







Línguas
Páginas
Legal

COPPE/UFRJCOPPE/UFRJ
ANÁLISE DO COMPORTAMENTO DE ESTRUTURAS DE SOLO GRAMPEADO
ATRAVÉS DA MONITORAÇÃO DE OBRA E MODELOS FÍSICOS (ESCALA 1:1)
Rafael Cerqueira Silva
Dissertação de Mestrado apresentada ao
Programa de Pós-graduação em Engenharia
Civil, COPPE, da Universidade Federal do Rio
de Janeiro, como parte dos requisitos
necessários à obtenção do título de Mestre em
Engenharia Civil.
Orientador: Maurício Ehrlich
Rio de Janeiro
Outubro de 2010
ANÁLISE DO COMPORTAMENTO DE ESTRUTURAS DE SOLO GRAMPEADO
ATRAVÉS DA MONITORAÇÃO DE OBRA E MODELOS FÍSICOS (ESCALA 1:1)
Rafael Cerqueira Silva
DISSERTAÇÃO SUBMETIDA AO CORPO DOCENTE DO INSTITUTO ALBERTO
LUIZ COIMBRA DE PÓS-GRADUAÇÃO E PESQUISA DE ENGENHARIA (COPPE)
DA UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COMO PARTE DOS
REQUISITOS NECESSÁRIOS PARA A OBTENÇÃO DO GRAU DE MESTRE EM
CIÊNCIAS EM ENGENHARIA CIVIL.
Examinada por:
________________________________________________
Prof. Maurício Ehrlich, D.Sc.
________________________________________________ Prof. Fernando Artur Brasil Danziger, D.Sc.
________________________________________________ Prof. Marcos Barreto de Mendonça, D.Sc.
________________________________________________ Prof. Alberto de Sampaio Ferraz Jardim Sayão, Ph.D.
RIO DE JANEIRO, RJ - BRASIL
OUTUBRO DE 2010

iii
Silva, Rafael Cerqueira
Análise do Comportamento de Estruturas de Solo
Grampeado através da Monitoração de Obra e Modelos
Físicos (Escala 1:1)/ Rafael Cerqueira Silva – Rio de
Janeiro: UFRJ/COPPE, 2010.
XIII, 354 p.: il.; 29,7 cm.
Orientador: Maurício Ehrlich
Dissertação (mestrado) – UFRJ/ COPPE/ Programa
de Engenharia Civil, 2010.
Referencias Bibliográficas: p. 321-335.
1. Solo Grampeado. 2. Instrumentação. 3.
Monitoração. 4. Sucção. 5. Obra em verdadeira
grandeza. 6. Modelos físicos (escala 1:1). I. Ehrlich,
Maurício. II. Universidade Federal do Rio de Janeiro,
COPPE, Programa de Engenharia Civil. III. Titulo.

iv
―Todas as idéias grandiosas que já tive me vieram como uma inspiração de Deus. Elas
Lhe pertencem de direito, mas Ele desejou me dar uma compreensão de Suas Leis e
Suas Idéias. Eis porque, já que elas não me pertencem, desejo transmiti-las a outros
para seu Uso e vantagem, como um dom de Deus.‖
(Pitágoras)

v
A Deus, minha família e amigos.

vi
AGRADECIMENTOS
Ao professor Maurício Ehrlich pela orientação deste trabalho, auxílio na
resolução dos problemas encontrados no desenvolvimento da pesquisa e pela
convivência, paciência e credibilidade nesses anos de trabalho;
Aos membros da banca examinadora pela avaliação do trabalho, professores
Fernando Artur Brasil Danziger, Marcos Barreto de Mendonça e Alberto de Sampaio
Ferraz Jardim Sayão;
Aos professores do curso de mestrado pelas orientações, conversas e
conhecimentos transmitidos: Anna Laura Nunes, Cláudio Mahler, Fernando Danziger,
Francisco Lopes, Ian Schumann, Laura Motta, Márcio Almeida, Maurício Ehrlich, Paulo
Santa Maria, Roberto Oliveira, Sandro Sandroni e Willy Lacerda;
À ENGGEOTECH Engenharia Ltda pela experiência transmitida e pelo apoio
técnico, financeiro e de logística para a realização do curso e pesquisa de Mestrado;
À TERRAE Engenharia na pessoa dos Engenheiros Robson Palhas Saramago
e Marcos Barreto de Mendonça pelo apoio financeiro disponibilizado para realização
de parte deste trabalho;
Ao Engenheiro Guilherme Isidoro da empresa GEOMECÂNICA S.A., pela
disponibilidade dos espaços (galpão e obra) necessários à realização da
instrumentação da obra de contenção da RJ123, km 0,5 e a toda a equipe que
contribuiu direta e indiretamente no galpão e na obra;
Ao professor Fernando Danziger e a Gustavo Guimarães pela amizade, apoio
e empréstimo das células de tensão total;
Aos engenheiros Ederli, João e Reila pela amizade, apoio e atenção e por ter
disponibilizar e recursos do Laboratório de Estruturas da COPPE/UFRJ;
Ao Renilson pela experiência transmitida sobre modelos físicos e ao Diógenes
pelo apoio em todas as fases de desenvolvimento dos MFs;
À equipe de instrumentação Hélcio, Luiz Mário, Mauro e Salviano;
À equipe de ensaios de laboratório e campo Sérgio, Carlinhos, Luizão, Maria
da Glória, Toninho e João;
À professora Laura Motta, ao Álvaro e à equipe do setor de pavimentação;
Ao corpo técnico e administrativo do PEC da COPPE/UFRJ;
Á equipe da secretaria do Laboratório de Geotecnia Alice e Márcia;
Aos amigos e colegas do curso de mestrado em Geotecnia da COPPE das
turmas de 2007 e 2008: Alessandra, Evandro, Fábio, Flávia, Harley, Henrique,
Graziela, Leonardo, Lydice, Márcia, Mário, Maurício, Ricardo D’Orsi, Simão… e
Beatriz, Dani, Daniel, Diego, Evandro, Felipe, Magnus, Schuler, Silvana...;
vii
Aos colegas geotécnicos da COPPE/UFRJ: Abdoul, Bruno, Cescyle, Christian,
Glauco, Gustavo, Jaqueline, Leonardo Deotti, Marcelo, Mário Riccio, Petrônio, Vitor...;
Aos colegas de consultoria e empresas parceiras da ENGGEOTECH;
Aos amigos que sempre me apoiaram e compreendem os sacrifícios que se
fizeram necessários para conciliar trabalho com estudo;
Aos amigos da capoeira e mountain bike;
À minha família;
Aos meus pais Aldanir e Maria de Lurdes, irmãs Taís e Laís, amada e filha,
Adriana e Maria Eduarda;
A Deus.
viii
Resumo da Dissertação apresentada à COPPE/UFRJ como parte dos requisitos
necessários para a obtenção do grau de Mestre em Ciências (M.Sc.)
ANÁLISE DO COMPORTAMENTO DE ESTRUTURAS DE SOLO GRAMPEADO
ATRAVÉS DA MONITORAÇÃO DE OBRA E MODELOS FÍSICOS (ESCALA 1:1)
Rafael Cerqueira Silva
Outubro/2010
Orientador: Maurício Ehrlich
Programa: Engenharia Civil
Na pesquisa analisa-se o comportamento de obra e dois modelos físicos de solo
grampeado na escala 1:1 com auxílio de um programa de monitoração. A obra
monitorada situa-se na rodovia RJ123, km 0,5, Secretário/RJ. Prospecções e ensaios
de laboratório e de campo foram realizados para determinação das informações
geotécnicas. Três grampos foram monitorados utilizando ―strain gauges‖. Leituras das
cargas nos grampos foram efetuadas durante a construção e em períodos seco e
chuvoso. Acompanharam-se os teores de umidade no solo. Observou-se a influência
da sucção do solo e da compactação do reaterro nas tensões induzidas nos grampos.
Os dois modelos físicos foram construídos no laboratório de geotecnia da
COPPE/UFRJ. A instrumentação dos modelos foi composta de ―strain gauges‖,
medidores de deslocamentos vertical e horizontal e células de tensão total. Buscando
exemplificar situações representativas das oriundas da saturação do solo e de alturas
superiores à caixa de ensaio, aplicaram-se estágios de carregamento e
descarregamento até a sobrecarga de 100 kPa. O desempenho dos modelos físicos
foi verificado por meio da monitoração das tensões de tração desenvolvidas nos
grampos, das tensões horizontais do solo junto à face, das tensões verticais nas zonas
ativa e passiva e dos deslocamentos da massa reforçada, terrapleno e faceamento, à
medida que se aplicavam sobrecargas na superfície do terrapleno.
ix
Abstract of Dissertation presented to COPPE/UFRJ as a partial fulfillment of the
requirements for the degree of Master of Science (M.Sc.)
ANALYSIS OF THE BEHAVIOR OF SOIL NAILING THROUGH THE MONITORING
OF A RETAINING STRUCTURE AND OF PHYSICAL MODELS (SCALE 1:1)
Rafael Cerqueira Silva
October/2010
Advisor: Maurício Ehrlich
Department: Civil Engineering
In the research, it has been analyzed the behavior of a retaining structure and of
two physical models of soil nailing technology in full-scale through the use geothecnical
monitoring. The soil nailed structure was executed in the RJ123 highway,
Secretário/RJ. Subsoil profile standard penetration tests, soil sampling and laboratorial
tests were performed. Laboratory tests include soil characterization, moisture content,
suction, permeability and soil shear resistance. Three nails have been monitored using
strain gauges. The process of monitoring was conducted throughout the construction of
the structure, in both dry and rainy weather conditions. The significance of soil suction
and backfill compaction next to the blocks facing in the induced tensions in the nails
was verified. The two physical models were built in the geotechnical laboratory of
COPPE/UFRJ. The instrumentation of the models consisted of strain gauges,
measurers of vertical and horizontal displacements and total stress cells. In order to
exemplify representative situations arising from the soil saturation and of heights above
the test box, it has been applied stages of loading and unloading up to the surcharges
of 100 kPa. The performance of physical models was checked by monitoring the
distribution of tensions along nails, the pressures on the ground and its deformations,
as surcharges were applied to the surface of the embankment.

x
ÍNDICE
CAPÍTULO I
INTRODUÇÃO
I.1 – Introdução......................................................................................................
I.2 – Organização do Trabalho...............................................................................
CAPÍTULO II
CARACTERÍSTICAS DOS SOLOS GRAMPEADOS
II.1 – Introdução.....................................................................................................
II.2 – Descrição do Solo Grampeado.....................................................................
II. 3 – Origem e Desenvolvimento do Solo Grampeado.........................................
II.4 – Procedimento Executivo do Solo Grampeado..............................................
II.4.1 – Grampos.....................................................................................................
II.4.2 – Faceamento...............................................................................................
II.4.3 – Drenagem..................................................................................................
II.5 – Critérios de Aplicação do Solo Grampeado..................................................
II.5.1 – Vantagens..................................................................................................
II.5.2 – Limitações..................................................................................................
II.6 – Comparação do Solo Grampeado com Cortina Atirantada...........................
CAPÍTULO III
COMPORTAMENTO GEOMECÂNICO DOS SOLOS GRAMPEADOS
III.1 – Introdução...................................................................................................
III.2 – Interação Solo-Grampo..............................................................................
III.2.1 – Resistência ao Cisalhamento na Interface Solo Grampo........................
III.2.1.1 – Fenômeno de Dilatância.......................................................................
III.2.1.2 – Processo de Injeção da Calda de Cimento..........................................
III.2.1.3 – Teor de Umidade no Solo.....................................................................
III.2.1.4 – Deformação Interna no Solo Reforçado...............................................
III.2.1.5 – Inclinação do Grampo com a Horizontal...............................................
III.2.1.6 – Método Executivo da Perfuração..........................................................
III.2.2 – Mobilização da Resistência ao Cisalhamento de Interface Solo-
Grampo..................................................................................................................
III.2.3 – Determinação da Resistência ao Cisalhamento Máxima de Interface
Solo-grampo..........................................................................................................
III.2.3.1 – Ensaios de Arrancamento em Grampos...............................................
III.2.3.2 – Previsão da Resistência ao Cisalhamento Máxima de Interface Solo-
1
2
3
3
5
7
10
11
12
12
12
13
15
17
18
18
19
22
24
25
26
28
28
29
30
xi
Grampo..................................................................................................................
III.3 – Mecanismo e Comportamento do Solo Grampeado...................................
III.3.1 – Distribuição das Tensões nos Grampos...................................................
III.3.2 – Taludes Verticalizados e Suaves Grampeados........................................
III.3.3 – Rigidez dos Grampos................................................................................
III.4 – Esforços Cisalhantes e Fletores nos Grampos............................................
III.5 – Estado de Tensões no Solo Grampeado.....................................................
III.6 – Deslocamentos e Deformações nos Solos Grampeados............................
III.7 – Faceamento nos Solos Grampeados...........................................................
III.8 – Tipos de Rupturas em Solos Grampeados..................................................
III.8.1 – Ruptura dos Grampos (Instabilidade Interna)...........................................
III.8.2 – Arrancamento dos Grampos (Instabilidade Interna).................................
III.8.3 – Eliminação do Efeito de Arqueamento (Instabilidade Interna)..................
III.8.4 – Ruptura Mista (Instabilidade Interna e Externa)........................................
III.8.5 – Ruptura Global (Instabilidade Externa).....................................................
CAPÍTULO IV
MÉTODOS DE ANÁLISE
IV.1 – Introdução....................................................................................................
IV.2 – Características Gerais das Análises das Estruturas de Solo Grampeado..
IV.2.1 – Análise de Estabilidade Externa...............................................................
IV.2.2 – Análise de Estabilidade Interna................................................................
IV.3 – Métodos de Análises de Estabilidade de Taludes Modificados...................
IV.3.1 – Método de Fellenius Modificado (FALCONI & ALONSO, 1996)...............
IV.3.2 – Aplicação das Teorias de Coulomb e Rankine.........................................
IV.4 – Métodos de Análises Clássicos da Literatura Internacional........................
IV.4.1 – Método do Multicritério ou Francês (SCHLOSSER, 1983).......................
IV.4.1.1 – Critérios do Método do Multicritério.......................................................
IV.4.1.2 – Considerações sobre os Critérios C3 e C4...........................................
IV.4.1.3 – Combinação dos Critérios de Ruptura (C1, C2, C3 e C4).....................
IV.4.1.4 – Fatores de Segurança...........................................................................
IV.4.2 – Método Cinemático (JURAN et al., 1988).................................................
IV.4.2.1 – Colapso por Arrancamento do Grampo.................................................
IV.4.2.2 – Colapso por Ruptura do Reforço...........................................................
IV.4.3 – Método de Davis (SHEN et al., 1981).......................................................
IV.4.4 – Método Alemão (STOCKER et al., 1979).................................................
CAPÍTULO V
33
38
39
43
44
52
57
62
75
88
89
89
91
92
92
94
97
100
101
103
103
105
108
109
112
116
118
120
120
125
126
127
132
xii
OBRA DE CONTENÇÃO DA RODOVIA RJ123 – km 0,5
V.1 – Introdução.....................................................................................................
V.2 – Área de Estudo.............................................................................................
V.2.1 – Localização e Descrição da Área..............................................................
V.2.2 – Características da Área.............................................................................
V.3 – Descrição da Ocorrência..............................................................................
V.4 – Solução Geotécnica......................................................................................
V.4.1 – Estrutura de Contenção Analisada............................................................
V.5 – Investigações Geotécnicas...........................................................................
V.6 – Instrumentação.............................................................................................
V.6.1 - Desenvolvimento de uma célula de carga com capacidade de 200 kN.....
V.6.2 – Instrumentação dos Grampos...................................................................
V.7 – Monitoração da Obra....................................................................................
V.7.1 – Monitoração e Análise dos Resultados do Grampo Intermediário............
V.7.2 – Resultados da Monitoração dos Grampos Superiores..............................
CAPÍTULO VI
MODELOS FÍSICOS DE SOLO GRAMPEADO – ESCALA 1:1
VI.1 – Introdução....................................................................................................
VI.2 – Materiais e Metodologia...............................................................................
VI.2.1 – Modelos Físicos Ensaiados......................................................................
VI.2.2 - Concepção do Modelo Físico....................................................................
VI.2.2.1 - Geometria do Modelo Físico..................................................................
VI.2.2.2 – Considerações.......................................................................................
VI.2.2.3 - Parâmetros do solo e dos grampos........................................................
VI.2.2.4 - Análises e Cálculos................................................................................
VI.2.3 - Instrumentação dos Modelos Físicos........................................................
VI.2.3.1 – Instrumentação para Monitorar a Movimentação Horizontal da Face...
VI.2.3.2 – Instrumentação para Monitorar os Deslocamentos Verticais do
Terrapleno..............................................................................................................
VI.2.3.3 – Instrumentação para Monitorar os Deslocamento no Interior do Solo.
VI.2.3.4 – Instrumentação para Monitorar as Tensões no Solo junto à Face........
VI.2.3.5 – Instrumentação para Monitorar a Pressão Vertical do Solo
Grampeado............................................................................................................
VI.2.3.6 – Instrumentação para Monitorar os Esforços nos Grampos...................
VI.2.4 - Construção dos Modelos Físicos..............................................................
VI.2.5 – Instalação da Instrumentação...................................................................
136
136
136
141
142
145
146
149
158
158
160
167
167
176
177
178
178
179
179
184
184
186
191
192
195
197
199
203
205
212
217
xiii
VI.2.6 – Sistema de Aplicação de Sobrecarga.......................................................
VI.3 – Resultados e Análises da Monitoração dos Modelos Físicos......................
VI.3.1 – Monitoração durante a Construção dos Modelos Físicos.........................
VI.3.2 – Monitoração dos Modelos Físicos sob Aplicação de Sobrecarga no
Terrapleno..............................................................................................................
VI.3.2.1 – Resultados da Monitoração do Modelo Físico MF01 sob Aplicação de
Sobrecarga (base do faceamento com atrito)........................................................
VI.3.2.2 – Resultados da Monitoração do Modelo Físico MF02 sob Aplicação de
Sobrecarga (base do faceamento sobre sistema de lubrificação).........................
VI.3.3 – Análise dos Resultados da Monitoração dos Modelos Físicos.................
VI.3.3.1 – Análise dos Resultados da Monitoração do Modelo Físico MF01
(base do faceamento com atrito)...........................................................................
VI.3.3.1.1 – Análise dos Resultados da Monitoração do Modelo Físico MF01 no
Segundo Ensaio de Aplicação de Sobrecarga no Terrapleno...............................
VI.3.3.2 – Análise dos Resultados da Monitoração do Modelo Físico MF02
(base do faceamento sobre sistema de lubrificação)............................................
VI.3.3.2.1 – Análise dos Resultados da Monitoração do Modelo Físico MF02 no
Segundo Ensaio de Aplicação de Sobrecarga no Terrapleno...............................
VI.3.3.3 – Sumário dos Resultados dos Experimentos MF01 (base do
faceamento com atrito) e MF02 (base do faceamento sobre sistema de
lubrificação)............................................................................................................
CAPÍTULO VII
CONCLUSÕES
VII.1 – Estrutura de Contenção em Solo Grampeado – Obra RJ123....................
VII.2 – Modelos Físicos de Solo Grampeado – Escala 1:1....................................
VII.3 – Sugestões para Futuras Pesquisas............................................................
REFERÊNCIAS BIBLIOGRÁFICAS......................................................................
APÊNDICES
APÊNDICE A – OBRA RJ123................................................................................
APÊNDICE B – MODELOS FÍSICOS....................................................................
223
225
226
235
236
251
265
265
278
287
301
309
315
316
320
321
336
345
1
CAPÍTULO I
INTRODUÇÃO
I.1 – Introdução
A técnica de solo grampeado, que data de 1970, consiste na estabilização de
taludes através da inclusão de reforços no maciço, denominados de grampos,
conjugado a um revestimento superficial que pode variar desde concreto projetado e
tela de aço até simplesmente uma proteção vegetal. Trata-se de uma solução de custo
relativamente baixo, e de fácil e rápida execução.
O comportamento geomecânico dos solos grampeados é, de forma geral,
analisado através de modelagens numéricas e ou de monitoração de obras em
verdadeiras grandezas e ou de modelos físicos. O objeto desta dissertação é a
avaliação do comportamento de estruturas de solo grampeado através de ensaios
geotécnicos e da monitoração de obra em verdadeira grandeza executada na rodovia
RJ123 e de dois modelos físicos em escala 1:1 construídos no laboratório de
geotecnia da COPPE/UFRJ.
O solo grampeado executado em maciço de solo residual de gnaisse, em
condições não saturadas, foi analisado através de ensaios geotécnicos (campo e
laboratório) e da monitoração das forças de tração mobilizadas em três grampos
instrumentados com ―strain gauges‖. Verificou-se a influência da sucção na
estabilidade da obra através de leituras realizadas nos grampos instrumentados em
períodos seco e chuvoso.
Em laboratório foi possível monitorar dois modelos físicos na escala 1:1 à
medida que se aplicavam sobrecargas no terrapleno. Os modelos construídos com os
mesmos instrumentos e materiais se diferenciaram pela liberdade de movimentação
da base do faceamento. Nos experimentos avaliaram-se os esforços de tração ao
longo do comprimento dos grampos, as tensões do solo junto à face em diferentes
profundidades, as pressões verticais nas zonas ativa e passiva, os deslocamentos
verticais do terrapleno, a movimentação do faceamento e os deslocamentos internos
na massa de solo grampeada.
O Laboratório de Modelos Físicos da Geotecnia da COPPE/UFRJ foi
construído no ano de 2002 com o objetivo inicial de, entre outros experimentos,
ensaiar estruturas de contenção de solo grampeado. No entanto, realizaram-se ao
2
longo dos anos somente monitorações de modelos físicos de solos reforçados. A
experiência adquirida com estes experimentos, bem como a estrutura e equipamentos
existentes no laboratório, foram aproveitados e serviram de base para concepção e
desenvolvimento desta pesquisa.
I.2 – Organização do Trabalho
A revisão bibliográfica dos conceitos que envolvem a técnica do solo
grampeado é apresentada nos capítulos II, III e IV. No capítulo II apresentam-se as
características gerais dos solos grampeados. Aspectos sobre o comportamento dos
solos grampeados e os métodos de análise clássicos da literatura são apresentados
nos capítulos III e IV, respectivamente.
Os experimentos da obra em verdadeira grandeza e dos modelos físicos de
solo grampeado são abordados nos capítulos V e VI, respectivamente. Em cada
capítulo são apresentadas características, materiais e metodologias específicas dos
ensaios, assim como os resultados e análises dos resultados das monitorações.
Por fim, no capítulo VII apresentam-se as conclusões da pesquisa, seguidas
das referências bibliográficas e apêndice.
3
CAPÍTULO II
CARACTERÍSTICAS DOS SOLOS GRAMPEADOS
II.1 – Introdução
Objetivando uma breve apresentação do solo grampeado, neste capítulo são
abordados, em linhas gerais: (i) descrição da técnica de grampeamento, incluindo sua
origem; (ii) aspectos construtivos do solo grampeado; (iii) critérios de aplicação e (iv)
comparação com a solução de estabilização em cortina atirantada.
II.2 – Descrição do Solo Grampeado
O solo grampeado é uma solução de estabilização de taludes naturais,
artificiais e de escavação, cujo conceito fundamental consiste no reforço do maciço de
solo ―in situ‖ através de inclusões de elementos resistentes à flexão composta,
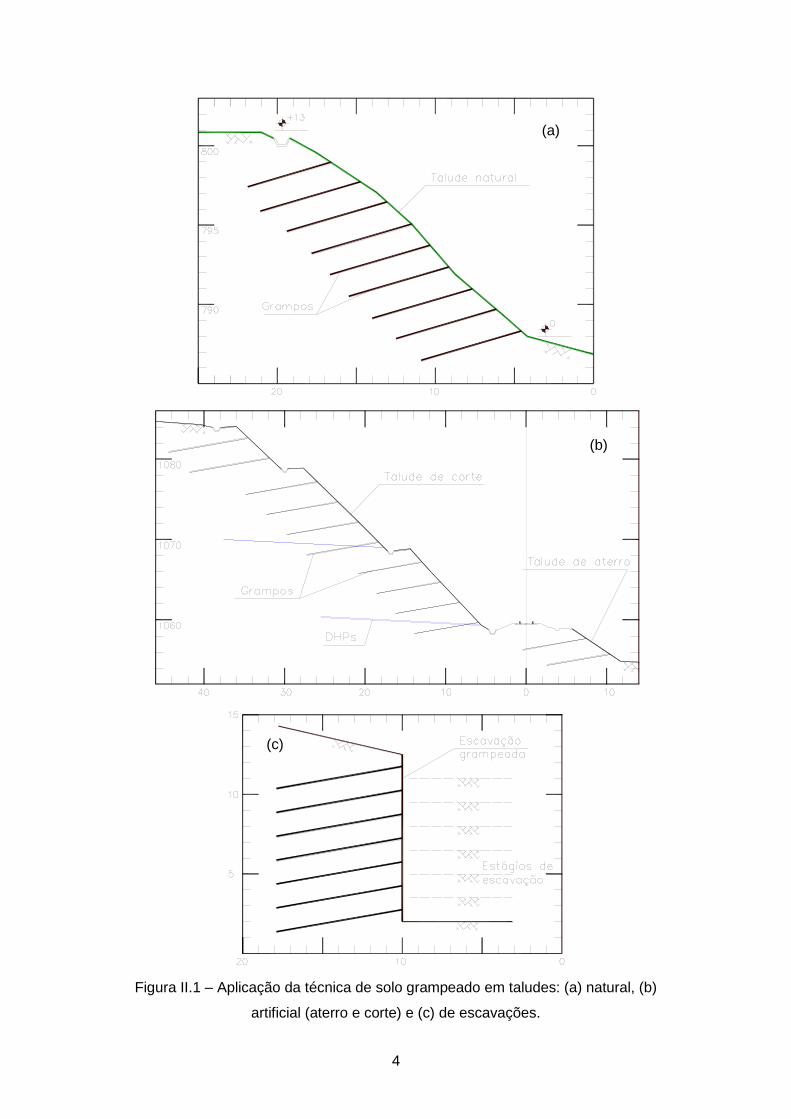
denominados de grampos (Figura II.1). O procedimento é concluído com a
implantação de um revestimento na face que pode variar desde concreto projetado
com tela de aço até simplesmente uma proteção vegetal.
A Norma de estabilidade de encostas, ABNT NBR 11682 (2009), apresenta a
seguinte definição para grampo:
―Elemento de reforço do terreno constituído de perfuração preenchida com
calda de cimento, ou argamassa, compósito ou outro aglutinante e elemento resistente
à tração/cisalhamento. Tem a finalidade de distribuir cargas ao longo de todo o seu
comprimento, interagindo com o terreno circunvizinho, podendo parte da carga
mobilizada ser absorvida pela cabeça. A mobilização de carga no grampo é induzida
pela deformação do terreno por pequena carga aplicada na extremidade externa.
Diferem dos tirantes, conforme descrito na ABNT NBR 5629, por não apresentarem
trecho livre e serem passivos.‖
4
Figura II.1 – Aplicação da técnica de solo grampeado em taludes: (a) natural, (b)
artificial (aterro e corte) e (c) de escavações.
(a)
(b)
(c)
5
Numa abordagem mais geral, EHRLICH (2003) define solo grampeado
conforme segue:
―O solo grampeado consiste no reforço do terreno natural. Os reforços
comumente são barras de aço protegidas por argamassa em furos pré-abertos. A
argamassa é injetada por gravidade, aderida à barra ao longo de todo o comprimento
e o grampo não é protendido. Em obras provisórias as barras podem ser
simplesmente cravadas sem a proteção de argamassa. Em geral, a execução da
escavação se processa em etapas, vertical e horizontalmente, minimizando os
movimentos, que normalmente apresentam-se inferiores a 0,2% a 0,3% da altura da
escavação. A face tem função secundária na estabilização, compreendendo
basicamente em evitar roturas localizadas e garantir o controle dos processos
erosivos. Comumente o faceamento é efetuado em concreto projetado reforçado com
malha metálica. Cobertura vegetal vem também sendo adotada em taludes menos
íngremes.‖
II. 3 – Origem e Desenvolvimento do Solo Grampeado
Segundo MITCHELL & VILLET (1987) o solo grampeado tem origem na
engenharia de minas na Europa, que na década de 50 desenvolveu técnicas para
estabilizar paredes de escavações em rochas. Reduziam-se as possibilidades de
desplacamento de lascas e da propagação de descontinuidades pré-existentes no
maciço rochoso, o qual passava a se comportar como um bloco único. Da
necessidade e avanços dos sistemas de sustentação das escavações subterrâneas
em rochas, RABCEWICZ (1964) desenvolveu uma técnica para construção de túneis
conhecida como NATM (New Austrian Tunneling Method). Obtinha-se a estabilização
com a aplicação, logo após a escavação, de um revestimento flexível de concreto
projetado, tela metálica e chumbadores curtos radiais na zona plástica com controle de
deformações da cavidade (ZIRLIS & PITTA, 1992). O método é adotado
freqüentemente no lugar das sustentações convencionais de túneis, cujos
deslocamentos do maciço são minimizados por meio de um suporte rígido que é
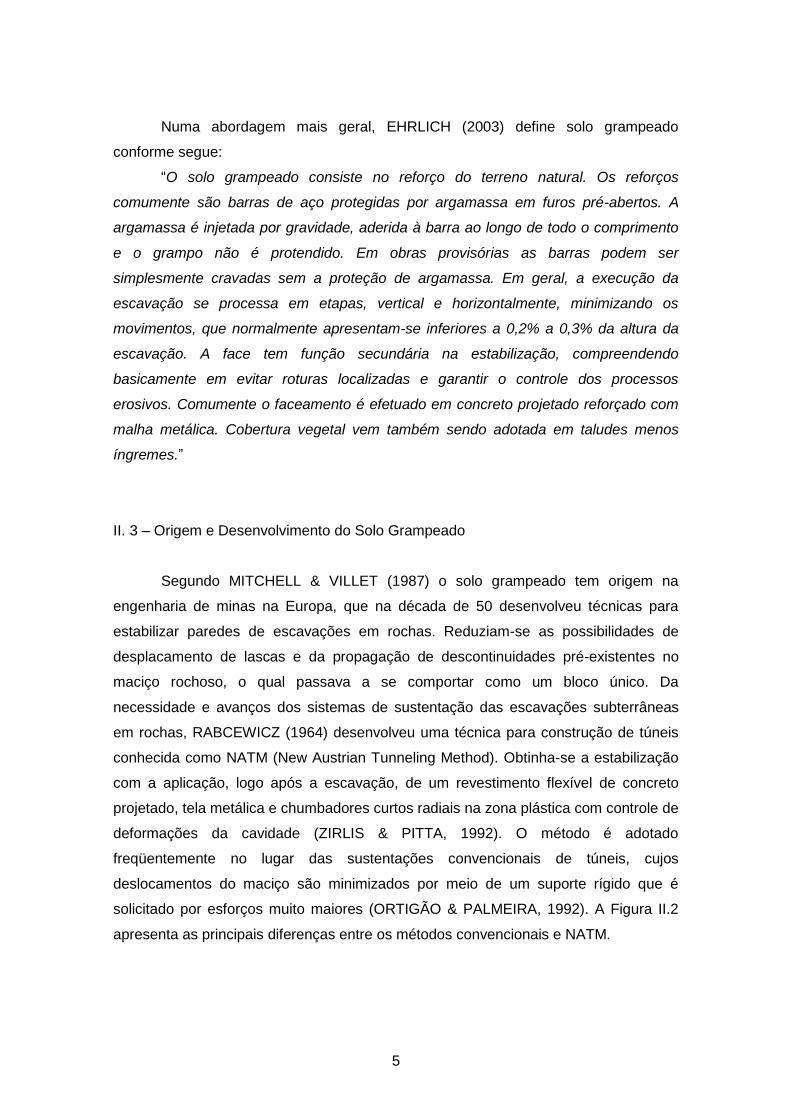
solicitado por esforços muito maiores (ORTIGÃO & PALMEIRA, 1992). A Figura II.2
apresenta as principais diferenças entre os métodos convencionais e NATM.
6
Figura II.2 – Métodos convencional e NATM para construção de túneis: princípio e
comportamento (CLOUTERRE, 1991).
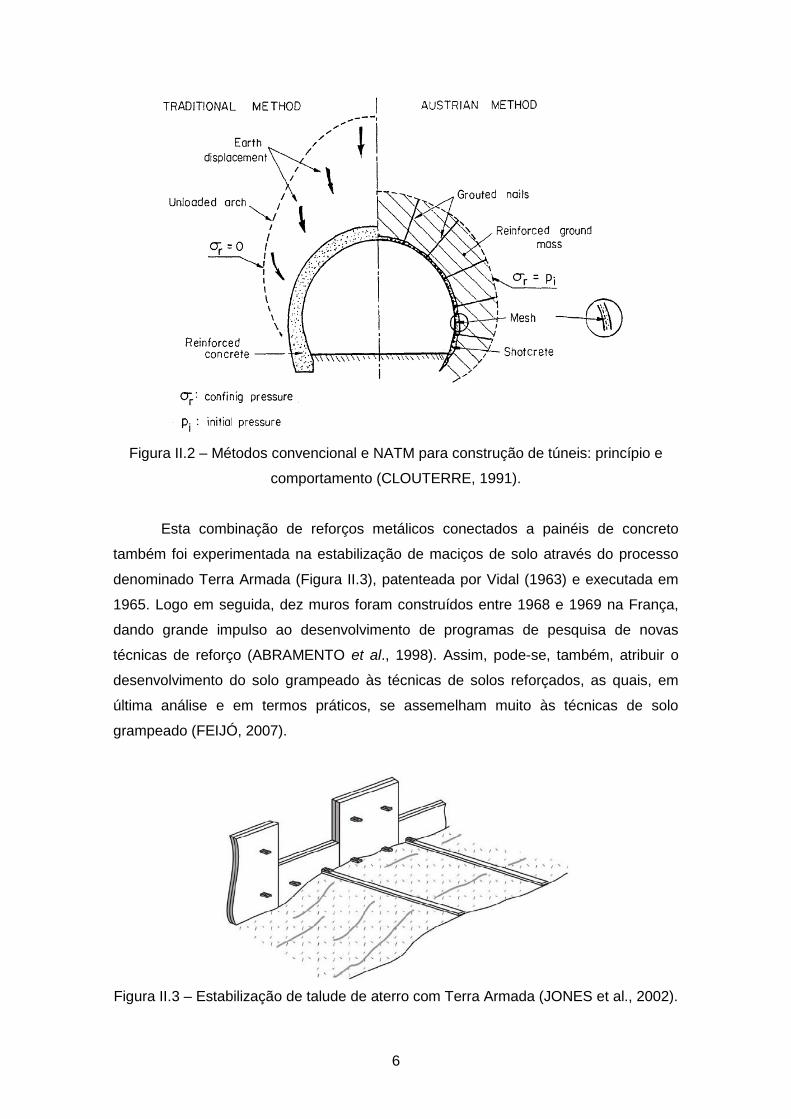
Esta combinação de reforços metálicos conectados a painéis de concreto
também foi experimentada na estabilização de maciços de solo através do processo
denominado Terra Armada (Figura II.3), patenteada por Vidal (1963) e executada em
1965. Logo em seguida, dez muros foram construídos entre 1968 e 1969 na França,
dando grande impulso ao desenvolvimento de programas de pesquisa de novas
técnicas de reforço (ABRAMENTO et al., 1998). Assim, pode-se, também, atribuir o
desenvolvimento do solo grampeado às técnicas de solos reforçados, as quais, em
última análise e em termos práticos, se assemelham muito às técnicas de solo
grampeado (FEIJÓ, 2007).
Figura II.3 – Estabilização de talude de aterro com Terra Armada (JONES et al., 2002).
7
Entretanto, pode-se dizer que o solo grampeado apareceu, essencialmente,
como uma extensão do método NATM, do qual combina elementos passivos com um
sistema de suporte flexível para estabilização de escavações (concreto projetado). A
técnica permite a mobilização de tensões nos reforços e deformações relativamente
pequenas na circunvizinhança do maciço de solo ou rocha. A associação do reforço
com o revestimento da superfície, quando aplicada no solo, no lugar da rocha, é
denominada de solo grampeado.
A partir do desenvolvimento da tecnologia NATM, no início da década de 70,
surgiram as primeiras obras de estabilização em solo grampeado (França, 1972;
Brasil, 1972; Alemanha, 1975; Estados Unidos, 1976). Entretanto, por conseqüência
da experiência com NATM e Terra Armada, ainda na década de 60, taludes foram
estabilizados através da associação de chumbadores e revestimento de concreto. Na
Alemanha Ocidental, em 1975, realizaram-se os primeiros estudos de solos
grampeados por meio de modelos em verdadeira grandeza (STOCKER et al., 1979).
Em 1979 houve um simpósio em Paris sobre solos grampeados, o qual permitiu um
intercâmbio de idéias, propiciando um grande desenvolvimento da técnica. Projetos de
pesquisa com modelos físicos (reduzidos e em escala real), obras e modelagem
numérica foram elaborados nos Estados Unidos (SHEN et al., 1981) e França
(CLOUTERRE, 1991). No Brasil as obras em solo grampeado tomaram impulso a
partir da década de 80. As informações detalhadas sobre as principais obras
executadas no Brasil podem ser encontradas em ZIRLIS & PITTA (1992), ORTIGÃO &
PALMEIRA (1992) e ORTIGÃO et al. (1993).
II.4 – Procedimento Executivo do Solo Grampeado
Devido a sua versatilidade são possíveis vários procedimentos construtivos e
cada um dependerá das condições locais e tecnologia disponível. Para fins de
apresentação da técnica, preocupou-se em relatar, de forma sucinta, a seqüência
típica necessária para a construção do solo grampeado. Aspectos executivos mais
detalhados da construção de estruturas grampeadas foram bastante explorados e
podem ser consultados na literatura internacional e nacional (CLOUTERRE, 1991;
ORTIGÃO & PALMEIRA, 1992; DIAS, 1992; ZIRLIS & PITTA, 1992; BYRNE et al.,
1998, ABRAMENTO et al., 1998; LAZARTE et al., 2003).
A construção de uma estrutura grampeada envolve o reforço do solo, enquanto
o trabalho de escavação progride, através do faceamento e da introdução de barras de
aço em furos pré-abertos preenchidos com calda de cimento, que trabalham
8
essencialmente à tração. Estas barras podem, também, trabalhar parcialmente ao
cisalhamento e flexão. Os grampos moldados ―in situ‖ são, geralmente, paralelos e
ligeiramente inclinados com a horizontal, variando de 5º a 30.
A seqüência de escavação e introdução dos grampos influencia
significativamente a movimentação da massa de solo que reflete no faceamento. De
maneira geral, é pequena a movimentação da face no nível do grampeamento após a
colocação dos grampos. Assim, para redução das movimentações, o grampeamento
deve ser o mais rápido possível. Em vista do caráter irreversível da influência das
movimentações, o grampeamento tardio tem efeitos praticamente irrecuperáveis. Nos
casos em que a altura e inclinação da escavação não garante a estabilidade do talude
para o período de tempo requerido, uma banqueta contínua pode ser empregada para
estabilizar a etapa da escavação, bem como apoiar e operar os equipamentos.
Tipicamente, a escavação avança progressivamente de cima para baixo, com a
inclinação desejada. A fim de manter a estabilidade local entre grampos, necessita-se
da execução de um revestimento, normalmente composto por concreto projetado e
tela metálica.
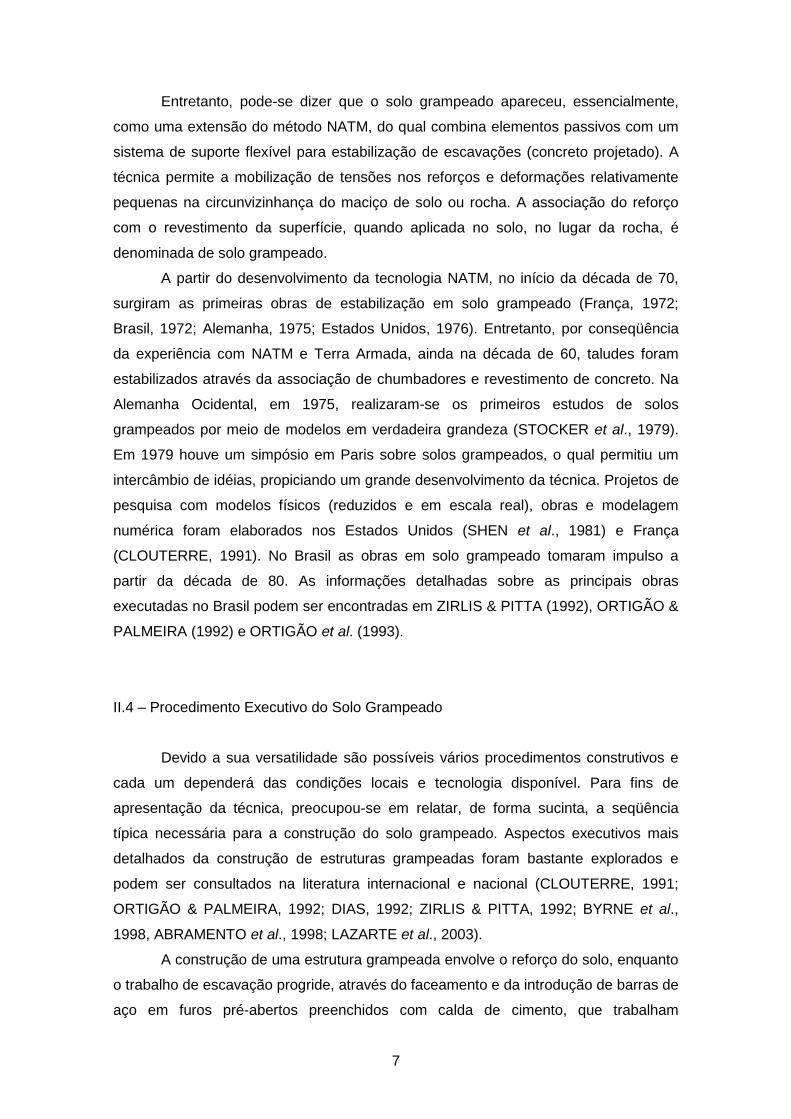
Conforme ilustrado na Figura II.4, a construção de uma estrutura em solo
grampeado se processa em fases sucessivas: (1) escavação; (2) instalação da linha
de grampos; (3) proteção da face do talude com aplicação de revestimento ao longo
de todo nível da escavação e (4) repete-se a seqüência até se atingir a altura de
projeto. Simultaneamente, executa-se o sistema de drenagem. Durante as fases de
escavação, o solo deve remanescer estável. A altura da escavação é função da
coesão do solo e, geralmente, limita-se entre 1 e 2 metros (CLOUTERRE, 1991).
Figura II.4 – Execução típica de escavações grampeadas (CLOUTERRE, 1991).
1 - Escavação
4 - Escavação 3 - Execução da Face
2 - Instalação do grampo
Escavação
por etapas
9
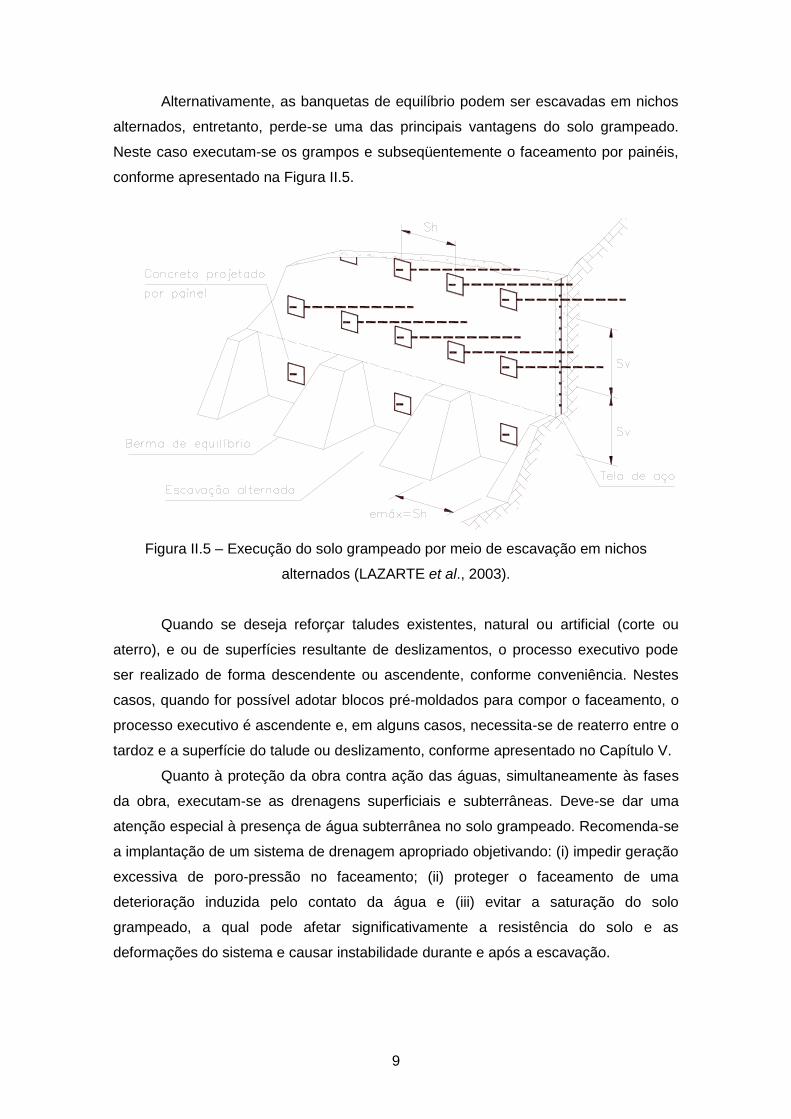
Alternativamente, as banquetas de equilíbrio podem ser escavadas em nichos
alternados, entretanto, perde-se uma das principais vantagens do solo grampeado.
Neste caso executam-se os grampos e subseqüentemente o faceamento por painéis,
conforme apresentado na Figura II.5.
Figura II.5 – Execução do solo grampeado por meio de escavação em nichos
alternados (LAZARTE et al., 2003).
Quando se deseja reforçar taludes existentes, natural ou artificial (corte ou
aterro), e ou de superfícies resultante de deslizamentos, o processo executivo pode
ser realizado de forma descendente ou ascendente, conforme conveniência. Nestes
casos, quando for possível adotar blocos pré-moldados para compor o faceamento, o
processo executivo é ascendente e, em alguns casos, necessita-se de reaterro entre o
tardoz e a superfície do talude ou deslizamento, conforme apresentado no Capítulo V.
Quanto à proteção da obra contra ação das águas, simultaneamente às fases
da obra, executam-se as drenagens superficiais e subterrâneas. Deve-se dar uma
atenção especial à presença de água subterrânea no solo grampeado. Recomenda-se
a implantação de um sistema de drenagem apropriado objetivando: (i) impedir geração
excessiva de poro-pressão no faceamento; (ii) proteger o faceamento de uma
deterioração induzida pelo contato da água e (iii) evitar a saturação do solo
grampeado, a qual pode afetar significativamente a resistência do solo e as
deformações do sistema e causar instabilidade durante e após a escavação.
10
II.4.1 – Grampos
O usual método de execução dos grampos consiste na perfuração sub-horizontal do
maciço de solo e preenchimento do furo com calda de cimento executado em
operação conjunta com a instalação da barra de aço. Os furos são, geralmente,
executados com diâmetros de 75 ou 100 mm, que permitem a instalação da barra de
aço e um ou mais tubos de injeção. Por meio da tubulação acessória, injeta-se a calda
de cimento (execução da ―bainha‖), a partir do fundo do furo, preenchendo totalmente
a cavidade. Deve-se garantir a resistência da barra de aço ao longo do tempo, por
meio de tratamento anticorrosivo adequado com um recobrimento mínimo de calda de
cimento contínuo e constante, garantido por dispositivos centralizadores instalados ao
longo das barras, normalmente espaçados de 1,5 m.
Os diferentes estágios de execução (perfuração, injeção de calda de cimento e
aplicação do concreto projetado) são normalmente executados por equipamentos
leves, de fácil manuseio, instalação e trabalho sobre qualquer talude.
No caso em que se deseja uma maior eficiência da aderência lateral, após a
instalação da calda de cimento, por meio de tubo perdido instalado juntamente com a
barra, é realizada uma fase única de injeção. Podem-se realizar dois estágios de
reinjeção, mas deve-se avaliar o custo benefício frente às melhorias que serão
oferecidas ao sistema de estabilização.
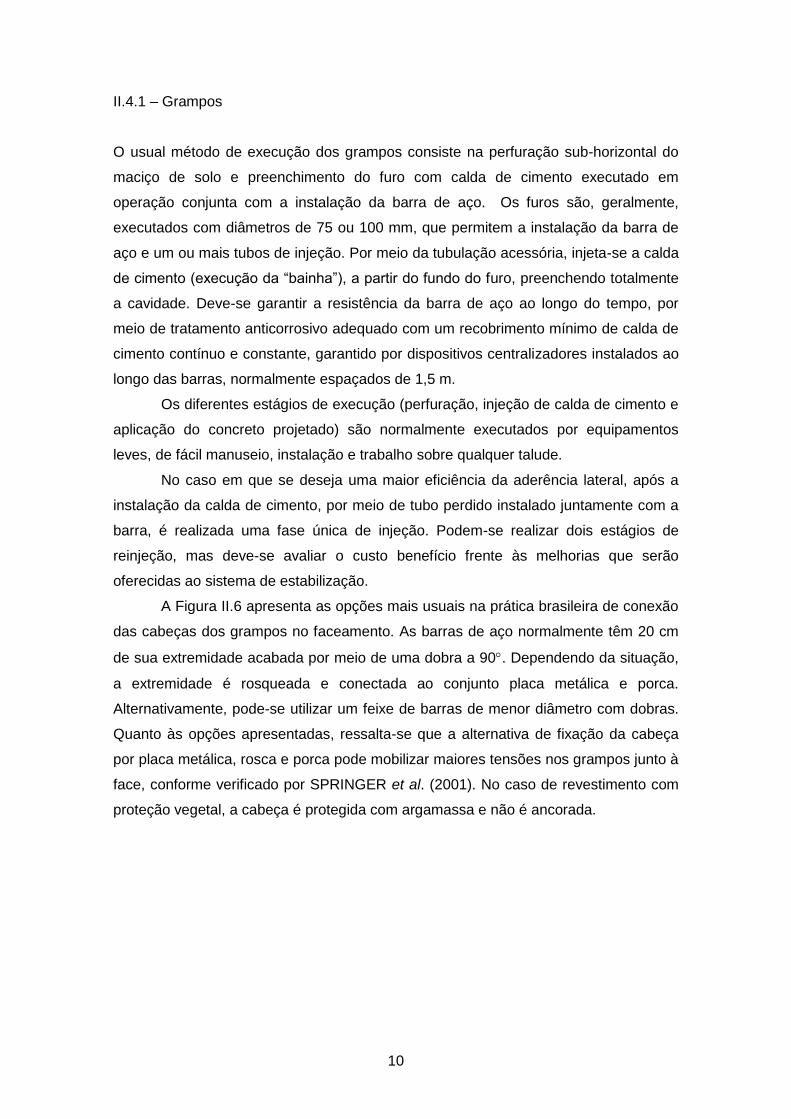
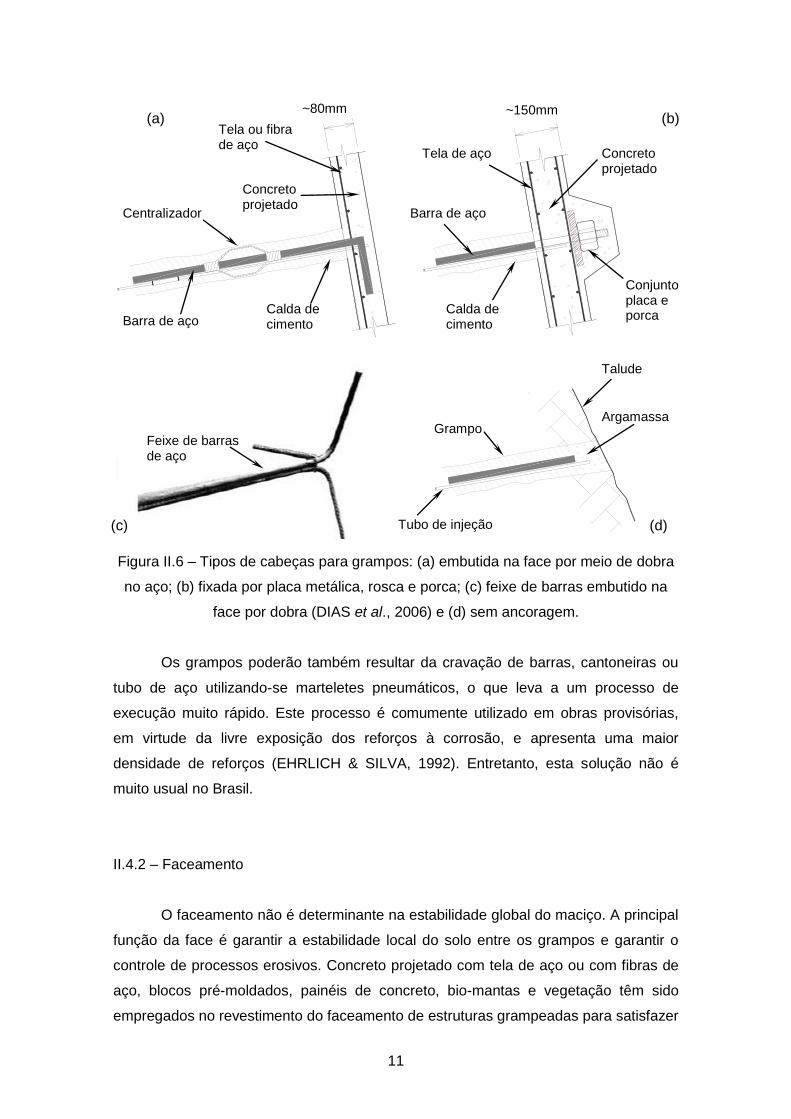
A Figura II.6 apresenta as opções mais usuais na prática brasileira de conexão
das cabeças dos grampos no faceamento. As barras de aço normalmente têm 20 cm
de sua extremidade acabada por meio de uma dobra a 90. Dependendo da situação,
a extremidade é rosqueada e conectada ao conjunto placa metálica e porca.
Alternativamente, pode-se utilizar um feixe de barras de menor diâmetro com dobras.
Quanto às opções apresentadas, ressalta-se que a alternativa de fixação da cabeça
por placa metálica, rosca e porca pode mobilizar maiores tensões nos grampos junto à
face, conforme verificado por SPRINGER et al. (2001). No caso de revestimento com
proteção vegetal, a cabeça é protegida com argamassa e não é ancorada.
11
Figura II.6 – Tipos de cabeças para grampos: (a) embutida na face por meio de dobra
no aço; (b) fixada por placa metálica, rosca e porca; (c) feixe de barras embutido na
face por dobra (DIAS et al., 2006) e (d) sem ancoragem.
Os grampos poderão também resultar da cravação de barras, cantoneiras ou
tubo de aço utilizando-se marteletes pneumáticos, o que leva a um processo de
execução muito rápido. Este processo é comumente utilizado em obras provisórias,
em virtude da livre exposição dos reforços à corrosão, e apresenta uma maior
densidade de reforços (EHRLICH & SILVA, 1992). Entretanto, esta solução não é
muito usual no Brasil.
II.4.2 – Faceamento
O faceamento não é determinante na estabilidade global do maciço. A principal
função da face é garantir a estabilidade local do solo entre os grampos e garantir o
controle de processos erosivos. Concreto projetado com tela de aço ou com fibras de
aço, blocos pré-moldados, painéis de concreto, bio-mantas e vegetação têm sido
empregados no revestimento do faceamento de estruturas grampeadas para satisfazer
(a)
(c) (d)
(b)
Centralizador
Concreto projetado
Tela ou fibra de aço
Calda de cimento Barra de aço
~80mm
Tela de aço
~150mm
Barra de aço
Calda de cimento
Concreto projetado
Conjunto placa e porca
Tubo de injeção
Argamassa
Feixe de barras de aço
Grampo
Talude
12
critérios de projeto, executivos e aspectos estéticos. Em complemento, dependendo
do tipo de faceamento deve-se implantar uma drenagem eficiente na interface do solo
com o revestimento.
II.4.3 – Drenagem
A água tem grande influência na estabilidade da estrutura grampeada, tanto na
sua construção, quanto no decorrer do tempo. Assim, os dispositivos de drenagem
exercem uma função fundamental e são considerados como parte integrante do solo
grampeado. Barbacãs (drenos pontuais) e ou geodrenos (drenos verticais de contato,
com núcleo de PVC revestido com filtro de geotêxtil) são executados no revestimento
de modo que toda água infiltrada próxima à estrutura possa ser drenada para fora. No
caso de fluxos hidráulicos internos é apropriado instalar drenagem profunda,
normalmente executada com drenos sub-horizontais (DHP´s). Dispositivos de
drenagem superficial, tais como canaletas e descidas d’água, protegem a estrutura
grampeada, direcionando a água superficial para dissipadores de energia, que por sua
vez evitam processos erosivos.
II.5 – Critérios de Aplicação do Solo Grampeado
II.5.1 - Vantagens
As principais vantagens do solo grampeado são: (i) baixo impacto ambiental;
(ii) baixo investimento, para obras usuais; (iii) menor porte dos equipamentos e (iv)
desempenho. Entretanto, mesmo que a técnica seja simples, a construção do solo
grampeado requer habilidade da construtora e acompanhamento geotécnico. Por outro
lado, o número de empresas e profissionais especializados com qualificações e
experiência na elaboração de projetos e construção de solo grampeado vem
aumentando.
O baixo impacto ambiental está relacionado ao procedimento executivo da
estrutura grampeada, quantidade reduzida de materiais, pouca produção de resíduos
de construção, alternativas de revestimento e uma menor interferência nos meio
biótico em relação às soluções convencionais, entre estas, o retaludamento que
ocasiona supressão vegetal.

13
Devido à característica da solução e ao processo executivo, a técnica de solo
grampeado representa uma solução de custo mais competitivo, pois combina
velocidade, simplicidade e uso de equipamento de pequeno porte.
No solo grampeado o único elemento estrutural utilizado para a estabilização
do maciço são os grampos (MITCHELL & VILLET, 1987). Em função da grande
quantidade de grampos utilizada na estrutura grampeada, a ruptura de algum grampo
pode não comprometer a estabilidade do sistema (JURAN & ELIAS, 1991). A estrutura
não precisa de fundações. A proteção do talude em concreto projetado ou outro tipo
de revestimento apresenta um investimento mais baixo em relação às técnicas de
estabilização similares.
O processo executivo propicia o avanço simultâneo dos serviços de
escavação, grampeamento e revestimento de forma segura e ágil, além de permitir
uma grande flexibilidade de adaptação do projeto às condições de campo, que muitas
vezes não podem ser totalmente investigadas na fase de estudo.
Embora a maioria dos estudos e pesquisas de solo grampeado desenvolvidos
seja limitada a solos homogêneos, a técnica também se adapta muito bem aos solos
heterogêneos (CLOUTERRE, 1991). A densidade e geometria (comprimento e
inclinação) dos grampos podem ser ajustadas ao tipo e à resistência dos solos
encontrados. Em perfis de solo variados, os grampos podem atravessar facilmente
camadas de pedregulhos ocasionais.
Durante a execução da estrutura grampeada utiliza-se uma pequena
quantidade de equipamentos de pequeno porte e de fácil manuseio, que podem ser
instalados em locais bastante adversos e de diferentes topografias.
Quanto ao desempenho, o solo grampeado, por ser uma estrutura deformável
na sua essência de funcionamento, suporta com segurança a ocorrência de recalques
totais ou diferenciais (MITCHELL & VILLET, 1987). Além disso, a mobilização do
trabalho dos grampos requer pequenos deslocamentos e desde que o grampeamento
seja aplicado no menor tempo possível após a escavação, os deslocamentos do solo
são minimizados (ORTIGÃO & PALMEIRA, 1992).
II.5.2 - Limitações
O solo grampeado apresenta determinados inconvenientes, principalmente em
relação aos deslocamentos inerentes à própria natureza da técnica, que constituem
uma limitação, particularmente importante, em áreas urbanas, cuja movimentação
pode afetar estruturas de obras próximas à escavação. Nestas condições é
14
fundamental certificar-se de que as utilidades e ou edificações vizinhas à escavação
grampeada possam tolerar, sem danos, os deslocamentos de curto e longo prazo.
Onde as estruturas existentes são incapazes de tolerar estas deformações, no
projeto podem-se incluir tirantes próximos ao topo do solo grampeado com o objetivo
de minimizar os deslocamentos (Figura II.7). Entretanto, mesmo com estas medidas,
devem-se instalar instrumentos para monitorar o desempenho do solo grampeado
objetivando-se verificar, durante e após a construção, se os deslocamentos são
mantidos dentro de um nível aceitável para as estruturas existentes.
Figura II.7 – Combinação das técnica de solo grampeado com cortina atirantada
objetivando minimizar deslocamentos.
A técnica não é aplicável em escavações em argila mole, uma vez que será
necessária uma alta densidade de grampos com comprimentos elevados (ZIRLIS &
PITTA, 1992). Além disso, o fenômeno de fluência e o aumento do teor de umidade
após a construção podem afetar significativamente em longo prazo o desempenho e
deslocamentos da estrutura.
A mobilização da resistência ao cisalhamento na interface solo-grampo é
afetada pela infiltração de água no solo. Solos com predominância de finos sofrem
significativas reduções de resistência devido ao aumento do teor de umidade, que atua
como mecanismo deflagrador da diminuição da resistência ao cisalhamento na
interface solo-grampo.
A escavação grampeada torna-se difícil em areias puras sem coesão aparente,
não sendo possível assegurar a estabilidade de taludes verticais, mesmo com baixa
altura. Os riscos são maiores com a presença de água e deve-se evitar esta situação.
Considerações de durabilidade podem impor limitações severas no uso de
grampos construídos com barra de aço e calda de cimento em ambientes agressivos
(JURAN & ELIAS, 1991).
Gasoduto
15
A presença de água dificulta a execução do solo grampeado e modifica a
condição hidrostática inicial do solo, resultando em fluxo d’água, que tem grande
influência na escavação grampeada. Além da influência direta nas pressões d’água no
faceamento, o fluxo influencia as tensões efetivas do solo e é capaz de promover a
instabilização do talude.
II.6 – Comparação do Solo Grampeado com Cortina Atirantada
Objetivando um melhor entendimento do conceito de estruturas de solo
grampeado, torna-se interessante comparar as principais características desta técnica
com aquelas da cortina atirantada, cujo processo executivo típico, também, é realizado
do topo para a base do sistema de contenção. Entretanto, ressalta-se que as duas
soluções podem ser executadas de forma descendente ou ascendente.
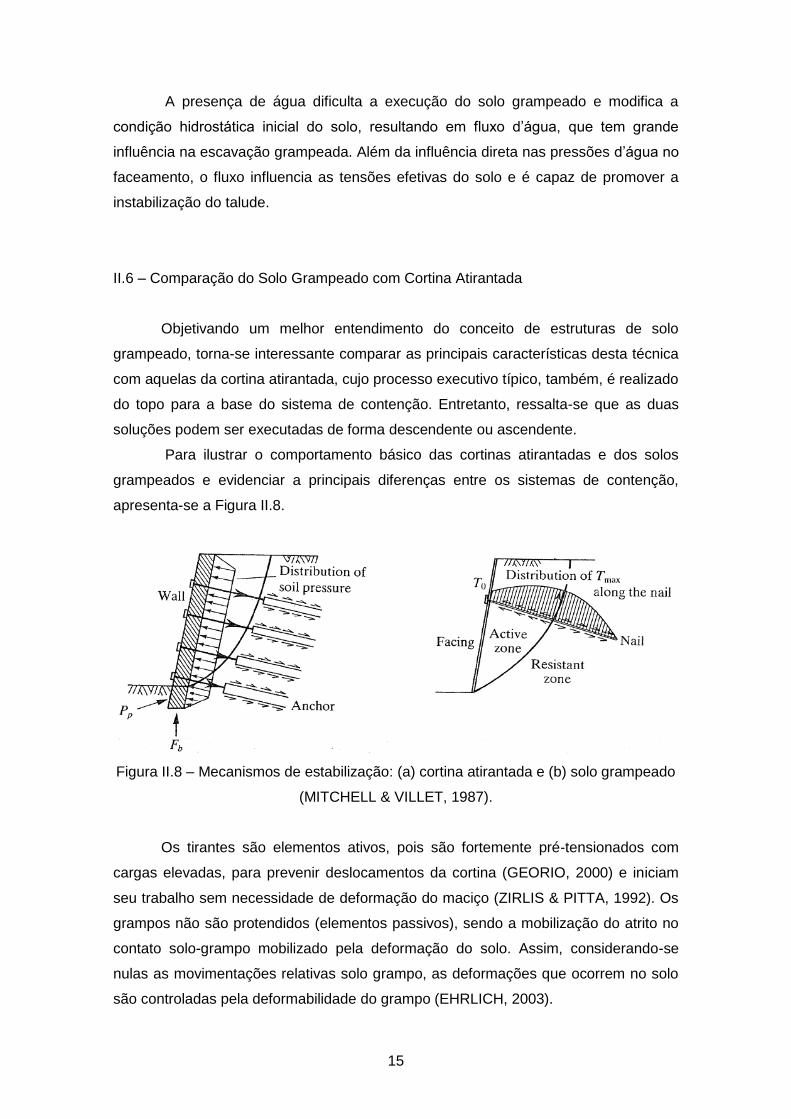
Para ilustrar o comportamento básico das cortinas atirantadas e dos solos
grampeados e evidenciar a principais diferenças entre os sistemas de contenção,
apresenta-se a Figura II.8.
Figura II.8 – Mecanismos de estabilização: (a) cortina atirantada e (b) solo grampeado
(MITCHELL & VILLET, 1987).
Os tirantes são elementos ativos, pois são fortemente pré-tensionados com
cargas elevadas, para prevenir deslocamentos da cortina (GEORIO, 2000) e iniciam
seu trabalho sem necessidade de deformação do maciço (ZIRLIS & PITTA, 1992). Os
grampos não são protendidos (elementos passivos), sendo a mobilização do atrito no
contato solo-grampo mobilizado pela deformação do solo. Assim, considerando-se
nulas as movimentações relativas solo grampo, as deformações que ocorrem no solo
são controladas pela deformabilidade do grampo (EHRLICH, 2003).
16
Sob condições semelhantes, a quantidade de grampos por área da face é
maior que a de tirantes. Como conseqüência da maior densidade de grampos, a
ruptura de um grampo terá um efeito menor na estabilidade do solo que a ruptura de
um tirante.
O dimensionamento estrutural do paramento de concreto da cortina atirantada
é muito importante, haja vista o puncionamento causado pela aplicação das elevadas
cargas de teste (FEIJÓ, 2007). No solo grampeado a face tem por objetivos garantir a
estabilidade local e evitar o desenvolvimento de processos erosivos, ao contrário do
que se verifica nas cortinas atirantadas nas quais a face é o promotor direto da
estabilidade da zona potencialmente instável (EHRLICH, 2003).
No solo grampeado a estabilidade é garantida pelas forças de atrito
desenvolvidas no contato solo-grampo. Através dos grampos promove-se a ―costura‖
da zona potencialmente instável e da zona resistente, melhorando a estabilidade do
conjunto (EHRLICH, 2003).
Os grampos, ao contrário das ancoragens, não têm trecho livre, transferindo
tensões para o solo ao longo de todo o seu comprimento (GEORIO, 2000). Já os
tirantes são projetados para transferir carga somente na região ancorada atrás da
superfície potencial de ruptura.
A distribuição das tensões é variável ao longo do comprimento do grampo. No
tirante, uma parcela do comprimento encontra-se livre, enquanto a parcela restante é
ancorada. A carga no trecho livre do tirante é aproximadamente constante e no trecho
ancorado é variável.
No Brasil não há norma para solos grampeados e na prática, quando se faz
ensaio de arrancamento em grampos, o número é muito reduzido. No caso de
cortinas, todos os tirantes são ensaiados para aceitação, conforme Norma ABNT NBR
5629 (Execução de tirantes ancorados no terreno).
A corrosão dos tirantes tende a ser maior, visto que o mesmo está exposto ao
efeito da corrosão sob tensão, ―stress corrosion‖, necessitando de cuidados especiais
de tratamento (ABRAMENTO et al., 1998).
A maioria das cortinas tradicionais tem parede moldada ―in situ‖ vertical. Ao
contrário, os solos grampeados podem facilmente ter faceamentos inclinados
acompanhando a inclinação natural do terreno e ou pode se adequar mais facilmente
a uma superfície irregular do talude, reduzindo-se escavações.
17
CAPÍTULO III
COMPORTAMENTO GEOMECÂNICO DOS SOLOS GRAMPEADOS
III.1 - Introdução
Neste capítulo discorre-se sobre os aspectos geomecânicos dos solos
grampeados. O comportamento geomecânico dessas estruturas de contenção tem
sido objeto de estudos e pesquisas que englobam métodos numéricos, ensaios,
experimentos, investigações e acompanhamentos, por meio de monitoração, do
desempenho de obras reais e modelos físicos em escala reduzida e na escala 1:1.
Sustentando-se nestas informações, diversos autores contribuíram com a literatura
técnica-científica para a melhor compreensão fenomenológica dos mecanismos que
controlam o conjunto solo, grampo, faceamento e drenagem que constituí o sistema de
contenção. Mesmo assim, o acervo de informações que se dispõe sobre o
desempenho da técnica de grampeamento é muito reduzido.
Por se tratar de uma obra geotécnica, não há uma regra geral e cada caso
deve ser analisado cuidadosamente, observando-se: (i) complexo ou modelo geológio-
geotécnico local; (ii) parâmetros geotécnicos das camadas do maciço de solo
reforçado; (iii) propriedades geométricas e mecânicas dos grampos e faceamento e
suas interações entre si e com o solo; (iv) condição e ação da água no solo; (v)
sistema de drenagem; (vi) processo executivo; (vii) solicitações externas e internas;
(viii) configuração geométrica dos grampos (mergulho e espaçamentos vertical e
horizontal) e (ix) relação entre os comprimentos dos grampos e altura da escavação
(L/H). Estas observações são elementos essenciais para a seleção da(s) referência(s)
bibliográfica(s) mais adequada(s) para subsidiar o projeto e prever o modo como as
tensões e os deslocamentos ocorrem e se distribuem no solo, nos grampos e no
faceamento, bem como, os tipos de rupturas que possam se instalar nas fases de
construção e em serviço.
Devido ao considerável número de parâmetros envolvidos, o nível de
compreensão é complexo, e por isso em certos casos de obra, é aconselhável a
realização de ensaios de arrancamento e emprego de instrumentos para monitorar o
comportamento do solo grampeado, acompanhando e verificando, principalmente, os
deslocamentos, deformações e esforços atuantes. No entanto, não há uma Norma
18
sobre a estabilidade de taludes naturais e de escavação com uso de grampos que
possa orientar os profissionais e empresas, tanto de consultoria, quanto de execução.
III.2 – Interação Solo-Grampo
Conforme descrito pelo projeto CLOUTERRE (1991), a interação solo-grampo
pode se desenvolver de duas formas nas estruturas de solo grampeado. A mais
importante interação é a resistência ao cisalhamento de interface solo-grampo, a
qual induz tensões nos grampos, predominantemente de tração, que devem ser
inferiores à resistência ao arrancamento (qs). Outra interação, de menor importância,
refere-se à pressão passiva do solo ao longo do grampo que possibilita, também, a
mobilização de esforços cisalhantes e de flexão, caso se desenvolva uma zona de
cisalhamento na massa de solo reforçada e o grampo tenha rigidez suficiente para
reagir aos esforços aplicados sobre ele.
III.2.1 – Resistência ao Cisalhamento de Interface Solo-Grampo
No que se refere ao comportamento de trabalho de uma estrutura de solo
reforçado, entende-se que existe um processo interativo no qual o solo tende a se
relaxar horizontalmente transferindo carga para o reforço até o limite da capacidade
de ligação da interface solo-reforço, até que a condição de equilíbrio seja atingida
em termos de deformações no solo, reforço e interface (EHRLICH & SILVA, 1992).
Assim, o conhecimento da interação solo-reforço é extremamente importante para a
análise de estruturas grampeadas.
A resistência ao cisalhamento desenvolvida na interface solo-grampo é um
parâmetro fundamental no desempenho do solo grampeado, pois é através desta
interação que os esforços são transferidos do solo para o grampo (PROTO SILVA et
al., 2006). Esta resistência é função das propriedades do grampo, do solo e da
interface solo-grampo.
A resistência ao cisalhamento de interface solo-grampo é influenciada pelo:
(i) fenômeno de dilatância em solos granulares compactos;
(ii) processo de injeção da calda de cimento;
(iii) teor de umidade no solo;

19
(iv) deformação interna do maciço reforçado;
(v) inclinação do grampo com a horizontal; e
(vi) método executivo da perfuração.
III.2.1.1 – Fenômeno de Dilatância
Segundo RICCIO FILHO (2007), a dificuldade em se determinar o valor da
resistência ao arrancamento está na determinação do valor da tensão normal efetiva,
pois seu valor sofre alterações devido à imposição de deformações cisalhantes,
provocando o fenômeno da dilatância em solos granulares compactos. A restrição ao
aumento de volume, devido às condições de contorno, e o efeito da dilatância fazem
com que haja um acréscimo significativo na tensão normal à superfície do reforço, ou
seja, σ’v sofre um acréscimo. Por outro lado, o aumento adicional na tensão de
confinamento, por aumento de sobrecarga, pode provocar uma diminuição na
tendência de ocorrer dilatância, ou seja, a influência deste fenômeno sobre os
coeficientes de atrito obtidos em ensaios de arrancamento tende a diminuir com o
aumento da sobrecarga.
Quando solos granulares compactos são submetidos a esforços cisalhantes
promovidos pela mobilização de um reforço, ocorre uma tendência de aumento do
volume da área que envolve do grampo que é contida pela baixa compressibilidade do
solo. Isto resulta em um acréscimo de tensão () na tensão normal inicial (σ’v)
aplicada na superfície do reforço (CLOUTERRE, 1991). Este fenômeno, denominado
de dilatância, foi observado por SCHLOSSER & ELIAS (1978), e no caso de reforços,
conduz à definição de um coeficiente de atrito aparente * definido pela Equação III.1:
v
*
´
(III.1)
Sendo a tensão cisalhante média ao longo do reforço e σ’v = Z a tensão
vertical de sobrecarga.
O valor de μ* sofre alteração de acordo com o acréscimo de tensão ()
provocado pela dilatância, ou seja, o valor real da tensão vertical atuante sobre a
superfície do reforço pode ser maior que σ’v, sendo denominado de σ’v,real. De acordo
com MITCHELL & VILLET (1987) os coeficientes de atrito aparente μ* (μ) e μ*real são
20
equacionados da seguinte forma (Equação III.2):
real,v
realreal
*
v ´´
(III.2)
Sendo σ’v,real = σ’v+ a tensão vertical real.
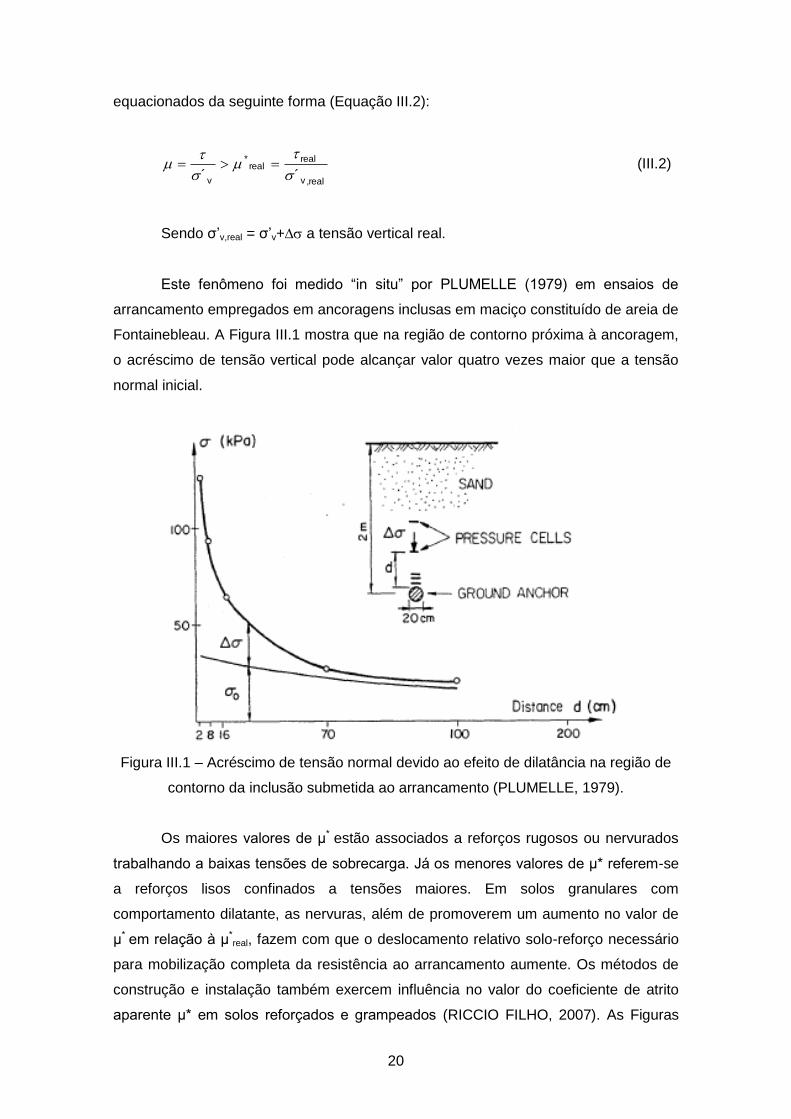
Este fenômeno foi medido ―in situ‖ por PLUMELLE (1979) em ensaios de
arrancamento empregados em ancoragens inclusas em maciço constituído de areia de
Fontainebleau. A Figura III.1 mostra que na região de contorno próxima à ancoragem,
o acréscimo de tensão vertical pode alcançar valor quatro vezes maior que a tensão
normal inicial.
Figura III.1 – Acréscimo de tensão normal devido ao efeito de dilatância na região de
contorno da inclusão submetida ao arrancamento (PLUMELLE, 1979).
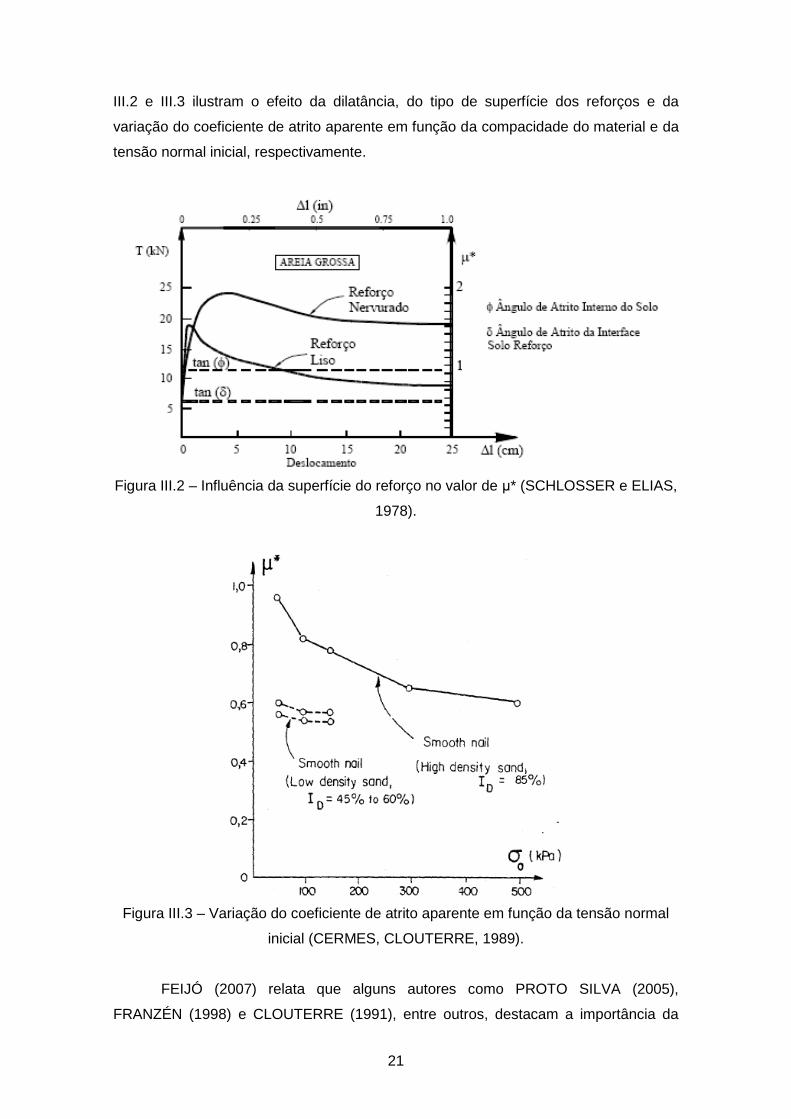
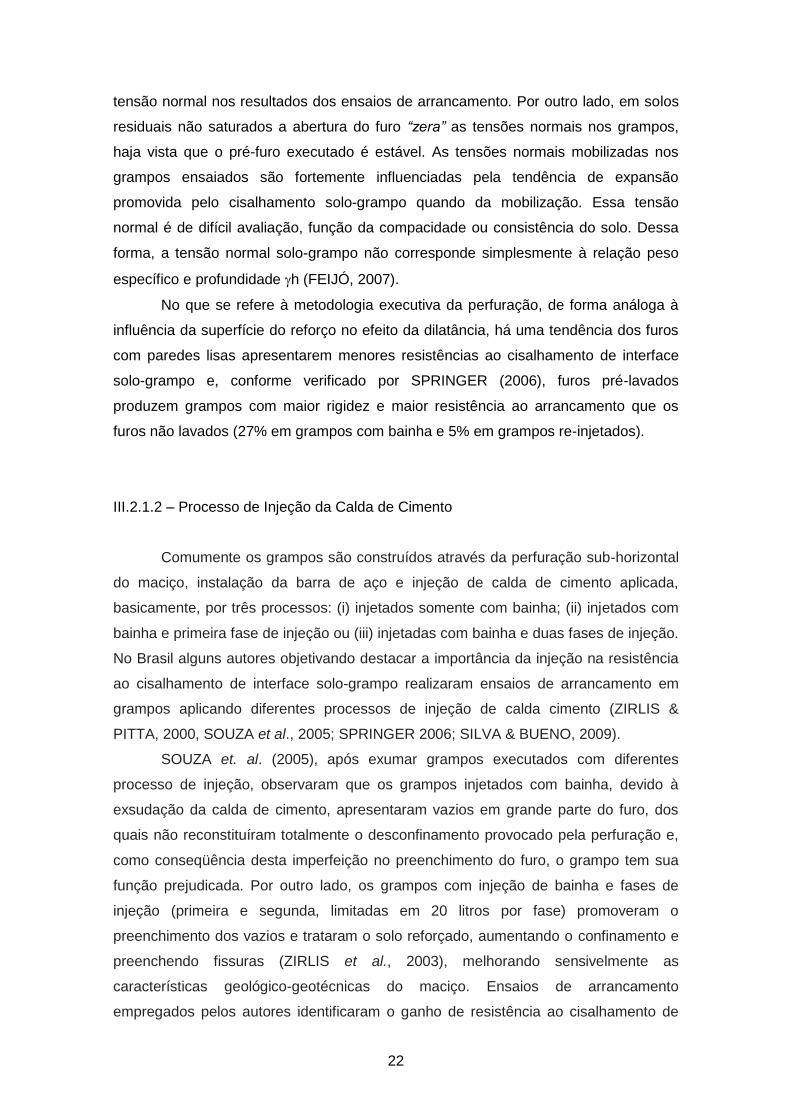
Os maiores valores de μ* estão associados a reforços rugosos ou nervurados
trabalhando a baixas tensões de sobrecarga. Já os menores valores de μ* referem-se
a reforços lisos confinados a tensões maiores. Em solos granulares com
comportamento dilatante, as nervuras, além de promoverem um aumento no valor de
μ* em relação à μ*real, fazem com que o deslocamento relativo solo-reforço necessário
para mobilização completa da resistência ao arrancamento aumente. Os métodos de
construção e instalação também exercem influência no valor do coeficiente de atrito
aparente μ* em solos reforçados e grampeados (RICCIO FILHO, 2007). As Figuras
21
III.2 e III.3 ilustram o efeito da dilatância, do tipo de superfície dos reforços e da
variação do coeficiente de atrito aparente em função da compacidade do material e da
tensão normal inicial, respectivamente.
Figura III.2 – Influência da superfície do reforço no valor de μ* (SCHLOSSER e ELIAS,
1978).
Figura III.3 – Variação do coeficiente de atrito aparente em função da tensão normal
inicial (CERMES, CLOUTERRE, 1989).
FEIJÓ (2007) relata que alguns autores como PROTO SILVA (2005),
FRANZÉN (1998) e CLOUTERRE (1991), entre outros, destacam a importância da
22
tensão normal nos resultados dos ensaios de arrancamento. Por outro lado, em solos
residuais não saturados a abertura do furo “zera” as tensões normais nos grampos,
haja vista que o pré-furo executado é estável. As tensões normais mobilizadas nos
grampos ensaiados são fortemente influenciadas pela tendência de expansão
promovida pelo cisalhamento solo-grampo quando da mobilização. Essa tensão
normal é de difícil avaliação, função da compacidade ou consistência do solo. Dessa
forma, a tensão normal solo-grampo não corresponde simplesmente à relação peso
específico e profundidade h (FEIJÓ, 2007).
No que se refere à metodologia executiva da perfuração, de forma análoga à
influência da superfície do reforço no efeito da dilatância, há uma tendência dos furos
com paredes lisas apresentarem menores resistências ao cisalhamento de interface
solo-grampo e, conforme verificado por SPRINGER (2006), furos pré-lavados
produzem grampos com maior rigidez e maior resistência ao arrancamento que os
furos não lavados (27% em grampos com bainha e 5% em grampos re-injetados).
III.2.1.2 – Processo de Injeção da Calda de Cimento
Comumente os grampos são construídos através da perfuração sub-horizontal
do maciço, instalação da barra de aço e injeção de calda de cimento aplicada,
basicamente, por três processos: (i) injetados somente com bainha; (ii) injetados com
bainha e primeira fase de injeção ou (iii) injetadas com bainha e duas fases de injeção.
No Brasil alguns autores objetivando destacar a importância da injeção na resistência
ao cisalhamento de interface solo-grampo realizaram ensaios de arrancamento em
grampos aplicando diferentes processos de injeção de calda cimento (ZIRLIS &
PITTA, 2000, SOUZA et al., 2005; SPRINGER 2006; SILVA & BUENO, 2009).
SOUZA et. al. (2005), após exumar grampos executados com diferentes
processo de injeção, observaram que os grampos injetados com bainha, devido à
exsudação da calda de cimento, apresentaram vazios em grande parte do furo, dos
quais não reconstituíram totalmente o desconfinamento provocado pela perfuração e,
como conseqüência desta imperfeição no preenchimento do furo, o grampo tem sua
função prejudicada. Por outro lado, os grampos com injeção de bainha e fases de
injeção (primeira e segunda, limitadas em 20 litros por fase) promoveram o
preenchimento dos vazios e trataram o solo reforçado, aumentando o confinamento e
preenchendo fissuras (ZIRLIS et al., 2003), melhorando sensivelmente as
características geológico-geotécnicas do maciço. Ensaios de arrancamento
empregados pelos autores identificaram o ganho de resistência ao cisalhamento de
23
interface solo-grampo em função das injeções. No entanto, os grampos injetados com
bainha e primeira fase de injeção apresentaram resistência ao arrancamento superior
à aqueles com três fases de injeção.
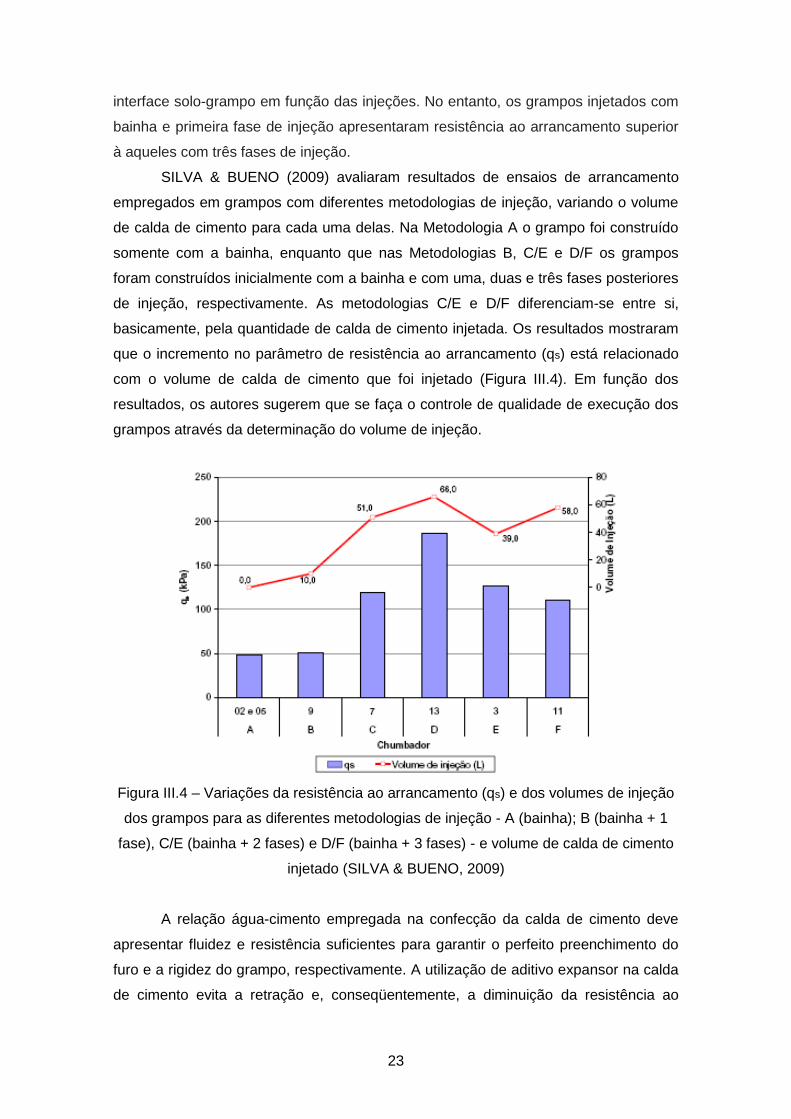
SILVA & BUENO (2009) avaliaram resultados de ensaios de arrancamento
empregados em grampos com diferentes metodologias de injeção, variando o volume
de calda de cimento para cada uma delas. Na Metodologia A o grampo foi construído
somente com a bainha, enquanto que nas Metodologias B, C/E e D/F os grampos
foram construídos inicialmente com a bainha e com uma, duas e três fases posteriores
de injeção, respectivamente. As metodologias C/E e D/F diferenciam-se entre si,
basicamente, pela quantidade de calda de cimento injetada. Os resultados mostraram
que o incremento no parâmetro de resistência ao arrancamento (qs) está relacionado
com o volume de calda de cimento que foi injetado (Figura III.4). Em função dos
resultados, os autores sugerem que se faça o controle de qualidade de execução dos
grampos através da determinação do volume de injeção.
Figura III.4 – Variações da resistência ao arrancamento (qs) e dos volumes de injeção
dos grampos para as diferentes metodologias de injeção - A (bainha); B (bainha + 1
fase), C/E (bainha + 2 fases) e D/F (bainha + 3 fases) - e volume de calda de cimento
injetado (SILVA & BUENO, 2009)
A relação água-cimento empregada na confecção da calda de cimento deve
apresentar fluidez e resistência suficientes para garantir o perfeito preenchimento do
furo e a rigidez do grampo, respectivamente. A utilização de aditivo expansor na calda
de cimento evita a retração e, conseqüentemente, a diminuição da resistência ao
24
cisalhamento ao longo da interface solo-grampo (ORTIGÃO, 1997).
SPRINGER (2006) realizou 25 ensaios de arrancamento em grampos inclusos
em solo residual de natureza gnáissica com dois tipos de injeção para verificar a
influência do processo de injeção. As análises dos resultados dos ensaios de
arrancamento realizados indicaram que a resistência ao arrancamento (qs) de
grampos re-injetados (bainha + 1 injeção) executados em solo residual maduro foi,
aproximadamente, 37% superior à do grampo com 1 injeção (bainha). Nos casos de
grampos em solo residual jovem, a resistência qs foi, em média, 27% superior para os
grampos com re-injeção. Além disso, os grampos re-injetados apresentaram-se mais
rígidos que os grampos executados com somente 1 injeção.
FEIJÓ & EHRLICH (2001) realizaram ensaios de arrancamento em solo
residual de natureza gnáissica aplicando injeção com baixa pressão com o auxílio de
uma bomba manual de baixa pressão, tendo encontrado valores elevados que
variaram de 100 a 300 kPa, conforme a consistência do terreno e a profundidade de
assentamento do grampo. SPRINGER (2006) observou que a resistência ao
arrancamento de grampos com 1 injeção compreendeu valores entre 94 e 162 kPa,
enquanto que grampos com 2 injeções apresentaram resultados entre 159 e 217 kPa.
Os estudos realizados evidenciam que a re-injeção permite uma melhor fixação
da barra ao solo, promovendo a ancoragem do grampo (SPRINGER, 2006), além de
tratar o maciço, aumentando o confinamento e preenchendo fissuras (ZIRLIS et al.,
2003). No entanto, deve-se verificar a viabilidade técnica econômica do processo de
injeção a ser empregado na construção da estrutura grampeada para que se possa
avaliar o custo benefício promovido por uma ou mais injeção na confecção dos
grampos.
III.2.1.3 – Teor de Umidade no Solo
A mobilização da resistência ao cisalhamento de interface solo-grampo,
responsável pelo aumento ou diminuição da resistência dos grampos, é afetada pela
infiltração d’água e ou elevação do lençol freático. Pela natureza e propriedades do
solo, a resistência ao cisalhamento de interface solo-grampo pode ser mobilizado tanto
pelo atrito, quanto pela adesão superficial no perímetro com comprimento ancorado do
grampo. A maioria dos solos grampeados apresenta características comuns aos solos
argilosos e aos granulares, devendo, em alguns casos, ser encarados como possuindo
as propriedades de ambos.
25
Solos com granulometria fina sofrem significativas variações de resistência
devido às variações do teor de umidade que influenciam na adesão de suas partículas
na superfície do grampo. Mesmo em solos perfeitamente não coesivos, determinado
grau de saturação confere ao maciço não saturado, por efeito de pressão capilar,
características de materiais coesivos. Entretanto, o aumento do teor de umidade atua
como um mecanismo deflagrador da diminuição das tensões cisalhantes no contato
solo-grampo pela redução e ou eliminação da adesão superficial.
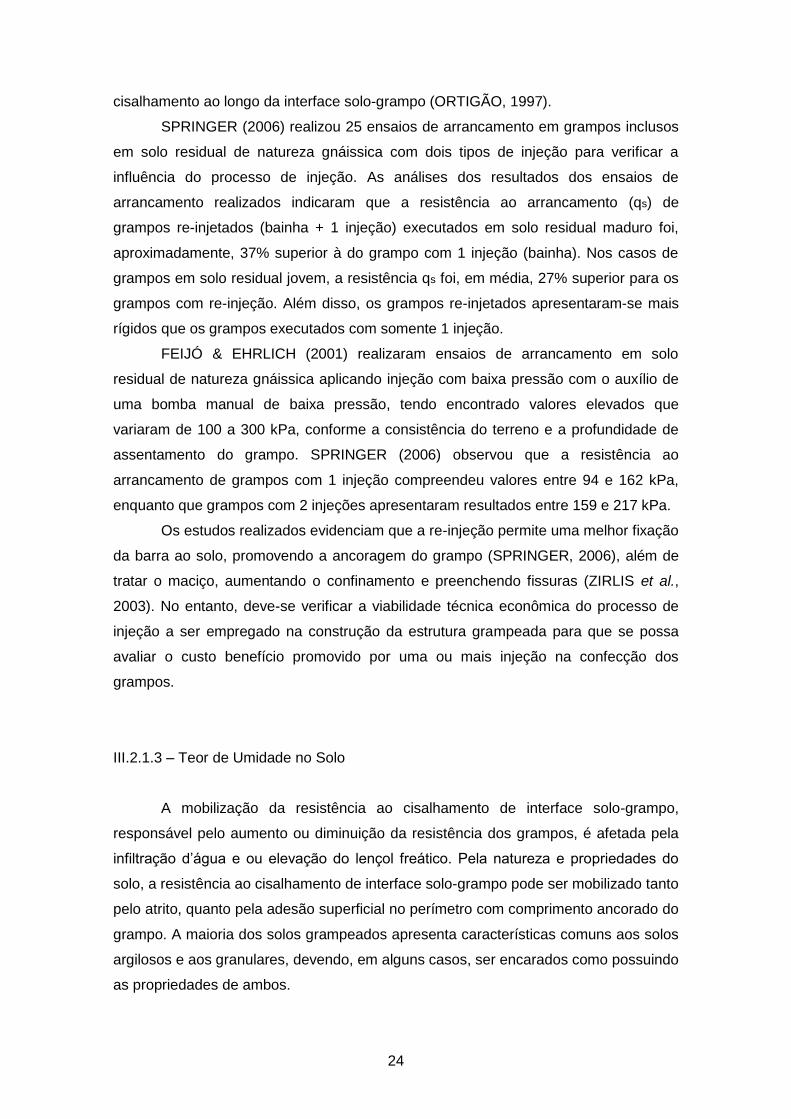
A Figura III.5 demonstra a expressiva influência do grau de saturação na
resistência ao cisalhamento de interface solo-grampo através dos resultados de ensaio
de arrancamento executado em solos com predominância de finos que foram
compactados na umidade ótima (Proctor Normal) e acima da umidade ótima
(saturado).
Figura III.5 – Resultados de ensaios de arrancamento em solo com predominância de
finos na umidade ótima e saturado (CLOUTERRE, 1991).
III.2.1.4 – Deformação Interna no Solo Reforçado
As deformações internas do solo grampeado e a descompressão lateral
induzem a mobilização da resistência ao cisalhamento ao longo da interface solo-
grampo. Durante os avanços sucessivos da escavação as deformações internas são
decorrentes, preponderantemente, da descompressão horizontal e quando em
trabalho, não havendo modificação na configuração geométrica e carregamentos
externos, as deformações são mobilizadas, principalmente, pelas variações cíclicas
26
sazonais nos teores de umidade do solo e, conseqüentemente, pelo aumento ou
diminuição da sucção.
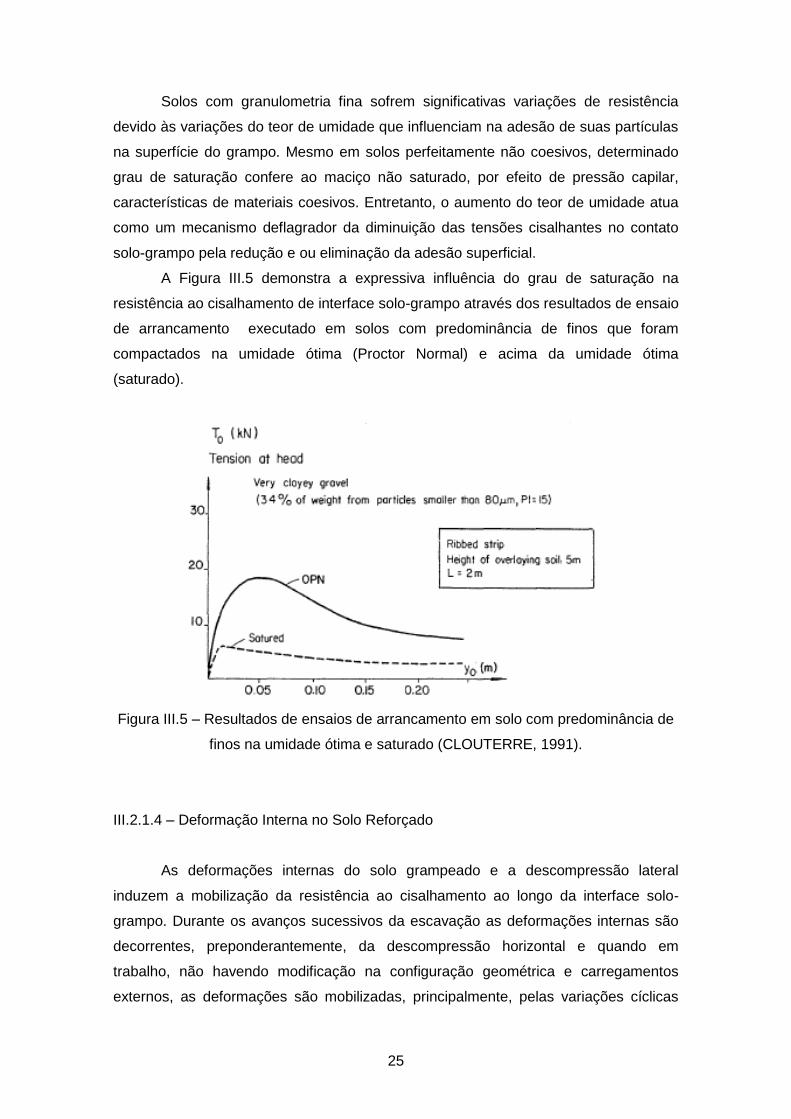
A Figura III.6 apresenta os resultados de monitoração, com auxílio de
inclinômetros, das deformações devidas à descompressão lateral do solo proveniente
do processo de escavação de uma estrutura grampeada. Em função da distribuição
dos deslocamentos horizontais, a mobilização da resistência ao cisalhamento de
interface solo-grampo é maior nos grampos superiores.
Figura III.6 – Deslocamentos horizontais de uma estrutura em solo grampeado
monitorado por inclinometria (CLOUTERRE, 1989).
III.2.1.5 – Inclinação do Grampo com a Horizontal
A inclinação dos grampos em relação à superfície de ruptura influi de maneira
bastante significativa na contribuição de resistência que os esforços podem fornecer
ao maciço (SPRINGER, 2006). Em escavações ou taludes, os grampos devem ser
instalados com pequena inclinação com a horizontal, para que apresentem um melhor
comportamento quando tracionados. A eficiência máxima dos grampos dá-se quando
sua inclinação coincide com a direção principal maior de deformação da massa
reforçada (EHRLICH, 2003).
FEIJÓ & EHRLICH (2001), a partir de monitoração de uma escavação
27
grampeada, observaram as distribuições das deformações em grampos
instrumentados em diferentes inclinações com a horizontal (5º, 15º e 30º). As leituras
registradas ao longo da escavação indicaram que os maiores e menores
deslocamentos foram registrados nas seções executadas com grampos inclinados
com 15º e 30º, respectivamente. A escavação grampeada com face vertical mobilizou
maiores esforços nos grampos com inclinação sub-horizontal de 15º, que,
provavelmente, se aproxima mais da direção principal maior de deformação da massa
reforçada.
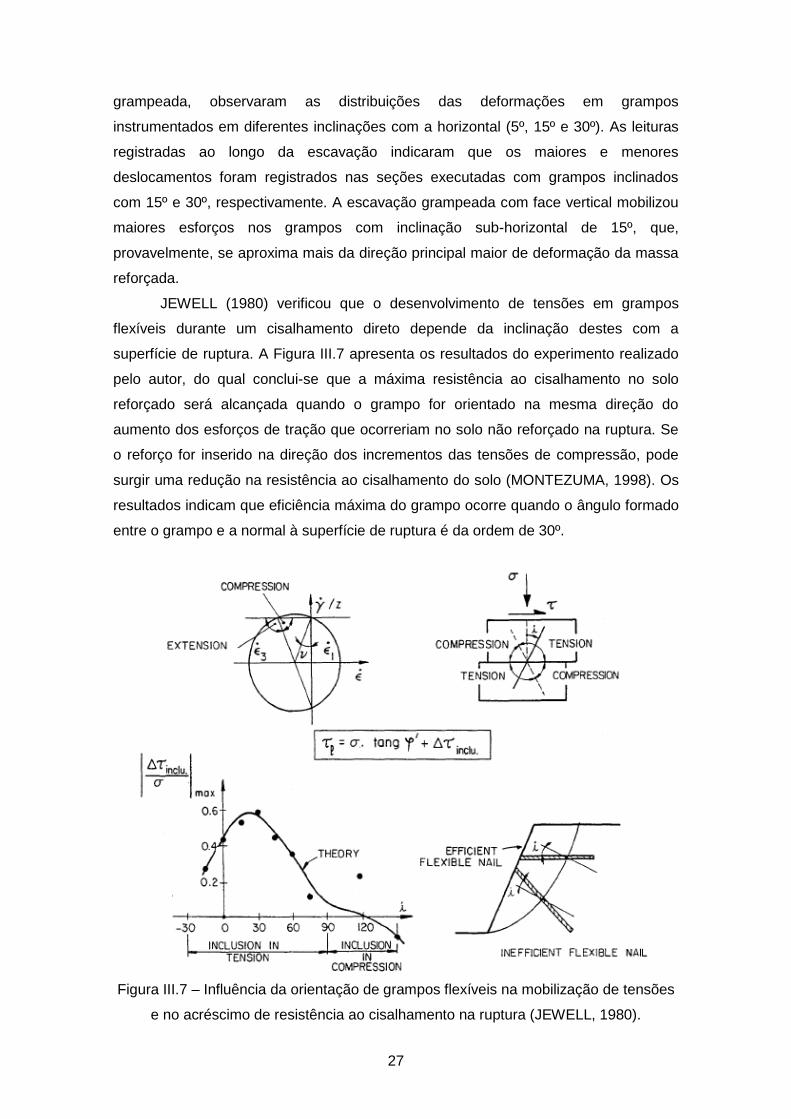
JEWELL (1980) verificou que o desenvolvimento de tensões em grampos
flexíveis durante um cisalhamento direto depende da inclinação destes com a
superfície de ruptura. A Figura III.7 apresenta os resultados do experimento realizado
pelo autor, do qual conclui-se que a máxima resistência ao cisalhamento no solo
reforçado será alcançada quando o grampo for orientado na mesma direção do
aumento dos esforços de tração que ocorreriam no solo não reforçado na ruptura. Se
o reforço for inserido na direção dos incrementos das tensões de compressão, pode
surgir uma redução na resistência ao cisalhamento do solo (MONTEZUMA, 1998). Os
resultados indicam que eficiência máxima do grampo ocorre quando o ângulo formado
entre o grampo e a normal à superfície de ruptura é da ordem de 30º.
Figura III.7 – Influência da orientação de grampos flexíveis na mobilização de tensões
e no acréscimo de resistência ao cisalhamento na ruptura (JEWELL, 1980).
28
III.2.1.6 – Método Executivo da Perfuração
Ensaios de arrancamento realizados por SPRINGER (2006) registraram que
em grampos re-injetados, a lavagem do furo fornece resistência ao arrancamento (qs)
5% maior que a obtida em furos secos (não lavados). Já em grampos com apenas 1
injeção (bainha), a lavagem do furo aumentou a resistência ao arrancamento (qs) em
cerca de 27%. Os grampos lavados também apresentaram maior rigidez. A autora
conclui que, devido ao aumento significativo dos custos de execução do solo
grampeado, a lavagem do furo com água justifica-se apenas em terrenos úmidos, nos
quais a própria perfuratriz deve utilizar água para perfuração.
III.2.2 – Mobilização da Resistência ao Cisalhamento de Interface Solo-Grampo
A mobilização da resistência ao cisalhamento de interface solo-grampo requer
pequenos deslocamentos do grampo em relação ao solo, da ordem de poucos
milímetros, como verificados em ensaios de arrancamento em grampos
(CLOUTERRE, 1991). Resultados de ensaios demonstram que a resistência ao
cisalhamento máxima de interface solo-grampo (qs) é alcançada quando ocorrem
deslocamentos de, aproximadamente, 15 mm (CLOUTERRE, 1991; ORTIGÃO et al.,
1992, BYRNE et al.,1998; GEORIO, 2000; FEIJÓ & EHRLICH, 2001; AZAMBUJA et
al., 2001; PROTO SILVA, 2005; SPRINGER, 2006; entre outros).
Conforme verificado pelo projeto CLOUTERRE (1991), a mobilização da
resistência ao cisalhamento de interface solo-grampo pode ser representada pela lei
bi-linear de FRANK & ZHAO (1982), conforme demonstrado na Figura III.8, que ilustra
a comparação entre as curvas teórica e experimental de ensaios de arrancamento
realizados na areia de Fountainbleau (CLOUTERRE, 1991). Esta lei é representada
pela plotagem gráfica da resistência ao cisalhamento de interface solo-grampo versus
deslocamento relativo solo-grampo, definida por duas linhas retas com inclinações na
razão k e k/5 que se interceptam na coordenada qs/2, tendo como limites inferior e
superior, a origem dos eixos e a resistência ao arrancamento (qs), respectivamente.
Desta forma, a resistência ao cisalhamento de interface solo-grampo pode ser
caracterizada a partir de dois parâmetros definidos pela inclinação do primeiro
segmento de linha reta k (rigidez do grampo) e pela resistência ao arrancamento (qs).

