







Línguas
Páginas
Legal


COMPORTAMENTO DE UM GERADOR DE INDUÇÃO TRIFÁSICO
AUTOEXCITADO
Edson Lucas Gaudereto Teixeira
Projeto de Graduação apresentado ao Curso
de Engenharia Elétrica da Escola Politécnica,
Universidade Federal do Rio de Janeiro, como
parte dos requisitos necessários à obtenção do
título de Engenheiro Eletricista.
Orientador: Professor Sebastião Ércules Melo
de Oliveira, D.Sc.
Rio de Janeiro
Março de 2018

COMPORTAMENTO DE UM GERADOR DE INDUÇÃO TRIFÁSICO
AUTOEXCITADO
Edson Lucas Gaudereto Teixeira
PROJETO DE GRADUAÇÃO SUBMETIDO AO CORPO DOCENTE DO
CURSO DE ENGENHARIA ELÉTRICA DA ESCOLA POLITÉCNICA
DA UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COMO PARTE
DOS REQUISITOS NECESSÁRIOS PARA A OBTENÇÃO DO GRAU DE
ENGENHEIRO ELETRICISTA.
Examinado por:
Prof. Sebastião Ércules Melo de Oliveira, D.Sc.
Prof. Sergio Sami Hazan, Ph.D.
Prof. Oumar Diene, D.Sc.
RIO DE JANEIRO, RJ BRASIL
MARÇO DE 2018

iii

Agradecimentos
Agradeço aos meus pais, Jorge Roberto Teixeira e Fátima Aparecida Gaudereto
Teixeira, pelo apoio e suporte ilimitados em minha vida e estudos, o que me permitiu
chegar até a conclusão desse trabalho.
Aos meus irmãos, Renan Gaudereto Teixeira e Graziele Gaudereto Teixeira, e
demais familiares, pelo apoio irrestrito.
Ao meu orientador, Prof. Sebastião, pela indicaçâo do tema e orientação ao
longo da elaboração do trabalho.
Aos meus amigos em geral e, em especial, a Pedro F., Yuri, Luis Eduardo, Lucas,
Pedro N. e Hugo, com os quais convivi durante o curso e estudos em conjunto, o
que me permitiu ultrapassar os desaos oferecidos pelas diversas disciplinas.
iv

Resumo do Projeto de Graduação apresentado à Escola Politécnica/ UFRJ como
parte dos requisitos necessários para a obtenção do grau de Engenheiro Eletricista.
COMPORTAMENTO DE UM GERADOR DE INDUÇÃO TRIFÁSICO
AUTOEXCITADO
Edson Lucas Gaudereto Teixeira
Março/2018
Orientador: Professor Sebastião Ércules Melo de Oliveira, D.Sc.
Curso: Engenharia Elétrica
Apresenta-se, neste relatório, uma descrição do funcionamento de um gerador
de indução trifásico sob operação balanceada. O gerador de indução pode operar
isolado da rede elétrica, como também pode operar conectado à rede. O trabalho
apresenta resultados de análise e medição que permitem caracterizar o desempenho
da máquina em operação isolada, a partir dos ensaios em vazio e de rotor bloqueado
necessários à determinação daqueles parâmetros de seu circuito equivalente com
impacto efetivo sobre o aparecimento do fenômeno de auto-excitação. Em seguida,
são apresentados resultados de cálculo da capacitância mínima que resulta em auto-
excitação, operação como gerador, transferência efetiva de potência e alimentação
de carga elétrica em seus terminais. Foram realizados, então, alguns ensaios com
medições que permitem caracterizar o comportamento do gerador sob diferentes
condições de amplitude da carga e, ainda, que permitem observar a mudança do
ponto de operação do gerador em função da velocidade imposta pelo motor CC
conectado a seu eixo como máquina motriz. Por m, são apresentados resulta-dos
de simulação computacional com o objetivo de validar o modelo da máquina e os
parâmetros utilizados.
v

Abstract of Undergraduate Project presented to POLI/UFRJ as a partial fulllment
of the requirements for the degree of Engineer.
BEHAVIOR OF A SELF-EXCITED THREE-PHASE INDUCTION
GENERATOR
Edson Lucas Gaudereto Teixeira
March/2018
Advisor: Professor Sebastião Ércules Melo de Oliveira, D.Sc.
Course: Electrical Engineering
A description of the operation of a three-phase induction generator under bal-
anced operation is presented in this report. The induction generator can operate
isolated from the mains, but can also operate connected to the network at its ter-
minals. The report presents results of analysis and measurements that allow to
characterize the performance of the machine under isolated operation, from the
no load and locked rotor tests necessary to the determination of those equivalent
circuit parameters with eective impact on the appearance of the self-excitation
phenomena. Next, we present results of calculation of the minimum capacitance
for self-excitation, operation as generator, eective power transfer and supply of
electric load at its terminals. Then, some tests were carried out with measurements
that allowed to characterize the generator behavior under dierent load amplitude
conditions and also that allowed to observe the change of the point of operation of
the generator as a function of the speed imposed by the dc motor connected to its
axis as a driving machine. Finally, results of computational simulation are presented
with the objective of validating the machine model used and the equivalent circuit
parameters.
vi
Sumário
Lista de Figuras ix
Lista de Tabelas xi
1 Introdução 1
1.1 Objetivos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.2 Organização do Trabalho . . . . . . . . . . . . . . . . . . . . . . . . . 2
2 Fundamentos Teóricos 4
2.1 Máquinas elétricas . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2.2 Características das máquinas de indução trifásicas . . . . . . . . . . . 5
2.3 Operação como gerador . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2.4 Desenvolvimento do modelo teórico utilizado . . . . . . . . . . . . . . 7
2.4.1 Análise da frequência de ressonância . . . . . . . . . . . . . . 8
2.4.2 Circuito equivalente do gerador de indução . . . . . . . . . . . 9
3 Funcionamento como gerador autoexcitado 10
3.1 Descrição do fenômeno de autoexcitação . . . . . . . . . . . . . . . . 10
3.2 Modelo do gerador autoexcitado . . . . . . . . . . . . . . . . . . . . . 12
3.3 Análise do circuito equivalente . . . . . . . . . . . . . . . . . . . . . . 15
3.4 Operação do gerador ligado ao sistema elétrico . . . . . . . . . . . . . 16
4 Ensaios em vazio e de rotor bloqueado 18
4.1 Máquina utilizada . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
4.2 Esquemas de Ligação . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
4.3 Ensaio em vazio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
4.3.1 Objetivo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
4.3.2 Material utilizado . . . . . . . . . . . . . . . . . . . . . . . . . 20
4.3.3 Experimento . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
4.4 Curva de magnetização . . . . . . . . . . . . . . . . . . . . . . . . . . 21
4.5 Determinação da faixa de capacitores necessária para a autoexcitação 24
4.6 Ensaio de rotor bloqueado . . . . . . . . . . . . . . . . . . . . . . . . 27
vii

4.6.1 Objetivo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
4.6.2 Material utilizado . . . . . . . . . . . . . . . . . . . . . . . . . 27
4.6.3 Experimento . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
5 Resultados Experimentais 31
5.1 Ensaios como gerador autoexcitado . . . . . . . . . . . . . . . . . . . 31
5.1.1 Objetivo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
5.1.2 Material utilizado . . . . . . . . . . . . . . . . . . . . . . . . . 31
5.1.3 Acoplamento mecânico . . . . . . . . . . . . . . . . . . . . . . 32
5.1.4 Experimentos realizados . . . . . . . . . . . . . . . . . . . . . 32
5.2 Capacitância mínima para autoexcitação sem carga . . . . . . . . . . 33
5.3 Ensaio com lâmpada de 40W e velocidade variando . . . . . . . . . . 34
5.4 Ensaio de carga variável . . . . . . . . . . . . . . . . . . . . . . . . . 36
6 Simulação digital da operação como gerador de indução autoexci-
tado 43
6.1 Objetivo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
6.2 Método iterativo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
6.3 Forma de cálculo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
6.4 Método de Newton-Raphson . . . . . . . . . . . . . . . . . . . . . . . 44
6.5 Resumo do programa . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
7 Resultados experimentais e simulados 47
8 Conclusão 51
Referências Bibliográcas 52
A Código do Matlab para a simulação do gerador de indução com
carga resistiva 53
viii
Lista de Figuras
2.1 Rotor gaiola de esquilo e estator de uma máquina de indução . . . . . 5
2.2 Curva conjugado x escorregamento para máquina de indução. . . . . 6
2.3 Fluxo de potência do gerador de indução. . . . . . . . . . . . . . . . . 7
2.4 Circuito equivalente por fase de um gerador de indução. . . . . . . . . 9
3.1 Processo de autoexcitação do gerador de indução trifásico . . . . . . . 11
3.2 Retas que determinam a faixa de capacitância . . . . . . . . . . . . . 12
3.3 Circuito equivalente por fase de um gerador de indução com a adição
da carga e do banco de capacitores. . . . . . . . . . . . . . . . . . . . 13
3.4 Circuito equivalente do gerador de indução referido à frequência do
estator . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
3.5 Circuito equivalente do gerador de indução com parâmetros divididos
por fpu. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
3.6 Esquema da operação do gerador ligado à rede . . . . . . . . . . . . 17
4.1 Esquemas de ligação possíveis de serem feitos no motor trifásico de
12 terminais utilizado . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
4.2 Conexões do Mavowatt 30 para máquina ligada em estrela . . . . . . 21
4.3 Pontos da curva de magnetização . . . . . . . . . . . . . . . . . . . . 24
4.4 Curva de magnetização e reta representativa do valor mínimo de ca-
pacitância . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
4.5 Curva de magnetização e retas representativas do valor mínimo e
máximo de capacitância . . . . . . . . . . . . . . . . . . . . . . . . . 26
4.6 Circuito Equivalente por fase do Gerador de Indução com o Rotor
bloqueado . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
4.7 Reta de resistência . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
4.8 Reta de impedância . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
5.1 Gerador de indução acoplado a um motor de corrente contínua . . . . 32
5.2 Comportamento da curva de magnetização e da reatância capacitiva
com a variação da frequência . . . . . . . . . . . . . . . . . . . . . . . 35
ix

5.3 Experimento realizado no laboratório, lâmpadas alimentadas pelo ge-
rador de indução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
5.4 Tensão terminal x Resistência de carga . . . . . . . . . . . . . . . . . 38
5.5 Corrente do gerador x Resistência de carga . . . . . . . . . . . . . . . 39
5.6 Corrente de carga x Resistência de carga . . . . . . . . . . . . . . . . 40
5.7 Corrente no capacitor x Resistência de carga . . . . . . . . . . . . . . 41
5.8 Escorregamento x Resistência de carga . . . . . . . . . . . . . . . . . 41
7.1 Tensão terminal de fase x Resistência de carga . . . . . . . . . . . . . 47
7.2 Tensão terminal de fase x Potência da carga . . . . . . . . . . . . . . 48
7.3 Corrente no estator x Resistência de carga . . . . . . . . . . . . . . . 48
7.4 Corrente no capacitor x Resistência de carga . . . . . . . . . . . . . . 49
7.5 Corrente na carga x Resistência de carga . . . . . . . . . . . . . . . . 49
7.6 Escorregamento x Resistência de carga . . . . . . . . . . . . . . . . . 50
x
Lista de Tabelas
4.1 Dados de placa da máquina . . . . . . . . . . . . . . . . . . . . . . . 18
4.2 Valores de tensão e corrente obtidos no ensaio em vazio . . . . . . . . 22
4.3 Valores médio de tensão e corrente das 3 fases obtidos no ensaio em
vazio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
5.1 Valores de tensão e corrente obtidos no ensaio em vazio . . . . . . . . 33
5.2 Valores de velocidade, frequência, tensão de fase e corrente de linha
medidos durante o ensaio . . . . . . . . . . . . . . . . . . . . . . . . . 34
5.3 Valores de velocidade, frequência, corrente no capacitor e corrente na
carga medidos durante o ensaio . . . . . . . . . . . . . . . . . . . . . 34
5.4 Valores de velocidade, frequência e valores médios de: tensão de fase,
corrente no gerador, corrente no capacitor e corrente na carga . . . . 35
5.5 Dados obtidos para capacitância de 15, 0µf . . . . . . . . . . . . . . . 36
5.6 Dados obtidos para capacitância de 15, 0µf . . . . . . . . . . . . . . . 37
5.7 Valores médios obtidos para o ensaio com capacitor de 15, 0µf . . . . 37
xi

Capítulo 1
Introdução
Este projeto é baseado na vericação experimental do comportamento de uma
máquina de indução trifásica com rotor gaiola de esquilo funcionando como gerador,
sendo realizada a excitação por meio de capacitores, sendo denominada autoexcita-
ção, devido à ausência de fontes externas.
Antes de 1830, a única fonte de energia elétrica conhecida eram as pilhas e ba-
terias, que transformavam energia química em eletricidade. Entretanto, em 1831,
o inglês Michael Faraday, inventou um sistema capaz de produzir energia elétrica
a partir de energia mecânica, criando, assim, um dispositivo gerador de energia.
O gerador de Faraday consistia num disco de cobre que girava no campo magné-
tico formado pelos polos de um ímã de ferradura e produzia uma corrente elétrica
contínua.
A descoberta de Faraday, além de ser fundamental para o crescimento, desenvol-
vimento e aplicabilidade da energia elétrica, foi a primeira etapa para o surgimento
dos geradores, que ao longo dos tempos foram sendo aperfeiçoados, incorporaram
inovações tecnológicas e transformaram-se em uma excelente e conável fonte de
energia. Graças ao legado de Michael Faraday e do avanço tecnológico propor-
cionado por outros diversos cientistas, atualmente, existem equipamentos de alta
tecnologia capazes de gerar energia de elevado padrão.
Os geradores de indução estiveram em uso desde o inicio de século XX, entre-
tanto, foi por volta de 1970, que começaram a ser usados em grande escala. Os
custos de energia na época se tornaram muito elevados devido a crise do petróleo.
O gerador de indução não requer muitos cuidados em termos de manutenção e
controle. Devido a sua simplicidade e ao pequeno tamanho por quilowatt de potên-
cia de saída, os geradores de indução são também muito indicados para geradores
eólicos de pequeno porte. Muitos desse geradores eólicos que estão no comércio são
projetados para funcionar em paralelo com grandes sistemas de potência, fornecendo
uma fração das necessidades totais da potência dos consumidores. De uma forma
geral, a máquina de indução, trabalhando como motor ou como gerador, utiliza
1

uma fonte de energia alternada para fornecer a potência reativa necessária à sua
magnetização. Quando ligado em paralelo à rede, sua corrente de magnetização é
suprida pelo barramento innito da rede, cando frequência e tensão controladas
pela própria rede. Já na operação isolada da rede, essa fonte de energia alternada é
substituída por capacitores, dimensionados de forma a serem capazes de promover a
autoexcitação. Esse trabalho é motivado pelo interesse em se estudar a viabilidade
de gerar energia elétrica através de uma máquina de indução trabalhando em regime
permanente, isolada da rede elétrica e auto-excitada por capacitores. Havendo dis-
ponibilidade de utilização de quedas d'agua ou de energia eólica para o acionamento
da máquina, esta poderá ser de grande utilidade em comunidades isoladas, podendo
suprir uma demanda de energia elétrica não atendida pelas redes de energia elétrica.
Na ausência de outras fontes de energia elétrica, precisa-se prover de outra ma-
neira a potência reativa essencial para seu funcionamento. Portanto, utilizam-se
capacitores para fornecer o reativo necessário.
A principal aplicação do gerador de indução autoexcitado consiste de seu uso em
localidades remotas, onde não exista rede de distribuição de energia elétrica.
Para o fornecimento da energia mecânica que provoca o movimento do rotor
do gerador, podem-se utilizar motores térmicos, cataventos, turbinas associadas a
quedas d'água. Entretanto, com o intuito de simular, em laboratório, o comporta-
mento dessas fontes de movimento, será utilizada um motor de corrente contínua
para acionar o gerador de indução.
1.1 Objetivos
Os objetivos desse trabalho são:
•Através de ensaios em vazio e de rotor bloqueado, determinar os parâmetros da
máquina.
•Calcular a capacitância mínima necessária para a autoexcitação do gerador.
•Realizar ensaios que permitam vericar o comportamento da máquina operando
como gerador autoexcitado.
•Resolver, por método iterativo, as equações que representam o modelo do ge-
rador autoexcitado.
•Comparar os resultados obtidos experimentalmente com os simulados
1.2 Organização do Trabalho
Esse trabalho encontra-se dividido da seguinte forma: No capítulo 1, é feita uma
introdução do assunto e são apontados quais são os objetivos do mesmo. No capítulo
2, conceitos básicos são introduzidos para que o leitor possa construir um raciocínio
2

do início. No capítulo 3, é explicado como a máquina funciona como gerador auto-
excitado. No capítulo 4, são feitos os ensaios necessários para o levantamento dos
parâmetros da máquina. No capitulo 5, são feitos ensaios para analisar o comporta-
mento do gerador de indução. No capítulo 6, é explicado o algoritmo utilizado para
fazer a simulação do comportamento da máquina no computador. No capítulo 7, é
feita uma simulação e comparação dos resultados obtidos.
3

