara eacute representada com a piracircmide em linhas
vermelhas e a origem do sistema fotogrameacutetrico eacute representada com a interseccedilatildeo
das linhas representadas com a cor azul no veacutertice da piracircmide
FIGURA 52 ndash Orientaccedilatildeo Exterior das fotografias para a calibraccedilatildeo da cacircmara
A distorccedilatildeo causada pelo sistema de lentes da cacircmara ocorre de forma mais
intensa nas bordas da imagem sendo a regiatildeo central o local com menor presenccedila
desta distorccedilatildeo A Figura 53 comprova este fato onde os vetores representados
com a cor vermelha partem dos pontos de controle na imagem e indicam a direccedilatildeo e
o sentido em que a distorccedilatildeo aumenta
FIGURA 53 ndash Direccedilatildeo das distorccedilotildees nos pontos da imagem TOF
89
Realizada a leitura das coordenadas dos pontos de controle os POI foram
calculados com o processo de calibraccedilatildeo da cacircmara e satildeo apresentados com a
Tabela 51
PARAcircMETROS INICIAIS OBTIDOS COM A LEITURA DAS IMAGENS
PARAcircMETRO VALOR
(piacutexeis) (mm)
Distacircncia focal (119891) (119891119909) (119891119910 )
285 80288 285 80288
1286113 1286113
Coordenadas do Ponto Principal (1199090)
(Origem no canto superior esquerdo) (1199100) 10150000 10150000
456750 456750
PARAcircMETROS DETERMINADOS COM A CALIBRACcedilAtildeO DA CAcircMARA
PARAcircMETRO VALOR DESVIO (3σ)
(piacutexeis) (mm) (piacutexeis) (mm)
Distacircncia focal (119891119888) calibrada (119891119909119888 ) (119891119910119888 )
29240511 29364057
1315823 1321383
plusmn 373164 plusmn 335357
plusmn 0167924 plusmn 0150911
Coordenadas do Ponto Principal (1199090119888 )
(Origem no canto superior esquerdo) (1199100119888 ) 10435253 10022287
4695864 4510029
plusmn 320459 plusmn 336886
plusmn 0144207 plusmn 0151599
1198701 -046768 -0021045 plusmn 003106 plusmn 0001398
1198702 060997 0027449 plusmn 013880 plusmn 0006246
1198703 000107 48150e-5
plusmn 000162 plusmn 72900e-5
1198751 000035 19350e-5
plusmn 000204 plusmn 91800e-5
1198752 000000 0000000 plusmn 000000 plusmn 0000000
Erro em pixel (119864119909 )
(119864119910 ) 049340 042754
0022203 0019239
TABELA 51 ndash Paracircmetros de Orientaccedilatildeo Interior calculados
Com os valores dos POI determinados foram calculados os fatores de escala
dos piacutexeis nas direccedilotildees 119904119909 e 119904119910 conforme as Equaccedilotildees (51) e (52)
119904119909 =119891
119891119909119888=
128119898119898
1315823119898119898= 0972775 (51)
119904119910 =119891
119891119910119888=
128119898119898
1321383119898119898= 0968682 (52)
A partir dos fatores de escala e da dimensatildeo do pixel igual a 45120583119898 das
imagens obtidas com a cacircmara PMD CamCube 20 foi calculado o tamanho efetivo
dos piacutexeis nas direccedilotildees x e y atraveacutes das Equaccedilotildees (53) e (54)
119875119909 = P ∙ 119904119909 = 45120583119898 ∙ 0972775 = 43774875120583119898 cong 44120583119898 (53)
119875119910 = P ∙ 119904119910 = 45120583119898 ∙ 0968682 = 43590690120583119898 cong 44120583119898 (54)
90
Os valores obtidos com as Equaccedilotildees (53) e (54) indicam que os elementos
do sensor podem ser considerados quadrados De acordo com Bazan et al (2009)
quando a diferenccedila de escala entre os lados do piacutexel natildeo eacute fornecida pelo fabricante
da cacircmara o fator de escala calculado para x pode absorver esta diferenccedila
Com a razatildeo entre as distacircncias focais obtidas com a calibraccedilatildeo da cacircmara
pode-se verificar a diferenccedila de escala Para a dimensatildeo do sensor esta diferenccedila
de escala natildeo alcanccedila o tamanho de um pixel conforme Equaccedilatildeo (56)
119863119868119865119864119878119862 =119891119909119888
119891119910119888=
1321383119898119898
1315823119898119898minus 1 = 1004225 minus 1 = 0004225 (55)
119863119868119865119864119878119862 = 0004225 lowast 204 = 08619 lt 1119901119894119909119890119897 (56)
A Equaccedilatildeo (56) indica que a diferenccedila de escala entre os eixos x e y eacute
menor que a dimensatildeo de um pixel isto considerando toda a dimensatildeo da imagem
de 204x204 piacutexeis da cacircmara PMD CamCube 20
Determinados os POI a imagem pode entatildeo ter sua geometria corrigida
conforme eacute ilustrado com a Figura 54b A Figura 54a ilustra a imagem original
obtida do gabarito onde se apresentam curvaturas provenientes da distorccedilatildeo
causada pelo sistema de lentes da cacircmara
FIGURA 54 ndash Correccedilatildeo geomeacutetrica da imagem TOF
91
Para a correccedilatildeo geomeacutetrica de imagens obtidas com cacircmaras de pequeno
formato Zhang (2000) recomenda utilizar somente os paracircmetros de distacircncia focal
calibrada 119891119888 coordenadas do Ponto Principal no plano da imagem 1199090 e 1199100 e os
coeficientes de Distorccedilatildeo Radial Simeacutetrica ateacute o segundo termo 1198701 e 1198702 Isto porque
este modelo de cacircmara apresenta principalmente a Distorccedilatildeo Radial Simeacutetrica
Outro fator diz respeito ao desvio calculado na determinaccedilatildeo de cada um destes
paracircmetros conforme valores apresentados na Tabela 51 o terceiro paracircmetro de
Distorccedilatildeo Radial Simeacutetrica 1198703 e os paracircmetros de Distorccedilatildeo Descentrada 1198751 e 1198752
apresentaram valores de desvios maiores do que os proacuteprios paracircmetros devendo
entatildeo serem desconsiderados para a correccedilatildeo geomeacutetrica da imagem
92
52 EXPERIMENTO 1 ndash ANAacuteLISE DE RUIacuteDO 1 IMAGEM TOF INTEIRA
O objetivo deste experimento consistiu em avaliar a presenccedila de ruiacutedo em
funccedilatildeo do tempo de integraccedilatildeo (TI) na aquisiccedilatildeo das imagens TOF Para sua
realizaccedilatildeo foram utilizadas imagens de uma parede com superfiacutecie plana distante
130m da cacircmara PMD CamCube 20 onde tambeacutem aparece parte de uma porta
Foram tomadas cinco imagens para cada valor de TI que variou entre 500 1000
1500 1700 1800 1900 2000 2500 3000 3500 4000 4500 5000 5300 5500
6000 e 7000μs gerando assim um conjunto de 85 imagens TOF
Com o objetivo de avaliar e reduzir a presenccedila de ruiacutedo nas imagens foram
realizadas as seguintes filtragens
Filtro passa-baixas pela meacutedia
Filtro pela mediana
Caacutelculo da meacutedia dos valores de distacircncia para imagens TOF
adquiridas com mesmo TI em instantes brevemente diferentes
Para cada imagem original foram criadas trecircs novas imagens filtradas com
os procedimentos mencionados
No graacutefico de dispersatildeo ilustrado com a Figura 55 os desvios padratildeo para o
conjunto de observaccedilotildees satildeo mostrados em funccedilatildeo do TI Foram calculados com
referecircncia no pixel central com coordenadas (102 102) e a aacuterea utilizada para o
caacutelculo possui dimensatildeo de 10x10 piacutexeis Escolheu-se esta regiatildeo por apresentar
padratildeo planar da superfiacutecie com menor distorccedilatildeo causada pelo sistema de lentes da
cacircmara tendo-se em vista que nesta etapa natildeo foi realizada a correccedilatildeo geomeacutetrica
dos dados da imagem TOF
Ainda com a Figura 55 verificou-se que o filtro da mediana aplicado nas
imagens gerou os menores desvios para a janela de 10x10 piacutexeis O menor desvio
calculado foi 12mm encontrado utilizando o filtro da mediana para o TI igual a
3000micros Verificou-se tambeacutem que os desvios apresentam valores similares para os
tempos de integraccedilatildeo que variaram entre 1500 agrave 2500micros para as imagens originais e
tambeacutem para as imagens filtradas
93
FIGURA 55 ndash Desvio padratildeo x TI janelas 10x10
A partir do graacutefico de dispersatildeo da Figura 55 escolheram-se imagens
captadas com os tempos de integraccedilatildeo de 500 2000 e 2500micros para realizar os
testes A Figura 56 ilustra superfiacutecies geradas a partir de filtragens realizadas em
imagem TOF obtida com TI igual a 500μs
FIGURA 56 ndash Imagens para TI=500μs e d=130m
94
Com TI de 500μs verificou-se intensa presenccedila de ruiacutedo na imagem original
e tambeacutem nas imagens filtradas Isto ocorreu devido ao baixo tempo de exposiccedilatildeo
do sensor A distorccedilatildeo causada pelo sistema de lentes da cacircmara tambeacutem pode ser
visualizada nestas superfiacutecies geradas com os arquivos de distacircncias da imagem
TOF As imagens foram obtidas de uma parede plana em que aparece parte de uma
porta o que justifica a descontinuidade vista em forma de degrau A anaacutelise
realizada com TI de 2000μs eacute ilustrada com a Figura 57
FIGURA 57 ndash Imagens para TI=2000μs e d=130m
Com TI de 2000μs obtiveram-se resultados melhores do que os obtidos com
TI de 500μs as superfiacutecies apresentaram-se mais suaves confirmando a tendecircncia
demonstrada com o graacutefico de dispersatildeo da Figura 55
A uacuteltima anaacutelise deste experimento foi realizada com o tempo de integraccedilatildeo
de 2500μs conforme pode ser visualizado com as superfiacutecies geradas com os
arquivos de distacircncias da imagem TOF original e das imagens filtradas ilustradas
com a Figura 58
95
FIGURA 58 ndash Imagens para TI=2500μs e d=130m
As imagens filtradas com TI de 2000μs e 2500μs apresentam suavizaccedilotildees
similares nas superfiacutecies geradas com os arquivos de distacircncias da imagem TOF
Verificou-se que o tempo de integraccedilatildeo para a aquisiccedilatildeo das imagens da parede a
13m de distacircncia da cacircmara deve ser um destes valores O TI de 2000μs pode ser
o escolhido e estaacute de acordo com o graacutefico de dispersatildeo ilustrado com a Figura 55
As filtragens de suavizaccedilatildeo com o filtro passa-baixas pela meacutedia e pela
mediana mostraram-se as melhores opccedilotildees a serem utilizadas com estas filtragens
apresentaram-se os menores desvios para a janela central de 10x10 piacutexeis Uma
vantagem da filtragem pela mediana eacute que mantecircm os valores originais de distacircncia
para os piacutexeis da imagem e preserva as bordas do objeto imageado No entanto a
filtragem com a mediana degrada as bordas da imagem devendo ser
cuidadosamente analisada para cada aplicaccedilatildeo
Tambeacutem foram calculados os desvios padratildeo para as imagens inteiras e os
valores obtidos foram de 19cm em meacutedia Este grande valor deveu-se a maior
curvatura ocorrer nas extremidades da imagem e tambeacutem ao fato de haver uma
descontinuidade na superfiacutecie presente na imagem TOF causada pela porta
presente na superfiacutecie da parede
96
53 EXPERIMENTO 2 ndash ANAacuteLISE DE RUIacuteDO 2 JANELAS DE 40X40 PIacuteXEIS
O objetivo deste experimento foi analisar a presenccedila de ruiacutedo em aacutereas
centrais da imagem TOF Para isto escolheram-se janelas com dimensotildees de 40x40
piacutexeis ao redor do pixel central da imagem Calculou-se o desvio padratildeo da distacircncia
de cada pixel em relaccedilatildeo a este pixel central As janelas utilizadas tiveram sua
posiccedilatildeo na imagem variando de (8282) ateacute (122122) e correspondem a aacuterea com
superfiacutecie plana de uma parede presente na cena
Primeiramente utilizaram-se imagens TOF adquiridas agrave distacircncia de 130m
entre a cacircmara e a parede com os tempos de integraccedilatildeo iguais a 2000 e 5000micros
Posteriormente utilizaram-se imagens TOF obtidas a 210m da parede com tempos
de integraccedilatildeo iguais a 2000 5000 e 7000micros
O graacutefico de dispersatildeo da Figura 59 ilustra uma anaacutelise para a captaccedilatildeo de
imagens TOF com diferentes distacircncias e tempos de integraccedilatildeo Os desvios padratildeo
foram calculados para imagens TOF captadas com a cacircmara CamCube 20 onde
variaram-se as distacircncias e os tempos de integraccedilatildeo no momento da aquisiccedilatildeo das
imagens
FIGURA 59 ndash Desvios padratildeo para distacircncia x TI
FONTE CENTENO e JUTZI (2010)
97
Com a Figura 510 eacute apresentado o primeiro resultado deste experimento o
graacutefico de dispersatildeo gerado com a imagem TOF adquirida do objeto agrave distacircncia de
130m da cacircmara com TI igual a 2000micros
FIGURA 510 ndash Desvios padratildeo para janelas com TI=2000μs d=130m
A Figura 511 ilustra as superfiacutecies geradas com o arquivo de distacircncias da
imagem TOF adquirida do objeto agrave distacircncia de 130m da cacircmara com TI igual a
2000micros e com as imagens resultantes das filtragens realizadas
FIGURA 511 ndash Janelas de 40x40 piacutexeis TI=2000μs d=130m
98
Com a Figura 511 conclui-se que os melhores resultados para a suavizaccedilatildeo
dos dados de distacircncia foram obtidos com os filtros passa-baixas pela meacutedia e
mediana
A Figura 512 ilustra o graacutefico de dispersatildeo para a imagem adquirida com TI
igual a 5000μs com distacircncia de 130m entre o objeto imageado e a cacircmara TOF A
Figura 513 ilustra as superfiacutecies geradas com as janelas centrais de 40x40 piacutexeis
FIGURA 512 ndash Desvios padratildeo para janelas com TI=5000μs d=130m
FIGURA 513 ndash Janelas de 40x40 piacutexeis TI=5000μs d=130m
99
O TI de 5000μs utilizado para a aquisiccedilatildeo da imagem saturou os elementos
do sensor e causou maior presenccedila de ruiacutedo nos dados Comparando as Figuras
511 e 513 conclui-se que para a distacircncia de 130m do sensor o tempo de
integraccedilatildeo mais adequado para a aquisiccedilatildeo da imagem foi 2000micros
A Figura 514 ilustra o graacutefico de dispersatildeo gerado para a imagem TOF
obtida com TI igual a 2000μs e distacircncia de 210m As superfiacutecies geradas a partir
das janelas de 40x40 piacutexeis desta imagem satildeo apresentadas com a Figura 515
FIGURA 514 ndash Desvios padratildeo para janelas com TI=2000μs d=210m
FIGURA 515 ndash Janelas de 40x40 piacutexeis TI=2000μs d=210m
100
O graacutefico de dispersatildeo calculado para a imagem adquirida com TI igual a
5000μs e distacircncia de 210m eacute ilustrado com a Figura 516
FIGURA 516 ndash Desvios padratildeo para janelas com TI=5000μs d=210m
Os menores desvios padratildeo foram encontrados na imagem filtrada utilizando
os filtros passa-baixas pela meacutedia e mediana conforme pode ser visualizado com a
Figura 516 Para a janela de 40x40 piacutexeis o desvio padratildeo de 107mm na imagem
original diminuiu para 96mm com a filtragem pela mediana A Figura 517 ilustra as
superfiacutecies geradas para a imagem obtida com distacircncia de 210m e TI de 5000μs
FIGURA 517 ndash Janelas de 40x40 piacutexeis TI=5000μs d=210m
101
Com a Figura 517 observa-se novamente que os melhores resultados para
a suavizaccedilatildeo da imagem foram obtidos com os filtros passa-baixas pela meacutedia e
pela mediana
A Figura 518 ilustra o graacutefico de dispersatildeo e a Figura 519 ilustra as
superfiacutecies geradas para as imagens adquiridas com distacircncia de 210m e TI igual a
7000μs
FIGURA 518 ndash Desvios padratildeo para janelas com TI=7000μs d=210m
FIGURA 519 ndash Janelas de 40x40 piacutexeis TI=7000μs d=210m
102
Com o graacutefico de dispersatildeo ilustrado com a Figura 518 observa-se que os
desvios padratildeo calculados para as imagens obtidas com os filtros passa-baixas pela
meacutedia e mediana satildeo maiores do que os desvios apresentados com o graacutefico de
dispersatildeo ilustrado com a Figura 516 Isto indica que as imagens captadas da
parede plana com TI igual a 7000μs e distacircncia de 210m apresentaram maior ruiacutedo
que as imagens obtidas com 5000μs
Comparando as Figuras 519 e 517 verifica-se que a imagem captada com
TI igual a 5000μs com distacircncia de 210m e filtrada com o filtro passa-baixas pela
meacutedia e tambeacutem com a mediana apresentou-se mais suavizada do que a imagem
obtida com TI igual a 7000μs
Comparando as imagens captadas com tempo de integraccedilatildeo de 2000μs e
5000μs para a distacircncia de 210m conforme Figuras 515 e 517 conclui-se que as
imagens obtidas com TI de 5000μs apresentaram menor presenccedila de ruiacutedo
54 EXPERIMENTO 3 ndash PROJECcedilAtildeO ORTOGONAL DOS PONTOS
Obtidos os POI atraveacutes do processo de calibraccedilatildeo da cacircmara e definido o
melhor TI para a captaccedilatildeo da imagem procedeu-se a um novo experimento no qual
se analisou a imagem de uma caixa com superfiacutecies planas A superfiacutecie do objeto
em questatildeo eacute composta por papel branco riacutegido e refletivo A caixa foi colocada
sobre uma cadeira agrave distacircncia aproximada de 13m da cacircmara Esta cadeira foi
girada enquanto a cacircmara continuou fixa com o mesmo ponto de vista Com base
no estudo da dispersatildeo dos dados em funccedilatildeo da distacircncia ao objeto optou-se por
utilizar o TI de 2000μs para a captaccedilatildeo das imagens Foram entatildeo adquiridas dez
imagens do objeto
Com a distacircncia do objeto em relaccedilatildeo agrave cacircmara igual a 13m e com a
distacircncia focal calibrada da cacircmara de 132mm valor encontrado com a Equaccedilatildeo
(57) calculou-se a escala aproximada das fotografias encontrando-se o valor
aproximado para a escala igual a 1100 conforme Equaccedilatildeo (58)
119891119888 =119891119909119888+119891119910119888
2=
1315823119898119898+1321383119898119898
2= 1318603119898119898 cong 132119898119898 (57)
103
119864 =119889
119863=
119891119888
119885=
132119898119898
13119898=
00132119898
13119898=
1
984848cong
1
100 (58)
Para realizar este experimento selecionou-se a terceira imagem captada por
apresentar vista perspectiva de trecircs superfiacutecies com padratildeo planar no objeto
imageado A Figura 520a ilustra o arquivo de intensidades da imagem TOF sem
correccedilatildeo geomeacutetrica A Figura 520b ilustra o arquivo de intensidade corrigido
geometricamente utilizando as coordenadas do Ponto Principal 1199090 e 1199100 os
coeficientes de distorccedilatildeo Radial Simeacutetrica 1198701 e 1198702 e a distacircncia focal calibrada 119891119888
FIGURA 520 ndash Arquivo de intensidades da imagem TOF obtida do objeto
Apoacutes a correccedilatildeo da geometria da imagem TOF geraram-se as superfiacutecies do
objeto Isto foi feito a partir do arquivo de distacircncias da imagem TOF conforme eacute
ilustrado com a Figura 521 onde se tem as distacircncias dos pontos em relaccedilatildeo ao
sensor representadas com a coordenada Z em metros sobre a imagem TOF com
dimensatildeo de 204x204 piacutexeis
104
FIGURA 521 ndash Arquivo de distacircncias da imagem TOF com geometria corrigida
A partir do arquivo de distacircncias da imagem TOF com a geometria dos
dados corrigida projetaram-se ortogonalmente os pontos gerando a nuvem de
pontos 3D ilustrada com a Figura 522 em vista frontal com o eixo Z ortogonal aos
eixos X e Y representados
FIGURA 522 ndash Nuvem de pontos vista frontal
105
A vista em perspectiva tridimensional da nuvem de pontos do objeto de
estudo eacute ilustrada com a Figura 523 Conteacutem 42025 pontos gerados a partir da
imagem TOF de 204x204 piacutexeis obtida com a cacircmara PMD CamCube 20
FIGURA 523 - Nuvem de pontos vista perspectiva 3D
106
55 EXPERIMENTO 4 ndash SEGMENTACcedilAtildeO 1 CRESCIMENTO DE REGIOtildeES
Realizou-se a segmentaccedilatildeo por crescimento de regiotildees a partir de trecircs
pontos semente Estes pontos foram escolhidos em aacutereas uniformes no arquivo de
intensidades da imagem TOF corrigida geometricamente e foram projetados
ortogonalmente para a nuvem 3D As coordenadas de imagem destes pontos foram
observadas nas posiccedilotildees indicadas com a Figura 524
FIGURA 524 ndash Pontos semente no arquivo de intensidades da imagem TOF
Os pontos semente foram escolhidos em trecircs superfiacutecies planas da caixa em
locais que apresentavam valores de intensidade uniforme As coordenadas de
imagem lidas em piacutexeis para estes trecircs pontos foram Ponto 1 (11681) Ponto 2
(72103) Ponto 3 (113108)
As Figuras 525 e 526 ilustram o crescimento em trecircs regiotildees realizados na
nuvem de pontos 3D Estes pontos correspondem agraves superfiacutecies frontal superior e
lateral da caixa ilustradas com as cores amarela verde e ciano respectivamente
Os trecircs autovetores calculados satildeo ilustrados com a cor azul ortogonais aos pontos
semente escolhidos nas trecircs superfiacutecies da imagem de intensidade
107
FIGURA 525 ndash Crescimento de regiotildees vista frontal
FIGURA 526 ndash Crescimento de regiotildees vista perspectiva 3D
Com as Figuras 525 e 526 verifica-se que o crescimento das regiotildees
ocorreu de forma coerente acompanhando o padratildeo planar das superfiacutecies do
objeto de estudo No entanto nas trecircs superfiacutecies analisadas houve crescimento de
regiotildees para fora dos limites de suas aacutereas Pontos de superfiacutecies ao fundo e abaixo
do objeto foram incluiacutedos nas regiotildees Isto ocorreu devido agrave utilizaccedilatildeo do criteacuterio de
108
similaridade de distacircncia do ponto agrave superfiacutecie plana sendo esta superfiacutecie definida
pelos pontos semente A distacircncia foi medida ao longo do autovetor o que fez com
que pontos de outras superfiacutecies paralelas a superfiacutecie plana em questatildeo fossem
agrupados na mesma regiatildeo Ou seja pontos que estavam orientados na direccedilatildeo da
superfiacutecie plana definida pelo autovalor que passa pelo ponto semente e que
estavam dentro do limiar de distacircncia estabelecido foram incluiacutedos nas regiotildees
mesmo natildeo pertencendo agrave superfiacutecie analisada
56 EXPERIMENTO 5 ndash SEGMENTACcedilAtildeO 2 ANAacuteLISE COM AUTOVALORES
Neste experimento realizou-se a segmentaccedilatildeo da imagem TOF por anaacutelise
da variaccedilatildeo local de autovalores locais de superfiacutecies O arquivo de distacircncias desta
imagem foi utilizado como ponto de partida para o caacutelculo dos autovalores com o
objetivo de intensificar as bordas dos objetos presentes na cena
O processamento consistiu em definir uma pequena vizinhanccedila quadrada
uma janela moacutevel e utilizar as coordenadas tridimensionais dos pontos nesta
vizinhanccedila para o caacutelculo dos autovalores
Apoacutes a normalizaccedilatildeo os autovalores foram armazenados na forma de trecircs
novas imagens conforme pode ser visualizado com as Figuras 527 528 e 529
Para a geraccedilatildeo destas imagens utilizou-se a janela moacutevel com dimensatildeo de 3x3
piacutexeis para o caacutelculo dos autovalores
109
FIGURA 527 ndash Imagem com bordas intensificadas gerada com 1205821
FIGURA 528 ndash Imagem com bordas intensificadas gerada com 1205822
FIGURA 529 ndash Imagem com bordas intensificadas gerada com 1205823
110
A partir da imagem com bordas intensificadas gerada com os autovalores
locais foi possiacutevel criar uma nova imagem de intensidade que tambeacutem estava com
as bordas dos objetos intensificadas A Figura 530 ilustra as imagens de
intensidade com bordas intensificadas que foram geradas utilizando o segundo
autovalor calculado a partir de janelas com as seguintes dimensotildees a)3x3 b)5x5
c)7x7 d)9x9 e)11x11 f)13x13 piacutexeis
FIGURA 530 ndash Imagens de intensidade com as bordas do objeto intensificadas
111
Com as imagens de intensidade ilustradas com a Figura 530 observou-se
que aumentando a quantidade de piacutexeis da janela utilizada para o caacutelculo dos
autovalores da regiatildeo aumentou-se tambeacutem a suavizaccedilatildeo sobre as superfiacutecies
planas e alargaram-se as bordas que limitam os objetos contidos na cena
Para este experimento utilizou-se a imagem gerada com a janela de 3x3
piacutexeis e com o segundo autovalor Esta imagem foi escolhida por apresentar linhas
finas limitando as bordas do objeto A imagem de intensidade com as bordas do
objeto intensificadas foi segmentada utilizando o algoritmo de deslocamento pela
meacutedia O resultado da segmentaccedilatildeo eacute ilustrado com a Figura 531
FIGURA 531 ndash Imagem com bordas intensificadas segmentada
112
A Figura 531a ilustra a imagem com bordas intensificadas a ser
segmentada gerada com o segundo conjunto de autovalores 1205822 Na Figura 531b
tem-se esta imagem suavizada por filtragem A Figura 531c corresponde agrave imagem
segmentada com o algoritmo de deslocamento pela meacutedia A imagem com os limites
das aacutereas segmentadas eacute ilustrada com a Figura 531d
A segmentaccedilatildeo foi realizada utilizando o software EDISON com os
paracircmetros (119893119904 119893119903 119867) = (7 9 300) Estes paracircmetros correspondem ao domiacutenio
espacial da imagem 119893119904 domiacutenio de caracteriacutesticas 119893119903 e tamanho miacutenimo das
regiotildees 119867 em piacutexeis O limite miacutenimo foi fixado para evitar que regiotildees muito
pequenas fossem incluiacutedas na segmentaccedilatildeo
Com a imagem segmentada da Figura 529c foi possiacutevel projetar os pontos
de interesse ortogonalmente gerando a nuvem de pontos 3D Para isto utilizou-se
as coordenadas dos piacutexeis no arquivo de intensidades e seus correspondentes no
arquivo de distacircncias da imagem TOF Estes pontos foram escolhidos sobre as
superfiacutecies da caixa A nuvem de pontos 3D resultante deste experimento eacute
apresentada com as Figuras 532 e 533
FIGURA 532 ndash Nuvem de pontos da imagem segmentada vista frontal
113
FIGURA 533 ndash Nuvem de pontos da imagem segmentada vista 3D
57 EXPERIMENTO 6 ndash ANAacuteLISE DAS MEDIDAS OBTIDAS
Para gerar a nuvem de pontos 3D com as superfiacutecies de interesse
primeiramente corrigiu-se a geometria do arquivo de distacircncias da imagem TOF com
as coordenadas do Ponto Principal 1199090 e 1199100 coeficientes de distorccedilatildeo Radial
Simeacutetrica 1198701 e 1198702 e distacircncia focal calibrada 119891119888 O passo seguinte foi gerar uma
imagem de intensidade com as bordas do objeto intensificadas Com este objetivo
calcularam-se os autovalores para os pontos do arquivo de distacircncias da imagem
TOF e geraram-se trecircs imagens novas correspondendo aos trecircs autovalores
calculados conforme o Experimento 5 O terceiro passo foi a segmentaccedilatildeo da
imagem de intensidade com bordas intensificadas utilizando o algoritmo de
deslocamento pela meacutedia Com a imagem segmentada pocircde-se escolher as
superfiacutecies que teriam seus piacutexeis projetados para a nuvem de pontos 3D
A imagem segmentada com o algoritmo de deslocamento pela meacutedia
apresenta niacuteveis de cinza diferentes para os piacutexeis de cada segmento Com isto foi
possiacutevel separar os pontos que compotildeem as superfiacutecies por seus valores digitais A
Figura 534 apresenta a nuvem de pontos 3D gerada com a imagem TOF corrigida
geometricamente com os pontos da superfiacutecie frontal representados com a cor azul
114
FIGURA 534 ndash Nuvem de pontos 3D segmentada
A superfiacutecie frontal foi projetada com atributo de cor diferenciado por
apresentar a melhor segmentaccedilatildeo na imagem de intensidade e pontos bem
definidos na nuvem 3D A partir desta superfiacutecie escolheram-se os pontos extremos
os veacutertices do objeto para a leitura de suas coordenadas 3D com o objetivo de
calcular o comprimento das arestas Com a Figura 535 satildeo ilustrados os quatro
pontos selecionados
FIGURA 535 ndash Pontos 3D selecionados na nuvem
115
Com as coordenadas destes quatro pontos e atraveacutes da relaccedilatildeo de distacircncia
tridimensional entre eles expressa pela Equaccedilatildeo (59) calcularam-se as dimensotildees
de trecircs arestas do objeto de estudo
119863119894119895 = 119883119894minus119883119895 2
+ 119884119894minus119884119895 2
+ 119885119894minus119885119895 2 (59)
onde
119863119894119895 ndash Distacircncia entre pontos no espaccedilo tridimensional
119883119894 119884119894 119885119894 119890 119883119895 119884119895 119885119895 - Coordenadas dos pontos 119894 e 119895 na nuvem de pontos 3D
Para verificar a confiabilidade das medidas obtidas com a metodologia
proposta compararam-se as medidas das arestas calculadas a partir dos pontos 3D
com as dimensotildees de referecircncia do objeto de estudo As medidas de referecircncia satildeo
ilustradas com o desenho da Figura 536
FIGURA 536 ndash Dimensotildees de referecircncia do objeto de estudo
A partir das coordenadas tridimensionais dos quatro pontos ilustrados com a
Figura 535 foi possiacutevel calcular as distacircncias entre os pontos e comparar-las com
as medidas de referecircncia As diferenccedilas obtidas satildeo ilustradas com a Tabela 52
116
Ponto
Coordenadas Arestas Medida realizada Diferenccedilas
X (cm) Y (cm) Z (cm) Pontos 3D (cm)
Ref (cm)
(cm) ()
1 -131 -136 -1219 Pontos 1-2 236 260 24 92
2 -80 61 -1098 Pontos 2-3 332 350 18 51
3 234 38 -1203 Pontos 2-4 263 210 53 252
4 -125 180 -1328
TABELA 52 ndash Coordenadas 3D dos pontos e medidas realizadas
O melhor resultado foi obtido para a medida realizada sobre a aresta entre
os pontos 2-3 com diferenccedila de aproximadamente 18 cm em relaccedilatildeo agrave medida de
referecircncia o que representa 5 da distacircncia medida O pior resultado foi obtido com
o calculo da aresta entre os pontos 2 e 4 com diferenccedila de aproximadamente
53cm que equivale 25 da medida de referecircncia Com este resultado conclui-se
que os pontos projetados com maior profundidade na nuvem de pontos 3D
apresentaram maior erro de posicionamento Estes pontos descrevem uma
superfiacutecie plana do objeto pouco aparente na imagem encontra-se muito inclinada
em relaccedilatildeo ao plano da imagem motivo pelo qual erros maiores podem ser
esperados Sobre os pontos 1 2 e 3 da superfiacutecie frontal do objeto o erro foi menor
na ordem de 2 centiacutemetros
Conforme o Experimento 1 realizado para a anaacutelise de ruiacutedo o melhor
resultado foi obtido utilizando o filtro da mediana que apresentou o desvio de 13cm
para a distacircncia de 13m medida utilizando tempo de integraccedilatildeo de 2000micros Este
fato indica coerecircncia com a diferenccedila de 2cm encontrada com a medida da aresta
frontal do objeto
117
58 MODELAGEM DAS SUPERFIacuteCIES 3D
Para a modelagem tridimensional das superfiacutecies segmentadas
primeiramente foi analisada a melhor forma de processamento da imagem TOF
Verificou-se com o Experimento 4 que o crescimento de regiotildees utilizando o arquivo
de intensidades da imagem TOF para escolha do ponto semente e o arquivo de
distacircncias para a projeccedilatildeo ortogonal e crescimento de regiotildees a partir deste ponto
natildeo foi satisfatoacuterio Isto porque o crescimento tambeacutem ocorreu em superfiacutecies que
natildeo pertenciam ao objeto analisado
Melhores resultados foram obtidos com a metodologia de segmentaccedilatildeo que
utilizou a imagem com bordas evidenciadas Esta foi gerada com a anaacutelise dos
autovalores locais das superfiacutecies a partir do arquivo de distacircncias da imagem TOF
conforme Experimento 5 A partir desta segmentaccedilatildeo projetaram-se ortogonalmente
os pontos das superfiacutecies frontal e superior do objeto de estudo gerando assim a
nuvem de pontos 3D que eacute ilustrada com a Figura 537
FIGURA 537 ndash Nuvem de pontos 3D das superfiacutecies frontal e superior
A partir da nuvem de pontos 3D realizou-se a modelagem das superfiacutecies
frontal e superior do objeto conforme eacute ilustrado com a Figura 538
118
FIGURA 538 ndash Modelagem tridimensional das superfiacutecies frontal e superior
Analisando a Figura 538 chegou-se a conclusatildeo que a superfiacutecie frontal do
objeto apresentou-se com padratildeo planar e uniforme Eacute a superfiacutecie que melhor
refletiu o sinal para o sensor devido agrave sua posiccedilatildeo em relaccedilatildeo agrave cacircmara TOF A
superfiacutecie superior apresentou-se um pouco inclinada em relaccedilatildeo ao plano da
imagem e com isto maior rugosidade foi observada nesta superfiacutecie Este
fenocircmeno deve-se a menor captaccedilatildeo do sinal refletido pela superfiacutecie do objeto pelo
sensor da cacircmara
119
6 CONCLUSOtildeES RECOMENDACcedilOtildeES E CONSIDERACcedilOtildeES FINAIS
61 CONCLUSOtildeES
Neste trabalho descreveram-se conceitos introdutoacuterios sobre as cacircmaras
TOF Avaliaram-se duas metodologias para a segmentaccedilatildeo da nuvem de pontos 3D
gerada a partir da imagem TOF Apresentou-se uma aplicaccedilatildeo para esta imagem na
extraccedilatildeo de informaccedilotildees meacutetricas do objeto de estudo imageado a distacircncia
aproximada de 13m
Para isto foram abordados os seguintes assuntos calibraccedilatildeo da cacircmara
para a obtenccedilatildeo de POI correccedilatildeo geomeacutetrica da imagem TOF filtragens para
anaacutelise e tratamento de ruiacutedo segmentaccedilatildeo atraveacutes do crescimento de regiotildees a
partir de um ponto semente segmentaccedilatildeo do arquivo de distacircncias da imagem TOF
utilizando autovalores locais para a geraccedilatildeo de uma imagem com bordas
intensificadas segmentaccedilatildeo da imagem com bordas intensificadas atraveacutes do
algoritmo de deslocamento pela meacutedia geraccedilatildeo da nuvem de pontos 3D atraveacutes da
projeccedilatildeo ortogonal dos pontos da imagem de bordas segmentada e por fim a
modelagem tridimensional de superfiacutecies do objeto de estudo
O processo de calibraccedilatildeo da cacircmara foi realizado utilizando o meacutetodo
proposto por Zhang (2000) e possibilitou a determinaccedilatildeo de POI A correccedilatildeo
geomeacutetrica das imagens foi feita atraveacutes das coordenadas 1199090 e 1199100 do Ponto
Principal coeficientes de distorccedilatildeo Radial Simeacutetrica de lentes 1198701 e 1198702 e distacircncia
focal calibrada 119891119888
Com os Experimentos 1 e 2 foram realizadas filtragens para o tratamento de
ruiacutedo das imagens TOF disponiacuteveis Nestes experimentos verificou-se que para a
captaccedilatildeo da imagem TOF agrave distacircncia de 13m entre o objeto e a cacircmara o tempo de
integraccedilatildeo de 2000μs foi o que gerou imagens com menor presenccedila de ruiacutedo Assim
como o tempo de integraccedilatildeo de 5000μs foi o mais adequado para captar imagens agrave
distacircncia de 21m No entanto chegou-se a conclusatildeo que para a geraccedilatildeo da nuvem
de pontos 3D natildeo se deveria utilizar filtragem nos dados pois pequenas alteraccedilotildees
no arquivo de distacircncias da imagem TOF poderiam modificar o posicionamento
tridimensional dos pontos o que afetaria a qualidade das medidas realizadas com os
pontos da nuvem 3D
120
A primeira metodologia proposta para a segmentaccedilatildeo da imagem TOF
mostrou-se insatisfatoacuteria para a soluccedilatildeo do problema Empregou-se o crescimento
de regiotildees a partir de pontos semente escolhidos no arquivo de intensidades desta
imagem projetando-os ortogonalmente para a nuvem de pontos 3D utilizando os
valores obtidos com o arquivo de distacircncias da imagem TOF Notou-se que erros no
crescimento de regiotildees ocorreram devido agrave toleracircncia utilizada para a distacircncia do
ponto agrave superfiacutecie plana Isto ocorreu porque a distacircncia foi calculada ao longo do
autovetor que eacute ortogonal a superfiacutecie no ponto semente Por este motivo alguns
pontos de superfiacutecies adjacentes foram selecionados equivocadamente como
pertencentes a uma mesma regiatildeo na nuvem de pontos 3D pois estavam dentro do
limite fixado no criteacuterio de similaridade utilizado mas na realidade natildeo eram
coplanares Para resolver o problema com esta metodologia seria necessaacuterio
estabelecer um limiar de crescimento lateral natildeo apenas de distacircncia ortogonal a
superfiacutecie plana semente Este limiar poderia ser o valor digital do pixel tendo em
vista que superfiacutecies coplanares apresentam uniformidade na resposta espectral A
rugosidade apresentada na superfiacutecie em que se realizava o crescimento da regiatildeo
tambeacutem influenciou em erros na seleccedilatildeo de pontos pois afetou no caacutelculo dos
autovalores fazendo com que inclinaccedilotildees em relaccedilatildeo a esta superfiacutecie fossem
notadas
A segunda metodologia analisada para a segmentaccedilatildeo da imagem TOF
mostrou-se satisfatoacuteria A segmentaccedilatildeo do arquivo de distacircncias da imagem TOF foi
realizada utilizando autovalores locais para a geraccedilatildeo de uma imagem com bordas
intensificadas segmentaccedilatildeo desta imagem com o algoritmo de deslocamento pela
meacutedia e projeccedilatildeo destes segmentos para a nuvem de pontos 3D A extraccedilatildeo de
informaccedilotildees meacutetricas em arestas do objeto de estudo a partir dos pontos 3D
apresentou diferenccedila na ordem de 2cm com a medida de referecircncia sendo a
imagem TOF adquirida com tempo de integraccedilatildeo de 2000μs a uma distacircncia
aproximada de 13m entre o objeto de estudo e a cacircmara
A Figura 61 ilustra as etapas de processamento a serem realizadas para a
geraccedilatildeo da nuvem de pontos 3D utilizando a segunda metodologia considerada
apropriada para a modelagem tridimensional de superfiacutecies utilizando a imagem
TOF Esta eacute a metodologia proposta como conclusatildeo do presente trabalho de
pesquisa
121
FIGURA 61 ndash Etapas da metodologia de processamento da imagem TOF
Foram encontradas medidas com maior qualidade quando a superfiacutecie do
objeto estava paralela ao plano da imagem Esta qualidade tambeacutem foi afetada pela
distacircncia entre a cacircmara e o objeto pela refletividade das superfiacutecies e pela
iluminaccedilatildeo ambiente Conforme o Experimento 6 realizado a aresta frontal do objeto
entre os pontos 2 e 3 apresentou a menor diferenccedila de medida 18cm que equivale
a 5 da distacircncia de referecircncia
Comparaccedilotildees para a diferenccedila de medida encontrada podem ser realizadas
com os seguintes trabalhos Kahlmann et al (2006) obtiveram exatidatildeo de 1cm nas
medidas com o alvo agrave distacircncia de 25m da cacircmara TOF utilizada Wiedemann et al
(2008) obtiveram exatidatildeo de 4cm com o alvo medido a distacircncia de 4m May et al
(2008) obtiveram erro de 30cm para uma medida de 108m considerada como
referecircncia com as imagens TOF captadas do centro de uma sala girando a cacircmara
360ordm e portanto envolviam tambeacutem Paracircmetros de Orientaccedilatildeo Exterior da cacircmara
Kolb et al (2009) obtiveram erro de 2cm para distacircncias medidas de 10m agrave 45m
Nestes trabalhos foram realizadas correccedilotildees geomeacutetricas nas imagens TOF com
POI determinados com a calibraccedilatildeo da cacircmara
Arquivo de distacircncias da imagem TOF
Correccedilatildeo geomeacutetrica dos dados utilizando POI calculados com o processo de calibraccedilatildeo da cacircmara
Imagem de intensidade com bordas itensificadas calculada com a anaacutelise da variaccedilatildeo local dos autovalores
Segmentaccedilatildeo da imagem com bordas intensificadas utilizando o algoriacutetmo de deslocamento pela meacutedia
Projeccedilatildeo ortogonal das aacutereas segmentadas para a geraccedilatildeo da nuvem de pontos 3D
Modelagem tridimensional das superfiacutecies do objeto
122
62 RECOMENDACcedilOtildeES
Recomenda-se realizar a anaacutelise preacutevia do tempo de integraccedilatildeo para a
aquisiccedilatildeo da imagem TOF com o objetivo de diminuir a presenccedila de ruiacutedo Este
tempo deve ser escolhido de acordo com o ambiente em que seraacute adquirida a
imagem e tambeacutem com as caracteriacutesticas de refletividade da superfiacutecie do objeto
Com este mesmo objetivo e devido ao fato desta imagem ser obtida com iluminaccedilatildeo
LED no comprimento de onda infravermelho recomenda-se analisar as influecircncias
da iluminaccedilatildeo exterior ao sistema de iluminaccedilatildeo da cacircmara
De acordo com a aplicaccedilatildeo a que se destina a imagem TOF recomenda-se
tambeacutem realizar a calibraccedilatildeo da cacircmara com meacutetodo fotogrameacutetrico convencional
Isto possibilitaria a melhora na correccedilatildeo geomeacutetrica da imagem e consequente
aumento na qualidade das medidas realizadas com os pontos da nuvem 3D
Correccedilotildees radiomeacutetricas tambeacutem podem ser aplicadas para melhorar a qualidade
das medidas obtidas com a imagem TOF
63 CONSIDERACcedilOtildeES FINAIS
Nuvens de pontos 3D geradas a partir de imagens TOF satildeo ferramentas
para a modelagem tridimensional das superfiacutecies de objetos Propiciam a obtenccedilatildeo
de informaccedilotildees meacutetricas destes objetos para distacircncias de 03 a 70 metros com
erro centimeacutetrico esperado
Aplicaccedilotildees para as imagens TOF podem ser realizadas para a modelagem
3D de tuacuteneis galerias instalaccedilotildees industriais e fachadas de preacutedios com interesse
de preservaccedilatildeo como patrimocircnio histoacuterico e cultural Com a alta frequecircncia de
aquisiccedilatildeo de imagens das cacircmaras TOF torna-se possiacutevel realizar filmagens e
mapeamentos em movimento
Outras aplicaccedilotildees possiacuteveis para as imagens TOF estatildeo na sua utilizaccedilatildeo
para a criaccedilatildeo de cenaacuterios 3D em jogos eletrocircnicos aquisiccedilatildeo de filmes com
tecnologia 3D modelagem tridimensional de obras de arte Biometria e anaacutelise de
movimentos
123
REFEREcircNCIAS BIBLIOGRAacuteFICAS
ANDRADE J B Fotogrametria 2 ed Curitiba SBEE 1998 274 p APUZZO N D‟ Recent advances in 3D full body scanning with applications to fashion and apparel 10p In Proceedings Optical 3-D Measurement Techniques IX Vienna Austria 2009 BALTSAVIAS E P Airborne laser scanning basic relations and formulas ISPRS - Journal of Photogrammetry amp Remote Sensing v 54 p 199-214 1999 BAZAN W S TOMMASELLI A M G GALO M RUY R S A influecircncia das injunccedilotildees de orientaccedilatildeo relativa na calibraccedilatildeo de um sistema dual de cacircmaras digitais 23p Boletim de Ciecircncias Geodeacutesicas v 15 n 3 Curitiba 2009 BELTON D Improving and extending the information on Principal Component Analysis for local neighborhoods in 3D points clouds 8p The international Archives of the Photogrammetry Remote Sensing and Spatial Information Sciences v XXXVII B5 Beijing 2008 BELTON D LICHTI D Classification and segmentation of terrestrial laser scanner point clouds using local variance information 6p In Proceedings ISPRS Commission V Simposium bdquoImage Engineering and Vision Metrology‟ 2006 BROWN D C Close-Range Camera Calibration Photogrammetric Engineering v 37 nordm 8 p 855-866 1971 CENTENO J A S Sensoriamento Remoto e Processamento de Imagens Digitais Curso de Poacutes-Graduaccedilatildeo em Ciecircncias Geodeacutesicas Curitiba UFPR 2004 209p CENTENO J A S JUTZI B Evaluation of range imaging sensor concerning resolution and illumination 6p In Proceedings The 2010 Canadian Geomatics Conference and Symposium of Commission I ISPRS Calgary Alberta 2010 CHRISTOUDIAS M C GEORGESCU B MEER P Synergism in Low Level Vision IEEE Transactions on Pattern Analysis and Machine Intelligence v 24 n 5 p 603-619 2002
124
COMANICIU D MEER P Mean Shift A Robust Approach Toward Feature Space Analysis 17p IEEE Transactions on Pattern Analysis and Machine Intelligence v 24 n 5 p 603-619 2002 FUCHS S HIRZINGER G Extrinsic and depth calibration of ToF cameras In Proceedings IEEE Conference on Computer Vision and Pattern Recognition (CVPR) Anchorage USA 2008 FUCHS S MAY S Calibration and registration for precise surface reconstruction with ToF cameras In Proceedings of the Dynamic 3D Imaging Workshop in Conjunction with DAGM (Dyn3D) v I Heidelberg Germany 2007 GEMAEL C Introduccedilatildeo ao ajustamento de observaccedilotildees aplicaccedilotildees geodeacutesicas 3 ed Curitiba UFPR 1994 319p GONZALEZ R C WOODS R E Processamento de imagens digitais Satildeo Paulo Edgard Bluumlcher Ltda 2000 509p GROSS H THOENNESSEN U Extraction of lines from laser point clouds p 86-91 In Proceedings Symposium of ISPRS Commission III Photogrammetric Computer Vision PCV06 Eds Foumlrstner W Steffen R International Archives of Photogrammetry Remote Sensing and Spatial Information Sciences 36 (Part 3) 2006 HABIB A MORGAN M Automatic calibration of low-cost digital cameras p 948-955 Journal of Photogrammetric Record 2003 JAMTSHO S Geometric modelling of 3D Range Cameras and their application for structural deformation measurement 174p (Master‟s Thesis Department of Geomatics Engineering) University of Calgary Alberta 2010 JOHNSON R A WICHERN D W Applied multivariate statistical analysis 4 ed New Jersey Pearson Prentice Hall 1998 JUTZI B GROSS H Nearest neighbor classification on laser point clouds to gain object structures from buildings 6p In Proceedings ISPRS Hannover Workshop 2009 High-Resolution Earth Imaging for Geospatial Information Disponiacutevel em lthttpwwwisprsorgproceedingsXXXVIII1_4_7-W5paperpapershtmgt Acesso 16112010
125
KAHLMANN T REMONDINO F INGENSAND H Calibration for increased accuracy of the range imaging camera SwissrangerTM ISPRS Commission V Symposium bdquoImage Engineering and Vision Metrology‟ v XXXVI n 5 2006 KEMENY S E EL-SAYED E MENDIS S FOSSUM E R Update on focal-plane image processing research 8p SPIE v 1447 Charged-Coupled Devices and Solid Optical Sensors II 1991 KHONGSAB P Signal processing and performance evaluation of a PMD camera for space docking 88p (Master‟s Thesis Continuation Courses Space Science and Technology Department of Space Science) Lulea University of Techology Kiruna 2009 KOCH R SCHILLER I BARTCZAK B KELLNER F KOumlSER K MixIn3D 3D mixed reality with ToF camera 16p In Work Programme of the EU‟s 7th Framework program 2009 KOLB A BARTH E KOCH R LARSEN R Time-of-Flight sensors in Computer Graphics 16p In STAR ndash State of The Art Report The Eurographics Association 2009 LANGE R 3D Time-of-Flight distance measurement with custom solid-state image sensors in CMOSCCD-technology 205 p (Dissertation Department of Electrical Engineering and Computer Science at University of Siegen for the degree of Doctor of Technical Sciences) Univesity of Siegen Alemanha 2000 LEON S J Linear Algebra with applications 4 ed Dartmouth Prentice Hall 1998 390p LUAN X Experimental investigation of Photonic Mixer Device and development of TOF 3D ranging systems based on PMD technology A dissertation submitted to the Department of Electrical Engineering and Computer Science at University of Siegen Siegen 2001 MACHADO A M L Extraccedilatildeo automaacutetica de contornos de edificaccedilotildees utilizando imagem gerada por cacircmara digital de pequeno formato e dados LIDAR 201 p Tese apresentada ao Curso de Poacutes-Graduaccedilatildeo em Ciecircncias Geodeacutesicas da Universidade Federal do Paranaacute Curitiba UFPR 2006
126
MASS H G VOSSELMAN Two algorithms for extracting building models from raw laser altimetry data 11p Elsevier Science Photogrammetry amp Remote Sensing 1999 MAY S DROESCHEL D HOLTZ D WIESEN C FUCHS S 3D Pose estimation and mapping with time-of-flight cameras 6p Germany 2008 Disponiacutevel em httpwwwroboticdefileadminroboticfuchsiros08_3dcampdf Acesso em 2510 2010 MITISHITA E A Monorestituiccedilatildeo digital de aerofotos associada com sistema de computaccedilatildeo graacutefica CAD para fins de mapeamento na aacuterea florestal 251p Tese (Doutorado em Engenharia Florestal) ndash Setor de Ciecircncias Agraacuterias Universidade Federal do Paranaacute 1997 MOumlLLER T KRAFT H FREY J ALBRECHT M LANGE R Robust 3D measurement with PMD sensors 2005 PAULY M GROSS M KOBBELT L P Efficient simplification of point-sampled surfaces 8p In VIS ‟02 Proceedings of the Conference on Visualization ‟02 Washington DC USA 2002 IEEE Computer Society PECHT Y FOSSUM E R Wide intrascene dynamic range CMOS APS using dual sampling IEEE Transactions on Electron Devices v 44 n 10 1997 PMD Technologies PMD [vison]regCamCube 20 4p Datasheet n 20090601 Siegen 2009 Disponiacutevel em lthttpwwwpmdteccomproducts-servicespmdvisionr-cameraspmdvisionr-camcube-20gt Acesso em 0103 2010 PMD Technologies PMD [vison]regCamCube 20 Software development tutorial 13p Siegen 2009 Disponiacutevel em lthttpwwwpmdteccomfileadminpmdtecdownloadsdocumentationcamcube_softwaredevelopmenttutorialpdfgt Acesso em 1504 2010 RAPP H Experimental and theoretical investigation of correlating TOF-camera systems 71p Diploma Thesis in Physics Faculty for Physics and Astronomy University of Heidelberg Alemanha 2007 RINGBECK T A 3D Time Of Flight camera for object detection 10p In Proceedings Optical 3D Measurement Techniques Plenary Session 1 Range Imaging I Zuumlrich 2007
127
SHAKARJI C M Least-Squares fitting algorithms of the NIST algorithm testing system 9p Journal of research of the national of standards and technology v 103 n 6 1998 THEUWISSEN A Solid-state imaging with Charge-Coupled Devices PP 34-46 Kluwer Academic Publishers 1995 Disponiacutevel em ltwwwspringerlinkcomgt Acesso em 08072010
WIEDEMANN M SAUER M DRIEWER F SCHILLING K Analysis and characterization of the PMD camera for application in mobile robotics 6p In Proceedings of the 17th World Congress The International Federation of Automatic Control Seoul Korea July 6-11 2008 ZHANG Z A flexible new technique for camera calibration 5p IEEE Transactions on Pattern Analysis and Machine Intelligence November 2000

vii
ABSTRACT
This work aims at studying the quality of 3D data obtained with a range
camera the PMD[vision]regCamCube 20 and assessing its potential to model object
surfaces The equipment computes the distance to the objects using the Time-Of-
Flight (TOF) principle Initially the equipment was calibrated using camera calibration
methods The Interior Orientation Parameters (IOP) allow reducing geometric
distortion in the images Another factor that influences the quality of data is the
presence of noise caused by illumination conditions which can be controlled by
varying the integration time of the light source Two options to reduce noise were
analyzed spatial filtering with low-pass and median filter and computing the
average of a series of images taken from the same point of view After determining
the best integration time and Interior Orientation Parameters the 3D coordinates of a
point cloud was computes The next step consists in image segmentation to identify
the surfaces of an object In a first approach it is applied a region growing method
using the point-plane distance as similarity parameter The second approach is
based on the calculation of local eigenvalues using small moving windows to
generate a new image where borders are highlighted This new image is segmented
using the mean-shift approach to delineate the surfaces of interest Each interest
pixel of the segmented image was projected for the 3D points cloud The dimensions
of the object are compared with real values The comparison showed differences
around 2cm within the expected range Finally the object surfaces can then be
modeled with the 3D points cloud
Keywords TOF image Range image Three-dimensional modeling surfaces
Camera calibration Noise analysis Eigenvalues Eigenvectors Orthogonal
projection Segmentation Region growing in 3D point clouds Mean Shift Algorithm
viii
LISTA DE FIGURAS
FIGURA 21 ndash Princiacutepio TOF 19
FIGURA 22 ndash Meacutetodo da diferenccedila de fase 20
FIGURA 23 ndash FC utilizada no meacutetodo da diferenccedila de fase 23
FIGURA 24 ndash Informaccedilatildeo das imagens TOF 25
FIGURA 25 ndash Imagem TOF obtida com cacircmara PMD 26
FIGURA 26 ndash Ruiacutedo na nuvem de pontos 3D proveniente de imagem TOF 27
FIGURA 27 ndash Princiacutepio de funcionamento do sistema PMD 28
FIGURA 28 ndash Captaccedilatildeo da carga do sinal em sensores CCD e CMOS 29
FIGURA 29 ndash Representaccedilatildeo de campos de franja 30
FIGURA 210 ndash Princiacutepio de armazenamento de cargas em sensores TOF 31
FIGURA 211 ndash Princiacutepio de captaccedilatildeo de cargas pelo sensor PMD 32
FIGURA 212 ndash Medida da diferenccedila de fase do sinal recebido 33
FIGURA 213 ndash Medida de distacircncia com a cacircmara PMD 35
FIGURA 214 ndash Cacircmara PMD CamCube 20 36
FIGURA 215 ndash Imagem captada com a cacircmara PMD CamCube 20 37
FIGURA 216 ndash Princiacutepio de funcionamento do SBI 39
FIGURA 217 ndash Modelos de cacircmaras TOF 39
FIGURA 218 ndash Nuvem de pontos 3D gerada a partir de imagem TOF 44
FIGURA 219 ndash Colinearidade entre os pontos no espaccedilo imagem e objeto 45
FIGURA 220 ndash Sistemas de coordenadas utilizados em imagens 47
FIGURA 221 ndash Filtro para a definiccedilatildeo de bordas do objeto 51
FIGURA 222 ndash Geometria do filtro para a definiccedilatildeo de bordas 52
FIGURA 223 ndash Autovetores em nuvem de pontos 3D de uma superfiacutecie plana 55
FIGURA 224 ndash Inclinaccedilotildees de superfiacutecies determinadas por autovalores 59
FIGURA 225 ndash Imagem segmentada 66
FIGURA 41 ndash Processamento da imagem TOF 69
FIGURA 42 ndash Filtragem passa-baixas pela meacutedia 80
FIGURA 43 ndash Filtragem pela mediana 80
FIGURA 44 ndash Filtragem utilizando a meacutedia temporal 81
FIGURA 45 ndash Intensificaccedilatildeo de bordas com autovalores 85
FIGURA 46 ndash Imagem com bordas intensificadas 85
FIGURA 51 ndash Imagens do gabarito utilizadas na calibraccedilatildeo da cacircmara 87
FIGURA 52 ndash Orientaccedilatildeo Exterior das fotografias para a calibraccedilatildeo da cacircmara 88
FIGURA 53 ndash Direccedilatildeo das distorccedilotildees nos pontos da imagem TOF 88
ix
FIGURA 54 ndash Correccedilatildeo geomeacutetrica da imagem TOF 90
FIGURA 55 ndash Desvio padratildeo x TI janelas 10x10 93
FIGURA 56 ndash Imagens para TI=500μs e d=130m 93
FIGURA 57 ndash Imagens para TI=2000μs e d=130m 94
FIGURA 58 ndash Imagens para TI=2500μs e d=130m 95
FIGURA 59 ndash Desvios padratildeo para distacircncia x TI 96
FIGURA 510 ndash Desvios padratildeo para janelas com TI=2000μs d=130m 97
FIGURA 511 ndash Janelas de 40x40 piacutexeis TI=2000μs d=130m 97
FIGURA 512 ndash Desvios padratildeo para janelas com TI=5000μs d=130m 98
FIGURA 513 ndash Janelas de 40x40 piacutexeis TI=5000μs d=130m 98
FIGURA 514 ndash Desvios padratildeo para janelas com TI=2000μs d=210m 99
FIGURA 515 ndash Janelas de 40x40 piacutexeis TI=2000μs d=210m 99
FIGURA 516 ndash Desvios padratildeo para janelas com TI=5000μs d=210m 100
FIGURA 517 ndash Janelas de 40x40 piacutexeis TI=5000μs d=210m 100
FIGURA 518 ndash Desvios padratildeo para janelas com TI=7000μs d=210m 101
FIGURA 519 ndash Janelas de 40x40 piacutexeis TI=7000μs d=210m 101
FIGURA 520 ndash Arquivo de intensidades da imagem TOF obtida do objeto 103
FIGURA 521 ndash Arquivo de distacircncias da imagem TOF com geometria corrigida 104
FIGURA 522 ndash Nuvem de pontos vista frontal 104
FIGURA 523 ndash Nuvem de pontos vista perspectiva 3D 105
FIGURA 524 ndash Pontos semente no arquivo de intensidades da imagem TOF 106
FIGURA 525 ndash Crescimento de regiotildees vista frontal 107
FIGURA 526 ndash Crescimento de regiotildees vista perspectiva 3D 107
FIGURA 527 ndash Imagem com bordas intensificadas gerada com 1205821 109
FIGURA 528 ndash Imagem com bordas intensificadas gerada com 1205822 109
FIGURA 529 ndash Imagem com bordas intensificadas gerada com 1205823 109
FIGURA 530 ndash Imagens de intensidade com as bordas do objeto intensificadas 110
FIGURA 531 ndash Imagem com bordas intensificadas segmentada 111
FIGURA 532 ndash Nuvem de pontos da imagem segmentada vista frontal 112
FIGURA 533 ndash Nuvem de pontos da imagem segmentada vista 3D 113
FIGURA 534 ndash Nuvem de pontos 3D segmentada 114
FIGURA 535 ndash Pontos 3D selecionados na nuvem 114
FIGURA 536 ndash Dimensotildees de referecircncia do objeto de estudo 115
FIGURA 537 ndash Nuvem de pontos 3D das superfiacutecies frontal e superior 117
FIGURA 538 ndash Modelagem tridimensional das superfiacutecies frontal e superior 118
x
LISTA DE QUADROS E TABELAS
QUADRO 21 ndash Especificaccedilotildees teacutecnicas da cacircmara PMD CamCube 20 37
QUADRO 22 ndash Especificaccedilotildees teacutecnicas de cacircmaras TOF 40
QUADRO 23 ndash Propriedades de superfiacutecies normais obtidas com autovalores 57
TABELA 51 ndash Paracircmetros de Orientaccedilatildeo Interior calculados 89
TABELA 52 ndash Coordenadas 3D dos pontos e medidas realizadas 116
xi
LISTA DE SIGLAS
Sigla Significado
AMISE Asymptotic Mean Integrated Square Error
CCD Charge Coupled Device
CMOS Complementary Metal Oxide Semiconductor
CP Centro Perspectivo
EDISON Edge Detection and Image SegmentatiON System
FC Funccedilatildeo de Correlaccedilatildeo
FPN Fixed Pattern Noise
FPS Frames Per Second
LASER Light Amplification by Stimulated Emission of Radiation
LED Light Emitting Diode
MDE Modelo Digital de Elevaccedilatildeo
MVC Matriz de Variacircncias e Covariacircncias
PMD Photonic Mixer Device
POE Paracircmetros de Orientaccedilatildeo Exterior
POI Paracircmetros de Orientaccedilatildeo Interior
PP Ponto Principal
SBI Supression of Background Ilumination
TI Tempo de Integraccedilatildeo
TOF Time-Of-Flight
xii
SUMAacuteRIO
1 INTRODUCcedilAtildeO 14
11 OBJETIVO GERAL 16
12 OBJETIVOS ESPECIacuteFICOS 16
13 JUSTIFICATIVA 17
14 ESTRUTURA DA DISSERTACcedilAtildeO 18
2 REVISAtildeO BIBLIOGRAacuteFICA 19
21 MEDIDA DE DISTAcircNCIA COM O PRINCIacutePIO TOF 19
22 IMAGEM TOF 25
23 TEMPO DE INTEGRACcedilAtildeO 26
24 PRINCIacutePIO DE FUNCIONAMENTO DO SENSOR PMD 28
25 CAcircMARAS PMD 34
251 Cacircmara PMD CamCube 20 36
252 Dispositivo SBI 38
253 Modelos de cacircmaras TOF 39
26 ERROS DE MEDIDA 40
261 Erros natildeo-sistemaacuteticos em cacircmaras TOF 41
262 Erros sistemaacuteticos em cacircmaras TOF 41
27 PROJECcedilAtildeO ORTOGONAL DOS PONTOS 45
28 REFINAMENTO DA NUVEM DE PONTOS 3D 50
29 ANAacuteLISE DE SUPERFIacuteCIES POR AUTOVALORES E AUTOVETORES 53
210 ANAacuteLISE DE SUPERFIacuteCIES POR MOMENTOS INVARIANTES 56
211 ALGORITMO DE DESLOCAMENTO PELA MEacuteDIA 60
3 MATERIAIS 67
4 MEacuteTODOS 68
41 CALIBRACcedilAtildeO DA CAcircMARA 69
42 ANAacuteLISE DA PRESENCcedilA DE RUIacuteDO 78
421 Filtragem passa-baixas pela meacutedia 79
422 Filtragem pela mediana 80
423 Filtragem com a meacutedia temporal 81
43 SEGMENTACcedilAtildeO 82
431 Crescimento de regiotildees a partir de superfiacutecies planas e ponto semente 82
xiii
432 Segmentaccedilatildeo por anaacutelise da variaccedilatildeo local de autovalores 84
433 Segmentaccedilatildeo com o algoritmo de deslocamento pela meacutedia 86
5 RESULTADOS E DISCUSSOtildeES 87
51 CALIBRACcedilAtildeO DA CAcircMARA 87
52 EXPERIMENTO 1 ndash ANAacuteLISE DE RUIacuteDO 1 IMAGEM TOF INTEIRA 92
53 EXPERIMENTO 2 ndash ANAacuteLISE DE RUIacuteDO 2 JANELAS DE 40X40 PIacuteXEIS 96
54 EXPERIMENTO 3 ndash PROJECcedilAtildeO ORTOGONAL DOS PONTOS 102
55 EXPERIMENTO 4 ndash SEGMENTACcedilAtildeO 1 CRESCIMENTO DE REGIOtildeES 106
56 EXPERIMENTO 5 ndash SEGMENTACcedilAtildeO 2 ANAacuteLISE COM AUTOVALORES 108
57 EXPERIMENTO 6 ndash ANAacuteLISE DAS MEDIDAS OBTIDAS 113
58 MODELAGEM DAS SUPERFIacuteCIES 3D 117
6 CONCLUSOtildeES RECOMENDACcedilOtildeES E CONSIDERACcedilOtildeES FINAIS 119
61 CONCLUSOtildeES 119
62 RECOMENDACcedilOtildeES 122
63 CONSIDERACcedilOtildeES FINAIS 122
REFEREcircNCIAS BIBLIOGRAacuteFICAS 123
14
1 INTRODUCcedilAtildeO
A informaccedilatildeo meacutetrica para a representaccedilatildeo espacial de objetos eacute uma
necessidade para diferentes aacutereas de estudo Algumas aplicaccedilotildees exigem que o
processo de aquisiccedilatildeo e representaccedilatildeo graacutefica desta informaccedilatildeo seja realizado com
rapidez e qualidade Em Ciecircncias Geodeacutesicas a obtenccedilatildeo desta informaccedilatildeo pode
ser feita atraveacutes de diversas maneiras dentre elas citam-se os levantamentos de
campo e as imagens obtidas por sensores remotos exemplos satildeo teacutecnicas
aplicadas em Topografia e Fotogrametria
Com a Topografia o trabalho pode alcanccedilar alto grau de exatidatildeo
dependendo da teacutecnica e precisatildeo do equipamento utilizado No entanto se gasta
bastante tempo para realizar o levantamento das informaccedilotildees em campo e tambeacutem
para o processamento e organizaccedilatildeo dos dados em escritoacuterio Algumas aplicaccedilotildees
da Topografia estatildeo na locaccedilatildeo de obras como rodovias geraccedilatildeo de perfis de
terrenos e rios monitoramento de deformaccedilotildees na estrutura de barragens pontes e
tambeacutem no levantamento de pontos 3D para representar fachadas de edifiacutecios
Com a Fotogrametria o levantamento das informaccedilotildees tridimensionais de um
objeto pode ser feito em tempo relativamente curto As fotografias satildeo obtidas de
forma instantacircnea No entanto quando se utilizam teacutecnicas convencionais de
Fotogrametria necessita-se de pelo menos duas fotografias com sobreposiccedilatildeo das
aacutereas imageadas para a geraccedilatildeo do modelo fotogrameacutetrico Outra forma eacute a teacutecnica
conhecida por Monorestituiccedilatildeo Digital onde se utiliza uma fotografia digital em
conjunto com um Modelo Digital de Elevaccedilatildeo (MDE) normalmente gerado por uma
nuvem de pontos proveniente de outro equipamento ou sensor (MITISHITA 1997)
Na modalidade terrestre da Fotogrametria eacute possiacutevel determinar pontos 3D
para representar fachadas de preacutedios obras de arte mapeamentos de ruas e
imoacuteveis com a plataforma em movimento dentre outras aplicaccedilotildees
Aleacutem das teacutecnicas convencionais de levantamentos utilizadas em Topografia
e Fotogrametria e com o objetivo de viabilizar a aquisiccedilatildeo da informaccedilatildeo espacial
equipamentos e teacutecnicas tecircm sido constantemente desenvolvidos e aperfeiccediloados
Avanccedilos tecnoloacutegicos tecircm possibilitado a obtenccedilatildeo da informaccedilatildeo tridimensional
para a representaccedilatildeo dos objetos de forma raacutepida e precisa Exemplos satildeo os
sistemas de varredura laser scanner e as cacircmaras TOF (Time-Of-Fligth) tambeacutem
15
conhecidas na literatura por Range Cameras Estas cacircmaras geram imagens com
informaccedilotildees de distacircncia para cada pixel do objeto imageado denominadas
imagens de profundidade distacircncia ou Range Image Neste trabalho seraacute utilizada
preferencialmente a denominaccedilatildeo ldquoimagem TOFrdquo
Nas uacuteltimas deacutecadas os sistemas de varredura laser scanner tecircm sido muito
utilizados para mapeamento Equipamentos com esta tecnologia possibilitam a
obtenccedilatildeo de milhares de pontos por segundo e podem ser instalados em
plataformas aeacutereas ou terrestres No entanto devido a este ser um equipamento
oacuteptico e mecacircnico o alto custo na sua aquisiccedilatildeo torna-o inviaacutevel para algumas
aplicaccedilotildees
Cacircmaras TOF atraem a atenccedilatildeo de diferentes aacutereas que necessitam de
pontos com coordenadas 3D de seus objetos de estudo tais como a Visatildeo
Computacional e a Engenharia de Automaccedilatildeo Um modelo de cacircmara TOF eacute a PMD
CamCube 20 que capta 25 imagens por segundo (Frames Per Secunde - FPS)
Com esta frequecircncia de aquisiccedilatildeo pode obter o movimento dos objetos na cena e de
grande quantidade de informaccedilatildeo tridimensional sobre os mesmos
No entanto a grande quantidade de dados captada deve ter sua qualidade
avaliada A iluminaccedilatildeo exterior ao sistema interfere negativamente Outro fator a ser
observado eacute a configuraccedilatildeo da cena pois interferecircncias satildeo causadas pelas
distacircncias orientaccedilotildees e refletividade das superfiacutecies dos objetos em relaccedilatildeo ao
sensor da cacircmara Em uma mesma cena podem-se apresentar medidas ambiacuteguas
de distacircncia para os pontos devido a erros causados pela iluminaccedilatildeo utilizada no
sistema As influencias causadas por erros sistemaacuteticos assim como ruiacutedos devem
ser observadas para cada tipo de aplicaccedilatildeo (MAY et al 2008)
A cacircmara TOF utilizada para a aquisiccedilatildeo das imagens nesta pesquisa foi a
PMD[vision]regCamCube 20 Esta utiliza um sensor de imageamento PMD (Photonic
Mixer Device) que possibilita armazenar informaccedilatildeo de distacircncia para os piacutexeis de
uma imagem de intensidade O equipamento fornece a imagem TOF que eacute
composta por um arquivo com as intensidades que o sinal retornou para o sensor e
um arquivo com as informaccedilotildees de distacircncia para cada pixel o que possibilita a
percepccedilatildeo da profundidade dos objetos na cena
16
11 OBJETIVO GERAL
O objetivo geral deste trabalho de pesquisa eacute desenvolver uma metodologia
para a modelagem tridimensional das superfiacutecies de objetos a partir da nuvem de
pontos 3D proveniente da imagem TOF
12 OBJETIVOS ESPECIacuteFICOS
Realizar a correccedilatildeo geomeacutetrica dos dados da imagem TOF atraveacutes de
Paracircmetros de Orientaccedilatildeo Interior obtidos com o processo de
calibraccedilatildeo da cacircmara
Testar meacutetodos de filtragem para a reduccedilatildeo de ruiacutedo presente nas
imagens TOF e analisar formas para a aquisiccedilatildeo da imagem TOF
com menor presenccedila de ruiacutedo
Analisar o tempo de integraccedilatildeo para diferentes situaccedilotildees de aquisiccedilatildeo
da imagem TOF
Avaliar meacutetodos para a segmentaccedilatildeo das superfiacutecies de objetos a
partir da imagem TOF
Gerar nuvem de pontos com coordenadas tridimensionais das
superfiacutecies segmentadas e modelar estas superfiacutecies
tridimensionalmente
Avaliar a qualidade das medidas obtidas com a modelagem
tridimensional das superfiacutecies do objeto de estudo
17
13 JUSTIFICATIVA
Com o desenvolvimento e aperfeiccediloamento das cacircmaras TOF acredita-se
na viabilizaccedilatildeo deste equipamento para a medida de distacircncia e modelagem
tridimensional das superfiacutecies de objetos para diferentes finalidades Apresenta as
seguintes vantagens
Recobrimento da aacuterea de forma instantacircnea
Possibilidade de filmar a cena registrando o movimento dos objetos
com frequecircncia de aquisiccedilatildeo de 25 imagens por segundo
Fornece grande quantidade de pontos com coordenadas 3D dos
objetos imageados
Uma imagem eacute suficiente para estimar a distacircncia dos objetos
Informaccedilatildeo na banda espectral do infravermelho
Uma imagem TOF captada instantaneamente disponibiliza informaccedilatildeo sobre
a distacircncia de objetos contidos na cena sendo possiacutevel a geraccedilatildeo de nuvens de
pontos para a representaccedilatildeo tridimensional de objetos sem necessitar de
informaccedilatildeo proveniente de outro sensor Outra vantagem eacute o sistema natildeo precisar
de iluminaccedilatildeo exterior
Algumas aplicaccedilotildees para as imagens TOF foram realizadas nas aacutereas de
prevenccedilatildeo de acidentes automobiliacutesticos e seguranccedila de pedestres (RINGBECK
2007) Visatildeo Computacional (WIEDEMANN et al 2008) mapeamentos
tridimensionais de objetos em ambientes fechados para a movimentaccedilatildeo roboacutetica
(MAY et al 2008) Computaccedilatildeo Graacutefica (KOLB 2009 et al KOCH et al 2009)
realizaccedilatildeo de medidas do corpo humano para a induacutestria de roupas (APUZZO
2009) e anaacutelise de deformaccedilotildees (JAMTSHO 2010)
18
14 ESTRUTURA DA DISSERTACcedilAtildeO
A presente dissertaccedilatildeo foi estruturada em seis capiacutetulos No primeiro
capitulo realiza-se a introduccedilatildeo ao tema descreve-se o objetivo geral e os objetivos
especiacuteficos aleacutem da justificativa para a pesquisa
O segundo capiacutetulo apresenta uma revisatildeo de conceitos sobre medida de
distacircncia utilizando o princiacutepio TOF descriccedilatildeo da imagem TOF e seus arquivos de
intensidades e distacircncias influencia do tempo de integraccedilatildeo (TI) na aquisiccedilatildeo da
imagem TOF princiacutepio de funcionamento do sensor PMD modelos de cacircmaras
TOF erros de medida que podem ocorrer utilizando estas cacircmaras projeccedilatildeo
ortogonal das distacircncias obtidas com a imagem TOF para a geraccedilatildeo da nuvem de
pontos 3D meacutetodo para o refinamento da nuvem de pontos 3D detecccedilatildeo de
superfiacutecies por autovetores e autovalores anaacutelise de superfiacutecies por momentos
invariantes e algoritmo de deslocamento pela meacutedia para a segmentaccedilatildeo de
imagens
No terceiro capitulo descrevem-se os materiais equipamentos e espaccedilo
fiacutesico utilizado para a realizaccedilatildeo do trabalho de pesquisa
Com o quarto capitulo satildeo descritos os meacutetodos utilizados para o
desenvolvimento da pesquisa calibraccedilatildeo da cacircmara filtragens para anaacutelise e
tratamento de ruiacutedo presente nas imagens meacutetodos de segmentaccedilatildeo por
crescimento de regiotildees na nuvem de pontos segmentaccedilatildeo por anaacutelise da variaccedilatildeo
local de autovalores no arquivo de distacircncias da imagem TOF e geraccedilatildeo de imagem
de intensidade com as bordas do objeto intensificadas segmentaccedilatildeo da imagem
com bordas intensificadas utilizando o algoritmo de deslocamento pela meacutedia
Com o quinto capitulo descrevem-se os resultados obtidos tais como
valores dos paracircmetros calculados no processo de calibraccedilatildeo da cacircmara
experimentos realizados para a anaacutelise da presenccedila de ruiacutedo nas imagens TOF
projeccedilatildeo ortogonal dos pontos para a geraccedilatildeo da nuvem de pontos 3D
segmentaccedilatildeo por crescimento de regiotildees segmentaccedilatildeo por anaacutelise da variaccedilatildeo
local de autovalores anaacutelise das medidas obtidas com a nuvem de pontos 3D
segmentada e tambeacutem se realiza a modelagem tridimensional de duas superfiacutecies
do objeto estudado
Finalmente com o sexto capitulo satildeo apresentadas conclusotildees
consideraccedilotildees finais e recomendaccedilotildees para trabalhos futuros de acordo com os
experimentos realizados
19
2 REVISAtildeO BIBLIOGRAacuteFICA
21 MEDIDA DE DISTAcircNCIA COM O PRINCIacutePIO TOF
O princiacutepio TOF (Time-Of-Flight) permite calcular a distacircncia de objetos a
partir da emissatildeo e recepccedilatildeo de um sinal luminoso Com este objetivo utiliza-se um
conjunto de emissor e receptor oacutepticos que mede o tempo necessaacuterio para o sinal
retornar para o sensor apoacutes atingir o alvo com base no conhecimento do valor da
velocidade da luz propagada no vaacutecuo De acordo com Baltsavias (1999) o caacutelculo
da distacircncia com o princiacutepio TOF pode ser realizado atraveacutes de dois meacutetodos
Tempo de percurso de pulsos curtos de energia
Mudanccedila de fase de um sinal modelado na forma de onda contiacutenua
Sistemas que utilizam o primeiro meacutetodo de medida transmitem um pulso e
medem o seu tempo de retorno Isto eacute possiacutevel devido ao retardo de tempo gasto no
percurso do sinal que eacute medido atraveacutes de um ponto no pulso de retorno com
referecircncia no pulso emitido Quanto melhor eacute a medida do tempo melhor a distacircncia
calculada sendo o reloacutegio do sensor um fator de grande importacircncia neste meacutetodo
Para obter precisatildeo meacutetrica necessita-se realizar a medida de tempo em nano
segundos (ƞs) O afastamento e duraccedilatildeo do pulso tambeacutem satildeo fatores importantes
na resoluccedilatildeo da medida de distacircncia com este meacutetodo A Figura 21 Ilustra a medida
de distacircncia com o princiacutepio TOF (LANGE 2000)
FIGURA 21 ndash Princiacutepio TOF
FONTE LANGE (2000)
20
Utilizando pulsos de uma fonte de luz pode-se calcular a distacircncia de um
alvo atraveacutes da Equaccedilatildeo (21)
119863 =119888 119905
2 (21)
onde
119863 ndash Distacircncia entre o sensor e o alvo
119888 ndash Valor constante da velocidade da luz
119905 ndash Variaccedilatildeo de tempo entre emissatildeo e recepccedilatildeo do pulso
O segundo meacutetodo trabalha com a determinaccedilatildeo da mudanccedila de fase do
sinal contido em uma onda contiacutenua modulada Pode ser utilizado para evitar o
problema na medida de tempo com alta precisatildeo O sinal luminoso pode ser emitido
utilizando fontes LED (Light Emitting Diode) ou LASER (Light Amplification by
Stimulated Emission of Radiation) Estas fontes permitem a modulaccedilatildeo direta do
sinal luminoso atraveacutes da voltagem do sistema (LANGE 2000)
Para a utilizaccedilatildeo do meacutetodo da diferenccedila de fase considera-se que o sinal
refletido pelo alvo manteacutem a forma do sinal modulado emitido mas a fase do sinal
emitido eacute diferente da fase do sinal recebido conforme ilustrado com a Figura 22
FIGURA 22 ndash Meacutetodo da diferenccedila de fase
21
Sendo assim a mudanccedila de fase entre os sinais pode ser utilizada para
calcular a distacircncia conforme Equaccedilatildeo (22)
119863 =120593∙119888
4∙120587∙120574 (22)
onde
119863 ndash Distacircncia entre o sensor e o alvo
120593 ndash Diferenccedila de fase entre o sinal emitido e o recebido
119888 ndash Valor constante da velocidade da luz
120574 ndash Frequecircncia de modulaccedilatildeo do sinal
Em cacircmaras TOF a distacircncia entre o sensor e o alvo eacute medida utilizando o
meacutetodo da diferenccedila de fase com uma Funccedilatildeo de Correlaccedilatildeo (FC) entre o sinal
emitido e o refletido As amplitudes dos sinais satildeo moduladas com a mesma
frequecircncia Com isto a iluminaccedilatildeo pode ser feita utilizando diacuteodos emissores de luz
LED tendo-se a vantagem que a FC pode ser obtida com o sensor PMD a partir da
forma senoidal do sinal recebido (RAPP 2007)
A FC eacute calculada atraveacutes do sinal emitido e recebido Estes sinais satildeo
modelados matematicamente com forma senoidal tendo em vista que sua
propagaccedilatildeo ocorre na forma de onda Dado um sinal luminoso emitido 119892 119905 e um
sinal recebido 119904 119905 em um ponto do sensor PMD as amostras 119888 120591 podem ser
calculadas atraveacutes da Equaccedilatildeo (23) Estas amostras satildeo utilizadas para modelar a
FC em um atraso de tempo 120591
119888 120591 = 119904 119905 otimes 119892 119905 = lim119879rarrinfin 119904 119905 ∙ 119892 119905 + 120591 +119879
2
minus119879
2
119889119905 (23)
onde
119904 119905 ndash Funccedilatildeo que modela a forma do sinal luminoso recebido
119892 119905 ndash Funccedilatildeo que modela a forma do sinal luminoso emitido
119905 ndash Variaccedilatildeo de tempo entre a emissatildeo e a recepccedilatildeo do sinal
120591 ndash Atraso de tempo no recebimento do sinal
22
O sinal emitido pode ser expresso com 119892 119905 = cos(120603119905) o recebido eacute
expresso atraveacutes da relaccedilatildeo 119904 119905 = 1 + 119886 ∙ cos(120603119905 minus 120593) Ambos com forma senoidal
amplitude 119886 e diferenccedila de fase 120593 Com isto a FC pode ser apresentada na forma da
Equaccedilatildeo (25)
119888 120591 = 1 + 119886 ∙ 119888119900119904 120603120591 minus 120593 otimes 119888119900119904 120603120591 (24)
119888 120591 = lim119879acuterarrinfin1
119879acute 1 + 119886 ∙ 119888119900119904 120603119905 minus 120593 ∙ 119888119900119904 120603119905 + 120603119905
+119879 acute
2
minus119879 acute
2
119889119905 (25)
119888 120591 =119886
2∙ cos 120593 + 120603119905 (26)
onde
119892 119905 ndash Funccedilatildeo senoidal que modela a forma do sinal emitido
119904 119905 ndash Funccedilatildeo que modela a forma do sinal recebido
119905 ndash Variaccedilatildeo de tempo entre a emissatildeo e recepccedilatildeo do sinal
120591 ndash Atraso no tempo de recebimento do sinal
119886 ndash Amplitude da onda portadora do sinal
120593 ndash Diferenccedila de fase
120603 ndash Referecircncia de fase para o sinal modelado na forma senoidal
Lange (2000) avaliou a FC para fases 120596 119905 preacute-definidas escolhendo quatro
fases 120596 119905 = 0deg 120596 119905 = 90deg 120596 119905 = 180deg 120596 119905 = 270deg Verificou que eacute possiacutevel calcular a
diferenccedila de fase 120593 e a amplitude 119886 do sinal recebido 119904(119905) Considerando que o sinal
recebido tem sobreposiccedilatildeo ao sinal emitido deve-se adicionar uma constante de
deslocamento 119870 conforme a Equaccedilatildeo (27)
119862 120591 = 119888 120591 + 119870 (27)
119862 1205910 = 119888 1205910 + 119870 =119886
2∙ cos 120593 + 119870 (28)
119862 1205911 = 119888 1205911 + 119870 = minus119886
2∙ 119904119890119899 120593 +119870 (29)
119862 1205912 = 119888 1205912 + 119870 = minus119886
2∙ cos 120593 + 119870 (210)
119862 1205913 = 119888 1205913 + 119870 =119886
2∙ 119904119890119899 120593 +119870 (211)
23
Analisando a FC em quatro pontos a diferenccedila de fase 120593 e a amplitude 119886 do
sinal 119904(119905) podem ser calculadas atraveacutes das Equaccedilotildees (212) e (213)
120593 = 119905119892minus1 119862 1205913 minus119862 1205911
119862 1205910 minus119862 1205912 (212)
119886 = 119862 1205913 minus119862 1205911 2+ 119862 1205910 minus119862 1205912 2
2 (213)
Pode-se fazer a simplificaccedilatildeo das Equaccedilotildees (214) agrave (217) para quatro
pontos amostrais que satildeo necessaacuterios na modelagem da FC
119862 1205911 = 1198601 (214)
119862 1205912 = 1198602 (215)
119862 1205913 = 1198603 (216)
119862 1205910 = 1198604 (217)
A anaacutelise da FC entre o sinal oacuteptico e eleacutetrico recebido no dispositivo do
sensor eacute feita utilizando a diferenccedila de fase conforme ilustrado com a Figura 23
FIGURA 23 ndash FC utilizada no meacutetodo da diferenccedila de fase
FONTE Adaptado de LANGE (2000)
A FC permite calcular a distacircncia entre o alvo e a cacircmara utilizando quatro
amostras 11986011198602 1198603 e 1198604 com defasagem de 90ordm A diferenccedila de fase 120593 entre o sinal
24
emitido e o recebido eacute proporcional agrave distacircncia entre o alvo e a cacircmara O valor para
a diferenccedila de fase pode ser calculado atraveacutes da Equaccedilatildeo (218)
120593 = 119886119903119888119905119886119899 1198601minus1198603
1198602 minus1198604 (218)
onde
120593 ndash Diferenccedila de fase entre a onda emitida e a recebida
1198601119860211986031198604 ndash Pontos amostrais utilizados na modelagem da FC
Aleacutem do valor da diferenccedila de fase entre os sinais dois outros valores
podem ser calculados a amplitude 119886 e o valor de intensidade 119887 do sinal recebido
conforme as Equaccedilotildees (219) e (220) respectivamente
119886 = 1198601minus1198603 2+ 1198602 minus1198604 2
2 (219)
119887 =1198601+1198602 +1198603+1198604
4 (220)
onde
119886 ndash Amplitude do sinal recebido
119887 ndash Intensidade do sinal recebido (offset)
A distacircncia 119889 do sensor ao alvo eacute calculada atraveacutes da Equaccedilatildeo (221)
119889 =119888∙120593
4120587∙119891119898119900119889 (221)
onde
119889 ndash Distacircncia entre o sensor e o alvo
119888 ndash Valor constante da velocidade da luz propagada no vaacutecuo
120593 ndash Diferenccedila de fase entre o sinal emitido e o recebido
119891119898119900119889 ndash Frequecircncia de modulaccedilatildeo do sinal luminoso utilizado
A frequecircncia de modulaccedilatildeo do sinal emitido estabelece a distacircncia maacutexima
que poderaacute ser medida para um determinado comprimento de onda Em um sinal
25
modulado com a frequecircncia 119891119898119900119889 = 20119872119867119911 e comprimento de onda 120582119898119900119889 = 15m
conforme a Equaccedilatildeo (222) a distacircncia maacutexima que poderaacute ser medida eacute de 75
metros (MOumlLLER et al 2005)
119889119898119886119909 =120582119898119900119889
2= 75119898 (222)
22 IMAGEM TOF
Os piacutexeis da imagem TOF contecircm informaccedilotildees de distacircncia e intensidade
das superfiacutecies dos objetos Proporcionam a anaacutelise da profundidade dos objetos na
cena aleacutem da informaccedilatildeo de intensidade do sinal captado pelo sensor A Figura 24
ilustra a informaccedilatildeo 3D contida na imagem TOF
FIGURA 24 ndash Informaccedilatildeo das imagens TOF
FONTE Adaptado de RINGBECK (2007)
Com a informaccedilatildeo de profundidade e o posicionamento bidimensional dos
objetos na imagem pode-se realizar o mapeamento destes objetos e estimar suas
dimensotildees As cacircmaras TOF podem captar imagens e viacutedeos para realizar medidas
e detectar movimentos A Figura 25 ilustra os arquivos da imagem TOF
26
FIGURA 25 ndash Imagem TOF obtida com cacircmara PMD
FONTE PMD Technologies (2009)
A Figura 25a ilustra o arquivo com informaccedilatildeo das distacircncias dos objetos
presentes na imagem TOF A Figura 25b ilustra o arquivo com as intensidades que
o sinal retornou para o sensor registrada em cada piacutexel da imagem infravermelha
captada com comprimento de onda de 870nm
23 TEMPO DE INTEGRACcedilAtildeO
O periacuteodo de tempo que o sensor da cacircmara ficou exposto para obter a
imagem eacute chamado de tempo de integraccedilatildeo (TI) A quantidade de energia
eletromagneacutetica captada pelo sensor eacute diretamente influenciada por este tempo
pelas caracteriacutesticas refletivas das superfiacutecies dos objetos e pelo meio em que a
imagem foi tomada Os elementos do sensor podem ser carregados de acordo com
seu intervalo de capacidade do insaturado ao supersaturado Estes valores causam
ruiacutedos na imagem variando de acordo com a distacircncia entre o objeto e o sensor
(CENTENO e JUTZI 2010)
Este pode ser considerado o paracircmetro interno mais criacutetico em uma cacircmara
TOF pois descreve o periacuteodo de tempo que os elementos sensores necessitam
para detectar o sinal luminoso com a finalidade de obter a diferenccedila de fase utilizada
27
para o caacutelculo da distacircncia Quando o TI eacute muito baixo alguns elementos do sensor
podem natildeo ser ativados ocasionando piacutexeis com valor zero natildeo sendo possiacutevel
calcular sua distacircncia Por outro lado se o TI eacute muito elevado o pixel pode ficar
supersaturado o que tambeacutem causa erro na medida da distacircncia Sendo assim eacute
necessaacuterio determinar um TI especiacutefico para cada situaccedilatildeo Nas cacircmaras PMD o
controle do TI eacute realizado atraveacutes de software em outros modelos de cacircmaras TOF
este controle pode ser feito atraveacutes de hardware (WIEDEMANN et al 2008)
A Figura 26 ilustra a presenccedila de ruiacutedo na imagem TOF influenciada pelo
TI Nesta figura as nuvens de pontos 3D foram geradas com imagens TOF obtidas
com a cacircmara PMD CamCube 20 a partir do mesmo ponto de vista mas com
diferentes TI (140micros 1400micros e 14000micros) isto causou a presenccedila de ruiacutedo com
diferentes comportamentos
FIGURA 26 ndash Ruiacutedo na nuvem de pontos 3D proveniente de imagem TOF
FONTE PMD CamCube Tutorial (2009)
A nuvem de pontos gerada com a imagem obtida com TI de 1400micros
ilustrada com a Figura 26b foi a que melhor representou a forma das superfiacutecies do
objeto A nuvem de pontos da Figura 26a foi gerada a partir da imagem obtida com
TI igual a 140micros considerada com baixa saturaccedilatildeo pois a intensidade do sinal
captado pelo sensor foi pequena A nuvem de pontos da Figura 26c foi gerada com
imagem obtida com TI igual a 14000micros o que causou a saturaccedilatildeo do sinal recebido
pelo sensor e maior presenccedila de ruiacutedo A nuvem de pontos apresentada com a
Figura 26c apresentou-se menos consistente para representar as superfiacutecies do
objeto em questatildeo
28
24 PRINCIacutePIO DE FUNCIONAMENTO DO SENSOR PMD
O dispositivo PMD (Photonic Mixer Device) realiza medidas de distacircncia
utilizando o princiacutepio TOF Com este objetivo o dispositivo emite sinais luminosos
com frequecircncia modulada e o sensor capta a intensidade de retorno do sinal
refletido pelo alvo Informaccedilotildees sobre as fases e intensidades destes sinais satildeo
obtidas com o processamento A Figura 27 ilustra as etapas deste processo
FIGURA 27 ndash Princiacutepio de funcionamento do sistema PMD
FONTE LUAN (2001)
O sinal modulado eacute emitido com uma fase determinada pelo oscilador do
sistema Para que se possa realizar a medida da distacircncia o sinal recebido deve ter
fase diferente da que foi emitido No dispositivo PMD as cargas eleacutetricas do sinal
recebido satildeo separadas de acordo com a voltagem do diodo de leitura tambeacutem
chamado de fotodiodo O arquivo de saiacuteda deste dispositivo conteacutem informaccedilatildeo de
fase e intensidade do sinal recebido o que possibilita obter informaccedilatildeo de distacircncia
e intensidade para cada piacutexel da imagem (LUAN 2001)
O sensor utilizado no imageamento eacute um CMOS (Complementary Metal-
Oxide-Semiconductor) que tem tecnologia similar a dos sensores CCD (Charged-
Coupled Device) O CMOS apresenta a vantagem de ser um circuito integrado com
baixo consumo de energia No CMOS a conversatildeo de voltagem e a amplificaccedilatildeo do
sinal ocorrem em cada fotodiodo e os valores podem ser lidos independentemente
29
A desvantagem eacute que a amplificaccedilatildeo no fotodiodo gera imagens com maior
presenccedila de ruiacutedo (PECHT e FOSSUM 1997)
Quando os foacutetons sensibilizam o sensor CCD a carga eleacutetrica eacute transferida
sequencialmente linha por linha coluna por coluna A conversatildeo de voltagem e
amplificaccedilatildeo do sinal eacute realizada fora da aacuterea do sensor Uma vantagem do sensor
CCD eacute a geraccedilatildeo de imagens mais niacutetidas devido agrave menor complexidade no seu
sistema Por processar as cargas eleacutetricas de forma unificada menores interferecircncias
satildeo causadas diminuindo a presenccedila de ruiacutedo (KEMENY et al 1991)
A diferenccedila no princiacutepio de funcionamento dos sensores CCD e CMOS eacute
Ilustrada com a Figura 28
FIGURA 28 ndash Captaccedilatildeo da carga do sinal em sensores CCD e CMOS
FONTE LANGE (2000)
O princiacutepio de funcionamento do sensor CCD eacute ilustrado com as Figuras
28a e 28c onde a leitura da informaccedilatildeo eacute feita de forma sequencial pelos elementos
do sensor Esta varredura realizada no sensor CCD faz com que a geraccedilatildeo da
30
imagem final seja mais lenta que no sensor CMOS que realiza a conversatildeo foacuteton-
eleacutetron e eleacutetron-voltagem diretamente em cada elemento sensor conforme eacute
ilustrado com as Figuras 28b e 28d Com isto o sensor CMOS tem maior
velocidade de transferecircncia de cargas acumuladas para o conversor analoacutegico-
digital
Fotodiodos satildeo os elementos fotossensiacuteveis utilizados como portas de
entrada para o sinal luminoso em sensores CMOS ou CCD Estes captam cargas
eleacutetricas presentes no sinal e estatildeo inseridos sobre uma placa de Siliacutecio O
transporte das cargas para o interior da placa eacute explicado fisicamente atraveacutes dos
campos de franjas ilustrado com a Figura 29 Os campos de franja estatildeo
representados para diferentes voltagens os elementos do sensor apresentado tem
entradas para trecircs voltagens 10V 5V e 0V
FIGURA 29 ndash Representaccedilatildeo de campos de franja
FONTE THEUWISSEN (1995)
A seccedilatildeo A-A‟ na Figura 29 ilustra os campos de franja gerados mais
proacuteximos agrave superfiacutecie da placa A forma do sinal pode ser modelada de forma
aproximada por segmentos de linhas retas Na seccedilatildeo B-B‟ com profundidade meacutedia
na placa de Siliacutecio a influecircncia do campo eleacutetrico das entradas vizinhas a porta
central de 5V estaacute em seu niacutevel maacuteximo Quanto mais fundo encontra-se a entrada
de cargas na placa de Siliacutecio menor seraacute a interferecircncia dos campos eleacutetricos
gerados pelas portas de entrada das cargas vizinhas conforme pode ser visualizado
na seccedilatildeo C-C‟ Nesta profundidade diferentes portas de entrada estatildeo praticamente
31
agrave mesma distacircncia da superfiacutecie e o valor de dispersatildeo do campo de franja diminui
O campo de franja miacutenimo de uma entrada que tecircm profundidade maacutexima
proporciona ao sensor o maior aproveitamento aumentando assim a velocidade no
transporte de cargas (THEUWISSEN 1995)
Quanto maior a modulaccedilatildeo na voltagem da entrada das cargas maior o
potencial de armazenamento conforme ilustrado com a Figura 210
FIGURA 210 ndash Princiacutepio de armazenamento de cargas em sensores TOF
FONTE LANGE (2000)
O sinal modulado recebido 119904 119905 e a Funccedilatildeo de Correlaccedilatildeo 119891 119905 + 120591 do sinal
modulado emitido satildeo ilustrados com a Figura 210b A Figura 210a ilustra a luz
incidente no sensor com as cargas captadas e armazenadas de acordo com a
modulaccedilatildeo do fotodiodo
O dispositivo PMD utiliza a tecnologia CMOS para o imageamento com dois
elementos fotossensiacuteveis e dois diodos que captam as cargas eleacutetricas do sinal
modulado recebido As informaccedilotildees oacutepticas e eleacutetricas misturadas geram os piacutexeis
da imagem com informaccedilatildeo de distacircncia dos pontos imageados A Figura 211
ilustra este elemento sensor
32
FIGURA 211 ndash Princiacutepio de captaccedilatildeo de cargas pelo sensor PMD
FONTE LUAN (2001)
As placas claras e centrais na Figura 211a correspondem ao circuito de
leitura do sinal oacuteptico estas placas satildeo condutoras e transparentes para possibilitar
a entrada de luz Os diodos satildeo os componentes do circuito de leitura que captam e
direcionam as cargas eleacutetricas recebidas em um determinado sentido satildeo ilustrados
com as placas mais afastadas na Figura 211a As cargas que chegam satildeo
distribuiacutedas de acordo com a voltagem do diodo Uma fina camada de oacutexido isola os
circuitos de leitura do dispositivo
A voltagem da carga que entra no sistema eacute controlada de acordo com a
modulaccedilatildeo do sinal aplicada pelo dispositivo emissor Sendo assim pode ser
captada pelo diodo da direita ou esquerda que registraraacute a quantidade de carga
recebida de acordo com sua voltagem A distribuiccedilatildeo de potencial na regiatildeo
superficial do dispositivo eacute influenciada pela seleccedilatildeo de cargas que faz este sistema
dinacircmico e equilibrado Para valores natildeo nulos a luz modulada recebida e a
diferenccedila de fase podem ser comparadas atraveacutes das cargas eleacutetricas recebidas A
quantidade de carga captada pelos diodos depende diretamente da diferenccedila de
fase entre o sinal modulado emitido e o recebido pelo sensor Esta informaccedilatildeo pode
ser utilizada para calcular a diferenccedila de fase entre o sinal emitido e o recebido pois
33
eacute diretamente proporcional a carga que cada diodo captou Com isto a distacircncia
entre o sensor e o objeto pode ser calculada utilizando o princiacutepio da diferenccedila de
fase No entanto se a luz incidente eacute modulada como um sinal retangular mas sua
fase entre a emissatildeo e a recepccedilatildeo eacute igual a zero a carga seraacute captada por apenas
um dos diodos e a distacircncia resultante seraacute igual a zero (MOumlLLER et al 2005)
A Figura 212 ilustra o comportamento dos diodos de leitura ao receber o
sinal com distacircncia diferente de zero entre o alvo e o sensor Na Figura 212a eacute
ilustrado o sinal luminoso recebido por um elemento fotossensiacutevel Este sinal eacute
captado pela porta de entrada PA do fotodiodo que registra parte desta carga de
acordo com sua modulaccedilatildeo
FIGURA 212 ndash Medida da diferenccedila de fase do sinal recebido
FONTE Adaptado de MOumlLLER et al (2005)
Na Figura 212a o sinal recebido pelo elemento fotossensiacutevel do sensor eacute
ilustrado no momento em que eacute captado pela porta com modulaccedilatildeo A (PmodA) A
carga eacute captada pelos dois fotodiodos com defasagem de meio ciclo com isto cada
um capta parte da carga recebida A Figura 212b ilustra a medida da diferenccedila de
fase do sinal recebido atraveacutes da quantidade de carga que foi captada pelos
fotodiodos com modulaccedilatildeo Mod_A e Mod_B A voltagem do diodo eacute estabelecida de
acordo com a modulaccedilatildeo do sinal luminoso que seraacute emitida pelo dispositivo
34
25 CAcircMARAS PMD
As cacircmaras TOF com tecnologia PMD consistem de um chip sensor fonte
de iluminaccedilatildeo transmissor e receptor oacutepticos aleacutem de perifeacutericos eletrocircnicos e
interface digital de controle realizada atraveacutes de software Dependendo das
exigecircncias de aplicaccedilatildeo os componentes da cacircmara podem ser adaptados Cada
um deles pode afetar os paracircmetros internos da cacircmara tais como o campo de
visatildeo (FOV) taxa de captaccedilatildeo e tempo de integraccedilatildeo para a aquisiccedilatildeo das imagens
A distacircncia da superfiacutecie a ser medida eacute o fator preponderante para a escolha destes
paracircmetros O fato destas cacircmaras serem modulares amplia sua gama de
aplicaccedilotildees Isto eacute possiacutevel levando-se em conta as condiccedilotildees adicionais que cada
aplicaccedilatildeo pode exigir tais como a luz exterior ao sistema e a necessidade de
mudanccedila na fonte de iluminaccedilatildeo utilizada (PMD Technologies 2009)
O sensor PMD proporciona o imageamento instantacircneo dos objetos
utilizando um sensor com tecnologia CMOS adaptado Este sensor eacute um arranjo de
elementos fotossensiacuteveis que permitem a raacutepida detecccedilatildeo e modulaccedilatildeo do sinal
luminoso com suas variaccedilotildees Isto eacute feito de acordo com a distacircncia da superfiacutecie
que atinge do objeto imageado Pode adquirir dados de distacircncia e intensidade
simultaneamente sem precisar de um sistema de digitalizaccedilatildeo mais complexo como
um laser scanner Apresenta a desvantagem de ser muito sensiacutevel agrave luz exterior ao
sistema que interfere causando a presenccedila de ruiacutedo na imagem TOF e consequente
erro na medida de distacircncia (KHONGSAB 2009)
O desempenho do sistema PMD depende da fonte de iluminaccedilatildeo utilizada
capacidade de fornecimento de energia e eficiecircncia oacuteptica na criaccedilatildeo da imagem
Normalmente eacute utilizada fonte de iluminaccedilatildeo LED nas cacircmaras PMD No entanto
outros fabricantes utilizam diodos LASER para a iluminaccedilatildeo isto porque possibilita
realizar medidas de distacircncias maiores O desenvolvimento dos sistemas LED fez
com que sua eficiecircncia de transformaccedilatildeo de energia eleacutetrica em energia oacuteptica seja
de 30 Com a iluminaccedilatildeo LED tem-se um sinal luminoso jaacute modulado devido a
suas caracteriacutesticas eletro-oacutepticas Como uma parte consideraacutevel da luz fica na
borda do feixe isto se torna uma desvantagem pois esta aacuterea normalmente fica fora
do campo de visatildeo do sensor PMD Outra desvantagem diz respeito ao limite de
modulaccedilatildeo dos LED‟s comerciais que trabalham na faixa de 20 MHz agrave 30 MHz Os
diodos LASER tecircm eficiecircncia oacuteptica de ateacute 50 dependendo da potecircncia de saiacuteda
35
utilizada sendo de aproximadamente 100 MHz a modulaccedilatildeo maacutexima da frequecircncia
que pode ser atingida O perfil do feixe LASER pode ser adaptado ao campo de
visatildeo do sensor PMD A desvantagem eacute que este seria um circuito modular mais
complexo e que teria necessidade de um maior nuacutemero de etapas para conseguir
estabilizar a fase da onda portadora do sinal Outra desvantagem eacute que a
implantaccedilatildeo de um sistema LASER necessita de maior atenccedilatildeo agrave seguranccedila dos
olhos do que o sistema LED (RINGBECK 2007)
Com a Figura 213 ilustra-se a medida de distacircncia com a cacircmara TOF
modelo 19k da PMD A fonte de iluminaccedilatildeo LED emite o sinal luminoso em direccedilatildeo
dos objetos que estatildeo no campo visual da cacircmara O retorno deste sinal eacute captado
pelo sensor e possibilita o caacutelculo da diferenccedila de fase entre o sinal emitido e o
recebido
FIGURA 213 ndash Medida de distacircncia com a cacircmara PMD
FONTE MOLLER et al (2005)
36
251 Cacircmara PMD CamCube 20
A cacircmara TOF modelo PMD[VISION]regCamCube 20 funciona em ambientes
internos e externos com sensor de 204x204 piacutexeis que captam os niacuteveis de cinza da
imagem de intensidade Simultaneamente realiza a medida da quantidade de carga
recebida utilizada para determinar a diferenccedila de fase entre o sinal emitido e o
recebido Isto possibilita o caacutelculo da distacircncia entre o sensor e os objetos presentes
na cena A Figura 214 ilustra a cacircmara PMD CamCube 20 com as fontes de
iluminaccedilatildeo LED acopladas em suas laterais
FIGURA 214 ndash Cacircmara PMD CamCube 20
FONTE PMD Technologies (2009)
Este equipamento pode ter seu campo de visatildeo variaacutevel possibilitando a
diminuiccedilatildeo de distorccedilotildees manchas ou outras imperfeiccedilotildees da imagem O software
de interface da cacircmara com o computador apresenta a possibilidade de trabalhar
com dados brutos para o processamento das imagens aleacutem de funcionar em
diferentes canais de frequecircncia Tambeacutem disponibiliza compatibilidade com o
software Matlab para realizar esta interface
A imagem de intensidade captada de uma parede utilizando a cacircmara PMD
CamCube 20 eacute ilustrada com a Figura 215
37
FIGURA 215 ndash Imagem captada com a cacircmara PMD CamCube 20
FONTE CENTENO e JUTZI (2010)
Com a Figura 215a eacute ilustrada a cacircmara PMD CamCube 20 instalada em
um tripeacute sobre uma mesa Na Figura 215b tem-se a imagem infravermelha da
superfiacutecie plana de uma parede obtida com esta cacircmara O Quadro 21 ilustra as
especificaccedilotildees teacutecnicas da cacircmara PMD CamCube 20
PARAcircMETROS VALOR PADRAtildeO OBSERVACcedilOtildeES
Tipo do sensor PhotonICs PMD41k-S (204x204 piacutexeis)
Tamanho efetivo do pixel no sensor igual a 45microm
Distacircncia de mediccedilatildeo 03 ndash 7metros
Precisatildeo na medida de distacircncia (1σ) lt 3mm
Para aacuterea central da imagem obtida agrave 2m do sensor em superfiacutecie com refletividade de 90
Frequecircncia de aquisiccedilatildeo de imagens 25 fps Configuraccedilatildeo padratildeo
Campo de visatildeo (FOV) 40ordmx40ordm f = 128mm
Comprimento de onda da fonte de iluminaccedilatildeo
870nm Infravermelho proacuteximo
Fonte de iluminaccedilatildeo [V] 12 V plusmn 10
Interface USB 20
Temperatura de operaccedilatildeo 0ordmC agrave 50ordmC
Temperatura de armazenamento -20ordmC agrave 85ordmC
