





Línguas
Páginas
Legal


Caracterização geotécnica em meio urbano apoiada em
métodos sísmicos:
Análise da influência das condições de fronteira
Rodrigo Silva Baptista
Dissertação para a obtenção do Grau de Mestre em Engenharia Civil
Mestrado Integrado em Engenharia Civil
Orientadores:
Prof. Dr. Rui Pedro Carrilho Gomes
Drª. Isabel Maria Figueiredo Lopes
Júri
Presidente: Prof. Dr. Luís Manuel Coelho Guerreiro
Orientador: Prof. Dr. Rui Pedro Carrilho Gomes
Vogal: Prof. Dr. Jaime Alberto dos Santos
Setembro 2016

ii

iii
Agradecimentos Aos amigos e colegas que tive a felicidade de me acompanharem ao longo de todo o percurso
académico.
Aos ARA, Marcelo, Dias, Marta, Johny, Joana, Tomás, Carina, Rebelo, a viagem foi longa, mas
o companheirismo e amizade nunca foi maior, sem vocês não tinha sido a mesma coisa. Que
esta seja a sina para uma amizade de largos e longos anos.
Aos “belgas”, Dani, Brás, Martini, convosco tive o prazer de partilhar dos melhores anos da minha
vida.
Ao prof. Rui e à profª Isabel, pelo acompanhamento e disponibilidade, os conhecimentos
transmitidos e o à vontade com que dirigiram as reuniões comprovaram que não poderia ter feito
uma melhor escolha.
À Fátima, pela amizade, conselhos e paciência em esclarecer as minhas dúvidas.
À Luísa, por diariamente contribuir para o meu crescimento a todos os níveis, pelo amor, carinho
e apoio dados.
Por último, mas sempre os mais importantes, aos meus pais e ao meu irmão por todo o apoio e
amor demonstrados, pela força dada para ir mais além e para nunca desistir dos sonhos, um
muito obrigado do fundo do coração, devo-vos tudo.

iv

v
Resumo No âmbito da caracterização geotécnica, aferir as propriedades do terreno com um baixo
grau de incerteza é um passo fundamental na conceção de um projeto. Métodos que permitam
uma caracterização cada vez mais expedita e que ao mesmo tempo sejam economicamente
eficientes são o foco da comunidade international.
Neste estudo aborda-se a aplicação conjunta de ensaios geofísicos baseados na
propagação de ondas superficiais, nomeadamente o MASW e o HVSR, em ambientes urbanos.
Desta forma, pretende-se conseguir uma caracterização mais abrangente de um maior volume
de solo e averiguar o impacto que estruturas subterrâneas causam nos resultados obtidos, uma
vez que a interação destas com as ondas incidentes originam fenómenos de reflexão.
A primeira parte é relativa a um enquadramento geológico-geotécnico de um caso de
estudo, baseando-se para isso na informação disponível de furos de sondagem e ensaios SPT
realizados no local. De seguida, aliando os dados dos ensaios MASW e HVSR, são definidas as
propriedades do terreno para um modelo bidimensional.
A modelação numérica recorre a um programa baseado no método de diferenças finitas,
FLAC. Inicialmente é feita uma fase de validação comparando os resultados numéricos com os
resultados analíticos para o caso da propagação de ondas unidimensional numa camada de solo
homogénea. Posteriormente, quando o modelo bidimensional confirma que os resultados
numéricos estão em concordância com os resultados experimentais, são introduzidas estruturas
subterrâneas para avaliar o seu impacto.
Os resultados obtidos no espectro V-f demonstraram uma baixa influência destas
superfícies, notando-se uma maior interferência na definição do modo fundamental nas baixas
frequências (< 20 Hz) enquanto que as altas frequências se mantiveram praticamente
inalteradas.
Palavras-chave: ondas superficiais, MASW, HVSR, método das diferenças finitas, FLAC,
Geopsy, pequenas deformações.

vi

vii
Abstract In the field of geotechnical characterization, assessing the soil properties with a low
degree of uncertainty is crucial. Adopting methods which allow for a more expedite
characterization and a more cost-effective procedure are the main concern in the international
community.
In this study, we focus on the joint applicability of geophysical tests based on surface
wave methods, namely the MASW and the HVSR, in highly dense urban environments. With this
method we aim to characterize larger volumes and assess the impact of existing underground
infrastructures, which are thought to cause disturbance on the results due to effects of reflections
on incoming waves.
The first stage concerns a geological-geotechnical characterization of a case study based
on SPT results and the definition of a bidimensional model, considered well established when the
numeric results comply with the field results. To assess the impact of underground infrastructures,
a numeric simulation of wave propagation problems is done using a software based on finite
differences, FLAC.
Initially, validation procedure comparing the analytical results with the numeric results for
a known solution is carried out, namely the one dimensional wave propagation on a homogeneous
visco elastic layer of soil. Afterwards, the bidimensional model is modelled, and once both
numerical and field results match, underground infrastructures are introduced in the model.
These were materialized with perfectly reflective boundaries. The results showed reduced
influence on the records, being able to clearly identify the fundamental mode on the V-f spectrum
and only slightly affecting the lower frequencies (< 20 Hz).
Keywords: MASW, HVSR, finite difference method, wave propagation, small-strain stiffness

viii
ix
Índice
AGRADECIMENTOS .............................................................................................................III
RESUMO ............................................................................................................................ V
ABSTRACT ........................................................................................................................ VII
ÍNDICE ............................................................................................................................... IX
ÍNDICE DE FIGURAS ............................................................................................................ XI
ÍNDICE DE TABELAS ........................................................................................................... XV
1 INTRODUÇÃO ............................................................................................................... 1
1.1 ENQUADRAMENTO ......................................................................................................... 1 1.2 OBJETIVOS ................................................................................................................... 1 1.3 ORGANIZAÇÃO .............................................................................................................. 2
2 PROPAGAÇÃO DE ONDAS SÍSMICAS NO TERRENO ......................................................... 3
2.1 ONDAS VOLÚMICAS ........................................................................................................ 3 2.1.1 Ondas superficiais ......................................................................................... 4
2.2 COMPORTAMENTO CÍCLICO DOS SOLOS............................................................................. 10 2.2.1 Gamas de comportamento .......................................................................... 10
2.2.2 Resposta cíclica .......................................................................................... 11
2.2.3 Fatores que afetam o módulo de distorção máximo, G0 ............................. 12
3 MÉTODOS DE PROSPEÇÃO SÍSMICOS ........................................................................... 15
3.1 GENERALIDADES .......................................................................................................... 15 3.2 ENSAIOS DE CAMPO ..................................................................................................... 16
3.2.1 Ensaio de Reflexão e Refração Sísmica..................................................... 16
3.2.2 Ensaios up-hole e down-hole ...................................................................... 19
3.2.3 Ensaio Crosshole ........................................................................................ 20
4 CASO DE ESTUDO ........................................................................................................ 39
4.1 ENQUADRAMENTO GERAL ............................................................................................. 39 4.2 ENQUADRAMENTO GEOLÓGICO ...................................................................................... 39 4.3 ENQUADRAMENTO GEOTÉCNICO ...................................................................................... 40

x
4.4 ENSAIOS SÍSMICOS ....................................................................................................... 45 4.4.1 Parametrização ........................................................................................... 47
4.4.2 Modelo Final ................................................................................................ 52
5 MODELAÇÃO NUMÉRICA ............................................................................................ 55
5.1 GENERALIDADES .......................................................................................................... 55 5.2 VALIDAÇÃO DO MODELO NUMÉRICO ................................................................................. 55
5.2.1 Função de Transferência Analítica ............................................................. 56
5.2.2 Função de Transferência Numérica ............................................................ 59
5.3 MODELAÇÃO DO CASO DE ESTUDO .................................................................................. 68 5.3.1 Definição do Modelo.................................................................................... 68
5.3.2 Resultados .................................................................................................. 71
6 CONCLUSÕES E DESENVOLVIMENTOS FUTUROS .......................................................... 79
6.1 CONCLUSÕES .............................................................................................................. 79 6.2 DESENVOLVIMENTOS FUTUROS ....................................................................................... 79
REFERÊNCIAS BIBLIOGRÁFICAS ........................................................................................... 81
ANEXOS............................................................................................................................. 84

xi
Índice de Figuras FIGURA 2.1 – DEFORMAÇÕES PRODUZIDAS POR ONDAS VOLÚMICAS: (A) ONDAS P; (B) ONDAS SV
(ADAPTADO DE KRAMER, 1996) .......................................................................................................... 3 FIGURA 2.2 – DEFORMAÇÕES PRODUZIDAS PELAS ONDAS SUPERFICIAIS DO TIPO: (A) RAYLEIGH; (B)
LOVE (ADAPTADO DE KRAMER, 1996) ................................................................................................. 4 FIGURA 2.3 – PROPAGAÇÃO DE ONDAS SUPERFICIAIS EM (A) MEIO HOMOGÉNEO, (B) MEIO
HETEROGÉNEO (ADAPTADO DE STROBBIA, 2003) .............................................................................. 5 FIGURA 2.4 – MOVIMENTO INDUZIDO POR UMA ONDA PLANA TÍPICA QUE SE PROPAGA NA DIREÇÃO X
(ADAPTADO DE KRAMER, 1996). ......................................................................................................... 6 FIGURA 2.5 – RELAÇÃO ENTRE A VELOCIDADE DE PROPAGAÇÃO DAS ONDAS P E ONDAS RAYLEIGH COM
A VELOCIDADE DA ONDA DE CORTE, EM FUNÇÃO DO COEFICIENTE DE POISSON (ADAPTADO DE RICHART ET AL., 1970) ......................................................................................................................... 7
FIGURA 2.6 – FATORES A E 1-A EM FUNÇÃO DE Ν (ADAPTADO DE LOPES, 2005) ....................................... 8 FIGURA 2.7 – VELOCIDADE DE FASE E VELOCIDADE DE GRUPO (ADAPTADO DE LOPES, 2005)................... 9 FIGURA 2.8 – CURVA DE DISPERSÃO NUM MODELO NORMALMENTE DISPERSIVO (ADAPTADO DE
STROBBIA, 2003) ................................................................................................................................ 10 FIGURA 2.9 – IDENTIFICAÇÃO DAS ZONAS I, II E III NUM ESPAÇO TRIAXIAL SEGUNDO O MODELO DE
JARDINE (1992) (ADAPTADO DE SANTOS, 1999) ............................................................................... 10 FIGURA 2.10 –(A) COMPORTAMENTO NÃO LINEAR HISTERÉTICO (Τ-Γ) DE UM SOLO SUBMETIDO A
CARREGAMENTO CÍCLICO; (B) CURVA ESQUELETO; (C) CURVA DE DEGRADAÇÃO DO MÓDULO (ADAPTADO DE KRAMER, 1996) ........................................................................................................ 11
FIGURA 3.1 – ENSAIOS MAIS USUAIS UTILIZADAS PARA A CARACTERIZAÇÃO DAS PROPRIEDADES DINÂMICAS DO SOLO (ADAPTADO DE PENICHE, 2015) ..................................................................... 17
FIGURA 3.2 – LEI DE SNELL (ADAPTADO DE PENICHE, 2015) ..................................................................... 17 FIGURA 3.3 – PRINCÍPIO DE REFRAÇÃO SÍSMICA (ADAPTADO DE HOUBRECHTS ET AL., 2011) ................. 18 FIGURA 3.4 – (A) ENSAIO DOWN-HOLE; (B) ENSAIO UP-HOLE (ADAPTADO DE KRAMER, 1996) ............... 19 FIGURA 3.5 – ENSAIO CROSSHOLE (ADAPTADO DE LOPES, 2005) ............................................................. 20 FIGURA 3.6 – ESQUEMA DAS PRINCIPAIS ETAPAS DOS MÉTODOS DAS ONDAS SUPERFICIAIS (ADAPTADO
DE STROBBIA, 2003) .......................................................................................................................... 21 FIGURA 3.7 – AMPLITUDE DA SOMA DE DIFERENTES ENERGIZAÇÕES PARA: A) O CASO SINCRONIZADO B)
COM DESFASAMENTO DE FASE (ADAPTADO DE STROBBIA, 2003). .................................................. 23 FIGURA 3.8 – DADOS DE CAMPO. SISMÓGRAFO (MARTELO COMO FONTE, 24 GEOFONES), E O ESPECTRO
F-K. (ADAPTADO DE STROBBIA, 2003) ............................................................................................... 24 FIGURA 3.9 – SISMÓGRAFO E ESPECTRO F-K APÓS FILTRAGEM ................................................................ 24 FIGURA 3.10 – EFEITO GLOBAL DA AMOSTRAGEM NO ESPECTRO F-K (A- AMPLITUDE ENERGÉTICA): A.
SECÇÃO IDEAL PARA UMA DETERMINADA FREQUÊNCIA, IDENTIFICAÇÃO EXATA DOS NÚMEROS DE ONDA A QUE CORRESPONDEM OS MÁXIMOS ENERGÉTICOS; B. SITUAÇÃO REAL, NEM SEMPRE OS MÁXIMOS ESTÃO BEM EVIDENTES (ADAPTADO DE LOPES, 2005) .................................................... 25
FIGURA 3.11 – ESQUEMA DA GEOMETRIA DE AQUISIÇÃO (ADAPTADO DE STROBBIA, 2003). ................. 26 FIGURA 3.12 – O PROCESSAMENTO ESTIMA A CURVA DE DISPERSÃO A PARTIR DE DADOS DE CAMPO
(ADAPTADO DE STROBBIA, 2003). ..................................................................................................... 27 FIGURA 3.13 – DISTRIBUIÇÃO NO ESPAÇO F – K TRIDIMENSIONAL DE DIFERENTES TIPOS DE ONDA
(ADAPTADO DE LOPES, 2005) ............................................................................................................ 28 FIGURA 3.14 – DIFERENTES JANELAS APLICADAS: EM CIMA NO DOMÍNIO DO TEMPO; EM BAIXO NO
DOMÍNIO DA FREQUÊNCIA (ADAPTADO DE STROBBIA, 2003) .......................................................... 29 FIGURA 3.15 – EXEMPLO DA CONSTRUÇÃO DA CURVA DE DISPERSÃO EXPERIMENTAL RESULTANTE DO
PROCESSAMENTO NO DOMÍNIO F – K: FIGURA SUPERIOR REPRESENTA O ESPECTRO F-K; A FIGURA INFERIOR REPRESENTA A CURVA DE DISPERSÃO EXPERIMENTAL COM MÁXIMOS RELATIVOS (PONTOS MENOS CARREGADOS) E MÁXIMOS ABSOLUTOS (PONTOS MAIS CARREGADOS), (ADAPTADO DE LOPES, 2005). ........................................................................................................... 29
FIGURA 3.16 – ESQUEMA DE INVERSÃO DO MÉTODO AS ONDAS SUPERFICIAIS (ADAPTADO DE STROBBIA, 2003) ................................................................................................................................ 30
FIGURA 3.17 – VARIAÇÃO DO MOVIMENTO DAS PARTÍCULAS NO MEIO DE PROPAGAÇÃO (SEMI-ESPAÇO HOMOGÉNEO) COM A PROFUNDIDADE (Z), CAUSADO PELA PASSAGEM DE UMA ONDA RAYLEIGH COM DIREÇÃO DE PROPAGAÇÃO SEGUNDO X (PENICHE, 2015). ...................................................... 33

xii
FIGURA 3.18 – ESTRUTURA GEOLÓGICA TÍPICA DE UMA BACIA DE SEDIMENTAÇÃO (ADAPTADO DE NAKAMURA, 2000) ............................................................................................................................ 34
FIGURA 3.19 – CURVA TÍPICA DO ENSAIO H/V ........................................................................................... 37 FIGURA 4.1 – LOCALIZAÇÃO DO CASO DE ESTUDO E DAS SONDAGENS USADAS ...................................... 39 FIGURA 4.2 - CARTA GEOLÓGICA DE LISBOA 1:20000 ................................................................................ 40 FIGURA 4.3 – CORTE GEOLÓGICO .............................................................................................................. 41 FIGURA 4.4 – REPRESENTAÇÃO GRÁFICA DAS CORRELAÇÕES ADOTADAS DE VS VS NSPT E INDICAÇÃO DA
VARIAÇÃO DOS VALORES DAS VELOCIDADES CALCULADAS PARA UM MESMO VALOR N60. ............ 44 FIGURA 4.5 – CURVAS DE DISPERSÃO OBTIDAS: A) A PARTIR DOS REGISTOS ATIVOS (MASW) E PASSIVOS
(REMI); B) ESPECTRO VR-F DA RESPETIVA CURVA DE DISPERSÃO (IN GOUVEIA ET AL., 2016) .......... 46 FIGURA 4.6 – RAZÃO ESPECTRAL H/V E CURVAS DE ELIPTICIDADE DAS ONDAS RAYLEIGH OBTIDAS A
PARTIR DOS REGISTOS DE VIBRAÇÃO AMBIENTE (ESQUERDA); PERFIL DE VELOCIDADES (DIREITA) (GOUVEIA ET AL., 2016). .................................................................................................................... 47
FIGURA 4.7 – CURVA DE DISPERSÃO DO MODELO BASE E REGISTOS EXPERIMENTAIS ............................. 48 FIGURA 4.8 – CURVAS DE DISPERSÃO EXPERIMENTAL, DO MODELO BASE E DA PRIMEIRA ITERAÇÃO. ... 49 FIGURA 4.9 – CUVA DE DISPERSÃO ASSOCIADA AO SEGUNDO MODELO DEFINIDO. ................................ 50 FIGURA 4.10 – CURVA DE DISPERSÃO ASSOCIADA À TERCEIRA HIPÓTESE. ............................................... 51 FIGURA 4.11 – CURVA DE DISPERSÃO ASSOCIADA À QUARTA HIPÓTESE. ................................................. 51 FIGURA 4.12 – CURVA DE DISPERSÃO DO MODELO FINAL ........................................................................ 52 FIGURA 4.13 – COMPARAÇÃO ENTRE OS DADOS OBTIDOS EXPERIMENTALMENTE E OS DADOS DO
MODELO DEFINIDO: A) RAZÃO H/V; B) PERFIL DE VELOCIDADES ..................................................... 53 FIGURA 5.1 – PROCESSO DE DETERMINAÇÃO DA RESPOSTA À SUPERFÍCIE UTILIZANDO FUNÇÕES DE
TRANSFERÊNCIA E DESCRIÇÃO DO MOVIMENTO (ADAPTADO DE KRAMER, 1996). ......................... 56 FIGURA 5.2 – FUNÇÃO DE TRANSFERÊNCIA PARA UMA CAMADA DE SOLO ELÁSTICA LINEAR NÃO
AMORTECIDA ASSENTE EM SUBSTRATO RÍGIDO E RESPETIVAS FREQUÊNCIAS NATURAIS PARA UMA AÇÃO APLICADA NA BASE (ADAPTADO DE KRAMER, 1996). ............................................................. 57
FIGURA 5.3 - FUNÇÃO DE TRANSFERÊNCIA PARA UMA CAMADA DE SOLO ELÁSTICA ASSENTE EM SUBSTRATO RÍGIDO E RESPETIVAS FREQUÊNCIAS NATURAIS PARA UMA AÇÃO APLICADA À SUPERFÍCIE. ........................................................................................................................................ 58
FIGURA 5.4 – ACELERAÇÃO DE INPUT. ....................................................................................................... 60 FIGURA 5.5 – REPRESENTAÇÃO ESQUEMÁTICA DO MODELO DEFINIDO PARA A VALIDAÇÃO: A) PONTOS
DE LEITURA DE ACELERAÇÕES; B) CONDIÇÕES DE FRONTEIRA PARA ONDAS S APLICADAS NO TOPO DO SUBSTRATO; C) CONDIÇÕES DE FRONTEIRA PARA ONDAS P APLICADAS NO TOPO DO SUBSTRATO. ....................................................................................................................................... 61
FIGURA 5.6 – VARIAÇÃO DO COEFICIENTE DE AMORTECIMENTO EM FUNÇÃO DA FREQUÊNCIA: A) 2%; B) 5% ...................................................................................................................................................... 61
FIGURA 5.7 – FUNÇÃO DE TRANSFERÊNCIA PARA O CASO DE ONDAS S COM AÇÃO APLICADA NA BASE: A) SEM AMORTECIMENTO; B) 0,1% DE AMORTECIMENTO; C) 2% DE AMORTECIMENTO; D) 5% DE AMORTECIMENTO ............................................................................................................................. 62
FIGURA 5.8 - FUNÇÃO DE TRANSFERÊNCIA PARA O CASO DE ONDAS P COM AÇÃO APLICADA NA BASE: A) SEM AMORTECIMENTO; B) 0,1% DE AMORTECIMENTO; C) 2% DE AMORTECIMENTO; D) 5% DE AMORTECIMENTO ............................................................................................................................. 63
FIGURA 5.9 - FUNÇÃO DE TRANSFERÊNCIA PARA O CASO DE ONDAS S COM AÇÃO APLICADA NO TOPO: A) SEM AMORTECIMENTO; B) 0,1% DE AMORTECIMENTO; C) 2% DE AMORTECIMENTO; D) 5% DE AMORTECIMENTO ............................................................................................................................. 64
FIGURA 5.10 - FUNÇÃO DE TRANSFERÊNCIA PARA O CASO DE ONDAS P COM AÇÃO APLICADA NO TOPO: A) SEM AMORTECIMENTO; B) 0,1% DE AMORTECIMENTO; C) 2% DE AMORTECIMENTO; D) 5% DE AMORTECIMENTO ............................................................................................................................. 65
FIGURA 5.11 – ACELERAÇÃO NO TOPO DO MODELO ................................................................................ 65 FIGURA 5.12 - ACELERAÇÃO NA INTERFACE PARA HSUBSTRATO=0,5, 2 E 5 METROS ...................................... 66 FIGURA 5.13- REGISTO DE ACELERAÇÕES NA INTERFACE ENTRE MATERIAIS NO FLAC (CINZENTO) E NO
STRATA (LARANJA) ............................................................................................................................. 67 FIGURA 5.14 – GEOMETRIA DO MODELO .................................................................................................. 68 FIGURA 5.15 – ILUSTRAÇÃO DAS CONDIÇÕES DE FRONTEIRA: A) PORMENOR TÚNEL; B) PORMENOR
PARQUE DE ESTACIONAMENTO; C) BASE DO MODELO .................................................................... 69 FIGURA 5.16 – SÉRIE TEMPORAL DE ACELERAÇÕES NO PONTO MAIS DISTANTE DA APLICAÇÃO DA AÇÃO
........................................................................................................................................................... 70

xiii
FIGURA 5.17 – ACELERAÇÃO VERTICAL REGISTADA NO PONTO DE APLICAÇÃO DA FORÇA ...................... 71 FIGURA 5.18 – ESPECTRO VR-F DO REGISTO EXPERIMENTAL COM TIRO A NW E CURVAS DE DISPERSÃO
REFERENTES AOS TIROS NW(CINZENTO) E INCERTEZA (A TRACEJADO) ............................................ 72 FIGURA 5.19 – ESPECTRO VR-F COM TIRO NW: A) DO MODELO NUMÉRICO SEM ESTRUTURAS E CURVA
DE DISPERSÃO EXPERIMENTAL NW (A VERDE) E SE (AMARELO). ..................................................... 73 FIGURA 5.20 – DEFORMADA DO MODELO SEM ESTRUTURAS NO INSTANTE EM QUE A AÇÃO É APLICADA.
........................................................................................................................................................... 74 FIGURA 5.21 – DEFORMADA DO MODELO SEM ESTRUTURAS SUBTERRÂNEAS NOS INSTANTES 0,196 S (A
TRACEJADO) E 0,204 S (LINHA CONTÍNUA) DE ANÁLISE. ................................................................... 74 FIGURA 5.22 - DEFORMADA DO MODELO COM ESTRUTURAS NOS INSTANTES 0,196 S (LINHA CONTÍNUA)
E 0,204 S (A TRACEJADO) DE ANÁLISE. .............................................................................................. 76 FIGURA 5.23 - ESPECTRO VR-F NUMÉRICO DO TIRO SE: COM ESTRUTURAS. ............................................. 76 FIGURA 5.24 – MODELO AXISSIMÉTRICO SEM ESTRUTURAS SUBTERRÂNEAS. ......................................... 78 FIGURA 5.25 – MODELO AXISSIMÉTRICO COM ESTRUTURAS SUBTERRÂNEAS. ........................................ 78

xiv

xv
Índice de Tabelas TABELA 2.1 – NÍVEL DE IMPORTÂNCIA DOS FATORES QUE AFETAM O VALOR DE G0 (ADAPTADO DE
BARROS, 1997) ................................................................................................................................... 13 TABELA 3.1 – CRITÉRIOS DE VALIDAÇÃO DOS RESULTADOS PROPOSTOS POR (BARD ET AL., 2004) ......... 36 TABELA 4.1 – VALORES NK, NMÉDIO E PESOS VOLÚMICOS CONSIDERADOS ................................................. 43 TABELA 4.2 – PROPRIEDADES DO TERRENO DETERMINADAS ATRAVÉS DE CORRELAÇÕES COM NSPT ...... 45 TABELA 4.3 – MODELO BASE DEFINIDO A PARTIR DOS VALORES DE PANCADAS SPT MÉDIOS ................. 48 TABELA 4.4 – PRIMEIRA ITERAÇÃO ASSUMIDA NA DEFINIÇÃO DO MODELO (V1). ................................... 49 TABELA 4.5 – MODELO DEFINIDO PELA SEGUNDA ITERAÇÃO (V2). ........................................................... 50 TABELA 4.6 – TERCEIRA HIPÓTESE ASSUMIDA DA ESTRUTURA DE SOLO (V3). .......................................... 50 TABELA 4.7 – QUARTA HIPÓTESE ASSUMIDA DA ESTRUTURA DO SOLO (V4). ........................................... 51 TABELA 4.8 – MODELO FINAL ..................................................................................................................... 52 TABELA 5.1 – PROPRIEDADES DA AÇÃO ..................................................................................................... 65 TABELA 5.2 – PROPRIEDADES DOS MATERIAIS APLICADOS NO MODELO ................................................. 65 TABELA 5.3 - PROPRIEDADES DOS MATERIAIS TESTADOS NO MODELO .................................................... 66 TABELA 5.4 – PROPRIEDADES DO MODELO E DIMENSÃO DA MALHA ....................................................... 70

xvi

1
1 Introdução
1.1 Enquadramento
A importância de uma correta caracterização das propriedades dinâmicas do terreno com
um alto grau de confiança vem ganhando importância na conceção de um projeto de engenharia
civil. Nas últimas décadas novos métodos foram desenvolvidos visando uma caracterização
expedita, menos onerosa e mais abrangente permitindo alargar o leque de propriedades que são
possíveis medir in situ reduzindo a necessidade de uma caracterização laboratorial demorada.
Os métodos geofísicos vêm ganhando destaque face aos métodos tradicionais devido à
rapidez de execução, baixo custo e carácter não intrusivo. Mais concretamente, métodos
baseados no registo de ondas superficiais, como o MASW e o HVSR, permitem obter um perfil
de velocidades na gama das pequenas deformações até profundidades de interesse do ponto
de vista geotécnico.
É na gama das pequenas deformações que o solo apresenta um comportamento elástico
linear, podendo caracterizar-se a rigidez ao corte do solo pelo módulo de distorção máximo ou
inicial, Gmáx ou G0. Assim, a determinação do módulo de distorção máximo é fulcral quando se
pretende caracterizar o solo do ponto de vista do seu comportamento dinâmico, permitindo,
juntamente com o conhecimento da degradação do módulo de distorção, prever a resposta do
solo a ações cíclicas.
Neste trabalho abordam-se alguns dos principais aspetos técnicos dos ensaios
geofísicos, tanto a nível de execução como de processamento, as suas limitações e
pressupostos teóricos visando validar o uso de uma metodologia conjunta para a determinação
dessas propriedades dinâmicas.
1.2 Objetivos
A presente dissertação tem como objetivo analisar a fiabilidade do uso conjunto do
método MASW e do método HVSR na determinação das propriedades dinâmicas do terreno em
meio urbano. Para tal, são analisados os dados das campanhas de aquisição efetuadas no local
de estudo e comparadas com a informação disponível de sondagens e ensaios SPT realizados
no mesmo local.
A validação destes dados é feita com recurso a modelação numérica, simulando o
modelo bidimensional do terreno com as propriedades derivadas dos resultados experimentais.
A partir da simulação é possível obter a curva de dispersão associada ao modelo estabelecido e
compará-la à obtida experimentalmente.
Com o modelo definido, efetua-se um estudo sobre a influência da presença de
estruturas subterrâneas. A partir desta modelação será possível verificar o impacto que estas
estruturas têm sobre a curva de dispersão e de que modo a alteram.

