





Línguas
Páginas
Legal


UNIVERSIDADE FEDERAL DE SANTA MARIACENTRO DE CIENCIAS NATURAIS E EXATAS
DEPARTAMENTO DE MATEMATICA
Equacoes a Diferencas nao Lineares:Metodos e Aplicacoes
TRABALHO DE CONCLUSAO DE CURSO
Luis Felipe Tatsch Schmidt
Santa Maria, RS, Brasil
2015

Equacoes a Diferencas nao Lineares: Metodos e
Aplicacoes
Luis Felipe Tatsch Schmidt
Trabalho de Conclusao de Curso apresentado ao Curso de Matematica doDepartamento de Matematica, da Universidade Federal de Santa Maria
(UFSM, RS), como requisito parcial para aprovacao na disciplina deTrabalho de Conclusao de Curso II - CCM1001.
Prof. Dr. Luiz Alberto Dıaz Rodrigues
Santa Maria, RS, Brasil
2015

Universidade Federal de Santa MariaCentro de Ciencias Naturais e Exatas
Departamento de Matematica
A Comissao Examinadora, abaixo assinada,aprova o Trabalho de Conclusao de Curso
Equacoes a Diferencas nao Lineares: Metodos e Aplicacoes
elaborado porLuis Felipe Tatsch Schmidt
como requisito parcial para aprovacao na disciplina de Trabalho de Conclusao deCurso II - CCM1001.
COMISSAO EXAMINADORA:
Luiz Alberto Dıaz Rodrigues, Dr.
(Orientador)
Diomar Cristina Mistro, Dra. (UFSM)
Salvador Lou Vega, Dr. (UFSM)
Santa Maria, 03 de Dezembro de 2015.

AGRADECIMENTOS
Primeiramente, agradeco aos meus pais, Luis Alberto Schmidt e Luciana da Con-
ceicao Tatsch Schmidt por todo apoio e carinho recebidos para que eu chegasse ate esta
etapa. Tudo que eu sou hoje, agradeco imensamente a voces.
Aos meus irmaos, Leonardo Tatsch Schmidt e Luis Eduardo Tatsch Schmidt.
A Gisiane da Silva Carneiro, por estar sempre ao meu lado e ser minha companheira
durante todo esse processo de conclusao de curso, me dando todo o apoio necessario.
Ao professor Luiz Alberto Dıaz Rodrigues, pela orientacao, ensinamentos e pela
enorme paciencia durante esse perıodo.
Ao Fundo de Incentivo a Pesquisa e Extencao da Universidade Federal de Santa
Maria, pelo apoio financeiro durante esse trabalho.
In Memoriam de minha Avo Terezinha Pessoa Tatsch, que sempre me disse para
eu correr atras de meus sonhos.
Aos meus amigos e familiares, que de alguma forma me ajudaram a chegar aqui.

RESUMO
Trabalho de Conclusao de Curso
Departamento de Matematica
Universidade Federal de Santa Maria
Equacoes a Diferencas nao Lineares: Metodos e Aplicacoes
AUTOR: Luis Felipe Tatsch Schmidt
ORIENTADOR: Luiz Alberto Dıaz Rodrigues
Data e Local da Defesa: Santa Maria, 03 de Dezembro de 2015.
Neste trabalho realizamos um estudo sobre as equacoes a diferencas lineares e
nao lineares de primeira ordem aplicadas a modelos classicos de dinamica de populacoes.
Foram estudados topicos como: o comportamento das equacoes a diferencas lineares de
primeira ordem, solucoes de equilıbrio e estabilidade local das equacoes a diferencas nao
lineares de primeira ordem e diagrama de teia de aranha e bifurcacao. Alem disso, foram
estudados os modelos classicos de Beverton-Holt, Ricker e modelo de crescimento com
efeito Allee, onde atraves da analise da estabilidade de cada modelo, podemos encontrar
a sua estabilidade local e seus respectivos diagramas de teia de aranha e bifurcacao.
Palavras-chave: Modelos discretos. Modelos classicos. Equacoes a diferencas.
Beverton-Holt. Ricker. Efeito Allee.

ABSTRACT
Dissertation
Graduate Program in Mathematics
Universidade Federal de Santa Maria
Nonlinear Difference equation: Methods and
Applications
AUTHOR: Luis Felipe Tatsch Schmidt
ADVISOR: Luiz Alberto Dıaz Rodrigues
Date and Location of Defense: Santa Maria, December 03, 2015.
In this work, we study first order linear equations applied to population dynamics.
We focus as: the behavior of linear difference equations of first order, equilibrium solutions
and local stability of a nonlinear difference equations of the first order and cobweb diagram
and split. Furthermore, the classical models were studied Beverton-Holt, Ricker and Allee
effect, where by examining the stability of each model, we can find a local stability and
their respective cobweb diagrams and split.
Keywords: Discrete models. Classic Models. Difference equations. Beverton-
Holt. Ricker. Allee effect.