QUADRO 21 - Especificaccedilotildees teacutecnicas da cacircmara PMD CamCube 20 FONTE Adaptado de PMD Technologies (2009)
O sensor PhotonICs PMD41k-S utilizado na cacircmara PMD CamCube 20 vem
com um dispositivo SBI para a supressatildeo de cargas provenientes da iluminaccedilatildeo
exterior ao sistema Estas cargas causam a saturaccedilatildeo dos piacutexeis da imagem TOF
38
252 Dispositivo SBI
O dispositivo SBI (Supression of Background Illumination) eacute uma soluccedilatildeo
teacutecnica encontrada para melhorar o contraste das imagens geradas com o sensor
PMD em ambientes com iluminaccedilatildeo exterior A presenccedila desta iluminaccedilatildeo na cena
do objeto imageado causa maior presenccedila de ruiacutedo no sinal captado pelo sensor
Esta iluminaccedilatildeo pode saturar os elementos do sensor fazendo com que
ocorram falhas na medida de distacircncia Este efeito pode ser minimizado utilizando o
tempo de integraccedilatildeo adequado para a tomada das imagens Outros distuacuterbios que
podem ocorrer satildeo devidos agrave corrente negra (DC - Dark Current) Este efeito eacute
causado porque o sensor natildeo capta o valor zero na imagem que seria a falta
completa de iluminaccedilatildeo nas superfiacutecies da cena A corrente negra natildeo pode ser
evitada em dispositivos semicondutores especialmente quando haacute altas
temperaturas Com uma temperatura de 80ordmC a corrente negra pode ser 1000 vezes
maior do que o normal o que afeta significativamente a qualidade das medidas
realizadas Para tornar o dispositivo PMD mais confiaacutevel na medida de distacircncias foi
criado o circuito SBI que suprime instantaneamente a iluminaccedilatildeo de fundo Neste
circuito eacute utilizada uma teacutecnica para a captaccedilatildeo do sinal luminoso minimizando a
interferecircncia de fatores externos Isto possibilita realizar medidas de distacircncia
confiaacuteveis mesmo em ambientes onde o sinal eacute modificado por interferecircncia de
iluminaccedilatildeo externa ou por altas temperaturas O sistema SBI pode ser desativado ou
ateacute mesmo ajustado para que seja possiacutevel realizar medidas de distacircncia com
qualidade em cenas tomadas em diferentes ambientes independente da presenccedila
de iluminaccedilatildeo exterior (MOumlLLER 2005)
O circuito SBI adiciona cargas eleacutetricas de compensaccedilatildeo instantacircnea nos
diodos de leitura minimizando os efeitos de saturaccedilatildeo causados por fatores externos
ao sistema Com o SBI espera-se que o sensor capte apenas o sinal correlacionado
com a medida de distacircncia sem interferecircncia de iluminaccedilatildeo exterior reduzindo
assim a interferecircncia da iluminaccedilatildeo de fundo no sinal recebido
A Figura 216a ilustra um sensor sem o dispositivo SBI a carga captada com
influecircncias externas de iluminaccedilatildeo e calor eacute maior do que a enviada pela fonte de
iluminaccedilatildeo refletida pela superfiacutecie do objeto e recebida pelo sensor Neste caso a
medida de distacircncia estaacute influenciada por fatores externos ao sistema e conteraacute
erros Na Figura 216b as cargas geradas por fatores externos ao sistema satildeo
39
minimizadas pelo dispositivo SBI Com isto tem-se maior quantidade de carga
captada com o sinal recebido eliminando a carga gerada por fatores externos
FIGURA 216 ndash Princiacutepio de funcionamento do SBI
FONTE MOumlLLER et al (2005)
Cacircmaras TOF com iluminaccedilatildeo LED infravermelha utilizam o dispositivo SBI
para a supressatildeo da iluminaccedilatildeo de fundo Outros modelos de cacircmaras TOF utilizam
iluminaccedilatildeo LASER para evitar o problema com a iluminaccedilatildeo exterior
253 Modelos de cacircmaras TOF
Diferentes cacircmaras TOF foram desenvolvidas nos uacuteltimos anos a Figura
217 ilustra alguns modelos destas cacircmaras
FIGURA 217 ndash Modelos de cacircmaras TOF
a) Effector O3D FONTE httpwwwifm-electroniccom
b) PMD[vision] CamCube 20 FONTE httpwwwpmdteccom
c) PMD[vision] 19k FONTE httpwwwpmdteccom
d) SwissRanger SR-3000 FONTE httpwwwmesa-imagingch
40
O Quadro 22 descreve as especificaccedilotildees teacutecnicas destas cacircmaras TOF
a)Effector
O3D
b)PMD[vision]
CamCube 20
c)PMD[vision]
19k
d)SwissRanger
SR-3000
Resoluccedilatildeo (piacutexeis) 64 x 50 204 x 204 160 x 120 176 x 144
Dimensotildees dos piacutexeis (microm) 100 x 100 45 x 45 40 x 40 40 x 40
Distacircncia focal (mm) 86 128 120 80
Fonte de iluminaccedilatildeo 1 matriz LED 2 matrizes LED 2 matrizes LED 1 matriz LED
Modulaccedilatildeo da fonte de
iluminaccedilatildeo (nm) 850 870 870 850
Frequecircncia de modulaccedilatildeo 20 MHz 20 MHz 20 MHz 20 MHz
Frequecircncia na aquisiccedilatildeo de
imagens
Maacuteximo
100 fps
Maacuteximo
25 fps
Maacuteximo
15 fps
Maacuteximo
40 fps
Conexatildeo Ethernet USB 2 Ethernet USB 2
Dimensotildees (mm) 55 x 45 x 85 194 x 60 x 60 220 x 210 x 55 60 x 50 x 65
QUADRO 22 ndash Especificaccedilotildees teacutecnicas de cacircmaras TOF FONTE Adaptado de RAPP (2007)
A partir do Quadro 22 verifica-se que estes modelos de cacircmaras TOF em
sua configuraccedilatildeo padratildeo possuem fonte de iluminaccedilatildeo LED distacircncia focais
variando de 8mm agrave 128mm e apresentam pequenas dimensotildees
26 ERROS DE MEDIDA
Observaccedilotildees realizadas com instrumentos de medida estatildeo acompanhadas
de erros provenientes da falibilidade humana imperfeiccedilatildeo na fabricaccedilatildeo do
equipamento e de interferecircncias causadas pelo ambiente em que o instrumento
utilizado e o objeto estavam no momento em que se realizou a medida Erros de
observaccedilatildeo satildeo tradicionalmente classificados como erros grosseiros sistemaacuteticos e
acidentais Erros grosseiros devem ser detectados e evitados pelo observador com
os devidos cuidados na obtenccedilatildeo da informaccedilatildeo tambeacutem ocorrem devido agrave
presenccedila de ruiacutedo nas observaccedilotildees Erros sistemaacuteticos se repetem seguindo um
determinado padratildeo e podem ser preditos e corrigidos Existem opccedilotildees para evitaacute-
los atraveacutes de teacutecnicas de observaccedilatildeo ou entatildeo eliminaacute-los a posteriori atraveacutes de
foacutermulas especiacuteficas Os erros acidentais ou aleatoacuterios satildeo randocircmicos natildeo
previsiacuteveis e podem ser distribuiacutedos entre o conjunto de observaccedilotildees por teacutecnicas
41
estatiacutesticas Eacute comum o uso da expressatildeo ldquopropriedades estatiacutesticas das
observaccedilotildeesrdquo devido a este erro (GEMAEL 1994)
Erros na medida de distacircncia utilizando cacircmaras TOF tambeacutem podem ser
divididos em natildeo-sistemaacuteticos e sistemaacuteticos conforme descrito nas seccedilotildees 261 e
262 onde seratildeo apresentados 3 erros natildeo-sistemaacuteticos e 7 erros sistemaacuteticos
261 Erros natildeo-sistemaacuteticos em cacircmaras TOF
De acordo com MAY et al (2008) a classificaccedilatildeo de erros natildeo-sistemaacuteticos
na medida de distacircncia utilizando cacircmaras TOF pode ser feita da seguinte maneira
1) Erro devido agrave relaccedilatildeo sinal-ruiacutedo (Signal-to-noise) quando a relaccedilatildeo da
carga recebida com o sinal eacute baixa e o ruiacutedo presente eacute alto haveraacute distorccedilatildeo na
medida de distacircncia que natildeo poderaacute ser corrigida posteriormente Para diminuir este
erro pode-se tomar cuidado com o tempo de exposiccedilatildeo do sensor na aquisiccedilatildeo da
imagem e tambeacutem amplificar a iluminaccedilatildeo do sistema Outra soluccedilatildeo eacute filtrar os
valores medidos com baixas amplitudes no sinal recebido
2) Reflexatildeo do sinal por muacuteltiplos caminhos (Multiple ways reflection) em
objetos com descontinuidade em suas superfiacutecies o sinal emitido pode percorrer
diferentes caminhos antes de retornar ao sensor Exemplos satildeo objetos com
superfiacutecies cocircncavas que podem refletir vaacuterias vezes o sinal e gerar erro na medida
de distacircncia Neste caso o sinal eacute refletido com sobreposiccedilatildeo ou seja pode ser
captado o sinal da uacuteltima superfiacutecie que o refletiu gerando uma distacircncia diferente
do valor esperado
3) Espalhamento da luz (Light scattering) ocorre na lente da cacircmara
causado pela presenccedila de objetos proacuteximos Este efeito e o causado pela reflexatildeo
por muacuteltiplos caminhos satildeo imprevisiacuteveis pois a topologia da cena observada eacute
desconhecida a priori
262 Erros sistemaacuteticos em cacircmaras TOF
Segundo RAPP (2007) nas cacircmaras TOF erros tambeacutem indicam a relaccedilatildeo
entre a variacircncia da distacircncia e a amplitude do sinal captado pelo sensor A relaccedilatildeo
42
estabelecida eacute que a variacircncia dos dados de distacircncia eacute inversamente proporcional agrave
raiz quadrada da amplitude do sinal recebido para realizar a medida Alguns erros
sistemaacuteticos das cacircmaras TOF estudados por RAPP foram
1) Erro devido a uma funccedilatildeo natildeo harmocircnica utilizada para correlacionar o
sinal emitido ao recebido
2) Ruiacutedos relacionados com o tempo de integraccedilatildeo Este tempo pode causar
exposiccedilatildeo insuficiente ou saturaccedilatildeo dos elementos do sensor
3) Erros geomeacutetricos no posicionamento dos piacutexeis devido ao sistema oacuteptico
da cacircmara
O erro devido agrave falta de harmonia na funccedilatildeo de correlaccedilatildeo entre o sinal
emitido e o recebido pode ser causado quando o sistema oacuteptico utilizado emite o
sinal de referecircncia com sua forma inicial e recebe o sinal refletido com forma
diferente Com isto a funccedilatildeo que representa o sinal recebido natildeo teraacute a forma
senoidal teoacuterica do sinal emitido Isto ocorre por conter harmocircnicos de Fourier
iacutempares quando eacute necessaacuteria uma amostra com pelo menos quatro pontos para
definir a FC entre os sinais Este erro tem grande influecircncia no caacutelculo da distacircncia
do objeto pois eacute a FC que possibilita a medida da diferenccedila de fase entre o sinal
emitido e o recebido
A presenccedila de ruiacutedo pode ser notada variando o TI na aquisiccedilatildeo da imagem
O conjunto de dados apresenta maiores distorccedilotildees radiomeacutetricas e geomeacutetricas
quando a presenccedila de ruiacutedo eacute forte Quando o TI eacute aumentado o ruiacutedo observado no
conjunto de dados pode diminuir Poreacutem valores extremamente altos introduzem
erros na mediccedilatildeo por causar saturaccedilatildeo do sensor Com esta informaccedilatildeo procura-se
definir uma funccedilatildeo para a modelagem do ruiacutedo de acordo com o tempo de
integraccedilatildeo Analisando dados obtidos com diferentes TI pode-se especificar qual o
melhor para cada situaccedilatildeo
Erros causados por exposiccedilatildeo insuficiente do sensor natildeo satildeo considerados
sistemaacuteticos poreacutem podem ser preditos Se o valor da amplitude do sinal eacute reduzido
o erro na medida da distacircncia aumenta Para reduzir os piacutexeis obtidos com
exposiccedilatildeo insuficiente pode-se definir um limite no valor da amplitude do sinal
Outra forma de controlar a exposiccedilatildeo eacute com o TI na obtenccedilatildeo da imagem Piacutexeis que
tem amplitude menor que 1 do valor maacuteximo das amplitudes na imagem TOF satildeo
considerados piacutexeis com exposiccedilatildeo insuficiente
43
Erros de posicionamento dos piacutexeis devido ao sistema oacuteptico da cacircmara
podem ser notados quando capta-se a imagem de uma fachada com portas e
janelas As linhas horizontais e verticais que representam estes elementos na
imagem aparecem com curvaturas de acordo com o sistema de lentes utilizado na
cacircmara A distorccedilatildeo de lentes tem um padratildeo fixo em cacircmaras com sensor CMOS
ou CCD e pode ser corrigida geometricamente atraveacutes dos POI da cacircmara que
captou a imagem
Erros sistemaacuteticos em cacircmaras TOF tambeacutem foram estudados por FUCHS e
HIRZINGER (2008) e MAY et al (2008) e foram classificados da seguinte maneira
4) Erro na medida de distacircncia (Distance-related error) este erro eacute causado
devido agrave assimetria da forma do sinal infravermelho recebido pelo sensor
Teoricamente assume-se que este sinal possui forma senoidal e harmocircnica com a
forma do sinal emitido o que na praacutetica pode natildeo acontecer Sendo assim o
pressuposto baacutesico para que se possa calcular o atraso de fase eacute que o sinal
luminoso emitido e o recebido satildeo harmocircnicos e com forma senoidal
Consequentemente se o caacutelculo do atraso de fase do sinal eacute impreciso a distacircncia
entre o objeto e o sensor tambeacutem seraacute calculada de forma imprecisa
5) Erro na amplitude do sinal captado (Amplitude-related error) o sensor natildeo
capta a energia eletromagneacutetica recebida com o sinal perfeitamente Deixando-se a
cacircmara e o objeto na mesma posiccedilatildeo podem-se obter diferentes medidas de
distacircncia devido a esta imperfeiccedilatildeo na fabricaccedilatildeo dos elementos do sensor Este
erro eacute relacionado com a amplitude de valores na captaccedilatildeo da imagem depende da
distacircncia e de caracteriacutesticas como a refletividade das superfiacutecies dos objetos
6) Erro devido agrave latecircncia dos elementos do sensor (Latency-related error) o
atraso de fase do sinal recebido eacute calculado atraveacutes das latecircncias com que o sensor
captou o sinal Estaacute relacionado com propriedades semicondutoras dos materiais
utilizados nos elementos sensores que satildeo responsaacuteveis pela medida da quantidade
de carga recebida Eacute causado quando o sinal emitido e o recebido satildeo
correlacionados diretamente na matriz do sensor Diferentes latecircncias do sinal
devem ser captadas por cada elemento do sensor para possibilitar o caacutelculo da
distacircncia de cada pixel de forma confiaacutevel
7) Ruiacutedo com padratildeo fixo (FPN - Fixed pattern noise) eacute relacionado com o
erro devido agrave latecircncia e ocorre devido agraves propriedades dos materiais utilizados na
fabricaccedilatildeo de cada elemento do sensor CMOS Este eacute um ruiacutedo com padratildeo fixo
44
pode ser corrigido a partir de uma imagem que tenha um pixel com valor constante
que serviraacute como referecircncia para a calibraccedilatildeo dos valores dos piacutexeis vizinhos
Tendo-se como referecircncia um pixel obtido em uma superfiacutecie uniforme de um objeto
pode-se utilizar um padratildeo de similaridade como referecircncia para os outros piacutexeis
Sendo assim a qualidade dos dados depende da posiccedilatildeo do pixel na imagem
Os uacuteltimos quatro erros sistemaacuteticos podem ser corrigidos utilizando o
meacutetodo de calibraccedilatildeo descrito em Fuchs et al (2007) Conforme realizado em
experimento por May et al (2008) os resultados alcanccedilados no mapeamento de uma
sala obtiveram a precisatildeo centimeacutetrica Este experimento foi realizado com o
objetivo de medir paredes opostas de uma sala com o sensor TOF em movimento
instalado em uma plataforma moacutevel O erro encontrado na medida das distacircncias
tambeacutem foi influenciado por erros na estimaccedilatildeo do posicionamento do sensor que eacute
obtido com a Orientaccedilatildeo Exterior da cacircmara no momento de aquisiccedilatildeo das imagens
Durante o registro dos quadros fotograacuteficos o erro em rotaccedilatildeo foi determinado como
sendo igual a 22ordm e o erro de translaccedilatildeo foi de 071m no eixo 119883 004m no eixo 119884 e
de -021m no eixo 119885 A distacircncia calculada entre paredes opostas foi igual a 105m
para a distacircncia de referecircncia de 108m A diferenccedila entre as duas medidas resultou
em 03m o que representa aproximadamente 28 da distacircncia de referecircncia A
nuvem de pontos 3D gerada por MAY et al (2008) eacute ilustrada com a Figura 218
FIGURA 218 ndash Nuvem de pontos 3D gerada a partir de imagem TOF
FONTE MAY et al (2008)
45
27 PROJECcedilAtildeO ORTOGONAL DOS PONTOS
As coordenadas tridimensionais dos pontos da imagem TOF satildeo obtidas
atraveacutes da projeccedilatildeo ortogonal Isto ocorre devido ao fato do equipamento utilizado
calcular as distacircncias dos objetos em um sistema esfeacuterico Esta projeccedilatildeo eacute feita a
partir da colinearidade entre o ponto no espaccedilo objeto o Centro Perspectivo (CP) e
o ponto no espaccedilo imagem conforme eacute ilustrado com a Figura 219
FIGURA 219 ndash Colinearidade entre os pontos no espaccedilo imagem e objeto
FONTE Adaptado de RAPP (2007)
A Figura 219 ilustra os sistemas referenciais adotados nos espaccedilos imagem
e objeto O sistema referencial fotogrameacutetrico (119909119875 119910119875) tem sua origem no CP que eacute
materializado pelo ponto nodal anterior do sistema de lentes da cacircmara Este ponto
projetado no plano da imagem gera o Ponto Principal (PP) A projeccedilatildeo do sistema
referencial fotogrameacutetrico na imagem eacute realizada considerando a simplificaccedilatildeo de
haverem apenas translaccedilotildees entre os eixos deste sistema e o sistema da imagem O
46
sistema referencial de imagem levoacutegiro (119862 119871) tem sua origem no canto superior
esquerdo Atraveacutes das Equaccedilotildees (223) e (224) esta origem pode ser transladada
para o centro da imagem (MACHADO 2006)
119862prime = 119862 minus119899119862minus1
2 (223)
119871prime = 119871 minus119899119871minus1
2 (224)
onde
119862 119871 ndash Sistema referencial de coordenadas da imagem (piacutexeis)
119899119862 119899119871 ndash Nuacutemero total de colunas e linhas da imagem (piacutexeis)
119862prime 119871prime ndash Sistema referencial auxiliar no centro da imagem (piacutexeis)
Para tornar o sistema referencial auxiliar (119862prime 119871prime) de imagem levoacutegiro em um
sistema dextroacutegiro (119909119894119898 119910119894119898 ) pode-se realizar uma reflexatildeo do eixo 119871prime atraveacutes da
Equaccedilatildeo (226)
119909119894119898 = 119862prime (225)
119910119894119898 = minus119871prime (226)
onde
119909119894119898 119910119894119898 ndash Coordenadas de um ponto no sistema referencial dextroacutegiro da
imagem (piacutexeis)
Com isto tem-se um sistema referencial dextroacutegiro centralizado na imagem e
que se relaciona com o sistema referencial fotogrameacutetrico projetado atraveacutes da
translaccedilatildeo de eixos determinada pelas coordenadas (119909119900 119910119900) do PP conforme
ilustrado com a Figura 220
47
FIGURA 220 ndash Sistemas de coordenadas utilizados em imagens
FONTE Adaptado de MACHADO (2006)
A partir do sistema referencial de imagem dextroacutegiro com origem no centro
da imagem e do sistema referencial fotogrameacutetrico projetado com origem no PP
satildeo estabelecidas as relaccedilotildees entre os sistemas de acordo com as Equaccedilotildees (227)
e (228)
119909119894119898 = (119909 minus 1199090) (227)
119910119894119898 = (119910 minus 1199100) (228)
onde
11990901199100 ndash Satildeo as coordenadas do ponto principal no sistema referencial de
imagem (piacutexeis)
119909119910 ndash Coordenadas dos pontos no sistema referencial fotogrameacutetrico
projetado na imagem (piacutexeis)
Os valores das coordenadas dos pontos do sistema fotogrameacutetrico projetado
na imagem estatildeo em piacutexeis A transformaccedilatildeo destes valores para miliacutemetros pode
ser feita multiplicando estas coordenadas pelo tamanho efetivo do pixel nas direccedilotildees
119909 e 119910 da imagem conforme as Equaccedilotildees (229) e (230)
48
119909 = 119909119894119898 ∙ 119875119909 (229)
119910 = 119910119894119898 ∙ 119875119910 (230)
onde
119909119910 ndash Satildeo as coordenadas dos pontos no sistema fotogrameacutetrico projetado
na imagem (miliacutemetros)
119875119909 119875119910 ndash Tamanho efetivo dos piacutexeis nas direccedilotildees 119909 e 119910 (miliacutemetros)
O tamanho efetivo dos piacutexeis nas direccedilotildees 119909 e 119910 satildeo calculados a partir do
fator de escala nestas direccedilotildees conforme Equaccedilotildees (231) e (232)
119875119909 = 119875 ∙ 119904119909 (231)
119875119910 = 119875 ∙ 119904119910 (232)
onde
119875119909 119875119910 ndash Tamanho efetivo dos piacutexeis nas direccedilotildees 119909 e 119910 (miliacutemetros)
119875 ndash Dimensatildeo do pixel obtida no manual do equipamento (miliacutemetros)
119904119909 119904119910 ndash Fatores de escala dos piacutexeis nas direccedilotildees 119909 e 119910
Os fatores de escala dos piacutexeis nas direccedilotildees 119909 e 119910 podem ser calculados
atraveacutes das Equaccedilotildees (233) e (234)
119904119909 =119891
119891119909 (233)
119904119910 =119891
119891119910 (234)
onde
119904119909 119904119910 ndash Fatores de escala dos piacutexeis nas direccedilotildees 119909 e 119910
119891119909 119891119910 ndash Distacircncia focal da cacircmara ao longo dos eixos 119909 e 119910 (miliacutemetros)
119891 ndash Distacircncia focal da cacircmara obtida no manual do equipamento
(miliacutemetros)
49
Quando o valor da distacircncia focal 119891119909 obtido com a calibraccedilatildeo da cacircmara
difere do valor 119891119910 tem-se um indicativo de escalas diferentes nos eixos 119909 e 119910 da
imagem
Realizadas as etapas de Orientaccedilatildeo Interior da imagem podem-se calcular
as coordenadas 3D dos pontos O posicionamento de cada ponto depende da
precisatildeo na determinaccedilatildeo dos acircngulos verticais e horizontais no sistema referencial
de imagem A projeccedilatildeo ortogonal das distacircncias dos pontos coordenada 119885 pode ser
feita atraveacutes da Equaccedilatildeo (235)
119885 = 119889119903 ∙ cos120573 (235)
onde
119885 ndash Distacircncia ortogonal do CP ao ponto observado no espaccedilo objeto
119889119903 ndash Distacircncia radial do CP ao ponto no sistema referencial esfeacuterico
120573 ndash Acircngulo formado entre o eixo que atinge o ponto na imagem partindo do
CP e o eixo principal da cacircmara (CP-PP)
O acircngulo 120573 pode ser calculado atraveacutes da funccedilatildeo trigonomeacutetrica expressa
com a Equaccedilatildeo (236)
tan120573 = 1199092
1198911199092 +
1199102
1198911199102 (236)
onde
119891119909 119891119910 ndash Distacircncia focal da cacircmara ao longo dos eixos 119909 e 119910 (miliacutemetros)
119909119910 ndash Coordenadas dos pontos no sistema referencial fotogrameacutetrico
projetado na imagem (miliacutemetros)
A Expressatildeo (235) relaciona a distacircncia radial 119889119903 com a coordenada 119885 dos
pontos no sistema ortogonal 3D em funccedilatildeo do acircngulo 120573 Substituindo a Equaccedilatildeo
(236) na Equaccedilatildeo (235) podemos explicitar a coordenada 119885 em funccedilatildeo das
distacircncias focais da cacircmara e das coordenadas dos pontos no sistema referencial
fotogrameacutetrico projetado na imagem conforme Equaccedilatildeo (237)
50
119885 = 119889119903 ∙ cos tanminus1 1199092
1198911199092 +
1199102
1198911199102 (237)
onde
119885 ndash Distacircncia ortogonal do CP ao ponto (miliacutemetros)
119889119903 ndash Distacircncia radial do CP ao ponto no sistema esfeacuterico da cacircmara
(miliacutemetros)
119891119909 119891119910 ndash Distacircncia focal da cacircmara ao longo dos eixos 119909 e 119910 (miliacutemetros)
119909119910 ndash Coordenadas dos pontos no sistema referencial fotogrameacutetrico
projetado na imagem (miliacutemetros)
As coordenadas (119883119884) dos pontos no sistema referencial ortogonal podem
entatildeo serem calculadas atraveacutes das Equaccedilotildees (238) e (239)
119883 = 119909 ∙119885
119891119909 (238)
119884 = 119910 ∙119885
119891119910 (239)
28 REFINAMENTO DA NUVEM DE PONTOS 3D
O processo de refinamento da nuvem de pontos 3D obtida com a imagem
TOF compreende a filtragem dos pontos que estejam esparsos devido agrave presenccedila
de ruiacutedo no arquivo de distacircncias da imagem TOF Com a Figura 221a satildeo
ilustrados pontos que natildeo pertencem agraves superfiacutecies do objeto aparecem na aresta
superior direita do objeto O sinal emitido atinge uma aacuterea da superfiacutecie do objeto e
natildeo apenas um ponto Esta aacuterea eacute proporcional agrave distacircncia entre o alvo e o sensor
ocorre devido agrave divergecircncia do feixe de luz emitido Com o princiacutepio TOF o valor da
distacircncia calculada eacute resultado da integraccedilatildeo do sinal recebido de acordo com a
aacuterea iluminada da superfiacutecie Quando o sinal emitido atinge superfiacutecies natildeo
coplanares o valor de distacircncia armazenado eacute um resultado interpolado Este
fenocircmeno ocorre principalmente nas bordas dos objetos e pode ser visto com a
51
Figura 221a que mostra um objeto com trecircs superfiacutecies planas uma base um
plano vertical na direita e um plano na parte superior
FIGURA 221 ndash Filtro para a definiccedilatildeo de bordas do objeto
FONTE MAY et al (2008)
A Figura 221b apresenta a nuvem de pontos 3D apoacutes a aplicaccedilatildeo do filtro
para o refinamento Este eacute um filtro gaussiano utilizado para a definiccedilatildeo de bordas e
desniacuteveis dos objetos eacute tambeacutem uma ferramenta para a remoccedilatildeo de pontos
esparsos provenientes da presenccedila de ruiacutedo nos dados da imagem TOF Funciona
considerando o acircngulo formado entre dois piacutexeis adjacentes na imagem onde o CP
eacute o ponto que completa o triacircngulo sendo o criteacuterio de seleccedilatildeo utilizado a distacircncia
meacutedia dos k pontos vizinhos mais proacuteximos
De acordo com May et al (2008) a distacircncia medida a partir de cacircmaras
TOF pode ser afetada pelo efeito de arredondamento das bordas Isto ocorre pela
suavizaccedilatildeo causada com a transiccedilatildeo entre as superfiacutecies iluminadas Dado um
conjunto de pontos 3D 119875 = 119901119894 119901119894 isin ℝ3 119894 = 1hellip 119873119901 as bordas podem ser
detectadas utilizando a Equaccedilatildeo (240) Esta eacute uma comparaccedilatildeo do acircngulo entre
dois piacutexeis 120585119894 119899 com base em um triacircngulo formado pelo centro perspectivo 119891 = 0 o
ponto 119901119894 e a vizinhanccedila deste ponto 119875119899 = 119901119894 119899 119899 = 1hellip 8 com o acircngulo de
vizinhanccedila 120585119905119893
120585119894 = max arcsin 119901119894 119899
119901119894 119899minus119901119894 ∙ 119904119894119899120593 (240)
52
119869 = 119901119894 120585119894 gt 120585119905119893 (241)
onde
120593 ndash Acircngulo maacuteximo entre dois piacutexeis veacutertice do triacircngulo no ponto 119891 = 0
O triacircngulo utilizado como referecircncia no filtro para a detecccedilatildeo de bordas
com veacutertice no ponto 119891 = 0 eacute ilustrado com a Figura 222
FIGURA 222 ndash Geometria do filtro para a definiccedilatildeo de bordas
FONTE MAY et al (2008)
Um conjunto 119878 de pontos pode ser filtrado atraveacutes da condiccedilatildeo expressa
com a Equaccedilatildeo (243)
119889 119901119894 = 1
119896 119901119894 minus 119901119894 119899 119896119899=1 (242)
119878 = 119901119894 isin 119875 119889 119901119894 lt 119889119905119893 (243)
onde
119889119905119893 ndash Distacircncia de vizinhanccedila constante
O conjunto 119876 de pontos selecionados satildeo os pontos filtrados da nuvem 3D
conforme a condiccedilatildeo da Equaccedilatildeo (244)
119876 = 119902119894 119902119894 isin 119875(119869 cup 119878) (244)
53
29 ANAacuteLISE DE SUPERFIacuteCIES POR AUTOVALORES E AUTOVETORES
A anaacutelise da forma de superfiacutecies pode ser feita pela variaccedilatildeo local de
autovalores que possibilita a classificaccedilatildeo e segmentaccedilatildeo de pontos com
coordenadas tridimensionais (BELTON e LICHTI 2006)
Autovetores e seus respectivos autovalores podem ser obtidos a partir da
Matriz de Variacircncias e Covariacircncias (119872119881119862) de um conjunto de observaccedilotildees O
tamanho relativo e a direccedilatildeo dos autovetores podem indicar propriedades locais
desta superfiacutecie permitindo analisar sua forma (PAULY et al 2002)
De acordo com Johnson e Wichern (1998) a 119872119881119862 pode ser calculada atraveacutes
da Equaccedilatildeo (245)
11987211988111986231199093 =1
119896 119903 119894 minus 119903 119896119894=1 ∙ 119903 119894 minus 119903
119879=
1205901199092 120590119909119910 120590119909119911
120590119909119910 1205901199102 120590119910119911
120590119909119911 120590119910119911 1205901199112
(245)
onde
119872119881119862 ndash Matriz de Variacircncias e Covariacircncias
119903 119894 ndash Vetor com as coordenadas 3D do ponto em questatildeo na amostra
119903 ndash Vetor com as coordenadas do centroacuteide da superfiacutecie
1205901199092120590119910
2 1205901199112 ndash Variacircncias
120590119909119910 120590119909119911 120590119910119911 ndash Covariacircncias
119896 ndash Nuacutemero de pontos da amostra
O vetor com as coordenadas do 119894-eacutesimo ponto da amostra eacute denotado com
119903 119894 pela Expressatildeo (246) A posiccedilatildeo relativa do centroacuteide pode ser calculada atraveacutes
da Equaccedilatildeo (247)
119903 119894 = 119909119894 119910119894 119911119894 119879 (246)
119903 =1
119896 119903 119894119896119894=1 (247)
54
A 119872119881119862 eacute quadrada simeacutetrica positiva-semidefinida e pode ser decomposta
em autovetores 119890 e autovalores 120582 atraveacutes da Equaccedilatildeo (248) Os autovalores 120582119894 satildeo
elementos escalares associados aos respectivos autovetores 119890 119894 (LEON 1998)
119872119881119862 ∙ 119890 = 120582 ∙ 119890 (248)
A partir do teorema de decomposiccedilatildeo espectral (decomposiccedilatildeo de Jordan) a
119872119881119862 pode ser isolada nesta igualdade conforme a Equaccedilatildeo (249) Maiores
detalhes podem ser vistos em Johnson e Wichern (1998) e Shakarji (1998)
119872119881119862 = 120582119894 ∙ 119890 119894 ∙ 119890 1198941198792
119894=0 (249)
onde
119872119881119862 ndash Matriz Variacircncia Covariacircncia
119890 119894 ndash Vetor com os autovetores 119890 119894
120582119894 ndash Matriz com os autovalores 120582119894
Os autovalores satildeo valores reais e os autovetores formam um sistema de
base ortogonal que correspondem aos componentes principais do conjunto de
observaccedilotildees (BELTON 2008)
De acordo com PAULY et al (2002) pode-se adotar a convenccedilatildeo entre os
autovalores da Expressatildeo (250) A partir desta convenccedilatildeo algumas propriedades
para superfiacutecies normais podem ser descritas
1205821 ge 1205822 ge 1205823 (250)
Em um conjunto de pontos 3D que formam uma superfiacutecie plana espera-se
que 1205821 ne 0 1205822 ne 0 e que 1205823 asymp 0 Com isto o menor autovetor 119890 3 apontaraacute na direccedilatildeo
normal a esta superfiacutecie Com a Figura 223 satildeo ilustrados os trecircs autovetores de
uma regiatildeo da superfiacutecie descrita pela nuvem de pontos 3D O terceiro autovetor 119890 3
com o menor autovalor 1205823 eacute ortogonal agrave superfiacutecie plana definida pelos outros dois
autovetores 119890 1 e 119890 2
55
FIGURA 223 ndash Autovetores em nuvem de pontos 3D de uma superfiacutecie plana
Pontos contidos na interseccedilatildeo entre duas superfiacutecies planas podem ser
identificados atraveacutes das relaccedilotildees 1205821 asymp 21205822 e 1205823 asymp 0 O autovetor 119890 1 apontaraacute na
direccedilatildeo da linha limitante da superfiacutecie plana e o autovetor 119890 3 seraacute ortogonal a esta
direccedilatildeo Podem-se encontrar segmentos de retas que limitam a borda de uma
superfiacutecie atraveacutes das relaccedilotildees 1205822 asymp 1205823 e 1205821 asymp 1205822+1205823
Quando os autovalores apresentam valores aproximadamente iguais
1205821 asymp 1205822 asymp 1205823 torna-se possiacutevel encontrar o veacutertice formado por trecircs superfiacutecies
planas
Normalizando os autovalores com a Equaccedilatildeo (251) remove-se a sua
dependecircncia em relaccedilatildeo ao tamanho da amostra utilizada
120582119894prime =
120582119894
1205821+1205822+1205823=
120582119894
119905119903119886 ccedil119900(120582) (251)
Para o autovalor miacutenimo (119894 = 3) pode-se definir o nuacutemero 119873 de pontos para
representar as variaccedilotildees na superfiacutecie atraveacutes da Equaccedilatildeo (252)
119873 =1205823
119905119903119886 ccedil119900(120582) (252)
O valor resultante da Equaccedilatildeo (252) eacute uma medida aproximada de
curvatura local e pode representar a rugosidade da superfiacutecie de forma normalizada
56
210 ANAacuteLISE DE SUPERFIacuteCIES POR MOMENTOS INVARIANTES
Caracteriacutesticas de superfiacutecies planas podem ser obtidas atraveacutes da anaacutelise
de momentos invariantes para isto utiliza-se a 119872119881119862 dos pontos que descrevem esta
superfiacutecie De acordo com MASS e VOSSELMAN (1999) os momentos invariantes
119898119894119895 podem ser calculados atraveacutes da Equaccedilatildeo (253)
119898119894119895 = 119909119894119910119895119891(119909119910)119889119909 1198891199101199102
1199101
1199092
1199091 (253)
onde
119894 119895 ndash Correspondem agrave ordem do momento
119891(119909119910) ndash A coordenada 119911 dos pontos eacute funccedilatildeo das coordenadas planas 119909 e 119910
em um conjunto de pontos que descrevem a superfiacutecie contiacutenua
A Equaccedilatildeo (254) permite determinar o volume de uma esfera unitaacuteria com
raio 119877 em um domiacutenio contiacutenuo 119873 de pontos 3D eacute obtida a partir da Equaccedilatildeo (253)
e possibilita o estudo de propriedades das superfiacutecies com padratildeo planar
119898119894119895119896 = 119909119894119910119895 119911119896119891(119909119910 119911)119889119907119881
(254)
onde
119894 119895119896 ndash Pertencem ao domiacutenio contiacutenuo da funccedilatildeo com 119873 pontos
119894 + 119895 + 119896 ndash Corresponde agrave ordem do momento
119891(119909119910 119911) ndash Eacute o volume da esfera unitaacuteria
Atraveacutes da Equaccedilatildeo (254) GROSS e THONNESSEN (2006) conseguiram
descrever algumas relaccedilotildees entre autovalores e as propriedades de superfiacutecies
normais conforme eacute ilustrado com o Quadro 23
57
ESTRUTURA AUTOVALORES
120640120783 120640120784 120640120785
PONTO ISOLADO
0 0 0
PONTO FINAL DE SEGMENTO
DE RETA
1
12= 0083 0 0
LINHA RETA 1
3= 0333 0 0
12 PLANO 1
4= 025
1
4 1 minus
64
91205872 = 00 0
PLANO 1
4= 025
1
4= 025 0
14 PLANO 1
4 1 minus
2
120587 = 009
1
4+
2
120587minus
32
91205872= 00 0
INTERSECcedilAtildeO DE 2 PLANOS
1
3= 0333
1
8= 0125
1
8minus
8
91205872= 003
INTERSECcedilAtildeO DE 3 PLANOS
1
6 1 minus
1
120587 = 011
1
6 1 minus
1
120587 = 011
1
6 1 +
2
120587 minus
26
331205872= 003
INTERSECcedilAtildeO DE 2 PLANOS
Agrave 30deg 025 01875 001747
QUADRO 23 ndash Propriedades de superfiacutecies normais obtidas com autovalores FONTE GROSS e THOENNESSEN (2006)
Os autovalores do Quadro 23 foram determinados analiticamente a partir da
Equaccedilatildeo (254) e podem ser utilizados como referecircncia para a estimaccedilatildeo da forma
das superfiacutecies que compotildeem a estrutura dos objetos
Restringindo a ordem dos momentos com 119894 + 119895 + 119896 le 2 pode-se calcular o
centro de gravidade da superfiacutecie conforme a Equaccedilatildeo (255) e os elementos da
119872119881119862 podem serem obtidos atraveacutes da Equaccedilatildeo (256)
119909 =119898100
119898000 119910 =
119898010
119898000 119911 =
119898001
119898000 (255)
58
119898 119894119895119896 = 119909119894 minus 119909 119894 119910 minus 119910 119895 119911 minus 119911 119896119891(119909119910 119911)119889119907119881
(256)
Os momentos de 2ordf ordem normalizados para os pontos 3D em um domiacutenio
discreto podem ser calculados atraveacutes da Equaccedilatildeo (257)
119898 119894119895119896 = 119909119897minus119909
119894 119910119897minus119910 119895 119911119897minus119911
119896119873119897=1
119877119894+119895+119896119873 (257)
onde
119898 119894119895119896 ndash Momentos de 2ordf ordem para os pontos 3D
119873 ndash Nuacutemero de pontos da amostra no domiacutenio contiacutenuo da funccedilatildeo
119877 ndash Raio da esfera unitaacuteria considerada para seleccedilatildeo de pontos
Desta forma os valores calculados para os momentos natildeo satildeo influenciados
pelo nuacutemero de pontos unidade fiacutesica das medidas ou peso dos elementos da 119872119881119862
Utilizando momentos de 2ordf ordem a 119872119881119862 pode ser obtida atraveacutes da Equaccedilatildeo
(258)
119872119881119862 =
119898 200 119898 110 119898 101
119898 110 119898 020 119898 011
119898 101 119898 011 119898 002
(258)
O caacutelculo dos autovalores 120582119894 e autovetores 119890 119894 com 119894 = 123 eacute variaacutevel para
cada ponto do conjunto de observaccedilotildees Sendo assim as classes de valores
geradas por GROSS e THONNESSEN (2006) com objetivo de modelar superfiacutecies
com padratildeo planar foram agraves seguintes
O primeiro autovalor 1205821 foi definido constante e igual a 025
O segundo autovalor 1205822 varia de 0125 agrave 025
O terceiro autovalor 1205823 varia de 0 agrave 0125
Com a aproximaccedilatildeo teoacuterica dos valores contidos no Quadro 24 JUTZI e
GROSS (2009) mostraram a possibilidade de determinar matematicamente
inclinaccedilotildees entre as superfiacutecies para os acircngulos de 0ordm 30ordm e 90ordm No entanto
quando satildeo utilizados dados reais para representar as superfiacutecies pequenas
variaccedilotildees nestes valores podem ser percebidas Um exemplo eacute que o terceiro
59
autovalor 1205823 natildeo teraacute valor igual a zero mesmo em uma superfiacutecie plana Isto ocorre
por haverem pequenos desvios entre os pontos desta superfiacutecie que satildeo causados
por ruiacutedo presente no conjunto de dados reais Este fato pode ser observado
calculando o terceiro autovalor que seraacute um valor positivo pequeno mas diferente
de zero Com isto quanto mais proacuteximo de zero o terceiro autovalor 1205823 maior seraacute o
indicativo que a superfiacutecie eacute plana conforme ilustrado com a Figura 224
FIGURA 224 ndash Inclinaccedilotildees de superfiacutecies determinadas por autovalores
FONTE JUTZI e GROSS (2009)
60
211 ALGORITMO DE DESLOCAMENTO PELA MEacuteDIA
O algoritmo de deslocamento pela meacutedia (Mean Shift) pode ser utilizado no
reconhecimento de padrotildees para a segmentaccedilatildeo de imagens A densidade de
pontos vizinhos em relaccedilatildeo a um ponto central pode ser estimada com a meacutedia do
conjunto de dados discretos A anaacutelise espacial de atributos eacute utilizada neste
contexto com o objetivo de extrair informaccedilotildees Para isto utiliza a vizinhanccedila de um
ponto na imagem Com os atributos definidos pode-se encontrar o centro das
regiotildees com as maiores densidades que representam caracteriacutesticas significativas
dos objetos presentes na imagem
Para realizar a anaacutelise espacial de atributos e obterem-se resultados
satisfatoacuterios deve-se reduzir o volume de dados ateacute que se tenham apenas as
caracteriacutesticas significativas distribuiacutedas em um sistema de coordenadas contiacutenuo O
conteuacutedo do espaccedilo de atributos deve ser passiacutevel de modelagem atraveacutes de uma
amostragem com distribuiccedilatildeo multivariada de probabilidade Devido a este
pressuposto eacute necessaacuterio verificar se a condiccedilatildeo de normalidade dos dados eacute
satisfeita em aplicaccedilotildees estatiacutesticas tradicionais que utilizam testes parameacutetricos
Em outras aplicaccedilotildees podem-se utilizar meacutetodos estatiacutesticos natildeo
parameacutetricos com menos restriccedilotildees sobre o comportamento dos dados como por
exemplo natildeo se preocupar com o tipo de distribuiccedilatildeo para as variaacuteveis aleatoacuterias O
conceito de Kernel pode ser empregado em meacutetodos natildeo parameacutetricos para a
estimativa de propriedades Esta eacute uma funccedilatildeo estatiacutestica contiacutenua simeacutetrica e com
limite superior e inferior de integraccedilatildeo definidos cuja integraccedilatildeo resulta na unidade
por conveniecircncia O Kernel atua na imagem como uma janela de convoluccedilatildeo
suavizando as caracteriacutesticas dos pontos analisados (MACHADO 2006)
De acordo com COMANICIU e MEER (2002) o algoritmo de deslocamento
pela meacutedia eacute uma ferramenta versaacutetil para anaacutelises espaciais de feiccedilotildees presentes
em amostras Utiliza o Kernel para a estimaccedilatildeo da densidade dos elementos no
conjunto de dados tendo como referecircncia um ponto fixo na regiatildeo central da
amostra Dado um conjunto de pontos 120169119894=1hellip119899 em um espaccedilo 119877 com dimensatildeo 119889 o
estimador de densidade multivariada por Kernel 119870(120169) e a matriz de paracircmetros 119867
com bandas de dimensatildeo 119889 pode ser calculada com os pontos 120169 Com estes
61
paracircmetros definidos a funccedilatildeo para estimar a densidade multivariada no ponto 120169 eacute
expressa com a Equaccedilatildeo (259)
119891 (120169) =1
119899 119870119867 120169 minus 120169119894 119899119894=1 (259)
119870119867(120169) = 119867 minus1
2119870(119867minus1
2120169) (260)
O Kernel 119870(120169) com dimensatildeo 119889 eacute uma funccedilatildeo para a anaacutelise da densidade
da vizinhanccedila dos pontos expressa atraveacutes das Equaccedilotildees (261) e (262)
119870(120169)119877119889
119889120169 = 1 lim 119909 rarrinfin 120169 119889 119870 120169 = 0 (261)
119909119870(120169)119889120169119877119889
= 0 120169120169119879119870(120169)119889120169119877119889
= 119888119870119868 (262)
Onde 119888119870 eacute uma constante A partir do Kernel univariado 1198701 119909 o Kernel
multivariado pode ser calculado de duas maneiras conforme as Equaccedilotildees (263) e
(264)
119870119875 120169 = 1198701 119909119894 119889119894=1 (263)
119870119878 120169 = 119886119896 1198891198701( 120169119894 ) (264)
Onde 119870119875(120169) eacute obtido com o produto dos Kernels univariados e 119870119878(120169) eacute
obtido rotacionando 1198701(119909) no espaccedilo 119877119889 o que faz 119870119878(120169) ser radialmente simeacutetrico
A constante 119886119896 119889minus1 = 1198701 120169 1198891201691198774
com 119870119878(119909) integrado de 0 agrave 1 O Kernel
radialmente simeacutetrico eacute de interesse em anaacutelises espaciais de imagens desde que
satisfaccedila a condiccedilatildeo da Equaccedilatildeo (265)
119870 119909 = 119888119896 119889119896( 120169 2) (265)
Neste caso define-se a funccedilatildeo de cada elemento do Kernel 119896 119909 para 119909 ge 0
A constante de normalizaccedilatildeo 119888119896 119889 pode ser calculada integrando 119870 120169 de 0 a 1
assumindo-se que eacute positiva A estimaccedilatildeo pode ser parametrizada com a matriz
diagonal de bandas do Kernel 119867 = 1198932119868 = 119889119894119886119892 11989312hellip 119893119889
2 onde 119868 eacute a matriz
identidade com dimensatildeo 119889 Esta matriz apresenta a vantagem de ser determinada
62
utilizando como uacutenico paracircmetro o nuacutemero de bandas 119893 ge 0 do Kernel Empregando
paracircmetros com o nuacutemero de bandas 119893 e dimensatildeo 119899 o estimador de densidade por
Kernel da Equaccedilatildeo (259) pode ser expresso atraveacutes da Equaccedilatildeo (266)
119891 (120169) =1
119899119893119889 119870119867
120169minus120169119894
119893 119899
119894=1 (266)
A qualidade do estimador de densidade por Kernel pode ser analisada
atraveacutes do erro meacutedio quadraacutetico entre a densidade real e a estimada Na praacutetica
somente a aproximaccedilatildeo assintoacutetica das medidas pode ser calculada (AMISE ndash
Asymptotic Mean Integrated Square Error) Para os Kernels multivariados o erro
meacutedio quadraacutetico AMISE eacute minimizado utilizando o Kernel de Epanechnikov
(COMANICIU e MEER 2002)
119896119864 119909 = 1 minus 119909 0 le 119909 le 1
0 119909 gt 0 (267)
119870119864 120169 = 1
2119888119889
minus1 119889 + 2 (1 minus 120169 2) 120169 le 1
0 119888119886119904119900 119888119900119899119905119903aacute119903119894119900 (268)
Onde 119888119889 eacute o volume de uma esfera com raio unitaacuterio e com dimensatildeo 119889 O
elemento do Kernel 119896119873 119909 pode ser calculado utilizando a Equaccedilatildeo (269)
119896119873 119909 = exp minus1
2119909 119909 ge 0 (269)
Para o Kernel multivariado calculado com a Equaccedilatildeo (269) um Kernel
normal 119870119873 pode ser calculado utilizando a Equaccedilatildeo (270)
119870119873 120169 = (2120587)minus1198892exp minus1
2 120169 2 (270)
Sendo o Kernel normal simeacutetrico e admitido finito Para a anaacutelise espacial de
imagens estas duas formas de calcular o Kernel satildeo suficientes e os resultados
obtidos com estas condiccedilotildees impostas satildeo satisfatoacuterios O estimador de densidade
por Kernel da Equaccedilatildeo (259) pode ser reescrito conforme a Equaccedilatildeo (271)
63
119891 119893 119870(120169) =119888119896 119889
119899119893119889 119896
120169minus120169119894
119893
2
119899119894=1 (271)
Para anaacutelise de feiccedilotildees espaciais primeiramente deve-se calcular a
densidade do conjunto de dados e verificar o seu comportamento espacial Isto pode
ser feito calculando o gradiente da funccedilatildeo de densidade 119891(120169) igual a zero nabla119891 120169 = 0
O algoritmo de deslocamento pela meacutedia eacute uma maneira de localizar estes zeros
para estimar a densidade do conjunto de observaccedilotildees Calculando o gradiente da
funccedilatildeo expressa com a Equaccedilatildeo (271) pode-se estimar a densidade atraveacutes da
Equaccedilatildeo (272)
nabla 119891119893 119870(120169) equiv2119888119896 119889
119899119893119889+2 (120169 minus 120169119894)119896prime
120169minus120169119894
119893
2
119899119894=1 (272)
Substituindo 119896prime pela funccedilatildeo 119892(119909) conforme expresso com a Equaccedilatildeo (273)
119892 119909 = 119896prime(119909) (273)
Assumindo que a derivada do Kernel 119896 exista para o conjunto finito de
pontos 119909 isin [0infin) O Kernel 119866(119909) com seus elementos 119892(119909) pode ser definido atraveacutes
da Equaccedilatildeo (274)
119866 119909 = 119888119892 119889119892( 120169 2) (274)
Onde 119888119892119889 corresponde a uma constante de normalizaccedilatildeo O Kernel 119866 119909
pode ser considerado uma aproximaccedilatildeo do Kernel 119870(119909) dependendo do contexto
em que seraacute empregado De forma similar o Kernel de Epanechnikov eacute uma
simplificaccedilatildeo do Kernel uniforme da esfera unitaacuteria com dimensatildeo 119889 Introduzindo
119892(119909) na Equaccedilatildeo (272) tem-se a Equaccedilatildeo (275)
nabla 119891119893 119870 120169 =2119888119896 119889
119899119893119889+2 120169 minus 120169119894 119892
120169minus120169119894
119893
2
119899119894=1 (275)
nabla 119891119893 119870 120169 =2119888119896 119889
119899119893119889+2 119892 120169minus120169119894
119893
2
119899119894=1 ∙
120169119894119892 120169minus120169119894119893
2 119899
119894=1
119892 120169minus120169119894119893
2 119899
119894=1
(276)
64
119892 120169minus120169119894
119893
2
119899119894=1 (277)
Considerando que o resultado da funccedilatildeo expressa com a Equaccedilatildeo (277) eacute
um nuacutemero positivo O primeiro termo da Equaccedilatildeo (276) eacute proporcional agrave densidade
estimada calculada para 120169 com o Kernel 119866 conforme Equaccedilatildeo (271) e expresso
agora em funccedilatildeo de 119892(119909) atraveacutes da Equaccedilatildeo (278)
119891119893 119866 120169 =119888119892 119889
119899119893119889 119892
120169minus120169119894
119893
2
119899119894=1 (278)
O segundo termo da Equaccedilatildeo (276) corresponde ao algoritmo de
deslocamento pela meacutedia conforme Equaccedilatildeo (279)
119898119893 119866 120169 = 120169119894119892
120169minus120169119894119893
2 119899
119894=1
119892 120169minus120169119894119893
2 119899
119894=1
minus 120169 (279)
A Equaccedilatildeo (279) representa a diferenccedila entre as meacutedias ponderadas
utilizando o Kernel 119866 para os pesos e o centro da janela de convoluccedilatildeo em 120169 A
partir das Equaccedilotildees (276) (278) e (279) chega-se as Equaccedilotildees (280) e (281)
nabla 119891119893 119870 120169 = 119891 119893 119866 120169 2119888119896 119889
1198932119888119892 119889119898119893 119866 120169 (280)
119898119893 119866 120169 =1
21198932119888nabla
119891 119893 119870 120169
119891 119893 119866 120169 (281)
Para a posiccedilatildeo 120169 o vetor de deslocamento pela meacutedia calculado com Kernel
119866 eacute proporcional agrave estimaccedilatildeo de densidade normalizada obtida resolvendo a funccedilatildeo
com gradiente igual a zero e Kernel 119870 Eacute a normalizaccedilatildeo da densidade estimada em
119909 calculada com o Kernel 119866
O vetor de deslocamento pela meacutedia aponta na direccedilatildeo de maacuteximo
crescimento da densidade do conjunto de dados A estimaccedilatildeo da densidade de
pontos com mesma caracteriacutestica eacute obtida atraveacutes de interaccedilotildees com sucessivos
caacutelculos do vetor de deslocamento pela meacutedia 119898119893 119866 120169 e translaccedilotildees do Kernel 119866(119909)
sobre a imagem Isto garante a convergecircncia ao redor do ponto de interesse
65
utilizando a Equaccedilatildeo (281) com gradiente igual a zero Regiotildees com baixa
densidade de observaccedilotildees natildeo satildeo interessantes para anaacutelises espaciais com o
algoritmo de deslocamento pela meacutedia pois muitas iteraccedilotildees seriam necessaacuterias
para obtenccedilatildeo de resultados pouco satisfatoacuterios De forma anaacuteloga em locais com
densidade maacutexima poucas iteraccedilotildees satildeo necessaacuterias e a anaacutelise pode atingir bons
resultados (COMANICIU e MEER 2002)
Imagens satildeo representadas matematicamente na forma de matrizes onde
cada posiccedilatildeo da matriz eacute ocupada por vetores com dimensatildeo 119901 onde 119901 = 1 no caso
de imagens em niacuteveis de cinza ou coloridas e 119901 ge 2 no caso de imagens
multiespectrais O posicionamento de cada pixel na matriz imagem estaacute contido no
domiacutenio espacial (Spatial domain) enquanto o valor digital do pixel faz parte do
domiacutenio de caracteriacutesticas da imagem (Range domain) assumindo-se estes
domiacutenios como espaccedilos euclidianos Deste modo o Kernel multivariado pode ser
definido como o produto de dois Kernels radialmente simeacutetricos em um espaccedilo
euclidiano calculado com um paracircmetro de cada domiacutenio atraveacutes da Equaccedilatildeo
(282)
119870119893119904119893119903(119909) =119862
1198931199042119893119903
119901 119896 120169119904
119893119904
2
119896 120169119903
119893119903
2
(282)
onde
120169119904 ndash Corresponde ao domiacutenio espacial
120169119903 ndash Corresponde ao domiacutenio de caracteriacutesticas
119896(119909) ndash Elemento da funccedilatildeo calculado em ambos os domiacutenios
119893119904 119893119903 ndash Paracircmetros das bandas de cada domiacutenio do Kernel empregado
119862 ndash Constante de normalizaccedilatildeo entre as bandas
Na praacutetica o Kernel de Epanechnikov tambeacutem conhecido por Kernel normal
atinge resultados satisfatoacuterios O usuaacuterio deve escolher apenas os paracircmetros das
bandas 119893 = 119893119904 119893119903 e a quantidade miacutenima 119867 de pixels das regiotildees segmentadas na
imagem determinando assim a resoluccedilatildeo na estimaccedilatildeo da densidade A Figura 225
ilustra um exemplo de segmentaccedilatildeo realizada utilizando o algoritmo de
deslocamento pela meacutedia sobre uma imagem em niacuteveis de cinza
66
FIGURA 225 ndash Imagem segmentada FONTE COMANICIU e MEER (2002)
A segmentaccedilatildeo de imagens atraveacutes do algoritmo de deslocamento pela
meacutedia foi implementada no software EDISON (Edge Detection and Image
SegmentatiON System) desenvolvido pela Universidade RUTGER de New Jersey
Este software aleacutem da segmentaccedilatildeo com o algoritmo de deslocamento pela meacutedia
realiza uma filtragem preservando as descontinuidades e detectando os limites dos
objetos contidos na imagem atraveacutes de uma funccedilatildeo gradiente (CHRISTOUDIAS et
al 2002)
67
3 MATERIAIS
Neste trabalho foram utilizadas imagens TOF obtidas com a cacircmara PMD
CamCube 20 que fornece dados de distacircncia e intensidade sob forma de matrizes
de imagem Para realizar os experimentos foram obtidos trecircs conjuntos de imagens
De um gabarito com a forma de um tabuleiro de xadrez para realizar
o processo de calibraccedilatildeo da cacircmara
De uma parede branca com padratildeo planar para anaacutelise de ruiacutedos e
distorccedilotildees geomeacutetricas das imagens e
Do objeto de estudo uma caixa de papelatildeo com superfiacutecies planas e
brancas
Para o processamento das imagens TOF foi utilizado um microcomputador
do laboratoacuterio de Fotogrametria e Sensoriamento Remoto Departamento de
Geomaacutetica da Universidade Federal do Paranaacute com as seguintes caracteriacutesticas
Processador Intelreg Coretrade2 Duo 293GHz
Capacidade do disco riacutegido de 320GB
Memoacuteria principal de 2GB
68
4 MEacuteTODOS
Neste capitulo descreve-se o desenvolvimento metodoloacutegico do presente
trabalho de pesquisa para a aquisiccedilatildeo e processamento da imagem TOF Esta
imagem eacute composta por dois arquivos O primeiro arquivo conteacutem informaccedilatildeo de
intensidade de retorno do sinal captado com iluminaccedilatildeo infravermelha O segundo
arquivo conteacutem informaccedilatildeo de distacircncia (range) para cada pixel gerado com o
sensor da cacircmara TOF
Considerando que as imagens TOF podem apresentar ruiacutedo em funccedilatildeo das
condiccedilotildees de iluminaccedilatildeo e da natureza das superfiacutecies dos objetos estudos para a
reduccedilatildeo do ruiacutedo foram efetuados Para isto utilizaram-se janelas na regiatildeo central
da imagem ao redor do pixel com coordenadas de imagem (102 102) As filtragens
foram realizadas em aacutereas que circundam este pixel central
Apoacutes a anaacutelise do tempo de integraccedilatildeo na aquisiccedilatildeo da imagem
determinaram-se POI atraveacutes do processo de calibraccedilatildeo da cacircmara Os POI
permitiram corrigir a geometria dos dados da imagem TOF Esta correccedilatildeo eacute
necessaacuteria devido agraves distorccedilotildees causadas pelo sistema de lentes da cacircmara
A etapa seguinte consistiu na segmentaccedilatildeo da imagem TOF onde duas
metodologias foram avaliadas
1) Segmentaccedilatildeo do conjunto de dados por crescimento de regiotildees no
espaccedilo tridimensional utilizando pontos semente escolhidos no arquivo de
intensidades da imagem TOF como referecircncia para o posicionamento (119883119884) dos
pontos com distacircncia (119885)
2) Segmentaccedilatildeo utilizando a anaacutelise da variaccedilatildeo local dos autovalores ao
longo do arquivo de distacircncias da imagem TOF Realizada para a geraccedilatildeo de uma
imagem com bordas intensificadas segmentaccedilatildeo desta imagem atraveacutes do
algoritmo de deslocamento pela meacutedia e projeccedilatildeo ortogonal dos pontos
pertencentes agraves aacutereas segmentadas As superfiacutecies segmentadas foram entatildeo
separadas atraveacutes do conjunto de pontos 3D
O passo seguinte consistiu no caacutelculo das coordenadas tridimensionais dos
pontos dos objetos imageados a partir da informaccedilatildeo de distacircncia das coordenadas
dos piacutexeis na imagem de intensidade e dos POI Com isto gerou-se a nuvem de
pontos 3D e tornou-se possiacutevel a modelagem tridimensional das superfiacutecies do
69
objeto de estudo sendo tambeacutem avaliado o resultado obtido A Figura 41 apresenta
as etapas realizadas no processamento das imagens TOF com as duas propostas
de metodologia para a etapa de segmentaccedilatildeo
FIGURA 41 ndash Processamento da imagem TOF
41 CALIBRACcedilAtildeO DA CAcircMARA
A calibraccedilatildeo foi realizada com o objetivo de determinar os Paracircmetros de
Orientaccedilatildeo Interior (POI) da cacircmara Estes paracircmetros possibilitam a reconstruccedilatildeo
do feixe perspectivo que gerou a imagem para o instante em que foi captada
permitindo a correccedilatildeo de sua geometria (ANDRADE 1998)
Com o processo de Orientaccedilatildeo Interior satildeo obtidos os seguintes POI
distacircncia focal calibrada (119891119888 ) posiccedilatildeo do Ponto Principal (1199090 1199100) na imagem
Distorccedilatildeo Radial Simeacutetrica (119870111987021198703) Distorccedilatildeo Descentrada (11987511198752) e os
paracircmetros que indicam falta de afinidade do sensor (119860119861)
IMAGEM TOF
CORRECcedilOtildeES GEOMEacuteTRICAS COM POI
ARQUIVO DE INTENSIDADES
SUPERFIacuteCIE SEMENTE
CRESCIMENTO DE REGIOtildeES COM PONTO SEMENTE
PROJECcedilAtildeO ORTOGONAL
NUVEM DE PONTOS 3D
ARQUIVO DE DISTAcircNCIAS
IMAGEM COM BORDAS INTENSIFICADAS VARIACcedilAtildeO LOCAL DE AUTOVALORES
SEGMENTACcedilAtildeO DA IMAGEM COM BORDAS INTENSIFICADAS
PROJECcedilAtildeO ORTOGONAL
NUVEM DE PONTOS 3D
MODELAGEM 3D DAS SUPERFIacuteCIES
70
Os POI obtidos com o processo de calibraccedilatildeo possibilitam realizar correccedilotildees
geomeacutetricas nos arquivos de intensidades e distacircncias das imagens TOF Com a
calibraccedilatildeo objetiva-se corrigir as distorccedilotildees ocorridas na passagem do raio de luz
pelo sistema de lentes ateacute atingir o plano focal Este erro ocorre pela impossibilidade
na construccedilatildeo de um sistema de lentes perfeito para a cacircmara A correccedilatildeo dos erros
sistemaacuteticos da cacircmara eacute realizada no plano da imagem no ponto onde uma linha
reta passante pelo ponto nodal anterior do sistema de lentes eacute ortogonal a este
plano
O meacutetodo de calibraccedilatildeo fotogrameacutetrica eacute o tradicionalmente utilizado na
determinaccedilatildeo dos POI em Ciecircncias Geodeacutesicas Para isto necessita de pontos de
apoio com coordenadas tridimensionais conhecidas na superfiacutecie de objetos com
correspondentes coordenadas bidimensionais observadas na imagem Relaciona-se
a informaccedilatildeo 3D da cena com a informaccedilatildeo 2D da imagem atraveacutes das equaccedilotildees de
colinearidade fazendo-se uma correspondecircncia entre a posiccedilatildeo dos pontos de
referecircncia 3D e os mesmos pontos reconhecidos na imagem 2D Esta calibraccedilatildeo
pode ser realizada de forma eficiente desde que sejam utilizadas teacutecnicas e campos
de calibraccedilatildeo apropriados para cada tipo de cacircmara e aplicaccedilatildeo que se destina a
imagem Outra teacutecnica que pode ser utilizada para a Orientaccedilatildeo Interior das imagens
eacute conhecida como auto-calibraccedilatildeo na qual natildeo haacute necessidade de pontos com
coordenadas conhecidas no espaccedilo objeto (ZHANG 2000)
A Distorccedilatildeo Radial Simeacutetrica eacute a parcela de refraccedilatildeo natildeo desejaacutevel que um
feixe luminoso sofre ao atravessar um sistema de lentes A Distorccedilatildeo Descentrada eacute
composta pelas distorccedilotildees Tangencial e Radial Assimeacutetrica Eacute causada pela
impossibilidade de alinhar-se perfeitamente o eixo oacuteptico do sistema de lentes que
compotildee a objetiva Correccedilotildees para estas distorccedilotildees podem ser feitas atraveacutes da
Equaccedilatildeo (41) Maiores detalhes podem ser vistos em Andrade (1998)
119909prime119910prime =
119909119910
119900119887119904minus
1199090
1199100 minus
120575119909120575119910 119903119886119889
minus 120575119909120575119910 119889119890119904
minus 120575119909120575119910 119886
(41)
71
onde
119909prime119910prime 119879 ndash Coordenadas corrigidas no sistema referencial de imagem
119909 119910 119900119887119904119879 ndash Coordenadas de imagem observadas
1199090 1199100 119879ndash Coordenadas do PP no sistema referencial de imagem
120575119909 120575119910 119903119886119889119879 ndash Distorccedilatildeo Radial Simeacutetrica
120575119909 120575119910 119889119890119904119879 ndash Distorccedilatildeo Descentrada
120575119909 120575119910 119886119879 ndash Distorccedilatildeo causada pela falta de afinidade entre os eixos do
sensor
Andrade (1998) ilustra algumas correccedilotildees necessaacuterias para as imagens
utilizadas em Fotogrametria e mostra a influencia dos POI nestas correccedilotildees Um
exemplo eacute a correccedilatildeo da distorccedilatildeo Radial Simeacutetrica que pode ser realizada atraveacutes
das Equaccedilotildees (42) e (43)
120575119909119903119886119889 = (1199032 ∙ 1198701 + 1199034 ∙ 1198702 + 1199036 ∙ 1198703) ∙ 119909 (42)
120575119910119903119886119889 = (1199032 ∙ 1198701 + 1199034 ∙ 1198702 + 1199036 ∙ 1198703) ∙ 119910 (43)
onde
119909 = (119909 minus 1199090)
119910 = (119910 minus 1199100)
119909119910 ndash Coordenadas dos pontos com distorccedilotildees no sistema referencial
fotogrameacutetrico projetado na imagem
11990901199100 ndash Coordenadas do Ponto Principal
119870111987021198703 ndash Coeficientes de Distorccedilatildeo Radial Simeacutetrica
72
A distacircncia 119903 entre o ponto com coordenadas na imagem e o Ponto Principal
pode ser calculada atraveacutes da Equaccedilatildeo (44)
119903 = 119909 2 + 119910 2 (44)
A Distorccedilatildeo Descentrada pode entatildeo ser corrigida atraveacutes das Equaccedilotildees
(45) e (46)
120575119909119889119890119904 = [1198751 ∙ (1199032 + 2 ∙ 1199092
) + 2 ∙ 1198752 ∙ 119909 ∙ 119910 ] ∙ (1 + 1198753 + r2 + ⋯ ) (45)
120575119910119889119890119904 = [2 ∙ 1198751 ∙ 119909 ∙ 119910 + 1198752 ∙ (r2 + 2 ∙ 119910 2)] ∙ (1 + 1198753 + r2 + ⋯ ) (46)
onde
119875111987521198753 ndash Coeficientes de Distorccedilatildeo Descentrada
A diferenccedila de escala dos eixos horizontal e vertical da imagem possiacutevel
natildeo ortogonalidade entre os elementos do sensor pode ser modelada utilizando as
Equaccedilotildees (47) e (48) que introduzem correccedilotildees utilizando os paracircmetros de
afinidade 119860 e 119861 (HABIB e MORGAN 2003)
120575119909119886 = 119860 119909 minus 1199090 + 119861(119910minus1199100) (47)
120575119910119886 = 119861(119910minus1199100) (48)
onde
119860119861 ndash Paracircmetros de afinidade
119909119910 ndash Coordenadas dos pontos com distorccedilotildees no sistema referencial
fotogrameacutetrico projetado na imagem
11990901199100 ndash Coordenadas do Ponto Principal
73
A partir da formulaccedilatildeo proposta por Brown (1971) e incluindo os paracircmetros
de afinidade 119860 e 119861 as Equaccedilotildees (49) e (410) possibilitam a correccedilatildeo da imagem
utilizando os coeficientes 119870111987021198703 e 11987511198752
119909prime = 119909 + 119909 ∙ 11987011199032+1198702119903
4+11987031199036 + ⋯ +
+ 1198751 ∙ 1199032 + 2 ∙ 119909
2 + 2 ∙ 1198752 ∙ 119909 ∙ 119910 ∙ 1 + 1198753 ∙ 119903
2 + ⋯ + 119909 119860 + 119910 119861 (49)
119910prime = 119910 + 119910 ∙ 11987011199032+1198702119903
4+11987031199036 + ⋯ +
+ 21198751 ∙ 119909 ∙ 119910 + 1198752 ∙ 1199032 + 2119910 2 ∙ 1 + 1198753 ∙ 119903
2 + ⋯ + 119910 119861 (410)
A Equaccedilatildeo (41) ilustra as correccedilotildees necessaacuterias na geometria da imagem
quando objetiva-se a extraccedilatildeo de informaccedilotildees meacutetricas Eacute um modelo jaacute consagrado
na Fotogrametria e bastante aplicado em Ciecircncias Geodeacutesicas Pode ser utilizado
para o entendimento das correccedilotildees necessaacuterias nas imagens devido agraves distorccedilotildees
causadas pelo sistema de lentes da cacircmara e pela falta de afinidade entre os
elementos do sensor Outros modelos matemaacuteticos para correccedilotildees geomeacutetricas de
imagens satildeo utilizados em aacutereas correlatas como a Visatildeo Computacional Com a
precisatildeo requerida em cada aplicaccedilatildeo alguns POI tecircm maior relevacircncia que outros
podendo haver a supressatildeo de alguns A correlaccedilatildeo entre os paracircmetros deve ser
analisada e evitada
As Equaccedilotildees (49) e (410) podem ser simplificadas para realizar apenas as
correccedilotildees utilizando os coeficientes de Distorccedilatildeo Radial Simeacutetrica 1198961 e 1198962 e os
paracircmetros de afinidade 119860 e 119861 Estes paracircmetros satildeo os mais significativos para a
correccedilatildeo da imagem obtida com cacircmaras digitais de pequeno formato conforme eacute
expresso atraveacutes das Equaccedilotildees (411) e (412)
119909prime = 119909 + 119909 ∙ 11987011199032+1198702119903
4 + 119909 119860 + 119910 119861 (411)
119910prime = 119910 + 119910 ∙ 11987011199032+1198702119903
4 + 119910 119861 (412)
74
onde
119909119910 ndash Coordenadas dos pontos com distorccedilotildees no sistema referencial
fotogrameacutetrico projetado na imagem
119909 = (119909 minus 1199090)
119910 = (119910 minus 1199100)
11990901199100 ndash Coordenadas do Ponto Principal
119860119861 ndash Paracircmetros de afinidade
Cacircmaras digitais de pequeno formato apresentam principalmente a
Distorccedilatildeo Radial Simeacutetrica causada pelo sistema de lentes sendo os coeficientes 1198961
e 1198962 os mais significativos Os paracircmetros de afinidade entre os eixos da imagem 119860
e 119861 tambeacutem podem ser considerados para a correccedilatildeo das imagens obtidas
dependendo da precisatildeo com que o sensor da cacircmara foi construiacutedo pelo fabricante
Alguns softwares calculam os POI de forma raacutepida com soluccedilatildeo aproximada
e dependendo da aplicaccedilatildeo a que se destina a imagem podem ser utilizados sem
maiores restriccedilotildees Um deles eacute o Toolbox CALIB para Matlab utiliza o algoritmo
proposto por Zhang (2000) Este meacutetodo consiste em determinar os POI da cacircmara
tomando diferentes imagens de um gabarito com quadrados pretos e brancos
similar a um tabuleiro de xadrez fixado em uma superfiacutecie riacutegida e com padratildeo
planar Devem ser obtidas imagens do gabarito variando a posiccedilatildeo e orientaccedilatildeo da
cacircmara natildeo sendo necessaacuterio conhecer a trajetoacuteria do seu movimento para a
determinaccedilatildeo dos POI Este algoritmo possibilita o caacutelculo dos POI da cacircmara de
forma aproximada atraveacutes de sucessivas iteraccedilotildees Para sua utilizaccedilatildeo eacute necessaacuterio
conhecer a dimensatildeo dos quadrados do gabarito e indicar os pontos posiccedilotildees dos
veacutertices que seratildeo utilizados como pontos de referecircncia
No algoritmo proposto por Zhang um vetor de pontos 2D eacute denotado por
119898 = [119906 119907]119879 e um vetor de pontos 3D por 119872 = [119883119884119885]119879 De forma similar pode-se
aumentar estes vetores adicionando uma linha com valor igual a 1 sendo os vetores
aumentados 119898 = [119906 119907 1]119879 e 119872 = [119883119884119885 1]119879 A colinearidade entre o ponto no
espaccedilo objeto centro perspectivo e o ponto no espaccedilo imagem eacute utilizada para
75
estabelecer a relaccedilatildeo entre os pontos 3D contidos no vetor 119872 e os pontos na
imagem 2D contidos no vetor 119898 conforme a Equaccedilatildeo (413)
119904119898 = 119860[119877 119905]119872 (413)
onde
119904 ndash Fator de escala
119877 119905 ndash Paracircmetros de Orientaccedilatildeo Exterior (POE) compostos por elementos de
rotaccedilatildeo e translaccedilatildeo que relacionam as coordenadas obtidas no sistema 3D do
espaccedilo objeto com o sistema de coordenadas 2D da imagem
119860 ndash Eacute a matriz com os POI da cacircmara Apresenta as coordenadas 1199060 e 1199070 do
PP 119864120572 e 119864120573 satildeo os fatores de escala na imagem com eixos 119906 e 119907 O paracircmetro 120574
descreve a falta de ortogonalidade entre os eixos do sistema referencial da imagem
A matriz 119860 eacute expressa atraveacutes da Equaccedilatildeo (414)
119860 = 119864120572 120574 1199060
0 119864120573 1199070
0 0 1
(414)
Comparando as Equaccedilotildees (411) e (412) com o modelo proposto por Zhang
expresso atraveacutes da Equaccedilatildeo (413) tecircm-se as seguintes correspondecircncias
119860 e 119861 satildeo os paracircmetros de afinidade das Equaccedilotildees (411) e (412)
que correspondem aos fatores de escala 119864120572 e 119864120573 da Equaccedilatildeo (413)
Sendo que o paracircmetro 120574 acircngulo entre os eixos da imagem pode ser
calculado a partir destes fatores de escala
1199090 e 1199100 satildeo as coordenadas do Ponto Principal expressas com as
Equaccedilotildees (411) e (412) que tem suas correspondecircncias nas
coordenadas 1199060 e 1199070 da Equaccedilatildeo (413)
O caacutelculo dos POI pode ser entatildeo ser realizado atraveacutes da Equaccedilatildeo (415)
119898119894119895 minus119898 119860119877119894 119905119894 119872119895 2119898
119895=1119899119894=1 (415)
76
onde
119898 119860119877119894 119905119894 119872119894 ndash Eacute a projeccedilatildeo do vetor do ponto 119872119895 sobre a imagem 119894
119877119894 ndash Eacute o vetor de rotaccedilatildeo com paracircmetros 119903
O algoritmo proposto por Zhang (2000) utiliza somente os dois primeiros
termos de Distorccedilatildeo Radial Simeacutetrica para a correccedilatildeo da imagem atraveacutes dos
coeficientes 1198961 e 1198962 conforme Equaccedilotildees (416) e (417) Cacircmaras digitais de
pequeno formato normalmente apresentam distorccedilotildees de lentes significantes
especialmente a Distorccedilatildeo Radial Simeacutetrica A funccedilatildeo de distorccedilatildeo eacute fortemente
influenciada pelos componentes radiais principalmente o primeiro termo 1198961 Dadas
as coordenadas de uma imagem (119906 119907) consideradas livres de distorccedilatildeo e as
correspondentes coordenadas de imagem observadas (119906 119907 ) consegue-se projetar
os pontos atraveacutes da relaccedilatildeo de colinearidade entre eles De forma similar (119909119910) satildeo
as coordenadas de imagem consideradas livres de distorccedilatildeo e (119909 119910 ) as coordenadas
que possuem distorccedilatildeo Estas coordenadas tecircm suas escalas compatibilizadas
atraveacutes de uma normalizaccedilatildeo
119909 = 119909 + 119909 1198961 1199092 + 1199102 + 1198962 119909
2 + 1199102 2 (416)
119910 = 119910 + 119910 1198961 1199092 + 1199102 + 1198962 119909
2 + 1199102 2 (417)
onde
11989611198962 ndash Satildeo os coeficientes de Distorccedilatildeo Radial Simeacutetrica O centro desta
distorccedilatildeo encontra-se no Ponto Principal projetado na imagem
Com 119906 = 1199060 + 119886119909 + 120574119910 e 119907 = 1199070 + 120573119910 e assumindo 120574 = 0 em uma imagem
que tem os eixos perpendiculares tem-se a relaccedilatildeo expressa com as Equaccedilotildees
(418) e (419)
119906 = 119906 + 119906 minus 1199060 1198961 1199092 + 1199102 + 1198962 119909
2 + 1199102 2 (418)
119907 = 119907 + 119907 minus 1199070 1198961 1199092 + 1199102 + 1198962 119909
2 + 1199102 2 (419)
Uma opccedilatildeo para estimar os coeficientes 1198961 e 1198962 eacute feita atraveacutes de
sucessivas iteraccedilotildees utilizando as coordenadas 119906 e 119907 dos piacutexeis considerados
77
isentos de erro Com isto tecircm-se duas expressotildees para os pontos da imagem
conforme a Equaccedilatildeo (420)
119906 minus 1199060 119909
2 + 1199102 119906 minus 1199060 1199092 + 1199102 2
119907 minus 1199070 1199092 + 1199102 119907 minus 1199070 119909
2 + 1199102 2 1198961
1198962 =
119906 minus 119906119907 minus 119907
(420)
Dados 119898 pontos em 119899 imagens podemos obter 2 ∙ 119898 ∙ 119899 equaccedilotildees Na forma
matricial 119863119896 = 119889 onde 119896 = 1198961 1198962 119879 A soluccedilatildeo deste sistema de equaccedilotildees eacute
possiacutevel pelo meacutetodo dos miacutenimos quadrados conforme a Equaccedilatildeo (421)
119896 = 119863119879119863 minus1119863119879119889 (421)
Uma vez que 1198961 e 1198962 foram calculados pode-se refinar a estimaccedilatildeo dos
outros paracircmetros resolvendo novamente a Equaccedilatildeo (415) substituindo os valores
de 119898 119860119877119894 119905119894 119872119894 pelos valores calculados com as Equaccedilotildees (418) e (419)
A estimaccedilatildeo do conjunto completo de POI pode ser expressa atraveacutes da
Equaccedilatildeo (422)
119898119894119895 minus119898 1198601198961 1198962119877119894 119905119894 119872119895 2119898
119895=1119899119894=1 (422)
onde
119898 119860 11989611198962119877119894 119905119894 119872119895 - Eacute funccedilatildeo da projeccedilatildeo do vetor do ponto 119872119895 na imagem
119894 de acordo com a Equaccedilatildeo (413)
Com este meacutetodo no miacutenimo duas imagens devem ser adquiridas com
orientaccedilotildees diferentes se os elementos sensores da cacircmara forem quadrados
Zhang (2000) recomenda a aquisiccedilatildeo de pelo menos cinco imagens para obter
melhores resultados com o processo de calibraccedilatildeo Sendo assim os passos para
realizar a calibraccedilatildeo da cacircmara utilizando este meacutetodo satildeo
1 Imprimir o gabarito e fixaacute-lo em uma superfiacutecie plana e riacutegida
2 Tomar imagens do gabarito com diferentes orientaccedilotildees variando a
posiccedilatildeo e orientaccedilatildeo da cacircmara
78
3 Realizar a leitura das coordenadas dos pontos de controle nas
imagens
4 Estimar os POI e POE utilizando soluccedilatildeo aproximada
5 Refinar todos os paracircmetros incluindo os paracircmetros de distorccedilatildeo de
lentes atraveacutes da Equaccedilatildeo (422)
Os passos 4 e 5 satildeo realizados automaticamente pelo Toolbox CALIB do
software Matlab devendo o usuaacuterio apenas inserir as imagens no software e realizar
as leituras dos veacutertices dos quadrados nas imagens do gabarito
42 ANAacuteLISE DA PRESENCcedilA DE RUIacuteDO
Os piacutexeis saturados causados por exposiccedilatildeo prolongada do sensor na
aquisiccedilatildeo da imagem e tambeacutem os piacutexeis com baixa exposiccedilatildeo devem ser
cuidadosamente analisados na imagem pois tambeacutem podem causar erros nas
medidas de distacircncia devido agrave presenccedila de ruiacutedo Quando o sensor capta o sinal
luminoso existe um limite maacuteximo de saturaccedilatildeo que natildeo pode ser diminuiacutedo
posteriormente
Khongsab (2009) utilizou como paracircmetro principal o tempo de integraccedilatildeo na
captaccedilatildeo da imagem para controlar a saturaccedilatildeo dos piacutexeis Como este tempo eacute
aplicado globalmente ao sensor acaba influenciando os valores digitais dos piacutexeis
da imagem de forma equivalente Alguns apresentam erros devido agrave baixa
exposiccedilatildeo pois com a reduccedilatildeo do tempo de integraccedilatildeo natildeo receberam energia
eletromagneacutetica suficiente para sensibilizar o sensor sendo chamados de piacutexeis
insaturados Estes problemas podem ser minimizados definindo-se tempos de
integraccedilatildeo adequados para a obtenccedilatildeo da imagem TOF
O tratamento do ruiacutedo pode ser realizado com diferentes filtragens na
imagem Com este objetivo foram estudados os filtros passa-baixas pela meacutedia e
mediana Outro processo de filtragem realizado foi o caacutelculo da meacutedia dos valores
de distacircncia para diferentes imagens de uma mesma cena com o mesmo tempo de
integraccedilatildeo mas adquiridas em instantes brevemente diferentes
79
421 Filtragem passa-baixas pela meacutedia
O caacutelculo da meacutedia dos valores da vizinhanccedila em torno do pixel de interesse
tem o efeito de suavizar a imagem Este processo conhecido como filtro linear
passa-baixas atenua as altas frequecircncias que no espaccedilo de frequecircncias
correspondem agraves transiccedilotildees raacutepidas Este tipo de variaccedilatildeo caracteriza tambeacutem a
presenccedila de ruiacutedo na imagem A suavizaccedilatildeo tende a minimizar a presenccedila de ruiacutedo
e tecircm o efeito de tornar a imagem menos contrastante O filtro linear passa-baixas
utilizado tem dimensatildeo 3x3 com pesos iguais para os vizinhos Filtros lineares
resultam da convoluccedilatildeo de uma janela moacutevel sobre a imagem A Equaccedilatildeo (423)
representa o modelo matemaacutetico aplicado na filtragem linear passa-baixas pela
meacutedia (CENTENO 2004)
119866 119910 119909 = (119901(119894 119895) ∙ 119868(119910 + 119894 minus 119886 119909 + 119895 minus 119886))119879119895=1
119879119894=1 (423)
onde
119868(119910 119909) ndash Corresponde ao valor do pixel na posiccedilatildeo ldquolinha = 119910rdquo e ldquocoluna = 119909rdquo
119901(119894 119895) ndash Representa o filtro
119879 ndash Tamanho da janela de filtragem
119866(119910 119909) ndash Imagem resultante da filtragem
119886 = 119894119899119905 119879
2 + 1
A Figura 42 Ilustra o filtro linear passa-baixas pela meacutedia a janela central
cinza que estaacute na matriz de uma imagem Este filtro tem dimensatildeo de 3x3 piacutexeis e
atua no valor digital 48 do pixel central O valor digital do pixel apoacutes a filtragem
passa a ser 41222 que corresponde a meacutedia dos valores digitais dos piacutexeis
vizinhos
80
FIGURA 42 ndash Filtragem passa-baixas pela meacutedia
422 Filtragem pela mediana
A filtragem natildeo linear pela mediana consiste na substituiccedilatildeo do valor do pixel
central pelo valor correspondente a mediana da vizinhanccedila Este meacutetodo tambeacutem
suaviza a presenccedila de ruiacutedo A diferenccedila principal em relaccedilatildeo ao filtro da meacutedia eacute
que o filtro da mediana natildeo introduz novos valores na imagem pois substitui o valor
central da vizinhanccedila por um valor jaacute existente na imagem Sendo assim natildeo
degrada as bordas dos objetos de forma extrema A Figura 43 ilustra esta filtragem
que resultaraacute no valor digital 44 para o pixel filtrado que anteriormente apresentava
valor digital 48
FIGURA 43 ndash Filtragem pela mediana
81
423 Filtragem com a meacutedia temporal
A terceira opccedilatildeo eacute a ponderaccedilatildeo dos valores dos piacutexeis ao longo do tempo
Para isto uma seacuterie de imagens foi obtida a partir do mesmo ponto de vista em
instantes diferentes O resultado foi um conjunto de imagens de um uacutenico objeto
desde a mesma perspectiva natildeo sendo a geometria da imagem alterada Assim
cada pixel de uma imagem tem seu equivalente nas outras Assumindo que o ruiacutedo
seja aleatoacuterio eacute esperado que o uso de mais de uma imagem diminua a presenccedila
de ruiacutedo atraveacutes do caacutelculo da meacutedia dos valores observados
A filtragem com a meacutedia temporal eacute ilustrada com a Figura 44 Nesta figura
tem-se a representaccedilatildeo de trecircs imagens com suas matrizes de valores digitais
(Ii=123) e a imagem filtrada (IF) resultante que corresponde a meacutedia das trecircs
imagens originais
FIGURA 44 ndash Filtragem utilizando a meacutedia temporal
82
43 SEGMENTACcedilAtildeO
Com a etapa de segmentaccedilatildeo objetivou-se separar o conjunto de dados em
subconjuntos Estes subconjuntos satildeo compostos por pontos com coordenadas
tridimensionais que descrevem as superfiacutecies de objetos Eacute assumido que estas
superfiacutecies satildeo partes estruturais do objeto a ser identificado Para atingir esta meta
duas alternativas foram desenvolvidas e avaliadas
1) Crescimento de regiotildees a partir de superfiacutecies planas e ponto semente
utilizando o arquivo de intensidades da imagem TOF para selecionar a posiccedilatildeo de
pontos ou regiotildees semente sendo o arquivo de distacircncias utilizado para o
crescimento de regiotildees
2) Segmentaccedilatildeo por anaacutelise da variaccedilatildeo local de autovalores utilizando
somente o arquivo de distacircncias da imagem TOF para gerar uma imagem de
intensidade com bordas intensificadas que posteriormente eacute segmentada em
regiotildees que tecircm seus piacutexeis projetados gerando uma nuvem de pontos 3D destas
superfiacutecies segmentadas A segmentaccedilatildeo da imagem de intensidade com bordas
evidenciadas gerada eacute realizada utilizando o algoritmo de deslocamento pela meacutedia
431 Crescimento de regiotildees a partir de superfiacutecies planas e ponto semente
O primeiro meacutetodo proposto se baseia no crescimento de regiotildees por
agregaccedilatildeo de elementos adjacentes Este meacutetodo utiliza um criteacuterio de similaridade
para avaliar se um ponto pertence a uma determinada regiatildeo A distacircncia de um
ponto a uma superfiacutecie plana e o valor digital de um pixel em uma imagem satildeo
exemplos de criteacuterios de similaridade que podem ser utilizados (GONZALEZ e
WOODS 2000)
Partindo de um subconjunto de pontos adjacentes que pertencem a uma
superfiacutecie plana o processo consiste em buscar na vizinhanccedila outros pontos que
estejam espacialmente proacuteximos a esta superfiacutecie atendendo ao criteacuterio de
coplanaridade Neste criteacuterio a distacircncia ortogonal do ponto a uma superfiacutecie plana eacute
calculada atraveacutes das coordenadas 3D do ponto sendo este ponto considerado
pertencente agrave superfiacutecie quando estaacute dentro do limiar estabelecido A superfiacutecie
plana eacute determinada atraveacutes do autovetor com menor autovalor do conjunto de
83
pontos 3D a distacircncia ortogonal eacute calculada na direccedilatildeo deste autovetor partindo da
superfiacutecie O processo eacute iterativo de forma que o subconjunto inicial cresce
agregando novos elementos em cada iteraccedilatildeo ateacute atingir os limites da superfiacutecie
quando o criteacuterio de coplanaridade natildeo eacute mais satisfeito
O primeiro problema consiste na identificaccedilatildeo de pontos ou regiotildees semente
para dar iniacutecio ao processo de crescimento Uma opccedilatildeo foi identificar visualmente
regiotildees planas no arquivo de intensidades da imagem TOF e realizar a leitura de
coordenadas de pontos nestas regiotildees A partir das coordenadas destes pontos
selecionados na imagem de intensidade e de suas correspondentes no arquivo de
distacircncias da imagem TOF determinou-se a superfiacutecie plana que mais se aproxima
a esta regiatildeo atraveacutes do caacutelculo de seus autovetores e autovalores esta foi
considerada a superfiacutecie semente
A hipoacutetese baacutesica assume que superfiacutecies planas ou pelo menos partes
delas aparecem como regiotildees uniformes na imagem de intensidade devido agraves
condiccedilotildees de iluminaccedilatildeo Esta hipoacutetese nem sempre pode ser verificada e
confirmada Por exemplo se a superfiacutecie eacute coberta por tonalidades com padratildeo
irregular de cor entatildeo o plano pode mostrar valores natildeo uniformes na imagem de
intensidade sendo este um caso extremo Em uma situaccedilatildeo real pode ocorrer que
parte da superfiacutecie plana esteja pintada ou contenha manchas que alterem a sua
resposta espectral O mesmo pode ocorrer se houverem sombras projetadas de
outros objetos sobre a superfiacutecie Neste caso poreacutem existem outras regiotildees da
superfiacutecie plana que podem aparecer uniformes na imagem de intensidade e serem
utilizadas como regiatildeo semente
Com base nesta suposiccedilatildeo buscaram-se regiotildees uniformes na imagem de
intensidade e verificou-se a possibilidade de formarem superfiacutecies planas que
pudessem ser utilizadas como sementes no arquivo de distacircncias da imagem TOF
A soluccedilatildeo proposta consiste em segmentar a imagem de intensidade em regiotildees
uniformes com atributos de cor Um limite miacutenimo no tamanho das regiotildees deve ser
fixado para evitar que regiotildees muito pequenas sejam incluiacutedas na anaacutelise visto que
estas regiotildees pequenas podem representar locais com curvatura
A chave para o crescimento de regiotildees eacute a definiccedilatildeo do grau de pertinecircncia
de cada ponto agrave superfiacutecie plana Para isto eacute utilizado o conceito de distacircncia
miacutenima do ponto a esta superfiacutecie Para pertencer a uma regiatildeo os pontos devem
84
estar dentro do limite de proximidade ou seja a distacircncia entre o ponto e a
superfiacutecie plana natildeo pode superar o limiar fixado
A qualidade deste processo depende de fatores como o estabelecimento de
correspondecircncia entre os pontos precisatildeo na determinaccedilatildeo da superfiacutecie normal
utilizada remoccedilatildeo de erros grosseiros do conjunto de observaccedilotildees e identificaccedilatildeo
da regiatildeo semente
432 Segmentaccedilatildeo por anaacutelise da variaccedilatildeo local de autovalores
Esta abordagem baseia-se na anaacutelise da variaccedilatildeo local dos autovalores e
autovetores A hipoacutetese baacutesica nesta metodologia foi considerar que ao longo de
uma superfiacutecie plana os autovalores devem apresentar valores similares ou muito
proacuteximos Considerando duas regiotildees adjacentes se estas regiotildees forem
coplanares entatildeo a magnitude relativa de seus autovalores seraacute aproximadamente
igual Se uma destas regiotildees encontra-se em uma borda do objeto os autovetores
seratildeo diferentes A regiatildeo a ser considerada eacute uma janela quadrada em torno do
pixel central Para efetuar esta anaacutelise devem ser calculados os autovalores de uma
regiatildeo em torno de cada pixel no arquivo de distacircncias da imagem TOF Estes
autovalores satildeo armazenados em matrizes que geram trecircs novas imagens digitais
com as bordas dos objetos intensificadas
Com a Figura 45 Ilustra-se a anaacutelise do arquivo de distacircncias da imagem
TOF realizado com o caacutelculo de seus autovalores As bordas dos objetos presentes
podem ser vistas em evidecircncia satildeo representadas com os maiores valores
85
FIGURA 45 ndash Intensificaccedilatildeo de bordas com autovalores
Os autovalores calculados para cada pixel satildeo normalizados na faixa de 0 a
255 utilizando-se 8 bits Assim estes valores podem ser representados como uma
imagem digital passiacutevel de ser analisada com softwares de processamento A Figura
46 ilustra uma imagem com bordas intensificadas proveniente da segmentaccedilatildeo
realizada com a anaacutelise da variaccedilatildeo local dos autovalores
FIGURA 46 ndash Imagem com bordas intensificadas
86
A imagem produzida pode entatildeo ser segmentada utilizando o algoritmo de
deslocamento pela meacutedia Os resultados da segmentaccedilatildeo satildeo regiotildees onde os
autovalores satildeo aproximadamente iguais definindo uma superfiacutecie com padratildeo
planar sendo estas superfiacutecies separadas das regiotildees de bordas
433 Segmentaccedilatildeo com o algoritmo de deslocamento pela meacutedia
A segmentaccedilatildeo com o algoritmo de deslocamento pela meacutedia eacute realizada
utilizando a imagem com as bordas dos objetos intensificadas gerada com a
segmentaccedilatildeo do arquivo de distacircncias da imagem TOF pela anaacutelise da variaccedilatildeo
local dos autovalores
Cada um dos trecircs autovalores calculados gera uma imagem com bordas
intensificadas Sendo assim espera-se que os valores digitais dos piacutexeis nas
superfiacutecies dos objetos sejam similares dentro desta imagem Com isto a
segmentaccedilatildeo proporcionaraacute a seleccedilatildeo das superfiacutecies do objeto
Para realizar a segmentaccedilatildeo da imagem de intensidade com as bordas
intensificadas deve-se escolher os paracircmetros (119893119904 119893119903 119867) mais adequados para a
segmentaccedilatildeo Estes paracircmetros correspondem ao domiacutenio espacial da imagem 119893119904
domiacutenio de caracteriacutesticas dos piacutexeis 119893119903 e o tamanho miacutenimo 119867 que as aacutereas
segmentadas devem possuir O limite miacutenimo na quantidade de piacutexeis deve ser
fixado para evitar que regiotildees muito pequenas sejam incluiacutedas na segmentaccedilatildeo o
que pode prejudicar esta etapa pois se espera que a imagem seja segmentada com
o menor nuacutemero de regiotildees
87
5 RESULTADOS E DISCUSSOtildeES
51 CALIBRACcedilAtildeO DA CAcircMARA
Com o objetivo de calcular os POI o processo de calibraccedilatildeo da cacircmara foi
realizado com o Toolbox CALIB do software Matlab que utiliza o meacutetodo proposto
por ZHANG (2000) O gabarito fotografado foi impresso com 7x9 quadrados com
dimensatildeo de 117x117mm Estas imagens foram captadas a uma distacircncia
aproximada de 25 metros da cacircmara Para que houvesse pontos do gabarito sobre
a aacuterea da imagem foram obtidas 36 imagens com diferentes orientaccedilotildees conforme eacute
ilustrado com a Figura 51
FIGURA 51 ndash Imagens do gabarito utilizadas na calibraccedilatildeo da cacircmara
88
A Orientaccedilatildeo Exterior das imagens em relaccedilatildeo agrave cacircmara para a calibraccedilatildeo eacute
ilustrada com a Figura 52 A cacircmara eacute representada com a piracircmide em linhas
vermelhas e a origem do sistema fotogrameacutetrico eacute representada com a interseccedilatildeo
das linhas representadas com a cor azul no veacutertice da piracircmide
FIGURA 52 ndash Orientaccedilatildeo Exterior das fotografias para a calibraccedilatildeo da cacircmara
A distorccedilatildeo causada pelo sistema de lentes da cacircmara ocorre de forma mais
intensa nas bordas da imagem sendo a regiatildeo central o local com menor presenccedila
desta distorccedilatildeo A Figura 53 comprova este fato onde os vetores representados
com a cor vermelha partem dos pontos de controle na imagem e indicam a direccedilatildeo e
o sentido em que a distorccedilatildeo aumenta
FIGURA 53 ndash Direccedilatildeo das distorccedilotildees nos pontos da imagem TOF
89
Realizada a leitura das coordenadas dos pontos de controle os POI foram
calculados com o processo de calibraccedilatildeo da cacircmara e satildeo apresentados com a
Tabela 51
PARAcircMETROS INICIAIS OBTIDOS COM A LEITURA DAS IMAGENS
PARAcircMETRO VALOR
(piacutexeis) (mm)
Distacircncia focal (119891) (119891119909) (119891119910 )
285 80288 285 80288
1286113 1286113
Coordenadas do Ponto Principal (1199090)
(Origem no canto superior esquerdo) (1199100) 10150000 10150000
456750 456750
PARAcircMETROS DETERMINADOS COM A CALIBRACcedilAtildeO DA CAcircMARA
PARAcircMETRO VALOR DESVIO (3σ)
(piacutexeis) (mm) (piacutexeis) (mm)
Distacircncia focal (119891119888) calibrada (119891119909119888 ) (119891119910119888 )
29240511 29364057
1315823 1321383
plusmn 373164 plusmn 335357
plusmn 0167924 plusmn 0150911
Coordenadas do Ponto Principal (1199090119888 )
(Origem no canto superior esquerdo) (1199100119888 ) 10435253 10022287
4695864 4510029
plusmn 320459 plusmn 336886
plusmn 0144207 plusmn 0151599
1198701 -046768 -0021045 plusmn 003106 plusmn 0001398
1198702 060997 0027449 plusmn 013880 plusmn 0006246
1198703 000107 48150e-5
plusmn 000162 plusmn 72900e-5
1198751 000035 19350e-5
plusmn 000204 plusmn 91800e-5
1198752 000000 0000000 plusmn 000000 plusmn 0000000
Erro em pixel (119864119909 )
(119864119910 ) 049340 042754
0022203 0019239
TABELA 51 ndash Paracircmetros de Orientaccedilatildeo Interior calculados
Com os valores dos POI determinados foram calculados os fatores de escala
dos piacutexeis nas direccedilotildees 119904119909 e 119904119910 conforme as Equaccedilotildees (51) e (52)
119904119909 =119891
119891119909119888=
128119898119898
1315823119898119898= 0972775 (51)
119904119910 =119891
119891119910119888=
128119898119898
1321383119898119898= 0968682 (52)
A partir dos fatores de escala e da dimensatildeo do pixel igual a 45120583119898 das
imagens obtidas com a cacircmara PMD CamCube 20 foi calculado o tamanho efetivo
dos piacutexeis nas direccedilotildees x e y atraveacutes das Equaccedilotildees (53) e (54)
119875119909 = P ∙ 119904119909 = 45120583119898 ∙ 0972775 = 43774875120583119898 cong 44120583119898 (53)
119875119910 = P ∙ 119904119910 = 45120583119898 ∙ 0968682 = 43590690120583119898 cong 44120583119898 (54)
90
Os valores obtidos com as Equaccedilotildees (53) e (54) indicam que os elementos
do sensor podem ser considerados quadrados De acordo com Bazan et al (2009)
quando a diferenccedila de escala entre os lados do piacutexel natildeo eacute fornecida pelo fabricante
da cacircmara o fator de escala calculado para x pode absorver esta diferenccedila
Com a razatildeo entre as distacircncias focais obtidas com a calibraccedilatildeo da cacircmara
pode-se verificar a diferenccedila de escala Para a dimensatildeo do sensor esta diferenccedila
de escala natildeo alcanccedila o tamanho de um pixel conforme Equaccedilatildeo (56)
119863119868119865119864119878119862 =119891119909119888
119891119910119888=
1321383119898119898
1315823119898119898minus 1 = 1004225 minus 1 = 0004225 (55)
119863119868119865119864119878119862 = 0004225 lowast 204 = 08619 lt 1119901119894119909119890119897 (56)
A Equaccedilatildeo (56) indica que a diferenccedila de escala entre os eixos x e y eacute
menor que a dimensatildeo de um pixel isto considerando toda a dimensatildeo da imagem
de 204x204 piacutexeis da cacircmara PMD CamCube 20
Determinados os POI a imagem pode entatildeo ter sua geometria corrigida
conforme eacute ilustrado com a Figura 54b A Figura 54a ilustra a imagem original
obtida do gabarito onde se apresentam curvaturas provenientes da distorccedilatildeo
causada pelo sistema de lentes da cacircmara
FIGURA 54 ndash Correccedilatildeo geomeacutetrica da imagem TOF
91
Para a correccedilatildeo geomeacutetrica de imagens obtidas com cacircmaras de pequeno
formato Zhang (2000) recomenda utilizar somente os paracircmetros de distacircncia focal
calibrada 119891119888 coordenadas do Ponto Principal no plano da imagem 1199090 e 1199100 e os
coeficientes de Distorccedilatildeo Radial Simeacutetrica ateacute o segundo termo 1198701 e 1198702 Isto porque
este modelo de cacircmara apresenta principalmente a Distorccedilatildeo Radial Simeacutetrica
Outro fator diz respeito ao desvio calculado na determinaccedilatildeo de cada um destes
paracircmetros conforme valores apresentados na Tabela 51 o terceiro paracircmetro de
Distorccedilatildeo Radial Simeacutetrica 1198703 e os paracircmetros de Distorccedilatildeo Descentrada 1198751 e 1198752
apresentaram valores de desvios maiores do que os proacuteprios paracircmetros devendo
entatildeo serem desconsiderados para a correccedilatildeo geomeacutetrica da imagem
92
52 EXPERIMENTO 1 ndash ANAacuteLISE DE RUIacuteDO 1 IMAGEM TOF INTEIRA
O objetivo deste experimento consistiu em avaliar a presenccedila de ruiacutedo em
funccedilatildeo do tempo de integraccedilatildeo (TI) na aquisiccedilatildeo das imagens TOF Para sua
realizaccedilatildeo foram utilizadas imagens de uma parede com superfiacutecie plana distante
130m da cacircmara PMD CamCube 20 onde tambeacutem aparece parte de uma porta
Foram tomadas cinco imagens para cada valor de TI que variou entre 500 1000
1500 1700 1800 1900 2000 2500 3000 3500 4000 4500 5000 5300 5500
6000 e 7000μs gerando assim um conjunto de 85 imagens TOF
Com o objetivo de avaliar e reduzir a presenccedila de ruiacutedo nas imagens foram
realizadas as seguintes filtragens
Filtro passa-baixas pela meacutedia
Filtro pela mediana
Caacutelculo da meacutedia dos valores de distacircncia para imagens TOF
adquiridas com mesmo TI em instantes brevemente diferentes
Para cada imagem original foram criadas trecircs novas imagens filtradas com
os procedimentos mencionados
No graacutefico de dispersatildeo ilustrado com a Figura 55 os desvios padratildeo para o
conjunto de observaccedilotildees satildeo mostrados em funccedilatildeo do TI Foram calculados com
referecircncia no pixel central com coordenadas (102 102) e a aacuterea utilizada para o
caacutelculo possui dimensatildeo de 10x10 piacutexeis Escolheu-se esta regiatildeo por apresentar
padratildeo planar da superfiacutecie com menor distorccedilatildeo causada pelo sistema de lentes da
cacircmara tendo-se em vista que nesta etapa natildeo foi realizada a correccedilatildeo geomeacutetrica
dos dados da imagem TOF
Ainda com a Figura 55 verificou-se que o filtro da mediana aplicado nas
imagens gerou os menores desvios para a janela de 10x10 piacutexeis O menor desvio
calculado foi 12mm encontrado utilizando o filtro da mediana para o TI igual a
3000micros Verificou-se tambeacutem que os desvios apresentam valores similares para os
tempos de integraccedilatildeo que variaram entre 1500 agrave 2500micros para as imagens originais e
tambeacutem para as imagens filtradas
93
FIGURA 55 ndash Desvio padratildeo x TI janelas 10x10
A partir do graacutefico de dispersatildeo da Figura 55 escolheram-se imagens
captadas com os tempos de integraccedilatildeo de 500 2000 e 2500micros para realizar os
testes A Figura 56 ilustra superfiacutecies geradas a partir de filtragens realizadas em
imagem TOF obtida com TI igual a 500μs
FIGURA 56 ndash Imagens para TI=500μs e d=130m
94
Com TI de 500μs verificou-se intensa presenccedila de ruiacutedo na imagem original
e tambeacutem nas imagens filtradas Isto ocorreu devido ao baixo tempo de exposiccedilatildeo
do sensor A distorccedilatildeo causada pelo sistema de lentes da cacircmara tambeacutem pode ser
visualizada nestas superfiacutecies geradas com os arquivos de distacircncias da imagem
TOF As imagens foram obtidas de uma parede plana em que aparece parte de uma
porta o que justifica a descontinuidade vista em forma de degrau A anaacutelise
realizada com TI de 2000μs eacute ilustrada com a Figura 57
FIGURA 57 ndash Imagens para TI=2000μs e d=130m
Com TI de 2000μs obtiveram-se resultados melhores do que os obtidos com
TI de 500μs as superfiacutecies apresentaram-se mais suaves confirmando a tendecircncia
demonstrada com o graacutefico de dispersatildeo da Figura 55
A uacuteltima anaacutelise deste experimento foi realizada com o tempo de integraccedilatildeo
de 2500μs conforme pode ser visualizado com as superfiacutecies geradas com os
arquivos de distacircncias da imagem TOF original e das imagens filtradas ilustradas
com a Figura 58
95
FIGURA 58 ndash Imagens para TI=2500μs e d=130m
