






Línguas
Páginas
Legal


MEMORIAS DEL XXIII CONGRESO INTERNACIONAL ANUAL DE LA SOMIM 20 al 22 DE SEPTIEMBRE DE 2017 CUERNAVACA, MORELOS, MÉXICO
Tema Diseño mecánico: Mecanismos
“Diseño de un sistema leva seguidor cilíndrico desmodrómico para generar desplazamientos lineales reciprocantes”
Ricardo Yañez-Valdeza*, Luis Bautista-Morelosa, Francisco Cuenca-Jiméneza, Marcelo López-Parrab
aCentro de Ingeniería Avanzada (CIA-DIMEI), Facultad de Ingeniería, Universidad Nacional Autónoma de México, Edificio X, Circuito exterior s/n,
Ciudad Universitaria, Coyoacán, Ciudad de México, CP 0.4510, México. bCentro de Alta Tecnología Universidad Nacional Autónoma de México, Campus Juriquilla 3001 Querétaro 76230, México.
*Autor contacto: [email protected]
R E S U M E N
El cierre geométrico del par cinemático superior que garantiza el contacto permanente entre una leva y su seguidor se
denomina desmodrómico. El principio de aplicación de este tipo de sistemas ha sido poco explorado, especialmente en
sistemas leva-seguidor de cara ranurada cilíndricas cuyo movimiento del seguidor es reciprocante. Su implementación
garantiza, teóricamente, una reducción significativa del juego mecánico en un ensamble. En este artículo se describe el
proceso de diseño de un sistema leva seguidor desmodrómico espacial. El proceso se centra en tres aspectos
fundamentales, i) el diseño de la ley de desplazamiento, ii) la obtención del perfil de la leva y, iii) la comprobación del
perfil de la leva. Se pretende implementar el sistema leva seguidor en un banco de prácticas que facilite la comprensión
de la importancia que tiene el juego mecánico en un ensamble.
Palabras Clave: Diseño de levas, Leva cilíndrica, Ley de desplazamiento, Sistema desmodrómico.
A B S T R A C T
The form-closed higher kinematic pair that ensures permanent contact between a cam and a translating follower is termed
desmodromic. The principle of this type of systems has been a few explored, specifically in cylindrical cams with
translating roller follower. The main theoretical advantage of this arrangement is that the assembly reduce backlash. This
article describes the process of designing of the desmodromic cylindrical cam. The process focuses on: i) the fundamental
law of cam design, ii) the cam profile determination, and iii) the cam profile checking. The aim is to facilitate the
understanding of backlash in a mechanical assembly.
Keywords: Cam design, Cylindrical cam, Desmodromic system.
1. Introducción
Las levas son elementos de máquinas de uso común y de
gran importancia en la maquinaria moderna. Su aplicación
se puede observar frecuentemente en motores de
automóviles, para la apertura y cierre de circuitos,
cerraduras, y diversos mecanismos de uso cotidiano. Las
levas se presentan en una gran variedad de formas y pueden
ser planas o espaciales.
Cada leva en particular es diseñada para cumplir con
exigencias particulares, mismas que determinan su
funcionamiento; por lo tanto, es necesario seguir un proceso
que permita obtener el perfil que se ajuste a cada necesidad
y que cumpla con las características de movimiento deseada.
Los mecanismos de levas se clasifican teniendo en cuenta
varios criterios. De acuerdo al tipo de cierre del par
cinemático superior formado entre la leva y el seguidor, se
clasifican como; a) con cierre por fuerza. Se requiere la
aplicación de una fuerza externa sobre el seguidor para
garantizar el contacto entre la leva y éste. b) con cierre
geométrico o por forma, en el que se garantiza el contacto
permanente leva-seguidor a través de la configuración
geométrica de dichos elementos. Estas levas se denominan
desmodrómicas.
