






Línguas
Páginas
Legal


Moto-redutores \ Accionamentos Electrónicos \ Drive Automation \ Serviços
Interface de Bus de Campo DFE24BEtherCAT
ManualEdição 05/200711571845 / PT
SEW-EURODRIVE – Driving the world

Manual – Interface de Bus de Campo DFE24B EtherCAT 3
Índice
1 Notas importantes.................................................................................................. 61.1 Explicação dos símbolos................................................................................ 61.2 Parte integrante do produto ........................................................................... 61.3 Referência à documentação .......................................................................... 61.4 Responsabilidade em caso de defeitos ......................................................... 71.5 Nomes dos produtos e marcas ...................................................................... 71.6 Reciclagem .................................................................................................... 7
2 Informações de segurança.................................................................................... 82.1 Notas preliminares ......................................................................................... 82.2 Informações gerais de segurança.................................................................. 8
2.2.1 Informações gerais de segurança sobre sistemas de bus .................. 82.3 Transporte / armazenamento......................................................................... 82.4 Instalação / montagem................................................................................... 92.5 Colocação em funcionamento / operação...................................................... 9
3 Introdução............................................................................................................. 103.1 Conteúdo deste manual ............................................................................... 103.2 Documentação adicional.............................................................................. 103.3 Características ............................................................................................. 10
3.3.1 MOVIDRIVE®, MOVITRAC® B e EtherCAT ..................................... 103.3.2 Acesso a toda a informação ............................................................. 113.3.3 Troca de dados cíclica através de EtherCAT .................................. 113.3.4 Troca de dados acíclica através de EtherCAT ................................ 113.3.5 Configuração da carta opcional EtherCAT ....................................... 113.3.6 Funções de monitorização ................................................................ 123.3.7 Diagnóstico ....................................................................................... 123.3.8 Monitor de bus de campo ................................................................. 12
4 Instruções de montagem e de instalação.......................................................... 134.1 Instalação da carta opcional DFE24B no MOVIDRIVE® MDX61B .............. 13
4.1.1 Antes de começar ............................................................................. 134.1.2 Procedimento básico para a instalação e remoção de uma carta
opcional ............................................................................................ 144.2 Instalação da carta opcional DFE24B no MOVITRAC® B ........................... 15
4.2.1 Ligação ao SBus ............................................................................... 154.2.2 Ligação do bus de sistema ............................................................... 16
4.3 Montagem e instalação do slot universal para opcionais UOH11B ............. 184.4 Ligação e descrição dos terminais da opção DFE24B ................................ 194.5 Atribuição dos pinos..................................................................................... 204.6 Blindagem e instalação dos cabos de bus................................................... 214.7 Terminação do bus ...................................................................................... 214.8 Configuração do endereço da estação ........................................................ 214.9 Indicadores de operação da opção DFE24B ............................................... 22
4.9.1 LEDs EtherCAT ................................................................................ 224.9.2 LED Gateway .................................................................................... 24

4 Manual – Interface de Bus de Campo DFE24B EtherCAT
Índice
5 Elaboração do projecto e colocação em funcionamento................................. 255.1 Validade dos ficheiros XML para a opção DFE24B..................................... 255.2 Elaboração do projecto do mestre EtherCAT para MOVIDRIVE® B
com o ficheiro XML ...................................................................................... 255.2.1 Ficheiro XML para operação no MOVIDRIVE® B ............................. 255.2.2 Procedimento para a elaboração do projecto ................................... 265.2.3 Configuração PDO para operação no MOVIDRIVE® ....................... 27
5.3 Elaboração do projecto do mestre EtherCAT para MOVITRAC® B/Gateway com o ficheiro XML ....................................................................... 355.3.1 Ficheiros XML para a operação no MOVITRAC® B e no slot
universal para opcionais UOH11B .................................................... 355.3.2 Procedimento para a elaboração do projecto ................................... 355.3.3 Configuração dos PDOs para DFE24B-Gateway
para MOVITRAC® B ......................................................................... 365.3.4 Auto-configuração para a operação de gateway .............................. 41
5.4 Configuração do variador tecnológico MOVIDRIVE® MDX61B................... 425.5 Configuração do conversor de frequência MOVITRAC® ............................. 43
6 Características de funcionamento no EtherCAT ............................................. 456.1 Controlo do variador tecnológico MOVIDRIVE® MDX61B........................... 45
6.1.1 Exemplo de controlo em TwinCAT com MOVIDRIVE® MDX61B ..... 466.1.2 Timeout em EtherCAT (MOVIDRIVE® MDX61B) ............................. 486.1.3 Resposta ao Timeout do bus de campo (MOVIDRIVE® MDX61B) .. 48
6.2 Controlo do conversor de frequência MOVITRAC® B (Gateway)................ 496.2.1 Exemplo de controlo em TwinCAT com MOVITRAC® B (Gateway) 506.2.2 Timeout do SBus .............................................................................. 516.2.3 Falha na unidade .............................................................................. 516.2.4 Timeout de bus de campo da carta DFE24B no modo de
gateway ............................................................................................ 526.3 Parametrização via EtherCAT ..................................................................... 52
6.3.1 Serviços SDO READ e WRITE ......................................................... 526.3.2 Exemplo para a leitura de um parâmetro em TwinCAT
via EtherCAT .................................................................................... 536.3.3 Exemplo para a escrita de um parâmetro em TwinCAT
via EtherCAT .................................................................................... 556.4 Códigos de retorno da configuração de parâmetros.................................... 56
6.4.1 Elementos ......................................................................................... 566.4.2 Classe de erro .................................................................................. 566.4.3 Código de erro .................................................................................. 566.4.4 Código adicional ............................................................................... 576.4.5 Lista dos códigos de erro implementados para os servidos SDO .... 57
7 Motion Control via EtherCAT ............................................................................. 587.1 Introdução ao EtherCAT .............................................................................. 58
7.1.1 Modo de velocidade .......................................................................... 617.1.2 Modo de posição .............................................................................. 62
7.2 Configurações no MOVIDRIVE® B com o MOVITOOLS® MotionStudio ..... 637.2.1 Configurações para o modo de velocidade ...................................... 637.2.2 Configurações para o modo de posição ........................................... 65
7.3 Configurações no mestre EtherCAT ............................................................ 677.3.1 Configurações para o modo de velocidade ...................................... 677.3.2 Configurações para o modo de posição ........................................... 68
7.4 Exemplo TwinCAT ....................................................................................... 697.4.1 Modo de velocidade .......................................................................... 71
Manual – Interface de Bus de Campo DFE24B EtherCAT 5
Índice
8 Funcionamento do MOVITOOLS® MotionStudio via EtherCAT....................... 748.1 Introdução .................................................................................................... 748.2 Hardware necessário ................................................................................... 758.3 Software necessário .................................................................................... 758.4 Instalação..................................................................................................... 758.5 Configuração da Mailbox-Gateway.............................................................. 768.6 Configurações de rede no PC de engenharia.............................................. 768.7 Configuração do servidor de comunicação SEW......................................... 78
8.7.1 Estabelecer a comunicação .............................................................. 788.7.2 Procedimento .................................................................................... 78
8.8 Busca automática das unidades instaladas (scan de unidades) ................. 808.9 Activação do modo de operação online....................................................... 818.10 Problemas comuns durante a utilização do MOVITOOLS® MotionStudio... 81
9 Diagnóstico de irregularidades........................................................................... 829.1 Procedimentos de diagnóstico..................................................................... 829.2 Lista de irregularidades................................................................................ 85
10 Informação técnica............................................................................................... 8610.1 Opção DFE24B para MOVIDRIVE® MDX61B ............................................. 8610.2 Opção DFE24B para MOVITRAC® B e slot universal para
opcionais UOH11B ...................................................................................... 87
11 Índice..................................................................................................................... 88

1 Notas importantesExplicação dos símbolos
6 Manual – Interface de Bus de Campo DFE24B EtherCAT
1 Notas importantes1.1 Explicação dos símbolos
Siga sempre as instruções de segurança e de advertência apresentadas nestemanual!
1.2 Parte integrante do produtoO manual de instruções é parte integrante da interface de Bus de Campo DFE24BEtherCAT, e inclui informações importantes para o seu funcionamento e manutenção.
1.3 Referência à documentação• O cumprimento das informações contidas na documentação é pré-requisito básico
para:– o funcionamento sem falhas, – efeitos de garantia devido a defeitos ou falhas.
• Leia este manual até ao fim com atenção antes de iniciar os trabalhos de instalaçãoe colocação em funcionamento de conversores/variadores em conjunto com a cartaopcional DFE24B EtherCAT.
• O presente manual assume que o utilizador tem acesso à documentaçãoMOVIDRIVE® e MOVITRAC® e que tem conhecimento das informações nelacontidas, particularmente nos Manuais do Sistema MOVIDRIVE® MDX60B/61B eMOVITRAC® B.
Perigo eléctrico.Possíveis consequências: danos graves ou fatais.
Perigo eminente. Possíveis consequências: danos graves ou fatais.
Situação perigosa.Possíveis consequências: danos ligeiros.
Situação crítica.Possíveis consequências: danos na unidade ou no meio ambiente.
Conselhos e informações úteis.

1Notas importantesResponsabilidade em caso de defeitos
Manual – Interface de Bus de Campo DFE24B EtherCAT 7
1.4 Responsabilidade em caso de defeitosO manuseamento incorrecto ou outras acções não especificadas neste manual deinstruções podem afectar as características do produto. Estas acções conduzem àperda imediata do direito à reclamação da garantia face à SEW-EURODRIVE.
1.5 Nomes dos produtos e marcasAs marcas e nomes de produtos mencionados neste manual são marcas comerciais oumarcas registadas pelos respectivos proprietários.
1.6 Reciclagem
Respeite os regulamentos nacionais em vigor!Elimine as várias partes separadamente de acordo com a natureza dos seus compo-nentes e as normas nacionais em vigor, por ex.:• Sucata electrónica• Plástico• Chapa• Cobreetc.
2 Informações de segurançaNotas preliminares
8 Manual – Interface de Bus de Campo DFE24B EtherCAT
2 Informações de segurança
2.1 Notas preliminares
2.2 Informações gerais de segurança
2.2.1 Informações gerais de segurança sobre sistemas de bus
2.3 Transporte / armazenamentoNo acto da entrega, inspeccione o material e verifique se existem danos cau-sados pelo transporte. Em caso afirmativo, informe imediatamente a transporta-dora. Não coloque em funcionamento unidades com danos.Se necessário, use equipamento de transporte apropriado e devidamente dimensio-nado.
A Interface de Bus de Campo DFE24B EtherCAT só deve ser instalada e colocadaem funcionamento por pessoal qualificado, com formação adequada e sobobservação e cumprimento dos regulamentos sobre a prevenção de acidentesem vigor e das Instruções de Operação do MOVIDRIVE® MDX60B/61B e doMOVITRAC® B!
As seguintes informações de segurança referem-se à utilização da interface deBus de Campo DFE24B EtherCAT.Observe também as notas suplementares de segurança nos vários capítulosdeste manual.
Nunca instale ou coloque em funcionamento produtos com danos.Em caso de danos, favor reclamar imediatamente à empresa transportadora.
Este sistema de comunicação permite-lhe ajustar com precisão o variador tecnológicoMOVIDRIVE® à sua aplicação específica. Como em todos os sistemas de bus,existe o perigo de uma alteração externa não visível dos parâmetros (relacio-nados com o variador tecnológico) e, com isto, uma alteração do comportamentodo variador. Tal pode resultar num comportamento inesperado do sistema(não incontrolado).
Possibilidade de danos devido a um armazenamento incorrecto!Se não pretender instalar a unidade imediatamente, armazene-a num local seco e sempoeiras.

2Informações de segurançaInstalação / montagem
Manual – Interface de Bus de Campo DFE24B EtherCAT 9
2.4 Instalação / montagemObserve as informações apresentadas no capítulo 4 "Instruções de montagem e deinstalação".
2.5 Colocação em funcionamento / operaçãoObserve as informações apresentadas no capítulo 5 "Configuração dos parâmetros ecolocação em funcionamento".

3 IntroduçãoConteúdo deste manual
10 Manual – Interface de Bus de Campo DFE24B EtherCAT
3 Introdução3.1 Conteúdo deste manual
Este manual inclui as seguintes informações:• instalação da carta opcional DFE24B EtherCAT no variador tecnológico
MOVIDRIVE® MDX61B• utilização da carta opcional DFE24B EtherCAT no conversor de frequência
MOVITRAC® B e no slot universal para opcionais UOH11B• colocação em funcionamento do MOVIDRIVE® MDX61B no sistema de bus de
campo EtherCAT• colocação em funcionamento do MOVITRAC® B na gateway EtherCAT• configuração do mestre EtherCAT com os ficheiros XML• funcionamento do MOVITOOLS® MotionStudio via EtherCAT
3.2 Documentação adicionalPara uma ligação fácil e eficiente do MOVIDRIVE® ao sistema de bus de campoEtherCAT, deve requerer, além deste manual do utilizador para a opção EtherCAT, aseguinte documentação sobre a tecnologia de bus de campo:• Manual de perfil da unidade para bus de campo MOVIDRIVE®
• Manual de Sistema "MOVITRAC® B"O manual de perfil da unidade para bus de campo MOVIDRIVE® e o manual de sistemado MOVITRAC® B descrevem os parâmetros de bus de campo e a sua codificação econtém explicações dos vários conceitos de controlo e opções de aplicação sob a formade pequenos exemplos.O manual de perfil da unidade para bus de campo MOVIDRIVE® contém também umalista de todos os parâmetros do variador tecnológico, que podem ser lidos e escritosatravés de vários interfaces de comunicação, como por exemplo, bus de sistema,RS485 e bus de campo.
3.3 CaracterísticasO variador tecnológico MOVIDRIVE® MDX61B e o conversor de frequênciaMOVITRAC® B permitem usar a opção DFE24B como interface de ligação a controla-dores programáveis de alto nível através do EtherCAT, graças ao seu interface decampo universal de alta performance.
3.3.1 MOVIDRIVE®, MOVITRAC® B e EtherCAT
O comportamento do variador tecnológico, que forma a base da operação comEtherCAT, é referido como perfil da unidade. Este comportamento é independente dobus de campo e, por conseguinte, uniforme. Esta característica torna possível desen-volver e planear aplicações independentes do bus de campo, o que torna muito maisfácil uma mudança para outros sistemas de bus, como por exemplo o DeviceNet(opção DFD).

3IntroduçãoCaracterísticas
Manual – Interface de Bus de Campo DFE24B EtherCAT 11
3.3.2 Acesso a toda a informação
O MOVIDRIVE® MDX61B permite um acesso digital a todos os parâmetros e funçõesdo accionamento através da interface EtherCAT. O variador tecnológico é controladoatravés dos dados de processo cíclicos de alta velocidade. Através deste canal dedados do processo, pode introduzir valores de referência (por ex., velocidade de refe-rência, tempo de geração de rampa para aceleração e desaceleração, etc.), bem comofazer actuar várias funções do accionamento, como por ex., habilitação, inibição docontrolador, paragem normal, paragem rápida, etc. Simultaneamente, pode tambémusar este canal para ler valores actuais do variador/conversor, como a velocidadeactual, a corrente, o estado da unidade, números de irregularidades e sinais dereferência.
3.3.3 Troca de dados cíclica através de EtherCAT
Em regra, a troca dos dados do processo entre o mestre EtherCAT e os variadores tec-nológicos MOVIDRIVE® B / conversores de frequência MOVITRAC® B ocorre de formacíclica. A duração do ciclo é definida durante a elaboração do projecto do mestreEtherCAT.
3.3.4 Troca de dados acíclica através de EtherCAT
Segundo a especificação EtherCAT, são introduzidos serviços acíclicos READ/WRITE,que são transmitidos juntamente com os telegramas durante a operação cíclica do bus,sem afectar o desempenho da comunicação dos dados do processo efectuada viaEtherCAT.O acesso à leitura e à escrita dos parâmetros do accionamento é possibilitado atravésde serviços SDO (Service Data Objects), implementados segundo serviços COE(CANopen over EtherCAT) ou VoE (Vendorspecific over EtherCAT).Esta troca de informações dos parâmetros permite-lhe implementar aplicações nasquais são memorizados no controlador programável mestre todos os parâmetros impor-tantes da unidade, não sendo necessário efectuar uma configuração manual dos parâ-metros no variador tecnológico.
3.3.5 Configuração da carta opcional EtherCAT
A carta opcional EtherCAT foi projectada e concebida de forma a que as configuraçõesespecíficas ao bus de campo possam ser realizadas durante a colocação em funciona-mento do sistema EtherCAT. Desta forma, é possível integrar e ligar rapidamente o vari-ador/conversor no ambiente EtherCAT.
61211AXXFig. 1: EtherCAT com MOVIDRIVE®
SEW
Drive
EtherCAT
EthernetHeader
FrameHeader
EtherCATHeader
Data ...
EtherCAT
Master
SEW
Drive
SEW
Drive
FCS
I/O
Drive 1 Drive 2 Drive 3
3 IntroduçãoCaracterísticas
12 Manual – Interface de Bus de Campo DFE24B EtherCAT
3.3.6 Funções de monitorização
O uso de um sistema de bus de campo requer funções de monitorização adicionais naengenharia de accionamentos, como por exemplo, a monitorização temporizada do busde campo (Timeout do bus de campo) ou conceitos de paragem rápida. Pode, porexemplo, adaptar as funções de monitorização do MOVIDRIVE® B/MOVITRAC® B àsua aplicação específica. Pode determinar, por exemplo, qual a resposta a irregulari-dades dos variadores tecnológicos na ocorrência de erros no bus. A paragem rápida éuma solução eficaz para muitas das aplicações; no entanto, pode também fazer ocorrerum "congelamento" do último valor de referência, de forma que o accionamento con-tinue a funcionar com o valor de referência válido mais recente (por ex., transportadorde correia). A funcionalidade dos terminais de controlo é também garantida no modo debus de campo. Por esta razão, pode continuar a implementar conceitos de paragemrápida independentes do bus de campo através dos terminais do variador tecnológico.
3.3.7 Diagnóstico
O variador tecnológico MOVIDRIVE® e o conversor de frequência MOVITRAC® Boferecem-lhe diversas opções de diagnóstico para a colocação em funcionamento eserviço da unidade. Pode, por exemplo, usar o monitor de bus de campo integrado paraverificar tanto os valores de referência enviados pelo controlador mestre como osvalores actuais.
3.3.8 Monitor de bus de campo
Além disso, está disponível um enorme número de informações adicionais sobre oestado da carta opcional de bus de campo. A função de monitor de bus de campooferece-lhe, em conjunto com o software MOVITOOLS® MotionStudio para PC, umaferramenta de diagnóstico confortável e de uso simples, que permite configurar todosos parâmetros do accionamento (incluindo os parâmetros do bus de campo), bem comoa visualização detalhada das informações sobre o bus de campo e sobre o estado daunidade.

4Instruções de montagem e de instalaçãoInstalação da carta opcional DFE24B no MOVIDRIVE® MDX61B
Manual – Interface de Bus de Campo DFE24B EtherCAT 13
4 Instruções de montagem e de instalaçãoEste capítulo inclui as instruções de montagem e de instalação da carta opcionalDFE24B nas unidades MOVIDRIVE® MDX61B, MOVITRAC® B e no slot universal paraopcionais UOH11B.
4.1 Instalação da carta opcional DFE24B no MOVIDRIVE® MDX61B
4.1.1 Antes de começar
A carta opcional DFE24B tem que ser instalada no slot de bus de campo.Observe as seguintes notas antes de efectuar a instalação ou a remoção da cartaopcional:• Desligue a tensão no variador tecnológico. Desligue a tensão de 24 VCC e a tensão
de alimentação.• Tome as devidas precauções para eliminar eventuais cargas eléctricas do seu corpo
antes de tocar em qualquer carta opcional (pulseira de descarga, sapatos condu-tores, etc.).
• Antes de instalar a carta opcional, remova a consola de operação e a tampa frontal(Æ cap. "Instalação" do Manual de Instruções do MOVIDRIVE® MDX60B/61B).
• Depois de ter instalado a carta opcional, volte a instalar a tampa frontal e a consola(Æ cap. "Instalação" do Manual de Instruções do MOVIDRIVE® MDX60B/61B).
• Guarde a carta opcional na sua embalagem de origem, retirando-a da embalagemsó quando efectuar a sua instalação.
• Pegue na carta apenas pela extremidade. Não toque em nenhum elementoelectrónico.
• As cartas opcionais para o MOVIDRIVE® MDX61B do tamanho 0 só podem serinstaladas ou removidas pelos técnicos da SEW-EURODRIVE.
• A instalação ou remoção de cartas opcionais pelos utilizadores só é possível paraos variadores tecnológicos MOVIDRIVE® MDX61B dos tamanhos 1 a 6.
• A opção DFE24B é alimentada com tensão através do MOVIDRIVE® B. Não énecessária uma tensão de alimentação adicional.

4 Instruções de montagem e de instalaçãoInstalação da carta opcional DFE24B no MOVIDRIVE® MDX61B
14 Manual – Interface de Bus de Campo DFE24B EtherCAT
4.1.2 Procedimento básico para a instalação e remoção de uma carta opcional
1. Desaperte os dois parafusos de fixação do suporte da carta opcional. Retire osuporte da carta opcional do slot exercendo a mesma pressão em ambos os lados(não torcer!).
2. No suporte da carta opcional, desaperte os dois parafusos de fixação da chapa deprotecção preta. Remova a chapa de protecção preta.
3. Instale a carta opcional com os três parafusos de fixação e alinhe-a de forma a queos parafusos caibam exactamente nos orifícios do suporte.
4. Volte a montar o suporte com a carta instalada no slot exercendo uma pressãomoderada. Volte a fixar o suporte da carta opcional com os dois parafusos defixação.
5. Para remover uma carta opcional siga os passos na ordem inversa.
60039AXXFig. 2: Instalação de uma carta opcional no MOVIDRIVE® MDX61B dos tamanhos 1 - 6
1.
4.
4.
1.2.
3.
3.
3.
2.
4Instruções de montagem e de instalaçãoInstalação da carta opcional DFE24B no MOVITRAC® B
Manual – Interface de Bus de Campo DFE24B EtherCAT 15
4.2 Instalação da carta opcional DFE24B no MOVITRAC® B
4.2.1 Ligação ao SBus
• O MOVITRAC® B não requer uma versão especial do firmware.• As cartas opcionais para o MOVITRAC® B só podem ser instaladas ou removidas
pelos técnicos da SEW-EURODRIVE.
61212AXX
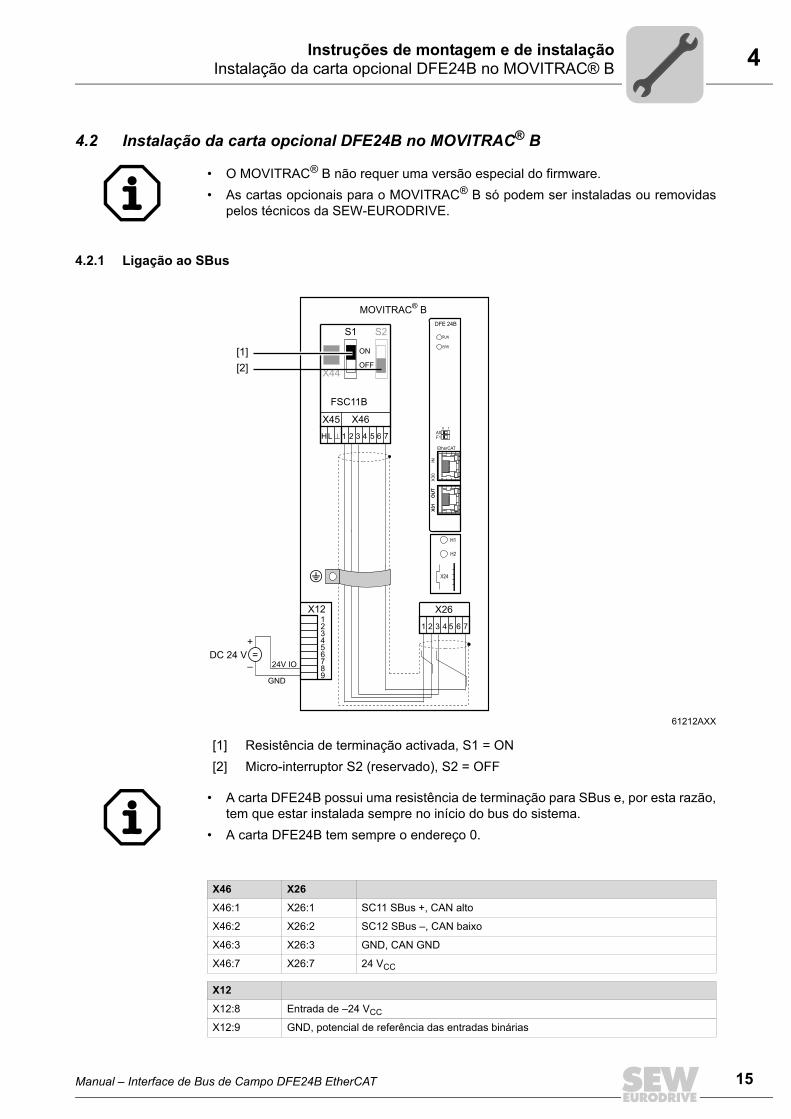
[1] Resistência de terminação activada, S1 = ON[2] Micro-interruptor S2 (reservado), S2 = OFF
X45 X46
1 2 3 4 5 6HL ⊥
FSC11B
MOVITRAC® B
S1
OFF
ON
7
S2
X44
X26
1 2 3 4 5 6 7
X24
H1
H2
X1212345678
24V IODC 24 V
–
+
9GND
=
[1]
0 1
F1
EtherCAT
AS
RUN
DFE 24B
ERR
INX
30
OU
TX
31
OU
TX
31
[2]
• A carta DFE24B possui uma resistência de terminação para SBus e, por esta razão,tem que estar instalada sempre no início do bus do sistema.
• A carta DFE24B tem sempre o endereço 0.
X46 X26
X46:1 X26:1 SC11 SBus +, CAN alto
X46:2 X26:2 SC12 SBus –, CAN baixo
X46:3 X26:3 GND, CAN GND
X46:7 X26:7 24 VCC
X12
X12:8 Entrada de –24 VCC
X12:9 GND, potencial de referência das entradas binárias

4 Instruções de montagem e de instalaçãoInstalação da carta opcional DFE24B no MOVITRAC® B
16 Manual – Interface de Bus de Campo DFE24B EtherCAT
Para simplificar a cablagem, a carta DFE24B pode ser alimentada no terminal X26.7com a tensão contínua de 24 V do terminal X46.7 do MOVITRAC® B.Se a carta DFE24B for alimentada através do MOVITRAC® B, este tem de ser tambémalimentado com tensão contínua de 24 V nos terminais X12.8 e X12.9.
4.2.2 Ligação do bus de sistema
61073AXXFig. 3: Ligação do bus de sistema
X45 X46
1 2 3 4 5 6HL ⊥
FSC11B
MOVITRAC® B
S1
OFF
ON
7
S2
X44
X45 X46
1 2 3 4 5 6HL ⊥
FSC11B
MOVITRAC® B
S1
OFF
ON
7
S2
X44
X45 X46
1 2 3 4 5 6H L ⊥
FSC11B
MOVITRAC® B
S1
OFF
ON
7
S2
X44
X26
1 2 3 4 5 6 7
X24
H1
H2
X1212345678
24V IODC 24 V
-
+
9GND
=
0 1
F1
EtherCAT
AS
RUN
DFE 24B
ERR
INX
30
OU
TX
31
OU
TX
31
DFE24BGND = Referência do bus do sistemaSC11 = Bus do sistema altoSC12 = Bus do sistema baixo
MOVITRAC® BGND = Referência do bus do sistemaSC22 = Bus de sistema baixo, saídaSC21 = Bus de sistema alto, saídaSC12 = Bus de sistema baixo, entradaSC11 = Bus de sistema alto, entradaS12 = Resistência de terminação do bus do sistema
4Instruções de montagem e de instalaçãoInstalação da carta opcional DFE24B no MOVITRAC® B
Manual – Interface de Bus de Campo DFE24B EtherCAT 17
Tenha em atenção:• Se possível, utilize um cabo de cobre de 2 x 2 fios torcidos e blindado (cabo de trans-
missão de dados com blindagem feita de um trançado de fios em cobre). Aplique ablindagem em ambos os lados e numa grande área no grampo de blindagem elec-trónica do MOVITRAC® B. Se for utilizado um cabo de dois fios, ligue adicionalmenteas pontas da blindagem a GND. O cabo deve respeitar as seguintes especificações:– Secção transversal dos condutores: 0,25 mm2 (AWG23) .... 0,75 mm2 (AWG18)– Resistência do cabo: 120 Ê a 1 MHz– Capacitância por unidade de comprimento  40 pF/m a 1 kHzCabos adequados são, por ex., os cabos para CAN-Bus e para DeviceNet.
• O comprimento total permitido para o cabo depende da velocidade de transmissãodo SBus configurada:– 250 kBaud: 160 m– 500 kBaud: 80 m– 1000 kBaud: 40 m
• Ligue a resistência de terminação do bus de sistema (S1 = ON) na última unidadedo bus de sistema. Desligue a resistência de terminação nas outras unidades (S1 =OFF). A gateway DFE24B tem de estar sempre instalada no início ou no fim do busdo sistema. Esta gateway possui uma resistência de terminação integrada.
• Não é permitida uma estrutura de bus em forma de estrela.
• Entre as unidades ligadas via SBus não pode existir diferença de potencial. Evite adiferença de potencial tomando as medidas adequadas, por exemplo, ligando aunidade à massa usando uma linha separada.