As imagens filtradas com TI de 2000μs e 2500μs apresentam suavizaccedilotildees
similares nas superfiacutecies geradas com os arquivos de distacircncias da imagem TOF
Verificou-se que o tempo de integraccedilatildeo para a aquisiccedilatildeo das imagens da parede a
13m de distacircncia da cacircmara deve ser um destes valores O TI de 2000μs pode ser
o escolhido e estaacute de acordo com o graacutefico de dispersatildeo ilustrado com a Figura 55
As filtragens de suavizaccedilatildeo com o filtro passa-baixas pela meacutedia e pela
mediana mostraram-se as melhores opccedilotildees a serem utilizadas com estas filtragens
apresentaram-se os menores desvios para a janela central de 10x10 piacutexeis Uma
vantagem da filtragem pela mediana eacute que mantecircm os valores originais de distacircncia
para os piacutexeis da imagem e preserva as bordas do objeto imageado No entanto a
filtragem com a mediana degrada as bordas da imagem devendo ser
cuidadosamente analisada para cada aplicaccedilatildeo
Tambeacutem foram calculados os desvios padratildeo para as imagens inteiras e os
valores obtidos foram de 19cm em meacutedia Este grande valor deveu-se a maior
curvatura ocorrer nas extremidades da imagem e tambeacutem ao fato de haver uma
descontinuidade na superfiacutecie presente na imagem TOF causada pela porta
presente na superfiacutecie da parede
96
53 EXPERIMENTO 2 ndash ANAacuteLISE DE RUIacuteDO 2 JANELAS DE 40X40 PIacuteXEIS
O objetivo deste experimento foi analisar a presenccedila de ruiacutedo em aacutereas
centrais da imagem TOF Para isto escolheram-se janelas com dimensotildees de 40x40
piacutexeis ao redor do pixel central da imagem Calculou-se o desvio padratildeo da distacircncia
de cada pixel em relaccedilatildeo a este pixel central As janelas utilizadas tiveram sua
posiccedilatildeo na imagem variando de (8282) ateacute (122122) e correspondem a aacuterea com
superfiacutecie plana de uma parede presente na cena
Primeiramente utilizaram-se imagens TOF adquiridas agrave distacircncia de 130m
entre a cacircmara e a parede com os tempos de integraccedilatildeo iguais a 2000 e 5000micros
Posteriormente utilizaram-se imagens TOF obtidas a 210m da parede com tempos
de integraccedilatildeo iguais a 2000 5000 e 7000micros
O graacutefico de dispersatildeo da Figura 59 ilustra uma anaacutelise para a captaccedilatildeo de
imagens TOF com diferentes distacircncias e tempos de integraccedilatildeo Os desvios padratildeo
foram calculados para imagens TOF captadas com a cacircmara CamCube 20 onde
variaram-se as distacircncias e os tempos de integraccedilatildeo no momento da aquisiccedilatildeo das
imagens
FIGURA 59 ndash Desvios padratildeo para distacircncia x TI
FONTE CENTENO e JUTZI (2010)
97
Com a Figura 510 eacute apresentado o primeiro resultado deste experimento o
graacutefico de dispersatildeo gerado com a imagem TOF adquirida do objeto agrave distacircncia de
130m da cacircmara com TI igual a 2000micros
FIGURA 510 ndash Desvios padratildeo para janelas com TI=2000μs d=130m
A Figura 511 ilustra as superfiacutecies geradas com o arquivo de distacircncias da
imagem TOF adquirida do objeto agrave distacircncia de 130m da cacircmara com TI igual a
2000micros e com as imagens resultantes das filtragens realizadas
FIGURA 511 ndash Janelas de 40x40 piacutexeis TI=2000μs d=130m
98
Com a Figura 511 conclui-se que os melhores resultados para a suavizaccedilatildeo
dos dados de distacircncia foram obtidos com os filtros passa-baixas pela meacutedia e
mediana
A Figura 512 ilustra o graacutefico de dispersatildeo para a imagem adquirida com TI
igual a 5000μs com distacircncia de 130m entre o objeto imageado e a cacircmara TOF A
Figura 513 ilustra as superfiacutecies geradas com as janelas centrais de 40x40 piacutexeis
FIGURA 512 ndash Desvios padratildeo para janelas com TI=5000μs d=130m
FIGURA 513 ndash Janelas de 40x40 piacutexeis TI=5000μs d=130m
99
O TI de 5000μs utilizado para a aquisiccedilatildeo da imagem saturou os elementos
do sensor e causou maior presenccedila de ruiacutedo nos dados Comparando as Figuras
511 e 513 conclui-se que para a distacircncia de 130m do sensor o tempo de
integraccedilatildeo mais adequado para a aquisiccedilatildeo da imagem foi 2000micros
A Figura 514 ilustra o graacutefico de dispersatildeo gerado para a imagem TOF
obtida com TI igual a 2000μs e distacircncia de 210m As superfiacutecies geradas a partir
das janelas de 40x40 piacutexeis desta imagem satildeo apresentadas com a Figura 515
FIGURA 514 ndash Desvios padratildeo para janelas com TI=2000μs d=210m
FIGURA 515 ndash Janelas de 40x40 piacutexeis TI=2000μs d=210m
100
O graacutefico de dispersatildeo calculado para a imagem adquirida com TI igual a
5000μs e distacircncia de 210m eacute ilustrado com a Figura 516
FIGURA 516 ndash Desvios padratildeo para janelas com TI=5000μs d=210m
Os menores desvios padratildeo foram encontrados na imagem filtrada utilizando
os filtros passa-baixas pela meacutedia e mediana conforme pode ser visualizado com a
Figura 516 Para a janela de 40x40 piacutexeis o desvio padratildeo de 107mm na imagem
original diminuiu para 96mm com a filtragem pela mediana A Figura 517 ilustra as
superfiacutecies geradas para a imagem obtida com distacircncia de 210m e TI de 5000μs
FIGURA 517 ndash Janelas de 40x40 piacutexeis TI=5000μs d=210m
101
Com a Figura 517 observa-se novamente que os melhores resultados para
a suavizaccedilatildeo da imagem foram obtidos com os filtros passa-baixas pela meacutedia e
pela mediana
A Figura 518 ilustra o graacutefico de dispersatildeo e a Figura 519 ilustra as
superfiacutecies geradas para as imagens adquiridas com distacircncia de 210m e TI igual a
7000μs
FIGURA 518 ndash Desvios padratildeo para janelas com TI=7000μs d=210m
FIGURA 519 ndash Janelas de 40x40 piacutexeis TI=7000μs d=210m
102
Com o graacutefico de dispersatildeo ilustrado com a Figura 518 observa-se que os
desvios padratildeo calculados para as imagens obtidas com os filtros passa-baixas pela
meacutedia e mediana satildeo maiores do que os desvios apresentados com o graacutefico de
dispersatildeo ilustrado com a Figura 516 Isto indica que as imagens captadas da
parede plana com TI igual a 7000μs e distacircncia de 210m apresentaram maior ruiacutedo
que as imagens obtidas com 5000μs
Comparando as Figuras 519 e 517 verifica-se que a imagem captada com
TI igual a 5000μs com distacircncia de 210m e filtrada com o filtro passa-baixas pela
meacutedia e tambeacutem com a mediana apresentou-se mais suavizada do que a imagem
obtida com TI igual a 7000μs
Comparando as imagens captadas com tempo de integraccedilatildeo de 2000μs e
5000μs para a distacircncia de 210m conforme Figuras 515 e 517 conclui-se que as
imagens obtidas com TI de 5000μs apresentaram menor presenccedila de ruiacutedo
54 EXPERIMENTO 3 ndash PROJECcedilAtildeO ORTOGONAL DOS PONTOS
Obtidos os POI atraveacutes do processo de calibraccedilatildeo da cacircmara e definido o
melhor TI para a captaccedilatildeo da imagem procedeu-se a um novo experimento no qual
se analisou a imagem de uma caixa com superfiacutecies planas A superfiacutecie do objeto
em questatildeo eacute composta por papel branco riacutegido e refletivo A caixa foi colocada
sobre uma cadeira agrave distacircncia aproximada de 13m da cacircmara Esta cadeira foi
girada enquanto a cacircmara continuou fixa com o mesmo ponto de vista Com base
no estudo da dispersatildeo dos dados em funccedilatildeo da distacircncia ao objeto optou-se por
utilizar o TI de 2000μs para a captaccedilatildeo das imagens Foram entatildeo adquiridas dez
imagens do objeto
Com a distacircncia do objeto em relaccedilatildeo agrave cacircmara igual a 13m e com a
distacircncia focal calibrada da cacircmara de 132mm valor encontrado com a Equaccedilatildeo
(57) calculou-se a escala aproximada das fotografias encontrando-se o valor
aproximado para a escala igual a 1100 conforme Equaccedilatildeo (58)
119891119888 =119891119909119888+119891119910119888
2=
1315823119898119898+1321383119898119898
2= 1318603119898119898 cong 132119898119898 (57)
103
119864 =119889
119863=
119891119888
119885=
132119898119898
13119898=
00132119898
13119898=
1
984848cong
1
100 (58)
Para realizar este experimento selecionou-se a terceira imagem captada por
apresentar vista perspectiva de trecircs superfiacutecies com padratildeo planar no objeto
imageado A Figura 520a ilustra o arquivo de intensidades da imagem TOF sem
correccedilatildeo geomeacutetrica A Figura 520b ilustra o arquivo de intensidade corrigido
geometricamente utilizando as coordenadas do Ponto Principal 1199090 e 1199100 os
coeficientes de distorccedilatildeo Radial Simeacutetrica 1198701 e 1198702 e a distacircncia focal calibrada 119891119888
FIGURA 520 ndash Arquivo de intensidades da imagem TOF obtida do objeto
Apoacutes a correccedilatildeo da geometria da imagem TOF geraram-se as superfiacutecies do
objeto Isto foi feito a partir do arquivo de distacircncias da imagem TOF conforme eacute
ilustrado com a Figura 521 onde se tem as distacircncias dos pontos em relaccedilatildeo ao
sensor representadas com a coordenada Z em metros sobre a imagem TOF com
dimensatildeo de 204x204 piacutexeis
104
FIGURA 521 ndash Arquivo de distacircncias da imagem TOF com geometria corrigida
A partir do arquivo de distacircncias da imagem TOF com a geometria dos
dados corrigida projetaram-se ortogonalmente os pontos gerando a nuvem de
pontos 3D ilustrada com a Figura 522 em vista frontal com o eixo Z ortogonal aos
eixos X e Y representados
FIGURA 522 ndash Nuvem de pontos vista frontal
105
A vista em perspectiva tridimensional da nuvem de pontos do objeto de
estudo eacute ilustrada com a Figura 523 Conteacutem 42025 pontos gerados a partir da
imagem TOF de 204x204 piacutexeis obtida com a cacircmara PMD CamCube 20
FIGURA 523 - Nuvem de pontos vista perspectiva 3D
106
55 EXPERIMENTO 4 ndash SEGMENTACcedilAtildeO 1 CRESCIMENTO DE REGIOtildeES
Realizou-se a segmentaccedilatildeo por crescimento de regiotildees a partir de trecircs
pontos semente Estes pontos foram escolhidos em aacutereas uniformes no arquivo de
intensidades da imagem TOF corrigida geometricamente e foram projetados
ortogonalmente para a nuvem 3D As coordenadas de imagem destes pontos foram
observadas nas posiccedilotildees indicadas com a Figura 524
FIGURA 524 ndash Pontos semente no arquivo de intensidades da imagem TOF
Os pontos semente foram escolhidos em trecircs superfiacutecies planas da caixa em
locais que apresentavam valores de intensidade uniforme As coordenadas de
imagem lidas em piacutexeis para estes trecircs pontos foram Ponto 1 (11681) Ponto 2
(72103) Ponto 3 (113108)
As Figuras 525 e 526 ilustram o crescimento em trecircs regiotildees realizados na
nuvem de pontos 3D Estes pontos correspondem agraves superfiacutecies frontal superior e
lateral da caixa ilustradas com as cores amarela verde e ciano respectivamente
Os trecircs autovetores calculados satildeo ilustrados com a cor azul ortogonais aos pontos
semente escolhidos nas trecircs superfiacutecies da imagem de intensidade
107
FIGURA 525 ndash Crescimento de regiotildees vista frontal
FIGURA 526 ndash Crescimento de regiotildees vista perspectiva 3D
Com as Figuras 525 e 526 verifica-se que o crescimento das regiotildees
ocorreu de forma coerente acompanhando o padratildeo planar das superfiacutecies do
objeto de estudo No entanto nas trecircs superfiacutecies analisadas houve crescimento de
regiotildees para fora dos limites de suas aacutereas Pontos de superfiacutecies ao fundo e abaixo
do objeto foram incluiacutedos nas regiotildees Isto ocorreu devido agrave utilizaccedilatildeo do criteacuterio de
108
similaridade de distacircncia do ponto agrave superfiacutecie plana sendo esta superfiacutecie definida
pelos pontos semente A distacircncia foi medida ao longo do autovetor o que fez com
que pontos de outras superfiacutecies paralelas a superfiacutecie plana em questatildeo fossem
agrupados na mesma regiatildeo Ou seja pontos que estavam orientados na direccedilatildeo da
superfiacutecie plana definida pelo autovalor que passa pelo ponto semente e que
estavam dentro do limiar de distacircncia estabelecido foram incluiacutedos nas regiotildees
mesmo natildeo pertencendo agrave superfiacutecie analisada
56 EXPERIMENTO 5 ndash SEGMENTACcedilAtildeO 2 ANAacuteLISE COM AUTOVALORES
Neste experimento realizou-se a segmentaccedilatildeo da imagem TOF por anaacutelise
da variaccedilatildeo local de autovalores locais de superfiacutecies O arquivo de distacircncias desta
imagem foi utilizado como ponto de partida para o caacutelculo dos autovalores com o
objetivo de intensificar as bordas dos objetos presentes na cena
O processamento consistiu em definir uma pequena vizinhanccedila quadrada
uma janela moacutevel e utilizar as coordenadas tridimensionais dos pontos nesta
vizinhanccedila para o caacutelculo dos autovalores
Apoacutes a normalizaccedilatildeo os autovalores foram armazenados na forma de trecircs
novas imagens conforme pode ser visualizado com as Figuras 527 528 e 529
Para a geraccedilatildeo destas imagens utilizou-se a janela moacutevel com dimensatildeo de 3x3
piacutexeis para o caacutelculo dos autovalores
109
FIGURA 527 ndash Imagem com bordas intensificadas gerada com 1205821
FIGURA 528 ndash Imagem com bordas intensificadas gerada com 1205822
FIGURA 529 ndash Imagem com bordas intensificadas gerada com 1205823
110
A partir da imagem com bordas intensificadas gerada com os autovalores
locais foi possiacutevel criar uma nova imagem de intensidade que tambeacutem estava com
as bordas dos objetos intensificadas A Figura 530 ilustra as imagens de
intensidade com bordas intensificadas que foram geradas utilizando o segundo
autovalor calculado a partir de janelas com as seguintes dimensotildees a)3x3 b)5x5
c)7x7 d)9x9 e)11x11 f)13x13 piacutexeis
FIGURA 530 ndash Imagens de intensidade com as bordas do objeto intensificadas
111
Com as imagens de intensidade ilustradas com a Figura 530 observou-se
que aumentando a quantidade de piacutexeis da janela utilizada para o caacutelculo dos
autovalores da regiatildeo aumentou-se tambeacutem a suavizaccedilatildeo sobre as superfiacutecies
planas e alargaram-se as bordas que limitam os objetos contidos na cena
Para este experimento utilizou-se a imagem gerada com a janela de 3x3
piacutexeis e com o segundo autovalor Esta imagem foi escolhida por apresentar linhas
finas limitando as bordas do objeto A imagem de intensidade com as bordas do
objeto intensificadas foi segmentada utilizando o algoritmo de deslocamento pela
meacutedia O resultado da segmentaccedilatildeo eacute ilustrado com a Figura 531
FIGURA 531 ndash Imagem com bordas intensificadas segmentada
112
A Figura 531a ilustra a imagem com bordas intensificadas a ser
segmentada gerada com o segundo conjunto de autovalores 1205822 Na Figura 531b
tem-se esta imagem suavizada por filtragem A Figura 531c corresponde agrave imagem
segmentada com o algoritmo de deslocamento pela meacutedia A imagem com os limites
das aacutereas segmentadas eacute ilustrada com a Figura 531d
A segmentaccedilatildeo foi realizada utilizando o software EDISON com os
paracircmetros (119893119904 119893119903 119867) = (7 9 300) Estes paracircmetros correspondem ao domiacutenio
espacial da imagem 119893119904 domiacutenio de caracteriacutesticas 119893119903 e tamanho miacutenimo das
regiotildees 119867 em piacutexeis O limite miacutenimo foi fixado para evitar que regiotildees muito
pequenas fossem incluiacutedas na segmentaccedilatildeo
Com a imagem segmentada da Figura 529c foi possiacutevel projetar os pontos
de interesse ortogonalmente gerando a nuvem de pontos 3D Para isto utilizou-se
as coordenadas dos piacutexeis no arquivo de intensidades e seus correspondentes no
arquivo de distacircncias da imagem TOF Estes pontos foram escolhidos sobre as
superfiacutecies da caixa A nuvem de pontos 3D resultante deste experimento eacute
apresentada com as Figuras 532 e 533
FIGURA 532 ndash Nuvem de pontos da imagem segmentada vista frontal
113
FIGURA 533 ndash Nuvem de pontos da imagem segmentada vista 3D
57 EXPERIMENTO 6 ndash ANAacuteLISE DAS MEDIDAS OBTIDAS
Para gerar a nuvem de pontos 3D com as superfiacutecies de interesse
primeiramente corrigiu-se a geometria do arquivo de distacircncias da imagem TOF com
as coordenadas do Ponto Principal 1199090 e 1199100 coeficientes de distorccedilatildeo Radial
Simeacutetrica 1198701 e 1198702 e distacircncia focal calibrada 119891119888 O passo seguinte foi gerar uma
imagem de intensidade com as bordas do objeto intensificadas Com este objetivo
calcularam-se os autovalores para os pontos do arquivo de distacircncias da imagem
TOF e geraram-se trecircs imagens novas correspondendo aos trecircs autovalores
calculados conforme o Experimento 5 O terceiro passo foi a segmentaccedilatildeo da
imagem de intensidade com bordas intensificadas utilizando o algoritmo de
deslocamento pela meacutedia Com a imagem segmentada pocircde-se escolher as
superfiacutecies que teriam seus piacutexeis projetados para a nuvem de pontos 3D
A imagem segmentada com o algoritmo de deslocamento pela meacutedia
apresenta niacuteveis de cinza diferentes para os piacutexeis de cada segmento Com isto foi
possiacutevel separar os pontos que compotildeem as superfiacutecies por seus valores digitais A
Figura 534 apresenta a nuvem de pontos 3D gerada com a imagem TOF corrigida
geometricamente com os pontos da superfiacutecie frontal representados com a cor azul
114
FIGURA 534 ndash Nuvem de pontos 3D segmentada
A superfiacutecie frontal foi projetada com atributo de cor diferenciado por
apresentar a melhor segmentaccedilatildeo na imagem de intensidade e pontos bem
definidos na nuvem 3D A partir desta superfiacutecie escolheram-se os pontos extremos
os veacutertices do objeto para a leitura de suas coordenadas 3D com o objetivo de
calcular o comprimento das arestas Com a Figura 535 satildeo ilustrados os quatro
pontos selecionados
FIGURA 535 ndash Pontos 3D selecionados na nuvem
115
Com as coordenadas destes quatro pontos e atraveacutes da relaccedilatildeo de distacircncia
tridimensional entre eles expressa pela Equaccedilatildeo (59) calcularam-se as dimensotildees
de trecircs arestas do objeto de estudo
119863119894119895 = 119883119894minus119883119895 2
+ 119884119894minus119884119895 2
+ 119885119894minus119885119895 2 (59)
onde
119863119894119895 ndash Distacircncia entre pontos no espaccedilo tridimensional
119883119894 119884119894 119885119894 119890 119883119895 119884119895 119885119895 - Coordenadas dos pontos 119894 e 119895 na nuvem de pontos 3D
Para verificar a confiabilidade das medidas obtidas com a metodologia
proposta compararam-se as medidas das arestas calculadas a partir dos pontos 3D
com as dimensotildees de referecircncia do objeto de estudo As medidas de referecircncia satildeo
ilustradas com o desenho da Figura 536
FIGURA 536 ndash Dimensotildees de referecircncia do objeto de estudo
A partir das coordenadas tridimensionais dos quatro pontos ilustrados com a
Figura 535 foi possiacutevel calcular as distacircncias entre os pontos e comparar-las com
as medidas de referecircncia As diferenccedilas obtidas satildeo ilustradas com a Tabela 52
116
Ponto
Coordenadas Arestas Medida realizada Diferenccedilas
X (cm) Y (cm) Z (cm) Pontos 3D (cm)
Ref (cm)
(cm) ()
1 -131 -136 -1219 Pontos 1-2 236 260 24 92
2 -80 61 -1098 Pontos 2-3 332 350 18 51
3 234 38 -1203 Pontos 2-4 263 210 53 252
4 -125 180 -1328
TABELA 52 ndash Coordenadas 3D dos pontos e medidas realizadas
O melhor resultado foi obtido para a medida realizada sobre a aresta entre
os pontos 2-3 com diferenccedila de aproximadamente 18 cm em relaccedilatildeo agrave medida de
referecircncia o que representa 5 da distacircncia medida O pior resultado foi obtido com
o calculo da aresta entre os pontos 2 e 4 com diferenccedila de aproximadamente
53cm que equivale 25 da medida de referecircncia Com este resultado conclui-se
que os pontos projetados com maior profundidade na nuvem de pontos 3D
apresentaram maior erro de posicionamento Estes pontos descrevem uma
superfiacutecie plana do objeto pouco aparente na imagem encontra-se muito inclinada
em relaccedilatildeo ao plano da imagem motivo pelo qual erros maiores podem ser
esperados Sobre os pontos 1 2 e 3 da superfiacutecie frontal do objeto o erro foi menor
na ordem de 2 centiacutemetros
Conforme o Experimento 1 realizado para a anaacutelise de ruiacutedo o melhor
resultado foi obtido utilizando o filtro da mediana que apresentou o desvio de 13cm
para a distacircncia de 13m medida utilizando tempo de integraccedilatildeo de 2000micros Este
fato indica coerecircncia com a diferenccedila de 2cm encontrada com a medida da aresta
frontal do objeto
117
58 MODELAGEM DAS SUPERFIacuteCIES 3D
Para a modelagem tridimensional das superfiacutecies segmentadas
primeiramente foi analisada a melhor forma de processamento da imagem TOF
Verificou-se com o Experimento 4 que o crescimento de regiotildees utilizando o arquivo
de intensidades da imagem TOF para escolha do ponto semente e o arquivo de
distacircncias para a projeccedilatildeo ortogonal e crescimento de regiotildees a partir deste ponto
natildeo foi satisfatoacuterio Isto porque o crescimento tambeacutem ocorreu em superfiacutecies que
natildeo pertenciam ao objeto analisado
Melhores resultados foram obtidos com a metodologia de segmentaccedilatildeo que
utilizou a imagem com bordas evidenciadas Esta foi gerada com a anaacutelise dos
autovalores locais das superfiacutecies a partir do arquivo de distacircncias da imagem TOF
conforme Experimento 5 A partir desta segmentaccedilatildeo projetaram-se ortogonalmente
os pontos das superfiacutecies frontal e superior do objeto de estudo gerando assim a
nuvem de pontos 3D que eacute ilustrada com a Figura 537
FIGURA 537 ndash Nuvem de pontos 3D das superfiacutecies frontal e superior
A partir da nuvem de pontos 3D realizou-se a modelagem das superfiacutecies
frontal e superior do objeto conforme eacute ilustrado com a Figura 538
118
FIGURA 538 ndash Modelagem tridimensional das superfiacutecies frontal e superior
Analisando a Figura 538 chegou-se a conclusatildeo que a superfiacutecie frontal do
objeto apresentou-se com padratildeo planar e uniforme Eacute a superfiacutecie que melhor
refletiu o sinal para o sensor devido agrave sua posiccedilatildeo em relaccedilatildeo agrave cacircmara TOF A
superfiacutecie superior apresentou-se um pouco inclinada em relaccedilatildeo ao plano da
imagem e com isto maior rugosidade foi observada nesta superfiacutecie Este
fenocircmeno deve-se a menor captaccedilatildeo do sinal refletido pela superfiacutecie do objeto pelo
sensor da cacircmara
119
6 CONCLUSOtildeES RECOMENDACcedilOtildeES E CONSIDERACcedilOtildeES FINAIS
61 CONCLUSOtildeES
Neste trabalho descreveram-se conceitos introdutoacuterios sobre as cacircmaras
TOF Avaliaram-se duas metodologias para a segmentaccedilatildeo da nuvem de pontos 3D
gerada a partir da imagem TOF Apresentou-se uma aplicaccedilatildeo para esta imagem na
extraccedilatildeo de informaccedilotildees meacutetricas do objeto de estudo imageado a distacircncia
aproximada de 13m
Para isto foram abordados os seguintes assuntos calibraccedilatildeo da cacircmara
para a obtenccedilatildeo de POI correccedilatildeo geomeacutetrica da imagem TOF filtragens para
anaacutelise e tratamento de ruiacutedo segmentaccedilatildeo atraveacutes do crescimento de regiotildees a
partir de um ponto semente segmentaccedilatildeo do arquivo de distacircncias da imagem TOF
utilizando autovalores locais para a geraccedilatildeo de uma imagem com bordas
intensificadas segmentaccedilatildeo da imagem com bordas intensificadas atraveacutes do
algoritmo de deslocamento pela meacutedia geraccedilatildeo da nuvem de pontos 3D atraveacutes da
projeccedilatildeo ortogonal dos pontos da imagem de bordas segmentada e por fim a
modelagem tridimensional de superfiacutecies do objeto de estudo
O processo de calibraccedilatildeo da cacircmara foi realizado utilizando o meacutetodo
proposto por Zhang (2000) e possibilitou a determinaccedilatildeo de POI A correccedilatildeo
geomeacutetrica das imagens foi feita atraveacutes das coordenadas 1199090 e 1199100 do Ponto
Principal coeficientes de distorccedilatildeo Radial Simeacutetrica de lentes 1198701 e 1198702 e distacircncia
focal calibrada 119891119888
Com os Experimentos 1 e 2 foram realizadas filtragens para o tratamento de
ruiacutedo das imagens TOF disponiacuteveis Nestes experimentos verificou-se que para a
captaccedilatildeo da imagem TOF agrave distacircncia de 13m entre o objeto e a cacircmara o tempo de
integraccedilatildeo de 2000μs foi o que gerou imagens com menor presenccedila de ruiacutedo Assim
como o tempo de integraccedilatildeo de 5000μs foi o mais adequado para captar imagens agrave
distacircncia de 21m No entanto chegou-se a conclusatildeo que para a geraccedilatildeo da nuvem
de pontos 3D natildeo se deveria utilizar filtragem nos dados pois pequenas alteraccedilotildees
no arquivo de distacircncias da imagem TOF poderiam modificar o posicionamento
tridimensional dos pontos o que afetaria a qualidade das medidas realizadas com os
pontos da nuvem 3D
120
A primeira metodologia proposta para a segmentaccedilatildeo da imagem TOF
mostrou-se insatisfatoacuteria para a soluccedilatildeo do problema Empregou-se o crescimento
de regiotildees a partir de pontos semente escolhidos no arquivo de intensidades desta
imagem projetando-os ortogonalmente para a nuvem de pontos 3D utilizando os
valores obtidos com o arquivo de distacircncias da imagem TOF Notou-se que erros no
crescimento de regiotildees ocorreram devido agrave toleracircncia utilizada para a distacircncia do
ponto agrave superfiacutecie plana Isto ocorreu porque a distacircncia foi calculada ao longo do
autovetor que eacute ortogonal a superfiacutecie no ponto semente Por este motivo alguns
pontos de superfiacutecies adjacentes foram selecionados equivocadamente como
pertencentes a uma mesma regiatildeo na nuvem de pontos 3D pois estavam dentro do
limite fixado no criteacuterio de similaridade utilizado mas na realidade natildeo eram
coplanares Para resolver o problema com esta metodologia seria necessaacuterio
estabelecer um limiar de crescimento lateral natildeo apenas de distacircncia ortogonal a
superfiacutecie plana semente Este limiar poderia ser o valor digital do pixel tendo em
vista que superfiacutecies coplanares apresentam uniformidade na resposta espectral A
rugosidade apresentada na superfiacutecie em que se realizava o crescimento da regiatildeo
tambeacutem influenciou em erros na seleccedilatildeo de pontos pois afetou no caacutelculo dos
autovalores fazendo com que inclinaccedilotildees em relaccedilatildeo a esta superfiacutecie fossem
notadas
A segunda metodologia analisada para a segmentaccedilatildeo da imagem TOF
mostrou-se satisfatoacuteria A segmentaccedilatildeo do arquivo de distacircncias da imagem TOF foi
realizada utilizando autovalores locais para a geraccedilatildeo de uma imagem com bordas
intensificadas segmentaccedilatildeo desta imagem com o algoritmo de deslocamento pela
meacutedia e projeccedilatildeo destes segmentos para a nuvem de pontos 3D A extraccedilatildeo de
informaccedilotildees meacutetricas em arestas do objeto de estudo a partir dos pontos 3D
apresentou diferenccedila na ordem de 2cm com a medida de referecircncia sendo a
imagem TOF adquirida com tempo de integraccedilatildeo de 2000μs a uma distacircncia
aproximada de 13m entre o objeto de estudo e a cacircmara
A Figura 61 ilustra as etapas de processamento a serem realizadas para a
geraccedilatildeo da nuvem de pontos 3D utilizando a segunda metodologia considerada
apropriada para a modelagem tridimensional de superfiacutecies utilizando a imagem
TOF Esta eacute a metodologia proposta como conclusatildeo do presente trabalho de
pesquisa
121
FIGURA 61 ndash Etapas da metodologia de processamento da imagem TOF
Foram encontradas medidas com maior qualidade quando a superfiacutecie do
objeto estava paralela ao plano da imagem Esta qualidade tambeacutem foi afetada pela
distacircncia entre a cacircmara e o objeto pela refletividade das superfiacutecies e pela
iluminaccedilatildeo ambiente Conforme o Experimento 6 realizado a aresta frontal do objeto
entre os pontos 2 e 3 apresentou a menor diferenccedila de medida 18cm que equivale
a 5 da distacircncia de referecircncia
Comparaccedilotildees para a diferenccedila de medida encontrada podem ser realizadas
com os seguintes trabalhos Kahlmann et al (2006) obtiveram exatidatildeo de 1cm nas
medidas com o alvo agrave distacircncia de 25m da cacircmara TOF utilizada Wiedemann et al
(2008) obtiveram exatidatildeo de 4cm com o alvo medido a distacircncia de 4m May et al
(2008) obtiveram erro de 30cm para uma medida de 108m considerada como
referecircncia com as imagens TOF captadas do centro de uma sala girando a cacircmara
360ordm e portanto envolviam tambeacutem Paracircmetros de Orientaccedilatildeo Exterior da cacircmara
Kolb et al (2009) obtiveram erro de 2cm para distacircncias medidas de 10m agrave 45m
Nestes trabalhos foram realizadas correccedilotildees geomeacutetricas nas imagens TOF com
POI determinados com a calibraccedilatildeo da cacircmara
Arquivo de distacircncias da imagem TOF
Correccedilatildeo geomeacutetrica dos dados utilizando POI calculados com o processo de calibraccedilatildeo da cacircmara
Imagem de intensidade com bordas itensificadas calculada com a anaacutelise da variaccedilatildeo local dos autovalores
Segmentaccedilatildeo da imagem com bordas intensificadas utilizando o algoriacutetmo de deslocamento pela meacutedia
Projeccedilatildeo ortogonal das aacutereas segmentadas para a geraccedilatildeo da nuvem de pontos 3D
Modelagem tridimensional das superfiacutecies do objeto
122
62 RECOMENDACcedilOtildeES
Recomenda-se realizar a anaacutelise preacutevia do tempo de integraccedilatildeo para a
aquisiccedilatildeo da imagem TOF com o objetivo de diminuir a presenccedila de ruiacutedo Este
tempo deve ser escolhido de acordo com o ambiente em que seraacute adquirida a
imagem e tambeacutem com as caracteriacutesticas de refletividade da superfiacutecie do objeto
Com este mesmo objetivo e devido ao fato desta imagem ser obtida com iluminaccedilatildeo
LED no comprimento de onda infravermelho recomenda-se analisar as influecircncias
da iluminaccedilatildeo exterior ao sistema de iluminaccedilatildeo da cacircmara
De acordo com a aplicaccedilatildeo a que se destina a imagem TOF recomenda-se
tambeacutem realizar a calibraccedilatildeo da cacircmara com meacutetodo fotogrameacutetrico convencional
Isto possibilitaria a melhora na correccedilatildeo geomeacutetrica da imagem e consequente
aumento na qualidade das medidas realizadas com os pontos da nuvem 3D
Correccedilotildees radiomeacutetricas tambeacutem podem ser aplicadas para melhorar a qualidade
das medidas obtidas com a imagem TOF
63 CONSIDERACcedilOtildeES FINAIS
Nuvens de pontos 3D geradas a partir de imagens TOF satildeo ferramentas
para a modelagem tridimensional das superfiacutecies de objetos Propiciam a obtenccedilatildeo
de informaccedilotildees meacutetricas destes objetos para distacircncias de 03 a 70 metros com
erro centimeacutetrico esperado
Aplicaccedilotildees para as imagens TOF podem ser realizadas para a modelagem
3D de tuacuteneis galerias instalaccedilotildees industriais e fachadas de preacutedios com interesse
de preservaccedilatildeo como patrimocircnio histoacuterico e cultural Com a alta frequecircncia de
aquisiccedilatildeo de imagens das cacircmaras TOF torna-se possiacutevel realizar filmagens e
mapeamentos em movimento
Outras aplicaccedilotildees possiacuteveis para as imagens TOF estatildeo na sua utilizaccedilatildeo
para a criaccedilatildeo de cenaacuterios 3D em jogos eletrocircnicos aquisiccedilatildeo de filmes com
tecnologia 3D modelagem tridimensional de obras de arte Biometria e anaacutelise de
movimentos
123
REFEREcircNCIAS BIBLIOGRAacuteFICAS
ANDRADE J B Fotogrametria 2 ed Curitiba SBEE 1998 274 p APUZZO N D‟ Recent advances in 3D full body scanning with applications to fashion and apparel 10p In Proceedings Optical 3-D Measurement Techniques IX Vienna Austria 2009 BALTSAVIAS E P Airborne laser scanning basic relations and formulas ISPRS - Journal of Photogrammetry amp Remote Sensing v 54 p 199-214 1999 BAZAN W S TOMMASELLI A M G GALO M RUY R S A influecircncia das injunccedilotildees de orientaccedilatildeo relativa na calibraccedilatildeo de um sistema dual de cacircmaras digitais 23p Boletim de Ciecircncias Geodeacutesicas v 15 n 3 Curitiba 2009 BELTON D Improving and extending the information on Principal Component Analysis for local neighborhoods in 3D points clouds 8p The international Archives of the Photogrammetry Remote Sensing and Spatial Information Sciences v XXXVII B5 Beijing 2008 BELTON D LICHTI D Classification and segmentation of terrestrial laser scanner point clouds using local variance information 6p In Proceedings ISPRS Commission V Simposium bdquoImage Engineering and Vision Metrology‟ 2006 BROWN D C Close-Range Camera Calibration Photogrammetric Engineering v 37 nordm 8 p 855-866 1971 CENTENO J A S Sensoriamento Remoto e Processamento de Imagens Digitais Curso de Poacutes-Graduaccedilatildeo em Ciecircncias Geodeacutesicas Curitiba UFPR 2004 209p CENTENO J A S JUTZI B Evaluation of range imaging sensor concerning resolution and illumination 6p In Proceedings The 2010 Canadian Geomatics Conference and Symposium of Commission I ISPRS Calgary Alberta 2010 CHRISTOUDIAS M C GEORGESCU B MEER P Synergism in Low Level Vision IEEE Transactions on Pattern Analysis and Machine Intelligence v 24 n 5 p 603-619 2002
124
COMANICIU D MEER P Mean Shift A Robust Approach Toward Feature Space Analysis 17p IEEE Transactions on Pattern Analysis and Machine Intelligence v 24 n 5 p 603-619 2002 FUCHS S HIRZINGER G Extrinsic and depth calibration of ToF cameras In Proceedings IEEE Conference on Computer Vision and Pattern Recognition (CVPR) Anchorage USA 2008 FUCHS S MAY S Calibration and registration for precise surface reconstruction with ToF cameras In Proceedings of the Dynamic 3D Imaging Workshop in Conjunction with DAGM (Dyn3D) v I Heidelberg Germany 2007 GEMAEL C Introduccedilatildeo ao ajustamento de observaccedilotildees aplicaccedilotildees geodeacutesicas 3 ed Curitiba UFPR 1994 319p GONZALEZ R C WOODS R E Processamento de imagens digitais Satildeo Paulo Edgard Bluumlcher Ltda 2000 509p GROSS H THOENNESSEN U Extraction of lines from laser point clouds p 86-91 In Proceedings Symposium of ISPRS Commission III Photogrammetric Computer Vision PCV06 Eds Foumlrstner W Steffen R International Archives of Photogrammetry Remote Sensing and Spatial Information Sciences 36 (Part 3) 2006 HABIB A MORGAN M Automatic calibration of low-cost digital cameras p 948-955 Journal of Photogrammetric Record 2003 JAMTSHO S Geometric modelling of 3D Range Cameras and their application for structural deformation measurement 174p (Master‟s Thesis Department of Geomatics Engineering) University of Calgary Alberta 2010 JOHNSON R A WICHERN D W Applied multivariate statistical analysis 4 ed New Jersey Pearson Prentice Hall 1998 JUTZI B GROSS H Nearest neighbor classification on laser point clouds to gain object structures from buildings 6p In Proceedings ISPRS Hannover Workshop 2009 High-Resolution Earth Imaging for Geospatial Information Disponiacutevel em lthttpwwwisprsorgproceedingsXXXVIII1_4_7-W5paperpapershtmgt Acesso 16112010
125
KAHLMANN T REMONDINO F INGENSAND H Calibration for increased accuracy of the range imaging camera SwissrangerTM ISPRS Commission V Symposium bdquoImage Engineering and Vision Metrology‟ v XXXVI n 5 2006 KEMENY S E EL-SAYED E MENDIS S FOSSUM E R Update on focal-plane image processing research 8p SPIE v 1447 Charged-Coupled Devices and Solid Optical Sensors II 1991 KHONGSAB P Signal processing and performance evaluation of a PMD camera for space docking 88p (Master‟s Thesis Continuation Courses Space Science and Technology Department of Space Science) Lulea University of Techology Kiruna 2009 KOCH R SCHILLER I BARTCZAK B KELLNER F KOumlSER K MixIn3D 3D mixed reality with ToF camera 16p In Work Programme of the EU‟s 7th Framework program 2009 KOLB A BARTH E KOCH R LARSEN R Time-of-Flight sensors in Computer Graphics 16p In STAR ndash State of The Art Report The Eurographics Association 2009 LANGE R 3D Time-of-Flight distance measurement with custom solid-state image sensors in CMOSCCD-technology 205 p (Dissertation Department of Electrical Engineering and Computer Science at University of Siegen for the degree of Doctor of Technical Sciences) Univesity of Siegen Alemanha 2000 LEON S J Linear Algebra with applications 4 ed Dartmouth Prentice Hall 1998 390p LUAN X Experimental investigation of Photonic Mixer Device and development of TOF 3D ranging systems based on PMD technology A dissertation submitted to the Department of Electrical Engineering and Computer Science at University of Siegen Siegen 2001 MACHADO A M L Extraccedilatildeo automaacutetica de contornos de edificaccedilotildees utilizando imagem gerada por cacircmara digital de pequeno formato e dados LIDAR 201 p Tese apresentada ao Curso de Poacutes-Graduaccedilatildeo em Ciecircncias Geodeacutesicas da Universidade Federal do Paranaacute Curitiba UFPR 2006
126
MASS H G VOSSELMAN Two algorithms for extracting building models from raw laser altimetry data 11p Elsevier Science Photogrammetry amp Remote Sensing 1999 MAY S DROESCHEL D HOLTZ D WIESEN C FUCHS S 3D Pose estimation and mapping with time-of-flight cameras 6p Germany 2008 Disponiacutevel em httpwwwroboticdefileadminroboticfuchsiros08_3dcampdf Acesso em 2510 2010 MITISHITA E A Monorestituiccedilatildeo digital de aerofotos associada com sistema de computaccedilatildeo graacutefica CAD para fins de mapeamento na aacuterea florestal 251p Tese (Doutorado em Engenharia Florestal) ndash Setor de Ciecircncias Agraacuterias Universidade Federal do Paranaacute 1997 MOumlLLER T KRAFT H FREY J ALBRECHT M LANGE R Robust 3D measurement with PMD sensors 2005 PAULY M GROSS M KOBBELT L P Efficient simplification of point-sampled surfaces 8p In VIS ‟02 Proceedings of the Conference on Visualization ‟02 Washington DC USA 2002 IEEE Computer Society PECHT Y FOSSUM E R Wide intrascene dynamic range CMOS APS using dual sampling IEEE Transactions on Electron Devices v 44 n 10 1997 PMD Technologies PMD [vison]regCamCube 20 4p Datasheet n 20090601 Siegen 2009 Disponiacutevel em lthttpwwwpmdteccomproducts-servicespmdvisionr-cameraspmdvisionr-camcube-20gt Acesso em 0103 2010 PMD Technologies PMD [vison]regCamCube 20 Software development tutorial 13p Siegen 2009 Disponiacutevel em lthttpwwwpmdteccomfileadminpmdtecdownloadsdocumentationcamcube_softwaredevelopmenttutorialpdfgt Acesso em 1504 2010 RAPP H Experimental and theoretical investigation of correlating TOF-camera systems 71p Diploma Thesis in Physics Faculty for Physics and Astronomy University of Heidelberg Alemanha 2007 RINGBECK T A 3D Time Of Flight camera for object detection 10p In Proceedings Optical 3D Measurement Techniques Plenary Session 1 Range Imaging I Zuumlrich 2007
127
SHAKARJI C M Least-Squares fitting algorithms of the NIST algorithm testing system 9p Journal of research of the national of standards and technology v 103 n 6 1998 THEUWISSEN A Solid-state imaging with Charge-Coupled Devices PP 34-46 Kluwer Academic Publishers 1995 Disponiacutevel em ltwwwspringerlinkcomgt Acesso em 08072010
WIEDEMANN M SAUER M DRIEWER F SCHILLING K Analysis and characterization of the PMD camera for application in mobile robotics 6p In Proceedings of the 17th World Congress The International Federation of Automatic Control Seoul Korea July 6-11 2008 ZHANG Z A flexible new technique for camera calibration 5p IEEE Transactions on Pattern Analysis and Machine Intelligence November 2000

viii
LISTA DE FIGURAS
FIGURA 21 ndash Princiacutepio TOF 19
FIGURA 22 ndash Meacutetodo da diferenccedila de fase 20
FIGURA 23 ndash FC utilizada no meacutetodo da diferenccedila de fase 23
FIGURA 24 ndash Informaccedilatildeo das imagens TOF 25
FIGURA 25 ndash Imagem TOF obtida com cacircmara PMD 26
FIGURA 26 ndash Ruiacutedo na nuvem de pontos 3D proveniente de imagem TOF 27
FIGURA 27 ndash Princiacutepio de funcionamento do sistema PMD 28
FIGURA 28 ndash Captaccedilatildeo da carga do sinal em sensores CCD e CMOS 29
FIGURA 29 ndash Representaccedilatildeo de campos de franja 30
FIGURA 210 ndash Princiacutepio de armazenamento de cargas em sensores TOF 31
FIGURA 211 ndash Princiacutepio de captaccedilatildeo de cargas pelo sensor PMD 32
FIGURA 212 ndash Medida da diferenccedila de fase do sinal recebido 33
FIGURA 213 ndash Medida de distacircncia com a cacircmara PMD 35
FIGURA 214 ndash Cacircmara PMD CamCube 20 36
FIGURA 215 ndash Imagem captada com a cacircmara PMD CamCube 20 37
FIGURA 216 ndash Princiacutepio de funcionamento do SBI 39
FIGURA 217 ndash Modelos de cacircmaras TOF 39
FIGURA 218 ndash Nuvem de pontos 3D gerada a partir de imagem TOF 44
FIGURA 219 ndash Colinearidade entre os pontos no espaccedilo imagem e objeto 45
FIGURA 220 ndash Sistemas de coordenadas utilizados em imagens 47
FIGURA 221 ndash Filtro para a definiccedilatildeo de bordas do objeto 51
FIGURA 222 ndash Geometria do filtro para a definiccedilatildeo de bordas 52
FIGURA 223 ndash Autovetores em nuvem de pontos 3D de uma superfiacutecie plana 55
FIGURA 224 ndash Inclinaccedilotildees de superfiacutecies determinadas por autovalores 59
FIGURA 225 ndash Imagem segmentada 66
FIGURA 41 ndash Processamento da imagem TOF 69
FIGURA 42 ndash Filtragem passa-baixas pela meacutedia 80
FIGURA 43 ndash Filtragem pela mediana 80
FIGURA 44 ndash Filtragem utilizando a meacutedia temporal 81
FIGURA 45 ndash Intensificaccedilatildeo de bordas com autovalores 85
FIGURA 46 ndash Imagem com bordas intensificadas 85
FIGURA 51 ndash Imagens do gabarito utilizadas na calibraccedilatildeo da cacircmara 87
FIGURA 52 ndash Orientaccedilatildeo Exterior das fotografias para a calibraccedilatildeo da cacircmara 88
FIGURA 53 ndash Direccedilatildeo das distorccedilotildees nos pontos da imagem TOF 88
ix
FIGURA 54 ndash Correccedilatildeo geomeacutetrica da imagem TOF 90
FIGURA 55 ndash Desvio padratildeo x TI janelas 10x10 93
FIGURA 56 ndash Imagens para TI=500μs e d=130m 93
FIGURA 57 ndash Imagens para TI=2000μs e d=130m 94
FIGURA 58 ndash Imagens para TI=2500μs e d=130m 95
FIGURA 59 ndash Desvios padratildeo para distacircncia x TI 96
FIGURA 510 ndash Desvios padratildeo para janelas com TI=2000μs d=130m 97
FIGURA 511 ndash Janelas de 40x40 piacutexeis TI=2000μs d=130m 97
FIGURA 512 ndash Desvios padratildeo para janelas com TI=5000μs d=130m 98
FIGURA 513 ndash Janelas de 40x40 piacutexeis TI=5000μs d=130m 98
FIGURA 514 ndash Desvios padratildeo para janelas com TI=2000μs d=210m 99
FIGURA 515 ndash Janelas de 40x40 piacutexeis TI=2000μs d=210m 99
FIGURA 516 ndash Desvios padratildeo para janelas com TI=5000μs d=210m 100
FIGURA 517 ndash Janelas de 40x40 piacutexeis TI=5000μs d=210m 100
FIGURA 518 ndash Desvios padratildeo para janelas com TI=7000μs d=210m 101
FIGURA 519 ndash Janelas de 40x40 piacutexeis TI=7000μs d=210m 101
FIGURA 520 ndash Arquivo de intensidades da imagem TOF obtida do objeto 103
FIGURA 521 ndash Arquivo de distacircncias da imagem TOF com geometria corrigida 104
FIGURA 522 ndash Nuvem de pontos vista frontal 104
FIGURA 523 ndash Nuvem de pontos vista perspectiva 3D 105
FIGURA 524 ndash Pontos semente no arquivo de intensidades da imagem TOF 106
FIGURA 525 ndash Crescimento de regiotildees vista frontal 107
FIGURA 526 ndash Crescimento de regiotildees vista perspectiva 3D 107
FIGURA 527 ndash Imagem com bordas intensificadas gerada com 1205821 109
FIGURA 528 ndash Imagem com bordas intensificadas gerada com 1205822 109
FIGURA 529 ndash Imagem com bordas intensificadas gerada com 1205823 109
FIGURA 530 ndash Imagens de intensidade com as bordas do objeto intensificadas 110
FIGURA 531 ndash Imagem com bordas intensificadas segmentada 111
FIGURA 532 ndash Nuvem de pontos da imagem segmentada vista frontal 112
FIGURA 533 ndash Nuvem de pontos da imagem segmentada vista 3D 113
FIGURA 534 ndash Nuvem de pontos 3D segmentada 114
FIGURA 535 ndash Pontos 3D selecionados na nuvem 114
FIGURA 536 ndash Dimensotildees de referecircncia do objeto de estudo 115
FIGURA 537 ndash Nuvem de pontos 3D das superfiacutecies frontal e superior 117
FIGURA 538 ndash Modelagem tridimensional das superfiacutecies frontal e superior 118
x
LISTA DE QUADROS E TABELAS
QUADRO 21 ndash Especificaccedilotildees teacutecnicas da cacircmara PMD CamCube 20 37
QUADRO 22 ndash Especificaccedilotildees teacutecnicas de cacircmaras TOF 40
QUADRO 23 ndash Propriedades de superfiacutecies normais obtidas com autovalores 57
TABELA 51 ndash Paracircmetros de Orientaccedilatildeo Interior calculados 89
TABELA 52 ndash Coordenadas 3D dos pontos e medidas realizadas 116
xi
LISTA DE SIGLAS
Sigla Significado
AMISE Asymptotic Mean Integrated Square Error
CCD Charge Coupled Device
CMOS Complementary Metal Oxide Semiconductor
CP Centro Perspectivo
EDISON Edge Detection and Image SegmentatiON System
FC Funccedilatildeo de Correlaccedilatildeo
FPN Fixed Pattern Noise
FPS Frames Per Second
LASER Light Amplification by Stimulated Emission of Radiation
LED Light Emitting Diode
MDE Modelo Digital de Elevaccedilatildeo
MVC Matriz de Variacircncias e Covariacircncias
PMD Photonic Mixer Device
POE Paracircmetros de Orientaccedilatildeo Exterior
POI Paracircmetros de Orientaccedilatildeo Interior
PP Ponto Principal
SBI Supression of Background Ilumination
TI Tempo de Integraccedilatildeo
TOF Time-Of-Flight
xii
SUMAacuteRIO
1 INTRODUCcedilAtildeO 14
11 OBJETIVO GERAL 16
12 OBJETIVOS ESPECIacuteFICOS 16
13 JUSTIFICATIVA 17
14 ESTRUTURA DA DISSERTACcedilAtildeO 18
2 REVISAtildeO BIBLIOGRAacuteFICA 19
21 MEDIDA DE DISTAcircNCIA COM O PRINCIacutePIO TOF 19
22 IMAGEM TOF 25
23 TEMPO DE INTEGRACcedilAtildeO 26
24 PRINCIacutePIO DE FUNCIONAMENTO DO SENSOR PMD 28
25 CAcircMARAS PMD 34
251 Cacircmara PMD CamCube 20 36
252 Dispositivo SBI 38
253 Modelos de cacircmaras TOF 39
26 ERROS DE MEDIDA 40
261 Erros natildeo-sistemaacuteticos em cacircmaras TOF 41
262 Erros sistemaacuteticos em cacircmaras TOF 41
27 PROJECcedilAtildeO ORTOGONAL DOS PONTOS 45
28 REFINAMENTO DA NUVEM DE PONTOS 3D 50
29 ANAacuteLISE DE SUPERFIacuteCIES POR AUTOVALORES E AUTOVETORES 53
210 ANAacuteLISE DE SUPERFIacuteCIES POR MOMENTOS INVARIANTES 56
211 ALGORITMO DE DESLOCAMENTO PELA MEacuteDIA 60
3 MATERIAIS 67
4 MEacuteTODOS 68
41 CALIBRACcedilAtildeO DA CAcircMARA 69
42 ANAacuteLISE DA PRESENCcedilA DE RUIacuteDO 78
421 Filtragem passa-baixas pela meacutedia 79
422 Filtragem pela mediana 80
423 Filtragem com a meacutedia temporal 81
43 SEGMENTACcedilAtildeO 82
431 Crescimento de regiotildees a partir de superfiacutecies planas e ponto semente 82
xiii
432 Segmentaccedilatildeo por anaacutelise da variaccedilatildeo local de autovalores 84
433 Segmentaccedilatildeo com o algoritmo de deslocamento pela meacutedia 86
5 RESULTADOS E DISCUSSOtildeES 87
51 CALIBRACcedilAtildeO DA CAcircMARA 87
52 EXPERIMENTO 1 ndash ANAacuteLISE DE RUIacuteDO 1 IMAGEM TOF INTEIRA 92
53 EXPERIMENTO 2 ndash ANAacuteLISE DE RUIacuteDO 2 JANELAS DE 40X40 PIacuteXEIS 96
54 EXPERIMENTO 3 ndash PROJECcedilAtildeO ORTOGONAL DOS PONTOS 102
55 EXPERIMENTO 4 ndash SEGMENTACcedilAtildeO 1 CRESCIMENTO DE REGIOtildeES 106
56 EXPERIMENTO 5 ndash SEGMENTACcedilAtildeO 2 ANAacuteLISE COM AUTOVALORES 108
57 EXPERIMENTO 6 ndash ANAacuteLISE DAS MEDIDAS OBTIDAS 113
58 MODELAGEM DAS SUPERFIacuteCIES 3D 117
6 CONCLUSOtildeES RECOMENDACcedilOtildeES E CONSIDERACcedilOtildeES FINAIS 119
61 CONCLUSOtildeES 119
62 RECOMENDACcedilOtildeES 122
63 CONSIDERACcedilOtildeES FINAIS 122
REFEREcircNCIAS BIBLIOGRAacuteFICAS 123
14
1 INTRODUCcedilAtildeO
A informaccedilatildeo meacutetrica para a representaccedilatildeo espacial de objetos eacute uma
necessidade para diferentes aacutereas de estudo Algumas aplicaccedilotildees exigem que o
processo de aquisiccedilatildeo e representaccedilatildeo graacutefica desta informaccedilatildeo seja realizado com
rapidez e qualidade Em Ciecircncias Geodeacutesicas a obtenccedilatildeo desta informaccedilatildeo pode
ser feita atraveacutes de diversas maneiras dentre elas citam-se os levantamentos de
campo e as imagens obtidas por sensores remotos exemplos satildeo teacutecnicas
aplicadas em Topografia e Fotogrametria
Com a Topografia o trabalho pode alcanccedilar alto grau de exatidatildeo
dependendo da teacutecnica e precisatildeo do equipamento utilizado No entanto se gasta
bastante tempo para realizar o levantamento das informaccedilotildees em campo e tambeacutem
para o processamento e organizaccedilatildeo dos dados em escritoacuterio Algumas aplicaccedilotildees
da Topografia estatildeo na locaccedilatildeo de obras como rodovias geraccedilatildeo de perfis de
terrenos e rios monitoramento de deformaccedilotildees na estrutura de barragens pontes e
tambeacutem no levantamento de pontos 3D para representar fachadas de edifiacutecios
Com a Fotogrametria o levantamento das informaccedilotildees tridimensionais de um
objeto pode ser feito em tempo relativamente curto As fotografias satildeo obtidas de
forma instantacircnea No entanto quando se utilizam teacutecnicas convencionais de
Fotogrametria necessita-se de pelo menos duas fotografias com sobreposiccedilatildeo das
aacutereas imageadas para a geraccedilatildeo do modelo fotogrameacutetrico Outra forma eacute a teacutecnica
conhecida por Monorestituiccedilatildeo Digital onde se utiliza uma fotografia digital em
conjunto com um Modelo Digital de Elevaccedilatildeo (MDE) normalmente gerado por uma
nuvem de pontos proveniente de outro equipamento ou sensor (MITISHITA 1997)
Na modalidade terrestre da Fotogrametria eacute possiacutevel determinar pontos 3D
para representar fachadas de preacutedios obras de arte mapeamentos de ruas e
imoacuteveis com a plataforma em movimento dentre outras aplicaccedilotildees
Aleacutem das teacutecnicas convencionais de levantamentos utilizadas em Topografia
e Fotogrametria e com o objetivo de viabilizar a aquisiccedilatildeo da informaccedilatildeo espacial
equipamentos e teacutecnicas tecircm sido constantemente desenvolvidos e aperfeiccediloados
Avanccedilos tecnoloacutegicos tecircm possibilitado a obtenccedilatildeo da informaccedilatildeo tridimensional
para a representaccedilatildeo dos objetos de forma raacutepida e precisa Exemplos satildeo os
sistemas de varredura laser scanner e as cacircmaras TOF (Time-Of-Fligth) tambeacutem
15
conhecidas na literatura por Range Cameras Estas cacircmaras geram imagens com
informaccedilotildees de distacircncia para cada pixel do objeto imageado denominadas
imagens de profundidade distacircncia ou Range Image Neste trabalho seraacute utilizada
preferencialmente a denominaccedilatildeo ldquoimagem TOFrdquo
Nas uacuteltimas deacutecadas os sistemas de varredura laser scanner tecircm sido muito
utilizados para mapeamento Equipamentos com esta tecnologia possibilitam a
obtenccedilatildeo de milhares de pontos por segundo e podem ser instalados em
plataformas aeacutereas ou terrestres No entanto devido a este ser um equipamento
oacuteptico e mecacircnico o alto custo na sua aquisiccedilatildeo torna-o inviaacutevel para algumas
aplicaccedilotildees
Cacircmaras TOF atraem a atenccedilatildeo de diferentes aacutereas que necessitam de
pontos com coordenadas 3D de seus objetos de estudo tais como a Visatildeo
Computacional e a Engenharia de Automaccedilatildeo Um modelo de cacircmara TOF eacute a PMD
CamCube 20 que capta 25 imagens por segundo (Frames Per Secunde - FPS)
Com esta frequecircncia de aquisiccedilatildeo pode obter o movimento dos objetos na cena e de
grande quantidade de informaccedilatildeo tridimensional sobre os mesmos
No entanto a grande quantidade de dados captada deve ter sua qualidade
avaliada A iluminaccedilatildeo exterior ao sistema interfere negativamente Outro fator a ser
observado eacute a configuraccedilatildeo da cena pois interferecircncias satildeo causadas pelas
distacircncias orientaccedilotildees e refletividade das superfiacutecies dos objetos em relaccedilatildeo ao
sensor da cacircmara Em uma mesma cena podem-se apresentar medidas ambiacuteguas
de distacircncia para os pontos devido a erros causados pela iluminaccedilatildeo utilizada no
sistema As influencias causadas por erros sistemaacuteticos assim como ruiacutedos devem
ser observadas para cada tipo de aplicaccedilatildeo (MAY et al 2008)
A cacircmara TOF utilizada para a aquisiccedilatildeo das imagens nesta pesquisa foi a
PMD[vision]regCamCube 20 Esta utiliza um sensor de imageamento PMD (Photonic
Mixer Device) que possibilita armazenar informaccedilatildeo de distacircncia para os piacutexeis de
uma imagem de intensidade O equipamento fornece a imagem TOF que eacute
composta por um arquivo com as intensidades que o sinal retornou para o sensor e
um arquivo com as informaccedilotildees de distacircncia para cada pixel o que possibilita a
percepccedilatildeo da profundidade dos objetos na cena
16
11 OBJETIVO GERAL
O objetivo geral deste trabalho de pesquisa eacute desenvolver uma metodologia
para a modelagem tridimensional das superfiacutecies de objetos a partir da nuvem de
pontos 3D proveniente da imagem TOF
12 OBJETIVOS ESPECIacuteFICOS
Realizar a correccedilatildeo geomeacutetrica dos dados da imagem TOF atraveacutes de
Paracircmetros de Orientaccedilatildeo Interior obtidos com o processo de
calibraccedilatildeo da cacircmara
Testar meacutetodos de filtragem para a reduccedilatildeo de ruiacutedo presente nas
imagens TOF e analisar formas para a aquisiccedilatildeo da imagem TOF
com menor presenccedila de ruiacutedo
Analisar o tempo de integraccedilatildeo para diferentes situaccedilotildees de aquisiccedilatildeo
da imagem TOF
Avaliar meacutetodos para a segmentaccedilatildeo das superfiacutecies de objetos a
partir da imagem TOF
Gerar nuvem de pontos com coordenadas tridimensionais das
superfiacutecies segmentadas e modelar estas superfiacutecies
tridimensionalmente
Avaliar a qualidade das medidas obtidas com a modelagem
tridimensional das superfiacutecies do objeto de estudo
17
13 JUSTIFICATIVA
Com o desenvolvimento e aperfeiccediloamento das cacircmaras TOF acredita-se
na viabilizaccedilatildeo deste equipamento para a medida de distacircncia e modelagem
tridimensional das superfiacutecies de objetos para diferentes finalidades Apresenta as
seguintes vantagens
Recobrimento da aacuterea de forma instantacircnea
Possibilidade de filmar a cena registrando o movimento dos objetos
com frequecircncia de aquisiccedilatildeo de 25 imagens por segundo
Fornece grande quantidade de pontos com coordenadas 3D dos
objetos imageados
Uma imagem eacute suficiente para estimar a distacircncia dos objetos
Informaccedilatildeo na banda espectral do infravermelho
Uma imagem TOF captada instantaneamente disponibiliza informaccedilatildeo sobre
a distacircncia de objetos contidos na cena sendo possiacutevel a geraccedilatildeo de nuvens de
pontos para a representaccedilatildeo tridimensional de objetos sem necessitar de
informaccedilatildeo proveniente de outro sensor Outra vantagem eacute o sistema natildeo precisar
de iluminaccedilatildeo exterior
Algumas aplicaccedilotildees para as imagens TOF foram realizadas nas aacutereas de
prevenccedilatildeo de acidentes automobiliacutesticos e seguranccedila de pedestres (RINGBECK
2007) Visatildeo Computacional (WIEDEMANN et al 2008) mapeamentos
tridimensionais de objetos em ambientes fechados para a movimentaccedilatildeo roboacutetica
(MAY et al 2008) Computaccedilatildeo Graacutefica (KOLB 2009 et al KOCH et al 2009)
realizaccedilatildeo de medidas do corpo humano para a induacutestria de roupas (APUZZO
2009) e anaacutelise de deformaccedilotildees (JAMTSHO 2010)
18
14 ESTRUTURA DA DISSERTACcedilAtildeO
A presente dissertaccedilatildeo foi estruturada em seis capiacutetulos No primeiro
capitulo realiza-se a introduccedilatildeo ao tema descreve-se o objetivo geral e os objetivos
especiacuteficos aleacutem da justificativa para a pesquisa
O segundo capiacutetulo apresenta uma revisatildeo de conceitos sobre medida de
distacircncia utilizando o princiacutepio TOF descriccedilatildeo da imagem TOF e seus arquivos de
intensidades e distacircncias influencia do tempo de integraccedilatildeo (TI) na aquisiccedilatildeo da
imagem TOF princiacutepio de funcionamento do sensor PMD modelos de cacircmaras
TOF erros de medida que podem ocorrer utilizando estas cacircmaras projeccedilatildeo
ortogonal das distacircncias obtidas com a imagem TOF para a geraccedilatildeo da nuvem de
pontos 3D meacutetodo para o refinamento da nuvem de pontos 3D detecccedilatildeo de
superfiacutecies por autovetores e autovalores anaacutelise de superfiacutecies por momentos
invariantes e algoritmo de deslocamento pela meacutedia para a segmentaccedilatildeo de
imagens
No terceiro capitulo descrevem-se os materiais equipamentos e espaccedilo
fiacutesico utilizado para a realizaccedilatildeo do trabalho de pesquisa
Com o quarto capitulo satildeo descritos os meacutetodos utilizados para o
desenvolvimento da pesquisa calibraccedilatildeo da cacircmara filtragens para anaacutelise e
tratamento de ruiacutedo presente nas imagens meacutetodos de segmentaccedilatildeo por
crescimento de regiotildees na nuvem de pontos segmentaccedilatildeo por anaacutelise da variaccedilatildeo
local de autovalores no arquivo de distacircncias da imagem TOF e geraccedilatildeo de imagem
de intensidade com as bordas do objeto intensificadas segmentaccedilatildeo da imagem
com bordas intensificadas utilizando o algoritmo de deslocamento pela meacutedia
Com o quinto capitulo descrevem-se os resultados obtidos tais como
valores dos paracircmetros calculados no processo de calibraccedilatildeo da cacircmara
experimentos realizados para a anaacutelise da presenccedila de ruiacutedo nas imagens TOF
projeccedilatildeo ortogonal dos pontos para a geraccedilatildeo da nuvem de pontos 3D
segmentaccedilatildeo por crescimento de regiotildees segmentaccedilatildeo por anaacutelise da variaccedilatildeo
local de autovalores anaacutelise das medidas obtidas com a nuvem de pontos 3D
segmentada e tambeacutem se realiza a modelagem tridimensional de duas superfiacutecies
do objeto estudado
Finalmente com o sexto capitulo satildeo apresentadas conclusotildees
consideraccedilotildees finais e recomendaccedilotildees para trabalhos futuros de acordo com os
experimentos realizados
19
2 REVISAtildeO BIBLIOGRAacuteFICA
21 MEDIDA DE DISTAcircNCIA COM O PRINCIacutePIO TOF
O princiacutepio TOF (Time-Of-Flight) permite calcular a distacircncia de objetos a
partir da emissatildeo e recepccedilatildeo de um sinal luminoso Com este objetivo utiliza-se um
conjunto de emissor e receptor oacutepticos que mede o tempo necessaacuterio para o sinal
retornar para o sensor apoacutes atingir o alvo com base no conhecimento do valor da
velocidade da luz propagada no vaacutecuo De acordo com Baltsavias (1999) o caacutelculo
da distacircncia com o princiacutepio TOF pode ser realizado atraveacutes de dois meacutetodos
Tempo de percurso de pulsos curtos de energia
Mudanccedila de fase de um sinal modelado na forma de onda contiacutenua
Sistemas que utilizam o primeiro meacutetodo de medida transmitem um pulso e
medem o seu tempo de retorno Isto eacute possiacutevel devido ao retardo de tempo gasto no
percurso do sinal que eacute medido atraveacutes de um ponto no pulso de retorno com
referecircncia no pulso emitido Quanto melhor eacute a medida do tempo melhor a distacircncia
calculada sendo o reloacutegio do sensor um fator de grande importacircncia neste meacutetodo
Para obter precisatildeo meacutetrica necessita-se realizar a medida de tempo em nano
segundos (ƞs) O afastamento e duraccedilatildeo do pulso tambeacutem satildeo fatores importantes
na resoluccedilatildeo da medida de distacircncia com este meacutetodo A Figura 21 Ilustra a medida
de distacircncia com o princiacutepio TOF (LANGE 2000)
FIGURA 21 ndash Princiacutepio TOF
FONTE LANGE (2000)
20
Utilizando pulsos de uma fonte de luz pode-se calcular a distacircncia de um
alvo atraveacutes da Equaccedilatildeo (21)
119863 =119888 119905
2 (21)
onde
119863 ndash Distacircncia entre o sensor e o alvo
119888 ndash Valor constante da velocidade da luz
119905 ndash Variaccedilatildeo de tempo entre emissatildeo e recepccedilatildeo do pulso
O segundo meacutetodo trabalha com a determinaccedilatildeo da mudanccedila de fase do
sinal contido em uma onda contiacutenua modulada Pode ser utilizado para evitar o
problema na medida de tempo com alta precisatildeo O sinal luminoso pode ser emitido
utilizando fontes LED (Light Emitting Diode) ou LASER (Light Amplification by
Stimulated Emission of Radiation) Estas fontes permitem a modulaccedilatildeo direta do
sinal luminoso atraveacutes da voltagem do sistema (LANGE 2000)
Para a utilizaccedilatildeo do meacutetodo da diferenccedila de fase considera-se que o sinal
refletido pelo alvo manteacutem a forma do sinal modulado emitido mas a fase do sinal
emitido eacute diferente da fase do sinal recebido conforme ilustrado com a Figura 22
FIGURA 22 ndash Meacutetodo da diferenccedila de fase
21
Sendo assim a mudanccedila de fase entre os sinais pode ser utilizada para
calcular a distacircncia conforme Equaccedilatildeo (22)
119863 =120593∙119888
4∙120587∙120574 (22)
onde
119863 ndash Distacircncia entre o sensor e o alvo
120593 ndash Diferenccedila de fase entre o sinal emitido e o recebido
119888 ndash Valor constante da velocidade da luz
120574 ndash Frequecircncia de modulaccedilatildeo do sinal
Em cacircmaras TOF a distacircncia entre o sensor e o alvo eacute medida utilizando o
meacutetodo da diferenccedila de fase com uma Funccedilatildeo de Correlaccedilatildeo (FC) entre o sinal
emitido e o refletido As amplitudes dos sinais satildeo moduladas com a mesma
frequecircncia Com isto a iluminaccedilatildeo pode ser feita utilizando diacuteodos emissores de luz
LED tendo-se a vantagem que a FC pode ser obtida com o sensor PMD a partir da
forma senoidal do sinal recebido (RAPP 2007)
A FC eacute calculada atraveacutes do sinal emitido e recebido Estes sinais satildeo
modelados matematicamente com forma senoidal tendo em vista que sua
propagaccedilatildeo ocorre na forma de onda Dado um sinal luminoso emitido 119892 119905 e um
sinal recebido 119904 119905 em um ponto do sensor PMD as amostras 119888 120591 podem ser
calculadas atraveacutes da Equaccedilatildeo (23) Estas amostras satildeo utilizadas para modelar a
FC em um atraso de tempo 120591
119888 120591 = 119904 119905 otimes 119892 119905 = lim119879rarrinfin 119904 119905 ∙ 119892 119905 + 120591 +119879
2
minus119879
2
119889119905 (23)
onde
119904 119905 ndash Funccedilatildeo que modela a forma do sinal luminoso recebido
119892 119905 ndash Funccedilatildeo que modela a forma do sinal luminoso emitido
119905 ndash Variaccedilatildeo de tempo entre a emissatildeo e a recepccedilatildeo do sinal
120591 ndash Atraso de tempo no recebimento do sinal
22
O sinal emitido pode ser expresso com 119892 119905 = cos(120603119905) o recebido eacute
expresso atraveacutes da relaccedilatildeo 119904 119905 = 1 + 119886 ∙ cos(120603119905 minus 120593) Ambos com forma senoidal
amplitude 119886 e diferenccedila de fase 120593 Com isto a FC pode ser apresentada na forma da
Equaccedilatildeo (25)
119888 120591 = 1 + 119886 ∙ 119888119900119904 120603120591 minus 120593 otimes 119888119900119904 120603120591 (24)
119888 120591 = lim119879acuterarrinfin1
119879acute 1 + 119886 ∙ 119888119900119904 120603119905 minus 120593 ∙ 119888119900119904 120603119905 + 120603119905
+119879 acute
2
minus119879 acute
2
119889119905 (25)
119888 120591 =119886
2∙ cos 120593 + 120603119905 (26)
onde
119892 119905 ndash Funccedilatildeo senoidal que modela a forma do sinal emitido
119904 119905 ndash Funccedilatildeo que modela a forma do sinal recebido
119905 ndash Variaccedilatildeo de tempo entre a emissatildeo e recepccedilatildeo do sinal
120591 ndash Atraso no tempo de recebimento do sinal
119886 ndash Amplitude da onda portadora do sinal
120593 ndash Diferenccedila de fase
120603 ndash Referecircncia de fase para o sinal modelado na forma senoidal
Lange (2000) avaliou a FC para fases 120596 119905 preacute-definidas escolhendo quatro
fases 120596 119905 = 0deg 120596 119905 = 90deg 120596 119905 = 180deg 120596 119905 = 270deg Verificou que eacute possiacutevel calcular a
diferenccedila de fase 120593 e a amplitude 119886 do sinal recebido 119904(119905) Considerando que o sinal
recebido tem sobreposiccedilatildeo ao sinal emitido deve-se adicionar uma constante de
deslocamento 119870 conforme a Equaccedilatildeo (27)
119862 120591 = 119888 120591 + 119870 (27)
119862 1205910 = 119888 1205910 + 119870 =119886
2∙ cos 120593 + 119870 (28)
119862 1205911 = 119888 1205911 + 119870 = minus119886
2∙ 119904119890119899 120593 +119870 (29)
119862 1205912 = 119888 1205912 + 119870 = minus119886
2∙ cos 120593 + 119870 (210)
119862 1205913 = 119888 1205913 + 119870 =119886
2∙ 119904119890119899 120593 +119870 (211)
23
Analisando a FC em quatro pontos a diferenccedila de fase 120593 e a amplitude 119886 do
sinal 119904(119905) podem ser calculadas atraveacutes das Equaccedilotildees (212) e (213)
120593 = 119905119892minus1 119862 1205913 minus119862 1205911
119862 1205910 minus119862 1205912 (212)
119886 = 119862 1205913 minus119862 1205911 2+ 119862 1205910 minus119862 1205912 2
2 (213)
Pode-se fazer a simplificaccedilatildeo das Equaccedilotildees (214) agrave (217) para quatro
pontos amostrais que satildeo necessaacuterios na modelagem da FC
119862 1205911 = 1198601 (214)
119862 1205912 = 1198602 (215)
119862 1205913 = 1198603 (216)
119862 1205910 = 1198604 (217)
A anaacutelise da FC entre o sinal oacuteptico e eleacutetrico recebido no dispositivo do
sensor eacute feita utilizando a diferenccedila de fase conforme ilustrado com a Figura 23
FIGURA 23 ndash FC utilizada no meacutetodo da diferenccedila de fase
FONTE Adaptado de LANGE (2000)
A FC permite calcular a distacircncia entre o alvo e a cacircmara utilizando quatro
amostras 11986011198602 1198603 e 1198604 com defasagem de 90ordm A diferenccedila de fase 120593 entre o sinal
24
emitido e o recebido eacute proporcional agrave distacircncia entre o alvo e a cacircmara O valor para
a diferenccedila de fase pode ser calculado atraveacutes da Equaccedilatildeo (218)
120593 = 119886119903119888119905119886119899 1198601minus1198603
1198602 minus1198604 (218)
onde
120593 ndash Diferenccedila de fase entre a onda emitida e a recebida
1198601119860211986031198604 ndash Pontos amostrais utilizados na modelagem da FC
Aleacutem do valor da diferenccedila de fase entre os sinais dois outros valores
podem ser calculados a amplitude 119886 e o valor de intensidade 119887 do sinal recebido
conforme as Equaccedilotildees (219) e (220) respectivamente
119886 = 1198601minus1198603 2+ 1198602 minus1198604 2
2 (219)
119887 =1198601+1198602 +1198603+1198604
4 (220)
onde
119886 ndash Amplitude do sinal recebido
119887 ndash Intensidade do sinal recebido (offset)
A distacircncia 119889 do sensor ao alvo eacute calculada atraveacutes da Equaccedilatildeo (221)
119889 =119888∙120593
4120587∙119891119898119900119889 (221)
onde
119889 ndash Distacircncia entre o sensor e o alvo
119888 ndash Valor constante da velocidade da luz propagada no vaacutecuo
120593 ndash Diferenccedila de fase entre o sinal emitido e o recebido
119891119898119900119889 ndash Frequecircncia de modulaccedilatildeo do sinal luminoso utilizado
A frequecircncia de modulaccedilatildeo do sinal emitido estabelece a distacircncia maacutexima
que poderaacute ser medida para um determinado comprimento de onda Em um sinal
25
modulado com a frequecircncia 119891119898119900119889 = 20119872119867119911 e comprimento de onda 120582119898119900119889 = 15m
conforme a Equaccedilatildeo (222) a distacircncia maacutexima que poderaacute ser medida eacute de 75
metros (MOumlLLER et al 2005)
119889119898119886119909 =120582119898119900119889
2= 75119898 (222)
22 IMAGEM TOF
Os piacutexeis da imagem TOF contecircm informaccedilotildees de distacircncia e intensidade
das superfiacutecies dos objetos Proporcionam a anaacutelise da profundidade dos objetos na
cena aleacutem da informaccedilatildeo de intensidade do sinal captado pelo sensor A Figura 24
ilustra a informaccedilatildeo 3D contida na imagem TOF
FIGURA 24 ndash Informaccedilatildeo das imagens TOF
FONTE Adaptado de RINGBECK (2007)
Com a informaccedilatildeo de profundidade e o posicionamento bidimensional dos
objetos na imagem pode-se realizar o mapeamento destes objetos e estimar suas
dimensotildees As cacircmaras TOF podem captar imagens e viacutedeos para realizar medidas
e detectar movimentos A Figura 25 ilustra os arquivos da imagem TOF
26
FIGURA 25 ndash Imagem TOF obtida com cacircmara PMD
FONTE PMD Technologies (2009)
A Figura 25a ilustra o arquivo com informaccedilatildeo das distacircncias dos objetos
presentes na imagem TOF A Figura 25b ilustra o arquivo com as intensidades que
o sinal retornou para o sensor registrada em cada piacutexel da imagem infravermelha
captada com comprimento de onda de 870nm
23 TEMPO DE INTEGRACcedilAtildeO
O periacuteodo de tempo que o sensor da cacircmara ficou exposto para obter a
imagem eacute chamado de tempo de integraccedilatildeo (TI) A quantidade de energia
eletromagneacutetica captada pelo sensor eacute diretamente influenciada por este tempo
pelas caracteriacutesticas refletivas das superfiacutecies dos objetos e pelo meio em que a
imagem foi tomada Os elementos do sensor podem ser carregados de acordo com
seu intervalo de capacidade do insaturado ao supersaturado Estes valores causam
ruiacutedos na imagem variando de acordo com a distacircncia entre o objeto e o sensor
(CENTENO e JUTZI 2010)
Este pode ser considerado o paracircmetro interno mais criacutetico em uma cacircmara
TOF pois descreve o periacuteodo de tempo que os elementos sensores necessitam
para detectar o sinal luminoso com a finalidade de obter a diferenccedila de fase utilizada
27
para o caacutelculo da distacircncia Quando o TI eacute muito baixo alguns elementos do sensor
podem natildeo ser ativados ocasionando piacutexeis com valor zero natildeo sendo possiacutevel
calcular sua distacircncia Por outro lado se o TI eacute muito elevado o pixel pode ficar
supersaturado o que tambeacutem causa erro na medida da distacircncia Sendo assim eacute
necessaacuterio determinar um TI especiacutefico para cada situaccedilatildeo Nas cacircmaras PMD o
controle do TI eacute realizado atraveacutes de software em outros modelos de cacircmaras TOF
este controle pode ser feito atraveacutes de hardware (WIEDEMANN et al 2008)
A Figura 26 ilustra a presenccedila de ruiacutedo na imagem TOF influenciada pelo
TI Nesta figura as nuvens de pontos 3D foram geradas com imagens TOF obtidas
com a cacircmara PMD CamCube 20 a partir do mesmo ponto de vista mas com
diferentes TI (140micros 1400micros e 14000micros) isto causou a presenccedila de ruiacutedo com
diferentes comportamentos
FIGURA 26 ndash Ruiacutedo na nuvem de pontos 3D proveniente de imagem TOF
FONTE PMD CamCube Tutorial (2009)
A nuvem de pontos gerada com a imagem obtida com TI de 1400micros
ilustrada com a Figura 26b foi a que melhor representou a forma das superfiacutecies do
objeto A nuvem de pontos da Figura 26a foi gerada a partir da imagem obtida com
TI igual a 140micros considerada com baixa saturaccedilatildeo pois a intensidade do sinal
captado pelo sensor foi pequena A nuvem de pontos da Figura 26c foi gerada com
imagem obtida com TI igual a 14000micros o que causou a saturaccedilatildeo do sinal recebido
pelo sensor e maior presenccedila de ruiacutedo A nuvem de pontos apresentada com a
Figura 26c apresentou-se menos consistente para representar as superfiacutecies do
objeto em questatildeo
28
24 PRINCIacutePIO DE FUNCIONAMENTO DO SENSOR PMD
O dispositivo PMD (Photonic Mixer Device) realiza medidas de distacircncia
utilizando o princiacutepio TOF Com este objetivo o dispositivo emite sinais luminosos
com frequecircncia modulada e o sensor capta a intensidade de retorno do sinal
refletido pelo alvo Informaccedilotildees sobre as fases e intensidades destes sinais satildeo
obtidas com o processamento A Figura 27 ilustra as etapas deste processo
FIGURA 27 ndash Princiacutepio de funcionamento do sistema PMD
FONTE LUAN (2001)
O sinal modulado eacute emitido com uma fase determinada pelo oscilador do
sistema Para que se possa realizar a medida da distacircncia o sinal recebido deve ter
fase diferente da que foi emitido No dispositivo PMD as cargas eleacutetricas do sinal
recebido satildeo separadas de acordo com a voltagem do diodo de leitura tambeacutem
chamado de fotodiodo O arquivo de saiacuteda deste dispositivo conteacutem informaccedilatildeo de
fase e intensidade do sinal recebido o que possibilita obter informaccedilatildeo de distacircncia
e intensidade para cada piacutexel da imagem (LUAN 2001)
O sensor utilizado no imageamento eacute um CMOS (Complementary Metal-
Oxide-Semiconductor) que tem tecnologia similar a dos sensores CCD (Charged-
Coupled Device) O CMOS apresenta a vantagem de ser um circuito integrado com
baixo consumo de energia No CMOS a conversatildeo de voltagem e a amplificaccedilatildeo do
sinal ocorrem em cada fotodiodo e os valores podem ser lidos independentemente
29
A desvantagem eacute que a amplificaccedilatildeo no fotodiodo gera imagens com maior
presenccedila de ruiacutedo (PECHT e FOSSUM 1997)
Quando os foacutetons sensibilizam o sensor CCD a carga eleacutetrica eacute transferida
sequencialmente linha por linha coluna por coluna A conversatildeo de voltagem e
amplificaccedilatildeo do sinal eacute realizada fora da aacuterea do sensor Uma vantagem do sensor
CCD eacute a geraccedilatildeo de imagens mais niacutetidas devido agrave menor complexidade no seu
sistema Por processar as cargas eleacutetricas de forma unificada menores interferecircncias
satildeo causadas diminuindo a presenccedila de ruiacutedo (KEMENY et al 1991)
A diferenccedila no princiacutepio de funcionamento dos sensores CCD e CMOS eacute
Ilustrada com a Figura 28
FIGURA 28 ndash Captaccedilatildeo da carga do sinal em sensores CCD e CMOS
FONTE LANGE (2000)
O princiacutepio de funcionamento do sensor CCD eacute ilustrado com as Figuras
28a e 28c onde a leitura da informaccedilatildeo eacute feita de forma sequencial pelos elementos
do sensor Esta varredura realizada no sensor CCD faz com que a geraccedilatildeo da
30
imagem final seja mais lenta que no sensor CMOS que realiza a conversatildeo foacuteton-
eleacutetron e eleacutetron-voltagem diretamente em cada elemento sensor conforme eacute
ilustrado com as Figuras 28b e 28d Com isto o sensor CMOS tem maior
velocidade de transferecircncia de cargas acumuladas para o conversor analoacutegico-
digital
Fotodiodos satildeo os elementos fotossensiacuteveis utilizados como portas de
entrada para o sinal luminoso em sensores CMOS ou CCD Estes captam cargas
eleacutetricas presentes no sinal e estatildeo inseridos sobre uma placa de Siliacutecio O
transporte das cargas para o interior da placa eacute explicado fisicamente atraveacutes dos
campos de franjas ilustrado com a Figura 29 Os campos de franja estatildeo
representados para diferentes voltagens os elementos do sensor apresentado tem
entradas para trecircs voltagens 10V 5V e 0V
FIGURA 29 ndash Representaccedilatildeo de campos de franja
FONTE THEUWISSEN (1995)
A seccedilatildeo A-A‟ na Figura 29 ilustra os campos de franja gerados mais
proacuteximos agrave superfiacutecie da placa A forma do sinal pode ser modelada de forma
aproximada por segmentos de linhas retas Na seccedilatildeo B-B‟ com profundidade meacutedia
na placa de Siliacutecio a influecircncia do campo eleacutetrico das entradas vizinhas a porta
central de 5V estaacute em seu niacutevel maacuteximo Quanto mais fundo encontra-se a entrada
de cargas na placa de Siliacutecio menor seraacute a interferecircncia dos campos eleacutetricos
gerados pelas portas de entrada das cargas vizinhas conforme pode ser visualizado
na seccedilatildeo C-C‟ Nesta profundidade diferentes portas de entrada estatildeo praticamente
31
agrave mesma distacircncia da superfiacutecie e o valor de dispersatildeo do campo de franja diminui
O campo de franja miacutenimo de uma entrada que tecircm profundidade maacutexima
proporciona ao sensor o maior aproveitamento aumentando assim a velocidade no
transporte de cargas (THEUWISSEN 1995)
Quanto maior a modulaccedilatildeo na voltagem da entrada das cargas maior o
potencial de armazenamento conforme ilustrado com a Figura 210
FIGURA 210 ndash Princiacutepio de armazenamento de cargas em sensores TOF
FONTE LANGE (2000)
O sinal modulado recebido 119904 119905 e a Funccedilatildeo de Correlaccedilatildeo 119891 119905 + 120591 do sinal
modulado emitido satildeo ilustrados com a Figura 210b A Figura 210a ilustra a luz
incidente no sensor com as cargas captadas e armazenadas de acordo com a
modulaccedilatildeo do fotodiodo
O dispositivo PMD utiliza a tecnologia CMOS para o imageamento com dois
elementos fotossensiacuteveis e dois diodos que captam as cargas eleacutetricas do sinal
modulado recebido As informaccedilotildees oacutepticas e eleacutetricas misturadas geram os piacutexeis
da imagem com informaccedilatildeo de distacircncia dos pontos imageados A Figura 211
ilustra este elemento sensor
32
FIGURA 211 ndash Princiacutepio de captaccedilatildeo de cargas pelo sensor PMD
FONTE LUAN (2001)
As placas claras e centrais na Figura 211a correspondem ao circuito de
leitura do sinal oacuteptico estas placas satildeo condutoras e transparentes para possibilitar
a entrada de luz Os diodos satildeo os componentes do circuito de leitura que captam e
direcionam as cargas eleacutetricas recebidas em um determinado sentido satildeo ilustrados
com as placas mais afastadas na Figura 211a As cargas que chegam satildeo
distribuiacutedas de acordo com a voltagem do diodo Uma fina camada de oacutexido isola os
circuitos de leitura do dispositivo
A voltagem da carga que entra no sistema eacute controlada de acordo com a
modulaccedilatildeo do sinal aplicada pelo dispositivo emissor Sendo assim pode ser
captada pelo diodo da direita ou esquerda que registraraacute a quantidade de carga
recebida de acordo com sua voltagem A distribuiccedilatildeo de potencial na regiatildeo
superficial do dispositivo eacute influenciada pela seleccedilatildeo de cargas que faz este sistema
dinacircmico e equilibrado Para valores natildeo nulos a luz modulada recebida e a
diferenccedila de fase podem ser comparadas atraveacutes das cargas eleacutetricas recebidas A
quantidade de carga captada pelos diodos depende diretamente da diferenccedila de
fase entre o sinal modulado emitido e o recebido pelo sensor Esta informaccedilatildeo pode
ser utilizada para calcular a diferenccedila de fase entre o sinal emitido e o recebido pois
33
eacute diretamente proporcional a carga que cada diodo captou Com isto a distacircncia
entre o sensor e o objeto pode ser calculada utilizando o princiacutepio da diferenccedila de
fase No entanto se a luz incidente eacute modulada como um sinal retangular mas sua
fase entre a emissatildeo e a recepccedilatildeo eacute igual a zero a carga seraacute captada por apenas
um dos diodos e a distacircncia resultante seraacute igual a zero (MOumlLLER et al 2005)
A Figura 212 ilustra o comportamento dos diodos de leitura ao receber o
sinal com distacircncia diferente de zero entre o alvo e o sensor Na Figura 212a eacute
ilustrado o sinal luminoso recebido por um elemento fotossensiacutevel Este sinal eacute
captado pela porta de entrada PA do fotodiodo que registra parte desta carga de
acordo com sua modulaccedilatildeo
FIGURA 212 ndash Medida da diferenccedila de fase do sinal recebido
FONTE Adaptado de MOumlLLER et al (2005)
Na Figura 212a o sinal recebido pelo elemento fotossensiacutevel do sensor eacute
ilustrado no momento em que eacute captado pela porta com modulaccedilatildeo A (PmodA) A
carga eacute captada pelos dois fotodiodos com defasagem de meio ciclo com isto cada
um capta parte da carga recebida A Figura 212b ilustra a medida da diferenccedila de
fase do sinal recebido atraveacutes da quantidade de carga que foi captada pelos
fotodiodos com modulaccedilatildeo Mod_A e Mod_B A voltagem do diodo eacute estabelecida de
acordo com a modulaccedilatildeo do sinal luminoso que seraacute emitida pelo dispositivo
34
25 CAcircMARAS PMD
As cacircmaras TOF com tecnologia PMD consistem de um chip sensor fonte
de iluminaccedilatildeo transmissor e receptor oacutepticos aleacutem de perifeacutericos eletrocircnicos e
interface digital de controle realizada atraveacutes de software Dependendo das
exigecircncias de aplicaccedilatildeo os componentes da cacircmara podem ser adaptados Cada
um deles pode afetar os paracircmetros internos da cacircmara tais como o campo de
visatildeo (FOV) taxa de captaccedilatildeo e tempo de integraccedilatildeo para a aquisiccedilatildeo das imagens
A distacircncia da superfiacutecie a ser medida eacute o fator preponderante para a escolha destes
paracircmetros O fato destas cacircmaras serem modulares amplia sua gama de
aplicaccedilotildees Isto eacute possiacutevel levando-se em conta as condiccedilotildees adicionais que cada
aplicaccedilatildeo pode exigir tais como a luz exterior ao sistema e a necessidade de
mudanccedila na fonte de iluminaccedilatildeo utilizada (PMD Technologies 2009)
O sensor PMD proporciona o imageamento instantacircneo dos objetos
utilizando um sensor com tecnologia CMOS adaptado Este sensor eacute um arranjo de
elementos fotossensiacuteveis que permitem a raacutepida detecccedilatildeo e modulaccedilatildeo do sinal
luminoso com suas variaccedilotildees Isto eacute feito de acordo com a distacircncia da superfiacutecie
que atinge do objeto imageado Pode adquirir dados de distacircncia e intensidade
simultaneamente sem precisar de um sistema de digitalizaccedilatildeo mais complexo como
um laser scanner Apresenta a desvantagem de ser muito sensiacutevel agrave luz exterior ao
sistema que interfere causando a presenccedila de ruiacutedo na imagem TOF e consequente
erro na medida de distacircncia (KHONGSAB 2009)
O desempenho do sistema PMD depende da fonte de iluminaccedilatildeo utilizada
capacidade de fornecimento de energia e eficiecircncia oacuteptica na criaccedilatildeo da imagem
Normalmente eacute utilizada fonte de iluminaccedilatildeo LED nas cacircmaras PMD No entanto
outros fabricantes utilizam diodos LASER para a iluminaccedilatildeo isto porque possibilita
realizar medidas de distacircncias maiores O desenvolvimento dos sistemas LED fez
com que sua eficiecircncia de transformaccedilatildeo de energia eleacutetrica em energia oacuteptica seja
de 30 Com a iluminaccedilatildeo LED tem-se um sinal luminoso jaacute modulado devido a
suas caracteriacutesticas eletro-oacutepticas Como uma parte consideraacutevel da luz fica na
borda do feixe isto se torna uma desvantagem pois esta aacuterea normalmente fica fora
do campo de visatildeo do sensor PMD Outra desvantagem diz respeito ao limite de
modulaccedilatildeo dos LED‟s comerciais que trabalham na faixa de 20 MHz agrave 30 MHz Os
diodos LASER tecircm eficiecircncia oacuteptica de ateacute 50 dependendo da potecircncia de saiacuteda
35
utilizada sendo de aproximadamente 100 MHz a modulaccedilatildeo maacutexima da frequecircncia
que pode ser atingida O perfil do feixe LASER pode ser adaptado ao campo de
visatildeo do sensor PMD A desvantagem eacute que este seria um circuito modular mais
complexo e que teria necessidade de um maior nuacutemero de etapas para conseguir
estabilizar a fase da onda portadora do sinal Outra desvantagem eacute que a
implantaccedilatildeo de um sistema LASER necessita de maior atenccedilatildeo agrave seguranccedila dos
olhos do que o sistema LED (RINGBECK 2007)
Com a Figura 213 ilustra-se a medida de distacircncia com a cacircmara TOF
modelo 19k da PMD A fonte de iluminaccedilatildeo LED emite o sinal luminoso em direccedilatildeo
dos objetos que estatildeo no campo visual da cacircmara O retorno deste sinal eacute captado
pelo sensor e possibilita o caacutelculo da diferenccedila de fase entre o sinal emitido e o
recebido
FIGURA 213 ndash Medida de distacircncia com a cacircmara PMD
FONTE MOLLER et al (2005)
36
251 Cacircmara PMD CamCube 20
A cacircmara TOF modelo PMD[VISION]regCamCube 20 funciona em ambientes
internos e externos com sensor de 204x204 piacutexeis que captam os niacuteveis de cinza da
imagem de intensidade Simultaneamente realiza a medida da quantidade de carga
recebida utilizada para determinar a diferenccedila de fase entre o sinal emitido e o
recebido Isto possibilita o caacutelculo da distacircncia entre o sensor e os objetos presentes
na cena A Figura 214 ilustra a cacircmara PMD CamCube 20 com as fontes de
iluminaccedilatildeo LED acopladas em suas laterais
FIGURA 214 ndash Cacircmara PMD CamCube 20
FONTE PMD Technologies (2009)
Este equipamento pode ter seu campo de visatildeo variaacutevel possibilitando a
diminuiccedilatildeo de distorccedilotildees manchas ou outras imperfeiccedilotildees da imagem O software
de interface da cacircmara com o computador apresenta a possibilidade de trabalhar
com dados brutos para o processamento das imagens aleacutem de funcionar em
diferentes canais de frequecircncia Tambeacutem disponibiliza compatibilidade com o
software Matlab para realizar esta interface
A imagem de intensidade captada de uma parede utilizando a cacircmara PMD
CamCube 20 eacute ilustrada com a Figura 215
37
FIGURA 215 ndash Imagem captada com a cacircmara PMD CamCube 20
FONTE CENTENO e JUTZI (2010)
Com a Figura 215a eacute ilustrada a cacircmara PMD CamCube 20 instalada em
um tripeacute sobre uma mesa Na Figura 215b tem-se a imagem infravermelha da
superfiacutecie plana de uma parede obtida com esta cacircmara O Quadro 21 ilustra as
especificaccedilotildees teacutecnicas da cacircmara PMD CamCube 20
PARAcircMETROS VALOR PADRAtildeO OBSERVACcedilOtildeES
Tipo do sensor PhotonICs PMD41k-S (204x204 piacutexeis)
Tamanho efetivo do pixel no sensor igual a 45microm
Distacircncia de mediccedilatildeo 03 ndash 7metros
Precisatildeo na medida de distacircncia (1σ) lt 3mm
Para aacuterea central da imagem obtida agrave 2m do sensor em superfiacutecie com refletividade de 90
Frequecircncia de aquisiccedilatildeo de imagens 25 fps Configuraccedilatildeo padratildeo
Campo de visatildeo (FOV) 40ordmx40ordm f = 128mm
Comprimento de onda da fonte de iluminaccedilatildeo
870nm Infravermelho proacuteximo
Fonte de iluminaccedilatildeo [V] 12 V plusmn 10
Interface USB 20
Temperatura de operaccedilatildeo 0ordmC agrave 50ordmC
Temperatura de armazenamento -20ordmC agrave 85ordmC
QUADRO 21 - Especificaccedilotildees teacutecnicas da cacircmara PMD CamCube 20 FONTE Adaptado de PMD Technologies (2009)
O sensor PhotonICs PMD41k-S utilizado na cacircmara PMD CamCube 20 vem
com um dispositivo SBI para a supressatildeo de cargas provenientes da iluminaccedilatildeo
exterior ao sistema Estas cargas causam a saturaccedilatildeo dos piacutexeis da imagem TOF
38
252 Dispositivo SBI
O dispositivo SBI (Supression of Background Illumination) eacute uma soluccedilatildeo
teacutecnica encontrada para melhorar o contraste das imagens geradas com o sensor
PMD em ambientes com iluminaccedilatildeo exterior A presenccedila desta iluminaccedilatildeo na cena
do objeto imageado causa maior presenccedila de ruiacutedo no sinal captado pelo sensor
Esta iluminaccedilatildeo pode saturar os elementos do sensor fazendo com que
ocorram falhas na medida de distacircncia Este efeito pode ser minimizado utilizando o
tempo de integraccedilatildeo adequado para a tomada das imagens Outros distuacuterbios que
podem ocorrer satildeo devidos agrave corrente negra (DC - Dark Current) Este efeito eacute
causado porque o sensor natildeo capta o valor zero na imagem que seria a falta
completa de iluminaccedilatildeo nas superfiacutecies da cena A corrente negra natildeo pode ser
evitada em dispositivos semicondutores especialmente quando haacute altas
temperaturas Com uma temperatura de 80ordmC a corrente negra pode ser 1000 vezes
maior do que o normal o que afeta significativamente a qualidade das medidas
realizadas Para tornar o dispositivo PMD mais confiaacutevel na medida de distacircncias foi
criado o circuito SBI que suprime instantaneamente a iluminaccedilatildeo de fundo Neste
circuito eacute utilizada uma teacutecnica para a captaccedilatildeo do sinal luminoso minimizando a
interferecircncia de fatores externos Isto possibilita realizar medidas de distacircncia
confiaacuteveis mesmo em ambientes onde o sinal eacute modificado por interferecircncia de
iluminaccedilatildeo externa ou por altas temperaturas O sistema SBI pode ser desativado ou
ateacute mesmo ajustado para que seja possiacutevel realizar medidas de distacircncia com
qualidade em cenas tomadas em diferentes ambientes independente da presenccedila
de iluminaccedilatildeo exterior (MOumlLLER 2005)
O circuito SBI adiciona cargas eleacutetricas de compensaccedilatildeo instantacircnea nos
diodos de leitura minimizando os efeitos de saturaccedilatildeo causados por fatores externos
ao sistema Com o SBI espera-se que o sensor capte apenas o sinal correlacionado
com a medida de distacircncia sem interferecircncia de iluminaccedilatildeo exterior reduzindo
assim a interferecircncia da iluminaccedilatildeo de fundo no sinal recebido
A Figura 216a ilustra um sensor sem o dispositivo SBI a carga captada com
influecircncias externas de iluminaccedilatildeo e calor eacute maior do que a enviada pela fonte de
iluminaccedilatildeo refletida pela superfiacutecie do objeto e recebida pelo sensor Neste caso a
medida de distacircncia estaacute influenciada por fatores externos ao sistema e conteraacute
erros Na Figura 216b as cargas geradas por fatores externos ao sistema satildeo
39
minimizadas pelo dispositivo SBI Com isto tem-se maior quantidade de carga
captada com o sinal recebido eliminando a carga gerada por fatores externos
FIGURA 216 ndash Princiacutepio de funcionamento do SBI
FONTE MOumlLLER et al (2005)
Cacircmaras TOF com iluminaccedilatildeo LED infravermelha utilizam o dispositivo SBI
para a supressatildeo da iluminaccedilatildeo de fundo Outros modelos de cacircmaras TOF utilizam
iluminaccedilatildeo LASER para evitar o problema com a iluminaccedilatildeo exterior
253 Modelos de cacircmaras TOF
Diferentes cacircmaras TOF foram desenvolvidas nos uacuteltimos anos a Figura
217 ilustra alguns modelos destas cacircmaras
FIGURA 217 ndash Modelos de cacircmaras TOF
a) Effector O3D FONTE httpwwwifm-electroniccom
b) PMD[vision] CamCube 20 FONTE httpwwwpmdteccom
c) PMD[vision] 19k FONTE httpwwwpmdteccom
d) SwissRanger SR-3000 FONTE httpwwwmesa-imagingch
40
O Quadro 22 descreve as especificaccedilotildees teacutecnicas destas cacircmaras TOF
a)Effector
O3D
b)PMD[vision]
CamCube 20
c)PMD[vision]
19k
d)SwissRanger
SR-3000
Resoluccedilatildeo (piacutexeis) 64 x 50 204 x 204 160 x 120 176 x 144
Dimensotildees dos piacutexeis (microm) 100 x 100 45 x 45 40 x 40 40 x 40
Distacircncia focal (mm) 86 128 120 80
Fonte de iluminaccedilatildeo 1 matriz LED 2 matrizes LED 2 matrizes LED 1 matriz LED
Modulaccedilatildeo da fonte de
iluminaccedilatildeo (nm) 850 870 870 850
Frequecircncia de modulaccedilatildeo 20 MHz 20 MHz 20 MHz 20 MHz
Frequecircncia na aquisiccedilatildeo de
imagens
Maacuteximo
100 fps
Maacuteximo
25 fps
Maacuteximo
15 fps
Maacuteximo
40 fps
Conexatildeo Ethernet USB 2 Ethernet USB 2
Dimensotildees (mm) 55 x 45 x 85 194 x 60 x 60 220 x 210 x 55 60 x 50 x 65
QUADRO 22 ndash Especificaccedilotildees teacutecnicas de cacircmaras TOF FONTE Adaptado de RAPP (2007)
A partir do Quadro 22 verifica-se que estes modelos de cacircmaras TOF em
sua configuraccedilatildeo padratildeo possuem fonte de iluminaccedilatildeo LED distacircncia focais
variando de 8mm agrave 128mm e apresentam pequenas dimensotildees
26 ERROS DE MEDIDA
Observaccedilotildees realizadas com instrumentos de medida estatildeo acompanhadas
de erros provenientes da falibilidade humana imperfeiccedilatildeo na fabricaccedilatildeo do
equipamento e de interferecircncias causadas pelo ambiente em que o instrumento
utilizado e o objeto estavam no momento em que se realizou a medida Erros de
observaccedilatildeo satildeo tradicionalmente classificados como erros grosseiros sistemaacuteticos e
acidentais Erros grosseiros devem ser detectados e evitados pelo observador com
os devidos cuidados na obtenccedilatildeo da informaccedilatildeo tambeacutem ocorrem devido agrave
presenccedila de ruiacutedo nas observaccedilotildees Erros sistemaacuteticos se repetem seguindo um
determinado padratildeo e podem ser preditos e corrigidos Existem opccedilotildees para evitaacute-
los atraveacutes de teacutecnicas de observaccedilatildeo ou entatildeo eliminaacute-los a posteriori atraveacutes de
foacutermulas especiacuteficas Os erros acidentais ou aleatoacuterios satildeo randocircmicos natildeo
previsiacuteveis e podem ser distribuiacutedos entre o conjunto de observaccedilotildees por teacutecnicas
41
estatiacutesticas Eacute comum o uso da expressatildeo ldquopropriedades estatiacutesticas das
observaccedilotildeesrdquo devido a este erro (GEMAEL 1994)
Erros na medida de distacircncia utilizando cacircmaras TOF tambeacutem podem ser
divididos em natildeo-sistemaacuteticos e sistemaacuteticos conforme descrito nas seccedilotildees 261 e
262 onde seratildeo apresentados 3 erros natildeo-sistemaacuteticos e 7 erros sistemaacuteticos
261 Erros natildeo-sistemaacuteticos em cacircmaras TOF
De acordo com MAY et al (2008) a classificaccedilatildeo de erros natildeo-sistemaacuteticos
na medida de distacircncia utilizando cacircmaras TOF pode ser feita da seguinte maneira
1) Erro devido agrave relaccedilatildeo sinal-ruiacutedo (Signal-to-noise) quando a relaccedilatildeo da
carga recebida com o sinal eacute baixa e o ruiacutedo presente eacute alto haveraacute distorccedilatildeo na
medida de distacircncia que natildeo poderaacute ser corrigida posteriormente Para diminuir este
erro pode-se tomar cuidado com o tempo de exposiccedilatildeo do sensor na aquisiccedilatildeo da
imagem e tambeacutem amplificar a iluminaccedilatildeo do sistema Outra soluccedilatildeo eacute filtrar os
valores medidos com baixas amplitudes no sinal recebido
2) Reflexatildeo do sinal por muacuteltiplos caminhos (Multiple ways reflection) em
objetos com descontinuidade em suas superfiacutecies o sinal emitido pode percorrer
diferentes caminhos antes de retornar ao sensor Exemplos satildeo objetos com
superfiacutecies cocircncavas que podem refletir vaacuterias vezes o sinal e gerar erro na medida
de distacircncia Neste caso o sinal eacute refletido com sobreposiccedilatildeo ou seja pode ser
captado o sinal da uacuteltima superfiacutecie que o refletiu gerando uma distacircncia diferente
do valor esperado
3) Espalhamento da luz (Light scattering) ocorre na lente da cacircmara
causado pela presenccedila de objetos proacuteximos Este efeito e o causado pela reflexatildeo
por muacuteltiplos caminhos satildeo imprevisiacuteveis pois a topologia da cena observada eacute
desconhecida a priori
262 Erros sistemaacuteticos em cacircmaras TOF
Segundo RAPP (2007) nas cacircmaras TOF erros tambeacutem indicam a relaccedilatildeo
entre a variacircncia da distacircncia e a amplitude do sinal captado pelo sensor A relaccedilatildeo
42
estabelecida eacute que a variacircncia dos dados de distacircncia eacute inversamente proporcional agrave
raiz quadrada da amplitude do sinal recebido para realizar a medida Alguns erros
sistemaacuteticos das cacircmaras TOF estudados por RAPP foram
1) Erro devido a uma funccedilatildeo natildeo harmocircnica utilizada para correlacionar o
sinal emitido ao recebido
2) Ruiacutedos relacionados com o tempo de integraccedilatildeo Este tempo pode causar
exposiccedilatildeo insuficiente ou saturaccedilatildeo dos elementos do sensor
3) Erros geomeacutetricos no posicionamento dos piacutexeis devido ao sistema oacuteptico
da cacircmara
O erro devido agrave falta de harmonia na funccedilatildeo de correlaccedilatildeo entre o sinal
emitido e o recebido pode ser causado quando o sistema oacuteptico utilizado emite o
sinal de referecircncia com sua forma inicial e recebe o sinal refletido com forma
diferente Com isto a funccedilatildeo que representa o sinal recebido natildeo teraacute a forma
senoidal teoacuterica do sinal emitido Isto ocorre por conter harmocircnicos de Fourier
iacutempares quando eacute necessaacuteria uma amostra com pelo menos quatro pontos para
definir a FC entre os sinais Este erro tem grande influecircncia no caacutelculo da distacircncia
do objeto pois eacute a FC que possibilita a medida da diferenccedila de fase entre o sinal
emitido e o recebido
A presenccedila de ruiacutedo pode ser notada variando o TI na aquisiccedilatildeo da imagem
O conjunto de dados apresenta maiores distorccedilotildees radiomeacutetricas e geomeacutetricas
quando a presenccedila de ruiacutedo eacute forte Quando o TI eacute aumentado o ruiacutedo observado no
conjunto de dados pode diminuir Poreacutem valores extremamente altos introduzem
erros na mediccedilatildeo por causar saturaccedilatildeo do sensor Com esta informaccedilatildeo procura-se
definir uma funccedilatildeo para a modelagem do ruiacutedo de acordo com o tempo de
integraccedilatildeo Analisando dados obtidos com diferentes TI pode-se especificar qual o
melhor para cada situaccedilatildeo
Erros causados por exposiccedilatildeo insuficiente do sensor natildeo satildeo considerados
sistemaacuteticos poreacutem podem ser preditos Se o valor da amplitude do sinal eacute reduzido
o erro na medida da distacircncia aumenta Para reduzir os piacutexeis obtidos com
