







Línguas
Páginas
Legal

ESTIMATIVA DE PARÂMETROS HIDRÁULICOS E DE TRANSPORTE POR
INFERÊNCIA BAYESIANA EM MEIOS POROSOS NÃO SATURADOS
Paulo Henrique da Silva Moreira
Tese de Doutorado apresentada ao Programa de
Pós-graduação em Engenharia Mecânica,
COPPE, da Universidade Federal do Rio de
Janeiro, como parte dos requisitos necessários à
obtenção do título de Doutor em Engenharia
Mecânica.
Orientadores: Helcio Rangel Barreto Orlande
Renato Machado Cotta
Rio de Janeiro
Dezembro de 2012
ESTIMATIVA DE PARÂMETROS HIDRÁULICOS E DE TRANSPORTE POR
INFERÊNCIA BAYESIANA EM MEIOS POROSOS NÃO SATURADOS
Paulo Henrique da Silva Moreira
TESE SUBMETIDA AO CORPO DOCENTE DO INSTITUTO ALBERTO LUIZ
COIMBRA DE PÓS-GRADUAÇÃO E PESQUISA DE ENGENHARIA (COPPE) DA
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COMO PARTE DOS
REQUISITOS NECESSÁRIOS PARA A OBTENÇÃO DO GRAU DE DOUTOR EM
CIÊNCIAS EM ENGENHARIA MECÂNICA.
Examinada por:
________________________________________________
Prof. Helcio Rangel Barreto Orlande, Ph.D.
________________________________________________ Prof. Renato Machado Cotta, Ph.D.
________________________________________________ Prof. Martinus Theodore van Genuchten, Ph.D.
________________________________________________ Prof. Carolina Palma Naveira-Cotta, D.Sc.
________________________________________________ Prof. Maria Claudia Barbosa, Ph.D.
________________________________________________ Dr. Jesús Salvador Perez Guerrero, D.Sc.
RIO DE JANEIRO, RJ - BRASIL
DEZEMBRO DE 2012

iii
Moreira, Paulo Henrique da Silva
Estimativa de parâmetros hidráulicos e de transporte
por inferência Bayesiana em meios porosos não saturados/
Paulo Henrique da Silva Moreira. – Rio de Janeiro:
UFRJ\COPPE, 2012.
XIX, 177 p.: il; 29,7 cm.
Orientadores: Helcio Rangel Barreto Orlande
Renato Machado Cotta
Tese (doutorado) – UFRJ/ COPPE/ Programa de
Engenharia Mecânica, 2012.
Referências bibliográficas: p. 159-177.
1. Estimativa Bayesiana. 2. Dispersão em meios
porosos. 3. Experimentos em coluna de solo. I. Orlande,
Helcio Rangel Barreto et al. II. Universidade Federal do
Rio de Janeiro, COPPE, Programa de Engenharia
Mecânica. III. Título.

iv
“Não vás para fora, volta a ti mesmo. No
homem interior habita a verdade”.
Santo Agostinho
À minha família
v
AGRADECIMENTOS
• Em primeiro lugar a Deus, fonte de minha inspiração, paz e força.
• Aos meus pais, Armenio e Maria, por todo o amor e dedicação que me ajudaram
a chegar até aqui.
• Aos meus irmãos, Fernando e Antonio, em quem posso sempre me espelhar.
• A Luciana e Letícia, que há vários anos se juntaram a esta família e cuja
amizade é inestimável. Também aos meus sobrinhos, Lucas e André,
simplesmente por existirem.
• Aos meus orientadores, Prof. Helcio Rangel Barreto Orlande e Prof. Renato
Machado Cotta, que com dedicação deram o apoio e orientação necessária para
que cada objetivo fosse alcançado e com quem muito tenho aprendido.
• Ao Dr. Martinus Theodore van Genuchten, cuja contribuição foi essencial nesta
trajetória.
• Ao Prof. Su Jian, a Prof. Carolina Palma Naveira-Cotta, a Dra. Elizabeth May
Pontedeiro, e as colegas Camila Bezerra, Marcia Batalha e Heloisa Fernandes,
com quem tive e tenho a satisfação de trabalhar em projetos realizados.
• Aos colegas e amigos Antonio Alves, Diego Estumano, Evaldinei Monteiro,
Farith Absi, Henrique Massard, Ítalo Madeira, Ivana (de Brasília) Cerqueira,
Ivana (do Pará) Fernandes, José Martim, Lamien Bernard, Maicon Magalhães,
Milena Villar, Rafael Mendonça, Thiago Carvalho, Wellington Betencurte e
todos os demais que tornaram da convivência no LTTC uma experiência
edificante.
vi
• Aos funcionários do LTTC, Evanise, Roberta, Julio, Paulo César e Paulo Veiga,
que com muito empenho tornam possível o bom funcionamento do Laboratório
e a elaboração desta tese.
• À CAPES e ao CNPq pelo suporte financeiro, através da bolsa de doutorado.
• À Dra. Inês Mariozzi Tavares, por todo apoio e contribuição nestes últimos anos
para meu crescimento humano.
• E a todos os amigos de fora da Universidade (impossível listar todos os nomes)
que, de alguma forma, colaboraram para que cada etapa deste desafio fosse
vencida.
vii
Resumo da Tese apresentada à COPPE/UFRJ como parte dos requisitos necessários
para a obtenção do grau de Doutor em Ciências (D.Sc.)
ESTIMATIVA DE PARÂMETROS HIDRÁULICOS E DE TRANSPORTE POR
INFERÊNCIA BAYESIANA EM MEIOS POROSOS NÃO SATURADOS
Paulo Henrique da Silva Moreira
Dezembro/2012
Orientadores: Helcio Rangel Barreto Orlande
Renato Machado Cotta
Programa: Engenharia Mecânica
Este trabalho apresenta a utilização da inferência Bayesiana para a estimativa
simultânea dos parâmetros referentes aos problemas de escoamento e de transporte de
solutos em solos cuja umidade é abaixo do valor de saturação. É apresentado um
procedimento para experimento de dispersão em coluna de solo visando a obtenção de
medidas experimentais a serem utilizadas nas estimativas, assim como a caracterização
de amostras de solo com o intuito de se obter informações a priori dos parâmetros. É
ainda realizada a verificação dos códigos computacionais utilizados para a modelagem
do problema físico e para a solução do problema inverso de estimativa de parâmetros,
bem como a análise dos coeficientes de sensibilidade dos parâmetros estimados. É
observada concordância entre os resultados experimentais e aqueles simulados com os
parâmetros estimados.

viii
Abstract of Thesis presented to COPPE/UFRJ as a partial fulfillment of the
requirements for the degree of Doctor of Science (D.Sc.)
BAYESIAN ESTIMATION OF HYDRAULIC AND TRANSPORT PARAMETERS
IN UNSATURATED POROUS MEDIA
Paulo Henrique da Silva Moreira
December/2012
Advisors: Helcio Rangel Barreto Orlande
Renato Machado Cotta
Department: Mechanical Engineering
This work presents a Bayesian approach for simultaneously estimating selected
hydraulic and transport parameters affecting fluid flow and contaminant transport in
variably saturated soils and groundwater. A soil column experiment for obtaining the
required data for the analysis is presented, as well as observed data from soil samples
used to obtain a priori information for the parameters. The computational codes used
for modeling of the physical problem and for solution of the inverse problem are
verified and the sensitivity coefficients of the estimated parameters are analyzed. The
close agreement between experimental results and results simulated with the estimated
parameters was obtained.
ix
SUMÁRIO
CAPÍTULO 1 - INTRODUÇÃO ............................................................................................................. 1
1.1 MOTIVAÇÃO E APLICAÇÃO ..................................................................................................................... 1 1.2 REVISÃO DE LITERATURA ....................................................................................................................... 4 1.3 ESTRUTURA DO TRABALHO .................................................................................................................. 11
CAPÍTULO 2 - FUNDAMENTOS TEÓRICOS ....................................................................................... 13
2.1 PROBLEMA FÍSICO ............................................................................................................................. 13 2.1.1 Formulação do problema de escoamento hidráulico ......................................................... 14 2.1.2 Problema de transporte de soluto ...................................................................................... 17 2.1.2.1 Modelo com condição de contorno do terceiro tipo ...................................................... 18 2.1.2.2 Modelo com condição de contorno do primeiro tipo ..................................................... 19
2.2 MÉTODOS DE SOLUÇÃO DO PROBLEMA DIRETO ....................................................................................... 23 2.2.1 Código para solução por volumes finitos ............................................................................ 23 2.2.2 Programa HYDRUS 1-D ....................................................................................................... 27
2.3 MÉTODO DE SOLUÇÃO DO PROBLEMA INVERSO ....................................................................................... 28 2.3.1 Método MCMC com utilização do algoritmo de Metropolis-Hastings ............................... 29
CAPÍTULO 3 - DESENVOLVIMENTO EXPERIMENTAL ........................................................................ 35
3.1 COLETA DAS AMOSTRAS DE SOLO .......................................................................................................... 35 3.2 ENSAIOS PADRÃO DE CARACTERIZAÇÃO DO SOLO ..................................................................................... 38 3.3 APARATO E PROCEDIMENTO EXPERIMENTAL PARA ENSAIO EM MEIO NÃO SATURADO ...................................... 42
CAPÍTULO 4 - RESULTADOS E DISCUSSÕES ..................................................................................... 53
4.1 VERIFICAÇÃO DOS MODELOS E MÉTODOS MATEMÁTICOS UTILIZADOS ........................................................... 53 4.1.1 Verificação do modelo de solução do problema direto por volumes finitos ....................... 53 4.1.2 Verificação do método MCMC de solução do problema inverso ........................................ 67
4.2 RESULTADOS DAS ESTIMATIVAS ............................................................................................................ 83 4.2.1 Análise dos coeficientes de sensibilidade ........................................................................... 83 4.2.2 Estimativa de parâmetros .................................................................................................. 99 4.2.2.1 Estimativas utilizando-se medidas experimentais simuladas ........................................ 99 4.2.2.2 Estimativas utilizando-se medidas experimentais reais............................................... 119
CAPÍTULO 5 - CONCLUSÕES E SUGESTÕES .................................................................................... 156
CAPÍTULO 6 - REFERÊNCIAS .......................................................................................................... 159
x
LISTA DE FIGURAS
FIGURA 1: ESQUEMA DAS CAMADAS DE SOLO. ................................................................................... 35
FIGURA 2: DOMÍNIO FÍSICO DO ESCOAMENTO E TRANSPORTE UNIDIMENSIONAIS............................. 13
FIGURA 3.A: COLETA DE AMOSTRA CONSOLIDADA DE SOLO DO TIPO ROCHA ALTERADA COM AMOSTRADOR DE PERCURSÃO. ........................................................................................................... 36
FIGURA 3.B: AMOSTRADOR CILÍNDRICO VAZADO................................................................................ 37
FIGURA 3.C: LOCAL DA COLETA DE SOLO NO MÓDULO DE SOLO ESTÉRIL COM AMOSTRADOR CILÍNDRICO VAZADO. ........................................................................................................................... 37
FIGURA 4: ESQUEMA DO EXPERIMENTO PARA ESCOAMENTO E TRANSPORTE DE SOLUTO EM MEIO POROSO NÃO SATURADO .................................................................................................................... 44
FIGURA 5.A. MONTAGEM DO EXPERIMENTO DE DISPERSÃO EM SOLO NÃO SATURADO .................... 45
FIGURA 5.B. POSICIONAMENTO DA COLUNA DE SOLO E COLETOR DE AMOSTRAS NA CÂMARA DE VÁCUO. ................................................................................................................................................ 45
FIGURA 5.C: BOMBA DE SERINGA E RESERVATÓRIO DE SOLUÇÃO DE TRAÇADOR ............................... 46
FIGURA 6A: CURVA DE CALIBRAÇÃO DO TRANSDUTOR DE PRESSÃO CONECTADO AO TENSIÔMETRO. ............................................................................................................................................................ 48
FIGURA 6.B: CURVA DE CALIBRAÇÃO DAS MEDIDAS DE CONDUTIVIDADE ELÉTRICA ........................... 48
FIGURA 7.A: VARIAÇÃO DO FLUXO DE DESCARGA COM O TEMPO – VOLUMES-FINITOS ..................... 55
FIGURA 7.B: VARIAÇÃO DA CARGA COM O TEMPO – VOLUMES-FINITOS ............................................ 55
FIGURA 8.A: VARIAÇÃO DO FLUXO DE DESCARGA COM O TEMPO – VOLUMES FINITOS E HYDRUS 1-D ............................................................................................................................................................ 56
FIGURA 8.B: VARIAÇÃO DA CARGA NO TOPO DA COLUNA COM O TEMPO – VOLUMES FINITOS E HYDRUS 1-D ......................................................................................................................................... 57
FIGURA 9: PERFIL DE CARGA NO REGIME PERMANENTE – VOLUMES-FINITOS E HYDRUS 1-D .............. 58
FIGURA 10: PERFIL DO TEOR DE UMIDADE NO REGIME PERMANENTE – VOLUMES-FINITOS E HYDRUS 1-D ....................................................................................................................................................... 58
FIGURA 11: PERFIL DE CONDUTIVIDADE HIDRÁULICA NO REGIME PERMANENTE – VOLUMES-FINITOS E HYDRUS 1-D ......................................................................................................................................... 59
FIGURA 12: PERFIL DE CAPACIDADE HIDRÁULICA NO REGIME PERMANENTE – VOLUMES-FINITOS E HYDRUS 1-D ......................................................................................................................................... 59
FIGURA 13: EFEITO DA VARIAÇÃO DE F E ααααM NA CONCENTRAÇÃO NA DESCARGA DA COLUNA, ANALISADO PELO MODELO DE VOLUMES FINITOS E PELO HYDRUS 1-D............................................... 61
FIGURA 14: COMPARAÇÃO DOS FLUXOS ACUMULADOS CALCULADOS PELO MÉTODO DE VOLUMES FINITOS E PELO HYDRUS 1-D, PARA DIFERENTES REFINAMENTOS DA MALHA EM COLUNA COM UMA CAMADA DE SOLO. .............................................................................................................................. 64
FIGURA 15: COMPARAÇÃO DOS FLUXOS ACUMULADOS CALCULADOS PELO MÉTODO DE VOLUMES FINITOS E PELO HYDRUS 1-D, PARA DIFERENTES REFINAMENTOS DA MALHA EM COLUNA COM DUAS CAMADAS DE SOLO. ............................................................................................................................ 65
FIGURA 16.A: VARIAÇÃO DO FLUXO ACUMULADO DE EFLUENTE E DOS COEFICIENTES DE SENSIBILIDADE NA VERIFICAÇÃO DO MÉTODO MCMC ........................................................................ 69
. ........................................................................................................................................................... 69
FIGURA 16.B: COEFICIENTES DE SENSIBILIDADE DOS PARÂMETROS HIDRÁULICOS EM RELAÇÃO AO FLUXO ACUMULADO DE EFLUENTE PARA COLUNA COMPOSTA DE DUAS CAMADAS DE MATERIAL INICIALMENTE SATURADOS NA VERIFICAÇÃO DO MÉTODO MCMC ..................................................... 69
xi
. ........................................................................................................................................................... 70
FIGURA 17: AJUSTE DAS CURVAS EXPERIMENTAL E ESTIMADA DO FLUXO ACUMULADO DE EFLUENTE DA COLUNA COMPOSTA POR DUAS CAMADAS DE SOLO NA VERIFICAÇÃO DO MÉTODO MCMC ......... 72
FIGURA 18.A: DISTRIBUIÇÃO A POSTERIORI PARA ΘR DA COLUNA DE SOLO NA VERIFICAÇÃO DO MÉTODO MCMC .................................................................................................................................. 73
FIGURA 18.B: DISTRIBUIÇÃO A POSTERIORI PARA ΘS DA COLUNA DE SOLO NA VERIFICAÇÃO DO MÉTODO MCMC .................................................................................................................................. 74
FIGURA 18.C: DISTRIBUIÇÃO A POSTERIORI PARA KS DA COLUNA DE SOLO NA VERIFICAÇÃO DO MÉTODO MCMC .................................................................................................................................. 74
FIGURA 18.D: DISTRIBUIÇÃO A POSTERIORI PARA Α DA COLUNA DE SOLO NA VERIFICAÇÃO DO MÉTODO MCMC .................................................................................................................................. 75
FIGURA 18.E: DISTRIBUIÇÃO A POSTERIORI PARA N DA COLUNA DE SOLO NA VERIFICAÇÃO DO MÉTODO MCMC .................................................................................................................................. 75
FIGURA 19.A: ACEITAÇÃO DOS ESTADOS DAS CADEIAS DE MARKOV. NA VERIFICAÇÃO DO MÉTODO MCMC .................................................................................................................................................. 76
FIGURA 19.B: ESTADOS DAS CADEIAS DE MARKOV PARA ΘR DA COLUNA DE SOLO NA VERIFICAÇÃO DO MÉTODO MCMC .................................................................................................................................. 77
FIGURA 19.C: ESTADOS DAS CADEIAS DE MARKOV PARA ΘS DA COLUNA DE SOLO NA VERIFICAÇÃO DO MÉTODO MCMC .................................................................................................................................. 77
FIGURA 19.D: ESTADOS DAS CADEIAS DE MARKOV PARA KS DA COLUNA DE SOLO NA VERIFICAÇÃO DO MÉTODO MCMC .................................................................................................................................. 78
FIGURA 19.E: ESTADOS DAS CADEIAS DE MARKOV PARA Α DA COLUNA DE SOLO NA VERIFICAÇÃO DO MÉTODO MCMC .................................................................................................................................. 78
FIGURA 19.F: ESTADOS DAS CADEIAS DE MARKOV PARA N DA COLUNA DE SOLO NA VERIFICAÇÃO DO MÉTODO MCMC .................................................................................................................................. 79
FIGURA 20.A: ESTADOS DAS CADEIAS DE MARKOV PARA ΘR DA PLACA CERÂMICA NA VERIFICAÇÃO DO MÉTODO MCMC ............................................................................................................................ 80
FIGURA 20.B: ESTADOS DAS CADEIAS DE MARKOV PARA ΘS DA PLACA CERÂMICA NA VERIFICAÇÃO DO MÉTODO MCMC .................................................................................................................................. 80
FIGURA 20.C: ESTADOS DAS CADEIAS DE MARKOV PARA KS DA PLACA CERÂMICA NA VERIFICAÇÃO DO MÉTODO MCMC .................................................................................................................................. 81
FIGURA 20.D: ESTADOS DAS CADEIAS DE MARKOV PARA Α DA PLACA CERÂMICA NA VERIFICAÇÃO DO MÉTODO MCMC .................................................................................................................................. 81
FIGURA 20.E: ESTADOS DAS CADEIAS DE MARKOV PARA N DA PLACA CERÂMICA NA VERIFICAÇÃO DO MÉTODO MCMC .................................................................................................................................. 82
FIGURA 21.A – VARIAÇÃO NO TEMPO DA CARGA NA METADE DA ALTURA DA COLUNA E DE SEUS COEFICIENTES DE SENSIBILIDADE (ROCHA ALTERADA)......................................................................... 88
FIGURA 21.B – VARIAÇÃO NO TEMPO DOS COEFICIENTES DE SENSIBILIDADE DA CARGA NA METADE DA ALTURA DA COLUNA (ROCHA ALTERADA) ...................................................................................... 88
FIGURA 22.A – VARIAÇÃO NO TEMPO DO FLUXO NA DESCARGA DA COLUNA E DE SEUS COEFICIENTES DE SENSIBILIDADE (ROCHA ALTERADA) ............................................................................................... 89
FIGURA 22.B – VARIAÇÃO NO TEMPO DOS COEFICIENTES DE SENSIBILIDADE DO FLUXO NA DESCARGA DA COLUNA (ROCHA ALTERADA) ......................................................................................................... 90
FIGURA 23.A – VARIAÇÃO NO TEMPO DA CONCENTRAÇÃO NA DESCARGA DA COLUNA E DE SEUS COEFICIENTES DE SENSIBILIDADE (ROCHA ALTERADA)......................................................................... 91
xii
FIGURA 23.B – VARIAÇÃO NO TEMPO DOS COEFICIENTES DE SENSIBILIDADE DA CONCENTRAÇÃO NA DESCARGA DA COLUNA (ROCHA ALTERADA) ....................................................................................... 92
FIGURA 24.A – VARIAÇÃO NO TEMPO DA CARGA NA METADE DA ALTURA DA COLUNA E DE SEUS COEFICIENTES DE SENSIBILIDADE (MÓDULO DE SOLO ESTÉRIL) ........................................................... 93
FIGURA 24.B – VARIAÇÃO NO TEMPO DOS COEFICIENTES DE SENSIBILIDADE DA CARGA NA METADE DA ALTURA DA COLUNA (MÓDULO DE SOLO ESTÉRIL) ......................................................................... 94
FIGURA 25.A – VARIAÇÃO NO TEMPO FLUXO DE DESCARGA DA COLUNA E DE SEUS COEFICIENTES DE SENSIBILIDADE (MÓDULO DE SOLO ESTÉRIL) ....................................................................................... 95
FIGURA 25.B – VARIAÇÃO NO TEMPO DOS COEFICIENTES DE SENSIBILIDADE DO FLUXO DE DESCARGA DA COLUNA (MÓDULO DE SOLO ESTÉRIL) ............................................................................................ 95
FIGURA 26.A – VARIAÇÃO NO TEMPO CONCENTRAÇÃO DE SOLUTO E DE SEUS COEFICIENTES DE SENSIBILIDADE (MÓDULO DE SOLO ESTÉRIL) ....................................................................................... 96
FIGURA 26.B – VARIAÇÃO NO TEMPO DOS COEFICIENTES DE SENSIBILIDADE DA CONCENTRAÇÃO DE SOLUTO (MÓDULO DE SOLO ESTÉRIL) .................................................................................................. 97
FIGURA 27.A: DISTRIBUIÇÃO A POSTERIORI PARA ΘR, COM MEDIDAS EXPERIMENTAIS SIMULADAS . 104
FIGURA 27.B: DISTRIBUIÇÃO A POSTERIORI PARA ΘS, COM MEDIDAS EXPERIMENTAIS SIMULADAS . 104
FIGURA 27.C: DISTRIBUIÇÃO A POSTERIORI PARA KS, COM MEDIDAS EXPERIMENTAIS SIMULADAS .. 105
FIGURA 27.D: DISTRIBUIÇÃO A POSTERIORI PARA N, COM MEDIDAS EXPERIMENTAIS SIMULADAS .. 105
FIGURA 27.E: DISTRIBUIÇÃO A POSTERIORI PARA αααα, COM MEDIDAS EXPERIMENTAIS SIMULADAS. .. 106
FIGURA 28.A: ESTADOS DA CADEIA DE MARKOV PARA ΘR, COM MEDIDAS EXPERIMENTAIS SIMULADAS. ...................................................................................................................................... 106
FIGURA 28.B: ESTADOS DA CADEIA DE MARKOV PARA ΘS, COM MEDIDAS EXPERIMENTAIS SIMULADAS ....................................................................................................................................... 107
FIGURA 28.C: ESTADOS DA CADEIA DE MARKOV PARA KS, COM MEDIDAS EXPERIMENTAIS SIMULADAS .......................................................................................................................................................... 107
FIGURA 28.D: ESTADOS DA CADEIA DE MARKOV PARA αααα, COM MEDIDAS EXPERIMENTAIS SIMULADAS .......................................................................................................................................................... 108
FIGURA 28.E: ESTADOS DA CADEIA DE MARKOV PARA N, COM MEDIDAS EXPERIMENTAIS SIMULADAS. .......................................................................................................................................................... 108
FIGURA 29.A: DISTRIBUIÇÃO A POSTERIORI PARA F, COM MEDIDAS EXPERIMENTAIS SIMULADAS ... 112
FIGURA 29.B: DISTRIBUIÇÃO A POSTERIORI PARA ρρρρKD, COM MEDIDAS EXPERIMENTAIS SIMULADAS .......................................................................................................................................................... 112
FIGURA 29.C: DISTRIBUIÇÃO A POSTERIORI PARA DD, COM MEDIDAS EXPERIMENTAIS SIMULADAS . 113
FIGURA 29.D: DISTRIBUIÇÃO A POSTERIORI PARA λλλλ, COM MEDIDAS EXPERIMENTAIS SIMULADAS .. 113
FIGURA 29.E: DISTRIBUIÇÃO A POSTERIORI PARA ααααM, COM MEDIDAS EXPERIMENTAIS SIMULADAS 114
FIGURA 30.A: ESTADOS ACEITOS DA CADEIA DE MARKOV, COM MEDIDAS EXPERIMENTAIS SIMULADAS ....................................................................................................................................... 115
FIGURA 30.B: ESTADOS DA CADEIA DE MARKOV PARA F, COM MEDIDAS EXPERIMENTAIS SIMULADAS .......................................................................................................................................................... 115
FIGURA 30.C: ESTADOS DA CADEIA DE MARKOV PARA ρρρρKD, COM MEDIDAS EXPERIMENTAIS SIMULADAS ....................................................................................................................................... 116
FIGURA 30.D: ESTADOS DA CADEIA DE MARKOV PARA DD, COM MEDIDAS EXPERIMENTAIS SIMULADAS ....................................................................................................................................... 116
xiii
FIGURA 30.E: ESTADOS DA CADEIA DE MARKOV PARA λλλλ, COM MEDIDAS EXPERIMENTAIS SIMULADAS .......................................................................................................................................................... 117
FIGURA 30.F: ESTADOS DA CADEIA DE MARKOV PARA ααααM, COM MEDIDAS EXPERIMENTAIS SIMULADAS ....................................................................................................................................... 117
FIGURA 31.A: COMPARAÇÃO DAS CURVAS EXPERIMENTAL E TEÓRICA DA CARGA AO LONGO DO TEMPO, COM MEDIDAS EXPERIMENTAIS REAIS. ................................................................................ 122
FIGURA 31.B: DIFERENÇA ENTRE OS VALORES EXPERIMENTAL E TEÓRICO DA CARGA AO LONGO DO TEMPO, COM MEDIDAS EXPERIMENTAIS REAIS. ................................................................................ 123
FIGURA 32.A: DISTRIBUIÇÃO A POSTERIORI PARA ΘR, COM MEDIDAS EXPERIMENTAIS REAIS .......... 123
FIGURA 32.B: DISTRIBUIÇÃO A POSTERIORI PARA ΘS, COM MEDIDAS EXPERIMENTAIS REAIS ........... 124
FIGURA 32.C: DISTRIBUIÇÃO A POSTERIORI PARA KS, COM MEDIDAS EXPERIMENTAIS REAIS ........... 124
FIGURA 32.D: DISTRIBUIÇÃO A POSTERIORI PARA αααα, COM MEDIDAS EXPERIMENTAIS REAIS ............ 125
FIGURA 32.E: DISTRIBUIÇÃO A POSTERIORI PARA N, COM MEDIDAS EXPERIMENTAIS REAIS ............ 125
FIGURA 32.F: DISTRIBUIÇÃO A POSTERIORI PARA H0, COM MEDIDAS EXPERIMENTAIS REAIS ........... 126
FIGURA 32.G: DISTRIBUIÇÃO A POSTERIORI PARA δδδδH, COM MEDIDAS EXPERIMENTAIS REAIS .......... 126
FIGURA 33.A: ESTADOS ACEITOS DA CADEIA DE MARKOV, COM MEDIDAS EXPERIMENTAIS REAIS ... 127
FIGURA 33.C: ESTADOS DA CADEIA DE MARKOV PARA ΘS, COM MEDIDAS EXPERIMENTAIS REAIS ... 128
FIGURA 33.D: ESTADOS DA CADEIA DE MARKOV PARA KS, COM MEDIDAS EXPERIMENTAIS REAIS ... 129
FIGURA 33.E: ESTADOS DA CADEIA DE MARKOV PARA αααα, COM MEDIDAS EXPERIMENTAIS REAIS ..... 129
FIGURA 33.F: ESTADOS DA CADEIA DE MARKOV PARA N, COM MEDIDAS EXPERIMENTAIS REAIS ..... 130
FIGURA 33.G: ESTADOS DA CADEIA DE MARKOV PARA H0, COM MEDIDAS EXPERIMENTAIS REAIS ... 130
FIGURA 33.H: ESTADOS DA CADEIA DE MARKOV PARA δδδδH, COM MEDIDAS EXPERIMENTAIS REAIS .. 131
FIGURA 34.A: COMPARAÇÃO ENTRE AS CURVAS EXPERIMENTAL E TEÓRICA DA CONCENTRAÇÃO DE SOLUTO NA DESCARGA DA COLUNA UTILIZANDO-SE O MODELO COM CONDIÇÃO DE CONTORNO DO TERCEIRO TIPO, COM MEDIDAS EXPERIMENTAIS REAIS. .................................................................... 136
FIGURA 34.B: DIFERENÇA ENTRE OS VALORES EXPERIMENTAL E TEÓRICO DA CONCENTRAÇAO DE SOLUTO UTILIZANDO-SE O MODELO COM CONDIÇÃO DE CONTORNO DO TERCEIRO TIPO, COM MEDIDAS EXPERIMENTAIS REAIS. ...................................................................................................... 136
FIGURA 35.A: COMPARAÇÃO ENTRE AS CURVAS EXPERIMENTAL E TEÓRICA DA CONCENTRAÇÃO DE SOLUTO NA DESCARGA DA COLUNA UTILIZANDO-SE O MODELO DE MODELO COM CONDIÇÃO DE CONTORNO DO PRIMEIRO TIPO, COM MEDIDAS EXPERIMENTAIS REAIS ........................................... 137
FIGURA 35.B: DIFERENÇA ENTRE OS VALORES EXPERIMENTAL E TEÓRICO DA CONCENTRAÇAO DE SOLUTO UTILIZANDO-SE O MODELO DE MODELO COM CONDIÇÃO DE CONTORNO DO PRIMEIRO TIPO, COM MEDIDAS EXPERIMENTAIS REAIS .............................................................................................. 137
FIGURA 36.A: DISTRIBUIÇÃO A POSTERIORI PARA F UTILIZANDO O MODELO COM CONDIÇÃO DE CONTORNO DO TERCEIRO TIPO, COM MEDIDAS EXPERIMENTAIS REAIS ........................................... 138
FIGURA 36.B: DISTRIBUIÇÃO A POSTERIORI PARA ρρρρKD UTILIZANDO O MODELO COM CONDIÇÃO DE CONTORNO DO TERCEIRO TIPO, COM MEDIDAS EXPERIMENTAIS REAIS ........................................... 139
FIGURA 36.C: DISTRIBUIÇÃO A POSTERIORI PARA λλλλ UTILIZANDO O MODELO COM CONDIÇÃO DE CONTORNO DO TERCEIRO TIPO, COM MEDIDAS EXPERIMENTAIS REAIS ........................................... 139
FIGURA 36.D: DISTRIBUIÇÃO A POSTERIORI PARA DD UTILIZANDO O MODELO COM CONDIÇÃO DE CONTORNO DO TERCEIRO TIPO, COM MEDIDAS EXPERIMENTAIS REAIS ........................................... 140
FIGURA 36.E: DISTRIBUIÇÃO A POSTERIORI PARA ααααM UTILIZANDO O MODELO COM CONDIÇÃO DE CONTORNO DO TERCEIRO TIPO, COM MEDIDAS EXPERIMENTAIS REAIS ........................................... 140
xiv
FIGURA 37.A: DISTRIBUIÇÃO A POSTERIORI PARA F UTILIZANDO O MODELO DE MODELO COM CONDIÇÃO DE CONTORNO DO PRIMEIRO TIPO, COM MEDIDAS EXPERIMENTAIS REAIS ................... 141
FIGURA 37.B: DISTRIBUIÇÃO A POSTERIORI PARA ρρρρKD UTILIZANDO O MODELO DE MODELO COM CONDIÇÃO DE CONTORNO DO PRIMEIRO TIPO, COM MEDIDAS EXPERIMENTAIS REAIS ................... 141
FIGURA 37.C: DISTRIBUIÇÃO A POSTERIORI PARA λλλλ UTILIZANDO O MODELO DE MODELO COM CONDIÇÃO DE CONTORNO DO PRIMEIRO TIPO, COM MEDIDAS EXPERIMENTAIS REAIS ................... 142
FIGURA 37.D: DISTRIBUIÇÃO A POSTERIORI PARA DD UTILIZANDO O MODELO DE MODELO COM CONDIÇÃO DE CONTORNO DO PRIMEIRO TIPO , COM MEDIDAS EXPERIMENTAIS REAIS .................. 142
FIGURA 37.E: DISTRIBUIÇÃO A POSTERIORI PARA ααααM UTILIZANDO O MODELO DE MODELO COM CONDIÇÃO DE CONTORNO DO PRIMEIRO TIPO, COM MEDIDAS EXPERIMENTAIS REAIS ................... 143
FIGURA 38.A: ACEITAÇÃO DOS ESTADOS DA CADEIA DE MARKOV UTILIZANDO-SE O MODELO COM CONDIÇÃO DE CONTORNO DO TERCEIRO TIPO, COM MEDIDAS EXPERIMENTAIS REAIS .................... 144
FIGURA 38.B: CADEIA DE MARKOV PARA O PARÂMETRO F UTILIZANDO-SE O MODELO COM CONDIÇÃO DE CONTORNO DO TERCEIRO TIPO, COM MEDIDAS EXPERIMENTAIS REAIS .................... 145
FIGURA 38.C: CADEIA DE MARKOV PARA O PARÂMETRO ρρρρKD UTILIZANDO-SE O MODELO COM CONDIÇÃO DE CONTORNO DO TERCEIRO TIPO, COM MEDIDAS EXPERIMENTAIS REAIS .................... 145
FIGURA 38.D: CADEIA DE MARKOV PARA O PARÂMETRO λλλλ UTILIZANDO-SE O MODELO COM CONDIÇÃO DE CONTORNO DO TERCEIRO TIPO, COM MEDIDAS EXPERIMENTAIS REAIS .................... 146
FIGURA 38.E: CADEIA DE MARKOV PARA O PARÂMETRO DD UTILIZANDO-SE O MODELO COM CONDIÇÃO DE CONTORNO DO TERCEIRO TIPO, COM MEDIDAS EXPERIMENTAIS REAIS .................... 146
FIGURA 38.F: CADEIA DE MARKOV PARA O PARÂMETRO ααααM UTILIZANDO-SE O MODELO COM CONDIÇÃO DE CONTORNO DO TERCEIRO TIPO, COM MEDIDAS EXPERIMENTAIS REAIS .................... 147
FIGURA 39.A: ACEITAÇÃO DOS ESTADOS DA CADEIA DE MARKOV UTILIZANDO-SE O MODELO DE MODELO COM CONDIÇÃO DE CONTORNO DO PRIMEIRO TIPO, COM MEDIDAS EXPERIMENTAIS REAIS .......................................................................................................................................................... 148
FIGURA 39.B: CADEIA DE MARKOV PARA O PARÂMETRO F UTILIZANDO-SE O MODELO DE MODELO COM CONDIÇÃO DE CONTORNO DO PRIMEIRO TIPO, COM MEDIDAS EXPERIMENTAIS REAIS ........... 148
FIGURA 39.C: CADEIA DE MARKOV PARA O PARÂMETRO ρρρρKD UTILIZANDO-SE O MODELO DE MODELO COM CONDIÇÃO DE CONTORNO DO PRIMEIRO TIPO, COM MEDIDAS EXPERIMENTAIS REAIS ........... 149
FIGURA 39.D: CADEIA DE MARKOV PARA O PARÂMETRO λλλλ UTILIZANDO-SE O MODELO DE MODELO COM CONDIÇÃO DE CONTORNO DO PRIMEIRO TIPO, COM MEDIDAS EXPERIMENTAIS REAIS ........... 149
FIGURA 39.E: CADEIA DE MARKOV PARA O PARÂMETRO DD UTILIZANDO-SE O MODELO DE MODELO COM CONDIÇÃO DE CONTORNO DO PRIMEIRO TIPO, COM MEDIDAS EXPERIMENTAIS REAIS ........... 150
FIGURA 39.F: CADEIA DE MARKOV PARA O PARÂMETRO ααααM UTILIZANDO-SE O MODELO DE MODELO COM CONDIÇÃO DE CONTORNO DO PRIMEIRO TIPO, COM MEDIDAS EXPERIMENTAIS REAIS ........... 150
FIGURA 40.A: ACEITAÇÃO DOS ESTADOS DA CADEIA DE MARKOV, ALTERANDO-SE AS DISTRIBUIÇÕES A
PRIORI, COM MEDIDAS EXPERIMENTAIS REAIS.................................................................................. 152
FIGURA 40.B: CADEIA DE MARKOV PARA O PARÂMETRO F, ALTERANDO-SE AS DISTRIBUIÇÕES A
PRIORI, COM MEDIDAS EXPERIMENTAIS REAIS.................................................................................. 153
FIGURA 40.C: CADEIA DE MARKOV PARA O PARÂMETRO ρρρρKD, ALTERANDO-SE AS DISTRIBUIÇÕES A
PRIORI, COM MEDIDAS EXPERIMENTAIS REAIS.................................................................................. 153
FIGURA 40.D: CADEIA DE MARKOV PARA O PARÂMETRO λλλλ, ALTERANDO-SE AS DISTRIBUIÇÕES A
PRIORI, COM MEDIDAS EXPERIMENTAIS REAIS.................................................................................. 154
FIGURA 40.E: CADEIA DE MARKOV PARA O PARÂMETRO DD, ALTERANDO-SE AS DISTRIBUIÇÕES A
PRIORI, COM MEDIDAS EXPERIMENTAIS REAIS.................................................................................. 154

xv
FIGURA 40.F: CADEIA DE MARKOV PARA O PARÂMETRO ααααM, ALTERANDO-SE AS DISTRIBUIÇÕES A
PRIORI, COM MEDIDAS EXPERIMENTAIS REAIS.................................................................................. 155
xvi
LISTA DE TABELAS
TABELA 1: PROPRIEDADES FÍSICAS PREVIAMENTE OBTIDAS NOS ENSAIOS DE CARACTERIZAÇÃO ....... 42
TABELA 2: VALORES INICIAIS DE PARÂMETROS E DISTRIBUIÇÕES A PRIORI NA VERIFICAÇÃO DO MÉTODO MCMC .................................................................................................................................. 71
TABELA 3: ESTIMATIVA DE PARÂMETROS PARA VERIFICAÇÃO DO MÉTODO MCMC ............................ 72
TABELA 4: PARÂMETROS UTILIZADOS NA GERAÇÃO DE MEDIDAS SIMULADAS. ................................ 101
TABELA 5: DISTRIBUIÇÕES A PRIORI DOS PARÂMETROS HIDRÁULICOS ESTIMADOS COM MEDIDAS SIMULADAS. ...................................................................................................................................... 102
TABELA 6: ESTIMATIVAS DOS PARÂMETROS HIDRÁULICOS OBTIDOS COM MEDIDAS SIMULADAS. .. 103
TABELA 7: DISTRIBUIÇÕES A PRIORI DOS PARÂMETROS DE TRANSPORTE ESTIMADOS UTILIZANDO-SE MEDIDAS SIMULADAS. ...................................................................................................................... 110
TABELA 8: ESTIMATIVAS DOS PARÂMETROS DE TRANSPORTE OBTIDAS COM MEDIDAS SIMULADAS. .......................................................................................................................................................... 111
TABELA 9: DISTRIBUIÇÕES A PRIORI DOS PARÂMETROS HIDRÁULICOS, COM MEDIDAS EXPERIMENTAIS REAIS ................................................................................................................................................. 120
TABELA 10: VALORES ESTIMADOS PARA OS PARÂMETROS HIDRÁULICOS, COM MEDIDAS EXPERIMENTAIS REAIS ....................................................................................................................... 121
TABELA 11: DISTRIBUIÇÕES A PRIORI ADOTADAS PARA OS PARÂMETROS DE TRANSPORTE, COM MEDIDAS EXPERIMENTAIS REAIS ....................................................................................................... 133
TABELA 12: PARÂMETROS DE TRANSPORTE ESTIMADOS UTILIZANDO-SE O MODELO COM CONDIÇÃO DE CONTORNO DO TERCEIRO TIPO, COM MEDIDAS EXPERIMENTAIS REAIS ...................................... 134
TABELA 13: PARÂMETROS DE TRANSPORTE ESTIMADOS UTILIZANDO-SE O MODELO DE MODELO COM CONDIÇÃO DE CONTORNO DO PRIMEIRO TIPO, COM MEDIDAS EXPERIMENTAIS REAIS ................... 134
TABELA 14: DISTRIBUIÇÕES A PRIORI DA ESTIMATIVA DE PARÂMETROS DE TRANSPORTE PARA COMPARAÇÃO ................................................................................................................................... 151
xvii
LISTA DE SÍMBOLOS
LATINOS
Cim Concentração de soluto na região estagnante
Cinj Concentração da solução de soluto injetada na coluna
Cm Concentração de soluto na região dinâmica
C0 Concentração inicial na região dinâmica
D* Coeficiente de difusão molecular efetivo
Dd Coeficiente de difusão molecular
Dm Coeficiente de dispersão
e0 Índice de vazios do solo
f Fração de massa na fase sólida da região dinâmica
h(t) Carga de pressão
hb(t) Carga piezométrica na base da coluna
hi(z) Carga piezométrica inicial ao longo da coluna
h0 Carga piezométrica inicial na metade da coluna
I Número total de volumes da malha espacial
i Índice de discretizaçao da malha espacial
J(P) Matriz de sensibilidade
K Condutividade hidráulica
Ka Condutividade hidráulica da interface entre meios
Kd Coeficiente de distribuição
Ks Condutividade hidráulica na saturação
xviii
L Comprimento
l Parâmetro de conectividade dos poros
m0 Massa da amostra de solo antes da secagem
ms Massa da amostra de solo após a secagem
n Índice de distribuição do tamanho de poros
PT Vetor de parâmetros
Pe Número de Peclet
q0(t) Fluxo de efluente
R Fator de retardamento
S(P) Função objetivo da estimativa de parâmetros
Se Saturação efetiva
S0 Grau de saturação inicial do solo
T Vetor de resposta do sistema
t Variável temporal
Vm Velocidade média da água nos poros
Vs Volume ocupado pela fase sólida no ensaio de sedimentação
W Inversa da matriz de covariancia
wf Fração do meio ocupado pelo sistema fraturado
YT Vetor de medidas
z Coordenada espacial

xix
GREGOS
α Inverso aproximado do coeficiente de entrada de ar
αm Taxa de transferência de massa
β Coeficiente adimensional dependente da geometria do problema
Γw Termo de transferência de água entre o meio fraturado e a matriz porosa
γw Fator de escala
∆t Intervalo de tempo
∆z Intervalo entre os pontos da malha espacial discretizada
δh Variação da carga piezométrica entre o centro e a extremidade da coluna
θ Teor volumétrico de umidade
θim Teor volumétrico de umidade na região imóvel
θm Teor volumétrico de umidade na região móvel
θ0 Teor mássico de umidade natural
θr Teor volumétrico de umidade residual
θs Teor volumétrico de umidade saturado
π(Y) Densidade marginal de probabilidade das medidas
π�YYYY|PPPP� Função de verossimilhança
πprior (P) Densidade a priori dos parâmetros
πposterior (P) Densidade posterior de probabilidade dos parâmetros
ρágua Massa específica da água
ρb Massa específica na base seca
ρp Massa específica real dos grãos
λ Dispersividade
1
CAPÍTULO 1 - Introdução
1.1 Motivação e aplicação
A migração de contaminantes em solos, assim como a determinação das
características hidrológicas dos solos em contato com tais contaminantes, vem sendo
tema de diversos estudos nos últimos anos. Essa importância vem do ponto de vista da
análise do impacto sobre o meio-ambiente, de se conhecer o comportamento difusivo e
dispersivo de contaminantes quando em contato com o meio e também de se descrever o
escoamento através do solo do líquido no qual estes contaminantes estão dissolvidos.
Esse conhecimento adquirido vem ao encontro do esforço computacional realizado nos
últimos anos no sentido de se desenvolver métodos e mecanismos que, se não eliminem,
pelo menos minimizem os efeitos causados pela sociedade industrial no meio ambiente.
Os resultados obtidos nesses estudos podem ser aplicados no projeto de barreiras de
engenharia para repositórios de resíduos industriais e radioativos e na simulação de
acidentes com despejo de substâncias tóxicas no solo, visando-se prever as
consequências de uma eventual ocorrência sobre o meio.
Neste contexto, vem sendo desenvolvida uma linha de pesquisa no Laboratório de
Transmissão e Tecnologia de Calor (LTTC) da COPPE/UFRJ em que se realizam
experimentos para o estudo da dispersão de agentes contaminantes em meios porosos.
Esse trabalho foi iniciado pelo Professor Roberto de Souza, com o estudo do transporte
de materiais radioativos em coluna de areia saturada e compactada visando-se a
estimativa do coeficiente de difusão aparente, utilizando-se traçador radioativo, em que
o solo da coluna era lixiviado (SOUZA et al., 1997). Posteriormente o estudo foi
realizado com um traçador não radioativo, utilizando-se solução de KBr e medindo-se a
2
concentração de sal de forma indireta, pela leitura da condutividade elétrica do efluente
da coluna (ORLANDE et al., 1999). O coeficiente de difusão foi também estimado a
partir de um experimento de coluna preenchida com areia saturada e compactada em
que não havia escoamento de líquido através do meio poroso (MOREIRA et al., 2003).
Com este resultado foi possível estimar o coeficiente de dispersão efetivo,
reproduzindo-se em menor escala o aparato experimental desenvolvido pelo Professor
Roberto de Souza (NASCIMENTO et al., 2004).
O passo seguinte foi o estudo do comportamento da dispersão e difusão de
contaminante em colunas de solo com teor de umidade menor do que aquele de
saturação (MOREIRA, 2007), em que se montou um aparato experimental que simula a
pressão negativa existente nos escoamentos não saturados, utilizando-se uma solução de
KBr como traçador. Nessa oportunidade foram estimados o coeficiente de distribuição e
o coeficiente de dispersão do traçador para diferentes tipos de solo.
Estes experimentos propiciaram um bom conhecimento a respeito dos fenômenos de
transporte em meios porosos saturados, assim como a obtenção de um conjunto de
parâmetros estimados e a possibilidade de se estimar parâmetros de transporte para
outros tipos de solo de maneira eficiente. Porém ainda não havia sido realizado nenhum
estudo visando a determinação das propriedades hidráulicas dos solos a serem
analisados, paralelamente à determinação dos parâmetros de transporte.
O presente trabalho é um prosseguimento dos estudos em meios porosos iniciados
pelo Professor Roberto de Souza e visa descrever um método experimental
desenvolvido para o estudo tanto do transporte de soluto em meio poroso não saturado,
quanto do escoamento de líquido através do mesmo meio. O trabalho também descreve
a utilização de uma abordagem Bayesiana na estimativa de parâmetros relacionados ao
problema físico. O método de Monte Carlo com cadeia de Markov (MCMC) é aplicado
3
para se estimar os parâmetros desejados a partir dos dados experimentais obtidos,
através da aplicação do algoritmo de Metropolis-Hastings. São estimados aqui os
parâmetros hidráulicos (conteúdo residual de água, θr, teor de umidade na saturação, θs,
condutividade hidráulica na saturação, Ks, o inverso do coeficiente de entrada de ar, α, e
o índice de distribuição do tamanho de poros, n) e os parâmetros de transporte (fator dos
sítios de sorção em contato com a água móvel, f, coeficiente de distribuição, Kd,
coeficiente de dispersão, Dd, dispersividade, λ, e a taxa de transferência de massa entre
as regiões dinâmica e estagnante, αm).
Os procedimentos desenvolvidos neste trabalho foram aplicados numa situação real,
para estimar as propriedades hidráulicas e de transporte de soluto do solo da região da
unidade de mineração de Urânio (URA) das Industrias Nucleares do Brasil (INB),
localizada em Caetité/Ba, onde foram coletadas as amostras de solo utilizadas nos
procedimentos experimentais realizados. O estudo das propriedades de transporte desse
solo é necessário para se avaliar eventuais riscos a longo prazo para o ambiente e gerar
dados para o eventual projeto de barreiras de engenharia.
A maior parte do Urânio utilizado nos reatores das usinas de geração de energia no
Brasil é atualmente extraído na unidade de mineração de Urânio (URA), das Indústrias
Nucleares do Brasil (INB), localizada em Caetité, BA. O processo de mineração do
Urânio, para posterior enriquecimento, produz rejeitos tanto líquidos quanto sólidos,
que são depositados de acordo com as normas de segurança estabelecidas
internacionalmente. Dada a grande quantidade de material depositada e a alta
concentração de reagentes químicos utilizados para se separar o Urânio puro da rocha,
como o ácido sulfúrico, deve-se considerar o risco de, com a ocorrência de chuvas, esse
material remanescente do processo industrial ser carregado para o ambiente.
4
1.2 Revisão de literatura Solução do problema hidráulico
O estudo do escoamento em meios poroso vem sendo assunto de uma grande
variedade de trabalhos. Van Genuchten (1980) apresentou uma formulação simples da
equação que descreve o teor de umidade em função da carga manométrica e que permite
a derivação de uma solução analítica para a a condutividade hidráulica em solos não
saturados.
Resultados para a estimativa de parâmetros hidráulicos a partir de medidas
experimentais também foram apresentados tanto para meios porosos (KOOL et al.,
1985, SIMUNEK et al., 1998) quanto para meios compostos por rocha fraturada
(PETERS e KLAVETTER, 1988, PRUESS e WANG, 1987, FLINT et al., 2001).
Também foram levantados valores para as propriedades hidráulicas de solos
frequentemente usados (LEIJ et al., 1997).
Foram desenvolvidas funções para o cálculo de parâmetros de retenção de água em
diferentes tipos de solos, a partir de propriedades físicas do mesmo (MAYR e JARVIS,
1998, SCHAAP et al., 2001, GHANBARIAN-ALAVIJEH et al., 2010). Os parâmetros
também foram estudados em casos em que se considera um meio poroso composto de
camadas sobrepostas de diferentes porosidades (DURNER et al., 1999).
Estudos foram realizados para se constatar que o teor de umidade do meio poroso
pode diferir muito do valor esperado segundo a curva de retenção, especialmente em
casos de escoamento a vazões elevadas, levando um longo período de tempo para este
ser verificado no meio (ROSS e SMETTEM, 2000, SCHULTZE et al., 1999,
5
WILDENSCHILD et al., 2001). Para esses casos, desenvolveu-se um modelo de
escoamento hidráulico em não equilíbrio em que o teor de umidade e a carga
manométrica presentes na equação de Richards clássica são desacoplados,
aproximando-se numericamente o teor de umidade de maneira independente (ROSS e
SMETTEM, 2000).
Foram feitas comparações entre resultados obtidos com uma variação do modelo de
Mualem e Van Genuchten e resultados anteriores (VOGEL et al., 2001). Valores para as
propriedades hidráulicas para solos localizados nos trópicos também foram
determinados a partir do modelo de Mualem-Van Genuchten (HODNETT e
TOMASELLA, 2002).
Foi desenvolvido o pacote de códigos computacionais HYDRUS-1D (SIMUNEK et
al., 2005) que, a partir de uma coletânea de modelos matemáticos conhecidos permite a
análise do escoamento e transporte de soluto, possibilitando a simulação do escoamento
do líquido percolante em situações de campo e experimentos de coluna (MA et al.,
2010, TAFTEH et al., 2012, JIANG et al., 2010, SIYAL e SKAGGS, 2009). Outros
códigos com a implementação de modelagem para o problema de escoamento são
utilizados na simulação do escoamento também foram desenvolvidos, sendo utilizados
no estudo da qualidade de água (ABBASPOUR et al., 2007, SCHUOL et al., 2008,
FARAMARZI et al, 2010, ROUHOLAHNEJAD et al., 2012). A influência de solos
calcários sobre as curvas de retenção também mereceu atenção especial em estudos
recentes (KHODAVERILOO et al., 2011), assim como a obtenção de parâmetros
hidráulicos de solos utilizando-se apenas informações da retenção de água
(TWARAKAVI et al., 2008).
Solução do problema de transporte de soluto

6
Diversos trabalhos também vem sendo realizados visando o estudo do transporte de
soluto em meios porosos não saturados, com a utilização de modelos matemáticos de
convecção-dispersão que descrevem as situações de equilíbrio e não-equilíbrio físico.
O escoamento em não equilíbrio físico em meio com porosidade dupla é descrito,
admitindo-se a ocorrência de caminhos preferenciais e baseando-se nas equações de
convecção-dispersão, com a formulação do modelo de porosidade dupla (PHILLIP,
1968, VAN GENUCHTEN e WIERENGA, 1976, PRUESS e WANG, 1987, GERKE,
VAN GENUCHTEN, 1993, JARVIS, 1994, HENDRICKX e FLURY, 2001, SKAGGS
e LEIJ, 2002, SIMUNEK et al., 2003). Nestes modelos, o meio poroso em estudo é
dividido eu duas regiões: uma dinâmica, onde ocorre o escoamento e outra estagnante,
onde o líquido é retido, utilizando-se a equação de Richards. Um modelo alternativo
baseado na equação cinemática da onda foi proposto por Germann (1985) e Germann e
Beven (1985), descrevendo o movimento gravitacional da água nos poros.
O meio poroso pode ainda ser dividido em regiões sucessivas (OTHMER et al,
1991; DURNER, 1994), usando para cada região a função do tipo van Genuchten-
Mualem das propriedades hidráulicas do solo. Modelos de multi-porosidade também
são utilizados, diferindo-se dos de porosidade dupla pela existência de regiões
adicionais no meio poroso (GWO et al., 1995; HUTSON e WAGENET, 1995),
podendo-se simplificá-los a modelos de porosidade dupla. Uma representação
macroscópica para a geometria estrutural para esses meios foi apresentada por Gerke e
van Genuchten (1996). Ao se sobrepor linearmente essas funções para cada região,
obtém-se um sistema de poros multi-modal (DURNER et al., 1999). Kohne et al. (2006)
mostraram que a utilização somente de dados experimentais hidráulicos é insuficiente
para a estimativa dos parâmetros hidráulicos, enquanto a utilização de dados
experimentais de escoamento, bem como da curva do avanço da frente de soluto
7
facilitam a obtenção simultânea dos parâmetros hidráulicos e de transporte. Porém,
modelos de porosidade simples e dupla apresentam eficácia limitada na previsão
simultânea dos fluxos de líquido e de soluto (HAWS et al., 2006)
O modelo de porosidade dupla tem sido utilizado na simulação e análise do
transporte de soluto e formação de caminhos preferenciais em uma grande quantidade
de situações como as em que substâncias químicas se deslocando no subsolo podem
causar danos ambientais (PETACH et al., 1991, ERIKSSON et al., 1997, SCHWARTZ
et al., 2000, KOHLER et al., 2001, MORADI et al., 2005, LARSBO e JARVIS, 2006
AKHAVAN et al., 2010). Uma modelagem para o transporte de soluto em colunas de
solo foi apresentada por Martinez et al. (2010).
Foram desenvolvidos programas comerciais e de domínio público contendo códigos
computacionais com as soluções de diversos modelos matemáticos, utilizando as
funções de van Genuchten-Mualem e suas modificações (VOGEL et al., 2001). O
código CXTFIT (TORIDE et al., 1999) também foi utilizado no estudo do transporte de
soluto, tendo sido implementadas soluções analíticas para a equação de convecção-
dispersão. A infiltração e saída de água em diferentes amostras de solo consolidado
foram simuladas (ROSS e SMETTEM, 2000).
Simulações da infiltração em amostras menores também foram realizadas
(SIMUNEK et al., 2001), mostrando relações entre a pressão e o volume de poros
ocupado por água. O programa HYDRUS (SIMUNEK et al., 2005) também possui
formulações para a solução dos problemas direto e inverso de estimativa de parâmetros
de transporte, possibilitando a simulação e análise do transporte de soluto em condições
de campo e em experimentos de coluna de solo em laboratório (NEWMANN et al.,
2011, MERK, 2012, JIANG, et al., 2010, RAMOS et al., 2011, JELLALI et al., 2010,
HEATWOLE e MCCRAY, 2007, BEGGS et al., 2011), com a possibilidade de se
8
discriminar o modelo a ser utilizado (PACHEPSKY et al., 2006) e avaliar o
comportamento dos modelos de equilíbrio e não equilíbrio físico (JELLALI et al.,
2010). O transporte de radionuclídeos provenientes de depósitos de rejeitos industriais
também foi simulado (PONTEDEIRO et al., 2010), e os resultados obtidos com o
HYDRUS foram comparados com o resultado de outros códigos (MERK, 2012).
Procedimentos experimentais
Para que os resultados de experimentos em colunas de solo de laboratório sejam
significativos, é necessário que o solo que preenche a coluna apresente características
físicas semelhantes às do ambiente natural, sendo para isso utilizadas técnicas de
compactação de solo no interior da coluna, em que o solo pode ser depositado tanto em
estado não saturado por via mecânica (OLIVEIRA et al., 1996, COMMUNAR et al.,
2004, PLUMMER et al., 2004), quanto em estado completamente saturado, onde a
coluna é previamente preenchida com água e o solo depositado homogeneamente no
fundo da coluna por ação da gravidade (SIMON et al., 2000, POWELSON e MILLS,
2001, JIN et al., 2007). Este procedimento permite a repetibilidade dos experimentos.
Porém, de acordo com Bromly et al. (2007), a compactação de amostras de solo não
consolidado com o objetivo de se obter um solo com densidade homogênea exerce
influência significativa no transporte de soluto, uma vez que para colunas de diâmetro
grande a dispersividade do solo é alterada.
Também foram realizados estudos onde o solo foi depositado na coluna de maneira
consolidada (BROWN et al., 1974, BOWMAN et al., 1994, STROCK e CASSEL,
2001, DOUSSET et al., 2004, LANDRY et al, 2004, TAKAMATSU et al., 2007). Neste
método, o experimento foi realizado em condições próximas das condições de campo, o
que permite o estudo dos macroporos que influenciam o transporte de soluto (LAWES
9
et al., 1982). Porém, há a desvantagem de não se garantir a presença significativa de
macroporos na amostra coletada (AKHTAR et al., 2003).
Uma preocupação em experimentos de coluna de solo é a ocorrência de caminhos
preferenciais não naturais como, por exemplo, o fluxo entre a superfície lateral do solo e
a superfície interna da parede da coluna (CORWIN, 2000, GHODRATI et al., 1999,
SENTENAC et al., 2001). Há uma diversidade de estudos que apresentaram propostas
para se contornar este problema (SMAJSTRA, 1985, SENTENAC et al., 2001,
CORWIN, 2000, CHABERNEAU, 2000).
Lewis e Sjöstram (2010) apresentaram um trabalho de revisão, analisando o estado
da arte na construção de colunas de solo e fornecendo informações para a otimização de
experimentos. Skaggs et al. (2002) apresentaram uma descrição de procedimentos
experimentais em laboratório com o objetivo de se reproduzir o escoamento e transporte
de soluto em meios porosos em colunas preenchidas por amostras de solo.
Experimentos em coluna de solo de laboratório também foram utilizados com o objetivo
de se obter dados experimentais a serem utilizados na estimativa de parâmetros do
problema de escoamento (KOOL et al., 1985, PARKER et al., 1985, SIMUNEK et al.,
1998, ZOU et al., 2001, KOHNE et al., 2006) e também do problema de transporte de
soluto, a partir da obtenção da curva de concentração de soluto ao longo do tempo
(KAMRA et al., 2001; BARIZON, 2004; SHASHIDHAR et al., 2007; SCHWAB et al.,
2007; CRANÇON et al., 2010).
Estimativa de parâmetros
A solução do problema de estimativa de parâmetros pela minimização da função
objetivo de máxima verossimilhança (BECK e ARNOLD, 1977) e de modelos que
reflitam as incertezas dos parâmetros antes das informações fornecidas pelos dados
10
experimentais, denominados modelos a priori (BECK e ARNOLD, 1977, KAIPIO e
SOMERSALO, 2004, LEE, 2004, TAN et al., 2006), vem sendo tema de uma grande
quantidade de trabalhos nas últimas décadas. Nesse contexto, tem-se observado um
crescente interesse na aplicação do método de Monte Carlo com cadeia de Markov
(MCMC) através do algoritmo de Metropolis-Hastings (KAIPIO e SOMERSALO,
2004, TAN et al., 2006, LEE, 2004). Foram realizados trabalhos para a estimativa das
distribuições a posteriori de parâmetros do modelo de escoamento hidráulico, dentre os
quais está a caracterização da sensibilidade e incerteza dos parâmetros a partir da
elaboração de uma base Bayesiana de dados estatísticos (HASSAN e CHAPMAN,
2006, YANG et al., 2007, HE et al., 2011). Jasper Vrugt e seus colaboradores aplicaram
computação paralela na estimativa Bayesiana de parâmetros hidráulicos (Vrugt et al.,
2006), como também introduziram a amostragem de partículas da cadeia de Markov em
sua metodologia de estimativa de parâmetros (VRUGT et al., 2012), entre outras
contribuições. A estimativa Bayesiana dos parâmetros de transporte de soluto também
tem sido objeto de estudo, com experimentos de batelada sendo realizados para se
estimar as propriedades de transporte de solos (IDEN e DURNER, 2008, ANAGU et
al., 2012). A caracterização geológica de solos também pode ser realizada a partir da
elaboração de base Bayesiana de dados estatísticos de parâmetros de transporte
(MINASNY et al., 2011).
O presente trabalho apresenta como inovação a estimativa simultânea dos
parâmetros referentes ao problema hidráulico e ao de transporte em que toda a
informação disponível sobre os parâmetros, inclusive resultados a posteriori de
estimativas de parâmetros hidráulicos, são admitidas na determinação das condições a
priori. Estão aqui reunidas todas as frentes de trabalho apresentadas nesta revisão. É
estudado o escoamento e o transporte de soluto em meios porosos não saturados, com a

11
realização de ensaios para a caracterização do solo e a utilização de um procedimento
experimental em coluna de solo não saturado. O experimento em coluna fornece
medidas das variações de carga e de concentração de soluto, que são utilizadas na
estimativa de parâmetros hidráulicos e de transporte. Primeiramente, estimam-se os
parâmetros hidráulicos através da solução do problema inverso de estimativa de
parâmetros pela aplicação de inferência Bayesiana. As distribuições a posteriori obtidas
são então utilizadas como condições a priori na estimativa simultânea dos parâmetros
hidráulicos e de transporte.
1.3 Estrutura do trabalho
No capítulo 2 são apresentados os modelos matemáticos que governam os fenômenos
físicos em estudo e os métodos de solução dos problemas direto e inverso utilizados. Na
seção 2.1 é descrito o problema físico considerado e são apresentados os modelos
matemáticos associados aos fenômenos físicos presentes no estudo. São eles um modelo
para a descrição do escoamento hidráulico baseado nas equações de Richards e um
modelo de dispersão de soluto em não-equilíbrio físico em meio poroso não saturado,
considerando-se duas regiões de porosidades diferentes, denominado “Two-Region
Model” (TRM). Duas formulações para as condições de contorno na entrada da coluna
são apresentadas para a equação de dispersão de soluto. A seção 2.2 mostra os métodos
de solução das equações apresentadas na seção 2.1 tanto nas simulações de verificação
quanto na definição do problema direto na estimativa de parâmetros. A seção 2.3, por
sua vez, traz a descrição do método de estimativa de parâmetros pelo Teorema de
Bayes, com a utilização do método de Monte Carlo com cadeias de Markov (MCMC).

