






Línguas
Páginas
Legal

MINISTÉRIO DA DEFESAEXÉRCITO BRASILEIRO
DEPARTAMENTO DE CIÊNCIA E TECNOLOGIAINSTITUTO MILITAR DE ENGENHARIA
CURSO DE MESTRADO EM ENGENHARIA ELÉTRICA
JOÃO PAULO LUZ ALVES
EQUALIZAÇÃO TURBO BASEADA EM FILTRAGEM DEPARTÍCULAS E MODELAGEM PROBABILÍSTICA DO CANAL E DA
VARIÂNCIA DO RUÍDO
Rio de Janeiro2012

INSTITUTO MILITAR DE ENGENHARIA
JOÃO PAULO LUZ ALVES
EQUALIZAÇÃO TURBO BASEADA EM FILTRAGEM DE
PARTÍCULAS E MODELAGEM PROBABILÍSTICA DO
CANAL E DA VARIÂNCIA DO RUÍDO
Dissertação de Mestrado apresentada ao Curso deMestrado em Engenharia Elétrica do Instituto Militarde Engenharia, como requisito parcial para obtenção dotítulo de Mestre em Ciências em Engenharia Elétrica.
Orientador: Prof. Ernesto Leite Pinto, D.C.Co-orientador: TC Alberto Gaspar Guimarães, D.C.
Rio de Janeiro2012
c2012
INSTITUTO MILITAR DE ENGENHARIAPraça General Tibúrcio, 80 - Praia VermelhaRio de Janeiro - RJ CEP: 22290-270
Este exemplar é de propriedade do Instituto Militar de Engenharia, que poderá incluí-lo em base de dados, armazenar em computador, micro�lmar ou adotar qualquer formade arquivamento.
É permitida a menção, reprodução parcial ou integral e a transmissão entre bibliotecasdeste trabalho, sem modi�cação de seu texto, em qualquer meio que esteja ou venha aser �xado, para pesquisa acadêmica, comentários e citações, desde que sem �nalidadecomercial e que seja feita a referência bibliográ�ca completa.
Os conceitos expressos neste trabalho são de responsabilidade do(s) autor(es) e do(s)orientador(es).
621.3828A474e
Alves, João Paulo Luz
Equalização Turbo Baseada em Filtragem dePartículas e Modelagem Probabilística do Canal eda Variância do Ruído/ João Paulo Luz Alves; ori-entado por Ernesto Leite Pinto e Alberto GasparGuimarães.- Rio de Janeiro: Instituto Militar de En-genharia, 2012.
100p.: il.
Dissertação (mestrado) � Instituto Militar de En-genharia, Rio de Janeiro, 2012.
1. Curso de Engenharia Elétrica - teses e disser-tações 2. Equalização 3. Filtragem I. Pinto, ErnestoLeite II. Guimarães, Alberto Gaspar III. Título. IV.Instituto Militar de Engenharia
2
INSTITUTO MILITAR DE ENGENHARIA
JOÃO PAULO LUZ ALVES
EQUALIZAÇÃO TURBO BASEADA EM FILTRAGEM DE
PARTÍCULAS E MODELAGEM PROBABILÍSTICA DO
CANAL E DA VARIÂNCIA DO RUÍDO
Dissertação de Mestrado apresentada ao Curso de Mestrado em Engenharia Elétricado Instituto Militar de Engenharia, como requisito parcial para obtenção do título deMestre em Ciências em Engenharia Elétrica.
Orientador: Prof. Ernesto Leite Pinto, D.C.Co-orientador: TC Alberto Gaspar Guimarães, D.C.
Aprovada em 03 de Maio de 2012 pela seguinte Banca Examinadora:
Prof. Ernesto Leite Pinto, D.C. do IME - Presidente
TC Alberto Gaspar Guimarães, D.C. do IME
Prof. Paulo Roberto Rosa Lopes Nunes, Ph.D. do IME
Prof. Francisco Marcos de Assis, D.C. da UFCG
Rio de Janeiro2012
3

À minha família, que sempre me apoia incondicional-mente.
4
AGRADECIMENTOS
A Deus, por me ajudar a conservar uma vida digna e produtiva.
A meus pais Antonio e Liege por todos seus esforços em me fornecer uma sólida base
de educação e valores que me permitiram as condições de chegar a este momento de minha
vida.
Aos amigos Alexandre, Daniel, Fábio, Humberto, Ingrid e Rodrigo, pela amizade e
companheirismo nos diversos trabalhos realizados.
A meu orientador e co-orientador, Professor Dr. Ernesto Leite e TC Alberto Guimarães,
pelos ensinamentos transmitidos, pela disponibilidade, atenção despendida durante esses
anos de curso e pela con�ança no meu trabalho.
A Leonardo Cavalcanti, que desenvolveu em seu mestrado e posteriormente disponibi-
lizou uma excelente biblioteca em C, ajudando muito no desenvolvimento deste trabalho.
Aos colegas Elaine e Maciel, pelo desenvolvimento do gerenciador de aplicativos do
Laboratório de Comunicações Digitais.
A Ricardo e Ema, pela atenção e apoio no desenvolvimento da dissertação.
A meus irmãos e irmã, que sempre me apoiaram na realização dos meus objetivos.
A todos meus familiares e amigos, que ao longo dessa dura jornada me proporcionaram
momentos de lazer e tranquilidade.
5

�A dúvida é o princípio da sabedoria.�Aristóteles.
6
SUMÁRIO
LISTA DE ILUSTRAÇÕES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
LISTA DE ABREVIATURAS E SÍMBOLOS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
1 INTRODUÇÃO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
1.1 Objetivos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
1.2 Organização do trabalho . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
1.3 Notação . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
2 EQUALIZAÇÃO TURBO E FILTRAGEM DE PARTÍCULAS . . . 21
2.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
2.2 Equalização Turbo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
2.2.1 Informação Extrínseca . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
2.3 Filtro de Partículas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
2.3.1 Estimação de Estados Bayesiana . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
2.3.2 Amostragem Sequencial por Importância . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
2.3.3 Função Importância . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
2.3.4 Reamostragem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
2.4 Conclusão . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
3 EQUALIZADORES PROPOSTOS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
3.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
3.2 Equalizador FLPSCV . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
3.2.1 Modelagem das observações . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
3.2.2 Modelagem a priori do canal e da variância do ruído . . . . . . . . . . . . . . . . . . . . . 35
3.2.3 Distribuição a posteriori dos símbolos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
3.2.4 Função Importância . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
3.2.5 Atualização dos pesos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
3.2.6 Saída Suave . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
3.3 Realimentação de estimativas extraídas do equalizador . . . . . . . . . . . . . . . . . . . 41
3.3.1 Estimação da CIR e determinação da matriz covariância do erro de
estimação do canal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
7
3.3.2 Estimação da variância do ruído . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
3.3.3 Equalizadores turbo com realimentação de estimativas de parâmetros . . . . . . 45
3.4 Realimentação da estimativa do canal proveniente do decodi�cador
(FLPSCV-F4) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
3.4.1 Estimação do canal através das saídas suaves do decodi�cador . . . . . . . . . . . . . 47
3.4.2 Variante com realimentação da estimativa de canal . . . . . . . . . . . . . . . . . . . . . . 49
3.5 Resumo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
4 AVALIAÇÃO DE COMPLEXIDADE COMPUTACIONAL . . . . . . . 51
4.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
4.2 Análise de Complexidade . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
4.2.1 Operações Básicas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
4.2.2 Equalizador BCJR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
4.2.3 Reamostragem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
4.2.4 Equalizador FLPS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
4.2.5 Equalizador FLPSC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
4.2.6 Equalizador FLPSCV . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
4.2.7 Equalizador FLPSCV-F4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
4.3 Exemplos Comparativos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
4.4 Uma Técnica para Redução de Complexidade . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
4.4.1 Técnica Proposta . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
4.4.2 Análise de Complexidade . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
4.5 Conclusão . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
5 AVALIAÇÃO DE DESEMPENHO EM TERMOS DA TAXA DE
ERRO DE BITS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
5.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
5.2 Implementação com sequências de treinamento . . . . . . . . . . . . . . . . . . . . . . . . . . 82
5.2.1 Inicialização dos Parâmetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
5.2.2 Resultados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
5.3 Equalização Cega . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
5.3.1 Inicialização dos Parâmetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
5.3.2 Resultados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
5.4 Redução de Complexidade . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
8
5.5 Conclusão . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 94
6 CONSIDERAÇÕES FINAIS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97
6.1 Propostas para trabalhos futuros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 98
7 REFERÊNCIAS BIBLIOGRÁFICAS . . . . . . . . . . . . . . . . . . . . . . . . . . . 99
9
LISTA DE ILUSTRAÇÕES
FIG.2.1 Diagrama em blocos de um sistema de comunicação empregando
recepção turbo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
FIG.2.2 Esquema de um codi�cador convolucional de taxa Rc=1/2 . . . . . . . . . . . . 22
FIG.2.3 Exemplo de um entrelaçador 3-Randômico . . . . . . . . . . . . . . . . . . . . . . . . . . 22
FIG.3.1 Diagrama em blocos do equalizador FLPSCV . . . . . . . . . . . . . . . . . . . . . . . 40
FIG.3.2 Diagrama em blocos da realimentação de parâmetros extraídos do
equalizador . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
FIG.3.3 Diagrama em blocos do equalizador FLPSCV-F3 . . . . . . . . . . . . . . . . . . . . 46
FIG.3.4 Diagrama em blocos do receptor que emprega o equalizador FLPSCV-
F4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
FIG.4.1 Complexidade dos equalizadores com a variação da memória do
canal (L). Algoritmos que utilizam o FP com retardo de 3 símbolos
(M = 3). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
FIG.4.2 Complexidade dos equalizadores com a variação da memória do
canal (L). Algoritmos que utilizam o FP com retardo de 5 símbolos
(M = 5). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
FIG.4.3 Complexidade dos equalizadores com um canal de 3 coe�cientes
(L = 5). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
FIG.4.4 Complexidade dos equalizadores com a variação da memória do
canal (L). Algoritmos que utilizam o FP com retardo igual a
memória do canal (M = L). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
FIG.4.5 Comparação de complexidade do equalizador FLPSCV-C1 com o
BCJR e FLPSCV. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
FIG.5.1 Curvas de desempenho dos equalizadores BCJR, FLPS, FLPSC e
FLPSCV para blocos de 128 bits e C+R=14 . . . . . . . . . . . . . . . . . . . . . . . 84
FIG.5.2 Curvas de desempenho dos equalizadores BCJR, FLPS, FLPSC e
FLPSCV para blocos de 128 bits e C+R=22 . . . . . . . . . . . . . . . . . . . . . . . 85
FIG.5.3 Curvas de desempenho dos equalizadores BCJR, FLPS, FLPSC e
FLPSCV para blocos de 1024 bits e C+R=14 . . . . . . . . . . . . . . . . . . . . . . 86
10
FIG.5.4 Curvas de desempenho do equalizador FLPSCV, para blocos de
1024 bits e equalização cega, com diferentes valores de ϕ. . . . . . . . . . . . . 88
FIG.5.5 Curvas de desempenho dos equalizadores BCJR, FLPS, FLPSC e
FLPSCV, para blocos de 1024 bits e equalização cega. . . . . . . . . . . . . . . 90
FIG.5.6 Número de blocos descartados na simulação com os equalizadores
BCJR, FLPS, FLPSC e FLPSCV, para blocos de 1024 bits e equa-
lização cega. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
FIG.5.7 Erro Médio Quadrático de σ2w para cenários de recepção com treina-
mento e sem treinamento (cega). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
FIG.5.8 Curvas de desempenho dos equalizadores FLPSCV, FLPSCV-F1,
FLPSCV-F2, FLPSCV-F3 e FLPSCV-F4, para blocos de 1024
bits e equalização cega. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
FIG.5.9 Número de blocos descartados na simulação com os equalizadores
FLPSCV, FLPSCV-F1, FLPSCV-F2, FLPSCV-F3 e FLPSCV-
F4, para blocos de 1024 bits e equalização cega . . . . . . . . . . . . . . . . . . . . . 94
FIG.5.10 Curvas de desempenho com tempo de simulação com os equaliza-
dores FLPSCV e FLPSCV-C1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
11
LISTA DE ABREVIATURAS E SÍMBOLOS
ABREVIATURAS
APP - A Posteriori Probability
AWGN - Additive White Gaussian Noise
BER - Bit Error Rate
BPSK - Binary Phase Shift Keying
CDMA - Code Division Multiple Access
CIR - Channel Impulse Response
DFE - Decision Feedback Equalizer
ECC - Error Control Code
EKF - Extended Kalman Filter
EMQ - Erro Médio Quadrático
EXIT - Extrinsic Information Transfer Chart
FDP - Função Densidade de Probabilidade
FEC - Forward Error Correction
FLOPS - Floating-Point Operations
FLPS - Fixed-Lag Particle Smoother
FP - Filtragem de Partículas
ISI - Inter-Symbol Interference
KF - Kalman Filter
LLR - Log-Likelihood Ratio
MAP - Maximum A posteriori Probability
MCMC - Markov Chain Monte Carlo
ML - Maximum Likelihood
MMSE - Minimum Mean Squared Error
NV - Noise Variance
PSK - Phase Shift Keying
QAM - Quadrature Amplitude Modulation
QPSK - Quadrature Phase Shift Keying
RBPF - Rao-Blackwellised Particle Filter
RBW - Rao-Blackwellization
12
RLS - Recursive Least Squares
SICE - Soft Input Channel Estimator
SIS - Sequential Importance Sampling
SISO - Soft Input Soft Output
SNR - Signal to Noise Ratio
SOVA - Soft-Output Viterbi Algorithm
TCM - Trellis Coded Modulation
VA - Variável Aleatória
ZFE - Zero Forcing Equalizers
SÍMBOLOS
a - Sequência de bits
b - Sequência de bits codi�cados
c - Sequência de bits codi�cados e embaralhados
N - Número de bits por bloco
P - Número de partículas
x - Sequência de símbolos
y - Sinal Recebido
13

RESUMO
Neste trabalho propõe-se equalizadores com entrada e saída suaves aptos a lidar comos coe�cientes da resposta ao impulso do canal e com a variância do ruído como parâme-tros desconhecidos, num contexto de equalização turbo. Utilizando-se modelos adequadospara a distribuição conjunta de probabilidades a priori destes parâmetros, formula-se umproblema de estimação (suavização) Bayesiana dos símbolos transmitidos. A distribuiçãoa posteriori dos símbolos é obtida através da técnica de �ltragem de partículas, dandoorigem a uma primeira proposta de equalizador com saída suave. Variantes deste equa-lizador são também desenvolvidas com o intuito de obter melhorias de desempenho, ex-plorando o conhecimento que pode ser obtido a respeito do canal e da variância do ruídoao longo das iterações da equalização turbo. São realizadas análises de complexidadecomputacional, determinando-se o número de operações de ponto �utuante requeridaspor cada algoritmo de equalização. O desempenho dos equalizadores propostos é avaliadoatravés da simulação de cenários típicos de transmissão com canal invariante no tempo einterferência entre símbolos severa. No que diz respeito ao emprego de estimativas iniciaisda resposta ao impulso do canal e da variância do ruído, considera-se tanto casos em quese emprega sequências de treinamento curtas quanto situações de recepção cega. Os resul-tados obtidos indicam que os algoritmos de equalização aqui propostos produzem ganhosde desempenho quando comparados a equalizadores concebidos supondo-se conhecidasa resposta ao impulso do canal e a variância do ruído. Comparações de complexidadecomputacional indicam que alguns dos equalizadores propostos neste trabalho são maise�cientes para canais de memória longa. Para reduzir ainda mais a complexidade com-putacional dos algoritmos aqui apresentados é proposta uma modi�cação no emprego datécnica de �ltragem de partícula, tirando-se proveito da informação a priori sobre ossímbolos para evitar cálculos de impacto desprezível sobre o desempenho.
14

ABSTRACT
Soft-input soft-output (SISO) equalizers which deals with channel impulse responsecoe�cients and noise variance as unknown parameters are proposed, embedded in a turboequalization framework. Proper models are used for the joint probability distribution ofthese parameters, and a Bayesian estimation (smoothing) procedure of the transmittedsymbols is formulated. The particle �ltering technique is used to obtain the a posterioridistribution of symbols, giving rise to an initial proposal of SISO equalizer. Some va-riants of this equalizer are further developed trying to explore the knowledge about thechannel response and noise variance obtained during the turbo equalization iterations.Computational complexity analysis is performed as well, and the number of �oating pointoperations required by each equalization algorithm is determined. The performance ofthe proposed equalizers is evaluated by simulation of typical transmission scenarios wheretime invariant channels and severe intersymbol interference are considered. Concerningthe initial estimates of the channel impulse response and noise variance, both the use ofshort training sequences and blind reception are addressed. The obtained results indicatethat the proposed equalizers present better performance when compared with equalizersfor known channel impulse response and noise variance. Computational complexity com-parisons reveal that some of the proposed equalizers are more e�cient for long-memorychannels. In order to further reduce the computational complexity of the equalizers pre-sented herein, a modi�cation in the application of the particle �ltering algorithm is pro-posed that exploits the a priori probability of the symbols to avoid calculations, withnegligible performance impact.
15
1 INTRODUÇÃO
A crescente demanda por serviços de comunicações tem incentivado o avanço de
pesquisas em diversas áreas, tais como processamento digital de sinais, transmissão digi-
tal, protocolos de comunicação, eletrônica digital e microeletrônica. Um dos temas em
destaque atualmente está relacionado à melhoria da e�ciência nas transmissões de dados,
i.e., ao melhor aproveitamento da banda de transmissão disponível, possibilitando melhora
na taxa efetiva de transmissão ou aumento do número de usuários de um determinado
serviço de telecomunicações.
Muitos sistemas de comunicações digitais necessitam de equalização para combater
distorções introduzidas pelo canal na forma de interferências entre símbolos (ISI, de inter-
symbol interference). Também no intuito de proteger a integridade dos dados, a maioria
dos sistemas utiliza a técnica denominada FEC (de forward error correction), na qual
o transmissor adiciona informações redundantes na sequência de símbolos transmitida
para que o receptor seja capaz de corrigir erros que possam ocorrer na transmissão. As
tarefas de adicionar informação redundante no transmissor e corrigir erros no receptor são
realizadas pelo codi�cador e decodi�cador de canal, respectivamente.
A forma original de implementar receptores para sistemas sujeitos a ISI munidos de
codi�cação FEC consistia em realizar os processos de equalização e decodi�cação sepa-
rados, de forma sequencial. Em geral, nesta abordagem, o equalizador realiza decisões
abruptas (hard decisions) sobre os símbolos transmitidos, que são depois processadas pelo
decodi�cador.
A realização de decisões abruptas no equalizador gera perdas de informações que pode-
riam ser utilizadas em etapas posteriores de recepção, sendo bem conhecido o fato de que
o uso de decisões suaves pelo decodi�cador permite melhorar o desempenho de receptores
sequenciais (M. TÜCHLER, 2004), ao custo de aumento de complexidade computacional.
No início da década de 90 foi proposta a codi�cação turbo (C. BERROU, 1993), que
consiste numa classe de códigos corretores de erro com decodi�cação iterativa, ou seja,
baseada na troca de informação suave (soft information) entre dois decodi�cadores ao
longo de várias iterações.
16
Um desenvolvimento importante, após a introdução dos códigos turbo, foi a equaliza-
ção turbo (C. DOUILLARD, 1995). Esta técnica lida com o canal como um codi�cador
interno acoplado em série a um codi�cador de canal convencional (tipicamente convolu-
cional). Desta maneira, o equalizador pode ser concebido para operar de forma semelhante
a um decodi�cador com entrada e saída suave (SISO, de soft input soft output), o que
possibilita um processo iterativo de troca de informações com um decodi�cador de canal
SISO. Este processo permite que ao longo das iterações a taxa de erro de bits (BER, de
Bit Error Rate) seja reduzida.
A primeira estrutura de equalização turbo, proposta em (C. DOUILLARD, 1995),
era constituída de um equalizador e um decodi�cador baseados no algoritmo BCJR
(L. R. BAHL, 1974) (M. TÜCHLER, 2004). Entretanto, o algoritmo de equalização BCJR
não leva em consideração incertezas a respeito de parâmetros da transmissão, como a res-
posta do canal ao impulso (CIR, de Channel Impulse Response) e a variância do ruído das
observações (NV, de Noise Variance). Quando os efeitos dos erros de estimação destes
parâmetros são signi�cativos, um equalizador SISO baseado no algoritmo BCJR tem seu
desempenho bastante degradado, como pode ser visto em (J. ALVES, 2011).
Por outro lado, a suposição de que a CIR e a NV são parâmetros desconhecidos pode
inviabilizar a obtenção de expressões analíticas para o desenvolvimento de equalizadores
SISO. Desta forma, muitos pesquisadores têm adotado técnicas baseadas em aproximações
de distribuições de probabilidades, tais como MCMC (de Markov Chain Monte Carlo)
(X. WANG, 2001) e �ltragem de partículas (FP) (A. DOUCET, 2000), para tentar obter
algoritmos de equalização computacionalmente viáveis.
O �ltro de partículas é uma ferramenta poderosa para estimação Bayesiana em cenários
onde não é possível desenvolver soluções analíticas fechadas para avaliação recursiva das
distribuições a posteriori de interesse. Esta técnica tem sido o foco de muitos trabalhos,
em diversas áreas de conhecimento, tais como engenharia, economia, física e estatística,
devido à sua aplicabilidade a problemas com modelos não-lineares e não-gaussianos. A
ideia básica desta técnica é aproximar funções densidade de probabilidade (FDP) contí-
nuas por números aleatórios discretos (partículas) com probabilidades a elas associadas
(pesos).
Em (P.M. DJURIC, 2003) são apresentados exemplos de aplicação de FP a problemas
de comunicação digital em cenários de canal desconhecido. Naquele trabalho considera-se
um exemplo de canal invariante no tempo e a FDP dos símbolos é obtida através de um
17
algoritmo de �ltragem de partículas com parâmetro desconhecido, utilizando-se o método
conhecido como Rao-Blackwellization (RBW) (A. DOUCET, 2000) (X. WANG, 2002),
no qual implementa-se um banco de �ltros de Kalman para a propagação das estatísticas
(média e matriz covariância) condicionais do canal ao longo do tempo. Desta maneira, a
equalização cega é realizada sem uma estimação explícita do canal.
Os sistemas de comunicação que utilizam equalizadores turbo cegos (blind turbo equa-
lizers) com estimação conjunta de canal e símbolos têm despertado bastante interesse de
muitos pesquisadores, tendo em vista o interesse em evitar o uso de sequências de treina-
mento para se obter maiores ganhos de e�ciência de transmissão. No entanto, este tipo
de equalizador normalmente apresenta uma complexidade muito elevada, o que motiva a
pesquisa de novas técnicas para minimizar esse efeito indesejado.
Em (M. BOLIC, 2002) é proposta uma modi�cação no algoritmo FP na qual o número
de partículas varia de acordo com as distribuições dos pesos, visando reduzir a comple-
xidade computacional. Já em (YUVAPOOSITANON, 2011) é proposta uma alteração
no algoritmo do �ltro RBPF para evitar os cálculos relativos à �ltragem de Kalman
em partículas replicadas. No entanto, nenhuma das duas técnicas foi desenvolvida con-
siderando o emprego de receptores iterativos. Consequentemente, as estratégias empre-
gadas para a diminuição de complexidade não levam em conta a disponibilidade da infor-
mação extrínseca fornecida pelo decodi�cador SISO num esquema de equalização turbo.
No presente trabalho são propostos e investigados novos equalizadores SISO baseados
em �ltragem de partículas para emprego em turbo-equalizadores, com habilidade para
lidar com estimativas ruidosas ou com o desconhecimento completo da resposta ao impulso
do canal e da variância do ruído.
1.1 OBJETIVOS
Os objetivos especí�cos desta dissertação são os seguintes:
• propor algoritmos de equalização SISO que lidam com os coe�cientes da resposta
ao impulso do canal e a variância do ruído como parâmetros desconhecidos;
• investigar versões alternativas destes algoritmos baseadas na realimentação de pa-
râmetros estatísticos da CIR e NV obtidas ao longo das iterações de um esquema
de equalização turbo;
18
• avaliar o custo computacional dos equalizadores obtidos, comparando-os com outros
equalizadores apresentados na literatura;
• avaliar os desempenhos dos equalizadores propostos em cenários com treinamento e
sem treinamento (equalização cega) utilizando modelos de canais com respostas em
frequência severas e compará-los com outras alternativas disponíveis na literatura;
• propor alterações nos algoritmos desenvolvidos no trabalho que apresentem me-
lhores características de desempenho, visando a diminuição de sua complexidade
computacional;
1.2 ORGANIZAÇÃO DO TRABALHO
Esta dissertação está organizada em 6 capítulos. No capítulo 2 são abordados conceitos
básicos de turbo equalização e �ltragem de partículas. No capítulo seguinte são propos-
tos novos equalizadores que consideram o canal e a variância do ruído como parâmetros
desconhecidos. Inicialmente é proposto um equalizador SISO, denominado FLPSCV (de
�xed-lag particle smoother unknown channel and variance), baseado em FP com suaviza-
ção. Posteriormente, são propostas alterações neste equalizador para aproveitar as infor-
mações obtidas ao �nal de cada iteração para atualizar os parâmetros da CIR e da NV
a serem usados na iteração seguinte. No �nal do capítulo é apresentada uma técnica que
utiliza a correlação cruzada entre as observações e as saídas suaves do decodi�cador para
re�nar a estimativa de canal.
No capítulo 4 são feitas análises de custo computacional dos equalizadores propostos,
comparando-os com outros encontrados na literatura atual. No �nal do capítulo é apre-
sentada uma técnica que aproveita o conhecimento obtido sobre os símbolos transmitidos
na evolução do processo iterativo para tentar diminuir a complexidade do algoritmo ao
longo das iterações.
No capítulo 5 são apresentadas curvas de desempenho de BER dos equalizadores pro-
postos, comparando-os com outros disponíveis na literatura.
Por �m, no capítulo 6, são apresentadas as considerações �nais sobre todo o trabalho
desenvolvido, incluindo as suas principais conclusões e propostas para trabalhos futuros.
19
1.3 NOTAÇÃO
As regras de notação utilizadas neste texto são as seguintes:
• vetores são escritos com letras minúsculas em negrito e matrizes com letras maiús-
culas em negrito;
• grandezas variantes no tempo são indicadas por um índice subscrito (por exemplo,
yk);
• a matriz 1i×j de dimensões i× j possui o valor 1 em todos os seus elementos;
• a matriz 0i×j de dimensões i× j possui o valor 0 em todos os seus elementos;
• Ii é a matriz identidade de dimensão i× i;
• o operador diag(·) aplicado a um vetor de tamanho i retorna uma matriz diagonal
com diagonal principal formada pelos elementos do vetor em questão;
• E[·] e V ar[·] representam os operadores valor esperado e variância, respectivamente,
de uma variável aleatória;
• Cov[x,y] e Rxy(k) denotam respectivamente a covariância e a correlação cruzada
entre dois vetores aleatórios x e y;
20
2 EQUALIZAÇÃO TURBO E FILTRAGEM DE PARTÍCULAS
2.1 INTRODUÇÃO
Neste capítulo são apresentados de forma breve alguns conceitos básicos de equalização
turbo e �ltragem de partículas que são empregados ao longo do texto.
2.2 EQUALIZAÇÃO TURBO
O modelo de sistema de comunicação digital com equalização turbo aqui adotado é
mostrado na �gura 2.1.
Os dados a serem enviados são protegidos com a introdução de redundâncias usando
um codi�cador convolucional (SKLAR, 1983) de taxa 1/2 bastante utilizado em artigos
que tratam de equalização turbo, o qual pode ser descrito pelas seguintes equações:
{b2k−1 = ak ⊕ an−2
b2k = ak ⊕ ak−1 ⊕ ak−2,(2.1)
onde os bits codi�cados são denotados por bk, os bits de informação são denotados por ak,
e ⊕ representa a operação binária OU Exclusivo. O diagrama de blocos deste codi�cador
é mostrado na �gura 2.2.
Utiliza-se um entrelaçador de bits sobre a sequência de bits codi�cados bk, criando
uma nova sequência ck.
Diversos tipos de entrelaçadores são descritos na literatura sobre o tema, dentre eles o
entrelaçador S-Randômico, que embaralha os bits codi�cados de maneira que se atenda à
restrição de que grupos de S bits embaralhados consecutivos (ck, ..., ck+S−1) correspondam
a bits codi�cados cujos índices de tempo estejam afastados de uma distância mínima de
S unidades. Na �gura 2.3 é mostrado um exemplo de um embaralhamento de 18 bits com
um entrelaçador 3-Randômico.
Neste trabalho é empregado um entrelaçador aleatório convencional, que não restringe
a distância mínima entre os índices dos bits codi�cados associados a grupos de bits em-
21
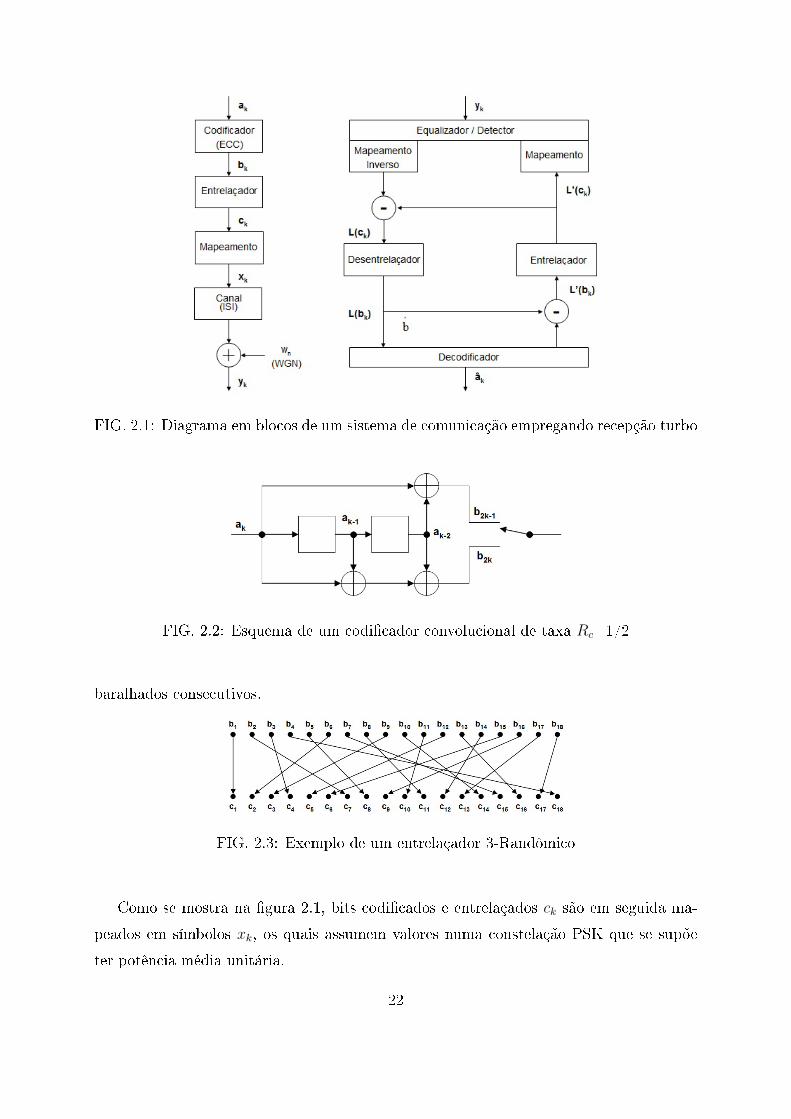
FIG. 2.1: Diagrama em blocos de um sistema de comunicação empregando recepção turbo
FIG. 2.2: Esquema de um codi�cador convolucional de taxa Rc=1/2
baralhados consecutivos.
FIG. 2.3: Exemplo de um entrelaçador 3-Randômico
Como se mostra na �gura 2.1, bits codi�cados e entrelaçados ck são em seguida ma-
peados em símbolos xk, os quais assumem valores numa constelação PSK que se supõe
ter potência média unitária.
22