2
1.3 Organização
A dissertação encontra-se estruturada em 6 capítulos. Neste primeiro capítulo apresenta-
se o enquadramento, objetivo e estrutura da dissertação.
No segundo capítulo aborda-se o tema da propagação de ondas sísmicas, focando-se
sobretudo sobre as características das ondas Rayleigh. Em seguida retrata-se o comportamento
cíclico dos solos e as suas propriedades dinâmicas.
No terceiro capítulo são abordados os métodos de prospeção sísmicos tradicionais e em
maior detalhe, os métodos das ondas superficiais. Dentro destes, exploram-se técnicas de
execução e de processamento de dados, bem como os seus fundamentos teóricos.
O quarto capítulo é referente ao caso de estudo, no qual é feito um enquadramento
geológico e geotécnico do local com base nos ensaios disponíveis e a sua respetiva
interpretação. A partir desta interpretação, elabora-se um estudo de parametrização sobre as
curvas de dispersão com vista a definir o modelo geotécnico.
No quinto capítulo descreve-se a modelação numérica realizada. Numa primeira fase é
efetuado um modelo de validação comparando os resultados numéricos e analíticos para o caso
de propagação de ondas unidimensional. Em seguida é definido o modelo numérico
bidimensional referente ao caso de estudo, em que é efetuado o estudo de sensibilidade de uma
das condicionantes do método definido e discussão dos respetivos resultados
Por fim, no sexto capítulo são apresentadas as considerações finais e sugestões de
desenvolvimentos futuros.
3
2 Propagação de ondas sísmicas no terreno
2.1 Ondas volúmicas
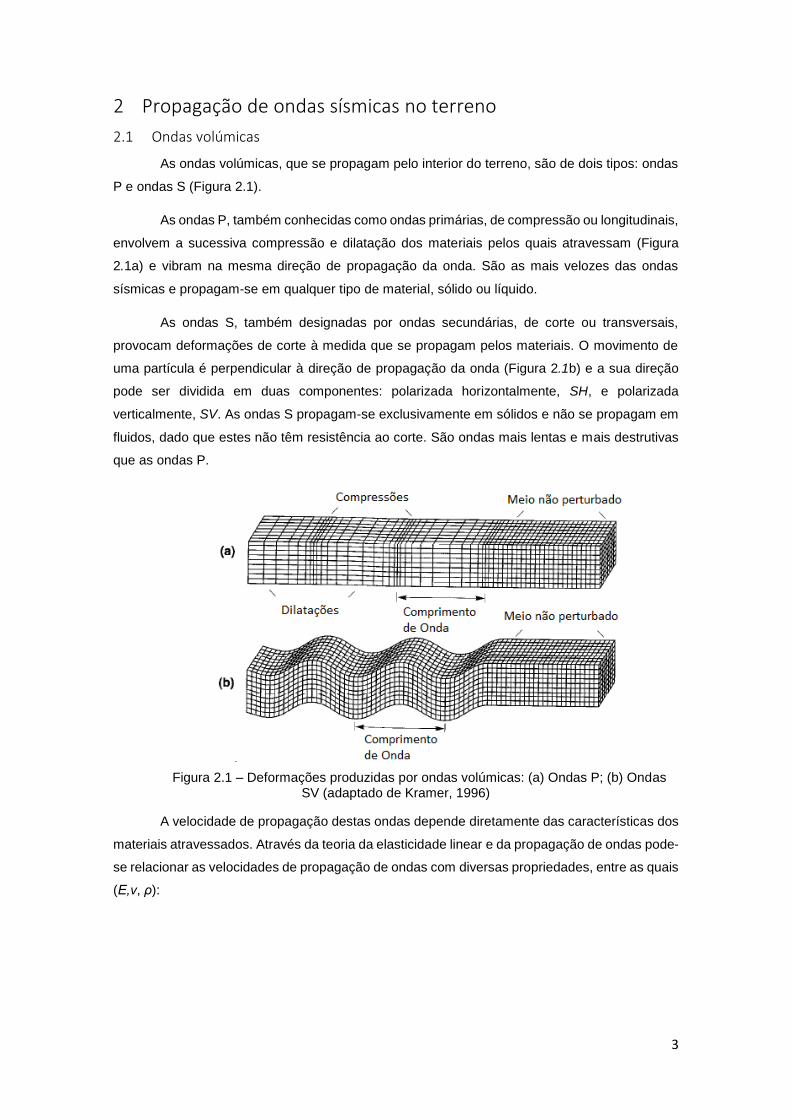
As ondas volúmicas, que se propagam pelo interior do terreno, são de dois tipos: ondas
P e ondas S (Figura 2.1).
As ondas P, também conhecidas como ondas primárias, de compressão ou longitudinais,
envolvem a sucessiva compressão e dilatação dos materiais pelos quais atravessam (Figura
2.1a) e vibram na mesma direção de propagação da onda. São as mais velozes das ondas
sísmicas e propagam-se em qualquer tipo de material, sólido ou líquido.
As ondas S, também designadas por ondas secundárias, de corte ou transversais,
provocam deformações de corte à medida que se propagam pelos materiais. O movimento de
uma partícula é perpendicular à direção de propagação da onda (Figura 2.1b) e a sua direção
pode ser dividida em duas componentes: polarizada horizontalmente, SH, e polarizada
verticalmente, SV. As ondas S propagam-se exclusivamente em sólidos e não se propagam em
fluidos, dado que estes não têm resistência ao corte. São ondas mais lentas e mais destrutivas
que as ondas P.
Figura 2.1 – Deformações produzidas por ondas volúmicas: (a) Ondas P; (b) Ondas SV (adaptado de Kramer, 1996)
A velocidade de propagação destas ondas depende diretamente das características dos
materiais atravessados. Através da teoria da elasticidade linear e da propagação de ondas pode-
se relacionar as velocidades de propagação de ondas com diversas propriedades, entre as quais
(Е,ν, ρ):

4
𝑉𝑃 = √𝐸 (1 − 𝜈)
𝜌 ∙ (1 + 𝜈) ∙ (1 − 2𝜈) 2.1
𝑉𝑆 = √𝐸
2 ∙ 𝜌 ∙ (1 + 𝜈) 2.2
No qual VP e VS representam a velocidade da onda P e onda S respectivamente, E o
módulo de elasticidade, 𝜈 o coeficiente de Poisson e ρ a massa volúmica do material
atravessado.
2.1.1 Ondas superficiais
As ondas superficiais são responsáveis por grande parte do efeito devastador de um
sismo. Estes tipos de ondas resultam do contacto entre as ondas volúmicas e a superfície, e
como o nome indica, propagam-se paralelamente à superfície do terreno. As ondas superficiais
podem ser de três tipos: ondas Love, ondas Rayleigh e ondas Stoneley, pese embora que estas
últimas sejam de baixa importância no âmbito da engenharia sísmica (Kramer, 1996). Uma
propriedade relevante das ondas Rayleigh e Love é a sua característica dispersiva, isto quer
dizer que para diferentes frequências as ondas propagam-se a velocidades diferentes.
Figura 2.2 – Deformações produzidas pelas ondas superficiais do tipo: (a) Rayleigh;
(b) Love (adaptado de Kramer, 1996)
As ondas Love na sua essência são ondas S de polarização horizontal, SH, propagando-
se exclusivamente nos casos em que existe uma camada superficial de rigidez inferior à que lhe
está subjacente. A passagem da onda gera um movimento das partículas na direção
perpendicular à direção de propagação, não se verificando movimento no plano vertical. Mais
concretamente, o movimento provocado à superfície pode ser assemelhado ao de o movimento
de translação de uma cobra (Figura 2.2b). A amplitude do movimento tende a decrescer
rapidamente em profundidade, embora à superfície é a onda que apresenta a menor taxa de
atenuação em relação à distância.
As ondas Rayleigh diferenciam-se das anteriores por não estarem dependentes das
camadas subjacentes para serem identificadas e por uma maior facilidade em gerar o movimento
necessário. Estas ondas ocorrem junto à superfície e impõem um movimento elíptico das

5
partículas com sentido retrógrado em relação à direção de propagação da onda, sendo que o
movimento apenas se verifica nos planos longitudinal e vertical (Figura 2.2a). Tal como as ondas
Love, também a amplitude do movimento decresce com a profundidade.
Estas ondas estão sempre presentes nos registos sísmicos e são facilmente geradas por
qualquer fonte ativa ou passiva à superfície. Além disso, a sua forma cilíndrica de propagação
aliada a sua lenta atenuação e o facto de que estas transportam, em geral, 2/3 da energia total
transmitida (Richart et al., 1970) justificam o poder destrutivo que podem ter. Quando
comparadas com as ondas volúmicas, estes tipos de ondas apresentam maior amplitude, maior
energia e menor atenuação, o que permite que a razão sinal/ruído seja mais elevada (o que
beneficia a sua aquisição). O facto de apresentarem uma atenuação geométrica lenta permite
concluir que um registo sísmico pode ser adequado a uma distância da fonte tal que o sinal seja
constituído essencialmente por ondas Rayleigh (Richart et al., 1970).
Se considerarmos a propagação destas ondas num meio homogéneo, existe apenas um
valor de velocidade para todas as frequências/comprimentos de onda. Contudo, se recordarmos
o seu carácter dispersivo, não é possível fazer a mesma análise considerando um meio
estratificado. A profundidade atingida pelo movimento das partículas e deformação depende
diretamente da frequência de excitação e, como consequência, do comprimento de onda (λ).
Ora, num meio verticalmente estratificado verifica-se uma variação das propriedades mecânicas
e como cada onda com um comprimento de onda distinto se propaga em camadas com
propriedades diferentes, as velocidades serão diferentes, como representado na Figura 2.3.
Teremos então, para a velocidade de uma onda Rayleigh, diferentes velocidades de fase
dependentes da frequência. Designa-se por curva de dispersão à relação entre a velocidade de
fase e a frequência (Lopes et al., 2008). De modo a compreender melhor o fenómeno, é
conveniente descrever as propriedades das ondas Rayleigh tanto num meio homogéneo limitado
por uma superfície livre como num meio verticalmente heterogéneo.
Figura 2.3 – Propagação de ondas superficiais em (a) Meio homogéneo, (b) Meio heterogéneo (adaptado de Strobbia, 2003)

6
Considerando um meio homogéneo, elástico e isotrópico sujeito a muito pequenas
deformações (propagação de ondas), o movimento pode ser descrito com base na Lei de Hooke
segundo a equação de Navier:
𝜇∇2𝑢 + (𝜆 + 𝜇)∇(∇ ∙ 𝑢) = 𝜌𝜕2𝑢
𝜕𝑡2 2.3
em que u é o vetor de deslocamento das partículas, λ e μ são as constantes de Lamé e ρ é a
massa volúmica do meio. Através desta equação é possível deduzir as soluções que descrevem
a propagação de ondas volúmicas e as suas respetivas velocidades se consideramos a hipótese
de formação de ondas planas. Nesta hipótese considera-se que apenas existe movimento
segundo a direção de propagação (direção x) e a profundidade (direção z), onde o sentido
positivo considerado é o descendente, não se verificando movimento na direção y. No caso
específico das ondas Rayleigh, verifica-se a mesma dependência de z tanto para uma onda plana
como para uma onda cilíndrica.
Figura 2.4 – Movimento induzido por uma onda plana típica que se propaga na direção x (adaptado de Kramer, 1996).
Segundo Lopes (2005), o desenvolvimento da última equação considerando meios reais
(0 < 𝜈 < 0,5) conduz a uma relação entre a velocidade das ondas Rayleigh com a velocidade
das ondas de corte (0,87< 𝑉𝑅 𝑉𝑆 <⁄ 0,96) em função do coeficiente de Poisson (ν) expressa pela
equação:
𝑉𝑅𝑉𝑆=0,87 + 1,12𝜈
1 + 𝜈 2.4
em que os índices R e S correspondem às ondas Rayleigh e de corte, respetivamente.
Recordando as equações de VS e VP verifica-se que estas são escritas em função das
características do material atravessado (módulo de deformabilidade, coeficiente de Poisson e
massa volúmica). Relacionando a velocidade das ondas de corte com as ondas de compressão,
obtém-se:

7
𝑉𝑃𝑉𝑆= √
2(1 − 𝜈)
1 − 2𝜈 2.5
onde os índices P e S representam as ondas P e ondas S respetivamente. É possível assim
relacionar a velocidade das ondas de corte e de compressão com a velocidade das ondas
Rayleigh, como apresentado na Figura 2.5.
Figura 2.5 – Relação entre a velocidade de propagação das ondas P e ondas Rayleigh com a velocidade da onda de corte, em função do coeficiente de Poisson (adaptado
de Richart et al., 1970)
Observa-se que a velocidade da onda Rayleigh depende da velocidade da onda de corte
e do coeficiente de Poisson, embora este último tenha uma influência reduzida. Essencialmente
𝑉𝑅 apresenta sensivelmente 90% da velocidade da onda de corte.
Como seria de esperar, num meio completamente homogéneo a relação 𝑉𝑅 𝑉𝑆⁄ é
independente da frequência, não se verificando fenómenos de dispersão. Na prática, um terreno
nunca será homogéneo quer seja por existência de variabilidade horizontal ou vertical ou até se
considerarmos que ocorre um aumento da tensão efetiva em profundidade, levando a um
aumento da rigidez do solo mais profundo e consequentemente, maior velocidade das ondas de
corte originando assim dispersão da velocidade das ondas Rayleigh.
Foti (2002) demonstrou que as ondas Rayleigh podem ser representadas através da
sobreposição das duas componentes do movimento provocado pela onda, concluindo que
ambas as componentes se propagam com a mesma velocidade, mas com diferentes leis
exponenciais de atenuação em profundidade. A sobreposição das duas componentes da onda
verifica as condições de fronteira assumidas, produzindo tensões de corte nulas à superfície.
Richart et al. (1970) estudou o fenómeno de atenuação geométrica e verificou que ao
aumentar a distância entre a fonte e o recetor, o intervalo de tempo de chegada aumentava e a
amplitude diminuía, verificando ainda que as ondas S e P sofriam uma atenuação mais
acentuada com a distância quando comparadas com as ondas Rayleigh. Assim, foi proposto um
fator de atenuação (fa) das ondas com a distância dada pela equação:
0
1
2
3
4
5
0 0,2 0,4
V/V
s
ν
Vs/Vp Vr/Vs VsVS/VS
0,86
0,88
0,9
0,92
0,94
0,96
0 0,2 0,4
Vr/
Vs
νVR/VsVR/VS
VP/VS VR/VS

8
𝑓𝑎 =1
𝑟𝑛, 𝑛 = 0,5; 1; 2 2.6
onde r representa a distância à fonte e n difere entre o tipo de onda considerado: n=0,5
considerando ondas Rayleigh; n=1 para ondas volúmicas que se propagam no interior e n=2 para
ondas volúmicas que se propagam junto da superfície.
A outra forma de atenuação, designada de atenuação interna, resulta da dissipação de
energia devida ao contacto entre as partículas e o movimento dos fluídos nos poros. Viktorov
(1967) demostrou que o coeficiente de atenuação das ondas Rayleigh αR depende da atenuação
das ondas volúmicas, representando essa dependência segundo a expressão:
𝛼𝑅 = 𝐴 ∙ 𝛼𝑃 + (1 − 𝐴) ∙ 𝛼𝑆 2.7
em que A é um coeficiente que depende de ν (Figura 2.6) e αP e αS são os coeficientes
de atenuação das ondas P e S.
Figura 2.6 – Fatores A e 1-A em função de ν (adaptado de Lopes, 2005)
A mesma análise efetuada para meios heterogéneos revela-se bastante mais complexa,
ainda para mais quando se considera condições de anisotropia e de variabilidade horizontal.
Contudo, se considerarmos meios verticalmente estratificados, horizontalmente homogéneos e
isotrópicos com a superfície livre paralela ao plano de isotropia existe de facto solução.
Num meio verticalmente estratificado cada comprimento de onda regista informação
sobre diferentes camadas de solo originando fenómenos de dispersão geométrica ou de carácter
dispersivo (Figura 2.3). Tipicamente, um solo de crescente rigidez em profundidade, e como tal
de crescente valor da velocidade das ondas de corte, é denominado por normalmente dispersivo,
caso se verifiquem inversões de rigidez então é denominado de inversamente dispersivo
(Peniche, 2015). Segundo Kramer (1996) este fenómeno provoca efeito também na distribuição
de energia sísmica ao longo do tempo. Uma vez que quanto maior o comprimento de onda (e
menor frequência) das ondas superficiais maior a profundidade que estas atingem, é de esperar
que ondas com menores comprimentos de onda tenham tempos de chegada menores que as
suas contrapartes de maior comprimento de onda. Consequentemente o efeito de dispersão
afetará a forma de distribuição da energia libertada durante um evento sísmico.
A solução da velocidade das ondas Rayleigh baseia-se no pressuposto de que um
carregamento harmónico produz um trem de ondas infinito. Esta velocidade corresponde à

9
velocidade que se propaga uma determinada frequência (Figura 2.7) e descreve a taxa com que
pontos de fase constante (por exemplo pico, mínimo, pontos nulos, etc.) atravessam o meio,
sendo denominada por velocidade de fase (𝑣 = 𝜔 𝑘⁄ ). A ocorrência do comportamento dispersivo
implica a consideração da velocidade de um pacote de ondas composto por diversas frequências,
a qual é denominada por velocidade de grupo (𝑣 = 𝑑𝜔 𝑑𝑘⁄ ). Num meio não dispersivo, uma vez
que não existe variação da velocidade das ondas Rayleigh (𝑑𝜔 𝑑𝑘⁄ = 0) a velocidade de fase e
a velocidade de grupo são iguais.
Figura 2.7 – Velocidade de fase e velocidade de grupo (adaptado de Lopes, 2005)
Portanto, como já se referiu, uma onda Rayleigh não tem apenas uma velocidade, mas
uma velocidade de fase que é função da frequência. A relação entre a frequência e a velocidade
de fase denomina-se por curva de dispersão. Para frequências elevadas, a velocidade de fase
representa a velocidade da onda Rayleigh na camada mais superficial, enquanto que para baixos
valores da frequência o efeito das camadas mais profundas tem de ser tido em conta, e a
velocidade de fase nestes casos tende assimptoticamente para a velocidade da onda Rayleigh
do material mais profundo, como se se estendesse infinitamente em profundidade (o considerado
semi-espaço) (Strobbia, 2003).
A propagação de ondas Rayleigh num meio verticalmente estratificado é considerado
como um fenómeno multimodal, isto é, para uma dada estratigrafia, a cada frequência aplicada
diferentes comprimentos de onda podem existir. Consequentemente, é possível obter diferentes
velocidades de fase para cada frequência, em que cada uma delas corresponde a um modo de
propagação. Assim, diferentes modos de propagação podem ser visíveis simultaneamente. Se
atendermos à Figura 2.8 é possível observar que, excluindo o 1º modo de propagação
(considerado o modo de propagação fundamental), existe uma frequência limite correspondente
à frequência mínima para a qual um determinado modo pode existir, e cuja velocidade de fase
tende para a velocidade da onda de corte máxima do meio estratificado. Segundo Lopes (2005)
é possível ainda constatar que, nas altas frequências, o modo fundamental tende para
representar a velocidade de fase das ondas Rayleigh ao passo que os restantes modos tendem
para a velocidade da onda de corte da primeira camada.

10
Figura 2.8 – Curva de dispersão num modelo normalmente dispersivo (adaptado de Strobbia, 2003)
A resolução de problemas considerando a propagação de ondas superficiais em meio
heterogéneo é bastante complexo e requer um intenso esforço computacional. Atualmente,
técnicas de resolução baseadas em métodos de elementos finitos, métodos das diferenças finitas
ou integração numérica servem como meio de resolução para os problemas mais complexos.
Conhecendo as propriedades necessárias para o estabelecimento da curva de
dispersão, é interessante enquadrar o comportamento do terreno quando este é sujeito à
propagação de ondas e de que forma se podem relacionar as velocidades de propagação com
as propriedades dinâmicas do solo.
2.2 Comportamento Cíclico dos Solos
2.2.1 Gamas de comportamento
Atualmente, considera-se adequada a descrição do comportamento do solo através da
definição de modelos com sucessivas superfícies múltiplas delimitando zonas com distintos
comportamentos típicos. Jardine (1992) estabeleceu um modelo geral considerando três zonas
de comportamento distinto, designadas por Zona I, II e III, e ainda três superfícies de delimitação
do respetivo comportamento, designadas por Y1, Y2 e Y3. Considere-se um elemento de solo
numa situação inicial de equilíbrio cujo estado de tensão é representado pelo ponto na Figura
2.9.
Figura 2.9 – Identificação das zonas I, II e III num espaço triaxial segundo o modelo de Jardine
(1992) (adaptado de Santos, 1999)

11
A Zona I define a região na qual se verifica um comportamento elástico linear do solo,
podendo, para esta zona, caracterizar-se a rigidez ao corte do solo pelo módulo de distorção
máximo ou inicial, Gmáx ou G0. A existência de valor constante para o módulo de distorção apenas
foi observado experimentalmente para níveis de muito pequenas distorções 10-6<γ<5x10-5. Nesta
zona o solo exibirá amortecimento muito reduzido (< 2%).
A Zona II tem a particularidade de, apesar de exibir uma relação tensão-deformação não
linear, apresentar recuperação total em ciclos de carga-descarga, i.e., sem deformações
permanentes mas envolvendo histerese (apresenta-se o conceito de ciclo histerético mais à
frente).
Na Zona III verificam-se o desenvolvimento de deformações permanentes à medida que
nos aproximamos da superfície dos estados limites Y3. Quando se atinge esta última superfície,
verificam-se grandes alterações no arranjo interno das partículas do solo, podendo verificar-se
efeitos de dilatância (positiva ou negativa) do material dependendo da localização do ponto na
superfície Y3.
2.2.2 Resposta cíclica
Um solo sujeito a carregamento cíclico simétrico exibe um ciclo histerético que não
depende da frequência da excitação, do tipo representado na Figura 2.10a (Kramer, 1996).
O ciclo histerético pode ser então descrito através de 2 parâmetros. O valor médio da
rigidez ao longo de todo o ciclo pode ser aproximado pelo módulo de rigidez secante, Gsec ou G,
dado por:
𝐺𝑠𝑒𝑐 = 𝐺 =𝜏𝑐
𝛾𝑐
2.8
Em que τc e γc representam a amplitude da tensão de corte e da distorção,
respetivamente, no ponto de inversão de carregamento.
Figura 2.10 –(a) Comportamento não linear histerético (τ-γ) de um solo submetido a
carregamento cíclico; (b) Curva esqueleto; (c) Curva de degradação do módulo (adaptado de Kramer,
1996)

12
A evolução do módulo de rigidez secante com a distorção, representado na Figura 2.10b,
é representada através de uma curva esqueleto, constituída pelos pontos correspondentes às
extremidades das curvas histeréticas para diferentes níveis de distorção, ou, pelas mais
familiares curvas de degradação do módulo com a distorção, no qual o valor de G é normalizado
em relação ao seu valor inicial, ou máximo (G0) , representado na Figura 2.10c.
A área do ciclo histerético é utilizada como uma medida da dissipação de energia,
caracterizada através do coeficiente de amortecimento ξ:
𝜉 =𝑊𝐷4𝜋𝑊𝑠
=1
2𝜋
𝐴𝑐𝐺𝛾𝑐
2 2.9
Na qual WD é a energia dissipada, Ws a energia distorcional máxima (representada pela
área do triângulo com os vértices: (0,0), (γc,τc) e (γc,0) da Figura 2.10a) e Ac é a área da curva
histerética.
2.2.3 Fatores que afetam o módulo de distorção máximo, G0
A determinação do módulo de distorção máximo quando se pretende caracterizar o solo
do ponto de vista do seu comportamento dinâmico, permite juntamente com o conhecimento do
módulo de distorção in situ, prever a resposta do solo a ações cíclicas. O modo de obtenção
destes parâmetros e os ensaios mais utilizados atualmente serão descritos no capítulo seguinte,
contudo considera-se relevante explorar quais os fatores que podem influenciar o valor tanto do
módulo de distorção máximo como do coeficiente de amortecimento e dos que afetam a relação
𝐺𝐺0⁄ - γ. Se considerarmos que o módulo de distorção máximo é habitualmente obtido a partir da
medição em campo da velocidade das ondas de corte, VS, então num dado solo o módulo pode
ser obtido segundo a equação:
𝐺0 = 𝜌𝑉𝑆2 2.10
Em que ρ é a massa volúmica do solo (𝜌 = 𝛾 𝑔⁄ ), γ é o peso volúmico do solo e g é a
aceleração da gravidade.
Na Tabela 2.1 é possível consultar a classificação concebida organizada de forma
decrescente de importância relativa, da qual se podem destacar: a tensão principal efetiva, 𝜎𝑖′; o
índice de vazios, 𝑒; o grau de saturação, 𝑆; e o grau de cimentação, 𝐶 como os mais relevantes.

13
Tabela 2.1 – Nível de importância dos fatores que afetam o valor de G0 (adaptado de Barros, 1997)
Nível de Importância
Decre
scente
Fator
Muito importante
Tensão principal efetiva na direção de
propagação da onda
Tensão principal efetiva na direção de vibração
da onda
Índice de vazios
Grau de saturação (particularmente em argilas e
siltes)
Grau de cimentação (natural ou artificial)
Importante
Grau de sobreconsolidação (somente em argilas
plásticas)
Tempo (somente em argilas)
Percentagem de finos em areias
Carregamento cíclico anterior
Menos importante
Tensão de corte estática
Consolidação sobre tensões anisotrópicas em
areias
Forma dos grãos em areias
Frequência de vibração (somente em argilas)
Relativamente pouco
importante
Temperatura
Tamanho dos grãos, distribuição granulométrica
Número de ciclos
Terceira tensão principal efetiva
Tipo de vibração
Condição de drenagem

14

15
3 Métodos de Prospeção Sísmicos
3.1 Generalidades
Tal como foi referido anteriormente, a medição das propriedades dinâmicas do solo é
uma tarefa fundamental para o projeto geotécnico. Neste âmbito, os ensaios de prospeção
sísmicos adquirem uma importância crescente na medida em que permitem caracterizar a
deformabilidade do solo na gama das pequenas deformações. Se considerarmos
especificamente os ensaios de campo sísmicos relativamente ao seu baixo custo de execução,
versatilidade e fiabilidade na obtenção dos parâmetros dinâmicos do terreno, podemos entender
a atração por este campo de aplicação.
Dentro dos métodos de caracterização das propriedades dinâmicas dos solos
atualmente utilizados consideram-se duas categorias: ensaios de campo e ensaios de
laboratório. A sua escolha vai depender do foco do plano de prospeção, isto é, variará conforme
o problema a resolver, o tipo de solicitação e as condições de tensão in situ (Lopes, 2005).
Algumas técnicas foram desenvolvidas exclusivamente com este intuito enquanto que outras
foram adaptadas de ensaios de caracterização do comportamento dos solos sob ações
monotónicas.
Os ensaios de campo sísmicos primam por, entre outros, não requererem amostragem
de solo e, consequentemente não introduzirem perturbação, de analisarem a gama de distorções
usualmente necessárias (pequenas deformações) e de permitirem a medição de dados de
grandes volumes de solo. Visto que os solos são tipicamente heterogéneos, estes ensaios
medem valores médios dos parâmetros do solo cuja análise permite simular um comportamento
aproximado da resposta do solo (Houbrechts et al., 2011). As grandes limitações deste tipo de
ensaio advêm do facto de não serem possíveis medições dos parâmetros do solo sob outras
condições senão as verificadas in situ, não permitirem a regulação das condições de drenagem
e de não medirem diretamente as propriedades do solo, requerendo posteriormente a
determinação das propriedades de interesse por intermédio de correlações empíricas,
aumentando o grau de incerteza.
Por sua vez os ensaios de laboratório são vantajosos caso seja pretendido uma análise
do terreno sob condições que não as verificadas no terreno, i.e., é possível alterar as condições
de drenagem, testar vários níveis de tensão de confinamento e atingir níveis de distorção que
permitam caracterizar o comportamento não linear do solo. As desvantagens associadas a estes
ensaios são relativas à dificuldade acrescida em retirar amostras indeformadas do solo que
preservem todas as suas condições in situ e da possibilidade de má representatividade do
terreno, uma vez que apenas se analisam pontos locais do terreno (Houbrechts et al., 2011).
No subcapítulo seguinte, discutem-se alguns dos ensaios de campo atualmente mais
usuais para a caracterização dinâmica dos terrenos, tanto os concebidos especificamente para
este objetivo como os que foram adaptados de ensaios geotécnicos convencionais para lhes
conferir a capacidade de medição da velocidade das ondas. Por fim, serão introduzidos em maior
16
detalhe os ensaios sobre os quais se irá focar a presente dissertação, e os quais vão ganhando
cada vez mais maior relevância no panorama da caracterização dinâmica.
3.2 Ensaios de Campo
Os ensaios geofísicos sísmicos medem a velocidade de propagação de ondas volúmicas
e superficiais. Para tal pode, ou não, ser necessária a criação destas ondas elásticas no terreno
por intermédio de fontes, as quais podem ser martelos mecânicos, explosões, etc. A importância
de um tipo de onda particular depende do tipo de excitação. Explosões e impactos verticais são
ricos em conteúdo de ondas P enquanto que impactos tangenciais criam ondas S. O tipo de
excitação influencia também a gama de frequências de excitação pelo que a fonte escolhida deve
ser capaz de abranger toda a gama de frequências de interesse.
Os ensaios de campo podem ainda ser subdivididos em duas categorias: ensaios
intrusivos e não intrusivos (Figura 3.1). Ensaios intrusivos podem ser sem recurso a furação,
como é o caso do ensaio CPT, ou com recurso a furos de sondagem, tendo estes últimos a
vantagem de permitir uma inspeção visual do solo atravessado, como também a identificação da
cota do nível freático. Os ensaios não intrusivos são ensaios executados à superfície do terreno,
sendo-lhes característico um menor custo e uma maior rapidez de execução, revelando-se
também especialmente vantajosos em ocasiões em que a furação e recolha de amostras não
são exequíveis.
Neste estudo consideram-se os métodos de ensaios sísmicos que se baseiam no registo
de ondas superficiais essencialmente devido à diferença de leis de atenuação entre os tipos de
onda. As ondas superficiais, além de ser-lhes característico uma velocidade ligeiramente inferior
à velocidade das ondas volúmicas, têm também um menor coeficiente de atenuação no sentido
de propagação da onda, possibilitando que a partir de uma certa distância o registo seja
composto maioritariamente por ondas Rayleigh.
3.2.1 Ensaio de Reflexão e Refração Sísmica
Este é um ensaio não intrusivo utilizado para determinar a velocidade das ondas P de
diferentes subcamadas e da sua espessura. Como o nome indica, o método baseia-se no
princípio de reflexão e refração sísmica o qual descreve o fenómeno de alteração da direção da
onda quando esta atinge e ultrapassa uma interface entre duas camadas de propriedades
mecânicas distintas. Recorrendo à lei de Snell, como representado na Figura 3.2, relaciona-se a
velocidade de cada camada com o ângulo de incidência, através da equação 3.1:

17
Figura 3.1 – Ensaios mais usuais utilizadas para a caracterização das propriedades dinâmicas do solo (adaptado de Peniche, 2015)
sin𝛷1sin𝛷2
=𝑉1𝑉2
3.1
Figura 3.2 – Lei de Snell (adaptado de Peniche, 2015)
Ensaios mecânicos
18
O ângulo de incidência de uma onda está relacionado com o ângulo de incidência crítico
(Φc) que delimita o comportamento da onda quando atinge interfaces diferentes. Se um
determinado ângulo de incidência (Φi) é menor que o ângulo de incidência crítico (Φc) a onda é
refractada para a camada inferior, enquanto que se Φi for maior que Φc a onda é reflectida. No
caso de o ângulo de incidência igualar o valor do ângulo crítico, a onda propaga-se ao longo da
interface, ocorrendo refração crítica.
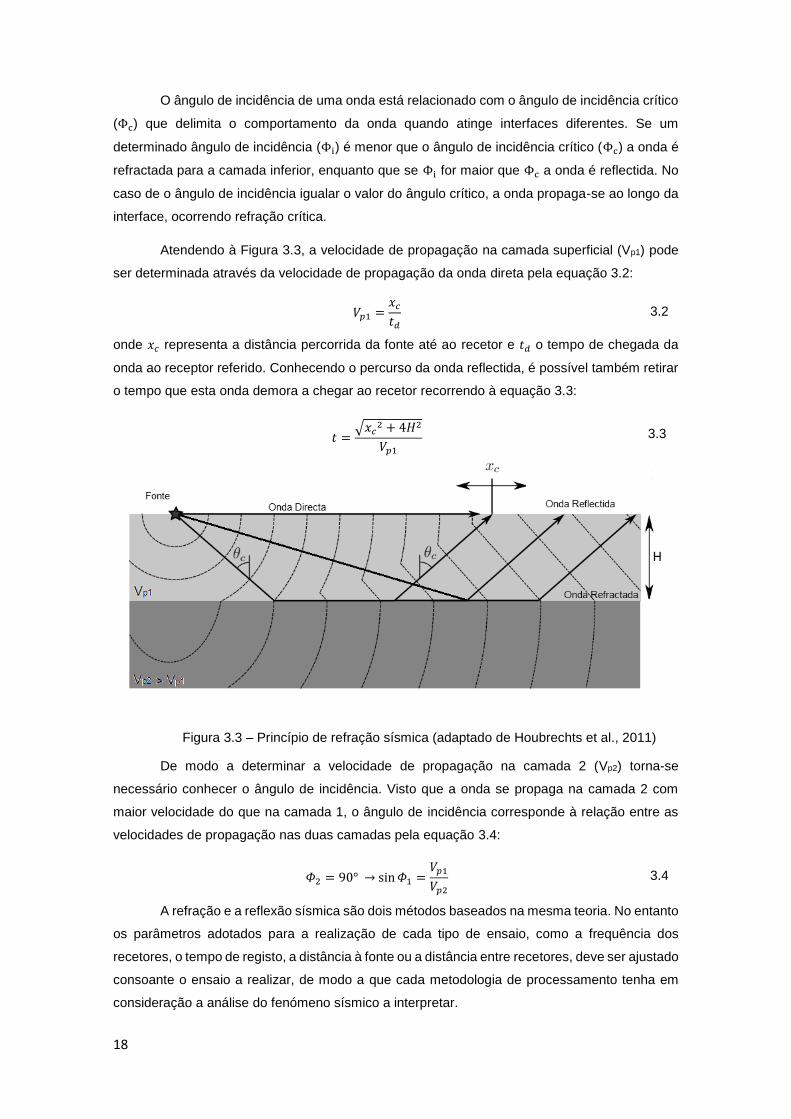
Atendendo à Figura 3.3, a velocidade de propagação na camada superficial (Vp1) pode
ser determinada através da velocidade de propagação da onda direta pela equação 3.2:
𝑉𝑝1 =𝑥𝑐𝑡𝑑
3.2
onde 𝑥𝑐 representa a distância percorrida da fonte até ao recetor e 𝑡𝑑 o tempo de chegada da
onda ao receptor referido. Conhecendo o percurso da onda reflectida, é possível também retirar
o tempo que esta onda demora a chegar ao recetor recorrendo à equação 3.3:
𝑡 =√𝑥𝑐
2 + 4𝐻2
𝑉𝑝1 3.3
Figura 3.3 – Princípio de refração sísmica (adaptado de Houbrechts et al., 2011)
De modo a determinar a velocidade de propagação na camada 2 (Vp2) torna-se
necessário conhecer o ângulo de incidência. Visto que a onda se propaga na camada 2 com
maior velocidade do que na camada 1, o ângulo de incidência corresponde à relação entre as
velocidades de propagação nas duas camadas pela equação 3.4:
𝛷2 = 90° → sin𝛷1 =𝑉𝑝1
𝑉𝑝2 3.4
A refração e a reflexão sísmica são dois métodos baseados na mesma teoria. No entanto
os parâmetros adotados para a realização de cada tipo de ensaio, como a frequência dos
recetores, o tempo de registo, a distância à fonte ou a distância entre recetores, deve ser ajustado
consoante o ensaio a realizar, de modo a que cada metodologia de processamento tenha em
consideração a análise do fenómeno sísmico a interpretar.

