







Línguas
Páginas
Legal

INSTITUTO FEDERAL DE SANTA CATARINA
Departamento Acadêmico de Eletrônica
Pós-Graduação em Desenvolvimento de Produtos Eletrônicos
Conversores Estáticos e Fontes Chaveadas
Controle de Conversores
Prof. Clóvis Antônio Petry, Dr. Eng.
Prof. Mauro Tavares Peraça, Dr. Eng.
Florianópolis, abril de 2009.
Bibliografia para esta aula
http://www.inep.ufsc.br/dissertacoes/Dissertacao_Peraca.pdf
Conteúdo desta aula
Controle de conversores
1. Conversores operando em malha fechada;
2. Projeto de compensadores;
3. Simulação em malha fechada.
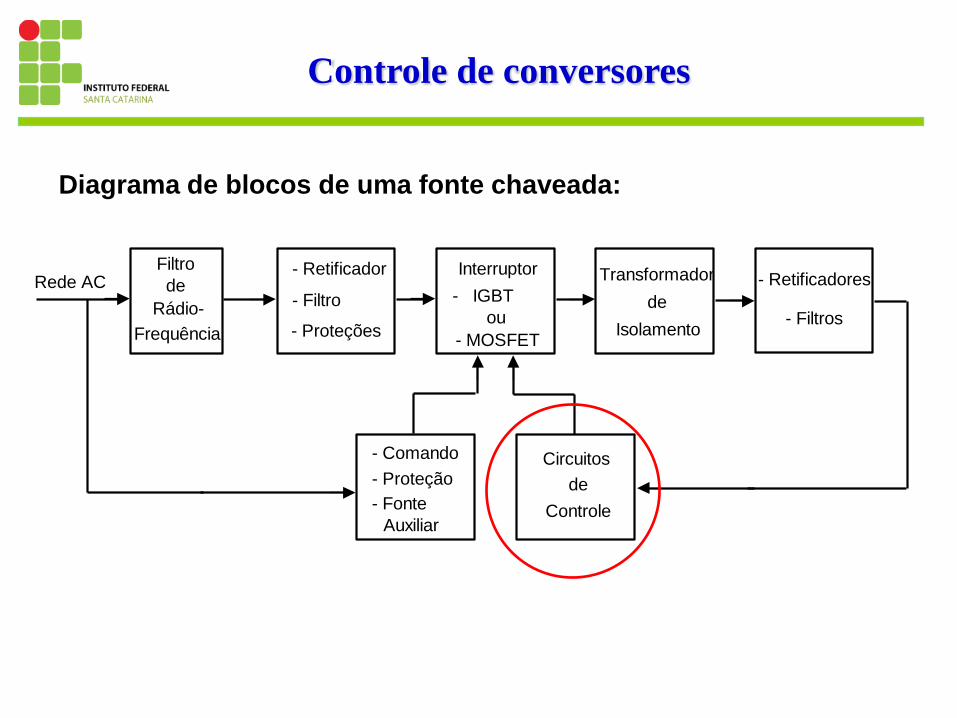
Filtro de
Rádio- Frequência
- Retificador
- Filtro
- Proteções
Interruptor - IGBT
ou - MOSFET
Transformador de
Isolamento
- Retificadores
- Filtros
Circuitos de
Controle
- Comando - Proteção - Fonte
Auxiliar
Rede AC
Controle de conversores
Diagrama de blocos de uma fonte chaveada:
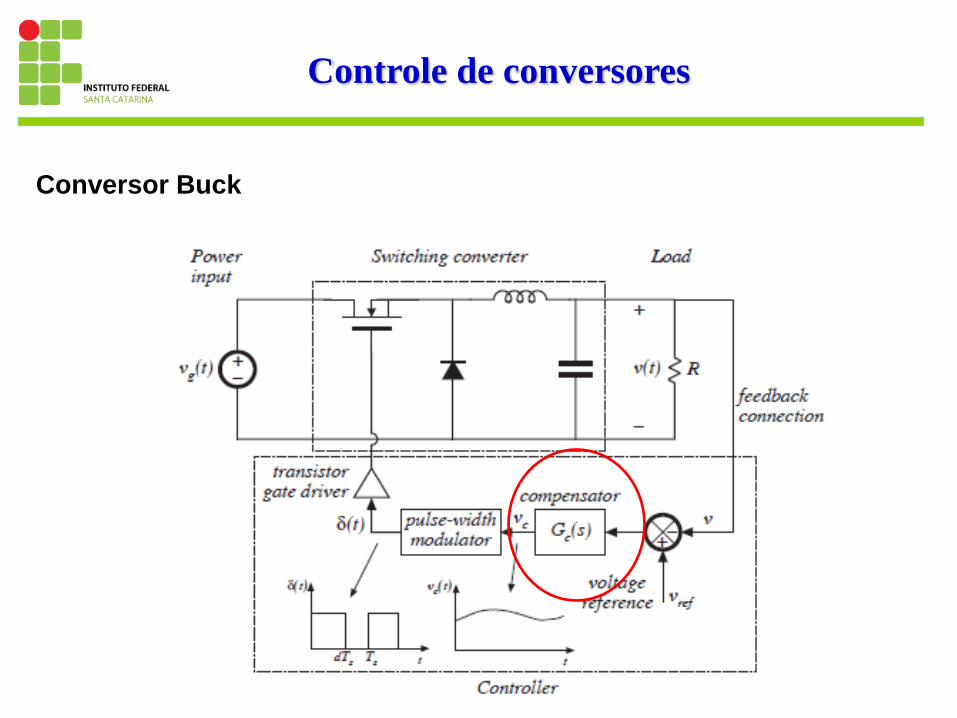
Conversor Buck
Controle de conversores
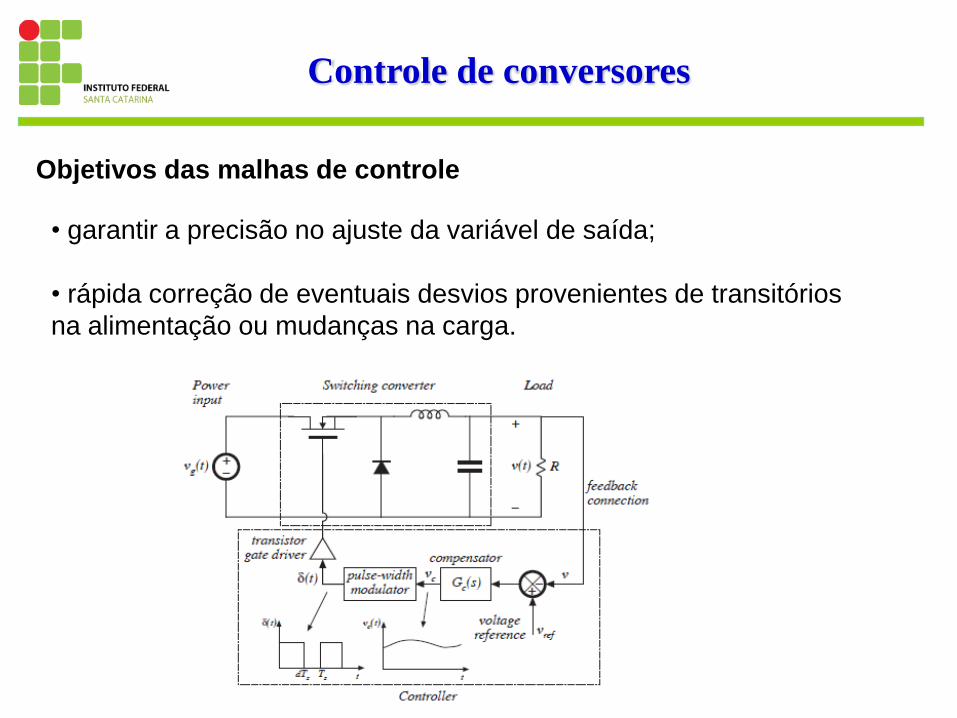
• garantir a precisão no ajuste da variável de saída;
• rápida correção de eventuais desvios provenientes de transitórios
na alimentação ou mudanças na carga.
Objetivos das malhas de controle
Controle de conversores
Controle de conversores

Controle de conversores
Sistema Realimentado
Controle de conversores