Admite-se que o canal é linear e invariante no tempo, e que se utiliza um receptor
coerente degradado por ruído aditivo gaussiano branco.
Considera-se também que o formato de pulso �ltrado no receptor atende o critério de
Nyquist para eliminação da interferência entre símbolos. Desta forma, o sinal recebido
em tempo discreto é representado pela sequência yk dada por
yk =∑L
l=1 hlxk−l+1 + wk, k = 1, 2, . . . , N (2.2)
onde L é o número de coe�cientes, hl da resposta ao impulso do canal e wk são amostras de
ruído estatisticamente independentes e identicamente distribuídas (IID), com distribuição
gaussiana de média nula e variância σ2w.
A razão sinal-ruído na entrada do receptor é especi�cada pela razão entre a energia
de bit e a densidade espectral de ruído (Eb/N0), que neste caso pode ser expressa por
Eb/N0 =
∑Ll=0 |hl|2
σ2w
=1
σ2w
, (2.3)
onde se admitiu que a resposta ao impulso do canal tem energia unitária.
Nesse contexto, a tarefa do receptor é detectar os dados transmitidos a partir das ob-
servações yk, utilizando o conhecimento prévio ou uma estimativa da resposta ao impulso
do canal e explorando a redundância introduzida pela codi�cação de canal.
EQUALIZADOR ITERATIVO
Num receptor sequencial convencional a detecção de símbolos é feita no equaliza-
dor e os outros processamentos de recepção têm como objetivo apenas reverter as suas
contrapartidas executadas na transmissão.
Num sistema com equalização turbo como o mostrado na �gura 2.1 empregam-se
equalizadores e decodi�cadores SISO e se implementa uma troca de informações suaves
entre esses processadores.
Assim sendo, a cada iteração o equalizador SISO utiliza a informação suave disponível
em sua entrada e explora a memória do canal para processar as amostras do sinal recebido
e produzir em sua saída informação suave a respeito dos bits codi�cados, a ser utilizada
pelo decodi�cador de canal SISO1.
1A operação do equalizador SISO é iniciada com informação suave de entrada nula, que corresponde
à suposição usual de que os bits transmitidos são equiprováveis.
23
O algoritmo de decodi�cação SISO, por sua vez, é capaz de processar a informação
suave proveniente do equalizador e gerar em sua saída nova informação suave sobre os
bits codi�cados (L(bk)), que é obtida explorando a memória do codi�cador convolucional
empregado. Esta informação pode então ser repassada ao equalizador SISO, para dar
inicio a uma nova iteração.
Cabe notar que o decodi�cador de canal também é capaz de gerar informação suave
sobre os bits de informação (L(ak)). Isto será feito no �nal da última iteração, quando a
decisão �nal (abrupta) sobre os bits de informação é obtida.
A troca de informações entre o equalizador e o decodi�cador pode ser repetida várias
vezes, tornando progressivamente mais con�ável a informação suave sobre os bits de infor-
mação (L(ak)). Este processo permite a obtenção de probabilidade de erro de bit muito
menor do que a que seria obtida num receptor sequencial, de modo a tornar compensador
o aumento de complexidade computacional requerido pela equalização turbo.
Entretanto, para que isso ocorra é necessário que a troca de informações suaves seja
feita de forma criteriosa, evitando que cada um dos processadores envolvidos realimente
para si informação produzida por ele mesmo, o que levaria à convergência prematura para
uma solução de baixo desempenho. Surge desta constatação o conceito de informação
extrínseca, que é introduzido na próxima sub-seção.
2.2.1 INFORMAÇÃO EXTRÍNSECA
O conceito de informação extrínseca é discutido a seguir tendo como referência a ope-
ração de um equalizador Bayesiano genérico. Este tipo de equalizador explora a memória
do canal e as observações disponíveis para extrair informação adicional a respeito dos bits
transmitidos, partindo de um conhecimento probabilístico a priori a respeito destes bits.
A informação suave L (ck|y) associada a um bit transmitido é usualmente quanti�-
cada através do logaritmo da razão de probabilidades a posteriori, a qual neste contexto
costuma ser denominada razão de log-verossimilhança, ou simplesmente LLR (de Loglike-
lihood ratio). Desta forma, tem-se
L (ck|y) = ln
(P (ck = 0|y)P (ck = 1|y)
). (2.4)
Por outro lado, as probabilidades a posteriori P (ck = c|y) podem ser expressas como
24

P (ck = c|y) =∑
∀c:ck=c
P (c|y) =∑
∀c:ck=c
P (y|c)P (c)
P (y), (2.5)
onde P (c) é a probabilidade a priori da sequência c, que quanti�ca o conhecimento prévio
a respeito dos bits ck.
Usualmente os bits ck são considerados estatisticamente independentes2, de modo que
P (c) =∏K
k=1 P (ck). Usando este fato nas equações (2.5) e (2.4), tem-se:
L(ck|y) = ln
(∑∀c:ck=0 P (y|c)
∏Ki=1 P (ci)∑
∀c:ck=1 P (y|c)∏K
i=1 P (ci)
)
= ln
(∑∀c:ck=0 P (y|c)
∏Ki=1;i =k P (ci)∑
∀c:ck=1 P (y|c)∏K
i=1;i =k P (ci)
)+ L(ck)
= Lext(ck|y) + L(ck), (2.6)
sendo L (ck) = ln(
P (ck=0)P (ck=1)
).
As expressões Lext(ck|y) e L(ck) correspondem respectivamente à LLR extrínseca e à
LLR a priori associadas ao bit ck.
A LLR extrínseca desempenha um papel crucial na equalização turbo, pois pode ser
entendida como a informação efetivamente extraída no processamento das amostras y,
em contrapartida à informação já disponível a priori, que é quanti�cada por L(ck).
Sendo assim, é precisamente a informação extrínseca que deve ser fornecida ao deco-
di�cador SISO envolvido no processo de turbo-equalização, o qual havia anteriormente
fornecido as LLR a priori L(ck)3.
A discussão acima realizada pode ser estendida a outros equalizadores SISO, tais
como os baseados no critério de mínimo erro médio quadrático (M. TÜCHLER, 2002),
caracterizando de maneira similar uma informação extrínseca que o equalizador extrai das
observações y, explorando a memória do canal.
Por outro lado, também é possível descrever de maneira semelhante o funcionamento
de um decodi�cador de canal SISO. Contando com o emprego de um desentrelaçador bem
projetado, os bits codi�cados são tratados por este tipo de decodi�cador como sendo es-
tatisticamente independentes, com probabilidades a priori obtidas das informações suaves2O emprego de entrelaçadores e desentrelaçadores bem projetados garante ser esta suposição factível
em sistemas de equalização turbo.3As LLR L(ck) são inicializadas com valor nulo, de forma coerente com o fato de que não há no inicio
da primeira iteração informação suave proveniente do decodi�cador de canal.
25
fornecidas pelo equalizador. Explorando a memória do codi�cador de canal, um deco-
di�cador SISO consegue extrair informações extrínsecas a serem realimentadas para o
equalizador. O algoritmo de decodi�cação SISO mais referenciado na literatura é o deco-
di�cador BCJR, cuja operação é analisada em (M. TÜCHLER, 2004).
2.3 FILTRO DE PARTÍCULAS
A �ltragem de partículas (FP), também denominada amostragem sequencial por im-
portância (SIS, de sequential importance sampling) (P.M. DJURIC, 2003) é um método
Bayesiano recursivo para estimação de estado, o qual se baseia na aproximação de dis-
tribuições de probabilidades contínuas por um conjunto de amostras ponderadas e no
conceito de amostragem por importância.
Nos últimos anos esta técnica tem sido aplicada com sucesso em diversas áreas da
engenharia, em problemas que requerem estimação de estado baseada em modelos não
lineares e/ou não Gaussianos (N.J. GORDON, 1993; A. DOUCET, 2000; M.S. ARULAM-
PALAM, 2002; C. BORDIN, 2008). Uma breve descrição desta metologia é apresentada
em seguida.
2.3.1 ESTIMAÇÃO DE ESTADOS BAYESIANA
Diversos problemas em engenharia recaem numa forma comum caracterizada pelo
objetivo de se estimar parâmetros internos de um sistema que não são diretamente obser-
váveis e podem não ser constantes, utilizando-se para tal uma sequência de dados aleatória
cuja probabilidade de ocorrência depende dos parâmetros a estimar e são coletadas na
presença de ruído.
A abordagem deste tipo de problema através de métodos Bayesianos de estimação se
assenta no emprego de um modelo probabilístico composto de duas equações vetoriais
envolvendo o vetor de parâmetros a ser estimado (usualmente denominado vetor de es-
tados) e o vetor de dados (vetor de observações). A primeira destas equações descreve
recursivamente a variação do vetor de estado e a outra descreve a conexão instantânea
entre este e o vetor de observações.
A equação de estado e a de observações são aqui respectivamente expressas como:
26
{xt = ft(xt−1,ut)
yt = ht(xt,wt)(2.7)
onde yt é o vetor de observações, xt é o vetor de estados, ft(·) e ht(·) são funções deter-
minísticas conhecidas, ut e wt são vetores de ruídos, e t corresponde ao índice em função
do qual as grandezas envolvidas variam (tempo, na maioria das aplicações).
No contexto da estimação de estados Bayesiana também se admite conhecidos os
modelos probabilísticos dos dois ruídos (ut e wt), os quais são usualmente considerados
estatisticamente independentes, sendo cada um deles um processo vetorial branco com
distribuição de primeira ordem conhecida. Admite-se ainda conhecida a distribuição de
probabilidade do vetor de estado no momento imediatamente anterior à obtenção da
primeira observação (distribuição a priori).
O objetivo de um método recursivo de estimação Bayesiana é obter para cada valor de
t uma estimativa do vetor de estado xt, a qual deve capturar toda a informação sobre xt
contida nas observações obtidas até o instante t+M , atendendo a um critério especí�co
de otimalidade. Além disso, tal estimativa deve ser calculada utilizando a estimativa do
estado anterior xt−1 e a observação mais recente yt+M . O signi�cado do parâmetro M é
explicitado um pouco mais adiante.
Pode-se mostrar que a estimativa ótima no sentido de qualquer critério Bayesiano
especí�co corresponde a um parâmetro da distribuição de probabilidade a posteriori do
vetor de estado, i.e., da distribuição de probabilidade condicional do estado, dadas as
observações até então obtidas (TREES, 2001).
Os critérios de otimalidade mais usuais no contexto de estimação Bayesiana são o de
mínimo erro quadrático médio (MEQM), em que a estimativa de estado corresponde à
média da distribuição a posteriori, e o de máximo a posteriori (MAP) em que a estimativa
corresponde a um valor do vetor de estados para o qual a distribuição a posteriori é
máxima.
Cabe aqui notar que no problema de estimação de estado pode-se distinguir 3 situações
particulares, de acordo com a relação temporal entre as observações utilizadas e a grandeza
estimada.
Dessa forma, a estimação de estado como acima descrita pode ser particularizada em:
predição, na qual se deseja estimar o estado num instante posterior ao da observação mais
recente (M < 0), �ltragem (M = 0) e suavização ou amaciamento (M > 0). Deste ponto
27
em diante faremos referência explícita ao problema de �ltragem, a bem da concisão, mas
os métodos apresentados se aplicam aos outros dois casos, com as devidas adaptações.
Diante do exposto acima, pode-se então caracterizar como objetivo principal de um
método Bayesiano de �ltragem o cálculo recursivo da distribuição de probabilidade con-
junta dos estados condicionada às observações, sendo necessário expressar as funções
p(x0:t|y0:t) através de p(x0:t−1|y0:t−1). Entretanto, em muitas situações de interesse é
impossível obter soluções exatas, principalmente devido ao fato de que a atualização das
distribuições necessárias pode requerer o cálculo de integrais que não têm solução analítica.
O algoritmo de estimação Bayesiana mais estudado e aplicado é o Filtro de Kalman
(KF, de Kalman Filter), que é uma solução ótima no sentido MEQM quando as equações
(ft(·) e ht(·)) são lineares, os ruídos (ut e wt) são gaussianos e mutuamente independentes,
e a distribuição a priori do vetor de estado também é Gaussiana. Nestas condições a
distribuição a posteriori é Gaussiana e o algoritmo de �ltragem de Kalman calcula recur-
sivamente os seus parâmetros, sem aproximações.
Para cenários onde os modelos são não-lineares ou o ruído é não-gaussiano, vários
métodos de aproximação foram propostos, como por exemplo o Filtro de Kalman Esten-
dido (EKF, de Extended Kalman Filter). Ao longo dos últimos anos a metodologia de
�ltragem de partículas vem se constituindo cada vez mais numa importante alternativa
ao EKF para ataque a este tipo de problema.
2.3.2 AMOSTRAGEM SEQUENCIAL POR IMPORTÂNCIA
Na �ltragem de partículas (amostragem sequencial por importância) as distribuições
de interesse são aproximadas por valores aleatórios discretos (partículas) e pesos a eles
associados.
Se p(x) é uma distribuição de interesse, sua aproximação é expressa por
p(x) ≈P∑i=1
λiδ(x− xi) (2.8)
onde xi denota uma partícula, λi denota o peso4 a ela correspondente, P é o número de
partículas utilizadas e δ(·) é a função delta de Dirac.4Os pesos são números reais não negativos e normalizados, de modo que
∑Pi=1 λ
i = 1.
28

Utilizando esta aproximação, cálculos de valores esperados que envolveriam integrais
são aproximadas por somas, como por exemplo:
E [g(x)] =
∫g(x)p(x)dx ≈
P∑i=1
λig(xi).
Um importante conceito usado na �ltragem por partículas é o de amostragem por
importância, que pode ser aplicada a casos em que é difícil gerar partículas diretamente
a partir da densidade de probabilidade p(x) que se deseja aproximar.
Nestes casos, a aproximação pode ser obtida utilizando-se outra função densidade de
probabilidade criteriosamente escolhida, denominada densidade de importância, a qual é
aqui denotada por q(x). Para cada partícula gerada através desta densidade são atribuídos
pesos (não-normalizados), de acordo com
λi∗ =
p(x)
q(x), (2.9)
e após a atribuição dos pesos de todas as partículas os mesmos são normalizados.
No caso da �ltragem Bayesiana recursiva, supondo que se dispõe da observação atual
yt e de uma aproximação da distribuição a posteriori p(x0:t−1|y0:t−1), associada ao con-
junto χt−1 ={xi0:t−1, λ
it−1
}Pi=1
de partículas e pesos, o objetivo é obter um conjunto de
parâmetros χt para aproximar p(x0:t|y0:t).
A metodologia de amostragem sequencial por importância alcança este objetivo uti-
lizando uma densidade de importância q(x0:t) escolhida de forma cuidadosa para a geração
de partículas xi0:t e para a atualização dos pesos, que pode ser dada por
λi∗ ∝
p(xi0:t)
q(xi0:t)
, (2.10)
onde a notação ∝ denota valores iguais a menos de um fator de normalização.
Se a densidade de importância empregada tiver a propriedade de que
q(x0:t|y0:t) = q(xt|x0:t−1,y0:t−1)q(x0:t−1|y0:t−1), (2.11)
é possível mostrar que a geração de partículas xi0:t pode ser feita com o emprego da
densidade condicional q(xt|xi0:t−1,y0:t), e que a atualização dos pesos pode ser feita de
forma recursiva, sendo dada por
λit ∝
p(yt|xit)p(x
it|xi
t−1)
q(xit|xi
0:t−1,y0:t)λit−1. (2.12)
29
Desta maneira, chega-se ao algoritmo de amostragem sequencial por importância (SIS)
pode ser descrito pelos seguintes passos:
1) gerar partículas através de x(i)t ∼ q(xt|xi
0:t−1,y0:t), com i = 1, · · · , P ;
2) calcular os pesos associados (λit) através da equação (2.12).
2.3.3 FUNÇÃO IMPORTÂNCIA
A densidade de importância tem um papel crucial no desempenho de um �ltro de
partículas (FP) e por isso tem sido objeto de alguns trabalhos de investigação. Na litera-
tura, as duas alternativas mais frequentemente utilizadas são a densidade de importância
a priori e a densidade de importância ótima.
A densidade de importância a priori é de�nida como q(xt|xi0:t−1,y0:t) = p(xt|xi
t−1). O
emprego desta densidade implica que a atualização dos pesos �ca dada por
λit ∝ λi
t−1p(yt|xit). (2.13)
A densidade de importância ótima minimiza a variância dos pesos condicionada a xit−1
e à observação yt, sendo dada por q(xt|xi0:t−1,y0:t) = p(xt|xi
t−1,y0:t). Quando esta função
de importância é utilizada, a atualização dos pesos é dada por
λit ∝ λi
t−1p(yt|xit−1). (2.14)
A implementação do FP utilizando a densidade de importância a priori é mais simples
do que utilizando a densidade ótima. A grande diferença é que o termo p(yt|xit−1), presente
na atualização dos pesos quando se emprega a densidade ótima exige o cálculo de uma
integral.
Cabe observar que, embora isso ocorra frequentemente na prática, o uso da densi-
dade de importância a priori implica desconsiderar a observação yt na geração de novas
partículas, o que pode limitar o desempenho do �ltro.
2.3.4 REAMOSTRAGEM
30
Uma característica importante dos algoritmos de �ltragem de partículas é que sem o
uso de alguma contramedida apropriada a maioria das partículas tenderia a �car associada
a pesos desprezíveis. Este fenômeno é conhecido como degenerescência e, se deixado fora
de controle, poderia degradar severamente o desempenho de um estimador baseado em
FP.
Entretanto, a degenerescência pode ser reduzida escolhendo-se bem a função importân-
cia e empregando uma técnica conhecida como reamostragem. Esta técnica consiste ba-
sicamente em substituir o conjunto de partículas corrente por um outro gerado com o
emprego da aproximação atual da distribuição de interesse. As novas partículas assim
obtidas recebem pesos idênticos.
A implementação deste método pode ser descrita da seguinte forma:
1) gerar P partículas x∗(i)t usando a distribuição χt;
2) fazer xit = x
∗(i)t e atribuir pesos iguais (1/P ) às partículas.
Para se evitar aumento excessivo no esforço computacional, o processo de reamostra-
gem não é realizado a cada passo da �ltragem, mas sim de acordo com a avaliação de
um parâmetro denominado valor efetivo do peso das partículas (M.S. ARULAMPALAM,
2002), que é dado por:
Peff =1
P∑P
i=1(λi)2
. (2.15)
Caso o valor efetivo do peso esteja abaixo de um limiar pré-de�nido, o processo de
reamostragem é realizado. Caso contrário, realiza-se o procedimento normal de geração
de partículas e atualização dos pesos. Na maioria dos trabalhos conhecidos o limiar acima
mencionado é escolhido no intervalo [1/4 1/2].
Levando em conta todos os pontos discutidos nesta seção, a concepção de uma solução
de �ltragem de partículas para um problema especí�co pode ser decomposta nas seguintes
etapas:
1) descrever o problema em termos de equações de estado e de observações;
2) escolher a função de importância para geração de partículas;
3) desenvolver as equações para atualização dos pesos.
Além disso, será necessário escolher o limiar do valor efetivo do peso das partículas
para ativação do algoritmo de reamostragem.
31
2.4 CONCLUSÃO
Neste capítulo foram descritas brevemente as técnicas de equalização turbo e �ltragem
de partículas. Estes tópicos são fundamentais no desenvolvimento deste trabalho e os
conceitos aqui apresentados são usados constantemente nos capítulos a seguir.
O fator mais crítico no emprego destas duas técnicas corresponde ao custo computa-
cional. Considerando primeiramente a equalização turbo, as iterações que ocorrem no
receptor geram um gasto computacional extra, em comparação a equalizadores sequen-
ciais. Entretanto, esse gasto pode ser compensado por uma melhora de desempenho
signi�cativa. Portanto, parece claro que a opção por este método �ca diretamente depen-
dente das condições de aplicação, tendo em vista que há aplicações em tempo real, por
exemplo, em que não é possível efetuar esta troca de complexidade por desempenho.
Por outro lado, com o emprego do �ltro de partículas é possível obter soluções de
estimação Bayesiana recursiva em condições de não linearidade e não gaussianidade, as
quais são precariamente cobertas por outros métodos �ltragem. Assim sendo, o aumento
de complexidade computational pode frequentemente resultar em ganhos de desempenho
compensadores.
32
3 EQUALIZADORES PROPOSTOS
3.1 INTRODUÇÃO
Desde o trabalho apresentado em (C. DOUILLARD, 1995), a turbo equalização tem
sido vista como uma maneira efetiva de se combater a ISI. A ideia básica da turbo equali-
zação é que um equalizador e um decodi�cador de canal SISO troquem informações suaves
a respeito dos símbolos transmitidos ao longo das iterações, com o intuito de reduzir a
BER. Contudo, em (C. DOUILLARD, 1995) é considerado um cenário de perfeito conhe-
cimento da CIR e NV, premissa que não corresponde a uma situação real de transmissão
na maioria das aplicações. Diferentes trabalhos nesta área de pesquisa foram apresentados
com o objetivo de aperfeiçoar a solução original e ampliar sua aplicação a cenários mais
realistas.
Alguns trabalhos tentaram lidar com o desconhecimento da CIR e da NV, como em
(X. WANG, 2001). Nesse artigo, é apresentado um equalizador SISO que utiliza o pro-
cedimento MCMC (de Markov Chain Monte Carlo) para a detecção dos símbolos em
um cenário que não utiliza sequências de treinamento para estimativa do canal (recepção
cega). Entretanto, a complexidade desse algoritmo se mostrou muito elevada e ainda com
possibilidades de divergência em casos de má inicialização dos parâmetros.
Alguns métodos, como o desenvolvido em (S. SONG, 2004), utilizam sequências de
treinamento, onde símbolos conhecidos são transmitidos para se obter estimativas iniciais
da CIR e NV, para, em seguida, apenas trabalhar com o rastreamento das variações da
CIR (canal variante) ou o re�namento da estimativa inicial da CIR (canal invariante).
Alguns dos trabalhos empregam o �ltro de Kalman (KF), utilizando o método conhecido
por Rao-Blackwellization (RBW) (X. WANG, 2002), onde os parâmetros da distribuição
do canal são propagados ao longo do tempo e a probabilidade a posteriori (APP) do
símbolo é obtida a partir de uma média estocástica dessa distribuição.
Em (GUIMARÃES, 2008), é elaborado um algoritmo de equalização SISO com solução
baseada em FP, que utiliza o método RBW (RBPF, de Rao-Blackwellised Particle Fil-
ter). Também é utilizada a técnica da suavização com retardo �xo, que condiciona as
33
APPs com observações futuras, com o intuito de reduzir a taxa de erros. Nesse artigo
foram realizadas avaliações de desempenho em cenários de equalização cega com canais
variantes no tempo. Entretanto, nesse trabalho a variância do ruído não foi considerada
um parâmetro desconhecido.
A modelagem probabilística da CIR e da NV muitas vezes inviabiliza a obtenção
de expressões analíticas para as FDPs a posteriori dos símbolos, tornando necessário
realizar integrações numéricas, o que gera um custo computacional excessivo. No intuito
de evitar tal problema, serão desenvolvidos equalizadores que empregam o FP, onde os
parâmetros desconhecidos (canal e variância do ruído) são obtidos por meio do cálculo de
uma média probabilística, via integração analítica, admitindo-se o conhecimento prévio
das distribuições a priori desses parâmetros. Com isto, o FP é implementado tendo como
vetor de estados formado apenas pelos símbolos (não incluindo a CIR e NV), o que alivia
o peso computacional do algoritmo de equalização.
Neste capítulo são também apresentadas duas metodologias para re�nar os parâmetros
estatísticos das distribuições ao �nal de uma iteração, para utilizá-los como parâmetros
iniciais na próxima iteração. A primeira utiliza os parâmetros da CIR e NV, para estimar,
ao �nal do bloco de uma iteração turbo, a média e a matriz covariância do erro de
estimação do canal e a variância do ruído. A segunda abordagem utiliza a correlação
cruzada entre as observações e a saída suave do decodi�cador para estimar os coe�cientes
da resposta ao impulso do canal.
Na seção 3.2 é introduzido o equalizador FLPSCV, que emprega o FP e que considera
a CIR e NV como parâmetros desconhecidos. Na seção 3.3 são apresentadas 3 variantes
deste equalizador (FLPSCV-F1, FLPSCV-F2 e FLPSCV-F3) que realimentam estimativas
dos parâmetros da CIR e/ou NV extraídas do equalizador. Na seção 3.4 é apresentada
uma quarta variante do equalizador FLPSCV, que realimenta estimativas dos coe�cientes
do canal calculadas a partir das saídas suaves do decodi�cador.
3.2 EQUALIZADOR FLPSCV
3.2.1 MODELAGEM DAS OBSERVAÇÕES
34