Capítulo 2
Fundamentos Teóricos
2.1 Máquinas elétricas
As máquinas elétricas assumem diversas formas e são conhecidas por diversos
nomes, tais como máquinas de corrente continua, síncronas, de imã permanente, de
relutância variável, de histerese, sem escovas e assim por diante. Embora aparentem
ser bem diferentes umas das outras, os princípios físicos que regem o comportamento
de cada uma dessas máquinas são bastante similares. São equipamentos destinados
a converter energia mecânica em elétrica ou vice-versa. São chamadas de gerador
no primeiro caso, e, quando transformam energia elétrica em mecânica, são denomi-
nadas motor.
O nome máquina de indução vem do fato do enrolamento do estator criar um
campo magnético girante que induz corrente alternada no enrolamento do rotor.
O tipo do enrolamento do rotor varia dependendo da necessidade de conjugado
ou controle de velocidade. Duas categorias podem ser distinguidas: o rotor em gaiola
de esquilo e o rotor bobinado. Dentre os dois, o mais utilizado é o gaiola de esquilo.
O rotor bobinado é utilizado quando é necessário, por exemplo, modicar a curva
de conjugado do motor.
A máquina de indução com rotor em gaiola de esquilo é a preferida para ser usada
como gerador, devido a fácil e pouca necessidade de manutenção e a ausência de
anéis coletores ou escovas de carbono. Em adição a isso há, por exemplo, a vantagem
de ter um entreferro mais regular e melhor resistência a esforços decorrentes da
ultrapassagem da velocidade de disparo.
O rotor em gaiola de esquilo consiste de barras de alumínio ou cobre inseridas
nas ranhuras do rotor com todas as barras ligadas em curto-circuito por dois anéis.
4
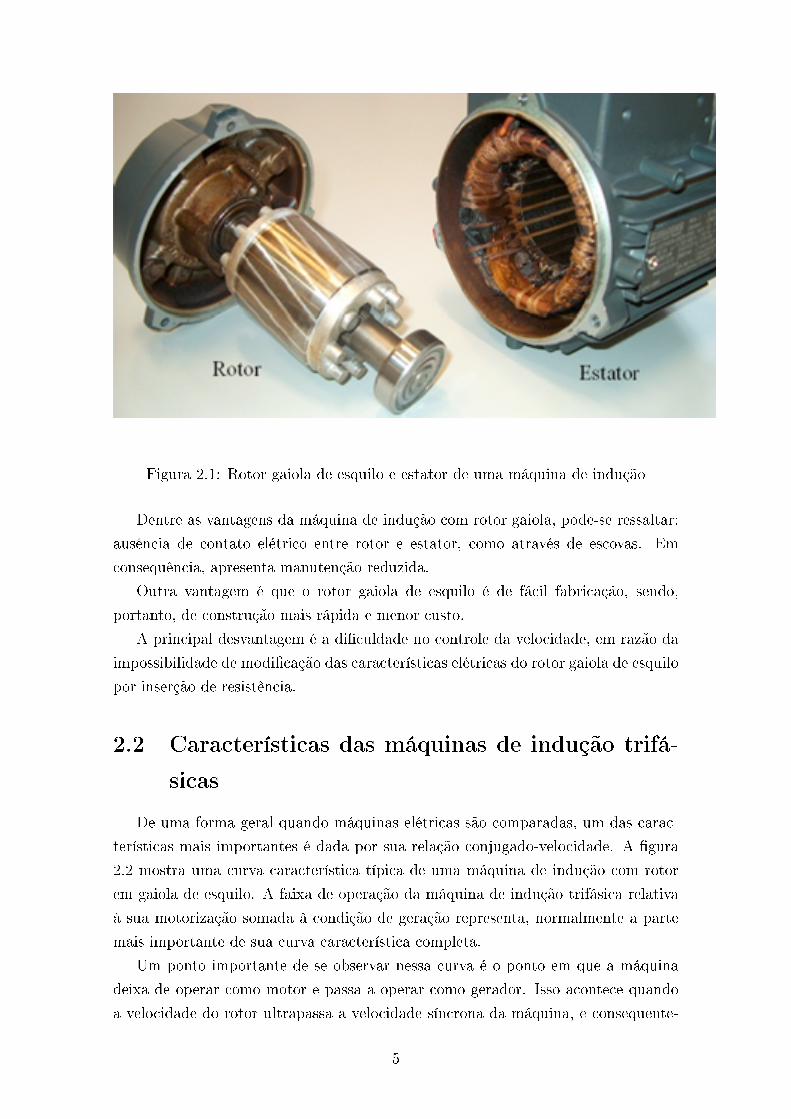
Figura 2.1: Rotor gaiola de esquilo e estator de uma máquina de indução
Dentre as vantagens da máquina de indução com rotor gaiola, pode-se ressaltar:
ausência de contato elétrico entre rotor e estator, como através de escovas. Em
consequência, apresenta manutenção reduzida.
Outra vantagem é que o rotor gaiola de esquilo é de fácil fabricação, sendo,
portanto, de construção mais rápida e menor custo.
A principal desvantagem é a diculdade no controle da velocidade, em razão da
impossibilidade de modicação das características elétricas do rotor gaiola de esquilo
por inserção de resistência.
2.2 Características das máquinas de indução trifá-
sicas
De uma forma geral quando máquinas elétricas são comparadas, um das carac-
terísticas mais importantes é dada por sua relação conjugado-velocidade. A gura
2.2 mostra uma curva característica típica de uma máquina de indução com rotor
em gaiola de esquilo. A faixa de operação da máquina de indução trifásica relativa
à sua motorização somada à condição de geração representa, normalmente a parte
mais importante de sua curva característica completa.
Um ponto importante de se observar nessa curva é o ponto em que a máquina
deixa de operar como motor e passa a operar como gerador. Isso acontece quando
a velocidade do rotor ultrapassa a velocidade síncrona da máquina, e consequente-
5

mente o escorregamento(s) passa a ser negativo.
Figura 2.2: Curva conjugado x escorregamento para máquina de indução.
Faixa de operação para diferentes valores de escorregamento:
• - s > 1: Frenagem por contramarcha
• - 0 < s < 1: Motor
• - s < 0: Gerador
2.3 Operação como gerador
Quando a máquina de indução esta operando como gerador, ela envia à rede
elétrica a energia recebida, na forma de energia mecânica, de sua máquina motriz,
uma turbina, hélices ou, até mesmo de uma outra máquina funcionando como mo-
tor, constituindo, neste caso, um grupo motor-gerador. Perdas da mesma natureza
daquelas que ocorrem no funcionamento como motor (como as perdas no cobre e as
6
perdas magnéticas no estator e no rotor e as perdas por atrito e ventilação) ocorrem
em condição de operação como gerador.
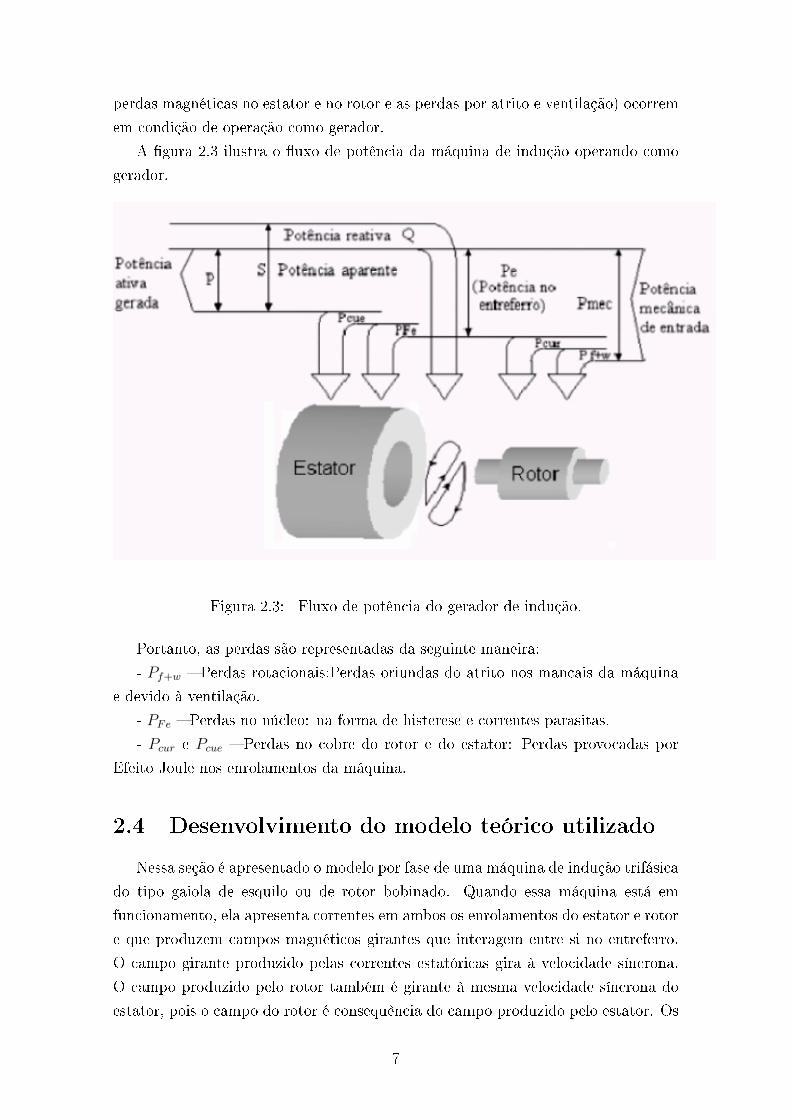
A gura 2.3 ilustra o uxo de potência da máquina de indução operando como
gerador.
Figura 2.3: Fluxo de potência do gerador de indução.
Portanto, as perdas são representadas da seguinte maneira:
- Pf+w Perdas rotacionais:Perdas oriundas do atrito nos mancais da máquina
e devido à ventilação.
- PFe Perdas no núcleo: na forma de histerese e correntes parasitas.
- Pcur e Pcue Perdas no cobre do rotor e do estator: Perdas provocadas por
Efeito Joule nos enrolamentos da máquina.
2.4 Desenvolvimento do modelo teórico utilizado
Nessa seção é apresentado o modelo por fase de uma máquina de indução trifásica
do tipo gaiola de esquilo ou de rotor bobinado. Quando essa máquina está em
funcionamento, ela apresenta correntes em ambos os enrolamentos do estator e rotor
e que produzem campos magnéticos girantes que interagem entre si no entreferro.
O campo girante produzido pelas correntes estatóricas gira à velocidade síncrona.
O campo produzido pelo rotor também é girante à mesma velocidade síncrona do
estator, pois o campo do rotor é consequência do campo produzido pelo estator. Os
7

campos citados induzem tensões no estator de frequência igual à de alimentação e
produzem tensões no rotor com a frequência de escorregamento.
É importante dizer que a indução de tensões no rotor, seja ele bobinado ou de
gaiola de esquilo, só acontece se sua velocidade de rotação for diferente da velocidade
síncrona. Caso contrário, não haveria variação no enlace de uxo e, consequente-
mente, indução de tensão no enrolamento de fases do rotor ou na gaiola rotórica.
2.4.1 Análise da frequência de ressonância
A velocidade de rotação angular, do campo girante, dado em rotações por minuto,
produzido pelo estator de uma máquina de indução é dada pela equação (2.1).
ns =120fsP
(2.1)
Onde:
• - fs- frequência da rede
• - p- número de pólos do estator
• - ns-velocidade de rotação do campo girante do estator
Logo:
ws =(2πns)
60(2.2)
Onde: ws= velocidade de rotação do campo girante do estator [ rds] e
wr =(2πnr)
60(2.3)
Onde: wr= velocidade de rotação do rotor [ rds]
Então, o escorregamento é denido pela equação (2.4).
s =(ws − wr)
ws(2.4)
Sabendo-se que w′r = ws − wr, é possível chegar à equação 2.5:
Onde: w′r= velocidade de rotação do campo girante do rotor [ rds]
s =(w′r)
ws(2.5)
Portanto:
f′
r = sfs (2.6)
8

• - fs- frequência da tensão do estator
• - f ′r-frequência induzida no rotor
2.4.2 Circuito equivalente do gerador de indução
A gura 2.4 introduz o circuito equivalente por fase de uma máquina de indução.
O modelo utilizado apresenta todos os parâmetros referidos ao estator. Como pode
ser observado o circuito é semelhante ao circuito equivalente de um transformador.
Figura 2.4: Circuito equivalente por fase de um gerador de indução.
Para o qual:
• - Rs- resistência do estator
• - Xs- reatância de magnetização do estator
• - Rc- resistência de perdas no núcleo
• - Xm- reatância de magnetização
• - X ′r- reatância de disperção do rotor referida ao estator
• - R′r- resistência do rotor referida ao estator
• - s- escorregamento
Devido às perdas no núcleo da máquina utilizada serem reduzidas, o circuito
apresentado na gura 2.4 pode ser simplicado desconsiderando a resistência Rc.
9

Capítulo 3
Funcionamento como gerador
autoexcitado
Neste capítulo será mostrado o funcionamento teórico da máquina de indução
funcionando como gerador autoexcitado por capacitores.
3.1 Descrição do fenômeno de autoexcitação
Para que haja geração de energia elétrica pelo gerador de indução, é preciso
que haja um magnetismo residual em seu rotor, para que em conjunto com sua
rotação permita a indução de tensão nos terminais do estator. Entretanto, devido à
pequena intensidade do magnetismo residual no rotor, proporcionado por operações
anteriores como motor ou ligação de baterias, as tensões induzidas serão muito baixas
e consequentemente insucientes para a utilização em carga.
Para que o efeito do magnetismo residual seja aumentado, é fundamental que
haja o fornecimento de potência reativa à máquina, seja através da rede elétrica,
quando ocorre a operação interligada, ou por meio de capacitores, quando a operação
isolada é necessária. Caso o circuito fosse fechado por um resistor, por exemplo, o
fenômeno não seria possível.
O fenômeno da autoexcitação ocorre devido à ligação do banco de capacitores
em paralelo aos terminais do estator, que implica em um avanço de fase na corrente
de excitação da máquina. Essa corrente, por sua vez, ao passar pelos enrolamentos
do estator, produzirá um uxo magnético de mesmo sentido que o uxo residual
original, aumentando a magnetização da máquina.
10