19
3.2.2 Ensaios up-hole e down-hole
Os ensaios down-hole e up-hole são ensaios intrusivos que recorrem à mesma técnica
de execução, requerendo a execução de um furo de sondagem e colocando no seu interior um(a)
recetor/fonte e medindo as velocidades de propagação das ondas de corte e de compressão à
superfície/dentro do furo consoante o ensaio.
No caso do ensaio down-hole, o procedimento inicia-se com a execução de um furo de
sondagem e a instalação de uma fonte à superfície próxima da localização, como ilustrado na
Figura 3.4a. No interior deste furo é colocado um recetor (habitualmente um geofone ou um
acelerómetro) na parede a uma profundidade 𝑧1e por fim, é excitada a fonte produzindo ondas
de corte e de compressão (a técnica de produção das respectivas ondas já foi descrita no
Capítulo 2), sendo registadas as velocidades no recetor. De modo a reduzir a incerteza das
leituras devido à presença de ruído, o ensaio é repetido várias vezes fazendo a soma dos sinais
para melhorar a razão sinal/ruído. Terminada a primeira leitura, a posição do recetor é alterada
segundo um ∆𝑧 constante (usualmente entre 0,5 m e 1 m) até ser atingida a cota final do furo.
Pode-se optar por colocar um cabo com múltiplos geofones ou acelerómetros no interior do furo
de modo a acelerar e tornar mais eficiente o processo.
Figura 3.4 – (a) Ensaio down-hole; (b) Ensaio up-hole (adaptado de Kramer, 1996)
O ensaio up-hole, bastante semelhante ao down-hole e também representado na Figura
3.4b, difere do último pela localização da fonte e do recetor. Neste caso a fonte é colocada no
interior do furo e as vibrações são registadas à superfície, reconhecendo que a escolha da fonte
de vibração deve ter em conta o limitado espaço existente no interior do furo. Tanto a geração
de ondas de compressão como a geração de ondas de corte pode ser feita com recurso a um
impacto vertical. Semelhante ao ensaio down-hole, devem ser também levados a cabo vários
ensaios de modo a reduzir a incerteza relativamente ao ruído existente.
Os registos permitem determinar os tempos de chegada das ondas S e P em função da
profundidade do recetor. A velocidade de propagação das ondas de compressão e de corte
podem então ser calculadas a partir da equação 3.5:
𝑉𝑝𝑛 =𝑧𝑖+1 − 𝑧𝑖
∆𝑡𝑗,𝑖+1 − ∆𝑡𝑗,𝑖 3.5
em que 𝑧𝑖 é a profundidade do recetor 𝑖 e ∆𝑡𝑗,𝑖 é o tempo de chegada da onda 𝑗 ( S ou P) no
recepetor 𝑖. A vantagem destes ensaios é a precisão dos resultados obtidos e a elevada

20
resolução espacial. Em contrapartida, o elevado custo associado serve de limitação se
comparamos com, por exemplo, um ensaio SCPT.
3.2.3 Ensaio crosshole
O ensaio crosshole é também um ensaio intrusivo que recorre à execução de dois ou
mais furos de sondagem, em que a fonte é colocada no interior de um dos furos e nos restantes
são colocados recetores. Recorrendo a furos de sondagem extra este ensaio revela-se mais
fiável e confere ao método a possibilidade de estimar o coeficiente de amortecimento do material.
O método de execução é semelhante ao dos ensaios descritos anteriormente,
executando a furação de todos os furos de sondagem numa fase inicial e posterior colocação da
fonte e recetores. Já o método de geração de ondas difere dos restantes devido ao reduzido
espaço disponível no interior do furo. O método preferencial será o de utilizar um mecanismo
com possibilidade de inversão de polaridade da ação, normalmente um mecanismo com ação
vertical. Deve ser tida em consideração que deve ser medida a inclinação dos furos uma vez que
pode afetar a distância entre furos a grandes profundidades. Tendo isto em conta, o método pode
ser aplicado até profundidades na ordem dos 50-80 m.
Figura 3.5 – Ensaio crosshole (adaptado de Lopes, 2005)
A análise dos dados é idêntica ao já referido, medindo-se a distância percorrida ∆𝑥 entre
o furo da fonte e o furo do receptor e o tempo que leva a ser detectado ∆𝑡(𝑧) á profundidade 𝑧.
Retira-se assim o valor da velocidade de propagação pela equação 3.6:
𝑉𝑗(𝑧) =∆𝑥
∆𝑡(𝑧) 3.6
em que 𝑉𝑗(𝑧) representa a velocidade da onda 𝑗 à profundidade 𝑧. Se se recorrer a mais
do que dois furos de sondagem, o ensaio é mais abrangente na medida em que permite a leitura
do tempo de chegada nos diversos furos, eliminando possíveis erros de medição aquando da
excitação da fonte e permite a estimativa do coeficiente de amortecimento material visto que é
possível medir o decréscimo de amplitude do sinal com a distância à fonte.
O ensaio tem um elevado custo associado, pese embora a alta fiabilidade dos dados
obtidos. Existe também o risco de ondas refratadas, ao percorrerem camadas próximas mais
rígidas, serem detetadas primeiro que as ondas horizontais diretas, implicando um especial
cuidado na definição do espaçamento entre furos de sondagem. O ensaio supõe ainda

21
estratificação horizontal, pelo que quando esta condição não se verificar os resultados não serão
fiáveis. A estimativa do coeficiente de amortecimento material também impõe alguns
condicionamentos, uma vez que para ser obtida uma boa estimativa é necessário garantir uma
boa ligação entre a parede do furo e o recetor.
3.2.4 Método das Ondas Superficiais
3.2.4.1 Generalidades
Os métodos que têm por base a aquisição de ondas superficiais seguem, por norma, três
fases: aquisição, processamento e inversão. Dependendo do método escolhido, as formas de
aquisição, técnicas de processamento e algoritmos de inversão variam. Dentro dos sistemas
atualmente utilizados, destacam-se o ensaio SASW (Spectral Analysis of Surface Waves)
clássico no qual a aquisição é feita com recurso a apenas dois canais, o ensaio MASW
(Multichannel Acquisition of Surface Waves), uma evolução do SASW, que permite recorrer a um
maior número de geofones cobrindo um maior volume de solo, e o ensaio CSW (Continuous
Surface Wave) cuja diferença reside na fonte que pode ser de impacto ou vibratória. Nesta
dissertação irão ser explorados mais especificamente os ensaios MASW e H/V, este último
também conhecido como método de Nakamura. Estes dois ensaios serão aprofundados nos
seguintes subcapítulos.
3.2.4.2 Multichannel Acquisition of Surface Waves (MASW)
3.2.4.2.1 Generalidades
O ensaio MASW é um método de caracterização dinâmica do solo baseado na teoria de
propagação das ondas superficiais. Este método tem essencialmente três fases: aquisição,
processamento e inversão (Figura 3.6). É na fase de aquisição que são obtidos os registos
sísmicos de um local, para posterior processamento de dados visando o estabelecimento da
curva de dispersão. Recorre-se então a algoritmos de inversão para, partindo da curva de
dispersão obtida, estimar as propriedades mecânicas do terreno. Seguidamente explorar-se-á
cada uma das fases referidas.
Figura 3.6 – Esquema das principais etapas dos métodos das ondas superficiais (adaptado de Strobbia, 2003)

22
3.2.4.2.2 Aquisição
O processo de aquisição é possivelmente o ponto mais importante do ensaio. Como foi
referido, os métodos das ondas superficiais baseiam-se na inversão das características
dispersivas destas ondas pelo que o registo do efeito da propagação de ondas Rayleigh tem de
ser o mais completo possível ao mesmo tempo que reduz a presença de fenómenos que possam
perturbar as leituras. Tanto o equipamento escolhido (fonte, tipo de recetor, número de recetores,
localização) como a disposição adotada influenciam diretamente a qualidade dos resultados
obtidos de tal modo que erros efetuados neste passo propagam-se para os restantes passos do
processo. A análise da aquisição revela-se algo complexa pois, apesar de ser conhecida a
predominância das ondas superficiais nos eventos sísmicos, (devido à sua elevada energia) esta
é feita no domínio das frequências, a qual necessita de uma alta razão sinal/ruído em toda a
gama de frequências que se pretende analisar. O problema reside no facto das ondas superficiais
apenas dominarem em alguns intervalos de frequência, os quais dependem diretamente do local
de estudo, podendo revelar-se insuficientes em extrair a informação necessária. Este facto tem
repercussões no processo de inversão uma vez que a escolha dos parâmetros de aquisição tem
de ser ponderada de modo a levar em conta todos os fatores que influenciam as medições,
garantindo que os dados invertidos contêm o máximo de informação coerente e o mínimo de
ruído incoerente (Strobbia, 2003).
Os limites da aquisição serão então devidos a dois fatores: ao ruído mecânico, uma vez
que a fonte geradora de ondas superficiais não será a única fonte de ruído presente, como é o
caso de ruído não sísmico, ruído elétrico ou ruído eletrónico; e à limitação intrínseca da
observação, dado que apenas é analisada uma janela temporal e espacial reduzida num número
limitado de pontos.
Conhecidos os limites inerentes a esta fase do processo, é necessário identificar
possíveis causas e formas de mitigação das mesmas. Como foi referido, uma das limitações é a
existência de ruído mecânico. Existem essencialmente duas formas de ruído: ruído coerente e
ruído incoerente.
O ruído incoerente está relacionado com a existência de fontes de sinal externas. Este
tipo de ruído pode ser produzido por fontes sísmicas (qualquer tipo de vibração, passagem de
veículos, etc.) e por fontes elétricas presentes nos recetores, cabos e nos sismógrafos. Aquando
da aquisição, este ruído é somado ao sinal da fonte que se pretende estudar. Por forma a ser
possível filtrar este ruído, presente em praticamente todos os casos de aplicação, pode ser
efetuado um registo sem energização da linha sísmica, permitindo identificar a fonte externa e a
frequência dominante por meios de uma análise ao conteúdo em frequências deste sinal. O
procedimento a adotar que vise a minimização do seu efeito consiste em somar diferentes
energizações (processo conhecido como stacking) para uma mesma geometria de aquisição,
garantindo que as diferentes energizações têm igual amplitude e fase por forma a aumentar a
razão sinal/ruído. Este aspeto é fundamental se se pretender aumentar a qualidade do sinal e,

23
garantindo uma sincronização perfeita entre energizações (fase constante), será possível
garantir a soma máxima do processo de stacking (Figura 3.7).
Figura 3.7 – Amplitude da soma de diferentes energizações para: a) o caso sincronizado b) com desfasamento de fase (adaptado de Strobbia, 2003).
O ruído coerente é resultado da aquisição e pode ser considerado como uma
característica do local em estudo, sendo gerado tipicamente pela propagação das ondas
volúmicas, pelo efeito de proximidade da fonte (near-field effects) e pelo efeito de longa distância
da linha de aquisição (far-field effects).
O efeito de proximidade da fonte (near-field effects) relaciona-se com o facto de que, as
ondas Rayleigh apenas podem ser consideradas como tendo uma propagação como ondas
planas (é a base do método) a uma certa distância, a qual depende do comprimento de onda. O
efeito de longa distância da linha de aquisição (far-field effects) deve-se à grande atenuação das
ondas superficiais nas altas frequências, de tal modo que a partir de uma determinada distância
da fonte o registo será apenas dominado por ondas volúmicas e não por ondas superficiais. É
possível reduzir estes efeitos através da aplicação de regras empíricas durante a aquisição ou
assegurando um processamento que leve em conta estas limitações.
Outra causa da presença de ruído coerente deve-se à variação lateral das características
do terreno. A teoria associada à inversão dos dados baseia-se num meio unidimensional
verticalmente heterogéneo, pelo que os resultados podem ser altamente influenciados caso
hajam fortes variações laterais podendo ser mesmo impossibilitada a sua interpretação (Peniche,
2015)
Como tal, um estudo prévio do local de estudo e o enquadramento geológico-geotécnico
é aconselhado para otimização do processo de aquisição. É possível detetar a presença de
variações laterais nas propriedades de diversas formas: conjugando duas aquisições segundo
uma mesma geometria e comparando-as de modo a detetar diferenças importantes; analisando
o espectro global f-k como a soma de dois espectros, em que o grau de semelhança entre estes
poderá indicar a presença de efeitos locais 2D; ou processando a diferença de fases para uma
mesma frequência que, caso não se verifique constante, poderá indicar a presença destas
alterações.
Podem ainda ser considerados como ruído coerente a propagação da onda sonora
resultante da ativação da fonte (impacto ou explosão) e a presença de modos superiores na
curva de dispersão. A primeira normalmente não origina preocupação uma vez que a sua energia

24
é normalmente menor e a sua frequência mais elevada, não acrescentando informação adicional
sobre as características mecânicas do terreno. A consideração dos modos superiores pode ser
considerada como informação útil uma vez que a sua velocidade de fase depende igualmente
das propriedades do solo atravessado. Para uma identificação eficaz destes modos é necessária
uma aquisição multicanal embora possa ser suscetível a uma deficiente interpretação dos dados
uma vez que podem ser registadas sobreposições de diferentes modos (Figura 3.8).
Figura 3.8 – Dados de campo. Sismógrafo (martelo como fonte, 24 geofones), e o espectro f-k. (adaptado de Strobbia, 2003)
O tratamento e remoção destes ruídos pode ser feito por intermédio de um processo de
filtragem antes da fase de processamento do sinal. Para tal é efetuada uma separação dos dados
em componentes considerando diferentes frequências, velocidades ou comprimentos de onda.
É possível assim retirar alguns efeitos do ruído registado como é observável na Figura 3.9.
Além das interferências referidas do ruído sobre a aquisição da curva de dispersão, esta
também tem como parâmetros fundamentais a definição espacial utilizada, a qual é relevante o
suficiente para impedir que se obtenha uma curva de dispersão real, ao invés sendo obtida uma
curva de dispersão aparente.
Figura 3.9 – Sismógrafo e espectro f-k após filtragem
Esta definição espacial depende essencialmente de dois fatores: o espaçamento entre
recetores e o comprimento total da aquisição. Estes são independentes da técnica de
processamento adotada e influenciam não só a resolução da curva de dispersão como também

25
a identificação de modos superiores de propagação dada a dificuldade de separação da energia
correspondente a cada um (Lopes, 2005).
Considerando o processamento efetuado no domínio f-k (em seguida explicar-se-á o
porquê desta escolha), a resolução em função do número de onda é a que permite determinar
os máximos que irão construir a curva de dispersão. Quando é analisada uma janela do espectro
para uma determinada frequência, idealmente seria possível identificar os picos de energia
correspondentes aos diferentes modos e respetivos comprimentos de onda (Figura 3.10a). Uma
vez que a janela analisada é por vezes limitada, a resolução obtida dificulta a correta identificação
destes picos (Figura 3.10b). O parâmetro que controla e facilita esta identificação é o
comprimento da linha de aquisição, de tal modo que se for suficientemente longo obteremos um
espectro em que os picos tenham valores de k distantes o suficiente para que facilite a sua
identificação.
Figura 3.10 – Efeito global da amostragem no espectro f-k (A- amplitude energética): a. Secção ideal para uma determinada frequência, identificação exata dos números de onda
a que correspondem os máximos energéticos; b. Situação real, nem sempre os máximos estão bem evidentes (adaptado de Lopes, 2005)
É necessário atentar ao facto de o número de recetores utilizados ser limitado e como
tal, um aumento do comprimento total de aquisição implicará um aumento do espaçamento
(equidistante) entre estes, resultando numa perda de informação nas altas frequências (menores
comprimentos de onda).
Como se pode concluir a escolha dos parâmetros de aquisição não é fácil dependendo
de inúmeros fatores que irão influenciar os resultados obtidos, tanto ao nível da profundidade
atingida como da qualidade de resolução. Dependendo do objetivo da campanha de prospeção
deverão ser definidos todos os parâmetros relevantes, sendo estes: o comprimento da linha de
aquisição e o respetivo espaçamento entre recetores; o tipo de fonte, o sinal que esta produz e
a distância deste ao primeiro recetor; e os parâmetros de amostragem temporal.

26
Figura 3.11 – Esquema da geometria de aquisição (adaptado de Strobbia, 2003).
Strobbia (2003) define a geometria da aquisição estabelecendo:
O espaçamento entre recetores, Δx, que representa o comprimento de onda
mínimo que é possível registar. Como já foi referido, a profundidade mínima
atingida depende do comprimento de onda, de modo que um grande
espaçamento origina perda de informação das camadas superficiais;
O comprimento total da linha de aquisição, L, influencia a capacidade de separar
os diversos modos de propagação e a resolução do espectro;
A distância da fonte ao primeiro recetor, LS, tem em conta os efeitos de
proximidade (near-field effects) dado que a uma distância considerável perde-se
informação sobre as altas frequências. Para ultrapassar estes efeitos é comum
adotar-se LS= Δx.
Park et al. (2004) (citado por Lopes, 2005) propõe que a distância entre a fonte e o último
recetor (LS + L) não exceda os 100 m.
Relativamente aos parâmetros da amostragem temporal, a taxa de amostragem, apesar
de não ser um parâmetro essencial, deve ser considerada consoante a frequência máxima
desejada. Por norma, frequências acima dos 100 Hz não são registadas inclusive em casos em
que a medição é efetuada em pavimentos. Considerar uma taxa de amostragem de 0.5-1 ms é
suficiente para que o espectro possa ser analisado até frequências na ordem dos 500 a 1000 Hz.
O que define a janela temporal a analisar é a necessidade de registar todo o trem de ondas
superficiais gerado podendo ser necessário efetuar uma aquisição durante alguns segundos em
locais com camadas de baixa velocidade.
De modo a ultrapassar todas estas limitações inerentes ao método, podem ser adotadas
diversas estratégias. Relativamente à disposição geométrica, uma vez que o equipamento
disponível é normalmente limitado de 24 a 48 geofones, podem ser levadas a cabo aquisições
com diferentes espaçamentos entre geofones (implicando um aumento do tempo total do
ensaio), pode ser alterado também tanto a posição dos geofones como da fonte de modo a
aumentar o número de traços da aquisição (deve ser considerado que a mudança de posição da
fonte, como já foi referido, pode trazer maior dificuldade na identificação de variações laterais de
fácies) ou podem ainda ser adotados espaçamentos não uniformes dos recetores (o que

27
implicará, nalguns métodos de processamento, tratar separadamente as parcelas do registo com
espaçamentos idênticos). A otimização da aquisição deverá ser efetuada levando a cabo uma
campanha de aquisição preliminar permitindo ajustar os parâmetros conforme se mostrar
conveniente. É ainda comum complementar-se a campanha de aquisição ativa (em que são
registados os dados provenientes de uma fonte controlada) com uma passiva (na qual são
registados os dados referentes ao ruído ambiente) contribuindo para uma maior definição da
curva de dispersão nas baixas frequências.
3.2.4.2.3 Processamento
Na etapa do processamento, o objetivo passa por estimar as características dispersivas
a partir dos dados recolhidos no local. Estes dados são obtidos como movimentos de partículas
em diferentes posições (geofones) a partir do qual o algoritmo de inversão estima a curva de
dispersão, a qual é determinada segundo a velocidade de fase em função da frequência (Figura
3.12). Esta curva de dispersão é posteriormente tratada por intermédio de uma inversão de dados
de modo a obter o perfil da velocidade das ondas de corte em profundidade.
Figura 3.12 – O processamento estima a curva de dispersão a partir de dados de campo (adaptado de Strobbia, 2003).
O problema com os dados adquiridos em campo é que estes registam todo o tipo de
ondas geradas, o que leva a ser necessário efetuar uma estimativa da velocidade de fase das
ondas Rayleigh a partir de registos que contêm outros eventos sísmicos. De modo a processar
estes dados, é necessário definir o tipo de evento sísmico a analisar e a identificação das suas
propriedades (velocidade e atenuação em função da frequência). Uma hipótese simplificativa
que é normalmente adotada é a de considerar que os eventos sísmicos dominantes detetados
correspondem, a cada frequência, à propagação das ondas Rayleigh. Considerando esta
hipótese, pode-se obter a velocidade de fase das ondas medindo a distância percorrida e o tempo
de chegada.
Strobbia (2003) nota que existem na literatura diversas técnicas para o processamento
de dados de múltiplos canais que permitem a obtenção da curva de dispersão experimental, tais
como: i) a transformada f – p; ii) a transformada f – k; iii) correlação cruzada; iv) FDBF no domínio
da frequência; v) método da função de transferência; vi) MOPA – análise de fase; vii) e a análise
no domínio do tempo e da frequência.
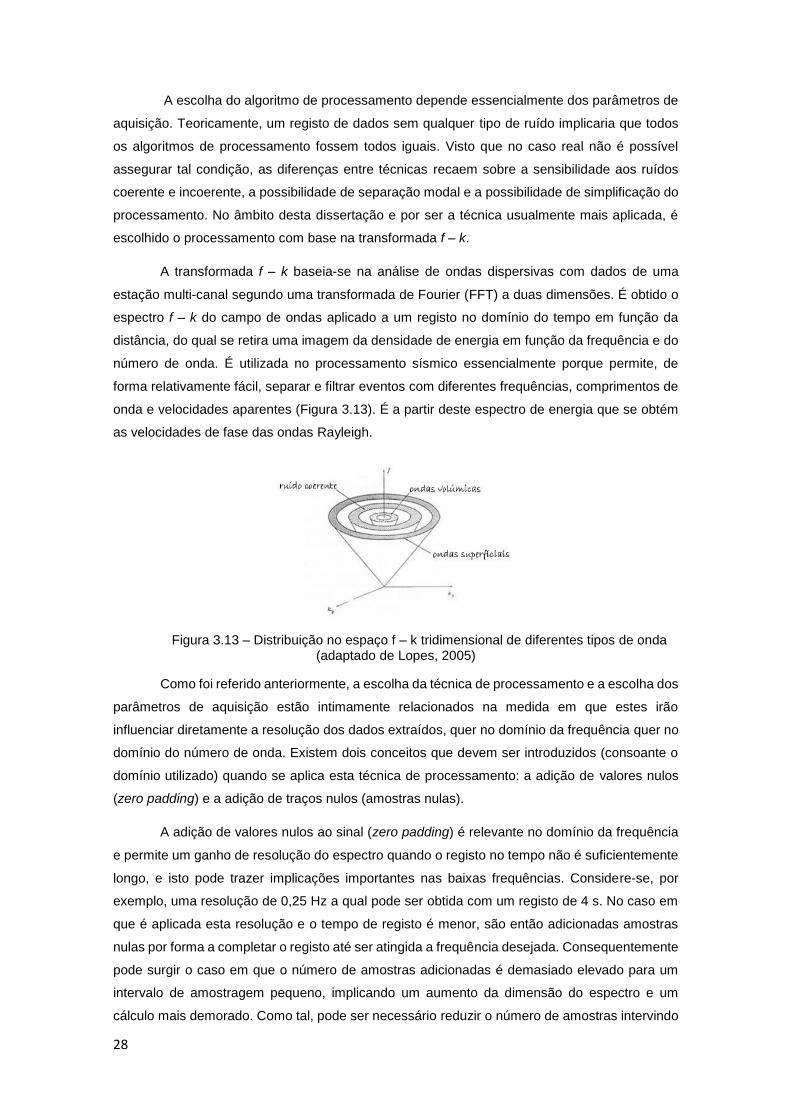
28
A escolha do algoritmo de processamento depende essencialmente dos parâmetros de
aquisição. Teoricamente, um registo de dados sem qualquer tipo de ruído implicaria que todos
os algoritmos de processamento fossem todos iguais. Visto que no caso real não é possível
assegurar tal condição, as diferenças entre técnicas recaem sobre a sensibilidade aos ruídos
coerente e incoerente, a possibilidade de separação modal e a possibilidade de simplificação do
processamento. No âmbito desta dissertação e por ser a técnica usualmente mais aplicada, é
escolhido o processamento com base na transformada f – k.
A transformada f – k baseia-se na análise de ondas dispersivas com dados de uma
estação multi-canal segundo uma transformada de Fourier (FFT) a duas dimensões. É obtido o
espectro f – k do campo de ondas aplicado a um registo no domínio do tempo em função da
distância, do qual se retira uma imagem da densidade de energia em função da frequência e do
número de onda. É utilizada no processamento sísmico essencialmente porque permite, de
forma relativamente fácil, separar e filtrar eventos com diferentes frequências, comprimentos de
onda e velocidades aparentes (Figura 3.13). É a partir deste espectro de energia que se obtém
as velocidades de fase das ondas Rayleigh.
Figura 3.13 – Distribuição no espaço f – k tridimensional de diferentes tipos de onda (adaptado de Lopes, 2005)
Como foi referido anteriormente, a escolha da técnica de processamento e a escolha dos
parâmetros de aquisição estão intimamente relacionados na medida em que estes irão
influenciar diretamente a resolução dos dados extraídos, quer no domínio da frequência quer no
domínio do número de onda. Existem dois conceitos que devem ser introduzidos (consoante o
domínio utilizado) quando se aplica esta técnica de processamento: a adição de valores nulos
(zero padding) e a adição de traços nulos (amostras nulas).
A adição de valores nulos ao sinal (zero padding) é relevante no domínio da frequência
e permite um ganho de resolução do espectro quando o registo no tempo não é suficientemente
longo, e isto pode trazer implicações importantes nas baixas frequências. Considere-se, por
exemplo, uma resolução de 0,25 Hz a qual pode ser obtida com um registo de 4 s. No caso em
que é aplicada esta resolução e o tempo de registo é menor, são então adicionadas amostras
nulas por forma a completar o registo até ser atingida a frequência desejada. Consequentemente
pode surgir o caso em que o número de amostras adicionadas é demasiado elevado para um
intervalo de amostragem pequeno, implicando um aumento da dimensão do espectro e um
cálculo mais demorado. Como tal, pode ser necessário reduzir o número de amostras intervindo

29
especialmente sobre as frequências muito elevadas, uma vez que estas não são usualmente
necessárias. A adição de traços nulos (amostras nulas) é aplicada no domínio do número de
onda vindo da necessidade de melhorar a discretização do espectro.
Como já foi referido, o comprimento da linha de aquisição influencia a capacidade de
serem identificáveis os diferentes modos de propagação no registo. Muitas vezes não é possível,
devido ao equipamento disponível, garantir o comprimento necessário e como tal, é introduzida
uma janela espacial que origina uma distribuição fictícia da energia no domínio f – k. A
consideração desta janela introduz efeitos indesejados no registo sob a forma de lóbulos
secundários (ondulações). Lopes (2005) refere que é possível minimizar estes efeitos recorrendo
a, por exemplo, janelas de Hamming e de Hanning (Figura 3.14).
Figura 3.14 – Diferentes janelas aplicadas: em cima no domínio do tempo; em baixo no domínio da frequência (adaptado de Strobbia, 2003)
A construção da curva de dispersão experimental é conseguida através da determinação
dos máximos para cada frequência embora seja necessário diferenciar sobre se são
determinados os máximos absolutos ou os relativos. No caso em que é evidente uma propagação
multimodal, a pesquisa dos máximos absolutos pode não representar o modo fundamental,
identificando-se saltos para modos superiores.
Figura 3.15 – Exemplo da construção da curva de dispersão experimental resultante do processamento no domínio f – k: figura superior representa o espectro f-k; a figura inferior
representa a curva de dispersão experimental com máximos relativos (pontos menos carregados) e máximos absolutos (pontos mais carregados), (adaptado de Lopes, 2005).