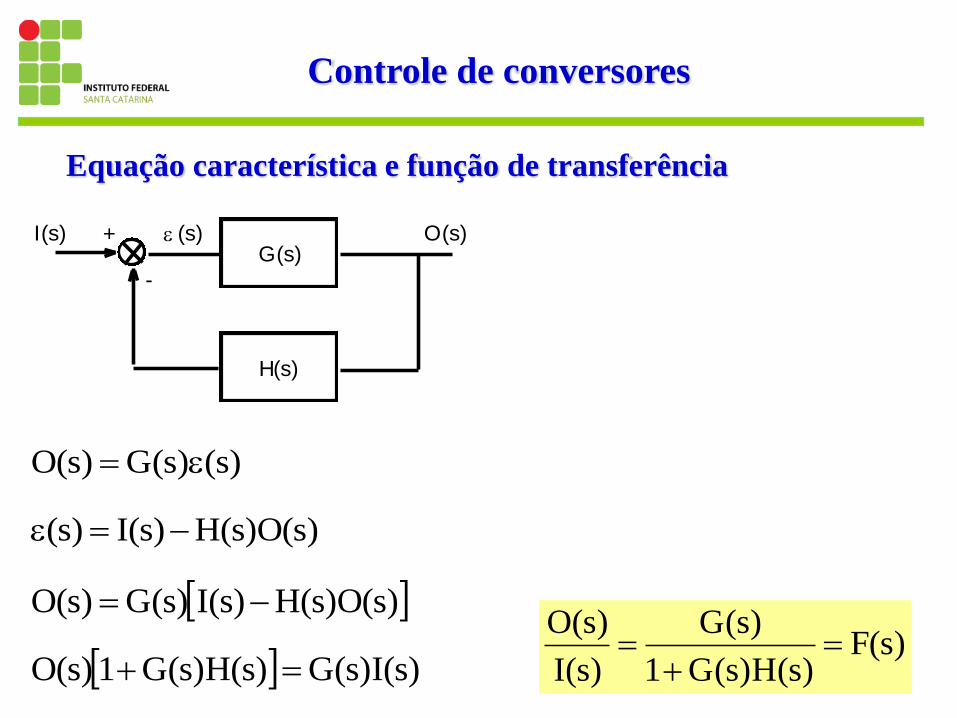
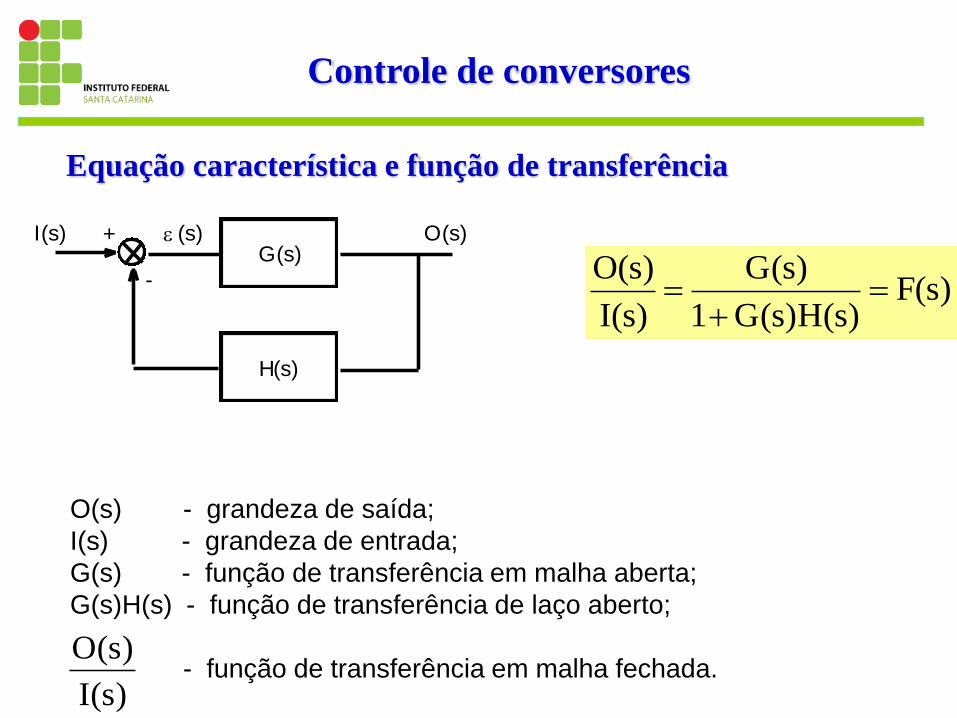
Equação característica e função de transferência
H(s)
G(s)O(s)I(s) +
-
(s)
)s()s(G)s(O
)s(O)s(H)s(I)s(
)s(O)s(H)s(I)s(G)s(O
)s(I)s(G)s(H)s(G1)s(O )s(F
)s(H)s(G1
)s(G
)s(I
)s(O
Controle de conversores
Equação característica e função de transferência
H(s)
G(s)O(s)I(s) +
-
(s)
)s(F)s(H)s(G1
)s(G
)s(I
)s(O
O(s) - grandeza de saída;
I(s) - grandeza de entrada;
G(s) - função de transferência em malha aberta;
G(s)H(s) - função de transferência de laço aberto;
- função de transferência em malha fechada.)s(I
)s(O
Controle de conversores
Equação característica e função de transferência
H(s)
G(s)O(s)I(s) +
-
(s)
)s(F)s(H)s(G1
)s(G
)s(I
)s(O
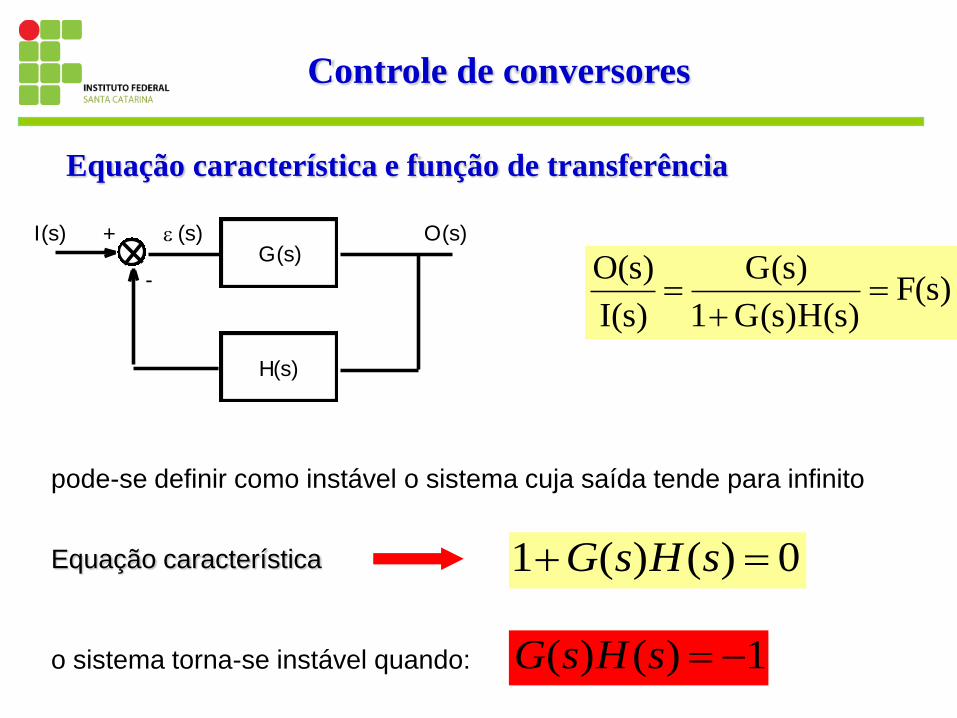
pode-se definir como instável o sistema cuja saída tende para infinito
1 ( ) ( ) 0G s H s Equação característica
o sistema torna-se instável quando: ( ) ( ) 1G s H s

Controle de conversores
Critérios de estabilidade
H(s)
G(s)O(s)I(s) +
-
(s))s(F
)s(H)s(G1
)s(G
)s(I
)s(O
( ) ( ) 1G s H s
20 log( ( ) ( ))
20 log( 1)
dB
dB
GH G s H s
GH
0dBGH 180
Controle de conversores
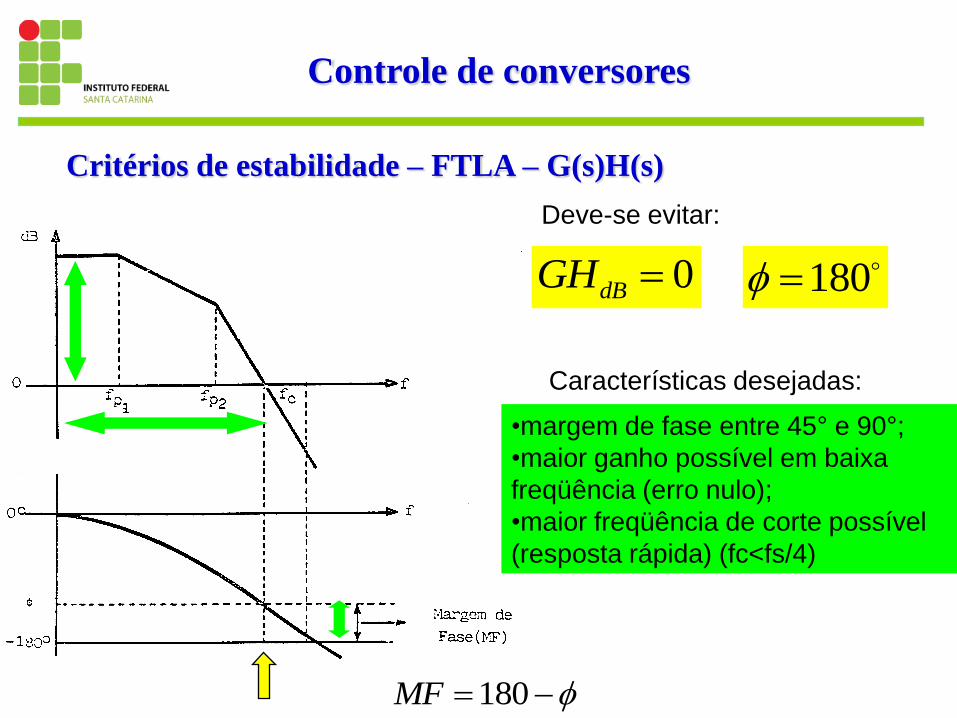
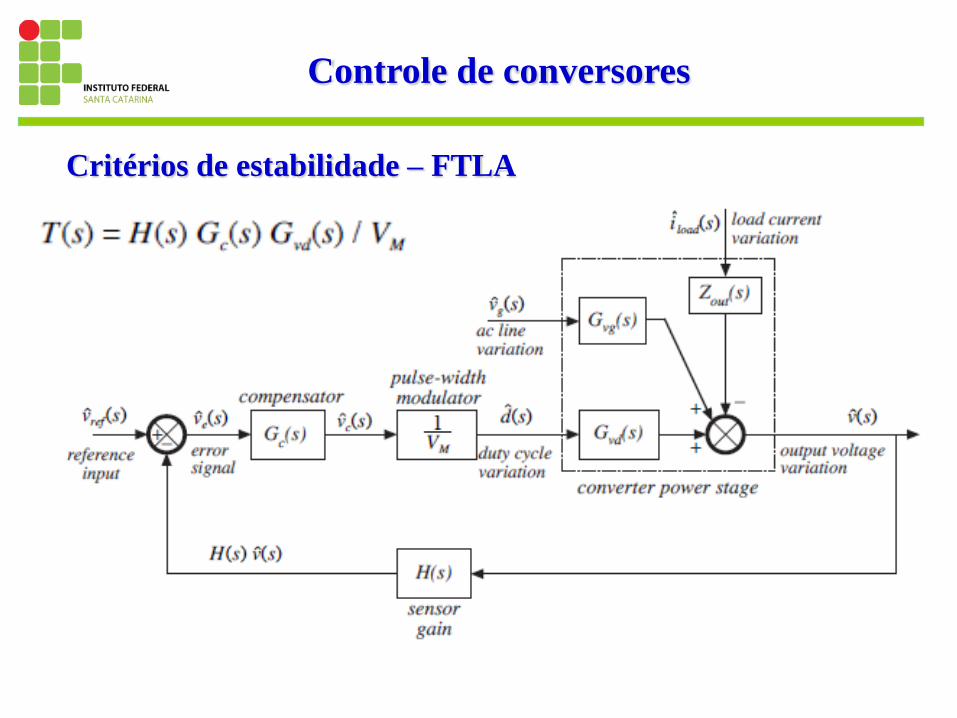
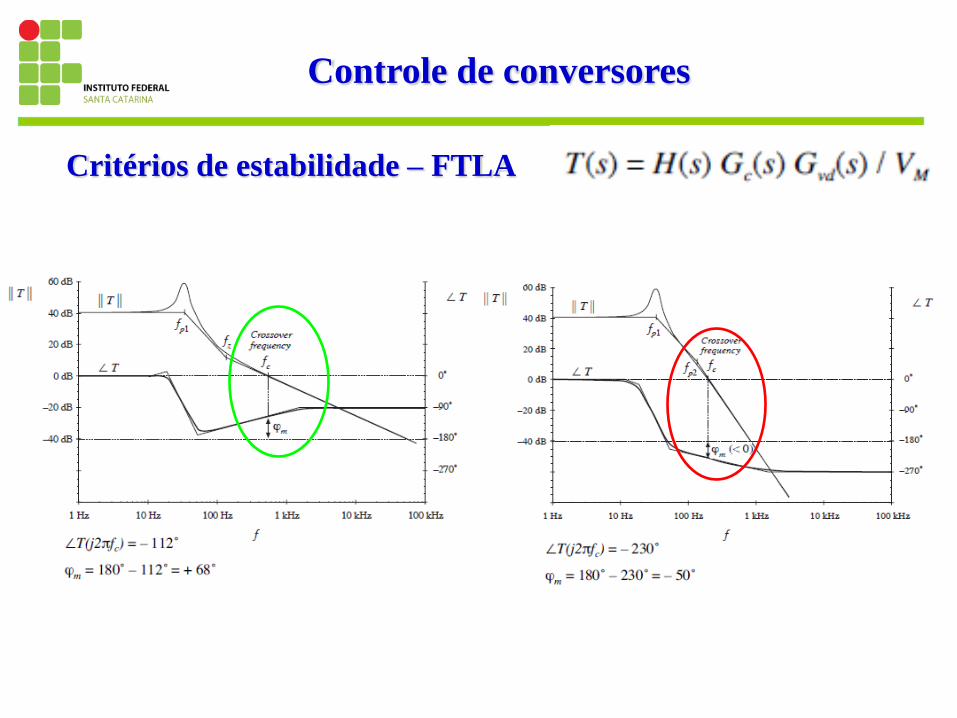
Critérios de estabilidade – FTLA – G(s)H(s)
0dBGH 180
180MF
•margem de fase entre 45° e 90°;