exposiccedilatildeo insuficiente pode-se definir um limite no valor da amplitude do sinal
Outra forma de controlar a exposiccedilatildeo eacute com o TI na obtenccedilatildeo da imagem Piacutexeis que
tem amplitude menor que 1 do valor maacuteximo das amplitudes na imagem TOF satildeo
considerados piacutexeis com exposiccedilatildeo insuficiente
43
Erros de posicionamento dos piacutexeis devido ao sistema oacuteptico da cacircmara
podem ser notados quando capta-se a imagem de uma fachada com portas e
janelas As linhas horizontais e verticais que representam estes elementos na
imagem aparecem com curvaturas de acordo com o sistema de lentes utilizado na
cacircmara A distorccedilatildeo de lentes tem um padratildeo fixo em cacircmaras com sensor CMOS
ou CCD e pode ser corrigida geometricamente atraveacutes dos POI da cacircmara que
captou a imagem
Erros sistemaacuteticos em cacircmaras TOF tambeacutem foram estudados por FUCHS e
HIRZINGER (2008) e MAY et al (2008) e foram classificados da seguinte maneira
4) Erro na medida de distacircncia (Distance-related error) este erro eacute causado
devido agrave assimetria da forma do sinal infravermelho recebido pelo sensor
Teoricamente assume-se que este sinal possui forma senoidal e harmocircnica com a
forma do sinal emitido o que na praacutetica pode natildeo acontecer Sendo assim o
pressuposto baacutesico para que se possa calcular o atraso de fase eacute que o sinal
luminoso emitido e o recebido satildeo harmocircnicos e com forma senoidal
Consequentemente se o caacutelculo do atraso de fase do sinal eacute impreciso a distacircncia
entre o objeto e o sensor tambeacutem seraacute calculada de forma imprecisa
5) Erro na amplitude do sinal captado (Amplitude-related error) o sensor natildeo
capta a energia eletromagneacutetica recebida com o sinal perfeitamente Deixando-se a
cacircmara e o objeto na mesma posiccedilatildeo podem-se obter diferentes medidas de
distacircncia devido a esta imperfeiccedilatildeo na fabricaccedilatildeo dos elementos do sensor Este
erro eacute relacionado com a amplitude de valores na captaccedilatildeo da imagem depende da
distacircncia e de caracteriacutesticas como a refletividade das superfiacutecies dos objetos
6) Erro devido agrave latecircncia dos elementos do sensor (Latency-related error) o
atraso de fase do sinal recebido eacute calculado atraveacutes das latecircncias com que o sensor
captou o sinal Estaacute relacionado com propriedades semicondutoras dos materiais
utilizados nos elementos sensores que satildeo responsaacuteveis pela medida da quantidade
de carga recebida Eacute causado quando o sinal emitido e o recebido satildeo
correlacionados diretamente na matriz do sensor Diferentes latecircncias do sinal
devem ser captadas por cada elemento do sensor para possibilitar o caacutelculo da
distacircncia de cada pixel de forma confiaacutevel
7) Ruiacutedo com padratildeo fixo (FPN - Fixed pattern noise) eacute relacionado com o
erro devido agrave latecircncia e ocorre devido agraves propriedades dos materiais utilizados na
fabricaccedilatildeo de cada elemento do sensor CMOS Este eacute um ruiacutedo com padratildeo fixo
44
pode ser corrigido a partir de uma imagem que tenha um pixel com valor constante
que serviraacute como referecircncia para a calibraccedilatildeo dos valores dos piacutexeis vizinhos
Tendo-se como referecircncia um pixel obtido em uma superfiacutecie uniforme de um objeto
pode-se utilizar um padratildeo de similaridade como referecircncia para os outros piacutexeis
Sendo assim a qualidade dos dados depende da posiccedilatildeo do pixel na imagem
Os uacuteltimos quatro erros sistemaacuteticos podem ser corrigidos utilizando o
meacutetodo de calibraccedilatildeo descrito em Fuchs et al (2007) Conforme realizado em
experimento por May et al (2008) os resultados alcanccedilados no mapeamento de uma
sala obtiveram a precisatildeo centimeacutetrica Este experimento foi realizado com o
objetivo de medir paredes opostas de uma sala com o sensor TOF em movimento
instalado em uma plataforma moacutevel O erro encontrado na medida das distacircncias
tambeacutem foi influenciado por erros na estimaccedilatildeo do posicionamento do sensor que eacute
obtido com a Orientaccedilatildeo Exterior da cacircmara no momento de aquisiccedilatildeo das imagens
Durante o registro dos quadros fotograacuteficos o erro em rotaccedilatildeo foi determinado como
sendo igual a 22ordm e o erro de translaccedilatildeo foi de 071m no eixo 119883 004m no eixo 119884 e
de -021m no eixo 119885 A distacircncia calculada entre paredes opostas foi igual a 105m
para a distacircncia de referecircncia de 108m A diferenccedila entre as duas medidas resultou
em 03m o que representa aproximadamente 28 da distacircncia de referecircncia A
nuvem de pontos 3D gerada por MAY et al (2008) eacute ilustrada com a Figura 218
FIGURA 218 ndash Nuvem de pontos 3D gerada a partir de imagem TOF
FONTE MAY et al (2008)
45
27 PROJECcedilAtildeO ORTOGONAL DOS PONTOS
As coordenadas tridimensionais dos pontos da imagem TOF satildeo obtidas
atraveacutes da projeccedilatildeo ortogonal Isto ocorre devido ao fato do equipamento utilizado
calcular as distacircncias dos objetos em um sistema esfeacuterico Esta projeccedilatildeo eacute feita a
partir da colinearidade entre o ponto no espaccedilo objeto o Centro Perspectivo (CP) e
o ponto no espaccedilo imagem conforme eacute ilustrado com a Figura 219
FIGURA 219 ndash Colinearidade entre os pontos no espaccedilo imagem e objeto
FONTE Adaptado de RAPP (2007)
A Figura 219 ilustra os sistemas referenciais adotados nos espaccedilos imagem
e objeto O sistema referencial fotogrameacutetrico (119909119875 119910119875) tem sua origem no CP que eacute
materializado pelo ponto nodal anterior do sistema de lentes da cacircmara Este ponto
projetado no plano da imagem gera o Ponto Principal (PP) A projeccedilatildeo do sistema
referencial fotogrameacutetrico na imagem eacute realizada considerando a simplificaccedilatildeo de
haverem apenas translaccedilotildees entre os eixos deste sistema e o sistema da imagem O
46
sistema referencial de imagem levoacutegiro (119862 119871) tem sua origem no canto superior
esquerdo Atraveacutes das Equaccedilotildees (223) e (224) esta origem pode ser transladada
para o centro da imagem (MACHADO 2006)
119862prime = 119862 minus119899119862minus1
2 (223)
119871prime = 119871 minus119899119871minus1
2 (224)
onde
119862 119871 ndash Sistema referencial de coordenadas da imagem (piacutexeis)
119899119862 119899119871 ndash Nuacutemero total de colunas e linhas da imagem (piacutexeis)
119862prime 119871prime ndash Sistema referencial auxiliar no centro da imagem (piacutexeis)
Para tornar o sistema referencial auxiliar (119862prime 119871prime) de imagem levoacutegiro em um
sistema dextroacutegiro (119909119894119898 119910119894119898 ) pode-se realizar uma reflexatildeo do eixo 119871prime atraveacutes da
Equaccedilatildeo (226)
119909119894119898 = 119862prime (225)
119910119894119898 = minus119871prime (226)
onde
119909119894119898 119910119894119898 ndash Coordenadas de um ponto no sistema referencial dextroacutegiro da
imagem (piacutexeis)
Com isto tem-se um sistema referencial dextroacutegiro centralizado na imagem e
que se relaciona com o sistema referencial fotogrameacutetrico projetado atraveacutes da
translaccedilatildeo de eixos determinada pelas coordenadas (119909119900 119910119900) do PP conforme
ilustrado com a Figura 220
47
FIGURA 220 ndash Sistemas de coordenadas utilizados em imagens
FONTE Adaptado de MACHADO (2006)
A partir do sistema referencial de imagem dextroacutegiro com origem no centro
da imagem e do sistema referencial fotogrameacutetrico projetado com origem no PP
satildeo estabelecidas as relaccedilotildees entre os sistemas de acordo com as Equaccedilotildees (227)
e (228)
119909119894119898 = (119909 minus 1199090) (227)
119910119894119898 = (119910 minus 1199100) (228)
onde
11990901199100 ndash Satildeo as coordenadas do ponto principal no sistema referencial de
imagem (piacutexeis)
119909119910 ndash Coordenadas dos pontos no sistema referencial fotogrameacutetrico
projetado na imagem (piacutexeis)
Os valores das coordenadas dos pontos do sistema fotogrameacutetrico projetado
na imagem estatildeo em piacutexeis A transformaccedilatildeo destes valores para miliacutemetros pode
ser feita multiplicando estas coordenadas pelo tamanho efetivo do pixel nas direccedilotildees
119909 e 119910 da imagem conforme as Equaccedilotildees (229) e (230)
48
119909 = 119909119894119898 ∙ 119875119909 (229)
119910 = 119910119894119898 ∙ 119875119910 (230)
onde
119909119910 ndash Satildeo as coordenadas dos pontos no sistema fotogrameacutetrico projetado
na imagem (miliacutemetros)
119875119909 119875119910 ndash Tamanho efetivo dos piacutexeis nas direccedilotildees 119909 e 119910 (miliacutemetros)
O tamanho efetivo dos piacutexeis nas direccedilotildees 119909 e 119910 satildeo calculados a partir do
fator de escala nestas direccedilotildees conforme Equaccedilotildees (231) e (232)
119875119909 = 119875 ∙ 119904119909 (231)
119875119910 = 119875 ∙ 119904119910 (232)
onde
119875119909 119875119910 ndash Tamanho efetivo dos piacutexeis nas direccedilotildees 119909 e 119910 (miliacutemetros)
119875 ndash Dimensatildeo do pixel obtida no manual do equipamento (miliacutemetros)
119904119909 119904119910 ndash Fatores de escala dos piacutexeis nas direccedilotildees 119909 e 119910
Os fatores de escala dos piacutexeis nas direccedilotildees 119909 e 119910 podem ser calculados
atraveacutes das Equaccedilotildees (233) e (234)
119904119909 =119891
119891119909 (233)
119904119910 =119891
119891119910 (234)
onde
119904119909 119904119910 ndash Fatores de escala dos piacutexeis nas direccedilotildees 119909 e 119910
119891119909 119891119910 ndash Distacircncia focal da cacircmara ao longo dos eixos 119909 e 119910 (miliacutemetros)
119891 ndash Distacircncia focal da cacircmara obtida no manual do equipamento
(miliacutemetros)
49
Quando o valor da distacircncia focal 119891119909 obtido com a calibraccedilatildeo da cacircmara
difere do valor 119891119910 tem-se um indicativo de escalas diferentes nos eixos 119909 e 119910 da
imagem
Realizadas as etapas de Orientaccedilatildeo Interior da imagem podem-se calcular
as coordenadas 3D dos pontos O posicionamento de cada ponto depende da
precisatildeo na determinaccedilatildeo dos acircngulos verticais e horizontais no sistema referencial
de imagem A projeccedilatildeo ortogonal das distacircncias dos pontos coordenada 119885 pode ser
feita atraveacutes da Equaccedilatildeo (235)
119885 = 119889119903 ∙ cos120573 (235)
onde
119885 ndash Distacircncia ortogonal do CP ao ponto observado no espaccedilo objeto
119889119903 ndash Distacircncia radial do CP ao ponto no sistema referencial esfeacuterico
120573 ndash Acircngulo formado entre o eixo que atinge o ponto na imagem partindo do
CP e o eixo principal da cacircmara (CP-PP)
O acircngulo 120573 pode ser calculado atraveacutes da funccedilatildeo trigonomeacutetrica expressa
com a Equaccedilatildeo (236)
tan120573 = 1199092
1198911199092 +
1199102
1198911199102 (236)
onde
119891119909 119891119910 ndash Distacircncia focal da cacircmara ao longo dos eixos 119909 e 119910 (miliacutemetros)
119909119910 ndash Coordenadas dos pontos no sistema referencial fotogrameacutetrico
projetado na imagem (miliacutemetros)
A Expressatildeo (235) relaciona a distacircncia radial 119889119903 com a coordenada 119885 dos
pontos no sistema ortogonal 3D em funccedilatildeo do acircngulo 120573 Substituindo a Equaccedilatildeo
(236) na Equaccedilatildeo (235) podemos explicitar a coordenada 119885 em funccedilatildeo das
distacircncias focais da cacircmara e das coordenadas dos pontos no sistema referencial
fotogrameacutetrico projetado na imagem conforme Equaccedilatildeo (237)
50
119885 = 119889119903 ∙ cos tanminus1 1199092
1198911199092 +
1199102
1198911199102 (237)
onde
119885 ndash Distacircncia ortogonal do CP ao ponto (miliacutemetros)
119889119903 ndash Distacircncia radial do CP ao ponto no sistema esfeacuterico da cacircmara
(miliacutemetros)
119891119909 119891119910 ndash Distacircncia focal da cacircmara ao longo dos eixos 119909 e 119910 (miliacutemetros)
119909119910 ndash Coordenadas dos pontos no sistema referencial fotogrameacutetrico
projetado na imagem (miliacutemetros)
As coordenadas (119883119884) dos pontos no sistema referencial ortogonal podem
entatildeo serem calculadas atraveacutes das Equaccedilotildees (238) e (239)
119883 = 119909 ∙119885
119891119909 (238)
119884 = 119910 ∙119885
119891119910 (239)
28 REFINAMENTO DA NUVEM DE PONTOS 3D
O processo de refinamento da nuvem de pontos 3D obtida com a imagem
TOF compreende a filtragem dos pontos que estejam esparsos devido agrave presenccedila
de ruiacutedo no arquivo de distacircncias da imagem TOF Com a Figura 221a satildeo
ilustrados pontos que natildeo pertencem agraves superfiacutecies do objeto aparecem na aresta
superior direita do objeto O sinal emitido atinge uma aacuterea da superfiacutecie do objeto e
natildeo apenas um ponto Esta aacuterea eacute proporcional agrave distacircncia entre o alvo e o sensor
ocorre devido agrave divergecircncia do feixe de luz emitido Com o princiacutepio TOF o valor da
distacircncia calculada eacute resultado da integraccedilatildeo do sinal recebido de acordo com a
aacuterea iluminada da superfiacutecie Quando o sinal emitido atinge superfiacutecies natildeo
coplanares o valor de distacircncia armazenado eacute um resultado interpolado Este
fenocircmeno ocorre principalmente nas bordas dos objetos e pode ser visto com a
51
Figura 221a que mostra um objeto com trecircs superfiacutecies planas uma base um
plano vertical na direita e um plano na parte superior
FIGURA 221 ndash Filtro para a definiccedilatildeo de bordas do objeto
FONTE MAY et al (2008)
A Figura 221b apresenta a nuvem de pontos 3D apoacutes a aplicaccedilatildeo do filtro
para o refinamento Este eacute um filtro gaussiano utilizado para a definiccedilatildeo de bordas e
desniacuteveis dos objetos eacute tambeacutem uma ferramenta para a remoccedilatildeo de pontos
esparsos provenientes da presenccedila de ruiacutedo nos dados da imagem TOF Funciona
considerando o acircngulo formado entre dois piacutexeis adjacentes na imagem onde o CP
eacute o ponto que completa o triacircngulo sendo o criteacuterio de seleccedilatildeo utilizado a distacircncia
meacutedia dos k pontos vizinhos mais proacuteximos
De acordo com May et al (2008) a distacircncia medida a partir de cacircmaras
TOF pode ser afetada pelo efeito de arredondamento das bordas Isto ocorre pela
suavizaccedilatildeo causada com a transiccedilatildeo entre as superfiacutecies iluminadas Dado um
conjunto de pontos 3D 119875 = 119901119894 119901119894 isin ℝ3 119894 = 1hellip 119873119901 as bordas podem ser
detectadas utilizando a Equaccedilatildeo (240) Esta eacute uma comparaccedilatildeo do acircngulo entre
dois piacutexeis 120585119894 119899 com base em um triacircngulo formado pelo centro perspectivo 119891 = 0 o
ponto 119901119894 e a vizinhanccedila deste ponto 119875119899 = 119901119894 119899 119899 = 1hellip 8 com o acircngulo de
vizinhanccedila 120585119905119893
120585119894 = max arcsin 119901119894 119899
119901119894 119899minus119901119894 ∙ 119904119894119899120593 (240)
52
119869 = 119901119894 120585119894 gt 120585119905119893 (241)
onde
120593 ndash Acircngulo maacuteximo entre dois piacutexeis veacutertice do triacircngulo no ponto 119891 = 0
O triacircngulo utilizado como referecircncia no filtro para a detecccedilatildeo de bordas
com veacutertice no ponto 119891 = 0 eacute ilustrado com a Figura 222
FIGURA 222 ndash Geometria do filtro para a definiccedilatildeo de bordas
FONTE MAY et al (2008)
Um conjunto 119878 de pontos pode ser filtrado atraveacutes da condiccedilatildeo expressa
com a Equaccedilatildeo (243)
119889 119901119894 = 1
119896 119901119894 minus 119901119894 119899 119896119899=1 (242)
119878 = 119901119894 isin 119875 119889 119901119894 lt 119889119905119893 (243)
onde
119889119905119893 ndash Distacircncia de vizinhanccedila constante
O conjunto 119876 de pontos selecionados satildeo os pontos filtrados da nuvem 3D
conforme a condiccedilatildeo da Equaccedilatildeo (244)
119876 = 119902119894 119902119894 isin 119875(119869 cup 119878) (244)
53
29 ANAacuteLISE DE SUPERFIacuteCIES POR AUTOVALORES E AUTOVETORES
A anaacutelise da forma de superfiacutecies pode ser feita pela variaccedilatildeo local de
autovalores que possibilita a classificaccedilatildeo e segmentaccedilatildeo de pontos com
coordenadas tridimensionais (BELTON e LICHTI 2006)
Autovetores e seus respectivos autovalores podem ser obtidos a partir da
Matriz de Variacircncias e Covariacircncias (119872119881119862) de um conjunto de observaccedilotildees O
tamanho relativo e a direccedilatildeo dos autovetores podem indicar propriedades locais
desta superfiacutecie permitindo analisar sua forma (PAULY et al 2002)
De acordo com Johnson e Wichern (1998) a 119872119881119862 pode ser calculada atraveacutes
da Equaccedilatildeo (245)
11987211988111986231199093 =1
119896 119903 119894 minus 119903 119896119894=1 ∙ 119903 119894 minus 119903
119879=
1205901199092 120590119909119910 120590119909119911
120590119909119910 1205901199102 120590119910119911
120590119909119911 120590119910119911 1205901199112
(245)
onde
119872119881119862 ndash Matriz de Variacircncias e Covariacircncias
119903 119894 ndash Vetor com as coordenadas 3D do ponto em questatildeo na amostra
119903 ndash Vetor com as coordenadas do centroacuteide da superfiacutecie
1205901199092120590119910
2 1205901199112 ndash Variacircncias
120590119909119910 120590119909119911 120590119910119911 ndash Covariacircncias
119896 ndash Nuacutemero de pontos da amostra
O vetor com as coordenadas do 119894-eacutesimo ponto da amostra eacute denotado com
119903 119894 pela Expressatildeo (246) A posiccedilatildeo relativa do centroacuteide pode ser calculada atraveacutes
da Equaccedilatildeo (247)
119903 119894 = 119909119894 119910119894 119911119894 119879 (246)
119903 =1
119896 119903 119894119896119894=1 (247)
54
A 119872119881119862 eacute quadrada simeacutetrica positiva-semidefinida e pode ser decomposta
em autovetores 119890 e autovalores 120582 atraveacutes da Equaccedilatildeo (248) Os autovalores 120582119894 satildeo
elementos escalares associados aos respectivos autovetores 119890 119894 (LEON 1998)
119872119881119862 ∙ 119890 = 120582 ∙ 119890 (248)
A partir do teorema de decomposiccedilatildeo espectral (decomposiccedilatildeo de Jordan) a
119872119881119862 pode ser isolada nesta igualdade conforme a Equaccedilatildeo (249) Maiores
detalhes podem ser vistos em Johnson e Wichern (1998) e Shakarji (1998)
119872119881119862 = 120582119894 ∙ 119890 119894 ∙ 119890 1198941198792
119894=0 (249)
onde
119872119881119862 ndash Matriz Variacircncia Covariacircncia
119890 119894 ndash Vetor com os autovetores 119890 119894
120582119894 ndash Matriz com os autovalores 120582119894
Os autovalores satildeo valores reais e os autovetores formam um sistema de
base ortogonal que correspondem aos componentes principais do conjunto de
observaccedilotildees (BELTON 2008)
De acordo com PAULY et al (2002) pode-se adotar a convenccedilatildeo entre os
autovalores da Expressatildeo (250) A partir desta convenccedilatildeo algumas propriedades
para superfiacutecies normais podem ser descritas
1205821 ge 1205822 ge 1205823 (250)
Em um conjunto de pontos 3D que formam uma superfiacutecie plana espera-se
que 1205821 ne 0 1205822 ne 0 e que 1205823 asymp 0 Com isto o menor autovetor 119890 3 apontaraacute na direccedilatildeo
normal a esta superfiacutecie Com a Figura 223 satildeo ilustrados os trecircs autovetores de
uma regiatildeo da superfiacutecie descrita pela nuvem de pontos 3D O terceiro autovetor 119890 3
com o menor autovalor 1205823 eacute ortogonal agrave superfiacutecie plana definida pelos outros dois
autovetores 119890 1 e 119890 2
55
FIGURA 223 ndash Autovetores em nuvem de pontos 3D de uma superfiacutecie plana
Pontos contidos na interseccedilatildeo entre duas superfiacutecies planas podem ser
identificados atraveacutes das relaccedilotildees 1205821 asymp 21205822 e 1205823 asymp 0 O autovetor 119890 1 apontaraacute na
direccedilatildeo da linha limitante da superfiacutecie plana e o autovetor 119890 3 seraacute ortogonal a esta
direccedilatildeo Podem-se encontrar segmentos de retas que limitam a borda de uma
superfiacutecie atraveacutes das relaccedilotildees 1205822 asymp 1205823 e 1205821 asymp 1205822+1205823
Quando os autovalores apresentam valores aproximadamente iguais
1205821 asymp 1205822 asymp 1205823 torna-se possiacutevel encontrar o veacutertice formado por trecircs superfiacutecies
planas
Normalizando os autovalores com a Equaccedilatildeo (251) remove-se a sua
dependecircncia em relaccedilatildeo ao tamanho da amostra utilizada
120582119894prime =
120582119894
1205821+1205822+1205823=
120582119894
119905119903119886 ccedil119900(120582) (251)
Para o autovalor miacutenimo (119894 = 3) pode-se definir o nuacutemero 119873 de pontos para
representar as variaccedilotildees na superfiacutecie atraveacutes da Equaccedilatildeo (252)
119873 =1205823
119905119903119886 ccedil119900(120582) (252)
O valor resultante da Equaccedilatildeo (252) eacute uma medida aproximada de
curvatura local e pode representar a rugosidade da superfiacutecie de forma normalizada
56
210 ANAacuteLISE DE SUPERFIacuteCIES POR MOMENTOS INVARIANTES
Caracteriacutesticas de superfiacutecies planas podem ser obtidas atraveacutes da anaacutelise
de momentos invariantes para isto utiliza-se a 119872119881119862 dos pontos que descrevem esta
superfiacutecie De acordo com MASS e VOSSELMAN (1999) os momentos invariantes
119898119894119895 podem ser calculados atraveacutes da Equaccedilatildeo (253)
119898119894119895 = 119909119894119910119895119891(119909119910)119889119909 1198891199101199102
1199101
1199092
1199091 (253)
onde
119894 119895 ndash Correspondem agrave ordem do momento
119891(119909119910) ndash A coordenada 119911 dos pontos eacute funccedilatildeo das coordenadas planas 119909 e 119910
em um conjunto de pontos que descrevem a superfiacutecie contiacutenua
A Equaccedilatildeo (254) permite determinar o volume de uma esfera unitaacuteria com
raio 119877 em um domiacutenio contiacutenuo 119873 de pontos 3D eacute obtida a partir da Equaccedilatildeo (253)
e possibilita o estudo de propriedades das superfiacutecies com padratildeo planar
119898119894119895119896 = 119909119894119910119895 119911119896119891(119909119910 119911)119889119907119881
(254)
onde
119894 119895119896 ndash Pertencem ao domiacutenio contiacutenuo da funccedilatildeo com 119873 pontos
119894 + 119895 + 119896 ndash Corresponde agrave ordem do momento
119891(119909119910 119911) ndash Eacute o volume da esfera unitaacuteria
Atraveacutes da Equaccedilatildeo (254) GROSS e THONNESSEN (2006) conseguiram
descrever algumas relaccedilotildees entre autovalores e as propriedades de superfiacutecies
normais conforme eacute ilustrado com o Quadro 23
57
ESTRUTURA AUTOVALORES
120640120783 120640120784 120640120785
PONTO ISOLADO
0 0 0
PONTO FINAL DE SEGMENTO
DE RETA
1
12= 0083 0 0
LINHA RETA 1
3= 0333 0 0
12 PLANO 1
4= 025
1
4 1 minus
64
91205872 = 00 0
PLANO 1
4= 025
1
4= 025 0
14 PLANO 1
4 1 minus
2
120587 = 009
1
4+
2
120587minus
32
91205872= 00 0
INTERSECcedilAtildeO DE 2 PLANOS
1
3= 0333
1
8= 0125
1
8minus
8
91205872= 003
INTERSECcedilAtildeO DE 3 PLANOS
1
6 1 minus
1
120587 = 011
1
6 1 minus
1
120587 = 011
1
6 1 +
2
120587 minus
26
331205872= 003
INTERSECcedilAtildeO DE 2 PLANOS
Agrave 30deg 025 01875 001747
QUADRO 23 ndash Propriedades de superfiacutecies normais obtidas com autovalores FONTE GROSS e THOENNESSEN (2006)
Os autovalores do Quadro 23 foram determinados analiticamente a partir da
Equaccedilatildeo (254) e podem ser utilizados como referecircncia para a estimaccedilatildeo da forma
das superfiacutecies que compotildeem a estrutura dos objetos
Restringindo a ordem dos momentos com 119894 + 119895 + 119896 le 2 pode-se calcular o
centro de gravidade da superfiacutecie conforme a Equaccedilatildeo (255) e os elementos da
119872119881119862 podem serem obtidos atraveacutes da Equaccedilatildeo (256)
119909 =119898100
119898000 119910 =
119898010
119898000 119911 =
119898001
119898000 (255)
58
119898 119894119895119896 = 119909119894 minus 119909 119894 119910 minus 119910 119895 119911 minus 119911 119896119891(119909119910 119911)119889119907119881
(256)
Os momentos de 2ordf ordem normalizados para os pontos 3D em um domiacutenio
discreto podem ser calculados atraveacutes da Equaccedilatildeo (257)
119898 119894119895119896 = 119909119897minus119909
119894 119910119897minus119910 119895 119911119897minus119911
119896119873119897=1
119877119894+119895+119896119873 (257)
onde
119898 119894119895119896 ndash Momentos de 2ordf ordem para os pontos 3D
119873 ndash Nuacutemero de pontos da amostra no domiacutenio contiacutenuo da funccedilatildeo
119877 ndash Raio da esfera unitaacuteria considerada para seleccedilatildeo de pontos
Desta forma os valores calculados para os momentos natildeo satildeo influenciados
pelo nuacutemero de pontos unidade fiacutesica das medidas ou peso dos elementos da 119872119881119862
Utilizando momentos de 2ordf ordem a 119872119881119862 pode ser obtida atraveacutes da Equaccedilatildeo
(258)
119872119881119862 =
119898 200 119898 110 119898 101
119898 110 119898 020 119898 011
119898 101 119898 011 119898 002
(258)
O caacutelculo dos autovalores 120582119894 e autovetores 119890 119894 com 119894 = 123 eacute variaacutevel para
cada ponto do conjunto de observaccedilotildees Sendo assim as classes de valores
geradas por GROSS e THONNESSEN (2006) com objetivo de modelar superfiacutecies
com padratildeo planar foram agraves seguintes
O primeiro autovalor 1205821 foi definido constante e igual a 025
O segundo autovalor 1205822 varia de 0125 agrave 025
O terceiro autovalor 1205823 varia de 0 agrave 0125
Com a aproximaccedilatildeo teoacuterica dos valores contidos no Quadro 24 JUTZI e
GROSS (2009) mostraram a possibilidade de determinar matematicamente
inclinaccedilotildees entre as superfiacutecies para os acircngulos de 0ordm 30ordm e 90ordm No entanto
quando satildeo utilizados dados reais para representar as superfiacutecies pequenas
variaccedilotildees nestes valores podem ser percebidas Um exemplo eacute que o terceiro
59
autovalor 1205823 natildeo teraacute valor igual a zero mesmo em uma superfiacutecie plana Isto ocorre
por haverem pequenos desvios entre os pontos desta superfiacutecie que satildeo causados
por ruiacutedo presente no conjunto de dados reais Este fato pode ser observado
calculando o terceiro autovalor que seraacute um valor positivo pequeno mas diferente
de zero Com isto quanto mais proacuteximo de zero o terceiro autovalor 1205823 maior seraacute o
indicativo que a superfiacutecie eacute plana conforme ilustrado com a Figura 224
FIGURA 224 ndash Inclinaccedilotildees de superfiacutecies determinadas por autovalores
FONTE JUTZI e GROSS (2009)
60
211 ALGORITMO DE DESLOCAMENTO PELA MEacuteDIA
O algoritmo de deslocamento pela meacutedia (Mean Shift) pode ser utilizado no
reconhecimento de padrotildees para a segmentaccedilatildeo de imagens A densidade de
pontos vizinhos em relaccedilatildeo a um ponto central pode ser estimada com a meacutedia do
conjunto de dados discretos A anaacutelise espacial de atributos eacute utilizada neste
contexto com o objetivo de extrair informaccedilotildees Para isto utiliza a vizinhanccedila de um
ponto na imagem Com os atributos definidos pode-se encontrar o centro das
regiotildees com as maiores densidades que representam caracteriacutesticas significativas
dos objetos presentes na imagem
Para realizar a anaacutelise espacial de atributos e obterem-se resultados
satisfatoacuterios deve-se reduzir o volume de dados ateacute que se tenham apenas as
caracteriacutesticas significativas distribuiacutedas em um sistema de coordenadas contiacutenuo O
conteuacutedo do espaccedilo de atributos deve ser passiacutevel de modelagem atraveacutes de uma
amostragem com distribuiccedilatildeo multivariada de probabilidade Devido a este
pressuposto eacute necessaacuterio verificar se a condiccedilatildeo de normalidade dos dados eacute
satisfeita em aplicaccedilotildees estatiacutesticas tradicionais que utilizam testes parameacutetricos
Em outras aplicaccedilotildees podem-se utilizar meacutetodos estatiacutesticos natildeo
parameacutetricos com menos restriccedilotildees sobre o comportamento dos dados como por
exemplo natildeo se preocupar com o tipo de distribuiccedilatildeo para as variaacuteveis aleatoacuterias O
conceito de Kernel pode ser empregado em meacutetodos natildeo parameacutetricos para a
estimativa de propriedades Esta eacute uma funccedilatildeo estatiacutestica contiacutenua simeacutetrica e com
limite superior e inferior de integraccedilatildeo definidos cuja integraccedilatildeo resulta na unidade
por conveniecircncia O Kernel atua na imagem como uma janela de convoluccedilatildeo
suavizando as caracteriacutesticas dos pontos analisados (MACHADO 2006)
De acordo com COMANICIU e MEER (2002) o algoritmo de deslocamento
pela meacutedia eacute uma ferramenta versaacutetil para anaacutelises espaciais de feiccedilotildees presentes
em amostras Utiliza o Kernel para a estimaccedilatildeo da densidade dos elementos no
conjunto de dados tendo como referecircncia um ponto fixo na regiatildeo central da
amostra Dado um conjunto de pontos 120169119894=1hellip119899 em um espaccedilo 119877 com dimensatildeo 119889 o
estimador de densidade multivariada por Kernel 119870(120169) e a matriz de paracircmetros 119867
com bandas de dimensatildeo 119889 pode ser calculada com os pontos 120169 Com estes
61
paracircmetros definidos a funccedilatildeo para estimar a densidade multivariada no ponto 120169 eacute
expressa com a Equaccedilatildeo (259)
119891 (120169) =1
119899 119870119867 120169 minus 120169119894 119899119894=1 (259)
119870119867(120169) = 119867 minus1
2119870(119867minus1
2120169) (260)
O Kernel 119870(120169) com dimensatildeo 119889 eacute uma funccedilatildeo para a anaacutelise da densidade
da vizinhanccedila dos pontos expressa atraveacutes das Equaccedilotildees (261) e (262)
119870(120169)119877119889
119889120169 = 1 lim 119909 rarrinfin 120169 119889 119870 120169 = 0 (261)
119909119870(120169)119889120169119877119889
= 0 120169120169119879119870(120169)119889120169119877119889
= 119888119870119868 (262)
Onde 119888119870 eacute uma constante A partir do Kernel univariado 1198701 119909 o Kernel
multivariado pode ser calculado de duas maneiras conforme as Equaccedilotildees (263) e
(264)
119870119875 120169 = 1198701 119909119894 119889119894=1 (263)
119870119878 120169 = 119886119896 1198891198701( 120169119894 ) (264)
Onde 119870119875(120169) eacute obtido com o produto dos Kernels univariados e 119870119878(120169) eacute
obtido rotacionando 1198701(119909) no espaccedilo 119877119889 o que faz 119870119878(120169) ser radialmente simeacutetrico
A constante 119886119896 119889minus1 = 1198701 120169 1198891201691198774
com 119870119878(119909) integrado de 0 agrave 1 O Kernel
radialmente simeacutetrico eacute de interesse em anaacutelises espaciais de imagens desde que
satisfaccedila a condiccedilatildeo da Equaccedilatildeo (265)
119870 119909 = 119888119896 119889119896( 120169 2) (265)
Neste caso define-se a funccedilatildeo de cada elemento do Kernel 119896 119909 para 119909 ge 0
A constante de normalizaccedilatildeo 119888119896 119889 pode ser calculada integrando 119870 120169 de 0 a 1
assumindo-se que eacute positiva A estimaccedilatildeo pode ser parametrizada com a matriz
diagonal de bandas do Kernel 119867 = 1198932119868 = 119889119894119886119892 11989312hellip 119893119889
2 onde 119868 eacute a matriz
identidade com dimensatildeo 119889 Esta matriz apresenta a vantagem de ser determinada
62
utilizando como uacutenico paracircmetro o nuacutemero de bandas 119893 ge 0 do Kernel Empregando
paracircmetros com o nuacutemero de bandas 119893 e dimensatildeo 119899 o estimador de densidade por
Kernel da Equaccedilatildeo (259) pode ser expresso atraveacutes da Equaccedilatildeo (266)
119891 (120169) =1
119899119893119889 119870119867
120169minus120169119894
119893 119899
119894=1 (266)
A qualidade do estimador de densidade por Kernel pode ser analisada
atraveacutes do erro meacutedio quadraacutetico entre a densidade real e a estimada Na praacutetica
somente a aproximaccedilatildeo assintoacutetica das medidas pode ser calculada (AMISE ndash
Asymptotic Mean Integrated Square Error) Para os Kernels multivariados o erro
meacutedio quadraacutetico AMISE eacute minimizado utilizando o Kernel de Epanechnikov
(COMANICIU e MEER 2002)
119896119864 119909 = 1 minus 119909 0 le 119909 le 1
0 119909 gt 0 (267)
119870119864 120169 = 1
2119888119889
minus1 119889 + 2 (1 minus 120169 2) 120169 le 1
0 119888119886119904119900 119888119900119899119905119903aacute119903119894119900 (268)
Onde 119888119889 eacute o volume de uma esfera com raio unitaacuterio e com dimensatildeo 119889 O
elemento do Kernel 119896119873 119909 pode ser calculado utilizando a Equaccedilatildeo (269)
119896119873 119909 = exp minus1
2119909 119909 ge 0 (269)
Para o Kernel multivariado calculado com a Equaccedilatildeo (269) um Kernel
normal 119870119873 pode ser calculado utilizando a Equaccedilatildeo (270)
119870119873 120169 = (2120587)minus1198892exp minus1
2 120169 2 (270)
Sendo o Kernel normal simeacutetrico e admitido finito Para a anaacutelise espacial de
imagens estas duas formas de calcular o Kernel satildeo suficientes e os resultados
obtidos com estas condiccedilotildees impostas satildeo satisfatoacuterios O estimador de densidade
por Kernel da Equaccedilatildeo (259) pode ser reescrito conforme a Equaccedilatildeo (271)
63
119891 119893 119870(120169) =119888119896 119889
119899119893119889 119896
120169minus120169119894
119893
2
119899119894=1 (271)
Para anaacutelise de feiccedilotildees espaciais primeiramente deve-se calcular a
densidade do conjunto de dados e verificar o seu comportamento espacial Isto pode
ser feito calculando o gradiente da funccedilatildeo de densidade 119891(120169) igual a zero nabla119891 120169 = 0
O algoritmo de deslocamento pela meacutedia eacute uma maneira de localizar estes zeros
para estimar a densidade do conjunto de observaccedilotildees Calculando o gradiente da
funccedilatildeo expressa com a Equaccedilatildeo (271) pode-se estimar a densidade atraveacutes da
Equaccedilatildeo (272)
nabla 119891119893 119870(120169) equiv2119888119896 119889
119899119893119889+2 (120169 minus 120169119894)119896prime
120169minus120169119894
119893
2
119899119894=1 (272)
Substituindo 119896prime pela funccedilatildeo 119892(119909) conforme expresso com a Equaccedilatildeo (273)
119892 119909 = 119896prime(119909) (273)
Assumindo que a derivada do Kernel 119896 exista para o conjunto finito de
pontos 119909 isin [0infin) O Kernel 119866(119909) com seus elementos 119892(119909) pode ser definido atraveacutes
da Equaccedilatildeo (274)
119866 119909 = 119888119892 119889119892( 120169 2) (274)
Onde 119888119892119889 corresponde a uma constante de normalizaccedilatildeo O Kernel 119866 119909
pode ser considerado uma aproximaccedilatildeo do Kernel 119870(119909) dependendo do contexto
em que seraacute empregado De forma similar o Kernel de Epanechnikov eacute uma
simplificaccedilatildeo do Kernel uniforme da esfera unitaacuteria com dimensatildeo 119889 Introduzindo
119892(119909) na Equaccedilatildeo (272) tem-se a Equaccedilatildeo (275)
nabla 119891119893 119870 120169 =2119888119896 119889
119899119893119889+2 120169 minus 120169119894 119892
120169minus120169119894
119893
2
119899119894=1 (275)
nabla 119891119893 119870 120169 =2119888119896 119889
119899119893119889+2 119892 120169minus120169119894
119893
2
119899119894=1 ∙
120169119894119892 120169minus120169119894119893
2 119899
119894=1
119892 120169minus120169119894119893
2 119899
119894=1
(276)
64
119892 120169minus120169119894
119893
2
119899119894=1 (277)
Considerando que o resultado da funccedilatildeo expressa com a Equaccedilatildeo (277) eacute
um nuacutemero positivo O primeiro termo da Equaccedilatildeo (276) eacute proporcional agrave densidade
estimada calculada para 120169 com o Kernel 119866 conforme Equaccedilatildeo (271) e expresso
agora em funccedilatildeo de 119892(119909) atraveacutes da Equaccedilatildeo (278)
119891119893 119866 120169 =119888119892 119889
119899119893119889 119892
120169minus120169119894
119893
2
119899119894=1 (278)
O segundo termo da Equaccedilatildeo (276) corresponde ao algoritmo de
deslocamento pela meacutedia conforme Equaccedilatildeo (279)
119898119893 119866 120169 = 120169119894119892
120169minus120169119894119893
2 119899
119894=1
119892 120169minus120169119894119893
2 119899
119894=1
minus 120169 (279)
A Equaccedilatildeo (279) representa a diferenccedila entre as meacutedias ponderadas
utilizando o Kernel 119866 para os pesos e o centro da janela de convoluccedilatildeo em 120169 A
partir das Equaccedilotildees (276) (278) e (279) chega-se as Equaccedilotildees (280) e (281)
nabla 119891119893 119870 120169 = 119891 119893 119866 120169 2119888119896 119889
1198932119888119892 119889119898119893 119866 120169 (280)
119898119893 119866 120169 =1
21198932119888nabla
119891 119893 119870 120169
119891 119893 119866 120169 (281)
Para a posiccedilatildeo 120169 o vetor de deslocamento pela meacutedia calculado com Kernel
119866 eacute proporcional agrave estimaccedilatildeo de densidade normalizada obtida resolvendo a funccedilatildeo
com gradiente igual a zero e Kernel 119870 Eacute a normalizaccedilatildeo da densidade estimada em
119909 calculada com o Kernel 119866
O vetor de deslocamento pela meacutedia aponta na direccedilatildeo de maacuteximo
crescimento da densidade do conjunto de dados A estimaccedilatildeo da densidade de
pontos com mesma caracteriacutestica eacute obtida atraveacutes de interaccedilotildees com sucessivos
caacutelculos do vetor de deslocamento pela meacutedia 119898119893 119866 120169 e translaccedilotildees do Kernel 119866(119909)
sobre a imagem Isto garante a convergecircncia ao redor do ponto de interesse
65
utilizando a Equaccedilatildeo (281) com gradiente igual a zero Regiotildees com baixa
densidade de observaccedilotildees natildeo satildeo interessantes para anaacutelises espaciais com o
algoritmo de deslocamento pela meacutedia pois muitas iteraccedilotildees seriam necessaacuterias
para obtenccedilatildeo de resultados pouco satisfatoacuterios De forma anaacuteloga em locais com
densidade maacutexima poucas iteraccedilotildees satildeo necessaacuterias e a anaacutelise pode atingir bons
resultados (COMANICIU e MEER 2002)
Imagens satildeo representadas matematicamente na forma de matrizes onde
cada posiccedilatildeo da matriz eacute ocupada por vetores com dimensatildeo 119901 onde 119901 = 1 no caso
de imagens em niacuteveis de cinza ou coloridas e 119901 ge 2 no caso de imagens
multiespectrais O posicionamento de cada pixel na matriz imagem estaacute contido no
domiacutenio espacial (Spatial domain) enquanto o valor digital do pixel faz parte do
domiacutenio de caracteriacutesticas da imagem (Range domain) assumindo-se estes
domiacutenios como espaccedilos euclidianos Deste modo o Kernel multivariado pode ser
definido como o produto de dois Kernels radialmente simeacutetricos em um espaccedilo
euclidiano calculado com um paracircmetro de cada domiacutenio atraveacutes da Equaccedilatildeo
(282)
119870119893119904119893119903(119909) =119862
1198931199042119893119903
119901 119896 120169119904
119893119904
2
119896 120169119903
119893119903
2
(282)
onde
120169119904 ndash Corresponde ao domiacutenio espacial
120169119903 ndash Corresponde ao domiacutenio de caracteriacutesticas
119896(119909) ndash Elemento da funccedilatildeo calculado em ambos os domiacutenios
119893119904 119893119903 ndash Paracircmetros das bandas de cada domiacutenio do Kernel empregado
119862 ndash Constante de normalizaccedilatildeo entre as bandas
Na praacutetica o Kernel de Epanechnikov tambeacutem conhecido por Kernel normal
atinge resultados satisfatoacuterios O usuaacuterio deve escolher apenas os paracircmetros das
bandas 119893 = 119893119904 119893119903 e a quantidade miacutenima 119867 de pixels das regiotildees segmentadas na
imagem determinando assim a resoluccedilatildeo na estimaccedilatildeo da densidade A Figura 225
ilustra um exemplo de segmentaccedilatildeo realizada utilizando o algoritmo de
deslocamento pela meacutedia sobre uma imagem em niacuteveis de cinza
66
FIGURA 225 ndash Imagem segmentada FONTE COMANICIU e MEER (2002)
A segmentaccedilatildeo de imagens atraveacutes do algoritmo de deslocamento pela
meacutedia foi implementada no software EDISON (Edge Detection and Image
SegmentatiON System) desenvolvido pela Universidade RUTGER de New Jersey
Este software aleacutem da segmentaccedilatildeo com o algoritmo de deslocamento pela meacutedia
realiza uma filtragem preservando as descontinuidades e detectando os limites dos
objetos contidos na imagem atraveacutes de uma funccedilatildeo gradiente (CHRISTOUDIAS et
al 2002)
67
3 MATERIAIS
Neste trabalho foram utilizadas imagens TOF obtidas com a cacircmara PMD
CamCube 20 que fornece dados de distacircncia e intensidade sob forma de matrizes
de imagem Para realizar os experimentos foram obtidos trecircs conjuntos de imagens
De um gabarito com a forma de um tabuleiro de xadrez para realizar
o processo de calibraccedilatildeo da cacircmara
De uma parede branca com padratildeo planar para anaacutelise de ruiacutedos e
distorccedilotildees geomeacutetricas das imagens e
Do objeto de estudo uma caixa de papelatildeo com superfiacutecies planas e
brancas
Para o processamento das imagens TOF foi utilizado um microcomputador
do laboratoacuterio de Fotogrametria e Sensoriamento Remoto Departamento de
Geomaacutetica da Universidade Federal do Paranaacute com as seguintes caracteriacutesticas
Processador Intelreg Coretrade2 Duo 293GHz
Capacidade do disco riacutegido de 320GB
Memoacuteria principal de 2GB
68
4 MEacuteTODOS
Neste capitulo descreve-se o desenvolvimento metodoloacutegico do presente
trabalho de pesquisa para a aquisiccedilatildeo e processamento da imagem TOF Esta
imagem eacute composta por dois arquivos O primeiro arquivo conteacutem informaccedilatildeo de
intensidade de retorno do sinal captado com iluminaccedilatildeo infravermelha O segundo
arquivo conteacutem informaccedilatildeo de distacircncia (range) para cada pixel gerado com o
sensor da cacircmara TOF
Considerando que as imagens TOF podem apresentar ruiacutedo em funccedilatildeo das
condiccedilotildees de iluminaccedilatildeo e da natureza das superfiacutecies dos objetos estudos para a
reduccedilatildeo do ruiacutedo foram efetuados Para isto utilizaram-se janelas na regiatildeo central
da imagem ao redor do pixel com coordenadas de imagem (102 102) As filtragens
foram realizadas em aacutereas que circundam este pixel central
Apoacutes a anaacutelise do tempo de integraccedilatildeo na aquisiccedilatildeo da imagem
determinaram-se POI atraveacutes do processo de calibraccedilatildeo da cacircmara Os POI
permitiram corrigir a geometria dos dados da imagem TOF Esta correccedilatildeo eacute
necessaacuteria devido agraves distorccedilotildees causadas pelo sistema de lentes da cacircmara
A etapa seguinte consistiu na segmentaccedilatildeo da imagem TOF onde duas
metodologias foram avaliadas
1) Segmentaccedilatildeo do conjunto de dados por crescimento de regiotildees no
espaccedilo tridimensional utilizando pontos semente escolhidos no arquivo de
intensidades da imagem TOF como referecircncia para o posicionamento (119883119884) dos
pontos com distacircncia (119885)
2) Segmentaccedilatildeo utilizando a anaacutelise da variaccedilatildeo local dos autovalores ao
longo do arquivo de distacircncias da imagem TOF Realizada para a geraccedilatildeo de uma
imagem com bordas intensificadas segmentaccedilatildeo desta imagem atraveacutes do
algoritmo de deslocamento pela meacutedia e projeccedilatildeo ortogonal dos pontos
pertencentes agraves aacutereas segmentadas As superfiacutecies segmentadas foram entatildeo
separadas atraveacutes do conjunto de pontos 3D
O passo seguinte consistiu no caacutelculo das coordenadas tridimensionais dos
pontos dos objetos imageados a partir da informaccedilatildeo de distacircncia das coordenadas
dos piacutexeis na imagem de intensidade e dos POI Com isto gerou-se a nuvem de
pontos 3D e tornou-se possiacutevel a modelagem tridimensional das superfiacutecies do
69
objeto de estudo sendo tambeacutem avaliado o resultado obtido A Figura 41 apresenta
as etapas realizadas no processamento das imagens TOF com as duas propostas
de metodologia para a etapa de segmentaccedilatildeo
FIGURA 41 ndash Processamento da imagem TOF
41 CALIBRACcedilAtildeO DA CAcircMARA
A calibraccedilatildeo foi realizada com o objetivo de determinar os Paracircmetros de
Orientaccedilatildeo Interior (POI) da cacircmara Estes paracircmetros possibilitam a reconstruccedilatildeo
do feixe perspectivo que gerou a imagem para o instante em que foi captada
permitindo a correccedilatildeo de sua geometria (ANDRADE 1998)
Com o processo de Orientaccedilatildeo Interior satildeo obtidos os seguintes POI
distacircncia focal calibrada (119891119888 ) posiccedilatildeo do Ponto Principal (1199090 1199100) na imagem
Distorccedilatildeo Radial Simeacutetrica (119870111987021198703) Distorccedilatildeo Descentrada (11987511198752) e os
paracircmetros que indicam falta de afinidade do sensor (119860119861)
IMAGEM TOF
CORRECcedilOtildeES GEOMEacuteTRICAS COM POI
ARQUIVO DE INTENSIDADES
SUPERFIacuteCIE SEMENTE
CRESCIMENTO DE REGIOtildeES COM PONTO SEMENTE
PROJECcedilAtildeO ORTOGONAL
NUVEM DE PONTOS 3D
ARQUIVO DE DISTAcircNCIAS
IMAGEM COM BORDAS INTENSIFICADAS VARIACcedilAtildeO LOCAL DE AUTOVALORES
SEGMENTACcedilAtildeO DA IMAGEM COM BORDAS INTENSIFICADAS
PROJECcedilAtildeO ORTOGONAL
NUVEM DE PONTOS 3D
MODELAGEM 3D DAS SUPERFIacuteCIES
70
Os POI obtidos com o processo de calibraccedilatildeo possibilitam realizar correccedilotildees
geomeacutetricas nos arquivos de intensidades e distacircncias das imagens TOF Com a
calibraccedilatildeo objetiva-se corrigir as distorccedilotildees ocorridas na passagem do raio de luz
pelo sistema de lentes ateacute atingir o plano focal Este erro ocorre pela impossibilidade
na construccedilatildeo de um sistema de lentes perfeito para a cacircmara A correccedilatildeo dos erros
sistemaacuteticos da cacircmara eacute realizada no plano da imagem no ponto onde uma linha
reta passante pelo ponto nodal anterior do sistema de lentes eacute ortogonal a este
plano
O meacutetodo de calibraccedilatildeo fotogrameacutetrica eacute o tradicionalmente utilizado na
determinaccedilatildeo dos POI em Ciecircncias Geodeacutesicas Para isto necessita de pontos de
apoio com coordenadas tridimensionais conhecidas na superfiacutecie de objetos com
correspondentes coordenadas bidimensionais observadas na imagem Relaciona-se
a informaccedilatildeo 3D da cena com a informaccedilatildeo 2D da imagem atraveacutes das equaccedilotildees de
colinearidade fazendo-se uma correspondecircncia entre a posiccedilatildeo dos pontos de
referecircncia 3D e os mesmos pontos reconhecidos na imagem 2D Esta calibraccedilatildeo
pode ser realizada de forma eficiente desde que sejam utilizadas teacutecnicas e campos
de calibraccedilatildeo apropriados para cada tipo de cacircmara e aplicaccedilatildeo que se destina a
imagem Outra teacutecnica que pode ser utilizada para a Orientaccedilatildeo Interior das imagens
eacute conhecida como auto-calibraccedilatildeo na qual natildeo haacute necessidade de pontos com
coordenadas conhecidas no espaccedilo objeto (ZHANG 2000)
A Distorccedilatildeo Radial Simeacutetrica eacute a parcela de refraccedilatildeo natildeo desejaacutevel que um
feixe luminoso sofre ao atravessar um sistema de lentes A Distorccedilatildeo Descentrada eacute
composta pelas distorccedilotildees Tangencial e Radial Assimeacutetrica Eacute causada pela
impossibilidade de alinhar-se perfeitamente o eixo oacuteptico do sistema de lentes que
compotildee a objetiva Correccedilotildees para estas distorccedilotildees podem ser feitas atraveacutes da
Equaccedilatildeo (41) Maiores detalhes podem ser vistos em Andrade (1998)
119909prime119910prime =
119909119910
119900119887119904minus
1199090
1199100 minus
120575119909120575119910 119903119886119889
minus 120575119909120575119910 119889119890119904
minus 120575119909120575119910 119886
(41)
71
onde
119909prime119910prime 119879 ndash Coordenadas corrigidas no sistema referencial de imagem
119909 119910 119900119887119904119879 ndash Coordenadas de imagem observadas
1199090 1199100 119879ndash Coordenadas do PP no sistema referencial de imagem
120575119909 120575119910 119903119886119889119879 ndash Distorccedilatildeo Radial Simeacutetrica
120575119909 120575119910 119889119890119904119879 ndash Distorccedilatildeo Descentrada
120575119909 120575119910 119886119879 ndash Distorccedilatildeo causada pela falta de afinidade entre os eixos do
sensor
Andrade (1998) ilustra algumas correccedilotildees necessaacuterias para as imagens
utilizadas em Fotogrametria e mostra a influencia dos POI nestas correccedilotildees Um
exemplo eacute a correccedilatildeo da distorccedilatildeo Radial Simeacutetrica que pode ser realizada atraveacutes
das Equaccedilotildees (42) e (43)
120575119909119903119886119889 = (1199032 ∙ 1198701 + 1199034 ∙ 1198702 + 1199036 ∙ 1198703) ∙ 119909 (42)
120575119910119903119886119889 = (1199032 ∙ 1198701 + 1199034 ∙ 1198702 + 1199036 ∙ 1198703) ∙ 119910 (43)
onde
119909 = (119909 minus 1199090)
119910 = (119910 minus 1199100)
119909119910 ndash Coordenadas dos pontos com distorccedilotildees no sistema referencial
fotogrameacutetrico projetado na imagem
11990901199100 ndash Coordenadas do Ponto Principal
119870111987021198703 ndash Coeficientes de Distorccedilatildeo Radial Simeacutetrica
72
A distacircncia 119903 entre o ponto com coordenadas na imagem e o Ponto Principal
pode ser calculada atraveacutes da Equaccedilatildeo (44)
119903 = 119909 2 + 119910 2 (44)
A Distorccedilatildeo Descentrada pode entatildeo ser corrigida atraveacutes das Equaccedilotildees
(45) e (46)
120575119909119889119890119904 = [1198751 ∙ (1199032 + 2 ∙ 1199092
) + 2 ∙ 1198752 ∙ 119909 ∙ 119910 ] ∙ (1 + 1198753 + r2 + ⋯ ) (45)
120575119910119889119890119904 = [2 ∙ 1198751 ∙ 119909 ∙ 119910 + 1198752 ∙ (r2 + 2 ∙ 119910 2)] ∙ (1 + 1198753 + r2 + ⋯ ) (46)
onde
119875111987521198753 ndash Coeficientes de Distorccedilatildeo Descentrada
A diferenccedila de escala dos eixos horizontal e vertical da imagem possiacutevel
natildeo ortogonalidade entre os elementos do sensor pode ser modelada utilizando as
Equaccedilotildees (47) e (48) que introduzem correccedilotildees utilizando os paracircmetros de
afinidade 119860 e 119861 (HABIB e MORGAN 2003)
120575119909119886 = 119860 119909 minus 1199090 + 119861(119910minus1199100) (47)
120575119910119886 = 119861(119910minus1199100) (48)
onde
119860119861 ndash Paracircmetros de afinidade
119909119910 ndash Coordenadas dos pontos com distorccedilotildees no sistema referencial
fotogrameacutetrico projetado na imagem
11990901199100 ndash Coordenadas do Ponto Principal
73
A partir da formulaccedilatildeo proposta por Brown (1971) e incluindo os paracircmetros
de afinidade 119860 e 119861 as Equaccedilotildees (49) e (410) possibilitam a correccedilatildeo da imagem
utilizando os coeficientes 119870111987021198703 e 11987511198752
119909prime = 119909 + 119909 ∙ 11987011199032+1198702119903
4+11987031199036 + ⋯ +
+ 1198751 ∙ 1199032 + 2 ∙ 119909
2 + 2 ∙ 1198752 ∙ 119909 ∙ 119910 ∙ 1 + 1198753 ∙ 119903
2 + ⋯ + 119909 119860 + 119910 119861 (49)
119910prime = 119910 + 119910 ∙ 11987011199032+1198702119903
4+11987031199036 + ⋯ +
+ 21198751 ∙ 119909 ∙ 119910 + 1198752 ∙ 1199032 + 2119910 2 ∙ 1 + 1198753 ∙ 119903
2 + ⋯ + 119910 119861 (410)
A Equaccedilatildeo (41) ilustra as correccedilotildees necessaacuterias na geometria da imagem
quando objetiva-se a extraccedilatildeo de informaccedilotildees meacutetricas Eacute um modelo jaacute consagrado
na Fotogrametria e bastante aplicado em Ciecircncias Geodeacutesicas Pode ser utilizado
para o entendimento das correccedilotildees necessaacuterias nas imagens devido agraves distorccedilotildees
causadas pelo sistema de lentes da cacircmara e pela falta de afinidade entre os
elementos do sensor Outros modelos matemaacuteticos para correccedilotildees geomeacutetricas de
imagens satildeo utilizados em aacutereas correlatas como a Visatildeo Computacional Com a
precisatildeo requerida em cada aplicaccedilatildeo alguns POI tecircm maior relevacircncia que outros
podendo haver a supressatildeo de alguns A correlaccedilatildeo entre os paracircmetros deve ser
analisada e evitada
As Equaccedilotildees (49) e (410) podem ser simplificadas para realizar apenas as
correccedilotildees utilizando os coeficientes de Distorccedilatildeo Radial Simeacutetrica 1198961 e 1198962 e os
paracircmetros de afinidade 119860 e 119861 Estes paracircmetros satildeo os mais significativos para a
correccedilatildeo da imagem obtida com cacircmaras digitais de pequeno formato conforme eacute
expresso atraveacutes das Equaccedilotildees (411) e (412)
119909prime = 119909 + 119909 ∙ 11987011199032+1198702119903
4 + 119909 119860 + 119910 119861 (411)
119910prime = 119910 + 119910 ∙ 11987011199032+1198702119903
4 + 119910 119861 (412)
74
onde
119909119910 ndash Coordenadas dos pontos com distorccedilotildees no sistema referencial
fotogrameacutetrico projetado na imagem
119909 = (119909 minus 1199090)
119910 = (119910 minus 1199100)
11990901199100 ndash Coordenadas do Ponto Principal
119860119861 ndash Paracircmetros de afinidade
Cacircmaras digitais de pequeno formato apresentam principalmente a
Distorccedilatildeo Radial Simeacutetrica causada pelo sistema de lentes sendo os coeficientes 1198961
e 1198962 os mais significativos Os paracircmetros de afinidade entre os eixos da imagem 119860
e 119861 tambeacutem podem ser considerados para a correccedilatildeo das imagens obtidas
dependendo da precisatildeo com que o sensor da cacircmara foi construiacutedo pelo fabricante
Alguns softwares calculam os POI de forma raacutepida com soluccedilatildeo aproximada
e dependendo da aplicaccedilatildeo a que se destina a imagem podem ser utilizados sem
maiores restriccedilotildees Um deles eacute o Toolbox CALIB para Matlab utiliza o algoritmo
proposto por Zhang (2000) Este meacutetodo consiste em determinar os POI da cacircmara
tomando diferentes imagens de um gabarito com quadrados pretos e brancos
similar a um tabuleiro de xadrez fixado em uma superfiacutecie riacutegida e com padratildeo
planar Devem ser obtidas imagens do gabarito variando a posiccedilatildeo e orientaccedilatildeo da
cacircmara natildeo sendo necessaacuterio conhecer a trajetoacuteria do seu movimento para a
determinaccedilatildeo dos POI Este algoritmo possibilita o caacutelculo dos POI da cacircmara de
forma aproximada atraveacutes de sucessivas iteraccedilotildees Para sua utilizaccedilatildeo eacute necessaacuterio
conhecer a dimensatildeo dos quadrados do gabarito e indicar os pontos posiccedilotildees dos
veacutertices que seratildeo utilizados como pontos de referecircncia
No algoritmo proposto por Zhang um vetor de pontos 2D eacute denotado por
119898 = [119906 119907]119879 e um vetor de pontos 3D por 119872 = [119883119884119885]119879 De forma similar pode-se
aumentar estes vetores adicionando uma linha com valor igual a 1 sendo os vetores
aumentados 119898 = [119906 119907 1]119879 e 119872 = [119883119884119885 1]119879 A colinearidade entre o ponto no
espaccedilo objeto centro perspectivo e o ponto no espaccedilo imagem eacute utilizada para
75
estabelecer a relaccedilatildeo entre os pontos 3D contidos no vetor 119872 e os pontos na
imagem 2D contidos no vetor 119898 conforme a Equaccedilatildeo (413)
119904119898 = 119860[119877 119905]119872 (413)
onde
119904 ndash Fator de escala
119877 119905 ndash Paracircmetros de Orientaccedilatildeo Exterior (POE) compostos por elementos de
rotaccedilatildeo e translaccedilatildeo que relacionam as coordenadas obtidas no sistema 3D do
espaccedilo objeto com o sistema de coordenadas 2D da imagem
119860 ndash Eacute a matriz com os POI da cacircmara Apresenta as coordenadas 1199060 e 1199070 do
PP 119864120572 e 119864120573 satildeo os fatores de escala na imagem com eixos 119906 e 119907 O paracircmetro 120574
descreve a falta de ortogonalidade entre os eixos do sistema referencial da imagem
A matriz 119860 eacute expressa atraveacutes da Equaccedilatildeo (414)
119860 = 119864120572 120574 1199060
0 119864120573 1199070
0 0 1
(414)
Comparando as Equaccedilotildees (411) e (412) com o modelo proposto por Zhang
expresso atraveacutes da Equaccedilatildeo (413) tecircm-se as seguintes correspondecircncias
119860 e 119861 satildeo os paracircmetros de afinidade das Equaccedilotildees (411) e (412)
que correspondem aos fatores de escala 119864120572 e 119864120573 da Equaccedilatildeo (413)
Sendo que o paracircmetro 120574 acircngulo entre os eixos da imagem pode ser
calculado a partir destes fatores de escala
1199090 e 1199100 satildeo as coordenadas do Ponto Principal expressas com as
Equaccedilotildees (411) e (412) que tem suas correspondecircncias nas
coordenadas 1199060 e 1199070 da Equaccedilatildeo (413)
O caacutelculo dos POI pode ser entatildeo ser realizado atraveacutes da Equaccedilatildeo (415)
119898119894119895 minus119898 119860119877119894 119905119894 119872119895 2119898
119895=1119899119894=1 (415)
76
onde
119898 119860119877119894 119905119894 119872119894 ndash Eacute a projeccedilatildeo do vetor do ponto 119872119895 sobre a imagem 119894
119877119894 ndash Eacute o vetor de rotaccedilatildeo com paracircmetros 119903
O algoritmo proposto por Zhang (2000) utiliza somente os dois primeiros
termos de Distorccedilatildeo Radial Simeacutetrica para a correccedilatildeo da imagem atraveacutes dos
coeficientes 1198961 e 1198962 conforme Equaccedilotildees (416) e (417) Cacircmaras digitais de
pequeno formato normalmente apresentam distorccedilotildees de lentes significantes
especialmente a Distorccedilatildeo Radial Simeacutetrica A funccedilatildeo de distorccedilatildeo eacute fortemente
influenciada pelos componentes radiais principalmente o primeiro termo 1198961 Dadas
as coordenadas de uma imagem (119906 119907) consideradas livres de distorccedilatildeo e as
correspondentes coordenadas de imagem observadas (119906 119907 ) consegue-se projetar
os pontos atraveacutes da relaccedilatildeo de colinearidade entre eles De forma similar (119909119910) satildeo
as coordenadas de imagem consideradas livres de distorccedilatildeo e (119909 119910 ) as coordenadas
que possuem distorccedilatildeo Estas coordenadas tecircm suas escalas compatibilizadas
atraveacutes de uma normalizaccedilatildeo
119909 = 119909 + 119909 1198961 1199092 + 1199102 + 1198962 119909
2 + 1199102 2 (416)
119910 = 119910 + 119910 1198961 1199092 + 1199102 + 1198962 119909
2 + 1199102 2 (417)
onde
11989611198962 ndash Satildeo os coeficientes de Distorccedilatildeo Radial Simeacutetrica O centro desta
distorccedilatildeo encontra-se no Ponto Principal projetado na imagem
Com 119906 = 1199060 + 119886119909 + 120574119910 e 119907 = 1199070 + 120573119910 e assumindo 120574 = 0 em uma imagem
que tem os eixos perpendiculares tem-se a relaccedilatildeo expressa com as Equaccedilotildees
(418) e (419)
119906 = 119906 + 119906 minus 1199060 1198961 1199092 + 1199102 + 1198962 119909
2 + 1199102 2 (418)
119907 = 119907 + 119907 minus 1199070 1198961 1199092 + 1199102 + 1198962 119909
2 + 1199102 2 (419)
Uma opccedilatildeo para estimar os coeficientes 1198961 e 1198962 eacute feita atraveacutes de
sucessivas iteraccedilotildees utilizando as coordenadas 119906 e 119907 dos piacutexeis considerados
77
isentos de erro Com isto tecircm-se duas expressotildees para os pontos da imagem
conforme a Equaccedilatildeo (420)
119906 minus 1199060 119909
2 + 1199102 119906 minus 1199060 1199092 + 1199102 2
119907 minus 1199070 1199092 + 1199102 119907 minus 1199070 119909
2 + 1199102 2 1198961
1198962 =
119906 minus 119906119907 minus 119907
(420)
Dados 119898 pontos em 119899 imagens podemos obter 2 ∙ 119898 ∙ 119899 equaccedilotildees Na forma
matricial 119863119896 = 119889 onde 119896 = 1198961 1198962 119879 A soluccedilatildeo deste sistema de equaccedilotildees eacute
possiacutevel pelo meacutetodo dos miacutenimos quadrados conforme a Equaccedilatildeo (421)
119896 = 119863119879119863 minus1119863119879119889 (421)
Uma vez que 1198961 e 1198962 foram calculados pode-se refinar a estimaccedilatildeo dos
outros paracircmetros resolvendo novamente a Equaccedilatildeo (415) substituindo os valores
de 119898 119860119877119894 119905119894 119872119894 pelos valores calculados com as Equaccedilotildees (418) e (419)
A estimaccedilatildeo do conjunto completo de POI pode ser expressa atraveacutes da
Equaccedilatildeo (422)
119898119894119895 minus119898 1198601198961 1198962119877119894 119905119894 119872119895 2119898
119895=1119899119894=1 (422)
onde
119898 119860 11989611198962119877119894 119905119894 119872119895 - Eacute funccedilatildeo da projeccedilatildeo do vetor do ponto 119872119895 na imagem
119894 de acordo com a Equaccedilatildeo (413)
Com este meacutetodo no miacutenimo duas imagens devem ser adquiridas com
orientaccedilotildees diferentes se os elementos sensores da cacircmara forem quadrados
Zhang (2000) recomenda a aquisiccedilatildeo de pelo menos cinco imagens para obter
melhores resultados com o processo de calibraccedilatildeo Sendo assim os passos para
realizar a calibraccedilatildeo da cacircmara utilizando este meacutetodo satildeo
1 Imprimir o gabarito e fixaacute-lo em uma superfiacutecie plana e riacutegida
2 Tomar imagens do gabarito com diferentes orientaccedilotildees variando a
posiccedilatildeo e orientaccedilatildeo da cacircmara
78
3 Realizar a leitura das coordenadas dos pontos de controle nas
imagens
4 Estimar os POI e POE utilizando soluccedilatildeo aproximada
5 Refinar todos os paracircmetros incluindo os paracircmetros de distorccedilatildeo de
lentes atraveacutes da Equaccedilatildeo (422)
Os passos 4 e 5 satildeo realizados automaticamente pelo Toolbox CALIB do
software Matlab devendo o usuaacuterio apenas inserir as imagens no software e realizar
as leituras dos veacutertices dos quadrados nas imagens do gabarito
42 ANAacuteLISE DA PRESENCcedilA DE RUIacuteDO
Os piacutexeis saturados causados por exposiccedilatildeo prolongada do sensor na
aquisiccedilatildeo da imagem e tambeacutem os piacutexeis com baixa exposiccedilatildeo devem ser
cuidadosamente analisados na imagem pois tambeacutem podem causar erros nas
medidas de distacircncia devido agrave presenccedila de ruiacutedo Quando o sensor capta o sinal
luminoso existe um limite maacuteximo de saturaccedilatildeo que natildeo pode ser diminuiacutedo
posteriormente
Khongsab (2009) utilizou como paracircmetro principal o tempo de integraccedilatildeo na
captaccedilatildeo da imagem para controlar a saturaccedilatildeo dos piacutexeis Como este tempo eacute
aplicado globalmente ao sensor acaba influenciando os valores digitais dos piacutexeis
da imagem de forma equivalente Alguns apresentam erros devido agrave baixa
exposiccedilatildeo pois com a reduccedilatildeo do tempo de integraccedilatildeo natildeo receberam energia
eletromagneacutetica suficiente para sensibilizar o sensor sendo chamados de piacutexeis
insaturados Estes problemas podem ser minimizados definindo-se tempos de
integraccedilatildeo adequados para a obtenccedilatildeo da imagem TOF
O tratamento do ruiacutedo pode ser realizado com diferentes filtragens na
imagem Com este objetivo foram estudados os filtros passa-baixas pela meacutedia e
mediana Outro processo de filtragem realizado foi o caacutelculo da meacutedia dos valores
de distacircncia para diferentes imagens de uma mesma cena com o mesmo tempo de
integraccedilatildeo mas adquiridas em instantes brevemente diferentes
79
421 Filtragem passa-baixas pela meacutedia
O caacutelculo da meacutedia dos valores da vizinhanccedila em torno do pixel de interesse
tem o efeito de suavizar a imagem Este processo conhecido como filtro linear
passa-baixas atenua as altas frequecircncias que no espaccedilo de frequecircncias
correspondem agraves transiccedilotildees raacutepidas Este tipo de variaccedilatildeo caracteriza tambeacutem a
presenccedila de ruiacutedo na imagem A suavizaccedilatildeo tende a minimizar a presenccedila de ruiacutedo
e tecircm o efeito de tornar a imagem menos contrastante O filtro linear passa-baixas
utilizado tem dimensatildeo 3x3 com pesos iguais para os vizinhos Filtros lineares
resultam da convoluccedilatildeo de uma janela moacutevel sobre a imagem A Equaccedilatildeo (423)
representa o modelo matemaacutetico aplicado na filtragem linear passa-baixas pela
meacutedia (CENTENO 2004)
119866 119910 119909 = (119901(119894 119895) ∙ 119868(119910 + 119894 minus 119886 119909 + 119895 minus 119886))119879119895=1
119879119894=1 (423)
onde
119868(119910 119909) ndash Corresponde ao valor do pixel na posiccedilatildeo ldquolinha = 119910rdquo e ldquocoluna = 119909rdquo
119901(119894 119895) ndash Representa o filtro
119879 ndash Tamanho da janela de filtragem
119866(119910 119909) ndash Imagem resultante da filtragem
119886 = 119894119899119905 119879
2 + 1
A Figura 42 Ilustra o filtro linear passa-baixas pela meacutedia a janela central
cinza que estaacute na matriz de uma imagem Este filtro tem dimensatildeo de 3x3 piacutexeis e
atua no valor digital 48 do pixel central O valor digital do pixel apoacutes a filtragem
passa a ser 41222 que corresponde a meacutedia dos valores digitais dos piacutexeis
vizinhos
80
FIGURA 42 ndash Filtragem passa-baixas pela meacutedia
422 Filtragem pela mediana
A filtragem natildeo linear pela mediana consiste na substituiccedilatildeo do valor do pixel
central pelo valor correspondente a mediana da vizinhanccedila Este meacutetodo tambeacutem
suaviza a presenccedila de ruiacutedo A diferenccedila principal em relaccedilatildeo ao filtro da meacutedia eacute
que o filtro da mediana natildeo introduz novos valores na imagem pois substitui o valor
central da vizinhanccedila por um valor jaacute existente na imagem Sendo assim natildeo
degrada as bordas dos objetos de forma extrema A Figura 43 ilustra esta filtragem
que resultaraacute no valor digital 44 para o pixel filtrado que anteriormente apresentava
valor digital 48
FIGURA 43 ndash Filtragem pela mediana
81
423 Filtragem com a meacutedia temporal
A terceira opccedilatildeo eacute a ponderaccedilatildeo dos valores dos piacutexeis ao longo do tempo
Para isto uma seacuterie de imagens foi obtida a partir do mesmo ponto de vista em
instantes diferentes O resultado foi um conjunto de imagens de um uacutenico objeto
desde a mesma perspectiva natildeo sendo a geometria da imagem alterada Assim
cada pixel de uma imagem tem seu equivalente nas outras Assumindo que o ruiacutedo
seja aleatoacuterio eacute esperado que o uso de mais de uma imagem diminua a presenccedila
de ruiacutedo atraveacutes do caacutelculo da meacutedia dos valores observados
A filtragem com a meacutedia temporal eacute ilustrada com a Figura 44 Nesta figura
tem-se a representaccedilatildeo de trecircs imagens com suas matrizes de valores digitais
(Ii=123) e a imagem filtrada (IF) resultante que corresponde a meacutedia das trecircs
imagens originais
FIGURA 44 ndash Filtragem utilizando a meacutedia temporal
82
43 SEGMENTACcedilAtildeO
Com a etapa de segmentaccedilatildeo objetivou-se separar o conjunto de dados em
subconjuntos Estes subconjuntos satildeo compostos por pontos com coordenadas
tridimensionais que descrevem as superfiacutecies de objetos Eacute assumido que estas
superfiacutecies satildeo partes estruturais do objeto a ser identificado Para atingir esta meta
duas alternativas foram desenvolvidas e avaliadas
1) Crescimento de regiotildees a partir de superfiacutecies planas e ponto semente
utilizando o arquivo de intensidades da imagem TOF para selecionar a posiccedilatildeo de
pontos ou regiotildees semente sendo o arquivo de distacircncias utilizado para o
crescimento de regiotildees
2) Segmentaccedilatildeo por anaacutelise da variaccedilatildeo local de autovalores utilizando
somente o arquivo de distacircncias da imagem TOF para gerar uma imagem de
intensidade com bordas intensificadas que posteriormente eacute segmentada em
regiotildees que tecircm seus piacutexeis projetados gerando uma nuvem de pontos 3D destas
superfiacutecies segmentadas A segmentaccedilatildeo da imagem de intensidade com bordas
evidenciadas gerada eacute realizada utilizando o algoritmo de deslocamento pela meacutedia
431 Crescimento de regiotildees a partir de superfiacutecies planas e ponto semente
O primeiro meacutetodo proposto se baseia no crescimento de regiotildees por
agregaccedilatildeo de elementos adjacentes Este meacutetodo utiliza um criteacuterio de similaridade
para avaliar se um ponto pertence a uma determinada regiatildeo A distacircncia de um
ponto a uma superfiacutecie plana e o valor digital de um pixel em uma imagem satildeo
exemplos de criteacuterios de similaridade que podem ser utilizados (GONZALEZ e
WOODS 2000)
Partindo de um subconjunto de pontos adjacentes que pertencem a uma
superfiacutecie plana o processo consiste em buscar na vizinhanccedila outros pontos que
estejam espacialmente proacuteximos a esta superfiacutecie atendendo ao criteacuterio de
coplanaridade Neste criteacuterio a distacircncia ortogonal do ponto a uma superfiacutecie plana eacute
calculada atraveacutes das coordenadas 3D do ponto sendo este ponto considerado
pertencente agrave superfiacutecie quando estaacute dentro do limiar estabelecido A superfiacutecie
plana eacute determinada atraveacutes do autovetor com menor autovalor do conjunto de
83
pontos 3D a distacircncia ortogonal eacute calculada na direccedilatildeo deste autovetor partindo da
superfiacutecie O processo eacute iterativo de forma que o subconjunto inicial cresce
agregando novos elementos em cada iteraccedilatildeo ateacute atingir os limites da superfiacutecie
quando o criteacuterio de coplanaridade natildeo eacute mais satisfeito
O primeiro problema consiste na identificaccedilatildeo de pontos ou regiotildees semente
para dar iniacutecio ao processo de crescimento Uma opccedilatildeo foi identificar visualmente
regiotildees planas no arquivo de intensidades da imagem TOF e realizar a leitura de
coordenadas de pontos nestas regiotildees A partir das coordenadas destes pontos
selecionados na imagem de intensidade e de suas correspondentes no arquivo de
distacircncias da imagem TOF determinou-se a superfiacutecie plana que mais se aproxima
a esta regiatildeo atraveacutes do caacutelculo de seus autovetores e autovalores esta foi
considerada a superfiacutecie semente
A hipoacutetese baacutesica assume que superfiacutecies planas ou pelo menos partes
delas aparecem como regiotildees uniformes na imagem de intensidade devido agraves
condiccedilotildees de iluminaccedilatildeo Esta hipoacutetese nem sempre pode ser verificada e
confirmada Por exemplo se a superfiacutecie eacute coberta por tonalidades com padratildeo
irregular de cor entatildeo o plano pode mostrar valores natildeo uniformes na imagem de
intensidade sendo este um caso extremo Em uma situaccedilatildeo real pode ocorrer que
parte da superfiacutecie plana esteja pintada ou contenha manchas que alterem a sua
resposta espectral O mesmo pode ocorrer se houverem sombras projetadas de
outros objetos sobre a superfiacutecie Neste caso poreacutem existem outras regiotildees da
superfiacutecie plana que podem aparecer uniformes na imagem de intensidade e serem
utilizadas como regiatildeo semente
Com base nesta suposiccedilatildeo buscaram-se regiotildees uniformes na imagem de
intensidade e verificou-se a possibilidade de formarem superfiacutecies planas que
pudessem ser utilizadas como sementes no arquivo de distacircncias da imagem TOF
A soluccedilatildeo proposta consiste em segmentar a imagem de intensidade em regiotildees
uniformes com atributos de cor Um limite miacutenimo no tamanho das regiotildees deve ser
fixado para evitar que regiotildees muito pequenas sejam incluiacutedas na anaacutelise visto que
estas regiotildees pequenas podem representar locais com curvatura
A chave para o crescimento de regiotildees eacute a definiccedilatildeo do grau de pertinecircncia
de cada ponto agrave superfiacutecie plana Para isto eacute utilizado o conceito de distacircncia
miacutenima do ponto a esta superfiacutecie Para pertencer a uma regiatildeo os pontos devem
84
estar dentro do limite de proximidade ou seja a distacircncia entre o ponto e a
superfiacutecie plana natildeo pode superar o limiar fixado
A qualidade deste processo depende de fatores como o estabelecimento de
correspondecircncia entre os pontos precisatildeo na determinaccedilatildeo da superfiacutecie normal
utilizada remoccedilatildeo de erros grosseiros do conjunto de observaccedilotildees e identificaccedilatildeo
da regiatildeo semente
432 Segmentaccedilatildeo por anaacutelise da variaccedilatildeo local de autovalores
Esta abordagem baseia-se na anaacutelise da variaccedilatildeo local dos autovalores e
autovetores A hipoacutetese baacutesica nesta metodologia foi considerar que ao longo de
uma superfiacutecie plana os autovalores devem apresentar valores similares ou muito
proacuteximos Considerando duas regiotildees adjacentes se estas regiotildees forem
coplanares entatildeo a magnitude relativa de seus autovalores seraacute aproximadamente
igual Se uma destas regiotildees encontra-se em uma borda do objeto os autovetores
seratildeo diferentes A regiatildeo a ser considerada eacute uma janela quadrada em torno do
pixel central Para efetuar esta anaacutelise devem ser calculados os autovalores de uma
regiatildeo em torno de cada pixel no arquivo de distacircncias da imagem TOF Estes
autovalores satildeo armazenados em matrizes que geram trecircs novas imagens digitais
com as bordas dos objetos intensificadas
Com a Figura 45 Ilustra-se a anaacutelise do arquivo de distacircncias da imagem
TOF realizado com o caacutelculo de seus autovalores As bordas dos objetos presentes
podem ser vistas em evidecircncia satildeo representadas com os maiores valores
85
FIGURA 45 ndash Intensificaccedilatildeo de bordas com autovalores
Os autovalores calculados para cada pixel satildeo normalizados na faixa de 0 a
255 utilizando-se 8 bits Assim estes valores podem ser representados como uma
imagem digital passiacutevel de ser analisada com softwares de processamento A Figura
46 ilustra uma imagem com bordas intensificadas proveniente da segmentaccedilatildeo
realizada com a anaacutelise da variaccedilatildeo local dos autovalores
FIGURA 46 ndash Imagem com bordas intensificadas
86
A imagem produzida pode entatildeo ser segmentada utilizando o algoritmo de
deslocamento pela meacutedia Os resultados da segmentaccedilatildeo satildeo regiotildees onde os
autovalores satildeo aproximadamente iguais definindo uma superfiacutecie com padratildeo
planar sendo estas superfiacutecies separadas das regiotildees de bordas
433 Segmentaccedilatildeo com o algoritmo de deslocamento pela meacutedia
A segmentaccedilatildeo com o algoritmo de deslocamento pela meacutedia eacute realizada
utilizando a imagem com as bordas dos objetos intensificadas gerada com a
segmentaccedilatildeo do arquivo de distacircncias da imagem TOF pela anaacutelise da variaccedilatildeo
local dos autovalores
Cada um dos trecircs autovalores calculados gera uma imagem com bordas
intensificadas Sendo assim espera-se que os valores digitais dos piacutexeis nas
superfiacutecies dos objetos sejam similares dentro desta imagem Com isto a
segmentaccedilatildeo proporcionaraacute a seleccedilatildeo das superfiacutecies do objeto
Para realizar a segmentaccedilatildeo da imagem de intensidade com as bordas
intensificadas deve-se escolher os paracircmetros (119893119904 119893119903 119867) mais adequados para a
segmentaccedilatildeo Estes paracircmetros correspondem ao domiacutenio espacial da imagem 119893119904
domiacutenio de caracteriacutesticas dos piacutexeis 119893119903 e o tamanho miacutenimo 119867 que as aacutereas
segmentadas devem possuir O limite miacutenimo na quantidade de piacutexeis deve ser
fixado para evitar que regiotildees muito pequenas sejam incluiacutedas na segmentaccedilatildeo o
que pode prejudicar esta etapa pois se espera que a imagem seja segmentada com
o menor nuacutemero de regiotildees
87
5 RESULTADOS E DISCUSSOtildeES
51 CALIBRACcedilAtildeO DA CAcircMARA
Com o objetivo de calcular os POI o processo de calibraccedilatildeo da cacircmara foi
realizado com o Toolbox CALIB do software Matlab que utiliza o meacutetodo proposto
por ZHANG (2000) O gabarito fotografado foi impresso com 7x9 quadrados com
dimensatildeo de 117x117mm Estas imagens foram captadas a uma distacircncia
aproximada de 25 metros da cacircmara Para que houvesse pontos do gabarito sobre
a aacuterea da imagem foram obtidas 36 imagens com diferentes orientaccedilotildees conforme eacute
ilustrado com a Figura 51
FIGURA 51 ndash Imagens do gabarito utilizadas na calibraccedilatildeo da cacircmara
88
A Orientaccedilatildeo Exterior das imagens em relaccedilatildeo agrave cacircmara para a calibraccedilatildeo eacute
ilustrada com a Figura 52 A cacircmara eacute representada com a piracircmide em linhas
vermelhas e a origem do sistema fotogrameacutetrico eacute representada com a interseccedilatildeo
das linhas representadas com a cor azul no veacutertice da piracircmide
FIGURA 52 ndash Orientaccedilatildeo Exterior das fotografias para a calibraccedilatildeo da cacircmara
A distorccedilatildeo causada pelo sistema de lentes da cacircmara ocorre de forma mais
intensa nas bordas da imagem sendo a regiatildeo central o local com menor presenccedila
desta distorccedilatildeo A Figura 53 comprova este fato onde os vetores representados
com a cor vermelha partem dos pontos de controle na imagem e indicam a direccedilatildeo e
o sentido em que a distorccedilatildeo aumenta
FIGURA 53 ndash Direccedilatildeo das distorccedilotildees nos pontos da imagem TOF
89
Realizada a leitura das coordenadas dos pontos de controle os POI foram
calculados com o processo de calibraccedilatildeo da cacircmara e satildeo apresentados com a
Tabela 51
PARAcircMETROS INICIAIS OBTIDOS COM A LEITURA DAS IMAGENS
PARAcircMETRO VALOR
(piacutexeis) (mm)
Distacircncia focal (119891) (119891119909) (119891119910 )
285 80288 285 80288
1286113 1286113
Coordenadas do Ponto Principal (1199090)
(Origem no canto superior esquerdo) (1199100) 10150000 10150000
456750 456750
PARAcircMETROS DETERMINADOS COM A CALIBRACcedilAtildeO DA CAcircMARA
PARAcircMETRO VALOR DESVIO (3σ)
(piacutexeis) (mm) (piacutexeis) (mm)
Distacircncia focal (119891119888) calibrada (119891119909119888 ) (119891119910119888 )
29240511 29364057
1315823 1321383
plusmn 373164 plusmn 335357
plusmn 0167924 plusmn 0150911
Coordenadas do Ponto Principal (1199090119888 )
(Origem no canto superior esquerdo) (1199100119888 ) 10435253 10022287
4695864 4510029
plusmn 320459 plusmn 336886
plusmn 0144207 plusmn 0151599
1198701 -046768 -0021045 plusmn 003106 plusmn 0001398
1198702 060997 0027449 plusmn 013880 plusmn 0006246
1198703 000107 48150e-5
plusmn 000162 plusmn 72900e-5
1198751 000035 19350e-5
plusmn 000204 plusmn 91800e-5
1198752 000000 0000000 plusmn 000000 plusmn 0000000
Erro em pixel (119864119909 )
(119864119910 ) 049340 042754
0022203 0019239
TABELA 51 ndash Paracircmetros de Orientaccedilatildeo Interior calculados
Com os valores dos POI determinados foram calculados os fatores de escala
dos piacutexeis nas direccedilotildees 119904119909 e 119904119910 conforme as Equaccedilotildees (51) e (52)
119904119909 =119891
119891119909119888=
128119898119898
1315823119898119898= 0972775 (51)
119904119910 =119891
119891119910119888=
128119898119898
1321383119898119898= 0968682 (52)
A partir dos fatores de escala e da dimensatildeo do pixel igual a 45120583119898 das
imagens obtidas com a cacircmara PMD CamCube 20 foi calculado o tamanho efetivo
dos piacutexeis nas direccedilotildees x e y atraveacutes das Equaccedilotildees (53) e (54)
119875119909 = P ∙ 119904119909 = 45120583119898 ∙ 0972775 = 43774875120583119898 cong 44120583119898 (53)
119875119910 = P ∙ 119904119910 = 45120583119898 ∙ 0968682 = 43590690120583119898 cong 44120583119898 (54)
90
Os valores obtidos com as Equaccedilotildees (53) e (54) indicam que os elementos
do sensor podem ser considerados quadrados De acordo com Bazan et al (2009)
quando a diferenccedila de escala entre os lados do piacutexel natildeo eacute fornecida pelo fabricante
da cacircmara o fator de escala calculado para x pode absorver esta diferenccedila
Com a razatildeo entre as distacircncias focais obtidas com a calibraccedilatildeo da cacircmara
pode-se verificar a diferenccedila de escala Para a dimensatildeo do sensor esta diferenccedila
de escala natildeo alcanccedila o tamanho de um pixel conforme Equaccedilatildeo (56)
119863119868119865119864119878119862 =119891119909119888
119891119910119888=
1321383119898119898
1315823119898119898minus 1 = 1004225 minus 1 = 0004225 (55)
119863119868119865119864119878119862 = 0004225 lowast 204 = 08619 lt 1119901119894119909119890119897 (56)
A Equaccedilatildeo (56) indica que a diferenccedila de escala entre os eixos x e y eacute
menor que a dimensatildeo de um pixel isto considerando toda a dimensatildeo da imagem
de 204x204 piacutexeis da cacircmara PMD CamCube 20
Determinados os POI a imagem pode entatildeo ter sua geometria corrigida
conforme eacute ilustrado com a Figura 54b A Figura 54a ilustra a imagem original
obtida do gabarito onde se apresentam curvaturas provenientes da distorccedilatildeo
causada pelo sistema de lentes da cacircmara
FIGURA 54 ndash Correccedilatildeo geomeacutetrica da imagem TOF
91
Para a correccedilatildeo geomeacutetrica de imagens obtidas com cacircmaras de pequeno
formato Zhang (2000) recomenda utilizar somente os paracircmetros de distacircncia focal
calibrada 119891119888 coordenadas do Ponto Principal no plano da imagem 1199090 e 1199100 e os
coeficientes de Distorccedilatildeo Radial Simeacutetrica ateacute o segundo termo 1198701 e 1198702 Isto porque
este modelo de cacircmara apresenta principalmente a Distorccedilatildeo Radial Simeacutetrica
Outro fator diz respeito ao desvio calculado na determinaccedilatildeo de cada um destes
paracircmetros conforme valores apresentados na Tabela 51 o terceiro paracircmetro de
Distorccedilatildeo Radial Simeacutetrica 1198703 e os paracircmetros de Distorccedilatildeo Descentrada 1198751 e 1198752
apresentaram valores de desvios maiores do que os proacuteprios paracircmetros devendo
entatildeo serem desconsiderados para a correccedilatildeo geomeacutetrica da imagem
92
52 EXPERIMENTO 1 ndash ANAacuteLISE DE RUIacuteDO 1 IMAGEM TOF INTEIRA
O objetivo deste experimento consistiu em avaliar a presenccedila de ruiacutedo em
funccedilatildeo do tempo de integraccedilatildeo (TI) na aquisiccedilatildeo das imagens TOF Para sua
realizaccedilatildeo foram utilizadas imagens de uma parede com superfiacutecie plana distante
130m da cacircmara PMD CamCube 20 onde tambeacutem aparece parte de uma porta
Foram tomadas cinco imagens para cada valor de TI que variou entre 500 1000
1500 1700 1800 1900 2000 2500 3000 3500 4000 4500 5000 5300 5500
6000 e 7000μs gerando assim um conjunto de 85 imagens TOF
Com o objetivo de avaliar e reduzir a presenccedila de ruiacutedo nas imagens foram
realizadas as seguintes filtragens
Filtro passa-baixas pela meacutedia
Filtro pela mediana
Caacutelculo da meacutedia dos valores de distacircncia para imagens TOF
adquiridas com mesmo TI em instantes brevemente diferentes
Para cada imagem original foram criadas trecircs novas imagens filtradas com
os procedimentos mencionados
No graacutefico de dispersatildeo ilustrado com a Figura 55 os desvios padratildeo para o
conjunto de observaccedilotildees satildeo mostrados em funccedilatildeo do TI Foram calculados com
referecircncia no pixel central com coordenadas (102 102) e a aacuterea utilizada para o
caacutelculo possui dimensatildeo de 10x10 piacutexeis Escolheu-se esta regiatildeo por apresentar
padratildeo planar da superfiacutecie com menor distorccedilatildeo causada pelo sistema de lentes da
cacircmara tendo-se em vista que nesta etapa natildeo foi realizada a correccedilatildeo geomeacutetrica
dos dados da imagem TOF
Ainda com a Figura 55 verificou-se que o filtro da mediana aplicado nas
imagens gerou os menores desvios para a janela de 10x10 piacutexeis O menor desvio
calculado foi 12mm encontrado utilizando o filtro da mediana para o TI igual a
3000micros Verificou-se tambeacutem que os desvios apresentam valores similares para os
tempos de integraccedilatildeo que variaram entre 1500 agrave 2500micros para as imagens originais e
tambeacutem para as imagens filtradas
93
FIGURA 55 ndash Desvio padratildeo x TI janelas 10x10
A partir do graacutefico de dispersatildeo da Figura 55 escolheram-se imagens
captadas com os tempos de integraccedilatildeo de 500 2000 e 2500micros para realizar os
testes A Figura 56 ilustra superfiacutecies geradas a partir de filtragens realizadas em
imagem TOF obtida com TI igual a 500μs
FIGURA 56 ndash Imagens para TI=500μs e d=130m
94
Com TI de 500μs verificou-se intensa presenccedila de ruiacutedo na imagem original
e tambeacutem nas imagens filtradas Isto ocorreu devido ao baixo tempo de exposiccedilatildeo
do sensor A distorccedilatildeo causada pelo sistema de lentes da cacircmara tambeacutem pode ser
visualizada nestas superfiacutecies geradas com os arquivos de distacircncias da imagem
TOF As imagens foram obtidas de uma parede plana em que aparece parte de uma
porta o que justifica a descontinuidade vista em forma de degrau A anaacutelise
realizada com TI de 2000μs eacute ilustrada com a Figura 57
FIGURA 57 ndash Imagens para TI=2000μs e d=130m
Com TI de 2000μs obtiveram-se resultados melhores do que os obtidos com
TI de 500μs as superfiacutecies apresentaram-se mais suaves confirmando a tendecircncia
demonstrada com o graacutefico de dispersatildeo da Figura 55
A uacuteltima anaacutelise deste experimento foi realizada com o tempo de integraccedilatildeo
de 2500μs conforme pode ser visualizado com as superfiacutecies geradas com os
arquivos de distacircncias da imagem TOF original e das imagens filtradas ilustradas
com a Figura 58
95
FIGURA 58 ndash Imagens para TI=2500μs e d=130m
As imagens filtradas com TI de 2000μs e 2500μs apresentam suavizaccedilotildees
similares nas superfiacutecies geradas com os arquivos de distacircncias da imagem TOF
Verificou-se que o tempo de integraccedilatildeo para a aquisiccedilatildeo das imagens da parede a
13m de distacircncia da cacircmara deve ser um destes valores O TI de 2000μs pode ser
o escolhido e estaacute de acordo com o graacutefico de dispersatildeo ilustrado com a Figura 55
As filtragens de suavizaccedilatildeo com o filtro passa-baixas pela meacutedia e pela
mediana mostraram-se as melhores opccedilotildees a serem utilizadas com estas filtragens
apresentaram-se os menores desvios para a janela central de 10x10 piacutexeis Uma
vantagem da filtragem pela mediana eacute que mantecircm os valores originais de distacircncia
para os piacutexeis da imagem e preserva as bordas do objeto imageado No entanto a
filtragem com a mediana degrada as bordas da imagem devendo ser
cuidadosamente analisada para cada aplicaccedilatildeo
Tambeacutem foram calculados os desvios padratildeo para as imagens inteiras e os
valores obtidos foram de 19cm em meacutedia Este grande valor deveu-se a maior
curvatura ocorrer nas extremidades da imagem e tambeacutem ao fato de haver uma
descontinuidade na superfiacutecie presente na imagem TOF causada pela porta
presente na superfiacutecie da parede
96
53 EXPERIMENTO 2 ndash ANAacuteLISE DE RUIacuteDO 2 JANELAS DE 40X40 PIacuteXEIS
O objetivo deste experimento foi analisar a presenccedila de ruiacutedo em aacutereas
centrais da imagem TOF Para isto escolheram-se janelas com dimensotildees de 40x40
piacutexeis ao redor do pixel central da imagem Calculou-se o desvio padratildeo da distacircncia
de cada pixel em relaccedilatildeo a este pixel central As janelas utilizadas tiveram sua
posiccedilatildeo na imagem variando de (8282) ateacute (122122) e correspondem a aacuterea com
superfiacutecie plana de uma parede presente na cena
Primeiramente utilizaram-se imagens TOF adquiridas agrave distacircncia de 130m
entre a cacircmara e a parede com os tempos de integraccedilatildeo iguais a 2000 e 5000micros
Posteriormente utilizaram-se imagens TOF obtidas a 210m da parede com tempos
de integraccedilatildeo iguais a 2000 5000 e 7000micros
O graacutefico de dispersatildeo da Figura 59 ilustra uma anaacutelise para a captaccedilatildeo de
imagens TOF com diferentes distacircncias e tempos de integraccedilatildeo Os desvios padratildeo
foram calculados para imagens TOF captadas com a cacircmara CamCube 20 onde
variaram-se as distacircncias e os tempos de integraccedilatildeo no momento da aquisiccedilatildeo das
imagens
FIGURA 59 ndash Desvios padratildeo para distacircncia x TI
FONTE CENTENO e JUTZI (2010)
97
Com a Figura 510 eacute apresentado o primeiro resultado deste experimento o
graacutefico de dispersatildeo gerado com a imagem TOF adquirida do objeto agrave distacircncia de
130m da cacircmara com TI igual a 2000micros
FIGURA 510 ndash Desvios padratildeo para janelas com TI=2000μs d=130m
A Figura 511 ilustra as superfiacutecies geradas com o arquivo de distacircncias da
imagem TOF adquirida do objeto agrave distacircncia de 130m da cacircmara com TI igual a
2000micros e com as imagens resultantes das filtragens realizadas
FIGURA 511 ndash Janelas de 40x40 piacutexeis TI=2000μs d=130m
98
Com a Figura 511 conclui-se que os melhores resultados para a suavizaccedilatildeo
dos dados de distacircncia foram obtidos com os filtros passa-baixas pela meacutedia e
mediana
A Figura 512 ilustra o graacutefico de dispersatildeo para a imagem adquirida com TI
igual a 5000μs com distacircncia de 130m entre o objeto imageado e a cacircmara TOF A
Figura 513 ilustra as superfiacutecies geradas com as janelas centrais de 40x40 piacutexeis
FIGURA 512 ndash Desvios padratildeo para janelas com TI=5000μs d=130m
FIGURA 513 ndash Janelas de 40x40 piacutexeis TI=5000μs d=130m
99
O TI de 5000μs utilizado para a aquisiccedilatildeo da imagem saturou os elementos
do sensor e causou maior presenccedila de ruiacutedo nos dados Comparando as Figuras
511 e 513 conclui-se que para a distacircncia de 130m do sensor o tempo de
integraccedilatildeo mais adequado para a aquisiccedilatildeo da imagem foi 2000micros
A Figura 514 ilustra o graacutefico de dispersatildeo gerado para a imagem TOF
obtida com TI igual a 2000μs e distacircncia de 210m As superfiacutecies geradas a partir
das janelas de 40x40 piacutexeis desta imagem satildeo apresentadas com a Figura 515
FIGURA 514 ndash Desvios padratildeo para janelas com TI=2000μs d=210m
FIGURA 515 ndash Janelas de 40x40 piacutexeis TI=2000μs d=210m
100
O graacutefico de dispersatildeo calculado para a imagem adquirida com TI igual a
5000μs e distacircncia de 210m eacute ilustrado com a Figura 516
FIGURA 516 ndash Desvios padratildeo para janelas com TI=5000μs d=210m
Os menores desvios padratildeo foram encontrados na imagem filtrada utilizando
os filtros passa-baixas pela meacutedia e mediana conforme pode ser visualizado com a
Figura 516 Para a janela de 40x40 piacutexeis o desvio padratildeo de 107mm na imagem
original diminuiu para 96mm com a filtragem pela mediana A Figura 517 ilustra as
superfiacutecies geradas para a imagem obtida com distacircncia de 210m e TI de 5000μs
FIGURA 517 ndash Janelas de 40x40 piacutexeis TI=5000μs d=210m
101
Com a Figura 517 observa-se novamente que os melhores resultados para
a suavizaccedilatildeo da imagem foram obtidos com os filtros passa-baixas pela meacutedia e
pela mediana
A Figura 518 ilustra o graacutefico de dispersatildeo e a Figura 519 ilustra as
superfiacutecies geradas para as imagens adquiridas com distacircncia de 210m e TI igual a
7000μs
FIGURA 518 ndash Desvios padratildeo para janelas com TI=7000μs d=210m
FIGURA 519 ndash Janelas de 40x40 piacutexeis TI=7000μs d=210m
102
Com o graacutefico de dispersatildeo ilustrado com a Figura 518 observa-se que os
desvios padratildeo calculados para as imagens obtidas com os filtros passa-baixas pela
meacutedia e mediana satildeo maiores do que os desvios apresentados com o graacutefico de
dispersatildeo ilustrado com a Figura 516 Isto indica que as imagens captadas da
parede plana com TI igual a 7000μs e distacircncia de 210m apresentaram maior ruiacutedo
que as imagens obtidas com 5000μs
Comparando as Figuras 519 e 517 verifica-se que a imagem captada com
TI igual a 5000μs com distacircncia de 210m e filtrada com o filtro passa-baixas pela
meacutedia e tambeacutem com a mediana apresentou-se mais suavizada do que a imagem
obtida com TI igual a 7000μs
Comparando as imagens captadas com tempo de integraccedilatildeo de 2000μs e
5000μs para a distacircncia de 210m conforme Figuras 515 e 517 conclui-se que as
imagens obtidas com TI de 5000μs apresentaram menor presenccedila de ruiacutedo
54 EXPERIMENTO 3 ndash PROJECcedilAtildeO ORTOGONAL DOS PONTOS
Obtidos os POI atraveacutes do processo de calibraccedilatildeo da cacircmara e definido o
melhor TI para a captaccedilatildeo da imagem procedeu-se a um novo experimento no qual
se analisou a imagem de uma caixa com superfiacutecies planas A superfiacutecie do objeto
em questatildeo eacute composta por papel branco riacutegido e refletivo A caixa foi colocada
sobre uma cadeira agrave distacircncia aproximada de 13m da cacircmara Esta cadeira foi
girada enquanto a cacircmara continuou fixa com o mesmo ponto de vista Com base
no estudo da dispersatildeo dos dados em funccedilatildeo da distacircncia ao objeto optou-se por
utilizar o TI de 2000μs para a captaccedilatildeo das imagens Foram entatildeo adquiridas dez
imagens do objeto
Com a distacircncia do objeto em relaccedilatildeo agrave cacircmara igual a 13m e com a
distacircncia focal calibrada da cacircmara de 132mm valor encontrado com a Equaccedilatildeo
(57) calculou-se a escala aproximada das fotografias encontrando-se o valor
aproximado para a escala igual a 1100 conforme Equaccedilatildeo (58)
119891119888 =119891119909119888+119891119910119888
2=
1315823119898119898+1321383119898119898
2= 1318603119898119898 cong 132119898119898 (57)
103
119864 =119889
119863=
119891119888
119885=
132119898119898
13119898=
00132119898
13119898=
1
984848cong
1
100 (58)
Para realizar este experimento selecionou-se a terceira imagem captada por
apresentar vista perspectiva de trecircs superfiacutecies com padratildeo planar no objeto
imageado A Figura 520a ilustra o arquivo de intensidades da imagem TOF sem
correccedilatildeo geomeacutetrica A Figura 520b ilustra o arquivo de intensidade corrigido
geometricamente utilizando as coordenadas do Ponto Principal 1199090 e 1199100 os
coeficientes de distorccedilatildeo Radial Simeacutetrica 1198701 e 1198702 e a distacircncia focal calibrada 119891119888
FIGURA 520 ndash Arquivo de intensidades da imagem TOF obtida do objeto
Apoacutes a correccedilatildeo da geometria da imagem TOF geraram-se as superfiacutecies do
objeto Isto foi feito a partir do arquivo de distacircncias da imagem TOF conforme eacute
ilustrado com a Figura 521 onde se tem as distacircncias dos pontos em relaccedilatildeo ao
sensor representadas com a coordenada Z em metros sobre a imagem TOF com
dimensatildeo de 204x204 piacutexeis
104
FIGURA 521 ndash Arquivo de distacircncias da imagem TOF com geometria corrigida
A partir do arquivo de distacircncias da imagem TOF com a geometria dos
dados corrigida projetaram-se ortogonalmente os pontos gerando a nuvem de
pontos 3D ilustrada com a Figura 522 em vista frontal com o eixo Z ortogonal aos
eixos X e Y representados
FIGURA 522 ndash Nuvem de pontos vista frontal
105
A vista em perspectiva tridimensional da nuvem de pontos do objeto de
estudo eacute ilustrada com a Figura 523 Conteacutem 42025 pontos gerados a partir da
imagem TOF de 204x204 piacutexeis obtida com a cacircmara PMD CamCube 20
FIGURA 523 - Nuvem de pontos vista perspectiva 3D
106
55 EXPERIMENTO 4 ndash SEGMENTACcedilAtildeO 1 CRESCIMENTO DE REGIOtildeES
Realizou-se a segmentaccedilatildeo por crescimento de regiotildees a partir de trecircs
pontos semente Estes pontos foram escolhidos em aacutereas uniformes no arquivo de
intensidades da imagem TOF corrigida geometricamente e foram projetados
ortogonalmente para a nuvem 3D As coordenadas de imagem destes pontos foram
observadas nas posiccedilotildees indicadas com a Figura 524
FIGURA 524 ndash Pontos semente no arquivo de intensidades da imagem TOF
Os pontos semente foram escolhidos em trecircs superfiacutecies planas da caixa em
locais que apresentavam valores de intensidade uniforme As coordenadas de
imagem lidas em piacutexeis para estes trecircs pontos foram Ponto 1 (11681) Ponto 2
(72103) Ponto 3 (113108)
As Figuras 525 e 526 ilustram o crescimento em trecircs regiotildees realizados na
nuvem de pontos 3D Estes pontos correspondem agraves superfiacutecies frontal superior e
lateral da caixa ilustradas com as cores amarela verde e ciano respectivamente
Os trecircs autovetores calculados satildeo ilustrados com a cor azul ortogonais aos pontos
semente escolhidos nas trecircs superfiacutecies da imagem de intensidade