30
Na Figura 3.15 é apresentado um exemplo da curva de dispersão experimental resultante
do processamento no domínio f – k. Nesta figura representa-se o espectro f – k em que os pontos
amarelos representam tanto os máximos absolutos como os máximos relativos identificados. Na
curva de dispersão experimental nem sempre é possível verificar que a escolha dos máximos
absolutos permita uma clara separação entre os diferentes modos de propagação, observando-
se por vezes uma curva contínua. A escolha dos máximos relativos muitas vezes ajuda uma mais
clara identificação dos diferentes modos permitindo observar saltos entre eles.
3.2.4.2.4 Inversão
No campo da geofísica, inversão significa estimar os parâmetros de um modelo
geológico a partir de um conjunto de observações. Este é o último passo do método das ondas
superficiais e é o que permite estimar os parâmetros do solo num modelo estratificado a partir
da curva de dispersão medida em campo, convertendo as características de propagação em
propriedades do terreno (Figura 3.16).
Figura 3.16 – Esquema de inversão do método as ondas superficiais (adaptado de Strobbia, 2003)
O problema da inversão é considerado um problema de não unicidade e de determinação
mista. Por um lado, é considerado de não unicidade pois o perfil que se retira não é único uma
vez que tem em conta o ajuste da velocidade das ondas Rayleigh à curva de dispersão. Por outro
lado, é de determinação mista dado que a informação disponível diminui com a profundidade
implicando que as camadas superficiais são sobre determinadas em relação às mais profundas.
Existem várias abordagens que podem ser tomadas de modo a efetuar a inversão dos
dados. Uma abordagem inicial, considerada bastante simplificada, é a que assume que a
velocidade das ondas de corte corresponde a 110% da velocidade de fase das ondas Rayleigh
e que corresponde a uma profundidade na ordem de 𝜆 3⁄ a 𝜆 2⁄ . Com esta abordagem é possível
estabelecer um cenário base a partir do qual, segundo um método iterativo de tentativa e erro é
possível convergir para uma solução que otimize o ajustamento entre a curva de dispersão
experimental e a teórica. No entanto, esta otimização encontra-se limitada ao que é estabelecido
como uma primeira aproximação, estando dependente do quão bem esta se ajusta ao cenário
ideal e influenciando diretamente o tempo de computação necessário para se atingir o objetivo.
Neste aspeto, o conhecimento de outros resultados de prospeção que já tenham sido efetuados
no terreno e a inspeção visual do terreno permitem estabelecer um modelo inicial que vise
minimizar o tempo de computação e que se encontre mais próximo do modelo final.

31
Os parâmetros que o modelo pretende estimar são geralmente relacionados com as suas
propriedades físicas e geométricas, como a velocidade das ondas de corte, o coeficiente de
Poisson, a posição do nível freático, a massa volúmica e a espessura das camadas. No entanto,
e como Lopes (2005) refere, certos parâmetros influenciam de maneira mais significativa o
comportamento da curva do que outros. Verificou-se que a velocidade da onda de corte e a
espessura das camadas revelam-se bastante importantes ao passo que o coeficiente de Poisson
e a massa volúmica assumem menor importância. É, portanto, comum assumir-se a priori os
valores destes dois últimos e mantê-los inalterados durante toda a inversão.
Existem também os aspetos acerca da quantidade de informação disponível sobre as
camadas consoante a profundidade atingida. Como já foi referido, a profundidade atingida pela
propagação de ondas depende do comprimento de onda considerado. Menores comprimentos
de onda, e respetivamente maiores frequências, atingem as camadas mais superficiais e em
caso oposto maiores comprimentos de onda atingem camadas mais profundas. Como cada
comprimento de onda recolhe informação acerca de todas as camadas atravessadas conclui-se
que as camadas superficiais influenciam praticamente todas as frequências consideradas, o que
vem implicar uma quantidade de informação superior acerca das camadas mais superficiais.
Consequentemente, o problema para as camadas superficiais está sobre determinado enquanto
que em profundidade está indeterminado.
Concluindo, a interpretação dos dados depende de um conjunto de fatores que determina
o grau de confiança no modelo final. A variabilidade lateral das propriedades pode induzir
interpretações incorretas da curva de dispersão. A sobreposição modal pode afetar
significativamente, dependendo pesadamente na estratégia de aquisição. A experiência e
sensibilidade do operador desempenham um papel fundamental na correta interpretação dos
dados obtidos.

32
3.2.4.3 Método de Nakamura (H/V ou HVSR)
3.2.4.3.1 Generalidades
O método concebido por Nakamura, também conhecido como H/V ou HVSR (Horizontal
to Vertical Spectral Ratio) surgiu da necessidade de avaliar a resposta sísmica local de uma
forma expedita, pouco onerosa e não invasiva.
Este método regista o ruído ambiente, o qual pode ser subdividido em duas categorias:
fontes naturais e fontes de origem humana. A baixas frequências o ruído é essencialmente de
fonte natural. Para frequências abaixo de 1 Hz, a sua origem estima-se que venha do efeito da
ondulação do oceano e do impacto derivado das ondas com a zona costeira e costuma ser
designado de micro sismo. A energia libertada por estas fontes é transportada através da crosta
terrestre por ondas superficiais mas, quando avaliadas localmente, tendem a atingir
profundidades significantes (devido ao seu grande comprimento de onda). Estas ondas, ao
interagirem com a estrutura geológica local, por exemplo bacias de sedimentação, originam não
só ondas superficiais como também ondas volúmicas (Bonnefoy-Claudet et al., 2006).
Frequências superiores a 1 Hz podem ser atribuídas à atividade humana, em que as
fontes estão geralmente à superfície e são características de uma alta variabilidade ao longo do
dia, sendo que para esta gama de frequências se designam de microtremores. Estas fontes estão
normalmente localizadas relativamente próximas do local em estudo e geram tanto ondas
superficiais como ondas volúmicas, apesar de que, com o aumento da distância, o registo das
ondas superficiais se torne predominante dado que as ondas superficiais têm caracteristicamente
uma menor atenuação quando comparadas com as volúmicas.
3.2.4.3.2 Relação entre a razão H/V e os tipos de onda
De modo a compreender os resultados obtidos pelo ensaio é necessário entender
inicialmente como é que o campo de ondas afeta o registo. Bard et al. (2004) descreve a origem
do campo de ondas que origina os picos na curva H/V, os quais são devidos a um campo de
ondas contendo tanto ondas Rayleigh, ondas Love, ondas S e ondas P. Características das
ondas como a elipticidade da onda Rayleigh, a velocidade de grupo mínima das ondas Love
(fase Airy) dos diferentes modos e a ressonância das ondas volúmicas influenciam grandemente
a curva extraída.
Como já foi referido, o que caracteriza as ondas Rayleigh é o movimento elíptico
retrógrado que provocam nas partículas e a sua velocidade de fase. Em meios estratificados em
que a velocidade varia com a profundidade, ambas as características dependem da frequência
e dão origem a diferentes modos de propagação. Como a razão H/V representa a medida do
rácio de elipticidade de todos os modos das ondas Rayleigh, este será também dependente da
frequência.
Para altos contrastes de velocidade das ondas S (cerca de 3 vezes), a curva H/V
apresenta picos infinitos e/ou zeros os quais correspondem ao desaparecimento da componente

33
vertical (e horizontal respetivamente) da razão e à inversão de sentido do movimento (de
retrógrado para progressivo) (Figura 3.17). Para baixos níveis de impedância, dado que o
movimento não altera de sentido com frequência, a curva apenas apresenta máximos nalgumas
frequências e mínimos noutras, não apresentando picos infinitos nem zeros. Considerando o
modo fundamental, o desaparecimento da componente vertical da razão ocorre para uma
frequência fr bastante próxima da frequência fundamental de ressonância das ondas S, o que
indica uma relação entre as ondas Rayleigh e as ondas S. Para que tal se verifique o contraste
entre velocidades de ondas S tem de ser no mínimo de 4. Quanto mais baixo for este contraste
o pico pontual é substituído por um pico alargado de baixa amplitude ocorrendo numa gama de
frequências que pode variar entre 0,5 e 1,5 vezes a frequência fundamental da onda S.
Figura 3.17 – Variação do movimento das partículas no meio de propagação (semi-espaço
homogéneo) com a profundidade (z), causado pela passagem de uma onda Rayleigh com
direção de propagação segundo x (Peniche, 2015).
A curva H/V no modo fundamental pode ainda exibir um mínimo numa frequência
superior, fz, que corresponde ao desaparecimento da componente horizontal e uma segunda
inversão do sentido (de progressivo para retrógrado). Modos superiores de propagação também
exibem picos na curva para maiores frequências, podendo coincidir com as frequências de
ressonância das ondas S superiores, embora este fenómeno se verifique especialmente em
estruturas de elevado contraste. Com estes resultados é então possível extrapolar para
estruturas geológicas mais complexas.
As ondas Love, devido à sua forma de propagação, transportam a energia segundo a
horizontal, pelo que a sua influência na razão H/V apenas afeta a componente horizontal.
Consequentemente, em casos de alto contraste de impedância, estas demonstram reforçar os
picos da curva (uma vez que é quando se dá o desaparecimento da componente vertical). A
frequência, fl, representa a velocidade de grupo mínima do modo fundamental das ondas Love e
é também bastante próxima da frequência fundamental das ondas S.
A relação do pico H/V com as ondas volúmicas prende-se com a gama de frequências a
que se registam as frequências de ressonância das ondas S e P. A componente horizontal da
razão exibe sempre picos na gama da frequência de ressonância das ondas S enquanto que a

34
sua componente vertical os exibe na gama da frequência de ressonância das ondas P, visto que
a gama de frequências a que se verifica a frequência fundamental das ondas S é sempre
consideravelmente menor que a respetiva frequência das ondas P. Para locais com elevado
contraste de impedância e horizontalmente estratificados é expectável que se registem picos de
H/V sobre os modos superiores das ondas S, desde que estes não coincidam com o modo
fundamental das ondas P.
Contudo, o método acarreta também algumas limitações. Deve ser consultada toda a
informação geológica e geotécnica disponível por forma a estimar a priori o contraste de
impedância e indicações de existência de variação lateral da estrutura do solo. Picos nas
frequências mais baixas são normalmente mais difíceis de identificar e interpretar em
comparação com as altas frequências. E caso se verifique dificuldade de identificação dos picos
na curva H/V, sugere-se a consulta dos espectros de Fourier das componentes horizontal e
vertical.
3.2.4.3.3 Formulação
A formulação do problema proposta por Nakamura (2000) considera a típica estrutura
geológica de uma bacia de sedimentação apresentada na Figura 3.18. Considere-se que o
microtremor induzido é dividido em duas componentes compostas por ondas Rayleigh e por
outras ondas. O espectro de amplitude do movimento na superfície (𝐻𝑓 e 𝑉𝑓) pode ser escrito
pelas equações 3.7 e 3.8:
𝐻𝑓 = 𝐴ℎ×𝐻𝑏 + 𝐻𝑠 , 𝑉𝑓 = 𝐴𝑣×𝑉𝑏 + 𝑉𝑠 3.7
𝑇ℎ =𝐻𝑓
𝐻𝑏 , 𝑇𝑣 =
𝑉𝑓
𝑉𝑏 3.8
Em que 𝐴ℎ e 𝐴𝑣 representam o factor de amplificação horizontal e vertical,
respetivamente, do movimento provocado por ondas volúmicas incidentes verticalmente; 𝐻𝑏 e 𝑉𝑏
são os espectros de amplitude horizontal e vertical, respectivamente, do substrato rochoso; 𝐻𝑠 e
𝑉𝑠 são os espectros de amplitude horizontal e vertical, respetivamente, das ondas Rayleigh na
camada sedimentar; e 𝑇ℎ e 𝑇𝑣 representam o fator de amplificação horizontal e vertical do
movimento na camada sedimentar. Admite-se também que a energia do microtremor é
constituída maioritariamente por ondas de Rayleigh e que os efeitos de amplificação local são
devidos à presença de uma camada de solo mole sobre um espaço semi-infinito.
Figura 3.18 – Estrutura geológica típica de uma bacia de sedimentação (adaptado de Nakamura, 2000)

35
Como foi referido, a gama de frequências consideradas que origina uma grande
amplificação da componente horizontal do movimento, não afeta a componente vertical. Como
tal 𝐴𝑣 assume o valor unitário. Se não se considerar o efeito das ondas Rayleigh, vem 𝑉𝑓 = 𝑉𝑏.
Pelo contrário, se o valor do espectro de amplitude vertical à superfície for superior em relação
ao do substrato rochoso, considera-se este aumento como consequência do efeito das ondas
superficiais sendo possível estimá-lo (𝑇𝑣 = 𝑉𝑓 𝑉𝑏⁄ ).
𝑇 =𝑇ℎ
𝑇𝑣=
𝐻𝑓
𝑉𝑓𝐻𝑏𝑉𝑏
=𝑄𝑇𝑆𝐻𝑏𝑉𝑏
=[𝐴ℎ+
𝐻𝑠𝐻𝑏]
[𝐴𝑣+𝑉𝑠𝑉𝑏] , 𝑄𝑇𝑆 =
𝐻𝑓
𝑉𝑓=𝐴ℎ×𝐻𝑏+𝐻𝑠
𝐴𝑣×𝑉𝑏+𝑉𝑠=𝐻𝑏
𝑉𝑏
[𝐴ℎ+𝐻𝑠𝐻𝑏]
[𝐴𝑣+𝑉𝑠𝑉𝑏] 3.9
A hipótese de que a componente do movimento no substrato é semelhante em ambas
as direções implica que 𝑉𝑏 = 𝐻𝑏. As componentes 𝐻𝑠
𝐻𝑏 e
𝑉𝑠
𝑉𝑏 estão relacionadas com o percurso da
energia das ondas Rayleigh. Se se considerar que não existe influência das ondas Rayleigh,
então 𝑄𝑇𝑆 =𝐴ℎ
𝐴𝑣, enquanto que se a influência for elevada, a componente referente às ondas de
Rayleigh é predominante (𝑄𝑇𝑆 =𝐻𝑠
𝑉𝑠) e a frequência de pico mínima das ondas Rayleigh equivale
à mínima frequência fundamental do fator de amplificação horizontal, 𝐴ℎ. Mesmo quando a
influência das ondas Rayleigh é grande, o 𝑉𝑠 torna-se pequeno resultando num pico da razão
𝐻𝑠 𝑉𝑠⁄ próximo da frequência fundamental de primeira ordem.
Concluindo, o QTS (Quasi-Transfer Spectra) representa a frequência fundamental de
primeira ordem, devido aos fenómenos de múltiplas reflexões de ondas SH na camada de
sedimentação, e correspondente fator de amplificação, independentemente do grau de influência
das ondas Rayleigh.
3.2.4.3.4 Especificações Técnicas
O trabalho desenvolvido por Bard et al. (2004) no projeto SESAME levou à elaboração
de recomendações baseadas tanto em simulações como por comparação entre ensaios
efetuados. As recomendações incidem tanto sobre a postura a adotar em campo, em termos de
disposição, melhor altura do dia para efetuar o registo, número de registos, etc. como sobre os
parâmetros de aquisição a definir para, de modo expedito, avaliar a viabilidade das curvas
obtidas e aferir sobre a necessidade de efetuar registos adicionais.
Relativamente aos parâmetros de campo, a localização assume alguma importância. De
modo a evitar ruído no registo, este deve ser feito afastado de edifícios vizinhos, maquinaria
pesada, geradores ou outras fontes monocromáticas. No caso de sinais transientes deve ser
alargado o tempo de aquisição, por forma a filtrar estes efeitos. Devem ser feitos um mínimo de
três registos na determinação da frequência fundamental com um espaçamento largo, e caso
seja necessário por identificação de variabilidade nas medições laterais o espaçamento deve ser
reduzido. Os fatores atmosféricos também devem ser considerados, medições sob ventos fortes
ou chuva intensa registam grandes perturbações nas baixas frequências.
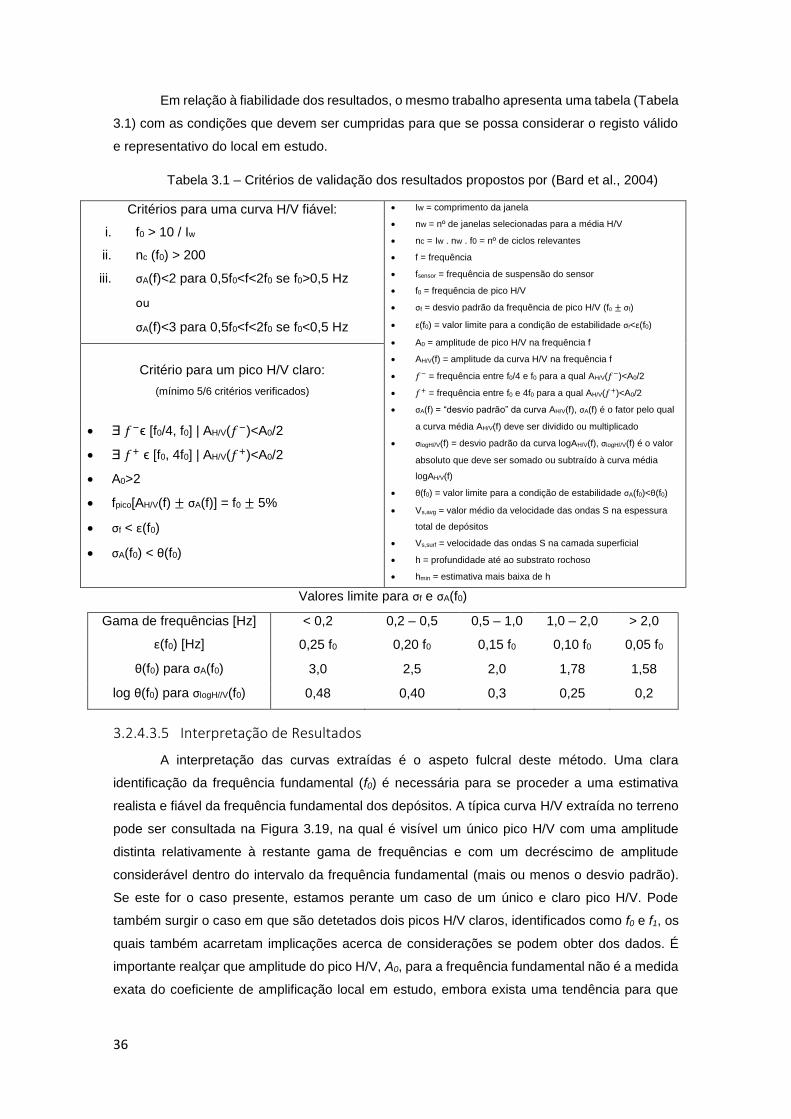
36
Em relação à fiabilidade dos resultados, o mesmo trabalho apresenta uma tabela (Tabela
3.1) com as condições que devem ser cumpridas para que se possa considerar o registo válido
e representativo do local em estudo.
Tabela 3.1 – Critérios de validação dos resultados propostos por (Bard et al., 2004)
Critérios para uma curva H/V fiável:
i. f0 > 10 / Iw
ii. nc (f0) > 200
iii. σA(f)<2 para 0,5f0<f<2f0 se f0>0,5 Hz
ou
σA(f)<3 para 0,5f0<f<2f0 se f0<0,5 Hz
Iw = comprimento da janela
nw = nº de janelas selecionadas para a média H/V
nc = Iw . nw . f0 = nº de ciclos relevantes
f = frequência
fsensor = frequência de suspensão do sensor
f0 = frequência de pico H/V
σf = desvio padrão da frequência de pico H/V (f0 ± σf)
ε(f0) = valor limite para a condição de estabilidade σf<ε(f0)
A0 = amplitude de pico H/V na frequência f
AH/V(f) = amplitude da curva H/V na frequência f
𝑓− = frequência entre f0/4 e f0 para a qual AH/V(𝑓−)<A0/2
𝑓+ = frequência entre f0 e 4f0 para a qual AH/V(𝑓+)<A0/2
σA(f) = “desvio padrão” da curva AH/V(f), σA(f) é o fator pelo qual
a curva média AH/V(f) deve ser dividido ou multiplicado
σlogH//V(f) = desvio padrão da curva logAH/V(f), σlogH//V(f) é o valor
absoluto que deve ser somado ou subtraído à curva média
logAH/V(f)
θ(f0) = valor limite para a condição de estabilidade σA(f0)<θ(f0)
Vs,avg = valor médio da velocidade das ondas S na espessura
total de depósitos
Vs,surf = velocidade das ondas S na camada superficial
h = profundidade até ao substrato rochoso
hmin = estimativa mais baixa de h
Critério para um pico H/V claro:
(mínimo 5/6 critérios verificados)
Ǝ 𝑓−ϵ [f0/4, f0] | AH/V(𝑓−)<A0/2
Ǝ 𝑓+ ϵ [f0, 4f0] | AH/V(𝑓+)<A0/2
A0>2
fpico[AH/V(f) ± σA(f)] = f0 ± 5%
σf < ε(f0)
σA(f0) < θ(f0)
Valores limite para σf e σA(f0)
Gama de frequências [Hz] < 0,2 0,2 – 0,5 0,5 – 1,0 1,0 – 2,0 > 2,0
ε(f0) [Hz] 0,25 f0 0,20 f0 0,15 f0 0,10 f0 0,05 f0
θ(f0) para σA(f0) 3,0 2,5 2,0 1,78 1,58
log θ(f0) para σlogH//V(f0) 0,48 0,40 0,3 0,25 0,2
3.2.4.3.5 Interpretação de Resultados
A interpretação das curvas extraídas é o aspeto fulcral deste método. Uma clara
identificação da frequência fundamental (f0) é necessária para se proceder a uma estimativa
realista e fiável da frequência fundamental dos depósitos. A típica curva H/V extraída no terreno
pode ser consultada na Figura 3.19, na qual é visível um único pico H/V com uma amplitude
distinta relativamente à restante gama de frequências e com um decréscimo de amplitude
considerável dentro do intervalo da frequência fundamental (mais ou menos o desvio padrão).
Se este for o caso presente, estamos perante um caso de um único e claro pico H/V. Pode
também surgir o caso em que são detetados dois picos H/V claros, identificados como f0 e f1, os
quais também acarretam implicações acerca de considerações se podem obter dos dados. É
importante realçar que amplitude do pico H/V, A0, para a frequência fundamental não é a medida
exata do coeficiente de amplificação local em estudo, embora exista uma tendência para que

37
esta subestime o coeficiente de amplificação local, como tal pode ser considerada como uma
estimativa inferior do verdadeiro valor do coeficiente.
Figura 3.19 – Curva típica do ensaio H/V
Como já foi referido, a frequência fundamental do pico H/V está indiretamente
relacionada com as características do terreno, e mais concretamente, com a resposta sísmica
deste, como tal é necessário compreender de que modo é que os picos H/V detetados nos dão
informação sobre o terreno.
Nos casos em que a frequência fundamental, f0, é clara e não tem origem industrial, pode
ser assumido, quase garantidamente, que existe um grande contraste de impedância
(aproximadamente 4). Neste caso, dependendo dos dados disponíveis, é possível retirar: uma
estimativa da velocidade das ondas de corte média (caso seja conhecida a espessura da camada
de depósitos, h, assumindo 𝑉𝑠,𝑎𝑣𝑔 ≈ 𝑓0 ∙ 4ℎ; uma estimativa inferior da espessura (caso seja
conhecida a velocidade das ondas de corte na camada superficial, 𝑉𝑠,𝑠𝑢𝑟𝑓) considerando ℎ𝑚𝑖𝑛 ≈
𝑉𝑠,𝑠𝑢𝑟𝑓 4 ∙ 𝑓0⁄ . No caso de detecção de picos acentuados com origem industrial, estes devem ser
descartados uma vez que não têm qualquer relação com as características locais.
No caso de serem detetados dois picos H/V, f0 e f1, que cumpram os critérios acima
mencionados, devem ser considerados os seguintes cenários: i) a velocidade na camada
superficial é baixa, ii) o substrato rochoso é muito rijo, iii) existem dois grandes contrastes de
impedância (superiores a 4) a duas escalas diferentes implicando que a amplificação terá
influência sobre uma gama de frequências desde f0 até f1. Neste caso, podemos adotar a mesma
postura que no parágrafo anterior para a estimativa da velocidade média das ondas de corte,
embora na estimativa inferior da espessura da camada seja necessário considerar a frequência
fundamental do segundo modo, ℎ𝑚𝑖𝑛 ≈ 𝑉𝑠,𝑠𝑢𝑟𝑓 4 ∙ 𝑓1⁄ .
Se surgir um pico H/V pouco claro nas baixas frequências (f0 < 1 Hz), devem ser evitadas
conclusões precipitadas. Neste caso, ou se opta por efetuar medições adicionais num horário do
dia em que a atividade humana seja relativamente baixa ou se adota um sensor de velocidade
para frequências baixas e maiores períodos de registo para que seja possível obter uma melhor
resolução na gama de frequências predominante. Se a curva H/V apresentar valores bastante

38
distintos de 1 da amplitude (por exemplo, até 10 ou próximos de 0,1), o ensaio deve ser repetido
e as medições descartadas.
Pode ser apresentada também a situação em que o pico H/V tem uma ampla gama de
frequências, o que pode implicar a existência de uma interface não horizontal entre camadas
moles e rijas. Para melhorar a compreensão deste registo, é sugerido proceder a medições
adicionais e comparar a gama de frequências a que se regista este pico. Neste caso, se se
verificar que as frequências variam significativamente de medição para medição e que estas se
mantêm na gama de frequências do pico alargado, existem indícios e fortes possibilidades de o
terreno apresentar grandes variações laterais implicando efeitos 2D ou 3D de reflexão.
Por fim, pode surgir o caso em que a curva H/V é praticamente plana, não exibindo
nenhum pico claro, o que implica estar-se perante um baixo contraste de impedância entre os
materiais. Como tal, o solo pode ser classificado como de baixa ou nula amplificação, embora a
segunda conclusão não deva ser tomada de consciência leve uma vez que este caso de nula
amplificação se regista quase exclusivamente em medições diretamente na rocha.
Conhecidos os aspetos técnicos e teóricos dos ensaios expostos, as suas vantagens e
limitações e de que forma se podem retirar as informações de interesse dos seus registos, é
possível proceder à análise dos registos efetuados em campo e agregá-los por forma a
estabelecer um modelo válido do terreno.