•maior ganho possível em baixa
freqüência (erro nulo);
•maior freqüência de corte possível
(resposta rápida) (fc<fs/4)
Deve-se evitar:
Características desejadas:
Controle de conversores
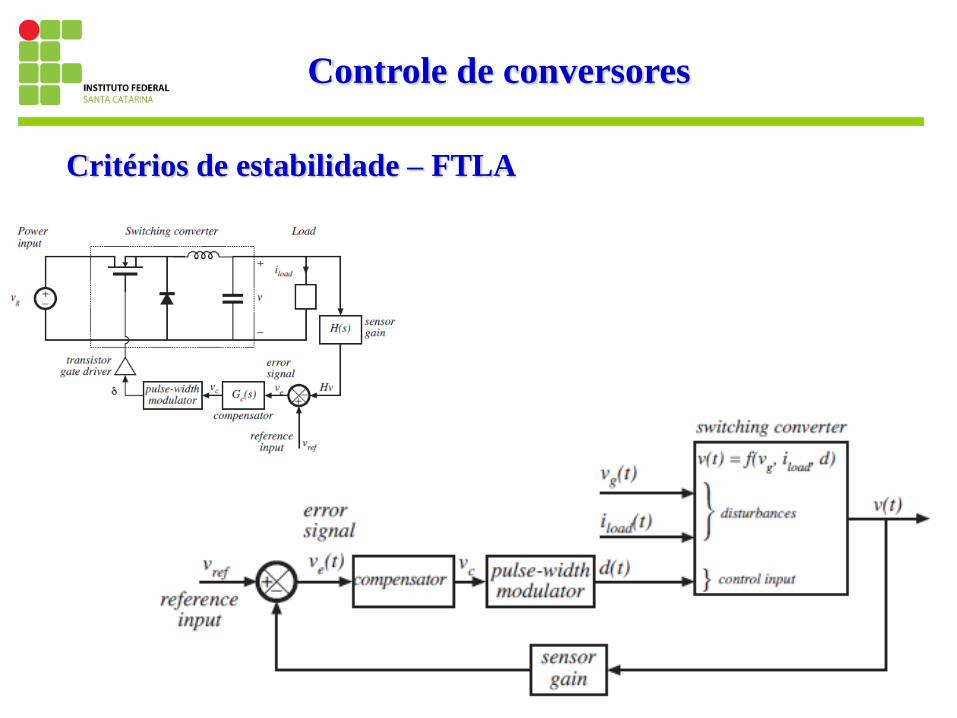
Critérios de estabilidade – FTLA
Controle de conversores
Critérios de estabilidade – FTLA
Controle de conversores
Critérios de estabilidade – FTLA
Controle de conversores
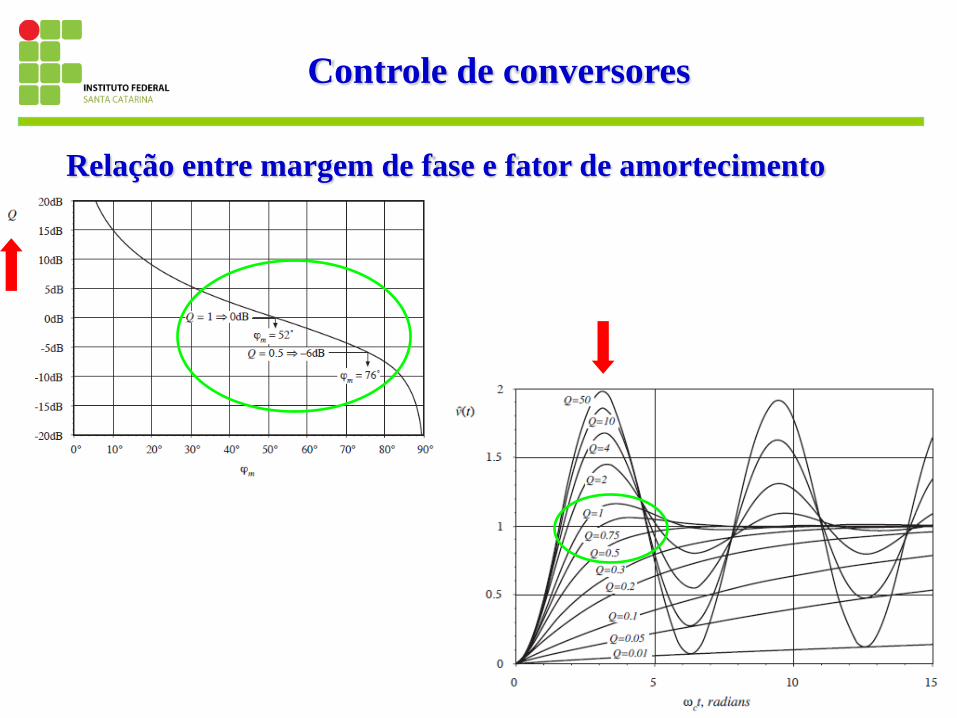
Relação entre margem de fase e fator de amortecimento
Controle de conversores
Projeto de compensadores
• propiciar bom ajuste da variável de saída diante de:
variações de carga;
variações da tensão de entrada (Ex. 120Hz);
• proporcionar boa resposta a transitórios:
rapidez
sobre-tensão e oscilação
• garantir a estabilidade
freqüência de corte elevada
margem de fase
alto ganho em baixa freqüência
margem de fase

Controle de conversores
Projeto de compensadores
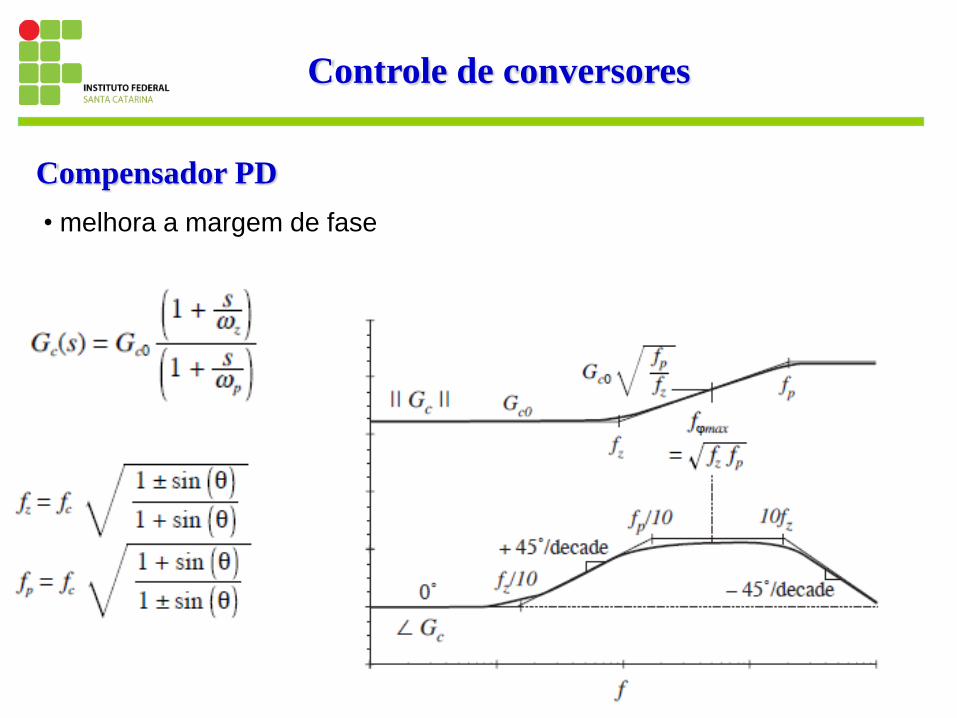
Compensador PD
• melhora a margem de fase
Compensador PI
• melhora o ganho em baixa freqüência
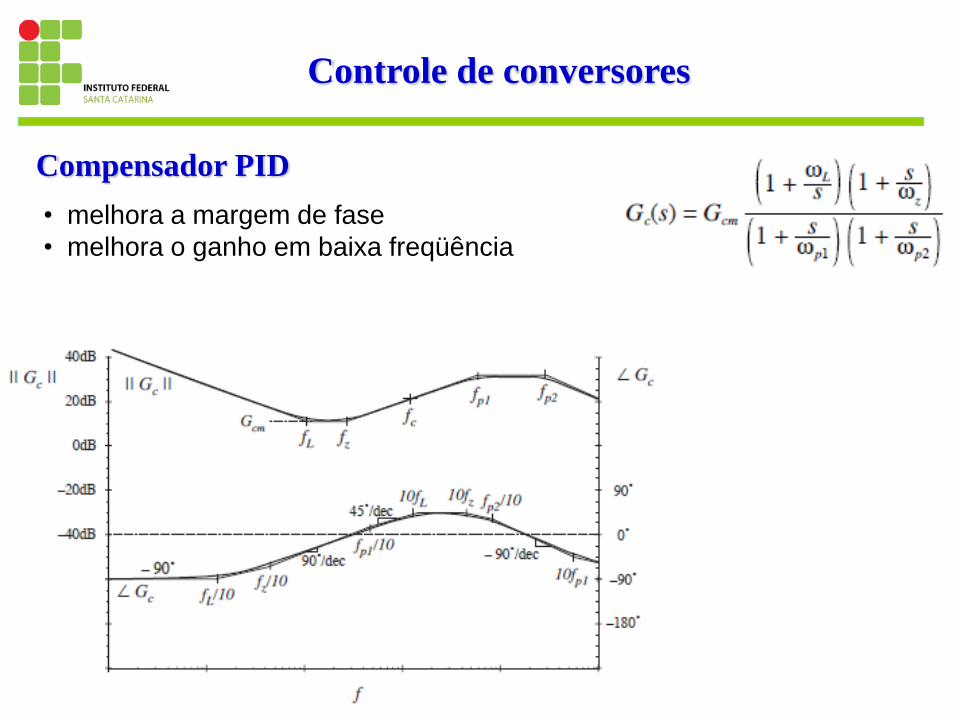
Compensador PID
• melhora a margem de fase
• melhora o ganho em baixa freqüência
Controle de conversores
Compensador PD
• melhora a margem de fase
Controle de conversores
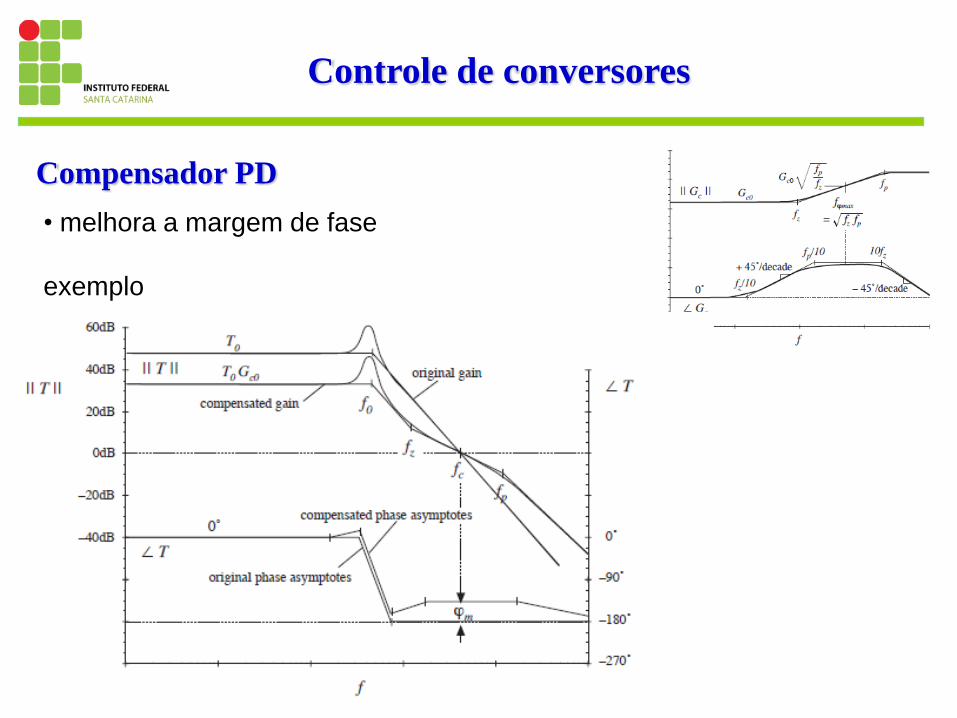
Compensador PD
• melhora a margem de fase
exemplo