ISSN 2448-5551 DM 326 Derechos Reservados © 2017, SOMIM

MEMORIAS DEL XXIII CONGRESO INTERNACIONAL ANUAL DE LA SOMIM 20 al 22 DE SEPTIEMBRE DE 2017 CUERNAVACA, MORELOS, MÉXICO
Existen cuatro tipos de mecanismos leva-seguidor
desmodrómicos planos: el de leva de cara ranurada, de
anchura constante, de diámetro constante y de levas
conjugadas. En el estudio de los mecanismos leva-seguidor
se ha determinado que la bibliografía especializada que los
trata, aborda fundamentalmente a los mecanismos leva-
seguidor planos en los que el cierre del par se realiza por
fuerza, debido a que son los más utilizados en la práctica.
Sin embargo, el estudio de los mecanismos leva-seguidor
espaciales desmodrómicos, es un tema de manera general
poco analizado, especialmente en sistemas leva-seguidor de
cara ranurada cilíndricas cuyo movimiento del seguidor es
reciprocante. El interés por este tipo de levas radica en la
posibilidad de reducir el juego mecánico en la conversión
del movimiento rotatorio en uno lineal.
Kozhenikov [1] presenta ejemplos de aplicación de levas
desmodrómicas, sin exponer los métodos del perfilado. El
estudio que presenta Wilson y Sadler [2] sobre levas
desmodrómicas es breve y escueto. Kolok y Václavík [3]
tratan someramente el tema. Huang [4] analiza la
combinación de curvas de desplazamiento para la síntesis de
perfiles conjugados. Chunhong, et. al. [5] exponen el diseño
analítico de un mecanismo de levas conjugadas utilizadas en
el mecanismo tejedor usual de los telares. Hong-Sen y Hung
Ming [6] estudian los efectos de los errores de fabricación
para levas planas conjugadas con seguidores oscilantes y
establecen un modelo dinámico de tres grados de libertad.
Zhang [7] expone un ejemplo sobre el diseño analítico de un
mecanismo de levas conjugadas para telares flexibles. Tsay
y Lin [8] plantean un procedimiento para definir el perfil de
una leva, plana o espacial, envolviendo la superficie del
seguidor representada en una forma paramétrica dadas
diferentes posiciones relativas entre la leva y un seguidor
oscilante. Chablat y Ángeles [9] presentan el diseño de un
sistema de levas conjugadas con múltiples rodillos
montados en un seguidor común para convertir el
movimiento rotacional en uno traslacional, produciendo un
movimiento de rodadura pura y con ello, reducir la fricción.
La interacción gráfica para el diseño de levas cilíndricas
también ha sido explorada [10, 11]. Trabajos más recientes
exploran propuestas de sistemas desmodrómicos cuyo
seguidor presenta movimiento rotacional [12, 13]. Este ha
sido el motivo para desarrollar el presente manuscrito, en el
cual se realiza la síntesis del perfil de levas y se analizan las
características de las leyes de desplazamiento para un
sistema leva-seguidor desmodrómico de cara ranurada y
seguidor reciprocante.
2. Mecanismos leva-seguidor desmodrómicos
El adjetivo desmodrómico establece una unión entre dos
puntos de un mecanismo. Entonces, un mecanismo de leva
desmodrómico es: aquel mecanismo de leva que utiliza dos
pares superiores conjugados de manera que ambos imponen
la misma restricción cinemática; la pérdida de contacto en
uno de los pares queda impedido por el otro par [14, 15].
De los 4 tipos de sistemas leva-seguidor desmodrómicas que
existen, se abordan en este trabajo los de cara ranurada
cilíndrica, Fig. 1.
Figura 1. Leva-seguidor de cara ranurada.
2.1. Mecanismos de leva de cara ranurada
En este mecanismo la cara de la leva presenta una ranura
dentro de la cual se coloca el rodillo del seguidor. En este
mecanismo de leva ranurada, el rodillo debe presentar el
juego necesario para que gire libremente sobre su eje.
Rothbart [16] menciona que ese juego no produce una
restricción real del seguidor, ya que el rodillo contactará
alternativamente con cada lado de la ranura de la leva,
cambiando, eventualmente, su dirección de rotación. Esta
ausencia de restricción perfecta, permite que haya presencia
de movimientos de rodadura y deslizamiento en todos los
seguidores de rodillo que utilizan las levas de cara ranurada.