39
4 Caso de Estudo
4.1 Enquadramento Geral
O caso de estudo a analisar encontra-se localizado na zona do Saldanha, entre a Av.
Fontes Pereira de Melo, a Av. 5 de Outubro e a Rua Pinheiro Chagas. Esta obra visa a
requalificação do espaço, através da construção de um novo empreendimento, denominado
Edifício Torre da Cidade. Este surge como oportunidade para executar uma campanha de
prospeção sísmica com os métodos MASW e HVSR diretamente no terreno por forma a
complementar a campanha de prospeção já levada a cabo baseada em ensaios SPT e ensaios
laboratoriais (Figura 4.1).
Em termos de principais condicionantes, a sua localização insere-se num meio
densamente urbano, a qual está limitada por infraestruturas subterrâneas tanto a Noroeste por
um parque de estacionamento como a Sudeste pelo Túnel do Metro de Lisboa. A avenida a
Sudeste (Av. Fontes Pereira de Melo) é considerada uma das principais artérias da cidade de
Lisboa, tendo um elevado fluxo de trânsito pedonal e motorizado, tendo sido por isso necessário
planear a execução dos ensaios sísmicos por forma a minimizar o ruído transiente.
A definição do modelo geológico-geotécnico é feita com base em relatórios geotécnicos
tanto do local de estudo, como de edifícios vizinhos e ainda em ensaios sísmicos executados por
Gouveia (2016). A localização dos ensaios foi efetuada recorrendo à georreferenciação
disponível no software Autocad garantindo uma correta localização dos furos de sondagem.
Figura 4.1 – Localização do caso de estudo e das sondagens usadas
4.2 Enquadramento Geológico
O terreno em estudo encontra-se sobre a unidade denominada por Argilas e calcários
dos Prazeres (MPr) (Pais et al. ,2005), pertencente à sequência sedimentar típica do “Miocénico
da Região de Lisboa”, zona constituída tipicamente por bancadas de argila, calcário, margas e
areias grosseiras (Cotter, 1955).
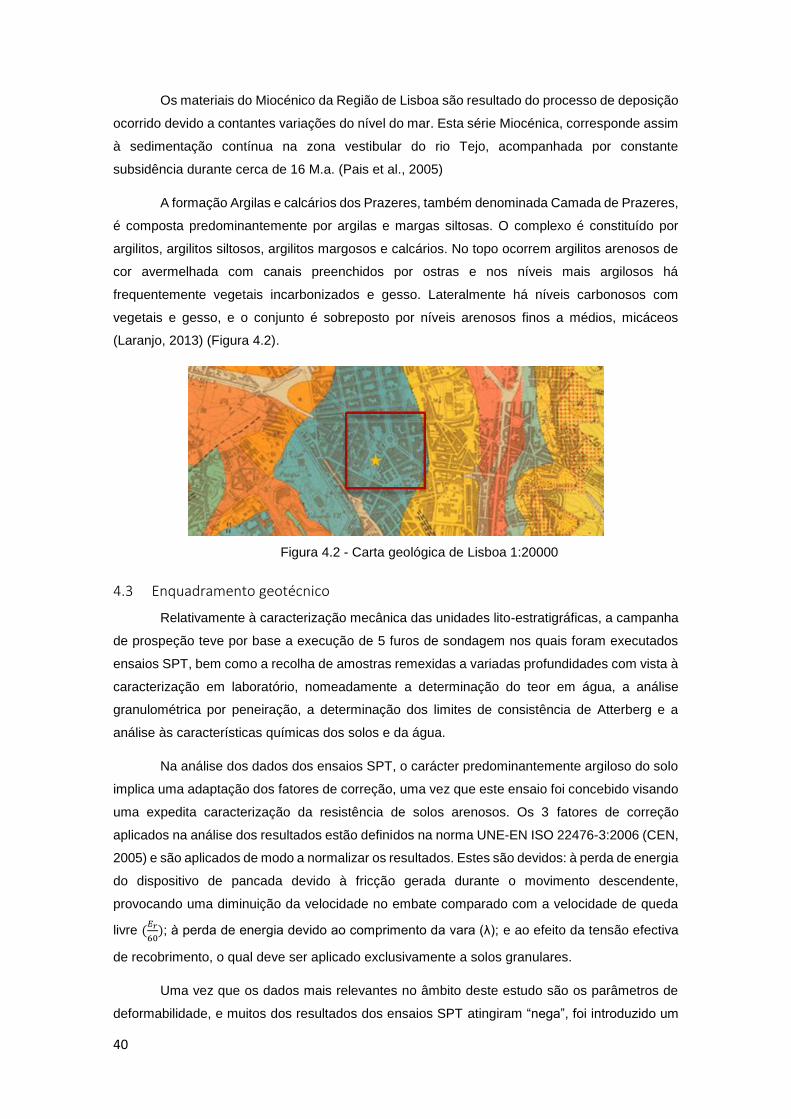
40
Os materiais do Miocénico da Região de Lisboa são resultado do processo de deposição
ocorrido devido a contantes variações do nível do mar. Esta série Miocénica, corresponde assim
à sedimentação contínua na zona vestibular do rio Tejo, acompanhada por constante
subsidência durante cerca de 16 M.a. (Pais et al., 2005)
A formação Argilas e calcários dos Prazeres, também denominada Camada de Prazeres,
é composta predominantemente por argilas e margas siltosas. O complexo é constituído por
argilitos, argilitos siltosos, argilitos margosos e calcários. No topo ocorrem argilitos arenosos de
cor avermelhada com canais preenchidos por ostras e nos níveis mais argilosos há
frequentemente vegetais incarbonizados e gesso. Lateralmente há níveis carbonosos com
vegetais e gesso, e o conjunto é sobreposto por níveis arenosos finos a médios, micáceos
(Laranjo, 2013) (Figura 4.2).
Figura 4.2 - Carta geológica de Lisboa 1:20000
4.3 Enquadramento geotécnico
Relativamente à caracterização mecânica das unidades lito-estratigráficas, a campanha
de prospeção teve por base a execução de 5 furos de sondagem nos quais foram executados
ensaios SPT, bem como a recolha de amostras remexidas a variadas profundidades com vista à
caracterização em laboratório, nomeadamente a determinação do teor em água, a análise
granulométrica por peneiração, a determinação dos limites de consistência de Atterberg e a
análise às características químicas dos solos e da água.
Na análise dos dados dos ensaios SPT, o carácter predominantemente argiloso do solo
implica uma adaptação dos fatores de correção, uma vez que este ensaio foi concebido visando
uma expedita caracterização da resistência de solos arenosos. Os 3 fatores de correção
aplicados na análise dos resultados estão definidos na norma UNE-EN ISO 22476-3:2006 (CEN,
2005) e são aplicados de modo a normalizar os resultados. Estes são devidos: à perda de energia
do dispositivo de pancada devido à fricção gerada durante o movimento descendente,
provocando uma diminuição da velocidade no embate comparado com a velocidade de queda
livre (𝐸𝑟
60); à perda de energia devido ao comprimento da vara (λ); e ao efeito da tensão efectiva
de recobrimento, o qual deve ser aplicado exclusivamente a solos granulares.
Uma vez que os dados mais relevantes no âmbito deste estudo são os parâmetros de
deformabilidade, e muitos dos resultados dos ensaios SPT atingiram “nega”, foi introduzido um

41
valor extrapolado 𝑁60∗ que permitiu associar o número de pancadas do martelo com a penetração
obtida, no caso de o ensaio ter apresentado nega. Tendo isso em conta, recorreu-se à seguinte
equação para extrapolar o valor de NSPT quando ocorreu nega para a extrapolação.
Assim, recorreu-se à expressão 4.1:
𝑁60∗ =
𝑁60×30
ℎ𝑝𝑒𝑛 (𝑐𝑜𝑚 ℎ𝑝𝑒𝑛 < 30 𝑐𝑚) 4.1
A análise cuidada das sondagens e dos resultados dos ensaios SPT, juntamente com a
ponderação dos resultados dos ensaios de laboratório levou ao estabelecimento de um modelo
base de 4 unidades geológico-geotécnicas. O peso volúmico das camadas adotado teve por
base os resultados de laboratório. A altura do solo modelada foi limitada a 30 metros
considerando que estudos anteriores teriam detectado por volta desta profundidade o maior
contraste de rigidez.
Figura 4.3 – Corte geológico
A primeira unidade geotécnica, UG1, foi identificada em todos os furos de sondagem
como depósito de aterros, com espessura variável entre os 2 e os 5 metros, apresentando
características bastante heterogéneas são compostos essencialmente por argilas arenosas e
argilas siltosas com fragmentos líticos e restos de cerâmica, correspondendo a materiais
modernos de origem antrópica. Os valores normalizados de pancadas variam entre 3 ≤ 𝑁60∗ ≤
23. Pontualmente foram detectados valores demasiado elevados para representarem o tipo de
terreno, os quais foram descartados por provavelmente serem devidos à presença da fração
pedregosa na camada.
A segunda unidade geotécnica definida, UG2, é composta por argilas margosas com
nódulos carbonatados, de cor castanho-esverdeada tendo sido detetada em todos os furos de
sondagem. Esta apresenta valores normalizados do número de pancadas entre 11 ≤ 𝑁60∗ ≤ 39,
com tendência a crescer linearmente em profundidade, tendo sido detetada a uma profundidade
relativamente constante, entre os 2 e os 9 metros. A definição desta unidade baseou-se na
descrição visual do solo encontrado e nos valores coerentes e consistentes do número de
pancadas. Os ensaios de laboratório revelaram ainda um índice de plasticidade médio de 18%.
A abundante presença de material argiloso e margoso leva a crer que a resistência da camada

42
foi bem caracterizada pese embora o facto de a presença de nódulos carbonatados e margas
calcárias no relatório de sondagem 169 ter apresentado valores bastante superiores aos
restantes. Estes valores foram, portanto, descartados por não representarem o comportamento
da camada.
A terceira unidade, UG3, é composta maioritariamente por argila siltosa com passagens
de nódulos calco-margosos e por argilas com forte presença de siltes e micas e tem uma
distribuição espacial variável, tendo sido detetada desde os 6 metros de profundidade até um
máximo de 20 metros. O valor normalizado do número de pancadas varia entre 27 ≤ 𝑁60∗ ≤ 107,
e apresenta em geral um índice de plasticidade médio de 12%.
Por fim, a quarta e última unidade geotécnica, UG4, definida é composta essencialmente
por argila siltosa, rija, exibindo valores elevados de resistência, variando entre 155 ≤ 𝑁60∗ ≤ 309.
Esta camada é a que apresenta menor confiança nos dados obtidos uma vez que surgia sempre
nos últimos metros das sondagens, não tendo sido detetada em todos os furos de sondagem.
Dado que, geralmente, esta camada era detetada por volta dos 22 metros de profundidade, é
esperado que tenha um comportamento resistente e rígido.
Deve ser tido em conta que a informação extraída dos ensaios SPT diz apenas respeito a
uma pequena porção da estrutura geológica a avaliar. Assim, os resultados obtidos em vários
ensaios para uma mesma unidade geotécnica, mas efetuados em diferentes pontos, são
processados em conjunto de modo a homogeneizar as propriedades das camadas, através do
cálculo dos valores médios e valores característicos. O cálculo do valor médio tende a traduzir o
comportamento “médio” do terreno enquanto que o valor característico considera a incerteza
associada à fiabilidade dos valores experimentais subestimando o seu valor. A diferença entre
os dois permitirá identificar uma maior ou menor variabilidade das propriedades de cada camada.
O procedimento adotado para este tratamento estatístico foi o proposto no Anexo D do
Eurocódigo 7 (2009) e por Frank et al. (2004) e é aplicado com os valores obtidos do número de
pancadas extrapolado. Para o efeito, considerou-se um solo homogéneo com amostragem local
e sem uma tendência clara do parâmetro geotécnico que considera uma distribuição normal dos
valores. O valor característico pode ser obtido recorrendo à equação 4.2:
𝑁𝑘 = 𝑁𝑚é𝑑𝑖𝑜(1 − 𝑘𝑛𝑉𝑋) 4.2
em que 𝑋𝑚é𝑑𝑖𝑜 representa a média aritmética do valor, 𝑉𝑋 é o coeficiente de variação do
parâmetro e 𝑘𝑛 é o coeficiente estatístico que tem em conta, entre outros, o tamanho da amostra
e o volume de solo caracterizado. Para determinar o coeficiente de variação, é necessário
considerar se 𝑉𝑋 é conhecido a priori ou não. O conhecimento a priori do parâmetro está
relacionado com a existência de uma base de dados de comparação ou da consulta de ensaios
efetuados em condições semelhantes. O procedimento adotado foi o de considerar 𝑉𝑋 conhecido
a priori por ser a abordagem recomendada por Frank et al. (2004).
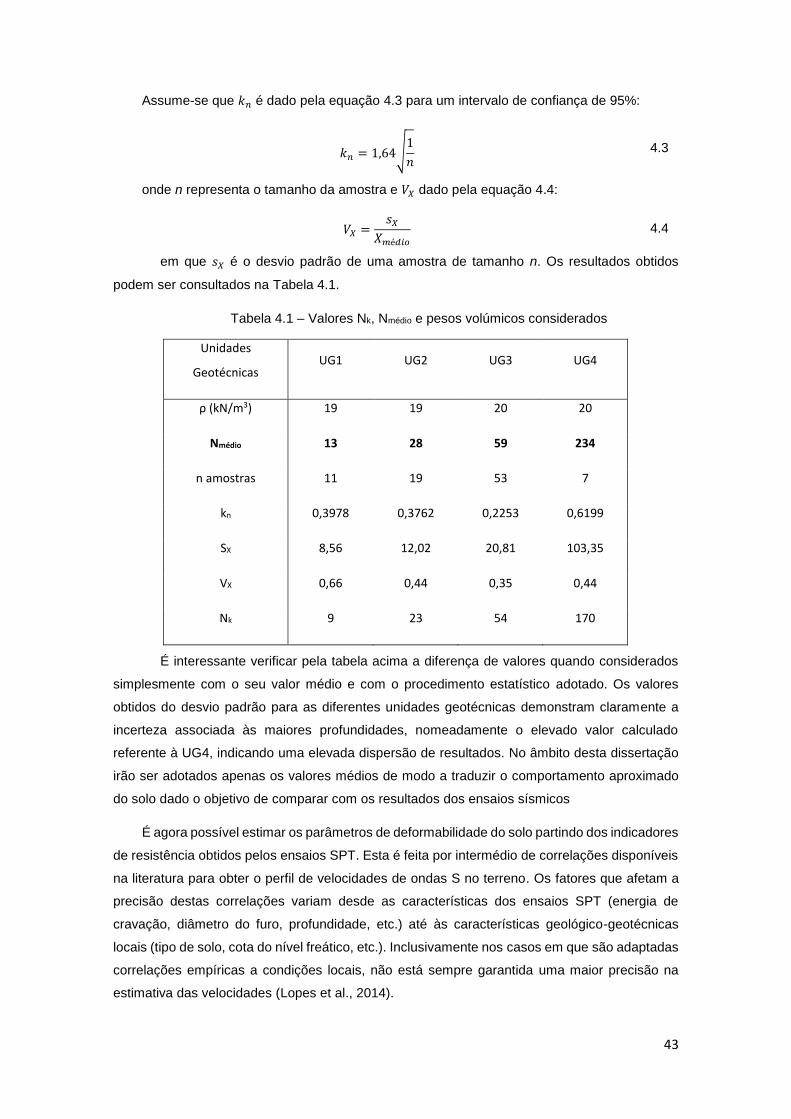
43
Assume-se que 𝑘𝑛 é dado pela equação 4.3 para um intervalo de confiança de 95%:
𝑘𝑛 = 1,64√1
𝑛 4.3
onde n representa o tamanho da amostra e 𝑉𝑋 dado pela equação 4.4:
𝑉𝑋 =𝑠𝑋
𝑋𝑚é𝑑𝑖𝑜 4.4
em que 𝑠𝑋 é o desvio padrão de uma amostra de tamanho n. Os resultados obtidos
podem ser consultados na Tabela 4.1.
Tabela 4.1 – Valores Nk, Nmédio e pesos volúmicos considerados
Unidades
Geotécnicas UG1 UG2 UG3 UG4
ρ (kN/m3) 19 19 20 20
Nmédio 13 28 59 234
n amostras 11 19 53 7
kn 0,3978 0,3762 0,2253 0,6199
SX 8,56 12,02 20,81 103,35
VX 0,66 0,44 0,35 0,44
Nk 9 23 54 170
É interessante verificar pela tabela acima a diferença de valores quando considerados
simplesmente com o seu valor médio e com o procedimento estatístico adotado. Os valores
obtidos do desvio padrão para as diferentes unidades geotécnicas demonstram claramente a
incerteza associada às maiores profundidades, nomeadamente o elevado valor calculado
referente à UG4, indicando uma elevada dispersão de resultados. No âmbito desta dissertação
irão ser adotados apenas os valores médios de modo a traduzir o comportamento aproximado
do solo dado o objetivo de comparar com os resultados dos ensaios sísmicos
É agora possível estimar os parâmetros de deformabilidade do solo partindo dos indicadores
de resistência obtidos pelos ensaios SPT. Esta é feita por intermédio de correlações disponíveis
na literatura para obter o perfil de velocidades de ondas S no terreno. Os fatores que afetam a
precisão destas correlações variam desde as características dos ensaios SPT (energia de
cravação, diâmetro do furo, profundidade, etc.) até às características geológico-geotécnicas
locais (tipo de solo, cota do nível freático, etc.). Inclusivamente nos casos em que são adaptadas
correlações empíricas a condições locais, não está sempre garantida uma maior precisão na
estimativa das velocidades (Lopes et al., 2014).

44
Tendo em conta estas condicionantes, a escolha das correlações a adotar serão
restringidas: às que sejam válidas para todos os tipos de solo; e às que sejam independentes da
energia de cravação (Dikmen, 2010). A sua expressão é dada pela equação 4.5
𝑉𝑆 = 𝛼𝑁60𝛽
4.5
Em que α e β variam consoante o autor e o tipo de solo.
Procedeu-se à escolha de correlações que se ajustassem aos valores mínimo, máximo e
médio estabelecidos. As correlações escolhidas foram as estabelecidas por Athanasopoulos
(1995), Sisman (1995) e Ohta e Goto (1978), todas elas representadas na Figura 4.4 em função
dos valores de pancadas SPT. Como se pode observar, existe uma grande variação do valor da
velocidade para um mesmo número de pancadas consoante a correlação adotada.
Figura 4.4 – Representação gráfica das correlações adotadas de Vs vs NSPT e indicação da variação dos valores das velocidades calculadas para um mesmo valor N60.
Os parâmetros de deformabilidade podem ser determinados uma vez conhecido o VS. O
módulo de distorção inicial pode ser calculado pela equação 4.6:
𝐺0 = 𝜌𝑉𝑆2 4.6
onde ρ representa a massa volúmica do material da respetiva camada. Consequentemente,
é possível também obter o módulo de deformabilidade na gama das pequenas deformações
seguindo a equação 4.7:
𝐸 = 2𝐺(1 + 𝜈) 4.7
Em que ν representa o coeficiente de Poisson, referindo ainda que para o presente
estudo, este coeficiente é fixado em 0,33 por representar o valor típico dos materiais correntes.
Na Tabela 4.2 apresenta-se um resumo dos valores obtidos tendo sido adotada a correlação
proposta por Ohta e Goto.
0
100
200
300
400
500
600
700
800
900
0 50 100 150 200 250
VS(
m/s
)
N60Athanasopoulos (1995), α=107,6 , β=0,36 Sisman (1995) α=32,8, β=0,51
Ohta e Goto (1978) α=85,34, β=0,348

45
Tabela 4.2 – Propriedades do terreno determinadas através de correlações com NSPT
Unidade Geotécnica UG1 UG2 UG3 UG4
Vs (m/s) 187 254 342 510
γ (kN/m3) 19 19 20 20
G (MPa) 66,2 123,0 233,9 519,3
ν 0,33
E (MPa) 176,1 327,2 622,3 1381,5
4.4 Ensaios Sísmicos
A complementar a campanha de prospeção geotécnica, foram efetuados registos de
vibração ambiente (passivo) com uma única estação e registos lineares ativos e passivos com
várias estações (linha de aquisição). Os detalhes de processamento, geometria de aquisição e
parâmetros de aquisição podem ser consultados em (Gouveia et al., 2016).
Os registos de vibração ambiente foram feitos com recurso a um sensor tridimensional
com vista à identificação da frequência fundamental do terreno e elaboração da curva de
elipticidade das ondas Rayleigh através dos métodos H/V e RayDec, respetivamente. O método
RayDec difere do método H/V pois permite determinar a curva de elipticidade das ondas Rayleigh
a partir de registos tridimensionais de vibração ambiente. Os ensaios MASW e ReMi foram
efetuados num registo com uma linha de aquisição de 24 geofones espaçados de 1,5 metros,
tendo sido feitas aquisições ativas e passivas, respetivamente, com vista à definição da curva de
dispersão. O método ReMi é similar ao MASW, baseado na propagação de ondas superficiais
com aquisição linear embora seja efectuado com registo passivo, ou seja baseando-se na leitura
da vibração ambiente, permitindo analisar frequências menores.
Aliando estas aquisições (curva de dispersão) aos registos de vibração ambiente (curva
de elipticidade das ondas Rayleigh e frequência fundamental) é possível efetuar um processo de
inversão conjunta visando a determinação do perfil de velocidades do terreno.
O uso conjunto dos registos segundo uma linha de aquisição e dos registos H/V permite
ultrapassar as limitações inerentes a cada método revelando-se numa mais valia em termos de
fiabilidade e grau de confiança dos resultados. O ensaio MASW, como já foi referido, apresenta
uma elevada quantidade de informação acerca das camadas superficiais perdendo
representatividade e fiabilidade nas baixas frequências (altas profundidades) enquanto que o
ensaio ReMi permite obter informação sobre as frequências mais baixas, resultando numa
melhor definição da curva dispersão dentro de uma maior gama de frequências.
Atendendo à Figura 4.5, para frequências inferiores a 20 Hz os registos com fonte a NW
e SE apresentam-se quase coincidentes, evidenciando uma estratificação relativamente
horizontal e sem variações laterais relevantes além de validar os dados nesta gama de

46
frequências que normalmente está associada a um maior grau de incerteza. A forma da curva
de dispersão assemelha-se a um meio normalmente dispersivo, isto é, com uma rigidez
crescente em profundidade. Este facto não exclui a existência de camadas de menor rigidez no
seio das camadas identificadas, porém é um forte indicador de que as suas propriedades não
são condicionantes do comportamento da estrutura do solo.
Figura 4.5 – Curvas de dispersão obtidas: a) a partir dos registos ativos (MASW) e passivos (ReMi); b) Espectro VR-f da respetiva curva de dispersão (in Gouveia et al., 2016)
Com auxílio do software Geopsy é possível calcular o espectro f-k e a partir desse retirar
o espectro velocidade de fase (VR) em função da frequência, o qual representa a energia de cada
velocidade de fase associada a cada frequência. Sabendo que o modo fundamental está
associado à relação VR-f que apresentar maior energia, e não se evidenciando concentrações
de energia em velocidades inferiores à apresentada, pode-se afirmar que esta curva representa
o modo fundamental. Sendo esta curva representativa do modo fundamental, e como já foi
referido esta tende, nas altas frequências, para a velocidade das camadas superficiais, verifica-
se que a estimativa inicial da velocidade para essa mesma camada é de 180 m/s.
Os registos de vibração ambiente (Figura 4.6) contêm também informação útil acerca da
estrutura do solo (na Figura 4.6 representa-se um dos registos efetuados a título de exemplo).
Nomeadamente, a frequência fundamental apresenta uma baixa variabilidade reforçando a
a)
b)
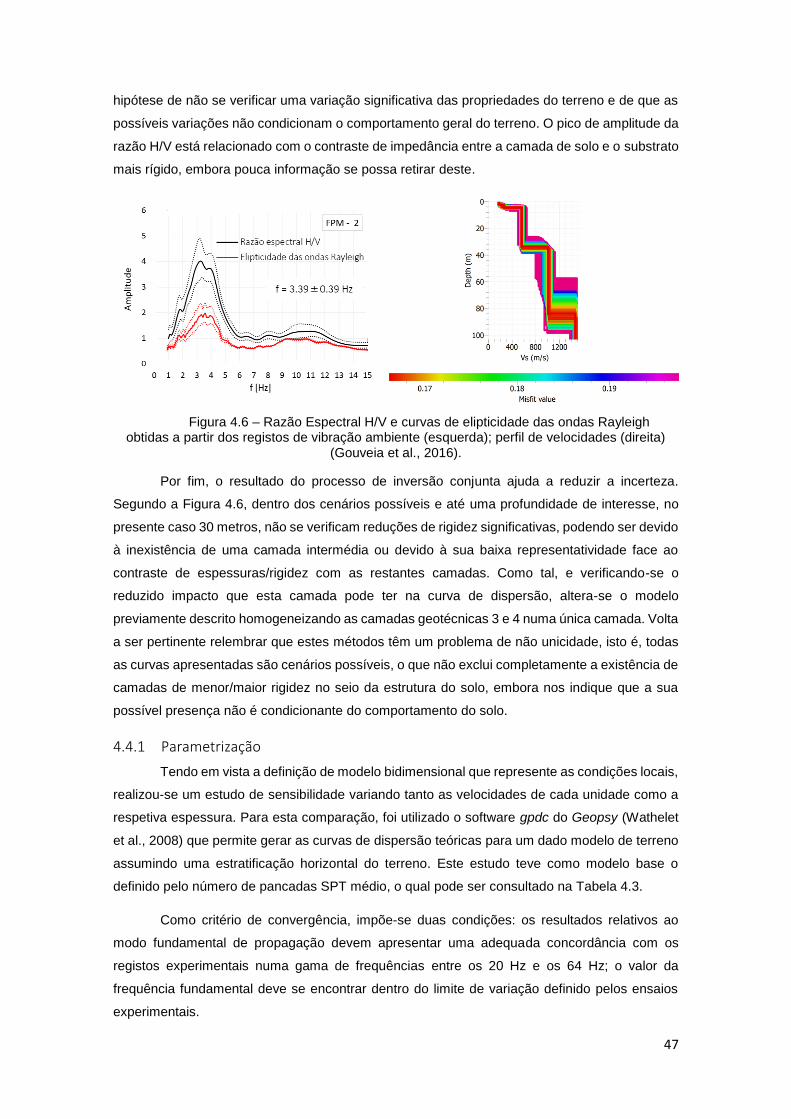
47
hipótese de não se verificar uma variação significativa das propriedades do terreno e de que as
possíveis variações não condicionam o comportamento geral do terreno. O pico de amplitude da
razão H/V está relacionado com o contraste de impedância entre a camada de solo e o substrato
mais rígido, embora pouca informação se possa retirar deste.
Figura 4.6 – Razão Espectral H/V e curvas de elipticidade das ondas Rayleigh obtidas a partir dos registos de vibração ambiente (esquerda); perfil de velocidades (direita)
(Gouveia et al., 2016).
Por fim, o resultado do processo de inversão conjunta ajuda a reduzir a incerteza.
Segundo a Figura 4.6, dentro dos cenários possíveis e até uma profundidade de interesse, no
presente caso 30 metros, não se verificam reduções de rigidez significativas, podendo ser devido
à inexistência de uma camada intermédia ou devido à sua baixa representatividade face ao
contraste de espessuras/rigidez com as restantes camadas. Como tal, e verificando-se o
reduzido impacto que esta camada pode ter na curva de dispersão, altera-se o modelo
previamente descrito homogeneizando as camadas geotécnicas 3 e 4 numa única camada. Volta
a ser pertinente relembrar que estes métodos têm um problema de não unicidade, isto é, todas
as curvas apresentadas são cenários possíveis, o que não exclui completamente a existência de
camadas de menor/maior rigidez no seio da estrutura do solo, embora nos indique que a sua
possível presença não é condicionante do comportamento do solo.
4.4.1 Parametrização
Tendo em vista a definição de modelo bidimensional que represente as condições locais,
realizou-se um estudo de sensibilidade variando tanto as velocidades de cada unidade como a
respetiva espessura. Para esta comparação, foi utilizado o software gpdc do Geopsy (Wathelet
et al., 2008) que permite gerar as curvas de dispersão teóricas para um dado modelo de terreno
assumindo uma estratificação horizontal do terreno. Este estudo teve como modelo base o
definido pelo número de pancadas SPT médio, o qual pode ser consultado na Tabela 4.3.
Como critério de convergência, impõe-se duas condições: os resultados relativos ao
modo fundamental de propagação devem apresentar uma adequada concordância com os
registos experimentais numa gama de frequências entre os 20 Hz e os 64 Hz; o valor da
frequência fundamental deve se encontrar dentro do limite de variação definido pelos ensaios
experimentais.
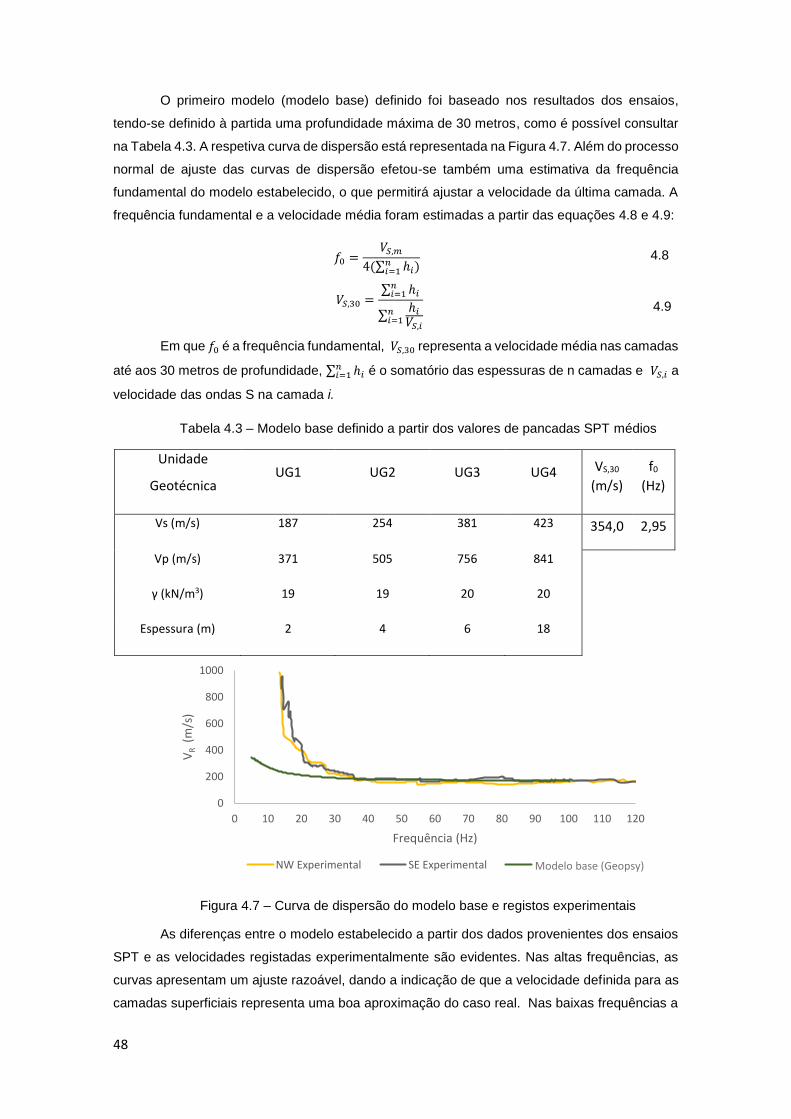
48
O primeiro modelo (modelo base) definido foi baseado nos resultados dos ensaios,
tendo-se definido à partida uma profundidade máxima de 30 metros, como é possível consultar
na Tabela 4.3. A respetiva curva de dispersão está representada na Figura 4.7. Além do processo
normal de ajuste das curvas de dispersão efetou-se também uma estimativa da frequência
fundamental do modelo estabelecido, o que permitirá ajustar a velocidade da última camada. A
frequência fundamental e a velocidade média foram estimadas a partir das equações 4.8 e 4.9:
𝑓0 =𝑉𝑆,𝑚
4(∑ ℎ𝑖)𝑛𝑖=1
4.8
𝑉𝑆,30 =∑ ℎ𝑖𝑛𝑖=1
∑ℎ𝑖𝑉𝑆,𝑖
𝑛𝑖=1
4.9
Em que 𝑓0 é a frequência fundamental, 𝑉𝑆,30 representa a velocidade média nas camadas
até aos 30 metros de profundidade, ∑ ℎ𝑖𝑛𝑖=1 é o somatório das espessuras de n camadas e 𝑉𝑆,𝑖 a
velocidade das ondas S na camada i.
Tabela 4.3 – Modelo base definido a partir dos valores de pancadas SPT médios
Unidade
Geotécnica UG1 UG2 UG3 UG4 VS,30
(m/s)
f0
(Hz)
Vs (m/s) 187 254 381 423 354,0 2,95
Vp (m/s) 371 505 756 841
γ (kN/m3) 19 19 20 20
Espessura (m) 2 4 6 18
Figura 4.7 – Curva de dispersão do modelo base e registos experimentais
As diferenças entre o modelo estabelecido a partir dos dados provenientes dos ensaios
SPT e as velocidades registadas experimentalmente são evidentes. Nas altas frequências, as
curvas apresentam um ajuste razoável, dando a indicação de que a velocidade definida para as
camadas superficiais representa uma boa aproximação do caso real. Nas baixas frequências a
0
200
400
600
800
1000
0 10 20 30 40 50 60 70 80 90 100 110 120
VR
(m
/s)
Frequência (Hz)
NW Experimental SE Experimental Teórica 1Modelo base (Geopsy)