12
No capítulo 3 são descritos os procedimentos experimentais utilizados para se obter
as propriedades físicas do solo utilizado neste trabalho. A seção 3.1 descreve os
resultados dos experimentos de caracterização do solo realizados no laboratório de
Geotecnia do PEC/COPPE/UFRJ, que forneceram dados utilizados nas simulações
preliminares e na especificação de distribuições a priori para a estimativa de parâmetros
hidráulicos. Na seção 3.2 são apresentados o aparato e a metodologia experimental
utilizados para a realização dos experimentos em laboratório de escoamento e dispersão
de soluto em coluna de solo para o caso de não-saturação. As especificações da
realização do experimento também são apresentadas nessa seção.
O capítulo 4 apresenta primeiramente as simulações dos experimentos de
escoamento e dispersão de soluto, realizadas com os métodos de solução do problema
direto descritos na seção 2.2 com a finalidade de se verificar o código de solução do
problema direto por volumes finitos desenvolvido para este trabalho. A análise dos
resultados obtidos na estimativa dos parâmetros hidráulicos e de transporte relativos aos
modelos matemáticos considerados também é apresentada neste capítulo.
No capítulo 5 são apresentadas as conclusões do trabalho realizado até aqui e as
sugestões para seu prosseguimento.
Por ultimo, no capítulo 6 são encontradas as referências bibliográficas citadas no
decorrer do texto.
13
CAPÍTULO 2 - Fundamentos Teóricos
2.1 Problema Físico
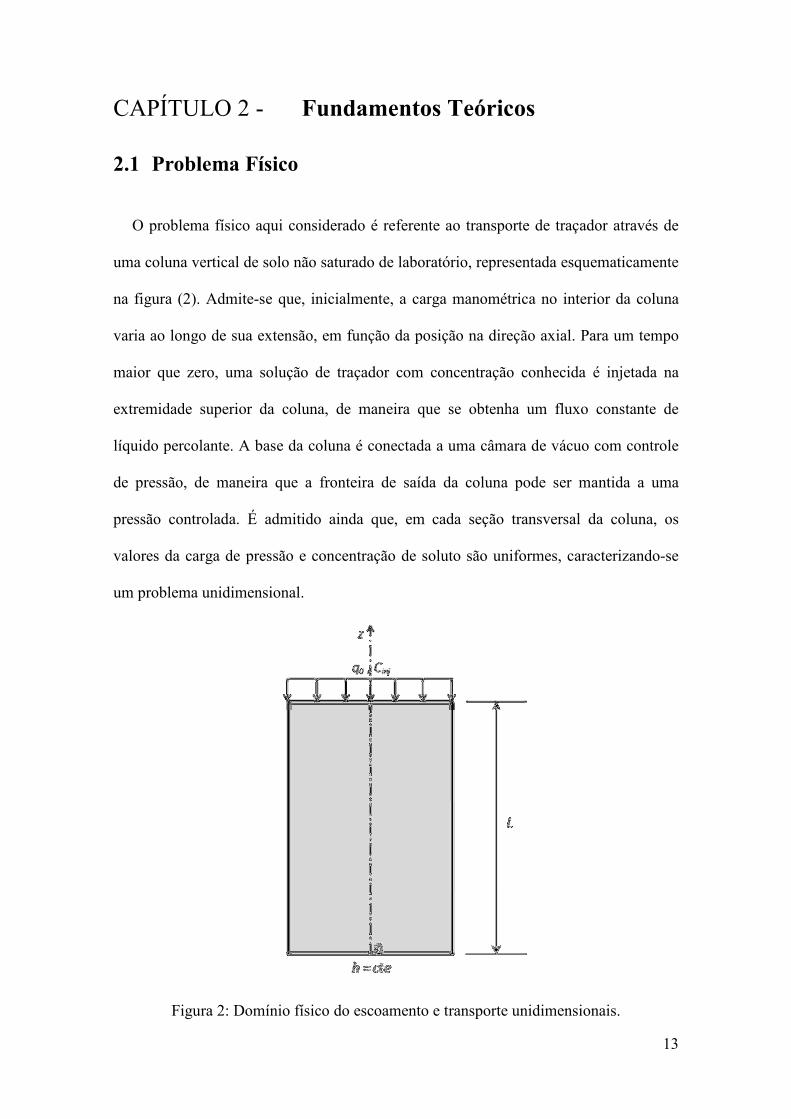
O problema físico aqui considerado é referente ao transporte de traçador através de
uma coluna vertical de solo não saturado de laboratório, representada esquematicamente
na figura (2). Admite-se que, inicialmente, a carga manométrica no interior da coluna
varia ao longo de sua extensão, em função da posição na direção axial. Para um tempo
maior que zero, uma solução de traçador com concentração conhecida é injetada na
extremidade superior da coluna, de maneira que se obtenha um fluxo constante de
líquido percolante. A base da coluna é conectada a uma câmara de vácuo com controle
de pressão, de maneira que a fronteira de saída da coluna pode ser mantida a uma
pressão controlada. É admitido ainda que, em cada seção transversal da coluna, os
valores da carga de pressão e concentração de soluto são uniformes, caracterizando-se
um problema unidimensional.
Figura 2: Domínio físico do escoamento e transporte unidimensionais.

14
2.1.1 Formulação do problema de escoamento hidráulico
O solo que preenche a coluna de laboratório pode ser modelado como a união de um
sistema não fraturado, denominado matriz, e um sistema fraturado. O escoamento pode
assim ser descrito por um modelo matemático que utiliza uma equação de Richards para
cada um desses sistemas, estando as duas equações acopladas pelo termo de
transferência de água, denominado modelo de porosidade dupla de Gerke e Van
Genuchten (1993). Para uma coluna, ilustrada na figura (1), o escoamento vertical de
água nos meios fraturado e na matriz porosa são então respectivamente descritos como
(SIMUNEK et al, 2003, KHONE et al, 2006):
f f wf f
f
hK K
t z z w
θ∂ ∂ Γ∂= + − ∂ ∂ ∂
(1.a)
1m m w
m m
f
hK K
t z z w
θ ∂ ∂ Γ∂= + + ∂ ∂ ∂ −
(1.b)
onde z é a coordenada espacial, que tem sua referência localizada na base da coluna e
em cuja direção negativa ocorre o escoamento, e t é a variável temporal. Os subscritos f
e m referem-se ao sistema fraturado e à matriz, respectivamente. Nestas equações, θ é o
teor volumétrico de umidade (L3/L3), h é a carga piezométrica (L), doravante
denominada carga, K é a função de condutividade hidráulica (LT-1), wf é a fração total
do meio poroso ocupada pelo sistema fraturado (0 < wf < 1) e Γw é o termo de
transferência de água entre os dois meios, definido como (GERKE E VAN
GENUCHTEN, 1993, KOHNE et al, 2006):
15
2( )w a w f mK h h
a
βγΓ = − (1.c)
onde β é um coeficiente adimensional que depende da geometria do problema, a é um
comprimento característico da estrutura da matriz (L), Ka é a condutividade hidráulica
da interface entre a matriz e o sistema fraturado (LT-1) e γw é um fator de escala,
normalmente tomado como 0.4
Neste trabalho, a percolação de líquido através da coluna de solo é descrita por um
modelo matemático de escoamento uniforme em um sistema de porosidade única,
obtido a partir da simplificação do modelo de permeabilidade dupla de Gerke e Van
Genuchten (1993), descrito nas equações (1.a-c). Neste modelo, o escoamento de água
num único meio poroso é descrito pela equação de Richards. O escoamento vertical é
então descrito como (SIMUNEK et al, 2003, KHONE et al, 2006):
hK K
t z z
θ ∂ ∂ ∂= + ∂ ∂ ∂
em 0 ≤ z ≤ L e t > 0 (2.a)
onde L é o comprimento da coluna. Admitindo-se fluxo de efluente q0 (LT-1) prescrito
no topo da coluna e carga hb(t) (L) prescrito na base da coluna, utilizam-se as seguintes
condições de contorno:
h = hb(t) em z = 0 para t > 0 (2.b)
0 ( )h
K K q tz
∂− + = ∂
em z = L para t > 0 (2.c)
A condição inicial é dada em termos de carga, da forma:

16
( )ih h z= em 0 ≤ z ≤ L para t = 0 (2.d)
Uma vez que se admite uma coluna de solo homogênea, considera-se ainda que
a variação da carga ao longo da coluna é linear no instante inicial. Nesse caso, admite-se
que hi (z) varia linearmente entre hi (0) = h0 – δh na base da coluna e hi (L) = h0 + δh no
topo da coluna, onde h0 é o valor inicial da carga de pressão na metade da coluna e δh é
o valor positivo da variação da carga de pressão entre a metade da coluna e cada uma
das suas extremidades. Esta definição será de grande importância nas estimativas de
parâmetros hidráulicos apresentadas no capítulo 4.
A relação entre θ e h, assim como o modelo de condutividade hidráulica, são
dados pelas funções de van Genuchten (1980) representadas pelas equações:
( ) ( ) 1m
n
r s rh hθ θ θ θ α−
= + − + (3.a)
( )2
1/( ) 1 1m
l m
e s e eK S K S S = − − (3.b)
sendo
11m
n= − (4.a)
saturaçãoefetivare
s r
Sθ θθ θ−
= =−
(4.b)
onde θr é o conteúdo volumétrico residual de água (L3/L3) e Ks é a condutividade
hidráulica na saturação (LT-1). Também são encontrados os parâmetros empíricos α, que
17
é o inverso do coeficiente de entrada de ar (L-1), o índice da distribuição de tamanho de
poros, n, e o parâmetro de conectividade de poros, l.
2.1.2 Problema de transporte de soluto
O transporte de soluto em meios porosos é descrito por modelos matemáticos
baseados na equação diferencial de convecção-difusão, utilizando-se um modelo de
sorção. Neste trabalho foi considerado um modelo matemático que descrevesse o
transporte de soluto em ensaios de coluna com solos coletados em campo, de maneira
que se mantivessem suas características físicas o mais próximo possível daquelas
existentes no ambiente de onde foram retiradas. De acordo com Skaggs e Leij (2002),
ao se realizar ensaios em colunas de solo não perturbado ou em campo, são encontradas
discrepâncias entre os resultados experimentais e aqueles estimados com modelos de
equilíbrio físico. Essas discrepâncias foram analisadas por Moreira (2007), quando se
verificou que para esses casos o modelo de sorção linear em não equilíbrio físico
apresenta o melhor ajuste entre os resultados experimental e teórico.
O modelo de transporte em não-equilíbrio físico entre duas regiões, ou “Two-Region
Model” (TRM), também denominado modelo de porosidade dupla, modifica o modelo
de convecção-difusão, estipulando que a água presente no solo é dividida entre regiões
móveis e imóveis (ou dinâmicas e estagnantes) (VAN GENUCHTEN e WIERENGA,
1976, VAN GENUCHTEN, 1981). O transporte de soluto por convecção é suposto
como restrito a região dinâmica. Também se supõe que o transporte de soluto entre as
duas regiões é controlado por difusão. Para o caso de sorção linear para as regiões
dinâmica e estagnante, as equações deste modelo podem ser escritas da seguinte forma
18
(VAN GENUCHTEN e WIERENGA, 1976, PETRACH et al., 1991, SKAGGS e LEIJ,
2002.a):
��� � + � ����� =
��� �� − ��� − ��� − ��� em 0 ≤ z ≤ L, t > 0 (5.a)
�� + �1 − �� ���� ������ = ��� − ��� em 0 ≤ z ≤ L, t > 0 (5.b)
Nestas equações, as variáveis Cm e Cim (ML-3) referem-se à concentração de soluto
nas regiões dinâmicas e estagnantes, respectivamente, Dm (L2T-1) é o coeficiente de
dispersão e Kd (L3M-1) é o coeficiente de distribuição. Os termos θm e θim (L3L-3)
referem-se respectivamente ao teor de umidade para as regiões dinâmica e estagnante,
enquanto o coeficiente αm (T-1) determina a taxa de transferência de massa entre as
regiões dinâmicas e estagnantes. O fluxo q (LT-1) é definido como q = Vmθm, onde Vm
(LT-1) é a velocidade média da água dos poros nas regiões dinâmicas. O fator f define a
fração de massa da fase sólida na região dinâmica e ρb (ML-3) é a massa específica na
base seca.
Neste estudo, foram consideradas duas formulações na definição das condições de
contorno na entrada da coluna (z = L). Na primeira formulação adota-se uma condição
de contorno de terceiro tipo na entrada da coluna; na segunda, a condição de contorno
escolhida é do primeiro tipo, como se pode ver na dos modelos a seguir.
2.1.2.1 Modelo com condição de contorno do terceiro tipo
19
Neste modelo, admite-se, a fim de se manter o balanço de massa na coluna, que o
transporte de soluto no topo da coluna de solo (z = L) é definido por uma condição de
contorno do terceiro tipo, considerando-se a dispersão do soluto no meio poroso, e por
uma condição de segundo tipo na base da coluna (z = 0).
0mC
z
∂=
∂ em z = 0, para t > 0 (6.a)
0 0 0( ) ( )mm m m
CD q t C q t C
zθ
∂− + =
∂ em z = L , para t > 0 (6.b)
tendo como condição inicial:
0( ,0)mC z C= em 0 ≤ z ≤ L, para 0t = (6.c)
Na definição desta condição de contorno o termo q0(t) (L T-1) é o fluxo afluente no
topo da coluna de solo.
2.1.2.2 Modelo com condição de contorno do primeiro tipo
Uma vez que, nos experimentos realizados, se conhece a concentração de soluto na
solução afluente no topo da coluna, como está descrito no capítulo 3, optou-se por se
considerar também um modelo de condição de contorno que a concentração de soluto é
prescrita na entrada de líquido na coluna, aplicando-se condição de contorno do
primeiro tipo em z = L. Na base da coluna aplica-se novamente uma condição de
contorno do segundo tipo. Neste caso, o problema é descrito pelas seguintes equações:

20
0mC
z
∂=
∂ em z = 0, para t > 0 (7.a)
Cm (L,t) = Cinj(t) em z = L, para 0t > (7.b)
tendo-se novamente como condição inicial:
0( ,0)mC z C= em 0 ≤ z ≤ L, para 0t = (7.c)
onde Cinj (ML-3) é a concentração da solução injetada na entrada da coluna e C0 (ML-3)
é a concentração inicial nas regiões dinâmicas.
O coeficiente de dispersão Dm é obtido a partir do modelo de Bear, utilizando o
modelo de Millington e Quirk para a tortuosidade (KHONE et al., 2006), através da
seguinte relação:
10 /3
2m
m m d
s
D D qθ
θ λθ
= + (8)
onde λ (L) é a dispersividade, Dd (L2T-1) é o coeficiente de difusão molecular e θs é o
teor de umidade do solo na condição de saturação. O fluxo de água q (LT-1) que percola
o meio não saturado é obtido através da Lei de Darcy-Buckingham:
( ) 1h
q K hz
∂ = − + ∂ (9)
21
Para o caso de sorção linear, o coeficiente de distribuição Kd se relaciona com o
fator de retardamento R de acordo com a equação:
1 b dKRρθ
= + (10)
sendo o conteúdo total de água θ definido por (VAN GENUCHTEN, 1981):
m imθ θ θ= + (11)
O valor da taxa de transferência de massa entre as regiões dinâmicas e estagnantes,
αm, na equação (5.b) pode ser obtido empiricamente (VAN GENUCHTEN e DALTON,
1986), podendo variar entre 0.0001 e 10 hr-1 (GRIFFIOEN et al.,1998). A variação da
fração de massa f e da fração de água móvel /mφ θ θ= provocam o mesmo efeito na
curva de efluentes (VAN GENUCHTEN e WIERENGA, 1976), assumindo-se por
simplicidade que (NKEDI-KIZZA et al., 1984):
mfθθ
= (12)
Substituindo-se as equações (8), (10), (11) e (12) nas equações (5.a-b), obtém-se a
seguinte formulação:
� ��� ���� = �
�� �∗ ����� − ��" − ��� − ��� em 0 ≤ z ≤ L, t > 0 (13.a)
22
�1 − �� ��� ����� = ��� − ��� em 0 ≤ z ≤ L, t > 0 (13.b)
Onde
10 / 3* 10/ 3
2d
s
D fD qθ λ
θ= + (14)
e o fator de retardamento R é dado pela equação (10). As condições de contorno e
inicial são as mesmas apresentadas nas equações (6.a-c) e (7.a-c), para os casos de
condição de contorno do terceiro e primeiro tipos no topo da coluna, respectivamente.
É de se notar que o conceito da partição da água presente no solo entre móvel e
imóvel pode variar em função das circunstâncias. Regiões estagnantes podem conter
água que esteja literalmente estagnada, ou que esteja numa velocidade muito menor do
que aquela das regiões dinâmicas. Isto acontece, por exemplo, quando o solo apresenta
macroporos derivados de fendas, canais de raízes mortas, rochas fraturadas, etc. O fluxo
nessas regiões terá uma velocidade muito superior a da matriz de solo. Na matriz de
solo, a divisão entre água móvel e imóvel ocorre quando uma porção da água do solo é
retida no espaço dos poros.
23
2.2 Métodos de solução do problema direto
Foram utilizados códigos computacionais para a solução das equações
representadas anteriormente na seção 2.1. A descrição de cada código utilizado é
apresentada a seguir.
2.2.1 Código para solução por volumes finitos
A fim de se realizar a análise do escoamento e do transporte de soluto através do
meio poroso não saturado, foi desenvolvido um código computacional para a solução do
problema direto associado aos problemas físicos de escoamento e transporte de soluto
em estudo. Esse código computacional foi escrito na linguagem FORTRAN, utilizando-
se a técnica de volumes finitos. A função de interpolação foi determinada a partir do
esquema WUDS (MALISKA, 1995). Foram utilizadas malhas espaciais de 50, 100 e
200 volumes para a discretização da coluna de solo. Os resultados obtidos com esta
solução numérica foram verificados a partir da comparação com aqueles obtidos pelo
programa HYDRUS 1-D, apresentado na seção a seguir. Esta verificação está descrita
no capítulo 6.
A equação de Richards, apresentada na equação (2.a), é uma equação diferencial
parcial que apresenta forte não-linearidade em razão do termo da condutividade
hidráulica ser calculado em função da carga de pressão, que é a variável se deseja
determinar. Isto faz com que a obtenção de uma solução analítica seja possível somente
em casos muito específicos. Para a obtenção da solução numérica da equação de
Richards, submetida às condições de contorno descritas nas equações (2.b-d), foi
realizada sua integração na direção z para cada volume da malha. Ao se aplicar
24
diferenças finitas centradas nos termos difusivos e discretizar implicitamente a equação
para cada volume da malha espacial, obtém-se uma formulação discretizada para o
problema de escoamento, como se observa:
#$%&$'#$%
(� = )*%&$+,%&$
(�, − )*%&$+$%&$
(�, + )*%&$')-%&$
(� para i = 1 (15.a)
#�%&$'#�
%
.� = )-%&$+�/$%&$
.�, − 0)*%&$1)-%&$2+�%&$
.�, +
+ )*%&$+�&$%&$
.�, + )*%&$')-%&$
.3 para i = 2,..., I-1 (15.b)
#4%&$'#4
%
.� = )-%&$+4%&$
.�, + )-%&$+4/$%&$
.�, − 567���1)-%&$8.� para i = I (15.c)
onde o índice n indica a discretização da malha temporal, com cada ponto separado pelo
intervalo ∆t e o índice i = 1,...,I representa a discretização da malha espacial, sendo I o
número total de volumes da malha utilizada, q0(t) é a infiltração de líquido na coluna e
os subscritos e e w se referem às fronteiras anterior e posterior de cada volume da
malha. O ponto espacial i = 1 corresponde ao volume da malha localizado em z = 0
(base da coluna) enquanto i = I corresponde ao volume localizado em z = L (topo de
coluna). As equações (15.a-c) formam um sistema de equações que tem como variável
independente a carga de pressão, h. Este sistema é resolvido pelo algoritmo da matriz
tri-diagonal (TDMA), de maneira que o valor da carga é calculado para cada volume da
malha espacial.
Procedimento semelhante foi realizado para as equações (13.a-b) governantes do

25
problema de transporte de soluto, utilizando-se os modelos de condições de contorno do
terceiro e do primeiro tipo apresentados nas equações (6.a-c) e (7.a-c), respectivamente.
Discretizando-se implicitamente a equação (13.a) por volumes finitos temos:
* 1 11 11 1 1 11 1
,1
* 1 11 1 1
,2
11 1,1 ,1
1
2
1
2
n nn nn n n ne ee e B m m
n nn n ne ee e m
n nn n
m m im
Df zRq q z C
t z
Dq C
z
f zRC zC
t
βθα α
βα
θα
+ ++ ++ + + +
+ ++ + +
+
∆ + + + − + ∆ − ∆ ∆
− − − = ∆
∆= + ∆
∆
para i = 1 (16.a)
onde qB é o fluxo de líquido percolante na posição z = 0.
* 1 11 1 1
, 1
1 1 * 1 11 1
1,
* 1 11 1
* 1 11 1
1
2
1
2
1
2
1
2
n nn n nw ww w m i
n n n nn ni i w ww w
n
m in n
n ne ee e m
n nn ne ee e
Dq C
z
f z R Dq
t zC
Dq z
z
Dq
z
βα
θ βα
βα α
βα
+ ++ + +
−
+ + + ++ +
+
+ ++ +
+ ++ +
− + + + ∆
∆ + − − + ∆ ∆ + − + + + ∆ ∆
− − − ∆
1, 1
1, , 1
n
m i
n nn ni im i m im i
C
f z RC zC
t
θα
++
++
=
∆= + ∆
∆
para i = 2,...,I-1 (16.b)
Para o modelo com condição de contorno do terceiro tipo, foi obtida a seguinte
equação discretizada no volume localizado no topo da coluna:

26
* 1 11 1 1
, 1
* 1 11 11 1 1
,
1, , 0 0
1
2
1
2
n nn n nw ww w m I
n nn nn n nw wI Iw w m m I
n nn nI Im I m im I
Dq C
z
Df z Rq z C
t z
f z RC zC q C
t
βα
βθα α
θα
+ ++ + +
−
+ ++ ++ + +
+
− + + + ∆
∆ + + − − + ∆ = ∆ ∆
∆= + ∆ −
∆
para i = I (16.c)
Para o modelo com condição de contorno do primeiro tipo, a equação da condição
de contorno no volume localizado no topo da coluna foi discretizada implicitamente por
volumes finitos da seguinte forma:
11
, 1
1 11 11
,
1
,
2
2
nnwm I
n nn nne wI Im I
nn nn eI Im I inj
Cz
f z RC
t z z
f z RC C
t z
β
β βθ
βθ
++−
+ ++ ++
+
− +∆ ∆
+ + + = ∆ ∆ ∆
∆= +
∆ ∆
para i = I (16.d)
onde Cinj é a concentração da solução injetada no topo de coluna. Os termos α e β são
definidos da seguinte forma (MALISKA, 1995):
α = sign(Pe)2
210 2
Pe
Pe+ (17)
2
2
1 0,005
1 0,05
Pe
Peβ
+=
+ (18)
27
onde Pe é o número de Peclet, dado por:
*
q zPe
D
∆= (19)
sendo D* definido pela equação (14). As equações (16.a-c) e (16.a-b,d) formaram dois
sistemas de equações lineares que tem como variável independente a concentração de
soluto e foram resolvidos pelo algoritmo da matriz tri-diagonal (TDMA), obtendo-se de
tal forma o valor da concentração de soluto em cada volume da malha espacial.
2.2.2 Programa HYDRUS 1-D
Para se verificar os resultados obtidos a partir do código computacional em
volumes finitos desenvolvido neste trabalho, foi utilizado o código (HYDRUS 1-D).
Trata-se de um código computacional em elementos finitos, que trata do transporte de
soluto em meios porosos não saturados, parcialmente saturados e saturados, podendo-se
considerar um perfil com várias camadas de solos. Esta característica permite ao
programa simular a percolação atrávés do meio poroso a ser estudado a partir de
diversos modelos matemáticos de escoamento em meios porosos, dentre os quais o
modelo de Gerke e Van Genuchten (1993) de porosidade dupla e sua versão
simplificada, representados pelas equações (1-4). O transporte de soluto em meios com
diferentes porosidades também pode ser simulado, através de modelos matemáticos de
equilíbrio e não equilíbrio físico e químico, dentre os quais se inclui o modelo não-
equilíbrio físico entre duas regiões descrito pelas equações (5.a-b). É possível ainda
28
estimar as propriedades físicas do meio poroso em estudo por meio de um outro código
embutido no mesmo programa, utilizando-se como dados de entrada informações sobre
a composição física do solo. Há ainda um catálogo de valores de parâmetros calculados
para uma variedade de solos de composição padrão.
O programa HYDRUS 1-D possui ainda uma boa interface gráfica, que permite
definir com facilidade a geometria do problema físico em estudo e a definição das
condições de contorno e pontos de medição. Graças a esta característica, foi este o
programa utilizado na simulação dos experimentos de percolação e transporte de soluto
em coluna de solo realizados ao longo do trabalho. Nas simulações, utilizou-se como
dados de entrada o comprimento da coluna de solo a ser utilizada no experimento, a
composição do solo a ser utilizado, as condições de contorno esperadas na entrada e na
saída da coluna e o gradiente de pressão ao longo da coluna, além dos parâmetros de
transporte do soluto, para os quais se utilizou valores aproximados.
2.3 Método de solução do problema inverso
Neste trabalho, os parâmetros presentes nos modelos matemáticos apresentados
anteriormente precisam ser estimados a partir de medidas experimentais obtidas. Esse
tipo de problema é denominado Problema Inverso de Estimativa de Parâmetros (BECK
e ARNOLD, 1977; OZISIK e ORLANDE, 2000).
Num grande número de trabalhos precedentes, a estimativa dos parâmetros
desconhecidos existentes nos modelos matemáticos foi realizada a partir da
minimização da norma dos mínimos quadrados pelo método de Levenberg-Marquart
(BECK e ARNOLD, 1977; LEVENBERG, 1944; MARQUARDT, 1963; OZISIK e
ORLANDE, 2000), havendo uma extensa coletânea de resultados obtidos através da
29
aplicação desse método. Neste trabalho, entretanto, optou-se pela aplicação de técnicas
de inferência Bayesiana (WINKLER, 2003), com a utilização do método de Monte
Carlo com cadeias de Markov (MCMC), implementado pelo algoritmo de Metropolis-
Hastings (KAIPIO e SOMERSALO, 2004; TAN et al., 2006; LEE, 2004; MOTA et al.,
2007; ORLANDE et al., 2007.a,b). A descrição da abordagem por inferência Bayesiana
se encontra a seguir.
2.3.1 Método MCMC com utilização do algoritmo de Metropolis-
Hastings
Na abordagem Bayesiana utiliza-se toda informação disponível a fim de se reduzir
a incerteza em problemas de inferência ou de tomada de decisão. Novas informações
obtidas são combinadas a informações previamente disponíveis, formando a base dos
processos estatísticos. O mecanismo formal para se gerar essa combinação é o Teorema
de Bayes (WINKLER, 2003). Assim sendo, o termo Bayesiano é utilizado para se
referir às denominadas técnicas estatísticas de solução de problema inverso, baseadas
nos seguintes princípios (KAIPIO e SOMERSALO, 2004):
1. Todos os parâmetros que aparecem no modelo matemático são
modelados como variáveis randômicas.
2. O grau de informação a respeito destas variáveis randômicas são
codificados em distribuições de probabilidade.
3. A solução do problema inverso é a distribuição posterior de
probabilidade.

30
Desta forma, a solução do problema inverso não se reduz a um conjunto de valores
pontuais estimados para os parâmetros, como nas técnicas tradicionais de solução, mas
sim à obtenção de uma distribuição estatística para os mesmos.
Considere-se o seguinte vetor de parâmetros da formulação matemática do problema
físico:
PT ≡ [P1,P2,...,PN] (20.a)
e o vetor de medidas na forma:
]...,,,[ 21 I
T YYY≡Y (20.b)
onde N é o número de parâmetros e I o número de medidas. O teorema de Bayes pode
ser escrito como (KAIPIO e SOMERSALO, 2004):
( ) ( )( ) ( )
( )prior
posterior
π ππ π
π= =
P Y PP P Y
Y (21)
onde πposterior(P) é a densidade posterior de probabilidade, isto é, a densidade
condicional dos parâmetros P dadas as medidas Y; πprior(P) é a densidade a priori dos
parâmetros, isto é, a informação codificada para os parâmetros disponível antes das
medidas; π(Y) é a densidade marginal de probabilidade das medidas, a qual desempenha
o papel de uma constante de normalização e π(Y|P) é a função de verossimilhança, que
31
expressa a densidade de probabilidade das medidas Y dados os parâmetros P. Supondo
erros experimentais aditivos, com distribuição Gaussiana, média zero, matriz de
covariância W-1 e independentes dos parâmetros P, a função de verossimilhança é dada
por:
/ 2/ 2 1 1( ) (2 ) exp ( ) ( )
2
II Tπ π
−− − = − Y P W Y -T W Y -T (22)
onde T é o vetor com a solução do problema direto (resposta do sistema)
correspondente às medidas Y, I é o número de medidas e W é a inversa da matriz de
covariância das medidas. Supondo ainda que as medidas não são correlacionadas,
temos:
21
22
2
1/ 0
1/
0 1/ I
σσ
σ
=
WO
(23)
Dada a dificuldade em se calcular a constante de normalização π(Y), torna-se
necessário o uso de técnicas numéricas de simulação como os métodos de Monte Carlo
com cadeias de Markov (MCMC), para obter-se amostras que representem a densidade
posterior de probabilidade. A implementação da cadeia de Markov requer uma
densidade q(P*,Pt-1
), a qual dá a probabilidade de mudança do atual estado da cadeia,
Pt-1
, para o novo estado, P*.
Um algoritmo largamente utilizado na implementação do método de Monte Carlo é
32
o de Metropolis-Hastings (KAIPIO e SOMERSALO, 2004, TAN el al., 2006, LEE,
2004, MOTA et al., 2007, ORLANDE et al., 2007.a,b), que pode ser descrito
resumidamente da seguinte forma:
1. Seleciona-se um ponto candidato P* da distribuição de movimentação
q(P*, Pt-1
).
2. Calcula-se:
* ( 1) *
( 1) * ( 1)
( | ) ( , )min 1,
( | ) ( , )
t
t t
q
q
πα
π
−
− −
=
P Y P P
P Y P P (24)
3. É gerado um número randômico U com distribuição uniforme em (0,1).
4. Se U ≤α , defina P(t)
= P* ; caso contrário, defina P(t)
= P(t-1).
5. Retorne ao passo 1 a fim de se gerar a seqüência {P(1)
, P(2)
, …, P(n)
}.
Este processo é realizado para se obter uma seqüência que represente a distribuição
posterior de probabilidade e a inferência sobre essa distribuição é obtida a partir da
inferência sobre as amostras {P(1)
, P(2)
, …, P(n)
}. Deve-se notar que os valores de P(i)
na sequência devem ser ignorados até que a cadeia tenha atingido equilíbrio.
O algoritmo de Metropolis-Hastings também é usado em um procedimento de
otimização denominado de recozimento simulado (simmulated annealing),
desenvolvido por Kirkpatrick et al (1983). Considerando-se um ponto de início P(1) é
gerada uma sequência {{P(1)
, P(2)
, …, P(n)
} de modo que uma função objetivo S(P) seja
minimizada (KIRKPATRICK et al, 1983, CORANA et al, 1987). A partir de um ponto
P(i) da sequência, um ponto candidato P* é escolhido. Caso ∆S = S(P*)-S(P
(i)) ≤ 0, o
ponto candidato é aceito, ou seja P(i+1) = P
(i). Caso contrário, o ponto candidato é aceito
33
segundo o critério de Metropolis (passo 3 acima) com probabilidade exp(-∆S/T), onde T
é um parâmetro de controle denominado de temperatura, em analogia ao processo de
mudança de estado de um material para um de menor nível de energia. O método do
recozimento simulado é iniciado com um valor alto de T. Após atingir equilíbrio, a
seqüência é reiniciada com um valor menor de T e tal procedimento é repetido até se
atingir um critério de convergência. Aspectos teóricos e maiores detalhes sobre o
algoritmo de Metropolis-Hastings e métodos de Monte Carlo com cadeia de Markov
podem ser encontrados em (KAIPIO e SOMERSALO, 2004; TAN et al., 2006; LEE,
2004).
Antes de se realizar a estimativa de parâmetros, é necessário que se faça a análise
dos coeficientes de sensibilidade da resposta do sistema em relação aos parâmetros. Os
coeficientes de sensibilidade são os elementos da chamada matriz de sensibilidade
(BECK e ARNOLD, 1977), que é definida como:
∂
∂
∂
∂
∂
∂
∂
∂
∂∂
∂∂
∂∂
∂∂
∂
∂
∂
∂
∂
∂
∂
∂
=
∂∂
=
N
IIII
N
N
TT
P
T
P
T
P
T
P
T
P
T
P
T
P
T
P
T
P
T
P
T
P
T
P
T
L
MMMM
L
L
321
2
3
2
2
2
1
2
1
3
1
2
1
1
1
)()(
P
PTPJ (25)
Como se vê na equação (25), os coeficientes de sensibilidade consistem da derivada
primeira da resposta do sistema (T) em relação aos parâmetros (P) e representam a
variação das variáveis medidas T em relação a variação dos parâmetros P, pertencentes
ao modelo matemático associado. É desejável que os coeficientes de sensibilidade
tenham valores absolutos altos, de modo que pequenas variações nos parâmetros
causem grandes variações na variável medida. Caso contrário, basicamente o mesmo
34
valor de T seria obtido para uma faixa grande de valores dos parâmetros e o problema
de estimativa seria difícil ou impossível. Neste trabalho foram considerados os
coeficientes de sensibilidade reduzidos, que são obtidos pela multiplicação dos
coeficientes de sensibilidade por seus respectivos parâmetros P, de modo que os
coeficientes de sensibilidade reduzidos tem a mesma unidade das medidas T.
Quando duas ou mais colunas da matriz de sensibilidade são linearmente
dependentes temos um problema inverso mal condicionado, o que significa que a
ocorrência de erros pequenos nos dados de entrada ou nos cálculos subsequentes
acarreta em erros grandes no resultado. Neste caso, o processo de estimativa de
parâmetros é bastante dificultado, sendo necessário realizar-se uma análise da variação
dos coeficientes de sensibilidade antes da solução do problema de estimativa de
parâmetros. Tal análise é realizada no capítulo 4.

35
CAPÍTULO 3 - Desenvolvimento experimental
Com o intuito de se estudar o transporte de contaminantes em solos, foram
realizados ensaios em laboratório visando a caracterização de diferentes tipos de solo
encontrados na região ao redor da mina em Caetité/BA e a simulação do transporte de
contaminantes nesses solos, através de ensaios de coluna de solo, descritos a seguir.
3.1 Coleta das amostras de solo
Para a amostragem de solo foi aberta uma trincheira com profundidade suficiente
para que se pudesse extrair amostras consolidadas de diferentes horizontes de solo,
possibilitando-se o estudo da dispersão de substâncias contaminadoras no solo da
região. Tal solo é de composição argilosa a argilo-arenosa, resultado da alteração de
rochas ou do transporte de materiais. São observados três horizontes, sendo os dois
primeiros de solo com coloração amarelo-avermelhada a vermelho-amarelada e o
terceiro formado por alterações de rochas graníticas e gnáissicas. A figura (1) apresenta
um esquema da estratificação do terreno.
Figura 1: Esquema das camadas de solo.
Solo Vermelho
Transição vermelho-amarelo
Solo Amarelo
Transição Amarelo-rocha
Rocha Alterada
2,0 m
4,0 m
5,0 m
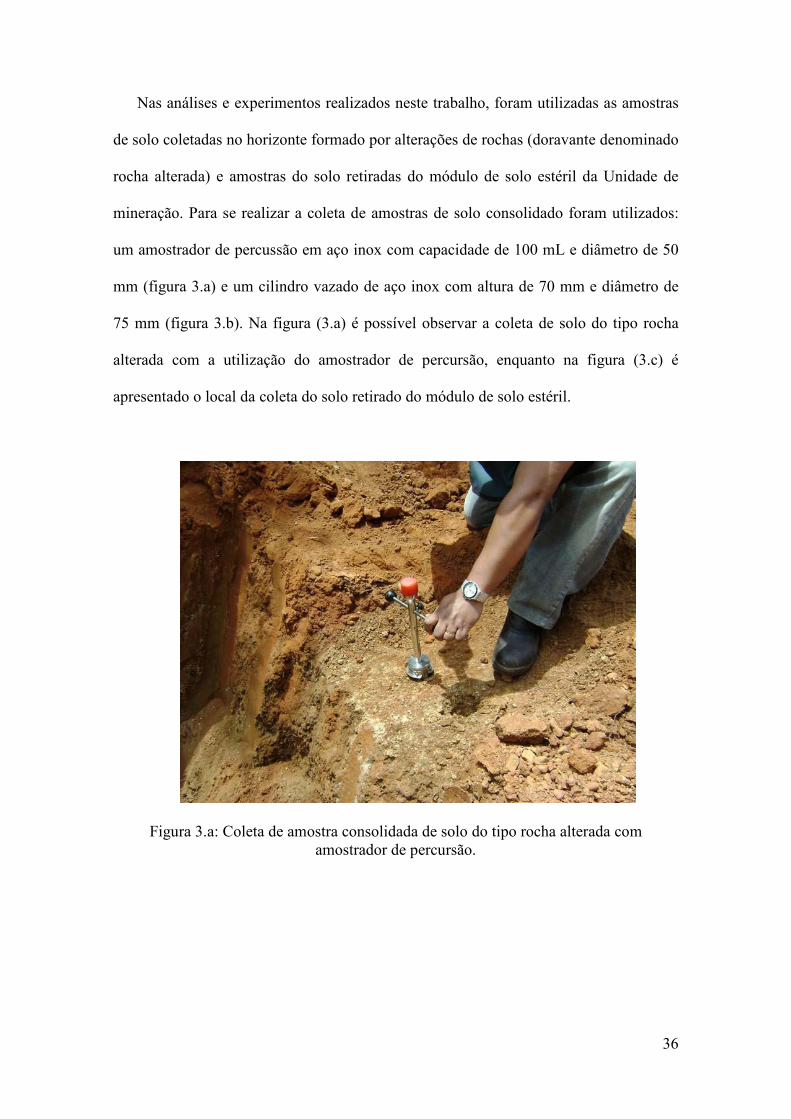
36
Nas análises e experimentos realizados neste trabalho, foram utilizadas as amostras
de solo coletadas no horizonte formado por alterações de rochas (doravante denominado
rocha alterada) e amostras do solo retiradas do módulo de solo estéril da Unidade de
mineração. Para se realizar a coleta de amostras de solo consolidado foram utilizados:
um amostrador de percussão em aço inox com capacidade de 100 mL e diâmetro de 50
mm (figura 3.a) e um cilindro vazado de aço inox com altura de 70 mm e diâmetro de
75 mm (figura 3.b). Na figura (3.a) é possível observar a coleta de solo do tipo rocha
alterada com a utilização do amostrador de percursão, enquanto na figura (3.c) é
apresentado o local da coleta do solo retirado do módulo de solo estéril.
Figura 3.a: Coleta de amostra consolidada de solo do tipo rocha alterada com amostrador de percursão.

37
Figura 3.b: Amostrador cilíndrico vazado
Figura 3.c: Local da coleta de solo no módulo de solo estéril com amostrador cilíndrico vazado.
38
Desta forma, foram obtidas amostras consolidadas de dois tamanhos distintos para
os dois solos considerados. As amostras obtidas com o amostrador de percussão, de
dimensões menores, foram utilizadas nos ensaios padrão de caracterização do solo
enquanto as amostras coletadas com o cilindro vazado, com dimensões maiores, foram
utilizadas nos experimentos de coluna de solo, como será demonstrado a seguir.
Também foram coletadas amostras não consolidadas de solo do tipo rocha alterada e do
módulo de solo estéril para a realização de análises de granulometria.
3.2 Ensaios padrão de caracterização do solo
Ensaios de caracterização de solos foram realizados para as amostras não-
consolidadas coletadas em Caetité, de acordo com as normas 6502/95 e 6502/80 da
ABNT. A granulometria dos solos foi realizada, determinando-se a porcentagem em
massa seca de cada uma das faixas de tamanho de grãos, em relação à massa seca total
da amostra. Estes resultados possibilitam a construção das curvas granulométricas para
classificação dos solos.
Nos ensaios de análise granulométrica, a amostra de solo é inicialmente pesada e
então inserida numa estufa à temperatura de 105º C por 24 horas. Após ser retirada da
estufa, a amostra é novamente pesada, obtendo-se seu teor de umidade natural, θ0, pela
relação:
θ0 = (m0 – ms) /ms (26)
onde ms é a massa da amostra após a secagem e m0 é a massa inicial.
O material seco é então passado por uma peneira de MESH 10 (diâmetro de 2,0
39
mm) e a quantidade retida nessa peneira é definida como pedregulho. O material que
passa pela primeira peneira é dividido em três partes: 60 gramas para a determinação da
massa específica real dos grãos, 50-100 gramas para a sedimentação e 200-600 gramas
para o peneiramento fino. O peneiramento fino se dá pela simples passagem do solo
seco pelas peneiras de tamanho de MESH variando entre 200 a 10, pesando-se a
quantidade de material retido em cada uma delas.
Na análise de sedimentação, o material é colocado em banho com defloculante
(solução de hexametafosfato de sódio) por um período de 6 a 24 horas. A mistura é
agitada com um agitador elétrico por 15 minutos e depositada numa proveta graduada,
completando-se com água destilada até se obter um volume de 1000 mL. São então
realizadas leituras de densímetro nas 25 horas subsequentes. Uma vez que os grãos do
solo decantam com velocidades diferentes, dependendo da forma, peso e diâmetro do
grão e viscosidade da água, as leituras sucessivas do densímetro possibilitam que se
determine a proporção correspondente a cada faixa de tamanho de grão.
A massa específica real dos grãos é determinada segundo a norma NBR 6508/84.
Para a medida dessa variável, deposita-se o solo num recipiente cerâmico, imergindo-o
em água destilada por 12 horas. O solo é cuidadosamente depositado num balão
volumétrico de 500 mL, sem que haja perda de material. Água é adicionada até que o
volume ocupado no balão seja de exatamente 500 mL. O conjunto é então pesado e a
massa específica real dos grãos é obtida pela relação
ρp = ms / Vs (27)
40
onde Vs é o volume ocupado pela parte sólida depositada, obtida pela diferença entre
o volume do balão e o volume total de líquido depositado.
Com este procedimento, conhecendo-se os valores para a massa seca da amostra
(ms), do volume da amostra (V) e a massa específica real dos grãos (ρp), foi possível
calcular também a massa específica aparente, ρb, o índice de vazios, e0 e o grau de
saturação inicial, S0 pelas relações abaixo:
ρb = ms / V (28)
e0 = ρp / ρb (29)
S0 = ρp θ0 / ρágua e0 (30)
A porosidade, que no caso do solo estar saturado pode ser considerada igual ao seu
teor de umidade na base volumétrica, θs, foi obtida a partir do valor calculado em
ensaios geotécnicos para o índice de vazios, e0, através da relação:
θs = e0 / (1+e0) (31)
Também foram realizados ensaios para determinar a permeabilidade em amostras de
solo não deformado coletados em cilindros de aço inoxidável de 4,90 cm de diâmetro e
altura aproximada de 5,30 cm, cravados in situ. As amostras primeiramente
permanecem embebidas em água por um período mínimo de 48 horas para se garantir
total saturação do material. Uma vez saturada, a amostra de solo é percolada pela
aplicação de um gradiente de pressão. É utilizado um cilindro metálico que é colocado
41
sobre uma pedra porosa. Sobre a pedra porosa são depositados areia grossa e um filtro
(metálico ou mesmo de papel), com o mesmo diâmetro do cilindro. A amostra, não
deformada, é colocada sobre o filtro, de modo a ficar concêntrica ao cilindro. O espaço
em volta da amostra é preenchido com argila plástica até que sua altura seja alcançada,
compactando-se o material de maneira adequada para se evitar a ocorrência de
caminhos entre o corpo de prova e a parede do cilindro. Deposita-se novamente areia
grossa sobre a amostra de solo e a argila plástica até se preencher todo o cilindro. Este
conjunto é chamado de permeâmetro.
O permeâmetro é colocado dentro de uma câmara e esta é fechada e vedada.
Procede-se à saturação do corpo de prova no sentido base-topo, para se facilitar a
retirada do ar presente nos vazios do solo, até que a água saia pelo topo do
permeâmetro. Um sistema de pressurização é utlizado para aplicar pressão confinante ao
corpo de prova dentro da câmara, de forma a aumentar a pressão interna, garantindo-se
a efetiva saturação do solo a ser analisado. A pressão aplicada é mantida constante
durante todo o ensaio e pode ser monitorada através de um manômetro afixado na
câmara do permeâmetro.
Para que seja possível a percolação do corpo de prova dentro da câmara
pressurizada, é utilizado um sistema de entrada de água localizado no fundo da câmara.
Este é ligado por meio de uma mangueira rígida a um reservatório de água, que consiste
de uma bureta, dotada de vedação e proteção, e capaz de suportar a pressão aplicada.
Uma linha de saída de água inicia no topo do corpo de prova, saindo da câmara e
desembocando em um segundo reservatório, a pressão atmosférica.
Uma vez montado o experimento, é estabelecido um fluxo, em que a água sai da
bureta, passa pelo corpo-de-prova e chega ao reservatório a pressão atmosférica. São
feitas leituras da carga e de seus tempos correspondentes, bem como anotações da
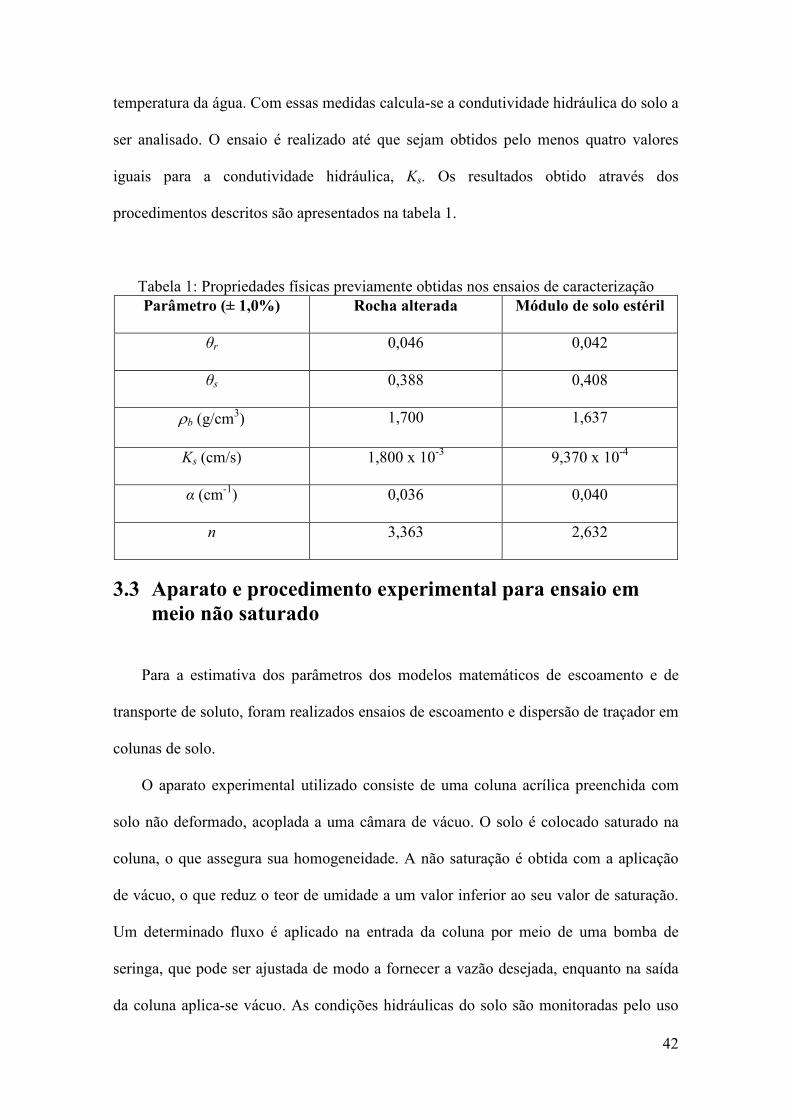
42
temperatura da água. Com essas medidas calcula-se a condutividade hidráulica do solo a
ser analisado. O ensaio é realizado até que sejam obtidos pelo menos quatro valores
iguais para a condutividade hidráulica, Ks. Os resultados obtido através dos
procedimentos descritos são apresentados na tabela 1.
Tabela 1: Propriedades físicas previamente obtidas nos ensaios de caracterização Parâmetro (± 1,0%) Rocha alterada Módulo de solo estéril
θr 0,046 0,042
θs 0,388 0,408
ρb (g/cm3) 1,700 1,637
Ks (cm/s) 1,800 x 10-3 9,370 x 10-4
α (cm-1) 0,036 0,040
n 3,363 2,632
3.3 Aparato e procedimento experimental para ensaio em meio não saturado
Para a estimativa dos parâmetros dos modelos matemáticos de escoamento e de
transporte de soluto, foram realizados ensaios de escoamento e dispersão de traçador em
colunas de solo.
O aparato experimental utilizado consiste de uma coluna acrílica preenchida com
solo não deformado, acoplada a uma câmara de vácuo. O solo é colocado saturado na
coluna, o que assegura sua homogeneidade. A não saturação é obtida com a aplicação
de vácuo, o que reduz o teor de umidade a um valor inferior ao seu valor de saturação.
Um determinado fluxo é aplicado na entrada da coluna por meio de uma bomba de
seringa, que pode ser ajustada de modo a fornecer a vazão desejada, enquanto na saída
da coluna aplica-se vácuo. As condições hidráulicas do solo são monitoradas pelo uso
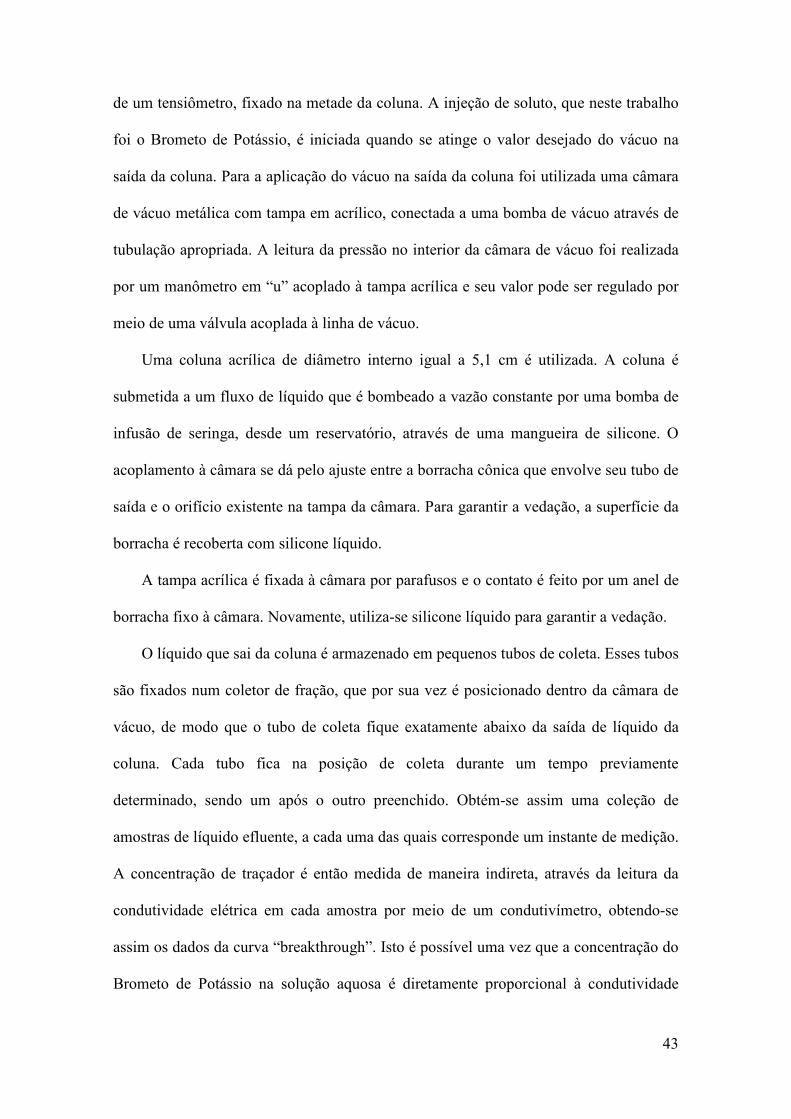
43
de um tensiômetro, fixado na metade da coluna. A injeção de soluto, que neste trabalho
foi o Brometo de Potássio, é iniciada quando se atinge o valor desejado do vácuo na
saída da coluna. Para a aplicação do vácuo na saída da coluna foi utilizada uma câmara
de vácuo metálica com tampa em acrílico, conectada a uma bomba de vácuo através de
tubulação apropriada. A leitura da pressão no interior da câmara de vácuo foi realizada
por um manômetro em “u” acoplado à tampa acrílica e seu valor pode ser regulado por
meio de uma válvula acoplada à linha de vácuo.
Uma coluna acrílica de diâmetro interno igual a 5,1 cm é utilizada. A coluna é
submetida a um fluxo de líquido que é bombeado a vazão constante por uma bomba de
infusão de seringa, desde um reservatório, através de uma mangueira de silicone. O
acoplamento à câmara se dá pelo ajuste entre a borracha cônica que envolve seu tubo de
saída e o orifício existente na tampa da câmara. Para garantir a vedação, a superfície da
borracha é recoberta com silicone líquido.
A tampa acrílica é fixada à câmara por parafusos e o contato é feito por um anel de
borracha fixo à câmara. Novamente, utiliza-se silicone líquido para garantir a vedação.
O líquido que sai da coluna é armazenado em pequenos tubos de coleta. Esses tubos
são fixados num coletor de fração, que por sua vez é posicionado dentro da câmara de
vácuo, de modo que o tubo de coleta fique exatamente abaixo da saída de líquido da
coluna. Cada tubo fica na posição de coleta durante um tempo previamente
determinado, sendo um após o outro preenchido. Obtém-se assim uma coleção de
amostras de líquido efluente, a cada uma das quais corresponde um instante de medição.
A concentração de traçador é então medida de maneira indireta, através da leitura da
condutividade elétrica em cada amostra por meio de um condutivímetro, obtendo-se
assim os dados da curva “breakthrough”. Isto é possível uma vez que a concentração do
Brometo de Potássio na solução aquosa é diretamente proporcional à condutividade
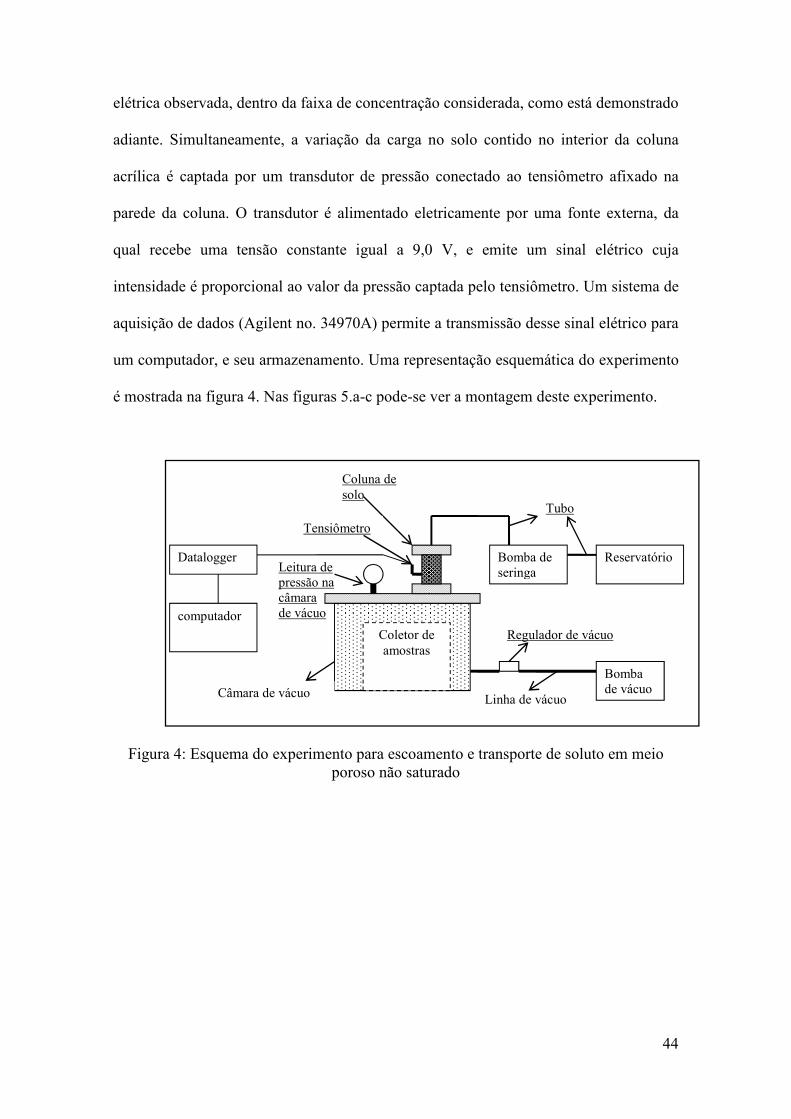
44
elétrica observada, dentro da faixa de concentração considerada, como está demonstrado
adiante. Simultaneamente, a variação da carga no solo contido no interior da coluna
acrílica é captada por um transdutor de pressão conectado ao tensiômetro afixado na
parede da coluna. O transdutor é alimentado eletricamente por uma fonte externa, da
qual recebe uma tensão constante igual a 9,0 V, e emite um sinal elétrico cuja
intensidade é proporcional ao valor da pressão captada pelo tensiômetro. Um sistema de
aquisição de dados (Agilent no. 34970A) permite a transmissão desse sinal elétrico para
um computador, e seu armazenamento. Uma representação esquemática do experimento
é mostrada na figura 4. Nas figuras 5.a-c pode-se ver a montagem deste experimento.
Figura 4: Esquema do experimento para escoamento e transporte de soluto em meio poroso não saturado
Bomba de vácuo
Coletor de amostras
Bomba de seringa
Datalogger
computador
Reservatório
Coluna de solo
Tubo
Regulador de vácuo
Câmara de vácuo Linha de vácuo
Tensiômetro
Leitura de pressão na câmara de vácuo
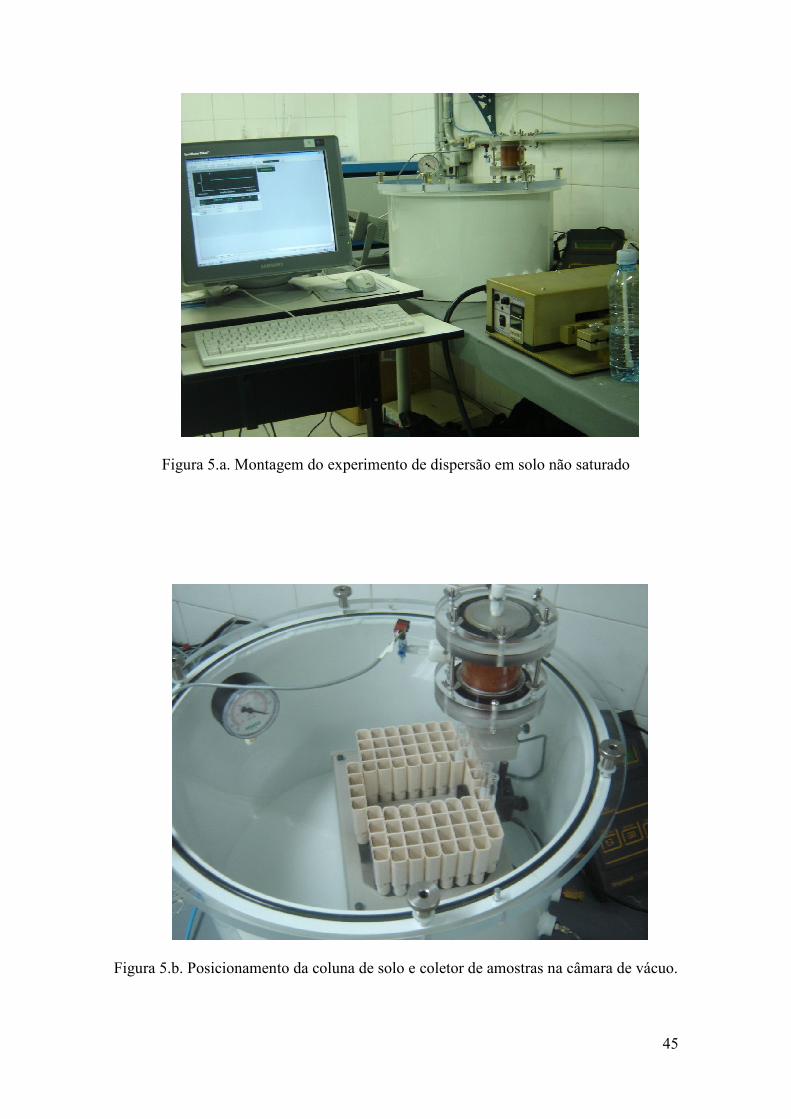
45
Figura 5.a. Montagem do experimento de dispersão em solo não saturado
Figura 5.b. Posicionamento da coluna de solo e coletor de amostras na câmara de vácuo.