LISTA DE FIGURAS
Figura 1.1 Solucao da equacao (1.2) para r = 1, 2 e x0 = 10. . . . . . . . . . . 14
Figura 1.2 Solucao da equacao (1.2) para r = 1 e x0 = 10. . . . . . . . . . . . 14
Figura 1.3 Solucao da equacao (1.2) para r = 0, 9 e x0 = 10. . . . . . . . . . . 15
Figura 1.4 Solucao da equacao (1.2) para r = −0, 9 e x0 = 10. . . . . . . . . . 15
Figura 1.5 Solucao da equacao (1.2) para r = −1 e x0 = 10. . . . . . . . . . . 16
Figura 1.6 Solucao da equacao (1.2) para r = −1, 2 e x0 = 10. . . . . . . . . . 16
Figura 1.7 Regiao de convergencia das solucao da equacao (1.2). . . . . . . . . 16
Figura 2.1 Ilustracao do Diagrama de Teia de aranha. . . . . . . . . . . . . . 22
Figura 2.2 Diagrama de bifurcacao da equacao logıstica em funcao do
parametro r no intervalo [0, 3, 55], mostrando os pontos de equilıbrio
bem como os ciclos de perıodo 2 e 4, bem como os intervalos de r para
os quais tais solucoes sao estaveis. . . . . . . . . . . . . . . . . . . . . . 23
Figura 3.1 Fator de crescimento do modelo de Beverton-Holt (3.1) para K =
10 e r = 0, 5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
Figura 3.2 (a) Densidade da populacao em funcao do tempo e (b) diagrama
de teia de aranha para K = 10 e r = 0, 5. . . . . . . . . . . . . . . . . . 26
Figura 3.3 (a) Densidade da populacao em funcao do tempo e (b) diagrama
de teia de aranha para K = 10 e r = 3. . . . . . . . . . . . . . . . . . . 27
Figura 3.4 Diagrama de Bifurcacao do modelo de Beverton-Holt em relacao
ao parametro r. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
Figura 3.5 Fator de Crescimento do Modelo de Ricker. . . . . . . . . . . . . . 28
Figura 3.6 (a) Densidade da populacao em funcao do tempo e (b) diagrama
de teia de aranha para K = 10 e r = 0, 5. . . . . . . . . . . . . . . . . . 29
Figura 3.7 (a) Densidade da populacao em funcao do tempo e (b) diagrama
de teia de aranha para K = 10 e r = 1, 5. . . . . . . . . . . . . . . . . . 29
Figura 3.8 (a) Densidade da populacao em funcao do tempo e (b) diagrama
de teia de aranha para K = 10 e r = 2, 45. . . . . . . . . . . . . . . . . 30
Figura 3.9 (a) Densidade da populacao em funcao do tempo e (b) diagrama
de teia de aranha para K = 10 e r = 2, 6. . . . . . . . . . . . . . . . . . 30

Figura 3.10 (a) Densidade da populacao em funcao do tempo e (b) diagrama
de teia de aranha para K = 10 e r = 2, 67. . . . . . . . . . . . . . . . . 31
Figura 3.11 Solucao Caotica. (a) Densidade da populacao em funcao do tempo
e (b) diagrama de teia de aranha para K = 10 e r = 3. . . . . . . . . . 31
Figura 3.12 Diagrama de Bifurcacao para o modelo de Ricker em relacao ao
parametro r. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
Figura 3.13 Fator de crescimento do modelo com efeito Allee forte. . . . . . . 34
Figura 3.14 Fixando o valor de b = 4, e variando o parametro r,temos em (a)
r = 2, (b)r = 4 e (c)r = 6, onde podemos visualizar cada um dos casos
de x∗. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
Figura 3.15 (a) Densidade populacional em funcao do tempo e (b) diagrama
teia de aranha para r2 < 4b. . . . . . . . . . . . . . . . . . . . . . . . 36
Figura 3.16 (a), (c) e (e) Densidades populacionais em funcao do tempo e (b),
(d) e (f) diagramas teia de aranha para r2 > 4b e diferentes condicoes
iniciais. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
Figura 3.17 (a) e (c) Densidades populacionais em funcao do tempo e (b) e (d)
diagramas teia de aranha para r2 = 4b e diferentes condicoes iniciais. . 38

SUMARIO
INTRODUCAO 10
1 Equacoes a Diferencas Lineares 12
1.1 Equacoes a Diferencas de Primeira Ordem Linear . . . . . . . . . . . . . . 13
1.2 Comportamento da Solucao Geral . . . . . . . . . . . . . . . . . . . . . . . 14
2 Equacoes a Diferencas Nao Lineares de Primeira Ordem 18
2.1 Solucoes de Equilıbrio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
2.2 Estabilidade Local . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
2.3 Metodo Teia de Aranha . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
2.4 Bifurcacoes em Equacoes a Diferencas de Primeira Ordem . . . . . . . . . 21
3 Alguns Modelos Classicos 24
3.1 Modelo de Beverton-Holt . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
3.2 Modelo de Ricker . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
3.3 Modelo com Efeito Allee forte . . . . . . . . . . . . . . . . . . . . . . . . . 32
CONCLUSAO 39
REFERENCIAS BIBLIOGRAFICAS 40

INTRODUCAO
Modelos discretos no tempo sao apropriados quando podemos pensar o fenomeno
a ser estudado em termos de etapas discretas de tempo ou quando se quer descrever
medidas experimentais que foram coletadas em intervalos fixos de tempo.
Em geral, estamos interessados em uma sequencia de quantidades
x0, x1, x2, x3, ...
onde xi denota a quantidade depois de i etapas de tempo.
Um modelo discreto e uma regra que descreve como estas quantidades variam no
tempo. Em particular, descreve como xn+1 depende de xn:
xn+1 = f (xn) .
A equacao acima e denominada recursao ou equacao a diferencas e f e chamada
um mapa.
Assim, dada alguma condicao inicial x0, a funcao pode ser iterada para fornecer
x1 = f (x0), x2 = f (x1), x3 = f (x2), etc.
A sequencia x0, x1, x2, x3, x4, ... e denominada uma orbita do mapa. Um bom
modelo deve ser capaz de produzir orbitas de acordo com os dados observados experimen-
talmente.
Em dinamica de populacoes a equacao xn+1 = f(xn) relaciona a populacao xn+1
com a populacao na geracao n, xn. Em geral, equacoes a diferencas desta forma sao nao
lineares e, portanto, nao possuem solucoes algebricas. Com o auxılio de um computador,
podemos gerar com facilidade orbitas para diferentes condicoes iniciais e parametros do
modelo, e ter uma ideia sobre a dinamica da populacao. No entanto, e possıvel que
determinados comportamentos do modelo passem desapercebidos.
Muitas vezes podemos obter informacoes importantes sobre a dinamica a partir
de tecnicas matematicas. Entre elas podemos destacar o metodo grafico conhecido como
teia de aranha que permite visualizar as orbitas e seu comportamento assintotico, a deter-
minacao de solucoes de equilıbrio e a analise de estabilidade das mesmas. As mudancas
qualitativas e o comportamento assintotico podem ser observados no diagrama de bi-
furcacao.