4 Instruções de montagem e de instalaçãoMontagem e instalação do slot universal para opcionais UOH11B
18 Manual – Interface de Bus de Campo DFE24B EtherCAT
4.3 Montagem e instalação do slot universal para opcionais UOH11B
O gateway é alimentado com uma tensão de 24 VCC, ligada a X26.
61074APT
X26
X26:1 SC11 Bus de sistema +, CAN alto
X26:2 SC12 Bus de sistema –, CAN baixo
X26:3 GND, CAN GND
X26:6 GND, CAN GND
X26:7 24 VCC
X261 2 3 4 5 6 7
SEW Drive
UOH11B
DC+24 VGND
X24
H1
H2
SC11 Bus de sistema +, CAN highSC12 Bus de sistema -, CAN low
GND, CAN GND
0 1
F1
EtherCAT
AS
RUN
DFE 24B
ERR
INX
30O
UT
X31
OU
TX
31

4Instruções de montagem e de instalaçãoLigação e descrição dos terminais da opção DFE24B
Manual – Interface de Bus de Campo DFE24B EtherCAT 19
4.4 Ligação e descrição dos terminais da opção DFE24BReferência Interface opcional EtherCAT, tipo DFE24B: 1821 126 7
A Interface opcional EtherCAT do tipo DFE24B só pode ser utilizada em conjunto como MOVIDRIVE® MDX61B. Esta opção não é possível em conjunto com o modeloMDX60B.A opção DFE24B tem que ser instalada no slot de bus de campo.
Vista frontal da DFE24B DescriçãoMicro-inter-ruptorTerminal
Função
58083AXX
RUN: LED de operação EtherCAT (cor-de-laranja/ verde)
ERR: LED de irregularidades EtherCAT (vermelho)
Sinaliza o estado de operação da electrónica do bus e da comunicação.
Sinaliza irregularidades na rede EtherCAT.
Micro-interruptor ASF1
Auto-configuração para a operação de gatewayReservado
LED Link/Activity (verde)
X30 IN: Ligação EtherCAT de entrada
LED Link/Activity (verde)
X31 OUT: Ligação EtherCAT de saída
Sinaliza que a ligação EtherCAT para a unidade precedente existe ou está activa.
Sinaliza que a ligação EtherCAT para a unidade seguinte existe ou está activa.
0 1
F1
EtherCAT
AS
RUN
DFE 24B
ERR
INX
30
OU
TX
31
OU
TX
31
Vista frontal no MOVI-TRAC® B e no e UOH11B Descrição Função
58129AXX
LED H1 (vermelho)
LED H2 (verde)
X24, Terminal X
Erro no sistema (só para funções de gateway)
Reservado
Interface RS485 para diagnóstico via PC e MOVITOOLS® MotionStudio
X24
H1
H2

4 Instruções de montagem e de instalaçãoAtribuição dos pinos
20 Manual – Interface de Bus de Campo DFE24B EtherCAT
4.5 Atribuição dos pinosUse conectores de ficha RJ45 pré-fabricados e blindados, de acordo com IEC11801edição 2.0 e da categoria 5:
Ligação DFE24B - EtherCAT
A opção DFE24B está equipada com dois conectores de ficha RJ45 para bus com umaestrutura em linha. O mestre EtherCAT deve ser ligado a X30 IN (RJ45) utilizando umcabo de pares torcidos blindado (eventualmente através de escravos EtherCAT adicio-nais). Unidades EtherCAT são ligadas via X31 OUT (RJ45).
54174AXXFig. 4: Atribuição dos pinos do conector de ficha RJ45
A = Vista frontalB = Vista traseira[1] Pino 1 TX+ "Transmit Plus"[2] Pino 2 TX– "Transmit Minus"[3] Pino 3 RX+ "Receive Plus"[6] Pino 6 RX– "Receive Minus"
[3] [2] [1]23
6
1
[6]
A B
De acordo com IEC 802.3, o comprimento máximo para Ethernet 100 MBaud(100BaseT), por ex., entre dois DFE24B, é 100 m.

4Instruções de montagem e de instalaçãoBlindagem e instalação dos cabos de bus
Manual – Interface de Bus de Campo DFE24B EtherCAT 21
4.6 Blindagem e instalação dos cabos de busUse exclusivamente cabos e elementos de ligação blindados que cumpram as exigên-cias da categoria 5 e classe D, de acordo com IEC11801 edição 2.0.Uma blindagem tecnicamente correcta do cabo de bus atenua eventuais interferênciaseléctricas que possam surgir em ambientes industriais. As seguintes medidas permitemobter as melhores características de blindagem:• Aperte manualmente os parafusos de fixação dos conectores, módulos e cabos de
compensação de potencial.• Utilize somente conectores com caixa metálica ou caixa metalizada.• Aplique a blindagem na ficha na maior superfície possível.• Aplique a blindagem do cabo de bus em ambos os lados.• Não instale os cabos de sinal e de bus paralelamente aos cabos de energia (cabos
do motor). Se possível, utilize calhas de cabos separadas.• Em ambientes industriais, utilize esteiras metálicas para cabos, e ligue-as à terra.• Instale os cabos de sinal próximos da compensação de potencial correspondente,
usando o menor trajecto possível.• Evite usar conectores de ficha para ampliar a extensão de linhas de bus.• Passe o cabo de bus próximo de superfícies com ligação à terra.
4.7 Terminação do busNão é necessária terminação do bus (por ex., através de resistências de terminação debus). Se não estiver ligado nenhuma unidade a seguir a uma unidade EtherCAT, tal éautomaticamente detectado.
4.8 Configuração do endereço da estaçãoOs endereços das unidades EtherCAT da SEW-EURODRIVE não são configurados napróprias unidades. A posição das unidades na estrutura do bus é automaticamentedetectada e os endereços são atribuídos às unidades pelo mestre EtherCAT. Os ende-reços podem ser visualizados por exemplo, na consola DBG60B (parâmetro P093).
Em caso de oscilações do potencial de terra, pode circular uma corrente de compen-sação através da blindagem ligada em ambos os lados e ligada ao potencial de terra(PE). Neste caso, garanta uma compensação de potencial suficiente de acordo com asregulamentações VDE aplicáveis.

4 Instruções de montagem e de instalaçãoIndicadores de operação da opção DFE24B
22 Manual – Interface de Bus de Campo DFE24B EtherCAT
4.9 Indicadores de operação da opção DFE24B4.9.1 LEDs EtherCAT
A carta opcional DFE24B possui 2 LEDs que sinalizam o estado actual da carta e dosistema EtherCAT.
LED RUN (verde/cor-de-laranja)
O LED RUN (verde/cor-de-laranja) sinaliza o estado da carta opcional DFE24B.
LED ERR (vermelho)
O LED ERR (vermelho) sinaliza uma falha no EtherCAT.
61070AXX
DFE24B
RUN
ERR
Estado Estado Descrição
Desligado INIT A carta opcional DFE24B encontra-se no estado de inicialização.
Verde a piscar
PRE-OPERATIONAL A carta opcional DFE24B encontra-se no estado pré-operacional.
Acende uma vez (verde)
SAFE-OPERATIONAL A carta opcional DFE24B encontra-se no estado operacional seguro.
Verde OPERATIONAL A carta opcional DFE24B encontra-se no estado operacional.
Verde brilhante
INITIALISATION ou BOOTSTRAP
• A carta opcional DFE24B está a inicializar-se mas ainda não alcançou o estado INIT.
• A carta opcional DFE24B encontra-se no estado BOOTSTRAP. O firmware está a ser carregado.
Cor-de-laranja a piscar
NOT CONNECTED A carta opcional DFE24B foi ligada mas ainda não foi acedida por um mestre EtherCAT.
Estado Anomalia Descrição
Desligado Sem irregularidade A comunicação EtherCAT da carta opcional DFE24B está no estado de operação.
Brilhante Erro de inicialização Foi detectado um erro de inicialização. A unidade entrou no estado INIT, mas o parâmetro "Change" no registo de estado AL foi colocado para "0x01:change/error".
A piscar Configuração inválida Erro geral de configuração.
Acende uma vez
Alteração de estado não requisitado.
A aplicação escrava alterou automaticamente o estado EtherCAT. Oparâmetro "Change" no registo de estado AL foi colocado para "0x01:change/error".
Acende duas vezes
Timeout no Watchdog da aplicação
Ocorreu um Timeout no Watchdog da aplicação.
Acende três vezes
Reservado -
Acende quatro vezes
Reservado -
Ligado Timeout Watchdog PDI
Ocorreu um Timeout no Watchdog PDI.

4Instruções de montagem e de instalaçãoIndicadores de operação da opção DFE24B
Manual – Interface de Bus de Campo DFE24B EtherCAT 23
Definição dos estados de visualização
Visualização Definição Progressão cronológica
Ligado O LED está permanentemente ligado.
Desligado O LED está permanentemente desligado.
Brilhante O LED comuta entre o estado ligado e desligado em intervalos iguais com uma frequência de 10 Hz.
58094AXX
Pisca uma vez O LED pisca rapidamente uma vez, seguido de uma fase de desligado.
58095AXX
A piscar O LED comuta entre o estado ligado e desligado em intervalos iguais com uma frequência de 2,5 Hz (ligado durante 200 ms/desligado durante 200 ms). 58096AXX
Acende uma vez O LED acende rapidamente uma vez (durante 200 ms), seguido de uma fase prolongada de desligado (1000 ms).
58097AXX
Acende duas vezes
O LED acende rapidamente duas vezes, seguido de uma fase de desligado.
58100AXX
Acende três vezes O LED acende rapidamente três vezes, seguido de uma fase de desligado.
58101AXX
Acende quatro vezes
O LED acende rapidamente quatro vezes, seguido de uma fase de desligado.
58102AXX
on
off
50ms
50ms
50mson
off
on
off
200ms 200ms
200ms 1s
on
off
200ms 1s
on
off
200ms 200ms
200ms
on
off
200ms 200ms 1s200ms 200ms
200ms
on
off
200ms 200ms 1s200ms 200ms 200ms 200ms

4 Instruções de montagem e de instalaçãoIndicadores de operação da opção DFE24B
24 Manual – Interface de Bus de Campo DFE24B EtherCAT
LED Link/Activity (verde)
Cada ligação EtherCAT de entrada (X30) e de saída (X31) possui um LED "Link/Activity". Estes LEDs sinalizam se a existe ligação EtherCAT com a unidade anterior(X30) ou posterior (X31), e se esta está activa.
4.9.2 LED GatewayLEDs de estado da comunicação da gateway
61195AXX
INX
30
OU
TX
31
OU
TX
31
LED"Link/Activity"
58129axx
LED H1 Sys-Fault (vermelho)
Só para funções de gateway
Estado Estado Descrição
Vermelho Irregularidade no sistema A gateway não está configurada ou um dos accionamentos está inactivo
Desligado SBus ok A gateway está configurada correctamente
A piscar Bus scan O Bus está a ser verificado pela gateway
X24
H1
H2
O LED H2 (verde) está reservado.O terminal X X24 é a interface RS485 para diagnóstico via PC e MOVITOOLS®
MotionStudio.

5Elaboração do projecto e colocação em funcionamentoValidade dos ficheiros XML para a opção DFE24B
Manual – Interface de Bus de Campo DFE24B EtherCAT 25
5 Elaboração do projecto e colocação em funcionamentoEste capítulo inclui informações sobre a elaboração de projectos para o mestreEtherCAT e colocação em funcionamento do conversor/variador para a operação combus de campo.
5.1 Validade dos ficheiros XML para a opção DFE24BO ficheiro XML é necessário para que se possa utilizar a carta DFE24B como opçãode bus de campo no MOVIDRIVE® B e como gateway no MOVITRAC® B, ou no slotuniversal para opcionais (UOH11B).
5.2 Elaboração do projecto do mestre EtherCAT para MOVIDRIVE® B com o ficheiro XML
5.2.1 Ficheiro XML para operação no MOVIDRIVE® B
Para a elaboração do projecto do mestre EtherCAT está disponível um ficheiro XML(SEW_DFE24B.XML). Copie este ficheiro para uma pasta do seu software de elabo-ração de projectos.O procedimento detalhado encontra-se descrito nos manuais do respectivo software deelaboração de projectos.Os ficheiros XML standardizados pelo "EtherCAT-Technology Group (ETG)" podem serlidos por todos os mestres EtherCAT.
A versão actual do ficheiro XML para a opção DFE24B está disponível na secção"Software" do site da Internet da SEW (http://sew-eurodrive.de).
O conteúdo do ficheiro XML não deve ser nem alterado nem complementado. A SEWnão assume qualquer responsabilidade por anomalias no funcionamento do con-versor/variador em consequência de ficheiros XML modificados!
00
I

5 Elaboração do projecto e colocação em funcionamentoElaboração do projecto do mestre EtherCAT para MOVIDRIVE® B com
26 Manual – Interface de Bus de Campo DFE24B EtherCAT
5.2.2 Procedimento para a elaboração do projecto
Efectue os passos abaixo indicados para a elaboração do projecto do MOVIDRIVE® Bcom a interface de bus de campo EtherCAT:1. Instale (copie) o ficheiro XML de acordo com as definições do seu software de
elaboração de projectos. Após a instalação bem sucedida, a unidade aparece nasestações escravas (em SEW-EURODRIVE Æ Drives), com a designaçãoMOVIDRIVE+DFE24B.
2. A unidade pode ser introduzida na estrutura EtherCAT através do item [Insert] domenu. O endereço é atribuído automaticamente. Para uma identificação mais fácil,é possível atribuir um nome individual à unidade.
3. Seleccione a configuração de dados do processo adequada para a sua aplicação(consulte o capítulo 5.2.3).
4. Ligue os dados I/O e os dados de periféricos com os dados de entrada e saída doprograma de aplicação
Após a elaboração do projecto, pode iniciar a comunicação EtherCAT. Os LEDs RUNe ERR sinalizam o estado da comunicação da opção DFE24B (ver capítulo 4.9 "Indica-dores de operação da opção DFE24B").
00
I
5Elaboração do projecto e colocação em funcionamentoElaboração do projecto do mestre EtherCAT para MOVIDRIVE® B com
Manual – Interface de Bus de Campo DFE24B EtherCAT 27
5.2.3 Configuração PDO para operação no MOVIDRIVE®
Na variante CoE (CANopen over EtherCAT), a EtherCAT utiliza, para a comunicaçãocíclica entre o mestre e os escravos, os objectos de dados do processo (PDO) definidosno padrão CANopen. Em conformidade com CANopen, é feita a distinção entre osobjectos de dados do processo Rx (Receive) e Tx (Transmit).
Objectos de dados do processo Rx
Os objectos de dados do processo Rx (Rx-PDO) são recebidos pelo escravo EtherCAT.Estes objectos transportam dados de saída do processo (valores de controlo, referên-cias, sinais digitais de saída) do mestre EtherCAT para o escravo EtherCAT.
Objectos de dados do processo Tx
Os objectos de dados do processo Tx (Tx-PDO) são devolvidos pelo escravo EtherCATao mestre EtherCAT. Estes objectos transportam dados de entrada do processo(valores actuais, estados, informações das entradas digitais, etc.).
No modo operacional DFE24B do MOVIDRIVE® B, podem ser utilizados dois tipos dePDO diferentes para os dados cíclicos de entrada e de saída do processo.• OutputData1 (Standard 10 PO)
PDO estático com 10 palavras de saída do processo cíclicas, ligadas por configu-ração fixa aos dados standard do processo do MOVIDRIVE® B (Manual de perfilpara unidade de bus de campo MOVIDRIVE®).
• OutputData2 (Configurable PO)PDO configurável com até 10 palavras cíclicas de dados de saída do processo(16 bit) e com até 8 variáveis cíclicas de sistema (32 bit). Este objecto pode ser con-figurado livremente e ligado a vários dados do processo do variador.
• InputData1 (Standard 10 PI)PDO estático com 10 palavras de entrada do processo cíclicas, ligadas por configu-ração fixa aos dados standard do processo do MOVIDRIVE® B (Manual de perfilpara unidade de bus de campo MOVIDRIVE®).
• InputData2 (Configurable PI)PDO configurável com até 10 palavras cíclicas de dados de entrada do processo(16 bit) e com até 8 variáveis cíclicas de sistema (32 bit). Este objecto pode ser con-figurado livremente e ligado a vários dados do processo do variador.
00
I

5 Elaboração do projecto e colocação em funcionamentoElaboração do projecto do mestre EtherCAT para MOVIDRIVE® B com
28 Manual – Interface de Bus de Campo DFE24B EtherCAT
Lista dos objectos de dados de processo (PDO) possíveis para DFE24B MOVIDRIVE® B
Índice Tamanho Nome Mapea-mento
Gestor sinc. Unidade sinc.
1600hex (5632dec)
20 bytes OutputData1 (Standard 10 PDO) Conteúdo fixo
2 0
1602hex (6656dec)
2 ... 52 bytes OutputData2 (Configurable PO) - 2 0
1A00hex (5632dec)
20 bytes InputData1 (Standard 10 PI) Conteúdo fixo
3 0
1A02hex (6658dec)
2 ... 52 bytes InputData2 (Configurable PI) - 3 0
61221AXXFig. 5: Utilização dos objectos de dados do processo "OutputData1" e "InputData1"
EtherCAT
MasterSEW
Drive
EtherCAT acycl. Mailbox
Communication
cycl. InputData1
(Standard 10 PI)
acycl. Mailbox
Communication
cycl. OutputData1
(Standard 10 PO)
EthernetHeader
FrameHeader
EtherCATHeader
Data ... FCSDrive
00
I
5Elaboração do projecto e colocação em funcionamentoElaboração do projecto do mestre EtherCAT para MOVIDRIVE® B com
Manual – Interface de Bus de Campo DFE24B EtherCAT 29
PDO estático para 10 palavras cíclicas de dados do processo
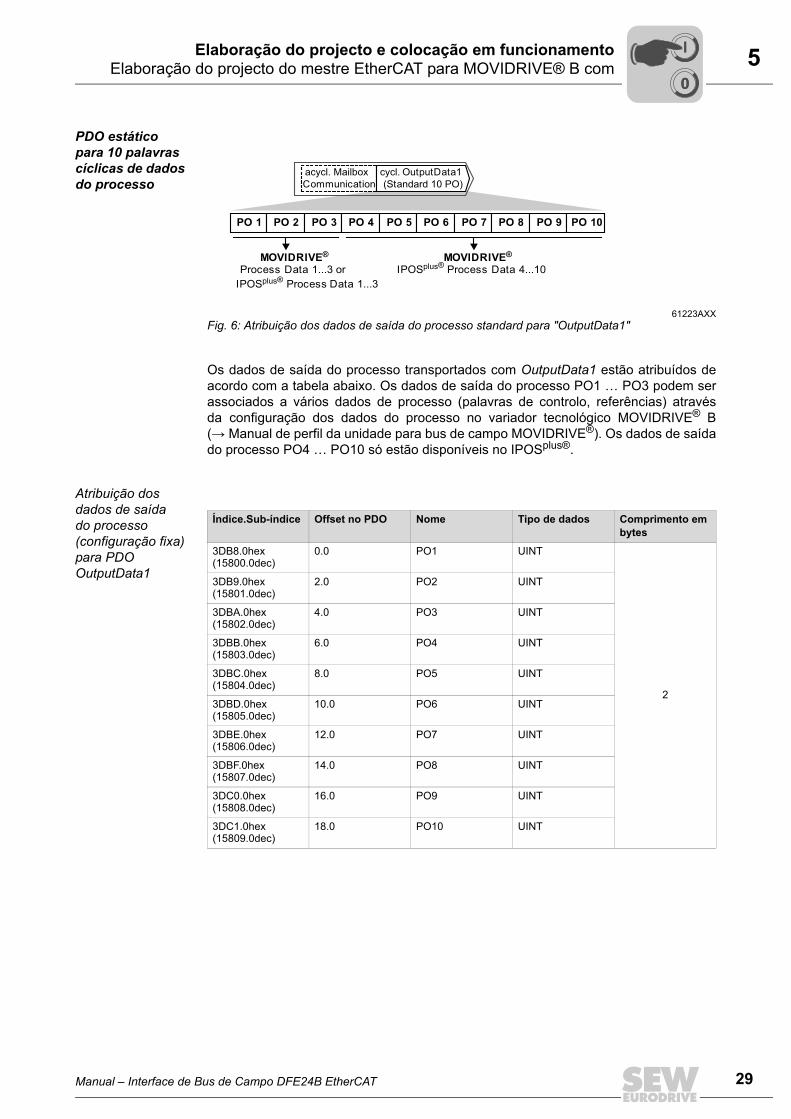
Os dados de saída do processo transportados com OutputData1 estão atribuídos deacordo com a tabela abaixo. Os dados de saída do processo PO1 … PO3 podem serassociados a vários dados de processo (palavras de controlo, referências) atravésda configuração dos dados do processo no variador tecnológico MOVIDRIVE® B(Æ Manual de perfil da unidade para bus de campo MOVIDRIVE®). Os dados de saídado processo PO4 … PO10 só estão disponíveis no IPOSplus®.
Atribuição dos dados de saída do processo (configuração fixa) para PDO OutputData1
61223AXXFig. 6: Atribuição dos dados de saída do processo standard para "OutputData1"
PO 1 PO 2 PO 3 PO 4 PO 5 PO 6 PO 7 PO 8 PO 9 PO 10
MOVIDRIVE®
Process Data 1...3 or
IPOSplus® Process Data 1...3
MOVIDRIVE®
Process Data 4...10
acycl. Mailbox
Communication
cycl. OutputData1
(Standard 10 PO)
IPOSplus®
Índice.Sub-índice Offset no PDO Nome Tipo de dados Comprimento em bytes
3DB8.0hex (15800.0dec)
0.0 PO1 UINT
2
3DB9.0hex (15801.0dec)
2.0 PO2 UINT
3DBA.0hex (15802.0dec)
4.0 PO3 UINT
3DBB.0hex (15803.0dec)
6.0 PO4 UINT
3DBC.0hex (15804.0dec)
8.0 PO5 UINT
3DBD.0hex (15805.0dec)
10.0 PO6 UINT
3DBE.0hex (15806.0dec)
12.0 PO7 UINT
3DBF.0hex (15807.0dec)
14.0 PO8 UINT
3DC0.0hex (15808.0dec)
16.0 PO9 UINT
3DC1.0hex (15809.0dec)
18.0 PO10 UINT
00
I

5 Elaboração do projecto e colocação em funcionamentoElaboração do projecto do mestre EtherCAT para MOVIDRIVE® B com
30 Manual – Interface de Bus de Campo DFE24B EtherCAT
Atribuição dos dados de entrada do processo (configuração fixa) para PDO InputData1
Os dados de entrada do processo transportados com InputData1 estão atribuídos deacordo com a tabela abaixo. Os dados de entrada do processo PI1 … PI3 podem serassociados a vários dados de processo (palavras de estado, valores actuais) atravésda configuração dos dados do processo no variador tecnológico MOVIDRIVE® B(Æ Manual de perfil da unidade para bus de campo MOVIDRIVE®). Os dados deentrada do processo PI4 … PI10 só estão disponíveis no IPOSplus®.
61226AXXFig. 7: Atribuição dos dados de entrada do processo standard para PDO InputData1
Índice.Sub-índice Offset no PDO Nome Tipo de dados Comprimento em bytes
3E1C.0hex (15900.0dec)
0.0 PI1 UINT
2
3E1D.0hex (15901.0dec)
2.0 PI2 UINT
3E1E.0hex (15902.0dec)
4.0 PI3 UINT
3E1F.0hex (15903.0dec)
6.0 PI4 UINT
3E20.0hex (15904.0dec)
8.0 PI5 UINT
3E21.0hex (15905.0dec)
10.0 PI6 UINT
3E22.0hex (15906.0dec)
12.0 PI7 UINT
3E23.0hex (15907.0dec)
14.0 PI8 UINT
3E24.0hex (15908.0dec)
16.0 PI9 UINT
3E25.0hex (15909.0dec)
18.0 PI10 UINT
acycl. Mailbox
Communication
cycl. InputData1
(Standard 10 PI)
PI 1 PI 2 PI 3 PI 4 PI 5 PI 6 PI 7 PI 8 PI 9 PI 10
MOVIDRIVE®
Process Data 1...3 or
IPOSplus® Process Data 1...3
MOVIDRIVE®
Process Data 4...10IPOSplus®
Se forem transmitidas menos de 10 palavras de dados do processo, ou o mapeamentoPDO tiver de ser ajustado, devem ser utilizados os PDOs configuráveis em vez dosPDOs estáticos.
00
I

5Elaboração do projecto e colocação em funcionamentoElaboração do projecto do mestre EtherCAT para MOVIDRIVE® B com
Manual – Interface de Bus de Campo DFE24B EtherCAT 31
PDOs configuráveis para até 8 variáveis IPOSplus® e 10 palavras de dados do processo
Os dados do processo transportados com "OutputData2" e "InputData2" podem serconfigurados com informações de dados do processo, de acordo com a tabela abaixo.Além das variáveis de 32 bits do tipo DINT, é também possível configurar os dadosstandard do processo PO1 ... PO10 e PI1 ... PI10. Desta forma, os PDOs podem serconfigurados para cada aplicação específica.
61230AXXFig. 8: Utilização dos PDOs configuráveis OutputData2 e InputData2
61232AXXFig. 9: Mapeamento dos PDOs de configuração livre para OutputData2
61237AXXFig. 10: Mapeamento dos PDOs de configuração livre para InputData2
EtherCAT
MasterSEW
Drive
EtherCAT acycl. MailboxCommunication
cycl. InputData2(Configurable PI)
acycl. MailboxCommunication
cycl. OutputData2(Configurable PO)
EthernetHeader
FrameHeader
EtherCATHeader
Data ... FCSDrive
PO1 PO2 PO106. Variable 7. Variable
max. 10 Process DataPO1..10 (UINT)
acycl. Mailbox
Communication
cycl. OutputData2
(Configurable PO)
8. Variable
Variables (DINT)
1. Variable
max. 8 IPOSplus®
PI1 PI102. Variable 8. Variable1. Variable 7. Variable
acycl. MailboxCommunication
cycl. InputData2
(Configurable PI)
max. 10 Process DataPI1..10 (UINT)
Variables (DINT)
max. 8 IPOSplus®
00
I

5 Elaboração do projecto e colocação em funcionamentoElaboração do projecto do mestre EtherCAT para MOVIDRIVE® B com
32 Manual – Interface de Bus de Campo DFE24B EtherCAT
Atribuição dos dados configuráveis de entrada e de saída do processo para PDO OutputData2 e InputData2
O número máximo de PDOs OutputData2 e InputData2 configuráveis é• 10 Palavras de dados do processo (tipo UINT)• 8 Variáveis IPOSplus® (tipo DINT)
Índice.Subíndice
Nome Tipo de dados
Compri-mento em bytes
LeituraEscrita
Atributo de acesso
2AF8.0hex (11000.0dec)
Template IposVar (0...1023)
DINT 4 4
Template para variáveis IPOSplus®
2CBD.0hex (11453.0dec)
ModuloCtrl (H453)
Palavra de controlo da função Modulo
2CBE.0hex (11454.0dec)
ModTagPos (H454)
Posição Modulo destino
2CBF.0hex (11455.0dec)
ModActPos (H455)
Posição Modulo actual
2CC0.0hex (11456.0dec)
ModCount (H456)
Valor Modulo de contagem
2CD1.0hex (11473.0dec)
StatusWord (H473)
Palavra de estado IPOS
2CD2.0hex (11474dec)
Scope474 Variável Scope directa
2CD3.0hex (11475.0dec)
Scope475 (H475)
Variável Scope directa
2CD6.0hex (11478.0dec)
AnaOutIPOS2 (H478)
Saída analógica 2 da opção DIO11B
2CD7.0hex (11478.0dec)
AnaOutIPOS (H479)
Saída analógica da opção DIO11B
2CD8.0hex (11480.0dec)
OptOutIPOS (H480)
Saídas digitais opcionais
2CD9.0hex (11481.0dec)
StdOutIPOS (H481)
Saídas digitais standard
2CDA.0hex (11482.0dec)
OutputLevel (H482)
Estado das saídas digitais
2CDB.0hex (11483.0dec)
InputLevel (H483)
Estado das entradas digitais
2CDC.0hex (11484.0dec)
ControlWord (H484)
Palavra de controlo IPOSplus®
2CE4.0hex (11492.0dec)
TargetPos (H492)
Posição destino
2CE7.0hex (11495.0dec)
LagDistance (H495)
Distância de atraso
2CEB.0hex (11499.0dec)
SetpPosBus (H499)
Referência de posição via bus
2CEC.0hex (11500.0dec)
TpPos2_VE (H500)
Posição Touch Probe 2 do encoder virtual
2CED.0hex (11501.0dec)
TpPos1_VE (H501)
Posição Touch Probe 1 do encoder virtual
2CEE.0hex (11502.0dec)
TpPos2_Abs (H502)
Posição Touch Probe 2
2CEF.0hex (11503dec)
TpPos1_Abs (H503)
Posição Touch Probe 1
00
I