Rothbart [16] también expone una manera práctica para la
eliminación del juego mecánico presente entre el rodillo y la
ranura, que consiste en colocar dos rodillos sobre el mismo
eje del seguidor de manera que cada uno contacte con una
superficie de la ranura, los rodillos además de ser
concéntricos son de diámetro diferente como se muestra en
la Fig. 2.
Figura 2. Diseño práctico de seguidor de rodillo para levas ranuradas.
Este sistema se busca adaptar al diseño del sistema leva-
seguidor desmodrómico de cara ranurada y seguidor
reciprocante.
ISSN 2448-5551 DM 327 Derechos Reservados © 2017, SOMIM

MEMORIAS DEL XXIII CONGRESO INTERNACIONAL ANUAL DE LA SOMIM 20 al 22 DE SEPTIEMBRE DE 2017 CUERNAVACA, MORELOS, MÉXICO
3. Proceso de diseño del mecanismo leva-seguidor
El proceso de diseño de un mecanismo leva-seguidor, y más
específicamente de una leva, consiste básicamente en tres
pasos fundamentales [14]. A continuación, se describen
brevemente.
3.1. Diseño de la ley de desplazamiento
Se resaltan dos tipos; la polinomial y la trigonométrica. Son
muy utilizadas y proporcionan las características necesarias
para determinar el contorno de la leva, la cinemática del
seguidor y, por tanto, la dinámica del mecanismo.
3.2. Obtención del perfil de la leva que impulsa a un
seguidor determinado según la ley de desplazamiento
diseñada
Una vez definida la ley de desplazamiento y de haber
elegido el tipo de seguidor a utilizar, se determina el perfil
de la leva que garantiza la ley especificada. La obtención del
perfil se puede obtener de forma gráfica o analítica.
3.3. Comprobación del perfil de la leva
Una vez obtenido el perfil de la leva se ha de comprobar que
éste no presente características geométricas indeseadas que
impidan un contacto correcto entre la leva y el seguidor. Los
problemas que se pueden presentan son:
i) Imposibilidad del seguidor para acceder al punto teórico
de contacto (Fig. 3), y
ii) Aparición de degeneraciones (vértices o
autointersecciones) en el perfil de la leva. Aún a pesar de
que la ley de movimiento del seguidor sea continua y suave.
Figura 3. Características geométricas que impiden un contacto
correcto entre una leva y el seguidor.
4. Diseño del mecanismo leva-seguidor desmodrómico
de cara ranurada y seguidor reciprocante
A continuación, se aplica el proceso de diseño descrito en la
sección anterior, subrayando las especificaciones obligadas
y recomendables.
4.1. Condiciones de continuidad en la ley de
desplazamiento
Como especificación se considera imprescindible que la
velocidad y aceleración del seguidor sea una función
continua. Se busca que la leva y el seguidor estén en
contacto permanente y evitar cualquier desajuste generado
por discontinuidades o sobreaceleraciones. Estas
condiciones de continuidad en el tiempo se traducen en las
mismas condiciones respecto a θ si θ(t) es suficientemente
continua.
Las ecuaciones de velocidad, aceleración y sobreaceleración
que relacionan a las derivadas cinemáticas con las derivadas
temporales de la ley de desplazamiento d(θ) son [17]:
´d t d t (1)
2´́ ´d t d t d t (2)
3 3d t d t d t t d t (3)
Para definir matemáticamente los tramos de la curva de
desplazamiento, y dado que se busca propagar un
movimiento traslacional al seguidor, se aplicarán las
funciones tradicionales.
4.2. Desplazamiento cicloidal
La curva cicloidal se desarrolla a partir de la trayectoria de
un punto en un círculo que se rueda en una línea recta.
Gráficamente, el desplazamiento del movimiento cicloidal
puede ser generado por un punto de un circulo de radio h/2π,
donde h es la elevación requerida, rodando sobre la ordenada
cero. Se grafica la función de desplazamiento s, su primera
derivada velocidad v y su segunda derivada aceleración a,
todas en ejes alineados como una función de ángulo de árbol
de levas θ. El periodo de cualquier segmento se define como
el ángulo β.