11
Alguns exemplos de organismos que tem reproducao discreta sao: insetos que
apresentam fases bem definidas durante seu ciclo de vida, passaros que se reproduzem de
maneira sincronizada uma vez por ano, plantas anuais que florescem no verao e depois
morrem deixando seus descendentes na forma de sementes, algumas especies de salmao
(Salmao do Pacıfico - Oncorhyncus) que nascem em agua doce, viajam para o mar onde
vivem ate atingirem a maturidade e retornam ao rio onde nasceram para desovar e morrer
(KOT, 2001).
Neste trabalho, daremos enfase ao estudo de equacoes a diferencas aplicadas a
dinamica de populacoes. No primeiro capıtulo e feita uma analise das equacoes lineares de
primeira ordem e do comportamento das suas solucoes. Ja no capıtulo dois, estudaremos a
formulacao matematica dos modelos e os metodos matematicos, analıticos e qualitativos,
necessarios para a resolucao e analise dos modelos de Beverton-Holt, Ricker e com Efeito
Allee.

Capıtulo 1
Equacoes a Diferencas Lineares
Para algumas especies, os nascimentos ocorrem em uma epoca especıfica do ano,
a estacao reprodutiva. Exemplos de populacoes que apresentam dinamicas discretas no
tempo incluem insetos, plantas anuais, peixes, aves e ate mamıferos (KOT, 2001). Alter-
nativamente, um modelo tempo-discreto tambem pode ser utilizado quando a populacao
e avaliada em intervalos discretos de tempo (BRITTON, 2003).
Admitindo que a populacao do ano n, denotada por xn, determine a populacao na
geracao seguinte, podemos escrever o modelo em tempo discreto como:
xn+1 = f(xn), (1.1)
para alguma funcao f .
Esta equacao e denominada equacao a diferencas de primeira ordem, porque xn+1
e determinada unicamente pela geracao anterior xn (SEGEL, 1984).
Solucoes para a equacao (1.1) podem ser obtidas de maneira recursiva. Dada uma
populacao inicial x0, podemos calcular o numero de indivıduos da populacao nas proximas
geracoes:
x1 = f(x0),
x2 = f(x1),
x3 = f(x2),
...
xn = f(xn−1),
...
Em contraposicao as equacoes diferenciais, esta propriedade das equacoes a dife-
rencas garante uma implementacao computacional direta, sem necessidade de metodos

13
numericos.
1.1 Equacoes a Diferencas de Primeira Ordem Linear
A equacao a diferencas de primeira ordem mais simples e a equacao linear:
xn+1 = rxn. (1.2)
A constante r denominada de fator especıfico de crescimento representa a diferenca
entre a taxa de nascimentos e a taxa de mortalidade. Observamos que no caso de modelos
discretos com sobreposicao de geracoes devemos adicionar uma unidade ao parametro r
para contabilizar os indivıduos que sobrevivem de uma geracao para a outra.
Exemplo:
Consideremos uma populacao de celulas que se divide de maneira sincronizada,
cada uma produzindo a celulas filhas (a > 0, pois e biologicamente impossıvel ter um
numero negativo de celulas, e tambem, a 6= 0 pois seria irrelevante). Podemos definir o
numero de celulas como sendo M1, M2, M3, ..., Mn, ate a n-esima geracao. A equacao
mais simples que relaciona a populacao de celulas com a geracao anterior e:
Mn+1 = aMn. (1.3)
Considerando uma populacao inicial de M0 celulas, qual sera a populacao de celulas
na n-esima geracao?
Podemos calcular aplicando recursivamente a Eq. (1.3) para achar o resultado.
M1 = aM0,
M2 = aM1 = a(aM0) = a2M0,
M3 = aM2 = a(a2M0) = a3M0, · · ·
Assim, para a n-esima geracao obtemos:
Mn = anM0. (1.4)
Como vimos no exemplo, uma equacao a diferencas da forma (1.2) pode ser resol-
vida explicitamente de maneira muito facil. Sua solucao, com condicao inicial x0 e
xn = rnx0, (1.5)
onde n e o numero de geracoes.

14
1.2 Comportamento da Solucao Geral
• Quando r > 1: A populacao cresce de geracao para geracao, ou seja, ela
cresce ilimitadamente, de maneira monotona, conforme Figura 1.1 .
Figura 1.1: Solucao da equacao (1.2) para r = 1, 2 e x0 = 10.
• Quando r = 1: A populacao permanece constante, nao ha aumento nem
diminuicao do numero de indivıduos com o passar do tempo, conforme Figura 1.2.
Figura 1.2: Solucao da equacao (1.2) para r = 1 e x0 = 10.
• Quando 0 < r < 1: O numero de indivıduos da populacao em cada geracao
e menor do que o numero de indivıduos da geracao anterior, ou seja, se aproxima
de zero monotonicamente, a populacao ira a extincao, conforme Figura 1.3.
O estudo do comportamento das equacoes a diferencas lineares de 1a ordem
admite o estudo das solucoes quando r < 0, apesar de ser biologicamente impossıvel.

15
Figura 1.3: Solucao da equacao (1.2) para r = 0, 9 e x0 = 10.
Assim os resultados apresentados a seguir correspondem as solucoes da equacao e serao
uteis no estudo das equacoes a diferencas nao lineares.
• Quando −1 < r < 0: A solucao da equacao admite valores alternadamente
positivos e negativos, aproximando-se de zero, conforme Figura 1.4.
Figura 1.4: Solucao da equacao (1.2) para r = −0, 9 e x0 = 10.
• Quando r = −1: A solucao alterna entre x0 e −x0, conforme Figura 1.5.
• Quando r < −1: A solucao assume valores alternados entre positivos e
negativos, oscilando com amplitude crescente, conforme a Figura 1.6.
O diagrama da Figura 1.7 a seguir, mostra um resumo desse comporta-
mento:
Concluımos assim,

16
Figura 1.5: Solucao da equacao (1.2) para r = −1 e x0 = 10.
Figura 1.6: Solucao da equacao (1.2) para r = −1, 2 e x0 = 10.
Figura 1.7: Regiao de convergencia das solucao da equacao (1.2).