Figura 3.1: Processo de autoexcitação do gerador de indução trifásico
A gura 3.1 ilustra a interação entre a corrente proveniente do banco de capa-
citores e a tensão induzida no estator pelo uxo residual do entreferro. Pode-se
perceber que no instante inicial, representado pela tensão residual, a tensão ecaz
residual no gerador é V1 , ao passo que a corrente é igual a zero. Após o início do
processo de autoexcitação, uma corrente de magnetização é gerada devido à tensão
V1 nos terminais do capacitor. Em consequência dessa corrente, o uxo aumentará
no rotor, criando assim, uma tensão maior que V1 nos terminais do estator. Para
essa tensão no estator, chamada V2, haverá uma corrente de magnetização maior,
chamada I2. O processo irá se repetir até que a curva de magnetização cruze com a
reta de carga Xc1 no ponto de saturação, denominado P.
Portanto, devem-se determinar os possíveis valores de capacitância que promo-
vem o aumento da magnetização.
O funcionamento adequado corresponde à interseção entre a reta de impedân-
cia dos capacitores e a curva de magnetização da máquina à velocidade síncrona.
Entretanto duas condições devem ser satisfeitas.
A reatância capacitiva deve ser menor ou igual à reatância de magnetização
não saturada da máquina, o que indica que a inclinação da reta de impedância dos
capacitores deve ser menor que a da linha de entreferro.
A capacitância máxima e, consequentemente, a reatância mínima do banco de
11

capacitores é limitada por um valor de reatância para a qual a corrente do estator
não exceda o seu valor nominal em vazio.
Logo, de acordo com a gura 3.2, nota-se que a região compreendida entre as
retas Cmin e Cmax corresponde à extensão de possíveis valores de reatância capacitiva
que promovem a autoexcitação. Uma reta fora desse intervalo não produz o efeito
desejado, haja vista a inexistência de interseção com a curva de magnetização.
Figura 3.2: Retas que determinam a faixa de capacitância
É importante que, na prática, a capacitância escolhida não tenha um valor muito
próximo da tangente da linha de entreferro, caso contrário uma alteração na carga
pode levar a reta de impedância para fora da faixa entre Cmin e Cmax.
3.2 Modelo do gerador autoexcitado
Na gura 3.3 é mostrado o circuito utilizado com a adição da carga e do banco
de capacitores necessário para a autoexcitação.
12

Figura 3.3: Circuito equivalente por fase de um gerador de indução com a adição
da carga e do banco de capacitores.
Para o qual:
• - Xc- reatância capacitiva
• - RL- resistência da carga
O circuito mostrado na gura 3.3 possui todos os parâmetros denidos na
frequência síncrona do estator. No entanto, no funcionamento proposto neste tra-
balho, ou seja, como gerador autoexcitado, a frequência de funcionamento pode se
alterar. Portanto, devem-se vericar quais parâmetros variam com a frequência e
em seguida corrigi-los de forma adequada. Para isso,basta adicionar o termofpu(frequência expressa por unidade) às respectivas expressões.
Sendo:
fpu =f
fs(3.1)
Para obter uma relação para o escorregamento em p.u., é necessário dividir pela
velocidade angular de base, ws.
spu =(w − wr)
w=
wws− w
ws
wws
(3.2)
Além disso:w
ws=f
fs= fpu (3.3)
δ =wrws
(3.4)
13
Com isso, o escorregamento assume uma nova expressão:
s =fpu − δfpu
(3.5)
Logo, chega-se, assim, à equação 3.6.
R′rs
=R′rfpufpu − δ
(3.6)
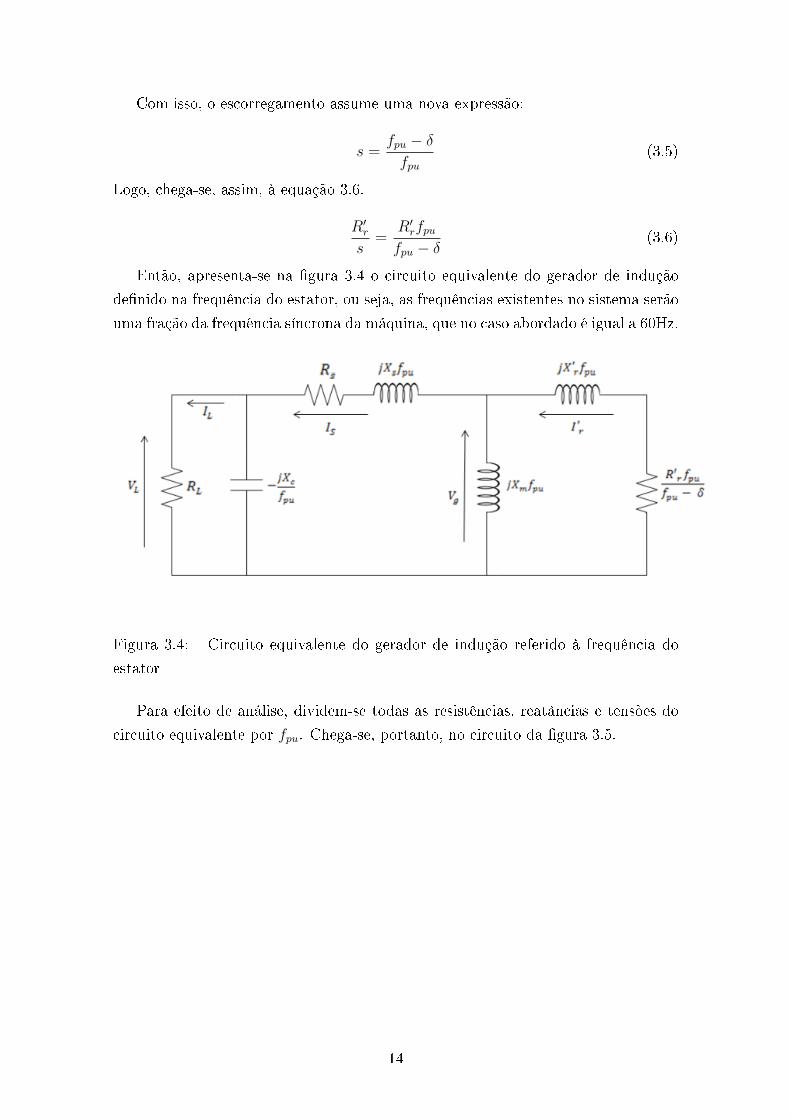
Então, apresenta-se na gura 3.4 o circuito equivalente do gerador de indução
denido na frequência do estator, ou seja, as frequências existentes no sistema serão
uma fração da frequência síncrona da máquina, que no caso abordado é igual a 60Hz.
Figura 3.4: Circuito equivalente do gerador de indução referido à frequência do
estator
Para efeito de análise, dividem-se todas as resistências, reatâncias e tensões do
circuito equivalente por fpu. Chega-se, portanto, no circuito da gura 3.5.
14

Figura 3.5: Circuito equivalente do gerador de indução com parâmetros divididos
por fpu.
3.3 Análise do circuito equivalente
No circuito mostrado na gura 3.5 não há nenhuma fonte externa de energia
elétrica aplicada, isso signica que a corrente total multiplicada pela impedância
equivalente do circuito deve ser igual a zero, como mostrado na equação 3.7.
ZeqIs = 0 (3.7)
Onde Zeq pode ser obitida por meio da seguinte equação:
Zeq =
(((Rr
fpu− δ+ jXr
)//jXm
)+
(jXs+
Rs
fpu
))//jXc
fpu2//Rl (3.8)
Para o modelo utilizado, a corrente Is é diferente de zero, caso contrário não
haveria magnetização da máquina. Logo, através da equação 3.7, conclui-se que a
impedância Zeq deve ser igual a zero. Assim, a condição de autoexcitação em regime
permanente será:
• - Parte real de Zeq igual a zero
• - Parte imaginária de Zeq igual a zero
Com as seguintes suposições; Rs = R′r = R e Xs = X ′r = X
Com isso é possível chegar às expressões Re(Zeq)=0 e Im(Zeq)=0:
Re(Zzeq) = (−2XRLXm −X2RL)f 3pu + 2δXRLXm + δRLX
2f 2pu +Xc(2R +
RLXm +XcX(2R +RL +RLR2fpu + [−δXc(RL +R)] = 0
15

e
Im(Zzeq) = [(2XXc + 2RLR)Xm + 2RLXR +X2Xc]f2pu + [−δ(2XcX +RRL)Xm −
δ(RRLXm − δ(RRL +XcX)X)]fpu +XcR(RL +R) = 0
Assumindo os valores dos parâmetros da máquina como constantes, pode-se iden-
ticar duas incógnitas, Xm e fpu, em duas equações que devem ser satisfeitas simul-
taneamente. A partir dessas equações, pode-se obter os valores de Xm e fpu através
de métodos computacionais, dos quais o de Newton-Raphson se destaca por sua
rápida convergência.
Os valores dessas duas icógnitas serão utilizados com o objetivo de calcular Vt e as
correntes Is, Ic e IL. A solução dessas equações pode ser obtida computacionalmente
e o desenvolvimento será mostrado no Capítulo 6- Simulação digital da operação
como gerador de indução autoexcitado.
Vt(i) = IL(i)RL(i) (3.9)
Is(i) =Vg(i)
R + jXfpu − jXcfpu
RL(i)
RL(i)− jXcfpu
(3.10)
Ic(i) =Vt(i)Xc
fpu
(3.11)
IL(i) = −jXcIs(i)fpu
RL(i)− jXc
fpu
(3.12)
3.4 Operação do gerador ligado ao sistema elétrico
O gerador de indução não precisa necessariamente operar isolado, o gerador
pode operar também ligado à rede. No tópico anterior foi determinado o modelo
matemático do gerador de indução autoexcitado, a excitação dos geradores operando
de forma isolada é feita por capacitores conectados em paralelo com a carga. No caso
do gerador ligado ao sistema elétrico, a rede é responsável por fornecer a potência
reativa para a excitação do gerador.
O gerador de indução não precisa estar necessariamente em sincronismo com a
rede para se conectar (mesma frequência, magnitude de tensão, sequência de fases).
Contudo, devem ser levados em consideração alguns aspectos para conexão.
16

Figura 3.6: Esquema da operação do gerador ligado à rede
Os seguintes passos devem ser seguidos para a conexão do gerador ao sistema:
• Ainda desconectado da rele elétrica, aumenta-se a velocidade da máquina pri-
mária até atingir a velocidade síncrona. Dessa maneira, aplicando tensão na
armadura não haverá injeção de corrente, já que o escorregamento é nulo.
Assim, evitam-se grandes magnitudes de corrente na conexão do gerador de
indução.
• Contudo, mesmo deixando o gerador com rotação síncrona, existe uma corrente
transitória, comumente chamada de inrush, nos terminais de máquina. Esta
corrente advém da magnetização da máquina, e não acarretará em problemas
para o gerador ou a rede.
• Após a conexão com velocidade síncrona, deve elevar a velocidade de rotação
da máquina primária, a m de que a máquina opere como gerador. A veloci-
dade da máquina deve ser elevada respeitando a corrente nominal da máquina,
que no caso é 1,9 A.
• Para o correto desligamento da máquina, a velocidade de rotação do motor pri-
mário deve ser diminuída até a velocidade síncrona. Quando o escorregamento
for nulo, o gerador poderá ser desconectado de forma segura.
17
Capítulo 4
Ensaios em vazio e de rotor
bloqueado
A determinação dos parâmetros da máquina de indução trifásica utilizada será
imprescindível para a realização das simulações realizadas nesse trabalho e, do
mesmo modo, para a execução do ensaio que promove a autoexcitação.
4.1 Máquina utilizada
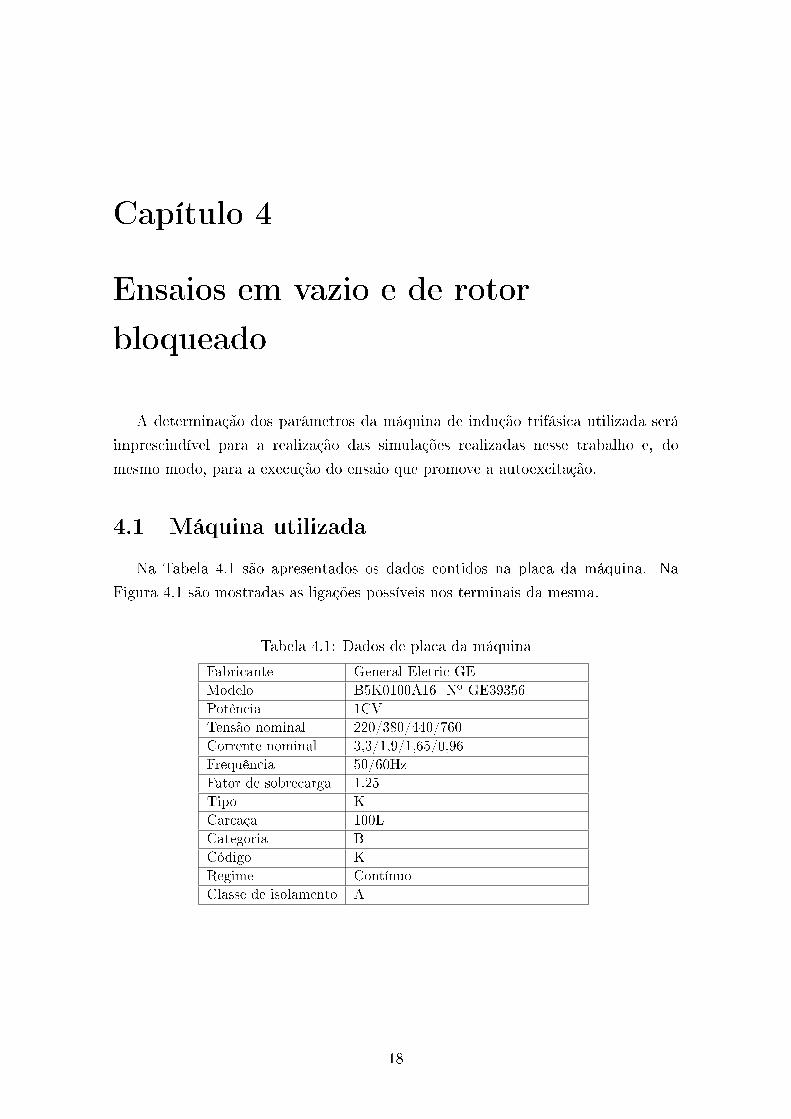
Na Tabela 4.1 são apresentados os dados contidos na placa da máquina. Na
Figura 4.1 são mostradas as ligações possíveis nos terminais da mesma.
Tabela 4.1: Dados de placa da máquina
Fabricante General Eletric GE
Modelo B5K0100A16 No GE39356
Potência 1CV
Tensão nominal 220/380/440/760
Corrente nominal 3,3/1,9/1,65/0,96
Frequência 50/60Hz
Fator de sobrecarga 1.25
Tipo K
Carcaça 100L
Categoria B
Código K
Regime Contínuo
Classe de isolamento A
18

