







Línguas
Páginas
Legal

MESTRADO INTEGRADO EM ARQUITECTURA AVALIAÇÃO DE DESEMPENHO
Módulo 1: DESEMPENHO ESPAÇO-FUNCIONAL
Docente: Teresa V. Heitor
A TEORIA DA SINTAXE ESPACIAL
O modelo sintáctico foi construído como um modelo descritivo para o fenómeno em estudo que é a
'forma urbana e arquitectónica'. A sua principal intenção é explicativa: procura caracterizar e interpretar
as interrelações entre os factores considerados relevantes na sua produção e captar relações espaciais
invariantes ou constantes formais. Para tal baseia-se num método conceptual de representação e
análise, designado por Análise Sintáctica, em que a realidade é descrita através de símbolos e relações
expressas em termos operativos. Consiste basicamente na descrição da estrutura configuracional do
sistema espacial.
A sua compreensão exige, porém, a prévia definição dos factores considerados relevantes e dos
conceitos em que se sustenta para traduzir a realidade.
Para a definição dos tipos morfológicos, Hillier e Hanson (1984) introduzem os termos genótipo e
fenótipo. Utilizam uma analogia biológica para fazer referência a uma visão morfogenética, ou seja ao
processo de configuração da forma em que o termo genótipo significa a constituição genética de um
organismo vivo e fenótipo se refere à composição actual do organismo distinta mas complementar da
sua constituição genética. O primeiro corresponde às constantes espaciais ou regras morfológicas de
natureza topológica, construídas em função das circunstâncias sociais do momento. O segundo
corresponde ao objecto urbano ou arquitectónico em que determinado genótipo foi aplicado. Ainda de
acordo com esta analogia, os elementos construídos são definidos como células1 ligadas ou
relacionadas entre si através de um genótipo.
O modelo subdivide-se em dois tipos: Alfa (α ) e Gama ( γ ). O modelo α destina-se a objectos urbanos
e γ a arquitectónicos. Esta distinção resulta essencialmente da especificidade das estruturas espaciais
1 Uma célula é definida como um espaço fisicamente delimitado e acessível do exterior, formado por pavimento, paredes e cobertura. Evidentemente para estes autores, a hipótese das células conterem DNA de modo a passar de geração em geração, instruções (códigos) sobre o modo de associação está posta de parte.
de cada um dos objectos. Em α a estrutura do espaço urbano é contínua, em γ o espaço interior de
um edifício não forma necessariamente um sistema contínuo. Enquanto no primeiro caso, os elementos
construídos (células) se articulam entre si de modo a definir relações de permeabilidade entre os
espaços e a permitirem a circulação, num edifício as células criam geralmente um conjunto de espaços
não-contínuos: na maioria dos casos, os espaços de um edifício não se destinam a serem
experimentados e percorridos globalmente; pelo contrário, organizam-se como um conjunto de factos
discretos, expressa e explicitamente desligados do sistema global. Este facto advém da própria
natureza social destes espaços.
Como já foi referido, a razão de ser de qualquer sistema espacial é promover o relacionamento entre os
dois grupos sociais que o utilizam: os habitantes e os visitantes. No entanto, o grau de controlo e
condicionamentos sobre esse relacionamento é substancialmente diferente em α e γ . Numa área
urbana é controlado ao nível da intensidade de uso e dos padrões de movimento e co-presença. Num
edifício constitui uma abstracção espacial associada a uma ideia funcional implícita no programa que se
estabelece em função de determinadas regras de utilização cuja realização é assegurada pela
dimensão espacial do edifício. Hillier e Hanson (1984) defendem que enquanto em α é a estrutura de
interrelações espaciais que influi nos padrões de movimento, em γ são frequentes as situações em
que os padrões de movimento são definidos pelo próprio programa do edifício e a organização espacial
se limita a permitir determinados movimentos.
Os modelos α e γ baseiam-se numa representação bi-dimensional. Esta simplificação da realidade
deriva unicamente do facto dos mecanismos estruturantes fundamentais da 'lógica social do espaço'
poderem ser traduzidos em duas dimensões. Apesar do espaço urbano e arquitectónico ser uma
entidade tridimensional, os indivíduos movem-se e relacionam-se nele bi-dimensionalmente. No modelo
γ , edifícios com mais de um piso correspondem a estruturas bi-dimensionais sobrepostas e ligadas.
1. O modelo α O modelo α é uma representação simplificada do espaço urbano destinada a captar a estrutura física
global de uma área urbana, embora não abdicando da estrutura local e de modo a que a dinâmica
social que o caracteriza seja integrada na própria descrição. Os pressupostos em que se baseia são:
O sistema espacial é considerado como uma estrutura de natureza contínua (y) definida em função das
relações de articulação estabelecidas entre os elementos construídos. Inclui os espaços de circulação,
de permanência e de acessibilidade aos elementos construídos. O sistema espacial está fisicamente
circunscrito por uma envolvente (Y), entendida como uma entidade única.
Os elementos construídos dividem-se em elementos primários (X) - células ou edifícios - e em
secundários (x) - barreiras ou limites construídos que definem espaços de acesso restrito, tais como
logradouros e jardins privados.
Os dois pólos do sistema - X e Y - correspondem a uma distinção sociológica fundamental em função
dos utilizadores do sistema. O polo X é o domínio dos Habitantes enquanto que Y representa o domínio
daqueles que entram no sistema vindos do exterior, os Visitantes. O relacionamento estabelece-se a
dois níveis: relações entre os habitantes do sistema e relações entre habitantes e visitantes.
Por sua vez, y organiza-se de dois modos distintos: bi-dimensionalmente através de superfícies
convexas e uni-dimensionalmente através de eixos de penetração física e visual, as linhas axiais. A
organização convexa de um sistema traduz a sua dimensão local: os espaços individualizados,
fisicamente delimitados por X e x. Como tal, um espaço convexo exprime em duas dimensões a máxima
extensão local do espaço público enquanto a organização axial representa a dimensão global do
sistema, referenciado a Y: uma linha axial capta o máximo de alongamento do espaço numa dimensão.
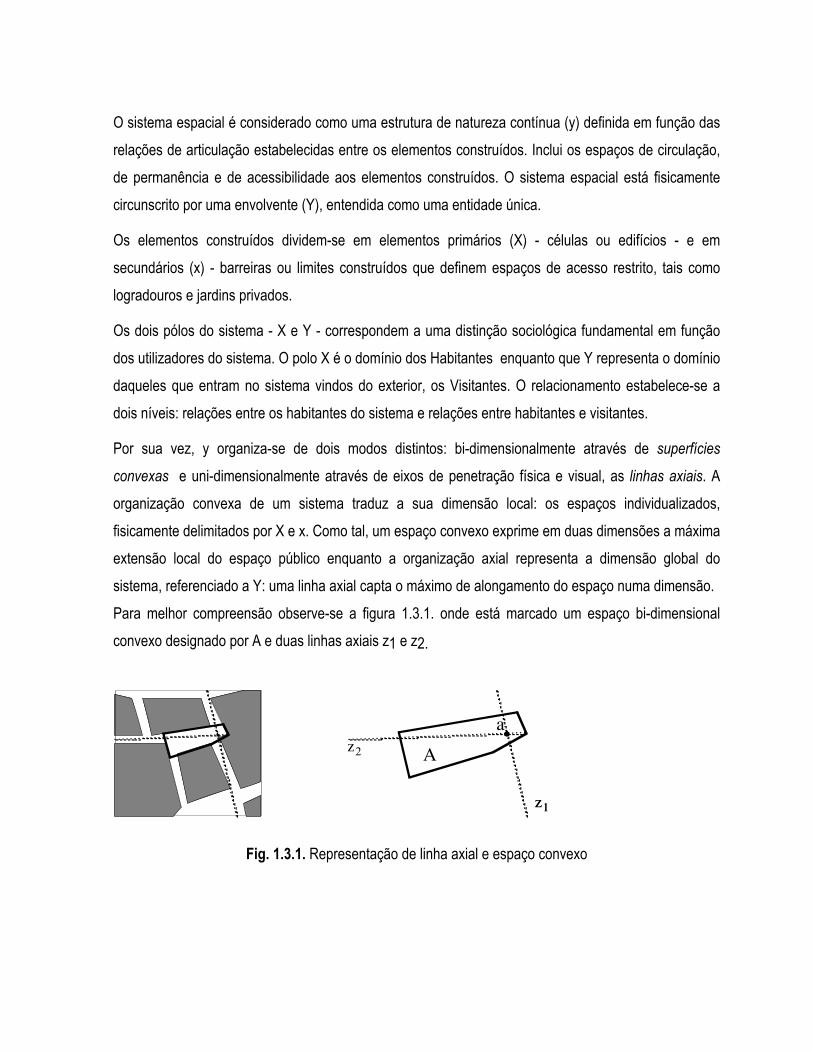
Para melhor compreensão observe-se a figura 1.3.1. onde está marcado um espaço bi-dimensional
convexo designado por A e duas linhas axiais z1 e z2.
z1z1
z2 Aa
Fig. 1.3.1. Representação de linha axial e espaço convexo
Por definição, num espaço convexo qualquer linha unindo quaisquer dois pontos está inteiramente nele
contida, i.e., todos os seus pontos são directamente acessíveis e visíveis a partir de um seu ponto
arbitrário.