5Elaboração do projecto e colocação em funcionamentoElaboração do projecto do mestre EtherCAT para MOVIDRIVE® B com
Manual – Interface de Bus de Campo DFE24B EtherCAT 33
2CF0.0hex (11504.0dec)
TpPos2_Ext (H504)
DINT 4 4
Posição Touch Probe 2, externa
2CF1.0hex (11505.0dec)
TpPos2_Mot (H505)
Posição Touch Probe 2, encoder do motor
2CF2.0hex (11506.0dec)
TpPos1_Ext (H506)
Posição Touch Probe 1, externa
2CF3.ohex (11507.0dec)
TpPos1_Mot (H507)
Posição Touch Probe 1, motor
2CF4.0hex (11508.0dec)
ActPos_Mot16bit (H508)
Posição actual do motor, 16 bit
2CF5.0hex (11509dec)
ActPos_Abs (H509)
Posição actual do encoder absoluto
2CF6.0hex (11510.0dec)
ActPos_Ext (H510)
Posição actual do encoder externo (X14)
2CF7.0hex (11511.0dec)
ActPos_Mot (H511)
Posição actual do encoder do motor
3DB8.0hex (15800.0dec)
PO1
UINT 2 2
Palavra standard dos dados de saída do processo PO1
3DB9.0hex (15801.0dec)
PO2 Palavra standard dos dados de saída do processo PO2
3DBA.0hex (15802.0dec)
PO3 Palavra standard dos dados de saída do processo PO3
3DBB.0hex (15803.0dec)
PO4 Palavra standard dos dados de saída do processo PO4
3DBC.0hex (15804.0dec)
PO5 Palavra standard dos dados de saída do processo PO5
3DBD.0hex (15805.0dec)
PO6 Palavra standard dos dados de saída do processo PO6
3DBE.0hex (15806.0dec)
PO7 Palavra standard dos dados de saída do processo PO7
3DBF.0hex (15807.0dec)
PO8 Palavra standard dos dados de saída do processo PO8
3DC0.0hex (15808.0dec)
PO9 Palavra standard dos dados de saída do processo PO9
3DC1.0hex (15801.0dec)
PO10 Palavra standard dos dados de saída do processo PO10
3E1C.0hex (15900.0dec)
PI1 Palavra standard dos dados de entrada do processo PI1
3E1D.0hex (1590010dec)
PI2 Palavra standard dos dados de entrada do processo PI2
3E1E.0hex (15902.0dec)
PI3 Palavra standard dos dados de entrada do processo PI3
3E1F.0hex (15903.0dec)
PI4 Palavra standard dos dados de entrada do processo PI4
3E20.0hex (15904.0dec)
PI5 Palavra standard dos dados de entrada do processo PI5
3E21.0hex (15905.0dec)
PI6 Palavra standard dos dados de entrada do processo PI6
3E22.0hex (15906.0dec)
PI7 Palavra standard dos dados de entrada do processo PI7
3E23.0hex (15907.0dec)
PI8 Palavra standard dos dados de entrada do processo PI8
3E24.0hex (15908.0dec)
PI9 Palavra standard dos dados de entrada do processo PI9
3E25.0hex (15909.0dec)
PI10 Palavra standard dos dados de entrada do processo PI10
Índice.Subíndice
Nome Tipo de dados
Compri-mento em bytes
LeituraEscrita
Atributo de acesso
00
I
5 Elaboração do projecto e colocação em funcionamentoElaboração do projecto do mestre EtherCAT para MOVIDRIVE® B com
34 Manual – Interface de Bus de Campo DFE24B EtherCAT
Plausibilidade da configuração dos objectos de dados do processo:• Nos objectos de dados do processo configuráveis OutputData2 e InputData2 não
podem ser introduzidos dados cíclicos de saída do processo PO1 … 10, seOutputData1 ou InputData1 tiver também sido configurado.
• Uma configuração múltipla dos objectos de dados do processo não é possível.• Como dados do processo, só é possível configurar os objectos standard PO1 ...
PO10, PI1 ... PI10 ou as variáveis IPOSplus® (índices 11000.0 ... 12023.0).
00
I
5Elaboração do projecto e colocação em funcionamentoElaboração do projecto do mestre EtherCAT para MOVITRAC® B /
Manual – Interface de Bus de Campo DFE24B EtherCAT 35
5.3 Elaboração do projecto do mestre EtherCAT para MOVITRAC® B / Gateway com o ficheiro XML
Neste capítulo é descrita a elaboração do projecto do mestre EtherCAT comMOVITRAC® B e DFE24B-Gateway / UOH11B.
5.3.1 Ficheiros XML para a operação no MOVITRAC® B e no slot universal para opcionais UOH11B
Para a elaboração do projecto do mestre EtherCAT está disponível um ficheiro XML(SEW_DFE24B.XML). Copie este ficheiro para uma pasta do seu software de elabo-ração de projectos.O procedimento detalhado encontra-se descrito nos manuais do respectivo software deelaboração de projectos.Os ficheiros XML standardizados pelo "EtherCAT-Technology Group (ETG)" podem serlidos por todos os mestres EtherCAT.
5.3.2 Procedimento para a elaboração do projecto
Efectue os passos abaixo indicados para a elaboração do projecto para o MOVITRAC®/Gateway com a interface EtherCAT:1. Instale (copie) o ficheiro XML de acordo com as definições do seu software de ela-
boração de projectos. Após a instalação bem sucedida, a unidade aparece nas esta-ções escravas (em SEW-EURODRIVE Æ Drives), com a designação DFE24B-Gateway.
2. A unidade pode ser introduzida na estrutura EtherCAT através do item [Insert] domenu. O endereço é atribuído automaticamente. Para uma identificação mais fácil,é possível atribuir um nome individual à unidade.
3. Ligue os dados I/O e os dados de periféricos com os dados de entrada e saída doprograma de aplicação
Após a elaboração do projecto, pode iniciar a comunicação EtherCAT. Os LEDs RUNe ERR sinalizam o estado da comunicação da opção DFE24B (ver capítulo 4.9 "Indica-dores de operação da opção DFE24B").
00
I
5 Elaboração do projecto e colocação em funcionamentoElaboração do projecto do mestre EtherCAT para MOVITRAC® B /
36 Manual – Interface de Bus de Campo DFE24B EtherCAT
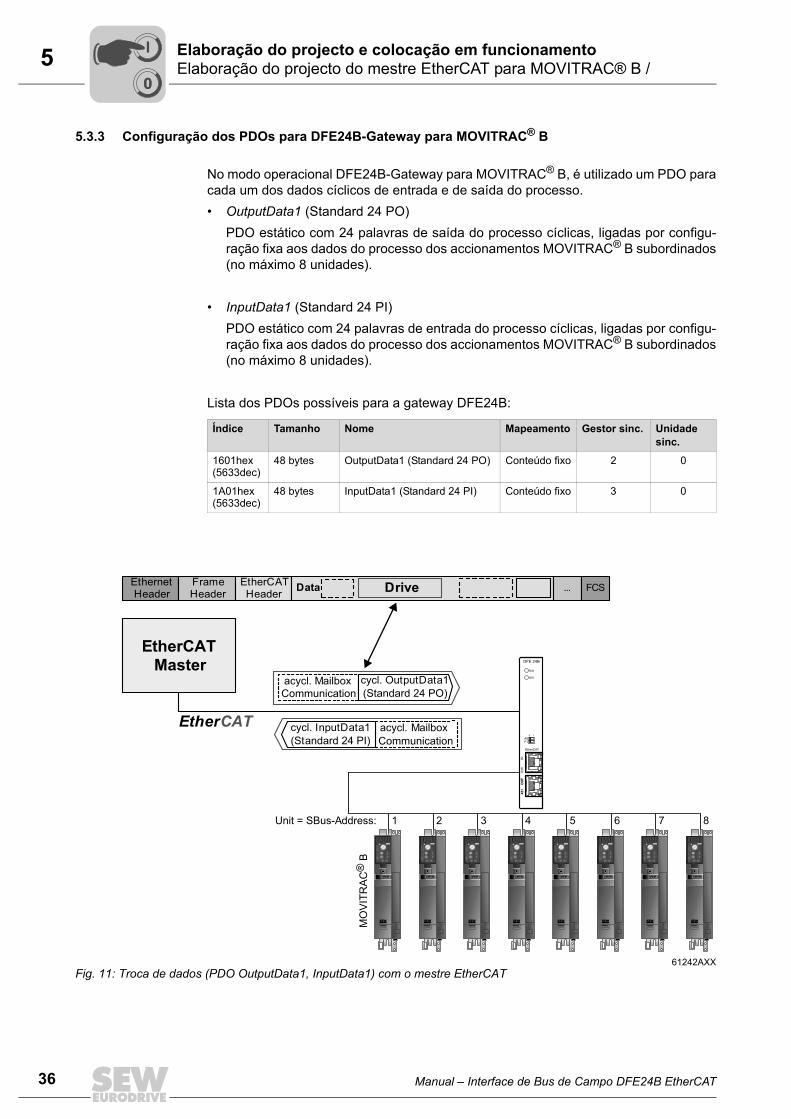
5.3.3 Configuração dos PDOs para DFE24B-Gateway para MOVITRAC® B
No modo operacional DFE24B-Gateway para MOVITRAC® B, é utilizado um PDO paracada um dos dados cíclicos de entrada e de saída do processo.• OutputData1 (Standard 24 PO)
PDO estático com 24 palavras de saída do processo cíclicas, ligadas por configu-ração fixa aos dados do processo dos accionamentos MOVITRAC® B subordinados(no máximo 8 unidades).
• InputData1 (Standard 24 PI)PDO estático com 24 palavras de entrada do processo cíclicas, ligadas por configu-ração fixa aos dados do processo dos accionamentos MOVITRAC® B subordinados(no máximo 8 unidades).
Lista dos PDOs possíveis para a gateway DFE24B:
Índice Tamanho Nome Mapeamento Gestor sinc. Unidade sinc.
1601hex (5633dec)
48 bytes OutputData1 (Standard 24 PO) Conteúdo fixo 2 0
1A01hex (5633dec)
48 bytes InputData1 (Standard 24 PI) Conteúdo fixo 3 0
61242AXXFig. 11: Troca de dados (PDO OutputData1, InputData1) com o mestre EtherCAT
Unit = SBus-Address: 1 2 3 4 5 6 7 8
EURODRIVEEURODRIVEEURODRIVEMO
VIT
RA
C®
B
EURODRIVEEURODRIVEEURODRIVE EURODRIVEEURODRIVEEURODRIVE EURODRIVEEURODRIVEEURODRIVE EURODRIVEEURODRIVEEURODRIVE EURODRIVEEURODRIVEEURODRIVE EURODRIVEEURODRIVEEURODRIVE EURODRIVEEURODRIVEEURODRIVE
EtherCAT
Master
EtherCAT acycl. Mailbox
Communication
cycl. InputData1
(Standard 24 PI)
acycl. Mailbox cycl. OutputData1
(Standard 24 PO)
EthernetHeader
FrameHeader
EtherCATHeader
Data ... FCSDrive
Communication
0 1
F1
EtherCAT
AS
RUN
DFE 24B
ERR
INX
30
OU
TX
31
OU
TX
31
00
I
5Elaboração do projecto e colocação em funcionamentoElaboração do projecto do mestre EtherCAT para MOVITRAC® B /
Manual – Interface de Bus de Campo DFE24B EtherCAT 37
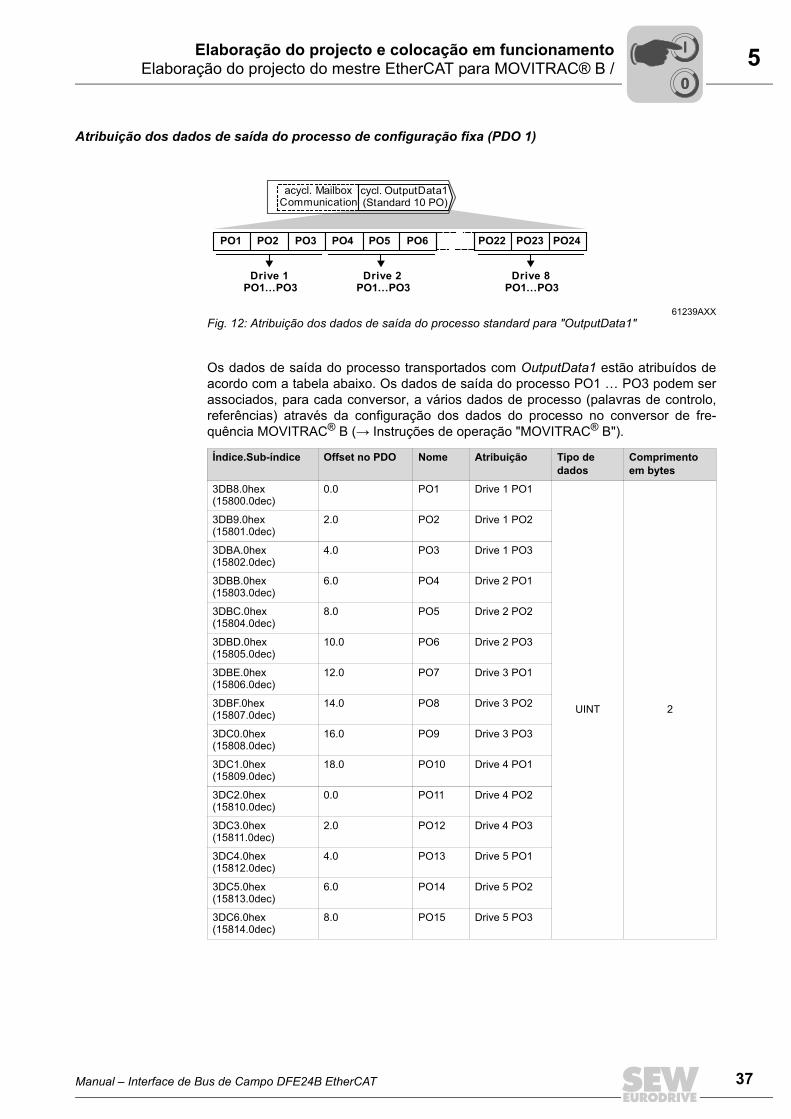
Atribuição dos dados de saída do processo de configuração fixa (PDO 1)
Os dados de saída do processo transportados com OutputData1 estão atribuídos deacordo com a tabela abaixo. Os dados de saída do processo PO1 … PO3 podem serassociados, para cada conversor, a vários dados de processo (palavras de controlo,referências) através da configuração dos dados do processo no conversor de fre-quência MOVITRAC® B (Æ Instruções de operação "MOVITRAC® B").
61239AXXFig. 12: Atribuição dos dados de saída do processo standard para "OutputData1"
Índice.Sub-índice Offset no PDO Nome Atribuição Tipo de dados
Comprimento em bytes
3DB8.0hex (15800.0dec)
0.0 PO1 Drive 1 PO1
UINT 2
3DB9.0hex (15801.0dec)
2.0 PO2 Drive 1 PO2
3DBA.0hex (15802.0dec)
4.0 PO3 Drive 1 PO3
3DBB.0hex (15803.0dec)
6.0 PO4 Drive 2 PO1
3DBC.0hex (15804.0dec)
8.0 PO5 Drive 2 PO2
3DBD.0hex (15805.0dec)
10.0 PO6 Drive 2 PO3
3DBE.0hex (15806.0dec)
12.0 PO7 Drive 3 PO1
3DBF.0hex (15807.0dec)
14.0 PO8 Drive 3 PO2
3DC0.0hex (15808.0dec)
16.0 PO9 Drive 3 PO3
3DC1.0hex (15809.0dec)
18.0 PO10 Drive 4 PO1
3DC2.0hex (15810.0dec)
0.0 PO11 Drive 4 PO2
3DC3.0hex (15811.0dec)
2.0 PO12 Drive 4 PO3
3DC4.0hex (15812.0dec)
4.0 PO13 Drive 5 PO1
3DC5.0hex (15813.0dec)
6.0 PO14 Drive 5 PO2
3DC6.0hex (15814.0dec)
8.0 PO15 Drive 5 PO3
PO1 PO2 PO3 PO4 PO5 PO6 PO22 PO23 PO24
Drive 1PO1...PO3
cycl. OutputData1(Standard 10 PO)
Drive 2PO1...PO3
Drive 8PO1...PO3
acycl. MailboxCommunication
00
I
5 Elaboração do projecto e colocação em funcionamentoElaboração do projecto do mestre EtherCAT para MOVITRAC® B /
38 Manual – Interface de Bus de Campo DFE24B EtherCAT
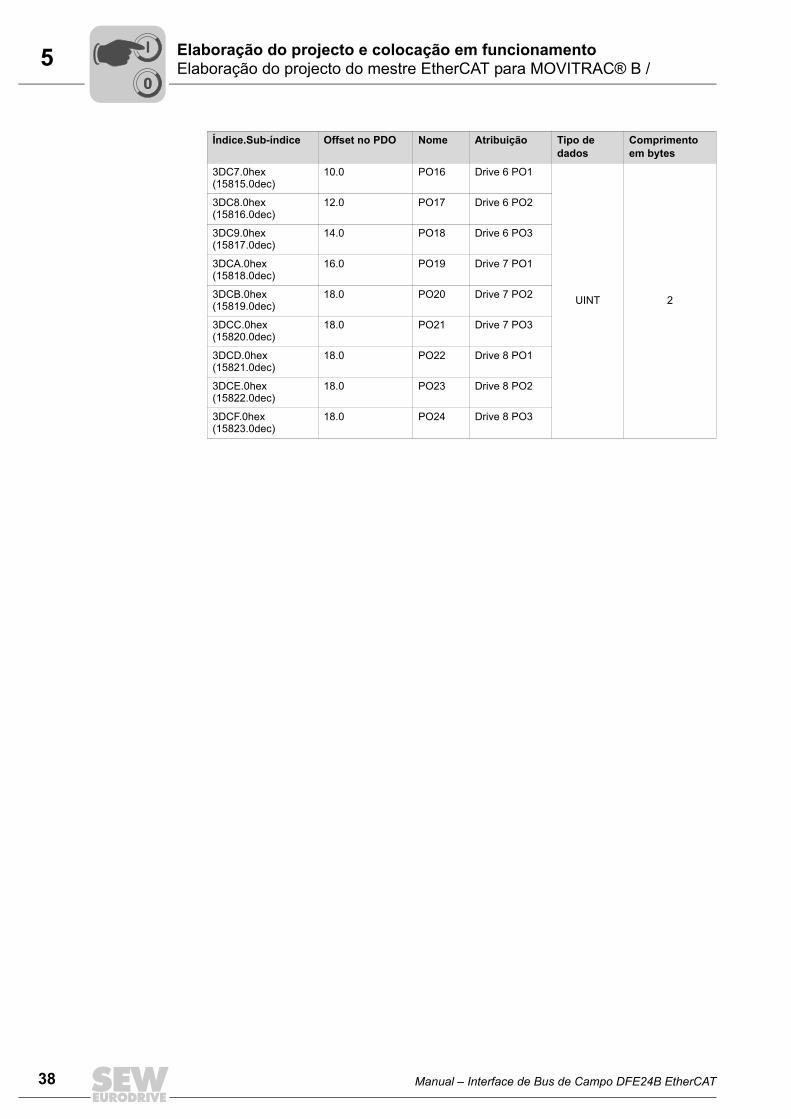
3DC7.0hex (15815.0dec)
10.0 PO16 Drive 6 PO1
UINT 2
3DC8.0hex (15816.0dec)
12.0 PO17 Drive 6 PO2
3DC9.0hex (15817.0dec)
14.0 PO18 Drive 6 PO3
3DCA.0hex (15818.0dec)
16.0 PO19 Drive 7 PO1
3DCB.0hex (15819.0dec)
18.0 PO20 Drive 7 PO2
3DCC.0hex (15820.0dec)
18.0 PO21 Drive 7 PO3
3DCD.0hex (15821.0dec)
18.0 PO22 Drive 8 PO1
3DCE.0hex (15822.0dec)
18.0 PO23 Drive 8 PO2
3DCF.0hex (15823.0dec)
18.0 PO24 Drive 8 PO3
Índice.Sub-índice Offset no PDO Nome Atribuição Tipo de dados
Comprimento em bytes
00
I
5Elaboração do projecto e colocação em funcionamentoElaboração do projecto do mestre EtherCAT para MOVITRAC® B /
Manual – Interface de Bus de Campo DFE24B EtherCAT 39
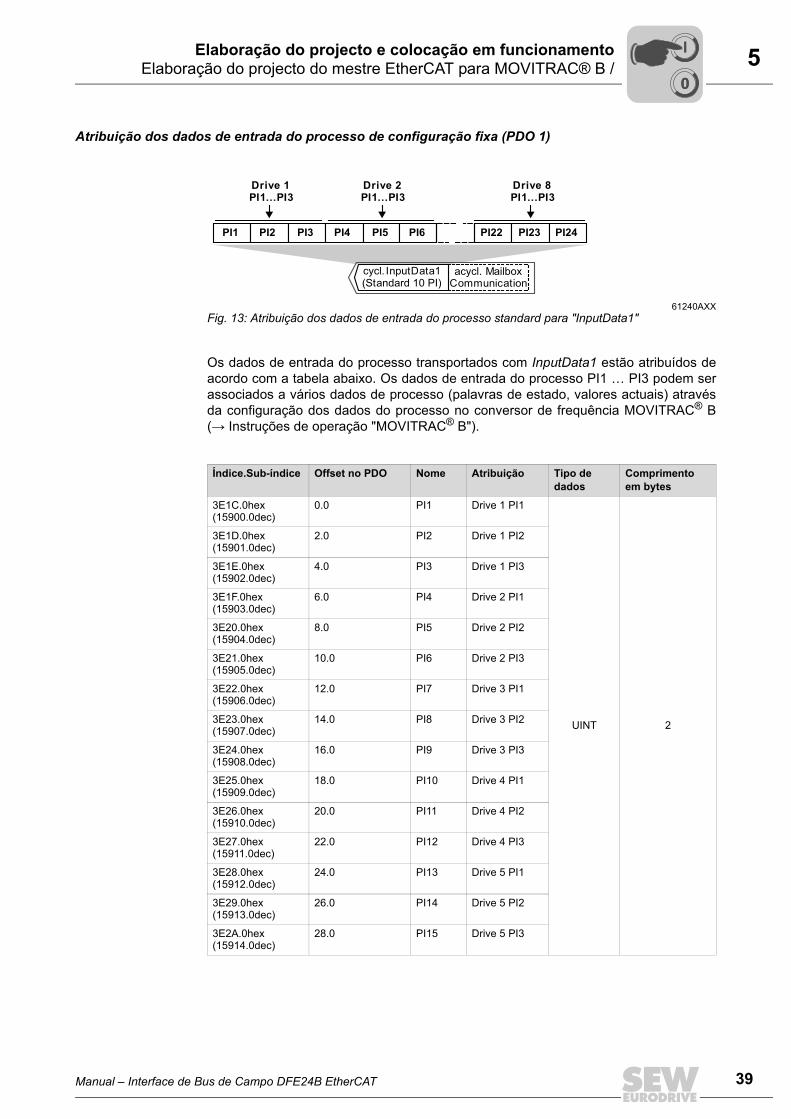
Atribuição dos dados de entrada do processo de configuração fixa (PDO 1)
Os dados de entrada do processo transportados com InputData1 estão atribuídos deacordo com a tabela abaixo. Os dados de entrada do processo PI1 … PI3 podem serassociados a vários dados de processo (palavras de estado, valores actuais) atravésda configuração dos dados do processo no conversor de frequência MOVITRAC® B(Æ Instruções de operação "MOVITRAC® B").
61240AXXFig. 13: Atribuição dos dados de entrada do processo standard para "InputData1"
Índice.Sub-índice Offset no PDO Nome Atribuição Tipo de dados
Comprimento em bytes
3E1C.0hex (15900.0dec)
0.0 PI1 Drive 1 PI1
UINT 2
3E1D.0hex (15901.0dec)
2.0 PI2 Drive 1 PI2
3E1E.0hex (15902.0dec)
4.0 PI3 Drive 1 PI3
3E1F.0hex (15903.0dec)
6.0 PI4 Drive 2 PI1
3E20.0hex (15904.0dec)
8.0 PI5 Drive 2 PI2
3E21.0hex (15905.0dec)
10.0 PI6 Drive 2 PI3
3E22.0hex (15906.0dec)
12.0 PI7 Drive 3 PI1
3E23.0hex (15907.0dec)
14.0 PI8 Drive 3 PI2
3E24.0hex (15908.0dec)
16.0 PI9 Drive 3 PI3
3E25.0hex (15909.0dec)
18.0 PI10 Drive 4 PI1
3E26.0hex (15910.0dec)
20.0 PI11 Drive 4 PI2
3E27.0hex (15911.0dec)
22.0 PI12 Drive 4 PI3
3E28.0hex (15912.0dec)
24.0 PI13 Drive 5 PI1
3E29.0hex (15913.0dec)
26.0 PI14 Drive 5 PI2
3E2A.0hex (15914.0dec)
28.0 PI15 Drive 5 PI3
cycl. InputData1(Standard 10 PI)
PI1 PI2 PI3 PI4 PI5 PI6 PI22 PI23 PI24
Drive 1PI1...PI3
Drive 2PI1...PI3
Drive 8PI1...PI3
acycl. MailboxCommunication
00
I

5 Elaboração do projecto e colocação em funcionamentoElaboração do projecto do mestre EtherCAT para MOVITRAC® B /
40 Manual – Interface de Bus de Campo DFE24B EtherCAT
3E2B.0hex (15915.0dec)
30.0 PI16 Drive 6 PI1 UINT 2
3E2C.0hex (15916.0dec)
32.0 PI17 Drive 6 PI2
3E2D.0hex (15917.0dec)
34.0 PI18 Drive 6 PI3
3E2E.0hex (15918.0dec)
36.0 PI19 Drive 7 PI1
3E2F.0hex (15919.0dec)
38.0 PI20 Drive 7 PI2
3E30.0hex (15920.0dec)
40.0 PI21 Drive 7 PI3
3E31.0hex (15921.0dec)
42.0 PI22 Drive 8 PI1
3E32.0hex (15922.0dec)
44.0 PI23 Drive 8 PI2
3E33.0hex (15923.0dec)
46.0 PI24 Drive 8 PI3
Índice.Sub-índice Offset no PDO Nome Atribuição Tipo de dados
Comprimento em bytes
00
I

5Elaboração do projecto e colocação em funcionamentoElaboração do projecto do mestre EtherCAT para MOVITRAC® B /
Manual – Interface de Bus de Campo DFE24B EtherCAT 41
5.3.4 Auto-configuração para a operação de gateway
A função de auto-configuração permite colocar a carta DFE24B em funcionamentocomo gateway sem o auxílio de um PC. Neste caso, a carta é activada através do micro-interruptor "Auto-setup" (ver capítulo 4.4 na página 19).
Na primeira fase, a carta DFE24B procura os conversores presentes no SBus e indica-o, piscando o LED H1 (erro de sistema) durante alguns segundos. A cada conversorligado à rede SBus, deve ser atribuído um único endereço SBus (P881). Recomenda-se atribuir os endereços por ordem crescente começando pelo endereço 1 e de acordocom a disposição dos conversores no quadro eléctrico. A imagem do processo no ladodo bus de campo é acrescida de 3 palavras para cada conversor detectado.Se não for encontrado qualquer conversor, o LED H1 fica aceso. São considerados nomáximo 8 conversores.Após completada a detecção das unidades, a carta DFE24B troca 3 palavras cíclicasde dados do processo com cada conversor ligado ao sistema. Os dados de saída doprocesso são obtidos pelo bus de campo, divididos em blocos de 3 e transmitidos. Osdados de entrada do processo são lidos pelos conversores, agrupados e transmitidosao mestre do bus de campo.O ciclo da comunicação através do SBus tem uma duração de 2 ms por estaçãoinstalada.Ou seja, para uma aplicação com 8 conversores ligados ao SBus, a duração total dociclo para a actualização dos dados do processo é 8 x 2 ms = 16 ms.
Ao ligar o micro-interruptor "Auto-setup" (AS), a função é executada uma vez. O micro-interruptor "Auto-setup" terá depois que permanecer ligado. A função pode sernovamente executada desligando e voltando a ligar o micro-interruptor.
Se alterar a definição dos dados do processo dos conversores ligados à DFE24B, exe-cute novamente o Auto-setup, pois a carta memoriza estes valores apenas durante oAuto-setup. Do mesmo modo, as definições dos dados do processo dos conversorestambém não poderão ser mais alteradas de forma dinâmica após o Auto-setup.
00
I