17
Se |r| > 1 entao a solucao da equacao (1.2) diverge.
Se |r| < 1 entao a solucao da equacao (1.2) converge.
Obviamente, e muito difıcil uma populacao possuir uma taxa de nascimento
constante como foi visto ate agora. Varios fatores influenciam para que isso nao ocorra.
Por exemplo, o esgotamento dos recursos e a acumulacao de toxinas no meio, vao levar
a uma diminuicao da taxa de natalidade, sendo assim, vamos focar nossos estudos nas
equacoes a diferencas nao-lineares de primeira ordem.

Capıtulo 2
Equacoes a Diferencas Nao Lineares
de Primeira Ordem
Uma equacao a diferencas de primeira ordem nao linear e uma equacao da forma
xn+1 = f(xn), (2.1)
onde a funcao f depende de combinacoes nao lineares do seu argumento xn. Da mesma
forma que nas equacoes a diferencas lineares, a solucao de uma equacao nao linear do tipo
(2.1) pode ser expressa em termos da condicao inicial x0:
x1 = f(x0), x2 = f 2(x0), x3 = f 3(x0), · · · , xn = fn(x0),
onde n representa o numero de iteracoes e fn a composicao da funcao f (ALLEN, 2007).
O estudo de equacoes a diferencas nao lineares se faz necessario porque muitos
processos biologicos sao realmente nao lineares. Como exemplos em dinamica de po-
pulacoes podemos citar os processos de autorregulacao de uma populacao e as interacoes
entre especies em competicao que resultam em nao linearidades (EDELSTEIN-KESHET,
1988).
A equacao (2.1) representa um sistema dinamico discreto cujo comportamento,
em geral, e muito complexo. Neste capıtulo, vamos introduzir as tecnicas matematicas
que sao utilizadas no estudo de equacoes nao lineares de primeira ordem. Tais tecnicas
incluem a identificacao de solucoes de equilıbrio, a analise de estabilidade destas solucoes
e mudancas no comportamento qualitativo em relacao a valores de um parametro do
modelo (ALLEN, 2007; SEGEL, 1984).
Muitos modelos populacionais podem ser escritos na forma geral
xn+1 = r(xn)xn, (2.2)
onde r(xn) indica um fator de crescimento dependente da densidade populacional xn. Este

19
fator descreve os mecanismos de autorregulacao que controlam o crescimento da populacao
e que devem ser considerados para tornar os modelos mais realısticos (de VRIES et al,
2006).
2.1 Solucoes de Equilıbrio
Problemas matematicos classicos no estudo das equacoes a diferencas nao lineares
incluem a identificacao das solucoes de equilıbrio e analise da estabilidade para essas
solucoes especiais.
O conceito de estado de equilıbrio diz respeito a ausencia de mudancas em um
sistema com relacao ao tempo, ou seja, ha equilıbrio quando nao ocorrem variacoes do
numero de indivıduos no tempo:
xn+1 = xn = x∗,
x∗ constante.
Definicao 1. Para a equacao a diferencas de primeira ordem,
xn+1 = f(xn),
uma solucao de equilıbrio e uma solucao constante, isto e, uma solucao x∗ que satisfaz:
x∗ = f(x∗).
Essas solucoes sao especialmente importantes porque se nas geracoes sucessivas a
populacao se aproxima de um limite, entao tal limite deve ser uma solucao de equilıbrio.
Assim, se
limn→∞
xn = x∗,
Entao assumindo f contınua
limn→∞
xn = limn→∞
f(xn−1)⇒ x∗ = f( limn→∞
f(xn−1)) = f(x∗)
Desta forma, para compreender a dinamica de um modelo e razoavel analisar a
evolucao no tempo de uma populacao que na geracao n esta proxima de uma solucao de
equilıbrio.

20
2.2 Estabilidade Local
A estabilidade local de um sistema esta associada a resposta de uma solucao
proxima de uma solucao de equilıbrio, ou seja, devemos analisar o que ocorre com a
solucao quando ela esta sujeita a pequenas perturbacoes do estado de equilıbrio. Uma
solucao de equilıbrio e estavel se dada alguma solucao xn “proxima”de x∗ entao xn tende
a x∗.
A seguir, vamos formalizar estas ideias atraves de uma analise linear de estabili-
dade.
Seja
xn = x∗ + αn, (2.3)
onde αn representa uma pequena perturbacao, de modo que a populacao na geracao n
esteja proxima de seu estado de equilıbrio x∗. Logo, x∗ sera estavel se αn tender a zero
quando n→∞.
Substituindo a expressao (2.3) na equacao (2.1) obtemos
x∗ + αn+1 = f(x∗ + αn). (2.4)
Para αn suficientemente pequeno podemos expandir f(x∗+αn) em serie de Taylor
em torno do ponto x∗:
f(x∗ + αn) = f(x∗) + f ′(x∗)αn +O(α2n), (2.5)
onde O(α2n) representa os termos de ordem igual ou superior a α2
n.
Agora, considerando apenas os termos lineares na expressao (2.5), escrevemos (2.4)
como
x∗ + αn+1 = f(x∗) + f ′(x∗)αn. (2.6)
Como x∗ e uma solucao de equilıbrio, de (2.6) obtemos a seguinte equacao a dife-
rencas linear para a perturbacao
αn+1 = f ′(x∗)αn,
cuja solucao e dada por
αn = C(f ′(x∗))n,
onde C e uma constante.
Logo, a constante f ′(x∗) determina se x∗ e localmente estavel ou instavel. Se
|f ′(x∗)| < 1, entao xn aproxima-se de x∗ para n → ∞ e se |f ′(x∗)| > 1, xn nao se
aproxima de x∗.

