





Línguas
Páginas
Legal


ESTRATÉGIA DE CONTROLE ÓTIMO PARA ROBÔS SUBMARINOS TIPO
ROV EM OPERAÇÕES DE INSPEÇÃO DE RISERS
Ivan Mauricio Salcedo Rincon
Dissertação de Mestrado apresentada ao
Programa de Pós-graduação em Engenharia
Mecânica, COPPE, da Universidade Federal
do Rio de Janeiro, como parte dos requisitos
necessários à obtenção do título de Mestre em
Engenharia Mecânica.
Orientador: Max Suell Dutra
Rio de Janeiro
Novembro de 2013

ESTRATÉGIA DE CONTROLE ÓTIMO PARA ROBÔS SUBMARINOS TIPO
ROV EM OPERAÇÕES DE INSPEÇÃO DE RISERS
Ivan Mauricio Salcedo Rincon
DISSERTAÇÃO SUBMETIDA AO CORPO DOCENTE DO INSTITUTO
ALBERTO LUIZ COIMBRA DE PÓS-GRADUAÇÃO E PESQUISA DE
ENGENHARIA (COPPE) DA UNIVERSIDADE FEDERAL DO RIO DE
JANEIRO COMO PARTE DOS REQUISITOS NECESSÁRIOS PARA A
OBTENÇÃO DO GRAU DE MESTRE EM CIÊNCIAS EM ENGENHARIA
MECÂNICA.
Examinada por:
Prof. Max Suell Dutra, Dr.-Ing.
Prof. Jules Ghislain Slama, D.Sc.
Prof. Marco Hiroshi Naka, D.Sc.
RIO DE JANEIRO, RJ � BRASIL
NOVEMBRO DE 2013

Salcedo Rincon, Ivan Mauricio
Estratégia de Controle Ótimo para Robôs Submarinos
Tipo ROV em Operações de Inspeção de Risers/Ivan
Mauricio Salcedo Rincon. � Rio de Janeiro:
UFRJ/COPPE, 2013.
XVII, 106 p.: il.; 29, 7cm.
Orientador: Max Suell Dutra
Dissertação (mestrado) � UFRJ/COPPE/Programa de
Engenharia Mecânica, 2013.
Referências Bibliográ�cas: p. 89 � 94.
1. ROV. 2. Controle Multivariável. 3. Controle
Ótimo. 4. Equipamentos O�shore. I. Dutra, Max
Suell. II. Universidade Federal do Rio de Janeiro, COPPE,
Programa de Engenharia Mecânica. III. Título.
iii

A Deus meu Pai, meu Mestre e
minha Luz nesse caminho. A
minha mãe Esperanza, a mulher
com o maior coração bondoso,
sempre está atenta me guiando à
imagem da Santíssima Virgem
Maria. Ao meu pai Hernando,
quem sempre tem uma palavra
digna para me providenciar. As
minhas irmãs Julie e Stephany,
por me oferecer todo seu apoio,
con�ança e respeito. À memória
das minhas avós e meus avôs.
iv

Agradecimentos
Para o professor Max Suell Dutra por me acolher como seu aluno, sendo meu orien-
tador nesta etapa.
Aos meus amigos Ivanovich Lache Salcedo, Edison Fabian Caballero Pérez, Wil-
liam Pinto Hernández, Edwin Francis Cárdenas, Juan Camilo Rivera Medina, Di-
ego Alejandro Godoy Diaz, Luis Carrión, Lila Lisboa, Marcelo Figuereido, Edinha
Lisboa, Angela Catherine Arana Andia, Jennifer Cortés, Camila Ferreira, César Va-
lencia, Nathalia Cáceres, porque além da sua amizade tornaram-se a minha família
incondicional ao longo destes anos.
A meus queridos amigos sacerdotes Pablo Hernán Barreiro, Julio César Wer-
lang, Francisco Ary Carnaúba e Vergilio Moro, porque além do apoio espiritual e
acolhimento em suas casas, se mostraram para mim como verdadeiros amigos.
A minhas guias espirituais Sonia e Betty, por me orientar no caminho de Deus
em cada passo.
Aos professores Luiz Pereira Calôba, Afonso Celso del Nero, Fernando Miranda
Pellon, Fernando Lizarralde, Fernando Parente, por me instruir de forma gentil e
pro�ssional.
Ao pessoal do laboratório de Robótica LABROB, Constantino Ribeiro, Marcio
Gomes, César Bogado, Je�erson Coelho, Eduardo Hirano, Alexis López, Paulo Ser-
gio Álves por me oferecer suas palavras e sugestões nas discussões relacionadas com
este trabalho. À Vera Noronha por me ajudar na secretária sempre.
À pessoas de grande valor que complementaram e �zeram meu caminho por este
país mais agradável, como a senhora Lucidalva e seu marido Aneilton, Francisco Roa,
Judy Ochoa, Jeni�er Muñoz, Marcela Tarazona, Oscar Solano, Carolina Viviescas,
César Arévalo, Erika Acosta, David González, Daniela Cruz, Darlis Varón, Iván
Sandoval e demais pessoal da Colômbia que compartilharam comigo esta experiência.
A meus amigos pessoais Jorge Montañez, Mauricio Ardila, Carlos Miranda, Nairo
Granados, Jaime Diaz, Ramón Angarita, Diego Martinez, Oscar Navarro, Luis Quin-
tero, Katherine Rojas, Sandra Palenque, Javier Mejia, assim como a meus primos
Diego, Duván, Sergio, César, Juan Carlos, Jaime Andrés, Lina Milena, Harold, Ale-
jandra, Liliana, Angela e demais por não parar de se comunicar comigo na distância
e valorar o vínculo de confraternidade que formamos.
v

Resumo da Dissertação apresentada à COPPE/UFRJ como parte dos requisitos
necessários para a obtenção do grau de Mestre em Ciências (M.Sc.)
ESTRATÉGIA DE CONTROLE ÓTIMO PARA ROBÔS SUBMARINOS TIPO
ROV EM OPERAÇÕES DE INSPEÇÃO DE RISERS
Ivan Mauricio Salcedo Rincon
Novembro/2013
Orientador: Max Suell Dutra
Programa: Engenharia Mecânica
Os veículos remotamente operados têm se apresentado como a principal ferra-
menta utilizada em operações submarinas que ultrapassam o limite de mergulho
para o homem, sendo de especial uso em tarefas de monitoramento do solo marinho,
resgate, medições batimétricas e localização.
Na industria do petróleo e gás o�shore, estes veículos representam um ferramenta
vital já que permitem a construção e manutenção dos equipamentos envolvidos no
processo de extração e transporte dos hidrocarbonetos até a superfície do mar. Ati-
vidades de inspeção, supervisão e reparação de risers e estruturas de plataforma,
assim como dos equipamentos instalados no solo marinho tipo árvores de natal e
manifolds, são executadas por meio dos manipuladores instalados nos ROVs de tra-
balho e inspeção.
Em países como o Brasil onde o número de operações o�shore está se incremen-
tado, ao tempo do avanço destas para profundidades cada vez maiores, a necessidade
de garantir e melhorar o desempenho dos ROVs, torna-se um desa�o da engenharia.
A literatura tem apresentado abordagens de controle não linear para tarefas de
posicionamento dinâmico e acompanhamento de trajetórias em veículos submarinos,
porém, poucos enfoques sobre técnicas de controle linear. Com o objetivo de prover
uma ferramenta que permita uma análise mais simples a partir do ponto de vista
matemático, esta dissertação apresenta uma aproximação de controle através de uma
técnica ótima linear, a qual oferece um alto grau de robustez, com resultados bem
sucedidos na área aeroespacial e de projéteis. Desta forma foram realizados simula-
ções controlando um modelo dinâmico de ROV em casos usuais de posicionamento
em atividades de inspeção de risers.
vi

Abstract of Dissertation presented to COPPE/UFRJ as a partial ful�llment of the
requirements for the degree of Master of Science (M.Sc.)
OPTIMAL CONTROL STRATEGY FOR SUBMARINE ROV-LIKE ROBOTS
IN OPERATIONS OF INSPECTION OF RISERS
Ivan Mauricio Salcedo Rincon
November/2013
Advisor: Max Suell Dutra
Department: Mechanical Engineering
Remotely Operated Vehicles have been presented as the main tool to be use
in sub-sea operations, which are developed under human's diving limit, being spe-
cially used in activities such as monitoring of the sea bed, rescue, bathymetry and
localization.
In the industry of oil and gas o�shore, these kind of vehicles represent an impor-
tant role as they allow the construction and maintenance of equipment related in the
process of extraction and carrying of hydrocarbons to the sea's surface. Activities
of inspection, supervision and repair of risers and platforms' structures, as well as
equipment installed on the sea bed, like Christmas trees and manifolds, are executed
using manipulators loaded on work class ROVs.
In countries such as Brazil where are increasing the number of operations o�shore,
at the time of the advancement of these on deeper waters, the need to ensure and
to improve the performance of ROVs, becomes an Engineering's challenge.
Literature has presented approaches of nonlinear control for tasks of dynamic po-
sitioning and tracking of trajectories for underwater vehicles, unlike, few approaches
using linear control. With the aim of providing a tool that allows a simpler math-
ematical analysis, this dissertation presents a control approach using a linear opti-
mal technique, which o�ers a high degree of robustness, with successful results in
aerospace and rockets. Thus, there were made simulated tests controlling a ROV's
dynamical model under typical cases of positioning in activities of inspection of
risers.
vii

Sumário
Lista de Figuras xi
Lista de Tabelas xiii
Lista de Símbolos xiv
Lista de Abreviaturas xvii
1 Introdução 1
1.1 Classi�cação dos ROVs . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.2 Intervenção com ROVs . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.3 Objetivos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.4 Organização da Dissertação . . . . . . . . . . . . . . . . . . . . . . . 6
2 Dinâmica de um ROV 8
2.1 Sistemas de Coordenadas . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.1.1 Matrizes de Rotação . . . . . . . . . . . . . . . . . . . . . . . 11
2.1.2 Ângulos de Euler . . . . . . . . . . . . . . . . . . . . . . . . . 13
2.1.3 Transformação Velocidade Linear . . . . . . . . . . . . . . . . 14
2.1.4 Transformação Velocidade Angular . . . . . . . . . . . . . . . 15
2.2 Dinâmica de um Corpo Rígido . . . . . . . . . . . . . . . . . . . . . . 16
2.2.1 Equações do Movimento de Translação . . . . . . . . . . . . . 18
2.2.2 Equações de Movimento de Rotação . . . . . . . . . . . . . . . 20
2.2.3 Representação Vetorial das Equações de movimento de um
Corpo Rígido . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
2.3 Esforços Hidrodinâmicos . . . . . . . . . . . . . . . . . . . . . . . . . 23
2.3.1 Esforços devidos à Massa Adicional e Inércia . . . . . . . . . . 24
2.3.2 Esforços devidos as Forças Centrípetas e de Coriolis Adicionais 27
2.3.3 Esforços devidos ao Amortecimento Hidrodinâmico . . . . . . 28
2.3.4 Esforços de Restauração . . . . . . . . . . . . . . . . . . . . . 31
2.3.5 Esforços gerados pelos Propulsores . . . . . . . . . . . . . . . 34
2.4 Modelo Dinâmico Matricial . . . . . . . . . . . . . . . . . . . . . . . 38
viii

3 Linearização do Modelo Dinâmico 42
3.1 Ponto de Operação . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
3.2 Metodologia de Linearização . . . . . . . . . . . . . . . . . . . . . . . 44
3.2.1 Linearização Esforços Hidrodinâmicos, Inerciais e de Restau-
ração . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
3.2.2 Linearização de Esforços devidos à Propulsão . . . . . . . . . 46
3.3 Resultado da Linearização do Modelo Dinâmico do ROV . . . . . . . 48
4 Sistema de Controle 51
4.1 Regulador Quadrático Linear (Linear Quadratic Regulator) . . . . . . 52
4.1.1 Problema das Condições Terminais . . . . . . . . . . . . . . . 54
4.1.2 Problema do Regulador Funcional . . . . . . . . . . . . . . . . 55
4.1.3 Regulador Linear Ótimo Determinístico . . . . . . . . . . . . . 56
4.1.4 Custo do Controle . . . . . . . . . . . . . . . . . . . . . . . . 56
4.1.5 Solução do Problema do Regulador . . . . . . . . . . . . . . . 56
4.1.6 Horizonte de Tempo In�nito . . . . . . . . . . . . . . . . . . . 58
4.2 Controlador LQR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
4.2.1 Índice de Estabilidade . . . . . . . . . . . . . . . . . . . . . . 60
4.2.2 Rastreamento de Referências . . . . . . . . . . . . . . . . . . . 61
4.2.3 Sintonização do Controlador . . . . . . . . . . . . . . . . . . . 62
4.3 Observador de Estados . . . . . . . . . . . . . . . . . . . . . . . . . . 62
5 Simulações e Resultados 66
5.1 Simulações Modelo Não Linear . . . . . . . . . . . . . . . . . . . . . . 66
5.2 Simulações Implementação Controlador LQR . . . . . . . . . . . . . . 69
5.3 Simulações Controlador LQR com Observador de Estados . . . . . . . 79
5.4 Simulações do Controlador sujeito a Perturbações Externas . . . . . . 83
6 Conclusões e Trabalhos Futuros 87
6.1 Trabalhos Futuros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
Referências Bibliográ�cas 89
A Parâmetros do ROV 95
B Matrizes e Equações Modelo Não Linear do ROV 97
C Matrizes e Equações Linearizadas 101
D Aproximação Parâmetros Hidrodinâmicos 102
D.1 Aproximação CX (α) e CX (β) . . . . . . . . . . . . . . . . . . . . . . 103
D.2 Aproximação CY (β) e CY (γ) . . . . . . . . . . . . . . . . . . . . . . 104
ix

D.3 Aproximação CZ (α) e CZ (γ) . . . . . . . . . . . . . . . . . . . . . . 105
D.4 Aproximação CK (γ), CM (α) e CN (β) . . . . . . . . . . . . . . . . . 106
x

Lista de Figuras
1.1 ROV Seaeye Falcon da Empresa SAAB Technologies. . . . . . . . . . 2
1.2 Classi�cação dos veículos submarinos. . . . . . . . . . . . . . . . . . . 3
1.3 ROV de inspeção geral. Tomada de http://www.divetechltd.ca/ . . . 6
2.1 Sistema de Coordenadas Inercial e Móvel para Veículos Submarinos. . 10
2.2 Posição e Orientação de um corpo rígido. . . . . . . . . . . . . . . . . 12
2.3 Movimento de um Corpo Rígido. . . . . . . . . . . . . . . . . . . . . 17
2.4 Coe�cientes hidrodinâmicos ROV Dolphin 3K em função do ângulo
de ataque. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
2.5 Esforços de Restauração em um corpo rígido submerso. . . . . . . . . 32
2.6 Sistema de Coordenadas Esféricas. . . . . . . . . . . . . . . . . . . . 36
2.7 De�nição dos vetores Rpi e Ppi . . . . . . . . . . . . . . . . . . . . . . 37
2.8 Arranjo de seis propulsores para simulações. . . . . . . . . . . . . . . 40
3.1 Aproximação da Força de Propulsão utilizando Mínimos Quadrados. . 46
3.2 Deslocamento pequeno na propulsão. . . . . . . . . . . . . . . . . . . 47
3.3 Sistema Linear do ROV em SIMULINK. . . . . . . . . . . . . . . . . 48
3.4 Sinais de Entrada para Simulação Sistema Linearizado ROV. . . . . . 49
3.5 Simulação Sistema Linearizado ROV, Estados x, y, z, φ, θ e ψ. . . . . 50
4.1 Diagrama de Bloques Controlador Feedback. . . . . . . . . . . . . . . 53
4.2 Controlador por Realimentação para Sistemas Lineares sem Trans-
missão Direta. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
4.3 Índice de Estabilidade. . . . . . . . . . . . . . . . . . . . . . . . . . . 61
4.4 Controlador LQR com sinal de Referência. . . . . . . . . . . . . . . . 61
4.5 Arquitetura Observador Luenberger. . . . . . . . . . . . . . . . . . . 63
5.1 Simulação Sistema Não Linear ROV. Sem Forças de propulsão agindo. 67
5.2 Simulação Sistema Não Linear ROV. Força de propulsão no eixo x. . 68
5.3 Simulação Sistema Não Linear ROV. Ponto de Operação e Sintoniza-
ção Método de Bryson. . . . . . . . . . . . . . . . . . . . . . . . . . . 71
xi

5.4 Simulação Sistema Não Linear ROV. Ponto de Operação e Sintoniza-
ção Método de Bryson (20 min). . . . . . . . . . . . . . . . . . . . . . 72
5.5 Mapa de Polos e Zeros para Sistema em Malha Fechada, Sintonização
Método de Bryson. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
5.6 Simulação Sistema Não Linear ROV. Estados com referência z = 1m,
Sintonização Bryson. . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
5.7 Simulação Sistema Não Linear ROV. Entradas com referência z =
1m, Sintonização Bryson. . . . . . . . . . . . . . . . . . . . . . . . . . 75
5.8 Simulação Sistema Não Linear ROV. Estados com referência z = 1m,
Sintonização Bryson com Saturador. . . . . . . . . . . . . . . . . . . 76
5.9 Simulação Sistema Não Linear ROV. Entradas com referência z =
1m, Sintonização Bryson com Saturador. . . . . . . . . . . . . . . . . 77
5.10 Comparação Velocidades u, v e w do Controlador e do Observador
com matriz Qe = 1000Q. . . . . . . . . . . . . . . . . . . . . . . . . . 78
5.11 Comparação Estados u, v, w, p, q e r do Controlador e do Observador
com Sintonização Manual, primeira tentativa. . . . . . . . . . . . . . 79
5.12 Comparação Estados x, y, z, φ, θ e ψ do Controlador e do Observador
com Sintonização Manual, primeira tentativa. . . . . . . . . . . . . . 80
5.13 Comparação Estados x, y, z, φ, θ e ψ do Controlador e do Observador
com Sintonização Manual. . . . . . . . . . . . . . . . . . . . . . . . . 81
5.14 Estados u, v, w, p, q e r Controlador e Observador Sintonização Manual. 82
5.15 Controlador submetido a Perturbações. Velocidade Água Constante,
teste 1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
5.16 Controlador submetido a Perturbações. Velocidade Água Constante,
teste 2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
5.17 Controlador submetido a Perturbações. Velocidade Água Constante,
teste 3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
B.1 Sistema Não Linear do ROV em SIMULINK. . . . . . . . . . . . . . . 100
D.1 Valores aproximados de CX (α) e CX (β). . . . . . . . . . . . . . . . . 103
D.2 Valores aproximados de CY (β) e CY (γ). . . . . . . . . . . . . . . . . 104
D.3 Valores aproximados de CZ (α) e CZ (γ). . . . . . . . . . . . . . . . . 105
D.4 Valores aproximados de CK (γ), CM (α) e CN (β). . . . . . . . . . . . 106
xii

Lista de Tabelas
2.1 Notação usada para veículos submarinos. . . . . . . . . . . . . . . . . 9
2.2 Variáveis para a descrição da Dinâmica do Corpo Rígido. . . . . . . . 16
3.1 Valores de propulsão para o Ponto de Operação. . . . . . . . . . . . . 44
3.2 Aproximação de Taylor para variáveis próximas de zero. . . . . . . . . 45
5.1 Valores Máximos para os Estados e Entradas do Sistema. . . . . . . . 70
A.1 Valores Parâmetros ROV MURS 300 MK II. . . . . . . . . . . . . . . 95
A.2 Valores Parâmetros Propulsores. . . . . . . . . . . . . . . . . . . . . . 96
xiii

Lista de Símbolos
Bacop Matriz de Acoplamento dos Propulsores, p. 38
CA Matriz de Coriolis e Forças Centrípetas Adicional, p. 28
C∗F (σ), C∗T (σ) Coe�cientes de empuxo e torque da hélice, p. 35
CRB Matriz de força de Coriolis e força Centrípeta do corpo rígido,
p. 21
Dhel Diâmetro da Hélice do Propulsor, p. 35
I0 Tensor de Inércia do corpo, p. 16
Ixx Momento de Inércia Eixo x, p. 17
Iyy Momento de Inércia Eixo y, p. 17
Izz Momento de Inércia Eixo z, p. 17
J Índice de desempenho Regulador de Horizonte de Tempo In�-
nito, p. 58
Ju Índice de desempenho para Entradas, p. 55
Jx Índice de desempenho para Estados, p. 55
K Momento Eixo x, p. 9
M Momento Eixo y, p. 9
MA Matriz de Massa Adicional, p. 25
MRB Matriz de inércia do corpo rígido, p. 21
N Momento Eixo z, p. 9
N2 (η2) Matriz de Rotação Total de Rotação, p. 15
OO Origem Sistema Móvel, p. 16
xiv

Ppi Vetor de Orientação da Força de Propulsão, p. 36
Q Matriz de Ponderação de Estados, p. 55
R Matriz de Ponderação de Entradas, p. 55
Rpi Vetor de Localização do Propulsor, p. 36
Rx Matriz de Rotação sobre o eixo x, p. 12
Ry Matriz de Rotação sobre o eixo y, p. 12
Rz Matriz de Rotação sobre o eixo z, p. 12
X Força Eixo x, p. 9
Y Força Eixo y, p. 9
Z Força Eixo z, p. 9
α, β, γ Ângulos de Ataque, Deriva e Ataque lateral, p. 30
N1 (η2) Matriz de Rotação Total de Translação, p. 14
η1 Vetor Posição, p. 11
η2 Vetor Orientação, p. 11
∀ Volume de �uido deslocado pelo veículo, p. 32
S Sistema Linear de Estados, p. 54
φ Orientação Eixo x, p. 9
ψ Orientação Eixo z, p. 9
ρ Densidade do �uido, p. 32
τ1 Vetor Força, p. 11
τ2 Vetor Momento, p. 11
τRB Vetor das forças e momentos resultantes agindo no corpo rígido,
p. 21
θ Orientação Eixo y, p. 9
υ Vetor das velocidades linear e angular do veículo, p. 21
υ1rel Velocidade de translação relativa do veículo, p. 29
xv

υ1 Vetor Velocidade Translação, p. 11
υ2 Vetor Velocidade Rotação, p. 11
g Aceleração da gravidade, p. 32
m Massa Total do Corpo, p. 32
npi Velocidade rotacional da i-ésima hélice, p. 35
p Velocidade Rotação Eixo x Móvel, p. 9
q Velocidade Rotação Eixo y Móvel, p. 9
r Velocidade Rotação Eixo z Móvel, p. 9
rB Vetor Centro de Flutuação, p. 32
rG Vetor Centro de Gravidade, p. 16
u Velocidade Translação Eixo x Móvel, p. 9
v Velocidade Translação Eixo y Móvel, p. 9
vci Velocidade dá água passando pelo disco da i-ésima hélice, p.
35
w Velocidade Translação Eixo z Móvel, p. 9
x Posição Eixo x, p. 9
y Posição Eixo y, p. 9
z Posição Eixo z, p. 9
xvi

Lista de Abreviaturas
AUV Autonomous Underwater Vehicle, p. 3
CG Centro de Gravidade, p. 10
LQR Regulador Quadrático Linear - Linear Quadratic Regulator, p.
52
LTI Sitema Linear Invariante no Tempo - Linear Time Invariant,
p. 52
MIMO Multiple Input Multiple Output, p. 52
MUV Manned Underwater Vehicle, p. 3
PID Controlador Proporcional Integral Derivativo, p. 2
ROV Veículo Operado Remotamente - Remotely Operated Vehicle,
p. 1
SISO Single Input Single Output, p. 52
SNAME Society of Naval Architects and Marine Engineers, p. 9
UUV Unmanned Underwater Vehicle, p. 3
VANT Veículo Aéreo Não Tripulado, p. 52
xvii

Capítulo 1
Introdução
A existência de grandes reservatórios de petróleo o�shore no Brasil é um dos respon-
sáveis pelo maior crescimento na industria Brasileira. Em maio de 2012, a Petrobras
con�rmou uma nova grande reserva no pré-sal da Bacia de Campos [1], estima-se que
possua um volume recuperável de 700 milhões de barris de petróleo e 545 milhões de
barris de óleo equivalentes de gás natural. Em 2010, foi reportado que as reservas de
petróleo do Brasil cresceram graças ao grande número de novos poços encontrados
no litoral do país. Adicionalmente, sabe-se que a maior parte do petróleo e do gás
brasileiro está sob o solo marinho [2]. Portanto, as atividades de pesquisa por no-
vos poços, quanto as atividades de perfuração, extração e transporte além de serem
mantidas, serão aumentadas com o decorrer do tempo.
O transporte dos hidrocarbonetos desde o leito do mar até as plataformas e na-
vios é realizado através de risers, os quais devem suportar os esforços e trabalho ao
longo dos anos, sofrendo danos devido a múltiplos fatores físicos, químicos e am-
bientais, tornando-se necessário o desenvolvimento de planos de manutenção tanto
preventivos quanto corretivos. Para realizar essas inspeções, frequentemente são
empregados ROVs (Remotely Operated Vehicles) dotados de câmeras, percorrendo
os risers ao longo da trajetória entre a plataforma e os equipamentos localizados no
solo marinho, vide Figura 1.1.
Empresas como a Petrobras contratam os serviços de ROVs de empresas for-
necedoras destes equipamentos. Um trabalho de mergulho para robôs submarinos
demanda uma complexa logística, incluindo contratar ou dispor de navios com a
capacidade de acolher a Estação de Controle, a Unidade de Potência, e o carretel do
cabo umbilical, além de contar com os equipamentos para garantir com segurança a
descida e posterior retorno ao bordo do veículo.
Contudo, o custo de cada operação com ROVs precisa de um alto orçamento.
Adicionalmente, com o avanço das operações para águas cada vez mais profundas,
a proteção e segurança na navegação se torna de vital importância. Por isto, o
desenvolvimento de técnicas de posicionamento dinâmico e assistência na operação
1