49
divergência entre resultados é tal que se pode tecer alguns comentários pertinentes: a velocidade
definida para as camadas a maior profundidade é demasiado reduzida, sendo necessário um
aumento considerável destas; o declive inicial da curva experimental é afetado essencialmente
pelo contraste de rigidez entre as camadas atravessada (Lopes, 2005), quanto menor o contraste
menos acentuado será este declive, e vice-versa.
Procedendo a uma iteração, Tabela 4.4 e Figura 4.8, uma redução da espessura das
camadas superficiais permite verificar que é este parâmetro que regula o instante em que a curva
de dispersão inicia a subida para valores mais elevados da velocidade. Contudo, revela-se
necessário um maior contraste de rigidez a maiores profundidades pois esta ainda não apresenta
um aumento do declive tão marcado como os registos experimentais.
Tabela 4.4 – Primeira iteração assumida na definição do modelo (V1).
Hipótese 1
Unidade
Geotécnica UG1 UG2 UG3 UG4 VS,30
(m/s)
f0
(Hz)
Vs (m/s) 187 254 423 600 510,8 4,18
Vp (m/s) 371 505 840 1191
γ (kN/m3) 19 19 20 20
Espessura (m) 1 1 4 24
Figura 4.8 – Curvas de dispersão experimental, do modelo base e da primeira iteração.
0
100
200
300
400
500
600
700
800
900
1000
0 10 20 30 40 50 60 70 80 90 100 110 120
VR
(m/s
)
Frequência (Hz)
Modelo V1 NW Experimental SE Experimental Modelo Base

50
Tabela 4.5 – Modelo definido pela segunda iteração (V2).
Hipótese 1
Unidade
Geotécnica UG1 UG2 UG3 UG4 VS,30
(m/s)
f0
(Hz)
Vs (m/s) 170 254 423 1000 583,0 5,0
Vp (m/s) 337 505 840 1985
γ (kN/m3) 19 19 20 20
Espessura (m) 1 1 10 18
Figura 4.9 – Cuva de dispersão associada ao segundo modelo definido.
Uma nova iteração do modelo, levou ao estabelecimento das propriedades definidas na
Tabela 4.5. O objetivo, como descrito acima, seria o de apresentar um contraste de rigidez tal
que originasse velocidades na ordem dos 400-500 m/s aos 20 Hz. Apesar deste modelo cumprir
esse requisito, a velocidade atribuída à última camada (1000 m/s) é característica de um material
tipo rocha, algo que não foi identificado no terreno. Como tal, ainda que se tenha adotado um
valor exagerado, a influência sobre a curva de dispersão foi a pretendida. O próximo passo
passará por prolongar as camadas de menor velocidade, por forma a “achatar” a curva ao longo
de uma maior gama de frequências e elevar a camada mais rígida.
Tabela 4.6 – Terceira hipótese assumida da estrutura de solo (V3).
Hipótese 3
Unidade Geotécnica UG1 UG2 UG3 UG4 VS,30
(m/s) f0 (Hz)
Vs (m/s) 170 200 423 1000 519,07 4,32
Espessura (m) 1 3 8 18
Total (m) 30
Vp (m/s) 337 397 840 1985
v 0,33
0
200
400
600
800
1000
0 10 20 30 40 50 60 70 80 90 100 110 120
VR
(m/s
)
Frequência (Hz)
Modelo V2 NW Experimental SE Experimental

51
Figura 4.10 – Curva de dispersão associada à terceira hipótese.
O novo modelo estabelecido, apresentado na Figura 4.10 e Tabela 4.6, apresenta um
melhor ajustamento. O aumento da espessura das camadas superficiais surtiu o efeito
pretendido, mantendo a velocidade da camada mais superficial até frequências mais baixas,
enquanto que a diminuição da espessura da terceira camada permitiu um aumento gradual da
velocidade anulando o patamar de velocidade mais ou menos constante verificado no modelo
anterior.
Tabela 4.7 – Quarta hipótese assumida da estrutura do solo (V4).
Hipótese 4
Unidade Geotécnica UG1 UG2 UG3 UG4 VS,30
(m/s) f0 (Hz)
Vs (m/s) 170 300 600 900 542,71 4,52
Espessura (m) 2 4 5 19
Total (m) 30
Vp (m/s) 318 596 1191 1787
Figura 4.11 – Curva de dispersão associada à quarta hipótese.
Nesta fase é cumprido o primeiro dos requisitos, verificando-se pela Figura 4.11 e Tabela
4.7 um andamento quase idêntico entre o registo com impacto a NW e a curva de dispersão
0
200
400
600
800
1000
0 10 20 30 40 50 60 70 80 90 100 110 120
VR
(m/s
)
Frequência (Hz)
NW Experimental SE Experimental Modelo V3
0
100
200
300
400
500
600
700
800
900
1000
0 5 10 15 20 25 30 35 40 45 50 55 60 65 70 75 80 85 90 95 100 105 110 115 120
VR
(m/s
)
Frequência (Hz)
NW Experimental SE Experimental Modelo V4

52
teórica. A variabilidade do registo experimental está associada à presença de ruído aquando da
execução da campanha de prospeção. Em contrapartida, o valor da frequência fundamental
continua com um desvio considerável o que, atendendo ao perfil de velocidades em profundidade
na Figura 4.6 é compreensível, pois um valor da velocidade da magnitude da definida acima
apenas é detetada quase aos 40 metros de profundidade, segundo o perfil de velocidades
exposto anteriormente.
4.4.2 Modelo Final
Cumpridos ambos os critérios de convergência definido obteve-se o modelo final, como
apresentada na Tabela 4.8.
Tabela 4.8 – Modelo final
Solução Final
Unidade Geotécnica UG1 UG2 UG3 UG4 VS,30
(m/s) f0
(Hz)
Vs (m/s) 170 300 600 600 455,7 3,80
Espessura (m) 2 4 5 19
Total (m) 30
Vp (m/s) 318 596 1191 1191
VsSPT (m/s) 187 254 342 510
Figura 4.12 – Curva de dispersão do modelo final
Observando a Figura 4.12 e relembrado o que foi referido acima, o ajuste nas baixas
frequências seria sempre uma limitação do modelo numérico devido à incerteza associada aos
próprios registos como da limitação da profundidade analisada neste estudo. Além disso, com
este modelo foi possível obter uma estimativa da frequência fundamental que se enquadrasse
dentro do intervalo definido para a mesma para uma profundidade de 30 metros. Este resultado
vai de encontro ao obtido por (Abreu, 2015), no qual foram estudados e modelados os registos
passivos no mesmo terreno, tendo também concluído que a presença do substrato competente
estaria na ordem dos 30 metros.
0
100
200
300
400
500
600
700
800
900
1000
0 5 10 15 20 25 30 35 40 45 50 55 60 65 70 75 80 85 90 95 100 105 110 115 120
VR
(m/s
)
Frequência (Hz)
NW Experimental SE Experimental Modelo Final
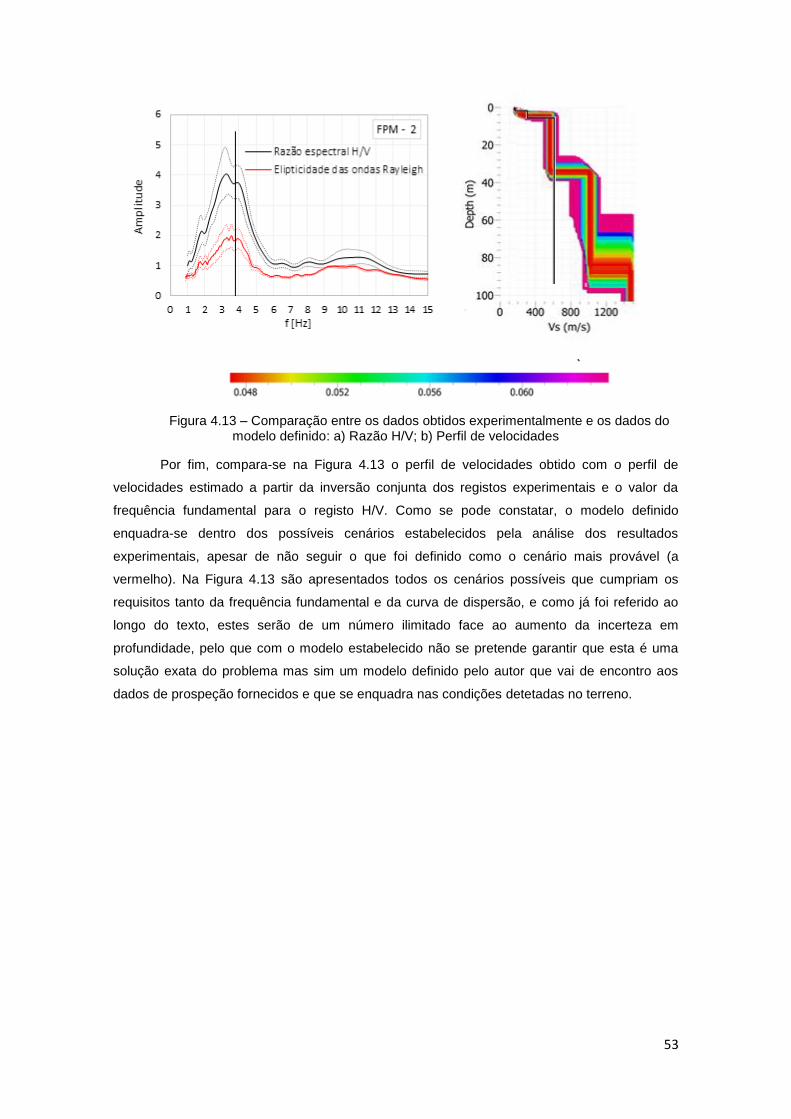
53
Figura 4.13 – Comparação entre os dados obtidos experimentalmente e os dados do modelo definido: a) Razão H/V; b) Perfil de velocidades
Por fim, compara-se na Figura 4.13 o perfil de velocidades obtido com o perfil de
velocidades estimado a partir da inversão conjunta dos registos experimentais e o valor da
frequência fundamental para o registo H/V. Como se pode constatar, o modelo definido
enquadra-se dentro dos possíveis cenários estabelecidos pela análise dos resultados
experimentais, apesar de não seguir o que foi definido como o cenário mais provável (a
vermelho). Na Figura 4.13 são apresentados todos os cenários possíveis que cumpriam os
requisitos tanto da frequência fundamental e da curva de dispersão, e como já foi referido ao
longo do texto, estes serão de um número ilimitado face ao aumento da incerteza em
profundidade, pelo que com o modelo estabelecido não se pretende garantir que esta é uma
solução exata do problema mas sim um modelo definido pelo autor que vai de encontro aos
dados de prospeção fornecidos e que se enquadra nas condições detetadas no terreno.

54

55
5 Modelação Numérica
5.1 Generalidades
No presente estudo foi adotado para simulação numérica do problema de propagação
de ondas o software FLAC2D v7.0 (Fast Langragian Analysis of Continua), um programa
baseado no método das diferenças finitas o qual tem uma vasta gama de aplicações, desde uma
análise elástica linear, adotada neste capítulo, até à modelação do comportamento não linear do
solo, tendo a possibilidade de escolher um dos variados critérios de rotura já definidos ou mesmo
utilizando um critério definido pelo utilizador.
A escolha do programa para o problema em questão foi baseada na possibilidade de
simular o semi-espaço através de fronteiras absorventes, podendo assim analisar casos em que
é necessário contabilizar a dissipação de energia de ondas. Neste caso específico, é possível
criar uma fonte emissora de ondas S e P através da aplicação de uma força horizontal/vertical,
respetivamente, e analisar a resposta do solo.
Neste capítulo, inicialmente procede-se à validação do programa para o caso de
propagação de ondas unidimensional. Posteriormente é modelado o caso de estudo e são
comparados os resultados numéricos com os experimentais a fim de validar o modelo geológico-
geotécnico definido. É ainda efetuada uma análise com o intuito de verificar o grau de
perturbação de resultados aquando da existência de superfícies refletoras, como as estruturas
subterrâneas, no interior da estrutura do solo.
5.2 Validação do modelo numérico
O primeiro passo a tomar neste capítulo corresponde a uma comparação de resultados
entre os obtidos numericamente e os previstos analiticamente. Este passo visa garantir a correta
utilização do programa de cálculo numérico. e ganhar sensibilidade sobre a simulação de
propagação de ondas.
A análise neste subcapítulo será feita segundo o modelo mais simplificado e bem
estudado, considerando o caso de propagação de ondas unidimensional numa coluna de solo
homogénea sobre um substrato rígido. Para o efeito, serão consideradas as propagações de
ondas volúmicas tanto com fonte à superfície como na base com uma fonte de excitação prescrita
e estabelecendo a função de transferência dos espectros de acelerações entre o nível da fonte
(superficial/base) e o seu contraposto. Para melhor representar o comportamento dos materiais
reais, serão analisados cenários em que se varia coeficiente de amortecimento e se compara a
previsão do modelo numérico com o analítico.
O modelo proposto consiste numa coluna de solo com 10 metros de altura, a qual está
assente sobre um substrato rígido. O terreno tem as suas propriedades definidas arbitrariamente,
tendo sido adotados os seguintes valores:

56
Peso volúmico: ρ = 2000 kg/m3;
Coeficiente de Poisson: ν = 0,25;
Velocidade das ondas de corte: VS = 200 m/s;
Módulo de Elasticidade: E (= 2𝐺(1 + 𝜈)); Módulo de Distorção: G (= 𝜌 ∙ 𝑉𝑆
2);
5.2.1 Função de Transferência Analítica
Se se considerar uma análise viscoelástica linear, dado que as propriedades dinâmicas
do solo não se alteram com o nível de tensão imposto, é possível estabelecer uma função de
transferência que relaciona o movimento entre dois pontos do depósito de solo. Esta função
permite, entre outros, verificar a existência de fenómenos de amplificação ou atenuação de um
depósito a ações aplicadas tanto na base como na superfície do mesmo. Para tal, são
relacionados os espectros de amplitudes das acelerações de input e de resposta recorrendo à
transformada de Fourier (FFT).
A transformada de Fourier permite assim analisar uma série temporal de acelerações no
domínio da frequência, decompondo-a na soma de funções sinusoidais de diferentes amplitudes,
ângulos de fase e frequência. Para determinar a resposta do solo (�̈�𝑟𝑒𝑠𝑝𝑜𝑠𝑡𝑎(𝜔)) a partir desta, é
definida uma função de transferência (𝐹(𝜔)) a qual depende das propriedades dinâmicas do
solo, da altura da camada e da frequência e multiplicá-la a cada uma das componentes da
frequência da ação(�̈�𝑖𝑛𝑝𝑢𝑡(𝜔)). No caso exemplificado na Figura 5.1 em que a ação é aplicada
na base, �̈�𝑟𝑒𝑠𝑝𝑜𝑠𝑡𝑎(𝜔) corresponde a �̈�𝑠𝑢𝑝𝑒𝑟𝑓í𝑐𝑖𝑒(𝜔) e �̈�𝑖𝑛𝑝𝑢𝑡(𝜔) a �̈�𝑏𝑎𝑠𝑒(𝜔).
Figura 5.1 – Processo de determinação da resposta à superfície utilizando funções de transferência e descrição do movimento (adaptado de Kramer, 1996).
Considere-se uma camada de solo homogénea viscoelástica linear isotrópica sobre um
substrato rígido em que um movimento horizontal é aplicado na base da camada de solo
produzindo ondas de corte propagadas verticalmente. Atendendo à Figura 5.1, o movimento
horizontal pode ser descrito segundo a equação 5.1:
𝑢(𝑧, 𝑡) = 𝐴𝑒𝑖(𝜔𝑡+𝑘𝑧) + 𝐵𝑒𝑖(𝜔𝑡−𝑘𝑧) 5.1
em que A e B representam a amplitude da onda ascendente e descendente respetivamente, ω
a frequência angular, k o número de onda e z a profundidade da camada. Se forem impostas as
condições de fronteira respetivas, isto é, a condição de tensão de corte nula na superfície livre
(equação 5.2), o deslocamento horizontal pode ser descrito segundo a equação z.

57
𝜏(0, 𝑡) = 𝐺 ∙ 𝛾(0, 𝑡) = 𝐺 ∙𝜕𝑢(0, 𝑡)
𝜕𝑧= 0 5.2
𝐺𝑖𝑘(𝐴𝑒𝑖𝑘(0) − 𝐵𝑒−𝑖𝑘(0))𝑒𝑖𝜔𝑡 = 𝐺𝑖𝑘(𝐴 − 𝐵)𝑒𝑖𝜔𝑡 = 0→ 𝐴 = 𝐵 5.3
𝑢(𝑧, 𝑡) = 2𝐴𝑒𝑖𝑘𝑧 + 𝑒−𝑖𝑘𝑧
2𝑒𝑖𝜔𝑡 = 2𝐴𝑐𝑜𝑠(𝑘𝑧)𝑒𝑖𝜔𝑡 5.4
Relacionando o movimento na base com o movimento à superfície, obtém-se a função
de transferência correspondente na equação 5.5 para o caso de não existir amortecimento.
𝐹(𝜔) =max [𝑢(𝑧 = 0, 𝑡)]
max [𝑢(𝑧 = 𝐻, 𝑡)]=
2𝐴𝑒𝑖𝜔𝑡
2𝐴𝑐𝑜𝑠(𝑘𝑧)𝑒𝑖𝜔𝑡=
1
cos (𝑘𝐻)=
1
𝑐𝑜𝑠 (𝜔𝐻𝑉𝑆) 5.5
As frequências naturais do sistema são obtidas quando esta função atinge um máximo,
(Figura 5.2). A frequência fundamental corresponde ao primeiro máximo detetado, o qual
corresponde ao maior fator de amplificação. Baseando-se na equação 5.5, o máximo da função
regista-se quando a componente 𝑐𝑜𝑠 (𝜔𝐻
𝑉𝑆) tende para zero, logo:
𝐹(𝜔) → 𝑚á𝑥 𝑞𝑢𝑎𝑛𝑑𝑜 𝑐𝑜𝑠 (𝜔𝐻
𝑉𝑆) = 0 ⇒ 𝑘𝐻 =
𝜋
2+ 𝑛𝜋 5.6
Figura 5.2 – Função de transferência para uma camada de solo elástica linear não amortecida assente em substrato rígido e respetivas frequências naturais para uma ação
aplicada na base (adaptado de Kramer, 1996).
Para considerar a dissipação de energia, a qual se revela como amortecimento do
movimento, 𝜉, é necessário interpretar o solo não como um material elástico linear mas com as
características de um sólido Kelvin-Voigt (Kramer, 1996). Comparando a equação 5.7 com a
equação 5.1, o número de onda, k, passa a ser considerado como um número de onda complexo,
k*, implicando a mesma lógica para a velocidade da onda de corte, VS*. Este efeito repercute-se
até ao módulo de distorção, G*, e como este é independente da frequência (𝐺∗ = 𝐺(1 + 𝑖2𝜉)) é
possível escrever a velocidade da onda de corte complexa (equação 5.8) e o número de onda
complexo (equação 5.9) igualmente independentes da frequência.
𝐹(𝜔) =1
cos (𝑘∗𝐻)=
1
𝑐𝑜𝑠 (𝜔𝐻𝑉𝑆∗ )
5.7
𝑉𝑆∗ = √
𝐺∗
𝜌= √
𝐺(1 + 𝑖2𝜉)
𝜌
≈𝜉 𝑝𝑒𝑞𝑢𝑒𝑛𝑜 √
𝐺
𝜌(1 + 𝑖𝜉) = 𝑉𝑆(1 + 𝑖𝜉) 5.8

58
𝑘∗ =𝜔
𝑉𝑆∗ ≈
𝜔
𝑉𝑆(1 − 𝑖𝜉) = 𝑘(1 − 𝑖𝜉) 5.9
De onde vem finalmente na equação 5.10 a função de transferência para uma ação
aplicada na base contabilizando o amortecimento:
𝐹(𝜔) =1
cos [𝜔𝐻(1 − 𝑖𝜉) 𝑉𝑆⁄ |cos (𝑥+𝑖𝑦)|=√𝑐𝑜𝑠2𝑥+𝑠𝑖𝑛ℎ2𝑦
→ 𝐹(𝜔) =1
√𝑐𝑜𝑠2(𝑘𝐻) + 𝑠𝑖𝑛ℎ2𝜉𝑘𝐻 5.10
Até este ponto, as fórmulas apresentadas representam a função de transferência para o
caso de uma ação aplicada na base, a qual é mais indicada para prever os efeitos de uma ação
sísmica num vale aluvionar. Ora, no caso dos ensaios referidos no Capítulo 0, a ação é
geralmente aplicada à superfície, pelo que se torna pertinente estabelecer a mesma função de
transferência mas adaptada a este caso, uma vez que serão esses os dados obtidos no local.
Atente-se novamente à Figura 5.1, considerando agora que o eixo z no sentido ascendente é
positivo, tendo como o topo do substrato rígido o seu valor nulo e que h representa o eixo z
original como representado.
Impõe-se inicialmente a condição de fronteira do substrato rígido, a qual implica que o
deslocamento em qualquer ponto do substrato é nulo (equação 5.11). Para um ponto qualquer
da camada (z=H-h) a função de transferência é definida pela equação 5.12
𝑢(𝑧 = 0, 𝑡) = 𝐴𝑒𝑖(𝜔𝑡+𝑘0) + 𝐵𝑒𝑖(𝜔𝑡−𝑘0) = 0⇔ 𝐴 + 𝐵 = 0 ⇒ 𝐴 = −𝐵 5.11
𝐹(𝜔) =sin (𝑘∗(𝐻 − ℎ))
sin (𝑘∗𝐻) 5.12
Em que o termo H-h assume valor nulo no topo do substrato rígido. Como tal, as leituras
realizadas serão feitas num ponto acima do substrato rígido. O andamento da função de
transferência (Figura 5.3), entre a superfície e 0,5 m acima do substrato, é ligeiramente diferente
quando comparado com a ação aplicada na base, sendo que o valor da frequência fundamental
é o dobro do inicial, fruto do acréscimo de rigidez do sistema.
Figura 5.3 - Função de transferência para uma camada de solo elástica assente em substrato rígido e respetivas frequências naturais para uma ação aplicada à superfície.
0
1
2
3
4
5
0 10 20 30 40 50 60
|F(ω
)|
Frequência (Hz)F(w) sem amort F(w) 2% amort F(w) 5% amort

59
5.2.2 Função de Transferência Numérica
O modelo de validação corresponde a uma coluna de solo com 10 metros de altura e de
largura unitária simulando a propagação de ondas sísmicas numa camada elástica assente num
substrato rígido. Este modelo pretende representar a propagação de ondas unidimensional
simulando uma camada de solo de largura infinita.
Por forma a materializar esta camada de solo, são aplicadas nas suas fronteiras as
condições de free-field boundaries, as quais simulam um espaço infinito com as mesmas
propriedades da camada de solo em que foi aplicada, de modo a que não se originarem
fenómenos de refração e reflexão das ondas incidentes nas fronteiras. Outra condição
necessária para garantir uma correta análise de problemas envolvendo propagação de ondas é
a definição da dimensão dos elementos da malha. Segundo o manual do software FLAC, o
critério utilizado é o proposto por Kuhlemeyer & J. (1973) no qual se refere que a dimensão dos
elementos não deve exceder entre um décimo a um oitavo do comprimento de onda, λ, associado
à maior frequência, f. Considerando uma frequência máxima de 40 Hz, determina-se a partir da
equação 5.15 que a dimensão dos elementos não poderá exceder os 0,5 metros.
𝑓𝑚á𝑥 = 40 𝐻𝑧 ⇒ 𝑇𝑚𝑖𝑛 =1
𝑓𝑚á𝑥= 0,025 𝑠 5.13
𝜆 = 𝑉𝑆 ∙ 𝑇𝑚𝑖𝑛 = 200 ∙ 0.025 = 5 𝑚 5.14
∆𝑙 ≤ 𝜆 10⁄ =5
10= 0,5 𝑚 5.15
A ação que será introduzida como input no software deverá ser simples o suficiente para
proceder a uma análise rápida e pouco complexa, requerendo pouco esforço computacional.
Deve ser tido em conta que os dados retirados serão tratados aplicando uma transformada de
Fourier, implicando que o número de dados extraídos seja igual a 2n. O incremento temporal da
ação deve ser pequeno o suficiente para discretizar a resposta do solo e extrair o máximo de
informação possível ao mesmo tempo que não entre em conflito com o incremento de tempo
mínimo do software para as diferentes análises a efetuar. Outra forma de contornar o problema
seria o de zero padding, como foi referido no Capítulo 0 embora não tenha sido adotada.
Um pormenor que é importante para a correta leitura da ação é que o incremento a que
a ação é definida deve ser igual ao incremento de análise uma vez que o incremento escolhido
na análise caso seja diferente não garantirá uma leitura de todos os dados introduzidos. Ou seja,
uma ação definida com um incremento de 0,001 segundos deve ser analisada com incrementos
que garantam a leitura dos dados de input em cada incremento da ação definido, qualquer valor
intermédio que seja lido pelo programa será resultado de uma interpolação linear entre os dois
valores consecutivos. Uma vez que não são impostas limitações quanto à definição da ação,
adaptou-se uma ação com uma aceleração unitária de 1 m/s2 com um incremento de 0,001
segundos e um tempo total de ação de 4,096 segundos (Figura 5.4).

60
Figura 5.4 – Aceleração de input.
Definidas as condições de fronteira, a ação a aplicar, o tempo de análise e o incremento
de tempo empregue, resta apenas definir de que modo a ação será aplicada no modelo.
Pretende-se simular dois tipos de ondas: ondas S e ondas P, em que cada uma delas será
aplicada tanto no topo do substrato rígido como no topo da camada de depósitos. Como foi
discutido no Capítulo 2, dependendo da onda considerada o movimento das partículas difere. As
ondas S aplicam um movimento nas partículas do solo perpendicular à direção de propagação
da onda enquanto que as ondas P impõem um movimento na mesma direção da sua
propagação.
Como tal, quando se considerar a ação imposta pelas ondas S, o movimento da coluna
de solo será restringido na direção vertical e quando forem consideradas as ondas P, o
movimento será restringido na direção horizontal. A única alteração que é necessária ser feita, e
que coincide para ambos os tipos de onda, é na hipótese de ser aplicada uma ação no topo da
camada de depósitos, sendo necessário restringir o movimento do topo do substrato rígido em
ambas as direções, que relembre-se foi uma das condições impostas quando foi descrita a
função de transferência para ações aplicadas no topo da camada elástica.
Na Figura 5.5a é apresentada a coluna de solo introduzida no software FLAC, na qual
os pontos numerados de 1 a 6 correspondem aos pontos onde serão lidas as acelerações após
a análise concluída. Quando a ação for aplicada no topo do substrato rígido, a função de
transferência irá considerar as acelerações obtidas entre os pontos 3 ou 4 e os pontos 1 ou 2 e
os pontos à mesma cota apresentarão a mesma leitura de acelerações. Enquanto que se a ação
for aplicada no topo da camada elástica a função de transferência considerará as acelerações
entre os pontos 5 ou 6 e os pontos 3 ou 4. Nas Figura 5.5b e 5c apresentam-se os modelos para
a aplicação de ondas S e P, respetivamente, e as suas condições de fronteira impostas.
Adotou-se o amortecimento Rayleigh, que varia em função da frequência, e ajustaram-
se os parâmetros de modo a que o coeficiente de amortecimento especificado ocorresse na
frequência fundamental.
0
0,2
0,4
0,6
0,8
1
0 1 2 3 4
Ace
lera
ção
[m
/s2]
Tempo [s]Acção Input

61
a) b) c)
Figura 5.5 – Representação esquemática do modelo definido para a validação: a) Pontos de leitura de acelerações; b) Condições de fronteira para ondas S aplicadas no topo
do substrato; c) Condições de fronteira para ondas P aplicadas no topo do substrato.
A gama de amortecimento de interesse situa-se entre os 2% e os 5%, podendo ser então
ajustados os parâmetros do amortecimento Rayleigh, visível na Figura 5.6a e Figura 5.6b. Pode
assim ser expectável que o primeiro modo seja bem representado em termos de amplitudes
comparando com a solução teórica embora seja esperado algum desvio para as frequências
superiores, devido a estas serem sujeitas a um coeficiente de amortecimento crescente, e como
tal apresentando menores amplitudes do que as suas contrapartes teóricas.
5.2.2.1 Acão aplicada na base
No seguimento da definição da geometria e respetivas condições de fronteiras, avalia-
se a sensibilidade das funções de transferência ao amortecimento introduzido no modelo. Optou-
se por inicialmente adotar um modelo sem amortecimento, Figura 5.7a, o qual revelou algum
desvio quando comparado com o resultado analítico. Incrementando o amortecimento
progressivamente, desde 0,1% na Figura 5.7b, até 2% na Figura 5.7c e 5% na Figura 5.7d,
percebe-se que apesar do programa não representar idealmente o caso não amortecido,
conforme este se aproxima de casos mais realistas o seu comportamento é bastante satisfatório
e com um ajuste adequado comparado com a solução analítica.
Figura 5.6 – Variação do coeficiente de amortecimento em função da frequência: a) 2%; b) 5%
0
0,01
0,02
0,03
0,04
0,05
0 5 10 15 20
ξ i
f [Hz]
a)
ξ(α=0) ξ(β=0) ξi
0
0,05
0,1
0 5 10 15 20
ξ i
f [Hz]
b)
ξ(α=0) ξ(β=0) ξi

62
Também os picos das funções de transferência se demonstram coerentes com os dados
introduzidos, revelando um máximo de amplificação do movimento nas frequências naturais do
sistema, 5 Hz e 15Hz, apesar de apresentarem uma amplitude menor. Além disso, a verificação
de que se registam iguais acelerações em qualquer ponto à mesma cota no modelo confirmam
a adequada representabilidade do modelo unidimensional.
Figura 5.7 – Função de transferência para o caso de ondas S com ação aplicada na base: a) Sem amortecimento; b) 0,1% de amortecimento; c) 2% de amortecimento; d) 5% de
amortecimento
O mesmo procedimento é efetuado para o caso de ondas P, em que uma das alterações
necessárias foi já exposta, referente às condições de fronteira. Para este caso, vem uma
velocidade de propagação das ondas P na ordem dos 346,41 m/s e uma frequência fundamental
de 8,66 Hz. Também para este caso se verifica um desvio nos casos não amortecidos e de muito
baixo amortecimento com uma melhoria crescente com o aumento do coeficiente de
amortecimento adotado, como é possível observar nas Figura 5.8a, b, c e d.
0
5
10
0 5 10 15 20 25 30 35 40
|H(w
)|
f [Hz]
a)
H(w) experimental H(w) sem amort teórico
0
5
10
0 5 10 15 20 25 30 35 40
|H(w
)|
f [Hz]
b)
H(w) teórico 0.1% amort H(w) experimental 0.1% amort
0
10
20
30
0 5 10 15 20 25 30 35 40
|H(w
)|
f [Hz]
c)
H(w) experimental 2% amortecimento H(w) 2% amort teórico
0
5
10
15
0 5 10 15 20 25 30 35 40
|H(w
)|
f [Hz]
d)
H(w) experimental 5% amort H(w) 5% amort teóriconumérico
numérico
numérico
numérico 0,1% amort analítico
Sem amort analítico
5% amort analítico
2% amort analítico