No sistema de comunicação considerado neste trabalho, sucessivos bits são codi�cados,
permutados e posteriormente mapeados em símbolos (xn). Antes de ser realizada a trans-
missão, os símbolos são separados em quadros e cada quadro pode conter um preâmbulo
com uma sequência de treinamento. O receptor é coerente e possui um �ltro casado, que
atende o critério de Nyquist para evitar a interferência entre símbolos. O sinal recebido
está corrompido por um ruído branco aditivo gaussiano (AWGN) e pela ISI provocada
pela resposta ao impulso do canal. Neste cenário, a equação de observação �ca:
yn = xTnh+ ωn, (3.1)
onde h = [h1, . . . , hL]T representa os coe�cientes da CIR, considerada de comprimento
�nito e invariante no tempo. O vetor xn = [xn, xn−1 . . . , xn−L+1]T contém os símbolos
transmitidos no intervalo de tempo de n a n−L+1 e ωn é uma amostra de ruído AWGN
no instante n.
3.2.2 MODELAGEM A PRIORI DO CANAL E DA VARIÂNCIA DO RUÍDO
Assume-se que a CIR e a NV são elementos desconhecidos e aleatórios com funções
densidade de probabilidade (FDP) a priori dadas, respectivamente, por:
p(h) = N (h; h0,Λ0) (3.2)
p(σ2ω) = IG(σ2
ω;α0, β0) (3.3)
onde N (h; h0,Λ0) representa uma distribuição gaussiana com argumento h, média h0 (es-
timativa inicial da CIR) e matriz covariância Λ0 (matriz covariância do erro de estimação
da CIR). A função IG(σ2ω;α0, β0) corresponde a uma distribuição Inversa-Gamma com
argumento σ2ω e parâmetros de forma e escala dados por α0 e β0, respectivamente.
3.2.3 DISTRIBUIÇÃO A POSTERIORI DOS SÍMBOLOS
Em um esquema de turbo equalização, é necessário o cálculo das APPs do símbolo
transmitido na etapa da equalização, tendo em vista que esta informação será utilizada
para alimentar o decodi�cador. O equalizador aqui apresentado calcula recursivamente
35

as APPs (p(x1:n|y1:n+M)) utilizando uma abordagem que emprega técnicas baseadas em
FP e suavização com retardo �xo (FLPS).
Assim sendo, admite-se que a distribuição conjunta dos símbolos (x1:n) a posteriori
pode ser aproximada por:
p(x1:n|y1:n+M) ≈P∑i=1
λinδ(x1:n − xi
1:n), (3.4)
onde as amostras xi1:n são geradas da função de importância q(x1:n|y1:n+M), e que a
atualização dos pesos λin associada a i-ésima trajetória xi
1:n−1 é dada por:
λin ∝ p(xi
1:n|y1:n+M)
q(xi1:n|y1:n+M)
,P∑i=1
λin = 1.
Assumindo que a função de importância pode ser fatorada conforme abaixo:
q(x1:n|y1:n+M) = q(xn|x1:n−1,y1:n+M)q(x1:n−1|y1:n+M−1),
pode-se obter os pesos λin recursivamente da seguinte forma:
λin ∝ λi
n−1 ×p(xi
n|xi1:n−1,y1:n+M)p(yn+M |xi
1:n−1,y1:n+M−1)
q(xin|xi
1:n−1,y1:n+M).
Soluções baseadas no algoritmo SIS sofrem do fenômeno de degenerescência das partícu-
las (vide subseção 2.3.4), logo é importante realizar periodicamente a reamostragem dos
pesos (λin) e também escolher com cautela a distribuição de importância q(xn|xi
1:n−1,y1:n+M).
Em relação à distribuição de importância, será escolhida a função "ótima" (no sentido
de minimização da variância dos pesos) (A. DOUCET, 2000) dada por:
qopt(xn|xi1:n−1,y1:n+M) = p(xn|xi
1:n−1,y1:n+M). (3.5)
Logo, os pesos das partículas são determinados por:
λin ∝ λi
n−1 × p(yn+M |xi1:n−1,y1:n+M−1). (3.6)
Determina-se a seguir as expressões para a distribuição de importância de (3.5) e a
função de verossimilhança mostrada em (3.6).
36

3.2.4 FUNÇÃO IMPORTÂNCIA
Em cada instante de tempo n e para cada trajetória i (i = 1, . . . , P ), é gerada uma
nova partícula xin, de acordo com a função da equação (3.5). Essa função pode ser escrita
como:
p(xn|xi1:n−1,y1:n+M) =
p(xn)p(yn:n+M |xn,xi1:n−1,y1:n−1)∑
xnp(xn)p(yn:n+M |xn,xi
1:n−1,y1:n−1). (3.7)
A probabilidade p(xn) é conhecida (informação suave para o equalizador) e o cálculo da
função p(yn:n+M |xn,xi1:n−1,y1:n−1) requer algumas manipulações algébricas. Para realizá-
lo, inicialmente escrevemos:
p(yn:n+M |xn,xi1:n−1,y1:n−1) =
∑xn+1
. . .∑xn+M
[M∏k=1
p(xn+k)
]× p(yn:n+M |θi
n), (3.8)
onde θin
def= {xn:n+M ,xi
1:n−1,y1:n−1}.A função de verossimilhança acima pode ser expressa como:
p(yn:n+M |θin) =
∫σ2ω
∫h
p(yn:n+M |θin,h, σ
2ω)p(h, σ
2ω|θi
n)dhdσ2ω. (3.9)
A decomposição da distribuição conjunta da CIR e NV (cálculo apresentado na seção
3.3) resulta em:
p(h, σ2ω|θi
n) = p(h|σ2ω,θ
in)p(σ
2ω|θi
n)
= N (h; hin,Λ
in)× IG(σ2
ω;αn−1, βin−1), (3.10)
onde as funções N (h; hin,Λ
in) e IG(σ2
ω;αn−1, βin−1) representam as distribuições a priori
do canal e da variância do ruído, respectivamente. Os parâmetros dessas funções, descritos
na subseção 3.2.2, podem ser atualizados recursivamente, conforme cálculos apresentados
na seção 3.3.
Substituindo (3.10) em (3.9) e observando que a função densidade condicional de
yn:n+M é Gaussiana (segundo modelo (3.1)), teremos:
37

p(yn:n+M |θin) =
∫σ2ω
∫h
N (yn:n+M ;Xnh, σ2ωIM+1)N (h; hi
n,Λin)dh︸ ︷︷ ︸
I1
× IG(σ2ω;αn−1, β
in−1)dσ
2ω, (3.11)
onde Xn = [xn+M ,xn+M−1, . . . ,xn]T e IM+1 é uma matriz identidade de ordem M + 1.
Por conveniência, considera-se que a matriz covariância do erro de estimação da CIR
pode ser fatorada como Λin ≡ σ2
ωQin, onde a matriz Qi
n é obtida através do �ltro de
Kalman. Com esta premissa, pode-se veri�car que o cálculo da integral I1 em (3.11)
resulta em:
I1 = N (yn:n+M ;Xnhin, σ
2ωΣn), (3.12)
onde Σn = IM+1 +XnQin(Xn)
H .
Substituindo (3.12) em (3.11) e após algumas manipulações algébricas, é possível obter:
p(yn:n+M |θin) = ki
n
∫ ∞
0
(σ2ω)
−bne−ain/σ2ωdσ2
ω, (3.13)
onde: kin = (2π)−
M+12 det(Σn)
− 12(βi
n−1)αn−1
Γ(αn−1)
ain =1
2(yn:n+M −Xnhn)
HΣ−1n × (yn:n+M −Xnhn) + βi
n−1
bn = M+12
+ αn−1 + 1
É possível ainda veri�car que completando o integrando na equação (3.13) com o fator(ain)
bn−1
Γ(bn−1)obtém-se uma FDP Inversa-Gamma, logo:
p(yn:n+M |θin) = ki
n
Γ(bn − 1)
(ain)bn−1
. (3.14)
Combinando as expressões (3.7), (3.8) e (3.14) e observando que o valor bn não é
função da sequência de símbolos xn, xn+1, . . . , xn+M , chegaremos �nalmente à expressão
fechada da função de importância, que é a seguinte:
p(xn|xi1:n−1,y1:n+M) = p(xn)×
∑xn+1
. . .∑
xn+M
[∏Mk=1 p(xn+k)
]kin(a
in)
1−bn∑xn
. . .∑
xn+M
[∏Mk=0 p(xn+k)
]kin(a
in)
1−bn
. (3.15)
38
3.2.5 ATUALIZAÇÃO DOS PESOS
O peso incremental dado por λin
def= p(yn+M |xi
1:n−1,y1:n+M−1) pode ser calculado da
seguinte maneira:
λin =
p(yn:n+M |xi1:n−1,y1:n−1)
p(yn:n+M−1|xi1:n−1,y1:n−1)
=
∑xn
. . .∑
xn+M
[∏Mk=0 p(xn+k)
]p(yn:n+M |θi
n)∑xn
. . .∑
xn+M−1
[∏M−1k=0 p(xn+k)
]p(yn:n+M−1|θi
n). (3.16)
Nota-se que o numerador da equação (3.16) é um fator do denominador da equação
(3.15), logo o custo computacional para calcular o peso utilizando a equação (3.16) será
somente devido ao cálculo da FDP p(yn:n+M−1|xi1:n−1,y1:n−1).
3.2.6 SAÍDA SUAVE
O esquema de funcionamento do equalizador FLPSCV é mostrado na �gura 3.1. Nesta
�gura é apresentado um diagrama de blocos que identi�ca as principais etapas do equali-
zador.
Analisando o diagrama, pode-se observar que o equalizador recebe como parâmetros
de entrada as amostras do sinal recebido (y1:n+M), os parâmetros estatísticos iniciais da
CIR (hi0 eQ
i0) e da NV (α0 e βi
0) e as informações extrínsecas proveniente do decodi�cador
(Lext(xn:n+M |y1:n+M)).
A cada instante de tempo e para todas as trajetórias das partículas, os parâmetros
estatísticos da CIR e NV são atualizados no equalizador, utilizando o método RBW e
a evolução recursiva de αn−1 e βin−1. Após a atualização dos parâmetros das variáveis
modeladas, é feito o cálculo da função importância e atualização dos pesos, utilizando
as equações (3.15) e (3.16), permitindo, assim, o sorteio da partícula na trajetória e,
posteriormente, o cálculo da informação suave.
O cálculo da saída suave do equalizador é realizada da seguinte forma:
L(xn|y1:n+M) = ln
(P (xn = 1|y1:n+M)
P (xn = −1|y1:n+M)
). (3.17)
39
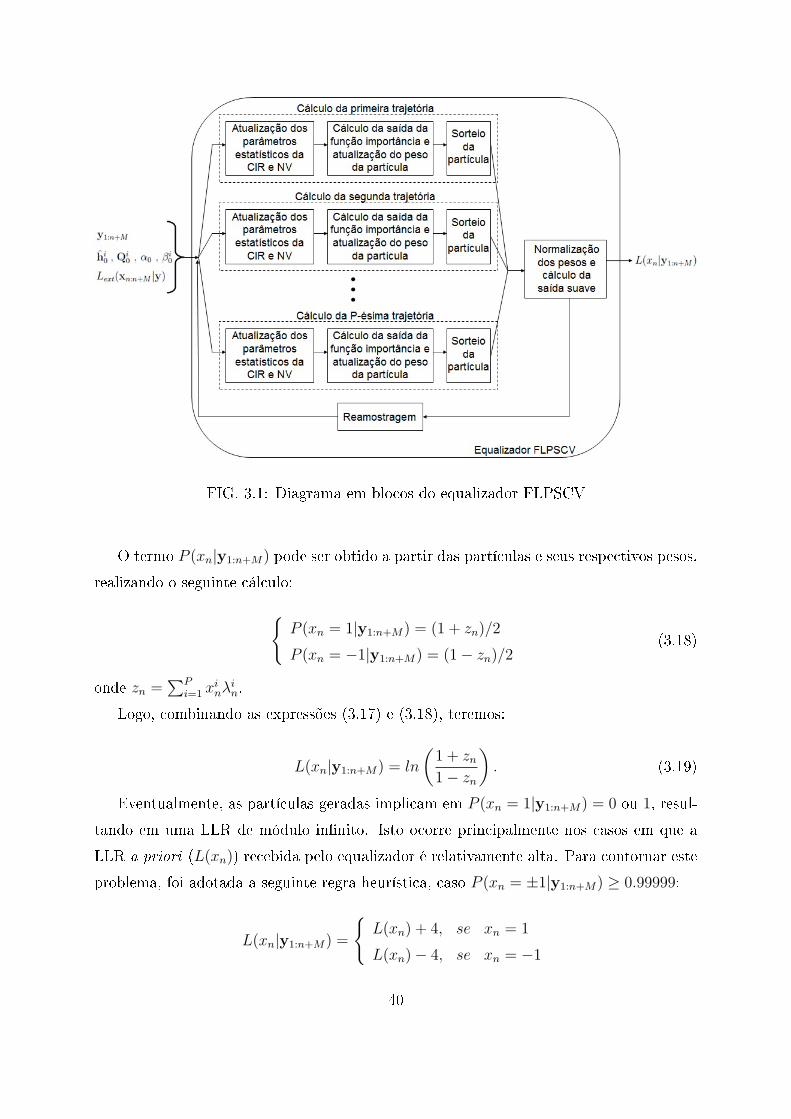
FIG. 3.1: Diagrama em blocos do equalizador FLPSCV
O termo P (xn|y1:n+M) pode ser obtido a partir das partículas e seus respectivos pesos,
realizando o seguinte cálculo:
{P (xn = 1|y1:n+M) = (1 + zn)/2
P (xn = −1|y1:n+M) = (1− zn)/2(3.18)
onde zn =∑P
i=1 xinλ
in.
Logo, combinando as expressões (3.17) e (3.18), teremos:
L(xn|y1:n+M) = ln
(1 + zn1− zn
). (3.19)
Eventualmente, as partículas geradas implicam em P (xn = 1|y1:n+M) = 0 ou 1, resul-
tando em uma LLR de módulo in�nito. Isto ocorre principalmente nos casos em que a
LLR a priori (L(xn)) recebida pelo equalizador é relativamente alta. Para contornar este
problema, foi adotada a seguinte regra heurística, caso P (xn = ±1|y1:n+M) ≥ 0.99999:
L(xn|y1:n+M) =
{L(xn) + 4, se xn = 1
L(xn)− 4, se xn = −1
40
O processo de reamostragem ilustrado na �gura 3.1 é realizado somente nos casos em
que o peso efetivo das partículas (Peff ) é menor que um limiar pré-de�nido, conforme
descrito na subseção 2.3.4.
Detalhes adicionais da implementação do algoritmo FLPSCV são apresentados na
subseção 4.2.6.
3.3 REALIMENTAÇÃO DE ESTIMATIVAS EXTRAÍDAS DO EQUALIZADOR
A escolha dos parâmetros estatísticos iniciais (média, matriz covariância do erro da
estimativa do canal e a variância do ruído) é um fator que impacta diretamente a taxa
de erros em uma recepção cega. Com o intuito de apresentar técnicas que exploram
os parâmetros da CIR (hin, Q
in) e da NV (αn−1 e βi
n−1), continuamente atualizados ao
longo do tempo em suas respectivas trajetórias no equalizador, são apresentados nesta
seção mais detalhes sobre a implementação do método Rao-Blackwellization (RBW) e do
cálculo da evolução recursiva de αn−1 e βin−1.
Também é descrito como realizar estimativas da média, da matriz covariância do erro
da estimativa do canal e da variância do ruído a partir dos valores hin, Q
in, αn−1 e βi
n−1
de cada trajetória. O objetivo de se calcular estas estimativas ao �nal de uma iteração é
utilizá-las como parâmetros iniciais na iteração seguinte, possibilitando uma convergência
mais rápida do processo turbo.
O princípio da realimentação destas estimativas extraídas do equalizador em um re-
ceptor turbo pode ser resumido por um diagrama em blocos, como o mostrado na �gura
3.2. Analisando o diagrama, pode-se observar que ao �nal de uma iteração são geradas
novas estimativas de h, Q e σ2w, que podem ser utilizadas como parâmetros iniciais para
a próxima iteração.
3.3.1 ESTIMAÇÃO DA CIR E DETERMINAÇÃO DA MATRIZ COVARIÂNCIA DO
ERRO DE ESTIMAÇÃO DO CANAL
A técnica RBW possibilita que a APP da variável de interesse (no nosso caso os sím-
bolos transmitidos) seja obtida por meio de uma média condicionada ao parâmetro des-
conhecido (no nosso caso a CIR). Ou seja, matematicamente, E[x|y] = Ex [E[h|x,y]|y].
41
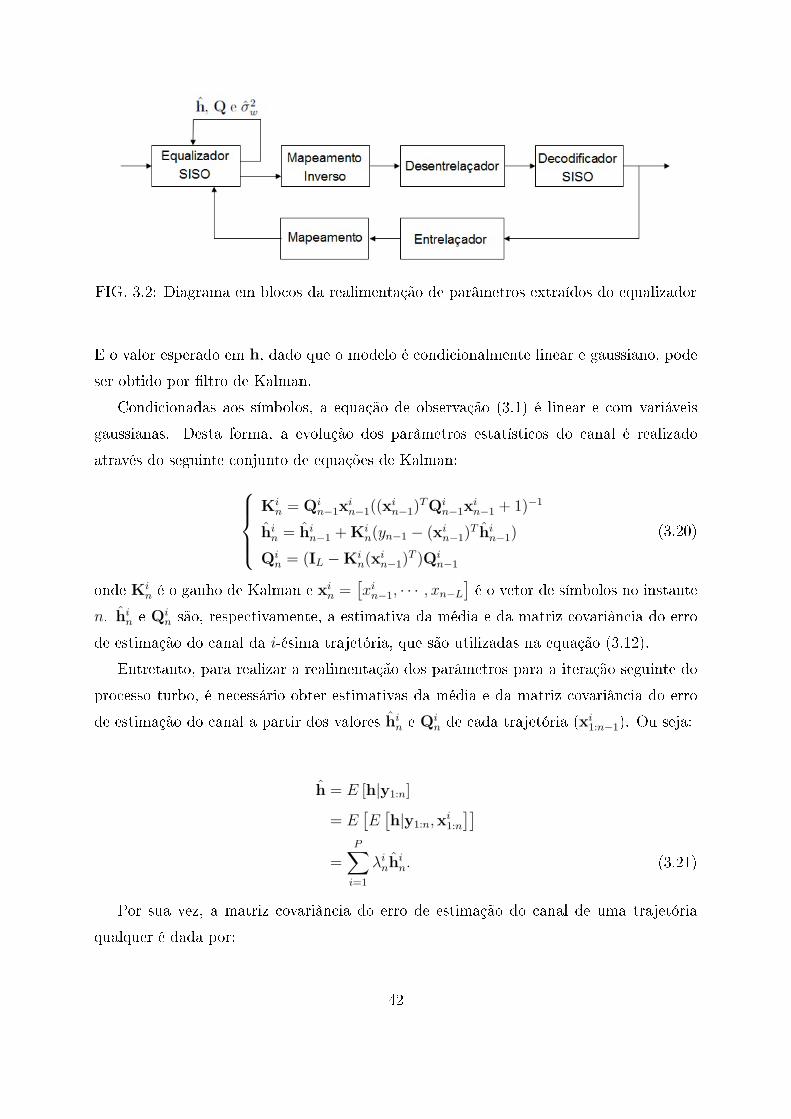
FIG. 3.2: Diagrama em blocos da realimentação de parâmetros extraídos do equalizador
E o valor esperado em h, dado que o modelo é condicionalmente linear e gaussiano, pode
ser obtido por �ltro de Kalman.
Condicionadas aos símbolos, a equação de observação (3.1) é linear e com variáveis
gaussianas. Desta forma, a evolução dos parâmetros estatísticos do canal é realizado
através do seguinte conjunto de equações de Kalman:Ki
n = Qin−1x
in−1((x
in−1)
TQin−1x
in−1 + 1)−1
hin = hi
n−1 +Kin(yn−1 − (xi
n−1)T hi
n−1)
Qin = (IL −Ki
n(xin−1)
T )Qin−1
(3.20)
onde Kin é o ganho de Kalman e xi
n =[xin−1, · · · , xn−L
]é o vetor de símbolos no instante
n. hin e Qi
n são, respectivamente, a estimativa da média e da matriz covariância do erro
de estimação do canal da i-ésima trajetória, que são utilizadas na equação (3.12).
Entretanto, para realizar a realimentação dos parâmetros para a iteração seguinte do
processo turbo, é necessário obter estimativas da média e da matriz covariância do erro
de estimação do canal a partir dos valores hin e Qi
n de cada trajetória (xi1:n−1). Ou seja:
h = E [h|y1:n]
= E[E[h|y1:n,x
i1:n
]]=
P∑i=1
λinh
in. (3.21)
Por sua vez, a matriz covariância do erro de estimação do canal de uma trajetória
qualquer é dada por:
42

Λin = σ2
wQin = E
[(h− hi
n)(h− hin)
T |xi1:n
]= E
[hhT |xi
1:n
]− hi
n(hin)
T . (3.22)
Assim, utilizando as equações (3.21) e (3.22), pode-se efetuar uma estimação explícita
da matriz covariância do erro de estimação do canal através das seguintes manipulações:
Λ = σ2wQ = E
[(h− h)(h− h)T
]= E
[E[(h− h)(h− h)T |xi
1:n
]]= E
[E[hhT |xi
1:n
]− E
[h|xi
1:n
]hT − hE
[h|xi
1:n
]T+ hhT
]= E
[E[hhT |xi
1:n
]− hi
nhT − h(hi
n)T + hhT
]= E
E [hhT |xi1:n
]− hi
n(hin)
T︸ ︷︷ ︸Λi
n
+hin(h
in)
T − hinh
T − h(hin)
T + hhT
= E
[Λi
n + (hin − h)(hi
n − h)T]
=P∑i=1
λin
[Λi
n + (hin − h)(hi
n − h)T]
=P∑i=1
λin
[σ2wQ
in + (hi
n − h)(hin − h)T
]= σ2
w
P∑i=1
λin
[Qi
n +1
σ2w
(hin − h)(hi
n − h)T].
Desta forma, obtém-se a seguinte estimativa da matriz Q:
Q =P∑i=1
λin
[Qi
n +1
σ2w
(hin − h)(hi
n − h)T]. (3.23)
3.3.2 ESTIMAÇÃO DA VARIÂNCIA DO RUÍDO
Dados os valores hi0 , Qi
0 e α0 e βi0 (determinados conforme cálculo apresentado no
capítulo 5) e que os termos hi0 , Qi
0 são atualizados pelo método RBW, é necessário
calcular inicialmente a seguinte função:
43

p(σ2ω|xi
1, y1) =p(y1|σ2
ω,xi1)p(σ
2ω)
p(y1|xi1)
,
onde p(y1|σ2ω,x
i1) = N (y1; (x
i1)
T hi1, σ
2ω (1 + (xi
1)TQi
1x1)︸ ︷︷ ︸λ1
).
Através de manipulações algébricas, chegamos à solução fechada, dada por:
p(σ2ω|xi
1, y1) =(βi
0)α0(2πσ2
ωλ1)−1/2e
(− βi0
σ2ω− (y1−(xi1)
T hi1)
2
2σ2ωλ1
)(σ2
ω)−(α0+1)
p(y1|xi1)
= k1e−βi
1/σ2ω(σ2
ω)(−α1−1).
Analisando a equação acima, obtemos as seguintes expressões para o cálculo de α1 e
βi1:
α1 = α0 + 1/2
βi1 = βi
0 +(y1 − (xi
1)T hi
1)2
2λ1
Agora, para n = 2, 3, . . ., temos que obter a expressão para:
p(σ2ω|xi
1:n−1,y1:n−1) =p(yn−1|σ2
ω,xi1:n−1,y1:n−2)p(σ
2ω|xi
1:n−1,y1:n−2)
p(yn−1|xi1:n−1,y1:n−2)
,
onde
p(yn−1|σ2ω,x
i1:n−1,y1:n−2) = N (yn−1; (x
in−1)
T hin−1, σ
2ω (1 + (xi
n−1)TQi
n−1xin−1︸ ︷︷ ︸
λn−1
).
Entretanto,
p(σ2ω|xi
1:n−1,y1:n−2) = p(σ2ω|xi
1:n−2,y1:n−2) = IG(σ2ω;αn−2, β
in−2)
logo,
p(σ2ω|xi
1:n−1, y1:n−1) = IG(σ2ω;αn−1, β
in−1).
Desta maneira, podemos facilmente encontrar as expressões para o cálculo de αn−1 e
βin−1, dados por:
44
αn−1 = αn−2 + 1/2
βin−1 = βi
n−2 +(yn−1 − (xi
n−1)T hi
n−1)2
2λn−1
Da mesma forma como ocorreu com a média e a matriz covariância do canal, deseja-
se obter uma estimativa da variância do ruído, utilizando os parâmetros recursivamente
atualizados αn−1 e βin−1. Esta estimativa é calculada através de uma média ponderada das
estimativas obtidas em cada trajetória (xi1:n−1) no instante n, conforme equação abaixo:
σ2ω =
P∑i=1
λin(σ
iω)
2 =P∑i=1
λin
βin−1
αn−1 − 1. (3.24)
3.3.3 EQUALIZADORES TURBO COM REALIMENTAÇÃO DE ESTIMATIVAS DE
PARÂMETROS
Nesta subseção são propostas alterações no algoritmo FLPSCV para realizar reali-
mentações de estimativas da média e matriz covariância do canal e da variância do ruído
extraídas no �nal de cada iteração turbo, para serem utilizadas na iteração seguinte. Com
base nos cálculos descritos nas subseções 3.3.1 e 3.3.2, três variantes são apresentadas:
• FLPSCV-F1: Algoritmo de equalização FLPSCV com realimentação dos coe�cientes
da CIR (h), estimados a partir da equação (3.21);
• FLPSCV-F2: Algoritmo de equalização FLPSCV com realimentação dos coe�cientes
da CIR (h) e da matriz covariância (Q), estimados a partir das equações (3.21) e
(3.23);
• FLPSCV-F3: Algoritmo de equalização FLPSCV com realimentação dos coe�cientes
da CIR (h), da matriz covariância (Q) e da variância do ruído (σ2ω), estimados a
partir das equações (3.21), (3.23) e (3.24);
O diagrama em blocos do equalizador FLPSCV-F35 é mostrado na �gura 3.3.
5É apresentado apenas o diagrama do equalizador FLPSCV-F3, tendo em vista que, para diferenciar
esse equalizador dos demais (FLPSCV-F1 e FLPSCV-F2), basta desconsiderar os cálculos dos parâmetros
não utilizados.
45
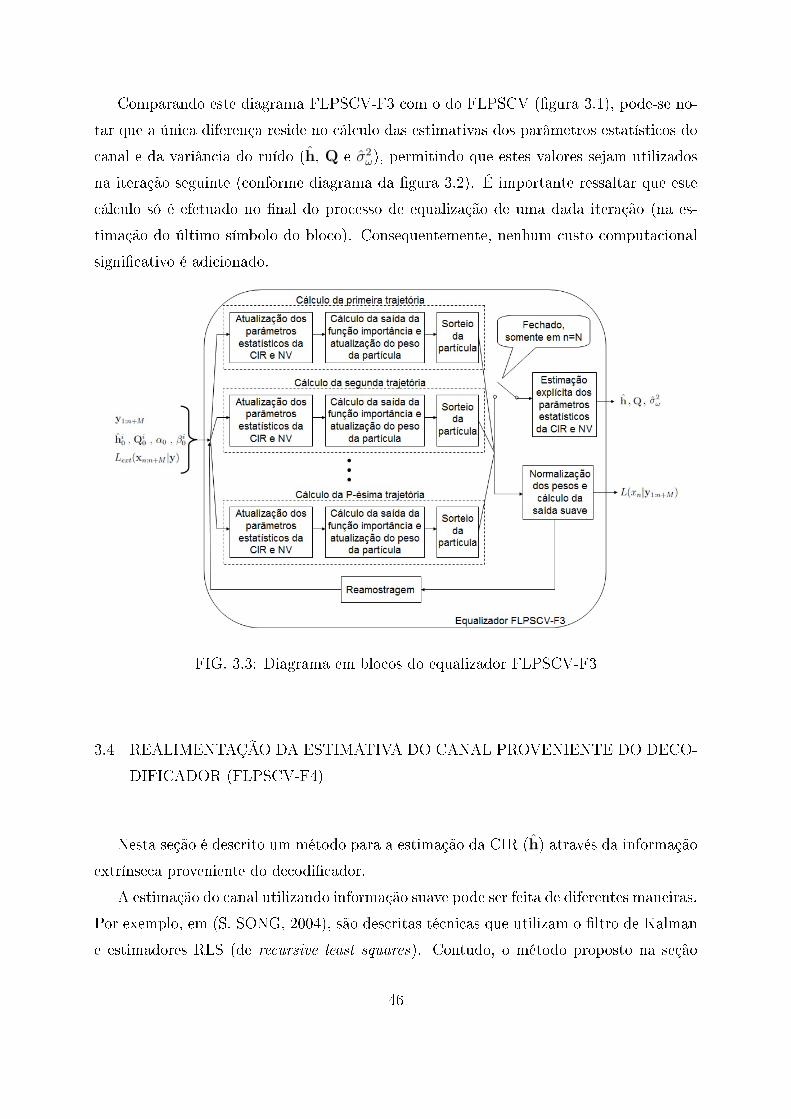
Comparando este diagrama FLPSCV-F3 com o do FLPSCV (�gura 3.1), pode-se no-
tar que a única diferença reside no cálculo das estimativas dos parâmetros estatísticos do
canal e da variância do ruído (h, Q e σ2ω), permitindo que estes valores sejam utilizados
na iteração seguinte (conforme diagrama da �gura 3.2). É importante ressaltar que este
cálculo só é efetuado no �nal do processo de equalização de uma dada iteração (na es-
timação do último símbolo do bloco). Consequentemente, nenhum custo computacional
signi�cativo é adicionado.
FIG. 3.3: Diagrama em blocos do equalizador FLPSCV-F3
3.4 REALIMENTAÇÃO DA ESTIMATIVA DO CANAL PROVENIENTE DO DECO-
DIFICADOR (FLPSCV-F4)
Nesta seção é descrito um método para a estimação da CIR (h) através da informação
extrínseca proveniente do decodi�cador.
A estimação do canal utilizando informação suave pode ser feita de diferentes maneiras.
Por exemplo, em (S. SONG, 2004), são descritas técnicas que utilizam o �ltro de Kalman
e estimadores RLS (de recursive least squares). Contudo, o método proposto na seção
46
3.4.1 é menos complexo, com o intuito de não elevar ainda mais o custo computacional
do receptor.
Utilizando o método proposto neste trabalho, é apresentado na subseção 3.4.2 uma
outra variante do equalizador FLPSCV.
3.4.1 ESTIMAÇÃO DO CANAL ATRAVÉS DAS SAÍDAS SUAVES DO DECODIFI-
CADOR
A técnica proposta utiliza a correlação cruzada entre as observações (y) e a infor-
mação extrínseca dos símbolos provenientes do decodi�cador (Lext (x|y)) para realizar a
estimação do canal.
Para efetuar o cálculo da correlação cruzada é utilizado o modelo para os valores das
saídas suaves descrito em (BRINK, 2001), dado por:
Lext (xn|y) = (σ2v
2)xn + vn. (3.25)
onde vn é uma variável aleatória independente de xn e que segue uma distribuição gaus-
siana (N (0, σ2v)). Neste modelo admite-se que:
• As médias condicionais das LLRs são, em módulo, iguais à metade da variância;
• A variável vk é descorrelacionada com o ruído nk do modelo das observações (equação
(3.1));
A suposição de que vk e nk são descorrelacionados é justi�cável, tendo em vista que a
variável vk está associada à informação extrínseca produzida pelo decodi�cador, e ainda,
que são empregados entrelaçadores no processo de turbo equalização, minimizando o efeito
de correlação entre as amostras.
A hipótese de que as médias condicionais das LLRs são, em módulo, iguais à metade
da variância é muito simplista, porém necessária para simpli�car a obtenção do estimador.
No entanto, o objetivo deste estimador não é ter desempenho semelhante ao de outros
desenvolvidos com modelos mais rigorosos, mas, sim, servir como uma técnica de baixa
complexidade que proporcione ganhos em desempenho de receptores que empregam a
estrutura turbo.
47