Figura 1.1: ROV Seaeye Falcon da Empresa SAAB Technologies.
cada vez mais con�áveis, são alvo de estudo contínuo por parte da engenharia.
Como se verá mais adiante neste trabalho, diversos trabalhos de controle têm sido
apresentados ao longo destes anos, sendo a maioria deles baseados em técnicas de
controle não linear. Porém, o estudo da estabilidade também chega a ser complexo
dependendo do sistema a se controlar. Pelo contrário, a teoria de controle linear
não registra muitos trabalhos na literatura, devido às limitações de robustez que
apresenta e ao alto grau de não linearidades dos modelos dinâmicos dos veículos
submersos. A grande vantagem dos sistemas lineares é a facilidade de análise e
implementação.
Autores como MA et al. [3] apresentaram a otimização de um controlador PID
utilizando uma função de energia, a qual constitui a base do Controle Ótimo.
SOYLU et al. [4] utilizaram um controle PID adaptativo para controlar a posi-
ção do manipulador de um ROV. Entretanto, GOMES et al. [5] mostraram uma
comparação entre duas técnicas de controle não linear.
O Controle Ótimo tem apresentado por sua vez, diversos estudos e implementa-
ções na área aerospacial, como relatado por LUNGU et al. [6], TEIMOORI et al. [7],
YI-RUI e YANGMIN [8], mostrando bons resultados, além de facilidade no estudo
da estabilidade do sistema em regime e da sintonização do controlador.
Desta forma, a implementação de uma técnica de controle ótimo linear em um
ROV de trabalho, pode se tornar um ponto de referência na área da robótica subma-
rina, destacando as vantagens e desvantagens que este tipo de abordagens poderiam
oferecer em relação ao desempenho quando comparadas com enfoques não lineares.
2

1.1 Classi�cação dos ROVs
Os veículos submarinos podem ser classi�cados em dois grupos principais: Veículos
submarinos tripulados (MUVs: Manned Underwater Vehicles) e Veículos subma-
rinos não tripulados (UUVs: Unmanned Underwater Vehicles) [9], sendo que os
ROVs pertencem a este último grupo, da mesma forma que os Veículos submarinos
autônomos (AUV: Autonomous Underwater Vehicles), ver Figura 1.2.
O termo ROV abrange um amplo grupo de equipamentos, desta forma não se
pode de�nir como "padrão", um único veículo. Além dos diversos projetos, o grande
número de tarefas que podem desempenhar, torna mais difícil classi�car estes veícu-
los dentro de um critério padronizado. A International Marine Contractors Associa-
tion (Associação Internacional de Contratantes Marítimos) estabelece no Código de
Práticas para a Segurança e Operação E�ciente de Veículos Operados Remotamente
[10] a seguinte classi�cação para ROVs.
Figura 1.2: Classi�cação dos veículos submarinos.
• Classe I. ROVs de observação.
Estes veículos são pequenos, equipados somente com sonar, câmera e luzes.
Destinam-se principalmente para observação, porém, podem conter mais um
sensor (como um equipamento de proteção catódica, ou como uma câmera de
vídeo adicional).
• Classe II. ROVs de observação com opção de carga.
Estes veículos estão equipados com duas câmeras/sonares simultaneamente
visíveis e padronizados, são capazes de manipular vários sensores adicionais.
3

Também podem ter capacidade básica de manipulação. Devem ser capa-
zes de operar sem perda da função original, enquanto carregam dois senso-
res/manipuladores adicionais.
• Classe III. Veículos de classe de trabalho.
Estes veículos são grandes o su�ciente para transportar sensores e/ou mani-
puladores adicionais. Os veículos da classe III normalmente têm a capacidade
de multiplexação, que permitem operar os sensores adicionais e ferramentas
sem ser do tipo de "conexão com �o"através do sistema de umbilical. Esses
veículos geralmente são maiores e mais potentes do que as classes I e II. São
possíveis variações da capacidade de largura, profundidade e potência.
• Classe IV. Veículos rebocadores e de rastejamento.
Veículos rebocados são puxados através da água por embarcações ou por um
guincho. Alguns veículos possuem potência de propulsão limitada e são capa-
zes de manobras limitadas. Veículos de rastejamento por sua vez, utilizam um
sistema de rodas ou de esteira para se deslocar através do fundo do mar, em-
bora alguns possam navegar distâncias limitadas. Esses veículos tipicamente
são grandes e pesados, e frequentemente são desenvolvidos para alguma tarefa
especí�ca, tal como entrincheirar cabos e/ou tubulações.
• Classe V. Protótipos ou Veículos em desenvolvimento.
Os veículos desta classe incluem aqueles que ainda estão sendo desenvolvidos e
são considerados protótipos. Veículos de propósito especial que não conseguem
se encaixar em alguma das outras classes são considerados também da classe
V. Esta classe inclui os AUVs.
1.2 Intervenção com ROVs
Todas as atividades executadas sob a superfície do mar são conhecidas como Inter-
venções submarinas. Geralmente, os ROVs são empregados para essas atividades
[11], as quais são citadas a seguir.
• Site survey (Metodologia aplicada na inspeção técnica minuciosa do local que
será objeto da instalação de uma nova infra-estrutura);
• Assistência na perfuração;
• Assistência na instalação;
• Assistência na operação;
4

• Inspeção; e
• Manutenção e reparação.
A inspeção é usada como uma rotina fundamental para as estruturas onde é
previsível a presença de danos devido à vibração das linhas de �uxo, vãos livres,
erosão interna, corrosão, etc. Uma inspeção inclui:
• Inspeção visual geral, incluindo medições catódicas e medições de crescimento
marinho. Na Figura 1.3 se apresenta um exemplo deste tipo de atividade;
• Inspeção visual próxima, sendo necessária limpeza física para efetuar a inspe-
ção, medições de proteção catódica, detecção de fendas por meio de Ensaios
Não Destrutivos ;
• Inspeção detalhada, incluindo inspeção visual próxima, detecção de fendas,
medição de espessura de paredes e detecção de partes inundadas; e
• Rotinas de inspeção de tubulações incluindo rastreamento e medição de pro-
fundidade de cobertura para tubulações enterradas. Também aplicável para
umbilicais de controle e cabos de potência/controle.
Na industria do petróleo e gás o�shore, as atividades de inspeção requerem que
o ROV se desloque seguindo a tubulação chamada de Riser, mantendo a orientação
de modo que o ROV sempre enxergue o riser para que a câmera frontal tome o vídeo
continuamente. Durante estas inspeções, também é preciso que o ROV se posicione
de forma dinâmica enquanto se realiza uma observação detalhada em algum ponto
especí�co do riser, tal como nos �anges, ou dani�cações encontradas.
1.3 Objetivos
Seguem os objetivos a cumprir nesta dissertação.
• Determinar um modelo matemático que permita simular o comportamento
dinâmico de um veículo submarino tipo ROV.
• Projetar uma estratégia de controle ótimo para um robô submarino tipo ROV.
• Implementar o sistema de controle no ambiente SIMULINK de MATLAB, o
qual permita modi�car os parâmetros relacionados à dinâmica do movimento,
e permita ajustar as componentes do sistema de controle.
• Descrever os resultados obtidos da simulação e sintonização do controlador
ótimo, destacando as principais vantagens e desvantagens encontradas.
5

Figura 1.3: ROV de inspeção geral. Tomada de http://www.divetechltd.ca/
Para este trabalho, não é considerado o projeto mecânico ou construção de pro-
tótipos para testes.
1.4 Organização da Dissertação
Para o desenvolvimento deste trabalho, foram considerados dois grandes alvos de
estudo. O primeiro relacionado com a dinâmica de corpos rígidos submersos. O
segundo, com técnicas de controle para sistemas dinâmicos não lineares.
Com o objetivo de facilitar a sua revisão e compreensão, esta dissertação foi
dividida em capítulos segundo a ordem de desenvolvimento do trabalho. Segue a
especi�cação destas partes junto a uma breve descrição dos conteúdos.
O capítulo 2 descreve o estudo da modelagem dinâmica de corpos submersos,
focada a ROVs, explicando a natureza tanto cinemática quanto dinâmica destes cor-
pos. Assim, se estabelece o relacionamento matemático dos principais esforços que
agem num veículo submarino, tais como os esforços hidrodinâmicos inerciais e de
arrasto, os esforços de restauração incluindo o empuxo e o peso. Depois se apresenta
uma abordagem quase-estática para modelar a dinâmica de propulsão dada por um
conjunto determinado de propulsores, arranjados no veículo dependendo das carac-
terísticas de construção. Finalmente, são expostas as considerações de simpli�cação
para o modelo adotado, resumindo de forma matricial, o comportamento dinâmico
nos seis graus de liberdade do ROV.
O capítulo 3 está destinado a descrever o procedimento de linearização do modelo
de�nido no capítulo 2, apresentando a metodologia utilizada e os resultados obtidos
nas equações dinâmicas do ROV.
6

O capítulo 4 apresenta na parte inicial, a teoria de controle ótimo e seu funda-
mento, explicando de forma matemática, o conceito de regulação baseado em uma
função de custo. Assim, se apresentam dois casos de controles suscetíveis de ser
utilizados dependendo das características de regime que o projeto demande. Na
parte �nal do capítulo, é apresentado o problema do observador de estados ótimo
precisado na maioria de implementações, devido a impossibilidade de medir todos
os estados do sistema de controle.
O capítulo 5 destinou-se para resumir o processo de implementação da lei de
controle ótima no modelo dinâmico, expondo os resultados do procedimento de
sintonização realizado em função da análise do comportamento simulado do sistema.
Primeiro, foi considerado o caso ideal sem perturbações externas agindo sobre o
ROV, depois foi implementado o observador ótimo. Com este conjunto foi testado
novamente o sistema, porém com perturbações devidas a correntezas de água, re-
sintonizado o controlador e observador com o objetivo de estabelecer as matrizes de
controle de�nitivas ao tempo de analisar as limitações do controlador simulado.
O capítulo 6 resume os resultados obtidos, gerando as conclusões deste estudo e
abre a possibilidade de complementá-los em futuros trabalhos e implementações.
Os valores e magnitudes utilizados para as simulações estão contidos no anexo
A. O anexo B relaciona as equações não lineares assim como as matrizes do modelo
não linear. As equações linearizadas como resultado do procedimento de linearização
estudado, são resumidas no anexo C. No anexo D são apresentadas as aproximações
realizadas às curvas de parâmetros hidrodinâmicos pertencentes ao ROV MURS 300
MK II.
7

Capítulo 2
Dinâmica de um ROV
Devido ao aumento das operações o�shore em águas profundas (superiores a 1000m),
os veículos remotamente operados tem-se tornado a principal ferramenta nas tare-
fas de construção, manutenção e reparação dos diversos equipamentos submarinos.
Estas tarefas demandam pessoal experiente na pilotagem destes robôs graças aos pro-
blemas envolvidos, tal como o controle de posição sob correntezas de água agindo
no veículo. Por isto, há alguns anos, o interesse em desenvolver ferramentas que
apoiem a operação de ROVs, especialmente no posicionamento dinâmico durante as
operações de supervisão de construção e de inspeção, tem aumentado consideravel-
mente.
A de�nição de um bom modelo dinâmico, que facilite entender o comportamento
do sistema robótico, se traduz na simpli�cação para calcular, testar e implementar
as diferentes técnicas de controle em função do objetivo a atingir, até mesmo facilita
a interpretação dos resultados a se obter.
Os sistemas submarinos tem sido amplamente estudados desde a década dos
anos oitenta, motivo pelo qual, na bibliogra�a se encontra uma grande variedade
de metodologias, procedimentos e aproximações para estudar a dinâmica envolvida
nestes veículos.
De forma geral, pode-se resumir o procedimento para construir um modelo di-
nâmico nos passos a seguir:
1. Determinar os sistemas de coordenadas para transladar as grandezas desde o
ROV até o centro de operação, e vice-versa;
2. De�nir e descrever as forças e momentos que agem no veículo;
3. Determinar os coe�cientes e parâmetros relacionados às forças e momentos
descritos no item anterior. Se for o caso de projetar um ROV novo, precisa-se
obter os diferentes coe�cientes por meio de testes de laboratório; e
4. Avaliar o comportamento do modelo através de simulações.
8

Assim, neste capítulo são introduzidos os principais conceitos para modelar o
sistema dinâmico de um ROV, começando pelos sistemas de coordenadas, seguido
das formulações para os fenômenos que geram as forças e momentos que agem e
regem o comportamento do veículo. Depois, será apresentado o modelo simpli�cado
de propulsão abordado neste trabalho, considerando a matriz de acoplamento para
poder introduzir um arranjo de propulsores especí�cos dentro do modelo dinâmico.
Depois, serão feitas algumas considerações para simpli�car a modelagem devido
às características construtivas do ROV. Finalmente serão apresentados os modelos
estudados e considerados para o desenvolvimento desta dissertação.
Devido aos sistemas atuais, desenvolvidos para trabalhos em grandes profundi-
dades, possuírem uma gaiola desenhada para diminuir os efeitos do cabo umbilical,
já que desce junto com o ROV até uma distância a partir da qual o veículo se separa
para realizar a tarefa programada, neste modelo não serão considerados estes efeitos.
2.1 Sistemas de Coordenadas
Para estudar a dinâmica de um veículo submarino, FOSSEN [12] estabelece que
precisa-se de�nir os seis graus de liberdade relacionados à posição e orientação de um
corpo rígido. Estes componentes são conhecidos comoAvanço, Deriva, Arfagem,
Balanço, Caturro e Guinada (Surge, Sway, Heave, Roll, Pitch e Yaw).
A SNAME (Society of Naval Architects and Marine Engineers) estabeleceu [13]
a nomenclatura para as diferentes grandezas utilizadas em navios e outros equipa-
mentos marítimos (incluindo ROVs).
Tabela 2.1: Notação usada para veículos submarinos.
Grau de LiberdadePosição eOrientação
VelocidadesLinear e Angular
Forçase Momentos
Movimento no eixo x (Avanço) x u XMovimento no eixo y (Deriva) y v YMovimento no eixo z (Arfagem) z w ZRotação sobre o eixo x (Balanço) φ p KRotação sobre o eixo y (Caturro) θ q MRotação sobre o eixo z (Guinada) ψ r N
Assim, a posição de um veículo marinho é descrita pelo vetor formado pelo
Avanço, Deriva e Arfagem, no entanto, a orientação é dada pelo vetor formado pelo
Balanço, Caturro e Guinada, como visto na Tabela 2.1. Além disso, para analisar
a dinâmica de movimento, precisa-se estabelecer dois sistemas de coordenadas: o
primeiro �xo ao corpo do veículo chamado de Sistema Móvel (xOyOzO), porque é
aquele que está em movimento, e o segundo chamado de Sistema Inercial (xyz), no
qual é referenciado o movimento do sistema móvel.
9

Y
X
Z
O
Xo
Yo
Zo
Oo
u (Avanço)
v (Deriva)
w (Arfagem)
p (Balanço)
q (Caturro)
r (Guinada)
Figura 2.1: Sistema de Coordenadas Inercial e Móvel para Veículos Submarinos.
De�nir ambos os sistemas permite obter e calcular as grandezas que agem direta-
mente no veículo através dos sensores embarcados, para depois serem transladados
para o sistema inercial e determinar a posição e orientação em relação ao centro de
operação.
Como segue na Figura 2.1, pode-se identi�car o sistema �xo no veículo ou móvel
xOyOzO e o sistema inercial �xo ao navio ou algum ponto �xo na terra xyz. Se o
centro de gravidade (CG), está localizado no plano principal de simetria, a origem
O do sistema móvel é geralmente escolhido para coincidir com o CG.
Cabe ressaltar da Tabela 2.1 que os valores de posição e orientação são descritos
em relação ao sistema inercial, enquanto as velocidades lineares e angulares são
de�nidos no sistema móvel. Além disso, suas representações vetoriais são descritas
nas Equações 2.1, 2.2, 2.3, 2.4, 2.5 e 2.6.
Para determinar o curso relativo do veículo em relação ao sistema inercial fre-
quentemente é empregado o método de Ângulos de Euler. Para explicar este procedi-
mento, primeiro deve ser introduzido o conceito de Matriz de Rotação, apresentado
a seguir. Com estes tópicos abordados, pode-se descrever totalmente a cinemática
do ROV.
10

η1 =
x
y
z
(2.1)
η2 =
φ
θ
ψ
(2.2)
υ1 =
u
v
w
(2.3)
υ2 =
p
q
r
(2.4)
τ1 =
X
Y
Z
(2.5)
τ2 =
K
M
N
(2.6)
2.1.1 Matrizes de Rotação
SICILIANO et al. [14] estabelecem que um corpo rígido é totalmente descrito no
espaço por sua posição e orientação em relação a um sistema de referência.
De�nindo o sistema móvel OO como sendo um sistema ortonormal, a descrição
deste no sistema de referência ou inercial em função dos vetores unitários, é apre-
sentado na Figura 2.2 e descrito na Equação 2.7.
x' = x′xx + x′yy + x′zz
y' = y′xx + y′yy + y′zz
z' = z′xx + z′yy + z′zz
(2.7)
De forma matricial, os três vetores são expressos na Equação 2.8, onde as com-
ponentes de cada vetor unitário são os cossenos diretores dos eixos do sistema móvel
em relação ao sistema inercial.
R =
x' y' z'
=
x′x y′x z′x
x′y y′y z′y
x′z y′z z′z
(2.8)
11

Y
X
Z
Ox’
y’
z’
Xo
Yo
Zo
Oo
x’o
y’o
z’o
Figura 2.2: Posição e Orientação de um corpo rígido.
Considerando uma rotação sendo o resultado de rotações elementares do sistema
de referência sobre um dos eixos coordenados, são de�nidas três possíveis rotações
elementares em função dos cossenos diretores. Determinando uma rotação positiva
no sentido contra horário (regra da mão direita), as matrizes são expressas a seguir:
Rx (φ) =
1 0 0
0 cosφ − sinφ
0 sinφ cosφ
(2.9)
Ry (θ) =
cos θ 0 sin θ
0 1 0
− sin θ 0 cos θ
(2.10)
Rz (ψ) =
cosψ − sinψ 0
sinψ cosψ 0
0 0 1
(2.11)
Alguns autores como FOSSEN [12] de�nem as matrizes de rotação baseados no
Teorema de Rotação de Euler, utilizando a regra da mão esquerda. Desta forma, as
matrizes resultantes são transpostas às Equações 2.9, 2.10 e 2.11. Isto deve ser levado
em consideração quando se escolhe um método para de�nir tanto a cinemática de
12

um corpo rígido quanto a sua dinâmica, por causa dos produtos vetoriais envolvidos.
Nesta dissertação, foi adotada a regra da mão direita.
2.1.2 Ângulos de Euler
As matrizes de rotação oferecem uma descrição redundante da orientação, de fato,
sua composição é de nove (9) elementos não independentes porém, relacionados por
seis (6) restrições devidas às condições de ortogonalidade.
Uma representação mínima é obtida usando o conjunto dos três (3) ângulos
de�nidos na Equação 2.2 (η2 = [φ θ ψ]T ). Assim, a matriz de rotação descrevendo
a orientação de um corpo rígido é de�nida como sendo a sequência de três rotações
elementares, garantindo que duas rotações sucessivas não são realizadas sobre eixos
paralelos. Desta forma, é possível obter doze (12) diferentes combinações chamadas
de Tripla de Ângulos de Euler ou simplesmente Ângulos de Euler.
SICILIANO et al. [14], CRAIG [15] apresentam diferentes descrições para estes
conjuntos, tais como os Ângulos ZYZ, Ângulos ZYX, Ângulos XYZ, Ângulos RPY
entre outros. Estes últimos são bastante utilizados nas industrias naval e aeroespa-
cial.
Neste trabalho, foram adotados os ângulos XYZ, conhecidos como Ângulos RPY
(Roll, Pitch e Yaw) segundo os nomes em inglês para Balanço, Caturro e Guinada,
para descrever a orientação do ROV no sistema móvel em relação ao sistema inercial.
Existem duas formas para realizar os cálculos, descritas a seguir:
• Cálculo baseado no Sistema de Referência (Inercial)
1. Rotacionar o Sistema de Referência (Inercial) de um ângulo ψ sobre o
eixo z (Guinada). Esta rotação é descrita pela matriz Rz (ψ) da Equação
2.11.
2. Rotacionar o Sistema de Referência de um ângulo θ sobre o eixo y (Ca-
turro). Esta rotação é descrita pela matriz Ry (θ) da Equação 2.10.
3. Rotacionar o Sistema de Referência de um ângulo φ sobre o eixo x (Ba-
lanço). Esta rotação é descrita pela matriz Rx (φ) da Equação 2.9.
• Cálculo baseado no Sistema Atual
1. Rotacionar o Sistema de Referência de um ângulo φ sobre o eixo x (Ba-
lanço). Esta rotação é descrita pela matriz Rx (φ) da Equação 2.9.
2. Rotacionar o Sistema Atual de um ângulo θ sobre o eixo y′ (Caturro).
Esta rotação é descrita pela matriz Ry′ (θ) da Equação 2.10.
3. Rotacionar o Sistema Atual de um ângulo ψ sobre o eixo z′′ (Guinada).
Esta rotação é descrita pela matriz Rz′′ (ψ) da Equação 2.11.
13

Tendo em vista que a matriz resultante, quando se realizam rotações sucessivas
sobre o sistema de referência é obtida pre-multiplicando as matrizes de rotação,
ambos os procedimentos são equivalentes, sendo expressos na Equação 2.12.
N1 (η2) = Rx (φ)Ry (θ)Rz (ψ)
N1 (η2) =
cos θ cosψ sinφ sin θ cosψ − cosφ sinψ cosφ sin θ cosψ + sinφ sinψ
cos θ sinψ sinφ sin θ sinψ + cosφ cosψ cosφ sin θ sinψ − sinφ cosψ
− sin θ sinφ cos θ cosφ cos θ
(2.12)
2.1.3 Transformação Velocidade Linear
O objetivo de obter um operador através dos ângulos de Euler é descrever o Vetor
de Velocidade Linear descrito no sistema móvel �xo no robô, no sistema inercial,
assim:
η1 = N1 (η2) υ1 (2.13)
Obtendo a matriz inversa de N1 (η2) é possível representar no sistema móvel
as grandezas calculadas no sistema inercial, sendo empregado mais a frente nesta
dissertação no caso do cálculo das forças de restauração.
O procedimento para calcular a matriz inversa de N1 (η2) se descreve na Equação
2.14, e considera as seguintes propriedades das matrizes ortogonais.
• A transposta de uma matriz ortogonal é igual a sua matriz inversa (RT (Θ) =
R−1 (Θ));
• As matrizes do grupo especial ortonormal são inversíveis, portanto, as matrizes
obtidas nos ângulos de Euler herdam esta propriedade; e
• O determinante de uma matriz ortogonal é igual a um (detRT (Θ) = 1).
N−11 (η2) = (Rx (φ)Ry (θ)Rz (ψ))−1
= (Rx (φ)Ry (θ)Rz (ψ))T
= RTz (ψ) (Rx (φ)Ry (θ))T
= RTz (ψ)RT
y (θ)RTx (φ)
(2.14)
Gerando a expressão da Equação 2.15.
14

N−11 (η2) =
cos θ cosψ cos θ sinψ − sin θ
sinφ sin θ cosψ − cosφ cosψ sinφ sin θ sinψ + cosφ cosψ sinφ cos θ
cosφ sin θ cosψ + sinφ sinψ cosφ sin θ sinψ − sinφ cosψ cosφ cos θ
(2.15)
2.1.4 Transformação Velocidade Angular
O Vetor de Velocidade Angular do ROV de�nido no sistema móvel υ2 expresso em
2.4 é representado no sistema inercial pela derivada do vetor 2.2 (η2 =[φ θ ψ
]T)
por meio do operador N2 (η2).
η2 = N2 (η2) υ2 (2.16)
O procedimento para encontrar este operador é diferente do desenvolvido para
N1 (η2), devido a υ2 não poder ser integrado de forma direta, pelo fato que∫ t0υ2 (τ) dτ não possui uma interpretação física direta, como explicado por FOS-
SEN [16]. Assim, se descreve υ2 como a combinação de componentes vetoriais das
derivadas angulares em cada eixo, obtidas da rotação do sistema móvel, como segue
na Equação 2.17.
υ2 =
φ
0
0
+RTx (φ)
0
θ
0
+RTx (φ)RT
y (θ)
0
0
ψ
= N−12 (η2) η2 (2.17)
A partir da expressão 2.17 são obtidas as expressões para N−12 (η2) e N2 (η2) e
apresentadas nas matrizes 2.18 e 2.19.
N−12 (η2) =
1 0 − sin θ
0 cosφ sinφ cos θ
0 − sinφ cosφ cos θ
(2.18)
N2 (η2) =
1 sinφ tan θ cosφ tan θ
0 cosφ − sinφ
0sinφ
cos θ
cosφ
cos θ
(2.19)
Em resumo, pode-se expressar a velocidade de movimento de um sistema móvel
em relação ao sistema inercial, ou de referência, através das transformações descritas
em 2.12 e 2.19 para os seis graus de liberdade, compactadas como η = N (η2) υ e
15

apresentadas na Equação 2.20.[η1
η2
]=
[N1 (η2) 03×3
03×3 N2 (η2)
][υ1
υ2
](2.20)
2.2 Dinâmica de um Corpo Rígido
Depois de ter de�nido a cinemática do robô submarino, o segundo passo é de�nir as
forças e momentos que agem sobre o ROV. Para descrever as equações de movimento,
são levados em consideração os seguintes pontos:
1. O veículo é um corpo rígido. Assim, são desconsideradas as forças agindo sobre
elementos individuais de massa; e
2. O sistema de coordenadas �xo na terra é inercial. Desta forma, são desconsi-
deradas as forças devidas ao movimento relativo da terra.
Um objeto é considerado um Corpo Rígido se não está sujeito a deformações
geradas por forças externas, ou seja, é um sistema no qual a posição relativa das
partículas não muda. Embora as estruturas e máquinas reais não sejam absoluta-
mente rígidas e apresentem deformações devidas às cargas atuantes, o corpo rígido
é uma boa aproximação, porque considera desprezíveis tais deformações.
Para descrever as equações dinâmicas não lineares dos seis graus de liberdade de
um corpo rígido são utilizados os princípios da Mecânica Newtoniana e Lagrangi-
ana. Considerando um sistema de coordenadas �xo ao corpo xOyOzO girando com
velocidade angular υ2 (vide 2.4) sobre um sistema de coordenadas inercial xIyIzIcomo mostrado na Figura 2.3.
As expressões apresentadas nesta seção são deduzidas para o caso geral, no qual
a origem do sistema coordenado do corpo (OO) não coincide com seu centro de
gravidade (CG). Na Tabela 2.2, são resumidas as principais variáveis a se empregar
na descrição do Movimento Translacional e Rotacional do corpo rígido.
Tabela 2.2: Variáveis para a descrição da Dinâmica do Corpo Rígido.
Variável DescriçãoRepresentação
Vetorial
i, j, k Vetores unitários do sistema de coordenadas móvel
rG Centro de Gravidade xGi+ yGj + zGk
υ1 Velocidade translacional do corpo na origem OO ui+ vj + wk
υ2 Velocidade rotacional do corpo na origem OO pi+ qj + rk
τ1 Forças externas agindo no corpo Xi+ Y j + Zk
τ2 Momentos externos agindo no corpo Ki+Mj +NkI0 Tensor de Inércia do corpo
16