107
FIGURA 525 ndash Crescimento de regiotildees vista frontal
FIGURA 526 ndash Crescimento de regiotildees vista perspectiva 3D
Com as Figuras 525 e 526 verifica-se que o crescimento das regiotildees
ocorreu de forma coerente acompanhando o padratildeo planar das superfiacutecies do
objeto de estudo No entanto nas trecircs superfiacutecies analisadas houve crescimento de
regiotildees para fora dos limites de suas aacutereas Pontos de superfiacutecies ao fundo e abaixo
do objeto foram incluiacutedos nas regiotildees Isto ocorreu devido agrave utilizaccedilatildeo do criteacuterio de
108
similaridade de distacircncia do ponto agrave superfiacutecie plana sendo esta superfiacutecie definida
pelos pontos semente A distacircncia foi medida ao longo do autovetor o que fez com
que pontos de outras superfiacutecies paralelas a superfiacutecie plana em questatildeo fossem
agrupados na mesma regiatildeo Ou seja pontos que estavam orientados na direccedilatildeo da
superfiacutecie plana definida pelo autovalor que passa pelo ponto semente e que
estavam dentro do limiar de distacircncia estabelecido foram incluiacutedos nas regiotildees
mesmo natildeo pertencendo agrave superfiacutecie analisada
56 EXPERIMENTO 5 ndash SEGMENTACcedilAtildeO 2 ANAacuteLISE COM AUTOVALORES
Neste experimento realizou-se a segmentaccedilatildeo da imagem TOF por anaacutelise
da variaccedilatildeo local de autovalores locais de superfiacutecies O arquivo de distacircncias desta
imagem foi utilizado como ponto de partida para o caacutelculo dos autovalores com o
objetivo de intensificar as bordas dos objetos presentes na cena
O processamento consistiu em definir uma pequena vizinhanccedila quadrada
uma janela moacutevel e utilizar as coordenadas tridimensionais dos pontos nesta
vizinhanccedila para o caacutelculo dos autovalores
Apoacutes a normalizaccedilatildeo os autovalores foram armazenados na forma de trecircs
novas imagens conforme pode ser visualizado com as Figuras 527 528 e 529
Para a geraccedilatildeo destas imagens utilizou-se a janela moacutevel com dimensatildeo de 3x3
piacutexeis para o caacutelculo dos autovalores
109
FIGURA 527 ndash Imagem com bordas intensificadas gerada com 1205821
FIGURA 528 ndash Imagem com bordas intensificadas gerada com 1205822
FIGURA 529 ndash Imagem com bordas intensificadas gerada com 1205823
110
A partir da imagem com bordas intensificadas gerada com os autovalores
locais foi possiacutevel criar uma nova imagem de intensidade que tambeacutem estava com
as bordas dos objetos intensificadas A Figura 530 ilustra as imagens de
intensidade com bordas intensificadas que foram geradas utilizando o segundo
autovalor calculado a partir de janelas com as seguintes dimensotildees a)3x3 b)5x5
c)7x7 d)9x9 e)11x11 f)13x13 piacutexeis
FIGURA 530 ndash Imagens de intensidade com as bordas do objeto intensificadas
111
Com as imagens de intensidade ilustradas com a Figura 530 observou-se
que aumentando a quantidade de piacutexeis da janela utilizada para o caacutelculo dos
autovalores da regiatildeo aumentou-se tambeacutem a suavizaccedilatildeo sobre as superfiacutecies
planas e alargaram-se as bordas que limitam os objetos contidos na cena
Para este experimento utilizou-se a imagem gerada com a janela de 3x3
piacutexeis e com o segundo autovalor Esta imagem foi escolhida por apresentar linhas
finas limitando as bordas do objeto A imagem de intensidade com as bordas do
objeto intensificadas foi segmentada utilizando o algoritmo de deslocamento pela
meacutedia O resultado da segmentaccedilatildeo eacute ilustrado com a Figura 531
FIGURA 531 ndash Imagem com bordas intensificadas segmentada
112
A Figura 531a ilustra a imagem com bordas intensificadas a ser
segmentada gerada com o segundo conjunto de autovalores 1205822 Na Figura 531b
tem-se esta imagem suavizada por filtragem A Figura 531c corresponde agrave imagem
segmentada com o algoritmo de deslocamento pela meacutedia A imagem com os limites
das aacutereas segmentadas eacute ilustrada com a Figura 531d
A segmentaccedilatildeo foi realizada utilizando o software EDISON com os
paracircmetros (119893119904 119893119903 119867) = (7 9 300) Estes paracircmetros correspondem ao domiacutenio
espacial da imagem 119893119904 domiacutenio de caracteriacutesticas 119893119903 e tamanho miacutenimo das
regiotildees 119867 em piacutexeis O limite miacutenimo foi fixado para evitar que regiotildees muito
pequenas fossem incluiacutedas na segmentaccedilatildeo
Com a imagem segmentada da Figura 529c foi possiacutevel projetar os pontos
de interesse ortogonalmente gerando a nuvem de pontos 3D Para isto utilizou-se
as coordenadas dos piacutexeis no arquivo de intensidades e seus correspondentes no
arquivo de distacircncias da imagem TOF Estes pontos foram escolhidos sobre as
superfiacutecies da caixa A nuvem de pontos 3D resultante deste experimento eacute
apresentada com as Figuras 532 e 533
FIGURA 532 ndash Nuvem de pontos da imagem segmentada vista frontal
113
FIGURA 533 ndash Nuvem de pontos da imagem segmentada vista 3D
57 EXPERIMENTO 6 ndash ANAacuteLISE DAS MEDIDAS OBTIDAS
Para gerar a nuvem de pontos 3D com as superfiacutecies de interesse
primeiramente corrigiu-se a geometria do arquivo de distacircncias da imagem TOF com
as coordenadas do Ponto Principal 1199090 e 1199100 coeficientes de distorccedilatildeo Radial
Simeacutetrica 1198701 e 1198702 e distacircncia focal calibrada 119891119888 O passo seguinte foi gerar uma
imagem de intensidade com as bordas do objeto intensificadas Com este objetivo
calcularam-se os autovalores para os pontos do arquivo de distacircncias da imagem
TOF e geraram-se trecircs imagens novas correspondendo aos trecircs autovalores
calculados conforme o Experimento 5 O terceiro passo foi a segmentaccedilatildeo da
imagem de intensidade com bordas intensificadas utilizando o algoritmo de
deslocamento pela meacutedia Com a imagem segmentada pocircde-se escolher as
superfiacutecies que teriam seus piacutexeis projetados para a nuvem de pontos 3D
A imagem segmentada com o algoritmo de deslocamento pela meacutedia
apresenta niacuteveis de cinza diferentes para os piacutexeis de cada segmento Com isto foi
possiacutevel separar os pontos que compotildeem as superfiacutecies por seus valores digitais A
Figura 534 apresenta a nuvem de pontos 3D gerada com a imagem TOF corrigida
geometricamente com os pontos da superfiacutecie frontal representados com a cor azul
114
FIGURA 534 ndash Nuvem de pontos 3D segmentada
A superfiacutecie frontal foi projetada com atributo de cor diferenciado por
apresentar a melhor segmentaccedilatildeo na imagem de intensidade e pontos bem
definidos na nuvem 3D A partir desta superfiacutecie escolheram-se os pontos extremos
os veacutertices do objeto para a leitura de suas coordenadas 3D com o objetivo de
calcular o comprimento das arestas Com a Figura 535 satildeo ilustrados os quatro
pontos selecionados
FIGURA 535 ndash Pontos 3D selecionados na nuvem
115
Com as coordenadas destes quatro pontos e atraveacutes da relaccedilatildeo de distacircncia
tridimensional entre eles expressa pela Equaccedilatildeo (59) calcularam-se as dimensotildees
de trecircs arestas do objeto de estudo
119863119894119895 = 119883119894minus119883119895 2
+ 119884119894minus119884119895 2
+ 119885119894minus119885119895 2 (59)
onde
119863119894119895 ndash Distacircncia entre pontos no espaccedilo tridimensional
119883119894 119884119894 119885119894 119890 119883119895 119884119895 119885119895 - Coordenadas dos pontos 119894 e 119895 na nuvem de pontos 3D
Para verificar a confiabilidade das medidas obtidas com a metodologia
proposta compararam-se as medidas das arestas calculadas a partir dos pontos 3D
com as dimensotildees de referecircncia do objeto de estudo As medidas de referecircncia satildeo
ilustradas com o desenho da Figura 536
FIGURA 536 ndash Dimensotildees de referecircncia do objeto de estudo
A partir das coordenadas tridimensionais dos quatro pontos ilustrados com a
Figura 535 foi possiacutevel calcular as distacircncias entre os pontos e comparar-las com
as medidas de referecircncia As diferenccedilas obtidas satildeo ilustradas com a Tabela 52
116
Ponto
Coordenadas Arestas Medida realizada Diferenccedilas
X (cm) Y (cm) Z (cm) Pontos 3D (cm)
Ref (cm)
(cm) ()
1 -131 -136 -1219 Pontos 1-2 236 260 24 92
2 -80 61 -1098 Pontos 2-3 332 350 18 51
3 234 38 -1203 Pontos 2-4 263 210 53 252
4 -125 180 -1328
TABELA 52 ndash Coordenadas 3D dos pontos e medidas realizadas
O melhor resultado foi obtido para a medida realizada sobre a aresta entre
os pontos 2-3 com diferenccedila de aproximadamente 18 cm em relaccedilatildeo agrave medida de
referecircncia o que representa 5 da distacircncia medida O pior resultado foi obtido com
o calculo da aresta entre os pontos 2 e 4 com diferenccedila de aproximadamente
53cm que equivale 25 da medida de referecircncia Com este resultado conclui-se
que os pontos projetados com maior profundidade na nuvem de pontos 3D
apresentaram maior erro de posicionamento Estes pontos descrevem uma
superfiacutecie plana do objeto pouco aparente na imagem encontra-se muito inclinada
em relaccedilatildeo ao plano da imagem motivo pelo qual erros maiores podem ser
esperados Sobre os pontos 1 2 e 3 da superfiacutecie frontal do objeto o erro foi menor
na ordem de 2 centiacutemetros
Conforme o Experimento 1 realizado para a anaacutelise de ruiacutedo o melhor
resultado foi obtido utilizando o filtro da mediana que apresentou o desvio de 13cm
para a distacircncia de 13m medida utilizando tempo de integraccedilatildeo de 2000micros Este
fato indica coerecircncia com a diferenccedila de 2cm encontrada com a medida da aresta
frontal do objeto
117
58 MODELAGEM DAS SUPERFIacuteCIES 3D
Para a modelagem tridimensional das superfiacutecies segmentadas
primeiramente foi analisada a melhor forma de processamento da imagem TOF
Verificou-se com o Experimento 4 que o crescimento de regiotildees utilizando o arquivo
de intensidades da imagem TOF para escolha do ponto semente e o arquivo de
distacircncias para a projeccedilatildeo ortogonal e crescimento de regiotildees a partir deste ponto
natildeo foi satisfatoacuterio Isto porque o crescimento tambeacutem ocorreu em superfiacutecies que
natildeo pertenciam ao objeto analisado
Melhores resultados foram obtidos com a metodologia de segmentaccedilatildeo que
utilizou a imagem com bordas evidenciadas Esta foi gerada com a anaacutelise dos
autovalores locais das superfiacutecies a partir do arquivo de distacircncias da imagem TOF
conforme Experimento 5 A partir desta segmentaccedilatildeo projetaram-se ortogonalmente
os pontos das superfiacutecies frontal e superior do objeto de estudo gerando assim a
nuvem de pontos 3D que eacute ilustrada com a Figura 537
FIGURA 537 ndash Nuvem de pontos 3D das superfiacutecies frontal e superior
A partir da nuvem de pontos 3D realizou-se a modelagem das superfiacutecies
frontal e superior do objeto conforme eacute ilustrado com a Figura 538
118
FIGURA 538 ndash Modelagem tridimensional das superfiacutecies frontal e superior
Analisando a Figura 538 chegou-se a conclusatildeo que a superfiacutecie frontal do
objeto apresentou-se com padratildeo planar e uniforme Eacute a superfiacutecie que melhor
refletiu o sinal para o sensor devido agrave sua posiccedilatildeo em relaccedilatildeo agrave cacircmara TOF A
superfiacutecie superior apresentou-se um pouco inclinada em relaccedilatildeo ao plano da
imagem e com isto maior rugosidade foi observada nesta superfiacutecie Este
fenocircmeno deve-se a menor captaccedilatildeo do sinal refletido pela superfiacutecie do objeto pelo
sensor da cacircmara
119
6 CONCLUSOtildeES RECOMENDACcedilOtildeES E CONSIDERACcedilOtildeES FINAIS
61 CONCLUSOtildeES
Neste trabalho descreveram-se conceitos introdutoacuterios sobre as cacircmaras
TOF Avaliaram-se duas metodologias para a segmentaccedilatildeo da nuvem de pontos 3D
gerada a partir da imagem TOF Apresentou-se uma aplicaccedilatildeo para esta imagem na
extraccedilatildeo de informaccedilotildees meacutetricas do objeto de estudo imageado a distacircncia
aproximada de 13m
Para isto foram abordados os seguintes assuntos calibraccedilatildeo da cacircmara
para a obtenccedilatildeo de POI correccedilatildeo geomeacutetrica da imagem TOF filtragens para
anaacutelise e tratamento de ruiacutedo segmentaccedilatildeo atraveacutes do crescimento de regiotildees a
partir de um ponto semente segmentaccedilatildeo do arquivo de distacircncias da imagem TOF
utilizando autovalores locais para a geraccedilatildeo de uma imagem com bordas
intensificadas segmentaccedilatildeo da imagem com bordas intensificadas atraveacutes do
algoritmo de deslocamento pela meacutedia geraccedilatildeo da nuvem de pontos 3D atraveacutes da
projeccedilatildeo ortogonal dos pontos da imagem de bordas segmentada e por fim a
modelagem tridimensional de superfiacutecies do objeto de estudo
O processo de calibraccedilatildeo da cacircmara foi realizado utilizando o meacutetodo
proposto por Zhang (2000) e possibilitou a determinaccedilatildeo de POI A correccedilatildeo
geomeacutetrica das imagens foi feita atraveacutes das coordenadas 1199090 e 1199100 do Ponto
Principal coeficientes de distorccedilatildeo Radial Simeacutetrica de lentes 1198701 e 1198702 e distacircncia
focal calibrada 119891119888
Com os Experimentos 1 e 2 foram realizadas filtragens para o tratamento de
ruiacutedo das imagens TOF disponiacuteveis Nestes experimentos verificou-se que para a
captaccedilatildeo da imagem TOF agrave distacircncia de 13m entre o objeto e a cacircmara o tempo de
integraccedilatildeo de 2000μs foi o que gerou imagens com menor presenccedila de ruiacutedo Assim
como o tempo de integraccedilatildeo de 5000μs foi o mais adequado para captar imagens agrave
distacircncia de 21m No entanto chegou-se a conclusatildeo que para a geraccedilatildeo da nuvem
de pontos 3D natildeo se deveria utilizar filtragem nos dados pois pequenas alteraccedilotildees
no arquivo de distacircncias da imagem TOF poderiam modificar o posicionamento
tridimensional dos pontos o que afetaria a qualidade das medidas realizadas com os
pontos da nuvem 3D
120
A primeira metodologia proposta para a segmentaccedilatildeo da imagem TOF
mostrou-se insatisfatoacuteria para a soluccedilatildeo do problema Empregou-se o crescimento
de regiotildees a partir de pontos semente escolhidos no arquivo de intensidades desta
imagem projetando-os ortogonalmente para a nuvem de pontos 3D utilizando os
valores obtidos com o arquivo de distacircncias da imagem TOF Notou-se que erros no
crescimento de regiotildees ocorreram devido agrave toleracircncia utilizada para a distacircncia do
ponto agrave superfiacutecie plana Isto ocorreu porque a distacircncia foi calculada ao longo do
autovetor que eacute ortogonal a superfiacutecie no ponto semente Por este motivo alguns
pontos de superfiacutecies adjacentes foram selecionados equivocadamente como
pertencentes a uma mesma regiatildeo na nuvem de pontos 3D pois estavam dentro do
limite fixado no criteacuterio de similaridade utilizado mas na realidade natildeo eram
coplanares Para resolver o problema com esta metodologia seria necessaacuterio
estabelecer um limiar de crescimento lateral natildeo apenas de distacircncia ortogonal a
superfiacutecie plana semente Este limiar poderia ser o valor digital do pixel tendo em
vista que superfiacutecies coplanares apresentam uniformidade na resposta espectral A
rugosidade apresentada na superfiacutecie em que se realizava o crescimento da regiatildeo
tambeacutem influenciou em erros na seleccedilatildeo de pontos pois afetou no caacutelculo dos
autovalores fazendo com que inclinaccedilotildees em relaccedilatildeo a esta superfiacutecie fossem
notadas
A segunda metodologia analisada para a segmentaccedilatildeo da imagem TOF
mostrou-se satisfatoacuteria A segmentaccedilatildeo do arquivo de distacircncias da imagem TOF foi
realizada utilizando autovalores locais para a geraccedilatildeo de uma imagem com bordas
intensificadas segmentaccedilatildeo desta imagem com o algoritmo de deslocamento pela
meacutedia e projeccedilatildeo destes segmentos para a nuvem de pontos 3D A extraccedilatildeo de
informaccedilotildees meacutetricas em arestas do objeto de estudo a partir dos pontos 3D
apresentou diferenccedila na ordem de 2cm com a medida de referecircncia sendo a
imagem TOF adquirida com tempo de integraccedilatildeo de 2000μs a uma distacircncia
aproximada de 13m entre o objeto de estudo e a cacircmara
A Figura 61 ilustra as etapas de processamento a serem realizadas para a
geraccedilatildeo da nuvem de pontos 3D utilizando a segunda metodologia considerada
apropriada para a modelagem tridimensional de superfiacutecies utilizando a imagem
TOF Esta eacute a metodologia proposta como conclusatildeo do presente trabalho de
pesquisa
121
FIGURA 61 ndash Etapas da metodologia de processamento da imagem TOF
Foram encontradas medidas com maior qualidade quando a superfiacutecie do
objeto estava paralela ao plano da imagem Esta qualidade tambeacutem foi afetada pela
distacircncia entre a cacircmara e o objeto pela refletividade das superfiacutecies e pela
iluminaccedilatildeo ambiente Conforme o Experimento 6 realizado a aresta frontal do objeto
entre os pontos 2 e 3 apresentou a menor diferenccedila de medida 18cm que equivale
a 5 da distacircncia de referecircncia
Comparaccedilotildees para a diferenccedila de medida encontrada podem ser realizadas
com os seguintes trabalhos Kahlmann et al (2006) obtiveram exatidatildeo de 1cm nas
medidas com o alvo agrave distacircncia de 25m da cacircmara TOF utilizada Wiedemann et al
(2008) obtiveram exatidatildeo de 4cm com o alvo medido a distacircncia de 4m May et al
(2008) obtiveram erro de 30cm para uma medida de 108m considerada como
referecircncia com as imagens TOF captadas do centro de uma sala girando a cacircmara
360ordm e portanto envolviam tambeacutem Paracircmetros de Orientaccedilatildeo Exterior da cacircmara
Kolb et al (2009) obtiveram erro de 2cm para distacircncias medidas de 10m agrave 45m
Nestes trabalhos foram realizadas correccedilotildees geomeacutetricas nas imagens TOF com
POI determinados com a calibraccedilatildeo da cacircmara
Arquivo de distacircncias da imagem TOF
Correccedilatildeo geomeacutetrica dos dados utilizando POI calculados com o processo de calibraccedilatildeo da cacircmara
Imagem de intensidade com bordas itensificadas calculada com a anaacutelise da variaccedilatildeo local dos autovalores
Segmentaccedilatildeo da imagem com bordas intensificadas utilizando o algoriacutetmo de deslocamento pela meacutedia
Projeccedilatildeo ortogonal das aacutereas segmentadas para a geraccedilatildeo da nuvem de pontos 3D
Modelagem tridimensional das superfiacutecies do objeto
122
62 RECOMENDACcedilOtildeES
Recomenda-se realizar a anaacutelise preacutevia do tempo de integraccedilatildeo para a
aquisiccedilatildeo da imagem TOF com o objetivo de diminuir a presenccedila de ruiacutedo Este
tempo deve ser escolhido de acordo com o ambiente em que seraacute adquirida a
imagem e tambeacutem com as caracteriacutesticas de refletividade da superfiacutecie do objeto
Com este mesmo objetivo e devido ao fato desta imagem ser obtida com iluminaccedilatildeo
LED no comprimento de onda infravermelho recomenda-se analisar as influecircncias
da iluminaccedilatildeo exterior ao sistema de iluminaccedilatildeo da cacircmara
De acordo com a aplicaccedilatildeo a que se destina a imagem TOF recomenda-se
tambeacutem realizar a calibraccedilatildeo da cacircmara com meacutetodo fotogrameacutetrico convencional
Isto possibilitaria a melhora na correccedilatildeo geomeacutetrica da imagem e consequente
aumento na qualidade das medidas realizadas com os pontos da nuvem 3D
Correccedilotildees radiomeacutetricas tambeacutem podem ser aplicadas para melhorar a qualidade
das medidas obtidas com a imagem TOF
63 CONSIDERACcedilOtildeES FINAIS
Nuvens de pontos 3D geradas a partir de imagens TOF satildeo ferramentas
para a modelagem tridimensional das superfiacutecies de objetos Propiciam a obtenccedilatildeo
de informaccedilotildees meacutetricas destes objetos para distacircncias de 03 a 70 metros com
erro centimeacutetrico esperado
Aplicaccedilotildees para as imagens TOF podem ser realizadas para a modelagem
3D de tuacuteneis galerias instalaccedilotildees industriais e fachadas de preacutedios com interesse
de preservaccedilatildeo como patrimocircnio histoacuterico e cultural Com a alta frequecircncia de
aquisiccedilatildeo de imagens das cacircmaras TOF torna-se possiacutevel realizar filmagens e
mapeamentos em movimento
Outras aplicaccedilotildees possiacuteveis para as imagens TOF estatildeo na sua utilizaccedilatildeo
para a criaccedilatildeo de cenaacuterios 3D em jogos eletrocircnicos aquisiccedilatildeo de filmes com
tecnologia 3D modelagem tridimensional de obras de arte Biometria e anaacutelise de
movimentos
123
REFEREcircNCIAS BIBLIOGRAacuteFICAS
ANDRADE J B Fotogrametria 2 ed Curitiba SBEE 1998 274 p APUZZO N D‟ Recent advances in 3D full body scanning with applications to fashion and apparel 10p In Proceedings Optical 3-D Measurement Techniques IX Vienna Austria 2009 BALTSAVIAS E P Airborne laser scanning basic relations and formulas ISPRS - Journal of Photogrammetry amp Remote Sensing v 54 p 199-214 1999 BAZAN W S TOMMASELLI A M G GALO M RUY R S A influecircncia das injunccedilotildees de orientaccedilatildeo relativa na calibraccedilatildeo de um sistema dual de cacircmaras digitais 23p Boletim de Ciecircncias Geodeacutesicas v 15 n 3 Curitiba 2009 BELTON D Improving and extending the information on Principal Component Analysis for local neighborhoods in 3D points clouds 8p The international Archives of the Photogrammetry Remote Sensing and Spatial Information Sciences v XXXVII B5 Beijing 2008 BELTON D LICHTI D Classification and segmentation of terrestrial laser scanner point clouds using local variance information 6p In Proceedings ISPRS Commission V Simposium bdquoImage Engineering and Vision Metrology‟ 2006 BROWN D C Close-Range Camera Calibration Photogrammetric Engineering v 37 nordm 8 p 855-866 1971 CENTENO J A S Sensoriamento Remoto e Processamento de Imagens Digitais Curso de Poacutes-Graduaccedilatildeo em Ciecircncias Geodeacutesicas Curitiba UFPR 2004 209p CENTENO J A S JUTZI B Evaluation of range imaging sensor concerning resolution and illumination 6p In Proceedings The 2010 Canadian Geomatics Conference and Symposium of Commission I ISPRS Calgary Alberta 2010 CHRISTOUDIAS M C GEORGESCU B MEER P Synergism in Low Level Vision IEEE Transactions on Pattern Analysis and Machine Intelligence v 24 n 5 p 603-619 2002
124
COMANICIU D MEER P Mean Shift A Robust Approach Toward Feature Space Analysis 17p IEEE Transactions on Pattern Analysis and Machine Intelligence v 24 n 5 p 603-619 2002 FUCHS S HIRZINGER G Extrinsic and depth calibration of ToF cameras In Proceedings IEEE Conference on Computer Vision and Pattern Recognition (CVPR) Anchorage USA 2008 FUCHS S MAY S Calibration and registration for precise surface reconstruction with ToF cameras In Proceedings of the Dynamic 3D Imaging Workshop in Conjunction with DAGM (Dyn3D) v I Heidelberg Germany 2007 GEMAEL C Introduccedilatildeo ao ajustamento de observaccedilotildees aplicaccedilotildees geodeacutesicas 3 ed Curitiba UFPR 1994 319p GONZALEZ R C WOODS R E Processamento de imagens digitais Satildeo Paulo Edgard Bluumlcher Ltda 2000 509p GROSS H THOENNESSEN U Extraction of lines from laser point clouds p 86-91 In Proceedings Symposium of ISPRS Commission III Photogrammetric Computer Vision PCV06 Eds Foumlrstner W Steffen R International Archives of Photogrammetry Remote Sensing and Spatial Information Sciences 36 (Part 3) 2006 HABIB A MORGAN M Automatic calibration of low-cost digital cameras p 948-955 Journal of Photogrammetric Record 2003 JAMTSHO S Geometric modelling of 3D Range Cameras and their application for structural deformation measurement 174p (Master‟s Thesis Department of Geomatics Engineering) University of Calgary Alberta 2010 JOHNSON R A WICHERN D W Applied multivariate statistical analysis 4 ed New Jersey Pearson Prentice Hall 1998 JUTZI B GROSS H Nearest neighbor classification on laser point clouds to gain object structures from buildings 6p In Proceedings ISPRS Hannover Workshop 2009 High-Resolution Earth Imaging for Geospatial Information Disponiacutevel em lthttpwwwisprsorgproceedingsXXXVIII1_4_7-W5paperpapershtmgt Acesso 16112010
125
KAHLMANN T REMONDINO F INGENSAND H Calibration for increased accuracy of the range imaging camera SwissrangerTM ISPRS Commission V Symposium bdquoImage Engineering and Vision Metrology‟ v XXXVI n 5 2006 KEMENY S E EL-SAYED E MENDIS S FOSSUM E R Update on focal-plane image processing research 8p SPIE v 1447 Charged-Coupled Devices and Solid Optical Sensors II 1991 KHONGSAB P Signal processing and performance evaluation of a PMD camera for space docking 88p (Master‟s Thesis Continuation Courses Space Science and Technology Department of Space Science) Lulea University of Techology Kiruna 2009 KOCH R SCHILLER I BARTCZAK B KELLNER F KOumlSER K MixIn3D 3D mixed reality with ToF camera 16p In Work Programme of the EU‟s 7th Framework program 2009 KOLB A BARTH E KOCH R LARSEN R Time-of-Flight sensors in Computer Graphics 16p In STAR ndash State of The Art Report The Eurographics Association 2009 LANGE R 3D Time-of-Flight distance measurement with custom solid-state image sensors in CMOSCCD-technology 205 p (Dissertation Department of Electrical Engineering and Computer Science at University of Siegen for the degree of Doctor of Technical Sciences) Univesity of Siegen Alemanha 2000 LEON S J Linear Algebra with applications 4 ed Dartmouth Prentice Hall 1998 390p LUAN X Experimental investigation of Photonic Mixer Device and development of TOF 3D ranging systems based on PMD technology A dissertation submitted to the Department of Electrical Engineering and Computer Science at University of Siegen Siegen 2001 MACHADO A M L Extraccedilatildeo automaacutetica de contornos de edificaccedilotildees utilizando imagem gerada por cacircmara digital de pequeno formato e dados LIDAR 201 p Tese apresentada ao Curso de Poacutes-Graduaccedilatildeo em Ciecircncias Geodeacutesicas da Universidade Federal do Paranaacute Curitiba UFPR 2006
126
MASS H G VOSSELMAN Two algorithms for extracting building models from raw laser altimetry data 11p Elsevier Science Photogrammetry amp Remote Sensing 1999 MAY S DROESCHEL D HOLTZ D WIESEN C FUCHS S 3D Pose estimation and mapping with time-of-flight cameras 6p Germany 2008 Disponiacutevel em httpwwwroboticdefileadminroboticfuchsiros08_3dcampdf Acesso em 2510 2010 MITISHITA E A Monorestituiccedilatildeo digital de aerofotos associada com sistema de computaccedilatildeo graacutefica CAD para fins de mapeamento na aacuterea florestal 251p Tese (Doutorado em Engenharia Florestal) ndash Setor de Ciecircncias Agraacuterias Universidade Federal do Paranaacute 1997 MOumlLLER T KRAFT H FREY J ALBRECHT M LANGE R Robust 3D measurement with PMD sensors 2005 PAULY M GROSS M KOBBELT L P Efficient simplification of point-sampled surfaces 8p In VIS ‟02 Proceedings of the Conference on Visualization ‟02 Washington DC USA 2002 IEEE Computer Society PECHT Y FOSSUM E R Wide intrascene dynamic range CMOS APS using dual sampling IEEE Transactions on Electron Devices v 44 n 10 1997 PMD Technologies PMD [vison]regCamCube 20 4p Datasheet n 20090601 Siegen 2009 Disponiacutevel em lthttpwwwpmdteccomproducts-servicespmdvisionr-cameraspmdvisionr-camcube-20gt Acesso em 0103 2010 PMD Technologies PMD [vison]regCamCube 20 Software development tutorial 13p Siegen 2009 Disponiacutevel em lthttpwwwpmdteccomfileadminpmdtecdownloadsdocumentationcamcube_softwaredevelopmenttutorialpdfgt Acesso em 1504 2010 RAPP H Experimental and theoretical investigation of correlating TOF-camera systems 71p Diploma Thesis in Physics Faculty for Physics and Astronomy University of Heidelberg Alemanha 2007 RINGBECK T A 3D Time Of Flight camera for object detection 10p In Proceedings Optical 3D Measurement Techniques Plenary Session 1 Range Imaging I Zuumlrich 2007
127
SHAKARJI C M Least-Squares fitting algorithms of the NIST algorithm testing system 9p Journal of research of the national of standards and technology v 103 n 6 1998 THEUWISSEN A Solid-state imaging with Charge-Coupled Devices PP 34-46 Kluwer Academic Publishers 1995 Disponiacutevel em ltwwwspringerlinkcomgt Acesso em 08072010
WIEDEMANN M SAUER M DRIEWER F SCHILLING K Analysis and characterization of the PMD camera for application in mobile robotics 6p In Proceedings of the 17th World Congress The International Federation of Automatic Control Seoul Korea July 6-11 2008 ZHANG Z A flexible new technique for camera calibration 5p IEEE Transactions on Pattern Analysis and Machine Intelligence November 2000

ix
FIGURA 54 ndash Correccedilatildeo geomeacutetrica da imagem TOF 90
FIGURA 55 ndash Desvio padratildeo x TI janelas 10x10 93
FIGURA 56 ndash Imagens para TI=500μs e d=130m 93
FIGURA 57 ndash Imagens para TI=2000μs e d=130m 94
FIGURA 58 ndash Imagens para TI=2500μs e d=130m 95
FIGURA 59 ndash Desvios padratildeo para distacircncia x TI 96
FIGURA 510 ndash Desvios padratildeo para janelas com TI=2000μs d=130m 97
FIGURA 511 ndash Janelas de 40x40 piacutexeis TI=2000μs d=130m 97
FIGURA 512 ndash Desvios padratildeo para janelas com TI=5000μs d=130m 98
FIGURA 513 ndash Janelas de 40x40 piacutexeis TI=5000μs d=130m 98
FIGURA 514 ndash Desvios padratildeo para janelas com TI=2000μs d=210m 99
FIGURA 515 ndash Janelas de 40x40 piacutexeis TI=2000μs d=210m 99
FIGURA 516 ndash Desvios padratildeo para janelas com TI=5000μs d=210m 100
FIGURA 517 ndash Janelas de 40x40 piacutexeis TI=5000μs d=210m 100
FIGURA 518 ndash Desvios padratildeo para janelas com TI=7000μs d=210m 101
FIGURA 519 ndash Janelas de 40x40 piacutexeis TI=7000μs d=210m 101
FIGURA 520 ndash Arquivo de intensidades da imagem TOF obtida do objeto 103
FIGURA 521 ndash Arquivo de distacircncias da imagem TOF com geometria corrigida 104
FIGURA 522 ndash Nuvem de pontos vista frontal 104
FIGURA 523 ndash Nuvem de pontos vista perspectiva 3D 105
FIGURA 524 ndash Pontos semente no arquivo de intensidades da imagem TOF 106
FIGURA 525 ndash Crescimento de regiotildees vista frontal 107
FIGURA 526 ndash Crescimento de regiotildees vista perspectiva 3D 107
FIGURA 527 ndash Imagem com bordas intensificadas gerada com 1205821 109
FIGURA 528 ndash Imagem com bordas intensificadas gerada com 1205822 109
FIGURA 529 ndash Imagem com bordas intensificadas gerada com 1205823 109
FIGURA 530 ndash Imagens de intensidade com as bordas do objeto intensificadas 110
FIGURA 531 ndash Imagem com bordas intensificadas segmentada 111
FIGURA 532 ndash Nuvem de pontos da imagem segmentada vista frontal 112
FIGURA 533 ndash Nuvem de pontos da imagem segmentada vista 3D 113
FIGURA 534 ndash Nuvem de pontos 3D segmentada 114
FIGURA 535 ndash Pontos 3D selecionados na nuvem 114
FIGURA 536 ndash Dimensotildees de referecircncia do objeto de estudo 115
FIGURA 537 ndash Nuvem de pontos 3D das superfiacutecies frontal e superior 117
FIGURA 538 ndash Modelagem tridimensional das superfiacutecies frontal e superior 118
x
LISTA DE QUADROS E TABELAS
QUADRO 21 ndash Especificaccedilotildees teacutecnicas da cacircmara PMD CamCube 20 37
QUADRO 22 ndash Especificaccedilotildees teacutecnicas de cacircmaras TOF 40
QUADRO 23 ndash Propriedades de superfiacutecies normais obtidas com autovalores 57
TABELA 51 ndash Paracircmetros de Orientaccedilatildeo Interior calculados 89
TABELA 52 ndash Coordenadas 3D dos pontos e medidas realizadas 116
xi
LISTA DE SIGLAS
Sigla Significado
AMISE Asymptotic Mean Integrated Square Error
CCD Charge Coupled Device
CMOS Complementary Metal Oxide Semiconductor
CP Centro Perspectivo
EDISON Edge Detection and Image SegmentatiON System
FC Funccedilatildeo de Correlaccedilatildeo
FPN Fixed Pattern Noise
FPS Frames Per Second
LASER Light Amplification by Stimulated Emission of Radiation
LED Light Emitting Diode
MDE Modelo Digital de Elevaccedilatildeo
MVC Matriz de Variacircncias e Covariacircncias
PMD Photonic Mixer Device
POE Paracircmetros de Orientaccedilatildeo Exterior
POI Paracircmetros de Orientaccedilatildeo Interior
PP Ponto Principal
SBI Supression of Background Ilumination
TI Tempo de Integraccedilatildeo
TOF Time-Of-Flight
xii
SUMAacuteRIO
1 INTRODUCcedilAtildeO 14
11 OBJETIVO GERAL 16
12 OBJETIVOS ESPECIacuteFICOS 16
13 JUSTIFICATIVA 17
14 ESTRUTURA DA DISSERTACcedilAtildeO 18
2 REVISAtildeO BIBLIOGRAacuteFICA 19
21 MEDIDA DE DISTAcircNCIA COM O PRINCIacutePIO TOF 19
22 IMAGEM TOF 25
23 TEMPO DE INTEGRACcedilAtildeO 26
24 PRINCIacutePIO DE FUNCIONAMENTO DO SENSOR PMD 28
25 CAcircMARAS PMD 34
251 Cacircmara PMD CamCube 20 36
252 Dispositivo SBI 38
253 Modelos de cacircmaras TOF 39
26 ERROS DE MEDIDA 40
261 Erros natildeo-sistemaacuteticos em cacircmaras TOF 41
262 Erros sistemaacuteticos em cacircmaras TOF 41
27 PROJECcedilAtildeO ORTOGONAL DOS PONTOS 45
28 REFINAMENTO DA NUVEM DE PONTOS 3D 50
29 ANAacuteLISE DE SUPERFIacuteCIES POR AUTOVALORES E AUTOVETORES 53
210 ANAacuteLISE DE SUPERFIacuteCIES POR MOMENTOS INVARIANTES 56
211 ALGORITMO DE DESLOCAMENTO PELA MEacuteDIA 60
3 MATERIAIS 67
4 MEacuteTODOS 68
41 CALIBRACcedilAtildeO DA CAcircMARA 69
42 ANAacuteLISE DA PRESENCcedilA DE RUIacuteDO 78
421 Filtragem passa-baixas pela meacutedia 79
422 Filtragem pela mediana 80
423 Filtragem com a meacutedia temporal 81
43 SEGMENTACcedilAtildeO 82
431 Crescimento de regiotildees a partir de superfiacutecies planas e ponto semente 82
xiii
432 Segmentaccedilatildeo por anaacutelise da variaccedilatildeo local de autovalores 84
433 Segmentaccedilatildeo com o algoritmo de deslocamento pela meacutedia 86
5 RESULTADOS E DISCUSSOtildeES 87
51 CALIBRACcedilAtildeO DA CAcircMARA 87
52 EXPERIMENTO 1 ndash ANAacuteLISE DE RUIacuteDO 1 IMAGEM TOF INTEIRA 92
53 EXPERIMENTO 2 ndash ANAacuteLISE DE RUIacuteDO 2 JANELAS DE 40X40 PIacuteXEIS 96
54 EXPERIMENTO 3 ndash PROJECcedilAtildeO ORTOGONAL DOS PONTOS 102
55 EXPERIMENTO 4 ndash SEGMENTACcedilAtildeO 1 CRESCIMENTO DE REGIOtildeES 106
56 EXPERIMENTO 5 ndash SEGMENTACcedilAtildeO 2 ANAacuteLISE COM AUTOVALORES 108
57 EXPERIMENTO 6 ndash ANAacuteLISE DAS MEDIDAS OBTIDAS 113
58 MODELAGEM DAS SUPERFIacuteCIES 3D 117
6 CONCLUSOtildeES RECOMENDACcedilOtildeES E CONSIDERACcedilOtildeES FINAIS 119
61 CONCLUSOtildeES 119
62 RECOMENDACcedilOtildeES 122
63 CONSIDERACcedilOtildeES FINAIS 122
REFEREcircNCIAS BIBLIOGRAacuteFICAS 123
14
1 INTRODUCcedilAtildeO
A informaccedilatildeo meacutetrica para a representaccedilatildeo espacial de objetos eacute uma
necessidade para diferentes aacutereas de estudo Algumas aplicaccedilotildees exigem que o
processo de aquisiccedilatildeo e representaccedilatildeo graacutefica desta informaccedilatildeo seja realizado com
rapidez e qualidade Em Ciecircncias Geodeacutesicas a obtenccedilatildeo desta informaccedilatildeo pode
ser feita atraveacutes de diversas maneiras dentre elas citam-se os levantamentos de
campo e as imagens obtidas por sensores remotos exemplos satildeo teacutecnicas
aplicadas em Topografia e Fotogrametria
Com a Topografia o trabalho pode alcanccedilar alto grau de exatidatildeo
dependendo da teacutecnica e precisatildeo do equipamento utilizado No entanto se gasta
bastante tempo para realizar o levantamento das informaccedilotildees em campo e tambeacutem
para o processamento e organizaccedilatildeo dos dados em escritoacuterio Algumas aplicaccedilotildees
da Topografia estatildeo na locaccedilatildeo de obras como rodovias geraccedilatildeo de perfis de
terrenos e rios monitoramento de deformaccedilotildees na estrutura de barragens pontes e
tambeacutem no levantamento de pontos 3D para representar fachadas de edifiacutecios
Com a Fotogrametria o levantamento das informaccedilotildees tridimensionais de um
objeto pode ser feito em tempo relativamente curto As fotografias satildeo obtidas de
forma instantacircnea No entanto quando se utilizam teacutecnicas convencionais de
Fotogrametria necessita-se de pelo menos duas fotografias com sobreposiccedilatildeo das
aacutereas imageadas para a geraccedilatildeo do modelo fotogrameacutetrico Outra forma eacute a teacutecnica
conhecida por Monorestituiccedilatildeo Digital onde se utiliza uma fotografia digital em
conjunto com um Modelo Digital de Elevaccedilatildeo (MDE) normalmente gerado por uma
nuvem de pontos proveniente de outro equipamento ou sensor (MITISHITA 1997)
Na modalidade terrestre da Fotogrametria eacute possiacutevel determinar pontos 3D
para representar fachadas de preacutedios obras de arte mapeamentos de ruas e
imoacuteveis com a plataforma em movimento dentre outras aplicaccedilotildees
Aleacutem das teacutecnicas convencionais de levantamentos utilizadas em Topografia
e Fotogrametria e com o objetivo de viabilizar a aquisiccedilatildeo da informaccedilatildeo espacial
equipamentos e teacutecnicas tecircm sido constantemente desenvolvidos e aperfeiccediloados
Avanccedilos tecnoloacutegicos tecircm possibilitado a obtenccedilatildeo da informaccedilatildeo tridimensional
para a representaccedilatildeo dos objetos de forma raacutepida e precisa Exemplos satildeo os
sistemas de varredura laser scanner e as cacircmaras TOF (Time-Of-Fligth) tambeacutem
15
conhecidas na literatura por Range Cameras Estas cacircmaras geram imagens com
informaccedilotildees de distacircncia para cada pixel do objeto imageado denominadas
imagens de profundidade distacircncia ou Range Image Neste trabalho seraacute utilizada
preferencialmente a denominaccedilatildeo ldquoimagem TOFrdquo
Nas uacuteltimas deacutecadas os sistemas de varredura laser scanner tecircm sido muito
utilizados para mapeamento Equipamentos com esta tecnologia possibilitam a
obtenccedilatildeo de milhares de pontos por segundo e podem ser instalados em
plataformas aeacutereas ou terrestres No entanto devido a este ser um equipamento
oacuteptico e mecacircnico o alto custo na sua aquisiccedilatildeo torna-o inviaacutevel para algumas
aplicaccedilotildees
Cacircmaras TOF atraem a atenccedilatildeo de diferentes aacutereas que necessitam de
pontos com coordenadas 3D de seus objetos de estudo tais como a Visatildeo
Computacional e a Engenharia de Automaccedilatildeo Um modelo de cacircmara TOF eacute a PMD
CamCube 20 que capta 25 imagens por segundo (Frames Per Secunde - FPS)
Com esta frequecircncia de aquisiccedilatildeo pode obter o movimento dos objetos na cena e de
grande quantidade de informaccedilatildeo tridimensional sobre os mesmos
No entanto a grande quantidade de dados captada deve ter sua qualidade
avaliada A iluminaccedilatildeo exterior ao sistema interfere negativamente Outro fator a ser
observado eacute a configuraccedilatildeo da cena pois interferecircncias satildeo causadas pelas
distacircncias orientaccedilotildees e refletividade das superfiacutecies dos objetos em relaccedilatildeo ao
sensor da cacircmara Em uma mesma cena podem-se apresentar medidas ambiacuteguas
de distacircncia para os pontos devido a erros causados pela iluminaccedilatildeo utilizada no
sistema As influencias causadas por erros sistemaacuteticos assim como ruiacutedos devem
ser observadas para cada tipo de aplicaccedilatildeo (MAY et al 2008)
A cacircmara TOF utilizada para a aquisiccedilatildeo das imagens nesta pesquisa foi a
PMD[vision]regCamCube 20 Esta utiliza um sensor de imageamento PMD (Photonic
Mixer Device) que possibilita armazenar informaccedilatildeo de distacircncia para os piacutexeis de
uma imagem de intensidade O equipamento fornece a imagem TOF que eacute
composta por um arquivo com as intensidades que o sinal retornou para o sensor e
um arquivo com as informaccedilotildees de distacircncia para cada pixel o que possibilita a
percepccedilatildeo da profundidade dos objetos na cena
16
11 OBJETIVO GERAL
O objetivo geral deste trabalho de pesquisa eacute desenvolver uma metodologia
para a modelagem tridimensional das superfiacutecies de objetos a partir da nuvem de
pontos 3D proveniente da imagem TOF
12 OBJETIVOS ESPECIacuteFICOS
Realizar a correccedilatildeo geomeacutetrica dos dados da imagem TOF atraveacutes de
Paracircmetros de Orientaccedilatildeo Interior obtidos com o processo de
calibraccedilatildeo da cacircmara
Testar meacutetodos de filtragem para a reduccedilatildeo de ruiacutedo presente nas
imagens TOF e analisar formas para a aquisiccedilatildeo da imagem TOF
com menor presenccedila de ruiacutedo
Analisar o tempo de integraccedilatildeo para diferentes situaccedilotildees de aquisiccedilatildeo
da imagem TOF
Avaliar meacutetodos para a segmentaccedilatildeo das superfiacutecies de objetos a
partir da imagem TOF
Gerar nuvem de pontos com coordenadas tridimensionais das
superfiacutecies segmentadas e modelar estas superfiacutecies
tridimensionalmente
Avaliar a qualidade das medidas obtidas com a modelagem
tridimensional das superfiacutecies do objeto de estudo
17
13 JUSTIFICATIVA
Com o desenvolvimento e aperfeiccediloamento das cacircmaras TOF acredita-se
na viabilizaccedilatildeo deste equipamento para a medida de distacircncia e modelagem
tridimensional das superfiacutecies de objetos para diferentes finalidades Apresenta as
seguintes vantagens
Recobrimento da aacuterea de forma instantacircnea
Possibilidade de filmar a cena registrando o movimento dos objetos
com frequecircncia de aquisiccedilatildeo de 25 imagens por segundo
Fornece grande quantidade de pontos com coordenadas 3D dos
objetos imageados
Uma imagem eacute suficiente para estimar a distacircncia dos objetos
Informaccedilatildeo na banda espectral do infravermelho
Uma imagem TOF captada instantaneamente disponibiliza informaccedilatildeo sobre
a distacircncia de objetos contidos na cena sendo possiacutevel a geraccedilatildeo de nuvens de
pontos para a representaccedilatildeo tridimensional de objetos sem necessitar de
informaccedilatildeo proveniente de outro sensor Outra vantagem eacute o sistema natildeo precisar
de iluminaccedilatildeo exterior
Algumas aplicaccedilotildees para as imagens TOF foram realizadas nas aacutereas de
prevenccedilatildeo de acidentes automobiliacutesticos e seguranccedila de pedestres (RINGBECK
2007) Visatildeo Computacional (WIEDEMANN et al 2008) mapeamentos
tridimensionais de objetos em ambientes fechados para a movimentaccedilatildeo roboacutetica
(MAY et al 2008) Computaccedilatildeo Graacutefica (KOLB 2009 et al KOCH et al 2009)
realizaccedilatildeo de medidas do corpo humano para a induacutestria de roupas (APUZZO
2009) e anaacutelise de deformaccedilotildees (JAMTSHO 2010)
18
14 ESTRUTURA DA DISSERTACcedilAtildeO
A presente dissertaccedilatildeo foi estruturada em seis capiacutetulos No primeiro
capitulo realiza-se a introduccedilatildeo ao tema descreve-se o objetivo geral e os objetivos
especiacuteficos aleacutem da justificativa para a pesquisa
O segundo capiacutetulo apresenta uma revisatildeo de conceitos sobre medida de
distacircncia utilizando o princiacutepio TOF descriccedilatildeo da imagem TOF e seus arquivos de
intensidades e distacircncias influencia do tempo de integraccedilatildeo (TI) na aquisiccedilatildeo da
imagem TOF princiacutepio de funcionamento do sensor PMD modelos de cacircmaras
TOF erros de medida que podem ocorrer utilizando estas cacircmaras projeccedilatildeo
ortogonal das distacircncias obtidas com a imagem TOF para a geraccedilatildeo da nuvem de
pontos 3D meacutetodo para o refinamento da nuvem de pontos 3D detecccedilatildeo de
superfiacutecies por autovetores e autovalores anaacutelise de superfiacutecies por momentos
invariantes e algoritmo de deslocamento pela meacutedia para a segmentaccedilatildeo de
imagens
No terceiro capitulo descrevem-se os materiais equipamentos e espaccedilo
fiacutesico utilizado para a realizaccedilatildeo do trabalho de pesquisa
Com o quarto capitulo satildeo descritos os meacutetodos utilizados para o
desenvolvimento da pesquisa calibraccedilatildeo da cacircmara filtragens para anaacutelise e
tratamento de ruiacutedo presente nas imagens meacutetodos de segmentaccedilatildeo por
crescimento de regiotildees na nuvem de pontos segmentaccedilatildeo por anaacutelise da variaccedilatildeo
local de autovalores no arquivo de distacircncias da imagem TOF e geraccedilatildeo de imagem
de intensidade com as bordas do objeto intensificadas segmentaccedilatildeo da imagem
com bordas intensificadas utilizando o algoritmo de deslocamento pela meacutedia
Com o quinto capitulo descrevem-se os resultados obtidos tais como
valores dos paracircmetros calculados no processo de calibraccedilatildeo da cacircmara
experimentos realizados para a anaacutelise da presenccedila de ruiacutedo nas imagens TOF
projeccedilatildeo ortogonal dos pontos para a geraccedilatildeo da nuvem de pontos 3D
segmentaccedilatildeo por crescimento de regiotildees segmentaccedilatildeo por anaacutelise da variaccedilatildeo
local de autovalores anaacutelise das medidas obtidas com a nuvem de pontos 3D
segmentada e tambeacutem se realiza a modelagem tridimensional de duas superfiacutecies
do objeto estudado
Finalmente com o sexto capitulo satildeo apresentadas conclusotildees
consideraccedilotildees finais e recomendaccedilotildees para trabalhos futuros de acordo com os
experimentos realizados
19
2 REVISAtildeO BIBLIOGRAacuteFICA
21 MEDIDA DE DISTAcircNCIA COM O PRINCIacutePIO TOF
O princiacutepio TOF (Time-Of-Flight) permite calcular a distacircncia de objetos a
partir da emissatildeo e recepccedilatildeo de um sinal luminoso Com este objetivo utiliza-se um
conjunto de emissor e receptor oacutepticos que mede o tempo necessaacuterio para o sinal
retornar para o sensor apoacutes atingir o alvo com base no conhecimento do valor da
velocidade da luz propagada no vaacutecuo De acordo com Baltsavias (1999) o caacutelculo
da distacircncia com o princiacutepio TOF pode ser realizado atraveacutes de dois meacutetodos
Tempo de percurso de pulsos curtos de energia
Mudanccedila de fase de um sinal modelado na forma de onda contiacutenua
Sistemas que utilizam o primeiro meacutetodo de medida transmitem um pulso e
medem o seu tempo de retorno Isto eacute possiacutevel devido ao retardo de tempo gasto no
percurso do sinal que eacute medido atraveacutes de um ponto no pulso de retorno com
referecircncia no pulso emitido Quanto melhor eacute a medida do tempo melhor a distacircncia
calculada sendo o reloacutegio do sensor um fator de grande importacircncia neste meacutetodo
Para obter precisatildeo meacutetrica necessita-se realizar a medida de tempo em nano
segundos (ƞs) O afastamento e duraccedilatildeo do pulso tambeacutem satildeo fatores importantes
na resoluccedilatildeo da medida de distacircncia com este meacutetodo A Figura 21 Ilustra a medida
de distacircncia com o princiacutepio TOF (LANGE 2000)
FIGURA 21 ndash Princiacutepio TOF
FONTE LANGE (2000)
20
Utilizando pulsos de uma fonte de luz pode-se calcular a distacircncia de um
alvo atraveacutes da Equaccedilatildeo (21)
119863 =119888 119905
2 (21)
onde
119863 ndash Distacircncia entre o sensor e o alvo
119888 ndash Valor constante da velocidade da luz
119905 ndash Variaccedilatildeo de tempo entre emissatildeo e recepccedilatildeo do pulso
O segundo meacutetodo trabalha com a determinaccedilatildeo da mudanccedila de fase do
sinal contido em uma onda contiacutenua modulada Pode ser utilizado para evitar o
problema na medida de tempo com alta precisatildeo O sinal luminoso pode ser emitido
utilizando fontes LED (Light Emitting Diode) ou LASER (Light Amplification by
Stimulated Emission of Radiation) Estas fontes permitem a modulaccedilatildeo direta do
sinal luminoso atraveacutes da voltagem do sistema (LANGE 2000)
Para a utilizaccedilatildeo do meacutetodo da diferenccedila de fase considera-se que o sinal
refletido pelo alvo manteacutem a forma do sinal modulado emitido mas a fase do sinal
emitido eacute diferente da fase do sinal recebido conforme ilustrado com a Figura 22
FIGURA 22 ndash Meacutetodo da diferenccedila de fase
21
Sendo assim a mudanccedila de fase entre os sinais pode ser utilizada para
calcular a distacircncia conforme Equaccedilatildeo (22)
119863 =120593∙119888
4∙120587∙120574 (22)
onde
119863 ndash Distacircncia entre o sensor e o alvo
120593 ndash Diferenccedila de fase entre o sinal emitido e o recebido
119888 ndash Valor constante da velocidade da luz
120574 ndash Frequecircncia de modulaccedilatildeo do sinal
Em cacircmaras TOF a distacircncia entre o sensor e o alvo eacute medida utilizando o
meacutetodo da diferenccedila de fase com uma Funccedilatildeo de Correlaccedilatildeo (FC) entre o sinal
emitido e o refletido As amplitudes dos sinais satildeo moduladas com a mesma
frequecircncia Com isto a iluminaccedilatildeo pode ser feita utilizando diacuteodos emissores de luz
LED tendo-se a vantagem que a FC pode ser obtida com o sensor PMD a partir da
forma senoidal do sinal recebido (RAPP 2007)
A FC eacute calculada atraveacutes do sinal emitido e recebido Estes sinais satildeo
modelados matematicamente com forma senoidal tendo em vista que sua
propagaccedilatildeo ocorre na forma de onda Dado um sinal luminoso emitido 119892 119905 e um
sinal recebido 119904 119905 em um ponto do sensor PMD as amostras 119888 120591 podem ser
calculadas atraveacutes da Equaccedilatildeo (23) Estas amostras satildeo utilizadas para modelar a
FC em um atraso de tempo 120591
119888 120591 = 119904 119905 otimes 119892 119905 = lim119879rarrinfin 119904 119905 ∙ 119892 119905 + 120591 +119879
2
minus119879
2
119889119905 (23)
onde
119904 119905 ndash Funccedilatildeo que modela a forma do sinal luminoso recebido
119892 119905 ndash Funccedilatildeo que modela a forma do sinal luminoso emitido
119905 ndash Variaccedilatildeo de tempo entre a emissatildeo e a recepccedilatildeo do sinal
120591 ndash Atraso de tempo no recebimento do sinal
22
O sinal emitido pode ser expresso com 119892 119905 = cos(120603119905) o recebido eacute
expresso atraveacutes da relaccedilatildeo 119904 119905 = 1 + 119886 ∙ cos(120603119905 minus 120593) Ambos com forma senoidal
amplitude 119886 e diferenccedila de fase 120593 Com isto a FC pode ser apresentada na forma da
Equaccedilatildeo (25)
119888 120591 = 1 + 119886 ∙ 119888119900119904 120603120591 minus 120593 otimes 119888119900119904 120603120591 (24)
119888 120591 = lim119879acuterarrinfin1
119879acute 1 + 119886 ∙ 119888119900119904 120603119905 minus 120593 ∙ 119888119900119904 120603119905 + 120603119905
+119879 acute
2
minus119879 acute
2
119889119905 (25)
119888 120591 =119886
2∙ cos 120593 + 120603119905 (26)
onde
119892 119905 ndash Funccedilatildeo senoidal que modela a forma do sinal emitido
119904 119905 ndash Funccedilatildeo que modela a forma do sinal recebido
119905 ndash Variaccedilatildeo de tempo entre a emissatildeo e recepccedilatildeo do sinal
120591 ndash Atraso no tempo de recebimento do sinal
119886 ndash Amplitude da onda portadora do sinal
120593 ndash Diferenccedila de fase
120603 ndash Referecircncia de fase para o sinal modelado na forma senoidal
Lange (2000) avaliou a FC para fases 120596 119905 preacute-definidas escolhendo quatro
fases 120596 119905 = 0deg 120596 119905 = 90deg 120596 119905 = 180deg 120596 119905 = 270deg Verificou que eacute possiacutevel calcular a
diferenccedila de fase 120593 e a amplitude 119886 do sinal recebido 119904(119905) Considerando que o sinal
recebido tem sobreposiccedilatildeo ao sinal emitido deve-se adicionar uma constante de
deslocamento 119870 conforme a Equaccedilatildeo (27)
119862 120591 = 119888 120591 + 119870 (27)
119862 1205910 = 119888 1205910 + 119870 =119886
2∙ cos 120593 + 119870 (28)
119862 1205911 = 119888 1205911 + 119870 = minus119886
2∙ 119904119890119899 120593 +119870 (29)
119862 1205912 = 119888 1205912 + 119870 = minus119886
2∙ cos 120593 + 119870 (210)
119862 1205913 = 119888 1205913 + 119870 =119886
2∙ 119904119890119899 120593 +119870 (211)
23
Analisando a FC em quatro pontos a diferenccedila de fase 120593 e a amplitude 119886 do
sinal 119904(119905) podem ser calculadas atraveacutes das Equaccedilotildees (212) e (213)
120593 = 119905119892minus1 119862 1205913 minus119862 1205911
119862 1205910 minus119862 1205912 (212)
119886 = 119862 1205913 minus119862 1205911 2+ 119862 1205910 minus119862 1205912 2
2 (213)
Pode-se fazer a simplificaccedilatildeo das Equaccedilotildees (214) agrave (217) para quatro
pontos amostrais que satildeo necessaacuterios na modelagem da FC
119862 1205911 = 1198601 (214)
119862 1205912 = 1198602 (215)
119862 1205913 = 1198603 (216)
119862 1205910 = 1198604 (217)
A anaacutelise da FC entre o sinal oacuteptico e eleacutetrico recebido no dispositivo do
sensor eacute feita utilizando a diferenccedila de fase conforme ilustrado com a Figura 23
FIGURA 23 ndash FC utilizada no meacutetodo da diferenccedila de fase
FONTE Adaptado de LANGE (2000)
A FC permite calcular a distacircncia entre o alvo e a cacircmara utilizando quatro
amostras 11986011198602 1198603 e 1198604 com defasagem de 90ordm A diferenccedila de fase 120593 entre o sinal
24
emitido e o recebido eacute proporcional agrave distacircncia entre o alvo e a cacircmara O valor para
a diferenccedila de fase pode ser calculado atraveacutes da Equaccedilatildeo (218)
120593 = 119886119903119888119905119886119899 1198601minus1198603
1198602 minus1198604 (218)
onde
120593 ndash Diferenccedila de fase entre a onda emitida e a recebida
1198601119860211986031198604 ndash Pontos amostrais utilizados na modelagem da FC
Aleacutem do valor da diferenccedila de fase entre os sinais dois outros valores
podem ser calculados a amplitude 119886 e o valor de intensidade 119887 do sinal recebido
conforme as Equaccedilotildees (219) e (220) respectivamente
119886 = 1198601minus1198603 2+ 1198602 minus1198604 2
2 (219)
119887 =1198601+1198602 +1198603+1198604
4 (220)
onde
119886 ndash Amplitude do sinal recebido
119887 ndash Intensidade do sinal recebido (offset)
A distacircncia 119889 do sensor ao alvo eacute calculada atraveacutes da Equaccedilatildeo (221)
119889 =119888∙120593
4120587∙119891119898119900119889 (221)
onde
119889 ndash Distacircncia entre o sensor e o alvo
119888 ndash Valor constante da velocidade da luz propagada no vaacutecuo
120593 ndash Diferenccedila de fase entre o sinal emitido e o recebido
119891119898119900119889 ndash Frequecircncia de modulaccedilatildeo do sinal luminoso utilizado
A frequecircncia de modulaccedilatildeo do sinal emitido estabelece a distacircncia maacutexima
que poderaacute ser medida para um determinado comprimento de onda Em um sinal
25
modulado com a frequecircncia 119891119898119900119889 = 20119872119867119911 e comprimento de onda 120582119898119900119889 = 15m
conforme a Equaccedilatildeo (222) a distacircncia maacutexima que poderaacute ser medida eacute de 75
metros (MOumlLLER et al 2005)
119889119898119886119909 =120582119898119900119889
2= 75119898 (222)
22 IMAGEM TOF
Os piacutexeis da imagem TOF contecircm informaccedilotildees de distacircncia e intensidade
das superfiacutecies dos objetos Proporcionam a anaacutelise da profundidade dos objetos na
cena aleacutem da informaccedilatildeo de intensidade do sinal captado pelo sensor A Figura 24
ilustra a informaccedilatildeo 3D contida na imagem TOF
FIGURA 24 ndash Informaccedilatildeo das imagens TOF
FONTE Adaptado de RINGBECK (2007)
Com a informaccedilatildeo de profundidade e o posicionamento bidimensional dos
objetos na imagem pode-se realizar o mapeamento destes objetos e estimar suas
dimensotildees As cacircmaras TOF podem captar imagens e viacutedeos para realizar medidas
e detectar movimentos A Figura 25 ilustra os arquivos da imagem TOF
26
FIGURA 25 ndash Imagem TOF obtida com cacircmara PMD
FONTE PMD Technologies (2009)
A Figura 25a ilustra o arquivo com informaccedilatildeo das distacircncias dos objetos
presentes na imagem TOF A Figura 25b ilustra o arquivo com as intensidades que
o sinal retornou para o sensor registrada em cada piacutexel da imagem infravermelha
captada com comprimento de onda de 870nm
23 TEMPO DE INTEGRACcedilAtildeO
O periacuteodo de tempo que o sensor da cacircmara ficou exposto para obter a
imagem eacute chamado de tempo de integraccedilatildeo (TI) A quantidade de energia
eletromagneacutetica captada pelo sensor eacute diretamente influenciada por este tempo
pelas caracteriacutesticas refletivas das superfiacutecies dos objetos e pelo meio em que a
imagem foi tomada Os elementos do sensor podem ser carregados de acordo com
seu intervalo de capacidade do insaturado ao supersaturado Estes valores causam
ruiacutedos na imagem variando de acordo com a distacircncia entre o objeto e o sensor
(CENTENO e JUTZI 2010)
Este pode ser considerado o paracircmetro interno mais criacutetico em uma cacircmara
TOF pois descreve o periacuteodo de tempo que os elementos sensores necessitam
para detectar o sinal luminoso com a finalidade de obter a diferenccedila de fase utilizada
27
para o caacutelculo da distacircncia Quando o TI eacute muito baixo alguns elementos do sensor
podem natildeo ser ativados ocasionando piacutexeis com valor zero natildeo sendo possiacutevel
calcular sua distacircncia Por outro lado se o TI eacute muito elevado o pixel pode ficar
supersaturado o que tambeacutem causa erro na medida da distacircncia Sendo assim eacute
necessaacuterio determinar um TI especiacutefico para cada situaccedilatildeo Nas cacircmaras PMD o
controle do TI eacute realizado atraveacutes de software em outros modelos de cacircmaras TOF
este controle pode ser feito atraveacutes de hardware (WIEDEMANN et al 2008)
A Figura 26 ilustra a presenccedila de ruiacutedo na imagem TOF influenciada pelo
TI Nesta figura as nuvens de pontos 3D foram geradas com imagens TOF obtidas
com a cacircmara PMD CamCube 20 a partir do mesmo ponto de vista mas com
diferentes TI (140micros 1400micros e 14000micros) isto causou a presenccedila de ruiacutedo com
diferentes comportamentos
FIGURA 26 ndash Ruiacutedo na nuvem de pontos 3D proveniente de imagem TOF
FONTE PMD CamCube Tutorial (2009)
A nuvem de pontos gerada com a imagem obtida com TI de 1400micros
ilustrada com a Figura 26b foi a que melhor representou a forma das superfiacutecies do
objeto A nuvem de pontos da Figura 26a foi gerada a partir da imagem obtida com
TI igual a 140micros considerada com baixa saturaccedilatildeo pois a intensidade do sinal
captado pelo sensor foi pequena A nuvem de pontos da Figura 26c foi gerada com
imagem obtida com TI igual a 14000micros o que causou a saturaccedilatildeo do sinal recebido
pelo sensor e maior presenccedila de ruiacutedo A nuvem de pontos apresentada com a
Figura 26c apresentou-se menos consistente para representar as superfiacutecies do
objeto em questatildeo
28
24 PRINCIacutePIO DE FUNCIONAMENTO DO SENSOR PMD
O dispositivo PMD (Photonic Mixer Device) realiza medidas de distacircncia
utilizando o princiacutepio TOF Com este objetivo o dispositivo emite sinais luminosos
com frequecircncia modulada e o sensor capta a intensidade de retorno do sinal
refletido pelo alvo Informaccedilotildees sobre as fases e intensidades destes sinais satildeo
obtidas com o processamento A Figura 27 ilustra as etapas deste processo
FIGURA 27 ndash Princiacutepio de funcionamento do sistema PMD
FONTE LUAN (2001)
O sinal modulado eacute emitido com uma fase determinada pelo oscilador do
sistema Para que se possa realizar a medida da distacircncia o sinal recebido deve ter
fase diferente da que foi emitido No dispositivo PMD as cargas eleacutetricas do sinal
recebido satildeo separadas de acordo com a voltagem do diodo de leitura tambeacutem
chamado de fotodiodo O arquivo de saiacuteda deste dispositivo conteacutem informaccedilatildeo de
fase e intensidade do sinal recebido o que possibilita obter informaccedilatildeo de distacircncia
e intensidade para cada piacutexel da imagem (LUAN 2001)
O sensor utilizado no imageamento eacute um CMOS (Complementary Metal-
Oxide-Semiconductor) que tem tecnologia similar a dos sensores CCD (Charged-
Coupled Device) O CMOS apresenta a vantagem de ser um circuito integrado com
baixo consumo de energia No CMOS a conversatildeo de voltagem e a amplificaccedilatildeo do
sinal ocorrem em cada fotodiodo e os valores podem ser lidos independentemente
29
A desvantagem eacute que a amplificaccedilatildeo no fotodiodo gera imagens com maior
presenccedila de ruiacutedo (PECHT e FOSSUM 1997)
Quando os foacutetons sensibilizam o sensor CCD a carga eleacutetrica eacute transferida
sequencialmente linha por linha coluna por coluna A conversatildeo de voltagem e
amplificaccedilatildeo do sinal eacute realizada fora da aacuterea do sensor Uma vantagem do sensor
CCD eacute a geraccedilatildeo de imagens mais niacutetidas devido agrave menor complexidade no seu
sistema Por processar as cargas eleacutetricas de forma unificada menores interferecircncias
satildeo causadas diminuindo a presenccedila de ruiacutedo (KEMENY et al 1991)
A diferenccedila no princiacutepio de funcionamento dos sensores CCD e CMOS eacute
Ilustrada com a Figura 28
FIGURA 28 ndash Captaccedilatildeo da carga do sinal em sensores CCD e CMOS
FONTE LANGE (2000)
O princiacutepio de funcionamento do sensor CCD eacute ilustrado com as Figuras
28a e 28c onde a leitura da informaccedilatildeo eacute feita de forma sequencial pelos elementos
do sensor Esta varredura realizada no sensor CCD faz com que a geraccedilatildeo da
30
imagem final seja mais lenta que no sensor CMOS que realiza a conversatildeo foacuteton-
eleacutetron e eleacutetron-voltagem diretamente em cada elemento sensor conforme eacute
ilustrado com as Figuras 28b e 28d Com isto o sensor CMOS tem maior
velocidade de transferecircncia de cargas acumuladas para o conversor analoacutegico-
digital
Fotodiodos satildeo os elementos fotossensiacuteveis utilizados como portas de
entrada para o sinal luminoso em sensores CMOS ou CCD Estes captam cargas
eleacutetricas presentes no sinal e estatildeo inseridos sobre uma placa de Siliacutecio O
transporte das cargas para o interior da placa eacute explicado fisicamente atraveacutes dos
campos de franjas ilustrado com a Figura 29 Os campos de franja estatildeo
representados para diferentes voltagens os elementos do sensor apresentado tem
entradas para trecircs voltagens 10V 5V e 0V
FIGURA 29 ndash Representaccedilatildeo de campos de franja
FONTE THEUWISSEN (1995)
A seccedilatildeo A-A‟ na Figura 29 ilustra os campos de franja gerados mais
proacuteximos agrave superfiacutecie da placa A forma do sinal pode ser modelada de forma
aproximada por segmentos de linhas retas Na seccedilatildeo B-B‟ com profundidade meacutedia
na placa de Siliacutecio a influecircncia do campo eleacutetrico das entradas vizinhas a porta
central de 5V estaacute em seu niacutevel maacuteximo Quanto mais fundo encontra-se a entrada
de cargas na placa de Siliacutecio menor seraacute a interferecircncia dos campos eleacutetricos
gerados pelas portas de entrada das cargas vizinhas conforme pode ser visualizado
na seccedilatildeo C-C‟ Nesta profundidade diferentes portas de entrada estatildeo praticamente
31
agrave mesma distacircncia da superfiacutecie e o valor de dispersatildeo do campo de franja diminui
O campo de franja miacutenimo de uma entrada que tecircm profundidade maacutexima
proporciona ao sensor o maior aproveitamento aumentando assim a velocidade no
transporte de cargas (THEUWISSEN 1995)
Quanto maior a modulaccedilatildeo na voltagem da entrada das cargas maior o
potencial de armazenamento conforme ilustrado com a Figura 210
FIGURA 210 ndash Princiacutepio de armazenamento de cargas em sensores TOF
FONTE LANGE (2000)
O sinal modulado recebido 119904 119905 e a Funccedilatildeo de Correlaccedilatildeo 119891 119905 + 120591 do sinal
modulado emitido satildeo ilustrados com a Figura 210b A Figura 210a ilustra a luz
incidente no sensor com as cargas captadas e armazenadas de acordo com a
modulaccedilatildeo do fotodiodo
O dispositivo PMD utiliza a tecnologia CMOS para o imageamento com dois
elementos fotossensiacuteveis e dois diodos que captam as cargas eleacutetricas do sinal
modulado recebido As informaccedilotildees oacutepticas e eleacutetricas misturadas geram os piacutexeis
da imagem com informaccedilatildeo de distacircncia dos pontos imageados A Figura 211
ilustra este elemento sensor
32
FIGURA 211 ndash Princiacutepio de captaccedilatildeo de cargas pelo sensor PMD
FONTE LUAN (2001)
As placas claras e centrais na Figura 211a correspondem ao circuito de
leitura do sinal oacuteptico estas placas satildeo condutoras e transparentes para possibilitar
a entrada de luz Os diodos satildeo os componentes do circuito de leitura que captam e
direcionam as cargas eleacutetricas recebidas em um determinado sentido satildeo ilustrados
com as placas mais afastadas na Figura 211a As cargas que chegam satildeo
distribuiacutedas de acordo com a voltagem do diodo Uma fina camada de oacutexido isola os
circuitos de leitura do dispositivo
A voltagem da carga que entra no sistema eacute controlada de acordo com a
modulaccedilatildeo do sinal aplicada pelo dispositivo emissor Sendo assim pode ser
captada pelo diodo da direita ou esquerda que registraraacute a quantidade de carga
recebida de acordo com sua voltagem A distribuiccedilatildeo de potencial na regiatildeo
superficial do dispositivo eacute influenciada pela seleccedilatildeo de cargas que faz este sistema
dinacircmico e equilibrado Para valores natildeo nulos a luz modulada recebida e a
diferenccedila de fase podem ser comparadas atraveacutes das cargas eleacutetricas recebidas A
quantidade de carga captada pelos diodos depende diretamente da diferenccedila de
fase entre o sinal modulado emitido e o recebido pelo sensor Esta informaccedilatildeo pode
ser utilizada para calcular a diferenccedila de fase entre o sinal emitido e o recebido pois
33
eacute diretamente proporcional a carga que cada diodo captou Com isto a distacircncia
entre o sensor e o objeto pode ser calculada utilizando o princiacutepio da diferenccedila de
fase No entanto se a luz incidente eacute modulada como um sinal retangular mas sua
fase entre a emissatildeo e a recepccedilatildeo eacute igual a zero a carga seraacute captada por apenas
um dos diodos e a distacircncia resultante seraacute igual a zero (MOumlLLER et al 2005)
A Figura 212 ilustra o comportamento dos diodos de leitura ao receber o
sinal com distacircncia diferente de zero entre o alvo e o sensor Na Figura 212a eacute
ilustrado o sinal luminoso recebido por um elemento fotossensiacutevel Este sinal eacute
captado pela porta de entrada PA do fotodiodo que registra parte desta carga de
acordo com sua modulaccedilatildeo
FIGURA 212 ndash Medida da diferenccedila de fase do sinal recebido
FONTE Adaptado de MOumlLLER et al (2005)
Na Figura 212a o sinal recebido pelo elemento fotossensiacutevel do sensor eacute
ilustrado no momento em que eacute captado pela porta com modulaccedilatildeo A (PmodA) A
carga eacute captada pelos dois fotodiodos com defasagem de meio ciclo com isto cada
um capta parte da carga recebida A Figura 212b ilustra a medida da diferenccedila de
fase do sinal recebido atraveacutes da quantidade de carga que foi captada pelos
fotodiodos com modulaccedilatildeo Mod_A e Mod_B A voltagem do diodo eacute estabelecida de
acordo com a modulaccedilatildeo do sinal luminoso que seraacute emitida pelo dispositivo
34
25 CAcircMARAS PMD
As cacircmaras TOF com tecnologia PMD consistem de um chip sensor fonte
de iluminaccedilatildeo transmissor e receptor oacutepticos aleacutem de perifeacutericos eletrocircnicos e
interface digital de controle realizada atraveacutes de software Dependendo das
exigecircncias de aplicaccedilatildeo os componentes da cacircmara podem ser adaptados Cada
um deles pode afetar os paracircmetros internos da cacircmara tais como o campo de
visatildeo (FOV) taxa de captaccedilatildeo e tempo de integraccedilatildeo para a aquisiccedilatildeo das imagens
A distacircncia da superfiacutecie a ser medida eacute o fator preponderante para a escolha destes
paracircmetros O fato destas cacircmaras serem modulares amplia sua gama de
aplicaccedilotildees Isto eacute possiacutevel levando-se em conta as condiccedilotildees adicionais que cada
aplicaccedilatildeo pode exigir tais como a luz exterior ao sistema e a necessidade de
mudanccedila na fonte de iluminaccedilatildeo utilizada (PMD Technologies 2009)
O sensor PMD proporciona o imageamento instantacircneo dos objetos
utilizando um sensor com tecnologia CMOS adaptado Este sensor eacute um arranjo de
elementos fotossensiacuteveis que permitem a raacutepida detecccedilatildeo e modulaccedilatildeo do sinal
luminoso com suas variaccedilotildees Isto eacute feito de acordo com a distacircncia da superfiacutecie
que atinge do objeto imageado Pode adquirir dados de distacircncia e intensidade
simultaneamente sem precisar de um sistema de digitalizaccedilatildeo mais complexo como
um laser scanner Apresenta a desvantagem de ser muito sensiacutevel agrave luz exterior ao
sistema que interfere causando a presenccedila de ruiacutedo na imagem TOF e consequente
erro na medida de distacircncia (KHONGSAB 2009)
O desempenho do sistema PMD depende da fonte de iluminaccedilatildeo utilizada
capacidade de fornecimento de energia e eficiecircncia oacuteptica na criaccedilatildeo da imagem
Normalmente eacute utilizada fonte de iluminaccedilatildeo LED nas cacircmaras PMD No entanto
outros fabricantes utilizam diodos LASER para a iluminaccedilatildeo isto porque possibilita
realizar medidas de distacircncias maiores O desenvolvimento dos sistemas LED fez
com que sua eficiecircncia de transformaccedilatildeo de energia eleacutetrica em energia oacuteptica seja
de 30 Com a iluminaccedilatildeo LED tem-se um sinal luminoso jaacute modulado devido a
suas caracteriacutesticas eletro-oacutepticas Como uma parte consideraacutevel da luz fica na
borda do feixe isto se torna uma desvantagem pois esta aacuterea normalmente fica fora
do campo de visatildeo do sensor PMD Outra desvantagem diz respeito ao limite de
modulaccedilatildeo dos LED‟s comerciais que trabalham na faixa de 20 MHz agrave 30 MHz Os
diodos LASER tecircm eficiecircncia oacuteptica de ateacute 50 dependendo da potecircncia de saiacuteda
35
utilizada sendo de aproximadamente 100 MHz a modulaccedilatildeo maacutexima da frequecircncia
que pode ser atingida O perfil do feixe LASER pode ser adaptado ao campo de
visatildeo do sensor PMD A desvantagem eacute que este seria um circuito modular mais
complexo e que teria necessidade de um maior nuacutemero de etapas para conseguir
estabilizar a fase da onda portadora do sinal Outra desvantagem eacute que a
implantaccedilatildeo de um sistema LASER necessita de maior atenccedilatildeo agrave seguranccedila dos
olhos do que o sistema LED (RINGBECK 2007)
Com a Figura 213 ilustra-se a medida de distacircncia com a cacircmara TOF
modelo 19k da PMD A fonte de iluminaccedilatildeo LED emite o sinal luminoso em direccedilatildeo
dos objetos que estatildeo no campo visual da cacircmara O retorno deste sinal eacute captado
pelo sensor e possibilita o caacutelculo da diferenccedila de fase entre o sinal emitido e o
recebido
FIGURA 213 ndash Medida de distacircncia com a cacircmara PMD
FONTE MOLLER et al (2005)
36
251 Cacircmara PMD CamCube 20
A cacircmara TOF modelo PMD[VISION]regCamCube 20 funciona em ambientes
internos e externos com sensor de 204x204 piacutexeis que captam os niacuteveis de cinza da
imagem de intensidade Simultaneamente realiza a medida da quantidade de carga
recebida utilizada para determinar a diferenccedila de fase entre o sinal emitido e o
recebido Isto possibilita o caacutelculo da distacircncia entre o sensor e os objetos presentes
na cena A Figura 214 ilustra a cacircmara PMD CamCube 20 com as fontes de
iluminaccedilatildeo LED acopladas em suas laterais
FIGURA 214 ndash Cacircmara PMD CamCube 20
FONTE PMD Technologies (2009)
Este equipamento pode ter seu campo de visatildeo variaacutevel possibilitando a
diminuiccedilatildeo de distorccedilotildees manchas ou outras imperfeiccedilotildees da imagem O software
de interface da cacircmara com o computador apresenta a possibilidade de trabalhar
com dados brutos para o processamento das imagens aleacutem de funcionar em
diferentes canais de frequecircncia Tambeacutem disponibiliza compatibilidade com o
software Matlab para realizar esta interface
A imagem de intensidade captada de uma parede utilizando a cacircmara PMD
CamCube 20 eacute ilustrada com a Figura 215
37
FIGURA 215 ndash Imagem captada com a cacircmara PMD CamCube 20
FONTE CENTENO e JUTZI (2010)
Com a Figura 215a eacute ilustrada a cacircmara PMD CamCube 20 instalada em
um tripeacute sobre uma mesa Na Figura 215b tem-se a imagem infravermelha da
superfiacutecie plana de uma parede obtida com esta cacircmara O Quadro 21 ilustra as
especificaccedilotildees teacutecnicas da cacircmara PMD CamCube 20
PARAcircMETROS VALOR PADRAtildeO OBSERVACcedilOtildeES
Tipo do sensor PhotonICs PMD41k-S (204x204 piacutexeis)
Tamanho efetivo do pixel no sensor igual a 45microm
Distacircncia de mediccedilatildeo 03 ndash 7metros
Precisatildeo na medida de distacircncia (1σ) lt 3mm
Para aacuterea central da imagem obtida agrave 2m do sensor em superfiacutecie com refletividade de 90
Frequecircncia de aquisiccedilatildeo de imagens 25 fps Configuraccedilatildeo padratildeo
Campo de visatildeo (FOV) 40ordmx40ordm f = 128mm
Comprimento de onda da fonte de iluminaccedilatildeo
870nm Infravermelho proacuteximo
Fonte de iluminaccedilatildeo [V] 12 V plusmn 10
Interface USB 20
Temperatura de operaccedilatildeo 0ordmC agrave 50ordmC
Temperatura de armazenamento -20ordmC agrave 85ordmC
QUADRO 21 - Especificaccedilotildees teacutecnicas da cacircmara PMD CamCube 20 FONTE Adaptado de PMD Technologies (2009)
O sensor PhotonICs PMD41k-S utilizado na cacircmara PMD CamCube 20 vem
com um dispositivo SBI para a supressatildeo de cargas provenientes da iluminaccedilatildeo
exterior ao sistema Estas cargas causam a saturaccedilatildeo dos piacutexeis da imagem TOF
38
252 Dispositivo SBI
O dispositivo SBI (Supression of Background Illumination) eacute uma soluccedilatildeo
teacutecnica encontrada para melhorar o contraste das imagens geradas com o sensor
PMD em ambientes com iluminaccedilatildeo exterior A presenccedila desta iluminaccedilatildeo na cena
do objeto imageado causa maior presenccedila de ruiacutedo no sinal captado pelo sensor
Esta iluminaccedilatildeo pode saturar os elementos do sensor fazendo com que
ocorram falhas na medida de distacircncia Este efeito pode ser minimizado utilizando o
tempo de integraccedilatildeo adequado para a tomada das imagens Outros distuacuterbios que
podem ocorrer satildeo devidos agrave corrente negra (DC - Dark Current) Este efeito eacute
causado porque o sensor natildeo capta o valor zero na imagem que seria a falta
completa de iluminaccedilatildeo nas superfiacutecies da cena A corrente negra natildeo pode ser
evitada em dispositivos semicondutores especialmente quando haacute altas
temperaturas Com uma temperatura de 80ordmC a corrente negra pode ser 1000 vezes
maior do que o normal o que afeta significativamente a qualidade das medidas
realizadas Para tornar o dispositivo PMD mais confiaacutevel na medida de distacircncias foi
criado o circuito SBI que suprime instantaneamente a iluminaccedilatildeo de fundo Neste
circuito eacute utilizada uma teacutecnica para a captaccedilatildeo do sinal luminoso minimizando a
interferecircncia de fatores externos Isto possibilita realizar medidas de distacircncia
confiaacuteveis mesmo em ambientes onde o sinal eacute modificado por interferecircncia de
iluminaccedilatildeo externa ou por altas temperaturas O sistema SBI pode ser desativado ou
ateacute mesmo ajustado para que seja possiacutevel realizar medidas de distacircncia com
qualidade em cenas tomadas em diferentes ambientes independente da presenccedila
de iluminaccedilatildeo exterior (MOumlLLER 2005)
O circuito SBI adiciona cargas eleacutetricas de compensaccedilatildeo instantacircnea nos
diodos de leitura minimizando os efeitos de saturaccedilatildeo causados por fatores externos
ao sistema Com o SBI espera-se que o sensor capte apenas o sinal correlacionado
com a medida de distacircncia sem interferecircncia de iluminaccedilatildeo exterior reduzindo
assim a interferecircncia da iluminaccedilatildeo de fundo no sinal recebido
A Figura 216a ilustra um sensor sem o dispositivo SBI a carga captada com
influecircncias externas de iluminaccedilatildeo e calor eacute maior do que a enviada pela fonte de
iluminaccedilatildeo refletida pela superfiacutecie do objeto e recebida pelo sensor Neste caso a
medida de distacircncia estaacute influenciada por fatores externos ao sistema e conteraacute
erros Na Figura 216b as cargas geradas por fatores externos ao sistema satildeo
39
minimizadas pelo dispositivo SBI Com isto tem-se maior quantidade de carga
captada com o sinal recebido eliminando a carga gerada por fatores externos
FIGURA 216 ndash Princiacutepio de funcionamento do SBI
FONTE MOumlLLER et al (2005)
Cacircmaras TOF com iluminaccedilatildeo LED infravermelha utilizam o dispositivo SBI
para a supressatildeo da iluminaccedilatildeo de fundo Outros modelos de cacircmaras TOF utilizam
iluminaccedilatildeo LASER para evitar o problema com a iluminaccedilatildeo exterior
253 Modelos de cacircmaras TOF
Diferentes cacircmaras TOF foram desenvolvidas nos uacuteltimos anos a Figura
217 ilustra alguns modelos destas cacircmaras
FIGURA 217 ndash Modelos de cacircmaras TOF
a) Effector O3D FONTE httpwwwifm-electroniccom
b) PMD[vision] CamCube 20 FONTE httpwwwpmdteccom
c) PMD[vision] 19k FONTE httpwwwpmdteccom
d) SwissRanger SR-3000 FONTE httpwwwmesa-imagingch
40
O Quadro 22 descreve as especificaccedilotildees teacutecnicas destas cacircmaras TOF
a)Effector
O3D
b)PMD[vision]
CamCube 20
c)PMD[vision]
19k
d)SwissRanger
SR-3000
Resoluccedilatildeo (piacutexeis) 64 x 50 204 x 204 160 x 120 176 x 144
Dimensotildees dos piacutexeis (microm) 100 x 100 45 x 45 40 x 40 40 x 40
Distacircncia focal (mm) 86 128 120 80
Fonte de iluminaccedilatildeo 1 matriz LED 2 matrizes LED 2 matrizes LED 1 matriz LED
Modulaccedilatildeo da fonte de
iluminaccedilatildeo (nm) 850 870 870 850
Frequecircncia de modulaccedilatildeo 20 MHz 20 MHz 20 MHz 20 MHz
Frequecircncia na aquisiccedilatildeo de
imagens
Maacuteximo
100 fps
Maacuteximo
25 fps
Maacuteximo
15 fps
Maacuteximo
40 fps
Conexatildeo Ethernet USB 2 Ethernet USB 2
Dimensotildees (mm) 55 x 45 x 85 194 x 60 x 60 220 x 210 x 55 60 x 50 x 65
QUADRO 22 ndash Especificaccedilotildees teacutecnicas de cacircmaras TOF FONTE Adaptado de RAPP (2007)
A partir do Quadro 22 verifica-se que estes modelos de cacircmaras TOF em
sua configuraccedilatildeo padratildeo possuem fonte de iluminaccedilatildeo LED distacircncia focais
variando de 8mm agrave 128mm e apresentam pequenas dimensotildees
26 ERROS DE MEDIDA
Observaccedilotildees realizadas com instrumentos de medida estatildeo acompanhadas
de erros provenientes da falibilidade humana imperfeiccedilatildeo na fabricaccedilatildeo do
equipamento e de interferecircncias causadas pelo ambiente em que o instrumento
utilizado e o objeto estavam no momento em que se realizou a medida Erros de
observaccedilatildeo satildeo tradicionalmente classificados como erros grosseiros sistemaacuteticos e
acidentais Erros grosseiros devem ser detectados e evitados pelo observador com
os devidos cuidados na obtenccedilatildeo da informaccedilatildeo tambeacutem ocorrem devido agrave
presenccedila de ruiacutedo nas observaccedilotildees Erros sistemaacuteticos se repetem seguindo um
determinado padratildeo e podem ser preditos e corrigidos Existem opccedilotildees para evitaacute-
los atraveacutes de teacutecnicas de observaccedilatildeo ou entatildeo eliminaacute-los a posteriori atraveacutes de
foacutermulas especiacuteficas Os erros acidentais ou aleatoacuterios satildeo randocircmicos natildeo
previsiacuteveis e podem ser distribuiacutedos entre o conjunto de observaccedilotildees por teacutecnicas
41
estatiacutesticas Eacute comum o uso da expressatildeo ldquopropriedades estatiacutesticas das
observaccedilotildeesrdquo devido a este erro (GEMAEL 1994)
Erros na medida de distacircncia utilizando cacircmaras TOF tambeacutem podem ser
divididos em natildeo-sistemaacuteticos e sistemaacuteticos conforme descrito nas seccedilotildees 261 e
262 onde seratildeo apresentados 3 erros natildeo-sistemaacuteticos e 7 erros sistemaacuteticos
261 Erros natildeo-sistemaacuteticos em cacircmaras TOF
De acordo com MAY et al (2008) a classificaccedilatildeo de erros natildeo-sistemaacuteticos
na medida de distacircncia utilizando cacircmaras TOF pode ser feita da seguinte maneira
1) Erro devido agrave relaccedilatildeo sinal-ruiacutedo (Signal-to-noise) quando a relaccedilatildeo da
carga recebida com o sinal eacute baixa e o ruiacutedo presente eacute alto haveraacute distorccedilatildeo na
medida de distacircncia que natildeo poderaacute ser corrigida posteriormente Para diminuir este
erro pode-se tomar cuidado com o tempo de exposiccedilatildeo do sensor na aquisiccedilatildeo da
imagem e tambeacutem amplificar a iluminaccedilatildeo do sistema Outra soluccedilatildeo eacute filtrar os
valores medidos com baixas amplitudes no sinal recebido
2) Reflexatildeo do sinal por muacuteltiplos caminhos (Multiple ways reflection) em
objetos com descontinuidade em suas superfiacutecies o sinal emitido pode percorrer
diferentes caminhos antes de retornar ao sensor Exemplos satildeo objetos com
superfiacutecies cocircncavas que podem refletir vaacuterias vezes o sinal e gerar erro na medida
de distacircncia Neste caso o sinal eacute refletido com sobreposiccedilatildeo ou seja pode ser
captado o sinal da uacuteltima superfiacutecie que o refletiu gerando uma distacircncia diferente
do valor esperado
3) Espalhamento da luz (Light scattering) ocorre na lente da cacircmara
causado pela presenccedila de objetos proacuteximos Este efeito e o causado pela reflexatildeo
por muacuteltiplos caminhos satildeo imprevisiacuteveis pois a topologia da cena observada eacute
desconhecida a priori
262 Erros sistemaacuteticos em cacircmaras TOF
Segundo RAPP (2007) nas cacircmaras TOF erros tambeacutem indicam a relaccedilatildeo
entre a variacircncia da distacircncia e a amplitude do sinal captado pelo sensor A relaccedilatildeo
42
estabelecida eacute que a variacircncia dos dados de distacircncia eacute inversamente proporcional agrave
raiz quadrada da amplitude do sinal recebido para realizar a medida Alguns erros
sistemaacuteticos das cacircmaras TOF estudados por RAPP foram
1) Erro devido a uma funccedilatildeo natildeo harmocircnica utilizada para correlacionar o
sinal emitido ao recebido
2) Ruiacutedos relacionados com o tempo de integraccedilatildeo Este tempo pode causar
exposiccedilatildeo insuficiente ou saturaccedilatildeo dos elementos do sensor
3) Erros geomeacutetricos no posicionamento dos piacutexeis devido ao sistema oacuteptico
da cacircmara
O erro devido agrave falta de harmonia na funccedilatildeo de correlaccedilatildeo entre o sinal
emitido e o recebido pode ser causado quando o sistema oacuteptico utilizado emite o
sinal de referecircncia com sua forma inicial e recebe o sinal refletido com forma
diferente Com isto a funccedilatildeo que representa o sinal recebido natildeo teraacute a forma
senoidal teoacuterica do sinal emitido Isto ocorre por conter harmocircnicos de Fourier
iacutempares quando eacute necessaacuteria uma amostra com pelo menos quatro pontos para
definir a FC entre os sinais Este erro tem grande influecircncia no caacutelculo da distacircncia
do objeto pois eacute a FC que possibilita a medida da diferenccedila de fase entre o sinal
emitido e o recebido
A presenccedila de ruiacutedo pode ser notada variando o TI na aquisiccedilatildeo da imagem
O conjunto de dados apresenta maiores distorccedilotildees radiomeacutetricas e geomeacutetricas
quando a presenccedila de ruiacutedo eacute forte Quando o TI eacute aumentado o ruiacutedo observado no
conjunto de dados pode diminuir Poreacutem valores extremamente altos introduzem
erros na mediccedilatildeo por causar saturaccedilatildeo do sensor Com esta informaccedilatildeo procura-se
definir uma funccedilatildeo para a modelagem do ruiacutedo de acordo com o tempo de
integraccedilatildeo Analisando dados obtidos com diferentes TI pode-se especificar qual o
melhor para cada situaccedilatildeo
Erros causados por exposiccedilatildeo insuficiente do sensor natildeo satildeo considerados
sistemaacuteticos poreacutem podem ser preditos Se o valor da amplitude do sinal eacute reduzido
o erro na medida da distacircncia aumenta Para reduzir os piacutexeis obtidos com
exposiccedilatildeo insuficiente pode-se definir um limite no valor da amplitude do sinal
Outra forma de controlar a exposiccedilatildeo eacute com o TI na obtenccedilatildeo da imagem Piacutexeis que
tem amplitude menor que 1 do valor maacuteximo das amplitudes na imagem TOF satildeo
considerados piacutexeis com exposiccedilatildeo insuficiente
43
Erros de posicionamento dos piacutexeis devido ao sistema oacuteptico da cacircmara
podem ser notados quando capta-se a imagem de uma fachada com portas e
janelas As linhas horizontais e verticais que representam estes elementos na
imagem aparecem com curvaturas de acordo com o sistema de lentes utilizado na
cacircmara A distorccedilatildeo de lentes tem um padratildeo fixo em cacircmaras com sensor CMOS
ou CCD e pode ser corrigida geometricamente atraveacutes dos POI da cacircmara que
captou a imagem
Erros sistemaacuteticos em cacircmaras TOF tambeacutem foram estudados por FUCHS e
HIRZINGER (2008) e MAY et al (2008) e foram classificados da seguinte maneira
4) Erro na medida de distacircncia (Distance-related error) este erro eacute causado
devido agrave assimetria da forma do sinal infravermelho recebido pelo sensor
Teoricamente assume-se que este sinal possui forma senoidal e harmocircnica com a
forma do sinal emitido o que na praacutetica pode natildeo acontecer Sendo assim o
pressuposto baacutesico para que se possa calcular o atraso de fase eacute que o sinal
luminoso emitido e o recebido satildeo harmocircnicos e com forma senoidal
Consequentemente se o caacutelculo do atraso de fase do sinal eacute impreciso a distacircncia
entre o objeto e o sensor tambeacutem seraacute calculada de forma imprecisa
5) Erro na amplitude do sinal captado (Amplitude-related error) o sensor natildeo
capta a energia eletromagneacutetica recebida com o sinal perfeitamente Deixando-se a
cacircmara e o objeto na mesma posiccedilatildeo podem-se obter diferentes medidas de
distacircncia devido a esta imperfeiccedilatildeo na fabricaccedilatildeo dos elementos do sensor Este
erro eacute relacionado com a amplitude de valores na captaccedilatildeo da imagem depende da
distacircncia e de caracteriacutesticas como a refletividade das superfiacutecies dos objetos
6) Erro devido agrave latecircncia dos elementos do sensor (Latency-related error) o
atraso de fase do sinal recebido eacute calculado atraveacutes das latecircncias com que o sensor
captou o sinal Estaacute relacionado com propriedades semicondutoras dos materiais
utilizados nos elementos sensores que satildeo responsaacuteveis pela medida da quantidade
de carga recebida Eacute causado quando o sinal emitido e o recebido satildeo
correlacionados diretamente na matriz do sensor Diferentes latecircncias do sinal
devem ser captadas por cada elemento do sensor para possibilitar o caacutelculo da
distacircncia de cada pixel de forma confiaacutevel
7) Ruiacutedo com padratildeo fixo (FPN - Fixed pattern noise) eacute relacionado com o
erro devido agrave latecircncia e ocorre devido agraves propriedades dos materiais utilizados na
fabricaccedilatildeo de cada elemento do sensor CMOS Este eacute um ruiacutedo com padratildeo fixo
44
pode ser corrigido a partir de uma imagem que tenha um pixel com valor constante
que serviraacute como referecircncia para a calibraccedilatildeo dos valores dos piacutexeis vizinhos
Tendo-se como referecircncia um pixel obtido em uma superfiacutecie uniforme de um objeto
pode-se utilizar um padratildeo de similaridade como referecircncia para os outros piacutexeis
Sendo assim a qualidade dos dados depende da posiccedilatildeo do pixel na imagem
Os uacuteltimos quatro erros sistemaacuteticos podem ser corrigidos utilizando o
meacutetodo de calibraccedilatildeo descrito em Fuchs et al (2007) Conforme realizado em
experimento por May et al (2008) os resultados alcanccedilados no mapeamento de uma
sala obtiveram a precisatildeo centimeacutetrica Este experimento foi realizado com o
objetivo de medir paredes opostas de uma sala com o sensor TOF em movimento
instalado em uma plataforma moacutevel O erro encontrado na medida das distacircncias
tambeacutem foi influenciado por erros na estimaccedilatildeo do posicionamento do sensor que eacute
obtido com a Orientaccedilatildeo Exterior da cacircmara no momento de aquisiccedilatildeo das imagens
Durante o registro dos quadros fotograacuteficos o erro em rotaccedilatildeo foi determinado como
sendo igual a 22ordm e o erro de translaccedilatildeo foi de 071m no eixo 119883 004m no eixo 119884 e
de -021m no eixo 119885 A distacircncia calculada entre paredes opostas foi igual a 105m
para a distacircncia de referecircncia de 108m A diferenccedila entre as duas medidas resultou
em 03m o que representa aproximadamente 28 da distacircncia de referecircncia A
nuvem de pontos 3D gerada por MAY et al (2008) eacute ilustrada com a Figura 218
FIGURA 218 ndash Nuvem de pontos 3D gerada a partir de imagem TOF
FONTE MAY et al (2008)
45
27 PROJECcedilAtildeO ORTOGONAL DOS PONTOS
As coordenadas tridimensionais dos pontos da imagem TOF satildeo obtidas
atraveacutes da projeccedilatildeo ortogonal Isto ocorre devido ao fato do equipamento utilizado
calcular as distacircncias dos objetos em um sistema esfeacuterico Esta projeccedilatildeo eacute feita a
partir da colinearidade entre o ponto no espaccedilo objeto o Centro Perspectivo (CP) e
o ponto no espaccedilo imagem conforme eacute ilustrado com a Figura 219
FIGURA 219 ndash Colinearidade entre os pontos no espaccedilo imagem e objeto
FONTE Adaptado de RAPP (2007)
A Figura 219 ilustra os sistemas referenciais adotados nos espaccedilos imagem
e objeto O sistema referencial fotogrameacutetrico (119909119875 119910119875) tem sua origem no CP que eacute
materializado pelo ponto nodal anterior do sistema de lentes da cacircmara Este ponto
projetado no plano da imagem gera o Ponto Principal (PP) A projeccedilatildeo do sistema
referencial fotogrameacutetrico na imagem eacute realizada considerando a simplificaccedilatildeo de
haverem apenas translaccedilotildees entre os eixos deste sistema e o sistema da imagem O
46
sistema referencial de imagem levoacutegiro (119862 119871) tem sua origem no canto superior
esquerdo Atraveacutes das Equaccedilotildees (223) e (224) esta origem pode ser transladada
para o centro da imagem (MACHADO 2006)
119862prime = 119862 minus119899119862minus1
2 (223)
119871prime = 119871 minus119899119871minus1
2 (224)
onde
119862 119871 ndash Sistema referencial de coordenadas da imagem (piacutexeis)
119899119862 119899119871 ndash Nuacutemero total de colunas e linhas da imagem (piacutexeis)
119862prime 119871prime ndash Sistema referencial auxiliar no centro da imagem (piacutexeis)
Para tornar o sistema referencial auxiliar (119862prime 119871prime) de imagem levoacutegiro em um
sistema dextroacutegiro (119909119894119898 119910119894119898 ) pode-se realizar uma reflexatildeo do eixo 119871prime atraveacutes da
Equaccedilatildeo (226)
119909119894119898 = 119862prime (225)
119910119894119898 = minus119871prime (226)
onde
119909119894119898 119910119894119898 ndash Coordenadas de um ponto no sistema referencial dextroacutegiro da
imagem (piacutexeis)
Com isto tem-se um sistema referencial dextroacutegiro centralizado na imagem e
que se relaciona com o sistema referencial fotogrameacutetrico projetado atraveacutes da
translaccedilatildeo de eixos determinada pelas coordenadas (119909119900 119910119900) do PP conforme
ilustrado com a Figura 220
47
FIGURA 220 ndash Sistemas de coordenadas utilizados em imagens
FONTE Adaptado de MACHADO (2006)
A partir do sistema referencial de imagem dextroacutegiro com origem no centro
da imagem e do sistema referencial fotogrameacutetrico projetado com origem no PP
satildeo estabelecidas as relaccedilotildees entre os sistemas de acordo com as Equaccedilotildees (227)
e (228)
119909119894119898 = (119909 minus 1199090) (227)
119910119894119898 = (119910 minus 1199100) (228)
onde
11990901199100 ndash Satildeo as coordenadas do ponto principal no sistema referencial de
imagem (piacutexeis)
119909119910 ndash Coordenadas dos pontos no sistema referencial fotogrameacutetrico
projetado na imagem (piacutexeis)
Os valores das coordenadas dos pontos do sistema fotogrameacutetrico projetado
na imagem estatildeo em piacutexeis A transformaccedilatildeo destes valores para miliacutemetros pode
ser feita multiplicando estas coordenadas pelo tamanho efetivo do pixel nas direccedilotildees
119909 e 119910 da imagem conforme as Equaccedilotildees (229) e (230)
48
119909 = 119909119894119898 ∙ 119875119909 (229)
119910 = 119910119894119898 ∙ 119875119910 (230)
onde
119909119910 ndash Satildeo as coordenadas dos pontos no sistema fotogrameacutetrico projetado
na imagem (miliacutemetros)
119875119909 119875119910 ndash Tamanho efetivo dos piacutexeis nas direccedilotildees 119909 e 119910 (miliacutemetros)
O tamanho efetivo dos piacutexeis nas direccedilotildees 119909 e 119910 satildeo calculados a partir do
fator de escala nestas direccedilotildees conforme Equaccedilotildees (231) e (232)
119875119909 = 119875 ∙ 119904119909 (231)
119875119910 = 119875 ∙ 119904119910 (232)
onde
119875119909 119875119910 ndash Tamanho efetivo dos piacutexeis nas direccedilotildees 119909 e 119910 (miliacutemetros)
119875 ndash Dimensatildeo do pixel obtida no manual do equipamento (miliacutemetros)
119904119909 119904119910 ndash Fatores de escala dos piacutexeis nas direccedilotildees 119909 e 119910
Os fatores de escala dos piacutexeis nas direccedilotildees 119909 e 119910 podem ser calculados
atraveacutes das Equaccedilotildees (233) e (234)
119904119909 =119891
119891119909 (233)
119904119910 =119891
119891119910 (234)
onde
119904119909 119904119910 ndash Fatores de escala dos piacutexeis nas direccedilotildees 119909 e 119910
119891119909 119891119910 ndash Distacircncia focal da cacircmara ao longo dos eixos 119909 e 119910 (miliacutemetros)
119891 ndash Distacircncia focal da cacircmara obtida no manual do equipamento
(miliacutemetros)
49
Quando o valor da distacircncia focal 119891119909 obtido com a calibraccedilatildeo da cacircmara
difere do valor 119891119910 tem-se um indicativo de escalas diferentes nos eixos 119909 e 119910 da
imagem
Realizadas as etapas de Orientaccedilatildeo Interior da imagem podem-se calcular
as coordenadas 3D dos pontos O posicionamento de cada ponto depende da
precisatildeo na determinaccedilatildeo dos acircngulos verticais e horizontais no sistema referencial
de imagem A projeccedilatildeo ortogonal das distacircncias dos pontos coordenada 119885 pode ser
feita atraveacutes da Equaccedilatildeo (235)
119885 = 119889119903 ∙ cos120573 (235)
onde
119885 ndash Distacircncia ortogonal do CP ao ponto observado no espaccedilo objeto
119889119903 ndash Distacircncia radial do CP ao ponto no sistema referencial esfeacuterico
120573 ndash Acircngulo formado entre o eixo que atinge o ponto na imagem partindo do
CP e o eixo principal da cacircmara (CP-PP)
O acircngulo 120573 pode ser calculado atraveacutes da funccedilatildeo trigonomeacutetrica expressa
com a Equaccedilatildeo (236)
tan120573 = 1199092
1198911199092 +
1199102
1198911199102 (236)
onde
119891119909 119891119910 ndash Distacircncia focal da cacircmara ao longo dos eixos 119909 e 119910 (miliacutemetros)
119909119910 ndash Coordenadas dos pontos no sistema referencial fotogrameacutetrico
projetado na imagem (miliacutemetros)
A Expressatildeo (235) relaciona a distacircncia radial 119889119903 com a coordenada 119885 dos
pontos no sistema ortogonal 3D em funccedilatildeo do acircngulo 120573 Substituindo a Equaccedilatildeo
(236) na Equaccedilatildeo (235) podemos explicitar a coordenada 119885 em funccedilatildeo das
distacircncias focais da cacircmara e das coordenadas dos pontos no sistema referencial
fotogrameacutetrico projetado na imagem conforme Equaccedilatildeo (237)
50
119885 = 119889119903 ∙ cos tanminus1 1199092
1198911199092 +
1199102
1198911199102 (237)
onde
119885 ndash Distacircncia ortogonal do CP ao ponto (miliacutemetros)
119889119903 ndash Distacircncia radial do CP ao ponto no sistema esfeacuterico da cacircmara
(miliacutemetros)
119891119909 119891119910 ndash Distacircncia focal da cacircmara ao longo dos eixos 119909 e 119910 (miliacutemetros)
119909119910 ndash Coordenadas dos pontos no sistema referencial fotogrameacutetrico
projetado na imagem (miliacutemetros)
As coordenadas (119883119884) dos pontos no sistema referencial ortogonal podem
entatildeo serem calculadas atraveacutes das Equaccedilotildees (238) e (239)
119883 = 119909 ∙119885
119891119909 (238)
119884 = 119910 ∙119885
119891119910 (239)
28 REFINAMENTO DA NUVEM DE PONTOS 3D
O processo de refinamento da nuvem de pontos 3D obtida com a imagem
TOF compreende a filtragem dos pontos que estejam esparsos devido agrave presenccedila
de ruiacutedo no arquivo de distacircncias da imagem TOF Com a Figura 221a satildeo
ilustrados pontos que natildeo pertencem agraves superfiacutecies do objeto aparecem na aresta
superior direita do objeto O sinal emitido atinge uma aacuterea da superfiacutecie do objeto e
natildeo apenas um ponto Esta aacuterea eacute proporcional agrave distacircncia entre o alvo e o sensor
ocorre devido agrave divergecircncia do feixe de luz emitido Com o princiacutepio TOF o valor da