5 Elaboração do projecto e colocação em funcionamentoConfiguração do variador tecnológico MOVIDRIVE® MDX61B
42 Manual – Interface de Bus de Campo DFE24B EtherCAT
5.4 Configuração do variador tecnológico MOVIDRIVE® MDX61BAs configurações seguintes são necessárias para a operação de bus de campo simples.
Para que seja possível controlar o variador tecnológico MOVIDRIVE® B via EtherCAT,este tem que ser configurado previamente para a fonte de sinal de controlo (P101) epara a fonte de referência (P100) = BUS DE CAMPO. A configuração BUS DE CAMPO(FIELDBUS) significa que os parâmetros do variador tecnológico são configurados paraa entrada de referência via EtherCAT. O variador tecnológico MOVIDRIVE® B respondeaos dados de saída do processo enviados pelo controlador programável mestre.Os parâmetros do variador tecnológico MOVIDRIVE® B podem ser configurados imedi-atamente através do EtherCAT sem serem necessárias outras configurações após ainstalação da carta opcional de EtherCAT. Desta forma, podem, por exemplo, ser con-figurados todos os parâmetros pelo controlador programável mestre logo que a unidadeseja ligada.
11638AXX
00
I

5Elaboração do projecto e colocação em funcionamentoConfiguração do conversor de frequência MOVITRAC®
Manual – Interface de Bus de Campo DFE24B EtherCAT 43
A activação da fonte do sinal de controlo e da referência BUS DE CAMPO é sinalizadano controlador mestre através do bit "Modo de bus de campo activo" da palavra deestado.Por razões de segurança, para controlo através do sistema de bus de campo, o variadortecnológico MOVIDRIVE® B tem também que ser habilitado nos terminais. Por conse-guinte, os terminais têm que ser ligados e programados de forma que o variador possaser habilitado através dos terminais de entrada. A maneira mais simples de habilitaro variador nos terminais é, por exemplo, ligar o terminal de entrada DIØØ (Função/CONTROLADOR INIBIDO) a um sinal de +24V e programar os terminais de entradaDIØ1 ... DIØ7 para SEM FUNÇÃO. O procedimento para a completa colocação em funcionamento do variador tecnológicoMOVIDRIVE® B com ligação ao EtherCAT está descrito nos capítulos 6 e 7.
5.5 Configuração do conversor de frequência MOVITRAC®
11639AXX
00
I

5 Elaboração do projecto e colocação em funcionamentoConfiguração do conversor de frequência MOVITRAC®
44 Manual – Interface de Bus de Campo DFE24B EtherCAT
Para que seja possível controlar o conversor de frequência MOVITRAC® B viaEtherCAT, este tem que ser configurado previamente para a fonte de sinal de controlo(P101) e para a fonte de referência (P100) = SBus. A configuração SBus significa queos parâmetros do conversor MOVITRAC® B são configurados para a entrada de refe-rência via gateway. O conversor de frequência MOVITRAC® B responde aos dados desaída do processo enviados pelo controlador programável mestre.Para que o conversor de frequência MOVITRAC® B pare em caso de uma anomalia nacomunicação através do SBus, é necessário configurar o tempo de Timeout do SBus(P883) para um valor diferente de 0 ms. Valores recomendados são: 50 ... 200 ms.A activação da fonte do sinal de controlo e da referência SBus é sinalizada no contro-lador mestre através do bit "Modo de SBus activo" da palavra de estado.Por razões de segurança, para controlo através do sistema de bus de campo, o con-versor tem também que ser habilitado nos terminais. Por conseguinte, os terminais têmque ser ligados e programados de forma que o conversor possa ser habilitado atravésdos terminais de entrada. A maneira mais simples de habilitar o conversor nos terminaisé, por exemplo, ligar o terminal de entrada DIØ1 (Função S.HOR/PARAGEM) a umsinal de +24V e programar os restantes terminais de entrada para SEM FUNÇÃO.
Configure o parâmetro P881 Endereço do SBus em ordem crescente para os valores 1até 8.O endereço de SBus 0 é utilizado pela gateway DFE24B e não pode ser utilizado.Configure o parâmetro P883 Timeout de SBus para os valores 50 … 200 ms.
00
I

6Características de funcionamento no EtherCATControlo do variador tecnológico MOVIDRIVE® MDX61B
Manual – Interface de Bus de Campo DFE24B EtherCAT 45
6 Características de funcionamento no EtherCAT Este capítulo descreve as características básicas do conversor/variador no EtherCAT,em caso de controlo por PDOs de configuração fixa para comunicação via bus decampo (aplicações motion control Æ Cap. 7).
6.1 Controlo do variador tecnológico MOVIDRIVE® MDX61BO variador tecnológico MOVIDRIVE® B é controlado através dos PDOs de configuraçãofixa, que têm um comprimento de 10 palavras I/O. Se for utilizado um mestre EtherCAT,estas palavras de dados do processo podem ser reflectidas directamente na represen-tação do processo e endereçadas directamente pelo programa de controlo.
61375AXXFig. 14: EtherCAT com accionamentos SEW
SEW
Drive
EtherCAT
EthernetHeader
FrameHeader
EtherCATHeader
Data ...
EtherCAT
Master
SEW
Drive
SEW
Drive
FCS
I/O
Drive 1 Drive 2 Drive 3
Para informações mais detalhadas sobre o controlo através do canal de dados de pro-cesso, em particular sobre a codificação da palavra de controlo e de estado, consulte omanual de perfil da unidade de bus de campo.
00
I
6 Características de funcionamento no EtherCATControlo do variador tecnológico MOVIDRIVE® MDX61B
46 Manual – Interface de Bus de Campo DFE24B EtherCAT
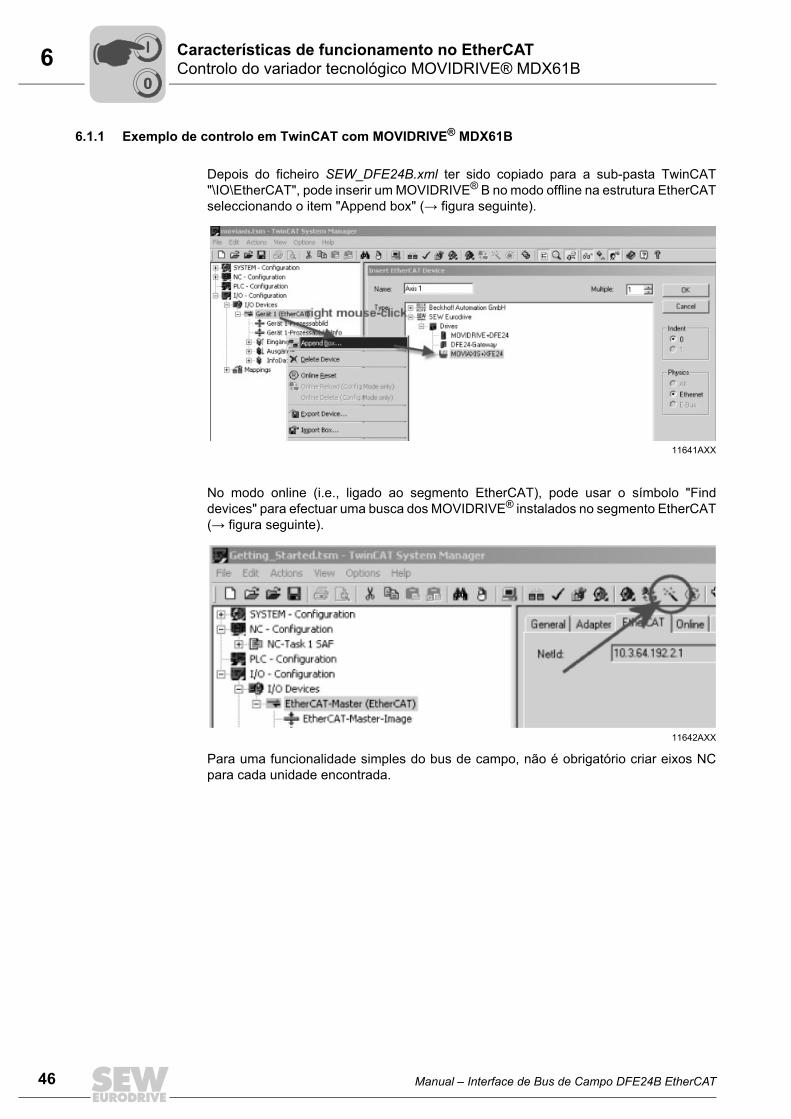
6.1.1 Exemplo de controlo em TwinCAT com MOVIDRIVE® MDX61B
Depois do ficheiro SEW_DFE24B.xml ter sido copiado para a sub-pasta TwinCAT"\IO\EtherCAT", pode inserir um MOVIDRIVE® B no modo offline na estrutura EtherCATseleccionando o item "Append box" (Æ figura seguinte).
No modo online (i.e., ligado ao segmento EtherCAT), pode usar o símbolo "Finddevices" para efectuar uma busca dos MOVIDRIVE® instalados no segmento EtherCAT(Æ figura seguinte).
Para uma funcionalidade simples do bus de campo, não é obrigatório criar eixos NCpara cada unidade encontrada.
11641AXX
11642AXX
00
I

6Características de funcionamento no EtherCATControlo do variador tecnológico MOVIDRIVE® MDX61B
Manual – Interface de Bus de Campo DFE24B EtherCAT 47
Para a transmissão dos dados do processo mais simples, só são necessários os doisPDOs InputData1 e OutputData1. Os PDOs configuráveis podem ser desactivadosremovendo as selecções dos dois PDOs (Input e Output) (Æ figura seguinte).
11643AXX
00
I
6 Características de funcionamento no EtherCATControlo do variador tecnológico MOVIDRIVE® MDX61B
48 Manual – Interface de Bus de Campo DFE24B EtherCAT
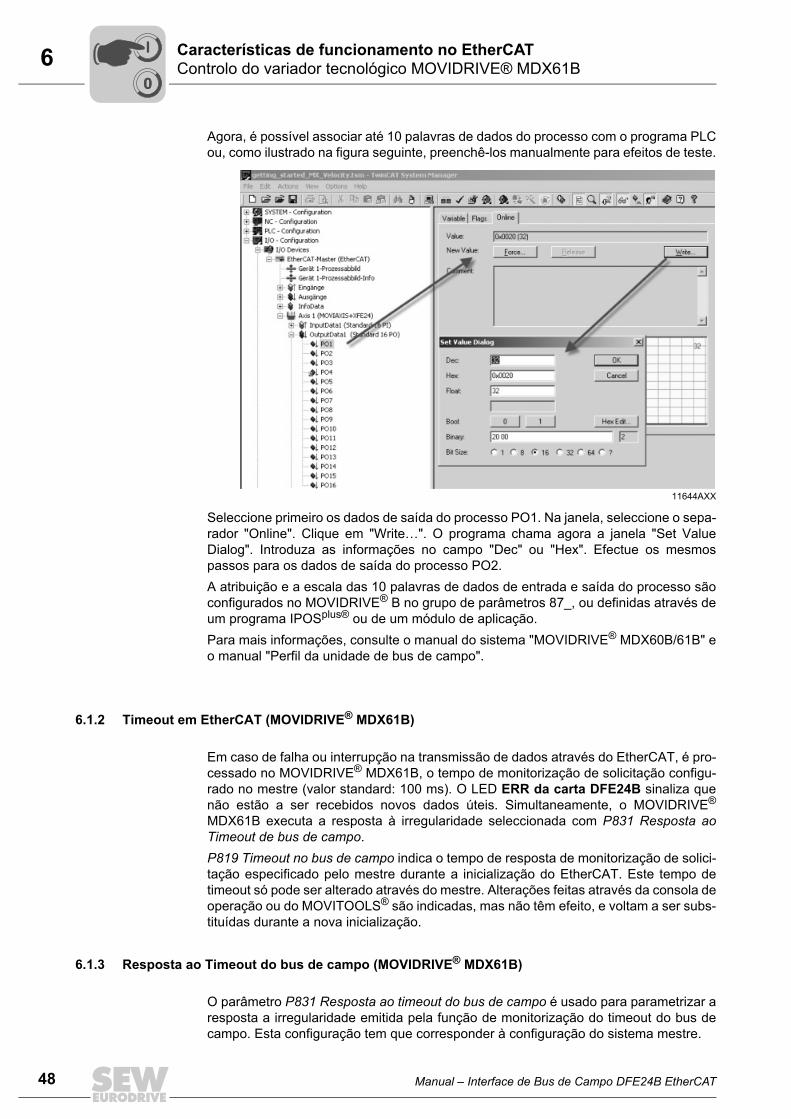
Agora, é possível associar até 10 palavras de dados do processo com o programa PLCou, como ilustrado na figura seguinte, preenchê-los manualmente para efeitos de teste.
Seleccione primeiro os dados de saída do processo PO1. Na janela, seleccione o sepa-rador "Online". Clique em "Write…". O programa chama agora a janela "Set ValueDialog". Introduza as informações no campo "Dec" ou "Hex". Efectue os mesmospassos para os dados de saída do processo PO2.A atribuição e a escala das 10 palavras de dados de entrada e saída do processo sãoconfigurados no MOVIDRIVE® B no grupo de parâmetros 87_, ou definidas através deum programa IPOSplus® ou de um módulo de aplicação.Para mais informações, consulte o manual do sistema "MOVIDRIVE® MDX60B/61B" eo manual "Perfil da unidade de bus de campo".
6.1.2 Timeout em EtherCAT (MOVIDRIVE® MDX61B)
Em caso de falha ou interrupção na transmissão de dados através do EtherCAT, é pro-cessado no MOVIDRIVE® MDX61B, o tempo de monitorização de solicitação configu-rado no mestre (valor standard: 100 ms). O LED ERR da carta DFE24B sinaliza quenão estão a ser recebidos novos dados úteis. Simultaneamente, o MOVIDRIVE®
MDX61B executa a resposta à irregularidade seleccionada com P831 Resposta aoTimeout de bus de campo.P819 Timeout no bus de campo indica o tempo de resposta de monitorização de solici-tação especificado pelo mestre durante a inicialização do EtherCAT. Este tempo detimeout só pode ser alterado através do mestre. Alterações feitas através da consola deoperação ou do MOVITOOLS® são indicadas, mas não têm efeito, e voltam a ser subs-tituídas durante a nova inicialização.
6.1.3 Resposta ao Timeout do bus de campo (MOVIDRIVE® MDX61B)
O parâmetro P831 Resposta ao timeout do bus de campo é usado para parametrizar aresposta a irregularidade emitida pela função de monitorização do timeout do bus decampo. Esta configuração tem que corresponder à configuração do sistema mestre.
11644AXX
00
I
6Características de funcionamento no EtherCATControlo do conversor de frequência MOVITRAC® B (Gateway)
Manual – Interface de Bus de Campo DFE24B EtherCAT 49
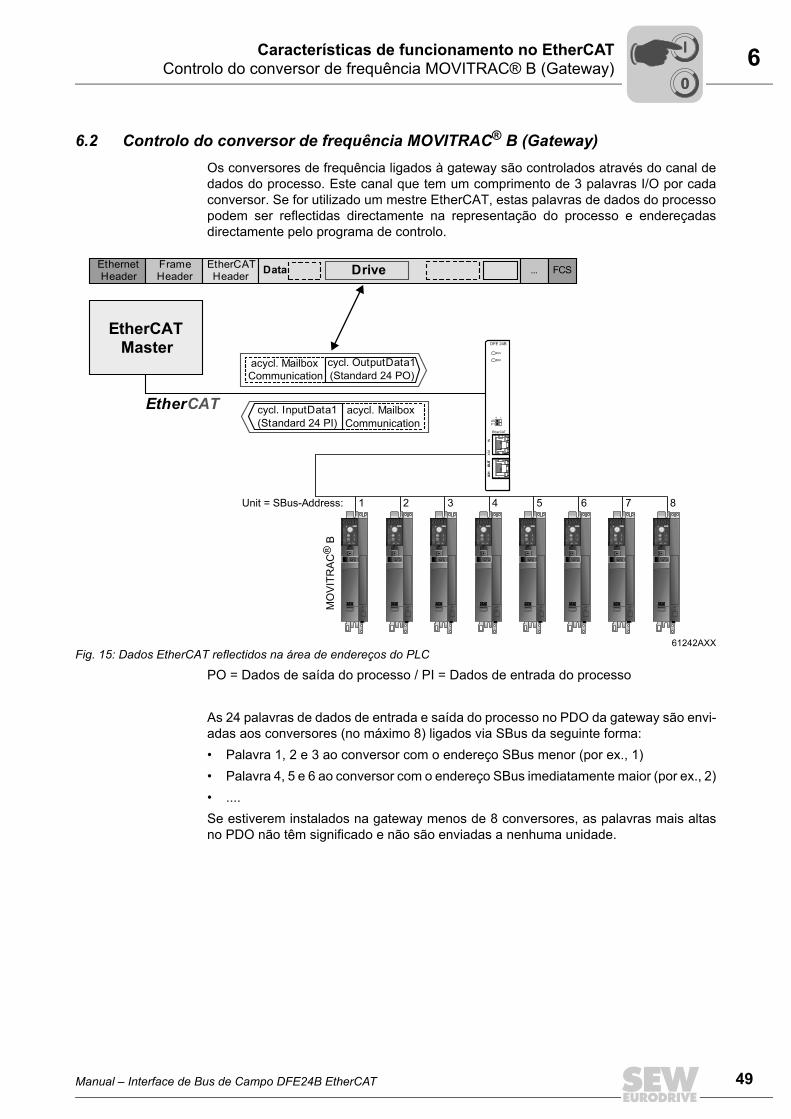
6.2 Controlo do conversor de frequência MOVITRAC® B (Gateway)Os conversores de frequência ligados à gateway são controlados através do canal dedados do processo. Este canal que tem um comprimento de 3 palavras I/O por cadaconversor. Se for utilizado um mestre EtherCAT, estas palavras de dados do processopodem ser reflectidas directamente na representação do processo e endereçadasdirectamente pelo programa de controlo.
PO = Dados de saída do processo / PI = Dados de entrada do processo
As 24 palavras de dados de entrada e saída do processo no PDO da gateway são envi-adas aos conversores (no máximo 8) ligados via SBus da seguinte forma:• Palavra 1, 2 e 3 ao conversor com o endereço SBus menor (por ex., 1)• Palavra 4, 5 e 6 ao conversor com o endereço SBus imediatamente maior (por ex., 2)• ....Se estiverem instalados na gateway menos de 8 conversores, as palavras mais altasno PDO não têm significado e não são enviadas a nenhuma unidade.
61242AXXFig. 15: Dados EtherCAT reflectidos na área de endereços do PLC
Unit = SBus-Address: 1 2 3 4 5 6 7 8
EURODRIVEEURODRIVEEURODRIVEMO
VIT
RA
C®
B
EURODRIVEEURODRIVEEURODRIVE EURODRIVEEURODRIVEEURODRIVE EURODRIVEEURODRIVEEURODRIVE EURODRIVEEURODRIVEEURODRIVE EURODRIVEEURODRIVEEURODRIVE EURODRIVEEURODRIVEEURODRIVE EURODRIVEEURODRIVEEURODRIVE
EtherCAT
Master
EtherCAT acycl. Mailbox
Communication
cycl. InputData1
(Standard 24 PI)
acycl. Mailbox cycl. OutputData1
(Standard 24 PO)
EthernetHeader
FrameHeader
EtherCATHeader
Data ... FCSDrive
Communication
0 1
F1
EtherCAT
AS
RUN
DFE 24B
ERR
INX
30
OU
TX
31
OU
TX
31
00
I

6 Características de funcionamento no EtherCATControlo do conversor de frequência MOVITRAC® B (Gateway)
50 Manual – Interface de Bus de Campo DFE24B EtherCAT
6.2.1 Exemplo de controlo em TwinCAT com MOVITRAC® B (Gateway)
Depois do ficheiro SEW_DFE24B.xml ter sido copiado para a sub-pasta TwinCAT"\IO\EtherCAT", pode inserir uma gateway DFE24B no modo offline na estruturaEtherCAT seleccionando o item "Append box" (Æ figura seguinte).
No modo online (i.e., ligado ao segmento EtherCAT), pode usar o símbolo "Finddevices" para efectuar uma busca das gateways DFE24B instaladas no segmentoEtherCAT (Æ figura seguinte).
Criar um eixo NC para uma gateway DFE24B encontrada não tem muito sentido. Nestecaso, seria necessário criar um eixo para cada MOVITRAC® B ligado na gatewayDFE24B. Para uma funcionalidade simples do bus de campo, não é obrigatório criareixos NC para cada unidade encontrada.
11645AXX
11642AXX
00
I

6Características de funcionamento no EtherCATControlo do conversor de frequência MOVITRAC® B (Gateway)
Manual – Interface de Bus de Campo DFE24B EtherCAT 51
As 3 primeiras palavras de dados do processo são trocadas com o primeiroMOVITRAC® B ligado na gateway DFE24B. Estas palavras podem ser associadas aoprograma PLC ou ser preenchidas manualmente para efeitos de teste (Æ figuraseguinte).
Seleccione primeiro os dados de saída do processo PO1. Na janela, seleccione o sepa-rador "Online". Clique em "Write…". O programa chama agora a janela "Set ValueDialog". Introduza as informações no campo "Dec" ou "Hex". Efectue os mesmospassos para os dados de saída do processo PO2.A atribuição e a escala das 3 palavras de dados de entrada e saída do processo sãoconfigurados no MOVITRAC® B no grupo de parâmetros 87_, ou definidas atravésde um programa IPOSplus®. Para mais informações, consulte o manual do sistema"MOVITRAC® B" e o manual "Comunicação MOVITRAC®".
6.2.2 Timeout do SBus
Quando um ou mais conversores/variadores ligados ao SBus deixarem de poder seracedidos pela DFE24B, a gateway exibe na palavra de estado 1 do respectivo con-versor/variador o código de erro F111 Erro de sistema. O LED H1 (erro de sistema)acende. O erro é também sinalizada através da interface de diagnóstico X24. Para queo conversor pare, é necessário ajustar o tempo de Tempo de timeout do SBus (P883)do erro de sistema do MOVITRAC® B para um valor diferente de 0. A resposta aotimeout é configurada no parâmetro P836.
6.2.3 Falha na unidade
As gateways detectam uma série de erros durante o auto-teste e bloqueiam-se. Asreacções exactas do erro e as medidas de resolução constam da lista de erros. Um errodurante o auto-teste resulta na apresentação do erro F111 Erro de sistema nos dadosde entrada do processo do bus de campo nas palavras de estado 1 de todos os conver-sores/variadores. O LED H1 (erro de sistema) da carta DFE24B começa a piscar emintervalos regulares. O código de erro exacto é indicado no estado da gateway com oMOVITOOLS® MotionStudio, na interface de diagnóstico X24.
11646AXX
00
I