YI
XI
ZI
OI
XO
YO
ZO
OO
2ט
1ט
CG
Gט
rG
rC
rO
Figura 2.3: Movimento de um Corpo Rígido.
O Tensor de Inércia do corpo I0 referenciado ao sistema móvel �xo no corpo, com
a origem OO escolhida de forma arbitrária, é de�nido na Expressão 2.21. Este tensor
é uma matriz de�nida positiva e cumpre a propriedade de I0 = IT0 . Os elementos da
diagonal principal (Ixx, Iyy e Izz) são os Momentos de Inércia sobre os eixos xO, yOe zO, respectivamente, enquanto os elementos fora da diagonal (Ixy = Iyx, Iyz = Izy
e Ixz = Izx) são os Produtos de Inércia.
I0 ,
Ixx −Ixy −Ixz−Iyx Iyy −Iyz−Izx −Izy Izz
(2.21)
Com o intuito de simpli�car as equações de movimento de um corpo rígido, são
considerados dois casos, detalhados a seguir.
1. A origem do sistema coordenado OO coincide com o centro de gra-
vidade rG.
Esta é a forma mais simples das equações de movimento. Esta abordagem
implica que rG = [0 0 0]T e que os eixos de sistema coordenado móvel xOyOzOcoincide com os eixos principais de inércia. Caso não coincida, pode se determi-
nar um sistema coordenado adicional xCyCzC sendo o resultado de transformar
o sistema móvel para cumprir a condição, ou seja determinaria um tensor de
17

inércia tal que IC = diag {IxC , IyC , IzC}. Depois, são calculados os autovaloresde IC , ou seja os momentos de inércia do novo sistema. A desvantagem desta
aproximação é que o novo sistema de coordenadas difere dos eixos longitudinal,
lateral e normal de simetria do corpo.
2. A origem OO é escolhida para tornar I0 diagonal. O objetivo desta
aproximação é permitir que os eixos do sistema coordenado móvel �xo no corpo
coincidam com os eixos principais longitudinal, lateral e normal de simetria
do corpo, portanto, a origem do sistema xOyOzO pode ser escolhida tal que
seu tensor de inércia seja diagonal, ou seja I0 = diag {Ix0 , Iy0 , Iz0}, utilizandoo teorema de eixos paralelos.
Teorema dos Eixos Paralelos.
O tensor de inércia I0 ao redor de uma origem arbitrária O é dito como sendo:
I0 = IC −m(rGr
TG − rTGrGI3×3
)(2.22)
Na Equação 2.22 I3×3 é a matriz identidade e IC é o tensor de inércia sobre o
centro de gravidade rG. Expandindo esta equação, obtêm-se as seguintes expressões.
Ix = IxC +m (y2G + z2G)
Iy = IyC +m (x2G + z2G)
Iz = IzC +m (x2G + y2G)
(2.23)
Na Expressão 2.23, xG, yG e zG devem satisfazer:
x2G =−IxCyCIxCzCmIyCzC
y2G =−IxCyCIyCzCmIxCzC
z2G =−IxCzCIyCzCmIxCyC
(2.24)
2.2.1 Equações do Movimento de Translação
Para expressar o movimento de translação de um corpo, deve-se considerar a deri-
vada em função do tempo de um vetor r nos sistemas xyz e zOyOzO apresentada na
Equação 2.25, onde r representa a derivada no sistema inercial xyz entanto r é a
derivada no sistema móvel xOyOzO.
r = r + (υ2 × r) (2.25)
Da Figura 2.3, de�nem-se as Equações 2.26 e 2.27 que relacionam os vetores de
posição e velocidade do centro de gravidade e a origem do sistema móvel com relação
ao sistema inercial.
18

rC = rO + rG (2.26)
˙rC = ˙rO + ˙rG (2.27)
Empregando a Equação 2.25, para de�nir a derivada do centro de gravidade
(CG) e considerando que rG = 0 para um corpo rígido, obtém-se a expressão 2.28.
˙rG = rG + (υ2 × rG)
˙rG = υ2 × rG(2.28)
Considerando que υ1 = ˙rO, υG = ˙rC e substituindo a Equação 2.28 em 2.27,
obtém-se a Equação 2.29 que de�ne a Velocidade de Translação do centro de gravi-
dade de um corpo rígido.
υG = υ1 + (υ2 × rG) (2.29)
A segunda lei de Newton estabelece que a força total resultante no corpo rígido é
de�nida como o produto entre a massa total do corpo multiplicada pela derivada da
velocidade absoluta no centro de gravidade (CG) do corpo (vide 2.30). Utilizando
a Equação 2.29, obtém-se a Expressão 2.31.
F = mdυGdt
(2.30)
F = md
dt{υ1 + (υ2 × rG)} (2.31)
O fato de que o sistema móvel �xo ao corpo (xOyOzO) encontra-se em movimento
em relação ao sistema inercial (xyz), sugere que a orientação do primeiro sistema
coordenado varia em função do tempo. Desta forma torna-se necessário obter as
expressões das derivadas dos vetores unitários i, j e k com respeito ao sistemas de
coordenadas de eixos rotatórios, apresentadas por YUH [17] e expressas em 2.32.
di
dt= rj− qk
dj
dt= pk− ri
dk
dt= qi− pj
(2.32)
Implementado correspondentemente as expressões de 2.32 na Equação 2.31, são
obtidas as formulações que de�nem o movimento de translação do corpo, represen-
tadas na dinâmica de veículos submarinos pelo vetor τ1 (vide Equação 2.5) segundo
19

a Tabela 2.1, e resumidas nas Equações 2.33, 2.34 e 2.35.
X = m[u− vr + wq − xG
(q2 + r2
)+ yG (pq − r) + zG (pr + q)
](2.33)
Y = m[v − wp+ ur − yG
(r2 + p2
)+ zG (qr − p) + xG (pq + r)
](2.34)
Z = m[w − uq + vp− zG
(p2 + q2
)+ xG (pr − q) + yG (qr + p)
](2.35)
Para explicar os componentes das forças em cada coordenada, precisa-se rear-
ranjar as expressões anteriores como segue.
X = mu+m (wq − vr) +m (zGq − yGr) +m[yGpq + zGpr − xG
(q2 + r2
)](2.36)
Y = mv +m (ur − wp) +m (xGr − zGp) +m[zGqr + xGpq − yG
(r2 + p2
)](2.37)
Z = mw +m (vp− uq) +m (yGp− xGq) +m[xGpr + yGqr − zG
(p2 + q2
)](2.38)
Assim, das Equações 2.36, 2.37 e 2.38 se destacam os seguintes componentes:
• O primeiro termo representa a força devida à massa, de�nida na segunda lei
de Newton, e sendo agrupada na matriz de massa da Equação 2.45;
• O segundo termo representa as forças de Coriolis;
• O terceiro termo representa as forças devidas à aceleração tangencial do centro
de gravidade (CG); e
• O quarto termo representa as forças centrífugas agindo na origem OO devido
à rotação de CG em relação de OO.
2.2.2 Equações de Movimento de Rotação
De forma similar, o Momento resultanteM em relação à origem do sistema móvel OO
pode-se de�nir como o somatório do momento total gerado no centro de gravidade
CG e o momento produzido pela força resultante F, agindo a uma distância rG.
Esta relação é expressa na Equação 2.39.
M = MG + (rG × F ) (2.39)
O momento total no centro de gravidade MG é relacionado como a taxa de
variação do momento angular em CG e apresentado na Equação 2.40.
MG =dHG
dt(2.40)
20

OMomento Angular H de um corpo rígido em relação a um sistema de referência
�xo no corpo é de�nido como o produto do tensor de inércia I0 e o vetor de velocidade
angular υ2 (vide Equação 2.41).
H = I0υ2 =
Ixx −Ixy −Ixz−Iyx Iyy −Iyz−Izx −Izy Izz
p
q
r
(2.41)
Substituindo as equações 2.40 e 2.41 em 2.39, e realizando os cálculos correspon-
dentes obtém-se as equações que relacionam os momentos do corpo rígido descritos
no vetor τ2 2.6, apresentadas em 2.42, 2.43 e 2.44.
K = Ixxp+ (Izz − Iyy) qr − Ixz (pq + r) + Iyz(r2 − q2
)+ Ixy (pr − q)
+m [yG (w − uq + vp)− zG (v − wp+ ur)] (2.42)
M = Iyy q + (Ixx − Izz) rp− Ixy (qr + p) + Izx(p2 − r2
)+ Iyz (pq − r)
+m [zG (u− vr + wq)− xG (w − uq + vp)] (2.43)
N = Izz r + (Iyy − Ixx) pq − Iyz (pr + q) + Ixy(q2 − p2
)+ Izx (qr − p)
+m [xG (v − wp+ ur)− yG (u− vr + wq)] (2.44)
2.2.3 Representação Vetorial das Equações de movimento de
um Corpo Rígido
FOSSEN [16] agrupa as equações de movimento de um corpo rígido de�nidas em
2.33, 2.34, 2.35, 2.42, 2.43 e 2.44, de modo a facilitar os projetos de controle lineares
e não lineares dos seis (ou menos) graus de liberdade de um veículo marinho. Estas
equações são apresentadas de forma vetorial na expressão a seguir:
MRBυ + CRB (υ) υ = τRB (2.45)
Os componentes da Equação 2.45 são de�nidos como sendo:
• MRB: Matriz de inércia do corpo rígido;
• CRB: Matriz que agrupa os termos de força de Coriolis e força Centrípeta do
corpo rígido;
• υ = [u v w p q r]T : Vetor das velocidades linear e angular do veículo de�nido
no sistema de coordenadas móvel OO; e
• τRB = [X Y Z K M N ]T : Vetor das forças e momentos resultantes agindo no
corpo rígido.
21

A Matriz de Inércia MRB pode ser expressa como um conjunto de 3 submatrizes
de 3× 3, chamadas de M11, M21 e M22, e descrita a seguir:
MRB =
[M11 MT
21
M21 M22
]
MRB =
m 0 0 0 mzG −myG0 m 0 −mzG 0 mxG
0 0 m myG −mxG 0
0 −mzG myG Ixx −Ixy −IxzmzG 0 −mxG −Iyx Iyy −Iyz−myG mxG 0 −Izx −Izy Izz
(2.46)
A parametrização da matriz de inércia de um corpo rígido é única e satisfaz as
seguintes propriedades:
• MRB = MTRB > 0.
• ˙MRB = 0.
Ao contrario da matriz MRB, a matriz CRB (υ) pode ser parametrizada de di-
versas formas. FOSSEN [12] apresenta uma parametrização de modo que CRB (υ) é
anti-simétrica, tal que:
CRB (υ) = −CTRB (υ) ∀ υ ∈ R6 (2.47)
De forma similar à matriz MRB (vide 2.46), a matriz CRB (υ) pode ser dividida
em três submatrizes chamadas de C11, C21 e C22 de�nidas a seguir:
C11 =
0 0 0
0 0 0
0 0 0
(2.48)
C21 =
−m (yGq + zGr) m (yGp+ w) m (zGp− v)
m (xGq − w) −m (zGr + xGp) m (zGq + u)
m (xGr + v) m (yGr − u) −m (xGp+ yGq)
(2.49)
C22 =
0 Izzr − Iyzq − Ixzp Ixyp+ Iyzr − IyyqIyzq + Ixzp− Izzr 0 Ixxp− Ixzr − IxyqIyyq − Ixyp− Iyzr Ixzr + Ixyq − Ixxp 0
(2.50)Assim, as matrizes das expressões 2.48, 2.49 e 2.50 constituem a matriz CRB (υ)
como descreve a Equação 2.51.
22

CRB (υ) ,
[C11 −CT
21
C21 C22
](2.51)
2.3 Esforços Hidrodinâmicos
No conceito básico de Hidrodinâmica é normal assumir que, tanto as forças quanto os
momentos agindo em um corpo rígido, podem ser superpostos linearmente, levando
em consideração dois sub-problemas propostos por FOSSEN [12] e FALTINSEN [18].
Forças Induzidas por Radiação. São as forças agindo sobre um corpo rígido,
quando o corpo é forçado a oscilar na frequência de excitação de onda, mas não há
ondas incidentes. Estas forças e momentos são expressos como o somatório de três
componentes.
1. Massa Adicional, devida à inércia do �uido circundante;
2. Amortecimento Potencial Induzido por Radiação, devido à energia levada pelas
ondas geradas na superfície; e
3. Forças de Restauração, devidas ao principio de Arquimides (peso e �utuação).
De forma matemática, estas forças são apresentadas na seguinte equação.
τH = −MAυ − CA (υ) υ −DP (υ) υ −G (η) (2.52)
As componentes na expressão 2.52, são identi�cadas a seguir:
• MAυ representa a massa adicional;
• CA (υ) υ estabelece as forças de Coriolis e Centrípetas adicionais;
• DP (υ) υ é o amortecimento potencial hidrodinâmico; e
• G (η) é o vetor das forças de restauração.
Forças de Difração e Forças Froude-Krilo�. São as forças atuantes sobre o corpo
rígido quando o corpo é impedido de oscilar e há ondas regulares incidentes. Estas
forças se referem aos efeitos de correntezas oceânicas, vento e ondas.
Os ROVs de trabalho são veículos desenvolvidos para trabalhar sob condições de
correntezas marítimas pequenas, além disso, as características de construção destes
equipamentos não incluem sistemas de resfriamento para as unidades de potência
elétrica, razão pela qual o resfriamento é feito pela transferência de calor da água.
Isto signi�ca que estes robôs operam somente a profundidades maiores a 50 metros.
23

Baseado nesta condição de operação, os efeitos de ondas e ventos não foram consi-
derados neste trabalho, e as correntezas foram tratadas como perturbação externa.
Em conjunto aos esforços já citados, são incluídas as forças e momentos gerados
pelos propulsores τProp em função do arranjo proposto para cada ROV. Desta forma,
os esforços totais agindo no robô submarino τRB podem ser expressados como o
somatório dos efeitos induzidos pela radiação τH , os efeitos gerados pelo arranjo de
propulsores τprop e os esforços externos (correntezas) τext, como segue:
τRB = τH + τProp = −MAυ − CA (υ) υ −DP (υ) υ −G (η) + τprop + τext (2.53)
Finalmente, a representação total não linear do movimento de um veículo ma-
rinho para os seis graus de liberdade é obtida igualando as expressões 2.45 e 2.53,
descrita como:
Mυ + C (υ) υ +D (υ) υ +G (η) = τprop + τext (2.54)
Onde M = MRB +MA, e C (υ) = CRB (υ) + CA (υ).
A explicação e análise de cada um dos esforços é apresentado nas subseções
como segue. Na subseção 2.3.1 são descritos os esforços devidos à massa adicional,
na subseção 2.3.2 os esforços gerados pela força de Coriolis e Centrípetas adicionais,
na subseção 2.3.3 os esforços produto do amortecimento hidrodinâmico. A subseção
2.3.4 descreve os esforços de restauração, e �nalmente na subseção 2.3.5 os esforços
gerados pelos propulsores.
2.3.1 Esforços devidos à Massa Adicional e Inércia
A massa adicional é um conceito de massa virtual de�nido como forças e momentos
induzidos pela pressão, devidos ao movimento harmônico forçado do corpo, sendo
proporcional à aceleração do corpo.
Um conceito errado da massa adicional é pensar nela como uma quantidade �nita
de água conectada ao corpo de modo a criar um novo sistema com uma quantidade
de massa maior do que a massa original do corpo. Entretanto, isto não é verdade
porque o movimento do corpo força o �uido a oscilar com diferentes amplitudes nas
partículas do �uido em fase com o movimento harmônico forçado.
FOSSEN [16] de�ne que para veículos totalmente submersos, os coe�cientes de
massa adicional são constantes e dessa forma independentes da frequência de onda
circular. Utilizando o conceito de energia cinética de um �uido (vide Equação 2.55)
descrita como forma quadrática dos componentes do vetor de velocidade axial.
24

TA =1
2υTMAυ (2.55)
Onde MA é a matriz 6× 6 de inércia adicional, de�nida na seguinte expressão:
MA =
[A11 A12
A21 A22
], −
Xu Xv Xw Xp Xq Xr
Yu Yv Yw Yp Yq Yr
Zu Zv Zw Zp Zq Zr
Ku Kv Kw Kp Kq Kr
Mu Mv Mw Mp Mq Mr
Nu Nv Nw Np Nq Nr
(2.56)
Assim, as forças e momentos devidos à massa adicional são descritas utilizando
a notação da SNAME [13], por exemplo, ZA relaciona a força adicional agindo no
eixo z, devida à aceleração v na direção do eixo y, e expressa na Equação 2.57.
ZA = Zvv ,∂Z
∂vv (2.57)
Para um corpo rígido submerso em repouso (υ ≈ 0) num �uido ideal, sem ondas
incidentes e sem correntes marinhas, a matriz de inércia adicional é positiva de�nida,
ou seja MA = MTA > 0.
Baseando-se na equação de energia cinética de um �uido (vide 2.55) junto com
as equações de Kirchho� em forma de componentes, obtêm-se as expressões que
relacionam as forças e momentos devidos à massa adicional.
XA = Xuu+Xw (w + uq) +Xq q + Zwwq + Zqq2
+Xvv +Xpp+Xrr − Yvvr − Yprp− Yrr2
−Xvur − Ywwr+Ywvq + Zppq − (Yq − Zr) qr
YA = Xvu+ Yww + Yq q
+Yvv + Ypp+ Yrr +Xvvr − Ywvp+Xrr2 + (Xp − Zr) rp− Zpp2
−Xw (up− wr) +Xuur − Zwwp−Zqpq +Xqqr
ZA = Xw (u− wq) + Zww + Zq q −Xuuq −Xqq2
+Ywv + Zpp+ Zrr + Yvvp+ Yrrp+ Ypp2
+Xvup+ Ywwp
−Xvvq − (Xp − Yq) pq −Xrqr
25

KA = Xpu+ Zpw +Kq q −Xuwu+Xruq − Yww2 − (Yq − Zr)wq +Mrq2
+Ypv +Kpp+Krr + Ywv2 − (Yq − Zr) vr + Zpvp−Mrr
2 −Kqrp
+Xwuv − (Yv − Zw) vw − (Yr + Zq)wr − Ypwp−Xqur
+ (Yr + Zq) vq +Krpq − (Mq −Nr) qr
MA = Xq (u+ wq) + Zq (w − uq) +Mq q −Xw (u2 − w2)− (Zw −Xu)wu
+Yqv +Kqp+Mrr + Ypvr − Yrvp−Kr (p2 − r2) + (Kp −Nr) rp
−Ywuv +Xvvw − (Xr + Zp) (up− wr) + (Xp + Zr) (wp+ ur)
−Mrpq +Kqqr
NA = Xru+ Zrw +Mrq +Xvu2 + Ywwu− (Xp − Yq)uq − Zpwq −Kqq
2
+Yrv +Krp+Nrr −Xvv2 −Xrvr − (Xp − Yq) vp+Mrrp+Kqp
2
− (Xu − Yv)uv −Xwvw + (Xq + Yp)up+ Yrur + Zqwp
− (Xq + Yp) vq − (Kp −Mq) pq −Krqr
(2.58)
GOULART [19] estabelece que ao considerar que o ROV apresenta planos de
simetria, a matriz MA pode ser simpli�cada, desprezando-se os termos menos signi-
�cativos. Assim, se apresentam três aproximações em função dos planos de simetria.
1. Veículos com simetria no plano xz e no plano yz e no plano xy (Simetria
Bombordo/Estibordo, Proa/Popa e Base/Topo)
MA ,
m11 0 0 0 0 0
0 m22 0 0 0 0
0 0 m33 0 0 0
0 0 0 m44 0 0
0 0 0 0 m55 0
0 0 0 0 0 m66
(2.59)
2. Veículos com simetria no plano xz (Simetria Bombordo/Estibordo)
MA ,
m11 0 m13 0 m15 0
0 m22 0 m24 0 m26
m31 0 m33 0 m35 0
0 m42 0 m44 0 m46
m51 0 m53 0 m55 0
0 m62 0 m64 0 m66
(2.60)
26

3. Veículos com simetria no plano xy (Simetria Base/Topo)
MA ,
m11 m12 0 0 0 m16
m21 m22 0 0 0 m26
0 0 m33 m34 m35 0
0 0 m43 m44 m45 0
0 0 m53 m54 m55 0
m61 m62 0 0 0 m66
(2.61)
4. Veículos com simetria no plano yz (Simetria Proa/Popa)
MA ,
m11 0 0 0 m15 m16
0 m22 m23 m24 0 0
0 m32 m33 m34 0 0
0 m42 m43 m44 0 0
m51 0 0 0 m55 m56
m61 0 0 0 m65 m66
(2.62)
5. Veículos com simetria no plano xz e no plano yz (Simetria Bom-
bordo/Estibordo e Proa/Popa)
MA ,
m11 0 0 0 m15 0
0 m22 0 m24 0 0
0 0 m33 0 0 0
0 m42 0 m44 0 0
m51 0 0 0 m55 0
0 0 0 0 0 m66
(2.63)
De forma geral, a matriz de Massa Adicional resultante para um veículo com
simetria no plano ij e no plano jk é obtida pela intersecção entre ambas as duas
matrizes.
mij∩jk = mij ∩mjk (2.64)
Onde mij = mji.
2.3.2 Esforços devidos as Forças Centrípetas e de Coriolis
Adicionais
Para um corpo rígido se movimentando em um �uido ideal, pode se parametrizar a
matriz de forças centrípetas e de Coriolis adicional como sendo anti-simétrica, assim:
27

CA (υ) = −CTA (υ) ∀ υ ∈ R6 (2.65)
Em forma de componentes, a matriz CA é expressa como:
CA =
0 0 0 0 −a3 a2
0 0 0 a3 0 −a10 0 0 −a2 a1 0
0 −a3 a2 0 −b3 b2
a3 0 −a1 b3 0 −b1−a2 a1 0 −b2 b1 0
(2.66)
Onde os componentes da matriz CA da expressão 2.66 são:
a1 = Xuu+Xvv +Xww +Xpp+Xqq +Xrr
a2 = Xvu+ Yvv + Yww + Ypp+ Yqq + Yrr
a3 = Xwu+ Ywv + Zww + Zpp+ Zqq + Zrr
b1 = Xpu+ Ypv + Zpw +Kpp+Kqq +Krr
b2 = Xqu+ Yqv + Zqw +Kqp+Mqq +Mrr
b3 = Xru+ Yrv + Zrw +Krp+Mrq +Nrr
(2.67)
Geralmente, as aplicações de veículos remotamente operados submarinos pre-
cisam de movimentos em baixas velocidades, fato que simpli�ca o problema da
dinâmica altamente não linear e acoplada. Além do mais, se o veículo possuir três
planos de simetria, pode se desconsiderar a contribuição dos elementos fora da di-
agonal principal na matriz de massa adicional MA. Obtém-se, então a expressão
simpli�cada para 2.66 apresentada em 2.68.
CA (υ) =
0 0 0 0 −Zww Yvv
0 0 0 Zww 0 −Xuu
0 0 0 −Yvv Xuu 0
0 −Zww Yvv 0 −Nrr Mqq
Zww 0 −Xuu Nrr 0 −Kpp
−Yvv Xuu 0 −Mqq Kpp 0
(2.68)
2.3.3 Esforços devidos ao Amortecimento Hidrodinâmico
A matriz de amortecimento hidrodinâmico total D (υ) é geralmente de�nida como
o somatório dos efeitos gerados pelo atrito super�cial DS (υ), o amortecimento pelo
escoamento de onda DW (υ), o amortecimento devido ao desprendimento de vórtices
DM (υ), e o amortecimento potencial DP (υ) expresso na equação 2.52.
28