distacircncia calculada eacute resultado da integraccedilatildeo do sinal recebido de acordo com a
aacuterea iluminada da superfiacutecie Quando o sinal emitido atinge superfiacutecies natildeo
coplanares o valor de distacircncia armazenado eacute um resultado interpolado Este
fenocircmeno ocorre principalmente nas bordas dos objetos e pode ser visto com a
51
Figura 221a que mostra um objeto com trecircs superfiacutecies planas uma base um
plano vertical na direita e um plano na parte superior
FIGURA 221 ndash Filtro para a definiccedilatildeo de bordas do objeto
FONTE MAY et al (2008)
A Figura 221b apresenta a nuvem de pontos 3D apoacutes a aplicaccedilatildeo do filtro
para o refinamento Este eacute um filtro gaussiano utilizado para a definiccedilatildeo de bordas e
desniacuteveis dos objetos eacute tambeacutem uma ferramenta para a remoccedilatildeo de pontos
esparsos provenientes da presenccedila de ruiacutedo nos dados da imagem TOF Funciona
considerando o acircngulo formado entre dois piacutexeis adjacentes na imagem onde o CP
eacute o ponto que completa o triacircngulo sendo o criteacuterio de seleccedilatildeo utilizado a distacircncia
meacutedia dos k pontos vizinhos mais proacuteximos
De acordo com May et al (2008) a distacircncia medida a partir de cacircmaras
TOF pode ser afetada pelo efeito de arredondamento das bordas Isto ocorre pela
suavizaccedilatildeo causada com a transiccedilatildeo entre as superfiacutecies iluminadas Dado um
conjunto de pontos 3D 119875 = 119901119894 119901119894 isin ℝ3 119894 = 1hellip 119873119901 as bordas podem ser
detectadas utilizando a Equaccedilatildeo (240) Esta eacute uma comparaccedilatildeo do acircngulo entre
dois piacutexeis 120585119894 119899 com base em um triacircngulo formado pelo centro perspectivo 119891 = 0 o
ponto 119901119894 e a vizinhanccedila deste ponto 119875119899 = 119901119894 119899 119899 = 1hellip 8 com o acircngulo de
vizinhanccedila 120585119905119893
120585119894 = max arcsin 119901119894 119899
119901119894 119899minus119901119894 ∙ 119904119894119899120593 (240)
52
119869 = 119901119894 120585119894 gt 120585119905119893 (241)
onde
120593 ndash Acircngulo maacuteximo entre dois piacutexeis veacutertice do triacircngulo no ponto 119891 = 0
O triacircngulo utilizado como referecircncia no filtro para a detecccedilatildeo de bordas
com veacutertice no ponto 119891 = 0 eacute ilustrado com a Figura 222
FIGURA 222 ndash Geometria do filtro para a definiccedilatildeo de bordas
FONTE MAY et al (2008)
Um conjunto 119878 de pontos pode ser filtrado atraveacutes da condiccedilatildeo expressa
com a Equaccedilatildeo (243)
119889 119901119894 = 1
119896 119901119894 minus 119901119894 119899 119896119899=1 (242)
119878 = 119901119894 isin 119875 119889 119901119894 lt 119889119905119893 (243)
onde
119889119905119893 ndash Distacircncia de vizinhanccedila constante
O conjunto 119876 de pontos selecionados satildeo os pontos filtrados da nuvem 3D
conforme a condiccedilatildeo da Equaccedilatildeo (244)
119876 = 119902119894 119902119894 isin 119875(119869 cup 119878) (244)
53
29 ANAacuteLISE DE SUPERFIacuteCIES POR AUTOVALORES E AUTOVETORES
A anaacutelise da forma de superfiacutecies pode ser feita pela variaccedilatildeo local de
autovalores que possibilita a classificaccedilatildeo e segmentaccedilatildeo de pontos com
coordenadas tridimensionais (BELTON e LICHTI 2006)
Autovetores e seus respectivos autovalores podem ser obtidos a partir da
Matriz de Variacircncias e Covariacircncias (119872119881119862) de um conjunto de observaccedilotildees O
tamanho relativo e a direccedilatildeo dos autovetores podem indicar propriedades locais
desta superfiacutecie permitindo analisar sua forma (PAULY et al 2002)
De acordo com Johnson e Wichern (1998) a 119872119881119862 pode ser calculada atraveacutes
da Equaccedilatildeo (245)
11987211988111986231199093 =1
119896 119903 119894 minus 119903 119896119894=1 ∙ 119903 119894 minus 119903
119879=
1205901199092 120590119909119910 120590119909119911
120590119909119910 1205901199102 120590119910119911
120590119909119911 120590119910119911 1205901199112
(245)
onde
119872119881119862 ndash Matriz de Variacircncias e Covariacircncias
119903 119894 ndash Vetor com as coordenadas 3D do ponto em questatildeo na amostra
119903 ndash Vetor com as coordenadas do centroacuteide da superfiacutecie
1205901199092120590119910
2 1205901199112 ndash Variacircncias
120590119909119910 120590119909119911 120590119910119911 ndash Covariacircncias
119896 ndash Nuacutemero de pontos da amostra
O vetor com as coordenadas do 119894-eacutesimo ponto da amostra eacute denotado com
119903 119894 pela Expressatildeo (246) A posiccedilatildeo relativa do centroacuteide pode ser calculada atraveacutes
da Equaccedilatildeo (247)
119903 119894 = 119909119894 119910119894 119911119894 119879 (246)
119903 =1
119896 119903 119894119896119894=1 (247)
54
A 119872119881119862 eacute quadrada simeacutetrica positiva-semidefinida e pode ser decomposta
em autovetores 119890 e autovalores 120582 atraveacutes da Equaccedilatildeo (248) Os autovalores 120582119894 satildeo
elementos escalares associados aos respectivos autovetores 119890 119894 (LEON 1998)
119872119881119862 ∙ 119890 = 120582 ∙ 119890 (248)
A partir do teorema de decomposiccedilatildeo espectral (decomposiccedilatildeo de Jordan) a
119872119881119862 pode ser isolada nesta igualdade conforme a Equaccedilatildeo (249) Maiores
detalhes podem ser vistos em Johnson e Wichern (1998) e Shakarji (1998)
119872119881119862 = 120582119894 ∙ 119890 119894 ∙ 119890 1198941198792
119894=0 (249)
onde
119872119881119862 ndash Matriz Variacircncia Covariacircncia
119890 119894 ndash Vetor com os autovetores 119890 119894
120582119894 ndash Matriz com os autovalores 120582119894
Os autovalores satildeo valores reais e os autovetores formam um sistema de
base ortogonal que correspondem aos componentes principais do conjunto de
observaccedilotildees (BELTON 2008)
De acordo com PAULY et al (2002) pode-se adotar a convenccedilatildeo entre os
autovalores da Expressatildeo (250) A partir desta convenccedilatildeo algumas propriedades
para superfiacutecies normais podem ser descritas
1205821 ge 1205822 ge 1205823 (250)
Em um conjunto de pontos 3D que formam uma superfiacutecie plana espera-se
que 1205821 ne 0 1205822 ne 0 e que 1205823 asymp 0 Com isto o menor autovetor 119890 3 apontaraacute na direccedilatildeo
normal a esta superfiacutecie Com a Figura 223 satildeo ilustrados os trecircs autovetores de
uma regiatildeo da superfiacutecie descrita pela nuvem de pontos 3D O terceiro autovetor 119890 3
com o menor autovalor 1205823 eacute ortogonal agrave superfiacutecie plana definida pelos outros dois
autovetores 119890 1 e 119890 2
55
FIGURA 223 ndash Autovetores em nuvem de pontos 3D de uma superfiacutecie plana
Pontos contidos na interseccedilatildeo entre duas superfiacutecies planas podem ser
identificados atraveacutes das relaccedilotildees 1205821 asymp 21205822 e 1205823 asymp 0 O autovetor 119890 1 apontaraacute na
direccedilatildeo da linha limitante da superfiacutecie plana e o autovetor 119890 3 seraacute ortogonal a esta
direccedilatildeo Podem-se encontrar segmentos de retas que limitam a borda de uma
superfiacutecie atraveacutes das relaccedilotildees 1205822 asymp 1205823 e 1205821 asymp 1205822+1205823
Quando os autovalores apresentam valores aproximadamente iguais
1205821 asymp 1205822 asymp 1205823 torna-se possiacutevel encontrar o veacutertice formado por trecircs superfiacutecies
planas
Normalizando os autovalores com a Equaccedilatildeo (251) remove-se a sua
dependecircncia em relaccedilatildeo ao tamanho da amostra utilizada
120582119894prime =
120582119894
1205821+1205822+1205823=
120582119894
119905119903119886 ccedil119900(120582) (251)
Para o autovalor miacutenimo (119894 = 3) pode-se definir o nuacutemero 119873 de pontos para
representar as variaccedilotildees na superfiacutecie atraveacutes da Equaccedilatildeo (252)
119873 =1205823
119905119903119886 ccedil119900(120582) (252)
O valor resultante da Equaccedilatildeo (252) eacute uma medida aproximada de
curvatura local e pode representar a rugosidade da superfiacutecie de forma normalizada
56
210 ANAacuteLISE DE SUPERFIacuteCIES POR MOMENTOS INVARIANTES
Caracteriacutesticas de superfiacutecies planas podem ser obtidas atraveacutes da anaacutelise
de momentos invariantes para isto utiliza-se a 119872119881119862 dos pontos que descrevem esta
superfiacutecie De acordo com MASS e VOSSELMAN (1999) os momentos invariantes
119898119894119895 podem ser calculados atraveacutes da Equaccedilatildeo (253)
119898119894119895 = 119909119894119910119895119891(119909119910)119889119909 1198891199101199102
1199101
1199092
1199091 (253)
onde
119894 119895 ndash Correspondem agrave ordem do momento
119891(119909119910) ndash A coordenada 119911 dos pontos eacute funccedilatildeo das coordenadas planas 119909 e 119910
em um conjunto de pontos que descrevem a superfiacutecie contiacutenua
A Equaccedilatildeo (254) permite determinar o volume de uma esfera unitaacuteria com
raio 119877 em um domiacutenio contiacutenuo 119873 de pontos 3D eacute obtida a partir da Equaccedilatildeo (253)
e possibilita o estudo de propriedades das superfiacutecies com padratildeo planar
119898119894119895119896 = 119909119894119910119895 119911119896119891(119909119910 119911)119889119907119881
(254)
onde
119894 119895119896 ndash Pertencem ao domiacutenio contiacutenuo da funccedilatildeo com 119873 pontos
119894 + 119895 + 119896 ndash Corresponde agrave ordem do momento
119891(119909119910 119911) ndash Eacute o volume da esfera unitaacuteria
Atraveacutes da Equaccedilatildeo (254) GROSS e THONNESSEN (2006) conseguiram
descrever algumas relaccedilotildees entre autovalores e as propriedades de superfiacutecies
normais conforme eacute ilustrado com o Quadro 23
57
ESTRUTURA AUTOVALORES
120640120783 120640120784 120640120785
PONTO ISOLADO
0 0 0
PONTO FINAL DE SEGMENTO
DE RETA
1
12= 0083 0 0
LINHA RETA 1
3= 0333 0 0
12 PLANO 1
4= 025
1
4 1 minus
64
91205872 = 00 0
PLANO 1
4= 025
1
4= 025 0
14 PLANO 1
4 1 minus
2
120587 = 009
1
4+
2
120587minus
32
91205872= 00 0
INTERSECcedilAtildeO DE 2 PLANOS
1
3= 0333
1
8= 0125
1
8minus
8
91205872= 003
INTERSECcedilAtildeO DE 3 PLANOS
1
6 1 minus
1
120587 = 011
1
6 1 minus
1
120587 = 011
1
6 1 +
2
120587 minus
26
331205872= 003
INTERSECcedilAtildeO DE 2 PLANOS
Agrave 30deg 025 01875 001747
QUADRO 23 ndash Propriedades de superfiacutecies normais obtidas com autovalores FONTE GROSS e THOENNESSEN (2006)
Os autovalores do Quadro 23 foram determinados analiticamente a partir da
Equaccedilatildeo (254) e podem ser utilizados como referecircncia para a estimaccedilatildeo da forma
das superfiacutecies que compotildeem a estrutura dos objetos
Restringindo a ordem dos momentos com 119894 + 119895 + 119896 le 2 pode-se calcular o
centro de gravidade da superfiacutecie conforme a Equaccedilatildeo (255) e os elementos da
119872119881119862 podem serem obtidos atraveacutes da Equaccedilatildeo (256)
119909 =119898100
119898000 119910 =
119898010
119898000 119911 =
119898001
119898000 (255)
58
119898 119894119895119896 = 119909119894 minus 119909 119894 119910 minus 119910 119895 119911 minus 119911 119896119891(119909119910 119911)119889119907119881
(256)
Os momentos de 2ordf ordem normalizados para os pontos 3D em um domiacutenio
discreto podem ser calculados atraveacutes da Equaccedilatildeo (257)
119898 119894119895119896 = 119909119897minus119909
119894 119910119897minus119910 119895 119911119897minus119911
119896119873119897=1
119877119894+119895+119896119873 (257)
onde
119898 119894119895119896 ndash Momentos de 2ordf ordem para os pontos 3D
119873 ndash Nuacutemero de pontos da amostra no domiacutenio contiacutenuo da funccedilatildeo
119877 ndash Raio da esfera unitaacuteria considerada para seleccedilatildeo de pontos
Desta forma os valores calculados para os momentos natildeo satildeo influenciados
pelo nuacutemero de pontos unidade fiacutesica das medidas ou peso dos elementos da 119872119881119862
Utilizando momentos de 2ordf ordem a 119872119881119862 pode ser obtida atraveacutes da Equaccedilatildeo
(258)
119872119881119862 =
119898 200 119898 110 119898 101
119898 110 119898 020 119898 011
119898 101 119898 011 119898 002
(258)
O caacutelculo dos autovalores 120582119894 e autovetores 119890 119894 com 119894 = 123 eacute variaacutevel para
cada ponto do conjunto de observaccedilotildees Sendo assim as classes de valores
geradas por GROSS e THONNESSEN (2006) com objetivo de modelar superfiacutecies
com padratildeo planar foram agraves seguintes
O primeiro autovalor 1205821 foi definido constante e igual a 025
O segundo autovalor 1205822 varia de 0125 agrave 025
O terceiro autovalor 1205823 varia de 0 agrave 0125
Com a aproximaccedilatildeo teoacuterica dos valores contidos no Quadro 24 JUTZI e
GROSS (2009) mostraram a possibilidade de determinar matematicamente
inclinaccedilotildees entre as superfiacutecies para os acircngulos de 0ordm 30ordm e 90ordm No entanto
quando satildeo utilizados dados reais para representar as superfiacutecies pequenas
variaccedilotildees nestes valores podem ser percebidas Um exemplo eacute que o terceiro
59
autovalor 1205823 natildeo teraacute valor igual a zero mesmo em uma superfiacutecie plana Isto ocorre
por haverem pequenos desvios entre os pontos desta superfiacutecie que satildeo causados
por ruiacutedo presente no conjunto de dados reais Este fato pode ser observado
calculando o terceiro autovalor que seraacute um valor positivo pequeno mas diferente
de zero Com isto quanto mais proacuteximo de zero o terceiro autovalor 1205823 maior seraacute o
indicativo que a superfiacutecie eacute plana conforme ilustrado com a Figura 224
FIGURA 224 ndash Inclinaccedilotildees de superfiacutecies determinadas por autovalores
FONTE JUTZI e GROSS (2009)
60
211 ALGORITMO DE DESLOCAMENTO PELA MEacuteDIA
O algoritmo de deslocamento pela meacutedia (Mean Shift) pode ser utilizado no
reconhecimento de padrotildees para a segmentaccedilatildeo de imagens A densidade de
pontos vizinhos em relaccedilatildeo a um ponto central pode ser estimada com a meacutedia do
conjunto de dados discretos A anaacutelise espacial de atributos eacute utilizada neste
contexto com o objetivo de extrair informaccedilotildees Para isto utiliza a vizinhanccedila de um
ponto na imagem Com os atributos definidos pode-se encontrar o centro das
regiotildees com as maiores densidades que representam caracteriacutesticas significativas
dos objetos presentes na imagem
Para realizar a anaacutelise espacial de atributos e obterem-se resultados
satisfatoacuterios deve-se reduzir o volume de dados ateacute que se tenham apenas as
caracteriacutesticas significativas distribuiacutedas em um sistema de coordenadas contiacutenuo O
conteuacutedo do espaccedilo de atributos deve ser passiacutevel de modelagem atraveacutes de uma
amostragem com distribuiccedilatildeo multivariada de probabilidade Devido a este
pressuposto eacute necessaacuterio verificar se a condiccedilatildeo de normalidade dos dados eacute
satisfeita em aplicaccedilotildees estatiacutesticas tradicionais que utilizam testes parameacutetricos
Em outras aplicaccedilotildees podem-se utilizar meacutetodos estatiacutesticos natildeo
parameacutetricos com menos restriccedilotildees sobre o comportamento dos dados como por
exemplo natildeo se preocupar com o tipo de distribuiccedilatildeo para as variaacuteveis aleatoacuterias O
conceito de Kernel pode ser empregado em meacutetodos natildeo parameacutetricos para a
estimativa de propriedades Esta eacute uma funccedilatildeo estatiacutestica contiacutenua simeacutetrica e com
limite superior e inferior de integraccedilatildeo definidos cuja integraccedilatildeo resulta na unidade
por conveniecircncia O Kernel atua na imagem como uma janela de convoluccedilatildeo
suavizando as caracteriacutesticas dos pontos analisados (MACHADO 2006)
De acordo com COMANICIU e MEER (2002) o algoritmo de deslocamento
pela meacutedia eacute uma ferramenta versaacutetil para anaacutelises espaciais de feiccedilotildees presentes
em amostras Utiliza o Kernel para a estimaccedilatildeo da densidade dos elementos no
conjunto de dados tendo como referecircncia um ponto fixo na regiatildeo central da
amostra Dado um conjunto de pontos 120169119894=1hellip119899 em um espaccedilo 119877 com dimensatildeo 119889 o
estimador de densidade multivariada por Kernel 119870(120169) e a matriz de paracircmetros 119867
com bandas de dimensatildeo 119889 pode ser calculada com os pontos 120169 Com estes
61
paracircmetros definidos a funccedilatildeo para estimar a densidade multivariada no ponto 120169 eacute
expressa com a Equaccedilatildeo (259)
119891 (120169) =1
119899 119870119867 120169 minus 120169119894 119899119894=1 (259)
119870119867(120169) = 119867 minus1
2119870(119867minus1
2120169) (260)
O Kernel 119870(120169) com dimensatildeo 119889 eacute uma funccedilatildeo para a anaacutelise da densidade
da vizinhanccedila dos pontos expressa atraveacutes das Equaccedilotildees (261) e (262)
119870(120169)119877119889
119889120169 = 1 lim 119909 rarrinfin 120169 119889 119870 120169 = 0 (261)
119909119870(120169)119889120169119877119889
= 0 120169120169119879119870(120169)119889120169119877119889
= 119888119870119868 (262)
Onde 119888119870 eacute uma constante A partir do Kernel univariado 1198701 119909 o Kernel
multivariado pode ser calculado de duas maneiras conforme as Equaccedilotildees (263) e
(264)
119870119875 120169 = 1198701 119909119894 119889119894=1 (263)
119870119878 120169 = 119886119896 1198891198701( 120169119894 ) (264)
Onde 119870119875(120169) eacute obtido com o produto dos Kernels univariados e 119870119878(120169) eacute
obtido rotacionando 1198701(119909) no espaccedilo 119877119889 o que faz 119870119878(120169) ser radialmente simeacutetrico
A constante 119886119896 119889minus1 = 1198701 120169 1198891201691198774
com 119870119878(119909) integrado de 0 agrave 1 O Kernel
radialmente simeacutetrico eacute de interesse em anaacutelises espaciais de imagens desde que
satisfaccedila a condiccedilatildeo da Equaccedilatildeo (265)
119870 119909 = 119888119896 119889119896( 120169 2) (265)
Neste caso define-se a funccedilatildeo de cada elemento do Kernel 119896 119909 para 119909 ge 0
A constante de normalizaccedilatildeo 119888119896 119889 pode ser calculada integrando 119870 120169 de 0 a 1
assumindo-se que eacute positiva A estimaccedilatildeo pode ser parametrizada com a matriz
diagonal de bandas do Kernel 119867 = 1198932119868 = 119889119894119886119892 11989312hellip 119893119889
2 onde 119868 eacute a matriz
identidade com dimensatildeo 119889 Esta matriz apresenta a vantagem de ser determinada
62
utilizando como uacutenico paracircmetro o nuacutemero de bandas 119893 ge 0 do Kernel Empregando
paracircmetros com o nuacutemero de bandas 119893 e dimensatildeo 119899 o estimador de densidade por
Kernel da Equaccedilatildeo (259) pode ser expresso atraveacutes da Equaccedilatildeo (266)
119891 (120169) =1
119899119893119889 119870119867
120169minus120169119894
119893 119899
119894=1 (266)
A qualidade do estimador de densidade por Kernel pode ser analisada
atraveacutes do erro meacutedio quadraacutetico entre a densidade real e a estimada Na praacutetica
somente a aproximaccedilatildeo assintoacutetica das medidas pode ser calculada (AMISE ndash
Asymptotic Mean Integrated Square Error) Para os Kernels multivariados o erro
meacutedio quadraacutetico AMISE eacute minimizado utilizando o Kernel de Epanechnikov
(COMANICIU e MEER 2002)
119896119864 119909 = 1 minus 119909 0 le 119909 le 1
0 119909 gt 0 (267)
119870119864 120169 = 1
2119888119889
minus1 119889 + 2 (1 minus 120169 2) 120169 le 1
0 119888119886119904119900 119888119900119899119905119903aacute119903119894119900 (268)
Onde 119888119889 eacute o volume de uma esfera com raio unitaacuterio e com dimensatildeo 119889 O
elemento do Kernel 119896119873 119909 pode ser calculado utilizando a Equaccedilatildeo (269)
119896119873 119909 = exp minus1
2119909 119909 ge 0 (269)
Para o Kernel multivariado calculado com a Equaccedilatildeo (269) um Kernel
normal 119870119873 pode ser calculado utilizando a Equaccedilatildeo (270)
119870119873 120169 = (2120587)minus1198892exp minus1
2 120169 2 (270)
Sendo o Kernel normal simeacutetrico e admitido finito Para a anaacutelise espacial de
imagens estas duas formas de calcular o Kernel satildeo suficientes e os resultados
obtidos com estas condiccedilotildees impostas satildeo satisfatoacuterios O estimador de densidade
por Kernel da Equaccedilatildeo (259) pode ser reescrito conforme a Equaccedilatildeo (271)
63
119891 119893 119870(120169) =119888119896 119889
119899119893119889 119896
120169minus120169119894
119893
2
119899119894=1 (271)
Para anaacutelise de feiccedilotildees espaciais primeiramente deve-se calcular a
densidade do conjunto de dados e verificar o seu comportamento espacial Isto pode
ser feito calculando o gradiente da funccedilatildeo de densidade 119891(120169) igual a zero nabla119891 120169 = 0
O algoritmo de deslocamento pela meacutedia eacute uma maneira de localizar estes zeros
para estimar a densidade do conjunto de observaccedilotildees Calculando o gradiente da
funccedilatildeo expressa com a Equaccedilatildeo (271) pode-se estimar a densidade atraveacutes da
Equaccedilatildeo (272)
nabla 119891119893 119870(120169) equiv2119888119896 119889
119899119893119889+2 (120169 minus 120169119894)119896prime
120169minus120169119894
119893
2
119899119894=1 (272)
Substituindo 119896prime pela funccedilatildeo 119892(119909) conforme expresso com a Equaccedilatildeo (273)
119892 119909 = 119896prime(119909) (273)
Assumindo que a derivada do Kernel 119896 exista para o conjunto finito de
pontos 119909 isin [0infin) O Kernel 119866(119909) com seus elementos 119892(119909) pode ser definido atraveacutes
da Equaccedilatildeo (274)
119866 119909 = 119888119892 119889119892( 120169 2) (274)
Onde 119888119892119889 corresponde a uma constante de normalizaccedilatildeo O Kernel 119866 119909
pode ser considerado uma aproximaccedilatildeo do Kernel 119870(119909) dependendo do contexto
em que seraacute empregado De forma similar o Kernel de Epanechnikov eacute uma
simplificaccedilatildeo do Kernel uniforme da esfera unitaacuteria com dimensatildeo 119889 Introduzindo
119892(119909) na Equaccedilatildeo (272) tem-se a Equaccedilatildeo (275)
nabla 119891119893 119870 120169 =2119888119896 119889
119899119893119889+2 120169 minus 120169119894 119892
120169minus120169119894
119893
2
119899119894=1 (275)
nabla 119891119893 119870 120169 =2119888119896 119889
119899119893119889+2 119892 120169minus120169119894
119893
2
119899119894=1 ∙
120169119894119892 120169minus120169119894119893
2 119899
119894=1
119892 120169minus120169119894119893
2 119899
119894=1
(276)
64
119892 120169minus120169119894
119893
2
119899119894=1 (277)
Considerando que o resultado da funccedilatildeo expressa com a Equaccedilatildeo (277) eacute
um nuacutemero positivo O primeiro termo da Equaccedilatildeo (276) eacute proporcional agrave densidade
estimada calculada para 120169 com o Kernel 119866 conforme Equaccedilatildeo (271) e expresso
agora em funccedilatildeo de 119892(119909) atraveacutes da Equaccedilatildeo (278)
119891119893 119866 120169 =119888119892 119889
119899119893119889 119892
120169minus120169119894
119893
2
119899119894=1 (278)
O segundo termo da Equaccedilatildeo (276) corresponde ao algoritmo de
deslocamento pela meacutedia conforme Equaccedilatildeo (279)
119898119893 119866 120169 = 120169119894119892
120169minus120169119894119893
2 119899
119894=1
119892 120169minus120169119894119893
2 119899
119894=1
minus 120169 (279)
A Equaccedilatildeo (279) representa a diferenccedila entre as meacutedias ponderadas
utilizando o Kernel 119866 para os pesos e o centro da janela de convoluccedilatildeo em 120169 A
partir das Equaccedilotildees (276) (278) e (279) chega-se as Equaccedilotildees (280) e (281)
nabla 119891119893 119870 120169 = 119891 119893 119866 120169 2119888119896 119889
1198932119888119892 119889119898119893 119866 120169 (280)
119898119893 119866 120169 =1
21198932119888nabla
119891 119893 119870 120169
119891 119893 119866 120169 (281)
Para a posiccedilatildeo 120169 o vetor de deslocamento pela meacutedia calculado com Kernel
119866 eacute proporcional agrave estimaccedilatildeo de densidade normalizada obtida resolvendo a funccedilatildeo
com gradiente igual a zero e Kernel 119870 Eacute a normalizaccedilatildeo da densidade estimada em
119909 calculada com o Kernel 119866
O vetor de deslocamento pela meacutedia aponta na direccedilatildeo de maacuteximo
crescimento da densidade do conjunto de dados A estimaccedilatildeo da densidade de
pontos com mesma caracteriacutestica eacute obtida atraveacutes de interaccedilotildees com sucessivos
caacutelculos do vetor de deslocamento pela meacutedia 119898119893 119866 120169 e translaccedilotildees do Kernel 119866(119909)
sobre a imagem Isto garante a convergecircncia ao redor do ponto de interesse
65
utilizando a Equaccedilatildeo (281) com gradiente igual a zero Regiotildees com baixa
densidade de observaccedilotildees natildeo satildeo interessantes para anaacutelises espaciais com o
algoritmo de deslocamento pela meacutedia pois muitas iteraccedilotildees seriam necessaacuterias
para obtenccedilatildeo de resultados pouco satisfatoacuterios De forma anaacuteloga em locais com
densidade maacutexima poucas iteraccedilotildees satildeo necessaacuterias e a anaacutelise pode atingir bons
resultados (COMANICIU e MEER 2002)
Imagens satildeo representadas matematicamente na forma de matrizes onde
cada posiccedilatildeo da matriz eacute ocupada por vetores com dimensatildeo 119901 onde 119901 = 1 no caso
de imagens em niacuteveis de cinza ou coloridas e 119901 ge 2 no caso de imagens
multiespectrais O posicionamento de cada pixel na matriz imagem estaacute contido no
domiacutenio espacial (Spatial domain) enquanto o valor digital do pixel faz parte do
domiacutenio de caracteriacutesticas da imagem (Range domain) assumindo-se estes
domiacutenios como espaccedilos euclidianos Deste modo o Kernel multivariado pode ser
definido como o produto de dois Kernels radialmente simeacutetricos em um espaccedilo
euclidiano calculado com um paracircmetro de cada domiacutenio atraveacutes da Equaccedilatildeo
(282)
119870119893119904119893119903(119909) =119862
1198931199042119893119903
119901 119896 120169119904
119893119904
2
119896 120169119903
119893119903
2
(282)
onde
120169119904 ndash Corresponde ao domiacutenio espacial
120169119903 ndash Corresponde ao domiacutenio de caracteriacutesticas
119896(119909) ndash Elemento da funccedilatildeo calculado em ambos os domiacutenios
119893119904 119893119903 ndash Paracircmetros das bandas de cada domiacutenio do Kernel empregado
119862 ndash Constante de normalizaccedilatildeo entre as bandas
Na praacutetica o Kernel de Epanechnikov tambeacutem conhecido por Kernel normal
atinge resultados satisfatoacuterios O usuaacuterio deve escolher apenas os paracircmetros das
bandas 119893 = 119893119904 119893119903 e a quantidade miacutenima 119867 de pixels das regiotildees segmentadas na
imagem determinando assim a resoluccedilatildeo na estimaccedilatildeo da densidade A Figura 225
ilustra um exemplo de segmentaccedilatildeo realizada utilizando o algoritmo de
deslocamento pela meacutedia sobre uma imagem em niacuteveis de cinza
66
FIGURA 225 ndash Imagem segmentada FONTE COMANICIU e MEER (2002)
A segmentaccedilatildeo de imagens atraveacutes do algoritmo de deslocamento pela
meacutedia foi implementada no software EDISON (Edge Detection and Image
SegmentatiON System) desenvolvido pela Universidade RUTGER de New Jersey
Este software aleacutem da segmentaccedilatildeo com o algoritmo de deslocamento pela meacutedia
realiza uma filtragem preservando as descontinuidades e detectando os limites dos
objetos contidos na imagem atraveacutes de uma funccedilatildeo gradiente (CHRISTOUDIAS et
al 2002)
67
3 MATERIAIS
Neste trabalho foram utilizadas imagens TOF obtidas com a cacircmara PMD
CamCube 20 que fornece dados de distacircncia e intensidade sob forma de matrizes
de imagem Para realizar os experimentos foram obtidos trecircs conjuntos de imagens
De um gabarito com a forma de um tabuleiro de xadrez para realizar
o processo de calibraccedilatildeo da cacircmara
De uma parede branca com padratildeo planar para anaacutelise de ruiacutedos e
distorccedilotildees geomeacutetricas das imagens e
Do objeto de estudo uma caixa de papelatildeo com superfiacutecies planas e
brancas
Para o processamento das imagens TOF foi utilizado um microcomputador
do laboratoacuterio de Fotogrametria e Sensoriamento Remoto Departamento de
Geomaacutetica da Universidade Federal do Paranaacute com as seguintes caracteriacutesticas
Processador Intelreg Coretrade2 Duo 293GHz
Capacidade do disco riacutegido de 320GB
Memoacuteria principal de 2GB
68
4 MEacuteTODOS
Neste capitulo descreve-se o desenvolvimento metodoloacutegico do presente
trabalho de pesquisa para a aquisiccedilatildeo e processamento da imagem TOF Esta
imagem eacute composta por dois arquivos O primeiro arquivo conteacutem informaccedilatildeo de
intensidade de retorno do sinal captado com iluminaccedilatildeo infravermelha O segundo
arquivo conteacutem informaccedilatildeo de distacircncia (range) para cada pixel gerado com o
sensor da cacircmara TOF
Considerando que as imagens TOF podem apresentar ruiacutedo em funccedilatildeo das
condiccedilotildees de iluminaccedilatildeo e da natureza das superfiacutecies dos objetos estudos para a
reduccedilatildeo do ruiacutedo foram efetuados Para isto utilizaram-se janelas na regiatildeo central
da imagem ao redor do pixel com coordenadas de imagem (102 102) As filtragens
foram realizadas em aacutereas que circundam este pixel central
Apoacutes a anaacutelise do tempo de integraccedilatildeo na aquisiccedilatildeo da imagem
determinaram-se POI atraveacutes do processo de calibraccedilatildeo da cacircmara Os POI
permitiram corrigir a geometria dos dados da imagem TOF Esta correccedilatildeo eacute
necessaacuteria devido agraves distorccedilotildees causadas pelo sistema de lentes da cacircmara
A etapa seguinte consistiu na segmentaccedilatildeo da imagem TOF onde duas
metodologias foram avaliadas
1) Segmentaccedilatildeo do conjunto de dados por crescimento de regiotildees no
espaccedilo tridimensional utilizando pontos semente escolhidos no arquivo de
intensidades da imagem TOF como referecircncia para o posicionamento (119883119884) dos
pontos com distacircncia (119885)
2) Segmentaccedilatildeo utilizando a anaacutelise da variaccedilatildeo local dos autovalores ao
longo do arquivo de distacircncias da imagem TOF Realizada para a geraccedilatildeo de uma
imagem com bordas intensificadas segmentaccedilatildeo desta imagem atraveacutes do
algoritmo de deslocamento pela meacutedia e projeccedilatildeo ortogonal dos pontos
pertencentes agraves aacutereas segmentadas As superfiacutecies segmentadas foram entatildeo
separadas atraveacutes do conjunto de pontos 3D
O passo seguinte consistiu no caacutelculo das coordenadas tridimensionais dos
pontos dos objetos imageados a partir da informaccedilatildeo de distacircncia das coordenadas
dos piacutexeis na imagem de intensidade e dos POI Com isto gerou-se a nuvem de
pontos 3D e tornou-se possiacutevel a modelagem tridimensional das superfiacutecies do
69
objeto de estudo sendo tambeacutem avaliado o resultado obtido A Figura 41 apresenta
as etapas realizadas no processamento das imagens TOF com as duas propostas
de metodologia para a etapa de segmentaccedilatildeo
FIGURA 41 ndash Processamento da imagem TOF
41 CALIBRACcedilAtildeO DA CAcircMARA
A calibraccedilatildeo foi realizada com o objetivo de determinar os Paracircmetros de
Orientaccedilatildeo Interior (POI) da cacircmara Estes paracircmetros possibilitam a reconstruccedilatildeo
do feixe perspectivo que gerou a imagem para o instante em que foi captada
permitindo a correccedilatildeo de sua geometria (ANDRADE 1998)
Com o processo de Orientaccedilatildeo Interior satildeo obtidos os seguintes POI
distacircncia focal calibrada (119891119888 ) posiccedilatildeo do Ponto Principal (1199090 1199100) na imagem
Distorccedilatildeo Radial Simeacutetrica (119870111987021198703) Distorccedilatildeo Descentrada (11987511198752) e os
paracircmetros que indicam falta de afinidade do sensor (119860119861)
IMAGEM TOF
CORRECcedilOtildeES GEOMEacuteTRICAS COM POI
ARQUIVO DE INTENSIDADES
SUPERFIacuteCIE SEMENTE
CRESCIMENTO DE REGIOtildeES COM PONTO SEMENTE
PROJECcedilAtildeO ORTOGONAL
NUVEM DE PONTOS 3D
ARQUIVO DE DISTAcircNCIAS
IMAGEM COM BORDAS INTENSIFICADAS VARIACcedilAtildeO LOCAL DE AUTOVALORES
SEGMENTACcedilAtildeO DA IMAGEM COM BORDAS INTENSIFICADAS
PROJECcedilAtildeO ORTOGONAL
NUVEM DE PONTOS 3D
MODELAGEM 3D DAS SUPERFIacuteCIES
70
Os POI obtidos com o processo de calibraccedilatildeo possibilitam realizar correccedilotildees
geomeacutetricas nos arquivos de intensidades e distacircncias das imagens TOF Com a
calibraccedilatildeo objetiva-se corrigir as distorccedilotildees ocorridas na passagem do raio de luz
pelo sistema de lentes ateacute atingir o plano focal Este erro ocorre pela impossibilidade
na construccedilatildeo de um sistema de lentes perfeito para a cacircmara A correccedilatildeo dos erros
sistemaacuteticos da cacircmara eacute realizada no plano da imagem no ponto onde uma linha
reta passante pelo ponto nodal anterior do sistema de lentes eacute ortogonal a este
plano
O meacutetodo de calibraccedilatildeo fotogrameacutetrica eacute o tradicionalmente utilizado na
determinaccedilatildeo dos POI em Ciecircncias Geodeacutesicas Para isto necessita de pontos de
apoio com coordenadas tridimensionais conhecidas na superfiacutecie de objetos com
correspondentes coordenadas bidimensionais observadas na imagem Relaciona-se
a informaccedilatildeo 3D da cena com a informaccedilatildeo 2D da imagem atraveacutes das equaccedilotildees de
colinearidade fazendo-se uma correspondecircncia entre a posiccedilatildeo dos pontos de
referecircncia 3D e os mesmos pontos reconhecidos na imagem 2D Esta calibraccedilatildeo
pode ser realizada de forma eficiente desde que sejam utilizadas teacutecnicas e campos
de calibraccedilatildeo apropriados para cada tipo de cacircmara e aplicaccedilatildeo que se destina a
imagem Outra teacutecnica que pode ser utilizada para a Orientaccedilatildeo Interior das imagens
eacute conhecida como auto-calibraccedilatildeo na qual natildeo haacute necessidade de pontos com
coordenadas conhecidas no espaccedilo objeto (ZHANG 2000)
A Distorccedilatildeo Radial Simeacutetrica eacute a parcela de refraccedilatildeo natildeo desejaacutevel que um
feixe luminoso sofre ao atravessar um sistema de lentes A Distorccedilatildeo Descentrada eacute
composta pelas distorccedilotildees Tangencial e Radial Assimeacutetrica Eacute causada pela
impossibilidade de alinhar-se perfeitamente o eixo oacuteptico do sistema de lentes que
compotildee a objetiva Correccedilotildees para estas distorccedilotildees podem ser feitas atraveacutes da
Equaccedilatildeo (41) Maiores detalhes podem ser vistos em Andrade (1998)
119909prime119910prime =
119909119910
119900119887119904minus
1199090
1199100 minus
120575119909120575119910 119903119886119889
minus 120575119909120575119910 119889119890119904
minus 120575119909120575119910 119886
(41)
71
onde
119909prime119910prime 119879 ndash Coordenadas corrigidas no sistema referencial de imagem
119909 119910 119900119887119904119879 ndash Coordenadas de imagem observadas
1199090 1199100 119879ndash Coordenadas do PP no sistema referencial de imagem
120575119909 120575119910 119903119886119889119879 ndash Distorccedilatildeo Radial Simeacutetrica
120575119909 120575119910 119889119890119904119879 ndash Distorccedilatildeo Descentrada
120575119909 120575119910 119886119879 ndash Distorccedilatildeo causada pela falta de afinidade entre os eixos do
sensor
Andrade (1998) ilustra algumas correccedilotildees necessaacuterias para as imagens
utilizadas em Fotogrametria e mostra a influencia dos POI nestas correccedilotildees Um
exemplo eacute a correccedilatildeo da distorccedilatildeo Radial Simeacutetrica que pode ser realizada atraveacutes
das Equaccedilotildees (42) e (43)
120575119909119903119886119889 = (1199032 ∙ 1198701 + 1199034 ∙ 1198702 + 1199036 ∙ 1198703) ∙ 119909 (42)
120575119910119903119886119889 = (1199032 ∙ 1198701 + 1199034 ∙ 1198702 + 1199036 ∙ 1198703) ∙ 119910 (43)
onde
119909 = (119909 minus 1199090)
119910 = (119910 minus 1199100)
119909119910 ndash Coordenadas dos pontos com distorccedilotildees no sistema referencial
fotogrameacutetrico projetado na imagem
11990901199100 ndash Coordenadas do Ponto Principal
119870111987021198703 ndash Coeficientes de Distorccedilatildeo Radial Simeacutetrica
72
A distacircncia 119903 entre o ponto com coordenadas na imagem e o Ponto Principal
pode ser calculada atraveacutes da Equaccedilatildeo (44)
119903 = 119909 2 + 119910 2 (44)
A Distorccedilatildeo Descentrada pode entatildeo ser corrigida atraveacutes das Equaccedilotildees
(45) e (46)
120575119909119889119890119904 = [1198751 ∙ (1199032 + 2 ∙ 1199092
) + 2 ∙ 1198752 ∙ 119909 ∙ 119910 ] ∙ (1 + 1198753 + r2 + ⋯ ) (45)
120575119910119889119890119904 = [2 ∙ 1198751 ∙ 119909 ∙ 119910 + 1198752 ∙ (r2 + 2 ∙ 119910 2)] ∙ (1 + 1198753 + r2 + ⋯ ) (46)
onde
119875111987521198753 ndash Coeficientes de Distorccedilatildeo Descentrada
A diferenccedila de escala dos eixos horizontal e vertical da imagem possiacutevel
natildeo ortogonalidade entre os elementos do sensor pode ser modelada utilizando as
Equaccedilotildees (47) e (48) que introduzem correccedilotildees utilizando os paracircmetros de
afinidade 119860 e 119861 (HABIB e MORGAN 2003)
120575119909119886 = 119860 119909 minus 1199090 + 119861(119910minus1199100) (47)
120575119910119886 = 119861(119910minus1199100) (48)
onde
119860119861 ndash Paracircmetros de afinidade
119909119910 ndash Coordenadas dos pontos com distorccedilotildees no sistema referencial
fotogrameacutetrico projetado na imagem
11990901199100 ndash Coordenadas do Ponto Principal
73
A partir da formulaccedilatildeo proposta por Brown (1971) e incluindo os paracircmetros
de afinidade 119860 e 119861 as Equaccedilotildees (49) e (410) possibilitam a correccedilatildeo da imagem
utilizando os coeficientes 119870111987021198703 e 11987511198752
119909prime = 119909 + 119909 ∙ 11987011199032+1198702119903
4+11987031199036 + ⋯ +
+ 1198751 ∙ 1199032 + 2 ∙ 119909
2 + 2 ∙ 1198752 ∙ 119909 ∙ 119910 ∙ 1 + 1198753 ∙ 119903
2 + ⋯ + 119909 119860 + 119910 119861 (49)
119910prime = 119910 + 119910 ∙ 11987011199032+1198702119903
4+11987031199036 + ⋯ +
+ 21198751 ∙ 119909 ∙ 119910 + 1198752 ∙ 1199032 + 2119910 2 ∙ 1 + 1198753 ∙ 119903
2 + ⋯ + 119910 119861 (410)
A Equaccedilatildeo (41) ilustra as correccedilotildees necessaacuterias na geometria da imagem
quando objetiva-se a extraccedilatildeo de informaccedilotildees meacutetricas Eacute um modelo jaacute consagrado
na Fotogrametria e bastante aplicado em Ciecircncias Geodeacutesicas Pode ser utilizado
para o entendimento das correccedilotildees necessaacuterias nas imagens devido agraves distorccedilotildees
causadas pelo sistema de lentes da cacircmara e pela falta de afinidade entre os
elementos do sensor Outros modelos matemaacuteticos para correccedilotildees geomeacutetricas de
imagens satildeo utilizados em aacutereas correlatas como a Visatildeo Computacional Com a
precisatildeo requerida em cada aplicaccedilatildeo alguns POI tecircm maior relevacircncia que outros
podendo haver a supressatildeo de alguns A correlaccedilatildeo entre os paracircmetros deve ser
analisada e evitada
As Equaccedilotildees (49) e (410) podem ser simplificadas para realizar apenas as
correccedilotildees utilizando os coeficientes de Distorccedilatildeo Radial Simeacutetrica 1198961 e 1198962 e os
paracircmetros de afinidade 119860 e 119861 Estes paracircmetros satildeo os mais significativos para a
correccedilatildeo da imagem obtida com cacircmaras digitais de pequeno formato conforme eacute
expresso atraveacutes das Equaccedilotildees (411) e (412)
119909prime = 119909 + 119909 ∙ 11987011199032+1198702119903
4 + 119909 119860 + 119910 119861 (411)
119910prime = 119910 + 119910 ∙ 11987011199032+1198702119903
4 + 119910 119861 (412)
74
onde
119909119910 ndash Coordenadas dos pontos com distorccedilotildees no sistema referencial
fotogrameacutetrico projetado na imagem
119909 = (119909 minus 1199090)
119910 = (119910 minus 1199100)
11990901199100 ndash Coordenadas do Ponto Principal
119860119861 ndash Paracircmetros de afinidade
Cacircmaras digitais de pequeno formato apresentam principalmente a
Distorccedilatildeo Radial Simeacutetrica causada pelo sistema de lentes sendo os coeficientes 1198961
e 1198962 os mais significativos Os paracircmetros de afinidade entre os eixos da imagem 119860
e 119861 tambeacutem podem ser considerados para a correccedilatildeo das imagens obtidas
dependendo da precisatildeo com que o sensor da cacircmara foi construiacutedo pelo fabricante
Alguns softwares calculam os POI de forma raacutepida com soluccedilatildeo aproximada
e dependendo da aplicaccedilatildeo a que se destina a imagem podem ser utilizados sem
maiores restriccedilotildees Um deles eacute o Toolbox CALIB para Matlab utiliza o algoritmo
proposto por Zhang (2000) Este meacutetodo consiste em determinar os POI da cacircmara
tomando diferentes imagens de um gabarito com quadrados pretos e brancos
similar a um tabuleiro de xadrez fixado em uma superfiacutecie riacutegida e com padratildeo
planar Devem ser obtidas imagens do gabarito variando a posiccedilatildeo e orientaccedilatildeo da
cacircmara natildeo sendo necessaacuterio conhecer a trajetoacuteria do seu movimento para a
determinaccedilatildeo dos POI Este algoritmo possibilita o caacutelculo dos POI da cacircmara de
forma aproximada atraveacutes de sucessivas iteraccedilotildees Para sua utilizaccedilatildeo eacute necessaacuterio
conhecer a dimensatildeo dos quadrados do gabarito e indicar os pontos posiccedilotildees dos
veacutertices que seratildeo utilizados como pontos de referecircncia
No algoritmo proposto por Zhang um vetor de pontos 2D eacute denotado por
119898 = [119906 119907]119879 e um vetor de pontos 3D por 119872 = [119883119884119885]119879 De forma similar pode-se
aumentar estes vetores adicionando uma linha com valor igual a 1 sendo os vetores
aumentados 119898 = [119906 119907 1]119879 e 119872 = [119883119884119885 1]119879 A colinearidade entre o ponto no
espaccedilo objeto centro perspectivo e o ponto no espaccedilo imagem eacute utilizada para
75
estabelecer a relaccedilatildeo entre os pontos 3D contidos no vetor 119872 e os pontos na
imagem 2D contidos no vetor 119898 conforme a Equaccedilatildeo (413)
119904119898 = 119860[119877 119905]119872 (413)
onde
119904 ndash Fator de escala
119877 119905 ndash Paracircmetros de Orientaccedilatildeo Exterior (POE) compostos por elementos de
rotaccedilatildeo e translaccedilatildeo que relacionam as coordenadas obtidas no sistema 3D do
espaccedilo objeto com o sistema de coordenadas 2D da imagem
119860 ndash Eacute a matriz com os POI da cacircmara Apresenta as coordenadas 1199060 e 1199070 do
PP 119864120572 e 119864120573 satildeo os fatores de escala na imagem com eixos 119906 e 119907 O paracircmetro 120574
descreve a falta de ortogonalidade entre os eixos do sistema referencial da imagem
A matriz 119860 eacute expressa atraveacutes da Equaccedilatildeo (414)
119860 = 119864120572 120574 1199060
0 119864120573 1199070
0 0 1
(414)
Comparando as Equaccedilotildees (411) e (412) com o modelo proposto por Zhang
expresso atraveacutes da Equaccedilatildeo (413) tecircm-se as seguintes correspondecircncias
119860 e 119861 satildeo os paracircmetros de afinidade das Equaccedilotildees (411) e (412)
que correspondem aos fatores de escala 119864120572 e 119864120573 da Equaccedilatildeo (413)
Sendo que o paracircmetro 120574 acircngulo entre os eixos da imagem pode ser
calculado a partir destes fatores de escala
1199090 e 1199100 satildeo as coordenadas do Ponto Principal expressas com as
Equaccedilotildees (411) e (412) que tem suas correspondecircncias nas
coordenadas 1199060 e 1199070 da Equaccedilatildeo (413)
O caacutelculo dos POI pode ser entatildeo ser realizado atraveacutes da Equaccedilatildeo (415)
119898119894119895 minus119898 119860119877119894 119905119894 119872119895 2119898
119895=1119899119894=1 (415)
76
onde
119898 119860119877119894 119905119894 119872119894 ndash Eacute a projeccedilatildeo do vetor do ponto 119872119895 sobre a imagem 119894
119877119894 ndash Eacute o vetor de rotaccedilatildeo com paracircmetros 119903
O algoritmo proposto por Zhang (2000) utiliza somente os dois primeiros
termos de Distorccedilatildeo Radial Simeacutetrica para a correccedilatildeo da imagem atraveacutes dos
coeficientes 1198961 e 1198962 conforme Equaccedilotildees (416) e (417) Cacircmaras digitais de
pequeno formato normalmente apresentam distorccedilotildees de lentes significantes
especialmente a Distorccedilatildeo Radial Simeacutetrica A funccedilatildeo de distorccedilatildeo eacute fortemente
influenciada pelos componentes radiais principalmente o primeiro termo 1198961 Dadas
as coordenadas de uma imagem (119906 119907) consideradas livres de distorccedilatildeo e as
correspondentes coordenadas de imagem observadas (119906 119907 ) consegue-se projetar
os pontos atraveacutes da relaccedilatildeo de colinearidade entre eles De forma similar (119909119910) satildeo
as coordenadas de imagem consideradas livres de distorccedilatildeo e (119909 119910 ) as coordenadas
que possuem distorccedilatildeo Estas coordenadas tecircm suas escalas compatibilizadas
atraveacutes de uma normalizaccedilatildeo
119909 = 119909 + 119909 1198961 1199092 + 1199102 + 1198962 119909
2 + 1199102 2 (416)
119910 = 119910 + 119910 1198961 1199092 + 1199102 + 1198962 119909
2 + 1199102 2 (417)
onde
11989611198962 ndash Satildeo os coeficientes de Distorccedilatildeo Radial Simeacutetrica O centro desta
distorccedilatildeo encontra-se no Ponto Principal projetado na imagem
Com 119906 = 1199060 + 119886119909 + 120574119910 e 119907 = 1199070 + 120573119910 e assumindo 120574 = 0 em uma imagem
que tem os eixos perpendiculares tem-se a relaccedilatildeo expressa com as Equaccedilotildees
(418) e (419)
119906 = 119906 + 119906 minus 1199060 1198961 1199092 + 1199102 + 1198962 119909
2 + 1199102 2 (418)
119907 = 119907 + 119907 minus 1199070 1198961 1199092 + 1199102 + 1198962 119909
2 + 1199102 2 (419)
Uma opccedilatildeo para estimar os coeficientes 1198961 e 1198962 eacute feita atraveacutes de
sucessivas iteraccedilotildees utilizando as coordenadas 119906 e 119907 dos piacutexeis considerados
77
isentos de erro Com isto tecircm-se duas expressotildees para os pontos da imagem
conforme a Equaccedilatildeo (420)
119906 minus 1199060 119909
2 + 1199102 119906 minus 1199060 1199092 + 1199102 2
119907 minus 1199070 1199092 + 1199102 119907 minus 1199070 119909
2 + 1199102 2 1198961
1198962 =
119906 minus 119906119907 minus 119907
(420)
Dados 119898 pontos em 119899 imagens podemos obter 2 ∙ 119898 ∙ 119899 equaccedilotildees Na forma
matricial 119863119896 = 119889 onde 119896 = 1198961 1198962 119879 A soluccedilatildeo deste sistema de equaccedilotildees eacute
possiacutevel pelo meacutetodo dos miacutenimos quadrados conforme a Equaccedilatildeo (421)
119896 = 119863119879119863 minus1119863119879119889 (421)
Uma vez que 1198961 e 1198962 foram calculados pode-se refinar a estimaccedilatildeo dos
outros paracircmetros resolvendo novamente a Equaccedilatildeo (415) substituindo os valores
de 119898 119860119877119894 119905119894 119872119894 pelos valores calculados com as Equaccedilotildees (418) e (419)
A estimaccedilatildeo do conjunto completo de POI pode ser expressa atraveacutes da
Equaccedilatildeo (422)
119898119894119895 minus119898 1198601198961 1198962119877119894 119905119894 119872119895 2119898
119895=1119899119894=1 (422)
onde
119898 119860 11989611198962119877119894 119905119894 119872119895 - Eacute funccedilatildeo da projeccedilatildeo do vetor do ponto 119872119895 na imagem
119894 de acordo com a Equaccedilatildeo (413)
Com este meacutetodo no miacutenimo duas imagens devem ser adquiridas com
orientaccedilotildees diferentes se os elementos sensores da cacircmara forem quadrados
Zhang (2000) recomenda a aquisiccedilatildeo de pelo menos cinco imagens para obter
melhores resultados com o processo de calibraccedilatildeo Sendo assim os passos para
realizar a calibraccedilatildeo da cacircmara utilizando este meacutetodo satildeo
1 Imprimir o gabarito e fixaacute-lo em uma superfiacutecie plana e riacutegida
2 Tomar imagens do gabarito com diferentes orientaccedilotildees variando a
posiccedilatildeo e orientaccedilatildeo da cacircmara
78
3 Realizar a leitura das coordenadas dos pontos de controle nas
imagens
4 Estimar os POI e POE utilizando soluccedilatildeo aproximada
5 Refinar todos os paracircmetros incluindo os paracircmetros de distorccedilatildeo de
lentes atraveacutes da Equaccedilatildeo (422)
Os passos 4 e 5 satildeo realizados automaticamente pelo Toolbox CALIB do
software Matlab devendo o usuaacuterio apenas inserir as imagens no software e realizar
as leituras dos veacutertices dos quadrados nas imagens do gabarito
42 ANAacuteLISE DA PRESENCcedilA DE RUIacuteDO
Os piacutexeis saturados causados por exposiccedilatildeo prolongada do sensor na
aquisiccedilatildeo da imagem e tambeacutem os piacutexeis com baixa exposiccedilatildeo devem ser
cuidadosamente analisados na imagem pois tambeacutem podem causar erros nas
medidas de distacircncia devido agrave presenccedila de ruiacutedo Quando o sensor capta o sinal
luminoso existe um limite maacuteximo de saturaccedilatildeo que natildeo pode ser diminuiacutedo
posteriormente
Khongsab (2009) utilizou como paracircmetro principal o tempo de integraccedilatildeo na
captaccedilatildeo da imagem para controlar a saturaccedilatildeo dos piacutexeis Como este tempo eacute
aplicado globalmente ao sensor acaba influenciando os valores digitais dos piacutexeis
da imagem de forma equivalente Alguns apresentam erros devido agrave baixa
exposiccedilatildeo pois com a reduccedilatildeo do tempo de integraccedilatildeo natildeo receberam energia
eletromagneacutetica suficiente para sensibilizar o sensor sendo chamados de piacutexeis
insaturados Estes problemas podem ser minimizados definindo-se tempos de
integraccedilatildeo adequados para a obtenccedilatildeo da imagem TOF
O tratamento do ruiacutedo pode ser realizado com diferentes filtragens na
imagem Com este objetivo foram estudados os filtros passa-baixas pela meacutedia e
mediana Outro processo de filtragem realizado foi o caacutelculo da meacutedia dos valores
de distacircncia para diferentes imagens de uma mesma cena com o mesmo tempo de
integraccedilatildeo mas adquiridas em instantes brevemente diferentes
79
421 Filtragem passa-baixas pela meacutedia
O caacutelculo da meacutedia dos valores da vizinhanccedila em torno do pixel de interesse
tem o efeito de suavizar a imagem Este processo conhecido como filtro linear
passa-baixas atenua as altas frequecircncias que no espaccedilo de frequecircncias
correspondem agraves transiccedilotildees raacutepidas Este tipo de variaccedilatildeo caracteriza tambeacutem a
presenccedila de ruiacutedo na imagem A suavizaccedilatildeo tende a minimizar a presenccedila de ruiacutedo
e tecircm o efeito de tornar a imagem menos contrastante O filtro linear passa-baixas
utilizado tem dimensatildeo 3x3 com pesos iguais para os vizinhos Filtros lineares
resultam da convoluccedilatildeo de uma janela moacutevel sobre a imagem A Equaccedilatildeo (423)
representa o modelo matemaacutetico aplicado na filtragem linear passa-baixas pela
meacutedia (CENTENO 2004)
119866 119910 119909 = (119901(119894 119895) ∙ 119868(119910 + 119894 minus 119886 119909 + 119895 minus 119886))119879119895=1
119879119894=1 (423)
onde
119868(119910 119909) ndash Corresponde ao valor do pixel na posiccedilatildeo ldquolinha = 119910rdquo e ldquocoluna = 119909rdquo
119901(119894 119895) ndash Representa o filtro
119879 ndash Tamanho da janela de filtragem
119866(119910 119909) ndash Imagem resultante da filtragem
119886 = 119894119899119905 119879
2 + 1
A Figura 42 Ilustra o filtro linear passa-baixas pela meacutedia a janela central
cinza que estaacute na matriz de uma imagem Este filtro tem dimensatildeo de 3x3 piacutexeis e
atua no valor digital 48 do pixel central O valor digital do pixel apoacutes a filtragem
passa a ser 41222 que corresponde a meacutedia dos valores digitais dos piacutexeis
vizinhos
80
FIGURA 42 ndash Filtragem passa-baixas pela meacutedia
422 Filtragem pela mediana
A filtragem natildeo linear pela mediana consiste na substituiccedilatildeo do valor do pixel
central pelo valor correspondente a mediana da vizinhanccedila Este meacutetodo tambeacutem
suaviza a presenccedila de ruiacutedo A diferenccedila principal em relaccedilatildeo ao filtro da meacutedia eacute
que o filtro da mediana natildeo introduz novos valores na imagem pois substitui o valor
central da vizinhanccedila por um valor jaacute existente na imagem Sendo assim natildeo
degrada as bordas dos objetos de forma extrema A Figura 43 ilustra esta filtragem
que resultaraacute no valor digital 44 para o pixel filtrado que anteriormente apresentava
valor digital 48
FIGURA 43 ndash Filtragem pela mediana
81
423 Filtragem com a meacutedia temporal
A terceira opccedilatildeo eacute a ponderaccedilatildeo dos valores dos piacutexeis ao longo do tempo
Para isto uma seacuterie de imagens foi obtida a partir do mesmo ponto de vista em
instantes diferentes O resultado foi um conjunto de imagens de um uacutenico objeto
desde a mesma perspectiva natildeo sendo a geometria da imagem alterada Assim
cada pixel de uma imagem tem seu equivalente nas outras Assumindo que o ruiacutedo
seja aleatoacuterio eacute esperado que o uso de mais de uma imagem diminua a presenccedila
de ruiacutedo atraveacutes do caacutelculo da meacutedia dos valores observados
A filtragem com a meacutedia temporal eacute ilustrada com a Figura 44 Nesta figura
tem-se a representaccedilatildeo de trecircs imagens com suas matrizes de valores digitais
(Ii=123) e a imagem filtrada (IF) resultante que corresponde a meacutedia das trecircs
imagens originais
FIGURA 44 ndash Filtragem utilizando a meacutedia temporal
82
43 SEGMENTACcedilAtildeO
Com a etapa de segmentaccedilatildeo objetivou-se separar o conjunto de dados em
subconjuntos Estes subconjuntos satildeo compostos por pontos com coordenadas
tridimensionais que descrevem as superfiacutecies de objetos Eacute assumido que estas
superfiacutecies satildeo partes estruturais do objeto a ser identificado Para atingir esta meta
duas alternativas foram desenvolvidas e avaliadas
1) Crescimento de regiotildees a partir de superfiacutecies planas e ponto semente
utilizando o arquivo de intensidades da imagem TOF para selecionar a posiccedilatildeo de
pontos ou regiotildees semente sendo o arquivo de distacircncias utilizado para o
crescimento de regiotildees
2) Segmentaccedilatildeo por anaacutelise da variaccedilatildeo local de autovalores utilizando
somente o arquivo de distacircncias da imagem TOF para gerar uma imagem de
intensidade com bordas intensificadas que posteriormente eacute segmentada em
regiotildees que tecircm seus piacutexeis projetados gerando uma nuvem de pontos 3D destas
superfiacutecies segmentadas A segmentaccedilatildeo da imagem de intensidade com bordas
evidenciadas gerada eacute realizada utilizando o algoritmo de deslocamento pela meacutedia
431 Crescimento de regiotildees a partir de superfiacutecies planas e ponto semente
O primeiro meacutetodo proposto se baseia no crescimento de regiotildees por
agregaccedilatildeo de elementos adjacentes Este meacutetodo utiliza um criteacuterio de similaridade
para avaliar se um ponto pertence a uma determinada regiatildeo A distacircncia de um
ponto a uma superfiacutecie plana e o valor digital de um pixel em uma imagem satildeo
exemplos de criteacuterios de similaridade que podem ser utilizados (GONZALEZ e
WOODS 2000)
Partindo de um subconjunto de pontos adjacentes que pertencem a uma
superfiacutecie plana o processo consiste em buscar na vizinhanccedila outros pontos que
estejam espacialmente proacuteximos a esta superfiacutecie atendendo ao criteacuterio de
coplanaridade Neste criteacuterio a distacircncia ortogonal do ponto a uma superfiacutecie plana eacute
calculada atraveacutes das coordenadas 3D do ponto sendo este ponto considerado
pertencente agrave superfiacutecie quando estaacute dentro do limiar estabelecido A superfiacutecie
plana eacute determinada atraveacutes do autovetor com menor autovalor do conjunto de
83
pontos 3D a distacircncia ortogonal eacute calculada na direccedilatildeo deste autovetor partindo da
superfiacutecie O processo eacute iterativo de forma que o subconjunto inicial cresce
agregando novos elementos em cada iteraccedilatildeo ateacute atingir os limites da superfiacutecie
quando o criteacuterio de coplanaridade natildeo eacute mais satisfeito
O primeiro problema consiste na identificaccedilatildeo de pontos ou regiotildees semente
para dar iniacutecio ao processo de crescimento Uma opccedilatildeo foi identificar visualmente
regiotildees planas no arquivo de intensidades da imagem TOF e realizar a leitura de
coordenadas de pontos nestas regiotildees A partir das coordenadas destes pontos
selecionados na imagem de intensidade e de suas correspondentes no arquivo de
distacircncias da imagem TOF determinou-se a superfiacutecie plana que mais se aproxima
a esta regiatildeo atraveacutes do caacutelculo de seus autovetores e autovalores esta foi
considerada a superfiacutecie semente
A hipoacutetese baacutesica assume que superfiacutecies planas ou pelo menos partes
delas aparecem como regiotildees uniformes na imagem de intensidade devido agraves
condiccedilotildees de iluminaccedilatildeo Esta hipoacutetese nem sempre pode ser verificada e
confirmada Por exemplo se a superfiacutecie eacute coberta por tonalidades com padratildeo
irregular de cor entatildeo o plano pode mostrar valores natildeo uniformes na imagem de
intensidade sendo este um caso extremo Em uma situaccedilatildeo real pode ocorrer que
parte da superfiacutecie plana esteja pintada ou contenha manchas que alterem a sua
resposta espectral O mesmo pode ocorrer se houverem sombras projetadas de
outros objetos sobre a superfiacutecie Neste caso poreacutem existem outras regiotildees da
superfiacutecie plana que podem aparecer uniformes na imagem de intensidade e serem
utilizadas como regiatildeo semente
Com base nesta suposiccedilatildeo buscaram-se regiotildees uniformes na imagem de
intensidade e verificou-se a possibilidade de formarem superfiacutecies planas que
pudessem ser utilizadas como sementes no arquivo de distacircncias da imagem TOF
A soluccedilatildeo proposta consiste em segmentar a imagem de intensidade em regiotildees
uniformes com atributos de cor Um limite miacutenimo no tamanho das regiotildees deve ser
fixado para evitar que regiotildees muito pequenas sejam incluiacutedas na anaacutelise visto que
estas regiotildees pequenas podem representar locais com curvatura
A chave para o crescimento de regiotildees eacute a definiccedilatildeo do grau de pertinecircncia
de cada ponto agrave superfiacutecie plana Para isto eacute utilizado o conceito de distacircncia
miacutenima do ponto a esta superfiacutecie Para pertencer a uma regiatildeo os pontos devem
84
estar dentro do limite de proximidade ou seja a distacircncia entre o ponto e a
superfiacutecie plana natildeo pode superar o limiar fixado
A qualidade deste processo depende de fatores como o estabelecimento de
correspondecircncia entre os pontos precisatildeo na determinaccedilatildeo da superfiacutecie normal
utilizada remoccedilatildeo de erros grosseiros do conjunto de observaccedilotildees e identificaccedilatildeo
da regiatildeo semente
432 Segmentaccedilatildeo por anaacutelise da variaccedilatildeo local de autovalores
Esta abordagem baseia-se na anaacutelise da variaccedilatildeo local dos autovalores e
autovetores A hipoacutetese baacutesica nesta metodologia foi considerar que ao longo de
uma superfiacutecie plana os autovalores devem apresentar valores similares ou muito
proacuteximos Considerando duas regiotildees adjacentes se estas regiotildees forem
coplanares entatildeo a magnitude relativa de seus autovalores seraacute aproximadamente
igual Se uma destas regiotildees encontra-se em uma borda do objeto os autovetores
seratildeo diferentes A regiatildeo a ser considerada eacute uma janela quadrada em torno do
pixel central Para efetuar esta anaacutelise devem ser calculados os autovalores de uma
regiatildeo em torno de cada pixel no arquivo de distacircncias da imagem TOF Estes
autovalores satildeo armazenados em matrizes que geram trecircs novas imagens digitais
com as bordas dos objetos intensificadas
Com a Figura 45 Ilustra-se a anaacutelise do arquivo de distacircncias da imagem
TOF realizado com o caacutelculo de seus autovalores As bordas dos objetos presentes
podem ser vistas em evidecircncia satildeo representadas com os maiores valores
85
FIGURA 45 ndash Intensificaccedilatildeo de bordas com autovalores
Os autovalores calculados para cada pixel satildeo normalizados na faixa de 0 a
255 utilizando-se 8 bits Assim estes valores podem ser representados como uma
imagem digital passiacutevel de ser analisada com softwares de processamento A Figura
46 ilustra uma imagem com bordas intensificadas proveniente da segmentaccedilatildeo
realizada com a anaacutelise da variaccedilatildeo local dos autovalores
FIGURA 46 ndash Imagem com bordas intensificadas
86
A imagem produzida pode entatildeo ser segmentada utilizando o algoritmo de
deslocamento pela meacutedia Os resultados da segmentaccedilatildeo satildeo regiotildees onde os
autovalores satildeo aproximadamente iguais definindo uma superfiacutecie com padratildeo
planar sendo estas superfiacutecies separadas das regiotildees de bordas
433 Segmentaccedilatildeo com o algoritmo de deslocamento pela meacutedia
A segmentaccedilatildeo com o algoritmo de deslocamento pela meacutedia eacute realizada
utilizando a imagem com as bordas dos objetos intensificadas gerada com a
segmentaccedilatildeo do arquivo de distacircncias da imagem TOF pela anaacutelise da variaccedilatildeo
local dos autovalores
Cada um dos trecircs autovalores calculados gera uma imagem com bordas
intensificadas Sendo assim espera-se que os valores digitais dos piacutexeis nas
superfiacutecies dos objetos sejam similares dentro desta imagem Com isto a
segmentaccedilatildeo proporcionaraacute a seleccedilatildeo das superfiacutecies do objeto
Para realizar a segmentaccedilatildeo da imagem de intensidade com as bordas
intensificadas deve-se escolher os paracircmetros (119893119904 119893119903 119867) mais adequados para a
segmentaccedilatildeo Estes paracircmetros correspondem ao domiacutenio espacial da imagem 119893119904
domiacutenio de caracteriacutesticas dos piacutexeis 119893119903 e o tamanho miacutenimo 119867 que as aacutereas
segmentadas devem possuir O limite miacutenimo na quantidade de piacutexeis deve ser
fixado para evitar que regiotildees muito pequenas sejam incluiacutedas na segmentaccedilatildeo o
que pode prejudicar esta etapa pois se espera que a imagem seja segmentada com
o menor nuacutemero de regiotildees
87
5 RESULTADOS E DISCUSSOtildeES
51 CALIBRACcedilAtildeO DA CAcircMARA
Com o objetivo de calcular os POI o processo de calibraccedilatildeo da cacircmara foi
realizado com o Toolbox CALIB do software Matlab que utiliza o meacutetodo proposto
por ZHANG (2000) O gabarito fotografado foi impresso com 7x9 quadrados com
dimensatildeo de 117x117mm Estas imagens foram captadas a uma distacircncia
aproximada de 25 metros da cacircmara Para que houvesse pontos do gabarito sobre
a aacuterea da imagem foram obtidas 36 imagens com diferentes orientaccedilotildees conforme eacute
ilustrado com a Figura 51
FIGURA 51 ndash Imagens do gabarito utilizadas na calibraccedilatildeo da cacircmara
88
A Orientaccedilatildeo Exterior das imagens em relaccedilatildeo agrave cacircmara para a calibraccedilatildeo eacute
ilustrada com a Figura 52 A cacircmara eacute representada com a piracircmide em linhas
vermelhas e a origem do sistema fotogrameacutetrico eacute representada com a interseccedilatildeo
das linhas representadas com a cor azul no veacutertice da piracircmide
FIGURA 52 ndash Orientaccedilatildeo Exterior das fotografias para a calibraccedilatildeo da cacircmara
A distorccedilatildeo causada pelo sistema de lentes da cacircmara ocorre de forma mais
intensa nas bordas da imagem sendo a regiatildeo central o local com menor presenccedila
desta distorccedilatildeo A Figura 53 comprova este fato onde os vetores representados
com a cor vermelha partem dos pontos de controle na imagem e indicam a direccedilatildeo e
o sentido em que a distorccedilatildeo aumenta
FIGURA 53 ndash Direccedilatildeo das distorccedilotildees nos pontos da imagem TOF
89
Realizada a leitura das coordenadas dos pontos de controle os POI foram
calculados com o processo de calibraccedilatildeo da cacircmara e satildeo apresentados com a
Tabela 51
PARAcircMETROS INICIAIS OBTIDOS COM A LEITURA DAS IMAGENS
PARAcircMETRO VALOR
(piacutexeis) (mm)
Distacircncia focal (119891) (119891119909) (119891119910 )
285 80288 285 80288
1286113 1286113
Coordenadas do Ponto Principal (1199090)
(Origem no canto superior esquerdo) (1199100) 10150000 10150000
456750 456750
PARAcircMETROS DETERMINADOS COM A CALIBRACcedilAtildeO DA CAcircMARA
PARAcircMETRO VALOR DESVIO (3σ)
(piacutexeis) (mm) (piacutexeis) (mm)
Distacircncia focal (119891119888) calibrada (119891119909119888 ) (119891119910119888 )
29240511 29364057
1315823 1321383
plusmn 373164 plusmn 335357
plusmn 0167924 plusmn 0150911
Coordenadas do Ponto Principal (1199090119888 )
(Origem no canto superior esquerdo) (1199100119888 ) 10435253 10022287
4695864 4510029
plusmn 320459 plusmn 336886
plusmn 0144207 plusmn 0151599
1198701 -046768 -0021045 plusmn 003106 plusmn 0001398
1198702 060997 0027449 plusmn 013880 plusmn 0006246
1198703 000107 48150e-5
plusmn 000162 plusmn 72900e-5
1198751 000035 19350e-5
plusmn 000204 plusmn 91800e-5
1198752 000000 0000000 plusmn 000000 plusmn 0000000
Erro em pixel (119864119909 )
(119864119910 ) 049340 042754
0022203 0019239
TABELA 51 ndash Paracircmetros de Orientaccedilatildeo Interior calculados
Com os valores dos POI determinados foram calculados os fatores de escala
dos piacutexeis nas direccedilotildees 119904119909 e 119904119910 conforme as Equaccedilotildees (51) e (52)
119904119909 =119891
119891119909119888=
128119898119898
1315823119898119898= 0972775 (51)
119904119910 =119891
119891119910119888=
128119898119898
1321383119898119898= 0968682 (52)
A partir dos fatores de escala e da dimensatildeo do pixel igual a 45120583119898 das
imagens obtidas com a cacircmara PMD CamCube 20 foi calculado o tamanho efetivo
dos piacutexeis nas direccedilotildees x e y atraveacutes das Equaccedilotildees (53) e (54)
119875119909 = P ∙ 119904119909 = 45120583119898 ∙ 0972775 = 43774875120583119898 cong 44120583119898 (53)
119875119910 = P ∙ 119904119910 = 45120583119898 ∙ 0968682 = 43590690120583119898 cong 44120583119898 (54)
90
Os valores obtidos com as Equaccedilotildees (53) e (54) indicam que os elementos
do sensor podem ser considerados quadrados De acordo com Bazan et al (2009)
quando a diferenccedila de escala entre os lados do piacutexel natildeo eacute fornecida pelo fabricante
da cacircmara o fator de escala calculado para x pode absorver esta diferenccedila
Com a razatildeo entre as distacircncias focais obtidas com a calibraccedilatildeo da cacircmara
pode-se verificar a diferenccedila de escala Para a dimensatildeo do sensor esta diferenccedila
de escala natildeo alcanccedila o tamanho de um pixel conforme Equaccedilatildeo (56)
119863119868119865119864119878119862 =119891119909119888
119891119910119888=
1321383119898119898
1315823119898119898minus 1 = 1004225 minus 1 = 0004225 (55)
119863119868119865119864119878119862 = 0004225 lowast 204 = 08619 lt 1119901119894119909119890119897 (56)
A Equaccedilatildeo (56) indica que a diferenccedila de escala entre os eixos x e y eacute
menor que a dimensatildeo de um pixel isto considerando toda a dimensatildeo da imagem
de 204x204 piacutexeis da cacircmara PMD CamCube 20
Determinados os POI a imagem pode entatildeo ter sua geometria corrigida
conforme eacute ilustrado com a Figura 54b A Figura 54a ilustra a imagem original
obtida do gabarito onde se apresentam curvaturas provenientes da distorccedilatildeo
causada pelo sistema de lentes da cacircmara
FIGURA 54 ndash Correccedilatildeo geomeacutetrica da imagem TOF
91
Para a correccedilatildeo geomeacutetrica de imagens obtidas com cacircmaras de pequeno
formato Zhang (2000) recomenda utilizar somente os paracircmetros de distacircncia focal
calibrada 119891119888 coordenadas do Ponto Principal no plano da imagem 1199090 e 1199100 e os
coeficientes de Distorccedilatildeo Radial Simeacutetrica ateacute o segundo termo 1198701 e 1198702 Isto porque
este modelo de cacircmara apresenta principalmente a Distorccedilatildeo Radial Simeacutetrica
Outro fator diz respeito ao desvio calculado na determinaccedilatildeo de cada um destes
paracircmetros conforme valores apresentados na Tabela 51 o terceiro paracircmetro de
Distorccedilatildeo Radial Simeacutetrica 1198703 e os paracircmetros de Distorccedilatildeo Descentrada 1198751 e 1198752
apresentaram valores de desvios maiores do que os proacuteprios paracircmetros devendo
entatildeo serem desconsiderados para a correccedilatildeo geomeacutetrica da imagem
92
52 EXPERIMENTO 1 ndash ANAacuteLISE DE RUIacuteDO 1 IMAGEM TOF INTEIRA
O objetivo deste experimento consistiu em avaliar a presenccedila de ruiacutedo em
funccedilatildeo do tempo de integraccedilatildeo (TI) na aquisiccedilatildeo das imagens TOF Para sua
realizaccedilatildeo foram utilizadas imagens de uma parede com superfiacutecie plana distante
130m da cacircmara PMD CamCube 20 onde tambeacutem aparece parte de uma porta
Foram tomadas cinco imagens para cada valor de TI que variou entre 500 1000
1500 1700 1800 1900 2000 2500 3000 3500 4000 4500 5000 5300 5500
6000 e 7000μs gerando assim um conjunto de 85 imagens TOF
Com o objetivo de avaliar e reduzir a presenccedila de ruiacutedo nas imagens foram
realizadas as seguintes filtragens
Filtro passa-baixas pela meacutedia
Filtro pela mediana
Caacutelculo da meacutedia dos valores de distacircncia para imagens TOF
adquiridas com mesmo TI em instantes brevemente diferentes
Para cada imagem original foram criadas trecircs novas imagens filtradas com
os procedimentos mencionados
No graacutefico de dispersatildeo ilustrado com a Figura 55 os desvios padratildeo para o
conjunto de observaccedilotildees satildeo mostrados em funccedilatildeo do TI Foram calculados com
referecircncia no pixel central com coordenadas (102 102) e a aacuterea utilizada para o
caacutelculo possui dimensatildeo de 10x10 piacutexeis Escolheu-se esta regiatildeo por apresentar
padratildeo planar da superfiacutecie com menor distorccedilatildeo causada pelo sistema de lentes da
cacircmara tendo-se em vista que nesta etapa natildeo foi realizada a correccedilatildeo geomeacutetrica
dos dados da imagem TOF
Ainda com a Figura 55 verificou-se que o filtro da mediana aplicado nas
imagens gerou os menores desvios para a janela de 10x10 piacutexeis O menor desvio
calculado foi 12mm encontrado utilizando o filtro da mediana para o TI igual a
3000micros Verificou-se tambeacutem que os desvios apresentam valores similares para os
tempos de integraccedilatildeo que variaram entre 1500 agrave 2500micros para as imagens originais e
tambeacutem para as imagens filtradas
93
FIGURA 55 ndash Desvio padratildeo x TI janelas 10x10
A partir do graacutefico de dispersatildeo da Figura 55 escolheram-se imagens
captadas com os tempos de integraccedilatildeo de 500 2000 e 2500micros para realizar os
testes A Figura 56 ilustra superfiacutecies geradas a partir de filtragens realizadas em
imagem TOF obtida com TI igual a 500μs
FIGURA 56 ndash Imagens para TI=500μs e d=130m
94
Com TI de 500μs verificou-se intensa presenccedila de ruiacutedo na imagem original
e tambeacutem nas imagens filtradas Isto ocorreu devido ao baixo tempo de exposiccedilatildeo
do sensor A distorccedilatildeo causada pelo sistema de lentes da cacircmara tambeacutem pode ser
visualizada nestas superfiacutecies geradas com os arquivos de distacircncias da imagem
TOF As imagens foram obtidas de uma parede plana em que aparece parte de uma
porta o que justifica a descontinuidade vista em forma de degrau A anaacutelise
realizada com TI de 2000μs eacute ilustrada com a Figura 57
FIGURA 57 ndash Imagens para TI=2000μs e d=130m
Com TI de 2000μs obtiveram-se resultados melhores do que os obtidos com
TI de 500μs as superfiacutecies apresentaram-se mais suaves confirmando a tendecircncia
demonstrada com o graacutefico de dispersatildeo da Figura 55
A uacuteltima anaacutelise deste experimento foi realizada com o tempo de integraccedilatildeo
de 2500μs conforme pode ser visualizado com as superfiacutecies geradas com os
arquivos de distacircncias da imagem TOF original e das imagens filtradas ilustradas
com a Figura 58
95
FIGURA 58 ndash Imagens para TI=2500μs e d=130m
As imagens filtradas com TI de 2000μs e 2500μs apresentam suavizaccedilotildees
similares nas superfiacutecies geradas com os arquivos de distacircncias da imagem TOF
Verificou-se que o tempo de integraccedilatildeo para a aquisiccedilatildeo das imagens da parede a
13m de distacircncia da cacircmara deve ser um destes valores O TI de 2000μs pode ser
o escolhido e estaacute de acordo com o graacutefico de dispersatildeo ilustrado com a Figura 55
As filtragens de suavizaccedilatildeo com o filtro passa-baixas pela meacutedia e pela
mediana mostraram-se as melhores opccedilotildees a serem utilizadas com estas filtragens
apresentaram-se os menores desvios para a janela central de 10x10 piacutexeis Uma
vantagem da filtragem pela mediana eacute que mantecircm os valores originais de distacircncia
para os piacutexeis da imagem e preserva as bordas do objeto imageado No entanto a
filtragem com a mediana degrada as bordas da imagem devendo ser
cuidadosamente analisada para cada aplicaccedilatildeo
Tambeacutem foram calculados os desvios padratildeo para as imagens inteiras e os
valores obtidos foram de 19cm em meacutedia Este grande valor deveu-se a maior
curvatura ocorrer nas extremidades da imagem e tambeacutem ao fato de haver uma
descontinuidade na superfiacutecie presente na imagem TOF causada pela porta
presente na superfiacutecie da parede
96
53 EXPERIMENTO 2 ndash ANAacuteLISE DE RUIacuteDO 2 JANELAS DE 40X40 PIacuteXEIS
O objetivo deste experimento foi analisar a presenccedila de ruiacutedo em aacutereas
centrais da imagem TOF Para isto escolheram-se janelas com dimensotildees de 40x40
piacutexeis ao redor do pixel central da imagem Calculou-se o desvio padratildeo da distacircncia
de cada pixel em relaccedilatildeo a este pixel central As janelas utilizadas tiveram sua
posiccedilatildeo na imagem variando de (8282) ateacute (122122) e correspondem a aacuterea com
superfiacutecie plana de uma parede presente na cena
Primeiramente utilizaram-se imagens TOF adquiridas agrave distacircncia de 130m
entre a cacircmara e a parede com os tempos de integraccedilatildeo iguais a 2000 e 5000micros
Posteriormente utilizaram-se imagens TOF obtidas a 210m da parede com tempos
de integraccedilatildeo iguais a 2000 5000 e 7000micros
O graacutefico de dispersatildeo da Figura 59 ilustra uma anaacutelise para a captaccedilatildeo de
imagens TOF com diferentes distacircncias e tempos de integraccedilatildeo Os desvios padratildeo
foram calculados para imagens TOF captadas com a cacircmara CamCube 20 onde
variaram-se as distacircncias e os tempos de integraccedilatildeo no momento da aquisiccedilatildeo das
imagens
FIGURA 59 ndash Desvios padratildeo para distacircncia x TI
FONTE CENTENO e JUTZI (2010)
97
Com a Figura 510 eacute apresentado o primeiro resultado deste experimento o
graacutefico de dispersatildeo gerado com a imagem TOF adquirida do objeto agrave distacircncia de
130m da cacircmara com TI igual a 2000micros
FIGURA 510 ndash Desvios padratildeo para janelas com TI=2000μs d=130m
A Figura 511 ilustra as superfiacutecies geradas com o arquivo de distacircncias da
imagem TOF adquirida do objeto agrave distacircncia de 130m da cacircmara com TI igual a
2000micros e com as imagens resultantes das filtragens realizadas
FIGURA 511 ndash Janelas de 40x40 piacutexeis TI=2000μs d=130m
98
Com a Figura 511 conclui-se que os melhores resultados para a suavizaccedilatildeo
dos dados de distacircncia foram obtidos com os filtros passa-baixas pela meacutedia e
mediana
A Figura 512 ilustra o graacutefico de dispersatildeo para a imagem adquirida com TI
igual a 5000μs com distacircncia de 130m entre o objeto imageado e a cacircmara TOF A
Figura 513 ilustra as superfiacutecies geradas com as janelas centrais de 40x40 piacutexeis
FIGURA 512 ndash Desvios padratildeo para janelas com TI=5000μs d=130m
FIGURA 513 ndash Janelas de 40x40 piacutexeis TI=5000μs d=130m
99
O TI de 5000μs utilizado para a aquisiccedilatildeo da imagem saturou os elementos
do sensor e causou maior presenccedila de ruiacutedo nos dados Comparando as Figuras
511 e 513 conclui-se que para a distacircncia de 130m do sensor o tempo de
integraccedilatildeo mais adequado para a aquisiccedilatildeo da imagem foi 2000micros
A Figura 514 ilustra o graacutefico de dispersatildeo gerado para a imagem TOF
obtida com TI igual a 2000μs e distacircncia de 210m As superfiacutecies geradas a partir
das janelas de 40x40 piacutexeis desta imagem satildeo apresentadas com a Figura 515
FIGURA 514 ndash Desvios padratildeo para janelas com TI=2000μs d=210m
FIGURA 515 ndash Janelas de 40x40 piacutexeis TI=2000μs d=210m
100
O graacutefico de dispersatildeo calculado para a imagem adquirida com TI igual a
5000μs e distacircncia de 210m eacute ilustrado com a Figura 516
FIGURA 516 ndash Desvios padratildeo para janelas com TI=5000μs d=210m
Os menores desvios padratildeo foram encontrados na imagem filtrada utilizando
os filtros passa-baixas pela meacutedia e mediana conforme pode ser visualizado com a
Figura 516 Para a janela de 40x40 piacutexeis o desvio padratildeo de 107mm na imagem
original diminuiu para 96mm com a filtragem pela mediana A Figura 517 ilustra as
superfiacutecies geradas para a imagem obtida com distacircncia de 210m e TI de 5000μs
FIGURA 517 ndash Janelas de 40x40 piacutexeis TI=5000μs d=210m
101
Com a Figura 517 observa-se novamente que os melhores resultados para
a suavizaccedilatildeo da imagem foram obtidos com os filtros passa-baixas pela meacutedia e
pela mediana
A Figura 518 ilustra o graacutefico de dispersatildeo e a Figura 519 ilustra as
superfiacutecies geradas para as imagens adquiridas com distacircncia de 210m e TI igual a
7000μs
FIGURA 518 ndash Desvios padratildeo para janelas com TI=7000μs d=210m
FIGURA 519 ndash Janelas de 40x40 piacutexeis TI=7000μs d=210m
102
Com o graacutefico de dispersatildeo ilustrado com a Figura 518 observa-se que os
desvios padratildeo calculados para as imagens obtidas com os filtros passa-baixas pela
meacutedia e mediana satildeo maiores do que os desvios apresentados com o graacutefico de
dispersatildeo ilustrado com a Figura 516 Isto indica que as imagens captadas da
parede plana com TI igual a 7000μs e distacircncia de 210m apresentaram maior ruiacutedo
que as imagens obtidas com 5000μs
Comparando as Figuras 519 e 517 verifica-se que a imagem captada com
TI igual a 5000μs com distacircncia de 210m e filtrada com o filtro passa-baixas pela
meacutedia e tambeacutem com a mediana apresentou-se mais suavizada do que a imagem
obtida com TI igual a 7000μs
Comparando as imagens captadas com tempo de integraccedilatildeo de 2000μs e
5000μs para a distacircncia de 210m conforme Figuras 515 e 517 conclui-se que as
imagens obtidas com TI de 5000μs apresentaram menor presenccedila de ruiacutedo
54 EXPERIMENTO 3 ndash PROJECcedilAtildeO ORTOGONAL DOS PONTOS
Obtidos os POI atraveacutes do processo de calibraccedilatildeo da cacircmara e definido o
melhor TI para a captaccedilatildeo da imagem procedeu-se a um novo experimento no qual
se analisou a imagem de uma caixa com superfiacutecies planas A superfiacutecie do objeto
em questatildeo eacute composta por papel branco riacutegido e refletivo A caixa foi colocada
sobre uma cadeira agrave distacircncia aproximada de 13m da cacircmara Esta cadeira foi
girada enquanto a cacircmara continuou fixa com o mesmo ponto de vista Com base
no estudo da dispersatildeo dos dados em funccedilatildeo da distacircncia ao objeto optou-se por
utilizar o TI de 2000μs para a captaccedilatildeo das imagens Foram entatildeo adquiridas dez
imagens do objeto
Com a distacircncia do objeto em relaccedilatildeo agrave cacircmara igual a 13m e com a
distacircncia focal calibrada da cacircmara de 132mm valor encontrado com a Equaccedilatildeo
(57) calculou-se a escala aproximada das fotografias encontrando-se o valor
aproximado para a escala igual a 1100 conforme Equaccedilatildeo (58)
119891119888 =119891119909119888+119891119910119888
2=
1315823119898119898+1321383119898119898
2= 1318603119898119898 cong 132119898119898 (57)
103
119864 =119889
119863=
119891119888
119885=
132119898119898
13119898=
00132119898
13119898=
1
984848cong
1
100 (58)
Para realizar este experimento selecionou-se a terceira imagem captada por
apresentar vista perspectiva de trecircs superfiacutecies com padratildeo planar no objeto
imageado A Figura 520a ilustra o arquivo de intensidades da imagem TOF sem
correccedilatildeo geomeacutetrica A Figura 520b ilustra o arquivo de intensidade corrigido
geometricamente utilizando as coordenadas do Ponto Principal 1199090 e 1199100 os
coeficientes de distorccedilatildeo Radial Simeacutetrica 1198701 e 1198702 e a distacircncia focal calibrada 119891119888
FIGURA 520 ndash Arquivo de intensidades da imagem TOF obtida do objeto
Apoacutes a correccedilatildeo da geometria da imagem TOF geraram-se as superfiacutecies do
objeto Isto foi feito a partir do arquivo de distacircncias da imagem TOF conforme eacute
ilustrado com a Figura 521 onde se tem as distacircncias dos pontos em relaccedilatildeo ao
sensor representadas com a coordenada Z em metros sobre a imagem TOF com
dimensatildeo de 204x204 piacutexeis
104
FIGURA 521 ndash Arquivo de distacircncias da imagem TOF com geometria corrigida
A partir do arquivo de distacircncias da imagem TOF com a geometria dos
dados corrigida projetaram-se ortogonalmente os pontos gerando a nuvem de
pontos 3D ilustrada com a Figura 522 em vista frontal com o eixo Z ortogonal aos
eixos X e Y representados
FIGURA 522 ndash Nuvem de pontos vista frontal
105
A vista em perspectiva tridimensional da nuvem de pontos do objeto de
estudo eacute ilustrada com a Figura 523 Conteacutem 42025 pontos gerados a partir da
imagem TOF de 204x204 piacutexeis obtida com a cacircmara PMD CamCube 20
FIGURA 523 - Nuvem de pontos vista perspectiva 3D
106
55 EXPERIMENTO 4 ndash SEGMENTACcedilAtildeO 1 CRESCIMENTO DE REGIOtildeES
Realizou-se a segmentaccedilatildeo por crescimento de regiotildees a partir de trecircs
pontos semente Estes pontos foram escolhidos em aacutereas uniformes no arquivo de
intensidades da imagem TOF corrigida geometricamente e foram projetados
ortogonalmente para a nuvem 3D As coordenadas de imagem destes pontos foram
observadas nas posiccedilotildees indicadas com a Figura 524
FIGURA 524 ndash Pontos semente no arquivo de intensidades da imagem TOF
Os pontos semente foram escolhidos em trecircs superfiacutecies planas da caixa em
locais que apresentavam valores de intensidade uniforme As coordenadas de
imagem lidas em piacutexeis para estes trecircs pontos foram Ponto 1 (11681) Ponto 2
(72103) Ponto 3 (113108)
As Figuras 525 e 526 ilustram o crescimento em trecircs regiotildees realizados na
nuvem de pontos 3D Estes pontos correspondem agraves superfiacutecies frontal superior e
lateral da caixa ilustradas com as cores amarela verde e ciano respectivamente
Os trecircs autovetores calculados satildeo ilustrados com a cor azul ortogonais aos pontos
semente escolhidos nas trecircs superfiacutecies da imagem de intensidade
107
FIGURA 525 ndash Crescimento de regiotildees vista frontal
FIGURA 526 ndash Crescimento de regiotildees vista perspectiva 3D
Com as Figuras 525 e 526 verifica-se que o crescimento das regiotildees
ocorreu de forma coerente acompanhando o padratildeo planar das superfiacutecies do
objeto de estudo No entanto nas trecircs superfiacutecies analisadas houve crescimento de
regiotildees para fora dos limites de suas aacutereas Pontos de superfiacutecies ao fundo e abaixo
do objeto foram incluiacutedos nas regiotildees Isto ocorreu devido agrave utilizaccedilatildeo do criteacuterio de
108
similaridade de distacircncia do ponto agrave superfiacutecie plana sendo esta superfiacutecie definida
pelos pontos semente A distacircncia foi medida ao longo do autovetor o que fez com
que pontos de outras superfiacutecies paralelas a superfiacutecie plana em questatildeo fossem
agrupados na mesma regiatildeo Ou seja pontos que estavam orientados na direccedilatildeo da
superfiacutecie plana definida pelo autovalor que passa pelo ponto semente e que
estavam dentro do limiar de distacircncia estabelecido foram incluiacutedos nas regiotildees
mesmo natildeo pertencendo agrave superfiacutecie analisada
56 EXPERIMENTO 5 ndash SEGMENTACcedilAtildeO 2 ANAacuteLISE COM AUTOVALORES
Neste experimento realizou-se a segmentaccedilatildeo da imagem TOF por anaacutelise
da variaccedilatildeo local de autovalores locais de superfiacutecies O arquivo de distacircncias desta
imagem foi utilizado como ponto de partida para o caacutelculo dos autovalores com o
objetivo de intensificar as bordas dos objetos presentes na cena
O processamento consistiu em definir uma pequena vizinhanccedila quadrada
uma janela moacutevel e utilizar as coordenadas tridimensionais dos pontos nesta
vizinhanccedila para o caacutelculo dos autovalores
Apoacutes a normalizaccedilatildeo os autovalores foram armazenados na forma de trecircs
novas imagens conforme pode ser visualizado com as Figuras 527 528 e 529
Para a geraccedilatildeo destas imagens utilizou-se a janela moacutevel com dimensatildeo de 3x3
piacutexeis para o caacutelculo dos autovalores
109
FIGURA 527 ndash Imagem com bordas intensificadas gerada com 1205821
FIGURA 528 ndash Imagem com bordas intensificadas gerada com 1205822
FIGURA 529 ndash Imagem com bordas intensificadas gerada com 1205823
110
A partir da imagem com bordas intensificadas gerada com os autovalores
locais foi possiacutevel criar uma nova imagem de intensidade que tambeacutem estava com
as bordas dos objetos intensificadas A Figura 530 ilustra as imagens de
intensidade com bordas intensificadas que foram geradas utilizando o segundo
autovalor calculado a partir de janelas com as seguintes dimensotildees a)3x3 b)5x5
c)7x7 d)9x9 e)11x11 f)13x13 piacutexeis
FIGURA 530 ndash Imagens de intensidade com as bordas do objeto intensificadas
111
Com as imagens de intensidade ilustradas com a Figura 530 observou-se
que aumentando a quantidade de piacutexeis da janela utilizada para o caacutelculo dos
autovalores da regiatildeo aumentou-se tambeacutem a suavizaccedilatildeo sobre as superfiacutecies
planas e alargaram-se as bordas que limitam os objetos contidos na cena
Para este experimento utilizou-se a imagem gerada com a janela de 3x3
piacutexeis e com o segundo autovalor Esta imagem foi escolhida por apresentar linhas
finas limitando as bordas do objeto A imagem de intensidade com as bordas do
objeto intensificadas foi segmentada utilizando o algoritmo de deslocamento pela
meacutedia O resultado da segmentaccedilatildeo eacute ilustrado com a Figura 531
FIGURA 531 ndash Imagem com bordas intensificadas segmentada
112
A Figura 531a ilustra a imagem com bordas intensificadas a ser
segmentada gerada com o segundo conjunto de autovalores 1205822 Na Figura 531b
tem-se esta imagem suavizada por filtragem A Figura 531c corresponde agrave imagem
segmentada com o algoritmo de deslocamento pela meacutedia A imagem com os limites
das aacutereas segmentadas eacute ilustrada com a Figura 531d
A segmentaccedilatildeo foi realizada utilizando o software EDISON com os
paracircmetros (119893119904 119893119903 119867) = (7 9 300) Estes paracircmetros correspondem ao domiacutenio
espacial da imagem 119893119904 domiacutenio de caracteriacutesticas 119893119903 e tamanho miacutenimo das
regiotildees 119867 em piacutexeis O limite miacutenimo foi fixado para evitar que regiotildees muito
pequenas fossem incluiacutedas na segmentaccedilatildeo
Com a imagem segmentada da Figura 529c foi possiacutevel projetar os pontos
de interesse ortogonalmente gerando a nuvem de pontos 3D Para isto utilizou-se
as coordenadas dos piacutexeis no arquivo de intensidades e seus correspondentes no
arquivo de distacircncias da imagem TOF Estes pontos foram escolhidos sobre as
superfiacutecies da caixa A nuvem de pontos 3D resultante deste experimento eacute
apresentada com as Figuras 532 e 533
FIGURA 532 ndash Nuvem de pontos da imagem segmentada vista frontal
113
FIGURA 533 ndash Nuvem de pontos da imagem segmentada vista 3D
57 EXPERIMENTO 6 ndash ANAacuteLISE DAS MEDIDAS OBTIDAS
Para gerar a nuvem de pontos 3D com as superfiacutecies de interesse
primeiramente corrigiu-se a geometria do arquivo de distacircncias da imagem TOF com
as coordenadas do Ponto Principal 1199090 e 1199100 coeficientes de distorccedilatildeo Radial
Simeacutetrica 1198701 e 1198702 e distacircncia focal calibrada 119891119888 O passo seguinte foi gerar uma
imagem de intensidade com as bordas do objeto intensificadas Com este objetivo
calcularam-se os autovalores para os pontos do arquivo de distacircncias da imagem
TOF e geraram-se trecircs imagens novas correspondendo aos trecircs autovalores
calculados conforme o Experimento 5 O terceiro passo foi a segmentaccedilatildeo da
imagem de intensidade com bordas intensificadas utilizando o algoritmo de
deslocamento pela meacutedia Com a imagem segmentada pocircde-se escolher as
superfiacutecies que teriam seus piacutexeis projetados para a nuvem de pontos 3D
A imagem segmentada com o algoritmo de deslocamento pela meacutedia
apresenta niacuteveis de cinza diferentes para os piacutexeis de cada segmento Com isto foi
possiacutevel separar os pontos que compotildeem as superfiacutecies por seus valores digitais A
Figura 534 apresenta a nuvem de pontos 3D gerada com a imagem TOF corrigida
geometricamente com os pontos da superfiacutecie frontal representados com a cor azul
114
FIGURA 534 ndash Nuvem de pontos 3D segmentada
A superfiacutecie frontal foi projetada com atributo de cor diferenciado por
apresentar a melhor segmentaccedilatildeo na imagem de intensidade e pontos bem
definidos na nuvem 3D A partir desta superfiacutecie escolheram-se os pontos extremos
os veacutertices do objeto para a leitura de suas coordenadas 3D com o objetivo de
calcular o comprimento das arestas Com a Figura 535 satildeo ilustrados os quatro
pontos selecionados
FIGURA 535 ndash Pontos 3D selecionados na nuvem
115
Com as coordenadas destes quatro pontos e atraveacutes da relaccedilatildeo de distacircncia
tridimensional entre eles expressa pela Equaccedilatildeo (59) calcularam-se as dimensotildees
de trecircs arestas do objeto de estudo
119863119894119895 = 119883119894minus119883119895 2
+ 119884119894minus119884119895 2
+ 119885119894minus119885119895 2 (59)
onde
119863119894119895 ndash Distacircncia entre pontos no espaccedilo tridimensional
119883119894 119884119894 119885119894 119890 119883119895 119884119895 119885119895 - Coordenadas dos pontos 119894 e 119895 na nuvem de pontos 3D
Para verificar a confiabilidade das medidas obtidas com a metodologia
proposta compararam-se as medidas das arestas calculadas a partir dos pontos 3D
com as dimensotildees de referecircncia do objeto de estudo As medidas de referecircncia satildeo
ilustradas com o desenho da Figura 536
FIGURA 536 ndash Dimensotildees de referecircncia do objeto de estudo
A partir das coordenadas tridimensionais dos quatro pontos ilustrados com a
Figura 535 foi possiacutevel calcular as distacircncias entre os pontos e comparar-las com
as medidas de referecircncia As diferenccedilas obtidas satildeo ilustradas com a Tabela 52
116
Ponto
Coordenadas Arestas Medida realizada Diferenccedilas
X (cm) Y (cm) Z (cm) Pontos 3D (cm)
Ref (cm)
(cm) ()
1 -131 -136 -1219 Pontos 1-2 236 260 24 92
2 -80 61 -1098 Pontos 2-3 332 350 18 51
3 234 38 -1203 Pontos 2-4 263 210 53 252
4 -125 180 -1328
TABELA 52 ndash Coordenadas 3D dos pontos e medidas realizadas
O melhor resultado foi obtido para a medida realizada sobre a aresta entre
os pontos 2-3 com diferenccedila de aproximadamente 18 cm em relaccedilatildeo agrave medida de
referecircncia o que representa 5 da distacircncia medida O pior resultado foi obtido com
o calculo da aresta entre os pontos 2 e 4 com diferenccedila de aproximadamente
53cm que equivale 25 da medida de referecircncia Com este resultado conclui-se
que os pontos projetados com maior profundidade na nuvem de pontos 3D
apresentaram maior erro de posicionamento Estes pontos descrevem uma
superfiacutecie plana do objeto pouco aparente na imagem encontra-se muito inclinada
em relaccedilatildeo ao plano da imagem motivo pelo qual erros maiores podem ser
esperados Sobre os pontos 1 2 e 3 da superfiacutecie frontal do objeto o erro foi menor
na ordem de 2 centiacutemetros
Conforme o Experimento 1 realizado para a anaacutelise de ruiacutedo o melhor
resultado foi obtido utilizando o filtro da mediana que apresentou o desvio de 13cm
para a distacircncia de 13m medida utilizando tempo de integraccedilatildeo de 2000micros Este
fato indica coerecircncia com a diferenccedila de 2cm encontrada com a medida da aresta
frontal do objeto
117
58 MODELAGEM DAS SUPERFIacuteCIES 3D
Para a modelagem tridimensional das superfiacutecies segmentadas
primeiramente foi analisada a melhor forma de processamento da imagem TOF
Verificou-se com o Experimento 4 que o crescimento de regiotildees utilizando o arquivo
de intensidades da imagem TOF para escolha do ponto semente e o arquivo de
distacircncias para a projeccedilatildeo ortogonal e crescimento de regiotildees a partir deste ponto
natildeo foi satisfatoacuterio Isto porque o crescimento tambeacutem ocorreu em superfiacutecies que
natildeo pertenciam ao objeto analisado
Melhores resultados foram obtidos com a metodologia de segmentaccedilatildeo que
utilizou a imagem com bordas evidenciadas Esta foi gerada com a anaacutelise dos
autovalores locais das superfiacutecies a partir do arquivo de distacircncias da imagem TOF
conforme Experimento 5 A partir desta segmentaccedilatildeo projetaram-se ortogonalmente
os pontos das superfiacutecies frontal e superior do objeto de estudo gerando assim a
nuvem de pontos 3D que eacute ilustrada com a Figura 537
FIGURA 537 ndash Nuvem de pontos 3D das superfiacutecies frontal e superior
A partir da nuvem de pontos 3D realizou-se a modelagem das superfiacutecies
frontal e superior do objeto conforme eacute ilustrado com a Figura 538
118
FIGURA 538 ndash Modelagem tridimensional das superfiacutecies frontal e superior
Analisando a Figura 538 chegou-se a conclusatildeo que a superfiacutecie frontal do
objeto apresentou-se com padratildeo planar e uniforme Eacute a superfiacutecie que melhor
refletiu o sinal para o sensor devido agrave sua posiccedilatildeo em relaccedilatildeo agrave cacircmara TOF A
superfiacutecie superior apresentou-se um pouco inclinada em relaccedilatildeo ao plano da
imagem e com isto maior rugosidade foi observada nesta superfiacutecie Este
fenocircmeno deve-se a menor captaccedilatildeo do sinal refletido pela superfiacutecie do objeto pelo
sensor da cacircmara
119
6 CONCLUSOtildeES RECOMENDACcedilOtildeES E CONSIDERACcedilOtildeES FINAIS
61 CONCLUSOtildeES
Neste trabalho descreveram-se conceitos introdutoacuterios sobre as cacircmaras
TOF Avaliaram-se duas metodologias para a segmentaccedilatildeo da nuvem de pontos 3D
gerada a partir da imagem TOF Apresentou-se uma aplicaccedilatildeo para esta imagem na
extraccedilatildeo de informaccedilotildees meacutetricas do objeto de estudo imageado a distacircncia
aproximada de 13m
Para isto foram abordados os seguintes assuntos calibraccedilatildeo da cacircmara
para a obtenccedilatildeo de POI correccedilatildeo geomeacutetrica da imagem TOF filtragens para
anaacutelise e tratamento de ruiacutedo segmentaccedilatildeo atraveacutes do crescimento de regiotildees a
partir de um ponto semente segmentaccedilatildeo do arquivo de distacircncias da imagem TOF
utilizando autovalores locais para a geraccedilatildeo de uma imagem com bordas
intensificadas segmentaccedilatildeo da imagem com bordas intensificadas atraveacutes do
algoritmo de deslocamento pela meacutedia geraccedilatildeo da nuvem de pontos 3D atraveacutes da
projeccedilatildeo ortogonal dos pontos da imagem de bordas segmentada e por fim a
modelagem tridimensional de superfiacutecies do objeto de estudo
O processo de calibraccedilatildeo da cacircmara foi realizado utilizando o meacutetodo
proposto por Zhang (2000) e possibilitou a determinaccedilatildeo de POI A correccedilatildeo
geomeacutetrica das imagens foi feita atraveacutes das coordenadas 1199090 e 1199100 do Ponto
Principal coeficientes de distorccedilatildeo Radial Simeacutetrica de lentes 1198701 e 1198702 e distacircncia
focal calibrada 119891119888