4.2 Esquemas de Ligação
Em um motor trifásico de 12 terminais pode-se ligar os enrolamentos do estator
de 4 formas diferentes:
• - Ligação triângulo série, onde os enrolamentos são ligados em série e em
triângulo(delta)
• - Ligação triângulo paralelo, onde os enrolamentos são ligados em paralelo e
em triângulo(delta)
• - Ligação estrela paralelo, onde os enrolamentos são ligados em paralelo e em
estrela
• - Ligação estrela série, onde os enrolamentos são ligados em série e em estrela
Figura 4.1: Esquemas de ligação possíveis de serem feitos no motor trifásico de 12
terminais utilizado
A ligação escolhida para realizar o trabalho foi a ligação estrela paralelo. É
importante saber que de acordo com a ligação adotada os parâmetros da máquina:
Rs- resistência do estator, Xs- reatância de magnetização do estator, Rc- resistência
de perdas no núcleo, Xm- reatância de magnetização, X ′r- reatância de disperção do
rotor referida ao estator, R′r- resistência do rotor referida ao estator variam.
19

4.3 Ensaio em vazio
4.3.1 Objetivo
O propósito deste ensaio é estimar uma faixa de capacitores que possibilite a
autoexcitação da máquina. Para isso, deve-se obter a curva de magnetização através
dos valores de tensão terminal e corrente de excitação.
4.3.2 Material utilizado
• - Máquina de indução trifásica ligada em estrela (380V/1,90A)
• - Gossen-Metrawatt MAVOWATT 30
• - Um Multímetro Analyst 2060
• - Um Multímetro Fluke 77
• - Um Autotransformador variável com tapes (0-440V)
• - Uma chave faca trifásica
• - Um disjuntor trifásico 5A
4.3.3 Experimento
Foram impostas tensões ao estator da máquina, provenientes do autotransfor-
mador. Sabendo que para a conguração adotada, a tensão nominal fase-neutro
é de 220V. Vericou-se que a tensão máxima de fase-neutro possível de ser obtida
equivale a 120 por cento do valor nominal, tensão em torno de 264V. Este valor é,
possivelmente, admissível para o alcance da região de saturação.
A gura 4.2 ilustra o esquema de montagem e ligações do ensaio.
20

Figura 4.2: Conexões do Mavowatt 30 para máquina ligada em estrela
A tabela 4.2 apresenta as medidas de tensão fase-fase e corrente de excitação
obtida para cada uma das fases.
Os primeiros valores da tabela 4.2 não devem ser utilizados para a elaboração
da curva de magnetização, haja visto que o rotor da máquina ainda não possuía
rotação e por isso os valores de corrente não obedecem a uma curva de tendência.
A tabela 4.3 expõe as tensões e correntes médias, obtidas da oitava à última
linha da tabela 4.2.
4.4 Curva de magnetização
A curva de magnetização foi obtida diretamente dos pontos da tabela 4.2, haja
visto que a tensão de entreferro é próxima da tensão terminal. Isso pode ser justi-
cado pela queda de tensão nos enrolamentos do estator ser pequena. Na gura 4.3,
encontra-se os pontos dos valores médios retirados da tabela 4.3, sendo um gráco
de tensão terminal fase-neutro por corrente no estator. A curva citada é novamente
apresentada, em pontilhado, na gura 4.4. Os asteriscos representam os pontos da
tabela 4.3, enquanto que a linha consiste na curva que realiza a aproximação da
função discreta fornecida, por uma função contínua, utilizando interpolação, através
do comando polyt do MATLAB, a partir dos pontos da tabela 4.3.
21
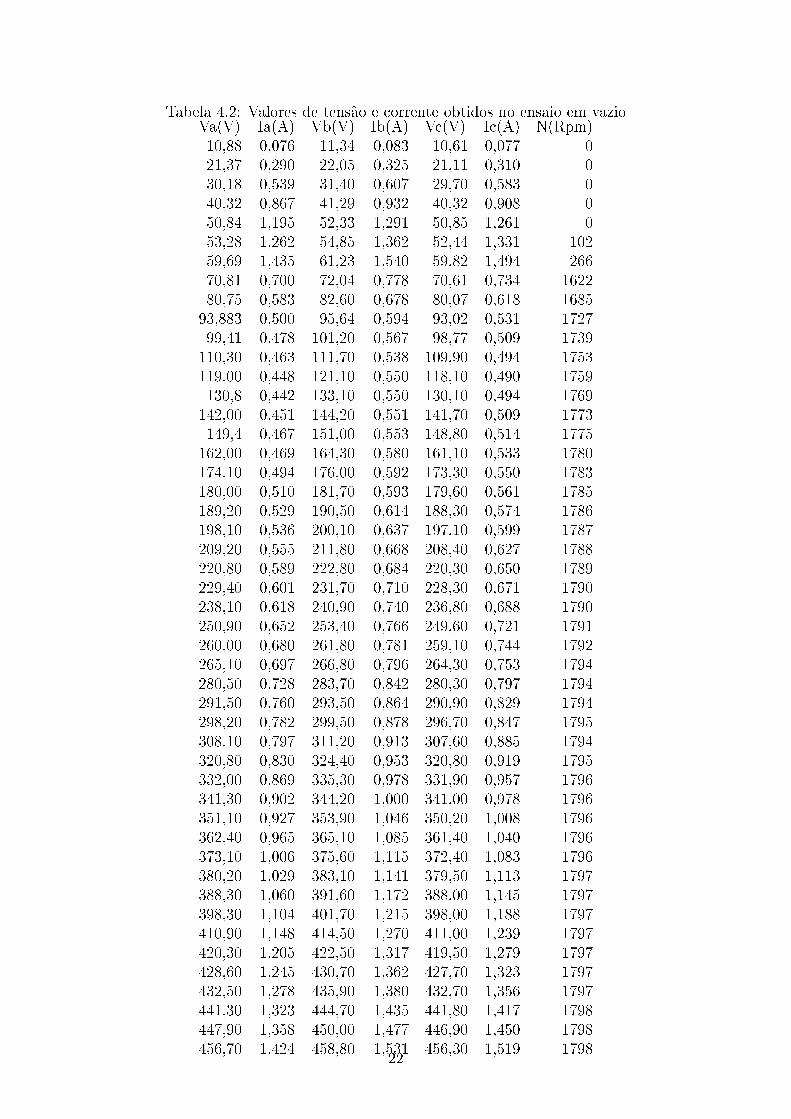
Tabela 4.2: Valores de tensão e corrente obtidos no ensaio em vazioVa(V) Ia(A) Vb(V) Ib(A) Vc(V) Ic(A) N(Rpm)10,88 0,076 11,34 0,083 10,61 0,077 021,37 0,290 22,05 0,325 21,11 0,310 030,18 0,539 31,40 0,607 29,70 0,583 040,32 0,867 41,29 0,932 40,32 0,908 050,84 1,195 52,33 1,291 50,85 1,261 053,28 1,262 54,85 1,362 52,44 1,331 10259,69 1,435 61,23 1,540 59,82 1,494 26670,81 0,700 72,04 0,778 70,61 0,734 162280,75 0,583 82,60 0,678 80,07 0,618 168593,883 0,500 95,64 0,594 93,02 0,531 172799,41 0,478 101,20 0,567 98,77 0,509 1739110,30 0,463 111,70 0,538 109,90 0,494 1753119,00 0,448 121,10 0,550 118,10 0,490 1759130,8 0,442 133,10 0,550 130,10 0,494 1769142,00 0,451 144,20 0,551 141,70 0,509 1773149,4 0,467 151,00 0,553 148,80 0,514 1775162,00 0,469 164,30 0,580 161,10 0,533 1780174,10 0,494 176,00 0,592 173,30 0,550 1783180,00 0,510 181,70 0,593 179,60 0,561 1785189,20 0,529 190,50 0,614 188,30 0,574 1786198,10 0,536 200,10 0,637 197,10 0,599 1787209,20 0,555 211,80 0,668 208,40 0,627 1788220,80 0,589 222,80 0,684 220,30 0,650 1789229,40 0,601 231,70 0,710 228,30 0,671 1790238,10 0,618 240,90 0,740 236,80 0,688 1790250,90 0,652 253,40 0,766 249,60 0,721 1791260,00 0,680 261,80 0,781 259,10 0,744 1792265,10 0,697 266,80 0,796 264,30 0,753 1794280,50 0,728 283,70 0,842 280,30 0,797 1794291,50 0,760 293,50 0,864 290,90 0,829 1794298,20 0,782 299,50 0,878 296,70 0,847 1795308,10 0,797 311,20 0,913 307,60 0,885 1794320,80 0,830 324,40 0,953 320,80 0,919 1795332,00 0,869 335,30 0,978 331,90 0,957 1796341,30 0,902 344,20 1,000 341,00 0,978 1796351,10 0,927 353,90 1,046 350,20 1,008 1796362,40 0,965 365,10 1,085 361,40 1,040 1796373,10 1,006 375,60 1,115 372,40 1,083 1796380,20 1,029 383,10 1,141 379,50 1,113 1797388,30 1,060 391,60 1,172 388,00 1,145 1797398,30 1,104 401,70 1,215 398,00 1,188 1797410,90 1,148 414,50 1,270 411,00 1,239 1797420,30 1,205 422,50 1,317 419,50 1,279 1797428,60 1,245 430,70 1,362 427,70 1,323 1797432,50 1,278 435,90 1,380 432,70 1,356 1797441,30 1,323 444,70 1,435 441,80 1,417 1798447,90 1,358 450,00 1,477 446,90 1,450 1798456,70 1,424 458,80 1,531 456,30 1,519 1798
22
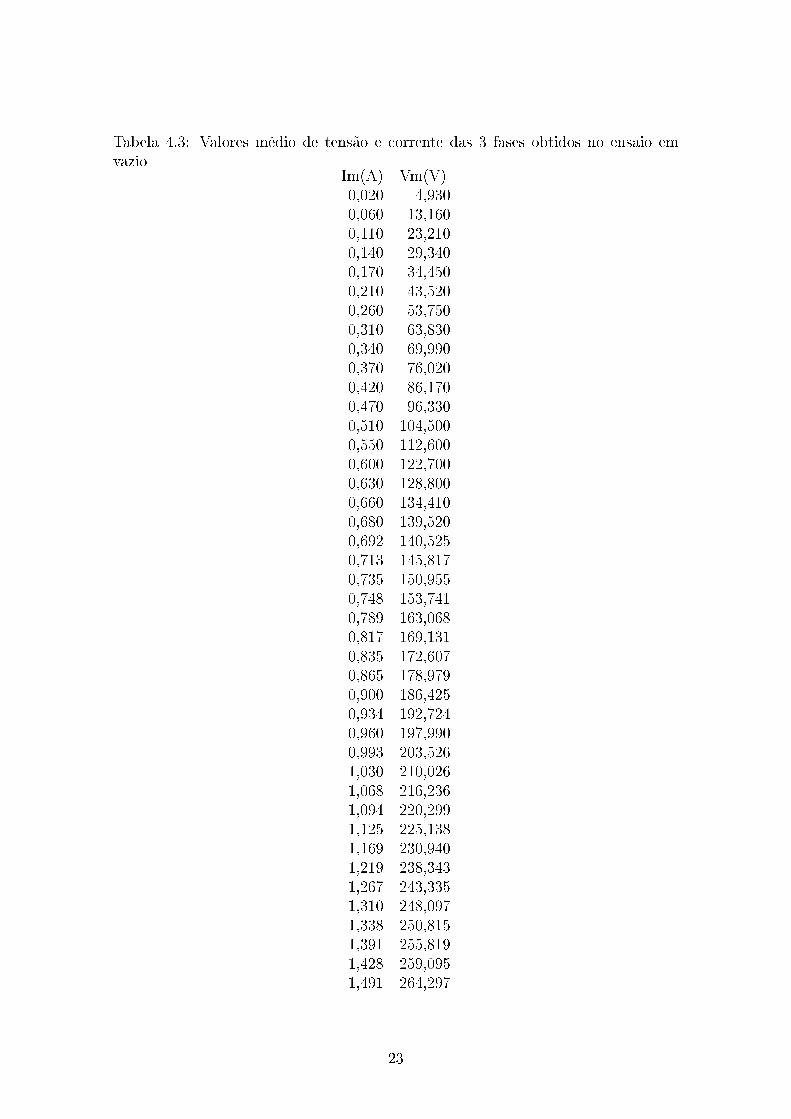
Tabela 4.3: Valores médio de tensão e corrente das 3 fases obtidos no ensaio emvazio
Im(A) Vm(V)0,020 4,9300,060 13,1600,110 23,2100,140 29,3400,170 34,4500,210 43,5200,260 53,7500,310 63,8300,340 69,9900,370 76,0200,420 86,1700,470 96,3300,510 104,5000,550 112,6000,600 122,7000,630 128,8000,660 134,4100,680 139,5200,692 140,5250,713 145,8170,735 150,9550,748 153,7410,789 163,0680,817 169,1310,835 172,6070,865 178,9790,900 186,4250,934 192,7240,960 197,9900,993 203,5261,030 210,0261,068 216,2361,094 220,2991,125 225,1381,169 230,9401,219 238,3431,267 243,3351,310 248,0971,338 250,8151,391 255,8191,428 259,0951,491 264,297
23
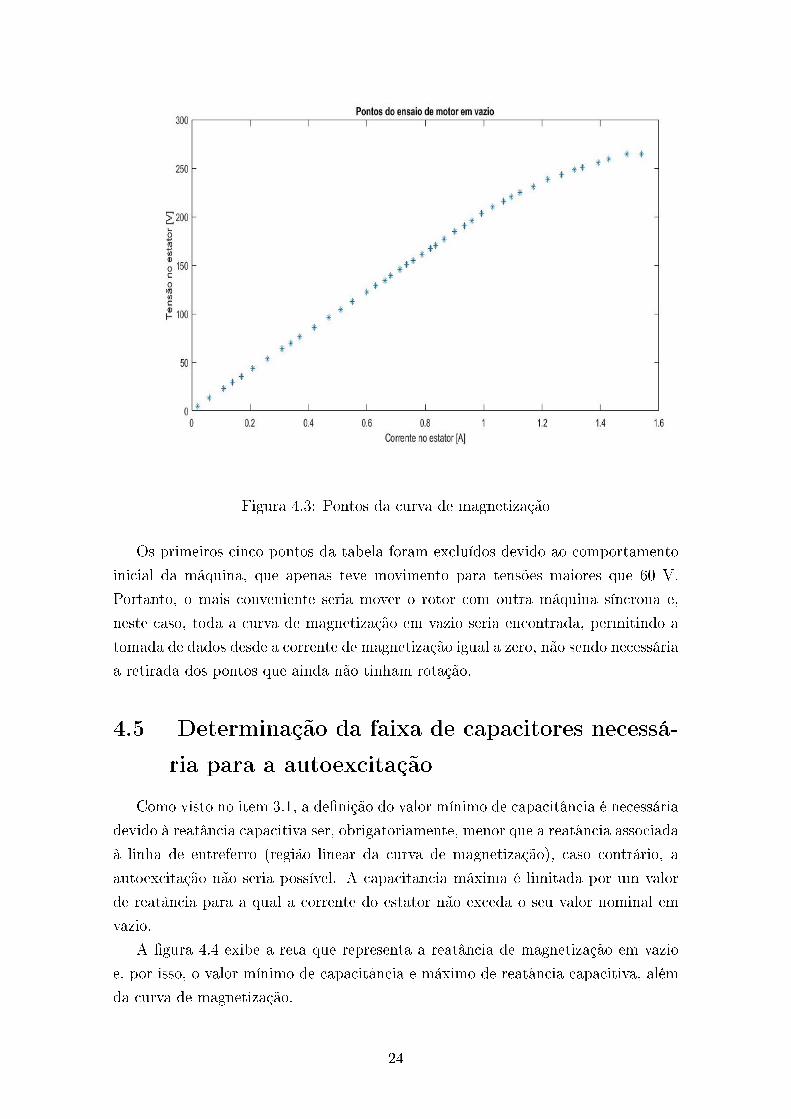
Figura 4.3: Pontos da curva de magnetização
Os primeiros cinco pontos da tabela foram excluídos devido ao comportamento
inicial da máquina, que apenas teve movimento para tensões maiores que 60 V.
Portanto, o mais conveniente seria mover o rotor com outra máquina síncrona e,
neste caso, toda a curva de magnetização em vazio seria encontrada, permitindo a
tomada de dados desde a corrente de magnetização igual a zero, não sendo necessária
a retirada dos pontos que ainda não tinham rotação.
4.5 Determinação da faixa de capacitores necessá-
ria para a autoexcitação
Como visto no item 3.1, a denição do valor mínimo de capacitância é necessária
devido à reatância capacitiva ser, obrigatoriamente, menor que a reatância associada
à linha de entreferro (região linear da curva de magnetização), caso contrário, a
autoexcitação não seria possível. A capacitância máxima é limitada por um valor
de reatância para a qual a corrente do estator não exceda o seu valor nominal em
vazio.
A gura 4.4 exibe a reta que representa a reatância de magnetização em vazio
e, por isso, o valor mínimo de capacitância e máximo de reatância capacitiva, além
da curva de magnetização.
24
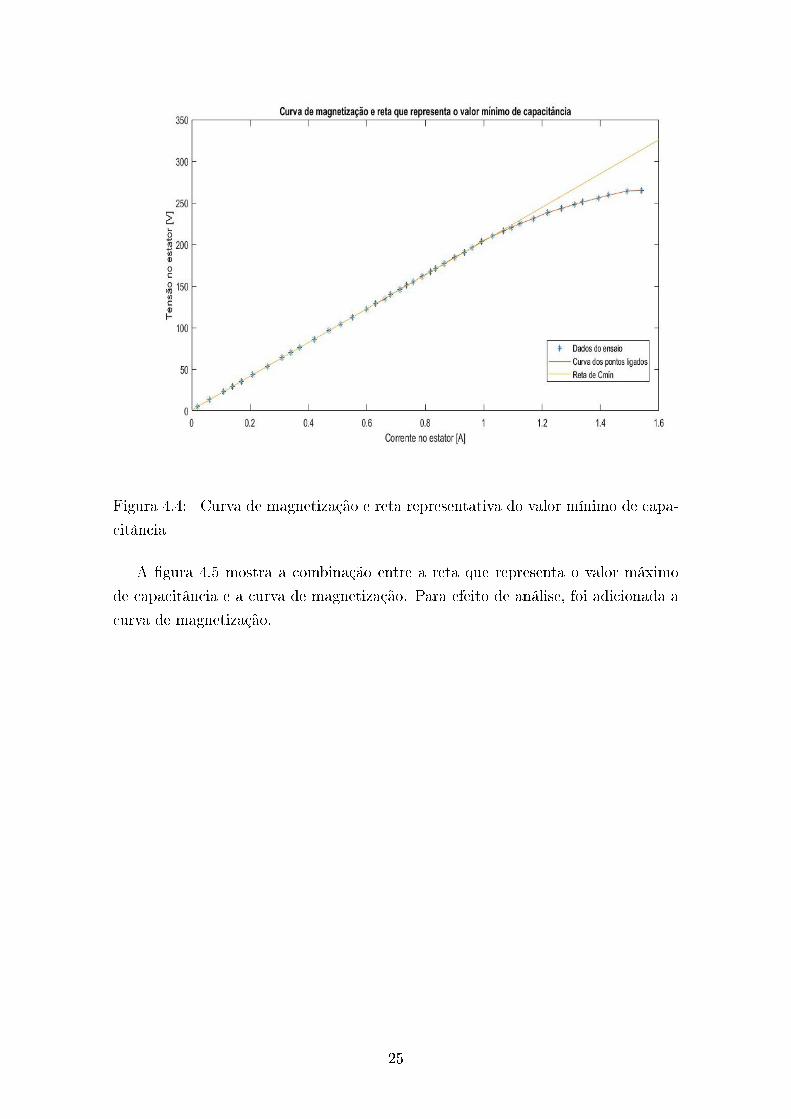
Figura 4.4: Curva de magnetização e reta representativa do valor mínimo de capa-
citância
A gura 4.5 mostra a combinação entre a reta que representa o valor máximo
de capacitância e a curva de magnetização. Para efeito de análise, foi adicionada a
curva de magnetização.
25