29
Figura III.8 – Modelagem experimental de ensaio de arrancamento utilizando a lei bi-
linear de FRANK & ZHAO (CLOUTERRE, 1991).
A magnitude do esforço de tração máximo mobilizado no grampo é variável e
decorre dos deslocamentos relativos solo-grampo e, conseqüentemente, da
mobilização da resistência ao cisalhamento de interface solo-grampo ao longo do
perímetro ancorado do grampo além da superfície de ruptura. Entretanto, quando o
solo grampeado se encontra no estado de tensão próximo à condição ativa, esforços
de cisalhamento e flexão também serão mobilizados.
III.2.3 – Determinação da Resistência ao Cisalhamento Máxima de Interface Solo-
grampo
ORTIGÃO et al. (1992) sugerem que o valor da resistência ao cisalhamento
máxima de interface solo-grampo (qs) seja estimada a partir de observações
experimentais em ensaios de arrancamento e posteriormente verificada ―in situ‖ a
partir de ensaios de arrancamento durante a construção. Na ausência de experiência
específica, pode-se estimar a resistência ao arrancamento (qs) por meio de
correlações empíricas da literatura (SPRINGER, 2006) e ou através da relação semi-
empírica, como, por exemplo, a relação desenvolvida por PROTO SILVA (2005).
FEIJÓ (2007) salienta que embora correlações entre valores de (qs) e as
características do solo sejam ferramentas importantes, principalmente para concepção
inicial de projeto, os ensaios de arrancamento se constituem numa necessidade

30
imperiosa para a real avaliação do atrito solo-grampo (qs) e do conseqüente
desenvolvimento do projeto executivo.
III.2.3.1 – Ensaios de Arrancamento em Grampos
A GEORIO (2000) recomenda que o ensaio de arrancamento seja realizado
para se determinar a resistência ao cisalhamento no contato solo-grampo e, durante a
obra, para que sejam confirmados os valores de projeto.
A resistência ao cisalhamento máxima de interface solo-grampo (qs) deve ser
medida através de ensaios de arrancamento, como, por exemplo, apresentado na
Figura III.9 que ilustra os detalhes de montagem necessários para a realização deste
ensaio. O esquema dos grampos nos ensaios de arrancamento e do sistema de
aplicação de carga empregado por FEIJÓ & EHRLICH (2001) corresponde a aquele
detalhado pela GEORIO (2000).
Figura III.9 – Ensaios de arrancamento: (a) montagem e injeção dos grampos e (b)
sistema de aplicação de carga (FEIJÓ & EHRLICH, 2001).
Placa de
referência

31
SPRINGER (2006) ressalta que o procedimento de instalação de grampos
destinados aos ensaios de arrancamento (inclinação, perfuração, introdução no furo e
injeção) deve ser exatamente o mesmo dos grampos de trabalho (permanentes).
A barra de aço empregada deve ser superdimensionada para que o ensaio
atinja preferencialmente a ruptura no contato calda-solo (GEORIO, 2000). A carga
máxima de ensaio (Tmáx) é dada pela Equação III.3.
symáx A.f.9,0T (III.3)
Onde fy é a tensão de escoamento do aço e As é a área da seção transversal
útil da barra. Esta carga não deve ser ultrapassada para evitar um acidente, devido à
possível ruptura brusca do aço.
O valor da resistência ao cisalhamento máxima de interface solo-grampo (qs)
obtido no ensaio é dependente do diâmetro da perfuração (Dp), do comprimento
ancorado atrás da superfície de ruptura (La) e da carga de tração máxima (Tmáx)
alcançada no ensaio de arrancamento. Através da plotagem da curva deslocamento
versus carregamento, obtém-se a carga axial máxima do ensaio de arrancamento. O
valor da resistência ao cisalhamento de interface solo-grampo (qs) é definida em
unidades de tensão (Equação III.4).
ap
máxs
L.D.
Tq
(III.4)
As cargas deverão ser aplicadas em pequenos estágios que não excedam 20%
da carga máxima esperada, aguardando-se pelo menos 30 minutos para estabilização
das deformações. Durante este tempo, a carga é mantida constante e os
deslocamentos são lidos a intervalos de 0, 1, 2, 4, 8, 15 minutos. Deverá ser
executado pelo menos um ciclo de carga-descarga, que deverá ser iniciado quando a
carga for da ordem da metade estimada da carga total máxima esperada.
FALCONI E ALONSO (1996) sugerem que o incremento de carga deve ser
suficientemente pequeno (entre 5kN ou 10kN), com 5 minutos em cada estágio de
carga até a ruptura, para permitir um número mínimo de leituras carga versus
deslocamento.
Na Figura III.10 apresenta-se o sistema de aplicação de cargas de tração, com
macaco hidráulico, à barra de aço que compõe o grampo pronto para a realização do
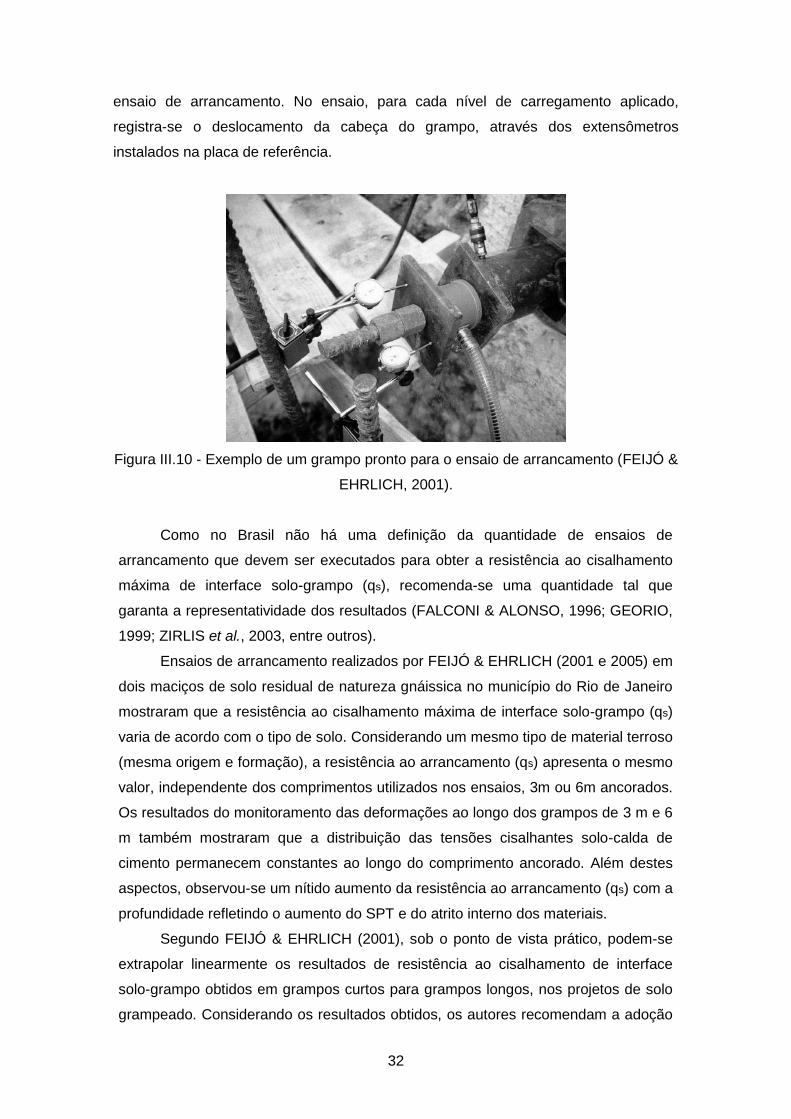
32
ensaio de arrancamento. No ensaio, para cada nível de carregamento aplicado,
registra-se o deslocamento da cabeça do grampo, através dos extensômetros
instalados na placa de referência.
Figura III.10 - Exemplo de um grampo pronto para o ensaio de arrancamento (FEIJÓ &
EHRLICH, 2001).
Como no Brasil não há uma definição da quantidade de ensaios de
arrancamento que devem ser executados para obter a resistência ao cisalhamento
máxima de interface solo-grampo (qs), recomenda-se uma quantidade tal que
garanta a representatividade dos resultados (FALCONI & ALONSO, 1996; GEORIO,
1999; ZIRLIS et al., 2003, entre outros).
Ensaios de arrancamento realizados por FEIJÓ & EHRLICH (2001 e 2005) em
dois maciços de solo residual de natureza gnáissica no município do Rio de Janeiro
mostraram que a resistência ao cisalhamento máxima de interface solo-grampo (qs)
varia de acordo com o tipo de solo. Considerando um mesmo tipo de material terroso
(mesma origem e formação), a resistência ao arrancamento (qs) apresenta o mesmo
valor, independente dos comprimentos utilizados nos ensaios, 3m ou 6m ancorados.
Os resultados do monitoramento das deformações ao longo dos grampos de 3 m e 6
m também mostraram que a distribuição das tensões cisalhantes solo-calda de
cimento permanecem constantes ao longo do comprimento ancorado. Além destes
aspectos, observou-se um nítido aumento da resistência ao arrancamento (qs) com a
profundidade refletindo o aumento do SPT e do atrito interno dos materiais.
Segundo FEIJÓ & EHRLICH (2001), sob o ponto de vista prático, podem-se
extrapolar linearmente os resultados de resistência ao cisalhamento de interface
solo-grampo obtidos em grampos curtos para grampos longos, nos projetos de solo
grampeado. Considerando os resultados obtidos, os autores recomendam a adoção
33
de grampos com três metros de comprimento ancorado e dois metros de trecho livre.
III.2.3.2 – Previsão da Resistência ao Cisalhamento Máxima de Interface Solo-grampo
Devido aos vários fatores que influenciam na determinação da resistência ao
cisalhamento máxima de interface solo-grampo, quando se faz uso de referências da
literatura para se estimar este parâmetro, correlações empíricas ou semi-empíricas
devem-se observar as características do solo, grampo e processo de injeção.
Geralmente, esta estimativa da resistência ao cisalhamento de interface solo-grampo é
adotada na concepção inicial da solução e ou no projeto básico. Entretanto, na prática
de algumas obras, principalmente aquelas de pequeno porte, não se verificam os
valores de qs com auxílio de ensaios de arrancamento quando se encontram na fase
executiva. SANDRONI & DA SILVA (2005) recomendam que este procedimento não
se torne prática usual, devendo-se realizar ensaios de arrancamento no campo e
verificação da sensibilidade do coeficiente de segurança ao valor de qs, face à
variabilidade deste parâmetro em função do tipo de solo e metodologia executiva.
SPRINGER (2006) faz um resumo de vários ensaios de arrancamento
disponíveis na literatura nacional (ORTIGÃO et al., 1992; FEIJÓ & EHRLICH, 2001;
PITTA et al., 2003; AZAMBUJA et al., 2001; SOARES & GOMES, 2003; MORAES &
ARDUÍNO, 2003; ALONSO & FALCONI, 2003; SOUZA et al., 2005; PROTO SILVA,
2005), organizando as informações sob a forma de tabelas e em função da referência,
destacando-se os diversos aspectos dos ensaios, como: local da obra, presença de
nível d’água, características do solo, do grampo, da injeção e dos ensaios de
arrancamento.
LIMA (2007) apresenta uma tabela com coletânea de valores de resistências
ao cisalhamento máxima de interface solo-grampo (qs) obtidos nos ensaios de
arrancamento realizados por ORTIGÃO et al. (1997), FEIJÓ & ERHLICH (2001 e
2005), AZAMBUJA et al. (2001 e 2003), PINTO & SILVEIRA (2001), MORAES &
ARDUÍNO (2003), PITTA et al. (2003), PROTO SILVA (2005), SOUZA et al. (2005),
ALONSO (2005) e SPRINGER (2006).
Quanto à sumarização dos resultados disponíveis na literatura nacional
(SPRINGER, 2006 e LIMA, 2007), com exceção das resistências ao arrancamento (qs)
obtidas por MORAES & ARDUÍNO (2003) e AZAMBUJA et al. (2001 e 2003), refere-se
a ensaios de arrancamento executados em solos da região sudeste, nos estados de
Minas Gerais, Rio de Janeiro e São Paulo. Entretanto, as propriedades mecânicas dos
solos, mesmo quando derivados de uma mesma litologia, dependem das condições
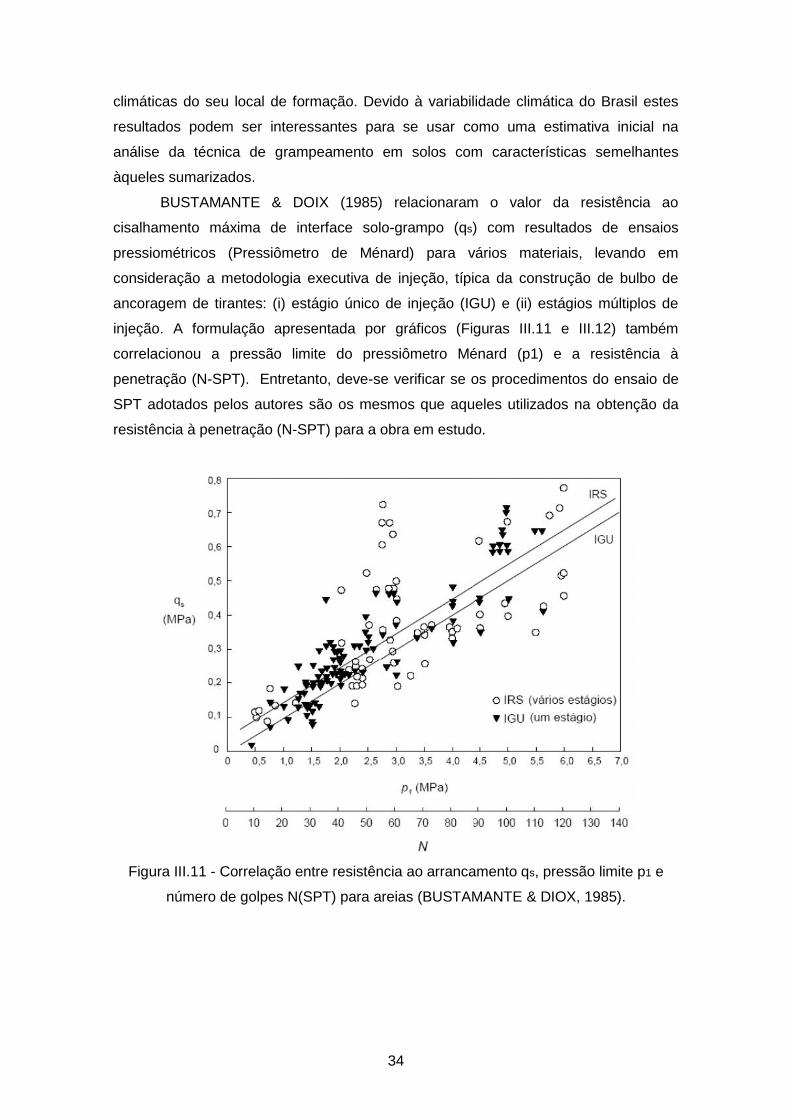
34
climáticas do seu local de formação. Devido à variabilidade climática do Brasil estes
resultados podem ser interessantes para se usar como uma estimativa inicial na
análise da técnica de grampeamento em solos com características semelhantes
àqueles sumarizados.
BUSTAMANTE & DOIX (1985) relacionaram o valor da resistência ao
cisalhamento máxima de interface solo-grampo (qs) com resultados de ensaios
pressiométricos (Pressiômetro de Ménard) para vários materiais, levando em
consideração a metodologia executiva de injeção, típica da construção de bulbo de
ancoragem de tirantes: (i) estágio único de injeção (IGU) e (ii) estágios múltiplos de
injeção. A formulação apresentada por gráficos (Figuras III.11 e III.12) também
correlacionou a pressão limite do pressiômetro Ménard (p1) e a resistência à
penetração (N-SPT). Entretanto, deve-se verificar se os procedimentos do ensaio de
SPT adotados pelos autores são os mesmos que aqueles utilizados na obtenção da
resistência à penetração (N-SPT) para a obra em estudo.
Figura III.11 - Correlação entre resistência ao arrancamento qs, pressão limite p1 e
número de golpes N(SPT) para areias (BUSTAMANTE & DIOX, 1985).
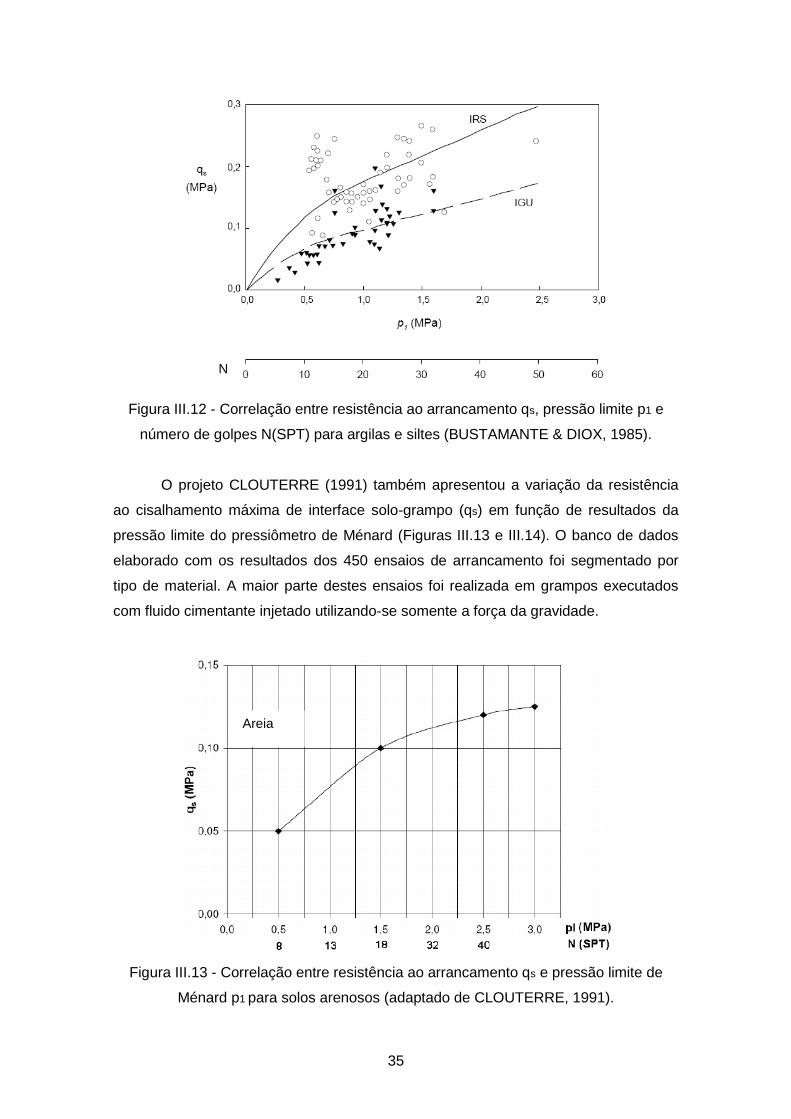
35
Figura III.12 - Correlação entre resistência ao arrancamento qs, pressão limite p1 e
número de golpes N(SPT) para argilas e siltes (BUSTAMANTE & DIOX, 1985).
O projeto CLOUTERRE (1991) também apresentou a variação da resistência
ao cisalhamento máxima de interface solo-grampo (qs) em função de resultados da
pressão limite do pressiômetro de Ménard (Figuras III.13 e III.14). O banco de dados
elaborado com os resultados dos 450 ensaios de arrancamento foi segmentado por
tipo de material. A maior parte destes ensaios foi realizada em grampos executados
com fluido cimentante injetado utilizando-se somente a força da gravidade.
Figura III.13 - Correlação entre resistência ao arrancamento qs e pressão limite de
Ménard p1 para solos arenosos (adaptado de CLOUTERRE, 1991).
Areia
N

36
Figura III.14 - Correlação entre resistência ao arrancamento qs e pressão limite de
Ménard p1 para solos argilosos (adaptado de CLOUTERRE, 1991).
FEIJÓ (2007) ressalta que as correlações apresentadas em CLOUTERRE
(1991) possuem grande potencial, ao contrário das propostas por BUSTAMANTE &
DOIX (1985), devido á grande dispersão de resultados, para a estimativa inicial da
resistência ao arrancamento (qs). No Brasil, no entanto, essas correlações não se
mostram úteis, haja vista a técnica de prospecção pressiométrica ser muito pouco
difundida (FEIJÓ, 2007).
ORTIGÃO & PALMEIRA (1997) compararam as resistências ao cisalhamento
máximas de interface solo-grampo (qs), obtidas por ensaios de arrancamento
realizados em solos do Rio de Janeiro, São Paulo e Brasília, com a resistência à
penetração (N-SPT). A Figura III.15 apresenta a correlação empírica sugerida por
ORTIGÃO & PALMEIRA (1997) para estimativa da resistência ao arrancamento (qs)
em função do número de golpes N (SPT). FEIJÓ (2007) salienta que essas
correlações apresentaram grande dispersão de resultados e podem ser válidas
apenas para os solos saprolíticos de ardósia, da região de Brasília, uma vez que 60%
dos pontos referem-se a este tipo de material.
Argila
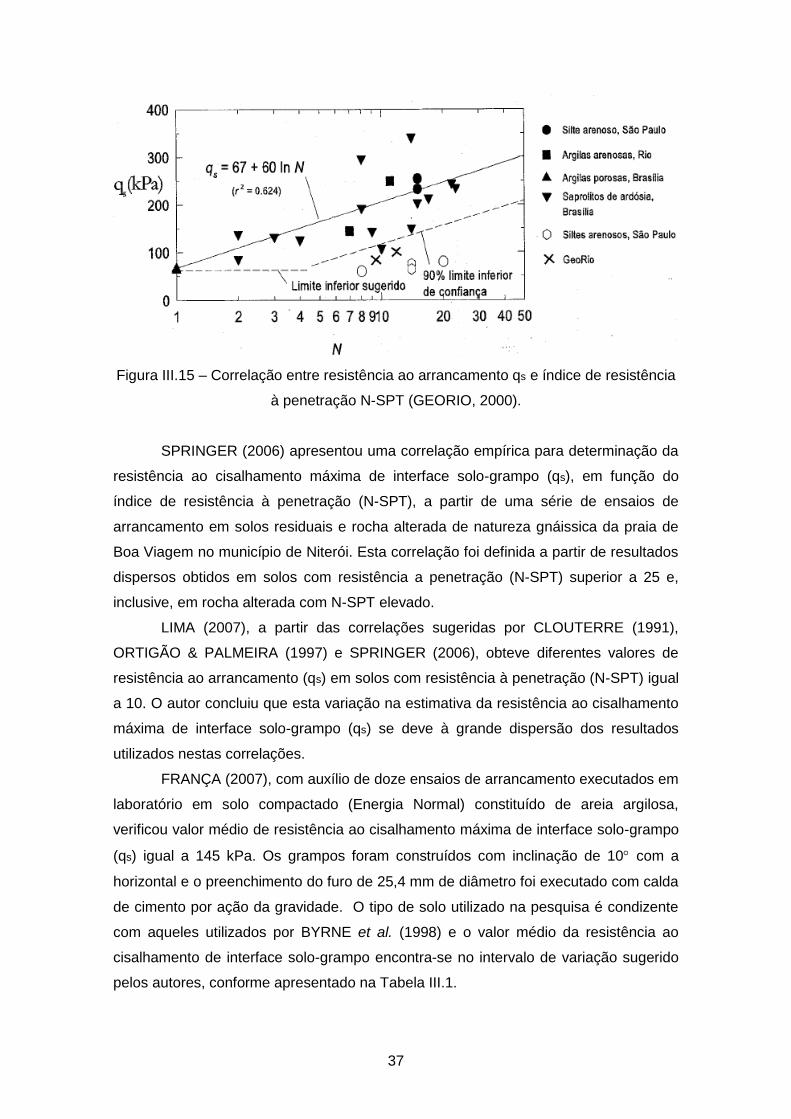
37
Figura III.15 – Correlação entre resistência ao arrancamento qs e índice de resistência
à penetração N-SPT (GEORIO, 2000).
SPRINGER (2006) apresentou uma correlação empírica para determinação da
resistência ao cisalhamento máxima de interface solo-grampo (qs), em função do
índice de resistência à penetração (N-SPT), a partir de uma série de ensaios de
arrancamento em solos residuais e rocha alterada de natureza gnáissica da praia de
Boa Viagem no município de Niterói. Esta correlação foi definida a partir de resultados
dispersos obtidos em solos com resistência a penetração (N-SPT) superior a 25 e,
inclusive, em rocha alterada com N-SPT elevado.
LIMA (2007), a partir das correlações sugeridas por CLOUTERRE (1991),
ORTIGÃO & PALMEIRA (1997) e SPRINGER (2006), obteve diferentes valores de
resistência ao arrancamento (qs) em solos com resistência à penetração (N-SPT) igual
a 10. O autor concluiu que esta variação na estimativa da resistência ao cisalhamento
máxima de interface solo-grampo (qs) se deve à grande dispersão dos resultados
utilizados nestas correlações.
FRANÇA (2007), com auxílio de doze ensaios de arrancamento executados em
laboratório em solo compactado (Energia Normal) constituído de areia argilosa,
verificou valor médio de resistência ao cisalhamento máxima de interface solo-grampo
(qs) igual a 145 kPa. Os grampos foram construídos com inclinação de 10 com a
horizontal e o preenchimento do furo de 25,4 mm de diâmetro foi executado com calda
de cimento por ação da gravidade. O tipo de solo utilizado na pesquisa é condizente
com aqueles utilizados por BYRNE et al. (1998) e o valor médio da resistência ao
cisalhamento de interface solo-grampo encontra-se no intervalo de variação sugerido
pelos autores, conforme apresentado na Tabela III.1.
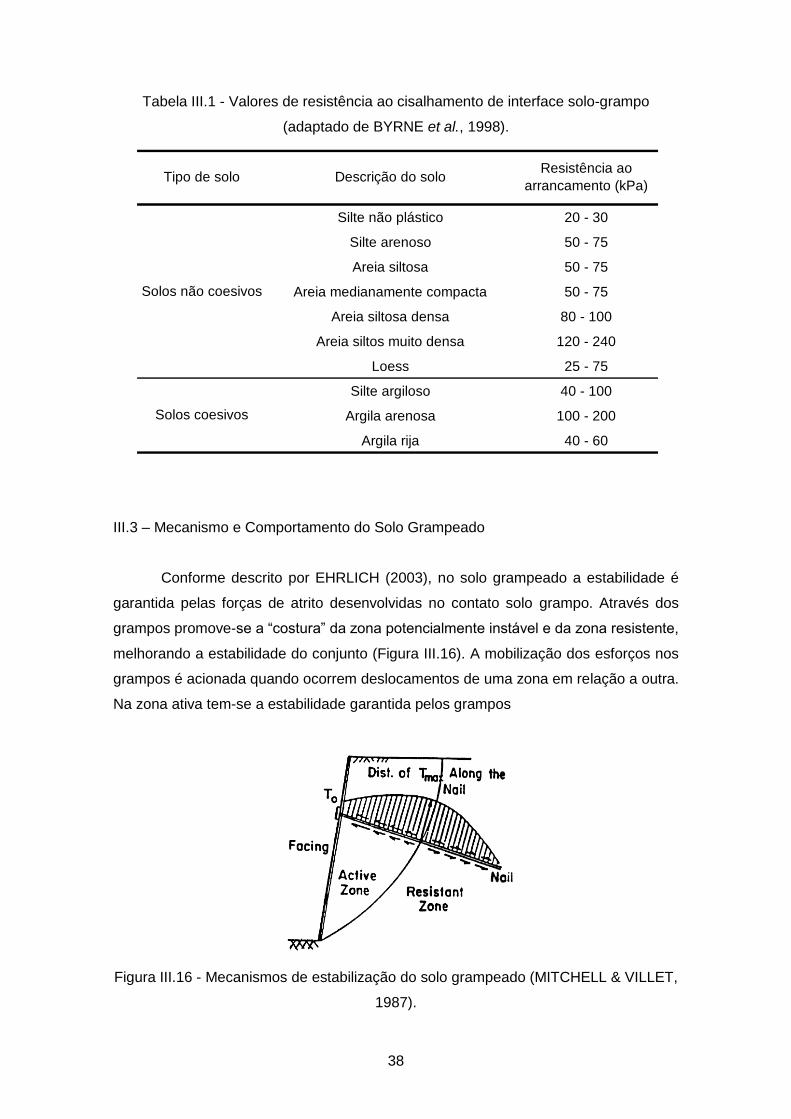
38
Tabela III.1 - Valores de resistência ao cisalhamento de interface solo-grampo
(adaptado de BYRNE et al., 1998).
Silte não plástico 20 - 30
Silte arenoso 50 - 75
Areia siltosa 50 - 75
Areia medianamente compacta 50 - 75
Areia siltosa densa 80 - 100
Areia siltos muito densa 120 - 240
Loess 25 - 75
Silte argiloso 40 - 100
Argila arenosa 100 - 200
Argila rija 40 - 60
Solos coesivos
Tipo de solo Descrição do soloResistência ao
arrancamento (kPa)
Solos não coesivos
III.3 – Mecanismo e Comportamento do Solo Grampeado
Conforme descrito por EHRLICH (2003), no solo grampeado a estabilidade é
garantida pelas forças de atrito desenvolvidas no contato solo grampo. Através dos
grampos promove-se a ―costura‖ da zona potencialmente instável e da zona resistente,
melhorando a estabilidade do conjunto (Figura III.16). A mobilização dos esforços nos
grampos é acionada quando ocorrem deslocamentos de uma zona em relação a outra.
Na zona ativa tem-se a estabilidade garantida pelos grampos
Figura III.16 - Mecanismos de estabilização do solo grampeado (MITCHELL & VILLET,
1987).
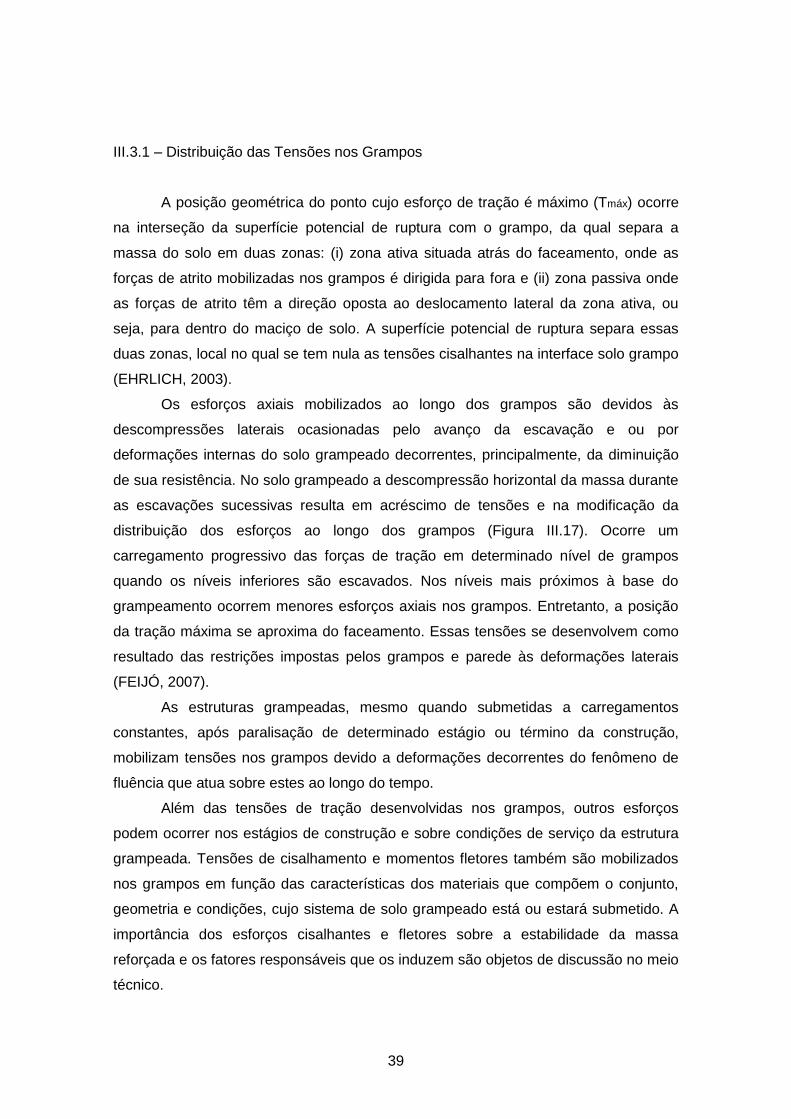
39
III.3.1 – Distribuição das Tensões nos Grampos
A posição geométrica do ponto cujo esforço de tração é máximo (Tmáx) ocorre
na interseção da superfície potencial de ruptura com o grampo, da qual separa a
massa do solo em duas zonas: (i) zona ativa situada atrás do faceamento, onde as
forças de atrito mobilizadas nos grampos é dirigida para fora e (ii) zona passiva onde
as forças de atrito têm a direção oposta ao deslocamento lateral da zona ativa, ou
seja, para dentro do maciço de solo. A superfície potencial de ruptura separa essas
duas zonas, local no qual se tem nula as tensões cisalhantes na interface solo grampo
(EHRLICH, 2003).
Os esforços axiais mobilizados ao longo dos grampos são devidos às
descompressões laterais ocasionadas pelo avanço da escavação e ou por
deformações internas do solo grampeado decorrentes, principalmente, da diminuição
de sua resistência. No solo grampeado a descompressão horizontal da massa durante
as escavações sucessivas resulta em acréscimo de tensões e na modificação da
distribuição dos esforços ao longo dos grampos (Figura III.17). Ocorre um
carregamento progressivo das forças de tração em determinado nível de grampos
quando os níveis inferiores são escavados. Nos níveis mais próximos à base do
grampeamento ocorrem menores esforços axiais nos grampos. Entretanto, a posição
da tração máxima se aproxima do faceamento. Essas tensões se desenvolvem como
resultado das restrições impostas pelos grampos e parede às deformações laterais
(FEIJÓ, 2007).
As estruturas grampeadas, mesmo quando submetidas a carregamentos
constantes, após paralisação de determinado estágio ou término da construção,
mobilizam tensões nos grampos devido a deformações decorrentes do fenômeno de
fluência que atua sobre estes ao longo do tempo.
Além das tensões de tração desenvolvidas nos grampos, outros esforços
podem ocorrer nos estágios de construção e sobre condições de serviço da estrutura
grampeada. Tensões de cisalhamento e momentos fletores também são mobilizados
nos grampos em função das características dos materiais que compõem o conjunto,
geometria e condições, cujo sistema de solo grampeado está ou estará submetido. A
importância dos esforços cisalhantes e fletores sobre a estabilidade da massa
reforçada e os fatores responsáveis que os induzem são objetos de discussão no meio
técnico.
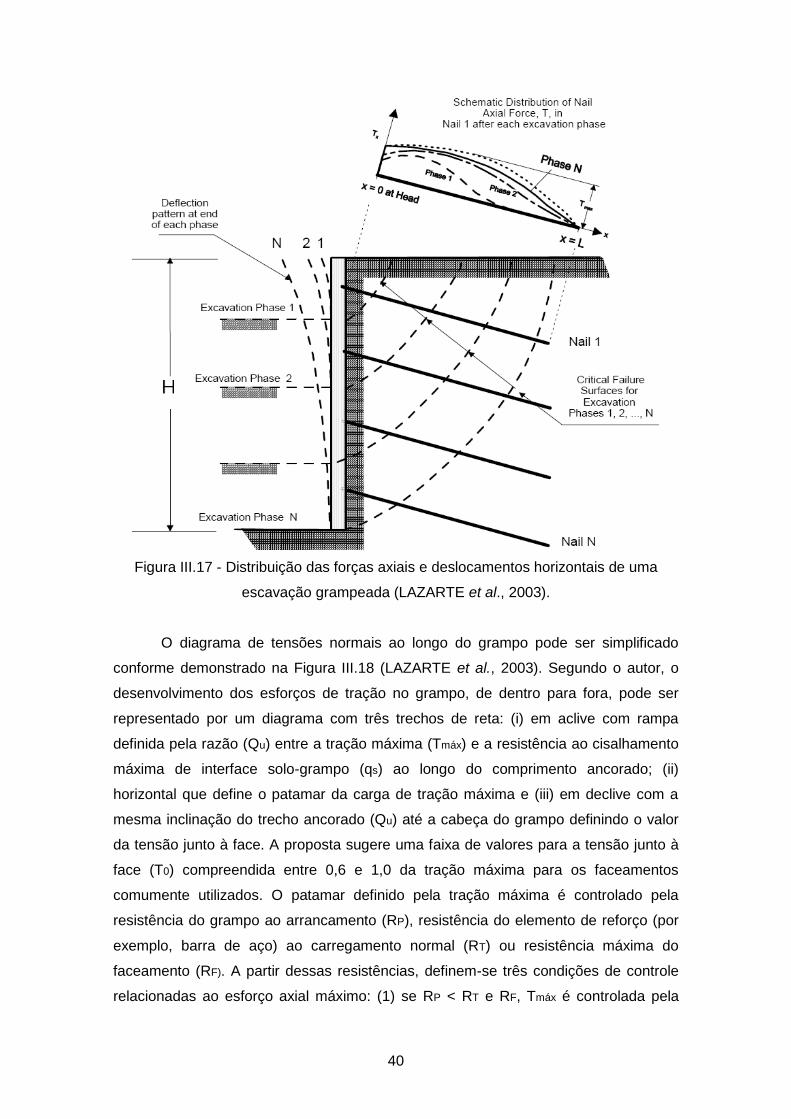
40
Figura III.17 - Distribuição das forças axiais e deslocamentos horizontais de uma
escavação grampeada (LAZARTE et al., 2003).
O diagrama de tensões normais ao longo do grampo pode ser simplificado
conforme demonstrado na Figura III.18 (LAZARTE et al., 2003). Segundo o autor, o
desenvolvimento dos esforços de tração no grampo, de dentro para fora, pode ser
representado por um diagrama com três trechos de reta: (i) em aclive com rampa
definida pela razão (Qu) entre a tração máxima (Tmáx) e a resistência ao cisalhamento
máxima de interface solo-grampo (qs) ao longo do comprimento ancorado; (ii)
horizontal que define o patamar da carga de tração máxima e (iii) em declive com a
mesma inclinação do trecho ancorado (Qu) até a cabeça do grampo definindo o valor
da tensão junto à face. A proposta sugere uma faixa de valores para a tensão junto à
face (T0) compreendida entre 0,6 e 1,0 da tração máxima para os faceamentos
comumente utilizados. O patamar definido pela tração máxima é controlado pela
resistência do grampo ao arrancamento (RP), resistência do elemento de reforço (por
exemplo, barra de aço) ao carregamento normal (RT) ou resistência máxima do
faceamento (RF). A partir dessas resistências, definem-se três condições de controle
relacionadas ao esforço axial máximo: (1) se RP < RT e RF, Tmáx é controlada pela

41
resistência ao arrancamento do grampo; (2) se RT < RP e RF, Tmáx é controlada pela
ruptura do elemento resistente à tração e (3) se RF < RP ou RT a Tmáx é controlada
pela resistência do faceamento. Idealmente, a elaboração de um projeto equilibrado
tenderá a valores de resistência próximos um dos outros.
(1) RP < RT < RF – mecanismo controlado pelo arrancamento do grampo;
(2) RT < RP < RF – mecanismo controlado pela resistência do grampo; e
(3) RF < RP ou RT – mecanismo controlado pela resistência da face em função
da razão T0/Tmáx.
RF = Resistência na face;
RT = Resistência a tração máxima do elemento de reforço (por exemplo, barra
de aço);
RP = Resistência máxima ao arrancamento do grampo;
Qu = Relação entre tração máxima e comprimento ancorado (Tmáx / La); e
qs = Resistência ao cisalhamento máxima de interface solo-grampo.
Figura III.18 - Distribuição simplificada dos esforços axiais e da mobilização da
resistência ao cisalhamento de interface solo-grampo (LAZARTE et al., 2003).
O projeto CLOUTERRE (1991) apresenta os resultados da monitoração dos
esforços axiais na cabeça de um grampo situado no nível intermediário de uma
escavação grampeada durante os sucessivos estágios de execução até,
aproximadamente, 100 dias do término da obra (Figura III.19). O desenvolvimento das
tensões no reforço durante as sucessivas etapas de escavação do solo grampeado foi
atribuído ao progressivo alívio de tensões e ao fenômeno de fluência no reforço. A
descompressão horizontal decorre dos acréscimos de tensões. O grampo, mesmo
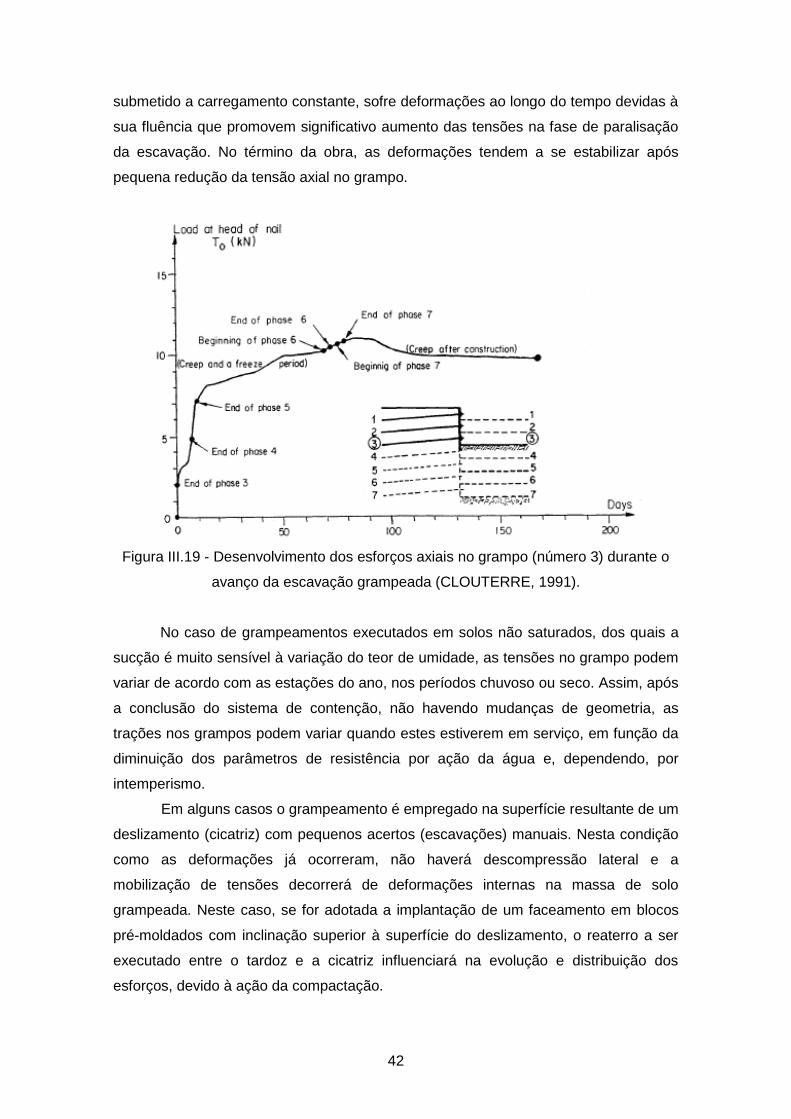
42
submetido a carregamento constante, sofre deformações ao longo do tempo devidas à
sua fluência que promovem significativo aumento das tensões na fase de paralisação
da escavação. No término da obra, as deformações tendem a se estabilizar após
pequena redução da tensão axial no grampo.
Figura III.19 - Desenvolvimento dos esforços axiais no grampo (número 3) durante o
avanço da escavação grampeada (CLOUTERRE, 1991).
No caso de grampeamentos executados em solos não saturados, dos quais a
sucção é muito sensível à variação do teor de umidade, as tensões no grampo podem
variar de acordo com as estações do ano, nos períodos chuvoso ou seco. Assim, após
a conclusão do sistema de contenção, não havendo mudanças de geometria, as
trações nos grampos podem variar quando estes estiverem em serviço, em função da
diminuição dos parâmetros de resistência por ação da água e, dependendo, por
intemperismo.
Em alguns casos o grampeamento é empregado na superfície resultante de um
deslizamento (cicatriz) com pequenos acertos (escavações) manuais. Nesta condição
como as deformações já ocorreram, não haverá descompressão lateral e a
mobilização de tensões decorrerá de deformações internas na massa de solo
grampeada. Neste caso, se for adotada a implantação de um faceamento em blocos
pré-moldados com inclinação superior à superfície do deslizamento, o reaterro a ser
executado entre o tardoz e a cicatriz influenciará na evolução e distribuição dos
esforços, devido à ação da compactação.
43
Reforçando-se taludes naturais ou de escavação com grampos, as
deformações laterais e, consequentemente, os esforços nos grampos serão
mobilizados de acordo com as variações de resistência interna do solo, ao longo do
tempo, que são potencializados nos períodos chuvosos, e ou estarão associadas a
relaxações de tensões e movimentações já em curso no talude.
III.3.2 – Taludes Verticalizados e Suaves Grampeados
Em taludes mais verticalizados, próximo ao pé da escavação, o comprimento
de transferência ao longo da interface solo-grampo na cunha ativa é pequeno e as
tensões junto à face podem se apresentar mais elevadas. Faces estruturalmente
resistentes podem se tornar necessárias nestas condições. Normalmente solos
grampeados com faceamento verticalizados são estabilizados com grampos com
inclinações entre 5 e 15 com a horizontal. Com estas geometrias, garantindo-se a
estabilidade de fundo da estrutura, a orientação da direção dos grampos tende a
corresponder à direção principal maior de deformação da massa reforçada, 1. Nestas
condições a tração mobilizada nos grampos prepondera como mecanismo
estabilizador (EHRLICH, 2003).
Por outro lado, com a diminuição da inclinação tem-se aumento do
comprimento de transferência na cunha ativa e diminuição das tensões atuantes junto
à face. Dessa forma a estabilidade próxima à face aumenta significativamente e o
revestimento pode se tornar desnecessário quanto ao aspecto estrutural (EHRLICH,
2003). Além disso, quando se reforça um talude com inclinação suave, a direção
principal maior de deformação da massa de solo reforçado, 1, é praticamente
perpendicular à direção dos grampos e condiciona contribuições mais significativas de
esforços de cisalhamento e flexão que, por sua vez, influenciarão na estabilidade do
grampeamento. Dessa forma, para se obter a estabilidade, os grampos devem resistir,
além das solicitações normais, aos efeitos combinados de cisalhamento e flexão na
região da superfície de ruptura e junto à face do talude, devido ao sistema de conexão
ou rigidez do faceamento (FEIJÓ, 2007).
LIMA (2002), através de estudos numéricos, verificou que a influência da
inclinação do talude é significativa nos deslocamentos horizontais, os quais crescem
de magnitude à medida que o talude torna-se mais íngreme. A execução de
escavações com taludes ligeiramente inclinados reduz significativamente a magnitude
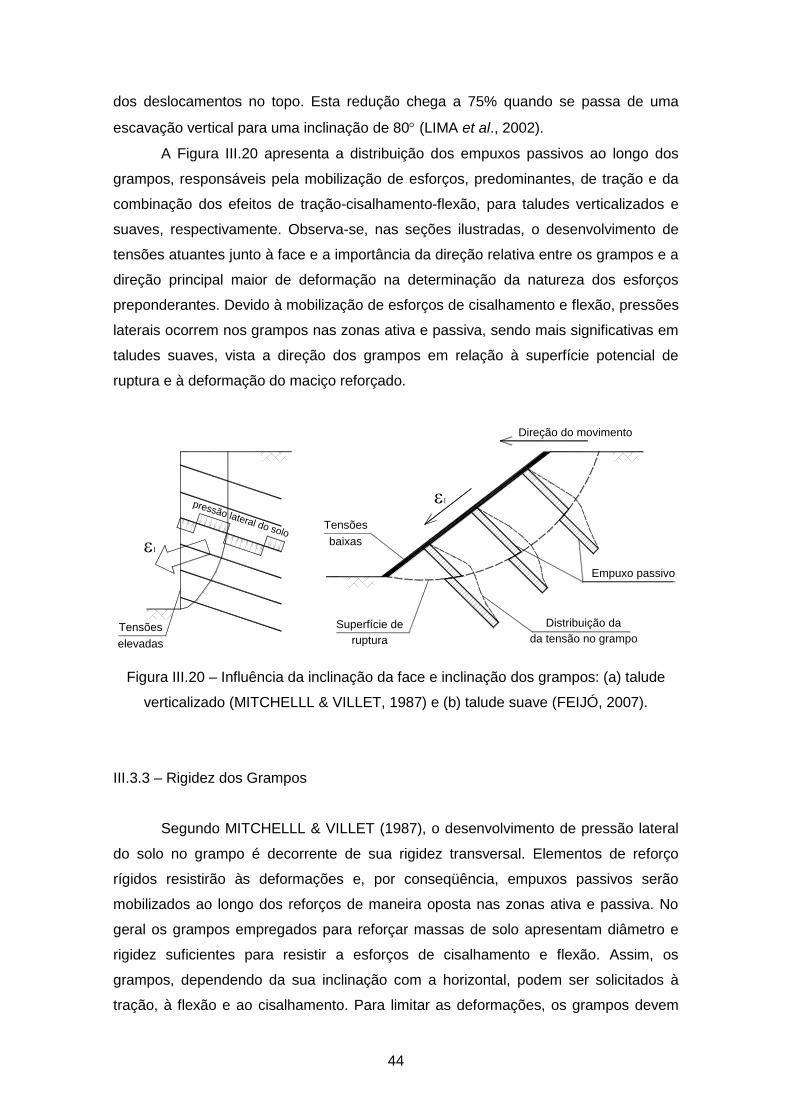
44
dos deslocamentos no topo. Esta redução chega a 75% quando se passa de uma
escavação vertical para uma inclinação de 80 (LIMA et al., 2002).
A Figura III.20 apresenta a distribuição dos empuxos passivos ao longo dos
grampos, responsáveis pela mobilização de esforços, predominantes, de tração e da
combinação dos efeitos de tração-cisalhamento-flexão, para taludes verticalizados e
suaves, respectivamente. Observa-se, nas seções ilustradas, o desenvolvimento de
tensões atuantes junto à face e a importância da direção relativa entre os grampos e a
direção principal maior de deformação na determinação da natureza dos esforços
preponderantes. Devido à mobilização de esforços de cisalhamento e flexão, pressões
laterais ocorrem nos grampos nas zonas ativa e passiva, sendo mais significativas em
taludes suaves, vista a direção dos grampos em relação à superfície potencial de
ruptura e à deformação do maciço reforçado.
Superfície de
ruptura
Distribuição da
da tensão no grampo
Empuxo passivo
Direção do movimento
Tensões
baixas
Tensões
elevadas
pressão lateral do solo
Figura III.20 – Influência da inclinação da face e inclinação dos grampos: (a) talude
verticalizado (MITCHELLL & VILLET, 1987) e (b) talude suave (FEIJÓ, 2007).
III.3.3 – Rigidez dos Grampos
Segundo MITCHELLL & VILLET (1987), o desenvolvimento de pressão lateral
do solo no grampo é decorrente de sua rigidez transversal. Elementos de reforço
rígidos resistirão às deformações e, por conseqüência, empuxos passivos serão
mobilizados ao longo dos reforços de maneira oposta nas zonas ativa e passiva. No
geral os grampos empregados para reforçar massas de solo apresentam diâmetro e
rigidez suficientes para resistir a esforços de cisalhamento e flexão. Assim, os
grampos, dependendo da sua inclinação com a horizontal, podem ser solicitados à
tração, à flexão e ao cisalhamento. Para limitar as deformações, os grampos devem
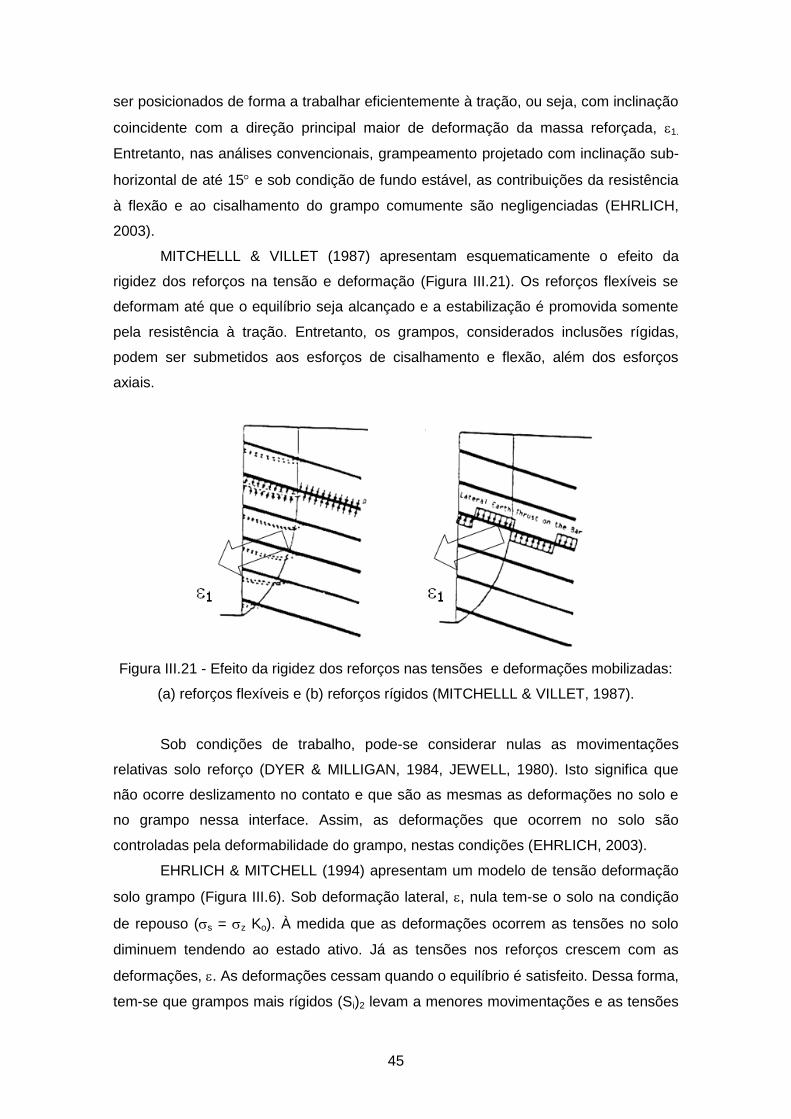
45
ser posicionados de forma a trabalhar eficientemente à tração, ou seja, com inclinação
coincidente com a direção principal maior de deformação da massa reforçada, 1.
Entretanto, nas análises convencionais, grampeamento projetado com inclinação sub-
horizontal de até 15 e sob condição de fundo estável, as contribuições da resistência
à flexão e ao cisalhamento do grampo comumente são negligenciadas (EHRLICH,
2003).
MITCHELLL & VILLET (1987) apresentam esquematicamente o efeito da
rigidez dos reforços na tensão e deformação (Figura III.21). Os reforços flexíveis se
deformam até que o equilíbrio seja alcançado e a estabilização é promovida somente
pela resistência à tração. Entretanto, os grampos, considerados inclusões rígidas,
podem ser submetidos aos esforços de cisalhamento e flexão, além dos esforços
axiais.
Figura III.21 - Efeito da rigidez dos reforços nas tensões e deformações mobilizadas:
(a) reforços flexíveis e (b) reforços rígidos (MITCHELLL & VILLET, 1987).
Sob condições de trabalho, pode-se considerar nulas as movimentações
relativas solo reforço (DYER & MILLIGAN, 1984, JEWELL, 1980). Isto significa que
não ocorre deslizamento no contato e que são as mesmas as deformações no solo e
no grampo nessa interface. Assim, as deformações que ocorrem no solo são
controladas pela deformabilidade do grampo, nestas condições (EHRLICH, 2003).
EHRLICH & MITCHELL (1994) apresentam um modelo de tensão deformação
solo grampo (Figura III.6). Sob deformação lateral, , nula tem-se o solo na condição
de repouso (s = z Ko). À medida que as deformações ocorrem as tensões no solo
diminuem tendendo ao estado ativo. Já as tensões nos reforços crescem com as
deformações, . As deformações cessam quando o equilíbrio é satisfeito. Dessa forma,
tem-se que grampos mais rígidos (Si)2 levam a menores movimentações e as tensões

46
no solo e nos reforços são mais próximas as correspondentes ao repouso. Grampos
mais deformáveis, (Si)1, permitem ao conjunto deformações suficientes para a
plastificação da zona potencialmente instável e tem-se o solo nesta zona num estado
de tensões mais próximo ao ativo. Nestas condições as tensões no grampo se
apresentam mais baixas (EHRLICH, 2003). Observa-se na Figura III.22, conforme
descrito pelo autor, a transferência de tensões do solo para o grampo à medida que as
deformações axiais são impostas, sendo a deformação axial (ε) associada ao
equilíbrio menor no caso do grampo mais rígido que, também, mobiliza maior carga.
Figura III.22 - Influência da rigidez do grampo nas deformações e tensões mobilizadas.
Conforme descrito por EHRLICH & MITCHELL (1994), Si é o índice de rigidez
relativa solo grampo (Equação III.5).
hva
rri
S.S..P.k
E.AS (III.5)
Onde:
Ar e Er são a área e módulo de deformabilidade dos grampos, respectivamente;
k é o módulo tangente inicial no modelo hiperbólico de DUNCAN et al. (1980);
Pa é a pressão atmosférica (constante unitária); e
Sv e Sh são os espaçamentos vertical e horizontal do grampo (definem a área
de influência).
LIMA (1996) e EHRLICH et al. (1996), através de simulação numérica
elaboraram estudo paramétrico de uma escavação em solo grampeado. A modelagem
da escavação e colocação dos grampos foi realizada em etapas de forma a
representar o processo executivo. Variou-se a inclinação () dos grampos e rigidez

47
dos grampos e da face de forma a destacar a importância destes fatores no
comportamento. Apresentam-se a seguir os resultados encontrados com relação à
influência do grampo (Figura III.23).
Figura III.23 - Influência da rigidez do grampo: (a) deslocamento horizontal da face; (b)
força axial no grampo; e (c) momentos fletores (EHRLICH et al., 1996).
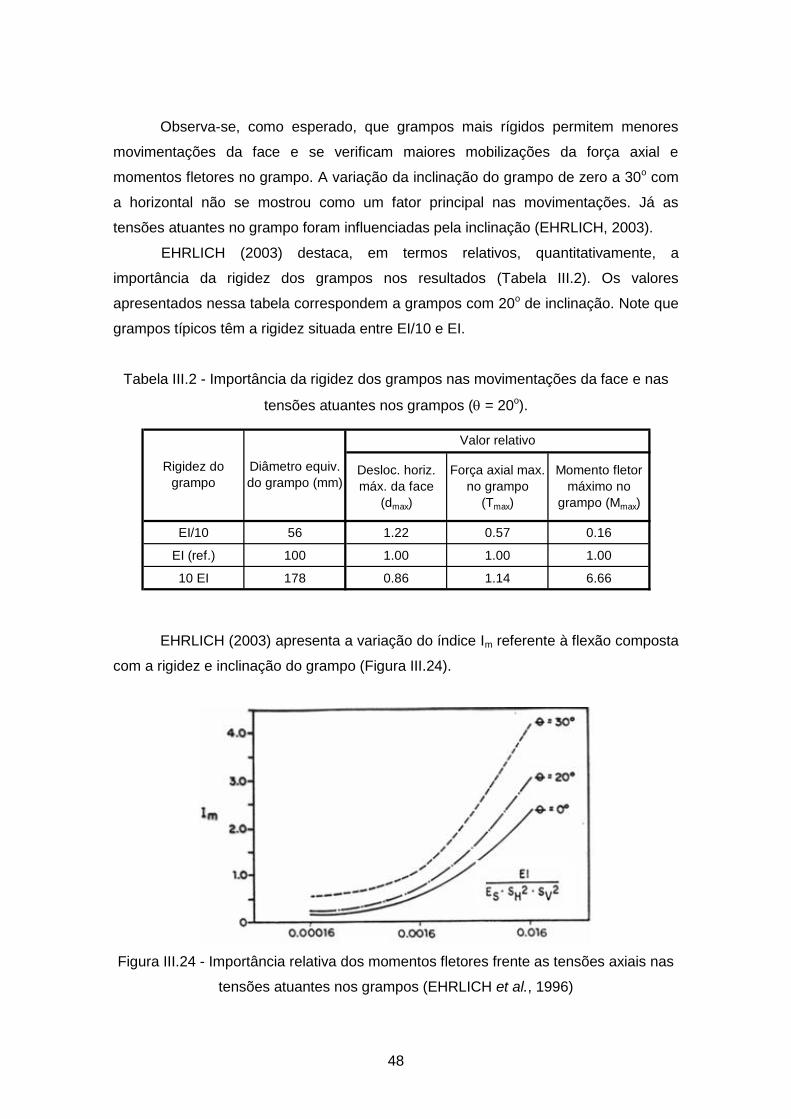
48
Observa-se, como esperado, que grampos mais rígidos permitem menores
movimentações da face e se verificam maiores mobilizações da força axial e
momentos fletores no grampo. A variação da inclinação do grampo de zero a 30o com
a horizontal não se mostrou como um fator principal nas movimentações. Já as
tensões atuantes no grampo foram influenciadas pela inclinação (EHRLICH, 2003).
EHRLICH (2003) destaca, em termos relativos, quantitativamente, a
importância da rigidez dos grampos nos resultados (Tabela III.2). Os valores
apresentados nessa tabela correspondem a grampos com 20o de inclinação. Note que
grampos típicos têm a rigidez situada entre EI/10 e EI.
Tabela III.2 - Importância da rigidez dos grampos nas movimentações da face e nas
tensões atuantes nos grampos ( = 20o).
Desloc. horiz.
máx. da face
(dmax)
Força axial max.
no grampo
(Tmax)
Momento fletor
máximo no
grampo (Mmax)
EI/10 56 1.22 0.57 0.16
EI (ref.) 100 1.00 1.00 1.00
10 EI 178 0.86 1.14 6.66
Diâmetro equiv.
do grampo (mm)
Valor relativo
Rigidez do
grampo
EHRLICH (2003) apresenta a variação do índice Im referente à flexão composta
com a rigidez e inclinação do grampo (Figura III.24).
Figura III.24 - Importância relativa dos momentos fletores frente as tensões axiais nas
tensões atuantes nos grampos (EHRLICH et al., 1996)
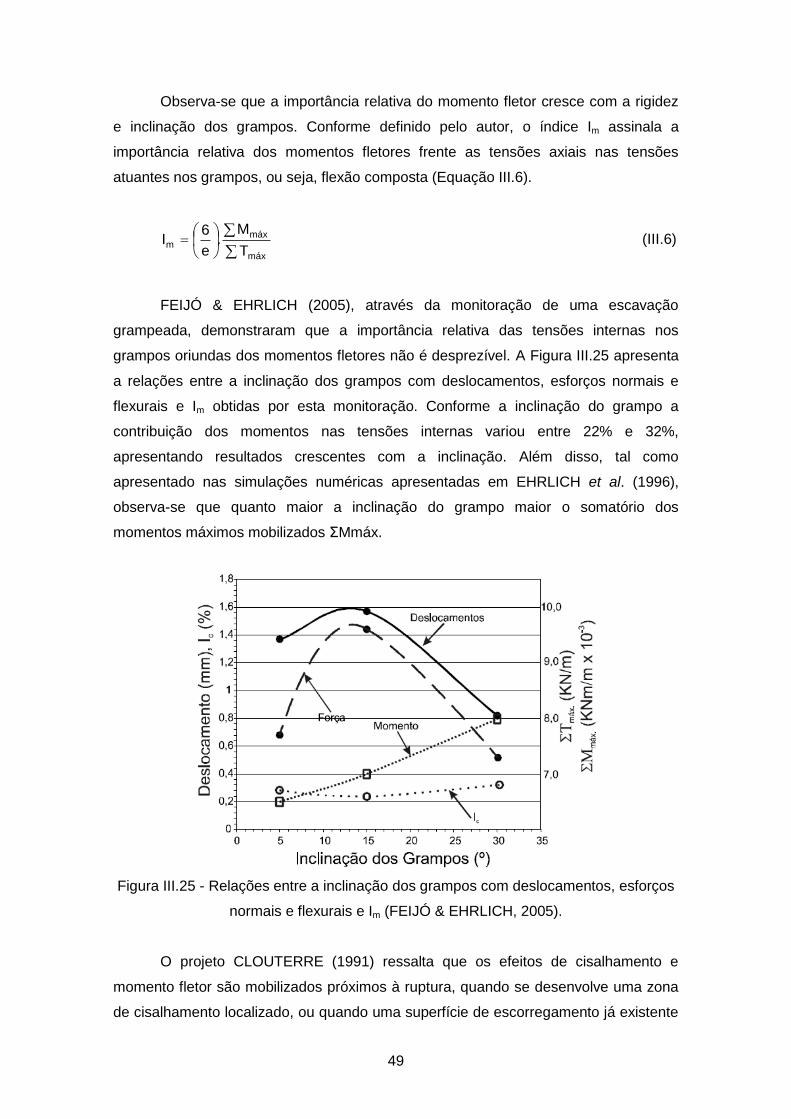
49
Observa-se que a importância relativa do momento fletor cresce com a rigidez
e inclinação dos grampos. Conforme definido pelo autor, o índice Im assinala a
importância relativa dos momentos fletores frente as tensões axiais nas tensões
atuantes nos grampos, ou seja, flexão composta (Equação III.6).
máx
máxm
T
M.
e
6I (III.6)
FEIJÓ & EHRLICH (2005), através da monitoração de uma escavação
grampeada, demonstraram que a importância relativa das tensões internas nos
grampos oriundas dos momentos fletores não é desprezível. A Figura III.25 apresenta
a relações entre a inclinação dos grampos com deslocamentos, esforços normais e
flexurais e Im obtidas por esta monitoração. Conforme a inclinação do grampo a
contribuição dos momentos nas tensões internas variou entre 22% e 32%,
apresentando resultados crescentes com a inclinação. Além disso, tal como
apresentado nas simulações numéricas apresentadas em EHRLICH et al. (1996),
observa-se que quanto maior a inclinação do grampo maior o somatório dos
momentos máximos mobilizados ΣMmáx.
Figura III.25 - Relações entre a inclinação dos grampos com deslocamentos, esforços
normais e flexurais e Im (FEIJÓ & EHRLICH, 2005).
O projeto CLOUTERRE (1991) ressalta que os efeitos de cisalhamento e
momento fletor são mobilizados próximos à ruptura, quando se desenvolve uma zona
de cisalhamento localizado, ou quando uma superfície de escorregamento já existente
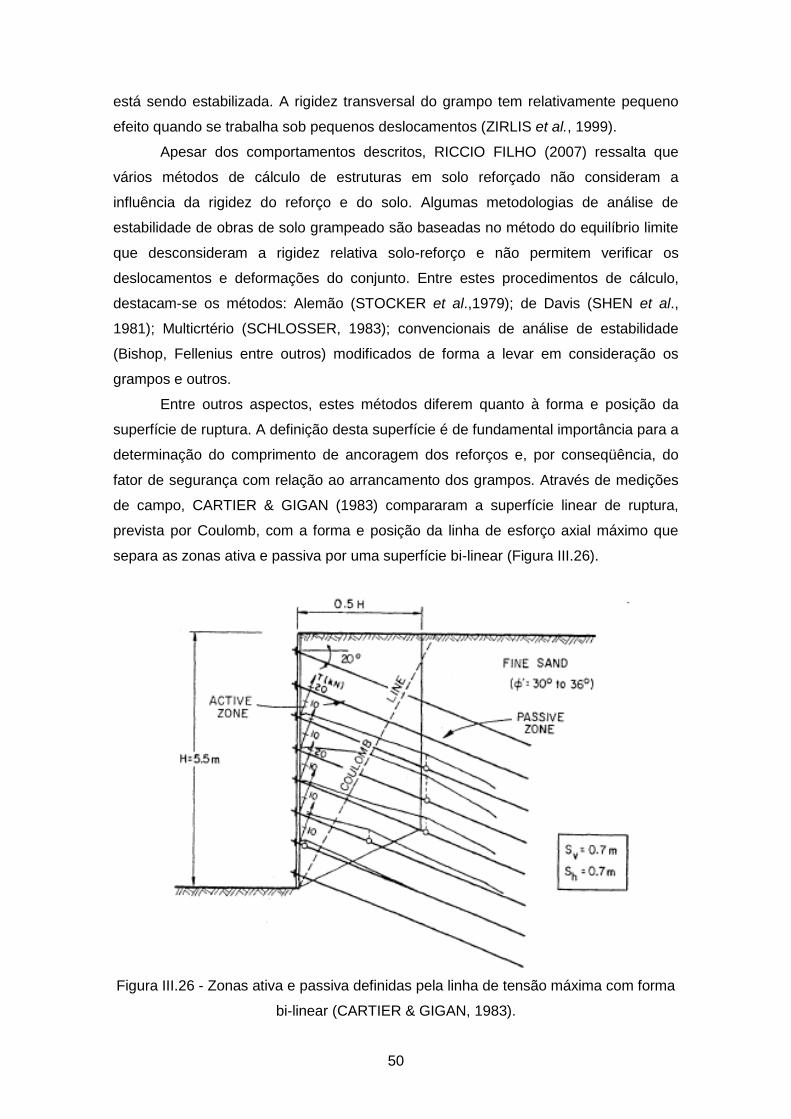
50
está sendo estabilizada. A rigidez transversal do grampo tem relativamente pequeno
efeito quando se trabalha sob pequenos deslocamentos (ZIRLIS et al., 1999).
Apesar dos comportamentos descritos, RICCIO FILHO (2007) ressalta que
vários métodos de cálculo de estruturas em solo reforçado não consideram a
influência da rigidez do reforço e do solo. Algumas metodologias de análise de
estabilidade de obras de solo grampeado são baseadas no método do equilíbrio limite
que desconsideram a rigidez relativa solo-reforço e não permitem verificar os
deslocamentos e deformações do conjunto. Entre estes procedimentos de cálculo,
destacam-se os métodos: Alemão (STOCKER et al.,1979); de Davis (SHEN et al.,
1981); Multicrtério (SCHLOSSER, 1983); convencionais de análise de estabilidade
(Bishop, Fellenius entre outros) modificados de forma a levar em consideração os
grampos e outros.
Entre outros aspectos, estes métodos diferem quanto à forma e posição da
superfície de ruptura. A definição desta superfície é de fundamental importância para a
determinação do comprimento de ancoragem dos reforços e, por conseqüência, do
fator de segurança com relação ao arrancamento dos grampos. Através de medições
de campo, CARTIER & GIGAN (1983) compararam a superfície linear de ruptura,
prevista por Coulomb, com a forma e posição da linha de esforço axial máximo que
separa as zonas ativa e passiva por uma superfície bi-linear (Figura III.26).
Figura III.26 - Zonas ativa e passiva definidas pela linha de tensão máxima com forma
bi-linear (CARTIER & GIGAN, 1983).
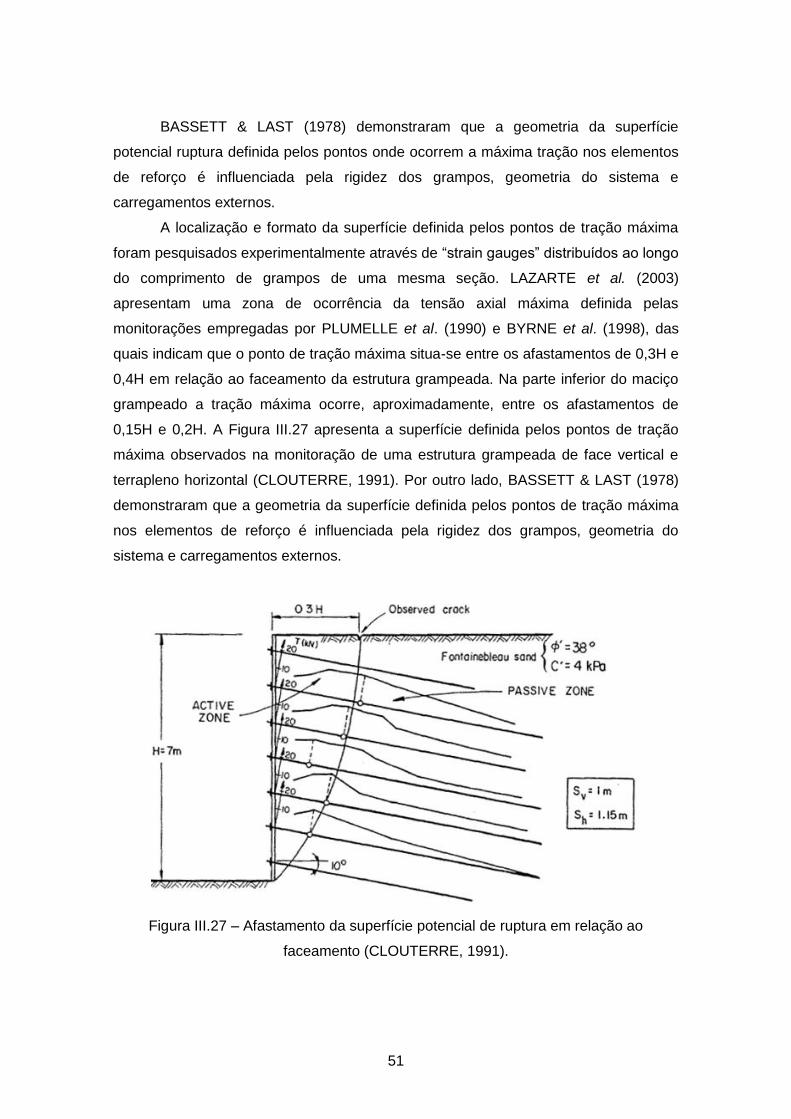
51
BASSETT & LAST (1978) demonstraram que a geometria da superfície
potencial ruptura definida pelos pontos onde ocorrem a máxima tração nos elementos
de reforço é influenciada pela rigidez dos grampos, geometria do sistema e
carregamentos externos.
A localização e formato da superfície definida pelos pontos de tração máxima
foram pesquisados experimentalmente através de ―strain gauges‖ distribuídos ao longo
do comprimento de grampos de uma mesma seção. LAZARTE et al. (2003)
apresentam uma zona de ocorrência da tensão axial máxima definida pelas
monitorações empregadas por PLUMELLE et al. (1990) e BYRNE et al. (1998), das
quais indicam que o ponto de tração máxima situa-se entre os afastamentos de 0,3H e
0,4H em relação ao faceamento da estrutura grampeada. Na parte inferior do maciço
grampeado a tração máxima ocorre, aproximadamente, entre os afastamentos de
0,15H e 0,2H. A Figura III.27 apresenta a superfície definida pelos pontos de tração
máxima observados na monitoração de uma estrutura grampeada de face vertical e
terrapleno horizontal (CLOUTERRE, 1991). Por outro lado, BASSETT & LAST (1978)
demonstraram que a geometria da superfície definida pelos pontos de tração máxima
nos elementos de reforço é influenciada pela rigidez dos grampos, geometria do
sistema e carregamentos externos.
Figura III.27 – Afastamento da superfície potencial de ruptura em relação ao
faceamento (CLOUTERRE, 1991).
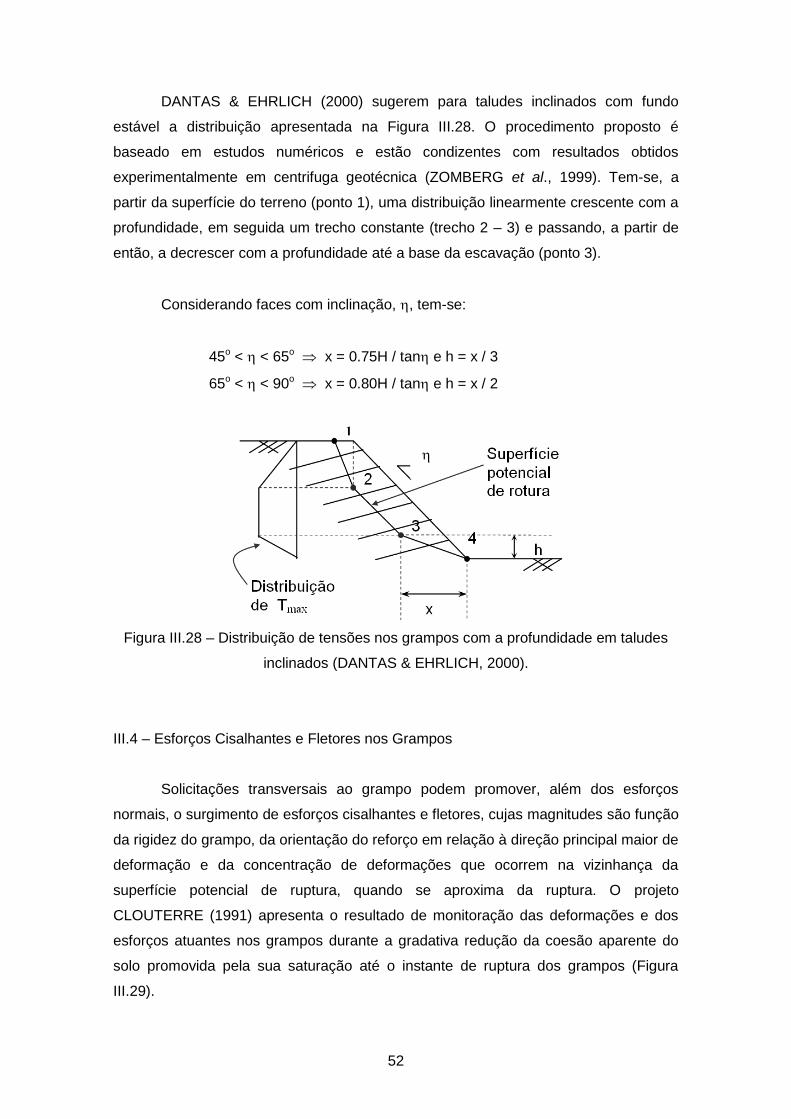
52
DANTAS & EHRLICH (2000) sugerem para taludes inclinados com fundo
estável a distribuição apresentada na Figura III.28. O procedimento proposto é
baseado em estudos numéricos e estão condizentes com resultados obtidos
experimentalmente em centrifuga geotécnica (ZOMBERG et al., 1999). Tem-se, a
partir da superfície do terreno (ponto 1), uma distribuição linearmente crescente com a
profundidade, em seguida um trecho constante (trecho 2 – 3) e passando, a partir de
então, a decrescer com a profundidade até a base da escavação (ponto 3).
Considerando faces com inclinação, , tem-se:
45o < < 65o x = 0.75H / tan e h = x / 3
65o < < 90o x = 0.80H / tan e h = x / 2
Figura III.28 – Distribuição de tensões nos grampos com a profundidade em taludes
inclinados (DANTAS & EHRLICH, 2000).
III.4 – Esforços Cisalhantes e Fletores nos Grampos
Solicitações transversais ao grampo podem promover, além dos esforços
normais, o surgimento de esforços cisalhantes e fletores, cujas magnitudes são função
da rigidez do grampo, da orientação do reforço em relação à direção principal maior de
deformação e da concentração de deformações que ocorrem na vizinhança da
superfície potencial de ruptura, quando se aproxima da ruptura. O projeto
CLOUTERRE (1991) apresenta o resultado de monitoração das deformações e dos
esforços atuantes nos grampos durante a gradativa redução da coesão aparente do
solo promovida pela sua saturação até o instante de ruptura dos grampos (Figura
III.29).
53
SCHLOSSER (1982) observou que as pressões laterais e as deformações nos
grampos são similares àquelas que se desenvolvem em estacas rígidas submetidas a
solicitações transversais (Figura III.30). Nesse caso, as deformações nos grampos
podem ser calculadas conforme procedimento empregado para estacas rígidas
submetidas a esforço horizontal no topo, utilizando-se o método simplificado do
coeficiente de reação horizontal, que conduz a equação diferencial (Equação III.7):
0yDkdz
ydEI cs4
4
(III.7)
onde:
EI = rigidez do grampo;
ks = coeficiente de reação horizontal;
y = deslocamento lateral do grampo;
z = coordenadas ao longo do grampo;
p = Ksy = tensão lateral no grampo; e
Dc = diâmetro do grampo.
A solução dessa equação introduz o conceito de comprimento de transferência
(l0) fornecida pela Equação III.8.
4
cs
0Dk
EI4l (III.8)
A distância 3l0, desde a superfície de ruptura, define o ponto a partir do qual os
momentos fletores se tornam nulos. Quando o comprimento do reforço (L) na zona de
cisalhamento excede em 3 vezes o valor do comprimento de transferência (l0), o
grampo pode ser considerado infinitamente longo e simétrico entre a superfície de
ruptura e os pontos onde os momentos fletores se tornam nulos. O comprimento de
transferência é, geralmente, da ordem de 10 cm (CLOUTERRE, 1991).
MITCHELLL & VILLET (1987) relatam que as variações na tensão normal ao
longo de um grampo ou estaca são responsáveis pela geração do momento fletor. E
conforme observado por SCHLOSSER (1982), o comportamento é em muitas
maneiras análogo àquele de uma estaca carregada lateralmente. O efeito da rigidez
na tensão normal atuante nos reforços e em sua deformação é mostrado
esquematicamente na Figura III.21 (MITCHELLL & VILLET,1987).
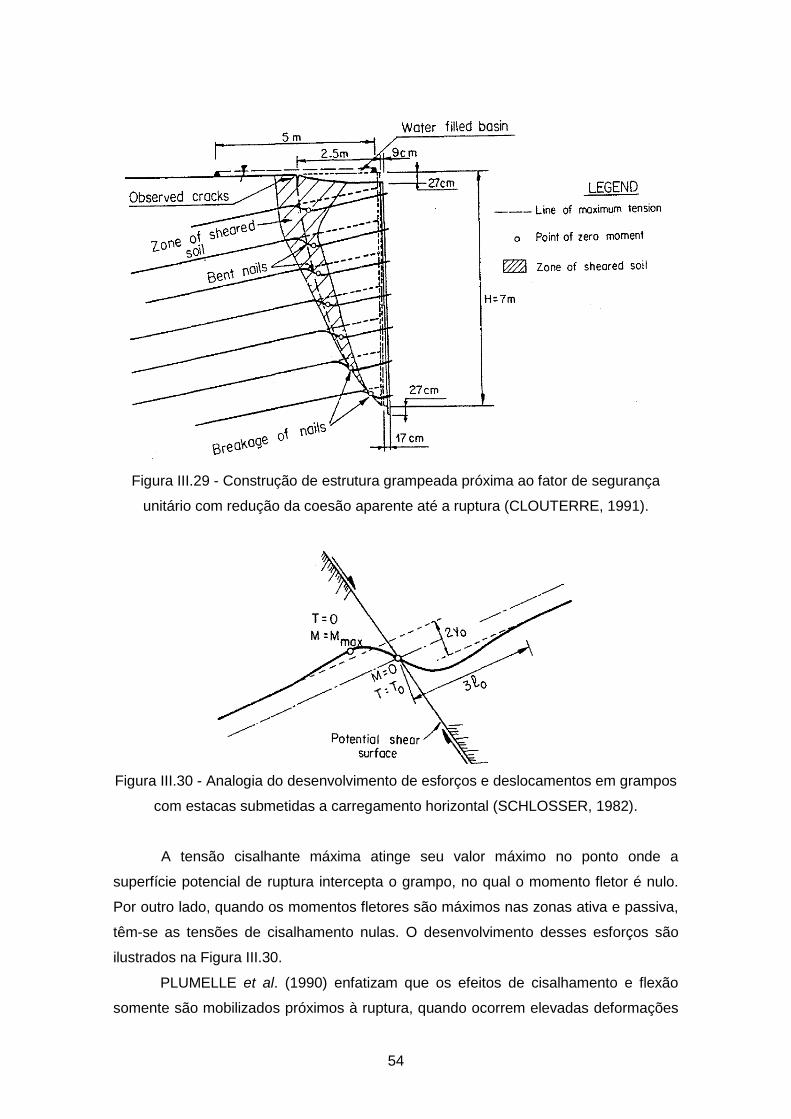
54
Figura III.29 - Construção de estrutura grampeada próxima ao fator de segurança
unitário com redução da coesão aparente até a ruptura (CLOUTERRE, 1991).
Figura III.30 - Analogia do desenvolvimento de esforços e deslocamentos em grampos
com estacas submetidas a carregamento horizontal (SCHLOSSER, 1982).
A tensão cisalhante máxima atinge seu valor máximo no ponto onde a
superfície potencial de ruptura intercepta o grampo, no qual o momento fletor é nulo.
Por outro lado, quando os momentos fletores são máximos nas zonas ativa e passiva,
têm-se as tensões de cisalhamento nulas. O desenvolvimento desses esforços são
ilustrados na Figura III.30.
PLUMELLE et al. (1990) enfatizam que os efeitos de cisalhamento e flexão
somente são mobilizados próximos à ruptura, quando ocorrem elevadas deformações

55
no maciço grampeado, ou quando uma superfície de escorregamento já existente está
sendo estabilizada (ZIRLIS et al., 1999). De fato, contanto que as deformações do
maciço grampeado sejam pequenas, a mobilização de momento fletor nos grampos
será pouco significativa (CLOUTERRE, 1991).
Nos grampos a razão entre os esforços cisalhantes e axiais é insignificante no
caso de reforço somente com barra de aço e muito baixa nos grampos mais rígidos
construídos com barra de aço e calda de cimento (CLOUTERRE, 1991). JURAN et al.
(1985) apresentam as mobilizações de esforços de flexão monitoradas em modelos
reduzidos construídos com grampos flexíveis e rígidos sobre condição de serviço
(Figura III.31). Os resultados revelam que os valores mais elevados da razão entre os
esforços máximos de cisalhamento e tração (Tcmáx / Tmáx) são alcançados no nível
superior de grampos, no qual a flexão é maior, devido ao método executivo que
consiste de sucessivas escavações de cima para baixo, ou seja, do topo até o pé da
estrutura grampeada.
Figura III.31 – Monitoração da mobilização de momentos fletores em modelo reduzido
de solo grampeado construído com grampos rígidos e flexíveis (JURAN et al., 1985).
JEWELL (1980) verificou experimentalmente que o desenvolvimento de
tensões em grampos com a mesma rigidez depende do ângulo formado entre o
grampo e a normal à superfície potencial de ruptura. O autor observou que o ângulo
entre reforço e superfície da ordem de 30º potencializa ao máximo os esforços axiais
no grampo e, portanto, corresponde à sua eficiência máxima.
MITCHELL & VILLET (1987) ressaltam que o deslocamento relativo entre solo
e grampo requerido para mobilizar a resistência ao cisalhamento e de flexão do
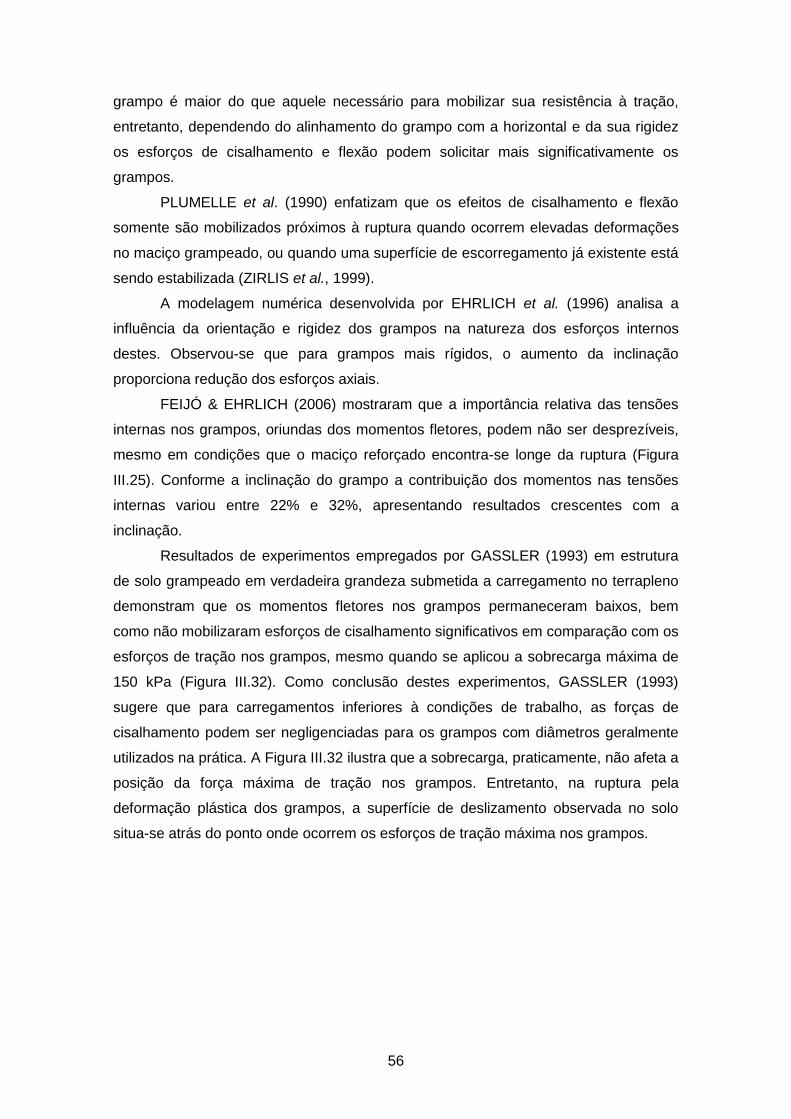
56
grampo é maior do que aquele necessário para mobilizar sua resistência à tração,
entretanto, dependendo do alinhamento do grampo com a horizontal e da sua rigidez
os esforços de cisalhamento e flexão podem solicitar mais significativamente os
grampos.
PLUMELLE et al. (1990) enfatizam que os efeitos de cisalhamento e flexão
somente são mobilizados próximos à ruptura quando ocorrem elevadas deformações
no maciço grampeado, ou quando uma superfície de escorregamento já existente está
sendo estabilizada (ZIRLIS et al., 1999).
A modelagem numérica desenvolvida por EHRLICH et al. (1996) analisa a
influência da orientação e rigidez dos grampos na natureza dos esforços internos
destes. Observou-se que para grampos mais rígidos, o aumento da inclinação
proporciona redução dos esforços axiais.
FEIJÓ & EHRLICH (2006) mostraram que a importância relativa das tensões
internas nos grampos, oriundas dos momentos fletores, podem não ser desprezíveis,
mesmo em condições que o maciço reforçado encontra-se longe da ruptura (Figura
III.25). Conforme a inclinação do grampo a contribuição dos momentos nas tensões
internas variou entre 22% e 32%, apresentando resultados crescentes com a
inclinação.
Resultados de experimentos empregados por GASSLER (1993) em estrutura
de solo grampeado em verdadeira grandeza submetida a carregamento no terrapleno
demonstram que os momentos fletores nos grampos permaneceram baixos, bem
como não mobilizaram esforços de cisalhamento significativos em comparação com os
esforços de tração nos grampos, mesmo quando se aplicou a sobrecarga máxima de
150 kPa (Figura III.32). Como conclusão destes experimentos, GASSLER (1993)
sugere que para carregamentos inferiores à condições de trabalho, as forças de
cisalhamento podem ser negligenciadas para os grampos com diâmetros geralmente
utilizados na prática. A Figura III.32 ilustra que a sobrecarga, praticamente, não afeta a
posição da força máxima de tração nos grampos. Entretanto, na ruptura pela
deformação plástica dos grampos, a superfície de deslizamento observada no solo
situa-se atrás do ponto onde ocorrem os esforços de tração máxima nos grampos.
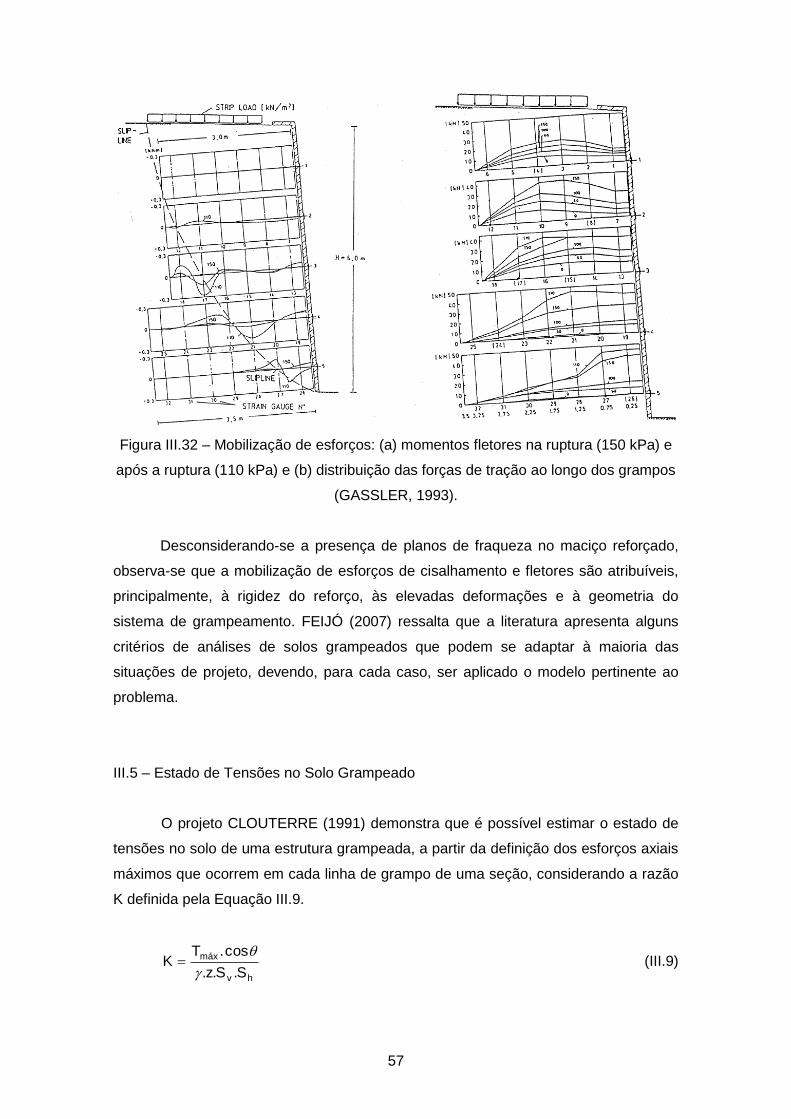
57
Figura III.32 – Mobilização de esforços: (a) momentos fletores na ruptura (150 kPa) e
após a ruptura (110 kPa) e (b) distribuição das forças de tração ao longo dos grampos
(GASSLER, 1993).
Desconsiderando-se a presença de planos de fraqueza no maciço reforçado,
observa-se que a mobilização de esforços de cisalhamento e fletores são atribuíveis,
principalmente, à rigidez do reforço, às elevadas deformações e à geometria do
sistema de grampeamento. FEIJÓ (2007) ressalta que a literatura apresenta alguns
critérios de análises de solos grampeados que podem se adaptar à maioria das
situações de projeto, devendo, para cada caso, ser aplicado o modelo pertinente ao
problema.
III.5 – Estado de Tensões no Solo Grampeado
O projeto CLOUTERRE (1991) demonstra que é possível estimar o estado de
tensões no solo de uma estrutura grampeada, a partir da definição dos esforços axiais
máximos que ocorrem em cada linha de grampo de uma seção, considerando a razão
K definida pela Equação III.9.
hv
máx
S.S.z.
cos.TK
(III.9)
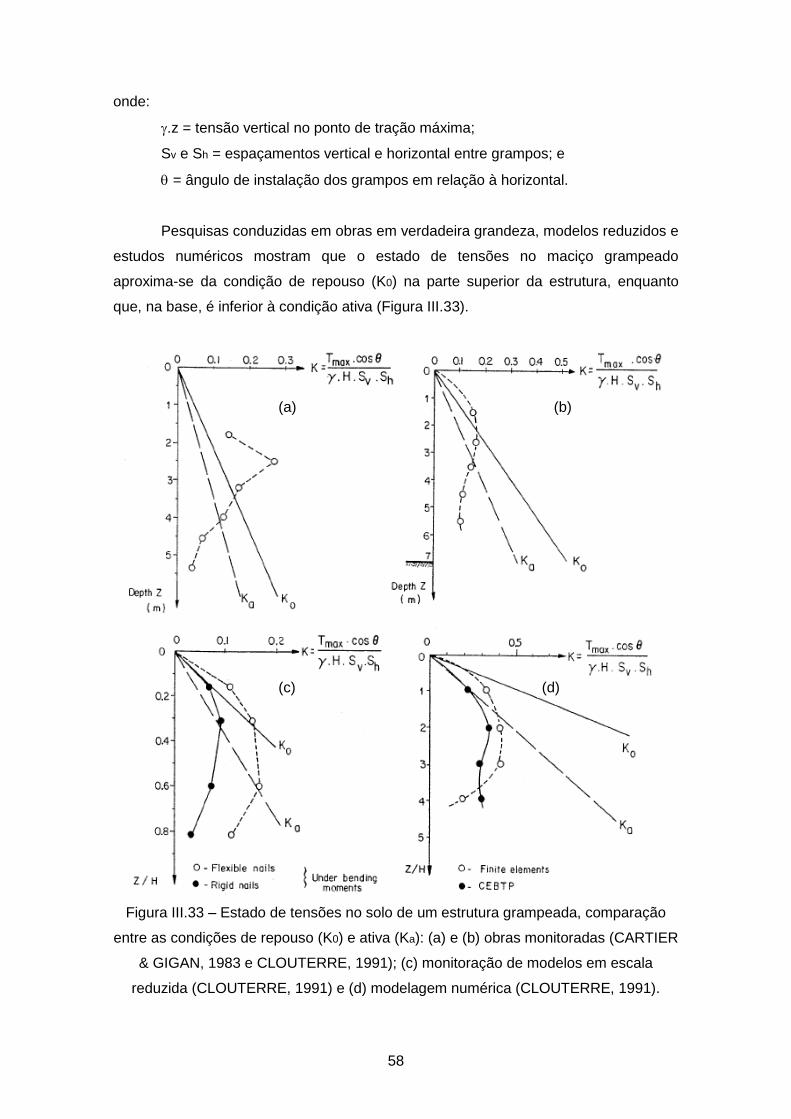
58
onde:
.z = tensão vertical no ponto de tração máxima;
Sv e Sh = espaçamentos vertical e horizontal entre grampos; e
= ângulo de instalação dos grampos em relação à horizontal.
Pesquisas conduzidas em obras em verdadeira grandeza, modelos reduzidos e
estudos numéricos mostram que o estado de tensões no maciço grampeado
aproxima-se da condição de repouso (K0) na parte superior da estrutura, enquanto
que, na base, é inferior à condição ativa (Figura III.33).
Figura III.33 – Estado de tensões no solo de um estrutura grampeada, comparação
entre as condições de repouso (K0) e ativa (Ka): (a) e (b) obras monitoradas (CARTIER
& GIGAN, 1983 e CLOUTERRE, 1991); (c) monitoração de modelos em escala
reduzida (CLOUTERRE, 1991) e (d) modelagem numérica (CLOUTERRE, 1991).
(a) (b)
(c) (d)
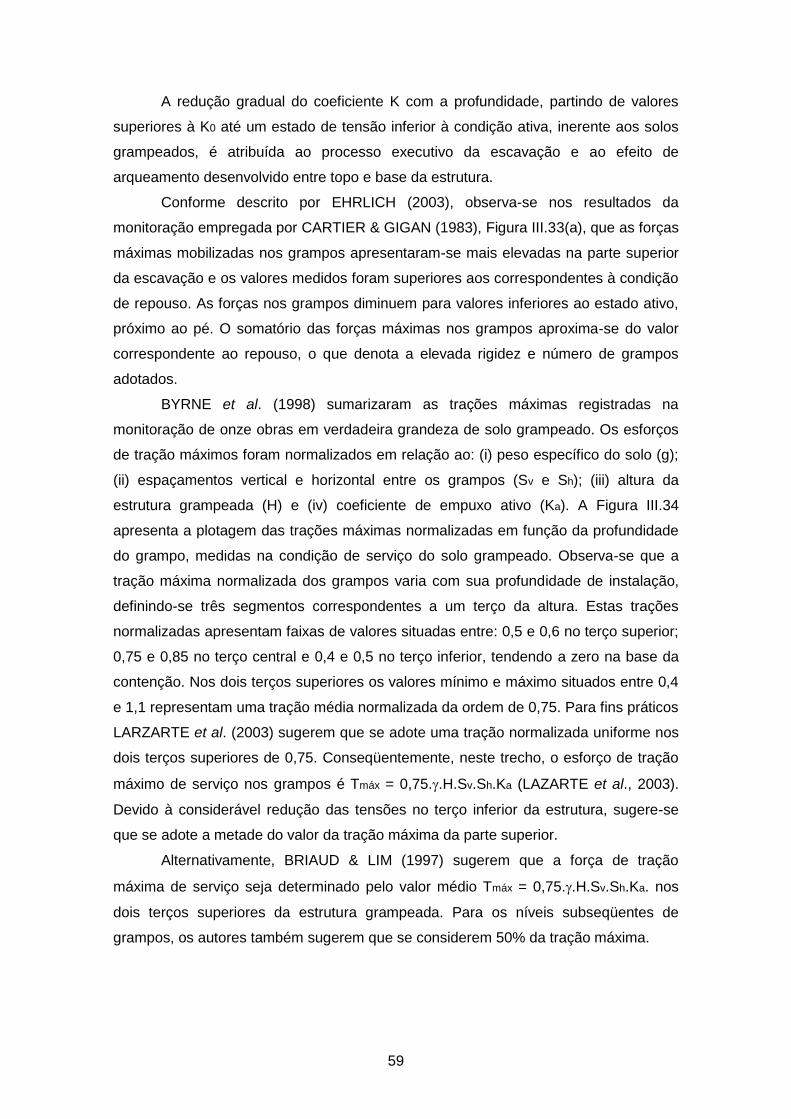
59
A redução gradual do coeficiente K com a profundidade, partindo de valores
superiores à K0 até um estado de tensão inferior à condição ativa, inerente aos solos
grampeados, é atribuída ao processo executivo da escavação e ao efeito de
arqueamento desenvolvido entre topo e base da estrutura.
Conforme descrito por EHRLICH (2003), observa-se nos resultados da
monitoração empregada por CARTIER & GIGAN (1983), Figura III.33(a), que as forças
máximas mobilizadas nos grampos apresentaram-se mais elevadas na parte superior
da escavação e os valores medidos foram superiores aos correspondentes à condição
de repouso. As forças nos grampos diminuem para valores inferiores ao estado ativo,
próximo ao pé. O somatório das forças máximas nos grampos aproxima-se do valor
correspondente ao repouso, o que denota a elevada rigidez e número de grampos
adotados.
BYRNE et al. (1998) sumarizaram as trações máximas registradas na
monitoração de onze obras em verdadeira grandeza de solo grampeado. Os esforços
de tração máximos foram normalizados em relação ao: (i) peso específico do solo (g);
(ii) espaçamentos vertical e horizontal entre os grampos (Sv e Sh); (iii) altura da
estrutura grampeada (H) e (iv) coeficiente de empuxo ativo (Ka). A Figura III.34
apresenta a plotagem das trações máximas normalizadas em função da profundidade
do grampo, medidas na condição de serviço do solo grampeado. Observa-se que a
tração máxima normalizada dos grampos varia com sua profundidade de instalação,
definindo-se três segmentos correspondentes a um terço da altura. Estas trações
normalizadas apresentam faixas de valores situadas entre: 0,5 e 0,6 no terço superior;
0,75 e 0,85 no terço central e 0,4 e 0,5 no terço inferior, tendendo a zero na base da
contenção. Nos dois terços superiores os valores mínimo e máximo situados entre 0,4
e 1,1 representam uma tração média normalizada da ordem de 0,75. Para fins práticos
LARZARTE et al. (2003) sugerem que se adote uma tração normalizada uniforme nos
dois terços superiores de 0,75. Conseqüentemente, neste trecho, o esforço de tração
máximo de serviço nos grampos é Tmáx = 0,75..H.Sv.Sh.Ka (LAZARTE et al., 2003).
Devido à considerável redução das tensões no terço inferior da estrutura, sugere-se
que se adote a metade do valor da tração máxima da parte superior.
Alternativamente, BRIAUD & LIM (1997) sugerem que a força de tração
máxima de serviço seja determinado pelo valor médio Tmáx = 0,75..H.Sv.Sh.Ka. nos
dois terços superiores da estrutura grampeada. Para os níveis subseqüentes de
grampos, os autores também sugerem que se considerem 50% da tração máxima.
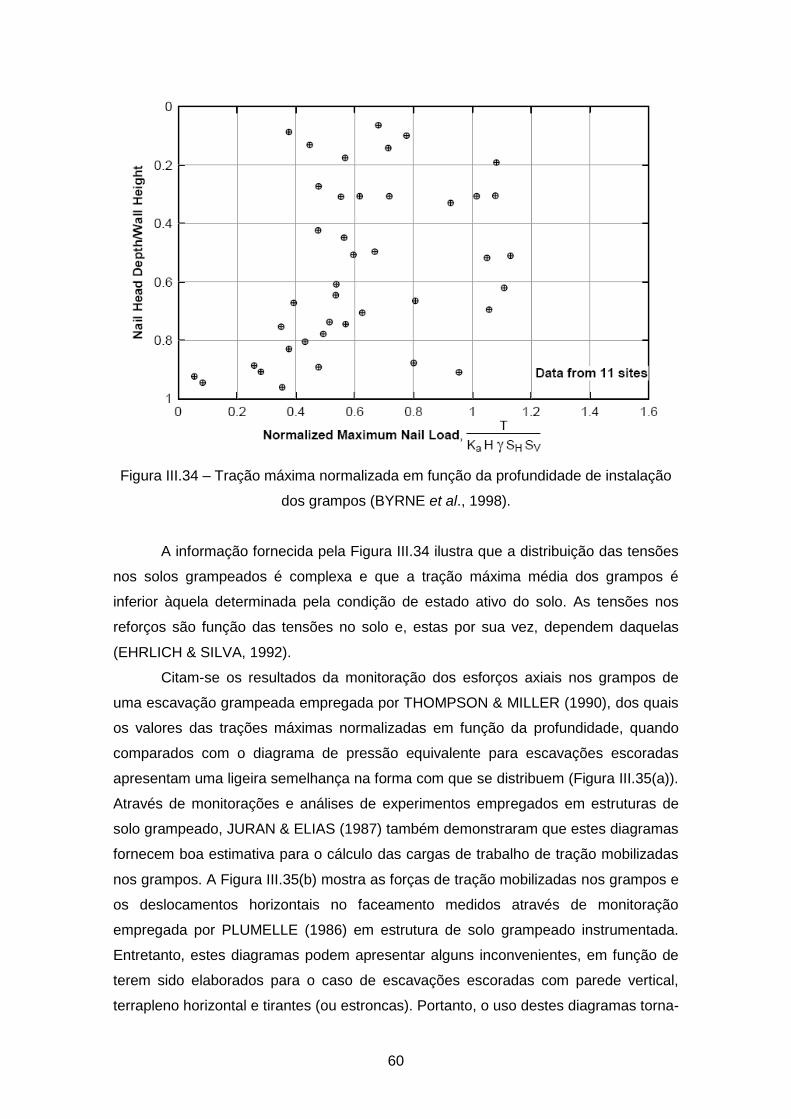
60
Figura III.34 – Tração máxima normalizada em função da profundidade de instalação
dos grampos (BYRNE et al., 1998).
A informação fornecida pela Figura III.34 ilustra que a distribuição das tensões
nos solos grampeados é complexa e que a tração máxima média dos grampos é
inferior àquela determinada pela condição de estado ativo do solo. As tensões nos
reforços são função das tensões no solo e, estas por sua vez, dependem daquelas
(EHRLICH & SILVA, 1992).
Citam-se os resultados da monitoração dos esforços axiais nos grampos de
uma escavação grampeada empregada por THOMPSON & MILLER (1990), dos quais
os valores das trações máximas normalizadas em função da profundidade, quando
comparados com o diagrama de pressão equivalente para escavações escoradas
apresentam uma ligeira semelhança na forma com que se distribuem (Figura III.35(a)).
Através de monitorações e análises de experimentos empregados em estruturas de
solo grampeado, JURAN & ELIAS (1987) também demonstraram que estes diagramas
fornecem boa estimativa para o cálculo das cargas de trabalho de tração mobilizadas
nos grampos. A Figura III.35(b) mostra as forças de tração mobilizadas nos grampos e
os deslocamentos horizontais no faceamento medidos através de monitoração
empregada por PLUMELLE (1986) em estrutura de solo grampeado instrumentada.
Entretanto, estes diagramas podem apresentar alguns inconvenientes, em função de
terem sido elaborados para o caso de escavações escoradas com parede vertical,
terrapleno horizontal e tirantes (ou estroncas). Portanto, o uso destes diagramas torna-
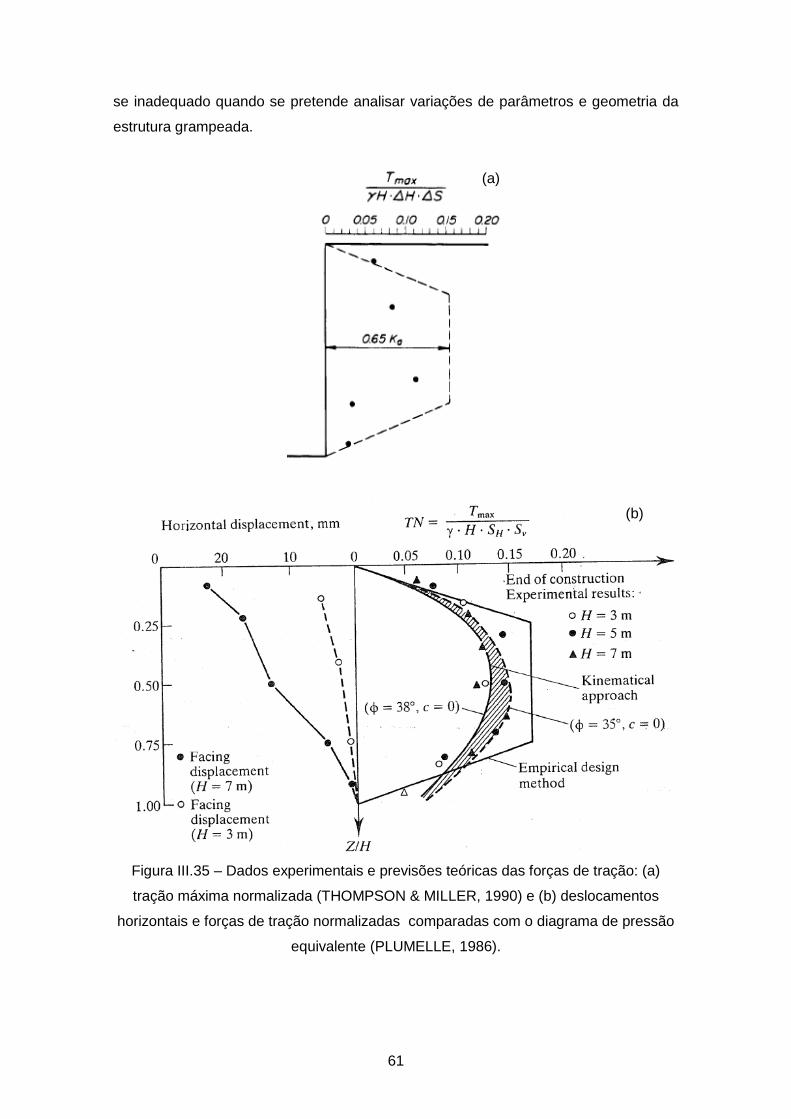
61
se inadequado quando se pretende analisar variações de parâmetros e geometria da
estrutura grampeada.
Figura III.35 – Dados experimentais e previsões teóricas das forças de tração: (a)
tração máxima normalizada (THOMPSON & MILLER, 1990) e (b) deslocamentos
horizontais e forças de tração normalizadas comparadas com o diagrama de pressão
equivalente (PLUMELLE, 1986).
(a)
(b)
62
III.6 – Deslocamentos e Deformações nos Solos Grampeados
Aspecto geotécnico de fundamental importância refere-se aos deslocamentos
induzidos pela execução da estrutura de contenção. Isto é especialmente importante
quando se lida com contenções de terrenos cortados: a escavação do terreno induz
deslocamentos verticais e horizontais e estes podem induzir danos em edificações ou
utilidades dispostas nas proximidades da escavação (RANZINI & NEGRO JR., 1998).
Além disso, em estruturas grampeadas, o comportamento tanto do solo como do
grampo depende do modo de deformação do sistema solo-reforço (SANTOS &
GERSCOVICH, 2009).
RANZINI & NEGRO JR. (1998) identificam dois tipos de deslocamento: os de
curto e os de longo prazo. Os primeiros são atribuíveis às inevitáveis alterações no
estado de tensões in situ, decorrentes do alívio de tensões que o corte produz no
terreno. São dependentes das propriedades e características do solo e elementos da
estrutura de contenção e, principalmente, da maneira e da seqüência como esta é
construída.
A magnitude dos deslocamentos e deformações observadas pelos
experimentos e programas de instrumentação de solos grampeados conduzidos
durante o projeto CLOUTERRE (1991) proporcionaram uma melhor compreensão do
comportamento do qual esta estrutura está sujeita nas fases de construção e sob
condição de serviço.
Os deslocamentos se caracterizaram por terem magnitude máxima junto ao
topo do talude, diminuindo com a profundidade. Movimentações mais concentradas no
topo do talude parecem estar relacionadas a possíveis alterações na sucção do solo
que poderiam ter ocorrido nesse trecho mais superficial. (FEIJÓ, 2005).
Segundo o projeto CLOUTERRE (1991), é possível considerar que as
deformações médias de uma estrutura grampeada de face vertical e terrapleno
horizontal podem ser estimadas a partir dos valores de três parâmetros de
deslocamento (Figura III.36).
0 - deslocamento horizontal atrás da massa grampeada;
h - deslocamento horizontal do topo dos revestimentos; e
v - deslocamento vertical do topo dos revestimentos.

63
Figura III.36 - Deformações de estruturas grampeadas definidas por deslocamentos
horizontais e verticais (CLOUTERRE, 1991).
Medidas em obras instrumentadas, realizadas por THOMPSON & MILLER
(1990), indicam que os deslocamentos têm magnitude máxima junto ao topo do
faceamento e decrescem, aproximadamente de forma linear, até a base da
escavação, conforme apresentado na Figura III.37.
Figura III.37 – Padrão de deslocamentos horizontais durante as sucessivas etapas de
escavação: (a) geometria do solo grampeado e locação do inclinômetro próximo à face
e (b) deslocamentos horizontais durante a evolução da escavação (THOMPSON &
MILLER, 1990).