21
Portanto, a condicao para estabilidade local pode ser escrita como:
x∗ e um ponto de equilıbrio estavel de xn+1 = f(xn)⇔ |f ′(x∗)| < 1.
2.3 Metodo Teia de Aranha
Nesta secao, vamos apresentar um metodo grafico conhecido como Diagrama de
Lamerey ou teia de aranha que permite visualizar as orbitas da equacao xn+1 = f(xn) e
seu comportamento assintotico sem necessidade de calcular as iteracoes sucessivas x0, x1,
x2, . . ., xn, . . .
Inicialmente, plotamos os graficos da funcao xn+1 = f(xn) e da reta xn+1 = xn
no mesmo plano (xn, xn+1). Observamos que toda intersecao dos graficos e um ponto de
equilıbrio x∗ da equacao.
Para representar graficamente as iteracoes atraves do metodo teia de aranha, fa-
zemos o seguinte:
1. Escolhemos um valor inicial x0 sobre o eixo das abscissas;
2. Tracamos uma linha vertical a partir de x0 ate o grafico da funcao f(x) determinando
o valor de x1;
3. Refletimos o valor de x1 no eixo das abscissas utilizando a reta diagonal xn+1 = xn;
4. Tomando x1 tracamos mais uma vez uma linha vertical ate o grafico de f(x) para
encontrar o valor de x2;
5. Para determinar x3, x4, e assim por diante, repetimos o processo tracando linhas
verticais ate o grafico da funcao e horizontais ate a reta xn+1 = xn.
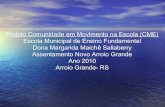
A figura (2.1) mostra um diagrama teia de aranha. Neste exemplo, a equacao
xn+1 = f(xn) tem dois pontos de equilıbrio: o zero e outro nao trivial. A sequencia x0,
x1, x2, . . ., converge para o ponto de equilıbrio nao trivial.
2.4 Bifurcacoes em Equacoes a Diferencas de Pri-
meira Ordem
Uma mudanca na dinamica de uma equacao xn+1 = f(xn) em relacao a variacao
de um parametro denomina-se bifurcacao. E o valor do parametro em que ocorre uma
mudanca de comportamento qualitativo do sistema e denominado ponto de bifurcacao.
Duas bifurcacoes tıpicas de equacoes a diferencas de primeira ordem sao a
transcrıtica e a de duplicacao de perıodo. Na bifurcacao transcrıtica, dois equilıbrios,

22
Figura 2.1: Ilustracao do Diagrama de Teia de aranha.
um estavel e outro instavel, trocam de estabilidade quando o valor de bifurcacao e atin-
gido. Na bifurcacao de duplicacao de perıodo, no ponto de bifurcacao, um equilıbrio
estavel torna-se instavel e aparece um ciclo de perıodo dois ou (2-ciclo) estavel. Perıodo
dois significa que as geracoes sucessivas se alternam entre dois valores fixos de xn. E
importante observar que este tipo de bifurcacao somente ocorre em equacoes a diferencas
(ALLEN, 2007; BRITTON, 2003).
Verificamos a partir do criterio de estabilidade para uma solucao de equilıbrio
(|f ′(x∗)| < 1) que bifurcacoes podem ocorrer quando f ′(x∗) = ±1.
A equacao logıstica discreta xn+1 = rxn(1−xn) e um prototipo do comportamento
dinamico complexo das equacoes a diferencas de primeira ordem. Esta equacao tem duas
solucoes de equilıbrio x∗1 = 0 e x∗2 = 1− 1
r. A expressao da derivada de f(x) = rx(1− x)
calculada no ponto de equilıbrio e dada por
f ′(x∗) = r − 2rx∗.
Substituindo x∗2 = 1− 1
rna expressao acima temos
f ′(x∗2) = r − 2r
(1− 1
r
)= 2− r.
Primeiro, fazendo f ′(x∗2) = 1 obtemos r = 1. Para este valor do parametro ocorre uma
bifurcacao transcrıtica na qual o ponto de equilıbrio x∗1 = 0 deixa de ser estavel, trocando
sua estabilidade com o ponto x∗2 = 1− 1
r.
Agora, fazendo f ′(x∗2) = −1 obtemos outro valor de bifurcacao, r = 3. Aqui ocorre
uma bifurcacao de duplicacao de perıodo em que x∗2 perde sua estabilidade para um 2-ciclo
estavel.
Um grafico que mostra solucoes de equilıbrio, orbitas periodicas e suas estabilidades

23
com relacao a um parametro e conhecido como diagrama de bifurcacao (BRITTON, 2003).
A figura 2.2 mostra um diagrama de bifurcacao para a equacao logıstica discreta.
Observamos que, para 0 ≤ r < 1, a populacao vai a extincao independente do valor inicial
x0. Para 1 < r < 3, a populacao atinge um estado de equilıbrio diferente de zero dado
por x∗2 = 1 − 1
re para 3 < r < 1 +
√6, a populacao oscila entre dois valores constantes
(ciclo de perıodo 2). Finalmente, para valores de r levemente maiores que 1 +√
6 temos
um ciclo de perıodo quatro (a populacao oscila entre quatro valores fixos).
Figura 2.2: Diagrama de bifurcacao da equacao logıstica em funcao do parametro r nointervalo [0, 3, 55], mostrando os pontos de equilıbrio bem como os ciclos de perıodo 2 e4, bem como os intervalos de r para os quais tais solucoes sao estaveis.
Duas outras bifurcacoes diferentes ocorrem em equacoes de primeira ordem quando
um valor de bifurcacao e atingido: a bifurcacao sela-no na qual dois equilıbrios, um estavel
e outro instavel, desaparecem e a bifurcacao “forcado”na qual tres equilıbrios surgem, dois
estaveis separado por um instavel (ALLEN, 2007; BRITTON, 2003).

Capıtulo 3
Alguns Modelos Classicos
Como mencionamos no capıtulo 2, o fator de crescimento de uma populacao de-
pende, em geral, da densidade da populacao. Um exemplo deste fenomeno e a competicao
intraespecıfica.
Neste capıtulo, analisamos tres modelos que levam em conta este aspecto utilizando
os conceitos e tecnicas matematicas estudados no capıtulo anterior.
3.1 Modelo de Beverton-Holt
O modelo de Beverton-Holt e um modelo no qual o crescimento da populacao
depende da densidade. Essa dependencia ocorre quando o numero de descendentes por
adulto varia de acordo com a densidade populacional. O modelo de Beverton-Holt parte
do princıpio que o numero de descendentes e inversamente proporcional a funcao linear
crescente do numero de adultos, ou seja, quanto mais indivıduos adultos tivermos em
uma populacao, menos descendentes irao ser gerados (KOT, 2001). Para este modelo,
escrevemos o fator de crescimento da populacao como funcao da densidade populacional:
r(xn) =xn+1
xn=
r
1 +
[(r − 1)
K
]xn
. (3.1)
O parametro r e denominado fator especıfico de crescimento e representa o fator
de crescimento na ausencia de competicao intraespecıfica. O parametro K e conhecido
como capacidade de suporte do meio e corresponde a densidade populacional que produz
um fator de crescimento igual a 1.
Na figura 3.1 mostramos o grafico do fator de crescimento r(xn) para o modelo de
Beverton-Holt.