46
Figura 5.c: Bomba de seringa e reservatório de solução de traçador
O tensiômetro utilizado para a medição da pressão no interior da coluna de solo
consiste num tubo acrílico com diâmetro de 1,0 cm e extensão de 6,1 cm. A uma de
suas extremidades é fixada uma barra cerâmica de 0,6 cm de diâmetro que fica em
contato com o solo, enquanto na outra extremidade é acoplado um transdutor de
pressão, que registra a variação da pressão negativa do solo e a transmite para o sistema
de aquisição de dados por meio de um sinal elétrico. O tensiômetro foi previamente
calibrado a partir da utilização de um manômetro de mercúrio, que consiste em um tubo
em “u” parcialmente preenchido com mercúrio, mantido na posição vertical por uma
estrutura metálica e preso a uma placa de compensado coberta com papel milimetrado.
Quando o valor da pressão é igual nas duas extremidades do tubo, o fuido contido nos
dois lados do tubo permanece nivelado. A uma das extremidades conectou-se uma
tubulação, ligada a uma bomba de vácuo. A outra extremidade do tubo em “u”
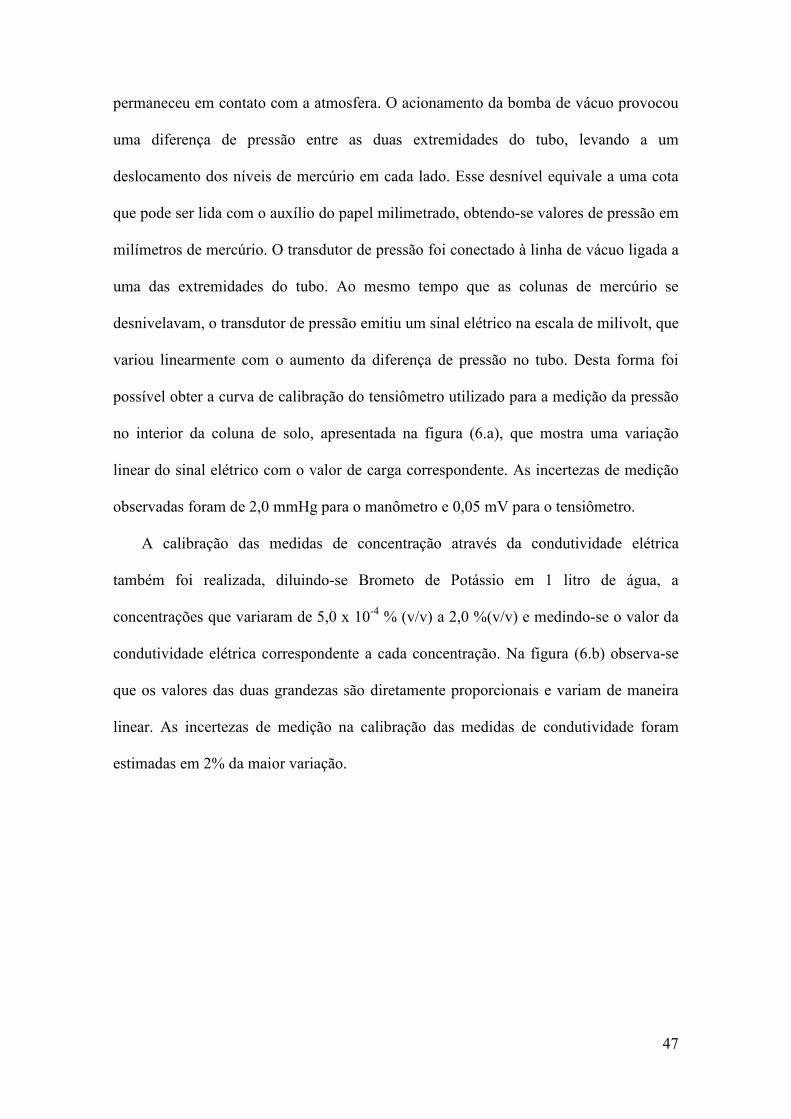
47
permaneceu em contato com a atmosfera. O acionamento da bomba de vácuo provocou
uma diferença de pressão entre as duas extremidades do tubo, levando a um
deslocamento dos níveis de mercúrio em cada lado. Esse desnível equivale a uma cota
que pode ser lida com o auxílio do papel milimetrado, obtendo-se valores de pressão em
milímetros de mercúrio. O transdutor de pressão foi conectado à linha de vácuo ligada a
uma das extremidades do tubo. Ao mesmo tempo que as colunas de mercúrio se
desnivelavam, o transdutor de pressão emitiu um sinal elétrico na escala de milivolt, que
variou linearmente com o aumento da diferença de pressão no tubo. Desta forma foi
possível obter a curva de calibração do tensiômetro utilizado para a medição da pressão
no interior da coluna de solo, apresentada na figura (6.a), que mostra uma variação
linear do sinal elétrico com o valor de carga correspondente. As incertezas de medição
observadas foram de 2,0 mmHg para o manômetro e 0,05 mV para o tensiômetro.
A calibração das medidas de concentração através da condutividade elétrica
também foi realizada, diluindo-se Brometo de Potássio em 1 litro de água, a
concentrações que variaram de 5,0 x 10-4 % (v/v) a 2,0 %(v/v) e medindo-se o valor da
condutividade elétrica correspondente a cada concentração. Na figura (6.b) observa-se
que os valores das duas grandezas são diretamente proporcionais e variam de maneira
linear. As incertezas de medição na calibração das medidas de condutividade foram
estimadas em 2% da maior variação.
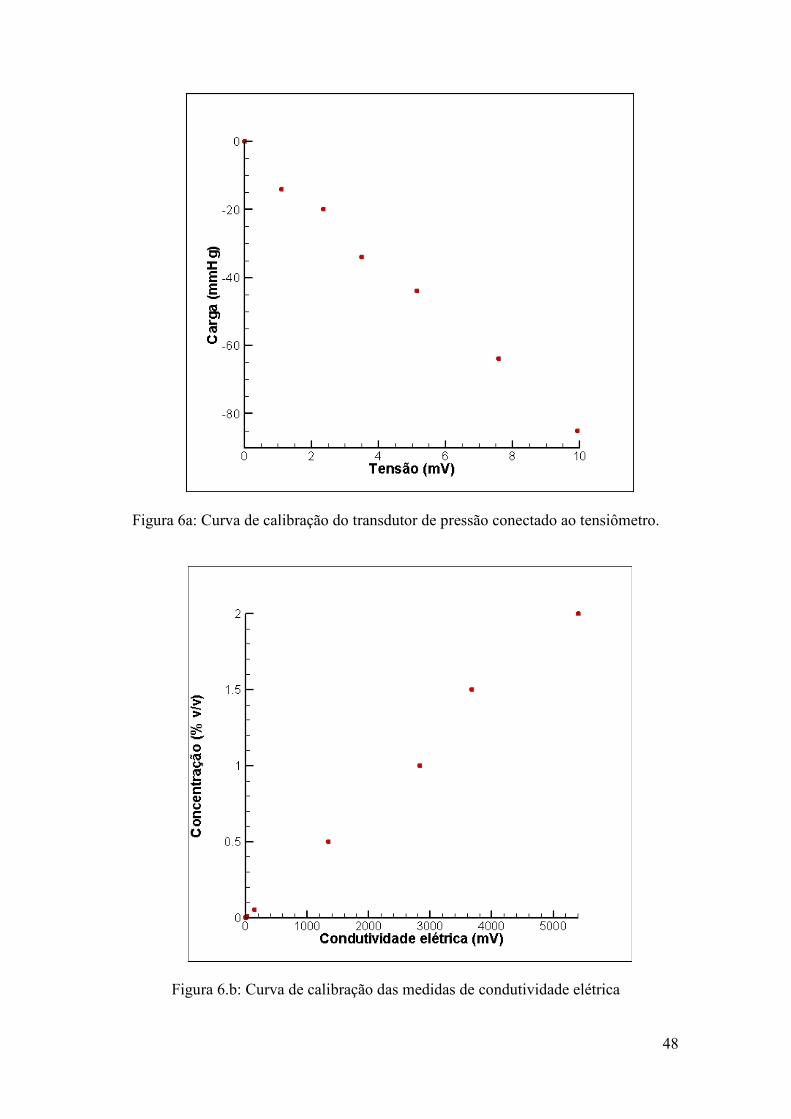
48
Figura 6a: Curva de calibração do transdutor de pressão conectado ao tensiômetro.
Figura 6.b: Curva de calibração das medidas de condutividade elétrica

49
A amostra consolidada a ser utilizada no experimento de coluna de solo foi
primeiramente embebida em água deionizada por 24 horas e depois cuidadosamente
transferida para a coluna cilíndrica, obtendo-se uma coluna de solo com extensão de
aproximadamente 7,0 cm. Note-se que após a colocação na coluna, o solo está
totalmente saturado. Esse procedimento foi realizado para se garantir a homogeneidade
do meio poroso no experimento.
Nos experimentos realizados, utilizaram-se amostras de solos do tipo rocha alterada
e do módulo de solo estéril, ambas coletadas na área da unidade de mineração de Urânio
das Industrias Nucleares do Brasil (INB). Ensaios padrão de caracterização realizados
no laboratório de Geotecnia do PEC/COPPE/UFRJ, forneceram os valores utilizados
para o teor de umidade do solo saturado, θs, a massa específica do solo na base seca, ρb,
e a condutividade hidráulica, Ks. Os valores do teor de umidade residual, θr, do inverso
da entrada de ar, α, e do índice de distribuição do tamanho de poros, n, foram obtidos
para os dois tipos de solo através da utilização do código Rosetta (SCHAAP et al.,
2001), que calcula os parâmetros hidráulicos a partir de funções de pedotransferência
em função da granulometria e da massa específica na base seca do solo e está presente
no pacote de códigos computacionais HYDRUS 1-D. Foi admitido um erro de 1,0% na
leitura dos resultados experimentais dos ensaios padrão de caracterização e nos
resultados obtidos pelo Rosetta a partir de da massa específica do solo. Os valores dos
parâmetros obtidos de maneira direta e calculados pelo Rosetta são apresentados na
seção 4.2.
A tampa superior da coluna foi fixada, garantindo uma vedação perfeita. Um
tensiômetro foi fixado na metade da coluna (3,5 cm acima de sua base). Antes de se
realizar o experimento, aplicou-se vácuo com valor de 55 mmHg na descarga da coluna
durante 5 horas, a fim de se retirar uma quantidade considerável de água, uma vez que
50
se desejava realizar um experimento em que o solo inicialmente não estivesse
completamente saturado. Ao final desse processo, foram retirados 10 mL de água do
solo contido na coluna.
A solução de traçador Brometo de Potássio (KBr) utilizada no experimento foi
preparada adicionando-se 1,25 g do sal em 500 mL de água deionizada, obtendo-se uma
solução com concentração de 2,5 g/L. O líquido foi então colocado no reservatório e
este conectado a bomba de seringa. A bomba por sua vez foi ajustada para injetar 0,4
mL da solução de traçador em intervalos determinados de acordo com a permeabilidade
do solo a ser utilizado, cujo valor pode ser obtido a partir dos ensaios de permeabilidade
descritos na seção anterior. Tubos de coleta foram fixados no coletor de fração, já
devidamente posicionado no interior da câmara de vácuo. O coletor foi então ajustado
para realizar a troca dos tubos a cada 18 minutos. Desta forma, estabeleceu-se o
intervalo de tempo entre cada medida de concentração de traçador no líquido que sai da
coluna.
A câmara foi fechada e a coluna de solo posicionada no orifício cônico da tampa, já
com o tubo de entrada de líquido conectado na tampa superior. A bomba de vácuo foi
então ligada e a variação da pressão interna da câmara de vácuo foi observada pela
leitura de um manômetro de mercúrio, conectado por um tubo à câmara. Quando o valor
para a pressão negativa dentro da câmara lido pelo manômetro de mercúrio alcançou os
51,5 mmHg (ou 70,0 cmH20) o regulador de vácuo foi ajustado para que se mantivesse
esse valor constante. Admitindo-se que a carga negativa no interior da coluna de solo
varia linearmente com a altura em relação a sua base, esperou-se tempo suficiente para
que a leitura do tensiômetro indicasse o valor de 66 cmH20. Nesse momento, a bomba
de seringa foi ligada, dando-se início ao experimento. Pulsos de 4 mL de solução de
traçador foram injetados com intervalos constantes de 60 segundos, resultando num
51
fluxo de líquido q igual a 3,25 x 10-4 cm/s. Após algum tempo, esse líquido começou a
fluir pela saída da coluna, sendo armazenado nos tubos de coleta posicionados no
coletor de fração no interior da câmara. Durante todo o experimento, a pressão negativa
no interior da coluna foi medida pelo transdutor conectado ao tensiômetro e enviada
para um computador por meio de um sistema de aquisição de dados. Desta maneira,
pode-se registrar a variação da pressão ao longo do tempo em virtude do aumento do
teor de umidade após o início da injeção de solução.
O experimento foi realizado seguindo-se as etapas descritas acima. Ao fim do
experimento a câmara foi despressurizada e aberta. Retirou-se cada um dos tubos de
coleta e a leitura da condutividade elétrica do líquido contido foi feita, utilizando-se um
condutivímetro (DIGIMED). A incerteza observada nas leituras do condutivímetro foi
de 1%. Os valores foram anotados sucessivamente e divididos pelo valor da
condutividade elétrica da solução de traçador. Como cada tubo corresponde a um
intervalo de tempo, conforme já descrito, obteve-se uma tabela da condutividade na
saída da coluna em função do tempo. Como a concentração de soluto é linearmente
proporcional ao valor da condutividade, conforme visto na figura (6.b), foi possível
obter a curva da variação da concentração de KBr ao longo do tempo na saída da coluna
de solo em valores adimensionais, dividindo-se o valor da condutividade lido em cada
amostra de líquido pelo valor verificado no reservatório da solução.
Observou-se que a variação da pressão negativa medida pelo tensiômetro afixado
no meio da coluna de solo atingiu o regime num intervalo de tempo bastante menor que
a variação da concentração de soluto. A pressão negativa na saída da coluna e o fluxo de
líquido injetado em sua entrada permaneceram constantes durante todo o experimento,
de maneira que se verificaram as condições de contorno descritas nas equações (2.b-c).