Controle de conversores
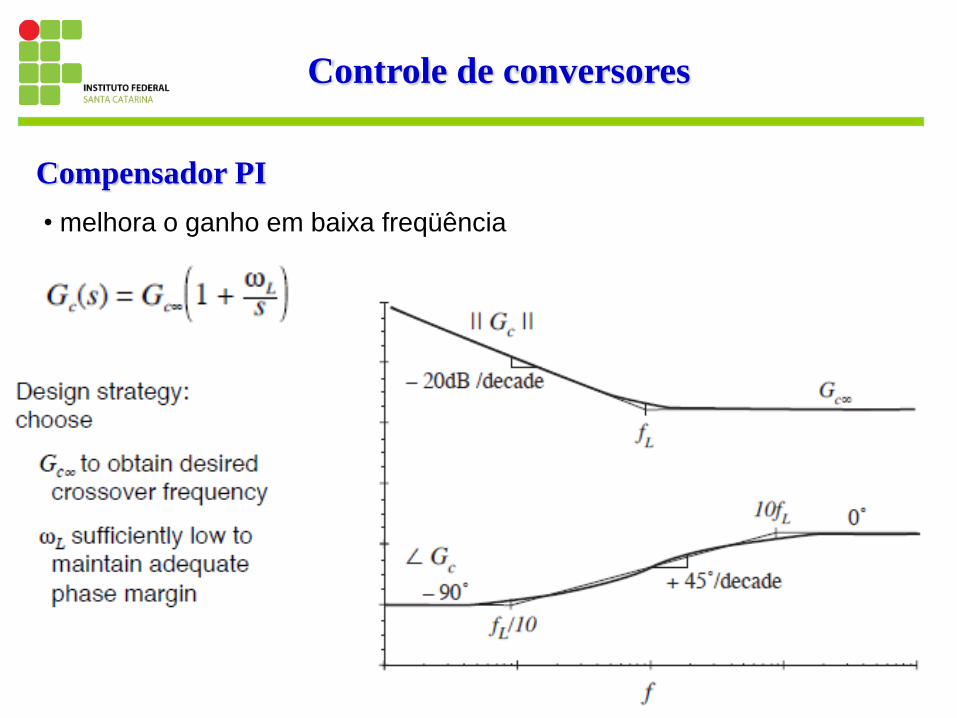
Compensador PI
• melhora o ganho em baixa freqüência
Controle de conversores
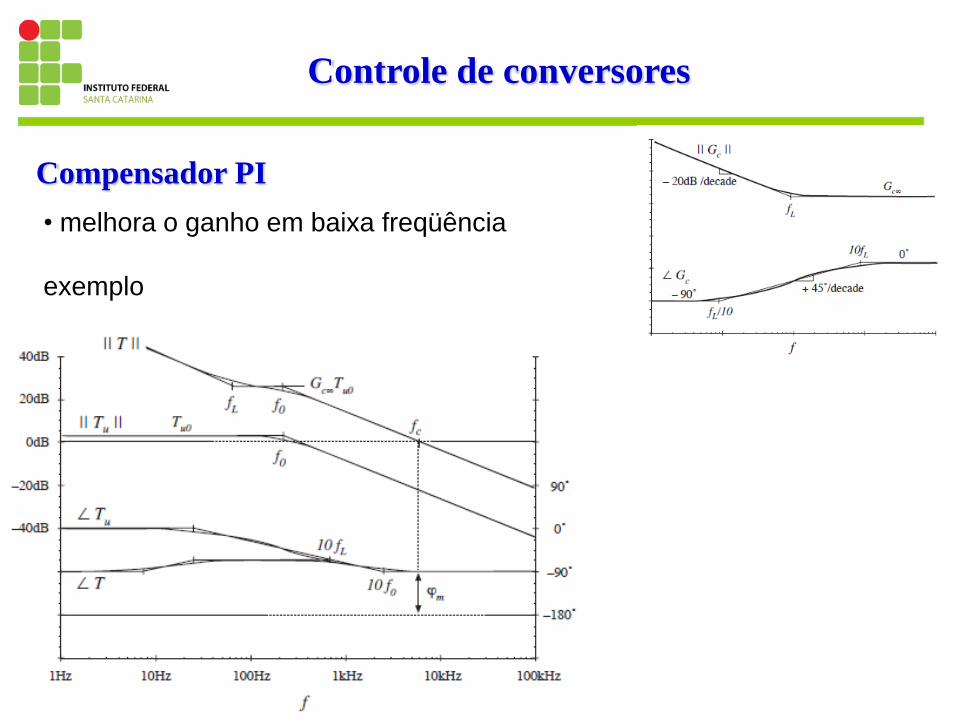
Compensador PI
• melhora o ganho em baixa freqüência
exemplo
Controle de conversores
Compensador PID
• melhora a margem de fase
• melhora o ganho em baixa freqüência
Controle de conversores
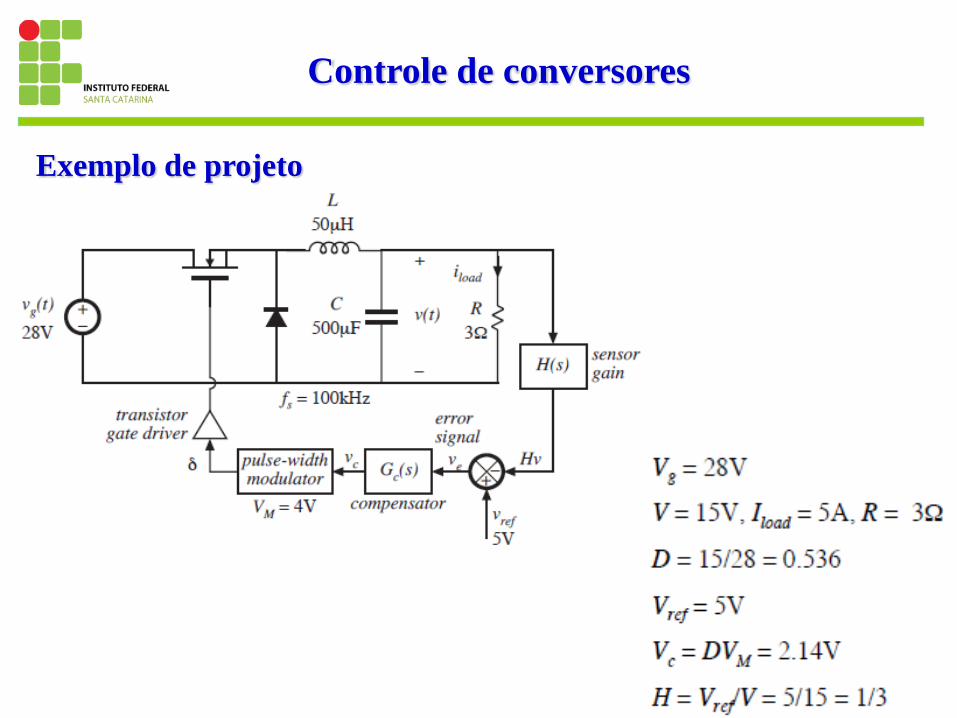
Exemplo de projeto
Controle de conversores
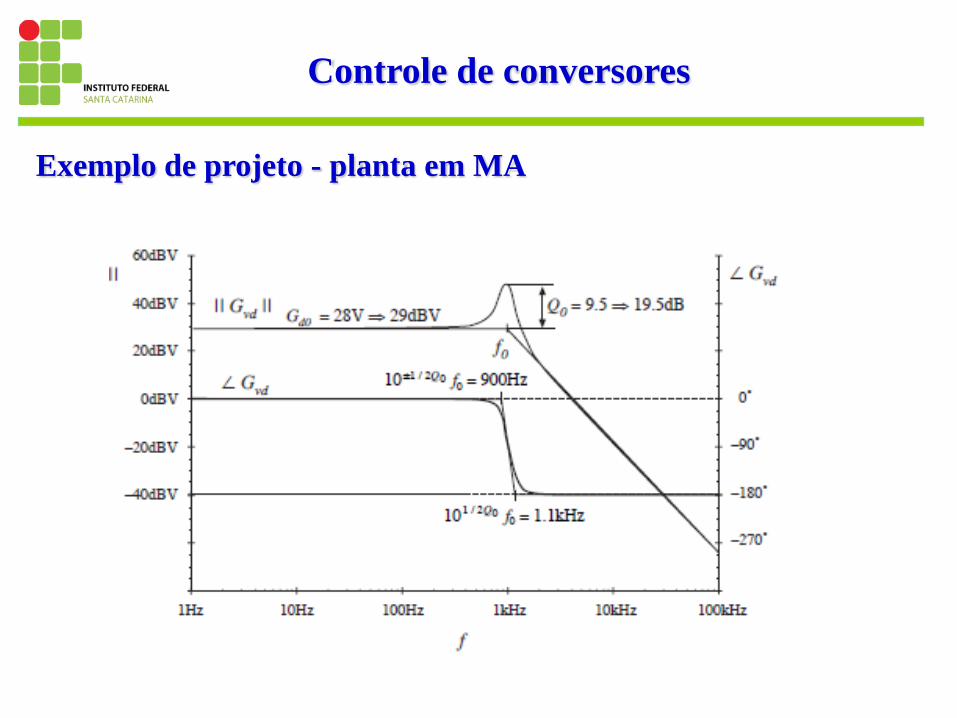
Exemplo de projeto - planta em MA
Controle de conversores
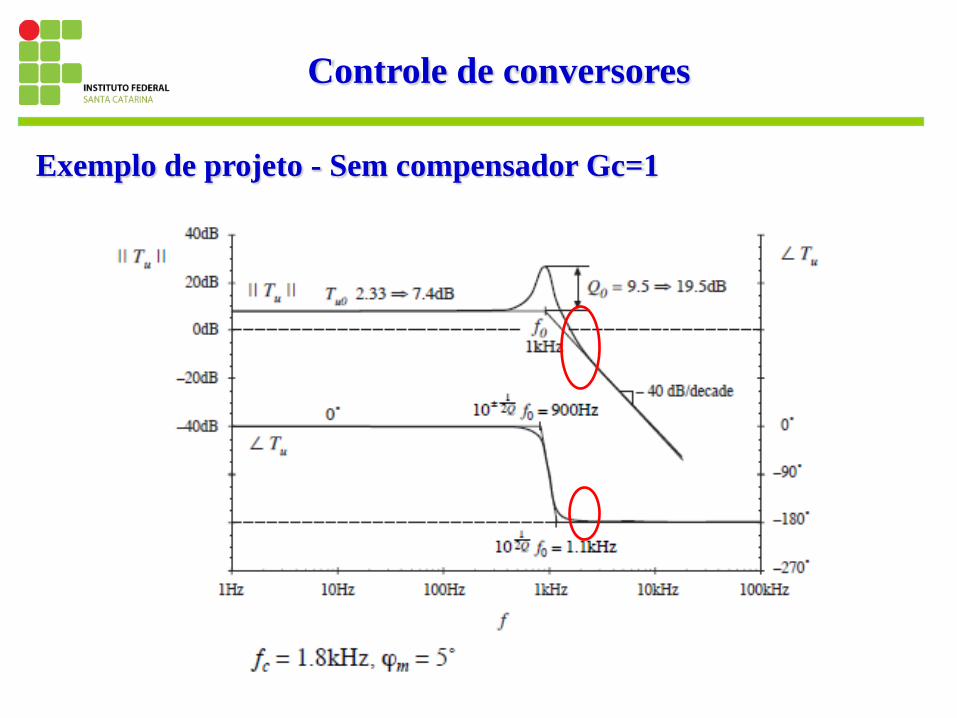
Exemplo de projeto - Sem compensador Gc=1
Controle de conversores
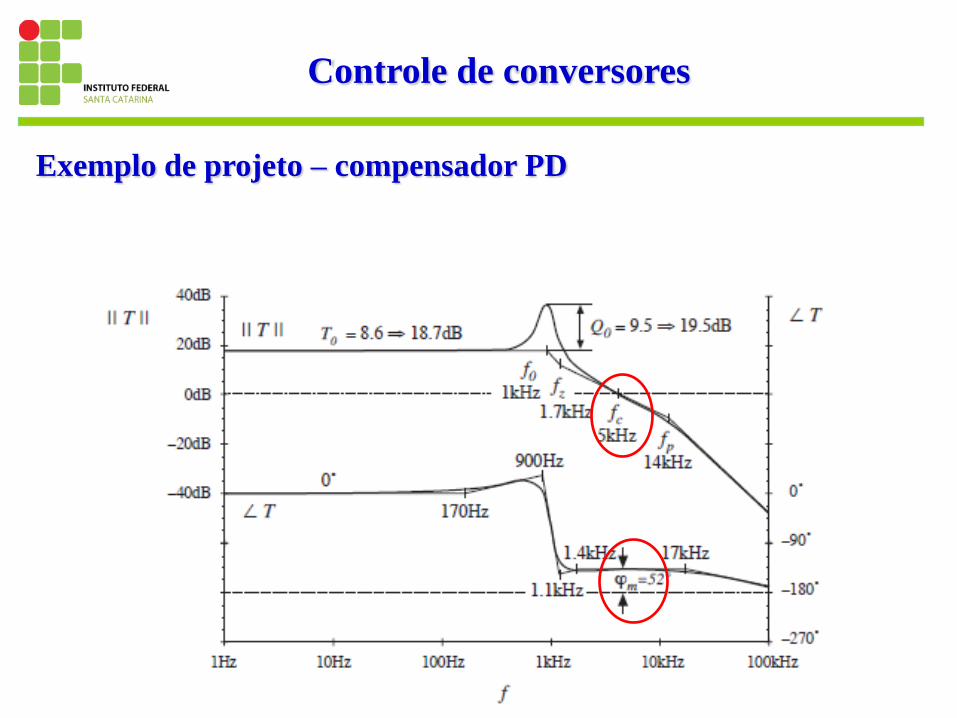
Exemplo de projeto – compensador PD
Controle de conversores
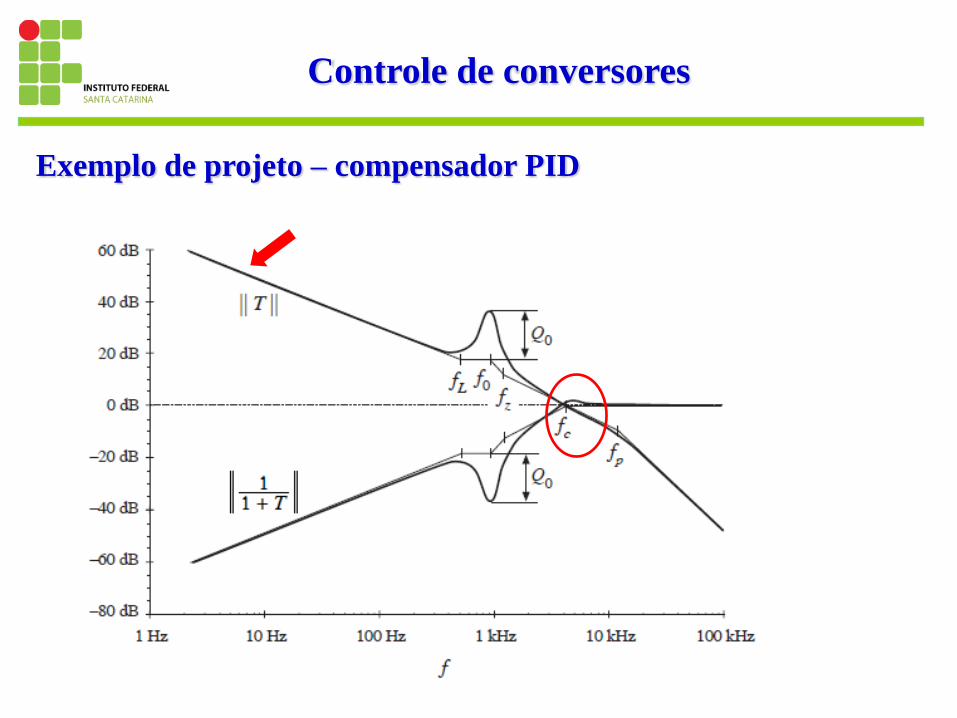
Exemplo de projeto – compensador PID

Controle de conversores
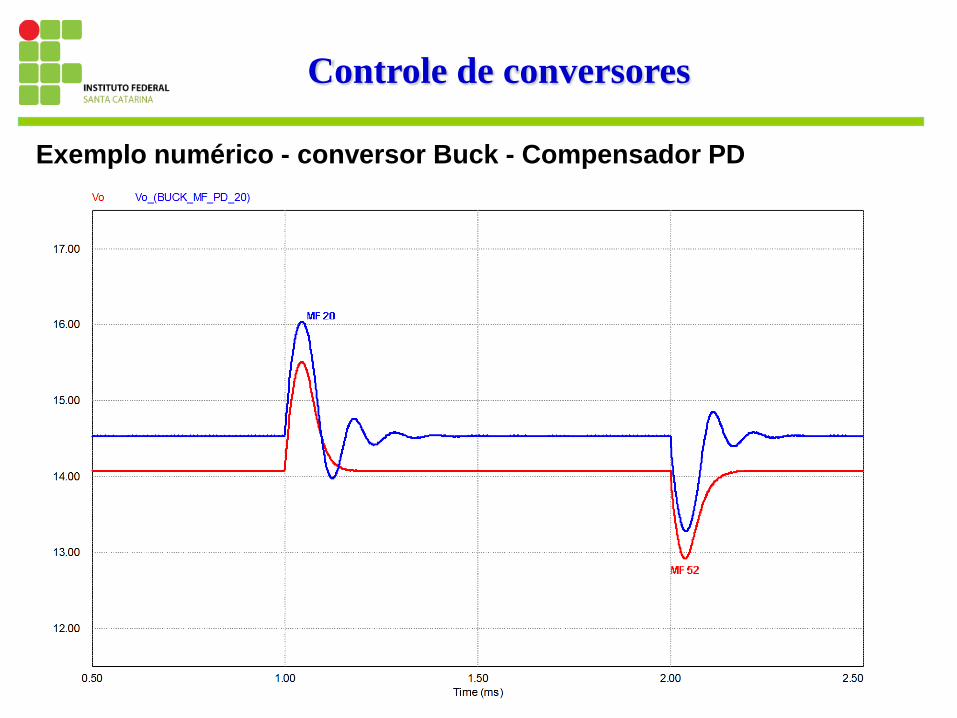
Exemplo numérico - conversor Buck
Compensador PD
Vin=30V Vout=15V
D=0,5 1-D=0,5
Po=100W Io=6.67A
Iin=3,33A Ro=2,25Ω
f=100kHz Vserra=4V
L=225μH C=50μF
Controle de conversores
Exemplo numérico - conversor Buck - Compensador PD

Controle de conversores
Circuitos de compensação com AMPOP
Topologia de 1 pólo
-V
i
R
fC
fR
+A
0
refV
R
ref
VC
ii RZ sC/1R
sC/RZ
ff
fff
( ) 1
( ) (1 )
fC
o i f f
RV s
V s R sC R
i
f
R
RG
ff
pCR2
1f
-20 dB/dec