O ponto a contido no espaço convexo pertence simultaneamente às rectas z1 e z2, designadas linhas
axiais, que também contêm outros pontos situados fora desse espaço convexo e que são directamente
visíveis e acessíveis a partir de a.
A axialidade relaciona os espaços convexos do sistema y entre si e com a envolvente Y e está
associada aos espaços de circulação e a padrões de movimento, enquanto a convexidade se refere aos
espaços de permanência e a padrões de co-presença.
A estrutura configuracional do sistema é o resultado das relações sintácticas estabelecidas entre y e X,
x e Y, ou mais precisamente, como os espaços de y se articulam entre si e simultaneamente se
relacionam com X, x e Y enquanto elementos de um conjunto mais lato.
As relações sintácticas caracterizam-se em função das noções de profundidade, de contiguidade e de
controlo espacial. A profundidade de um espaço v prende-se com a distância de v a todos os outros
espaços do sistema. Um espaço será tanto mais profundo quanto maior for a sua distância aos outros
espaços, i.e. quanto menos acessível for. A contiguidade de um espaço v traduz o número de espaços
directamente adjacentes. Um espaço será tanto mais contíguo quanto maior for o número de espaços
confinantes com ele. O controlo de um espaço v precisa a importância do espaço v relativamente aos
outros espaços do sistema enquanto ponto obrigatório de passagem.
A caracterização de um sistema ou parte dele, em função das relações sintácticas estabelecidas entre
os seus espaços designa-se por descrição sintáctica..
Para facilitar a compreensão destas relações, observe-se os grafos representado na figura 1.3.2. em
que os vértices representam espaços e as arestas as relações de adjacência entre eles.
Relativamente à profundidade (distância), verifica-se que os grafos I, III e IV apresentam menor
profundidade do que o grafo II. No primeiro caso, as distâncias entre os vértices variam entre os valores
1 e 2, enquanto no segundo variam entre 1 e 3.
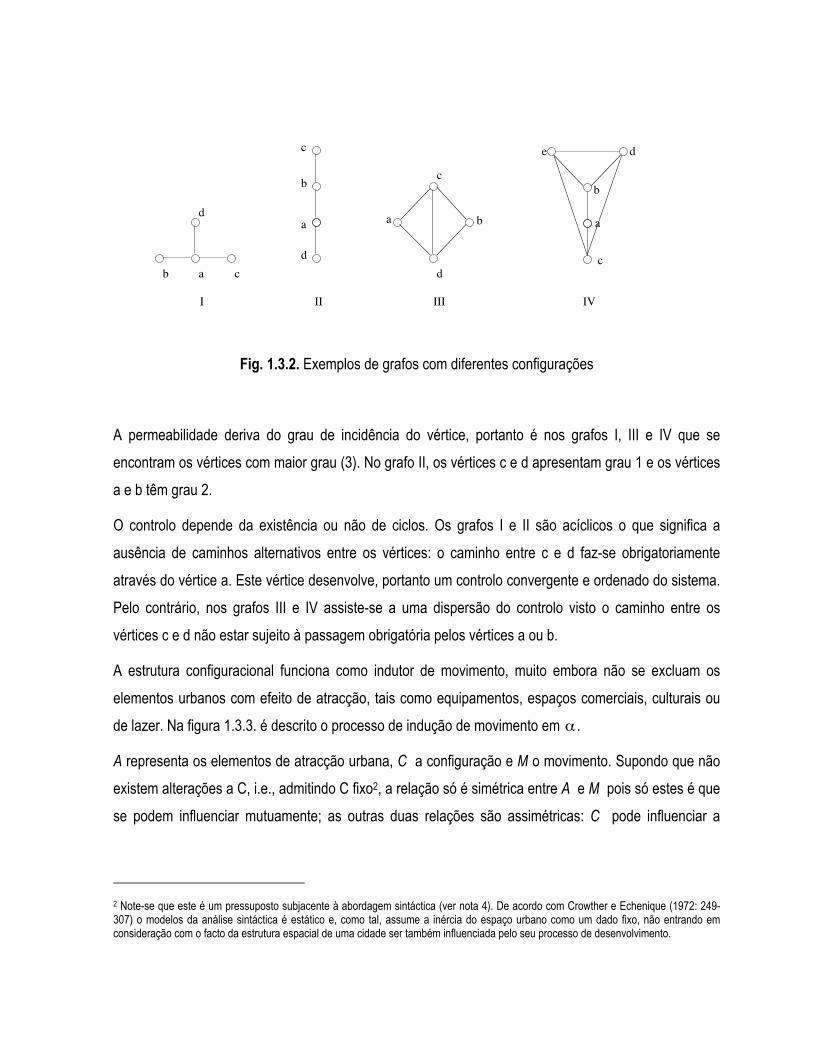
Fig. 1.3.2. Exemplos de grafos com diferentes configurações
A permeabilidade deriva do grau de incidência do vértice, portanto é nos grafos I, III e IV que se
encontram os vértices com maior grau (3). No grafo II, os vértices c e d apresentam grau 1 e os vértices
a e b têm grau 2.
O controlo depende da existência ou não de ciclos. Os grafos I e II são acíclicos o que significa a
ausência de caminhos alternativos entre os vértices: o caminho entre c e d faz-se obrigatoriamente
através do vértice a. Este vértice desenvolve, portanto um controlo convergente e ordenado do sistema.
Pelo contrário, nos grafos III e IV assiste-se a uma dispersão do controlo visto o caminho entre os
vértices c e d não estar sujeito à passagem obrigatória pelos vértices a ou b.
A estrutura configuracional funciona como indutor de movimento, muito embora não se excluam os
elementos urbanos com efeito de atracção, tais como equipamentos, espaços comerciais, culturais ou
de lazer. Na figura 1.3.3. é descrito o processo de indução de movimento em α .
A representa os elementos de atracção urbana, C a configuração e M o movimento. Supondo que não
existem alterações a C, i.e., admitindo C fixo2, a relação só é simétrica entre A e M pois só estes é que
se podem influenciar mutuamente; as outras duas relações são assimétricas: C pode influenciar a
2 Note-se que este é um pressuposto subjacente à abordagem sintáctica (ver nota 4). De acordo com Crowther e Echenique (1972: 249-307) o modelos da análise sintáctica é estático e, como tal, assume a inércia do espaço urbano como um dado fixo, não entrando em consideração com o facto da estrutura espacial de uma cidade ser também influenciada pelo seu processo de desenvolvimento.
b a c
da
b
c
d
I II III IV
a b
c
dc
a
b
de

localização de A, mas A não influencia C. Do mesmo modo, C influencia M apesar de M não
influenciar C.
C M
A
Fig.1.3.3. Processo de indução de movimento em α (Hillier, et al, 1993)
Hillier et alt (1993) consideram que as únicas linhas que permitem interpretar logicamente as relações
encontradas entre, por um lado, M e por outro, C e A são a partir de C para M e A, em que M e A se
influenciam um ao outro. A partir desta relação concluem que C funciona como indutor da actividade
pedonal.
1.1. Representação gráfica do modelo
O modelo α pode ser representado graficamente através dos mapas convexo e axial, que são
configurações bidimensionais produzidas a partir da planta. O primeiro é formado pelo menor conjunto
de espaços convexos de maior área ou seja são apenas considerados os espaços com área máxima, e
o seu número é designado por C. O segundo é constituído pelo menor conjunto de linhas axiais que
cobre todo o sistema espacial no sentido que qualquer espaço convexo é atravessado por pelo menos
uma dessas linhas. O número de linhas é designado por L.
O mapa axial descreve a estrutura configuracional do sistema e corresponde à imagem de continuidade
física e visual experimentada por aqueles que se movem no sistema, enquanto o mapa convexo permite
caracterizar as relações entre os espaços do sistema e os elementos construídos e traduz a imagem de
contenção física experimentada por aqueles que permanecem estáticos no sistema.
A figura 1.3.4. mostra o sistema espacial da zona N1 e os respectivos mapas convexo e axial .

1. planta 2. mapa figura-fundo
3. mapa convexo 4. mapa axial
Fig.1.3.4. Zona N1 de Chelas: sistema espacial, mapa convexo e mapa axial. Para representar o
sistema espacial recorreu-se à técnica de figura-fundo. Os elementos construídos (X e x) foram
marcados a negro. Distinguem-se do espaço público (y) em função da sua fragmentação.
A partir destes mapas é possível ter uma compreensão imediata do padrão espacial da área em
questão e quantificar as relações sintácticas estabelecidas entre os seus espaços. Note-se que os
mapas pretendem apenas caracterizar a configuração do espaço em termos sintácticos e não métricos.
Assim, a escala em que são representados é, em princípio irrelevante.
Os mapas axial e convexo permitem quantificar dois tipos de relações sintácticas: as relações em que a
informação é retirada directamente da representação e aquelas em que é necessário introduzir
informação adicional. As primeiras designam-se por relações sintácticas directas e as segundas por
indirectas.
1.2. Quantificação das relações sintácticas do mapa axial Para tornar um mapa axial susceptível de tratamento computacional é necessário encontrar uma classe
de objectos caracterizantes que possam ser representados ou codificados. Diz-se que um dado objecto
caracteriza um mapa axial quando permite captar toda a informação nele contida. Assim, a dois mapas
diferentes nunca poderá corresponder o mesmo objecto. A representação ou codificação de um objecto
consiste na sua descrição através de uma sequência de símbolos que possa ser usada como input de
um algoritmo num computador.