Figura 4.5: Curva de magnetização e retas representativas do valor mínimo e
máximo de capacitância
Para a determinação das capacitâncias foi calculado o coeciente angular das
retas que representam as reatâncias mínima e máxima. Com isso, podem-se calcular
as capacitâncias limites.
XCmax=203,1
w = 2πf = 377
Cmin =1
wXCmax
= 13, 01µf (4.1)
Para o calculo de XCmin, a análise é feita baseado na corrente nominal que circula
pelo estator. Sendo assim, sabendo que a corrente nominal do estator é 1,9A e
supondo a tensão nominal nos terminais do estator 380V fase-fase, temos:
XCmin =380
1, 9√
3= 115, 47 (4.2)
XCmin=115,47
w = 2πf = 377
Cmax =1
wXCmin
= 22, 91µf (4.3)
26

4.6 Ensaio de rotor bloqueado
4.6.1 Objetivo
O propósito deste ensaio é determinar as reatâncias de dispersão e as resistências
do estator e rotor, com todos os parâmetros referidos ao estator da máquina.
4.6.2 Material utilizado
• - Máquina de indução trifásica ligada em estrela (380V/1,90A)
• - Um Multímetro Analyst 2060
• - Um Multímetro Fluke 77
• - Um Autotransformador variável com tapes (0-440V)
• - Uma chave faca trifásica
• - Um disjuntor trifásico 5A
• - Uma chave de grifo
4.6.3 Experimento
Primeiramente, trava-se o rotor da máquina com algum artefato que impeça
completamente o movimento. No ensaio descrito, uma chave de grifo foi utilizada.
Em seguida, com o auxílio do autotransformador variável, aplica-se uma pequena
tensão nos terminais do estator, aumentando gradativamente até que se alcance
a corrente nominal. Com isso, realizam-se medições de tensão, corrente, potência
aparente, potência ativa e fator de potência. Para o cálculo dos parâmetros, pode-se
desprezar a reatância de magnetização Xm, uma vez que a tensão está muito abaixo
da nominal. Como o rotor está bloqueado, o escorregamento S tem valor unitário e,
dessa forma, é possível considerar o circuito equivalente da gura 4.6.
27

Figura 4.6: Circuito Equivalente por fase do Gerador de Indução com o Rotor
bloqueado
Portanto, tem-se que a potência trifásica dissipada nas resistências do estator e
do rotor é dada por:
P = 3RI2 (4.4)
Onde,
R = Rs+R′r (4.5)
Com isso, pode-se calcular o valor de R para cada valor de tensão trifásica e de
corrente de excitação.
28
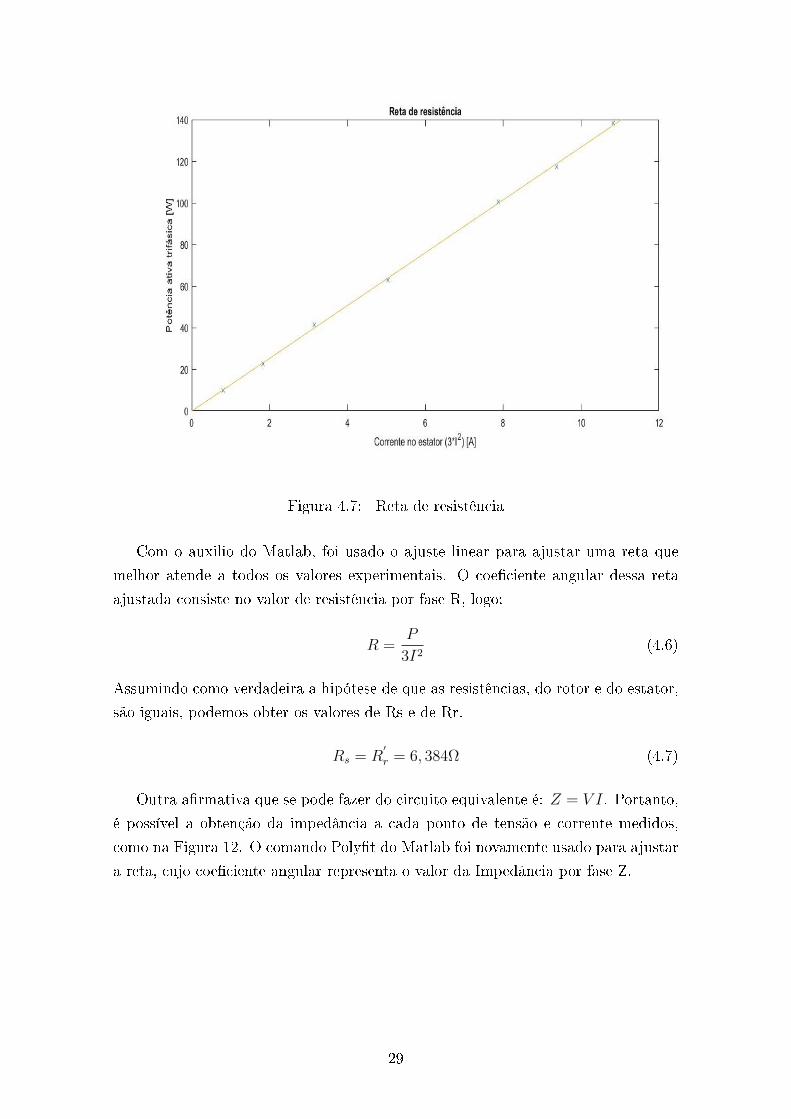
Figura 4.7: Reta de resistência
Com o auxilio do Matlab, foi usado o ajuste linear para ajustar uma reta que
melhor atende a todos os valores experimentais. O coeciente angular dessa reta
ajustada consiste no valor de resistência por fase R, logo:
R =P
3I2(4.6)
Assumindo como verdadeira a hipótese de que as resistências, do rotor e do estator,
são iguais, podemos obter os valores de Rs e de Rr.
Rs = R′
r = 6, 384Ω (4.7)
Outra armativa que se pode fazer do circuito equivalente é: Z = V I. Portanto,
é possível a obtenção da impedância a cada ponto de tensão e corrente medidos,
como na Figura 12. O comando Polyt do Matlab foi novamente usado para ajustar
a reta, cujo coeciente angular representa o valor da Impedância por fase Z.
29

Figura 4.8: Reta de impedância
Z = 21, 95Ω (4.8)
X2 =√Z2 −R2 (4.9)
Tendo (5.6) e assumindo-se como verdadeira a hipótese de que as reatâncias do rotor
e do estator são iguais, pode-se obter os valores de Xs e de X'r.
X = 17, 854Ω (4.10)
Xs = X′
r = 8, 925Ω (4.11)
30

Capítulo 5
Resultados Experimentais
5.1 Ensaios como gerador autoexcitado
5.1.1 Objetivo
Comprovar o fenômeno da autoexcitação utilizando diferentes valores de carga e,
com a realização de medidas, ilustrar o desempenho da máquina funcionando como
gerador.
5.1.2 Material utilizado
• - Máquina de indução trifásica ligada em estrela (380V/1,90A)
• - Motor de Corrente contínua com resistência de campo variável
• - Um Multímetro Analyst 2060
• - Um Multímetro Fluke 77
• - Um Autotransformador variável com tapes (0-440V)
• - Uma chave faca trifásica
• - Um disjuntor trifásico 5A
• - Um tacômetro Minipa MDT-2236A
• - Três réguas para conexão das lâmpadas ao circuito
• - Lâmpadas incandescentes de 25 W, 40 W, 60 W e 100W
• - Banco de capacitores com possíveis associações de 5, 10 e 20µf
31
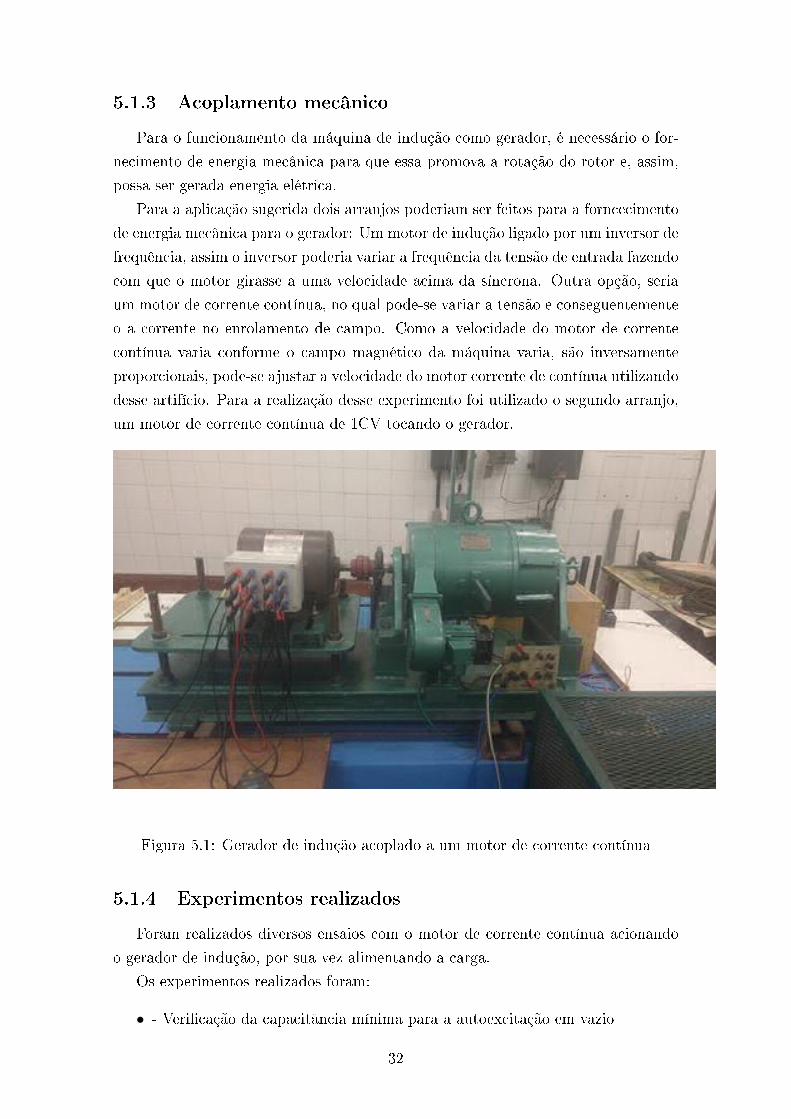
5.1.3 Acoplamento mecânico
Para o funcionamento da máquina de indução como gerador, é necessário o for-
necimento de energia mecânica para que essa promova a rotação do rotor e, assim,
possa ser gerada energia elétrica.
Para a aplicação sugerida dois arranjos poderiam ser feitos para a forncecimento
de energia mecânica para o gerador: Um motor de indução ligado por um inversor de
frequência, assim o inversor poderia variar a frequência da tensão de entrada fazendo
com que o motor girasse a uma velocidade acima da síncrona. Outra opção, seria
um motor de corrente contínua, no qual pode-se variar a tensão e conseguentemente
o a corrente no enrolamento de campo. Como a velocidade do motor de corrente
contínua varia conforme o campo magnético da máquina varia, são inversamente
proporcionais, pode-se ajustar a velocidade do motor corrente de contínua utilizando
desse artifício. Para a realização desse experimento foi utilizado o segundo arranjo,
um motor de corrente contínua de 1CV tocando o gerador.
Figura 5.1: Gerador de indução acoplado a um motor de corrente contínua
5.1.4 Experimentos realizados
Foram realizados diversos ensaios com o motor de corrente contínua acionando
o gerador de indução, por sua vez alimentando a carga.
Os experimentos realizados foram:
• - Vericação da capacitância mínima para a autoexcitação em vazio
32