Las ecuaciones de desplazamiento cicloidal, así como de
velocidad y aceleración, son [16]:
12
2s h sen
(4)
ISSN 2448-5551 DM 328 Derechos Reservados © 2017, SOMIM

MEMORIAS DEL XXIII CONGRESO INTERNACIONAL ANUAL DE LA SOMIM 20 al 22 DE SEPTIEMBRE DE 2017 CUERNAVACA, MORELOS, MÉXICO
1 cos 2h
v
(5)
22 2
ha sen
(6)
4.3. Desplazamiento seno modificado
La curva seno modificado es una combinación de la curva
de onda senoidal. En términos de su acción torsional, el
cambio del par positivo al negativo ocurre en más del 40 por
ciento del tiempo de recorrido [18]. Este atributo hace que
esta curva sea atractiva como una opción para mover
grandes masas. Su menor par y demanda de potencia hacen
que la curva sinusoidal modificada sea una de las mejores
opciones.
Las ecuaciones de desplazamiento, velocidad y aceleración
de la curva seno modificado son [16]:
1
44 4 4
s h sen
(7)
2 9 4
4 4 4 4 3 3v h sen
(8)
2 1
44 4 4 4 3
a h sen
(9)
4.4. Desplazamiento polinomial 4-5-6-7
La función polinomial 4-5-6-7 tiene la ventaja de una
rapidez de aceleración más suave para un mejor control de
la vibración. Sin embargo, la forma de una aceleración
teórica pico mayor a otras funciones podría hacerla poco
atractiva para una aplicación donde se persigue obtener alta
velocidad.
Las ecuaciones de desplazamiento, velocidad y aceleración
del polinomio 4-5-6-7 son [16]:
4 5 6 7
35 84 70 20s h
(10)
3 4 5 6
140 420 420 140v h
(11)
2 3 4 5
420 1680 2100 840a h
(12)
4.5. Desplazamiento polinomial D de Berzak
El ajuste de la forma de la curva puede mejorarse cambiando
los exponentes del polinomio. Este procedimiento se realiza
a prueba y error con cierto grado de previsibilidad, porque
mientras más alta es la potencia del polinomio, mayor será
la aceleración máxima, y ésta tenderá a desplazarse hacia el
inicio de la curva de desplazamiento [16]. En este sentido,
una curva que se ha desarrollado y que muestra excelentes
características dinámicas es la llamada curva polinomial D
de Berzak.
Las ecuaciones de desplazamiento, velocidad y aceleración
de la curva polinomial D de Berzak son [16]:
3 4 5
6 7
[12.1 25.5 24.9
14.7 4.2 ]
s h
(13)
2 3 4
5 6
[36.3 102 124.5
88.2 29.4 ]
hv
(14)
2 3
2
4 5
[72.6 306 498
441 176.4 ]
ha
(15)
4.6. Comparación de las curvas
Las Figs. 4-6 muestran la comparación de las curvas de
desplazamiento, velocidad y aceleración.