64
Os resultados obtidos pelo projeto CLOUTERRE (1991) indicaram que os
deslocamentos horizontais h e verticais v na crista do faceamento possuem a mesma
ordem de grandeza, sobre condição de serviço e próximo à ruptura (Figura III.38). O
projeto observou que o deslocamento atrás da massa reforçada 0 encontra-se
compreendido, geralmente, entre 4H/10.000 e 5H/I0.000, sendo que este valor varia
inversamente à relação L/H e, também, depende da natureza do solo. Estes
deslocamentos demonstram que há uma ligeira distorção da massa de solo
grampeada (CLOUTERRE, 1991).
Figura III.38 - Relação entre os deslocamentos horizontal e vertical medidos na crista
de estruturas grampeadas (CLOUTERRE, 1991).
Entretanto, monitorações de obras em verdadeira grandeza e em modelos
reduzidos e estudos numéricos realizados por autores nacionais demonstram que não
ocorre a igualdade entre os deslocamentos horizontal e vertical conforme indicado
pelo projeto CLOUTERRE (1991). Nestes casos, nos deslocamentos induzidos pela
escavação do terreno durante a construção de um solo grampeado, as deformações
horizontais do topo da estrutura não apresentaram a mesma ordem de grandeza dos
deslocamentos verticais da superfície do terrapleno junto à face.
AZAMBUJA, et al. (2001) acompanharam os deslocamentos horizontais e
verticais de uma estrutura grampeada, especialmente antes e depois dos eventos de
escavação, a partir de leituras periódicas de marcos topográficos instalados na crista
logo no início das escavações. Nesta monitoração observou-se que os deslocamentos
máximos da estrutura nos pontos medidos foram 70 mm na direção horizontal e 23
mm na direção vertical. Segundo os autores, os deslocamentos de crista foram
elevados e as bacias de deformações foram mais amplas que o esperado. A maioria

65
dos registros reporta-se a deformações verticais nulas a distâncias da crista inferiores
a 1,5 vezes a altura escavada. Entretanto, foram observadas trincas de tração e
recalques a distâncias de até 2 vezes as alturas escavadas (AZAMBUJA et al., 2001).
FRANÇA (2007), ao simular uma escavação grampeada com o auxílio de um
modelo reduzido de solo grampeado, observou taxas de incremento crescentes dos
deslocamentos durante a execução de cada linha de grampos (Figura III.39).
Observou-se que os deslocamentos verticais máximos durante a execução foram da
ordem de 64% dos deslocamentos horizontais máximos. O valor do deslocamento
horizontal próximo à face correspondeu a 0,07% da altura do modelo reduzido, do qual
se aproxima muito do valor mínimo previsto por GUILLOUX & SCHLOSSER (1982) e
CLOUTERRE (1991), que estimam uma faixa entre 0,1% a 0,4% da altura do muro.
Figura III.39 – Evolução dos deslocamentos durante simulação de uma escavação
grampeada realizada em modelo reduzido (FRANÇA, 2007).
Por outro lado, quando se define uma zona de concentração de esforços
cisalhantes, os grampos são submetidos, de maneira mais intensa, à flexão. Desta
forma, quando são mobilizados momentos fletores há tendência dos deslocamentos
verticais sofrerem acréscimos significativos, podendo até superar a magnitude dos
deslocamentos horizontais. O projeto CLOUTERRE (1991) apresenta o caso de uma
estrutura que foi levada à ruptura, através da saturação do maciço a partir do
terrapleno, da qual os esforços cisalhantes e fletores além da resistência dos grampos
imprimiram um padrão de deslocamento e deformação condizente a um maciço
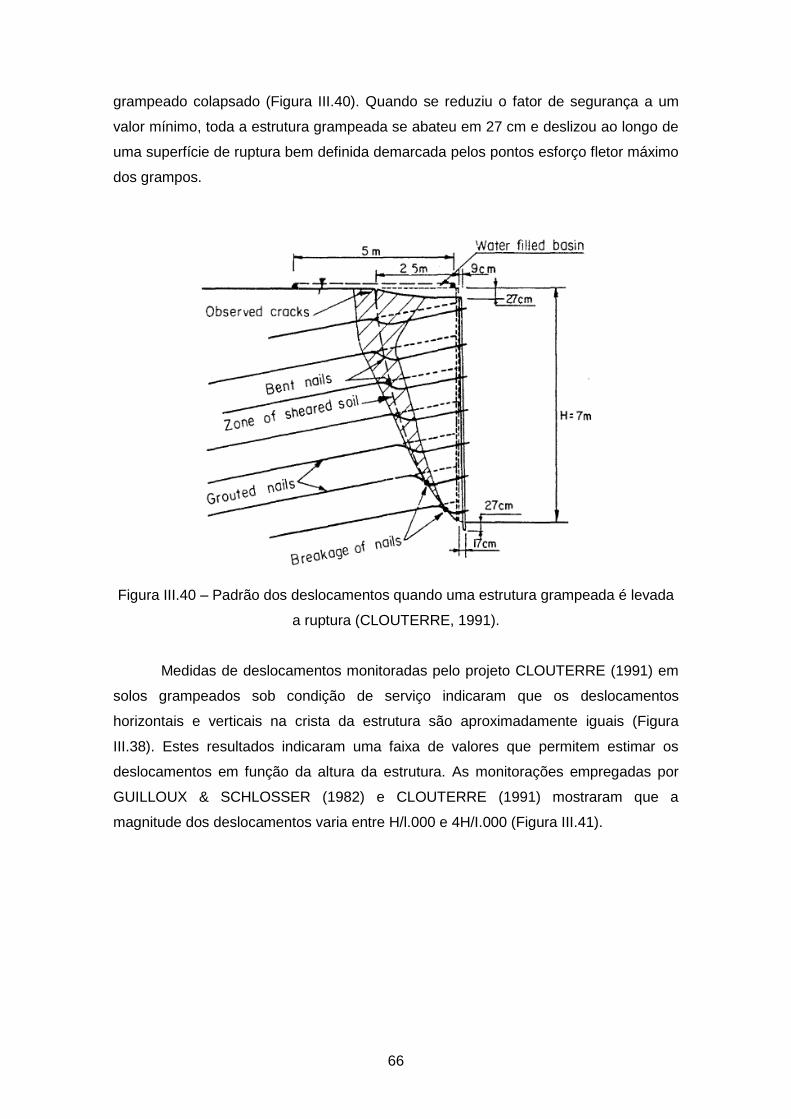
66
grampeado colapsado (Figura III.40). Quando se reduziu o fator de segurança a um
valor mínimo, toda a estrutura grampeada se abateu em 27 cm e deslizou ao longo de
uma superfície de ruptura bem definida demarcada pelos pontos esforço fletor máximo
dos grampos.
Figura III.40 – Padrão dos deslocamentos quando uma estrutura grampeada é levada
a ruptura (CLOUTERRE, 1991).
Medidas de deslocamentos monitoradas pelo projeto CLOUTERRE (1991) em
solos grampeados sob condição de serviço indicaram que os deslocamentos
horizontais e verticais na crista da estrutura são aproximadamente iguais (Figura
III.38). Estes resultados indicaram uma faixa de valores que permitem estimar os
deslocamentos em função da altura da estrutura. As monitorações empregadas por
GUILLOUX & SCHLOSSER (1982) e CLOUTERRE (1991) mostraram que a
magnitude dos deslocamentos varia entre H/l.000 e 4H/I.000 (Figura III.41).
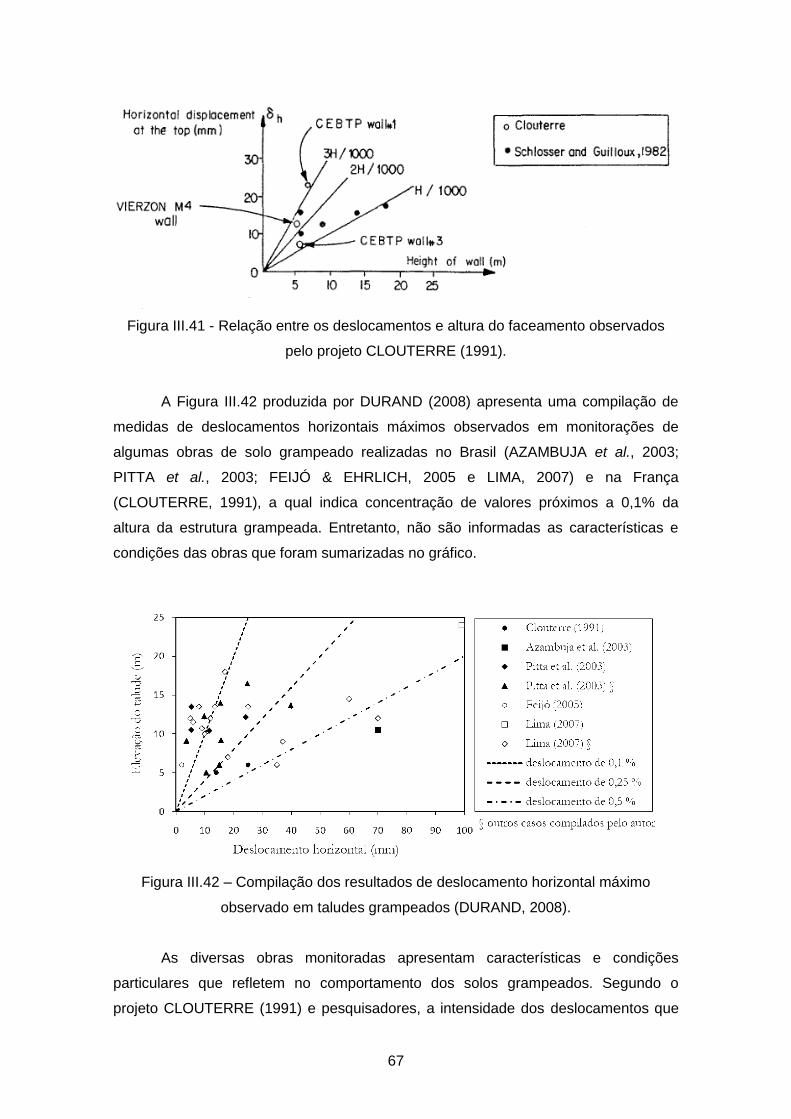
67
Figura III.41 - Relação entre os deslocamentos e altura do faceamento observados
pelo projeto CLOUTERRE (1991).
A Figura III.42 produzida por DURAND (2008) apresenta uma compilação de
medidas de deslocamentos horizontais máximos observados em monitorações de
algumas obras de solo grampeado realizadas no Brasil (AZAMBUJA et al., 2003;
PITTA et al., 2003; FEIJÓ & EHRLICH, 2005 e LIMA, 2007) e na França
(CLOUTERRE, 1991), a qual indica concentração de valores próximos a 0,1% da
altura da estrutura grampeada. Entretanto, não são informadas as características e
condições das obras que foram sumarizadas no gráfico.
Figura III.42 – Compilação dos resultados de deslocamento horizontal máximo
observado em taludes grampeados (DURAND, 2008).
As diversas obras monitoradas apresentam características e condições
particulares que refletem no comportamento dos solos grampeados. Segundo o
projeto CLOUTERRE (1991) e pesquisadores, a intensidade dos deslocamentos que
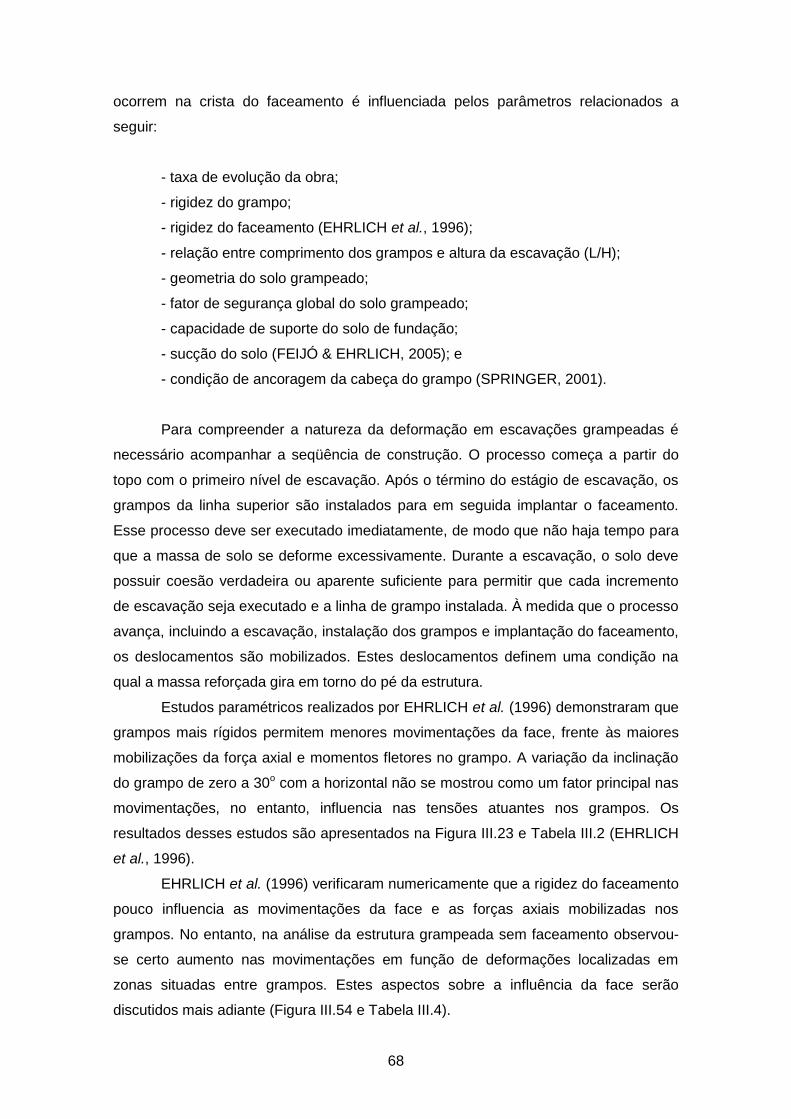
68
ocorrem na crista do faceamento é influenciada pelos parâmetros relacionados a
seguir:
- taxa de evolução da obra;
- rigidez do grampo;
- rigidez do faceamento (EHRLICH et al., 1996);
- relação entre comprimento dos grampos e altura da escavação (L/H);
- geometria do solo grampeado;
- fator de segurança global do solo grampeado;
- capacidade de suporte do solo de fundação;
- sucção do solo (FEIJÓ & EHRLICH, 2005); e
- condição de ancoragem da cabeça do grampo (SPRINGER, 2001).
Para compreender a natureza da deformação em escavações grampeadas é
necessário acompanhar a seqüência de construção. O processo começa a partir do
topo com o primeiro nível de escavação. Após o término do estágio de escavação, os
grampos da linha superior são instalados para em seguida implantar o faceamento.
Esse processo deve ser executado imediatamente, de modo que não haja tempo para
que a massa de solo se deforme excessivamente. Durante a escavação, o solo deve
possuir coesão verdadeira ou aparente suficiente para permitir que cada incremento
de escavação seja executado e a linha de grampo instalada. À medida que o processo
avança, incluindo a escavação, instalação dos grampos e implantação do faceamento,
os deslocamentos são mobilizados. Estes deslocamentos definem uma condição na
qual a massa reforçada gira em torno do pé da estrutura.
Estudos paramétricos realizados por EHRLICH et al. (1996) demonstraram que
grampos mais rígidos permitem menores movimentações da face, frente às maiores
mobilizações da força axial e momentos fletores no grampo. A variação da inclinação
do grampo de zero a 30o com a horizontal não se mostrou como um fator principal nas
movimentações, no entanto, influencia nas tensões atuantes nos grampos. Os
resultados desses estudos são apresentados na Figura III.23 e Tabela III.2 (EHRLICH
et al., 1996).
EHRLICH et al. (1996) verificaram numericamente que a rigidez do faceamento
pouco influencia as movimentações da face e as forças axiais mobilizadas nos
grampos. No entanto, na análise da estrutura grampeada sem faceamento observou-
se certo aumento nas movimentações em função de deformações localizadas em
zonas situadas entre grampos. Estes aspectos sobre a influência da face serão
discutidos mais adiante (Figura III.54 e Tabela III.4).
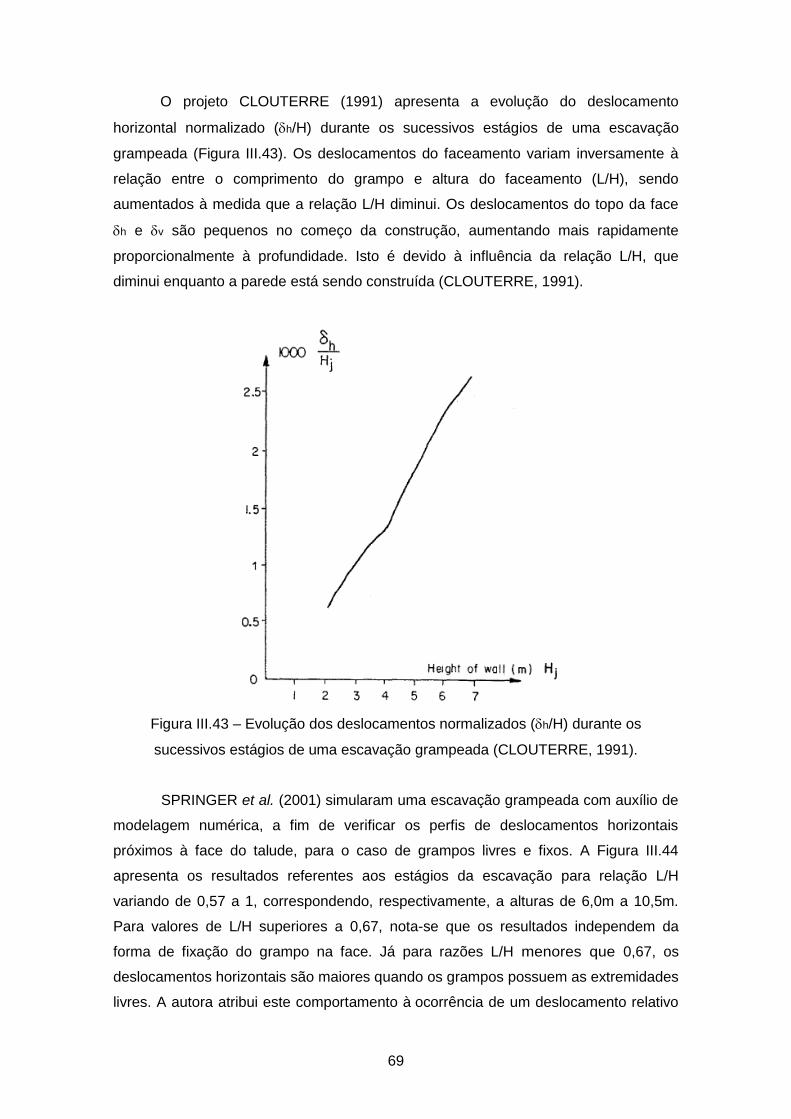
69
O projeto CLOUTERRE (1991) apresenta a evolução do deslocamento
horizontal normalizado (h/H) durante os sucessivos estágios de uma escavação
grampeada (Figura III.43). Os deslocamentos do faceamento variam inversamente à
relação entre o comprimento do grampo e altura do faceamento (L/H), sendo
aumentados à medida que a relação L/H diminui. Os deslocamentos do topo da face
h e v são pequenos no começo da construção, aumentando mais rapidamente
proporcionalmente à profundidade. Isto é devido à influência da relação L/H, que
diminui enquanto a parede está sendo construída (CLOUTERRE, 1991).
Figura III.43 – Evolução dos deslocamentos normalizados (h/H) durante os
sucessivos estágios de uma escavação grampeada (CLOUTERRE, 1991).
SPRINGER et al. (2001) simularam uma escavação grampeada com auxílio de
modelagem numérica, a fim de verificar os perfis de deslocamentos horizontais
próximos à face do talude, para o caso de grampos livres e fixos. A Figura III.44
apresenta os resultados referentes aos estágios da escavação para relação L/H
variando de 0,57 a 1, correspondendo, respectivamente, a alturas de 6,0m a 10,5m.
Para valores de L/H superiores a 0,67, nota-se que os resultados independem da
forma de fixação do grampo na face. Já para razões L/H menores que 0,67, os
deslocamentos horizontais são maiores quando os grampos possuem as extremidades
livres. A autora atribui este comportamento à ocorrência de um deslocamento relativo
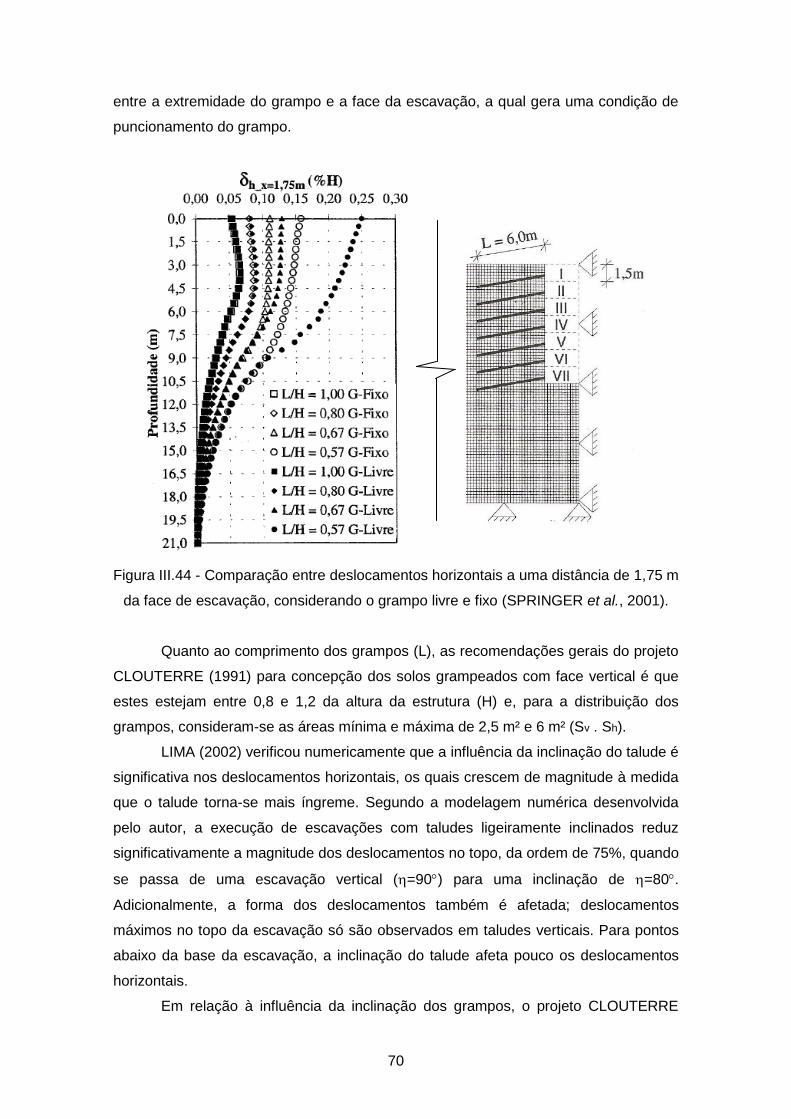
70
entre a extremidade do grampo e a face da escavação, a qual gera uma condição de
puncionamento do grampo.
Figura III.44 - Comparação entre deslocamentos horizontais a uma distância de 1,75 m
da face de escavação, considerando o grampo livre e fixo (SPRINGER et al., 2001).
Quanto ao comprimento dos grampos (L), as recomendações gerais do projeto
CLOUTERRE (1991) para concepção dos solos grampeados com face vertical é que
estes estejam entre 0,8 e 1,2 da altura da estrutura (H) e, para a distribuição dos
grampos, consideram-se as áreas mínima e máxima de 2,5 m² e 6 m² (Sv . Sh).
LIMA (2002) verificou numericamente que a influência da inclinação do talude é
significativa nos deslocamentos horizontais, os quais crescem de magnitude à medida
que o talude torna-se mais íngreme. Segundo a modelagem numérica desenvolvida
pelo autor, a execução de escavações com taludes ligeiramente inclinados reduz
significativamente a magnitude dos deslocamentos no topo, da ordem de 75%, quando
se passa de uma escavação vertical (=90) para uma inclinação de =80.
Adicionalmente, a forma dos deslocamentos também é afetada; deslocamentos
máximos no topo da escavação só são observados em taludes verticais. Para pontos
abaixo da base da escavação, a inclinação do talude afeta pouco os deslocamentos
horizontais.
Em relação à influência da inclinação dos grampos, o projeto CLOUTERRE
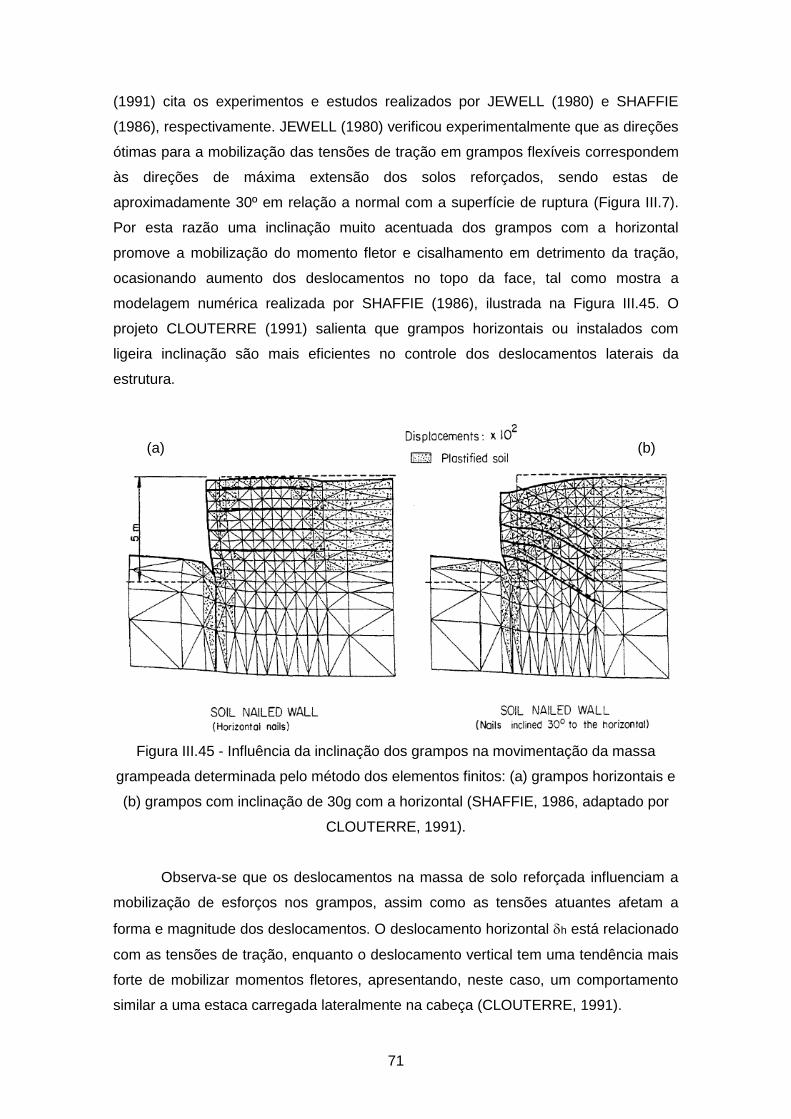
71
(1991) cita os experimentos e estudos realizados por JEWELL (1980) e SHAFFIE
(1986), respectivamente. JEWELL (1980) verificou experimentalmente que as direções
ótimas para a mobilização das tensões de tração em grampos flexíveis correspondem
às direções de máxima extensão dos solos reforçados, sendo estas de
aproximadamente 30º em relação a normal com a superfície de ruptura (Figura III.7).
Por esta razão uma inclinação muito acentuada dos grampos com a horizontal
promove a mobilização do momento fletor e cisalhamento em detrimento da tração,
ocasionando aumento dos deslocamentos no topo da face, tal como mostra a
modelagem numérica realizada por SHAFFIE (1986), ilustrada na Figura III.45. O
projeto CLOUTERRE (1991) salienta que grampos horizontais ou instalados com
ligeira inclinação são mais eficientes no controle dos deslocamentos laterais da
estrutura.
Figura III.45 - Influência da inclinação dos grampos na movimentação da massa
grampeada determinada pelo método dos elementos finitos: (a) grampos horizontais e
(b) grampos com inclinação de 30g com a horizontal (SHAFFIE, 1986, adaptado por
CLOUTERRE, 1991).
Observa-se que os deslocamentos na massa de solo reforçada influenciam a
mobilização de esforços nos grampos, assim como as tensões atuantes afetam a
forma e magnitude dos deslocamentos. O deslocamento horizontal h está relacionado
com as tensões de tração, enquanto o deslocamento vertical tem uma tendência mais
forte de mobilizar momentos fletores, apresentando, neste caso, um comportamento
similar a uma estaca carregada lateralmente na cabeça (CLOUTERRE, 1991).
(a) (b)

72
A geometria de uma seção de solo grampeado tem como procedimento usual e
geralmente muito prático, os grampos com o mesmo comprimento, conforme
demonstrado na Figura III.46(a). Pode-se projetar a distribuição dos grampos de forma
que seus comprimentos diminuam com a profundidade (Figura II.46(b)). Esta solução
também reduz os deslocamentos laterais na crista da estrutura grampeada. Por outro
lado, uma distribuição inversa com os grampos maiores na base da estrutura, tal como
ilustrado na Figura III.46(c), não é considerada adequada e, portanto, não é
recomendável (CLOUTERRE, 1991; SALCEDO, 1997).
Figura III.46 - Influência da distribuição dos grampos na movimentação da massa
grampeada: (a) comprimentos constantes; (b) comprimentos diminuindo com a
profundidade e (c) comprimentos aumentando com a profundidade – não
recomendados (CLOUTERRE, 1991).
Quando o solo grampeado tem um fator de segurança global baixo, os valores
dos deslocamentos 0 e h tendem a ser mais elevados. A monitoração do primeiro
experimento realizado pelo projeto CLOUTERRE (1991), cujo fator de segurança é
praticamente unitário (Figura III.40), registrou valor igual a 3H/1.000 para os
deslocamentos (Figura III.41).
Quanto menor a relação entre o comprimento do grampo e a altura da estrutura
(L/H), menor será a área de massa reforçada sobre o solo abaixo dos grampos e,
conseqüentemente, menor será a capacidade de suporte do solo de fundação. As
tensões podem ser elevadas em relação à capacidade de suporte do solo de fundação
a ponto de promover recalques e ou ruptura da obra.
Monitoração empregada por FEIJÓ & EHRLICH (2003) em escavação
grampeada em solo residual de gnaisse apresentou medidas de deformações muito
pequenas, indicando estar o maciço longe da ruptura. Estas pequenas movimentações
foram consistentes com a não saturação do maciço. Os resultados da relação entre a
altura do talude e os deslocamentos se mostraram menores do que aqueles relatados
(a) (b) (c)
73
pelo projeto CLOUTERRE (1991), que tipifica um faixa de valores de deslocamentos
máximos entre 0,1%H e 0,4%H, sendo H a altura da escavação. A obra monitorada
indicou uma faixa de variação situada entre 0,014%H e 0,026%H. Entretanto, os
autores ressaltam que os estudos apresentados em CLOUTERRE (1991)
correspondem a escavações em materiais basicamente granulares. Na monitoração
empregada observou-se que a sucção do solo exerce influência significativa no
comportamento da escavação grampeada, haja vista tratar-se de um material com
elevado percentual de finos (FEIJÓ & EHRLICH, 2003).
Os estudos numéricos de SPRINGER et al. (2001) demonstraram que, para
grampos livres, a face do talude escavado desloca-se mais livremente, atingindo um
valor máximo de 0,25%H. No caso de grampo fixo, os deslocamentos observados são
ainda menores, da ordem de 0,16%H.
Conhecidos os deslocamentos de curto e longo prazo, induzidos pela execução
de contenção de terreno natural escavado, conclui-se o dimensionamento geotécnico
com a estimativa de danos em utilidades ou em edificações vizinhas à contenção
(RANZINI & NEGRO JR., 1998). Sabe-se que a maior parte dos danos numa estrutura
manifesta-se na forma de deformação de tração (BURLAND & WROTH, 1974). Estas
deformações resultam de recalques diferenciais (distorção angular) e deformação
lateral (horizontal) de tração.
A escavação do terreno, pelo alívio de tensões, mobiliza deslocamentos
verticais e horizontais e estes podem ocasionar danos em edificações e ou utilidades
que se encontram próximas ao corte. A inclusão de grampos à medida que cada
estágio da escavação avança apresenta-se como uma possível solução para
minimizar estes deslocamentos. Entretanto, suas intensidades podem ser acima de
valores aceitáveis para que estruturas próximas à escavação não sejam danificadas.
Portanto, na fase de projeto, é importante verificar se as estruturas existentes na
vizinhança da escavação grampeada podem resistir ao campo dos deslocamentos
causados pela sua construção. Normalmente, em projetos, define-se esta área a partir
de um afastamento em relação à crista da estrutura de contenção. Os deslocamentos
são reduzidos à medida que os afastamentos aumentam, até um ponto onde cessa a
deformação do terreno.
O projeto CLOUTERRE (1991), a partir de medições de campo, apresenta
sugestões quanto aos deslocamentos horizontais e verticais máximos que ocorrem na
crista da estrutura grampeada para solos de diferentes propriedades (Tabela III.3) e
recomenda que os afastamentos em relação ao topo do faceamento sejam estimados
utilizando-se a Equação III.10, que depende da geometria da obra (altura da estrutura
H e inclinação da face ) e do coeficiente empírico () do qual é obtido em função do
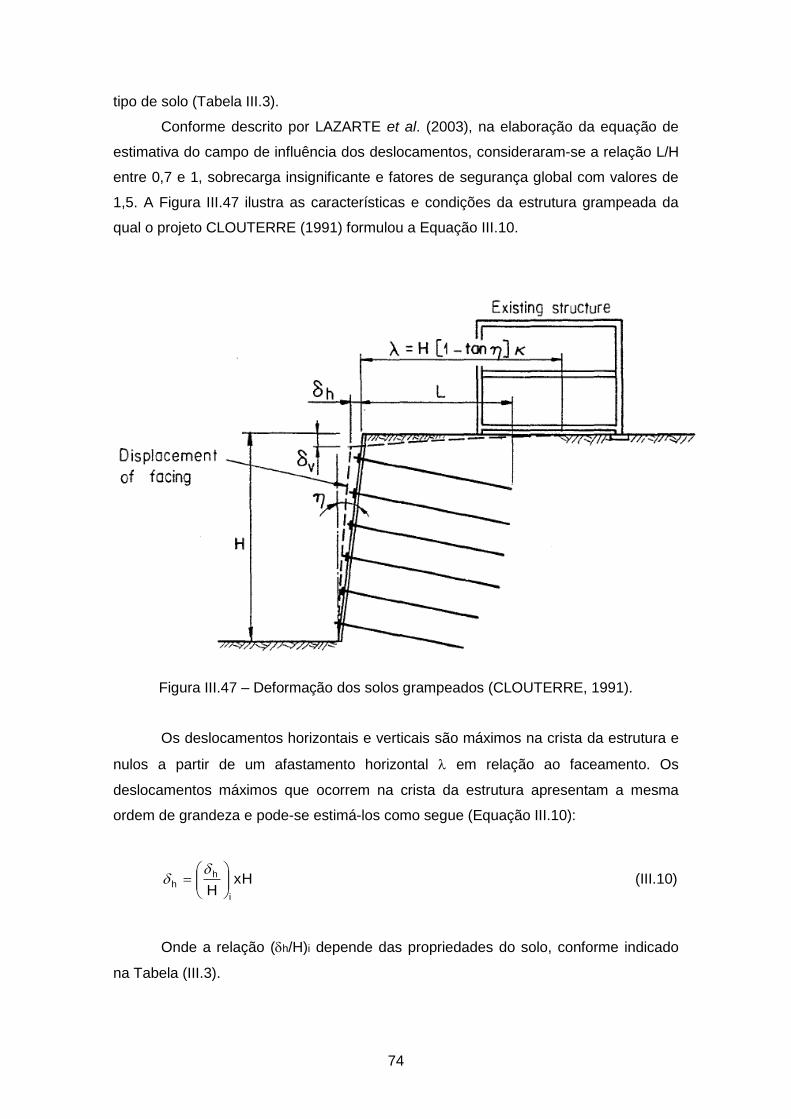
74
tipo de solo (Tabela III.3).
Conforme descrito por LAZARTE et al. (2003), na elaboração da equação de
estimativa do campo de influência dos deslocamentos, consideraram-se a relação L/H
entre 0,7 e 1, sobrecarga insignificante e fatores de segurança global com valores de
1,5. A Figura III.47 ilustra as características e condições da estrutura grampeada da
qual o projeto CLOUTERRE (1991) formulou a Equação III.10.
Figura III.47 – Deformação dos solos grampeados (CLOUTERRE, 1991).
Os deslocamentos horizontais e verticais são máximos na crista da estrutura e
nulos a partir de um afastamento horizontal em relação ao faceamento. Os
deslocamentos máximos que ocorrem na crista da estrutura apresentam a mesma
ordem de grandeza e pode-se estimá-los como segue (Equação III.10):
xHH
i
hh
(III.10)
Onde a relação (h/H)i depende das propriedades do solo, conforme indicado
na Tabela (III.3).

75
Tabela III.3 - Deslocamentos horizontais e verticais máximos na crista do solo
grampeado e coeficiente empírico (CLOUTERRE, 1991).
Alteração de rocha Solos arenosos Solos argilosos
v h H/1.000 2H/1.000 4H/1.000
0,8 1,25 1,5
Tipo de solo
Onde o coeficiente k é utilizado para determinar o comprimento do campo de
deslocamentos (), definido pela Equação III.11.
= H (1 - tan) (III.11)
Esta é uma forma fácil de estimar o campo de deslocamentos, entretanto,
como não são levados em consideração todos os aspectos que influenciam a
deformação da massa grampeada, recomenda-se que, em determinados
empreendimentos, sejam realizados estudos mais sofisticados. Neste caso, além
destas análises, torna-se interessante a verificação da bacia de deformação através
da monitoração do solo grampeado nas suas diversas fases construtivas, sobre
condição de serviço e ao longo do tempo.
III.7 – Faceamento nos Solos Grampeados
EHRLICH (2003), baseado nos resultados de modelagens numéricas e
monitorações de solos grampeados, discorre sobre a função e características
dos faceamentos nestas estruturas de contenção:
―O faceamento tem função secundária na estabilização, compreendendo
basicamente em evitar roturas localizadas. Em taludes mais verticalizados, próximo ao
pé da escavação, o comprimento de transferência ao longo da interface solo grampo
na cunha ativa é pequeno e as tensões junto à face podem se apresentar mais
elevadas (Figura III.48(a)). Faces estruturalmente resistentes podem se tornar
necessárias nestas condições. Usualmente adota-se concreto projetado de 7 a 10 cm
de espessura e malha metálica simples solidarizada aos grampos.‖
―Com a diminuição da inclinação tem-se aumento do comprimento de
transferência na cunha ativa e diminuição das tensões atuantes junto à face (Figura
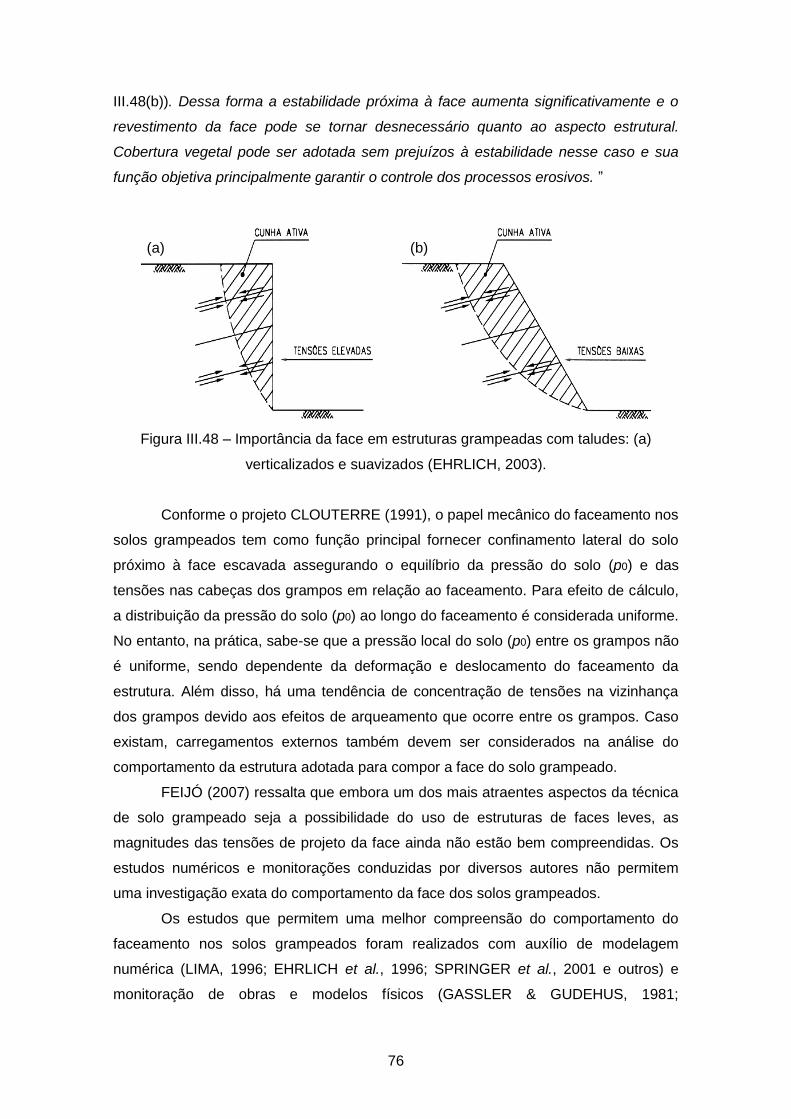
76
III.48(b)). Dessa forma a estabilidade próxima à face aumenta significativamente e o
revestimento da face pode se tornar desnecessário quanto ao aspecto estrutural.
Cobertura vegetal pode ser adotada sem prejuízos à estabilidade nesse caso e sua
função objetiva principalmente garantir o controle dos processos erosivos. ‖
Figura III.48 – Importância da face em estruturas grampeadas com taludes: (a)
verticalizados e suavizados (EHRLICH, 2003).
Conforme o projeto CLOUTERRE (1991), o papel mecânico do faceamento nos
solos grampeados tem como função principal fornecer confinamento lateral do solo
próximo à face escavada assegurando o equilíbrio da pressão do solo (p0) e das
tensões nas cabeças dos grampos em relação ao faceamento. Para efeito de cálculo,
a distribuição da pressão do solo (p0) ao longo do faceamento é considerada uniforme.
No entanto, na prática, sabe-se que a pressão local do solo (p0) entre os grampos não
é uniforme, sendo dependente da deformação e deslocamento do faceamento da
estrutura. Além disso, há uma tendência de concentração de tensões na vizinhança
dos grampos devido aos efeitos de arqueamento que ocorre entre os grampos. Caso
existam, carregamentos externos também devem ser considerados na análise do
comportamento da estrutura adotada para compor a face do solo grampeado.
FEIJÓ (2007) ressalta que embora um dos mais atraentes aspectos da técnica
de solo grampeado seja a possibilidade do uso de estruturas de faces leves, as
magnitudes das tensões de projeto da face ainda não estão bem compreendidas. Os
estudos numéricos e monitorações conduzidas por diversos autores não permitem
uma investigação exata do comportamento da face dos solos grampeados.
Os estudos que permitem uma melhor compreensão do comportamento do
faceamento nos solos grampeados foram realizados com auxílio de modelagem
numérica (LIMA, 1996; EHRLICH et al., 1996; SPRINGER et al., 2001 e outros) e
monitoração de obras e modelos físicos (GASSLER & GUDEHUS, 1981;
(a) (b)

77
CLOUTERRE, 1991, BYRNE et al., 1998 e outros). Embora as modelagens
computacionais sejam ferramentas eficazes para simular o comportamento das
estruturas de solo grampeado, no que se refere aos diversos critérios de análise do
faceamento, prevalecem os empíricos baseados em observações do comportamento
em campo.
GASSLER & GUDEHUS (1981), através da monitoração de células de pressão
total instaladas na interface do solo com a face, observaram que, na maioria dos
casos, os valores das pressões junto à face variam de 50% a 70% dos valores
calculados utilizando o método de Coulomb para a condição ativa ao final da
escavação. A Figura III.49 apresenta o resultado da monitoração empregada por
GASSLER & GUDEHUS (1981) em estrutura grampeada na condições de serviço com
e sem aplicação de sobrecarga no terrapleno da contenção.
Figura III.49 – Tensões junto à face registradas por Células de pressão total instaladas
na interface solo-faceamento devido: (a) ao peso próprio e, também, (b) à aplicação de
sobrecarga no topo da estrutura (GASSLER & GUDEHUS, 1981)
O projeto CLOUTERRE (1991) verificou durante a construção de uma estrutura
de solo grampeado que a mobilização da tensão nos grampos ocorre somente durante
as três a quatro fases subseqüentes da escavação até que a tensão se estabilize.
Enquanto a escavação progride, esta tensão mobilizada corresponde, principalmente,
à sucessiva descompressão lateral do maciço de solo e ao desenvolvimento do efeito
de arqueamento. Resultados dos experimentos demonstram que a distribuição da
tensão ao longo dos grampos evolui enquanto a estrutura grampeada está sendo
construída. Observa-se na monitoração do primeiro experimento do projeto
(a)
(b)
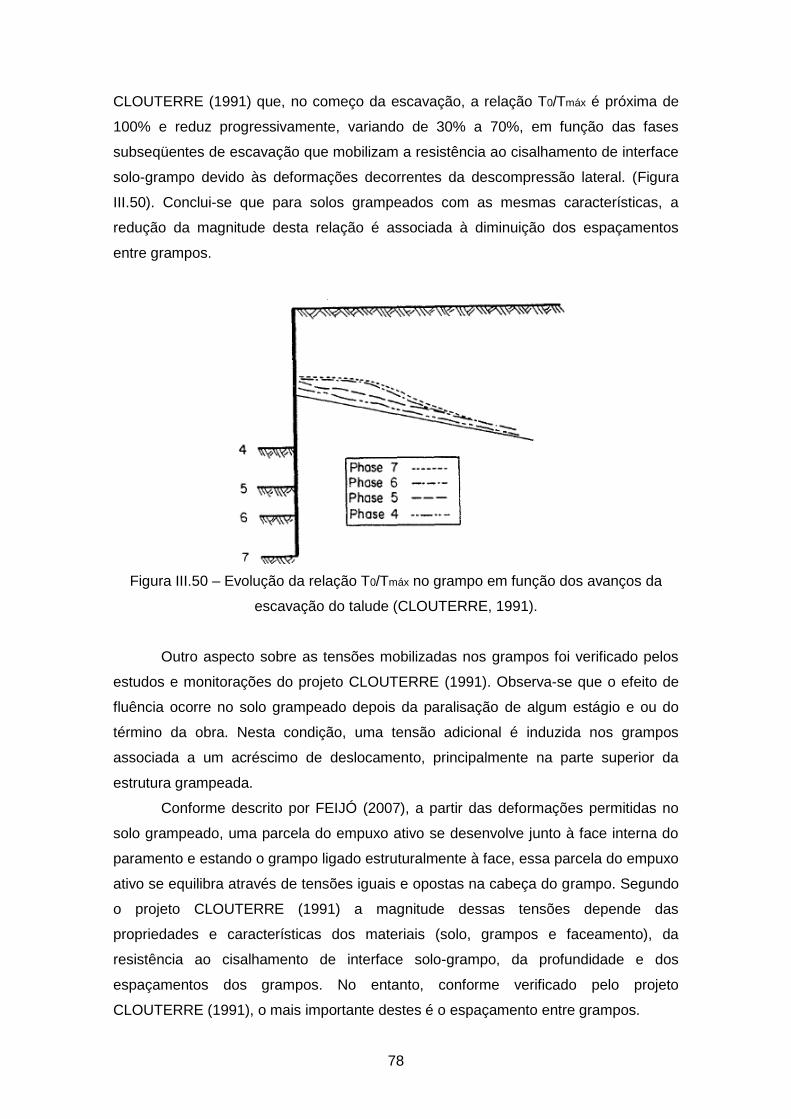
78
CLOUTERRE (1991) que, no começo da escavação, a relação T0/Tmáx é próxima de
100% e reduz progressivamente, variando de 30% a 70%, em função das fases
subseqüentes de escavação que mobilizam a resistência ao cisalhamento de interface
solo-grampo devido às deformações decorrentes da descompressão lateral. (Figura
III.50). Conclui-se que para solos grampeados com as mesmas características, a
redução da magnitude desta relação é associada à diminuição dos espaçamentos
entre grampos.
Figura III.50 – Evolução da relação T0/Tmáx no grampo em função dos avanços da
escavação do talude (CLOUTERRE, 1991).
Outro aspecto sobre as tensões mobilizadas nos grampos foi verificado pelos
estudos e monitorações do projeto CLOUTERRE (1991). Observa-se que o efeito de
fluência ocorre no solo grampeado depois da paralisação de algum estágio e ou do
término da obra. Nesta condição, uma tensão adicional é induzida nos grampos
associada a um acréscimo de deslocamento, principalmente na parte superior da
estrutura grampeada.
Conforme descrito por FEIJÓ (2007), a partir das deformações permitidas no
solo grampeado, uma parcela do empuxo ativo se desenvolve junto à face interna do
paramento e estando o grampo ligado estruturalmente à face, essa parcela do empuxo
ativo se equilibra através de tensões iguais e opostas na cabeça do grampo. Segundo
o projeto CLOUTERRE (1991) a magnitude dessas tensões depende das
propriedades e características dos materiais (solo, grampos e faceamento), da
resistência ao cisalhamento de interface solo-grampo, da profundidade e dos
espaçamentos dos grampos. No entanto, conforme verificado pelo projeto
CLOUTERRE (1991), o mais importante destes é o espaçamento entre grampos.
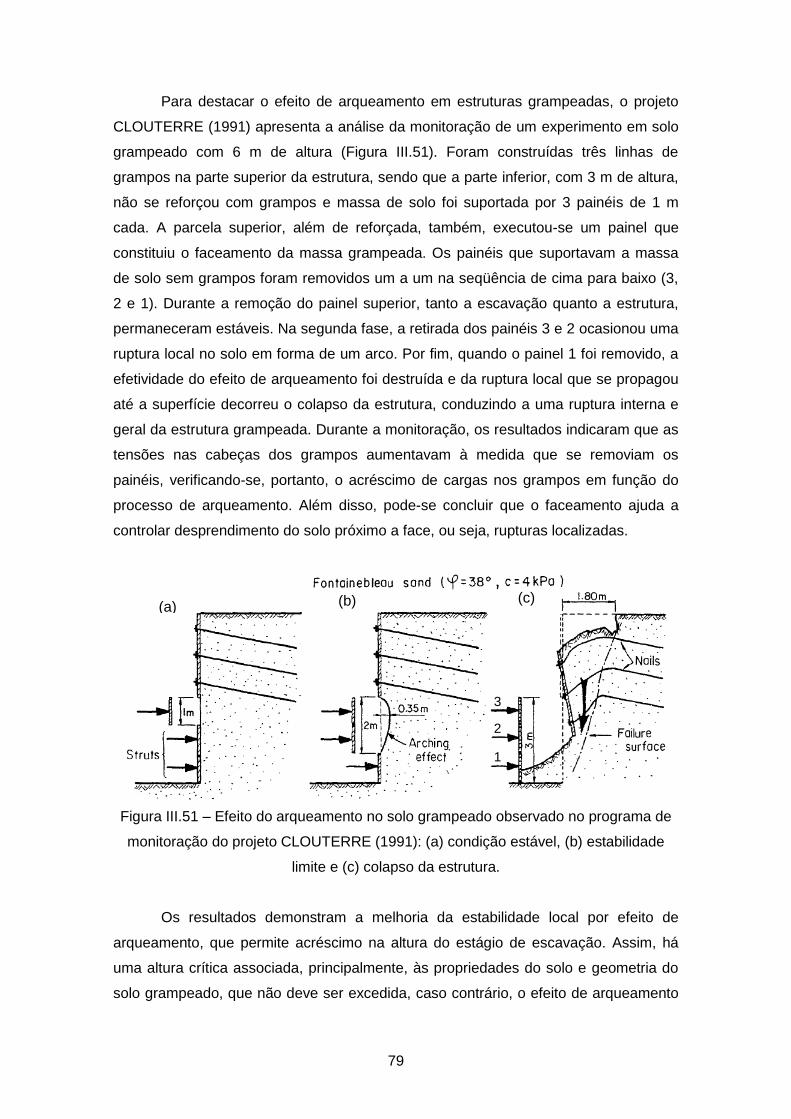
79
Para destacar o efeito de arqueamento em estruturas grampeadas, o projeto
CLOUTERRE (1991) apresenta a análise da monitoração de um experimento em solo
grampeado com 6 m de altura (Figura III.51). Foram construídas três linhas de
grampos na parte superior da estrutura, sendo que a parte inferior, com 3 m de altura,
não se reforçou com grampos e massa de solo foi suportada por 3 painéis de 1 m
cada. A parcela superior, além de reforçada, também, executou-se um painel que
constituiu o faceamento da massa grampeada. Os painéis que suportavam a massa
de solo sem grampos foram removidos um a um na seqüência de cima para baixo (3,
2 e 1). Durante a remoção do painel superior, tanto a escavação quanto a estrutura,
permaneceram estáveis. Na segunda fase, a retirada dos painéis 3 e 2 ocasionou uma
ruptura local no solo em forma de um arco. Por fim, quando o painel 1 foi removido, a
efetividade do efeito de arqueamento foi destruída e da ruptura local que se propagou
até a superfície decorreu o colapso da estrutura, conduzindo a uma ruptura interna e
geral da estrutura grampeada. Durante a monitoração, os resultados indicaram que as
tensões nas cabeças dos grampos aumentavam à medida que se removiam os
painéis, verificando-se, portanto, o acréscimo de cargas nos grampos em função do
processo de arqueamento. Além disso, pode-se concluir que o faceamento ajuda a
controlar desprendimento do solo próximo a face, ou seja, rupturas localizadas.
Figura III.51 – Efeito do arqueamento no solo grampeado observado no programa de
monitoração do projeto CLOUTERRE (1991): (a) condição estável, (b) estabilidade
limite e (c) colapso da estrutura.
Os resultados demonstram a melhoria da estabilidade local por efeito de
arqueamento, que permite acréscimo na altura do estágio de escavação. Assim, há
uma altura crítica associada, principalmente, às propriedades do solo e geometria do
solo grampeado, que não deve ser excedida, caso contrário, o efeito de arqueamento
3
2
1
(a)
(b) (c)

80
é minimizado até sua eliminação e, por conseqüência, a contenção sofrerá colapso
decorrente de uma ruptura global. O projeto CLOUTERRE (1991) verificou
experimentalmente que a natureza e o comportamento dos solos grampeados
observados conduzem a uma altura crítica da qual não deve superar alturas de 2 m.
No entanto, cada caso deve ser analisado em função das características do conjunto
que constitui o solo grampeado.
Ainda que os experimentos do projeto CLOUTERRE (1991) indiquem que a
distribuição da pressão do solo grampeado junto à face não seja uniforme devido à
tendência de efeito de arqueamento entre os grampos que resulta em concentração de
tensões nas vizinhanças dos grampos, admite-se, para efeito de análise, que a
pressão do solo apresenta uma distribuição uniforme ao longo do faceamento (Figura
III.52).
Figura III.52 – Distribuição da pressão do solo (p0) na face do solo grampeada,
considerada, para efeito de simplificação, uniforme (CLOUTERRE, 19991).
Comumente, as estruturas de faceamento dos solos grampeados são
submetidas à tensão desenvolvida na cabeça dos grampos (T0) e à pressão de solo
(p0) entre os grampos. Segundo o projeto CLOUTERRE (1991), o faceamento destas
estruturas apresenta um comportamento semelhante ao de uma laje submetida a
carregamentos uniformemente distribuídos e concentrados suportados pelas cabeças
dos grampos. Alternativamente, para simplificação matemática, supõe-se geralmente
que o sistema de conexão dos grampos no faceamento reduz a força de tração para
T0 e que a pressão de solo (p0) é uniforme.
Baseado nas análises de resultados de monitorações de campo, o projeto
CLOUTERRE (1991) propõe uma formulação para a estimativa das tensões de tração
na cabeça dos grampos. Considera-se que a pressão de solo p0 corresponde a uma
parcela da tensão de tração máxima que pode ser mobilizada no solo grampeado.
Para tanto, torna-se necessário determinar a tensão normal nas cabeças dos grampos

81
e a pressão do solo p0 no faceamento resultante da tensão aplicada. Esta pressão
pode ser calculada a partir da Equação III.12 (CLOUTERRE, 1991):
hv
00
S.S
T (III.12)
Onde:
p0 = tensão no solo entre os grampos;
T0 = tensão de tração nas cabeças dos grampos; e
Sh e Sv = espaçamentos horizontal e vertical dos grampos, respectivamente.
Nos experimentos realizados na França (CLOUTERRE, 1991), foi observado
que a relação entre as tensões na cabeça do grampo e a máxima variou entre 0,4 e
0,5 na parte superior da estrutura. Adicionalmente, estes resultados mostraram que
devido ao efeito de arqueamento que ocorre entre os grampos, um menor
espaçamento entre estes causa uma redução nas tensões junto à face. Baseado
nestes resultados, o projeto CLOUTERRE (1991) recomenda que se adotem valores
de tensão de tração na cabeça do grampo, sobre condições de serviço, da ordem de
60% da tração máxima de serviço no grampo para espaçamento máximo igual ou
inferior a 1 m e de 100% para espaçamento superior a 3 m. O valor máximo da relação
entre a tensão junto à face e tração máxima T0/Tmáx é obtida a partir de equações
empíricas em função do maior valor entre os espaçamentos vertical e horizontal dos
grampos (Equação III.13).
5
)5,0(5,00
S
T
T
máx
, quando 1 S 3 m (III.13)
6,00 máxT
T , quando S 1 m
10 máxT
T , quando S 3 m
O espaçamento máximo S é definido pelo maior dos valores adotados para o
sentido horizontal (Sh) ou vertical (Sv). Segundo o projeto CLOUTERRE (1991), para
um espaçamento típico de 1,5 m, o esforço axial na cabeça do grampo corresponde a
70% da tração máxima do grampo.
82
As duas aproximações são possíveis (p0 ou T0). Pode-se deduzir p0 calculando
a tensão T0, partindo-se da suposição de que as tensões máximas podem ser
mobilizadas nos grampos. Ou pode calcular p0 como uma pressão local de solo
usando um mecanismo apropriado de ruptura para deduzir, então, T0. Na ausência de
alguns dados de confiança na maneira como a pressão de solo é distribuída ao longo
da face, recomenda-se que se adote a primeira aproximação descrita acima. O valor
de T0 é deduzido do valor da força de tração máxima Tmáx que pode ser mobilizada
considerando um único valor para a relação T0/Tmáx na estrutura grampeada em
associação ao espaçamento conforme sugerido pelo projeto CLOUTERRE (1991) na
Equação III.13. Nestas análises, para determinação da tração nos grampos devem-se
considerar os estágios de escavação, que preponderam, na maioria dos casos, sobre
a fase final de construção do solo grampeado.
O projeto CLOUTERRE (1991) recomenda que a avaliação da tração máxima
Tmáx em uma linha de grampos seja realizada pela verificação do valor mínimo
determinado para a força de tração ou resistência ao arrancamento dos grampos
considerando seu comprimento ancorado (La) e respectivo fator de segurança
(Equação III.14):
FS
R
FS
DLqmínT nas
máx ,
(III.14)
Onde Rn representa a resistência à tensão de tração do elemento utilizado com
reforço. Comumente, nos grampos utilizam-se barras de aço.
Conforme relatado, tanto as monitorações, quanto as modelagens numéricas
elaboradas em solos grampeados demonstram que a força de tração no grampo junto
à face, normalmente é menor ou igual ao esforço axial máximo mobilizado no grampo.
LAZARTE et al. (2003) citam uma compilação de resultados de monitoração de campo
de 9 estruturas grampeadas realizada por BYRNE et al. (1998). A Figura III.53
apresenta os valores normalizados das tensões de tração medidas na cabeça dos
grampos sobre condições de serviço em função do seu nível de instalação ao longo da
altura da estrutura. Observa-se que as tensões junto à face normalizadas são
comparáveis à distribuição das tensões máximas normalizadas mostradas na Figura
(III.33). Comparando estas figuras, os valores da relação entre as tensões
normalizadas junto à face e a máxima variam de 0,6 a 1,0. Na parte superior até a
metade da face, a tensão na cabeça do grampo normalizada varia entre 0,4 e 0,5 e da
metade da face até a base da estrutura as tensões normalizadas reduzem
gradualmente e tendem a zero quando se aproximam do pé da contenção.
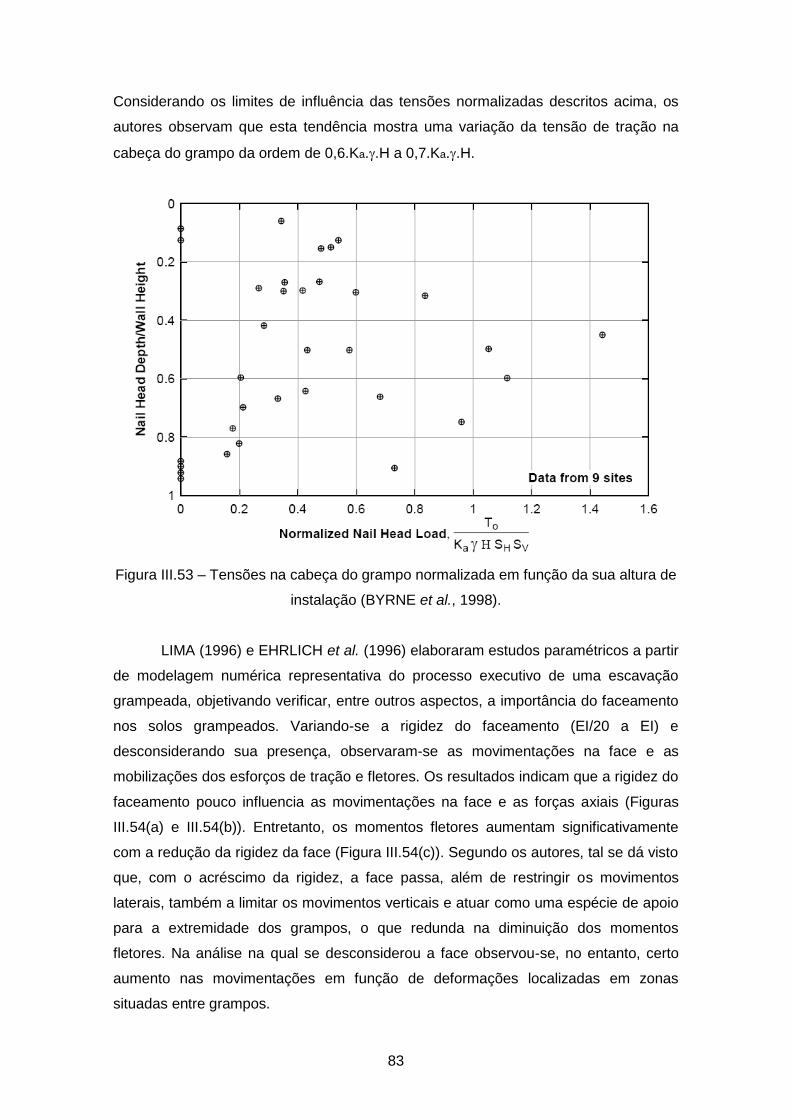
83
Considerando os limites de influência das tensões normalizadas descritos acima, os
autores observam que esta tendência mostra uma variação da tensão de tração na
cabeça do grampo da ordem de 0,6.Ka..H a 0,7.Ka..H.
Figura III.53 – Tensões na cabeça do grampo normalizada em função da sua altura de
instalação (BYRNE et al., 1998).
LIMA (1996) e EHRLICH et al. (1996) elaboraram estudos paramétricos a partir
de modelagem numérica representativa do processo executivo de uma escavação
grampeada, objetivando verificar, entre outros aspectos, a importância do faceamento
nos solos grampeados. Variando-se a rigidez do faceamento (EI/20 a EI) e
desconsiderando sua presença, observaram-se as movimentações na face e as
mobilizações dos esforços de tração e fletores. Os resultados indicam que a rigidez do
faceamento pouco influencia as movimentações na face e as forças axiais (Figuras
III.54(a) e III.54(b)). Entretanto, os momentos fletores aumentam significativamente
com a redução da rigidez da face (Figura III.54(c)). Segundo os autores, tal se dá visto
que, com o acréscimo da rigidez, a face passa, além de restringir os movimentos
laterais, também a limitar os movimentos verticais e atuar como uma espécie de apoio
para a extremidade dos grampos, o que redunda na diminuição dos momentos
fletores. Na análise na qual se desconsiderou a face observou-se, no entanto, certo
aumento nas movimentações em função de deformações localizadas em zonas
situadas entre grampos.
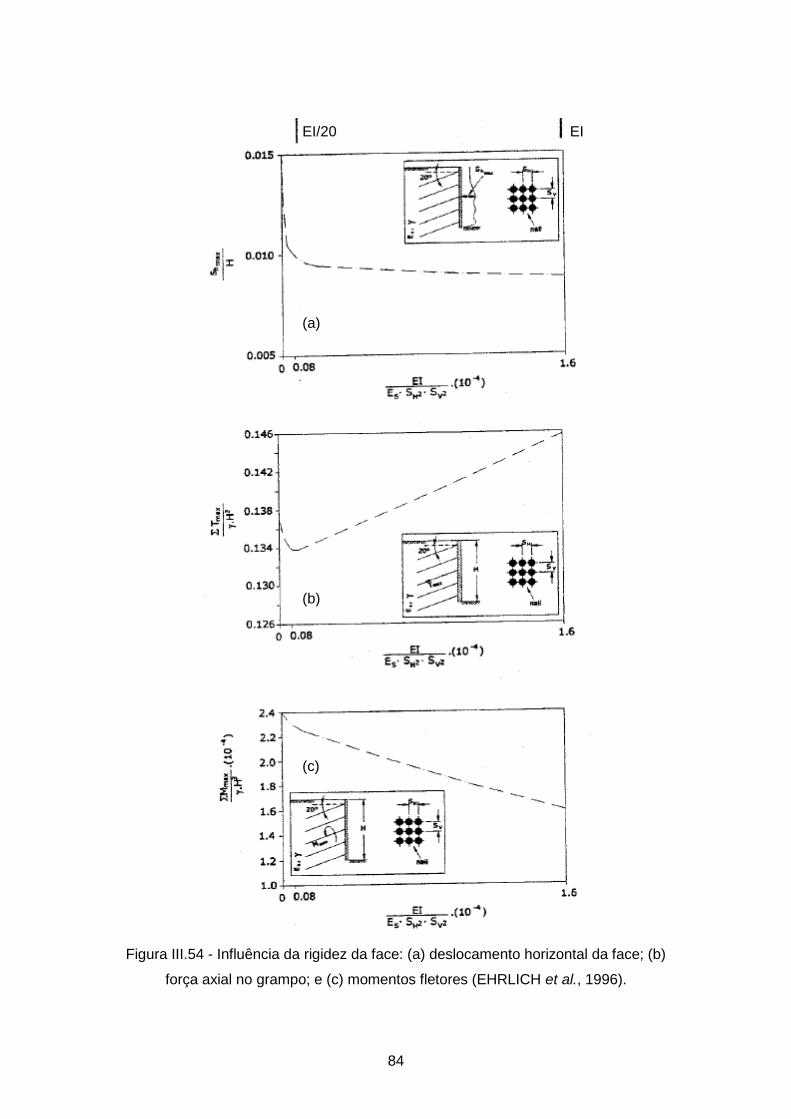
84
Figura III.54 - Influência da rigidez da face: (a) deslocamento horizontal da face; (b)
força axial no grampo; e (c) momentos fletores (EHRLICH et al., 1996).
EI/20 EI
(a)
(b)
(c)
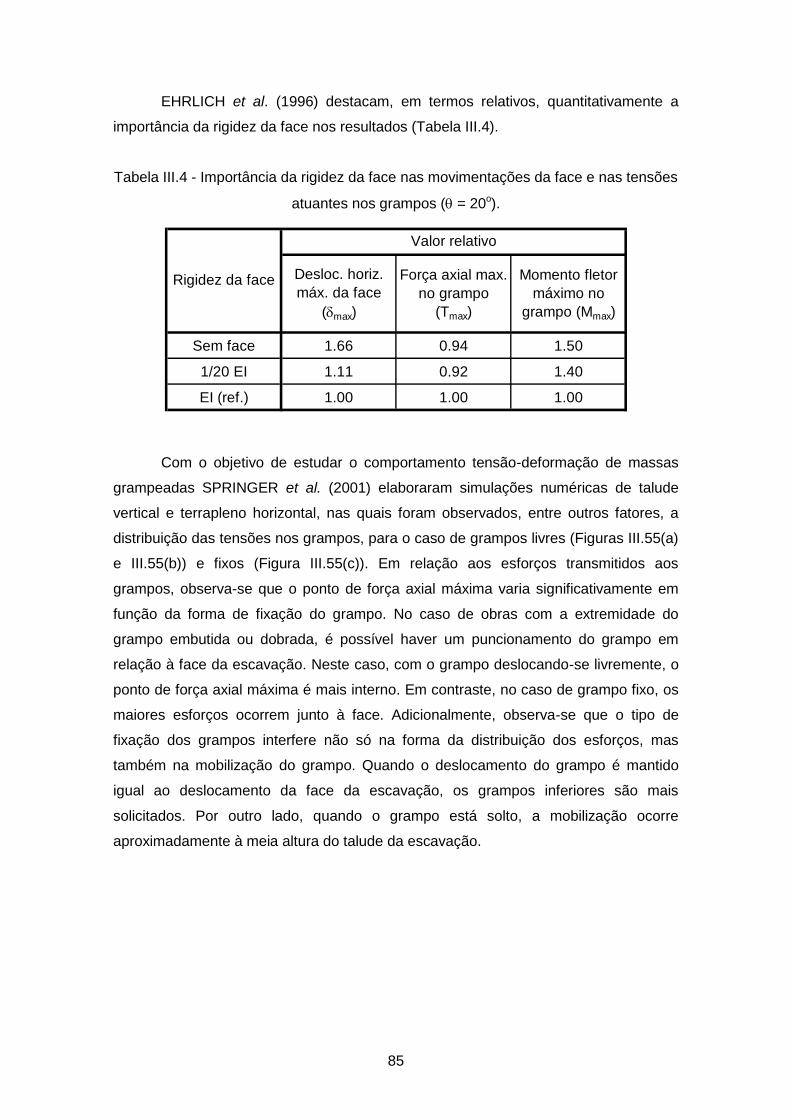
85
EHRLICH et al. (1996) destacam, em termos relativos, quantitativamente a
importância da rigidez da face nos resultados (Tabela III.4).
Tabela III.4 - Importância da rigidez da face nas movimentações da face e nas tensões
atuantes nos grampos ( = 20o).
Desloc. horiz.
máx. da face
(max)
Força axial max.
no grampo
(Tmax)
Momento fletor
máximo no
grampo (Mmax)
Sem face 1.66 0.94 1.50
1/20 EI 1.11 0.92 1.40
EI (ref.) 1.00 1.00 1.00
Valor relativo
Rigidez da face
Com o objetivo de estudar o comportamento tensão-deformação de massas
grampeadas SPRINGER et al. (2001) elaboraram simulações numéricas de talude
vertical e terrapleno horizontal, nas quais foram observados, entre outros fatores, a
distribuição das tensões nos grampos, para o caso de grampos livres (Figuras III.55(a)
e III.55(b)) e fixos (Figura III.55(c)). Em relação aos esforços transmitidos aos
grampos, observa-se que o ponto de força axial máxima varia significativamente em
função da forma de fixação do grampo. No caso de obras com a extremidade do
grampo embutida ou dobrada, é possível haver um puncionamento do grampo em
relação à face da escavação. Neste caso, com o grampo deslocando-se livremente, o
ponto de força axial máxima é mais interno. Em contraste, no caso de grampo fixo, os
maiores esforços ocorrem junto à face. Adicionalmente, observa-se que o tipo de
fixação dos grampos interfere não só na forma da distribuição dos esforços, mas
também na mobilização do grampo. Quando o deslocamento do grampo é mantido
igual ao deslocamento da face da escavação, os grampos inferiores são mais
solicitados. Por outro lado, quando o grampo está solto, a mobilização ocorre
aproximadamente à meia altura do talude da escavação.
86
Figura III.55 – Tipos de fixação das cabeças dos grampos no faceamento dos solos
grampeados: (a) embutida, (b) dobrada e (c) com placa e porca (GEORIO, 2000).
Os estudos numéricos de SPRINGER et al. (2001) demonstraram que, para
grampos livres, a face do talude escavado desloca-se mais livremente e o ponto de
força axial máxima ocorre mais no interior do maciço reforçado. No caso de grampo
fixo, os maiores esforços ocorrem junto à face e os deslocamentos observados são
ainda menores. A autora conclui que com isto o mecanismo de ruptura baseado na
existência de duas regiões, ativa e passiva, só ocorre em estruturas grampeadas
quando o método executivo permite o deslocamento relativo entre o grampo e a face
do talude.
Por razões de estabilidade de fundo e para evitar que a pressão abaixo do
faceamento exceda a capacidade de suporte do solo de fundação, bem como, garantir
o confinamento do solo prevenindo o carreamento de finos através de fluxo d’água,
pode-se aprofundar o pé do faceamento abaixo do nível de escavação (Figura III.56).
A profundidade do pé da face depende, basicamente, das propriedades do solo e
geometria do faceamento (altura e inclinação). O projeto CLOUTERRE (1991)
(a)
(b)
(c)
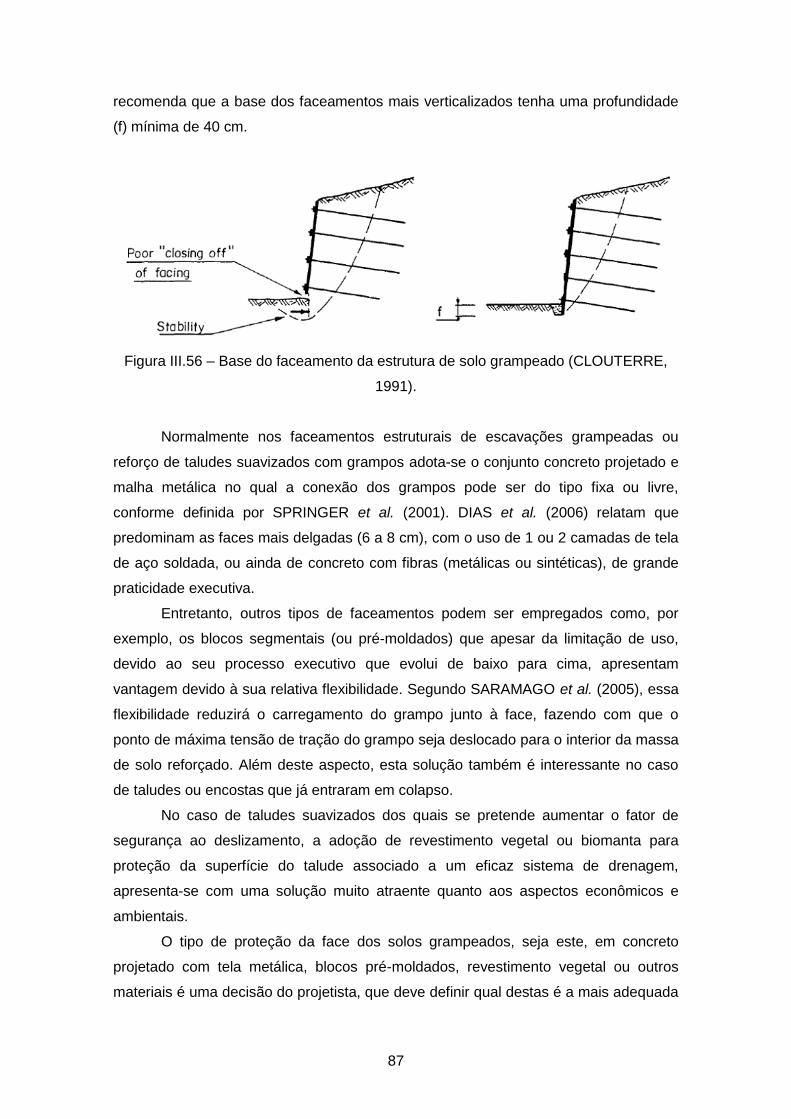
87
recomenda que a base dos faceamentos mais verticalizados tenha uma profundidade
(f) mínima de 40 cm.
Figura III.56 – Base do faceamento da estrutura de solo grampeado (CLOUTERRE,
1991).
Normalmente nos faceamentos estruturais de escavações grampeadas ou
reforço de taludes suavizados com grampos adota-se o conjunto concreto projetado e
malha metálica no qual a conexão dos grampos pode ser do tipo fixa ou livre,
conforme definida por SPRINGER et al. (2001). DIAS et al. (2006) relatam que
predominam as faces mais delgadas (6 a 8 cm), com o uso de 1 ou 2 camadas de tela
de aço soldada, ou ainda de concreto com fibras (metálicas ou sintéticas), de grande
praticidade executiva.
Entretanto, outros tipos de faceamentos podem ser empregados como, por
exemplo, os blocos segmentais (ou pré-moldados) que apesar da limitação de uso,
devido ao seu processo executivo que evolui de baixo para cima, apresentam
vantagem devido à sua relativa flexibilidade. Segundo SARAMAGO et al. (2005), essa
flexibilidade reduzirá o carregamento do grampo junto à face, fazendo com que o
ponto de máxima tensão de tração do grampo seja deslocado para o interior da massa
de solo reforçado. Além deste aspecto, esta solução também é interessante no caso
de taludes ou encostas que já entraram em colapso.
No caso de taludes suavizados dos quais se pretende aumentar o fator de
segurança ao deslizamento, a adoção de revestimento vegetal ou biomanta para
proteção da superfície do talude associado a um eficaz sistema de drenagem,
apresenta-se com uma solução muito atraente quanto aos aspectos econômicos e
ambientais.
O tipo de proteção da face dos solos grampeados, seja este, em concreto
projetado com tela metálica, blocos pré-moldados, revestimento vegetal ou outros
materiais é uma decisão do projetista, que deve definir qual destas é a mais adequada
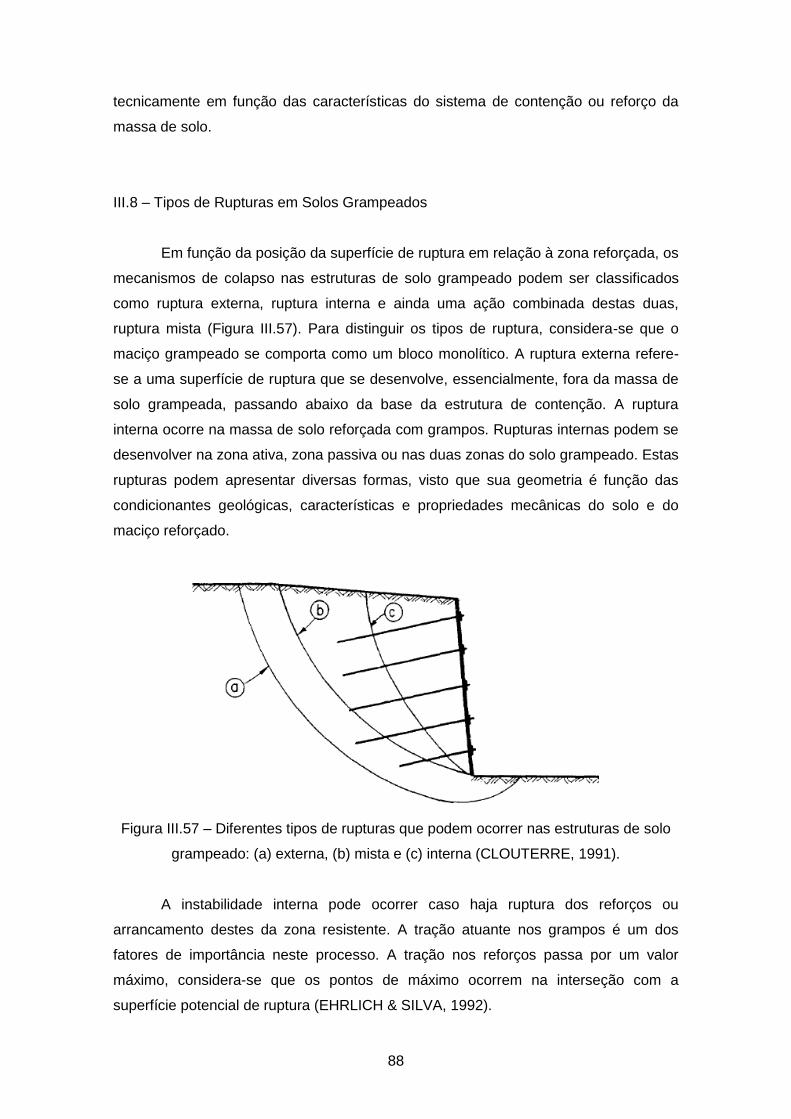
88
tecnicamente em função das características do sistema de contenção ou reforço da
massa de solo.
III.8 – Tipos de Rupturas em Solos Grampeados
Em função da posição da superfície de ruptura em relação à zona reforçada, os
mecanismos de colapso nas estruturas de solo grampeado podem ser classificados
como ruptura externa, ruptura interna e ainda uma ação combinada destas duas,
ruptura mista (Figura III.57). Para distinguir os tipos de ruptura, considera-se que o
maciço grampeado se comporta como um bloco monolítico. A ruptura externa refere-
se a uma superfície de ruptura que se desenvolve, essencialmente, fora da massa de
solo grampeada, passando abaixo da base da estrutura de contenção. A ruptura
interna ocorre na massa de solo reforçada com grampos. Rupturas internas podem se
desenvolver na zona ativa, zona passiva ou nas duas zonas do solo grampeado. Estas
rupturas podem apresentar diversas formas, visto que sua geometria é função das
condicionantes geológicas, características e propriedades mecânicas do solo e do
maciço reforçado.
Figura III.57 – Diferentes tipos de rupturas que podem ocorrer nas estruturas de solo
grampeado: (a) externa, (b) mista e (c) interna (CLOUTERRE, 1991).
A instabilidade interna pode ocorrer caso haja ruptura dos reforços ou
arrancamento destes da zona resistente. A tração atuante nos grampos é um dos
fatores de importância neste processo. A tração nos reforços passa por um valor
máximo, considera-se que os pontos de máximo ocorrem na interseção com a
superfície potencial de ruptura (EHRLICH & SILVA, 1992).
89
Em resumo, dentro do maciço de solo grampeado identificam-se três modos de
ruptura: (i) interna, cuja superfície de ruptura intercepta todos os grampos, (ii) externa,
cuja superfície de ruptura passa atrás da massa reforçada e (iii) mista, cuja superfície
de ruptura intercepta alguns níveis de grampos.
III.8.1 – Ruptura dos Grampos (Instabilidade Interna)
O mecanismo de instabilidade interna promovido pela ruptura dos grampos
pode ser ocasionado por diferentes fatores relacionados aos elementos que compõem
a estrutura de solo grampeado. Dentre estes, destacam-se: (i) seção do reforço
inadequada; (ii) corrosão das barras de aço dos grampos (GUILLOUX & JAILLOUX,
1979); (iii) sobrecargas não consideradas na análise (STOCKER et al., 1979) e (iv)
saturação ou aumento do teor de umidade do maciço reforçado (CLOUTERRE, 1991).
Os resultados da monitoração de uma estrutura grampeada que foi levada à
ruptura pela saturação da massa reforçada demonstraram que, na circunvizinhança da
ruptura e em torno da linha de tensão máxima, desenvolveu-se uma zona de
cisalhamento no solo onde os grampos romperam por flexão composta. A superfície
de ruptura no solo foi delineada próxima à linha definida pelos pontos de tensão
máxima, que pode, conseqüentemente, ser considerada como uma superfície
potencial de ruptura (Figura III.29). Este tipo de ruptura interna, devido a resistência à
flexão e ao cisalhamento dos grampos, se desenvolve gradativamente, ao contrário
dos reforços flexíveis que rompem repentinamente. No experimento, a resistência à
flexão dos grampos impediu uma completa destruição da estrutura.
III.8.2 – Arrancamento dos Grampos (Instabilidade Interna)
O arrancamento dos grampos decorre da baixa resistência ao cisalhamento de
interface solo-grampo na zona passiva em relação ao empuxo de solo que tende a
instabilizar a estrutura de solo grampeado e ou de falhas no processo de execução da
obra. As observações do projeto CLOUTERRE (1991) demonstram que, geralmente,
este tipo de ruptura não é repentino, exceto em alguns casos durante a construção e
quando elevadas deformações se desenvolvem.
Solos com as mesmas propriedades mecânicas, quando reforçados com
grampos instalados com inclinações iguais, terão resistência ao arrancamento (qs)
insuficiente para estabilizar a estrutura em função do comprimento ancorado e
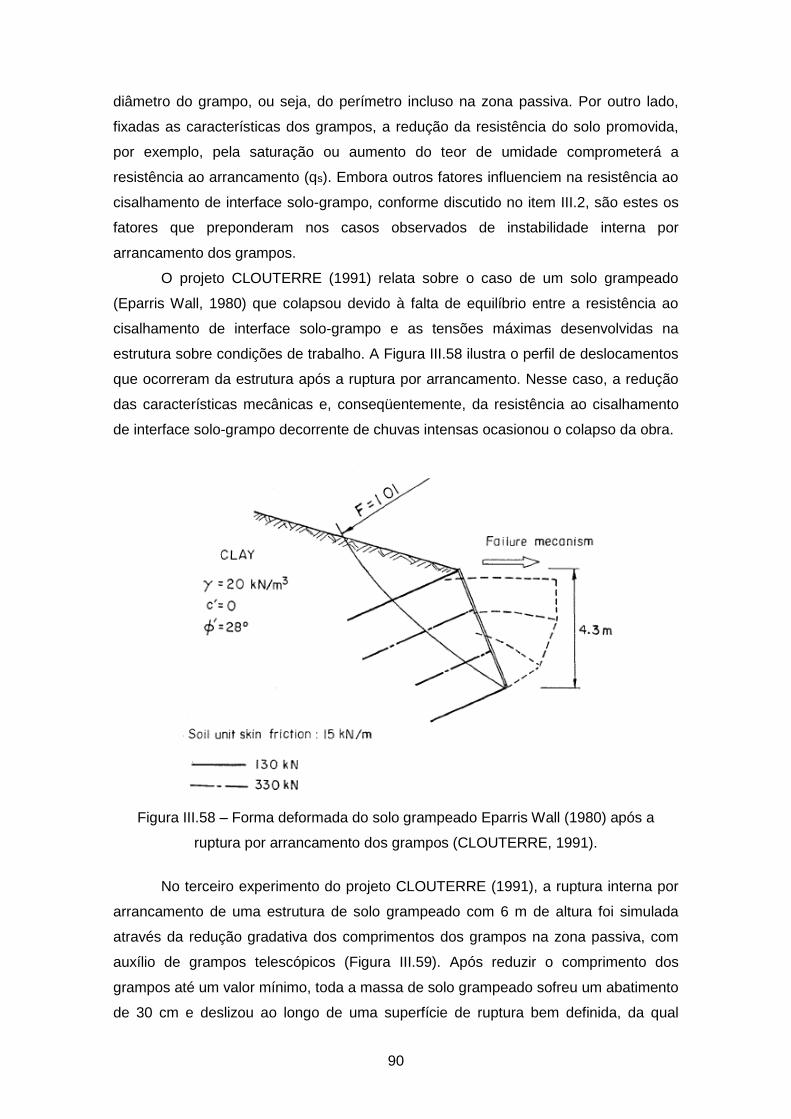
90
diâmetro do grampo, ou seja, do perímetro incluso na zona passiva. Por outro lado,
fixadas as características dos grampos, a redução da resistência do solo promovida,
por exemplo, pela saturação ou aumento do teor de umidade comprometerá a
resistência ao arrancamento (qs). Embora outros fatores influenciem na resistência ao
cisalhamento de interface solo-grampo, conforme discutido no item III.2, são estes os
fatores que preponderam nos casos observados de instabilidade interna por
arrancamento dos grampos.
O projeto CLOUTERRE (1991) relata sobre o caso de um solo grampeado
(Eparris Wall, 1980) que colapsou devido à falta de equilíbrio entre a resistência ao
cisalhamento de interface solo-grampo e as tensões máximas desenvolvidas na
estrutura sobre condições de trabalho. A Figura III.58 ilustra o perfil de deslocamentos
que ocorreram da estrutura após a ruptura por arrancamento. Nesse caso, a redução
das características mecânicas e, conseqüentemente, da resistência ao cisalhamento
de interface solo-grampo decorrente de chuvas intensas ocasionou o colapso da obra.
Figura III.58 – Forma deformada do solo grampeado Eparris Wall (1980) após a
ruptura por arrancamento dos grampos (CLOUTERRE, 1991).
No terceiro experimento do projeto CLOUTERRE (1991), a ruptura interna por
arrancamento de uma estrutura de solo grampeado com 6 m de altura foi simulada
através da redução gradativa dos comprimentos dos grampos na zona passiva, com
auxílio de grampos telescópicos (Figura III.59). Após reduzir o comprimento dos
grampos até um valor mínimo, toda a massa de solo grampeado sofreu um abatimento
de 30 cm e deslizou ao longo de uma superfície de ruptura bem definida, da qual

91
correspondeu ao limite de ruptura entre a instabilidade interna devida à falta de atrito e
a instabilidade externa.
Figura III.59 – Ruptura induzida através da redução gradual do comprimento dos
grampos (CLOUTERRE, 1991).
III.8.3 – Eliminação do Efeito de Arqueamento (Instabilidade Interna)
Este mecanismo de ruptura foi verificado pelo projeto CLOUTERRE (1991)
com auxílio da monitoração de uma escavação grampeada com 6 m de altura, da qual
foi levada à ruptura a partir da remoção de painéis que suportavam a massa de solo
na base da estrutura (Figuras III.51 e III.60). Cada painel, com 1 m, foi retirado um a
um de cima para baixo. A escavação grampeada sofreu uma ruptura local em forma
de arco, até a remoção dos painéis superior e intermediário. Entretanto, a efetividade
do efeito de arqueamento foi destruída com a remoção do painel inferior e da ruptura
local que se propagou até o topo decorreu o colapso da estrutura, conduzindo a uma
ruptura interna da escavação grampeada. Neste caso os grampos deformam-se
através dos esforços fletores, mas podem não quebrar. Deste experimento conclui-se
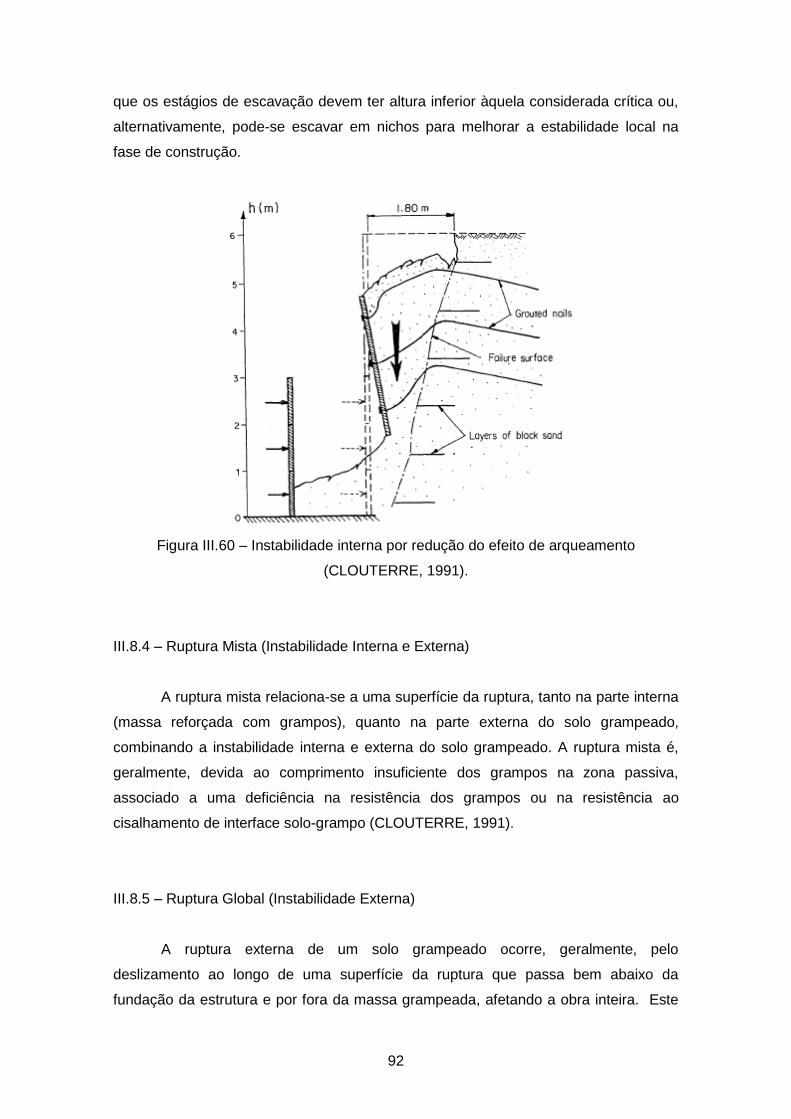
92
que os estágios de escavação devem ter altura inferior àquela considerada crítica ou,
alternativamente, pode-se escavar em nichos para melhorar a estabilidade local na
fase de construção.
Figura III.60 – Instabilidade interna por redução do efeito de arqueamento
(CLOUTERRE, 1991).
III.8.4 – Ruptura Mista (Instabilidade Interna e Externa)
A ruptura mista relaciona-se a uma superfície da ruptura, tanto na parte interna
(massa reforçada com grampos), quanto na parte externa do solo grampeado,
combinando a instabilidade interna e externa do solo grampeado. A ruptura mista é,
geralmente, devida ao comprimento insuficiente dos grampos na zona passiva,
associado a uma deficiência na resistência dos grampos ou na resistência ao
cisalhamento de interface solo-grampo (CLOUTERRE, 1991).
III.8.5 – Ruptura Global (Instabilidade Externa)
A ruptura externa de um solo grampeado ocorre, geralmente, pelo
deslizamento ao longo de uma superfície da ruptura que passa bem abaixo da
fundação da estrutura e por fora da massa grampeada, afetando a obra inteira. Este

93
tipo de ruptura que é comum a todas as estruturas de contenção decorre da baixa
capacidade de suporte do solo de fundação ou do comprimento insuficiente dos
grampos e tem como resultado a ruptura global, que toma a forma de um deslizamento
passando por fora da massa grampeada e pela base da contenção (CLOUTERRE,
1991).
94
CAPÍTULO IV
MÉTODOS DE ANÁLISE
IV.1 – Introdução
A análise básica de estruturas de solo grampeado consiste na transferência de
forças de tração resistentes promovidas pelos grampos no solo através do atrito das
interfaces. A interação entre o solo e grampos restringe a movimentação do maciço
grampeado durante e após a escavação ou reforço do talude. As forças de tração
mobilizadas nos grampos induzem um acréscimo de tensão normal ao longo da
superfície potencial de ruptura aumentando a resistência ao cisalhamento do solo
natural (SCHAEFER et al., 1997). O local da força de tração máxima separa a massa
de solo grampeado em duas zonas: (i) ativa, onde tensões de cisalhamento de
interface são mobilizadas para restringir o movimento do solo e (ii) passiva (ou
resistente), onde as forças desenvolvidas nos grampos são transferidas através da
resistência ao cisalhamento solo-grampo ao maciço reforçado.
A elaboração de estudos e projetos preliminares referentes à estabilização e ou
reforço de taludes naturais, escavados e ou de aterros é uma rotina em escritórios de
consultoria geotécnica, visto que, a partir desta pré-solução podem-se identificar os
condicionantes técnico-financeiros frente às questões ambientais. Embora, estes
sejam bastante expeditos, fornecem uma idéia inicial da solução a ser implantada e
em certos casos pode se aproximar muito de um projeto executivo que norteará uma
obra bem sucedida. Os métodos de análise de solos grampeados comentados neste
capítulo proporcionam condições de se elaborar os estudos e projetos de engenharia a
níveis básico e executivo.
MITCHELL & VILLET (1987) recomendam que nas análises de solo
grampeados considerem-se as características do conjunto que constitui sistema de
reforço: (i) propriedades do solo; (ii) propriedades dos grampos; (iii) resistência ao
cisalhamento de interface solo-grampo (qs); (iv) parâmetros referentes à mobilização
do empuxo passivo sobre os grampos; (v) geometria dos componentes da estrutura
grampeada e (vi) processos executivos dos grampos e faceamento.
Baseado em diversas compilações elaboradas por diversos autores (JURAN et
al., 1990; ORTIGÃO & PALMEIRA, 1992; ABRAMENTO et al., 1998; SCHAEFER et
al., 1997; MONTEZUMA, 1998; CAMARGO, 2005; SPRINGER, 2006; LIMA, 2007 e
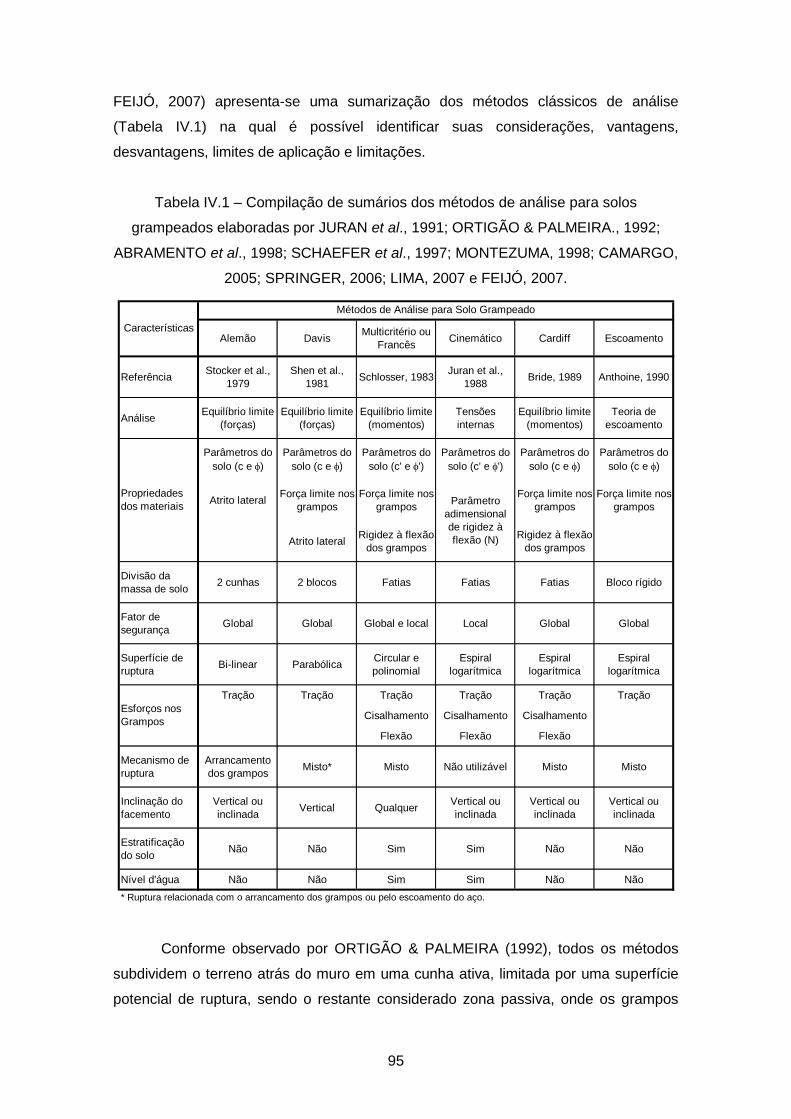
95
FEIJÓ, 2007) apresenta-se uma sumarização dos métodos clássicos de análise
(Tabela IV.1) na qual é possível identificar suas considerações, vantagens,
desvantagens, limites de aplicação e limitações.
Tabela IV.1 – Compilação de sumários dos métodos de análise para solos
grampeados elaboradas por JURAN et al., 1991; ORTIGÃO & PALMEIRA., 1992;
ABRAMENTO et al., 1998; SCHAEFER et al., 1997; MONTEZUMA, 1998; CAMARGO,
2005; SPRINGER, 2006; LIMA, 2007 e FEIJÓ, 2007.
Alemão DavisMulticritério ou
FrancêsCinemático Cardiff Escoamento
ReferênciaStocker et al.,
1979
Shen et al.,
1981Schlosser, 1983
Juran et al.,
1988Bride, 1989 Anthoine, 1990
AnáliseEquilíbrio limite
(forças)
Equilíbrio limite
(forças)
Equilíbrio limite
(momentos)
Tensões
internas
Equilíbrio limite
(momentos)
Teoria de
escoamento
Parâmetros do
solo (c e )
Parâmetros do
solo (c e )
Parâmetros do
solo (c' e ')
Parâmetros do
solo (c' e ')
Parâmetros do
solo (c e )
Parâmetros do
solo (c e )
Atrito lateralForça limite nos
grampos
Força limite nos
grampos
Força limite nos
grampos
Força limite nos
grampos
Atrito lateralRigidez à flexão
dos grampos
Rigidez à flexão
dos grampos
Divisão da
massa de solo2 cunhas 2 blocos Fatias Fatias Fatias Bloco rígido
Fator de
segurançaGlobal Global Global e local Local Global Global
Superfície de
rupturaBi-linear Parabólica
Circular e
polinomial
Espiral
logarítmica
Espiral
logarítmica
Espiral
logarítmica
Tração Tração Tração Tração Tração Tração
Cisalhamento Cisalhamento Cisalhamento
Flexão Flexão Flexão
Mecanismo de
ruptura
Arrancamento
dos gramposMisto* Misto Não utilizável Misto Misto
Inclinação do
facemento
Vertical ou
inclinadaVertical Qualquer
Vertical ou
inclinada
Vertical ou
inclinada
Vertical ou
inclinada
Estratificação
do soloNão Não Sim Sim Não Não
Nível d'água Não Não Sim Sim Não Não
* Ruptura relacionada com o arrancamento dos grampos ou pelo escoamento do aço.
Esforços nos
Grampos
Características
Métodos de Análise para Solo Grampeado
Propriedades
dos materiaisParâmetro
adimensional
de rigidez à
flexão (N)
Conforme observado por ORTIGÃO & PALMEIRA (1992), todos os métodos
subdividem o terreno atrás do muro em uma cunha ativa, limitada por uma superfície
potencial de ruptura, sendo o restante considerado zona passiva, onde os grampos

96
são fixados. A análise de estabilidade global é feita aplicando-se os esforços
estabilizantes dos grampos na cunha ativa. Observa-se que a maioria destes métodos
baseia-se na análise de equilíbrio limite, onde a superfície potencial de ruptura é
examinada (FEIJÓ, 2007). No entanto, estes métodos envolvem diferentes
considerações quanto à forma da superfície de ruptura, ao método de cálculo do
equilíbrio das forças atuantes e à natureza dessas forças (ORTIGÃO & PALMEIRA,
1992).
SPRINGER (2006) apresenta as ilustrações esquemáticas (Figura IV.1) das
considerações dos principais métodos de análise indicados na Tabela IV.1. Observa-
se que estes métodos adotam a hipótese de superfície de ruptura bi-lineares,
parabólicas, circular, polinomial ou espiral logarítmica, que permitem a consideração
simultânea de aspectos de equilíbrio externo e interno. Nas análises são consideradas
as contribuições somente dos grampos que atravessam a superfície de ruptura.
Alguns destes métodos consideram a contribuição das forças de tração, cisalhamento
e flexão dos grampos (SCHLOSSER, 1983; JURAN et al., 1988 e BRIDLE, 1989), no
entanto, comumente ignora-se a contribuição das forças de cisalhamento e flexão dos
grampos (STOCKER et al., 1979; SHEN et al., 1981; ANTHOINE, 1990, FALCONI &
ALONSO, 1996 e outros).
Figura IV.1 – Ilustração esquemática das considerações feitas nos métodos de análise
(SPRINGER, 2006).
Observa-se que não há uma metodologia padrão de dimensionamento dos
solos grampeados. No entanto, todos os métodos de análise subdividem o terreno
atrás do faceamento em uma zona ativa, limitada por uma superfície potencial de
97
ruptura, sendo o restante considerada zona passiva, onde os grampos são fixados.
Nos vários trabalhos publicados vêem-se enfoques conceituais diferentes quanto a
fenomenologia de funcionamento desta estrutura de contenção que contribuem com a
definição de um projeto, entretanto, a experiência do executor, com o criterioso
acompanhamento da execução, a análise da instrumentação, os ensaios do solo,
estudos de geologia e hidrologia, são condicionantes básicos no estágio atual, para
definição de um projeto (ABRAMENTO et al., 1998).
Objetivando fornecer subsídios aos engenheiros geotécnicos que os auxiliem a
desenvolver um projeto de solo grampeado de maneira racional, CAMARGO (2005)
realizou comparações de alguns processos de cálculo de solos grampeados baseados
em métodos de equilíbrio limite desenvolvidos por STOCKER et al., 1979; SHEN et al.,
1981; SCHLOSSER, 1983; JEWELL et al., 1984; JURAN et al., 1990 e por autores do
Brasil (FALCONI & ALONSO, 1996; HACHICH, 1997 e SILVA & VIDAL, 1999).
IV.2 – Características Gerais das Análises das Estruturas de Solo Grampeado
O processo de análise das estruturas de solo grampeado é caracterizado por
uma rotina de etapas que envolvem definições, estimativas, cálculos e verificações,
conforme apresentado a seguir (SCHAEFER et al., 1997), que visam garantir a
estabilidade da obra com o fator de segurança apropriado.
(i) Definição da geometria da estrutura (altura e inclinação do faceamento),
perfil geológico geotécnico do solo e sobrecargas;
(ii) Estimativa das forças de trabalho dos grampos e da posição e
geometria da superfície potencial de ruptura;
(iii) Definição das características do reforço (tipo, seção transversal,
resistência, comprimento, inclinação e espaçamentos) e verificação da
estabilidade local de cada nível de grampo, ou seja, se a resistência do
grampo (tensão de ruptura e resistência ao arrancamento) é suficiente
para suportar as forças de trabalho estimadas com um fator de
segurança adequado;
(iv) Verificação dos modos de ruptura e da estabilidade global da estrutura
de solo grampeado e da sustentação do maciço reforçado durante e
após a construção com um fator de segurança apropriado;
98
(v) Estimativa do sistema de forças que atuam no faceamento (pressão
horizontal do solo e forças dos grampos nas conecções) e
dimensionamento da face para a solução adotada;
(vi) Para estruturas permanentes, a definição da proteção contra corrosão é
um aspecto importante; e
(vii) Definição do sistema de drenagem interna (subterrânea, sub-superficial
e de contato) e externa (superficial).
Os métodos de análise para projetos de estruturas de solo grampeado podem
ser classificados em duas categorias principais (CLOUTERRE, 1991; SCHAEFER et
al., 1997). A mais usual, refere-se aos métodos de equilíbrio limite ou análise de
estabilidade de taludes modificada, das quais são utilizadas para avaliar o fator de
segurança global da estrutura de solo grampeado relativa a ruptura ao longo da
superfície de deslizamento, considerando-se a resistência à tração, cisalhamento e
flexão ou a resistência ao arrancamento dos grampos que atravessam a superfície
potencial de ruptura. Outra categoria, mecanicamente mais rigorosa, decorre das
análises do estado de tensões internas na massa de solo, das quais são usadas para
estimar as forças de tração e cisalhamento desenvolvidas nos grampos durante a
construção sobre condições de carregamento e avaliação da estabilidade local de
cada nível de grampo (SCHAEFER et al., 1997).
Em ambas as categorias principais de métodos de análise, os efeitos dos
grampos no solo são considerados através dos vetores de forças aplicados nos pontos
onde os grampos atravessam a superfície potencial de ruptura. As forças nos grampos
são determinadas baseadas no conhecimento de várias modalidades de ruptura na
estrutura de solo grampeado e dos critérios de ruptura do conjunto solo-grampo, bem
como a interação solo-grampo (CLOUTERRE, 1991).
Sobretudo, a validade prática destes métodos supõe a possibilidade de
mobilizar simultaneamente o estado limite do solo e dos grampos. Isto implica na
compatibilidade da tensão de ruptura dos grampos e do solo, a rigidez dos grampos e
a gradual deformação plástica do solo. Esta suposição de mobilização simultânea de
todas as resistências envolvidas no conjunto solo-grampo (resistência à tração,
cisalhamento e flexão do grampo, resistência ao cisalhamento do solo, resistência ao
arrancamento e pressão normal do solo sobre o grampo) é uma boa aproximação do
comportamento das estruturas de solo grampeado (CLOUTERRE, 1991).
Os métodos de equilíbrio limite examinam o equilíbrio de uma massa de solo
na ruptura fazendo a verificação da força de todos os materiais que constituem o solo
grampeado. Verificam-se as estabilidades interna e externa da estrutura verificando o
99
equilíbrio estático de uma parte do sistema limitado por uma superfície potencial de
ruptura. Elabora-se a análise pelos métodos clássicos de equilíbrio do limite,
verificando o equilíbrio da parte da massa do solo limitada por uma superfície potencial
de ruptura sujeita às forças externas e todas as tensões ou forças mobilizadas no solo
e nos grampos, respectivamente. Como exemplo pode-se citar os métodos clássicos
das fatias (Fellenius e Bishop). A estabilidade é definida em relação à superfície
potencial de ruptura mais crítica. Estes métodos não permitem que se calculem como
as forças se interagem entre diferentes níveis de grampo quando a estrutura está na
condição de serviço (CLOUTERRE, 1991).
Quando se elabora um dimensionamento de solo grampeado através da
análise por equilíbrio limite deve analisar os diferentes modos de ruptura e levar em
consideração os esforços de tração e, dependendo da situação, os de cisalhamento e
flexão dos grampos que atravessam o plano de ruptura. Elevadas alturas poderão ser
atingidas, função do comprimento, quantidade e resistência dos grampos empregados.
O comprimento e quantidade de reforços são estabelecidos por análises de
estabilidade externa, interna e mista. (EHRLICH, 2003). Ressalta-se que a relação
entre o comprimento dos grampos e altura do faceamento influencia o mecanismo
comportamental da estrutura de solo grampeado.
Os métodos baseados nas análises do estado de tensões internas na massa
de solo estudam o equilíbrio estático de uma porção do sistema limitado pela
superfície potencial de ruptura. Esta parte é submetida aos efeitos das forças
externas, das forças de resistência que podem ser mobilizadas no solo e nos grampos
ao longo da superfície potencial de ruptura, de acordo com os critérios de ruptura dos
materiais envolvidos. Estes métodos são mecanicamente mais rigorosos do que
métodos clássicos de equilíbrio limite, no entanto, ainda, não possuem dados sob
circunstâncias reais suficientes que comprovem sua eficácia (CLOUTERRE, 1991).
Na segunda categoria, cita-se o método proposto por JURAN et al. (1988) que
é fundamentado na análise de estabilidade local da zona ativa. Considera-se que o
mecanismo de ruptura se desenvolve pela falência progressiva dos reforços.
Utilizando análise limite cinemática, e levando em consideração o equilíbrio local e a
flexibilidade dos reforços, as tensões máximas de tração e cisalhamento em cada linha
de reforços são avaliadas (EHRLICH & SILVA, 1992). O método Cinemático,
entretanto, leva somente a fatores de segurança parciais, calculados a partir de
análise do estado de tensões internas na massa de solo (ORTIGÃO & PALMEIRA,
1992).
Para um projeto seguro de solo grampeado, deve-se atentar para uma
avaliação racional das forças de trabalho dos grampos para analisar a estabilidade

100
interna local de cada nível de grampo e a estabilidade global da estrutura. A análise
pelo método do equilíbrio limite fornece somente o fator de segurança global relativo à
resistência do conjunto solo grampo. Torna-se importante a verificação da estabilidade
local em um nível de grampos, pois esta pode ser significativamente mais crítica que a
estabilidade global (JURAN et al., 1990).
IV.2.1 – Análise de Estabilidade Externa
A avaliação da estabilidade externa é um aspecto importante para projetos de
solos grampeados, devida ao fato da magnitude e conseqüência da ruptura poderem
ser significantes. Análises de estabilidade externa são elaboradas para verificar se o
sistema de solo grampeado é capaz de resistir às forças solicitantes induzidas pela
escavação, tensões de serviço e carregamentos externos (LAZARTE et al., 2003).
Conforme descrito por EHRLICH (2003), a massa reforçada pode ser
entendida como um muro de gravidade, garantindo a estabilidade da zona não
reforçada. Os procedimentos convencionais de análise de estabilidade externa de
muros convencionais comumente são adotados nesta fase de projeto. Deve-se, sob a
ação do empuxo promovido pela massa não reforçada, garantir a estabilidade externa
da massa de solo reforçada. A largura da zona reforçada deve ser definida de forma a
evitar-se o escorregamento, o tombamento, a rotura das fundações e a ruptura geral,
que compreende uma superfície de colapso passado bem abaixo da base da zona
reforçada (Figura IV.2).
Figura IV.2 – Equilíbrios externos (EHRLICH, 2003).
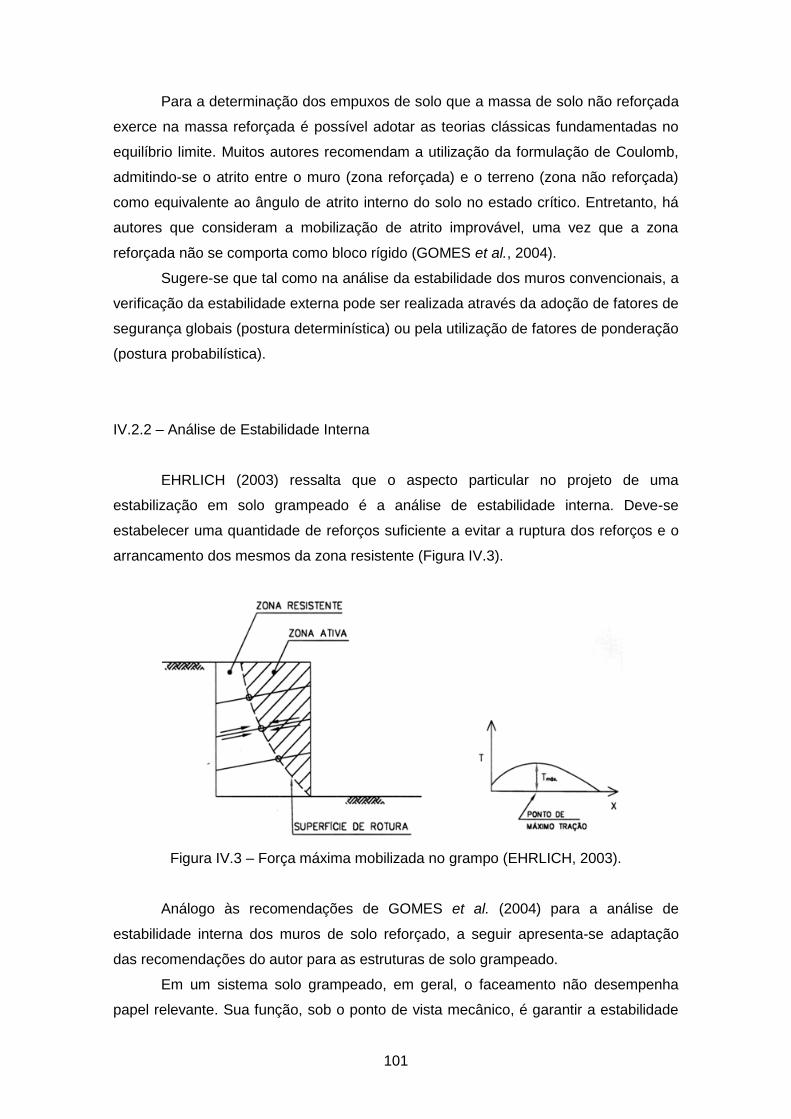
101
Para a determinação dos empuxos de solo que a massa de solo não reforçada
exerce na massa reforçada é possível adotar as teorias clássicas fundamentadas no
equilíbrio limite. Muitos autores recomendam a utilização da formulação de Coulomb,
admitindo-se o atrito entre o muro (zona reforçada) e o terreno (zona não reforçada)
como equivalente ao ângulo de atrito interno do solo no estado crítico. Entretanto, há
autores que consideram a mobilização de atrito improvável, uma vez que a zona
reforçada não se comporta como bloco rígido (GOMES et al., 2004).
Sugere-se que tal como na análise da estabilidade dos muros convencionais, a
verificação da estabilidade externa pode ser realizada através da adoção de fatores de
segurança globais (postura determinística) ou pela utilização de fatores de ponderação
(postura probabilística).
IV.2.2 – Análise de Estabilidade Interna
EHRLICH (2003) ressalta que o aspecto particular no projeto de uma
estabilização em solo grampeado é a análise de estabilidade interna. Deve-se
estabelecer uma quantidade de reforços suficiente a evitar a ruptura dos reforços e o
arrancamento dos mesmos da zona resistente (Figura IV.3).
Figura IV.3 – Força máxima mobilizada no grampo (EHRLICH, 2003).
Análogo às recomendações de GOMES et al. (2004) para a análise de
estabilidade interna dos muros de solo reforçado, a seguir apresenta-se adaptação
das recomendações do autor para as estruturas de solo grampeado.
Em um sistema solo grampeado, em geral, o faceamento não desempenha
papel relevante. Sua função, sob o ponto de vista mecânico, é garantir a estabilidade

102
localizada da massa de solo entre os grampos em uma área próxima à face. O
equilíbrio global seria possível mesmo na ausência do faceamento.
Na elaboração dos estudos, a determinação da magnitude dos esforços
máximos de tração, cisalhamento e flexão atuantes nos grampos é fundamental para
elaborar a análise de estabilidade interna.
O projeto de um muro de solo grampeado deve ser conduzido de forma a
garantir um embutimento mínimo do grampo na zona resistente, evitando-se o seu
arrancamento em relação ao solo (Figura IV.4(a)). Para tanto, o valor da tração
máxima (Tmáx) não deverá superar o valor da resistência ao arrancamento do grampo
(qs), resguardado o respectivo fator de segurança. Além disso, a aderência entre a
calda de cimento e a barra de aço deverá suportar força de tração máxima (Figura
IV.4(b)).
Para evitar a ruptura dos grampos (Figuras IV.4(c) e IV.4(d)), os valores dos
esforços solicitantes não deverão ser superiores ao menor valor esperado para as
resistências de projeto do grampo, resguardando-se um adequado fator de segurança.
Figura IV.4 – Modos de ruptura interna: (a) arrancamento entre grampo-solo, (b)
arrancamento entre barra de aço e calda de cimento, (c) ruptura dos grampos por
força de tração e (d) ruptura dos grampos por combinação de forças de cisalhamento
e flexão excessivas (LAZARTE et al., 2003).
(a)
(d) (c)
(b)
103
IV.3 – Métodos de Análises de Estabilidade de Taludes Modificados
Nas análises de ruptura circular, em geral, adotam-se métodos convencionais
de análise de estabilidade de taludes (Bishop, Fellenius entre outros) adaptados de
forma a levar em consideração a resistência do grampo. Normalmente desconsidera-
se a contribuição das forças de cisalhamento e flexão dos grampos, sendo a
estabilidade da cunha ativa promovida pelo efeito da tração nos reforços. Conhecido a
tração máxima, o seu efeito é incluído na análise de estabilidade de taludes. A
adaptação destes métodos para solos grampeados envolve a introdução das forças
das inclusões através de suas projeções normal e tangente à superfície potencial de
ruptura na base de cada fatia reforçada. Esses métodos têm a vantagem de levar em
conta a heterogeneidade e as pressões de água no solo, com facilidade. Entretanto,
deve-se observar que, em geral, a hipótese de superfície de ruptura circular é
inadequada para representar o mecanismo de ruptura real (EHRLICH, 2003).
A análise de estabilidade global é feita considerando os esforços estabilizantes
dos grampos atuando na zona ativa, dos quais podem ser traduzidos como forças
aplicadas à superfície de ruptura. Estas forças podem ser incorporadas no método de
análise de estabilidade, pois produzem momentos e forças estabilizantes
(ABRAMENTO et al., 1998).
IV.3.1 – Método de Fellenius Modificado (FALCONI & ALONSO, 1996)
FALCONI & ALONSO (1996) apresentam uma proposta de metodologia para
cálculo de estrutura de solo grampeado que faz uso de um misto de análise de
estabilidade de taludes (Bishop e Fellenius) para definir as superfícies de ruptura (fator
de segurança unitário e igual a 1,5) e incluir o efeito do grampo, definindo o
comprimento de cada linha de grampo.
O fator de segurança, com base no método de Fellenius, é esquematizado na
Figura IV.5. O processo consiste em se obter inicialmente a superfície com fator de
segurança FS=1, sem levar em conta a ação estabilizadora dos grampos (Equação
IV.1). Os autores ressaltam que o procedimento, também, pode ser aplicado para o
caso do método de Bishop.