Portanto, adotando os modelos de observações e da informação extrínseca dadas, res-
pectivamente, pelas equações (3.1) e (3.25), podemos escrever:
Ryl(k) = E [ynLext(xn−k|y)]
= E
[(xT
nh+ ωn)
((σ2v
2)xn−k + vn−k
)]= E
[(L∑l=1
(xn−l+1hl) + ωn
)((σ2v
2)xn−k + vn−k
)]
= E
[(σ2v
2)x2
n−khk−1
]= (
σ2v
2)hk−1 (3.26)
Podemos obter uma estimativa da correlação cruzada entre as observações e as saídas
suaves através do seguinte cálculo:
Ryl(k) =1
N − k
N∑n=k+1
ynLext (xn−k|y) . (3.27)
Assim, combinando as expressões (3.26) e (3.27), podemos obter a estimativa do coe-
�ciente do canal hk−1, através da expressão:
hk−1 =Ryl(k)
σ2v/2
. (3.28)
É possível obter σ2v utilizando o momento de segunda ordem de Lext(xn|y). Inicial-
mente escreveremos:
E[Lext(xn|y)2
]= E
[Lext(xn|y)2|xn = 1
]P [xn = 1] + E
[Lext(xn|y)2|xn = −1
]P [xn = −1]
= E[(σ2
v/2 + vn)2]P [xn = 1] + E
[(−σ2
v/2 + vn)2]P [xn = −1]
= σ4v/4 + σ2
v (3.29)
Utilizando a estimativa do momento de segunda ordem de Lext(xn|y), dada por:
M2 [Lext(xn|y)] =1
N
N∑n=1
Lext(xn|y)2
e combinando com a equação (3.29), obtemos:
48
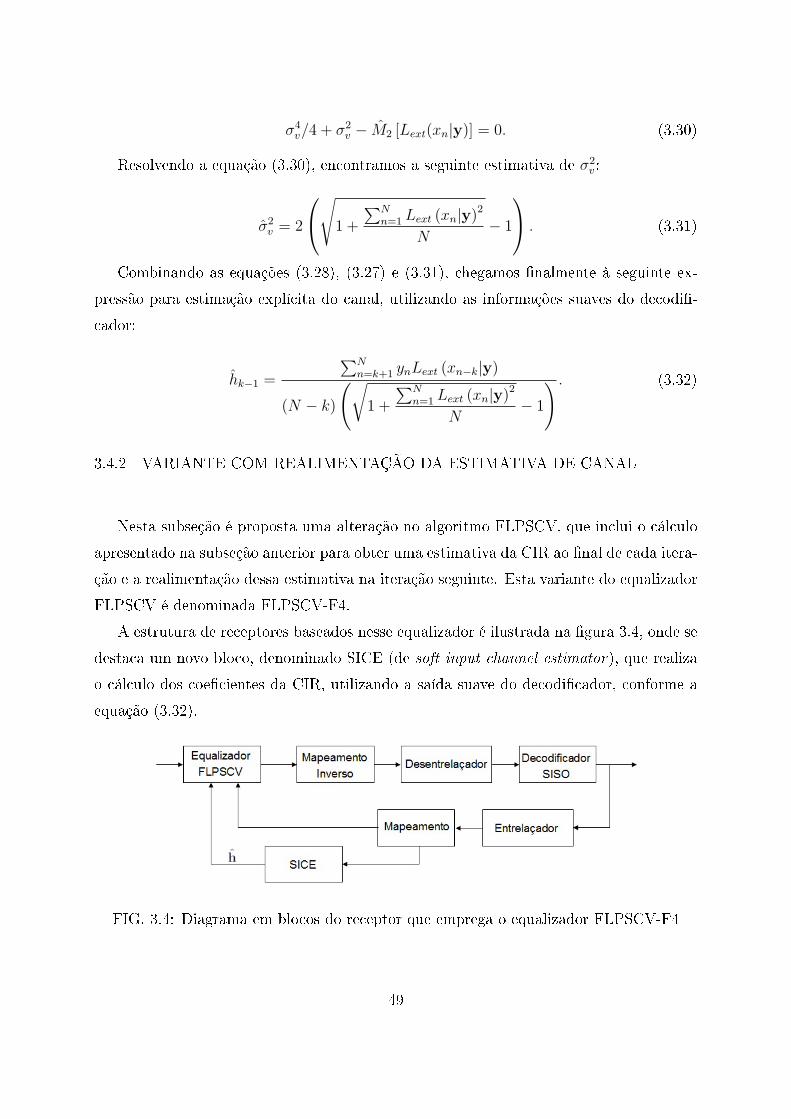
σ4v/4 + σ2
v − M2 [Lext(xn|y)] = 0. (3.30)
Resolvendo a equação (3.30), encontramos a seguinte estimativa de σ2v :
σ2v = 2
√1 +
∑Nn=1 Lext (xn|y)2
N− 1
. (3.31)
Combinando as equações (3.28), (3.27) e (3.31), chegamos �nalmente à seguinte ex-
pressão para estimação explícita do canal, utilizando as informações suaves do decodi�-
cador:
hk−1 =
∑Nn=k+1 ynLext (xn−k|y)
(N − k)
(√1 +
∑Nn=1 Lext (xn|y)2
N− 1
) . (3.32)
3.4.2 VARIANTE COM REALIMENTAÇÃO DA ESTIMATIVA DE CANAL
Nesta subseção é proposta uma alteração no algoritmo FLPSCV, que inclui o cálculo
apresentado na subseção anterior para obter uma estimativa da CIR ao �nal de cada itera-
ção e a realimentação dessa estimativa na iteração seguinte. Esta variante do equalizador
FLPSCV é denominada FLPSCV-F4.
A estrutura de receptores baseados nesse equalizador é ilustrada na �gura 3.4, onde se
destaca um novo bloco, denominado SICE (de soft input channel estimator), que realiza
o cálculo dos coe�cientes da CIR, utilizando a saída suave do decodi�cador, conforme a
equação (3.32).
FIG. 3.4: Diagrama em blocos do receptor que emprega o equalizador FLPSCV-F4
49
3.5 RESUMO
Na seção 3.2 foi apresentado um equalizador SISO, denominado FLPSCV, baseado
em FP e suavização com retardo �xo para um cenário em que a CIR e a NV são consi-
deradas desconhecidas. Na seção 3.3 foram apresentadas 3 variantes desse equalizador,
denominadas FLPSCV-F1, FLPSCV-F2 e FLPSCV-F3, nos quais a CIR e a NV são es-
timadas ao �nal de cada iteração turbo, e estes valores são utilizados como parâmetros
iniciais nas iterações seguintes. Na seção 3.4 foi apresentada uma quarta variante, de-
nominada FLPSCV-F4, em que são realimentadas estimativas da resposta ao impulso do
canal obtidas utilizando-se da informação extrínseca do decodi�cador.
50
4 AVALIAÇÃO DE COMPLEXIDADE COMPUTACIONAL
4.1 INTRODUÇÃO
Neste capítulo será analisada a complexidade dos algoritmos propostos, em termos de
operações com ponto �utuantes (�ops, de �oating-point operations). Um �op será de�nido
neste trabalho como uma operação de somar, subtrair, multiplicar ou dividir dois números
de ponto �utuante (variável tipo �oat).
Existem operações que não são facilmente medidas em termos de �ops, como a geração
de números aleatórios e os cálculos de funções não-lineares. Neste trabalho será descrita
uma abordagem que tenta estimar os custos computacionais de todas as operações em
termos de número de �ops a partir do tempo de execução.
Neste capítulo são apresentadas as complexidades dos algoritmos FLPSCV e FLPSCV-
F4. Com o objetivo de comparar resultados, são calculadas as complexidades dos seguintes
algoritmos de equalização propostos em trabalhos anteriores:
• BCJR, equalizador baseado no algoritmo BCJR (L. R. BAHL, 1974) e que considera
os parâmetros CIR e NV �xos e conhecidos;
• FLPS, equalizador baseado em FP e suavização com retardo �xo que considera os
parâmetros CIR e NV �xos e conhecidos;
• FLPSC (A. GUIMARÃES, 2010), equalizador baseado em FP com parâmetro des-
conhecido (RBPF) e suavização com retardo �xo que considera a CIR como um
vetor aleatório gaussiano e a NV �xa e conhecida;
Uma tarefa difícil de ser realizada é a estimação do custo computacional do processo
de reamostragem de um algoritmo que utiliza o �ltro de partículas. No artigo (R. KARLS-
SON, 2005), o custo, em termos de �ops, dessa operação é estimado a partir do tempo
de execução. Na subseção 4.2.3 é apresentada a metodologia adotada para o cálculo da
complexidade dessa operação.
Na seção 4.4 é apresentada uma técnica que visa diminuir o custo computacional do
algoritmo FLPSCV utilizando a informação extrínseca do decodi�cador para eliminar
51
uma parte do cálculo da função de verossimilhança, referente a trajetórias com baixa
probabilidade.
4.2 ANÁLISE DE COMPLEXIDADE
4.2.1 OPERAÇÕES BÁSICAS
Para possibilitar a análise de complexidade dos algoritmos de equalização é necessário
primeiramente ter em mãos o custo computacional das operações básicas realizadas pelos
mesmos. A abordagem escolhida neste trabalho para se obter o custo destas operações foi
realizar comparações em termos de tempo de execução das operações elementares (soma,
subtração, multiplicação e divisão).
Para evitar distorções nos resultados devidas às características do sistema operacional
ou ao tempo de acesso à memória, foi elaborada uma rotina de testes especí�ca, reali-
zada em 3 computadores diferentes, com todos os programas usando a linguagem C. Os
seguintes computadores foram utilizados para os testes:
• CPU 1: Laptop com processador Intel Core i5 @ 2.40GHz 64 bits com sistema
operacional Windows 7 Home Premium;
• CPU 2: Desktop com processador Intel Core 2 Quad @ 2.83GHz 64 bits com sistema
operacional Ubuntu v.4.4.3-4 (UNIX);
• CPU 3: Desktop com processador Intel Core 2 Quad @ 2.83GHz 64 bits com sistema
operacional Ubuntu v.4.4.3-4 (UNIX);
Os testes consistiram em executar diversas operações em laços "for" e comparar o
tempo de execução de cada laço completo, conforme os três exemplos abaixo:
Teste 1. Tempo da operação de multiplicação
Início
Var a = π
Var b = exp(1)
52

Iniciar contagem de tempo
para k = 1, . . . , 109 faça
Var c = a× b
�m
Terminar contagem de tempo
Fim
Teste 2. Tempo da operação exponencial
Início
Var a = π
Iniciar contagem de tempo
para k = 1, . . . , 109 faça
Var b = exp(a)
�m
Terminar contagem de tempo
Fim
Teste 3. Tempo da operação de randn
Início
Iniciar contagem de tempo
para k = 1, . . . , 109 faça
Var a = randn(1, 1)
�m
Terminar contagem de tempo
Fim
Estes testes forneceram os seguintes resultados:
53
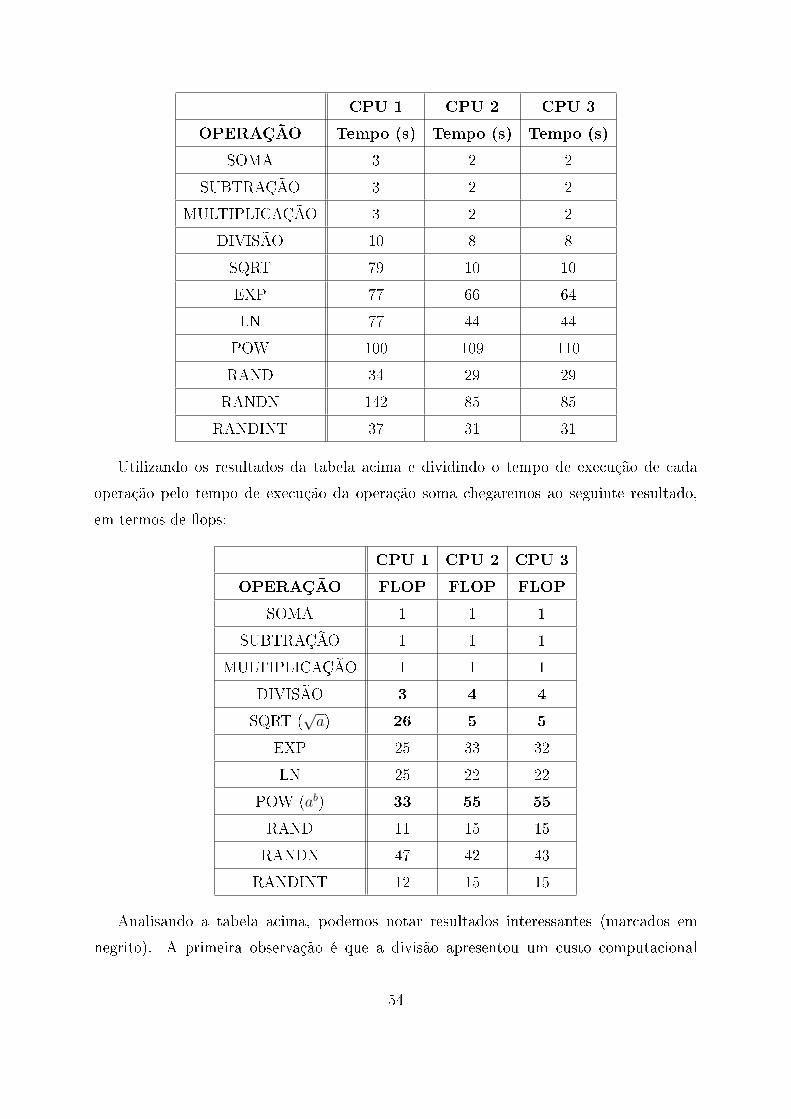
CPU 1 CPU 2 CPU 3
OPERAÇÃO Tempo (s) Tempo (s) Tempo (s)
SOMA 3 2 2
SUBTRAÇÃO 3 2 2
MULTIPLICAÇÃO 3 2 2
DIVISÃO 10 8 8
SQRT 79 10 10
EXP 77 66 64
LN 77 44 44
POW 100 109 110
RAND 34 29 29
RANDN 142 85 85
RANDINT 37 31 31
Utilizando os resultados da tabela acima e dividindo o tempo de execução de cada
operação pelo tempo de execução da operação soma chegaremos ao seguinte resultado,
em termos de �ops:
CPU 1 CPU 2 CPU 3
OPERAÇÃO FLOP FLOP FLOP
SOMA 1 1 1
SUBTRAÇÃO 1 1 1
MULTIPLICAÇÃO 1 1 1
DIVISÃO 3 4 4
SQRT (√a) 26 5 5
EXP 25 33 32
LN 25 22 22
POW (ab) 33 55 55
RAND 11 15 15
RANDN 47 42 43
RANDINT 12 15 15
Analisando a tabela acima, podemos notar resultados interessantes (marcados em
negrito). A primeira observação é que a divisão apresentou um custo computacional
54
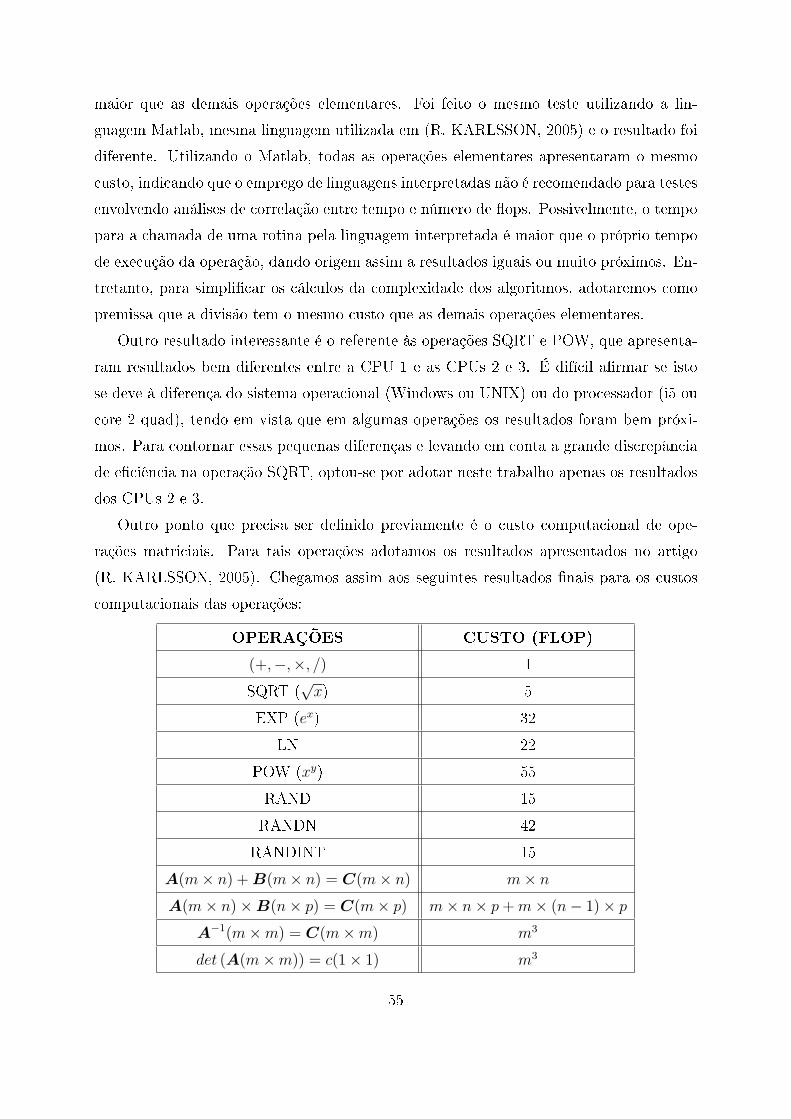
maior que as demais operações elementares. Foi feito o mesmo teste utilizando a lin-
guagem Matlab, mesma linguagem utilizada em (R. KARLSSON, 2005) e o resultado foi
diferente. Utilizando o Matlab, todas as operações elementares apresentaram o mesmo
custo, indicando que o emprego de linguagens interpretadas não é recomendado para testes
envolvendo análises de correlação entre tempo e número de �ops. Possivelmente, o tempo
para a chamada de uma rotina pela linguagem interpretada é maior que o próprio tempo
de execução da operação, dando origem assim a resultados iguais ou muito próximos. En-
tretanto, para simpli�car os cálculos da complexidade dos algoritmos, adotaremos como
premissa que a divisão tem o mesmo custo que as demais operações elementares.
Outro resultado interessante é o referente às operações SQRT e POW, que apresenta-
ram resultados bem diferentes entre a CPU 1 e as CPUs 2 e 3. É difícil a�rmar se isto
se deve à diferença do sistema operacional (Windows ou UNIX) ou do processador (i5 ou
core 2 quad), tendo em vista que em algumas operações os resultados foram bem próxi-
mos. Para contornar essas pequenas diferenças e levando em conta a grande discrepância
de e�ciência na operação SQRT, optou-se por adotar neste trabalho apenas os resultados
dos CPUs 2 e 3.
Outro ponto que precisa ser de�nido previamente é o custo computacional de ope-
rações matriciais. Para tais operações adotamos os resultados apresentados no artigo
(R. KARLSSON, 2005). Chegamos assim aos seguintes resultados �nais para os custos
computacionais das operações:
OPERAÇÕES CUSTO (FLOP)
(+,−,×, /) 1
SQRT (√x) 5
EXP (ex) 32
LN 22
POW (xy) 55
RAND 15
RANDN 42
RANDINT 15
A(m× n) +B(m× n) = C(m× n) m× n
A(m× n)×B(n× p) = C(m× p) m× n× p+m× (n− 1)× p
A−1(m×m) = C(m×m) m3
det (A(m×m)) = c(1× 1) m3
55

4.2.2 EQUALIZADOR BCJR
Para facilitar o entendimento do cálculo de complexidade, elaboramos a rotina abaixo,
que descreve o algoritmo de equalização BCJR e foi gerada com base no artigo (M. TÜCH-
LER, 2004).
Rotina 1. Algoritmo de equalização BCJR
(Dados: y, h, σ2ω, p(x) e B)
Início
para k = 1, . . . , N faça
para i = 1, . . . , 2L−1 faça
para j = 1, . . . , 2L−1 faça
se Bk(i, j) = 1 faça
P k(i, j) =p(xn)
(2πσ2ω)
1/2exp
(− 1
2σ2ω
(yn − xTn:n−Lh)
2
)�m
�m
�m
�m
para k = 2, . . . , N e j = N − 1, . . . , 1 faça
fk = P k−1fk−1
bj = P Tj bj+1
�m
para k = 1, . . . , N faça
L(ck|y) = ln
(fT
kBk(+1)bk+1
fTkBk(−1)bk+1
)�m
Fim
Os vetores e matrizes da rotina acima têm as seguintes dimensões:
• y → N × 1;
• h → L× 1;
• Bk → 2L−1 × 2L−1;
56

• P k → 2L−1 × 2L−1;
• fk → 2L−1 × 1;
• bk → 2L−1 × 1;
A partir da rotina descrita acima e utilizando os custos computacionais das operações
básicas, podemos realizar o cálculo da complexidade, conforme abaixo:
a) Cálculo de P :
xTn:n−Lh → 2L− 1
− 1
2σ2ω
(yn − ϵ)2 → 4
p(xn)
(2πσ2ω)
1/2exp (ϵ) → 40
se Bk(i, j) = 1 →redução do laço duplo de 2L−1 × 2L−1 para 2L−1
Complexidade(P ) = N × 2L−1 × (2L+ 43)
b) Cálculo de f e b:
P k−1fk−1 → 2L−1(2L − 1)
P jf j+1 → 2L−1(2L − 1)
Complexidade(f , b) = (N − 1)× 2L × (2L − 1)
c) Cálculo de L(c|y):fT
kBk(−1) → 2L−1(2L − 1)
ϵbk+1 → 2L−1(2L − 1)
fTkBk(+1) → 2L−1(2L − 1)
ϵbk+1 → 2L−1(2L − 1)
ln
(ϵ1ϵ2
)→ 23
Complexidade(L(c|y)) = N ×[2L+1(2L − 1) + 23
]Somando todos os custos, chegamos ao resultado �nal da complexidade do algoritmo
BCJR, dada por:
Complexidade(BCJR) = complexidade(P ,f , b, L(c|y))
= N[2L+1(2L − 1) + 2L−1(2L+ 43) + 23
]+ (N − 1)2L(2L − 1) (4.1)
57