ISSN 2448-5551 DM 329 Derechos Reservados © 2017, SOMIM
MEMORIAS DEL XXIII CONGRESO INTERNACIONAL ANUAL DE LA SOMIM 20 al 22 DE SEPTIEMBRE DE 2017 CUERNAVACA, MORELOS, MÉXICO
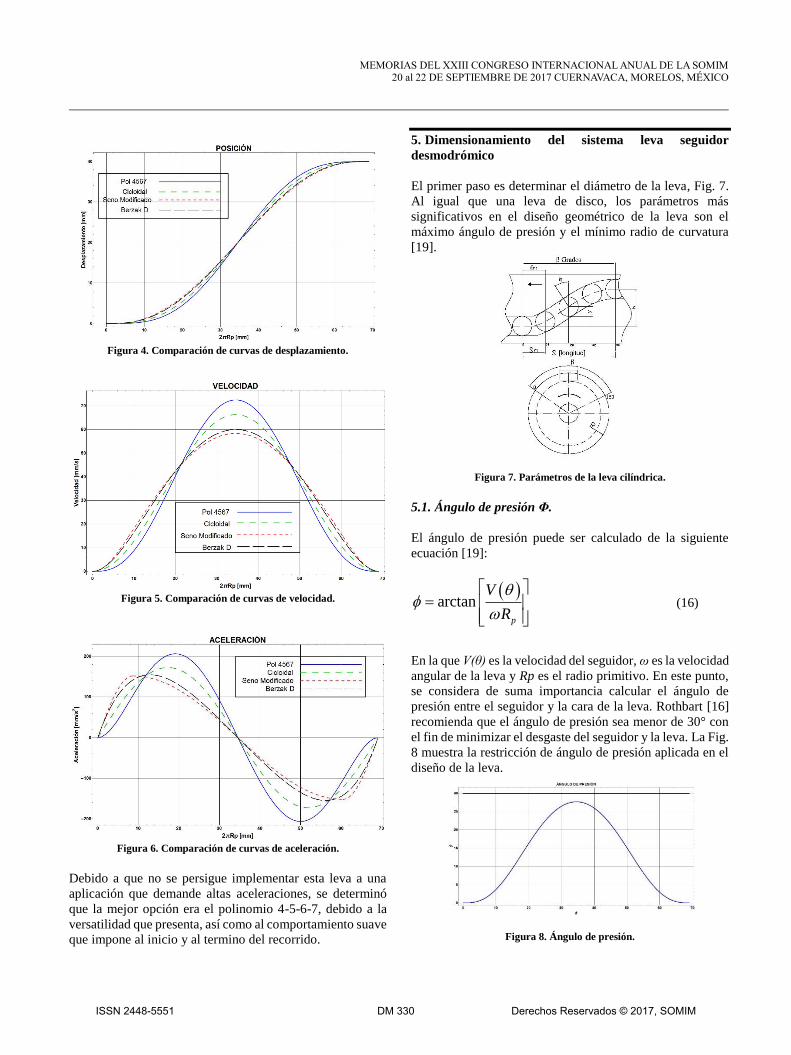
Figura 4. Comparación de curvas de desplazamiento.
Figura 5. Comparación de curvas de velocidad.
Figura 6. Comparación de curvas de aceleración.
Debido a que no se persigue implementar esta leva a una
aplicación que demande altas aceleraciones, se determinó
que la mejor opción era el polinomio 4-5-6-7, debido a la
versatilidad que presenta, así como al comportamiento suave
que impone al inicio y al termino del recorrido.
5. Dimensionamiento del sistema leva seguidor
desmodrómico
El primer paso es determinar el diámetro de la leva, Fig. 7.
Al igual que una leva de disco, los parámetros más
significativos en el diseño geométrico de la leva son el
máximo ángulo de presión y el mínimo radio de curvatura
[19].
Figura 7. Parámetros de la leva cilíndrica.
5.1. Ángulo de presión Φ.
El ángulo de presión puede ser calculado de la siguiente
ecuación [19]:
arctan
p
V
R
(16)
En la que V(θ) es la velocidad del seguidor, ω es la velocidad
angular de la leva y Rp es el radio primitivo. En este punto,
se considera de suma importancia calcular el ángulo de
presión entre el seguidor y la cara de la leva. Rothbart [16]
recomienda que el ángulo de presión sea menor de 30° con
el fin de minimizar el desgaste del seguidor y la leva. La Fig.
8 muestra la restricción de ángulo de presión aplicada en el
diseño de la leva.
Figura 8. Ángulo de presión.