25
Figura 3.1: Fator de crescimento do modelo de Beverton-Holt (3.1) para K = 10 e r = 0, 5.
Podemos reescrever a equacao a diferencas (3.1):
xn+1 =rxn
1 +
[(r − 1)
K
]xn
, (3.2)
conhecida como curva de estoque e recrutamento de Beverton-Holt, que e hiperbolica e
monotona crescente.
Agora podemos analisar a estabilidade do modelo. Para tanto, na equacao (3.2)
atribuımos xn+1 = xn = x∗. Assim,
x∗ =rx∗
1 +
[(r − 1)
K
]x∗,
de onde obtemos dois valores para x∗, a solucao trivial x∗1 = 0 e x∗2 = K.
Para a verificacao da estabilidade de cada solucao de equilıbrio derivamos a funcao
f(xn):
f ′(xn) =r[
1 +
(r − 1
K
)xn
]2 . (3.3)
Uma solucao de equilıbrio sera estavel se |f ′(x∗)| < 1, como vimos no capıtulo
anterior.

26
• Para x∗ = 0:
f ′(0) =r[
1 +
(r − 1
K
)0
]2 =r
1= r
• Para x∗ = K:
f ′(K) =r[
1 +
(r − 1
K
)K
]2 =r
r2=
1
r
Portanto,
|f ′(x∗)| =
r, parax∗ = 01
r, parax∗ = K
Podemos concluir entao que para r < 1, x∗1 = 0 e estavel e x∗2 = K e instavel.
Neste caso, a populacao tendera a extincao quando n→∞ (Como na figura (??) ). Para
r > 1, x∗1 = 0 e instavel e x∗2 = K e estavel, e a populacao tendera para a capacidade de
suporte K quando n→∞.
Podemos entao aplicar o metodo do diagrama de teia de aranha ao modelo de
Beverton-Holt, afim de analisar a estabilidade de seus pontos de equilıbrio. Nas Figuras
(3.2) e (3.3) mostramos os diagramas de teia de aranha para r < 1 e r > 1, respectiva-
mente.
Figura 3.2: (a) Densidade da populacao em funcao do tempo e (b) diagrama de teia dearanha para K = 10 e r = 0, 5.
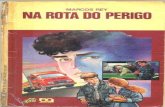
A figura 3.4 mostra o diagrama de bifurcacao em relacao ao parametro r para o
modelo de Beverton-Holt. Em r = 1, ocorre uma bifurcacao transcrıtica, o ponto de
equilıbrio x∗1 = 0 perde estabilidade e o ponto de equilıbrio x∗2 = K torna-se estavel.

27
Figura 3.3: (a) Densidade da populacao em funcao do tempo e (b) diagrama de teia dearanha para K = 10 e r = 3.
Figura 3.4: Diagrama de Bifurcacao do modelo de Beverton-Holt em relacao ao parametror.

28
3.2 Modelo de Ricker
O modelo de Ricker, assim como o de Beverton-Holt e um modelo denso-
dependente, onde o numero de indivıduos de uma populacao depende da densidade po-
pulacional. Esse modelo leva em conta os fatores ambientais na limitacao do crescimento.
Nos grandes aglomerados populacionais podera ocorrer uma diminuicao da reproducao
devido ao aumento do stress ou reducao de nutrientes essenciais. Assim, a medida que a
populacao aumenta, a sua taxa de crescimento podera a diminuir.
O modelo de Ricker surge como uma interessante funcao de reproducao. Por exem-
plo, em algumas especies, os adultos alimentam-se dos indivıduos jovens, desta forma, um
numero muito elevado de adultos podera ocasionar alteracoes significativas no tamanho
da populacao.
Este fenomeno e ilustrado pelo modelo de Ricker:
xn+1 = xner(1−xn
K ), (3.4)
onde r e K sao parametros positivos.
No modelo, o fator de crescimento e dado por
r(xn) = er(1−xnK ) = ere(−
rKxn).
O fator er pode ser interpretado como um fator de crescimento constante e e(−rKxn)
como um fator de mortalidade que depende da densidade populacional. Observamos que
este fator e mais intenso para xn grande. O grafico de r(xn) e mostrado na figura 3.5.
Figura 3.5: Fator de Crescimento do Modelo de Ricker.
Para analisar o modelo, primeiro determinamos as solucoes de equilıbrio. A
equacao
f(x∗) = x∗er(1−x∗K ) = x∗,

29
tem como solucoes x∗1 = 0 e x∗2 = K.
A estabilidade destas solucoes de equilıbrio e determinada pela derivada da funcao
f(xn):
f ′(xn) = er(1−xnK )(
1− rxnK
).
Para o ponto de equilıbrio x∗1 = 0 temos f ′(0) = er e para o ponto de equilıbrio
nao trivial x∗2 = K, f ′(K) = 1− r.O ponto x∗1 = 0 e sempre instavel pois er > 1 para r > 0. Como |1 − r| < 1
para 0 < r < 2, concluımos que o ponto de equilıbrio nao trivial x∗2 = K e estavel para
0 < r < 2 e instavel para r > 2. Simulacoes numericas do modelo para qualquer condicao
inicial x0 mostram que as solucoes se aproximam da solucao de equilıbrio nao trivial para
0 < r < 2 quando n → ∞. Se 0 ≤ r < 1 entao 0 ≤ 1 − r < 1, portanto a convergencia
para o ponto x∗2 = K e monotona (figura 3.6). Se 1 < r < 2 entao −1 < 1 − r < 0 e,
portanto, as solucoes se aproximam de K oscilando (figura 3.7).
Figura 3.6: (a) Densidade da populacao em funcao do tempo e (b) diagrama de teia dearanha para K = 10 e r = 0, 5.
Figura 3.7: (a) Densidade da populacao em funcao do tempo e (b) diagrama de teia dearanha para K = 10 e r = 1, 5.
Verificamos que para 0 < r < 2 as solucoes da equacao de Ricker convergem para