6 Características de funcionamento no EtherCATParametrização via EtherCAT
52 Manual – Interface de Bus de Campo DFE24B EtherCAT
6.2.4 Timeout de bus de campo da carta DFE24B no modo de gatewayCom o parâmetro P831 Resposta ao timeout do bus de campo, é possível configurarcomo a gateway deve reagir no caso de ocorrência de um timeout na comunicaçãoEtherCAT.
6.3 Parametrização via EtherCATNo EtherCAT, o acesso aos parâmetros do accionamento é feito através dos serviçosSDO READ e WRITE usuais do CoE (CANopen over EtherCAT).
6.3.1 Serviços SDO READ e WRITE
A interface do utilizador tem uma apresentação que depende do mestre EtherCATespecífico e das informações configuradas no projecto. No entanto, são sempre neces-sários os seguintes tamanhos para a execução dos comandos SDO.
Para os serviços SDO READ e WRITE, é possível que sejam necessárias ainda outrasflags e parâmetros:• para activação da função• para visualização da mensagem "em processamento" ou da mensagem de irregula-
ridade• para a monitorização do timeout• para visualização da mensagem de irregularidades durante a execução
P831 Resposta ao timeout do bus de campo
Descrição
Sem resposta Os accionamentos do SBus subordinado continuam a funcionar com a última referência.No caso de uma interrupção na comunicação EtherCAT, estes accionamentos deixam de poder ser controlados.
PA_DATA = 0 Quando é detectado um timeout EtherCAT, é imediatamente activada uma paragem rápida em todos os accionamentos que contêm uma configuração de dados do processo com palavra de controlo 1 ou 2. Para tal, a gateway coloca a 0 os bits 0 … 2 da palavra de controlo.Os accionamentos são imobilizados com a rampa de paragem rápida.
A configuração dos parâmetros através do canal de parâmetros do EtherCAT só é pos-sível para o MOVIDRIVE® MDX61B e para os parâmetros da gateway DFE24B.De momento, o canal de parâmetros SDO do EtherCAT não permite o acesso aosdados dos parâmetros dos conversores/variadores que estão instalados no SBus numnível inferior ao da gateway. Através dos serviços VoE (Vendor specific over EtherCAT), o MOVITOOLS® Motion-Studio também pode aceder aos MOVITRAC® B ligados à gateway via SBus (Æ Cap. 8).
SDO-READ DescriçãoEndereço do escravo (16 bits)
Endereço EtherCAT do conversor/variador do qual as informações devem ser lidas.
Índice (16 bits)Sub-índice (8 bits)
Endereço no "Object dictionary", do qual as informações devem ser lidas.
DadosComprimento dos dados
Estrutura para memorização dos dados recebidos e seu comprimento.
SDO-WRITE DescriçãoEndereço do escravo (16 bits)
Endereço EtherCAT do conversor/variador no qual as informações devem ser escritas.
Índice (16 bits)Sub-índice (8 bits)
Endereço no "Object dictionary", no qual as informações devem ser escritas.
DadosComprimento dos dados
Estrutura, na qual os dados a escrever se encontram memorizados.
00
I
6Características de funcionamento no EtherCATParametrização via EtherCAT
Manual – Interface de Bus de Campo DFE24B EtherCAT 53
6.3.2 Exemplo para a leitura de um parâmetro em TwinCAT via EtherCAT
A função SDO-READ está disponível para a leitura de parâmetros. Para tal, é neces-sário o índice do parâmetro a ser lido. O índice do parâmetro pode ser visualizado noprograma SHELL ou na estrutura de parâmetros usando a combinação de teclas[CTRL+F1].Para a implementação no TwinCAT, é necessário o bloco de funçãoFB_EcCoESdoRead. Este módulo pode ser encontrado na biblioteca TcEtherCAT.lib.O módulo pode ser integrado em dois passos.1. Criação de uma instância do bloco de função FB_EcCoESdoRead2. As entradas do bloco de função estão atribuídas da seguinte maneira:
– sNetID: Net-Id do mestre EtherCAT– nSlaveAddr: Endereço EtherCAT da unidade SEW, da qual os dados devem ser
lidos.– nIndex: Índice do parâmetro a ser lido.– nSubIndex: Sub-índice do parâmetro a ser lido.– pDstBuf: Ponteiro na área de dados, na qual devem ser memorizados os parâ-
metros lidos.– cbBufLen: Tamanho máximo para a memória dos parâmetros a ser lidos (em
bytes).– bExecute: Um flanco positivo inicia o processo de leitura.– tTimeout: Tempo de timeout do bloco de função.
As flags bBusy e bError sinalizam o estado do serviço, nErrId. Em caso de erro, apre-sentam o número do erro quando a flag bError estiver activa.
00
I
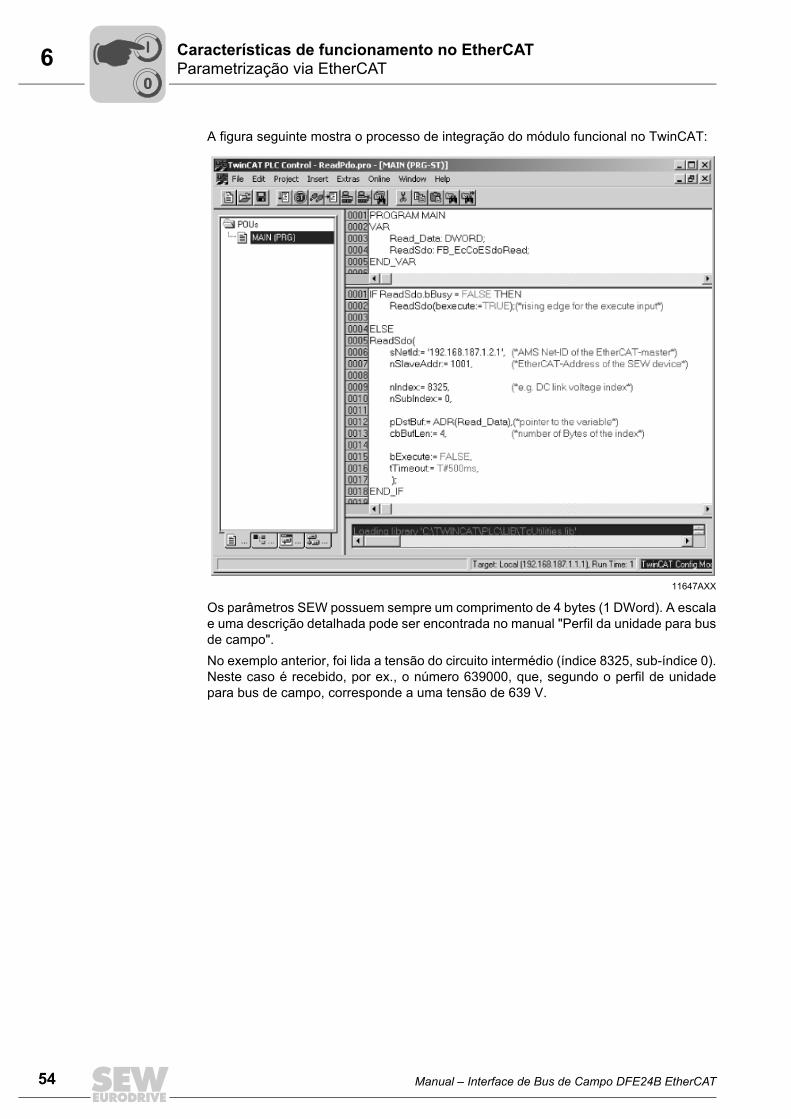
6 Características de funcionamento no EtherCATParametrização via EtherCAT
54 Manual – Interface de Bus de Campo DFE24B EtherCAT
A figura seguinte mostra o processo de integração do módulo funcional no TwinCAT:
Os parâmetros SEW possuem sempre um comprimento de 4 bytes (1 DWord). A escalae uma descrição detalhada pode ser encontrada no manual "Perfil da unidade para busde campo".No exemplo anterior, foi lida a tensão do circuito intermédio (índice 8325, sub-índice 0).Neste caso é recebido, por ex., o número 639000, que, segundo o perfil de unidadepara bus de campo, corresponde a uma tensão de 639 V.
11647AXX
00
I
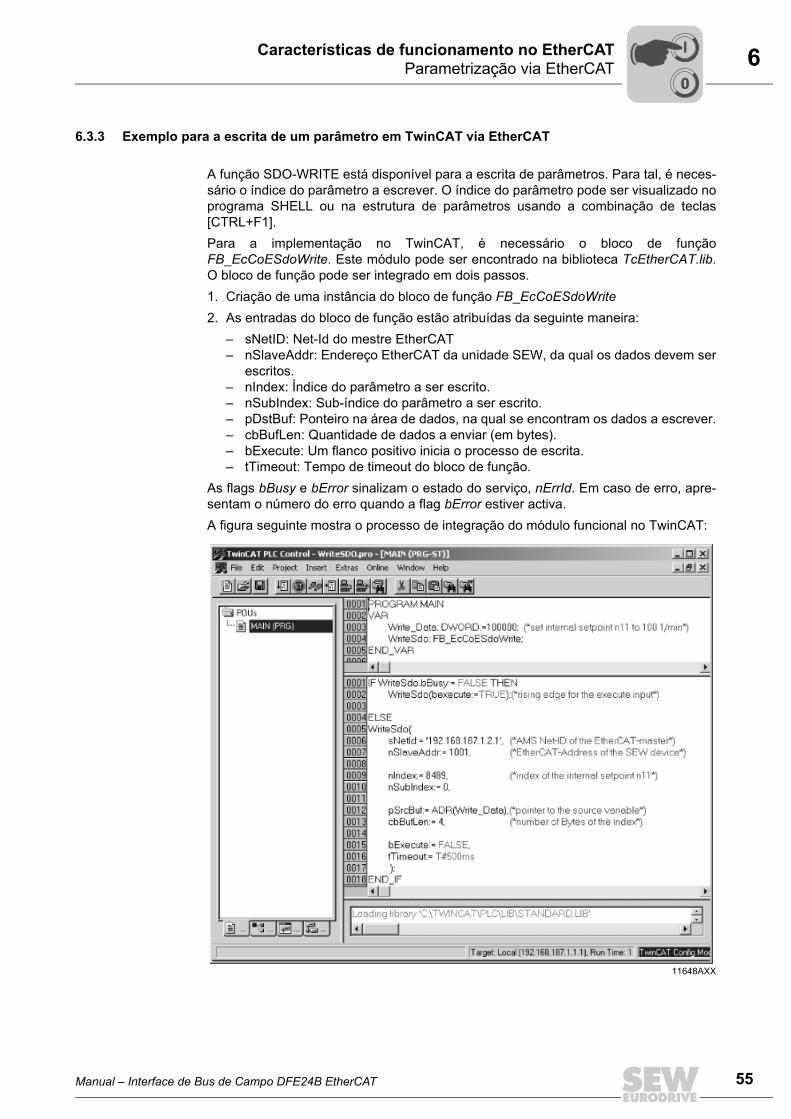
6Características de funcionamento no EtherCATParametrização via EtherCAT
Manual – Interface de Bus de Campo DFE24B EtherCAT 55
6.3.3 Exemplo para a escrita de um parâmetro em TwinCAT via EtherCAT
A função SDO-WRITE está disponível para a escrita de parâmetros. Para tal, é neces-sário o índice do parâmetro a escrever. O índice do parâmetro pode ser visualizado noprograma SHELL ou na estrutura de parâmetros usando a combinação de teclas[CTRL+F1].Para a implementação no TwinCAT, é necessário o bloco de funçãoFB_EcCoESdoWrite. Este módulo pode ser encontrado na biblioteca TcEtherCAT.lib.O bloco de função pode ser integrado em dois passos.1. Criação de uma instância do bloco de função FB_EcCoESdoWrite2. As entradas do bloco de função estão atribuídas da seguinte maneira:
– sNetID: Net-Id do mestre EtherCAT– nSlaveAddr: Endereço EtherCAT da unidade SEW, da qual os dados devem ser
escritos.– nIndex: Índice do parâmetro a ser escrito.– nSubIndex: Sub-índice do parâmetro a ser escrito.– pDstBuf: Ponteiro na área de dados, na qual se encontram os dados a escrever.– cbBufLen: Quantidade de dados a enviar (em bytes).– bExecute: Um flanco positivo inicia o processo de escrita.– tTimeout: Tempo de timeout do bloco de função.
As flags bBusy e bError sinalizam o estado do serviço, nErrId. Em caso de erro, apre-sentam o número do erro quando a flag bError estiver activa.A figura seguinte mostra o processo de integração do módulo funcional no TwinCAT:
11648AXX
00
I
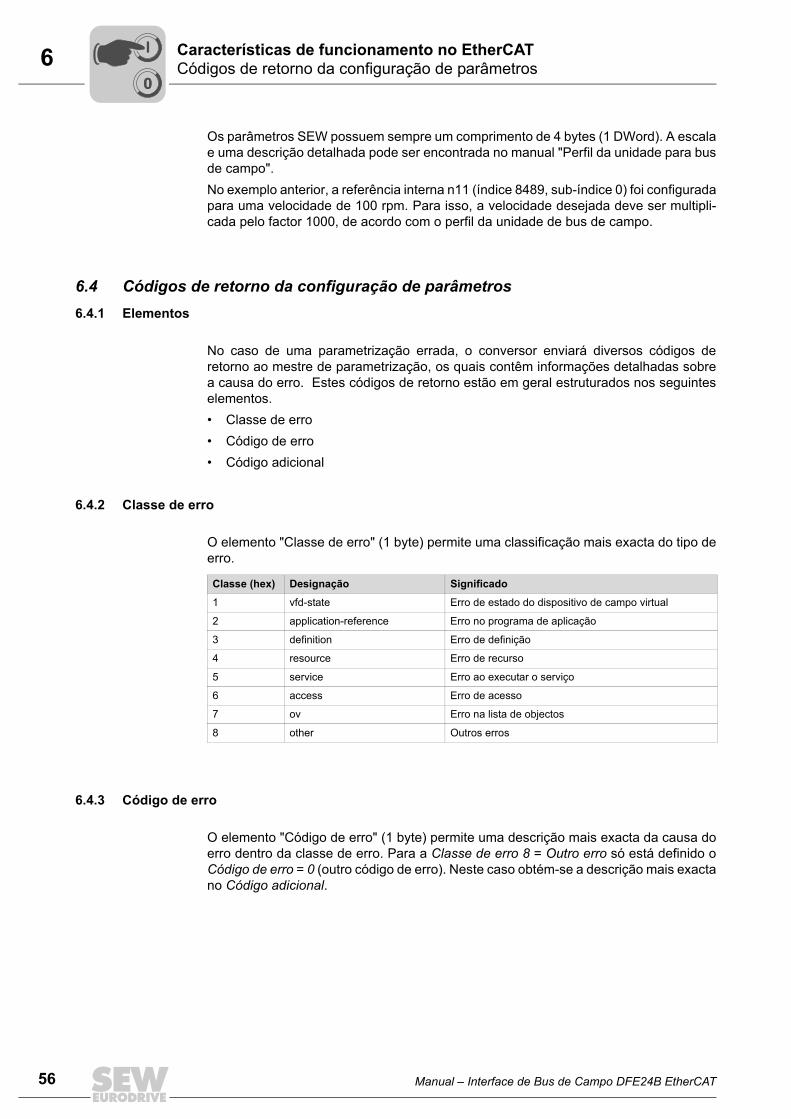
6 Características de funcionamento no EtherCATCódigos de retorno da configuração de parâmetros
56 Manual – Interface de Bus de Campo DFE24B EtherCAT
Os parâmetros SEW possuem sempre um comprimento de 4 bytes (1 DWord). A escalae uma descrição detalhada pode ser encontrada no manual "Perfil da unidade para busde campo".No exemplo anterior, a referência interna n11 (índice 8489, sub-índice 0) foi configuradapara uma velocidade de 100 rpm. Para isso, a velocidade desejada deve ser multipli-cada pelo factor 1000, de acordo com o perfil da unidade de bus de campo.
6.4 Códigos de retorno da configuração de parâmetros6.4.1 Elementos
No caso de uma parametrização errada, o conversor enviará diversos códigos deretorno ao mestre de parametrização, os quais contêm informações detalhadas sobrea causa do erro. Estes códigos de retorno estão em geral estruturados nos seguinteselementos.• Classe de erro• Código de erro• Código adicional
6.4.2 Classe de erro
O elemento "Classe de erro" (1 byte) permite uma classificação mais exacta do tipo deerro.
6.4.3 Código de erro
O elemento "Código de erro" (1 byte) permite uma descrição mais exacta da causa doerro dentro da classe de erro. Para a Classe de erro 8 = Outro erro só está definido oCódigo de erro = 0 (outro código de erro). Neste caso obtém-se a descrição mais exactano Código adicional.
Classe (hex) Designação Significado
1 vfd-state Erro de estado do dispositivo de campo virtual
2 application-reference Erro no programa de aplicação
3 definition Erro de definição
4 resource Erro de recurso
5 service Erro ao executar o serviço
6 access Erro de acesso
7 ov Erro na lista de objectos
8 other Outros erros
00
I

6Características de funcionamento no EtherCATCódigos de retorno da configuração de parâmetros
Manual – Interface de Bus de Campo DFE24B EtherCAT 57
6.4.4 Código adicional
O código adicional (2 bytes) inclui a descrição detalhada do erro.
6.4.5 Lista dos códigos de erro implementados para os servidos SDO
Código de erro
Classe de erro
Código de erro
Código adicional
Designação Descrição
0x00000000 0 0 0 NO_ERROR Sem erro.
0x05030000 5 3 0 TOGGLE_BIT_NOT_CHANGED Erro no toggle bit durante transfe-rência segmentada.
0x05040000 5 4 0 SDO_PROTOCOL_TIMEOUT Timeout durante a execução do serviço.
0x05040001 5 4 1 COMMAND_SPECIFIER_UNKNOWN Serviço SDO desconhecido.
0x05040005 5 4 5 OUT_OF_MEMORY Overflow da memória durante a execução do serviço SDO.
0x06010000 6 1 0 UNSUPPORTED_ACCESS Acesso não autorizado a um índice.
0x06010001 6 1 1 WRITE_ONLY_ENTRY O índice pode ser escrito, mas não pode ser lido.
0x06010002 6 1 2 READ_ONLY_ENTRY O índice pode ser lido, mas não pode ser escrito. Bloqueio de parâmetros activo.
0x06020000 6 2 0 OBJECT_NOT_EXISTING O objecto não existe, índice incorrecto.Carta opcional para este índice não instalada.
0x06040041 6 4 41 OBJECT_CANT_BE_PDOMAPPED O índice não pode ser mapeado num PDO.
0x06040042 6 4 42 MAPPED_OBJECTS_EXCEED_PDO Número muito elevado de objectos mapeados para PDO.
0x06040043 6 4 43 PARAM_IS_INCOMPATIBLE Formato incompatível de dados para o índice.
0x06040047 6 4 47 INTERNAL_DEVICE_INCOMPATIBILITY Erro interno da unidade.
0x06060000 6 6 0 HARDWARE ERROR Erro interno da unidade.
0x06070010 6 7 10 PARAM_LENGTH_ERROR O formato de dados para o índice possui um tamanho incorrecto.
0x06070012 6 7 12 PARAM_LENGTH_TOO_LONG Formato de dados para o índice demasiado grande.
0x06070013 6 7 13 PARAM_LENGTH_TOO_SHORT Formato de dados para o índice demasiado pequeno.
0x06090011 6 9 11 SUBINDEX_NOT_EXISTING Sub-índice não implementado.
0x06090030 6 9 30 VALUE_EXCEEDED Valor inválido.
0x06090031 6 9 31 VALUE_TOO_GREAT Valor demasiado alto.
0x06090032 6 9 32 VALUE_TOO_SMALL Valor demasiado baixo.
0x06090036 6 9 36 MAX_VALUE_IS_LESS_THAN_MIN_VALUE Limite superior para o valor é menor do que o limite inferior.
0x08000000 8 0 0 GENERAL_ERROR Erro geral.
0x08000020 8 0 20 DATA_CANNOT_BE_READ_OR_STORED Erro no acesso aos dados.
0x08000021 8 0 21 DATA_CANNOT_BE_READ_OR_STORED_BECAUSE_OF_LOCAL_CONTROL
Erro no acesso aos dados devido ao controlo local.
0x08000022 8 0 22 DATA_CANNOT_BE_READ_OR_STORED_ IN_THIS_STATE
Erro no acesso aos dados devido ao estado da unidade.
0x08000023 8 0 23 NO_OBJECT_DICTIONARY_IS_PRESENT "Object dictionary" não presente.
00
I

7 Motion Control via EtherCATIntrodução ao EtherCAT
58 Manual – Interface de Bus de Campo DFE24B EtherCAT
7 Motion Control via EtherCAT Neste capítulo são apresentadas informações sobre as funções EtherCAT, que possi-bilitam uma operação em sincronismo do MOVIDRIVE® B num mestre EtherCAT,necessária para aplicações Motion Control.
7.1 Introdução ao EtherCATEste capítulo descreve as funções e termos usados para operar conversores/varia-dores da SEW em sincronismo, via EtherCAT. Informações técnicas mais detalhadassobre o EtherCAT podem ser obtidas junto à organização dos utilizadores EtherCAT,p. ex., no site www.EtherCAT.org, e junto aos fabricantes de sistemas de mestreEtherCAT.Tendo como base a regulação em cascata, comum na engenharia dos accionamentos,são descritos agora os mecanismos básicos das aplicações Motion Control.
Parte-se de um referência da posição (xref). Juntamente com o valor actual da posição(xact), o controlador de posição [1] calcula uma referência de velocidade (vref). O con-trolador de velocidade [2] usa esta referência a velocidade actual vact para calcular areferência de binário (tref) para criar um binário no motor alimentado pelo conversor [3].Em função do contra-binário de cada máquina accionada [4], há uma rotação (mediçãoatravés de encoder [5]) no motor. Em função da velocidade do motor, ocorre uma alte-ração de posição, que é detectada por um encoder de posição [5] no motor.De acordo com cada aplicação, é agora possível fechar o circuito de controlo do binário,da velocidade ou da posição no conversor ou no controlador do nível superior. OMOVIDRIVE® B pode assumir todos os circuitos de controlo, inclusive o controlo daposição. Desta forma, só é possível realizar um posicionamento por transmissão deuma posição de referência ao conversor (por ex., módulo de aplicação "Posicionamentopor bus"). Ao controlador é enviada a posição actual e, quando a tarefa de posiciona-mento estiver concluída, uma "mensagem de conclusão".
61477AXX
M
V
X X
[1] [2] [3] [4]
tref
vref
vactxact
xref
[5]
[5] [6]
xref Referência de posição [1] Controlador da posiçãoxact Valor actual da posição [2] Controlador da velocidadevref Referência da velocidade [3] Estágio de saída do conversorvact Valor actual da velocidade [4] Máquina accionada (carga)tref Referência do binário [5] Encoder (V = velocidade; X = posição)
[6] Encoder de sincronização opcional
00
I
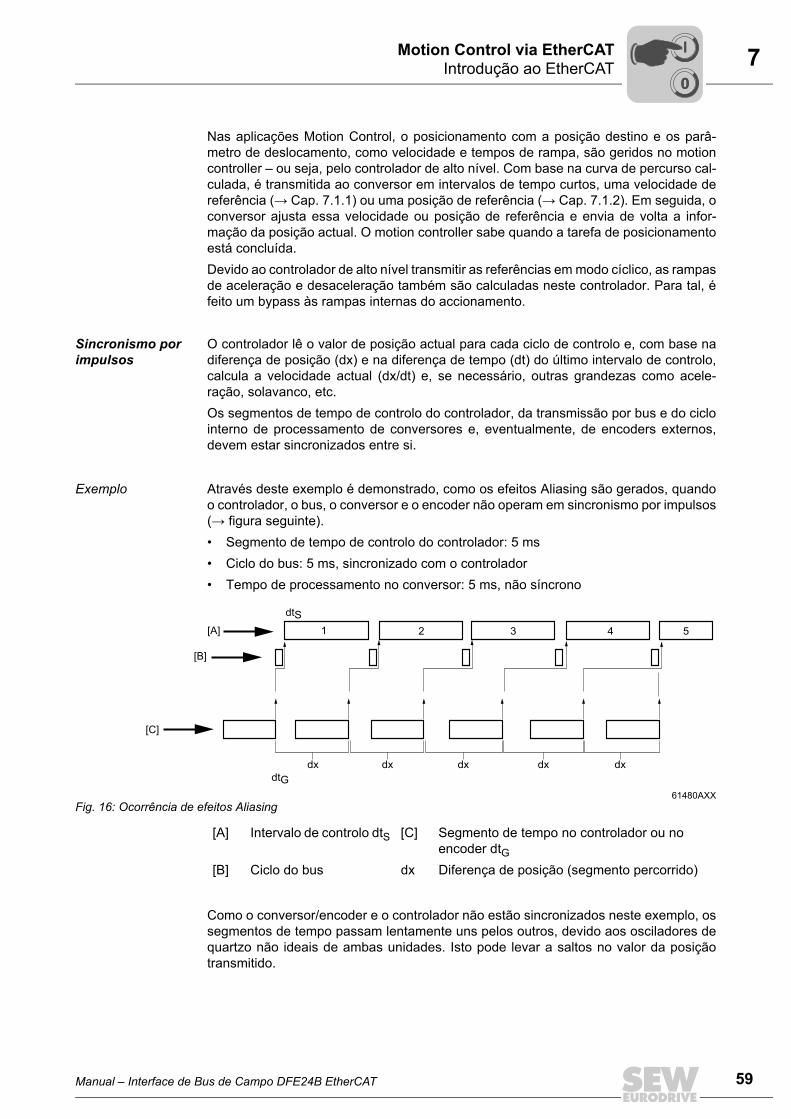
7Motion Control via EtherCATIntrodução ao EtherCAT
Manual – Interface de Bus de Campo DFE24B EtherCAT 59
Nas aplicações Motion Control, o posicionamento com a posição destino e os parâ-metro de deslocamento, como velocidade e tempos de rampa, são geridos no motioncontroller – ou seja, pelo controlador de alto nível. Com base na curva de percurso cal-culada, é transmitida ao conversor em intervalos de tempo curtos, uma velocidade dereferência (Æ Cap. 7.1.1) ou uma posição de referência (Æ Cap. 7.1.2). Em seguida, oconversor ajusta essa velocidade ou posição de referência e envia de volta a infor-mação da posição actual. O motion controller sabe quando a tarefa de posicionamentoestá concluída.Devido ao controlador de alto nível transmitir as referências em modo cíclico, as rampasde aceleração e desaceleração também são calculadas neste controlador. Para tal, éfeito um bypass às rampas internas do accionamento.
Sincronismo por impulsos
O controlador lê o valor de posição actual para cada ciclo de controlo e, com base nadiferença de posição (dx) e na diferença de tempo (dt) do último intervalo de controlo,calcula a velocidade actual (dx/dt) e, se necessário, outras grandezas como acele-ração, solavanco, etc.Os segmentos de tempo de controlo do controlador, da transmissão por bus e do ciclointerno de processamento de conversores e, eventualmente, de encoders externos,devem estar sincronizados entre si.
Exemplo Através deste exemplo é demonstrado, como os efeitos Aliasing são gerados, quandoo controlador, o bus, o conversor e o encoder não operam em sincronismo por impulsos(Æ figura seguinte).• Segmento de tempo de controlo do controlador: 5 ms• Ciclo do bus: 5 ms, sincronizado com o controlador• Tempo de processamento no conversor: 5 ms, não síncrono
Como o conversor/encoder e o controlador não estão sincronizados neste exemplo, ossegmentos de tempo passam lentamente uns pelos outros, devido aos osciladores dequartzo não ideais de ambas unidades. Isto pode levar a saltos no valor da posiçãotransmitido.
61480AXXFig. 16: Ocorrência de efeitos Aliasing
1 2 3 4 5
dtS
dtG
dx dx dx dx dx
[A]
[B]
[C]
[A] Intervalo de controlo dtS [C] Segmento de tempo no controlador ou no encoder dtG
[B] Ciclo do bus dx Diferença de posição (segmento percorrido)
00
I

7 Motion Control via EtherCATIntrodução ao EtherCAT
60 Manual – Interface de Bus de Campo DFE24B EtherCAT
Enquanto que nos intervalos de controlo 1 a 3 a velocidade é apenas levemente impre-cisa (v = dx/dtS À dx/dtG) é calculada, o cálculo da velocidade no quarto intervalo decontrolo apresenta um erro evidente (v = 2dx/dtS). Esta velocidade calculada incorrec-tamente para um intervalo de amostragem leva a reacções fortes por parte do algoritmode regulação no controlador, e pode até causar mensagens de irregularidade.O problema acima descrito, formada pela amostragem directa entre dois sistemas dife-rentes, normalmente só surgirá de modo perturbador em aplicações motion control,quando o tempo de ciclo do controlador for curto ou da mesma dimensão do ciclo deprocessamento interno de conversores e encoders externos.O EtherCAT está estruturado de maneira a que o ciclo do bus e o ciclo de controlosejam síncronos.Com o mecanismo Distributed Clock também é possível sincronizar simultaneamente osegmento de tempo de processamento interno do conversor.No MOVIDRIVE® B, a sincronização dos segmentos de tempo e da aceitação de dadosé controlada através da RAM dual-port da placa opcional DFE24B.
00
I

7Motion Control via EtherCATIntrodução ao EtherCAT
Manual – Interface de Bus de Campo DFE24B EtherCAT 61
7.1.1 Modo de velocidade
No modo de velocidade, o controlador transmite uma referência de rotação (ou veloci-dade) ao conversor e o valor actual da posição é lido pelo conversor ou por um encoderseparado.No modo de velocidade, o conversor é um elemento de ajuste de velocidade simples. Ossegmentos de tempo de controlo do controlador, da transmissão por bus e do ciclointerno de processamento de conversor e do encoder devem estar sincronizados entre si.O referenciamento da posição, a monitorização de percursos de deslocação ou fins decurso admitidos, bem como a especificação da rampa dependente da carga e a moni-torização do erro de atraso, são realizadas no controlador de alto nível e por conse-guinte, não são tarefas do MOVIDRIVE® B.Para evitar acelerações involuntariamente altas no caso de intervalos longos de con-trolo (>1 ms), a referência de rotação não é directamente assumida pelo MOVIDRIVE®
B, mas sim de modo linear interpolado. Ou seja, num ciclo de referência de 5 ms, o con-trolador no MOVIDRIVE® B não ajusta a alteração de rotação desejada a cada 5 ms sónuma grande etapa, mas sim em 5 pequenas etapas de 1 ms de duração.
61478AXXFig. 17: Modo de velocidade – Cascata com interface de bus de campo
M
V
X X
Xref vref
trefXact vact
[3][2][1] [4]
[5]
[C][A]
[5] [6]
[B]
[A] Controlador [B] Interface de bus de campo
[C] Conversor de frequência
xref Referência de posição [1] Controlador da posiçãoxact Valor actual da posição [2] Controlador da velocidadevref Referência da velocidade [3] Estágio de saída do conversorvact Valor actual da velocidade [4] Máquina accionadatref Referência do binário [5] Encoder (V = velocidade; X = posição)
[6] Encoder de sincronização opcional
00
I
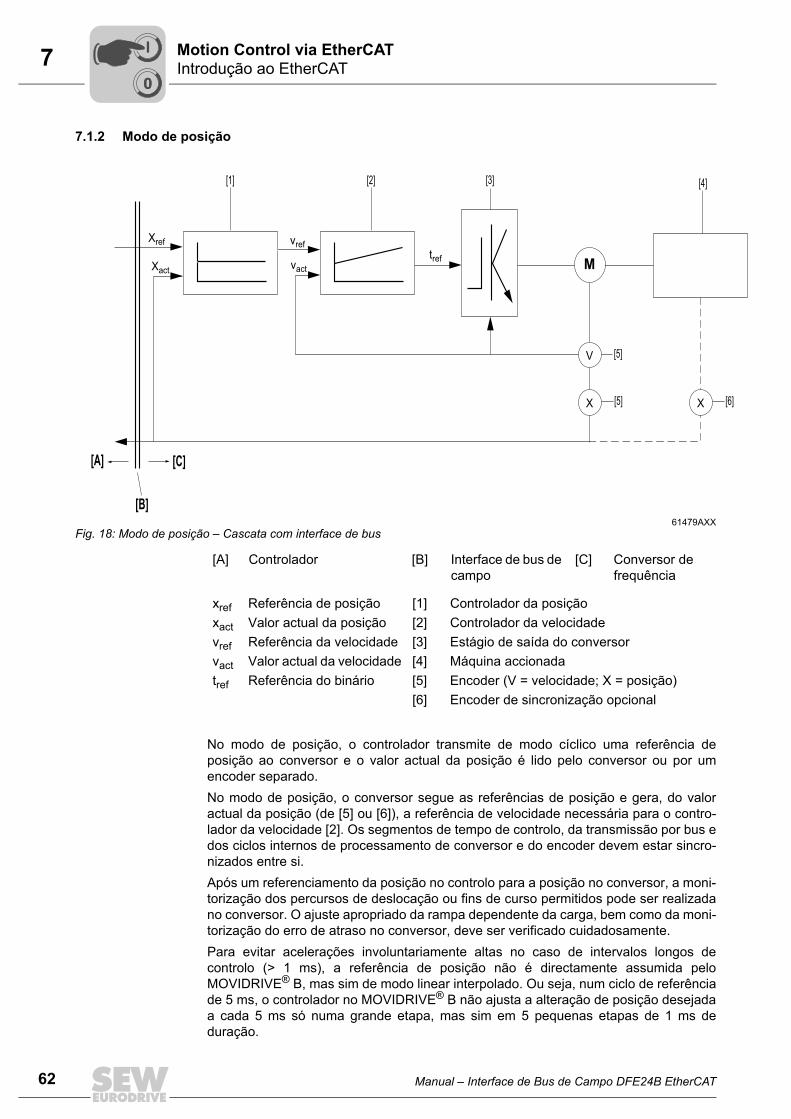
7 Motion Control via EtherCATIntrodução ao EtherCAT
62 Manual – Interface de Bus de Campo DFE24B EtherCAT
7.1.2 Modo de posição
No modo de posição, o controlador transmite de modo cíclico uma referência deposição ao conversor e o valor actual da posição é lido pelo conversor ou por umencoder separado.No modo de posição, o conversor segue as referências de posição e gera, do valoractual da posição (de [5] ou [6]), a referência de velocidade necessária para o contro-lador da velocidade [2]. Os segmentos de tempo de controlo, da transmissão por bus edos ciclos internos de processamento de conversor e do encoder devem estar sincro-nizados entre si.Após um referenciamento da posição no controlo para a posição no conversor, a moni-torização dos percursos de deslocação ou fins de curso permitidos pode ser realizadano conversor. O ajuste apropriado da rampa dependente da carga, bem como da moni-torização do erro de atraso no conversor, deve ser verificado cuidadosamente.Para evitar acelerações involuntariamente altas no caso de intervalos longos decontrolo (> 1 ms), a referência de posição não é directamente assumida peloMOVIDRIVE® B, mas sim de modo linear interpolado. Ou seja, num ciclo de referênciade 5 ms, o controlador no MOVIDRIVE® B não ajusta a alteração de posição desejadaa cada 5 ms só numa grande etapa, mas sim em 5 pequenas etapas de 1 ms deduração.
61479AXXFig. 18: Modo de posição – Cascata com interface de bus
M
V
X X
Xref vref
trefXact
vact
[C][A]
[3][2][1] [4]
[5]
[5] [6]
[B]
[A] Controlador [B] Interface de bus de campo
[C] Conversor de frequência
xref Referência de posição [1] Controlador da posiçãoxact Valor actual da posição [2] Controlador da velocidadevref Referência da velocidade [3] Estágio de saída do conversorvact Valor actual da velocidade [4] Máquina accionadatref Referência do binário [5] Encoder (V = velocidade; X = posição)
[6] Encoder de sincronização opcional
00
I