Tal como foi definido, o mapa axial constitui uma realidade demasiado complexa para que seja fácil
encontrar uma classe de objectos caracterizantes que traduzam toda a informação nele contida acerca
das relações sintácticas - e não métricas - entre os espaços. Note-se que estas englobam quer o modo
como as linhas se distribuem no plano, quer a forma e o tipo de articulação existente entre as regiões
definidas pelas intersecções dessas linhas.
Optou-se então por quantificar apenas os diferentes níveis de acessibilidade presentes, entendendo
esta propriedade como o número de mudanças de direcção a que é necessário proceder - ou de linhas
axiais diferentes que é necessário percorrer - para ir de um espaço a outro. Com esta simplificação já é
possível encontrar objectos para caracterizar um mapa axial. Na literatura são consideradas duas
classes de grafos (Hillier et al 1993; Hillier e Hanson, 1984; Krüger, 1989 e 1990): o grafo axial e o
grafo de nós.
Como já foi referido, um grafo pode ser representado através de uma matriz de adjacência. Este
processo permite transformar um mapa axial num conjunto de elementos discretos logo codificáveis.
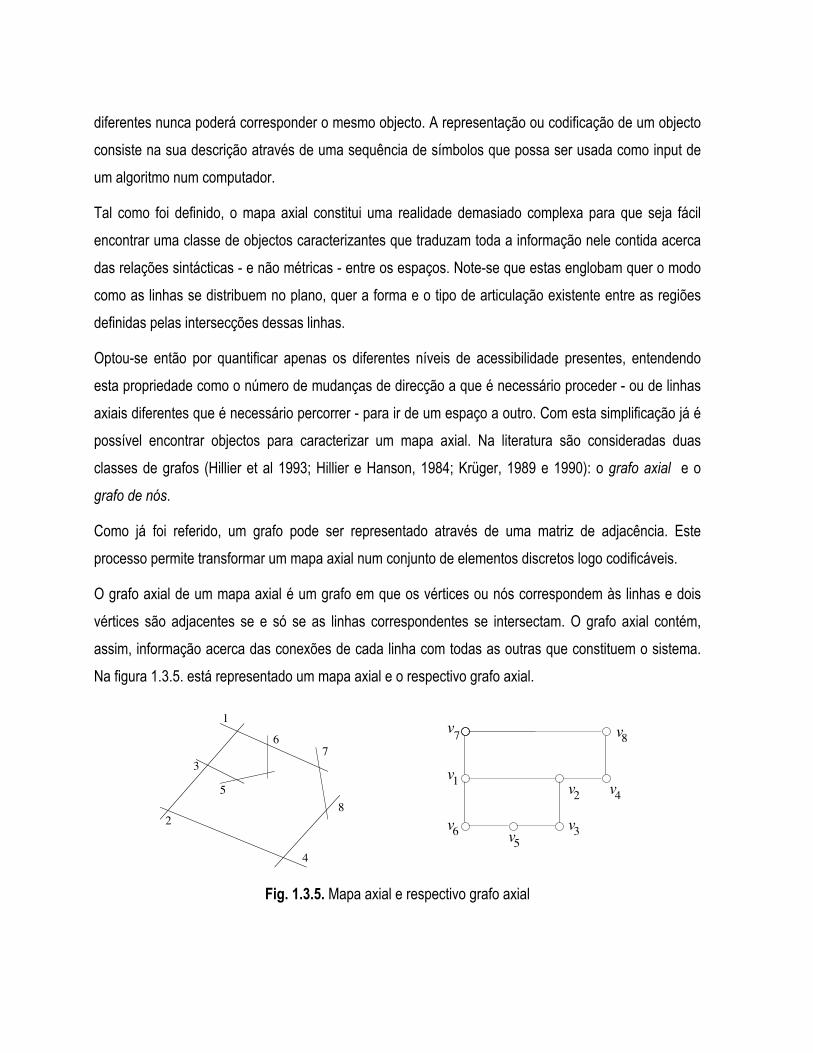
O grafo axial de um mapa axial é um grafo em que os vértices ou nós correspondem às linhas e dois
vértices são adjacentes se e só se as linhas correspondentes se intersectam. O grafo axial contém,
assim, informação acerca das conexões de cada linha com todas as outras que constituem o sistema.
Na figura 1.3.5. está representado um mapa axial e o respectivo grafo axial.
1
2
7
8
4
3
5
6v7
v1
v6 v5v3
v2 v4
v8
Fig. 1.3.5. Mapa axial e respectivo grafo axial
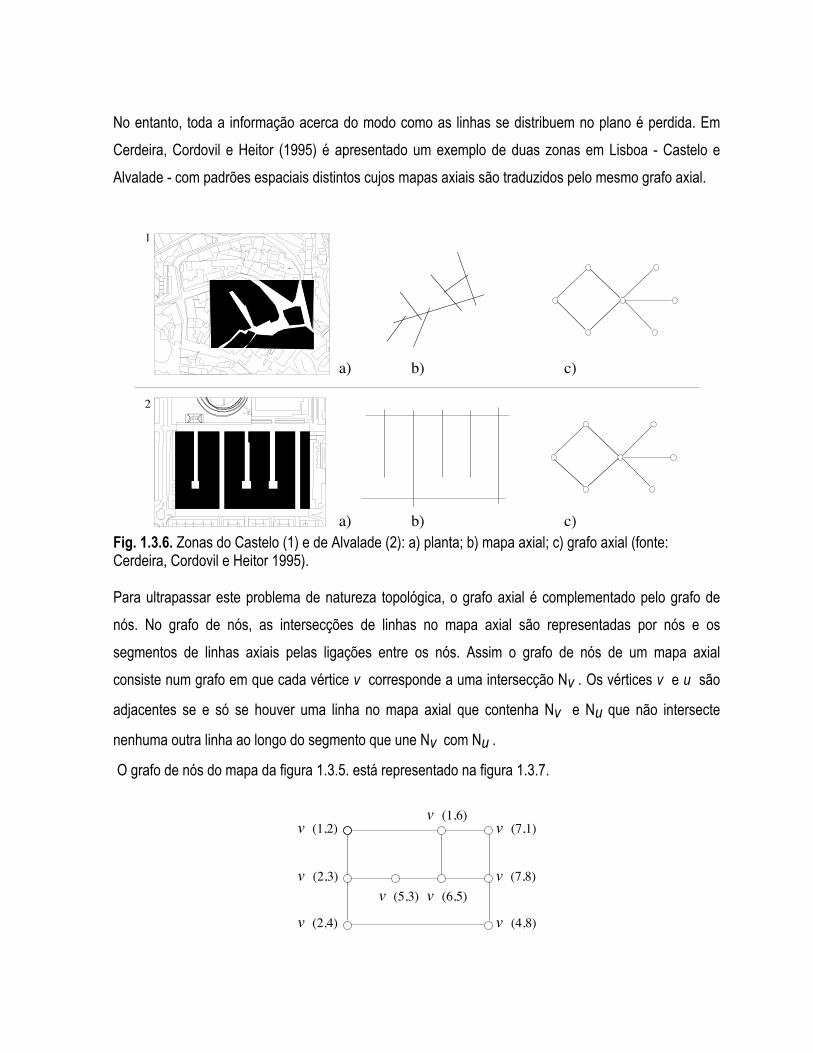
No entanto, toda a informação acerca do modo como as linhas se distribuem no plano é perdida. Em
Cerdeira, Cordovil e Heitor (1995) é apresentado um exemplo de duas zonas em Lisboa - Castelo e
Alvalade - com padrões espaciais distintos cujos mapas axiais são traduzidos pelo mesmo grafo axial.
a) b) c)
1
a) b) c)
2
Fig. 1.3.6. Zonas do Castelo (1) e de Alvalade (2): a) planta; b) mapa axial; c) grafo axial (fonte: Cerdeira, Cordovil e Heitor 1995). Para ultrapassar este problema de natureza topológica, o grafo axial é complementado pelo grafo de
nós. No grafo de nós, as intersecções de linhas no mapa axial são representadas por nós e os
segmentos de linhas axiais pelas ligações entre os nós. Assim o grafo de nós de um mapa axial
consiste num grafo em que cada vértice v corresponde a uma intersecção Nv . Os vértices v e u são
adjacentes se e só se houver uma linha no mapa axial que contenha Nv e Nu que não intersecte
nenhuma outra linha ao longo do segmento que une Nv com Nu .