104
Figura IV.5 - Introdução do efeito do reforço em uma análise de equilíbrio limite pelo
método de Fellenius ou das fatias: (a) sem ação do grampo e (b) efeito adicional do
grampo (FALCONI & ALONSO, 1996).
i
iiiIii
T
tgluNlcFS
)..(.)1( (IV.1)
O cálculo é feito por tentativas, assumindo valores do raio R da superfície de
ruptura até se obter aquele que conduza a FS(1) = 1 (Figura IV.5(a)). A seguir,
tomando essa superfície como referência, introduz-se a ação das forças Fci dos
grampos e calcula-se o fator de segurança final (Equação IV.2), que deverá ser no
mínimo 1,5 (Figura IV.5(b)).
i
iciciiiiIii
fT
tgNTtgluNlcFS
.)..(.)( (IV.2)
Em que Tci e Nci são, respectivamente, as componentes tangencial e normal da
força Fci que o grampo da fatia i deverá resistir. Conhecida esta força, o comprimento
do reforço é obtido em função do seu diâmetro externo e da sua adesão com o solo.
O comprimento mínimo do grampo, contado a partir da superfície com FS=1,
deve ser aquele que atinja a superfície com FS=1,5, calculada pela Equação IV.1, ou
seja sem levar em conta a ação dos grampos, conforme se indica na Figura IV.6.
(a) (b)
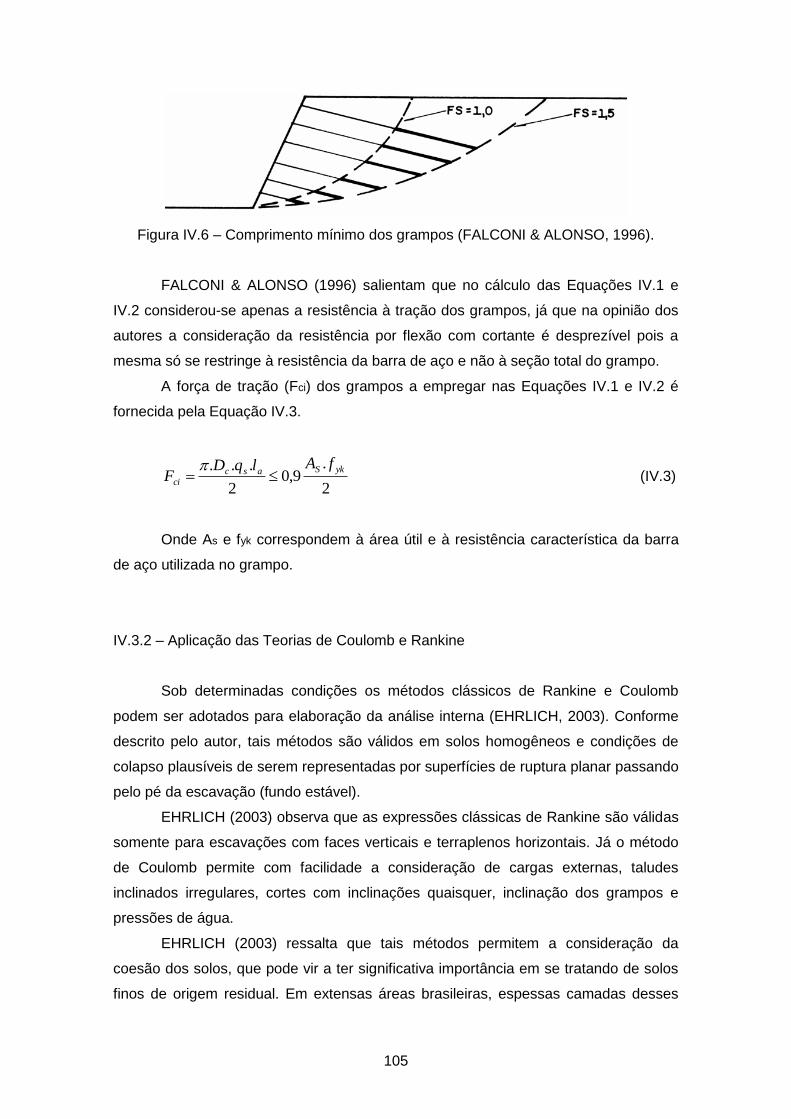
105
Figura IV.6 – Comprimento mínimo dos grampos (FALCONI & ALONSO, 1996).
FALCONI & ALONSO (1996) salientam que no cálculo das Equações IV.1 e
IV.2 considerou-se apenas a resistência à tração dos grampos, já que na opinião dos
autores a consideração da resistência por flexão com cortante é desprezível pois a
mesma só se restringe à resistência da barra de aço e não à seção total do grampo.
A força de tração (Fci) dos grampos a empregar nas Equações IV.1 e IV.2 é
fornecida pela Equação IV.3.
2
.9,0
2
... ykSasc
ci
fAlqDF
(IV.3)
Onde As e fyk correspondem à área útil e à resistência característica da barra
de aço utilizada no grampo.
IV.3.2 – Aplicação das Teorias de Coulomb e Rankine
Sob determinadas condições os métodos clássicos de Rankine e Coulomb
podem ser adotados para elaboração da análise interna (EHRLICH, 2003). Conforme
descrito pelo autor, tais métodos são válidos em solos homogêneos e condições de
colapso plausíveis de serem representadas por superfícies de ruptura planar passando
pelo pé da escavação (fundo estável).
EHRLICH (2003) observa que as expressões clássicas de Rankine são válidas
somente para escavações com faces verticais e terraplenos horizontais. Já o método
de Coulomb permite com facilidade a consideração de cargas externas, taludes
inclinados irregulares, cortes com inclinações quaisquer, inclinação dos grampos e
pressões de água.
EHRLICH (2003) ressalta que tais métodos permitem a consideração da
coesão dos solos, que pode vir a ter significativa importância em se tratando de solos
finos de origem residual. Em extensas áreas brasileiras, espessas camadas desses
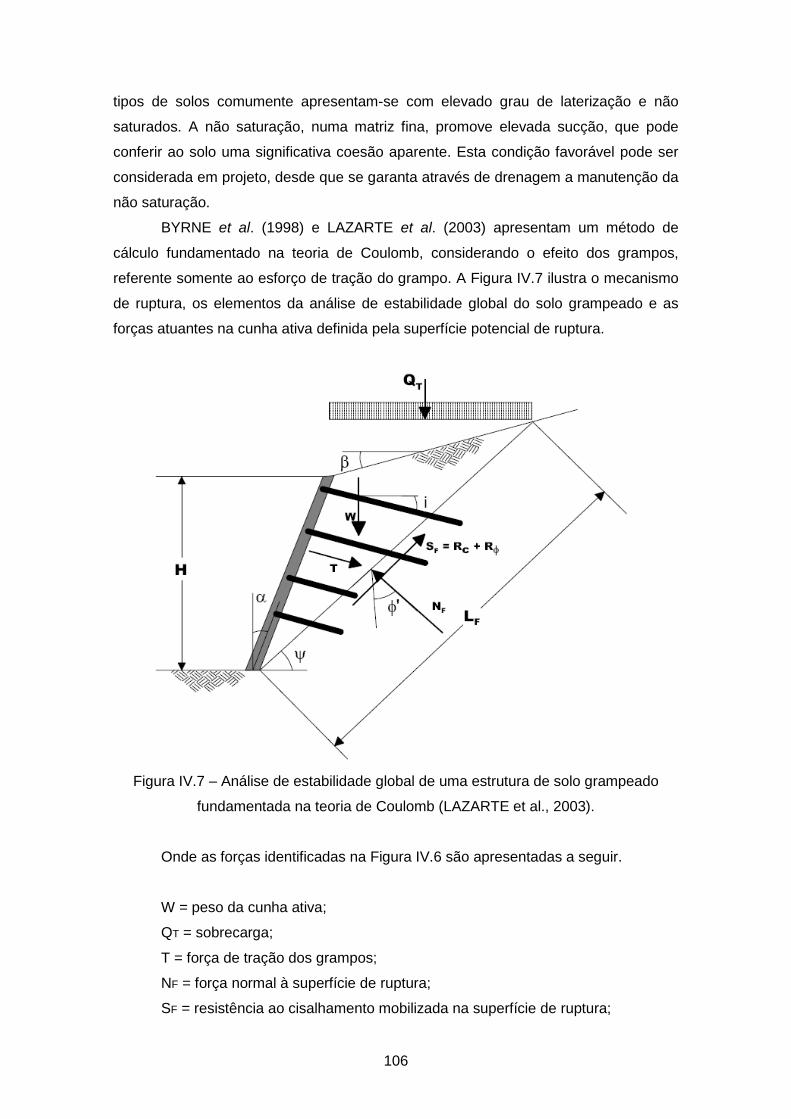
106
tipos de solos comumente apresentam-se com elevado grau de laterização e não
saturados. A não saturação, numa matriz fina, promove elevada sucção, que pode
conferir ao solo uma significativa coesão aparente. Esta condição favorável pode ser
considerada em projeto, desde que se garanta através de drenagem a manutenção da
não saturação.
BYRNE et al. (1998) e LAZARTE et al. (2003) apresentam um método de
cálculo fundamentado na teoria de Coulomb, considerando o efeito dos grampos,
referente somente ao esforço de tração do grampo. A Figura IV.7 ilustra o mecanismo
de ruptura, os elementos da análise de estabilidade global do solo grampeado e as
forças atuantes na cunha ativa definida pela superfície potencial de ruptura.
Figura IV.7 – Análise de estabilidade global de uma estrutura de solo grampeado
fundamentada na teoria de Coulomb (LAZARTE et al., 2003).
Onde as forças identificadas na Figura IV.6 são apresentadas a seguir.
W = peso da cunha ativa;
QT = sobrecarga;
T = força de tração dos grampos;
NF = força normal à superfície de ruptura;
SF = resistência ao cisalhamento mobilizada na superfície de ruptura;

107
Rc = componente de coesão da resistência ao cisalhamento SF; e
R = componente de atrito da resistência ao cisalhamento SF.
No método as forças solicitantes consistem nas componentes dos vetores de
peso (W) e sobrecarga (QT) na direção tangencial ao plano de ruptura. As forças
resistentes ao longo da superfície de ruptura referem-se à resistência ao cisalhamento
do solo (SF) e ao somatório das forças de tração dos grampos (T). O fator de
segurança contra a ruptura global (FS) é expresso pela relação entre as forças
resistentes e solicitantes que atuam tangencialmente ao plano de ruptura (Equação
IV.4).
osolicitaçãforças
sresistenteforçasFS (IV.4)
As forças normal e tangencial ao plano de ruptura são fornecidas pelas
Equações IV.5 e IV.6.
0)cos(.cos).( FT NiTQWNormaisFoças (IV.5)
0S)i(sen.Tsen).QW(sTangenciaiFoças FT (IV.6)
Onde a resistência ao cisalhamento do solo ao longo da superfície de ruptura é
definida pela Equação IV.7.
mFFmcF NLcRRS tan.. (IV.7)
Sendo que m e cm representam o ângulo de atrito e a coesão mobilizados do
solo (Equações IV.8 e IV.9). Um único fator de segurança é aplicado nas forças
resistentes de atrito (’) e coesão (c’) do solo. Entretanto, é possível selecionar
diferentes fatores de segurança para cada componente de resistência do maciço
grampeado.
FS
m
'tantan
(IV.8)
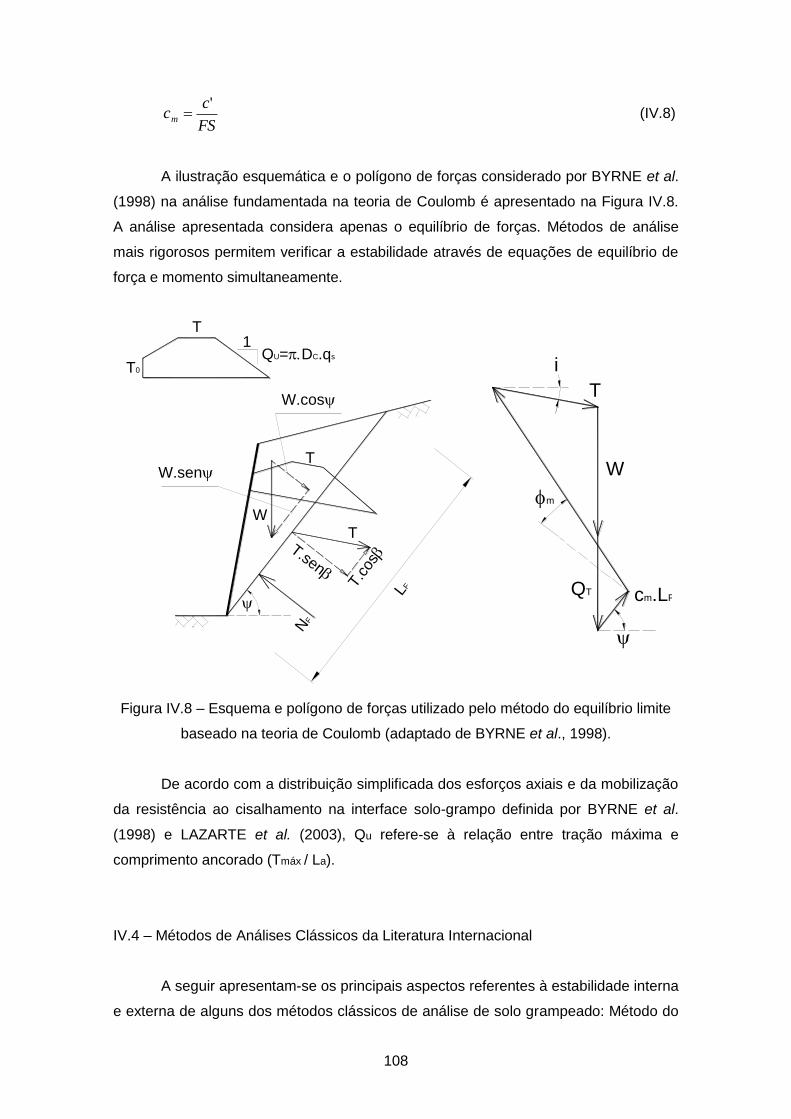
108
FS
ccm
' (IV.8)
A ilustração esquemática e o polígono de forças considerado por BYRNE et al.
(1998) na análise fundamentada na teoria de Coulomb é apresentado na Figura IV.8.
A análise apresentada considera apenas o equilíbrio de forças. Métodos de análise
mais rigorosos permitem verificar a estabilidade através de equações de equilíbrio de
força e momento simultaneamente.
i
W
QT cm.LF
m
T
LF
T
T0
1QU=DC.qs
WT
NF
T.c
osT.sen
W.cos
W.senT
i
W
QT cm.LF
m
T
LF
T
T0
1QU=DC.qs
WT
NF
T.c
osT.sen
W.cos
W.senT
Figura IV.8 – Esquema e polígono de forças utilizado pelo método do equilíbrio limite
baseado na teoria de Coulomb (adaptado de BYRNE et al., 1998).
De acordo com a distribuição simplificada dos esforços axiais e da mobilização
da resistência ao cisalhamento na interface solo-grampo definida por BYRNE et al.
(1998) e LAZARTE et al. (2003), Qu refere-se à relação entre tração máxima e
comprimento ancorado (Tmáx / La).
IV.4 – Métodos de Análises Clássicos da Literatura Internacional
A seguir apresentam-se os principais aspectos referentes à estabilidade interna
e externa de alguns dos métodos clássicos de análise de solo grampeado: Método do
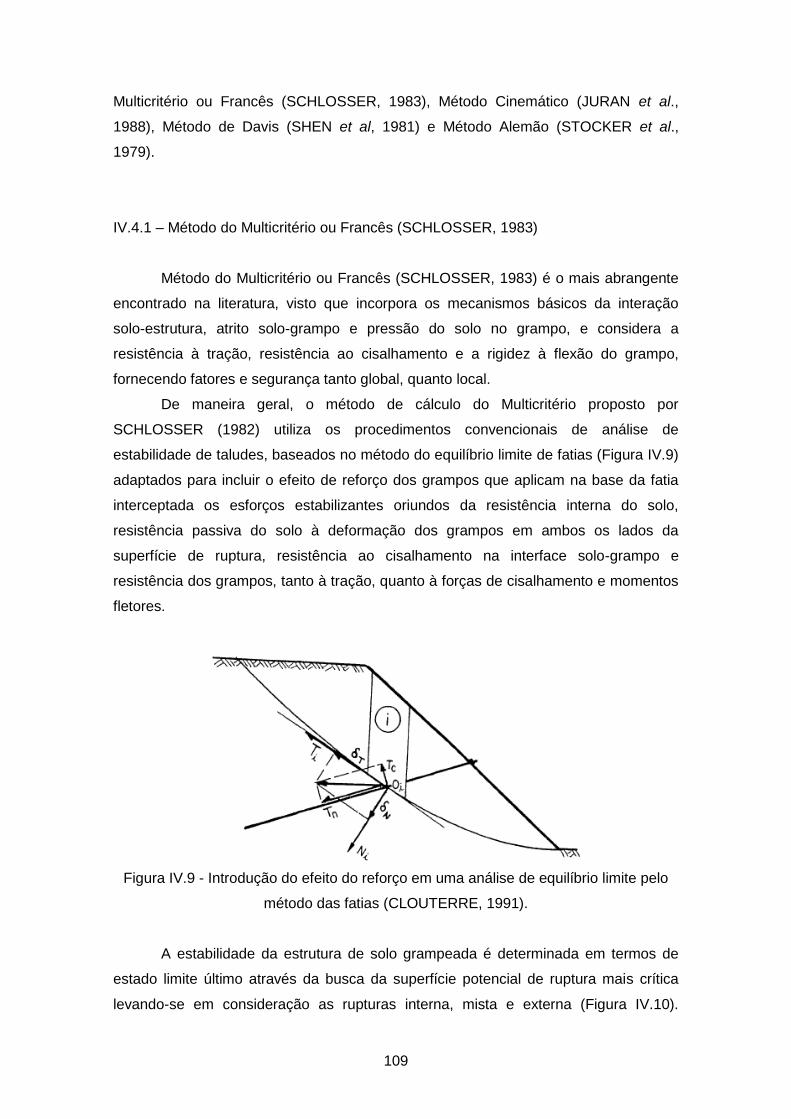
109
Multicritério ou Francês (SCHLOSSER, 1983), Método Cinemático (JURAN et al.,
1988), Método de Davis (SHEN et al, 1981) e Método Alemão (STOCKER et al.,
1979).
IV.4.1 – Método do Multicritério ou Francês (SCHLOSSER, 1983)
Método do Multicritério ou Francês (SCHLOSSER, 1983) é o mais abrangente
encontrado na literatura, visto que incorpora os mecanismos básicos da interação
solo-estrutura, atrito solo-grampo e pressão do solo no grampo, e considera a
resistência à tração, resistência ao cisalhamento e a rigidez à flexão do grampo,
fornecendo fatores e segurança tanto global, quanto local.
De maneira geral, o método de cálculo do Multicritério proposto por
SCHLOSSER (1982) utiliza os procedimentos convencionais de análise de
estabilidade de taludes, baseados no método do equilíbrio limite de fatias (Figura IV.9)
adaptados para incluir o efeito de reforço dos grampos que aplicam na base da fatia
interceptada os esforços estabilizantes oriundos da resistência interna do solo,
resistência passiva do solo à deformação dos grampos em ambos os lados da
superfície de ruptura, resistência ao cisalhamento na interface solo-grampo e
resistência dos grampos, tanto à tração, quanto à forças de cisalhamento e momentos
fletores.
Figura IV.9 - Introdução do efeito do reforço em uma análise de equilíbrio limite pelo
método das fatias (CLOUTERRE, 1991).
A estabilidade da estrutura de solo grampeada é determinada em termos de
estado limite último através da busca da superfície potencial de ruptura mais crítica
levando-se em consideração as rupturas interna, mista e externa (Figura IV.10).

110
Enquanto a estrutura apresentar-se instável, altera-se a concepção do projeto,
verificando-o, quantas vezes necessárias, de modo interativo, até que se garanta a
estabilidade otimizada da contenção.
Figura IV.10 - Análise de estabilidade em função da localização da superfície potencial
de ruptura examinada: (a) externa, (b) mista e (c) interna (CLOUTERRE, 1991).
As forças no grampo no ponto de interseção com a superfície potencial de
ruptura podem ser representadas pelo sistema de forças, composto pelos esforços de
tração (Tn), cisalhamento (Tc) e flexão (M). A determinação destes esforços que
ocasionam a ruptura dos grampos requer a consideração de quatro critérios de ruptura
para os materiais constituintes e suas interações um com o outro. Considera-se a
resistência ao cisalhamento de interface solo-grampo, pressão aplicada pelo solo
normal ao eixo do grampo, resistência dos elementos de esforço e resistência ao
cisalhamento ao longo da superfície de ruptura definida pelo critério de ruptura de
Mohr-Coulomb ( <c’+.tan’).
- Interação do atrito solo-grampo: qs ou Tmáxqs.Dc.la;
- Interação da pressão lateral solo-grampo: p pu; e
- Material constituinte: k.
Onde k refere-se às resistências máximas à tração, ao cisalhamento e à flexão
do material com o qual o grampo é feito. Nos critérios do método analisa-se, também,
a combinação destes esforços.
De maneira similar a análise de estacas submetidas a carregamento horizontal,
considera-se que o desenvolvimento da pressão aplicada pelo solo contra a superfície
normal à direção de mobilização do atrito na interface solo-grampo (p) é função da
rigidez dos grampos (MITCHELL & VILLET, 1987) e atinge um valor limite máximo
(pu), além do qual ocorre a plastificação do solo circundante ao grampo.
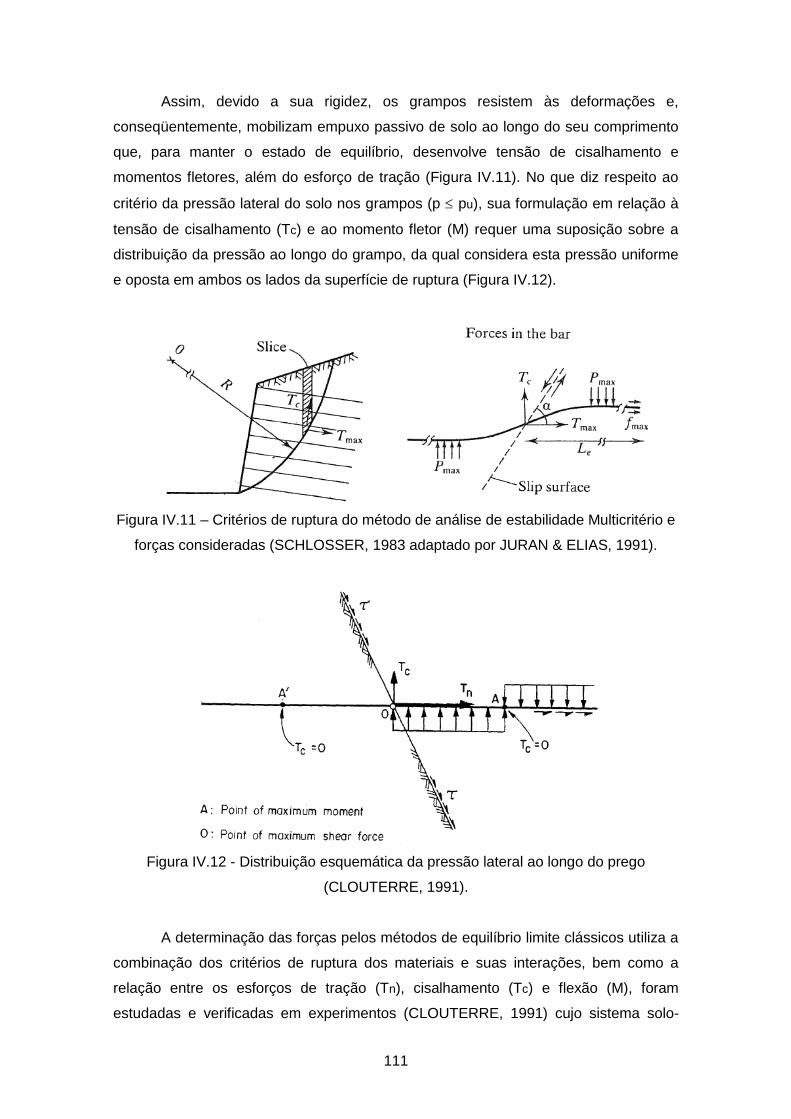
111
Assim, devido a sua rigidez, os grampos resistem às deformações e,
conseqüentemente, mobilizam empuxo passivo de solo ao longo do seu comprimento
que, para manter o estado de equilíbrio, desenvolve tensão de cisalhamento e
momentos fletores, além do esforço de tração (Figura IV.11). No que diz respeito ao
critério da pressão lateral do solo nos grampos (p pu), sua formulação em relação à
tensão de cisalhamento (Tc) e ao momento fletor (M) requer uma suposição sobre a
distribuição da pressão ao longo do grampo, da qual considera esta pressão uniforme
e oposta em ambos os lados da superfície de ruptura (Figura IV.12).
Figura IV.11 – Critérios de ruptura do método de análise de estabilidade Multicritério e
forças consideradas (SCHLOSSER, 1983 adaptado por JURAN & ELIAS, 1991).
Figura IV.12 - Distribuição esquemática da pressão lateral ao longo do prego
(CLOUTERRE, 1991).
A determinação das forças pelos métodos de equilíbrio limite clássicos utiliza a
combinação dos critérios de ruptura dos materiais e suas interações, bem como a
relação entre os esforços de tração (Tn), cisalhamento (Tc) e flexão (M), foram
estudadas e verificadas em experimentos (CLOUTERRE, 1991) cujo sistema solo-
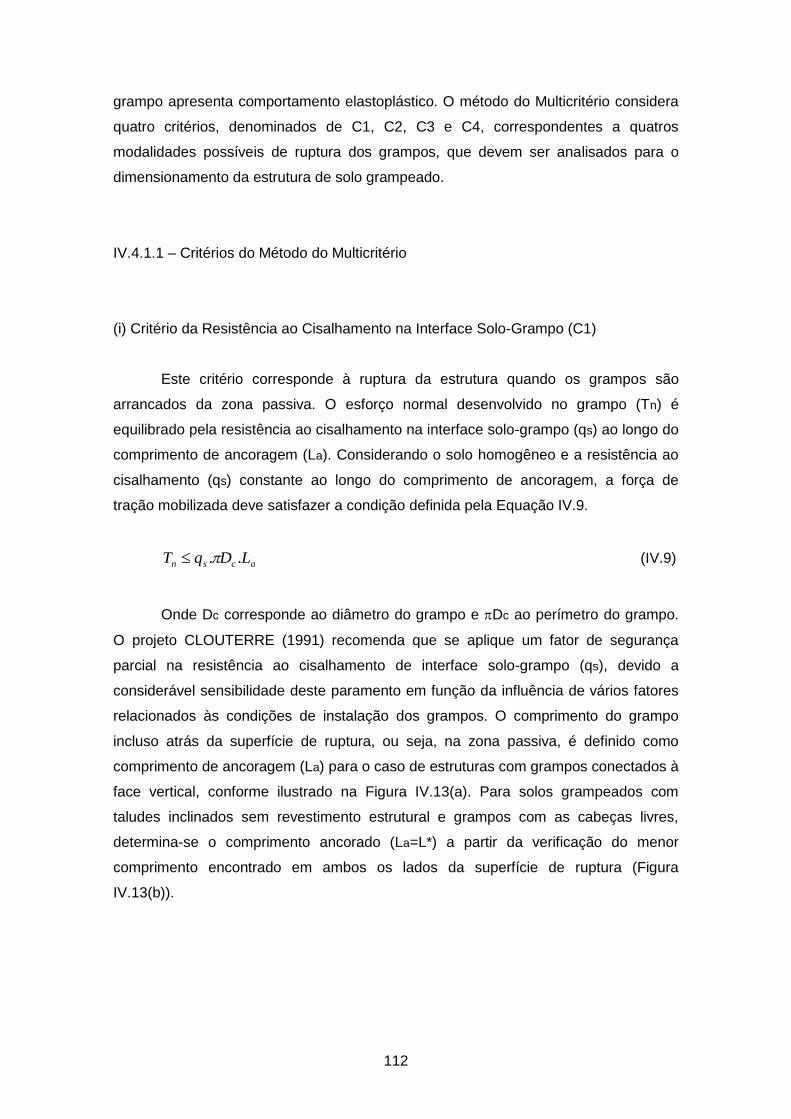
112
grampo apresenta comportamento elastoplástico. O método do Multicritério considera
quatro critérios, denominados de C1, C2, C3 e C4, correspondentes a quatros
modalidades possíveis de ruptura dos grampos, que devem ser analisados para o
dimensionamento da estrutura de solo grampeado.
IV.4.1.1 – Critérios do Método do Multicritério
(i) Critério da Resistência ao Cisalhamento na Interface Solo-Grampo (C1)
Este critério corresponde à ruptura da estrutura quando os grampos são
arrancados da zona passiva. O esforço normal desenvolvido no grampo (Tn) é
equilibrado pela resistência ao cisalhamento na interface solo-grampo (qs) ao longo do
comprimento de ancoragem (La). Considerando o solo homogêneo e a resistência ao
cisalhamento (qs) constante ao longo do comprimento de ancoragem, a força de
tração mobilizada deve satisfazer a condição definida pela Equação IV.9.
acsn LDqT .. (IV.9)
Onde Dc corresponde ao diâmetro do grampo e Dc ao perímetro do grampo.
O projeto CLOUTERRE (1991) recomenda que se aplique um fator de segurança
parcial na resistência ao cisalhamento de interface solo-grampo (qs), devido a
considerável sensibilidade deste paramento em função da influência de vários fatores
relacionados às condições de instalação dos grampos. O comprimento do grampo
incluso atrás da superfície de ruptura, ou seja, na zona passiva, é definido como
comprimento de ancoragem (La) para o caso de estruturas com grampos conectados à
face vertical, conforme ilustrado na Figura IV.13(a). Para solos grampeados com
taludes inclinados sem revestimento estrutural e grampos com as cabeças livres,
determina-se o comprimento ancorado (La=L*) a partir da verificação do menor
comprimento encontrado em ambos os lados da superfície de ruptura (Figura
IV.13(b)).
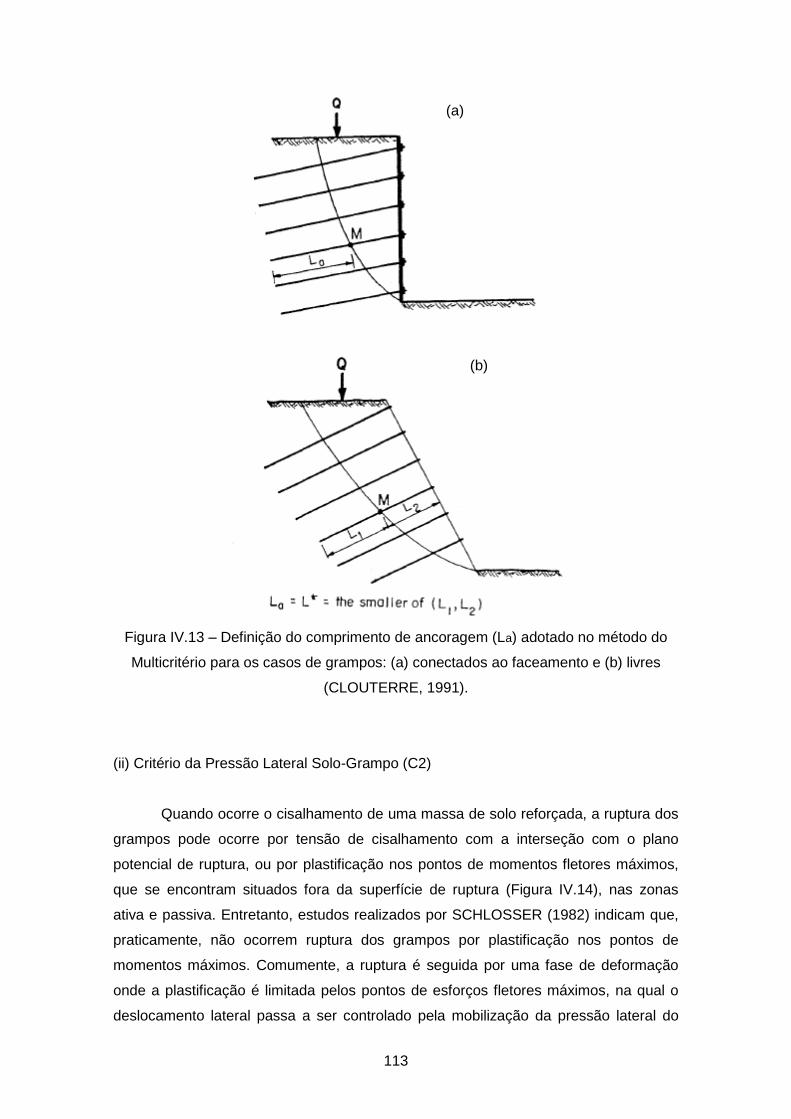
113
Figura IV.13 – Definição do comprimento de ancoragem (La) adotado no método do
Multicritério para os casos de grampos: (a) conectados ao faceamento e (b) livres
(CLOUTERRE, 1991).
(ii) Critério da Pressão Lateral Solo-Grampo (C2)
Quando ocorre o cisalhamento de uma massa de solo reforçada, a ruptura dos
grampos pode ocorre por tensão de cisalhamento com a interseção com o plano
potencial de ruptura, ou por plastificação nos pontos de momentos fletores máximos,
que se encontram situados fora da superfície de ruptura (Figura IV.14), nas zonas
ativa e passiva. Entretanto, estudos realizados por SCHLOSSER (1982) indicam que,
praticamente, não ocorrem ruptura dos grampos por plastificação nos pontos de
momentos máximos. Comumente, a ruptura é seguida por uma fase de deformação
onde a plastificação é limitada pelos pontos de esforços fletores máximos, na qual o
deslocamento lateral passa a ser controlado pela mobilização da pressão lateral do
(a)
(b)
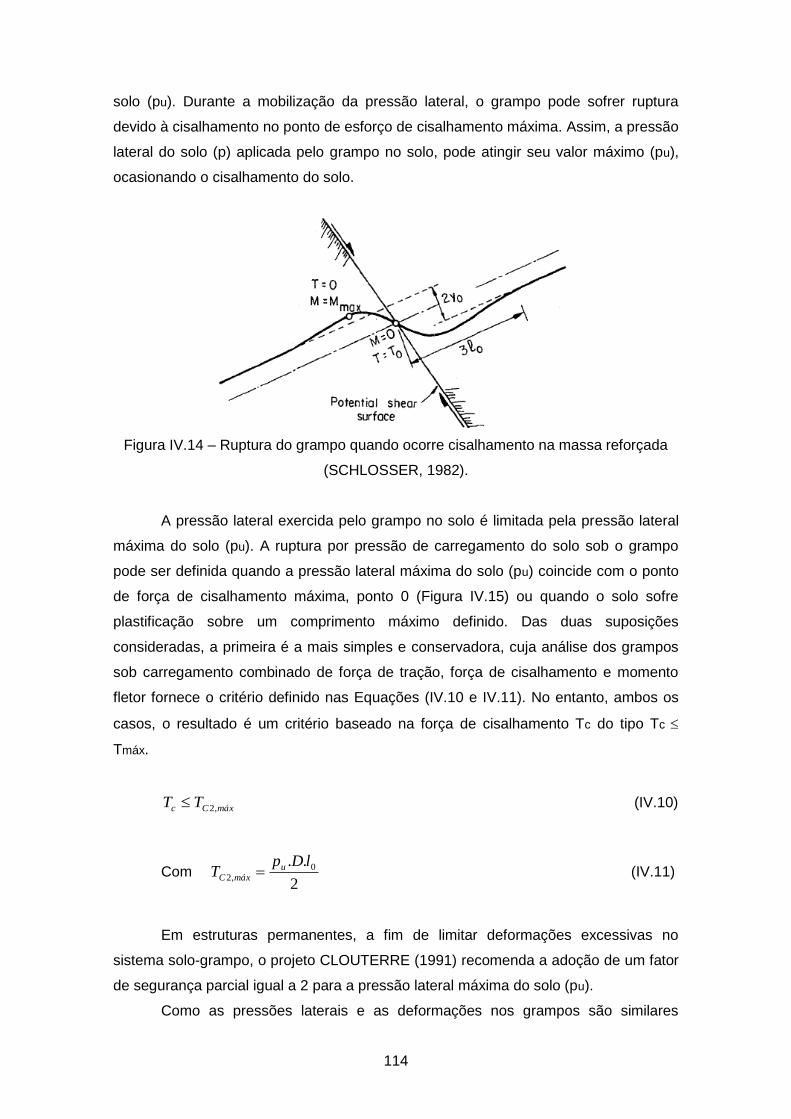
114
solo (pu). Durante a mobilização da pressão lateral, o grampo pode sofrer ruptura
devido à cisalhamento no ponto de esforço de cisalhamento máxima. Assim, a pressão
lateral do solo (p) aplicada pelo grampo no solo, pode atingir seu valor máximo (pu),
ocasionando o cisalhamento do solo.
Figura IV.14 – Ruptura do grampo quando ocorre cisalhamento na massa reforçada
(SCHLOSSER, 1982).
A pressão lateral exercida pelo grampo no solo é limitada pela pressão lateral
máxima do solo (pu). A ruptura por pressão de carregamento do solo sob o grampo
pode ser definida quando a pressão lateral máxima do solo (pu) coincide com o ponto
de força de cisalhamento máxima, ponto 0 (Figura IV.15) ou quando o solo sofre
plastificação sobre um comprimento máximo definido. Das duas suposições
consideradas, a primeira é a mais simples e conservadora, cuja análise dos grampos
sob carregamento combinado de força de tração, força de cisalhamento e momento
fletor fornece o critério definido nas Equações (IV.10 e IV.11). No entanto, ambos os
casos, o resultado é um critério baseado na força de cisalhamento Tc do tipo Tc
Tmáx.
máxCc TT ,2 (IV.10)
Com 2
.. 0
,2
lDpT u
máxC (IV.11)
Em estruturas permanentes, a fim de limitar deformações excessivas no
sistema solo-grampo, o projeto CLOUTERRE (1991) recomenda a adoção de um fator
de segurança parcial igual a 2 para a pressão lateral máxima do solo (pu).
Como as pressões laterais e as deformações nos grampos são similares
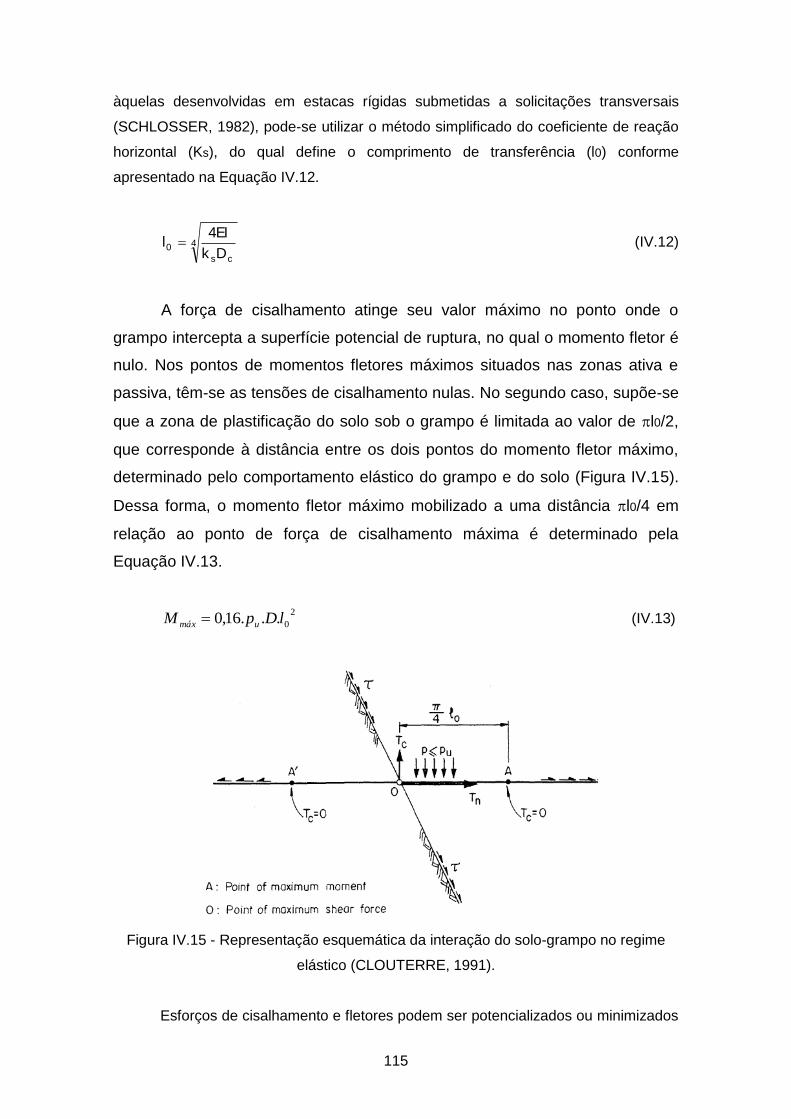
115
àquelas desenvolvidas em estacas rígidas submetidas a solicitações transversais
(SCHLOSSER, 1982), pode-se utilizar o método simplificado do coeficiente de reação
horizontal (Ks), do qual define o comprimento de transferência (l0) conforme
apresentado na Equação IV.12.
4
cs
0Dk
EI4l (IV.12)
A força de cisalhamento atinge seu valor máximo no ponto onde o
grampo intercepta a superfície potencial de ruptura, no qual o momento fletor é
nulo. Nos pontos de momentos fletores máximos situados nas zonas ativa e
passiva, têm-se as tensões de cisalhamento nulas. No segundo caso, supõe-se
que a zona de plastificação do solo sob o grampo é limitada ao valor de l0/2,
que corresponde à distância entre os dois pontos do momento fletor máximo,
determinado pelo comportamento elástico do grampo e do solo (Figura IV.15).
Dessa forma, o momento fletor máximo mobilizado a uma distância l0/4 em
relação ao ponto de força de cisalhamento máxima é determinado pela
Equação IV.13.
2
0...16,0 lDpM umáx (IV.13)
Figura IV.15 - Representação esquemática da interação do solo-grampo no regime
elástico (CLOUTERRE, 1991).
Esforços de cisalhamento e fletores podem ser potencializados ou minimizados

116
conforme geometria do solo grampeado. Estudos demonstram que o desenvolvimento
das tensões em grampos com a mesma rigidez depende do ângulo formado entre o
grampo e a normal à superfície potencial de ruptura (JEWELL, 1980).
IV.4.1.2 – Considerações sobre os Critérios C3 e C4
Os dois critérios (C3) e (C4) referem-se à resistência interna dos reforços e
envolvem momento fletor (M), as forças de tração (Tn) e de cisalhamento (Tc)
mobilizados pelos grampos quando há plastificação por cisalhamento no ponto de
máximo esforço cortante (0), ou por momento fletor entre os pontos de momentos
máximos (A e A’), conforme ilustrado na Figura IV.15. Para efeito de simplificação
matemática, assume-se que a força normal (Tn) não varia na zona de esforços fletores
em torno da superfície potencial de ruptura. Uma forma conservadora para representar
a resistência do grampo pode ser através do critério de ANTHONIE (1987), do qual se
propõem a Equação simplificada (IV.14).
10
22
M
M
R
T
R
T
c
c
n
n (IV.14)
Onde Rn, Rc e M0 correspondem a resistência do grampo à tração, ao
cisalhamento e à flexão, respectivamente. Normalmente, a resistência ao
cisalhamento do grampo (Rc) é definida pela metade do valor da resistência à tensão
normal (Rn/2). No caso de grampo executado com barra de aço, Rn é função da área
da seção transversal (As) e da tensão de escoamento característica (fyk) da barra
(Rn=As.fyk).
(iii) Critério da Resistência Interna do Grampo aos Esforços Normal e Cortante
Combinados (C3)
A plastificação do grampo por esforço cortante ocorre no ponto (0) de força de
cisalhamento máxima (Tco), que corresponde à interseção do reforço com a superfície
potencial de ruptura e ao momento fletor nulo (M=0). Considera-se que o grampo
possui comprimento infinito, quando, em ambos os lados da superfície potencial de
ruptura, seu comprimento supera em 3 vezes o valor do comprimento de transferência
117
(l0). e pode-se considerar que há simetria em relação ao plano de ruptura. A distância
3l0, simétrica em relação ao plano de ruptura, define o ponto a partir do qual os
momentos fletores se tornam nulos nas zonas ativa e passiva.
No ponto de tensão de cisalhamento máxima, coincidente com o plano da
superfície potencial de ruptura, o momento fletor é nulo (M=0) e o critério de ruptura
baseado na resistência interna do grampo (ANTHONIE, 1987) pode ser reescrito pela
Equação IV.15. No plano Tn versus Tc, o critério de ruptura interna do grampo por
esforços normal e cortante é representado por uma elipse.
1
22
c
c
n
n
R
T
R
T (IV.15)
(iv) Critério da Resistência Interna do Grampo ao Momento Fletor (C4)
A partir de uma suposição simplificada, considera-se que a plastificação do
grampo por momento fletor ocorre nos pontos de momento máximo (A e A’)
localizados em ambos os lados da superfície potencial de ruptura numa distância (lp)
equivalente a l0/4 e para efeito de análise, assume-se que conjunto solo-grampo
possui um comportamento elástico. A plastificação nestes pontos de momento
máximo, onde a força de cisalhamento é nula (Tc=0), corresponde ao critério do qual
MMmáx, sendo o momento máximo (Mmáx) determinado pelo critério de resistência
interna do grampo (ANTHONIE, 1987), que conduz a Equação IV.16 que representa
uma parábola.
2
0 1.n
n
máxR
TMM (IV.16)
Assim, baseado neste valor, a força de cisalhamento no ponto 0 pode ser
obtida pela Equação IV.17.
2
0
0
0 1..n
n
cR
T
l
MaT (IV.17)

118
Onde ―a‖ é uma constante com valor igual a 3,12 e Tco corresponde à força de
cisalhamento mobilizada na superfície de ruptura a uma distância l0/4 dos pontos de
momento fletor máximo que ocorrem nas zonas ativa e passiva.
A distância entre a superfície de ruptura e os pontos de momento fletores
máximos (lp) inicialmente igual l0/4 é considerada constante no decorrer da
mobilização dos momentos máximos. No entanto, sua determinação é complexa
quando o conjunto solo grampo se encontra na fase elastoplástica. Experimentos
empregados em solos grampeados pelo projeto CLOUTERRE (1991) demonstram que
há uma tendência da distância lp variar no interior da massa de solo reforçada. Assim,
sugere-se que, na ausência de uma informação detalhada, seja adotado o valor
constante e igual a l0/4 para a distância entre os momentos máximos e a força de
cisalhamento máxima que ocorre no ponto 0. Assumindo esta hipótese na mobilização
dos momentos nos pontos (A e A’), a plastificação do grampo decorrente da pressão
lateral do solo define o critério TcTc4,máx, do qual fornece a Equação IV.18.
uc
n
n
máxc plDcR
T
l
MbT ...1.. 0
2
0
0
,4
(IV.18)
Onde b e c correspondem a duas constantes com valores, respectivamente,
iguais a 1,62 e 0,24. Salienta-se que a suposição de outro valor para a distância lp
resultaria em um critério similar.
IV.4.1.3 – Combinação dos Critérios de Ruptura (C1, C2, C3 e C4)
O método do Multicritério (SCHLOSSER, 1982 e 1983) consiste na análise dos
quatro critérios (C1, C2, C3 e C4) auxiliada pela representação destes no plano força
normal versus força de cisalhamento (Tn x Tc). A interseção destes critérios (Figura
IV.16) define um domínio convexo de estabilidade que considera as combinações dos
esforços normal e cortante. O ponto representativo dos esforços no grampo sob
condição de ruptura na interseção com a superfície potencial de ruptura pode,
inicialmente, situar-se em qualquer lugar da fronteira do domínio.
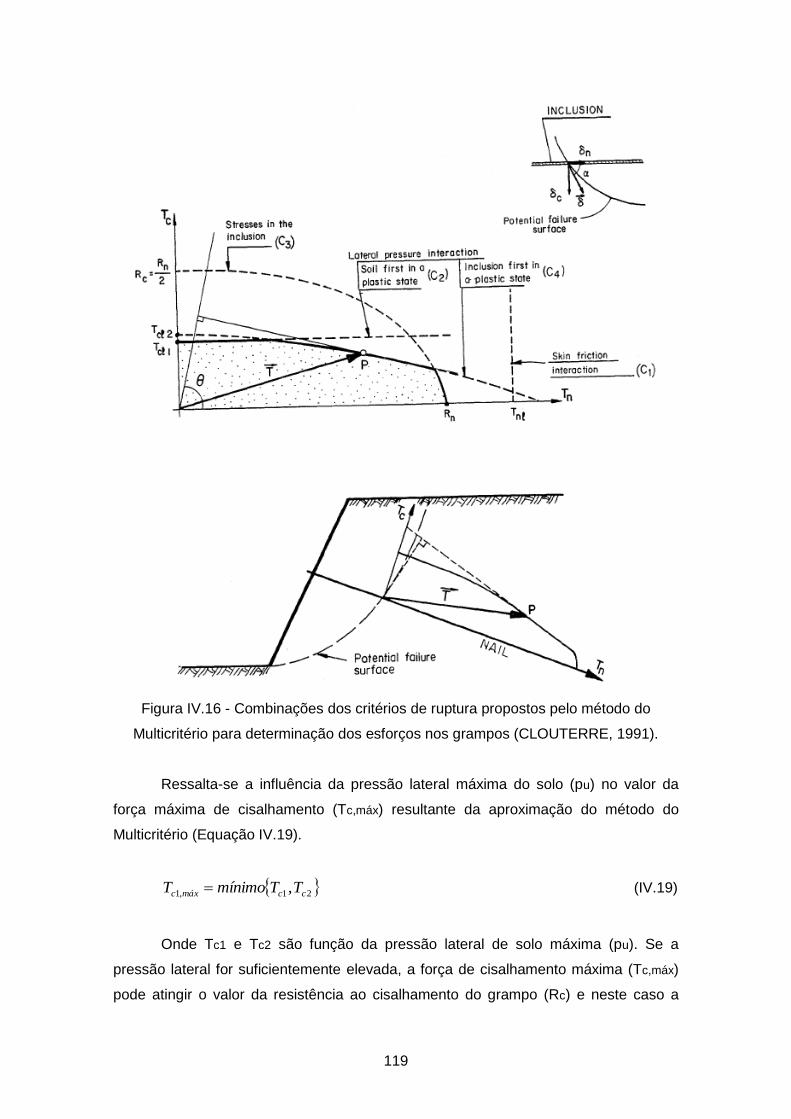
119
Figura IV.16 - Combinações dos critérios de ruptura propostos pelo método do
Multicritério para determinação dos esforços nos grampos (CLOUTERRE, 1991).
Ressalta-se a influência da pressão lateral máxima do solo (pu) no valor da
força máxima de cisalhamento (Tc,máx) resultante da aproximação do método do
Multicritério (Equação IV.19).
21,1 , ccmáxc TTmínimoT (IV.19)
Onde Tc1 e Tc2 são função da pressão lateral de solo máxima (pu). Se a
pressão lateral for suficientemente elevada, a força de cisalhamento máxima (Tc,máx)
pode atingir o valor da resistência ao cisalhamento do grampo (Rc) e neste caso a
120
interseção dos critérios é reduzida para C1. Esta condição pode ocorrer no caso de
grampo instalado em um maciço rochoso que sofre cisalhamento no plano de falha da
rocha.
IV.4.1.4 – Fatores de Segurança
Salienta-se que o método do Multicritério propõe adoção de diferentes fatores
de segurança relacionados à vários modos de ruptura. Estes fatores de segurança
parciais incidem na resistência do grampo à tração (Tn) e ao cisalhamento (Tc),
pressão lateral do solo sobre o grampo (pu), resistência ao arrancamento do grampo
(qs) e resistência ao cisalhamento do solo (coesão e ângulo de atrito). Estes fatores
são função das características do solo grampeado e das condições de contorno, e
geralmente assumem o valor de 1,5, exceto no caso da pressão lateral de solo, do
qual recomenda-se fator de segurança igual a 2.
IV.4.2 – Método Cinemático (JURAN et al., 1988)
Comumente, os processos de cálculo dos sistemas de solo grampeado são
elaborados utilizando métodos de análise de estabilidade de taludes baseados na
teoria do equilíbrio limite. Estes métodos incorporam o efeito das resistências à tração
e ao cisalhamento dos reforços passivos na estabilidade do talude e fornecem
somente um fator de segurança global (JURAN et al., 1988). O método de análise
limite Cinemático proposto por JURAN et al. (1988) proporciona uma estimativa
racional das forças de tração e cisalhamento máximas mobilizadas em cada grampo,
bem como permite a avaliação do efeito dos principais parâmetros de projeto
(geometria da estrutura, inclinação, espaçamentos e rigidez a flexão dos grampos) em
relação às forças de tração e cisalhamento mobilizadas nos grampos durante a
construção do solo grampeado. Desta forma, o método fornece condições de verificar
a estabilidade local em cada nível de grampo, da qual pode se apresentar mais crítica
que o fator de segurança relacionado à estabilidade global da estrutura (JURAN et al.,
1990). Os autores, para verificarem a aplicabilidade do método, compararam a
previsão destas forças com os resultados de monitorações de modelos físicos e
estruturas em verdadeira grandeza.
O método, também de origem francesa, realiza análises das superfícies
potenciais de ruptura com geometria de espirais logarítmicas que interceptam a base

121
da estrutura grampeada. A massa grampeada é dividida em fatias paralelas aos
grampos. A hipótese formulada é de que a componente horizontal (EH) da força entre
duas fatias permaneça constante. Considera-se o solo homogêneo e sem presença
de nível d’água. Supõe-se, também, que os pontos das forças de tração e
cisalhamento máximas do grampo coincidem com a superfície potencial de ruptura
que corresponde ao fator de segurança global mínimo.
O projeto CLOUTERRE (1991) observa que este método apresenta aspecto
interessante devido a consideração da estabilidade local em cada fatia, utilizada para
calcular as forças de tração e cisalhamento desenvolvidas em cada nível de grampo
em seu ponto de interseção com a superfície potencial de ruptura. Assim, o solo
grampeado pode ser projetado para evitar o risco progressivo de ruptura através da
quebra do grampo desencadeada pela ruptura de um nível de grampo. Entretanto, o
método não permite a análise de ruptura mista, ou seja, interna e externa
(CLOUTERRE, 1991).
O método é fundamento nas análises do estado de tensões internas na massa
de solo. As principais hipóteses consideradas no método de análise limite Cinemático
são ilustradas na Figura IV.17 e descritas a seguir:
(i) a ruptura decorre da rotação de um bloco semi-rígido na zona ativa
limitada por uma superfície potencial de ruptura em forma de espiral
logarítmica;
(ii) na ruptura, o ponto onde ocorrem as forças de tração e cisalhamento
máximas coincide com a superfície potencial de ruptura desenvolvida
no solo;
(iii) a zonas ativa (semi-rígida) e passiva são separadas por uma fina
camada de solo no estado limite de fluxo rígido plástico;
(iv) a resistência ao cisalhamento do solo, definida pelo critério de ruptura
de Coulomb, é totalmente mobilizada ao longo da superfície potencial
de ruptura;
(v) as componentes horizontais (Eh) das forças entre fatias atuam em
ambos os lados da fatia que envolvem o grampo, são iguais;
(vi) o efeito da inclinação (ou sobrecarga horizontal, Fh) no terrapleno do
solo grampeado sobre as forças nos grampos decresce ao longo da
superfície potencial de ruptura.
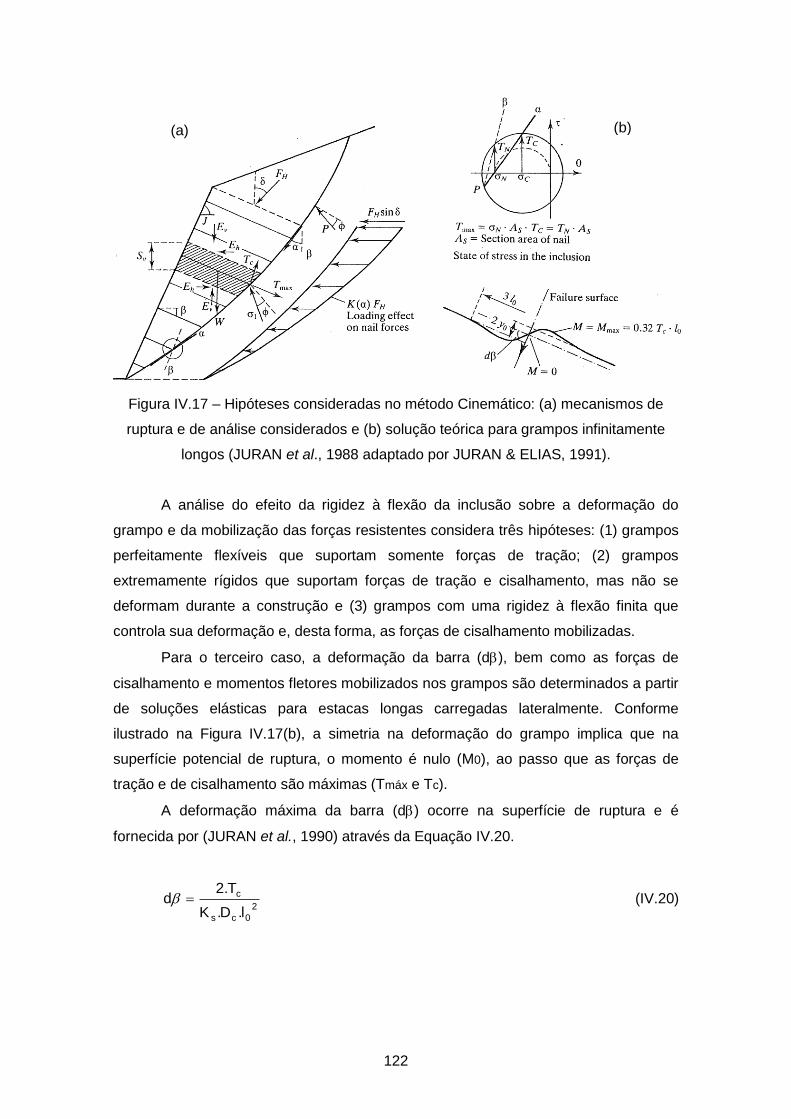
122
Figura IV.17 – Hipóteses consideradas no método Cinemático: (a) mecanismos de
ruptura e de análise considerados e (b) solução teórica para grampos infinitamente
longos (JURAN et al., 1988 adaptado por JURAN & ELIAS, 1991).
A análise do efeito da rigidez à flexão da inclusão sobre a deformação do
grampo e da mobilização das forças resistentes considera três hipóteses: (1) grampos
perfeitamente flexíveis que suportam somente forças de tração; (2) grampos
extremamente rígidos que suportam forças de tração e cisalhamento, mas não se
deformam durante a construção e (3) grampos com uma rigidez à flexão finita que
controla sua deformação e, desta forma, as forças de cisalhamento mobilizadas.
Para o terceiro caso, a deformação da barra (d), bem como as forças de
cisalhamento e momentos fletores mobilizados nos grampos são determinados a partir
de soluções elásticas para estacas longas carregadas lateralmente. Conforme
ilustrado na Figura IV.17(b), a simetria na deformação do grampo implica que na
superfície potencial de ruptura, o momento é nulo (M0), ao passo que as forças de
tração e de cisalhamento são máximas (Tmáx e Tc).
A deformação máxima da barra (d) ocorre na superfície de ruptura e é
fornecida por (JURAN et al., 1990) através da Equação IV.20.
2
0cs
c
l.D.K
T.2d (IV.20)
(a)
(b)
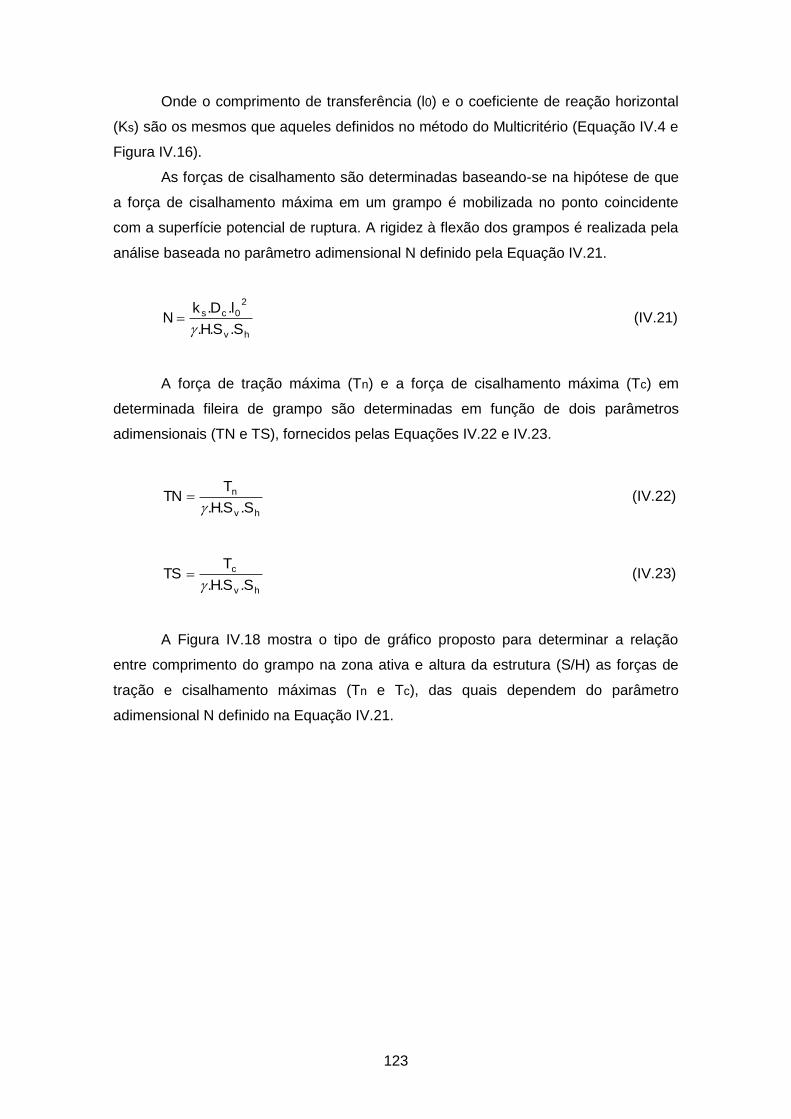
123
Onde o comprimento de transferência (l0) e o coeficiente de reação horizontal
(Ks) são os mesmos que aqueles definidos no método do Multicritério (Equação IV.4 e
Figura IV.16).
As forças de cisalhamento são determinadas baseando-se na hipótese de que
a força de cisalhamento máxima em um grampo é mobilizada no ponto coincidente
com a superfície potencial de ruptura. A rigidez à flexão dos grampos é realizada pela
análise baseada no parâmetro adimensional N definido pela Equação IV.21.
hv
2
0cs
S.S.H.
l.D.kN
(IV.21)
A força de tração máxima (Tn) e a força de cisalhamento máxima (Tc) em
determinada fileira de grampo são determinadas em função de dois parâmetros
adimensionais (TN e TS), fornecidos pelas Equações IV.22 e IV.23.
hv
n
S.S.H.
TTN
(IV.22)
hv
c
S.S.H.
TTS
(IV.23)
A Figura IV.18 mostra o tipo de gráfico proposto para determinar a relação
entre comprimento do grampo na zona ativa e altura da estrutura (S/H) as forças de
tração e cisalhamento máximas (Tn e Tc), das quais dependem do parâmetro
adimensional N definido na Equação IV.21.
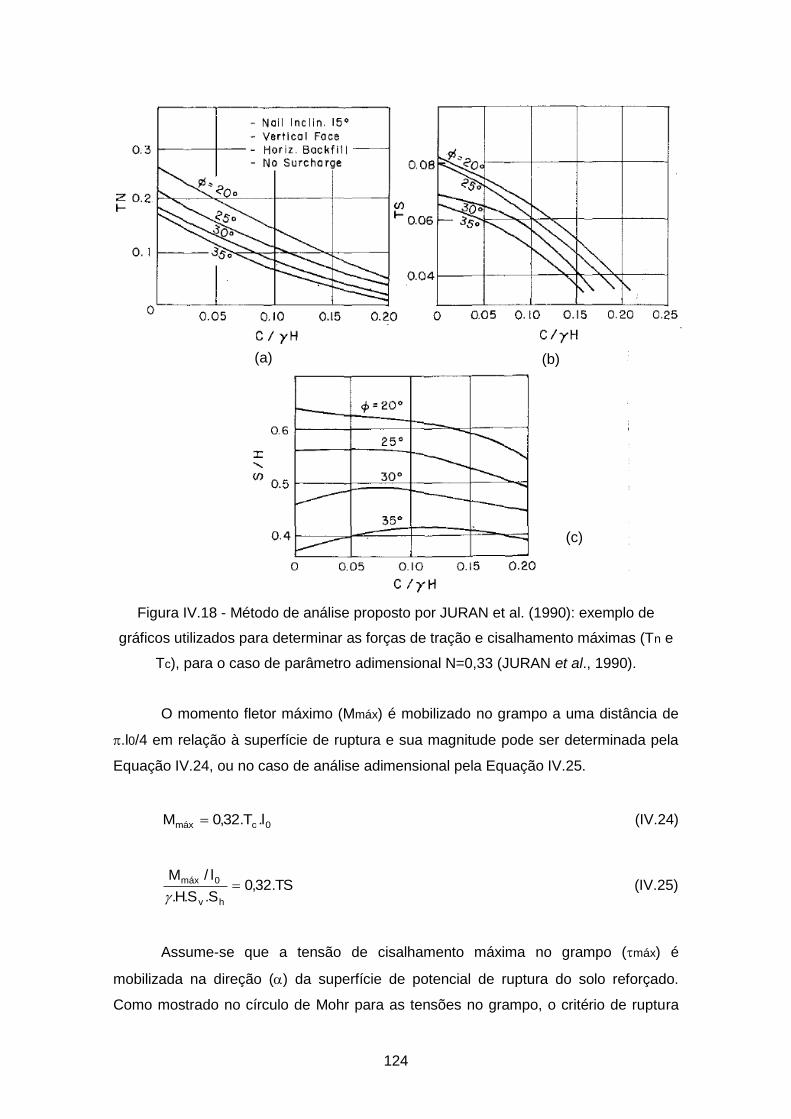
124
Figura IV.18 - Método de análise proposto por JURAN et al. (1990): exemplo de
gráficos utilizados para determinar as forças de tração e cisalhamento máximas (Tn e
Tc), para o caso de parâmetro adimensional N=0,33 (JURAN et al., 1990).
O momento fletor máximo (Mmáx) é mobilizado no grampo a uma distância de
.l0/4 em relação à superfície de ruptura e sua magnitude pode ser determinada pela
Equação IV.24, ou no caso de análise adimensional pela Equação IV.25.
0cmáx l.T.32,0M (IV.24)
TS.32,0S.S.H.
l/M
hv
0máx
(IV.25)
Assume-se que a tensão de cisalhamento máxima no grampo (máx) é
mobilizada na direção () da superfície de potencial de ruptura do solo reforçado.
Como mostrado no círculo de Mohr para as tensões no grampo, o critério de ruptura
(b) (a)
(c)
125
implica que a tensão de cisalhamento (n) e a tensão normal (n) atuantes no plano
normal do grampo são relacionadas pela Equação IV.26.
nmodn .2cot.2
1 (IV.26)
Onde é inclinação inicial do grampo e mod é definida Equação IV.27.
dmod (IV.27)
O dimensionamento dos solos grampeados com análise limite cinemática é
baseada na avaliação da estabilidade local de cada reforço. JURAN et al. (1988)
recomendam que sejam elaboradas verificações referentes à estabilidade a partir de
dois principais critérios de ruptura: (i) arrancamento do grampo e (ii) quebra do reforço
por solicitações excessivas de esforços de tração, cisalhamento e flexão.
IV.4.2.1 – Colapso por Arrancamento do Grampo
Este tipo de colapso está associado à interação solo-grampo referente à
resistência ao cisalhamento de interface solo-grampo, a qual induz tensões nos
grampos, predominantemente de tração, que devem ser inferiores à resistência ao
arrancamento (qs). Segundo o método Cinemático, o colapso por arrancamento do
grampo de seção circular pode ser avaliado pela Equação IV.28.
dl.qFS
D.
S.S.H.
TTN
als
P
c
hv
máx
(IV.28)
Onde FSp é o coeficiente de segurança referente à resistência ao
arrancamento do grampo, cujo valor igual a 2 é recomendado por JURAN et al. (1990).
O comprimento de ancoragem (la=L-S) é fornecido pela relação entre o comprimento
do grampo e altura da estrutura (L/H), parâmetros adimensionais (N e TN) e da
profundidade relativa de instalação do grampo (Equação IV.29).
pFS.
TN
H
S
H
L (IV.29)

126
Onde o parâmetro é definido pela Equação IV.30.
hv
cs
S.S.
D.q
(IV.30)
IV.4.2.2 – Colapso por Ruptura do Reforço
O colapso decorrente da ruptura do reforço, também, tem relação com a
interação solo-grampo, da qual a pressão lateral do solo ao longo do grampo pode
promover, além de tração, a mobilização de esforços de cisalhamento e de flexão nos
grampos, caso se desenvolva uma zona de plastificação na massa de solo reforçada e
o grampo tenha rigidez à flexão suficiente para resistir às solicitações aplicadas sobre
ele. Assim verifica-se à ruptura do grampo por ocasião de esforços de tração,
cisalhamento e flexão excessivos que possam ocorrer no solo grampeado.
Para o caso de grampo executado com barra de aço e calda de cimento, a
ruptura decorrente do escoamento do elemento de reforço é verificada pela Equação
IV.31.
TNS.S.H.
A.f
hv
syk
(IV.31)
Onde fyk e As referem-se à tensão de escoamento admissível e seção
transversal da barra de aço, respectivamente.
No caso de grampos rígidos, a instabilidade pode ocorrer por ruptura da ação
conjunta das forças de tração e cisalhamento, da qual pode ser analisada a partir de
analogia com estacas carregadas lateralmente. A estabilidade é verificada pela
Equação IV.32.
eq
hv
sykK
S.S.H.
A.f
(IV.32)
Onde Keq é fornecido pela Equação IV.33 desenvolvida a partir da
consideração de que o elemento de reforço obedece ao critério de ruptura de Tresca.
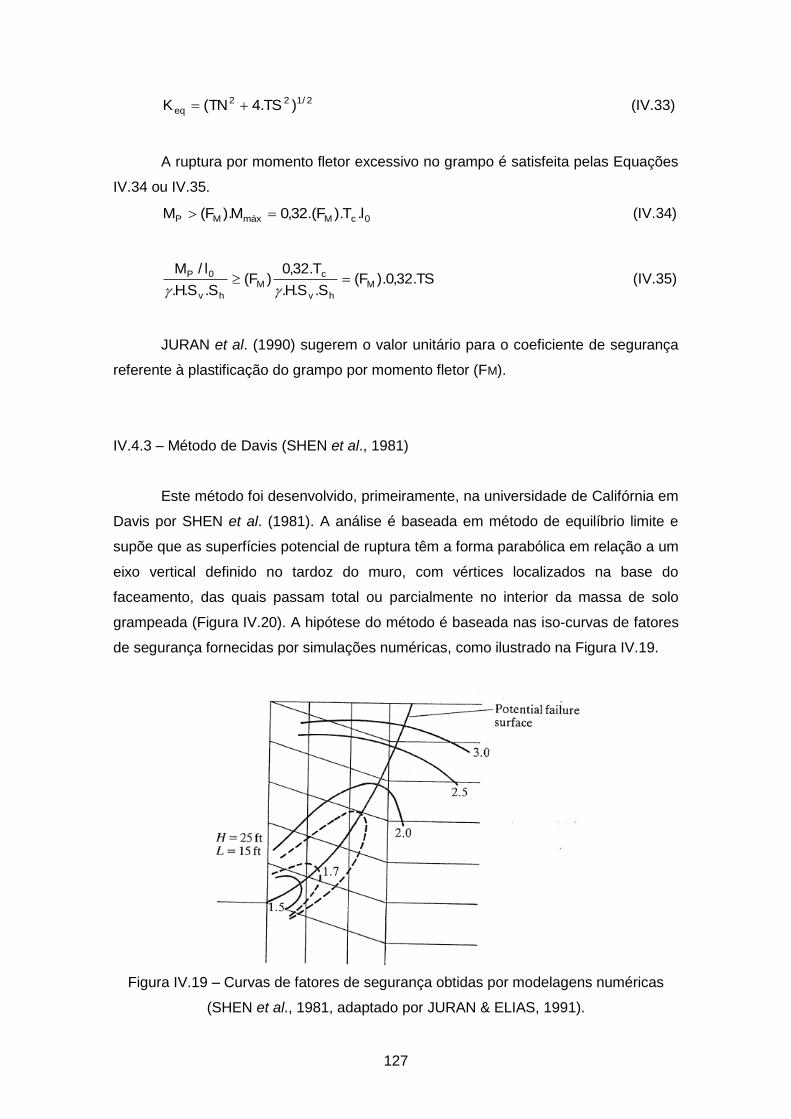
127
2/122eq )TS.4TN(K (IV.33)
A ruptura por momento fletor excessivo no grampo é satisfeita pelas Equações
IV.34 ou IV.35.
0cMmáxMP l.T).F.(32,0M).F(M (IV.34)
TS.32,0).F(S.S.H.
T.32,0)F(
S.S.H.
l/MM
hv
cM
hv
0P
(IV.35)
JURAN et al. (1990) sugerem o valor unitário para o coeficiente de segurança
referente à plastificação do grampo por momento fletor (FM).
IV.4.3 – Método de Davis (SHEN et al., 1981)
Este método foi desenvolvido, primeiramente, na universidade de Califórnia em
Davis por SHEN et al. (1981). A análise é baseada em método de equilíbrio limite e
supõe que as superfícies potencial de ruptura têm a forma parabólica em relação a um
eixo vertical definido no tardoz do muro, com vértices localizados na base do
faceamento, das quais passam total ou parcialmente no interior da massa de solo
grampeada (Figura IV.20). A hipótese do método é baseada nas iso-curvas de fatores
de segurança fornecidas por simulações numéricas, como ilustrado na Figura IV.19.
Figura IV.19 – Curvas de fatores de segurança obtidas por modelagens numéricas
(SHEN et al., 1981, adaptado por JURAN & ELIAS, 1991).

128
Figura IV.20 – Considerações do método de análise proposto de Davis (SHEN et al.
1981, adaptado por CLOUTERRE, 1991).
O solo é considerado homogêneo, sem presença de água e obedece ao critério
de ruptura de Mohr-Coulomb. A geometria da estrutura de contenção grampeada é
pouco sofisticada: (i) faceamento vertical; (ii) terrapleno horizontal; (iii) linhas de
grampos paralelas, eqüidistantes e com o mesmo comprimento. SHEN et al. (1981)
consideram que os grampos trabalham somente à esforços de tração e instabilidade
pode ocorrer por arrancamento ou escoamento do elemento de reforço.
Consideram-se dois blocos separados por uma linha vertical que atravessa a
extremidade dos grampos. Nas análises de estabilidade consideram-se duas
situações, cuja superfície potencial de ruptura intercepta uma parcela dos grampos e
passa além da massa de solo reforçada. Para calcular as forças entre estes dois
blocos, utiliza-se um coeficiente K, definido como a relação entre as tensões
horizontais e verticais, e toma-se como igual a 0,4 e 0,5 para solos granulares e
coesivos, respectivamente. Os valores recomendados para o coeficiente K encontram-
se próximos daqueles definidos para o coeficiente de empuxo de solo no repouso (K0).
A validade deste método, do qual é limitado à geometria muito simples e a um
mecanismo de ruptura específico, foi avaliada analisando as superfícies de rupturas
observadas em ensaios de modelos reduzidos realizados em centrífugas. O projeto
CLOUTERRE (1991) observa que a comparação entre a previsão e os resultados

129
experimentais parece aceitável para a pouca quantidade e simplicidade das
experiências conduzidas. Posteriormente, o método foi modificado objetivando análise
de estruturas grampeadas com geometrias mais complexas (ELIAS & JURAN, 1990).
O mesmo fator de segurança global FS é adotado para o solo e grampos,
conforme demonstrado nas Equações IV.36 e IV.37. Aplica-se FS nos parâmetros do
solo (coesão e ângulo de atrito mobilizados ao longo da superfície de ruptura) e no
menor dos valores encontrados entre a resistência ao cisalhamento de interface solo-
grampo e a tensão de escoamento admissível da barra de aço. Estes fatores deverão
ser iguais ao fator de segurança global.
FS
tan.
FS
c
c
mob (IV.36)
t
syk
t
smob
FS
A.f,
FS
qmín (IV.37)
Onde tc FSFSFSFS .
Procede-se a análise de estabilidade de taludes utilizando o método das fatias
modificado para determinar a superfície potencial de ruptura. Elabora-se a pesquisa do
fator de segurança (FS) crítico, variando a superfície de ruptura parabólica, até
encontrar um valor mínimo, determinado através de processos interativos. Assim, o
valor mínimo do fator de segurança (FS) que corresponde à parábola mais crítica pode
ser definido.
No método de Davis, as forças de tração são divididas em componentes
paralelas e perpendiculares à superfície de ruptura. As componentes de força normal e
tangencial, em cada grampo que atravessa a superfície de ruptura, são somadas às
forças resistentes do solo para a determinação do fator de segurança de toda a massa
de solo grampeado.
A Figura IV.21 apresenta o mecanismo de ruptura proposto pelo processo de
Davis com as forças solicitantes e estabilizantes consideradas e o diagrama de corpo
livre dos elementos 1 e 2. As forças S2 e S3, relativas ao atrito interno do material, são
tomadas como paralelas aos correspondentes arcos.
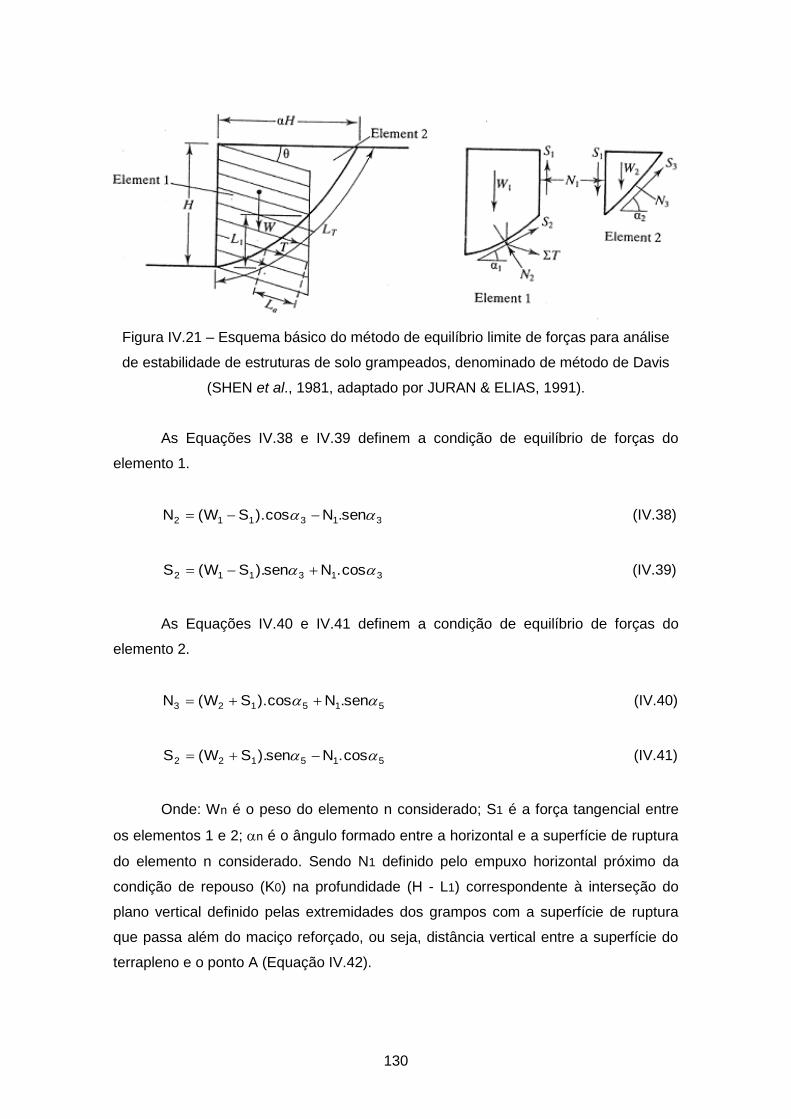
130
Figura IV.21 – Esquema básico do método de equilíbrio limite de forças para análise
de estabilidade de estruturas de solo grampeados, denominado de método de Davis
(SHEN et al., 1981, adaptado por JURAN & ELIAS, 1991).
As Equações IV.38 e IV.39 definem a condição de equilíbrio de forças do
elemento 1.
313112 sen.Ncos).SW(N (IV.38)
313112 cos.Nsen).SW(S (IV.39)
As Equações IV.40 e IV.41 definem a condição de equilíbrio de forças do
elemento 2.
515123 sen.Ncos).SW(N (IV.40)
515122 cos.Nsen).SW(S (IV.41)
Onde: Wn é o peso do elemento n considerado; S1 é a força tangencial entre
os elementos 1 e 2; n é o ângulo formado entre a horizontal e a superfície de ruptura
do elemento n considerado. Sendo N1 definido pelo empuxo horizontal próximo da
condição de repouso (K0) na profundidade (H - L1) correspondente à interseção do
plano vertical definido pelas extremidades dos grampos com a superfície de ruptura
que passa além do maciço reforçado, ou seja, distância vertical entre a superfície do
terrapleno e o ponto A (Equação IV.42).
131
2
K.h.N 0
2
1
(IV.42)
O esforço total solicitante (SD) ao longo do plano da superfície potencial de
ruptura é determinada pela Equação IV.43.
)cos.(cosNsen).SW(sen).SW(S 531512311D (IV.43)
O esforço total resistente (SR) ao longo da superfície de ruptura se constitui da
resistência ao cisalhamento mobilizada no solo mais a resistência adicional devida às
componentes normal e tangencial desenvolvidas pelas forças atuantes no reforço
(Equação IV.44).
T1223TR T'tan.'N'tan.NL'.cS (IV.44)
Onde:
c’ – coesão efetiva do solo;
LT – comprimento da superfície de ruptura;
N3 – reação normal sobre a superfície de ruptura no elemento 2;
’n – atrito interno do solo no elemento n considerado;
N’2 – corresponde à N2+TN;
TN – componente normal à superfície de ruptura devida ao esforço de tração
desenvolvido no grampo; e
TT – componente tangencial à superfície de ruptura devida ao esforço de
tração desenvolvido no grampo.
Para solução da equação da força total resistente (SR), torna-se necessário
definir a força de tração máxima que ocorre em cada linha de grampo, pois as
componentes normal e tangencial à superfície de ruptura (TN e TT) são função deste
esforço.
O equilíbrio é alcançado quando os esforços total solicitante e total resistente
se igualam (SD=SR) segundo um fator de segurança (FS) adequado para o caso em
análise.

132
IV.4.4 – Método Alemão (STOCKER et al., 1979)
STOCKER et al. (1979) propuseram um método de equilíbrio limite para
projetar estruturas de solo grampeado adaptado do método de KRANZ (1953), do qual
considera a superfície de ruptura com forma bi-linear, composto por dois segmentos
de reta, e adotaram a mesma definição para o fator de segurança global. Este método,
que foi desenvolvido baseado na experiência dos ensaios de laboratório em modelos
reduzidos, foi comparado também com monitorações de solos grampeado em
verdadeira grandeza (GASSLER & GUDEHUS, 1981). Os resultados analisados
conduziram a adoção de um mecanismo de ruptura composto por uma cunha bipartida
(Figura IV.22). Além destes aspectos, considera-se que o conjunto solo-grampo se
comporta como um muro de gravidade.
Figura IV.22 – Superfície de ruptura bi-linear considerada no método Alemão
(STOCKER et al., 1979 adaptado por CLOUTERRE, 1991).
O fator de segurança global da estrutura é definido pela relação das forças
resistentes (reação do solo ao longo do plano de ruptura, tensões nos grampos) com
as forças solicitantes (peso e carregamento) e então se elabora o cálculo utilizando
modelo cinemático de análise limite.
133
No método, o momento fletor e o esforço de cisalhamento nos grampos são
ignorados. Assim, considera-se que os grampos resistem aos esforços de tração e a
resistência ao cisalhamento do solo, da qual obedece ao critério de ruptura de Mohr-
Coulomb, é totalmente mobilizada ao longo da superfície de ruptura. Admite ainda,
que o valor da resistência máxima ao cisalhamento de interface solo-grampo (qs) é
constante.
Na verificação da resistência máxima em cada grampo, adota-se a menor
magnitude encontrada na análise das rupturas por arrancamento e por tração além do
limite de escoamento do elemento de reforço considerado, normalmente barra de aço
(Equação IV.45).
syksacmáx AfqlDmínT .,... (IV.45)
A inclinação 1 da cunha que passa através da base da estrutura grampeada é
determinada por processo interativo para obter um fator de segurança mínimo.
GASSLER & GUDEHUS (1981) demonstraram através de análises de estabilidade
que o fator de segurança mínimo é comumente obtido pelo o ângulo 2, cujo valor é
considerado igual a /4 + /2, onde o é o ângulo de atrito interno do solo.
O cálculo é elaborado considerando o equilíbrio de dois blocos que deslizam
um em relação ao outro ao longo de uma linha vertical retilínea. Supõe-se que o solo é
homogêneo e sem presença de água. Se houver presença de camadas de solo com
diferentes características mecânicas, recomenda-se que somente um valor seja usado
para os parâmetros do solo, priorizando a condição mais desfavorável na resistência
ao cisalhamento ou utilizando parâmetros médios ponderados.
O método será descrito com o auxílio da Figura IV.23, onde um sistema de
superfícies de ruptura é adotado, formando dois monolitos. O primeiro, representando
uma zona reforçada, assemelhado a um muro de gravidade e como tal analisado, e o
segundo, triangular, representando uma cunha ativa agindo sobre a zona reforçada.

134
Figura IV.23 – Mecanismo de ruptura e esforços solicitantes e resistentes
considerados pelo método Alemão (STOCKER et al., 1979, adaptado por JURAN &
ELIAS, 1991)
O mecanismo de ruptura proporciona a elaboração de um polígono de forças
que pode ser representado graficamente. Conhecem-se as direções e magnitudes das
forças relativas ao peso próprio do material (WA e WB), carregamento externo (P1 e
P2) e as dos grampos inferiores, que atravessam a superfície de ruptura inferior (T3 a
T6). Além da contribuição dos grampos, os esforços resistentes, oriundos da
resistência ao cisalhamento do solo, aplicados ao longo dos dois segmentos de reta
que definem a superfície de ruptura, são representados pelas forças de coesão (SCA e
SCB) e de atrito (SA e SB).
No processo de cálculo consideram os elementos de reforço sujeitos
unicamente aos esforços de tração. Desta forma, resistência ao arrancamento (qs) ou
a tensão de escoamento do elemento de reforço (fyk) é a variável decisiva para
definição da força de tração máxima e elaboração da análise.
Como a superfície de ruptura intercepta os grampos apenas na base da cunha
A, a resultante de tração dos grampos não é considerada no processo de cálculo da
cunha B. Assim, não havendo ação das forças dos grampos sobre a base cunha B,
supõe-se que esta apresenta comportamento de uma cunha ativa atuando na zona
reforçada (QAB). No entanto, a princípio, poderia ter sido considerado as forças de
tração dos grampos superiores (N1 a N5) na interface destas cunhas.
A Figura IV.24 apresenta o polígono resultante das forças solicitantes e
estabilizantes mostradas na Figura IV.23.

135
Figura IV.24 - Polígono de forças atuantes numa estrutura de solo grampeado
(STOCKER et al., 1979, adaptado por JURAN & ELIAS, 1991).
A definição do fator de segurança global é dada pela relação da ação conjunta
das forças internas nos planos de escorregamento e da contribuição das forças nos
grampos pela ação da gravidade mais de carregamentos externos. Nas análises são
consideradas as contribuições somente dos grampos que atravessam a superfície de
deslizamento adotada.
O método sugere que se adotem fatores de segurança parciais aproximados
para o ângulo de atrito interno ( ou ), coesão (c), resistência máxima ao
cisalhamento de interface solo-grampo (qs) e tensão de escoamento do elemento de
reforço (GASSLER & GUDEHUS, 1983).
O método Alemão foi avaliado principalmente em observações em modelos
reduzidos e experimentos de campo com aplicação de carregamento sobre o
terrapleno. O projeto CLOUTERRE (1991) baseado nos resultados de experimentos
realizados em estruturas e modelos de solos grampeados questiona o método quanto
à forma adotada para a superfície de ruptura, devido à inconsistência com
comportamentos observados nos ensaios sob a ação do peso próprio, cujas
superfícies apresentam-se curvilíneas. Alega-se, ainda, que a ruptura induzida por
sobrecarga pode não ser a condição representativa do mecanismo de ruptura que atua
em estruturas grampeadas.
136
CAPÍTULO V
OBRA DE CONTENÇÃO DA RODOVIA RJ123 – km 0,5
V.1 – Introdução
O presente capítulo avalia os resultados da monitoração de estrutura de
contenção em solo grampeado com faceamento de blocos segmentais (TERRAE tipo
W) executada na rodovia estadual RJ 123, km 0,5.
Descreve-se a área pesquisada, quanto a sua localização e características
gerais. Relata-se o evento do deslizamento e a solução geotécnica adotada para a
estabilização do talude de corte. Destaca-se a obra de contenção objeto do estudo.
Apresentam-se os resultados das investigações geotécnicas, que
compreenderam prospecções, coletas de amostras e ensaios de campo e laboratório.
A instrumentação desenvolvida refere-se à instalação de ―strain gauges‖
arranjados em ponte de Wheatstone e distribuídos ao longo de 3 (três) barras de aço
que foram empregadas na confecção de grampos. Apresentam-se os detalhes da
instrumentação.
Foi monitorada, nessa obra, a evolução das distribuições dos esforços axiais
ao longo do comprimento de cada grampo instrumentado, durante a construção da
obra e em períodos chuvoso e seco.
V.2 – Área de Estudo
V.2.1 – Localização e Descrição da Área
A área em estudo situa-se no km 0,5, perímetro urbano, da RJ123, rodovia
estadual de ligação entre BR040 (km 51) e município de Secretário, nas coordenadas
geográficas de longitude 43°08'39,87" oeste e latitude 22°19'47,5" sul (Datum
horizontal: Córrego Alegre MG) com altitude média de 800 metros (Datum vertical:
marégrafo Imbituba SC). A localização e a identificação dos pontos notáveis são
apresentadas nas Figuras V.1 e V.2.

137
Figura V.1 – Localização da área em estudo: (a) mapa do Brasil (CPRM, 2000), (b)
mapa do Estado do Rio de Janeiro com a posição geográfica da obra (GPRH, 2006) e
(c) mapa rodoviário contendo a rodovia estadual RJ123, km 0,5, Secretário / RJ (DNIT,
2001).
Em relação aos elementos naturais, a ocorrência insere-se no Bioma típico da
Mata Atlântica e encontra-se compreendida em vale com as vertentes pertencentes à
Serra das Araras. Um corpo hídrico margeia o segmento rodoviário da RJ123 e
deságua no ribeirão Retiro das Pedras, afluente do rio Piabanha.
Pedro do Rio (Petrópolis)
Rio de Janeiro
RJ123 – km0,5
(a)
(b)
(c)
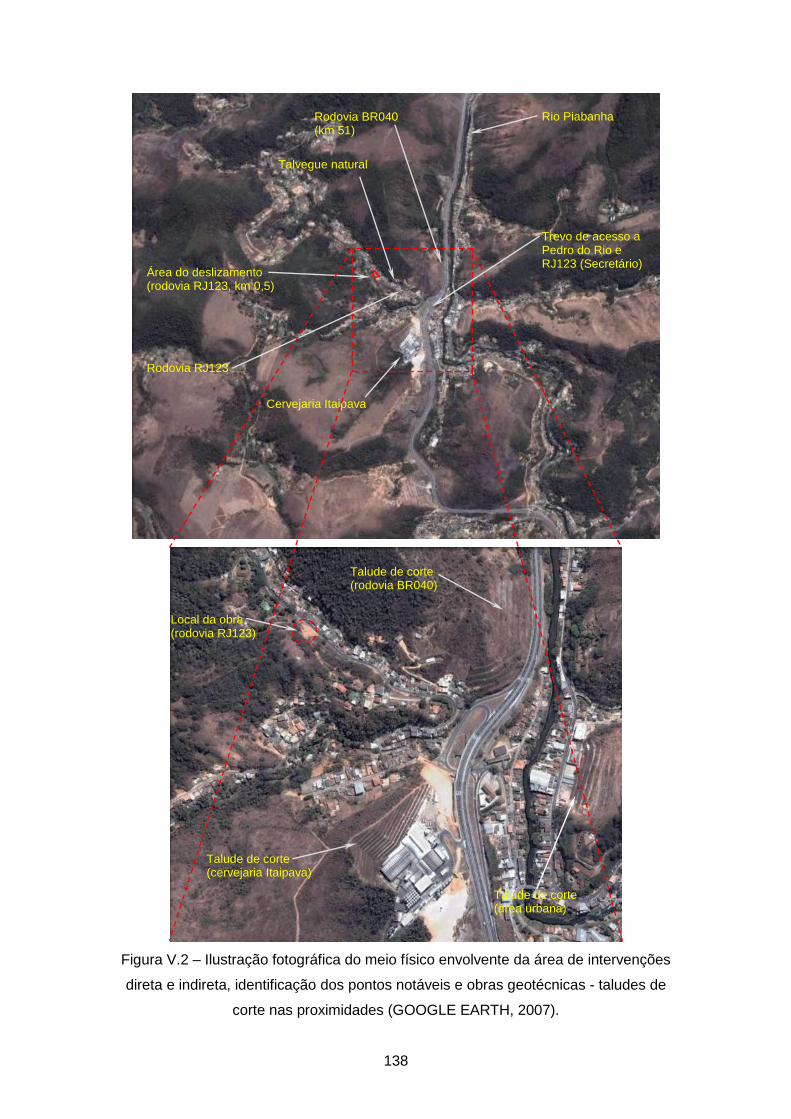
138
Figura V.2 – Ilustração fotográfica do meio físico envolvente da área de intervenções
direta e indireta, identificação dos pontos notáveis e obras geotécnicas - taludes de
corte nas proximidades (GOOGLE EARTH, 2007).
Rodovia BR040 (km 51)
Talude de corte (cervejaria Itaipava)
Local da obra (rodovia RJ123)
Rodovia RJ123
Cervejaria Itaipava
Rio Piabanha
Área do deslizamento (rodovia RJ123, km 0,5)
Talude de corte (rodovia BR040)
Talvegue natural
Talude de corte (área urbana)
Trevo de acesso a Pedro do Rio e RJ123 (Secretário)
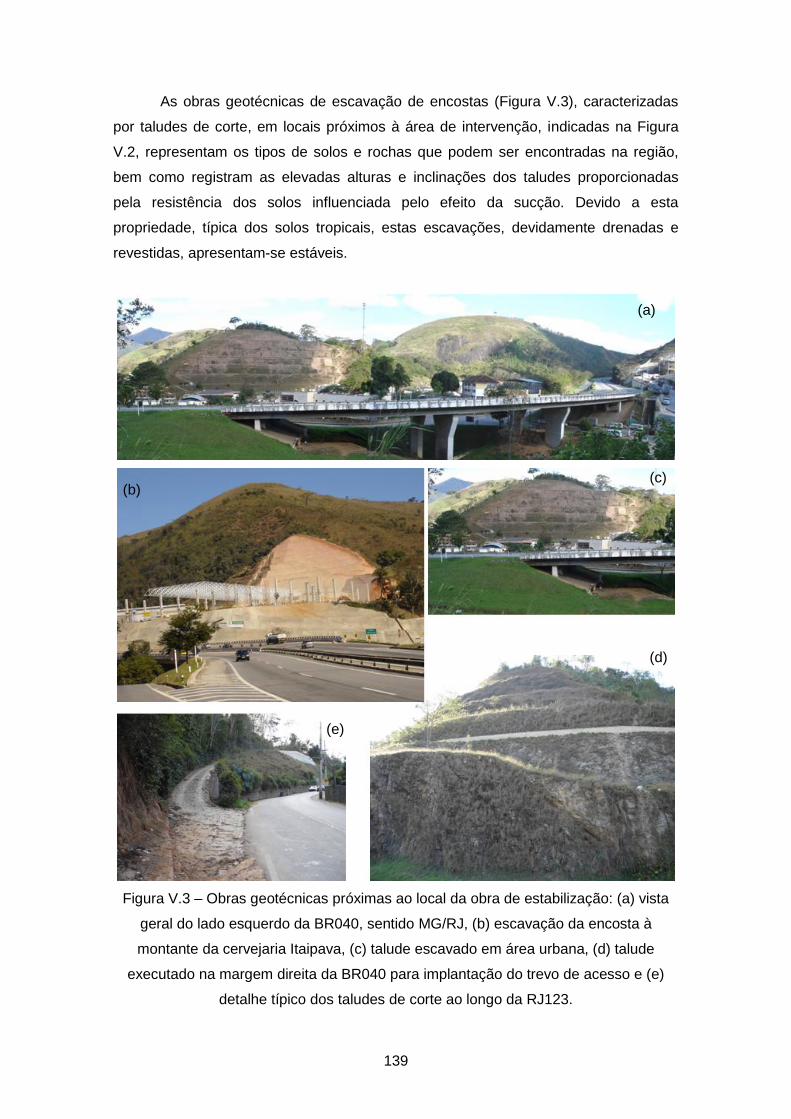
139
As obras geotécnicas de escavação de encostas (Figura V.3), caracterizadas
por taludes de corte, em locais próximos à área de intervenção, indicadas na Figura
V.2, representam os tipos de solos e rochas que podem ser encontradas na região,
bem como registram as elevadas alturas e inclinações dos taludes proporcionadas
pela resistência dos solos influenciada pelo efeito da sucção. Devido a esta
propriedade, típica dos solos tropicais, estas escavações, devidamente drenadas e
revestidas, apresentam-se estáveis.
Figura V.3 – Obras geotécnicas próximas ao local da obra de estabilização: (a) vista
geral do lado esquerdo da BR040, sentido MG/RJ, (b) escavação da encosta à
montante da cervejaria Itaipava, (c) talude escavado em área urbana, (d) talude
executado na margem direita da BR040 para implantação do trevo de acesso e (e)
detalhe típico dos taludes de corte ao longo da RJ123.
(b) (c)
(d)
(e)
(a)

140
As vertentes da Serra das Araras, que formam o vale onde a obra de
estabilização se encontra inserida e o talvegue responsável pela escoamento das
águas oriundas desta bacia de contribuição, podem ser visualizadas nas fotografias
registradas no topo da área de intervenção (Figura V.4). Observa-se, na ilustração, a
ocorrência de outro ponto de deslizamento, do tipo superficial pouco profundo, na
vertente da esquerda, provavelmente ocasionado pela aumento do nível d’água do
talvegue natural que passa no pé da encosta.
Figura V.4 – Vistas da bacia de contribuição onde a obra de contenção se encontra
inserida: (a) sentido de montante e (b) sentido de jusante do curso d’água.
Por fim, apresenta-se na Figura V.5 o local do deslizamento em diferentes
fases ao longo dos anos de 2008 e 2009: (a) janeiro de 2008 – material deslizado já
removido e obra superior, cortina atirantada, em fase inicial e (b) abril de 2009 –
aproximadamente um ano após a conclusão da obra.
Figura V.5 – Local objeto da pesquisa – rodovia RJ123, km 0,5 – pouco depois do
deslizamento e um ano após a conclusão da obra.
(b) (a) Deslizamento
(a) (b)
141
V.2.2 – Características da Área
Conforme descrito por DANTAS (2000), a área de estudo apresenta terreno
montanhoso e amorreado, de amplitude de relevo elevada, muito acidentado,
localizado no reverso da escarpa da Serra das Araras. Trata-se de superfícies
residuais, soerguidas por tectônica, que resistiram aos processos erosivos e de
aplainamento atuantes durante o Cenozóico Superior. Vertentes caracterizadas por
gradiente elevado a muito elevado são predominantemente retilíneas a côncavas,
escarpadas e topos de cristas alinhadas, aguçados ou levemente arredondados.
Ocorrência de compartimentos colinosos e/ou de morros, em seções alveolares nos
vales principais. Densidade de drenagem alta de padrão de drenagem variável
(dendrítico a treliça ou retangular). Predomínio de amplitude topográfica superiores a
500m e gradientes elevados, com ocorrência de colúvios e depósitos de tálus, solos
rasos e afloramentos de rocha.
O trecho inicial da rodovia RJ123, objeto da presente pesquisa, foi construído a
700 m acima no nível do mar, numa região onde o regime climático é do tipo Cwb-
clima do sistema de Köppen denominado de tropical de altitude (úmido), com verões
úmidos e invernos secos, que domina as porções mais elevadas do estado do Rio de
Janeiro. Segundo GUIDICINI & NIEBLE (1983) o ambiente tropical úmido, ou os perfis
de intemperismo de encostas, em condições climáticas tropicais úmidas, representam
um meio ideal ao aparecimento de fenômenos de instabilidade.
A Figura V.6 ilustra o relevo e as áreas das bacias hidrográficas sob influência
direta e indireta do local do deslizamento.
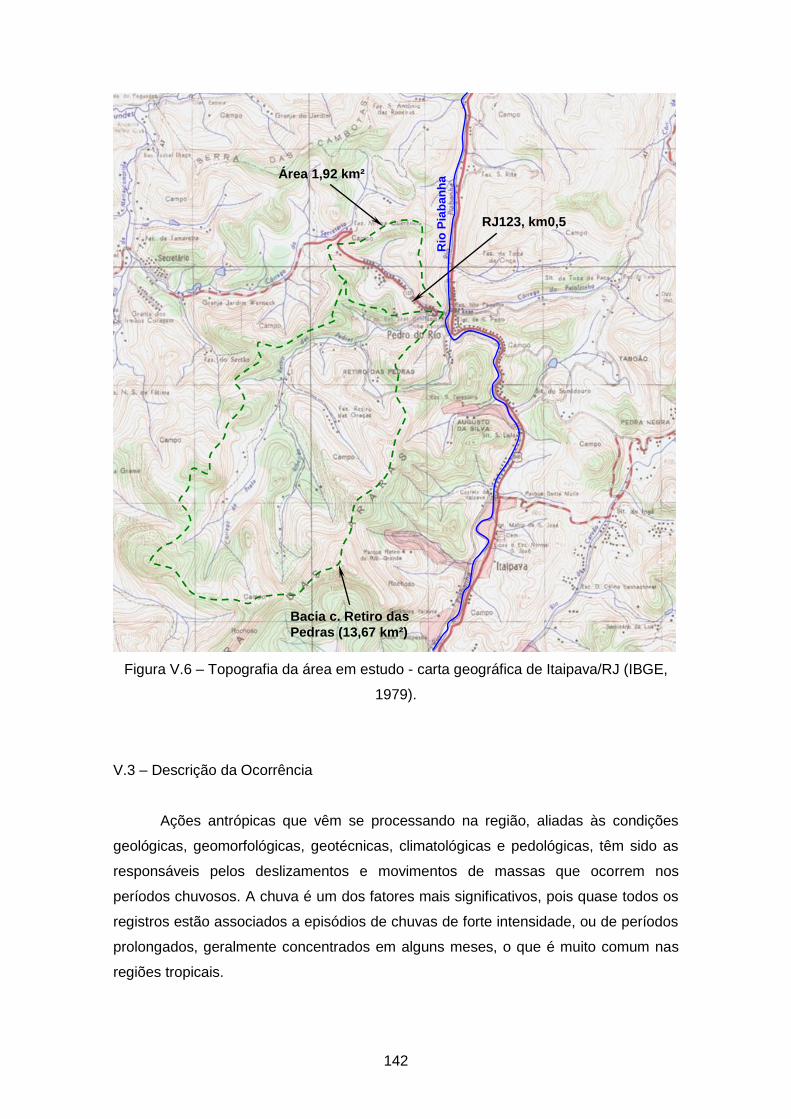
142
Figura V.6 – Topografia da área em estudo - carta geográfica de Itaipava/RJ (IBGE,
1979).
V.3 – Descrição da Ocorrência
Ações antrópicas que vêm se processando na região, aliadas às condições
geológicas, geomorfológicas, geotécnicas, climatológicas e pedológicas, têm sido as
responsáveis pelos deslizamentos e movimentos de massas que ocorrem nos
períodos chuvosos. A chuva é um dos fatores mais significativos, pois quase todos os
registros estão associados a episódios de chuvas de forte intensidade, ou de períodos
prolongados, geralmente concentrados em alguns meses, o que é muito comum nas
regiões tropicais.
Área 1,92 km²
Bacia c. Retiro das
Pedras (13,67 km²)
RJ123, km0,5
Rio
Pia
ba
nh
a
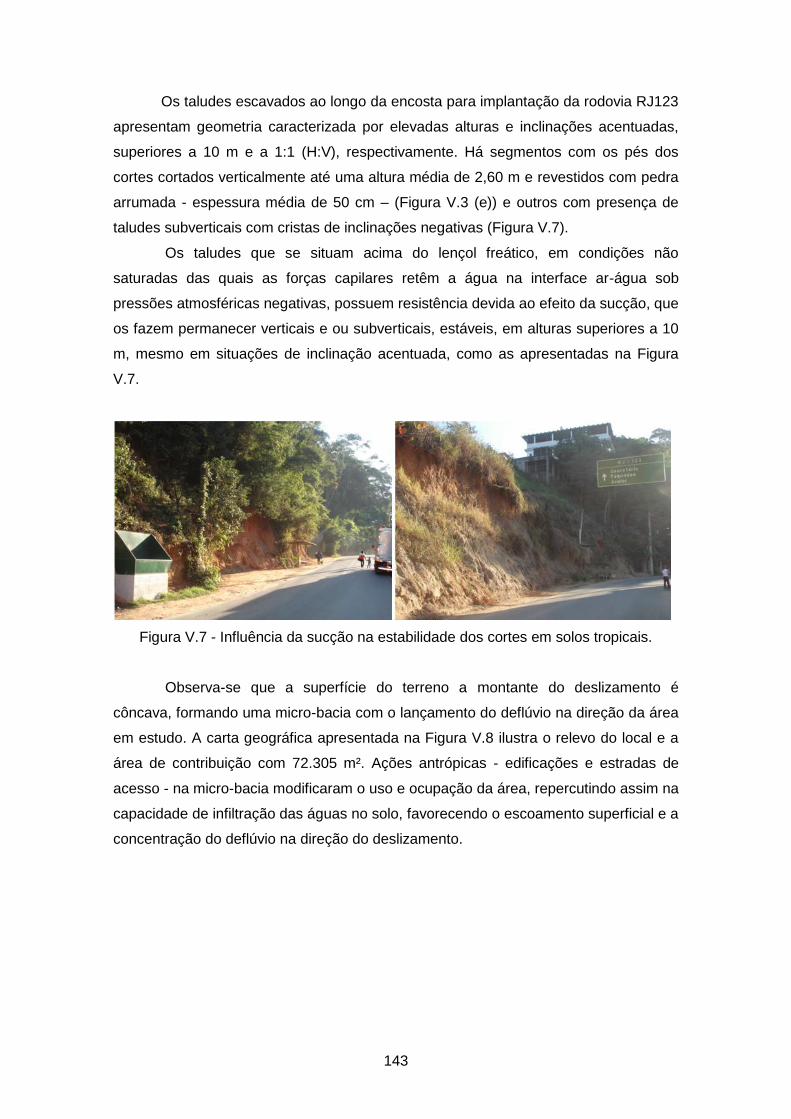
143
Os taludes escavados ao longo da encosta para implantação da rodovia RJ123
apresentam geometria caracterizada por elevadas alturas e inclinações acentuadas,
superiores a 10 m e a 1:1 (H:V), respectivamente. Há segmentos com os pés dos
cortes cortados verticalmente até uma altura média de 2,60 m e revestidos com pedra
arrumada - espessura média de 50 cm – (Figura V.3 (e)) e outros com presença de
taludes subverticais com cristas de inclinações negativas (Figura V.7).
Os taludes que se situam acima do lençol freático, em condições não
saturadas das quais as forças capilares retêm a água na interface ar-água sob
pressões atmosféricas negativas, possuem resistência devida ao efeito da sucção, que
os fazem permanecer verticais e ou subverticais, estáveis, em alturas superiores a 10
m, mesmo em situações de inclinação acentuada, como as apresentadas na Figura
V.7.
Figura V.7 - Influência da sucção na estabilidade dos cortes em solos tropicais.
Observa-se que a superfície do terreno a montante do deslizamento é
côncava, formando uma micro-bacia com o lançamento do deflúvio na direção da área
em estudo. A carta geográfica apresentada na Figura V.8 ilustra o relevo do local e a
área de contribuição com 72.305 m². Ações antrópicas - edificações e estradas de
acesso - na micro-bacia modificaram o uso e ocupação da área, repercutindo assim na
capacidade de infiltração das águas no solo, favorecendo o escoamento superficial e a
concentração do deflúvio na direção do deslizamento.