D (υ) , DP (υ) +DS (υ) +DW (υ) +DM (υ) (2.69)
Para um corpo rígido, movimentando-se em um �uido ideal, a matriz de amor-
tecimento hidrodinâmico total é real, não simétrica e de�nida positiva. Assim:
D (υ) > 0 ∀ υ ∈ R6 (2.70)
A expressão 2.70 é importante pelo fato que as forças de amortecimento hidro-
dinâmicas são ditas como sendo dissipativas. Desta forma, empregando a forma
quadrática:
υTD (υ) υ > 0 ∀ υ 6= 0 (2.71)
Na prática, é difícil determinar os termos de ordem alta, bem como os compo-
nentes fora de diagonal principal de D (υ). Por isto, são procuradas aproximações
para calcular estes esforços.
De forma similar à massa adicional em veículos submarinos, o amortecimento
hidrodinâmico para altas velocidades é altamente não linear e acoplado. Porém,
supondo que o robô se desloca de forma desacoplada nos seis graus de liberdade,
possui três planos de simetria e que os termos maiores que segunda ordem são
desprezíveis, pode-se aproximar a matriz D (υ) com os termos lineares e quadráticos
da diagonal principal.
D (υ) = diag{Xu, Yv, Zw, Kp,Mq, Nr}+diag{Xu|u||u|, Yv|v||v|, Zw|w||w|, Kp|p||p|,Mq|q||q|, Nr|r||r|}
(2.72)
Uma outra abordagem é proposta por HSU et al. [20], TSUSAKA et al. [21], e
ISHIDERA et al. [22]. Baseando-se na consideração de que os esforços hidrodinâ-
micos são um efeito dissipativo, ou seja:
FH · υ1rel ≤ 0 (2.73)
Onde υ1rel é a velocidade de translação relativa do veículo.
A condição de dissipatividade deve ser mantida em todo momento para todas as
componentes, caso contrário, haverá uma aceleração naquela direção, instabilizando
o modelo, segundo como foi apresentado por DOMINGUEZ [23].
Assim, os efeitos hidrodinâmicos são considerados como uma resistência que à
água exerce sobre o veículo em movimento, e de�nidos nas expressões 2.74 e 2.75.
29

FH =ρ
2|υ1rel |2O
23R
CX (α, β)
CY (β, γ)
CZ (α, γ)
(2.74)
TH =ρ
2
|υ1rel |2OR
CK (γ)
CM (α)
CN (β)
+ O53R
CPp|p|CQq|q|CRr|r|
(2.75)
Onde α, β e γ são os ângulos de ataque, deriva e ataque lateral, respectivamente,
de�nindo a direção e o sentido da velocidade relativa do veículo, sendo calculados
por meio das seguintes equações:
α = arctan
(wrelurel
)β = arctan
(vrelurel
)(2.76)
γ = arctan
(wrelvrel
)Os coe�cientes de arrasto hidrodinâmico CX (α, β), CY (β, γ) e CZ (α, γ) são cal-
culados através da combinação de funções de cada ângulo separadamente, e relatadas
nas expressões:
CX (α, β) = CX (α)
∣∣∣∣ CX (β)
CX (β|β=0◦)
∣∣∣∣CY (β, γ) = CY (β)
∣∣∣∣ CY (γ)
CY (γ|γ=0◦)
∣∣∣∣ (2.77)
CZ (α, γ) = CZ (γ)
∣∣∣∣ CZ (α)
CZ (α|α=90◦)
∣∣∣∣Os coe�cientes de arrasto de amortecimento de movimento de traslação CX (α),
CZ (α), CX (β), CY (β), CY (γ) e CZ (γ), e os coe�cientes de rotação CM (α), CN (β)
e CK (γ) são gerados através de testes de laboratório em túneis de vento e similares,
para depois ser registrados em curvas. Para isto, precisam-se incluir na modelagem
dinâmica algoritmos de interpolação, para extrair os valores dos coe�cientes em
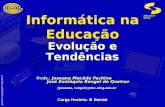
cada passo de análise e simulação. NOMOTO e HATTORI [24] apresentam as
curvas obtidas para o ROV Dolphin 3K, na Figura 2.4 são mostrados os coe�cientes
hidrodinâmicos em função do ângulo de ataque como exemplo. Intrinsecamente, esta
�gura apresenta uma condição para garantir o critério de dissipatividade exigido em
2.73. Em todo instante de tempo, os coe�cientes de amortecimento de movimento de
traslação deverão possuir sinal contrário do que a sua correspondente componente
de velocidade. Isto é expresso como segue:
30

0 50 100 150 200 250 300
−1.5
−1
−0.5
0
0.5
1
α(graus)
CX(α)
CZα)
CM
α)
Figura 2.4: Coe�cientes hidrodinâmicos ROV Dolphin 3K em função do ângulo deataque.
sign (CX (α)) = −sign (urel)
sign (CY (β)) = −sign (vrel)
sign (CZ (γ)) = −sign (wrel)
(2.78)
Entretanto, os coe�cientes de amortecimento do movimento de rotação dados
por CP , CQ e CR obtidos de forma experimental são constantes (vide Anexo A).
Além do mais, as seguintes equivalências são válidas e devem ser conferidas em
situações de aproximação das curvas dos coe�cientes de amortecimento e/ou nas
fórmulas de interpolação.
CX (α|α=0◦) = CX (β|β=0◦)
CY (β|β=90◦) = CY (γ|γ=0◦)
CZ (γ|γ=90◦) = CZ (α|α=90◦)
(2.79)
SAYER [25] descreve que a operabilidade e controle de veículos submarinos tipo
ROV é altamente in�uenciada pelas características hidrodinâmicas, em especial em
zonas próximas à superfície do mar afetadas pela dinâmica das ondas marinas. Po-
rém, para águas profundas, as vezes chegam ser considerados constantes ou ter
comportamentos estáveis sob pequenas variações, como indicado por FANG et al.
[26].
2.3.4 Esforços de Restauração
Os esforços de restauração são de�nidos como sendo as forças gravitacionais e as
forças de �utuação (empuxo), segundo a terminologia utilizada na hidrodinâmica.
A força gravitacional FG é considerada agindo no centro de gravidade rG =
31

B
G
G
B
B
G
G
B
GB
O
Figura 2.5: Esforços de Restauração em um corpo rígido submerso.
[xG, yG, zG] do corpo, enquanto a força de �utuação FB age no centro de �utuação
rB = [xB, yB, zB].
A força gravitacional é de�nida pelo peso W = mg, onde m representa a massa
do veículo incluindo a água nos espaços livres de �utuação, g é a aceleração da
gravidade. Por sua vez, a força de �utuação é de�nida como B = ρg∀, onde ρ é a
densidade do �uido e ∀ é o volume de �uido deslocado pelo veículo.De acordo com a relação entre a força gravitacional e a força de �utuação, a
�utuabilidade de um veículo submerso pode ser de�nida como:
• Negativa, se |FB| < |FG|.
• Neutra, se |FB| = |FG|.
• Positiva, se |FB| > |FG|.
O tipo de atividade e o tamanho do veículo in�uenciam o projeto do robô, por
exemplo, em veículos de grande porte, procura-se garantir a �utuabilidade nega-
tiva, desta forma, o veículo se desloca pelo solo marinho em atividades tais como
rastejamento ou entrincheiramento de tubulações.
Em equipamentos submarinos, a �utuabilidade é frequentemente aumentada
através da adesão de �utuadores, localizados de modo que seja mantida a locali-
zação do centro de �utuação e o tipo de �utuabilidade desejada.
Em veículos menores como ROVs de trabalho, procura-se �utuabilidade positiva,
assim nos casos de operações próximas do fundo do mar, os propulsores trabalham
puxando água para acima, e desta forma, evitar perturbar o material do solo, como
areia, a qual interferiria nas imagens de vídeo tomadas pela câmera a bordo, di�cul-
tando a visão do entorno e em geral a possibilidade de executar a tarefa programada.
32

Também, manter uma �utuabilidade positiva aumenta as possibilidades de recupe-
rar estes equipamentos nos casos de rompimento do umbilical que fornece a potência
elétrica e/ou de controle.
Já em veículos tipo AUV, é importante manter uma �utuabilidade neutra devido
à propulsão ser limitada por não possuir cabo umbilical. Desta forma a força vertical
resultante é nula, ou seja, representa a condição de menor esforço de deslocamento,
o que traduz em otimização das reservas energéticas e/ou aumento da autonomia
tanto das baterias quanto do robô mesmo.
Estes esforços são de�nidos no sistema inercial, por este motivo, precisa-se levá-
los ao sistema móvel, para serem adicionadas ao modelo dinâmico, sendo empregado
para tal objetivo, a matriz de transformação desenvolvida na Equação 2.15, obtendo-
se as seguintes formulações para FG e FB.
FG (η2) = N−11 (η2)
0
0
W
FB (η2) = −N−11 (η2)
0
0
B
(2.80)
Cabe ressaltar que segundo a notação adotada da SNAME [13], o sinal do peso
é positivo levando em consideração que age no sentido positivo do eixo z do sistema
inercial.
Devido às forças de restauração geralmente agirem em dois pontos diferentes de
um corpo rígido submerso rG e rB (vide Figura 2.5), além das forças, são induzidos
momentos em torno dos três eixos referenciados ao veículo (sistema móvel) xO, yOe zO, no sentido de alinhar tais centros ao eixo z. Quanto maior for a distância
metacêntrica entre o centro de gravidade rG e o centro de �utuação rB , maior será
a atuação do torque restaurador (TGB) buscando estabilizar o corpo rígido, tentando
alinhar ambos os pontos com o eixo z do sistema inercial, como é apresentado por
OLIVEIRA et al. [27].
Sem perda de generalidade, pode-se expressar os esforços de restauração como
sendo função de η invés de η2. Assim, obtém-se a expressão:
G (η) =
[FGB
TGB
]=
[FG (η) + FB (η)
rG × FG (η) + rB × FB (η)
](2.81)
Substituindo os resultados da expressão 2.80 na expressão 2.81, encontra-se o
vetor dos esforços de restauração, relacionando o peso e a �utuação para cada um
dos seis graus de liberdade, em função dos ângulos de Euler, como segue.
33

G (η) =
− (W −B) sin θ
(W −B) sinφ cos θ
(W −B) cosφ cos θ
(yGW − yBB) cosφ cos θ − (zGW − zBB) sinφ cos θ
− (zGW − zBB) sin θ − (xGW − xBB) cosφ cos θ
(xGW − xBB) sinφ cos θ + (yGW − yBB) sin θ
(2.82)
2.3.5 Esforços gerados pelos Propulsores
Para o deslocamento e posicionamento de veículos submarinos tipo ROV ao longo
dos seis graus de liberdade precisa-se de um arranjo de propulsores que permita
desenvolver as manobras de forma controlada. Isto implica em desenvolver um
modelo de propulsão em função da localização dos propulsores no veículo, assim
como incluir as caraterísticas dinâmicas dos propulsores, determinando as forças e
momentos para cada um dos seis graus de liberdade como o somatório dos aportes
individuais de cada propulsor.
Na bibliogra�a, são encontradas diversas abordagens para modelar estes esforços.
PINTO [28] divide a modelagem de um sistema de propulsão em três partes, como
segue:
1. Modelagem do motor elétrico. Na maioria dos casos, os propulsores dos
ROVs são elétricos de corrente continua tipo brushless, razão pela qual são
utilizados modelos matemáticos não lineares de controle de voltagem de arma-
dura ou campo para motores DC.
2. Modelagem hidrodinâmica da hélice. Aqui são modeladas as relações
entre os esforços de empuxo e velocidades de rotação do eixo do motor, tudo
baseado na teoria de sustentação e arrasto hidrodinâmico.
3. Modelagem do �uido. Faz a relação à velocidade relativa do �uido no
interior do propulsor.
Este tipo de abordagem é chamada de modelo dinâmico de propulsores.
Outros autores relatam o comportamento dos propulsores como sendo uma caixa
preta para transformar o sinal de controle em uma força e torque de propulsão. Em
modelos de helicópteros (vide [29], [30] e [31]), são desenvolvidos testes de laboratório
obtendo através de processos iterativos, as curvas de voltagem versus força gerada.
Uma vez obtidas estas curvas, frequentemente são aproximadas de funções por meio
de métodos como os mínimos quadrados. Esta abordagem é conhecida como modelo
estático de propulsores.
34

Por sua vez, trabalhos desenvolvidos (vide WHITCOMB e YOERGER [32], HSU
et al. [20]) utilizam uma modelagem chamada de abordagem Quase-Estática. Isto
se deve a que a abordagem Estática, estas são função de parâmetros externos, neste
caso especí�co, a velocidade da correnteza da água atravessando as hélices dos pro-
pulsores. Embora, desconsidera os efeitos inerciais dos motores elétricos incluídos
na abordagem dinâmica.
GOULART [19] assume uma abordagem quase-estática, onde a força de propul-
são FPie o momento axial de reação TPi
produzidos por cada hélice são de�nidos
como segue.
Fpropi = C∗F (σ)ρ
8
[υ2ci + (0.7πnpiDhel)
2] πD2hel (2.83)
Tpropi = C∗T (σ)ρ
8
[υ2ci + (0.7πnpiDhel)
2] πD3hel (2.84)
Onde,
• Dhel é o diâmetro da hélice em metros.
• npi é a velocidade rotacional da i-ésima hélice expressa em revoluções por
segundo (rps).
• vci é a velocidade dá água passando pelo disco da i-ésima hélice em metros por
segundo (m/s).
• ρ é a densidade do �uido.
• C∗F (σ) e C∗T (σ) são os coe�cientes de empuxo e torque da hélice.
A obtenção dos coe�cientes C∗F (σ) e C∗T (σ) é feita através de teste de laboratório.
BACHMAYER et al. [33] propuseram um mecanismo simples para determinar estes
coe�cientes. Obtendo de forma experimental, a força máxima desenvolvida pelo
propulsor dada pela máxima velocidade de rotação np, e usando as Equações 2.83 e
2.84, os coe�cientes são calculados como segue:
C∗F (σ) =8FPmax
0.7ρπ3n2pmax
D4hel
(2.85)
C∗T (σ) =8TPmax
0.7ρπ3n2pmax
D5hel
(2.86)
As Equações 2.83 e 2.84 descrevem a magnitude da força e torque geradas por
cada propulsor. Porém, não indicam a direção onde tais esforços agem. Desta forma,
precisa-se de�nir o vetor de orientação Ppi associado aos três graus de liberdade de
translação. De forma similar para obter a direção do torque gerado pelos propulsores,
35

x
y
z
θe
ɸe
P(re,ɸe,θe)
re
eixo re
eixo θe
eixo ɸe
Figura 2.6: Sistema de Coordenadas Esféricas.
precisa-se conhecer o vetor Rpi relacionando o posição relativa do centro de empuxo
do propulsor à origem do sistema móvel OO. Desta forma, se formulam os esforços
de restauração nos seis graus de liberdade como sendo:
τprop =
[FP
TP
](2.87)
FP =k∑i=1
FpropiPpi =
Xprop
Yprop
Zprop
(2.88)
TP =k∑i=1
[TpropiPpi +Rpi × (FpropiPpi)] =
Kprop
Mprop
Nprop
(2.89)
Nas expressões 2.88 e 2.89, k representa o número de propulsores do ROV, no
entanto Xprop, Yprop e Zprop são as componentes da força total de propulsão ao longo
dos eixos coordenados do sistema móvel xOyOzO. Por sua vez Kprop, Mprop e Nprop
são as componentes do torque sobre os mesmos eixos relatados.
Na Figura 2.7, são representados os vetores Rpi e Ppi . O primeiro destes obtido da
localização geométrica do propulsor com relação à origem, determina as componentes
xRpi, yRpi
e zRpi.
Entretanto, para determinar os componentes xPpi, yPpi
e zPpido vetor Ppi é
utilizado o conceito de sistema de coordenadas esféricas.
No sistema de coordenadas esféricas, como se apresenta na Figura 2.6, um ponto
P é representado por um conjunto de três grandezas, na convenção não norte-
americana são de�nidas como:
36

OO
O
OPi
Pi
Pi
Pi
Pi
Pi
Pi
PPi
PPi
Figura 2.7: De�nição dos vetores Rpi e Ppi .
• O Raio re que de�ne a distância entre o ponto P e a origem, onde 0 ≤ re ≤ ∞.
Esta distância é sempre positiva.
• O Azimute ou longitude φe, é o ângulo entre o eixo x positivo e o vetor re que
une a origem com a projeção de ponto P no plano xy, onde 0 ≤ φe ≤ 2π.
• A colatitude o ângulo polar θe, é o ângulo formado entre o eixo z e o vetor re,
onde 0 ≤ θe ≤ π.
Devido ao fato que a magnitude da força é dado pela Equação 2.83, o vetor Ppiserá unitário, ou seja re = |Ppi | = 1. Desta forma, de�ne-se as componentes deste
vetor em função dos ângulos θpi e φpi , correspondentes ao azimute e a colatitude do
sistema esférico.
Cabe ressaltar que mesmo existindo aplicações de controle com propulsores de
orientação variável (vide [34], [35]), no caso da maioria de aplicações com ROVs, os
propulsores são �xos ao corpo rígido, em outras palavras, tanto θpi quanto φpi são
constantes, e dependerão da orientação projetada. Desta forma, as componentes do
vetor Ppi são calculadas, utilizando a expressão 2.90. xPpi
yPpi
zPpi
=
sin θpi cosφpisin θpi sinφpi
cos θpi
(2.90)
O torque de propulsão TP da Equação 2.89, está composto por o torque de reação
entre as pás da hélice e o �uido, correspondente à primeira parte da expressão, a
37

segunda parte relata o torque gerado pela força de propulsão e a localização do
propulsor em relação à origem do sistema coordenado móvel.
Introduzindo as expressões 2.88 e 2.89 em 2.87, rearrumando e expandindo-
as obtém-se uma nova expressão apresentada na forma matricial para facilitar a
formulação e obtenção do vetor τprop.
τprop = Bacop
Fprop1
Fprop2...
FpropkTprop1
Tprop2...
Tpropk
(2.91)
Onde, Bacop ∈ R6×2k chamada de Matriz de Acoplamento é uma matriz com
informação da posição e orientação dos propulsores, descrita como segue.
Bacop =
[Pp1 Pp2 · · · Ppk 03×1 03×1 · · · 03×1
Rp1 × Pp1 Rp2 × Pp2 · · · Rpk × Ppk Pp1 Pp2 · · · Ppk
](2.92)
Sob algumas considerações a matriz Bacop (vide Equação 2.92) pode ser simpli-
�cada. A primeira condição é obtida se não se precisa considerar algum dos seis
graus de liberdade. Por exemplo, em navios não é levado em consideração a arfagem
(movimento no eixo z, vide a Tabela 2.1).
A segunda consideração corresponde à magnitude relativa entre os momentos de
reação dos propulsores, em relação ao momento devido às forças restauradoras FG e
FB. GOULART [19] despreza as contribuições dadas pela reação, porque são meno-
res o bastante quando comparadas aos torques produzidos pela força gravitacional
e a força de �utuação.
2.4 Modelo Dinâmico Matricial
O modelo dinâmico adotado nesta dissertação é apresentado como resultado da
análise das seções estudadas ao longo deste capítulo. Rearrumando a Equação 2.54,
se obtém:
(MRB +MA) υ = τprop + τext − C (υ) υ −D (υ) υ −G (η) (2.93)
A expressão 2.93, apresenta o modelo matricial utilizado nas simulações desen-
38

volvidas neste trabalho, sob as seguintes considerações:
1. Parâmetros do ROV.
Devido ao fato de que não se possui um ROV físico, foram utilizados as gran-
dezas físicas e parâmetros hidrodinâmicos do ROV MURS 300 MK II, relaci-
onados no Anexo A.
2. Esforços externos τext.
Tais como correntezas, são considerados como perturbações dentro do sistema
de controle.
3. Centros de Gravidade rG e de Flutuação rB. Para simpli�car a matriz de
inércia do ROV, foi utilizado o Teorema dos Eixos Paralelos como explicado
na seção 2.2. Desta forma o vetor rG �cou na origem do sistema móvel OO e
rB realocado e o tensor de inércia I0 diagonalizado. Adicionalmente, o fato de
levar o centro de gravidade à origem, anula o efeito de torque de restauração
devido ao peso do veículo (vide 2.81).
4. Matriz de Massa Adicional MA.
Como apresentado na seção 2.3.1, se considerou uma simetria nos três planos
xyz, de forma a diagonalizar a matriz MA, encaixando-a aos dados fornecidos
no Anexo A.
5. Esforços devidos as Forças Centrípetas e de Coriolis.
O cálculo das componentes da matriz CA envolvem um alto custo computa-
cional produto das derivadas (vide 2.68). Por isto, optou-se por utilizar a
formulação proposta por HSU et al. [20], De�ne-se o vetor de Esforços Inerci-
ais C (υ) υ = τI = [FI TI ]T como segue:
[FI
TI
]=
υ2 ×(M11υ1 + A11υ1rel + (M21 + A21)
T υ2
)+A11 (υ2 × υ1cor)
υ2 × (M21υ1 + A21υ1rel + (M22 + A22) υ2)
+υ1 ×MT21υ2 + A21 (υ2 × υ1cor)
+υ1rel ×(A11υ1rel + AT21υ2
)
(2.94)
Onde υ1cor é a velocidade da correnteza da água, υ1rel foi de�nida em 2.73,
M11,M21 e M22 foram de�nidas em 2.46, e A11,A21 e A22 em 2.56.
6. Esforços devidos ao Amortecimento Hidrodinâmico.
39

O cálculo da matriz D (υ) está submetida a altos custos computacionais de
forma similar a CA. Por isto, foram utilizadas as expressões 2.74 e 2.75. Assim,
os esforços devidos ao amortecimento hidrodinâmico são ditos como sendo:
D (υ) υ = τH = [FH TH ]T .
7. Torque de Reação dos Propulsores.
Ao comparar a contribuição do torque de reação gerado pelas pás dos pro-
pulsores com o torque devido ao esforço gerado em função da distância do
propulsor à origem OO, se encontrou que a reação formulada em 2.86 é menor
(menor de 10 vezes em magnitude). Por isto, foi desconsiderado este torque,
de�nindo como torque de propulsão aquele gerado pela propulsão.
8. Aproximação dos Coe�cientes de Arrasto Hidrodinâmico
Estes coe�cientes são obtidos de forma experimental mediante testes de labo-
ratório como estudado por JULCA [36], sendo representados por curvas em
função dos ângulos de ataque do veículo em relação à correnteza da água.
Frequentemente essas curvas são limitadas para ângulos pequenos.
JULCA [36] e GODOY [37] obtiveram curvas próximas de funções sinusoidais
em modelos de propulsores e de turbinas eólicas respetivamente. Isto posto,
neste trabalho os coe�cientes de arrasto foram aproximados de ondas seno,
sendo apresentadas no Anexo D.
Figura 2.8: Arranjo de seis propulsores para simulações.
40

Com base no descrito anteriormente, a Equação 2.93 pode se expandir como
segue:
υ = M−1 (τH +G (η)− τI + τprop)[υ1
υ2
]= M−1
[τ1
τ2
]= (MRB +MA)−1
[FH + FGB − FI + FP
TH + TGB − TI + TP
](2.95)
Para este trabalho adotou-se um arranjo de seis propulsores, chamados de p1,
p2, p3, p4, p5, e p6, instalados em duplas para gerar a força nos três eixos xOyOzO.
Assim, p1 e p2 agirão sobre o eixo xO, p3 e p4 sobre o eixo yO, e p5 e p6 sobre o eixo
zO. A notação vetorial para este arranjo é apresentado no Anexo B, entretanto, a
organização dos propulsores é apresentada na Figura 2.8.
A descrição das equações dinâmicas utilizadas nesta dissertação para cada grau
de liberdade é apresentada no Anexo B, como também o diagrama de blocos do
modelo em Simulink.
41

Capítulo 3
Linearização do Modelo Dinâmico
A teoria de controle ótimo foi desenvolvida para ser aplicada em sistemas lineares,
porém não signi�ca que sistemas não lineares não possam ser controlados utilizando
esta técnica.
Implementar uma lei de controle ótimo em um sistema não linear implica em
executar os seguintes três passos como segue:
1. Escolher um ponto de operação, calculando os sinais de entrada necessários
para manter o corpo estável naquele ponto.
2. Linearizar o modelo não linear sobre o ponto de operação determinado.
3. Veri�car o funcionamento do sistema no ponto de operação.
Este capítulo é destinado a descrever os passos citados no procedimento anterior,
sendo dividido em três partes. A primeira parte do capítulo apresenta a seleção do
ponto de operação, baseado nos requerimentos da planta dinâmica e do objetivo
de operação do veículo submarino. A segunda parte relaciona a metodologia e as
considerações feitas para linearizar o modelo dinâmico não linear do ROV. A terceira
parte apresenta os resultados da linearização testado no ponto de operação escolhido.
3.1 Ponto de Operação
O objetivo de determinar um ponto de operação é levar o ROV para uma posição
de equilíbrio. Em outras palavras, este ponto deve levar os estados do sistema para
zero, ou para algum valor �xo desejado se requerido. Neste ponto o veículo deve
permanecer desde que não seja sujeito a perturbações externas.
Para esta dissertação o ponto de operação foi escolhido para manter o ROV
estável de forma erguida sem deslocamentos e sem ângulos de inclinação nos seus
graus de liberdade rotacionais.
42