63
Figura 5.8 - Função de transferência para o caso de ondas P com ação aplicada na base: a) Sem amortecimento; b) 0,1% de amortecimento; c) 2% de amortecimento; d) 5% de
amortecimento
5.2.2.2 Acão aplicada no topo
O mesmo estudo é efetuado novamente agora para o caso em que é aplicada uma ação
no topo da camada. Como foi referido anteriormente, fruto do aumento de rigidez do sistema,
verifica-se também um aumento do valor das frequências naturais, sendo agora o dobro do
expresso para o caso da ação aplicada na base. Verifica-se então os máximos de amplificação
nas frequências de 10 Hz e 17,32 Hz para as ondas S e P, respetivamente. Novamente verifica-
se um correto amortecimento da primeira frequência natural e um sobre amortecimento dos
modos superiores.
Nos casos não amortecidos e de reduzido amortecimento existe uma diferença notável
entre os resultados obtidos, realçando alguma incapacidade do programa em corretamente
reproduzir o comportamento analítico (Figura 5.9a e b, Figura 5.10a e b). Nos casos em que o
coeficiente de amortecimento se aproxima dos casos reais, para uma baixa gama de frequências,
geralmente até à segunda frequência natural, 𝑓1, o modelo numérico apresenta uma boa
concordância com o método analítico, ajustando-se à função de transferência analítica (Figura
5.9c e d, Figura 5.10c e d). Quando as frequências consideradas se aproximam de 𝑓1 nota-se
algum desvio em termos de amplitudes, no entanto o andamento da curva mostra-se bastante
satisfatório a prever o correto comportamento da camada de solo.
0
5
10
15
20
0 5 10 15 20
|H(w
)|
f [Hz]
a)
H(w) experimental H(w) sem amort teórico
0
5
10
15
20
0 5 10 15 20
|H(w
)|
f [Hz]
b)
H(w) teórico 0.1% amort H(w) experimental
0
5
10
15
20
25
30
0 5 10 15 20
|H(w
)|
f [Hz]
c)
H(w) experimental H(w) 2% amort teórico
0
5
10
15
0 5 10 15 20
|H(w
)|
f [Hz]
d)
H(w) experimental H(w) 5% amort teórico
numérico
numérico numérico
numérico 0,1% amort analítico
Sem amort analítico
2% amort analítico
5% amort analítico

64
Figura 5.9 - Função de transferência para o caso de ondas S com ação aplicada no topo: a) Sem amortecimento; b) 0,1% de amortecimento; c) 2% de amortecimento; d) 5% de
amortecimento
5.2.2.3 Fronteira absorvente na base
As hipóteses testadas anteriormente mantinham sempre o mesmo pressuposto, que a
camada elástica assentava sobre um substrato infinitamente rígido e que garantia a completa
reflexão de ondas sem absorção. Como se sabe, este caso é um caso bastante específico pois
na sua grande maioria encontraremos presentes materiais algo compressíveis e como tal,
expectáveis de absorverem parte da energia transportada pelas ondas. Revela-se assim
pertinente testar o comportamento do modelo considerando uma fronteira absorvente (quiet
boundary). Esta fronteira é materializada no software sob a forma de dois amortecedores
independentes aplicados em cada nó nas direções normal e transversal, os quais absorvem a
energia proveniente das ondas sísmicas com ângulos de incidência superiores a 30° refletindo
as restantes.
0
5
10
15
20
0 5 10 15 20
|H(w
)|
f [Hz]
a)
H(w) experimentalH(w) sem amort teórico
0
5
10
15
0 5 10 15 20
|H(w
)|
f [Hz]
b)
H(w) experimentalH(w) teórico 0.1% amort
0
1
2
3
0 5 10 15 20
|H(w
)|
f [Hz]
c)
H(w) 2% amort teóricoH(w) experimental
0
1
2
0 5 10 15 20
|H(w
)|f [Hz]
d)
H(w) 5% amort teóricoH(w) experimental
0
5
10
15
20
0 5 10 15 20
|H(w
)|
f [Hz]
a)
H(w) sem amort teórico H(w) experimental
0
5
10
15
20
0 5 10 15 20
|H(w
)|
f [Hz]
b)
H(w) experimental H(w) teórico 0.1% amort
2% amort analítico
numérico 5% amort analítico numérico
numérico 0,1% amort analítico
numérico
Sem amort analítico
0,1% amort analítico
Sem amort analítico
Numérico Numérico
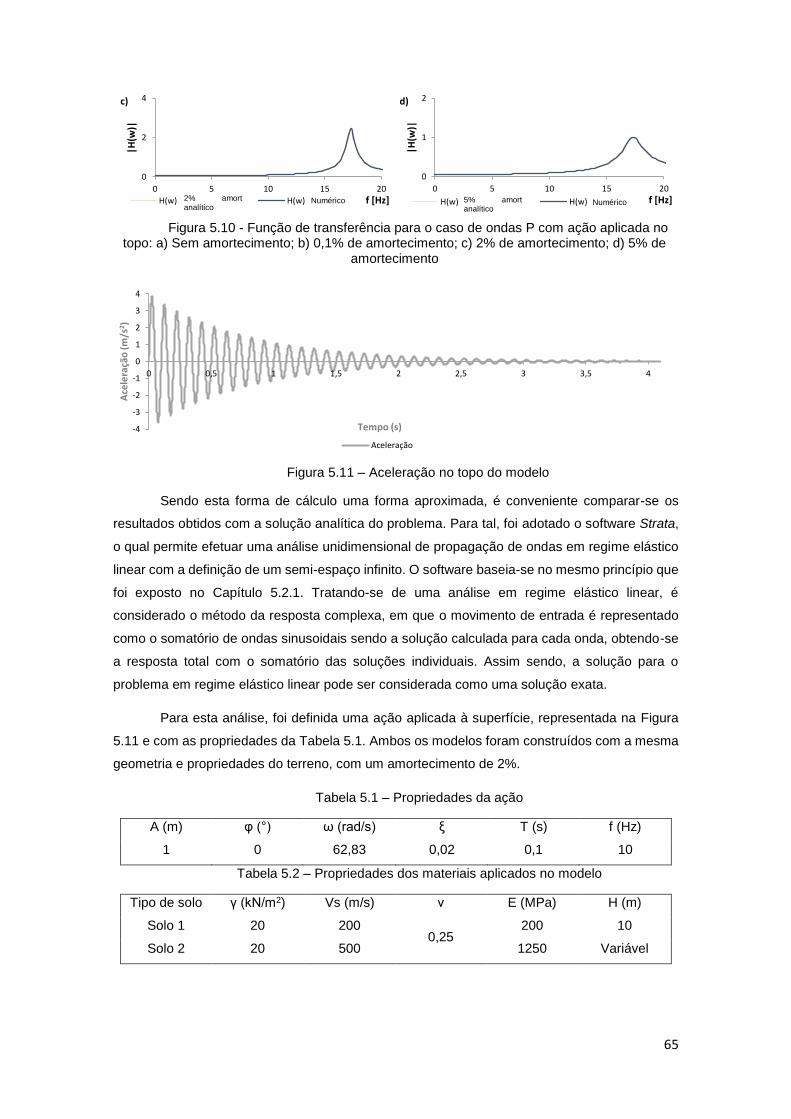
65
Figura 5.10 - Função de transferência para o caso de ondas P com ação aplicada no topo: a) Sem amortecimento; b) 0,1% de amortecimento; c) 2% de amortecimento; d) 5% de
amortecimento
Figura 5.11 – Aceleração no topo do modelo
Sendo esta forma de cálculo uma forma aproximada, é conveniente comparar-se os
resultados obtidos com a solução analítica do problema. Para tal, foi adotado o software Strata,
o qual permite efetuar uma análise unidimensional de propagação de ondas em regime elástico
linear com a definição de um semi-espaço infinito. O software baseia-se no mesmo princípio que
foi exposto no Capítulo 5.2.1. Tratando-se de uma análise em regime elástico linear, é
considerado o método da resposta complexa, em que o movimento de entrada é representado
como o somatório de ondas sinusoidais sendo a solução calculada para cada onda, obtendo-se
a resposta total com o somatório das soluções individuais. Assim sendo, a solução para o
problema em regime elástico linear pode ser considerada como uma solução exata.
Para esta análise, foi definida uma ação aplicada à superfície, representada na Figura
5.11 e com as propriedades da Tabela 5.1. Ambos os modelos foram construídos com a mesma
geometria e propriedades do terreno, com um amortecimento de 2%.
Tabela 5.1 – Propriedades da ação
A (m) φ (°) ω (rad/s) ξ T (s) f (Hz)
1 0 62,83 0,02 0,1 10
Tabela 5.2 – Propriedades dos materiais aplicados no modelo
Tipo de solo γ (kN/m2) Vs (m/s) ν E (MPa) H (m)
Solo 1 20 200 0,25
200 10
Solo 2 20 500 1250 Variável
0
2
4
0 5 10 15 20
|H(w
)|
f [Hz]
c)
H(w) 2% amort teórico H(w) experimental
0
1
2
0 5 10 15 20
|H(w
)|
f [Hz]
d)
H(w) 5% amort teórico H(w) experimental
-4
-3
-2
-1
0
1
2
3
4
0 0,5 1 1,5 2 2,5 3 3,5 4
Ace
lera
ção
(m
/s2 )
Tempo (s)
Aceleração
5% amort analítico
2% amort analítico
Numérico Numérico

66
Por forma a aprofundar o conhecimento acerca de que modo o FLAC simula as fronteiras
viscosas foram testadas várias alturas para o substrato mantendo a espessura da camada de
depósitos constante e igual a 10 metros. O intuito neste caso é o de averiguar se existe ou não
influência da distância à fronteira nos resultados obtidos na interface entre os materiais, isto é,
se existe uma altura crítica para que a dissipação de energia das ondas seja corretamente
representada. Para tal, fixou-se as propriedades dos materiais, apresentados na Tabela 5.2, e
variou-se a geometria mantendo a altura da camada de depósitos também fixa.
Figura 5.12 - Aceleração na interface para Hsubstrato=0,5, 2 e 5 metros
Pela Figura 5.12, e como seria de esperar, a influência da altura da camada do substrato
é desprezável, sendo os valores obtidos para cada altura praticamente iguais, isto é, verifica-se
a correta simulação de um espaço semi-infinito por parte das fronteiras viscosas simuladas pelo
FLAC, não havendo impacto por parte de uma possível reflexão de ondas nos registos obtidos.
É claro, e importante afirmar que como a análise em questão se trata do caso unidimensional,
também não seria expectável registar-se ângulos de incidência inferiores a 30° na fronteira
absorvente, fruto da verticalidade da propagação de ondas, sendo, portanto, reter que no caso
bidimensional em que se terá uma geometria mais “larga” poderá verificar-se influência destas
reflexões.
Tabela 5.3 - Propriedades dos materiais testados no modelo
Tipo de solo γ (kN/m2) Vs (m/s) ν E (MPa)
Solo 1
20
100
0,25
50
Solo 2 500 1250
Solo 3 1000 5000
Uma vez testada a hipótese de variação da altura do substrato e a respetiva conclusão
do seu efeito, considerou-se válida a hipótese de testar de que forma o contraste de rigidez na
interface dos materiais influencia os resultados. Para tal, fixaram-se as propriedades da camada
de depósitos (Vs=200 m/s) e estabeleceram-se três valores de VS para o substrato, como
-3
-2
-1
0
1
2
3
0 0,1 0,2 0,3 0,4 0,5
Ace
lera
ção
(m
/s2 )
Tempo (s)
Aceleração FLAC Hsub=0,5m Aceleração FLAC Hsub=5mAceleração FLAC Hsub=2
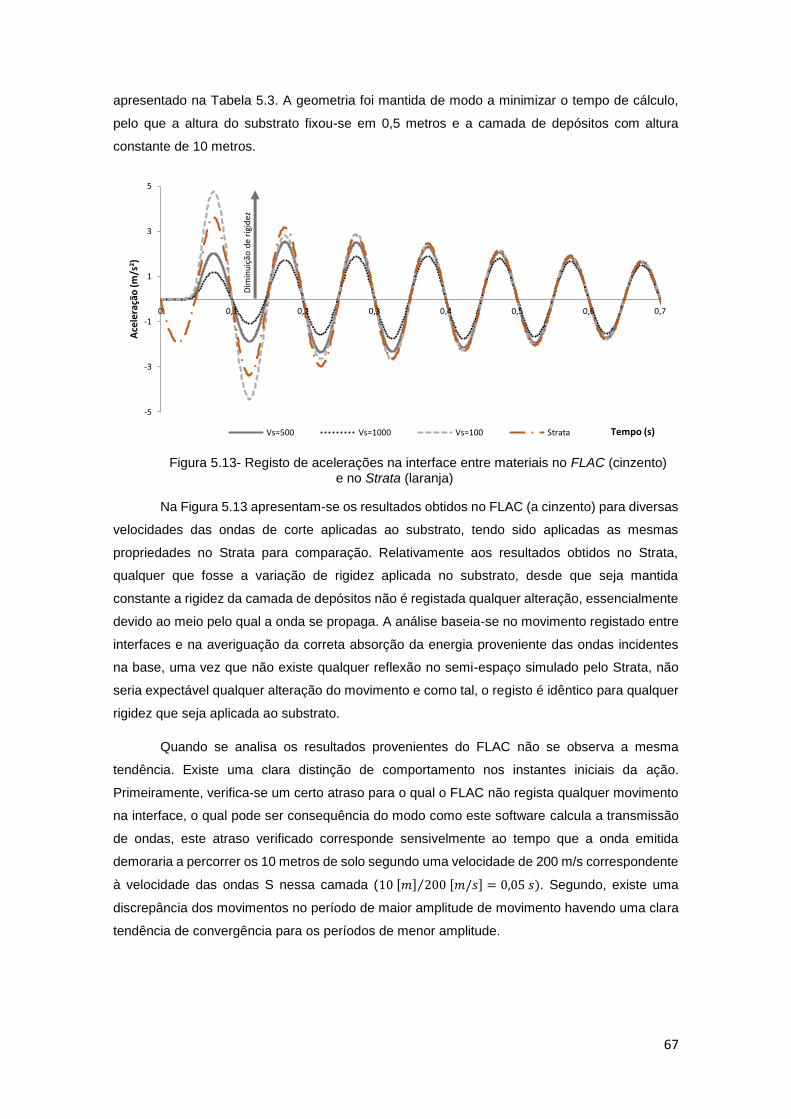
67
apresentado na Tabela 5.3. A geometria foi mantida de modo a minimizar o tempo de cálculo,
pelo que a altura do substrato fixou-se em 0,5 metros e a camada de depósitos com altura
constante de 10 metros.
Figura 5.13- Registo de acelerações na interface entre materiais no FLAC (cinzento) e no Strata (laranja)
Na Figura 5.13 apresentam-se os resultados obtidos no FLAC (a cinzento) para diversas
velocidades das ondas de corte aplicadas ao substrato, tendo sido aplicadas as mesmas
propriedades no Strata para comparação. Relativamente aos resultados obtidos no Strata,
qualquer que fosse a variação de rigidez aplicada no substrato, desde que seja mantida
constante a rigidez da camada de depósitos não é registada qualquer alteração, essencialmente
devido ao meio pelo qual a onda se propaga. A análise baseia-se no movimento registado entre
interfaces e na averiguação da correta absorção da energia proveniente das ondas incidentes
na base, uma vez que não existe qualquer reflexão no semi-espaço simulado pelo Strata, não
seria expectável qualquer alteração do movimento e como tal, o registo é idêntico para qualquer
rigidez que seja aplicada ao substrato.
Quando se analisa os resultados provenientes do FLAC não se observa a mesma
tendência. Existe uma clara distinção de comportamento nos instantes iniciais da ação.
Primeiramente, verifica-se um certo atraso para o qual o FLAC não regista qualquer movimento
na interface, o qual pode ser consequência do modo como este software calcula a transmissão
de ondas, este atraso verificado corresponde sensivelmente ao tempo que a onda emitida
demoraria a percorrer os 10 metros de solo segundo uma velocidade de 200 m/s correspondente
à velocidade das ondas S nessa camada (10 [𝑚] 200 [𝑚/𝑠]⁄ = 0,05 𝑠). Segundo, existe uma
discrepância dos movimentos no período de maior amplitude de movimento havendo uma clara
tendência de convergência para os períodos de menor amplitude.
-5
-3
-1
1
3
5
0 0,1 0,2 0,3 0,4 0,5 0,6 0,7
Ace
lera
ção
(m
/s2 )
Tempo (s)Vs=500 Vs=1000 Vs=100 Strata
Dim
inu
ição
de
rigi
dez

68
5.3 Modelação do Caso de Estudo
5.3.1 Definição do Modelo
Com a definição das propriedades do terreno, o passo que se segue é o da definição
das dimensões do modelo. Com recurso ao Autocad foi possível localizar a linha de aquisição e,
estendendo o modelo em ambas as direções, foi possível introduzir no modelo condições de
fronteira que podem ser condicionantes, isto é, a SE (lado direito do modelo) existe o túnel do
Metropolitano de Lisboa, nomeadamente a ligação Marquês de Pombal – Saldanha, e a NW (do
lado esquerdo do modelo) o parque de estacionamento sob o Jardim Augusto Monjardino. No
presente estudo considera-se um estado plano de deformação e um comportamento elástico.
Assim, o modelo definido apresentado na Figura 5.14 tem de dimensões 70x30 m, o
parque de estacionamento considerou-se com 7 metros de profundidade e o túnel com 10 metros
de altura e 10 metros de largura na base. Uma condição relativa às fronteiras que é necessária
definir é a sua interação com as ondas incidentes, e neste campo existem três escolhas: free-
field boundaries, quiet boundaries e perfeitamente refletoras, cujos conceitos foram explicados
anteriormente. No presente modelo foram adotadas quiet boundaries lateral e inferiormente
exceto nos locais do parque de estacionamento e do túnel, tendo sido nesses casos adotadas
fronteiras perfeitamente refletoras (materializando a situação mais condicionante da presença de
estruturas subterrâneas) como apresentado na Figura 5.15. Em termos de restrições de
movimento da fronteira do modelo, lateralmente fixou-se os nós segundo o eixo x, exceto no
contorno do túnel, na base e no parque de estacionamento em que se restringiu o movimento
em ambas as direções.
Figura 5.14 – Geometria do modelo
A escolha da dimensão dos elementos finitos foi feita considerando a proposta por
Kuhlemeyer & J. (1973) apresentada na equação 5.15. Para tal, considerou-se a gama de
velocidades em análise e até que profundidade seriam detetadas para estabelecer um modelo
com diferentes malhas consoante o critério de modo a reduzir o tempo de computação
necessário e de modo a alargar a gama de frequências em análise. A discretização do modelo
pode ser consultada na Tabela 5.4.
NW SE 36 m

69
Figura 5.15 – Ilustração das condições de fronteira: a) Pormenor túnel; b) Pormenor parque de estacionamento; c) Base do modelo
Com esta definição, podemos esperar resultados coerentes numa gama de frequências
entre os 20 e os 64 Hz. O limite superior das frequências está relacionado com vários fatores:
um dos critérios impostos pelo software FLAC implica garantir a correta propagação de ondas
no modelo dependendo do tamanho da malha definida, a qual teve de ser gerada com
consideração do esforço de computação associado; considerar frequências demasiado elevadas
revela-se desnecessário pois a estas correspondem comprimentos de onda tão curtos que não
têm interesse na análise. O limite inferior está relacionado com a incerteza associada aos
registos nas baixas frequências, tanto por estarem associadas a maiores comprimentos de onda
e menor discretização da informação recolhida de cada camada, como pelas dimensões finitas
do modelo estabelecido, não permitindo modelar toda a estrutura de solo atravessada pelas
ondas.
Relativamente à estratigrafia do terreno, todas as camadas foram modeladas com
estratificação horizontal, como concluído pela análise no capítulo 4.4. A superfície do terreno foi
igualmente modelada horizontalmente uma vez que, aquando da campanha de prospeção
destes ensaios, o terreno havia já sido escavado e terraplanado até à cota do coroamento das
estacas. Em relação à ação e geometria de aquisição, a ação definida representa uma força
vertical unitária igual à apresentada na Figura 5.4 e o seu ponto de aplicação definido em cada
extremo do registo: a NW a uma distância de 7 metros e a SE a 25,5 metros. Os 24 geofones
foram recriados com um espaçamento de 1,5 metros para um total 36 metros de comprimento
de aquisição registando as acelerações verticais no modelo. A adoção de uma força ao invés de
uma aceleração deve-se a uma limitação do programa, uma vez que quando é definida a
aceleração num nó o seu movimento fica prescrito impossibilitando a resposta do terreno. O
registo de aceleração vertical no ponto de aplicação da força é apresentado na Figura 5.17.
a) b) c)

70
Tabela 5.4 – Propriedades do modelo e dimensão da malha
Unidade Geotécnica UG1 UG2 UG3
Vs (m/s) 170 300 600
γ (kN/m3) 19 20 20
ρ (kg/m3) 1900,00 2000,00 2000,00
G (Pa) 4,86E+07 1,80E+08 7,20E+08
G (MPa) 48,6 180,0 720,0
ν 0,33
E (Pa) 1,294E+08 4,788E+08 1,915E+09
E (MPa) 129,4 478,8 1915,2
λ (m) 2,5 6 30
f (Hz) 64 50 20
Δhmín (m) 0,25 0,6 3
Δhadotado (m) 0,25 0,5 1
Em termos de parâmetros da análise, o timestep adotado foi condicionado tanto pelo seu
valor crítico dado pela dimensão da malha como também garantindo a leitura do impulso no
instante 0,1 s, tendo sido, por isso, adotado um incremento temporal de 1E-6 s e um tempo total
de análise de 2,0 s considerando-se que este seria suficientemente longo para que todos os
recetores registassem o fenómeno de propagação e de dissipação de energia (Figura 5.16). Para
a definição do amortecimento, foi adotado novamente o amortecimento Rayleigh com uma
frequência central de 3,8 Hz por forma a aplicar o amortecimento prescrito à frequência
fundamental do sistema e um coeficiente de amortecimento de 5% uma vez ter sido verificado
no capítulo 5.2.2 que este era o valor que assegurava melhor precisão numérica. Por último, de
modo a agilizar e acelerar o tempo de análise foi acionada a opção de multistepping a qual
permite executar a computação considerando apenas o timestep crítico para cada zona com
diferentes multiplicadores (diferentes malhas), isto é, enquanto que as zonas com uma malha
mais apertada requerem uma análise com um incremento de tempo menor, as menos
discretizadas podem ser analisadas com um incremento maior, então o Flac agrega esta
informação e apenas computa os nós necessários.
Figura 5.16 – Série temporal de acelerações no ponto mais distante da aplicação da ação
-1,00E-07
-8,00E-08
-6,00E-08
-4,00E-08
-2,00E-08
0,00E+00
2,00E-08
4,00E-08
6,00E-08
8,00E-08
1,00E-07
0 0,5 1 1,5 2
Ace
lera
ção
Ver
tica
l (m
/s2)
Tempo (s)

71
Figura 5.17 – Aceleração vertical registada no ponto de aplicação da força
5.3.2 Resultados
De modo a ser possível comparar os resultados obtidos experimentalmente com os
obtidos a partir do modelo numérico, o tratamento dos dados seguiu a seguinte metodologia:
1. Extração de 24 registos de acelerações verticais do FLAC;
2. Introdução dos registos e definição dos parâmetros de registo no Geopsy;
3. Elaboração do espectro VR-f para cada caso;
4. Sobreposição dos espectros obtidos numericamente e experimentalmente.
Seguindo estes passos é possível verificar a adequabilidade do modelo estabelecido. A
influência de estruturas subterrâneas sobre os registos experimentais é ainda uma condição
pouco estudada, apenas se conhecendo que poderão surgir fenómenos de reflexão que
perturbem os registos com fonte ativa (não se conhecendo bem a sua real influência sobre o
espectro obtido). Como tal, optou-se por realizar a simulação em duas fases: inicialmente sem a
presença de estruturas subterrâneas verificando que o modelo traduzia uma resposta
semelhante ao detetado no local de estudo, e em seguida a introdução do parque de
estacionamento e do túnel do metropolitano de modo a averiguar o seu impacto.
Na Figura 5.18 representa-se o espectro VR-f dos resultados experimentais com tiro a
NW e sobrepõe-se a curva de dispersão do tiro de NW. Será com base nestes resultados que
serão comparados os resultados numéricos. É importante realçar que a curva de dispersão aqui
demonstrada corresponde a uma média dos registos obtidos e o espectro de velocidade em
função da frequência corresponde apenas a um único registo pelo que se optou por representar
também a gama de valores sobre a qual a curva de dispersão pode variar.
-6,00E-03
-4,00E-03
-2,00E-03
0,00E+00
2,00E-03
4,00E-03
6,00E-03
0 0,1 0,2 0,3 0,4 0,5A
cele
raçã
o v
erti
cal (
m/s
2 )
Tempo (s)

72
Figura 5.18 – Espectro VR-f do registo experimental com tiro a NW e curvas de dispersão
referentes aos tiros NW(cinzento) e incerteza (a tracejado)
5.3.2.1 Modelo sem estruturas subterrâneas
O modelo inicial (Figura 5.14) foi concebido sem a presença de estruturas subterrâneas
e analisado com impactos a NW (lado esquerdo) e SE (lado direito) por forma a simular o ensaio
experimental. Na Figura 5.19 apresenta-se o espectro para o tiro a NW no modelo numérico com
sobreposição da curva de dispersão experimental. O esquema de cores apresentado representa
a distribuição de energia para cada frequência, estando o tom rosa relacionado com a maior
concentração de energia. É com base nestas zonas de maior energia que se pode traçar a
respetiva curva de dispersão.
São visíveis algumas diferenças entre os resultados obtidos numericamente e os obtidos
experimentalmente. Nas altas frequências o modelo numérico tende a representar uma
velocidade ligeiramente superior à prevista pelo estudo de sensibilidade, nomeadamente entre
os 50 e os 70 Hz a uma velocidade de fase a rondar os 180 m/s correspondendo a uma
velocidade das ondas de corte de 200 m/s (VS = 110% VR), o que representa um desvio à volta
dos 30-40 m/s do modelo estabelecido, embora ainda encaixe dentro do intervalo de variação da
curva de dispersão experimental. Nesta gama de frequências a onda atinge profundidades entre
1 a 2 metros (profundidade equivale entre a metade a um terço do comprimento de onda)
representando a camada mais superficial. O desvio é baixo, e tendo em conta a sua ordem de
VR
(m/s
)
Frequência (Hz)
NW Experimental Vs (+) Vs (-)
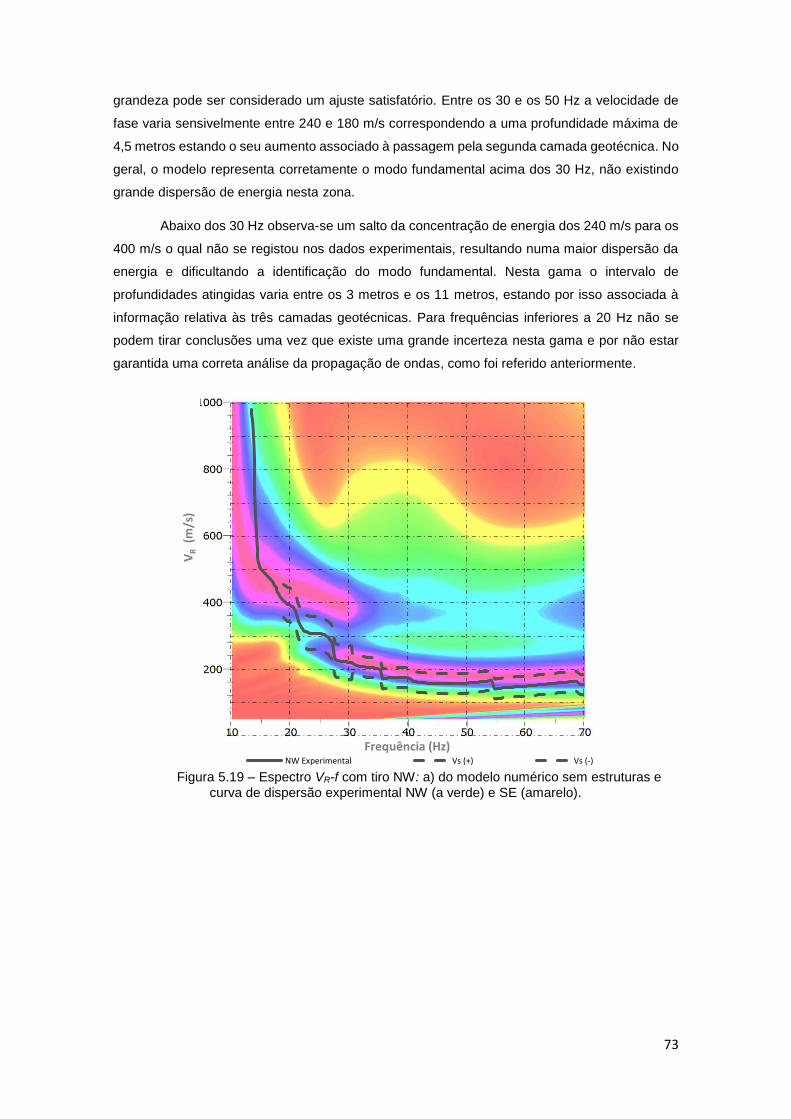
73
grandeza pode ser considerado um ajuste satisfatório. Entre os 30 e os 50 Hz a velocidade de
fase varia sensivelmente entre 240 e 180 m/s correspondendo a uma profundidade máxima de
4,5 metros estando o seu aumento associado à passagem pela segunda camada geotécnica. No
geral, o modelo representa corretamente o modo fundamental acima dos 30 Hz, não existindo
grande dispersão de energia nesta zona.
Abaixo dos 30 Hz observa-se um salto da concentração de energia dos 240 m/s para os
400 m/s o qual não se registou nos dados experimentais, resultando numa maior dispersão da
energia e dificultando a identificação do modo fundamental. Nesta gama o intervalo de
profundidades atingidas varia entre os 3 metros e os 11 metros, estando por isso associada à
informação relativa às três camadas geotécnicas. Para frequências inferiores a 20 Hz não se
podem tirar conclusões uma vez que existe uma grande incerteza nesta gama e por não estar
garantida uma correta análise da propagação de ondas, como foi referido anteriormente.
Figura 5.19 – Espectro VR-f com tiro NW: a) do modelo numérico sem estruturas e
curva de dispersão experimental NW (a verde) e SE (amarelo).
VR
(m/s
)
Frequência (Hz)NW Experimental Vs (+) Vs (-)

74
Figura 5.20 – Deformada do modelo sem estruturas no instante em que a ação é aplicada.
Figura 5.21 – Deformada do modelo sem estruturas subterrâneas nos instantes 0,196 s (a
tracejado) e 0,204 s (linha contínua) de análise.