Com os Experimentos 1 e 2 foram realizadas filtragens para o tratamento de
ruiacutedo das imagens TOF disponiacuteveis Nestes experimentos verificou-se que para a
captaccedilatildeo da imagem TOF agrave distacircncia de 13m entre o objeto e a cacircmara o tempo de
integraccedilatildeo de 2000μs foi o que gerou imagens com menor presenccedila de ruiacutedo Assim
como o tempo de integraccedilatildeo de 5000μs foi o mais adequado para captar imagens agrave
distacircncia de 21m No entanto chegou-se a conclusatildeo que para a geraccedilatildeo da nuvem
de pontos 3D natildeo se deveria utilizar filtragem nos dados pois pequenas alteraccedilotildees
no arquivo de distacircncias da imagem TOF poderiam modificar o posicionamento
tridimensional dos pontos o que afetaria a qualidade das medidas realizadas com os
pontos da nuvem 3D
120
A primeira metodologia proposta para a segmentaccedilatildeo da imagem TOF
mostrou-se insatisfatoacuteria para a soluccedilatildeo do problema Empregou-se o crescimento
de regiotildees a partir de pontos semente escolhidos no arquivo de intensidades desta
imagem projetando-os ortogonalmente para a nuvem de pontos 3D utilizando os
valores obtidos com o arquivo de distacircncias da imagem TOF Notou-se que erros no
crescimento de regiotildees ocorreram devido agrave toleracircncia utilizada para a distacircncia do
ponto agrave superfiacutecie plana Isto ocorreu porque a distacircncia foi calculada ao longo do
autovetor que eacute ortogonal a superfiacutecie no ponto semente Por este motivo alguns
pontos de superfiacutecies adjacentes foram selecionados equivocadamente como
pertencentes a uma mesma regiatildeo na nuvem de pontos 3D pois estavam dentro do
limite fixado no criteacuterio de similaridade utilizado mas na realidade natildeo eram
coplanares Para resolver o problema com esta metodologia seria necessaacuterio
estabelecer um limiar de crescimento lateral natildeo apenas de distacircncia ortogonal a
superfiacutecie plana semente Este limiar poderia ser o valor digital do pixel tendo em
vista que superfiacutecies coplanares apresentam uniformidade na resposta espectral A
rugosidade apresentada na superfiacutecie em que se realizava o crescimento da regiatildeo
tambeacutem influenciou em erros na seleccedilatildeo de pontos pois afetou no caacutelculo dos
autovalores fazendo com que inclinaccedilotildees em relaccedilatildeo a esta superfiacutecie fossem
notadas
A segunda metodologia analisada para a segmentaccedilatildeo da imagem TOF
mostrou-se satisfatoacuteria A segmentaccedilatildeo do arquivo de distacircncias da imagem TOF foi
realizada utilizando autovalores locais para a geraccedilatildeo de uma imagem com bordas
intensificadas segmentaccedilatildeo desta imagem com o algoritmo de deslocamento pela
meacutedia e projeccedilatildeo destes segmentos para a nuvem de pontos 3D A extraccedilatildeo de
informaccedilotildees meacutetricas em arestas do objeto de estudo a partir dos pontos 3D
apresentou diferenccedila na ordem de 2cm com a medida de referecircncia sendo a
imagem TOF adquirida com tempo de integraccedilatildeo de 2000μs a uma distacircncia
aproximada de 13m entre o objeto de estudo e a cacircmara
A Figura 61 ilustra as etapas de processamento a serem realizadas para a
geraccedilatildeo da nuvem de pontos 3D utilizando a segunda metodologia considerada
apropriada para a modelagem tridimensional de superfiacutecies utilizando a imagem
TOF Esta eacute a metodologia proposta como conclusatildeo do presente trabalho de
pesquisa
121
FIGURA 61 ndash Etapas da metodologia de processamento da imagem TOF
Foram encontradas medidas com maior qualidade quando a superfiacutecie do
objeto estava paralela ao plano da imagem Esta qualidade tambeacutem foi afetada pela
distacircncia entre a cacircmara e o objeto pela refletividade das superfiacutecies e pela
iluminaccedilatildeo ambiente Conforme o Experimento 6 realizado a aresta frontal do objeto
entre os pontos 2 e 3 apresentou a menor diferenccedila de medida 18cm que equivale
a 5 da distacircncia de referecircncia
Comparaccedilotildees para a diferenccedila de medida encontrada podem ser realizadas
com os seguintes trabalhos Kahlmann et al (2006) obtiveram exatidatildeo de 1cm nas
medidas com o alvo agrave distacircncia de 25m da cacircmara TOF utilizada Wiedemann et al
(2008) obtiveram exatidatildeo de 4cm com o alvo medido a distacircncia de 4m May et al
(2008) obtiveram erro de 30cm para uma medida de 108m considerada como
referecircncia com as imagens TOF captadas do centro de uma sala girando a cacircmara
360ordm e portanto envolviam tambeacutem Paracircmetros de Orientaccedilatildeo Exterior da cacircmara
Kolb et al (2009) obtiveram erro de 2cm para distacircncias medidas de 10m agrave 45m
Nestes trabalhos foram realizadas correccedilotildees geomeacutetricas nas imagens TOF com
POI determinados com a calibraccedilatildeo da cacircmara
Arquivo de distacircncias da imagem TOF
Correccedilatildeo geomeacutetrica dos dados utilizando POI calculados com o processo de calibraccedilatildeo da cacircmara
Imagem de intensidade com bordas itensificadas calculada com a anaacutelise da variaccedilatildeo local dos autovalores
Segmentaccedilatildeo da imagem com bordas intensificadas utilizando o algoriacutetmo de deslocamento pela meacutedia
Projeccedilatildeo ortogonal das aacutereas segmentadas para a geraccedilatildeo da nuvem de pontos 3D
Modelagem tridimensional das superfiacutecies do objeto
122
62 RECOMENDACcedilOtildeES
Recomenda-se realizar a anaacutelise preacutevia do tempo de integraccedilatildeo para a
aquisiccedilatildeo da imagem TOF com o objetivo de diminuir a presenccedila de ruiacutedo Este
tempo deve ser escolhido de acordo com o ambiente em que seraacute adquirida a
imagem e tambeacutem com as caracteriacutesticas de refletividade da superfiacutecie do objeto
Com este mesmo objetivo e devido ao fato desta imagem ser obtida com iluminaccedilatildeo
LED no comprimento de onda infravermelho recomenda-se analisar as influecircncias
da iluminaccedilatildeo exterior ao sistema de iluminaccedilatildeo da cacircmara
De acordo com a aplicaccedilatildeo a que se destina a imagem TOF recomenda-se
tambeacutem realizar a calibraccedilatildeo da cacircmara com meacutetodo fotogrameacutetrico convencional
Isto possibilitaria a melhora na correccedilatildeo geomeacutetrica da imagem e consequente
aumento na qualidade das medidas realizadas com os pontos da nuvem 3D
Correccedilotildees radiomeacutetricas tambeacutem podem ser aplicadas para melhorar a qualidade
das medidas obtidas com a imagem TOF
63 CONSIDERACcedilOtildeES FINAIS
Nuvens de pontos 3D geradas a partir de imagens TOF satildeo ferramentas
para a modelagem tridimensional das superfiacutecies de objetos Propiciam a obtenccedilatildeo
de informaccedilotildees meacutetricas destes objetos para distacircncias de 03 a 70 metros com
erro centimeacutetrico esperado
Aplicaccedilotildees para as imagens TOF podem ser realizadas para a modelagem
3D de tuacuteneis galerias instalaccedilotildees industriais e fachadas de preacutedios com interesse
de preservaccedilatildeo como patrimocircnio histoacuterico e cultural Com a alta frequecircncia de
aquisiccedilatildeo de imagens das cacircmaras TOF torna-se possiacutevel realizar filmagens e
mapeamentos em movimento
Outras aplicaccedilotildees possiacuteveis para as imagens TOF estatildeo na sua utilizaccedilatildeo
para a criaccedilatildeo de cenaacuterios 3D em jogos eletrocircnicos aquisiccedilatildeo de filmes com
tecnologia 3D modelagem tridimensional de obras de arte Biometria e anaacutelise de
movimentos
123
REFEREcircNCIAS BIBLIOGRAacuteFICAS
ANDRADE J B Fotogrametria 2 ed Curitiba SBEE 1998 274 p APUZZO N D‟ Recent advances in 3D full body scanning with applications to fashion and apparel 10p In Proceedings Optical 3-D Measurement Techniques IX Vienna Austria 2009 BALTSAVIAS E P Airborne laser scanning basic relations and formulas ISPRS - Journal of Photogrammetry amp Remote Sensing v 54 p 199-214 1999 BAZAN W S TOMMASELLI A M G GALO M RUY R S A influecircncia das injunccedilotildees de orientaccedilatildeo relativa na calibraccedilatildeo de um sistema dual de cacircmaras digitais 23p Boletim de Ciecircncias Geodeacutesicas v 15 n 3 Curitiba 2009 BELTON D Improving and extending the information on Principal Component Analysis for local neighborhoods in 3D points clouds 8p The international Archives of the Photogrammetry Remote Sensing and Spatial Information Sciences v XXXVII B5 Beijing 2008 BELTON D LICHTI D Classification and segmentation of terrestrial laser scanner point clouds using local variance information 6p In Proceedings ISPRS Commission V Simposium bdquoImage Engineering and Vision Metrology‟ 2006 BROWN D C Close-Range Camera Calibration Photogrammetric Engineering v 37 nordm 8 p 855-866 1971 CENTENO J A S Sensoriamento Remoto e Processamento de Imagens Digitais Curso de Poacutes-Graduaccedilatildeo em Ciecircncias Geodeacutesicas Curitiba UFPR 2004 209p CENTENO J A S JUTZI B Evaluation of range imaging sensor concerning resolution and illumination 6p In Proceedings The 2010 Canadian Geomatics Conference and Symposium of Commission I ISPRS Calgary Alberta 2010 CHRISTOUDIAS M C GEORGESCU B MEER P Synergism in Low Level Vision IEEE Transactions on Pattern Analysis and Machine Intelligence v 24 n 5 p 603-619 2002
124
COMANICIU D MEER P Mean Shift A Robust Approach Toward Feature Space Analysis 17p IEEE Transactions on Pattern Analysis and Machine Intelligence v 24 n 5 p 603-619 2002 FUCHS S HIRZINGER G Extrinsic and depth calibration of ToF cameras In Proceedings IEEE Conference on Computer Vision and Pattern Recognition (CVPR) Anchorage USA 2008 FUCHS S MAY S Calibration and registration for precise surface reconstruction with ToF cameras In Proceedings of the Dynamic 3D Imaging Workshop in Conjunction with DAGM (Dyn3D) v I Heidelberg Germany 2007 GEMAEL C Introduccedilatildeo ao ajustamento de observaccedilotildees aplicaccedilotildees geodeacutesicas 3 ed Curitiba UFPR 1994 319p GONZALEZ R C WOODS R E Processamento de imagens digitais Satildeo Paulo Edgard Bluumlcher Ltda 2000 509p GROSS H THOENNESSEN U Extraction of lines from laser point clouds p 86-91 In Proceedings Symposium of ISPRS Commission III Photogrammetric Computer Vision PCV06 Eds Foumlrstner W Steffen R International Archives of Photogrammetry Remote Sensing and Spatial Information Sciences 36 (Part 3) 2006 HABIB A MORGAN M Automatic calibration of low-cost digital cameras p 948-955 Journal of Photogrammetric Record 2003 JAMTSHO S Geometric modelling of 3D Range Cameras and their application for structural deformation measurement 174p (Master‟s Thesis Department of Geomatics Engineering) University of Calgary Alberta 2010 JOHNSON R A WICHERN D W Applied multivariate statistical analysis 4 ed New Jersey Pearson Prentice Hall 1998 JUTZI B GROSS H Nearest neighbor classification on laser point clouds to gain object structures from buildings 6p In Proceedings ISPRS Hannover Workshop 2009 High-Resolution Earth Imaging for Geospatial Information Disponiacutevel em lthttpwwwisprsorgproceedingsXXXVIII1_4_7-W5paperpapershtmgt Acesso 16112010
125
KAHLMANN T REMONDINO F INGENSAND H Calibration for increased accuracy of the range imaging camera SwissrangerTM ISPRS Commission V Symposium bdquoImage Engineering and Vision Metrology‟ v XXXVI n 5 2006 KEMENY S E EL-SAYED E MENDIS S FOSSUM E R Update on focal-plane image processing research 8p SPIE v 1447 Charged-Coupled Devices and Solid Optical Sensors II 1991 KHONGSAB P Signal processing and performance evaluation of a PMD camera for space docking 88p (Master‟s Thesis Continuation Courses Space Science and Technology Department of Space Science) Lulea University of Techology Kiruna 2009 KOCH R SCHILLER I BARTCZAK B KELLNER F KOumlSER K MixIn3D 3D mixed reality with ToF camera 16p In Work Programme of the EU‟s 7th Framework program 2009 KOLB A BARTH E KOCH R LARSEN R Time-of-Flight sensors in Computer Graphics 16p In STAR ndash State of The Art Report The Eurographics Association 2009 LANGE R 3D Time-of-Flight distance measurement with custom solid-state image sensors in CMOSCCD-technology 205 p (Dissertation Department of Electrical Engineering and Computer Science at University of Siegen for the degree of Doctor of Technical Sciences) Univesity of Siegen Alemanha 2000 LEON S J Linear Algebra with applications 4 ed Dartmouth Prentice Hall 1998 390p LUAN X Experimental investigation of Photonic Mixer Device and development of TOF 3D ranging systems based on PMD technology A dissertation submitted to the Department of Electrical Engineering and Computer Science at University of Siegen Siegen 2001 MACHADO A M L Extraccedilatildeo automaacutetica de contornos de edificaccedilotildees utilizando imagem gerada por cacircmara digital de pequeno formato e dados LIDAR 201 p Tese apresentada ao Curso de Poacutes-Graduaccedilatildeo em Ciecircncias Geodeacutesicas da Universidade Federal do Paranaacute Curitiba UFPR 2006
126
MASS H G VOSSELMAN Two algorithms for extracting building models from raw laser altimetry data 11p Elsevier Science Photogrammetry amp Remote Sensing 1999 MAY S DROESCHEL D HOLTZ D WIESEN C FUCHS S 3D Pose estimation and mapping with time-of-flight cameras 6p Germany 2008 Disponiacutevel em httpwwwroboticdefileadminroboticfuchsiros08_3dcampdf Acesso em 2510 2010 MITISHITA E A Monorestituiccedilatildeo digital de aerofotos associada com sistema de computaccedilatildeo graacutefica CAD para fins de mapeamento na aacuterea florestal 251p Tese (Doutorado em Engenharia Florestal) ndash Setor de Ciecircncias Agraacuterias Universidade Federal do Paranaacute 1997 MOumlLLER T KRAFT H FREY J ALBRECHT M LANGE R Robust 3D measurement with PMD sensors 2005 PAULY M GROSS M KOBBELT L P Efficient simplification of point-sampled surfaces 8p In VIS ‟02 Proceedings of the Conference on Visualization ‟02 Washington DC USA 2002 IEEE Computer Society PECHT Y FOSSUM E R Wide intrascene dynamic range CMOS APS using dual sampling IEEE Transactions on Electron Devices v 44 n 10 1997 PMD Technologies PMD [vison]regCamCube 20 4p Datasheet n 20090601 Siegen 2009 Disponiacutevel em lthttpwwwpmdteccomproducts-servicespmdvisionr-cameraspmdvisionr-camcube-20gt Acesso em 0103 2010 PMD Technologies PMD [vison]regCamCube 20 Software development tutorial 13p Siegen 2009 Disponiacutevel em lthttpwwwpmdteccomfileadminpmdtecdownloadsdocumentationcamcube_softwaredevelopmenttutorialpdfgt Acesso em 1504 2010 RAPP H Experimental and theoretical investigation of correlating TOF-camera systems 71p Diploma Thesis in Physics Faculty for Physics and Astronomy University of Heidelberg Alemanha 2007 RINGBECK T A 3D Time Of Flight camera for object detection 10p In Proceedings Optical 3D Measurement Techniques Plenary Session 1 Range Imaging I Zuumlrich 2007
127
SHAKARJI C M Least-Squares fitting algorithms of the NIST algorithm testing system 9p Journal of research of the national of standards and technology v 103 n 6 1998 THEUWISSEN A Solid-state imaging with Charge-Coupled Devices PP 34-46 Kluwer Academic Publishers 1995 Disponiacutevel em ltwwwspringerlinkcomgt Acesso em 08072010
WIEDEMANN M SAUER M DRIEWER F SCHILLING K Analysis and characterization of the PMD camera for application in mobile robotics 6p In Proceedings of the 17th World Congress The International Federation of Automatic Control Seoul Korea July 6-11 2008 ZHANG Z A flexible new technique for camera calibration 5p IEEE Transactions on Pattern Analysis and Machine Intelligence November 2000

x
LISTA DE QUADROS E TABELAS
QUADRO 21 ndash Especificaccedilotildees teacutecnicas da cacircmara PMD CamCube 20 37
QUADRO 22 ndash Especificaccedilotildees teacutecnicas de cacircmaras TOF 40
QUADRO 23 ndash Propriedades de superfiacutecies normais obtidas com autovalores 57
TABELA 51 ndash Paracircmetros de Orientaccedilatildeo Interior calculados 89
TABELA 52 ndash Coordenadas 3D dos pontos e medidas realizadas 116
xi
LISTA DE SIGLAS
Sigla Significado
AMISE Asymptotic Mean Integrated Square Error
CCD Charge Coupled Device
CMOS Complementary Metal Oxide Semiconductor
CP Centro Perspectivo
EDISON Edge Detection and Image SegmentatiON System
FC Funccedilatildeo de Correlaccedilatildeo
FPN Fixed Pattern Noise
FPS Frames Per Second
LASER Light Amplification by Stimulated Emission of Radiation
LED Light Emitting Diode
MDE Modelo Digital de Elevaccedilatildeo
MVC Matriz de Variacircncias e Covariacircncias
PMD Photonic Mixer Device
POE Paracircmetros de Orientaccedilatildeo Exterior
POI Paracircmetros de Orientaccedilatildeo Interior
PP Ponto Principal
SBI Supression of Background Ilumination
TI Tempo de Integraccedilatildeo
TOF Time-Of-Flight
xii
SUMAacuteRIO
1 INTRODUCcedilAtildeO 14
11 OBJETIVO GERAL 16
12 OBJETIVOS ESPECIacuteFICOS 16
13 JUSTIFICATIVA 17
14 ESTRUTURA DA DISSERTACcedilAtildeO 18
2 REVISAtildeO BIBLIOGRAacuteFICA 19
21 MEDIDA DE DISTAcircNCIA COM O PRINCIacutePIO TOF 19
22 IMAGEM TOF 25
23 TEMPO DE INTEGRACcedilAtildeO 26
24 PRINCIacutePIO DE FUNCIONAMENTO DO SENSOR PMD 28
25 CAcircMARAS PMD 34
251 Cacircmara PMD CamCube 20 36
252 Dispositivo SBI 38
253 Modelos de cacircmaras TOF 39
26 ERROS DE MEDIDA 40
261 Erros natildeo-sistemaacuteticos em cacircmaras TOF 41
262 Erros sistemaacuteticos em cacircmaras TOF 41
27 PROJECcedilAtildeO ORTOGONAL DOS PONTOS 45
28 REFINAMENTO DA NUVEM DE PONTOS 3D 50
29 ANAacuteLISE DE SUPERFIacuteCIES POR AUTOVALORES E AUTOVETORES 53
210 ANAacuteLISE DE SUPERFIacuteCIES POR MOMENTOS INVARIANTES 56
211 ALGORITMO DE DESLOCAMENTO PELA MEacuteDIA 60
3 MATERIAIS 67
4 MEacuteTODOS 68
41 CALIBRACcedilAtildeO DA CAcircMARA 69
42 ANAacuteLISE DA PRESENCcedilA DE RUIacuteDO 78
421 Filtragem passa-baixas pela meacutedia 79
422 Filtragem pela mediana 80
423 Filtragem com a meacutedia temporal 81
43 SEGMENTACcedilAtildeO 82
431 Crescimento de regiotildees a partir de superfiacutecies planas e ponto semente 82
xiii
432 Segmentaccedilatildeo por anaacutelise da variaccedilatildeo local de autovalores 84
433 Segmentaccedilatildeo com o algoritmo de deslocamento pela meacutedia 86
5 RESULTADOS E DISCUSSOtildeES 87
51 CALIBRACcedilAtildeO DA CAcircMARA 87
52 EXPERIMENTO 1 ndash ANAacuteLISE DE RUIacuteDO 1 IMAGEM TOF INTEIRA 92
53 EXPERIMENTO 2 ndash ANAacuteLISE DE RUIacuteDO 2 JANELAS DE 40X40 PIacuteXEIS 96
54 EXPERIMENTO 3 ndash PROJECcedilAtildeO ORTOGONAL DOS PONTOS 102
55 EXPERIMENTO 4 ndash SEGMENTACcedilAtildeO 1 CRESCIMENTO DE REGIOtildeES 106
56 EXPERIMENTO 5 ndash SEGMENTACcedilAtildeO 2 ANAacuteLISE COM AUTOVALORES 108
57 EXPERIMENTO 6 ndash ANAacuteLISE DAS MEDIDAS OBTIDAS 113
58 MODELAGEM DAS SUPERFIacuteCIES 3D 117
6 CONCLUSOtildeES RECOMENDACcedilOtildeES E CONSIDERACcedilOtildeES FINAIS 119
61 CONCLUSOtildeES 119
62 RECOMENDACcedilOtildeES 122
63 CONSIDERACcedilOtildeES FINAIS 122
REFEREcircNCIAS BIBLIOGRAacuteFICAS 123
14
1 INTRODUCcedilAtildeO
A informaccedilatildeo meacutetrica para a representaccedilatildeo espacial de objetos eacute uma
necessidade para diferentes aacutereas de estudo Algumas aplicaccedilotildees exigem que o
processo de aquisiccedilatildeo e representaccedilatildeo graacutefica desta informaccedilatildeo seja realizado com
rapidez e qualidade Em Ciecircncias Geodeacutesicas a obtenccedilatildeo desta informaccedilatildeo pode
ser feita atraveacutes de diversas maneiras dentre elas citam-se os levantamentos de
campo e as imagens obtidas por sensores remotos exemplos satildeo teacutecnicas
aplicadas em Topografia e Fotogrametria
Com a Topografia o trabalho pode alcanccedilar alto grau de exatidatildeo
dependendo da teacutecnica e precisatildeo do equipamento utilizado No entanto se gasta
bastante tempo para realizar o levantamento das informaccedilotildees em campo e tambeacutem
para o processamento e organizaccedilatildeo dos dados em escritoacuterio Algumas aplicaccedilotildees
da Topografia estatildeo na locaccedilatildeo de obras como rodovias geraccedilatildeo de perfis de
terrenos e rios monitoramento de deformaccedilotildees na estrutura de barragens pontes e
tambeacutem no levantamento de pontos 3D para representar fachadas de edifiacutecios
Com a Fotogrametria o levantamento das informaccedilotildees tridimensionais de um
objeto pode ser feito em tempo relativamente curto As fotografias satildeo obtidas de
forma instantacircnea No entanto quando se utilizam teacutecnicas convencionais de
Fotogrametria necessita-se de pelo menos duas fotografias com sobreposiccedilatildeo das
aacutereas imageadas para a geraccedilatildeo do modelo fotogrameacutetrico Outra forma eacute a teacutecnica
conhecida por Monorestituiccedilatildeo Digital onde se utiliza uma fotografia digital em
conjunto com um Modelo Digital de Elevaccedilatildeo (MDE) normalmente gerado por uma
nuvem de pontos proveniente de outro equipamento ou sensor (MITISHITA 1997)
Na modalidade terrestre da Fotogrametria eacute possiacutevel determinar pontos 3D
para representar fachadas de preacutedios obras de arte mapeamentos de ruas e
imoacuteveis com a plataforma em movimento dentre outras aplicaccedilotildees
Aleacutem das teacutecnicas convencionais de levantamentos utilizadas em Topografia
e Fotogrametria e com o objetivo de viabilizar a aquisiccedilatildeo da informaccedilatildeo espacial
equipamentos e teacutecnicas tecircm sido constantemente desenvolvidos e aperfeiccediloados
Avanccedilos tecnoloacutegicos tecircm possibilitado a obtenccedilatildeo da informaccedilatildeo tridimensional
para a representaccedilatildeo dos objetos de forma raacutepida e precisa Exemplos satildeo os
sistemas de varredura laser scanner e as cacircmaras TOF (Time-Of-Fligth) tambeacutem
15
conhecidas na literatura por Range Cameras Estas cacircmaras geram imagens com
informaccedilotildees de distacircncia para cada pixel do objeto imageado denominadas
imagens de profundidade distacircncia ou Range Image Neste trabalho seraacute utilizada
preferencialmente a denominaccedilatildeo ldquoimagem TOFrdquo
Nas uacuteltimas deacutecadas os sistemas de varredura laser scanner tecircm sido muito
utilizados para mapeamento Equipamentos com esta tecnologia possibilitam a
obtenccedilatildeo de milhares de pontos por segundo e podem ser instalados em
plataformas aeacutereas ou terrestres No entanto devido a este ser um equipamento
oacuteptico e mecacircnico o alto custo na sua aquisiccedilatildeo torna-o inviaacutevel para algumas
aplicaccedilotildees
Cacircmaras TOF atraem a atenccedilatildeo de diferentes aacutereas que necessitam de
pontos com coordenadas 3D de seus objetos de estudo tais como a Visatildeo
Computacional e a Engenharia de Automaccedilatildeo Um modelo de cacircmara TOF eacute a PMD
CamCube 20 que capta 25 imagens por segundo (Frames Per Secunde - FPS)
Com esta frequecircncia de aquisiccedilatildeo pode obter o movimento dos objetos na cena e de
grande quantidade de informaccedilatildeo tridimensional sobre os mesmos
No entanto a grande quantidade de dados captada deve ter sua qualidade
avaliada A iluminaccedilatildeo exterior ao sistema interfere negativamente Outro fator a ser
observado eacute a configuraccedilatildeo da cena pois interferecircncias satildeo causadas pelas
distacircncias orientaccedilotildees e refletividade das superfiacutecies dos objetos em relaccedilatildeo ao
sensor da cacircmara Em uma mesma cena podem-se apresentar medidas ambiacuteguas
de distacircncia para os pontos devido a erros causados pela iluminaccedilatildeo utilizada no
sistema As influencias causadas por erros sistemaacuteticos assim como ruiacutedos devem
ser observadas para cada tipo de aplicaccedilatildeo (MAY et al 2008)
A cacircmara TOF utilizada para a aquisiccedilatildeo das imagens nesta pesquisa foi a
PMD[vision]regCamCube 20 Esta utiliza um sensor de imageamento PMD (Photonic
Mixer Device) que possibilita armazenar informaccedilatildeo de distacircncia para os piacutexeis de
uma imagem de intensidade O equipamento fornece a imagem TOF que eacute
composta por um arquivo com as intensidades que o sinal retornou para o sensor e
um arquivo com as informaccedilotildees de distacircncia para cada pixel o que possibilita a
percepccedilatildeo da profundidade dos objetos na cena
16
11 OBJETIVO GERAL
O objetivo geral deste trabalho de pesquisa eacute desenvolver uma metodologia
para a modelagem tridimensional das superfiacutecies de objetos a partir da nuvem de
pontos 3D proveniente da imagem TOF
12 OBJETIVOS ESPECIacuteFICOS
Realizar a correccedilatildeo geomeacutetrica dos dados da imagem TOF atraveacutes de
Paracircmetros de Orientaccedilatildeo Interior obtidos com o processo de
calibraccedilatildeo da cacircmara
Testar meacutetodos de filtragem para a reduccedilatildeo de ruiacutedo presente nas
imagens TOF e analisar formas para a aquisiccedilatildeo da imagem TOF
com menor presenccedila de ruiacutedo
Analisar o tempo de integraccedilatildeo para diferentes situaccedilotildees de aquisiccedilatildeo
da imagem TOF
Avaliar meacutetodos para a segmentaccedilatildeo das superfiacutecies de objetos a
partir da imagem TOF
Gerar nuvem de pontos com coordenadas tridimensionais das
superfiacutecies segmentadas e modelar estas superfiacutecies
tridimensionalmente
Avaliar a qualidade das medidas obtidas com a modelagem
tridimensional das superfiacutecies do objeto de estudo
17
13 JUSTIFICATIVA
Com o desenvolvimento e aperfeiccediloamento das cacircmaras TOF acredita-se
na viabilizaccedilatildeo deste equipamento para a medida de distacircncia e modelagem
tridimensional das superfiacutecies de objetos para diferentes finalidades Apresenta as
seguintes vantagens
Recobrimento da aacuterea de forma instantacircnea
Possibilidade de filmar a cena registrando o movimento dos objetos
com frequecircncia de aquisiccedilatildeo de 25 imagens por segundo
Fornece grande quantidade de pontos com coordenadas 3D dos
objetos imageados
Uma imagem eacute suficiente para estimar a distacircncia dos objetos
Informaccedilatildeo na banda espectral do infravermelho
Uma imagem TOF captada instantaneamente disponibiliza informaccedilatildeo sobre
a distacircncia de objetos contidos na cena sendo possiacutevel a geraccedilatildeo de nuvens de
pontos para a representaccedilatildeo tridimensional de objetos sem necessitar de
informaccedilatildeo proveniente de outro sensor Outra vantagem eacute o sistema natildeo precisar
de iluminaccedilatildeo exterior
Algumas aplicaccedilotildees para as imagens TOF foram realizadas nas aacutereas de
prevenccedilatildeo de acidentes automobiliacutesticos e seguranccedila de pedestres (RINGBECK
2007) Visatildeo Computacional (WIEDEMANN et al 2008) mapeamentos
tridimensionais de objetos em ambientes fechados para a movimentaccedilatildeo roboacutetica
(MAY et al 2008) Computaccedilatildeo Graacutefica (KOLB 2009 et al KOCH et al 2009)
realizaccedilatildeo de medidas do corpo humano para a induacutestria de roupas (APUZZO
2009) e anaacutelise de deformaccedilotildees (JAMTSHO 2010)
18
14 ESTRUTURA DA DISSERTACcedilAtildeO
A presente dissertaccedilatildeo foi estruturada em seis capiacutetulos No primeiro
capitulo realiza-se a introduccedilatildeo ao tema descreve-se o objetivo geral e os objetivos
especiacuteficos aleacutem da justificativa para a pesquisa
O segundo capiacutetulo apresenta uma revisatildeo de conceitos sobre medida de
distacircncia utilizando o princiacutepio TOF descriccedilatildeo da imagem TOF e seus arquivos de
intensidades e distacircncias influencia do tempo de integraccedilatildeo (TI) na aquisiccedilatildeo da
imagem TOF princiacutepio de funcionamento do sensor PMD modelos de cacircmaras
TOF erros de medida que podem ocorrer utilizando estas cacircmaras projeccedilatildeo
ortogonal das distacircncias obtidas com a imagem TOF para a geraccedilatildeo da nuvem de
pontos 3D meacutetodo para o refinamento da nuvem de pontos 3D detecccedilatildeo de
superfiacutecies por autovetores e autovalores anaacutelise de superfiacutecies por momentos
invariantes e algoritmo de deslocamento pela meacutedia para a segmentaccedilatildeo de
imagens
No terceiro capitulo descrevem-se os materiais equipamentos e espaccedilo
fiacutesico utilizado para a realizaccedilatildeo do trabalho de pesquisa
Com o quarto capitulo satildeo descritos os meacutetodos utilizados para o
desenvolvimento da pesquisa calibraccedilatildeo da cacircmara filtragens para anaacutelise e
tratamento de ruiacutedo presente nas imagens meacutetodos de segmentaccedilatildeo por
crescimento de regiotildees na nuvem de pontos segmentaccedilatildeo por anaacutelise da variaccedilatildeo
local de autovalores no arquivo de distacircncias da imagem TOF e geraccedilatildeo de imagem
de intensidade com as bordas do objeto intensificadas segmentaccedilatildeo da imagem
com bordas intensificadas utilizando o algoritmo de deslocamento pela meacutedia
Com o quinto capitulo descrevem-se os resultados obtidos tais como
valores dos paracircmetros calculados no processo de calibraccedilatildeo da cacircmara
experimentos realizados para a anaacutelise da presenccedila de ruiacutedo nas imagens TOF
projeccedilatildeo ortogonal dos pontos para a geraccedilatildeo da nuvem de pontos 3D
segmentaccedilatildeo por crescimento de regiotildees segmentaccedilatildeo por anaacutelise da variaccedilatildeo
local de autovalores anaacutelise das medidas obtidas com a nuvem de pontos 3D
segmentada e tambeacutem se realiza a modelagem tridimensional de duas superfiacutecies
do objeto estudado
Finalmente com o sexto capitulo satildeo apresentadas conclusotildees
consideraccedilotildees finais e recomendaccedilotildees para trabalhos futuros de acordo com os
experimentos realizados
19
2 REVISAtildeO BIBLIOGRAacuteFICA
21 MEDIDA DE DISTAcircNCIA COM O PRINCIacutePIO TOF
O princiacutepio TOF (Time-Of-Flight) permite calcular a distacircncia de objetos a
partir da emissatildeo e recepccedilatildeo de um sinal luminoso Com este objetivo utiliza-se um
conjunto de emissor e receptor oacutepticos que mede o tempo necessaacuterio para o sinal
retornar para o sensor apoacutes atingir o alvo com base no conhecimento do valor da
velocidade da luz propagada no vaacutecuo De acordo com Baltsavias (1999) o caacutelculo
da distacircncia com o princiacutepio TOF pode ser realizado atraveacutes de dois meacutetodos
Tempo de percurso de pulsos curtos de energia
Mudanccedila de fase de um sinal modelado na forma de onda contiacutenua
Sistemas que utilizam o primeiro meacutetodo de medida transmitem um pulso e
medem o seu tempo de retorno Isto eacute possiacutevel devido ao retardo de tempo gasto no
percurso do sinal que eacute medido atraveacutes de um ponto no pulso de retorno com
referecircncia no pulso emitido Quanto melhor eacute a medida do tempo melhor a distacircncia
calculada sendo o reloacutegio do sensor um fator de grande importacircncia neste meacutetodo
Para obter precisatildeo meacutetrica necessita-se realizar a medida de tempo em nano
segundos (ƞs) O afastamento e duraccedilatildeo do pulso tambeacutem satildeo fatores importantes
na resoluccedilatildeo da medida de distacircncia com este meacutetodo A Figura 21 Ilustra a medida
de distacircncia com o princiacutepio TOF (LANGE 2000)
FIGURA 21 ndash Princiacutepio TOF
FONTE LANGE (2000)
20
Utilizando pulsos de uma fonte de luz pode-se calcular a distacircncia de um
alvo atraveacutes da Equaccedilatildeo (21)
119863 =119888 119905
2 (21)
onde
119863 ndash Distacircncia entre o sensor e o alvo
119888 ndash Valor constante da velocidade da luz
119905 ndash Variaccedilatildeo de tempo entre emissatildeo e recepccedilatildeo do pulso
O segundo meacutetodo trabalha com a determinaccedilatildeo da mudanccedila de fase do
sinal contido em uma onda contiacutenua modulada Pode ser utilizado para evitar o
problema na medida de tempo com alta precisatildeo O sinal luminoso pode ser emitido
utilizando fontes LED (Light Emitting Diode) ou LASER (Light Amplification by
Stimulated Emission of Radiation) Estas fontes permitem a modulaccedilatildeo direta do
sinal luminoso atraveacutes da voltagem do sistema (LANGE 2000)
Para a utilizaccedilatildeo do meacutetodo da diferenccedila de fase considera-se que o sinal
refletido pelo alvo manteacutem a forma do sinal modulado emitido mas a fase do sinal
emitido eacute diferente da fase do sinal recebido conforme ilustrado com a Figura 22
FIGURA 22 ndash Meacutetodo da diferenccedila de fase
21
Sendo assim a mudanccedila de fase entre os sinais pode ser utilizada para
calcular a distacircncia conforme Equaccedilatildeo (22)
119863 =120593∙119888
4∙120587∙120574 (22)
onde
119863 ndash Distacircncia entre o sensor e o alvo
120593 ndash Diferenccedila de fase entre o sinal emitido e o recebido
119888 ndash Valor constante da velocidade da luz
120574 ndash Frequecircncia de modulaccedilatildeo do sinal
Em cacircmaras TOF a distacircncia entre o sensor e o alvo eacute medida utilizando o
meacutetodo da diferenccedila de fase com uma Funccedilatildeo de Correlaccedilatildeo (FC) entre o sinal
emitido e o refletido As amplitudes dos sinais satildeo moduladas com a mesma
frequecircncia Com isto a iluminaccedilatildeo pode ser feita utilizando diacuteodos emissores de luz
LED tendo-se a vantagem que a FC pode ser obtida com o sensor PMD a partir da
forma senoidal do sinal recebido (RAPP 2007)
A FC eacute calculada atraveacutes do sinal emitido e recebido Estes sinais satildeo
modelados matematicamente com forma senoidal tendo em vista que sua
propagaccedilatildeo ocorre na forma de onda Dado um sinal luminoso emitido 119892 119905 e um
sinal recebido 119904 119905 em um ponto do sensor PMD as amostras 119888 120591 podem ser
calculadas atraveacutes da Equaccedilatildeo (23) Estas amostras satildeo utilizadas para modelar a
FC em um atraso de tempo 120591
119888 120591 = 119904 119905 otimes 119892 119905 = lim119879rarrinfin 119904 119905 ∙ 119892 119905 + 120591 +119879
2
minus119879
2
119889119905 (23)
onde
119904 119905 ndash Funccedilatildeo que modela a forma do sinal luminoso recebido
119892 119905 ndash Funccedilatildeo que modela a forma do sinal luminoso emitido
119905 ndash Variaccedilatildeo de tempo entre a emissatildeo e a recepccedilatildeo do sinal
120591 ndash Atraso de tempo no recebimento do sinal
22
O sinal emitido pode ser expresso com 119892 119905 = cos(120603119905) o recebido eacute
expresso atraveacutes da relaccedilatildeo 119904 119905 = 1 + 119886 ∙ cos(120603119905 minus 120593) Ambos com forma senoidal
amplitude 119886 e diferenccedila de fase 120593 Com isto a FC pode ser apresentada na forma da
Equaccedilatildeo (25)
119888 120591 = 1 + 119886 ∙ 119888119900119904 120603120591 minus 120593 otimes 119888119900119904 120603120591 (24)
119888 120591 = lim119879acuterarrinfin1
119879acute 1 + 119886 ∙ 119888119900119904 120603119905 minus 120593 ∙ 119888119900119904 120603119905 + 120603119905
+119879 acute
2
minus119879 acute
2
119889119905 (25)
119888 120591 =119886
2∙ cos 120593 + 120603119905 (26)
onde
119892 119905 ndash Funccedilatildeo senoidal que modela a forma do sinal emitido
119904 119905 ndash Funccedilatildeo que modela a forma do sinal recebido
119905 ndash Variaccedilatildeo de tempo entre a emissatildeo e recepccedilatildeo do sinal
120591 ndash Atraso no tempo de recebimento do sinal
119886 ndash Amplitude da onda portadora do sinal
120593 ndash Diferenccedila de fase
120603 ndash Referecircncia de fase para o sinal modelado na forma senoidal
Lange (2000) avaliou a FC para fases 120596 119905 preacute-definidas escolhendo quatro
fases 120596 119905 = 0deg 120596 119905 = 90deg 120596 119905 = 180deg 120596 119905 = 270deg Verificou que eacute possiacutevel calcular a
diferenccedila de fase 120593 e a amplitude 119886 do sinal recebido 119904(119905) Considerando que o sinal
recebido tem sobreposiccedilatildeo ao sinal emitido deve-se adicionar uma constante de
deslocamento 119870 conforme a Equaccedilatildeo (27)
119862 120591 = 119888 120591 + 119870 (27)
119862 1205910 = 119888 1205910 + 119870 =119886
2∙ cos 120593 + 119870 (28)
119862 1205911 = 119888 1205911 + 119870 = minus119886
2∙ 119904119890119899 120593 +119870 (29)
119862 1205912 = 119888 1205912 + 119870 = minus119886
2∙ cos 120593 + 119870 (210)
119862 1205913 = 119888 1205913 + 119870 =119886
2∙ 119904119890119899 120593 +119870 (211)
23
Analisando a FC em quatro pontos a diferenccedila de fase 120593 e a amplitude 119886 do
sinal 119904(119905) podem ser calculadas atraveacutes das Equaccedilotildees (212) e (213)
120593 = 119905119892minus1 119862 1205913 minus119862 1205911
119862 1205910 minus119862 1205912 (212)
119886 = 119862 1205913 minus119862 1205911 2+ 119862 1205910 minus119862 1205912 2
2 (213)
Pode-se fazer a simplificaccedilatildeo das Equaccedilotildees (214) agrave (217) para quatro
pontos amostrais que satildeo necessaacuterios na modelagem da FC
119862 1205911 = 1198601 (214)
119862 1205912 = 1198602 (215)
119862 1205913 = 1198603 (216)
119862 1205910 = 1198604 (217)
A anaacutelise da FC entre o sinal oacuteptico e eleacutetrico recebido no dispositivo do
sensor eacute feita utilizando a diferenccedila de fase conforme ilustrado com a Figura 23
FIGURA 23 ndash FC utilizada no meacutetodo da diferenccedila de fase
FONTE Adaptado de LANGE (2000)
A FC permite calcular a distacircncia entre o alvo e a cacircmara utilizando quatro
amostras 11986011198602 1198603 e 1198604 com defasagem de 90ordm A diferenccedila de fase 120593 entre o sinal
24
emitido e o recebido eacute proporcional agrave distacircncia entre o alvo e a cacircmara O valor para
a diferenccedila de fase pode ser calculado atraveacutes da Equaccedilatildeo (218)
120593 = 119886119903119888119905119886119899 1198601minus1198603
1198602 minus1198604 (218)
onde
120593 ndash Diferenccedila de fase entre a onda emitida e a recebida
1198601119860211986031198604 ndash Pontos amostrais utilizados na modelagem da FC
Aleacutem do valor da diferenccedila de fase entre os sinais dois outros valores
podem ser calculados a amplitude 119886 e o valor de intensidade 119887 do sinal recebido
conforme as Equaccedilotildees (219) e (220) respectivamente
119886 = 1198601minus1198603 2+ 1198602 minus1198604 2
2 (219)
119887 =1198601+1198602 +1198603+1198604
4 (220)
onde
119886 ndash Amplitude do sinal recebido
119887 ndash Intensidade do sinal recebido (offset)
A distacircncia 119889 do sensor ao alvo eacute calculada atraveacutes da Equaccedilatildeo (221)
119889 =119888∙120593
4120587∙119891119898119900119889 (221)
onde
119889 ndash Distacircncia entre o sensor e o alvo
119888 ndash Valor constante da velocidade da luz propagada no vaacutecuo
120593 ndash Diferenccedila de fase entre o sinal emitido e o recebido
119891119898119900119889 ndash Frequecircncia de modulaccedilatildeo do sinal luminoso utilizado
A frequecircncia de modulaccedilatildeo do sinal emitido estabelece a distacircncia maacutexima
que poderaacute ser medida para um determinado comprimento de onda Em um sinal
25
modulado com a frequecircncia 119891119898119900119889 = 20119872119867119911 e comprimento de onda 120582119898119900119889 = 15m
conforme a Equaccedilatildeo (222) a distacircncia maacutexima que poderaacute ser medida eacute de 75
metros (MOumlLLER et al 2005)
119889119898119886119909 =120582119898119900119889
2= 75119898 (222)
22 IMAGEM TOF
Os piacutexeis da imagem TOF contecircm informaccedilotildees de distacircncia e intensidade
das superfiacutecies dos objetos Proporcionam a anaacutelise da profundidade dos objetos na
cena aleacutem da informaccedilatildeo de intensidade do sinal captado pelo sensor A Figura 24
ilustra a informaccedilatildeo 3D contida na imagem TOF
FIGURA 24 ndash Informaccedilatildeo das imagens TOF
FONTE Adaptado de RINGBECK (2007)
Com a informaccedilatildeo de profundidade e o posicionamento bidimensional dos
objetos na imagem pode-se realizar o mapeamento destes objetos e estimar suas
dimensotildees As cacircmaras TOF podem captar imagens e viacutedeos para realizar medidas
e detectar movimentos A Figura 25 ilustra os arquivos da imagem TOF
26
FIGURA 25 ndash Imagem TOF obtida com cacircmara PMD
FONTE PMD Technologies (2009)
A Figura 25a ilustra o arquivo com informaccedilatildeo das distacircncias dos objetos
presentes na imagem TOF A Figura 25b ilustra o arquivo com as intensidades que
o sinal retornou para o sensor registrada em cada piacutexel da imagem infravermelha
captada com comprimento de onda de 870nm
23 TEMPO DE INTEGRACcedilAtildeO
O periacuteodo de tempo que o sensor da cacircmara ficou exposto para obter a
imagem eacute chamado de tempo de integraccedilatildeo (TI) A quantidade de energia
eletromagneacutetica captada pelo sensor eacute diretamente influenciada por este tempo
pelas caracteriacutesticas refletivas das superfiacutecies dos objetos e pelo meio em que a
imagem foi tomada Os elementos do sensor podem ser carregados de acordo com
seu intervalo de capacidade do insaturado ao supersaturado Estes valores causam
ruiacutedos na imagem variando de acordo com a distacircncia entre o objeto e o sensor
(CENTENO e JUTZI 2010)
Este pode ser considerado o paracircmetro interno mais criacutetico em uma cacircmara
TOF pois descreve o periacuteodo de tempo que os elementos sensores necessitam
para detectar o sinal luminoso com a finalidade de obter a diferenccedila de fase utilizada
27
para o caacutelculo da distacircncia Quando o TI eacute muito baixo alguns elementos do sensor
podem natildeo ser ativados ocasionando piacutexeis com valor zero natildeo sendo possiacutevel
calcular sua distacircncia Por outro lado se o TI eacute muito elevado o pixel pode ficar
supersaturado o que tambeacutem causa erro na medida da distacircncia Sendo assim eacute
necessaacuterio determinar um TI especiacutefico para cada situaccedilatildeo Nas cacircmaras PMD o
controle do TI eacute realizado atraveacutes de software em outros modelos de cacircmaras TOF
este controle pode ser feito atraveacutes de hardware (WIEDEMANN et al 2008)
A Figura 26 ilustra a presenccedila de ruiacutedo na imagem TOF influenciada pelo
TI Nesta figura as nuvens de pontos 3D foram geradas com imagens TOF obtidas
com a cacircmara PMD CamCube 20 a partir do mesmo ponto de vista mas com
diferentes TI (140micros 1400micros e 14000micros) isto causou a presenccedila de ruiacutedo com
diferentes comportamentos
FIGURA 26 ndash Ruiacutedo na nuvem de pontos 3D proveniente de imagem TOF
FONTE PMD CamCube Tutorial (2009)
A nuvem de pontos gerada com a imagem obtida com TI de 1400micros
ilustrada com a Figura 26b foi a que melhor representou a forma das superfiacutecies do
objeto A nuvem de pontos da Figura 26a foi gerada a partir da imagem obtida com
TI igual a 140micros considerada com baixa saturaccedilatildeo pois a intensidade do sinal
captado pelo sensor foi pequena A nuvem de pontos da Figura 26c foi gerada com
imagem obtida com TI igual a 14000micros o que causou a saturaccedilatildeo do sinal recebido
pelo sensor e maior presenccedila de ruiacutedo A nuvem de pontos apresentada com a
Figura 26c apresentou-se menos consistente para representar as superfiacutecies do
objeto em questatildeo
28
24 PRINCIacutePIO DE FUNCIONAMENTO DO SENSOR PMD
O dispositivo PMD (Photonic Mixer Device) realiza medidas de distacircncia
utilizando o princiacutepio TOF Com este objetivo o dispositivo emite sinais luminosos
com frequecircncia modulada e o sensor capta a intensidade de retorno do sinal
refletido pelo alvo Informaccedilotildees sobre as fases e intensidades destes sinais satildeo
obtidas com o processamento A Figura 27 ilustra as etapas deste processo
FIGURA 27 ndash Princiacutepio de funcionamento do sistema PMD
FONTE LUAN (2001)
O sinal modulado eacute emitido com uma fase determinada pelo oscilador do
sistema Para que se possa realizar a medida da distacircncia o sinal recebido deve ter
fase diferente da que foi emitido No dispositivo PMD as cargas eleacutetricas do sinal
recebido satildeo separadas de acordo com a voltagem do diodo de leitura tambeacutem
chamado de fotodiodo O arquivo de saiacuteda deste dispositivo conteacutem informaccedilatildeo de
fase e intensidade do sinal recebido o que possibilita obter informaccedilatildeo de distacircncia
e intensidade para cada piacutexel da imagem (LUAN 2001)
O sensor utilizado no imageamento eacute um CMOS (Complementary Metal-
Oxide-Semiconductor) que tem tecnologia similar a dos sensores CCD (Charged-
Coupled Device) O CMOS apresenta a vantagem de ser um circuito integrado com
baixo consumo de energia No CMOS a conversatildeo de voltagem e a amplificaccedilatildeo do
sinal ocorrem em cada fotodiodo e os valores podem ser lidos independentemente
29
A desvantagem eacute que a amplificaccedilatildeo no fotodiodo gera imagens com maior
presenccedila de ruiacutedo (PECHT e FOSSUM 1997)
Quando os foacutetons sensibilizam o sensor CCD a carga eleacutetrica eacute transferida
sequencialmente linha por linha coluna por coluna A conversatildeo de voltagem e
amplificaccedilatildeo do sinal eacute realizada fora da aacuterea do sensor Uma vantagem do sensor
CCD eacute a geraccedilatildeo de imagens mais niacutetidas devido agrave menor complexidade no seu
sistema Por processar as cargas eleacutetricas de forma unificada menores interferecircncias
satildeo causadas diminuindo a presenccedila de ruiacutedo (KEMENY et al 1991)
A diferenccedila no princiacutepio de funcionamento dos sensores CCD e CMOS eacute
Ilustrada com a Figura 28
FIGURA 28 ndash Captaccedilatildeo da carga do sinal em sensores CCD e CMOS
FONTE LANGE (2000)
O princiacutepio de funcionamento do sensor CCD eacute ilustrado com as Figuras
28a e 28c onde a leitura da informaccedilatildeo eacute feita de forma sequencial pelos elementos
do sensor Esta varredura realizada no sensor CCD faz com que a geraccedilatildeo da
30
imagem final seja mais lenta que no sensor CMOS que realiza a conversatildeo foacuteton-
eleacutetron e eleacutetron-voltagem diretamente em cada elemento sensor conforme eacute
ilustrado com as Figuras 28b e 28d Com isto o sensor CMOS tem maior
velocidade de transferecircncia de cargas acumuladas para o conversor analoacutegico-
digital
Fotodiodos satildeo os elementos fotossensiacuteveis utilizados como portas de
entrada para o sinal luminoso em sensores CMOS ou CCD Estes captam cargas
eleacutetricas presentes no sinal e estatildeo inseridos sobre uma placa de Siliacutecio O
transporte das cargas para o interior da placa eacute explicado fisicamente atraveacutes dos
campos de franjas ilustrado com a Figura 29 Os campos de franja estatildeo
representados para diferentes voltagens os elementos do sensor apresentado tem
entradas para trecircs voltagens 10V 5V e 0V
FIGURA 29 ndash Representaccedilatildeo de campos de franja
FONTE THEUWISSEN (1995)
A seccedilatildeo A-A‟ na Figura 29 ilustra os campos de franja gerados mais
proacuteximos agrave superfiacutecie da placa A forma do sinal pode ser modelada de forma
aproximada por segmentos de linhas retas Na seccedilatildeo B-B‟ com profundidade meacutedia
na placa de Siliacutecio a influecircncia do campo eleacutetrico das entradas vizinhas a porta
central de 5V estaacute em seu niacutevel maacuteximo Quanto mais fundo encontra-se a entrada
de cargas na placa de Siliacutecio menor seraacute a interferecircncia dos campos eleacutetricos
gerados pelas portas de entrada das cargas vizinhas conforme pode ser visualizado
na seccedilatildeo C-C‟ Nesta profundidade diferentes portas de entrada estatildeo praticamente
31
agrave mesma distacircncia da superfiacutecie e o valor de dispersatildeo do campo de franja diminui
O campo de franja miacutenimo de uma entrada que tecircm profundidade maacutexima
proporciona ao sensor o maior aproveitamento aumentando assim a velocidade no
transporte de cargas (THEUWISSEN 1995)
Quanto maior a modulaccedilatildeo na voltagem da entrada das cargas maior o
potencial de armazenamento conforme ilustrado com a Figura 210
FIGURA 210 ndash Princiacutepio de armazenamento de cargas em sensores TOF
FONTE LANGE (2000)
O sinal modulado recebido 119904 119905 e a Funccedilatildeo de Correlaccedilatildeo 119891 119905 + 120591 do sinal
modulado emitido satildeo ilustrados com a Figura 210b A Figura 210a ilustra a luz
incidente no sensor com as cargas captadas e armazenadas de acordo com a
modulaccedilatildeo do fotodiodo
O dispositivo PMD utiliza a tecnologia CMOS para o imageamento com dois
elementos fotossensiacuteveis e dois diodos que captam as cargas eleacutetricas do sinal
modulado recebido As informaccedilotildees oacutepticas e eleacutetricas misturadas geram os piacutexeis
da imagem com informaccedilatildeo de distacircncia dos pontos imageados A Figura 211
ilustra este elemento sensor
32
FIGURA 211 ndash Princiacutepio de captaccedilatildeo de cargas pelo sensor PMD
FONTE LUAN (2001)
As placas claras e centrais na Figura 211a correspondem ao circuito de
leitura do sinal oacuteptico estas placas satildeo condutoras e transparentes para possibilitar
a entrada de luz Os diodos satildeo os componentes do circuito de leitura que captam e
direcionam as cargas eleacutetricas recebidas em um determinado sentido satildeo ilustrados
com as placas mais afastadas na Figura 211a As cargas que chegam satildeo
distribuiacutedas de acordo com a voltagem do diodo Uma fina camada de oacutexido isola os
circuitos de leitura do dispositivo
A voltagem da carga que entra no sistema eacute controlada de acordo com a
modulaccedilatildeo do sinal aplicada pelo dispositivo emissor Sendo assim pode ser
captada pelo diodo da direita ou esquerda que registraraacute a quantidade de carga
recebida de acordo com sua voltagem A distribuiccedilatildeo de potencial na regiatildeo
superficial do dispositivo eacute influenciada pela seleccedilatildeo de cargas que faz este sistema
dinacircmico e equilibrado Para valores natildeo nulos a luz modulada recebida e a
diferenccedila de fase podem ser comparadas atraveacutes das cargas eleacutetricas recebidas A
quantidade de carga captada pelos diodos depende diretamente da diferenccedila de
fase entre o sinal modulado emitido e o recebido pelo sensor Esta informaccedilatildeo pode
ser utilizada para calcular a diferenccedila de fase entre o sinal emitido e o recebido pois
33
eacute diretamente proporcional a carga que cada diodo captou Com isto a distacircncia
entre o sensor e o objeto pode ser calculada utilizando o princiacutepio da diferenccedila de
fase No entanto se a luz incidente eacute modulada como um sinal retangular mas sua
fase entre a emissatildeo e a recepccedilatildeo eacute igual a zero a carga seraacute captada por apenas
um dos diodos e a distacircncia resultante seraacute igual a zero (MOumlLLER et al 2005)
A Figura 212 ilustra o comportamento dos diodos de leitura ao receber o
sinal com distacircncia diferente de zero entre o alvo e o sensor Na Figura 212a eacute
ilustrado o sinal luminoso recebido por um elemento fotossensiacutevel Este sinal eacute
captado pela porta de entrada PA do fotodiodo que registra parte desta carga de
acordo com sua modulaccedilatildeo
FIGURA 212 ndash Medida da diferenccedila de fase do sinal recebido
FONTE Adaptado de MOumlLLER et al (2005)
Na Figura 212a o sinal recebido pelo elemento fotossensiacutevel do sensor eacute
ilustrado no momento em que eacute captado pela porta com modulaccedilatildeo A (PmodA) A
carga eacute captada pelos dois fotodiodos com defasagem de meio ciclo com isto cada
um capta parte da carga recebida A Figura 212b ilustra a medida da diferenccedila de
fase do sinal recebido atraveacutes da quantidade de carga que foi captada pelos
fotodiodos com modulaccedilatildeo Mod_A e Mod_B A voltagem do diodo eacute estabelecida de
acordo com a modulaccedilatildeo do sinal luminoso que seraacute emitida pelo dispositivo
34
25 CAcircMARAS PMD
As cacircmaras TOF com tecnologia PMD consistem de um chip sensor fonte
de iluminaccedilatildeo transmissor e receptor oacutepticos aleacutem de perifeacutericos eletrocircnicos e
interface digital de controle realizada atraveacutes de software Dependendo das
exigecircncias de aplicaccedilatildeo os componentes da cacircmara podem ser adaptados Cada
um deles pode afetar os paracircmetros internos da cacircmara tais como o campo de
visatildeo (FOV) taxa de captaccedilatildeo e tempo de integraccedilatildeo para a aquisiccedilatildeo das imagens
A distacircncia da superfiacutecie a ser medida eacute o fator preponderante para a escolha destes
paracircmetros O fato destas cacircmaras serem modulares amplia sua gama de
aplicaccedilotildees Isto eacute possiacutevel levando-se em conta as condiccedilotildees adicionais que cada
aplicaccedilatildeo pode exigir tais como a luz exterior ao sistema e a necessidade de
mudanccedila na fonte de iluminaccedilatildeo utilizada (PMD Technologies 2009)
O sensor PMD proporciona o imageamento instantacircneo dos objetos
utilizando um sensor com tecnologia CMOS adaptado Este sensor eacute um arranjo de
elementos fotossensiacuteveis que permitem a raacutepida detecccedilatildeo e modulaccedilatildeo do sinal
luminoso com suas variaccedilotildees Isto eacute feito de acordo com a distacircncia da superfiacutecie
que atinge do objeto imageado Pode adquirir dados de distacircncia e intensidade
simultaneamente sem precisar de um sistema de digitalizaccedilatildeo mais complexo como
um laser scanner Apresenta a desvantagem de ser muito sensiacutevel agrave luz exterior ao
sistema que interfere causando a presenccedila de ruiacutedo na imagem TOF e consequente
erro na medida de distacircncia (KHONGSAB 2009)
O desempenho do sistema PMD depende da fonte de iluminaccedilatildeo utilizada
capacidade de fornecimento de energia e eficiecircncia oacuteptica na criaccedilatildeo da imagem
Normalmente eacute utilizada fonte de iluminaccedilatildeo LED nas cacircmaras PMD No entanto
outros fabricantes utilizam diodos LASER para a iluminaccedilatildeo isto porque possibilita
realizar medidas de distacircncias maiores O desenvolvimento dos sistemas LED fez
com que sua eficiecircncia de transformaccedilatildeo de energia eleacutetrica em energia oacuteptica seja
de 30 Com a iluminaccedilatildeo LED tem-se um sinal luminoso jaacute modulado devido a
suas caracteriacutesticas eletro-oacutepticas Como uma parte consideraacutevel da luz fica na
borda do feixe isto se torna uma desvantagem pois esta aacuterea normalmente fica fora
do campo de visatildeo do sensor PMD Outra desvantagem diz respeito ao limite de
modulaccedilatildeo dos LED‟s comerciais que trabalham na faixa de 20 MHz agrave 30 MHz Os
diodos LASER tecircm eficiecircncia oacuteptica de ateacute 50 dependendo da potecircncia de saiacuteda
35
utilizada sendo de aproximadamente 100 MHz a modulaccedilatildeo maacutexima da frequecircncia
que pode ser atingida O perfil do feixe LASER pode ser adaptado ao campo de
visatildeo do sensor PMD A desvantagem eacute que este seria um circuito modular mais
complexo e que teria necessidade de um maior nuacutemero de etapas para conseguir
estabilizar a fase da onda portadora do sinal Outra desvantagem eacute que a
implantaccedilatildeo de um sistema LASER necessita de maior atenccedilatildeo agrave seguranccedila dos
olhos do que o sistema LED (RINGBECK 2007)
Com a Figura 213 ilustra-se a medida de distacircncia com a cacircmara TOF
modelo 19k da PMD A fonte de iluminaccedilatildeo LED emite o sinal luminoso em direccedilatildeo
dos objetos que estatildeo no campo visual da cacircmara O retorno deste sinal eacute captado
pelo sensor e possibilita o caacutelculo da diferenccedila de fase entre o sinal emitido e o
recebido
FIGURA 213 ndash Medida de distacircncia com a cacircmara PMD
FONTE MOLLER et al (2005)
36
251 Cacircmara PMD CamCube 20
A cacircmara TOF modelo PMD[VISION]regCamCube 20 funciona em ambientes
internos e externos com sensor de 204x204 piacutexeis que captam os niacuteveis de cinza da
imagem de intensidade Simultaneamente realiza a medida da quantidade de carga
recebida utilizada para determinar a diferenccedila de fase entre o sinal emitido e o
recebido Isto possibilita o caacutelculo da distacircncia entre o sensor e os objetos presentes
na cena A Figura 214 ilustra a cacircmara PMD CamCube 20 com as fontes de
iluminaccedilatildeo LED acopladas em suas laterais
FIGURA 214 ndash Cacircmara PMD CamCube 20
FONTE PMD Technologies (2009)
Este equipamento pode ter seu campo de visatildeo variaacutevel possibilitando a
diminuiccedilatildeo de distorccedilotildees manchas ou outras imperfeiccedilotildees da imagem O software
de interface da cacircmara com o computador apresenta a possibilidade de trabalhar
com dados brutos para o processamento das imagens aleacutem de funcionar em
diferentes canais de frequecircncia Tambeacutem disponibiliza compatibilidade com o
software Matlab para realizar esta interface
A imagem de intensidade captada de uma parede utilizando a cacircmara PMD
CamCube 20 eacute ilustrada com a Figura 215
37
FIGURA 215 ndash Imagem captada com a cacircmara PMD CamCube 20
FONTE CENTENO e JUTZI (2010)
Com a Figura 215a eacute ilustrada a cacircmara PMD CamCube 20 instalada em
um tripeacute sobre uma mesa Na Figura 215b tem-se a imagem infravermelha da
superfiacutecie plana de uma parede obtida com esta cacircmara O Quadro 21 ilustra as
especificaccedilotildees teacutecnicas da cacircmara PMD CamCube 20
PARAcircMETROS VALOR PADRAtildeO OBSERVACcedilOtildeES
Tipo do sensor PhotonICs PMD41k-S (204x204 piacutexeis)
Tamanho efetivo do pixel no sensor igual a 45microm
Distacircncia de mediccedilatildeo 03 ndash 7metros
Precisatildeo na medida de distacircncia (1σ) lt 3mm
Para aacuterea central da imagem obtida agrave 2m do sensor em superfiacutecie com refletividade de 90
Frequecircncia de aquisiccedilatildeo de imagens 25 fps Configuraccedilatildeo padratildeo
Campo de visatildeo (FOV) 40ordmx40ordm f = 128mm
Comprimento de onda da fonte de iluminaccedilatildeo
870nm Infravermelho proacuteximo
Fonte de iluminaccedilatildeo [V] 12 V plusmn 10
Interface USB 20
Temperatura de operaccedilatildeo 0ordmC agrave 50ordmC
Temperatura de armazenamento -20ordmC agrave 85ordmC
QUADRO 21 - Especificaccedilotildees teacutecnicas da cacircmara PMD CamCube 20 FONTE Adaptado de PMD Technologies (2009)
O sensor PhotonICs PMD41k-S utilizado na cacircmara PMD CamCube 20 vem
com um dispositivo SBI para a supressatildeo de cargas provenientes da iluminaccedilatildeo
exterior ao sistema Estas cargas causam a saturaccedilatildeo dos piacutexeis da imagem TOF
38
252 Dispositivo SBI
O dispositivo SBI (Supression of Background Illumination) eacute uma soluccedilatildeo
teacutecnica encontrada para melhorar o contraste das imagens geradas com o sensor
PMD em ambientes com iluminaccedilatildeo exterior A presenccedila desta iluminaccedilatildeo na cena
do objeto imageado causa maior presenccedila de ruiacutedo no sinal captado pelo sensor
Esta iluminaccedilatildeo pode saturar os elementos do sensor fazendo com que
ocorram falhas na medida de distacircncia Este efeito pode ser minimizado utilizando o
tempo de integraccedilatildeo adequado para a tomada das imagens Outros distuacuterbios que
podem ocorrer satildeo devidos agrave corrente negra (DC - Dark Current) Este efeito eacute
causado porque o sensor natildeo capta o valor zero na imagem que seria a falta
completa de iluminaccedilatildeo nas superfiacutecies da cena A corrente negra natildeo pode ser
evitada em dispositivos semicondutores especialmente quando haacute altas
temperaturas Com uma temperatura de 80ordmC a corrente negra pode ser 1000 vezes
maior do que o normal o que afeta significativamente a qualidade das medidas
realizadas Para tornar o dispositivo PMD mais confiaacutevel na medida de distacircncias foi
criado o circuito SBI que suprime instantaneamente a iluminaccedilatildeo de fundo Neste
circuito eacute utilizada uma teacutecnica para a captaccedilatildeo do sinal luminoso minimizando a
interferecircncia de fatores externos Isto possibilita realizar medidas de distacircncia
confiaacuteveis mesmo em ambientes onde o sinal eacute modificado por interferecircncia de
iluminaccedilatildeo externa ou por altas temperaturas O sistema SBI pode ser desativado ou
ateacute mesmo ajustado para que seja possiacutevel realizar medidas de distacircncia com
qualidade em cenas tomadas em diferentes ambientes independente da presenccedila
de iluminaccedilatildeo exterior (MOumlLLER 2005)
O circuito SBI adiciona cargas eleacutetricas de compensaccedilatildeo instantacircnea nos
diodos de leitura minimizando os efeitos de saturaccedilatildeo causados por fatores externos
ao sistema Com o SBI espera-se que o sensor capte apenas o sinal correlacionado
com a medida de distacircncia sem interferecircncia de iluminaccedilatildeo exterior reduzindo
assim a interferecircncia da iluminaccedilatildeo de fundo no sinal recebido
A Figura 216a ilustra um sensor sem o dispositivo SBI a carga captada com
influecircncias externas de iluminaccedilatildeo e calor eacute maior do que a enviada pela fonte de
iluminaccedilatildeo refletida pela superfiacutecie do objeto e recebida pelo sensor Neste caso a
medida de distacircncia estaacute influenciada por fatores externos ao sistema e conteraacute
erros Na Figura 216b as cargas geradas por fatores externos ao sistema satildeo
39
minimizadas pelo dispositivo SBI Com isto tem-se maior quantidade de carga
captada com o sinal recebido eliminando a carga gerada por fatores externos
FIGURA 216 ndash Princiacutepio de funcionamento do SBI
FONTE MOumlLLER et al (2005)
Cacircmaras TOF com iluminaccedilatildeo LED infravermelha utilizam o dispositivo SBI
para a supressatildeo da iluminaccedilatildeo de fundo Outros modelos de cacircmaras TOF utilizam
iluminaccedilatildeo LASER para evitar o problema com a iluminaccedilatildeo exterior
253 Modelos de cacircmaras TOF
Diferentes cacircmaras TOF foram desenvolvidas nos uacuteltimos anos a Figura
217 ilustra alguns modelos destas cacircmaras
FIGURA 217 ndash Modelos de cacircmaras TOF
a) Effector O3D FONTE httpwwwifm-electroniccom
b) PMD[vision] CamCube 20 FONTE httpwwwpmdteccom
c) PMD[vision] 19k FONTE httpwwwpmdteccom
d) SwissRanger SR-3000 FONTE httpwwwmesa-imagingch
40
O Quadro 22 descreve as especificaccedilotildees teacutecnicas destas cacircmaras TOF
a)Effector
O3D
b)PMD[vision]
CamCube 20
c)PMD[vision]
19k
d)SwissRanger
SR-3000
Resoluccedilatildeo (piacutexeis) 64 x 50 204 x 204 160 x 120 176 x 144
Dimensotildees dos piacutexeis (microm) 100 x 100 45 x 45 40 x 40 40 x 40
Distacircncia focal (mm) 86 128 120 80
Fonte de iluminaccedilatildeo 1 matriz LED 2 matrizes LED 2 matrizes LED 1 matriz LED
Modulaccedilatildeo da fonte de
iluminaccedilatildeo (nm) 850 870 870 850
Frequecircncia de modulaccedilatildeo 20 MHz 20 MHz 20 MHz 20 MHz
Frequecircncia na aquisiccedilatildeo de
imagens
Maacuteximo
100 fps
Maacuteximo
25 fps
Maacuteximo
15 fps
Maacuteximo
40 fps
Conexatildeo Ethernet USB 2 Ethernet USB 2
Dimensotildees (mm) 55 x 45 x 85 194 x 60 x 60 220 x 210 x 55 60 x 50 x 65
QUADRO 22 ndash Especificaccedilotildees teacutecnicas de cacircmaras TOF FONTE Adaptado de RAPP (2007)
A partir do Quadro 22 verifica-se que estes modelos de cacircmaras TOF em
sua configuraccedilatildeo padratildeo possuem fonte de iluminaccedilatildeo LED distacircncia focais
variando de 8mm agrave 128mm e apresentam pequenas dimensotildees
26 ERROS DE MEDIDA
Observaccedilotildees realizadas com instrumentos de medida estatildeo acompanhadas
de erros provenientes da falibilidade humana imperfeiccedilatildeo na fabricaccedilatildeo do
equipamento e de interferecircncias causadas pelo ambiente em que o instrumento
utilizado e o objeto estavam no momento em que se realizou a medida Erros de
observaccedilatildeo satildeo tradicionalmente classificados como erros grosseiros sistemaacuteticos e
acidentais Erros grosseiros devem ser detectados e evitados pelo observador com
os devidos cuidados na obtenccedilatildeo da informaccedilatildeo tambeacutem ocorrem devido agrave
presenccedila de ruiacutedo nas observaccedilotildees Erros sistemaacuteticos se repetem seguindo um
determinado padratildeo e podem ser preditos e corrigidos Existem opccedilotildees para evitaacute-
los atraveacutes de teacutecnicas de observaccedilatildeo ou entatildeo eliminaacute-los a posteriori atraveacutes de
foacutermulas especiacuteficas Os erros acidentais ou aleatoacuterios satildeo randocircmicos natildeo
previsiacuteveis e podem ser distribuiacutedos entre o conjunto de observaccedilotildees por teacutecnicas
41
estatiacutesticas Eacute comum o uso da expressatildeo ldquopropriedades estatiacutesticas das
observaccedilotildeesrdquo devido a este erro (GEMAEL 1994)
Erros na medida de distacircncia utilizando cacircmaras TOF tambeacutem podem ser
divididos em natildeo-sistemaacuteticos e sistemaacuteticos conforme descrito nas seccedilotildees 261 e
262 onde seratildeo apresentados 3 erros natildeo-sistemaacuteticos e 7 erros sistemaacuteticos
261 Erros natildeo-sistemaacuteticos em cacircmaras TOF
De acordo com MAY et al (2008) a classificaccedilatildeo de erros natildeo-sistemaacuteticos
na medida de distacircncia utilizando cacircmaras TOF pode ser feita da seguinte maneira
1) Erro devido agrave relaccedilatildeo sinal-ruiacutedo (Signal-to-noise) quando a relaccedilatildeo da
carga recebida com o sinal eacute baixa e o ruiacutedo presente eacute alto haveraacute distorccedilatildeo na
medida de distacircncia que natildeo poderaacute ser corrigida posteriormente Para diminuir este
erro pode-se tomar cuidado com o tempo de exposiccedilatildeo do sensor na aquisiccedilatildeo da
imagem e tambeacutem amplificar a iluminaccedilatildeo do sistema Outra soluccedilatildeo eacute filtrar os
valores medidos com baixas amplitudes no sinal recebido
2) Reflexatildeo do sinal por muacuteltiplos caminhos (Multiple ways reflection) em
objetos com descontinuidade em suas superfiacutecies o sinal emitido pode percorrer
diferentes caminhos antes de retornar ao sensor Exemplos satildeo objetos com
superfiacutecies cocircncavas que podem refletir vaacuterias vezes o sinal e gerar erro na medida
de distacircncia Neste caso o sinal eacute refletido com sobreposiccedilatildeo ou seja pode ser
captado o sinal da uacuteltima superfiacutecie que o refletiu gerando uma distacircncia diferente
do valor esperado
3) Espalhamento da luz (Light scattering) ocorre na lente da cacircmara
causado pela presenccedila de objetos proacuteximos Este efeito e o causado pela reflexatildeo
por muacuteltiplos caminhos satildeo imprevisiacuteveis pois a topologia da cena observada eacute
desconhecida a priori
262 Erros sistemaacuteticos em cacircmaras TOF
Segundo RAPP (2007) nas cacircmaras TOF erros tambeacutem indicam a relaccedilatildeo
entre a variacircncia da distacircncia e a amplitude do sinal captado pelo sensor A relaccedilatildeo
42
estabelecida eacute que a variacircncia dos dados de distacircncia eacute inversamente proporcional agrave
raiz quadrada da amplitude do sinal recebido para realizar a medida Alguns erros
sistemaacuteticos das cacircmaras TOF estudados por RAPP foram
1) Erro devido a uma funccedilatildeo natildeo harmocircnica utilizada para correlacionar o
sinal emitido ao recebido
2) Ruiacutedos relacionados com o tempo de integraccedilatildeo Este tempo pode causar
exposiccedilatildeo insuficiente ou saturaccedilatildeo dos elementos do sensor
3) Erros geomeacutetricos no posicionamento dos piacutexeis devido ao sistema oacuteptico
da cacircmara
O erro devido agrave falta de harmonia na funccedilatildeo de correlaccedilatildeo entre o sinal
emitido e o recebido pode ser causado quando o sistema oacuteptico utilizado emite o
sinal de referecircncia com sua forma inicial e recebe o sinal refletido com forma
diferente Com isto a funccedilatildeo que representa o sinal recebido natildeo teraacute a forma
senoidal teoacuterica do sinal emitido Isto ocorre por conter harmocircnicos de Fourier
iacutempares quando eacute necessaacuteria uma amostra com pelo menos quatro pontos para
definir a FC entre os sinais Este erro tem grande influecircncia no caacutelculo da distacircncia
do objeto pois eacute a FC que possibilita a medida da diferenccedila de fase entre o sinal
emitido e o recebido
A presenccedila de ruiacutedo pode ser notada variando o TI na aquisiccedilatildeo da imagem
O conjunto de dados apresenta maiores distorccedilotildees radiomeacutetricas e geomeacutetricas
quando a presenccedila de ruiacutedo eacute forte Quando o TI eacute aumentado o ruiacutedo observado no
conjunto de dados pode diminuir Poreacutem valores extremamente altos introduzem
erros na mediccedilatildeo por causar saturaccedilatildeo do sensor Com esta informaccedilatildeo procura-se
definir uma funccedilatildeo para a modelagem do ruiacutedo de acordo com o tempo de
integraccedilatildeo Analisando dados obtidos com diferentes TI pode-se especificar qual o
melhor para cada situaccedilatildeo
Erros causados por exposiccedilatildeo insuficiente do sensor natildeo satildeo considerados
sistemaacuteticos poreacutem podem ser preditos Se o valor da amplitude do sinal eacute reduzido
o erro na medida da distacircncia aumenta Para reduzir os piacutexeis obtidos com
exposiccedilatildeo insuficiente pode-se definir um limite no valor da amplitude do sinal
Outra forma de controlar a exposiccedilatildeo eacute com o TI na obtenccedilatildeo da imagem Piacutexeis que
tem amplitude menor que 1 do valor maacuteximo das amplitudes na imagem TOF satildeo
considerados piacutexeis com exposiccedilatildeo insuficiente
43
Erros de posicionamento dos piacutexeis devido ao sistema oacuteptico da cacircmara
podem ser notados quando capta-se a imagem de uma fachada com portas e
janelas As linhas horizontais e verticais que representam estes elementos na
imagem aparecem com curvaturas de acordo com o sistema de lentes utilizado na
cacircmara A distorccedilatildeo de lentes tem um padratildeo fixo em cacircmaras com sensor CMOS
ou CCD e pode ser corrigida geometricamente atraveacutes dos POI da cacircmara que
captou a imagem
Erros sistemaacuteticos em cacircmaras TOF tambeacutem foram estudados por FUCHS e
HIRZINGER (2008) e MAY et al (2008) e foram classificados da seguinte maneira
4) Erro na medida de distacircncia (Distance-related error) este erro eacute causado
devido agrave assimetria da forma do sinal infravermelho recebido pelo sensor
Teoricamente assume-se que este sinal possui forma senoidal e harmocircnica com a
forma do sinal emitido o que na praacutetica pode natildeo acontecer Sendo assim o
pressuposto baacutesico para que se possa calcular o atraso de fase eacute que o sinal
luminoso emitido e o recebido satildeo harmocircnicos e com forma senoidal
Consequentemente se o caacutelculo do atraso de fase do sinal eacute impreciso a distacircncia
entre o objeto e o sensor tambeacutem seraacute calculada de forma imprecisa
5) Erro na amplitude do sinal captado (Amplitude-related error) o sensor natildeo
capta a energia eletromagneacutetica recebida com o sinal perfeitamente Deixando-se a
cacircmara e o objeto na mesma posiccedilatildeo podem-se obter diferentes medidas de
distacircncia devido a esta imperfeiccedilatildeo na fabricaccedilatildeo dos elementos do sensor Este
erro eacute relacionado com a amplitude de valores na captaccedilatildeo da imagem depende da
distacircncia e de caracteriacutesticas como a refletividade das superfiacutecies dos objetos
6) Erro devido agrave latecircncia dos elementos do sensor (Latency-related error) o
atraso de fase do sinal recebido eacute calculado atraveacutes das latecircncias com que o sensor
captou o sinal Estaacute relacionado com propriedades semicondutoras dos materiais
utilizados nos elementos sensores que satildeo responsaacuteveis pela medida da quantidade
de carga recebida Eacute causado quando o sinal emitido e o recebido satildeo
correlacionados diretamente na matriz do sensor Diferentes latecircncias do sinal
devem ser captadas por cada elemento do sensor para possibilitar o caacutelculo da
distacircncia de cada pixel de forma confiaacutevel
7) Ruiacutedo com padratildeo fixo (FPN - Fixed pattern noise) eacute relacionado com o
erro devido agrave latecircncia e ocorre devido agraves propriedades dos materiais utilizados na
fabricaccedilatildeo de cada elemento do sensor CMOS Este eacute um ruiacutedo com padratildeo fixo
44
pode ser corrigido a partir de uma imagem que tenha um pixel com valor constante
que serviraacute como referecircncia para a calibraccedilatildeo dos valores dos piacutexeis vizinhos
Tendo-se como referecircncia um pixel obtido em uma superfiacutecie uniforme de um objeto
pode-se utilizar um padratildeo de similaridade como referecircncia para os outros piacutexeis
Sendo assim a qualidade dos dados depende da posiccedilatildeo do pixel na imagem
Os uacuteltimos quatro erros sistemaacuteticos podem ser corrigidos utilizando o
meacutetodo de calibraccedilatildeo descrito em Fuchs et al (2007) Conforme realizado em
experimento por May et al (2008) os resultados alcanccedilados no mapeamento de uma
sala obtiveram a precisatildeo centimeacutetrica Este experimento foi realizado com o
objetivo de medir paredes opostas de uma sala com o sensor TOF em movimento
instalado em uma plataforma moacutevel O erro encontrado na medida das distacircncias
tambeacutem foi influenciado por erros na estimaccedilatildeo do posicionamento do sensor que eacute
obtido com a Orientaccedilatildeo Exterior da cacircmara no momento de aquisiccedilatildeo das imagens
Durante o registro dos quadros fotograacuteficos o erro em rotaccedilatildeo foi determinado como
sendo igual a 22ordm e o erro de translaccedilatildeo foi de 071m no eixo 119883 004m no eixo 119884 e
de -021m no eixo 119885 A distacircncia calculada entre paredes opostas foi igual a 105m
para a distacircncia de referecircncia de 108m A diferenccedila entre as duas medidas resultou
em 03m o que representa aproximadamente 28 da distacircncia de referecircncia A
nuvem de pontos 3D gerada por MAY et al (2008) eacute ilustrada com a Figura 218
FIGURA 218 ndash Nuvem de pontos 3D gerada a partir de imagem TOF
FONTE MAY et al (2008)
45
27 PROJECcedilAtildeO ORTOGONAL DOS PONTOS
As coordenadas tridimensionais dos pontos da imagem TOF satildeo obtidas
atraveacutes da projeccedilatildeo ortogonal Isto ocorre devido ao fato do equipamento utilizado
calcular as distacircncias dos objetos em um sistema esfeacuterico Esta projeccedilatildeo eacute feita a
partir da colinearidade entre o ponto no espaccedilo objeto o Centro Perspectivo (CP) e
o ponto no espaccedilo imagem conforme eacute ilustrado com a Figura 219
FIGURA 219 ndash Colinearidade entre os pontos no espaccedilo imagem e objeto
FONTE Adaptado de RAPP (2007)
A Figura 219 ilustra os sistemas referenciais adotados nos espaccedilos imagem
e objeto O sistema referencial fotogrameacutetrico (119909119875 119910119875) tem sua origem no CP que eacute
materializado pelo ponto nodal anterior do sistema de lentes da cacircmara Este ponto
projetado no plano da imagem gera o Ponto Principal (PP) A projeccedilatildeo do sistema
referencial fotogrameacutetrico na imagem eacute realizada considerando a simplificaccedilatildeo de
haverem apenas translaccedilotildees entre os eixos deste sistema e o sistema da imagem O
46
sistema referencial de imagem levoacutegiro (119862 119871) tem sua origem no canto superior
esquerdo Atraveacutes das Equaccedilotildees (223) e (224) esta origem pode ser transladada
para o centro da imagem (MACHADO 2006)
119862prime = 119862 minus119899119862minus1
2 (223)
119871prime = 119871 minus119899119871minus1
2 (224)
onde
119862 119871 ndash Sistema referencial de coordenadas da imagem (piacutexeis)
119899119862 119899119871 ndash Nuacutemero total de colunas e linhas da imagem (piacutexeis)
119862prime 119871prime ndash Sistema referencial auxiliar no centro da imagem (piacutexeis)
Para tornar o sistema referencial auxiliar (119862prime 119871prime) de imagem levoacutegiro em um
sistema dextroacutegiro (119909119894119898 119910119894119898 ) pode-se realizar uma reflexatildeo do eixo 119871prime atraveacutes da
Equaccedilatildeo (226)
119909119894119898 = 119862prime (225)
119910119894119898 = minus119871prime (226)
onde
119909119894119898 119910119894119898 ndash Coordenadas de um ponto no sistema referencial dextroacutegiro da
imagem (piacutexeis)
Com isto tem-se um sistema referencial dextroacutegiro centralizado na imagem e
que se relaciona com o sistema referencial fotogrameacutetrico projetado atraveacutes da
translaccedilatildeo de eixos determinada pelas coordenadas (119909119900 119910119900) do PP conforme
ilustrado com a Figura 220
47
FIGURA 220 ndash Sistemas de coordenadas utilizados em imagens
FONTE Adaptado de MACHADO (2006)
A partir do sistema referencial de imagem dextroacutegiro com origem no centro
da imagem e do sistema referencial fotogrameacutetrico projetado com origem no PP
satildeo estabelecidas as relaccedilotildees entre os sistemas de acordo com as Equaccedilotildees (227)
e (228)
119909119894119898 = (119909 minus 1199090) (227)
119910119894119898 = (119910 minus 1199100) (228)
onde
11990901199100 ndash Satildeo as coordenadas do ponto principal no sistema referencial de
imagem (piacutexeis)
119909119910 ndash Coordenadas dos pontos no sistema referencial fotogrameacutetrico
projetado na imagem (piacutexeis)
Os valores das coordenadas dos pontos do sistema fotogrameacutetrico projetado
na imagem estatildeo em piacutexeis A transformaccedilatildeo destes valores para miliacutemetros pode
ser feita multiplicando estas coordenadas pelo tamanho efetivo do pixel nas direccedilotildees
119909 e 119910 da imagem conforme as Equaccedilotildees (229) e (230)
48
119909 = 119909119894119898 ∙ 119875119909 (229)
119910 = 119910119894119898 ∙ 119875119910 (230)
onde
119909119910 ndash Satildeo as coordenadas dos pontos no sistema fotogrameacutetrico projetado
na imagem (miliacutemetros)
119875119909 119875119910 ndash Tamanho efetivo dos piacutexeis nas direccedilotildees 119909 e 119910 (miliacutemetros)
O tamanho efetivo dos piacutexeis nas direccedilotildees 119909 e 119910 satildeo calculados a partir do
fator de escala nestas direccedilotildees conforme Equaccedilotildees (231) e (232)
119875119909 = 119875 ∙ 119904119909 (231)
119875119910 = 119875 ∙ 119904119910 (232)
onde
119875119909 119875119910 ndash Tamanho efetivo dos piacutexeis nas direccedilotildees 119909 e 119910 (miliacutemetros)
119875 ndash Dimensatildeo do pixel obtida no manual do equipamento (miliacutemetros)
119904119909 119904119910 ndash Fatores de escala dos piacutexeis nas direccedilotildees 119909 e 119910
Os fatores de escala dos piacutexeis nas direccedilotildees 119909 e 119910 podem ser calculados
atraveacutes das Equaccedilotildees (233) e (234)
119904119909 =119891
119891119909 (233)
119904119910 =119891
119891119910 (234)
onde
119904119909 119904119910 ndash Fatores de escala dos piacutexeis nas direccedilotildees 119909 e 119910
119891119909 119891119910 ndash Distacircncia focal da cacircmara ao longo dos eixos 119909 e 119910 (miliacutemetros)
119891 ndash Distacircncia focal da cacircmara obtida no manual do equipamento
(miliacutemetros)
49
Quando o valor da distacircncia focal 119891119909 obtido com a calibraccedilatildeo da cacircmara
difere do valor 119891119910 tem-se um indicativo de escalas diferentes nos eixos 119909 e 119910 da
imagem
Realizadas as etapas de Orientaccedilatildeo Interior da imagem podem-se calcular
as coordenadas 3D dos pontos O posicionamento de cada ponto depende da
precisatildeo na determinaccedilatildeo dos acircngulos verticais e horizontais no sistema referencial
de imagem A projeccedilatildeo ortogonal das distacircncias dos pontos coordenada 119885 pode ser
feita atraveacutes da Equaccedilatildeo (235)
119885 = 119889119903 ∙ cos120573 (235)
onde
119885 ndash Distacircncia ortogonal do CP ao ponto observado no espaccedilo objeto
119889119903 ndash Distacircncia radial do CP ao ponto no sistema referencial esfeacuterico
120573 ndash Acircngulo formado entre o eixo que atinge o ponto na imagem partindo do
CP e o eixo principal da cacircmara (CP-PP)
O acircngulo 120573 pode ser calculado atraveacutes da funccedilatildeo trigonomeacutetrica expressa
com a Equaccedilatildeo (236)
tan120573 = 1199092
1198911199092 +
1199102
1198911199102 (236)
onde
119891119909 119891119910 ndash Distacircncia focal da cacircmara ao longo dos eixos 119909 e 119910 (miliacutemetros)
119909119910 ndash Coordenadas dos pontos no sistema referencial fotogrameacutetrico
projetado na imagem (miliacutemetros)
A Expressatildeo (235) relaciona a distacircncia radial 119889119903 com a coordenada 119885 dos
pontos no sistema ortogonal 3D em funccedilatildeo do acircngulo 120573 Substituindo a Equaccedilatildeo
(236) na Equaccedilatildeo (235) podemos explicitar a coordenada 119885 em funccedilatildeo das
distacircncias focais da cacircmara e das coordenadas dos pontos no sistema referencial
fotogrameacutetrico projetado na imagem conforme Equaccedilatildeo (237)
50
119885 = 119889119903 ∙ cos tanminus1 1199092
1198911199092 +
1199102
1198911199102 (237)
onde
119885 ndash Distacircncia ortogonal do CP ao ponto (miliacutemetros)
119889119903 ndash Distacircncia radial do CP ao ponto no sistema esfeacuterico da cacircmara
(miliacutemetros)
119891119909 119891119910 ndash Distacircncia focal da cacircmara ao longo dos eixos 119909 e 119910 (miliacutemetros)
119909119910 ndash Coordenadas dos pontos no sistema referencial fotogrameacutetrico
projetado na imagem (miliacutemetros)
As coordenadas (119883119884) dos pontos no sistema referencial ortogonal podem
entatildeo serem calculadas atraveacutes das Equaccedilotildees (238) e (239)
119883 = 119909 ∙119885
119891119909 (238)
119884 = 119910 ∙119885
119891119910 (239)
28 REFINAMENTO DA NUVEM DE PONTOS 3D
O processo de refinamento da nuvem de pontos 3D obtida com a imagem
TOF compreende a filtragem dos pontos que estejam esparsos devido agrave presenccedila
de ruiacutedo no arquivo de distacircncias da imagem TOF Com a Figura 221a satildeo
ilustrados pontos que natildeo pertencem agraves superfiacutecies do objeto aparecem na aresta
superior direita do objeto O sinal emitido atinge uma aacuterea da superfiacutecie do objeto e
natildeo apenas um ponto Esta aacuterea eacute proporcional agrave distacircncia entre o alvo e o sensor
ocorre devido agrave divergecircncia do feixe de luz emitido Com o princiacutepio TOF o valor da
distacircncia calculada eacute resultado da integraccedilatildeo do sinal recebido de acordo com a
aacuterea iluminada da superfiacutecie Quando o sinal emitido atinge superfiacutecies natildeo
coplanares o valor de distacircncia armazenado eacute um resultado interpolado Este
fenocircmeno ocorre principalmente nas bordas dos objetos e pode ser visto com a
51
Figura 221a que mostra um objeto com trecircs superfiacutecies planas uma base um
plano vertical na direita e um plano na parte superior
FIGURA 221 ndash Filtro para a definiccedilatildeo de bordas do objeto
FONTE MAY et al (2008)
A Figura 221b apresenta a nuvem de pontos 3D apoacutes a aplicaccedilatildeo do filtro
para o refinamento Este eacute um filtro gaussiano utilizado para a definiccedilatildeo de bordas e
desniacuteveis dos objetos eacute tambeacutem uma ferramenta para a remoccedilatildeo de pontos
esparsos provenientes da presenccedila de ruiacutedo nos dados da imagem TOF Funciona
considerando o acircngulo formado entre dois piacutexeis adjacentes na imagem onde o CP
eacute o ponto que completa o triacircngulo sendo o criteacuterio de seleccedilatildeo utilizado a distacircncia
meacutedia dos k pontos vizinhos mais proacuteximos
De acordo com May et al (2008) a distacircncia medida a partir de cacircmaras
TOF pode ser afetada pelo efeito de arredondamento das bordas Isto ocorre pela
suavizaccedilatildeo causada com a transiccedilatildeo entre as superfiacutecies iluminadas Dado um
conjunto de pontos 3D 119875 = 119901119894 119901119894 isin ℝ3 119894 = 1hellip 119873119901 as bordas podem ser
detectadas utilizando a Equaccedilatildeo (240) Esta eacute uma comparaccedilatildeo do acircngulo entre
dois piacutexeis 120585119894 119899 com base em um triacircngulo formado pelo centro perspectivo 119891 = 0 o
ponto 119901119894 e a vizinhanccedila deste ponto 119875119899 = 119901119894 119899 119899 = 1hellip 8 com o acircngulo de
vizinhanccedila 120585119905119893
120585119894 = max arcsin 119901119894 119899
119901119894 119899minus119901119894 ∙ 119904119894119899120593 (240)
52
119869 = 119901119894 120585119894 gt 120585119905119893 (241)
onde
120593 ndash Acircngulo maacuteximo entre dois piacutexeis veacutertice do triacircngulo no ponto 119891 = 0
O triacircngulo utilizado como referecircncia no filtro para a detecccedilatildeo de bordas
com veacutertice no ponto 119891 = 0 eacute ilustrado com a Figura 222
FIGURA 222 ndash Geometria do filtro para a definiccedilatildeo de bordas
FONTE MAY et al (2008)
Um conjunto 119878 de pontos pode ser filtrado atraveacutes da condiccedilatildeo expressa
com a Equaccedilatildeo (243)
119889 119901119894 = 1
119896 119901119894 minus 119901119894 119899 119896119899=1 (242)
119878 = 119901119894 isin 119875 119889 119901119894 lt 119889119905119893 (243)
onde
119889119905119893 ndash Distacircncia de vizinhanccedila constante
O conjunto 119876 de pontos selecionados satildeo os pontos filtrados da nuvem 3D
conforme a condiccedilatildeo da Equaccedilatildeo (244)
119876 = 119902119894 119902119894 isin 119875(119869 cup 119878) (244)
53
29 ANAacuteLISE DE SUPERFIacuteCIES POR AUTOVALORES E AUTOVETORES
A anaacutelise da forma de superfiacutecies pode ser feita pela variaccedilatildeo local de
autovalores que possibilita a classificaccedilatildeo e segmentaccedilatildeo de pontos com
coordenadas tridimensionais (BELTON e LICHTI 2006)
Autovetores e seus respectivos autovalores podem ser obtidos a partir da
Matriz de Variacircncias e Covariacircncias (119872119881119862) de um conjunto de observaccedilotildees O
tamanho relativo e a direccedilatildeo dos autovetores podem indicar propriedades locais
desta superfiacutecie permitindo analisar sua forma (PAULY et al 2002)
De acordo com Johnson e Wichern (1998) a 119872119881119862 pode ser calculada atraveacutes
da Equaccedilatildeo (245)
11987211988111986231199093 =1
119896 119903 119894 minus 119903 119896119894=1 ∙ 119903 119894 minus 119903
119879=
1205901199092 120590119909119910 120590119909119911
120590119909119910 1205901199102 120590119910119911
120590119909119911 120590119910119911 1205901199112
(245)
onde
119872119881119862 ndash Matriz de Variacircncias e Covariacircncias
119903 119894 ndash Vetor com as coordenadas 3D do ponto em questatildeo na amostra
119903 ndash Vetor com as coordenadas do centroacuteide da superfiacutecie
1205901199092120590119910
2 1205901199112 ndash Variacircncias
120590119909119910 120590119909119911 120590119910119911 ndash Covariacircncias
119896 ndash Nuacutemero de pontos da amostra
O vetor com as coordenadas do 119894-eacutesimo ponto da amostra eacute denotado com
119903 119894 pela Expressatildeo (246) A posiccedilatildeo relativa do centroacuteide pode ser calculada atraveacutes
da Equaccedilatildeo (247)
119903 119894 = 119909119894 119910119894 119911119894 119879 (246)
119903 =1
119896 119903 119894119896119894=1 (247)
54
A 119872119881119862 eacute quadrada simeacutetrica positiva-semidefinida e pode ser decomposta
em autovetores 119890 e autovalores 120582 atraveacutes da Equaccedilatildeo (248) Os autovalores 120582119894 satildeo
elementos escalares associados aos respectivos autovetores 119890 119894 (LEON 1998)
119872119881119862 ∙ 119890 = 120582 ∙ 119890 (248)
A partir do teorema de decomposiccedilatildeo espectral (decomposiccedilatildeo de Jordan) a
119872119881119862 pode ser isolada nesta igualdade conforme a Equaccedilatildeo (249) Maiores
detalhes podem ser vistos em Johnson e Wichern (1998) e Shakarji (1998)
119872119881119862 = 120582119894 ∙ 119890 119894 ∙ 119890 1198941198792
119894=0 (249)
onde
119872119881119862 ndash Matriz Variacircncia Covariacircncia
119890 119894 ndash Vetor com os autovetores 119890 119894
120582119894 ndash Matriz com os autovalores 120582119894
Os autovalores satildeo valores reais e os autovetores formam um sistema de
base ortogonal que correspondem aos componentes principais do conjunto de
observaccedilotildees (BELTON 2008)
De acordo com PAULY et al (2002) pode-se adotar a convenccedilatildeo entre os
autovalores da Expressatildeo (250) A partir desta convenccedilatildeo algumas propriedades
para superfiacutecies normais podem ser descritas
1205821 ge 1205822 ge 1205823 (250)
Em um conjunto de pontos 3D que formam uma superfiacutecie plana espera-se
que 1205821 ne 0 1205822 ne 0 e que 1205823 asymp 0 Com isto o menor autovetor 119890 3 apontaraacute na direccedilatildeo
normal a esta superfiacutecie Com a Figura 223 satildeo ilustrados os trecircs autovetores de
uma regiatildeo da superfiacutecie descrita pela nuvem de pontos 3D O terceiro autovetor 119890 3
com o menor autovalor 1205823 eacute ortogonal agrave superfiacutecie plana definida pelos outros dois
autovetores 119890 1 e 119890 2
55
FIGURA 223 ndash Autovetores em nuvem de pontos 3D de uma superfiacutecie plana
Pontos contidos na interseccedilatildeo entre duas superfiacutecies planas podem ser
identificados atraveacutes das relaccedilotildees 1205821 asymp 21205822 e 1205823 asymp 0 O autovetor 119890 1 apontaraacute na
direccedilatildeo da linha limitante da superfiacutecie plana e o autovetor 119890 3 seraacute ortogonal a esta
direccedilatildeo Podem-se encontrar segmentos de retas que limitam a borda de uma
superfiacutecie atraveacutes das relaccedilotildees 1205822 asymp 1205823 e 1205821 asymp 1205822+1205823
Quando os autovalores apresentam valores aproximadamente iguais
1205821 asymp 1205822 asymp 1205823 torna-se possiacutevel encontrar o veacutertice formado por trecircs superfiacutecies
planas
Normalizando os autovalores com a Equaccedilatildeo (251) remove-se a sua
dependecircncia em relaccedilatildeo ao tamanho da amostra utilizada
120582119894prime =
120582119894
1205821+1205822+1205823=
120582119894
119905119903119886 ccedil119900(120582) (251)
Para o autovalor miacutenimo (119894 = 3) pode-se definir o nuacutemero 119873 de pontos para
representar as variaccedilotildees na superfiacutecie atraveacutes da Equaccedilatildeo (252)
119873 =1205823
119905119903119886 ccedil119900(120582) (252)
O valor resultante da Equaccedilatildeo (252) eacute uma medida aproximada de
curvatura local e pode representar a rugosidade da superfiacutecie de forma normalizada
56
210 ANAacuteLISE DE SUPERFIacuteCIES POR MOMENTOS INVARIANTES
Caracteriacutesticas de superfiacutecies planas podem ser obtidas atraveacutes da anaacutelise
de momentos invariantes para isto utiliza-se a 119872119881119862 dos pontos que descrevem esta
superfiacutecie De acordo com MASS e VOSSELMAN (1999) os momentos invariantes
119898119894119895 podem ser calculados atraveacutes da Equaccedilatildeo (253)
119898119894119895 = 119909119894119910119895119891(119909119910)119889119909 1198891199101199102
1199101
1199092
1199091 (253)
onde
119894 119895 ndash Correspondem agrave ordem do momento
119891(119909119910) ndash A coordenada 119911 dos pontos eacute funccedilatildeo das coordenadas planas 119909 e 119910
em um conjunto de pontos que descrevem a superfiacutecie contiacutenua
A Equaccedilatildeo (254) permite determinar o volume de uma esfera unitaacuteria com
raio 119877 em um domiacutenio contiacutenuo 119873 de pontos 3D eacute obtida a partir da Equaccedilatildeo (253)
e possibilita o estudo de propriedades das superfiacutecies com padratildeo planar
119898119894119895119896 = 119909119894119910119895 119911119896119891(119909119910 119911)119889119907119881
(254)
onde
119894 119895119896 ndash Pertencem ao domiacutenio contiacutenuo da funccedilatildeo com 119873 pontos
119894 + 119895 + 119896 ndash Corresponde agrave ordem do momento
119891(119909119910 119911) ndash Eacute o volume da esfera unitaacuteria
Atraveacutes da Equaccedilatildeo (254) GROSS e THONNESSEN (2006) conseguiram
descrever algumas relaccedilotildees entre autovalores e as propriedades de superfiacutecies
normais conforme eacute ilustrado com o Quadro 23
57
ESTRUTURA AUTOVALORES
120640120783 120640120784 120640120785
PONTO ISOLADO
0 0 0
PONTO FINAL DE SEGMENTO
DE RETA
1
12= 0083 0 0
LINHA RETA 1
3= 0333 0 0
12 PLANO 1
4= 025
1
4 1 minus
64
91205872 = 00 0
PLANO 1
4= 025
1
4= 025 0
14 PLANO 1
4 1 minus
2
120587 = 009
1
4+
2
120587minus
32
91205872= 00 0
INTERSECcedilAtildeO DE 2 PLANOS
1
3= 0333
1
8= 0125
1
8minus
8
91205872= 003
INTERSECcedilAtildeO DE 3 PLANOS
1
6 1 minus
1
120587 = 011
1
6 1 minus
1
120587 = 011
1
6 1 +
2
120587 minus
26
331205872= 003
INTERSECcedilAtildeO DE 2 PLANOS
Agrave 30deg 025 01875 001747
QUADRO 23 ndash Propriedades de superfiacutecies normais obtidas com autovalores FONTE GROSS e THOENNESSEN (2006)
Os autovalores do Quadro 23 foram determinados analiticamente a partir da
Equaccedilatildeo (254) e podem ser utilizados como referecircncia para a estimaccedilatildeo da forma
das superfiacutecies que compotildeem a estrutura dos objetos
Restringindo a ordem dos momentos com 119894 + 119895 + 119896 le 2 pode-se calcular o
centro de gravidade da superfiacutecie conforme a Equaccedilatildeo (255) e os elementos da
119872119881119862 podem serem obtidos atraveacutes da Equaccedilatildeo (256)
119909 =119898100
119898000 119910 =
119898010
119898000 119911 =
119898001
119898000 (255)
58
119898 119894119895119896 = 119909119894 minus 119909 119894 119910 minus 119910 119895 119911 minus 119911 119896119891(119909119910 119911)119889119907119881
(256)
Os momentos de 2ordf ordem normalizados para os pontos 3D em um domiacutenio
discreto podem ser calculados atraveacutes da Equaccedilatildeo (257)
119898 119894119895119896 = 119909119897minus119909
119894 119910119897minus119910 119895 119911119897minus119911
119896119873119897=1
119877119894+119895+119896119873 (257)
onde
119898 119894119895119896 ndash Momentos de 2ordf ordem para os pontos 3D
119873 ndash Nuacutemero de pontos da amostra no domiacutenio contiacutenuo da funccedilatildeo
119877 ndash Raio da esfera unitaacuteria considerada para seleccedilatildeo de pontos
Desta forma os valores calculados para os momentos natildeo satildeo influenciados
pelo nuacutemero de pontos unidade fiacutesica das medidas ou peso dos elementos da 119872119881119862
Utilizando momentos de 2ordf ordem a 119872119881119862 pode ser obtida atraveacutes da Equaccedilatildeo
(258)
119872119881119862 =
119898 200 119898 110 119898 101
119898 110 119898 020 119898 011
119898 101 119898 011 119898 002
(258)
O caacutelculo dos autovalores 120582119894 e autovetores 119890 119894 com 119894 = 123 eacute variaacutevel para
cada ponto do conjunto de observaccedilotildees Sendo assim as classes de valores
geradas por GROSS e THONNESSEN (2006) com objetivo de modelar superfiacutecies
com padratildeo planar foram agraves seguintes
O primeiro autovalor 1205821 foi definido constante e igual a 025
O segundo autovalor 1205822 varia de 0125 agrave 025
O terceiro autovalor 1205823 varia de 0 agrave 0125
Com a aproximaccedilatildeo teoacuterica dos valores contidos no Quadro 24 JUTZI e
GROSS (2009) mostraram a possibilidade de determinar matematicamente
inclinaccedilotildees entre as superfiacutecies para os acircngulos de 0ordm 30ordm e 90ordm No entanto
quando satildeo utilizados dados reais para representar as superfiacutecies pequenas
variaccedilotildees nestes valores podem ser percebidas Um exemplo eacute que o terceiro
59
autovalor 1205823 natildeo teraacute valor igual a zero mesmo em uma superfiacutecie plana Isto ocorre
por haverem pequenos desvios entre os pontos desta superfiacutecie que satildeo causados
por ruiacutedo presente no conjunto de dados reais Este fato pode ser observado
calculando o terceiro autovalor que seraacute um valor positivo pequeno mas diferente
de zero Com isto quanto mais proacuteximo de zero o terceiro autovalor 1205823 maior seraacute o
indicativo que a superfiacutecie eacute plana conforme ilustrado com a Figura 224
FIGURA 224 ndash Inclinaccedilotildees de superfiacutecies determinadas por autovalores
FONTE JUTZI e GROSS (2009)
60
211 ALGORITMO DE DESLOCAMENTO PELA MEacuteDIA
O algoritmo de deslocamento pela meacutedia (Mean Shift) pode ser utilizado no
reconhecimento de padrotildees para a segmentaccedilatildeo de imagens A densidade de
pontos vizinhos em relaccedilatildeo a um ponto central pode ser estimada com a meacutedia do
conjunto de dados discretos A anaacutelise espacial de atributos eacute utilizada neste
contexto com o objetivo de extrair informaccedilotildees Para isto utiliza a vizinhanccedila de um
ponto na imagem Com os atributos definidos pode-se encontrar o centro das
regiotildees com as maiores densidades que representam caracteriacutesticas significativas
dos objetos presentes na imagem
Para realizar a anaacutelise espacial de atributos e obterem-se resultados
satisfatoacuterios deve-se reduzir o volume de dados ateacute que se tenham apenas as
caracteriacutesticas significativas distribuiacutedas em um sistema de coordenadas contiacutenuo O
conteuacutedo do espaccedilo de atributos deve ser passiacutevel de modelagem atraveacutes de uma
amostragem com distribuiccedilatildeo multivariada de probabilidade Devido a este
pressuposto eacute necessaacuterio verificar se a condiccedilatildeo de normalidade dos dados eacute
satisfeita em aplicaccedilotildees estatiacutesticas tradicionais que utilizam testes parameacutetricos
Em outras aplicaccedilotildees podem-se utilizar meacutetodos estatiacutesticos natildeo
parameacutetricos com menos restriccedilotildees sobre o comportamento dos dados como por
exemplo natildeo se preocupar com o tipo de distribuiccedilatildeo para as variaacuteveis aleatoacuterias O
conceito de Kernel pode ser empregado em meacutetodos natildeo parameacutetricos para a
estimativa de propriedades Esta eacute uma funccedilatildeo estatiacutestica contiacutenua simeacutetrica e com