De�nindo os estados do sistema como sendo as velocidades translacionais e ro-
tacionais no sistema móvel, e a posição e ângulos de Euler no sistema inercial (vide
3.1).
x (t) =
υ1
υ2
η1
η2
(3.1)
Logo, podem ser de�nidos os estados do sistema no ponto de operação como:
uo
vo
wo
po
qo
ro
φo
θo
ψo
xo
yo
zo
=
0
0
0
0
0
0
0
0
0
0
0
0
(3.2)
Para garantir que os estados do sistema sejam anulados, as derivadas de veloci-
dade no sistema móvel devem ser zero também, já que pela segunda lei de Newton,
estas são relacionadas às forças como visto no Capítulo 2. Em outras palavras, igua-
lando a zero o somatório de forças para cada um dos seis graus de liberdade, podem
ser encontradas as condições necessárias para manter o ROV no ponto de operação
determinado.
Usando as equações do Anexo B foram calculados os esforços de propulsão ne-
cessários para manter o ROV no ponto de operação determinado em 3.2.
A partir das Equações B.5 e B.6, pode se perceber que as forças X e Y não são
afetadas pela restauração se os ângulos de avanço e caturro (φ e θ) são nulos. Como
o ponto de operação escolhido possui φ = 0 e θ = 0, os propulsores não devem
gerar força. Além do mais, neste ponto, a velocidade do ROV é zero, eliminando
os esforços de arrasto hidrodinâmico e inerciais. Logo, para manter o sistema no
equilíbrio nos eixos x e y os propulsores p1, p2, p3 e p4 não deverão gerar propulsão.
Fprop1o = 0 , Fprop2o = 0 Fprop3o = 0 , Fprop4o = 0 (3.3)
43

No entanto, este fato não se apresenta no eixo z, porque a componente de restau-
ração na Equação B.7 é dependente dos cossenos dos ângulos de Euler, ou seja, para
o ponto de operação determinado, o valor destes será máximo (cos 0 = 1), existindo
esta força em todo momento que o ROV esteja pousado na água. Igualando para
zero o somatório de forças em z, ou seja Z = 0.
(m− ρ∀) g = −0.72zPp5C∗F5
(σ)ρ
8n2p5π3D4
hel5− 0.72zPp6
C∗F6(σ)
ρ
8n2p6π3D4
hel6
(3.4)
Considerando que todos os propulsores do arranjo são iguais, pode se reescrever
a expressão 3.4 de forma que a força que cada propulsor deve gerar seja a metade
da força total para manter o ROV sem deslocamento ao longo do eixo z, logo:
Fprop5o = Fprop6o =FpropZ
2(3.5)
Substituindo 3.5 em 3.4 se calcula o valor de força de propulsão para p5 e p6assim como o valor do sinal de entrada (np5o e np6o ) para gerá-la.
Fprop5o = Fprop6o =5267
191[N ] , np5o = np6o =
4950
167[rps] (3.6)
Em resumo, a seguinte Tabela apresenta os valores de propulsão requeridos para
manter o ROV no ponto de equilibrio:
Tabela 3.1: Valores de propulsão para o Ponto de Operação.
PropulsorEixo
Propulsãonpo [rps] Fpropo [N]
p1 x 0 0p2 x 0 0p3 y 0 0p4 −y 0 0p5 z 29.641 27.576p6 z 29.641 27.576
Esta análise foi estendida para avaliar os torques K,M e N , porém, estes depen-
dem diretamente da propulsão gerada pelo arranjo de propulsores. Desta forma os
valores resumidos na Tabela 3.1 foram substituídos nas expressões B.8, B.9 e B.10,
corroborando que no ponto de operação os torques são anulados.
3.2 Metodologia de Linearização
O objetivo deste procedimento é localizar o ROV em um ponto de operação estaci-
onário tal que os movimentos sejam considerados como pequenos deslocamentos, e
44

desta forma, utilizar a teoria de Aproximação de Taylor. Esta abordagem implica
que cada variável pode ser dividida como segue:
x (t) = xo (t) + xδ (t) (3.7)
Onde xo (t) é o valor da variável no ponto de operação, entanto xδ (t) corresponde
à variação devida ao pequeno deslocamento e desta forma tratar o sistema como um
Sistema de Sinal Pequeno como apresentado por BECH et al. [38]. Também se usou
a aproximação de pequenos ângulos e produtos resumidos na seguinte tabela (vide
[39]).
Como foi de�nido para o ponto de operação, os estados neste ponto deverão
ser nulos (vide 3.2), e ao aplicar a formulação 3.7, pode se escrever os estados
linearizados como segue:
u = uo + uδ = uδ
v = vo + vδ = vδ
w = wo + wδ = wδ
p = po + pδ = pδ
q = qo + qδ = qδ
r = ro + rδ = rδ
φ = φo + φδ = φδ
θ = θo + θδ = θδ
ψ = ψo + ψδ = ψδ
x = xo + xδ = xδ
y = yo + yδ = yδ
z = zo + zδ = zδ
(3.8)
As componentes de amortecimento hidrodinâmico τH , esforços inerciais τI e de
restauração G (η) das Equações apresentadas no Anexo B foram linearizadas de
forma direta, no entanto, a formulação para os esforços de propulsão precisou de
pre-processamento como se explicará na frente.
Tabela 3.2: Aproximação de Taylor para variáveis próximas de zero.Expressão Não Linear Expressão Linear
a sin Φ (t) aΦδ (t)a cos Φ (t) aax (t) + b axδ (t)x (t) y (t) 0
45

3.2.1 Linearização Esforços Hidrodinâmicos, Inerciais e de
Restauração
A modo de exemplo são apresentadas as equações linearizadas para estes esforços
na componente x (vide B.5).
XGB = Lin {− (m− ρ∀) g sin θ} = − (m− ρ∀) gθδ (3.9)
A força inercial XI é composta pela multiplicação de velocidades translacionais
com rotacionais, tal como qw. Sob a consideração inicial, as variações de velocidade
valores pequenos próximos de zero, assim o produto entre elas responde à quarta
linha da Tabela 3.2, anulando a contribuição desta força.
De forma similar, a força de arrasto hidrodinâmico XH contém o módulo da
velocidade relativa do veículo (υ1rel). Sob a mesma consideração para a velocidade,
o módulo será então um valor muito pequeno, tendendo para zero. Em resumo, este
esforço desaparece também na linearização.
3.2.2 Linearização de Esforços devidos à Propulsão
A maioria de propulsores geram diferentes magnitudes de forças para a mesma velo-
cidade de rotação nos dois sentidos de giro. Isto devido à simetria das pás, estabe-
lecendo diferentes ângulos de ataque. Assim os coe�cientes de empuxo e torque das
expressões 2.83 e 2.84 devem ser calculados para ambos os sentidos (usando 2.88 e
2.89) como realizado por STIPANOV et al. [40].
−50 −40 −30 −20 −10 0 10 20 30 40 50−60
−30
0
30
60
90
nprop
[rps]
Fpr
op [N
]
Força CalculadaAproximação Polinômio Grau 1Aproximação Polinômio Grau 2Aproximação Polinômio Grau 3
Figura 3.1: Aproximação da Força de Propulsão utilizando Mínimos Quadrados.
Para o modelo utilizado nas simulações e apresentado no Anexo A, se calculou
46

um coe�ciente para cada sentido de rotação (C∗Ffrente(σ) e C∗Fre
(σ)). Em termos
de controle, o fato é que estes dois coe�cientes gerariam duas plantas dinâmicas,
di�cultando a determinação da lei de controle.
Isto posto, foram geradas as curvas de propulsão acopladas para ambos os senti-
dos de rotação, e depois foram uni�cadas sob uma simples função não linear. Para
fazer isto, a primeira tentativa foi utilizar o método dos Mínimos Quadrados como
realizado por SMALLWOOD e WHITCOMB [41].
Nas aproximações foi assumido que não há velocidade de água incidente nas
pás dos rotores. Após da geração das aproximações segundo visto na Figura 3.1,
foram analisados os resultados obtidos. A aproximação do polinômio de grau 1
apresenta a pior abordagem porque para uma velocidade de entrada nula (np = 0),
a resposta é não nula, sendo um fato de alta relevância na implementação da lei de
controle, levando o sistema a se tornar instável as vezes, segundo visto nas simulações
realizadas. Embora a aproximação de grau dois solucione este problema, a curva
obtida não é uma aproximação boa devido ao erro pode alcançar valores de até 50%.
No caso do polinômio de grau três, o erro foi minimizado o bastante gerando uma
curva muito similar à original, porém esta abordagem não é válida para implementar
uma lei de controle linear.
δ
O
δO
Figura 3.2: Deslocamento pequeno na propulsão.
Considerando que a derivada de uma função corresponde à taxa de variação
instantânea (declive), e se comporta como uma função linear (vide Figura 3.2) ao
redor de um ponto no domínio da função, optou-se por derivar a Equação 2.83 em
função da velocidade de rotação do propulsor np, e desta forma, obter a função
linear próxima de um ponto de operação. Logo, esta abordagem se encaixa dentro
da aproximação de Taylor para pequenos sinais, como se vê na Figura 3.2. Assim,
a equação linearizada pode ser obtida como:
Fprop = (np − npo)dFpropdnp
∣∣∣∣np=npo
+ Fpropo (3.10)
47

Onde npo e Fpo são determinados no ponto de operação para cada propulsor,
e a derivada da expressão 3.10 é avaliada nesse mesmo ponto. Implementado os
respectivos valores para cada propulsor, como resumido na Tabela 3.1, as equações
linearizadas para o arranjo de propulsores proposto são apresentadas a seguir:
Fprop1 =1349
1146np1 ' 1.177np1 (3.11)
Fprop2 =1349
1146np2 ' 1.177np2 (3.12)
Fprop3 =1349
1146np3 ' 1.177np3 (3.13)
Fprop4 =1349
1146np1 ' 1.177np4 (3.14)
Fprop5 =2030
1091np5 −
5267
191' 1.861np5 − 27.576 (3.15)
Fprop6 =2030
1091np6 −
5267
191' 1.861np6 − 27.576 (3.16)
No Anexo C são apresentadas as equações linearizadas para cada grau de liber-
dade explicitadas no Anexo B.
3.3 Resultado da Linearização do Modelo Dinâmico
do ROV
Para avaliar o comportamento do sistema linearizado obtido através do procedimento
relatado nas seções anteriores, foi utilizado o diagrama de blocos construído no
ambiente grá�co SIMULINK de MATLAB apresentado na Figura 3.3.
Figura 3.3: Sistema Linear do ROV em SIMULINK.
Tomando como sinal de entrada para o sistema a velocidade de rotação dos
48

propulsores (u (t) = npi , i = 1 . . . 6), foram inseridos diferentes valores para cada
propulsor como se apresenta na Figura 3.4, e depois analisadas as respostas obtidas.
0 10 20 30 40 50 60−1
−0.5
0
0.5
1
n p 1 [rps
]
0 10 20 30 40 50 60−1
−0.5
0
0.5
1
n p 2 [rps
]
0 10 20 30 40 50 60−1
−0.5
0
0.5
1
n p 3 [rps
]
0 10 20 30 40 50 60−1
−0.5
0
0.5
1
n p 4 [rps
]
0 10 20 30 40 50 6029
29.5
30
30.5
31
n p 5 [rps
]
0 10 20 30 40 50 6029
29.5
30
30.5
31
Tempo [s]
n p 6 [rps
]
Figura 3.4: Sinais de Entrada para Simulação Sistema Linearizado ROV.
Segundo a distribuição dos propulsores, para a entrada disposta, é gerado um
empuxo no eixo positivo, como o somatório destas forças é maior do que a força de
restauração total (este ROV possui �utuação positiva), o ROV deveria se afundar
ao longo do tempo. A Figura 3.5 corrobora este resultado. Pode-se destacar que
o deslocamento sobre o eixo z cresce rapidamente com apenas um sinal de 30rps
para os propulsores p5 e p6, isto porque no modelo linearizado os efeitos inerciais e
hidrodinâmicos são desconsiderados, em outras palavras, o sistema age como sendo
ideal sem esforços hidrodinâmicos. Mas o resultado obtido não invalida a veracidade
do modelo determinado. De forma similar foram realizados outros testes, variando
49

as velocidades de rotação em todos os propulsores.
0 10 20 30 40 50 60−1
0
1A
vanç
o [m
]
0 10 20 30 40 50 60−1
0
1
Der
iva
[m]
0 10 20 30 40 50 600
200
400
600
Arf
agem
[m]
0 10 20 30 40 50 60−1
0
1
Bal
anço
[gra
us]
0 10 20 30 40 50 60−1
0
1
Cat
urro
[gra
us]
0 10 20 30 40 50 60−1
0
1
Tempo [s]
Gui
nada
[gra
us]
Figura 3.5: Simulação Sistema Linearizado ROV, Estados x, y, z, φ, θ e ψ.
50

Capítulo 4
Sistema de Controle
Como visto no Capítulo 2, a modelagem dinâmica de um veículo submarino tipo
ROV abrange uma grande faixa de parâmetros e coe�cientes, em sua maioria não
lineares. Mesmo assim, o fato de muitos deles serem obtidos de forma experimental,
faz o sistema susceptível a incertezas. Por esta razão, escolher um sistema de controle
torna-se uma tarefa não trivial e cuidadosa, levando em consideração o valor destes
equipamentos, assim, como as condições nas quais estes vão interagir.
Além do mais, tratando-se de um ambiente hidrodinâmico submarino, as pertur-
bações externas in�uenciam o comportamento dinâmico do ROV, chegando as vezes,
a fazê-lo instável. Isto implica que a técnica de controle deverá ser capaz de com-
pensar as incertezas e perturbações, sendo as técnicas por realimentação de estados
(Feedback) preferidas sobre as técnicas por pre-alimentação (vide [42]). Ainda as-
sim, LEE e KANG [43], ou SZYMAK e MALECKI [44] realizaram trabalhos usando
técnicas Feedforward.
Dentro das possibilidades de técnicas de controle por realimentação, as teorias
de controle robusto e controle adaptativo se apresentam como fortes candidatos
para interagir com sistemas não lineares, onde as técnicas de controle clássico têm
apresentado di�culdades na performance em regime, tratamento de incertezas e
análise de altas não linearidades. Porém, a análise de estabilidade e a sintonização
envolvidos nestas técnicas não são tão simples quando comparadas com as técnicas
de controle linear.
Levando em conta que os métodos de realimentação de estados se mostram su-
periores que a teoria de controle clássico, em especial porque permitem alocar "li-
vremente" os autovalores de malha fechada, assim como oferecem a possibilidade
de ser complementados com técnicas de observação de estados quando a medição
dos estados se torna uma tarefa limitada em termos econômicos ou físicos.
Tanto na literatura quanto em trabalhos acadêmicos, encontra-se uma grande
variedade de estratégias de controle para posicionamento dinâmico e seguimento de
trajetórias. A maioria destes utilizam técnicas de controle robusto, tais como Modos
51

deslizantes (vide CUNHA et al. [45]) e Linearização por Realimentação, e técnicas
de controle adaptativo como proposto por HSU et al. [46], TANNURI et al. [47].
Porém, nem no controle clássico, nem no controle por realimentação de estados
é esclarecido explicitamente a relação existente entre as especi�cações dinâmicas e
o "custo" para poder executá-las. Por exemplo, de�nir de forma explícita a relação
entre a velocidade de resposta da variável controlada e a ação de controle requerida.
Contudo, a teoria de Controle Ótimo aparece fornecendo solução às desvantagens
apresentadas anteriormente, no entanto, oferece um alto grau de robustez perante
as incertezas da modelagem. Também, devido ao fato de ser baseado na teoria de
controle linear, permite a facilidade de utilizar as ferramentas de análise deste tipo
de controle.
O Controle Ótimo tem apresentado bons resultados em aplicações da área ae-
roespacial, como seguimento de rumo em aviões, posicionamento dinâmico em heli-
cópteros, quadrotores, navegação de VANTs (Veículos Aéreos Não Tripulados), mas
não foram encontradas referências de aplicações para controlar veículos submarinos.
Assim neste trabalho é apresentada uma abordagem por Controle Ótimo para
controlar a planta dinâmica de um ROV, apresentando os testes, resultados e con-
clusões obtidos ao longo desta tentativa.
A organização deste capítulo é descrita a seguir. Na primeira seção são des-
critos os conceitos teóricos relacionados ao Controle Ótimo. Seguido, na segunda
parte, são expostos os procedimentos necessários para controlar o modelo dinâmico
de um ROV. Uma terceira parte contém os parâmetros e matrizes obtidas através
da implementação do sistema de controle. A quarta seção introduz o conceito de
Observadores de Estados para complementar a estratégia de controle implementada.
4.1 Regulador Quadrático Linear (Linear Quadra-
tic Regulator)
Em sistemas MIMO (Multiple Input Multiple Output) não existe correspondência
direta entre a resposta temporal e a alocação dos polos, mesmo assim, neste tipo
de sistemas, a alocação dos polos pode se fazer com diferentes conjuntos de ganhos,
podendo gerar diferentes respostas temporais.
Os controladores baseados na teoria clássica têm mostrado bom rendimento em
sistemas SISO (Single Input Single Output), porém a extensão a sistemas MIMO
LTI (Sistemas Lineares Invariantes no Tempo), os quais são caracterizados por uma
matriz de funções de transferência, torna difícil a implementação destes controlado-
res.
Antes de entrar na descrição do LQR (Regulador Quadrático Linear) é introdu-
52

Figura 4.1: Diagrama de Bloques Controlador Feedback.
zido o conceito do Problema de Controle Ótimo. MOHAN e KAR [48] de�nem que
os elementos essenciais de um problema de controle são:
• A saída desejada do sistema;
• O conjunto de entradas admissíveis ou controles; e
• O desempenho ou função de custo que meça com efetividade uma dada ação
de controle.
O objetivo do sistema frequentemente é transformado num requerimento da
saída. Devido que os sinais de controle em sistemas físicos são geralmente obti-
dos através de equipamentos, estes fornecem uma quantidade limitada de energia ou
força, o que traduz em entradas restritas dentro do sistema. Assim, tais restrições
geram o conjunto de Entradas Admissíveis.
O conceito de solução ótima de um problema intuitivamente se traduz como a
melhor solução, porém, este conceito é subjetivo, razão pela qual para projetar um
sistema de controle real, deve-se lhe associar um Índice de Performance, permitindo
assim obter uma medida quanti�cável do comportamento do controlador. Frequen-
temente na bibliogra�a, a função de custo a se minimizar é chamada de J e adota
o nome de Índice de desempenho ou performance (vide [49]).
Assim, um sistema será considerado ótimo se minimizar uma Função Custo, na
qual é explicitado o compromisso entre diferentes especi�cações e restrições. Em ou-
tras palavras, a função de custo dependerá do comportamento desejado do sistema.
Na maioria de casos dependerá das entradas e das variáveis do sistema.
Contudo, o objetivo será desenvolver um controlador por realimentação de es-
tados para uma planta linear (ou linearizada se o sistema for não linear), tal que,
mantenha um desempenho ótimo, projetado para manter uma relação entre as en-
tradas possíveis e as saídas desejadas (vide Figura 4.1).
53

4.1.1 Problema das Condições Terminais
Para o Sistema Linear de Estados S da Expressão 4.1, x (t) ∈ Rn representa o
vetor dos estados do sistema, u (t) ∈ Rp representa o vetor dos sinais de controle ou
entradas, y (t) ∈ Rq é o vetor q-dimensional que descreve as saídas do sistema, todos
no tempo t. As matrizes A ∈ Rn×n, B ∈ Rn×p, C ∈ Rq×n e D ∈ Rq×p são chamadas
de Matriz de Estados, Matriz de Entrada, Matriz de Saída e Matriz de Transmissão
Direta respectivamente.
x (t) = Ax (t) +Bu (t)
y (t) = Cx (t) +Du (t)(4.1)
Deseja-se para o sistema S que num tempo especi�cado tf o vetor de estados
da saída y (tf ) se aproxime o máximo possível de um vetor de estados desejados y∗.
O objetivo será minimizar um sinal de erro de�nido como e (t), matematicamente
explicitado como:
e (t) = y (t)− y∗ (4.2)
A formulação em 4.2 requer uma minimização vetorial, razão pela qual, o pro-
blema é reescrito procurando minimizar uma quantidade escalar através do conceito
de Erro Quadrático. Então, rede�nindo o problema:
Jx = min(eT (tf )Q
∗e (tf ))
(4.3)
Percebe-se que além de usar a forma quadrática, foi introduzida uma matriz Q∗,
cujo objetivo é permitir 'penalizar' ou 'priorizar' algum dos estados. Dito de outra
forma, Q∗ ponderará o vetor e (tf ) segundo os requerimentos do projeto. Cabe res-
saltar que para garantir o conceito de erro quadrático, Q∗ deve ser de�nida positiva
(Q∗ > 0).
O problema é transformado como sendo um problema de aproximar a saída
de zero, ao invés de procurar um valor y∗. Assim, o sistema da Expressão 4.1 é
aumentado, porque é de�nida uma nova variável:
p (t) = y∗ ∀t (4.4)
Este planteamento implica que p (t) = 0 ∀t. Arrumando estas expressões junto
ao sistema linear proposto, obtém-se o modelo expandido Se da seguinte expressão.
54

[x (t)
p (t)
]=
[A 0
0 0
][x (t)
p (t)
]+
[B
0
]u (t)
e (t) =[C −I
] [ x (t)
p (t)
]+[D 0
]u (t)
(4.5)
Onde as condições iniciais serão x0e = [x0 y∗]T .
O problema então se traduz em levar ao valor mínimo à saída y (tf ). Expressando
este problema de forma similar à Equação 4.3:
Jx = min(yT (tf )Q
∗y (tf ))
(4.6)
Porém, considerando D = 0 ou seja sem transmissão direta entre o sinal de
entrada e a saída, se obtém y (t) = Cx (t), e substituindo na Equação 4.6.
Jx = xT (tf )CTQ∗Cx (tf )
Jx = xT (tf )Qx (tf )(4.7)
Onde Q = CTQ∗C ∈ Rn×n é uma matriz positiva semi-de�nida.
Para garantir uma trajetória ótima é preciso que Jx seja mínima ao longo de um
intervalo [t0 tf ]. De forma matemática pode se expressar como segue.
Jx =
tf∫t0
[xT (t)Qx (t)
]dt (4.8)
Onde Q > 0 ∀t ∈ [t0 tf ].
4.1.2 Problema do Regulador Funcional
BURGHES e GRAHAM [50] especi�cam que o índice de performance Jx pode se
associar às amplitudes de saída e a rapidez com que ela se aproxima de zero, sendo
observável na expressão 4.7. Porém, durante a minimização de Jx pode acontecer
um incremento razoável dos sinais de entrada u (·). Para garantir que as entradas
não ultrapassem os valores admissíveis, precisa-se modi�car a função de custo para
incluir um parâmetro destinado a regular este sinal.
De forma similar ao índice determinado em 4.8, de�ne-se uma nova função de
custo.
Ju =
tf∫t0
[uT (t)Ru (t)
]dt (4.9)
Onde R ∈ Rp×p > 0 ∀t ∈ [t0 tf ].
55

Considerando que minimizar duas funções separadamente equivale a minimizar
seu somatório como expressado por DEL NERO [49], sempre que ambas as funções
sejam positivas, obtém-se o novo índice de desempenho.
Jtf = Jx + Ju =
tf∫t0
[xT (t)Qx (t) + uT (t)Ru (t)
]dt (4.10)
4.1.3 Regulador Linear Ótimo Determinístico
Um sistema linear S acarreta para duas entradas diferentes, dois vetores de valores
�nais e dois índices de performance diferentes. Em outras palavras, melhorar o
comportamento funcional das variáveis u (t) e y (t) não implica necessariamente
melhorar também o comportamento terminal.
Para garantir boas propriedades terminais, precisa-se modi�car a formulação de
Jtf , incluindo um término que garanta chegar ao comportamento terminal desejado.
Jcf =
tf∫t0
[xT (t)Qx (t) + uT (t)Ru (t)
]dt+ xT (tf )Tx (tf ) (4.11)
Onde T = CTT ∗C > 0. O último parâmetro na Equação 4.11 descreve a condição
�nal desejada, e sob o mesmo conceito de ponderação, foi introduzida a matriz T ∗.
4.1.4 Custo do Controle
Na literatura, frequentemente são encontrados denominações de Controle Caro e
Controle Barato.
Na teoria de Controle Ótimo, se o sistema precisar manter amplitudes pequenas
da entrada, mediante valores grandes na matriz R, é chamado de Controle Caro.
Nos casos em que não se deseja desprezar a atuação dos sinais de entrada, deve-se
anular o valor da matriz R.
Por outro lado, o Controle Barato é projetado nos casos em que não é neces-
sário tomar cuidado com as magnitudes das entradas, mas procura-se melhorar o
comportamento da saída, através de valores baixos em R e ponderando com valores
altos a matriz Q.
4.1.5 Solução do Problema do Regulador
O sistema S da Expressão 4.1 é apresentado na Figura 4.2, junto com a solução por
realimentação F .
56