ISSN 2448-5551 DM 330 Derechos Reservados © 2017, SOMIM
MEMORIAS DEL XXIII CONGRESO INTERNACIONAL ANUAL DE LA SOMIM 20 al 22 DE SEPTIEMBRE DE 2017 CUERNAVACA, MORELOS, MÉXICO
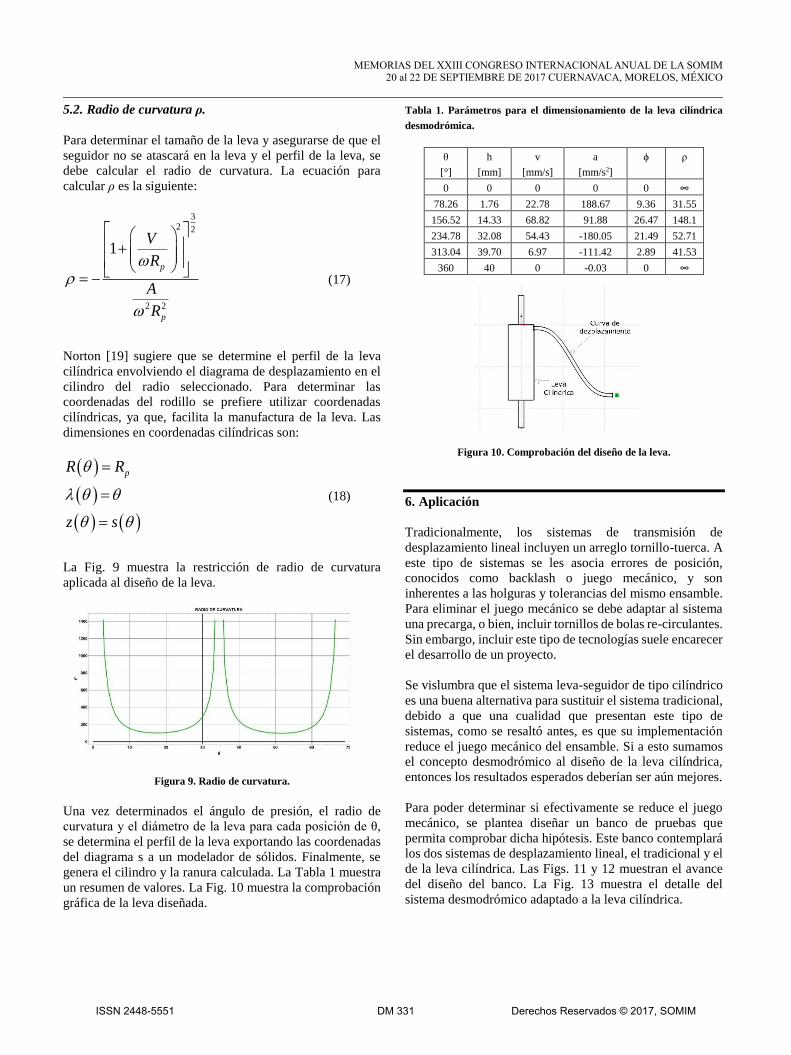
5.2. Radio de curvatura ρ.
Para determinar el tamaño de la leva y asegurarse de que el
seguidor no se atascará en la leva y el perfil de la leva, se
debe calcular el radio de curvatura. La ecuación para
calcular ρ es la siguiente:
32 2
2 2
1p
p
V
R
A
R
(17)
Norton [19] sugiere que se determine el perfil de la leva
cilíndrica envolviendo el diagrama de desplazamiento en el
cilindro del radio seleccionado. Para determinar las
coordenadas del rodillo se prefiere utilizar coordenadas
cilíndricas, ya que, facilita la manufactura de la leva. Las
dimensiones en coordenadas cilíndricas son:
pR R
z s
(18)
La Fig. 9 muestra la restricción de radio de curvatura
aplicada al diseño de la leva.
Figura 9. Radio de curvatura.
Una vez determinados el ángulo de presión, el radio de
curvatura y el diámetro de la leva para cada posición de θ,
se determina el perfil de la leva exportando las coordenadas
del diagrama s a un modelador de sólidos. Finalmente, se
genera el cilindro y la ranura calculada. La Tabla 1 muestra
un resumen de valores. La Fig. 10 muestra la comprobación
gráfica de la leva diseñada.
Tabla 1. Parámetros para el dimensionamiento de la leva cilíndrica
desmodrómica.