limite superior e inferior de integraccedilatildeo definidos cuja integraccedilatildeo resulta na unidade
por conveniecircncia O Kernel atua na imagem como uma janela de convoluccedilatildeo
suavizando as caracteriacutesticas dos pontos analisados (MACHADO 2006)
De acordo com COMANICIU e MEER (2002) o algoritmo de deslocamento
pela meacutedia eacute uma ferramenta versaacutetil para anaacutelises espaciais de feiccedilotildees presentes
em amostras Utiliza o Kernel para a estimaccedilatildeo da densidade dos elementos no
conjunto de dados tendo como referecircncia um ponto fixo na regiatildeo central da
amostra Dado um conjunto de pontos 120169119894=1hellip119899 em um espaccedilo 119877 com dimensatildeo 119889 o
estimador de densidade multivariada por Kernel 119870(120169) e a matriz de paracircmetros 119867
com bandas de dimensatildeo 119889 pode ser calculada com os pontos 120169 Com estes
61
paracircmetros definidos a funccedilatildeo para estimar a densidade multivariada no ponto 120169 eacute
expressa com a Equaccedilatildeo (259)
119891 (120169) =1
119899 119870119867 120169 minus 120169119894 119899119894=1 (259)
119870119867(120169) = 119867 minus1
2119870(119867minus1
2120169) (260)
O Kernel 119870(120169) com dimensatildeo 119889 eacute uma funccedilatildeo para a anaacutelise da densidade
da vizinhanccedila dos pontos expressa atraveacutes das Equaccedilotildees (261) e (262)
119870(120169)119877119889
119889120169 = 1 lim 119909 rarrinfin 120169 119889 119870 120169 = 0 (261)
119909119870(120169)119889120169119877119889
= 0 120169120169119879119870(120169)119889120169119877119889
= 119888119870119868 (262)
Onde 119888119870 eacute uma constante A partir do Kernel univariado 1198701 119909 o Kernel
multivariado pode ser calculado de duas maneiras conforme as Equaccedilotildees (263) e
(264)
119870119875 120169 = 1198701 119909119894 119889119894=1 (263)
119870119878 120169 = 119886119896 1198891198701( 120169119894 ) (264)
Onde 119870119875(120169) eacute obtido com o produto dos Kernels univariados e 119870119878(120169) eacute
obtido rotacionando 1198701(119909) no espaccedilo 119877119889 o que faz 119870119878(120169) ser radialmente simeacutetrico
A constante 119886119896 119889minus1 = 1198701 120169 1198891201691198774
com 119870119878(119909) integrado de 0 agrave 1 O Kernel
radialmente simeacutetrico eacute de interesse em anaacutelises espaciais de imagens desde que
satisfaccedila a condiccedilatildeo da Equaccedilatildeo (265)
119870 119909 = 119888119896 119889119896( 120169 2) (265)
Neste caso define-se a funccedilatildeo de cada elemento do Kernel 119896 119909 para 119909 ge 0
A constante de normalizaccedilatildeo 119888119896 119889 pode ser calculada integrando 119870 120169 de 0 a 1
assumindo-se que eacute positiva A estimaccedilatildeo pode ser parametrizada com a matriz
diagonal de bandas do Kernel 119867 = 1198932119868 = 119889119894119886119892 11989312hellip 119893119889
2 onde 119868 eacute a matriz
identidade com dimensatildeo 119889 Esta matriz apresenta a vantagem de ser determinada
62
utilizando como uacutenico paracircmetro o nuacutemero de bandas 119893 ge 0 do Kernel Empregando
paracircmetros com o nuacutemero de bandas 119893 e dimensatildeo 119899 o estimador de densidade por
Kernel da Equaccedilatildeo (259) pode ser expresso atraveacutes da Equaccedilatildeo (266)
119891 (120169) =1
119899119893119889 119870119867
120169minus120169119894
119893 119899
119894=1 (266)
A qualidade do estimador de densidade por Kernel pode ser analisada
atraveacutes do erro meacutedio quadraacutetico entre a densidade real e a estimada Na praacutetica
somente a aproximaccedilatildeo assintoacutetica das medidas pode ser calculada (AMISE ndash
Asymptotic Mean Integrated Square Error) Para os Kernels multivariados o erro
meacutedio quadraacutetico AMISE eacute minimizado utilizando o Kernel de Epanechnikov
(COMANICIU e MEER 2002)
119896119864 119909 = 1 minus 119909 0 le 119909 le 1
0 119909 gt 0 (267)
119870119864 120169 = 1
2119888119889
minus1 119889 + 2 (1 minus 120169 2) 120169 le 1
0 119888119886119904119900 119888119900119899119905119903aacute119903119894119900 (268)
Onde 119888119889 eacute o volume de uma esfera com raio unitaacuterio e com dimensatildeo 119889 O
elemento do Kernel 119896119873 119909 pode ser calculado utilizando a Equaccedilatildeo (269)
119896119873 119909 = exp minus1
2119909 119909 ge 0 (269)
Para o Kernel multivariado calculado com a Equaccedilatildeo (269) um Kernel
normal 119870119873 pode ser calculado utilizando a Equaccedilatildeo (270)
119870119873 120169 = (2120587)minus1198892exp minus1
2 120169 2 (270)
Sendo o Kernel normal simeacutetrico e admitido finito Para a anaacutelise espacial de
imagens estas duas formas de calcular o Kernel satildeo suficientes e os resultados
obtidos com estas condiccedilotildees impostas satildeo satisfatoacuterios O estimador de densidade
por Kernel da Equaccedilatildeo (259) pode ser reescrito conforme a Equaccedilatildeo (271)
63
119891 119893 119870(120169) =119888119896 119889
119899119893119889 119896
120169minus120169119894
119893
2
119899119894=1 (271)
Para anaacutelise de feiccedilotildees espaciais primeiramente deve-se calcular a
densidade do conjunto de dados e verificar o seu comportamento espacial Isto pode
ser feito calculando o gradiente da funccedilatildeo de densidade 119891(120169) igual a zero nabla119891 120169 = 0
O algoritmo de deslocamento pela meacutedia eacute uma maneira de localizar estes zeros
para estimar a densidade do conjunto de observaccedilotildees Calculando o gradiente da
funccedilatildeo expressa com a Equaccedilatildeo (271) pode-se estimar a densidade atraveacutes da
Equaccedilatildeo (272)
nabla 119891119893 119870(120169) equiv2119888119896 119889
119899119893119889+2 (120169 minus 120169119894)119896prime
120169minus120169119894
119893
2
119899119894=1 (272)
Substituindo 119896prime pela funccedilatildeo 119892(119909) conforme expresso com a Equaccedilatildeo (273)
119892 119909 = 119896prime(119909) (273)
Assumindo que a derivada do Kernel 119896 exista para o conjunto finito de
pontos 119909 isin [0infin) O Kernel 119866(119909) com seus elementos 119892(119909) pode ser definido atraveacutes
da Equaccedilatildeo (274)
119866 119909 = 119888119892 119889119892( 120169 2) (274)
Onde 119888119892119889 corresponde a uma constante de normalizaccedilatildeo O Kernel 119866 119909
pode ser considerado uma aproximaccedilatildeo do Kernel 119870(119909) dependendo do contexto
em que seraacute empregado De forma similar o Kernel de Epanechnikov eacute uma
simplificaccedilatildeo do Kernel uniforme da esfera unitaacuteria com dimensatildeo 119889 Introduzindo
119892(119909) na Equaccedilatildeo (272) tem-se a Equaccedilatildeo (275)
nabla 119891119893 119870 120169 =2119888119896 119889
119899119893119889+2 120169 minus 120169119894 119892
120169minus120169119894
119893
2
119899119894=1 (275)
nabla 119891119893 119870 120169 =2119888119896 119889
119899119893119889+2 119892 120169minus120169119894
119893
2
119899119894=1 ∙
120169119894119892 120169minus120169119894119893
2 119899
119894=1
119892 120169minus120169119894119893
2 119899
119894=1
(276)
64
119892 120169minus120169119894
119893
2
119899119894=1 (277)
Considerando que o resultado da funccedilatildeo expressa com a Equaccedilatildeo (277) eacute
um nuacutemero positivo O primeiro termo da Equaccedilatildeo (276) eacute proporcional agrave densidade
estimada calculada para 120169 com o Kernel 119866 conforme Equaccedilatildeo (271) e expresso
agora em funccedilatildeo de 119892(119909) atraveacutes da Equaccedilatildeo (278)
119891119893 119866 120169 =119888119892 119889
119899119893119889 119892
120169minus120169119894
119893
2
119899119894=1 (278)
O segundo termo da Equaccedilatildeo (276) corresponde ao algoritmo de
deslocamento pela meacutedia conforme Equaccedilatildeo (279)
119898119893 119866 120169 = 120169119894119892
120169minus120169119894119893
2 119899
119894=1
119892 120169minus120169119894119893
2 119899
119894=1
minus 120169 (279)
A Equaccedilatildeo (279) representa a diferenccedila entre as meacutedias ponderadas
utilizando o Kernel 119866 para os pesos e o centro da janela de convoluccedilatildeo em 120169 A
partir das Equaccedilotildees (276) (278) e (279) chega-se as Equaccedilotildees (280) e (281)
nabla 119891119893 119870 120169 = 119891 119893 119866 120169 2119888119896 119889
1198932119888119892 119889119898119893 119866 120169 (280)
119898119893 119866 120169 =1
21198932119888nabla
119891 119893 119870 120169
119891 119893 119866 120169 (281)
Para a posiccedilatildeo 120169 o vetor de deslocamento pela meacutedia calculado com Kernel
119866 eacute proporcional agrave estimaccedilatildeo de densidade normalizada obtida resolvendo a funccedilatildeo
com gradiente igual a zero e Kernel 119870 Eacute a normalizaccedilatildeo da densidade estimada em
119909 calculada com o Kernel 119866
O vetor de deslocamento pela meacutedia aponta na direccedilatildeo de maacuteximo
crescimento da densidade do conjunto de dados A estimaccedilatildeo da densidade de
pontos com mesma caracteriacutestica eacute obtida atraveacutes de interaccedilotildees com sucessivos
caacutelculos do vetor de deslocamento pela meacutedia 119898119893 119866 120169 e translaccedilotildees do Kernel 119866(119909)
sobre a imagem Isto garante a convergecircncia ao redor do ponto de interesse
65
utilizando a Equaccedilatildeo (281) com gradiente igual a zero Regiotildees com baixa
densidade de observaccedilotildees natildeo satildeo interessantes para anaacutelises espaciais com o
algoritmo de deslocamento pela meacutedia pois muitas iteraccedilotildees seriam necessaacuterias
para obtenccedilatildeo de resultados pouco satisfatoacuterios De forma anaacuteloga em locais com
densidade maacutexima poucas iteraccedilotildees satildeo necessaacuterias e a anaacutelise pode atingir bons
resultados (COMANICIU e MEER 2002)
Imagens satildeo representadas matematicamente na forma de matrizes onde
cada posiccedilatildeo da matriz eacute ocupada por vetores com dimensatildeo 119901 onde 119901 = 1 no caso
de imagens em niacuteveis de cinza ou coloridas e 119901 ge 2 no caso de imagens
multiespectrais O posicionamento de cada pixel na matriz imagem estaacute contido no
domiacutenio espacial (Spatial domain) enquanto o valor digital do pixel faz parte do
domiacutenio de caracteriacutesticas da imagem (Range domain) assumindo-se estes
domiacutenios como espaccedilos euclidianos Deste modo o Kernel multivariado pode ser
definido como o produto de dois Kernels radialmente simeacutetricos em um espaccedilo
euclidiano calculado com um paracircmetro de cada domiacutenio atraveacutes da Equaccedilatildeo
(282)
119870119893119904119893119903(119909) =119862
1198931199042119893119903
119901 119896 120169119904
119893119904
2
119896 120169119903
119893119903
2
(282)
onde
120169119904 ndash Corresponde ao domiacutenio espacial
120169119903 ndash Corresponde ao domiacutenio de caracteriacutesticas
119896(119909) ndash Elemento da funccedilatildeo calculado em ambos os domiacutenios
119893119904 119893119903 ndash Paracircmetros das bandas de cada domiacutenio do Kernel empregado
119862 ndash Constante de normalizaccedilatildeo entre as bandas
Na praacutetica o Kernel de Epanechnikov tambeacutem conhecido por Kernel normal
atinge resultados satisfatoacuterios O usuaacuterio deve escolher apenas os paracircmetros das
bandas 119893 = 119893119904 119893119903 e a quantidade miacutenima 119867 de pixels das regiotildees segmentadas na
imagem determinando assim a resoluccedilatildeo na estimaccedilatildeo da densidade A Figura 225
ilustra um exemplo de segmentaccedilatildeo realizada utilizando o algoritmo de
deslocamento pela meacutedia sobre uma imagem em niacuteveis de cinza
66
FIGURA 225 ndash Imagem segmentada FONTE COMANICIU e MEER (2002)
A segmentaccedilatildeo de imagens atraveacutes do algoritmo de deslocamento pela
meacutedia foi implementada no software EDISON (Edge Detection and Image
SegmentatiON System) desenvolvido pela Universidade RUTGER de New Jersey
Este software aleacutem da segmentaccedilatildeo com o algoritmo de deslocamento pela meacutedia
realiza uma filtragem preservando as descontinuidades e detectando os limites dos
objetos contidos na imagem atraveacutes de uma funccedilatildeo gradiente (CHRISTOUDIAS et
al 2002)
67
3 MATERIAIS
Neste trabalho foram utilizadas imagens TOF obtidas com a cacircmara PMD
CamCube 20 que fornece dados de distacircncia e intensidade sob forma de matrizes
de imagem Para realizar os experimentos foram obtidos trecircs conjuntos de imagens
De um gabarito com a forma de um tabuleiro de xadrez para realizar
o processo de calibraccedilatildeo da cacircmara
De uma parede branca com padratildeo planar para anaacutelise de ruiacutedos e
distorccedilotildees geomeacutetricas das imagens e
Do objeto de estudo uma caixa de papelatildeo com superfiacutecies planas e
brancas
Para o processamento das imagens TOF foi utilizado um microcomputador
do laboratoacuterio de Fotogrametria e Sensoriamento Remoto Departamento de
Geomaacutetica da Universidade Federal do Paranaacute com as seguintes caracteriacutesticas
Processador Intelreg Coretrade2 Duo 293GHz
Capacidade do disco riacutegido de 320GB
Memoacuteria principal de 2GB
68
4 MEacuteTODOS
Neste capitulo descreve-se o desenvolvimento metodoloacutegico do presente
trabalho de pesquisa para a aquisiccedilatildeo e processamento da imagem TOF Esta
imagem eacute composta por dois arquivos O primeiro arquivo conteacutem informaccedilatildeo de
intensidade de retorno do sinal captado com iluminaccedilatildeo infravermelha O segundo
arquivo conteacutem informaccedilatildeo de distacircncia (range) para cada pixel gerado com o
sensor da cacircmara TOF
Considerando que as imagens TOF podem apresentar ruiacutedo em funccedilatildeo das
condiccedilotildees de iluminaccedilatildeo e da natureza das superfiacutecies dos objetos estudos para a
reduccedilatildeo do ruiacutedo foram efetuados Para isto utilizaram-se janelas na regiatildeo central
da imagem ao redor do pixel com coordenadas de imagem (102 102) As filtragens
foram realizadas em aacutereas que circundam este pixel central
Apoacutes a anaacutelise do tempo de integraccedilatildeo na aquisiccedilatildeo da imagem
determinaram-se POI atraveacutes do processo de calibraccedilatildeo da cacircmara Os POI
permitiram corrigir a geometria dos dados da imagem TOF Esta correccedilatildeo eacute
necessaacuteria devido agraves distorccedilotildees causadas pelo sistema de lentes da cacircmara
A etapa seguinte consistiu na segmentaccedilatildeo da imagem TOF onde duas
metodologias foram avaliadas
1) Segmentaccedilatildeo do conjunto de dados por crescimento de regiotildees no
espaccedilo tridimensional utilizando pontos semente escolhidos no arquivo de
intensidades da imagem TOF como referecircncia para o posicionamento (119883119884) dos
pontos com distacircncia (119885)
2) Segmentaccedilatildeo utilizando a anaacutelise da variaccedilatildeo local dos autovalores ao
longo do arquivo de distacircncias da imagem TOF Realizada para a geraccedilatildeo de uma
imagem com bordas intensificadas segmentaccedilatildeo desta imagem atraveacutes do
algoritmo de deslocamento pela meacutedia e projeccedilatildeo ortogonal dos pontos
pertencentes agraves aacutereas segmentadas As superfiacutecies segmentadas foram entatildeo
separadas atraveacutes do conjunto de pontos 3D
O passo seguinte consistiu no caacutelculo das coordenadas tridimensionais dos
pontos dos objetos imageados a partir da informaccedilatildeo de distacircncia das coordenadas
dos piacutexeis na imagem de intensidade e dos POI Com isto gerou-se a nuvem de
pontos 3D e tornou-se possiacutevel a modelagem tridimensional das superfiacutecies do
69
objeto de estudo sendo tambeacutem avaliado o resultado obtido A Figura 41 apresenta
as etapas realizadas no processamento das imagens TOF com as duas propostas
de metodologia para a etapa de segmentaccedilatildeo
FIGURA 41 ndash Processamento da imagem TOF
41 CALIBRACcedilAtildeO DA CAcircMARA
A calibraccedilatildeo foi realizada com o objetivo de determinar os Paracircmetros de
Orientaccedilatildeo Interior (POI) da cacircmara Estes paracircmetros possibilitam a reconstruccedilatildeo
do feixe perspectivo que gerou a imagem para o instante em que foi captada
permitindo a correccedilatildeo de sua geometria (ANDRADE 1998)
Com o processo de Orientaccedilatildeo Interior satildeo obtidos os seguintes POI
distacircncia focal calibrada (119891119888 ) posiccedilatildeo do Ponto Principal (1199090 1199100) na imagem
Distorccedilatildeo Radial Simeacutetrica (119870111987021198703) Distorccedilatildeo Descentrada (11987511198752) e os
paracircmetros que indicam falta de afinidade do sensor (119860119861)
IMAGEM TOF
CORRECcedilOtildeES GEOMEacuteTRICAS COM POI
ARQUIVO DE INTENSIDADES
SUPERFIacuteCIE SEMENTE
CRESCIMENTO DE REGIOtildeES COM PONTO SEMENTE
PROJECcedilAtildeO ORTOGONAL
NUVEM DE PONTOS 3D
ARQUIVO DE DISTAcircNCIAS
IMAGEM COM BORDAS INTENSIFICADAS VARIACcedilAtildeO LOCAL DE AUTOVALORES
SEGMENTACcedilAtildeO DA IMAGEM COM BORDAS INTENSIFICADAS
PROJECcedilAtildeO ORTOGONAL
NUVEM DE PONTOS 3D
MODELAGEM 3D DAS SUPERFIacuteCIES
70
Os POI obtidos com o processo de calibraccedilatildeo possibilitam realizar correccedilotildees
geomeacutetricas nos arquivos de intensidades e distacircncias das imagens TOF Com a
calibraccedilatildeo objetiva-se corrigir as distorccedilotildees ocorridas na passagem do raio de luz
pelo sistema de lentes ateacute atingir o plano focal Este erro ocorre pela impossibilidade
na construccedilatildeo de um sistema de lentes perfeito para a cacircmara A correccedilatildeo dos erros
sistemaacuteticos da cacircmara eacute realizada no plano da imagem no ponto onde uma linha
reta passante pelo ponto nodal anterior do sistema de lentes eacute ortogonal a este
plano
O meacutetodo de calibraccedilatildeo fotogrameacutetrica eacute o tradicionalmente utilizado na
determinaccedilatildeo dos POI em Ciecircncias Geodeacutesicas Para isto necessita de pontos de
apoio com coordenadas tridimensionais conhecidas na superfiacutecie de objetos com
correspondentes coordenadas bidimensionais observadas na imagem Relaciona-se
a informaccedilatildeo 3D da cena com a informaccedilatildeo 2D da imagem atraveacutes das equaccedilotildees de
colinearidade fazendo-se uma correspondecircncia entre a posiccedilatildeo dos pontos de
referecircncia 3D e os mesmos pontos reconhecidos na imagem 2D Esta calibraccedilatildeo
pode ser realizada de forma eficiente desde que sejam utilizadas teacutecnicas e campos
de calibraccedilatildeo apropriados para cada tipo de cacircmara e aplicaccedilatildeo que se destina a
imagem Outra teacutecnica que pode ser utilizada para a Orientaccedilatildeo Interior das imagens
eacute conhecida como auto-calibraccedilatildeo na qual natildeo haacute necessidade de pontos com
coordenadas conhecidas no espaccedilo objeto (ZHANG 2000)
A Distorccedilatildeo Radial Simeacutetrica eacute a parcela de refraccedilatildeo natildeo desejaacutevel que um
feixe luminoso sofre ao atravessar um sistema de lentes A Distorccedilatildeo Descentrada eacute
composta pelas distorccedilotildees Tangencial e Radial Assimeacutetrica Eacute causada pela
impossibilidade de alinhar-se perfeitamente o eixo oacuteptico do sistema de lentes que
compotildee a objetiva Correccedilotildees para estas distorccedilotildees podem ser feitas atraveacutes da
Equaccedilatildeo (41) Maiores detalhes podem ser vistos em Andrade (1998)
119909prime119910prime =
119909119910
119900119887119904minus
1199090
1199100 minus
120575119909120575119910 119903119886119889
minus 120575119909120575119910 119889119890119904
minus 120575119909120575119910 119886
(41)
71
onde
119909prime119910prime 119879 ndash Coordenadas corrigidas no sistema referencial de imagem
119909 119910 119900119887119904119879 ndash Coordenadas de imagem observadas
1199090 1199100 119879ndash Coordenadas do PP no sistema referencial de imagem
120575119909 120575119910 119903119886119889119879 ndash Distorccedilatildeo Radial Simeacutetrica
120575119909 120575119910 119889119890119904119879 ndash Distorccedilatildeo Descentrada
120575119909 120575119910 119886119879 ndash Distorccedilatildeo causada pela falta de afinidade entre os eixos do
sensor
Andrade (1998) ilustra algumas correccedilotildees necessaacuterias para as imagens
utilizadas em Fotogrametria e mostra a influencia dos POI nestas correccedilotildees Um
exemplo eacute a correccedilatildeo da distorccedilatildeo Radial Simeacutetrica que pode ser realizada atraveacutes
das Equaccedilotildees (42) e (43)
120575119909119903119886119889 = (1199032 ∙ 1198701 + 1199034 ∙ 1198702 + 1199036 ∙ 1198703) ∙ 119909 (42)
120575119910119903119886119889 = (1199032 ∙ 1198701 + 1199034 ∙ 1198702 + 1199036 ∙ 1198703) ∙ 119910 (43)
onde
119909 = (119909 minus 1199090)
119910 = (119910 minus 1199100)
119909119910 ndash Coordenadas dos pontos com distorccedilotildees no sistema referencial
fotogrameacutetrico projetado na imagem
11990901199100 ndash Coordenadas do Ponto Principal
119870111987021198703 ndash Coeficientes de Distorccedilatildeo Radial Simeacutetrica
72
A distacircncia 119903 entre o ponto com coordenadas na imagem e o Ponto Principal
pode ser calculada atraveacutes da Equaccedilatildeo (44)
119903 = 119909 2 + 119910 2 (44)
A Distorccedilatildeo Descentrada pode entatildeo ser corrigida atraveacutes das Equaccedilotildees
(45) e (46)
120575119909119889119890119904 = [1198751 ∙ (1199032 + 2 ∙ 1199092
) + 2 ∙ 1198752 ∙ 119909 ∙ 119910 ] ∙ (1 + 1198753 + r2 + ⋯ ) (45)
120575119910119889119890119904 = [2 ∙ 1198751 ∙ 119909 ∙ 119910 + 1198752 ∙ (r2 + 2 ∙ 119910 2)] ∙ (1 + 1198753 + r2 + ⋯ ) (46)
onde
119875111987521198753 ndash Coeficientes de Distorccedilatildeo Descentrada
A diferenccedila de escala dos eixos horizontal e vertical da imagem possiacutevel
natildeo ortogonalidade entre os elementos do sensor pode ser modelada utilizando as
Equaccedilotildees (47) e (48) que introduzem correccedilotildees utilizando os paracircmetros de
afinidade 119860 e 119861 (HABIB e MORGAN 2003)
120575119909119886 = 119860 119909 minus 1199090 + 119861(119910minus1199100) (47)
120575119910119886 = 119861(119910minus1199100) (48)
onde
119860119861 ndash Paracircmetros de afinidade
119909119910 ndash Coordenadas dos pontos com distorccedilotildees no sistema referencial
fotogrameacutetrico projetado na imagem
11990901199100 ndash Coordenadas do Ponto Principal
73
A partir da formulaccedilatildeo proposta por Brown (1971) e incluindo os paracircmetros
de afinidade 119860 e 119861 as Equaccedilotildees (49) e (410) possibilitam a correccedilatildeo da imagem
utilizando os coeficientes 119870111987021198703 e 11987511198752
119909prime = 119909 + 119909 ∙ 11987011199032+1198702119903
4+11987031199036 + ⋯ +
+ 1198751 ∙ 1199032 + 2 ∙ 119909
2 + 2 ∙ 1198752 ∙ 119909 ∙ 119910 ∙ 1 + 1198753 ∙ 119903
2 + ⋯ + 119909 119860 + 119910 119861 (49)
119910prime = 119910 + 119910 ∙ 11987011199032+1198702119903
4+11987031199036 + ⋯ +
+ 21198751 ∙ 119909 ∙ 119910 + 1198752 ∙ 1199032 + 2119910 2 ∙ 1 + 1198753 ∙ 119903
2 + ⋯ + 119910 119861 (410)
A Equaccedilatildeo (41) ilustra as correccedilotildees necessaacuterias na geometria da imagem
quando objetiva-se a extraccedilatildeo de informaccedilotildees meacutetricas Eacute um modelo jaacute consagrado
na Fotogrametria e bastante aplicado em Ciecircncias Geodeacutesicas Pode ser utilizado
para o entendimento das correccedilotildees necessaacuterias nas imagens devido agraves distorccedilotildees
causadas pelo sistema de lentes da cacircmara e pela falta de afinidade entre os
elementos do sensor Outros modelos matemaacuteticos para correccedilotildees geomeacutetricas de
imagens satildeo utilizados em aacutereas correlatas como a Visatildeo Computacional Com a
precisatildeo requerida em cada aplicaccedilatildeo alguns POI tecircm maior relevacircncia que outros
podendo haver a supressatildeo de alguns A correlaccedilatildeo entre os paracircmetros deve ser
analisada e evitada
As Equaccedilotildees (49) e (410) podem ser simplificadas para realizar apenas as
correccedilotildees utilizando os coeficientes de Distorccedilatildeo Radial Simeacutetrica 1198961 e 1198962 e os
paracircmetros de afinidade 119860 e 119861 Estes paracircmetros satildeo os mais significativos para a
correccedilatildeo da imagem obtida com cacircmaras digitais de pequeno formato conforme eacute
expresso atraveacutes das Equaccedilotildees (411) e (412)
119909prime = 119909 + 119909 ∙ 11987011199032+1198702119903
4 + 119909 119860 + 119910 119861 (411)
119910prime = 119910 + 119910 ∙ 11987011199032+1198702119903
4 + 119910 119861 (412)
74
onde
119909119910 ndash Coordenadas dos pontos com distorccedilotildees no sistema referencial
fotogrameacutetrico projetado na imagem
119909 = (119909 minus 1199090)
119910 = (119910 minus 1199100)
11990901199100 ndash Coordenadas do Ponto Principal
119860119861 ndash Paracircmetros de afinidade
Cacircmaras digitais de pequeno formato apresentam principalmente a
Distorccedilatildeo Radial Simeacutetrica causada pelo sistema de lentes sendo os coeficientes 1198961
e 1198962 os mais significativos Os paracircmetros de afinidade entre os eixos da imagem 119860
e 119861 tambeacutem podem ser considerados para a correccedilatildeo das imagens obtidas
dependendo da precisatildeo com que o sensor da cacircmara foi construiacutedo pelo fabricante
Alguns softwares calculam os POI de forma raacutepida com soluccedilatildeo aproximada
e dependendo da aplicaccedilatildeo a que se destina a imagem podem ser utilizados sem
maiores restriccedilotildees Um deles eacute o Toolbox CALIB para Matlab utiliza o algoritmo
proposto por Zhang (2000) Este meacutetodo consiste em determinar os POI da cacircmara
tomando diferentes imagens de um gabarito com quadrados pretos e brancos
similar a um tabuleiro de xadrez fixado em uma superfiacutecie riacutegida e com padratildeo
planar Devem ser obtidas imagens do gabarito variando a posiccedilatildeo e orientaccedilatildeo da
cacircmara natildeo sendo necessaacuterio conhecer a trajetoacuteria do seu movimento para a
determinaccedilatildeo dos POI Este algoritmo possibilita o caacutelculo dos POI da cacircmara de
forma aproximada atraveacutes de sucessivas iteraccedilotildees Para sua utilizaccedilatildeo eacute necessaacuterio
conhecer a dimensatildeo dos quadrados do gabarito e indicar os pontos posiccedilotildees dos
veacutertices que seratildeo utilizados como pontos de referecircncia
No algoritmo proposto por Zhang um vetor de pontos 2D eacute denotado por
119898 = [119906 119907]119879 e um vetor de pontos 3D por 119872 = [119883119884119885]119879 De forma similar pode-se
aumentar estes vetores adicionando uma linha com valor igual a 1 sendo os vetores
aumentados 119898 = [119906 119907 1]119879 e 119872 = [119883119884119885 1]119879 A colinearidade entre o ponto no
espaccedilo objeto centro perspectivo e o ponto no espaccedilo imagem eacute utilizada para
75
estabelecer a relaccedilatildeo entre os pontos 3D contidos no vetor 119872 e os pontos na
imagem 2D contidos no vetor 119898 conforme a Equaccedilatildeo (413)
119904119898 = 119860[119877 119905]119872 (413)
onde
119904 ndash Fator de escala
119877 119905 ndash Paracircmetros de Orientaccedilatildeo Exterior (POE) compostos por elementos de
rotaccedilatildeo e translaccedilatildeo que relacionam as coordenadas obtidas no sistema 3D do
espaccedilo objeto com o sistema de coordenadas 2D da imagem
119860 ndash Eacute a matriz com os POI da cacircmara Apresenta as coordenadas 1199060 e 1199070 do
PP 119864120572 e 119864120573 satildeo os fatores de escala na imagem com eixos 119906 e 119907 O paracircmetro 120574
descreve a falta de ortogonalidade entre os eixos do sistema referencial da imagem
A matriz 119860 eacute expressa atraveacutes da Equaccedilatildeo (414)
119860 = 119864120572 120574 1199060
0 119864120573 1199070
0 0 1
(414)
Comparando as Equaccedilotildees (411) e (412) com o modelo proposto por Zhang
expresso atraveacutes da Equaccedilatildeo (413) tecircm-se as seguintes correspondecircncias
119860 e 119861 satildeo os paracircmetros de afinidade das Equaccedilotildees (411) e (412)
que correspondem aos fatores de escala 119864120572 e 119864120573 da Equaccedilatildeo (413)
Sendo que o paracircmetro 120574 acircngulo entre os eixos da imagem pode ser
calculado a partir destes fatores de escala
1199090 e 1199100 satildeo as coordenadas do Ponto Principal expressas com as
Equaccedilotildees (411) e (412) que tem suas correspondecircncias nas
coordenadas 1199060 e 1199070 da Equaccedilatildeo (413)
O caacutelculo dos POI pode ser entatildeo ser realizado atraveacutes da Equaccedilatildeo (415)
119898119894119895 minus119898 119860119877119894 119905119894 119872119895 2119898
119895=1119899119894=1 (415)
76
onde
119898 119860119877119894 119905119894 119872119894 ndash Eacute a projeccedilatildeo do vetor do ponto 119872119895 sobre a imagem 119894
119877119894 ndash Eacute o vetor de rotaccedilatildeo com paracircmetros 119903
O algoritmo proposto por Zhang (2000) utiliza somente os dois primeiros
termos de Distorccedilatildeo Radial Simeacutetrica para a correccedilatildeo da imagem atraveacutes dos
coeficientes 1198961 e 1198962 conforme Equaccedilotildees (416) e (417) Cacircmaras digitais de
pequeno formato normalmente apresentam distorccedilotildees de lentes significantes
especialmente a Distorccedilatildeo Radial Simeacutetrica A funccedilatildeo de distorccedilatildeo eacute fortemente
influenciada pelos componentes radiais principalmente o primeiro termo 1198961 Dadas
as coordenadas de uma imagem (119906 119907) consideradas livres de distorccedilatildeo e as
correspondentes coordenadas de imagem observadas (119906 119907 ) consegue-se projetar
os pontos atraveacutes da relaccedilatildeo de colinearidade entre eles De forma similar (119909119910) satildeo
as coordenadas de imagem consideradas livres de distorccedilatildeo e (119909 119910 ) as coordenadas
que possuem distorccedilatildeo Estas coordenadas tecircm suas escalas compatibilizadas
atraveacutes de uma normalizaccedilatildeo
119909 = 119909 + 119909 1198961 1199092 + 1199102 + 1198962 119909
2 + 1199102 2 (416)
119910 = 119910 + 119910 1198961 1199092 + 1199102 + 1198962 119909
2 + 1199102 2 (417)
onde
11989611198962 ndash Satildeo os coeficientes de Distorccedilatildeo Radial Simeacutetrica O centro desta
distorccedilatildeo encontra-se no Ponto Principal projetado na imagem
Com 119906 = 1199060 + 119886119909 + 120574119910 e 119907 = 1199070 + 120573119910 e assumindo 120574 = 0 em uma imagem
que tem os eixos perpendiculares tem-se a relaccedilatildeo expressa com as Equaccedilotildees
(418) e (419)
119906 = 119906 + 119906 minus 1199060 1198961 1199092 + 1199102 + 1198962 119909
2 + 1199102 2 (418)
119907 = 119907 + 119907 minus 1199070 1198961 1199092 + 1199102 + 1198962 119909
2 + 1199102 2 (419)
Uma opccedilatildeo para estimar os coeficientes 1198961 e 1198962 eacute feita atraveacutes de
sucessivas iteraccedilotildees utilizando as coordenadas 119906 e 119907 dos piacutexeis considerados
77
isentos de erro Com isto tecircm-se duas expressotildees para os pontos da imagem
conforme a Equaccedilatildeo (420)
119906 minus 1199060 119909
2 + 1199102 119906 minus 1199060 1199092 + 1199102 2
119907 minus 1199070 1199092 + 1199102 119907 minus 1199070 119909
2 + 1199102 2 1198961
1198962 =
119906 minus 119906119907 minus 119907
(420)
Dados 119898 pontos em 119899 imagens podemos obter 2 ∙ 119898 ∙ 119899 equaccedilotildees Na forma
matricial 119863119896 = 119889 onde 119896 = 1198961 1198962 119879 A soluccedilatildeo deste sistema de equaccedilotildees eacute
possiacutevel pelo meacutetodo dos miacutenimos quadrados conforme a Equaccedilatildeo (421)
119896 = 119863119879119863 minus1119863119879119889 (421)
Uma vez que 1198961 e 1198962 foram calculados pode-se refinar a estimaccedilatildeo dos
outros paracircmetros resolvendo novamente a Equaccedilatildeo (415) substituindo os valores
de 119898 119860119877119894 119905119894 119872119894 pelos valores calculados com as Equaccedilotildees (418) e (419)
A estimaccedilatildeo do conjunto completo de POI pode ser expressa atraveacutes da
Equaccedilatildeo (422)
119898119894119895 minus119898 1198601198961 1198962119877119894 119905119894 119872119895 2119898
119895=1119899119894=1 (422)
onde
119898 119860 11989611198962119877119894 119905119894 119872119895 - Eacute funccedilatildeo da projeccedilatildeo do vetor do ponto 119872119895 na imagem
119894 de acordo com a Equaccedilatildeo (413)
Com este meacutetodo no miacutenimo duas imagens devem ser adquiridas com
orientaccedilotildees diferentes se os elementos sensores da cacircmara forem quadrados
Zhang (2000) recomenda a aquisiccedilatildeo de pelo menos cinco imagens para obter
melhores resultados com o processo de calibraccedilatildeo Sendo assim os passos para
realizar a calibraccedilatildeo da cacircmara utilizando este meacutetodo satildeo
1 Imprimir o gabarito e fixaacute-lo em uma superfiacutecie plana e riacutegida
2 Tomar imagens do gabarito com diferentes orientaccedilotildees variando a
posiccedilatildeo e orientaccedilatildeo da cacircmara
78
3 Realizar a leitura das coordenadas dos pontos de controle nas
imagens
4 Estimar os POI e POE utilizando soluccedilatildeo aproximada
5 Refinar todos os paracircmetros incluindo os paracircmetros de distorccedilatildeo de
lentes atraveacutes da Equaccedilatildeo (422)
Os passos 4 e 5 satildeo realizados automaticamente pelo Toolbox CALIB do
software Matlab devendo o usuaacuterio apenas inserir as imagens no software e realizar
as leituras dos veacutertices dos quadrados nas imagens do gabarito
42 ANAacuteLISE DA PRESENCcedilA DE RUIacuteDO
Os piacutexeis saturados causados por exposiccedilatildeo prolongada do sensor na
aquisiccedilatildeo da imagem e tambeacutem os piacutexeis com baixa exposiccedilatildeo devem ser
cuidadosamente analisados na imagem pois tambeacutem podem causar erros nas
medidas de distacircncia devido agrave presenccedila de ruiacutedo Quando o sensor capta o sinal
luminoso existe um limite maacuteximo de saturaccedilatildeo que natildeo pode ser diminuiacutedo
posteriormente
Khongsab (2009) utilizou como paracircmetro principal o tempo de integraccedilatildeo na
captaccedilatildeo da imagem para controlar a saturaccedilatildeo dos piacutexeis Como este tempo eacute
aplicado globalmente ao sensor acaba influenciando os valores digitais dos piacutexeis
da imagem de forma equivalente Alguns apresentam erros devido agrave baixa
exposiccedilatildeo pois com a reduccedilatildeo do tempo de integraccedilatildeo natildeo receberam energia
eletromagneacutetica suficiente para sensibilizar o sensor sendo chamados de piacutexeis
insaturados Estes problemas podem ser minimizados definindo-se tempos de
integraccedilatildeo adequados para a obtenccedilatildeo da imagem TOF
O tratamento do ruiacutedo pode ser realizado com diferentes filtragens na
imagem Com este objetivo foram estudados os filtros passa-baixas pela meacutedia e
mediana Outro processo de filtragem realizado foi o caacutelculo da meacutedia dos valores
de distacircncia para diferentes imagens de uma mesma cena com o mesmo tempo de
integraccedilatildeo mas adquiridas em instantes brevemente diferentes
79
421 Filtragem passa-baixas pela meacutedia
O caacutelculo da meacutedia dos valores da vizinhanccedila em torno do pixel de interesse
tem o efeito de suavizar a imagem Este processo conhecido como filtro linear
passa-baixas atenua as altas frequecircncias que no espaccedilo de frequecircncias
correspondem agraves transiccedilotildees raacutepidas Este tipo de variaccedilatildeo caracteriza tambeacutem a
presenccedila de ruiacutedo na imagem A suavizaccedilatildeo tende a minimizar a presenccedila de ruiacutedo
e tecircm o efeito de tornar a imagem menos contrastante O filtro linear passa-baixas
utilizado tem dimensatildeo 3x3 com pesos iguais para os vizinhos Filtros lineares
resultam da convoluccedilatildeo de uma janela moacutevel sobre a imagem A Equaccedilatildeo (423)
representa o modelo matemaacutetico aplicado na filtragem linear passa-baixas pela
meacutedia (CENTENO 2004)
119866 119910 119909 = (119901(119894 119895) ∙ 119868(119910 + 119894 minus 119886 119909 + 119895 minus 119886))119879119895=1
119879119894=1 (423)
onde
119868(119910 119909) ndash Corresponde ao valor do pixel na posiccedilatildeo ldquolinha = 119910rdquo e ldquocoluna = 119909rdquo
119901(119894 119895) ndash Representa o filtro
119879 ndash Tamanho da janela de filtragem
119866(119910 119909) ndash Imagem resultante da filtragem
119886 = 119894119899119905 119879
2 + 1
A Figura 42 Ilustra o filtro linear passa-baixas pela meacutedia a janela central
cinza que estaacute na matriz de uma imagem Este filtro tem dimensatildeo de 3x3 piacutexeis e
atua no valor digital 48 do pixel central O valor digital do pixel apoacutes a filtragem
passa a ser 41222 que corresponde a meacutedia dos valores digitais dos piacutexeis
vizinhos
80
FIGURA 42 ndash Filtragem passa-baixas pela meacutedia
422 Filtragem pela mediana
A filtragem natildeo linear pela mediana consiste na substituiccedilatildeo do valor do pixel
central pelo valor correspondente a mediana da vizinhanccedila Este meacutetodo tambeacutem
suaviza a presenccedila de ruiacutedo A diferenccedila principal em relaccedilatildeo ao filtro da meacutedia eacute
que o filtro da mediana natildeo introduz novos valores na imagem pois substitui o valor
central da vizinhanccedila por um valor jaacute existente na imagem Sendo assim natildeo
degrada as bordas dos objetos de forma extrema A Figura 43 ilustra esta filtragem
que resultaraacute no valor digital 44 para o pixel filtrado que anteriormente apresentava
valor digital 48
FIGURA 43 ndash Filtragem pela mediana
81
423 Filtragem com a meacutedia temporal
A terceira opccedilatildeo eacute a ponderaccedilatildeo dos valores dos piacutexeis ao longo do tempo
Para isto uma seacuterie de imagens foi obtida a partir do mesmo ponto de vista em
instantes diferentes O resultado foi um conjunto de imagens de um uacutenico objeto
desde a mesma perspectiva natildeo sendo a geometria da imagem alterada Assim
cada pixel de uma imagem tem seu equivalente nas outras Assumindo que o ruiacutedo
seja aleatoacuterio eacute esperado que o uso de mais de uma imagem diminua a presenccedila
de ruiacutedo atraveacutes do caacutelculo da meacutedia dos valores observados
A filtragem com a meacutedia temporal eacute ilustrada com a Figura 44 Nesta figura
tem-se a representaccedilatildeo de trecircs imagens com suas matrizes de valores digitais
(Ii=123) e a imagem filtrada (IF) resultante que corresponde a meacutedia das trecircs
imagens originais
FIGURA 44 ndash Filtragem utilizando a meacutedia temporal
82
43 SEGMENTACcedilAtildeO
Com a etapa de segmentaccedilatildeo objetivou-se separar o conjunto de dados em
subconjuntos Estes subconjuntos satildeo compostos por pontos com coordenadas
tridimensionais que descrevem as superfiacutecies de objetos Eacute assumido que estas
superfiacutecies satildeo partes estruturais do objeto a ser identificado Para atingir esta meta
duas alternativas foram desenvolvidas e avaliadas
1) Crescimento de regiotildees a partir de superfiacutecies planas e ponto semente
utilizando o arquivo de intensidades da imagem TOF para selecionar a posiccedilatildeo de
pontos ou regiotildees semente sendo o arquivo de distacircncias utilizado para o
crescimento de regiotildees
2) Segmentaccedilatildeo por anaacutelise da variaccedilatildeo local de autovalores utilizando
somente o arquivo de distacircncias da imagem TOF para gerar uma imagem de
intensidade com bordas intensificadas que posteriormente eacute segmentada em
regiotildees que tecircm seus piacutexeis projetados gerando uma nuvem de pontos 3D destas
superfiacutecies segmentadas A segmentaccedilatildeo da imagem de intensidade com bordas
evidenciadas gerada eacute realizada utilizando o algoritmo de deslocamento pela meacutedia
431 Crescimento de regiotildees a partir de superfiacutecies planas e ponto semente
O primeiro meacutetodo proposto se baseia no crescimento de regiotildees por
agregaccedilatildeo de elementos adjacentes Este meacutetodo utiliza um criteacuterio de similaridade
para avaliar se um ponto pertence a uma determinada regiatildeo A distacircncia de um
ponto a uma superfiacutecie plana e o valor digital de um pixel em uma imagem satildeo
exemplos de criteacuterios de similaridade que podem ser utilizados (GONZALEZ e
WOODS 2000)
Partindo de um subconjunto de pontos adjacentes que pertencem a uma
superfiacutecie plana o processo consiste em buscar na vizinhanccedila outros pontos que
estejam espacialmente proacuteximos a esta superfiacutecie atendendo ao criteacuterio de
coplanaridade Neste criteacuterio a distacircncia ortogonal do ponto a uma superfiacutecie plana eacute
calculada atraveacutes das coordenadas 3D do ponto sendo este ponto considerado
pertencente agrave superfiacutecie quando estaacute dentro do limiar estabelecido A superfiacutecie
plana eacute determinada atraveacutes do autovetor com menor autovalor do conjunto de
83
pontos 3D a distacircncia ortogonal eacute calculada na direccedilatildeo deste autovetor partindo da
superfiacutecie O processo eacute iterativo de forma que o subconjunto inicial cresce
agregando novos elementos em cada iteraccedilatildeo ateacute atingir os limites da superfiacutecie
quando o criteacuterio de coplanaridade natildeo eacute mais satisfeito
O primeiro problema consiste na identificaccedilatildeo de pontos ou regiotildees semente
para dar iniacutecio ao processo de crescimento Uma opccedilatildeo foi identificar visualmente
regiotildees planas no arquivo de intensidades da imagem TOF e realizar a leitura de
coordenadas de pontos nestas regiotildees A partir das coordenadas destes pontos
selecionados na imagem de intensidade e de suas correspondentes no arquivo de
distacircncias da imagem TOF determinou-se a superfiacutecie plana que mais se aproxima
a esta regiatildeo atraveacutes do caacutelculo de seus autovetores e autovalores esta foi
considerada a superfiacutecie semente
A hipoacutetese baacutesica assume que superfiacutecies planas ou pelo menos partes
delas aparecem como regiotildees uniformes na imagem de intensidade devido agraves
condiccedilotildees de iluminaccedilatildeo Esta hipoacutetese nem sempre pode ser verificada e
confirmada Por exemplo se a superfiacutecie eacute coberta por tonalidades com padratildeo
irregular de cor entatildeo o plano pode mostrar valores natildeo uniformes na imagem de
intensidade sendo este um caso extremo Em uma situaccedilatildeo real pode ocorrer que
parte da superfiacutecie plana esteja pintada ou contenha manchas que alterem a sua
resposta espectral O mesmo pode ocorrer se houverem sombras projetadas de
outros objetos sobre a superfiacutecie Neste caso poreacutem existem outras regiotildees da
superfiacutecie plana que podem aparecer uniformes na imagem de intensidade e serem
utilizadas como regiatildeo semente
Com base nesta suposiccedilatildeo buscaram-se regiotildees uniformes na imagem de
intensidade e verificou-se a possibilidade de formarem superfiacutecies planas que
pudessem ser utilizadas como sementes no arquivo de distacircncias da imagem TOF
A soluccedilatildeo proposta consiste em segmentar a imagem de intensidade em regiotildees
uniformes com atributos de cor Um limite miacutenimo no tamanho das regiotildees deve ser
fixado para evitar que regiotildees muito pequenas sejam incluiacutedas na anaacutelise visto que
estas regiotildees pequenas podem representar locais com curvatura
A chave para o crescimento de regiotildees eacute a definiccedilatildeo do grau de pertinecircncia
de cada ponto agrave superfiacutecie plana Para isto eacute utilizado o conceito de distacircncia
miacutenima do ponto a esta superfiacutecie Para pertencer a uma regiatildeo os pontos devem
84
estar dentro do limite de proximidade ou seja a distacircncia entre o ponto e a
superfiacutecie plana natildeo pode superar o limiar fixado
A qualidade deste processo depende de fatores como o estabelecimento de
correspondecircncia entre os pontos precisatildeo na determinaccedilatildeo da superfiacutecie normal
utilizada remoccedilatildeo de erros grosseiros do conjunto de observaccedilotildees e identificaccedilatildeo
da regiatildeo semente
432 Segmentaccedilatildeo por anaacutelise da variaccedilatildeo local de autovalores
Esta abordagem baseia-se na anaacutelise da variaccedilatildeo local dos autovalores e
autovetores A hipoacutetese baacutesica nesta metodologia foi considerar que ao longo de
uma superfiacutecie plana os autovalores devem apresentar valores similares ou muito
proacuteximos Considerando duas regiotildees adjacentes se estas regiotildees forem
coplanares entatildeo a magnitude relativa de seus autovalores seraacute aproximadamente
igual Se uma destas regiotildees encontra-se em uma borda do objeto os autovetores
seratildeo diferentes A regiatildeo a ser considerada eacute uma janela quadrada em torno do
pixel central Para efetuar esta anaacutelise devem ser calculados os autovalores de uma
regiatildeo em torno de cada pixel no arquivo de distacircncias da imagem TOF Estes
autovalores satildeo armazenados em matrizes que geram trecircs novas imagens digitais
com as bordas dos objetos intensificadas
Com a Figura 45 Ilustra-se a anaacutelise do arquivo de distacircncias da imagem
TOF realizado com o caacutelculo de seus autovalores As bordas dos objetos presentes
podem ser vistas em evidecircncia satildeo representadas com os maiores valores
85
FIGURA 45 ndash Intensificaccedilatildeo de bordas com autovalores
Os autovalores calculados para cada pixel satildeo normalizados na faixa de 0 a
255 utilizando-se 8 bits Assim estes valores podem ser representados como uma
imagem digital passiacutevel de ser analisada com softwares de processamento A Figura
46 ilustra uma imagem com bordas intensificadas proveniente da segmentaccedilatildeo
realizada com a anaacutelise da variaccedilatildeo local dos autovalores
FIGURA 46 ndash Imagem com bordas intensificadas
86
A imagem produzida pode entatildeo ser segmentada utilizando o algoritmo de
deslocamento pela meacutedia Os resultados da segmentaccedilatildeo satildeo regiotildees onde os
autovalores satildeo aproximadamente iguais definindo uma superfiacutecie com padratildeo
planar sendo estas superfiacutecies separadas das regiotildees de bordas
433 Segmentaccedilatildeo com o algoritmo de deslocamento pela meacutedia
A segmentaccedilatildeo com o algoritmo de deslocamento pela meacutedia eacute realizada
utilizando a imagem com as bordas dos objetos intensificadas gerada com a
segmentaccedilatildeo do arquivo de distacircncias da imagem TOF pela anaacutelise da variaccedilatildeo
local dos autovalores
Cada um dos trecircs autovalores calculados gera uma imagem com bordas
intensificadas Sendo assim espera-se que os valores digitais dos piacutexeis nas
superfiacutecies dos objetos sejam similares dentro desta imagem Com isto a
segmentaccedilatildeo proporcionaraacute a seleccedilatildeo das superfiacutecies do objeto
Para realizar a segmentaccedilatildeo da imagem de intensidade com as bordas
intensificadas deve-se escolher os paracircmetros (119893119904 119893119903 119867) mais adequados para a
segmentaccedilatildeo Estes paracircmetros correspondem ao domiacutenio espacial da imagem 119893119904
domiacutenio de caracteriacutesticas dos piacutexeis 119893119903 e o tamanho miacutenimo 119867 que as aacutereas
segmentadas devem possuir O limite miacutenimo na quantidade de piacutexeis deve ser
fixado para evitar que regiotildees muito pequenas sejam incluiacutedas na segmentaccedilatildeo o
que pode prejudicar esta etapa pois se espera que a imagem seja segmentada com
o menor nuacutemero de regiotildees
87
5 RESULTADOS E DISCUSSOtildeES
51 CALIBRACcedilAtildeO DA CAcircMARA
Com o objetivo de calcular os POI o processo de calibraccedilatildeo da cacircmara foi
realizado com o Toolbox CALIB do software Matlab que utiliza o meacutetodo proposto
por ZHANG (2000) O gabarito fotografado foi impresso com 7x9 quadrados com
dimensatildeo de 117x117mm Estas imagens foram captadas a uma distacircncia
aproximada de 25 metros da cacircmara Para que houvesse pontos do gabarito sobre
a aacuterea da imagem foram obtidas 36 imagens com diferentes orientaccedilotildees conforme eacute
ilustrado com a Figura 51
FIGURA 51 ndash Imagens do gabarito utilizadas na calibraccedilatildeo da cacircmara
88
A Orientaccedilatildeo Exterior das imagens em relaccedilatildeo agrave cacircmara para a calibraccedilatildeo eacute
ilustrada com a Figura 52 A cacircmara eacute representada com a piracircmide em linhas
vermelhas e a origem do sistema fotogrameacutetrico eacute representada com a interseccedilatildeo
das linhas representadas com a cor azul no veacutertice da piracircmide
FIGURA 52 ndash Orientaccedilatildeo Exterior das fotografias para a calibraccedilatildeo da cacircmara
A distorccedilatildeo causada pelo sistema de lentes da cacircmara ocorre de forma mais
intensa nas bordas da imagem sendo a regiatildeo central o local com menor presenccedila
desta distorccedilatildeo A Figura 53 comprova este fato onde os vetores representados
com a cor vermelha partem dos pontos de controle na imagem e indicam a direccedilatildeo e
o sentido em que a distorccedilatildeo aumenta
FIGURA 53 ndash Direccedilatildeo das distorccedilotildees nos pontos da imagem TOF
89
Realizada a leitura das coordenadas dos pontos de controle os POI foram
calculados com o processo de calibraccedilatildeo da cacircmara e satildeo apresentados com a
Tabela 51
PARAcircMETROS INICIAIS OBTIDOS COM A LEITURA DAS IMAGENS
PARAcircMETRO VALOR
(piacutexeis) (mm)
Distacircncia focal (119891) (119891119909) (119891119910 )
285 80288 285 80288
1286113 1286113
Coordenadas do Ponto Principal (1199090)
(Origem no canto superior esquerdo) (1199100) 10150000 10150000
456750 456750
PARAcircMETROS DETERMINADOS COM A CALIBRACcedilAtildeO DA CAcircMARA
PARAcircMETRO VALOR DESVIO (3σ)
(piacutexeis) (mm) (piacutexeis) (mm)
Distacircncia focal (119891119888) calibrada (119891119909119888 ) (119891119910119888 )
29240511 29364057
1315823 1321383
plusmn 373164 plusmn 335357
plusmn 0167924 plusmn 0150911
Coordenadas do Ponto Principal (1199090119888 )
(Origem no canto superior esquerdo) (1199100119888 ) 10435253 10022287
4695864 4510029
plusmn 320459 plusmn 336886
plusmn 0144207 plusmn 0151599
1198701 -046768 -0021045 plusmn 003106 plusmn 0001398
1198702 060997 0027449 plusmn 013880 plusmn 0006246
1198703 000107 48150e-5
plusmn 000162 plusmn 72900e-5
1198751 000035 19350e-5
plusmn 000204 plusmn 91800e-5
1198752 000000 0000000 plusmn 000000 plusmn 0000000
Erro em pixel (119864119909 )
(119864119910 ) 049340 042754
0022203 0019239
TABELA 51 ndash Paracircmetros de Orientaccedilatildeo Interior calculados
Com os valores dos POI determinados foram calculados os fatores de escala
dos piacutexeis nas direccedilotildees 119904119909 e 119904119910 conforme as Equaccedilotildees (51) e (52)
119904119909 =119891
119891119909119888=
128119898119898
1315823119898119898= 0972775 (51)
119904119910 =119891
119891119910119888=
128119898119898
1321383119898119898= 0968682 (52)
A partir dos fatores de escala e da dimensatildeo do pixel igual a 45120583119898 das
imagens obtidas com a cacircmara PMD CamCube 20 foi calculado o tamanho efetivo
dos piacutexeis nas direccedilotildees x e y atraveacutes das Equaccedilotildees (53) e (54)
119875119909 = P ∙ 119904119909 = 45120583119898 ∙ 0972775 = 43774875120583119898 cong 44120583119898 (53)
119875119910 = P ∙ 119904119910 = 45120583119898 ∙ 0968682 = 43590690120583119898 cong 44120583119898 (54)
90
Os valores obtidos com as Equaccedilotildees (53) e (54) indicam que os elementos
do sensor podem ser considerados quadrados De acordo com Bazan et al (2009)
quando a diferenccedila de escala entre os lados do piacutexel natildeo eacute fornecida pelo fabricante
da cacircmara o fator de escala calculado para x pode absorver esta diferenccedila
Com a razatildeo entre as distacircncias focais obtidas com a calibraccedilatildeo da cacircmara
pode-se verificar a diferenccedila de escala Para a dimensatildeo do sensor esta diferenccedila
de escala natildeo alcanccedila o tamanho de um pixel conforme Equaccedilatildeo (56)
119863119868119865119864119878119862 =119891119909119888
119891119910119888=
1321383119898119898
1315823119898119898minus 1 = 1004225 minus 1 = 0004225 (55)
119863119868119865119864119878119862 = 0004225 lowast 204 = 08619 lt 1119901119894119909119890119897 (56)
A Equaccedilatildeo (56) indica que a diferenccedila de escala entre os eixos x e y eacute
menor que a dimensatildeo de um pixel isto considerando toda a dimensatildeo da imagem
de 204x204 piacutexeis da cacircmara PMD CamCube 20
Determinados os POI a imagem pode entatildeo ter sua geometria corrigida
conforme eacute ilustrado com a Figura 54b A Figura 54a ilustra a imagem original
obtida do gabarito onde se apresentam curvaturas provenientes da distorccedilatildeo
causada pelo sistema de lentes da cacircmara
FIGURA 54 ndash Correccedilatildeo geomeacutetrica da imagem TOF
91
Para a correccedilatildeo geomeacutetrica de imagens obtidas com cacircmaras de pequeno
formato Zhang (2000) recomenda utilizar somente os paracircmetros de distacircncia focal
calibrada 119891119888 coordenadas do Ponto Principal no plano da imagem 1199090 e 1199100 e os
coeficientes de Distorccedilatildeo Radial Simeacutetrica ateacute o segundo termo 1198701 e 1198702 Isto porque
este modelo de cacircmara apresenta principalmente a Distorccedilatildeo Radial Simeacutetrica
Outro fator diz respeito ao desvio calculado na determinaccedilatildeo de cada um destes
paracircmetros conforme valores apresentados na Tabela 51 o terceiro paracircmetro de
Distorccedilatildeo Radial Simeacutetrica 1198703 e os paracircmetros de Distorccedilatildeo Descentrada 1198751 e 1198752
apresentaram valores de desvios maiores do que os proacuteprios paracircmetros devendo
entatildeo serem desconsiderados para a correccedilatildeo geomeacutetrica da imagem
92
52 EXPERIMENTO 1 ndash ANAacuteLISE DE RUIacuteDO 1 IMAGEM TOF INTEIRA
O objetivo deste experimento consistiu em avaliar a presenccedila de ruiacutedo em
funccedilatildeo do tempo de integraccedilatildeo (TI) na aquisiccedilatildeo das imagens TOF Para sua
realizaccedilatildeo foram utilizadas imagens de uma parede com superfiacutecie plana distante
130m da cacircmara PMD CamCube 20 onde tambeacutem aparece parte de uma porta
Foram tomadas cinco imagens para cada valor de TI que variou entre 500 1000
1500 1700 1800 1900 2000 2500 3000 3500 4000 4500 5000 5300 5500
6000 e 7000μs gerando assim um conjunto de 85 imagens TOF
Com o objetivo de avaliar e reduzir a presenccedila de ruiacutedo nas imagens foram
realizadas as seguintes filtragens
Filtro passa-baixas pela meacutedia
Filtro pela mediana
Caacutelculo da meacutedia dos valores de distacircncia para imagens TOF
adquiridas com mesmo TI em instantes brevemente diferentes
Para cada imagem original foram criadas trecircs novas imagens filtradas com
os procedimentos mencionados
No graacutefico de dispersatildeo ilustrado com a Figura 55 os desvios padratildeo para o
conjunto de observaccedilotildees satildeo mostrados em funccedilatildeo do TI Foram calculados com
referecircncia no pixel central com coordenadas (102 102) e a aacuterea utilizada para o
caacutelculo possui dimensatildeo de 10x10 piacutexeis Escolheu-se esta regiatildeo por apresentar
padratildeo planar da superfiacutecie com menor distorccedilatildeo causada pelo sistema de lentes da
cacircmara tendo-se em vista que nesta etapa natildeo foi realizada a correccedilatildeo geomeacutetrica
dos dados da imagem TOF
Ainda com a Figura 55 verificou-se que o filtro da mediana aplicado nas
imagens gerou os menores desvios para a janela de 10x10 piacutexeis O menor desvio
calculado foi 12mm encontrado utilizando o filtro da mediana para o TI igual a
3000micros Verificou-se tambeacutem que os desvios apresentam valores similares para os
tempos de integraccedilatildeo que variaram entre 1500 agrave 2500micros para as imagens originais e
tambeacutem para as imagens filtradas
93
FIGURA 55 ndash Desvio padratildeo x TI janelas 10x10
A partir do graacutefico de dispersatildeo da Figura 55 escolheram-se imagens
captadas com os tempos de integraccedilatildeo de 500 2000 e 2500micros para realizar os
testes A Figura 56 ilustra superfiacutecies geradas a partir de filtragens realizadas em
imagem TOF obtida com TI igual a 500μs
FIGURA 56 ndash Imagens para TI=500μs e d=130m
94
Com TI de 500μs verificou-se intensa presenccedila de ruiacutedo na imagem original
e tambeacutem nas imagens filtradas Isto ocorreu devido ao baixo tempo de exposiccedilatildeo
do sensor A distorccedilatildeo causada pelo sistema de lentes da cacircmara tambeacutem pode ser
visualizada nestas superfiacutecies geradas com os arquivos de distacircncias da imagem
TOF As imagens foram obtidas de uma parede plana em que aparece parte de uma
porta o que justifica a descontinuidade vista em forma de degrau A anaacutelise
realizada com TI de 2000μs eacute ilustrada com a Figura 57
FIGURA 57 ndash Imagens para TI=2000μs e d=130m
Com TI de 2000μs obtiveram-se resultados melhores do que os obtidos com
TI de 500μs as superfiacutecies apresentaram-se mais suaves confirmando a tendecircncia
demonstrada com o graacutefico de dispersatildeo da Figura 55
A uacuteltima anaacutelise deste experimento foi realizada com o tempo de integraccedilatildeo
de 2500μs conforme pode ser visualizado com as superfiacutecies geradas com os
arquivos de distacircncias da imagem TOF original e das imagens filtradas ilustradas
com a Figura 58
95
FIGURA 58 ndash Imagens para TI=2500μs e d=130m
As imagens filtradas com TI de 2000μs e 2500μs apresentam suavizaccedilotildees
similares nas superfiacutecies geradas com os arquivos de distacircncias da imagem TOF
Verificou-se que o tempo de integraccedilatildeo para a aquisiccedilatildeo das imagens da parede a
13m de distacircncia da cacircmara deve ser um destes valores O TI de 2000μs pode ser
o escolhido e estaacute de acordo com o graacutefico de dispersatildeo ilustrado com a Figura 55
As filtragens de suavizaccedilatildeo com o filtro passa-baixas pela meacutedia e pela
mediana mostraram-se as melhores opccedilotildees a serem utilizadas com estas filtragens
apresentaram-se os menores desvios para a janela central de 10x10 piacutexeis Uma
vantagem da filtragem pela mediana eacute que mantecircm os valores originais de distacircncia
para os piacutexeis da imagem e preserva as bordas do objeto imageado No entanto a
filtragem com a mediana degrada as bordas da imagem devendo ser
cuidadosamente analisada para cada aplicaccedilatildeo
Tambeacutem foram calculados os desvios padratildeo para as imagens inteiras e os
valores obtidos foram de 19cm em meacutedia Este grande valor deveu-se a maior
curvatura ocorrer nas extremidades da imagem e tambeacutem ao fato de haver uma
descontinuidade na superfiacutecie presente na imagem TOF causada pela porta
presente na superfiacutecie da parede
96
53 EXPERIMENTO 2 ndash ANAacuteLISE DE RUIacuteDO 2 JANELAS DE 40X40 PIacuteXEIS
O objetivo deste experimento foi analisar a presenccedila de ruiacutedo em aacutereas
centrais da imagem TOF Para isto escolheram-se janelas com dimensotildees de 40x40
piacutexeis ao redor do pixel central da imagem Calculou-se o desvio padratildeo da distacircncia
de cada pixel em relaccedilatildeo a este pixel central As janelas utilizadas tiveram sua
posiccedilatildeo na imagem variando de (8282) ateacute (122122) e correspondem a aacuterea com
superfiacutecie plana de uma parede presente na cena
Primeiramente utilizaram-se imagens TOF adquiridas agrave distacircncia de 130m
entre a cacircmara e a parede com os tempos de integraccedilatildeo iguais a 2000 e 5000micros
Posteriormente utilizaram-se imagens TOF obtidas a 210m da parede com tempos
de integraccedilatildeo iguais a 2000 5000 e 7000micros
O graacutefico de dispersatildeo da Figura 59 ilustra uma anaacutelise para a captaccedilatildeo de
imagens TOF com diferentes distacircncias e tempos de integraccedilatildeo Os desvios padratildeo
foram calculados para imagens TOF captadas com a cacircmara CamCube 20 onde
variaram-se as distacircncias e os tempos de integraccedilatildeo no momento da aquisiccedilatildeo das
imagens
FIGURA 59 ndash Desvios padratildeo para distacircncia x TI
FONTE CENTENO e JUTZI (2010)
97
Com a Figura 510 eacute apresentado o primeiro resultado deste experimento o
graacutefico de dispersatildeo gerado com a imagem TOF adquirida do objeto agrave distacircncia de
130m da cacircmara com TI igual a 2000micros
FIGURA 510 ndash Desvios padratildeo para janelas com TI=2000μs d=130m
A Figura 511 ilustra as superfiacutecies geradas com o arquivo de distacircncias da
imagem TOF adquirida do objeto agrave distacircncia de 130m da cacircmara com TI igual a
2000micros e com as imagens resultantes das filtragens realizadas
FIGURA 511 ndash Janelas de 40x40 piacutexeis TI=2000μs d=130m
98
Com a Figura 511 conclui-se que os melhores resultados para a suavizaccedilatildeo
dos dados de distacircncia foram obtidos com os filtros passa-baixas pela meacutedia e
mediana
A Figura 512 ilustra o graacutefico de dispersatildeo para a imagem adquirida com TI
igual a 5000μs com distacircncia de 130m entre o objeto imageado e a cacircmara TOF A
Figura 513 ilustra as superfiacutecies geradas com as janelas centrais de 40x40 piacutexeis
FIGURA 512 ndash Desvios padratildeo para janelas com TI=5000μs d=130m
FIGURA 513 ndash Janelas de 40x40 piacutexeis TI=5000μs d=130m
99
O TI de 5000μs utilizado para a aquisiccedilatildeo da imagem saturou os elementos
do sensor e causou maior presenccedila de ruiacutedo nos dados Comparando as Figuras
511 e 513 conclui-se que para a distacircncia de 130m do sensor o tempo de
integraccedilatildeo mais adequado para a aquisiccedilatildeo da imagem foi 2000micros
A Figura 514 ilustra o graacutefico de dispersatildeo gerado para a imagem TOF
obtida com TI igual a 2000μs e distacircncia de 210m As superfiacutecies geradas a partir
das janelas de 40x40 piacutexeis desta imagem satildeo apresentadas com a Figura 515
FIGURA 514 ndash Desvios padratildeo para janelas com TI=2000μs d=210m
FIGURA 515 ndash Janelas de 40x40 piacutexeis TI=2000μs d=210m
100
O graacutefico de dispersatildeo calculado para a imagem adquirida com TI igual a
5000μs e distacircncia de 210m eacute ilustrado com a Figura 516
FIGURA 516 ndash Desvios padratildeo para janelas com TI=5000μs d=210m
Os menores desvios padratildeo foram encontrados na imagem filtrada utilizando
os filtros passa-baixas pela meacutedia e mediana conforme pode ser visualizado com a
Figura 516 Para a janela de 40x40 piacutexeis o desvio padratildeo de 107mm na imagem
original diminuiu para 96mm com a filtragem pela mediana A Figura 517 ilustra as
superfiacutecies geradas para a imagem obtida com distacircncia de 210m e TI de 5000μs
FIGURA 517 ndash Janelas de 40x40 piacutexeis TI=5000μs d=210m
101
Com a Figura 517 observa-se novamente que os melhores resultados para
a suavizaccedilatildeo da imagem foram obtidos com os filtros passa-baixas pela meacutedia e
pela mediana
A Figura 518 ilustra o graacutefico de dispersatildeo e a Figura 519 ilustra as
superfiacutecies geradas para as imagens adquiridas com distacircncia de 210m e TI igual a
7000μs
FIGURA 518 ndash Desvios padratildeo para janelas com TI=7000μs d=210m
FIGURA 519 ndash Janelas de 40x40 piacutexeis TI=7000μs d=210m
102
Com o graacutefico de dispersatildeo ilustrado com a Figura 518 observa-se que os
desvios padratildeo calculados para as imagens obtidas com os filtros passa-baixas pela
meacutedia e mediana satildeo maiores do que os desvios apresentados com o graacutefico de
dispersatildeo ilustrado com a Figura 516 Isto indica que as imagens captadas da
parede plana com TI igual a 7000μs e distacircncia de 210m apresentaram maior ruiacutedo
que as imagens obtidas com 5000μs
Comparando as Figuras 519 e 517 verifica-se que a imagem captada com
TI igual a 5000μs com distacircncia de 210m e filtrada com o filtro passa-baixas pela
meacutedia e tambeacutem com a mediana apresentou-se mais suavizada do que a imagem
obtida com TI igual a 7000μs
Comparando as imagens captadas com tempo de integraccedilatildeo de 2000μs e
5000μs para a distacircncia de 210m conforme Figuras 515 e 517 conclui-se que as
imagens obtidas com TI de 5000μs apresentaram menor presenccedila de ruiacutedo
54 EXPERIMENTO 3 ndash PROJECcedilAtildeO ORTOGONAL DOS PONTOS
Obtidos os POI atraveacutes do processo de calibraccedilatildeo da cacircmara e definido o
melhor TI para a captaccedilatildeo da imagem procedeu-se a um novo experimento no qual
se analisou a imagem de uma caixa com superfiacutecies planas A superfiacutecie do objeto
em questatildeo eacute composta por papel branco riacutegido e refletivo A caixa foi colocada
sobre uma cadeira agrave distacircncia aproximada de 13m da cacircmara Esta cadeira foi
girada enquanto a cacircmara continuou fixa com o mesmo ponto de vista Com base
no estudo da dispersatildeo dos dados em funccedilatildeo da distacircncia ao objeto optou-se por
utilizar o TI de 2000μs para a captaccedilatildeo das imagens Foram entatildeo adquiridas dez
imagens do objeto
Com a distacircncia do objeto em relaccedilatildeo agrave cacircmara igual a 13m e com a
distacircncia focal calibrada da cacircmara de 132mm valor encontrado com a Equaccedilatildeo
(57) calculou-se a escala aproximada das fotografias encontrando-se o valor
aproximado para a escala igual a 1100 conforme Equaccedilatildeo (58)
119891119888 =119891119909119888+119891119910119888
2=
1315823119898119898+1321383119898119898
2= 1318603119898119898 cong 132119898119898 (57)
103
119864 =119889
119863=
119891119888
119885=
132119898119898
13119898=
00132119898
13119898=
1
984848cong
1
100 (58)
Para realizar este experimento selecionou-se a terceira imagem captada por
apresentar vista perspectiva de trecircs superfiacutecies com padratildeo planar no objeto
imageado A Figura 520a ilustra o arquivo de intensidades da imagem TOF sem
correccedilatildeo geomeacutetrica A Figura 520b ilustra o arquivo de intensidade corrigido
geometricamente utilizando as coordenadas do Ponto Principal 1199090 e 1199100 os
coeficientes de distorccedilatildeo Radial Simeacutetrica 1198701 e 1198702 e a distacircncia focal calibrada 119891119888
FIGURA 520 ndash Arquivo de intensidades da imagem TOF obtida do objeto
Apoacutes a correccedilatildeo da geometria da imagem TOF geraram-se as superfiacutecies do
objeto Isto foi feito a partir do arquivo de distacircncias da imagem TOF conforme eacute
ilustrado com a Figura 521 onde se tem as distacircncias dos pontos em relaccedilatildeo ao
sensor representadas com a coordenada Z em metros sobre a imagem TOF com
dimensatildeo de 204x204 piacutexeis
104
FIGURA 521 ndash Arquivo de distacircncias da imagem TOF com geometria corrigida
A partir do arquivo de distacircncias da imagem TOF com a geometria dos
dados corrigida projetaram-se ortogonalmente os pontos gerando a nuvem de
pontos 3D ilustrada com a Figura 522 em vista frontal com o eixo Z ortogonal aos
eixos X e Y representados
FIGURA 522 ndash Nuvem de pontos vista frontal
105
A vista em perspectiva tridimensional da nuvem de pontos do objeto de
estudo eacute ilustrada com a Figura 523 Conteacutem 42025 pontos gerados a partir da
imagem TOF de 204x204 piacutexeis obtida com a cacircmara PMD CamCube 20
FIGURA 523 - Nuvem de pontos vista perspectiva 3D
106
55 EXPERIMENTO 4 ndash SEGMENTACcedilAtildeO 1 CRESCIMENTO DE REGIOtildeES
Realizou-se a segmentaccedilatildeo por crescimento de regiotildees a partir de trecircs
pontos semente Estes pontos foram escolhidos em aacutereas uniformes no arquivo de
intensidades da imagem TOF corrigida geometricamente e foram projetados
ortogonalmente para a nuvem 3D As coordenadas de imagem destes pontos foram
observadas nas posiccedilotildees indicadas com a Figura 524
FIGURA 524 ndash Pontos semente no arquivo de intensidades da imagem TOF
Os pontos semente foram escolhidos em trecircs superfiacutecies planas da caixa em
locais que apresentavam valores de intensidade uniforme As coordenadas de
imagem lidas em piacutexeis para estes trecircs pontos foram Ponto 1 (11681) Ponto 2
(72103) Ponto 3 (113108)
As Figuras 525 e 526 ilustram o crescimento em trecircs regiotildees realizados na
nuvem de pontos 3D Estes pontos correspondem agraves superfiacutecies frontal superior e
lateral da caixa ilustradas com as cores amarela verde e ciano respectivamente
Os trecircs autovetores calculados satildeo ilustrados com a cor azul ortogonais aos pontos
semente escolhidos nas trecircs superfiacutecies da imagem de intensidade
107
FIGURA 525 ndash Crescimento de regiotildees vista frontal
FIGURA 526 ndash Crescimento de regiotildees vista perspectiva 3D
Com as Figuras 525 e 526 verifica-se que o crescimento das regiotildees
ocorreu de forma coerente acompanhando o padratildeo planar das superfiacutecies do
objeto de estudo No entanto nas trecircs superfiacutecies analisadas houve crescimento de
regiotildees para fora dos limites de suas aacutereas Pontos de superfiacutecies ao fundo e abaixo
do objeto foram incluiacutedos nas regiotildees Isto ocorreu devido agrave utilizaccedilatildeo do criteacuterio de
108
similaridade de distacircncia do ponto agrave superfiacutecie plana sendo esta superfiacutecie definida
pelos pontos semente A distacircncia foi medida ao longo do autovetor o que fez com
que pontos de outras superfiacutecies paralelas a superfiacutecie plana em questatildeo fossem
agrupados na mesma regiatildeo Ou seja pontos que estavam orientados na direccedilatildeo da
superfiacutecie plana definida pelo autovalor que passa pelo ponto semente e que
estavam dentro do limiar de distacircncia estabelecido foram incluiacutedos nas regiotildees
mesmo natildeo pertencendo agrave superfiacutecie analisada
56 EXPERIMENTO 5 ndash SEGMENTACcedilAtildeO 2 ANAacuteLISE COM AUTOVALORES
Neste experimento realizou-se a segmentaccedilatildeo da imagem TOF por anaacutelise
da variaccedilatildeo local de autovalores locais de superfiacutecies O arquivo de distacircncias desta
imagem foi utilizado como ponto de partida para o caacutelculo dos autovalores com o
objetivo de intensificar as bordas dos objetos presentes na cena
O processamento consistiu em definir uma pequena vizinhanccedila quadrada
uma janela moacutevel e utilizar as coordenadas tridimensionais dos pontos nesta
vizinhanccedila para o caacutelculo dos autovalores
Apoacutes a normalizaccedilatildeo os autovalores foram armazenados na forma de trecircs
novas imagens conforme pode ser visualizado com as Figuras 527 528 e 529
Para a geraccedilatildeo destas imagens utilizou-se a janela moacutevel com dimensatildeo de 3x3
piacutexeis para o caacutelculo dos autovalores
109
FIGURA 527 ndash Imagem com bordas intensificadas gerada com 1205821
FIGURA 528 ndash Imagem com bordas intensificadas gerada com 1205822
FIGURA 529 ndash Imagem com bordas intensificadas gerada com 1205823
110
A partir da imagem com bordas intensificadas gerada com os autovalores
locais foi possiacutevel criar uma nova imagem de intensidade que tambeacutem estava com
as bordas dos objetos intensificadas A Figura 530 ilustra as imagens de
intensidade com bordas intensificadas que foram geradas utilizando o segundo
autovalor calculado a partir de janelas com as seguintes dimensotildees a)3x3 b)5x5
c)7x7 d)9x9 e)11x11 f)13x13 piacutexeis
FIGURA 530 ndash Imagens de intensidade com as bordas do objeto intensificadas
111
Com as imagens de intensidade ilustradas com a Figura 530 observou-se
que aumentando a quantidade de piacutexeis da janela utilizada para o caacutelculo dos
autovalores da regiatildeo aumentou-se tambeacutem a suavizaccedilatildeo sobre as superfiacutecies
planas e alargaram-se as bordas que limitam os objetos contidos na cena
Para este experimento utilizou-se a imagem gerada com a janela de 3x3
piacutexeis e com o segundo autovalor Esta imagem foi escolhida por apresentar linhas
finas limitando as bordas do objeto A imagem de intensidade com as bordas do
objeto intensificadas foi segmentada utilizando o algoritmo de deslocamento pela
meacutedia O resultado da segmentaccedilatildeo eacute ilustrado com a Figura 531
FIGURA 531 ndash Imagem com bordas intensificadas segmentada
112
A Figura 531a ilustra a imagem com bordas intensificadas a ser
segmentada gerada com o segundo conjunto de autovalores 1205822 Na Figura 531b
tem-se esta imagem suavizada por filtragem A Figura 531c corresponde agrave imagem
segmentada com o algoritmo de deslocamento pela meacutedia A imagem com os limites
das aacutereas segmentadas eacute ilustrada com a Figura 531d
A segmentaccedilatildeo foi realizada utilizando o software EDISON com os
paracircmetros (119893119904 119893119903 119867) = (7 9 300) Estes paracircmetros correspondem ao domiacutenio
espacial da imagem 119893119904 domiacutenio de caracteriacutesticas 119893119903 e tamanho miacutenimo das
regiotildees 119867 em piacutexeis O limite miacutenimo foi fixado para evitar que regiotildees muito
pequenas fossem incluiacutedas na segmentaccedilatildeo
Com a imagem segmentada da Figura 529c foi possiacutevel projetar os pontos
de interesse ortogonalmente gerando a nuvem de pontos 3D Para isto utilizou-se
as coordenadas dos piacutexeis no arquivo de intensidades e seus correspondentes no
arquivo de distacircncias da imagem TOF Estes pontos foram escolhidos sobre as
superfiacutecies da caixa A nuvem de pontos 3D resultante deste experimento eacute
apresentada com as Figuras 532 e 533
FIGURA 532 ndash Nuvem de pontos da imagem segmentada vista frontal
113
FIGURA 533 ndash Nuvem de pontos da imagem segmentada vista 3D
57 EXPERIMENTO 6 ndash ANAacuteLISE DAS MEDIDAS OBTIDAS
Para gerar a nuvem de pontos 3D com as superfiacutecies de interesse
primeiramente corrigiu-se a geometria do arquivo de distacircncias da imagem TOF com
as coordenadas do Ponto Principal 1199090 e 1199100 coeficientes de distorccedilatildeo Radial
Simeacutetrica 1198701 e 1198702 e distacircncia focal calibrada 119891119888 O passo seguinte foi gerar uma
imagem de intensidade com as bordas do objeto intensificadas Com este objetivo
calcularam-se os autovalores para os pontos do arquivo de distacircncias da imagem
TOF e geraram-se trecircs imagens novas correspondendo aos trecircs autovalores
calculados conforme o Experimento 5 O terceiro passo foi a segmentaccedilatildeo da
imagem de intensidade com bordas intensificadas utilizando o algoritmo de
deslocamento pela meacutedia Com a imagem segmentada pocircde-se escolher as
superfiacutecies que teriam seus piacutexeis projetados para a nuvem de pontos 3D
A imagem segmentada com o algoritmo de deslocamento pela meacutedia
apresenta niacuteveis de cinza diferentes para os piacutexeis de cada segmento Com isto foi
possiacutevel separar os pontos que compotildeem as superfiacutecies por seus valores digitais A
Figura 534 apresenta a nuvem de pontos 3D gerada com a imagem TOF corrigida
geometricamente com os pontos da superfiacutecie frontal representados com a cor azul
114
FIGURA 534 ndash Nuvem de pontos 3D segmentada
A superfiacutecie frontal foi projetada com atributo de cor diferenciado por
apresentar a melhor segmentaccedilatildeo na imagem de intensidade e pontos bem
definidos na nuvem 3D A partir desta superfiacutecie escolheram-se os pontos extremos
os veacutertices do objeto para a leitura de suas coordenadas 3D com o objetivo de
calcular o comprimento das arestas Com a Figura 535 satildeo ilustrados os quatro
pontos selecionados
FIGURA 535 ndash Pontos 3D selecionados na nuvem
115
Com as coordenadas destes quatro pontos e atraveacutes da relaccedilatildeo de distacircncia
tridimensional entre eles expressa pela Equaccedilatildeo (59) calcularam-se as dimensotildees
de trecircs arestas do objeto de estudo
119863119894119895 = 119883119894minus119883119895 2
+ 119884119894minus119884119895 2
+ 119885119894minus119885119895 2 (59)
onde
119863119894119895 ndash Distacircncia entre pontos no espaccedilo tridimensional
119883119894 119884119894 119885119894 119890 119883119895 119884119895 119885119895 - Coordenadas dos pontos 119894 e 119895 na nuvem de pontos 3D
Para verificar a confiabilidade das medidas obtidas com a metodologia
proposta compararam-se as medidas das arestas calculadas a partir dos pontos 3D
com as dimensotildees de referecircncia do objeto de estudo As medidas de referecircncia satildeo
ilustradas com o desenho da Figura 536
FIGURA 536 ndash Dimensotildees de referecircncia do objeto de estudo
A partir das coordenadas tridimensionais dos quatro pontos ilustrados com a
Figura 535 foi possiacutevel calcular as distacircncias entre os pontos e comparar-las com
as medidas de referecircncia As diferenccedilas obtidas satildeo ilustradas com a Tabela 52
116
Ponto
Coordenadas Arestas Medida realizada Diferenccedilas
X (cm) Y (cm) Z (cm) Pontos 3D (cm)
Ref (cm)
(cm) ()
1 -131 -136 -1219 Pontos 1-2 236 260 24 92
2 -80 61 -1098 Pontos 2-3 332 350 18 51
3 234 38 -1203 Pontos 2-4 263 210 53 252
4 -125 180 -1328
TABELA 52 ndash Coordenadas 3D dos pontos e medidas realizadas
O melhor resultado foi obtido para a medida realizada sobre a aresta entre
os pontos 2-3 com diferenccedila de aproximadamente 18 cm em relaccedilatildeo agrave medida de
referecircncia o que representa 5 da distacircncia medida O pior resultado foi obtido com
o calculo da aresta entre os pontos 2 e 4 com diferenccedila de aproximadamente
53cm que equivale 25 da medida de referecircncia Com este resultado conclui-se
que os pontos projetados com maior profundidade na nuvem de pontos 3D
apresentaram maior erro de posicionamento Estes pontos descrevem uma
superfiacutecie plana do objeto pouco aparente na imagem encontra-se muito inclinada
em relaccedilatildeo ao plano da imagem motivo pelo qual erros maiores podem ser
esperados Sobre os pontos 1 2 e 3 da superfiacutecie frontal do objeto o erro foi menor
na ordem de 2 centiacutemetros
Conforme o Experimento 1 realizado para a anaacutelise de ruiacutedo o melhor
resultado foi obtido utilizando o filtro da mediana que apresentou o desvio de 13cm
para a distacircncia de 13m medida utilizando tempo de integraccedilatildeo de 2000micros Este
fato indica coerecircncia com a diferenccedila de 2cm encontrada com a medida da aresta
frontal do objeto
117
58 MODELAGEM DAS SUPERFIacuteCIES 3D
Para a modelagem tridimensional das superfiacutecies segmentadas
primeiramente foi analisada a melhor forma de processamento da imagem TOF
Verificou-se com o Experimento 4 que o crescimento de regiotildees utilizando o arquivo
de intensidades da imagem TOF para escolha do ponto semente e o arquivo de
distacircncias para a projeccedilatildeo ortogonal e crescimento de regiotildees a partir deste ponto
natildeo foi satisfatoacuterio Isto porque o crescimento tambeacutem ocorreu em superfiacutecies que
natildeo pertenciam ao objeto analisado
Melhores resultados foram obtidos com a metodologia de segmentaccedilatildeo que
utilizou a imagem com bordas evidenciadas Esta foi gerada com a anaacutelise dos
autovalores locais das superfiacutecies a partir do arquivo de distacircncias da imagem TOF
conforme Experimento 5 A partir desta segmentaccedilatildeo projetaram-se ortogonalmente
os pontos das superfiacutecies frontal e superior do objeto de estudo gerando assim a
nuvem de pontos 3D que eacute ilustrada com a Figura 537
FIGURA 537 ndash Nuvem de pontos 3D das superfiacutecies frontal e superior
A partir da nuvem de pontos 3D realizou-se a modelagem das superfiacutecies
frontal e superior do objeto conforme eacute ilustrado com a Figura 538
118
FIGURA 538 ndash Modelagem tridimensional das superfiacutecies frontal e superior
Analisando a Figura 538 chegou-se a conclusatildeo que a superfiacutecie frontal do
objeto apresentou-se com padratildeo planar e uniforme Eacute a superfiacutecie que melhor
refletiu o sinal para o sensor devido agrave sua posiccedilatildeo em relaccedilatildeo agrave cacircmara TOF A
superfiacutecie superior apresentou-se um pouco inclinada em relaccedilatildeo ao plano da
imagem e com isto maior rugosidade foi observada nesta superfiacutecie Este
fenocircmeno deve-se a menor captaccedilatildeo do sinal refletido pela superfiacutecie do objeto pelo
sensor da cacircmara
119
6 CONCLUSOtildeES RECOMENDACcedilOtildeES E CONSIDERACcedilOtildeES FINAIS
61 CONCLUSOtildeES
Neste trabalho descreveram-se conceitos introdutoacuterios sobre as cacircmaras
TOF Avaliaram-se duas metodologias para a segmentaccedilatildeo da nuvem de pontos 3D
gerada a partir da imagem TOF Apresentou-se uma aplicaccedilatildeo para esta imagem na
extraccedilatildeo de informaccedilotildees meacutetricas do objeto de estudo imageado a distacircncia
aproximada de 13m
Para isto foram abordados os seguintes assuntos calibraccedilatildeo da cacircmara
para a obtenccedilatildeo de POI correccedilatildeo geomeacutetrica da imagem TOF filtragens para
anaacutelise e tratamento de ruiacutedo segmentaccedilatildeo atraveacutes do crescimento de regiotildees a
partir de um ponto semente segmentaccedilatildeo do arquivo de distacircncias da imagem TOF
utilizando autovalores locais para a geraccedilatildeo de uma imagem com bordas
intensificadas segmentaccedilatildeo da imagem com bordas intensificadas atraveacutes do
algoritmo de deslocamento pela meacutedia geraccedilatildeo da nuvem de pontos 3D atraveacutes da
projeccedilatildeo ortogonal dos pontos da imagem de bordas segmentada e por fim a
modelagem tridimensional de superfiacutecies do objeto de estudo
O processo de calibraccedilatildeo da cacircmara foi realizado utilizando o meacutetodo
proposto por Zhang (2000) e possibilitou a determinaccedilatildeo de POI A correccedilatildeo
geomeacutetrica das imagens foi feita atraveacutes das coordenadas 1199090 e 1199100 do Ponto
Principal coeficientes de distorccedilatildeo Radial Simeacutetrica de lentes 1198701 e 1198702 e distacircncia
focal calibrada 119891119888
Com os Experimentos 1 e 2 foram realizadas filtragens para o tratamento de
ruiacutedo das imagens TOF disponiacuteveis Nestes experimentos verificou-se que para a
captaccedilatildeo da imagem TOF agrave distacircncia de 13m entre o objeto e a cacircmara o tempo de
integraccedilatildeo de 2000μs foi o que gerou imagens com menor presenccedila de ruiacutedo Assim
como o tempo de integraccedilatildeo de 5000μs foi o mais adequado para captar imagens agrave
distacircncia de 21m No entanto chegou-se a conclusatildeo que para a geraccedilatildeo da nuvem
de pontos 3D natildeo se deveria utilizar filtragem nos dados pois pequenas alteraccedilotildees
no arquivo de distacircncias da imagem TOF poderiam modificar o posicionamento
tridimensional dos pontos o que afetaria a qualidade das medidas realizadas com os
pontos da nuvem 3D
120
A primeira metodologia proposta para a segmentaccedilatildeo da imagem TOF
mostrou-se insatisfatoacuteria para a soluccedilatildeo do problema Empregou-se o crescimento
de regiotildees a partir de pontos semente escolhidos no arquivo de intensidades desta
imagem projetando-os ortogonalmente para a nuvem de pontos 3D utilizando os
valores obtidos com o arquivo de distacircncias da imagem TOF Notou-se que erros no
crescimento de regiotildees ocorreram devido agrave toleracircncia utilizada para a distacircncia do
ponto agrave superfiacutecie plana Isto ocorreu porque a distacircncia foi calculada ao longo do
autovetor que eacute ortogonal a superfiacutecie no ponto semente Por este motivo alguns
pontos de superfiacutecies adjacentes foram selecionados equivocadamente como
pertencentes a uma mesma regiatildeo na nuvem de pontos 3D pois estavam dentro do
limite fixado no criteacuterio de similaridade utilizado mas na realidade natildeo eram
coplanares Para resolver o problema com esta metodologia seria necessaacuterio
estabelecer um limiar de crescimento lateral natildeo apenas de distacircncia ortogonal a
superfiacutecie plana semente Este limiar poderia ser o valor digital do pixel tendo em
vista que superfiacutecies coplanares apresentam uniformidade na resposta espectral A
rugosidade apresentada na superfiacutecie em que se realizava o crescimento da regiatildeo
tambeacutem influenciou em erros na seleccedilatildeo de pontos pois afetou no caacutelculo dos
autovalores fazendo com que inclinaccedilotildees em relaccedilatildeo a esta superfiacutecie fossem
notadas
A segunda metodologia analisada para a segmentaccedilatildeo da imagem TOF
mostrou-se satisfatoacuteria A segmentaccedilatildeo do arquivo de distacircncias da imagem TOF foi
realizada utilizando autovalores locais para a geraccedilatildeo de uma imagem com bordas
intensificadas segmentaccedilatildeo desta imagem com o algoritmo de deslocamento pela
meacutedia e projeccedilatildeo destes segmentos para a nuvem de pontos 3D A extraccedilatildeo de
informaccedilotildees meacutetricas em arestas do objeto de estudo a partir dos pontos 3D
apresentou diferenccedila na ordem de 2cm com a medida de referecircncia sendo a
imagem TOF adquirida com tempo de integraccedilatildeo de 2000μs a uma distacircncia
aproximada de 13m entre o objeto de estudo e a cacircmara
A Figura 61 ilustra as etapas de processamento a serem realizadas para a
geraccedilatildeo da nuvem de pontos 3D utilizando a segunda metodologia considerada
apropriada para a modelagem tridimensional de superfiacutecies utilizando a imagem
TOF Esta eacute a metodologia proposta como conclusatildeo do presente trabalho de
pesquisa
121
FIGURA 61 ndash Etapas da metodologia de processamento da imagem TOF
Foram encontradas medidas com maior qualidade quando a superfiacutecie do
objeto estava paralela ao plano da imagem Esta qualidade tambeacutem foi afetada pela
distacircncia entre a cacircmara e o objeto pela refletividade das superfiacutecies e pela
iluminaccedilatildeo ambiente Conforme o Experimento 6 realizado a aresta frontal do objeto
entre os pontos 2 e 3 apresentou a menor diferenccedila de medida 18cm que equivale
a 5 da distacircncia de referecircncia
Comparaccedilotildees para a diferenccedila de medida encontrada podem ser realizadas
com os seguintes trabalhos Kahlmann et al (2006) obtiveram exatidatildeo de 1cm nas
medidas com o alvo agrave distacircncia de 25m da cacircmara TOF utilizada Wiedemann et al
(2008) obtiveram exatidatildeo de 4cm com o alvo medido a distacircncia de 4m May et al
(2008) obtiveram erro de 30cm para uma medida de 108m considerada como
referecircncia com as imagens TOF captadas do centro de uma sala girando a cacircmara
360ordm e portanto envolviam tambeacutem Paracircmetros de Orientaccedilatildeo Exterior da cacircmara
Kolb et al (2009) obtiveram erro de 2cm para distacircncias medidas de 10m agrave 45m
Nestes trabalhos foram realizadas correccedilotildees geomeacutetricas nas imagens TOF com
POI determinados com a calibraccedilatildeo da cacircmara
Arquivo de distacircncias da imagem TOF
Correccedilatildeo geomeacutetrica dos dados utilizando POI calculados com o processo de calibraccedilatildeo da cacircmara
Imagem de intensidade com bordas itensificadas calculada com a anaacutelise da variaccedilatildeo local dos autovalores
Segmentaccedilatildeo da imagem com bordas intensificadas utilizando o algoriacutetmo de deslocamento pela meacutedia
Projeccedilatildeo ortogonal das aacutereas segmentadas para a geraccedilatildeo da nuvem de pontos 3D
Modelagem tridimensional das superfiacutecies do objeto
122
62 RECOMENDACcedilOtildeES
Recomenda-se realizar a anaacutelise preacutevia do tempo de integraccedilatildeo para a
aquisiccedilatildeo da imagem TOF com o objetivo de diminuir a presenccedila de ruiacutedo Este
tempo deve ser escolhido de acordo com o ambiente em que seraacute adquirida a
imagem e tambeacutem com as caracteriacutesticas de refletividade da superfiacutecie do objeto
Com este mesmo objetivo e devido ao fato desta imagem ser obtida com iluminaccedilatildeo
LED no comprimento de onda infravermelho recomenda-se analisar as influecircncias
da iluminaccedilatildeo exterior ao sistema de iluminaccedilatildeo da cacircmara
De acordo com a aplicaccedilatildeo a que se destina a imagem TOF recomenda-se
tambeacutem realizar a calibraccedilatildeo da cacircmara com meacutetodo fotogrameacutetrico convencional
Isto possibilitaria a melhora na correccedilatildeo geomeacutetrica da imagem e consequente
aumento na qualidade das medidas realizadas com os pontos da nuvem 3D
Correccedilotildees radiomeacutetricas tambeacutem podem ser aplicadas para melhorar a qualidade
das medidas obtidas com a imagem TOF
63 CONSIDERACcedilOtildeES FINAIS
Nuvens de pontos 3D geradas a partir de imagens TOF satildeo ferramentas
para a modelagem tridimensional das superfiacutecies de objetos Propiciam a obtenccedilatildeo
de informaccedilotildees meacutetricas destes objetos para distacircncias de 03 a 70 metros com
erro centimeacutetrico esperado
Aplicaccedilotildees para as imagens TOF podem ser realizadas para a modelagem
3D de tuacuteneis galerias instalaccedilotildees industriais e fachadas de preacutedios com interesse
de preservaccedilatildeo como patrimocircnio histoacuterico e cultural Com a alta frequecircncia de
aquisiccedilatildeo de imagens das cacircmaras TOF torna-se possiacutevel realizar filmagens e
mapeamentos em movimento
Outras aplicaccedilotildees possiacuteveis para as imagens TOF estatildeo na sua utilizaccedilatildeo
para a criaccedilatildeo de cenaacuterios 3D em jogos eletrocircnicos aquisiccedilatildeo de filmes com
tecnologia 3D modelagem tridimensional de obras de arte Biometria e anaacutelise de
movimentos
123
REFEREcircNCIAS BIBLIOGRAacuteFICAS
ANDRADE J B Fotogrametria 2 ed Curitiba SBEE 1998 274 p APUZZO N D‟ Recent advances in 3D full body scanning with applications to fashion and apparel 10p In Proceedings Optical 3-D Measurement Techniques IX Vienna Austria 2009 BALTSAVIAS E P Airborne laser scanning basic relations and formulas ISPRS - Journal of Photogrammetry amp Remote Sensing v 54 p 199-214 1999 BAZAN W S TOMMASELLI A M G GALO M RUY R S A influecircncia das injunccedilotildees de orientaccedilatildeo relativa na calibraccedilatildeo de um sistema dual de cacircmaras digitais 23p Boletim de Ciecircncias Geodeacutesicas v 15 n 3 Curitiba 2009 BELTON D Improving and extending the information on Principal Component Analysis for local neighborhoods in 3D points clouds 8p The international Archives of the Photogrammetry Remote Sensing and Spatial Information Sciences v XXXVII B5 Beijing 2008 BELTON D LICHTI D Classification and segmentation of terrestrial laser scanner point clouds using local variance information 6p In Proceedings ISPRS Commission V Simposium bdquoImage Engineering and Vision Metrology‟ 2006 BROWN D C Close-Range Camera Calibration Photogrammetric Engineering v 37 nordm 8 p 855-866 1971 CENTENO J A S Sensoriamento Remoto e Processamento de Imagens Digitais Curso de Poacutes-Graduaccedilatildeo em Ciecircncias Geodeacutesicas Curitiba UFPR 2004 209p CENTENO J A S JUTZI B Evaluation of range imaging sensor concerning resolution and illumination 6p In Proceedings The 2010 Canadian Geomatics Conference and Symposium of Commission I ISPRS Calgary Alberta 2010 CHRISTOUDIAS M C GEORGESCU B MEER P Synergism in Low Level Vision IEEE Transactions on Pattern Analysis and Machine Intelligence v 24 n 5 p 603-619 2002
124
COMANICIU D MEER P Mean Shift A Robust Approach Toward Feature Space Analysis 17p IEEE Transactions on Pattern Analysis and Machine Intelligence v 24 n 5 p 603-619 2002 FUCHS S HIRZINGER G Extrinsic and depth calibration of ToF cameras In Proceedings IEEE Conference on Computer Vision and Pattern Recognition (CVPR) Anchorage USA 2008 FUCHS S MAY S Calibration and registration for precise surface reconstruction with ToF cameras In Proceedings of the Dynamic 3D Imaging Workshop in Conjunction with DAGM (Dyn3D) v I Heidelberg Germany 2007 GEMAEL C Introduccedilatildeo ao ajustamento de observaccedilotildees aplicaccedilotildees geodeacutesicas 3 ed Curitiba UFPR 1994 319p GONZALEZ R C WOODS R E Processamento de imagens digitais Satildeo Paulo Edgard Bluumlcher Ltda 2000 509p GROSS H THOENNESSEN U Extraction of lines from laser point clouds p 86-91 In Proceedings Symposium of ISPRS Commission III Photogrammetric Computer Vision PCV06 Eds Foumlrstner W Steffen R International Archives of Photogrammetry Remote Sensing and Spatial Information Sciences 36 (Part 3) 2006 HABIB A MORGAN M Automatic calibration of low-cost digital cameras p 948-955 Journal of Photogrammetric Record 2003 JAMTSHO S Geometric modelling of 3D Range Cameras and their application for structural deformation measurement 174p (Master‟s Thesis Department of Geomatics Engineering) University of Calgary Alberta 2010 JOHNSON R A WICHERN D W Applied multivariate statistical analysis 4 ed New Jersey Pearson Prentice Hall 1998 JUTZI B GROSS H Nearest neighbor classification on laser point clouds to gain object structures from buildings 6p In Proceedings ISPRS Hannover Workshop 2009 High-Resolution Earth Imaging for Geospatial Information Disponiacutevel em lthttpwwwisprsorgproceedingsXXXVIII1_4_7-W5paperpapershtmgt Acesso 16112010
125
KAHLMANN T REMONDINO F INGENSAND H Calibration for increased accuracy of the range imaging camera SwissrangerTM ISPRS Commission V Symposium bdquoImage Engineering and Vision Metrology‟ v XXXVI n 5 2006 KEMENY S E EL-SAYED E MENDIS S FOSSUM E R Update on focal-plane image processing research 8p SPIE v 1447 Charged-Coupled Devices and Solid Optical Sensors II 1991 KHONGSAB P Signal processing and performance evaluation of a PMD camera for space docking 88p (Master‟s Thesis Continuation Courses Space Science and Technology Department of Space Science) Lulea University of Techology Kiruna 2009 KOCH R SCHILLER I BARTCZAK B KELLNER F KOumlSER K MixIn3D 3D mixed reality with ToF camera 16p In Work Programme of the EU‟s 7th Framework program 2009 KOLB A BARTH E KOCH R LARSEN R Time-of-Flight sensors in Computer Graphics 16p In STAR ndash State of The Art Report The Eurographics Association 2009 LANGE R 3D Time-of-Flight distance measurement with custom solid-state image sensors in CMOSCCD-technology 205 p (Dissertation Department of Electrical Engineering and Computer Science at University of Siegen for the degree of Doctor of Technical Sciences) Univesity of Siegen Alemanha 2000 LEON S J Linear Algebra with applications 4 ed Dartmouth Prentice Hall 1998 390p LUAN X Experimental investigation of Photonic Mixer Device and development of TOF 3D ranging systems based on PMD technology A dissertation submitted to the Department of Electrical Engineering and Computer Science at University of Siegen Siegen 2001 MACHADO A M L Extraccedilatildeo automaacutetica de contornos de edificaccedilotildees utilizando imagem gerada por cacircmara digital de pequeno formato e dados LIDAR 201 p Tese apresentada ao Curso de Poacutes-Graduaccedilatildeo em Ciecircncias Geodeacutesicas da Universidade Federal do Paranaacute Curitiba UFPR 2006
126
MASS H G VOSSELMAN Two algorithms for extracting building models from raw laser altimetry data 11p Elsevier Science Photogrammetry amp Remote Sensing 1999 MAY S DROESCHEL D HOLTZ D WIESEN C FUCHS S 3D Pose estimation and mapping with time-of-flight cameras 6p Germany 2008 Disponiacutevel em httpwwwroboticdefileadminroboticfuchsiros08_3dcampdf Acesso em 2510 2010 MITISHITA E A Monorestituiccedilatildeo digital de aerofotos associada com sistema de computaccedilatildeo graacutefica CAD para fins de mapeamento na aacuterea florestal 251p Tese (Doutorado em Engenharia Florestal) ndash Setor de Ciecircncias Agraacuterias Universidade Federal do Paranaacute 1997 MOumlLLER T KRAFT H FREY J ALBRECHT M LANGE R Robust 3D measurement with PMD sensors 2005 PAULY M GROSS M KOBBELT L P Efficient simplification of point-sampled surfaces 8p In VIS ‟02 Proceedings of the Conference on Visualization ‟02 Washington DC USA 2002 IEEE Computer Society PECHT Y FOSSUM E R Wide intrascene dynamic range CMOS APS using dual sampling IEEE Transactions on Electron Devices v 44 n 10 1997 PMD Technologies PMD [vison]regCamCube 20 4p Datasheet n 20090601 Siegen 2009 Disponiacutevel em lthttpwwwpmdteccomproducts-servicespmdvisionr-cameraspmdvisionr-camcube-20gt Acesso em 0103 2010 PMD Technologies PMD [vison]regCamCube 20 Software development tutorial 13p Siegen 2009 Disponiacutevel em lthttpwwwpmdteccomfileadminpmdtecdownloadsdocumentationcamcube_softwaredevelopmenttutorialpdfgt Acesso em 1504 2010 RAPP H Experimental and theoretical investigation of correlating TOF-camera systems 71p Diploma Thesis in Physics Faculty for Physics and Astronomy University of Heidelberg Alemanha 2007 RINGBECK T A 3D Time Of Flight camera for object detection 10p In Proceedings Optical 3D Measurement Techniques Plenary Session 1 Range Imaging I Zuumlrich 2007
127
SHAKARJI C M Least-Squares fitting algorithms of the NIST algorithm testing system 9p Journal of research of the national of standards and technology v 103 n 6 1998 THEUWISSEN A Solid-state imaging with Charge-Coupled Devices PP 34-46 Kluwer Academic Publishers 1995 Disponiacutevel em ltwwwspringerlinkcomgt Acesso em 08072010
WIEDEMANN M SAUER M DRIEWER F SCHILLING K Analysis and characterization of the PMD camera for application in mobile robotics 6p In Proceedings of the 17th World Congress The International Federation of Automatic Control Seoul Korea July 6-11 2008 ZHANG Z A flexible new technique for camera calibration 5p IEEE Transactions on Pattern Analysis and Machine Intelligence November 2000





















































































































Top Related