O grafo de nós do mapa da figura 1.3.5. está representado na figura 1.3.7.
v (1,6)
v (1,2)
v (2,3)
v (2,4)
v (7,1)
v (7,8)
v (4,8)v (5,3) v (6,5)
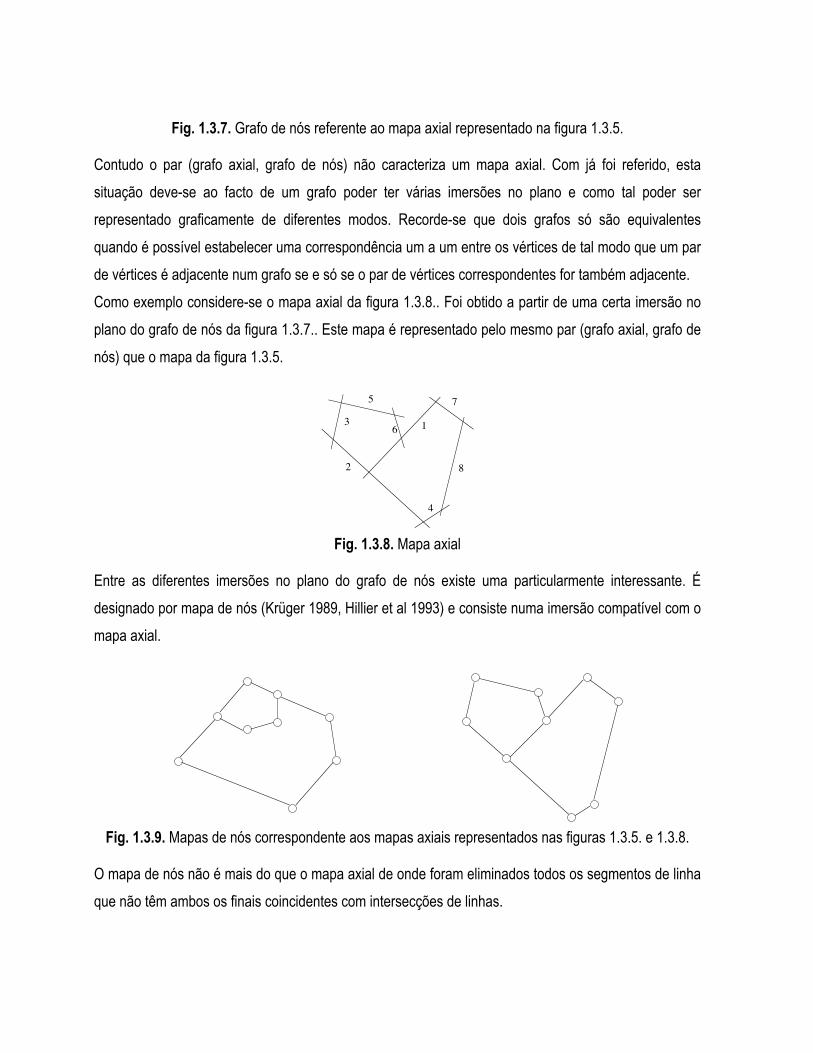
Fig. 1.3.7. Grafo de nós referente ao mapa axial representado na figura 1.3.5. Contudo o par (grafo axial, grafo de nós) não caracteriza um mapa axial. Com já foi referido, esta
situação deve-se ao facto de um grafo poder ter várias imersões no plano e como tal poder ser
representado graficamente de diferentes modos. Recorde-se que dois grafos só são equivalentes
quando é possível estabelecer uma correspondência um a um entre os vértices de tal modo que um par
de vértices é adjacente num grafo se e só se o par de vértices correspondentes for também adjacente.
Como exemplo considere-se o mapa axial da figura 1.3.8.. Foi obtido a partir de uma certa imersão no
plano do grafo de nós da figura 1.3.7.. Este mapa é representado pelo mesmo par (grafo axial, grafo de
nós) que o mapa da figura 1.3.5.
1
2
3
5
6
7
8
4
Fig. 1.3.8. Mapa axial Entre as diferentes imersões no plano do grafo de nós existe uma particularmente interessante. É
designado por mapa de nós (Krüger 1989, Hillier et al 1993) e consiste numa imersão compatível com o
mapa axial.
Fig. 1.3.9. Mapas de nós correspondente aos mapas axiais representados nas figuras 1.3.5. e 1.3.8.
O mapa de nós não é mais do que o mapa axial de onde foram eliminados todos os segmentos de linha
que não têm ambos os finais coincidentes com intersecções de linhas.

O par (mapa de nós, grafo axial) está bastante próximo da caracterização do mapa axial. Com efeito,
excepto a orientação daquelas linhas cujas intersecções ocorrem num único ponto, a reconstrução do
mapa axial é possível. No entanto, as dificuldades de utilização deste par surgem dos problemas
levantados com a codificação do mapa dos nós. Estes são idênticos aos da codificação do próprio mapa
axial. Hillier (Hillier et al, 1993) tem consciência desta situação mas não adianta nenhuma solução.
O mapa axial permite ainda analisar outro tipo de relações indirectas nomeadamente entre o sistema
espacial (y) e os elementos construídos (x, X) e os padrões de uso e movimento. A relação entre y e (x,
X) destina-se a analisar as relações de permeabilidade existentes. Quando existe uma relação de
acessibilidade entre uma linha (espaço) e um elemento construído diz-se que a linha é constituída.
A relação entre y e os padrões de actividade pedonal permite analisar a distribuição dos padrões em
função das propriedades sintácticas do sistema. Os padrões de actividade pedonal fornecem
informação acerca do comportamento do sistema enquanto potencial campo de encontro e interacção
entre os diferentes grupos de utilizadores e revelam o modo como as relações sociais são estruturadas
e construídas no espaço e pelo espaço através da configuração espacial em questão.
1.3. Quantificação das relações sintácticas do mapa convexo
Os problema de caracterização do mapa convexo são idênticos aos do mapa axial. O mapa convexo
constitui ainda uma representação bastante complexa da realidade para que toda a informação acerca
das relações sintácticas nele contida seja traduzida. Estas englobam quer o modo como os espaços se
distribuem no plano, quer a forma e o tipo de articulação existente entre eles.
Mais uma vez, optou-se por quantificar apenas os diferentes níveis de acessibilidade presentes,
entendendo esta propriedade como o número de espaços que é necessário atravessar para ir de um
espaço a outro.
Para analisar a relação entre os espaços convexos do sistema o mapa convexo é transformado num
grafo, tal como o mapa axial. Os espaços correspondem aos vértices ou nós e as relações de
permeabilidade entre eles às arestas.
1 2
64
8
1615
13 14
5
7
10
11
12
93
12
3
4 5 6
710
12 11 98
1413
1615
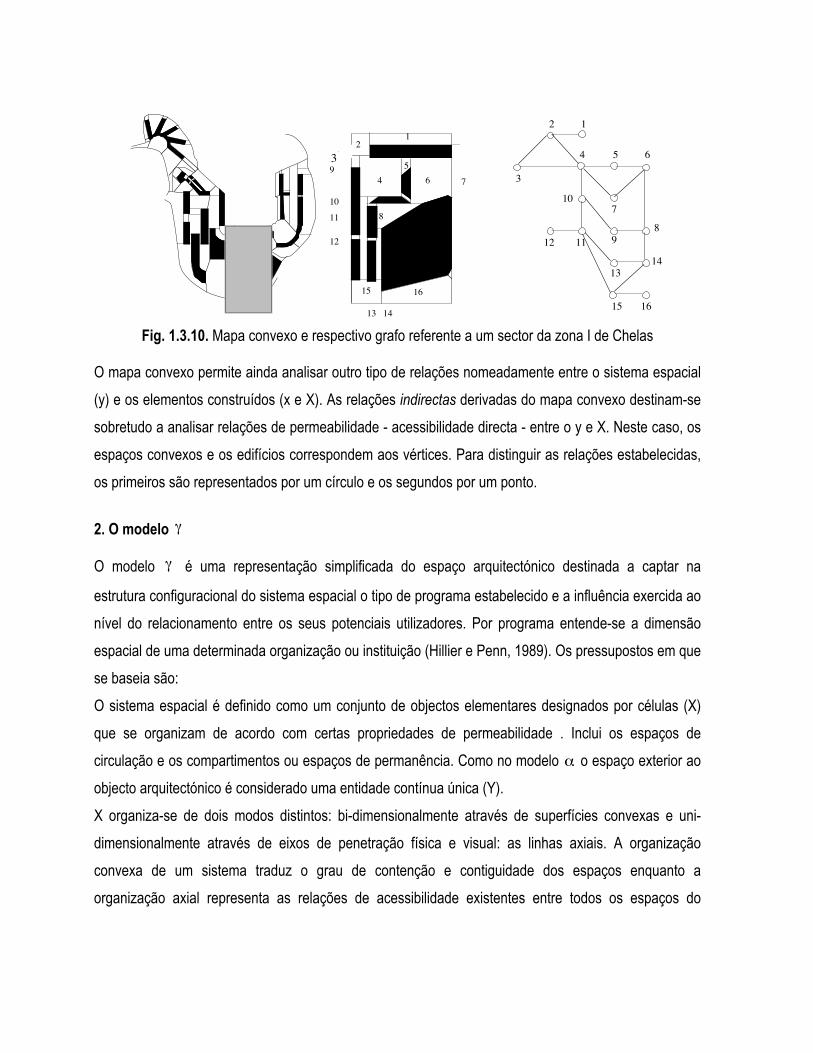
Fig. 1.3.10. Mapa convexo e respectivo grafo referente a um sector da zona I de Chelas O mapa convexo permite ainda analisar outro tipo de relações nomeadamente entre o sistema espacial
(y) e os elementos construídos (x e X). As relações indirectas derivadas do mapa convexo destinam-se
sobretudo a analisar relações de permeabilidade - acessibilidade directa - entre o y e X. Neste caso, os
espaços convexos e os edifícios correspondem aos vértices. Para distinguir as relações estabelecidas,
os primeiros são representados por um círculo e os segundos por um ponto.