52
O experimento, portanto, forneceu como dados experimentais a variação da
concentração de soluto na descarga da coluna de solo e a variação da pressão negativa
no interior da amostra de solo ao longo do tempo. Estes dados serão aqueles utilizados
na estimativa dos parâmetros hidráulicos e de transporte.
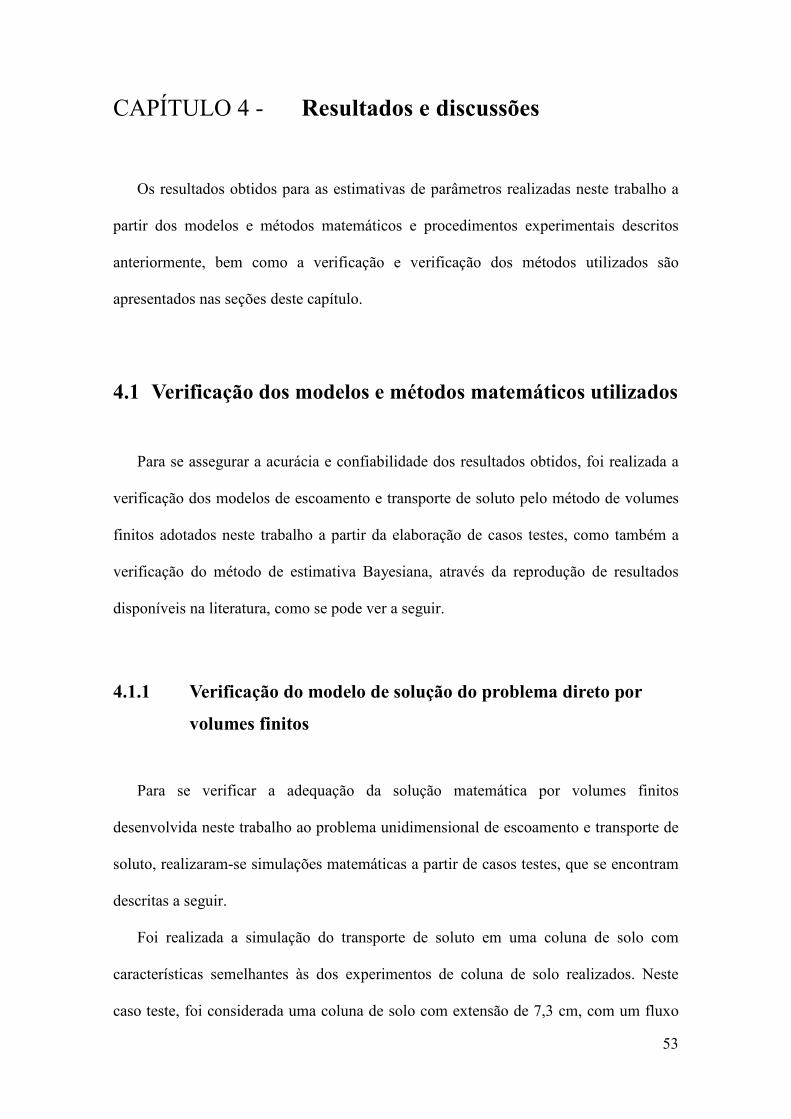
53
CAPÍTULO 4 - Resultados e discussões
Os resultados obtidos para as estimativas de parâmetros realizadas neste trabalho a
partir dos modelos e métodos matemáticos e procedimentos experimentais descritos
anteriormente, bem como a verificação e verificação dos métodos utilizados são
apresentados nas seções deste capítulo.
4.1 Verificação dos modelos e métodos matemáticos utilizados
Para se assegurar a acurácia e confiabilidade dos resultados obtidos, foi realizada a
verificação dos modelos de escoamento e transporte de soluto pelo método de volumes
finitos adotados neste trabalho a partir da elaboração de casos testes, como também a
verificação do método de estimativa Bayesiana, através da reprodução de resultados
disponíveis na literatura, como se pode ver a seguir.
4.1.1 Verificação do modelo de solução do problema direto por
volumes finitos
Para se verificar a adequação da solução matemática por volumes finitos
desenvolvida neste trabalho ao problema unidimensional de escoamento e transporte de
soluto, realizaram-se simulações matemáticas a partir de casos testes, que se encontram
descritas a seguir.
Foi realizada a simulação do transporte de soluto em uma coluna de solo com
características semelhantes às dos experimentos de coluna de solo realizados. Neste
caso teste, foi considerada uma coluna de solo com extensão de 7,3 cm, com um fluxo
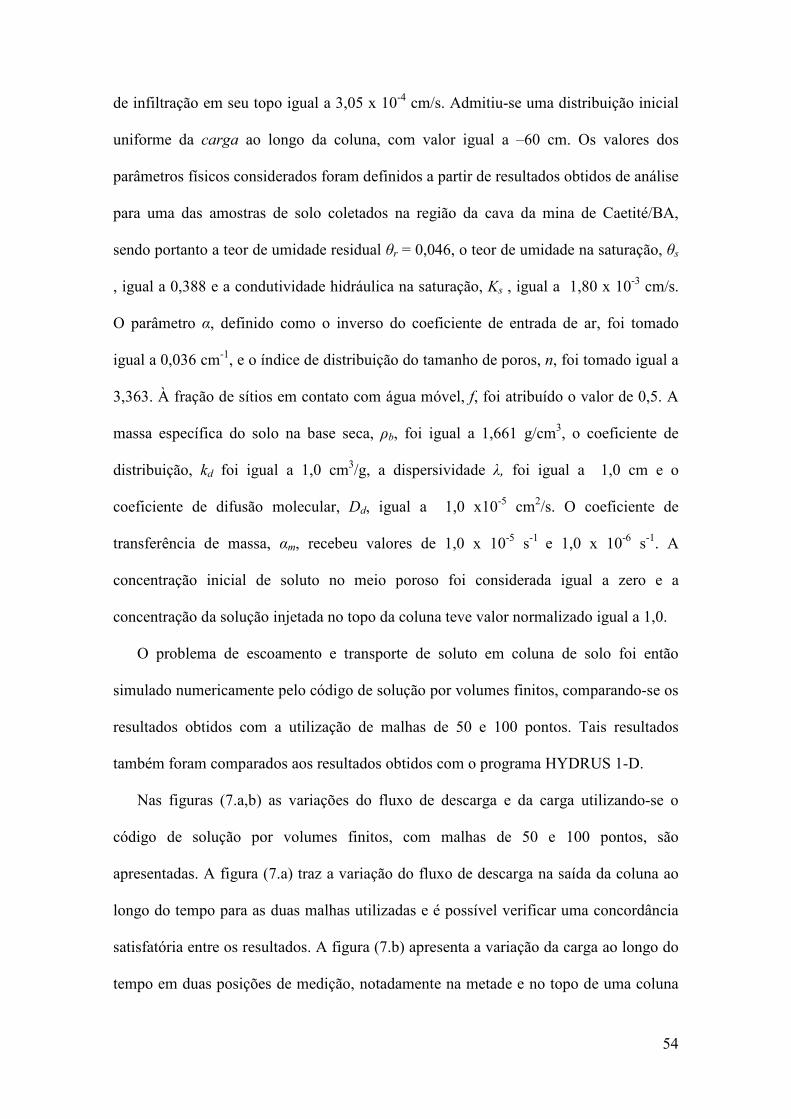
54
de infiltração em seu topo igual a 3,05 x 10-4 cm/s. Admitiu-se uma distribuição inicial
uniforme da carga ao longo da coluna, com valor igual a –60 cm. Os valores dos
parâmetros físicos considerados foram definidos a partir de resultados obtidos de análise
para uma das amostras de solo coletados na região da cava da mina de Caetité/BA,
sendo portanto a teor de umidade residual θr = 0,046, o teor de umidade na saturação, θs
, igual a 0,388 e a condutividade hidráulica na saturação, Ks , igual a 1,80 x 10-3 cm/s.
O parâmetro α, definido como o inverso do coeficiente de entrada de ar, foi tomado
igual a 0,036 cm-1, e o índice de distribuição do tamanho de poros, n, foi tomado igual a
3,363. À fração de sítios em contato com água móvel, f, foi atribuído o valor de 0,5. A
massa específica do solo na base seca, ρb, foi igual a 1,661 g/cm3, o coeficiente de
distribuição, kd foi igual a 1,0 cm3/g, a dispersividade λ, foi igual a 1,0 cm e o
coeficiente de difusão molecular, Dd, igual a 1,0 x10-5 cm2/s. O coeficiente de
transferência de massa, αm, recebeu valores de 1,0 x 10-5 s-1 e 1,0 x 10-6 s-1. A
concentração inicial de soluto no meio poroso foi considerada igual a zero e a
concentração da solução injetada no topo da coluna teve valor normalizado igual a 1,0.
O problema de escoamento e transporte de soluto em coluna de solo foi então
simulado numericamente pelo código de solução por volumes finitos, comparando-se os
resultados obtidos com a utilização de malhas de 50 e 100 pontos. Tais resultados
também foram comparados aos resultados obtidos com o programa HYDRUS 1-D.
Nas figuras (7.a,b) as variações do fluxo de descarga e da carga utilizando-se o
código de solução por volumes finitos, com malhas de 50 e 100 pontos, são
apresentadas. A figura (7.a) traz a variação do fluxo de descarga na saída da coluna ao
longo do tempo para as duas malhas utilizadas e é possível verificar uma concordância
satisfatória entre os resultados. A figura (7.b) apresenta a variação da carga ao longo do
tempo em duas posições de medição, notadamente na metade e no topo de uma coluna
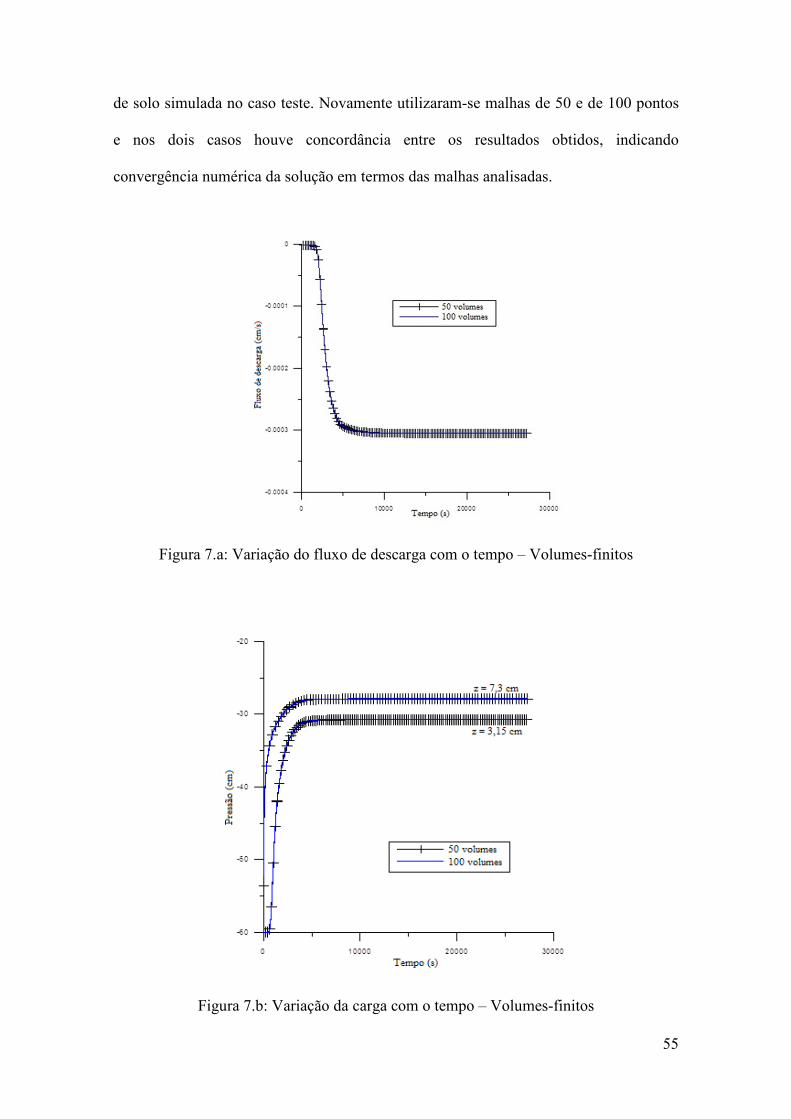
55
de solo simulada no caso teste. Novamente utilizaram-se malhas de 50 e de 100 pontos
e nos dois casos houve concordância entre os resultados obtidos, indicando
convergência numérica da solução em termos das malhas analisadas.
Figura 7.a: Variação do fluxo de descarga com o tempo – Volumes-finitos
Figura 7.b: Variação da carga com o tempo – Volumes-finitos
56
O fluxo de descarga e a variação da carga foram novamente simulados, desta vez
utilizando-se o código computacional comercial HYDRUS 1-D. Ao se sobrepor os
gráficos destes resultados e aqueles obtidos através do modelo de volumes finitos nota-
se que os resultados obtidos através os dois métodos utilizados são concordantes para o
fluxo de descarga e apresentam uma pequena discrepância, da ordem de 2%, para a
carga de pressão, como se pode observar nas figuras 8(a-b).
Figura 8.a: Variação do fluxo de descarga com o tempo – Volumes finitos e HYDRUS 1-D
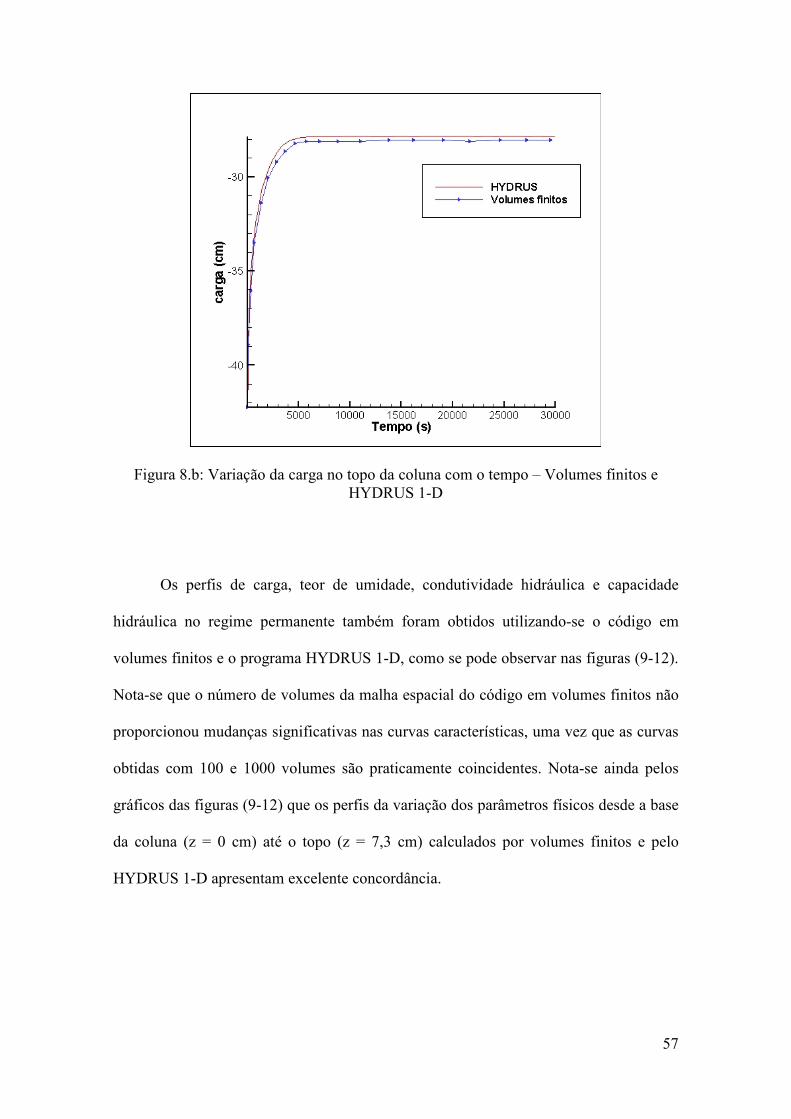
57
Figura 8.b: Variação da carga no topo da coluna com o tempo – Volumes finitos e HYDRUS 1-D
Os perfis de carga, teor de umidade, condutividade hidráulica e capacidade
hidráulica no regime permanente também foram obtidos utilizando-se o código em
volumes finitos e o programa HYDRUS 1-D, como se pode observar nas figuras (9-12).
Nota-se que o número de volumes da malha espacial do código em volumes finitos não
proporcionou mudanças significativas nas curvas características, uma vez que as curvas
obtidas com 100 e 1000 volumes são praticamente coincidentes. Nota-se ainda pelos
gráficos das figuras (9-12) que os perfis da variação dos parâmetros físicos desde a base
da coluna (z = 0 cm) até o topo (z = 7,3 cm) calculados por volumes finitos e pelo
HYDRUS 1-D apresentam excelente concordância.
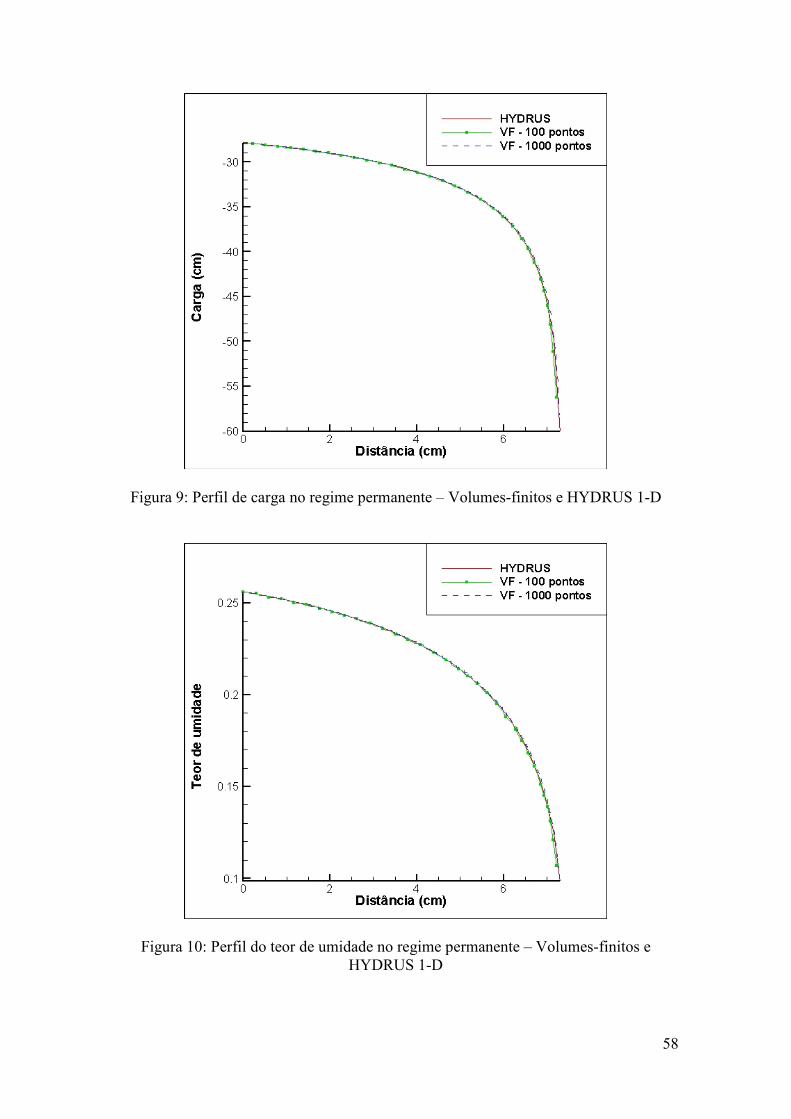
58
Figura 9: Perfil de carga no regime permanente – Volumes-finitos e HYDRUS 1-D
Figura 10: Perfil do teor de umidade no regime permanente – Volumes-finitos e HYDRUS 1-D
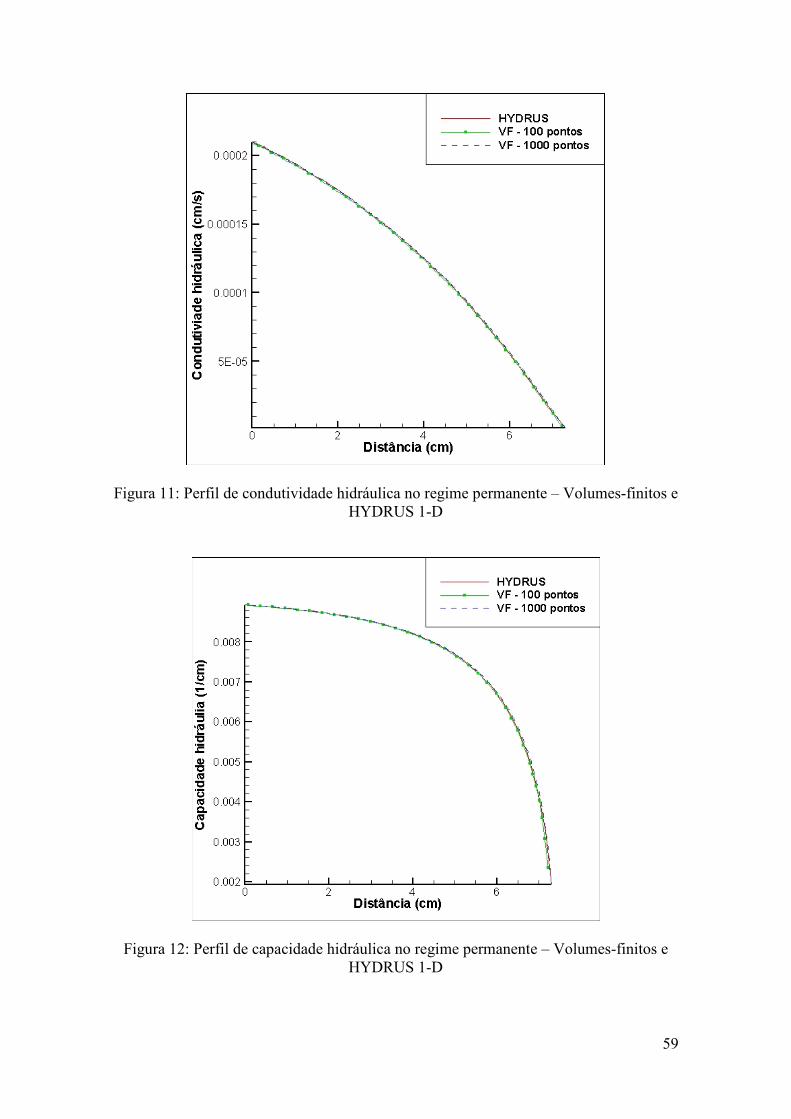
59
Figura 11: Perfil de condutividade hidráulica no regime permanente – Volumes-finitos e HYDRUS 1-D
Figura 12: Perfil de capacidade hidráulica no regime permanente – Volumes-finitos e HYDRUS 1-D
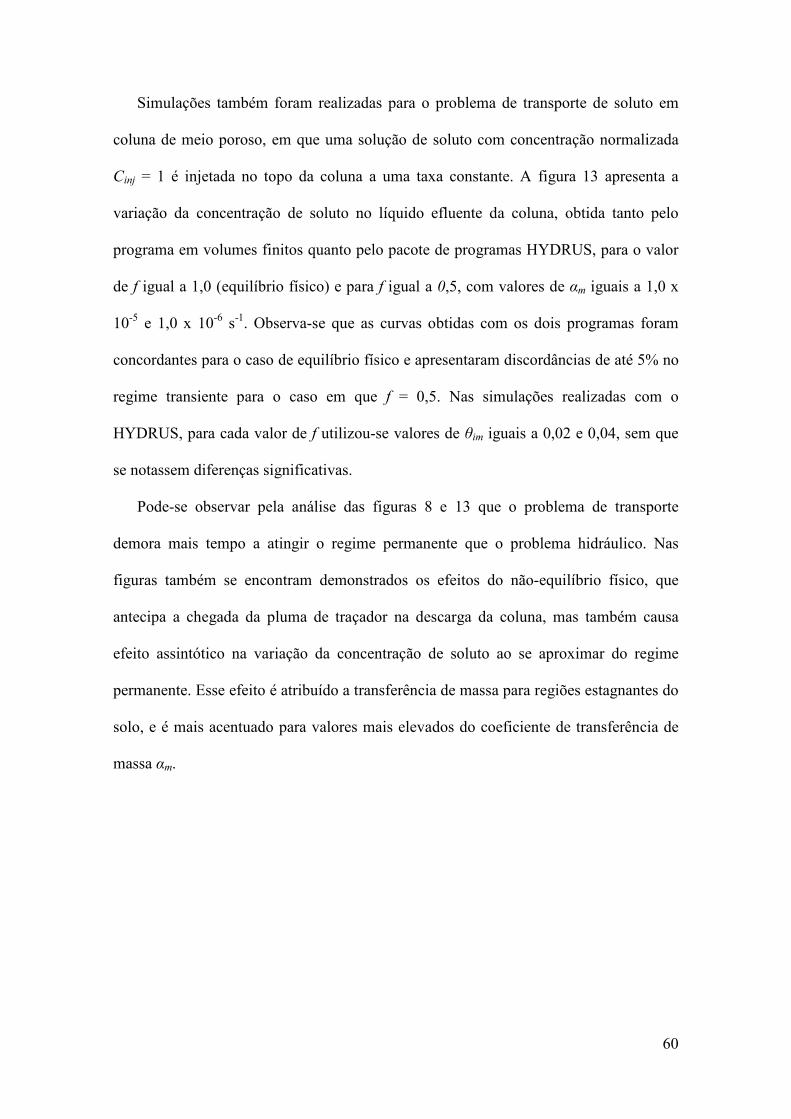
60
Simulações também foram realizadas para o problema de transporte de soluto em
coluna de meio poroso, em que uma solução de soluto com concentração normalizada
Cinj = 1 é injetada no topo da coluna a uma taxa constante. A figura 13 apresenta a
variação da concentração de soluto no líquido efluente da coluna, obtida tanto pelo
programa em volumes finitos quanto pelo pacote de programas HYDRUS, para o valor
de f igual a 1,0 (equilíbrio físico) e para f igual a 0,5, com valores de αm iguais a 1,0 x
10-5 e 1,0 x 10-6 s-1. Observa-se que as curvas obtidas com os dois programas foram
concordantes para o caso de equilíbrio físico e apresentaram discordâncias de até 5% no
regime transiente para o caso em que f = 0,5. Nas simulações realizadas com o
HYDRUS, para cada valor de f utilizou-se valores de θim iguais a 0,02 e 0,04, sem que
se notassem diferenças significativas.
Pode-se observar pela análise das figuras 8 e 13 que o problema de transporte
demora mais tempo a atingir o regime permanente que o problema hidráulico. Nas
figuras também se encontram demonstrados os efeitos do não-equilíbrio físico, que
antecipa a chegada da pluma de traçador na descarga da coluna, mas também causa
efeito assintótico na variação da concentração de soluto ao se aproximar do regime
permanente. Esse efeito é atribuído a transferência de massa para regiões estagnantes do
solo, e é mais acentuado para valores mais elevados do coeficiente de transferência de
massa αm.
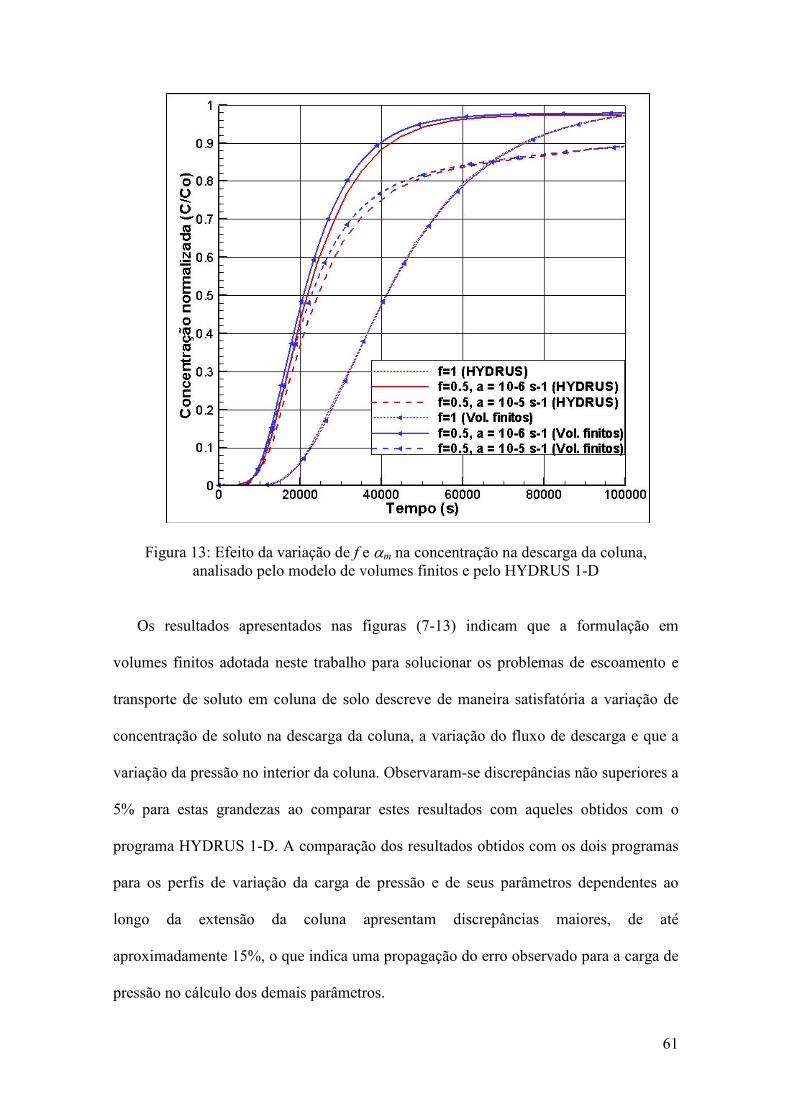
61
Figura 13: Efeito da variação de f e αm na concentração na descarga da coluna, analisado pelo modelo de volumes finitos e pelo HYDRUS 1-D
Os resultados apresentados nas figuras (7-13) indicam que a formulação em
volumes finitos adotada neste trabalho para solucionar os problemas de escoamento e
transporte de soluto em coluna de solo descreve de maneira satisfatória a variação de
concentração de soluto na descarga da coluna, a variação do fluxo de descarga e que a
variação da pressão no interior da coluna. Observaram-se discrepâncias não superiores a
5% para estas grandezas ao comparar estes resultados com aqueles obtidos com o
programa HYDRUS 1-D. A comparação dos resultados obtidos com os dois programas
para os perfis de variação da carga de pressão e de seus parâmetros dependentes ao
longo da extensão da coluna apresentam discrepâncias maiores, de até
aproximadamente 15%, o que indica uma propagação do erro observado para a carga de
pressão no cálculo dos demais parâmetros.
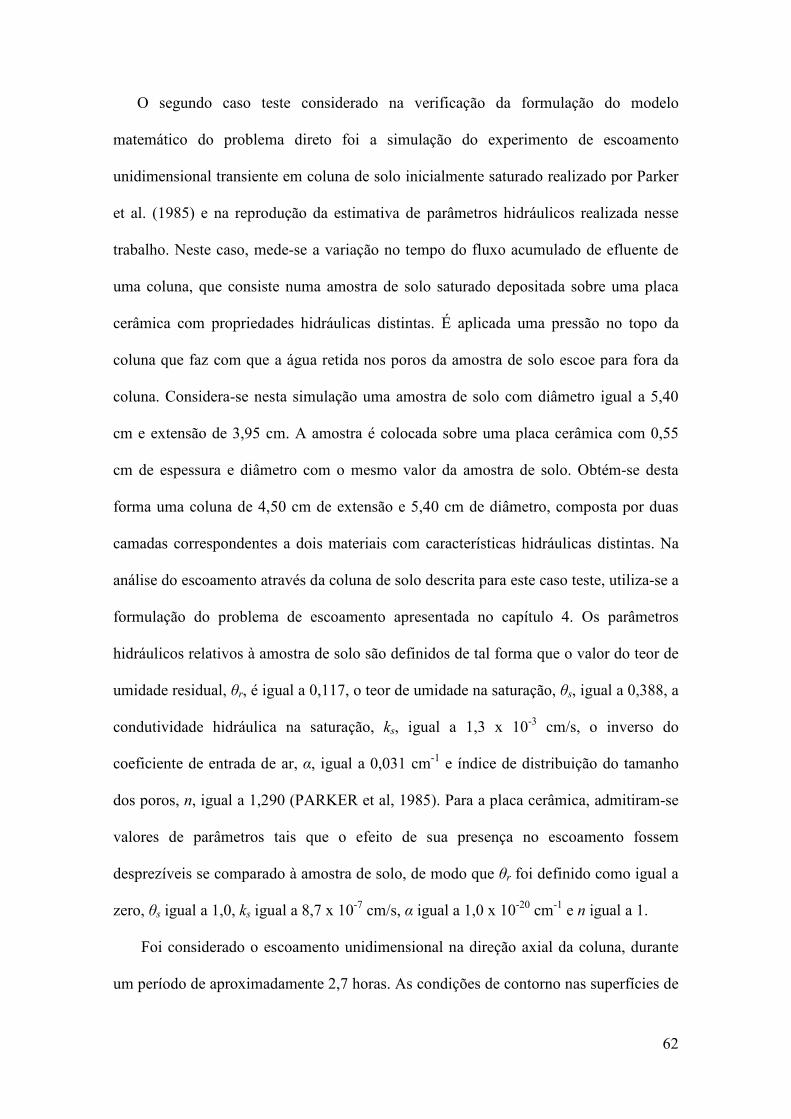
62
O segundo caso teste considerado na verificação da formulação do modelo
matemático do problema direto foi a simulação do experimento de escoamento
unidimensional transiente em coluna de solo inicialmente saturado realizado por Parker
et al. (1985) e na reprodução da estimativa de parâmetros hidráulicos realizada nesse
trabalho. Neste caso, mede-se a variação no tempo do fluxo acumulado de efluente de
uma coluna, que consiste numa amostra de solo saturado depositada sobre uma placa
cerâmica com propriedades hidráulicas distintas. É aplicada uma pressão no topo da
coluna que faz com que a água retida nos poros da amostra de solo escoe para fora da
coluna. Considera-se nesta simulação uma amostra de solo com diâmetro igual a 5,40
cm e extensão de 3,95 cm. A amostra é colocada sobre uma placa cerâmica com 0,55
cm de espessura e diâmetro com o mesmo valor da amostra de solo. Obtém-se desta
forma uma coluna de 4,50 cm de extensão e 5,40 cm de diâmetro, composta por duas
camadas correspondentes a dois materiais com características hidráulicas distintas. Na
análise do escoamento através da coluna de solo descrita para este caso teste, utiliza-se a
formulação do problema de escoamento apresentada no capítulo 4. Os parâmetros
hidráulicos relativos à amostra de solo são definidos de tal forma que o valor do teor de
umidade residual, θr, é igual a 0,117, o teor de umidade na saturação, θs, igual a 0,388, a
condutividade hidráulica na saturação, ks, igual a 1,3 x 10-3 cm/s, o inverso do
coeficiente de entrada de ar, α, igual a 0,031 cm-1 e índice de distribuição do tamanho
dos poros, n, igual a 1,290 (PARKER et al, 1985). Para a placa cerâmica, admitiram-se
valores de parâmetros tais que o efeito de sua presença no escoamento fossem
desprezíveis se comparado à amostra de solo, de modo que θr foi definido como igual a
zero, θs igual a 1,0, ks igual a 8,7 x 10-7 cm/s, α igual a 1,0 x 10-20 cm-1 e n igual a 1.
Foi considerado o escoamento unidimensional na direção axial da coluna, durante
um período de aproximadamente 2,7 horas. As condições de contorno nas superfícies de
63
fronteira ortogonais à direção do escoamento são definidas por uma pressão constante
igual a -1000 m na base da coluna e de fluxo constante e igual a zero no topo da coluna.
O fluxo transiente acumulado de líquido efluente da coluna de solo é simulado
computacionalmente através da utilização da formulação matemática do problema
direto de escoamento por volumes finitos. A fim de se avaliar se os resultados obtidos
por este método correspondem àqueles esperados, o experimento de escoamento
unidimensional transiente é também simulado utilizando-se o programa HYDRUS 1-D,
admitindo-se em ambas as simulações os mesmos valores de parâmetros e a mesma
geometria e condições de contorno do problema, considerados nesta simulação.
A simulação foi inicialmente realizada admitindo-se a coluna como sendo composta
apenas pela camada correspondente à amostra de solo, tendo-se desta maneira uma
coluna com propriedades hidráulicas uniformes ao longo de uma extensão de 3,95 cm.
Admitiu-se que, no início da simulação, a carga hidráulica ao longo da coluna
apresentava uma variação linear, sendo os valores no topo e na base da coluna iguais a
-3,95 cm e zero, respectivamente. Considerou-se que a coluna estava submetida a uma
pressão negativa igual a -1000 cm na superfície imediatamente abaixo de sua base e a
um fluxo constante de líquido igual a zero em sua superfície imediatamente acima do
seu topo. Foram consideradas malhas de 50, 100 e 200 volumes e, para cada um desses
casos, a curva da variação do fluxo de efluente acumulado obtida através da formulação
do problema de escoamento por volumes finitos apresentou excelente concordância com
aquela obtida através do HYDRUS 1-D, como se pode observar na figura 14. Esta
figura mostra uma excelente concordância entre os resultados obtidos com o programa
desenvolvido neste estudo e aqueles obtidos com o HYDRUS 1-D.
64
Figura 14: comparação dos fluxos acumulados calculados pelo método de volumes finitos e pelo HYDRUS 1-D, para diferentes refinamentos da malha em coluna com
uma camada de solo.
O passo seguinte foi realizar a comparação dos resultados obtidos ao se simular o
escoamento através da coluna de 4,50 cm de extensão, constituída pela camada de solo e
pela placa cerâmica. Considera-se, portanto, uma coluna de solo em que os parâmetros
hidráulicos apresentam valores distintos ao longo do domínio dimensional, sendo a
malha dividida em duas regiões, uma para cada material. O número de volumes
admitido em cada região é definido em função do número total de volumes da malha, de
maneira que se mantenha a mesma razão observada entre a extensão da coluna
preenchida pelo material correspondente e a extensão total da coluna. O código
computacional desenvolvido neste trabalho, que inicialmente admitia valores de
parâmetros constantes ao longo de toda a malha, foi então modificado para que este
caso teste pudesse ser corretamente modelado.
As condições de contorno foram definidas por uma pressão de -1000 cm na base da
coluna (abaixo da placa cerâmica) e fluxo constante e igual a zero no topo da coluna.
Admitiu-se como condição inicial uma distribuição linear da pressão ao longo da
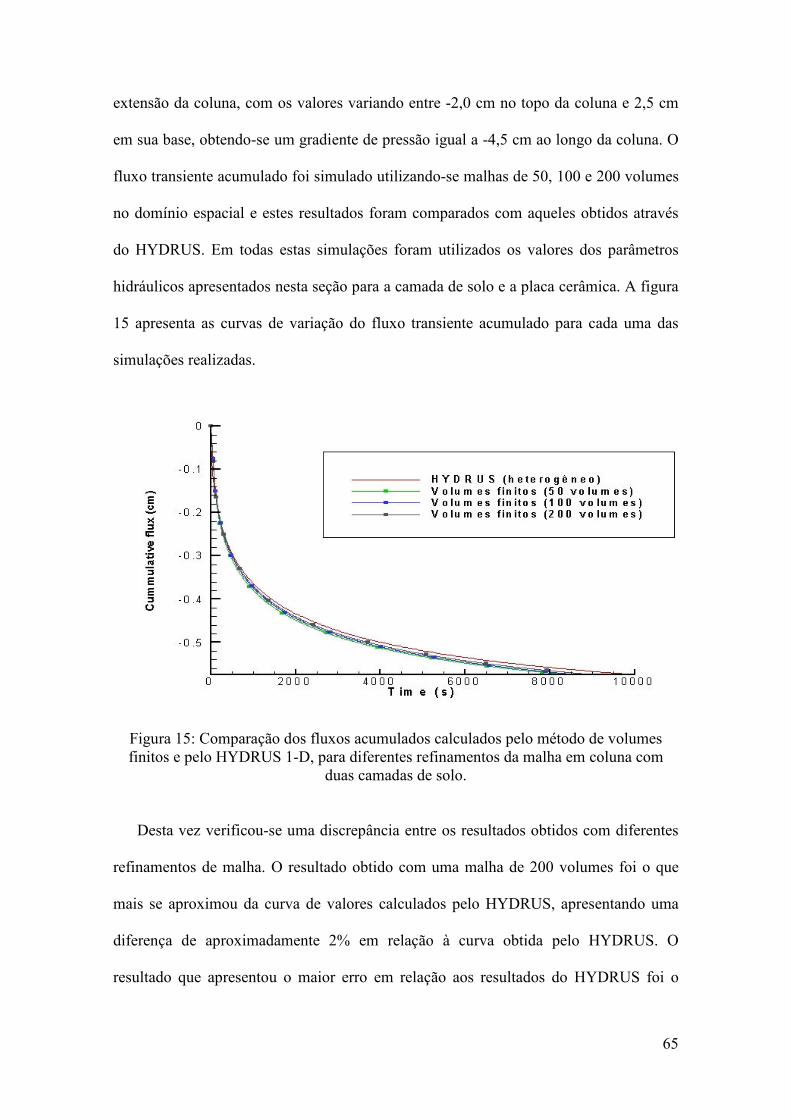
65
extensão da coluna, com os valores variando entre -2,0 cm no topo da coluna e 2,5 cm
em sua base, obtendo-se um gradiente de pressão igual a -4,5 cm ao longo da coluna. O
fluxo transiente acumulado foi simulado utilizando-se malhas de 50, 100 e 200 volumes
no domínio espacial e estes resultados foram comparados com aqueles obtidos através
do HYDRUS. Em todas estas simulações foram utilizados os valores dos parâmetros
hidráulicos apresentados nesta seção para a camada de solo e a placa cerâmica. A figura
15 apresenta as curvas de variação do fluxo transiente acumulado para cada uma das
simulações realizadas.
Figura 15: Comparação dos fluxos acumulados calculados pelo método de volumes finitos e pelo HYDRUS 1-D, para diferentes refinamentos da malha em coluna com
duas camadas de solo.
Desta vez verificou-se uma discrepância entre os resultados obtidos com diferentes
refinamentos de malha. O resultado obtido com uma malha de 200 volumes foi o que
mais se aproximou da curva de valores calculados pelo HYDRUS, apresentando uma
diferença de aproximadamente 2% em relação à curva obtida pelo HYDRUS. O
resultado que apresentou o maior erro em relação aos resultados do HYDRUS foi o
66
obtido com a malha de 50 volumes, com uma diferença de aproximadamente 5% em
relação à referência.
Observa-se que o número de volumes utilizados na malha espacial ainda não foi
suficiente para haver convergência, sendo necessário melhorar o refinamento da malha
para se obter a concordância entre as curvas calculadas pelos dois programas.
Entretanto, como esta solução seria ainda utilizada para modelar o problema direto da
estimativa Bayesiana de parâmetros, um maior refinamento da malha acarretaria um
acréscimo significativo do custo computacional da estimativa. Por este motivo, optou-se
por se utilizar o a malha de 200 volumes para a verificação do método MCMC, como
está descrito a seguir.
67
4.1.2 Verificação do método MCMC de solução do problema
inverso
Para se verificar o método de Monte Carlo com obtenção das cadeias de Markov
(MCMC), implementado através do algoritmo de Metropolis-Hastings, procedeu-se à
reprodução da estimativa de parâmetros realizada por Parker et al., (1985), referente ao
experimento de escoamento unidimensional transiente em coluna de solo inicialmente
saturado, composta por uma camada de solo e uma placa cerâmica. Tal modelo físico é
o mesmo considerado na seção 4.1.1, e sujeito às mesmas condições de contorno. Os
parâmetros hidráulicos relacionados ao problema foram estimados a partir de medidas
experimentais relativas ao fluxo acumulado de líquido efluente da coluna e os resultados
foram comparados com aqueles obtidos por Parker et al. (1985). O problema inverso ao
se estimar o vetor de parâmetros desconhecidos a partir da minimização da função
objetivo baseada no método da máxima vizinhança de Marquardt (MARQUARDT,
1963). O vetor de parâmetros estimados nesse trabalho consistiu nos valores do teor de
umidade residual, θr, igual a 0,161, o inverso do coeficiente de entrada de ar, α, igual a
0,033 cm-1 e a distribuição do tamanho de poros, n, igual a 1,387. Ensaios geotécnicos
foram realizados para se obter de maneira direta os valores do teor de umidade saturado,
θs =0,388 e da condutividade hidráulica saturada, ks =1,5 x 10-3 cm/s. Para verificar o
método MCMC utilizado neste trabalho, realizou-se a estimativa destes cinco
parâmetros relacionados ao escoamento, admitindo-se para o problema direto a
formulação do problema de escoamento apresentada no capítulo 4.
Antes da estimativa de parâmetros, realizou-se a análise dos coeficientes de
sensibilidade do fluxo acumulado em relação aos parâmetros hidráulicos da coluna
considerada (BECK e ARNOLD, 1977). Os valores de parâmetros admitidos no cálculo
dos coeficientes de sensibilidade foram os mesmos obtidos por Parker et al. (1985). Para
68
a placa cerâmica, admitiram-se valores de parâmetros tais que o efeito de sua presença
no escoamento fossem desprezíveis se comparado à amostra de solo, de modo que θr foi
definido como igual a zero, θs igual a 1, Ks igual a 8,7 x 10-7 cm/s, α igual a 1 x 10-20
cm-1 e n igual a 1.
A figura (16.a) mostra a variação do fluxo acumulado na saída da coluna de solo,
juntamente com os coeficientes de sensibilidade reduzidos do fluxo acumulado em
relação aos parâmetros referentes à formulação matemática que modela o escoamento
na coluna composta por duas camadas de material inicialmente saturada. Estes
coeficientes são obtidos pela multiplicação dos coeficientes de sensibilidade por seus
respectivos parâmetros, de modo que os coeficientes de sensibilidade reduzidos tem a
mesma unidade da variável medida, possibilitando que se identifique de maneira
adequada eventuais dependências lineares e pequenas magnitudes dos coeficientes em
relação à variável. Observando a figura (16.a), nota-se que os coeficientes de
sensibilidade são muito pequenos se comparados à variação do fluxo acumulado. A
figura (16.b) mostra uma ampliação dos valores dos coeficientes de sensibilidade
reduzidos no tempo, onde se pode ver que a magnitude dos coeficientes é
aproximadamente três vezes menor que a do fluxo acumulado, significando que a
influencia da variação dos parâmetros hidráulicos na variação do fluxo acumulado é
pequena. Analisando-se a figura (16.b), observa-se que existe dependência linear entre
os parâmetros θr e θs e entre os parâmetros ks, α e n. Assim, as estimativas simultâneas
de θr e θs, assim como de Ks, α e n, não são possíveis.
O uso de técnicas de estimativas, dentro de uma abordagem Bayesiana, permite que
informações sobre parâmetros, obtidas em outros experimentos, sejam codificadas em
termos de distribuições estatísticas. Assim, dentro de cada um destes dois grupos de
parâmetros linearmente dependentes, apenas um parâmetro será considerado com uma
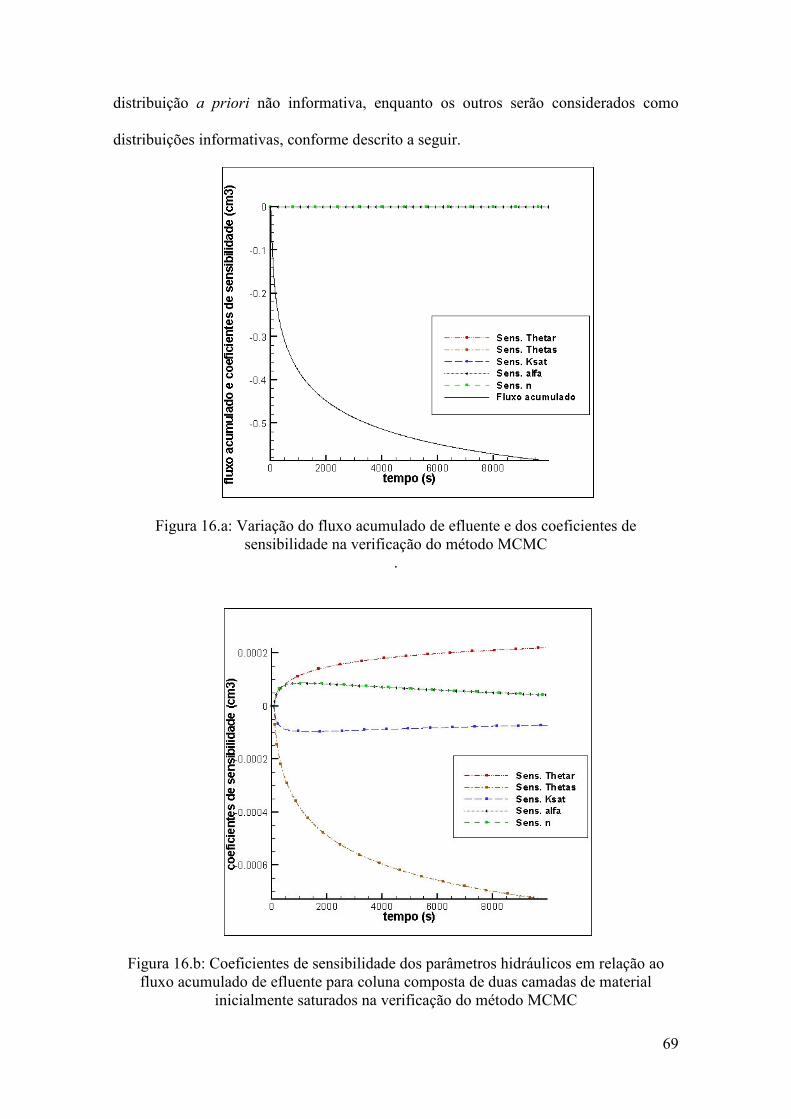
69
distribuição a priori não informativa, enquanto os outros serão considerados como
distribuições informativas, conforme descrito a seguir.
Figura 16.a: Variação do fluxo acumulado de efluente e dos coeficientes de sensibilidade na verificação do método MCMC
.
Figura 16.b: Coeficientes de sensibilidade dos parâmetros hidráulicos em relação ao fluxo acumulado de efluente para coluna composta de duas camadas de material
inicialmente saturados na verificação do método MCMC
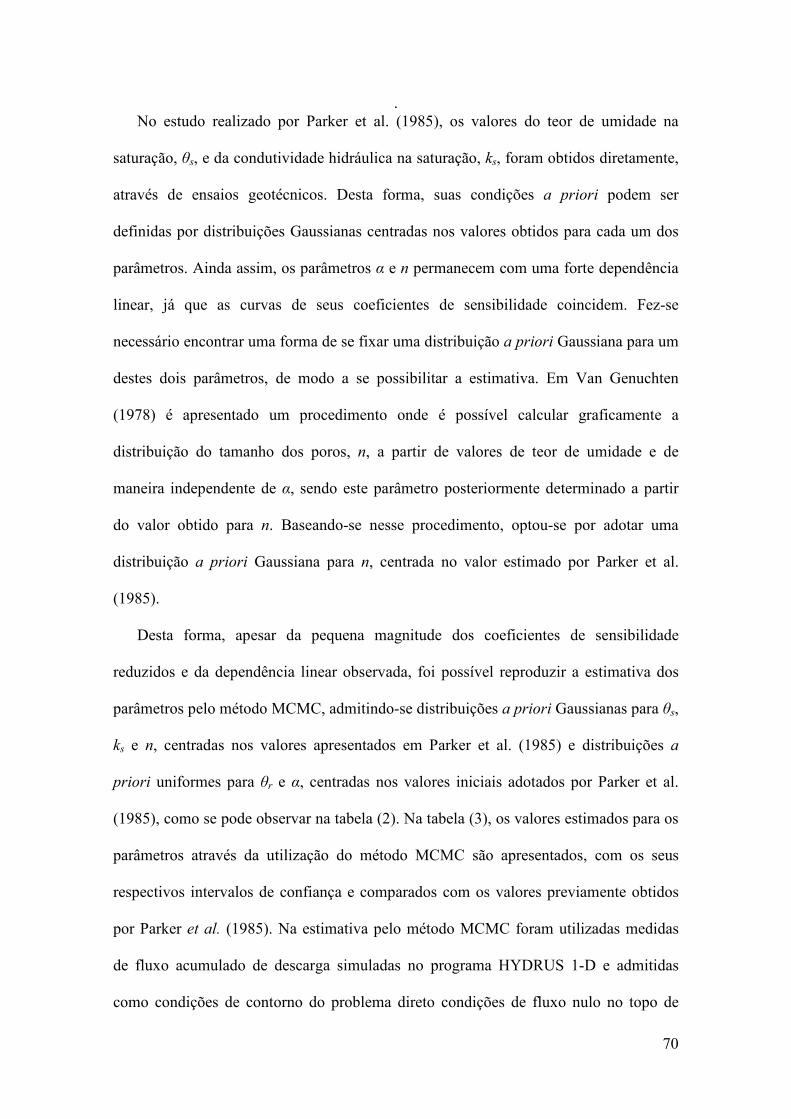
70
. No estudo realizado por Parker et al. (1985), os valores do teor de umidade na
saturação, θs, e da condutividade hidráulica na saturação, ks, foram obtidos diretamente,
através de ensaios geotécnicos. Desta forma, suas condições a priori podem ser
definidas por distribuições Gaussianas centradas nos valores obtidos para cada um dos
parâmetros. Ainda assim, os parâmetros α e n permanecem com uma forte dependência
linear, já que as curvas de seus coeficientes de sensibilidade coincidem. Fez-se
necessário encontrar uma forma de se fixar uma distribuição a priori Gaussiana para um
destes dois parâmetros, de modo a se possibilitar a estimativa. Em Van Genuchten
(1978) é apresentado um procedimento onde é possível calcular graficamente a
distribuição do tamanho dos poros, n, a partir de valores de teor de umidade e de
maneira independente de α, sendo este parâmetro posteriormente determinado a partir
do valor obtido para n. Baseando-se nesse procedimento, optou-se por adotar uma
distribuição a priori Gaussiana para n, centrada no valor estimado por Parker et al.
(1985).
Desta forma, apesar da pequena magnitude dos coeficientes de sensibilidade
reduzidos e da dependência linear observada, foi possível reproduzir a estimativa dos
parâmetros pelo método MCMC, admitindo-se distribuições a priori Gaussianas para θs,
ks e n, centradas nos valores apresentados em Parker et al. (1985) e distribuições a
priori uniformes para θr e α, centradas nos valores iniciais adotados por Parker et al.
(1985), como se pode observar na tabela (2). Na tabela (3), os valores estimados para os
parâmetros através da utilização do método MCMC são apresentados, com os seus
respectivos intervalos de confiança e comparados com os valores previamente obtidos
por Parker et al. (1985). Na estimativa pelo método MCMC foram utilizadas medidas
de fluxo acumulado de descarga simuladas no programa HYDRUS 1-D e admitidas
como condições de contorno do problema direto condições de fluxo nulo no topo de
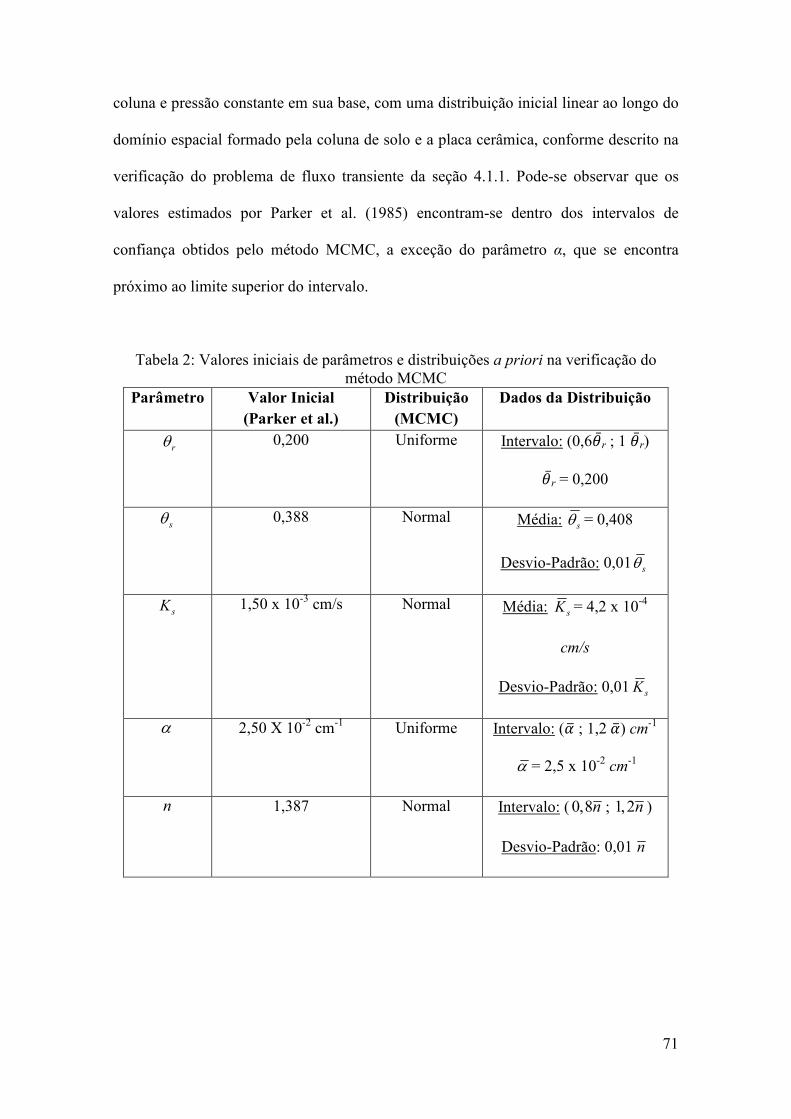
71
coluna e pressão constante em sua base, com uma distribuição inicial linear ao longo do
domínio espacial formado pela coluna de solo e a placa cerâmica, conforme descrito na
verificação do problema de fluxo transiente da seção 4.1.1. Pode-se observar que os
valores estimados por Parker et al. (1985) encontram-se dentro dos intervalos de
confiança obtidos pelo método MCMC, a exceção do parâmetro α, que se encontra
próximo ao limite superior do intervalo.
Tabela 2: Valores iniciais de parâmetros e distribuições a priori na verificação do método MCMC
Parâmetro Valor Inicial (Parker et al.)
Distribuição (MCMC)
Dados da Distribuição
rθ 0,200 Uniforme Intervalo: (0,6r ; 1 r)
r = 0,200
sθ 0,388 Normal Média: sθ = 0,408
Desvio-Padrão: 0,01 sθ
sK 1,50 x 10-3 cm/s Normal Média: sK = 4,2 x 10-4
cm/s
Desvio-Padrão: 0,01 sK
α 2,50 X 10-2 cm-1 Uniforme Intervalo: (�: ; 1,2 �:) cm-1
α = 2,5 x 10-2 cm-1
n 1,387 Normal Intervalo: ( 0,8n ; 1,2n )
Desvio-Padrão: 0,01 n
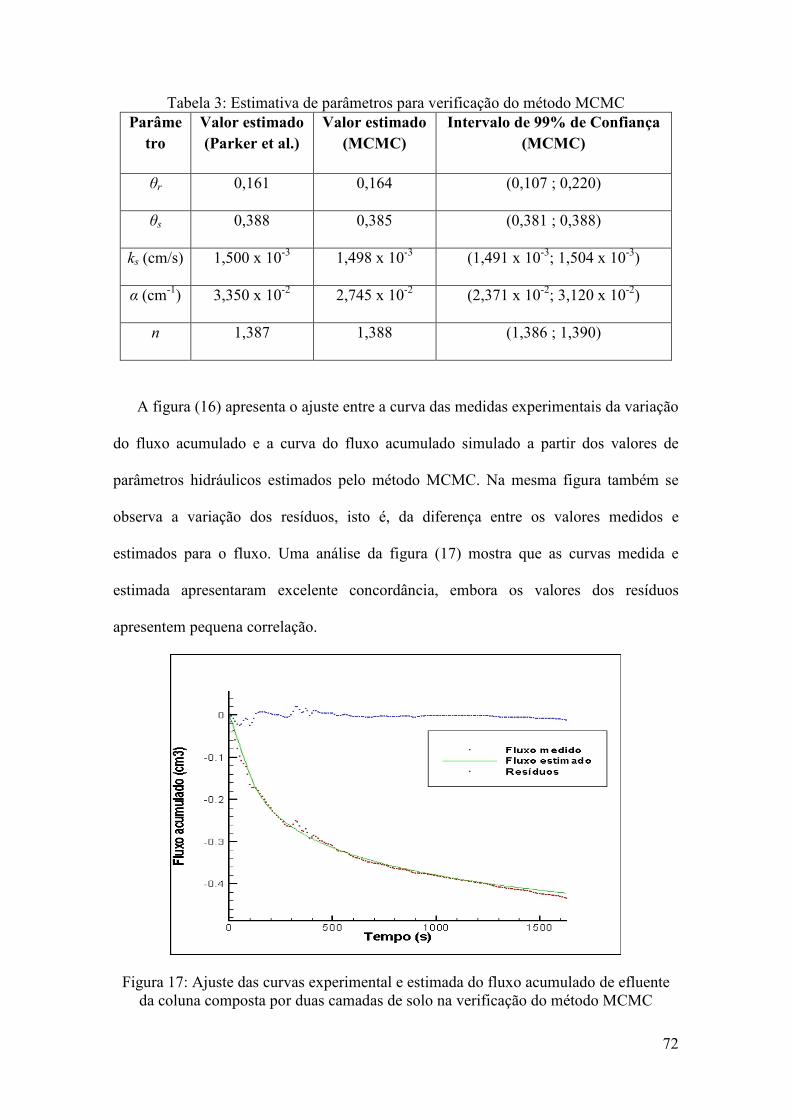
72
Tabela 3: Estimativa de parâmetros para verificação do método MCMC Parâme
tro
Valor estimado (Parker et al.)
Valor estimado (MCMC)
Intervalo de 99% de Confiança (MCMC)
θr 0,161 0,164 (0,107 ; 0,220)
θs 0,388 0,385 (0,381 ; 0,388)
ks (cm/s) 1,500 x 10-3 1,498 x 10-3 (1,491 x 10-3; 1,504 x 10-3)
α (cm-1) 3,350 x 10-2 2,745 x 10-2 (2,371 x 10-2; 3,120 x 10-2)
n 1,387 1,388 (1,386 ; 1,390)
A figura (16) apresenta o ajuste entre a curva das medidas experimentais da variação
do fluxo acumulado e a curva do fluxo acumulado simulado a partir dos valores de
parâmetros hidráulicos estimados pelo método MCMC. Na mesma figura também se
observa a variação dos resíduos, isto é, da diferença entre os valores medidos e
estimados para o fluxo. Uma análise da figura (17) mostra que as curvas medida e
estimada apresentaram excelente concordância, embora os valores dos resíduos
apresentem pequena correlação.
Figura 17: Ajuste das curvas experimental e estimada do fluxo acumulado de efluente da coluna composta por duas camadas de solo na verificação do método MCMC
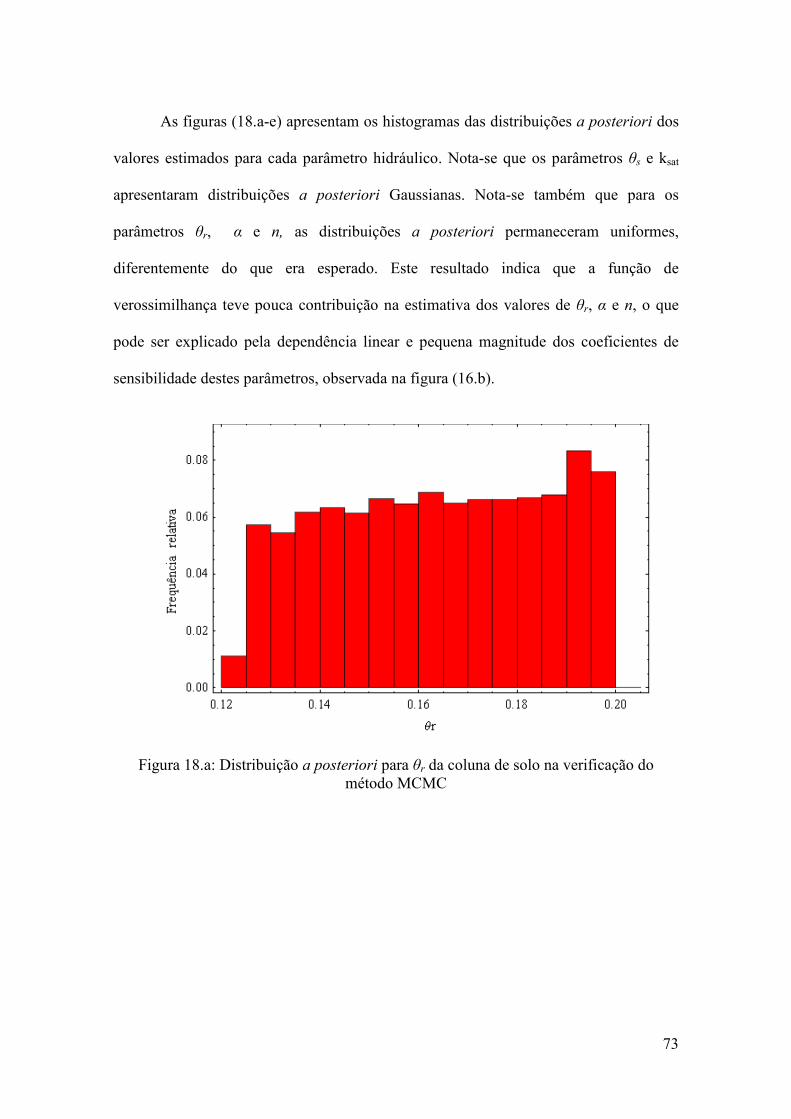
73
As figuras (18.a-e) apresentam os histogramas das distribuições a posteriori dos
valores estimados para cada parâmetro hidráulico. Nota-se que os parâmetros θs e ksat
apresentaram distribuições a posteriori Gaussianas. Nota-se também que para os
parâmetros θr, α e n, as distribuições a posteriori permaneceram uniformes,
diferentemente do que era esperado. Este resultado indica que a função de
verossimilhança teve pouca contribuição na estimativa dos valores de θr, α e n, o que
pode ser explicado pela dependência linear e pequena magnitude dos coeficientes de
sensibilidade destes parâmetros, observada na figura (16.b).
Figura 18.a: Distribuição a posteriori para θr da coluna de solo na verificação do método MCMC
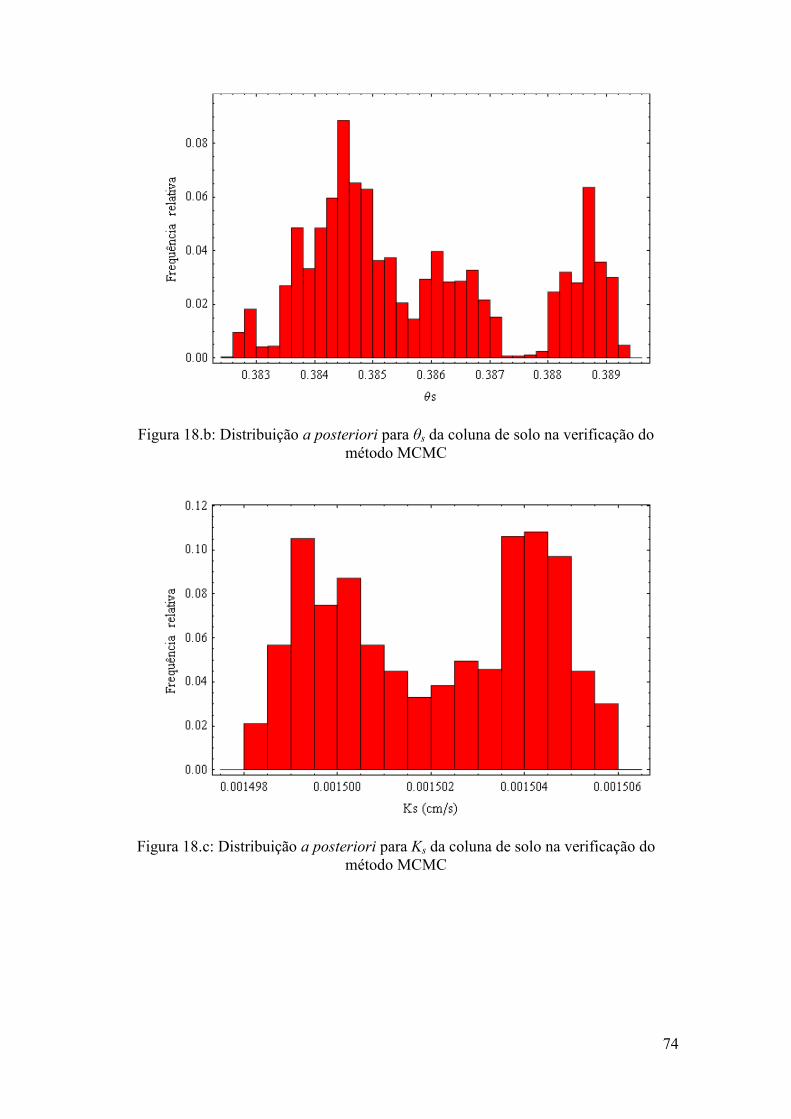
74
Figura 18.b: Distribuição a posteriori para θs da coluna de solo na verificação do método MCMC
Figura 18.c: Distribuição a posteriori para Ks da coluna de solo na verificação do método MCMC
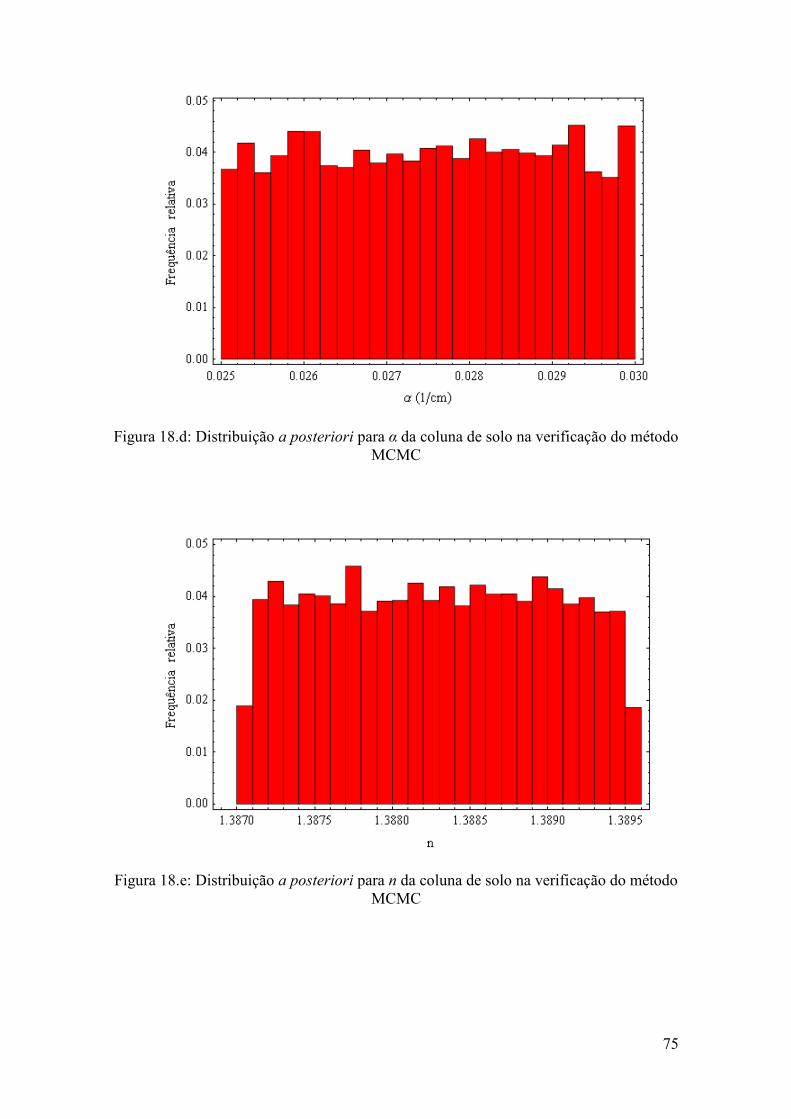
75
Figura 18.d: Distribuição a posteriori para α da coluna de solo na verificação do método MCMC
Figura 18.e: Distribuição a posteriori para n da coluna de solo na verificação do método MCMC

76
As figuras (19.a-f) apresentam a variação dos estados aceitos nas cadeias de
Markov para cada um dos parâmetros de transporte estimados. Foram considerados
10000 estados candidatos, com uma aceitação de aproximadamente 70%. Foi observada
uma boa convergência para os parâmetros cuja distribuição a priori foi definida como
uniforme. A convergência não foi tão boa para os parâmetros com distribuição a priori
Gaussiana, porém estes permaneceram confinados dentro de uma pequena faixa de
variação, devido ao baixo valor dos desvios padrão usados na distribuição a priori.
Figura 19.a: Aceitação dos estados das cadeias de Markov. na verificação do método MCMC

77
Figura 19.b: Estados das cadeias de Markov para θr da coluna de solo na verificação do método MCMC
Figura 19.c: Estados das cadeias de Markov para θs da coluna de solo na verificação do método MCMC
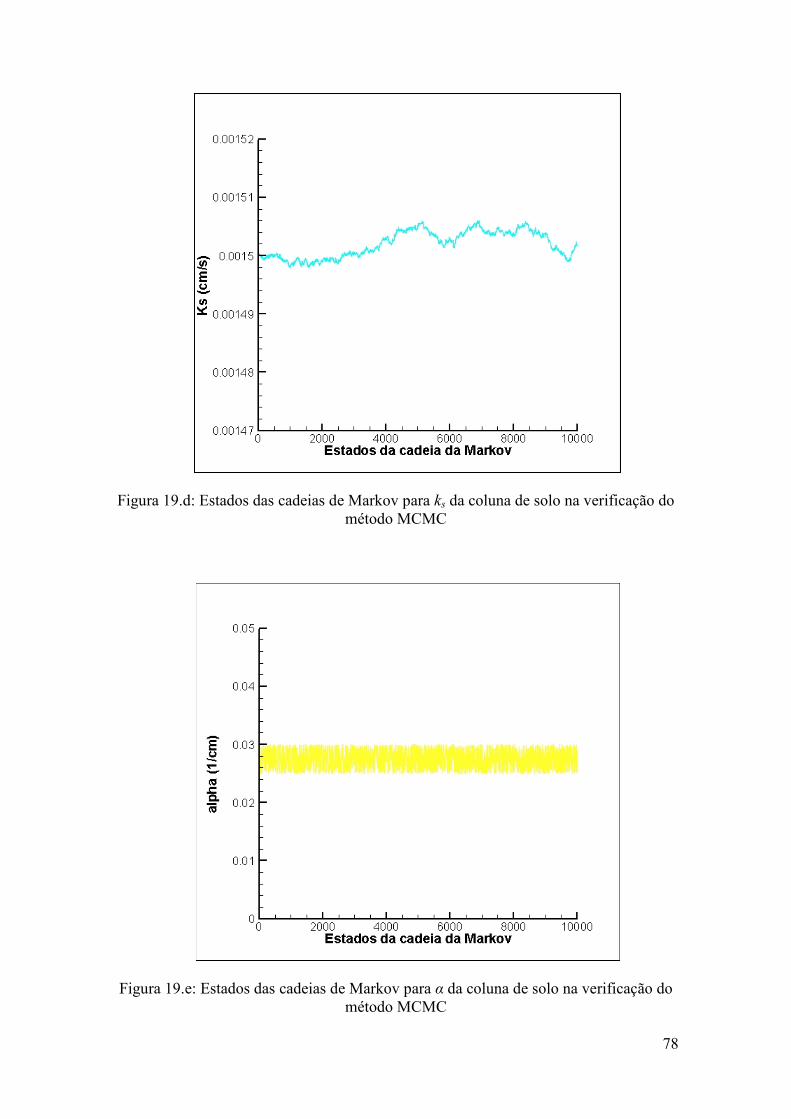
78
Figura 19.d: Estados das cadeias de Markov para ks da coluna de solo na verificação do método MCMC
Figura 19.e: Estados das cadeias de Markov para α da coluna de solo na verificação do método MCMC
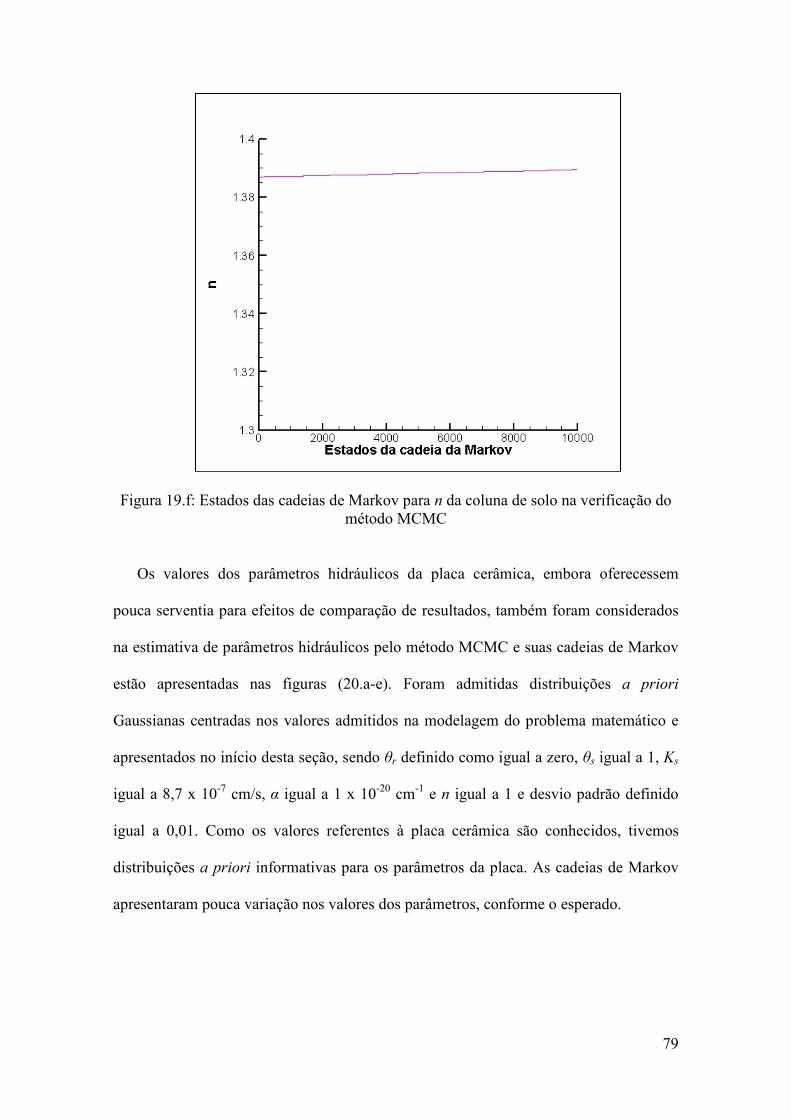
79
Figura 19.f: Estados das cadeias de Markov para n da coluna de solo na verificação do método MCMC
Os valores dos parâmetros hidráulicos da placa cerâmica, embora oferecessem
pouca serventia para efeitos de comparação de resultados, também foram considerados
na estimativa de parâmetros hidráulicos pelo método MCMC e suas cadeias de Markov
estão apresentadas nas figuras (20.a-e). Foram admitidas distribuições a priori
Gaussianas centradas nos valores admitidos na modelagem do problema matemático e
apresentados no início desta seção, sendo θr definido como igual a zero, θs igual a 1, Ks
igual a 8,7 x 10-7 cm/s, α igual a 1 x 10-20 cm-1 e n igual a 1 e desvio padrão definido
igual a 0,01. Como os valores referentes à placa cerâmica são conhecidos, tivemos
distribuições a priori informativas para os parâmetros da placa. As cadeias de Markov
apresentaram pouca variação nos valores dos parâmetros, conforme o esperado.
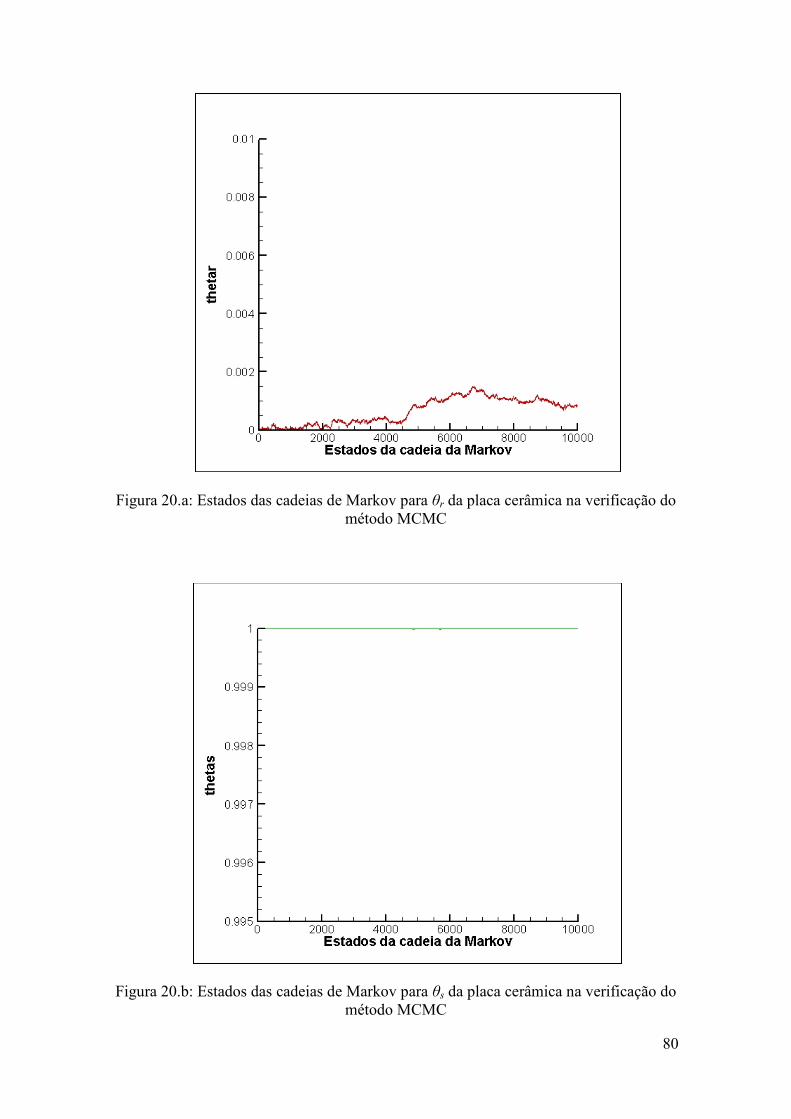
80
Figura 20.a: Estados das cadeias de Markov para θr da placa cerâmica na verificação do método MCMC
Figura 20.b: Estados das cadeias de Markov para θs da placa cerâmica na verificação do método MCMC
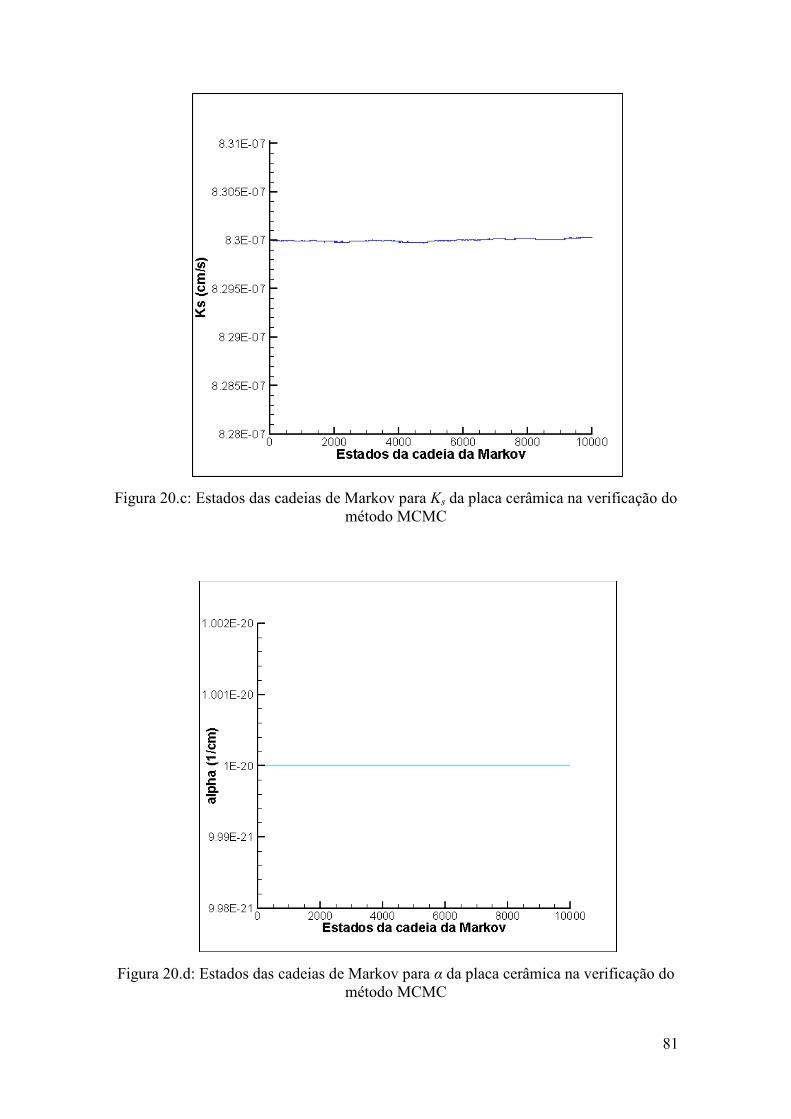
81
Figura 20.c: Estados das cadeias de Markov para Ks da placa cerâmica na verificação do método MCMC
Figura 20.d: Estados das cadeias de Markov para α da placa cerâmica na verificação do método MCMC
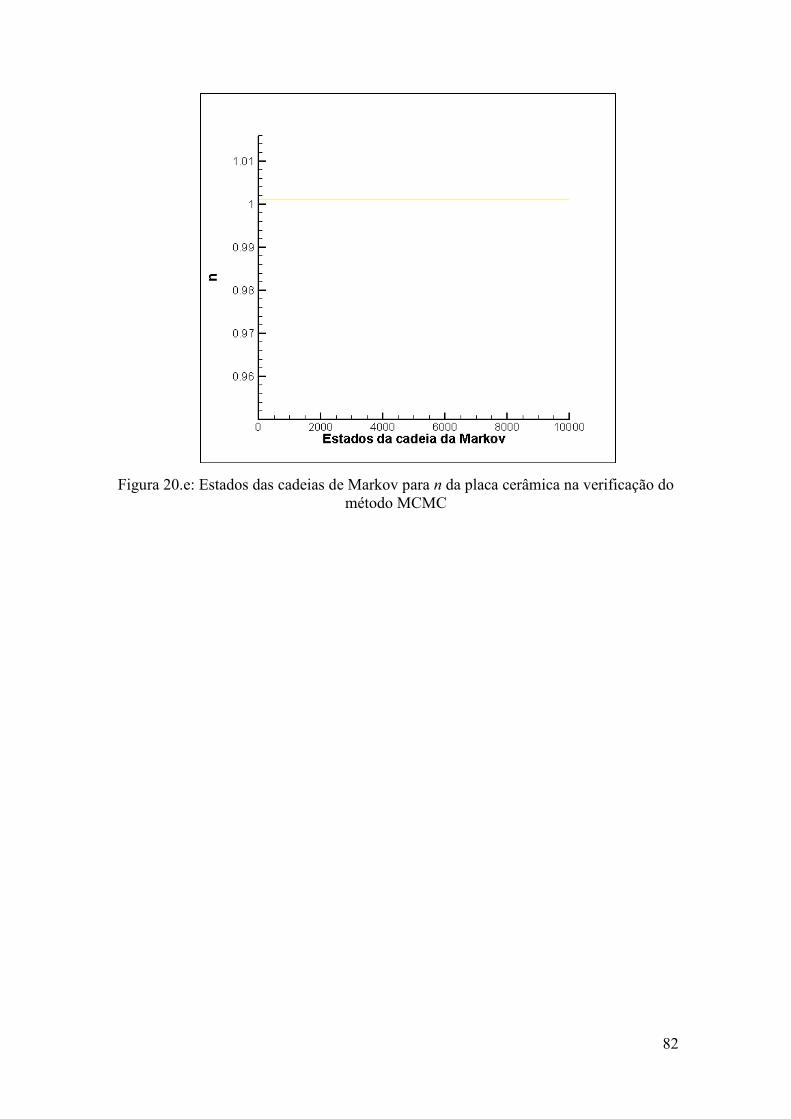
82
Figura 20.e: Estados das cadeias de Markov para n da placa cerâmica na verificação do método MCMC
83
4.2 Resultados das estimativas
A estimativa dos parâmetros físicos relacionados ao escoamento e transporte de
soluto em meios porosos foi realizada segundo uma abordagem Bayesiana pelo método
MCMC, com a utilização do algoritmo de Metropolis-Hastings (KAIPIO e
SOMERSALO, 2004, TAN el al., 2006, LEE, 2004, MOTA et al., 2007, ORLANDE et
al., 2007.a,b) a partir de medidas de carga e concentração de soluto obtidas em
experimentos de coluna de solo em laboratório realizados conforme o procedimento
demonstrado na seção 3.3. Antes, porém, de se proceder com a estimativa de parâmetros
é necessário se verificar a existência de dependência linear entre eles. Para isso foi
realizada a análise dos coeficientes de sensibilidade dos parâmetros para os dois tipos de
solo considerados neste trabalho, como está apresentado a seguir.
4.2.1 Análise dos coeficientes de sensibilidade
Os coeficientes de sensibilidade dos parâmetros hidráulicos e de transporte a serem
estimados para os solos utilizados foram obtidos através do cálculo da matriz de
sensibilidade (BECK e ARNOLD, 1977), definida na equação (25), que descreve o
comportamento das medidas em relação à variação dos parâmetros físicos. Nesta
análise, considera-se como medidas experimentais disponíveis a variação da carga no
sensor localizado no meio do comprimento da coluna, assim como a variação da
concentração de soluto presente no líquido efluente coletado na descarga da coluna e
também a variação do fluxo desse líquido. Foram utilizadas as soluções numéricas
listadas escritas na linguagem FORTRAN descritas na seção 2.2 para a solução do
problema direto, sendo o problema de escoamento solucionado pelas equações (15.a-c)
84
e o de transporte de soluto resolvido pela solução do modelo de condições de contorno
do terceiro tipo, descrito pelas equações (16.a-c).
Primeiramente apresentam-se os vetores de parâmetros a serem analisados e
estimados, que são definidos como:
0[ , , , , , , ]T
Hidráulico s s rK n h hθ θ α δ=P (32)
[ , ( ), , , ]T
Transporte b d d mf K Dρ λ α=P (33)
PT = [PTHidráulico , PTTransporte] (34)
onde PTHidráulico é o vetor de parâmetros hidráulicos a serem estimados, pertencentes ao
modelo hidráulico definido na seção 2.1.1 e PTTransporte é o vetor de parâmetros de
transporte estimados, pertencentes ao modelo de transporte de soluto apresentado na
seção 2.1.2. Finalmente, PT é o vetor total de parâmetros estimados ao se resolver
simultaneamente os problemas inversos de estimativa de parâmetros hidráulicos e de
transporte, tendo sido definido anteriormente pela equação (20.a).
Nota-se que o vetor PTHidráulico contém os parâmetros referentes a carga, h0 e δ h
que são, respectivamente, a leitura inicial da carga na posição de medição e o gradiende
de pressão ao logo da coluna. Estes parâmetros foram definidos pois, conforme está
relatado na seção 4.2.2.2, fez-se necessária a estimativa de seus valores juntamente aos
demais parâmetros hidráulicos. Pode-se observar ainda que os parâmetros bρ e dK
aparecem multiplicados no vetor PTTransporte. Isto acontece devido ao fato de não ser
85
possível estimá-los de forma independente, uma vez que eles também aparecem
multiplicados na formulação matemática do problema de transporte de soluto. Assim,
para efeito de estimativa de parâmetros, considerou-se o produto ( bρ dK ) como um
único parâmetro a ser estimado. Tal fato não gera grandes restrições, tendo em vista que
a massa específica bρ pode ser facilmente medida em outros ensaios.
Para a análise dos coeficientes de sensibilidade dos parâmetros presentes nos
modelos matemáticos adotados neste trabalho foi elaborado um caso teste que levou em
conta as características do experimento de coluna descrito na seção 3.3, considerando-se
uma coluna de solo com extensão de 7,3 cm, com um fluxo de infiltração em seu topo
igual a 3,05 x 10-4 cm/s. Admitiu-se a distribuição inicial da carga ao longo da coluna
como sendo uniforme e igual a –60 cm. A análise dos coeficientes de sensibilidade foi
então realizada tanto para o solo do tipo rocha alterada, que foi considerado na obtenção
de medidas experimentais simuladas, quanto para o solo do módulo de estéril, utilizado
nos experimentos de coluna não saturada em laboratório. Os parâmetros previamente
conhecidos destes dois tipos de solo, cuja obtenção foi descrita no capítulo 3, são os
mesmos apresentados na 1,.
86
Apresentam-se primeiramente os resultados da análise de sensibilidade dos
parâmetros pertinentes ao solo rocha alterada. Os valores dos parâmetros foram
definidos como sendo o teor de umidade residual, θr, igual a 0,046, o teor de umidade
na saturação, θs , igual a 0,388 e a condutividade hidráulica na saturação, Ks , igual a
1,8 x 10-3 cm/s. O parâmetro α, definido como o inverso do coeficiente de entrada de ar,
foi determinado igual a 0,036 cm-1, e o índice de distribuição do tamanho de poros, n,
foi determinado igual a 3,363 Admitindo-se que o transporte de soluto é governado pelo
modelo de não-equilíbrio físico, a fração de sítios em contato com água móvel, f, foi
definida como igual a 0,500. A massa específica do solo na base seca, ρb, foi igual a
1,661 g/cm3. Admitindo-se um transporte de soluto pouco reativo, o coeficiente de
distribuição, kd foi admitido igual a 1,0 cm3/g, a dispersividade λ, foi ajustada como
igual a 1,0 cm e o coeficiente de difusão molecular, Dd, igual a 1,0 x 10-5 cm2/s. O
coeficiente de transferência de massa, αm, recebeu valores de 1,0 x 10-5 s-1. A
concentração inicial de soluto no meio poroso foi considerada igual a zero e a
concentração da solução injetada no topo da coluna teve valor normalizado igual a 1.
A figura (21.a) mostra a variação da carga na metade da extensão da coluna de solo,
juntamente com os coeficientes de sensibilidade reduzidos da carga em relação aos
parâmetros do modelo do problema hidráulico. Estes coeficientes são obtidos pela
multiplicação dos coeficientes de sensibilidade por seus respectivos parâmetros, de
modo que os coeficientes de sensibilidade reduzidos tem a mesma unidade da variável
medida, possibilitando identificar de forma adequada eventuais dependências lineares e
pequenas magnitudes dos coeficientes em relação à variável. Observe-se pela figura
(21.a) que os coeficientes de sensibilidade são praticamente nulos quando comparados a
variação da carga. Na figura (21.b) é apresentada uma ampliação da figura (21.a) na
região de interesse para a análise dos coeficientes de sensibilidade, onde se pode