7Motion Control via EtherCATConfigurações no MOVIDRIVE® B com o MOVITOOLS® MotionStudio
Manual – Interface de Bus de Campo DFE24B EtherCAT 63
7.2 Configurações no MOVIDRIVE® B com o MOVITOOLS® MotionStudio7.2.1 Configurações para o modo de velocidade
Para controlar um MOVIDRIVE® B no Motion Control com especificação de rotação emsincronismo por impulsos, é necessário efectuar as seguintes configurações dos parâ-metros no MOVITOOLS® MotionStudio (Æ figura seguinte):
• P100 Fonte da referência = bus de campo• P101 Fonte do sinal de controlo = bus de campo• P700 Modo de operação = SERVO + IPOS ou CFC + IPOS• P870 Descrição da referência PO1 = palavra de controlo 1• P873 Descrição do valor actual PI1 = palavra de estado 1
61450AXX
00
I

7 Motion Control via EtherCATConfigurações no MOVIDRIVE® B com o MOVITOOLS® MotionStudio
64 Manual – Interface de Bus de Campo DFE24B EtherCAT
Em seguida, é necessário activar a sincronização do controlador para a rede EtherCAT.Para tal, configure os seguintes parâmetros (Æ figura seguinte):
• P887 Sincronização externa contrl. = LIG• P888 Tempo de sincronização SBus [ms] = 1
O tempo de sincronização configurado tem que corresponder ao ciclo do bus.• P916 Tipo de rampa = Interpolação da velocidade• P970 Sincronização DPRAM = SIM• P971 Fase de sincronização = 0
No parâmetro P971, é possível optimizar a fase de sincronização, caso ocorramefeitos de Aliasing. Configure o valor para 0 ms.
61451AXX
00
I

7Motion Control via EtherCATConfigurações no MOVIDRIVE® B com o MOVITOOLS® MotionStudio
Manual – Interface de Bus de Campo DFE24B EtherCAT 65
7.2.2 Configurações para o modo de posição
Para controlar um MOVIDRIVE® B no Motion Control com especificação da posição emsincronismo por impulsos, é necessário efectuar as seguintes configurações dos parâ-metros no MOVITOOLS® MotionStudio (Æ figura seguinte):
• P100 Fonte da referência = bus de campo• P101 Fonte do sinal de controlo = bus de campo• P700 Modo de operação = SERVO + IPOS ou CFC + IPOS• P87x Descrição dos dados do processo
Dependendo do controlador instalado e da aplicação específica, é possível utilizarpalavra de controlo ou palavra de estado. As palavras de controlo e de estadopodem ser configuradas com os parâmetros P870 ... P876 ou transmitidas às variá-veis IPOSplus®, e serem aí operadas de acordo com as funções da máquina deestado do motion controller.
61452AXX
00
I
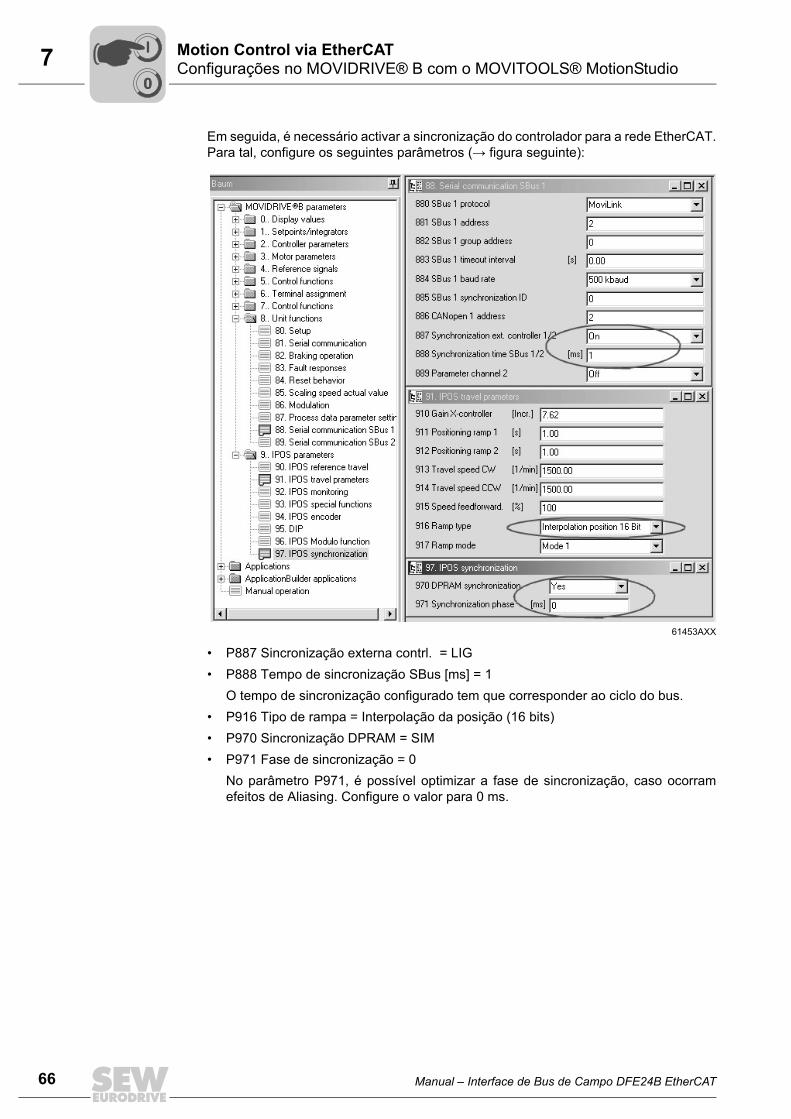
7 Motion Control via EtherCATConfigurações no MOVIDRIVE® B com o MOVITOOLS® MotionStudio
66 Manual – Interface de Bus de Campo DFE24B EtherCAT
Em seguida, é necessário activar a sincronização do controlador para a rede EtherCAT.Para tal, configure os seguintes parâmetros (Æ figura seguinte):
• P887 Sincronização externa contrl. = LIG• P888 Tempo de sincronização SBus [ms] = 1
O tempo de sincronização configurado tem que corresponder ao ciclo do bus.• P916 Tipo de rampa = Interpolação da posição (16 bits)• P970 Sincronização DPRAM = SIM• P971 Fase de sincronização = 0
No parâmetro P971, é possível optimizar a fase de sincronização, caso ocorramefeitos de Aliasing. Configure o valor para 0 ms.
61453AXX
00
I
7Motion Control via EtherCATConfigurações no mestre EtherCAT
Manual – Interface de Bus de Campo DFE24B EtherCAT 67
7.3 Configurações no mestre EtherCATPara efectuar a sincronização dos segmentos de tempo, active a função DistributedClock. O ciclo do bus deve corresponder ao tempo de sincronização configurado noparâmetro P888. Active o Watchdog para a monitorização de timeout apenas paraSyncmanager 0x1000 (Output Data).Os PDOs (InputData1 e OutputData1) com configuração fixa devem estar desacti-vados.
7.3.1 Configurações para o modo de velocidade
• A referência de velocidade é escrita directamente na variável de sistema H499através do PDO2 configurável e é escalada do seguinte modo:– 1 dígito Ô 0,2 rpm, i.e., um valor de 5000 Ô 1000 rpmAs grandezas utilizadas no controlador devem ser escaladas de forma correspon-dente antes de serem transmitidas ao conversor.
• A palavra de controlo é transmitida via PO1 juntamente com a referência de veloci-dade em PDO2.
• A posição transmitida para o controlador, é lida directamente da variável de sistemaH511 através do PDO2 configurável. A posição é escalada da seguinte forma:– 4096 dígitos correspondem a uma rotaçãoA posição lida tem depois de ser escalada para a grandeza utilizada no controlador.
• A palavra de estado é transmitida via PI1 juntamente com a posição actual emPDO2.
00
I
7 Motion Control via EtherCATConfigurações no mestre EtherCAT
68 Manual – Interface de Bus de Campo DFE24B EtherCAT
7.3.2 Configurações para o modo de posição
• A referência de posição é escrita directamente na variável de sistema H499 atravésdo PDO2 configurável e é escalada do seguinte modo:– 1 Rotação do motor Ô 216
As grandezas utilizadas no controlador devem ser escaladas de forma correspon-dente antes de serem transmitidas ao conversor.
• A palavra de controlo pode ser transmitida da seguinte maneira:– via PO1, juntamente com a referência de posição em PDO2– ou, se for necessária uma optimização da máquina de estado, directamente
numa variável de sistema no IPOSplus®. A adaptação específica para a aplicaçãoda máquina de estado é realizada como programa IPOSplus® ou no motion con-troller como programa PLC.
• A posição transmitida para o controlador, é lida directamente da variável de sistemaH508 através do PDO2 configurável. A posição é escalada da seguinte forma:– 1 Rotação do motor Ô 216
A posição lida tem depois de ser escalada para a grandeza utilizada no controlador.
• A palavra de estado pode ser transmitida via PI1 juntamente com a referência deposição em PDO2 ou, durante uma adaptação específica para a aplicação damáquina de estado no IPOSplus®, ser directamente lida por uma variável de sistemano IPOSplus®.
00
I

7Motion Control via EtherCATExemplo TwinCAT
Manual – Interface de Bus de Campo DFE24B EtherCAT 69
7.4 Exemplo TwinCATConfiguração de operação síncrona
Efectue as configurações apresentadas nas figuras seguintes.
Para operação síncrona, seleccione a opção "DC for synchronization" do separador DC(Distributed Clock). Garanta que a duração do ciclo indicado no campo "Cycle time"corresponda exactamente ao tempo de sincronização configurado no parâmetro P888.
61455AXX
61456AXX
00
I
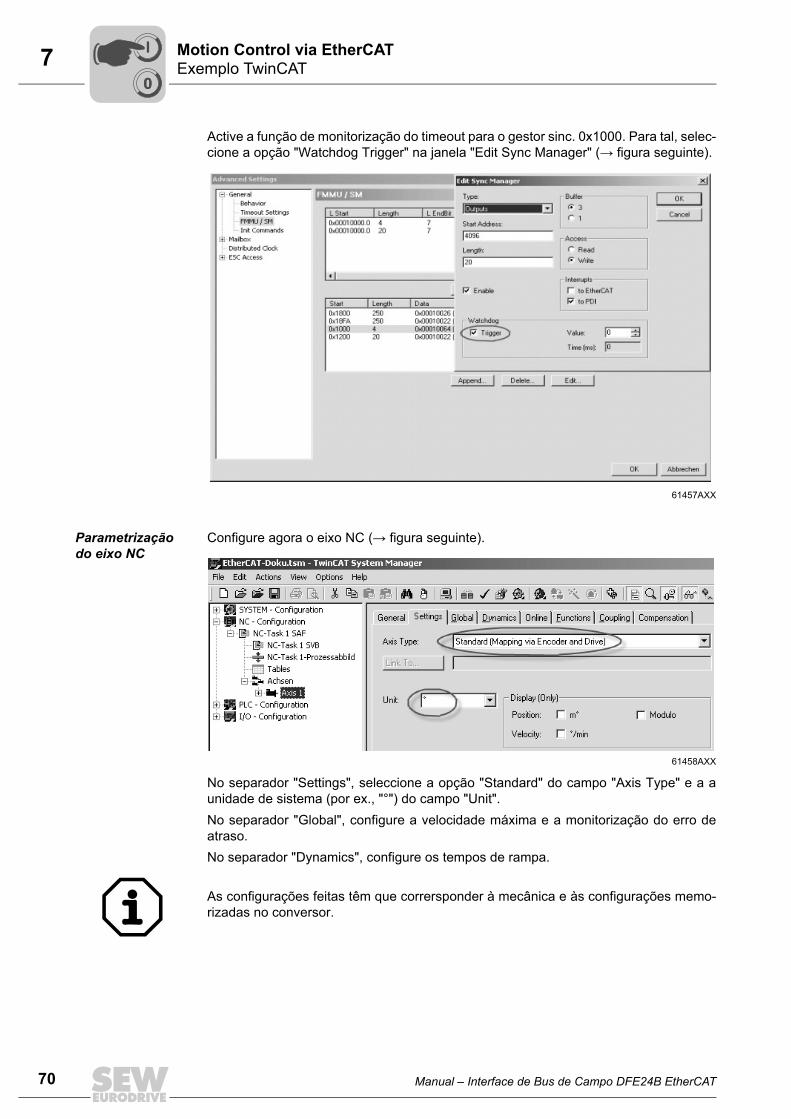
7 Motion Control via EtherCATExemplo TwinCAT
70 Manual – Interface de Bus de Campo DFE24B EtherCAT
Active a função de monitorização do timeout para o gestor sinc. 0x1000. Para tal, selec-cione a opção "Watchdog Trigger" na janela "Edit Sync Manager" (Æ figura seguinte).
Parametrização do eixo NC
Configure agora o eixo NC (Æ figura seguinte).
No separador "Settings", seleccione a opção "Standard" do campo "Axis Type" e a aunidade de sistema (por ex., "°") do campo "Unit".No separador "Global", configure a velocidade máxima e a monitorização do erro deatraso.No separador "Dynamics", configure os tempos de rampa.
61457AXX
61458AXX
As configurações feitas têm que corrersponder à mecânica e às configurações memo-rizadas no conversor.
00
I
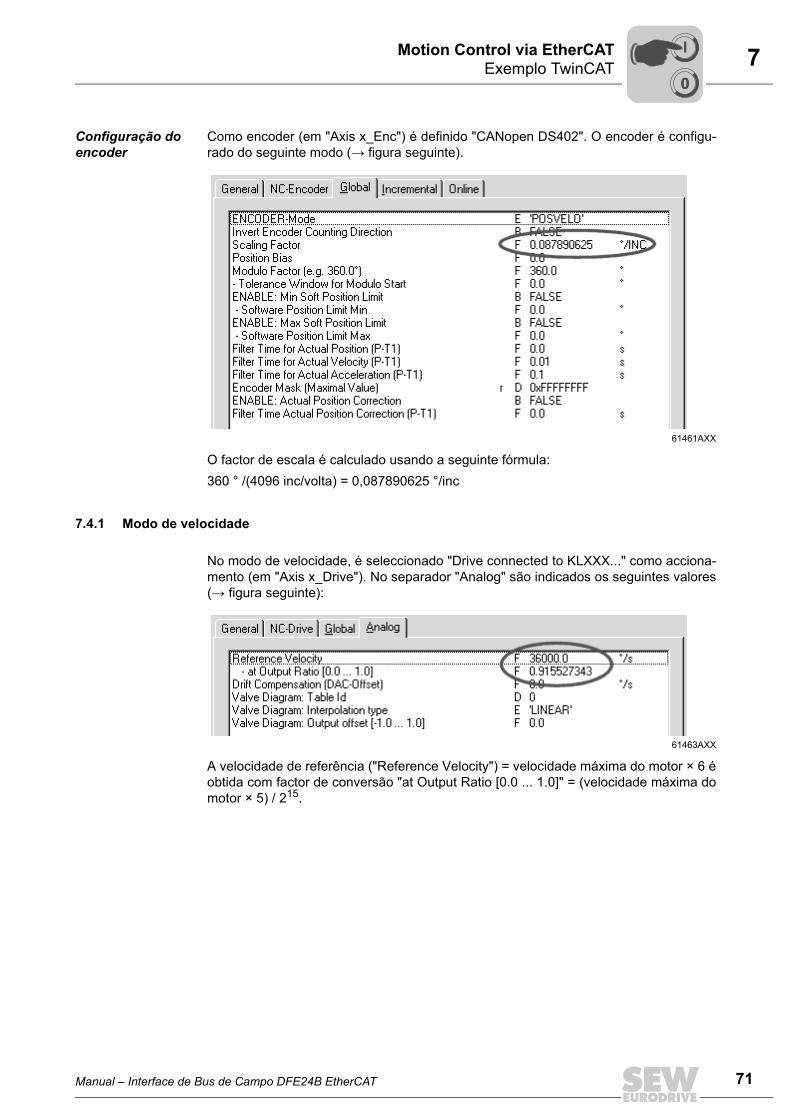
7Motion Control via EtherCATExemplo TwinCAT
Manual – Interface de Bus de Campo DFE24B EtherCAT 71
Configuração do encoder
Como encoder (em "Axis x_Enc") é definido "CANopen DS402". O encoder é configu-rado do seguinte modo (Æ figura seguinte).
O factor de escala é calculado usando a seguinte fórmula:360 ° /(4096 inc/volta) = 0,087890625 °/inc
7.4.1 Modo de velocidade
No modo de velocidade, é seleccionado "Drive connected to KLXXX..." como acciona-mento (em "Axis x_Drive"). No separador "Analog" são indicados os seguintes valores(Æ figura seguinte):
A velocidade de referência ("Reference Velocity") = velocidade máxima do motor × 6 éobtida com factor de conversão "at Output Ratio [0.0 ... 1.0]" = (velocidade máxima domotor × 5) / 215.
61461AXX
61463AXX
00
I

7 Motion Control via EtherCATExemplo TwinCAT
72 Manual – Interface de Bus de Campo DFE24B EtherCAT
Na atribuição do PDO, o PDO1 é desactivado e a velocidade de referência e a palavrade controlo ou a posição actual (H511) e a palavra de estado são definidas no PDO2(Æ figura seguinte).
61464AXX
61465AXX
00
I
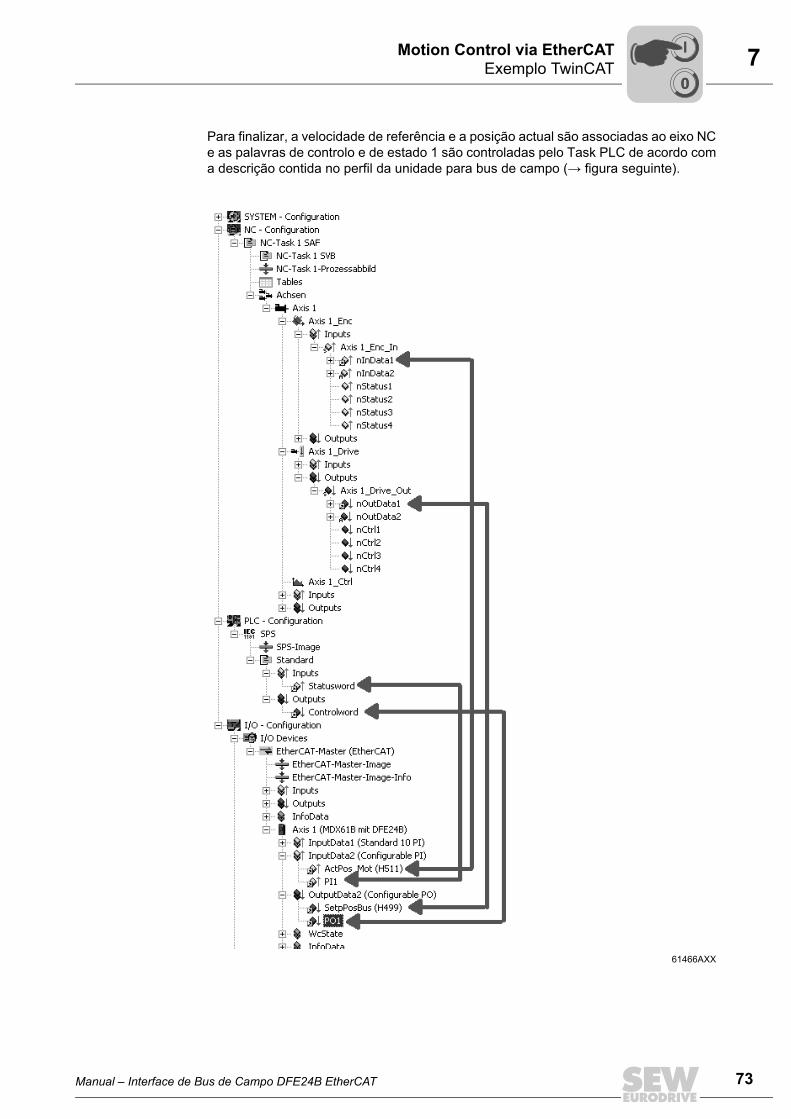
7Motion Control via EtherCATExemplo TwinCAT
Manual – Interface de Bus de Campo DFE24B EtherCAT 73
Para finalizar, a velocidade de referência e a posição actual são associadas ao eixo NCe as palavras de controlo e de estado 1 são controladas pelo Task PLC de acordo coma descrição contida no perfil da unidade para bus de campo (Æ figura seguinte).
61466AXX
00
I
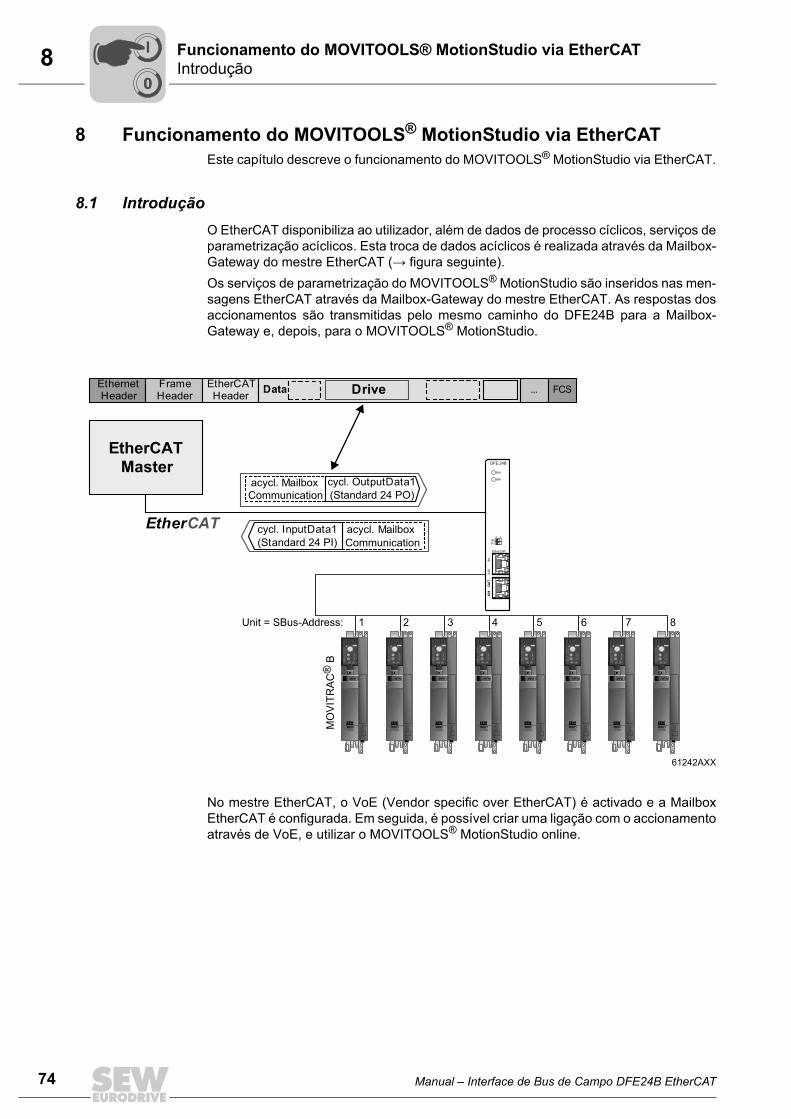
8 Funcionamento do MOVITOOLS® MotionStudio via EtherCATIntrodução
74 Manual – Interface de Bus de Campo DFE24B EtherCAT
8 Funcionamento do MOVITOOLS® MotionStudio via EtherCATEste capítulo descreve o funcionamento do MOVITOOLS® MotionStudio via EtherCAT.
8.1 IntroduçãoO EtherCAT disponibiliza ao utilizador, além de dados de processo cíclicos, serviços deparametrização acíclicos. Esta troca de dados acíclicos é realizada através da Mailbox-Gateway do mestre EtherCAT (Æ figura seguinte).Os serviços de parametrização do MOVITOOLS® MotionStudio são inseridos nas men-sagens EtherCAT através da Mailbox-Gateway do mestre EtherCAT. As respostas dosaccionamentos são transmitidas pelo mesmo caminho do DFE24B para a Mailbox-Gateway e, depois, para o MOVITOOLS® MotionStudio.
No mestre EtherCAT, o VoE (Vendor specific over EtherCAT) é activado e a MailboxEtherCAT é configurada. Em seguida, é possível criar uma ligação com o accionamentoatravés de VoE, e utilizar o MOVITOOLS® MotionStudio online.
61242AXX
Unit = SBus-Address: 1 2 3 4 5 6 7 8
EURODRIVEEURODRIVEEURODRIVEMO
VIT
RA
C®
B
EURODRIVEEURODRIVEEURODRIVE EURODRIVEEURODRIVEEURODRIVE EURODRIVEEURODRIVEEURODRIVE EURODRIVEEURODRIVEEURODRIVE EURODRIVEEURODRIVEEURODRIVE EURODRIVEEURODRIVEEURODRIVE EURODRIVEEURODRIVEEURODRIVE
EtherCAT
Master
EtherCAT acycl. Mailbox
Communication
cycl. InputData1
(Standard 24 PI)
acycl. Mailbox cycl. OutputData1
(Standard 24 PO)
EthernetHeader
FrameHeader
EtherCATHeader
Data ... FCSDrive
Communication
0 1
F1
EtherCAT
AS
RUN
DFE 24B
ERR
INX
30
OU
TX
31
OU
TX
31
00
I

8Funcionamento do MOVITOOLS® MotionStudio via EtherCATHardware necessário
Manual – Interface de Bus de Campo DFE24B EtherCAT 75
8.2 Hardware necessárioNão é necessário hardware adicional, se estiver instalado um sistema operativo ade-quado para o MOVITOOLS® MotionStudio no controlador EtherCAT.Se não estiver instalado um sistema operativo adequado ou o MOVITOOLS® MotionStudio tiver de ser operado a partir de um outro PC, o mestre EtherCAT precisaráde uma segunda interface Ethernet, que deve ser ligada via LAN ao PC, na qual oMOVITOOLS® está instalado (Æ figura seguinte).
8.3 Software necessárioMOVITOOLS® MotionStudio, versão 5.40 ou superior
8.4 InstalaçãoInstale o software MOVITOOLS® MotionStudio. Se for utilizado o MOVIDRIVE® B, énecessário instalar também o pacote MOVITOOLS®.
61475AXX
Ethernet TCP/IPEngineering LAN
Windows
MMS
MBX
EtherCAT
EtherCAT
TCP/IP
00
I

8 Funcionamento do MOVITOOLS® MotionStudio via EtherCATConfiguração da Mailbox-Gateway
76 Manual – Interface de Bus de Campo DFE24B EtherCAT
8.5 Configuração da Mailbox-Gateway• Active o suporte VoE/EoE do controlador EtherCAT.• Defina o endereço IP da Mailbox-Gateway EtherCAT. Em regra, este endereço é
atribuído pelo programa TwinCAT e não deve ser alterado.No programa TwinCAT da Beckhoff, as configurações têm a seguinte apresentação:
8.6 Configurações de rede no PC de engenhariaSe o MOVITOOLS® MotionStudio funcionar no mestre EtherCAT, não é mais neces-sário efectuar configurações de rede adicionais.Se o mestre EtherCAT estiver ligado a uma rede Ethernet, os PCs na mesma subredeequipados com MOVITOOLS® MotionStudio poderão aceder aos accionamentos SEWEtherCAT (Æ Cap. 8.2). Para isso, as mensagens do PC de engenharia são trans-portadas através da interface Ethernet do mestre EtherCAT para a Mailbox-Gateway(o chamado "routing").
11649AXXFig. 19: Configuração do endereço IP da Mailbox-Gateway EtherCAT
00
I