2. O modelo γ
O modelo γ é uma representação simplificada do espaço arquitectónico destinada a captar na
estrutura configuracional do sistema espacial o tipo de programa estabelecido e a influência exercida ao
nível do relacionamento entre os seus potenciais utilizadores. Por programa entende-se a dimensão
espacial de uma determinada organização ou instituição (Hillier e Penn, 1989). Os pressupostos em que
se baseia são:
O sistema espacial é definido como um conjunto de objectos elementares designados por células (X)
que se organizam de acordo com certas propriedades de permeabilidade . Inclui os espaços de
circulação e os compartimentos ou espaços de permanência. Como no modelo α o espaço exterior ao
objecto arquitectónico é considerado uma entidade contínua única (Y).
X organiza-se de dois modos distintos: bi-dimensionalmente através de superfícies convexas e uni-
dimensionalmente através de eixos de penetração física e visual: as linhas axiais. A organização
convexa de um sistema traduz o grau de contenção e contiguidade dos espaços enquanto a
organização axial representa as relações de acessibilidade existentes entre todos os espaços do
sistema. Assim, as relações de contenção e contiguidade em α equivalem, respectivamente, a relações
de controlo e permeabilidade directa em γ .
Os dois pólos do sistema - X e Y - correspondem a uma distinção sociológica fundamental em função
dos utilizadores do sistema. X é fruído por dois grupos distintos: de um lado estão aqueles que
controlam o funcionamento da instituição e do outro aqueles que são controlados. Os primeiros
designam-se por Habitantes e os segundos por Visitantes. Y é o domínio dos estranhos ao sistema. Tal
como em α o relacionamento em γ estabelece-se a dois níveis: relações entre os habitantes do
sistema e relações entre habitantes e visitantes. A 'razão de ser' de X é simultaneamente promover
aquele relacionamento e excluir os estranhos.
A estrutura configuracional do sistema é o resultado das relações sintácticas estabelecidas em X e entre
X e Y ou, mais precisamente, como os espaços de X se articulam entre si e se relacionam com Y
enquanto elementos de um conjunto mais lato. Tal como em α , as relações sintácticas caracterizam-se
em termos das propriedades básicas de profundidade de contiguidade e de controlo espacial.
Aos espaços com maior profundidade correspondem geralmente, os lugares ocupados por indivíduos
colocados no topo da hierarquia da organização ou da instituição e traduzem-se em 'poder'. Os espaços
de menor profundidade também designados por rasos correspondem a zonas em que o acesso é livre e
em que o relacionamento entre visitantes e residentes é propositado3.
2.1. Representação gráfica do modelo
O modelo γ pode ser representado graficamente através de mapas produzidos a partir da planta. Estes
mapas dividem-se em três tipos. O primeiro, designado por mapa γ destina-se a representar o tipo de
programa e de fragmentação espacial estabelecidos. Como tal não são consideradas nem relações de
contenção espacial e de acessibilidade visual. O mapa é representado graficamente por um grafo em
que os vértices correspondem às células e as arestas às relações de permeabilidade existentes entre
elas. Os outros dois são construídos de modo semelhante aos mapas convexo e axial em α . No mapa
convexo, cada espaço convexo é representado por um vértice e as relações de permeabilidade directa
3 Por exemplo, num banco, o conselho de administração ocupa sempre os lugares de maior profundidade enquanto os espaços de atendimento público são directamente acessíveis do exterior. Hillier e Hanson (1984) referem, no entanto, que esta relação é invertida num tipo particular de instituição em que a profundidade é inversamente proporcional ao poder tais como prisões e hospitais. Aí os visitantes - prisioneiros, doentes internados e recolhidos - ocupam os espaços mais profundos e os residentes - guardas, pessoal médico e de enfermagem - as posições rasas, geralmente com descrições aneladas.
estabelecidas entre eles por arestas; no mapa axial, as linhas axiais representam os eixos de
visibilidade e acessibilidade física.
Hillier e Hanson introduziram ainda o chamado grafo justificado como forma de representação da
relação entre X e Y. Este grafo não é mais do que uma representação particular do grafo axial e
convexo em que são considerados vários níveis. Assim, Y corresponde ao nível zero e é designado por
raiz do grafo; os espaços directamente acessíveis a partir do exterior são colocados no nível imediato
(1); no nível 2 são colocados os espaços em que é necessário passar por um espaço intermédio e
assim sucessivamente até serem considerados todos os espaços.
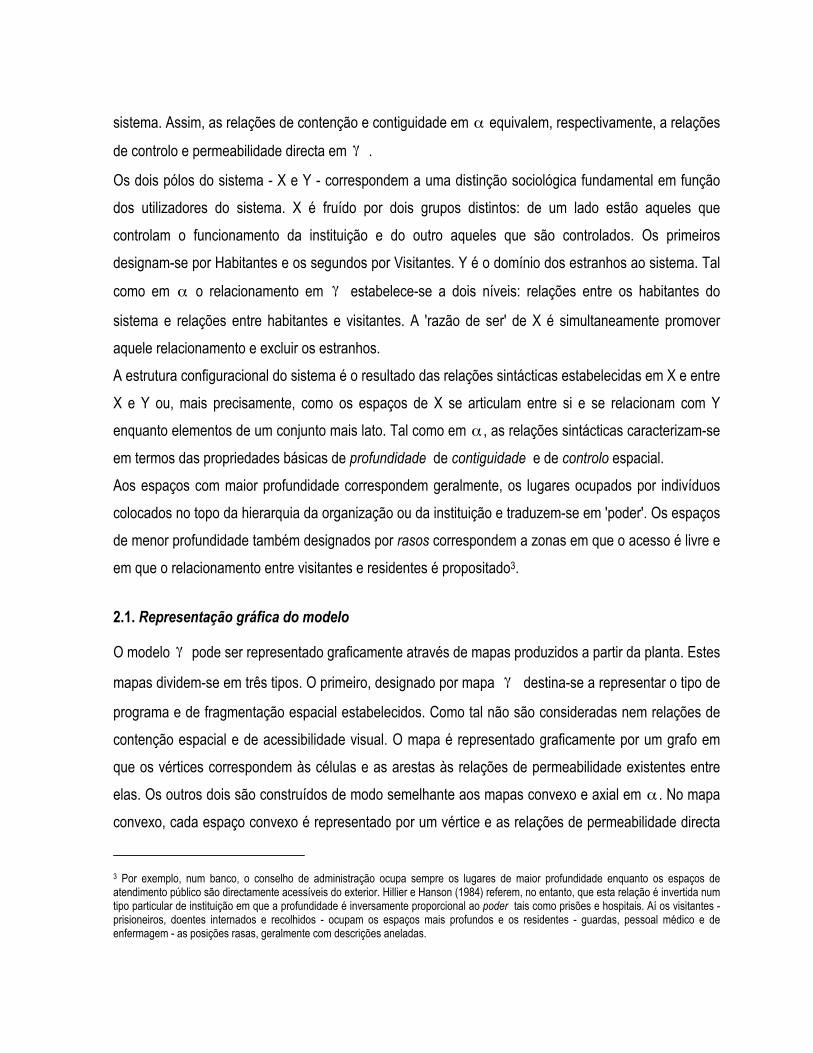
Na figura 1.3.10. está representada a planta de um fogo em Chelas (Matriz H; zona N1) e o respectivo
grafo justificado. Como se pretendia apenas analisar a organização espacial do fogo, optou-se por
considerar o patamar de acesso ao fogo como o exterior (Y).
3 4 5 6 7 8 9
1
2
10
2
13 4
567
8 9
10
11
Fig. 1.3.11. Planta do fogo e respectivo grafo justificado em que a raiz corresponde ao patamar de
acesso.
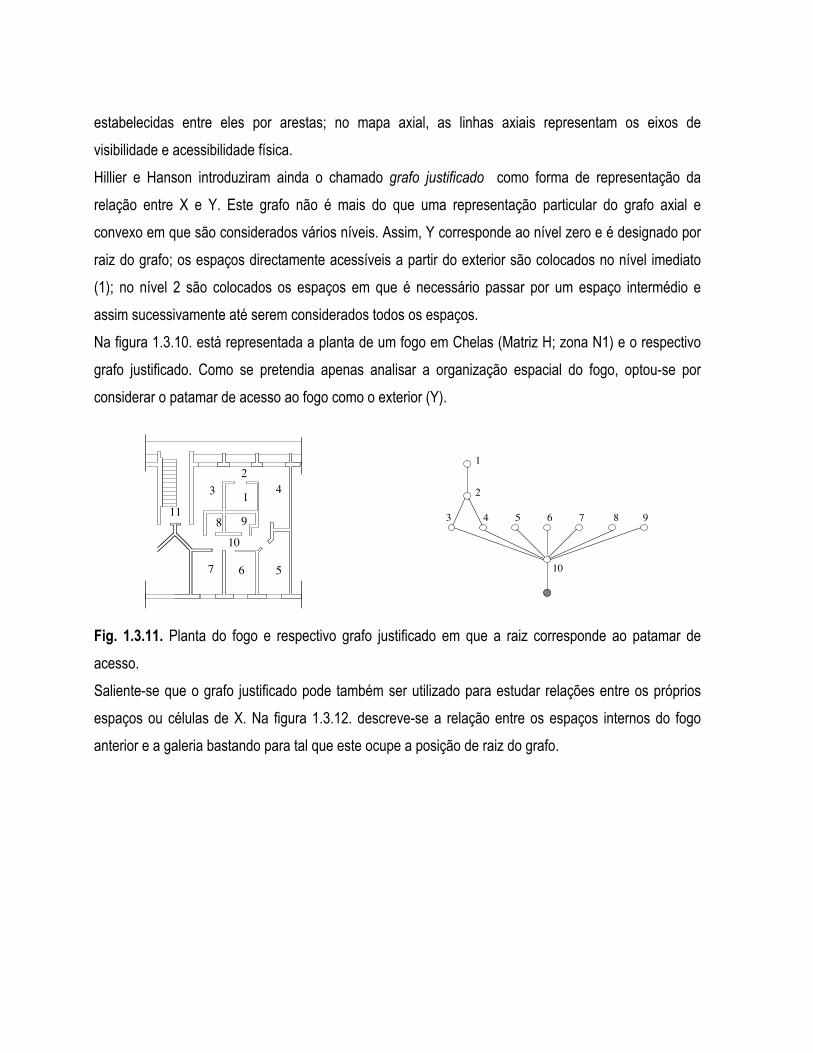
Saliente-se que o grafo justificado pode também ser utilizado para estudar relações entre os próprios
espaços ou células de X. Na figura 1.3.12. descreve-se a relação entre os espaços internos do fogo
anterior e a galeria bastando para tal que este ocupe a posição de raiz do grafo.