87
verificar que a magnitude dos coeficientes reduzidos é aproximadamente 4 vezes menor
que a da carga. Conclui-se assim que, para o caso em análise, a influência dos
parâmetros na variação da carga é praticamente inexistente. A análise da figura (21.b)
revela que os coeficientes de sensibilidade com relação a Ks e n são linearmente
dependentes, assim como os coeficientes de sensibilidade com relação aos grupos de
parâmetros (θr, θs, δh) e (n, h0). Portanto, os parâmetros Ks e n não podem ser estimados
simultaneamente com medidas da carga. Da mesma forma, os parâmetros θr, θs e δh não
podem ser estimados simultaneamente com medidas dessa variável. A mesma restrição
ocorre para a estimativa simultânea de n e h0. Observa-se ainda que os coeficientes de
sensibilidade dos parâmetros de transporte são nulos. Tal comportamento já era
esperado, devido ao fato dos parâmetros de transporte não afetarem as variáveis
hidráulicas, tal como a carga. A figura (21.b) também mostra que os coeficientes de
sensibilidade tendem a valores nulos ou constantes ao se aproximar o regime
permanente. Portanto, as medidas no regime permanente não fornecem informação
significativa para a estimativa dos parâmetros.
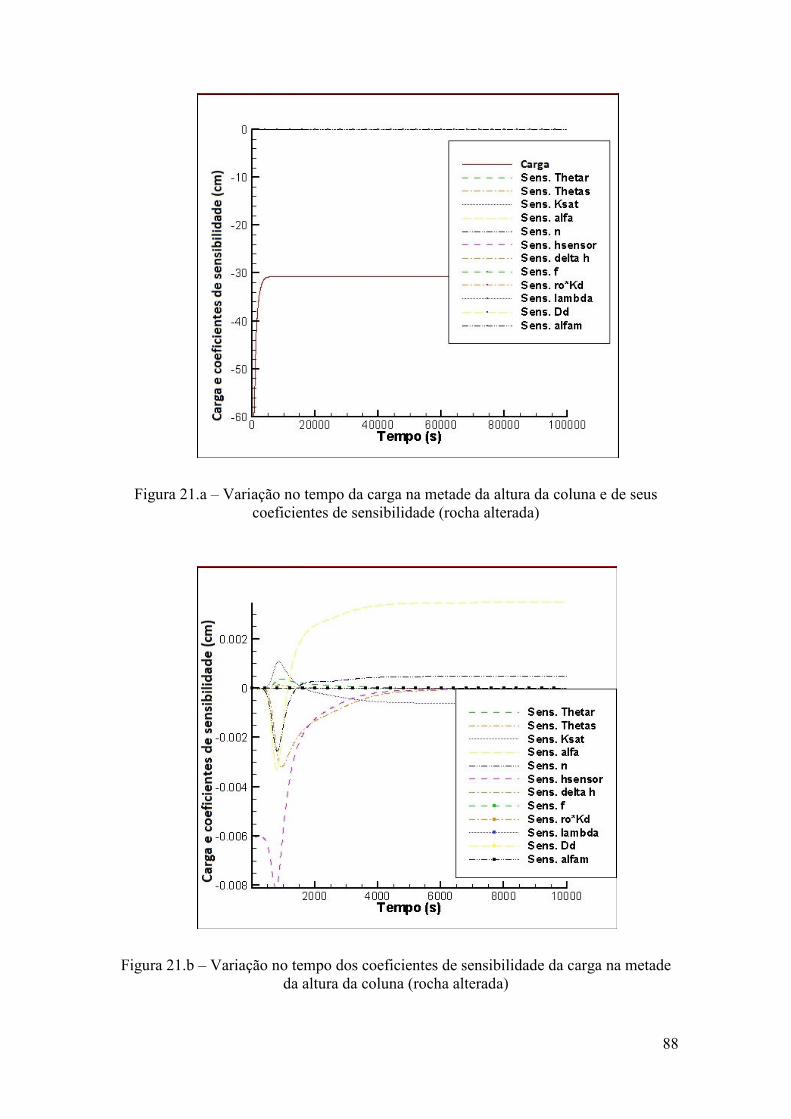
88
Figura 21.a – Variação no tempo da carga na metade da altura da coluna e de seus coeficientes de sensibilidade (rocha alterada)
Figura 21.b – Variação no tempo dos coeficientes de sensibilidade da carga na metade da altura da coluna (rocha alterada)
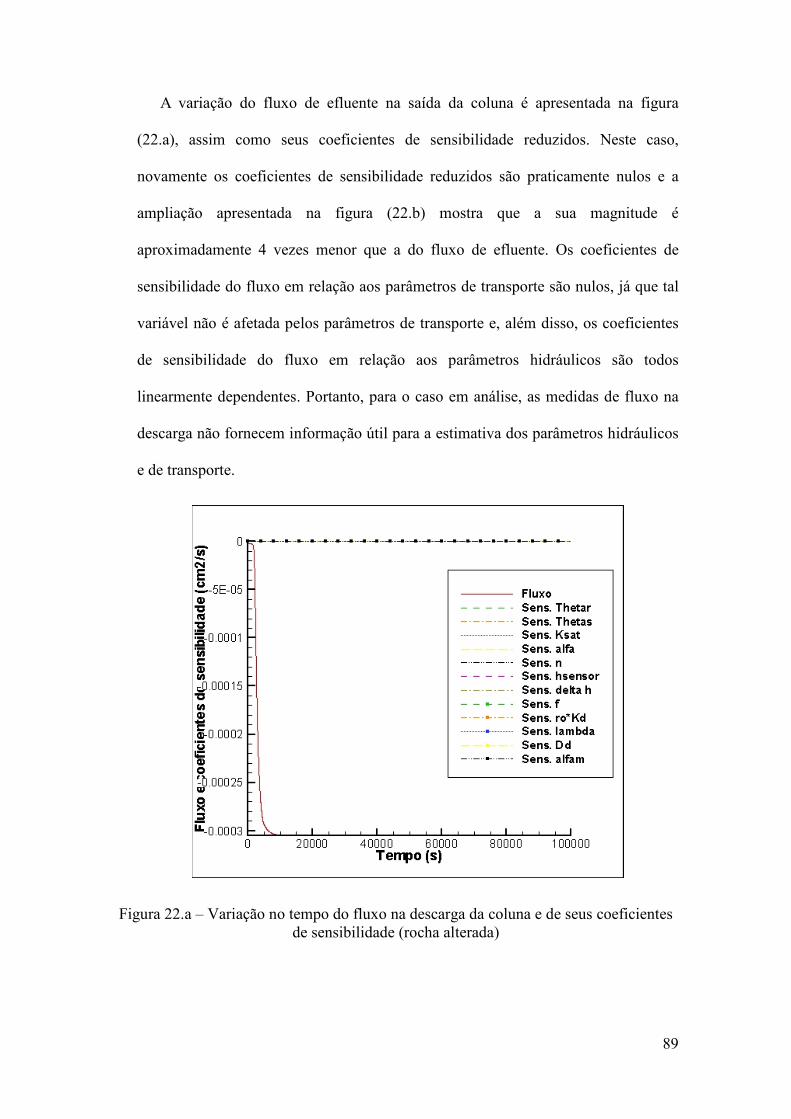
89
A variação do fluxo de efluente na saída da coluna é apresentada na figura
(22.a), assim como seus coeficientes de sensibilidade reduzidos. Neste caso,
novamente os coeficientes de sensibilidade reduzidos são praticamente nulos e a
ampliação apresentada na figura (22.b) mostra que a sua magnitude é
aproximadamente 4 vezes menor que a do fluxo de efluente. Os coeficientes de
sensibilidade do fluxo em relação aos parâmetros de transporte são nulos, já que tal
variável não é afetada pelos parâmetros de transporte e, além disso, os coeficientes
de sensibilidade do fluxo em relação aos parâmetros hidráulicos são todos
linearmente dependentes. Portanto, para o caso em análise, as medidas de fluxo na
descarga não fornecem informação útil para a estimativa dos parâmetros hidráulicos
e de transporte.
Figura 22.a – Variação no tempo do fluxo na descarga da coluna e de seus coeficientes de sensibilidade (rocha alterada)
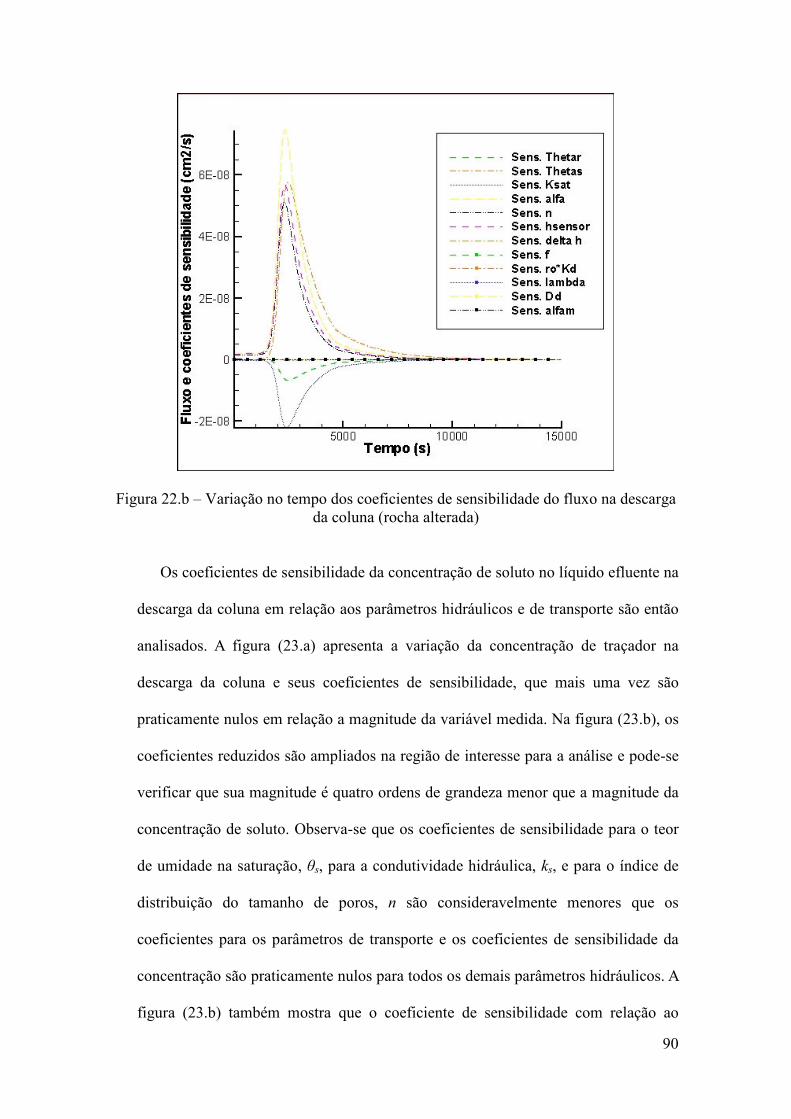
90
Figura 22.b – Variação no tempo dos coeficientes de sensibilidade do fluxo na descarga da coluna (rocha alterada)
Os coeficientes de sensibilidade da concentração de soluto no líquido efluente na
descarga da coluna em relação aos parâmetros hidráulicos e de transporte são então
analisados. A figura (23.a) apresenta a variação da concentração de traçador na
descarga da coluna e seus coeficientes de sensibilidade, que mais uma vez são
praticamente nulos em relação a magnitude da variável medida. Na figura (23.b), os
coeficientes reduzidos são ampliados na região de interesse para a análise e pode-se
verificar que sua magnitude é quatro ordens de grandeza menor que a magnitude da
concentração de soluto. Observa-se que os coeficientes de sensibilidade para o teor
de umidade na saturação, θs, para a condutividade hidráulica, ks, e para o índice de
distribuição do tamanho de poros, n são consideravelmente menores que os
coeficientes para os parâmetros de transporte e os coeficientes de sensibilidade da
concentração são praticamente nulos para todos os demais parâmetros hidráulicos. A
figura (23.b) também mostra que o coeficiente de sensibilidade com relação ao
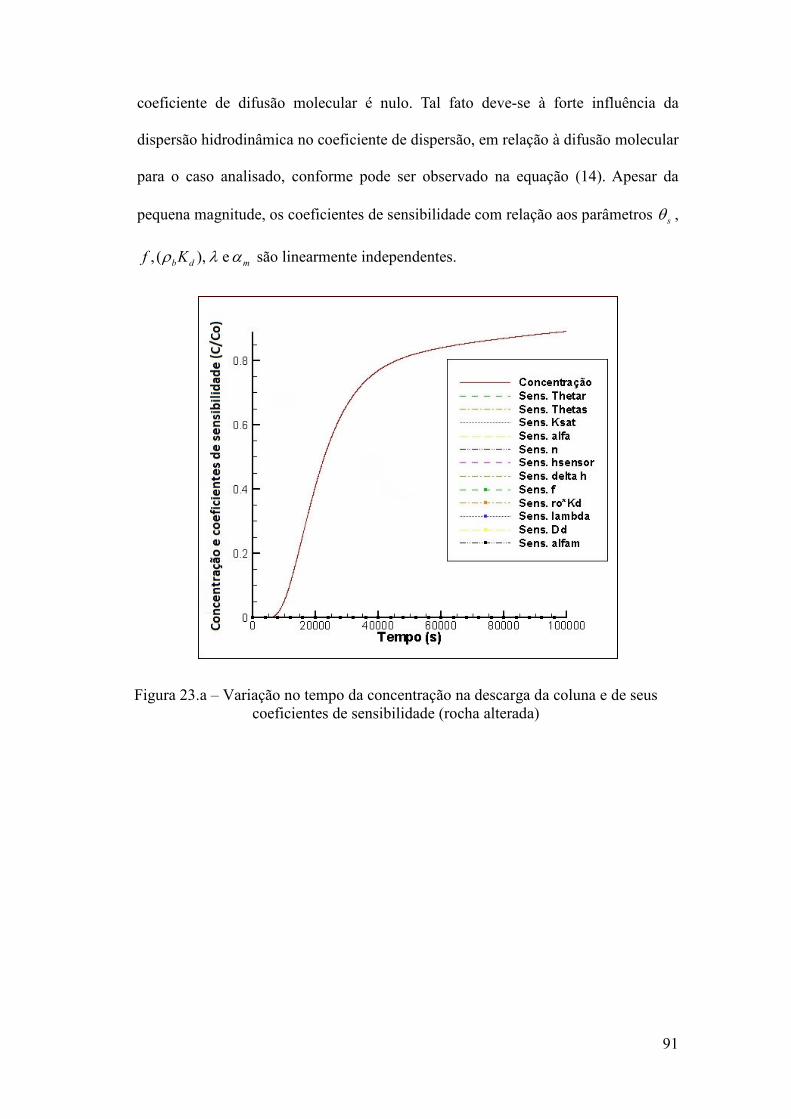
91
coeficiente de difusão molecular é nulo. Tal fato deve-se à forte influência da
dispersão hidrodinâmica no coeficiente de dispersão, em relação à difusão molecular
para o caso analisado, conforme pode ser observado na equação (14). Apesar da
pequena magnitude, os coeficientes de sensibilidade com relação aos parâmetros sθ ,
, ( ), eb d mf Kρ λ α são linearmente independentes.
Figura 23.a – Variação no tempo da concentração na descarga da coluna e de seus coeficientes de sensibilidade (rocha alterada)
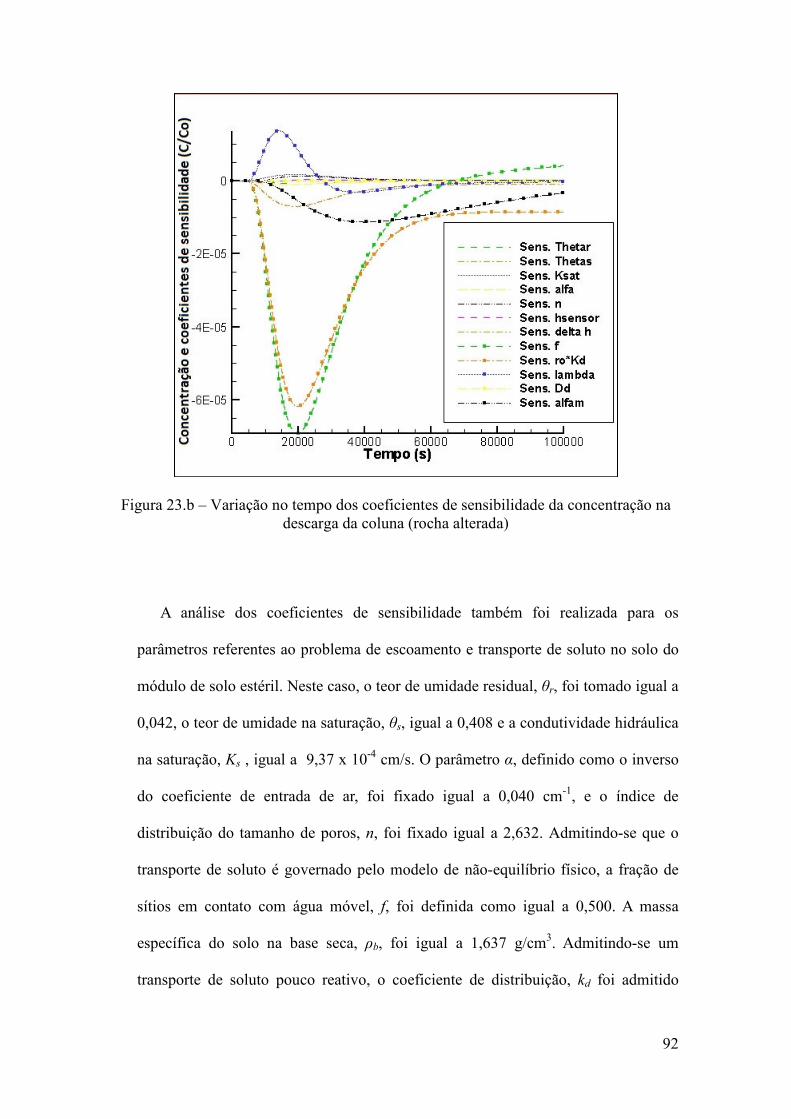
92
Figura 23.b – Variação no tempo dos coeficientes de sensibilidade da concentração na descarga da coluna (rocha alterada)
A análise dos coeficientes de sensibilidade também foi realizada para os
parâmetros referentes ao problema de escoamento e transporte de soluto no solo do
módulo de solo estéril. Neste caso, o teor de umidade residual, θr, foi tomado igual a
0,042, o teor de umidade na saturação, θs, igual a 0,408 e a condutividade hidráulica
na saturação, Ks , igual a 9,37 x 10-4 cm/s. O parâmetro α, definido como o inverso
do coeficiente de entrada de ar, foi fixado igual a 0,040 cm-1, e o índice de
distribuição do tamanho de poros, n, foi fixado igual a 2,632. Admitindo-se que o
transporte de soluto é governado pelo modelo de não-equilíbrio físico, a fração de
sítios em contato com água móvel, f, foi definida como igual a 0,500. A massa
específica do solo na base seca, ρb, foi igual a 1,637 g/cm3. Admitindo-se um
transporte de soluto pouco reativo, o coeficiente de distribuição, kd foi admitido
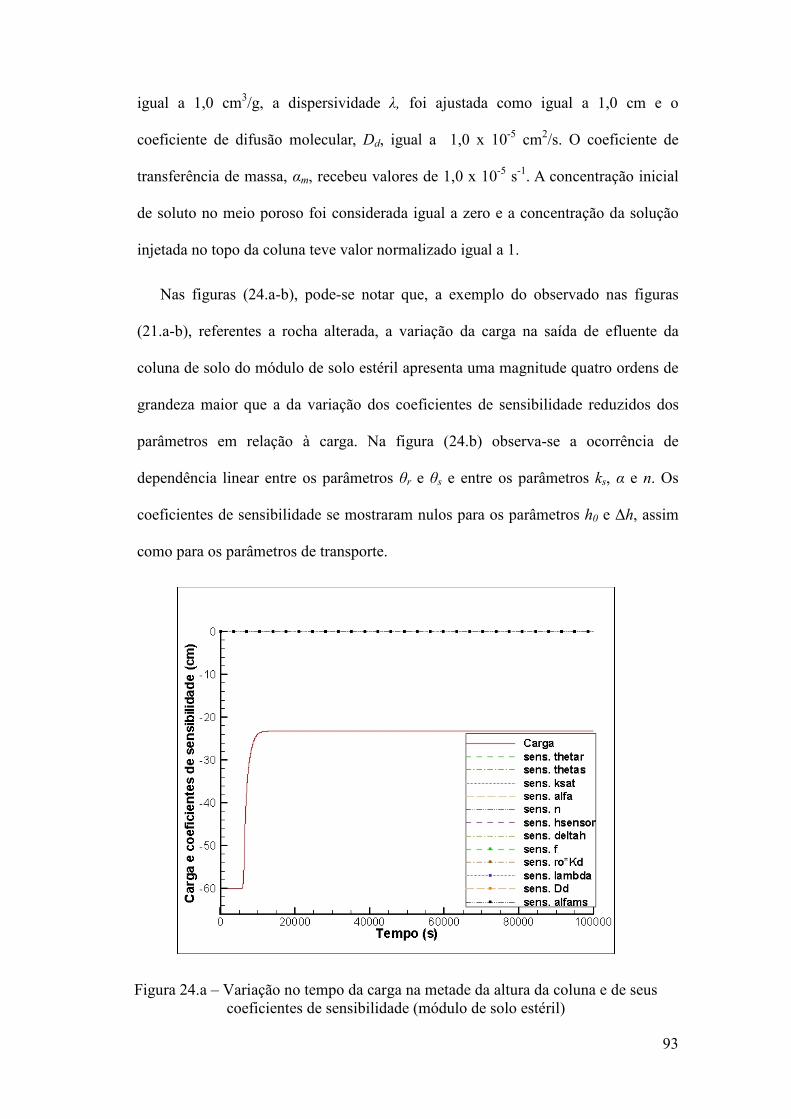
93
igual a 1,0 cm3/g, a dispersividade λ, foi ajustada como igual a 1,0 cm e o
coeficiente de difusão molecular, Dd, igual a 1,0 x 10-5 cm2/s. O coeficiente de
transferência de massa, αm, recebeu valores de 1,0 x 10-5 s-1. A concentração inicial
de soluto no meio poroso foi considerada igual a zero e a concentração da solução
injetada no topo da coluna teve valor normalizado igual a 1.
Nas figuras (24.a-b), pode-se notar que, a exemplo do observado nas figuras
(21.a-b), referentes a rocha alterada, a variação da carga na saída de efluente da
coluna de solo do módulo de solo estéril apresenta uma magnitude quatro ordens de
grandeza maior que a da variação dos coeficientes de sensibilidade reduzidos dos
parâmetros em relação à carga. Na figura (24.b) observa-se a ocorrência de
dependência linear entre os parâmetros θr e θs e entre os parâmetros ks, α e n. Os
coeficientes de sensibilidade se mostraram nulos para os parâmetros h0 e ∆h, assim
como para os parâmetros de transporte.
Figura 24.a – Variação no tempo da carga na metade da altura da coluna e de seus coeficientes de sensibilidade (módulo de solo estéril)
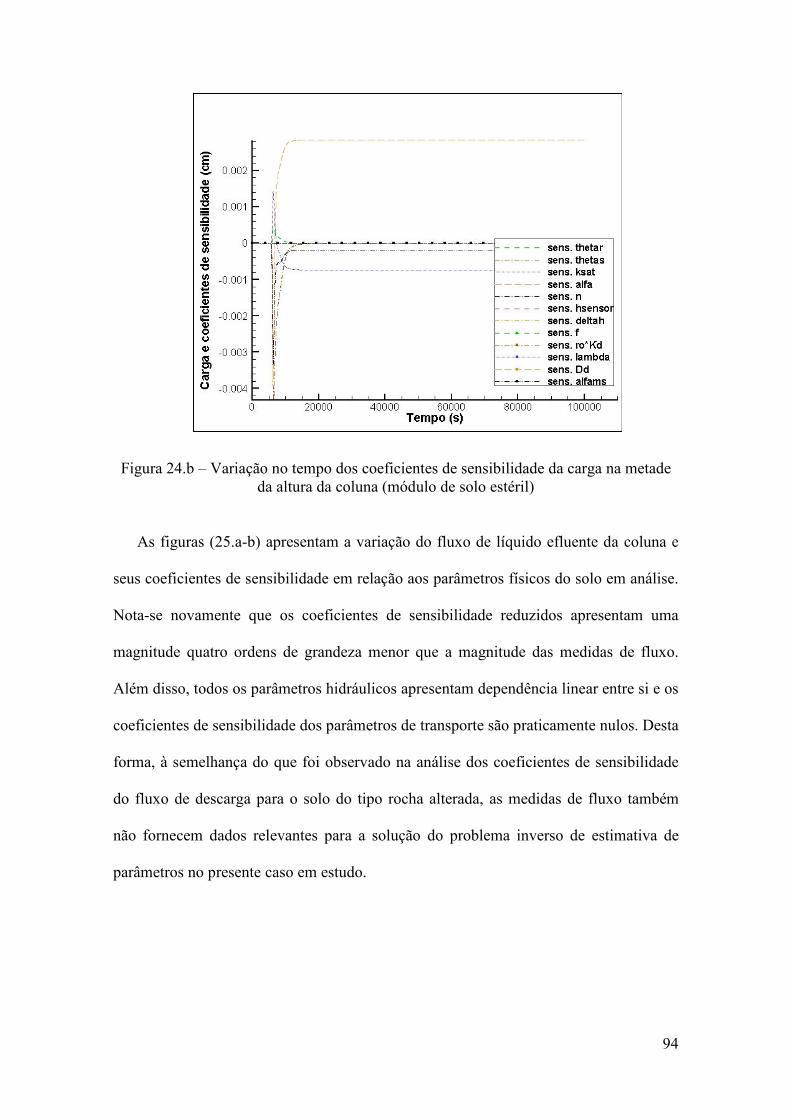
94
Figura 24.b – Variação no tempo dos coeficientes de sensibilidade da carga na metade da altura da coluna (módulo de solo estéril)
As figuras (25.a-b) apresentam a variação do fluxo de líquido efluente da coluna e
seus coeficientes de sensibilidade em relação aos parâmetros físicos do solo em análise.
Nota-se novamente que os coeficientes de sensibilidade reduzidos apresentam uma
magnitude quatro ordens de grandeza menor que a magnitude das medidas de fluxo.
Além disso, todos os parâmetros hidráulicos apresentam dependência linear entre si e os
coeficientes de sensibilidade dos parâmetros de transporte são praticamente nulos. Desta
forma, à semelhança do que foi observado na análise dos coeficientes de sensibilidade
do fluxo de descarga para o solo do tipo rocha alterada, as medidas de fluxo também
não fornecem dados relevantes para a solução do problema inverso de estimativa de
parâmetros no presente caso em estudo.
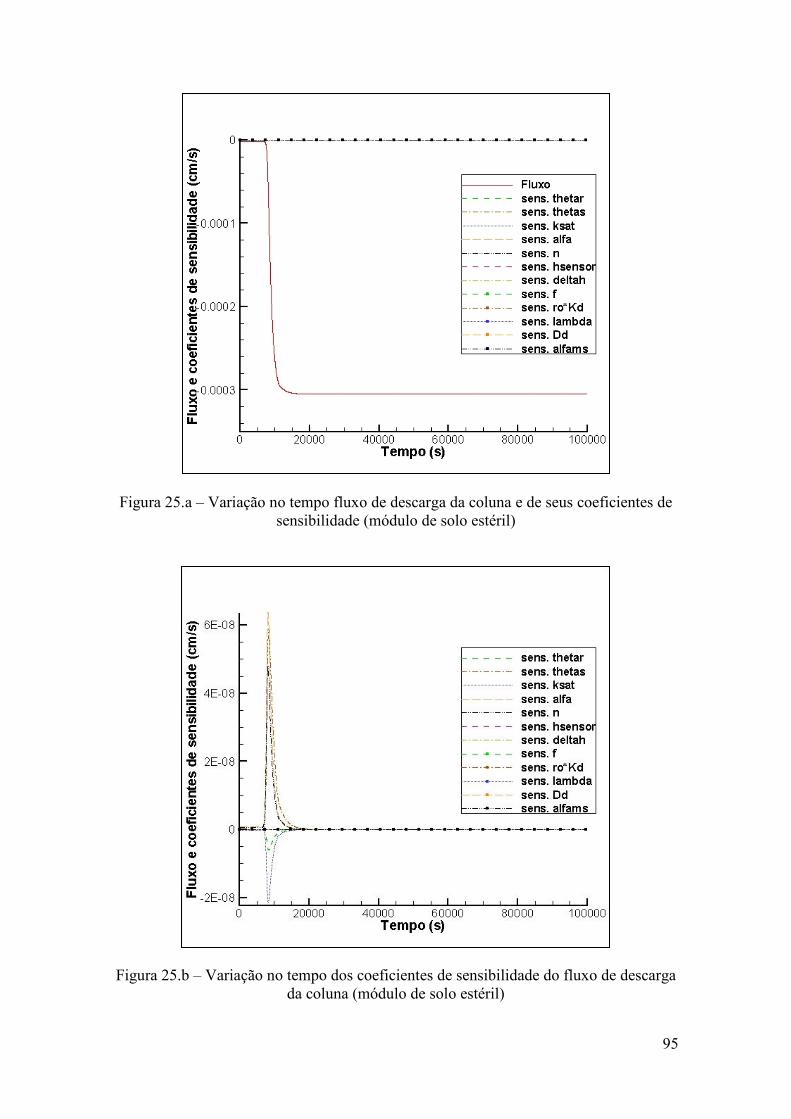
95
Figura 25.a – Variação no tempo fluxo de descarga da coluna e de seus coeficientes de sensibilidade (módulo de solo estéril)
Figura 25.b – Variação no tempo dos coeficientes de sensibilidade do fluxo de descarga da coluna (módulo de solo estéril)

96
A variação da concentração de soluto no líquido efluente, assim como análise dos
seus coeficientes de sensibilidade são apresentadas nas figuras (26.a-b). Novamente se
observa que os coeficientes de sensibilidade reduzidos apresentam uma magnitude
quatro ordens de grandeza menor que a variação da concentração ao longo do tempo.
Na figura (26.b) é apresentada a variação no tempo dos coeficientes de sensibilidade em
relação à concentração de soluto. Nota-se que os parâmetros α e n apresentam
dependência linear, assim como os parâmetros θs e ks. Os coeficientes de sensibilidade
para h0 e ∆h são novamente nulos. A figura ainda mostra que, a exemplo do que
aconteceu na análise da rocha alterada e apesar da pequena magnitude, os parâmetros de
transporte , ( ), eb d mf Kρ λ α são linearmente independentes. O coeficiente de
sensibilidade do coeficiente de dispersão molecular, Dd, é nulo o que se explica pela
forte influência da dispersão hidrodinâmica no coeficiente de dispersão, em relação à
difusão molecular para o caso analisado, conforme pode ser observado na equação (14).
Figura 26.a – Variação no tempo concentração de soluto e de seus coeficientes de sensibilidade (módulo de solo estéril)
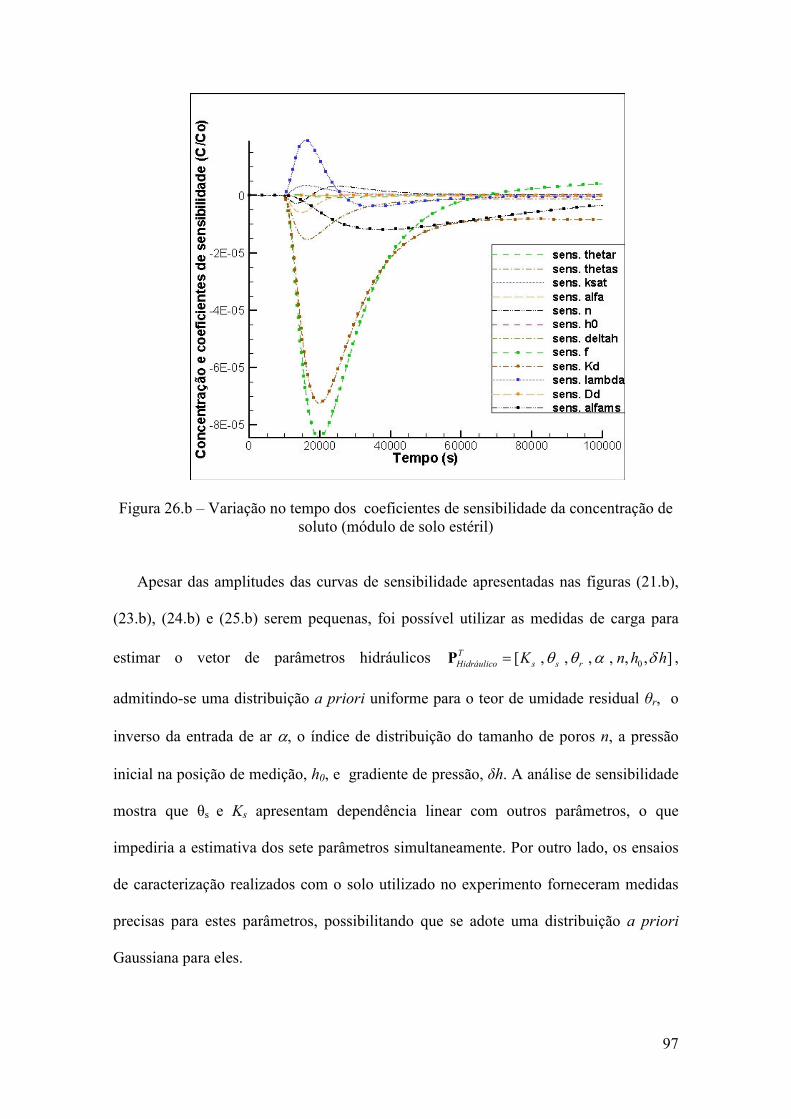
97
Figura 26.b – Variação no tempo dos coeficientes de sensibilidade da concentração de soluto (módulo de solo estéril)
Apesar das amplitudes das curvas de sensibilidade apresentadas nas figuras (21.b),
(23.b), (24.b) e (25.b) serem pequenas, foi possível utilizar as medidas de carga para
estimar o vetor de parâmetros hidráulicos 0[ , , , , , , ]T
Hidráulico s s rK n h hθ θ α δ=P ,
admitindo-se uma distribuição a priori uniforme para o teor de umidade residual θr, o
inverso da entrada de ar α, o índice de distribuição do tamanho de poros n, a pressão
inicial na posição de medição, h0, e gradiente de pressão, δh. A análise de sensibilidade
mostra que θs e Ks apresentam dependência linear com outros parâmetros, o que
impediria a estimativa dos sete parâmetros simultaneamente. Por outro lado, os ensaios
de caracterização realizados com o solo utilizado no experimento forneceram medidas
precisas para estes parâmetros, possibilitando que se adote uma distribuição a priori
Gaussiana para eles.
98
A análise de sensibilidade também mostra que o vetor de parâmetros de transporte
[ , ( ), , , ]T
Transporte b d d mf K Dρ λ α=P pode ser estimado a partir das medidas experimentais
de concentração de soluto na saída da coluna de solo. Pode-se observar nas figuras
(23.b) e (26.b) que a amplitude do coeficiente para o coeficiente de difusão molecular,
Dd, é muito menor do que para os demais parâmetros, o que indica que a influência de
efeitos difusivos no problema pode ser considerada desprezível. Optou-se porém por
admitir uma distribuição a priori Gaussiana para Dd e uma distribuição a priori
uniforme para os demais parâmetros.
Apesar da dependência linear entre parâmetros verificada e da pequena magnitude
apresentada por todos os coeficientes de sensibilidade nas análises realizadas para os
dois tipos de solo, é possível, com o uso da inferência Bayesiana, realizar a estimativa
dos parâmetros do problema de maneira simultânea, uma vez que nesta técnica se utiliza
informação a priori, codificada em distribuições estatísticas para os parâmetros, na
geração da distribuição posterior de probabilidade. Em contrapartida, as incertezas das
distribuições a priori deverão sempre ser pequenas para os parâmetros linearmente
dependentes com coeficientes de sensibilidade de baixa magnitude.
Com base na influência da variação dos parâmetros hidráulicos e de transporte nas
medidas de fluxo, carga e concentração de soluto observadas nas análises realizadas, foi
estabelecido que as medidas experimentais de carga seriam utilizadas na estimativa dos
parâmetros hidráulicos, enquanto os parâmetros de transporte seriam estimados a partir
de medidas experimentais de concentração de soluto.
99
4.2.2 Estimativa de parâmetros
A partir das medidas experimentais de concentração de soluto e carga foi possível
estimar os parâmetros hidráulicos e de transporte pela aplicação do teorema de Bayes,
através do método de Monte Carlo com cadeias de Markov (MCMC).
Foram primeiramente estimados os parâmetros hidráulicos, a partir das medidas de
carga. Os parâmetros de transporte foram estimados num segundo momento, quando
que se tomou como informação a priori os valores médios dos parâmetros hidráulicos,
assim como a matriz de covariância, obtidos a partir das distribuições a posteriori da
estimativa de parâmetros hidráulicos. Nesta segunda etapa, foram utilizadas medidas
experimentais da variação da carga e da concentração de soluto.
Este procedimento foi realizado utilizando-se tanto medidas experimentais
simuladas quanto medidas experimentais reais, conforme descrito nas seções a seguir.
4.2.2.1 Estimativas utilizando-se medidas experimentais simuladas
Inicialmente, foram simulados experimentos em coluna de solo considerando-se as
propriedades físicas do solo do tipo rocha alterada, que estão descritas na tabela 1.
Foram simuladas as medições da variação da carga na posição de medição do
tensiômetro afixado na metade da coluna de solo e da variação da concentração de
soluto no efluente coletado na descarga da coluna.
Para a simulação das medidas experimentais de carga e concentração, os problemas
de escoamento e transporte apresentados na seção 2.1.1 foi calculado, adicionando-se
aos valores obtidos erros randômicos, não correlacionados, com distribuição normal,
média zero e desvio padrão constante (ORLANDE et al., 2009). Os valores constantes
de desvio padrão foram definidos como 1 cm para as medidas simuladas de carga (que
100
corresponde a aproximadamente 3% da variação da carga no tempo) e 0,01 para a
concentração reduzida de soluto (correspondente a 1 % da variação de concentração). A
partir das medidas simuladas de carga na posição do tensiômetro e das medidas de
concentração de soluto no efluente, foi realizada a solução do problema inverso para
estimativa de parâmetros hidráulicos e de transporte pelo método MCMC.
Medidas simuladas de carga foram utilizadas para se estimar o vetor de parâmetros
hidráulicos [ , , , , ]T
Hidráulico s s rK nθ θ α=P . Neste caso, admitiu-se a carga ao longo de
toda a coluna como tendo um valor inicial uniforme igual a -60 cm. Como foram
utilizadas medidas simuladas para a carga de pressão, não houve necessidade de se
estimar os parâmetros h0 e δh. As medidas simuladas foram obtidas ao se calcular o
problema de escoamento utilizando-se os valores de parâmetros apresentados na tabela
4.
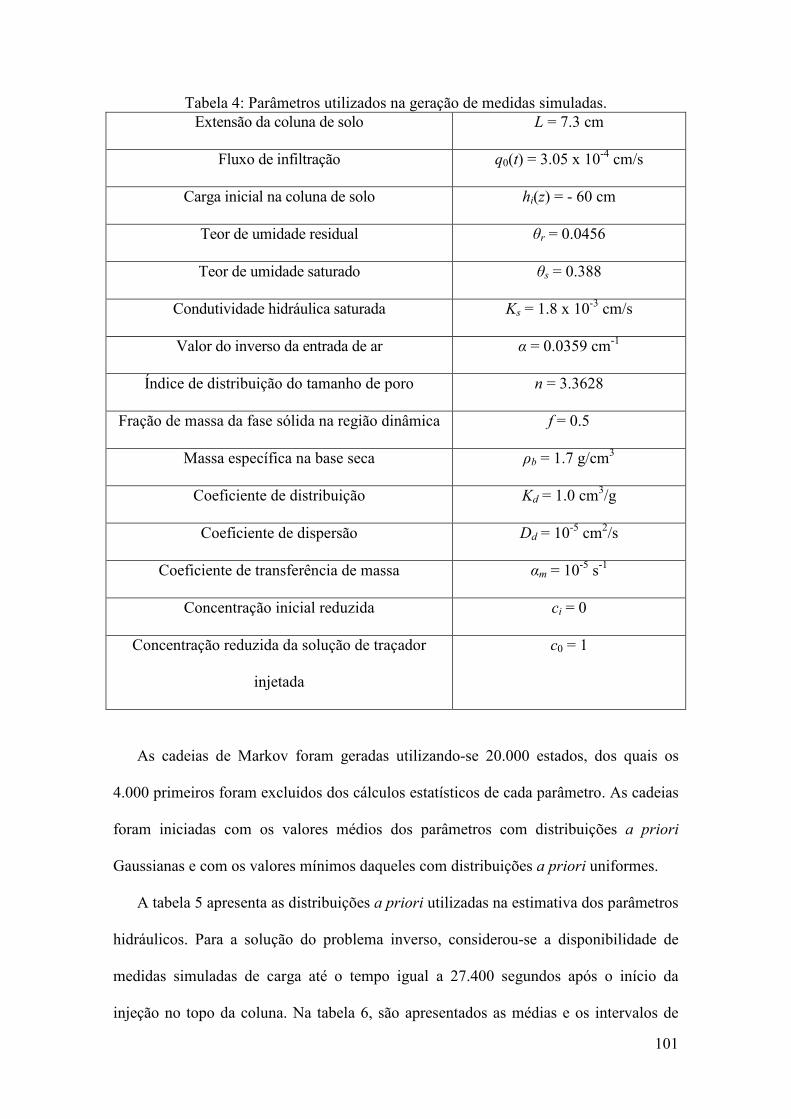
101
Tabela 4: Parâmetros utilizados na geração de medidas simuladas. Extensão da coluna de solo L = 7.3 cm
Fluxo de infiltração q0(t) = 3.05 x 10-4 cm/s
Carga inicial na coluna de solo hi(z) = - 60 cm
Teor de umidade residual θr = 0.0456
Teor de umidade saturado θs = 0.388
Condutividade hidráulica saturada Ks = 1.8 x 10-3 cm/s
Valor do inverso da entrada de ar α = 0.0359 cm-1
Índice de distribuição do tamanho de poro n = 3.3628
Fração de massa da fase sólida na região dinâmica f = 0.5
Massa específica na base seca ρb = 1.7 g/cm3
Coeficiente de distribuição Kd = 1.0 cm3/g
Coeficiente de dispersão Dd = 10-5 cm2/s
Coeficiente de transferência de massa αm = 10-5 s-1
Concentração inicial reduzida ci = 0
Concentração reduzida da solução de traçador
injetada
c0 = 1
As cadeias de Markov foram geradas utilizando-se 20.000 estados, dos quais os
4.000 primeiros foram excluidos dos cálculos estatísticos de cada parâmetro. As cadeias
foram iniciadas com os valores médios dos parâmetros com distribuições a priori
Gaussianas e com os valores mínimos daqueles com distribuições a priori uniformes.
A tabela 5 apresenta as distribuições a priori utilizadas na estimativa dos parâmetros
hidráulicos. Para a solução do problema inverso, considerou-se a disponibilidade de
medidas simuladas de carga até o tempo igual a 27.400 segundos após o início da
injeção no topo da coluna. Na tabela 6, são apresentados as médias e os intervalos de
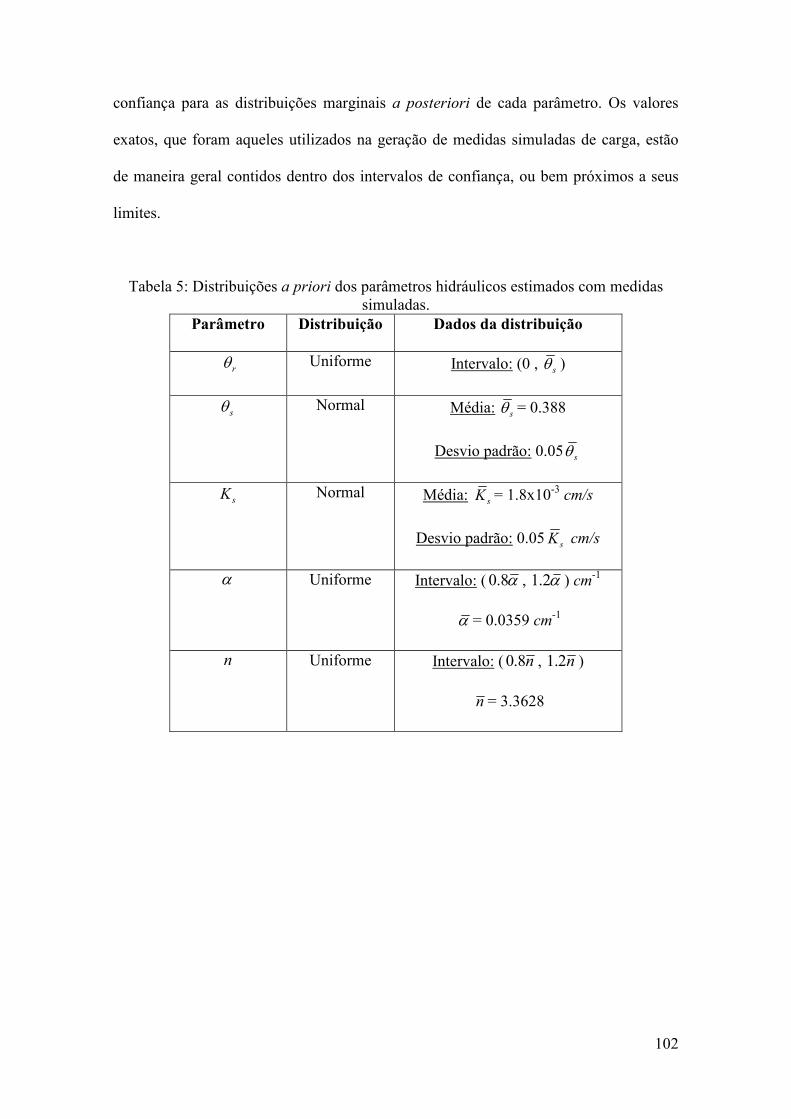
102
confiança para as distribuições marginais a posteriori de cada parâmetro. Os valores
exatos, que foram aqueles utilizados na geração de medidas simuladas de carga, estão
de maneira geral contidos dentro dos intervalos de confiança, ou bem próximos a seus
limites.
Tabela 5: Distribuições a priori dos parâmetros hidráulicos estimados com medidas simuladas.
Parâmetro Distribuição Dados da distribuição
rθ Uniforme Intervalo: (0 , sθ )
sθ Normal Média: sθ = 0.388
Desvio padrão: 0.05sθ
sK Normal Média: sK = 1.8x10-3 cm/s
Desvio padrão: 0.05sK cm/s
α Uniforme Intervalo: ( 0.8α , 1.2α ) cm-1
α = 0.0359 cm-1
n Uniforme Intervalo: (0.8n , 1.2n )
n = 3.3628
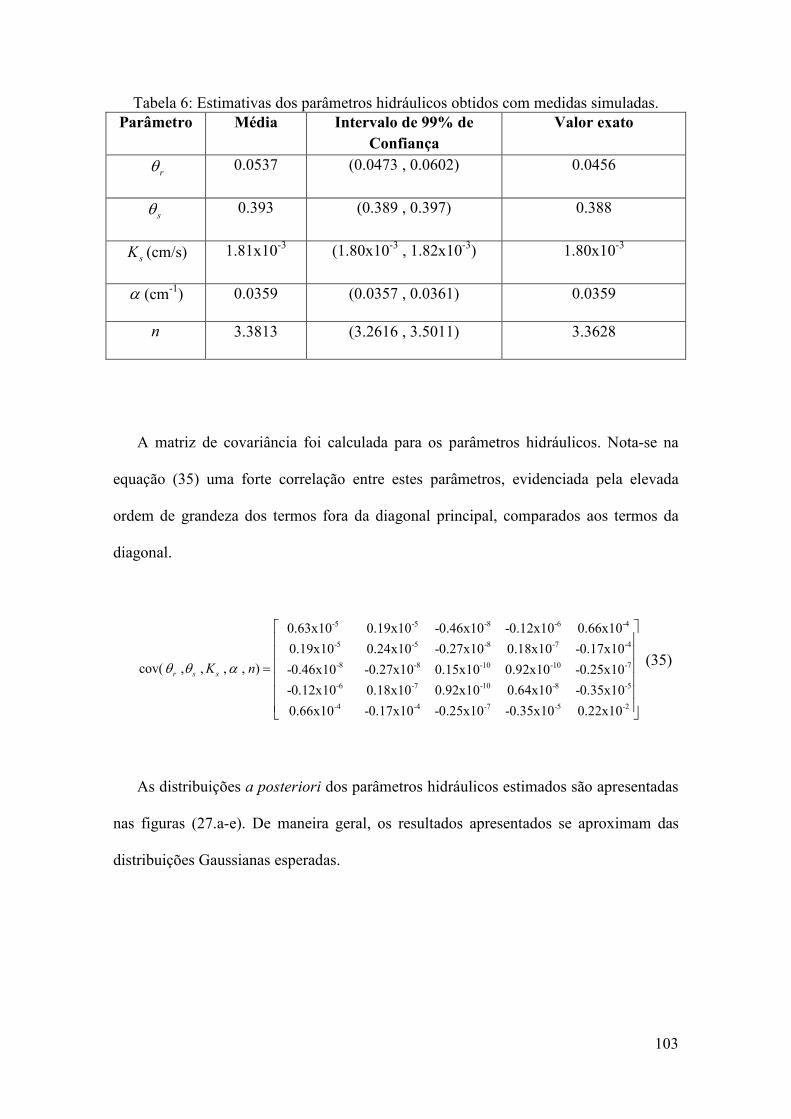
103
Tabela 6: Estimativas dos parâmetros hidráulicos obtidos com medidas simuladas. Parâmetro Média Intervalo de 99% de
Confiança Valor exato
rθ 0.0537 (0.0473 , 0.0602) 0.0456
sθ 0.393 (0.389 , 0.397) 0.388
sK (cm/s) 1.81x10-3 (1.80x10-3 , 1.82x10-3) 1.80x10-3
α (cm-1) 0.0359 (0.0357 , 0.0361) 0.0359
n 3.3813 (3.2616 , 3.5011) 3.3628
A matriz de covariância foi calculada para os parâmetros hidráulicos. Nota-se na
equação (35) uma forte correlação entre estes parâmetros, evidenciada pela elevada
ordem de grandeza dos termos fora da diagonal principal, comparados aos termos da
diagonal.
-5 -5 -8 -6 -4
-5 -5 -8 -7 -4
-8 -8 -10 -10 -7
-6 -7 -10
0.63x10 0.19x10 -0.46x10 -0.12x10 0.66x10
0.19x10 0.24x10 -0.27x10 0.18x10 -0.17x10
cov( , , , , ) -0.46x10 -0.27x10 0.15x10 0.92x10 -0.25x10
-0.12x10 0.18x10 0.92x10 0.64r s sK nθ θ α =
-8 -5
-4 -4 -7 -5 -2
x10 -0.35x10
0.66x10 -0.17x10 -0.25x10 -0.35x10 0.22x10
(35)
As distribuições a posteriori dos parâmetros hidráulicos estimados são apresentadas
nas figuras (27.a-e). De maneira geral, os resultados apresentados se aproximam das
distribuições Gaussianas esperadas.
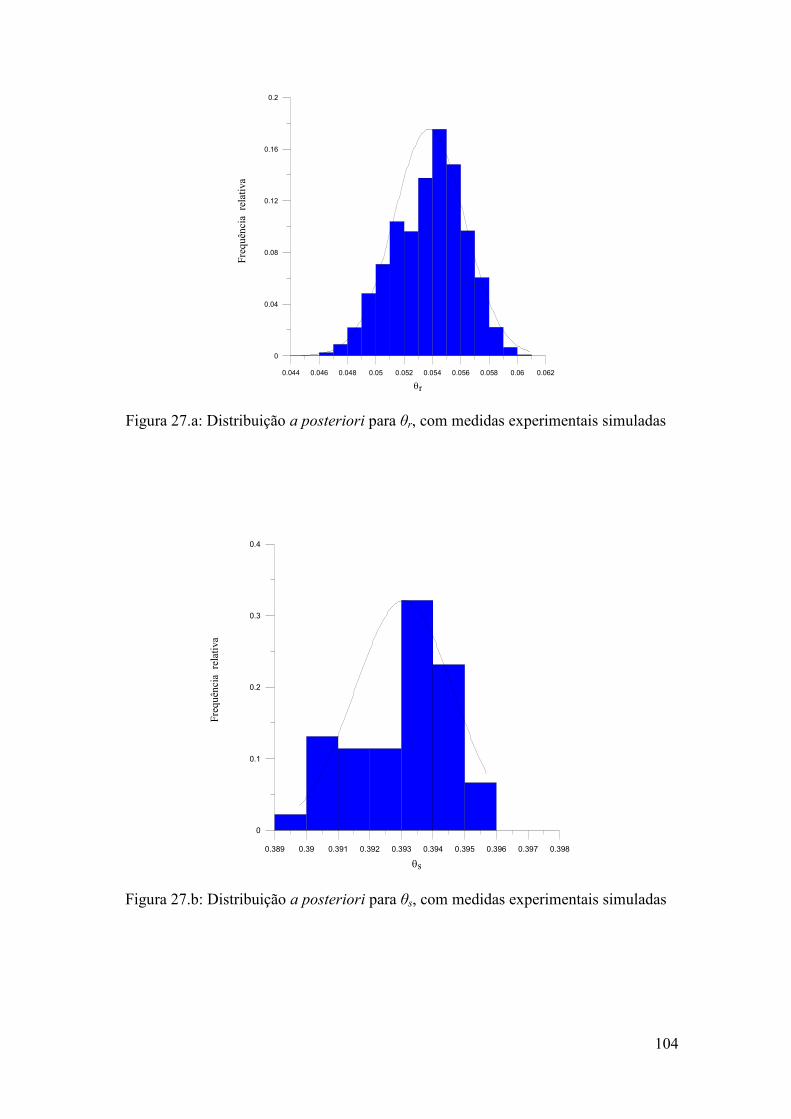
104
Figura 27.a: Distribuição a posteriori para θr, com medidas experimentais simuladas
Figura 27.b: Distribuição a posteriori para θs, com medidas experimentais simuladas
0.044 0.046 0.048 0.05 0.052 0.054 0.056 0.058 0.06 0.062
θr
0
0.04
0.08
0.12
0.16
0.2
0.389 0.39 0.391 0.392 0.393 0.394 0.395 0.396 0.397 0.398
θs
0
0.1
0.2
0.3
0.4
Freq
uênc
ia r
elat
iva
Freq
uênc
ia r
elat
iva
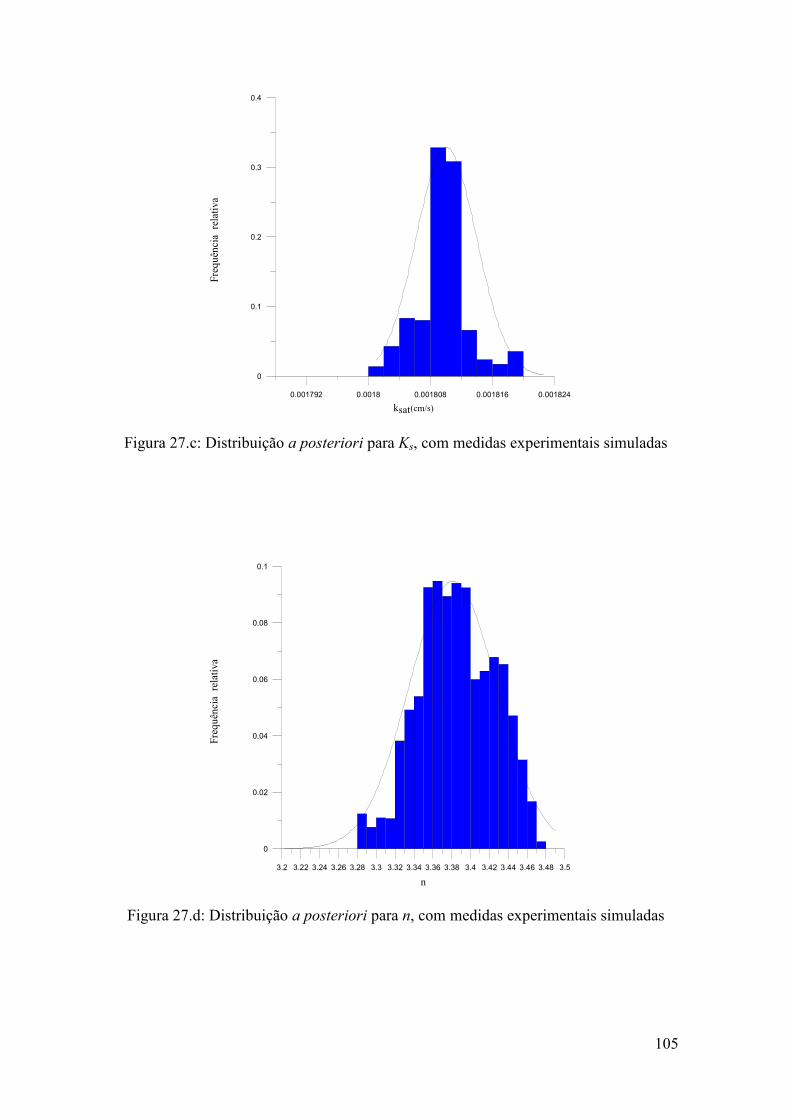
105
Figura 27.c: Distribuição a posteriori para Ks, com medidas experimentais simuladas
Figura 27.d: Distribuição a posteriori para n, com medidas experimentais simuladas
0.001792 0.0018 0.001808 0.001816 0.001824
ksat( (cm/s)
0
0.1
0.2
0.3
0.4
3.2 3.22 3.24 3.26 3.28 3.3 3.32 3.34 3.36 3.38 3.4 3.42 3.44 3.46 3.48 3.5
n
0
0.02
0.04
0.06
0.08
0.1
Freq
uênc
ia r
elat
iva
Freq
uênc
ia r
elat
iva