144
Figura V.8 - Delimitação da área de contribuição a montante da área do deslizamento
(IBGE, 1979).
No meio tropical brasileiro é de conhecimento generalizado a vinculação dos
escorregamentos à estação de chuvas e, dentro dela, à ocorrência de chuvas intensas
(GUIDICINI & NIEBLE, 1983). Na região as chuvas se concentram de outubro a
março, ocorrendo com maior intensidade no mês de dezembro. No período menos
chuvoso, que vai de maio a agosto, o mês de julho apresenta o menor índice
pluviométrico. O deslizamento do talude de corte ocorreu no mês de dezembro de
2007, após período prolongado de chuvas de forte intensidade.
Com a grande quantidade de água infiltrada na encosta, o efeito da coesão
aparente foi praticamente eliminado, reduzindo a resistência ao cisalhamento do
maciço e da superfície de contato da capa de argila com o solo residual jovem. A
superfície potencial de ruptura da massa colapsada, ou cicatriz do movimento, ocorreu
na interface da capa de argila pouco espessa com o solo residual pouco intemperizado
(Figura V.9).
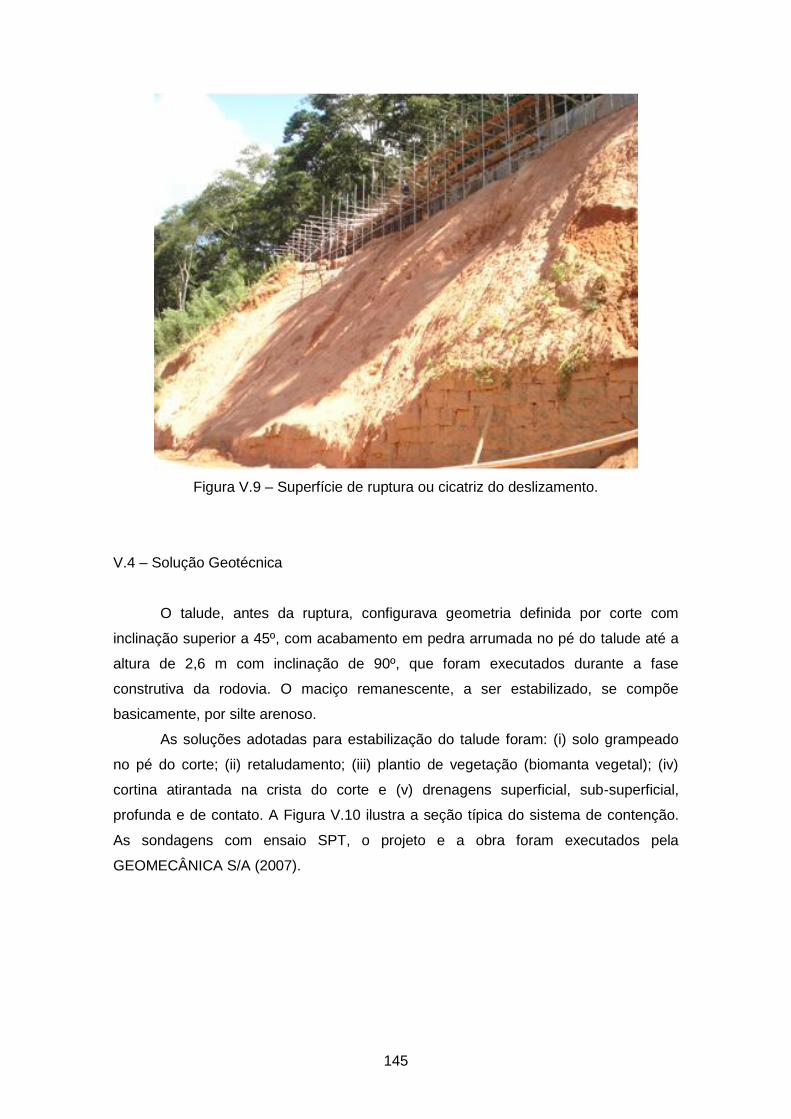
145
Figura V.9 – Superfície de ruptura ou cicatriz do deslizamento.
V.4 – Solução Geotécnica
O talude, antes da ruptura, configurava geometria definida por corte com
inclinação superior a 45º, com acabamento em pedra arrumada no pé do talude até a
altura de 2,6 m com inclinação de 90º, que foram executados durante a fase
construtiva da rodovia. O maciço remanescente, a ser estabilizado, se compõe
basicamente, por silte arenoso.
As soluções adotadas para estabilização do talude foram: (i) solo grampeado
no pé do corte; (ii) retaludamento; (iii) plantio de vegetação (biomanta vegetal); (iv)
cortina atirantada na crista do corte e (v) drenagens superficial, sub-superficial,
profunda e de contato. A Figura V.10 ilustra a seção típica do sistema de contenção.
As sondagens com ensaio SPT, o projeto e a obra foram executados pela
GEOMECÂNICA S/A (2007).
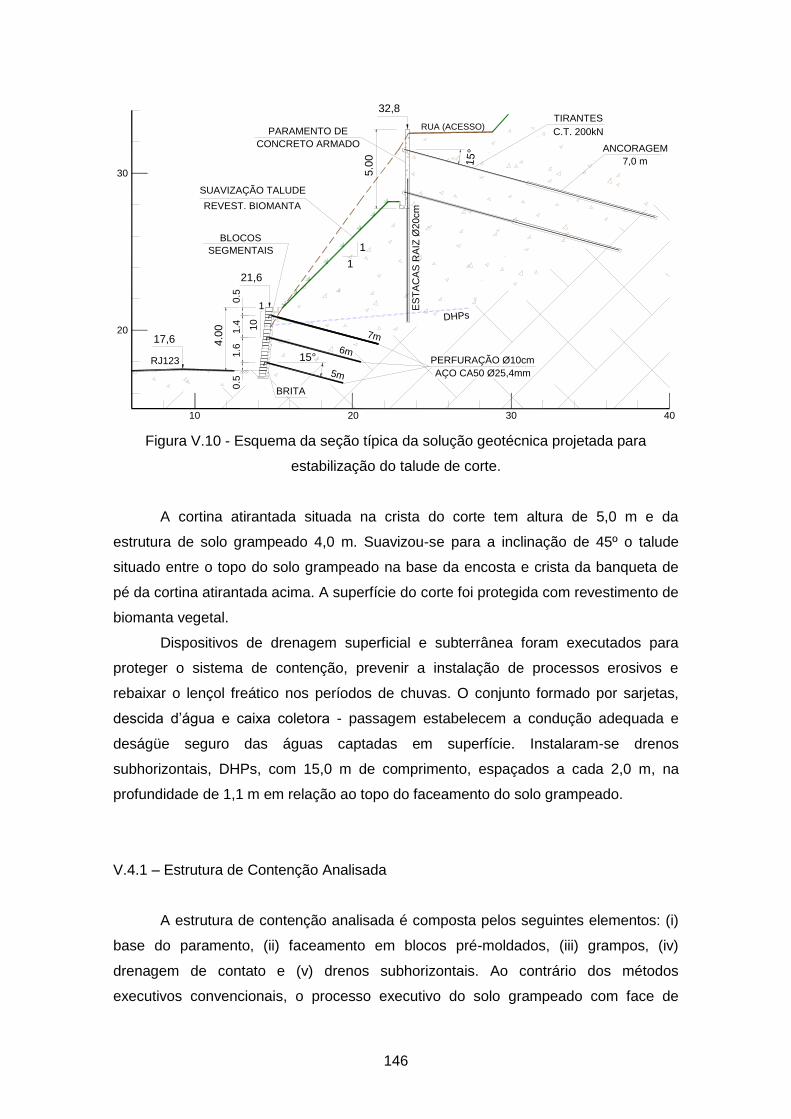
146
30
20
403010 20
RJ123
DISTÂNCIA EM RELAÇÃO À LINHA BASE (m)
CO
TA
S (
m)
1
10
5m
6m
7m
1.4
1.6
0.5
0.5
4.0
0
15°
BLOCOS
SEGMENTAIS
PERFURAÇÃO Ø10cm
DHPs
ES
TA
CA
S R
AIZ
Ø2
0cm
BRITA
AÇO CA50 Ø25,4mm
PARAMENTO DE
CONCRETO ARMADO
5.0
0
1
1
SUAVIZAÇÃO TALUDE
15°
TIRANTES
C.T. 200kN
ANCORAGEM
7,0 m
REVEST. BIOMANTA
32,8
17,6
21,6
RUA (ACESSO)
Figura V.10 - Esquema da seção típica da solução geotécnica projetada para
estabilização do talude de corte.
A cortina atirantada situada na crista do corte tem altura de 5,0 m e da
estrutura de solo grampeado 4,0 m. Suavizou-se para a inclinação de 45º o talude
situado entre o topo do solo grampeado na base da encosta e crista da banqueta de
pé da cortina atirantada acima. A superfície do corte foi protegida com revestimento de
biomanta vegetal.
Dispositivos de drenagem superficial e subterrânea foram executados para
proteger o sistema de contenção, prevenir a instalação de processos erosivos e
rebaixar o lençol freático nos períodos de chuvas. O conjunto formado por sarjetas,
descida d’água e caixa coletora - passagem estabelecem a condução adequada e
deságüe seguro das águas captadas em superfície. Instalaram-se drenos
subhorizontais, DHPs, com 15,0 m de comprimento, espaçados a cada 2,0 m, na
profundidade de 1,1 m em relação ao topo do faceamento do solo grampeado.
V.4.1 – Estrutura de Contenção Analisada
A estrutura de contenção analisada é composta pelos seguintes elementos: (i)
base do paramento, (ii) faceamento em blocos pré-moldados, (iii) grampos, (iv)
drenagem de contato e (v) drenos subhorizontais. Ao contrário dos métodos
executivos convencionais, o processo executivo do solo grampeado com face de

147
blocos pré-moldados é ascensional. A Figura V.11 ilustra os detalhes executivos da
obra em seção e planta.
0.15
Figura V.11 – Detalhes típicos do solo grampeado com face em blocos segmentais: (a)
seção transversal típica, (b) detalhes do grampo e faceamento em planta e (c) fixação
da cabeça do grampo na face.
Conforme recomendado pela TERRAE, os blocos pré-moldados foram
instalados por simples justaposição sem utilização de argamassa para rejunte, ou seja,
encaixe a seco. A inclinação longitudinal do paramento acompanhou o greide da
rodovia. A Figura V.12 registra as fases de execução da obra.
(a) (b)
(c)

148
Figura V.12 – Registro fotográfico da execução do solo grampeado: (a) preparação da
base; (b) execução do faceamento de baixo para cima; (c) seções intermediária e
laterais; (d) inclusão dos grampos em declive - perfuração, instalação da barra de aço
e injeção de calda de cimento; (e) implantação do sistema de drenagem e (f)
aplicação da biomanta na superfície do talude – obra concluída (junho de 2008).
O trecho em solo grampeado tem 50,0 m de extensão e 4,0 m de altura. A
contenção foi executada no pé do corte e possui dois tipos de faceamento: (i) blocos
segmentais com inclinação de 1:10 (H:V) ou 84,29º (subvertical) no trecho
intermediário e (ii) pedras arrumadas remanescentes com complemento da altura em
blocos segmentais.
(a) (b)
(c) (d)
(e) (f)
149
A contenção apresenta três níveis de grampeamento, 0,5 m, 2,1 m e 3,5 m.
Grampos com 5,0 m, 6,0 m e 7,0 m de comprimento foram instalados em cada um
desses níveis, respectivamente. O espaçamento horizontal entre grampos foi de 2,0
m. Os grampos foram instalados em furos de 100 mm com inclinação de 15º,
utilizando-se calda de cimento, sem pressão, e barras de aço CA50 com diâmetro de
25,4 mm. Os grampos fixam-se aos blocos segmentais preenchidos com concreto.
V.5 – Investigações Geotécnicas
O programa de investigações para a elaboração do projeto consistiu no
conhecimento do perfil geotécnico através de quatro sondagens com ensaio SPT
(GEOMECÂNICA S/A, 2007). Visando ao desenvolvimento desta pesquisa a qual
avalia o comportamento do solo grampeado conduziram-se campanhas de retiradas
de amostras deformadas e indeformadas para a realização de ensaios em laboratório
(Laboratório de Geotecnia da COPPE/UFRJ, 2008).
As sondagens realizadas caracterizaram perfil de intemperismo de natureza
gnáissica, constituído por horizontes de alteração de rocha, com valores médios de
N(SPT) crescente com a profundidade, solo residual jovem, de cor marrom clara,
homogêneo (NSPT=12), e capa pouco espessa de solo residual maduro, de cor
vermelha.
O levantamento plani-altimétrico cobrindo a área que sofreu o deslizamento e
circunvizinhanças com a locação das sondagens a percussão e o perfil geológico
geotécnico com os índices de resistência à penetração (N) são apresentados nas
Figuras V.13 e V.14, respectivamente.
Coletaram-se amostras, após a conclusão da obra, que serviram de subsídio
para a plotagem do perfil de intemperismo do solo e, também, para a determinação do
teor de umidade ao longo da profundidade. Salienta-se que as características dos
solos residuais de gnaisse sofrem variações em função, principalmente, do grau de
intemperismo e das características herdadas da rocha matriz. A Figura V.15 ilustra o
perfil do solo próximo ao tardoz do muro.
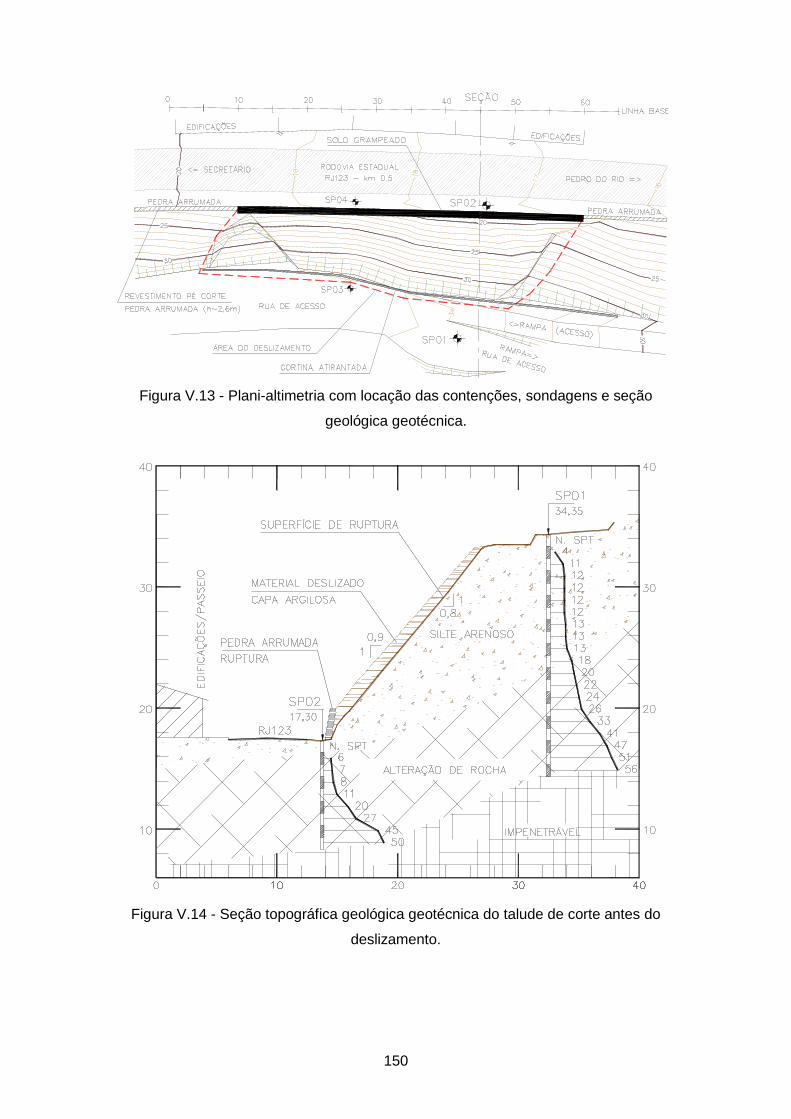
150
Figura V.13 - Plani-altimetria com locação das contenções, sondagens e seção
geológica geotécnica.
Figura V.14 - Seção topográfica geológica geotécnica do talude de corte antes do
deslizamento.
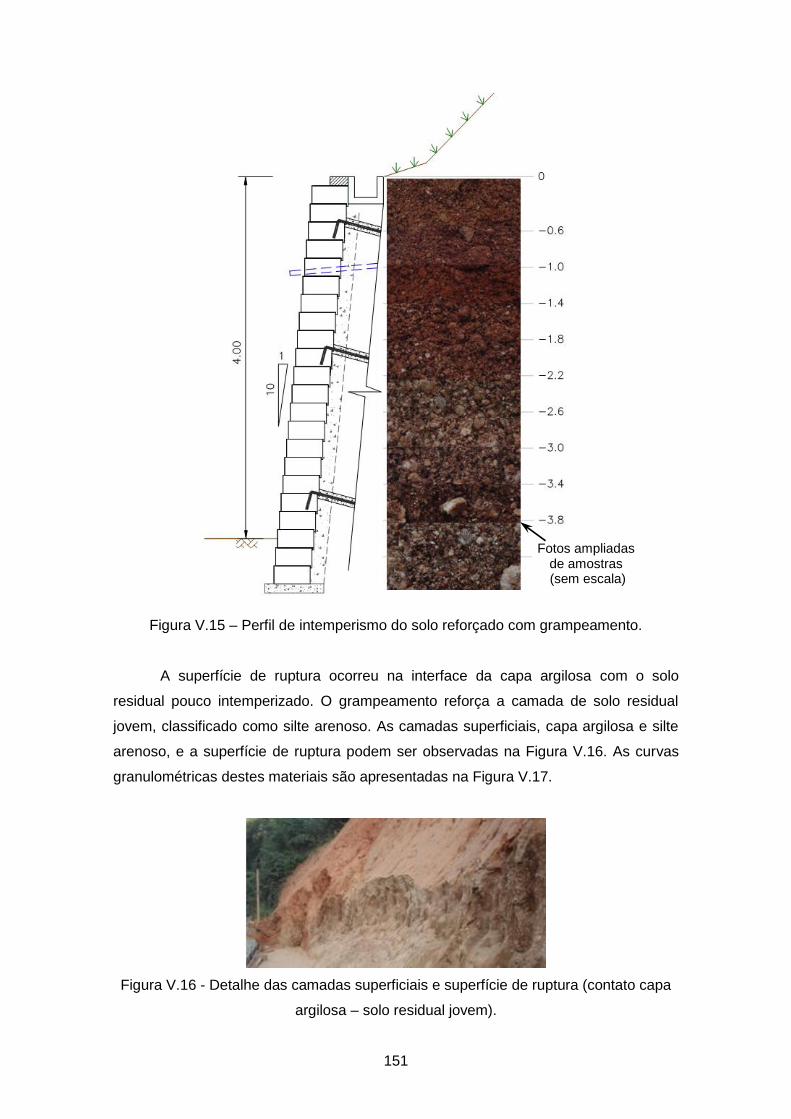
151
Figura V.15 – Perfil de intemperismo do solo reforçado com grampeamento.
A superfície de ruptura ocorreu na interface da capa argilosa com o solo
residual pouco intemperizado. O grampeamento reforça a camada de solo residual
jovem, classificado como silte arenoso. As camadas superficiais, capa argilosa e silte
arenoso, e a superfície de ruptura podem ser observadas na Figura V.16. As curvas
granulométricas destes materiais são apresentadas na Figura V.17.
Figura V.16 - Detalhe das camadas superficiais e superfície de ruptura (contato capa
argilosa – solo residual jovem).
Fotos ampliadas de amostras (sem escala)
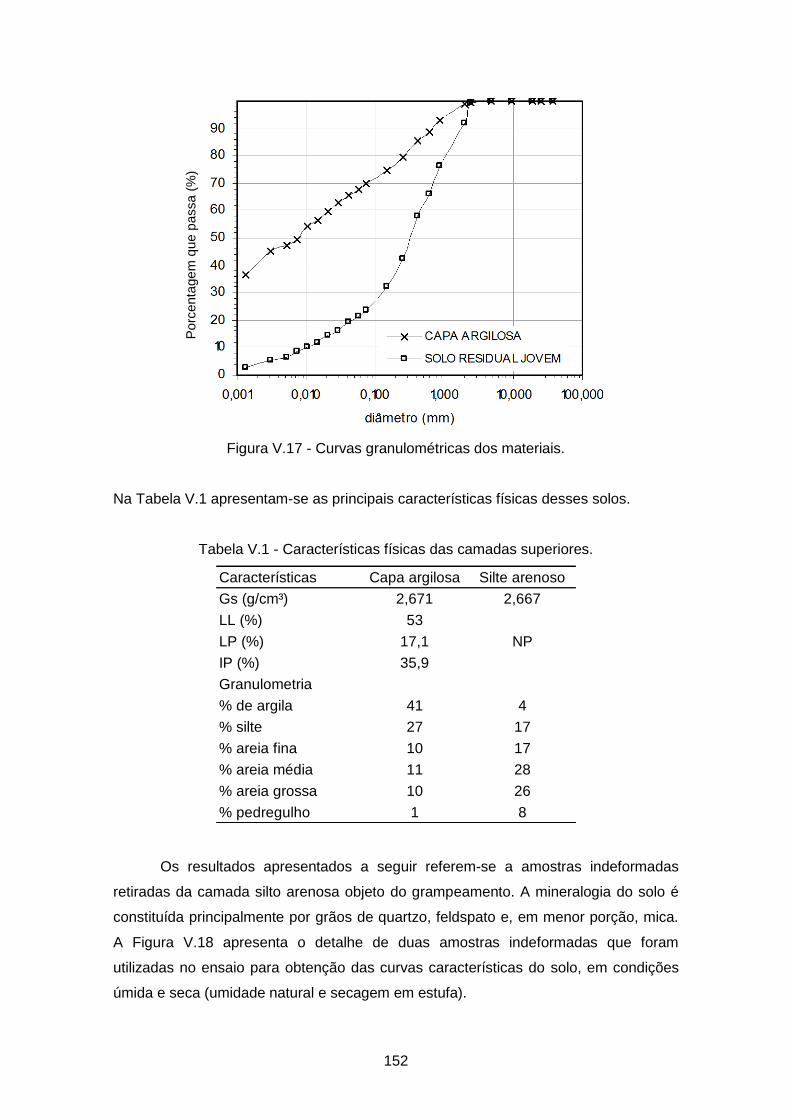
152
Figura V.17 - Curvas granulométricas dos materiais.
Na Tabela V.1 apresentam-se as principais características físicas desses solos.
Tabela V.1 - Características físicas das camadas superiores.
Características Capa argilosa Silte arenoso
Gs (g/cm³) 2,671 2,667
LL (%) 53
LP (%) 17,1 NP
IP (%) 35,9
Granulometria
% de argila 41 4
% silte 27 17
% areia fina 10 17
% areia média 11 28
% areia grossa 10 26
% pedregulho 1 8
Os resultados apresentados a seguir referem-se a amostras indeformadas
retiradas da camada silto arenosa objeto do grampeamento. A mineralogia do solo é
constituída principalmente por grãos de quartzo, feldspato e, em menor porção, mica.
A Figura V.18 apresenta o detalhe de duas amostras indeformadas que foram
utilizadas no ensaio para obtenção das curvas características do solo, em condições
úmida e seca (umidade natural e secagem em estufa).
Porc
enta
ge
m q
ue p
assa (
%)

153
Figura V.18 – Detalhe de corpos de prova de amostras indeformadas na umidade
natural e após secagem em estufa.
Os ensaios de permeabilidade, com permeâmetro de carga variável,
forneceram valores de condutividade hidráulica na faixa de 2 a 3 x10-4 cm/s. Dados da
literatura indicam que estes resultados apresentam magnitude típica de solos residuais
derivados de gnaisse no estado do Rio de Janeiro.
Ensaios de cisalhamento direto foram efetuados na umidade natural e no
estado inundado (corpos de prova embebidos por um período de 24 horas),
objetivando avaliar a importância da sucção no comportamento responsável pelo
desenvolvimento de coesão aparente no solo. As tensões normais aplicadas para
estes ensaios foram de 12,3, 25, 50 e 100 kPa, para a condição inundada e 12,3, 50,
100 e 190 kPa, para o estado natural, num total de quatro ensaios por envoltória. A
velocidade de deformação adotada foi de 0,1 mm/minuto. As envoltórias
apresentaram-se razoavelmente lineares e definiram-se os parâmetros pelo ajuste de
uma reta.
As curvas tensão de cisalhamento versus deslocamento horizontal e
deslocamento vertical versus deslocamento horizontal, determinadas através do
ensaio de cisalhamento direto nas condições naturais e inundadas, são apresentadas
nas Figuras V.19 e V.20, respectivamente. A Figura V.21 mostra as envoltórias e os
parâmetros de resistência (ângulo de atrito e intercepto de coesão) determinados pelo
ensaio de cisalhamento direto. O peso específico natural do solo é, aproximadamente,
14,5 kN/m³.
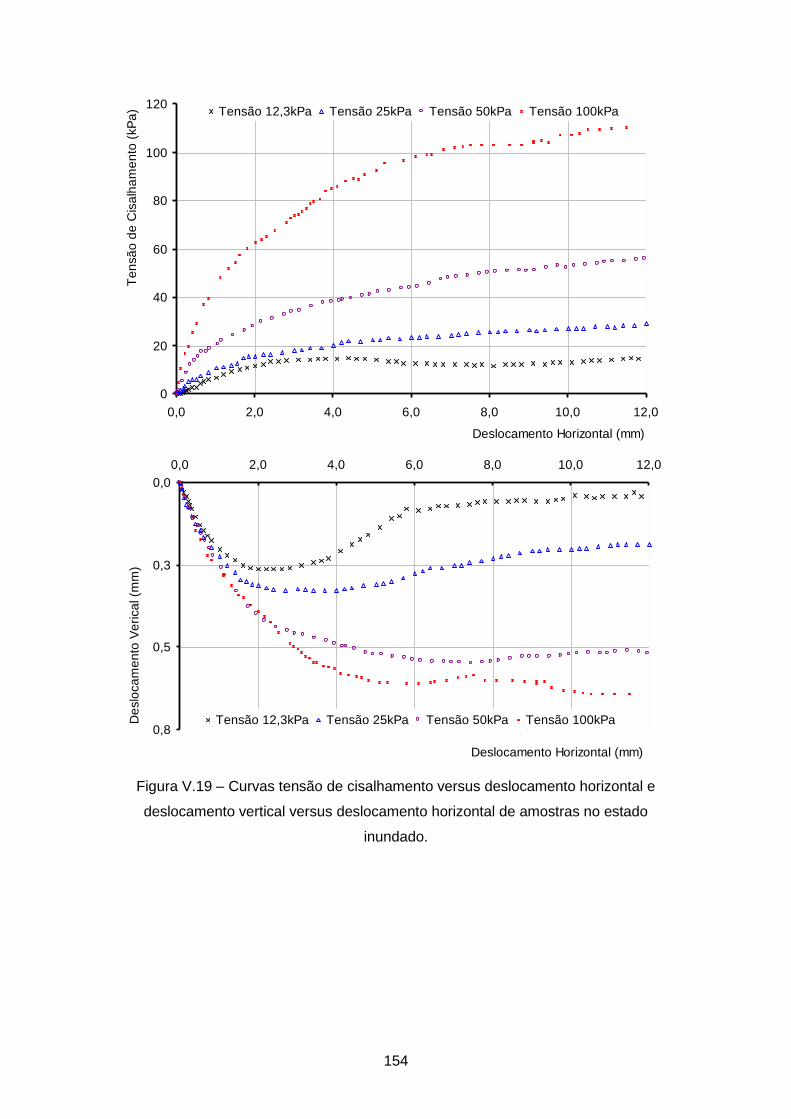
154
Deslocamento Horizontal x Tensão de Cisalhamento
0
20
40
60
80
100
120
0,0 2,0 4,0 6,0 8,0 10,0 12,0
Deslocamento Horizontal (mm)
Te
nsã
o d
e C
isa
lha
me
nto
(kP
a) Tensão 12,3kPa Tensão 25kPa Tensão 50kPa Tensão 100kPa
Deslocamento Horizontal x Deslocamento Vertical
-0,8
-0,5
-0,3
0,0
0,0 2,0 4,0 6,0 8,0 10,0 12,0
Deslocamento Horizontal (mm)
De
slo
ca
me
nto
Ve
rica
l (m
m)
Tensão 12,3kPa Tensão 25kPa Tensão 50kPa Tensão 100kPa
Figura V.19 – Curvas tensão de cisalhamento versus deslocamento horizontal e
deslocamento vertical versus deslocamento horizontal de amostras no estado
inundado.

155
Deslocamento Horizontal x Tensão de Cisalhamento
0
50
100
150
200
250
0,0 2,0 4,0 6,0 8,0 10,0 12,0
Deslocamento Horizontal (mm)
Te
nsã
o d
e C
isa
lha
me
nto
(kP
a)
Tensão 12,3kPa Tensão 50kPa
Tensão 100kPa Tensão 190kPa
Deslocamento Horizontal x Deslocamento Vertical
-0,7
-0,4
-0,2
0,1
0,4
0,6
0,0 2,0 4,0 6,0 8,0 10,0 12,0
Deslocamento Horizontal (mm)
De
slo
ca
me
nto
Ve
rica
l (m
m)
Tensão 12,3kPa Tensão 50kPa
Tensão 100kPa Tensão 190kPa
Figura V.20 – Curvas tensão de cisalhamento versus deslocamento horizontal e
deslocamento vertical versus deslocamento horizontal de amostras na umidade
natural.
Observa-se a influência da sucção na resistência ao cisalhamento do solo nos
ensaios realizados nas condições de submersão e de umidade natural. O intercepto de
coesão foi nulo, para cisalhamento com os corpos de prova embebidos, e 9 kPa na
umidade natural. Os valores dos ângulos de atrito variaram entre 40 e 42.
-
-
-

156
e c estado inundado
e c kPa umidade natural
Figura V.21 - Envoltórias do ensaio de cisalhamento direto e parâmetros de
resistência.
Para realização dos ensaios de curva característica do solo (residual jovem),
utilizou-se o método do papel filtro, segundo procedimento preconizado por MARINHO
(1994). As curvas características foram obtidas no ramo de secagem. A primeira
medição foi feita a partir da umidade de campo, colocando-se os papéis filtro logo
após a retirada do corpo de prova. Após a primeira leitura cada corpo de prova foi
saturado e submetido ao processo de secagem lenta para induzir as variações de
sucção (MARINHO, 2001). Foram realizadas oito medições em dez corpos de prova.
Adotou-se o período mínimo de sete dias com tempo de equalização. A sucção
desenvolvida foi determinada a partir das umidades obtidas para cada estágio,
utilizando-se a curva de calibração do papel quantitativo Whatman n° 42 (CHANDLER
et al., 1992). A sucção variou de 6 kPa a 10.000 kPa, para teores de umidade entre
25% e 5%. A Figura V.22 mostra os corpos de prova ensaiados e a relação sucção
mátrica (ua – uw) versus teor de umidade.
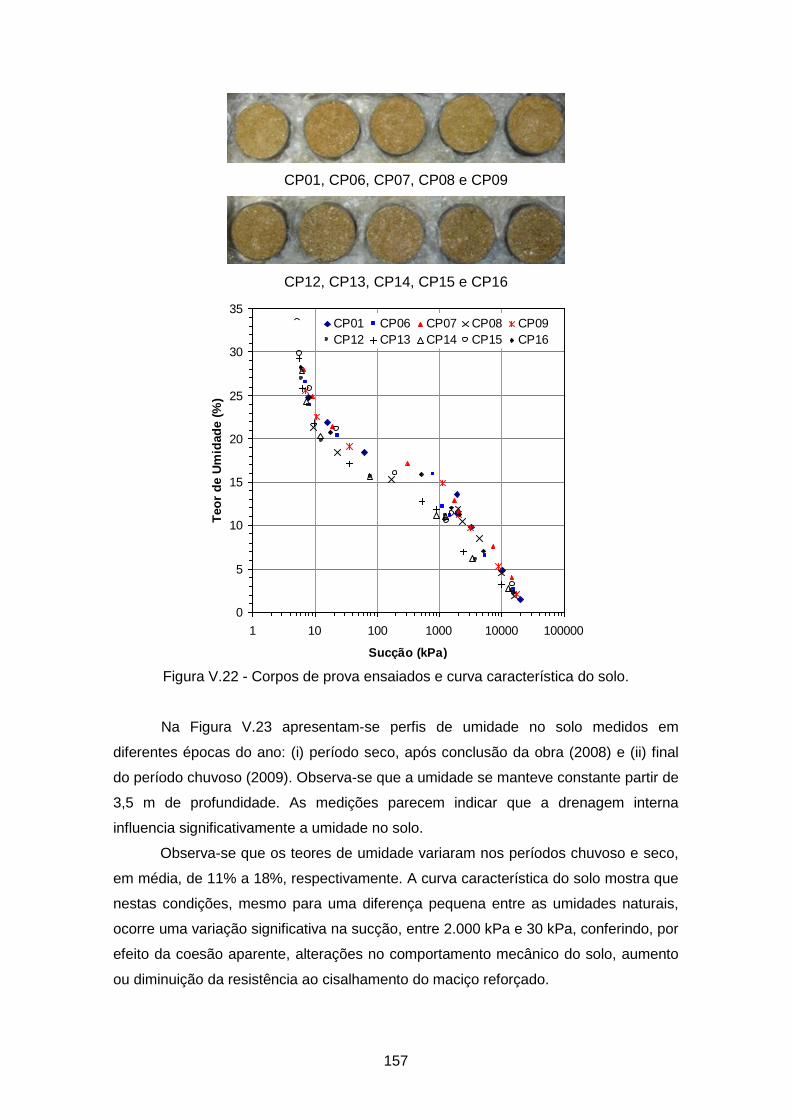
157
CP01, CP06, CP07, CP08 e CP09
CP12, CP13, CP14, CP15 e CP16
0
5
10
15
20
25
30
35
1 10 100 1000 10000 100000
Sucção (kPa)
Teo
r d
e U
mid
ad
e (
%)
CP01 CP06 CP07 CP08 CP09
CP12 CP13 CP14 CP15 CP16
Figura V.22 - Corpos de prova ensaiados e curva característica do solo.
Na Figura V.23 apresentam-se perfis de umidade no solo medidos em
diferentes épocas do ano: (i) período seco, após conclusão da obra (2008) e (ii) final
do período chuvoso (2009). Observa-se que a umidade se manteve constante partir de
3,5 m de profundidade. As medições parecem indicar que a drenagem interna
influencia significativamente a umidade no solo.
Observa-se que os teores de umidade variaram nos períodos chuvoso e seco,
em média, de 11% a 18%, respectivamente. A curva característica do solo mostra que
nestas condições, mesmo para uma diferença pequena entre as umidades naturais,
ocorre uma variação significativa na sucção, entre 2.000 kPa e 30 kPa, conferindo, por
efeito da coesão aparente, alterações no comportamento mecânico do solo, aumento
ou diminuição da resistência ao cisalhamento do maciço reforçado.
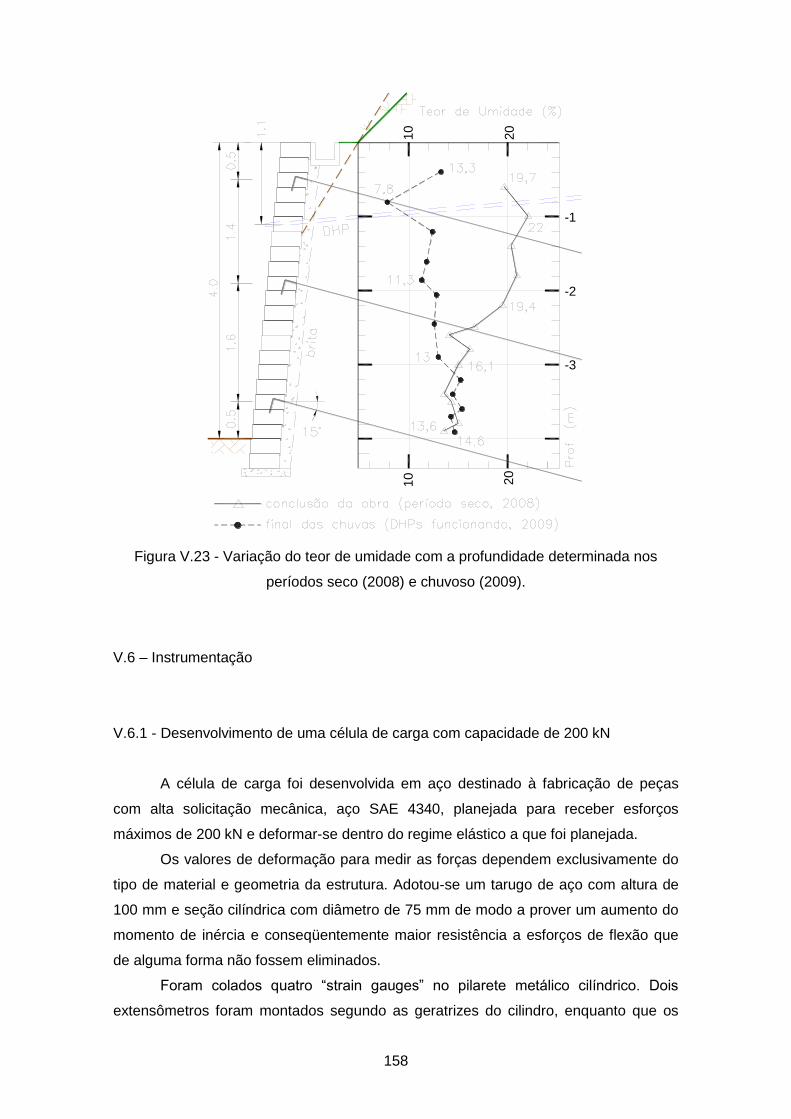
158
10
20
10 20
-2
-1
-3
Figura V.23 - Variação do teor de umidade com a profundidade determinada nos
períodos seco (2008) e chuvoso (2009).
V.6 – Instrumentação
V.6.1 - Desenvolvimento de uma célula de carga com capacidade de 200 kN
A célula de carga foi desenvolvida em aço destinado à fabricação de peças
com alta solicitação mecânica, aço SAE 4340, planejada para receber esforços
máximos de 200 kN e deformar-se dentro do regime elástico a que foi planejada.
Os valores de deformação para medir as forças dependem exclusivamente do
tipo de material e geometria da estrutura. Adotou-se um tarugo de aço com altura de
100 mm e seção cilíndrica com diâmetro de 75 mm de modo a prover um aumento do
momento de inércia e conseqüentemente maior resistência a esforços de flexão que
de alguma forma não fossem eliminados.
Foram colados quatro ―strain gauges‖ no pilarete metálico cilíndrico. Dois
extensômetros foram montados segundo as geratrizes do cilindro, enquanto que os
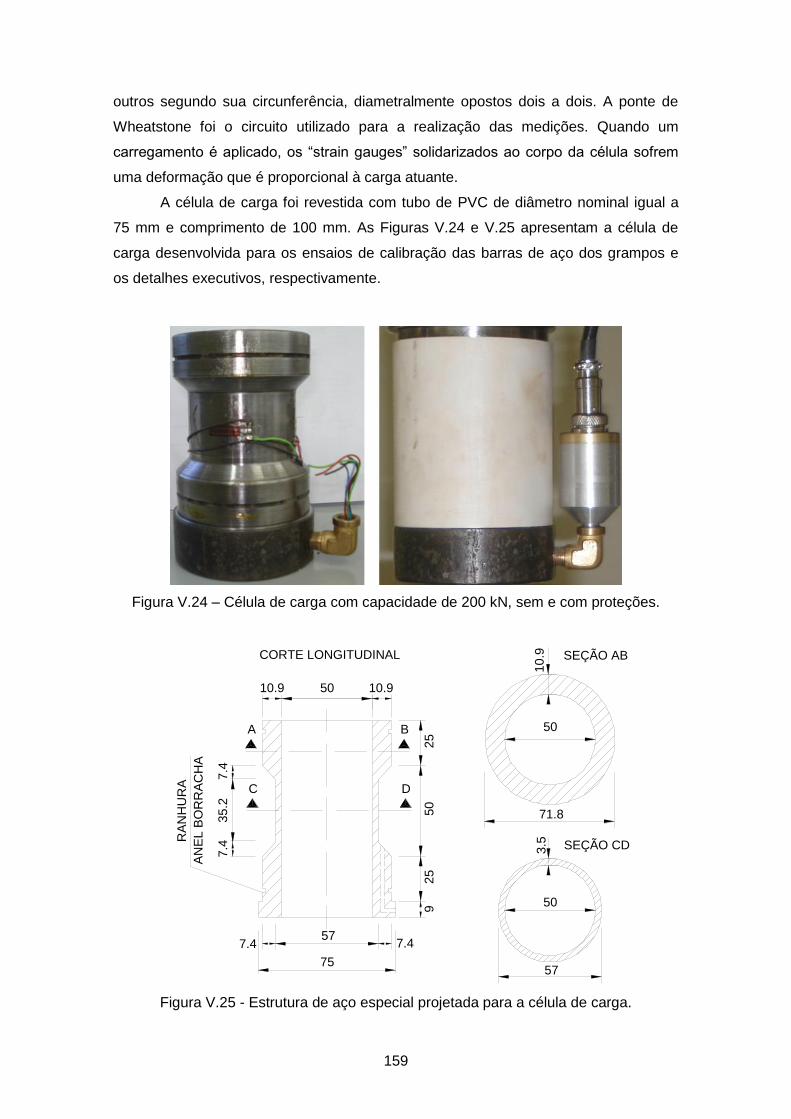
159
outros segundo sua circunferência, diametralmente opostos dois a dois. A ponte de
Wheatstone foi o circuito utilizado para a realização das medições. Quando um
carregamento é aplicado, os ―strain gauges‖ solidarizados ao corpo da célula sofrem
uma deformação que é proporcional à carga atuante.
A célula de carga foi revestida com tubo de PVC de diâmetro nominal igual a
75 mm e comprimento de 100 mm. As Figuras V.24 e V.25 apresentam a célula de
carga desenvolvida para os ensaios de calibração das barras de aço dos grampos e
os detalhes executivos, respectivamente.
Figura V.24 – Célula de carga com capacidade de 200 kN, sem e com proteções.
25
25
50
50
57
3.5
50
57
C D
SEÇÃO CD
7.4
7.4
10.9 10.9
7.4
35.2
7.4
10.9
50
71.8
SEÇÃO AB
RA
NH
UR
A
AN
EL B
OR
RA
CH
A
75
A B
CORTE LONGITUDINAL
9
Figura V.25 - Estrutura de aço especial projetada para a célula de carga.
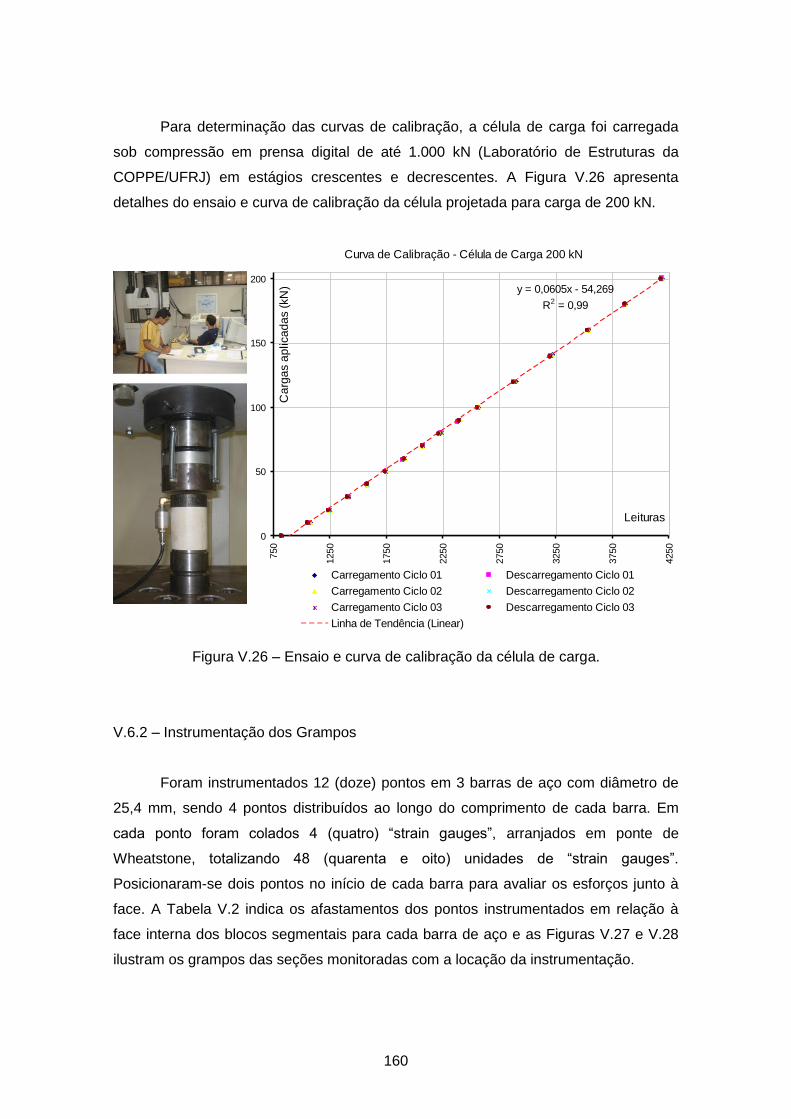
160
Para determinação das curvas de calibração, a célula de carga foi carregada
sob compressão em prensa digital de até 1.000 kN (Laboratório de Estruturas da
COPPE/UFRJ) em estágios crescentes e decrescentes. A Figura V.26 apresenta
detalhes do ensaio e curva de calibração da célula projetada para carga de 200 kN.
Curva de Calibração - Célula de Carga 200 kN
y = 0,0605x - 54,269
R2 = 0,99
0
50
100
150
200750
1250
1750
2250
2750
3250
3750
4250
Leituras
Ca
rga
s a
plica
da
s (
kN
)
Carregamento Ciclo 01 Descarregamento Ciclo 01
Carregamento Ciclo 02 Descarregamento Ciclo 02
Carregamento Ciclo 03 Descarregamento Ciclo 03
Linha de Tendência (Linear)
Figura V.26 – Ensaio e curva de calibração da célula de carga.
V.6.2 – Instrumentação dos Grampos
Foram instrumentados 12 (doze) pontos em 3 barras de aço com diâmetro de
25,4 mm, sendo 4 pontos distribuídos ao longo do comprimento de cada barra. Em
cada ponto foram colados 4 (quatro) ―strain gauges‖, arranjados em ponte de
Wheatstone, totalizando 48 (quarenta e oito) unidades de ―strain gauges‖.
Posicionaram-se dois pontos no início de cada barra para avaliar os esforços junto à
face. A Tabela V.2 indica os afastamentos dos pontos instrumentados em relação à
face interna dos blocos segmentais para cada barra de aço e as Figuras V.27 e V.28
ilustram os grampos das seções monitoradas com a locação da instrumentação.
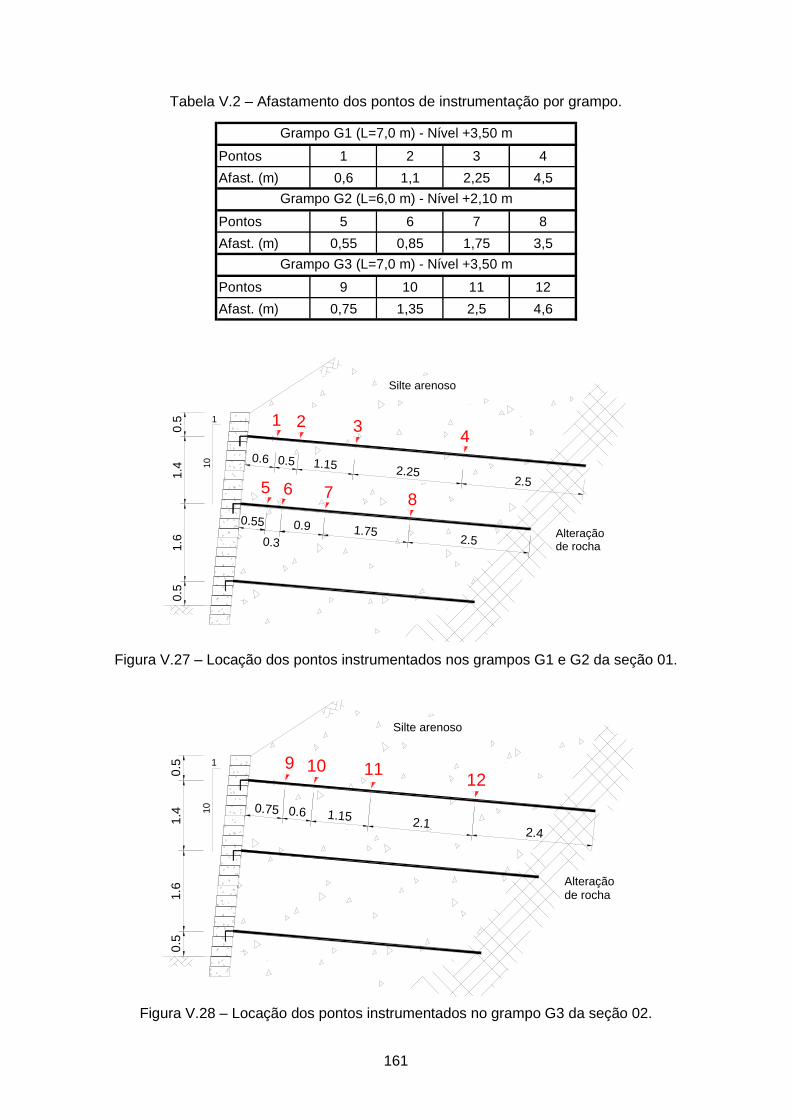
161
Tabela V.2 – Afastamento dos pontos de instrumentação por grampo.
Pontos 1 2 3 4
Afast. (m) 0,6 1,1 2,25 4,5
Pontos 5 6 7 8
Afast. (m) 0,55 0,85 1,75 3,5
Pontos 9 10 11 12
Afast. (m) 0,75 1,35 2,5 4,6
Grampo G1 (L=7,0 m) - Nível +3,50 m
Grampo G2 (L=6,0 m) - Nível +2,10 m
Grampo G3 (L=7,0 m) - Nível +3,50 m
1
10
Silte arenoso
Alteração
0.5
1.4
1.6
0.5
1 34
2
5 7 86
de rocha
2.52.25
1.150.50.6
0.55
0.3
0.9 1.752.5
Figura V.27 – Locação dos pontos instrumentados nos grampos G1 e G2 da seção 01.
1
10
9 1112
100.5
1.4
1.6
0.5
0.75 0.6 1.152.1
2.4
Silte arenoso
Alteraçãode rocha
Figura V.28 – Locação dos pontos instrumentados no grampo G3 da seção 02.
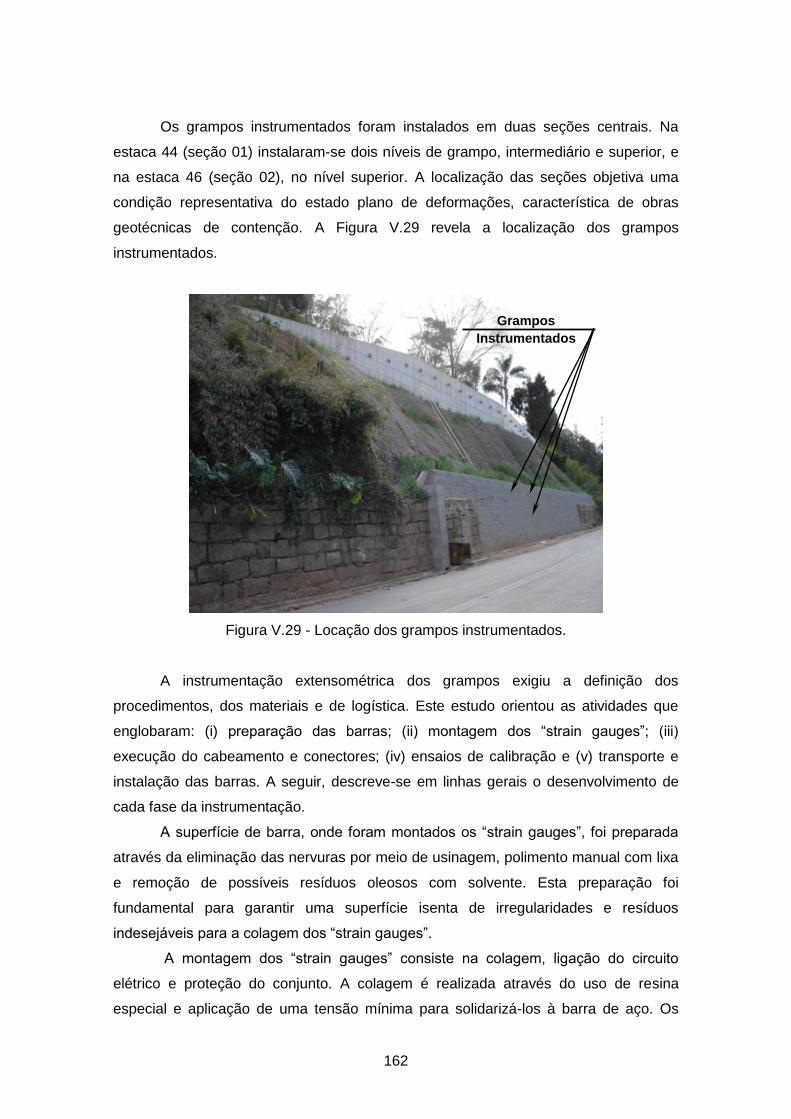
162
Os grampos instrumentados foram instalados em duas seções centrais. Na
estaca 44 (seção 01) instalaram-se dois níveis de grampo, intermediário e superior, e
na estaca 46 (seção 02), no nível superior. A localização das seções objetiva uma
condição representativa do estado plano de deformações, característica de obras
geotécnicas de contenção. A Figura V.29 revela a localização dos grampos
instrumentados.
Figura V.29 - Locação dos grampos instrumentados.
A instrumentação extensométrica dos grampos exigiu a definição dos
procedimentos, dos materiais e de logística. Este estudo orientou as atividades que
englobaram: (i) preparação das barras; (ii) montagem dos ―strain gauges‖; (iii)
execução do cabeamento e conectores; (iv) ensaios de calibração e (v) transporte e
instalação das barras. A seguir, descreve-se em linhas gerais o desenvolvimento de
cada fase da instrumentação.
A superfície de barra, onde foram montados os ―strain gauges‖, foi preparada
através da eliminação das nervuras por meio de usinagem, polimento manual com lixa
e remoção de possíveis resíduos oleosos com solvente. Esta preparação foi
fundamental para garantir uma superfície isenta de irregularidades e resíduos
indesejáveis para a colagem dos ―strain gauges‖.
A montagem dos ―strain gauges‖ consiste na colagem, ligação do circuito
elétrico e proteção do conjunto. A colagem é realizada através do uso de resina
especial e aplicação de uma tensão mínima para solidarizá-los à barra de aço. Os
Grampos
Instrumentados
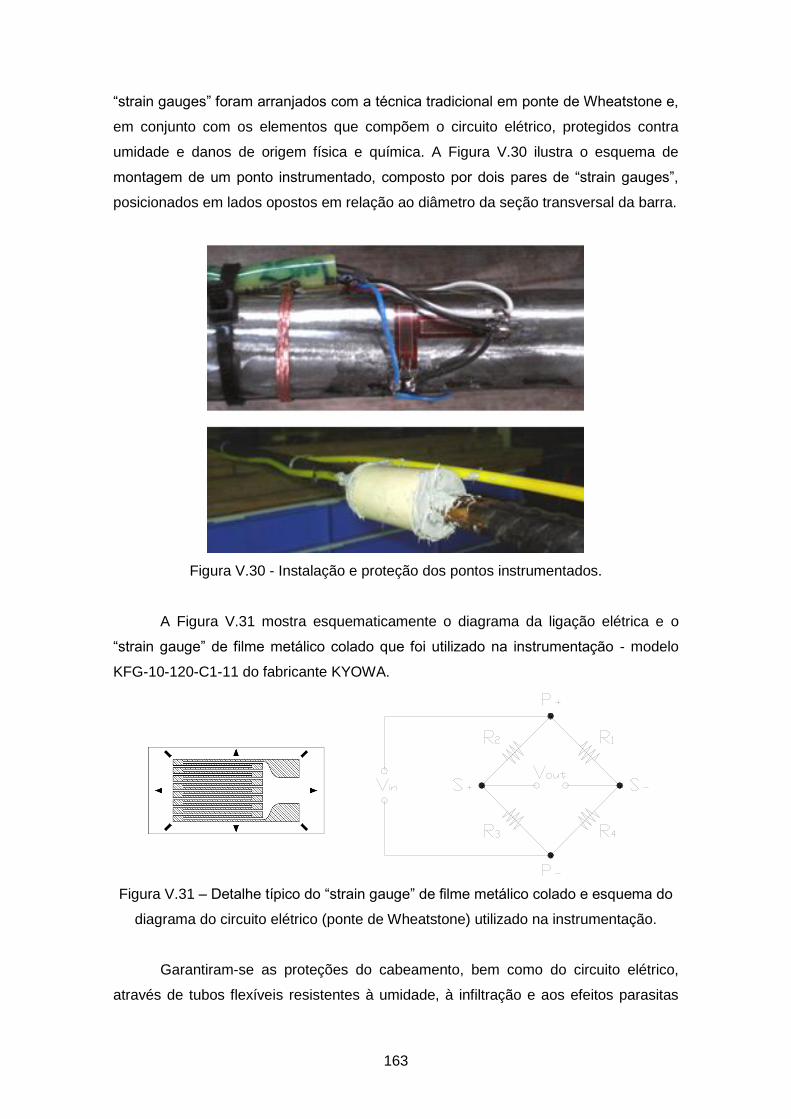
163
―strain gauges‖ foram arranjados com a técnica tradicional em ponte de Wheatstone e,
em conjunto com os elementos que compõem o circuito elétrico, protegidos contra
umidade e danos de origem física e química. A Figura V.30 ilustra o esquema de
montagem de um ponto instrumentado, composto por dois pares de ―strain gauges‖,
posicionados em lados opostos em relação ao diâmetro da seção transversal da barra.
Figura V.30 - Instalação e proteção dos pontos instrumentados.
A Figura V.31 mostra esquematicamente o diagrama da ligação elétrica e o
―strain gauge‖ de filme metálico colado que foi utilizado na instrumentação - modelo
KFG-10-120-C1-11 do fabricante KYOWA.
Figura V.31 – Detalhe típico do ―strain gauge‖ de filme metálico colado e esquema do
diagrama do circuito elétrico (ponte de Wheatstone) utilizado na instrumentação.
Garantiram-se as proteções do cabeamento, bem como do circuito elétrico,
através de tubos flexíveis resistentes à umidade, à infiltração e aos efeitos parasitas
164
que porventura pudesse ocorrer, nas leituras. As conexões e terminais foram
fabricados em aço inoxidável e alumínio, devidamente vedados para evitar qualquer
migração de umidade pelo cabeamento (Figura V.32).
Figura V.32 – Conectores e terminais protegidos por meio de caixas ―blindadas‖.
Na calibração das barras utilizou-se célula de carga especialmente
desenvolvida para tal. Curvas de calibração foram obtidas para cada ponto
instrumentado com base em ciclos de carga e descarga com variação de 10 kN, até a
carga de 100 kN, para se verificar o comportamento dos ―strain gauges‖ em diferentes
níveis de carregamento. Estes ensaios foram executados com a barra inserida em
tubo de aço de parede espessa, onde as extremidades foram ancoradas no tubo e no
final do conjunto formado pelas placas de reação, macaco hidráulico e célula de carga,
situado entre o tubo e placa de reação/suporte. Os níveis de carga, aplicados pelo
macaco hidráulico, foram controlados pela célula de carga e correlacionados com as
leituras registradas pela deformação dos ―strain gauges‖. A Figura V.33 registra a
realização do ensaio e ilustra o arranjo do sistema empregado na calibração das
barras.
As doze curvas de calibração plotadas indicaram comportamento elástico
linear, fornecendo constantes de calibração semelhantes em todos os ―strain gauges‖
de uma mesma barra instrumentada. A Figura V.34 apresenta as curvas de calibração
de uma barra. Os resultados da calibração encontram-se no Apêndice A (Figuras A.3,
A.4 e A.5).
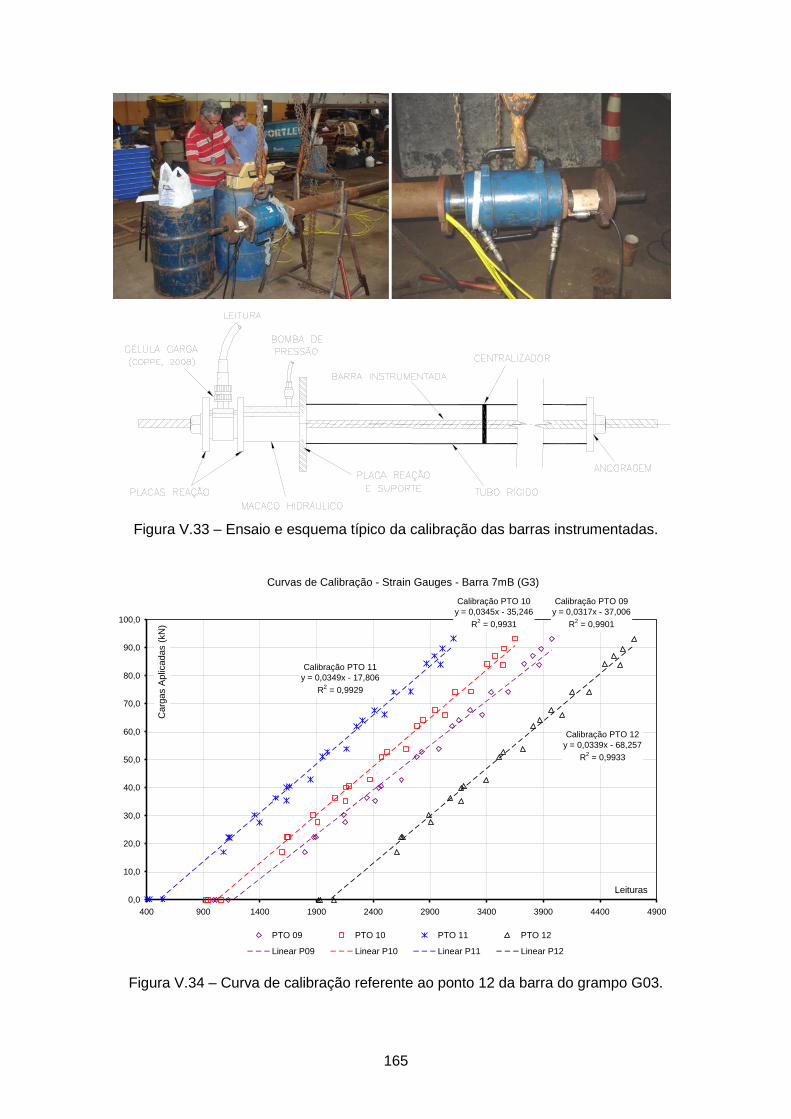
165
Figura V.33 – Ensaio e esquema típico da calibração das barras instrumentadas.
Curvas de Calibração - Strain Gauges - Barra 7mB (G3)
Calibração PTO 09
y = 0,0317x - 37,006
R2 = 0,9901
Calibração PTO 10
y = 0,0345x - 35,246
R2 = 0,9931
Calibração PTO 11
y = 0,0349x - 17,806
R2 = 0,9929
Calibração PTO 12
y = 0,0339x - 68,257
R2 = 0,9933
0,0
10,0
20,0
30,0
40,0
50,0
60,0
70,0
80,0
90,0
100,0
400 900 1400 1900 2400 2900 3400 3900 4400 4900
Leituras
Carg
as A
plic
adas (
kN
)
PTO 09 PTO 10 PTO 11 PTO 12
Linear P09 Linear P10 Linear P11 Linear P12
Figura V.34 – Curva de calibração referente ao ponto 12 da barra do grampo G03.
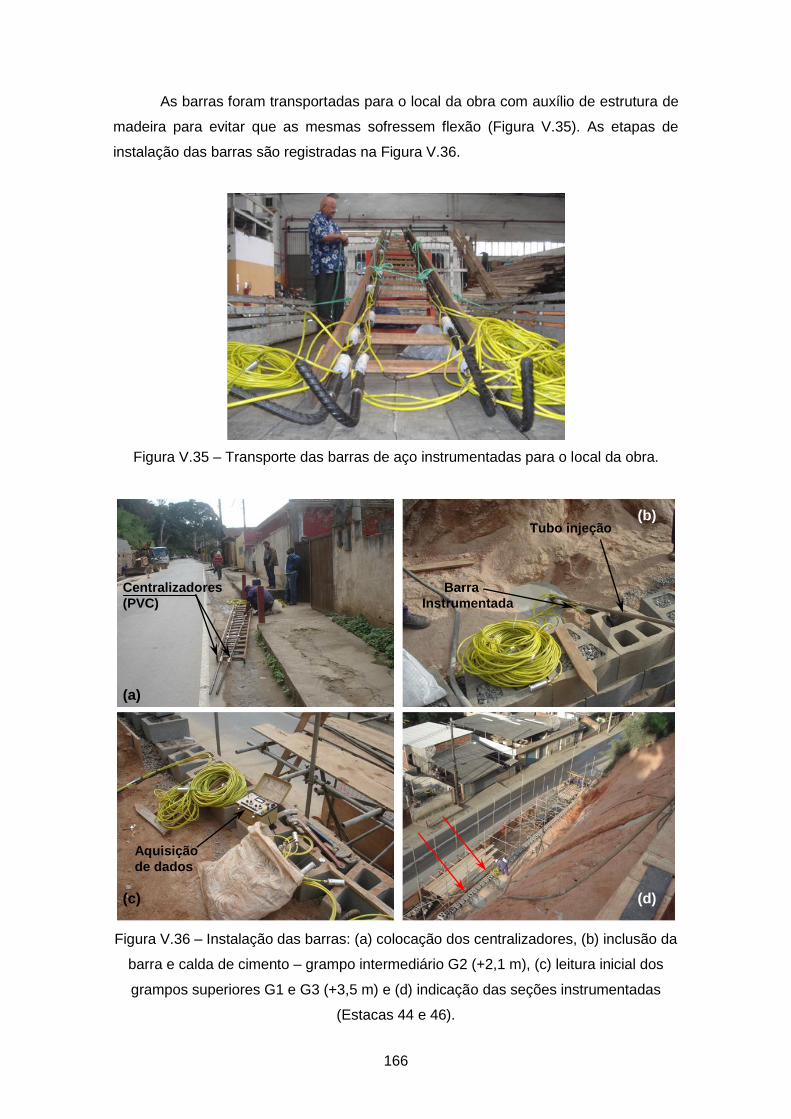
166
As barras foram transportadas para o local da obra com auxílio de estrutura de
madeira para evitar que as mesmas sofressem flexão (Figura V.35). As etapas de
instalação das barras são registradas na Figura V.36.
Figura V.35 – Transporte das barras de aço instrumentadas para o local da obra.
Figura V.36 – Instalação das barras: (a) colocação dos centralizadores, (b) inclusão da
barra e calda de cimento – grampo intermediário G2 (+2,1 m), (c) leitura inicial dos
grampos superiores G1 e G3 (+3,5 m) e (d) indicação das seções instrumentadas
(Estacas 44 e 46).
(a)
(d)
(b)
(c)
Centralizadores
(PVC)
Barra
Instrumentada
Tubo injeção
Aquisição
de dados

167
V.7 – Monitoração da Obra
O programa de pesquisa da monitoração previa acompanhamento da evolução
da distribuição dos esforços axiais em três grampos de uma mesma seção. Entretanto,
quando a equipe (COPPE/UFRJ, 2008) foi acionada para começar os trabalhos de
instrumentação das barras de aço, o primeiro nível (+0,5 m) de grampos já havia sido
executado. Decidiu-se, então, instrumentar duas barras de 7 m e uma de 6 m,
referentes aos níveis superior e intermediário (Figuras V.27 e V.28), respectivamente.
O sistema foi projetado adequadamente e, conforme demonstrado nas curvas de
calibração (Apêndice A, Figuras A.3, A.4 e A.5), a instrumentação das barras obteve o
sucesso almejado. Monitoraram-se as solicitações nos grampos durante a construção,
em serviço e em períodos chuvoso e seco.
Dos três grampos que tiveram os esforços axiais monitorados, aqueles
pertencentes ao nível superior (G1 e G3, +3,5 m) apresentaram comportamento
inesperado, indicando que estes trabalharam, predominantemente, à compressão. Os
resultados apresentados a seguir referem-se ao grampo G2, nível intermediário (+2,1
m), cujos esforços mobilizados ao longo do seu comprimento foram de tração.
V.7.1 – Monitoração e Análise dos Resultados do Grampo Intermediário
Na Figura V.37 apresenta-se a evolução das distribuições das forças axiais
medidas ao longo do comprimento do grampo intermediário. As medições foram
efetuadas durante a instalação, em construção, em serviço e em períodos seco e
chuvoso (vide Figura V.23). As leituras iniciais dos pontos instrumentados foram
realizadas logo após a inclusão das barras instrumentadas nos furos.
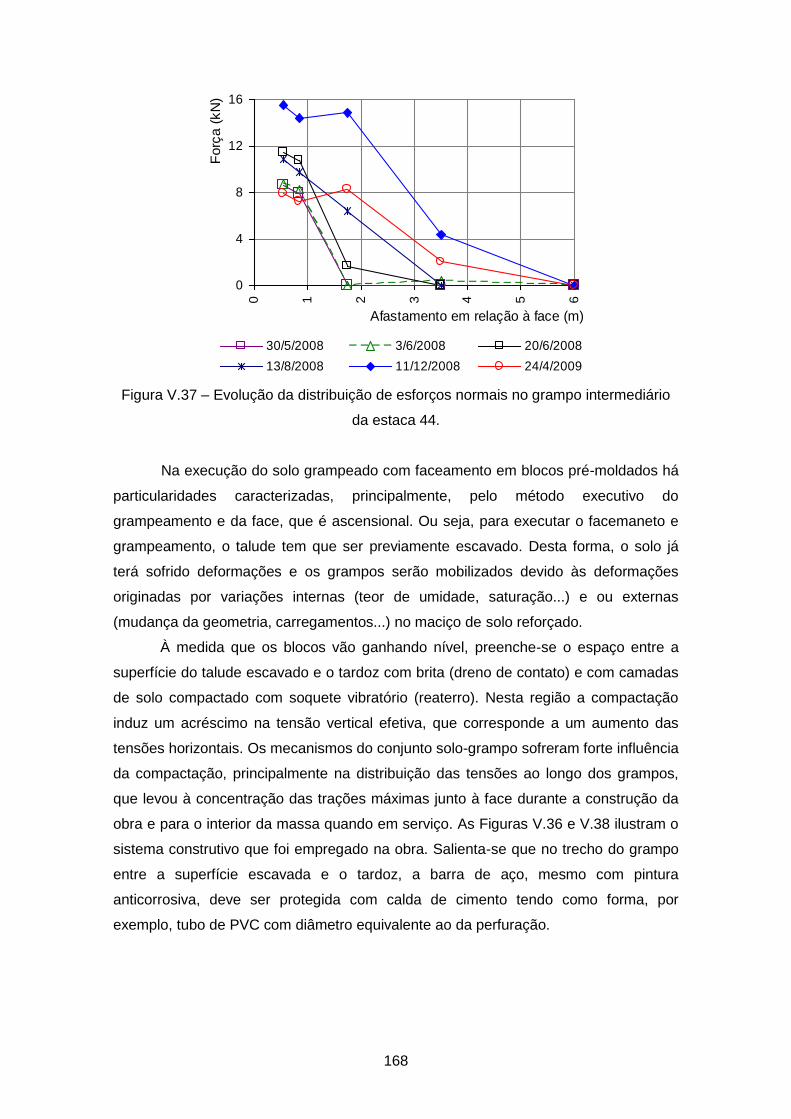
168
0
4
8
12
16
0 1 2 3 4 5 6
Afastamento em relação à face (m)
Forç
a (
kN
)
30/5/2008 3/6/2008 20/6/2008
13/8/2008 11/12/2008 24/4/2009
Figura V.37 – Evolução da distribuição de esforços normais no grampo intermediário
da estaca 44.
Na execução do solo grampeado com faceamento em blocos pré-moldados há
particularidades caracterizadas, principalmente, pelo método executivo do
grampeamento e da face, que é ascensional. Ou seja, para executar o facemaneto e
grampeamento, o talude tem que ser previamente escavado. Desta forma, o solo já
terá sofrido deformações e os grampos serão mobilizados devido às deformações
originadas por variações internas (teor de umidade, saturação...) e ou externas
(mudança da geometria, carregamentos...) no maciço de solo reforçado.
À medida que os blocos vão ganhando nível, preenche-se o espaço entre a
superfície do talude escavado e o tardoz com brita (dreno de contato) e com camadas
de solo compactado com soquete vibratório (reaterro). Nesta região a compactação
induz um acréscimo na tensão vertical efetiva, que corresponde a um aumento das
tensões horizontais. Os mecanismos do conjunto solo-grampo sofreram forte influência
da compactação, principalmente na distribuição das tensões ao longo dos grampos,
que levou à concentração das trações máximas junto à face durante a construção da
obra e para o interior da massa quando em serviço. As Figuras V.36 e V.38 ilustram o
sistema construtivo que foi empregado na obra. Salienta-se que no trecho do grampo
entre a superfície escavada e o tardoz, a barra de aço, mesmo com pintura
anticorrosiva, deve ser protegida com calda de cimento tendo como forma, por
exemplo, tubo de PVC com diâmetro equivalente ao da perfuração.
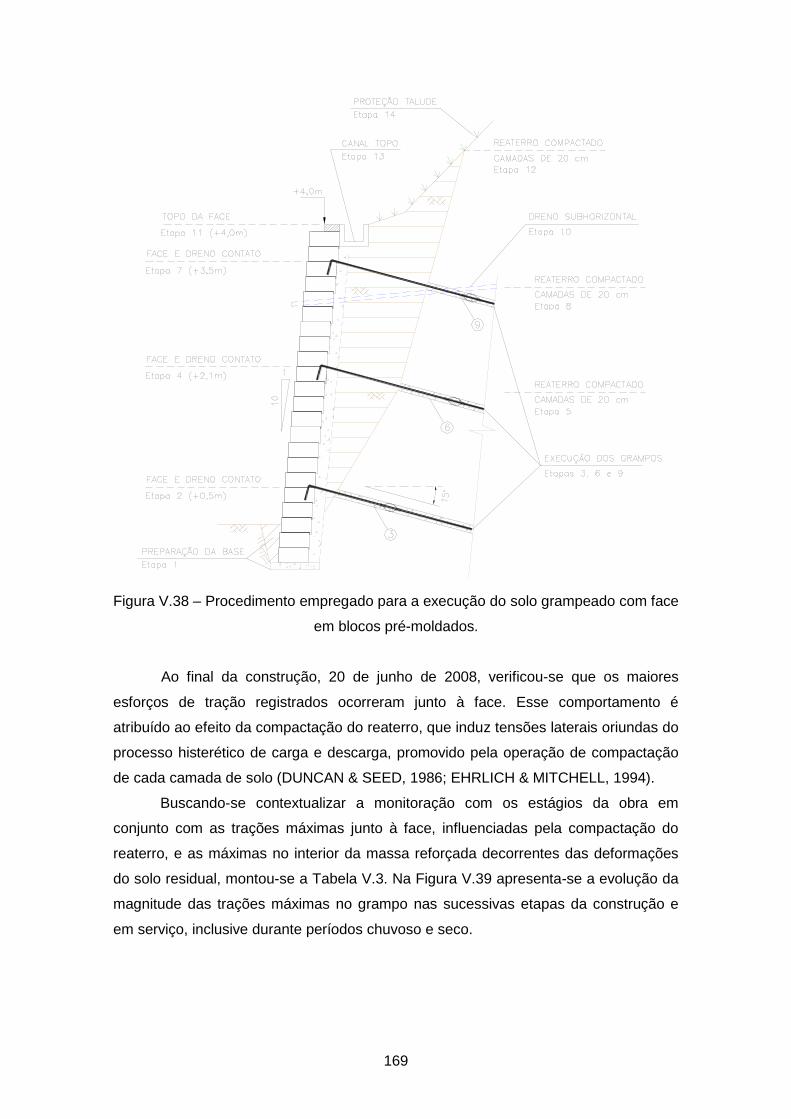
169
Figura V.38 – Procedimento empregado para a execução do solo grampeado com face
em blocos pré-moldados.
Ao final da construção, 20 de junho de 2008, verificou-se que os maiores
esforços de tração registrados ocorreram junto à face. Esse comportamento é
atribuído ao efeito da compactação do reaterro, que induz tensões laterais oriundas do
processo histerético de carga e descarga, promovido pela operação de compactação
de cada camada de solo (DUNCAN & SEED, 1986; EHRLICH & MITCHELL, 1994).
Buscando-se contextualizar a monitoração com os estágios da obra em
conjunto com as trações máximas junto à face, influenciadas pela compactação do
reaterro, e as máximas no interior da massa reforçada decorrentes das deformações
do solo residual, montou-se a Tabela V.3. Na Figura V.39 apresenta-se a evolução da
magnitude das trações máximas no grampo nas sucessivas etapas da construção e
em serviço, inclusive durante períodos chuvoso e seco.
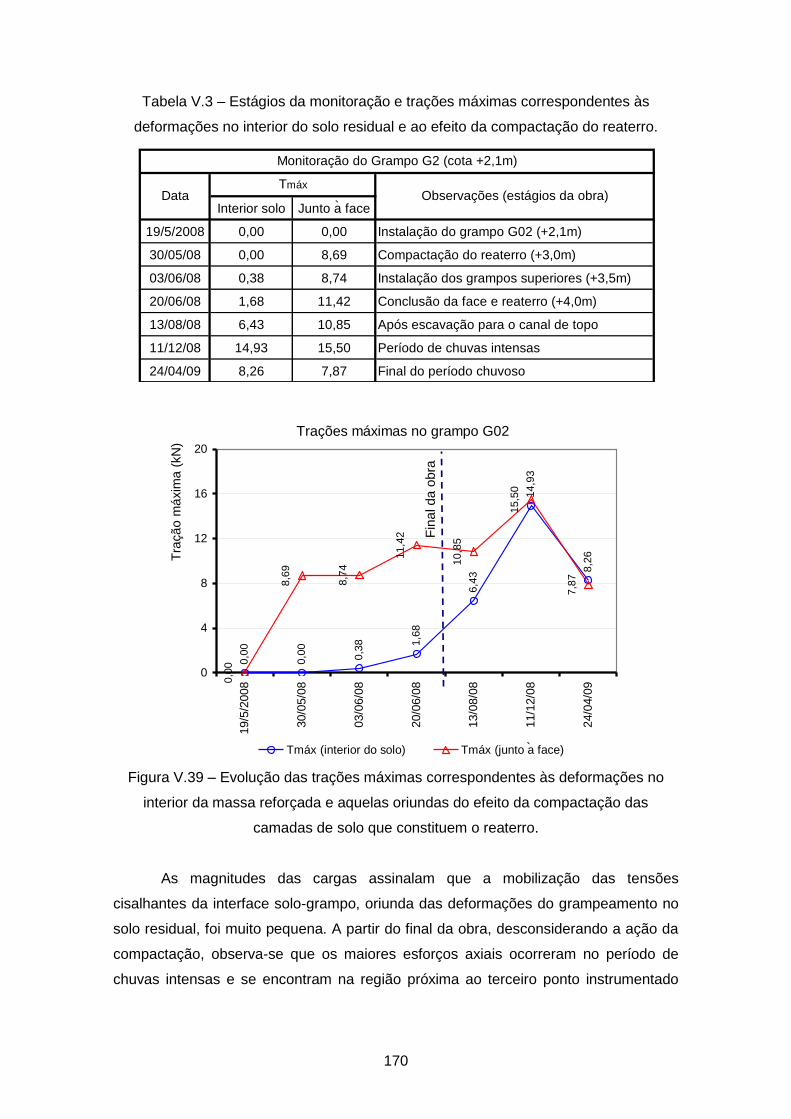
170
Tabela V.3 – Estágios da monitoração e trações máximas correspondentes às
deformações no interior do solo residual e ao efeito da compactação do reaterro.
Interior solo Junto a face
19/5/2008 0,00 0,00 Instalação do grampo G02 (+2,1m)
30/05/08 0,00 8,69 Compactação do reaterro (+3,0m)
03/06/08 0,38 8,74 Instalação dos grampos superiores (+3,5m)
20/06/08 1,68 11,42 Conclusão da face e reaterro (+4,0m)
13/08/08 6,43 10,85 Após escavação para o canal de topo
11/12/08 14,93 15,50 Período de chuvas intensas
24/04/09 8,26 7,87 Final do período chuvoso
DataTmáx
Observações (estágios da obra)
Monitoração do Grampo G2 (cota +2,1m)
Trações máximas no grampo G02
0,0
0
0,0
0
0,3
8 1,6
8
6,4
3
14,9
3
8,2
6
8,6
9
8,7
4
11,4
2
10,8
5
15,5
0
7,8
7
0,0
0
0
4
8
12
16
20
19/5
/2008
30/0
5/0
8
03/0
6/0
8
20/0
6/0
8
13/0
8/0
8
11/1
2/0
8
24/0
4/0
9
Tra
çã
o m
áxim
a (
kN
)
Tmáx (interior do solo) Tmáx (junto a face)
Figura V.39 – Evolução das trações máximas correspondentes às deformações no
interior da massa reforçada e aquelas oriundas do efeito da compactação das
camadas de solo que constituem o reaterro.
As magnitudes das cargas assinalam que a mobilização das tensões
cisalhantes da interface solo-grampo, oriunda das deformações do grampeamento no
solo residual, foi muito pequena. A partir do final da obra, desconsiderando a ação da
compactação, observa-se que os maiores esforços axiais ocorreram no período de
chuvas intensas e se encontram na região próxima ao terceiro ponto instrumentado
Fin
al da
obra
`
`
171
(afastamento 1,75 m). A tração do grampo neste trecho da barra foi,
aproximadamente, de 15 kN.
O comportamento do grampo instrumentado pode ser segmentado em fases.
Na fase 1, durante as sucessivas etapas da construção da estrutura de solo
grampeado até o final da obra (julho de 2008), a mobilização do grampo está
associada, principalmente, às tensões induzidas pela compactação do reaterro
executado entre a superfície escavada e o faceamento. Nesta fase, as trações
máximas no grampo ocorrem junto à face, na região do reaterro, cuja operação do
equipamento de compactação gerou no solo reforçado um efeito similar ao sobre-
adensamento, induzido pela máxima tensão vertical efetiva (EHRLICH & MITCHELL,
1994). Assim, ao final da compactação o solo estará pré-adensado submetido a uma
tensão horizontal maior que a inicial. Com a conclusão da obra, a magnitude da tração
máxima, decorrente do efeito da compactação, estabeleceu um patamar médio com
valor de 9 kN (Figura V.39), em decorrência do incremento da tensão horizontal
ocasionado pela máxima tensão vertical que ocorreu no solo em sua história, ou seja,
durante a execução do reaterro.
Após o término da estrutura de contenção grampeada, fase 2, verifica-se o
progressivo aumento da tração nos pontos do grampo situados no interior do solo
residual e a manutenção do nível médio de tensão nos pontos junto à face. Nesta fase,
os teores de umidade registrados no solo residual apresentaram uma média de 17,5%
(elevação +2,1), ocasionando a diminuição do efeito da coesão aparente do solo e,
conseqüentemente, o aumento das tensões de tração nos grampos decorrente da
mobilização das tensões cisalhantes ao longo do contato solo-grampo originada pelas
deformações internas no maciço de solo grampeado.
A fase 3 engloba os períodos de chuvas intensas e final das chuvas, nos quais
a evolução das forças axiais está relacionada às solicitações ocorridas no conjunto
constituído pelos solos do reaterro e do maciço remanescente, decorrentes das
variações de sucção. Visto os grampos serem elementos passivos, em linhas gerais,
as mobilizações de cargas no caso devem se originar principalmente das alterações
nos teores de umidade do solo. A redução nas tensões no grampo, observada entre os
meses de dezembro e abril, provavelmente está relacionada às variações observadas
no teor de umidade. Nesse período ocorreram chuvas com maior intensidade e maior
infiltração d’água no terreno.
No caso de faceamento em blocos pré-moldados, por não ser empregada
argamassa no assentamento dos blocos, existe um flexibilidade relativa das
extremidades dos grampos, reduzindo o carregamento junto à face (T0) e fazendo com
que o ponto de máxima tensão de tração (Tmáx) do grampo seja deslocado para o

172
interior da massa de solo reforçado (SARAMAGO et al., 2005). Na monitoração
realizada no período de chuvas intensas, cujas medições não são mais influenciadas
pelo efeito da compactação, o acréscimo de força de tração do grampo no ponto
instrumentado posicionado junto à face foi da ordem de 7 kN. Comparando-se esse
valor com a tração máxima decorrente da deformação da massa grampeada, a relação
T0/Tmáx, desenvolvida no grampo G2, equivale a 0,5. Esta relação traduziria uma
distribuição das cargas axiais conforme ilustrado na Figura V.40. Entretanto, apesar de
sugestivo o patamar que estabelece a pressão de sobre-adensamento (Figura V.39),
não se pode ter certeza da parcela da tração na face induzida pela compactação, mas
pode-se verificar que o ponto de tração máxima ocorre no interior do solo.
0
4
8
12
16
0 1 2 3 4 5 6Afastamento em relação à face (m)
Forç
a (
kN
)
30/5/2008 3/6/2008 20/6/2008
13/8/2008 11/12/2008 24/4/2009
Figura V.40 - Distribuição de esforços axiais desconsiderando a ação da compactação.
A partir das deformações permitidas no solo grampeado, uma parcela do
empuxo ativo se desenvolve junto à face interna do paramento. Uma vez estando o
grampo ligado estruturalmente à face, essa parcela do empuxo ativo se equilibra
através de tensões iguais e opostas na cabeça do grampo (FEIJÓ, 2007). Na
elaboração de projetos de solo grampeado, a definição do valor da força de tração na
face (T0) serve de suporte para o dimensionamento do tipo de faceamento adotado
que por sua vez promoverá a estabilidade local do solo próximo à face. Na
monitoração empregada pretendia-se, também, verificar a relação T0/Tmáx com face
em blocos pré-moldados, entretanto, o processo executivo deste tipo de
grampeamento modificou o estado de tensões do solo pela ação da compactação, que
comumente, em escavações grampeadas, é decorrente da descompressão lateral.
Vários trabalhos publicados na literatura, envolvendo estudos numéricos e
experimentos, têm apresentado relação entre a tração na face (T0) e a tração máxima
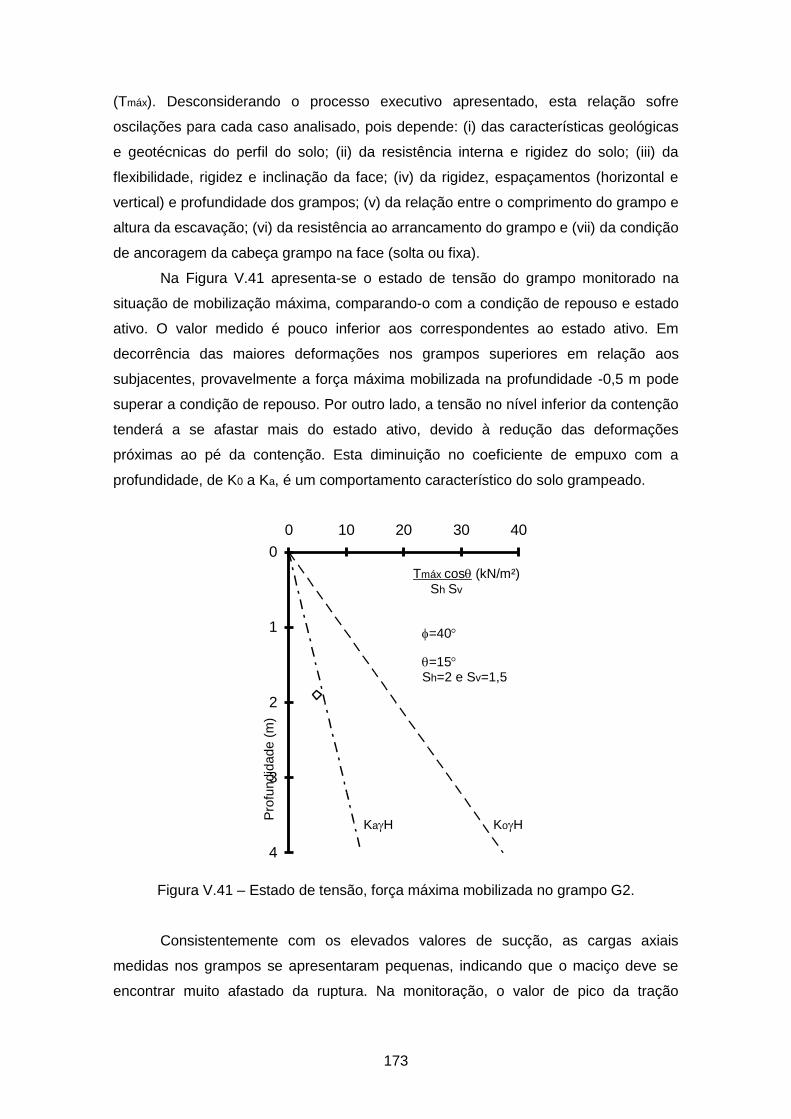
173
(Tmáx). Desconsiderando o processo executivo apresentado, esta relação sofre
oscilações para cada caso analisado, pois depende: (i) das características geológicas
e geotécnicas do perfil do solo; (ii) da resistência interna e rigidez do solo; (iii) da
flexibilidade, rigidez e inclinação da face; (iv) da rigidez, espaçamentos (horizontal e
vertical) e profundidade dos grampos; (v) da relação entre o comprimento do grampo e
altura da escavação; (vi) da resistência ao arrancamento do grampo e (vii) da condição
de ancoragem da cabeça grampo na face (solta ou fixa).
Na Figura V.41 apresenta-se o estado de tensão do grampo monitorado na
situação de mobilização máxima, comparando-o com a condição de repouso e estado
ativo. O valor medido é pouco inferior aos correspondentes ao estado ativo. Em
decorrência das maiores deformações nos grampos superiores em relação aos
subjacentes, provavelmente a força máxima mobilizada na profundidade -0,5 m pode
superar a condição de repouso. Por outro lado, a tensão no nível inferior da contenção
tenderá a se afastar mais do estado ativo, devido à redução das deformações
próximas ao pé da contenção. Esta diminuição no coeficiente de empuxo com a
profundidade, de K0 a Ka, é um comportamento característico do solo grampeado.
0
1
2
3
4
0 10 20 30 40
Figura V.41 – Estado de tensão, força máxima mobilizada no grampo G2.
Consistentemente com os elevados valores de sucção, as cargas axiais
medidas nos grampos se apresentaram pequenas, indicando que o maciço deve se
encontrar muito afastado da ruptura. Na monitoração, o valor de pico da tração
Tmáx cos (kN/m²) Sh Sv
KoH
Pro
fundid
ad
e (
m)
KaH
=40
=15 Sh=2 e Sv=1,5
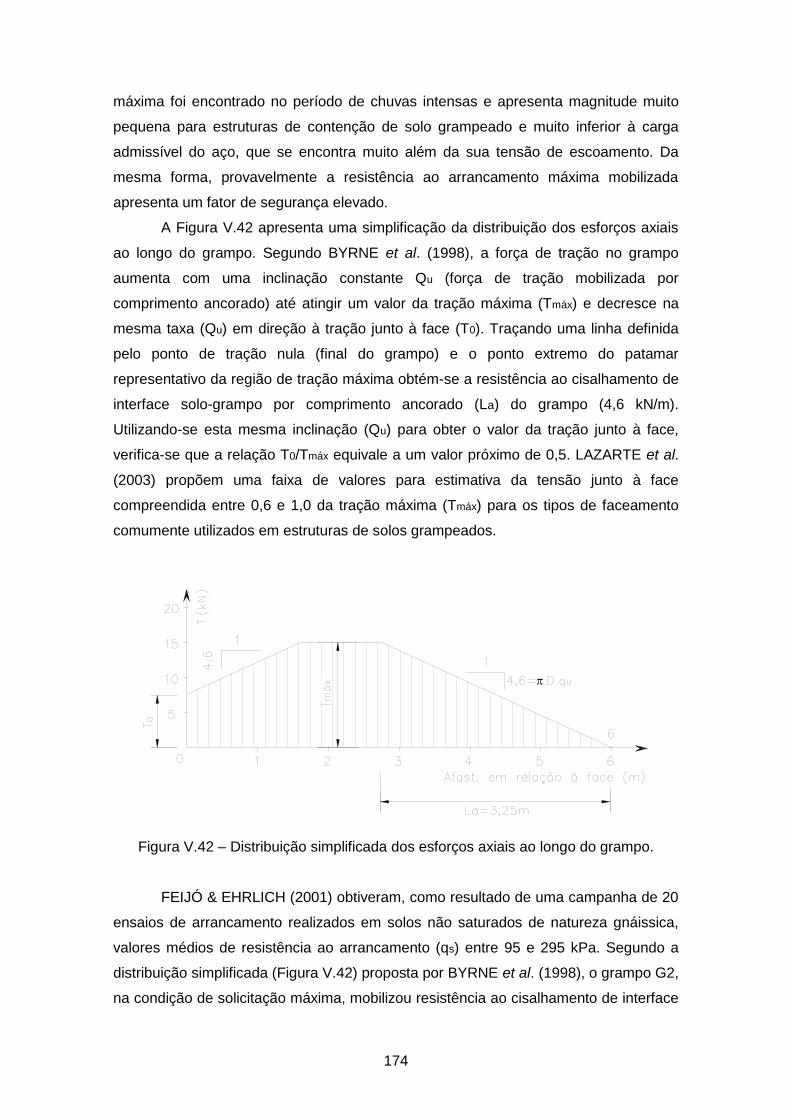
174
máxima foi encontrado no período de chuvas intensas e apresenta magnitude muito
pequena para estruturas de contenção de solo grampeado e muito inferior à carga
admissível do aço, que se encontra muito além da sua tensão de escoamento. Da
mesma forma, provavelmente a resistência ao arrancamento máxima mobilizada
apresenta um fator de segurança elevado.
A Figura V.42 apresenta uma simplificação da distribuição dos esforços axiais
ao longo do grampo. Segundo BYRNE et al. (1998), a força de tração no grampo
aumenta com uma inclinação constante Qu (força de tração mobilizada por
comprimento ancorado) até atingir um valor da tração máxima (Tmáx) e decresce na
mesma taxa (Qu) em direção à tração junto à face (T0). Traçando uma linha definida
pelo ponto de tração nula (final do grampo) e o ponto extremo do patamar
representativo da região de tração máxima obtém-se a resistência ao cisalhamento de
interface solo-grampo por comprimento ancorado (La) do grampo (4,6 kN/m).
Utilizando-se esta mesma inclinação (Qu) para obter o valor da tração junto à face,
verifica-se que a relação T0/Tmáx equivale a um valor próximo de 0,5. LAZARTE et al.
(2003) propõem uma faixa de valores para estimativa da tensão junto à face
compreendida entre 0,6 e 1,0 da tração máxima (Tmáx) para os tipos de faceamento
comumente utilizados em estruturas de solos grampeados.
Figura V.42 – Distribuição simplificada dos esforços axiais ao longo do grampo.
FEIJÓ & EHRLICH (2001) obtiveram, como resultado de uma campanha de 20
ensaios de arrancamento realizados em solos não saturados de natureza gnáissica,
valores médios de resistência ao arrancamento (qs) entre 95 e 295 kPa. Segundo a
distribuição simplificada (Figura V.42) proposta por BYRNE et al. (1998), o grampo G2,
na condição de solicitação máxima, mobilizou resistência ao cisalhamento de interface

175
solo-grampo com magnitude aproximada de 14,5 kPa, a qual se encontra muito
afastada dos valores indicados na literatura para resistência ao arrancamento (qs).
Salienta-se que a Figura V.42 representa uma distribuição simplificada e não se pode
afirmar que todo o comprimento do grampo na zona passiva foi mobilizado.
A Figura V.43 ilustra as superfícies potenciais de ruptura definidas por análises
de Equilíbrio Limite considerando a seqüência executiva do sistema de contenção, a
qual foi iniciada com a construção da cortina atirantada na crista do talude. Após a
conclusão da estrutura superior, o solo grampeado foi executado na base do talude.
Utilizou-se o software de análise de estabilidade de taludes GEOSLOPE, o qual definiu
as superfícies potenciais de ruptura através do método de Morgenstern & Price
considerando a contribuição dos elementos ativos (tirantes) e passivos (grampos). A
condição de equilíbrio do talude encontra-se no limite (FS=1) até que se construa a
estrutura grampeada na base. Observa-se que as superfícies potenciais de ruptura
interceptam o grampo intermediário próximo ao trecho de tração máxima definida pelo
diagrama simplificado sugerida por BYRNE et al. (1998) e LAZARTE et al. (2003).
Figura V.43 – Superfícies potenciais de ruptura definidas pelas análises de Equilíbrio
Limite considerando: (1) conjunto solo grampeado e cortina atirantada (FS=1,32); (2) e
(3) término da execução dos tirantes (FS=1,0).
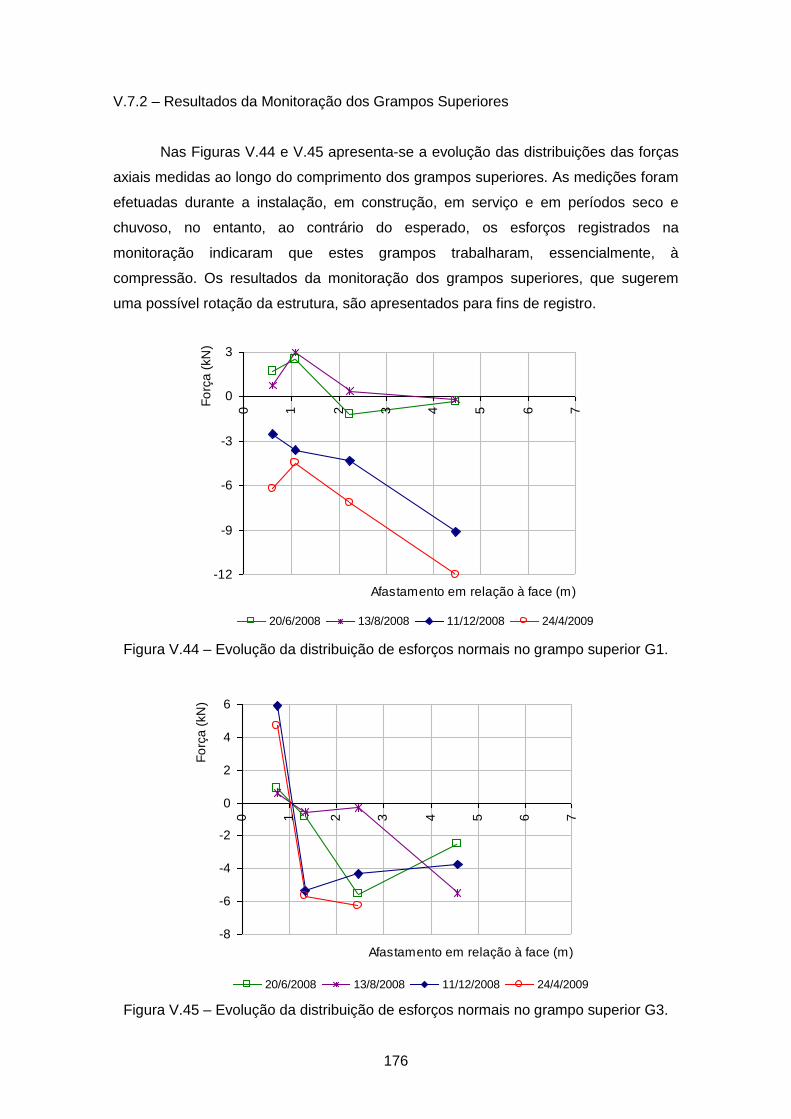
176
V.7.2 – Resultados da Monitoração dos Grampos Superiores
Nas Figuras V.44 e V.45 apresenta-se a evolução das distribuições das forças
axiais medidas ao longo do comprimento dos grampos superiores. As medições foram
efetuadas durante a instalação, em construção, em serviço e em períodos seco e
chuvoso, no entanto, ao contrário do esperado, os esforços registrados na
monitoração indicaram que estes grampos trabalharam, essencialmente, à
compressão. Os resultados da monitoração dos grampos superiores, que sugerem
uma possível rotação da estrutura, são apresentados para fins de registro.
-12
-9
-6
-3
0
3
0 1 2 3 4 5 6 7
Afastamento em relação à face (m)
Fo
rça
(kN
)
20/6/2008 13/8/2008 11/12/2008 24/4/2009
Figura V.44 – Evolução da distribuição de esforços normais no grampo superior G1.
-8
-6
-4
-2
0
2
4
6
0 1 2 3 4 5 6 7
Afastamento em relação à face (m)
Fo
rça
(kN
)
20/6/2008 13/8/2008 11/12/2008 24/4/2009
Figura V.45 – Evolução da distribuição de esforços normais no grampo superior G3.
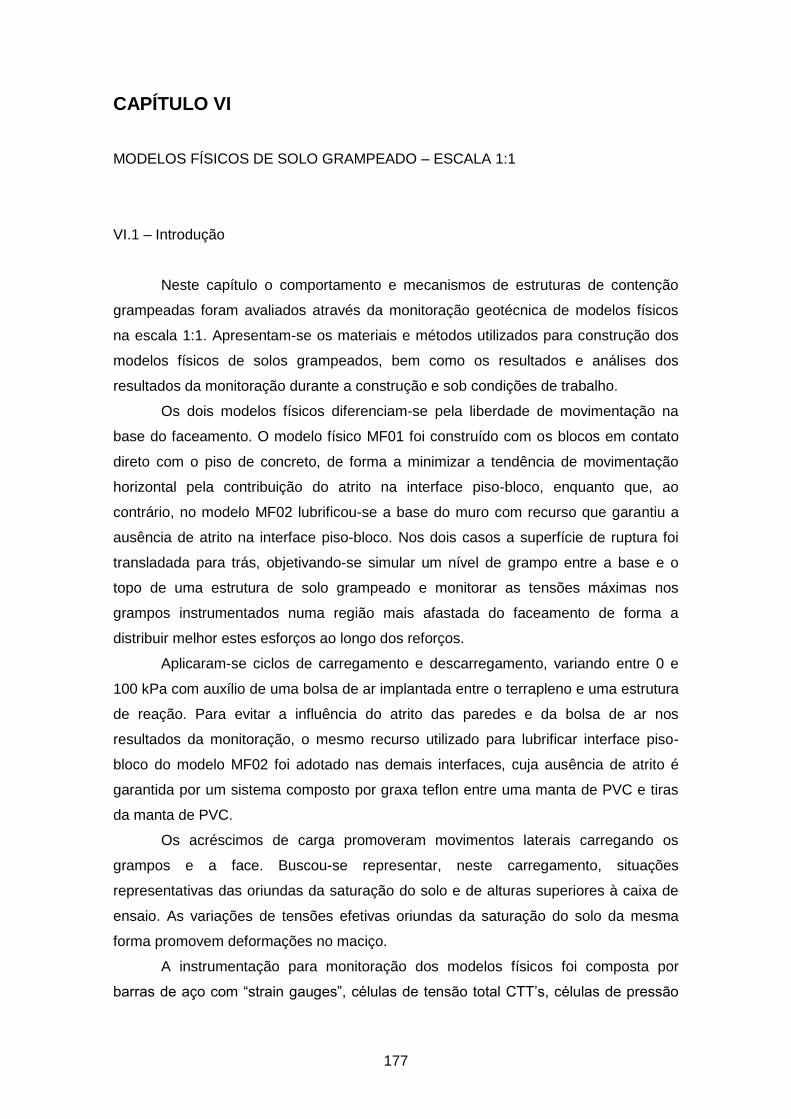
177
CAPÍTULO VI
MODELOS FÍSICOS DE SOLO GRAMPEADO – ESCALA 1:1
VI.1 – Introdução
Neste capítulo o comportamento e mecanismos de estruturas de contenção
grampeadas foram avaliados através da monitoração geotécnica de modelos físicos
na escala 1:1. Apresentam-se os materiais e métodos utilizados para construção dos
modelos físicos de solos grampeados, bem como os resultados e análises dos
resultados da monitoração durante a construção e sob condições de trabalho.
Os dois modelos físicos diferenciam-se pela liberdade de movimentação na
base do faceamento. O modelo físico MF01 foi construído com os blocos em contato
direto com o piso de concreto, de forma a minimizar a tendência de movimentação
horizontal pela contribuição do atrito na interface piso-bloco, enquanto que, ao
contrário, no modelo MF02 lubrificou-se a base do muro com recurso que garantiu a
ausência de atrito na interface piso-bloco. Nos dois casos a superfície de ruptura foi
transladada para trás, objetivando-se simular um nível de grampo entre a base e o
topo de uma estrutura de solo grampeado e monitorar as tensões máximas nos
grampos instrumentados numa região mais afastada do faceamento de forma a
distribuir melhor estes esforços ao longo dos reforços.
Aplicaram-se ciclos de carregamento e descarregamento, variando entre 0 e
100 kPa com auxílio de uma bolsa de ar implantada entre o terrapleno e uma estrutura
de reação. Para evitar a influência do atrito das paredes e da bolsa de ar nos
resultados da monitoração, o mesmo recurso utilizado para lubrificar interface piso-
bloco do modelo MF02 foi adotado nas demais interfaces, cuja ausência de atrito é
garantida por um sistema composto por graxa teflon entre uma manta de PVC e tiras
da manta de PVC.
Os acréscimos de carga promoveram movimentos laterais carregando os
grampos e a face. Buscou-se representar, neste carregamento, situações
representativas das oriundas da saturação do solo e de alturas superiores à caixa de
ensaio. As variações de tensões efetivas oriundas da saturação do solo da mesma
forma promovem deformações no maciço.
A instrumentação para monitoração dos modelos físicos foi composta por
barras de aço com ―strain gauges‖, células de tensão total CTT’s, células de pressão

178
total CPT’s, medidores elétricos de deslocamentos LVDT’s e medidores de
deslocamentos verticais. As células de pressão total CPT’s e os medidores de
deslocamento vertical MDV’s foram construídos com auxílio de transdutores de
pressão. Na monitoração utilizou-se um total de 29 instrumentos que foram
desenvolvidos e calibrados no Laboratório de Geotecnia da COPPE/UFRJ. Nos dois
modelos avaliaram-se os esforços de tração ao longo dos grampos, as tensões do
solo junto à face em diferentes profundidades, as tensões verticais do solo grampeado
nas zonas ativa e passiva, os deslocamentos verticais do terrapleno horizontal, os
deslocamentos horizontais do faceamento em planta e perfil e os deslocamentos
internos da massa de solo reforçada.
VI.2 – Materiais e Metodologia
Para construção dos modelos físicos utilizou-se a estrutura e equipamentos do
Laboratório de Modelos Físicos (Prédio Willy Lacerda), solo fabricado (quartzo moído),
blocos segmentais, instrumentos geotécnicos e acessórios auxiliares. O experimento
foi empregado em dois modelos físicos, cuja diferença é caracterizada pela presença e
ausência de atrito na interface piso-bloco na base do faceamento.
Além de garantir o estado plano de deformações e de evitar a influência do
atrito dos contatos do solo grampeado com as paredes e bolsa de ar, a metodologia
adotada para avaliação do comportamento e mecanismos dos modelos físicos
consistiu na monitoração através da leitura dos instrumentos durante a construção e
aplicação dos ciclos de carregamento e descarregamento.
VI.2.1 – Modelos Físicos Ensaiados
Os muros foram construídos com faces em blocos pré-moldados de concreto
(ou segmentais), solo fabricado e dois grampos, dentro de uma caixa de ensaio. O
solo foi compactado de forma a reproduzir um terreno natural e garantir a
homogeneidade. Aplicando-se ciclos de carregamento e descarregamento, foi
acompanhado o comportamento dos modelos físicos através de medição das
movimentações horizontais externas (faceamento) e internas (massa de solo
grampeado), dos deslocamentos verticais ao longo do terrapleno horizontal, das
tensões no solo junto à face, dos esforços de tração ao longo dos grampos
instrumentados com ―strain gauges‖ e das pressões verticais nas zonas ativa e
179
passiva do solo grampeado. da distribuição das tensões normais e flexurais nos
grampos instrumentados, além das deformações.
A caixa de ensaio tem a forma de ―U‖, com as paredes em concreto armado e
possui as seguintes dimensões: 2,0 m de largura, 3,0 m de profundidade e 1,5 m de
altura. O sistema composto por bolsa de ar comprimido e estrutura de reação foi
responsável pela aplicação de sobrecarga de 100 kPa nos topos do maciço
grampeado e dos blocos.
A massa que foi reforçada utilizou um solo fabricado, decorrente da moagem
de minerais de quartzo. Este material sem coesão equivale a uma areia bem graduada
(cu = 8,9) e nas condições em que os modelos físicos foram ensaiados (=21 kN/m³ e
índice de vazios médio de 0,55) o ângulo de atrito interno corresponde a 58,48º.
VI.2.2 - Concepção do Modelo Físico
Nos itens a seguir são descritos os procedimentos utilizados para análise de
estabilidade interna e dimensionamento dos grampos. A análise das forças atuantes e
a elaboração do dimensionamento dos reforços basearam-se nas geometrias do
modelo físico, nos parâmetros adotados para os materiais (solo ―fabricado‖ e grampo)
e nas hipóteses consideradas.
VI.2.2.1 - Geometria do Modelo Físico
A área útil para a montagem do modelo físico foi determinada pelas dimensões
da bolsa de ar responsável pela aplicação das sobrecargas nas superfícies de topo do
terrapleno e blocos segmentais, situados na altura de 1,40 m em relação ao piso da
caixa de ensaio.
Os modelos físicos foram construídos em uma caixa projetada, inicialmente,
para experimentos de solos grampeados. No entanto, até o momento somente foram
ensaiados modelos físicos de solos reforçados (SARAMAGO, 2002; BARBOZA
JÚNIOR, 2003; GUEDES, 2004; OLIVEIRA, 2006; COSTA, 2008). A caixa foi
construída com as mesmas dimensões do projeto inicial, possuindo 2 m de largura, 3
m de profundidade e 1,5 m de altura. As laterais da caixa foram construídas em
concreto armado que garantem um estado plano de deformações.
A bolsa de ar responsável pela aplicação da sobrecarga possui as seguintes
dimensões: 2,0 m de largura e 2,50 m de profundidade. A profundidade da bolsa
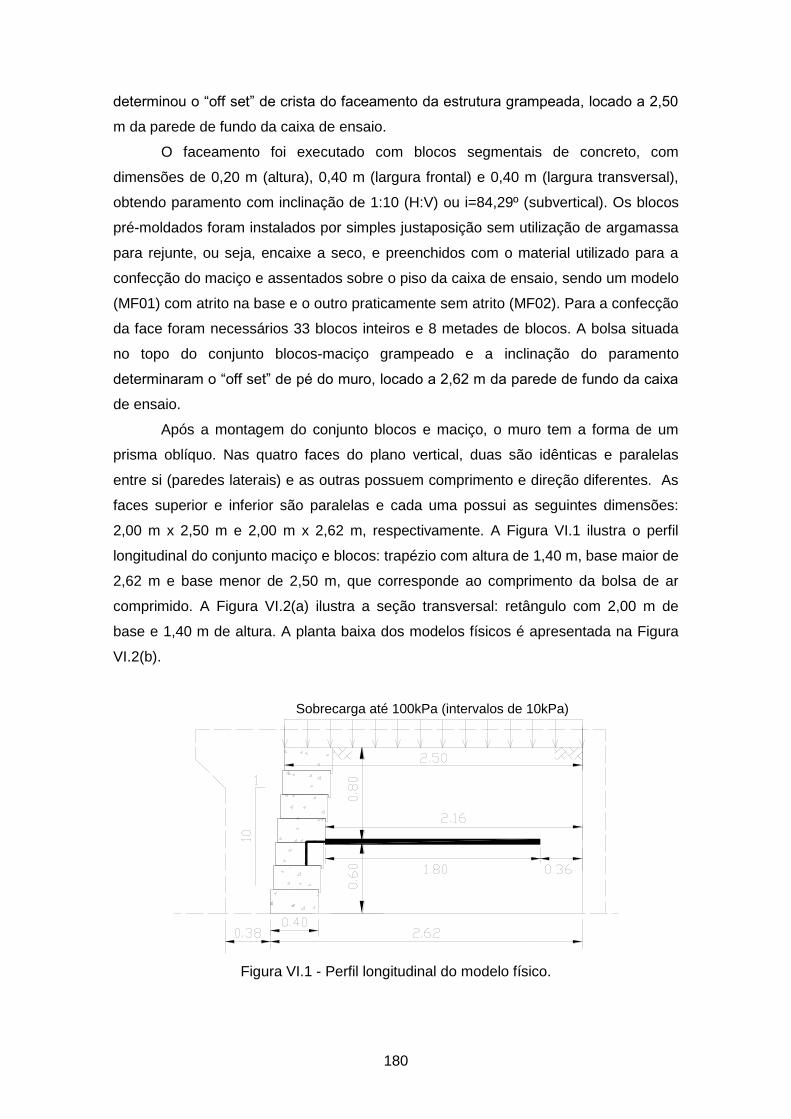
180
determinou o ―off set‖ de crista do faceamento da estrutura grampeada, locado a 2,50
m da parede de fundo da caixa de ensaio.
O faceamento foi executado com blocos segmentais de concreto, com
dimensões de 0,20 m (altura), 0,40 m (largura frontal) e 0,40 m (largura transversal),
obtendo paramento com inclinação de 1:10 (H:V) ou i=84,29º (subvertical). Os blocos
pré-moldados foram instalados por simples justaposição sem utilização de argamassa
para rejunte, ou seja, encaixe a seco, e preenchidos com o material utilizado para a
confecção do maciço e assentados sobre o piso da caixa de ensaio, sendo um modelo
(MF01) com atrito na base e o outro praticamente sem atrito (MF02). Para a confecção
da face foram necessários 33 blocos inteiros e 8 metades de blocos. A bolsa situada
no topo do conjunto blocos-maciço grampeado e a inclinação do paramento
determinaram o ―off set‖ de pé do muro, locado a 2,62 m da parede de fundo da caixa
de ensaio.
Após a montagem do conjunto blocos e maciço, o muro tem a forma de um
prisma oblíquo. Nas quatro faces do plano vertical, duas são idênticas e paralelas
entre si (paredes laterais) e as outras possuem comprimento e direção diferentes. As
faces superior e inferior são paralelas e cada uma possui as seguintes dimensões:
2,00 m x 2,50 m e 2,00 m x 2,62 m, respectivamente. A Figura VI.1 ilustra o perfil
longitudinal do conjunto maciço e blocos: trapézio com altura de 1,40 m, base maior de
2,62 m e base menor de 2,50 m, que corresponde ao comprimento da bolsa de ar
comprimido. A Figura VI.2(a) ilustra a seção transversal: retângulo com 2,00 m de
base e 1,40 m de altura. A planta baixa dos modelos físicos é apresentada na Figura
VI.2(b).
Sobrecarga até 100kPa (intervalos de 10kPa)
Figura VI.1 - Perfil longitudinal do modelo físico.
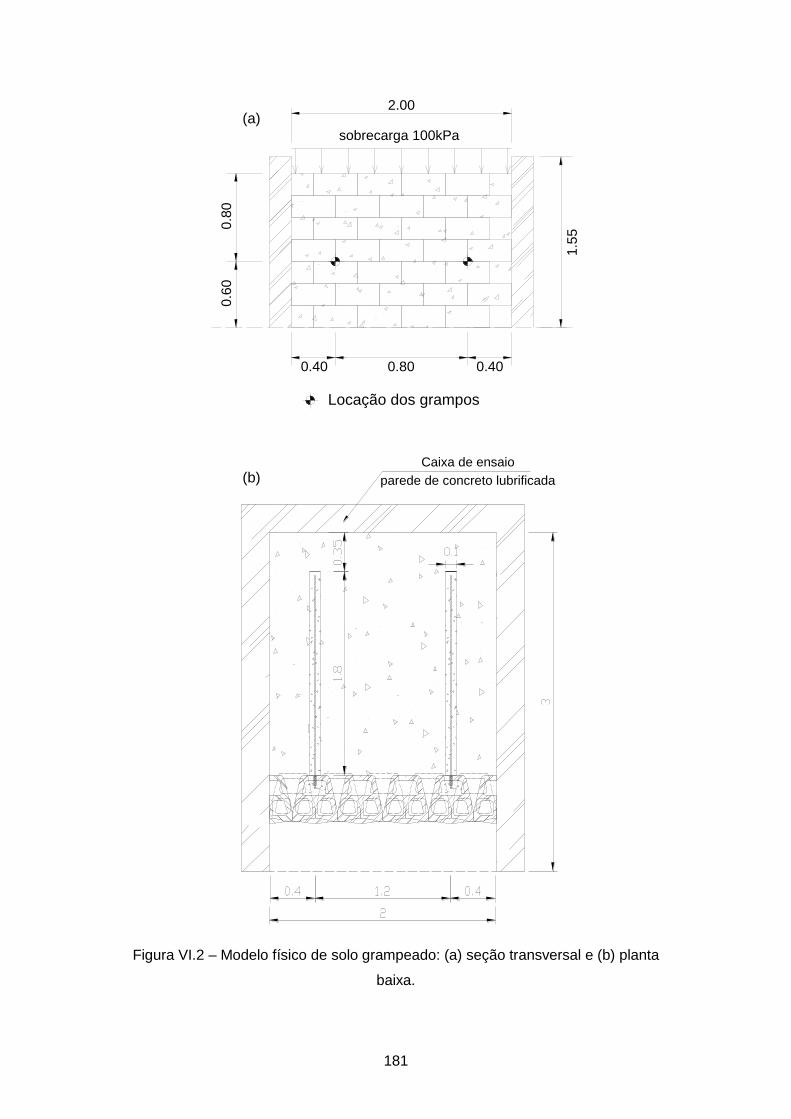
181
0.6
00.8
0
0.400.40 0.80
Locação dos grampos
sobrecarga 100kPa
2.00
1.5
5
Caixa de ensaio
parede de concreto lubrificada
Figura VI.2 – Modelo físico de solo grampeado: (a) seção transversal e (b) planta
baixa.
(a)
(b)
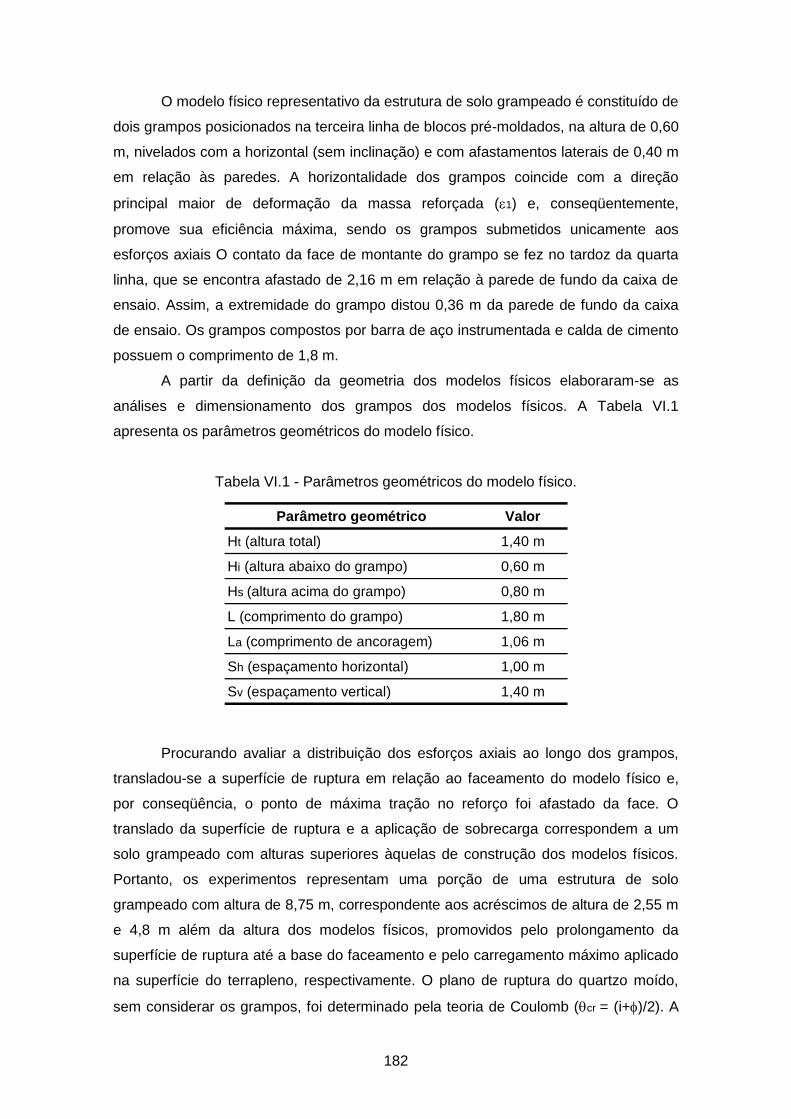
182
O modelo físico representativo da estrutura de solo grampeado é constituído de
dois grampos posicionados na terceira linha de blocos pré-moldados, na altura de 0,60
m, nivelados com a horizontal (sem inclinação) e com afastamentos laterais de 0,40 m
em relação às paredes. A horizontalidade dos grampos coincide com a direção
principal maior de deformação da massa reforçada (1) e, conseqüentemente,
promove sua eficiência máxima, sendo os grampos submetidos unicamente aos
esforços axiais O contato da face de montante do grampo se fez no tardoz da quarta
linha, que se encontra afastado de 2,16 m em relação à parede de fundo da caixa de
ensaio. Assim, a extremidade do grampo distou 0,36 m da parede de fundo da caixa
de ensaio. Os grampos compostos por barra de aço instrumentada e calda de cimento
possuem o comprimento de 1,8 m.
A partir da definição da geometria dos modelos físicos elaboraram-se as
análises e dimensionamento dos grampos dos modelos físicos. A Tabela VI.1
apresenta os parâmetros geométricos do modelo físico.
Tabela VI.1 - Parâmetros geométricos do modelo físico.
Parâmetro geométrico Valor
Ht (altura total) 1,40 m
Hi (altura abaixo do grampo) 0,60 m
Hs (altura acima do grampo) 0,80 m
L (comprimento do grampo) 1,80 m
La (comprimento de ancoragem) 1,06 m
Sh (espaçamento horizontal) 1,00 m
Sv (espaçamento vertical) 1,40 m
Procurando avaliar a distribuição dos esforços axiais ao longo dos grampos,
transladou-se a superfície de ruptura em relação ao faceamento do modelo físico e,
por conseqüência, o ponto de máxima tração no reforço foi afastado da face. O
translado da superfície de ruptura e a aplicação de sobrecarga correspondem a um
solo grampeado com alturas superiores àquelas de construção dos modelos físicos.
Portanto, os experimentos representam uma porção de uma estrutura de solo
grampeado com altura de 8,75 m, correspondente aos acréscimos de altura de 2,55 m
e 4,8 m além da altura dos modelos físicos, promovidos pelo prolongamento da
superfície de ruptura até a base do faceamento e pelo carregamento máximo aplicado
na superfície do terrapleno, respectivamente. O plano de ruptura do quartzo moído,
sem considerar os grampos, foi determinado pela teoria de Coulomb (cr = (i+)/2). A

183
Figura VI.3 ilustra a estrutura de solo grampeada representativa dos experimentos
realizados.
A relação entre o comprimento do grampo e a altura equivalente no nível de
instalação dos grampos nos modelos físicos encontra-se dentro do intervalo
recomendado pelo projeto CLOUTERRE (1991), o qual sugere uma relação L/H entre
0,5 e 1,2. Conforme relatado, a ausência de inclinação dos grampos é devida à
necessidade de se garantir sua eficiência máxima, objetivando monitorar os esforços
de tração, sem contribuição de esforços de cisalhamento e flexão.
Superfície de ruptura
Teoria de Coulomb
Zonaativa
Quartzo moído
Modelo físico
Zona passiva
Figura VI.3 – Estrutura de solo grampeado representativa dos modelos físicos
ensaiados.

184
VI.2.2.2 – Considerações
Para reproduzir os mecanismos de comportamento dos solos grampeados nos
ensaios com modelos físicos foram feitas as seguintes considerações:
Paredes da caixa de ensaio permitem a livre movimentação do maciço e dos
blocos;
Condição de deformação plana (característica típica das obras de contenção);
Condição de fundo estável para que a tendência de movimentação seja
preponderantemente horizontal;
Os grampos por sua rigidez podem ser solicitados à tração, à flexão e ao
cisalhamento, porém na análise e dimensionamento as contribuições da
resistência à flexão e ao cisalhamento foram negligenciadas;
A tração mobilizada nos grampos prepondera como mecanismo estabilizador;
As deformações que ocorrem no maciço são controladas pela deformabilidade
do grampo, isto é, as movimentações relativas solo-grampo são nulas nas
condições de trabalho;
Ocorre aderência da barra de aço com a calda de cimento;
Os reforços permitem deformação suficiente para mobilização do estado ativo;
O terrapleno é perfeitamente horizontal;
O método de análise de estabilidade adotado no estudo é o método analítico
baseado na teoria do equilíbrio limite; e
A superfície potencial de ruptura é planar passando por uma linha com
afastamento de 0,6 m em relação ao pé do tardoz do muro.
VI.2.2.3 - Parâmetros do solo e dos grampos
O solo utilizado nos modelos físicos é caracterizado por se tratar de um
material inerte e puramente friccional (c=0). Este solo foi fabricado através da moagem
de minerais de quartzo, que produziu uma ―areia‖ com distribuição granulométrica bem
graduada (Cu = 8,9), apresentando um comportamento histerético quando carregada e
descarregada. COSTA (2005) verificou os ângulos de atrito interno deste quartzo
moído na condição de deformação plana (PS) e através de ensaios triaxiais
convencionais (AS), com tensões confinantes de 50, 100, 200 e 300 kPa, que
forneceram valores médios de 58,48 e 48,05, respectivamente. Executa-se a
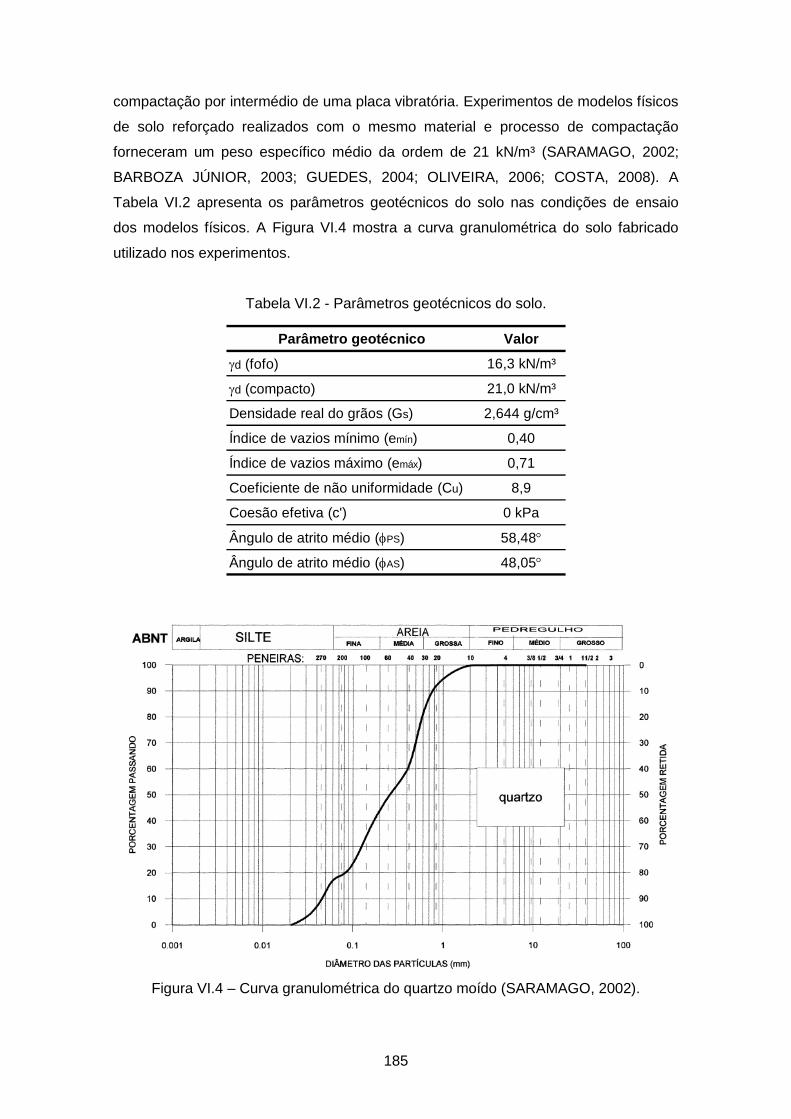
185
compactação por intermédio de uma placa vibratória. Experimentos de modelos físicos
de solo reforçado realizados com o mesmo material e processo de compactação
forneceram um peso específico médio da ordem de 21 kN/m³ (SARAMAGO, 2002;
BARBOZA JÚNIOR, 2003; GUEDES, 2004; OLIVEIRA, 2006; COSTA, 2008). A
Tabela VI.2 apresenta os parâmetros geotécnicos do solo nas condições de ensaio
dos modelos físicos. A Figura VI.4 mostra a curva granulométrica do solo fabricado
utilizado nos experimentos.
Tabela VI.2 - Parâmetros geotécnicos do solo.
Parâmetro geotécnico Valor
d (fofo) 16,3 kN/m³
d (compacto) 21,0 kN/m³
Densidade real do grãos (Gs) 2,644 g/cm³
Índice de vazios mínimo (emín) 0,40
Índice de vazios máximo (emáx) 0,71
Coeficiente de não uniformidade (Cu) 8,9
Coesão efetiva (c') 0 kPa
Ângulo de atrito médio (PS) 58,48
Ângulo de atrito médio (AS) 48,05
Figura VI.4 – Curva granulométrica do quartzo moído (SARAMAGO, 2002).