4.2.3 REAMOSTRAGEM
No artigo (R. KARLSSON, 2005), a�rma-se que a complexidade do processo de rea-
mostragem é proporcional ao número de partículas, sendo a constante de proporcionali-
dade estimada através do tempo de simulação. No exemplo desse artigo conclui-se que o
valor desse coe�ciente é de 485 �ops.
Como, diferentemente do artigo (R. KARLSSON, 2005), utilizamos a linguagem C,
adotaremos uma metodologia própria para chegar a esse valor, incluindo mais detalhes
da implementação. Para descobrirmos o custo do processo de reamostragem, inicialmente
calcularemos o custo de realização dessa etapa, para posteriormente multiplicar pela fre-
quência de ocorrência desse processo.
Descrevemos abaixo a rotina de reamostragem, para facilitar o entendimento dos cál-
culos.
Rotina 2. Algoritmo da Reamostragem
(Dados: λn, xin, zn e Peff )
Início
se Peff ≤ 1/2 faça
para i = 1, . . . , P faça
Sorteio de k
se k ≤ 1 + zn2
faça
xin = 1
caso contrário faça
xin = −1
�m
λn =1
P�m
�m
Fim
A partir da rotina descrita acima, chegamos ao seguinte valor de complexidade:
a) Cálculo da reamostragem:
58
Sorteio de k → 151 + zn
2→ 1
1
P→ 0
Complexidade(rotina) = 16P
Para obter o valor de frequência de ocorrência do processo de reamostragem foi si-
mulada a transmissão de 100 blocos de 128 e 1024 bits, variando a razão Eb/N0 de 4 a
12 dB, com as mesmas con�gurações de simulação utilizadas para obter os resultados de
avaliação de desempenho que são apresentados no capitulo 5. Foi possível observar que
a frequência de ocorrência varia na faixa de 0 a 12% e que a taxa de erro no bloco afeta
diretamente esse parâmetro. Pelas características do algoritmo é esperado que esta fre-
quência de ocorrência seja fortemente in�uenciada pelo número de partículas (P ) e pelo
limite mínimo do valor efetivo do peso das partículas (Peff ). Entretanto, como em todo
o trabalho esses parâmetros não são alterados, esta analise não será feita. Adotaremos
no nosso trabalho o valor de frequência de ocorrência de 6% (centro do intervalo). Desta
forma, chegamos ao seguinte valor do custo computacional de reamostragem:
Complexidade(Reamostragem) = 0, 06× 16P ≈ P (4.2)
4.2.4 EQUALIZADOR FLPS
O equalizador FLPS utiliza o FP com suavização e considera os parâmetros CIR e NV
como �xos e conhecidos. A rotina deste equalizador é apresentada abaixo:
Rotina 3. Algoritmo de equalização FLPS
(Dados: y, h, σ2ω e p(x))
Início
para n = 1, . . . , N faça
para i = 1, . . . , P faça
para m = 1, . . . , 2M faça
a∗m = − 1
2σ2ω
(yn:n+M−1 −X∗nh)
T (yn:n+M−1 −X∗nh)
S1 = S1 +∏M−1
k=0
[p(xm
n+k)]exp (a∗m)
�m
59

para m = 1, . . . , 2M+1 faça
am = − 1
2σ2ω
(yn:n+M −Xnh)T (yn:n+M −Xnh)
S2 = S2 +∏M
k=0
[p(xm
n+k)]exp (am), para m ≤ 2M
S3 = S3 +∏M
k=0
[p(xm
n+k)]exp (am)
�m
p(xn|xi1:n−1,y1:n+M) =
S2
S3
λin = λi
n−1 ×S2
S1Sorteio de xi
n
�m
λn =[λ1
n, . . . , λPn ]
T∑Pi=1 λ
in
xn = [x1n, . . . , x
Pn ]
T
zn = (xn)Tλn
L(xn|y) = ln
(1 + zn1− zn
)Peff = 1
PλTnλn
Reamostragem(λn,xn, zn, Peff )
�m
Fim
As dimensões dos vetores e matrizes da rotina acima são as seguintes:
• y → N × 1;
• h → L× 1;
• xn → L× 1;
• X∗n → M × L;
• Xn → (M + 1)× L;
• λn → P × 1;
• xn → P × 1;
A partir da rotina descrita acima, dos custos computacionais das operações básicas
e do custo computacional da reamostragem dada pela equação (4.2) podemos realizar o
cálculo da complexidade, conforme abaixo:
60

a) Cálculo de S1:
yn:n+M−1 −X∗nh → 2ML
− 1
2σ2ω
ϵTϵ → 2M + 1
S1 +∏M−1
k=0
[p(xm
n+k)]exp (a∗m) → M + 34
Complexidade(S1) = N × P × 2M × [M(2L+ 3) + 35]
b) Cálculo de S3:
yn:n+M −Xnh → 2ML+ 2L1
2σ2ω
ϵTϵ → 2M + 3
S3 +∏M
k=0
[p(xm
n+k)]exp (am) → M + 35
Complexidade(S3) = N × P × 2M+1 × [M(2L+ 3) + 2L+ 38]
c) Cálculo de p(xn|xi1:n−1,y1:n+M), λi
n e xin:
S2
S3
→ 1
λin−1 ×
S3
S1
→ 2
randint(1,1) → 15
Complexidade(p(xn|xi1:n−1,y1:n+M), λi
n, xin) = N × P × 18
d) Cálculo de λn, zn, L(xn|y) e reamostragem:[λ1
n, . . . , λPn ]
T∑Pi=1 λ
in
→ 2P
(xn)Tλn → 2P − 1
ln
(1 + zn1− zn
)→ 23
1PλT
nλn→ 2P
Reamostragem(λn,xn, zn, Peff ) → P
Complexidade(λn, zn, L(xn|y), Reamos.) = N × (7P + 22)
A partir dos cálculos apresentados acima é possível obter complexidade do algoritmo
FLPS, dada por:
Complexidade(FLPS) = 2M+1N × P [M(2L+ 3) + 2L+ 38]
+ 2MN × P [M(2L+ 3) + 35] + 25N × P + 22N (4.3)
61

4.2.5 EQUALIZADOR FLPSC
O equalizador FLPSC (A. GUIMARÃES, 2010) emprega o �ltro de partículas com
parâmetro desconhecido (RBPF) e a suavização com retardo �xo. Esse equalizador consi-
dera a CIR como um vetor aleatório gaussiano, com parâmetros estatísticos atualizados ao
longo do tempo em cada trajetória pelo do �ltro de Kalman, utilizando o método RBW.
A rotina deste equalizador é descrita abaixo:
Rotina 4. Algoritmo de equalização FLPSC
(Dados: y, hi0, Q
i0, σ
2ω e p(x))
Início
para n = 1, . . . , N faça
para i = 1, . . . , P faça
Kn = Qin−1x
in−1((x
in−1)
TQin−1x
in−1 + 1)−1, para n ≥ 2
hin = hi
n−1 +Kn(yn−1 − (xin−1)
T hin−1), para n ≥ 2
Qin = (IL −Kn(x
in−1)
T )Qin−1, para n ≥ 2
para m = 1, . . . , 2M faça
Σ∗n = IM +X∗
nQinX
∗Tn
k∗m = det(Σ∗
n)− 1
2
a∗m =1
2σ2ω
(yn:n+M−1 −X∗nh
in)
TΣ∗−1n (yn:n+M−1 −X∗
nhin)
�m
para m = 1, . . . , 2M+1 faça
Σn = IM+1 +XnQinX
Tn
km = det(Σn)− 1
2
am =1
2σ2ω
(yn:n+M −Xnhin)
TΣ−1n (yn:n+M −Xnh
in)
�m
p(xn|xi1:n−1,y1:n+M) =
∑2M
m=1
[∏Mk=0 p(x
mn+k)
]kmexp(am)∑2M+1
m=1
[∏Mk=0 p(x
mn+k)
]kmexp(am)
λin = λi
n−1 ×
∑2M+1
m=1
[∏Mk=0 p(x
mn+k)
]kmexp(am)∑2M
m=1
[∏M−1k=0 p(xm
n+k)]k∗mexp(a
∗m)
Sorteio de xin
�m
62

λn =[λ1
n, . . . , λPn ]
T∑Pi=1 λ
in
xn = [x1n, . . . , x
Pn ]
T
zn = (xn)Tλn
L(xn|y) = ln
(1 + zn1− zn
)Peff = 1
PλTnλn
Reamostragem(λn,xn, zn, Peff )
�m
Fim
Na rotina 4, os vetores e matrizes têm as seguintes dimensões:
• y → N × 1;
• hin → L× 1;
• Qin → L× L;
• xin−1 → L× 1;
• Kn → L× L;
• X∗n → M × L;
• Σ∗n → M ×M ;
• Xn → (M + 1)× L;
• Σn → (M + 1)× (M + 1);
• λn → P × 1;
• xn → P × 1;
Utilizando a rotina 4 e os custos computacionais das operações básicas e da rea-
mostragem, descritos nas subseções 4.2.1 e 4.2.3, respectivamente, podemos calcular a
complexidade, conforme abaixo:
63

a) Filtro de Kalman:
Qin−1x
in−1((x
in−1)
TQin−1x
in−1 + 1)−1 → 4L2 + L
hin−1 +Kn(yn−1 − (xi
n−1)T hi
n−1) → 4L
(IL −Kn(xin−1)
T )Qin−1 → 2L3 + L2
Complexidade(Kalman) = (N − 1)× P × (2L3 + 5L2 + 5L)
b) Cálculo de k∗m e a∗m:
IM +X∗nQ
inX
∗Tn → 2M2L+M(2L2 − L)
det(Σ∗n)
− 12 → M3 + 6
yn:n+M−1 −X∗nh
in → 2ML
1
2σ2ω
ϵTΣ∗−1n ϵ → 2M2 +M + 1
Complexidade(k∗m, a
∗m) = N × P × 2M × [M3 + 2M2(L+ 1)
+M(2L2 + L+ 1) + 7]
c) Cálculo de km e am:
IM+1 +XnQinX
Tn → 2M2L+M(2L2 + 3L) + (2L2 + L)
det(Σn)− 1
2 → M3 + 3M2 + 3M + 7
yn:n+M −Xnhin → 2ML+ 2L
1
2σ2ω
ϵTΣ−1n ϵ → 2M2 + 5M + 3
Complexidade(km, am) = N × P × 2M+1 × [M3 +M2(2L+ 5)
+M(2L2 + 5L+ 8) + (2L2 + 3L+ 10)]
d) Cálculo de p(xn|xi1:n−1,y1:n+M), λi
n e xin:∑2M
m=1
[∏M−1k=0 p(xm
n+k)]k∗mexp(a
∗m) → 2M(M + 35)∑2M+1
m=1
[∏Mk=0 p(x
mn+k)
]kmexp(am) → 2M+1(M + 36)
ϵ1ϵ2
→ 1
λin−1 ×
ϵ2ϵ3
→ 2
randint(1,1) → 15
Complexidade(p(xn|xi1:n−1,y1:n+M), λi
n, xin) = N × P × [2M+1(M + 36)
+2M(M + 35) + 18]
e) Cálculo de λn, zn, L(xn|y) e reamostragem:
64

[λ1n, . . . , λ
Pn ]
T∑Pi=1 λ
in
→ 2P
(xn)Tλn → 2P − 1
ln
(1 + zn1− zn
)→ 23
1PλT
nλn→ 2P
Reamostragem(λn,xn, zn, Peff ) → P
Complexidade(λn, zn, L(xn|y), Reamos.) = N × (7P + 22)
Somando todos os custos, chegamos ao resultado �nal da complexidade do algoritmo
FLPSC, dada por:
Complexidade(FLPSC) = 2M+1N × P [M3 +M2(2L+ 5) +M(2L2 + 5L+ 9)
+ (2L2 + 3L+ 46)] + 2MN × P [M3 + 2M2(L+ 1)
+M(2L2 + L+ 2) + 42] +N(25P + 22)
+ (N − 1)× P (2L3 + 5L2 + 5L) (4.4)
4.2.6 EQUALIZADOR FLPSCV
A rotina abaixo corresponde a implementação do algoritmo de equalização FLPSCV.
Rotina 5. Algoritmo de equalização FLPSCV
(Dados: y, hi0, Q
i0, α0, βi
0 e p(x))
Início
para n = 1, . . . , N faça
αn−1 = αn−2 + 1/2, para n ≥ 2
para i = 1, . . . , P faça
Kn = Qin−1x
in−1((x
in−1)
TQin−1x
in−1 + 1)−1, para n ≥ 2
hin = hi
n−1 +Kn(yn−1 − (xin−1)
T hin−1), para n ≥ 2
Qin = (IL −Kn(x
in−1)
T )Qin−1, para n ≥ 2
βin−1 = βi
n−2 +(yn−1 − (xi
n−1)T hi
n)2
2(1 + (xin−1)
TQinx
in−1)
, para n ≥ 2
para m = 1, . . . , 2M faça
Σ∗n = IM +X∗
nQinX
∗Tn
k∗m = det(Σ∗
n)− 1
2 (βin−1)
αn−1
65

a∗m =1
2(yn:n+M−1 −X∗
nhin)
TΣ∗−1n (yn:n+M−1 −X∗
nhin) + βi
n−1
b∗m = M/2 + αn−1 + 1
�m
para m = 1, . . . , 2M+1 faça
Σn = IM+1 +XnQinX
Tn
km = det(Σn)− 1
2 (βin−1)
αn−1
am =1
2(yn:n+M −Xnh
in)
TΣ−1n (yn:n+M −Xnh
in) + βi
n−1
bm = M+12
+ αn−1 + 1
�m
p(xn|xi1:n−1,y1:n+M) =
∑2M
m=1
[∏Mk=0 p(x
mn+k)
]kma
1−bmm∑2M+1
m=1
[∏Mk=0 p(x
mn+k)
]kma1−bm
m
λin = λi
n−1 ×
∑2M+1
m=1
[∏Mk=0 p(x
mn+k)
]kma
1−bmm∑2M
m=1
[∏M−1k=0 p(xm
n+k)]k∗m(a
∗m)
1−b∗m
Sorteio de xin
�m
λn =[λ1
n, . . . , λPn ]
T∑Pi=1 λ
in
xn = [x1n, . . . , x
Pn ]
T
zn = (xn)Tλn
L(xn|y) = ln
(1 + zn1− zn
)Peff = 1
PλTnλn
Reamostragem(λn,xn, zn, Peff )
�m
Fim
As dimensões dos vetores e matrizes da rotina acima são as seguintes:
• y → N × 1;
• hi
n → L× 1;
• Qin → L× L;
• xin−1 → L× 1;
• Kn → L× L;
66

• X∗n → M × L;
• Σ∗n → M ×M ;
• Xn → (M + 1)× L;
• Σn → (M + 1)× (M + 1);
• λn → P × 1;
• xn → P × 1;
Utilizando a rotina 5 e os custos computacionais das operações básicas e da reamostra-
gem, descritos nas subseções 4.2.1 e 4.2.3, respectivamente, calculamos a complexidade,
como mostrado a seguir:
a) Cálculo de αn−1 e βin−1 e do �ltro de Kalman:
αn−2 + 1/2 → 1
Qin−1x
in−1((x
in−1)
TQin−1x
in−1 + 1)−1 → 4L2 + L
hin−1 +Kn(yn−1 − (xi
n−1)T hi
n−1) → 4L
(IL −Kn(xin−1)
T )Qin−1 → 2L3 + L2
βin−2 +
(yn−1 − (xin−1)
T hin)
2
2(1 + (xin−1)
TQinx
in−1)
→ 2L2 + 3L+ 3
Complexidade(Kalman, αn−1, βin−1) = (N − 1)× P × (2L3 + 7L2 + 3)
+(N − 1)
b) Cálculo de k∗m, a
∗m e b∗m:
IM +X∗nQ
inX
∗Tn → 2M2L+M(2L2 − L)
det(Σ∗n)
− 12 (βi
n−1)αn−1 → M3 + 62
yn:n+M−1 −X∗nh
in → 2ML
1
2ϵTΣ∗−1
n ϵ+ βin−1 → 2M2 +M + 1
M/2 + αn−1 + 1 → 1
Complexidade(k∗m, a
∗m, b
∗m) = N × P × (2M)× [M3 + 2M2(L+ 1)
+M(2L2 + L+ 1) + 64]
c) Cálculo de km, am e bm:
67

IM+1 +XnQinX
Tn → 2M2L+M(2L2 + 3L) + (2L2 + L)
det(Σn)− 1
2 (βin−1)
αn−1 → M3 + 3M2 + 3M + 63
yn:n+M −Xnhin → 2ML+ 2L
1
2ϵTΣ−1
n ϵ+ βin−1 → 2M2 + 5M + 4
(M + 1)/2 + αn−1 + 1 → 1
Complexidade(km, am, bm) = N × P × (2M+1)× [M3 +M2(2L+ 5)
+M(2L2 + 5L+ 8) + (2L2 + 3L+ 68)]
d) Cálculo de p(xn|xi1:n−1,y1:n+M), λi
n e xin:∑2M
m=1
[∏M−1k=0 p(xm
n+k)]k∗m(a
∗m)
1−b∗m → 2M(M + 58)∑2M+1
m=1
[∏Mk=0 p(x
mn+k)
]kma
1−bmm → 2M+1(M + 59)
ϵ1ϵ2
→ 1
λin−1 ×
ϵ2ϵ3
→ 2
randint(1,1) → 15
Complexidade(p(xn|xi1:n−1,y1:n+M), λi
n e xin) = N × P × [2M+1(M + 59)
+2M(M + 58) + 18]
e) Cálculo de λn, zn, L(xn|y) e reamostragem:[λ1
n, . . . , λPn ]
T∑Pi=1 λ
in
→ 2P
(xn)Tλn → 2P − 1
ln
(1 + zn1− zn
)→ 23
1PλT
nλn→ 2P
Reamostragem(λn,xn, zn, Peff ) → P
Complexidade(λn, zn, L(xn|y), Reamos.) = N × (7P + 22)
Somando os custos apresentados acima, chegamos à complexidade do algoritmo FLPSCV,
dada por:
Complexidade(FLPSCV ) = 2M+1N × P [M3 +M2(2L+ 5) +M(2L2 + 5L+ 9)
+ (2L2 + 3L+ 127)] + 2MN × P [M3 + 2M2(L+ 1)
+M(2L2 + L+ 2) + 122] +N(25P + 23)
+ (N − 1)× P (2L3 + 7L2 + 3)− 1 (4.5)
68

4.2.7 EQUALIZADOR FLPSCV-F4
É possível notar pelo diagrama de blocos da �gura 3.4 que o custo do equalizador
FLPSCV-F4 pode ser decomposto em dois termos: no custo do algoritmo FLPSCV (já
calculada neste capítulo) e no custo da técnica SICE. Com base no exposto na seção 3.4,
elaboramos a rotina abaixo, correspondente à técnica SICE.
Rotina 6. Algoritmo da técnica SICE
(Dados: y e Lext(x|y))Início
para k = 2, . . . , L+ 1 faça
hk−1 =
∑Nn=k+1 ynLext (xn−k|y)
(N − k)
(√1 +
∑Nn=1 Lext (xn|y)2
N− 1
)�m
Fim
A partir da rotina descrita acima, chegamos ao seguinte valor de complexidade:
a) Cálculo da técnica SICE:∑Nn=k+1 ynLext (xn−k|y) →≈ 2N
(N − k)
(√1 +
∑Nn=1 Lext (xn|y)2
N− 1
)→ 2N + 5
ϵ1ϵ2
→ 1
Complexidade(SICE) → L(4N + 6)
Somando o custo da técnica SICE calculada acima e o custo do equalizador FLPSCV,
resumido na equação 4.5, chegamos ao resultado �nal da complexidade do algoritmo
FLPSCV-F4, dada por:
Complexidade(FLPSCV − F4) = 2M+1N × P [M3 +M2(2L+ 5)
+M(2L2 + 5L+ 9) + (2L2 + 3L+ 127)]
+ 2MN × P [M3 + 2M2(L+ 1)
+M(2L2 + L+ 2) + 122] +N(25P + 4L+ 23)
+ (N − 1)× P (2L3 + 7L2 + 3) + 6L− 1 (4.6)
69
4.3 EXEMPLOS COMPARATIVOS
O objetivo desta seção é avaliar a complexidade de alguns dos algoritmos desenvolvidos
no capitulo 3. Esses equalizadores foram comparados com outros algoritmos desenvolvidos
em outros trabalhos, com custos resumidos pelas equações (4.1), (4.3) e (4.4).
Em todos os exemplos apresentados nesta seção foram utilizados blocos de 1024 bits,
tendo em vista que as complexidades de todos os algoritmos são mais in�uenciados pelo
retardo (M) escolhido e pela memória do canal (L) do que pelo tamanho do bloco (N).
Também foi �xado o número de partículas dos algoritmos que utilizam o FP, haja vista que
em todas as con�gurações de simulação utilizadas para obter os resultados apresentados
no capitulo 5 foram utilizados o mesmo valor (N = 30).
A �gura 4.1 apresenta a complexidade dos algoritmos de equalização com a variação
da memória do canal (L). Neste exemplo foi �xado o retardo em 3 símbolos (M = 3).
Como podemos observar, a complexidade do algoritmo BCJR é muito mais in�uenciada
por este parâmetro (L) do que os demais. Este resultado é devido à complexidade do
algoritmo BCJR ser proporcional ao termo 22L+1, enquanto que a do FLPS a L e pelos
demais a L3. Outra observação interessante dessa �gura é a proximidade de complexidade
entre os equalizadores FLPSC e FLPSCV, indicando que modelar a variância de ruído
como variável aleatória não resulta em aumento signi�cativo do custo computacional.
A �gura 4.2 também ilustra o comportamento da complexidade dos algoritmos de
equalização com a variação da duração do canal (L), porém com um retardo �xado em 5
símbolos (M = 5). Podemos observar que o algoritmo BCJR passa a ser mais complexo
a partir de L = 11, diferentemente da �gura 4.1, em que o mesmo ocorreu a partir de
L = 9. Essa mudança se deve ao aumento do custo computacional do algoritmo FLPSCV
com o aumento do retardo (M).
A �gura 4.3 ilustra o comportamento da complexidade dos algoritmos em um cenário
onde a ordem do canal é �xa e é variado o retardo (M) dos algoritmos que empregam o FP
com suavização de retardo �xo. Podemos observar claramente o crescimento exponencial
(2M+1) das complexidades destes algoritmos.
Devido ao efeito de memória do canal, as informações sobre o símbolo atual conti-
das nas primeiras L observações futuras (yn:n+L) são mais signi�cativas que as restantes
(yn+L+1:N). Assim, apesar do equalizador BCJR calcular as probabilidades a posteriori
70
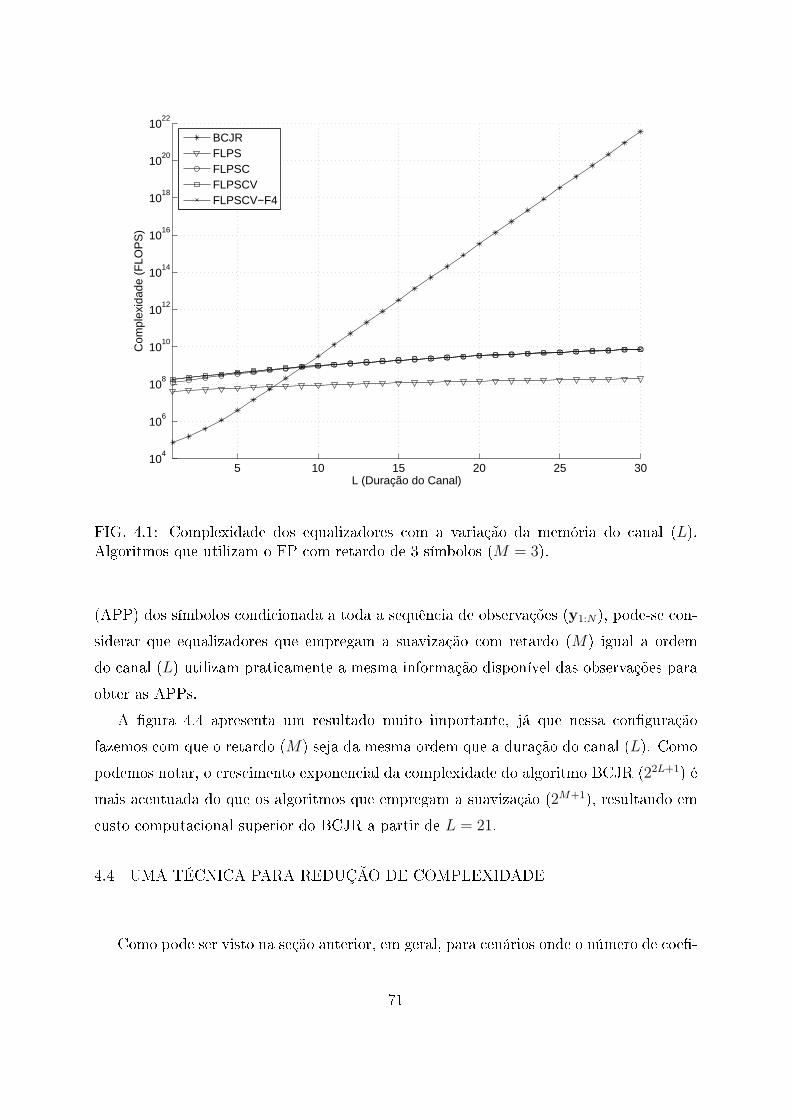
5 10 15 20 25 3010
4
106
108
1010
1012
1014
1016
1018
1020
1022
L (Duração do Canal)
Com
plex
idad
e (F
LOP
S)
BCJRFLPSFLPSCFLPSCVFLPSCV−F4
FIG. 4.1: Complexidade dos equalizadores com a variação da memória do canal (L).Algoritmos que utilizam o FP com retardo de 3 símbolos (M = 3).
(APP) dos símbolos condicionada a toda a sequência de observações (y1:N), pode-se con-
siderar que equalizadores que empregam a suavização com retardo (M) igual a ordem
do canal (L) utilizam praticamente a mesma informação disponível das observações para
obter as APPs.
A �gura 4.4 apresenta um resultado muito importante, já que nessa con�guração
fazemos com que o retardo (M) seja da mesma ordem que a duração do canal (L). Como
podemos notar, o crescimento exponencial da complexidade do algoritmo BCJR (22L+1) é
mais acentuada do que os algoritmos que empregam a suavização (2M+1), resultando em
custo computacional superior do BCJR a partir de L = 21.
4.4 UMA TÉCNICA PARA REDUÇÃO DE COMPLEXIDADE
Como pode ser visto na seção anterior, em geral, para cenários onde o número de coe�-
71
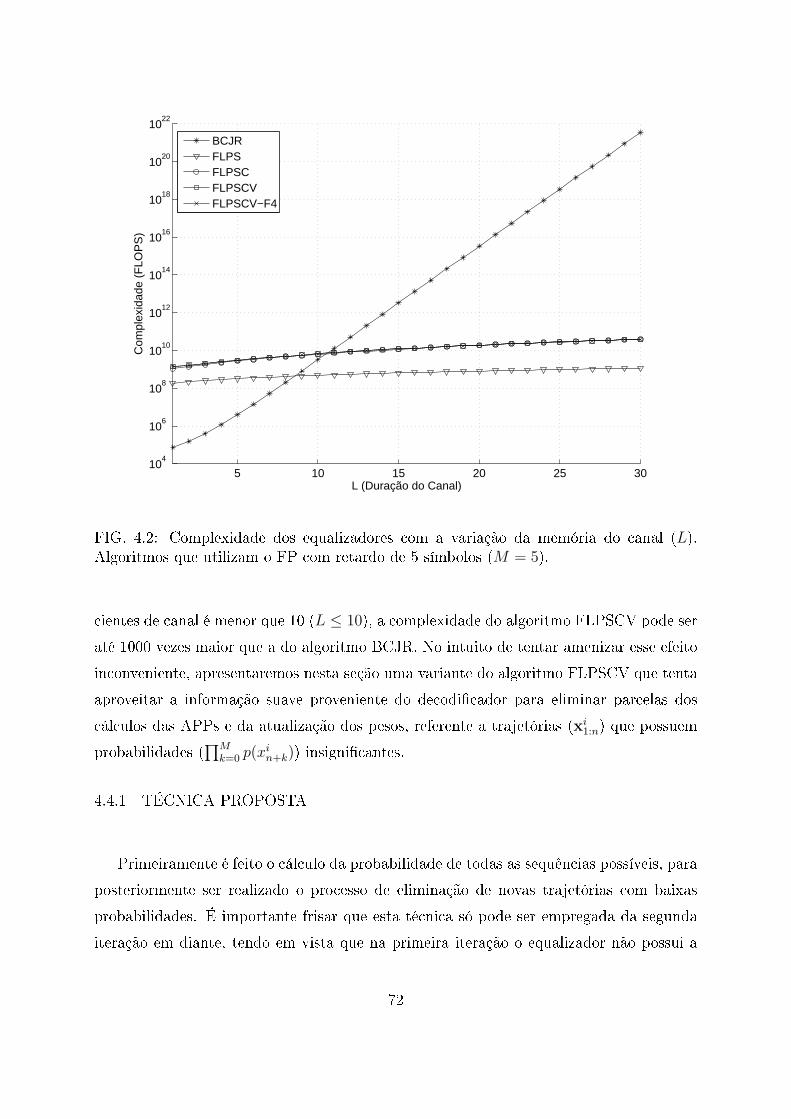
5 10 15 20 25 3010
4
106
108
1010
1012
1014
1016
1018
1020
1022
L (Duração do Canal)
Com
plex
idad
e (F
LOP
S)
BCJRFLPSFLPSCFLPSCVFLPSCV−F4
FIG. 4.2: Complexidade dos equalizadores com a variação da memória do canal (L).Algoritmos que utilizam o FP com retardo de 5 símbolos (M = 5).
cientes de canal é menor que 10 (L ≤ 10), a complexidade do algoritmo FLPSCV pode ser
até 1000 vezes maior que a do algoritmo BCJR. No intuito de tentar amenizar esse efeito
inconveniente, apresentaremos nesta seção uma variante do algoritmo FLPSCV que tenta
aproveitar a informação suave proveniente do decodi�cador para eliminar parcelas dos
cálculos das APPs e da atualização dos pesos, referente a trajetórias (xi1:n) que possuem
probabilidades (∏M
k=0 p(xin+k)) insigni�cantes.
4.4.1 TÉCNICA PROPOSTA
Primeiramente é feito o cálculo da probabilidade de todas as sequências possíveis, para
posteriormente ser realizado o processo de eliminação de novas trajetórias com baixas
probabilidades. É importante frisar que esta técnica só pode ser empregada da segunda
iteração em diante, tendo em vista que na primeira iteração o equalizador não possui a
72