106
Figura 27.e: Distribuição a posteriori para α, com medidas experimentais simuladas.
As figuras (28.a-e) apresentam os estados das cadeias de Markov para cada um dos
parâmetros hidráulicos estimados. De maneira geral, observa-se uma convergência para
as cadeias, com excessão dos parâmetros θs e Ks, devido a suas dependências lineares
em relação a θr e n, respectivamente.
Figura 28.a: Estados da cadeia de Markov para θr, com medidas experimentais
simuladas.
0.0354 0.0355 0.0356 0.0357 0.0358 0.0359 0.036 0.0361 0.0362 0.0363
α (cm-1)
0
0.04
0.08
0.12
0 4000 8000 12000 16000 20000
States of the Markov Chain
0
0.02
0.04
0.06
0.08
θ r
Freq
uênc
ia r
elat
iva
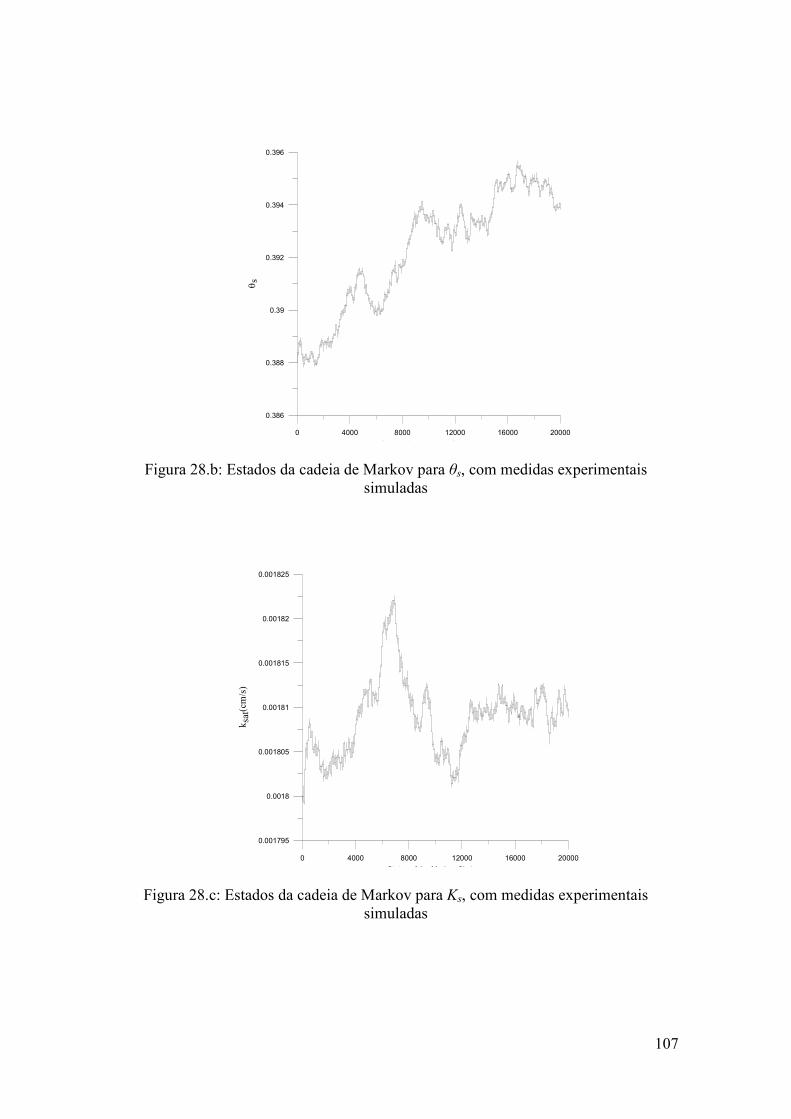
107
0 4000 8000 12000 16000 20000
States of the Markov Chain
0.386
0.388
0.39
0.392
0.394
0.396
θ s
Figura 28.b: Estados da cadeia de Markov para θs, com medidas experimentais simuladas
0 4000 8000 12000 16000 20000
States of the Markov Chain
0.001795
0.0018
0.001805
0.00181
0.001815
0.00182
0.001825
k sat
(cm
/s)
Figura 28.c: Estados da cadeia de Markov para Ks, com medidas experimentais simuladas
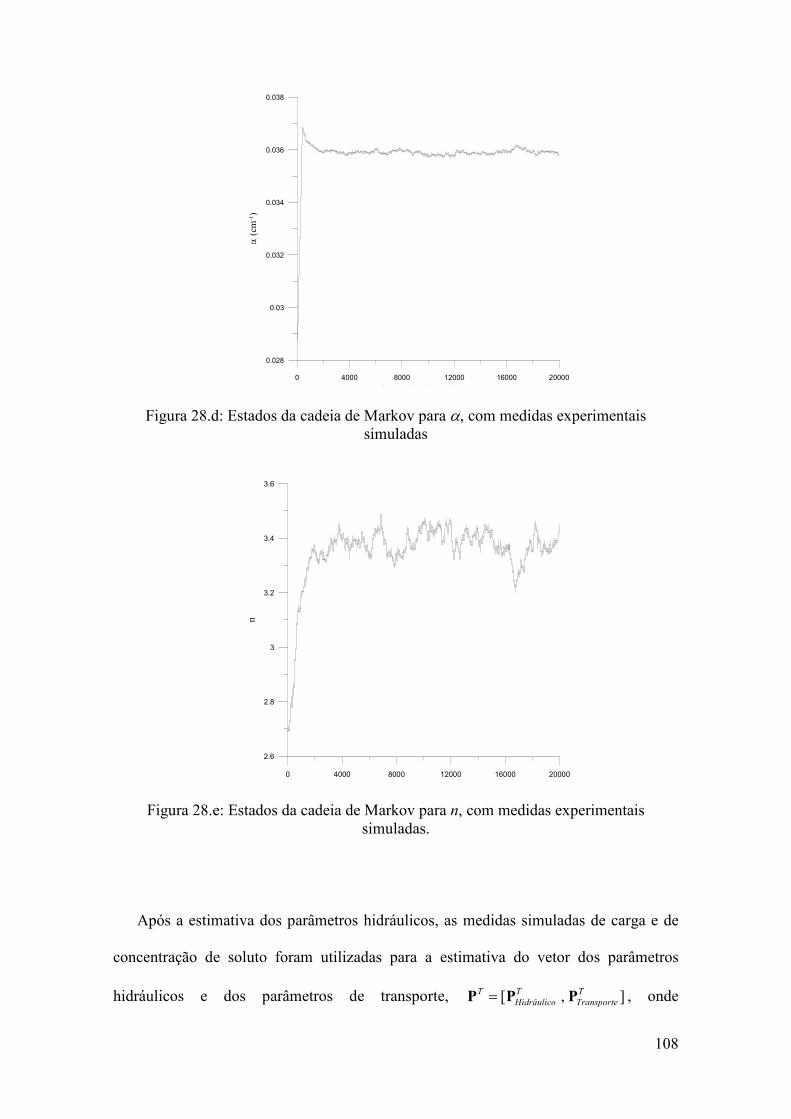
108
0 4000 8000 12000 16000 20000
States of the Markov Chain
0.028
0.03
0.032
0.034
0.036
0.038
α (
cm-1)
Figura 28.d: Estados da cadeia de Markov para α, com medidas experimentais simuladas
0 4000 8000 12000 16000 20000
States of the Markov Chain
2.6
2.8
3
3.2
3.4
3.6
n
Figura 28.e: Estados da cadeia de Markov para n, com medidas experimentais simuladas.
Após a estimativa dos parâmetros hidráulicos, as medidas simuladas de carga e de
concentração de soluto foram utilizadas para a estimativa do vetor dos parâmetros
hidráulicos e dos parâmetros de transporte, [ , ]T T T
Hidráulico Transporte=P P P , onde
109
[ , , , , ]T
Hidráulico s s rK nθ θ α=P e [ , ( ), , , ]T
Transporte b d d mf K Dρ λ α=P , utilizando-se o
modelo com condição de contorno do terceiro tipo apresentado na seção 2.1.2. Os
valores obtidos na estimativa dos parâmetros hidráulicos foram, desta vez, adotados
como informação a priori. As distribuições Gaussianas apresentadas na tabela 6
definiram as novas distribuições a priori e a matriz de covariâncias apresentada na
equação (35) o desvio padrão dos parâmetros hidráulicos. Foi simulado um experimento
de dispersão de soluto, segundo os procedimentos descritos na seção 3.2, com duração
de 13000 segundos, tempo suficiente para a concentração reduzida chegar ao regime
permanente na descarga da coluna. Nesta simulação, foram consideradas as
características físicas conhecidas para a amostra de solo do tipo rocha alterada,
apresentadas na tabela 1. As distribuições a priori adotadas para os parâmetros de
transporte estão apresentadas na tabela 7. A tabela 8 apresenta os valores estimados para
os parâmetros de transporte, juntamente com seus respectivos intervalos de confiança e
os valores exatos, utilizados na geração de medidas simuladas de carga. Repare-se que
esses valores exatos estão de maneira geral dentro do intervalo de confiança, ou bem
próximos ao seu limite.
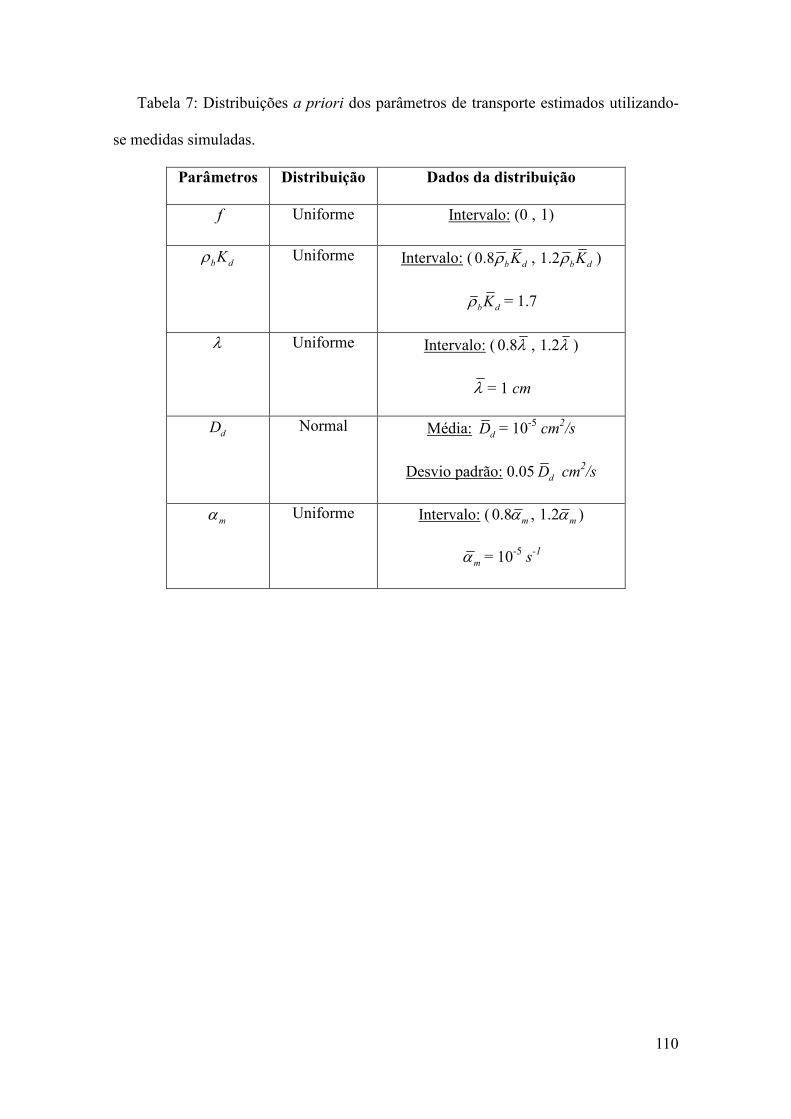
110
Tabela 7: Distribuições a priori dos parâmetros de transporte estimados utilizando-
se medidas simuladas.
Parâmetros Distribuição Dados da distribuição
f Uniforme Intervalo: (0 , 1)
b dKρ Uniforme Intervalo: ( 0.8 b dKρ , 1.2 b dKρ )
b dKρ = 1.7
λ Uniforme Intervalo: ( 0.8λ , 1.2λ )
λ = 1 cm
dD Normal Média: dD = 10-5 cm2/s
Desvio padrão: 0.05dD cm2/s
mα Uniforme Intervalo: ( 0.8 mα , 1.2 mα )
mα = 10-5 s-1

111
Tabela 8: Estimativas dos parâmetros de transporte obtidas com medidas simuladas. Parâmetro Média Intervalo de 99% de
confiança Valor exato
rθ 0.0538 (0.0537 , 0.0539) 0.046
sθ 0.393 (0.392 , 0.393) 0.388
sK (cm/s) 1.8099x10-3 (1.8097x10-3 , 1.810x10-3) 1.80x10-3
α (cm-1) 0.035909 (0.035907 , 0.035912) 0.036
n 3.3769 (3.3754 , 3.3783) 3.363
f 0.500 (0.497 , 0.503) 0.5
b dKρ 1.69 (1.67 , 1.71) 1.70
λ (cm) 1.00 (0.99 , 1.01) 1.00
dD (cm2/s) 1.000x10-5 (0.997 , 1.004) x 10-5 1,0x10-5
mα (s-1) 1.000x10-5 (0.990 , 1.010) x 10-5 1,0x10-5
Os histogramas das distribuições a posteriori dos parâmetros de transporte são
apresentados nas figuras (29a-e). Deve-se notar que as distribuições são, de maneira
geral, Gaussianas, exceto para Dd em virtude de seu coeficiente de sensibilidade ser
nulo.
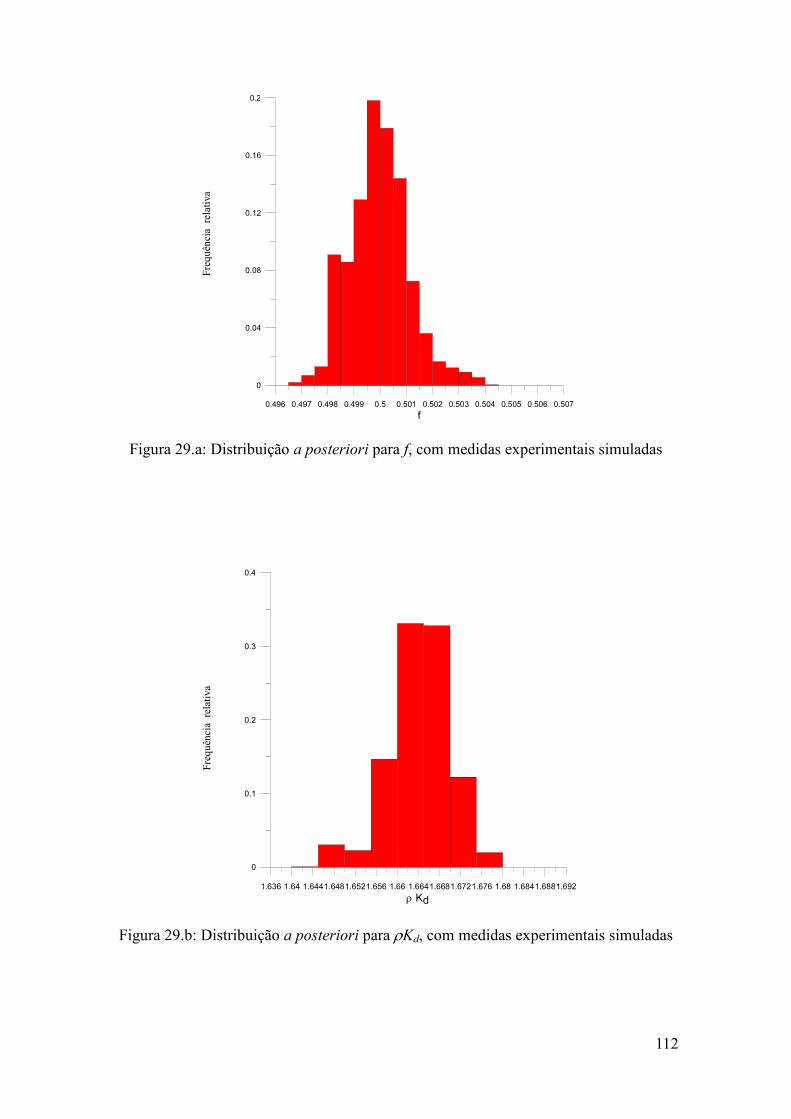
112
0.496 0.497 0.498 0.499 0.5 0.501 0.502 0.503 0.504 0.505 0.506 0.507
f
0
0.04
0.08
0.12
0.16
0.2
Figura 29.a: Distribuição a posteriori para f, com medidas experimentais simuladas
1.636 1.64 1.6441.6481.6521.656 1.66 1.6641.6681.6721.676 1.68 1.6841.6881.692
ρ Kd
0
0.1
0.2
0.3
0.4
Relative Frequency
Figura 29.b: Distribuição a posteriori para ρKd, com medidas experimentais simuladas
Freq
uênc
ia r
elat
iva
Freq
uênc
ia r
elat
iva

113
9.98E-006 1E-005 1.002E-005 1.004E-005 1.006E-005
Dd(cm2/s)
0
0.05
0.1
0.15
0.2
0.25
Figura 29.c: Distribuição a posteriori para Dd, com medidas experimentais simuladas
0.94 0.945 0.95 0.955 0.96 0.965 0.97 0.975 0.98 0.985 0.99 0.995 1 1.005 1.01
λ (cm)
0
0.1
0.2
0.3
0.4
Figura 29.d: Distribuição a posteriori para λ, com medidas experimentais simuladas
Freq
uênc
ia r
elat
iva
Freq
uênc
ia r
elat
iva
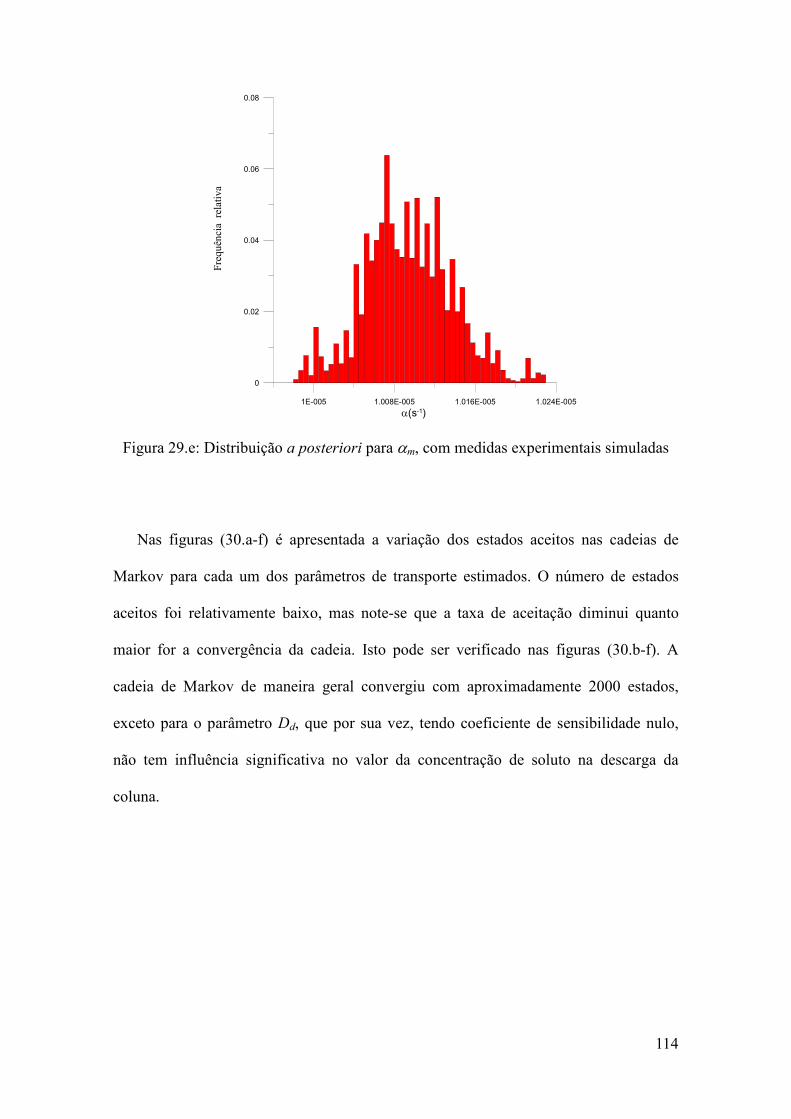
114
1E-005 1.008E-005 1.016E-005 1.024E-005
α(s-1)
0
0.02
0.04
0.06
0.08
Figura 29.e: Distribuição a posteriori para αm, com medidas experimentais simuladas
Nas figuras (30.a-f) é apresentada a variação dos estados aceitos nas cadeias de
Markov para cada um dos parâmetros de transporte estimados. O número de estados
aceitos foi relativamente baixo, mas note-se que a taxa de aceitação diminui quanto
maior for a convergência da cadeia. Isto pode ser verificado nas figuras (30.b-f). A
cadeia de Markov de maneira geral convergiu com aproximadamente 2000 estados,
exceto para o parâmetro Dd, que por sua vez, tendo coeficiente de sensibilidade nulo,
não tem influência significativa no valor da concentração de soluto na descarga da
coluna.
Freq
uênc
ia r
elat
iva
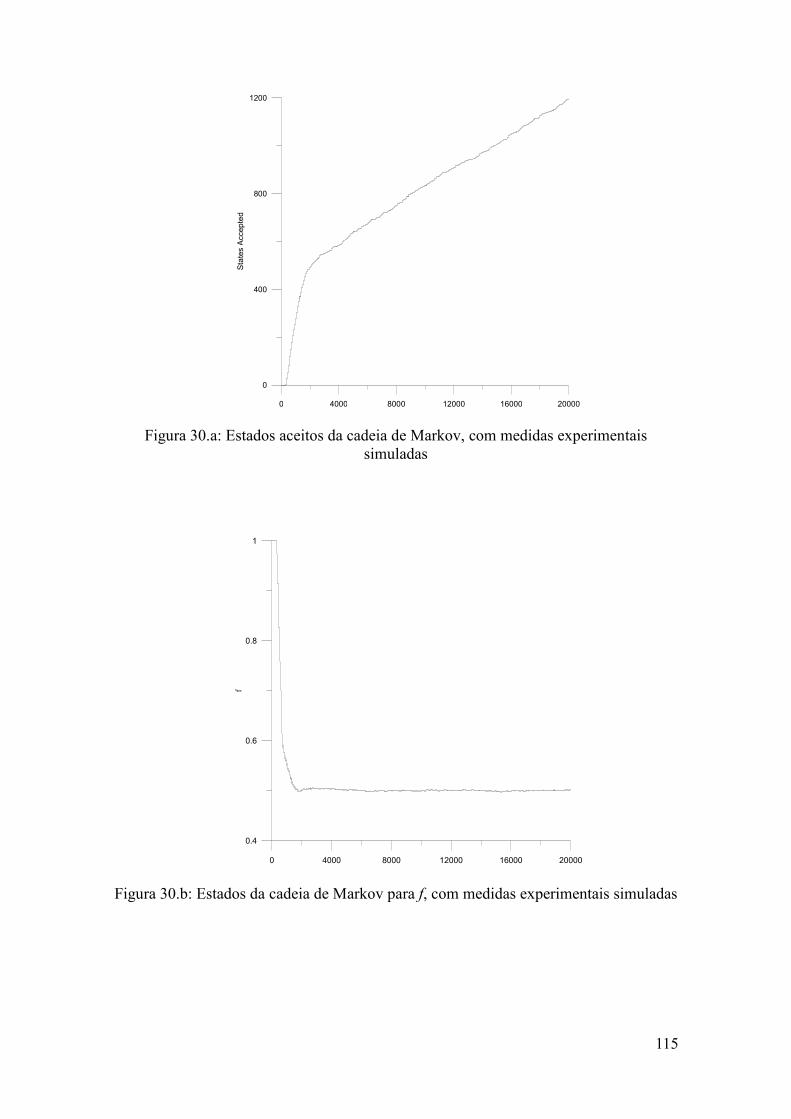
115
0 4000 8000 12000 16000 20000
0
400
800
1200
States Accepted
Figura 30.a: Estados aceitos da cadeia de Markov, com medidas experimentais simuladas
Figura 30.b: Estados da cadeia de Markov para f, com medidas experimentais simuladas
0 4000 8000 12000 16000 20000States of the Markov Chain
0.4
0.6
0.8
1
f
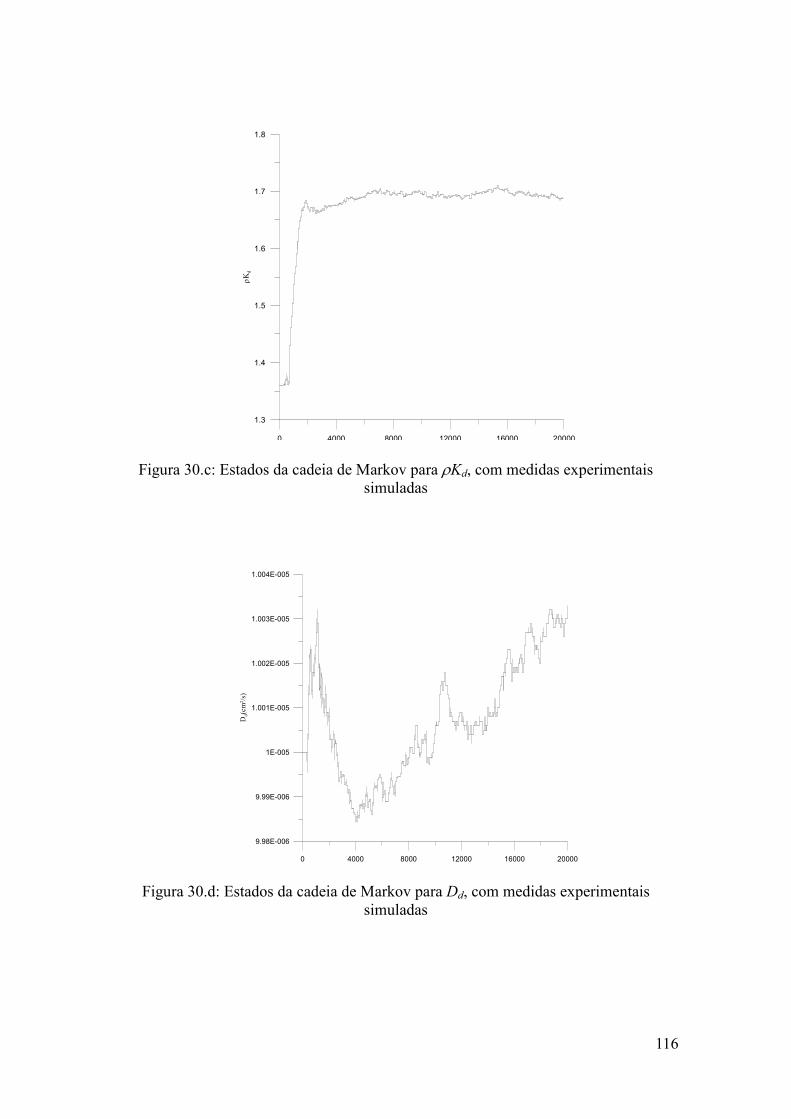
116
0 4000 8000 12000 16000 20000
1.3
1.4
1.5
1.6
1.7
1.8
ρKd
Figura 30.c: Estados da cadeia de Markov para ρKd, com medidas experimentais simuladas
0 4000 8000 12000 16000 20000States of the Markov Chain
9.98E-006
9.99E-006
1E-005
1.001E-005
1.002E-005
1.003E-005
1.004E-005
Dd(
cm2 /
s)
Figura 30.d: Estados da cadeia de Markov para Dd, com medidas experimentais simuladas
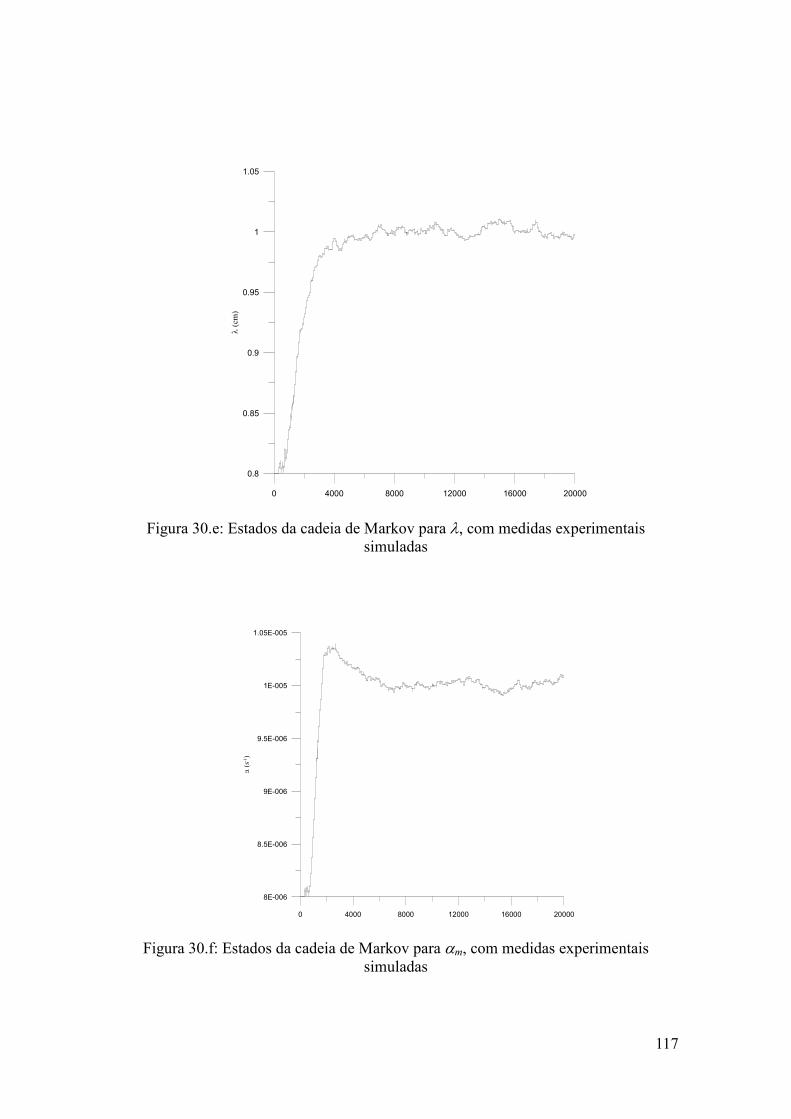
117
Figura 30.e: Estados da cadeia de Markov para λ, com medidas experimentais simuladas
0 4000 8000 12000 16000 20000States of the Markov Chain
8E-006
8.5E-006
9E-006
9.5E-006
1E-005
1.05E-005
α (
s-1)
Figura 30.f: Estados da cadeia de Markov para αm, com medidas experimentais simuladas
0 4000 8000 12000 16000 20000States of the Markov Chain
0.8
0.85
0.9
0.95
1
1.05
λ (
cm)
118
A convergência das cadeias de Markov e a distribuição a posteriori Gaussiana dos
parâmetros hidráulicos e de transporte, com erros randômicos, estimados neste caso
indicam a acurácia do método de solução do problema inverso utilizado para o caso em
que se utiliza medidas simuladas para a carga na posição do tensiômetro afixado na
coluna de solo. O passo seguinte no trabalho é repetir-se o procedimento de estimativa
de parâmetros, desta vez utilizando-se medidas experimentais reais para a carga e
concentração de soluto.
119
4.2.2.2 Estimativas utilizando-se medidas experimentais reais
As primeiras tentativas de se estimar o vetor de parâmetros hidráulicos com medidas
experimentais reais não foram bem sucedidas, uma vez que as curvas experimental e
teórica, obtida a partir das equações (2.a-d) apresentavam perfis distintos, quaisquer que
fossem as distribuições a priori dos parâmetros e passos de procura na escolha de
pontos amostrais da cadeia de Markov. Após uma série de análises, percebeu-se que ao
se alterar o valor inicial da carga na modelagem do problema direto do código
computacional de estimativa de parâmetros, as curvas começavam a apresentar uma
melhor concordância. Como, de acordo com os procedimentos descritos na seção 3.3, o
solo foi depositado na coluna acrílica inicialmente saturado, sendo depois retirado o
excesso de água, era muito provável que o teor de umidade do solo utilizado tivesse um
valor inicial diferente daquele obtido a partir da curva de retenção para a pressão
negativa de 66 cm lida pelo tensiômetro dentro da coluna de solo no início do
experimento. Optou-se então por modificar o vetor de parâmetros hidráulicos, de modo
a se estimar também o valor da carga correspondente ao teor de umidade no início do
experimento e definí-lo como valor inicial da carga dentro da coluna de solo na posição
do tensiômetro, h0, assim como o gradiente de pressão ao longo da coluna, δh. Assim, o
vetor de parâmetros hidráulicos passou a ser representado por
0[ , , , , , , ]T
Hidráulico s s rK n h hθ θ α δ=P .
Esta medida surtiu efeito desejado, uma vez que as curvas experimental e teórica de
carga passaram a apresentar uma concordância razoável, embora o valor estimado para
a carga inicial na posição do tensiômetro fosse de fato diferente daquele medido
experimentalmente. As informações a priori usadas para os parâmetros são
apresentadas na tabela 9. Nota-se que se admitiu um valor alto para o desvio padrão de
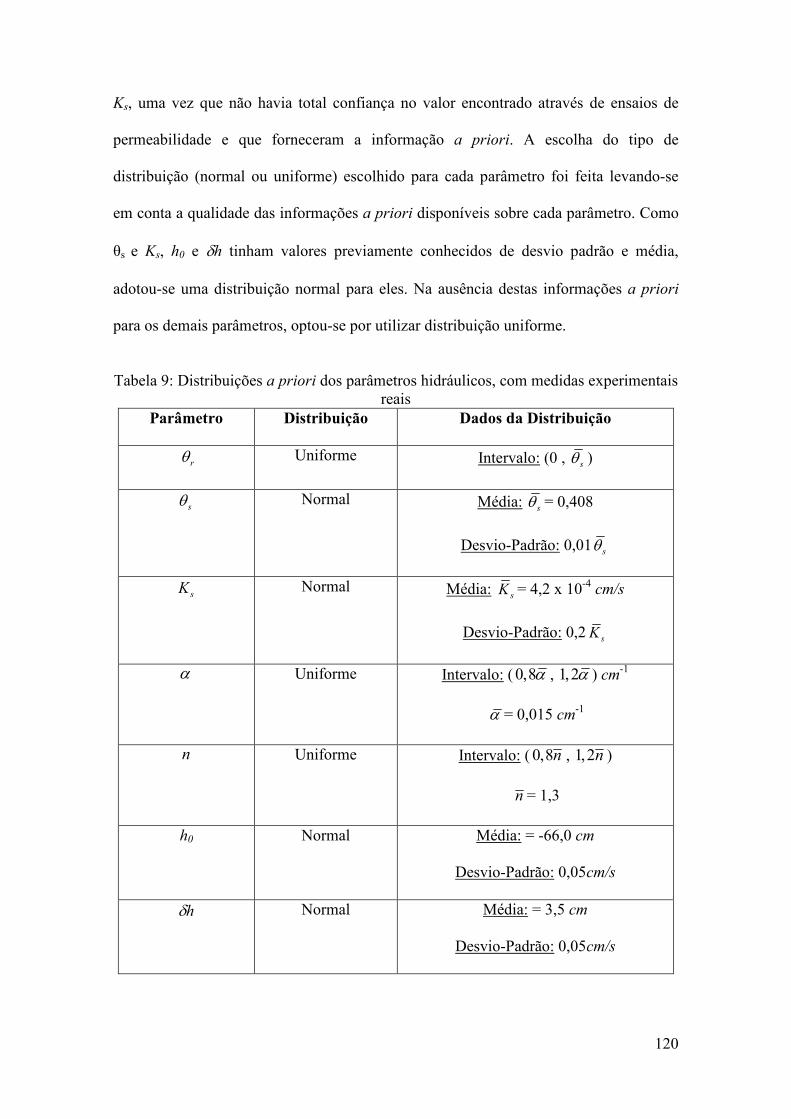
120
Ks, uma vez que não havia total confiança no valor encontrado através de ensaios de
permeabilidade e que forneceram a informação a priori. A escolha do tipo de
distribuição (normal ou uniforme) escolhido para cada parâmetro foi feita levando-se
em conta a qualidade das informações a priori disponíveis sobre cada parâmetro. Como
θs e Ks, h0 e δh tinham valores previamente conhecidos de desvio padrão e média,
adotou-se uma distribuição normal para eles. Na ausência destas informações a priori
para os demais parâmetros, optou-se por utilizar distribuição uniforme.
Tabela 9: Distribuições a priori dos parâmetros hidráulicos, com medidas experimentais
reais Parâmetro Distribuição Dados da Distribuição
rθ Uniforme Intervalo: (0 , sθ )
sθ Normal Média: sθ = 0,408
Desvio-Padrão: 0,01sθ
sK Normal Média: sK = 4,2 x 10-4 cm/s
Desvio-Padrão: 0,2sK
α Uniforme Intervalo: (0,8α , 1,2α ) cm-1
α = 0,015 cm-1
n Uniforme Intervalo: ( 0,8n , 1,2n )
n = 1,3
h0 Normal Média: = -66,0 cm
Desvio-Padrão: 0,05cm/s
δh Normal Média: = 3,5 cm
Desvio-Padrão: 0,05cm/s
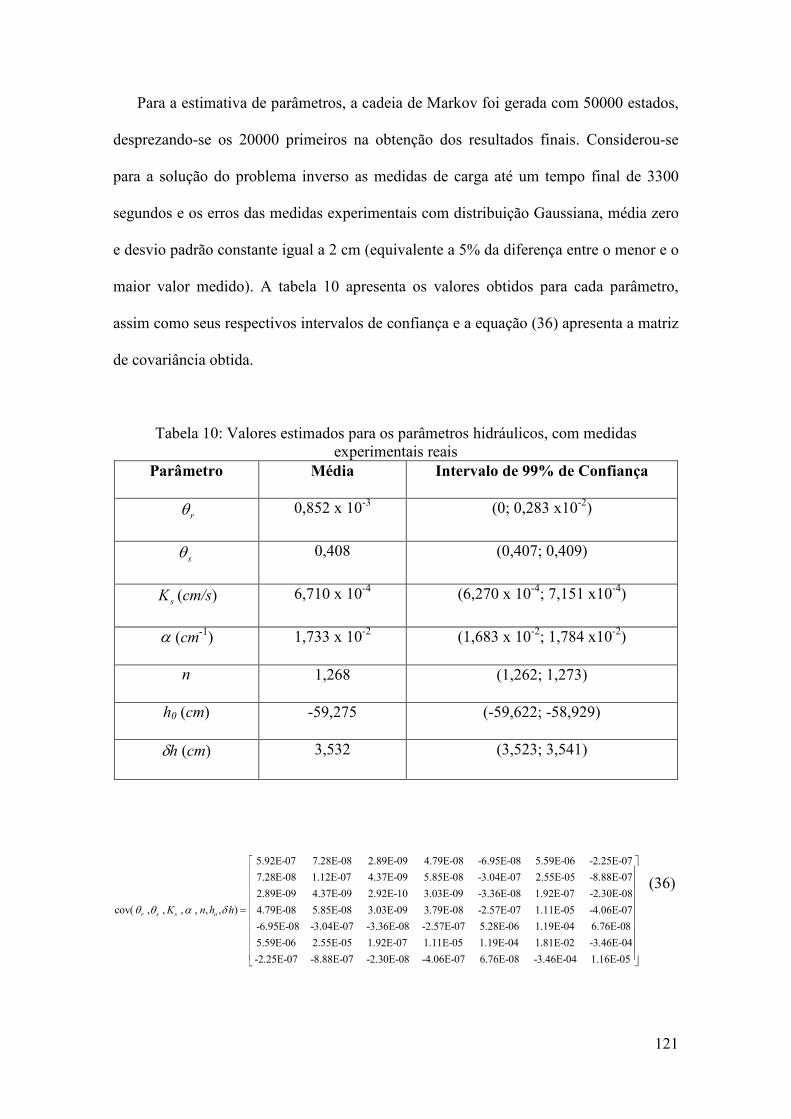
121
Para a estimativa de parâmetros, a cadeia de Markov foi gerada com 50000 estados,
desprezando-se os 20000 primeiros na obtenção dos resultados finais. Considerou-se
para a solução do problema inverso as medidas de carga até um tempo final de 3300
segundos e os erros das medidas experimentais com distribuição Gaussiana, média zero
e desvio padrão constante igual a 2 cm (equivalente a 5% da diferença entre o menor e o
maior valor medido). A tabela 10 apresenta os valores obtidos para cada parâmetro,
assim como seus respectivos intervalos de confiança e a equação (36) apresenta a matriz
de covariância obtida.
Tabela 10: Valores estimados para os parâmetros hidráulicos, com medidas experimentais reais
Parâmetro Média Intervalo de 99% de Confiança
rθ 0,852 x 10-3 (0; 0,283 x10-2)
sθ 0,408 (0,407; 0,409)
sK (cm/s) 6,710 x 10-4 (6,270 x 10-4; 7,151 x10-4)
α (cm-1) 1,733 x 10-2 (1,683 x 10-2; 1,784 x10-2)
n 1,268 (1,262; 1,273)
h0 (cm) -59,275 (-59,622; -58,929)
δh (cm) 3,532 (3,523; 3,541)
5.92E-07 7.28E-08 2.89E-09 4.79E-08 -6.95E-08 5.59E-06 -2.25E-07
7.28E-08 1.12E-07 4.37E-09 5.85E-08 -3.04E-07 2.55E-05 -8.88E-07
2.89E-09 4.37E-09 2.92E-10 3.03E-09 -3.36E-08 1.92E-07 -2.30E-08
cov( , , , , , , ) 4.r s s oK n h hθ θ α δ = 79E-08 5.85E-08 3.03E-09 3.79E-08 -2.57E-07 1.11E-05 -4.06E-07
-6.95E-08 -3.04E-07 -3.36E-08 -2.57E-07 5.28E-06 1.19E-04 6.76E-08
5.59E-06 2.55E-05 1.92E-07 1.11E-05 1.19E-04 1.81E-02 -3.46E-04
-2.25E-07 -8.88E-07 -2.30E-08 -4.06E-07 6.76E-08 -3.46E-04 1.16E-05
(36)
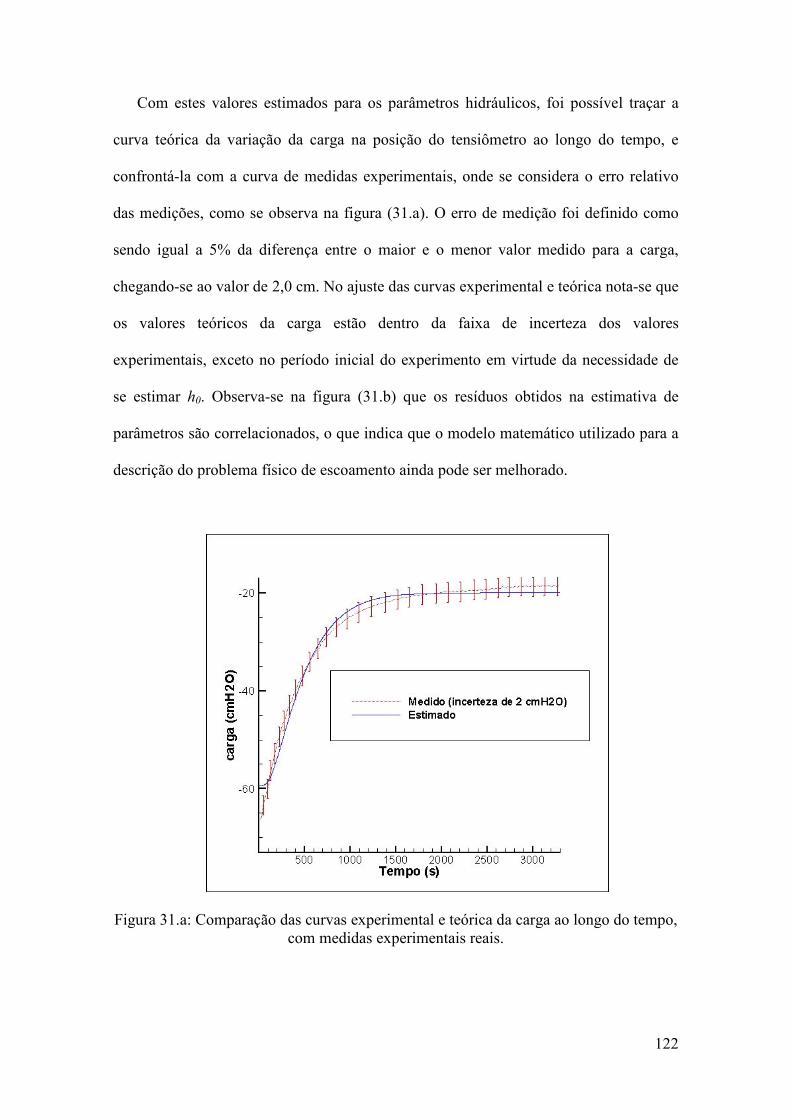
122
Com estes valores estimados para os parâmetros hidráulicos, foi possível traçar a
curva teórica da variação da carga na posição do tensiômetro ao longo do tempo, e
confrontá-la com a curva de medidas experimentais, onde se considera o erro relativo
das medições, como se observa na figura (31.a). O erro de medição foi definido como
sendo igual a 5% da diferença entre o maior e o menor valor medido para a carga,
chegando-se ao valor de 2,0 cm. No ajuste das curvas experimental e teórica nota-se que
os valores teóricos da carga estão dentro da faixa de incerteza dos valores
experimentais, exceto no período inicial do experimento em virtude da necessidade de
se estimar h0. Observa-se na figura (31.b) que os resíduos obtidos na estimativa de
parâmetros são correlacionados, o que indica que o modelo matemático utilizado para a
descrição do problema físico de escoamento ainda pode ser melhorado.
Figura 31.a: Comparação das curvas experimental e teórica da carga ao longo do tempo, com medidas experimentais reais.
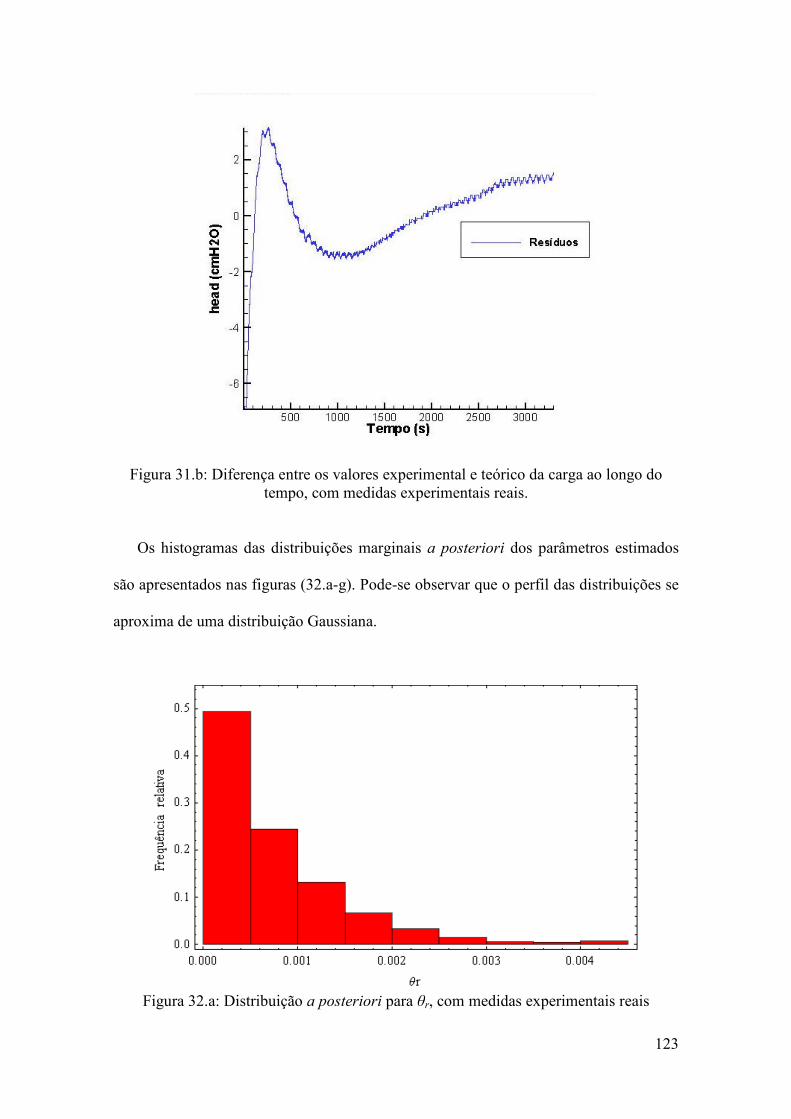
123
Figura 31.b: Diferença entre os valores experimental e teórico da carga ao longo do tempo, com medidas experimentais reais.
Os histogramas das distribuições marginais a posteriori dos parâmetros estimados
são apresentados nas figuras (32.a-g). Pode-se observar que o perfil das distribuições se
aproxima de uma distribuição Gaussiana.
Figura 32.a: Distribuição a posteriori para θr, com medidas experimentais reais
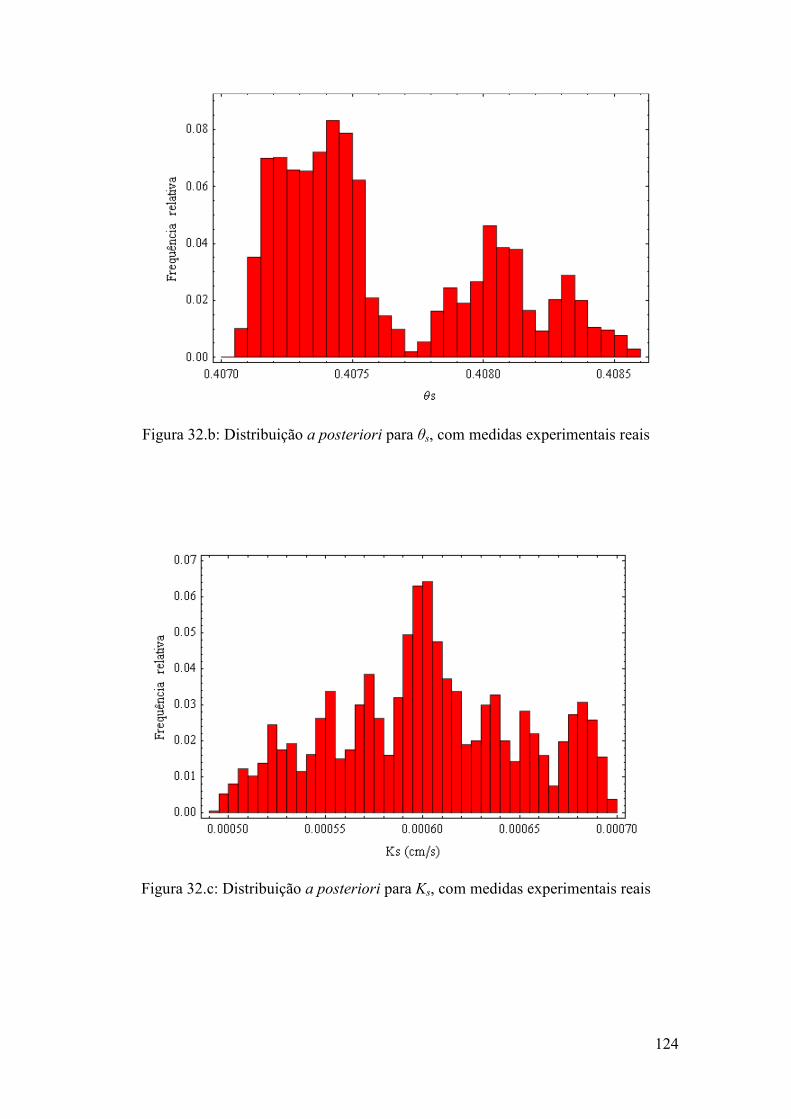
124
Figura 32.b: Distribuição a posteriori para θs, com medidas experimentais reais
Figura 32.c: Distribuição a posteriori para Ks, com medidas experimentais reais
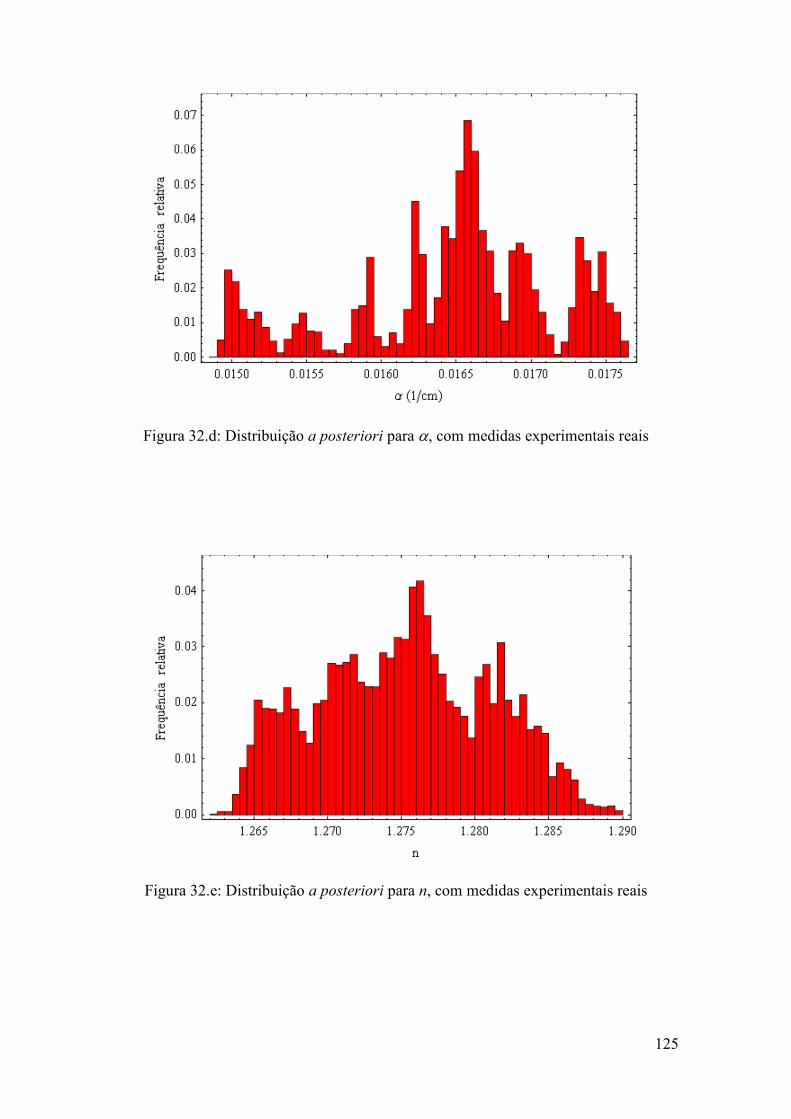
125
Figura 32.d: Distribuição a posteriori para α, com medidas experimentais reais
Figura 32.e: Distribuição a posteriori para n, com medidas experimentais reais