Figura 4.2: Controlador por Realimentação para Sistemas Lineares sem TransmissãoDireta.
A literatura presenta diversas abordagens para resolver o problema do Regulador
Quadrático Linear Ótimo. LEWIS et al. [51], BINI [52] apresentam a Solução pelo
cálculo das variações e pelo método das Equações Variacionais. Assim, a solução é
dada pela seguinte equação.
u∗ (t) = −R−1BTP ∗ (t)x∗ (t)
u∗ (t) = F ∗ (t)x∗ (t)(4.12)
Na Equação 4.12 se percebe que o sinal de entrada solução u∗ (t) é obtido como
resultado de realimentar o estado solução x∗ (t) premultiplicado pela matriz inversa
de ponderação do sinal de entrada R e da transposta da matriz de entrada B. Além
do mais, a matriz P ∗ (t) se apresenta como aquela que minimiza a função de custo
Jcf .
Porém, os métodos citados representam um alto grau de complexidade no cálculo
da matriz P ∗ (t). Contudo, uma abordagem mais simples é utilizada geralmente para
encontrar a solução do problema que minimiza o índice de desempenho da Equação
4.11, tal solução é obtida através da Equação de Ricatti Matricial.
P (t) = −ATP (t)− P (t)A+ P (t)BR−1BTP (t)−QP (tf ) = Pf
(4.13)
A Equação 4.13 está de�nida com condições de contorno terminais, isto facilita
a obtenção da solução única P ∗ (t). A solução cumpre com a seguinte propriedade:
P ∗ (t) = P ∗T (t)∀t ∈ [t0 tf ] (4.14)
Como já explicado, o problema de regulação implica levar a zero os estados de
um sistema dado, desta forma, a Equação 4.13 é generalizada como segue:
ATX +XA−XBR−1BTX +Q = 0 (4.15)
A Expressão 4.15 é chamada de Equação de Ricatti Matricial Algébrica. Para
57

esta aproximação a matriz de ponderação P ∗ (t) = Pf é constante, sendo a solução
constante da Equação de Ricatti Matricial.
4.1.6 Horizonte de Tempo In�nito
Na maioria de problemas de controle, além de atingir um alvo ou setpoint desejado,
precisa-se manter esta condição de forma inde�nida até um novo estado desejado
ser solicitado. Na teoria de controle ótimo, isto signi�ca expandir a formulação já
exposta usando tf →∞. Assim, o problema é minimizar o seguinte critério.
Jti = limtf→∞
tf∫t0
[xT (t)Qx (t) + uT (t)Ru (t)
]dt+ xT (tf )Tx (tf )
(4.16)
Onde as matrizes Q > 0, R > 0 e T > 0.
A Expressão 4.16 implica que tanto o sinal de entrada quanto os estados do
sistema deverão tender para zero quando tf →∞, caso contrário, a integral fará com
que Jti →∞, e assim o problema de minimização perderá o valor. Em consequência,
as seguintes duas condições são necessárias para encontrar a solução do problema
de Horizonte de Tempo In�nito, como segue.
1. limt→∞
u (t) = 0.
2. limt→∞
y (t) = 0.
A última condição implica que o estado �nal deverá se anular, ou seja, o terceiro
termo da Equação 4.16 limtf→∞
xT (tf )Tx (tf ) = 0. Desta forma as condições terminais
não afetam este problema, sendo eliminadas do critério. Em outras palavras, o índice
de performance que se precisa minimizar é aquele expresso na Equação 4.10, assim
que Jti = Jtf onde tf → ∞ e t0 = 0 sem perder generalidade, como mostrado por
SETHI e THOMPSON [53].
J =
∞∫0
[xT (t)Qx (t) + uT (t)Ru (t)
]dt (4.17)
A solução deste problema é tomada a partir da Equação 4.12, da qual procura-se
encontrar o limite para P ∗ (t), lembrado que dita matriz é uma solução positiva
semide�nida da Equação de Ricatti Matricial.
P = limtf→∞
P ∗ (t) (4.18)
58

Alguns autores como SUBCHAN e ZBIKOWSKI [54] interpretam 4.18 como
Solução em Regime da Equação de Ricatti Matricial. Se Pf é livremente escolhida,
quando tf → ∞, a solução da Equação de Ricatti Matricial tenderá a um valor
constante, tornando-se a solução da Equação de Ricatti Matricial Algébrica.
4.2 Controlador LQR
A construção do controlador por realimentação de estados empregando a teoria do
Regulador Quadrático Linear se resume em determinar a Matriz de ganho F . A
partir da Figura 4.2, e substituindo na Equação 4.12 se obtém:
x (t) = Ax (t)−BFx (t)
x (t) = (A−BF )x (t)
x (t) =(A−BR−1BTP
)x (t)
(4.19)
A matriz F permitirá alocar os polos do sistema para garantir o seu controle
sob as condições desejadas, como expresso por RIVERA [55]. Como se apresentou,
P é a solução do problema do Regulador, e mantém uma relação estreita com as
matrizes de ponderação dos estado e das estradas Q e R.
Para implementar este controlador, se emprega a teoria do controle linear, assim,
o sistema deve cumprir com as seguintes propriedades.
1. O sistema linear deve ser Controlável, ou seja a dupla [A B] deve cumprir esta
propriedade.
2. A dupla [A H] deve ser controlável, onde HHT = Q.
3. As matrizes de ponderação Q e R devem ser simétricas, positivas de�nidas.
Assim, se pode de�nir o procedimento para projetar o controlador:
1. Escolher as matrizes Q ∈ Rn×n e R ∈ Rp×p. Para garantir que ambas as ma-
trizes sejam positivas de�nidas, geralmente na prática se utilizam como sendo
diagonais, assim cada componente da diagonal principal é associado a cada
um dos estados e das entradas, estabelecendo de forma direta a ponderação
correspondente.
2. Resolver a Equação de Ricatti Matricial Algébrica da expressão 4.15 encon-
trando a Matriz P . Frequentemente os problemas de controle de sistemas
físicos devem se resolver utilizando a abordagem do Regulador de Tempo In-
�nito (Vide 4.1.6).
59

3. Calcular a matriz F a partir da formulação F = R−1BTP . Assim que esta ma-
triz tenha sido calculada, se deve fechar a malha de controle por realimentação,
e proceder a testar o sistema.
4.2.1 Índice de Estabilidade
Este parâmetro possibilita melhorar a resposta do sistema em malha fechada, já que
permite que os polos do sistema sejam limitados, segundo o projetista lhes aloque
no projeto.
Manipulando o índice de performance J da Equação 4.17:
Je =
∞∫0
e2κt[xT (t)Qx (t) + uT (t)Ru (t)
]dt
Je =
∞∫0
[(eκtx (t)
)TQ(eκtx (t)
)+(eκtu (t)
)TR(eκtu (t)
)]dt (4.20)
Je =
∞∫0
[xT (t)Qx (t) + uT (t)Ru (t)
]dt
Da Expressão 4.20 são de�nidas duas novas variáveis:
x (t) = eκtx (t)
u (t) = eκtu (t)(4.21)
Derivando a primeira expressão em 4.21, se encontra:
˙x (t) = eκtx (t) + κeκtx (t)˙x (t) = eκt (Ax (t) +Bu (t)) + κeκtx (t)˙x (t) = A (eκtx (t)) +B (eκtu (t)) + κeκtx (t)˙x (t) = (A+ κI) eκtx (t) +B (eκtu (t))˙x (t) = (A+ κI) x (t) +Bu (t)
(4.22)
Substituindo a Expressão 4.21 na lei de controle 4.12, obtém-se:
u (t) = −Fx (t)
eκtu (t) = −Feκtx (t)
u (t) = −Fx (t)
(4.23)
Desta forma, é conferido que a inclusão do fator κ no sistema,não modi�ca a lei
de controle. Além do mais, percebe-se que no caso de κ > 0, os polos do sistema em
malha fechada serão deslocados mais para a esquerda do plano complexo, tal como
se amostra na Figura 4.3.
60

κ
jω
σ
Figura 4.3: Índice de Estabilidade.
4.2.2 Rastreamento de Referências
O controlador já apresentado foi de�nido para atingir um estado �nal estável e �xo.
Porém, na maioria das aplicações reais, deseja-se seguir o rastrear uma trajetória.
O controlador LQR tem a capacidade de fazer o sistema seguir um sinal, para tal
�m, é preciso modi�car a malha de controle, embora não mudem as características
do controlador.
ref
Figura 4.4: Controlador LQR com sinal de Referência.
Como se apresenta na Figura 4.4, a inclusão do Sinal de Referência modi�ca
a realimentação dos estados, porém, só em magnitude. A ideia é fazer com que o
valor do estado x (t) se aproxime ao valor de referência xref (t) de forma assintótica.
Assim, a nova lei de controle é formulada como:
u (t) = −F (x (t)− xref (t)) (4.24)
61

4.2.3 Sintonização do Controlador
O procedimento de sintonização das matrizes de ponderação Q e R é um processo
que permite melhorar o desempenho do controlador, diminuindo o erro em regime,
a velocidade de estabilização, o overshoot.
De forma similar à teoria de controle clássico, não existe um método exato para
achar os valores apropriados para se obter o melhor comportamento após um sinal
de entrada. Porém, existem abordagens empíricas que têm logrado sucesso quando
se procura pelos valores de ponderação.
A regra de Bryson apresenta um 'palpite' sobre os valores iniciais dos compo-
nentes das matrizes de ponderação Q e R.
Qn,n =1
x2nmax
Rp,p =1
u2pmax
(4.25)
Onde x2nmaxcorresponde aos valores máximos projetados dos estados do sistema.
Entretanto, u2pmaxsão os valores máximos que as entradas podem adotar.
Após testar o comportamento do sistema para os valores iniciais propostos na
Expressão 4.25, estes poderão ser incrementados ou diminuídos segundo os requeri-
mentos de desempenho projetados para o sistema.
4.3 Observador de Estados
Quando é projetado um controlador, geralmente se faz a suposição que todos os
estados do sistema, estão habilitados para ser medidos. Porém tal suposição nem
sempre é certa. Algumas vezes os custos da instrumentação precisa, o tamanho dos
dispositivos requeridos, os diferentes tipos de ambientes, as metodologias existentes,
ou simplesmente pelo limite tecnológico, torna impossível chegar a medir todas as
variáveis de um sistema.
Em outras ocasiões o problema radica em que os sensores disponíveis, não con-
seguem medir a variável precisada, e para solucioná-lo é necessário de métodos de
integração e/ou derivação numérica. Isto faz com que o sistema se torne altamente
suscetível a ruídos, ou mesmo perdendo o concepto de Causalidade.
Por este motivo, foi desenvolvida a teoria dos Observadores de Estados (Estima-
dores). Um observador calcula o valor de todas as variáveis de estado, incluindo as
variáveis não medíveis, baseado nos estados medidos e nas entradas do sistema. A
arquitetura mais empregada no projeto de observadores, é o Observador Identidade
também chamado de Observador de Luenberger, como apresentado por LUENBER-
GER [56], NIKOUKHAH et al. [57].
62

ref
e
Figura 4.5: Arquitetura Observador Luenberger.
A Figura 4.5 mostra o diagrama de blocos de um observador. Uma primeira
parte é chamado de Preditor, o qual é composto por uma réplica da planta dinâmica
do sistema. Além do preditor, um bloco de correção deve ser inserido, porque as
incertezas na modelagem fazem com que a estimação correta dos estados não seja
obtida somente através do preditor. Desta forma o vetor de estados estimados é
de�nido como segue:
˙x (t) = Ax (t) +Bu (t) + L (y (t)− y (t)) (4.26)
De forma geral, o observador (ou estimador) de estados, calculará os estados
do sistema baseado nas matrizes da dinâmica deste mesmo, adicionalmente, através
do bloco de correção, comparará os valores dos estados medidos y (t) com os equi-
valentes estimados y (t), obtendo assim o sinal de erro εe (t), sendo realimentado
pre-multiplicado pelo ganho L. Assim, quanto menor for o erro, menor será a ação
de correção e vice-versa.
Pode-se perceber a relação existente entre a matriz L e a �abilidade do modelo
dinâmico desenvolvido. Assim, quando é garantida uma boa modelagem da planta,
L pode ser projetada com valores pequenos, porém, se a con�ança no modelo, ou se
as medições dos estados são afeitadas por ruido, L deverá possuir um valor alto.
O erro de estimação total é de�nido como segue:
63

ee (t) = x (t)− x (t) (4.27)
Da expressão 4.27 obtém-se a sua derivada em função do tempo:
ee (t) = x (t)− ˙x (t) (4.28)
Substituindo as expressões 4.1 e 4.26 em 4.28, obtém-se:
ee (t) = Ax (t) +Bu (t)− Ax (t)−Bu (t)− Lεe (t)
ee (t) = Ax (t) +Bu (t)− Ax (t)−Bu (t)− L (y (t)− y (t))
ee (t) = A (x (t)− x (t))− L (y (t)− y (t))
ee (t) = Aee (t)− LC (x (t)− x (t))
ee (t) = Aee (t)− LCee (t)
ee (t) = (A− LC) ee (t)
(4.29)
Pode-se concluir que o estimador de estados fará tender o erro de estimação para
zero (ee → 0) quando t→∞, como explicado por ELLIS [58].
Da expressão 4.29 se pode observar que L aumenta diretamente os autovalores
em (A− LC), sempre que L seja positiva de�nida. Em outras palavras, os polos do
observador estarão alocados mais a esquerda do plano complexo quando comparados
com os polos da planta.
Manipulando os valores em L, é possível alocar os polos do observador tão distan-
tes quanto se desejar no projeto, porém na prática, esta escolha pode fazer instáveis
alguns dos estados. Para evitar este problema, é utilizado um procedimento para
calcular L de forma ótima, sendo conhecido na literatura como Filtro de Kalman.
Reformulando o problema de minimização do índice de performance para o ob-
servador, deve minimizar o erro de estimação realimentado junto com o sinal de
entrada, assim:
Je =
∞∫0
[εTe (t)Q∗eεe (t) + uTe (t)Reue (t)
]dt
Je =
∞∫0
[eTe (t)CTQ∗eCee (t) + uTe (t)Reue (t)
]dt (4.30)
Je =
∞∫0
[eTe (t)Qeee (t) + uTe (t)Reue (t)
]dt
Onde Qe = CTQ∗eC > 0 ∈ Rn×n), e Re > 0 ∈ Rq×q, sendo n a quantidade de
64

estados do sistema, e q a quantidade de estados mesuráveis.
Ao comparar a Equação de realimentação de estados em 4.19 para o controlador
LQR com a Equação do erro realimentação do observador 4.29 se encontra a se-
melhança entre (A−BF ) e (A− LC). Transpondo a segunda expressão obtém-se(AT − CTLT
). Levando em conta a propriedade 4.14, então conclui-se que K é a
solução da Equação de Ricatti Matricial Algébrica seguinte:
AK +KAT −KCTR−1e CK +Qe = 0 (4.31)
Desta forma, a matriz de retroalimentação do erro de estimação é expressa na
Equação 4.32.
L = KCTR−1e (4.32)
Quando se projeta um observador de estados se deve analisar a Observabilidade
da dupla (A,C), porque esta permite determinar os estados do sistemas suscetíveis
de estimar (vide [59]).
65

Capítulo 5
Simulações e Resultados
Este capítulo apresenta as simulações realizadas no modelo não linear do ROV ope-
rando com o sistema de controle LQR implementado, analisando os resultados ob-
tidos. Como já foi dito, todas as simulações foram executadas com os modelos
projetados em SIMULINK. Os sinais de entrada e/ou controle considerados foram
as velocidades rotacionais dos propulsores.
Desta forma, este capítulo está dividido como segue: A primeira parte apresenta
as simulações realizadas no modelo não linear com o objetivo de avaliá-lo. A segunda
parte relata os resultados obtidos após a implementação do sistema de controle LQR
ao modelo não linear, incluindo a sintonização do controlador. A terceira parte
mostra os resultados do controlador melhorado com a ação de saturadores e do
observador de estados completo.
5.1 Simulações Modelo Não Linear
Para testar o modelo não linear do ROV foram realizados vários testes. O objetivo
do primeiro teste foi determinar o comportamento do veículo sem forças de empuxo
geradas pelos propulsores. Veri�cou-se que o ROV procura se estabilizar alinhando
o plano metacêntrico com o eixo z do sistema inercial.
Como se apresenta na Figura 5.1 o ROV se movimenta procurando encontrar
a estabilidade, produzindo-se um pequeno deslocamento no eixo x, assim como pe-
quenas rotações sobre os eixos x e z. Porém, percebe-se que o deslocamento sobre
o eixo y aumenta continuamente. De forma similar o deslocamento no eixo −z é
continuo, devido à ação da forma de restauração que sempre tentará levar o ROV
para a superfície. Já, a rotação sobre o eixo y embora seja factível de se conside-
rar desprezível, vai aumentando aos poucos. Se o veículo continuar sem ação de
controle, tal oscilação pode se tornar grande o su�ciente para instabilizar o sistema.
Depois de testar o sistema dessa forma, foram realizados testes variando os valo-
res de entrada nos sinais de controle dos propulsores com o objetivo de veri�car que
66

0 10 20 30 40 50 600
0.5
x 10−17
Ava
nço
[m]
0 10 20 30 40 50 600
0.02
0.04
Der
iva
[m]
0 10 20 30 40 50 60−40
−20
0
Arf
agem
[m]
0 10 20 30 40 50 60−1
−0.5
0
Bal
anço
[gra
us]
0 10 20 30 40 50 60−2
0
2x 10
−16
Cat
urro
[gra
us]
0 10 20 30 40 50 60
−0.5
0x 10
−14
Tempo [s]
Gui
nada
[gra
us]
Figura 5.1: Simulação Sistema Não Linear ROV. Sem Forças de propulsão agindo.
para os esforços gerados num eixo de�nido, os deslocamentos produzidos correspon-
dam ao mesmo eixo de propulsão. Na Figura 5.2 se apresenta o resultado obtido
após de gerar uma entrada constante de 15 rps nos propulsores p1 e p2 (propulsão
no eixo x do sistema móvel).
Na Figura 5.2, no inicio da simulação se observa que o ROV começou a se deslocar
ao longo do eixo xO. Porém a distribuição da matriz de inércia faz com que sejam
gerados forças e momentos em função do tempo decorrido, neste caso especí�co a
guinada aumenta fazendo girar sem controle o ROV. Próximo aos 30 segundos de
simulação, o veículo já tem girado quase 360◦, tal como se vê no avanço (movimento
sobre o eixo x).
Depois de fazer experiencias mudando a propulsão no ROV, os resultados foram
67

0 10 20 30 40 50 600
1
2
3
Ava
nço
[m]
0 10 20 30 40 50 60−2
−1
0
1
Der
iva
[m]
0 10 20 30 40 50 60−30
−20
−10
0
Arf
agem
[m]
0 10 20 30 40 50 60−1
−0.5
0
0.5
Bal
anço
[gra
us]
0 10 20 30 40 50 60−1
−0.5
0
Cat
urro
[gra
us]
0 10 20 30 40 50 60−1000
−500
0
Tempo [s]
Gui
nada
[gra
us]
Figura 5.2: Simulação Sistema Não Linear ROV. Força de propulsão no eixo x.
similares aos apresentados. Por exemplo para uma força da mesma magnitude an-
terior sobre os propulsores do eixo y, a oscilação na orientação é muito menor, e
apresenta oscilação estável no balanço. Se a propulsão é gerada nos propulsores do
eixo z geram oscilação mínima na orientação do ROV, após girar levemente sobre o
eixo x, porém o deslocamento sobre o eixo y aumenta em função do tempo.
Estas simulações validaram a construção do modelo dinâmico não linear baseado
na teoria estudada no Capítulo 2.
68

5.2 Simulações Implementação Controlador LQR
Após a avaliação do modelo dinâmico não linear, foi introduzido o controlador LQR
estudado no Capítulo 4. O primeiro dos testes com o controlador implementado
foi realizado sem sinal de referência ou Set Point para conferir a regulação sobre
o ponto de operação escolhido na Seção 3.1. Na primeira tentativa as matrizes do
LQR foram calculadas utilizando a regra de Bryson da Seção 4.2.3.
Os valores considerados como máximos tanto para os estados, foram escolhidos
segundo o comportamento padrão dos ROVs de trabalho e inspeção, além das con-
siderações de avaliação do modelo não linear implementado. Entretanto, os valores
máximos para as entradas foram eleitos a partir das propriedades dos propulsores
utilizados. Seguem estes valores e as matrizes Q e R do regulador LQR explicado
no capítulo 4.
Q =
1.563 0 0 0 0 0 · · ·0 1.563 0 0 0 0 · · ·0 0 1.563 0 0 0 · · ·0 0 0 32.653 0 0 · · ·0 0 0 0 32.653 0 · · ·0 0 0 0 0 32.653 · · ·0 0 0 0 0 0 · · ·0 0 0 0 0 0 · · ·0 0 0 0 0 0 · · ·0 0 0 0 0 0 · · ·0 0 0 0 0 0 · · ·0 0 0 0 0 0 · · ·
· · · 0 0 0 0 0 0
· · · 0 0 0 0 0 0
· · · 0 0 0 0 0 0
· · · 0 0 0 0 0 0
· · · 0 0 0 0 0 0
· · · 0 0 0 0 0 0
· · · 10000 0 0 0 0 0
· · · 0 10000 0 0 0 0
· · · 0 0 10000 0 0 0
· · · 0 0 0 131.211 0 0
· · · 0 0 0 0 131.211 0
· · · 0 0 0 0 0 131.211
(5.1)
69

R =
0.0025 0 0 0 0 0
0 0.0025 0 0 0 0
0 0 0.0025 0 0 0
0 0 0 0.0025 0 0
0 0 0 0 0.0004 0
0 0 0 0 0 0.0004
(5.2)
As matrizes 5.1 e 5.2 foram obtidas a partir dos seguintes valores:
Tabela 5.1: Valores Máximos para os Estados e Entradas do Sistema.Variável Valor Unidade
umax 0.8 m/svmax 0.8 m/swmax 0.8 m/spmax 0.175 rad/sqmax 0.175 rad/srmax 0.175 rad/sxmax 0.01 mymax 0.01 mzmax 0.01 mφmax 0.087 radθmax 0.087 radψmax 0.087 radnp1max
20 rpsnp2max
20 rpsnp3max
20 rpsnp4max
20 rpsnp5max
50 rpsnp6max
50 rps
O resultado da implementação do controlador sintonizado pelo método de Bryson
é apresentado na Figura 5.3. Após de 60 segundos de simulação, pode se observar
que o ROV permanece no ponto de operação. Note-se que as curvas obtidas não
são apresentadas por retas, porém, a magnitude dos grá�cos vão entre 1 × 10−17 e
1 × 10−50. Assim as oscilações presentes principalmente em φ e θ podem se con-
siderar desprezíveis na hora de implementar na prática o controlador. O estado
melhor comportado é a arfagem z se estabilizando após poucos segundos do início
da simulação. O problema deste controlador está nas curvas apresentadas nos ou-
tros graus de liberdade, devido que, crescem continuamente. Embora como já dito
a magnitude seja desprezível, não tem garantia de continuar dessa forma após um
longo tempo. Este fato torna-se relevante para atividades de apoio ou de posici-
onamento dinâmico, nas quais o ROV frequentemente permanece imóvel durante
tempos prolongados.
Isto posto, se determinou trabalhar as matrizes do regulador ótimo com o obje-
tivo de estabilizar todos os graus de liberdade do ROV.
Depois de realizar diversas modi�cações nos valores das matrizes de ponderação,
não foram obtidas melhoras signi�cativas no desempenho do controlador. Por isto,
70

0 10 20 30 40 50 60−5
0
5x 10
−50
Ava
nço
[m]
0 10 20 30 40 50 600
1
2x 10
−34
Der
iva
[m]
0 10 20 30 40 50 60
−1.5−1
−0.5
x 10−17
Arf
agem
[m]
0 10 20 30 40 50 60−5
0
5x 10
−33
Bal
anço
[gra
us]
0 10 20 30 40 50 60−5
0
5x 10
−49
Cat
urro
[gra
us]
0 10 20 30 40 50 60−5
0
5x 10
−44
Tempo [s]
Gui
nada
[gra
us]
Figura 5.3: Simulação Sistema Não Linear ROV. Ponto de Operação e SintonizaçãoMétodo de Bryson.
optou-se por simular o sistema com a sintonização pelo método de Bryson para
um tempo muito maior. Assim foram simulados 1200 segundos. O resultado é
apresentado na Figura 5.4.
O resultado obtido mostra que embora o avanço, a deriva e a guinada não consi-
gam se estabilizar num valor mínimo, o crescimento destes estados não vira instável
e signi�cativo após os 20 minutos de simulação. Desta forma se deu por válida a
sintonização pelo método de Bryson.
Assim, foi construído o mapa de polos e zeros correspondente ao sistema em
malha fechada com o controlador e comparado com o sistema em malha aberta.
Como apresentado na Figura 5.5 o sistema não possui zeros, porém as componentes
reais dos polos são zero. Já com o controlador, veri�cou-se que todos os polos foram
71

0 200 400 600 800 1000 1200−5
0
5x 10
−49
Ava
nço
[m]
0 200 400 600 800 1000 12000
2
4x 10
−33
Der
iva
[m]
0 200 400 600 800 1000 1200
−1.5−1
−0.5
x 10−17
Arf
agem
[m]
0 200 400 600 800 1000 1200−5
0
5x 10
−33
Bal
anço
[gra
us]
0 200 400 600 800 1000 1200−5
0
5x 10
−49
Cat
urro
[gra
us]
0 200 400 600 800 1000 1200−1
0
1x 10
−42
Tempo [s]
Gui
nada
[gra
us]
Figura 5.4: Simulação Sistema Não Linear ROV. Ponto de Operação e SintonizaçãoMétodo de Bryson (20 min).
deslocados mais para o lado esquerdo do plano real garantindo a estabilidade do
sistema.
O seguinte teste foi especi�car uma referência para o ROV e analisar a resposta
obtida. A maioria das operações de inspeção precisam de deslocamentos ao longo do
eixo z para rastrear os riser, no entanto, os deslocamentos em x e y são realizados
para manter uma distância quase �xa com relação à tubulação. Desta forma foi
inserido um set point de um metro no eixo z (arfagem).
O resultado obtido mostra a velocidade de resposta do regulador ótimo, alcan-
çando o objetivo em um segundo. Os outros graus de liberdade sofreram pertur-
bações mínimas que podem se considerar desprezíveis, com exceção do balanço (φ)
que apresentou de até −20◦ estabilizando em zero próximo dos dez segundos de
72