186
O elemento de reforço do grampo considerado para elaboração dos cálculos é
de aço existente no mercado, do tipo ―A‖ (laminado a quente) e categoria CA50. A
categoria é indicada pelo código CA (aço de concreto armado) e pelo número
indicativo da tensão de escoamento (50 kN/cm²). Considera-se que o conjunto aço e
calda de cimento seja uma construção solidária, isto é, admite-se que não há
deslocamento de um em relação ao outro. Conhecidos os valores característicos das
tensões de escoamento do aço (fyk), para determinar o valor de cálculo (fyd) divide-se
pelo coeficiente de minoração (ys) igual a 1,15. O módulo de elasticidade (Es) do aço
é igual a 21.000 kN/cm². A Tabela VI.3 apresenta os parâmetros mecânicos dos
elementos das barras.
Tabela VI.3 - Parâmetros mecânicos das barras de aço.
Categoria
Tensão de
escoamento
mínima, fyk
(kN/cm²)
Tensão para
deformação de
0,2%
sd (kN/cm²)
Tensão de
cálculo fyd
(kN/cm²)
Módulo de
elasticidade Es
(kNcm²)
Aderência com a
calda de cimento
CA 50 A 50 42 44 21.000 1,5
VI.2.2.4 - Análises e Cálculos
Para determinação da tração máxima nos grampos utilizaram-se os métodos
clássicos de Rankine e Coulomb. FEIJÓ & EHRLICH (2001) relatam que utilizaram um
modelo simplista, com base na teoria de Rankine, o qual apresentou resultados
consistentes com as forças de tração medidas em grampos instrumentados com
―strain gauges‖. Entretanto, para utilizar a teoria de Rankine, considerou-se
faceamento vertical (=90). Devido à face possuir uma inclinação de 1:10 (H:V) ou
84,29º, aplicou-se, também, a teoria de Coulomb.
A concepção dos Modelos Físicos da estrutura de solo grampeado contempla
dois grampos com espaçamentos vertical (Sv) de 1,40 m e horizontal (Sh) de 1,00 m, o
que corresponde a uma densidade de 1 grampo para cada 1,40 metros quadrados de
face. Considerando a profundidade de instalação (z=-0,8) e a área de influência de
cada grampo, as teorias de Rankine e Coulomb fornecem esforços de tração em cada
grampo de 7,1 kN e 9,6 kN, respectivamente.
No projeto, com base no maior valor encontrado para força de tração máxima,
definiu-se uma seção de aço adequada para se evitar a ruptura e um comprimento de
transferência do grampo suficiente para evitar seu arrancamento da zona resistente.
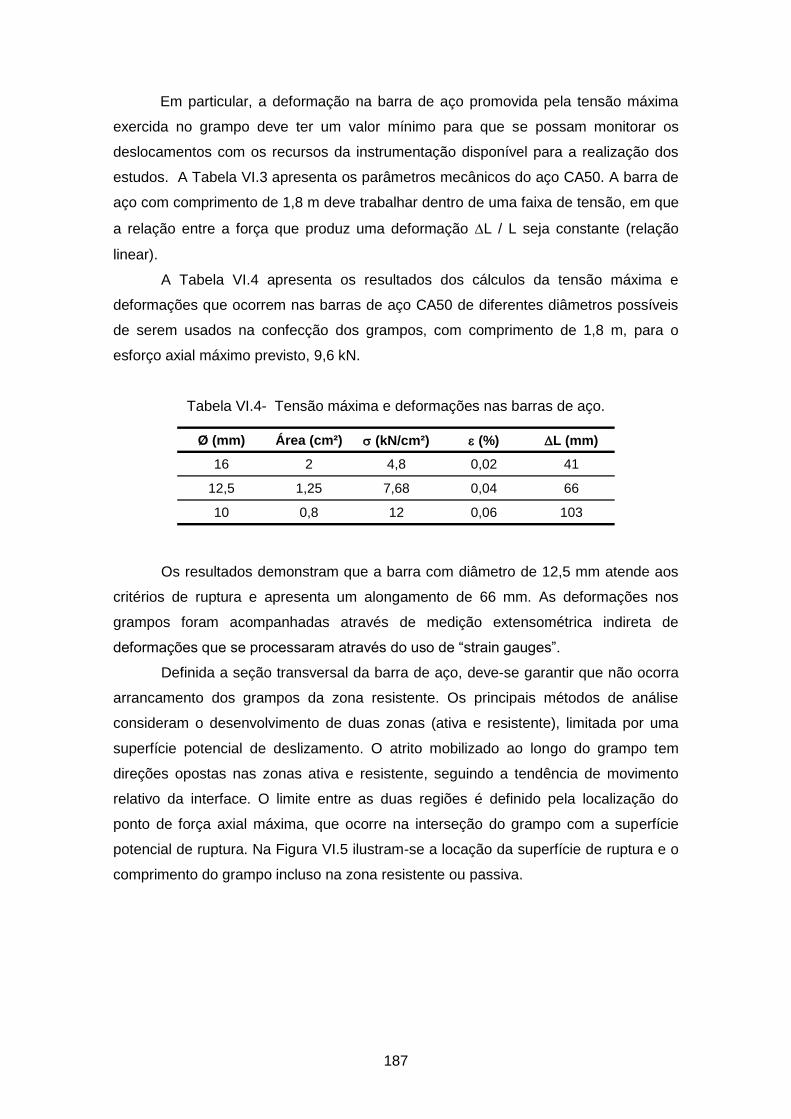
187
Em particular, a deformação na barra de aço promovida pela tensão máxima
exercida no grampo deve ter um valor mínimo para que se possam monitorar os
deslocamentos com os recursos da instrumentação disponível para a realização dos
estudos. A Tabela VI.3 apresenta os parâmetros mecânicos do aço CA50. A barra de
aço com comprimento de 1,8 m deve trabalhar dentro de uma faixa de tensão, em que
a relação entre a força que produz uma deformação L / L seja constante (relação
linear).
A Tabela VI.4 apresenta os resultados dos cálculos da tensão máxima e
deformações que ocorrem nas barras de aço CA50 de diferentes diâmetros possíveis
de serem usados na confecção dos grampos, com comprimento de 1,8 m, para o
esforço axial máximo previsto, 9,6 kN.
Tabela VI.4- Tensão máxima e deformações nas barras de aço.
Ø (mm) Área (cm²) (kN/cm²) (%) L (mm)
16 2 4,8 0,02 41
12,5 1,25 7,68 0,04 66
10 0,8 12 0,06 103
Os resultados demonstram que a barra com diâmetro de 12,5 mm atende aos
critérios de ruptura e apresenta um alongamento de 66 mm. As deformações nos
grampos foram acompanhadas através de medição extensométrica indireta de
deformações que se processaram através do uso de ―strain gauges‖.
Definida a seção transversal da barra de aço, deve-se garantir que não ocorra
arrancamento dos grampos da zona resistente. Os principais métodos de análise
consideram o desenvolvimento de duas zonas (ativa e resistente), limitada por uma
superfície potencial de deslizamento. O atrito mobilizado ao longo do grampo tem
direções opostas nas zonas ativa e resistente, seguindo a tendência de movimento
relativo da interface. O limite entre as duas regiões é definido pela localização do
ponto de força axial máxima, que ocorre na interseção do grampo com a superfície
potencial de ruptura. Na Figura VI.5 ilustram-se a locação da superfície de ruptura e o
comprimento do grampo incluso na zona resistente ou passiva.
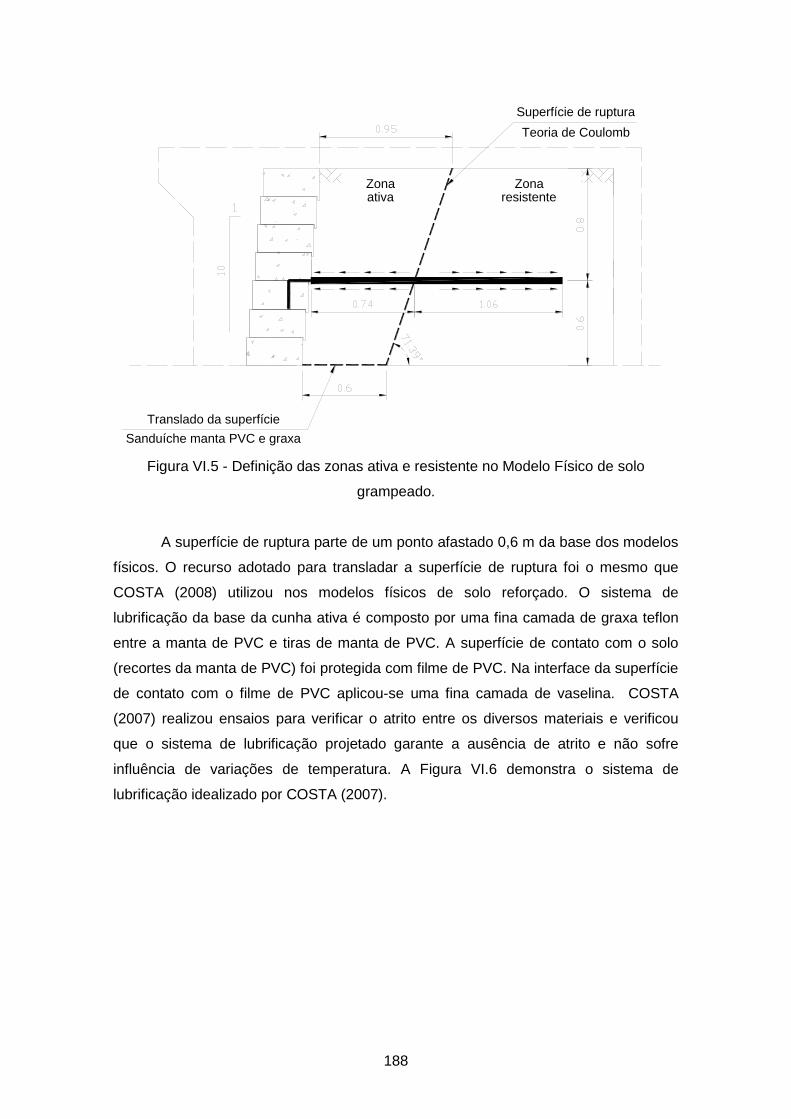
188
Translado da superfície
Sanduíche manta PVC e graxa
ZonaZonaresistenteativa
Superfície de ruptura
Teoria de Coulomb
Figura VI.5 - Definição das zonas ativa e resistente no Modelo Físico de solo
grampeado.
A superfície de ruptura parte de um ponto afastado 0,6 m da base dos modelos
físicos. O recurso adotado para transladar a superfície de ruptura foi o mesmo que
COSTA (2008) utilizou nos modelos físicos de solo reforçado. O sistema de
lubrificação da base da cunha ativa é composto por uma fina camada de graxa teflon
entre a manta de PVC e tiras de manta de PVC. A superfície de contato com o solo
(recortes da manta de PVC) foi protegida com filme de PVC. Na interface da superfície
de contato com o filme de PVC aplicou-se uma fina camada de vaselina. COSTA
(2007) realizou ensaios para verificar o atrito entre os diversos materiais e verificou
que o sistema de lubrificação projetado garante a ausência de atrito e não sofre
influência de variações de temperatura. A Figura VI.6 demonstra o sistema de
lubrificação idealizado por COSTA (2007).
189
Figura VI.6 – Sistema de lubrificação adotado para transladar a superfície de ruptura:
(a) aplicação da camada de graxa teflon sobre a manta de PVC, (b) colocação dos
recortes da manta de PVC sobre o pano de manta de PVC engraxada, (c) aplicação
da camada de vaselina sobre as tiras de manta de PVC e (d) proteção da superfície de
contato com o solo com filme de PVC.
Definindo o ponto onde a superfície de ruptura intercepta o grampo, conhece-
se o comprimento do grampo embutido na zona resistente. A Figura VI.5 mostra os
comprimentos do grampo nas zonas ativa e passiva. O trecho ancorado de cada
grampo (la) tem 1,06 m de comprimento. Para verificar se o comprimento ancorado é
suficiente para evitar o arrancamento do grampo da zona resistente é necessário o
conhecimento das forças de atrito desenvolvidas na interface solo-grampo. Para tanto,
admite-se que a resistência ao cisalhamento máxima de interface solo-grampo (qs) é
constante ao longo do grampo e pode ser determinado teoricamente pelo critério de
ruptura de Mohr-Coulomb (Equação VI.1).
'tan.. eqs Hq (VI.1)
(a) (b)
(c) (d)
190
Onde Heq corresponde à soma da altura equivalente promovida pela
sobrecarga com a profundidade de instalação do grampo (z=-0,8m). O critério de
ruptura fornecido pela Equação VI.1 pode se apresentar adequado, se a superfície do
perímetro do grampo for constituída do mesmo material do solo. Mais adiante será
demonstrado que esta condição foi garantida quando fabricaram-se os grampos.
Para garantir a estabilidade interna dos modelos físicos, verificou-se as
resistências ao arrancamento (qs) para cada nível de carregamento e suas
correspondentes forças de tração máximas nos grampos determinadas pela Equação
VI.2.
acsmáx lDqT .. (VI.2)
Na prática executam-se grampos com diâmetros (Dc) de 75 mm e 100 mm. A
análise da estabilidade interna referente ao arrancamento do grampo da zona
resistente indicou que o mais adequado seria adotar um diâmetro de 100 mm. A
Figura VI.7 apresenta os detalhes executivos da cabeça e corpo dos grampos.
12,5
mm
100 m
m
Luva r
osqueada
Calda cimento
CA50 Ø12,5mm
Ø100mm
Luva
rosqueada
Figura VI.7 – Detalhe executivo das duas partes dos grampos: cabeça e corpo unidas
com emenda por luva.
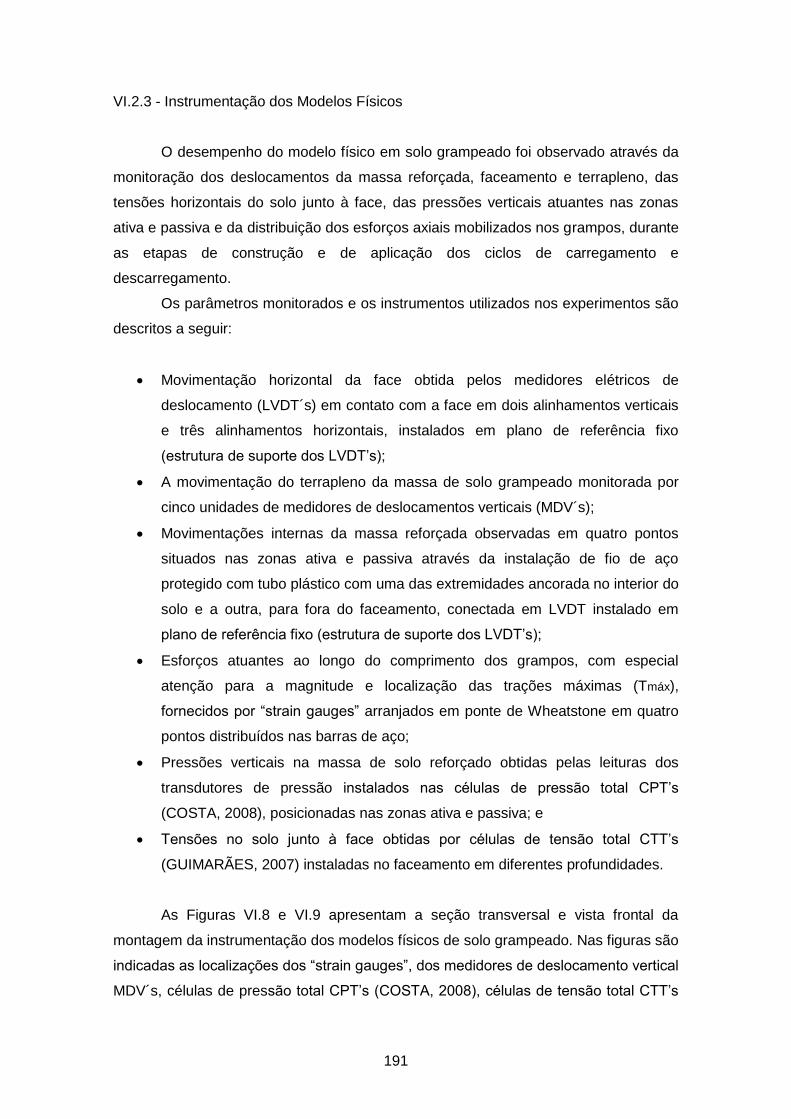
191
VI.2.3 - Instrumentação dos Modelos Físicos
O desempenho do modelo físico em solo grampeado foi observado através da
monitoração dos deslocamentos da massa reforçada, faceamento e terrapleno, das
tensões horizontais do solo junto à face, das pressões verticais atuantes nas zonas
ativa e passiva e da distribuição dos esforços axiais mobilizados nos grampos, durante
as etapas de construção e de aplicação dos ciclos de carregamento e
descarregamento.
Os parâmetros monitorados e os instrumentos utilizados nos experimentos são
descritos a seguir:
Movimentação horizontal da face obtida pelos medidores elétricos de
deslocamento (LVDT´s) em contato com a face em dois alinhamentos verticais
e três alinhamentos horizontais, instalados em plano de referência fixo
(estrutura de suporte dos LVDT’s);
A movimentação do terrapleno da massa de solo grampeado monitorada por
cinco unidades de medidores de deslocamentos verticais (MDV´s);
Movimentações internas da massa reforçada observadas em quatro pontos
situados nas zonas ativa e passiva através da instalação de fio de aço
protegido com tubo plástico com uma das extremidades ancorada no interior do
solo e a outra, para fora do faceamento, conectada em LVDT instalado em
plano de referência fixo (estrutura de suporte dos LVDT’s);
Esforços atuantes ao longo do comprimento dos grampos, com especial
atenção para a magnitude e localização das trações máximas (Tmáx),
fornecidos por ―strain gauges‖ arranjados em ponte de Wheatstone em quatro
pontos distribuídos nas barras de aço;
Pressões verticais na massa de solo reforçado obtidas pelas leituras dos
transdutores de pressão instalados nas células de pressão total CPT’s
(COSTA, 2008), posicionadas nas zonas ativa e passiva; e
Tensões no solo junto à face obtidas por células de tensão total CTT’s
(GUIMARÃES, 2007) instaladas no faceamento em diferentes profundidades.
As Figuras VI.8 e VI.9 apresentam a seção transversal e vista frontal da
montagem da instrumentação dos modelos físicos de solo grampeado. Nas figuras são
indicadas as localizações dos ―strain gauges‖, dos medidores de deslocamento vertical
MDV´s, células de pressão total CPT’s (COSTA, 2008), células de tensão total CTT’s
192
(GUIMARÃES, 2007), medidores elétricos de deslocamento LVDT´s responsáveis
pelas medidas de deslocamento horizontal do faceamento e da massa de solo
grampeado.
LVDT (h solo)
crít (Coulomb)
LVDT (h face)
CPT (solo) e CTT (face)
Strain gauges (p. completa)
MDV ( vertical)
com e sem atrito na base
Translado da superfície de ruptura
(camada de graxa entre manta e tiras de PVC)
2x
3x
4x
2x
Zona ativa Zona passiva
Figura VI.8 - Seção transversal dos modelos físicos com a instrumentação montada.
VI.2.3.1 – Instrumentação para Monitorar a Movimentação Horizontal da Face
Para monitorar a movimentação do faceamento utilizaram-se medidores
elétricos de deslocamento (LVDT´s) posicionados em diferentes pontos obtendo dois
alinhamentos verticais e três alinhamentos horizontais. A localização dos LVDT´s é
apresentada na vista frontal, ilustrada na Figura VI.9. Para a realização da medição
dos deslocamentos foi necessária a construção de uma estrutura de suporte fixada no
piso do laboratório para instalar os LVDT’s e servir como plano de referência (Figura
VI.10). Utilizou-se a estrutura de suporte de LVDT’s desenvolvida por SARAMAGO
(2002) e fabricou-se outra para permitir medir os deslocamentos em diversos pontos
do faceamento.

193
Perfil horizontal 03 (cota 1,1m)
Perfil horizontal 02 (cota 0,7m)
Perfil horizontal 01 (cota 0,3m)
Locação dos grampos
Conexões para suporte dos LVDT's (h face)
Células de tensão total CTT's (solo-face)
LVDT's fixados na mesa e ligados nos fios de aço (h solo)
Perf
il vert
ical 01
Afa
st. 1
,0m
Perf
il vert
ical 02
Afa
st. 1
,4m
Suporte LVDT's
Plano de referência
deslocamento interno do solo
Figura VI.9 - Localização dos pontos de contato dos LVDT´s na face do modelo físico.
Figura VI.10 – Fabricação da estrutura de suporte dos LVDT´s.
As calibrações dos medidores elétricos de deslocamento (LVDT’s) foram
realizadas com o auxílio de micrômetro que serviu como referência das medidas em
mm. Os intervalos de medida variaram de 2,5 mm, em ciclos de encurtamento e
alongamento, até o valor máximo de 50 mm. As figuras VI.11 e VI.12 apresentam os
detalhes do ensaio, a título de exemplo, uma das curvas de calibração. As demais
curvas de calibração dos LVDT’s encontram-se no Apêndice B.
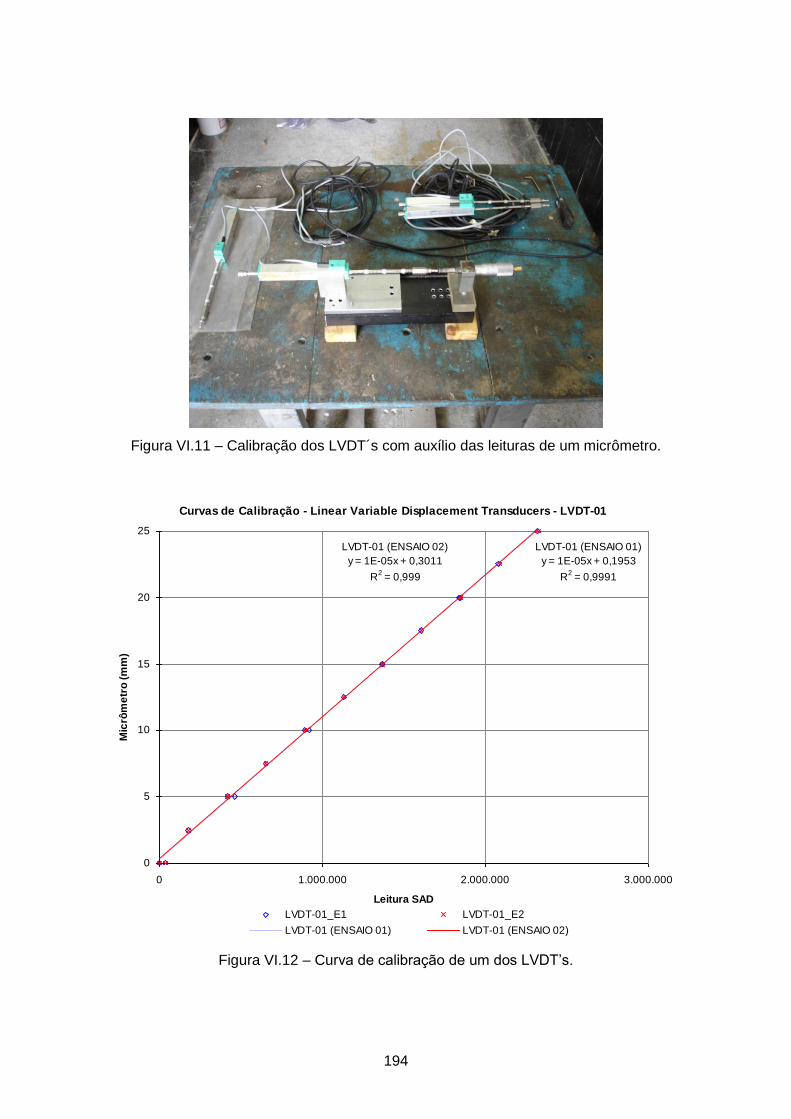
194
Figura VI.11 – Calibração dos LVDT´s com auxílio das leituras de um micrômetro.
Curvas de Calibração - Linear Variable Displacement Transducers - LVDT-01
LVDT-01 (ENSAIO 01)
y = 1E-05x + 0,1953
R2 = 0,9991
LVDT-01 (ENSAIO 02)
y = 1E-05x + 0,3011
R2 = 0,999
0
5
10
15
20
25
0 1.000.000 2.000.000 3.000.000
Leitura SAD
Mic
rôm
etr
o (
mm
)
LVDT-01_E1 LVDT-01_E2
LVDT-01 (ENSAIO 01) LVDT-01 (ENSAIO 02)
Figura VI.12 – Curva de calibração de um dos LVDT’s.

195
VI.2.3.2 – Instrumentação para Monitorar os Deslocamentos Verticais do Terrapleno
As movimentações na superfície de topo do maciço foram obtidas por cinco
unidades de medidores de deslocamentos verticais (MDV´s), instalados em seção
situada no meio do muro, a 1,0 m das paredes laterais, na superfície de topo do
maciço reforçado (cota +1,40 m) ou terrapleno. Os MDV´s foram dispostos a 0,15 m,
0,65 m, 1,25 m, 1,60 m e 1,90 m da face (Figura VI.8).
Norteando-se na concepção empregada por EHRLICH (1979) para o
desenvolvimento de medidor de deslocamento vertical, o instrumento baseia-se no
princípio dos vasos comunicantes e utiliza dois líquidos (mercúrio e água) para
ampliação do desnível entre dois pontos. Assim, o medidor de deslocamento vertical
MDV é um sistema composto de duas partes interligadas: disco e pote de acrílico,
ambos providos de reservatório interno preenchidos com mercúrio na parte inferior e
água desaerada na superior. Um tubo plástico interliga as bases dos reservatórios,
ficando estes em contato com a atmosfera durante a operação do instrumento. O disco
é instalado na superfície que se deseja monitorar os deslocamentos verticais. No pote
ligado a um plano de referência fixado na parede do laboratório é instalado um
transdutor de pressão no topo do reservatório onde contém água desaerada. A
variação do nível do mercúrio em função do desnível entre os dois reservatórios
promove acréscimo ou redução de pressão na coluna de água contida na parte
superior do reservatório do pote. Esta variação de pressão, a qual é registrada pelo
transdutor de pressão, é associada à variação dos deslocamentos verticais. Tal
correlação é realizada através das curvas de calibração. A Figura VI.13 apresenta os
detalhes do sistema utilizado para monitorar os deslocamentos verticais durante os
ciclos de carregamento e descarregamento dos modelos físicos.

196
Figura VI.13 – Detalhe dos medidores de deslocamentos verticais MDV’s: (a) esquema
do sistema de medição (OLIVEIRA, 2006), (b) disco instalado na superfície do
terrapleno e (c) reservatório ligado ao transdutor de pressão.
Os ensaios de calibração dos MDV’s foram efetuados numa prensa de
deformação controlada e consistiram da correlação dos acréscimos e decréscimos de
deslocamentos verticais fornecidos por extensômetro analógico com as leituras do
transdutor de pressão registradas pelo sistema de aquisição de dados. Os ensaios de
calibração foram realizados por VASCONCELOS (2009). A Figura VI.14 apresenta as
curvas de calibração de cada um dos medidores de deslocamentos verticais (MDV’s).
(a)
(c) (b)
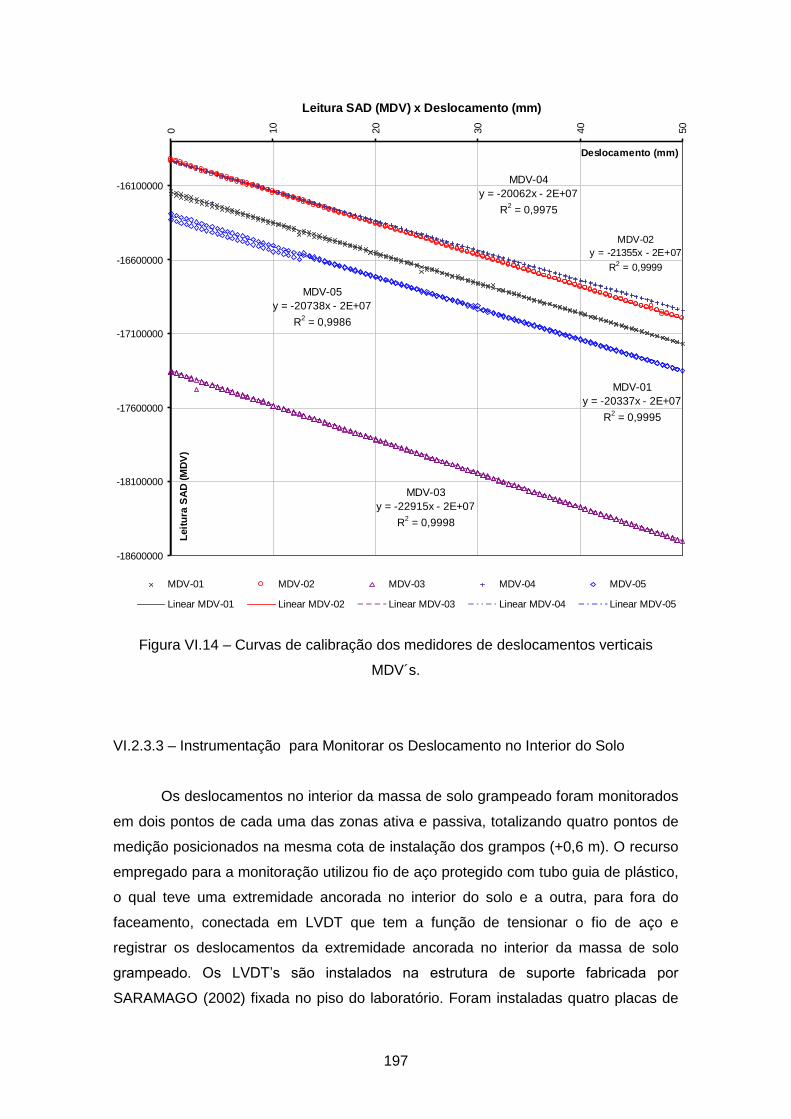
197
Leitura SAD (MDV) x Deslocamento (mm)
MDV-01
y = -20337x - 2E+07
R2 = 0,9995
MDV-02
y = -21355x - 2E+07
R2 = 0,9999
MDV-03
y = -22915x - 2E+07
R2 = 0,9998
MDV-04
y = -20062x - 2E+07
R2 = 0,9975
MDV-05
y = -20738x - 2E+07
R2 = 0,9986
-18600000
-18100000
-17600000
-17100000
-16600000
-16100000
0 10
20
30
40
50
Deslocamento (mm)
Leit
ura
SA
D (
MD
V)
MDV-01 MDV-02 MDV-03 MDV-04 MDV-05
Linear MDV-01 Linear MDV-02 Linear MDV-03 Linear MDV-04 Linear MDV-05
Figura VI.14 – Curvas de calibração dos medidores de deslocamentos verticais
MDV´s.
VI.2.3.3 – Instrumentação para Monitorar os Deslocamento no Interior do Solo
Os deslocamentos no interior da massa de solo grampeado foram monitorados
em dois pontos de cada uma das zonas ativa e passiva, totalizando quatro pontos de
medição posicionados na mesma cota de instalação dos grampos (+0,6 m). O recurso
empregado para a monitoração utilizou fio de aço protegido com tubo guia de plástico,
o qual teve uma extremidade ancorada no interior do solo e a outra, para fora do
faceamento, conectada em LVDT que tem a função de tensionar o fio de aço e
registrar os deslocamentos da extremidade ancorada no interior da massa de solo
grampeado. Os LVDT’s são instalados na estrutura de suporte fabricada por
SARAMAGO (2002) fixada no piso do laboratório. Foram instaladas quatro placas de
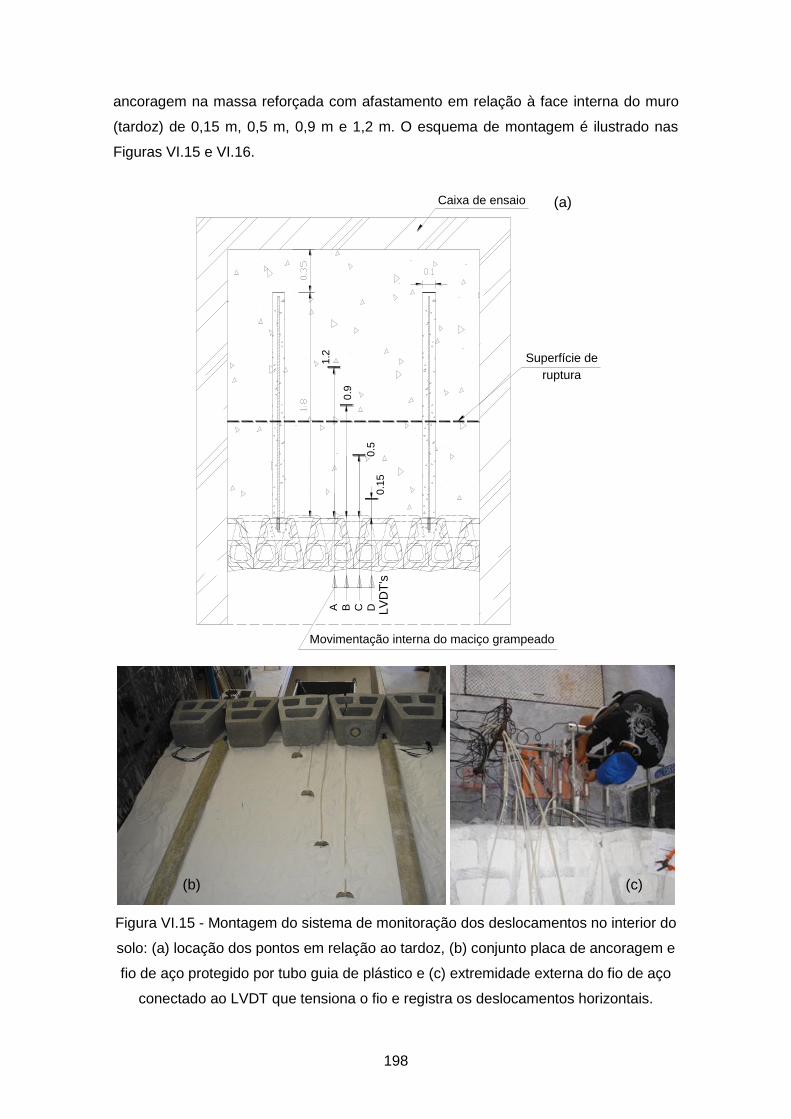
198
ancoragem na massa reforçada com afastamento em relação à face interna do muro
(tardoz) de 0,15 m, 0,5 m, 0,9 m e 1,2 m. O esquema de montagem é ilustrado nas
Figuras VI.15 e VI.16.
1.2
0.5
0.1
5
A
0.9
LV
DT
's
Movimentação interna do maciço grampeado
B C D
Caixa de ensaio
Superfície de
ruptura
Figura VI.15 - Montagem do sistema de monitoração dos deslocamentos no interior do
solo: (a) locação dos pontos em relação ao tardoz, (b) conjunto placa de ancoragem e
fio de aço protegido por tubo guia de plástico e (c) extremidade externa do fio de aço
conectado ao LVDT que tensiona o fio e registra os deslocamentos horizontais.
(b) (c)
(a)
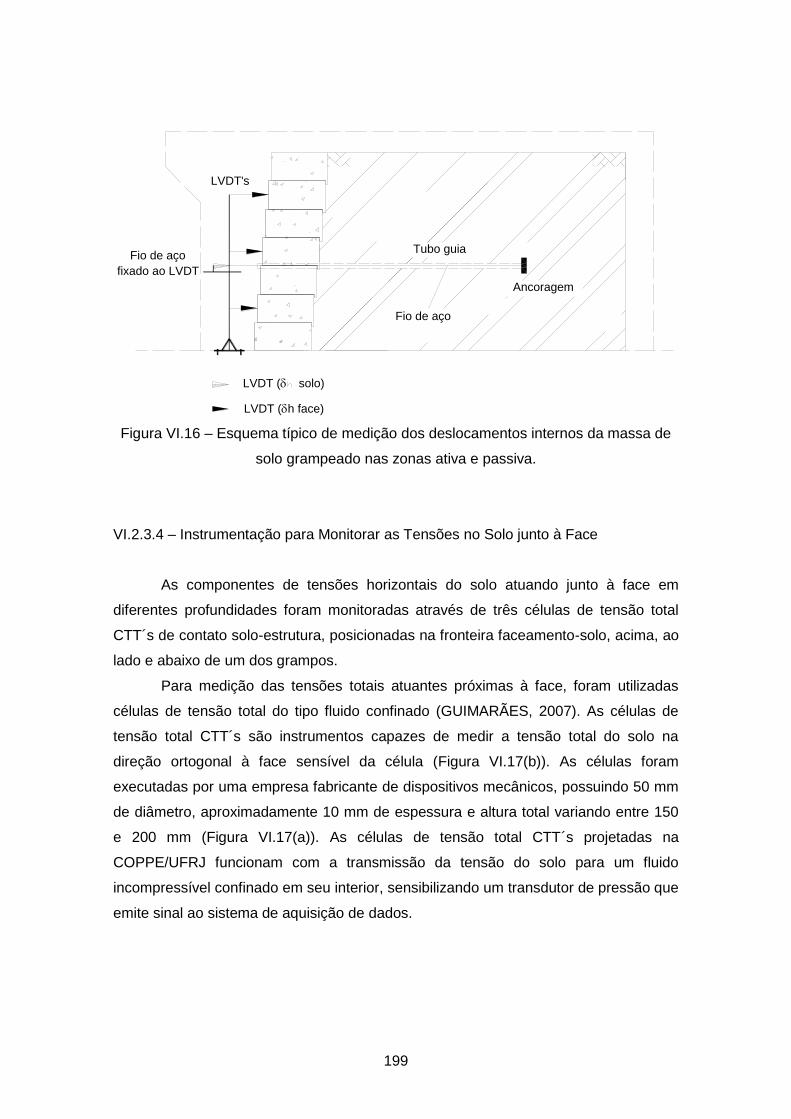
199
Tubo guia
Ancoragem
Fio de aço
LVDT's
Fio de aço
fixado ao LVDT
LVDT ( solo)
LVDT (h face)
Figura VI.16 – Esquema típico de medição dos deslocamentos internos da massa de
solo grampeado nas zonas ativa e passiva.
VI.2.3.4 – Instrumentação para Monitorar as Tensões no Solo junto à Face
As componentes de tensões horizontais do solo atuando junto à face em
diferentes profundidades foram monitoradas através de três células de tensão total
CTT´s de contato solo-estrutura, posicionadas na fronteira faceamento-solo, acima, ao
lado e abaixo de um dos grampos.
Para medição das tensões totais atuantes próximas à face, foram utilizadas
células de tensão total do tipo fluido confinado (GUIMARÃES, 2007). As células de
tensão total CTT´s são instrumentos capazes de medir a tensão total do solo na
direção ortogonal à face sensível da célula (Figura VI.17(b)). As células foram
executadas por uma empresa fabricante de dispositivos mecânicos, possuindo 50 mm
de diâmetro, aproximadamente 10 mm de espessura e altura total variando entre 150
e 200 mm (Figura VI.17(a)). As células de tensão total CTT´s projetadas na
COPPE/UFRJ funcionam com a transmissão da tensão do solo para um fluido
incompressível confinado em seu interior, sensibilizando um transdutor de pressão que
emite sinal ao sistema de aquisição de dados.

200
Figura VI.17 – Célula Tensão Total CTT: (a) conjunto corpo e peça de adaptação
(copo) e (b) face sensível da célula (GUIMARÃES, 2007).
A Figura VI.18 ilustra os detalhes dos ensaios de calibração e a Figura VI.19
apresenta a curva de calibração obtida para uma das células. Os resultados da
calibração das demais células são apresentados no Apêndice B.
Figura VI.18 – Detalhes do ensaio de calibração das células de tensão total CTT´s: (a)
painel de controle pneumático responsável pela aplicação da pressão de ar e (b)
célula instalada dentro da câmara de ar e manômetro responsável pela precisão das
leituras feitas preliminarmente pelo painel de controle.
Face
sensível
(a)
(b)
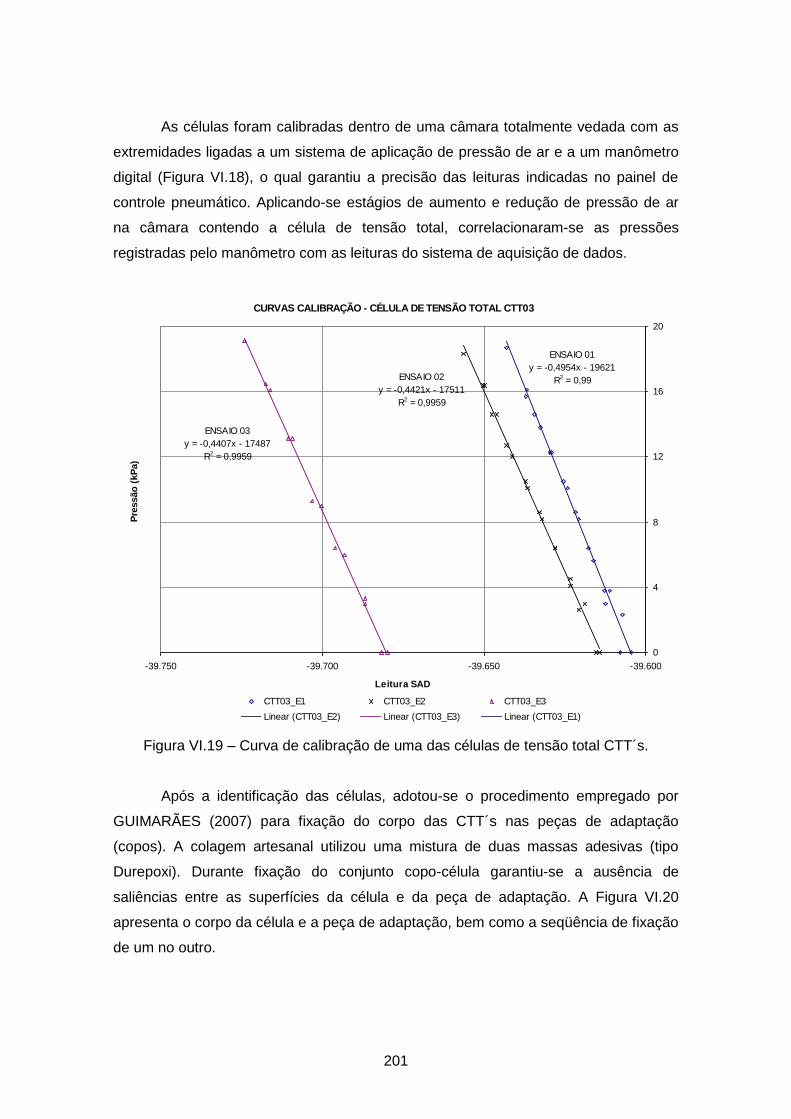
201
As células foram calibradas dentro de uma câmara totalmente vedada com as
extremidades ligadas a um sistema de aplicação de pressão de ar e a um manômetro
digital (Figura VI.18), o qual garantiu a precisão das leituras indicadas no painel de
controle pneumático. Aplicando-se estágios de aumento e redução de pressão de ar
na câmara contendo a célula de tensão total, correlacionaram-se as pressões
registradas pelo manômetro com as leituras do sistema de aquisição de dados.
CURVAS CALIBRAÇÃO - CÉLULA DE TENSÃO TOTAL CTT03
ENSAIO 02
y = -0,4421x - 17511
R2 = 0,9959
ENSAIO 03
y = -0,4407x - 17487
R2 = 0,9959
ENSAIO 01
y = -0,4954x - 19621
R2 = 0,99
0
4
8
12
16
20
-39.750 -39.700 -39.650 -39.600
Leitura SAD
Pre
ssão
(kP
a)
CTT03_E1 CTT03_E2 CTT03_E3
Linear (CTT03_E2) Linear (CTT03_E3) Linear (CTT03_E1)
Figura VI.19 – Curva de calibração de uma das células de tensão total CTT´s.
Após a identificação das células, adotou-se o procedimento empregado por
GUIMARÃES (2007) para fixação do corpo das CTT´s nas peças de adaptação
(copos). A colagem artesanal utilizou uma mistura de duas massas adesivas (tipo
Durepoxi). Durante fixação do conjunto copo-célula garantiu-se a ausência de
saliências entre as superfícies da célula e da peça de adaptação. A Figura VI.20
apresenta o corpo da célula e a peça de adaptação, bem como a seqüência de fixação
de um no outro.
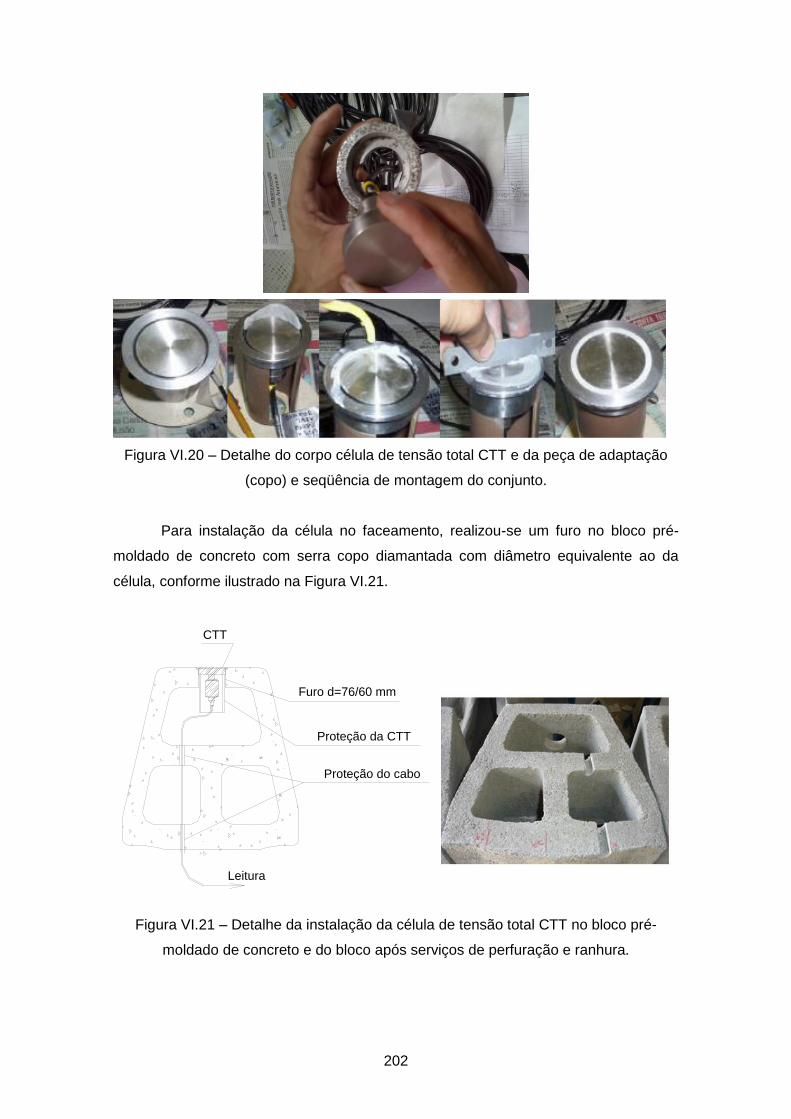
202
Figura VI.20 – Detalhe do corpo célula de tensão total CTT e da peça de adaptação
(copo) e seqüência de montagem do conjunto.
Para instalação da célula no faceamento, realizou-se um furo no bloco pré-
moldado de concreto com serra copo diamantada com diâmetro equivalente ao da
célula, conforme ilustrado na Figura VI.21.
CTT
Furo d=76/60 mm
Proteção da CTT
Proteção do cabo
Leitura
Figura VI.21 – Detalhe da instalação da célula de tensão total CTT no bloco pré-
moldado de concreto e do bloco após serviços de perfuração e ranhura.

203
VI.2.3.5 – Instrumentação para Monitorar a Pressão Vertical do Solo Grampeado
As pressões verticais no solo foram monitoradas com auxílio de 2 células de
pressão total CPT´s instaladas em seção situada no meio do muro, a 1,0 m das
paredes laterais, no interior da massa grampeada nas zonas ativa e passiva a 0,40 m
abaixo do nível de instalação dos grampos. As CPT´s foram dispostas a 0,4 m e 0,9 m
da face (Figura VI.8).
Para medição das pressões verticais no solo COSTA (2008) projetou e
desenvolveu células de pressão total do tipo fluido confinado, das quais transmitiram a
pressão do solo para um fluido incompressível existente em seu interior, sensibilizando
um transdutor de pressão instalado no instrumento.
O corpo das células com diâmetro de 0,2 m desenvolvidas por COSTA (2008)
foram construídas com o material utilizado na bolsa de ar comprimido utilizada por
SARAMAGO (2002) para aplicar sobrecarga no terrapleno dos modelos físicos de solo
reforçado. Buscou-se com este tipo de material evitar a influência do fenômeno de
arqueamento, que poderia falsear os resultados da instrumentação. Conforme RICCIO
FILHO (2007), o fluido utilizado para preenchimento da câmara foi água desaerada, o
que representou uma simplificação operacional considerável. A câmara da célula foi
conectada a um transdutor de pressão por meio de um tubo plástico. A Figura VI.22
apresenta os detalhes da célula de pressão total CPT.
Solda
Célula
Transdutor
0,2m
de pressão
Tu
bo
lig
açã
o
Figura VI.22 – Detalhes da célula de pressão total desenvolvidas por COSTA (2008):
(a) planta baixa e seção transversal do conjunto corpo da célula e transdutor e (b)
fotografia da instrumento sobre camada do solo fabricado (quartzo moído).
(a)
(b)
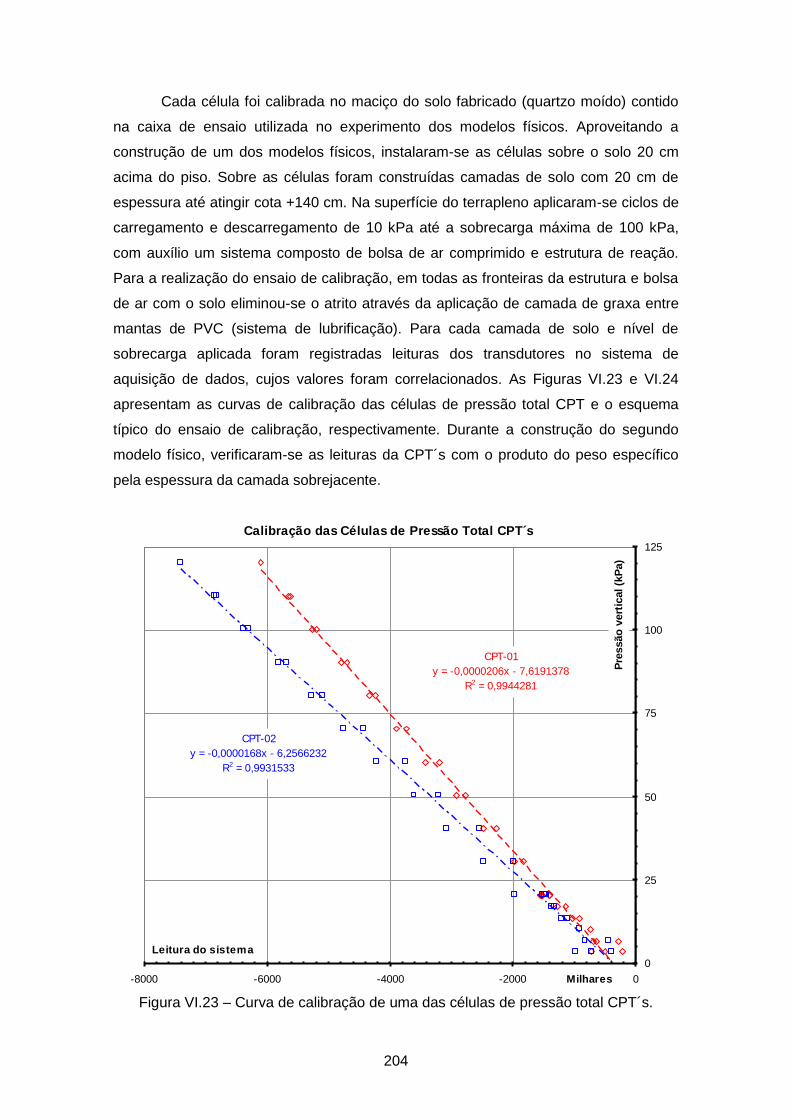
204
Cada célula foi calibrada no maciço do solo fabricado (quartzo moído) contido
na caixa de ensaio utilizada no experimento dos modelos físicos. Aproveitando a
construção de um dos modelos físicos, instalaram-se as células sobre o solo 20 cm
acima do piso. Sobre as células foram construídas camadas de solo com 20 cm de
espessura até atingir cota +140 cm. Na superfície do terrapleno aplicaram-se ciclos de
carregamento e descarregamento de 10 kPa até a sobrecarga máxima de 100 kPa,
com auxílio um sistema composto de bolsa de ar comprimido e estrutura de reação.
Para a realização do ensaio de calibração, em todas as fronteiras da estrutura e bolsa
de ar com o solo eliminou-se o atrito através da aplicação de camada de graxa entre
mantas de PVC (sistema de lubrificação). Para cada camada de solo e nível de
sobrecarga aplicada foram registradas leituras dos transdutores no sistema de
aquisição de dados, cujos valores foram correlacionados. As Figuras VI.23 e VI.24
apresentam as curvas de calibração das células de pressão total CPT e o esquema
típico do ensaio de calibração, respectivamente. Durante a construção do segundo
modelo físico, verificaram-se as leituras da CPT´s com o produto do peso específico
pela espessura da camada sobrejacente.
Calibração das Células de Pressão Total CPT´s
CPT-01
y = -0,0000206x - 7,6191378
R2 = 0,9944281
CPT-02
y = -0,0000168x - 6,2566232
R2 = 0,9931533
0
25
50
75
100
125
-8000 -6000 -4000 -2000 0Milhares
Leitura do sistema
Pre
ssão
vert
ical (k
Pa)
CPT1 CPT2 Linear CPT1 Linear CPT2
Figura VI.23 – Curva de calibração de uma das células de pressão total CPT´s.
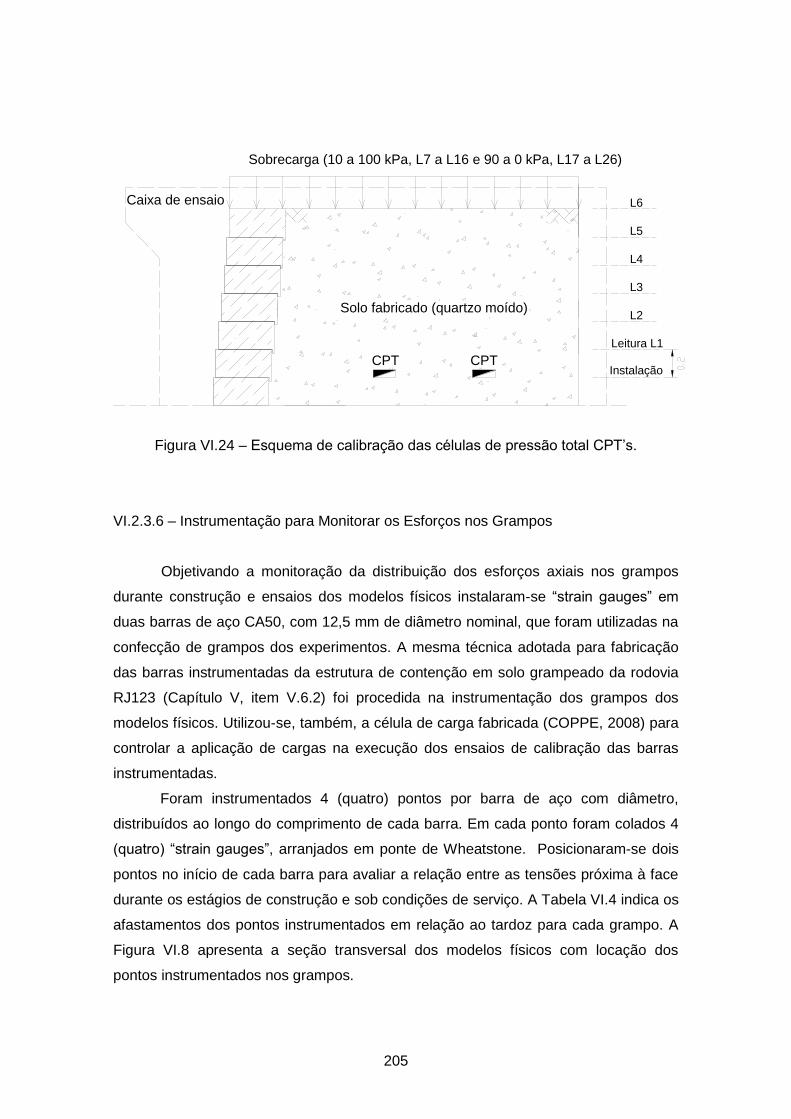
205
Sobrecarga (10 a 100 kPa, L7 a L16 e 90 a 0 kPa, L17 a L26)
Caixa de ensaio
Solo fabricado (quartzo moído)
CPTCPT
Leitura L1
L2
L3
L4
L5
L6
Instalação
Figura VI.24 – Esquema de calibração das células de pressão total CPT’s.
VI.2.3.6 – Instrumentação para Monitorar os Esforços nos Grampos
Objetivando a monitoração da distribuição dos esforços axiais nos grampos
durante construção e ensaios dos modelos físicos instalaram-se ―strain gauges‖ em
duas barras de aço CA50, com 12,5 mm de diâmetro nominal, que foram utilizadas na
confecção de grampos dos experimentos. A mesma técnica adotada para fabricação
das barras instrumentadas da estrutura de contenção em solo grampeado da rodovia
RJ123 (Capítulo V, item V.6.2) foi procedida na instrumentação dos grampos dos
modelos físicos. Utilizou-se, também, a célula de carga fabricada (COPPE, 2008) para
controlar a aplicação de cargas na execução dos ensaios de calibração das barras
instrumentadas.
Foram instrumentados 4 (quatro) pontos por barra de aço com diâmetro,
distribuídos ao longo do comprimento de cada barra. Em cada ponto foram colados 4
(quatro) ―strain gauges‖, arranjados em ponte de Wheatstone. Posicionaram-se dois
pontos no início de cada barra para avaliar a relação entre as tensões próxima à face
durante os estágios de construção e sob condições de serviço. A Tabela VI.4 indica os
afastamentos dos pontos instrumentados em relação ao tardoz para cada grampo. A
Figura VI.8 apresenta a seção transversal dos modelos físicos com locação dos
pontos instrumentados nos grampos.

206
Tabela VI.4 - Afastamento dos pontos de instrumentação por grampo.
Pontos 1 2 3 4
Afast. (m) 0,15 0,55 0,95 1,35
Pontos 5 6 7 8
Afast. (m) 0,15 0,55 0,95 1,35
Grampo G1 (L=1,8 m) - Nível +0,6 m
Grampo G2 (L=1,8 m) - Nível +0,6 m
Conforme ilustrado na Figura VI.1, os grampos instrumentados foram
instalados a 0,6 m e 0,4 m em relação ao piso e a parede da caixa de ensaio,
respectivamente. A geometria de instalação dos grampos corresponde aos
espaçamentos de 1,4 m e 1,0 m nas direções vertical e horizontal, respectivamente.
As etapas da instrumentação das barras seguiram a mesma seqüência
executiva que evolveram: (i) preparação das barras; (ii) montagem dos ―strain gauges‖;
(iii) execução do cabeamento e conectores e (iv) ensaios de calibração.
A superfície de barra nos pontos de instrumentação foi preparada através da
eliminação das nervuras e resíduos indesejáveis para a colagem dos ―strain gauges‖.
Os ―Strain gauges‖ foram arranjados com a técnica tradicional em ponte de
Wheatstone e, em conjunto com os elementos que compõem o circuito elétrico,
protegidos contra umidade e danos de origem física e química (Figura VI.25).
Figura VI.25 – Detalhes do sistema de proteção dos pontos instrumentados com
―strain gauges‖.
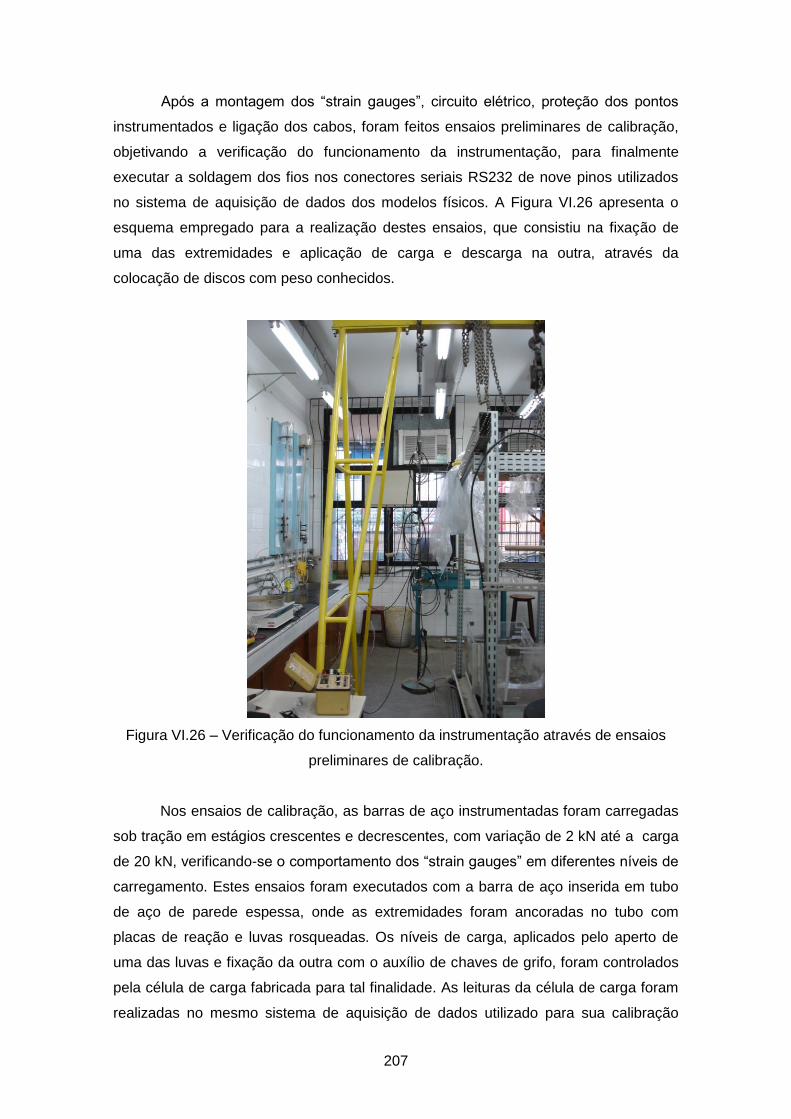
207
Após a montagem dos ―strain gauges‖, circuito elétrico, proteção dos pontos
instrumentados e ligação dos cabos, foram feitos ensaios preliminares de calibração,
objetivando a verificação do funcionamento da instrumentação, para finalmente
executar a soldagem dos fios nos conectores seriais RS232 de nove pinos utilizados
no sistema de aquisição de dados dos modelos físicos. A Figura VI.26 apresenta o
esquema empregado para a realização destes ensaios, que consistiu na fixação de
uma das extremidades e aplicação de carga e descarga na outra, através da
colocação de discos com peso conhecidos.
Figura VI.26 – Verificação do funcionamento da instrumentação através de ensaios
preliminares de calibração.
Nos ensaios de calibração, as barras de aço instrumentadas foram carregadas
sob tração em estágios crescentes e decrescentes, com variação de 2 kN até a carga
de 20 kN, verificando-se o comportamento dos ―strain gauges‖ em diferentes níveis de
carregamento. Estes ensaios foram executados com a barra de aço inserida em tubo
de aço de parede espessa, onde as extremidades foram ancoradas no tubo com
placas de reação e luvas rosqueadas. Os níveis de carga, aplicados pelo aperto de
uma das luvas e fixação da outra com o auxílio de chaves de grifo, foram controlados
pela célula de carga fabricada para tal finalidade. As leituras da célula de carga foram
realizadas no mesmo sistema de aquisição de dados utilizado para sua calibração
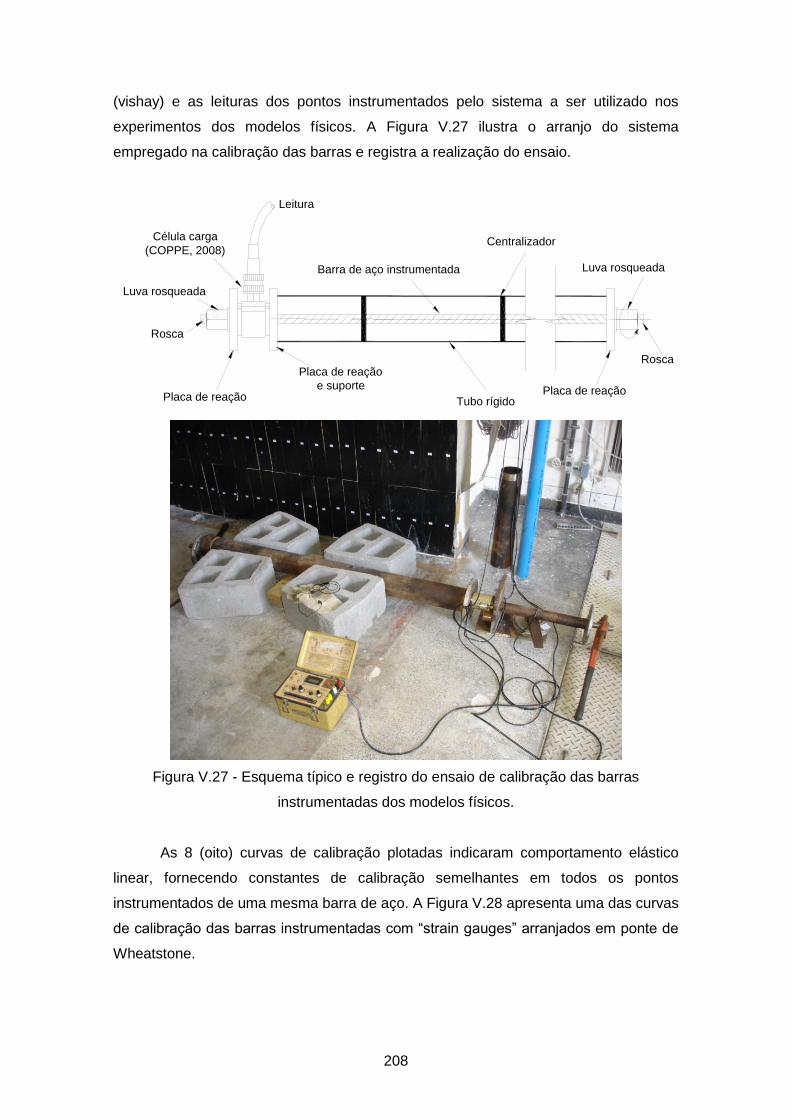
208
(vishay) e as leituras dos pontos instrumentados pelo sistema a ser utilizado nos
experimentos dos modelos físicos. A Figura V.27 ilustra o arranjo do sistema
empregado na calibração das barras e registra a realização do ensaio.
Célula carga
(COPPE, 2008)
Leitura
Barra de aço instrumentada
Centralizador
Placa de reação
e suporte
Tubo rígidoPlaca de reação
Luva rosqueada
Rosca
Placa de reação
Luva rosqueada
Rosca
Figura V.27 - Esquema típico e registro do ensaio de calibração das barras
instrumentadas dos modelos físicos.
As 8 (oito) curvas de calibração plotadas indicaram comportamento elástico
linear, fornecendo constantes de calibração semelhantes em todos os pontos
instrumentados de uma mesma barra de aço. A Figura V.28 apresenta uma das curvas
de calibração das barras instrumentadas com ―strain gauges‖ arranjados em ponte de
Wheatstone.
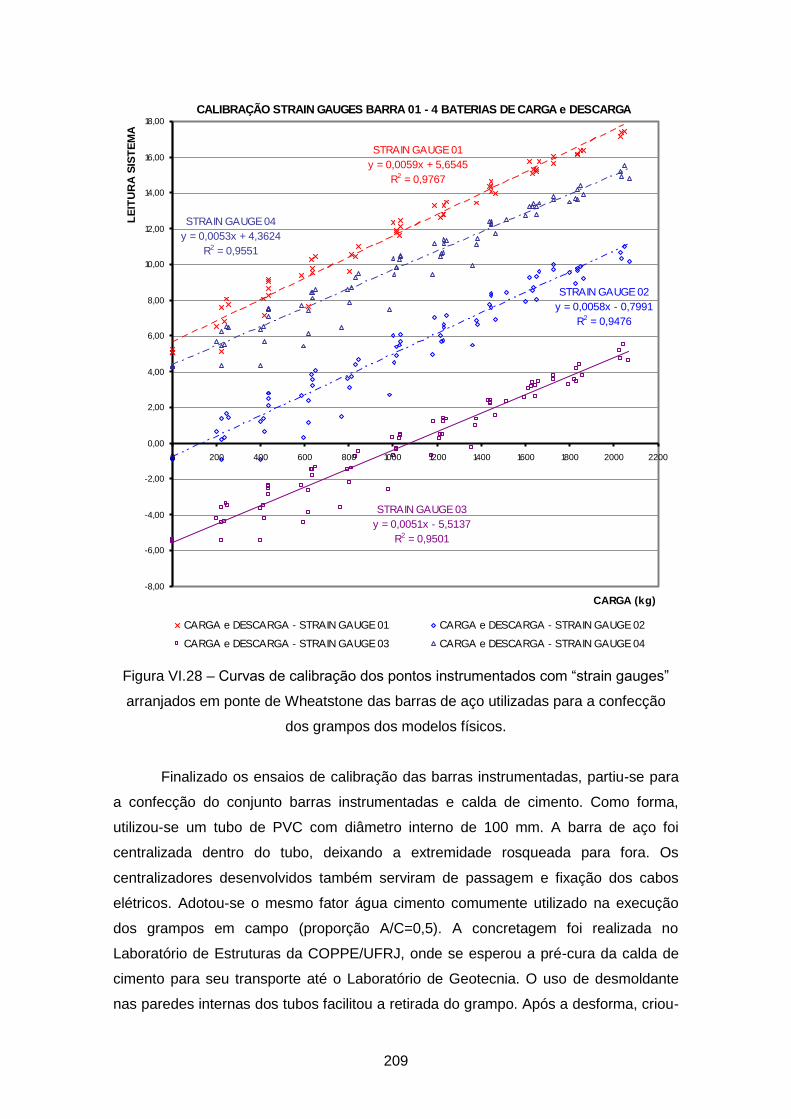
209
CALIBRAÇÃO STRAIN GAUGES BARRA 01 - 4 BATERIAS DE CARGA e DESCARGA
STRAIN GAUGE 01
y = 0,0059x + 5,6545
R2 = 0,9767
STRAIN GAUGE 02
y = 0,0058x - 0,7991
R2 = 0,9476
STRAIN GAUGE 03
y = 0,0051x - 5,5137
R2 = 0,9501
STRAIN GAUGE 04
y = 0,0053x + 4,3624
R2 = 0,9551
-8,00
-6,00
-4,00
-2,00
0,00
2,00
4,00
6,00
8,00
10,00
12,00
14,00
16,00
18,00
0 200 400 600 800 1000 1200 1400 1600 1800 2000 2200
CARGA (kg)
LE
ITU
RA
SIS
TE
MA
CARGA e DESCARGA - STRAIN GAUGE 01 CARGA e DESCARGA - STRAIN GAUGE 02
CARGA e DESCARGA - STRAIN GAUGE 03 CARGA e DESCARGA - STRAIN GAUGE 04
Figura VI.28 – Curvas de calibração dos pontos instrumentados com ―strain gauges‖
arranjados em ponte de Wheatstone das barras de aço utilizadas para a confecção
dos grampos dos modelos físicos.
Finalizado os ensaios de calibração das barras instrumentadas, partiu-se para
a confecção do conjunto barras instrumentadas e calda de cimento. Como forma,
utilizou-se um tubo de PVC com diâmetro interno de 100 mm. A barra de aço foi
centralizada dentro do tubo, deixando a extremidade rosqueada para fora. Os
centralizadores desenvolvidos também serviram de passagem e fixação dos cabos
elétricos. Adotou-se o mesmo fator água cimento comumente utilizado na execução
dos grampos em campo (proporção A/C=0,5). A concretagem foi realizada no
Laboratório de Estruturas da COPPE/UFRJ, onde se esperou a pré-cura da calda de
cimento para seu transporte até o Laboratório de Geotecnia. O uso de desmoldante
nas paredes internas dos tubos facilitou a retirada do grampo. Após a desforma, criou-
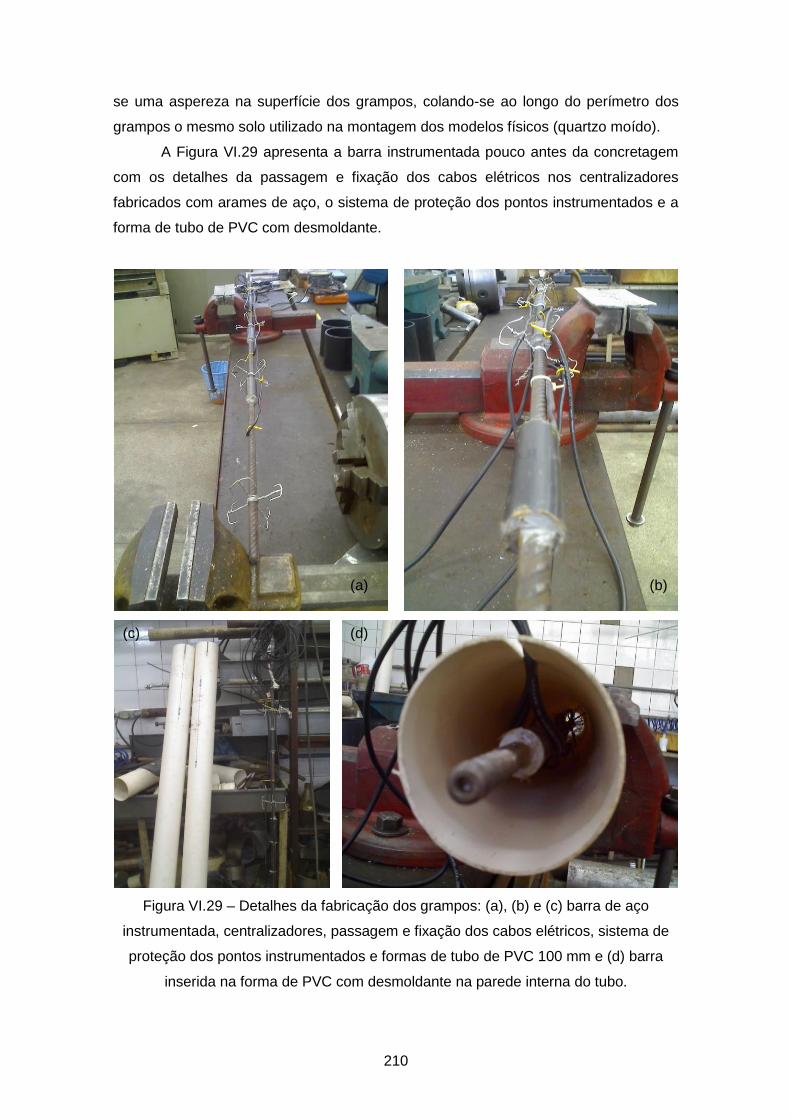
210
se uma aspereza na superfície dos grampos, colando-se ao longo do perímetro dos
grampos o mesmo solo utilizado na montagem dos modelos físicos (quartzo moído).
A Figura VI.29 apresenta a barra instrumentada pouco antes da concretagem
com os detalhes da passagem e fixação dos cabos elétricos nos centralizadores
fabricados com arames de aço, o sistema de proteção dos pontos instrumentados e a
forma de tubo de PVC com desmoldante.
Figura VI.29 – Detalhes da fabricação dos grampos: (a), (b) e (c) barra de aço
instrumentada, centralizadores, passagem e fixação dos cabos elétricos, sistema de
proteção dos pontos instrumentados e formas de tubo de PVC 100 mm e (d) barra
inserida na forma de PVC com desmoldante na parede interna do tubo.
(b)
(c) (d)
(a)

211
A Figura VI.30(a) apresenta o grampo após a desforma com destaque para
saída dos cabos elétricos e extremidade rosqueada da barra de aço que será unida à
cabeça do grampo através de luva rosqueada. Objetivando obter uma superfície
áspera ao longo do perímetro do grampo com as mesmas características do solo
fabricado pela moagem de quartzo, aplicou-se uma cola muito resistente ao longo do
perímetro dos grampos para garantir a fixação dos grãos de quartzo moído utilizados
como solo para construção dos modelos físicos, conforme ilustrado na Figura VI.30(b).
Figura VI.30 – Ilustração do acabamento final dos grampos: (a) após a desforma e (b)
colagem dos grãos de quartzo moído ao longo do perímetro do grampo.
A Figura VI.31 apresenta a aspereza criada com o recurso de colar o solo na
superfície do grampo e o detalhe da ligação da cabeça ao corpo do grampo. A junção
das duas partes de cada grampo (cabeça e corpo) foi realizada através da emenda
com luva rosqueada. A exigência básica pertinente às ligações com luvas impõe que
as luvas apresentem resistência superior à das barras emendadas. A emenda por luva
projetada obedece ao disposto na NBR 6118 e NBR 14931.
(b) (a)

212
Figura VI.31 – Detalhes dos grampos: (a) e (b) aspereza criada na superfície do
grampo e detalhe da junção da cabeça ao corpo do grampo (emenda por luva).
VI.2.4 - Construção dos Modelos Físicos
Na construção dos dois muros foram utilizados dois grampos com
espaçamentos vertical de 1,40 m e horizontal de 1,00 m, o que corresponde a uma
densidade de 1 grampo para cada 1,40 metros quadrados de face e comprimento em
relação à face interna do muro igual a 1,80 m. Os grampos foram executados com
diâmetro de 100 mm, confeccionados em tubo de PVC (forma perdida), utilizando
calda de cimento com fator água cimento na proporção A/C=0,5 injetada pela ação da
gravidade e barra de aço CA50 de 12,5 mm.
A face foi executada com blocos segmentais de concreto, com dimensões de
0,2 m (altura), 0,40 m (largura frontal) e 0,40 (largura transversal), instalados por
simples justaposição, obtendo paramento com inclinação de 1:10 (H:V) ou 84,29º
(subvertical) e assentados sobre piso (com e sem atrito).
A fim de se reduzir o atrito na interface elementos de contorno e solo, foi
instalado o sistema de lubrificação nas paredes laterais, na interface da bolsa de ar
com a superfície de topo do maciço e parcialmente no piso (Figura VI.31). O sistema
de lubrificação é composto por fina camada de graxa teflon entre pano e recortes de
manta de PVC. Objetivou-se com este procedimento diminuir a influência do atrito das
paredes e da bolsa de ar no comportamento da massa de solo reforçado.
(a)
(b)
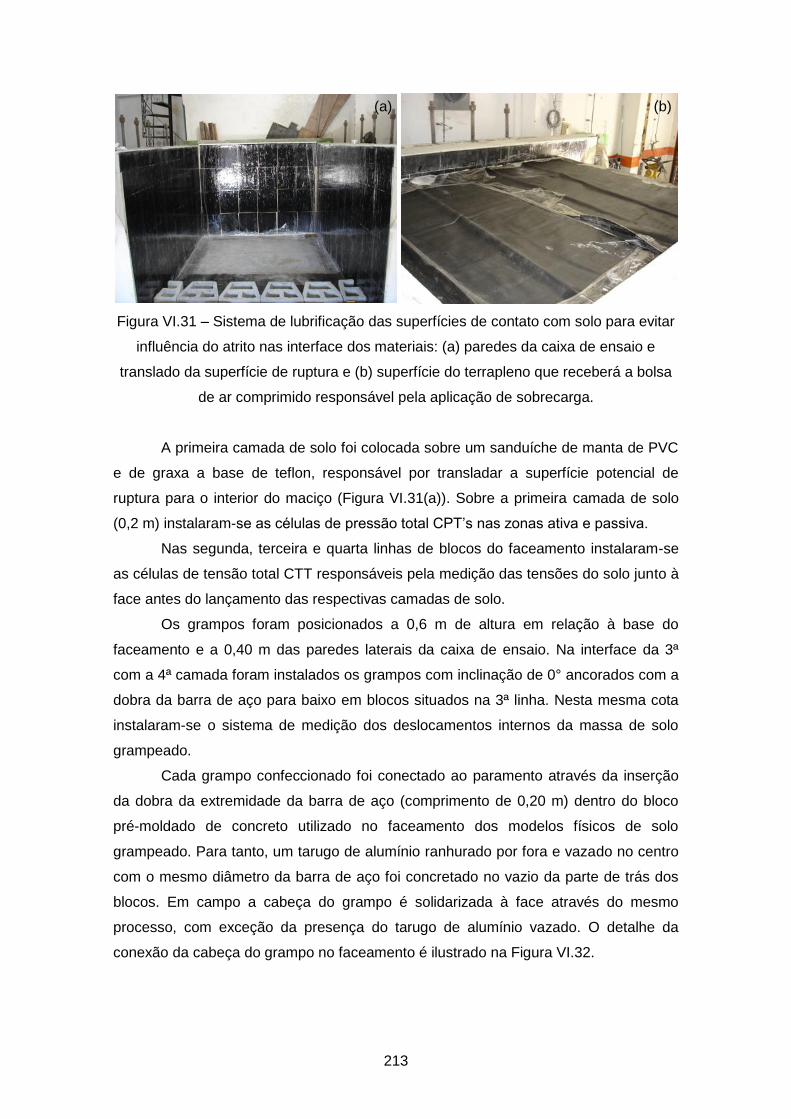
213
Figura VI.31 – Sistema de lubrificação das superfícies de contato com solo para evitar
influência do atrito nas interface dos materiais: (a) paredes da caixa de ensaio e
translado da superfície de ruptura e (b) superfície do terrapleno que receberá a bolsa
de ar comprimido responsável pela aplicação de sobrecarga.
A primeira camada de solo foi colocada sobre um sanduíche de manta de PVC
e de graxa a base de teflon, responsável por transladar a superfície potencial de
ruptura para o interior do maciço (Figura VI.31(a)). Sobre a primeira camada de solo
(0,2 m) instalaram-se as células de pressão total CPT’s nas zonas ativa e passiva.
Nas segunda, terceira e quarta linhas de blocos do faceamento instalaram-se
as células de tensão total CTT responsáveis pela medição das tensões do solo junto à
face antes do lançamento das respectivas camadas de solo.
Os grampos foram posicionados a 0,6 m de altura em relação à base do
faceamento e a 0,40 m das paredes laterais da caixa de ensaio. Na interface da 3ª
com a 4ª camada foram instalados os grampos com inclinação de 0° ancorados com a
dobra da barra de aço para baixo em blocos situados na 3ª linha. Nesta mesma cota
instalaram-se o sistema de medição dos deslocamentos internos da massa de solo
grampeado.
Cada grampo confeccionado foi conectado ao paramento através da inserção
da dobra da extremidade da barra de aço (comprimento de 0,20 m) dentro do bloco
pré-moldado de concreto utilizado no faceamento dos modelos físicos de solo
grampeado. Para tanto, um tarugo de alumínio ranhurado por fora e vazado no centro
com o mesmo diâmetro da barra de aço foi concretado no vazio da parte de trás dos
blocos. Em campo a cabeça do grampo é solidarizada à face através do mesmo
processo, com exceção da presença do tarugo de alumínio vazado. O detalhe da
conexão da cabeça do grampo no faceamento é ilustrado na Figura VI.32.
(a) (b)
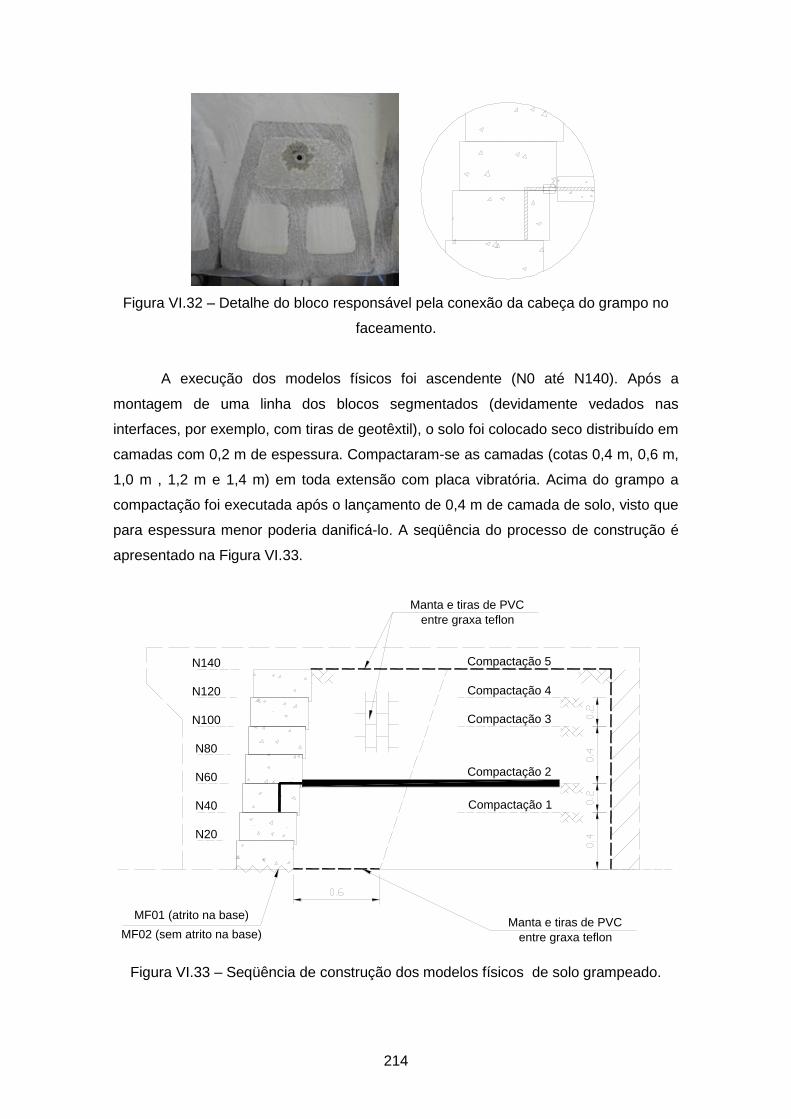
214
Figura VI.32 – Detalhe do bloco responsável pela conexão da cabeça do grampo no
faceamento.
A execução dos modelos físicos foi ascendente (N0 até N140). Após a
montagem de uma linha dos blocos segmentados (devidamente vedados nas
interfaces, por exemplo, com tiras de geotêxtil), o solo foi colocado seco distribuído em
camadas com 0,2 m de espessura. Compactaram-se as camadas (cotas 0,4 m, 0,6 m,
1,0 m , 1,2 m e 1,4 m) em toda extensão com placa vibratória. Acima do grampo a
compactação foi executada após o lançamento de 0,4 m de camada de solo, visto que
para espessura menor poderia danificá-lo. A seqüência do processo de construção é
apresentado na Figura VI.33.
MF01 (atrito na base)Manta e tiras de PVC
Compactação 2
Compactação 1
Compactação 3
Compactação 4
Compactação 5
N20
MF02 (sem atrito na base)
N40
N60
N80
N100
N120
N140
entre graxa teflon
Manta e tiras de PVC
entre graxa teflon
Figura VI.33 – Seqüência de construção dos modelos físicos de solo grampeado.

215
Após a compactação, de no máximo duas camadas (0,40 m), realizaram-se
ensaios para determinação do peso específico. A Figura VI.34 mostra o perfil do peso
específico ao longo da profundidade dos modelos físicos MF01 e MF02, onde se
observa que o valor médio, para os dois casos, é de 21 kN/m³.
Peso específico do solo com a profundidade
0
20
40
60
80
100
120
140
19 20 21 22
Peso específico (kN/m3)
Ele
va
çã
o d
a f
ac
e (
cm
)
MF01 MF02
Figura VI.34 – Peso específico do solo de quartzo moído ao longo da profundidade da
massa de solo grampeada.
As compactações das camadas N40, N60, N100, N120 e N140 foram
realizadas de forma homogênea na superfície com placa vibratória por um período de
10 minutos. A Figura VI.35 mostra a compactação das camadas de assentamento dos
grampos (N60) e do terrapleno (N140).
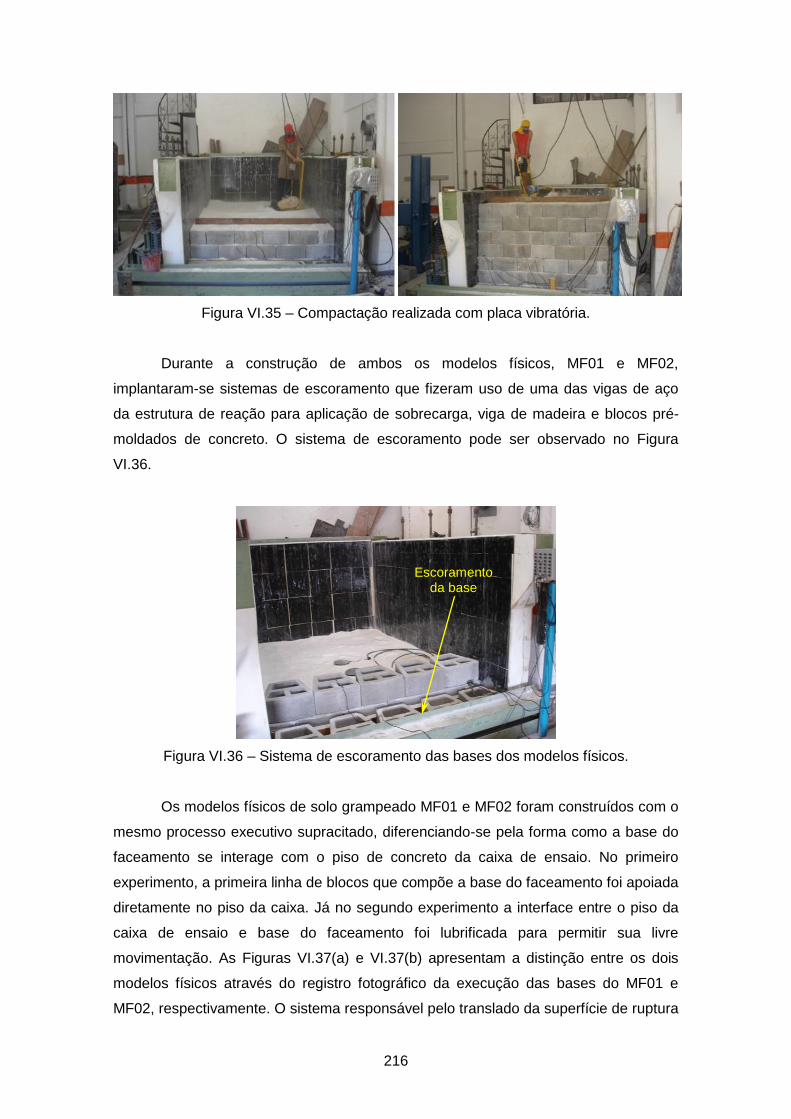
216
Figura VI.35 – Compactação realizada com placa vibratória.
Durante a construção de ambos os modelos físicos, MF01 e MF02,
implantaram-se sistemas de escoramento que fizeram uso de uma das vigas de aço
da estrutura de reação para aplicação de sobrecarga, viga de madeira e blocos pré-
moldados de concreto. O sistema de escoramento pode ser observado no Figura
VI.36.
Figura VI.36 – Sistema de escoramento das bases dos modelos físicos.
Os modelos físicos de solo grampeado MF01 e MF02 foram construídos com o
mesmo processo executivo supracitado, diferenciando-se pela forma como a base do
faceamento se interage com o piso de concreto da caixa de ensaio. No primeiro
experimento, a primeira linha de blocos que compõe a base do faceamento foi apoiada
diretamente no piso da caixa. Já no segundo experimento a interface entre o piso da
caixa de ensaio e base do faceamento foi lubrificada para permitir sua livre
movimentação. As Figuras VI.37(a) e VI.37(b) apresentam a distinção entre os dois
modelos físicos através do registro fotográfico da execução das bases do MF01 e
MF02, respectivamente. O sistema responsável pelo translado da superfície de ruptura
Escoramento da base

217
composto por camada de graxa teflon entre pano e recortes de manta PVC foi
prolongado para, também, abranger a base da primeira linha de blocos do modelo
físico MF02.
Figura VI.37 – Distinção entre os modelos físicos: (a) MF01, base do faceamento com
atrito e (b) MF02, base do faceamento sobre sistema de lubrificação.
VI.2.5 – Instalação da Instrumentação
Durante a construção dos modelos físicos instalaram-se os instrumentos
projetados e fabricados para a monitoração dos experimentos MF01 e MF02. Para
cada instalação realizou-se a leitura zero do instrumento. Desta forma, na etapa de
construção dos modelos físicos monitoraram-se as tensões verticais no solo, as
tensões horizontais junto à face e a distribuição dos esforços ao longo do comprimento
dos grampos.
(a)
(b)
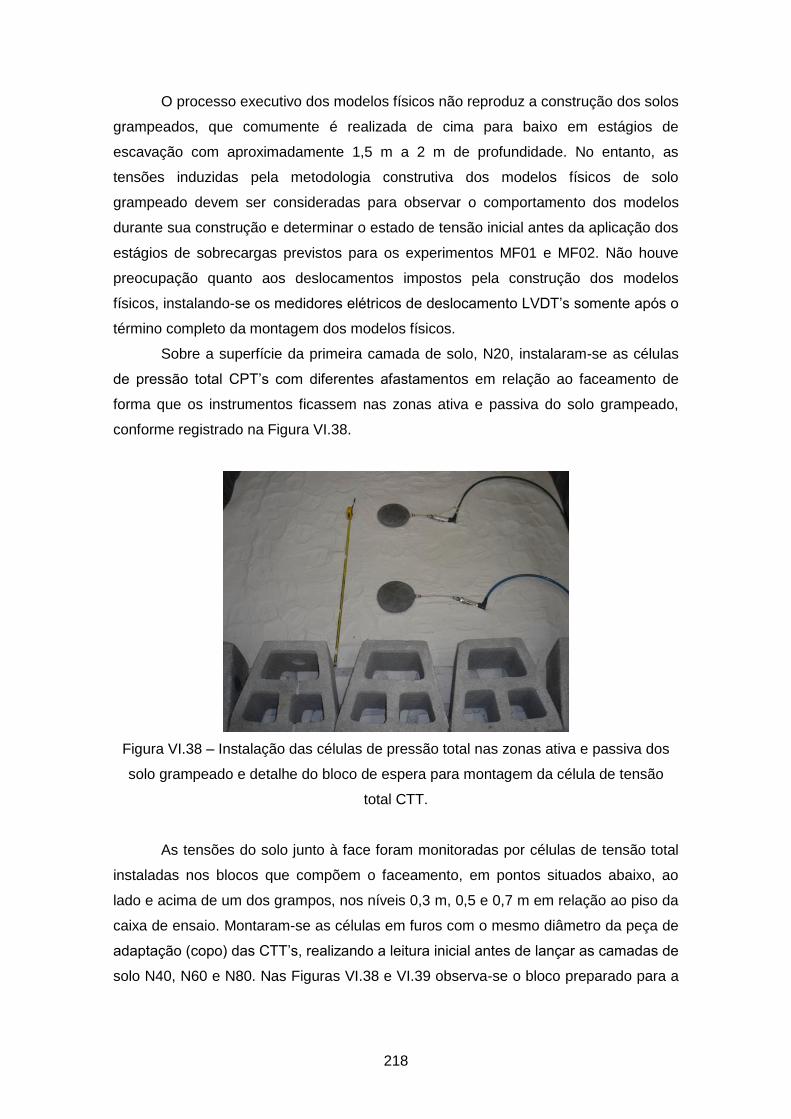
218
O processo executivo dos modelos físicos não reproduz a construção dos solos
grampeados, que comumente é realizada de cima para baixo em estágios de
escavação com aproximadamente 1,5 m a 2 m de profundidade. No entanto, as
tensões induzidas pela metodologia construtiva dos modelos físicos de solo
grampeado devem ser consideradas para observar o comportamento dos modelos
durante sua construção e determinar o estado de tensão inicial antes da aplicação dos
estágios de sobrecargas previstos para os experimentos MF01 e MF02. Não houve
preocupação quanto aos deslocamentos impostos pela construção dos modelos
físicos, instalando-se os medidores elétricos de deslocamento LVDT’s somente após o
término completo da montagem dos modelos físicos.
Sobre a superfície da primeira camada de solo, N20, instalaram-se as células
de pressão total CPT’s com diferentes afastamentos em relação ao faceamento de
forma que os instrumentos ficassem nas zonas ativa e passiva do solo grampeado,
conforme registrado na Figura VI.38.
Figura VI.38 – Instalação das células de pressão total nas zonas ativa e passiva dos
solo grampeado e detalhe do bloco de espera para montagem da célula de tensão
total CTT.
As tensões do solo junto à face foram monitoradas por células de tensão total
instaladas nos blocos que compõem o faceamento, em pontos situados abaixo, ao
lado e acima de um dos grampos, nos níveis 0,3 m, 0,5 e 0,7 m em relação ao piso da
caixa de ensaio. Montaram-se as células em furos com o mesmo diâmetro da peça de
adaptação (copo) das CTT’s, realizando a leitura inicial antes de lançar as camadas de
solo N40, N60 e N80. Nas Figuras VI.38 e VI.39 observa-se o bloco preparado para a
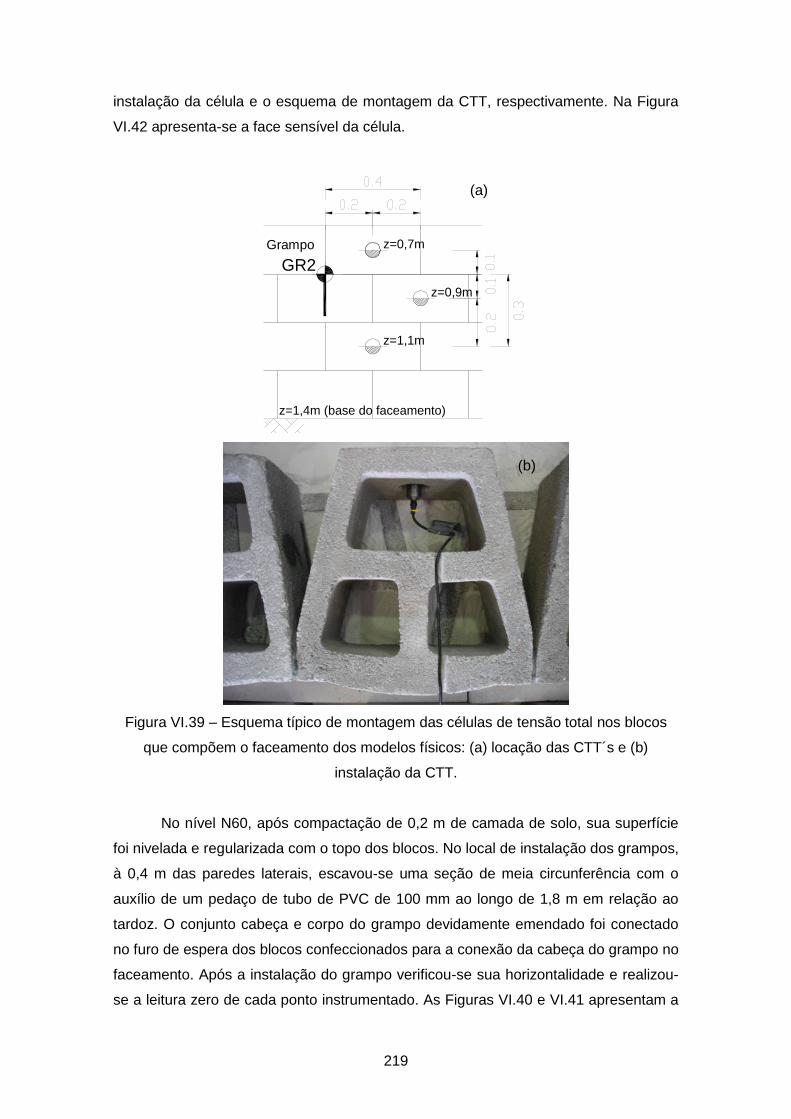
219
instalação da célula e o esquema de montagem da CTT, respectivamente. Na Figura
VI.42 apresenta-se a face sensível da célula.
GR2
z=0,7m
z=0,9m
z=1,1m
z=1,4m (base do faceamento)
Figura VI.39 – Esquema típico de montagem das células de tensão total nos blocos
que compõem o faceamento dos modelos físicos: (a) locação das CTT´s e (b)
instalação da CTT.
No nível N60, após compactação de 0,2 m de camada de solo, sua superfície
foi nivelada e regularizada com o topo dos blocos. No local de instalação dos grampos,
à 0,4 m das paredes laterais, escavou-se uma seção de meia circunferência com o
auxílio de um pedaço de tubo de PVC de 100 mm ao longo de 1,8 m em relação ao
tardoz. O conjunto cabeça e corpo do grampo devidamente emendado foi conectado
no furo de espera dos blocos confeccionados para a conexão da cabeça do grampo no
faceamento. Após a instalação do grampo verificou-se sua horizontalidade e realizou-
se a leitura zero de cada ponto instrumentado. As Figuras VI.40 e VI.41 apresentam a
(a)
(b)
Grampo
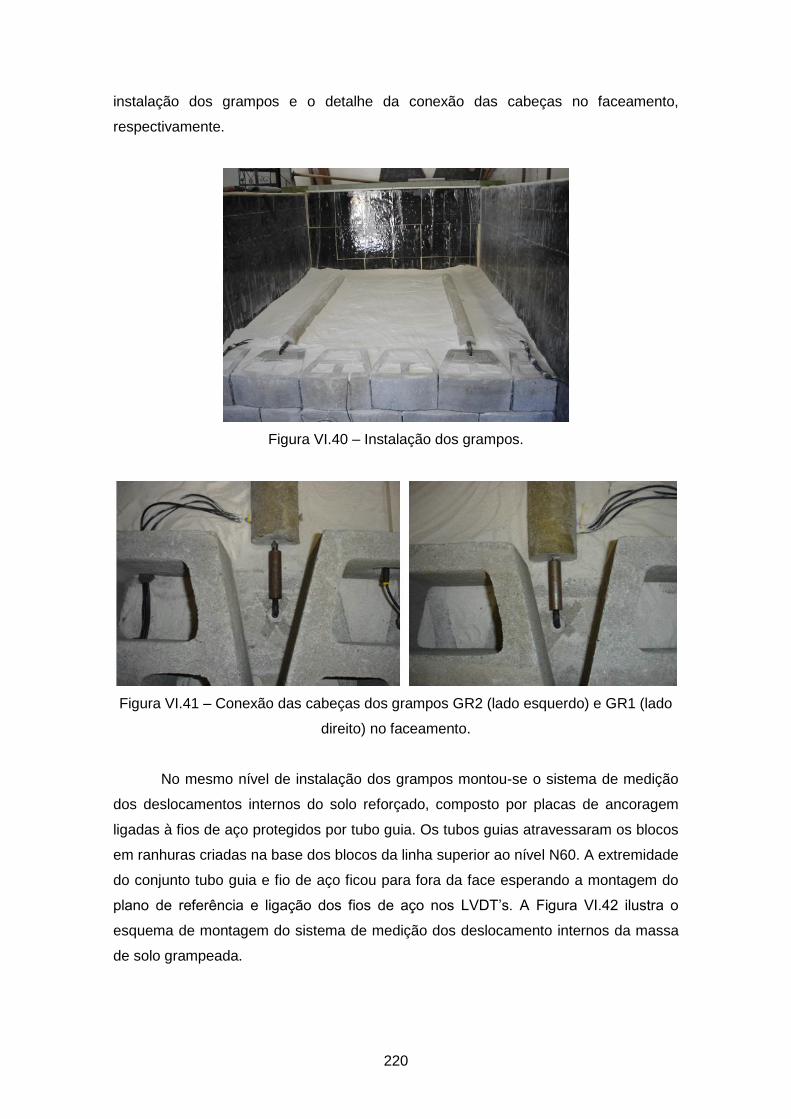
220
instalação dos grampos e o detalhe da conexão das cabeças no faceamento,
respectivamente.
Figura VI.40 – Instalação dos grampos.
Figura VI.41 – Conexão das cabeças dos grampos GR2 (lado esquerdo) e GR1 (lado
direito) no faceamento.
No mesmo nível de instalação dos grampos montou-se o sistema de medição
dos deslocamentos internos do solo reforçado, composto por placas de ancoragem
ligadas à fios de aço protegidos por tubo guia. Os tubos guias atravessaram os blocos
em ranhuras criadas na base dos blocos da linha superior ao nível N60. A extremidade
do conjunto tubo guia e fio de aço ficou para fora da face esperando a montagem do
plano de referência e ligação dos fios de aço nos LVDT’s. A Figura VI.42 ilustra o
esquema de montagem do sistema de medição dos deslocamento internos da massa
de solo grampeada.

221
Figura VI.42 – Esquema de montagem do sistema de medição dos deslocamentos
internos da massa de solo grampeada e detalhe da face sensível da célula de tensão
total CTT.
Após a compactação da última camada de solo, N140, na superfície horizontal
do terrapleno nivelada e regularizada com o topo do faceamento instalaram-se os
medidores de deslocamento vertical MDV’s na seção central dos modelos físicos com
diferentes afastamentos em relação ao faceamento através de pequenas escavações
manuais realizadas com colher de pedreiro. A leitura inicial foi realizada após garantir
que os instrumentos estivessem nivelados com a horizontal. A Figura VI.43 ilustra a
montagem dos MDV’s na superfície do terrapleno, destacando um dos MDV’s antes de
colocar uma fina camada de solo sobre o topo do disco.
Figura VI.43 – Medidores de deslocamento vertical instalados na superfície do
terrapleno horizontal dos modelos físicos.
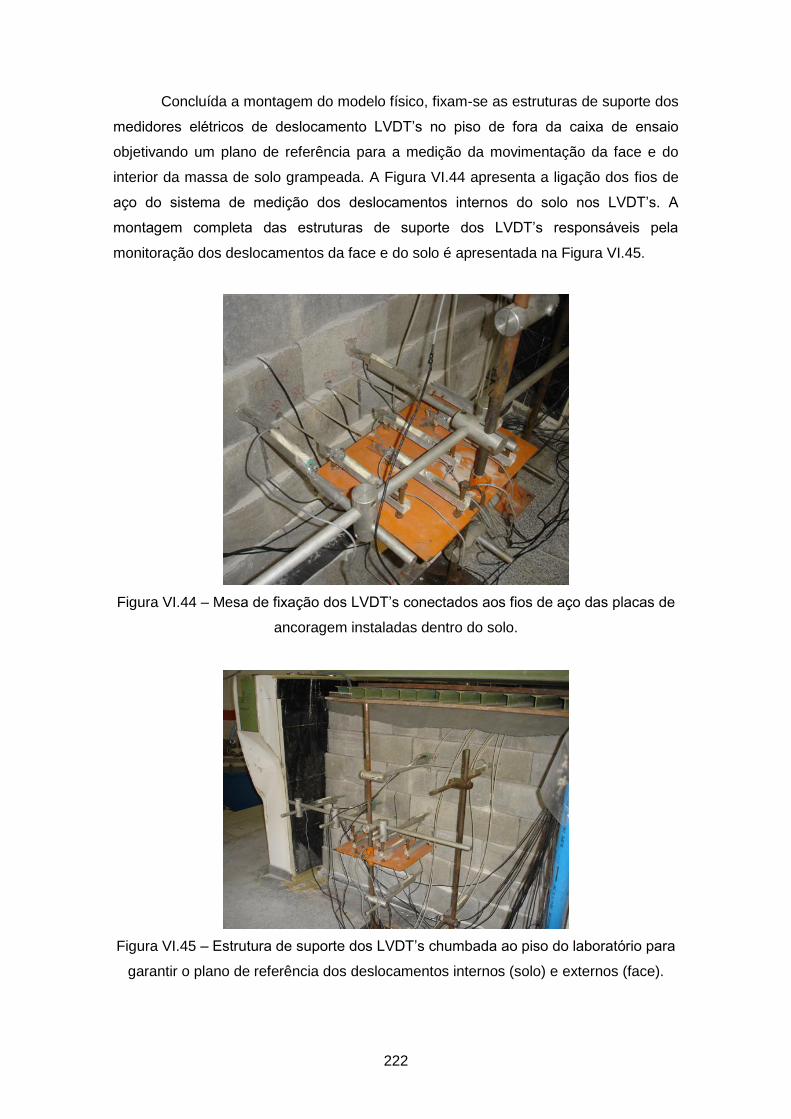
222
Concluída a montagem do modelo físico, fixam-se as estruturas de suporte dos
medidores elétricos de deslocamento LVDT’s no piso de fora da caixa de ensaio
objetivando um plano de referência para a medição da movimentação da face e do
interior da massa de solo grampeada. A Figura VI.44 apresenta a ligação dos fios de
aço do sistema de medição dos deslocamentos internos do solo nos LVDT’s. A
montagem completa das estruturas de suporte dos LVDT’s responsáveis pela
monitoração dos deslocamentos da face e do solo é apresentada na Figura VI.45.
Figura VI.44 – Mesa de fixação dos LVDT’s conectados aos fios de aço das placas de
ancoragem instaladas dentro do solo.
Figura VI.45 – Estrutura de suporte dos LVDT’s chumbada ao piso do laboratório para
garantir o plano de referência dos deslocamentos internos (solo) e externos (face).
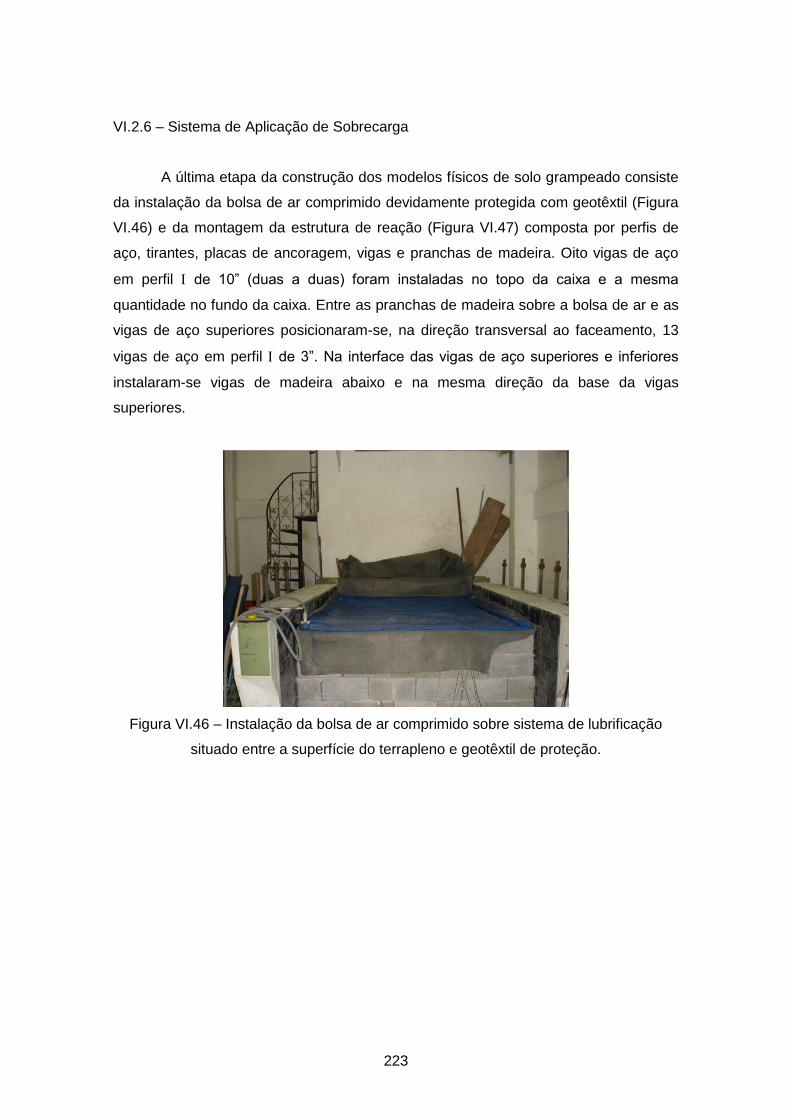
223
VI.2.6 – Sistema de Aplicação de Sobrecarga
A última etapa da construção dos modelos físicos de solo grampeado consiste
da instalação da bolsa de ar comprimido devidamente protegida com geotêxtil (Figura
VI.46) e da montagem da estrutura de reação (Figura VI.47) composta por perfis de
aço, tirantes, placas de ancoragem, vigas e pranchas de madeira. Oito vigas de aço
em perfil de 10‖ (duas a duas) foram instaladas no topo da caixa e a mesma
quantidade no fundo da caixa. Entre as pranchas de madeira sobre a bolsa de ar e as
vigas de aço superiores posicionaram-se, na direção transversal ao faceamento, 13
vigas de aço em perfil de 3‖. Na interface das vigas de aço superiores e inferiores
instalaram-se vigas de madeira abaixo e na mesma direção da base da vigas
superiores.
Figura VI.46 – Instalação da bolsa de ar comprimido sobre sistema de lubrificação
situado entre a superfície do terrapleno e geotêxtil de proteção.