5 10 15 20 25 3010
4
106
108
1010
1012
1014
1016
1018
1020
1022
M (Lag)
Com
plex
idad
e (F
LOP
S)
BCJRFLPSFLPSCFLPSCVFLPSCV−F4
FIG. 4.3: Complexidade dos equalizadores com um canal de 3 coe�cientes (L = 5).
informação extrínseca dos símbolos, provenientes do decodi�cador, implicando que todas
as sequências sejam equiprováveis (p(xn = 1) = p(xn = −1) = 0, 5 para ∀xn).
O processo de eliminação de sequências é realizado da seguinte forma:
1) Ordena-se de forma decrescente o vetor com as probabilidades das sequências (π1:2M+1);
2) De posse de um limiar de probabilidade (Plim) escolhido previamente, determina-se o
menor conjunto de sequências que a soma de suas probabilidades seja igual ou superior
a Plim, isto é, procura-se encontrar o índice x, do vetor ordenado πord1:2M+1 que satisfaça:∑x
m=1 πordm ≈ Plim, onde 1 ≤ x ≤ 2M+1.
Esse algoritmo de equalização será denominado de FLPSCV-C1(P2, · · · , PI), onde PI
corresponde a probabilidade limiar utilizada na I-ésima iteração, no processo de elimi-
nação de sequências.
A partir da descrição do processo de eliminação, foi desenvolvido a seguinte rotina:
Rotina 7. Algoritmo de equalização FLPSCV-C1
73
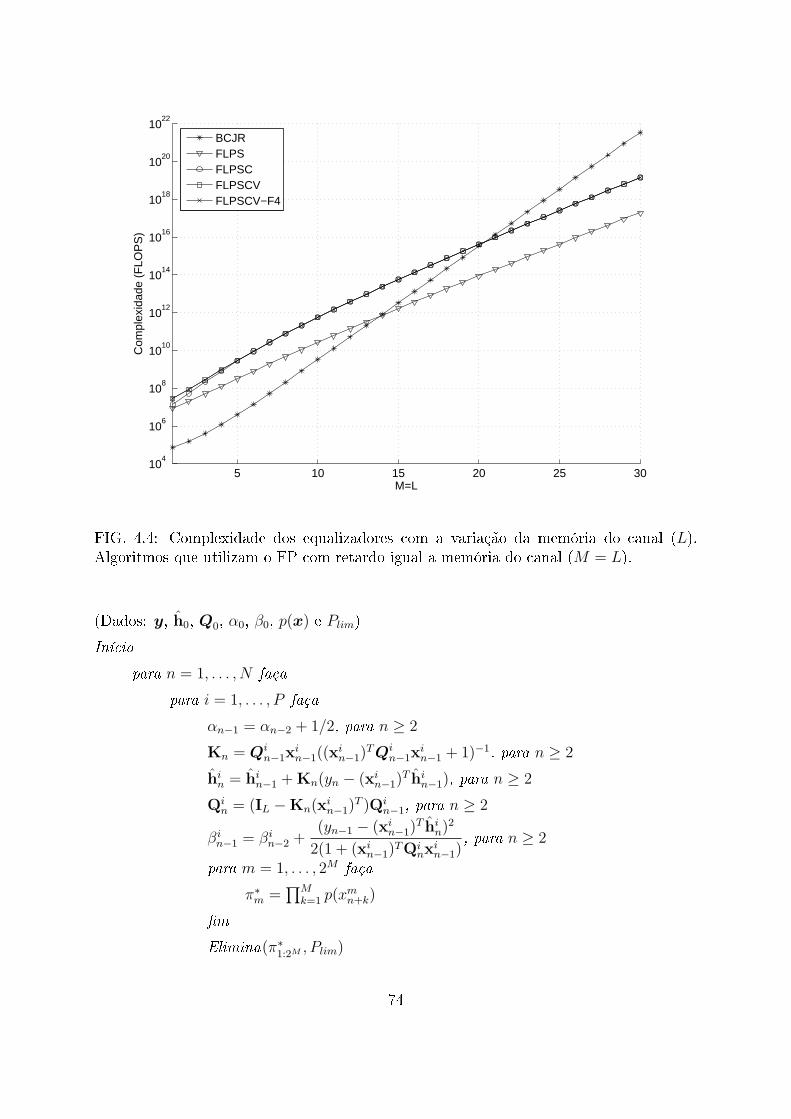
5 10 15 20 25 3010
4
106
108
1010
1012
1014
1016
1018
1020
1022
M=L
Com
plex
idad
e (F
LOP
S)
BCJRFLPSFLPSCFLPSCVFLPSCV−F4
FIG. 4.4: Complexidade dos equalizadores com a variação da memória do canal (L).Algoritmos que utilizam o FP com retardo igual a memória do canal (M = L).
(Dados: y, h0, Q0, α0, β0, p(x) e Plim)
Início
para n = 1, . . . , N faça
para i = 1, . . . , P faça
αn−1 = αn−2 + 1/2, para n ≥ 2
Kn = Qin−1x
in−1((x
in−1)
TQin−1x
in−1 + 1)−1, para n ≥ 2
hin = hi
n−1 +Kn(yn − (xin−1)
T hin−1), para n ≥ 2
Qin = (IL −Kn(x
in−1)
T )Qin−1, para n ≥ 2
βin−1 = βi
n−2 +(yn−1 − (xi
n−1)T hi
n)2
2(1 + (xin−1)
TQinx
in−1)
, para n ≥ 2
para m = 1, . . . , 2M faça
π∗m =
∏Mk=1 p(x
mn+k)
�m
Elimina(π∗1:2M , Plim)
74

para m = 1, . . . , 2M faça
se π∗m não foi eliminada
Σ∗n = IM +X∗
nQinX
∗Tn
k∗m = det(Σ∗
n)− 1
2 (βin−1)
αn−1
a∗m =1
2(yn:n+M−1 −X∗
ncin)
TΣ∗−1n (yn:n+M−1 −X∗
ncin) + βi
n−1
b∗m = M/2 + αn−1 + 1
ϵ1 = ϵ1 + π∗mk
∗m(a
∗m)
1−b∗m
�m
�m
para m = 1, . . . , 2M+1 faça
πm =∏M
k=0 p(xmn+k)
�m
Elimina(π1:2M+1 , Plim)
para m = 1, . . . , 2M+1 faça
se πm não foi eliminada
Σn = IM+1 +XnQinX
Tn
km = det(Σn)− 1
2 (βin−1)
αn−1
am =1
2(yn:n+M −Xnh
in)
TΣ−1n (yn:n+M −Xnh
in) + βi
n−1
bm = M+12
+ αn−1 + 1
ϵ2 = ϵ2 + πmkma1−bmm , para m ≤ 2M
ϵ3 = ϵ3 + πmkma1−bmm
�m
�m
p(xn|xi1:n−1,y1:n+M) =
ϵ2ϵ3
λin = λi
n−1 ×ϵ3ϵ1
Sorteio de xin
�m
λn =[λ1
n, . . . , λPn ]
T∑Pi=1 λ
in
xn = [x1n, . . . , x
Pn ]
T
zn = (xn)Tλn
L(xn|y) = log
(1 + zn1− zn
)P eff = 1
PλTnλn
75
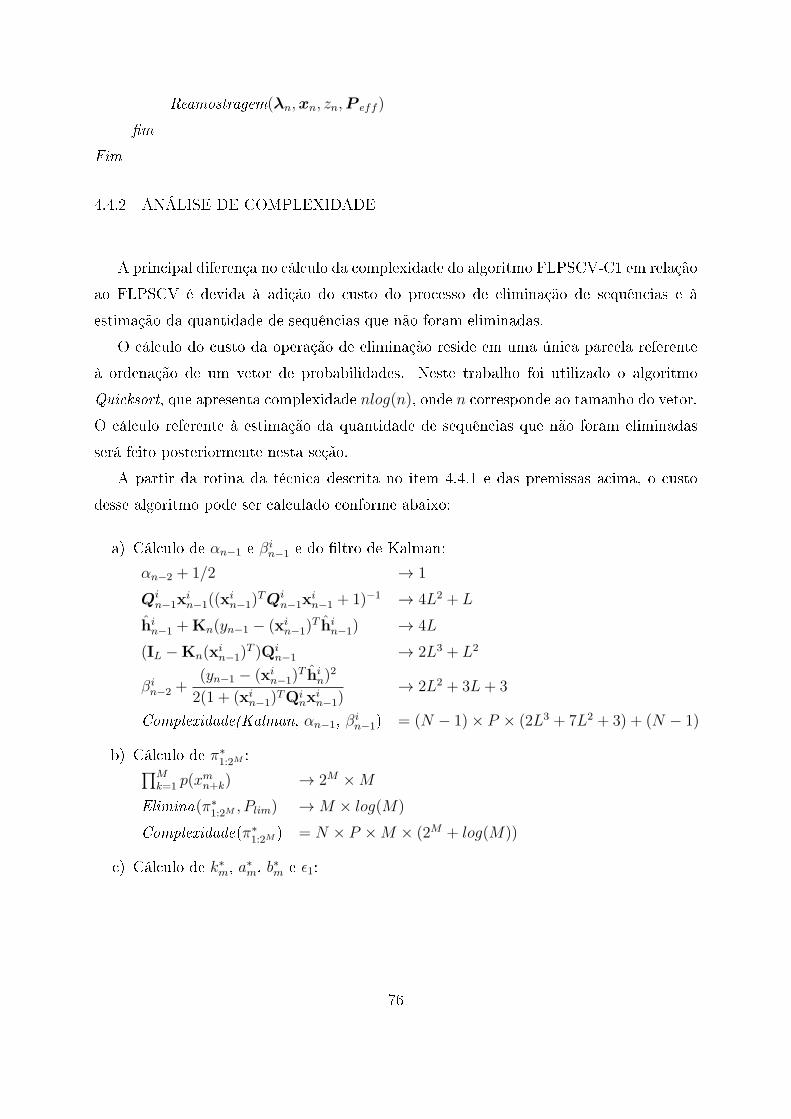
Reamostragem(λn,xn, zn,P eff )
�m
Fim
4.4.2 ANÁLISE DE COMPLEXIDADE
A principal diferença no cálculo da complexidade do algoritmo FLPSCV-C1 em relação
ao FLPSCV é devida à adição do custo do processo de eliminação de sequências e à
estimação da quantidade de sequências que não foram eliminadas.
O cálculo do custo da operação de eliminação reside em uma única parcela referente
à ordenação de um vetor de probabilidades. Neste trabalho foi utilizado o algoritmo
Quicksort, que apresenta complexidade nlog(n), onde n corresponde ao tamanho do vetor.
O cálculo referente à estimação da quantidade de sequências que não foram eliminadas
será feito posteriormente nesta seção.
A partir da rotina da técnica descrita no item 4.4.1 e das premissas acima, o custo
desse algoritmo pode ser calculado conforme abaixo:
a) Cálculo de αn−1 e βin−1 e do �ltro de Kalman:
αn−2 + 1/2 → 1
Qin−1x
in−1((x
in−1)
TQin−1x
in−1 + 1)−1 → 4L2 + L
hin−1 +Kn(yn−1 − (xi
n−1)T hi
n−1) → 4L
(IL −Kn(xin−1)
T )Qin−1 → 2L3 + L2
βin−2 +
(yn−1 − (xin−1)
T hin)
2
2(1 + (xin−1)
TQinx
in−1)
→ 2L2 + 3L+ 3
Complexidade(Kalman, αn−1, βin−1) = (N − 1)× P × (2L3 + 7L2 + 3) + (N − 1)
b) Cálculo de π∗1:2M :∏M
k=1 p(xmn+k) → 2M ×M
Elimina(π∗1:2M , Plim) → M × log(M)
Complexidade(π∗1:2M ) = N × P ×M × (2M + log(M))
c) Cálculo de k∗m, a
∗m, b
∗m e ϵ1:
76
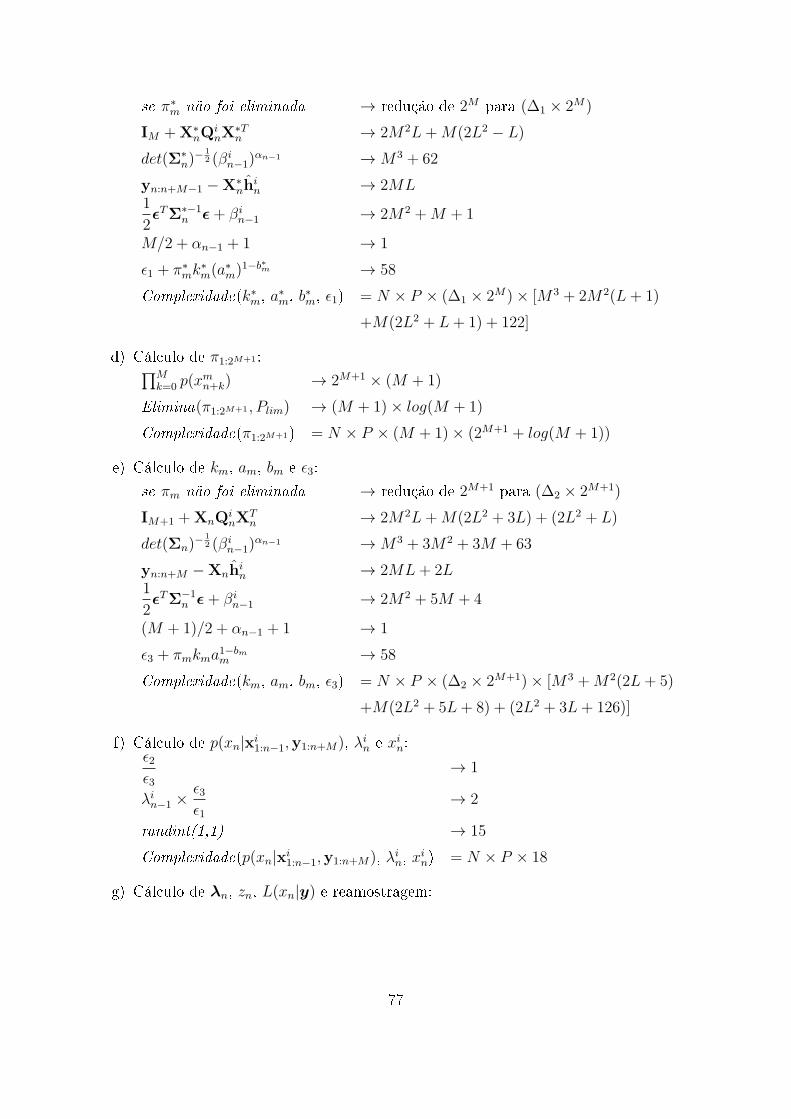
se π∗m não foi eliminada → redução de 2M para (∆1 × 2M)
IM +X∗nQ
inX
∗Tn → 2M2L+M(2L2 − L)
det(Σ∗n)
− 12 (βi
n−1)αn−1 → M3 + 62
yn:n+M−1 −X∗nh
in → 2ML
1
2ϵTΣ∗−1
n ϵ+ βin−1 → 2M2 +M + 1
M/2 + αn−1 + 1 → 1
ϵ1 + π∗mk
∗m(a
∗m)
1−b∗m → 58
Complexidade(k∗m, a
∗m, b
∗m, ϵ1) = N × P × (∆1 × 2M)× [M3 + 2M2(L+ 1)
+M(2L2 + L+ 1) + 122]
d) Cálculo de π1:2M+1 :∏Mk=0 p(x
mn+k) → 2M+1 × (M + 1)
Elimina(π1:2M+1 , Plim) → (M + 1)× log(M + 1)
Complexidade(π1:2M+1) = N × P × (M + 1)× (2M+1 + log(M + 1))
e) Cálculo de km, am, bm e ϵ3:
se πm não foi eliminada → redução de 2M+1 para (∆2 × 2M+1)
IM+1 +XnQinX
Tn → 2M2L+M(2L2 + 3L) + (2L2 + L)
det(Σn)− 1
2 (βin−1)
αn−1 → M3 + 3M2 + 3M + 63
yn:n+M −Xnhin → 2ML+ 2L
1
2ϵTΣ−1
n ϵ+ βin−1 → 2M2 + 5M + 4
(M + 1)/2 + αn−1 + 1 → 1
ϵ3 + πmkma1−bmm → 58
Complexidade(km, am, bm, ϵ3) = N × P × (∆2 × 2M+1)× [M3 +M2(2L+ 5)
+M(2L2 + 5L+ 8) + (2L2 + 3L+ 126)]
f) Cálculo de p(xn|xi1:n−1,y1:n+M), λi
n e xin:
ϵ2ϵ3
→ 1
λin−1 ×
ϵ3ϵ1
→ 2
randint(1,1) → 15
Complexidade(p(xn|xi1:n−1,y1:n+M), λi
n, xin) = N × P × 18
g) Cálculo de λn, zn, L(xn|y) e reamostragem:
77

[λ1n, . . . , λ
Pn ]
T∑Pi=1 λ
in
→ 2P
(xn)Tλn → 2P − 1
log
(1 + zn1− zn
)→ 23
1PλT
nλn→ 2P
Reamostragem(λn,xn, zn, Peff ) → P
Complexidade(λn, zn, L(xn|y), Reamos.) = N × (7P + 22)
Como pode ser observado acima, ainda temos que calcular os termos ∆1 e ∆2, re-
ferentes ao número de sequências que não foram eliminadas. Para tal, foi simulada a
transmissão de 100 blocos de 128 e 1024 bits, variando a razão Eb/N0 de 4 a 12 dB, com
as mesmas con�gurações de simulação utilizadas para obter os resultados apresentados
no capítulo 5. Um parâmetro importante para o emprego do equalizador FLPSCV-C1 é
a probabilidade limiar (Plim), que foi variada de 95% a 99%. Após os testes foi possível
observar uma forte dependência dos termos ∆1 e ∆2 com a taxa de erros, com a razão
Eb/N0 e com o parâmetro Plim. Neste trabalho, foi escolhida a média dos parâmetros ∆1
e ∆2 obtidas quando Eb/N0 = 8 dB e utilizando Plim = 0, 97 para todas as iterações.
Assim chegamos aos seguintes valores de ∆1 e ∆2:
• Segunda iteração: ∆1 = 35% e ∆2 = 25%;
• Terceira iteração: ∆1 = 20% e ∆2 = 10%;
• Quarta iteração: ∆1 = 15% e ∆2 = 5%;
Somando todos os custos e mantendo a referência aos parâmetros∆1 e∆2 na expressão
(para serem substituídos com os valores escolhidos acima, de acordo com a iteração),
chegamos ao resultado �nal da complexidade do algoritmo FLPSCV-C1, dada por:
78
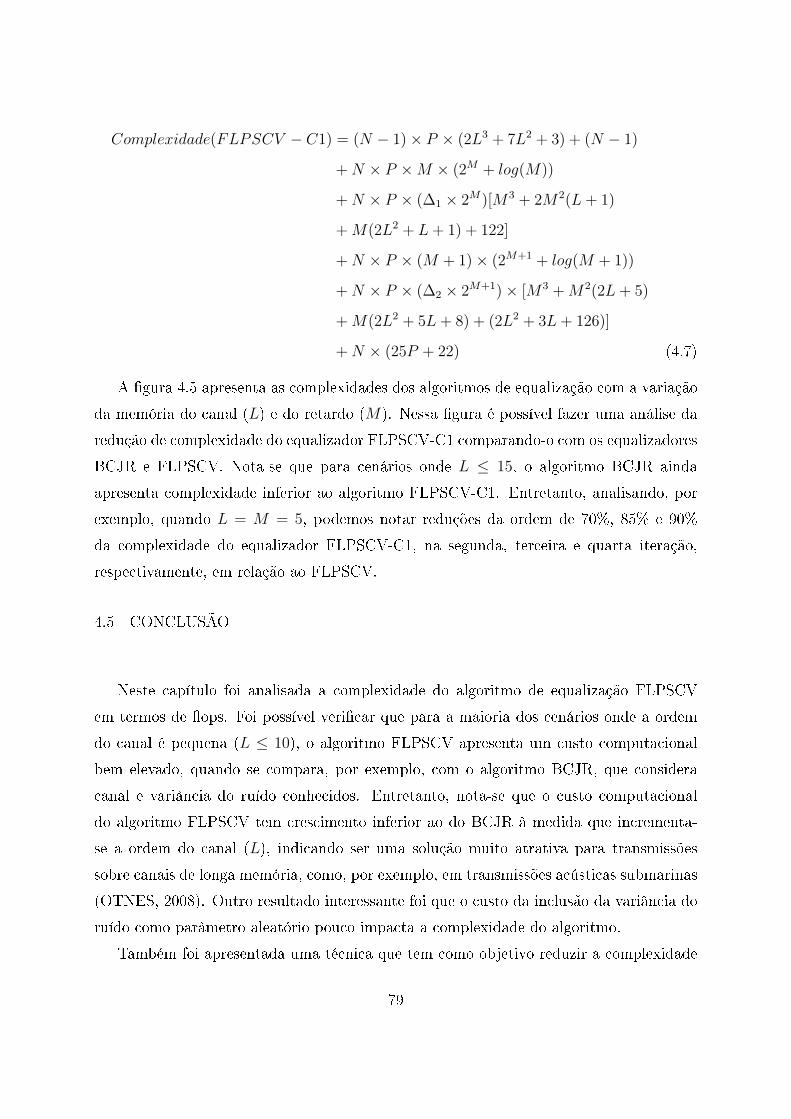
Complexidade(FLPSCV − C1) = (N − 1)× P × (2L3 + 7L2 + 3) + (N − 1)
+N × P ×M × (2M + log(M))
+N × P × (∆1 × 2M)[M3 + 2M2(L+ 1)
+M(2L2 + L+ 1) + 122]
+N × P × (M + 1)× (2M+1 + log(M + 1))
+N × P × (∆2 × 2M+1)× [M3 +M2(2L+ 5)
+M(2L2 + 5L+ 8) + (2L2 + 3L+ 126)]
+N × (25P + 22) (4.7)
A �gura 4.5 apresenta as complexidades dos algoritmos de equalização com a variação
da memória do canal (L) e do retardo (M). Nessa �gura é possível fazer uma análise da
redução de complexidade do equalizador FLPSCV-C1 comparando-o com os equalizadores
BCJR e FLPSCV. Nota-se que para cenários onde L ≤ 15, o algoritmo BCJR ainda
apresenta complexidade inferior ao algoritmo FLPSCV-C1. Entretanto, analisando, por
exemplo, quando L = M = 5, podemos notar reduções da ordem de 70%, 85% e 90%
da complexidade do equalizador FLPSCV-C1, na segunda, terceira e quarta iteração,
respectivamente, em relação ao FLPSCV.
4.5 CONCLUSÃO
Neste capítulo foi analisada a complexidade do algoritmo de equalização FLPSCV
em termos de �ops. Foi possível veri�car que para a maioria dos cenários onde a ordem
do canal é pequena (L ≤ 10), o algoritmo FLPSCV apresenta um custo computacional
bem elevado, quando se compara, por exemplo, com o algoritmo BCJR, que considera
canal e variância do ruído conhecidos. Entretanto, nota-se que o custo computacional
do algoritmo FLPSCV tem crescimento inferior ao do BCJR à medida que incrementa-
se a ordem do canal (L), indicando ser uma solução muito atrativa para transmissões
sobre canais de longa memória, como, por exemplo, em transmissões acústicas submarinas
(OTNES, 2008). Outro resultado interessante foi que o custo da inclusão da variância do
ruído como parâmetro aleatório pouco impacta a complexidade do algoritmo.
Também foi apresentada uma técnica que tem como objetivo reduzir a complexidade
79
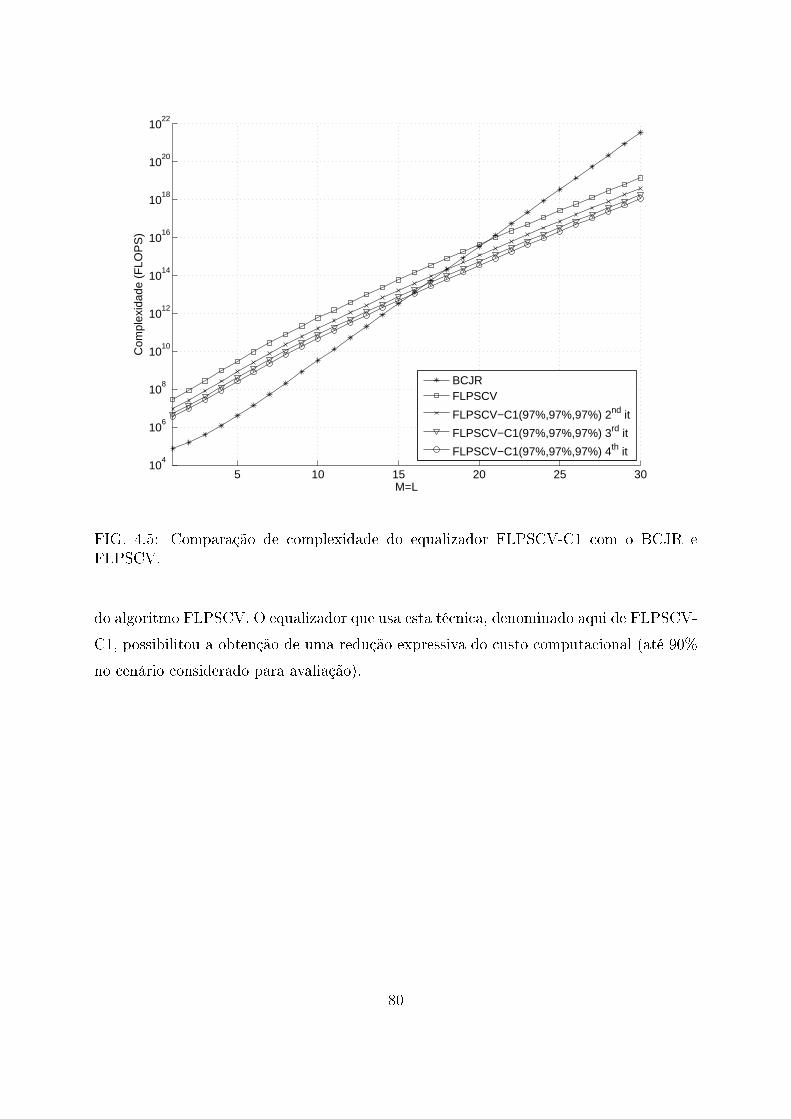
5 10 15 20 25 3010
4
106
108
1010
1012
1014
1016
1018
1020
1022
M=L
Com
plex
idad
e (F
LOP
S)
BCJRFLPSCV
FLPSCV−C1(97%,97%,97%) 2nd it
FLPSCV−C1(97%,97%,97%) 3rd it
FLPSCV−C1(97%,97%,97%) 4th it
FIG. 4.5: Comparação de complexidade do equalizador FLPSCV-C1 com o BCJR eFLPSCV.
do algoritmo FLPSCV. O equalizador que usa esta técnica, denominado aqui de FLPSCV-
C1, possibilitou a obtenção de uma redução expressiva do custo computacional (até 90%
no cenário considerado para avaliação).
80
5 AVALIAÇÃO DE DESEMPENHO EM TERMOS DA TAXA DE ERRO
DE BITS
5.1 INTRODUÇÃO
Neste capítulo são apresentados resultados de simulação e avaliação de desempenho de
receptores turbo que utilizam os algoritmos de equalização SISO propostos neste trabalho.
Foi adotado o seguinte cenário de simulação: uma sequência de bits foi gerada aleato-
riamente e codi�cada utilizando-se um codi�cador convolucional de taxa Rc = 1/2, com
polinômios geradores 1 + x2 e 1 + x + x2. Esses bits codi�cados foram embaralhados e
mapeados utilizando a modulação BPSK (xn = ±1). Em todos os cenários foi utilizado o
canal "C" (PROAKIS, 1994) e em todos os receptores empregou-se o decodi�cador BCJR
(L. R. BAHL, 1974). Todos os equalizadores baseados em FP com suavização foram im-
plementados com retardo de 3 símbolos (M = 3) e 30 partículas (P = 30) foram utilizadas
para aproximar a distribuição a posteriori dos símbolos. Com o objetivo de combater o
problema de degenerescência das partículas foi utilizado o limite mínimo do valor efetivo
do peso das partículas de 1/2 (Peff = 1/2). Em todas as simulações foram realizadas
quatro iterações no receptor, para permitir a análise do ganho de desempenho entre a
primeira e quarta iteração.
Para a avaliação de desempenho apresentada na seção 5.2 foi adicionado um preâmbulo
de símbolos conhecidos ao pacote de dados para estimação do canal e da variância do ruído.
Já na seção 5.3 são considerados turbo equalizadores cegos em que apenas a ordem e a
norma do canal são consideradas conhecidas. Na seção 5.4 são apresentados resultados de
taxa de erro de bit (BER xEb
N0
) e tempo total de simulação do equalizador FLPSCV-C1,
comparando-o com os do algoritmo FLPSCV, procurando-se assim avaliar a barganha
obtida entre redução do custo computacional e aumento da taxa de erros.
81