• - Análise do comportamento do conjunto para velocidade e capacitância cons-
tante com carga variável, tendo sido realizado para duas diferentes associações
de capacitores. Foi observada, inclusive, a maior carga suportável, sem perda
da excitação
• - Avaliação do desempenho para carga e capacitância xa e velocidade ajustável
5.2 Capacitância mínima para autoexcitação sem
carga
Com o motor de corrente contínua acionando o gerador, foram colocados à prova
valores crescentes de capacitância a partir de 5 µf . Ressalta-se, que os valores
disponíveis resultam de combinações série e paralelo dos capacitores de 5, 10 e 20
µf . Logo, obteve-se:
Tabela 5.1: Valores de tensão e corrente obtidos no ensaio em vazioV elocidade(rpm) C apacitância(µf) T ensão média(V) C orrente média(A)
1826 Em vazio - -1812 5 6,25 0,0061808 10 13,42 0,0301726 15 247,40 1,2761658 20 266,10 1,6801601 25 273,30 2,2801540 30 275,40 2,700
Com esse teste foi possível conrmar a faixa de valores de capacitância que podem
ser usados para autoexcitar a máquina. Observando-se a tabela 5.1, com valores de
capacitância inferiores a Cmin = 13, 01µf a máquina não e autoexcitada. A máquina
começou a se autoexcitar a partir do capacitor de 15, 0µf , onde pode-se perceber um
aumento signicativo da corrente e tensão média das fases. O valor de capacitância
máxima é aquele que quando o gerador está operando em vazio tem uma corrente de
excitação superior a corrente nominal da máquina. O valor de capacitância máxima
encontrado na seção 4.5 foi, Cmax = 22, 91µf , o que conrma o valor encontrado
nessa experiência. Como visto na tabela, para valores de capacitância inferiores a
25µf a corrente média no estator não superou a corrente nominal de 1,9A, enquanto
que para valores de capacitância superiores a 25µf a corrente média no estator da
máquina superou a corrente nominal de 1,9A.
33
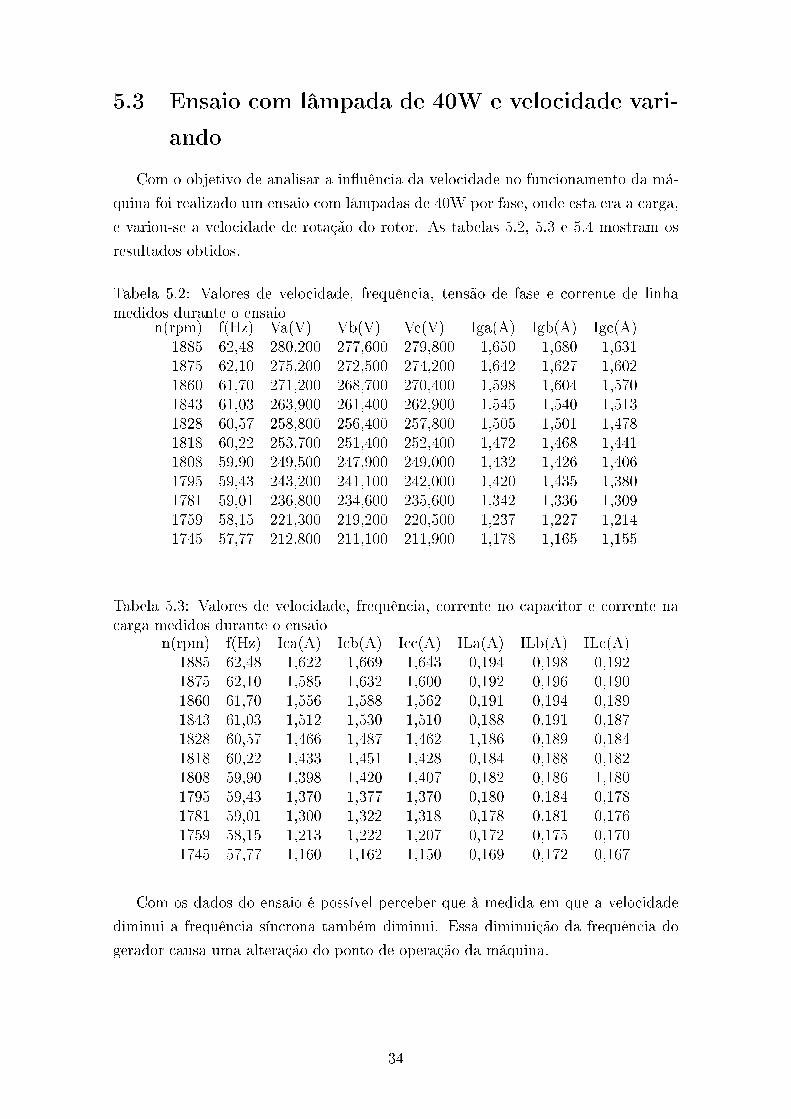
5.3 Ensaio com lâmpada de 40W e velocidade vari-
ando
Com o objetivo de analisar a inuência da velocidade no funcionamento da má-
quina foi realizado um ensaio com lâmpadas de 40W por fase, onde esta era a carga,
e variou-se a velocidade de rotação do rotor. As tabelas 5.2, 5.3 e 5.4 mostram os
resultados obtidos.
Tabela 5.2: Valores de velocidade, frequência, tensão de fase e corrente de linhamedidos durante o ensaio
n(rpm) f(Hz) Va(V) Vb(V) Vc(V) Iga(A) Igb(A) Igc(A)1885 62,48 280,200 277,600 279,800 1,650 1,680 1,6311875 62,10 275,200 272,500 274,200 1,642 1,627 1,6021860 61,70 271,200 268,700 270,400 1,598 1,604 1,5701843 61,03 263,900 261,400 262,900 1,545 1,540 1,5131828 60,57 258,800 256,400 257,800 1,505 1,501 1,4781818 60,22 253,700 251,400 252,400 1,472 1,468 1,4411808 59,90 249,500 247,900 249,000 1,432 1,426 1,4061795 59,43 243,200 241,100 242,000 1,420 1,435 1,3801781 59,01 236,800 234,600 235,600 1,342 1,336 1,3091759 58,15 221,300 219,200 220,500 1,237 1,227 1,2141745 57,77 212,800 211,100 211,900 1,178 1,165 1,155
Tabela 5.3: Valores de velocidade, frequência, corrente no capacitor e corrente nacarga medidos durante o ensaio
n(rpm) f(Hz) Ica(A) Icb(A) Icc(A) ILa(A) ILb(A) ILc(A)1885 62,48 1,622 1,669 1,643 0,194 0,198 0,1921875 62,10 1,585 1,632 1,600 0,192 0,196 0,1901860 61,70 1,556 1,588 1,562 0,191 0,194 0,1891843 61,03 1,512 1,530 1,510 0,188 0,191 0,1871828 60,57 1,466 1,487 1,462 1,186 0,189 0,1841818 60,22 1,433 1,451 1,428 0,184 0,188 0,1821808 59,90 1,398 1,420 1,407 0,182 0,186 1,1801795 59,43 1,370 1,377 1,370 0,180 0,184 0,1781781 59,01 1,300 1,322 1,318 0,178 0,181 0,1761759 58,15 1,213 1,222 1,207 0,172 0,175 0,1701745 57,77 1,160 1,162 1,150 0,169 0,172 0,167
Com os dados do ensaio é possível perceber que à medida em que a velocidade
diminui a frequência síncrona também diminui. Essa diminuição da frequência do
gerador causa uma alteração do ponto de operação da máquina.
34

Tabela 5.4: Valores de velocidade, frequência e valores médios de: tensão de fase,corrente no gerador, corrente no capacitor e corrente na carga
n(rpm) f(Hz) Vm(v) Igm(A) Icm(A) ILm(A)1885 62,48 279,200 1,654 1,645 0,1951875 62,10 273,967 1,624 1,606 0,1931860 61,70 270,100 1,591 1,569 0,1911843 61,03 262,733 1,533 1,517 0,1891828 60,57 257,667 1,495 1,472 0,5201818 60,22 252,500 1,460 1,437 0,1851808 59,90 248,800 1,421 1,408 0,5161795 59,43 242,100 1,412 1,372 0,1811781 59,01 235,667 1,329 1,313 0,1781759 58,15 220,333 1,226 1,214 0,1721745 57,77 211,933 1,166 1,157 0,169
Figura 5.2: Comportamento da curva de magnetização e da reatância capacitiva
com a variação da frequência
Na gura 5.2, o ponto A representa o ponto de operação da máquina para uma
frequência inicial, e o ponto B representa a operação para uma frequência menor. A
medida que a frequência diminui a reatância de magnetização, Xm, também dimi-
35

nuiu:
Xm = j2πfL (5.1)
Ao mesmo tempo a reatância capacitiva, Xc, aumenta:
Xc =1
j2πfC(5.2)
Com isso, ca provado que para uma frequência de rotação muito baixa a reta
de reatância capacitiva não interceptará a curva de magnetização da máquina e con-
sequentemente não será possível autoexcitá-la. Além disso, a mudança do ponto de
operação da máquina faz com que as tensões induzidas no terminal do gerador dimi-
nuam e consequentemente as correntes de carga e do capacitor também diminuam.
5.4 Ensaio de carga variável
Nesta etapa foram utilizados diferentes valores de carga, com rotação imposta
pelo motor de corrente contínua para o valor de capacitância de 15µf .
O cálculo das resistências das cargas são feitos utilizando os valores de tensão e
corrente médios medidos durante o ensaio.
• - Capacitância de 15, 0µf
Tabela 5.5: Dados obtidos para capacitância de 15, 0µfP(W) N(rpm) Va(V) Vb(V) Vc(V) Iga(A) Igb(A) Igc(A) f(Hz)
25 1807 255,2 253,2 254,4 1,455 1,445 1,450 60,1140 1840 263,8 261,9 263,5 1,549 1,548 1,527 61,1065 1798 237,2 235,4 236,2 1,396 1,357 1,350 59,4580 1808 238,1 236,2 237,0 1,417 1,398 1,383 58,72105 1790 209,3 207,7 208,4 1,263 1,250 1,242 58,85120 1794 191,7 190,5 191,0 1,185 1,183 1,183 58,90145 1821 166,5 165,5 165,7 1,097 1,099 1,097 59,54160 1849 155,6 154,0 155,2 1,068 1,086 1,071 60,28
• - Vm- tensão média das fases
• - Igm- corrente média entre as fases do gerador
• - Icm - corrente média entre as fase do capacitor
• - Ilm- corrente média entre as fases da carga
36
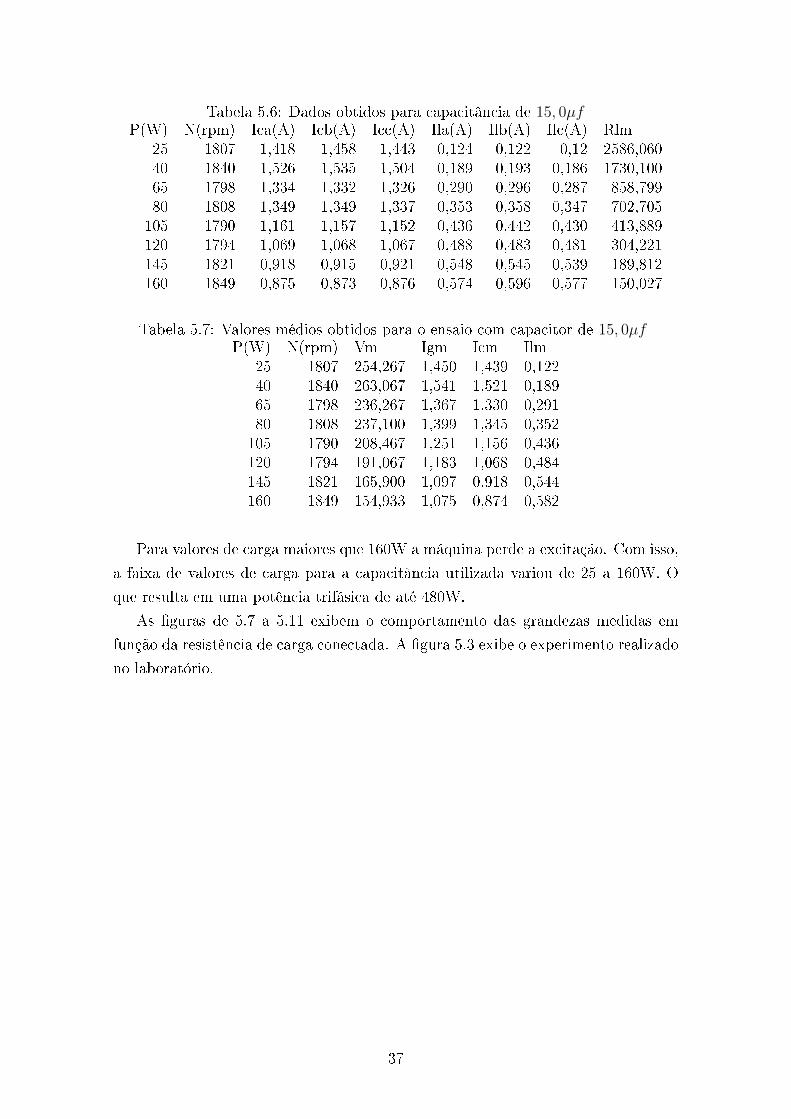
Tabela 5.6: Dados obtidos para capacitância de 15, 0µfP(W) N(rpm) Ica(A) Icb(A) Icc(A) Ila(A) Ilb(A) Ilc(A) Rlm
25 1807 1,418 1,458 1,443 0,124 0,122 0,12 2586,06040 1840 1,526 1,535 1,504 0,189 0,193 0,186 1730,10065 1798 1,334 1,332 1,326 0,290 0,296 0,287 858,79980 1808 1,349 1,349 1,337 0,353 0,358 0,347 702,705105 1790 1,161 1,157 1,152 0,436 0,442 0,430 413,889120 1794 1,069 1,068 1,067 0,488 0,483 0,481 304,221145 1821 0,918 0,915 0,921 0,548 0,545 0,539 189,812160 1849 0,875 0,873 0,876 0,574 0,596 0,577 150,027
Tabela 5.7: Valores médios obtidos para o ensaio com capacitor de 15, 0µfP(W) N(rpm) Vm Igm Icm Ilm
25 1807 254,267 1,450 1,439 0,12240 1840 263,067 1,541 1,521 0,18965 1798 236,267 1,367 1,330 0,29180 1808 237,100 1,399 1,345 0,352105 1790 208,467 1,251 1,156 0,436120 1794 191,067 1,183 1,068 0,484145 1821 165,900 1,097 0,918 0,544160 1849 154,933 1,075 0,874 0,582
Para valores de carga maiores que 160W a máquina perde a excitação. Com isso,
a faixa de valores de carga para a capacitância utilizada variou de 25 a 160W. O
que resulta em uma potência trifásica de até 480W.
As guras de 5.7 a 5.11 exibem o comportamento das grandezas medidas em
função da resistência de carga conectada. A gura 5.3 exibe o experimento realizado
no laboratório.
37