75
5.3.2.2 Modelo com estruturas subterrâneas
A introdução das estruturas no modelo passou pela eliminação dos elementos no interior
do túnel e fixação dos nós do seu contorno em ambas as direções, podendo considerar-se estas
estruturas como infinitamente rígidas dado o nível de deformações em questão. Iguais condições
de restrição de movimento foram aplicadas na zona do parque de estacionamento e retiradas as
fronteiras absorventes de modo a materializar a superfície refletora.
Com uma consulta à deformada do modelo, Figura 5.22, para os mesmos instantes
anteriormente apresentados, é possível verificar uma mudança de comportamento na fronteira.
Observa-se uma reflexão nos contornos do túnel movendo a deformada no sentido contrário ao
de propagação da onda. Este fenómeno verifica-se mais acentuado para a primeira onda
incidente, verificando-se perturbações a montante da fronteira lateral embora esta reflexão não
seja de uma magnitude suficiente para inverter o sentido da deformada. O restante trem de ondas
incidentes tem uma menor amplitude de tal forma que tende a dispersar na fronteira lateral
imediatamente acima e abaixo do túnel fruto da diferença de magnitudes entre as ondas
incidentes e refletidas.
Relativamente ao espectro da velocidade em função da frequência, apresentado na
Figura 5.23, a sua forma apresenta bastantes semelhanças com o anterior espectro.
Acima dos 30 Hz os espectros apresentam sensivelmente a mesma velocidade de fase a rondar
os 180 m/s correspondendo a uma profundidade máxima de 3 metros. Inclusive no intervalo de
frequências mais baixo, entre os 20 e os 30 Hz em que a influência das estruturas subterrâneas
se presumia ser mais pronunciada e cuja profundidade atingida pelas ondas é maior não se
verificam alterações relevantes, apesar de a deformada ter apresentado um comportamento
distinto nas fases iniciais. No geral, mantém-se a tendência de o modelo apresentar uma
velocidade de fase da camada superficial superior ao definido no estudo de sensibilidade bem
como do salto de velocidades entre os 20 e os 30 Hz.

76
Figura 5.22 - Deformada do modelo com estruturas nos instantes 0,196 s (linha contínua) e
0,204 s (a tracejado) de análise.
Figura 5.23 - Espectro VR-f numérico do tiro SE: com estruturas.
Visto terem-se obtido resultados numéricos que divergiam ligeiramente dos resultados
experimentais, considerou-se a hipótese de poder haver influência das opções adotadas ao
longo desta dissertação. Opções com as condições de fronteira adotadas, a distância da ação à
fronteira, dimensão dos elementos, condições de análise e o uso de diferentes dimensões num
mesmo modelo podem ter algum impacto nos resultados. No Anexo I estudou-se a influência da
distância a que se aplicava a ação relativamente à fronteira absorvente, visto ter sido esta a
adotada ao longo da presente simulação. Pelas análises dos Anexo I. 1, Anexo I. 2 e Anexo I. 3
pode-se constatar a existência de uma dependência dos resultados em função da distância a
que é aplicada a ação da fronteira. Como seria de esperar, para o caso de um modelo
VR
(m/s
)
Frequência (Hz)
NW Experimental Vs (+) Vs (-)

77
considerando estado plano de deformação. a distância à fronteira é um fator condicionante dos
resultados extraídos, provavelmente devido à incapacidade da fronteira absorvente de
representar o meio semi-infinito e como tal surgindo alguns fenómenos de reflexão.
No Anexo II comparou-se a influência de adoção dos diferentes tipos de fronteira lateral
disponíveis, nomeadamente fronteiras free-field, fronteiras absorventes, fronteiras refletoras e a
adoção de diferentes dimensões dos elementos finitos nas unidades geotécnicas. A diferença
entre uma fronteira absorvente e uma fronteira free-field para problemas dinâmicos revelou-se
pequena, os Anexo II. 1 e Anexo II. 3 representam o espectro de velocidade em função da
frequência para os dois casos não se verificando alterações significantes. O Anexo II. 2
demonstra bem o efeito da reflexão de ondas na fronteira, registando-se uma maior dispersão
de energia, o salto de velocidades verifica-se para frequências maiores e aumentando a incerteza
nas baixas frequências, inclusive registando-se picos anormais a altas velocidades à volta dos
30 Hz. O Anexo II. 4 representa o caso em que são aplicadas dimensões distintas dos elementos
finitos para a primeira unidade e para as restantes. Com uma redução da dimensão dos
elementos nas camadas mais superficiais, como seria de esperar verifica-se uma melhoria na
resolução do espectro observando-se o modo fundamental de uma forma contínua até
frequências mais baixas.
A presente análise teve ainda como opção inicial a consideração de um estado plano de
deformação por forma a simular o ensaio de campo e de modo a incorporar todas as estruturas
subterrâneas identificadas que poderiam afetar os resultados. Estudos anteriores (Peniche
(2015), Ali et al. (2014), Nasseri-moghaddam (2006)) consideraram um modelo axissimétrico ao
invés de um estado plano de tensão. Esta condição simula um eixo de revolução na origem do
referencial (x=0) com as propriedades do modelo definido impondo na origem uma restrição de
movimentos no eixo x e no restante modelo restrição no plano radial. Para a simulação de uma
carga pontual, como é o caso, um modelo axissimétrico com carga aplicada na origem seria o
ideal pois seria o único a simular a propagação da onda em todas as direções, ao passo que se
a carga for aplicada num modelo em estado plano de deformação ou no caso axissimétrico
afastado da origem irá ser simulada uma carga uniformemente distribuída fruto da continuidade
do modelo, não recriando fielmente o ensaio aplicado no terreno. A forma como o modelo simula
o terreno fora da geometria definida também, no caso do estado plano de deformação as
mesmas propriedades serão recriadas longitudinalmente, sem consideração do terreno para lá
das fronteiras laterais. Já que o modelo com axissimetria permite simular o efeito 3D através de
um sólido de revolução, recriando as condições do modelo embora mantenha as propriedades
da fronteira lateral exterior em toda a sua periferia, o que implica uma má representação do túnel
e das condicionantes nos arredores do caso de estudo.
Pelas Figura 5.24 eFigura 5.25, pode-se observar que a forma como o modelo é
representado influencia os resultados obtidos, o espectro da velocidade em função da frequência
regista um ajuste mais adequado na gama de frequências de interesse, entre os 20 e os 70 Hz
quando a carga pontual é simulada. Entre os 50 e os 70 Hz registam-se velocidades de fase a

78
rondar os 150 m/s equivalendo a uma velocidade das ondas de corte de 165 m/s, praticamente
idêntica à definida no estudo de sensibilidade para a camada superficial. O andamento da curva
de dispersão experimental sobrepõe quase perfeitamente a maior concentração de energia
registada no espectro numérico dos 30 aos 70 Hz, registando-se o maior desvio dos 20 aos 30
Hz, em que a velocidade da curva de dispersão experimental excede em cerca de 80 m/s,
embora se mantenha dentro do intervalo de variação definido.
Figura 5.24 – Modelo axissimétrico sem estruturas subterrâneas.
Figura 5.25 – Modelo axissimétrico com estruturas subterrâneas.
De forma geral não se verificam interferências nos resultados devido à presença das
estruturas subterrâneas nas proximidades do local de ensaio e não resultando em elementos
condicionantes para a caracterização do terreno. Os espectros para os casos com e sem
estruturas são praticamente idênticos, revelando-se o modelo axissimétrico capaz de representar
corretamente a informação da estrutura de solo até frequências mais baixas, nomeadamente até
aos 20 Hz. Contudo, dado o elevado esforço computacional do problema em questão, uma
abordagem com um modelo de maiores dimensões e de malha mais refinada poderia ajudar a
analisar a influência das fronteiras na análise plana de deformação embora um modelo 3D seja
o ideal. É importante referir também que o método MASW foi idealmente estabelecido
considerando condições de campo livre, sendo que os resultados experimentais foram efetuados
em meio urbano com presença de estruturas subterrâneas e ruído ambiente constante. As suas
técnicas de interpretação e de inversão para estes casos estão ainda em fase de
desenvolvimento, contudo fica a ideia de ser possível obter um perfil de velocidades até uma
profundidade considerável para estes casos com o uso do MASW e do HVSR de forma fiável e
expedita.
NW Experimental Vs (+) Vs (-)NW Experimental Vs (+) Vs (-)

79
6 Conclusões e desenvolvimentos futuros
6.1 Conclusões
Nesta dissertação analisou-se a aplicação de métodos baseados na propagação de
ondas superficiais para a determinação das propriedades dinâmicas do terreno com o objetivo
de divulgar e validar a aplicação da metodologia conjunta dos ensaios MASW e HVSR em meios
urbanos.
Numa fase inicial, foram tratados separadamente os dados provenientes dos ensaios
SPT e dos ensaios MASW e HVSR referentes ao local de estudo. As análises destes dados
permitiram adquirir experiência sobre a fiabilidade de cada ensaio, bem como das incertezas
inerentes aos registos e de como o seu tratamento pode afetar a sua interpretação.
Os ensaios baseados no método das ondas superficiais permitiram obter uma maior
definição do perfil de VS do terreno. A sobreposição das curvas de dispersão relativas às fontes
em cada extremo da linha de aquisição, as quais se revelaram praticamente idênticas, em
resultado da baixa variabilidade lateral das propriedades do terreno. A identificação da frequência
fundamental permitiu estimar a velocidade da quarta unidade geotécnica e a profundidade do
substrato rígido.
Em seguida, foi utilizado um programa de cálculo numérico, FLAC, para simular os
resultados experimentais e avaliar a condicionante de existência de estruturas subterrâneas no
modelo. O modelo bidimensional permitiu recriar as condições encontradas no local de estudo e
conceber a curva de dispersão relativa ao modelo definido. Por este meio foi possível
compatibilizar os resultados numéricos com os resultados experimentais, garantindo um grau de
aproximação satisfatório e validando a estrutura de solo definida. Posteriormente, adaptou-se o
modelo bidimensional de modo a incorporar as estruturas subterrâneas identificadas no terreno,
nomeadamente o parque de estacionamento a NW e o túnel do metropolitano a SE. Os
resultados numéricos permitiram constatar que, apesar de se registarem perturbações nos
registos devido à existência de superfícies refletoras, estas não se revelaram condicionantes na
definição do espectro V-f nem da curva de dispersão extraída. Este caso foi verificado para uma
distância de 7 metros entre a fonte e superfície refletora mais próxima, a qual se considerou ser
uma distância suficientemente próxima para simular os casos mais condicionantes.
6.2 Desenvolvimentos futuros
A introdução do método das ondas superficiais no panorama internacional tem sido
gradual e o seu campo de aplicabilidade na determinação de um perfil bidimensional de
velocidades continua envolto de incertezas.
Como foi referido ao longo desta dissertação, a incerteza associada às baixas
frequências é uma das principais condicionantes destes métodos, pelo que conceber uma
estratégia de aquisição ou um aumento da precisão do equipamento é fundamental de modo a
obter uma melhor definição do perfil do solo em profundidade.

80
Na conceção do modelo definido, optou-se por uma simplificação das camadas
detetadas, não tendo sido representadas as pequenas variações de rigidez identificadas pelos
ensaios SPT: As variações dos registos experimentais foram atribuídas essencialmente à
presença de ruído durante a fase de aquisição mas poderá também ser devido à influência destas
variações, pelo que a conceção de um modelo bidimensional com uma estrutura mais complexa
poderá fornecer uma perspetiva sobre as reais causas destas variações.
O modelo numérico veio mostrar que a existência de superfícies refletoras não resulta
num elemento condicionante do método, porém existe a necessidade de comprovar o mesmo
facto no terreno. Para tal, sugere-se um estudo experimental com a aplicação da ação variando
a distância a estas superfícies por forma a validar o estudo numérico efetuado e, caso se verifique
os mesmos resultados, desconstruir o pressuposto com que foi baseada esta condicionante.
Um estudo semelhante deveria também ser efetuado mas considerando um modelo de
dimensões superiores, evitando qualquer tipo de influência das fronteiras. Igualmente, a adoção
de elementos de menor dimensão e se possível com uma malha uniforme permitiriam avaliar
todo o espectro de frequências que possam ser relevantes.

81
Referências bibliográficas Abreu, A.L., 2015. Aplicação de métodos sísmicos em meio urbano para caracterização
geológica-geotécnica. Tese de Mestrado, Técnico, Universidade de Lisboa.
Ali, H., Cascante, G., Phillips, C. & Hutchinson, D.J., 2014. Numerical and Experimental Analysis
of Multichannel Analysis of Surface Waves Test for Detection of Underground Voids Effects
of underground cavities on Rayleigh waves — Field and numerical experiments.
Universidade de Waterloo, Soil Dynamics and Earthquake Engineering 27 (2007) 300–313.
Bard, P. Duval, A., Koehler, A. & Rao, S., 2004. Guidelines for the Implementation of the H / V
Spectral Ratio Technique on Ambient Vibrations Measurements , Processing and
Interpretation. Interpretation A Journal Of Bible And Theology, 169(December), pp.1–62.
Barros, D.J.M., 1997. Módulo de Cisalhamento Dinâmico de Solos Tropicais. São Paulo: Tese
de Doutoramento, Escola Politécnica da Universidade de São Paulo.
Bonnefoy-Claudet, S., Cotton, F. & Bard, P., 2006. The nature of noise wavefield and its
applications for site effects studies. A literature review. University Joseph Fourier, Grenoble,
France.
Cotter, J.B., 1955. Comunicações dos serviços geológicos no 36. Direcção geral de minas e
serviços geologicos.
Dikmen, Ü., 2010. Statistical correlations of shear wave velocity and penetration resistance for
soils. Journal of Geophysics and Engineering, 7(1), pp.803–804.
Foti, S., 2002. Multistation Methods for Geotechnical Characterization using Surface Waves.
Tese de Doutoramento, Politecnico di Torino.
Frank, R., Bauduin, C., Driscoll, R., Kavvadas, M., Orr, T., Schuppener, B. & Krebs Ovensen, N.,
2004. Eurocode 7 Geotechnical Design-General Rules-Guide To En 1997-1. , p.230.
Gouveia, F., Lopes, I. & Gomes, R.C., 2016. Identificação do perfil de velocidades do terreno em
meio urbano utilizando o método das ondas superficiais., Técnico, Universidade de Lisboa.
Gouveia, F. previsto 2016. Caracterização Dinâmica in situ do Terreno em Meio Urbano
Confinado Caracterização Dinâmica in situ do Terreno em Meio Urbano Confinado. Tese
de Doutoramento, Técnico, Universidade de Lisboa
Houbrechts, J., Schevenels, M., Lombaert, G., Degrande, G., Rucker, W., Cuellar, V. & Smekal,
A., 2011. RIVAS WP1.1 Test procedures for the determination of the dynamic soil
characteristics. International Union of Railways (UIC).
Jardine, R. J., 1992. Some observations on the kinematic nature of soil stiffness. Soils and
Foundations, JSSMFE, vol. 32, no. 2, pp. 111-124.
Kramer, S., 1996. Geotechnical Earthquake Engineering, Prentice-Hall International Series.

82
Kuhlemeyer, R.L. & Lysmer, J., 1973. Finite element method accuracy for wave propagation
problems. Journal of the Soil Dynamics Division, 99, 421-427.
Laranjo, M., 2013. Argilas Miocénicas de Lisboa - Parametrização para o dimensionamento de
estruturas geotécnicas. Tese de Doutoramento, Faculdade de Engenharia da Universidade
do Porto.
Lopes, I., Santos, J.A. & Almeida, I.M. de, 2008. The surface wave method: acquisition,
processing and inversion. Técnico, Universidade de Lisboa.
Lopes, I., Santos, J.A. & Gomes, R.C., 2014. V S profile: measured versus empirical
correlations—a Lower Tagus river valley example. Bulletin of Engineering Geology and the
Environment.
Lopes, I.M.F., 2005. Caracterização Geotécnica de Solos no Domínio das Pequenas
Deformações. Aplicação do Método das Ondas Superficiais. Tese de Doutoramento,
Faculdade de Ciências, Universidade de Lisboa.
Nakamura, Y., 2000. Clear Identification of Fundamental Idea of Nakamura’s Technique and Its
Applications. In 12th World Conference on Earthqwake Engineering. New Zealand.
Nasseri-Moghaddam, A., 2006. Study of the effect of lateral inhomogeneities on the propagation
of Rayleigh waves in an elastic medium. Tese de Doutoramento, Universidade de Waterloo,
pp 96-104.
Norma Portuguesa NP EN 1990 2009 - Eurocódigo 7 - Bases para o projecto de estruturas.,
CEN, Brussels
Pais, J., Moniz, C., Clavijo, E., Dias, R. P., Manuppella, G. & Machado, S. , 2005. Carta Geológica
de Portugal, na escala de 1:50.000. Folha 34-D - Lisboa. Direcção Geral de Minas e
Serviços Geológicos, Lisboa.
Park, C.B. Miller, R D., Ryden, N., Xia & J., Ivanov, 2004. Combined Use of Active and Passive
Surface Waves. , pp.323–334. Kansas Geological Survey, University of Kansas.
Peniche, B., 2015. Utilização de ensaios sísmicos para a caracterização dinâmica local 2D. Tese
de Mestrado, Técnico, Universidade de Lisboa.
Richart, F.E., Hall, J.R. & Woods, R.D., 1970. Vibrations of Soils and Foundations. Prentice-Hall,
University of Michigan, New Jersey.
Santos, D.J.A., 1999. Caracterização de solos através de ensaios dinâmicos e cíclicos de torção
- Aplicação ao estudo do comportamento de estacas sob acções horizontais estáticas e
dinâmicas. Tese de Doutoramento, Técnico, Universidade de Lisboa.
Strobbia, C., 2003. Surface Wave Methods - Acquisition, processing and inversion. Tese de
Doutoramento, Politecnico di Torino.

83
UNE-EN ISO 22476-[3]-2005 - Ensayo de Penetración Estándar, CEN, Brussels
Viktorov, I. A., 1967. Rayleigh and Lamb waves: physical theory and applications. Plenum Press,
New York.
Wathelet, M., Jongmans, D., Ohrnberger, M. & S. Bonnefoy-Claudet, 2008. Array performances
for ambient vibrations on a shallow structure and consequences over Vs inversion. Journal
of Seismology, 12, 1-19.

84
Anexos
Anexo I
Estudo de sensibilidade para uma ação a distância variável da fronteira absorvente.
Anexo I. 1 - Ação aplicada a 2 metros de distância da fronteira.
Anexo I. 2 - Ação aplicada a 10 metros de distância da fronteira.
Anexo I. 3 - Ação aplicada a 20 metros de distância da fronteira.

85
Anexo II
Estudo de comparação entre fronteiras laterais livres e fronteiras laterais absorventes.
Anexo II. 1 - Ação a 2 metros da fronteira free-field.
Anexo II. 2 - Acão a 2 metros da fronteira refletora.
Anexo II. 3 - Ação a 2 metros da fronteira
absorvente.
Anexo II. 4 - Ação a 2 metros com elementos
de diferentes dimensões.
NW ExperimentalNW Experimental
NW ExperimentalNW Experimental

90
Anexo III
Código FLAC para análise do caso de estudo
config dynamic
grid 1090,40
gen 0.0,0.0 0.0,7.0 64.0,6.999999 64.0,-4.7683716E-7 i=1,65 j=1,8
gen 64.0,-4.7683716E-7 64.0,6.999999 70.0,6.999999 70.0,0.0 i=65,71 j=1,8
gen 0.0,7.0 0.0,15.878421 64.0,15.878421 64.0,6.999999 i=1,65 j=8,17
gen 64.0,6.999999 64.0,15.878421 70.0,15.87842 70.0,6.999999 i=65,71 j=8,17
gen 0.0,15.878421 0.0,19.0 64.0,19.0 64.0,15.878421 i=72,200 j=1,7
gen 64.0,15.878421 65.0,16.9 70.0,16.9 70.0,15.87842 i=201,213 j=1,5
gen 64.0,15.878421 64.0,19.0 64.754265,19.0 65.0,16.9 i=214,218 j=1,7
gen 65.0,16.9 64.754265,19.0 70.0,19.0 70.0,16.9 i=219,231 j=1,13
gen 0.0,19.0 0.0,24.0 64.0,24.0 64.0,19.0 i=72,200 j=7,17
gen 64.0,19.0 64.0,24.0 65.97315,24.0 64.754265,19.0 i=214,218 j=7,17
gen 64.754265,19.0 65.97315,24.0 70.0,24.000002 70.0,19.0 i=219,231 j=13,33
gen 0.0,24.0 0.0,27.40795 64.0,27.40795 64.0,24.0 i=232,488 j=1,17
gen 64.0,24.0 64.0,27.40795 66.4308,24.915302 65.97315,24.0 i=489,505 j=1,9
gen 65.97315,24.0 66.4308,24.915302 70.0,26.9 70.0,24.000002 i=219,231 j=33,41
gen 66.4308,24.915302 64.0,27.40795 70.0,27.40795 70.0,26.9 i=506,530 j=1,9
gen 0.0,27.40795 0.0,28.0 64.0,27.999998 64.0,27.40795 i=531,1043 j=1,5
gen 64.0,27.40795 64.0,27.999998 70.0,28.0 70.0,27.40795 i=1043,1091 j=1,5
gen 0.0,28.0 0.0,30.0 64.0,30.0 64.0,27.999998 i=531,1043 j=5,21
gen 64.0,27.999998 64.0,30.0 70.0,30.0 70.0,28.0 i=1043,1091 j=5,21
; Define nonlinear edges and interpolate subgrids
gen col 218,8 64.818016 19.517546 64.88176 20.035093 64.94551 20.552639 65.00926 21.070185 65.07301 21.587732 65.136765 22.105278 65.273544 22.600782 65.506744 23.067188 65.73995 23.533594
gen col 219,14 64.78614 19.258774 64.818016 19.517546 64.849884 19.77632 64.88176 20.035093 64.913635 20.293865 64.94551 20.552639 64.97739 20.811413 65.00926 21.070185 65.04114 21.328959 65.07301 21.587732 65.10489 21.846504 65.136765 22.105278 65.205154 22.353031 65.273544 22.600782 65.390144 22.833984 65.506744 23.067188 65.62335 23.300392 65.73995 23.533594 65.85655 23.766796
gen row 220,41 66.70204 25.131186 66.97328 25.347073 67.24452 25.562958 67.51576 25.778841 67.787 25.994724 68.058235 26.21061 68.33652 26.412918 68.66921 26.510334 69.00191 26.607754 69.33461 26.705168 69.667305 26.802584
gen row 507,1 66.56642 25.023243 66.70204 25.131186 66.83766 25.239128 66.97328 25.347073 67.1089 25.455015 67.24452 25.562958 67.38014 25.670898 67.51576 25.778841 67.65138 25.886784 67.787 25.994724 67.92262 26.102667 68.058235 26.21061 68.19737 26.311764 68.33652 26.412918 68.50287 26.461626 68.66921 26.510334 68.835556 26.559044 69.00191 26.607754 69.16826 26.65646 69.33461 26.705168 69.50096 26.753876 69.667305 26.802584 69.83365 26.851292
gen bilinear i=214,218 j=7,17
gen bilinear i=219,231 j=13,33
gen bilinear i=219,231 j=33,41
gen bilinear i=506,530 j=1,9
model elastic i=1,64 j=1,7
model elastic i=65,70 j=1,7
model elastic i=1,64 j=8,16
model elastic i=65,70 j=8,16
model elastic i=72,199 j=1,6
model elastic i=201,212 j=1,4

91
model elastic i=214,217 j=1,6
model elastic i=219,230 j=1,12
model elastic i=72,199 j=7,16
model elastic i=214,217 j=7,16
model elastic i=219,230 j=13,32
model elastic i=232,487 j=1,16
model elastic i=489,504 j=1,8
model elastic i=219,230 j=33,40
model elastic i=506,529 j=1,8
model elastic i=531,1042 j=1,4
model elastic i=1043,1090 j=1,4
model elastic i=531,1042 j=5,20
model elastic i=1043,1090 j=5,20
; Attach grids
attach aside from 72,1 to 200,1 bside from 1,17 to 65,17
attach aside from 201,1 to 213,1 bside from 65,17 to 71,17
attach aside from 214,1 to 214,7 bside from 200,1 to 200,7
attach aside from 214,1 to 218,1 bside from 201,1 to 201,5
attach aside from 219,1 to 231,1 bside from 201,5 to 213,5
attach aside from 219,1 to 219,13 bside from 218,1 to 218,7
attach aside from 232,1 to 488,1 bside from 72,17 to 200,17
attach aside from 214,7 to 214,17 bside from 200,7 to 200,17
attach aside from 489,1 to 505,1 bside from 214,17 to 218,17
attach aside from 219,13 to 219,33 bside from 218,7 to 218,17
attach aside from 531,1 to 1043,1 bside from 232,17 to 488,17
attach aside from 489,1 to 489,9 bside from 488,1 to 488,17
attach aside from 506,9 to 506,1 bside from 489,9 to 505,9
attach aside from 219,33 to 219,41 bside from 505,1 to 505,9
attach aside from 506,1 to 530,1 bside from 219,41 to 231,41
attach aside from 1043,1 to 1091,1 bside from 506,9 to 530,9
; Define edge marks
mark i=72,200 j=17
mark i=214,218 j=17
mark i=232,488 j=1
mark i=505 j=1,9
mark i=489,505 j=1
mark i=219 j=33,41
mark i=219,231 j=41
mark i=506,530 j=1
mark i=531,1043 j=5
mark i=1043,1091 j=5
model null region 225 23
group 'null' region 225 23
group delete 'null'
group 'GeomFinal:Final1' region 784 16
group 'GeomFinal:Final3' region 1012 3
group 'GeomFinal:Final3' region 471 11
group 'GeomFinal:Final3' region 498 7
group 'GeomFinal:Final3' region 516 4
group 'GeomFinal:Final3' region 189 8
group 'GeomFinal:Final3' region 214 9
group 'GeomFinal:Final3' region 204 3
group 'GeomFinal:Final4' region 60 11
model elastic notnull group 'GeomFinal:Final1'
prop density=1900.0 bulk=1.26471E8 shear=4.84962E7 notnull group 'GeomFinal:Final1'
model elastic notnull group 'GeomFinal:Final3'
prop density=2000.0 bulk=4.68431E8 shear=1.79624E8 notnull group 'GeomFinal:Final3'
model elastic notnull group 'GeomFinal:Final4'

92
prop density=2000.0 bulk=1.87745E9 shear=7.19925E8 notnull group 'GeomFinal:Final4'
group 'GeomFinal:Final4' region 180 9
group 'GeomFinal:Final4' region 216 13
group 'GeomFinal:Final4' region 205 4
model elastic notnull group 'GeomFinal:Final4'
prop density=2000.0 bulk=1.87745E9 shear=7.19925E8 notnull group 'GeomFinal:Final4'
apply xquiet from 72,15 to 72,1
apply xquiet from 1,17 to 1,1
apply xquiet from 1,1 to 71,1
apply xquiet from 213,5 to 213,1
apply xquiet from 71,17 to 71,1
apply xquiet from 1091,21 to 1091,1
apply xquiet from 530,9 to 530,1
apply yquiet from 72,15 to 72,1
apply yquiet from 1,17 to 1,1
apply yquiet from 1,1 to 71,1
apply yquiet from 213,5 to 213,1
apply yquiet from 71,17 to 71,1
apply yquiet from 1091,21 to 1091,1
apply yquiet from 530,9 to 530,1
fix x y i 1 71 j 1
fix x y i 506 530 j 1
fix x y i 505 j 1 8
fix x y i 505 j 1
fix x y i 218 j 1 16
fix x y i 202 213 j 5
fix x y i 531 j 1 21
fix x y i 232 j 1 16
fix x y i 72 j 15 16
fix x i 72 j 1 14
fix x i 1 j 2 16
fix x i 213 j 1 4
fix x i 213 j 1
fix x i 71 j 2 16
fix x i 1091 j 1 21
fix x i 530 j 2 8
history 1 yaccel i=587, j=21
history 2 yaccel i=599, j=21
history 3 yaccel i=611, j=21
history 4 yaccel i=623, j=21
history 5 yaccel i=635, j=21
history 6 yaccel i=647, j=21
history 7 yaccel i=659, j=21
history 8 yaccel i=671, j=21
history 9 yaccel i=683, j=21
history 10 yaccel i=695, j=21
history 11 yaccel i=707, j=21
history 12 yaccel i=719, j=21
history 13 yaccel i=731, j=21
history 14 yaccel i=743, j=21
history 15 yaccel i=755, j=21
history 16 yaccel i=767, j=21
history 17 yaccel i=779, j=21
history 18 yaccel i=791, j=21
history 19 yaccel i=803, j=21
history 20 yaccel i=815, j=21
history 21 yaccel i=827, j=21
history 22 yaccel i=839, j=21
history 23 yaccel i=851, j=21
history 24 yaccel i=862, j=21
history 25 yaccel i=875, j=21
history 26 yaccel i=887, j=21
history 27 dytime
hist 28 read E:\Programas\FLAC700\Exe32\axx_completo.his
apply yforce -1.0 hist 28 from 587,21 to 587,21
set multistep=on
set dydt=1.0E-6

93
set dy_damping rayleigh=0.05 3.8
set step=100000000
history 999 unbalanced
ini xvel=0 yvel=0 xdisp=0 ydisp=0
history 28 ydisp i=587, j=21
history 29 ydisp i=599, j=21
history 30 ydisp i=611, j=21
history 31 ydisp i=623, j=21
history 32 ydisp i=635, j=21
history 33 ydisp i=647, j=21
history 34 ydisp i=659, j=21
history 35 ydisp i=671, j=21
history 36 ydisp i=683, j=21
history 37 ydisp i=695, j=21
history 38 ydisp i=707, j=21
history 39 ydisp i=719, j=21
history 40 ydisp i=731, j=21
history 41 ydisp i=743, j=21
history 42 ydisp i=755, j=21
history 43 ydisp i=767, j=21
history 44 ydisp i=779, j=21
history 45 ydisp i=791, j=21
history 46 ydisp i=803, j=21
history 47 ydisp i=815, j=21
history 48 ydisp i=827, j=21
history 49 ydisp i=839, j=21
history 50 ydisp i=851, j=21
history 51 ydisp i=862, j=21
history 52 ydisp i=875, j=21
history 53 ydisp i=887, j=21
solve dytime=2.0