+90°
-90°
0
+20
-20
0
-400,1f f 10f 100fp p p p
dB
i
f
o
C
Z
Z
V
V
Controle de conversores
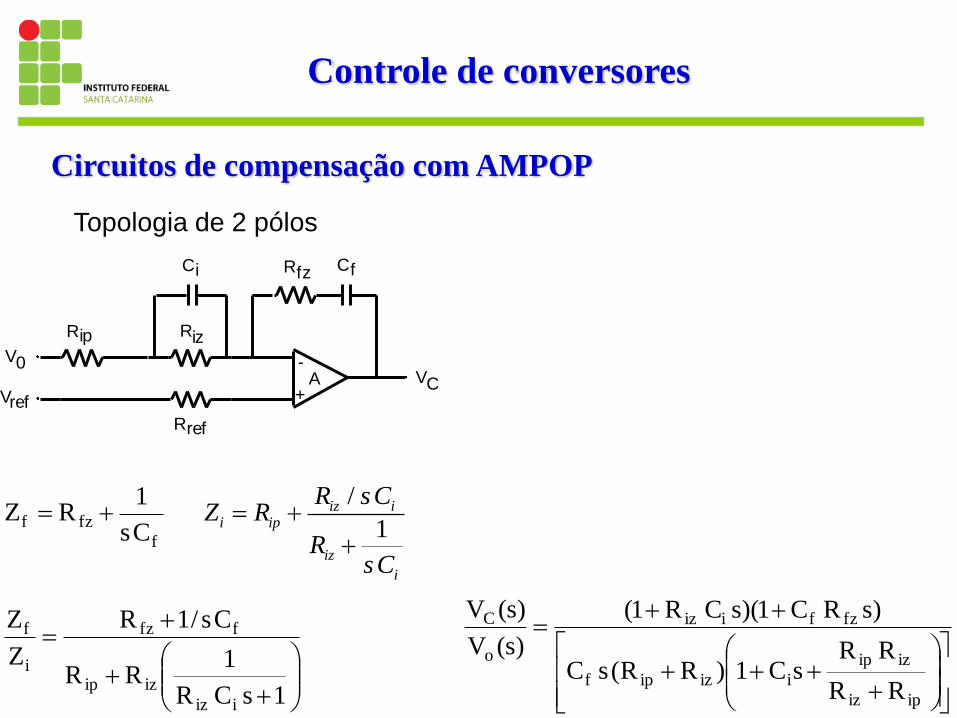
Circuitos de compensação com AMPOP
Topologia de 2 pólos
-V
fz
R
fC
izR
+A
0
refV
R
ref
VC
Rip
iC
f
fzfCs
1RZ
/
1iz i
i ip
iz
i
R sCZ R
RsC
1sCR
1RR
Cs/1R
Z
Z
iiz
izip
ffz
i
f
ipiz
izip
iizipf
fzfiiz
o
C
RR
RRsC1)RR(sC
)sRC1)(sCR1(
)s(V
)s(V
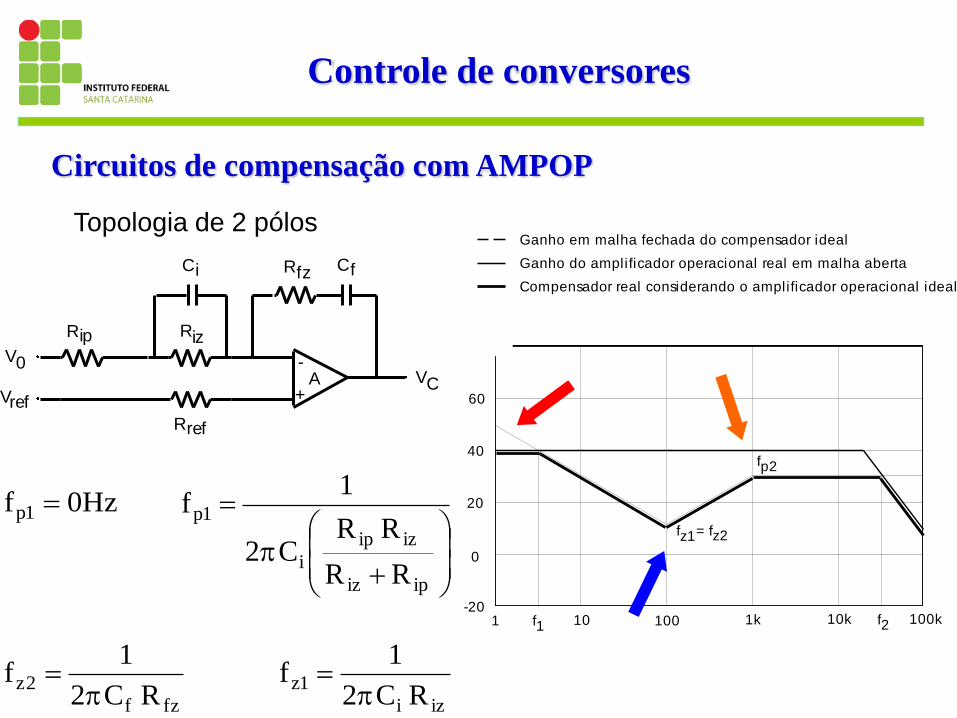
80
60
40
20
0
-201 10 100 1k 10k 100kf2f1
fp2
fz1= fz2
(dB)
Ganho em malha fechada do compensador ideal
Ganho do amplificador operacional real em malha aberta
Compensador real considerando o amplificador operacional ideal
Controle de conversores
Circuitos de compensação com AMPOP
Topologia de 2 pólos
-V
fz
R
fC
izR
+A
0
refV
R
ref
VC
Rip
iC
Hz0f 1p
izi
1zRC2
1f
ipiz
izip
i
1p
RR
RRC2
1f
fzf
2zRC2
1f
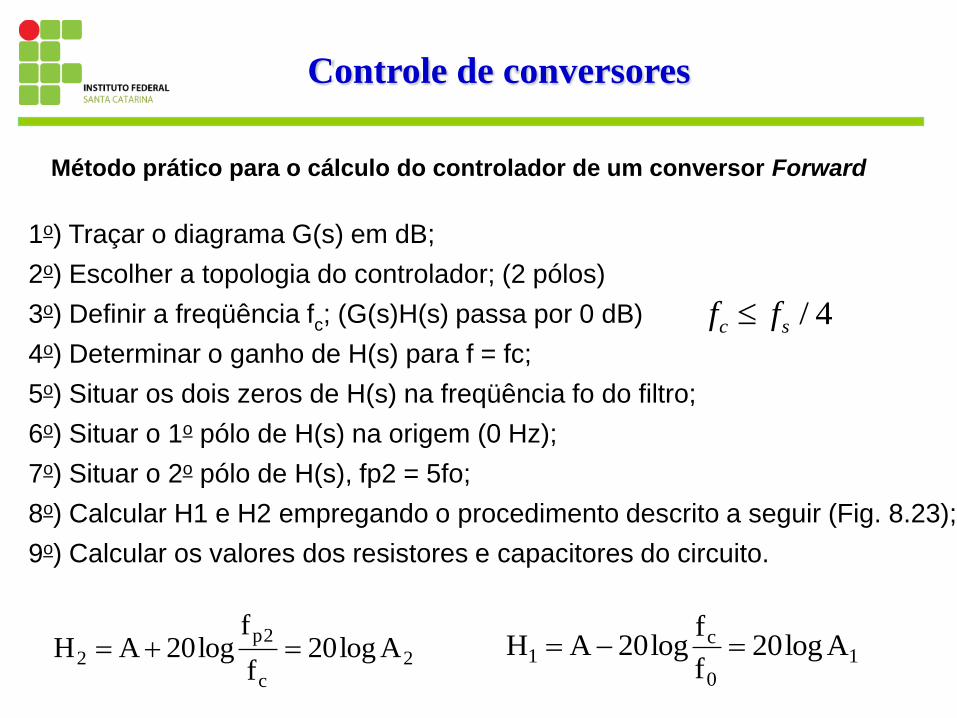
1o) Traçar o diagrama G(s) em dB;
2o) Escolher a topologia do controlador; (2 pólos)
3o) Definir a freqüência fc; (G(s)H(s) passa por 0 dB)
4o) Determinar o ganho de H(s) para f = fc;
5o) Situar os dois zeros de H(s) na freqüência fo do filtro;
6o) Situar o 1o pólo de H(s) na origem (0 Hz);
7o) Situar o 2o pólo de H(s), fp2 = 5fo;
8o) Calcular H1 e H2 empregando o procedimento descrito a seguir (Fig. 8.23);
9o) Calcular os valores dos resistores e capacitores do circuito.