8Funcionamento do MOVITOOLS® MotionStudio via EtherCATConfigurações de rede no PC de engenharia
Manual – Interface de Bus de Campo DFE24B EtherCAT 77
Estão disponíveis duas variantes para routing:1. Variante: Acesso à Mailbox-Gateway definindo a gateway standard no PC de enge-
nharia. Nesta variante, é indicado o endereço IP do mestre EtherCAT como gatewaystandard. Seleccione [Iniciar] / [Configurações] / [Ligações de rede]. É apresentada a janela"Ligações de rede". Faça um clique com o botão direito do rato sobre uma ligaçãoLAN e seleccione a opção "Propriedades" do menu de contexto. É apresentada ajanela "Propriedades da ligação LAN". Na área de selecção, seleccione o protocolo"Internet protocol (TCP/IP). Clique no botão "Propriedades". É apresentada a janela"Propriedades do protocolo de Internet (TCP/IP)". Seleccione a opção "Utilizar oseguinte endereço IP", e introduza as seguintes informações (Æ figura seguinte):
2. Variante: Definição de uma rota estática.Nesta variante, é inserido um registro na tabela de routing do PC de engenharia, quetransporta os dados de engenharia através do mestre EtherCAT para o Mailbox-Gateway.Na janela DOS, deve ser introduzido o seguinte comando para criar uma rotaestática:route –p add [Destino] MASK [Máscara de rede] [Gateway][Destino]: endereço IP da Mailbox-Gateway EtherCAT[Máscara de rede]: configurado, em regra, para 255.255.255.255 (host routing)[Gateway]: endereço IP do mestre EtherCAT na rede TCP/IP.
61942AXX
61941AXX
Use the following IP address
IP address
Subnet mask
Standard gateway
10 . 3 . 64 . 60
255 . 255 . 252 . 0
10 . 3 . 64 . 170
00
I
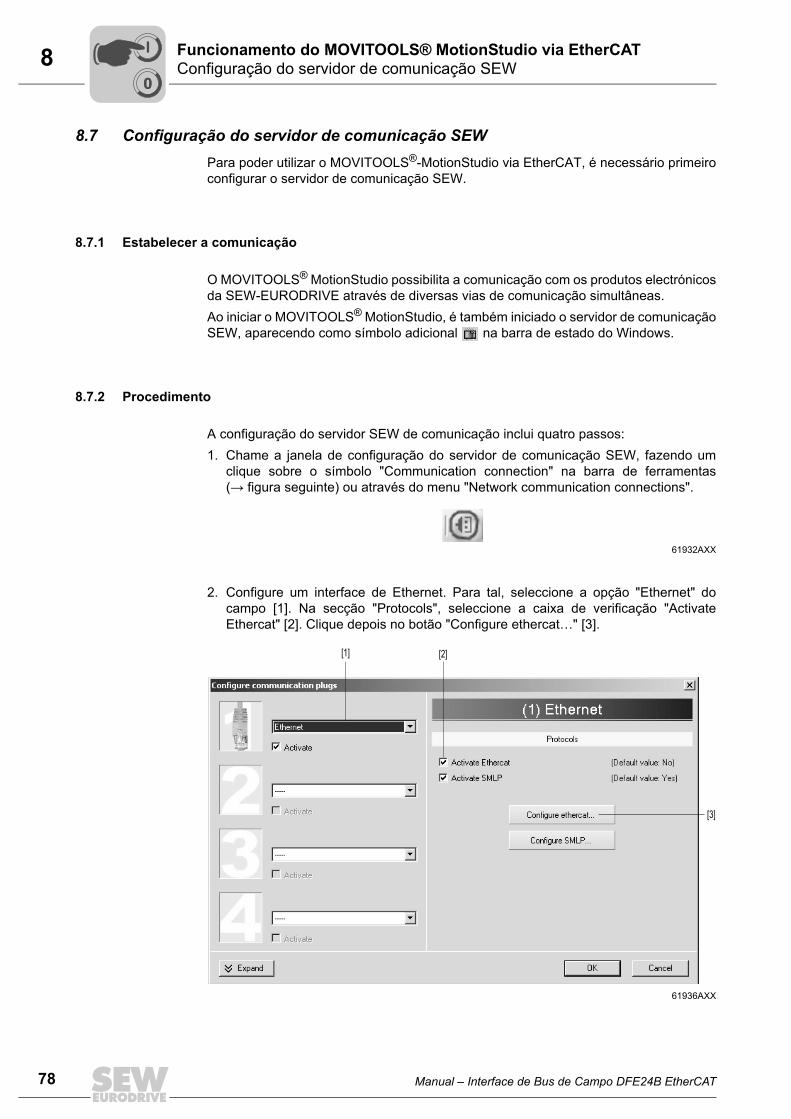
8 Funcionamento do MOVITOOLS® MotionStudio via EtherCATConfiguração do servidor de comunicação SEW
78 Manual – Interface de Bus de Campo DFE24B EtherCAT
8.7 Configuração do servidor de comunicação SEWPara poder utilizar o MOVITOOLS®-MotionStudio via EtherCAT, é necessário primeiroconfigurar o servidor de comunicação SEW.
8.7.1 Estabelecer a comunicação
O MOVITOOLS® MotionStudio possibilita a comunicação com os produtos electrónicosda SEW-EURODRIVE através de diversas vias de comunicação simultâneas.Ao iniciar o MOVITOOLS® MotionStudio, é também iniciado o servidor de comunicaçãoSEW, aparecendo como símbolo adicional na barra de estado do Windows.
8.7.2 Procedimento
A configuração do servidor SEW de comunicação inclui quatro passos:1. Chame a janela de configuração do servidor de comunicação SEW, fazendo um
clique sobre o símbolo "Communication connection" na barra de ferramentas(Æ figura seguinte) ou através do menu "Network communication connections".
2. Configure um interface de Ethernet. Para tal, seleccione a opção "Ethernet" docampo [1]. Na secção "Protocols", seleccione a caixa de verificação "ActivateEthercat" [2]. Clique depois no botão "Configure ethercat…" [3].
61932AXX
61936AXX
[1] [2]
[3]
00
I
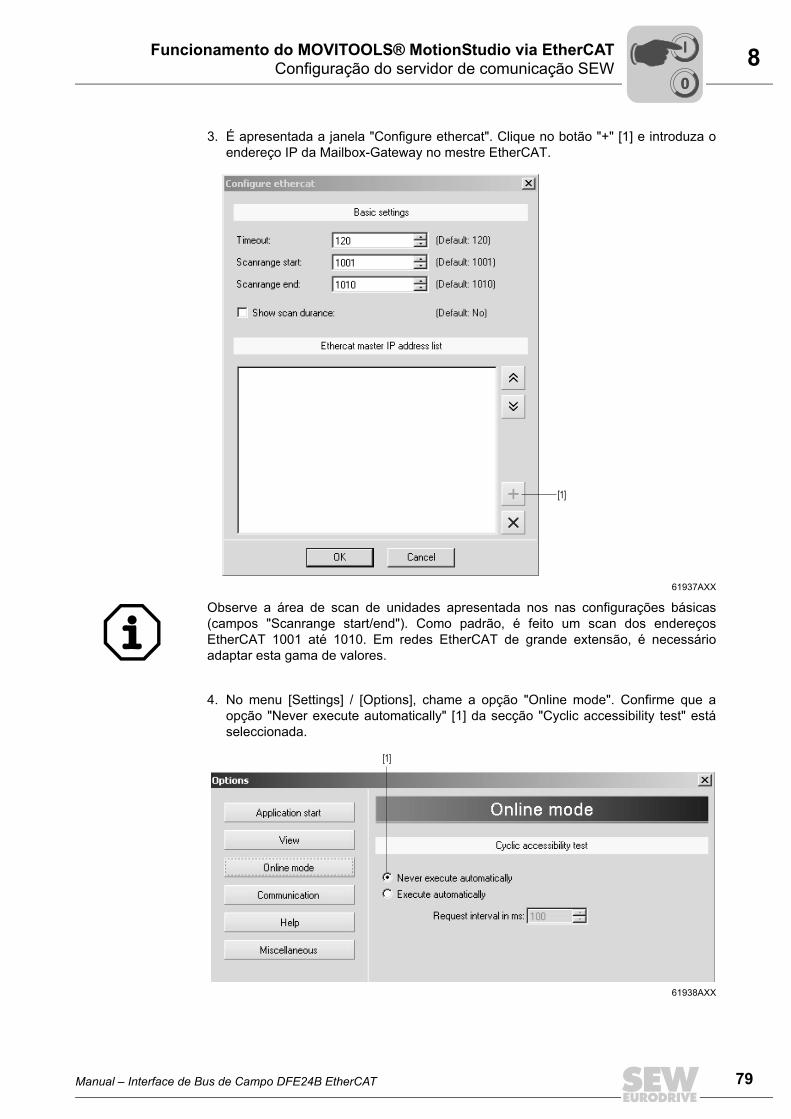
8Funcionamento do MOVITOOLS® MotionStudio via EtherCATConfiguração do servidor de comunicação SEW
Manual – Interface de Bus de Campo DFE24B EtherCAT 79
3. É apresentada a janela "Configure ethercat". Clique no botão "+" [1] e introduza oendereço IP da Mailbox-Gateway no mestre EtherCAT.
4. No menu [Settings] / [Options], chame a opção "Online mode". Confirme que aopção "Never execute automatically" [1] da secção "Cyclic accessibility test" estáseleccionada.
61937AXX
[1]
Observe a área de scan de unidades apresentada nos nas configurações básicas(campos "Scanrange start/end"). Como padrão, é feito um scan dos endereçosEtherCAT 1001 até 1010. Em redes EtherCAT de grande extensão, é necessárioadaptar esta gama de valores.
61938AXX
[1]
00
I
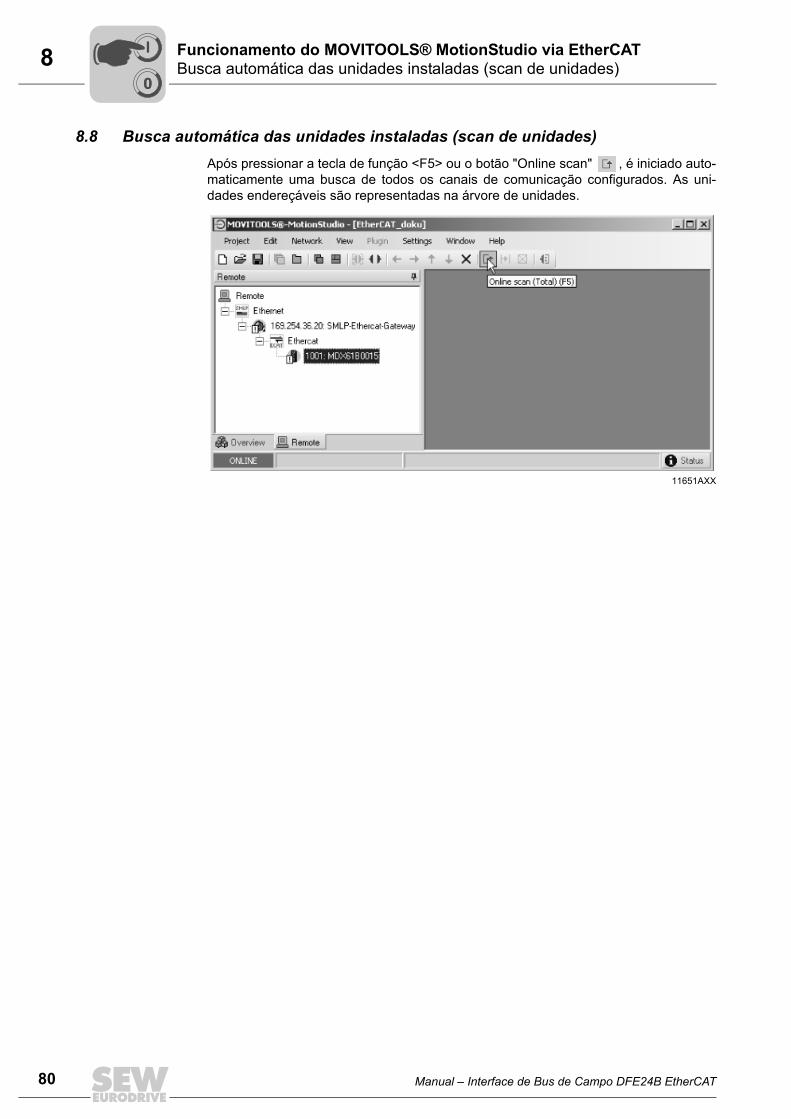
8 Funcionamento do MOVITOOLS® MotionStudio via EtherCATBusca automática das unidades instaladas (scan de unidades)
80 Manual – Interface de Bus de Campo DFE24B EtherCAT
8.8 Busca automática das unidades instaladas (scan de unidades)Após pressionar a tecla de função <F5> ou o botão "Online scan" , é iniciado auto-maticamente uma busca de todos os canais de comunicação configurados. As uni-dades endereçáveis são representadas na árvore de unidades.
11651AXX
00
I

8Funcionamento do MOVITOOLS® MotionStudio via EtherCATActivação do modo de operação online
Manual – Interface de Bus de Campo DFE24B EtherCAT 81
8.9 Activação do modo de operação online• Execute a busca das unidades (ver capítulo 8.7)• Utilize o rato para seleccionar a unidade desejada e comute o MOVITOOLS®
MotionStudio para o modo online, pressionando o botão "Online mode" (Æ figuraseguinte).
• Seleccione agora a unidade desejada e active o menu plug-in utilizando a tecladireita do rato.
8.10 Problemas comuns durante a utilização do MOVITOOLS® MotionStudioVerifique os seguintes pontos se surgirem problemas durante a configuração:• O protocolo EtherCAT está activado nas configurações da comunicação do
MOVITOOLS® MotionStudio?• O endereço IP da Mailbox-Gateway foi configurado correctamente no mestre
EtherCAT?• É possível aceder à Mailbox-Gateway EtherCAT com o comando "ping"?• A amplitude da área de scan de unidades é suficiente?• O teste cíclico de acessibilidade online está desactivado no MOVITOOLS® Motion-
Studio?
11652AXX
00
I

9 Diagnóstico de irregularidadesProcedimentos de diagnóstico
82 Manual – Interface de Bus de Campo DFE24B EtherCAT
9 Diagnóstico de irregularidades9.1 Procedimentos de diagnóstico
Os procedimentos descritos nas páginas seguintes mostram os métodos de análise defalhas para os seguintes problemas:• O variador tecnológico não funciona no EtherCAT • O variador tecnológico não pode ser controlado usando o mestre EtherCATPara informações adicionais, em especial, acerca da configuração dos parâmetros dovariador tecnológico para aplicações de bus de campo, consulte o manual Perfil daunidade de bus de campo e lista de parâmetros MOVIDRIVE®.
Passo 1: Verifique se o variador está correctamente ligado no EtherCAT
Passo 2: Como reage o LED RUN?
O conector de bus está ligado no mestre e no variador? NÃO Æ [A]SIM
Ç
Como reage o LED Link/Activity da opção DFE24B? DESLI-GADO Æ [A]
LIGADOÇ
O variador tecnológico está devidamente ligado ao EtherCAT? Verifique a ligação EtherCAT em X30 IN (ligação EtherCAT de entrada) / X31 OUT (ligação EtherCAT de saída).
NÃO Æ [A]
SIMÇ
Continue com 2: Como reage o LED RUN?
[A] Verifique os cabos do bus!
DESL O mestre comutou o escravo para o estado INIT?SIM Æ
NÃO Æ
[A]
[B]
Cor de laranja a piscar
Inicialização do bus ainda em curso. Æ [C]
Verde a piscar O escravo encontra-se no estado PRE-OPERATIONAL Æ [C]
Pisca uma vez a verde
O escravo encontra-se no estado SAFE-OPERATIONAL Æ [C]
Verde aceso O escravo encontra-se no estado OPERATIONAL. Æ [C]
[A] Efectue a inicialização do bus no mestre.
[B] Opção DFE24B avariada.
[C] Continue com 3: Como reage o LED ERR?

9Diagnóstico de irregularidadesProcedimentos de diagnóstico
Manual – Interface de Bus de Campo DFE24B EtherCAT 83
Passo 3: Como reage o LED ERR?
DESL Caso 1: O LED RUN acende a verde (o escravo encontra-se no estado OPERATIONAL).
Ç
A comunicação EtherCAT da carta opcional DFE24B está no estado de operação.
Caso 2:• O LED RUN pisca a verde (o escravo encontra-se no estado
PRE-OPERATIONAL).• O LED RUN acende uma vez a verde (o escravo encontra-se
no estado SAFE-OPERATIONAL).
Ç
Execute a inicialização do bus no mestre e comute o escravo para o estado OPERATIONAL.
Ç
Inicie a comunicação dos dados do processo.
Brilhante Pré-requisito: • O LED RUN pisca a verde (o escravo encontra-se no estado
PRE-OPERATIONAL)• O LED RUN acende uma vez a verde (o escravo encontra-se
no estado SAFE-OPERATIONAL)
Ç
Foi detectado um erro de inicialização. Inicialize a opção DFE24B.
Ç
Se o LED ERR continuar a brilhar, a opção DFE24B está avariada.
Pisca duas vezes a vermelho
Caso 1: O LED RUN acende a verde (o escravo encontra-se no estado OPERATIONAL).
Ç
Timeout no bus de campo, ligue os dados de saída do processo.
Caso 2:• O LED RUN pisca a verde (o escravo encontra-se no estado
PRE-OPERATIONAL)• O LED RUN acende uma vez a verde (o escravo encontra-se
no estado SAFE-OPERATIONAL)
Ç
Timeout Watchdog Æ Execute a inicialização do bus no mestre e comute o escravo para o estado OPERATIONAL.
Ç
Inicie a comunicação dos dados do processo.
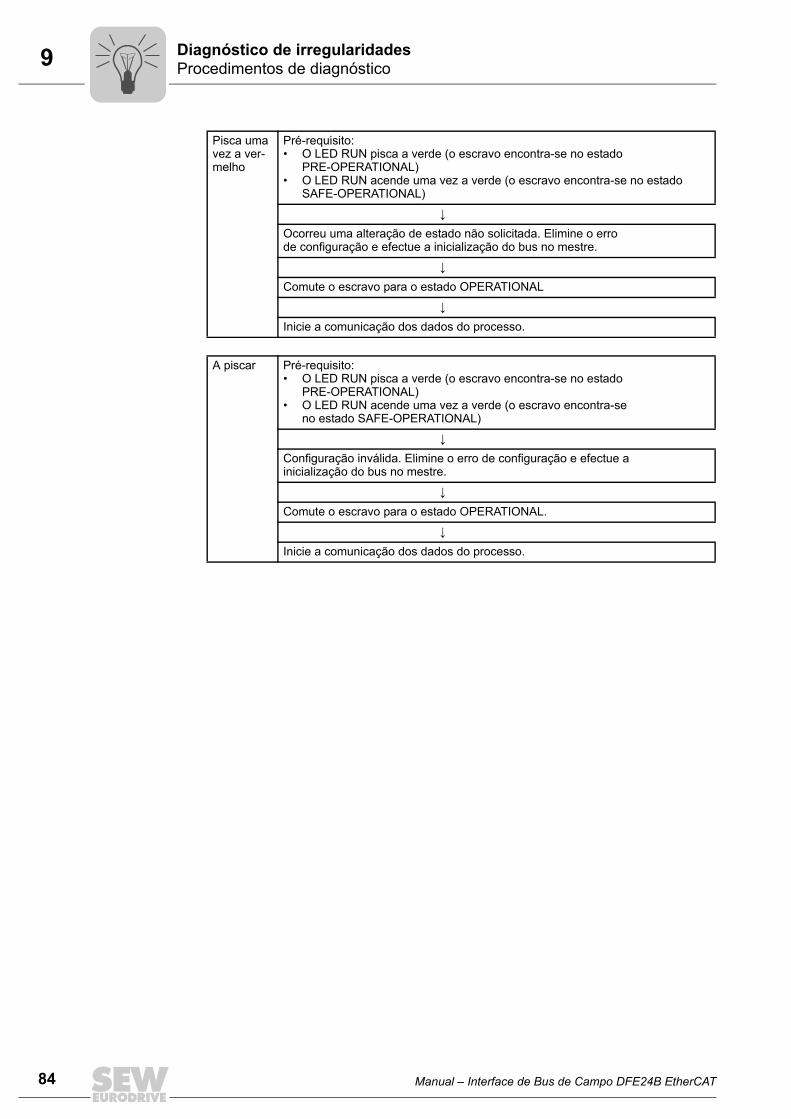
9 Diagnóstico de irregularidadesProcedimentos de diagnóstico
84 Manual – Interface de Bus de Campo DFE24B EtherCAT
Pisca uma vez a ver-melho
Pré-requisito:• O LED RUN pisca a verde (o escravo encontra-se no estado
PRE-OPERATIONAL)• O LED RUN acende uma vez a verde (o escravo encontra-se no estado
SAFE-OPERATIONAL)
Ç
Ocorreu uma alteração de estado não solicitada. Elimine o erro de configuração e efectue a inicialização do bus no mestre.
Ç
Comute o escravo para o estado OPERATIONAL
Ç
Inicie a comunicação dos dados do processo.
A piscar Pré-requisito:• O LED RUN pisca a verde (o escravo encontra-se no estado
PRE-OPERATIONAL)• O LED RUN acende uma vez a verde (o escravo encontra-se
no estado SAFE-OPERATIONAL)
Ç
Configuração inválida. Elimine o erro de configuração e efectue a inicialização do bus no mestre.
Ç
Comute o escravo para o estado OPERATIONAL.
Ç
Inicie a comunicação dos dados do processo.
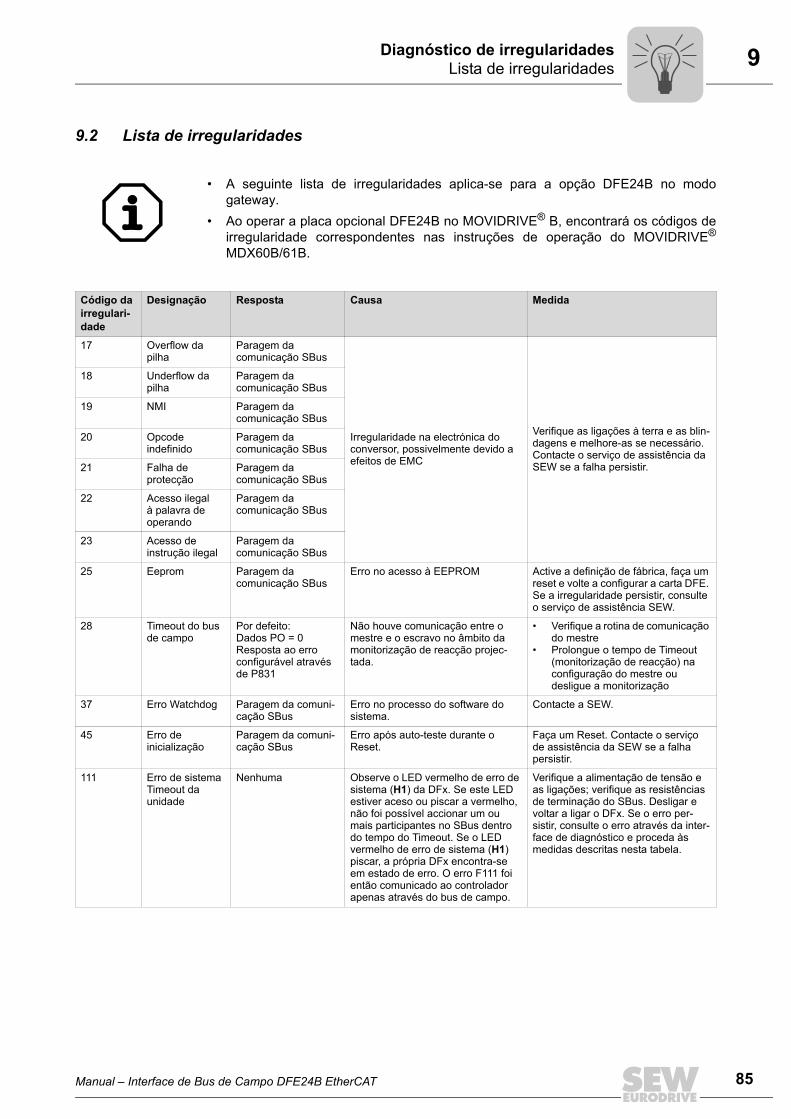
9Diagnóstico de irregularidadesLista de irregularidades
Manual – Interface de Bus de Campo DFE24B EtherCAT 85
9.2 Lista de irregularidades
• A seguinte lista de irregularidades aplica-se para a opção DFE24B no modogateway.
• Ao operar a placa opcional DFE24B no MOVIDRIVE® B, encontrará os códigos deirregularidade correspondentes nas instruções de operação do MOVIDRIVE®
MDX60B/61B.
Código da irregulari-dade
Designação Resposta Causa Medida
17 Overflow da pilha
Paragem da comunicação SBus
Irregularidade na electrónica do conversor, possivelmente devido a efeitos de EMC
Verifique as ligações à terra e as blin-dagens e melhore-as se necessário. Contacte o serviço de assistência da SEW se a falha persistir.
18 Underflow da pilha
Paragem da comunicação SBus
19 NMI Paragem da comunicação SBus
20 Opcode indefinido
Paragem da comunicação SBus
21 Falha de protecção
Paragem da comunicação SBus
22 Acesso ilegal à palavra de operando
Paragem da comunicação SBus
23 Acesso de instrução ilegal
Paragem da comunicação SBus
25 Eeprom Paragem da comunicação SBus
Erro no acesso à EEPROM Active a definição de fábrica, faça um reset e volte a configurar a carta DFE. Se a irregularidade persistir, consulte o serviço de assistência SEW.
28 Timeout do bus de campo
Por defeito: Dados PO = 0Resposta ao erro configurável através de P831
Não houve comunicação entre o mestre e o escravo no âmbito da monitorização de reacção projec-tada.
• Verifique a rotina de comunicação do mestre
• Prolongue o tempo de Timeout (monitorização de reacção) na configuração do mestre ou desligue a monitorização
37 Erro Watchdog Paragem da comuni-cação SBus
Erro no processo do software do sistema.
Contacte a SEW.
45 Erro de inicialização
Paragem da comuni-cação SBus
Erro após auto-teste durante o Reset.
Faça um Reset. Contacte o serviço de assistência da SEW se a falha persistir.
111 Erro de sistema Timeout da unidade
Nenhuma Observe o LED vermelho de erro de sistema (H1) da DFx. Se este LED estiver aceso ou piscar a vermelho, não foi possível accionar um ou mais participantes no SBus dentro do tempo do Timeout. Se o LED vermelho de erro de sistema (H1) piscar, a própria DFx encontra-se em estado de erro. O erro F111 foi então comunicado ao controlador apenas através do bus de campo.
Verifique a alimentação de tensão e as ligações; verifique as resistências de terminação do SBus. Desligar e voltar a ligar o DFx. Se o erro per-sistir, consulte o erro através da inter-face de diagnóstico e proceda às medidas descritas nesta tabela.