30
a solucao de equilıbrio x∗2 = K. Mas qual o comportamento do modelo para valores de
r > 2?
Quando aumentamos o valor de r ultrapassando r = 2, o equilıbrio que era estavel
torna-se instavel e aparecem oscilacoes . Essas oscilacoes podem ser de perıodo 2 ou mais,
dependendo do valor de r > 2. No modelo de Ricker podem ocorrer ciclos de perıodo
2, 4, 8, · · · , 2n, · · · , para n ∈ N.
Analisemos algumas situacoes:
• Ciclo de perıodo 2: 2, 01 . r . 2, 519 (Figura 3.8).
Figura 3.8: (a) Densidade da populacao em funcao do tempo e (b) diagrama de teia dearanha para K = 10 e r = 2, 45.
• Ciclo de perıodo 4: 2, 52 . r . 2, 653 (Figura 3.9).
Figura 3.9: (a) Densidade da populacao em funcao do tempo e (b) diagrama de teia dearanha para K = 10 e r = 2, 6.
• Ciclo de perıodo 8: 2, 654 . r . 2, 685 (Figura 3.10).
Se continuarmos aumentando levemente o parametro r, ocorrem duplicacoes
dos perıodos. Para valores maiores que r > 2, 68 encontramos uma regiao de ciclos

31
Figura 3.10: (a) Densidade da populacao em funcao do tempo e (b) diagrama de teia dearanha para K = 10 e r = 2, 67.
estaveis, bem como solucoes aperiodicas. Estas solucoes que apresentam grandes flu-
tuacoes aperiodicas sao conhecidas como caoticas. O caos e definido como uma dinamica
aperiodica limitada em um sistema determinıstico. Aperiodica significa que nenhum valor
se repete duas vezes e limitada quer dizer que a sequencia de iteracoes x0, x1, x2, ...,
xn, ... permanece em um intervalo limitado para todo n. Outra caracterıstica importante
do caos e a dependencia das condicoes iniciais; duas condicoes inicialmente proximas se
afastam com o tempo. Desta forma, e impossıvel prever o comportamento assintotico de
uma solucao em um regime caotico (KAPLAN-GLASS, 1995).
A figura (3.11) mostra uma solucao caotica para r = 3.
Figura 3.11: Solucao Caotica. (a) Densidade da populacao em funcao do tempo e (b)diagrama de teia de aranha para K = 10 e r = 3.
Como analisamos anteriormente, para valores de r entre 0 e 2 a solucao e estavel.
Isto e observado no diagrama da figura (3.12). O valor de r = 2 e onde aparece o ciclo de
perıodo 2. Para r = 2, 45, cuja solucao esta ilustrada na figura (3.8), a solucao x∗ = K
torna-se instavel e surge um 2-ciclo estavel. Da mesma forma, quando tomamos r = 2, 6
(Figura 3.9), temos um ciclo de periodo 4. Tambem, quando tomamos r = 2, 67, temos

32
Figura 3.12: Diagrama de Bifurcacao para o modelo de Ricker em relacao ao parametror.
um ciclo de perıodo igual a 8. E finalmente para r > 3, o diagrama apresenta um regime
caotico.
3.3 Modelo com Efeito Allee forte
Os modelos discretos em dinamica populacional, em geral, consideram o fator de
crescimento como uma funcao decrescente do tamanho (densidade) da populacao. Esta
dependencia negativa da densidade justifica-se pela competicao intraespecıfica. No en-
tanto, esta hipotese pode nao ser adequada em determinados casos. Se a populacao e
muito pequena nao ha razao para que ocorra a competicao por espaco e nutrientes. As-
sim, e razoavel considerar, para densidades populacionais muito pequenas, o fator de
crescimento como uma funcao crescente da densidade populacional. Este mecanismo e
conhecido como efeito Allee (SEIDEL, 2006).
Podemos formular um modelo matematico que descreve a dinamica de uma po-
pulacao que apresenta efeito Allee, consideramos a seguinte equacao:
xn+1 = f(xn), (3.5)
onde xn e o tamanho da populacao na geracao n.
Admitimos que o mapa f(xn) admite a solucao de equilıbrio trivial e pelo menos
um nao trivial x∗ = K. Com essas hipoteses, uma populacao apresenta efeito Allee quando

33
f(xn) > f ′(0)xn, (3.6)
para valores suficientemente pequenos de xn.
O efeito Allee e chamado forte se
0 ≤ f ′(0) < 1. (3.7)
Neste caso, existe pelo menos outro ponto de equilıbrio entre zero e x∗ = K.
Contudo, o efeito Allee e dito fraco se
f ′(0) > 1. (3.8)
Uma populacao que apresenta um efeito Allee fraco apresenta um fator de cres-
cimento pequeno para densidades populacionais baixas, isto e, a populacao cresce mais
lentamente quando o numero de indivıduos e pequeno. Um efeito Allee forte introduz
um limiar populacional abaixo do qual a populacao vai para a extincao. Se a densidade
populacional estiver abaixo deste limiar, a populacao ira a extincao.
O efeitos Allee pode provir da dificuldade de encontrar parceiros ou de uma menor
eficiencia de alimentacao em densidades populacionais muito baixas, do acasalamento de
indivıduos consanguıneos ou ainda da fragmentacao da populacao.
Uma populacao com flutuacoes periodicas e um efeito Allee forte e especialmente
vulneravel a extincao pois as flutuacoes podem conduzir sua densidade abaixo do limiar
crıtico.
Um modelo que considera a dinamica de uma populacao que apresenta efeito Allee
e dado pela equacao:
xn+1 = f(xn) =rx2n
1 + bx2n, (3.9)
onde r e b sao constantes positivas.
O modelo (3.9) pode ser escrito na forma
xn+1 = r(xn)xn,
onde
r(xn) =rxn
1 + bx2n
e o fator de crescimento dependente da densidade populacional xn.
O grafico do fator r(xn) e mostrado na figura 3.13.
Observamos que o fator de crescimento cresce ate um maximo (efeito Allee) e
depois decresce aproximando-se de zero (efeito da competicao intraespecıfica).
A magnitude de r(xn) determina se a populacao cresce ou decresce com o passar