5.2 IMPLEMENTAÇÃO COM SEQUÊNCIAS DE TREINAMENTO
5.2.1 INICIALIZAÇÃO DOS PARÂMETROS
Neste cenário de transmissão, uma sequência de C + R símbolos de treinamento é
enviada para possibilitar a estimação dos parâmetros de transmissão (h0, Λ0, α0 e β0).
Os primeiros C símbolos são utilizados no algoritmo RLS para estimar h0 = hRLS. A
matriz covariância do erro de estimação inicial é determinada por Λ0 = σ2ωQ
RLS, onde
QRLS é a matriz de correlação inversa (HAYKIN, 1991), dada pelo algoritmo RLS. A
variância do ruído (σ2ω) é estimada pelos R símbolos de treinamento restantes, conforme
abaixo:
σ2w =
1
R
R∑n=1
(yn − xTn h
RLS)2. (5.1)
É possível calcular a média e a variância de σ2w, se assumirmos que:
h = hRLS + he,
onde he representa o erro entre o valor real da CIR e hRLS. Considerando que este erro
segue uma distribuição gaussiana com parâmetros:
p(he) = N (he;0,Λ0)
podemos encontrar, após algumas manipulações algébricas:
E[σ2w
]=
1
RE
[R∑
n=1
(wn + xTnh
e)2
]
= σ2w +
δRR, (5.2)
onde δR =∑R
i=1 xTi Λ0xi e:
V ar[σ2w
]= E
[σ4w
]− E2
[σ2w
]=
2σ4w
R+
4σ2wδRR2
+2γRR2
(5.3)
82

onde γR =∑R
i=1
∑Rj=1(x
Ti Λ0xj)
2.
Dado o modelo de�nido pela equação (3.3), os parâmetros iniciais α0 e β0 estão rela-
cionados à média e variância de σ2w, conforme a seguir (A. GELMAN, 1995): α0 =
E2[σ2ω]
V ar[σ2ω]
+ 2
β0 = (α0 − 1)E[σ2ω]
(5.4)
É razoável assumir que:
E[σ2w
]= σ2
w. (5.5)
Desta forma, com o intuito de obter a expressão para a variância σ2w, utilizando a
equação (5.5), faremos:
V ar[σ2w] = E[(σ2
w − E[σ2w])
2]
= E[(σ2w − σ2
w)2]
= V ar[σ2w] +
(δRR
)2
. (5.6)
Logo, combinando as expressões (5.2), (5.3), (5.4), (5.5) e (5.6), �nalmente podemos
encontrar a expressão para calcular α0 and β0, conforme abaixo: α0 =R3σ4
ω
2(Rσ2w − δR)2 + 4δR(Rσ2
w − δR) +Rδ2R + 2RγR+ 2
β0 = (α0 − 1)σ2ω
(5.7)
5.2.2 RESULTADOS
A �gura 5.1 apresenta BER em função da razão Eb/N0 (BER xEb
N0
) da 1a e 4a iteração
para blocos de comprimento de 128 bits, quando C+R = 14. Ela mostra que as taxas de
erro de todas as alternativas são altas, principalmente devido a uma inicialização precária
do algoritmo e à severa característica do canal. Entretanto, após quatro iterações, o
receptor com equalizador FLPSCV alcança uma taxa de erro bem menor do que as demais
alternativas, principalmente para valores de Eb/N0 > 8 dB. Até mesmo na primeira
iteração, o desempenho é claramente melhor, alcançando em Eb/N0 = 12 dB uma taxa de
erro menor do que qualquer outra alternativa após 4 iterações. Quando comparados os
83
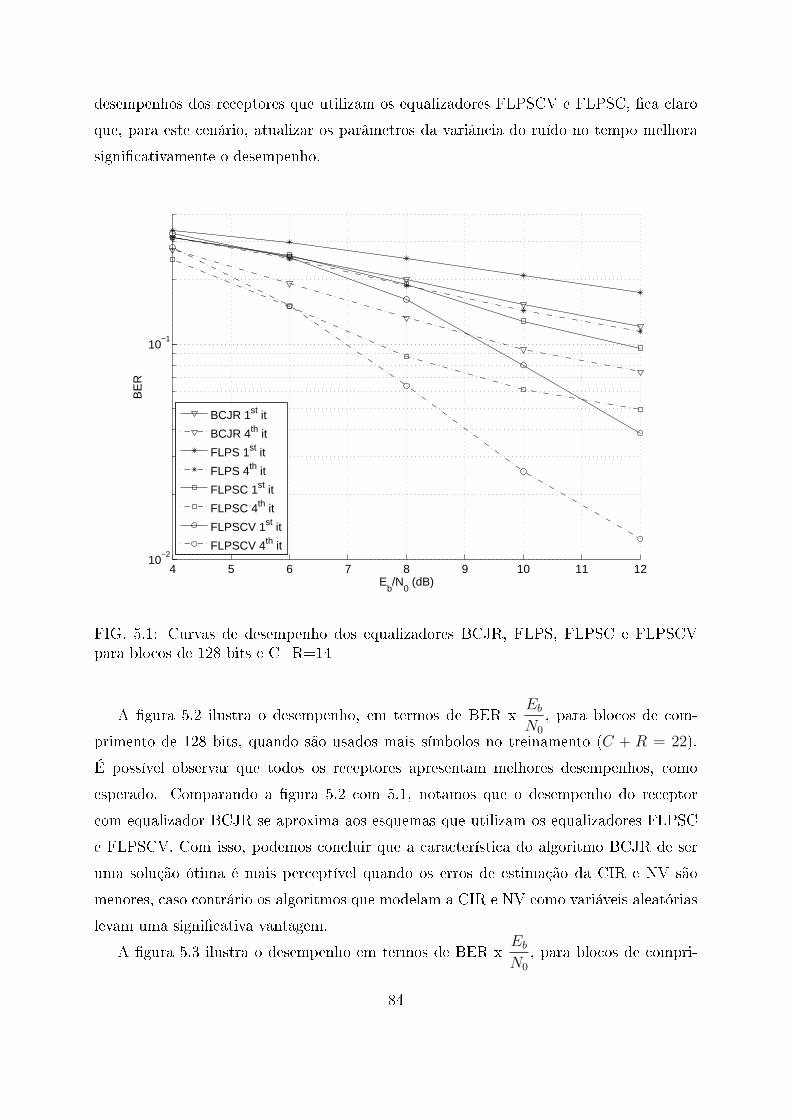
desempenhos dos receptores que utilizam os equalizadores FLPSCV e FLPSC, �ca claro
que, para este cenário, atualizar os parâmetros da variância do ruído no tempo melhora
signi�cativamente o desempenho.
4 5 6 7 8 9 10 11 1210
−2
10−1
Eb/N
0 (dB)
BE
R
BCJR 1st it
BCJR 4th it
FLPS 1st it
FLPS 4th it
FLPSC 1st it
FLPSC 4th it
FLPSCV 1st it
FLPSCV 4th it
FIG. 5.1: Curvas de desempenho dos equalizadores BCJR, FLPS, FLPSC e FLPSCVpara blocos de 128 bits e C+R=14
A �gura 5.2 ilustra o desempenho, em termos de BER xEb
N0
, para blocos de com-
primento de 128 bits, quando são usados mais símbolos no treinamento (C + R = 22).
É possível observar que todos os receptores apresentam melhores desempenhos, como
esperado. Comparando a �gura 5.2 com 5.1, notamos que o desempenho do receptor
com equalizador BCJR se aproxima aos esquemas que utilizam os equalizadores FLPSC
e FLPSCV. Com isso, podemos concluir que a característica do algoritmo BCJR de ser
uma solução ótima é mais perceptível quando os erros de estimação da CIR e NV são
menores, caso contrário os algoritmos que modelam a CIR e NV como variáveis aleatórias
levam uma signi�cativa vantagem.
A �gura 5.3 ilustra o desempenho em termos de BER xEb
N0
, para blocos de compri-
84
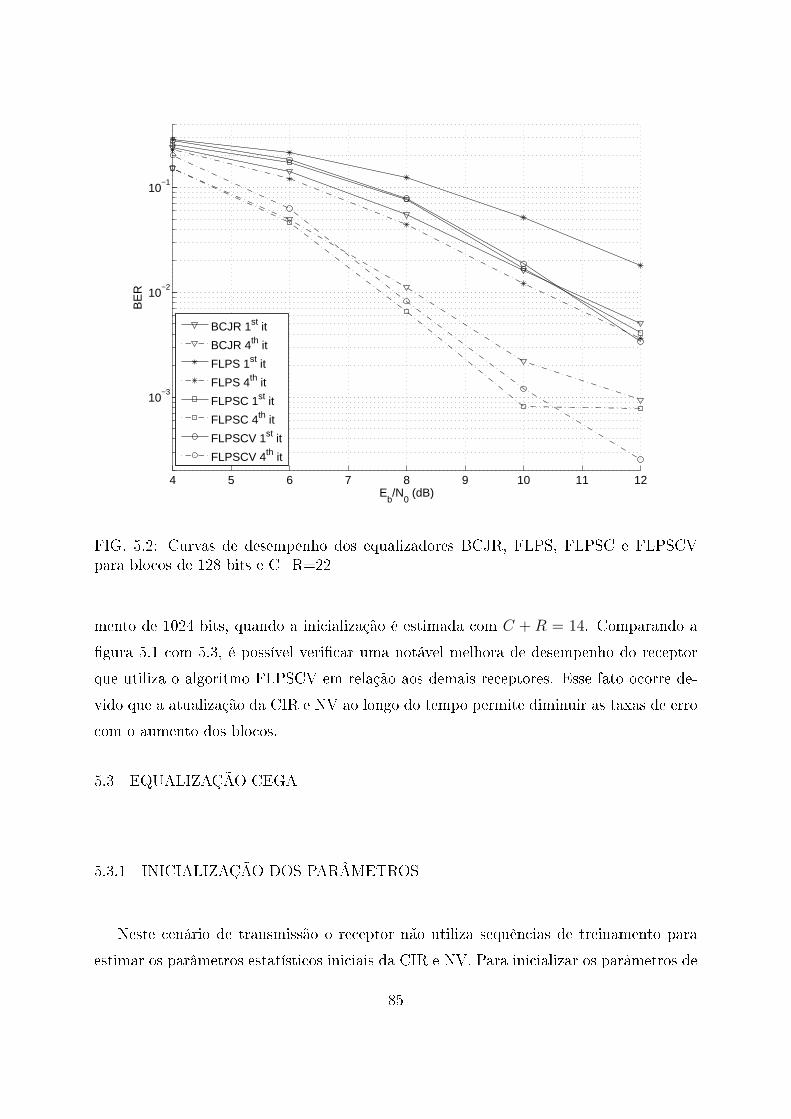
4 5 6 7 8 9 10 11 12
10−3
10−2
10−1
Eb/N
0 (dB)
BE
R
BCJR 1st it
BCJR 4th it
FLPS 1st it
FLPS 4th it
FLPSC 1st it
FLPSC 4th it
FLPSCV 1st it
FLPSCV 4th it
FIG. 5.2: Curvas de desempenho dos equalizadores BCJR, FLPS, FLPSC e FLPSCVpara blocos de 128 bits e C+R=22
mento de 1024 bits, quando a inicialização é estimada com C + R = 14. Comparando a
�gura 5.1 com 5.3, é possível veri�car uma notável melhora de desempenho do receptor
que utiliza o algoritmo FLPSCV em relação aos demais receptores. Esse fato ocorre de-
vido que a atualização da CIR e NV ao longo do tempo permite diminuir as taxas de erro
com o aumento dos blocos.
5.3 EQUALIZAÇÃO CEGA
5.3.1 INICIALIZAÇÃO DOS PARÂMETROS
Neste cenário de transmissão o receptor não utiliza sequências de treinamento para
estimar os parâmetros estatísticos iniciais da CIR e NV. Para inicializar os parâmetros de
85
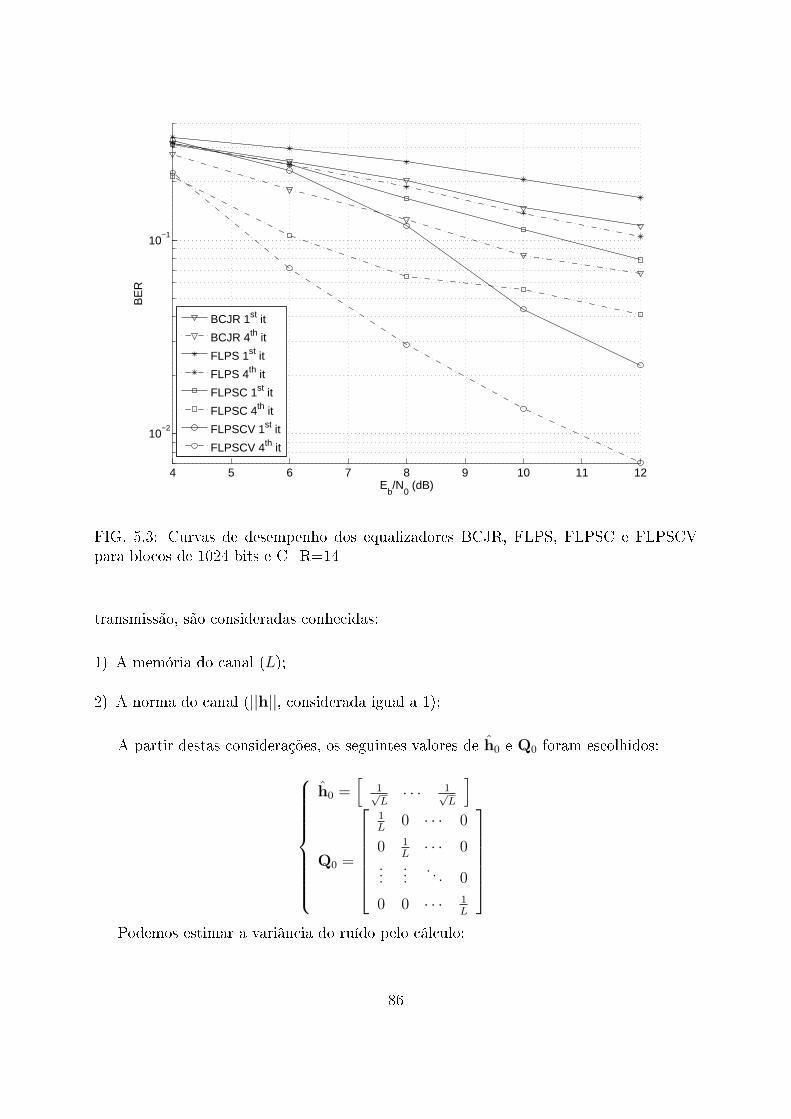
4 5 6 7 8 9 10 11 12
10−2
10−1
Eb/N
0 (dB)
BE
R
BCJR 1st it
BCJR 4th it
FLPS 1st it
FLPS 4th it
FLPSC 1st it
FLPSC 4th it
FLPSCV 1st it
FLPSCV 4th it
FIG. 5.3: Curvas de desempenho dos equalizadores BCJR, FLPS, FLPSC e FLPSCVpara blocos de 1024 bits e C+R=14
transmissão, são consideradas conhecidas:
1) A memória do canal (L);
2) A norma do canal (||h||, considerada igual a 1);
A partir destas considerações, os seguintes valores de h0 e Q0 foram escolhidos:
h0 =[
1√L
· · · 1√L
]
Q0 =
1L
0 · · · 0
0 1L
· · · 0...
.... . . 0
0 0 · · · 1L
Podemos estimar a variância do ruído pelo cálculo:
86