Controle de conversores
Método prático para o cálculo do controlador de um conversor Forward
/ 4c sf f
2
c
2p
2 Alog20f
flog20AH 1
0
c1 Alog20
f
flog20AH
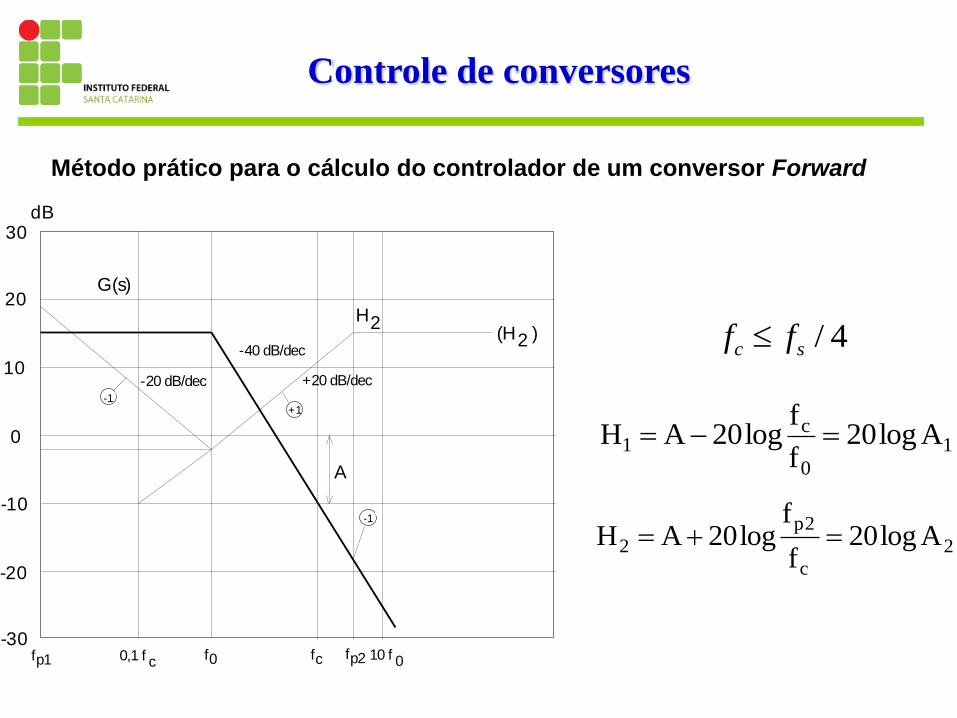
Controle de conversores
Método prático para o cálculo do controlador de um conversor Forward
/ 4c sf f
2
c
2p
2 Alog20f
flog20AH
1
0
c1 Alog20
f
flog20AH
30
20
10
0
-10
-20
10 f 0
G(s)
-30
dB
-40 dB/dec
-20 dB/dec +20 dB/dec
+1
-1
-1
A
(H )2
H 2
fp2fcf00,1 f cfp1
Controle de conversores
Método prático para o cálculo
do controlador de um conversor Forward
10 100 1 103
1 104
1 105
60
40
20
0
20
40
Gdb ( )
f ( )
10 100 1 103
1 104
1 105
200
150
100
50
0
Gfase ( )
f ( )
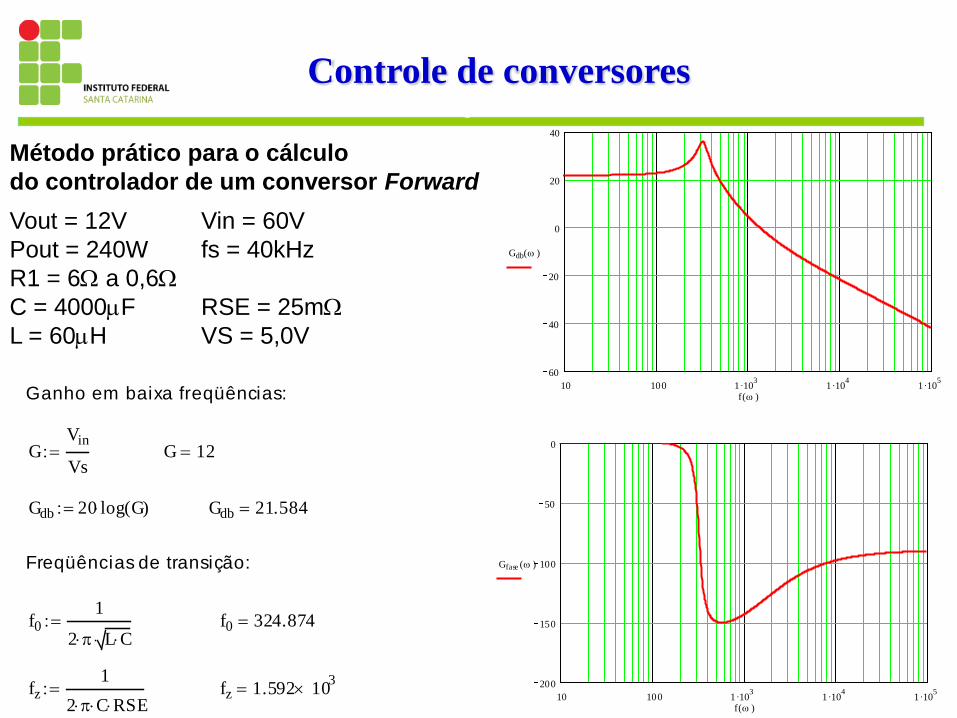
Ganho em baixa freqüências:
GVin
Vs G 12
Gdb 20 log G( ) Gdb 21.584
Freqüências de transição:
f0
1
2 L C f0 324.874
fz
1
2 C RSE fz 1.592 10
3
Vout = 12V Vin = 60V
Pout = 240W fs = 40kHz
R1 = 6 a 0,6
C = 4000F RSE = 25m
L = 60H VS = 5,0V
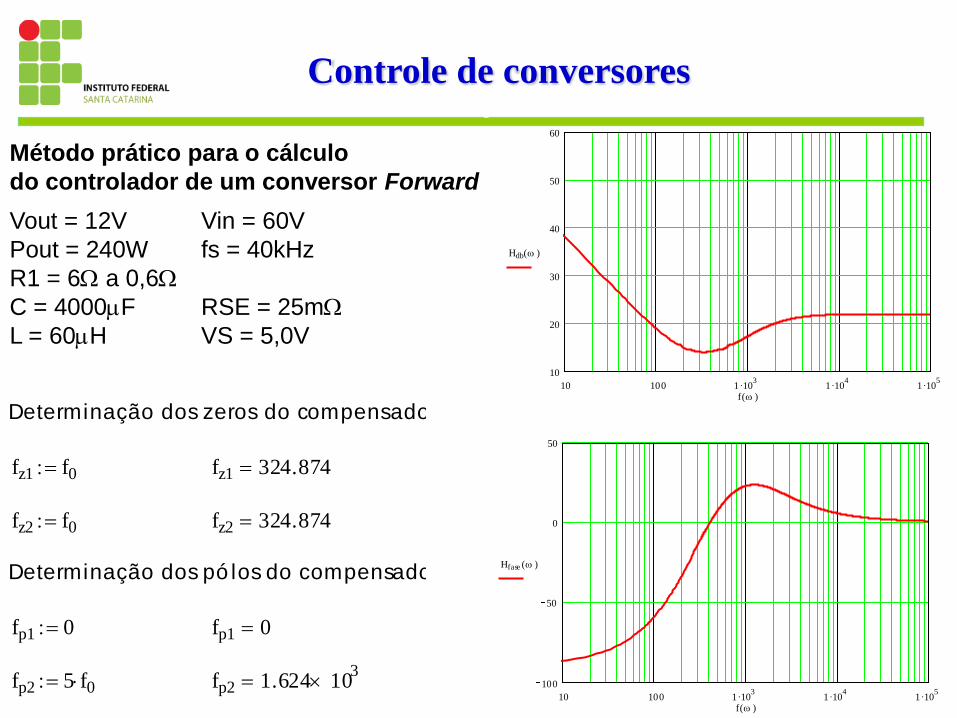
Controle de conversores
Método prático para o cálculo
do controlador de um conversor Forward
Vout = 12V Vin = 60V
Pout = 240W fs = 40kHz
R1 = 6 a 0,6
C = 4000F RSE = 25m
L = 60H VS = 5,0V
Determinação dos zeros do compensador:
fz1 f0 fz1 324.874
fz2 f0 fz2 324.874
Determinação dos pó los do compensador:
fp1 0 fp1 0
fp2 5 f0 fp2 1.624 103
10 100 1 103
1 104
1 105
10
20
30
40
50
60
Hdb ( )
f ( )
10 100 1 103
1 104
1 105
100
50
0
50
Hfase ( )
f ( )
Controle de conversores
Método prático para o cálculo
do controlador de um conversor Forward
Vout = 12V Vin = 60V
Pout = 240W fs = 40kHz
R1 = 6 a 0,6
C = 4000F RSE = 25m
L = 60H VS = 5,0V
10 100 1 103
1 104
1 105
40
20
0
20
40
60
80
GHdb ( )
f ( )