224
Figura VI.47 – Sistema de aplicação de sobrecarga composto por bolsa de ar
comprimido e estrutura de reação: (a) montagem da estrutura de reação e vistas (b)
frontal, (c) superior e (d) lateral.
Garantiu-se a uniformidade da aplicação da sobrecarga na superfície do
terrapleno e topo dos blocos do faceamento através das pranchas de madeira
instaladas entre a bolsa de ar e vigas de reação ancoradas no sistema de tirantes
(Dywidag ST85/105 32mm). A Figura VI.48 apresenta a realização do experimento
nas fases de aplicação de sobrecarga, bem como, o sistema que controla as pressões
de ar injetado dentro da bolsa.
(b) (a)
(c) (d)

225
Figura VI.48 – Detalhe da aplicação da sobrecarga: (a) conjunto estrutura de reação e
bolsa de ar comprimido, (b) bolsa com ar comprimido aplicando sobrecarga no
terrapleno e (c) vista do painel de controle da pressão de ar.
VI.3 – Resultados e Análises da Monitoração dos Modelos Físicos
Monitoraram e analisaram-se as etapas de construção dos modelos físicos e
dos estágios de carregamento uniformemente distribuído aplicados sobre o terrapleno
horizontal. Mesmo sendo o processo executivo dos modelos físicos diferente daquele
comumente executado em estruturas de contenção de solos grampeados,
monitoraram-se as tensões induzidas pela construção dos MF01 e MF02 no interior da
massa reforçada, no solo junto à face e nos grampos, objetivando-se conhecer as
leituras inciais de cada instrumento responsável por estas medições antes da
aplicação das sobrecargas.
A Figura VI.49 apresenta a montagem completa do modelo físico de solo
grampeado com todos os instrumentos, equipamento e acessórios, inclusive o sistema
de aquisição de dados utilizado para a monitoração dos experimentos MF01 e MF02.
(c)
Bolsa com ar comprimido
(b) (a)
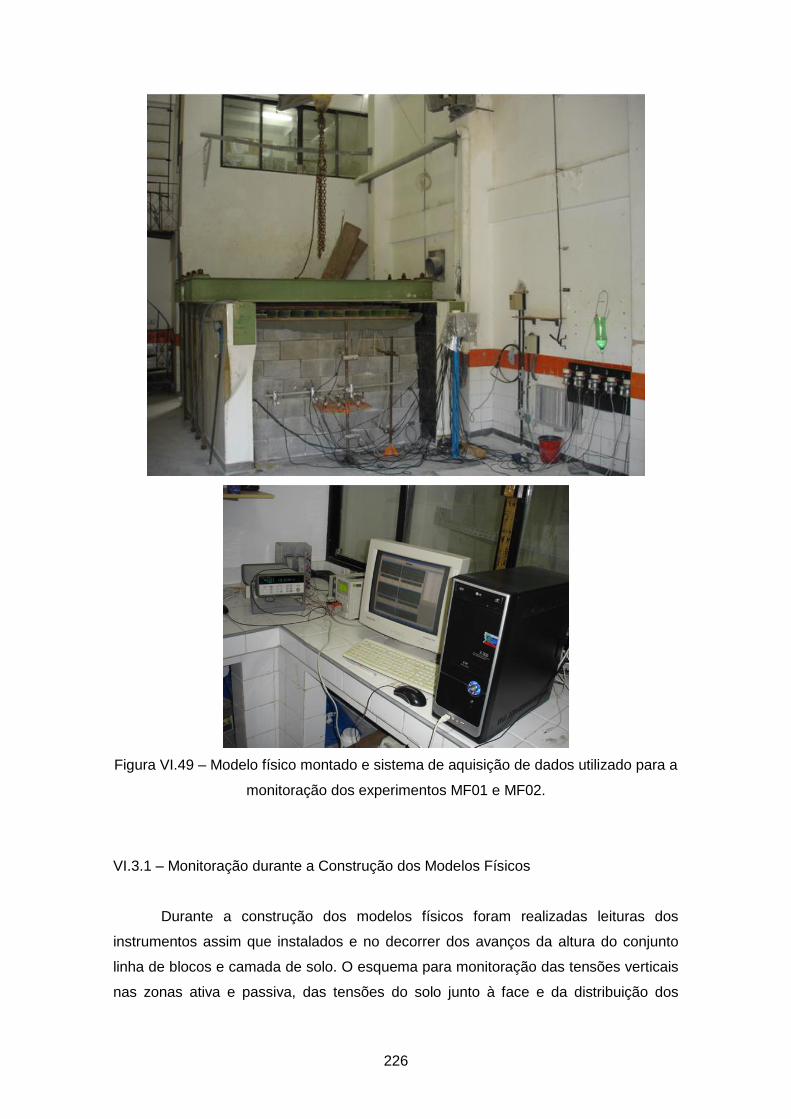
226
Figura VI.49 – Modelo físico montado e sistema de aquisição de dados utilizado para a
monitoração dos experimentos MF01 e MF02.
VI.3.1 – Monitoração durante a Construção dos Modelos Físicos
Durante a construção dos modelos físicos foram realizadas leituras dos
instrumentos assim que instalados e no decorrer dos avanços da altura do conjunto
linha de blocos e camada de solo. O esquema para monitoração das tensões verticais
nas zonas ativa e passiva, das tensões do solo junto à face e da distribuição dos
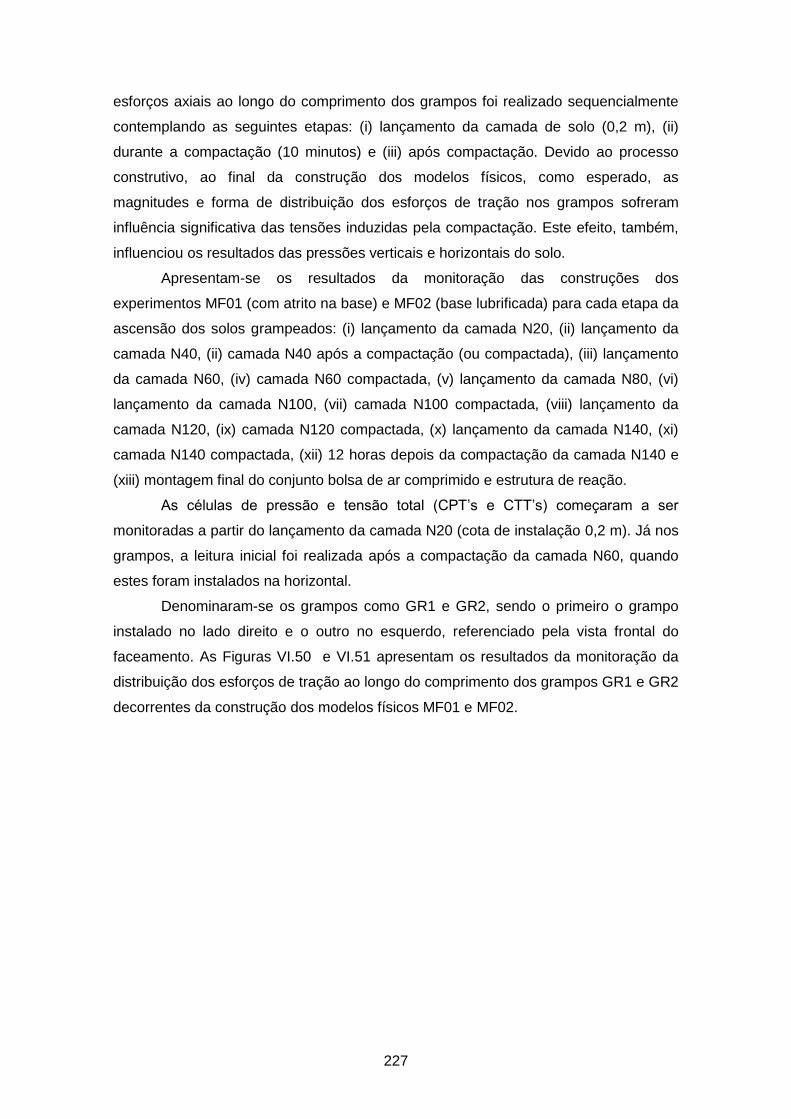
227
esforços axiais ao longo do comprimento dos grampos foi realizado sequencialmente
contemplando as seguintes etapas: (i) lançamento da camada de solo (0,2 m), (ii)
durante a compactação (10 minutos) e (iii) após compactação. Devido ao processo
construtivo, ao final da construção dos modelos físicos, como esperado, as
magnitudes e forma de distribuição dos esforços de tração nos grampos sofreram
influência significativa das tensões induzidas pela compactação. Este efeito, também,
influenciou os resultados das pressões verticais e horizontais do solo.
Apresentam-se os resultados da monitoração das construções dos
experimentos MF01 (com atrito na base) e MF02 (base lubrificada) para cada etapa da
ascensão dos solos grampeados: (i) lançamento da camada N20, (ii) lançamento da
camada N40, (ii) camada N40 após a compactação (ou compactada), (iii) lançamento
da camada N60, (iv) camada N60 compactada, (v) lançamento da camada N80, (vi)
lançamento da camada N100, (vii) camada N100 compactada, (viii) lançamento da
camada N120, (ix) camada N120 compactada, (x) lançamento da camada N140, (xi)
camada N140 compactada, (xii) 12 horas depois da compactação da camada N140 e
(xiii) montagem final do conjunto bolsa de ar comprimido e estrutura de reação.
As células de pressão e tensão total (CPT’s e CTT’s) começaram a ser
monitoradas a partir do lançamento da camada N20 (cota de instalação 0,2 m). Já nos
grampos, a leitura inicial foi realizada após a compactação da camada N60, quando
estes foram instalados na horizontal.
Denominaram-se os grampos como GR1 e GR2, sendo o primeiro o grampo
instalado no lado direito e o outro no esquerdo, referenciado pela vista frontal do
faceamento. As Figuras VI.50 e VI.51 apresentam os resultados da monitoração da
distribuição dos esforços de tração ao longo do comprimento dos grampos GR1 e GR2
decorrentes da construção dos modelos físicos MF01 e MF02.
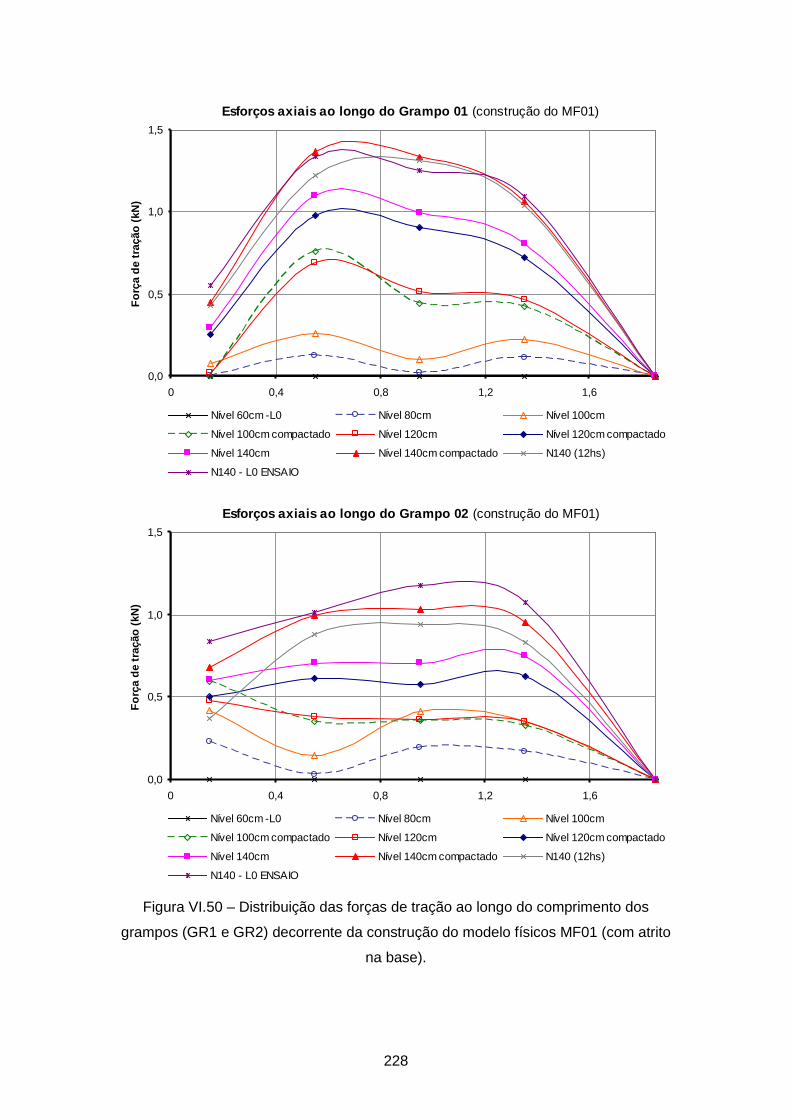
228
Esforços axiais ao longo do Grampo 01 (construção do MF01)
0,0
0,5
1,0
1,5
0 0,4 0,8 1,2 1,6
Afastamento em relação à cabeça do grampo (m)
Fo
rça d
e t
ração
(kN
)
Nível 60cm -L0 Nível 80cm Nível 100cm
Nível 100cm compactado Nível 120cm Nível 120cm compactado
Nível 140cm Nível 140cm compactado N140 (12hs)
N140 - L0 ENSAIO
Esforços axiais ao longo do Grampo 02 (construção do MF01)
0,0
0,5
1,0
1,5
0 0,4 0,8 1,2 1,6
Afastamento em relação à cabeça do grampo (m)
Fo
rça d
e t
ração
(kN
)
Nível 60cm -L0 Nível 80cm Nível 100cm
Nível 100cm compactado Nível 120cm Nível 120cm compactado
Nível 140cm Nível 140cm compactado N140 (12hs)
N140 - L0 ENSAIO
Figura VI.50 – Distribuição das forças de tração ao longo do comprimento dos
grampos (GR1 e GR2) decorrente da construção do modelo físicos MF01 (com atrito
na base).
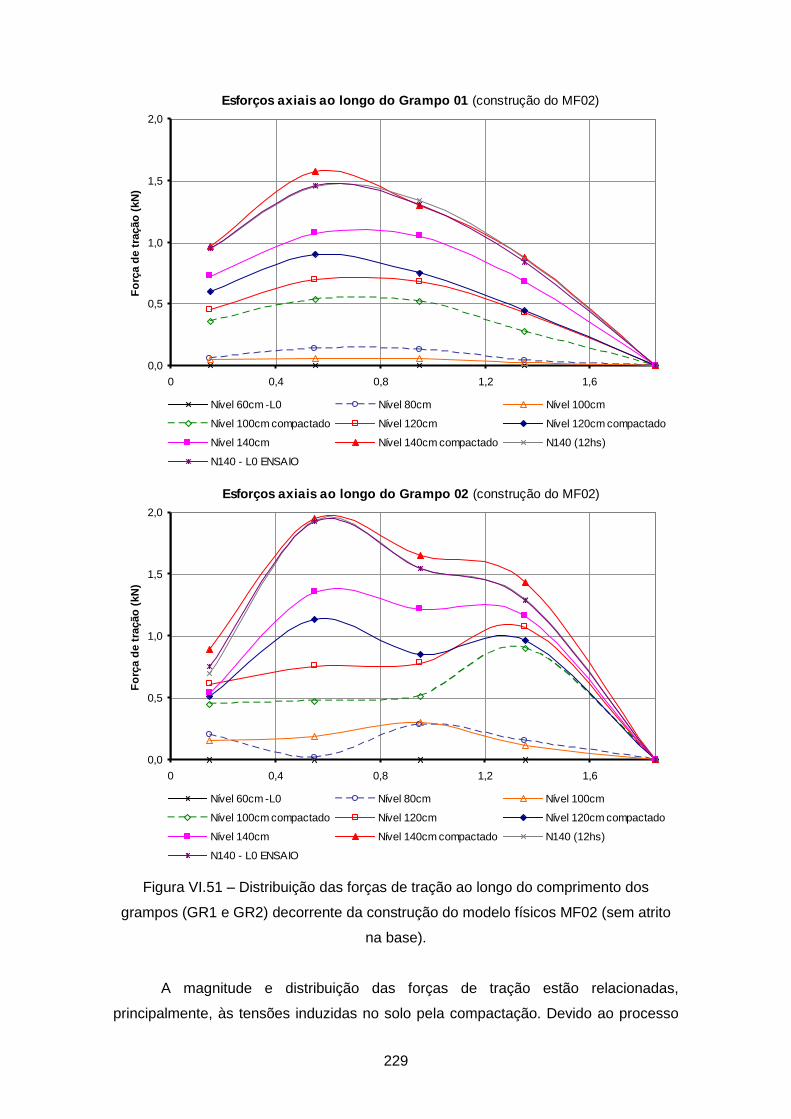
229
Esforços axiais ao longo do Grampo 01 (construção do MF02)
0,0
0,5
1,0
1,5
2,0
0 0,4 0,8 1,2 1,6
Afastamento em relação à cabeça do grampo (m)
Fo
rça d
e t
ração
(kN
)
Nível 60cm -L0 Nível 80cm Nível 100cm
Nível 100cm compactado Nível 120cm Nível 120cm compactado
Nível 140cm Nível 140cm compactado N140 (12hs)
N140 - L0 ENSAIO
Esforços axiais ao longo do Grampo 02 (construção do MF02)
0,0
0,5
1,0
1,5
2,0
0 0,4 0,8 1,2 1,6
Afastamento em relação à cabeça do grampo (m)
Fo
rça d
e t
ração
(kN
)
Nível 60cm -L0 Nível 80cm Nível 100cm
Nível 100cm compactado Nível 120cm Nível 120cm compactado
Nível 140cm Nível 140cm compactado N140 (12hs)
N140 - L0 ENSAIO
Figura VI.51 – Distribuição das forças de tração ao longo do comprimento dos
grampos (GR1 e GR2) decorrente da construção do modelo físicos MF02 (sem atrito
na base).
A magnitude e distribuição das forças de tração estão relacionadas,
principalmente, às tensões induzidas no solo pela compactação. Devido ao processo
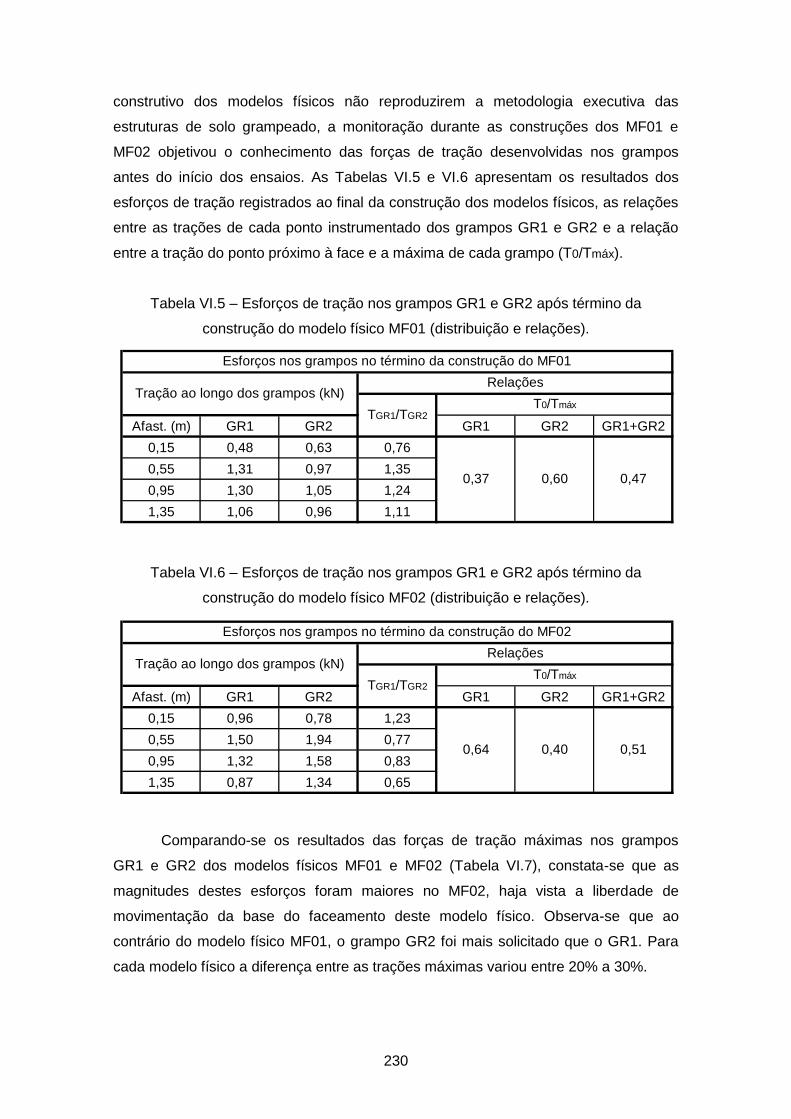
230
construtivo dos modelos físicos não reproduzirem a metodologia executiva das
estruturas de solo grampeado, a monitoração durante as construções dos MF01 e
MF02 objetivou o conhecimento das forças de tração desenvolvidas nos grampos
antes do início dos ensaios. As Tabelas VI.5 e VI.6 apresentam os resultados dos
esforços de tração registrados ao final da construção dos modelos físicos, as relações
entre as trações de cada ponto instrumentado dos grampos GR1 e GR2 e a relação
entre a tração do ponto próximo à face e a máxima de cada grampo (T0/Tmáx).
Tabela VI.5 – Esforços de tração nos grampos GR1 e GR2 após término da
construção do modelo físico MF01 (distribuição e relações).
Afast. (m) GR1 GR2 GR1 GR2 GR1+GR2
0,15 0,48 0,63 0,76
0,55 1,31 0,97 1,35
0,95 1,30 1,05 1,24
1,35 1,06 0,96 1,11
0,60 0,47
Esforços nos grampos no término da construção do MF01
Tração ao longo dos grampos (kN)Relações
TGR1/TGR2T0/Tmáx
0,37
Tabela VI.6 – Esforços de tração nos grampos GR1 e GR2 após término da
construção do modelo físico MF02 (distribuição e relações).
Afast. (m) GR1 GR2 GR1 GR2 GR1+GR2
0,15 0,96 0,78 1,23
0,55 1,50 1,94 0,77
0,95 1,32 1,58 0,83
1,35 0,87 1,34 0,65
0,40
Esforços nos grampos no término da construção do MF02
Tração ao longo dos grampos (kN)Relações
TGR1/TGR2T0/Tmáx
0,64 0,51
Comparando-se os resultados das forças de tração máximas nos grampos
GR1 e GR2 dos modelos físicos MF01 e MF02 (Tabela VI.7), constata-se que as
magnitudes destes esforços foram maiores no MF02, haja vista a liberdade de
movimentação da base do faceamento deste modelo físico. Observa-se que ao
contrário do modelo físico MF01, o grampo GR2 foi mais solicitado que o GR1. Para
cada modelo físico a diferença entre as trações máximas variou entre 20% a 30%.
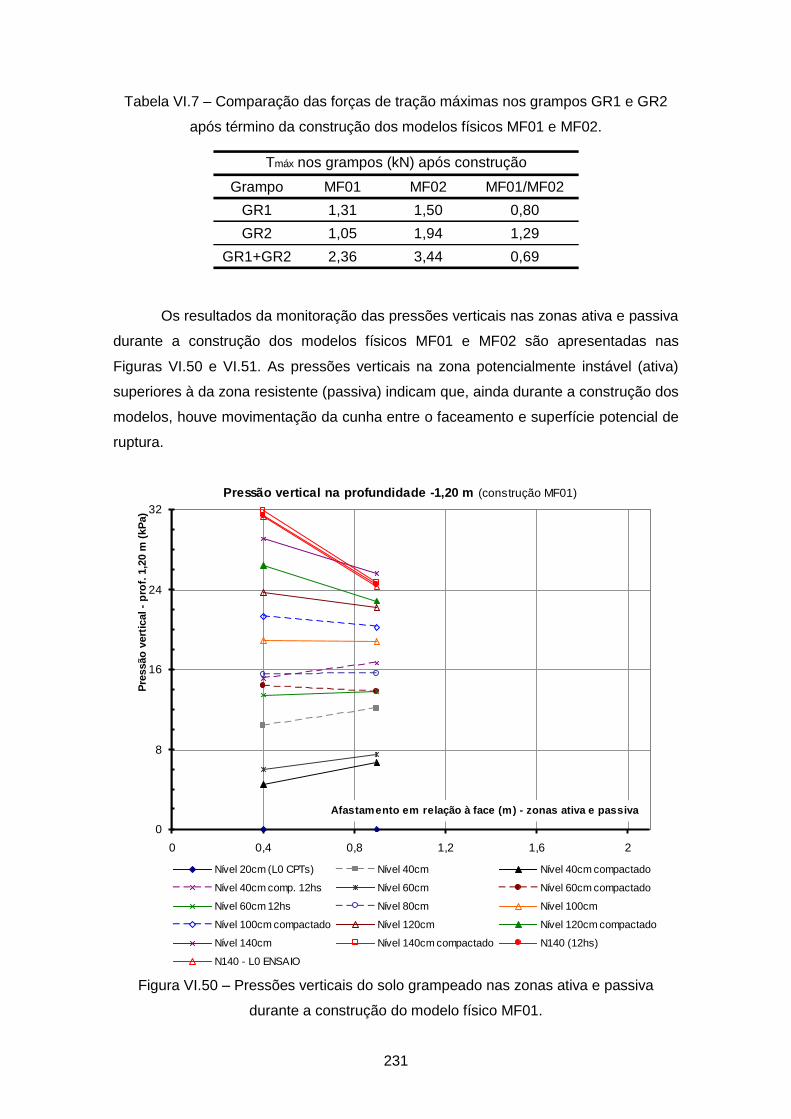
231
Tabela VI.7 – Comparação das forças de tração máximas nos grampos GR1 e GR2
após término da construção dos modelos físicos MF01 e MF02.
Grampo MF01 MF02 MF01/MF02
GR1 1,31 1,50 0,80
GR2 1,05 1,94 1,29
GR1+GR2 2,36 3,44 0,69
Tmáx nos grampos (kN) após construção
Os resultados da monitoração das pressões verticais nas zonas ativa e passiva
durante a construção dos modelos físicos MF01 e MF02 são apresentadas nas
Figuras VI.50 e VI.51. As pressões verticais na zona potencialmente instável (ativa)
superiores à da zona resistente (passiva) indicam que, ainda durante a construção dos
modelos, houve movimentação da cunha entre o faceamento e superfície potencial de
ruptura.
Pressão vertical na profundidade -1,20 m (construção MF01)
0
8
16
24
32
0 0,4 0,8 1,2 1,6 2
Afastamento em relação à face (m) - zonas ativa e passiva
Pre
ssão
vert
ical -
pro
f. 1
,20 m
(kP
a)
Nível 20cm (L0 CPTs) Nível 40cm Nível 40cm compactado
Nível 40cm comp. 12hs Nível 60cm Nível 60cm compactado
Nível 60cm 12hs Nível 80cm Nível 100cm
Nível 100cm compactado Nível 120cm Nível 120cm compactado
Nível 140cm Nível 140cm compactado N140 (12hs)
N140 - L0 ENSAIO
Figura VI.50 – Pressões verticais do solo grampeado nas zonas ativa e passiva
durante a construção do modelo físico MF01.
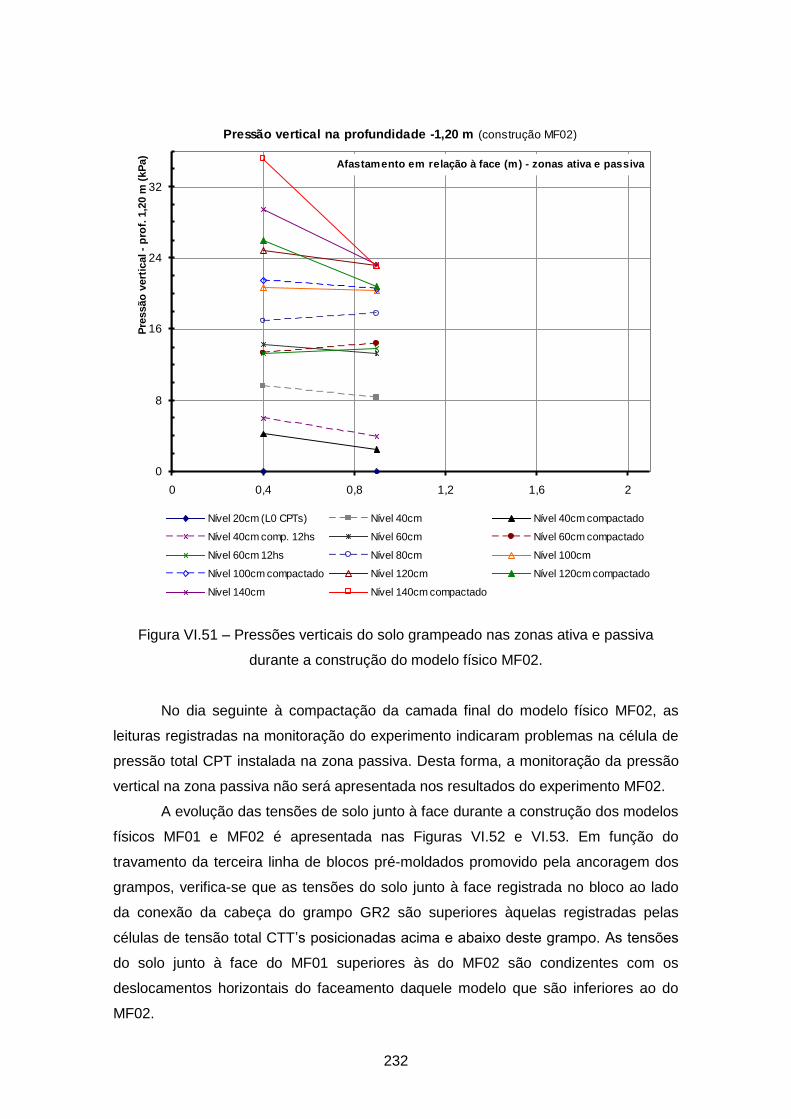
232
Pressão vertical na profundidade -1,20 m (construção MF02)
0
8
16
24
32
0 0,4 0,8 1,2 1,6 2
Afastamento em relação à face (m) - zonas ativa e passiva
Pre
ssão
vert
ical -
pro
f. 1
,20 m
(kP
a)
Nível 20cm (L0 CPTs) Nível 40cm Nível 40cm compactado
Nível 40cm comp. 12hs Nível 60cm Nível 60cm compactado
Nível 60cm 12hs Nível 80cm Nível 100cm
Nível 100cm compactado Nível 120cm Nível 120cm compactado
Nível 140cm Nível 140cm compactado
Figura VI.51 – Pressões verticais do solo grampeado nas zonas ativa e passiva
durante a construção do modelo físico MF02.
No dia seguinte à compactação da camada final do modelo físico MF02, as
leituras registradas na monitoração do experimento indicaram problemas na célula de
pressão total CPT instalada na zona passiva. Desta forma, a monitoração da pressão
vertical na zona passiva não será apresentada nos resultados do experimento MF02.
A evolução das tensões de solo junto à face durante a construção dos modelos
físicos MF01 e MF02 é apresentada nas Figuras VI.52 e VI.53. Em função do
travamento da terceira linha de blocos pré-moldados promovido pela ancoragem dos
grampos, verifica-se que as tensões do solo junto à face registrada no bloco ao lado
da conexão da cabeça do grampo GR2 são superiores àquelas registradas pelas
células de tensão total CTT’s posicionadas acima e abaixo deste grampo. As tensões
do solo junto à face do MF01 superiores às do MF02 são condizentes com os
deslocamentos horizontais do faceamento daquele modelo que são inferiores ao do
MF02.
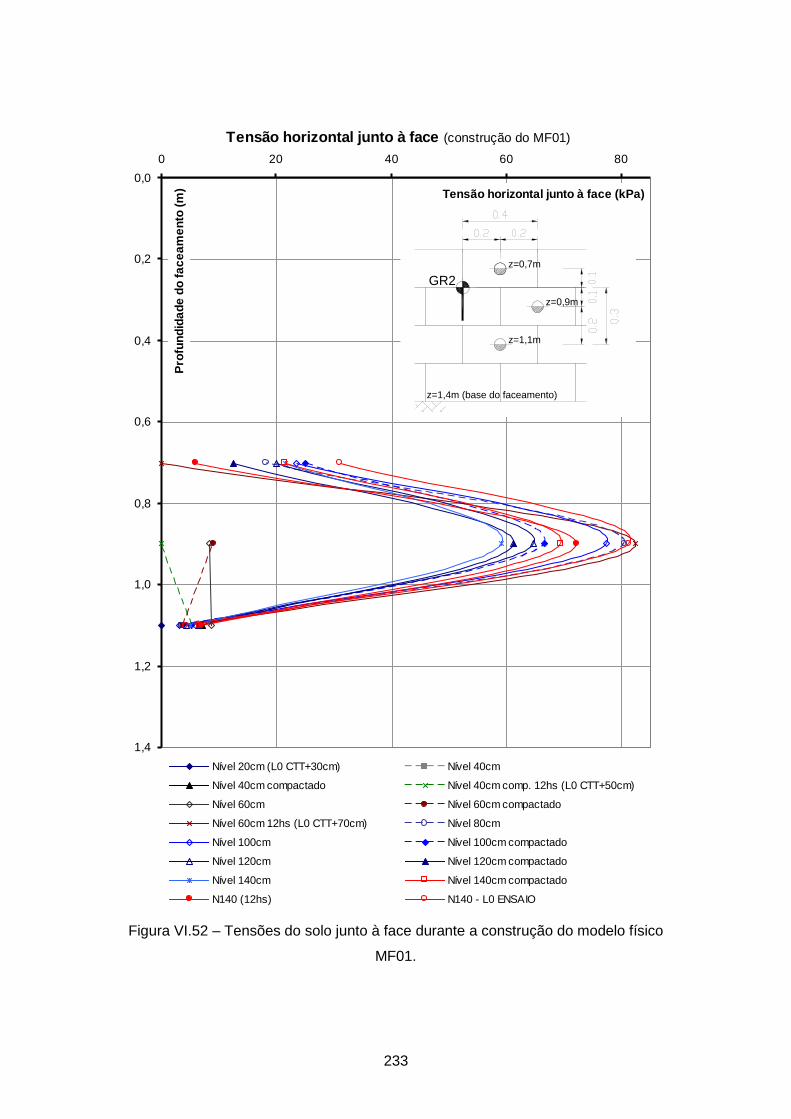
233
Tensão horizontal junto à face (construção do MF01)
0,0
0,2
0,4
0,6
0,8
1,0
1,2
1,4
0 20 40 60 80
Tensão horizontal junto à face (kPa)
Pro
fun
did
ad
e d
o f
ac
ea
me
nto
(m
)
Nível 20cm (L0 CTT+30cm) Nível 40cm
Nível 40cm compactado Nível 40cm comp. 12hs (L0 CTT+50cm)
Nível 60cm Nível 60cm compactado
Nível 60cm 12hs (L0 CTT+70cm) Nível 80cm
Nível 100cm Nível 100cm compactado
Nível 120cm Nível 120cm compactado
Nível 140cm Nível 140cm compactado
N140 (12hs) N140 - L0 ENSAIO
Figura VI.52 – Tensões do solo junto à face durante a construção do modelo físico
MF01.
GR2
z=0,7m
z=0,9m
z=1,1m
z=1,4m (base do faceamento)
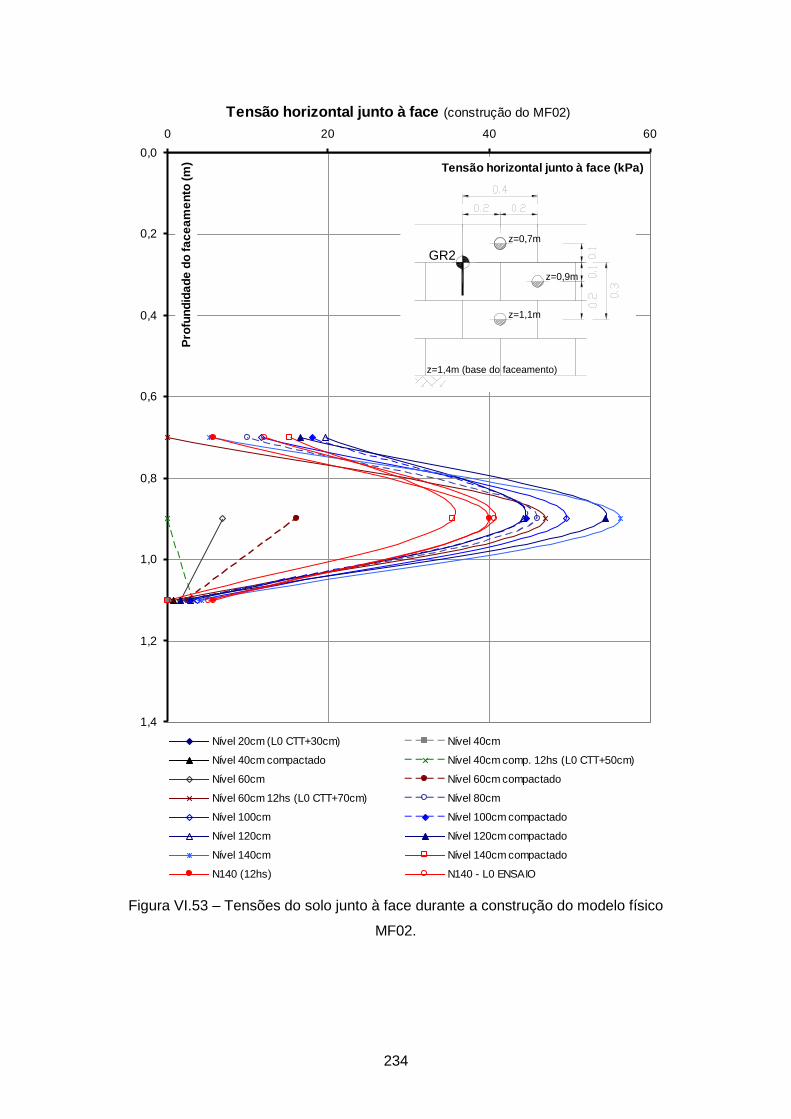
234
Tensão horizontal junto à face (construção do MF02)
0,0
0,2
0,4
0,6
0,8
1,0
1,2
1,4
0 20 40 60
Tensão horizontal junto à face (kPa)
Pro
fun
did
ad
e d
o f
ac
ea
me
nto
(m
)
Nível 20cm (L0 CTT+30cm) Nível 40cm
Nível 40cm compactado Nível 40cm comp. 12hs (L0 CTT+50cm)
Nível 60cm Nível 60cm compactado
Nível 60cm 12hs (L0 CTT+70cm) Nível 80cm
Nível 100cm Nível 100cm compactado
Nível 120cm Nível 120cm compactado
Nível 140cm Nível 140cm compactado
N140 (12hs) N140 - L0 ENSAIO
Figura VI.53 – Tensões do solo junto à face durante a construção do modelo físico
MF02.
GR2
z=0,7m
z=0,9m
z=1,1m
z=1,4m (base do faceamento)
235
VI.3.2 – Monitoração dos Modelos Físicos sob Aplicação de Sobrecarga no Terrapleno
O experimento dos modelos físicos consistiu da monitoração do solo
grampeado sob aplicação de sobrecargas na superfície do terrapleno e topo do
faceamento, cujos estágios de carregamento e descarregamento buscaram
representar situações representativas das oriundas da saturação do solo e de alturas
superiores à caixa de ensaio. Assim, realizaram-se medidas nos instrumentos
instalados em cada um dos estágios de carregamento e descarregamento, que
variaram de 10 kPa, até o carregamento máximo de 100 kPa. Para cada modelo físico
realizaram-se dois ensaios de sobrecarga, o primeiro foi denominado de carregamento
virgem e o segundo de recarregamento. No ensaio de recarregamento apresentam-se
as análises das tensões mobilizadas nos grampos.
Apresentam-se, a seguir, os resultados das monitorações empregadas nos
modelos físicos, MF01 (item VI.3.2.1) e MF02 (item VI.3.2.2), nas fases de
carregamento e descarregamento, na seguinte seqüência: (i) distribuição e evolução
dos esforços axiais ao longo dos grampos, (ii) tensões do solo junto à face, (iii)
pressões verticais do solo reforçado nas zonas ativa e passiva, (iv) movimentação do
faceamento caracterizadas por deslocamentos horizontais, (v) deslocamentos no
interior da massa de solo grampeado e (vi) deslocamentos verticais da superfície do
terrapleno.
As análises dos resultados da monitoração dos modelos físicos MF01 (base do
faceamento com atrito) e MF02 (base sobre sistema de lubrificação) no primeiro
ensaio de aplicação de sobrecarga (carregamento virgem) são apresentadas nos itens
VI.3.3.1 e VI.3.3.2, cujos seus subitens referem-se às análises do recarregamento
(ensaio 2 de sobrecarga), respectivamente.
Devido a problemas com três unidades de medidores de deslocamento
elétricos (LVDT´s), a movimentação da face foi analisada através de dois perfis
verticais (PV-01 e PV-02) e do alinhamento horizontal inferior (AH-01). A Figura VI.54
apresenta os LVDT´s com defeito e os perfis verticais e o alinhamento vertical
definidos pelos LVDT´s que funcionaram corretamente.

236
AH-01 (cota 0,3m)
Locação dos grampos
Conexões para suporte dos LVDT's (h face)
LVDT's fixados na mesa e ligados nos fios de aço (h solo)
PV
-01
PV
-02
Suporte LVDT's
Plano de referência
deslocamento interno do solo
LVDT's com defeito
Figura VI.54 – Perfis verticais e alinhamento horizontal dos quais monitoraram-se os
deslocamentos da face e LVDT´s que apresentaram mau funcionamento.
VI.3.2.1 – Resultados da Monitoração do Modelo Físico MF01 sob Aplicação de
Sobrecarga (base do faceamento com atrito)
As Figuras VI.55 e VI.56 apresentam os resultados da monitoração da
evolução e distribuição dos esforços de tração ao longo do comprimento dos grampos
GR1 e GR2 do modelo físico MF01 nas fases de carregamento e descarregamento,
respectivamente. A carga máxima medida, para o carregamento virgem, foi de 6 kN.
Observa-se que o ponto de esforço axial máximo ocorre no interior da massa
de solo grampeado, sendo sua posição, praticamente, coincidente com a interseção
da superfície de ruptura com os grampos, nos estágios de carregamento e
descarregamento.
Verifica-se que os incrementos de tração entre as sobrecargas de 0 a 20 kPa
são menores que os demais no estágio de carregamento e maiores no estágio de
descarregamento. Neste intervalo, no estágio de carregamento os acréscimos de
tração apresentam valores próximos dos decréscimos registrados no intervalo de
descarregamento de 100 a 20 kPa. E no estágio de descarregamento ocorre o
contrário.
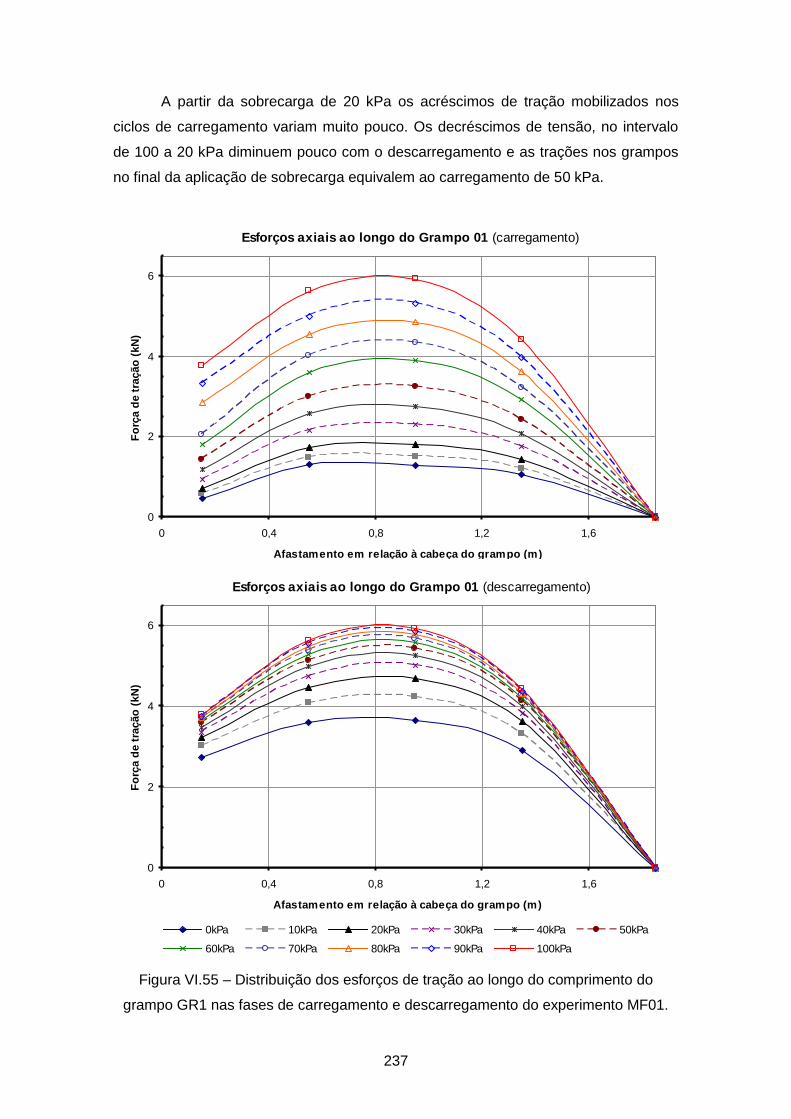
237
A partir da sobrecarga de 20 kPa os acréscimos de tração mobilizados nos
ciclos de carregamento variam muito pouco. Os decréscimos de tensão, no intervalo
de 100 a 20 kPa diminuem pouco com o descarregamento e as trações nos grampos
no final da aplicação de sobrecarga equivalem ao carregamento de 50 kPa.
Esforços axiais ao longo do Grampo 01 (carregamento)
0
2
4
6
0 0,4 0,8 1,2 1,6
Afastamento em relação à cabeça do grampo (m)
Fo
rça d
e t
ração
(kN
)
0kPa 10kPa 20kPa 30kPa 40kPa 50kPa
60kPa 70kPa 80kPa 90kPa 100kPa
Esforços axiais ao longo do Grampo 01 (descarregamento)
0
2
4
6
0 0,4 0,8 1,2 1,6
Afastamento em relação à cabeça do grampo (m)
Fo
rça d
e t
ração
(kN
)
0kPa 10kPa 20kPa 30kPa 40kPa 50kPa
60kPa 70kPa 80kPa 90kPa 100kPa
Figura VI.55 – Distribuição dos esforços de tração ao longo do comprimento do
grampo GR1 nas fases de carregamento e descarregamento do experimento MF01.
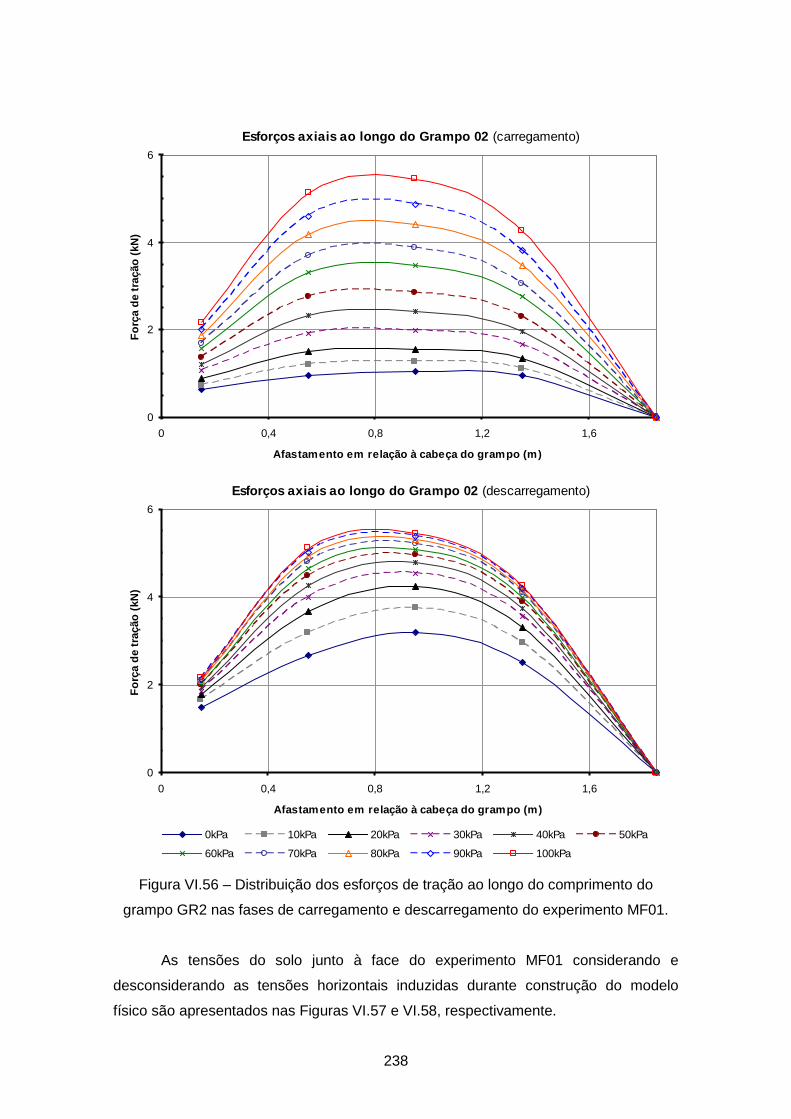
238
Esforços axiais ao longo do Grampo 02 (carregamento)
0
2
4
6
0 0,4 0,8 1,2 1,6
Afastamento em relação à cabeça do grampo (m)
Fo
rça d
e t
ração
(kN
)
0kPa 10kPa 20kPa 30kPa 40kPa 50kPa
60kPa 70kPa 80kPa 90kPa 100kPa
Esforços axiais ao longo do Grampo 02 (descarregamento)
0
2
4
6
0 0,4 0,8 1,2 1,6
Afastamento em relação à cabeça do grampo (m)
Fo
rça d
e t
ração
(kN
)
0kPa 10kPa 20kPa 30kPa 40kPa 50kPa
60kPa 70kPa 80kPa 90kPa 100kPa
Figura VI.56 – Distribuição dos esforços de tração ao longo do comprimento do
grampo GR2 nas fases de carregamento e descarregamento do experimento MF01.
As tensões do solo junto à face do experimento MF01 considerando e
desconsiderando as tensões horizontais induzidas durante construção do modelo
físico são apresentados nas Figuras VI.57 e VI.58, respectivamente.
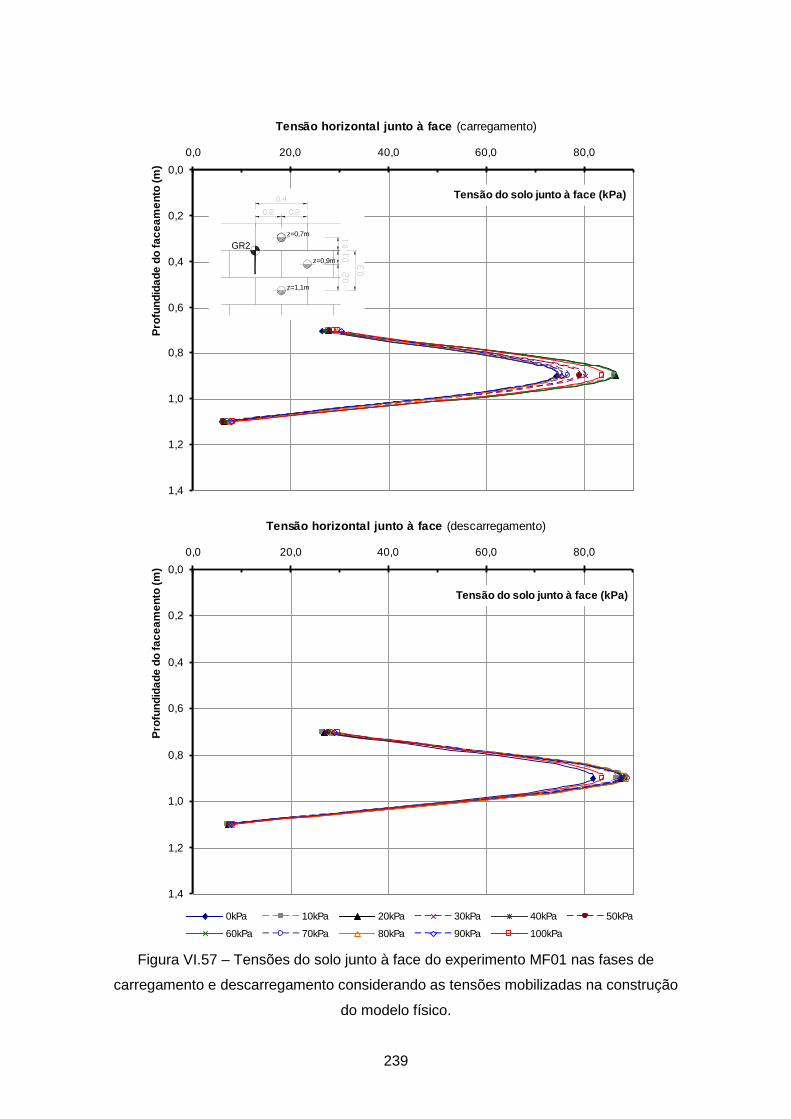
239
Tensão horizontal junto à face (carregamento)
0,0
0,2
0,4
0,6
0,8
1,0
1,2
1,4
0,0 20,0 40,0 60,0 80,0
Tensão do solo junto à face (kPa)
Pro
fun
did
ad
e d
o f
ac
ea
me
nto
(m
)
0kPa 10kPa 20kPa 30kPa 40kPa 50kPa
60kPa 70kPa 80kPa 90kPa 100kPa
Tensão horizontal junto à face (descarregamento)
0,0
0,2
0,4
0,6
0,8
1,0
1,2
1,4
0,0 20,0 40,0 60,0 80,0
Tensão do solo junto à face (kPa)
Pro
fun
did
ad
e d
o f
ac
ea
me
nto
(m
)
0kPa 10kPa 20kPa 30kPa 40kPa 50kPa
60kPa 70kPa 80kPa 90kPa 100kPa
Figura VI.57 – Tensões do solo junto à face do experimento MF01 nas fases de
carregamento e descarregamento considerando as tensões mobilizadas na construção
do modelo físico.
GR2
z=0,7m
z=0,9m
z=1,1m
z=1,4m (base do faceamento)

240
Incremento de tensão horizontal junto à face (carregamento)
0,0
0,2
0,4
0,6
0,8
1,0
1,2
1,4
0,0 2,5 5,0 7,5 10,0 12,5
Tensão do solo junto à face (kPa)
Pro
fun
did
ad
e d
o f
ac
ea
me
nto
(m
)
0kPa 10kPa 20kPa 30kPa 40kPa 50kPa
60kPa 70kPa 80kPa 90kPa 100kPa
Incremento de tensão horizontal junto à face (descarregamento)
0,0
0,2
0,4
0,6
0,8
1,0
1,2
1,4
0,0 2,5 5,0 7,5 10,0 12,5 15,0
Tensão do solo junto à face (kPa)
Pro
fun
did
ad
e d
o f
ac
ea
me
nto
(m
)
0kPa 10kPa 20kPa 30kPa 40kPa 50kPa
60kPa 70kPa 80kPa 90kPa 100kPa
Figura VI.58 – Tensões do solo junto à face do experimento MF01 nas fases de
carregamento e descarregamento desconsiderando as tensões mobilizadas na
construção do modelo físico.
GR2
z=0,7m
z=0,9m
z=1,1m
z=1,4m (base do faceamento)
241
Verifica-se que as tensões do contato do solo com o faceamento no nível de
instalação do grampo são superiores àquelas mobilizadas acima e abaixo do grampo.
Estas tensões medidas na célula instalada na mesma linha de blocos de conexão da
cabeça dos grampos demonstram o travamento proporcionado pelos reforços. Soma-
se a esta menor movimentação da linha de blocos de conexão das cabeças dos
grampos, a indução de tensões horizontais promovida pela compactação da camada
de assentamento dos grampos (entre os níveis N40 e N60).
Em vista das diferenças de liberdade de movimentação horizontal do
faceamento, são variáveis as tensões horizontais do solo junto à face registradas nas
células de tensão total instaladas acima, abaixo e ao lado do grampo. Observa-se que
as tensões horizontais do solo junto à face acima do grampo são pouco maiores
àquelas registradas logo abaixo. No entanto, comportamento pouco esperado pode
ser observado no término da fase de descarregamento, cujo estado de tensão final do
solo junto à face não corresponde ao estado induzido pela sobrecarga máxima de 100
kPa.
Os resultados destacam a relação entre a deformação do solo e as tensões do
solo junto à face, cujos deslocamentos horizontais da face ocasionam mudanças no
estado de tensões atuantes no contato do solo com o faceamento, resultando em
aumento pronunciado nas pressões horizontais próximas à conexão das cabeças dos
grampos na face.
A Figura VI.59 apresenta o resultado da monitoração das pressões verticais no
solo grampeado nas zonas ativa e passiva referente ao experimento MF01 nas fases
de carregamento e descarregamento. Devido à tendência de movimentação do maciço
na cunha ativa, observou-se que as pressões verticais do solo grampeado são
ligeiramente maiores nesta zona. Os incrementos de pressão são constantes tanto na
zona ativa, quanto na zona passiva. Ao contrário do padrão de comportamento
observado na tensão do solo junto à face, o estado de tensão antes da aplicação da
sobrecarga volta a sua condição inicial com final do descarregamento.
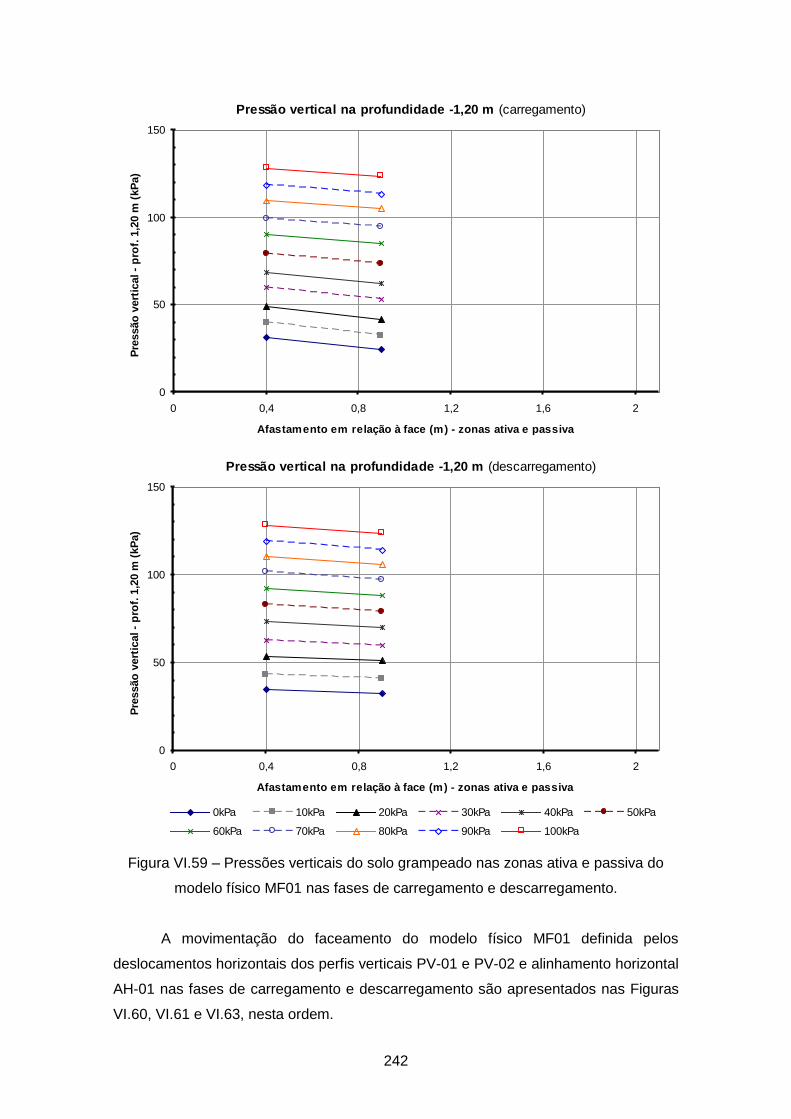
242
Pressão vertical na profundidade -1,20 m (carregamento)
0
50
100
150
0 0,4 0,8 1,2 1,6 2
Afastamento em relação à face (m) - zonas ativa e passiva
Pre
ssão
vert
ical -
pro
f. 1
,20 m
(kP
a)
0kPa 10kPa 20kPa 30kPa 40kPa 50kPa
60kPa 70kPa 80kPa 90kPa 100kPa
Pressão vertical na profundidade -1,20 m (descarregamento)
0
50
100
150
0 0,4 0,8 1,2 1,6 2
Afastamento em relação à face (m) - zonas ativa e passiva
Pre
ssão
vert
ical -
pro
f. 1
,20 m
(kP
a)
0kPa 10kPa 20kPa 30kPa 40kPa 50kPa
60kPa 70kPa 80kPa 90kPa 100kPa
Figura VI.59 – Pressões verticais do solo grampeado nas zonas ativa e passiva do
modelo físico MF01 nas fases de carregamento e descarregamento.
A movimentação do faceamento do modelo físico MF01 definida pelos
deslocamentos horizontais dos perfis verticais PV-01 e PV-02 e alinhamento horizontal
AH-01 nas fases de carregamento e descarregamento são apresentados nas Figuras
VI.60, VI.61 e VI.63, nesta ordem.
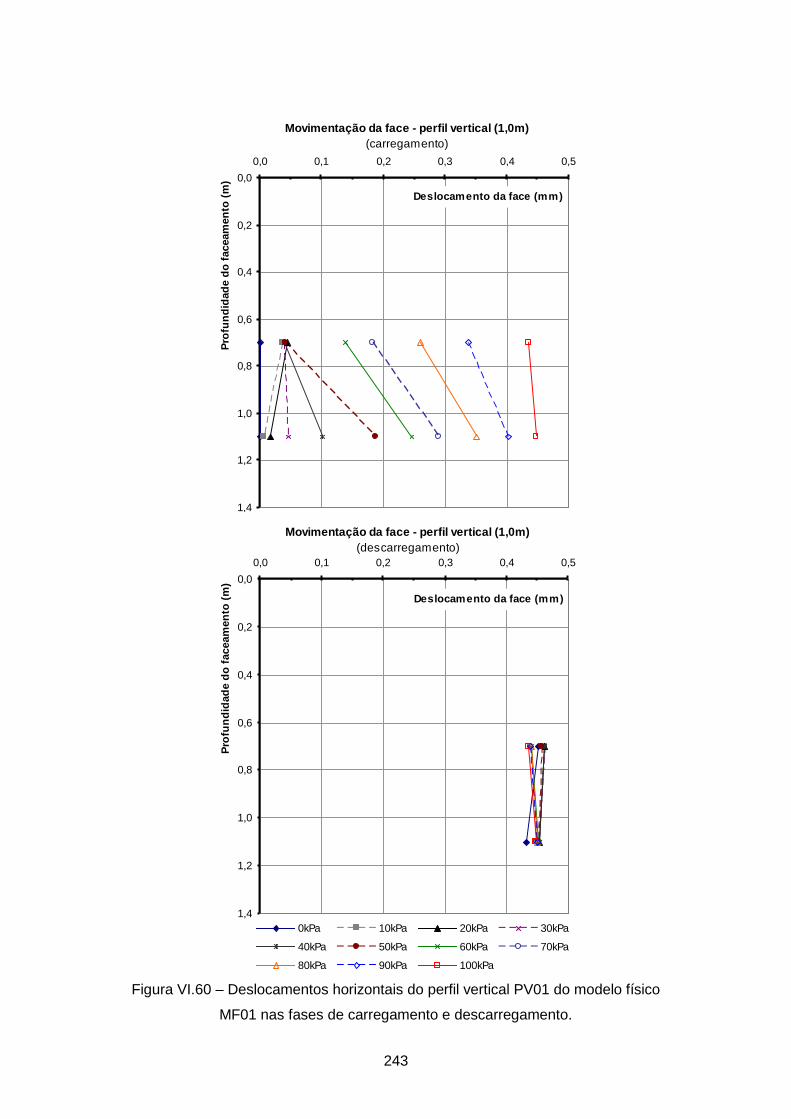
243
Movimentação da face - perfil vertical (1,0m)
(carregamento)
0,0
0,2
0,4
0,6
0,8
1,0
1,2
1,4
0,0 0,1 0,2 0,3 0,4 0,5
Deslocamento da face (mm)
Pro
fun
did
ad
e d
o f
aceam
en
to (
m)
0kPa 10kPa 20kPa 30kPa
40kPa 50kPa 60kPa 70kPa
80kPa 90kPa 100kPa
Movimentação da face - perfil vertical (1,0m)
(descarregamento)
0,0
0,2
0,4
0,6
0,8
1,0
1,2
1,4
0,0 0,1 0,2 0,3 0,4 0,5
Deslocamento da face (mm)
Pro
fun
did
ad
e d
o f
aceam
en
to (
m)
0kPa 10kPa 20kPa 30kPa
40kPa 50kPa 60kPa 70kPa
80kPa 90kPa 100kPa
Figura VI.60 – Deslocamentos horizontais do perfil vertical PV01 do modelo físico
MF01 nas fases de carregamento e descarregamento.
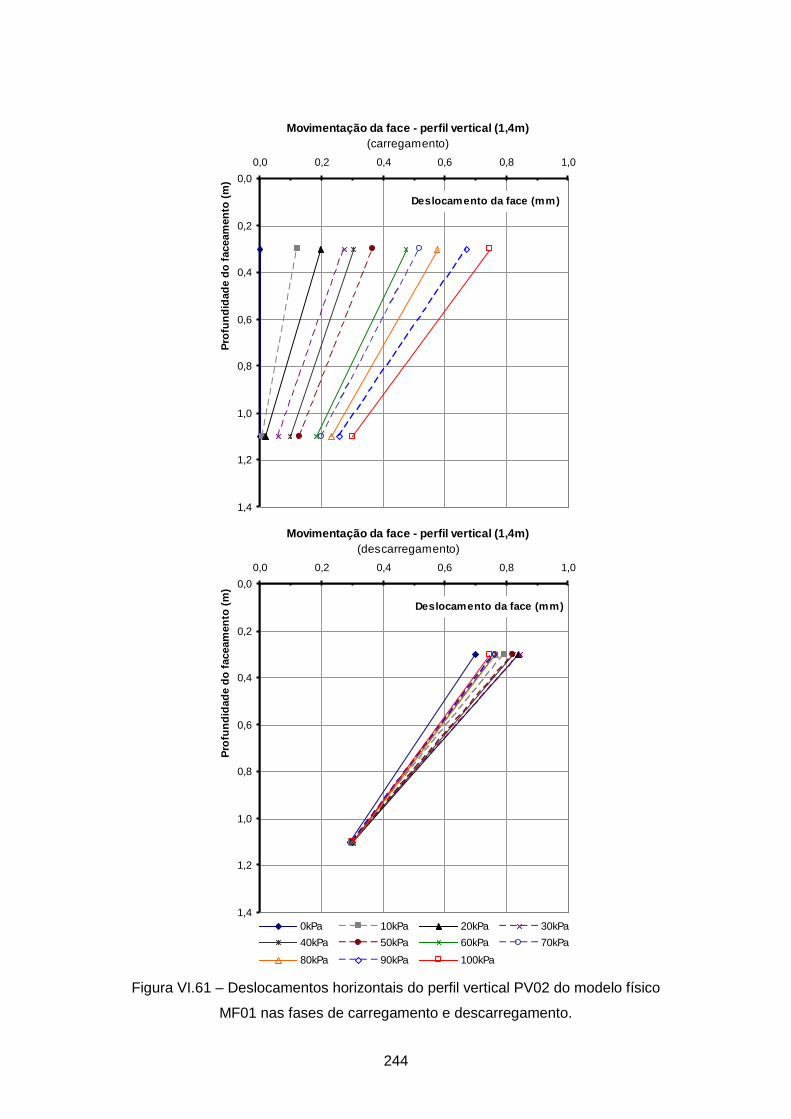
244
Movimentação da face - perfil vertical (1,4m)
(carregamento)
0,0
0,2
0,4
0,6
0,8
1,0
1,2
1,4
0,0 0,2 0,4 0,6 0,8 1,0
Deslocamento da face (mm)
Pro
fun
did
ad
e d
o f
aceam
en
to (
m)
0kPa 10kPa 20kPa 30kPa
40kPa 50kPa 60kPa 70kPa
80kPa 90kPa 100kPa
Movimentação da face - perfil vertical (1,4m)
(descarregamento)
0,0
0,2
0,4
0,6
0,8
1,0
1,2
1,4
0,0 0,2 0,4 0,6 0,8 1,0
Deslocamento da face (mm)
Pro
fun
did
ad
e d
o f
aceam
en
to (
m)
0kPa 10kPa 20kPa 30kPa
40kPa 50kPa 60kPa 70kPa
80kPa 90kPa 100kPa
Figura VI.61 – Deslocamentos horizontais do perfil vertical PV02 do modelo físico
MF01 nas fases de carregamento e descarregamento.
245
As medidas realizadas na seção vertical entre grampos, central (PV-01),
indicam que os deslocamentos foram muito pequenos, inferiores à 0,5 mm. Apesar
dos deslocamentos à meia altura serem inferiores àqueles próximos à base do
faceamento, os resultados da monitoração indicam que há uma tendência destes se
igualarem à medida que a sobrecarga aumenta. Conforme esperado, no
descarregamento, os deslocamentos da face permanecem inalterados.
O perfil vertical dos deslocamentos horizontais da face PV-02 plotado a partir
de leituras realizadas em LVDT´s instalados na base (z=1,1 m) e topo do faceamento
(z=0,3 m), indicam que, ainda que pequenos, os deslocamentos são maiores no topo
do faceamento (0,8 mm) e menores na sua base (0,3 mm). Por outro lado, o perfil PV-
01 (central) indica que os deslocamentos no faceamento próximos ao nível de
instalação dos grampos são inferiores àqueles que ocorrem na sua base. Assim, as
medidas dos deslocamentos que ocorrem nestas duas seções (PV-01 e PV-02)
sugerem que os deslocamentos horizontais ao longo da altura da face podem ser
representados, grosseiramente, por dois segmentos de reta, no qual na altura média
há um ponto de inflexão onde a movimentação da face é menor.
A sugestão de um perfil vertical de deslocamentos horizontais na face bi-linear
é razoável quando comparado com as tensões do solo registradas junto à face (Figura
VI.58). Comparando os resultados das medições das tensões de contato do solo com
o faceamento e dos deslocamentos horizontais da face, observa-se que as tensões
atuantes no solo e cargas nos grampos são diretamente influenciadas pelo valor e tipo
da movimentação. Menores deformações tenderão a manter o estado de tensões
próximo ao repouso e movimentações mais significativas no faceamento promoverão
modificações no estado de tensões, tendendo-as ao estado ativo.
Através do alinhamento horizontal delineado pelos LVDT´s instalados nas
bases das seções central e próxima ao grampo, observa-se que, ainda que pequenos,
os deslocamentos são maiores na seção intermediária dos grampos (Figura VI.62).
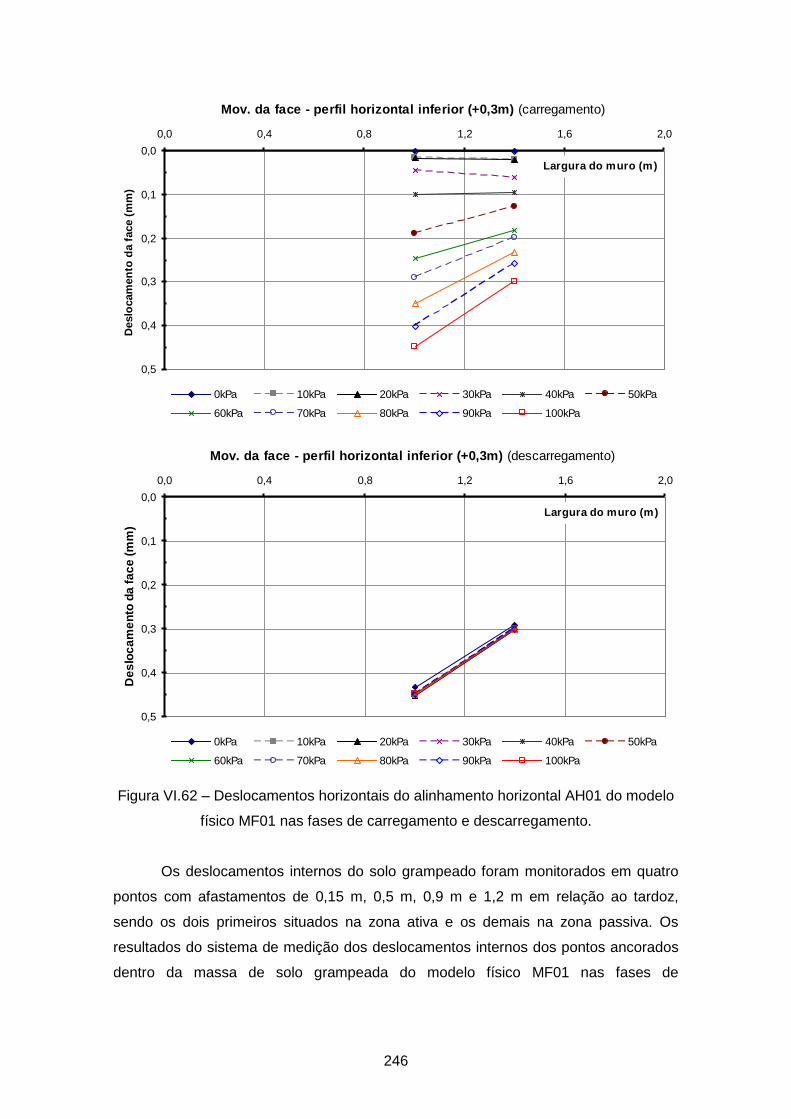
246
Mov. da face - perfil horizontal inferior (+0,3m) (carregamento)
0,0
0,1
0,2
0,3
0,4
0,5
0,0 0,4 0,8 1,2 1,6 2,0
Largura do muro (m)
Deslo
cam
en
to d
a f
ace (
mm
)
0kPa 10kPa 20kPa 30kPa 40kPa 50kPa
60kPa 70kPa 80kPa 90kPa 100kPa
Mov. da face - perfil horizontal inferior (+0,3m) (descarregamento)
0,0
0,1
0,2
0,3
0,4
0,5
0,0 0,4 0,8 1,2 1,6 2,0
Largura do muro (m)
De
slo
ca
me
nto
da
fa
ce
(m
m)
0kPa 10kPa 20kPa 30kPa 40kPa 50kPa
60kPa 70kPa 80kPa 90kPa 100kPa
Figura VI.62 – Deslocamentos horizontais do alinhamento horizontal AH01 do modelo
físico MF01 nas fases de carregamento e descarregamento.
Os deslocamentos internos do solo grampeado foram monitorados em quatro
pontos com afastamentos de 0,15 m, 0,5 m, 0,9 m e 1,2 m em relação ao tardoz,
sendo os dois primeiros situados na zona ativa e os demais na zona passiva. Os
resultados do sistema de medição dos deslocamentos internos dos pontos ancorados
dentro da massa de solo grampeada do modelo físico MF01 nas fases de
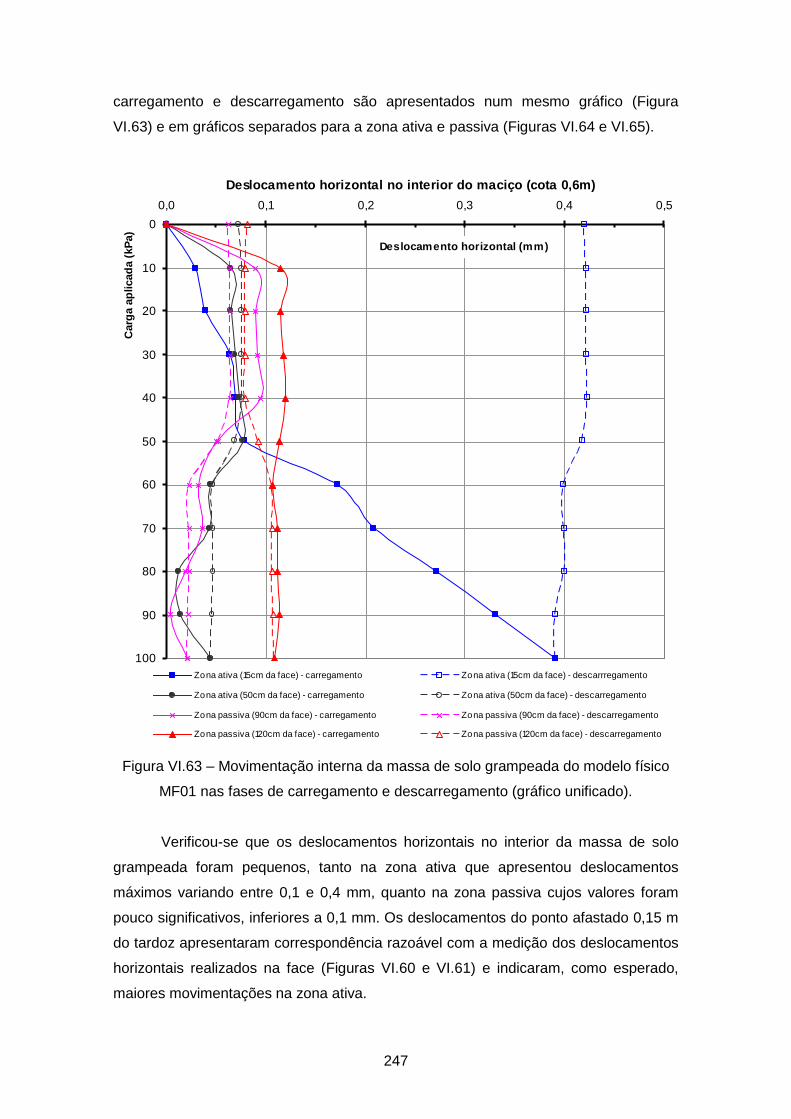
247
carregamento e descarregamento são apresentados num mesmo gráfico (Figura
VI.63) e em gráficos separados para a zona ativa e passiva (Figuras VI.64 e VI.65).
Deslocamento horizontal no interior do maciço (cota 0,6m)
0
10
20
30
40
50
60
70
80
90
100
0,0 0,1 0,2 0,3 0,4 0,5
Deslocamento horizontal (mm)
Carg
a a
plicad
a (
kP
a)
Zona ativa (15cm da face) - carregamento Zona ativa (15cm da face) - descarrregamento
Zona ativa (50cm da face) - carregamento Zona ativa (50cm da face) - descarregamento
Zona passiva (90cm da face) - carregamento Zona passiva (90cm da face) - descarregamento
Zona passiva (120cm da face) - carregamento Zona passiva (120cm da face) - descarregamento
Figura VI.63 – Movimentação interna da massa de solo grampeada do modelo físico
MF01 nas fases de carregamento e descarregamento (gráfico unificado).
Verificou-se que os deslocamentos horizontais no interior da massa de solo
grampeada foram pequenos, tanto na zona ativa que apresentou deslocamentos
máximos variando entre 0,1 e 0,4 mm, quanto na zona passiva cujos valores foram
pouco significativos, inferiores a 0,1 mm. Os deslocamentos do ponto afastado 0,15 m
do tardoz apresentaram correspondência razoável com a medição dos deslocamentos
horizontais realizados na face (Figuras VI.60 e VI.61) e indicaram, como esperado,
maiores movimentações na zona ativa.
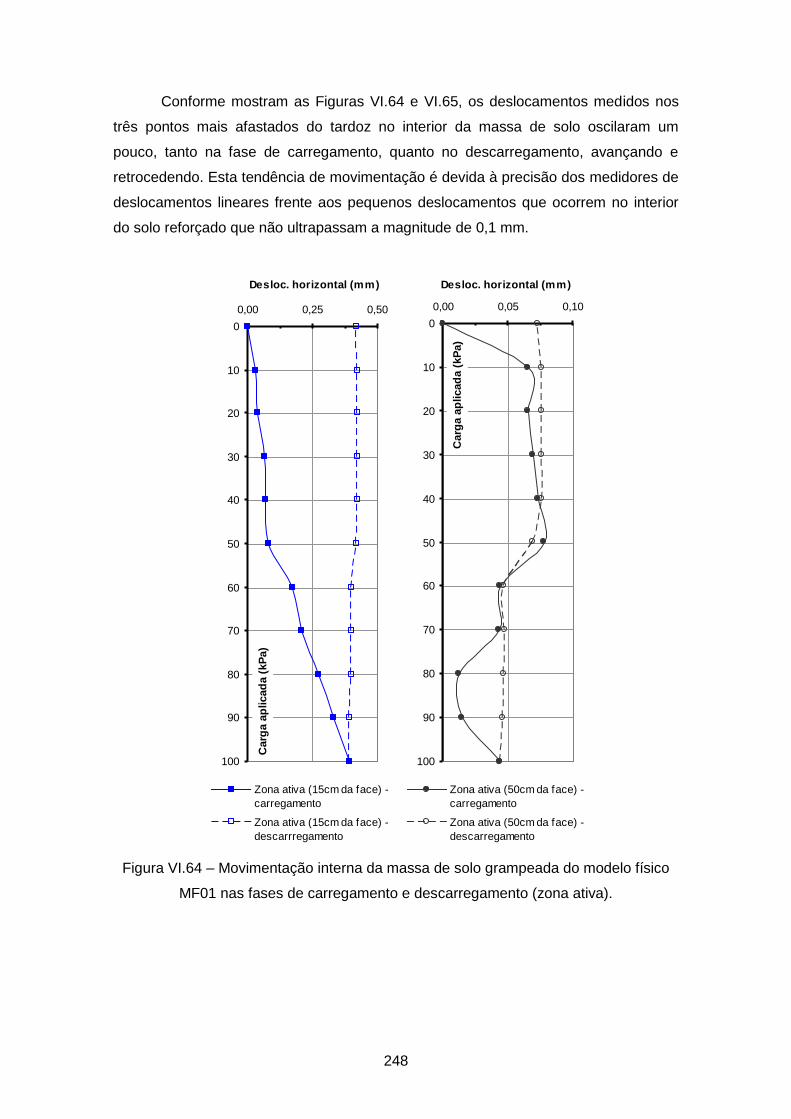
248
Conforme mostram as Figuras VI.64 e VI.65, os deslocamentos medidos nos
três pontos mais afastados do tardoz no interior da massa de solo oscilaram um
pouco, tanto na fase de carregamento, quanto no descarregamento, avançando e
retrocedendo. Esta tendência de movimentação é devida à precisão dos medidores de
deslocamentos lineares frente aos pequenos deslocamentos que ocorrem no interior
do solo reforçado que não ultrapassam a magnitude de 0,1 mm.
0
10
20
30
40
50
60
70
80
90
100
0,00 0,25 0,50
Desloc. horizontal (mm)
Carg
a a
plicad
a (
kP
a)
Zona ativa (15cm da face) -
carregamento
Zona ativa (15cm da face) -
descarrregamento
0
10
20
30
40
50
60
70
80
90
100
0,00 0,05 0,10
Desloc. horizontal (mm)
Carg
a a
plicad
a (
kP
a)
Zona ativa (50cm da face) -
carregamento
Zona ativa (50cm da face) -
descarregamento
Figura VI.64 – Movimentação interna da massa de solo grampeada do modelo físico
MF01 nas fases de carregamento e descarregamento (zona ativa).
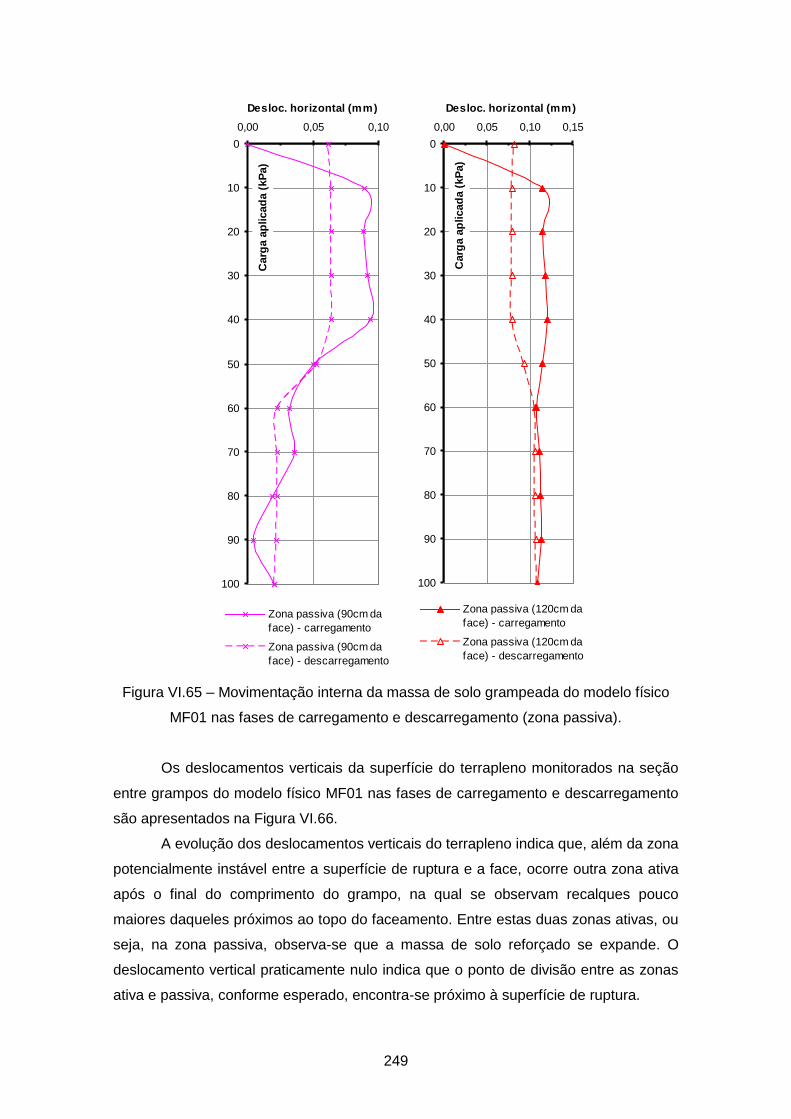
249
0
10
20
30
40
50
60
70
80
90
100
0,00 0,05 0,10
Desloc. horizontal (mm)
Carg
a a
plicad
a (
kP
a)
Zona passiva (90cm da
face) - carregamento
Zona passiva (90cm da
face) - descarregamento
0
10
20
30
40
50
60
70
80
90
100
0,00 0,05 0,10 0,15
Desloc. horizontal (mm)
Carg
a a
plicad
a (
kP
a)
Zona passiva (120cm da
face) - carregamento
Zona passiva (120cm da
face) - descarregamento
Figura VI.65 – Movimentação interna da massa de solo grampeada do modelo físico
MF01 nas fases de carregamento e descarregamento (zona passiva).
Os deslocamentos verticais da superfície do terrapleno monitorados na seção
entre grampos do modelo físico MF01 nas fases de carregamento e descarregamento
são apresentados na Figura VI.66.
A evolução dos deslocamentos verticais do terrapleno indica que, além da zona
potencialmente instável entre a superfície de ruptura e a face, ocorre outra zona ativa
após o final do comprimento do grampo, na qual se observam recalques pouco
maiores daqueles próximos ao topo do faceamento. Entre estas duas zonas ativas, ou
seja, na zona passiva, observa-se que a massa de solo reforçado se expande. O
deslocamento vertical praticamente nulo indica que o ponto de divisão entre as zonas
ativa e passiva, conforme esperado, encontra-se próximo à superfície de ruptura.
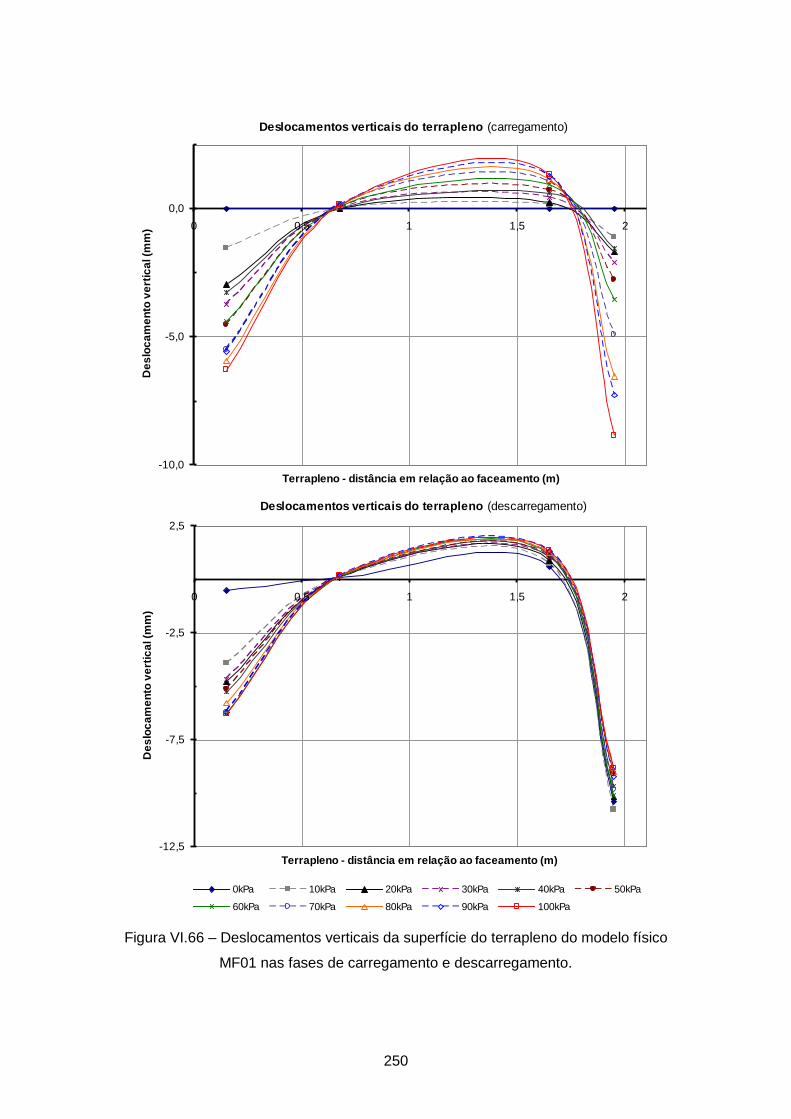
250
Deslocamentos verticais do terrapleno (carregamento)
-10,0
-5,0
0,0
0 0,5 1 1,5 2
Terrapleno - distância em relação ao faceamento (m)
De
slo
ca
me
nto
ve
rtic
al (m
m)
0kPa 10kPa 20kPa 30kPa 40kPa 50kPa
60kPa 70kPa 80kPa 90kPa 100kPa
Deslocamentos verticais do terrapleno (descarregamento)
-12,5
-7,5
-2,5
2,5
0 0,5 1 1,5 2
Terrapleno - distância em relação ao faceamento (m)
De
slo
ca
me
nto
ve
rtic
al (m
m)
0kPa 10kPa 20kPa 30kPa 40kPa 50kPa
60kPa 70kPa 80kPa 90kPa 100kPa
Figura VI.66 – Deslocamentos verticais da superfície do terrapleno do modelo físico
MF01 nas fases de carregamento e descarregamento.
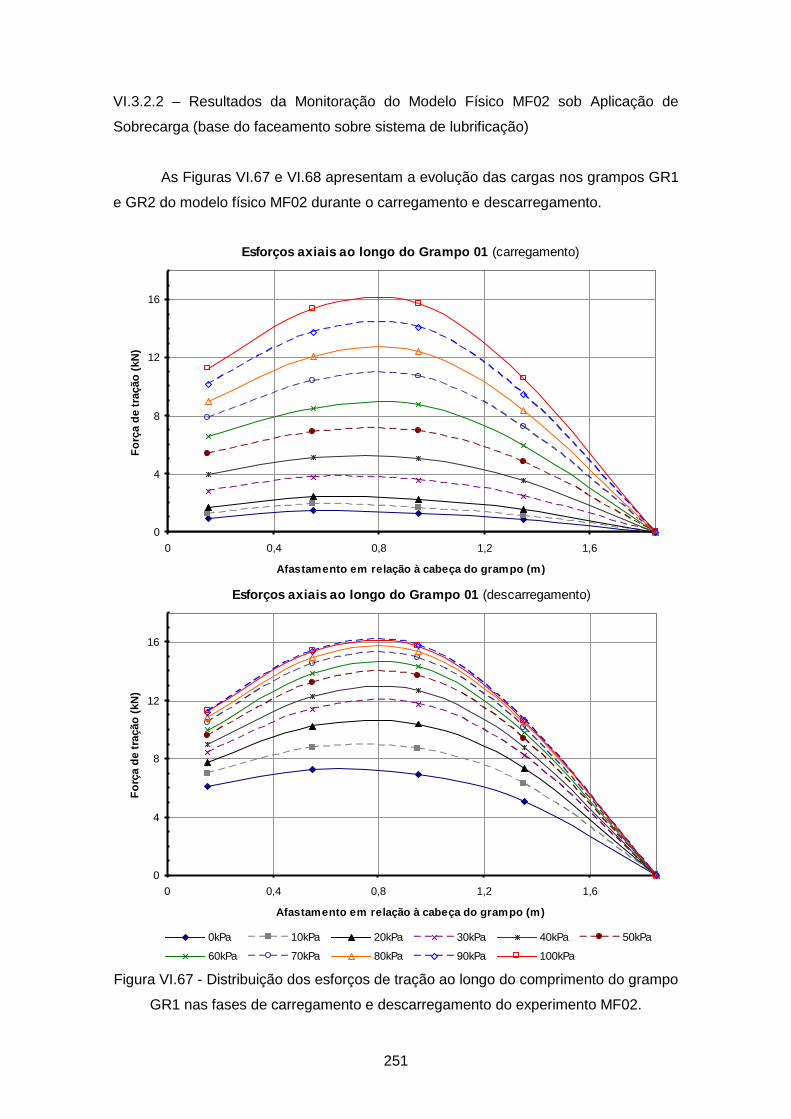
251
VI.3.2.2 – Resultados da Monitoração do Modelo Físico MF02 sob Aplicação de
Sobrecarga (base do faceamento sobre sistema de lubrificação)
As Figuras VI.67 e VI.68 apresentam a evolução das cargas nos grampos GR1
e GR2 do modelo físico MF02 durante o carregamento e descarregamento.
Esforços axiais ao longo do Grampo 01 (carregamento)
0
4
8
12
16
0 0,4 0,8 1,2 1,6
Afastamento em relação à cabeça do grampo (m)
Fo
rça d
e t
ração
(kN
)
0kPa 10kPa 20kPa 30kPa 40kPa 50kPa
60kPa 70kPa 80kPa 90kPa 100kPa
Esforços axiais ao longo do Grampo 01 (descarregamento)
0
4
8
12
16
0 0,4 0,8 1,2 1,6
Afastamento em relação à cabeça do grampo (m)
Fo
rça d
e t
ração
(kN
)
0kPa 10kPa 20kPa 30kPa 40kPa 50kPa
60kPa 70kPa 80kPa 90kPa 100kPa
Figura VI.67 - Distribuição dos esforços de tração ao longo do comprimento do grampo
GR1 nas fases de carregamento e descarregamento do experimento MF02.
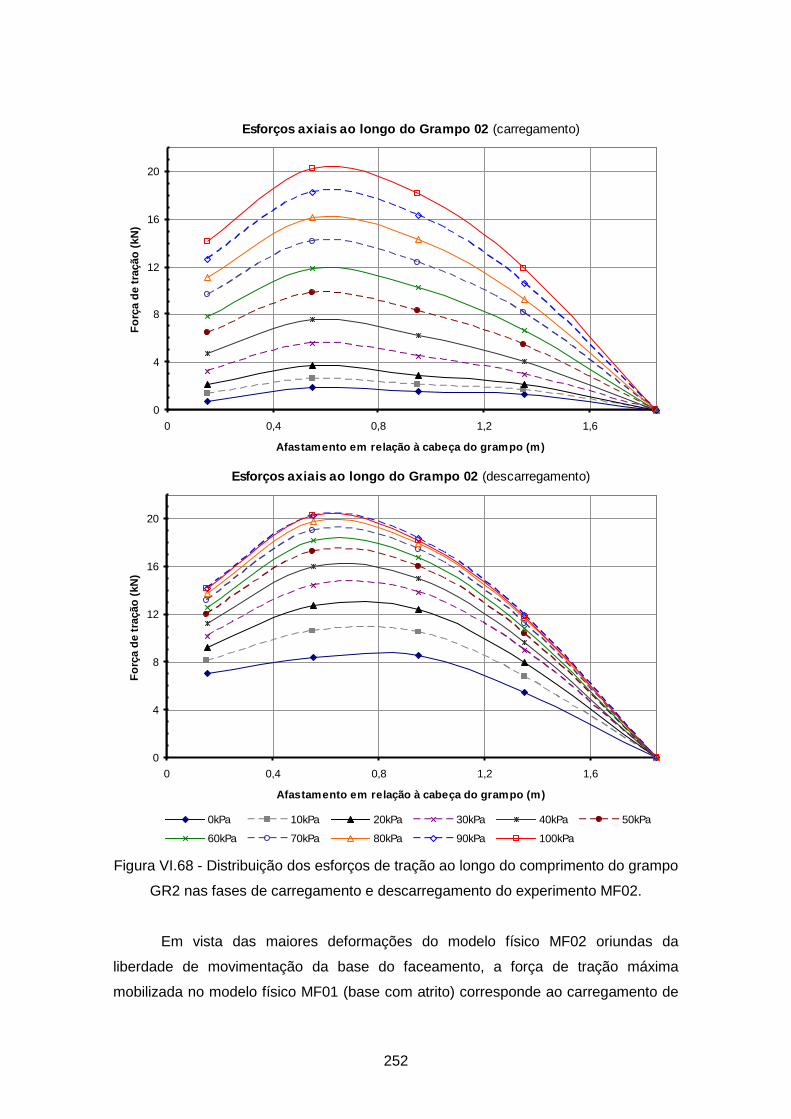
252
Esforços axiais ao longo do Grampo 02 (carregamento)
0
4
8
12
16
20
0 0,4 0,8 1,2 1,6
Afastamento em relação à cabeça do grampo (m)
Fo
rça d
e t
ração
(kN
)
0kPa 10kPa 20kPa 30kPa 40kPa 50kPa
60kPa 70kPa 80kPa 90kPa 100kPa
Esforços axiais ao longo do Grampo 02 (descarregamento)
0
4
8
12
16
20
0 0,4 0,8 1,2 1,6
Afastamento em relação à cabeça do grampo (m)
Fo
rça d
e t
ração
(kN
)
0kPa 10kPa 20kPa 30kPa 40kPa 50kPa
60kPa 70kPa 80kPa 90kPa 100kPa
Figura VI.68 - Distribuição dos esforços de tração ao longo do comprimento do grampo
GR2 nas fases de carregamento e descarregamento do experimento MF02.
Em vista das maiores deformações do modelo físico MF02 oriundas da
liberdade de movimentação da base do faceamento, a força de tração máxima
mobilizada no modelo físico MF01 (base com atrito) corresponde ao carregamento de
253
30 kPa do experimento MF02, cuja carga máxima medida, para o carregamento
virgem, foi de 20 kN, cerca de 3,3 vezes a carga máxima do experimento MF01.
Através da comparação dos resultados obtidos nos dois experimentos, MF01 e MF02,
fica evidenciado que as forças transmitidas aos grampos dependem da magnitude e
tipo de movimentação do solo grampeado, notadamente os deslocamentos do
faceamento.
Da mesma forma que na evolução da distribuição dos esforços de tração nos
grampos do experimento MF01, o ponto de força axial máxima ocorre no interior da
massa de solo grampeado, sendo sua localização próxima à interseção da superfície
de ruptura com os grampos, nos estágios de carregamento e descarregamento.
Semelhante ao padrão de comportamento verificado no experimento MF01, os
incrementos de tração indicam que a sobrecarga de 20 kPa define o nível de tensão
nos grampos cujo os acréscimos e decréscimos de forças axiais são, respectivamente,
menores no estágio de carregamento e maiores no descarregamento dentro do
intervalo de 0 a 20 kPa.
No intervalo de sobrecarga entre 20 e 100 kPa, durante o estágio de
carregamento os incrementos de tensão de tração nos grampos quase não variam
significativamente. Entretanto, no descarregamento as trações variam de forma não
linear, cujos decréscimos aumentam à medida que se diminui a sobrecarga até que o
estado de tensões nos grampos corresponda àquele mobilizado quando se aplicou o
carregamento de 50 kPa.
Com exceção das magnitudes dos esforços axiais, os grampos dos modelos
físicos com e sem atrito na base do faceamento, respectivamente MF01 e MF02,
apresentaram semelhanças no que se refere aos aspectos comportamentais
discutidos acima.
As tensões do solo junto à face do experimento MF02, considerando e
desconsiderando as tensões horizontais induzidas durante a construção do modelo
físico, são apresentados nas Figuras VI.69 e VI.70, respectivamente.

254
Tensão horizontal junto à face (carregamento)
0,0
0,2
0,4
0,6
0,8
1,0
1,2
1,4
0,0 10,0 20,0 30,0 40,0
Tensão do solo junto à face (kPa)
Pro
fun
did
ad
e d
o f
ac
ea
me
nto
(m
)
0kPa 10kPa 20kPa 30kPa 40kPa 50kPa
60kPa 70kPa 80kPa 90kPa 100kPa
Tensão horizontal junto à face (descarregamento)
0,0
0,2
0,4
0,6
0,8
1,0
1,2
1,4
0,0 10,0 20,0 30,0 40,0
Tensão do solo junto à face (kPa)
Pro
fun
did
ad
e d
o f
ac
ea
me
nto
(m
)
0kPa 10kPa 20kPa 30kPa 40kPa 50kPa
60kPa 70kPa 80kPa 90kPa 100kPa
Figura VI.69 – Tensões do solo junto à face do experimento MF02 nas fases de
carregamento e descarregamento considerando as tensões mobilizadas na construção
do modelo físico.
GR2
z=0,7m
z=0,9m
z=1,1m
z=1,4m (base do faceamento)

255
Incremento de tensão horizontal junto à face (carregamento)
0,0
0,2
0,4
0,6
0,8
1,0
1,2
1,4
0 2 4 6 8
Tensão do solo junto à face (kPa)
Pro
fun
did
ad
e d
o f
ac
ea
me
nto
(m
)
0kPa 10kPa 20kPa 30kPa 40kPa 50kPa
60kPa 70kPa 80kPa 90kPa 100kPa
Incremento de tensão horizontal junto à face (descarregamento)
0,0
0,2
0,4
0,6
0,8
1,0
1,2
1,4
0 2 4 6 8
Tensão do solo junto à face (kPa)
Pro
fun
did
ad
e d
o f
ac
ea
me
nto
(m
)
0kPa 10kPa 20kPa 30kPa 40kPa 50kPa
60kPa 70kPa 80kPa 90kPa 100kPa
Figura VI.70 – Tensões do solo junto à face do experimento MF02 nas fases de
carregamento e descarregamento desconsiderando as tensões mobilizadas na
construção do modelo físico.
GR2
z=0,7m
z=0,9m
z=1,1m
z=1,4m (base do faceamento)
256
O sistema de escoramento instalado na base do faceamento do modelo físico
durante a sua construção somado ao processo executivo empregado justifica a
evolução das tensões do solo junto à face observada na Figura VI.69 que apresenta
maiores tensões horizontais no nível de ancoragem da cabeça do grampo.
Na Figura VI.70 verifica-se que as tensões do contato do solo com a face são
decrescentes com a profundidade e as diferenças de tensão horizontal medidas nas
três células instaladas acima, abaixo e ao lado do grampo são constantes quando se
aplica a sobrecarga máxima, tendendo a um comportamento linear. Devido à
associação da mobilização de tensão horizontal com os deslocamentos impostos, que
no caso é decorrente da aplicação da sobrecarga no terrapleno, os resultados da
monitoração, cujas tensões do solo junto à face são decrescentes com a profundidade,
confirmam a liberdade de movimentação da base do faceamento.
Observa-se que as medidas dos incrementos de tensão horizontal oscilaram
bastante no nível de ancoragem da cabeça do grampo. Como será visto adiante, esta
variação não teve relação direta com os deslocamentos horizontais da face e do solo
reforçado.
Entretanto, no geral, os resultados mostraram-se consistentes com os
deslocamentos horizontais medidos na face que aumentam com a profundidade
(Figuras VI.72 e VI.73), promovendo maior alívio das tensões horizontais na base do
faceamento do modelo físico MF02.
A Figura VI.71 apresenta as pressões verticais medidas na zona ativa do solo
grampeado do experimento MF02 nas fases de carregamento e descarregamento. A
monitoração da evolução da pressão vertical na zona passiva foi comprometida pela
ruptura do corpo da célula de pressão total, e conseqüente vazamento do fluido, após
o término da construção do modelo físico.
Observa-se que os incrementos de pressão vertical durante aplicação da
sobrecarga aumentaram de maneira não muito linear e no final do descarregamento a
pressão não voltou a seu valor inicial. Além disso, apesar da pressão vertical inicial na
zona ativa apresentar-se próxima daquela medida no experimento MF01, no final do
carregamento houve uma diferença de aproximadamente 10 kPa entre as pressões.
Durante a desmontagem do modelo MF02, ao verificar o estado da célula de pressão
total CPT na zona ativa, verificou-se que havia presença de ar na tubulação entre o
corpo da célula e o transdutor de pressão.
Os resultados das pressões verticais durante a construção do modelo físico
MF02 parecem consistentes, quando comparados com o MF01. No entanto, devido
aos problemas encontrados nas CPT´s os resultados são apresentados (Figura VI.71)
para fins de registro, não sendo analisados.