Mapa de Polos e Zeros
Eixo Real (seconds−1)
Eix
o Im
agin
ario
(se
cond
s−1 )
−4 −3.5 −3 −2.5 −2 −1.5 −1 −0.5 0−4
−3
−2
−1
0
1
2
3
40.080.170.280.380.50.64
0.8
0.94
0.080.170.280.380.50.64
0.8
0.94
0.5
1
1.5
2
2.5
3
3.5
4
0.5
1
1.5
2
2.5
3
3.5
4
Malha AbertaMalha Fechada
Figura 5.5: Mapa de Polos e Zeros para Sistema em Malha Fechada, SintonizaçãoMétodo de Bryson.
simulação (vide Figura 5.6).
As velocidades do ROV permanecem dentro da faixa projetada na Tabela 5.2,
porém no início da simulação a velocidade no eixo zO ultrapassa o valor máximo
chegando até 5 m/s. Na realidade isto pode ser um fato irreal devido às limita-
ções físicas do veículo e seus equipamentos. Cabe ressaltar que este incremento na
velocidade deve-se à rápida resposta do controlador sobre a referência solicitada.
Ao inspecionar os sinais de entrada, foi encontrado que tanto os propulsores p3e p4 encargados da propulsão em yO, quanto os propulsores p5 e p6 com a propulsão
para zO, alcançam valores além das condições reais de geração. Por exemplo, os
propulsores p5 e p6 precisam girar inicialmente num valor próximo às 5000 rps,
fato impossível devido que ultrapassa cem vezes o valor máximo de rotação real dos
propulsores adotados. Outro problema relacionado aconteceria no evento de solicitar
um set point maior, já que se pode esperar que a ação de controle aumente também
até alcançar a regulação.
Os valores de propulsão são apresentados na Figura 5.7.
A análise deste problema levou a reestudar a teoria do controlador ótimo,
achando que devido à regra de Bryson, a matriz R calculada para este projeto
possui valores pequenos quando comparados com os valores de Q, em outras pala-
vras, a regra de Bryson levou a projetar um controlador barato, com ação mínima
de supervisão sobre as entradas.
Para compensar este problema, foram incrementados os valores de R, esperando
tornar mais caro o controlador, e por sua vez diminuir as magnitudes de controle.
O resultado depois de vários testes foi que o efeito direto de incrementar a matriz
de ponderação de entradas é tornar mais lento a resposta do sistema, um resultado
73

0 10 20 30 40 50 60−1
0
1x 10
−13
Ava
nço
[m]
0 10 20 30 40 50 60−0.05
0
0.05
Der
iva
[m]
0 10 20 30 40 50 600
1
2
Arf
agem
[m]
0 10 20 30 40 50 60−50
0
50
Bal
anço
[gra
us]
0 10 20 30 40 50 60−5
0
5x 10
−13
Cat
urro
[gra
us]
0 10 20 30 40 50 60−2
0
2x 10
−10
Tempo [s]
Gui
nada
[gra
us]
Figura 5.6: Simulação Sistema Não Linear ROV. Estados com referência z = 1m,Sintonização Bryson.
lógico tomando em consideração a diminuição da ação de controle sobre o sistema.
Para citar um exemplo com uma matriz R = diag {100 100 100 100 100 100} osistema alcança o set point próximo aos quinze segundos após do sinal de controle.
Contudo, a velocidade de rotação inicial para os propulsores involucrados foi de
37 rps até diminuir assintoticamente ao ponto de operação.
Logo, tentar limitar a ação de controle somente através da matriz R é uma
abordagem não con�ável porque torna lento a resposta do sistema e não garante
que ante uma entrada maior, o controlador não solicite um valor fora da faixa de
valores permitidos.
Para garantir que as entradas de controle não sobrepassem os valores máximos
projetados e/ou admissíveis, foi adicionado ao modelo não linear um bloco de Satu-
74

0 10 20 30 40 50 60−4
−2
0x 10
−10
n p 1 [rps
]
0 10 20 30 40 50 600
5x 10
−10
n p 2 [rps
]
0 10 20 30 40 50 60−100
0
100
n p 3 [rps
]
0 10 20 30 40 50 60−100
0
100
n p 4 [rps
]
0 10 20 30 40 50 60−5000
0
5000
n p 5 [rps
]
0 10 20 30 40 50 60−5000
0
5000
Tempo [s]
n p 6 [rps
]
Figura 5.7: Simulação Sistema Não Linear ROV. Entradas com referência z = 1m,Sintonização Bryson.
radores. Este bloco limita a ação de controle de forma similar de um ampli�cador
operacional na zona de saturação. Assim cada entrada de controle foi limitada por
meio de um saturador.
O principio de funcionamento destes blocos é resumido a seguir:
uout =
umin ∀ uin ≤ umin
uin ∀ umin < uin < umax
umax ∀ uin ≥ umax
(5.3)
Desta forma foi introduzido no modelo dinâmico construído em SIMULINK o
bloco de saturadores. O primeiro objetivo foi testar o desempenho do controlador
sintonizado com o método de Bryson.
75

0 10 20 30 40 50 60−1
0
1x 10
−16
Ava
nço
[m]
0 10 20 30 40 50 60−2
0
2x 10
−3
Der
iva
[m]
0 10 20 30 40 50 600
1
2
Arf
agem
[m]
0 10 20 30 40 50 60−0.5
0
0.5
Bal
anço
[gra
us]
0 10 20 30 40 50 60−2
0
2x 10
−15
Cat
urro
[gra
us]
0 10 20 30 40 50 60−5
0
5x 10
−13
Tempo [s]
Gui
nada
[gra
us]
Figura 5.8: Simulação Sistema Não Linear ROV. Estados com referência z = 1m,Sintonização Bryson com Saturador.
O resultado deste teste mostrou que o desempenho do controlador não é afetado,
exceto pelo atraso gerado para atingir o set point. Isto é um resultado esperado, já
que a ação de controle foi limitada dentro da faixa admissível.
Nesta simulação, o ROV atinge o set point próximo aos cinco segundos de si-
mulação, um resultado bastante bom, levando em consideração a velocidade de
deslocamento do veículo. Além do mais, os estados restantes apresentaram um
comportamento relativamente estável sem oscilações relevantes. O resultado desta
simulação é apresentado na Figura 5.8.
Por sua vez, na Figura 5.9 são apresentadas as entradas correspondentes a esta
simulação. Pode-se conferir nas grá�cas dos propulsores p5 e p6 a ação dos saturado-
res nos primeiros sete segundos de simulação. O resultado mostra que embora a ação
76

0 10 20 30 40 50 60−2
0
2x 10
−12
n p 1 [rps
]
0 10 20 30 40 50 60−2
0
2x 10
−12
n p 2 [rps
]
0 10 20 30 40 50 60−5
0
5
n p 3 [rps
]
0 10 20 30 40 50 60−5
0
5
n p 4 [rps
]
0 10 20 30 40 50 60−50
0
50
n p 5 [rps
]
0 10 20 30 40 50 60−50
0
50
Tempo [s]
n p 6 [rps
]
Figura 5.9: Simulação Sistema Não Linear ROV. Entradas com referência z = 1m,Sintonização Bryson com Saturador.
de controle seja limitada, o regulador ótimo consegue regular os estados levando-os
para o valor mínimo.
Para �nalizar estes testes, se escolheram outras referencias para estudar o com-
portamento do sistema nos outros eixos. Primeiramente, foram eleitos set points
com movimentos desacoplados, considerando que o controlador responde satisfatori-
amente para estes comandos. O teste �nal foi realizado com movimentos acoplados,
procurando atingir alvos simultaneamente em dois graus de liberdade de posição
ou nos três. De novo o controlador respondeu atingindo cada referência requerida,
porém, os movimentos acoplados geram torques que afetam consideravelmente os
ângulos de Euler durante os transitórios de translação.
Embora aos poucos o controlador consiga estabilizar o sistema entorno à referên-
77

0 10 20 30 40 50 60−0.2
0
0.2
0.4
0.6
u [m
/s]
MedidoEstimado
0 10 20 30 40 50 60−0.2
0
0.2
0.4
0.6
v [m
/s]
0 10 20 30 40 50 60−0.2
0
0.2
0.4
0.6
w [m
/s]
Figura 5.10: Comparação Velocidades u, v e w do Controlador e do Observador commatriz Qe = 1000Q.
cia, transitórios com este tipo de problema podem não ser bené�cos para atividades
tais como reparações, nas quais, o ROV utiliza um o dois manipuladores para realizar
a tarefa.
Isto abre a possibilidade de trabalhar mais um pouco com a sintonização das
matrizes de ponderação Q e R. Não só com a matriz Q, porque assim que esta au-
mentar, a ação das entradas se tornará menor, voltando ao problema já apresentado
de sinais de entrada altas e respostas lentas pelos saturadores.
Neste trabalho, optou-se por tratar o problema do Observador de Estados antes
de realizar a sintonização �na, devido ao fato que na maioria das aplicações não
é possível medir todos os estados, e que a implementação do observador afetará o
performance do sistema.
78

5.3 Simulações Controlador LQR com Observador
de Estados
Baseado nos resultados obtidos para o controlador LQR trabalhando em conjunto
com o saturador, foi projetado o Observador de Estados Completo segundo o estu-
dado no Capítulo 4 na Seção 4.3.
Foram realizadas diversas tentativas, tentando alocar o polos de malha fechada
do observador de forma não ótima, porém, nem sempre foram obtidos bons resulta-
dos. Na maioria destas tentativas alguns dos estados viraram instáveis ou o erro de
estimação em regime era considerável.
0 10 20 30 40 50 60−0.5
0
0.5
1
u [m
/s]
MedidoEstimado
0 10 20 30 40 50 60−0.5
0
0.5
1
v [m
/s]
0 10 20 30 40 50 60−0.5
0
0.5
w [m
/s]
0 10 20 30 40 50 60−0.5
0
0.5
p [r
ad/s
]
0 10 20 30 40 50 60−0.2
0
0.2
q [r
ad/s
]
0 10 20 30 40 50 60−0.5
0
0.5
Tempo [s]
r [r
ad/s
]
Figura 5.11: Comparação Estados u, v, w, p, q e r do Controlador e do Observadorcom Sintonização Manual, primeira tentativa.
Após esses resultados, se determinou calcular a matriz L de forma ótima. Man-
79

tendo o conceito principal que o observador deve responder rapidamente, anteci-
pando a resposta da planta dinâmica, os polos do observador devem se alocar mais
longe à esquerda da parte negativa real do plano S do que os polos em malha fechada
do controlador.
0 10 20 30 40 50 600
0.5
1
1.5
x [m
]
MedidoEstimado
0 10 20 30 40 50 600
0.5
1
1.5
y [m
]
0 10 20 30 40 50 600
0.5
1
1.5
z [m
]
0 10 20 30 40 50 60−5
0
5
10
φ [g
raus
]
0 10 20 30 40 50 60−5
0
5
θ [g
raus
]
0 10 20 30 40 50 60−40
−20
0
20
Tempo [s]
ψ [g
raus
]
Figura 5.12: Comparação Estados x, y, z, φ, θ e ψ do Controlador e do Observadorcom Sintonização Manual, primeira tentativa.
Assim, uma primeira tentativa foi multiplicar os elementos da matriz Q calculada
para o controlador pelo método de Bryson por um fator. Os resultados obtidos após
varias simulações mostraram que as velocidades no sistema móvel não conseguiram
rastrear os estados medidos de forma satisfatória. Para uma referência acoplada de
[x y z]T = [1 1 1]T , a velocidade na arfagem (w) tornou-se instável embora a matriz
Q foi aumentada mil vezes. A Figura 5.10 apresenta os resultados obtidos.
Desta forma se decidiu trabalhar as componentes da matriz Qe separadamente.
80

0 5 10 15 20 25 300
0.5
1
1.5
x [m
]
MedidoEstimado
0 5 10 15 20 25 300
0.5
1
1.5
y [m
]
0 5 10 15 20 25 300
0.5
1
1.5
z [m
]
0 5 10 15 20 25 30−4
−2
0
2
φ [g
raus
]
0 5 10 15 20 25 30−2
0
2
4
θ [g
raus
]
0 5 10 15 20 25 30−10
−5
0
5
Tempo [s]
ψ [g
raus
]
Figura 5.13: Comparação Estados x, y, z, φ, θ e ψ do Controlador e do Observadorcom Sintonização Manual.
Observando o comportamento do observador sobre o estado de velocidade w, o
qual não consegue se regular para zero mantendo um erro em regime, optou-se por
aumentar a ponderação deste estado em conjunto com u e v, por sua vez, foram
diminuídos os valores para os outros estados, já que nas simulações anteriores estes
apresentaram um rastreamento bom sob pequenas ponderações.
Além do mais, os ângulos de Euler do veículo ainda sofrem o problema de ser alta-
mente perturbados durante o transitório das translações. Mesmo assim, o overshoot
presente na resposta da translação pode tentar ser diminuído através da manipulação
das ponderações na matriz Q.
Depois de fazer múltiplas combinações aumentando e diminuindo os valores da
matriz Q, se encontrou que a medida que o os valores da ponderação diminuem num
81

0 5 10 15 20 25 30−0.5
0
0.5
u [m
/s]
MedidoEstimado
0 5 10 15 20 25 30−0.5
0
0.5
v [m
/s]
0 5 10 15 20 25 30−0.5
0
0.5
w [m
/s]
0 5 10 15 20 25 30−0.1
0
0.1
p [r
ad/s
]
0 5 10 15 20 25 30−0.1
0
0.1
q [r
ad/s
]
0 5 10 15 20 25 30−0.2
0
0.2
Tempo [s]
r [r
ad/s
]
Figura 5.14: Estados u, v, w, p, q e r Controlador e Observador Sintonização Manual.
estado determinado, a sua resposta apresenta menor overshoot, porém aumenta o
erro em regime do estado, de forma que para corrigir o erro, deve-se trabalhar em
conjunto com a derivada do estado. Da mesma forma, isto leva a aumentar ou
diminuir a velocidade de estabilização do estado. Como se vê na Figura 5.13 pode-
se observar que para o estado z, há um erro mínimo (quando comparado com a
referência solicitada zref = 1m) em regime. Não foi possível minimizar mais este
erro sem afetar o amortecimento no transiente.
O amortecimento presente anteriormente nos ângulos de Euler foram corrigidos,
especialmente para o balanço (φ), o qual se logrou estabilizar quase nos dez primeiros
segundos de simulação. O maior deslocamento angular foi atingido pela guinada (ψ),
porém a ultrapassagem maior atingiu 5◦, fato que não apresenta um risco para a
82

0 10 20 30 40 50 60−2
0
2x 10
−4
Ava
nço
[m]
0 10 20 30 40 50 60−0.04
−0.02
0
Der
iva
[m]
0 10 20 30 40 50 600
0.005
0.01
Arf
agem
[m]
0 10 20 30 40 50 60−1.5
−1
−0.5
0
Bal
anço
[gra
us]
0 10 20 30 40 50 60−0.05
0
0.05
Cat
urro
[gra
us]
0 10 20 30 40 50 60−5
0
5
Tempo [s]
Gui
nada
[gra
us]
Figura 5.15: Controlador submetido a Perturbações. Velocidade Água Constante,teste 1.
integridade das operações de inspeção.
5.4 Simulações do Controlador sujeito a Perturba-
ções Externas
Com o objetivo de testar a robustez do controlador foram realizadas simulações com
perturbações externas devidas a correntezas de água para os três graus de liberdade
de translação.
O primeiro teste consistiu em introduzir uma velocidade de correnteza constante
num eixo por vez, e analisar a resposta de regulação do controlador sem referências.
83

0 10 20 30 40 50 600
1
2x 10
−3
Ava
nço
[m]
0 10 20 30 40 50 600
0.01
0.02
Der
iva
[m]
0 10 20 30 40 50 60−2
0
2x 10
−3
Arf
agem
[m]
0 10 20 30 40 50 600
1
2
Bal
anço
[gra
us]
0 10 20 30 40 50 600
0.5
1
Cat
urro
[gra
us]
0 10 20 30 40 50 60−1
−0.5
0
Tempo [s]
Gui
nada
[gra
us]
Figura 5.16: Controlador submetido a Perturbações. Velocidade Água Constante,teste 2.
Encontrou-se que o controlador conseguia se estabilizar ao redor do ponto de equi-
líbrio, porém dependendo da magnitude da força e do eixo no qual tal força age, o
ROV podia apresentar uma oscilação entorno dos zero graus para as orientações.
Como resultado das simulações, pôde se estabelecer que a velocidade máxima da
água que o controlador consegue compensar permanecendo sob controle no ponto de
operação era de aproximadamente 0.5 m/s. Acima desta velocidade o controlador
não consegue estabilizar o veículo, visto que a propulsão resulta insu�ciente para
reagir os esforços inerciais e hidrodinâmicos gerados.
Na Figura 5.15 se mostra tal efeito para uma velocidade da água presente sob
o eixo zcor = 0.6 m/s. Percebe-se que além dos problemas que apresentam neste
limite de velocidade, o regulação entorno do ponto de operação não é atingida,
84

0 10 20 30 40 50 600
1
2
Ava
nço
[m]
0 10 20 30 40 50 600
0.5
1
1.5
Der
iva
[m]
0 10 20 30 40 50 600
0.5
1
1.5
Arf
agem
[m]
0 10 20 30 40 50 60−5
0
5
Bal
anço
[gra
us]
0 10 20 30 40 50 60−5
0
5
10
Cat
urro
[gra
us]
0 10 20 30 40 50 60−40
−20
0
20
Tempo [s]
Gui
nada
[gra
us]
Figura 5.17: Controlador submetido a Perturbações. Velocidade Água Constante,teste 3.
se estabilizando num ponto próximo. Após a analise desse resultado, se pensou
em melhorar o desempenho do regulador modi�cando novamente os valores das
ponderações de Q.
Foram simuladas varias combinações de valores nas matrizes, descobrindo que
para melhorar o performance é preciso aumentar os pesos das componentes relacio-
nadas aos estados de posição na matriz Q.
Isto posto, foram realizados testes com componentes de velocidades de água nos
três eixos. Mais uma vez foi conferido que a velocidade máxima total que o ROV
é capaz de compensar é de 0.5 m/s, sem que nenhuma componente ultrapasse esse
mesmo valor. Dito de outra forma ‖υcormax‖ ≤ 0.5.
Na Figura 5.16 se apresenta uma simulação para uma corrente de água de 0.3m/s
85

para cada componente, sendo ‖υcor‖ ' 0.52m/s. Percebe-se que todos os estados
mantêm um erro de regime pequeno o su�ciente para ser desconsiderado em uma
aplicação de inspeção.
Para �nalizar se realizaram testes sujeita à mesma correnteza e com uma refe-
rência acoplada de [x y z]T = [1 1 1]T . Novamente precisou-se ajustar os valores da
matriz de ponderação Q para atingir a referência. Os resultados para este teste são
apresentados na Figura 5.17.
86

Capítulo 6
Conclusões e Trabalhos Futuros
No presente trabalho se apresentou uma estratégia de controle ótimo aplicada ao
modelo dinâmico de um veículo remotamente operado, simulando o comportamento
desta técnica durante o processo de sintonização. Assim, foi avaliado tanto o modelo
dinâmico quanto o desempenho do controlador.
Foram estudadas duas metodologias para modelar a dinâmica de um corpo rígido
submerso. O primeiro proposto por FOSSEN [12], o segundo por ISHIDERA et al.
[22]. O último se mostrou mais simples de se implementar devido ao tratamento dado
aos esforços de arrasto hidrodinâmico. Com esta abordagem são obtidos tempos de
simulação menores relacionados ao menor número de integrais envolvidas.
O controlador LQR estudado, apresentou-se como uma técnica de controle ótimo
capaz de controlar o posicionamento dinâmico e o seguimento de referências para
um ROV. Considerando que estas tarefas constituem as principais manobras deste
veículo em atividades de inspeção de risers, conclui-se que esta técnica pode ser im-
plementada �sicamente no veículo para con�gurações de assistência na tele-operação,
ou para testes e pesquisas de operação autônoma.
A planta do ROV precisou ser linearizada num ponto de operação devido ao
carácter linear do controlador LQR. Desta forma, foi possível analisar o comporta-
mento do sistema usando a teoria de controle linear. Além do mais, a possibilidade
de interagir com os sinais de entrada do ROV e seus estados de forma direta, torna
esta técnica atraente para projetos nos quais se deva garantir um comportamento
determinado para estas variáveis.
O processo de sintonização do controlador permitiu veri�car a relação direta
entre os estados do sistema. No caso especí�co trabalhado, através da ponderação
dos estados de velocidade, era possível manipular a rapidez de resposta da posição
do veiculo, similar ao efeito preditivo da ação derivativa num controlador PID. Da
mesma forma, ao proporcionar um alto ganho na ponderação dos estados de posição,
pode aumentar o valor de ultrapassagem no regime transiente.
Percebeu-se que o controlador consegue compensar variações ou incertezas no
87

modelo, veri�cando a robustez da técnica. O exemplo mais comum, é a variação
na massa do veiculo devido ao uso de ferramentas em algumas atividades. No
estudo de caso desta dissertação foram realizadas simulações variando a massa até
um 10% (220Kg). Assim, se a variação é menor do 7.5%, o controlador consegue
compensar esta incerteza paramétrica alcançando o set point requerido. No entanto,
se a variação aumenta até 10% o controlador tentará alcançar a referência, porém
apresentará problemas tanto no overshoot do transiente (chegando até 50%), quanto
no erro de regime. Para solucionar este inconveniente pode-se implementar um
sistema Anti Wind-up como é realizado na teoria de controle clássico.
O controlador foi testado também sob a ação de perturbações externas, simu-
lando correntezas de água constantes e variáveis (utilizando sinais de ruido branco).
Constatou-se que a robustez do controlador permite compensar estas se a magni-
tude máxima da velocidade não ultrapassa os 0.5 m/s, dado que a correnteza tenha
direção apenas em um eixo, ou seja a combinação de componentes nos três eixos.
Os resultados obtidos após as simulações e a comparação de desempenho frente
a técnicas de controle não lineares como mostrado por PINTO [28], validaram o
regulador quadrático linear para ser implementado �sicamente como controlador
em ROVs de trabalho e inspeção.
6.1 Trabalhos Futuros
Esta dissertação apresentou uma abordagem de controle não reportada em trabalhos
para ROVs. Graças aos resultados obtidos, se abre a possibilidade de continuar e
complementar este tema, para o qual se apresentam as seguintes contribuições:
• Implementar um sistema Anti Wind-up para correger o problema do transiente
encontrado nas simulações com variação na massa total do corpo.
• As ponderações das matrizes Q e R podem ser ajustadas cada vez que precisar,
para obter boas respostas tanto no transiente quanto em regime. Logo, pode-
se complementar este trabalho através de um controle tipo feedforward para
encontrar os valores adequados segundo os cenários possíveis.
• Avaliar em forma experimental o controlador simulado, com o objetivo de
de�nir uma planta viável de se implementar num equipamento físico.
• Expandir esta estratégia de controle, para outras operações realizadas com
ROVs, como a supervisão na construção, tarefa na qual um ROV permanece
supervisionando o trabalho realizado por um outro. Isto abre a possibilidade
de desenvolver uma estratégia de controle cooperativo tipo líder-seguidor ou
estrutura virtual.
88

Referências Bibliográ�cas
[1] �Portal EBC�. . Disponível em: <http://agenciabrasil.ebc.\com.
br/noticia/2012-05-24/petrobras-confirma-descoberta\
-de-nova-reserva-de-petroleo-no-pre-sal-da-bacia-de-campos>.
Acesso em: 24 jun. 2012.
[2] �R7 Notícias�. . Disponível em: <http://noticias.r7.com/
economia\/noticias/reservas-de-petroleo-do-brasil-\
tem-maior-crescimento-desde-2000-20110216.html>. Acesso
em: 3 ago. 2012.
[3] MA, W., PANG, Y., JIANG, C., et al. �Research on the optimization of PID
control of remotely operated underwater vehicle�. In: 2011 International
Conference on Computer Science and Service System (CSSS), pp. 3525�
3528, 2011.
[4] SOYLU, S., BUCKHAM, B., PODHORODESKI, R. �Development of a coordi-
nated controller for underwater vehicle-manipulator systems�. In: OCE-
ANS 2008, pp. 1�9, 2008.
[5] GOMES, R., SOUSA, J., PEREIRA, F. �Integrated maneuver and control design
for ROV operations�. In: OCEANS 2003. Proceedings, pp. 703�710, 2003.
[6] LUNGU, R., ISPAS, S., IANCU, M., et al. �Optimal control of helicopter mo-
tion�. In: International Conference on Applied and Theoretical Electricity
(ICATE), pp. 1�5, 2012.
[7] TEIMOORI, H., POTA, H., GARRATT, M., et al. �Helicopter �ight control
using inverse optimal control and backstepping�. In: 12th International
Conference on Control, Automation, Robotics & Vision (ICARCV), pp.
978�983, Guangzhou, China, Dez. 2012.
[8] YI-RUI, T., YANGMIN, L. �Design of an Optimal Flight Control System with
Integral Augmented Compensator for a Nonlinear UAV Helicopter�. In:
10th World Congress on Intelligent Control and Automation (WCICA),
pp. 3927�3932, Beijing, China, Jul. 2012.
89