126
Figura 32.f: Distribuição a posteriori para h0, com medidas experimentais reais
Figura 32.g: Distribuição a posteriori para δh, com medidas experimentais reais
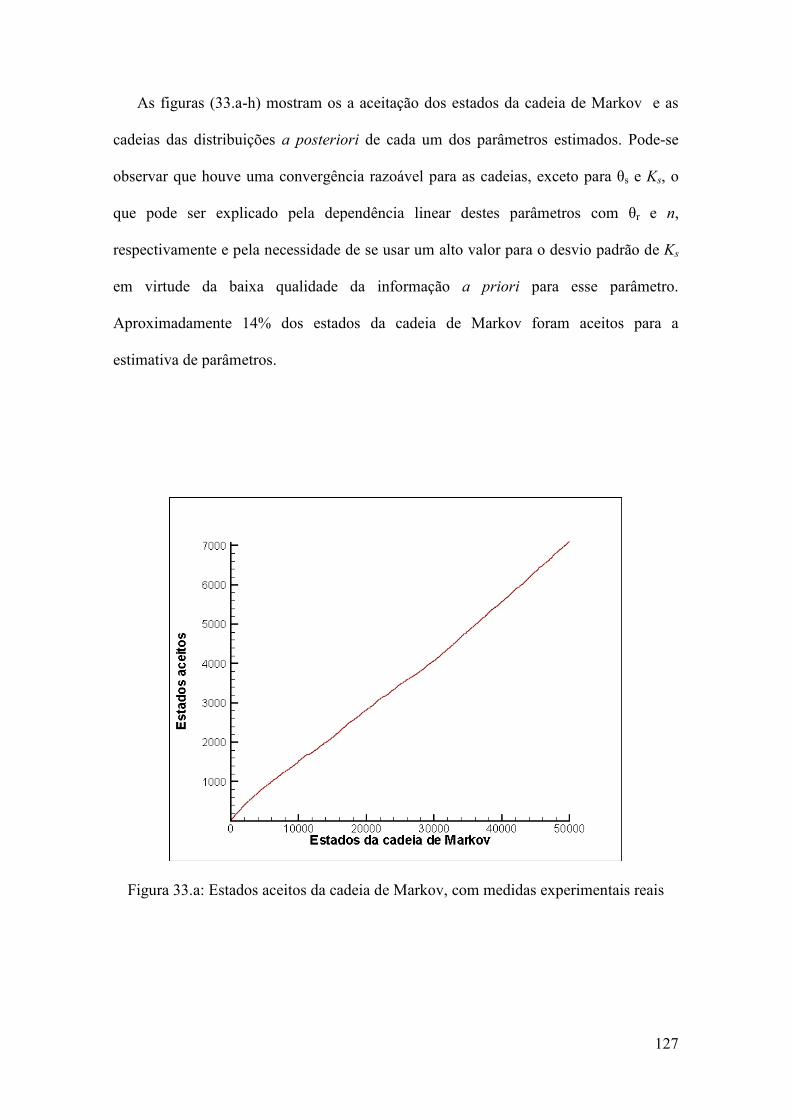
127
As figuras (33.a-h) mostram os a aceitação dos estados da cadeia de Markov e as
cadeias das distribuições a posteriori de cada um dos parâmetros estimados. Pode-se
observar que houve uma convergência razoável para as cadeias, exceto para θs e Ks, o
que pode ser explicado pela dependência linear destes parâmetros com θr e n,
respectivamente e pela necessidade de se usar um alto valor para o desvio padrão de Ks
em virtude da baixa qualidade da informação a priori para esse parâmetro.
Aproximadamente 14% dos estados da cadeia de Markov foram aceitos para a
estimativa de parâmetros.
Figura 33.a: Estados aceitos da cadeia de Markov, com medidas experimentais reais

128
Figura 33.b: Estados da cadeia de Markov para θr, com medidas experimentais reais
Figura 33.c: Estados da cadeia de Markov para θs, com medidas experimentais reais
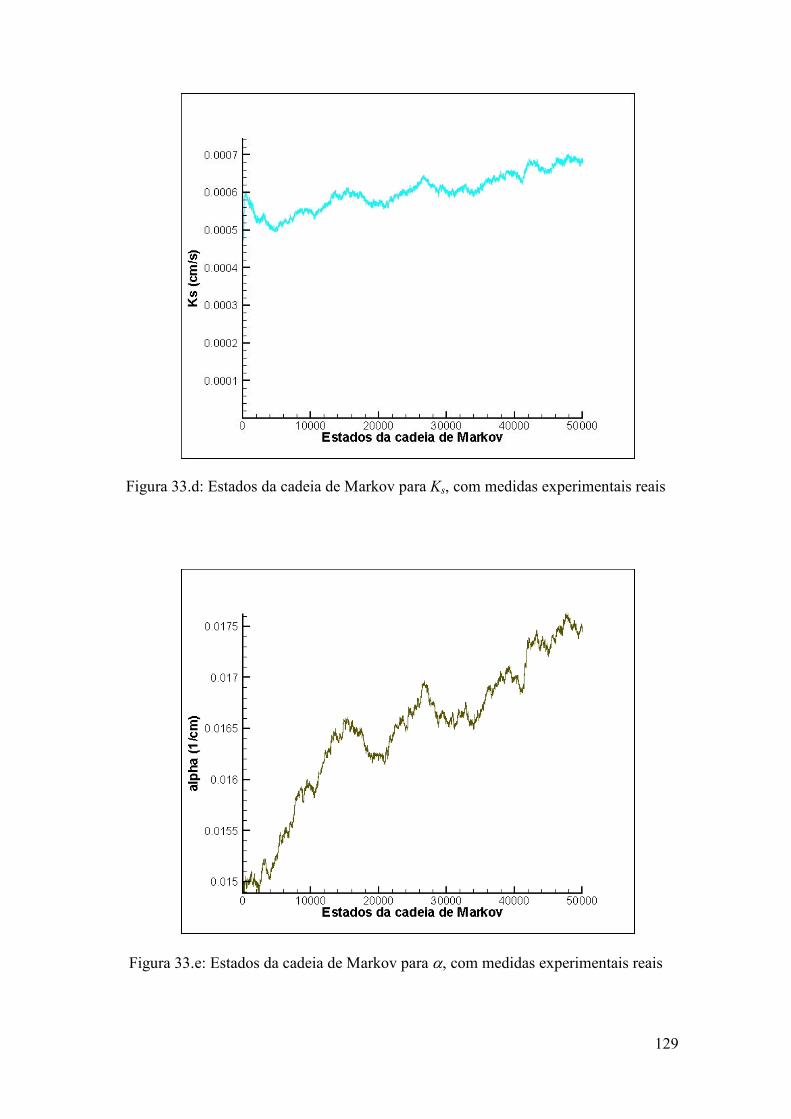
129
Figura 33.d: Estados da cadeia de Markov para Ks, com medidas experimentais reais
Figura 33.e: Estados da cadeia de Markov para α, com medidas experimentais reais
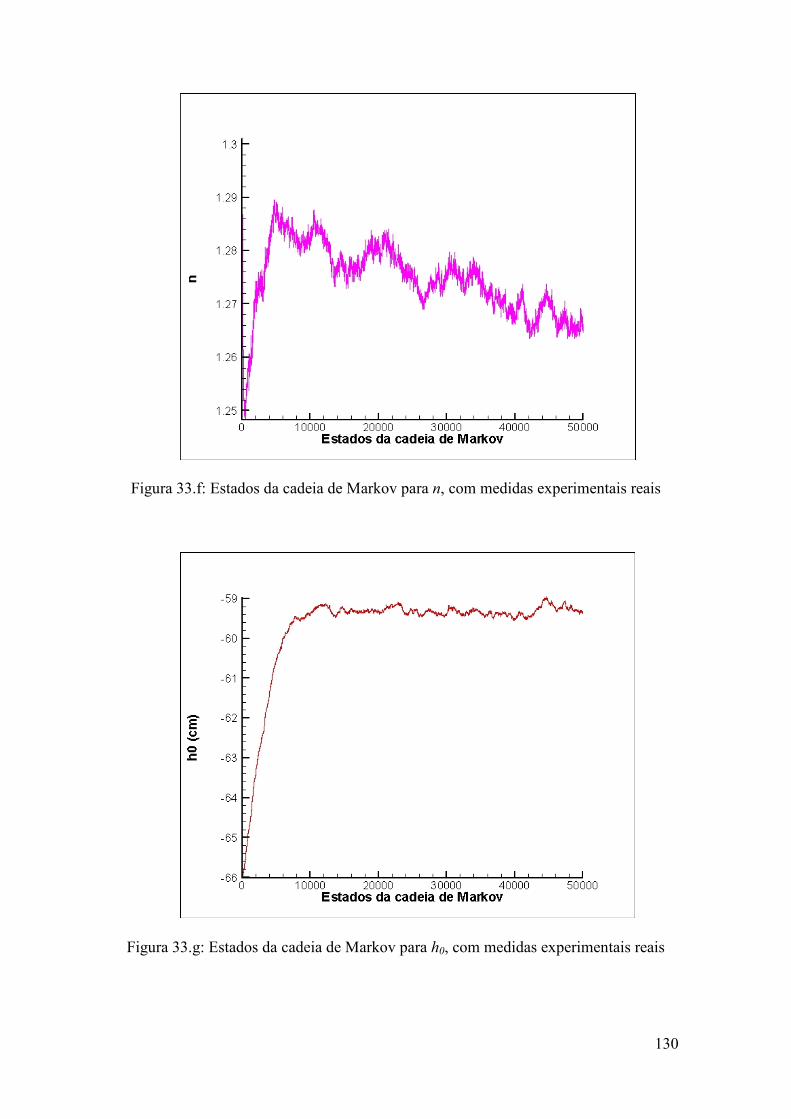
130
Figura 33.f: Estados da cadeia de Markov para n, com medidas experimentais reais
Figura 33.g: Estados da cadeia de Markov para h0, com medidas experimentais reais
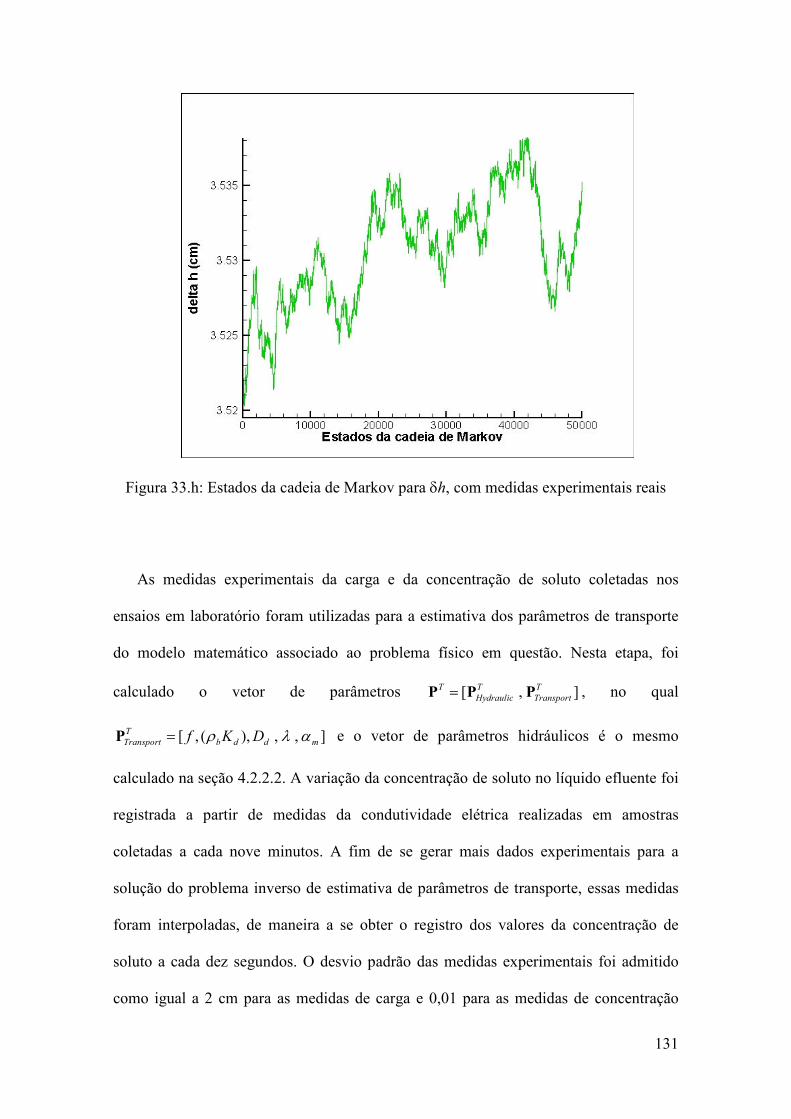
131
Figura 33.h: Estados da cadeia de Markov para δh, com medidas experimentais reais
As medidas experimentais da carga e da concentração de soluto coletadas nos
ensaios em laboratório foram utilizadas para a estimativa dos parâmetros de transporte
do modelo matemático associado ao problema físico em questão. Nesta etapa, foi
calculado o vetor de parâmetros [ , ]T T T
Hydraulic Transport=P P P , no qual
[ , ( ), , , ]T
Transport b d d mf K Dρ λ α=P e o vetor de parâmetros hidráulicos é o mesmo
calculado na seção 4.2.2.2. A variação da concentração de soluto no líquido efluente foi
registrada a partir de medidas da condutividade elétrica realizadas em amostras
coletadas a cada nove minutos. A fim de se gerar mais dados experimentais para a
solução do problema inverso de estimativa de parâmetros de transporte, essas medidas
foram interpoladas, de maneira a se obter o registro dos valores da concentração de
soluto a cada dez segundos. O desvio padrão das medidas experimentais foi admitido
como igual a 2 cm para as medidas de carga e 0,01 para as medidas de concentração
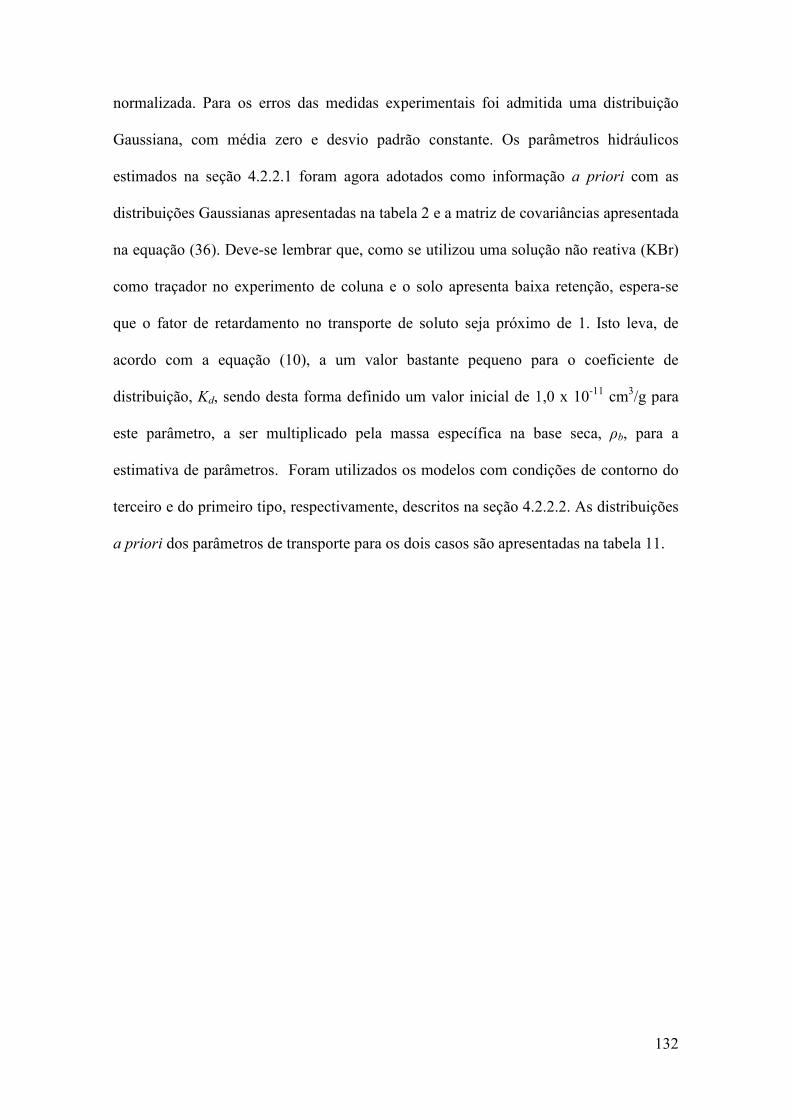
132
normalizada. Para os erros das medidas experimentais foi admitida uma distribuição
Gaussiana, com média zero e desvio padrão constante. Os parâmetros hidráulicos
estimados na seção 4.2.2.1 foram agora adotados como informação a priori com as
distribuições Gaussianas apresentadas na tabela 2 e a matriz de covariâncias apresentada
na equação (36). Deve-se lembrar que, como se utilizou uma solução não reativa (KBr)
como traçador no experimento de coluna e o solo apresenta baixa retenção, espera-se
que o fator de retardamento no transporte de soluto seja próximo de 1. Isto leva, de
acordo com a equação (10), a um valor bastante pequeno para o coeficiente de
distribuição, Kd, sendo desta forma definido um valor inicial de 1,0 x 10-11 cm3/g para
este parâmetro, a ser multiplicado pela massa específica na base seca, ρb, para a
estimativa de parâmetros. Foram utilizados os modelos com condições de contorno do
terceiro e do primeiro tipo, respectivamente, descritos na seção 4.2.2.2. As distribuições
a priori dos parâmetros de transporte para os dois casos são apresentadas na tabela 11.
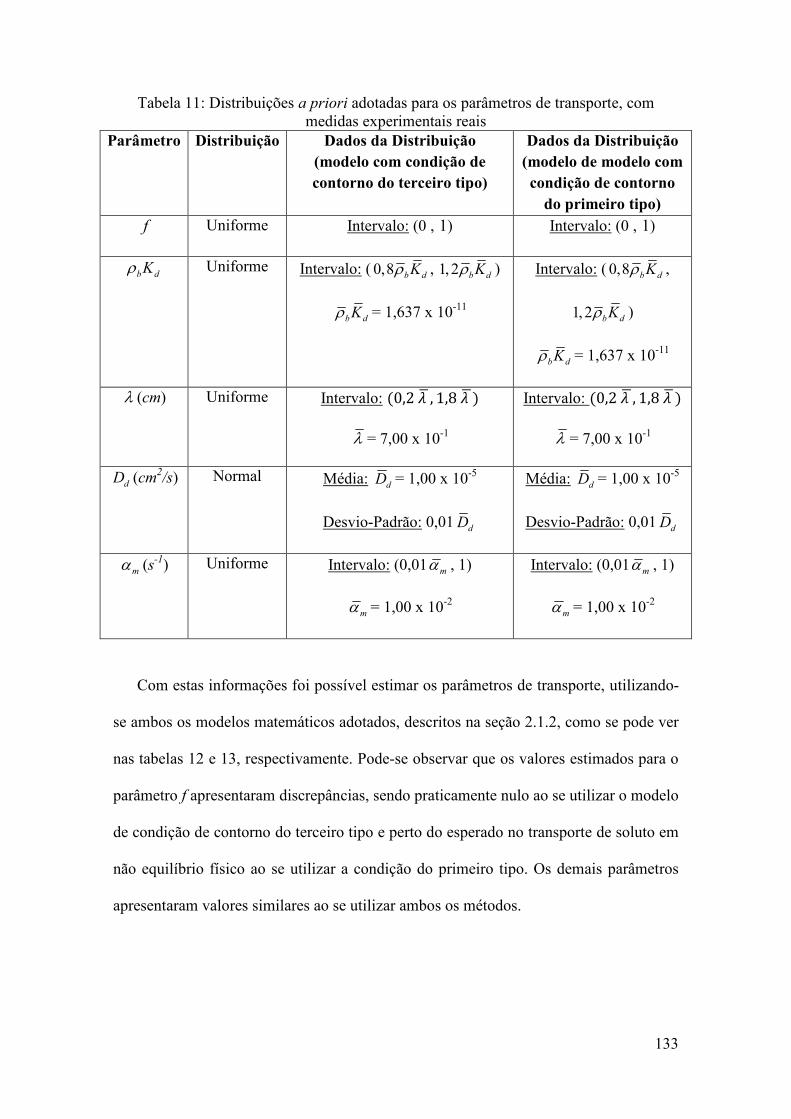
133
Tabela 11: Distribuições a priori adotadas para os parâmetros de transporte, com medidas experimentais reais
Parâmetro Distribuição Dados da Distribuição (modelo com condição de contorno do terceiro tipo)
Dados da Distribuição (modelo de modelo com condição de contorno do primeiro tipo)
f Uniforme Intervalo: (0 , 1) Intervalo: (0 , 1)
b dKρ Uniforme Intervalo: ( 0,8 b dKρ , 1,2 b dKρ )
b dKρ = 1,637 x 10-11
Intervalo: ( 0,8 b dKρ ,
1,2 b dKρ )
b dKρ = 1,637 x 10-11
λ (cm) Uniforme Intervalo: �0,2 > ?, 1,8 > ?�
λ = 7,00 x 10-1
Intervalo: �0,2 > ?, 1,8 > ?�
λ = 7,00 x 10-1
dD (cm2/s) Normal Média: dD = 1,00 x 10-5
Desvio-Padrão: 0,01dD
Média: dD = 1,00 x 10-5
Desvio-Padrão: 0,01dD
mα (s-1) Uniforme Intervalo: (0,01 mα , 1)
mα = 1,00 x 10-2
Intervalo: (0,01 mα , 1)
mα = 1,00 x 10-2
Com estas informações foi possível estimar os parâmetros de transporte, utilizando-
se ambos os modelos matemáticos adotados, descritos na seção 2.1.2, como se pode ver
nas tabelas 12 e 13, respectivamente. Pode-se observar que os valores estimados para o
parâmetro f apresentaram discrepâncias, sendo praticamente nulo ao se utilizar o modelo
de condição de contorno do terceiro tipo e perto do esperado no transporte de soluto em
não equilíbrio físico ao se utilizar a condição do primeiro tipo. Os demais parâmetros
apresentaram valores similares ao se utilizar ambos os métodos.
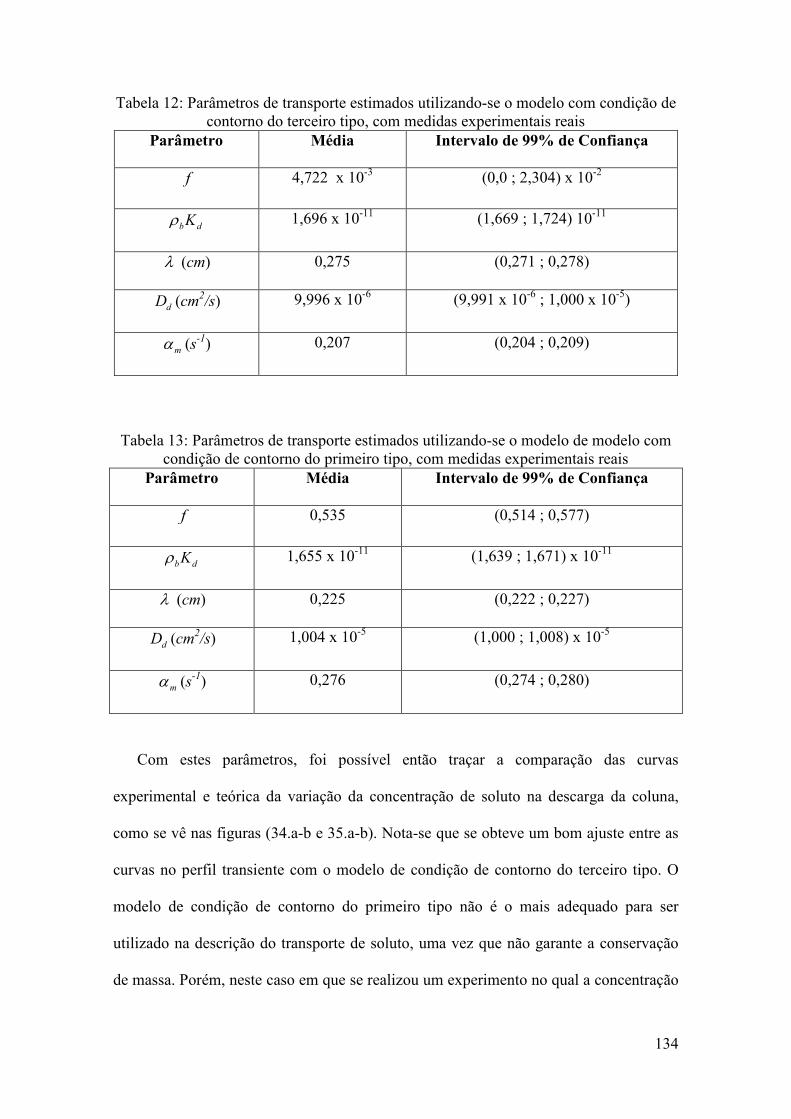
134
Tabela 12: Parâmetros de transporte estimados utilizando-se o modelo com condição de contorno do terceiro tipo, com medidas experimentais reais
Parâmetro Média Intervalo de 99% de Confiança
f 4,722 x 10-3 (0,0 ; 2,304) x 10-2
b dKρ 1,696 x 10-11 (1,669 ; 1,724) 10-11
λ (cm) 0,275 (0,271 ; 0,278)
dD (cm2/s) 9,996 x 10-6 (9,991 x 10-6 ; 1,000 x 10-5)
mα (s-1) 0,207 (0,204 ; 0,209)
Tabela 13: Parâmetros de transporte estimados utilizando-se o modelo de modelo com condição de contorno do primeiro tipo, com medidas experimentais reais
Parâmetro Média Intervalo de 99% de Confiança
f 0,535 (0,514 ; 0,577)
b dKρ 1,655 x 10-11 (1,639 ; 1,671) x 10-11
λ (cm) 0,225 (0,222 ; 0,227)
dD (cm2/s) 1,004 x 10-5 (1,000 ; 1,008) x 10-5
mα (s-1) 0,276 (0,274 ; 0,280)
Com estes parâmetros, foi possível então traçar a comparação das curvas
experimental e teórica da variação da concentração de soluto na descarga da coluna,
como se vê nas figuras (34.a-b e 35.a-b). Nota-se que se obteve um bom ajuste entre as
curvas no perfil transiente com o modelo de condição de contorno do terceiro tipo. O
modelo de condição de contorno do primeiro tipo não é o mais adequado para ser
utilizado na descrição do transporte de soluto, uma vez que não garante a conservação
de massa. Porém, neste caso em que se realizou um experimento no qual a concentração

135
de soluto na solução afluente é plenamente conhecida, o que consiste num caso
específico de concentração prescrita, o modelo de condição de contorno do primeiro
tipo foi capaz de descrever o transporte de soluto de maneira satisfatória, de maneira
que se obteve também uma ótima concordância entre as curvas do perfil transiente. A
figura (34.b) mostra que os resíduos (diferença entre os valores experimental e teórico)
tem valores próximos à incerteza das medidas de concentração ao se utilizar condições
de contorno do terceiro tipo no problema direto, enquanto a figura (35.b) apresenta
resíduos predominantemente inferiores à incerteza das medidas quando se utiliza
condições de contorno do primeiro tipo. Também se observa que os resíduos são
novamente correlacionados, o que indica que os modelos matemáticos utilizados ao
problema físico devem ser melhorados.
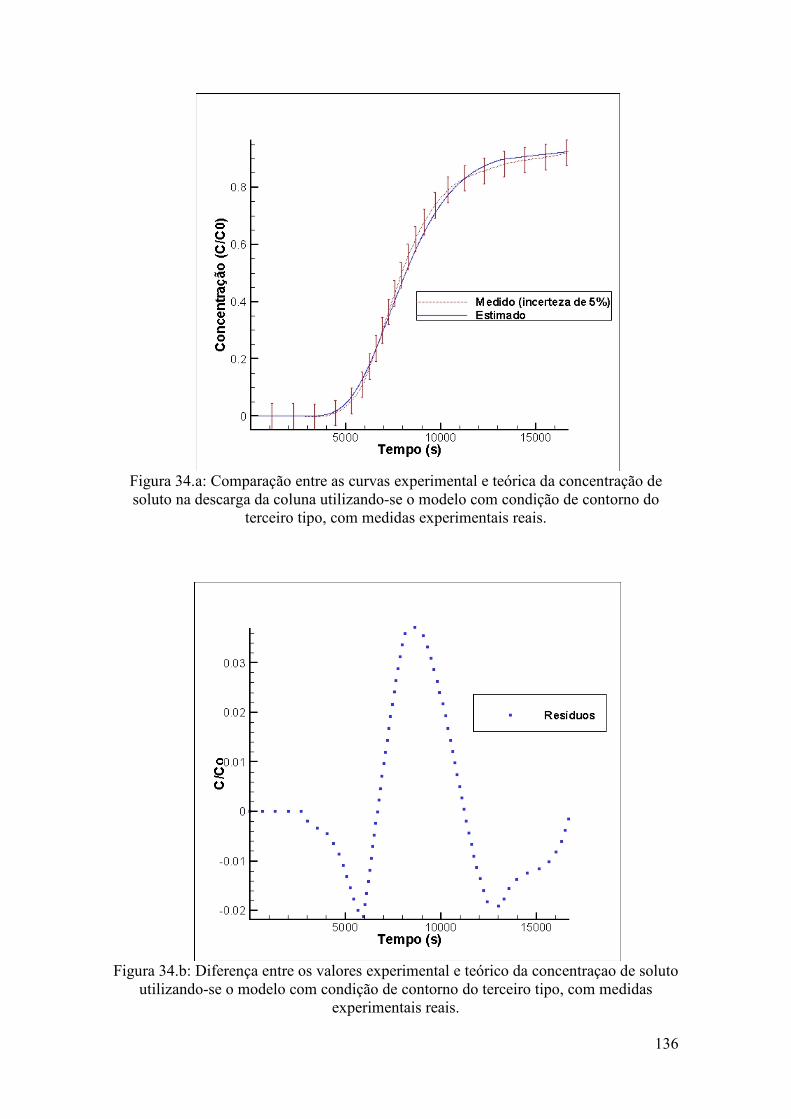
136
Figura 34.a: Comparação entre as curvas experimental e teórica da concentração de soluto na descarga da coluna utilizando-se o modelo com condição de contorno do
terceiro tipo, com medidas experimentais reais.
Figura 34.b: Diferença entre os valores experimental e teórico da concentraçao de soluto
utilizando-se o modelo com condição de contorno do terceiro tipo, com medidas experimentais reais.
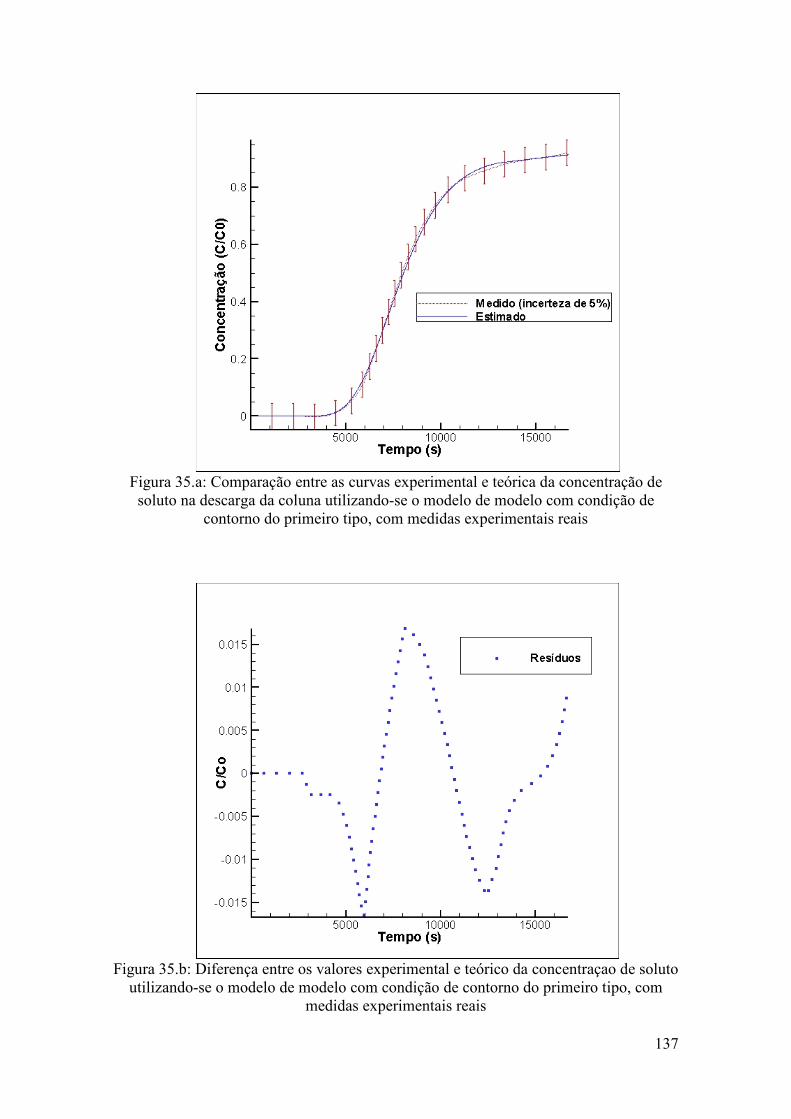
137
Figura 35.a: Comparação entre as curvas experimental e teórica da concentração de soluto na descarga da coluna utilizando-se o modelo de modelo com condição de
contorno do primeiro tipo, com medidas experimentais reais
Figura 35.b: Diferença entre os valores experimental e teórico da concentraçao de soluto
utilizando-se o modelo de modelo com condição de contorno do primeiro tipo, com medidas experimentais reais
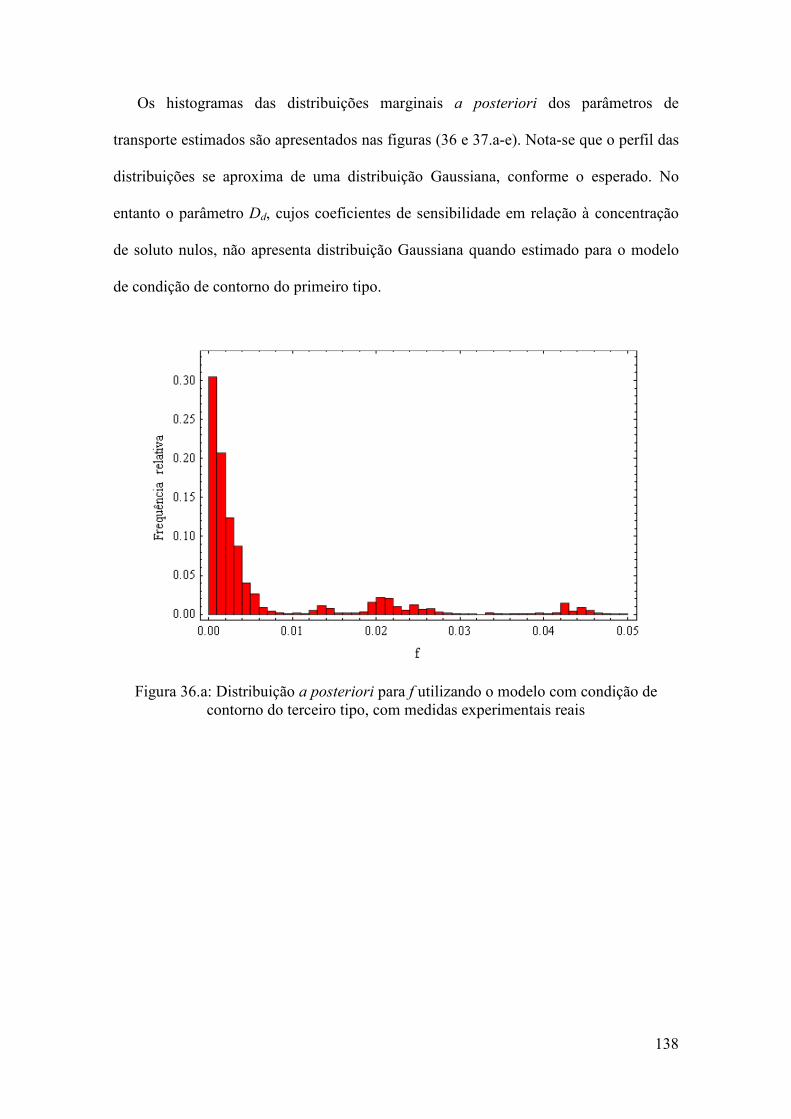
138
Os histogramas das distribuições marginais a posteriori dos parâmetros de
transporte estimados são apresentados nas figuras (36 e 37.a-e). Nota-se que o perfil das
distribuições se aproxima de uma distribuição Gaussiana, conforme o esperado. No
entanto o parâmetro Dd, cujos coeficientes de sensibilidade em relação à concentração
de soluto nulos, não apresenta distribuição Gaussiana quando estimado para o modelo
de condição de contorno do primeiro tipo.
Figura 36.a: Distribuição a posteriori para f utilizando o modelo com condição de contorno do terceiro tipo, com medidas experimentais reais
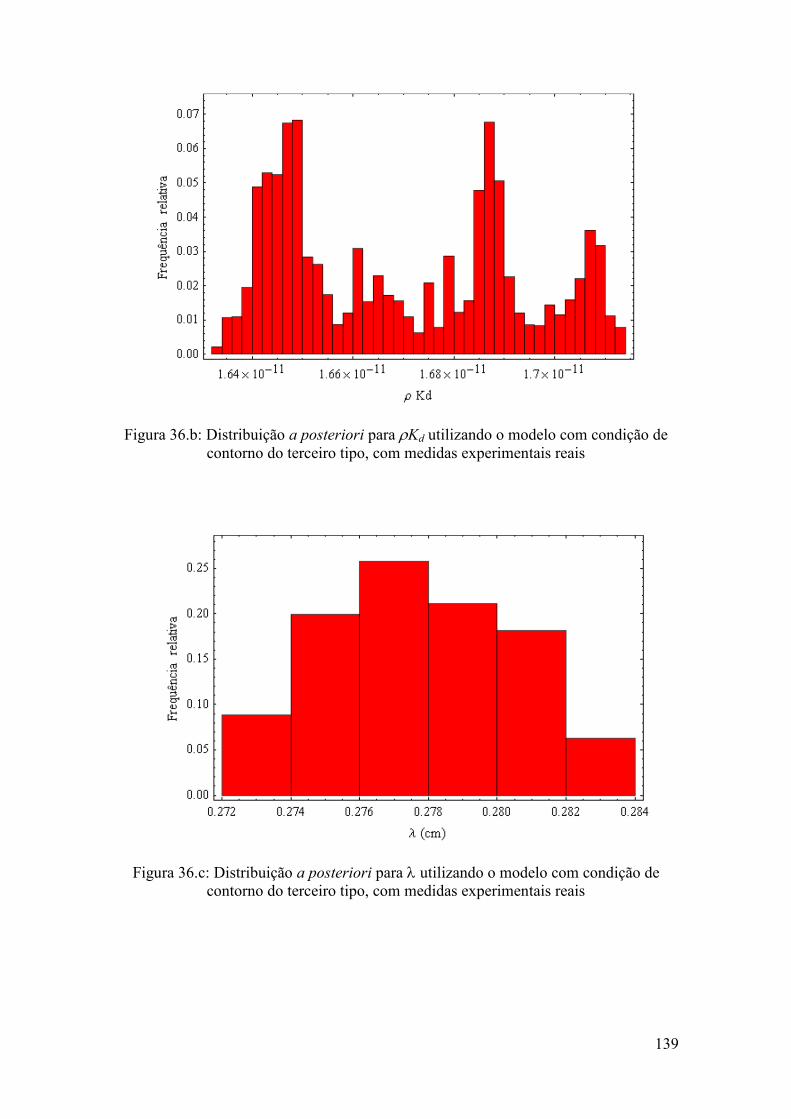
139
Figura 36.b: Distribuição a posteriori para ρKd utilizando o modelo com condição de contorno do terceiro tipo, com medidas experimentais reais
Figura 36.c: Distribuição a posteriori para λ utilizando o modelo com condição de contorno do terceiro tipo, com medidas experimentais reais
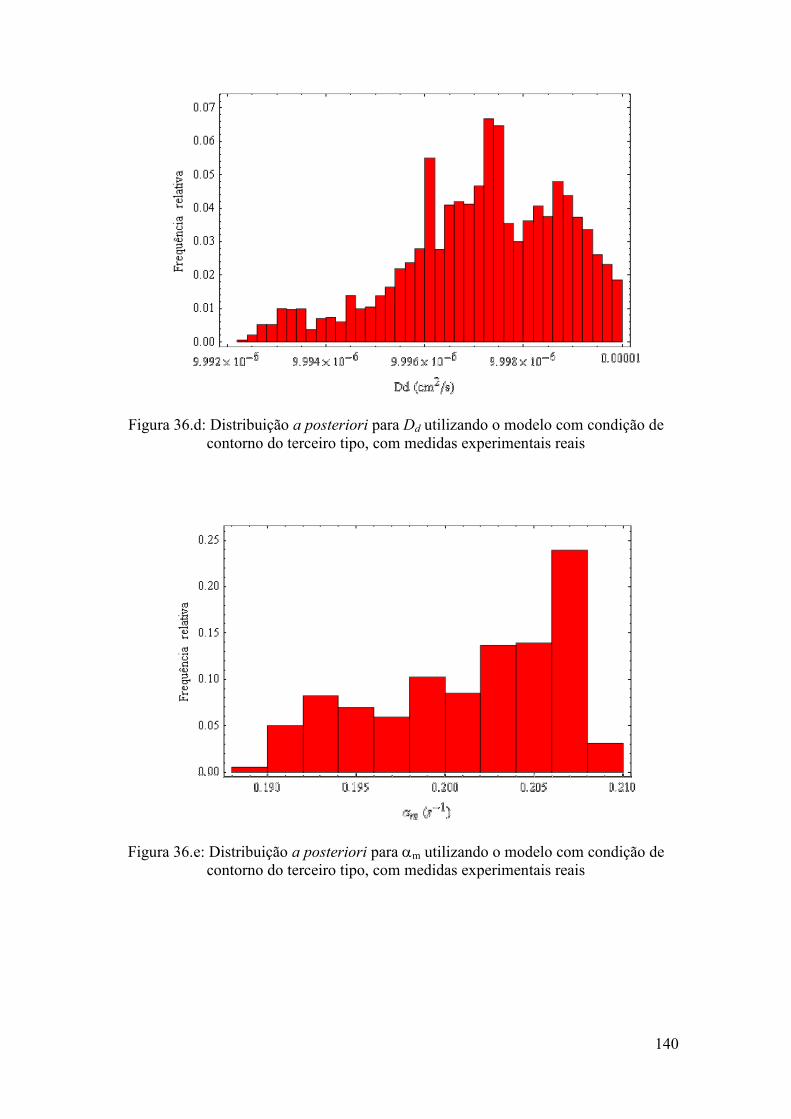
140
Figura 36.d: Distribuição a posteriori para Dd utilizando o modelo com condição de contorno do terceiro tipo, com medidas experimentais reais
Figura 36.e: Distribuição a posteriori para αm utilizando o modelo com condição de contorno do terceiro tipo, com medidas experimentais reais
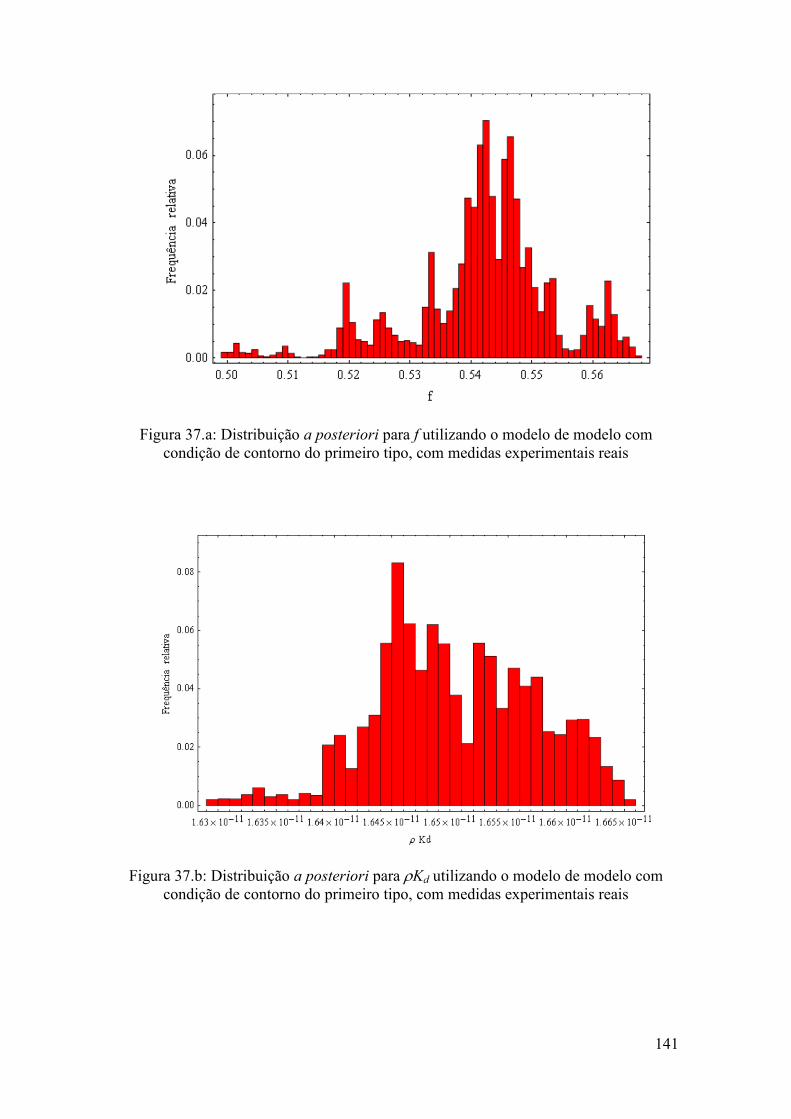
141
Figura 37.a: Distribuição a posteriori para f utilizando o modelo de modelo com condição de contorno do primeiro tipo, com medidas experimentais reais
Figura 37.b: Distribuição a posteriori para ρKd utilizando o modelo de modelo com condição de contorno do primeiro tipo, com medidas experimentais reais
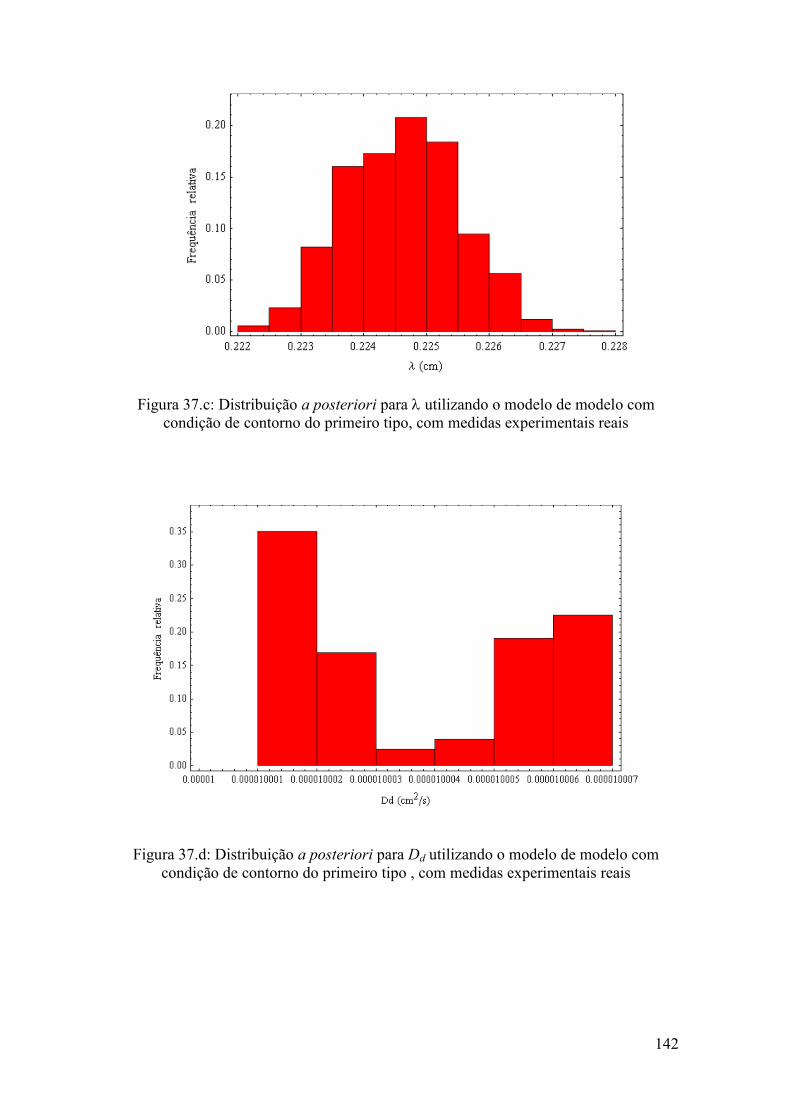
142
Figura 37.c: Distribuição a posteriori para λ utilizando o modelo de modelo com condição de contorno do primeiro tipo, com medidas experimentais reais
Figura 37.d: Distribuição a posteriori para Dd utilizando o modelo de modelo com condição de contorno do primeiro tipo , com medidas experimentais reais
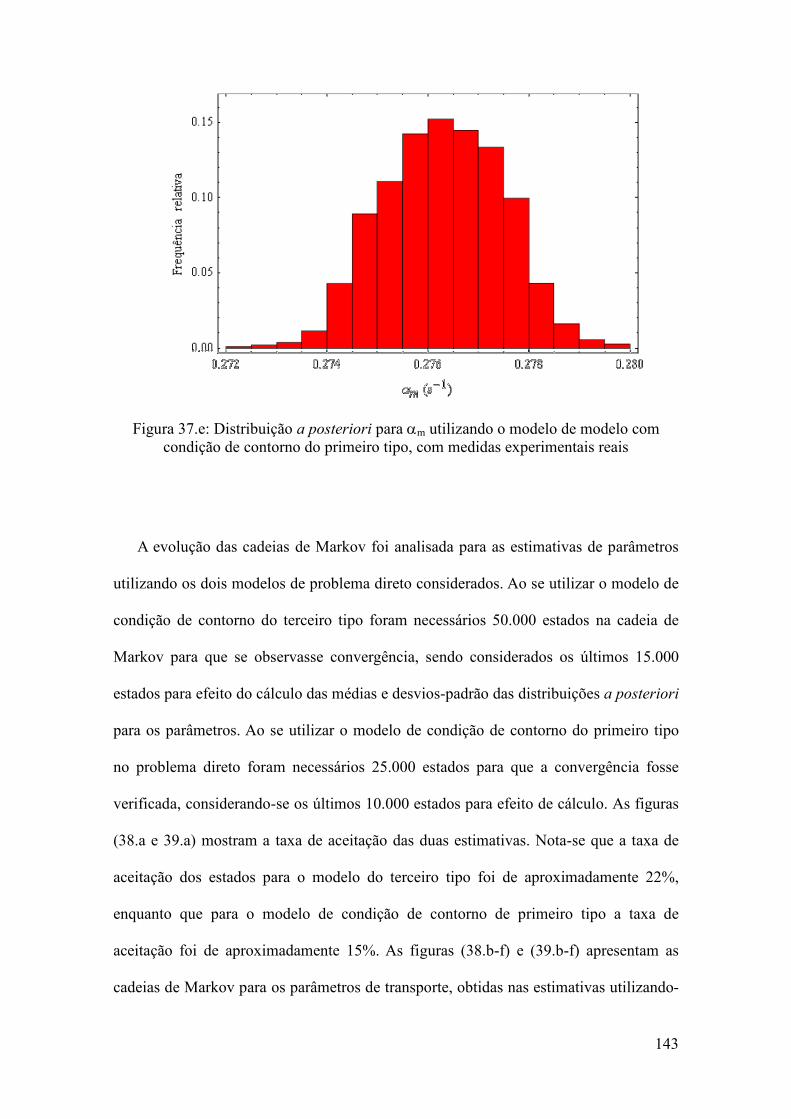
143
Figura 37.e: Distribuição a posteriori para αm utilizando o modelo de modelo com condição de contorno do primeiro tipo, com medidas experimentais reais
A evolução das cadeias de Markov foi analisada para as estimativas de parâmetros
utilizando os dois modelos de problema direto considerados. Ao se utilizar o modelo de
condição de contorno do terceiro tipo foram necessários 50.000 estados na cadeia de
Markov para que se observasse convergência, sendo considerados os últimos 15.000
estados para efeito do cálculo das médias e desvios-padrão das distribuições a posteriori
para os parâmetros. Ao se utilizar o modelo de condição de contorno do primeiro tipo
no problema direto foram necessários 25.000 estados para que a convergência fosse
verificada, considerando-se os últimos 10.000 estados para efeito de cálculo. As figuras
(38.a e 39.a) mostram a taxa de aceitação das duas estimativas. Nota-se que a taxa de
aceitação dos estados para o modelo do terceiro tipo foi de aproximadamente 22%,
enquanto que para o modelo de condição de contorno de primeiro tipo a taxa de
aceitação foi de aproximadamente 15%. As figuras (38.b-f) e (39.b-f) apresentam as
cadeias de Markov para os parâmetros de transporte, obtidas nas estimativas utilizando-
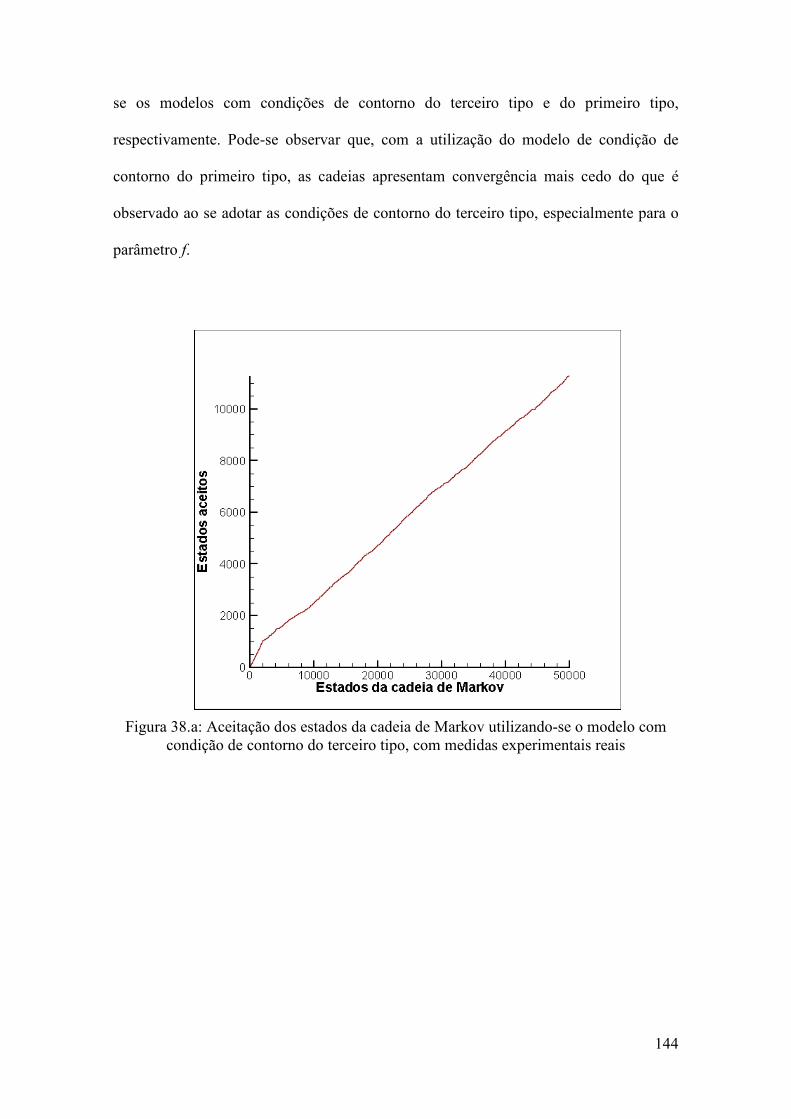
144
se os modelos com condições de contorno do terceiro tipo e do primeiro tipo,
respectivamente. Pode-se observar que, com a utilização do modelo de condição de
contorno do primeiro tipo, as cadeias apresentam convergência mais cedo do que é
observado ao se adotar as condições de contorno do terceiro tipo, especialmente para o
parâmetro f.
Figura 38.a: Aceitação dos estados da cadeia de Markov utilizando-se o modelo com condição de contorno do terceiro tipo, com medidas experimentais reais
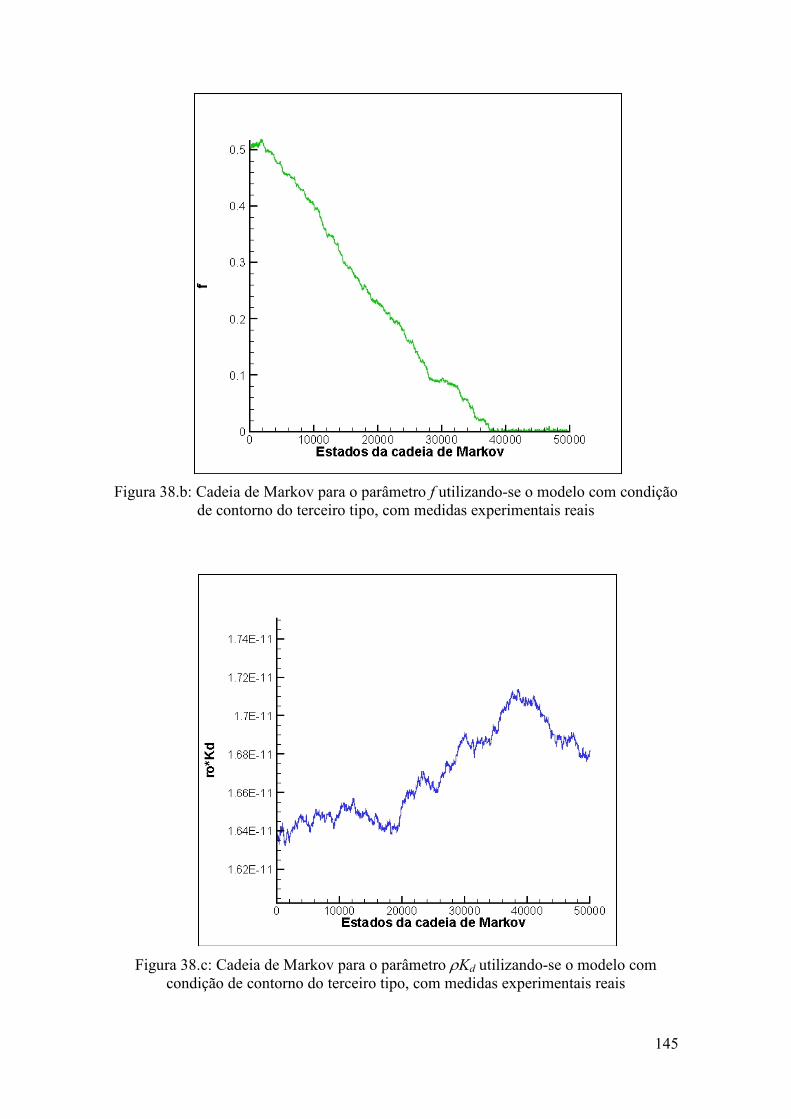
145
Figura 38.b: Cadeia de Markov para o parâmetro f utilizando-se o modelo com condição de contorno do terceiro tipo, com medidas experimentais reais
Figura 38.c: Cadeia de Markov para o parâmetro ρKd utilizando-se o modelo com condição de contorno do terceiro tipo, com medidas experimentais reais