θ
[°]
h
[mm]
v
[mm/s]
a
[mm/s2]
ϕ ρ
0 0 0 0 0 ∞
78.26 1.76 22.78 188.67 9.36 31.55
156.52 14.33 68.82 91.88 26.47 148.1
234.78 32.08 54.43 -180.05 21.49 52.71
313.04 39.70 6.97 -111.42 2.89 41.53
360 40 0 -0.03 0 ∞
Figura 10. Comprobación del diseño de la leva.
6. Aplicación
Tradicionalmente, los sistemas de transmisión de
desplazamiento lineal incluyen un arreglo tornillo-tuerca. A
este tipo de sistemas se les asocia errores de posición,
conocidos como backlash o juego mecánico, y son
inherentes a las holguras y tolerancias del mismo ensamble.
Para eliminar el juego mecánico se debe adaptar al sistema
una precarga, o bien, incluir tornillos de bolas re-circulantes.
Sin embargo, incluir este tipo de tecnologías suele encarecer
el desarrollo de un proyecto.
Se vislumbra que el sistema leva-seguidor de tipo cilíndrico
es una buena alternativa para sustituir el sistema tradicional,
debido a que una cualidad que presentan este tipo de
sistemas, como se resaltó antes, es que su implementación
reduce el juego mecánico del ensamble. Si a esto sumamos
el concepto desmodrómico al diseño de la leva cilíndrica,
entonces los resultados esperados deberían ser aún mejores.
Para poder determinar si efectivamente se reduce el juego
mecánico, se plantea diseñar un banco de pruebas que
permita comprobar dicha hipótesis. Este banco contemplará
los dos sistemas de desplazamiento lineal, el tradicional y el
de la leva cilíndrica. Las Figs. 11 y 12 muestran el avance
del diseño del banco. La Fig. 13 muestra el detalle del
sistema desmodrómico adaptado a la leva cilíndrica.
ISSN 2448-5551 DM 331 Derechos Reservados © 2017, SOMIM

MEMORIAS DEL XXIII CONGRESO INTERNACIONAL ANUAL DE LA SOMIM 20 al 22 DE SEPTIEMBRE DE 2017 CUERNAVACA, MORELOS, MÉXICO
Figura 11. Sketch del prototipo del banco de pruebas.
Figura 12. Ensamble del prototipo del banco de pruebas.
Figura 13. Detalle del sistema desmodrómico adaptado a la leva
cilíndrica.
Para construir e implementar el banco de pruebas se
pretende hacer uso de elementos comerciales e incluir
materiales de resinas similares al plástico, impresas
mediante técnicas de prototipado rápido. La inclusión de un
transductor de desplazamiento lineal, como lo muestra la
Fig. 11, permitirá medir los cambios de desplazamiento de
cada arreglo, así sean infinitamente pequeños. El transductor
se adaptará al tamaño del banco de pruebas, por lo que este
instrumento será diseñado especialmente para dicho banco.
Este banco de prueba se podría usar como banco de
prácticas, con el cual se vincule la teoría con la práctica en
la formación de estudiantes de ingeniería, específicamente
en la comprensión de la importancia que tienen las
tolerancias, la holgura y el juego mecánico en un ensamble.
Será hasta que se construya el banco de pruebas que se pueda
comprobar si efectivamente se reduce el juego mecánico en
la conversión del movimiento rotacional a uno lineal
reciprocante.
7. Conclusión
Se presentó el proceso de diseño de un sistema leva seguidor
de cara ranurada cilíndrica con seguidor traslacional. Se
pretende reducir el juego mecánico en un ensamble que
demande la conversión de un movimiento rotacional a uno
lineal reciprocante. En este diseño se ha adoptado un sistema
desmodrómico, hasta cierto punto común en mecanismos
planos, no así en mecanismos espaciales. Se debe comprobar
su viabilidad y con este avance se espera validar su
funcionalidad respecto a un sistema tradicional. Para validar
su funcionamiento, se plantea construir un banco de pruebas
que incluya dos arreglos; uno tradicional tornillo-tuerca, y
otro con el sistema propuesto. El banco podrá funcionar
como banco de prácticas dentro de las materias curriculares
de las carreras de ingeniería mecánica.