[9] CHRIST, R., WERNLI, R. The ROV Manual: A User Guide to Observation-
class Remotely Operated Vehicles. 1 ed. Oxford, U.K., Butterworth-
Heinemann, 2007.
[10] �IMCA R 004�. . Disponível em: <http://www.imca-int.com/documents/
divisions/rov/docs/IMCAR004.pdf>. Acesso em: 28 jul. 2012.
[11] BAI, Y., BAI, Q. Subsea Engineering Handbook. Houston, USA, Gulf Profes-
sional Publishing, 2010.
[12] FOSSEN, T. Guidance and control of ocean vehicles. Chichester, U.K., Wiley,
1994.
[13] SNAME. Nomenclature for Treating the Motion of a Submerged Body Through
a Fluid. Relatório técnico, The Society of Naval Architects and Marine
Engineers, Abr. 1950.
[14] SICILIANO, B., SCIAVICCO, L., VILLANI, L., et al. Robotics: Modelling,
Planning and Control. London, U.K., Springer, 2009.
[15] CRAIG, J. Robótica. 3 ed. Naucalpan de Juárez, Estado de México, Pearson
Prentice Hall, 2006.
[16] FOSSEN, T. Marine Control Systems: Guidance, Navigation and Control of
Ships, Rigs and Underwater Vehicles. Trondheim, Norway, Marine Cy-
bernetics, 2002.
[17] YUH, J. �Modeling and control of underwater robotic vehicles�, IEEE Transac-
tions on Systems, Man and Cybernetics, v. 20, n. 6, pp. 1475�1483, Nov.
1990.
[18] FALTINSEN, O. Sea Loads on Ships and O�shore Structures. Cambridge,
U.K., Cambridge University Press, 1993.
[19] GOULART, C. Modelagem, simulação e controle de um veículo submarino de
operação remota. Dissertação de M.Sc., COPPE/UFRJ, Rio de Janeiro,
RJ, Brasil, 2007.
[20] HSU, L., COSTA, R., LIZARRALDE, F., et al. �Avaliação Experimental de
um Simulador para Veículos Submarinos de Operação Remota�, Revista
Controle & Automação, v. 11, n. 2, pp. 82�93, Mai. 2000.
[21] TSUSAKA, Y., ISHIDERA, H., ITOH, Y. �MURS-300 MK II: A remote ins-
pection system for underwater facilities of hydraulic power plants�, IEEE
Journal of Oceanic Engineering, v. 11, n. 3, pp. 358�363, Jul. 1986.
90

[22] ISHIDERA, H., TSUSAKA, Y., ITO, Y., et al. �Motion Simulation of a Remo-
tely Operated Vehicle (ROV)�, Journal of the Society of Naval Architects
of Japan, , n. 158, pp. 157�168, Dez. 1985.
[23] DOMINGUEZ, R. Simulação e Controle de um Veículo Submarino de Operação
Remota. Dissertação de M.Sc., COPPE/UFRJ, Rio de Janeiro, RJ, Brasil,
1989.
[24] NOMOTO, M., HATTORI, M. �A deep ROV "DOLPHIN 3K": Design and
performance analysis�, IEEE Journal of Oceanic Engineering, v. 11, n. 3,
pp. 373�391, Jul. 1986.
[25] SAYER, P. �Hydrodynamic Forces on ROVs near the Air-Sea Interface�, Inter-
national Journal of O�shore and Polar Engineering, v. 6, n. 3, pp. 177�
183, Sep. 1996.
[26] FANG, M.-C., CHEN, J.-H., LUO, J.-H., et al. �On the Behavior of an Un-
derwater Remotely Operated Vehicle in a Uniform Current�, Marine Te-
chnology, v. 45, n. 4, pp. 241�249, Out. 2008.
[27] OLIVEIRA, P., SILVESTRE, C., PASCOAL, A., et al. �Vehicle And Mission
Control Of The Sirene Underwater Shuttle�, Proc. IFAC Conference on
Control Applications in Marine Systems, 1998.
[28] PINTO, W. Modelagem dinâmica de um robó submarino semi-autônomo (tipo
ROV) para inspeção de "risers". Dissertação de M.Sc., COPPE/UFRJ,
Rio de Janeiro, RJ, Brasil, 2012.
[29] GAVRILETS, V. Autonomous Aerobatic Maneuvering of Miniature Helicop-
ters. Tese de Ph.D., Massachusetts Institute of Technology, Massachu-
setts, USA, 2003.
[30] BOUABDALLAH, S., SIEGWART, R., CAPRARI, G. �Design and Control of
an Indoor Coaxial Helicopter�. In: Intelligent Robots and Systems, 2006
IEEE/RSJ International Conference on, pp. 2930�2935, Beijing, China,
Out. 2006.
[31] DEL CERRO, J. Arquitectura Abierta para el Control Autónomo y Teleoperado
de un Mini-Helicóptero. Tese de D.Sc., Universidad Politécnica de Madrid,
Madrid, Espanha, 2007.
[32] WHITCOMB, L., YOERGER, D. �Development, Comparison, And Prelimi-
nary Experimental Validation Of Non-Linear Dynamic Thruster Models�,
IEEE Journal of Oceanic Engineering, v. 24, n. 4, pp. 481�494, Out. 1999.
91

[33] BACHMAYER, R., WHITCOMB, L., GROSENBAUGH, M. �An accurate
four-quadrant nonlinear dynamical model for marine thrusters: theory
and experimental validation�, IEEE Journal of Oceanic Engineering, v. 25,
n. 1, pp. 146�159, Jan. 2000.
[34] SHENG, L., DONG, R., BING, L., et al. �Research on Variable Direction
Rotatable Axis Variable Vector Propeller of AUV in Vertical Motion�,
2010 International Forum on Information Technology and Applications
(IFITA), v. 3, pp. 267�270, 2010.
[35] WONG, K., GUERRERO, J., LARA, D., et al. �Attitude stabilization in hover
�ight of a mini tail-sitter AUV with variable pitch propeller�. In: Pro-
ceedings of the 2007 IEEE/RSJ International Conference on Intelligent
Robots and Systems, pp. 2642�2647, San Diego, CA, USA, Out. 2007.
[36] JULCA, J. Modelagem e Identi�cação de Parâmetros Hidrodinâmicos de um
Veículo Robótico Submarino. Tese de D.Sc., Universidade de São Paulo,
São Paulo, SP, Brasil, 2008.
[37] GODOY, D. Estudo de Turbina Eólica Vertical com Ângulo de Pá Variável.
Dissertação de M.Sc., COPPE/UFRJ, Rio de Janeiro, RJ, Brasil, 2012.
[38] BECH, U., VANDBORG, M., SIEGUMFELDT, M. Nonlinear Modeling and
Optimal Control of a Miniature Autonomous Helicopter. Dissertação de
M.Sc., Aalborg University, Aalborg, Dinamarca, 2006.
[39] HALD, U., HESSELBAEK, M., HOLMGAARD, J., et al. Autonomous Heli-
copter Modelling and Control. Relatório técnico, Mai. 2005.
[40] STIPANOV, M., MISKOVIC, N., VUKIC, Z., et al. �ROV Autonomization -
YAW Identi�cation and Automarine Module Architecture�, 2006.
[41] SMALLWOOD, D., WHITCOMB, L. �Preliminary Experiments in the Adap-
tive Identi�cation of Dynamically Positioned Underwater Robotic Vehi-
cles�. pp. 1803�1810, Maui, Hawaii, USA, Out. 2001.
[42] ZANOLI, S., CONTE, G. �Remotely operated vehicle depth control�, Control
Engineering Practice, v. 11, n. 4, pp. 453�459, 2003.
[43] LEE, W., KANG, G. �A fuzzy model-based controller of an underwater robotic
vehicle under the in�uence of thruster dynamics�. In: IEEE International
Conference on Robotics & Automation, pp. 750�755, Leuven, Belgium,
Mai. 1998.
92

[44] SZYMAK, P., MALECKI, J. �Control System of Underwater Vehicle Based on
Arti�cial Intelligence Methods�, Automation and Robotics, pp. 285�297,
2008.
[45] CUNHA, J., HSU, L., COSTA, R., et al. �Controle de sistemas lineares incer-
tos por modos deslizantes e observador de alto ganho sem peaking�, Sba:
Controle & Automação Sociedade Brasileira de Automatica, v. 16,
n. 4, pp. 449�466, Dez. 2005.
[46] HSU, L., COSTA, R., LIZARRALDE, F., et al. �Dynamic positioning of remo-
tely operated underwater vehicles�, IEEE Robotics & Automation Maga-
zine, v. 7, n. 3, pp. 21�31, Sep. 2000.
[47] TANNURI, E., AGOSTINHO, A., MORISHITA, H., et al. �Dynamic positio-
ning systems: An experimental analysis of sliding mode control�, Control
Engineering Practice, v. 18, n. 10, pp. 1121�1132, Out. 2010.
[48] MOHAN, B., KAR, S. Continuous Time Dynamical Systems: State Estimation
and Optimal Control with Orthogonal Functions. Boca Raton, FL, CRC
Press, 2013.
[49] DEL NERO, A. Controle Linear Quadrático: Caso Determinístico. Rio de
Janeiro, Brasil, COPPE-UFRJ, 1999.
[50] BURGHES, D., GRAHAM, A. Control and Optimal Control Theories with
Applications. Chichester, U.K., Horwood, 2004.
[51] LEWIS, F., VRABIE, D., SYRMOS, V. Optimal Control. 3 ed. New Jersey,
USA, Wiley, 2012.
[52] BINI, E. Design of Optimal Control Systems. Dissertação de M.Sc., Università
Degli Studi di Pisa, Pisa, Itália, 2009.
[53] SETHI, S., THOMPSON, G. Optimal Control Theory: Applications to Mana-
gement Science and Economics. 2 ed. New York, USA, Springer, 2006.
[54] SUBCHAN, S., ZBIKOWSKI, R. Computational Optimal Control: Tools and
Practice. Chichester, U.K., Wiley, 2009.
[55] RIVERA, J. Modelagem e Controle de um Helicóptero Coaxial em Escala Re-
duzida. Dissertação de M.Sc., COPPE/UFRJ, Rio de Janeiro, RJ, Brasil,
2013.
[56] LUENBERGER, D. �An introduction to observers�, IEEE Transactions on
Automatic Control, v. 16, n. 6, pp. 596�602, Dez. 1971.
93

[57] NIKOUKHAH, R., CAMPBELL, S., DELEBECQUE, F. �Observer Design for
General Linear Time-invariant Systems�, Automatica, v. 34, n. 5, pp. 575�
583, Mai. 1998.
[58] ELLIS, G. Observers in Control Systems: A Practical Guide. San Diego, CA,
Academic Press, 2002.
[59] ALESSANDRI, A., COLETTA, P. �Design of Luenberger Observers for a Class
of Hybrid Linear Systems�. In: Hybrid Systems: Computation and Con-
trol, v. 2034, Lecture Notes in Computer Science, Springer Berlin Heidel-
berg, pp. 7�18, 2001.
[60] YH, E., WS, L., LOW, E., et al. �Estimation of the Hydrodynamics Coe�cients
of an ROV using Free Decay Pendulum Motion�, Engineers Letters, v. 16,
n. 3, Ago. 2008.
94

Apêndice A
Parâmetros do ROV
Foram estudados dois ROVs industriais existentes, o primeiro apresentado por NO-
MOTO e HATTORI [24] chamado DOLPHIN 3K, e o segundo trabalhado por ISHI-
DERA et al. [22] e avaliados por HSU et al. [20] chamado MURS 300 MK II.
Tabela A.1: Valores Parâmetros ROV MURS 300 MK II.Item Símbolo Valor Unidade
Comprimento L 0.96 mLargo W 0.76 mAltura H 0.63 mMassa m 200 Kg
Momento de Inércia Ixx 12.3 Kg.m2
Iyy 17.7 Kg.m2
Izz 19.5 Kg.m2
Ixy -0.2 Kg.m2
Ixz -0.9 Kg.m2
Iyz 0 Kg.m2
Massa adicional MA((1,1) 157 KgMA((2,2) 197 KgMA((3,3) 270 KgMA((4,4) 7.9 Kg.m2
MA((5,5) 12.8 Kg.m2
MA((6,6) 8.5 Kg.m2
MA((i,j) (i 6= j) 0Volume total corpo OR 0.378 m3
Volume deslocado ∀ 0.2 m3
Centro de gravidade xG -0.013 myG 0 mzG 0.006 m
Centro de �utuação xB -0.013 myB 0 mzB -0.094 m
Além disso, os coe�cientes de arrasto hidrodinâmico rotacionais são:
CP = −0.16 , CQ = −0.37 , CR = −0.32 (A.1)
O valor para a densidade da água de mar utilizado foi ρ = 1028.11Kg/m3 e para
95

a aceleração da gravidade g = 9.81m/s2.
Como sistema de propulsão foi projetado um arranjo de seis propulsores. A
localização foi escolhida para que o impulso em cada eixo seja realizada por uma
dupla. Desta forma, os propulsores p1 e p2 geram força no eixo x do sistema móvel,
p3 e p4 geram força no eixo y e p5 e p6 geram força no eixo z. Seguem os vetores Ppie Rpi . Cabe ressaltar que Ppi é adimensional, entanto os valores de Rpi são dados
em metros.
Pp1 =
1
0
0
, Rp1 =
−0.467
−0.19
0
Pp2 =
1
0
0
, Rp2 =
−0.467
0.19
0
Pp3 =
0
1
0
, Rp3 =
0
−0.38
0.05
Pp4 =
0
−1
0
, Rp4 =
0
0.38
0.05
Pp5 =
0
0
1
, Rp5 =
−0.15
0
−0.321
Pp6 =
0
0
1
, Rp6 =
0.15
0
−0.321
(A.2)
Os valores para calcular os parâmetros dos propulsores foram tomados de GOU-
LART [19], sendo resumidos na seguinte tabela.
Tabela A.2: Valores Parâmetros Propulsores.Item Valor Unidade
Dhel 0.234 mnmax 2500 rpmFfmax
97.8626 NFbmax
57.8279 NTfmax 0.05889 NmTbmax 0.09979 Nm
Da Tabela A Ffmax e Fbmax são os valores máximos de força gerada tanto em
marcha direta quanto em marcha ré, Tfmax e Tbmax são os torques máximos gerados
em cada sentido de giro, e nmax é a velocidade máxima de rotação dos propulsores.
96

Apêndice B
Matrizes e Equações Modelo Não
Linear do ROV
As simulações desta dissertação levaram em consideração os argumentos apresenta-
dos na seção 2.4. Seguem as matrizes obtidas.
1. Matriz de Inércia do Veículo MRB.
MRB =
m 0 0 0 0 0
0 m 0 0 0 0
0 0 m 0 0 0
0 0 0 ixx 0 0
0 0 0 0 iyy 0
0 0 0 0 0 izz
(B.1)
2. Matriz de Massa Adicional MA.
MA =
MA(1,1) 0 0 0 0 0
0 MA(2,2) 0 0 0 0
0 0 MA(3,3) 0 0 0
0 0 0 MA(4,4) 0 0
0 0 0 0 MA(5,5) 0
0 0 0 0 0 MA(6,6)
(B.2)
3. Matriz de Acoplamento dos Propulsores Bacop.
Para calcular esta matriz foi considerado o arranjo de seis propulsores apre-
sentado na Anexo A.
97

Bacop =
1 1 0 0 0 0 0 0 0 0 0 0
0 0 1 −1 0 0 0 0 0 0 0 0
0 0 0 0 1 1 0 0 0 0 0 0
0 0 −0.05 0.05 0 0 1 1 0 0 0 0
0 0 0 0 0.15 −0.15 0 0 1 −1 0 0
0.19 −0.19 0 0 0 0 0 0 0 0 1 1
(B.3)
Abrindo a notação vetorial da Equação 2.95, para descrever a formulação para
cada grau de liberdade (vide 2.3, 2.4, 2.5 e 2.6), obtêm-se:
u =(MRB(1,1) +MA(1,1)
)−1X
v =(MRB(2,2) +MA(2,2)
)−1Y
w =(MRB(3,3) +MA(3,3)
)−1Z
p =(MRB(4,4) +MA(4,4)
)−1K
q =(MRB(5,5) +MA(5,5)
)−1M
r =(MRB(6,6) +MA(6,6)
)−1N
(B.4)
As equações para calcular X, Y , Z, K, M e N são apresentadas a seguir.
X =ρ
2|υ1rel |
2O23RCX (α)
∣∣∣∣ CX (β)
CX (β|β=0◦)
∣∣∣∣− (m− ρ∀) g sin θ
−q(mw +MA(3,3)wrel
)+ r
(mv +MA(2,2)vrel
)−MA(1,1) (qwcor − rvcor)
+xPp1C∗F1
(σ)ρ
8
[υ2corx1 + (0.7πnp1Dhel1)
2]πD2
hel1
+xPp2C∗F2
(σ)ρ
8
[υ2corx2 + (0.7πnp2Dhel2)
2]πD2
hel2
(B.5)
Y =ρ
2|υ1rel |
2O23RCY (β)
∣∣∣∣ CY (γ)
CY (γ|γ=0◦)
∣∣∣∣+ (m− ρ∀) g sinφ cos θ
−r(mu+MA(1,1)urel
)+ p
(mw +MA(3,3)wrel
)−MA(2,2) (pwcor − rucor)
+yPp3C∗F3
(σ)ρ
8
[υ2cory3 + (0.7πnp3Dhel3)
2]πD2
hel3
+yPp4C∗F4
(σ)ρ
8
[υ2cory4 + (0.7πnp4Dhel4)
2]πD2
hel4
(B.6)
98

Z =ρ
2|υ1rel |
2O23RCZ (γ)
∣∣∣∣ CZ (α)
CZ (α|α=90◦)
∣∣∣∣+ (m− ρ∀) g cosφ cos θ
−p(mv +MA(2,2)vrel
)+ q
(mu+MA(1,1)urel
)−MA(3,3) (pvcor − qucor)
+zPp5C∗F5
(σ)ρ
8
[υ2corz5 + (0.7πnp5Dhel5)
2]πD2
hel5
+zPp6C∗F6
(σ)ρ
8
[υ2corz6 + (0.7πnp6Dhel6)
2]πD2
hel6
(B.7)
K =ρ
2
(|υ1rel |
2ORCK (γ) + O53RCPp |p|
)+zBρ∀g sinφ cos θ
+qr(iyy − izz +MA(5,5) −MA(6,6)
)− vrelwrel
(MA(3,3) −MA(2,2)
)−yPp3
zRp3C∗F3
(σ)ρ
8
[υ2cory3 + (0.7πnp3Dhel3)
2]πD2
hel3
−yPp4zRp4
C∗F4(σ)
ρ
8
[υ2cory4 + (0.7πnp4Dhel4)
2]πD2
hel4
(B.8)
M =ρ
2
(|υ1rel |
2ORCM (α) + O53RCQq |q|
)+zBρ∀g sin θ
+pr(izz − ixx +MA(6,6) −MA(4,4)
)− urelwrel
(MA(1,1) −MA(3,3)
)−zPp5
xRp5C∗F5
(σ)ρ
8
[υ2corz5 + (0.7πnp5Dhel5)
2]πD2
hel5
−zPp6xRp6
C∗F6(σ)
ρ
8
[υ2corz6 + (0.7πnp6Dhel6)
2]πD2
hel6
(B.9)
N =ρ
2
(|υ1rel |
2ORCN (β) + O53RCRr |r|
)+pq
(ixx − iyy +MA(4,4) −MA(5,5)
)− urelvrel
(MA(2,2) −MA(1,1)
)−xPp1
yRp1C∗F1
(σ)ρ
8
[υ2corx1 + (0.7πnp1Dhel1)
2]πD2
hel1
−xPp2yRp2
C∗F2(σ)
ρ
8
[υ2corx2 + (0.7πnp2Dhel2)
2]πD2
hel2
(B.10)
Nas Equações B.5, B.6, B.7, B.8, B.9 e B.10, a primeira linha corresponde à con-
tribuição fornecida pela amortecimento hidrodinâmico FH , a segunda linha corres-
ponde à força de restauração FGB, a terceira à força inercial FI , e as linhas restantes
correspondem à contribuição individual devida à propulsão de cada propulsor FP .
Note-se que a Equação B.10 não possui componente nenhuma relacionada ao
torque de restauração.
As simulações do modelo dinâmico não linear do ROV que incluem estas equa-
ções, foi desenvolvido em SIMULINK e apresentado na �gura a seguir.
99

Pos
ição
EF
5
Vel
ocid
ade
EF
4
Ace
lera
ção
3
Vel
ocid
ade
BF
2
Pos
ição
BF
1
Vol
ume
Des
loca
do
vd
Vol
ume
vv
Vel
ocid
ades
Rel
ativ
as
Vel
ocid
ade
Rel
ativ
a
Tot
al E
sfor
ços
Ter
min
ator
Sis
tem
a de
Pro
puls
ão
rps
Vel
ocid
ade
Agu
a
E_p
rop
Plo
t Âng
ulos
de
Ata
que
Veí
culo
Plo
t Vel
ocid
ade
Rel
ativ
a V
eícu
lo
Plo
t For
ças
Plo
t Esf
orço
s
E_p
r
E_i
n
E_h
d
E_g
e
V_r
el
Pes
o
w
Mat
riz
Mas
sa (
inv)
M_i
* u
Mas
sa C
orpo
Ríg
ido
M_r
b
Mas
sa A
dici
onal
M_a
d
Inte
grad
or V
eloc
idad
e M
óvel
1 sx o
Inte
grad
or V
eloc
idad
e
1 sx o
Inte
grad
or A
cele
raçã
o
1 sx o
Gra
vida
de
g
Fun
ção
Vel
ocid
ade
móv
el a
iner
cial
V_m
ov
X_i
ne
V_i
nefu
n_V
_m2i
Fun
ção
Cál
culo
Esf
orço
s R
esta
uraç
ão
X_i
ne
R_g
R_e ro w g
vd
E_g
e
fun_
E_g
e
Fun
ção
Cál
culo
Esf
orço
s In
erci
ais
V_m
ov
V_r
el
V_c
or
M_r
b
M_a
d
E_i
n
fun_
E_i
n
Fun
ção
Cál
culo
Esf
orço
s A
rras
tos
Hid
rodi
nâm
icos
V_r
el
V_m
ov vv ro
E_h
d
ataq
uefu
n_E
_hd
Den
sida
de Á
gua
Mar
roCon
d. In
i. V
1
-C-
Con
d. In
i. V
-C-
Con
d. In
i. A
-C-
Cen
tro
Gra
vida
de
R_g
Cen
tro
Flu
tuaç
ão
R_e
Vel
ocid
ade
Águ
a
3
Per
turb
ação
Ext
erna
2
U [r
ps]
1
E_t
ot
Vre
l
Vre
l
Vm
ov
Figura B.1: Sistema Não Linear do ROV em SIMULINK.
100

Apêndice C
Matrizes e Equações Linearizadas
Neste anexo são apresentadas as equações descritas no Anexo B após do procedi-
mento de linearização estudado no Capítulo 3.
X = − (m− ρ∀) gθδ +1349
1146np1xPp1
+1349
1146np2xPp2
(C.1)
Y = (m− ρ∀) gφδ +1349
1146np3yPp3
+1349
1146np4yPp4
(C.2)
Z = (m− ρ∀) g +2030
1091np5zPp5
− 5267
191zPp5
+2030
1091np6zPp6
− 5267
191zPp6
(C.3)
K = zBρ∀gφδ −1349
1146np3yPp3
zRp3− 1349
1146np4yPp4
zRp4(C.4)
M = zBρ∀gθδ −2030
1091np5zPp5
xRp5+
5267
191zPp5
xRp5− 2030
1091np6zPp6
xRp6
+5267
191zPp6
xRp6(C.5)
N = −1349
1146np1xPp1
yRp1− 1349
1146np2xPp2
yRp2(C.6)
101

Apêndice D
Aproximação Parâmetros
Hidrodinâmicos
Como explicado no capítulo 2, o ROV utilizado nas simulações foi o MURS 300
MK II [21]. A obtenção dos parâmetros hidrodinâmicos foi realizada em tanques
de teste gerando as curvas apresentadas por ISHIDERA et al. [22]. Estes grá�cos
só descrevem os valores para ângulos pequenos de ataque (próximos de zero).
Estes parâmetros formam sinais similares de ondas senoidais ([22],[60]), logo,
optou-se por aproximar os coe�cientes através de funções deste tipo. Desta forma
foi diminuído o custo computacional de simulação já que se evitou a interpolação
direta. Seguem as fórmulas para cada coe�ciente hidrodinâmico e as curvas obtidas.
CX (α) = −31
50cos( π
180α)
(D.1)
CZ (α) = −6
5sin( π
180α)
(D.2)
CM (α) =173
2000sin( π
90α)
(D.3)
CX (β) = −31
50cos( π
180β)
(D.4)
CY (β) = −22
20sin( π
180β)
(D.5)
CN (β) = − 79
1000sin( π
90β)
(D.6)
CY (γ) = −22
20cos( π
180γ)
(D.7)
CZ (γ) = −6
5sin( π
180γ)
(D.8)
CK (γ) =7
100cos( π
30γ)
(D.9)
102

D.1 Aproximação CX (α) e CX (β)
−300 −200 −100 0 100 200 300−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
α
CX(α
)
−300 −200 −100 0 100 200 300−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
β
CX(β
)
ExperimentalAproximado
Figura D.1: Valores aproximados de CX (α) e CX (β).
103

D.2 Aproximação CY (β) e CY (γ)
−300 −200 −100 0 100 200 300−1.5
−1
−0.5
0
0.5
1
1.5
β
CY(β
)
−300 −200 −100 0 100 200 300−1.5
−1
−0.5
0
0.5
1
1.5
γ
CY(γ
)
ExperimentalAproximado
Figura D.2: Valores aproximados de CY (β) e CY (γ).
104

D.3 Aproximação CZ (α) e CZ (γ)
−300 −200 −100 0 100 200 300−1.5
−1
−0.5
0
0.5
1
1.5
α
CZ(α
)
−300 −200 −100 0 100 200 300−1.5
−1
−0.5
0
0.5
1
1.5
γ
CZ(γ
)
ExperimentalAproximado
Figura D.3: Valores aproximados de CZ (α) e CZ (γ).
105

D.4 Aproximação CK (γ), CM (α) e CN (β)
−300 −200 −100 0 100 200 300−0.1
−0.05
0
0.05
0.1
γ
CK(γ
)
−300 −200 −100 0 100 200 300−0.1
−0.05
0
0.05
0.1
β
CM
(α)
−300 −200 −100 0 100 200 300−0.1
−0.05
0
0.05
0.1
β
CN
(β)
ExperimentalAproximado
Figura D.4: Valores aproximados de CK (γ), CM (α) e CN (β).
106