10 100 1 103
1 104
1 105
150
100
50
0
GHfase ( )
f ( )
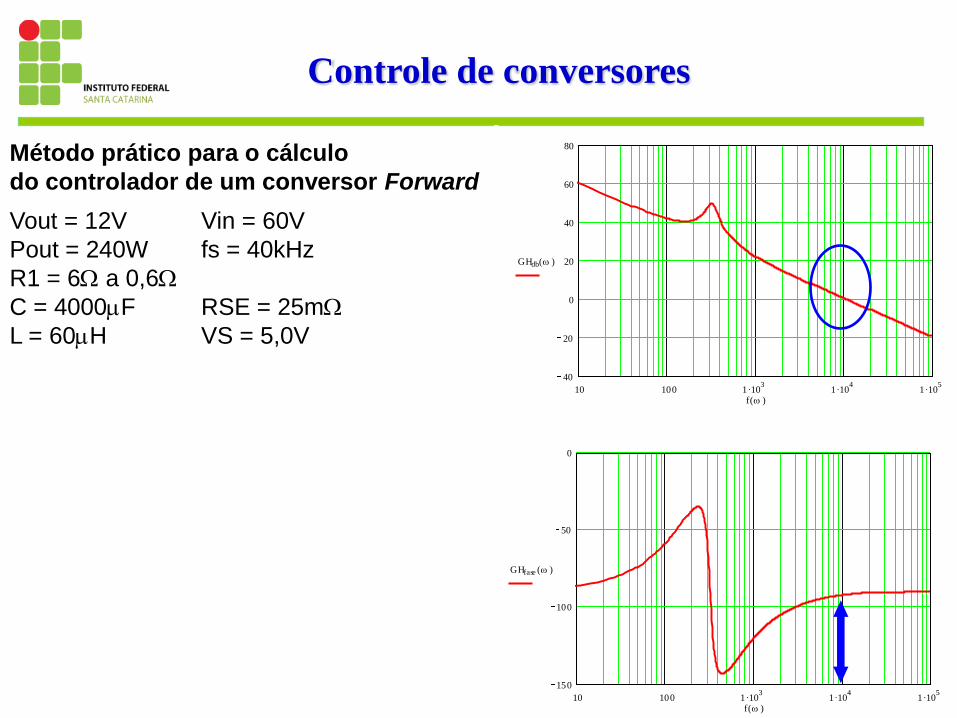
Controle de conversores
Método prático para o cálculo
do controlador de um conversor Forward
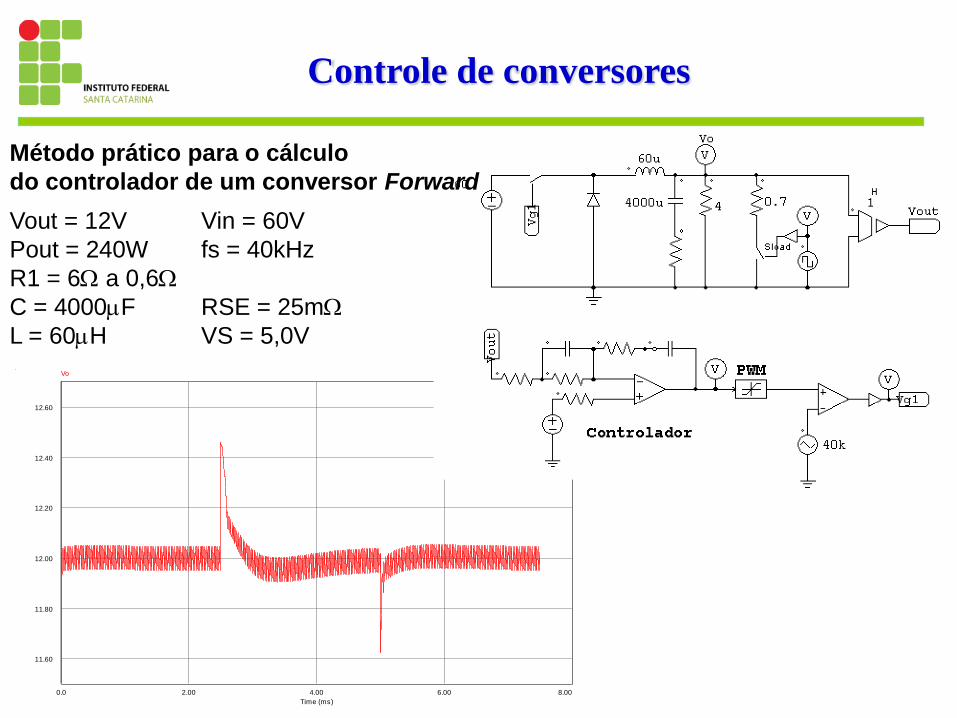
Vout = 12V Vin = 60V
Pout = 240W fs = 40kHz
R1 = 6 a 0,6
C = 4000F RSE = 25m
L = 60H VS = 5,0V
0.0 2.00 4.00 6.00 8.00
Time (ms)
11.60
11.80
12.00
12.20
12.40
12.60
Vo
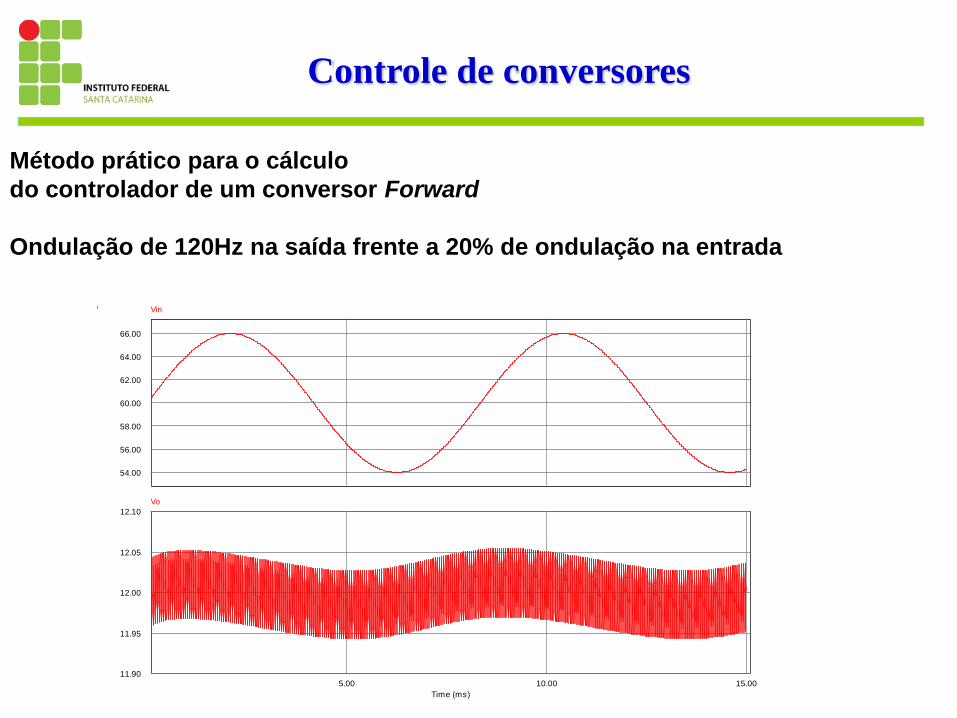
Controle de conversores
Método prático para o cálculo
do controlador de um conversor Forward
Ondulação de 120Hz na saída frente a 20% de ondulação na entrada
54.00
56.00
58.00
60.00
62.00
64.00
66.00
Vin
5.00 10.00 15.00
Time (ms)
11.90
11.95
12.00
12.05
12.10
Vo
Controle de conversores
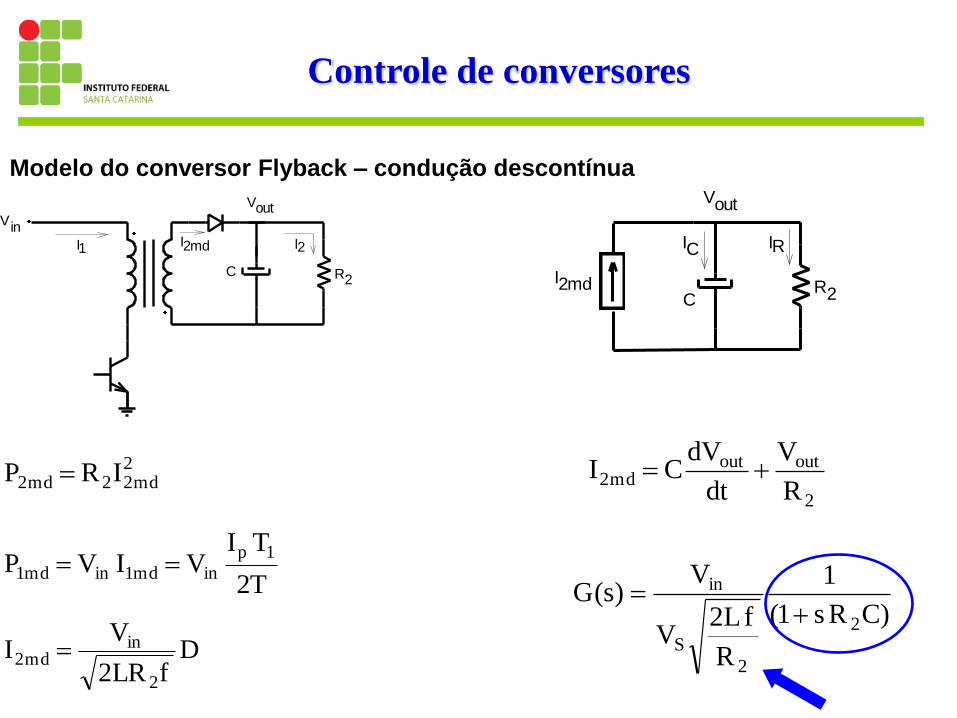
Modelo do conversor Flyback – condução descontínua
2RC
VoutVin
I1 I2md I2
2md22md2 IRP
T2
TIVIVP
1p
inmd1inmd1
DfLR2
VI
2
inmd2
2RC
Vout
IRIC
I2md
2
outoutmd2
R
V
dt
dVCI
)CRs1(
1
R
fL2V
V)s(G
2
2
S
in
Controle de conversores
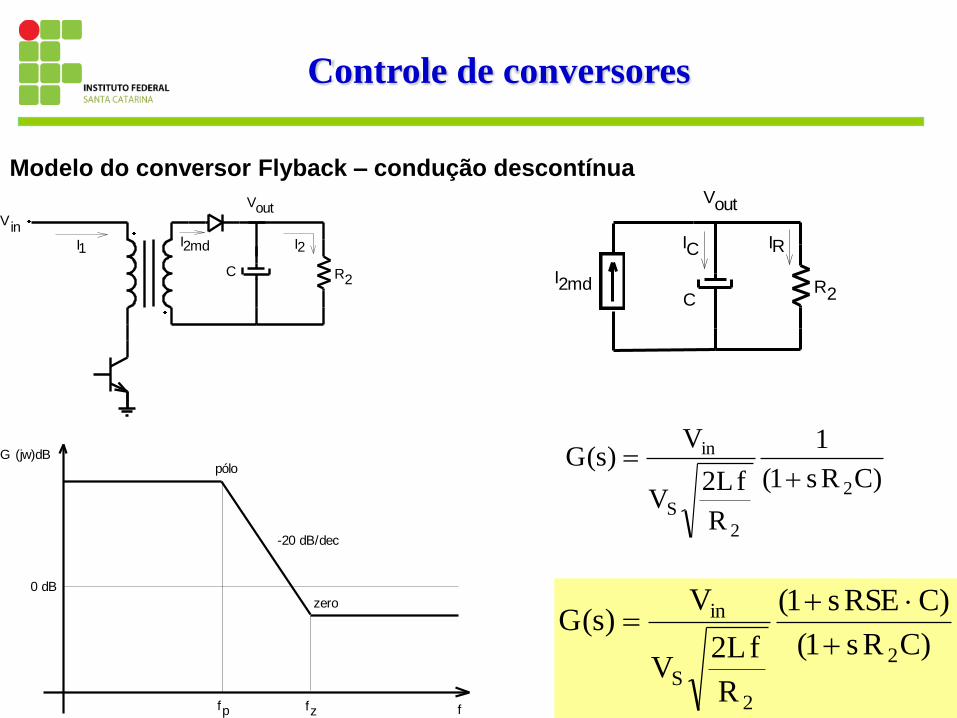
Modelo do conversor Flyback – condução descontínua
2RC
VoutVin
I1 I2md I2
2RC
Vout
IRIC
I2md
)CRs1(
1
R
fL2V
V)s(G
2
2
S
in
)CRs1(
)CRSEs1(
R
fL2V
V)s(G
2
2
S
in
pólo
-20 dB/dec
zero
G (jw)dB
0 dB
fp fz f
Controle de conversores
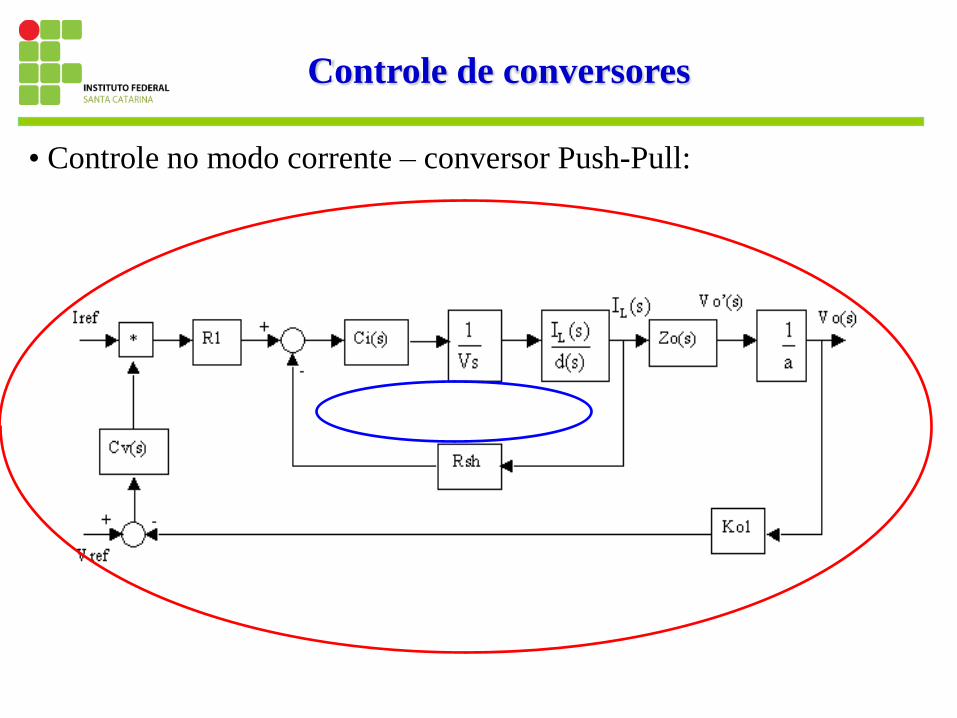
• Controle no modo corrente – conversor Push-Pull:
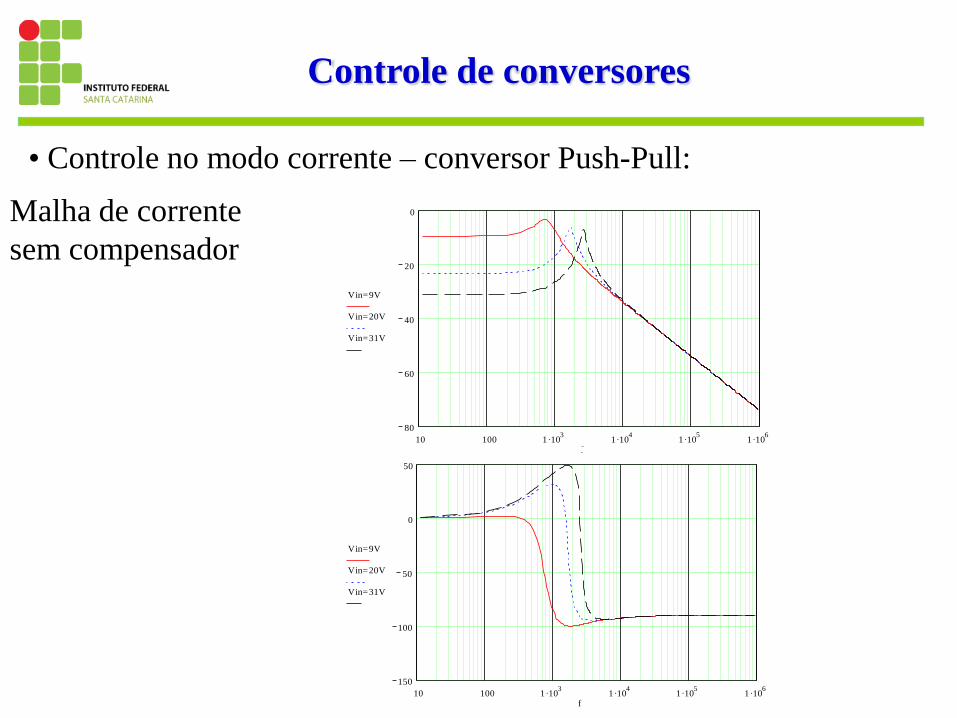
Controle de conversores
• Controle no modo corrente – conversor Push-Pull:
Malha de corrente
sem compensador
10 100 1 103
1 104
1 105
1 106
80
60
40
20
0
Vin=9V
Vin=20V
Vin=31V
f
10 100 1 103
1 104
1 105
1 106
150
100
50
0
50
f
Vin=9V
Vin=20V
Vin=31V
Controle de conversores