Figura 5.3: Experimento realizado no laboratório, lâmpadas alimentadas pelo gera-
dor de indução
Figura 5.4: Tensão terminal x Resistência de carga
38

Figura 5.5: Corrente do gerador x Resistência de carga
39

Figura 5.6: Corrente de carga x Resistência de carga
40
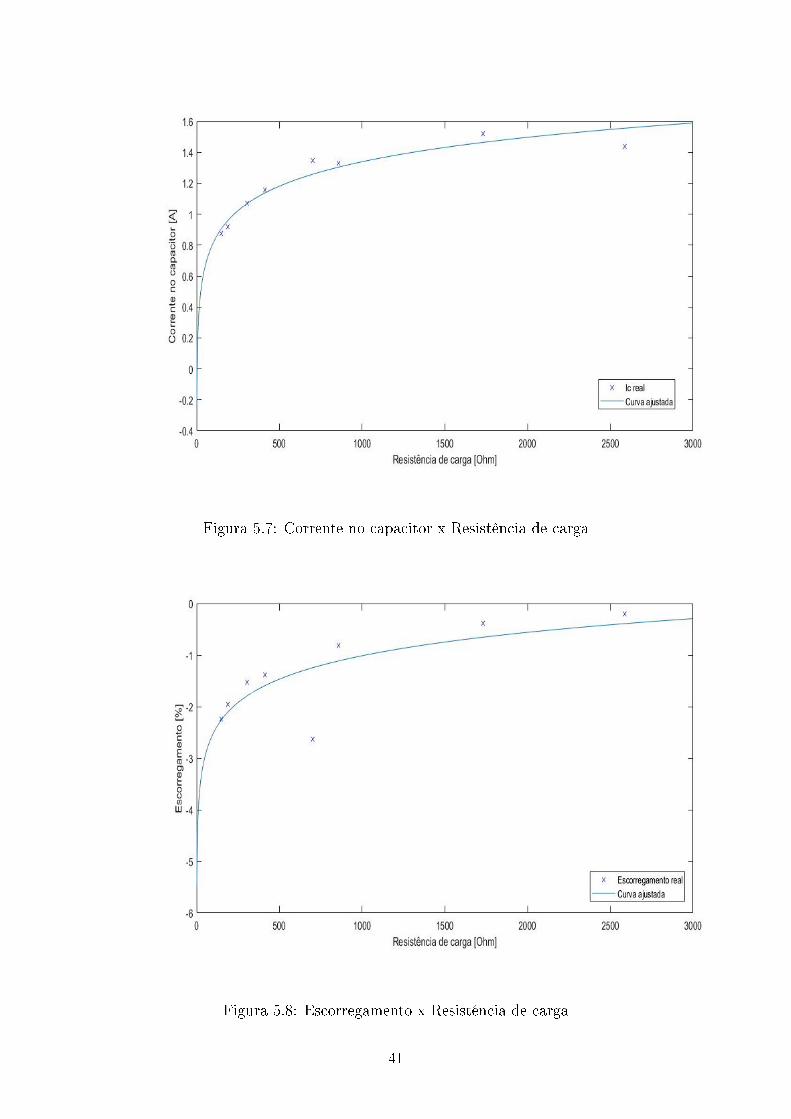
Figura 5.7: Corrente no capacitor x Resistência de carga
Figura 5.8: Escorregamento x Resistência de carga
41
Ao aumentar a resistência de carga, o que signica menor potência, ou seja,
menos lâmpadas conectadas, a corrente na carga diminui, causando uma variação
na corrente do gerador, reduzindo o uxo contrário que interage com o da máquina,
diminuindo, em módulo, o escorregamento. Em consequência, há o aumento no
módulo das correntes dos capacitores e, devido a isso, a corrente do gerador se
estabelece em um valor, em módulo, maior, apesar da menor componente real.
Portanto, o comportamento observado no experimento condiz com o teórico.
42

Capítulo 6
Simulação digital da operação como
gerador de indução autoexcitado
6.1 Objetivo
Resolução da equação 3.8 utilizando os dados obtidos a partir dos ensaios prelimi-
nares, tais como parâmetros do circuito equivalente da máquina de indução trifásica
e capacitâncias utilizadas para a autoexcitação, além dos diferentes valores de carga
aplicados. Com isso, é possível comparar a operação real da máquina, obtida por
meio do ensaio com capacitores, com os resultados da simulação.
6.2 Método iterativo
Um método iterativo, ou método numérico, tem como objetivo determinar um ou
mais valores que são a solução de um problema matemático, principalmente, quando
o cálculo direto é muito longo ou complexo.
Ao contrário de metodologias analíticas, que conduzem a soluções exatas, os
métodos iterativos produzem soluções aproximadas. Devido ao exposto, deve-se
denir qual a precisão dos cálculos, erro tolerável, com a qual se pretende obter a
solução numérica desejada.
6.3 Forma de cálculo
Devido à complexidade da solução da equação 3.8, é necessária a utilização de
uma solução iterativa, para que a resposta almejada possa ser determinada. De
acordo com o exposto, escolhe-se o método de Newton-Raphson, tendo em vista sua
rápida convergência.
43

6.4 Método de Newton-Raphson
A ideia central no método de Newton-Raphson é a linearização da função a ser
calculada via série de Taylor. Como pode ser visto através dos passos a seguir.
• - Condição inicial: xi, i=0
• - Cálculo do valor da função no ponto xi : f(xi)
• - Linearização da função em torno do ponto (xi, f(xi)) pela série de Taylor:
f(xi + ∆xi) = f(xi) +df(x)
dx|Xi∆xi + ... (6.1)
Para o qual, desprezam-se as derivadas de ordem maior ou igual a dois.
f(xi + f′(xi)∆xi = 0 (6.2)
∆xi =f(xi)
f ′(xi)(6.3)
• - Iteração: xi+1 = xi + ∆xi e em seguida volta ao passo 2
O processo deve ser repetido até que |f(x)| <= ε, sendo o valor do erro a ser
estipulado. O caso abordado neste trabalho utiliza uma função denida por uma
matriz, ou seja, deve-se utilizar a forma multidimensional do método de Newton-
Raphson, assim como nos cálculos de uxo de potência em redes elétricas.
Portanto, emprega-se o seguinte tipo de linearização:
f(xi) + ∆xi) = f(xi) + J i∆xi (6.4)
Onde: j = [ dfdx
]nxm é chamada de matriz jacobiana.
6.5 Resumo do programa
Como foi explicado anteriormente, o objetivo da simulação digital empregada
neste trabalho é encontrar a solução das equações:
Re(Zzeq) = (−2XRLXm −X2RL)f 3pu + 2δXRLXm + δRLX
2f 2pu +Xc(2R +
RLXm +XcX(2R +RL +RLR2fpu + [−δXc(RL +R)] = 0
e
Im(Zzeq) = [(2XXc + 2RLR)Xm + 2RLXR +X2Xc]f2pu + [−δ(2XcX +RRL)Xm −
δ(RRLXm − δ(RRL +XcX)X)]fpu +XcR(RL +R) = 0
44

Para que a solução seja obtida é necessária a determinação de alguns parâmetros
que servem como dados de entrada, estes parâmetros são:
• - Reatância de magnetização inicial e capacitância utilizada, obtido através do
ensaio em vazio
• - Resistências e reatância estatóricas e rotóricas, obtidas através do ensaio de
rotor bloqueado
• - Resistência de carga e rotação, obtido através do ensaio em carga
• - Tensão de entreferro, calculado a partir do ensaio em carga
Para o cálculo da tensão de entreferro, é utilizada a equação 6.5.
Vg = Vt − Is(Rs + jXs) (6.5)
com Vt e Is determinados pelo ensaio em carga.
O programa soluciona as equações Re(Zeq) = 0 e Im(Zeq) = 0 para cada valor
de resistência de carga fornecidos como entrada. Para isso deve-se entrar com os
valores iniciais de frequência de 60 Hz e de reatância de magnetização de entreferro
de 203,1 Ω, esse último calculado no item 3.3.5. A capacitância usada na simulação
deve ser a mesma que a usada no ensaio em carga, assim como os valores de carga.
Uma vez denidos os parâmetros de entrada, faz-se necessário o cálculo dos termos
do Jacobiano, logo dene-se:
F (Xm, fpu) = Re(Zeq) (6.6)
G(Xm, fpu) = Im(Zeq) (6.7)
O cálculo das derivadas parciais é apresentado a seguir:
dF (Xm, fpu)
dXm
= −2XRLf3pu + δXRLf
2pu +Xc(2R +RL)fpu − δXc(RL +R) (6.8)
dF (Xm, fpu)
dfpu= 3(−2XRLXm−RLX
2)f 2pu + 2(2δXRLXm + δRLX
2)fpu + ... (6.9)
Devido ao tamanho da equação 6.9, essa será reescrita ao longo do texto a seguir:dF (Xm, fpu)
dfpu= 3(−2XRLXm−RLX
2)f 2pu + 2(2δXRLXm + δRLX
2)fpu +Xc(RL +
45

R)Xm +XXc(RL + 2R) +RLR2.
dG(Xm, fpu)
dXm
= (2XXc + 2RRL)f 2pu − δfpu(2XXc +RLR)fpu (6.10)
dG(Xm, fpu)
dfpu= 2fpu((2XXc+2RRL)Xm+2RRLX+XcX
2)−δXm(2XXc+RRl)−δX(XXc+RLR)
(6.11)
Dessa forma, calcula-se a matriz Jacobiana:
J=
dF (Xm, fpu)
dXm
dF (Xm, fpu)
dfpudG(Xm, fpu)
dXm
dG(Xm, fpu)
dfpu
Em seguida resolve-se o sistema:(H1(i+ 1)
H2(i+ 1)
)= J−1x
(−F (i)
−G(i)
)
As variáveis Xm e fpu devem ser atualizadas e o valores de F (Xm, fpu) e
G(Xm, fpu) devem ser calculados a cada uma dessas iterações.
Xm(i+ 1) = Xm(i) +H1(i+ 1) (6.12)
fpu(i+ 1) = fpu(i) +H2(i+ 1) (6.13)
Assim que houver a convergência dos valores, ou seja, F (Xm, fpu) e G(Xm, fpu)
estiverem abaixo da tolerância estabelecida, então o processo acabou e os valores de
Xm e fpu são armazenados para o respectivo valor de carga. Após a convergência é
possível determinar os valores das correntes no gerador, na carga e nos capacitores,
além da tensão terminal.
Vt(i) = IL(i)RL(i) (6.14)
Is(i) =Vg(i)
R + jXfpu − jXcfpu
RL(i)
RL(i)− jXcfpu
(6.15)
Ic(i) =Vt(i)Xc
fpu
(6.16)
IL(i) = −jXcIs(i)fpu
RL(i)− jXc
fpu
(6.17)
46

Capítulo 7
Resultados experimentais e
simulados
Nesse capítulo são apresentados os resultados, tanto do ensaio prático quanto
da simulação das equações do circuito equivalente, o que permite a validação do
experimento realizado.
As guras 7.1 a 7.6 elucidam o comportamento das medidas efetuadas em função
da resistência de carga conectada, para o valor de capacitândia de 15µf .
Figura 7.1: Tensão terminal de fase x Resistência de carga
47
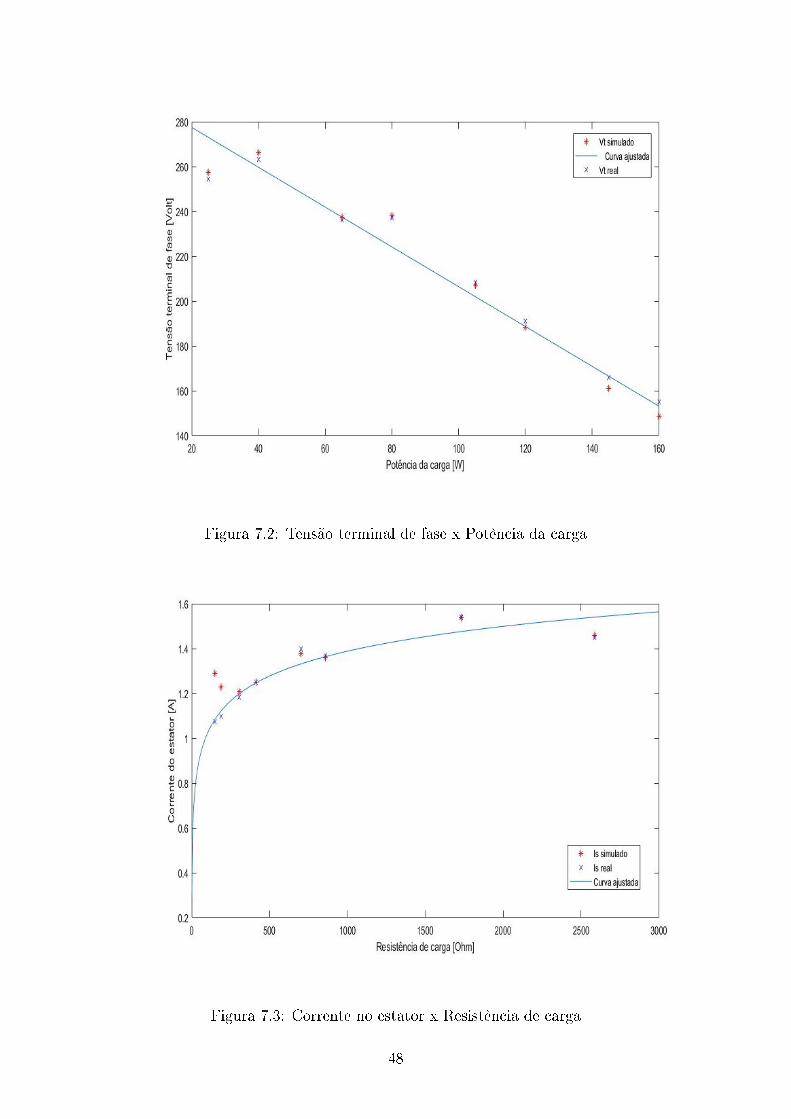
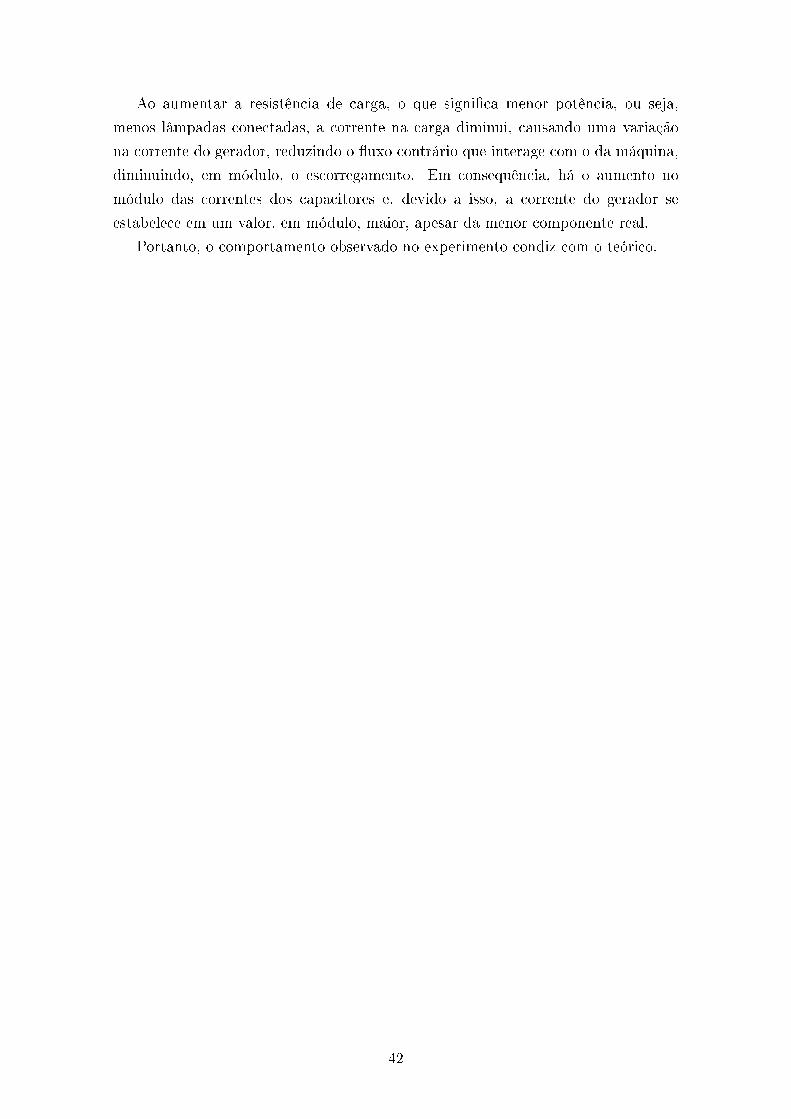
Figura 7.2: Tensão terminal de fase x Potência da carga
Figura 7.3: Corrente no estator x Resistência de carga
48