Agradecimientos
Se agradece a la DGAPA por los recursos otorgados
mediante el proyecto UNAM-DGAPA-PAPIME E106017.
REFERENCIAS
[1] S. Kozhevnikov, Mecanismos: Barcelona: Gustavo Gili, 1981.
[2] C. Wilson and P. Sadler, Kinematic and dynamics of Machinery 3rd ed.: Pearson, 2003.
[3] Z. Kolov and M. Václavík, "Special cams," in Studies in mechanical engineering 14, ed: Polygrafia, a. s. Praga, 1993, pp. 349-353.
[4] G. Huang, "Investigation of conjugate-cam design for the beat-up mechanism," Journal of Textile Institute (Tianjin Institute of Textile Science and Technology), vol. 84, pp. 387-393, 1993.
[5] L. Chunhong, L. Ming, and L. Yujun, "The design of a new outside conjugate cams for shedding mechanism," Journal of China Textile University, vol. 13, pp. 38-44, 1996.
[6] Y. Hong-Sen and T. Hung-Ming, "The effects of manufacturing errors on planar conjugates cams," Journal of the Chinese Society of Mechanical Engineers, vol. 17, pp. 145-153, 1996.
[7] J. Zhang and L. BI, "Conjugate cam with five-bar linkage mechanism for rapid drive of flexible rapier looms," Journal of China Textile University, vol. 14, pp. 71-75, 1997.
ISSN 2448-5551 DM 332 Derechos Reservados © 2017, SOMIM

MEMORIAS DEL XXIII CONGRESO INTERNACIONAL ANUAL DE LA SOMIM 20 al 22 DE SEPTIEMBRE DE 2017 CUERNAVACA, MORELOS, MÉXICO
[8] D. M. Tsay and B. J. Lin, "Improving the geometry
design of cylindrical cams using nonparametric rational B-splines," Computer-Aided Design, vol. 28, pp. 5-15, 1996.
[9] D. Chablat and J. Angeles, "The Design of a Novel Prismatic Drive for a Three-DOF Parallel-Kinematics Machine," Journal of Mechanical Design, vol. 128, pp. 710-718, 2005.
[10] Y. L. Lai, J. P. Hung, and J. H. Chen, "Roller guide design and manufacturing for spatial cylindrical cams," Engineering and Technology, vol. 38, pp. 142-148, 2008.
[11] J.-P. Hung and Y.-L. Lai, "Wide roller guide machining by four-axis machine tools for cylindrical cams," The International Journal of Advanced Manufacturing Technology, vol. 62, pp. 923-932, 2012.
[12] S. Cardona, E. Zayas, L. Jordi, and P. Català, "Synthesis of displacement functions by Bézier curves in constant-breadth cams with parallel flat-faced double translating and oscillating followers," Mechanism and machine theory, vol. 62, pp. 51-62, 2013.
[13] E. Sanmiguel-Rojas and M. Hidalgo-Martínez, "Cam mechanisms based on a double roller translating follower of negative radius," Mechanism and machine theory, vol. 95, pp. 93-101, 2016.
[14] S. Cardona and D. Clos, Teoría de máquinas, 1a ed. Universitat Politecnica de Catalunya, SL, 2001.
[15] E. E. Zayas Figueras, "Aportación al estudio de levas desmodrómicas," Doctoral Thesis, Universitat Politècnica de Catalunya. Departament d'Enginyeria Mecànica Universitat Politècnica de Catalunya, 2001.
[16] H. A. Rothbart, Cam design handbook: McGraw-Hill, 2004.
[17] Zayas Figeroa, E. E. Aportación al estudio de levas
desmodrómicas. Tesis Doctoral. Universitat Politecnica
de Catalunya, Barcelona, 2001. [18] F. Y. Chen, Mechanics and design of cam mechanisms:
Pergamos Press, 1982. [19] R. L. Norton, Cam design and manufacturing handbook:
Industrial Press Inc., 2009.
ISSN 2448-5551 DM 333 Derechos Reservados © 2017, SOMIM
Top Related