10 Informação técnicaOpção DFE24B para MOVIDRIVE® MDX61B
86 Manual – Interface de Bus de Campo DFE24B EtherCAT
10 Informação técnica10.1 Opção DFE24B para MOVIDRIVE® MDX61B
Opção DFE24B (MOVIDRIVE® MDX61B)
Referência 1821 126 7
Consumo de potência P = 3 W
Standards IEC 61158, IEC 61784-2
Velocidade de trans-missão
100 MBaud, Fullduplex
Tecnologia de ligações 2 × RJ45 (8x8 Jack modular)
Terminação do bus Não integrada, pois a terminação do bus é activada automaticamente.
OSI Layer Ethernet II
Endereço de estação Configuração via mestre EtherCAT (Æ visualização com P093)
Nome do ficheiro XML SEW_DFE24B.xml
Vendor ID 0x59 (CANopenVendor ID)
Serviços EtherCAT • CoE (CANopen via EtherCAT)• VoE (Simple MOVILINK-Protocol over EtherCAT)
Versão do firmware do MOVIDRIVE® B
824 854 0.18 ou superior (Æ visualização com P076)
Ferramentas auxiliares para a colocação em funcionamento
• Programa MOVITOOLS® MotionStudio para PC, a partir da versão 5.40• Consola DBG60B
Pi
fkVA
Hz
n

10Informação técnicaOpção DFE24B para MOVITRAC® B e slot universal para opcionais
Manual – Interface de Bus de Campo DFE24B EtherCAT 87
10.2 Opção DFE24B para MOVITRAC® B e slot universal para opcionais UOH11B
59796AXXFig. 20: Dimensões do slot universal para opcionais UOH11B
Opção DFE24B (Gateway MOVITRAC® B)
Alimentação com tensão externa
U = 24 VCC (–15 %, +20 %)Imáx = 200 mACCPmáx = 3.4 W
Standards IEC 61158, IEC 61784-2
Velocidade de trans-missão
100 MBaud, Fullduplex
Tecnologia de ligações 2 × RJ45 (8x8 Jack modular)
Terminação do bus Não integrada, pois a terminação do bus é activada automaticamente.
OSI Layer Ethernet II
Endereço de estação Configuração via mestre EtherCAT (Æ visualização com P093)
Nome do ficheiro XML SEW_DFE24B.xml
Vendor ID 0x59 (CANopenVendor ID)
Serviços EtherCAT • CoE (CANopen via EtherCAT)• VoE (Simple MOVILINK-Protocol over EtherCAT)
Versão do firmware do MOVITRAC® B
Não é necessária uma versão especial do firmware
Ferramentas auxiliares para a colocação em funcionamento
• Programa MOVITOOLS® MotionStudio para PC, a partir da versão 5.40• Consola FBG60B
4.5
5.5
28
30
185
257.
5 224
234.
5
100
22.5
0 1
F1
EtherCAT
AS
RUN
DFE 24B
ERR
INX
30
OU
TX
31
OU
TX
31
Pi
fkVA
Hz
n

11
88 Manual – Interface de Bus de Campo DFE24B EtherCAT
Índice
11 Índice
AArmazenamento ....................................................8Atribuição dos pinos do conector de ficha RJ45 20Auto-configuração para a operação de gateway 41
CCabo de bus
Blindagem ....................................................21Instalação .....................................................21
Características de funcionamento no EtherCAT .45Carta opcional
Instalação e remoção ...................................14Classe de erro .....................................................56Código adicional .................................................57Código de erro ....................................................56Códigos de retorno da configuração de parâmetros .....................................................56Configuração
Conversor de frequência MOVITRAC® B .....43Variador tecnológico
MOVIDRIVE® MDX61B ...................42Configuração da carta opcional EtherCAT .........11Configuração da Mailbox-Gateway .....................76Configuração dos objectos de dados do processo (PDO)
Para operação EtherCAT cíclica do MOVIDRIVE® MDX61B ...................27
Configuração dos parâmetrosCódigos de retorno .......................................56Via EtherCAT ...............................................52
Configurações no MOVIDRIVE® com o MOVITOOLS® MotionStudio ..............................63Controlador
MOVITRAC® B .............................................49Controlo
MOVIDRIVE® MDX61B ................................45
DDescrição dos terminais
Opção DFE24B ............................................19DFE24B
Descrição dos terminais ...............................19Indicadores de operação ..............................22Ligação .........................................................19
Diagnóstico .........................................................12Diagnóstico de irregularidades ...........................82
EElaboração do projecto
Elaboração do projecto do mestre EtherCAT para MOVITRAC® B ou Gateway, com o ficheiro XML ......................... 35
Mestre EtherCAT para MOVIDRIVE® B com o ficheiro XML ......................... 25
Procedimento ........................................ 26, 35Endereço de estação ................................... 86, 87
Configurações ............................................. 21EtherCAT
Características de funcionamento ............... 45Configuração da carta opcional ................... 11Configuração dos parâmetros ..................... 52Funções ....................................................... 58LEDs ............................................................ 22Timeout ........................................................ 48Troca de dados ............................................ 11
Exemplo de controlo .......................................... 46Explicação dos símbolos ..................................... 6
FFicheiro XML ................................................ 86, 87
Para a operação na caixa de gateway UOH11B ......................................... 35
Para a operação no MOVITRAC® B ........... 35Para EtherCAT ............................................ 25Validade para a carta DFE24B .................... 25
FunçõesEtherCAT ..................................................... 58
Funções de monitorização ................................. 12
IIndicadores de operação da carta DFE24B ....... 22Informação técnica
Opção DFE24B para MOVIDRIVE® MDX61B ......................................... 86
Opção DFE24B para MOVITRAC® B .......... 87Opção DFE24B para slot universal para
opcionais UOH11B ......................... 87Informações
Segurança ..................................................... 8Informações de segurança .................................. 8
Colocação em funcionamento / Operação .... 9Instalação / montagem .................................. 9Sistemas de bus ............................................ 8Transporte / armazenamento ........................ 8

Manual – Interface de Bus de Campo DFE24B EtherCAT 89
11Índice
InstruçõesDocumentação ...............................................6Montagem e instalação ................................13Notas importantes ..........................................6
LLEDs, EtherCAT .................................................22Ligação
Opção DFE24B ............................................19Ligação ao SBus da opção DFE24B no MOVITRAC® B ..............................................15Ligação do bus de sistema .................................16
MMailbox-Gateway
Configuração ................................................76Micro-interruptor ..................................................19Modo de operação online, activação ..................81Modo de posição .................................................62Modo de velocidade ............................................61Monitor de bus de campo ...................................12Montagem
Carta opcional DFE24B no MOVIDRIVE® MDX61B ..........................................13
Carta opcional DFE24B no MOVITRAC® B 15Instalação e remoção de uma carta
opcional ...........................................14Slot universal para opcionais UOH11B ........18
Motion Control via EtherCAT ..............................58Configurações no mestre EtherCAT ............67Configurações no MOVIDRIVE® com o
MOVITOOLS® MotionStudio ...........63Exemplo TwinCAT ........................................69Introdução ....................................................58Modo de posição ..........................................62Modo de velocidade .....................................61Sincronismo por impulsos ............................59
MOVIDRIVE® MDX61BConfiguração do variador tecnológico ..........42Controlo ........................................................45
MOVITOOLS® MotionStudioFuncionamento via EtherCAT ......................74
MOVITRAC® BConfiguração do conversor de frequência ...43Controlador ...................................................49
RReferência .......................................................... 86Responsabilidade em caso de defeitos ............... 7
SSBus
Timeout ........................................................ 51Scan de unidades .............................................. 80Serviços SDO
READ e WRITE ........................................... 52Servidor de comunicação SEW ......................... 78Sincronismo por impulsos .................................. 59
TTecnologia de ligações ................................ 86, 87Terminação do bus ................................21, 86, 87Timeout
EtherCAT ..................................................... 48SBus ............................................................ 51
Transporte ............................................................ 8Troca de dados através de EtherCAT ............... 11TwinCAT ............................................................ 46
VVelocidade de transmissão ................................ 17

306 05/2008
Índice de endereços
Índice de endereçosAlemanhaDirecção principalFábrica de produçãoVendas
Bruchsal SEW-EURODRIVE GmbH & Co KGErnst-Blickle-Straße 42 D-76646 BruchsalEndereço postalPostfach 3023 • D-76642 Bruchsal
Tel. +49 7251 75-0Fax +49 7251 75-1970http://[email protected]
AssistênciaCentros de competência
Região Centro SEW-EURODRIVE GmbH & Co KGErnst-Blickle-Straße 1 D-76676 Graben-Neudorf
Tel. +49 7251 75-1710Fax +49 7251 [email protected]
Região Norte SEW-EURODRIVE GmbH & Co KGAlte Ricklinger Straße 40-42 D-30823 Garbsen (próximo de Hannover)
Tel. +49 5137 8798-30Fax +49 5137 [email protected]
Região Este SEW-EURODRIVE GmbH & Co KGDänkritzer Weg 1D-08393 Meerane (próximo de Zwickau)
Tel. +49 3764 7606-0Fax +49 3764 [email protected]
Região Sul SEW-EURODRIVE GmbH & Co KGDomagkstraße 5D-85551 Kirchheim (próximo de Munique)
Tel. +49 89 909552-10Fax +49 89 [email protected]
Região Oeste SEW-EURODRIVE GmbH & Co KGSiemensstraße 1D-40764 Langenfeld (próximo de Düsseldorf)
Tel. +49 2173 8507-30Fax +49 2173 [email protected]
Electrónica SEW-EURODRIVE GmbH & Co KGErnst-Blickle-Straße 42 D-76646 Bruchsal
Tel. +49 7251 75-1780Fax +49 7251 [email protected]
Drive Service Hotline / Serviço de Assistência a 24-horas +49 180 5 SEWHELP+49 180 5 7394357
Para mais endereços consulte os serviços de assistência na Alemanha.
FrançaFábrica de produçãoVendasServiço de assistência
Haguenau SEW-USOCOME 48-54, route de Soufflenheim B. P. 20185F-67506 Haguenau Cedex
Tel. +33 3 88 73 67 00 Fax +33 3 88 73 66 00http://[email protected]
Fábrica de produção
Forbach SEW-EUROCOME Zone Industrielle Technopôle Forbach SudB. P. 30269F-57604 Forbach Cedex
Tel. +33 3 87 29 38 00
Centros de montagemVendasServiço de assistência
Bordeaux SEW-USOCOME Parc d'activités de Magellan62, avenue de Magellan - B. P. 182F-33607 Pessac Cedex
Tel. +33 5 57 26 39 00Fax +33 5 57 26 39 09
Lyon SEW-USOCOME Parc d'Affaires RooseveltRue Jacques TatiF-69120 Vaulx en Velin
Tel. +33 4 72 15 37 00Fax +33 4 72 15 37 15
Paris SEW-USOCOME Zone industrielle 2, rue Denis Papin F-77390 Verneuil I'Etang
Tel. +33 1 64 42 40 80Fax +33 1 64 42 40 88
Para mais endereços consulte os serviços de assistência na França.
África do SulCentros de montagemVendasServiço de assistência
Johannesburg SEW-EURODRIVE (PROPRIETARY) LIMITEDEurodrive House Cnr. Adcock Ingram and Aerodrome RoadsAeroton Ext. 2Johannesburg 2013P.O.Box 90004Bertsham 2013
Tel. +27 11 248-7000Fax +27 11 494-3104http://[email protected]
05/2008 307
Índice de endereços
Centros de montagemVendasServiço de assistência
Capetown SEW-EURODRIVE (PROPRIETARY) LIMITED Rainbow ParkCnr. Racecourse & Omuramba RoadMontague GardensCape TownP.O.Box 36556Chempet 7442 Cape Town
Tel. +27 21 552-9820Fax +27 21 552-9830Telex 576 [email protected]
Durban SEW-EURODRIVE (PROPRIETARY) LIMITED2 Monaceo PlacePinetownDurbanP.O. Box 10433, Ashwood 3605
Tel. +27 31 700-3451Fax +27 31 [email protected]
ArgéliaVendas Argel Réducom
16, rue des Frères ZaghnounBellevue El-Harrach16200 Alger
Tel. +213 21 8222-84Fax +213 21 [email protected]
ArgentinaCentro de montagemVendasServiço de assistência
Buenos Aires SEW EURODRIVE ARGENTINA S.A.Centro Industrial Garin, Lote 35Ruta Panamericana Km 37,51619 Garin
Tel. +54 3327 4572-84Fax +54 3327 [email protected]://www.sew-eurodrive.com.ar
AustráliaCentros de montagemVendasServiço de assistência
Melbourne SEW-EURODRIVE PTY. LTD.27 Beverage DriveTullamarine, Victoria 3043
Tel. +61 3 9933-1000Fax +61 3 9933-1003http://[email protected]
Sydney SEW-EURODRIVE PTY. LTD.9, Sleigh Place, Wetherill Park New South Wales, 2164
Tel. +61 2 9725-9900Fax +61 2 [email protected]
ÁustriaCentro de montagemVendasServiço de assistência
Viena SEW-EURODRIVE Ges.m.b.H. Richard-Strauss-Strasse 24A-1230 Wien
Tel. +43 1 617 55 00-0Fax +43 1 617 55 00-30http://[email protected]
BélgicaCentro de montagemVendasServiço de assistência
Bruxelas SEW Caron-Vector S.A.Avenue Eiffel 5B-1300 Wavre
Tel. +32 10 231-311Fax +32 10 231-336http://[email protected]
Assistência Centros de competência
Redutores industriais
SEW Caron-Vector S.A.Rue de Parc Industriel, 31BE-6900 Marche-en-Famenne
Tel. +32 84 219-878Fax +32 84 219-879http://[email protected]
BielorússiaVendas Minsk SEW-EURODRIVE BY
RybalkoStr. 26BY-220033 Minsk
Tel.+375 (17) 298 38 50Fax +375 (17) 29838 [email protected]
BrasilFábrica de produçãoVendasServiço de assistência
São Paulo SEW-EURODRIVE Brasil Ltda.Avenida Amâncio Gaiolli, 152 - Rodovia Presidente Dutra Km 208Guarulhos - 07251-250 - SPSAT - SEW ATENDE - 0800 7700496
Tel. +55 11 6489-9133Fax +55 11 6480-3328http://[email protected]
Para mais endereços consulte os serviços de assistência no Brasil.
África do Sul
308 05/2008
Índice de endereços
BulgáriaVendas Sofia BEVER-DRIVE GmbH
Bogdanovetz Str.1BG-1606 Sofia
Tel. +359 2 9151160Fax +359 2 [email protected]
CamarõesVendas Douala Electro-Services
Rue Drouot AkwaB.P. 2024Douala
Tel. +237 33 431137Fax +237 33 431137
CanadáCentros de montagemVendasServiço de assistência
Toronto SEW-EURODRIVE CO. OF CANADA LTD. 210 Walker Drive Bramalea, Ontario L6T3W1
Tel. +1 905 791-1553Fax +1 905 791-2999http://[email protected]
Vancouver SEW-EURODRIVE CO. OF CANADA LTD.7188 Honeyman Street Delta. B.C. V4G 1 E2
Tel. +1 604 946-5535Fax +1 604 [email protected]
Montreal SEW-EURODRIVE CO. OF CANADA LTD.2555 Rue Leger LaSalle, Quebec H8N 2V9
Tel. +1 514 367-1124Fax +1 514 [email protected]
Para mais endereços consulte os serviços de assistência no Canadá.
ChileCentro de montagemVendasServiço de assistência
Santiago de Chile
SEW-EURODRIVE CHILE LTDA.Las Encinas 1295Parque Industrial Valle GrandeLAMPARCH-Santiago de ChileEndereço postalCasilla 23 Correo Quilicura - Santiago - Chile
Tel. +56 2 75770-00Fax +56 2 75770-01http://[email protected]
ChinaFábrica de produçãoCentro de montagemVendasServiço de assistência
Tianjin SEW-EURODRIVE (Tianjin) Co., Ltd.No. 46, 7th Avenue, TEDATianjin 300457
Tel. +86 22 25322612Fax +86 22 [email protected]://www.sew-eurodrive.cn
Centro de montagemVendasServiço de assistência
Suzhou SEW-EURODRIVE (Suzhou) Co., Ltd.333, Suhong Middle RoadSuzhou Industrial ParkJiangsu Province, 215021
Tel. +86 512 62581781Fax +86 512 [email protected]
Guangzhou SEW-EURODRIVE (Guangzhou) Co., Ltd.No. 9, JunDa RoadEast Section of GETDDGuangzhou 510530
Tel. +86 20 82267890Fax +86 20 [email protected]
Shenyang SEW-EURODRIVE (Shenyang) Co., Ltd.10A-2, 6th RoadShenyang Economic Technological Development AreaShenyang, 110141
Tel. +86 24 25382538Fax +86 24 [email protected]
Wuhan SEW-EURODRIVE (Wuhan) Co., Ltd.10A-2, 6th RoadNo. 59, the 4th Quanli Road, WEDA430056 Wuhan
Tel. +86 27 84478398Fax +86 27 84478388
Para mais endereços consulte os serviços de assistência na China.
ColômbiaCentro de montagemVendasServiço de assistência
Bogotá SEW-EURODRIVE COLOMBIA LTDA. Calle 22 No. 132-60Bodega 6, Manzana BSantafé de Bogotá
Tel. +57 1 54750-50Fax +57 1 54750-44http://[email protected]

05/2008 309
Índice de endereços
CoreiaCentro de montagemVendasServiço de assistência
Ansan-City SEW-EURODRIVE KOREA CO., LTD. B 601-4, Banweol Industrial Estate 1048-4, Shingil-DongAnsan 425-120
Tel. +82 31 492-8051Fax +82 31 492-8056http://[email protected]
Busan SEW-EURODRIVE KOREA Co., Ltd.No. 1720 - 11, Songjeong - dongGangseo-kuBusan 618-270
Tel. +82 51 832-0204Fax +82 51 [email protected]
Costa do MarfimVendas Abidjan SICA
Ste industrielle et commerciale pour l'Afrique165, Bld de MarseilleB.P. 2323, Abidjan 08
Tel. +225 2579-44Fax +225 2584-36
CroáciaVendasServiço de assistência
Zagreb KOMPEKS d. o. o.PIT Erdödy 4 IIHR 10 000 Zagreb
Tel. +385 1 4613-158Fax +385 1 [email protected]
DinamarcaCentro de montagemVendasServiço de assistência
Copenhaga SEW-EURODRIVEA/SGeminivej 28-30DK-2670 Greve
Tel. +45 43 9585-00Fax +45 43 9585-09http://[email protected]
EgiptoVendasServiço de assistência
Cairo Copam Egypt for Engineering & Agencies33 EI Hegaz ST, Heliopolis, Cairo
Tel. +20 2 22566-299 + 1 23143088Fax +20 2 22594-757http://www.copam-egypt.com/ [email protected]
EslováquiaVendas Bratislava SEW-Eurodrive SK s.r.o.
Rybničná 40SK-83554 Bratislava
Tel. +421 2 49595201Fax +421 2 [email protected]://www.sew-eurodrive.sk
Žilina SEW-Eurodrive SK s.r.o.ul. Vojtecha Spanyola 33SK-010 01 Žilina
Tel. +421 41 700 2513Fax +421 41 700 [email protected]
Banská Bystrica SEW-Eurodrive SK s.r.o.Rudlovská cesta 85SK-97411 Banská Bystrica
Tel. +421 48 414 6564Fax +421 48 414 [email protected]
EslovéniaVendasServiço de assistência
Celje Pakman - Pogonska Tehnika d.o.o.UI. XIV. divizije 14SLO - 3000 Celje
Tel. +386 3 490 83-20Fax +386 3 490 [email protected]
EspanhaCentro de montagemVendasServiço de assistência
Bilbao SEW-EURODRIVE ESPAÑA, S.L. Parque Tecnológico, Edificio, 302E-48170 Zamudio (Vizcaya)
Tel. +34 94 43184-70Fax +34 94 43184-71http://[email protected]
EstóniaVendas Tallin ALAS-KUUL AS
Reti tee 4EE-75301 Peetri küla, Rae vald, Harjumaa
Tel. +372 6593230Fax +372 [email protected]
310 05/2008
Índice de endereços
EUAFábrica de produçãoCentro de montagemVendasServiço de assistência
Greenville SEW-EURODRIVE INC. 1295 Old Spartanburg Highway P.O. Box 518Lyman, S.C. 29365
Tel. +1 864 439-7537Fax Sales +1 864 439-7830Fax Manuf. +1 864 439-9948Fax Ass. +1 864 439-0566Telex 805 550 http://[email protected]
Centros de montagemVendasServiço de assistência
San Francisco SEW-EURODRIVE INC. 30599 San Antonio St.Hayward, California 94544-7101
Tel. +1 510 487-3560Fax +1 510 [email protected]
Philadelphia/PA SEW-EURODRIVE INC. Pureland Ind. Complex 2107 High Hill Road, P.O. Box 481Bridgeport, New Jersey 08014
Tel. +1 856 467-2277Fax +1 856 [email protected]
Dayton SEW-EURODRIVE INC.2001 West Main Street Troy, Ohio 45373
Tel. +1 937 335-0036Fax +1 937 [email protected]
Dallas SEW-EURODRIVE INC.3950 Platinum Way Dallas, Texas 75237
Tel. +1 214 330-4824Fax +1 214 [email protected]
Para mais endereços consulte os serviços de assistência nos EUA.
FinlândiaCentro de montagemVendasServiço de assistência
Lahti SEW-EURODRIVE OYVesimäentie 4FIN-15860 Hollola 2
Tel. +358 201 589-300Fax +358 3 [email protected]://www.sew-eurodrive.fi
Fábrica de produçãoCentro de montagemServiço de assistência
Karkkila SEW Industrial Gears OYValurinkatu 6FIN-03600 Karkkila
Tel. +358 201 589-300Fax +358 201 [email protected]://www.sew-eurodrive.fi
GabãoVendas Libreville Electro-Services
B.P. 1889Libreville
Tel. +241 7340-11Fax +241 7340-12
Grã-BretanhaCentro de montagemVendasServiço de assistência
Normanton SEW-EURODRIVE Ltd.Beckbridge Industrial Estate P.O. Box No.1GB-Normanton, West- Yorkshire WF6 1QR
Tel. +44 1924 893-855Fax +44 1924 893-702http://[email protected]
GréciaVendasServiço de assistência
Atenas Christ. Boznos & Son S.A.12, Mavromichali StreetP.O. Box 80136, GR-18545 Piraeus
Tel. +30 2 1042 251-34 Fax +30 2 1042 251-59http://[email protected]
HolandaCentro de montagemVendasServiço de assistência
Rotterdam VECTOR Aandrijftechniek B.V. Industrieweg 175 NL-3044 AS RotterdamPostbus 10085NL-3004 AB Rotterdam
Tel. +31 10 4463-700Fax +31 10 4155-552http://[email protected]
Hong KongCentro de montagemVendasServiço de assistência
Hong Kong SEW-EURODRIVE LTD.Unit No. 801-806, 8th FloorHong Leong Industrial ComplexNo. 4, Wang Kwong Road Kowloon, Hong Kong
Tel. +852 2 7960477 + 79604654Fax +852 2 [email protected]

05/2008 311
Índice de endereços
HungriaVendasServiço de assistência
Budapeste SEW-EURODRIVE Kft.H-1037 BudapestKunigunda u. 18
Tel. +36 1 437 06-58Fax +36 1 437 [email protected]
ÍndiaCentro de montagemVendasServiço de assistência
Vadodara SEW-EURODRIVE India Private LimitedPlot No. 4, GIDCPOR Ramangamdi • Vadodara - 391 243Gujarat
Tel. +91 265 2831086Fax +91 265 2831087http://[email protected]@seweurodriveindia.com
IrlandaVendasServiço de assistência
Dublin Alperton Engineering Ltd. 48 Moyle RoadDublin Industrial EstateGlasnevin, Dublin 11
Tel. +353 1 830-6277Fax +353 1 [email protected]://www.alperton.ie
IsraelVendas Tel-Aviv Liraz Handasa Ltd.
Ahofer Str 34B / 22858858 Holon
Tel. +972 3 5599511Fax +972 3 5599512http://[email protected]
ItáliaCentro de montagemVendasServiço de assistência
Milão SEW-EURODRIVE di R. Blickle & Co.s.a.s.Via Bernini,14 I-20020 Solaro (Milano)
Tel. +39 02 96 9801Fax +39 02 96 799781http://[email protected]
JapãoCentro de montagemVendasServiço de assistência
Iwata SEW-EURODRIVE JAPAN CO., LTD 250-1, Shimoman-no,IwataShizuoka 438-0818
Tel. +81 538 373811Fax +81 538 373814http://[email protected]
LetóniaVendas Riga SIA Alas-Kuul
Katlakalna 11CLV-1073 Riga
Tel. +371 7139253Fax +371 7139386http://[email protected]
LibanoVendas Beirute Gabriel Acar & Fils sarl
B. P. 80484Bourj Hammoud, Beirut
Tel. +961 1 4947-86 +961 1 4982-72+961 3 2745-39Fax +961 1 4949-71 [email protected]
LituâniaVendas Alytus UAB Irseva
Naujoji 19LT-62175 Alytus
Tel. +370 315 79204Fax +370 315 [email protected]://www.sew-eurodrive.lt
LuxemburgoCentro de montagemVendasServiço de assistência
Bruxelas CARON-VECTOR S.A.Avenue Eiffel 5B-1300 Wavre
Tel. +32 10 231-311Fax +32 10 231-336http://[email protected]
MalásiaCentro de montagemVendasServiço de assistência
Johore SEW-EURODRIVE SDN BHD No. 95, Jalan Seroja 39, Taman Johor Jaya81000 Johor Bahru, JohorWest Malaysia
Tel. +60 7 3549409Fax +60 7 [email protected]
312 05/2008
Índice de endereços
MarrocosVendas Casablanca Afit
5, rue Emir AbdelkaderMA 20300 Casablanca
Tel. +212 22618372Fax +212 [email protected]
MéxicoCentro de montagemVendasServiço de assistência
Queretaro SEW-EURODRIVE MEXIKO SA DE CVSEM-981118-M93Tequisquiapan No. 102Parque Industrial QueretaroC.P. 76220Queretaro, Mexico
Tel. +52 442 1030-300Fax +52 442 1030-301http://[email protected]
NoruegaCentro de montagemVendasServiço de assistência
Moss SEW-EURODRIVE A/SSolgaard skog 71N-1599 Moss
Tel. +47 69 24 10 20Fax +47 69 24 10 40http://[email protected]
Nova ZelândiaCentros de montagemVendasServiço de assistência
Auckland SEW-EURODRIVE NEW ZEALAND LTD. P.O. Box 58-428 82 Greenmount driveEast Tamaki Auckland
Tel. +64 9 2745627Fax +64 9 2740165http://[email protected]
Christchurch SEW-EURODRIVE NEW ZEALAND LTD. 10 Settlers Crescent, FerrymeadChristchurch
Tel. +64 3 384-6251Fax +64 3 [email protected]
PeruCentro de montagemVendasServiço de assistência
Lima SEW DEL PERU MOTORES REDUCTORES S.A.C.Los Calderos, 120-124Urbanizacion Industrial Vulcano, ATE, Lima
Tel. +51 1 3495280Fax +51 1 3493002http://[email protected]
PolóniaCentro de montagemVendasServiço de assistência
ŁódÑ SEW-EURODRIVE Polska Sp.z.o.o.ul. Techniczna 5 PL-92-518 ŁódÑ
Tel. +48 42 67710-90Fax +48 42 67710-99http://[email protected]
Serviço de Assistência 24/24 horas Tel. +48 602 739 739(+48 602 SEW SEW)[email protected]
PortugalCentro de montagemVendasServiço de assistência
Coimbra SEW-EURODRIVE, LDA.Apartado 15 P-3050-901 Mealhada
Tel. +351 231 20 9670Fax +351 231 20 3685http://[email protected]
República ChecaVendas Praga SEW-EURODRIVE CZ S.R.O.
Business Centrum Praha Lužná 591CZ-16000 Praha 6 - Vokovice
Tel. +420 255 709 601Fax +420 220 121 237http://[email protected]
RuméniaVendasServiço de assistência
Bucareste Sialco Trading SRL str. Madrid nr.4 011785 Bucuresti
Tel. +40 21 230-1328Fax +40 21 230-7170 [email protected]
RússiaCentro de montagemVendasServiço de assistência
São Petersburgo
ZAO SEW-EURODRIVE P.O. Box 36 195220 St. Petersburg Russia
Tel. +7 812 3332522 +7 812 5357142Fax +7 812 3332523http://[email protected]

05/2008 313
Índice de endereços
SenegalVendas Dakar SENEMECA
Mécanique GénéraleKm 8, Route de Rufisque B.P. 3251, Dakar
Tel. +221 338 494 770Fax +221 338 494 [email protected]
SérviaVendas Belgrado DIPAR d.o.o.
Ustanicka 128aPC Košum, IV floorSCG-11000 Beograd
Tel. +381 11 347 3244 / +381 11 288 0393Fax +381 11 347 [email protected]
SingapuraCentro de montagemVendasServiço de assistência
Singapura SEW-EURODRIVE PTE. LTD. No 9, Tuas Drive 2 Jurong Industrial Estate Singapore 638644
Tel. +65 68621701Fax +65 68612827http://[email protected]
SuéciaCentro de montagemVendasServiço de assistência
Jönköping SEW-EURODRIVE ABGnejsvägen 6-8S-55303 JönköpingBox 3100 S-55003 Jönköping
Tel. +46 36 3442 00Fax +46 36 3442 80http://[email protected]
SuíçaCentro de montagemVendasServiço de assistência
Basiléia Alfred lmhof A.G.Jurastrasse 10 CH-4142 Münchenstein bei Basel
Tel. +41 61 417 1717Fax +41 61 417 1700http://[email protected]
TailândiaCentro de montagemVendasServiço de assistência
Chonburi SEW-EURODRIVE (Thailand) Ltd.700/456, Moo.7, DonhuarohMuang Chonburi 20000
Tel. +66 38 454281Fax +66 38 [email protected]
TunísiaVendas Tunis T. M.S. Technic Marketing Service
5, Rue El Houdaibiah 1000 Tunis
Tel. +216 71 4340-64 + 71 4320-29Fax +216 71 [email protected]
TurquiaCentro de montagemVendasServiço de assistência
Istambul SEW-EURODRIVE Hareket Sistemleri San. ve Tic. Ltd. Sti. Bagdat Cad. Koruma Cikmazi No. 3 TR-34846 Maltepe ISTANBUL
Tel. +90 216 4419164, 3838014, 3738015Fax +90 216 3055867http://[email protected]
UcrâniaVendasServiço de assistência
Dnepropetrovsk SEW-EURODRIVEStr. Rabochaja 23-B, Office 40949008 Dnepropetrovsk
Tel. +380 56 370 3211Fax +380 56 372 2078http://[email protected]
VenezuelaCentro de montagemVendasServiço de assistência
Valencia SEW-EURODRIVE Venezuela S.A.Av. Norte Sur No. 3, Galpon 84-319Zona Industrial Municipal NorteValencia, Estado Carabobo
Tel. +58 241 832-9804Fax +58 241 838-6275http://[email protected]@cantv.net


SEW-EURODRIVE – Driving the world

www.sew-eurodrive.com
O mundo em movimento …
Com pessoas de pensamento veloz que constroem o futuro consigo.
Com uma assistência após vendas disponível 24 horas sobre 24 e 365 dias por ano.
Com sistemas de acciona-mento e comando que multiplicam automatica-mente a sua capacidade de acção.
Com uma vasta experiência em todos os sectores da indústria de hoje.
Com um alto nível de qualidade, cujo standard simplifica todas as operações do dia-a-dia.
Com uma presença global para rápidas e apropriadas soluções.
Com ideias inovadoras que criam hoje a solução para os problemas do futuro.
Com acesso permanente à informação e dados, assim como o mais recente software via Internet.
Moto-redutores \ Accionamentos Electrónicos \ Drive Automation \ Serviços
SEW-EURODRIVEo mundo em movimento …
SEW-EURODRIVE GmbH & Co KGP.O. Box 3023 · D-76642 Bruchsal / GermanyPhone +49 7251 75-0 · Fax +49 7251 [email protected]