Figura 7.4: Corrente no capacitor x Resistência de carga
Figura 7.5: Corrente na carga x Resistência de carga
49
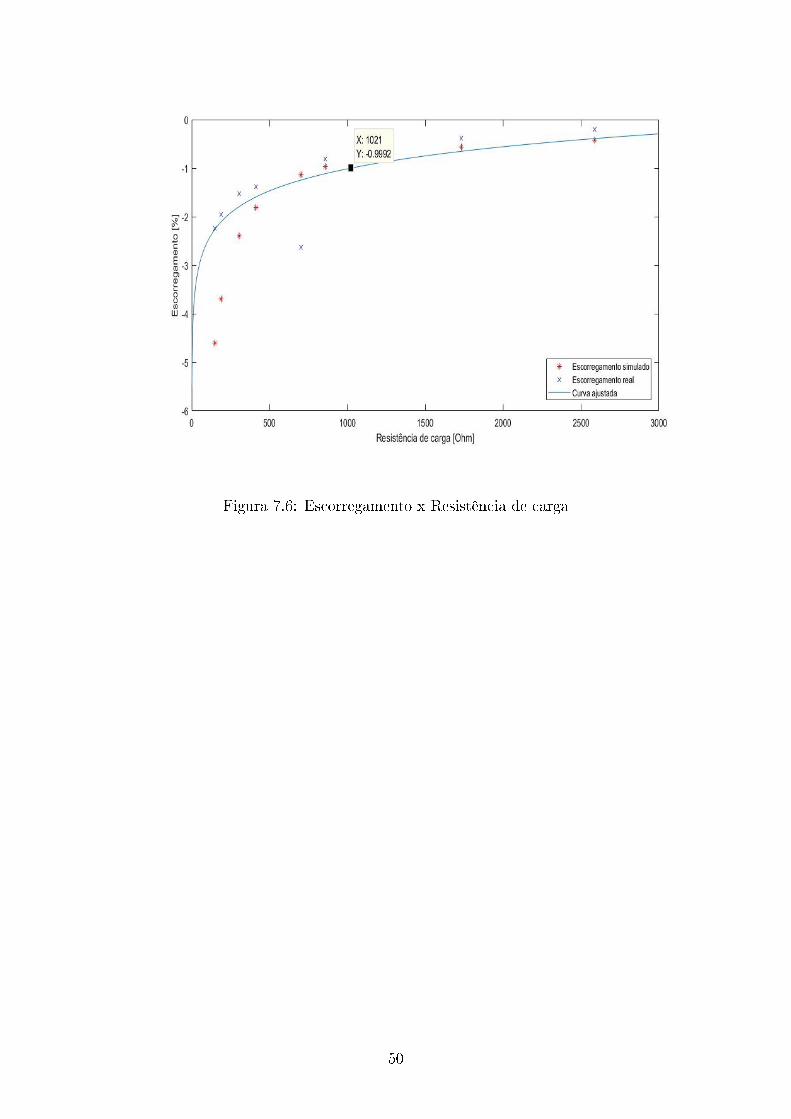
Figura 7.6: Escorregamento x Resistência de carga
50

Capítulo 8
Conclusão
Os grácos apresentados mostram que os valores de tensão, corrente e frequência
encontrados no ensaio para capacitância de 15,0µf estão de acordo com o previsto
na simulação. As pequenas diferenças existentes foram ocasionadas, principalmente,
pelas aproximações realizadas. Portanto, percebe-se que as condições arbitradas
tiveram pouca inuência no resultado nal.
Ao aumentar a resistência de carga, o que signica menor potência, a corrente
na carga diminui, causando uma variação na corrente do gerador, reduzindo o uxo
contrário que interage com o da máquina, diminuindo, em módulo, o escorregamento.
Em consequência, há o aumento no módulo das correntes dos capacitores e, devido
a isso, a corrente do gerador se estabelece em um valor, em módulo, maior, apesar
da menor componente real.
Para capacitor e carga xos:
A diminuição na velocidade de rotação ocasiona decréscimo na frequência e dimi-
nuição na relação entre reatância capacitiva e frequência, o que provoca diminuição
na tensão terminal e na corrente dos capacitores e na carga.
51

Referências Bibliográcas
[1] Stephen J. Chapman- Fundamentos de máquinas elétricas-5a edição-2013
[2] Humberto Wilke e Electo Eduardo Silva Lora-Desenvolvimento de um mó-
dulo combustor de biomassa-motor Stirling aplicado a sistemas de geração isolada e
baseados em gerador de indução- Unifei
[3] Fitzgeral, A. E., Kingsley Jr., Kusko A. Máquinas Elétricas, McGraw-Hill,
1977
[4]Walmir Freitas, José Carlos Vieria Jr., André Morelato França, Luiz Carlos da
Silva, Vivaldo da Costa-Análise comparativa entre geradores síncronos e geradores de
indução com com rotor tipo gaiola de esquilo para aplicação em geração distribuida-
Unicamp-2005
[5]Macedo Medeiros, Augusto Nelson Carvalho Viana, Ângelo José Junqueira
Rezek-Estudo de geradores de indução na geração de energia elétrica em micro-
centrais hidrelétricas-Daniel de Macedo Medeiros, Augusto Nelson Carvalho Viana,
Ângelo José Junqueira Rezek-Unifei-2005
[6] Guilherme Homrich, Regulação de tensão em geradores de indução-UFRGS-
2013
52
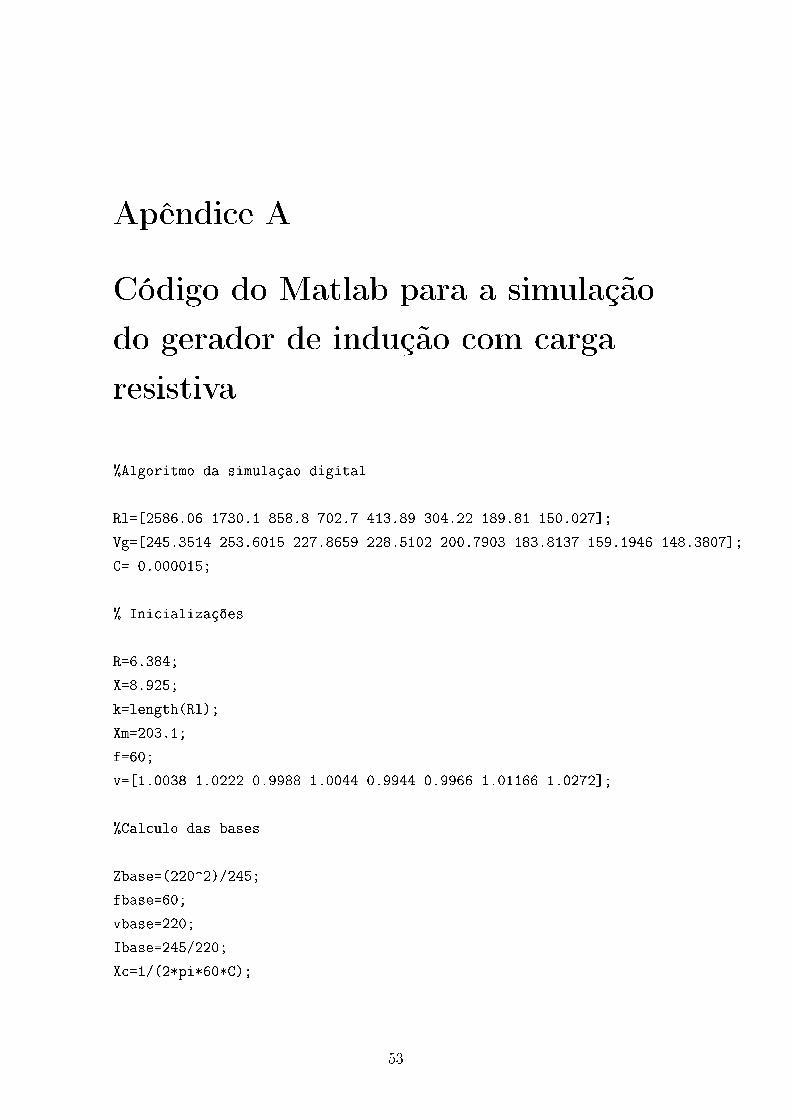
Apêndice A
Código do Matlab para a simulação
do gerador de indução com carga
resistiva
%Algoritmo da simulaçao digital
Rl=[2586.06 1730.1 858.8 702.7 413.89 304.22 189.81 150.027];
Vg=[245.3514 253.6015 227.8659 228.5102 200.7903 183.8137 159.1946 148.3807];
C= 0.000015;
% Inicializações
R=6.384;
X=8.925;
k=length(Rl);
Xm=203.1;
f=60;
v=[1.0038 1.0222 0.9988 1.0044 0.9944 0.9966 1.01166 1.0272];
%Calculo das bases
Zbase=(220^2)/245;
fbase=60;
vbase=220;
Ibase=245/220;
Xc=1/(2*pi*60*C);
53
%Conversão em valores p.u.
f=f/fbase;
Rl=Rl/Zbase;
X=X/Zbase;
R=R/Zbase;
Xc=Xc/Zbase;
Xm=Xm/Zbase;
Vg=Vg/220;
for i=1:k
f=1; %Deve-se setar os parâmetros, para que não
Xm=203.1/Zbase; %interfiram nos outros valores de carga
%Calculo dos valores inciais de fx, gx e suas derivadas
fx=(-2*X*Rl(i)*Xm-Rl(i)*X^2)*f^3+(v(i)*2*X*Rl(i)*Xm+v(i)*Rl(i)*X^2)*f^2+
+(Xc*(2*R+Rl(i))*Xm+Xc*X*(2*R+Rl(i))+R^2*Rl(i))*f+
+(-v(i)*Xc*(R+Rl(i))*Xm-v(i)*Xc*X*(R+Rl(i)));
gx=((2*X*Xc+Rl(i)*2*R)*Xm+Rl(i)*X*2*R+Xc*X^2)*f^2+
+(-v(i)*(2*Xc*X+Rl(i)*R)*Xm-
+v(i)*(Rl(i)*R+Xc*X)*X)*f-Xc*R*(R+Rl(i));
dfXm=-2*X*Rl(i)*f^3+v(i)*2*X*Rl(i)*f^2+Xc*(2*R+Rl(i))*f-v(i)*Xc*(R+Rl(i));
dgXm=(2*X*Xc+R*2*Rl(i))*f^2+(-v(i)*(2*Xc*X+Rl(i)*R))*f;
dff=3*(-2*X*Rl(i)*Xm-Rl(i)*X^2)*f^2+2*(v(i)*2*X*Rl(i)*Xm+v(i)*Rl(i)*X^2)*f+
+(Xc*(2*R+Rl(i))*Xm+Xc*X*(2*R+Rl(i))+R^2*Rl(i));
dgf=2*((2*X*Xc+Rl(i)*2*R)*Xm+Rl(i)*X*2*R+Xc*X^2)*f+(-v(i)*(2*Xc*X+Rl(i)*R)*Xm-
+v(i)*(Rl(i)*R+Xc*X)*X);
while abs(fx)>=(0.001) || abs(gx)>=(0.001)
J=[dfXm dff;dgXm dgf]; %matriz jacobiana
H=(J^-1)*[-fx;-gx]; %Calculo dos incrementos
Xm=Xm+H(1);
f=f+H(2);
54

fx=(-2*X*Rl(i)*Xm-Rl(i)*X^2)*f^3+(v(i)*2*X*Rl(i)*Xm+v(i)*Rl(i)*X^2)*f^2+
+(Xc*(2*R+Rl(i))*Xm+Xc*X*(2*R+Rl(i))+R^2*Rl(i))*f+(-v(i)*Xc*(R+Rl(i))*Xm +
-v(i)*Xc*X*(R+Rl(i)));
gx=((2*X*Xc+Rl(i)*2*R)*Xm+Rl(i)*X*2*R+Xc*X^2)*f^2+(-v(i)*(2*Xc*X+
+Rl(i)*R)*Xm-v(i)*(Rl(i)*R+Xc*X)*X)*f-Xc*R*(R+Rl(i));
dfXm=-2*X*Rl(i)*f^3+v(i)*2*X*Rl(i)*f^2+Xc*(2*R+Rl(i))*f-v(i)*Xc*(R+Rl(i));
dgXm=(2*X*Xc+R*2*Rl(i))*f^2+(-v(i)*(2*Xc*X+Rl(i)*R))*f;
dff=3*(-2*X*Rl(i)*Xm-Rl(i)*X^2)*f^2+2*(v(i)*2*X*Rl(i)*Xm+v(i)*Rl(i)*X^2)*f+
+(Xc*(2*R+Rl(i))*Xm+Xc*X*(2*R+Rl(i))+R^2*Rl(i));
dgf=2*((2*X*Xc+Rl(i)*2*R)*Xm+Rl(i)*X*2*R+Xc*X^2)*f+(-v(i)*(2*Xc*X+Rl(i)*R)*Xm-
+v(i)*(Rl(i)*R+Xc*X)*X);
end
Gx(i)=Xm;
Gf(i)=f;
Is(i)=abs(Vg(i)/(R+j*X*abs(f)-(j*(Xc/abs(f))*Rl(i))/(Rl(i)-j*(Xc/abs(f)))));
Il(i)=abs((-j*(Xc/abs(f))*Is(i))/(Rl(i)-j*(Xc/abs(f))));
Vt(i)=Il(i)*Rl(i);
Ic(i)=Vt(i)/(Xc/abs(f));
end
Vt=Vt*220;
Gx=Gx*Zbase;
Is=Is*Ibase;
Il=Il*Ibase;
Ic=Ic*Ibase;
55
Top Related