1
2
3 4 5 6 7 8 9
10
11
Fig. 1.3.12. Grafo justificado do fogo representado em 1.3.11. em que a raiz corresponde à galeria.
3. As medidas sintácticas
As medidas sintácticas tem como finalidade quantificar o padrão das relações presentes num sistema,
ou mais propriamente, o modo como os espaços se organizam localmente e se estruturam globalmente
a partir das noções de profundidade, contiguidade e controlo.
A dimensão local corresponde às relações de vizinhança estabelecidas entre os espaços, ou seja ao
modo como os espaços se relacionam com os imediatamente adjacentes, enquanto a dimensão global
é determinada pelas interrelações estabelecidas entre todos os espaços presentes na configuração.
Assim, a cada espaço são atribuídos valores numéricos que expressam a sua importância relativamente
aos espaços vizinhos e a complexidade dos percursos que permitem o acesso aos restantes.
A quantificação do padrão de relações sintácticas existente processa-se a dois níveis. O primeiro refere-
se às características directas da estrutura configuracional e engloba as medidas de 1ª ordem: a
integração de natureza global, o controlo, a conectividade e o raio 3 de natureza local. Num segundo
nível quantificam-se as relações entre as medidas de 1ª ordem (global e locais), através do coeficiente
de correlação de Pearson. São as chamadas medidas de 2ª ordem.
3.1. Medidas de 1ª ordem
Medida global: Integração A medida sintáctica de maior relevância é a integração e exprime o grau de centralidade (ou
acessibilidade) dos espaços presentes no sistema funcionando, assim, como uma medida de hierarquia
espacial.
A integração de um espaço relativamente a outro é dada pela sua profundidade relativa. Como já foi
referido, é uma medida de natureza topológica definida pelo número mínimo de mudanças de direcção
necessárias para ir de um espaço ao outro no sistema. Assim, diz-se que a profundidade é igual a 1
quando os espaços são adjacentes, i.e., quando eles estão colocados à distância de um passo axial e
é igual a 2 quando existe um linha axial intermédia: Isto significa que para calcular a profundidade entre
dois espaços do sistema basta adicionar uma unidade ao menor número de linhas axiais
compreendidas entre eles.
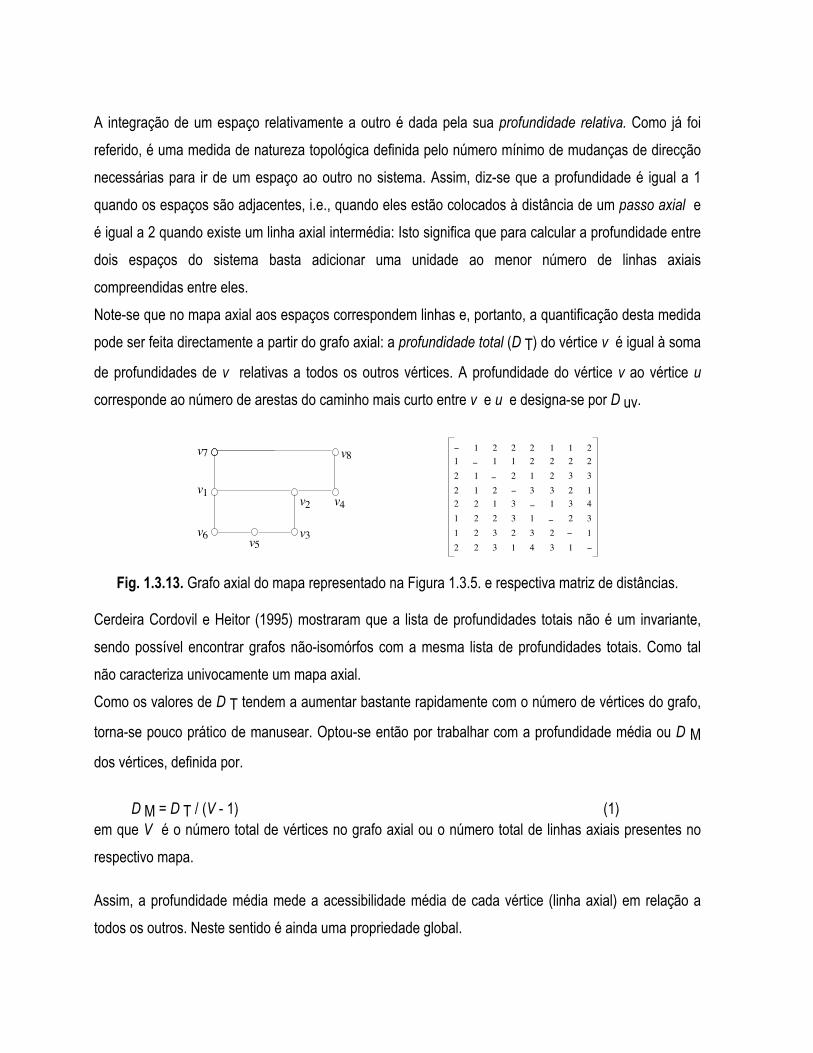
Note-se que no mapa axial aos espaços correspondem linhas e, portanto, a quantificação desta medida
pode ser feita directamente a partir do grafo axial: a profundidade total (D T) do vértice v é igual à soma
de profundidades de v relativas a todos os outros vértices. A profundidade do vértice v ao vértice u
corresponde ao número de arestas do caminho mais curto entre v e u e designa-se por D uv.
v7
v1
v6 v5v3
v2 v4
v8 − 1 2 2 2 1 1 21 − 1 1 2 2 2 22 1 − 2 1 2 3 32 1 2 − 3 3 2 12 2 1 3 − 1 3 41 2 2 3 1 − 2 31 2 3 2 3 2 − 12 2 3 1 4 3 1 −
Fig. 1.3.13. Grafo axial do mapa representado na Figura 1.3.5. e respectiva matriz de distâncias. Cerdeira Cordovil e Heitor (1995) mostraram que a lista de profundidades totais não é um invariante,
sendo possível encontrar grafos não-isomórfos com a mesma lista de profundidades totais. Como tal
não caracteriza univocamente um mapa axial.
Como os valores de D T tendem a aumentar bastante rapidamente com o número de vértices do grafo,
torna-se pouco prático de manusear. Optou-se então por trabalhar com a profundidade média ou D M
dos vértices, definida por.
D M = D T / (V - 1) (1) em que V é o número total de vértices no grafo axial ou o número total de linhas axiais presentes no
respectivo mapa.
Assim, a profundidade média mede a acessibilidade média de cada vértice (linha axial) em relação a
todos os outros. Neste sentido é ainda uma propriedade global.
Os valores de D M estão naturalmente dependentes da dimensão (número de vértices) e da
configuração do grafo. De modo a padronizar o valor de D M isto é, situá-lo entre zero e um, Hillier e
Hanson (1984) propõe uma medida designada por Assimetria Relativa (RA) que compara a
profundidade de um grafo axial a partir de um determinado vértice com a profundidade que esse vértice
teoricamente poderia ter.
A profundidade máxima ocorre num vértice extremo de um caminho hamiltoniano. Assim
maxD T = nn=1
V −1∑ = V ( V - 1) / 2 (2)
e, substituindo (2) na equação (1), obtém-se
maxD M = V / 2 (3)
Por outro lado, a profundidade é mínima num vértice que seja adjacente a todos os outros. Neste caso
minD T é igual ao número dos restantes vértices do grafo e minD M é igual a 1.
Hillier e Hanson (1984) propõem então que RA seja definida por:
RA = ( D M - minD M ) / ( maxD M - minD M ). (4)
garantindo assim que RA ∈ [0,1].
Substituindo os valores de minD M e maxD M em (4) obtém-se
RA = 2(D M - 1) / (V - 2). (5)
Vértices com valores próximos de zero correspondem a linhas axiais bem integradas no sistema.
Vértices com valores próximos de 1 correspondem a linhas axiais mais segregadas.
Como pode ser concluído a partir de (5) não é possível comparar directamente os valores de RA para
vértices de grafos correspondentes a sistemas com dimensões diferentes (nº de vértices). Neste sentido
têm sido propostos diferentes procedimentos.