E[y2n]= E
[(xT
nh+ ωn)2]
= E
( L∑l=1
(xn−l+1hl) + ωn
)2 .
Sabendo que xn e xk são descorrelacionados ∀n = k e que xn e wk são descorrelaciona-
dos ∀(n, k), teremos:
E[y2n]= E
( L∑l=1
(xn−l+1hl) + ωn
)2
= E
[(L∑l=1
(x2n−l+1h
2l ) + ω2
n
)]
=L∑l=1
h2lE[x2n−l+1
]+ E
[ω2n
]=
L∑l=1
h2l × 1 + V ar
[ω2n
]= ||h||2 + σ2
ω.
Desta forma, podemos obter o valor da variância através da seguinte equação:
σ2ω =
1
N
N∑n=1
y2n − ||h||2 (5.8)
=1
N
N∑n=1
y2n − 1
Ainda é necessário criar um artifício para estimar os valores de α0 e β0. Inicialmente,
iremos de�nir o parâmetro ϕ como:
ϕ =V ar[σ2
ω]
E2[σ2ω]
. (5.9)
Como já temos calculado o valor de σ2ω pela equação (5.8), podemos combinar as
equações (5.4) e (5.9) e obter:
87
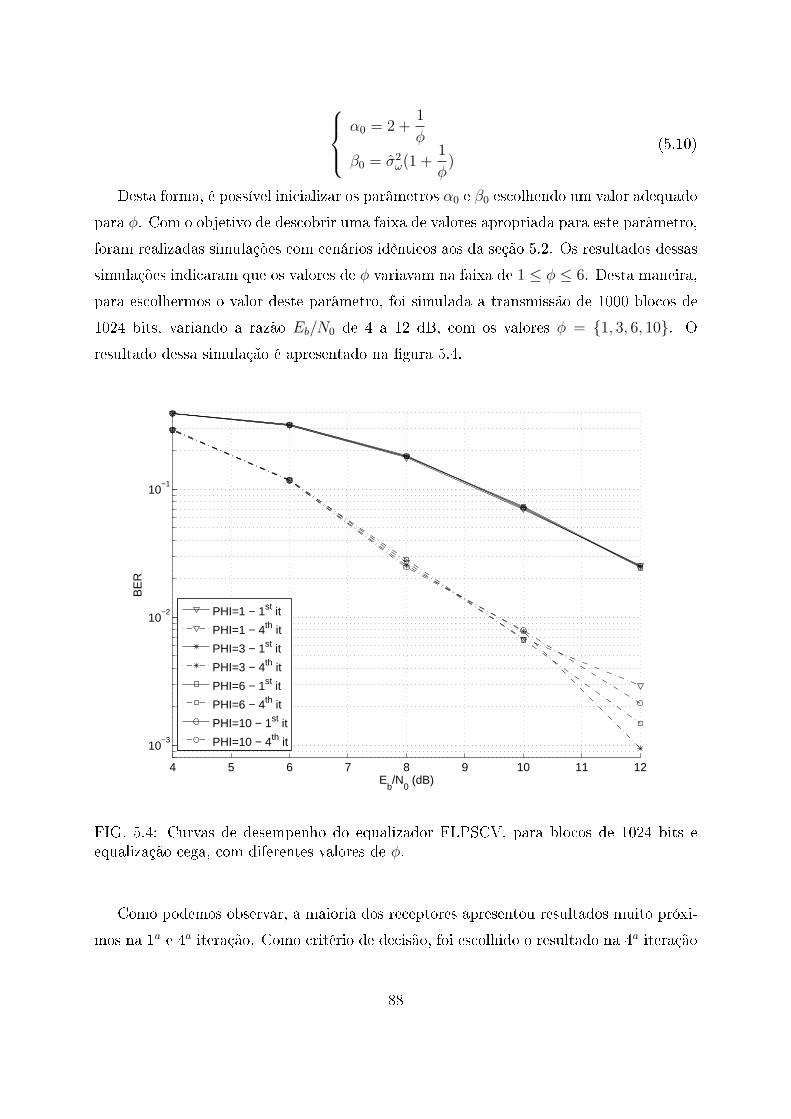
α0 = 2 +
1
ϕ
β0 = σ2ω(1 +
1
ϕ)
(5.10)
Desta forma, é possível inicializar os parâmetros α0 e β0 escolhendo um valor adequado
para ϕ. Com o objetivo de descobrir uma faixa de valores apropriada para este parâmetro,
foram realizadas simulações com cenários idênticos aos da seção 5.2. Os resultados dessas
simulações indicaram que os valores de ϕ variavam na faixa de 1 ≤ ϕ ≤ 6. Desta maneira,
para escolhermos o valor deste parâmetro, foi simulada a transmissão de 1000 blocos de
1024 bits, variando a razão Eb/N0 de 4 a 12 dB, com os valores ϕ = {1, 3, 6, 10}. O
resultado dessa simulação é apresentado na �gura 5.4.
4 5 6 7 8 9 10 11 12
10−3
10−2
10−1
Eb/N
0 (dB)
BE
R
PHI=1 − 1st it
PHI=1 − 4th it
PHI=3 − 1st it
PHI=3 − 4th it
PHI=6 − 1st it
PHI=6 − 4th it
PHI=10 − 1st it
PHI=10 − 4th it
FIG. 5.4: Curvas de desempenho do equalizador FLPSCV, para blocos de 1024 bits eequalização cega, com diferentes valores de ϕ.
Como podemos observar, a maioria dos receptores apresentou resultados muito próxi-
mos na 1a e 4a iteração. Como critério de decisão, foi escolhido o resultado na 4a iteração
88
em Eb/N0 = 12dB, tendo em vista que este foi o único resultado em que as curvas apre-
sentaram uma diferença mais signi�cativa, indicando um melhor desempenho do receptor
que utilizava o valor ϕ = 3 (valor escolhido).
5.3.2 RESULTADOS
Durante as simulações nos cenários de equalização cega, notou-se que alguns blocos
(5% em média) apresentavam taxas de erros elevadas em todas as iterações, indicando que
o algoritmo de recepção estava divergindo. A �m de evitar que esses blocos com elevadas
taxas de erro distorça o resultado �nal, foi elaborada uma regra para eliminação desses
blocos. A regra consiste em descartar blocos que tenham taxa de erro acima de 35% na
4a iteração. Este valor foi escolhido arbitrariamente.
As �guras 5.5 e 5.6 apresentam, respectivamente, o desempenho em termos de BER
xEb
N0
e o número de blocos descartados dos turbo equalizadores cegos baseados nos al-
goritmos de equalização BCJR, FLPS, FLPSC e FLPSCV, para blocos de 1024 bits.
Observando o desempenho dos receptores com equalizadores BCJR e FLPS, podemos in-
ferir claramente que considerar a CIR como conhecida implica uma perda de desempenho
signi�cativa. Podemos notar que na 1a iteração a modelagem da variância de ruído pi-
orou o resultado, tendo em vista que o receptor com equalizador FLPSC apresentou as
menores taxas de erros. Analisando o número de blocos perdidos, podemos observar que
os receptores baseados nos equalizadores FLPS e BCJR tiveram um número muito alto
de blocos descartados e que os receptores baseados nos algoritmos FLPSC e FLPSCV
tiveram resultados próximos.
O desempenho inferior do equalizador FLPSCV em relação ao FLPSC pode indicar
uma má estimação dos parâmetros estatísticos da variância do ruído pela técnica des-
crita na subseção 5.3.1. Embora a NV seja modelada como um parâmetro desconhecido
no equalizador FLPSCV, é possível que uma inicialização muito distante do valor real
provoque uma divergência na propagação dos parâmetros estatísticos dessa variável (αn−1
e βin−1), isto é, é possível que a média da variância do ruído ((σi
w)2 = βi
n−1/(αn−1 − 1))
esteja se distanciando do valor real ao longo do tempo. Para con�rmar este indicativo,
foi realizada uma simulação com 1000 blocos de 1024 bits, variando a razão Eb/N0 entre
4 e 12 dB, com o objetivo de obter o erro médio quadrático (EMQ) da estimativa da
variância (σ2w) em cenários de recepção com treinamento e sem treinamento (cega). Esse
89
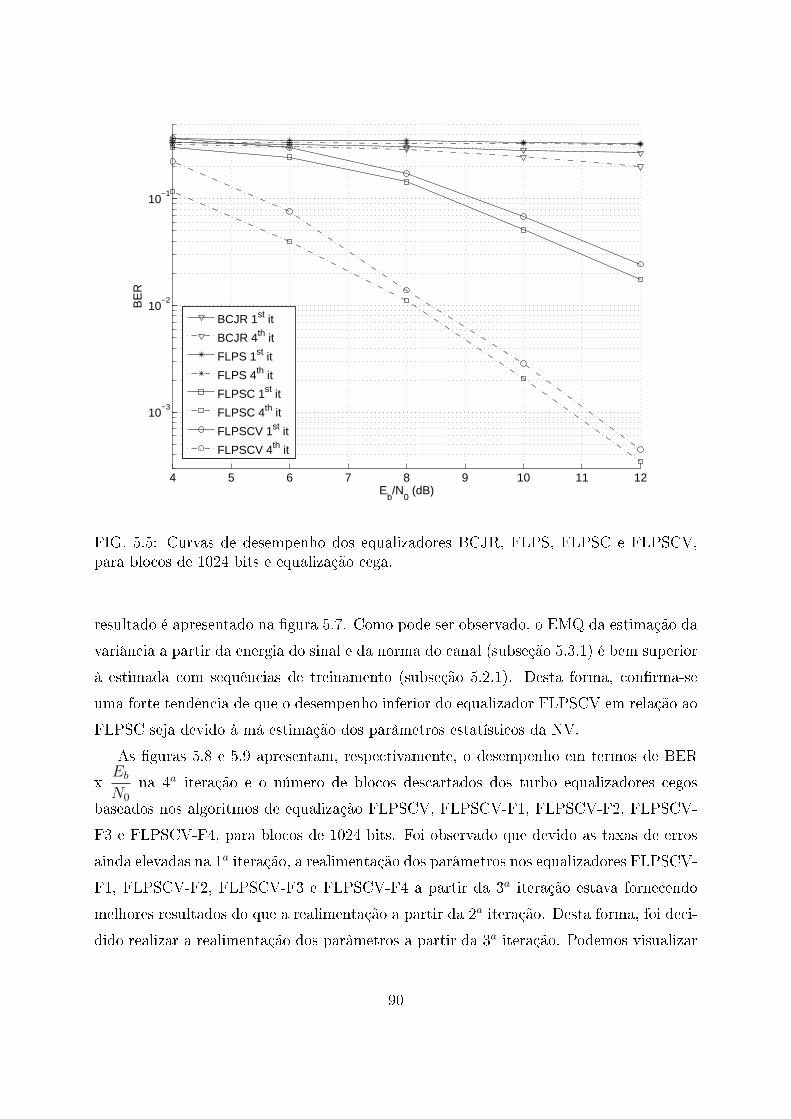
4 5 6 7 8 9 10 11 12
10−3
10−2
10−1
Eb/N
0 (dB)
BE
R
BCJR 1st it
BCJR 4th it
FLPS 1st it
FLPS 4th it
FLPSC 1st it
FLPSC 4th it
FLPSCV 1st it
FLPSCV 4th it
FIG. 5.5: Curvas de desempenho dos equalizadores BCJR, FLPS, FLPSC e FLPSCV,para blocos de 1024 bits e equalização cega.
resultado é apresentado na �gura 5.7. Como pode ser observado, o EMQ da estimação da
variância a partir da energia do sinal e da norma do canal (subseção 5.3.1) é bem superior
à estimada com sequências de treinamento (subseção 5.2.1). Desta forma, con�rma-se
uma forte tendência de que o desempenho inferior do equalizador FLPSCV em relação ao
FLPSC seja devido à má estimação dos parâmetros estatísticos da NV.
As �guras 5.8 e 5.9 apresentam, respectivamente, o desempenho em termos de BER
xEb
N0
na 4a iteração e o número de blocos descartados dos turbo equalizadores cegos
baseados nos algoritmos de equalização FLPSCV, FLPSCV-F1, FLPSCV-F2, FLPSCV-
F3 e FLPSCV-F4, para blocos de 1024 bits. Foi observado que devido as taxas de erros
ainda elevadas na 1a iteração, a realimentação dos parâmetros nos equalizadores FLPSCV-
F1, FLPSCV-F2, FLPSCV-F3 e FLPSCV-F4 a partir da 3a iteração estava fornecendo
melhores resultados do que a realimentação a partir da 2a iteração. Desta forma, foi deci-
dido realizar a realimentação dos parâmetros a partir da 3a iteração. Podemos visualizar
90
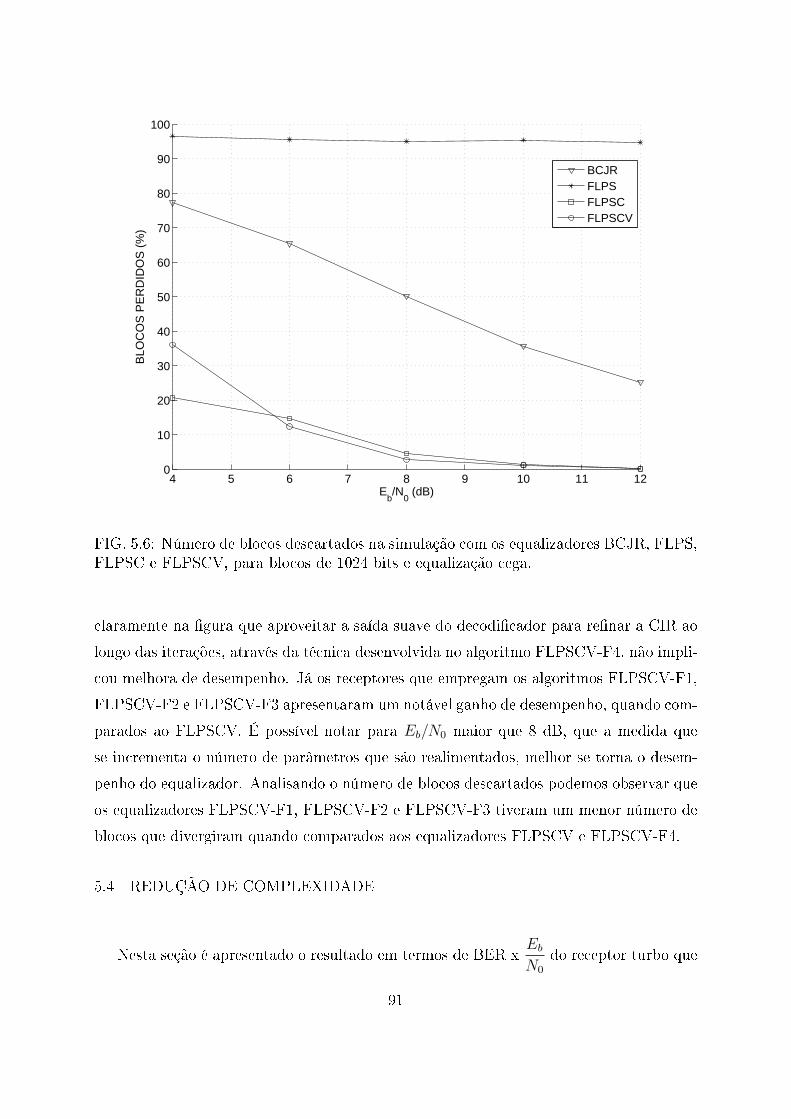
4 5 6 7 8 9 10 11 120
10
20
30
40
50
60
70
80
90
100
Eb/N
0 (dB)
BLO
CO
S P
ER
DID
OS
(%
)
BCJRFLPSFLPSCFLPSCV
FIG. 5.6: Número de blocos descartados na simulação com os equalizadores BCJR, FLPS,FLPSC e FLPSCV, para blocos de 1024 bits e equalização cega.
claramente na �gura que aproveitar a saída suave do decodi�cador para re�nar a CIR ao
longo das iterações, através da técnica desenvolvida no algoritmo FLPSCV-F4, não impli-
cou melhora de desempenho. Já os receptores que empregam os algoritmos FLPSCV-F1,
FLPSCV-F2 e FLPSCV-F3 apresentaram um notável ganho de desempenho, quando com-
parados ao FLPSCV. É possível notar para Eb/N0 maior que 8 dB, que a medida que
se incrementa o número de parâmetros que são realimentados, melhor se torna o desem-
penho do equalizador. Analisando o número de blocos descartados podemos observar que
os equalizadores FLPSCV-F1, FLPSCV-F2 e FLPSCV-F3 tiveram um menor número de
blocos que divergiram quando comparados aos equalizadores FLPSCV e FLPSCV-F4.
5.4 REDUÇÃO DE COMPLEXIDADE
Nesta seção é apresentado o resultado em termos de BER xEb
N0
do receptor turbo que
91
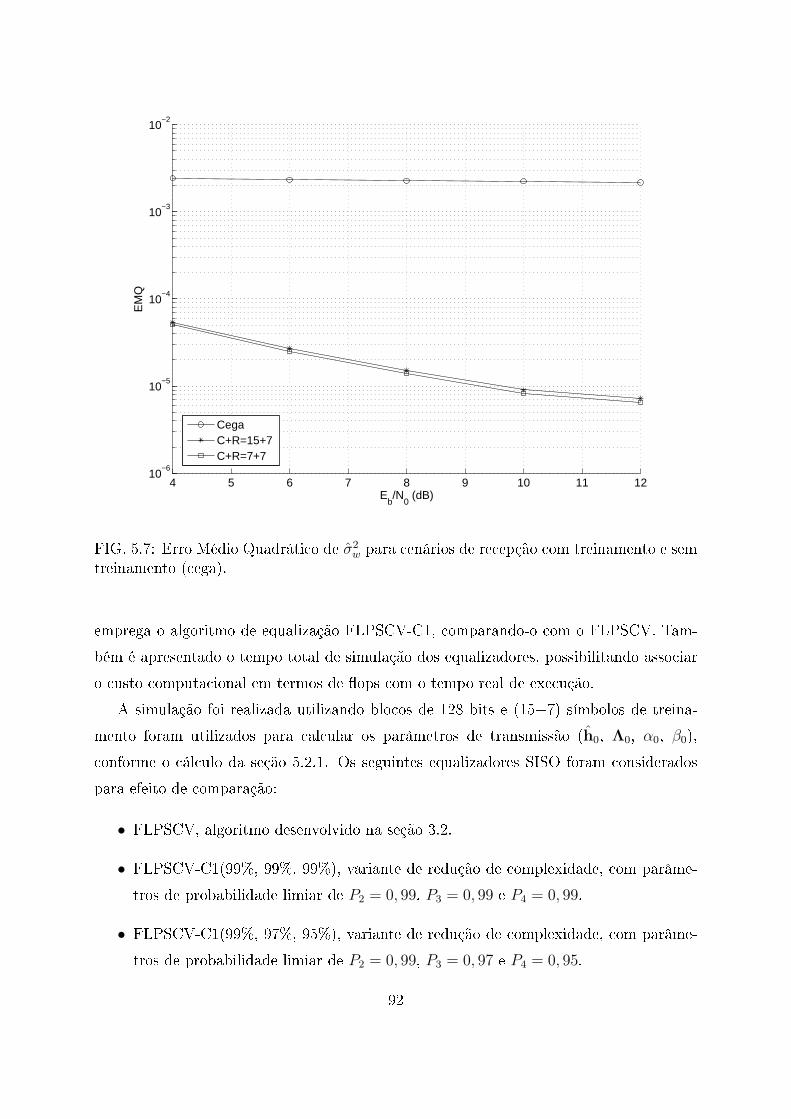
4 5 6 7 8 9 10 11 1210
−6
10−5
10−4
10−3
10−2
Eb/N
0 (dB)
EM
Q
CegaC+R=15+7C+R=7+7
FIG. 5.7: Erro Médio Quadrático de σ2w para cenários de recepção com treinamento e sem
treinamento (cega).
emprega o algoritmo de equalização FLPSCV-C1, comparando-o com o FLPSCV. Tam-
bém é apresentado o tempo total de simulação dos equalizadores, possibilitando associar
o custo computacional em termos de �ops com o tempo real de execução.
A simulação foi realizada utilizando blocos de 128 bits e (15+7) símbolos de treina-
mento foram utilizados para calcular os parâmetros de transmissão (h0, Λ0, α0, β0),
conforme o cálculo da seção 5.2.1. Os seguintes equalizadores SISO foram considerados
para efeito de comparação:
• FLPSCV, algoritmo desenvolvido na seção 3.2.
• FLPSCV-C1(99%, 99%, 99%), variante de redução de complexidade, com parâme-
tros de probabilidade limiar de P2 = 0, 99, P3 = 0, 99 e P4 = 0, 99.
• FLPSCV-C1(99%, 97%, 95%), variante de redução de complexidade, com parâme-
tros de probabilidade limiar de P2 = 0, 99, P3 = 0, 97 e P4 = 0, 95.
92
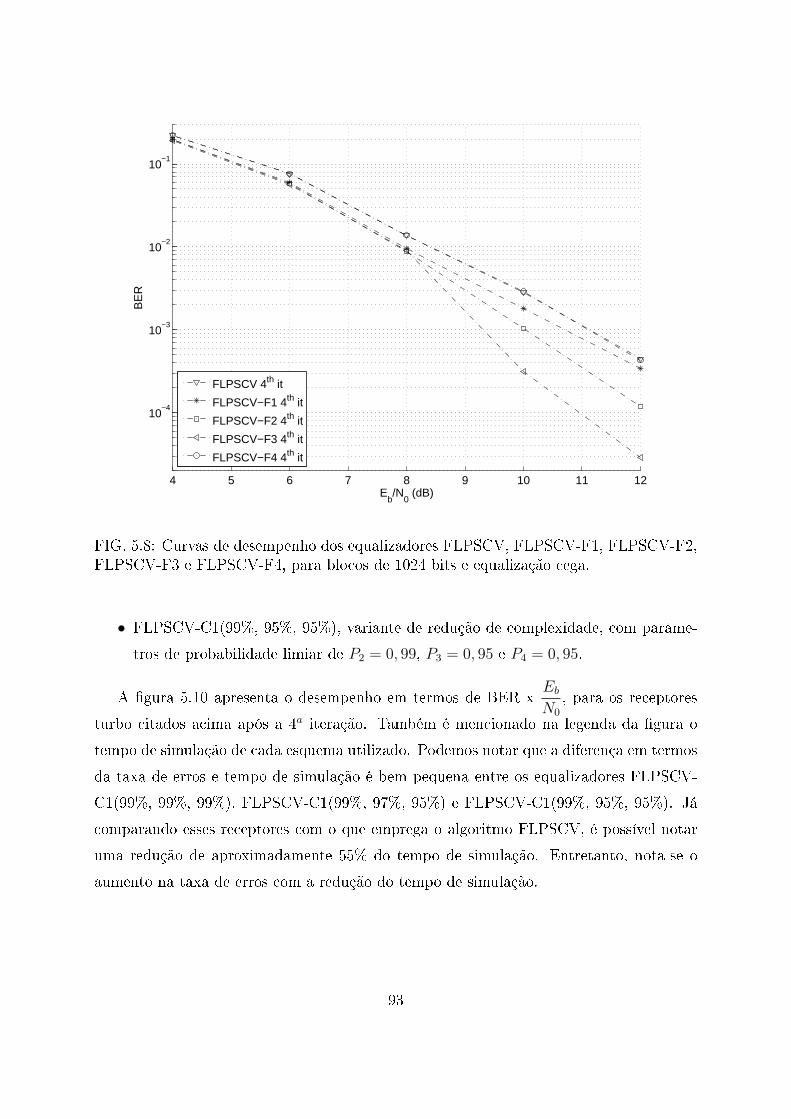
4 5 6 7 8 9 10 11 12
10−4
10−3
10−2
10−1
Eb/N
0 (dB)
BE
R
FLPSCV 4th it
FLPSCV−F1 4th it
FLPSCV−F2 4th it
FLPSCV−F3 4th it
FLPSCV−F4 4th it
FIG. 5.8: Curvas de desempenho dos equalizadores FLPSCV, FLPSCV-F1, FLPSCV-F2,FLPSCV-F3 e FLPSCV-F4, para blocos de 1024 bits e equalização cega.
• FLPSCV-C1(99%, 95%, 95%), variante de redução de complexidade, com parâme-
tros de probabilidade limiar de P2 = 0, 99, P3 = 0, 95 e P4 = 0, 95.
A �gura 5.10 apresenta o desempenho em termos de BER xEb
N0
, para os receptores
turbo citados acima após a 4a iteração. Também é mencionado na legenda da �gura o
tempo de simulação de cada esquema utilizado. Podemos notar que a diferença em termos
da taxa de erros e tempo de simulação é bem pequena entre os equalizadores FLPSCV-
C1(99%, 99%, 99%), FLPSCV-C1(99%, 97%, 95%) e FLPSCV-C1(99%, 95%, 95%). Já
comparando esses receptores com o que emprega o algoritmo FLPSCV, é possível notar
uma redução de aproximadamente 55% do tempo de simulação. Entretanto, nota-se o
aumento na taxa de erros com a redução do tempo de simulação.
93
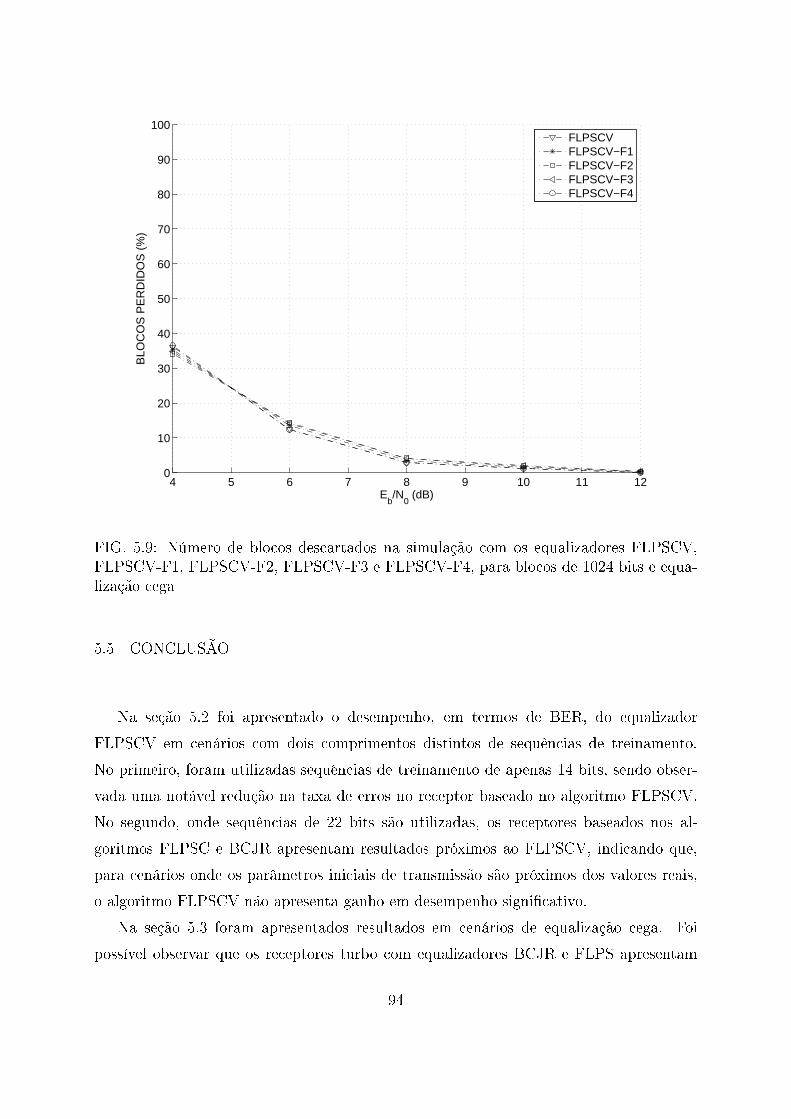
4 5 6 7 8 9 10 11 120
10
20
30
40
50
60
70
80
90
100
Eb/N
0 (dB)
BLO
CO
S P
ER
DID
OS
(%
)
FLPSCVFLPSCV−F1FLPSCV−F2FLPSCV−F3FLPSCV−F4
FIG. 5.9: Número de blocos descartados na simulação com os equalizadores FLPSCV,FLPSCV-F1, FLPSCV-F2, FLPSCV-F3 e FLPSCV-F4, para blocos de 1024 bits e equa-lização cega
5.5 CONCLUSÃO
Na seção 5.2 foi apresentado o desempenho, em termos de BER, do equalizador
FLPSCV em cenários com dois comprimentos distintos de sequências de treinamento.
No primeiro, foram utilizadas sequências de treinamento de apenas 14 bits, sendo obser-
vada uma notável redução na taxa de erros no receptor baseado no algoritmo FLPSCV.
No segundo, onde sequências de 22 bits são utilizadas, os receptores baseados nos al-
goritmos FLPSC e BCJR apresentam resultados próximos ao FLPSCV, indicando que,
para cenários onde os parâmetros iniciais de transmissão são próximos dos valores reais,
o algoritmo FLPSCV não apresenta ganho em desempenho signi�cativo.
Na seção 5.3 foram apresentados resultados em cenários de equalização cega. Foi
possível observar que os receptores turbo com equalizadores BCJR e FLPS apresentam
94
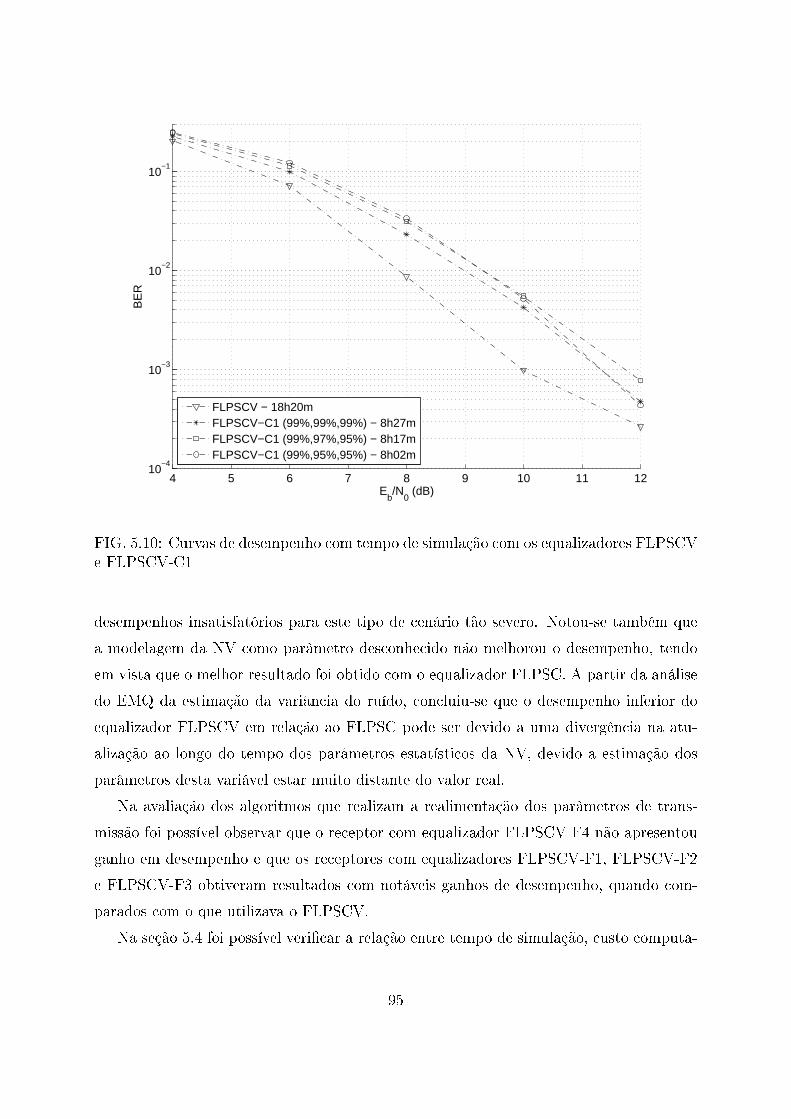
4 5 6 7 8 9 10 11 1210
−4
10−3
10−2
10−1
Eb/N
0 (dB)
BE
R
FLPSCV − 18h20mFLPSCV−C1 (99%,99%,99%) − 8h27mFLPSCV−C1 (99%,97%,95%) − 8h17mFLPSCV−C1 (99%,95%,95%) − 8h02m
FIG. 5.10: Curvas de desempenho com tempo de simulação com os equalizadores FLPSCVe FLPSCV-C1
desempenhos insatisfatórios para este tipo de cenário tão severo. Notou-se também que
a modelagem da NV como parâmetro desconhecido não melhorou o desempenho, tendo
em vista que o melhor resultado foi obtido com o equalizador FLPSC. A partir da análise
do EMQ da estimação da variância do ruído, concluiu-se que o desempenho inferior do
equalizador FLPSCV em relação ao FLPSC pode ser devido a uma divergência na atu-
alização ao longo do tempo dos parâmetros estatísticos da NV, devido a estimação dos
parâmetros desta variável estar muito distante do valor real.
Na avaliação dos algoritmos que realizam a realimentação dos parâmetros de trans-
missão foi possível observar que o receptor com equalizador FLPSCV-F4 não apresentou
ganho em desempenho e que os receptores com equalizadores FLPSCV-F1, FLPSCV-F2
e FLPSCV-F3 obtiveram resultados com notáveis ganhos de desempenho, quando com-
parados com o que utilizava o FLPSCV.
Na seção 5.4 foi possível veri�car a relação entre tempo de simulação, custo computa-
95
cional e taxa de erro de bits do equalizador com redução de complexidade. Primeiramente,
comparando a redução do tempo de simulação com o aumento da taxa de erros, pode-se
observar, em média, uma redução de tempo de 55%, enquanto o aumento da taxa de
erros foi em torno de 1 dB. Comparando a redução do custo computacional com a re-
dução do tempo de simulação, nota-se uma redução do custo de 80% (resultado obtido
da análise de número de �ops no capítulo 4), enquanto que, na prática, veri�ca-se que o
tempo de simulação foi reduzido em 55% para o conjunto de software/hardware utilizado
na simulação.
96
6 CONSIDERAÇÕES FINAIS
Nesta dissertação foram propostos novos algoritmos com entrada e saída suaves basea-
dos em �ltragem de partículas para equalização turbo em situações de desconhecimento
da resposta ao impulso do canal e da variância do ruído.
Foram também elaboradas técnicas de melhorias dos algoritmos desenvolvidos, tirando
proveito de parâmetros estatísticos gerados ao longo das iterações pelo equalizador e pelo
decodi�cador de canal.
Além disso, foram feitas avaliações do custo computacional e de desempenho de taxa
de erros de bits, comparando os algoritmos desenvolvidos com outros equalizadores en-
contrados na literatura.
Com relação à avaliação de desempenho, pode-se concluir que:
• Com sequências de treinamento de 14 bits, o equalizador FLPSCV aqui desenvolvido
apresentou desempenho muito superior aos demais algoritmos analisados;
• Com sequências de treinamento de 22 bits, o desempenho do equalizador FLPSCV
foi ligeiramente inferior ao do FLPSC e um pouco melhor do que o do equalizador
BCJR, indicando que quando se dispõe de melhores estimativas iniciais dos parâ-
metros de canal e ruído o emprego deste último é mais interessante, devido à sua
reduzida complexidade;
• Na equalização cega, os equalizadores BCJR e FLPS apresentaram severas degrada-
ções de desempenho em comparação com os que modelam a CIR como parâmetro
desconhecido (FLPSC e FLPSCV);
• Na equalização cega, o FLPSCV mostrou desempenho inferior ao FLPSC, sugerindo
que a obtenção da variância do ruído a partir da energia do sinal e da norma do
canal fornece estimativas muito imprecisas;
• Na equalização cega, os equalizadores que empregam a realimentação de parâme-
tros extraídos ao �nal de cada iteração (FLPSCV-F1, FLPSCV-F2 e FLPSCV-F3)
apresentaram ganhos de desempenho signi�cativos em relação ao FLPSCV;
97
Quanto à avaliação da complexidade, chegou-se às seguintes conclusões:
• O custo computacional do algoritmo FLPSCV tem crescimento inferior ao do BCJR
à medida que incrementa-se a ordem do canal (L), o que indica ser o FLPSCV uma
solução atrativa para cenários de canais de longa memória, como, por exemplo, a
de transmissões acústicas submarinas (OTNES, 2008);
• Para canais de memória relativamente curta (L ≤ 10), o algoritmo FLPSCV apre-
senta complexidade extremamente elevada, quando comparada à do algoritmo BCJR;
• A introdução de técnicas de re�namento dos parâmetros da resposta ao impulso do
canal e da variância do ruído ao longo das iterações, tais como as utilizadas nos
algoritmos FLPSCV-F1, FLPSCV-F2, FLPSCV-F3 e FLPSCV-F4, não impacta o
custo computacional;
• O algoritmo FLPSCV-C1, que explora a informação a priori sobre os símbolos para
evitar cálculos envolvendo sub-sequências de baixa probabilidade a priori, apre-
sentou bons resultados, em termos do balanço entre complexidade e desempenho,
mostrando-se assim ser uma técnica bastante promissora para cenários onde se re-
quer redução da taxa de erros sem grandes aumentos de custo computacional.
6.1 PROPOSTAS PARA TRABALHOS FUTUROS
No sentido de dar prosseguimento a esta linha de trabalho, os seguintes temas para
investigações futuras podem ser destacados:
• avaliação de desempenho dos equalizadores propostos em canais variantes no tempo;
• avaliação de desempenho dos equalizadores propostos em canais de longa memória;
• busca por novas técnicas de redução de complexidade;
• tratamento da ordem e norma do canal como parâmetros desconhecidos.
98
7 REFERÊNCIAS BIBLIOGRÁFICAS
A. DOUCET, S.J. GODSILL, C. A. On sequential monte carlo sampling methodsfor bayesian �ltering. Statistics and Computing, 3(10):197�208, August 2000.
A. GELMAN, J. C. H. S. e RUBIN, D. Bayesian data analysis. Chapman and Hall,1995.
A. GUIMARÃES, B. AIT-EL-FQUIH, F. D. A �xed-lag particle smoother for blindsiso equalization of time-varying channels. IEEE Transactions on Wireless Com-munication, 9(2):512�516, February 2010.
BRINK, S. T. Convergence behavior of iteratively decoded parallel concatenatedcodes. IEEE Transactions on Communications, 49(10):1727�1737, October 2001.
C. BERROU, A. GLAVIEUX, P. T. New shannon limit error-correcting coding:Turbo codes. Proc. IEEE Int. Conf. on Communications, May 1993.
C. BORDIN, M. B. Particle �lters for joint blind equalization and decodingin frequency-selective channels. IEEE Transactions on Signal Processing, 56(4):2395�2405, June 2008.
C. DOUILLARD, M. JEZEQUEL, C. B. A. P. P. D. e GLAVIEUX, A. Iterative cor-rection of intersymbol interference: Turbo equalization. European Trans.Telecomm, 6(5):507�511, September 1995.
GUIMARÃES, A. e PINTO, E. Particle �ltering applied to turbo equalizationwith channel and noise variance estimation. Proc. IEEE 9th Workshop on Sig.Proc. Adv. in Wir. Comm. (SPAWC), July 2008.
HAYKIN, S. Adaptive �lter theory. Prentice-Hall, 1991.
J. ALVES, A. G. e PINTO, E. A �xed-lag particle smoother applied to turboequalization with channel and noise variance uncertainty. International Work-shop on Telecommunications, May 2011.
L. R. BAHL, J. COCKE, F. J. J. R. Optimal decoding of linear codes for minimizingsymbol error rate. IEEE Transactions On Information Theory, March 1974.
M. BOLIC, S. H. e DJURIC, P. M. Performance and complexity analysis of adap-tive particle �ltering for tracking applications. 36th Asilomar Conference onSignals, Systems and Computers, 1, November 2002.
M. TÜCHLER, R. KOETTER, A. C. S. Turbo equalization: An iterative equal-ization and decoding technique for coded data transmission. IEEE SignalProcessing Magazine, January 2004.
99
M. TÜCHLER, A. S. e KOETTER, R. Minimum mean squared error equalizationusing priors. IEEE Trans. Signal Process., 50(3):673�683, March 2002.
M.S. ARULAMPALAM, S. MASKELL, N. G. T. C. A tutorial on particle �lters foronline nonlinear/non-gaussian bayesian tracking. IEEE Transactions on SignalProcessing, 50(2):174�188, February 2002.
N.J. GORDON, D.J. SALMOND, A. S. Novel approach to nonlinear/non-gaussianbayesian state estimation. IEE Proceedings-F, 140(2):107�113, April 1993.
OTNES, R. e EGGEN, T. H. Underwater acoustic communications: Long-termtest of turbo equalization in shallow water. IEEE J. Ocean. Eng., 33(3):321�334,March 2008.
P.M. DJURIC, J.H. KOTECHA, J. Z. Y. H. T. G. M. B. J. M. Particle �ltering: Areview of the theory and how it can be used for solving problems in wirelesscommunications. IEEE Signal Processing Magazine, September 2003.
PROAKIS, J. G. Communications systems engineering. Prentice-Hall, 1994.
R. KARLSSON, T. S. e GUSTAFSSON, F. Complexity analysis of the marginalizedparticle �lter. IEEE Trans. Signal Process., 53(11):4408�4411, November 2005.
S. SONG, A. SINGER, K.-M. S. Soft input channel estimation for turbo equaliza-tion. IEEE Transactions on Signal Processing, 52(10):2885�2894, October 2004.
SKLAR, B. A structured overview of digital communications - a tutorial review- part ii. IEEE Communications Magazine, 21(7):6�21, October 1983.
TREES, H. L. V. Detection, estimation, and modulation theory. John Wiley andSons, 2001.
X. WANG, R. CHEN, J. L. Monte carlo bayesian signal processing for wirelesscommunications. Journal of VLSI Signal Processing, 30, June 2002.
X. WANG, R. C. Blind turbo equalization in gaussian and impulsive noise. IEEETransactions on Vehicular Technology, 50(4):1092�1105, July 2001.
YUVAPOOSITANON, P. Reduced-complexity rao-blackwellised particle �lteringfor fault diagnosis. International Symposium on Intelligent Signal Processing andCommunication Systems (ISPACS), December 2011.
100
Top Related