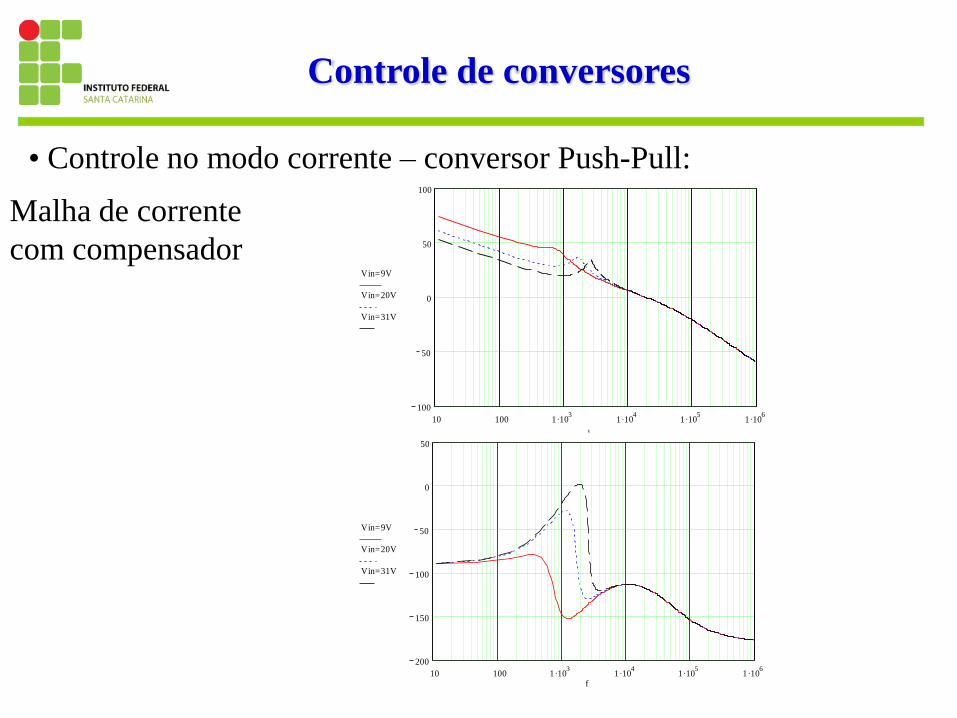
• Controle no modo corrente – conversor Push-Pull:
Malha de corrente
com compensador
10 100 1 103
1 104
1 105
1 106
100
50
0
50
100
f
Vin=9V
Vin=20V
Vin=31V
10 100 1 103
1 104
1 105
1 106
200
150
100
50
0
50
f
Vin=9V
Vin=20V
Vin=31V
Controle de conversores
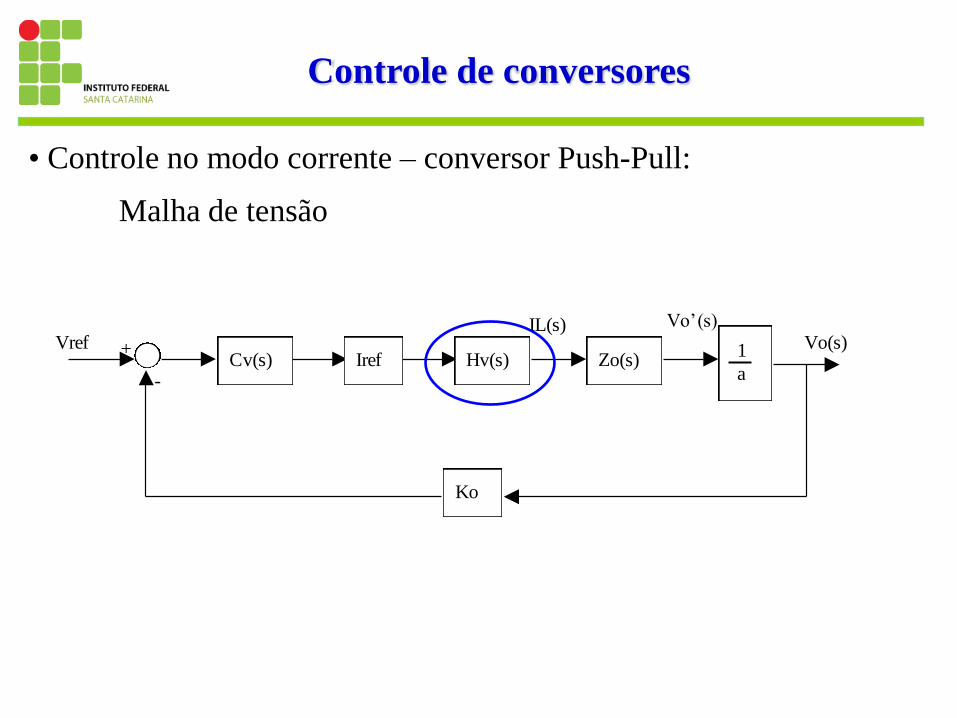
• Controle no modo corrente – conversor Push-Pull:
Malha de tensão
Vref +
-
Vo(s)
Vo’(s)
Cv(s)
Ko
Iref Hv(s) Zo(s)1
a
IL(s)
Controle de conversores
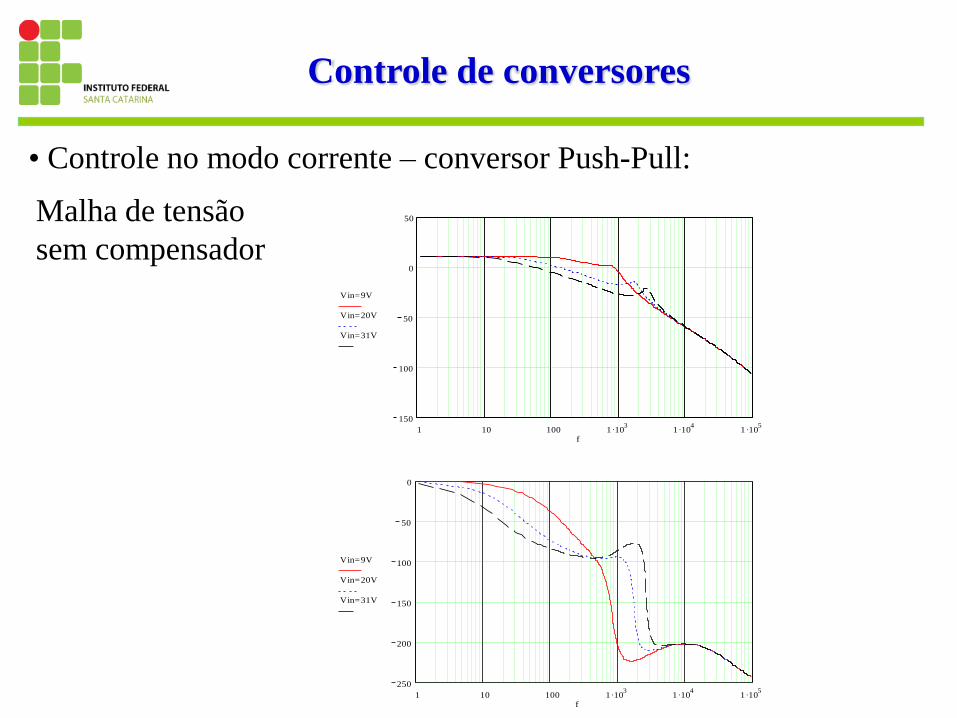
• Controle no modo corrente – conversor Push-Pull:
Malha de tensão
sem compensador
1 10 100 1 103
1 104
1 105
150
100
50
0
50
f
Vin=9V
Vin=20V
Vin=31V
1 10 100 1 103
1 104
1 105
250
200
150
100
50
0
f
Vin=9V
Vin=20V
Vin=31V
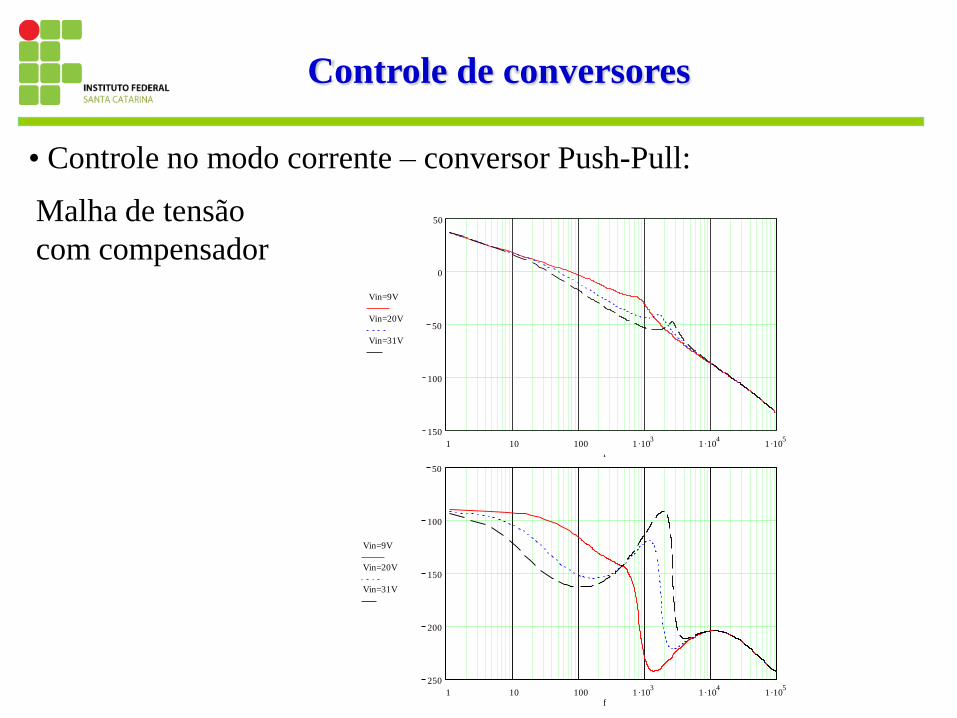
Controle de conversores
• Controle no modo corrente – conversor Push-Pull:
Malha de tensão
com compensador
1 10 100 1 103
1 104
1 105
150
100
50
0
50
f
Vin=9V
Vin=20V
Vin=31V
1 10 100 1 103
1 104
1 105
250
200
150
100
50
f
Vin=9V
Vin=20V
Vin=31V

Controle de conversores
• Controle no modo corrente – conversor Push-Pull:
Tim e
1 0 m s 1 5 m s 2 0 m s 2 5 m s 3 0 m s 3 5 m s 4 0 m sV1 (R o)
1 5 0 V
2 0 0 V
2 5 0 V
3 0 0 V
Tensão de saída e corrente de entrada - transitórios
Controle de conversores
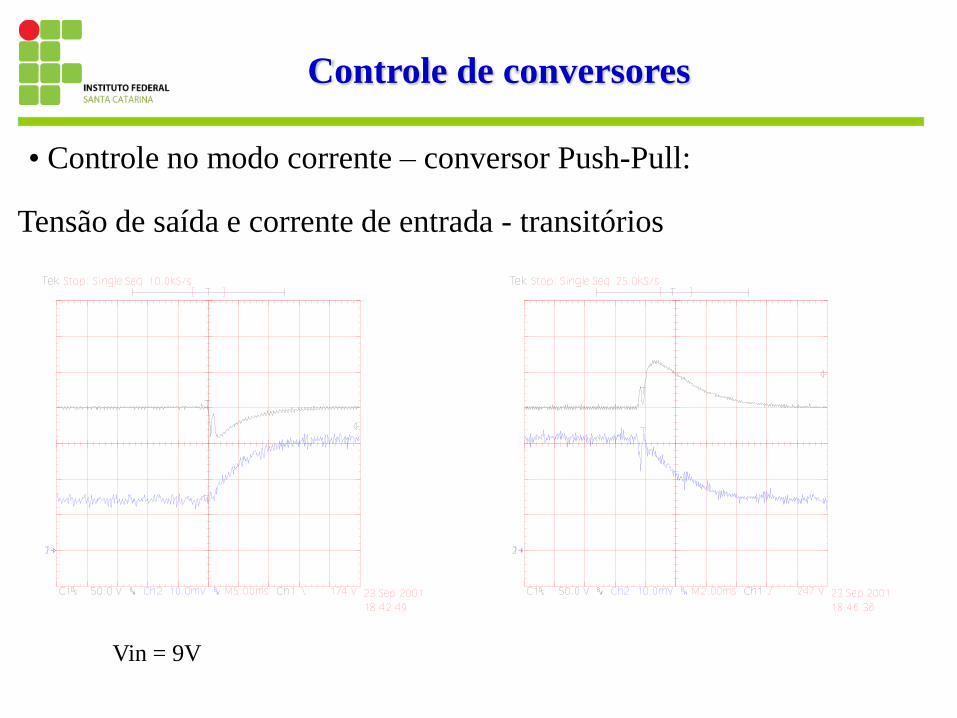
• Controle no modo corrente – conversor Push-Pull:
Tensão de saída e corrente de entrada - transitórios
Vin = 9V
Controle de conversores
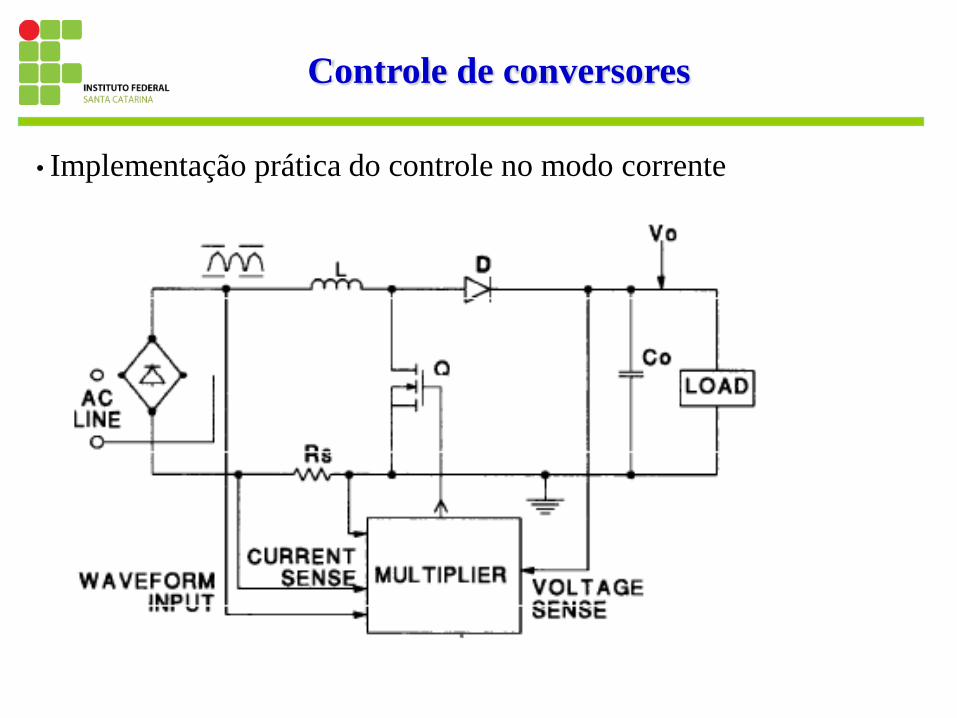
• Implementação prática do controle no modo corrente
Controle de conversores

Próxima aula
Metodologia e exemplo de projeto de fonte chaveada
Trazer: livro e calculadora
Top Related