Hillier e Hanson (19849 introduzem um grafo com o aspecto daquele representado na figura 1.3.14, a
que chamam diamante.
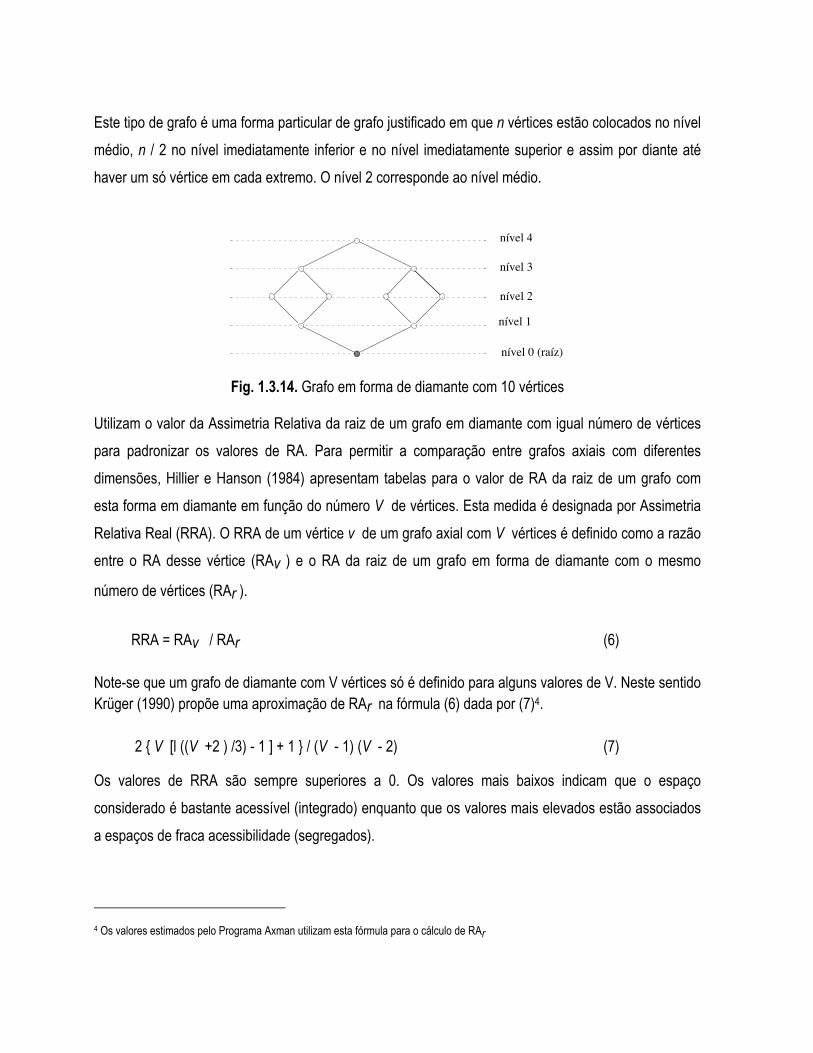
Este tipo de grafo é uma forma particular de grafo justificado em que n vértices estão colocados no nível
médio, n / 2 no nível imediatamente inferior e no nível imediatamente superior e assim por diante até
haver um só vértice em cada extremo. O nível 2 corresponde ao nível médio.
nível 1
nível 2
nível 3
nível 4
nível 0 (raíz)
Fig. 1.3.14. Grafo em forma de diamante com 10 vértices Utilizam o valor da Assimetria Relativa da raiz de um grafo em diamante com igual número de vértices
para padronizar os valores de RA. Para permitir a comparação entre grafos axiais com diferentes
dimensões, Hillier e Hanson (1984) apresentam tabelas para o valor de RA da raiz de um grafo com
esta forma em diamante em função do número V de vértices. Esta medida é designada por Assimetria
Relativa Real (RRA). O RRA de um vértice v de um grafo axial com V vértices é definido como a razão
entre o RA desse vértice (RAv ) e o RA da raiz de um grafo em forma de diamante com o mesmo
número de vértices (RAr ).
RRA = RAv / RAr (6)
Note-se que um grafo de diamante com V vértices só é definido para alguns valores de V. Neste sentido Krüger (1990) propõe uma aproximação de RAr na fórmula (6) dada por (7)4.
2 { V [l ((V +2 ) /3) - 1 ] + 1 } / (V - 1) (V - 2) (7)
Os valores de RRA são sempre superiores a 0. Os valores mais baixos indicam que o espaço
considerado é bastante acessível (integrado) enquanto que os valores mais elevados estão associados
a espaços de fraca acessibilidade (segregados).
4 Os valores estimados pelo Programa Axman utilizam esta fórmula para o cálculo de RAr
Krüger (1990) sugere ainda uma outra maneira de padronizar os valores de RA usando uma malha
regular com o mesmo número de pontos. Esta medida é também definida por Assimetria Relativa Real.
Ao inverso de RRA que dá-se o nome de Integração. Nas análises que serão feitas da malha de Chelas,
será esta a medida sintáctica usada, o que significa que aos valores mais elevados correspondem
espaços de grande acessibilidade enquanto os valores mais baixos indiciam espaços mais segregados.
A compreensão do padrão de integração presente numa dada configuração é facilitada pela leitura do
casco . O casco é uma amostra constituída pelos 5%, 10% ou 20% (dependente da dimensão do
sistema) dos vértices (espaços ou linhas axiais) que obtiveram maiores e menores valores. Hillier,
Hanson e Peponis (1987a) consideram que o casco de integração traduz a estrutura profunda de uma
área, ou seja os princípios organizativos contidos na forma mas não directamente observáveis.
A partir da análise de um vasto conjunto de exemplos concluíram que o mapa axial do casco toma
frequentemente a forma de uma roda deformada podendo notar-se um centro, os raios e uma linha
periférica ou aro. A partir desta constatação definem vários tipos morfológicos de casco consoante as
partes constituintes (centro, raio e aro) estão presentes ou ausentes, o modo como se posicionam no
mapa axial global e a relação com o exterior. Relativamente ao primeiro, os cascos podem ser radiais,
(constituídos por raios e centro mas sem aro), centralizados (só com o centro), penetrantes (um raio e
parte do aro), lineares (só aro). No que diz respeito à forma como o casco se integra no mapa axial ele
pode estar localizado ou pelo contrário abranger a sua globalidade, podendo ainda apresentar-se
fragmentado ou unificado. Relativamente à localização face ao exterior , considera-se que o casco é
raso quando se situa junto aos extremos e profundo na situação oposta.
A possibilidade de inferir a distribuição dos padrões de uso e movimento num sistema a partir do valor
da medida integração foi também considerado por Hillier et al (1987b; 1993), a partir do modelo acima
descrito. Através da análise de correlação entre as taxas de encontro e os respectivos valores da
integração foi possível concluir que aos valores mais integrados correspondem em geral os espaços
mais densamente utilizados e aos mais segregados os espaços mais desertificados e menos utilizados.
Assim, o padrão de actividade pedonal é determinado em primeira instância pelo padrão da integração
e a densidade global da actividade pedonal pelo grau de integração global. Isto significa que a
densidade de actividade pedonal num determinado sistema é fundamentalmente determinada pela
relação dos espaços com o sistema na sua globalidade e só secundariamente pelas propriedades locais
do espaço.

As medidas locais: conectividade, controlo e raio 3
A conectividade c1 indica o grau dos vértices de um grafo. Fazendo Cvu = 1 se o vértice v for
adjacente ao vértice u e Cvu = 0 caso contrário (não se considera que um vértice seja adjacente a ele
próprio), a conectividade do vértice v, gv será dada pela expressão:
gv = ∑u Cvu (9)
Na figura 1.3.15. está representada a matriz de adjacência do grafo axial representado na figura 1.3.5. A
conectividade do vértice é a soma dos valores das linhas.
Portanto, a conectividade da linha l corresponde ao número de linhas que cruzam a linha l e lhe são
directamente acessíveis.
v7
v1
v6 v5v3
v2 v4
v8− 1 0 0 0 1 1 01 − 1 1 0 0 0 00 1 − 0 1 0 0 00 1 0 − 0 0 0 10 0 1 0 − 1 0 01 0 0 0 1 − 0 01 0 0 0 0 0 − 10 0 0 1 0 1 0 −
Fig. 1.3.15. Grafo axial e respectiva matriz de adjacência O controlo exprime a quantidade proporcional de acessos que um espaço apresenta em relação aos
espaços adjacentes i.e. indica o grau de importância que um espaço assume em relação aos espaços
vizinhos enquanto ponto obrigatório de passagem. É calculado somando o inverso dos graus
(conectividade) dos vértices adjacentes. Aos valores mais altos correspondem vértices com maior
controlo nas relações locais.
O controlo do vértice v , 2vC , sobre os restantes será dado por:
vucvgu
∑ (10)
Por exemplo para a matriz apresentada o controlo do vértice 1 é 4/3 (=1/3+1/2+1/2) e o do vértice 7 é
5/6 (=1/2+1/3).
O raio 3 mede a integração local dos vértices, i.e. o número de arestas que é necessário percorrer para
ir de um vértice a todos os outros que se encontram a uma profundidade menor ou igual do que 3. O
seu valor é calculado através de uma fórmula análoga à usada para calcular o valor da integração mas
considerando apenas distâncias iguais ou inferiores a três unidades.