146
Figura 38.d: Cadeia de Markov para o parâmetro λ utilizando-se o modelo com condição de contorno do terceiro tipo, com medidas experimentais reais
Figura 38.e: Cadeia de Markov para o parâmetro Dd utilizando-se o modelo com condição de contorno do terceiro tipo, com medidas experimentais reais

147
Figura 38.f: Cadeia de Markov para o parâmetro αm utilizando-se o modelo com condição de contorno do terceiro tipo, com medidas experimentais reais
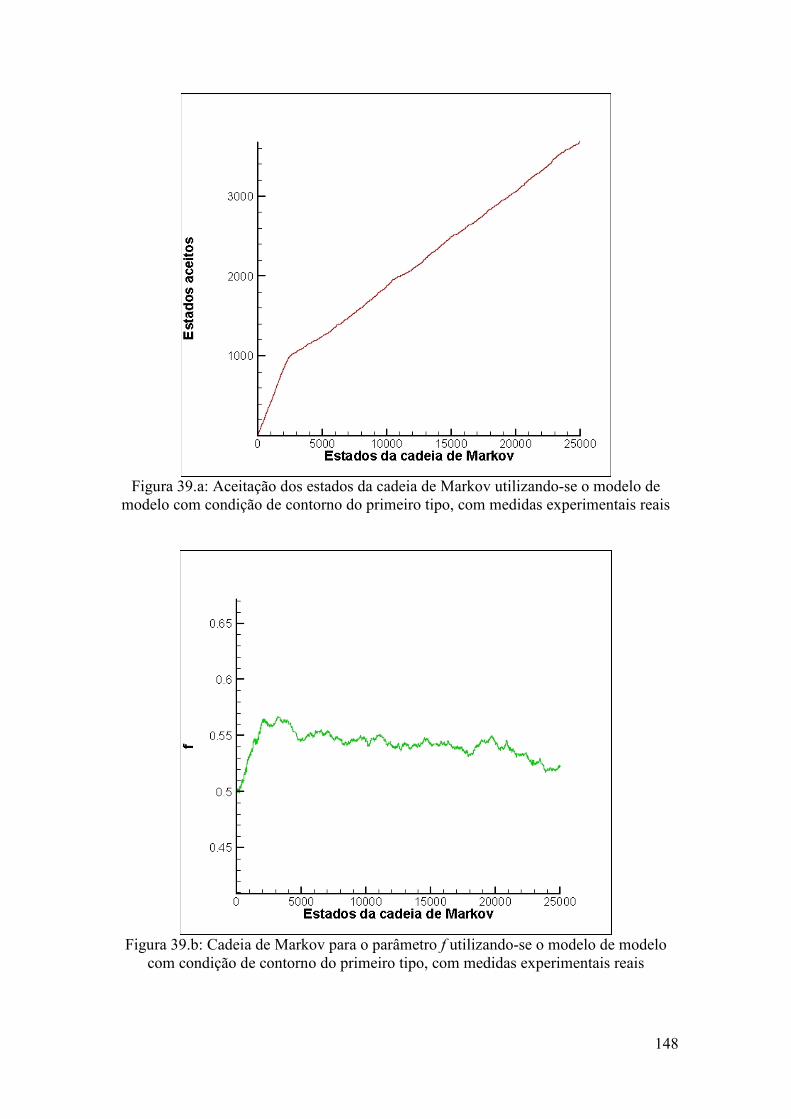
148
Figura 39.a: Aceitação dos estados da cadeia de Markov utilizando-se o modelo de
modelo com condição de contorno do primeiro tipo, com medidas experimentais reais
Figura 39.b: Cadeia de Markov para o parâmetro f utilizando-se o modelo de modelo
com condição de contorno do primeiro tipo, com medidas experimentais reais
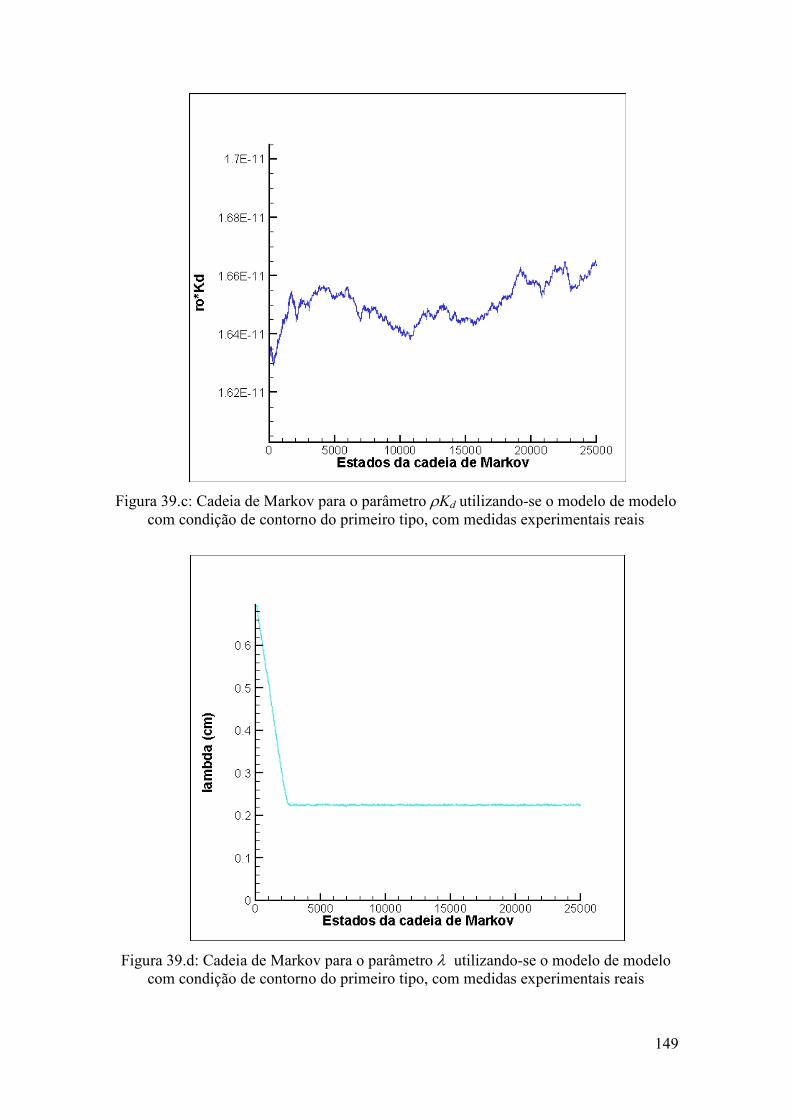
149
Figura 39.c: Cadeia de Markov para o parâmetro ρKd utilizando-se o modelo de modelo com condição de contorno do primeiro tipo, com medidas experimentais reais
Figura 39.d: Cadeia de Markov para o parâmetro λ utilizando-se o modelo de modelo com condição de contorno do primeiro tipo, com medidas experimentais reais
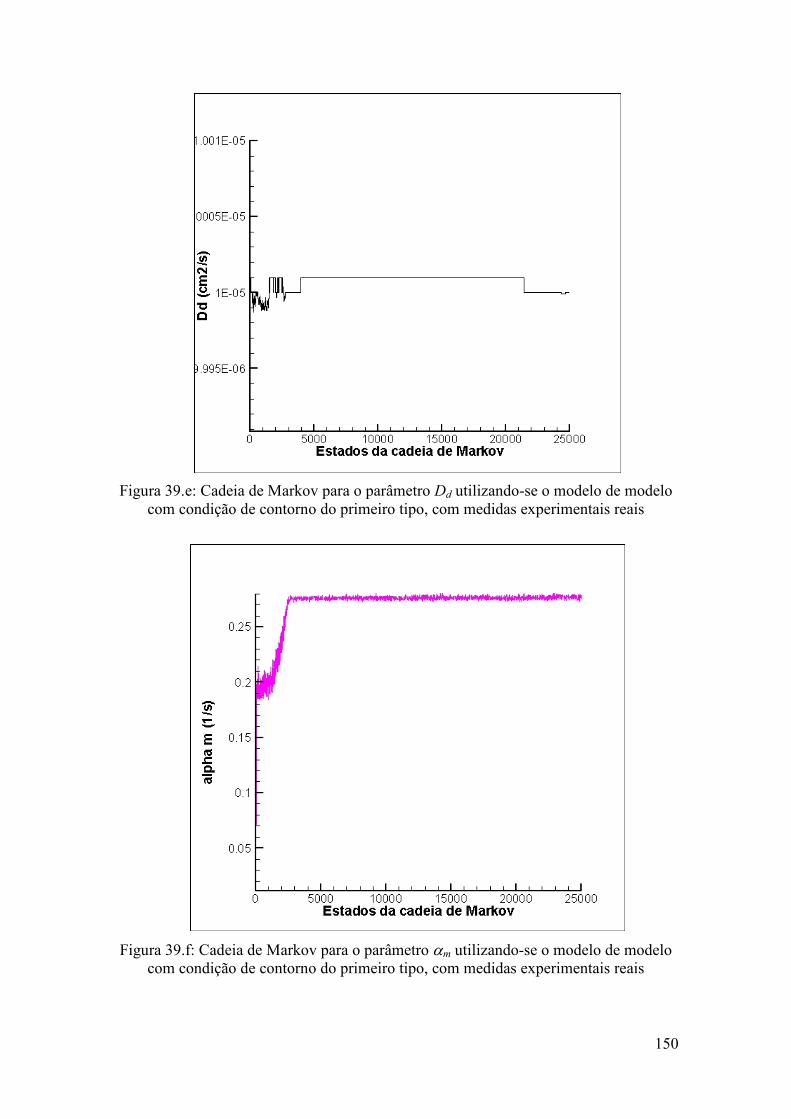
150
Figura 39.e: Cadeia de Markov para o parâmetro Dd utilizando-se o modelo de modelo com condição de contorno do primeiro tipo, com medidas experimentais reais
Figura 39.f: Cadeia de Markov para o parâmetro αm utilizando-se o modelo de modelo com condição de contorno do primeiro tipo, com medidas experimentais reais

151
Realizou-se uma última estimativa para se avaliar a influência da distribuição a
priori na convergência da cadeia de Markov. Utilizou-se novamente o modelo com
condição de contorno do primeiro tipo, porém desta vez utilizando outra distribuição a
priori para os parâmetros de transporte. Isto foi feito ao se aumentar a extensão dos
intervalos das distribuições uniformes de b dKρ e λ e alterando a média da distribuição
Gaussiana de mα , como apresentado na tabela 14.
Tabela 14: Distribuições a priori da estimativa de parâmetros de transporte para comparação
Parâmetro Distribuição Dados da Distribuição (modelo de modelo com condição de contorno do primeiro tipo)
f Uniforme Intervalo: (0 , 1)
b dKρ (g/cm3) Uniforme Intervalo: (0,6 b dKρ , 1,4
b dKρ )
b dKρ = 1,637 x 10-11
λ (cm) Uniforme Intervalo: (0, 2λ )
λ = 7,00 x 10-1
dD (cm2/s) Normal Média: dD = 1,00 x 10-5
Desvio-Padrão: 0,01dD
mα (s-1) Uniforme Intervalo: (0,01 mα , 1)
mα = 5,00 x 10-2

152
As cadeias de Markov então calculadas estão representadas nas figuras (40.a-f).
Nota-se que, mesmo alterando todas as distribuições a priori, a cadeia convergiu para
valores semelhantes àqueles observados nas figuras (39.b-f). Isto indica a robustez do
código de estimativa de parâmetros por inferência Bayesiana pelo uso do método
MCMC para as cadeias de Markov, uma vez que em se alterando as distribuições a
priori dos parâmetros os resultados obtidos não sofreram alterações significativas.
Figura 40.a: Aceitação dos estados da cadeia de Markov, alterando-se as distribuições a priori, com medidas experimentais reais
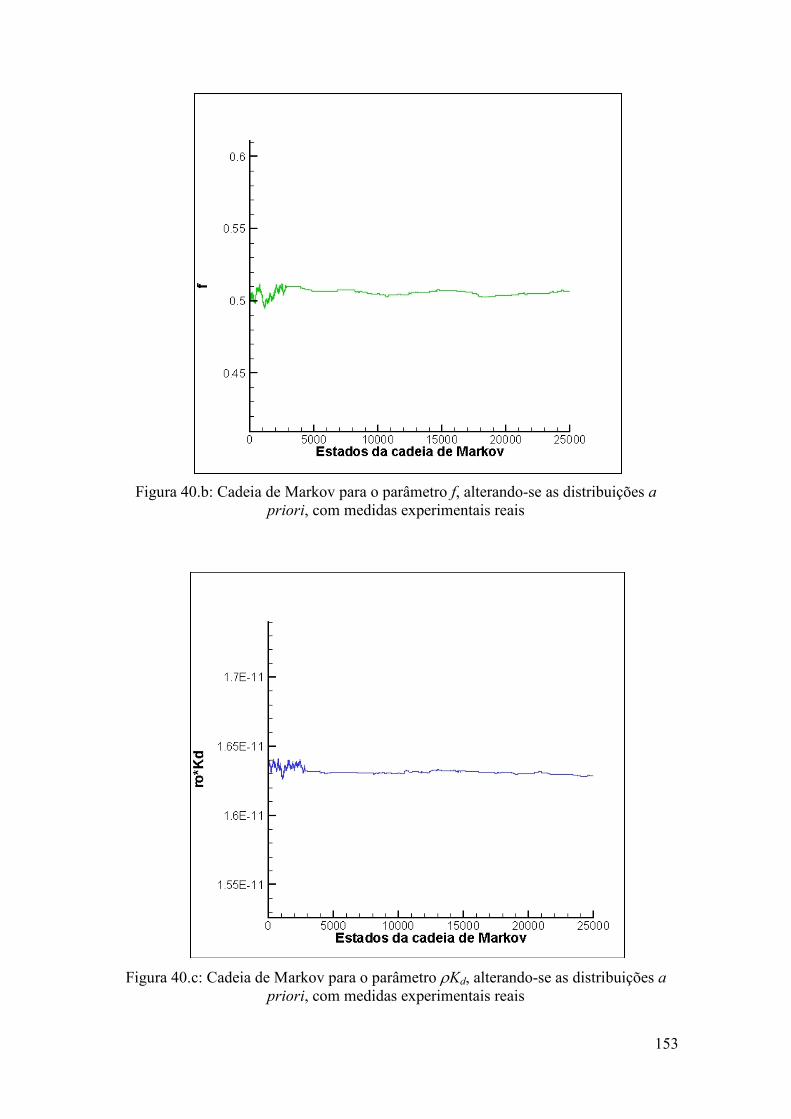
153
Figura 40.b: Cadeia de Markov para o parâmetro f, alterando-se as distribuições a priori, com medidas experimentais reais
Figura 40.c: Cadeia de Markov para o parâmetro ρKd, alterando-se as distribuições a priori, com medidas experimentais reais
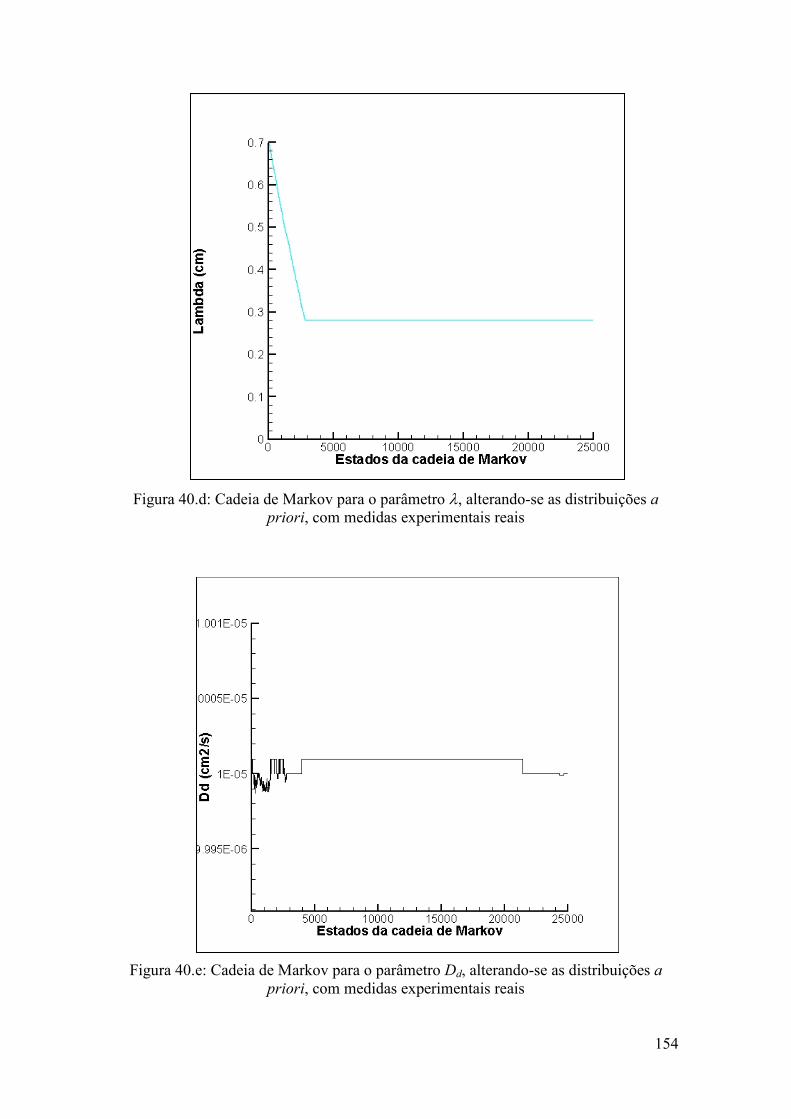
154
Figura 40.d: Cadeia de Markov para o parâmetro λ, alterando-se as distribuições a priori, com medidas experimentais reais
Figura 40.e: Cadeia de Markov para o parâmetro Dd, alterando-se as distribuições a priori, com medidas experimentais reais
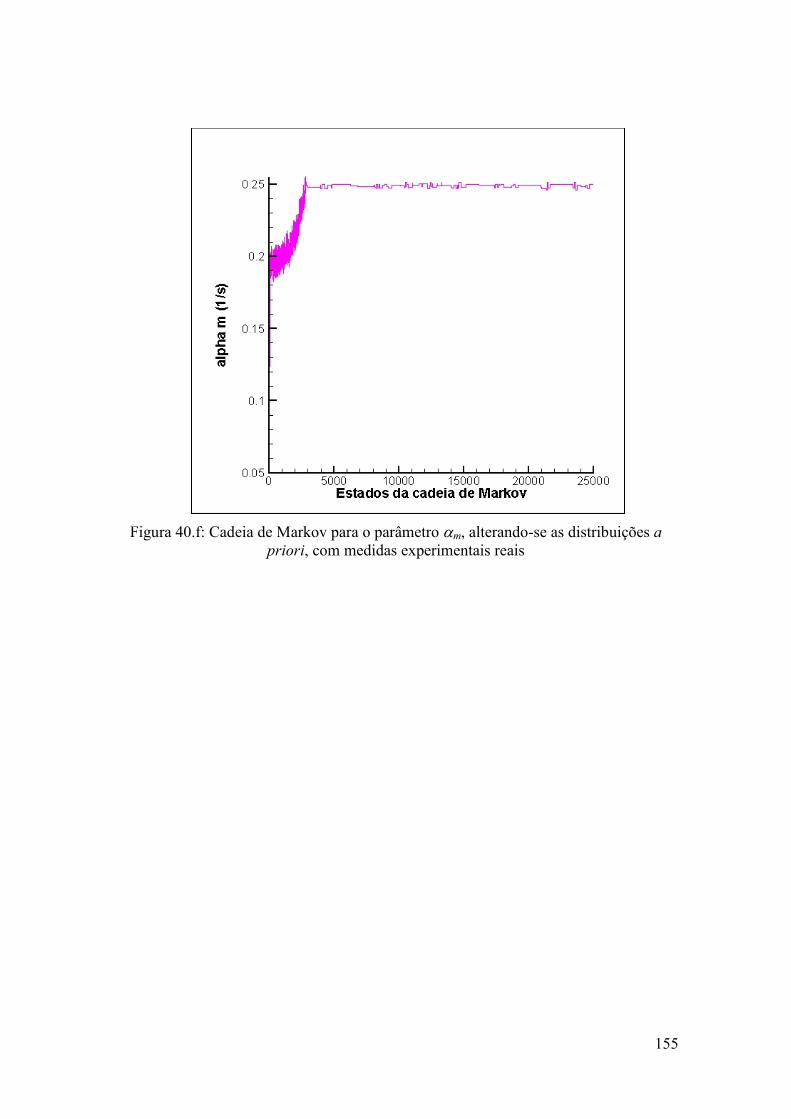
155
Figura 40.f: Cadeia de Markov para o parâmetro αm, alterando-se as distribuições a priori, com medidas experimentais reais

156
CAPÍTULO 5 - Conclusões e sugestões
Neste trabalho foi feita a estimativa dos parâmetros hidráulicos e de transporte para
amostras de solo por meio de ensaios em laboratório e o método de Monte Carlo com
cadeias de Markov.
Implementou-se um método experimental e de análise do problema inverso para o
estudo simultâneo do escoamento e da dispersão de soluto em meio poroso não
saturado. Foram estudados o escoamento, medindo-se a variação da carga no interior da
coluna em virtude da mudança do teor de umidade, e também a migração de soluto no
meio poroso, com a medição da variação de concentração de traçador no líquido
efluente que sai da coluna. Para a modelagem do problema de escoamento foi
considerado um modelo baseado na equação de Richards e para a modelagem do
problema de transporte adotou-se um modelo de convecção-difusão de não-equilíbrio
físico em duas regiões (TRM). Neste caso, foram consideradas duas modelagens para as
condições de contorno. Foram apresentados os resultados das estimativas dos
parâmetros hidráulicos e de transporte, assim como suas distribuições a posteriori e os
gráficos das cadeias de Markov para cada parâmetro estimado. Os resultados obtidos
para as estimativas utilizando-se os dois modelos para o problema de transporte foram
comparados. Também foi estudada a influência da escolha da distribuição a priori dos
parâmetros estimados na convergência da cadeia de Markov.
Foi desenvolvido um código computacional em linguagem FORTRAN para a
estimativa de parâmetros por inferência Bayesiana, com a utilização dos métodos de
Monte Carlo com cadeias de Markov (MCMC). Para a determinação do problema direto
nesse código, utilizou-se uma formulação por volumes finitos para a solução das
equações diferenciais que governam os fenômenos hidráulicos e de transporte. Para a

157
verificação da solução por volumes finitos, foram feitas simulações do escoamento e de
transporte de soluto utilizando-se esta metodologia. Esses resultados foram então
comparados com aqueles utilizando-se o programa HYDRUS-1D. Para a verificação da
estimativa de parâmetros por inferência Bayesiana pelo método MCMC foi realizada a
estimativa de parâmetros hidráulicos em coluna de solo a partir de medidas
experimentais de fluxo acumulado na descarga da coluna e os resultados obtidos foram
então comparados com aqueles disponíveis na literatura (PARKER et al., 1985).
Os parâmetros de transporte foram estimados considerando-se os modelos com
condição de contorno do terceiro e do primeiro tipo no problema direto. Obteve-se um
bom ajuste da curva experimental de variação da concentração de soluto com a curva
calculada com os valores de parâmetros estimados ao se considerar o modelo de
condição de contorno do terceiro tipo. Ao se considerar o modelo de condição de
contorno do primeiro tipo, as curvas obtidas apresentaram também uma boa
concordância, apesar deste modelo não garantir a conservação de massa, o que pode ser
explicado pelo fato da concentração da solução afluente no experimento de coluna ser
conhecida. Ao se mudar a distribuição a priori dos parâmetros de transporte,
considerando-se o mesmo modelo para o problema direto, os resultados obtidos foram
muito próximos aos originalmente obtidos, o que mostra a robustez da metodologia de
estimativa de parâmetros utilizada.
Apesar de se ter observado a ocorrência de resíduos correlacionados, indicando que
o modelo matemático utilizado para a descrição do problema físico ainda pode ser
melhorado, foi possível utilizar de maneira bem sucedida a estimativa de parâmetros por
inferência Bayesiana, com a utilização dos métodos de Monte Carlo com cadeias de
Markov (MCMC), para se obter os valores dos parâmetros hidráulicos e de transporte
158
referentes ao problema estudado.
Por fim, o problema de escoamento pode ser também resolvido para o caso de
escoamento em não equilíbrio, de maneira a se abranger o caso de meios fraturados e
com forte ocorrência de caminhos preferenciais. O procedimento de estimativa
Bayesiana de parâmetros apresentado neste trabalho pode ser aplicado para a
caracterização de diferentes tipos de solos, o que possibilitaria a criação de um banco de
dados de propriedades físicas para a simulação do escoamento e transporte de soluto em
solos situados nas diversas regiões do Brasil.
159
CAPÍTULO 6 - Referências
ABBASPOUR, K. C., YANG, J., MAXIMOV, I. et al., 2007, “Modelling hydrology
and water quality in the pre-alpine/alpine Thur watershed using SWAT”, Journal of
Hydrology, v. 333, pp. 413-430.
AKHAVAN, S., ABEDI-KOUPAI, J., MOUSAVI, S. F. et al., 2010, “Application os
SWAT model to investigate nitrate leaching in Hamadan-Bahar Watershed, Iran”,
Agriculture, Ecosystems & Environment, v. 139, pp. 675-688.
AKHTAR, M. S., STEENHUIS, T.S., RICHARDS, B. K. et al., 2003, “Chloride and
lithium transport in large arrays of undisturbed silt loam and sandy loam soil columns”,
Vadose Zone Journal, v. 2, pp. 715-727.
ANAGU, I., INGWERSEN, J., IDEN, S. C. et al., 2012, “Estimating Freundlich
isotherm parameteres of heavy metals from multiple batch extration tests using a
Bayesian approach”, Geoderma, v. 174, pp. 42-49.
BARIZON, R.R.M, 2004, Sorção e transporte de pesticidas sob condições de não
equilíbrio, Tese de D.Sc., Escola Superior de Agricultura Luiz de Queiroz, Piracicaba,
SP, Brasil.
BECK, J.V. e ARNOLD, K.J., 1977, Parameter Estimation in Engineering and Science,
Wiley, New York.
160
BEGGS, R.A., HILLS, D. J., TCHOBANOGLOUS, G. et al., 2011, “Fate of nitrogen
for subsurface drip dispersal of effluent from small wastewater systems”, Journal of
Contaminant Hydrology, v. 126, pp. 19-28.
BOWMAN, B.T., BRUNKE, R.R., REYNOLDS, W.D. et al., 1994, “Rainfall simulator
grid lysimeter system for solute transport studies using large, intact soil blocks”,
Journal of Environmental Quality, v. 23, pp. 815-822.
BROMLY, M., HINZ, C., AYLMORE, L. A. G., 2007, “Relation of dispersivity to
properties of homogeneous saturated repacked soil columns”, European Journal of Soil
Science, v. 58, pp. 293-301.
BROWN, K.W., GERARD, C. J., HIPP, B. W. et al., 1974, “A procedure for placing
large undisturbed monoliths in lysimeters”, Soil Science Society of America Journal, v.
38, pp 981-983.
BROUYÈRE, S., DASSARGUES, A., HALLET, V., 2004, “Migration of contaminants
through the unsaturated zone overlying the Hesbaye chalky aquifer in Belgium: a field
investigation”, Journal of Contaminant Hydrology v. 72, pp. 135– 164.
CHABERNAU, R. J., 2000, Growndwater Hydraulics and Pollutant Transport,
Prentice Hall, Upper Saddle River, New Jersey.
CORANA, A., MARCHESI, M., MARTINI, C. et al.,1987, Minimizing Multimodal
functions of sontinuous variables with the simulated annealing algorithm, ACM
Transactions on Mathematical Software, 13, pp. 262-280.
161
COMEGNA, V., COPPOLA, A., SOMMELA, A., 2001, “Effectiveness of equilibrium
and physical non-equilibrium approaches for interpreting solute transport through
undisturbed soil columns”, Journal of Contaminant Hydrology v. 50, pp. 121–138.
COMMUNAR, G., KEREN, R. LI, F.H., 2004, “Deriving boron adsorption isotherms
from soil column displacement experiments”, Soil Science Society of America Journal,
v. 68, pp. 481-488.
CORWIN, D. L., 2000, “Evaluation of a simple lysimeter-design modification to
minimiza sidewall flow”, Journal of Contaminant Hydrology, v. 42, pp. 35-49.
COTTA, R. M., 1993, Integral Transforms in Computational Heat and Fluid Flow,
CRC Press, Boca Raton, FL.
CRANÇON, P., PILI, E., CHARLET, L., 2010, “Uranium facilitated transport by
water-dispersible colloids in field and soil columns”, Science of the Total
Environmnent, v. 408, pp. 1118-1128.
DOUSSET, S., CHAUVIN, C., DURLET, P. et al., 2004, “Transfer of hexazinone and
glyphosate through undisturbed soil columns in soils under Christmas tree cultivation”,
Chemosphere, v. 57, pp. 265-272.
DURNER, W., 1994, “Hydraulic conductivity estimation for soils with heterogeneous
pore structure”. Water Resources Research v. 30, pp. 211–233.
DURNER, W., PRIESACK, E., VOGEL, H.-J. et al., 1999, “Determination of
parameters for flexible hydraulic functions by inverse modeling”. In: van Genuchten,
162
M.Th., Leij, F.J., Wu, L. (eds.), Characterization and Measurement of the Hydraulic
Properties of Unsaturated Porous Media, University of California, Riverside, CA, p.
817–829.
ERIKSSON, N., GUPTA, A., DESTOUNI, G., 1997, “Comparative analysis of
laboratory and field tracer tests for investigating preferential flow and transport in
mining waste rock”, Journal of Hydrology, v. 194, pp. 143-163.
FARAMARZI, M., YANG, H., SCHULIN, R. et al., 2010, “Modeling wheat yield and
crop water productivity in Iran: Implications of agricultural water management for what
production”, Agricultural Water Management, v. 97, pp. 1861-1875.
FLINT, A. L., FLINT, L. E., BODVARSSON, G.S. et al., 2001, “Development of the
conceptual model of unsaturated zone hydrology at Yucca Mountain, Nevada”,
Conceptual models of flow and transport in the fracturated vadose zone, National
Research Council, National Academy Press, Washington, DC, pp. 47-85.
GHANBARIAN-ALAVIJEH, B., LIAGHAT, A., HUANG, G. H. et al., 2010,
“Estimation of the van Genuchten soil water retention properties from soil textural
data”, Pedosphere, v. 20, pp. 456-465.
GERKE, H.H., VAN GENUCHTEN, M.Th., 1993, “A dual-porosity model for
simulating the preferential movement of water and solutes in structured porous media”.
Water Resoures Research v.29, pp. 305–319.
GERMANN, P.F., 1985, “Kinematic wave approach to infiltration and drainage into
and from soil macropores”. Trans. ASAE v. 28, .p. 745–749.
163
GERMANN, P.F., BEVEN, K.,1985, “Kinematic wave approximation to infiltration
into soils with sorbing macropores”. Water Resources Research v. 21 (7), pp. 990–996.
GHODRATI, M., CHENDORAIN, M. CHANG, Y.J., 1999, “Characterization of
macropore flow mechanisms in soil by means of a Split Macropore Column”, Soil
Science Society of America Journal, v. 63, pp. 1093-1101.
GUERRERO, J. S. P, PIMENTEL, L. C. G., SKAGGS, T. H. et al., 2009, “Analytical
solution of the advection-diffusion transport equation using a change-of-variable and
integral transform technique”, International Journal of Heat and Mass Transfer, v. 52,
pp. 3297-3304.
GWO, J.P., JARDINE, P.M., WILSON, G.V. et al., 1995, “A multiple-pore-region
concept to modeling mass transfer in subsurface media”, Journal of Hydrology, v. 164,
pp. 217–237.
HASSAN, A., CHAPMAN, J., 2006, Verification and uncertainty reduction of
Amchikta underground nuclear testing models, U.S. Department of Energy, disponível
em http://www.osti.gov/bridge.
HAWS, N. W., RAO, P. S. C., SIMUNEK, J. et al., 2005, “Single-porosity and dual-
porosity modeling of water flow and solute transport in subsurface-drained fields using
effective field-scale parameters”, Journal of Hydrology, v. 313, pp. 257-273.
HE, M., HOGUE, T. S., FRANZ, K. J. et al., 2011, “Characterizing parameter
sensitivity and uncertainty for a snow model across hydroclimatic regimes”, Advances
in Water Resources, v. 34, pp. 114-127.
164
HEATWOLE, K. K., MCCRAY, J. E., 2007, “Modeling potential vadose-zone
transport of nitrogen from onsite wastewater systems at the development scale”, Journal
of Contaminant Hydrology, v. 91, pp. 184-201.
HENDRICKX, J. M. H., FLURY, M., 2001, “Uniform and preferential mechanisms in
the vadose zone”, In: National Research Concil, Conceptual models of flow and
transport in the fractured vadose zone, The National Academies Press, Washington,
DC., pp. 149-188.
HODNET, M. G., TOMASELLA, J., 2002, “Marked differences between Van
Genuchten soil water retentions parameters for temperate and tropical soils: a new water
retention pedo-transfer functions developed for tropical soils”, Geoderma, v. 108, pp.
155-180.
HUTSON, J.L., WAGENET, R.J., 1995, “A multiregion model describing water flow
and solute transport in heterogeneous soils”. Soil Science Society American Journal. v.
59, pp. 743–751.
IDEN, S.C., DURNER, W., 2008, “Multiple batch extraction test to estimate
contaminant release parameters using a Bayesian approach”, Journal of Contaminand
Hydrology, v. 95, pp.168-182.
JARVIS, N.J.,1994, “The MACRO Model” Version 3.1. Technical Description and
Sample Simulations. Reports and Dissertations. Department of Soil Science, Swedish
University of Agricultural Science, Uppsala, Sweden, v. 19 pp. 51.
JELLALI, S., DIAMANTOPOULOS, E., KALLALI, H. et al., 2010, “Dynamic
sorption of ammonium by sandy soil in fixed bed columns: Evaluation of equilibrium
165
and non-equilibrium transport processes”, Journal of Environmental Management, v.
91, pp. 897-905.
JIANG, S., PANG, L., BUCHAN, G. D. et al., 2010, “Modeling water flow and
bacterial transport in undisturbed lysimeters under irrigations of diary shed effluent and
water using HYDRUS-1D”, Water Research, v. 44, pp. 1050-1061.
JIN, Y., YATES, M.V., THOMPSON, S.S. et al., 1997, “Sorption of viruses during
flow through saturated sand columns”, Environmental Science & Technology, v. 31, pp.
548-555.
KAMRA, S.K., LENNARTZ, B., VAN GENUCHTEN, M.Th. et al., 2001, Evaluating
non-equilibrium solute transport in small soil columns, Journal of Contaminant
Hydrology v. 48, pp.189–212.
KAIPIO, J. e SOMERSALO, E., 2004, Statistical and Computational Inverse Problems,
Applied Mathematical Sciences 160, Springer-Verlag.
KOHLER, A., ABBASPOUR, K. C., FRITSCH, M. et al., 2001, “Simulating
unsaturated flow and transport in a macroporous soil to tile drains subjected to an
entrance head: model development and preliminary evaluation”, Journal of Hydrology,
v. 254, pp. 67-81.
KHODAVERDILOO, H., HOMAEE, M., VAN GENUCHTEN, M. Th. et al., 2011,
“Deriving and validating pedotransfer funcions for some calcareous soils”, Journal of
Hydrology, v. 399, pp. 93-99.
166
KOOL, J. B., PARKER, J.C., VAN GENUCHTEN, M. Th., 1985, “Determining soil
hydraulic properties from one-step outflow experiments by parameter estimation: I.
Theory and numerical studies”, Soil Science Society of America Journal, v. 49, pp.
1348-1354.
KOHNE, J. M., MOHANTY, B. P., SIMUNEK, J., 2006, Inverse dual-permeability
modeling for preferential water flow in a soil column and implications for field-scale
solute transport, Vadose Zone Journal v. 5, pp. 59-76
KIRKPATRICK, S., GELATT, C., VECHI, M., 1983, Optimization by Simulated
Annealing, Science, 220, pp. 671-680.
LANDRY, D., DOUSSET, S., ANDREUX, F., 2004, “Laboratory leaching studies of
oryzalin and diurion through three undisturbed vineyard soil columns”, Chemosphere,
v. 54, pp. 735-742.
LARBO, M., JARVIS, N., 2006, “Information content of measurements from tracer
microlysimeter experiments designed for parameter identification in dual-permeability
models”, Journal of Hydrology, v. 325, pp. 273-287.
LAWES, J., GILBERT, J., WARINGTON, R., 1982, On the Amount and Composition
of the Rain and Drainage Water Collected at Rothamstead, William Clowes and Sons,
Ltd, London.
LEE, P., 2004, Bayesian Statistics, Oxford University Press, London.
167
LEIJ, F. J., RUSSEL, W. R., LESCH, S. M., 1997, “Closed form expressions for water
retention and conductivity data”, Ground Water, v. 35, pp.848-858.
LEVENBERG, K., 1944, “A method for the solution of certain non-linear problems in
least-squares”, Quart. Appl. Math., v.2, pp. 164-168.
LEWIS, J., SJÖNSTROM, J., 2010, “Optimizing the experimental design of soil
column in saturated and unsaturated transport experiments”, Journal of Contaminant
Hydrology, v. 115, pp. 1-13.
MA, Y., FENG, S., SU, D. et al., 2010, “Modeling water infiltration in a large layered
soil column with a modified Green-Ampt model and HYDRUS-1D”, Computers and
Eletronics in Agriculture, v. 715, pp., 540-547.
MALISKA, C. R., 1995, Transferência de Calor e mecânica dos Fluidos
Computacional: Fundamentos - Coordenadas Generalizadas, LTC - Livros Técnicos e
Científicos Editora S.A., Rio de Janeiro – RJ.
MARQUARDT, D.W., An algorithm for least squares estimation of nonlinear
parameters, J. Soc. Ind. Appl. Math., vol. 11, 431-441, 1963.
MARTINEZ, F. S. J., PACHEPSKY, Y. A., RAWLS, W. J., 2010, “Modelling solute
transport in soil columns using advective-dispersive equations with fractional spatial
derivatives”, Advances in Engineering Software, v. 41, pp. 4-8.
MAYR, T., JARVIS, N. J., 1998, “Pedotransfer functions to estimate soil water
retention parameters for a modified Brooks-Corey type model”, Geoderma, v. 91, pp. 1-
9.
168
MERK, R., 2012, “Numerical modeling of the radionuclide water pathway with
HYDRUS and comparison with the IAES model of SR 44”, Journal of Environmental
Radioactivity, v. 105, pp. 60-69.
MINASNY, B., VRUGT, J.A., MCBRATNEY, A. B., 2011, “Confronting uncertainty
in model-based geostatistics using Markov Chain Monte Carlo simulation”, Geoderma,
v. 163, pp. 150-162.
MOHANTY, B.P., SHOUSE, P.J., VAN GENUCHTEN, M.Th, 1998, “Spatio-temporal
dynamics of water and heat in a field soil”, Soil & Tillage Research, v. 47, pp. 133-143.
MORADI, A., ABBASPOUR, K. C., AFYUNI, M., 2005, “Modelling field-scale
cadmium transport below the root zone of a sewage sludge amended soil in an arid
region in Central Iran”, Journal of Contaminant Hydrology, v. 79, pp. 187-206.
MOREIRA, P.H.S, 2007, “Análise teórico-experimental da dispersão de soluto em meio
poroso não saturado sob condições de não-equilíbrio físico”, dissertação de M.Sc.,
COPPE/UFRJ, Rio de Janeiro, Brasil.
MOREIRA, P. H. S., BARROS, F. P. J., ORLANDE, H. R. B., COTTA, R. M., 2003,
“Inverse analysis in mass diffusion with electrical conductivity measurements”. In:
Proceedings of the XVII International Congress of Mechanical Engineering (COBEM
2003), São Paulo, SP, Brazil, 10-14/11/2003.
MOTA, C., ORLANDE, H.R.B., WELLELE, O. et al., 2007, “Inverse Problem of
Simultaneous Identification of Thermophysical Properties And Boundary Heat Flux”,
In: Preceedings of the 19th International Congress of Mechanical Engineering,
Brasilia-DF, Nov. 2007.
169
NASCIMENTO, U., MOREIRA, P.H.S., ORLANDE, H.R.B., COTTA, R.M., 2004,
“Transport of Contaminants in Porous Media Columns: Direct and Inverse Analysis”.
In: Proceedings of the 10th Brazilian Congress of Thermal Sciences and Engineering,
pp.CIT04-0131, Rio de Janeiro, Nov. 2004.
NEUMANN, L. E., SIMUNEK, J., COOK, F. J., 2011, “Implementation of quadratic
upstream interpolation schemes for the solute transport into HYDRUS-1D”,
Environmental Modelling & Software, v. 26, pp. 1298-1308.
OLIVEIRA, I. B., DEMOND, A. H., SALEHZADEH, A., 1996, “Packing of sands for
the production of homogeneous porous media”, Soil Science Society of America
Journal, v. 60, pp. 49-53.
ORLANDE, H. R. B. ; PEREIRA, L. M. ; SOUZA, R. ; COTTA, R.M.,1999,
“Comparação de Métodos de Medida de Concentração para a Estimativa do Coeficiente
Aparente de Difusão”. In: Anais do XXVII Congesso Brasileiro de Sistemas
Particulados, Campos do Jordão
ORLANDE, H.R.B., COLAÇO, M., DULIKRAVICH, G., 2007.a, “Approximation Of
The Likelihood Function In The Bayesian Technique For The Solution Of Inverse
Problems”. In: Inverse Problems, Design and Optimization Symposium, Miami, Florida,
EUA, 16-18 de abril.
ORLANDE, H.R.B, KOLEHMAINEN, V., KAIPIO, J.P., 2007.b, “Reconstruction Of
Thermal Parameters Using A Tomographic Approach”, Int J Heat Mass Transfer, pp.
5150-5160.
ORLANDE, H.R.B, VAN GENUCHTEN, M.TH., COTTA, R. M., MOREIRA, P.H.S.,
2009, “Bayesian estimation oh hydraulic and solute transport parameters from
170
laboratory soil experiments”. In: International Symposium on Convective Heat and
Mass Transfer in Sustainable Energy ( CONV 09), Yasmine Hammamet, Tunisia, 26 de
abril – 01 de maio.
OTHMER, H., DIEKKRUGER, B., KUTILEK, 1991, “M.,Bimodal porosity
and unsaturated hydraulic conductivity”, Soil Science Society of America Journal. v.
152 ,n. 3, pp. 139–150.
OZISIK, M.N. e ORLANDE, H.R.B., 2000, Inverse Heat Transfer: Fundamentals and
Applications, Taylor and Francis, New York.
PACHEPSKY, Y., GUBER, A., JACQUES, D. et al., 2006, “Information content and
complexity of simulated soil water fluxes”, Geoderma v. 134, pp. 253-266.
PARKER, J.C., KOOL, J.B., VAN GENUCHTEN, M. Th., 1985. “Determining soil
hydraulic properties from one-step outflow experiments by parameter estimation: II.
Experimental studies”, Soil Science Society of America Journal, v. 49, pp. 1354-1359.
PETACH, M. C., WAGENET, R. J, DEGLORIA, S. D., 1991, “Regional water flow
and pesticide leaching using simulations with spatially distributed data”, Geoderma, v.
48, pp. 245-269.
PETERS, R.R., KLAVETTER, E. A., 1988, “A continuum model for water movement
in an unsaturated fractured rock mass, Water Resources Research, v. 24(3), pp. 416-
430.
PHILLIP, J.R., 1968, “The theory of absorption in aggregated media”, Aust. Journal of.
Soil Research. v. 6, pp. 1–19.
171
PLUMMER, M. A., HULL, L. C., FOX, D.T., 2004, “Transport of carbon-14 in a large
unsaturated soil column”, Vadose Zone Journal, v. 3, pp. 109-121.
PONTEDEIRO, E. M., VAN GENUCHTEN, M. Th., COTTA, R. M. et al., 2010, “The
effects of preferential flow and soil texture on a risk assessments of a NORM waste
disposal site”, Journal of Hazardous Materials, v. 174, pp. 648-655.
POWELSON, D.K., MILLS, A.L., 2001, “Transport of Eschterichia coli in sand
columns with constant and changing water contents”, Journal of Environmental
Quality, v. 30, pp. 238-245.
PRUESS, K., WANG, J.S.Y., “Numerical modeling of isothermal and non-isothermal
flow in unsaturated fractured rock – a review”. In: Evans, D.D., Nicholson, T.J. (eds.),
Flow and Transport through Unsaturated Fractured Rock, Geophysics Monograph,.
American Geophysical Union, Washington, DC, v. 42, pp. 11–22, 1987.
RAMOS, T. B., SIMUNEK, J., GONÇALVES, M. C. et al., 2011, “Field evaluation of
a multicomponent solute model in soils irrigated with saline waters”, Journal of
Hydrology, v. 407, pp. 129-144.
ROSS, P.J., SMETTEM, K.R., 2000, “A simple treatment of physical nonequilibrium
water flow in soils”, Soil Science Society. American Journal, v. 64, pp. 1926–1930.
ROUHOLAHNEJAD, E., ABBASPOUR, K. C., VEJDANI, M. et al., 2012, “A
parallelization framework for calibration of hydrological models”, Environmental
Modelling & Software, v. 31, pp. 28-36.
172
SCHAAP, M. G., LEIJ, F. J., VAN GENUCHTEN, M. Th., 2001, “ROSETTA: A
computer program for estimating hydraulic parameters with hierarchical pedotransfer
functions”, Journal of Hydrology, v. 251, pp. 163-176.
SCHULTZE, B., IPPISCH, O., HOWE, B. et al., 1999, “Dinamic nonequilibrium
during unsaturated water flow”, in: van Genuchten, M. Th, Leij, F.J., Wo, L., (Eds.),
Characterization and measurements of the hydraulic properties of unsaturated porous
media, University of California, Riverside, CA, pp. 877-892.
SCHUOL, J., ABBASPOUR, K. C., SRINIVASAN, R. et al., 2008, “Estimation of
freshwater availability in the West African sub-continent using the SWAT hydrologic
model”, Journal of Hydrology, v. 352, pp. 30-49.
SCHWAB, P., ZHU, D., BANKS, M.K., 2007, “Heavy metal leaching from mine
tailings as affected by organic amendments”, Bioresource Technology, v. 98, pp. 2935-
2941.
SCHWARTZ, R. C., JUO, A. S. R., MCINNES, K. J., 2000, “Estimating parameters for
a dual-porosity model to describe non-equilibrium, reactive transport in a fine-textured
soil”, Journal of Hydrology, v. 229, pp. 149-167.
SENTENAC, P., LYNCH, R., BOLTON, M., 2001, “Measurement of the side-wall
boundary effect in soil columns using fibre-optics sensing”, International Journal of
Physical Modelling in Geotechnics, v. 4, pp. 35-41.
SHASHIDHAR, T., BHALLAMUDI, S.M, PHILIP, L., 2007, “Development and
validation of a model of bio-barriers for remediation of Cr(VI) contaminated aquifers
173
using laboratory column experiments”, Journal of Hazardous Materials v. 145, pp.
437–452.
SIMON, R., COLON, D., TEBES-STEVENS, C.L. et al., 2000, “Effect of redox
zonation on the reductive transformation of p-cyanonitrobenzene in a laboratory
sediment column”, Environmental Science & Technology, v. 34, pp. 3617-3662.
SIMUNEK,J., JARAMILLO, R. A., SCHAAP, M. G. et al., 1998, “Using an inverse
method to estimate the hydraulic properties of crusted soils from tension-disc
infiltrometer data”, Geoderma, v. 86, pp.61-81
SIMUNEK, J., JARVIS, N. J., VAN GENUCHTEN, M. Th. et al., 2003, “Review and
comparison of models for describing non-equilibrium and preferential flow and
transport in the vadose zone”, Journal of Hydrology, v. 272, pp. 14-35.
SIMUNEK,J.,VAN GENUCHTEN, M., Th., 1998, “Parameter estimation analysis of
the evaporation method for determining soil hydraulic properties”, Soil Science Society.
American Journal v.68, pp. 894-905.
SIMUNEK, J., VAN GENUCHTEN, M.,Th., SEJNA, M., 2005, The HYDRUS-1D
Software Package for Simulating the One-Dimensional Movement of Water, Heat and
Multiple Solutes in Variably-Saturated Media. Version 3.0. HYDRUS Software Series
1, Department of Environmental Sciences, University of California, Riverside.
SIMUNEK, J., WENDROTH, O., WYPLER, N., VAN GENUCHTEN, M.Th., 2001,
Nonequilibrium water flow characterized from an upward infiltration experiment.
European Journal of Soil Sciences, v. 52 (1), pp. 13–24.
174
SIYAL, A. A., SKAGGS, T. H., 2009, “Measured and simulated soil wetting patterns
under porous clay pipe sub-surface irrigation”, Agricultural Water Management, v. 96,
pp. 983-904.
SKAGGS, T.H., LEIJ, .F.J., 2002, “Solute Transport: Theoretical background”, In:
DANE, J.H., TOPP, G.C. (eds), Methods of soil analysis - Part 4 – physical methods.
Madison, Wisconsin, USA, Soil Science Society of America, Inc, pp. 1353-1380.
SKAGGS, T.H.,WILSON, G.V, SHOUSE, P.J. et al., 2002, “Solute Transport:
Experimental Methods”. In: DANE, J.H., TOPP, G.C. (eds), Methods of soil analysis -
Part 4 – physical methods. Madison, Wisconsin, USA, Soil Science Society of America,
Inc, p. 1353-1380.
SMAJSTRA, A., 1985, “A field lysimeter for crop water use and water stress studies in
humid regions”, Soil & Crop Science Society of Florida, Proceedings, p. 28.
SOUZA, R. ; PEREIRA, L. M. ; H.R.B.ORLANDE ; COTTA, R. M., “Analysis of
Radioactive Waste Contamination in Soils. Part III:- Estimation of Apparent Diffusion
Coefficient”. In:Preecidings of International Conference on the Radiological Accident
of Goiânia - 10 Years Later, Goiânia, v. 1. pp. 1-6, 1997.
STROCK, J. S., CASSEL, D. K., 2001, “Developing and testing a system for studying
unsaturated solute transport on undisturbed soil blocks”, Journal of Soil and Water
Conservation, v. 56, pp. 112-119.

175
TAFTEH, A., SEPASKHAH, A. R., 2012, “Application of HYDRUS-1D model for
simulating water and nitrate leaching from continuous and alternate furrow irrigated
rapeseed and maize fields”, Agricultural Water Management, artigo em impressão.
TAKAMATSU, T., KOSHIKAWA, M. K., WATANABE, M. et al., 2007, “Design of a
meso-scale indoor lysimeter for undisturbed soil to investigate the behaviour of solutes
in soil”, European Journal of Soil Science, v. 58, pp. 329-334.
TAN, S., FOX, C., NICHOLLS, G., 2006, Inverse Problems, Course Notes for Physics
707, University of Auckland.
TORIDE, N, LEIJ, F.J., VAN GENUCHTEN, M.Th., 1999, The CXTFIT code for
estimating transport parameters from laboratory or field tracer experiments, version
2.1, Research Report No. 137, US Salinity Laboratory, Agricultural Research Service,
U.S. Department of Agriculture, Riverside, California.
TWARAKAVI, N. K., SAITO, H,. SIMUNEK,J.,VAN GENUCHTEN, M.,Th., 2008,
“A new approach to estimate soil hydraulic parameters using only soil water retention
data”, Soil Science Society of America Journal, v. 72, pp. 471-479.
VAN GENUCHTEN, M. Th., 1978, “Calculating the unsaturated hydraulic
conductivity with a new closed-form analytical model”, Hydrology document Number
412, Department of Civil Engeneering, Princeton University, Princeton, New Jersey.
VAN GENUCHTEN, M. Th., 1980, “A closed form equation for predicting the
hydraulic conductivity of unsaturated soils”, Soil Science Society America Journal, v.
44, pp. 892–898.
176
VAN GENUCHTEN, M. Th., 1981, “Non-equilibrium transport parameters from
miscible displacement experiments”, Research report No.119, US Department of
Agriculture, US Saline Laboratory, Riverside.
VAN GENUCHTEN, M. Th., WIERENGA, P.J.1976, “Mass transfer studies in sorbing
porous media: analytical solutions”, Soil Science American Journal v. 40, pp. 473, 480.
VOGEL, T., VAN GENUCHTEN, M. Th., CISLEROVA, M., 2001, “Efect of the shape
of the soil hydraulic functions near saturation on variably-saturated fow predictions”,
Advances in Water Resources v. 24, pp. 133-144.
VRUGT, J. A., BRAAK, A. J. F., DIKS, C. G. H. et al., 2012, “Hydrologic data
assimilation using particle Markov chain Monte Carlo simulation: Theory, concepts and
applications”, Advances in Water Resources, artigo em impressão.
VRUGT, J. A., NUALLAIN, B. O., ROBINSON, B. A. et al., 2006, “Application of
parallel computing to stochastic parameter estimation in environmental models”,
Computers & Geosciences, v. 32, pp. 1139-1155.
WILDENSCHILD, D., HOPMANS, J. W., SIMUNEK, J., 2001, “Flow rate
dependency of soil hydraulic characteristics”, Soil Science Society American Journal,
v. 65, pp. 35-48.
YANG, J., REICHERT, P., ABBASPOUR, K. C. et al., 2007, “Hydrological modeling
of the Chaohe Basin in China: Statistical model formulation and Bayesian inference”,
Journal of Hydrology, v. 340, pp. 167-182.
177
ZOU, Z. Y., YOUNG, M. H., LI, Z., WIERENGA, P. J., 2001, “Estimation of depth
averaged unsaturated soil hydraulic properties from infiltration experiments”, Journal of
Hydrology, v. 242, pp. 26-42.
Top Related