34
Figura 3.13: Fator de crescimento do modelo com efeito Allee forte.
do tempo, isto e,
• Se |r(xn)| > 1⇒ xn cresce com as geracoes sucessivas;
• Se |r(xn)| < 1⇒ xn decresce com as geracoes sucessivas;
• Se |r(xn)| = 1⇒ xn e constante.
Podemos, atraves do modelo (3.9), encontrar os pontos de equilıbrio resolvendo a
equacao
x∗ =rx∗2
1 + bx∗2⇒
⇒ 1 =rx∗
1 + bx∗2⇒
⇒ 1 + bx∗2 = rx∗ ⇒
⇒ bx∗2 − rx∗ + 1 = 0⇒
⇒ x∗ =r ±√r2 − 4b
2b.
Vemos que os pontos de equilıbrio dependem diretamente dos valores de r e b:
• se r2 < 4b, entao existe um unico ponto de equilıbrio, que e o trivial, isto e,
x∗1 = 0.

35
• se r2 = 4b entao existem dois pontos de equilıbrio:
x∗1 = 0,
x∗2 =r
2b.
• e se r2 > 4b, entao existem tres pontos de equilıbrio:
x∗1 = 0,
x∗2 =r −√r2 − 4b
2b,
x∗3 =r +√r2 − 4b
2b.
A figura 3.14 ilustra estas tres possibilidades.
Figura 3.14: Fixando o valor de b = 4, e variando o parametro r,temos em (a) r = 2,(b)r = 4 e (c)r = 6, onde podemos visualizar cada um dos casos de x∗.
Como ja encontramos os pontos de equilıbrio, agora podemos verificar suas respec-
tivas estabilidades, para isso, derivamos a funcao f dada em (3.9), obtendo:
f ′(xn) =2rxn
(1 + bx2n)2, (3.10)
Assim, levando-se em conta que r e b sao parametros positivos do modelo, se
r2 < 4b, a desigualdade

36
rx2
(1 + bx2)< x,
e satisfeita para todo x > 0. Isto e, o grafico da f esta abaixo da diagonal y = x. Assim,
para qualquer valor inicial x0 > 0, a sucessao de iteracoes de f tende monotonicamente
para zero, como ilustra a figura 3.15.
Se r2 > 4b, entao a desigualdade
rx2
(1 + bx2)> x,
e satisfeita quando x∗2 < x < x∗3, onde
x∗2 =r −√r2 − 4b
2b,
x∗3 =r +√r2 − 4b
2b.
Portanto, a equacao (3.9) tem tres pontos de equilıbrio: x∗2, x∗3 e x∗1 que e a solucao
trivial, ilustradas juntamente com as solucoes na figura 3.17.
Finalmente quando r2 = 4b, os pontos de equilıbrio nao triviais coincidem e o
grafico de f tangencia a reta diagonal xn+1 = xn (figura 3.16).
Figura 3.15: (a) Densidade populacional em funcao do tempo e (b) diagrama teia dearanha para r2 < 4b.

37
Figura 3.16: (a), (c) e (e) Densidades populacionais em funcao do tempo e (b), (d) e(f) diagramas teia de aranha para r2 > 4b e diferentes condicoes iniciais.

38
Figura 3.17: (a) e (c) Densidades populacionais em funcao do tempo e (b) e (d) diagra-mas teia de aranha para r2 = 4b e diferentes condicoes iniciais.

CONCLUSAO
Neste trabalho foi realizado um estudo de equacoes a diferencas de primeira ordem
aplicadas a dinamica de populacoes. No primeiro capıtulo estudamos as solucoes de
equacoes lineares de primeira ordem.
No capıtulo 2 analisamos os metodos matematicos utilizados no estudo das
equacoes a diferencas nao lineares de primeira ordem:
- definicao e identificacao de solucoes de equilıbrio;
- analise de estabilidade linear das solucoes de equilıbrio;
- metodo grafico para analisar o comportamento assintotico das solucoes;
- diagrama de bifurcacao.
Finalmente, as tecnicas desenvolvidas no capıtulo 2 foram utilizadas na
analise de tres modelos classicos: o modelo de Beverton-Holt, o de Ricker e um modelo
com efeito Allee forte.
As simulacoes aqui apresentadas foram feitas utilizando o software matematico
Mathematica.

REFERENCIAS BIBLIOGRAFICAS
[1] ALLEN, L. J. S. An Introduction to Mathematical Biology. Pearson Prentice
Hall, 2007.
[2] BRITTON, N. F. Essential Mathematical Biology. Springer-Verlag, New York,
2003.
[3] de VRIES, G. et al. A Course in Mathematical Biology: Quantitative Mo-
deling with Mathematical and Computational Methods. SIAM, 2006.
[4] EDELSTEIN-KESHET, L. Mathematical Models in Biology. New York: Ran-
dom House, 1988.
[5] KAPLAN, D.; GLASS, L. Understanting Nonlinear Dynamics. Springer-Verlag,
New York, Berlim, 1995.
[6] KOT, M. Elements of Mathematical Ecology. Cambridge: Cambridge University
Press, 2001.
[7] MURRAY, J. D. Mathematical Biology. 3 ed. Berlin: Springer-Verlag, 2003.
[8] SEGEL, L. A. Modeling Dynamic Phenomena in Molecular and Cellular
Biology. New York: Cambridge University, 1984.
[9] SEIDEL, D. J. Modelos Matematicos Para a Formacao de Padroes em Sis-
temas Biologicos. 2006. 96f. Dissertacao (Mestrado em Modelagem Matematica) -
UNIJUI, Ijuı, 2006.
[10] RODRIGUES, V. W. Modelos Discretos em Dinamica de Populacoes. 2014.
62f. Trabalho (Trabalho de Conclusao de Curso) - UFSM, Santa Maria, 2014.
Top Related