Refira-se, no entanto que neste caso a profundidade total de um vértice v , considerando apenas
profundidades iguais ou menores que 3 seria dada por:
T3D (v) = uvDu: uv≤3D{ }∑ (11)
e a correspondente profundidade média M
3D = T3D / V-1, onde V é o número de vértices do grafo em
que Duv ≤ 3. A padronização desta medida pode ser feita de forma análoga à da medida de integração (RA).
Finalmente e para comparar medidas de RA3 para grafos correspondentes a sistemas com dimensões
diferentes pode-se proceder à padronização dos valores através da Assimetria relativa de Raio 3, RA3 ,
de um grafo em forma de diamante com igual número de vértices, como indicado para a Assimetria
Relativa Real (RRA).
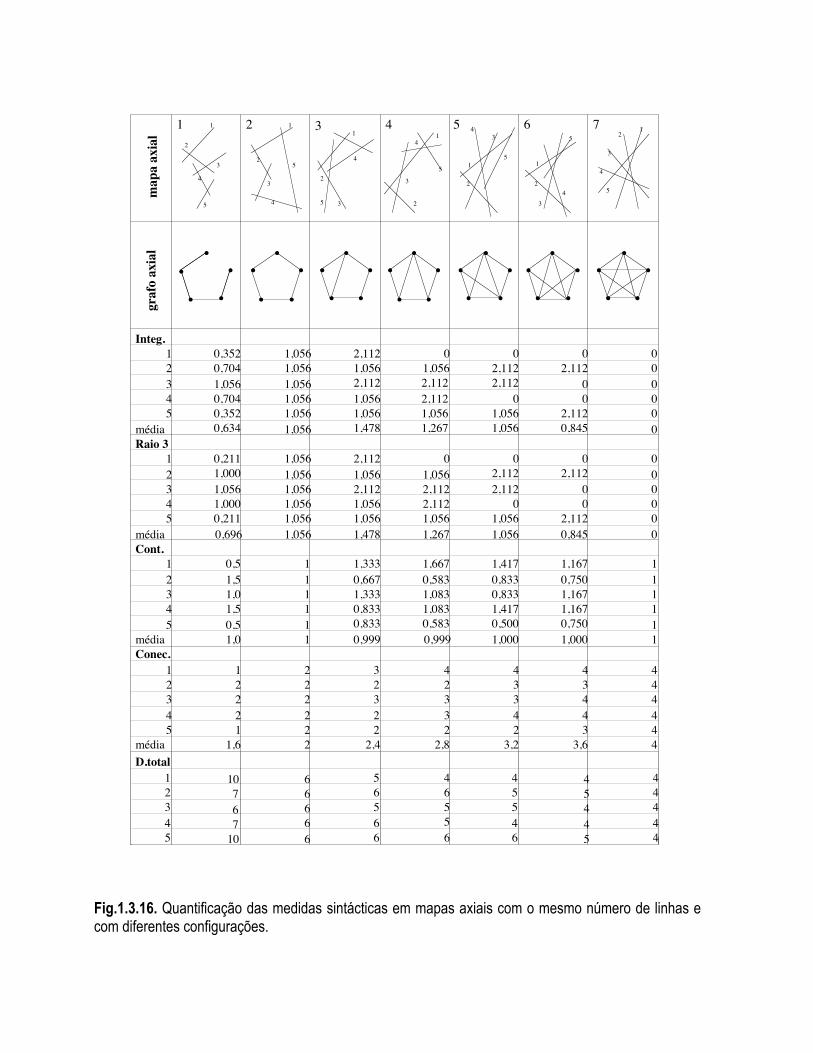
No quadro representado na figura 1.3.16 apresentam-se os valores das medidas sintácticas de 1ª
ordem para mapas axiais com cinco linhas e com diferentes configurações. Os valores apresentados
para a integração correspondem a 1/RRA. Para melhor compreensão desta medida optou-se por
colocar os valores das distâncias totais entre os vértices (não padronizadas).
Todos as situações representadas, à excepção da primeira, correspondem a grafos com ciclos. Note-se
que os grafos 2 e 7 constituem casos particulares: o grafo 2 forma um só ciclo hamiltoniano e o grafo 7
é completo (também designado em teoria de grafos por K5). O mapa 1 corresponde a uma cadeia
hamiltoniana. Portanto a profundidade é máxima (Dtotal =10) nos vértices extremos do grafo
correspondente ao mapa 1 e é mínima quando os vértices são adjacentes a todos os outros (Dtotal= 4).
Dada a forma como é calculado o valor da integração (1/RRA), os vértices que são adjacentes a todos
os outros obtém valor nulo. Tal situação ocorre nos mapas 7 (em todas as linhas), no 6 (linhas 1, 3 e 4),
no 5 (linhas 1 e 4) e no 4 (linha 1).
Integ.1 0,352 1,056 2,112 0 0 0 02 0,704 1,056 1,056 1,056 2,112 2,112 03 1,056 1,056 2,112 2,112 2,112 0 04 0,704 1,056 1,056 2,112 0 0 05 0,352 1,056 1,056 1,056 1,056 2,112 0
média 0,634 1,056 1,478 1,267 1,056 0,845 0Raio 3
1 0,211 1,056 2,112 0 0 0 02 1,000 1,056 1,056 1,056 2,112 2,112 03 1,056 1,056 2,112 2,112 2,112 0 04 1,000 1,056 1,056 2,112 0 0 05 0,211 1,056 1,056 1,056 1,056 2,112 0
média 0,696 1,056 1,478 1,267 1,056 0,845 0Cont.
1 0,5 1 1,333 1,667 1,417 1,167 12 1,5 1 0,667 0,583 0,833 0,750 13 1,0 1 1,333 1,083 0,833 1,167 14 1,5 1 0,833 1,083 1,417 1,167 15 0,5 1 0,833 0,583 0,500 0,750 1
média 1,0 1 0,999 0,999 1,000 1,000 1Conec.
1 2 3 4 4 4 42 2 2 2 3 3 42 2 3 3 3 4 42 2 2 3 4 4 4
12345 1 2 2 2 2 3 4
média 1,6 2 2,4 2,8 3,2 3,6 4
1
2
3
4
5
1
2
3
4
5
1
2
3
4
5
1
2
3
5
4
1
2
4
5
3
1
2
34
51
2
3
4
5
graf
o ax
ial
map
a ax
ial
1 2 3 4 5 6 7
D.total44444
45445
45546
46556
56566
66666
1076710
12345
Fig.1.3.16. Quantificação das medidas sintácticas em mapas axiais com o mesmo número de linhas e com diferentes configurações.
Nas configurações onde não ocorre esta situação, os valores da integração distribuem-se de acordo
com os valores da profundidade (Dtotal): no mapa 1 a linha mais integrada (1,056) corresponde no
grafo ao vértice de menor profundidade (situado no centro da
cadeia) e as mais segregadas às de maior profundidade, i.e. aos extremos da cadeia (0,352); no mapa
3 observa-se uma situação idêntica. No mapa 2 o valor da integração das linhas mantém-se constante
dado a profundidade também o ser.
Relativamente ao Raio 3, os seus valores apenas variam dos valores obtidos para a integração no
mapa 1, pois só nessa situação é que se encontram linhas com profundidade superior a 3.
O controlo de uma linha depende do seu valor de conectividade e dos valores de conectividade dos
espaços adjacentes. Observe-se, por exemplo, o mapa 3. O menor controlo pertence à linha 2. Apesar
da linha 2 ter uma conectividade igual à 4 e à 5, é adjacente a linhas com conectividade superior às
outras duas. Logo, proporcionalmente o controlo que a linha 2 exerce sobre as outras linhas do sistema
é menor. Situação análoga observa-se nos mapas 1 e 5 para as linhas 3 e 5 respectivamente.
3.2. Medidas de 2ª ordem
Inteligibilidade sintáctica A correlação entre a integração (propriedade global) e a conectividade (propriedade local), define a
inteligibilidade sintáctica do sistema e constitui a medida de 2ª ordem mais importante. Esta medida
relaciona a valência de um vértice - propriedade local - com a sua profundidade relativa - propriedade
global. Assim, se os vértices disfrutarem localmente de boa acessibilidade - conectividade elevada - e
se ao mesmo tempo assumirem um padrão elevado de acessibilidade - integração elevada - a
correlação será forte e o sistema será inteligível.
Com efeito, aos espaços com conectividade elevada corresponde uma grande permeabilidade física o
que se traduz em termos de actividade pedonal na presença de percursos alternativos. Quando estas
condições não estão associadas a espaços com uma boa integração no sistema global e que apontem
regras de orientação das deslocações, a legibilidade do tecido é afectada e o sistema tende a tornar-se
labiríntico. Portanto, a inteligibilidade sintáctica exprime o modo como o sistema espacial (y) pode ser
reconhecido no seu todo através da leitura das suas partes constituintes, ou por outra palavras, é a
propriedade que permite a um indivíduo movendo-se através de um sistema, ter simultaneamente
informação acerca do padrão global do sistema.
Refira-se que o valor da inteligibilidade do sistema, é no entanto, fortemente influenciado pelo valor da
integração. Hillier,B.(1989) mostrou através da análise de correlação entre os valores da integração e
da inteligibilidade para diversas situações distintas que a possibilidade de inferir a estrutura global de
um sistema a partir das suas propriedades locais dependente essencialmente do valor da integração.
Top Related