257
Pressão vertical na profundidade -1,20 m (carregamento)
0
50
100
150
0 0,4 0,8 1,2 1,6 2
Afastamento em relação à face (m) - zonas ativa e passiva
Pre
ssão
vert
ical -
pro
f. 1
,20 m
(kP
a)
0kPa 10kPa 20kPa 30kPa 40kPa 50kPa
60kPa 70kPa 80kPa 90kPa 100kPa
Pressão vertical na profundidade -1,20 m (descarregamento)
0
50
100
150
0 0,4 0,8 1,2 1,6 2
Afastamento em relação à face (m) - zonas ativa e passiva
Pre
ssão
vert
ical -
pro
f. 1
,20 m
(kP
a)
0kPa 10kPa 20kPa 30kPa 40kPa 50kPa
60kPa 70kPa 80kPa 90kPa 100kPa
Figura VI.71 – Pressões verticais do solo grampeado nas zonas ativa e passiva do
modelo físico MF02 nas fases de carregamento e descarregamento.
A movimentação do faceamento do modelo físico MF02 definida pelos
deslocamentos horizontais dos perfis verticais PV01 e PV02 e alinhamento horizontal
AH01 nas fases de carregamento e descarregamento são apresentados nas Figuras
VI.72, VI.73 e VI.74, nesta ordem.
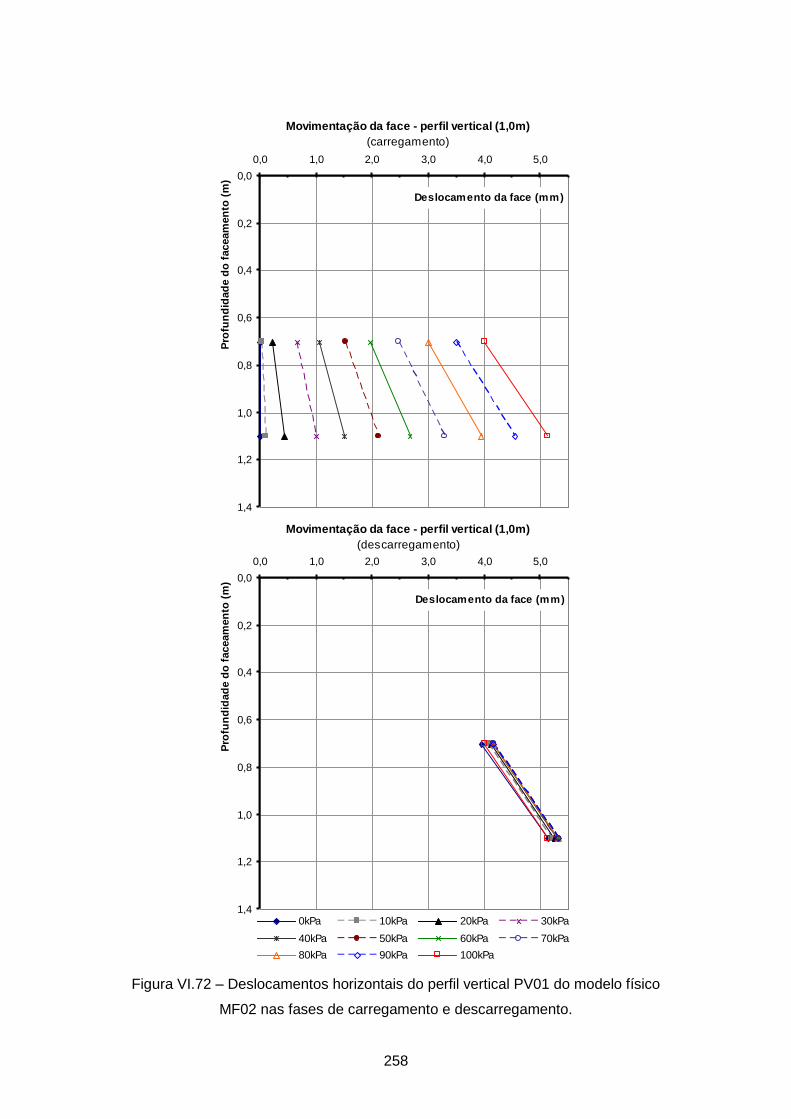
258
Movimentação da face - perfil vertical (1,0m)
(carregamento)
0,0
0,2
0,4
0,6
0,8
1,0
1,2
1,4
0,0 1,0 2,0 3,0 4,0 5,0
Deslocamento da face (mm)
Pro
fun
did
ad
e d
o f
aceam
en
to (
m)
0kPa 10kPa 20kPa 30kPa
40kPa 50kPa 60kPa 70kPa
80kPa 90kPa 100kPa
Movimentação da face - perfil vertical (1,0m)
(descarregamento)
0,0
0,2
0,4
0,6
0,8
1,0
1,2
1,4
0,0 1,0 2,0 3,0 4,0 5,0
Deslocamento da face (mm)
Pro
fun
did
ad
e d
o f
aceam
en
to (
m)
0kPa 10kPa 20kPa 30kPa
40kPa 50kPa 60kPa 70kPa
80kPa 90kPa 100kPa
Figura VI.72 – Deslocamentos horizontais do perfil vertical PV01 do modelo físico
MF02 nas fases de carregamento e descarregamento.
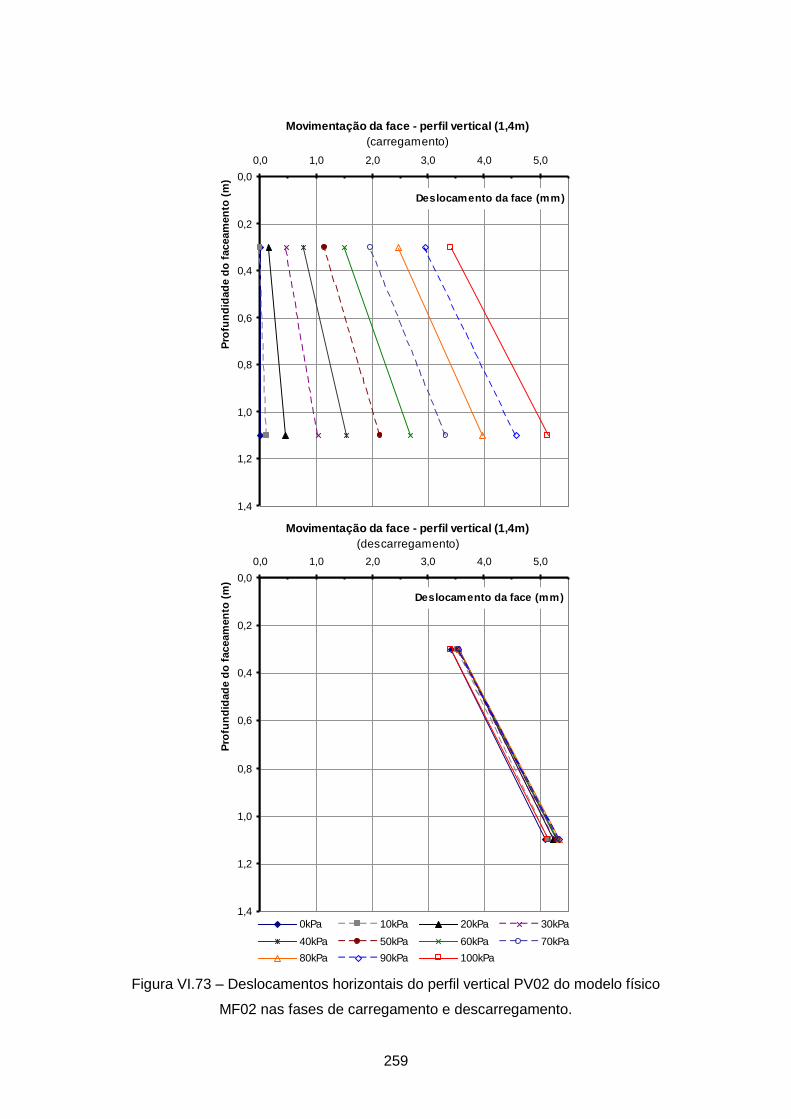
259
Movimentação da face - perfil vertical (1,4m)
(carregamento)
0,0
0,2
0,4
0,6
0,8
1,0
1,2
1,4
0,0 1,0 2,0 3,0 4,0 5,0
Deslocamento da face (mm)
Pro
fun
did
ad
e d
o f
aceam
en
to (
m)
0kPa 10kPa 20kPa 30kPa
40kPa 50kPa 60kPa 70kPa
80kPa 90kPa 100kPa
Movimentação da face - perfil vertical (1,4m)
(descarregamento)
0,0
0,2
0,4
0,6
0,8
1,0
1,2
1,4
0,0 1,0 2,0 3,0 4,0 5,0
Deslocamento da face (mm)
Pro
fun
did
ad
e d
o f
aceam
en
to (
m)
0kPa 10kPa 20kPa 30kPa
40kPa 50kPa 60kPa 70kPa
80kPa 90kPa 100kPa
Figura VI.73 – Deslocamentos horizontais do perfil vertical PV02 do modelo físico
MF02 nas fases de carregamento e descarregamento.
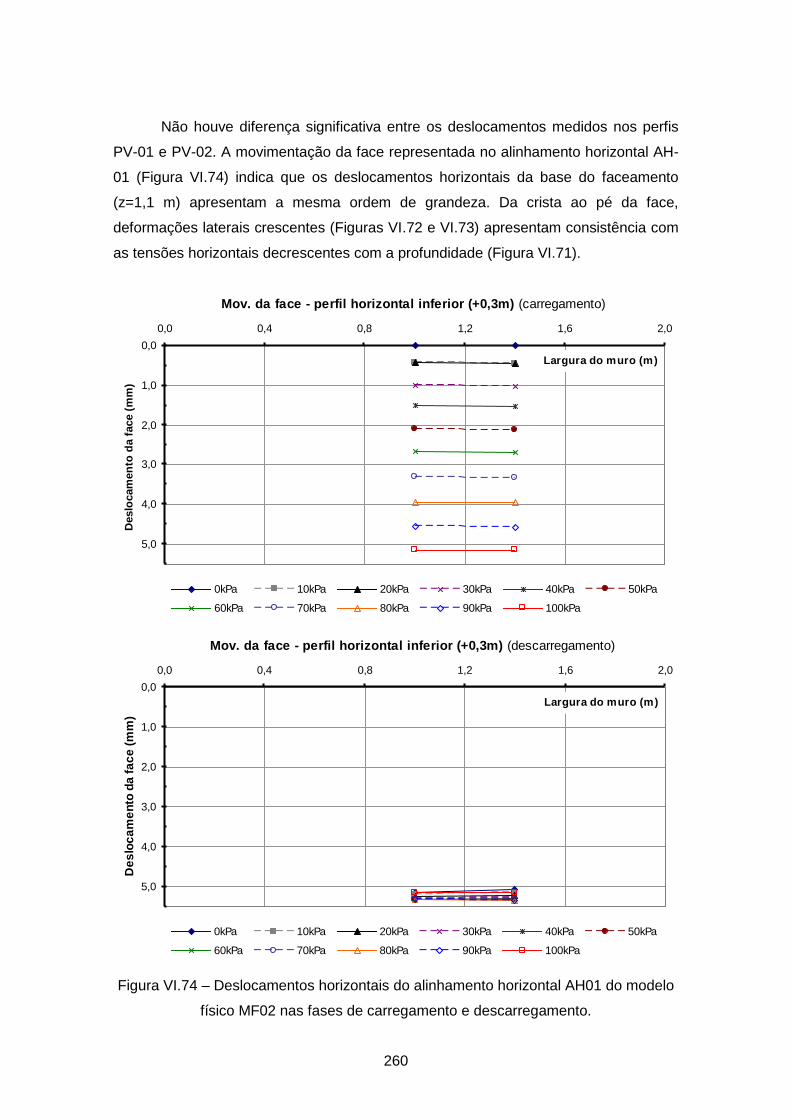
260
Não houve diferença significativa entre os deslocamentos medidos nos perfis
PV-01 e PV-02. A movimentação da face representada no alinhamento horizontal AH-
01 (Figura VI.74) indica que os deslocamentos horizontais da base do faceamento
(z=1,1 m) apresentam a mesma ordem de grandeza. Da crista ao pé da face,
deformações laterais crescentes (Figuras VI.72 e VI.73) apresentam consistência com
as tensões horizontais decrescentes com a profundidade (Figura VI.71).
Mov. da face - perfil horizontal inferior (+0,3m) (carregamento)
0,0
1,0
2,0
3,0
4,0
5,0
0,0 0,4 0,8 1,2 1,6 2,0
Largura do muro (m)
Deslo
cam
en
to d
a f
ace (
mm
)
0kPa 10kPa 20kPa 30kPa 40kPa 50kPa
60kPa 70kPa 80kPa 90kPa 100kPa
Mov. da face - perfil horizontal inferior (+0,3m) (descarregamento)
0,0
1,0
2,0
3,0
4,0
5,0
0,0 0,4 0,8 1,2 1,6 2,0
Largura do muro (m)
De
slo
ca
me
nto
da
fa
ce
(m
m)
0kPa 10kPa 20kPa 30kPa 40kPa 50kPa
60kPa 70kPa 80kPa 90kPa 100kPa
Figura VI.74 – Deslocamentos horizontais do alinhamento horizontal AH01 do modelo
físico MF02 nas fases de carregamento e descarregamento.
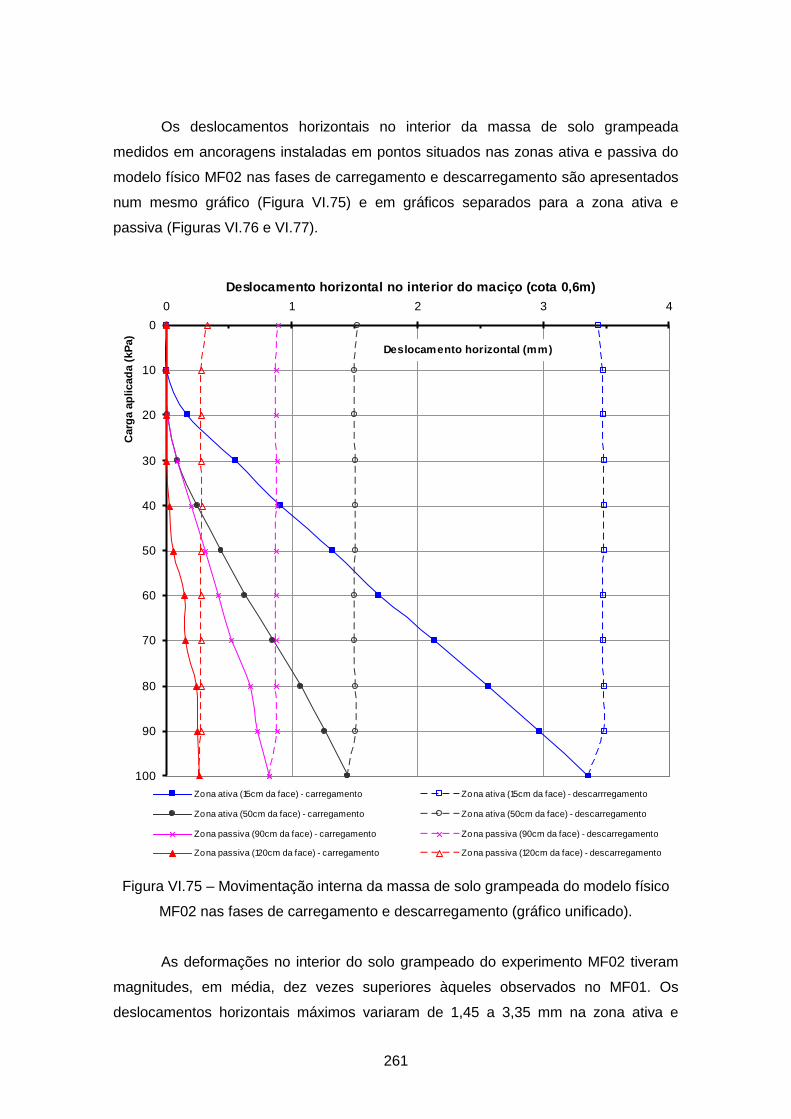
261
Os deslocamentos horizontais no interior da massa de solo grampeada
medidos em ancoragens instaladas em pontos situados nas zonas ativa e passiva do
modelo físico MF02 nas fases de carregamento e descarregamento são apresentados
num mesmo gráfico (Figura VI.75) e em gráficos separados para a zona ativa e
passiva (Figuras VI.76 e VI.77).
Deslocamento horizontal no interior do maciço (cota 0,6m)
0
10
20
30
40
50
60
70
80
90
100
0 1 2 3 4
Deslocamento horizontal (mm)
Carg
a a
plicad
a (
kP
a)
Zona ativa (15cm da face) - carregamento Zona ativa (15cm da face) - descarrregamento
Zona ativa (50cm da face) - carregamento Zona ativa (50cm da face) - descarregamento
Zona passiva (90cm da face) - carregamento Zona passiva (90cm da face) - descarregamento
Zona passiva (120cm da face) - carregamento Zona passiva (120cm da face) - descarregamento
Figura VI.75 – Movimentação interna da massa de solo grampeada do modelo físico
MF02 nas fases de carregamento e descarregamento (gráfico unificado).
As deformações no interior do solo grampeado do experimento MF02 tiveram
magnitudes, em média, dez vezes superiores àqueles observados no MF01. Os
deslocamentos horizontais máximos variaram de 1,45 a 3,35 mm na zona ativa e

262
foram inferiores a 0,82 mm na zona passiva, sendo de 0,26 mm no ponto mais distante
(afastamento de 1,2 m). Observa-se que a partir do carregamento de 20 kPa as os
incrementos de deslocamentos horizontais em função da sobrecarga são constantes e
maiores à medida que o ponto monitorado se aproxima do faceamento. As
deformações da face e no interior do solo grampeado apresentam boa
correspondência. Os deslocamentos na zona ativa do ponto situado a 0,15 do
faceamento apresentaram valores próximos aos deslocamentos horizontais da face
(Figuras VI.72 e VI.73).
0
10
20
30
40
50
60
70
80
90
100
0 2 4
Desloc. horizontal (mm)
Carg
a a
plicad
a (
kP
a)
Zona ativa (15cm da face) -
carregamento
Zona ativa (15cm da face) -
descarrregamento
0
10
20
30
40
50
60
70
80
90
100
0 1 2
Desloc. horizontal (mm)
Carg
a a
plicad
a (
kP
a)
Zona ativa (50cm da face) -
carregamento
Zona ativa (50cm da face) -
descarregamento
Figura VI.76 – Movimentação interna da massa de solo grampeada do modelo físico
MF02 nas fases de carregamento e descarregamento (zona ativa).
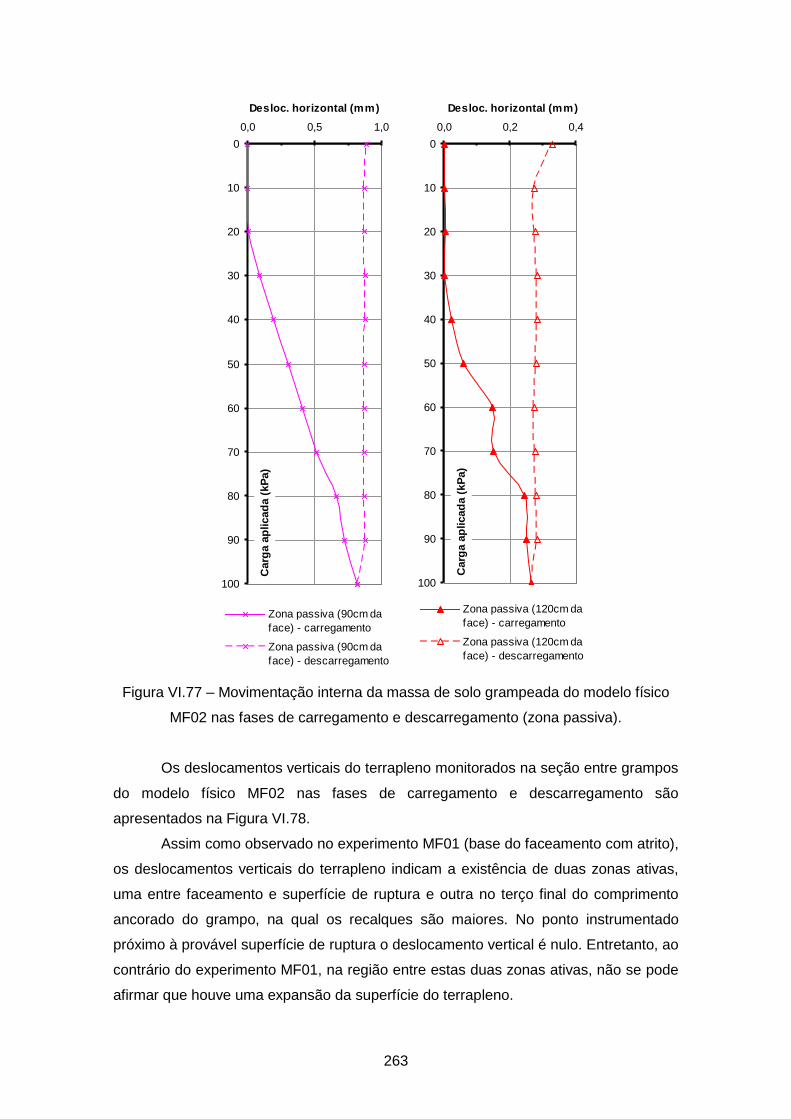
263
0
10
20
30
40
50
60
70
80
90
100
0,0 0,5 1,0
Desloc. horizontal (mm)
Carg
a a
plicad
a (
kP
a)
Zona passiva (90cm da
face) - carregamento
Zona passiva (90cm da
face) - descarregamento
0
10
20
30
40
50
60
70
80
90
100
0,0 0,2 0,4
Desloc. horizontal (mm)
Carg
a a
plicad
a (
kP
a)
Zona passiva (120cm da
face) - carregamento
Zona passiva (120cm da
face) - descarregamento
Figura VI.77 – Movimentação interna da massa de solo grampeada do modelo físico
MF02 nas fases de carregamento e descarregamento (zona passiva).
Os deslocamentos verticais do terrapleno monitorados na seção entre grampos
do modelo físico MF02 nas fases de carregamento e descarregamento são
apresentados na Figura VI.78.
Assim como observado no experimento MF01 (base do faceamento com atrito),
os deslocamentos verticais do terrapleno indicam a existência de duas zonas ativas,
uma entre faceamento e superfície de ruptura e outra no terço final do comprimento
ancorado do grampo, na qual os recalques são maiores. No ponto instrumentado
próximo à provável superfície de ruptura o deslocamento vertical é nulo. Entretanto, ao
contrário do experimento MF01, na região entre estas duas zonas ativas, não se pode
afirmar que houve uma expansão da superfície do terrapleno.
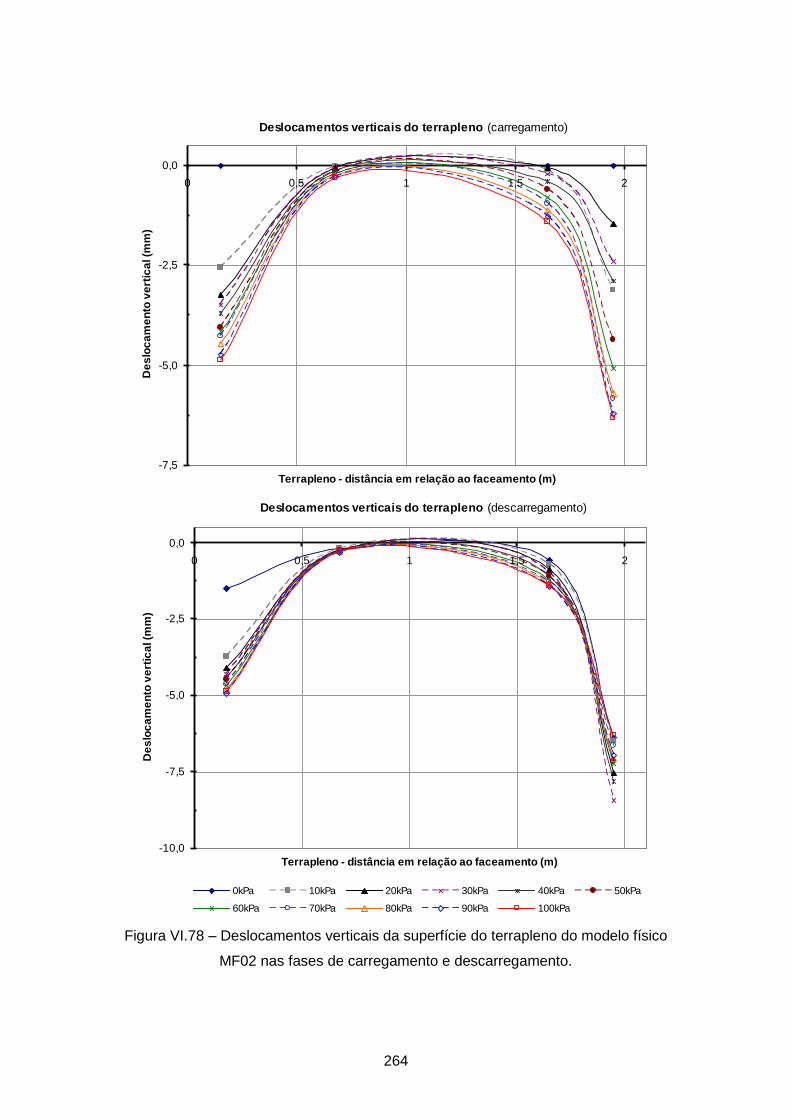
264
Deslocamentos verticais do terrapleno (carregamento)
-7,5
-5,0
-2,5
0,0
0 0,5 1 1,5 2
Terrapleno - distância em relação ao faceamento (m)
De
slo
ca
me
nto
ve
rtic
al (m
m)
0kPa 10kPa 20kPa 30kPa 40kPa 50kPa
60kPa 70kPa 80kPa 90kPa 100kPa
Deslocamentos verticais do terrapleno (descarregamento)
-10,0
-7,5
-5,0
-2,5
0,0
0 0,5 1 1,5 2
Terrapleno - distância em relação ao faceamento (m)
De
slo
ca
me
nto
ve
rtic
al (m
m)
0kPa 10kPa 20kPa 30kPa 40kPa 50kPa
60kPa 70kPa 80kPa 90kPa 100kPa
Figura VI.78 – Deslocamentos verticais da superfície do terrapleno do modelo físico
MF02 nas fases de carregamento e descarregamento.
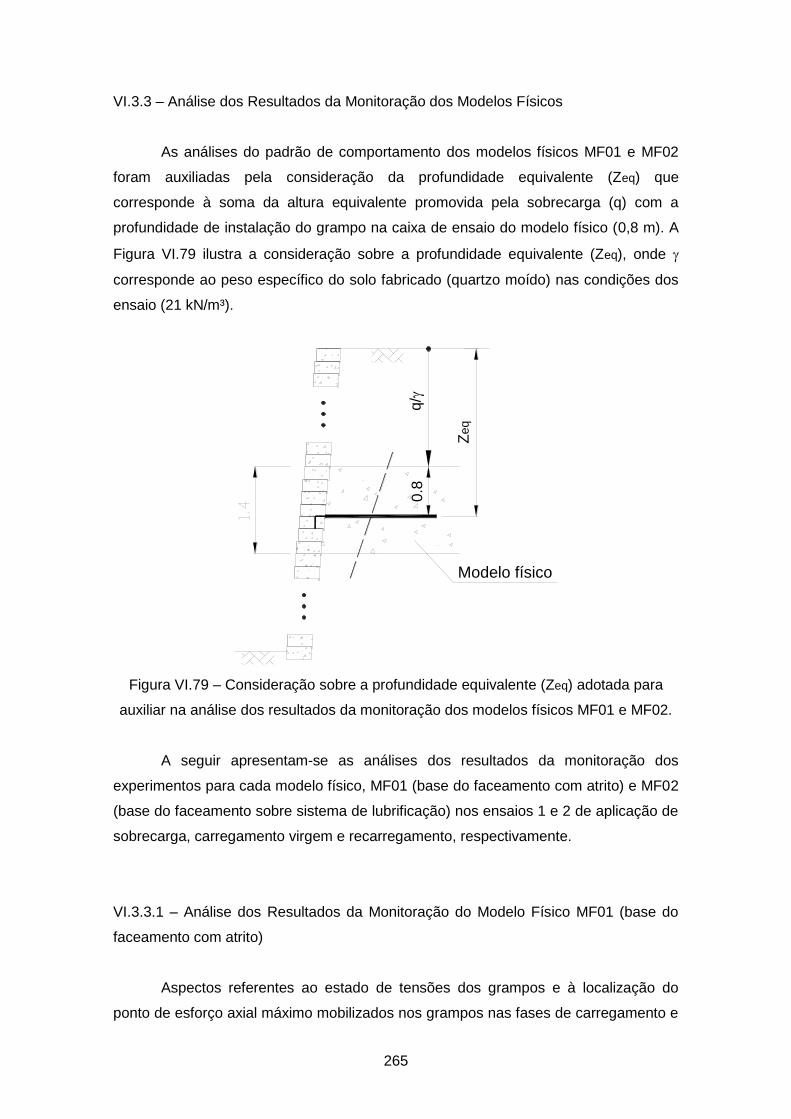
265
VI.3.3 – Análise dos Resultados da Monitoração dos Modelos Físicos
As análises do padrão de comportamento dos modelos físicos MF01 e MF02
foram auxiliadas pela consideração da profundidade equivalente (Zeq) que
corresponde à soma da altura equivalente promovida pela sobrecarga (q) com a
profundidade de instalação do grampo na caixa de ensaio do modelo físico (0,8 m). A
Figura VI.79 ilustra a consideração sobre a profundidade equivalente (Zeq), onde
corresponde ao peso específico do solo fabricado (quartzo moído) nas condições dos
ensaio (21 kN/m³).
Modelo físico
q/
0.8
Zeq
Figura VI.79 – Consideração sobre a profundidade equivalente (Zeq) adotada para
auxiliar na análise dos resultados da monitoração dos modelos físicos MF01 e MF02.
A seguir apresentam-se as análises dos resultados da monitoração dos
experimentos para cada modelo físico, MF01 (base do faceamento com atrito) e MF02
(base do faceamento sobre sistema de lubrificação) nos ensaios 1 e 2 de aplicação de
sobrecarga, carregamento virgem e recarregamento, respectivamente.
VI.3.3.1 – Análise dos Resultados da Monitoração do Modelo Físico MF01 (base do
faceamento com atrito)
Aspectos referentes ao estado de tensões dos grampos e à localização do
ponto de esforço axial máximo mobilizados nos grampos nas fases de carregamento e
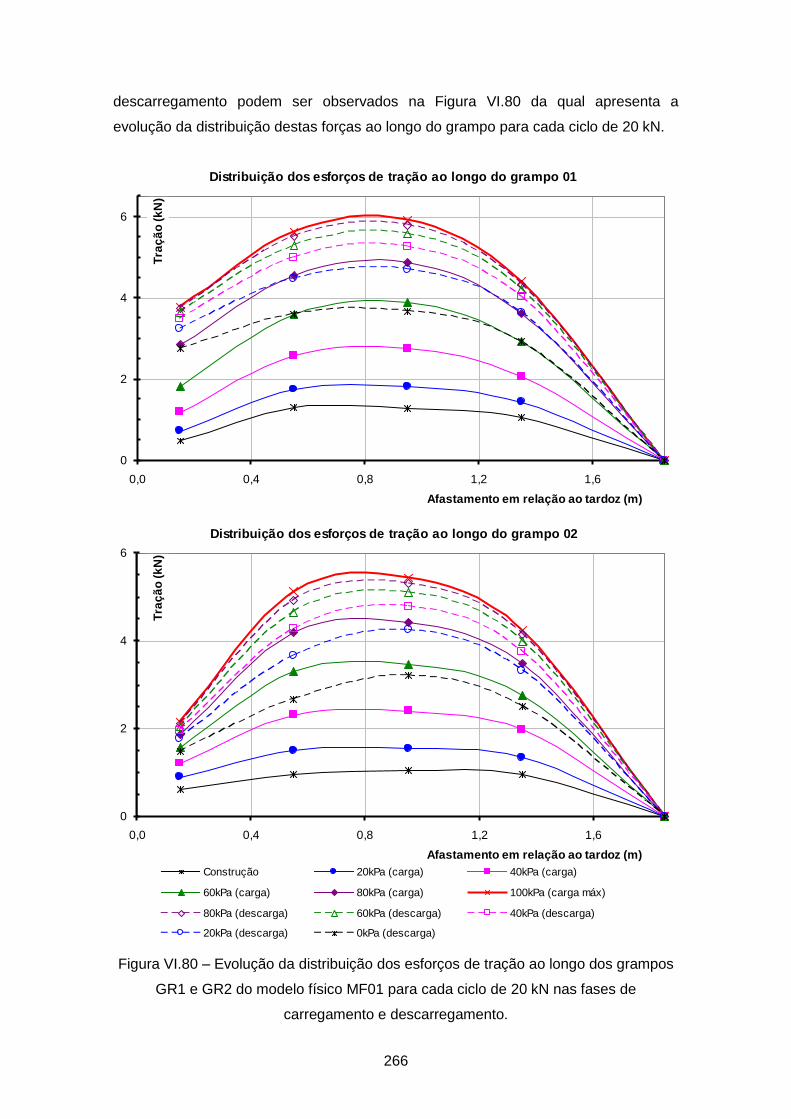
266
descarregamento podem ser observados na Figura VI.80 da qual apresenta a
evolução da distribuição destas forças ao longo do grampo para cada ciclo de 20 kN.
Distribuição dos esforços de tração ao longo do grampo 01
0
2
4
6
0,0 0,4 0,8 1,2 1,6
Afastamento em relação ao tardoz (m)
Tra
çã
o (
kN
)
Construção 20kPa (carga) 40kPa (carga)
60kPa (carga) 80kPa (carga) 100kPa (carga máx)
80kPa (descarga) 60kPa (descarga) 40kPa (descarga)
20kPa (descarga) 0kPa (descarga)
Distribuição dos esforços de tração ao longo do grampo 02
0
2
4
6
0,0 0,4 0,8 1,2 1,6
Afastamento em relação ao tardoz (m)
Tra
çã
o (
kN
)
Construção 20kPa (carga) 40kPa (carga)
60kPa (carga) 80kPa (carga) 100kPa (carga máx)
80kPa (descarga) 60kPa (descarga) 40kPa (descarga)
20kPa (descarga) 0kPa (descarga)
Figura VI.80 – Evolução da distribuição dos esforços de tração ao longo dos grampos
GR1 e GR2 do modelo físico MF01 para cada ciclo de 20 kN nas fases de
carregamento e descarregamento.
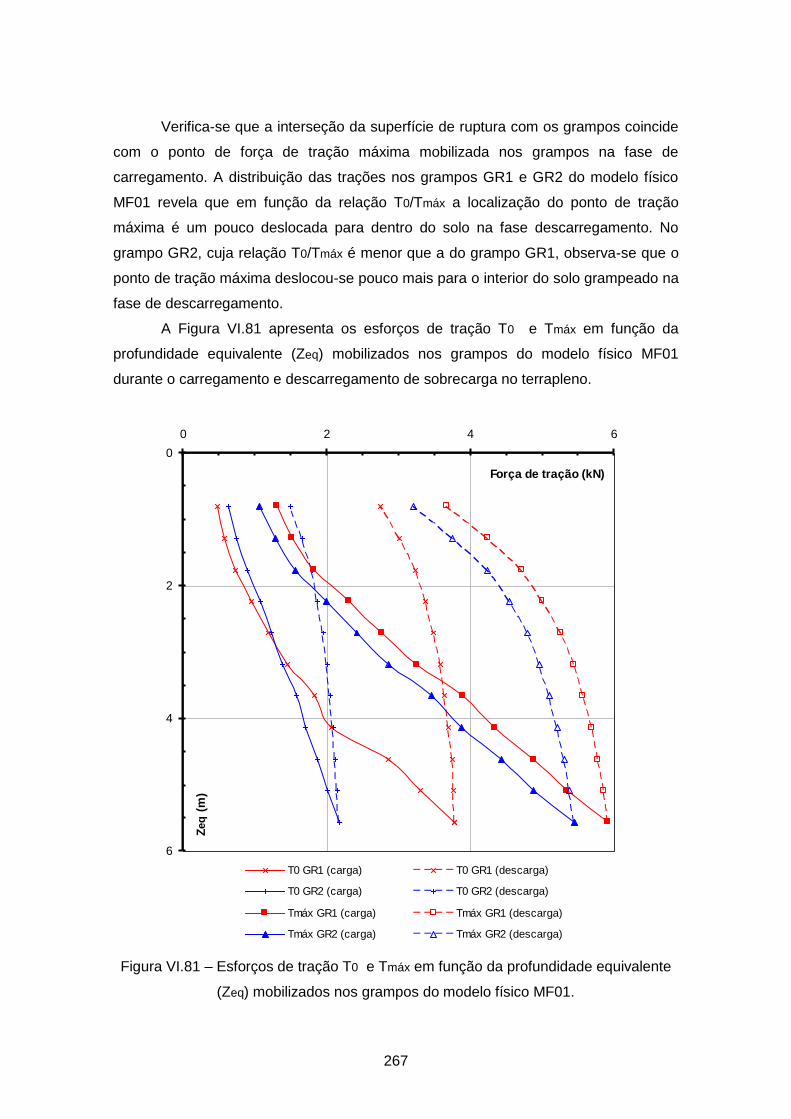
267
Verifica-se que a interseção da superfície de ruptura com os grampos coincide
com o ponto de força de tração máxima mobilizada nos grampos na fase de
carregamento. A distribuição das trações nos grampos GR1 e GR2 do modelo físico
MF01 revela que em função da relação T0/Tmáx a localização do ponto de tração
máxima é um pouco deslocada para dentro do solo na fase descarregamento. No
grampo GR2, cuja relação T0/Tmáx é menor que a do grampo GR1, observa-se que o
ponto de tração máxima deslocou-se pouco mais para o interior do solo grampeado na
fase de descarregamento.
A Figura VI.81 apresenta os esforços de tração T0 e Tmáx em função da
profundidade equivalente (Zeq) mobilizados nos grampos do modelo físico MF01
durante o carregamento e descarregamento de sobrecarga no terrapleno.
Forças de Tração To e Tmáx mobilizadas nos grampos
0
2
4
6
0 2 4 6
Força de tração (kN)
Zeq
(m
)
T0 GR1 (carga) T0 GR1 (descarga)
T0 GR2 (carga) T0 GR2 (descarga)
Tmáx GR1 (carga) Tmáx GR1 (descarga)
Tmáx GR2 (carga) Tmáx GR2 (descarga)
Figura VI.81 – Esforços de tração T0 e Tmáx em função da profundidade equivalente
(Zeq) mobilizados nos grampos do modelo físico MF01.
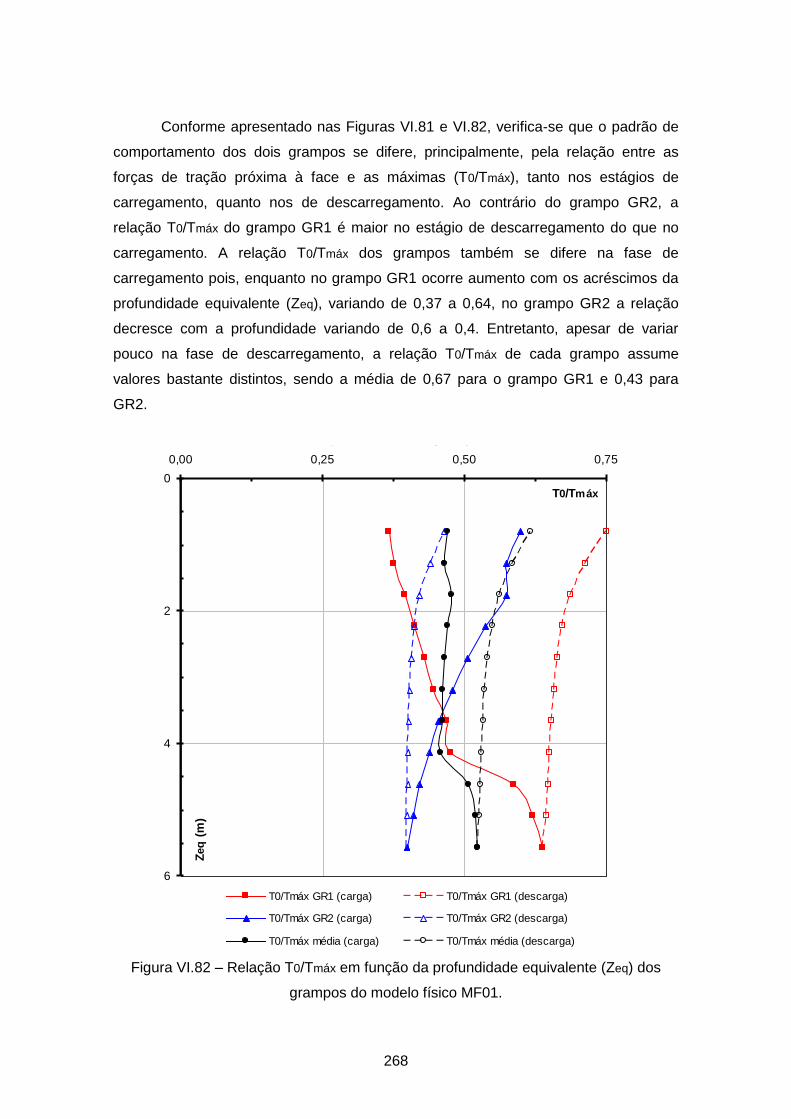
268
Conforme apresentado nas Figuras VI.81 e VI.82, verifica-se que o padrão de
comportamento dos dois grampos se difere, principalmente, pela relação entre as
forças de tração próxima à face e as máximas (T0/Tmáx), tanto nos estágios de
carregamento, quanto nos de descarregamento. Ao contrário do grampo GR2, a
relação T0/Tmáx do grampo GR1 é maior no estágio de descarregamento do que no
carregamento. A relação T0/Tmáx dos grampos também se difere na fase de
carregamento pois, enquanto no grampo GR1 ocorre aumento com os acréscimos da
profundidade equivalente (Zeq), variando de 0,37 a 0,64, no grampo GR2 a relação
decresce com a profundidade variando de 0,6 a 0,4. Entretanto, apesar de variar
pouco na fase de descarregamento, a relação T0/Tmáx de cada grampo assume
valores bastante distintos, sendo a média de 0,67 para o grampo GR1 e 0,43 para
GR2.
Relação To /Tmáx dos grampos
0
2
4
6
0,00 0,25 0,50 0,75
T0/Tmáx
Zeq
(m
)
T0/Tmáx GR1 (carga) T0/Tmáx GR1 (descarga)
T0/Tmáx GR2 (carga) T0/Tmáx GR2 (descarga)
T0/Tmáx média (carga) T0/Tmáx média (descarga)
Figura VI.82 – Relação T0/Tmáx em função da profundidade equivalente (Zeq) dos
grampos do modelo físico MF01.

269
Analisando-se a relação T0/Tmáx pela média das trações que ocorrem nos dois
grampos (Figura VI.82), verifica-se que as relações nos estágios de carregamento e
descarregamento tendem a serem constantes, assumindo valores médios,
respectivamente, iguais a 0,5 e 0,57. Entretanto, a relação T0/Tmáx pode ser bem
menor se considerarmos T0 na face do bloco e uma variação linear da tração entre o
ponto instrumentado (15 cm da face) e a face.
A Figura VI.83 apresenta o estado de tensão dos grampos na situação de
mobilização de esforço de tração máxima em relação à condição de repouso e estado
ativo. No experimento MF01 realizado com atrito na base do modelo físico verificou-se
que o estado de tensão dos grampos nos estágios de carregamento e
descarregamento encontra-se abaixo da condição ativa do solo. Já no final do
descarregamento, no quarto superior da profundidade equivalente (Zeq), o estado de
tensão dos grampos caminha do estado ativo para a condição de repouso.
Estado de tensão (tração máxima mobilizada)
0
2
4
6
0 2 4 6
Zeq
(m
)
GR1 (carga) GR1 (descarga)
GR2 (carga) GR2 (descarga)
Estado ativo Estado de repouso
Figura VI.83 – Estado de tensão referente às cargas máximas mobilizadas nos
grampos do modelo físico MF01.
Tmáx
Sv.Sh
.z.Ko
.z.Ka
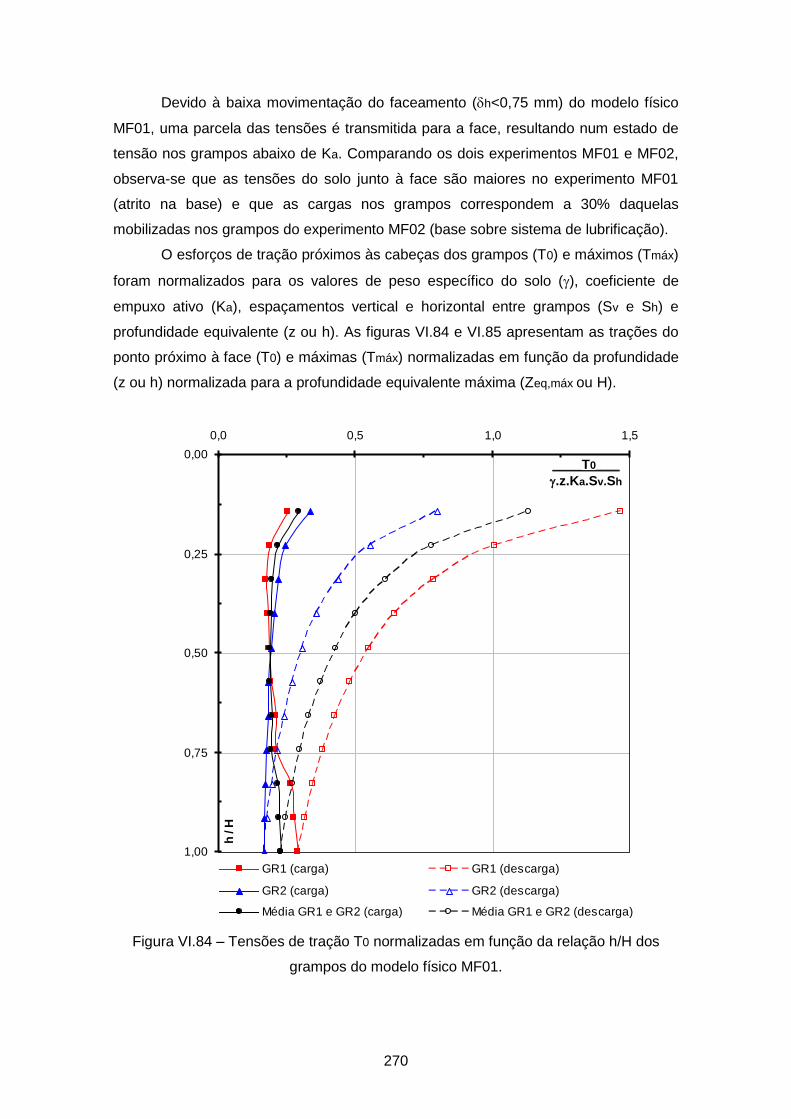
270
Devido à baixa movimentação do faceamento (h<0,75 mm) do modelo físico
MF01, uma parcela das tensões é transmitida para a face, resultando num estado de
tensão nos grampos abaixo de Ka. Comparando os dois experimentos MF01 e MF02,
observa-se que as tensões do solo junto à face são maiores no experimento MF01
(atrito na base) e que as cargas nos grampos correspondem a 30% daquelas
mobilizadas nos grampos do experimento MF02 (base sobre sistema de lubrificação).
O esforços de tração próximos às cabeças dos grampos (T0) e máximos (Tmáx)
foram normalizados para os valores de peso específico do solo (), coeficiente de
empuxo ativo (Ka), espaçamentos vertical e horizontal entre grampos (Sv e Sh) e
profundidade equivalente (z ou h). As figuras VI.84 e VI.85 apresentam as trações do
ponto próximo à face (T0) e máximas (Tmáx) normalizadas em função da profundidade
(z ou h) normalizada para a profundidade equivalente máxima (Zeq,máx ou H).
Tensão de tração na face normalizada em função de h/H
0,00
0,25
0,50
0,75
1,00
0,0 0,5 1,0 1,5
h / H
GR1 (carga) GR1 (descarga)
GR2 (carga) GR2 (descarga)
Média GR1 e GR2 (carga) Média GR1 e GR2 (descarga)
Figura VI.84 – Tensões de tração T0 normalizadas em função da relação h/H dos
grampos do modelo físico MF01.
____T0____
.z.Ka.Sv.Sh
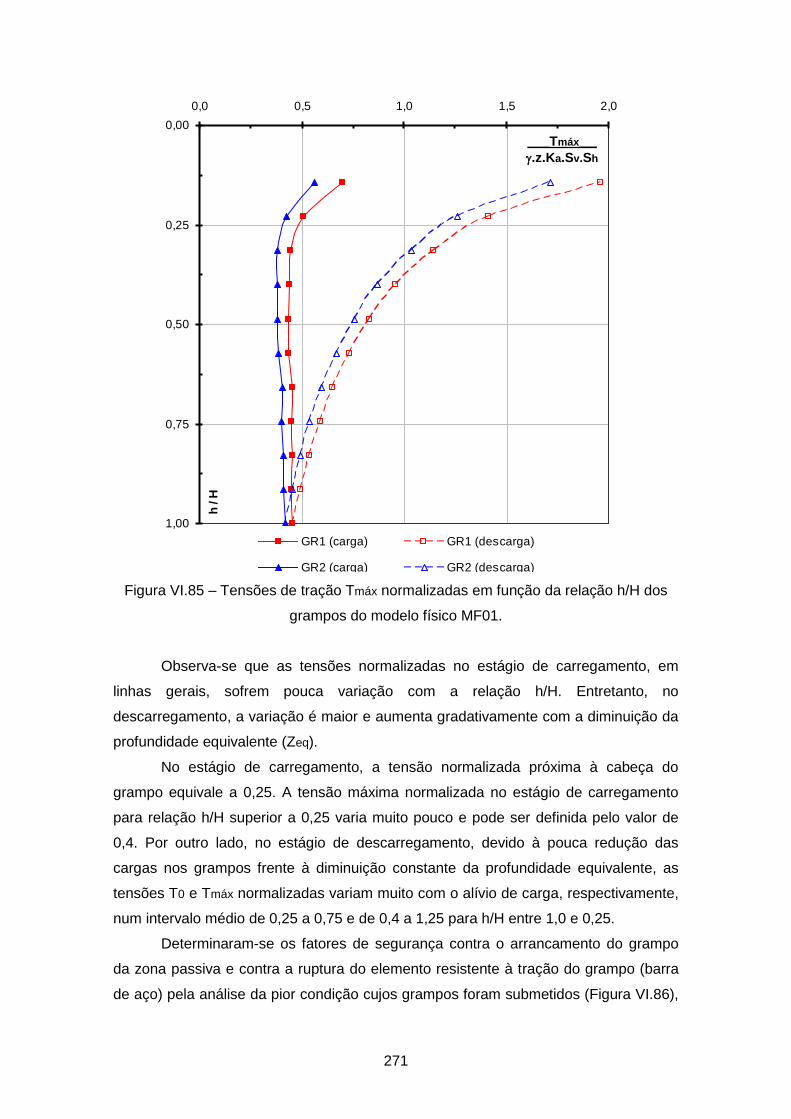
271
Tensão de tração máxima normalizada em função de h/H
0,00
0,25
0,50
0,75
1,00
0,0 0,5 1,0 1,5 2,0
h / H
GR1 (carga) GR1 (descarga)
GR2 (carga) GR2 (descarga)
Figura VI.85 – Tensões de tração Tmáx normalizadas em função da relação h/H dos
grampos do modelo físico MF01.
Observa-se que as tensões normalizadas no estágio de carregamento, em
linhas gerais, sofrem pouca variação com a relação h/H. Entretanto, no
descarregamento, a variação é maior e aumenta gradativamente com a diminuição da
profundidade equivalente (Zeq).
No estágio de carregamento, a tensão normalizada próxima à cabeça do
grampo equivale a 0,25. A tensão máxima normalizada no estágio de carregamento
para relação h/H superior a 0,25 varia muito pouco e pode ser definida pelo valor de
0,4. Por outro lado, no estágio de descarregamento, devido à pouca redução das
cargas nos grampos frente à diminuição constante da profundidade equivalente, as
tensões T0 e Tmáx normalizadas variam muito com o alívio de carga, respectivamente,
num intervalo médio de 0,25 a 0,75 e de 0,4 a 1,25 para h/H entre 1,0 e 0,25.
Determinaram-se os fatores de segurança contra o arrancamento do grampo
da zona passiva e contra a ruptura do elemento resistente à tração do grampo (barra
de aço) pela análise da pior condição cujos grampos foram submetidos (Figura VI.86),
___Tmáx___
.z.Ka.Sv.Sh
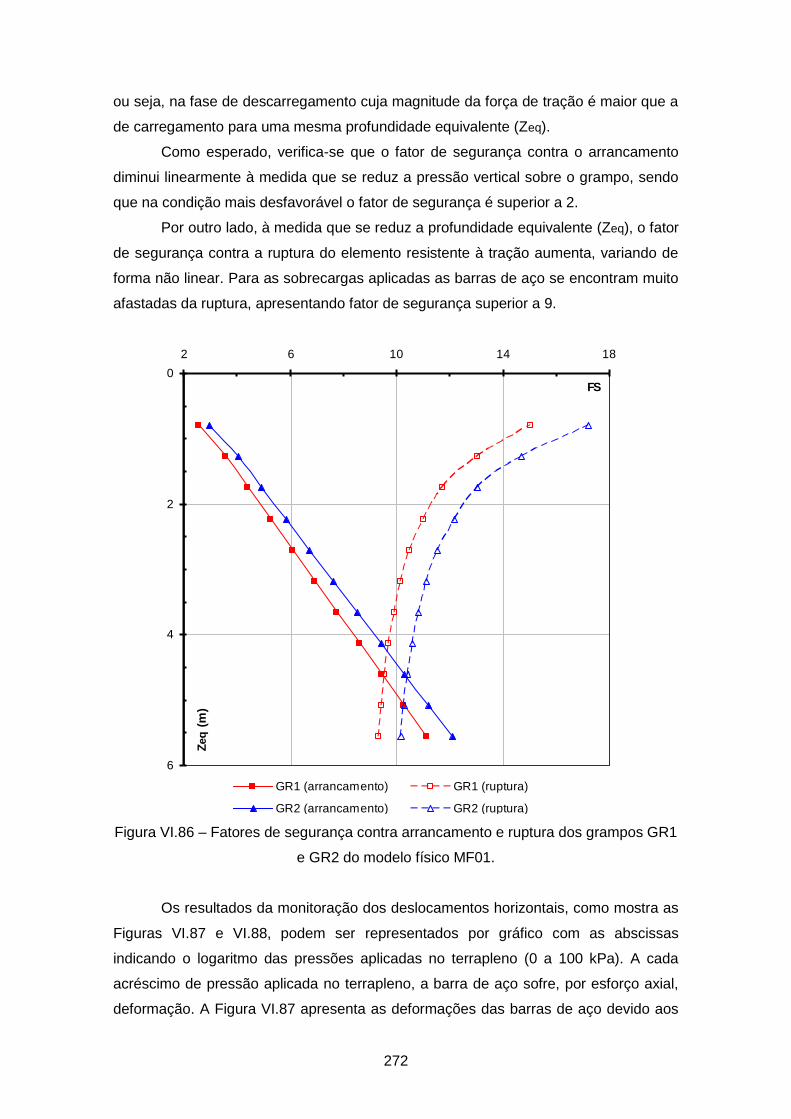
272
ou seja, na fase de descarregamento cuja magnitude da força de tração é maior que a
de carregamento para uma mesma profundidade equivalente (Zeq).
Como esperado, verifica-se que o fator de segurança contra o arrancamento
diminui linearmente à medida que se reduz a pressão vertical sobre o grampo, sendo
que na condição mais desfavorável o fator de segurança é superior a 2.
Por outro lado, à medida que se reduz a profundidade equivalente (Zeq), o fator
de segurança contra a ruptura do elemento resistente à tração aumenta, variando de
forma não linear. Para as sobrecargas aplicadas as barras de aço se encontram muito
afastadas da ruptura, apresentando fator de segurança superior a 9.
Fatores de segurança (arrancamento e ruptura dos grampos)
0
2
4
6
2 6 10 14 18
FS
Zeq
(m
)
GR1 (arrancamento) GR1 (ruptura)
GR2 (arrancamento) GR2 (ruptura)
Figura VI.86 – Fatores de segurança contra arrancamento e ruptura dos grampos GR1
e GR2 do modelo físico MF01.
Os resultados da monitoração dos deslocamentos horizontais, como mostra as
Figuras VI.87 e VI.88, podem ser representados por gráfico com as abscissas
indicando o logaritmo das pressões aplicadas no terrapleno (0 a 100 kPa). A cada
acréscimo de pressão aplicada no terrapleno, a barra de aço sofre, por esforço axial,
deformação. A Figura VI.87 apresenta as deformações das barras de aço devido aos

273
esforços de tração máximos em função das sobrecargas aplicadas em escala
logarítmica, nos estágio de carregamento e descarregamento. Observa-se mudança
de gradiente da curva no ponto entre as sobrecargas de 30 e 40 kPa. A partir deste
ponto as deformações do aço aumentam linearmente com o logaritmo do acréscimo
de sobrecarga aplicada no terrapleno. Este comportamento indica que o modelo físico
anteriormente foi solicitado por uma pressão, sendo esta resultante do processo
executivo empregado na sua construção.
Deslocamento versus log pressão vertical
0,0
0,1
0,2
0,3
0,4
10 100
log Pressão (kPa)
Dh
(m
m)
Barra de aço GR1 (carga) Barra de aço GR1 (descarga)
Barra de aço GR2 (carga) Barra de aço GR2 (descarga)
Figura VI.87 – Deslocamento horizontal em função do logaritmo da pressão vertical
aplicada sobre o terrapleno do modelo físico MF01.
A Figura VI.88 apresenta a relação dos deslocamentos horizontais medidos no
faceamento do modelo físico MF01 com o logaritmo da pressão aplicada no
terrapleno, durante os estágios de carregamento e descarregamento. A forma pouco
regular das curvas de cada ponto monitorado, conforme discutido anteriormente, é
devida à baixa movimentação da face frente à precisão do equipamento. Verifica-se

274
que a partir da sobrecarga de 40 kPa a deformação no interior do solo aumenta
linearmente com o logaritmo do acréscimo de pressão de sobrecarga aplicada.
Deslocamento horizontal da face versus log pressão vertical
0,0
0,2
0,4
0,6
0,8
10 100
log Pressão (kPa)
Dh
(m
m)
PV-01 LVDT (h=0,3m) PV-01 LVDT (h=0,7m)
PV-02 LVDT (h=0,3m) PV-02 LVDT (h=1,1m)
Figura VI.88 – Deslocamento horizontal da face em função do logaritmo da pressão
vertical aplicada sobre o terrapleno do modelo físico MF01.
Conforme mostram as Figuras VI.87 e VI.88, o aspecto do gráfico indica que, a
partir de uma determinada pressão, os deslocamentos variaram, de maneira geral,
linearmente com o logaritmo da pressão aplicada. A representação da pressão em
escala logarítmica permitiu a detecção de uma mudança acentuada no gradiente da
curva, a qual atesta o carregamento anterior decorrente do processo executivo
empregado na construção do modelo físico. Este fato sugere que a construção do
modelo físico induziu uma tensão com magnitude aproximada de 30 kPa. Esta tensão
pode ser definida, em analogia, por exemplo, ao adensamento dos solos, como tensão
de pré-adensamento. Esta conclusão, de certa forma, estava implícita nos gráficos que
apresentam a evolução da distribuição dos esforços de tração ao longo do
comprimento dos grampos.
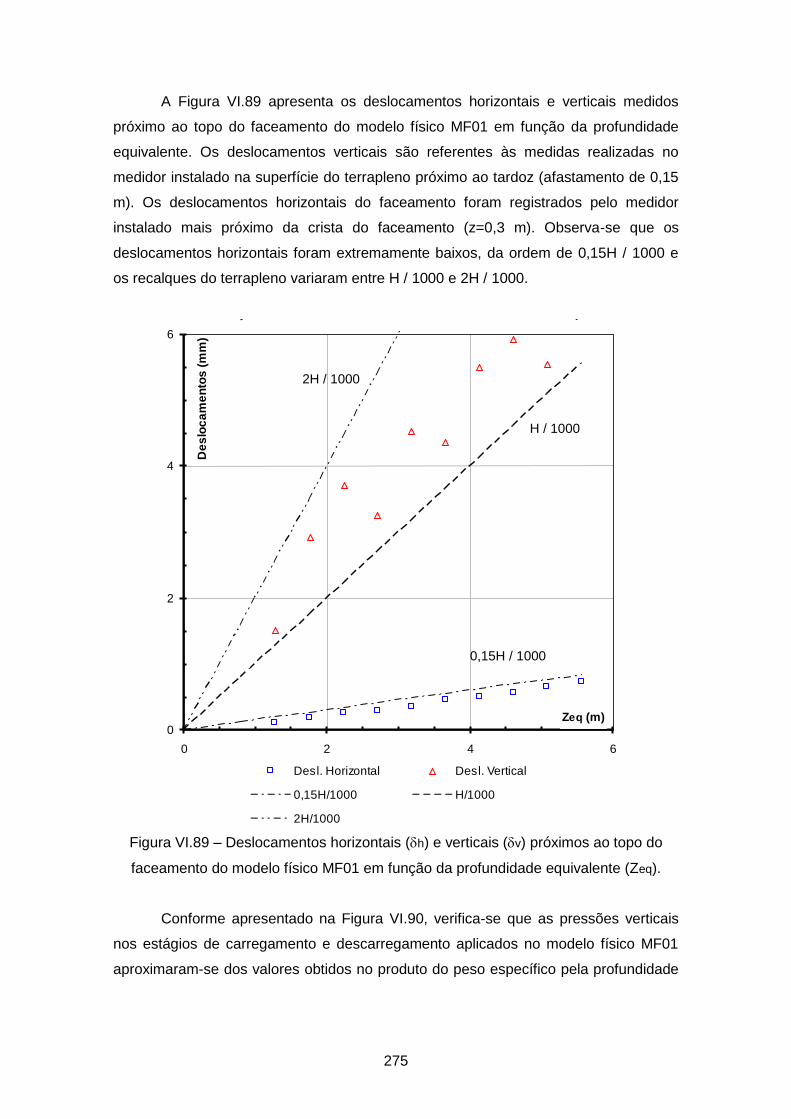
275
A Figura VI.89 apresenta os deslocamentos horizontais e verticais medidos
próximo ao topo do faceamento do modelo físico MF01 em função da profundidade
equivalente. Os deslocamentos verticais são referentes às medidas realizadas no
medidor instalado na superfície do terrapleno próximo ao tardoz (afastamento de 0,15
m). Os deslocamentos horizontais do faceamento foram registrados pelo medidor
instalado mais próximo da crista do faceamento (z=0,3 m). Observa-se que os
deslocamentos horizontais foram extremamente baixos, da ordem de 0,15H / 1000 e
os recalques do terrapleno variaram entre H / 1000 e 2H / 1000.
Relações dos deslocamentos vertical e horizontal com Zeq
0
2
4
6
0 2 4 6
Zeq (m)
De
slo
ca
me
nto
s (
mm
)
Desl. Horizontal Desl. Vertical
0,15H/1000 H/1000
2H/1000
Figura VI.89 – Deslocamentos horizontais (h) e verticais (v) próximos ao topo do
faceamento do modelo físico MF01 em função da profundidade equivalente (Zeq).
Conforme apresentado na Figura VI.90, verifica-se que as pressões verticais
nos estágios de carregamento e descarregamento aplicados no modelo físico MF01
aproximaram-se dos valores obtidos no produto do peso específico pela profundidade
2H / 1000
H / 1000
0,15H / 1000
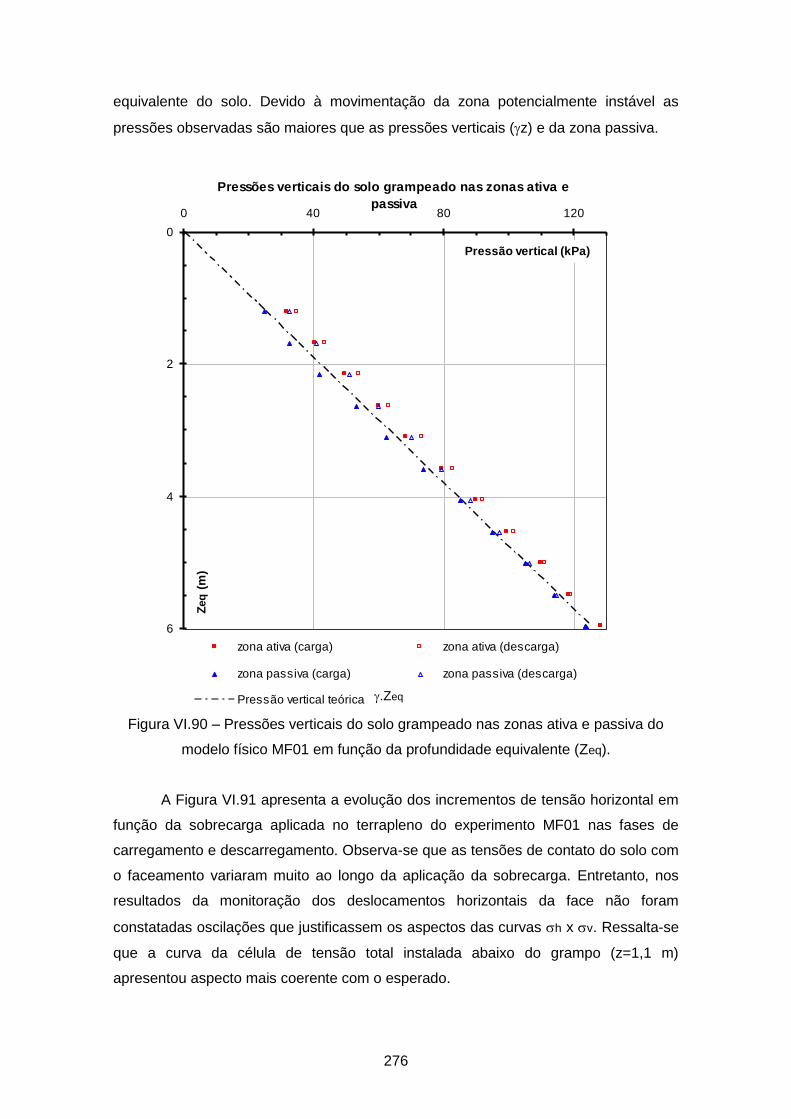
276
equivalente do solo. Devido à movimentação da zona potencialmente instável as
pressões observadas são maiores que as pressões verticais (z) e da zona passiva.
Pressões verticais do solo grampeado nas zonas ativa e
passiva
0
2
4
6
0 40 80 120
Pressão vertical (kPa)
Zeq
(m
)
zona ativa (carga) zona ativa (descarga)
zona passiva (carga) zona passiva (descarga)
Pressão vertical teórica
Figura VI.90 – Pressões verticais do solo grampeado nas zonas ativa e passiva do
modelo físico MF01 em função da profundidade equivalente (Zeq).
A Figura VI.91 apresenta a evolução dos incrementos de tensão horizontal em
função da sobrecarga aplicada no terrapleno do experimento MF01 nas fases de
carregamento e descarregamento. Observa-se que as tensões de contato do solo com
o faceamento variaram muito ao longo da aplicação da sobrecarga. Entretanto, nos
resultados da monitoração dos deslocamentos horizontais da face não foram
constatadas oscilações que justificassem os aspectos das curvas h x v. Ressalta-se
que a curva da célula de tensão total instalada abaixo do grampo (z=1,1 m)
apresentou aspecto mais coerente com o esperado.
.Zeq

277
Incremento de tensão do solo junto á face versus sobrecarga
0
5
10
15
0 20 40 60 80 100
Sobrecarga (kPa)
Inc
rem
en
to d
e t
en
sã
o h
ori
zo
nta
l (k
Pa
)
CTT-01 (carga) CTT-01 (descarga)
CTT-02 (carga) CTT-02 (descarga)
CTT-03 (carga) CTT-03 (descarga)
Figura VI.91 – Incrementos de tensão horizontal do solo junto à face em função da
sobrecarga aplicada no terrapleno do modelo físico MF01 nas fases de carregamento
e descarregamento.
A Figura VI.92 ilustra as deformações do experimento MF01 ao final da
aplicação da sobrecarga máxima (100 kPa) juntamente com a distribuição dos
esforços de tração ao longo do comprimento do grampo e a superfície de ruptura
definida pela teoria de Coulomb. Os deslocamentos da face decrescentes com a
profundidade podem ser definidos por dois segmentos de reta. Os recalques próximos
à face e no fundo do modelo físico indicam duas cunhas ativas nas quais ocorrem
redução do volume. Ainda com relação à variação de volume, observa-se que a região
entre as duas zonas ativas sofre aumento de volume. A expansão da superfície do
terreno na zona passiva é associada à movimentação das zonas ativas, caracterizada
por recalques de até 8,84 mm, e à quase imobilidade do faceamento, cuja deformação
se apresentou muito baixa (hmáx=0,75 mm). Se o sistema de contenção permitir
movimentos horizontais da face, maiores poderão ser os recalques e,
conseqüentemente, haverá menor tendência de expansão da região situada entre as
duas zonas de movimentação. A carga máxima mobilizada no grampo foi de
aproximadamente 6 kN. A superfície de ruptura definida pela teoria de Coulomb
interceptou o grampo no ponto de tração máxima, encontrando-se nas regiões que
apresentaram redução e aumento de volume.
Z=1,1m
Z=0,9m
Z=0,7m
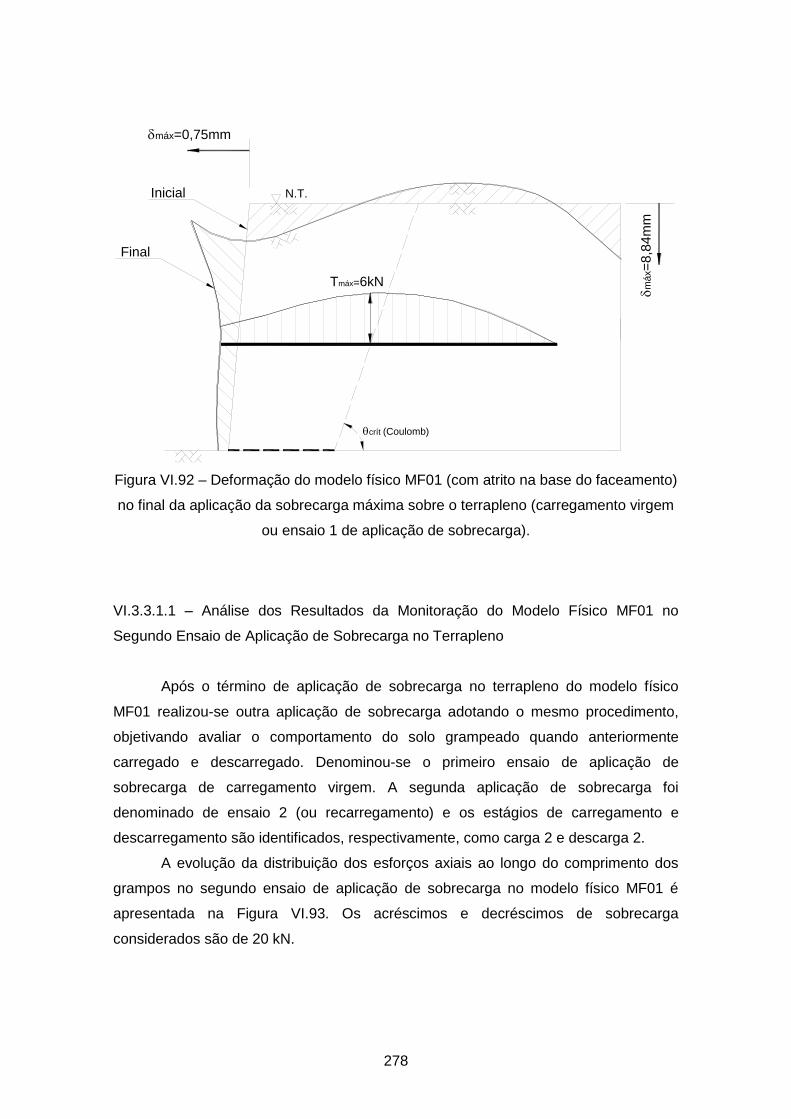
278
Inicial
Final
N.T.
Tmáx=6kN
crít (Coulomb)
máx=0,75mm
m
áx=
8,8
4m
m
Figura VI.92 – Deformação do modelo físico MF01 (com atrito na base do faceamento)
no final da aplicação da sobrecarga máxima sobre o terrapleno (carregamento virgem
ou ensaio 1 de aplicação de sobrecarga).
VI.3.3.1.1 – Análise dos Resultados da Monitoração do Modelo Físico MF01 no
Segundo Ensaio de Aplicação de Sobrecarga no Terrapleno
Após o término de aplicação de sobrecarga no terrapleno do modelo físico
MF01 realizou-se outra aplicação de sobrecarga adotando o mesmo procedimento,
objetivando avaliar o comportamento do solo grampeado quando anteriormente
carregado e descarregado. Denominou-se o primeiro ensaio de aplicação de
sobrecarga de carregamento virgem. A segunda aplicação de sobrecarga foi
denominado de ensaio 2 (ou recarregamento) e os estágios de carregamento e
descarregamento são identificados, respectivamente, como carga 2 e descarga 2.
A evolução da distribuição dos esforços axiais ao longo do comprimento dos
grampos no segundo ensaio de aplicação de sobrecarga no modelo físico MF01 é
apresentada na Figura VI.93. Os acréscimos e decréscimos de sobrecarga
considerados são de 20 kN.

279
Distribuição dos esforços de tração ao longo do grampo 01
0
2
4
6
0,0 0,4 0,8 1,2 1,6
Afastamento em relação ao tardoz (m)
Tra
çã
o (
kN
)
C. virgem 20kPa (carga 2) 40kPa (carga 2)
60kPa (carga 2) 80kPa (carga 2) 100kPa (carga 2 máx)
80kPa (descarga 2) 60kPa (descarga 2) 40kPa (descarga 2)
20kPa (descarga 2) 0kPa (descarga 2)
Distribuição dos esforços de tração ao longo do grampo 02
0
2
4
6
0,0 0,4 0,8 1,2 1,6
Afastamento em relação ao tardoz (m)
Tra
çã
o (
kN
)
C. virgem 20kPa (carga 2) 40kPa (carga 2)
60kPa (carga 2) 80kPa (carga 2) 100kPa (carga 2 máx)
80kPa (descarga 2) 60kPa (descarga 2) 40kPa (descarga 2)
20kPa (descarga 2) 0kPa (descarga 2)
Figura VI.93 – Evolução da distribuição dos esforços de tração ao longo dos grampos
GR1 e GR2 do modelo físico MF01 para cada ciclo de 20 kN durante o segundo
ensaio de aplicação de sobrecarga (carregamento e descarregamento).
Observa-se que magnitude e distribuição das tensões ao longo dos
comprimentos dos grampos no final do descarregamento do ensaio de sobrecarga 2
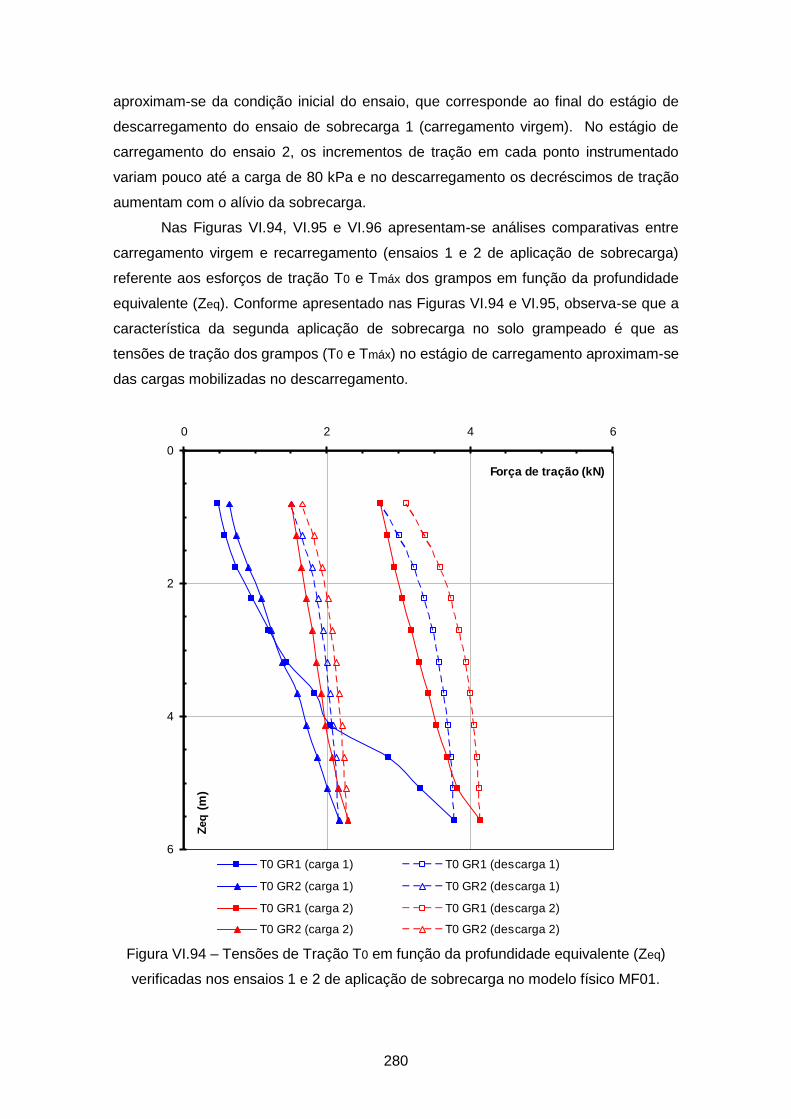
280
aproximam-se da condição inicial do ensaio, que corresponde ao final do estágio de
descarregamento do ensaio de sobrecarga 1 (carregamento virgem). No estágio de
carregamento do ensaio 2, os incrementos de tração em cada ponto instrumentado
variam pouco até a carga de 80 kPa e no descarregamento os decréscimos de tração
aumentam com o alívio da sobrecarga.
Nas Figuras VI.94, VI.95 e VI.96 apresentam-se análises comparativas entre
carregamento virgem e recarregamento (ensaios 1 e 2 de aplicação de sobrecarga)
referente aos esforços de tração T0 e Tmáx dos grampos em função da profundidade
equivalente (Zeq). Conforme apresentado nas Figuras VI.94 e VI.95, observa-se que a
característica da segunda aplicação de sobrecarga no solo grampeado é que as
tensões de tração dos grampos (T0 e Tmáx) no estágio de carregamento aproximam-se
das cargas mobilizadas no descarregamento.
To nos grampos (ensaios 1 e2 de sobrecarga)
0
2
4
6
0 2 4 6
Força de tração (kN)
Zeq
(m
)
T0 GR1 (carga 1) T0 GR1 (descarga 1)
T0 GR2 (carga 1) T0 GR2 (descarga 1)
T0 GR1 (carga 2) T0 GR1 (descarga 2)
T0 GR2 (carga 2) T0 GR2 (descarga 2)
Figura VI.94 – Tensões de Tração T0 em função da profundidade equivalente (Zeq)
verificadas nos ensaios 1 e 2 de aplicação de sobrecarga no modelo físico MF01.
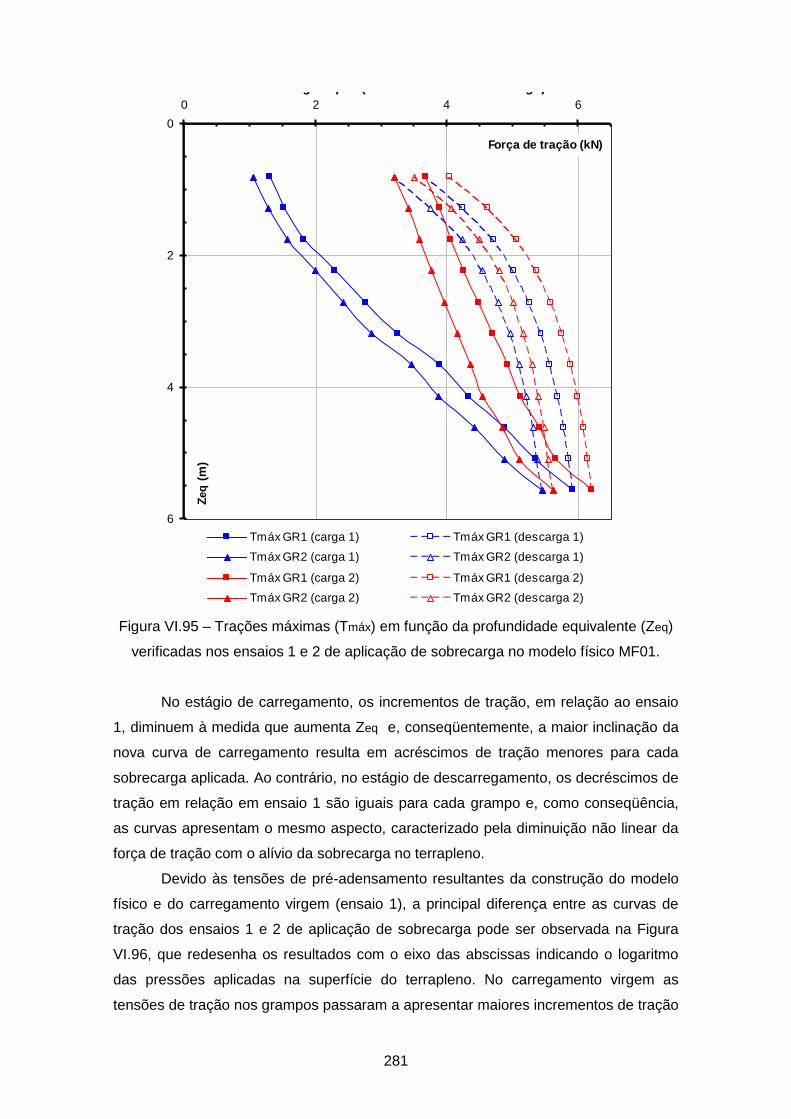
281
Tmáx nos grampos (ensaios 1 e 2 de sobrecarga)
0
2
4
6
0 2 4 6
Força de tração (kN)
Zeq
(m
)
Tmáx GR1 (carga 1) Tmáx GR1 (descarga 1)
Tmáx GR2 (carga 1) Tmáx GR2 (descarga 1)
Tmáx GR1 (carga 2) Tmáx GR1 (descarga 2)
Tmáx GR2 (carga 2) Tmáx GR2 (descarga 2)
Figura VI.95 – Trações máximas (Tmáx) em função da profundidade equivalente (Zeq)
verificadas nos ensaios 1 e 2 de aplicação de sobrecarga no modelo físico MF01.
No estágio de carregamento, os incrementos de tração, em relação ao ensaio
1, diminuem à medida que aumenta Zeq e, conseqüentemente, a maior inclinação da
nova curva de carregamento resulta em acréscimos de tração menores para cada
sobrecarga aplicada. Ao contrário, no estágio de descarregamento, os decréscimos de
tração em relação em ensaio 1 são iguais para cada grampo e, como conseqüência,
as curvas apresentam o mesmo aspecto, caracterizado pela diminuição não linear da
força de tração com o alívio da sobrecarga no terrapleno.
Devido às tensões de pré-adensamento resultantes da construção do modelo
físico e do carregamento virgem (ensaio 1), a principal diferença entre as curvas de
tração dos ensaios 1 e 2 de aplicação de sobrecarga pode ser observada na Figura
VI.96, que redesenha os resultados com o eixo das abscissas indicando o logaritmo
das pressões aplicadas na superfície do terrapleno. No carregamento virgem as
tensões de tração nos grampos passaram a apresentar maiores incrementos de tração

282
variando linearmente com o logaritmo da sobrecarga após a tensão de pré-
adensamento oriunda do processo executivo empregado na construção do modelo
físico. Já no segundo ensaio, este aumento e variação linear dos incrementos de
tração são observados nos níveis de sobrecarga próximos ao valor do carregamento
final (100 kPa).
As curvas do estágio de descarregamento das tensões de tração em função da
profundidade apresentam o mesmo aspecto nos dois ensaios de aplicação de
sobrecarga e não há diferenças significativas das magnitudes. Este comportamento é
esperado, pois no recarregamento (ensaio 2) não foi aplicado sobrecarga maior que a
do carregamento virgem. Assim, a curva de descarregamento do ensaio 2 deve
perfazer o mesmo caminho da curva de carregamento virgem.
Tmáx nos grampos (ensaios 1 e 2 de sobrecarga)
0
2
4
6
10 100log Pressão (kPa)
Tm
áx
(k
N)
Tmáx GR1 (carga 1) Tmáx GR1 (descarga 1)
Tmáx GR2 (carga 1) Tmáx GR2 (descarga 1)
Tmáx GR1 (carga 2) Tmáx GR1 (descarga 2)
Tmáx GR2 (carga 2) Tmáx GR2 (descarga 2)
Figura VI.96 – Trações máximas dos grampos do modelo físico MF01 em função do
logaritmo da sobrecarga verificadas no carregamento virgem e recaregamento.
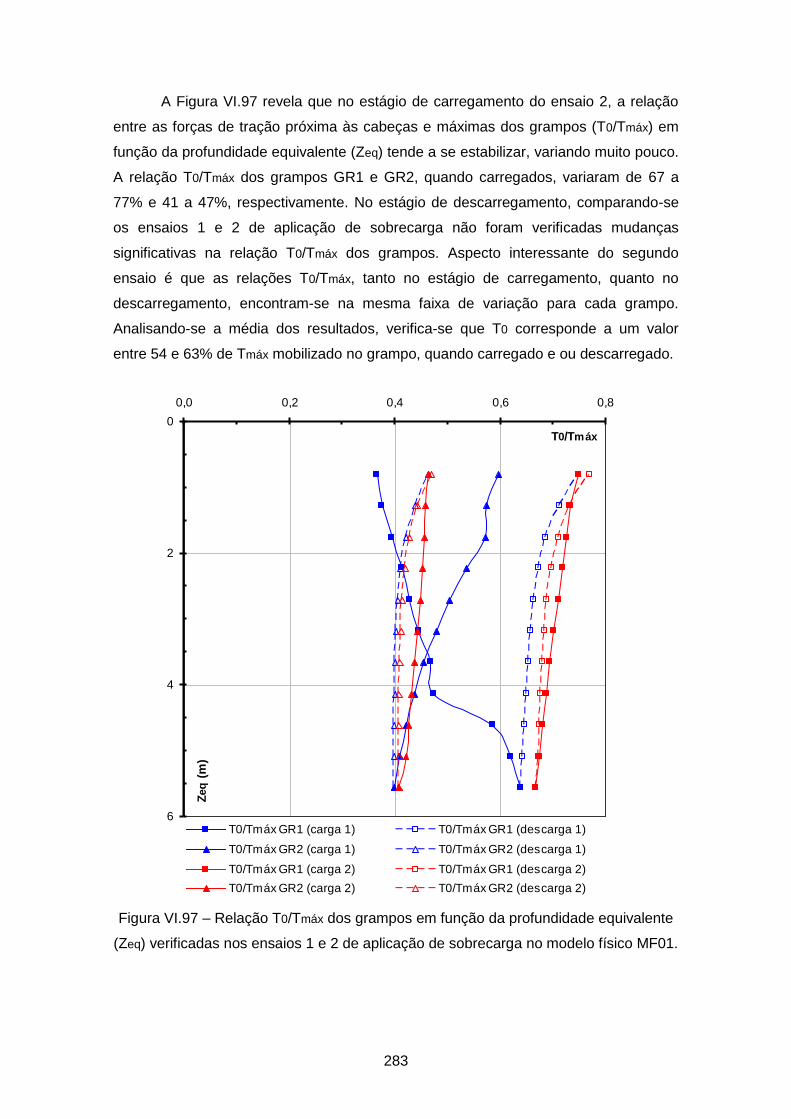
283
A Figura VI.97 revela que no estágio de carregamento do ensaio 2, a relação
entre as forças de tração próxima às cabeças e máximas dos grampos (T0/Tmáx) em
função da profundidade equivalente (Zeq) tende a se estabilizar, variando muito pouco.
A relação T0/Tmáx dos grampos GR1 e GR2, quando carregados, variaram de 67 a
77% e 41 a 47%, respectivamente. No estágio de descarregamento, comparando-se
os ensaios 1 e 2 de aplicação de sobrecarga não foram verificadas mudanças
significativas na relação T0/Tmáx dos grampos. Aspecto interessante do segundo
ensaio é que as relações T0/Tmáx, tanto no estágio de carregamento, quanto no
descarregamento, encontram-se na mesma faixa de variação para cada grampo.
Analisando-se a média dos resultados, verifica-se que T0 corresponde a um valor
entre 54 e 63% de Tmáx mobilizado no grampo, quando carregado e ou descarregado.
Relação To /Tmáx dos grampos (ensaios 1 e 2 de sobrecarga)
0
2
4
6
0,0 0,2 0,4 0,6 0,8
T0/Tmáx
Zeq
(m
)
T0/Tmáx GR1 (carga 1) T0/Tmáx GR1 (descarga 1)
T0/Tmáx GR2 (carga 1) T0/Tmáx GR2 (descarga 1)
T0/Tmáx GR1 (carga 2) T0/Tmáx GR1 (descarga 2)
T0/Tmáx GR2 (carga 2) T0/Tmáx GR2 (descarga 2)
Figura VI.97 – Relação T0/Tmáx dos grampos em função da profundidade equivalente
(Zeq) verificadas nos ensaios 1 e 2 de aplicação de sobrecarga no modelo físico MF01.
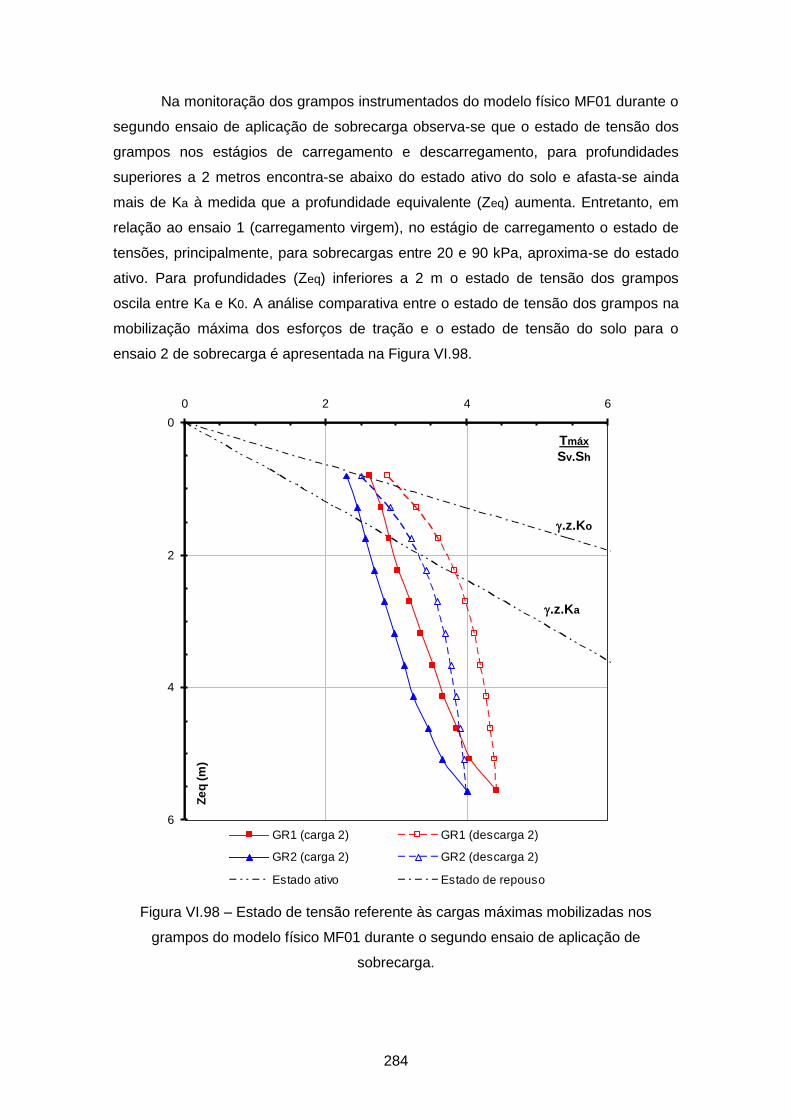
284
Na monitoração dos grampos instrumentados do modelo físico MF01 durante o
segundo ensaio de aplicação de sobrecarga observa-se que o estado de tensão dos
grampos nos estágios de carregamento e descarregamento, para profundidades
superiores a 2 metros encontra-se abaixo do estado ativo do solo e afasta-se ainda
mais de Ka à medida que a profundidade equivalente (Zeq) aumenta. Entretanto, em
relação ao ensaio 1 (carregamento virgem), no estágio de carregamento o estado de
tensões, principalmente, para sobrecargas entre 20 e 90 kPa, aproxima-se do estado
ativo. Para profundidades (Zeq) inferiores a 2 m o estado de tensão dos grampos
oscila entre Ka e K0. A análise comparativa entre o estado de tensão dos grampos na
mobilização máxima dos esforços de tração e o estado de tensão do solo para o
ensaio 2 de sobrecarga é apresentada na Figura VI.98.
Estado de tensão (tração máxima mobilizada)
0
2
4
6
0 2 4 6
Ze
q (
m)
GR1 (carga 2) GR1 (descarga 2)
GR2 (carga 2) GR2 (descarga 2)
Estado ativo Estado de repouso
Figura VI.98 – Estado de tensão referente às cargas máximas mobilizadas nos
grampos do modelo físico MF01 durante o segundo ensaio de aplicação de
sobrecarga.
Tmáx
Sv.Sh
.z.Ko
.z.Ka
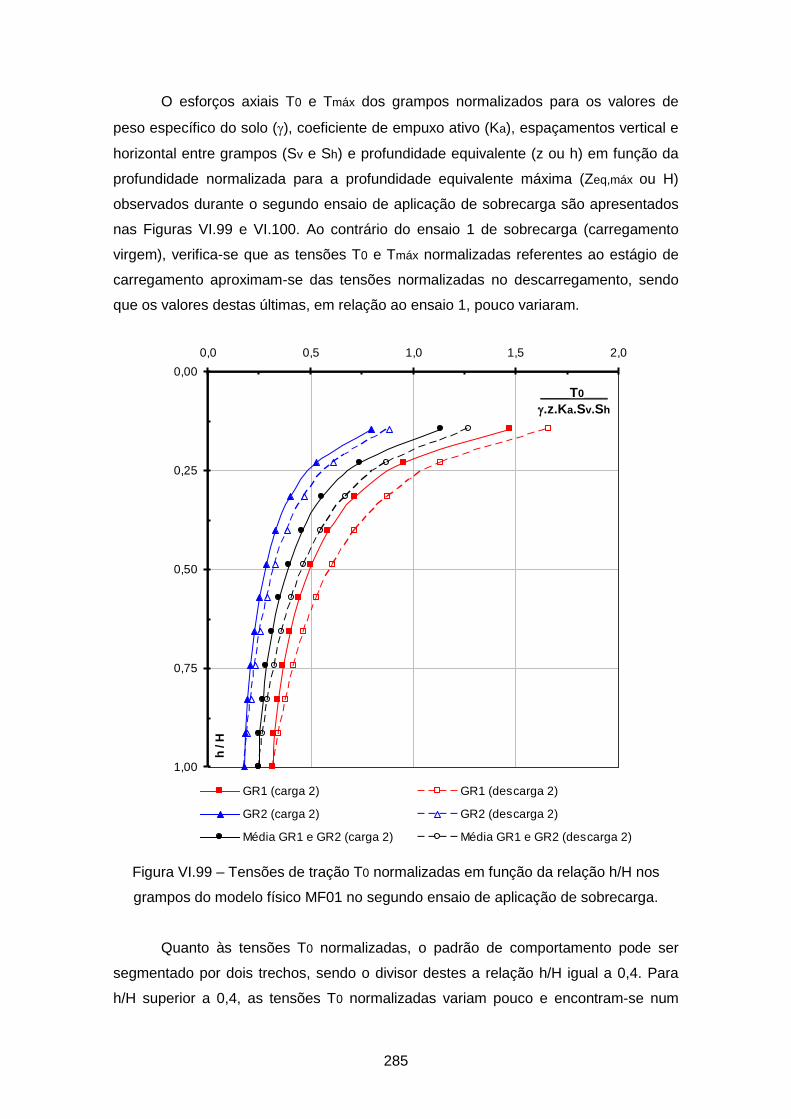
285
O esforços axiais T0 e Tmáx dos grampos normalizados para os valores de
peso específico do solo (), coeficiente de empuxo ativo (Ka), espaçamentos vertical e
horizontal entre grampos (Sv e Sh) e profundidade equivalente (z ou h) em função da
profundidade normalizada para a profundidade equivalente máxima (Zeq,máx ou H)
observados durante o segundo ensaio de aplicação de sobrecarga são apresentados
nas Figuras VI.99 e VI.100. Ao contrário do ensaio 1 de sobrecarga (carregamento
virgem), verifica-se que as tensões T0 e Tmáx normalizadas referentes ao estágio de
carregamento aproximam-se das tensões normalizadas no descarregamento, sendo
que os valores destas últimas, em relação ao ensaio 1, pouco variaram.
Tensão de tração na face normalizada em função de h/H
0,00
0,25
0,50
0,75
1,00
0,0 0,5 1,0 1,5 2,0
h / H
GR1 (carga 2) GR1 (descarga 2)
GR2 (carga 2) GR2 (descarga 2)
Média GR1 e GR2 (carga 2) Média GR1 e GR2 (descarga 2)
Figura VI.99 – Tensões de tração T0 normalizadas em função da relação h/H nos
grampos do modelo físico MF01 no segundo ensaio de aplicação de sobrecarga.
Quanto às tensões T0 normalizadas, o padrão de comportamento pode ser
segmentado por dois trechos, sendo o divisor destes a relação h/H igual a 0,4. Para
h/H superior a 0,4, as tensões T0 normalizadas variam pouco e encontram-se num
____T0____
.z.Ka.Sv.Sh
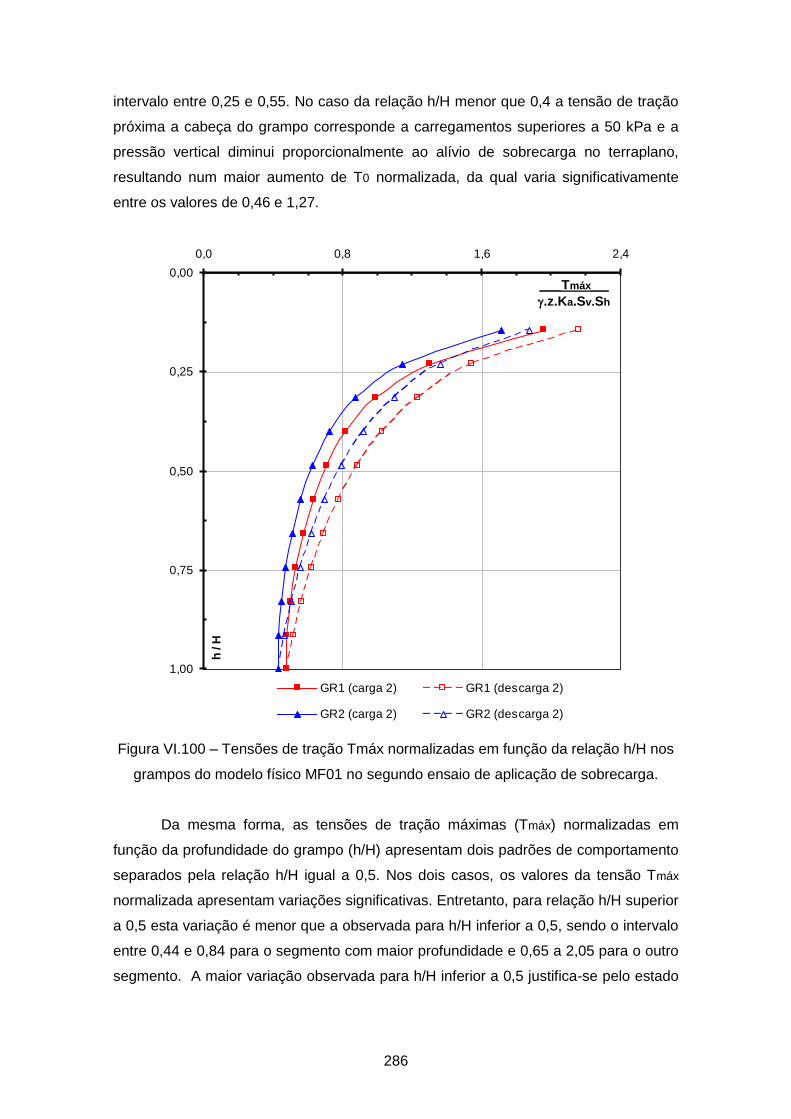
286
intervalo entre 0,25 e 0,55. No caso da relação h/H menor que 0,4 a tensão de tração
próxima a cabeça do grampo corresponde a carregamentos superiores a 50 kPa e a
pressão vertical diminui proporcionalmente ao alívio de sobrecarga no terraplano,
resultando num maior aumento de T0 normalizada, da qual varia significativamente
entre os valores de 0,46 e 1,27.
Tensão de tração máxima normalizada em função de h/H
0,00
0,25
0,50
0,75
1,00
0,0 0,8 1,6 2,4
h / H
GR1 (carga 2) GR1 (descarga 2)
GR2 (carga 2) GR2 (descarga 2)
Figura VI.100 – Tensões de tração Tmáx normalizadas em função da relação h/H nos
grampos do modelo físico MF01 no segundo ensaio de aplicação de sobrecarga.
Da mesma forma, as tensões de tração máximas (Tmáx) normalizadas em
função da profundidade do grampo (h/H) apresentam dois padrões de comportamento
separados pela relação h/H igual a 0,5. Nos dois casos, os valores da tensão Tmáx
normalizada apresentam variações significativas. Entretanto, para relação h/H superior
a 0,5 esta variação é menor que a observada para h/H inferior a 0,5, sendo o intervalo
entre 0,44 e 0,84 para o segmento com maior profundidade e 0,65 a 2,05 para o outro
segmento. A maior variação observada para h/H inferior a 0,5 justifica-se pelo estado
___Tmáx___
.z.Ka.Sv.Sh

287
de tensão inicial do grampo mobilizado pela anterior aplicação de sobrecarga frente às
baixas pressões verticais.
VI.3.3.2 – Análise dos Resultados da Monitoração do Modelo Físico MF02 (base do
faceamento sobre sistema de lubrificação)
A evolução da distribuição dos esforços axiais nos grampos em função das
sobrecargas aplicadas no terrapleno do modelo físico MF02 é apresentada na Figura
VI.101.
Aspectos referentes à localização do ponto de esforço axial máximo mobilizado
nos grampos nas fases de carregamento e descarregamento podem ser observados
na Figura VI.101 que apresenta a distribuição destas forças ao longo do grampo para
cada ciclo de 20 kN. A distribuição das trações nos grampos GR1 e GR2 do modelo
físico MF02 revela que a localização do ponto de tração máxima praticamente não foi
alterada com as fases de carregamento e descarregamento da sobrecarga aplicada
sobre o terrapleno. No entanto, a relação entre a força de tração próxima à face e
máxima dos grampos (T0/Tmáx) variou em função da sobrecarga aplicada.
Conforme discutido, as cargas nos grampos do experimento MF02 são 3,3
vezes superiores às do MF01. Ao contrário do MF01, verificou-se que a interseção da
superfície de ruptura com os grampos coincide com o ponto de força de tração
máxima mobilizada nos grampos, tanto no estágio de carregamento, quanto no
descarregamento. O grampo GR2 mobilizou mais esforços axiais, no qual a tração
máxima atingiu 20 kN, enquanto no GR1 este valor é de 16 kN. As relações T0/Tmáx
observadas nos grampos GR1 e GR2 apresentam diferenças entre si para níveis de
carregamento inferiores a 70 kPa. Entretanto, no estágio de descarregamento, quase
não há diferença para sobrecargas superiores a 30 kPa. O estado de tensão nos
grampos no final do descarregamento (0 kPa) correspondeu àquele mobilizado pelo
carregamento aproximado de 50 kPa.
Conforme apresentado na Figura VI.102, os acréscimos das trações T0 e Tmáx
a partir da sobrecarga de 20 kPa aumentam linearmente com a profundidade
equivalente (Zeq), com inclinação maior para o grampo mais solicitado, GR2. No
estágio de descarregamentos os decréscimos de tração variam de forma não linear,
sendo a magnitude final destes esforços equivalente a sobrecargas de 60 e 50 kPa,
respectivamente para as trações T0 e Tmáx.

288
Distribuição dos esforços de tração ao longo do grampo 01
0
4
8
12
16
0,0 0,4 0,8 1,2 1,6
Afastamento em relação ao tardoz (m)
Tra
çã
o (
kN
)
Construção 20kPa (carga) 40kPa (carga)
60kPa (carga) 80kPa (carga) 100kPa (carga máx)
80kPa (descarga) 60kPa (descarga) 40kPa (descarga)
20kPa (descarga) 0kPa (descarga)
Distribuição dos esforços de tração ao longo do grampo 02
0
4
8
12
16
20
0,0 0,4 0,8 1,2 1,6
Afastamento em relação ao tardoz (m)
Tra
çã
o (
kN
)
Construção 20kPa (carga) 40kPa (carga)
60kPa (carga) 80kPa (carga) 100kPa (carga máx)
80kPa (descarga) 60kPa (descarga) 40kPa (descarga)
20kPa (descarga) 0kPa (descarga)
Figura VI.101 – Evolução da distribuição dos esforços de tração ao longo dos grampos
GR1 e GR2 do modelo físico MF02 para cada ciclo de 20 kN nas fases de
carregamento e descarregamento.
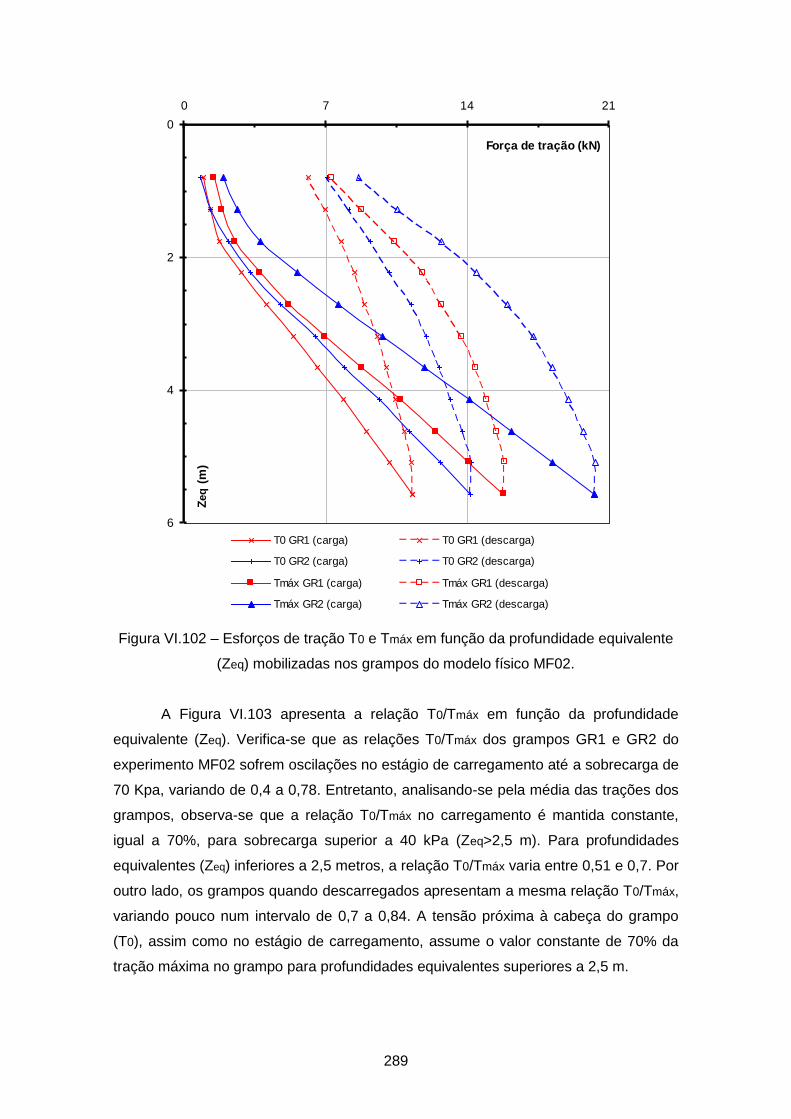
289
Forças de Tração To e Tmáx mobilizadas nos grampos
0
2
4
6
0 7 14 21
Força de tração (kN)
Zeq
(m
)
T0 GR1 (carga) T0 GR1 (descarga)
T0 GR2 (carga) T0 GR2 (descarga)
Tmáx GR1 (carga) Tmáx GR1 (descarga)
Tmáx GR2 (carga) Tmáx GR2 (descarga)
Figura VI.102 – Esforços de tração T0 e Tmáx em função da profundidade equivalente
(Zeq) mobilizadas nos grampos do modelo físico MF02.
A Figura VI.103 apresenta a relação T0/Tmáx em função da profundidade
equivalente (Zeq). Verifica-se que as relações T0/Tmáx dos grampos GR1 e GR2 do
experimento MF02 sofrem oscilações no estágio de carregamento até a sobrecarga de
70 Kpa, variando de 0,4 a 0,78. Entretanto, analisando-se pela média das trações dos
grampos, observa-se que a relação T0/Tmáx no carregamento é mantida constante,
igual a 70%, para sobrecarga superior a 40 kPa (Zeq>2,5 m). Para profundidades
equivalentes (Zeq) inferiores a 2,5 metros, a relação T0/Tmáx varia entre 0,51 e 0,7. Por
outro lado, os grampos quando descarregados apresentam a mesma relação T0/Tmáx,
variando pouco num intervalo de 0,7 a 0,84. A tensão próxima à cabeça do grampo
(T0), assim como no estágio de carregamento, assume o valor constante de 70% da
tração máxima no grampo para profundidades equivalentes superiores a 2,5 m.
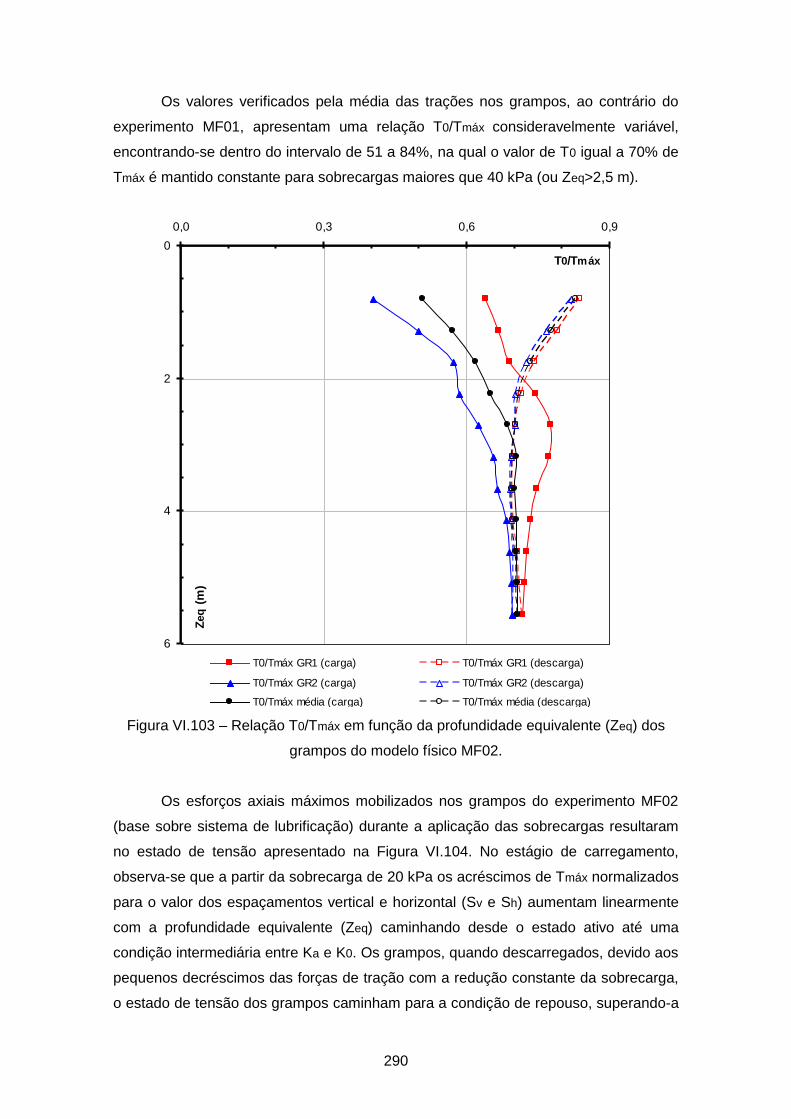
290
Os valores verificados pela média das trações nos grampos, ao contrário do
experimento MF01, apresentam uma relação T0/Tmáx consideravelmente variável,
encontrando-se dentro do intervalo de 51 a 84%, na qual o valor de T0 igual a 70% de
Tmáx é mantido constante para sobrecargas maiores que 40 kPa (ou Zeq>2,5 m).
Relação To /Tmáx dos grampos
0
2
4
6
0,0 0,3 0,6 0,9
T0/Tmáx
Zeq
(m
)
T0/Tmáx GR1 (carga) T0/Tmáx GR1 (descarga)
T0/Tmáx GR2 (carga) T0/Tmáx GR2 (descarga)
T0/Tmáx média (carga) T0/Tmáx média (descarga)
Figura VI.103 – Relação T0/Tmáx em função da profundidade equivalente (Zeq) dos
grampos do modelo físico MF02.
Os esforços axiais máximos mobilizados nos grampos do experimento MF02
(base sobre sistema de lubrificação) durante a aplicação das sobrecargas resultaram
no estado de tensão apresentado na Figura VI.104. No estágio de carregamento,
observa-se que a partir da sobrecarga de 20 kPa os acréscimos de Tmáx normalizados
para o valor dos espaçamentos vertical e horizontal (Sv e Sh) aumentam linearmente
com a profundidade equivalente (Zeq) caminhando desde o estado ativo até uma
condição intermediária entre Ka e K0. Os grampos, quando descarregados, devido aos
pequenos decréscimos das forças de tração com a redução constante da sobrecarga,
o estado de tensão dos grampos caminham para a condição de repouso, superando-a
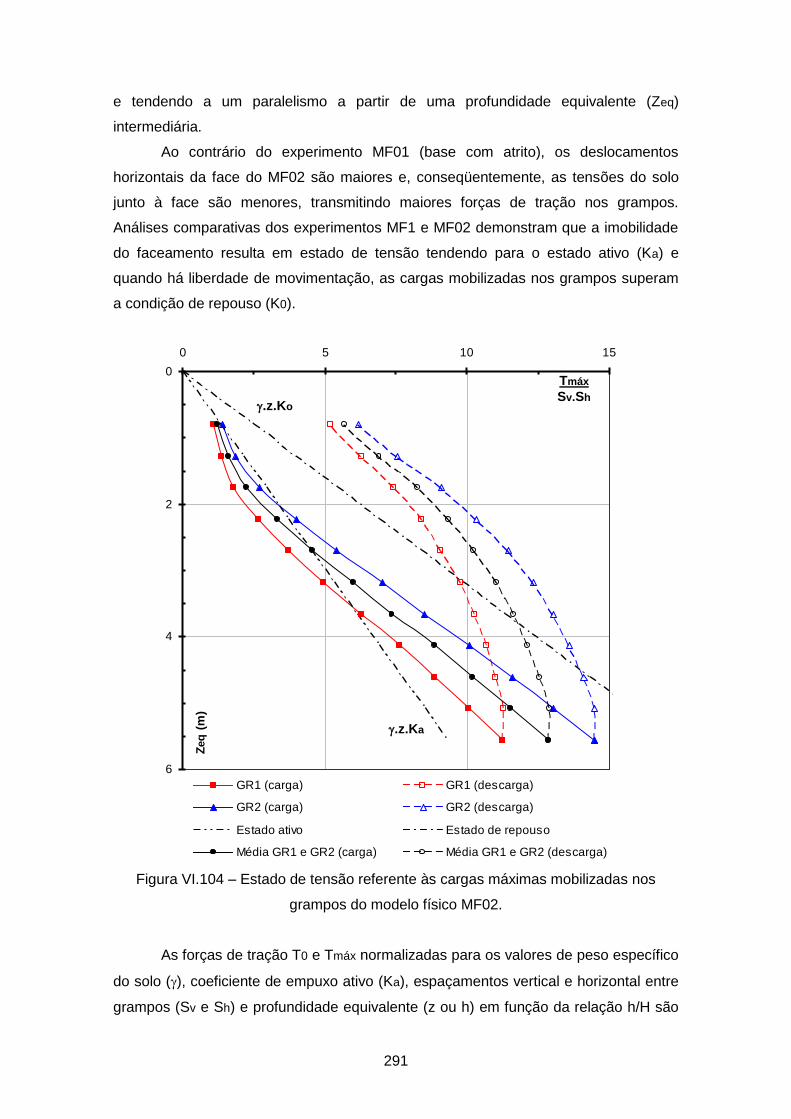
291
e tendendo a um paralelismo a partir de uma profundidade equivalente (Zeq)
intermediária.
Ao contrário do experimento MF01 (base com atrito), os deslocamentos
horizontais da face do MF02 são maiores e, conseqüentemente, as tensões do solo
junto à face são menores, transmitindo maiores forças de tração nos grampos.
Análises comparativas dos experimentos MF1 e MF02 demonstram que a imobilidade
do faceamento resulta em estado de tensão tendendo para o estado ativo (Ka) e
quando há liberdade de movimentação, as cargas mobilizadas nos grampos superam
a condição de repouso (K0).
Estado de tensão (tração máxima mobilizada)
0
2
4
6
0 5 10 15
Zeq
(m
)
GR1 (carga) GR1 (descarga)
GR2 (carga) GR2 (descarga)
Estado ativo Estado de repouso
Média GR1 e GR2 (carga) Média GR1 e GR2 (descarga)
Figura VI.104 – Estado de tensão referente às cargas máximas mobilizadas nos
grampos do modelo físico MF02.
As forças de tração T0 e Tmáx normalizadas para os valores de peso específico
do solo (), coeficiente de empuxo ativo (Ka), espaçamentos vertical e horizontal entre
grampos (Sv e Sh) e profundidade equivalente (z ou h) em função da relação h/H são
Tmáx
Sv.Sh .z.Ko
.z.Ka
292
apresentadas nas Figuras VI.105 e VI.106, respectivamente. Observa-se que as
tensões normalizadas no estágio de carregamento, em linhas gerais, sofrem pouca
variação com a relação h/H em relação ao descarregamento, que apresenta dois
padrões de comportamentos, linear e não linear. Aspecto comum entre as tensões T0
e Tmáx normalizadas é o aumento crescente com a profundidade equivalente (Zeq)
durante o estágio de carregamento e, ao contrário, no descarregamento as tensões
normalizadas crescem com a redução da profundidade. O comportamento não linear
na fase de descarregamento, à medida que a sobrecarga aproxima-se de 0 Kpa,
decorre da baixa redução das cargas nos grampos frente aos decréscimos constantes
da pressão vertical.
No estágio de descarregamento a variação da tração T0 normalizada aumenta
linearmente com a diminuição da profundidade equivalente (Zeq) para sobrecargas
entre 100 e 40 kPa. Para sobrecargas menores que 40 kPa os incrementos de tração
normalizada aumentam gradativamente com as reduções das pressões aplicadas no
terrapleno. No segmento linear situado entre 1,0 e 0,5 da relação h/H a tensão T0
normalizada encontra-se no intervalo de 0,98 a 1,59 e para o outro segmento (h/H
<0,5) a variação é maior, saindo de 1,59 para 3,51, sendo que entre a sobrecarga 10 e
0 kPa há um salto significativo de 2,5 para 3,51. No estágio de carregamento,
separando os resultados das tensões de tração T0 normalizadas em dois segmentos
com divisor na relação h/H igual 0,5, tem-se que nas partes superior e inferior, os
valores variaram, respectivamente, de 0,47 a 0,67 e de 0,67 a 0,98.
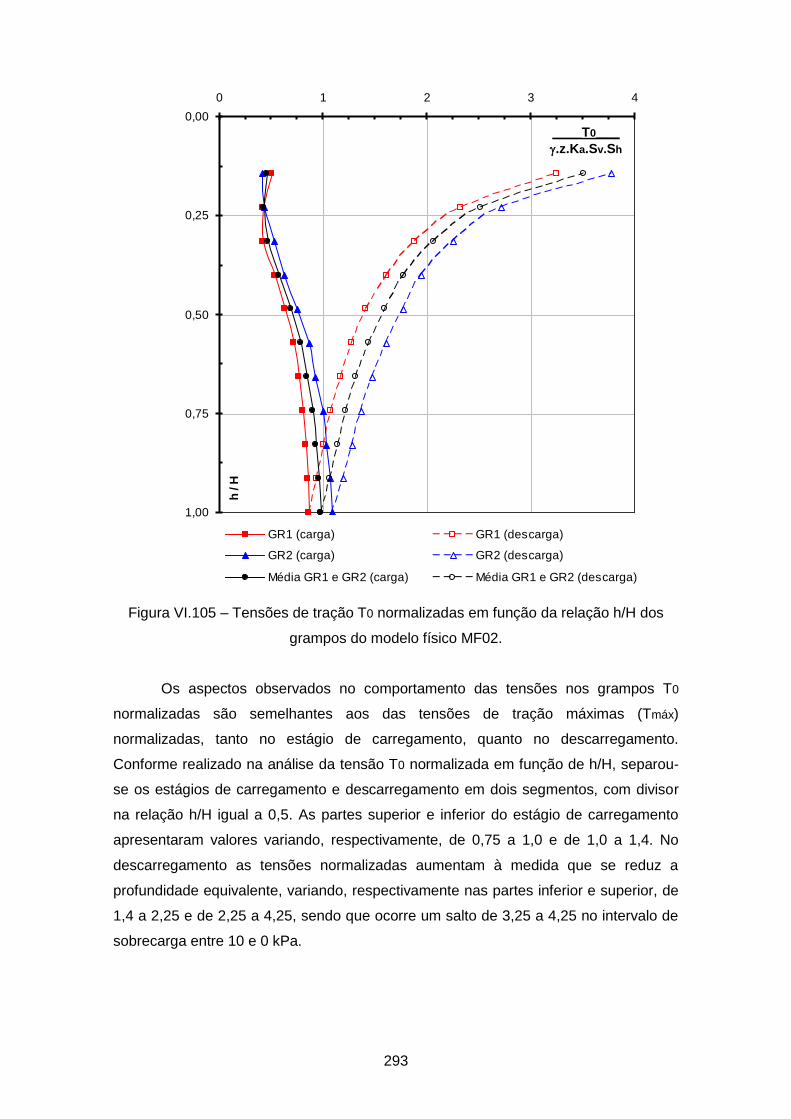
293
Tensão de tração na face normalizada em função de h/H
0,00
0,25
0,50
0,75
1,00
0 1 2 3 4
h / H
GR1 (carga) GR1 (descarga)
GR2 (carga) GR2 (descarga)
Média GR1 e GR2 (carga) Média GR1 e GR2 (descarga)
Figura VI.105 – Tensões de tração T0 normalizadas em função da relação h/H dos
grampos do modelo físico MF02.
Os aspectos observados no comportamento das tensões nos grampos T0
normalizadas são semelhantes aos das tensões de tração máximas (Tmáx)
normalizadas, tanto no estágio de carregamento, quanto no descarregamento.
Conforme realizado na análise da tensão T0 normalizada em função de h/H, separou-
se os estágios de carregamento e descarregamento em dois segmentos, com divisor
na relação h/H igual a 0,5. As partes superior e inferior do estágio de carregamento
apresentaram valores variando, respectivamente, de 0,75 a 1,0 e de 1,0 a 1,4. No
descarregamento as tensões normalizadas aumentam à medida que se reduz a
profundidade equivalente, variando, respectivamente nas partes inferior e superior, de
1,4 a 2,25 e de 2,25 a 4,25, sendo que ocorre um salto de 3,25 a 4,25 no intervalo de
sobrecarga entre 10 e 0 kPa.
____T0____
.z.Ka.Sv.Sh

294
Tensão de tração máxima normalizada em função de h/H
0,00
0,25
0,50
0,75
1,00
0 1 2 3 4 5
h / H
GR1 (carga) GR1 (descarga)
GR2 (carga) GR2 (descarga)
Média GR1 e GR2 (carga) Média GR1 e GR2 (descarga)
Figura VI.106 – Tensões de tração Tmáx em função da relação h/H dos grampos do
modelo físico MF02.
Os fatores de segurança contra o arrancamento do grampo da zona passiva e
contra a ruptura do elemento resistente à tração do grampo (barra de aço) verificados
pela maior solicitação dos grampos são apresentados na Figura VI.107.
Da mesma forma que verificado no experimento MF01, o fator de segurança
contra o arrancamento diminui linearmente à medida que se reduz a pressão vertical
sobre o grampo. Entretanto, ao contrário de MF01, no experimento MF02 o fator de
segurança se aproxima do valor unitário, no final do estágio de sobrecarga.
Já, o fator de segurança contra a ruptura da barra de aço aumenta com um
padrão de comportamento não linear. O FS crítico aproximadamente igual a 3, ainda
que dentro do recomendado, correspondente a um terço do FS encontrado na
condição mais desfavorável do experimento MF01.
___Tmáx___
.z.Ka.Sv.Sh

295
Fatores de segurança (arrancamento e ruptura dos grampos)
0
2
4
6
0 2 4 6 8
FS
Zeq
(m
)
GR1 (arrancamento) GR1 (ruptura)
GR2 (arrancamento) GR2 (ruptura)
Figura VI.107 – Fatores de segurança contra arrancamento e ruptura dos grampos
GR1 e GR2 do modelo físico MF02.
A Figura VI.108 apresenta a deformação da barra de aço decorrente do esforço
axial máximo em função do logaritmo das pressões aplicadas na superfície do
terrapleno. Semelhante ao experimento MF01, observa-se mudança de gradiente da
curva após a sobrecarga de 30 kPa. A partir deste ponto as deformações do aço
aumentam linearmente com o logaritmo do acréscimo de sobrecarga aplicada no
terrapleno. O mesmo fato pode ser observado na mobilização das tensões de tração
nos grampos, que a partir da sobrecarga de 30 kPa os incrementos de tração são
maiores e aumentam linearmente com a profundidade equivalente (Figura VI.102).
Este comportamento indica que da construção do modelo físico MF02, assim como do
MF01, resulta uma tensão de pré-adensamento, que confirma a ocorrência do
carregamento anterior.
Conforme discutido, o processo executivo empregado na construção dos
modelos físicos induz tensões superiores aos primeiros níveis de sobrecarga. E
quando o modelo físico fica submetido a sobrecargas maiores que a carga máxima
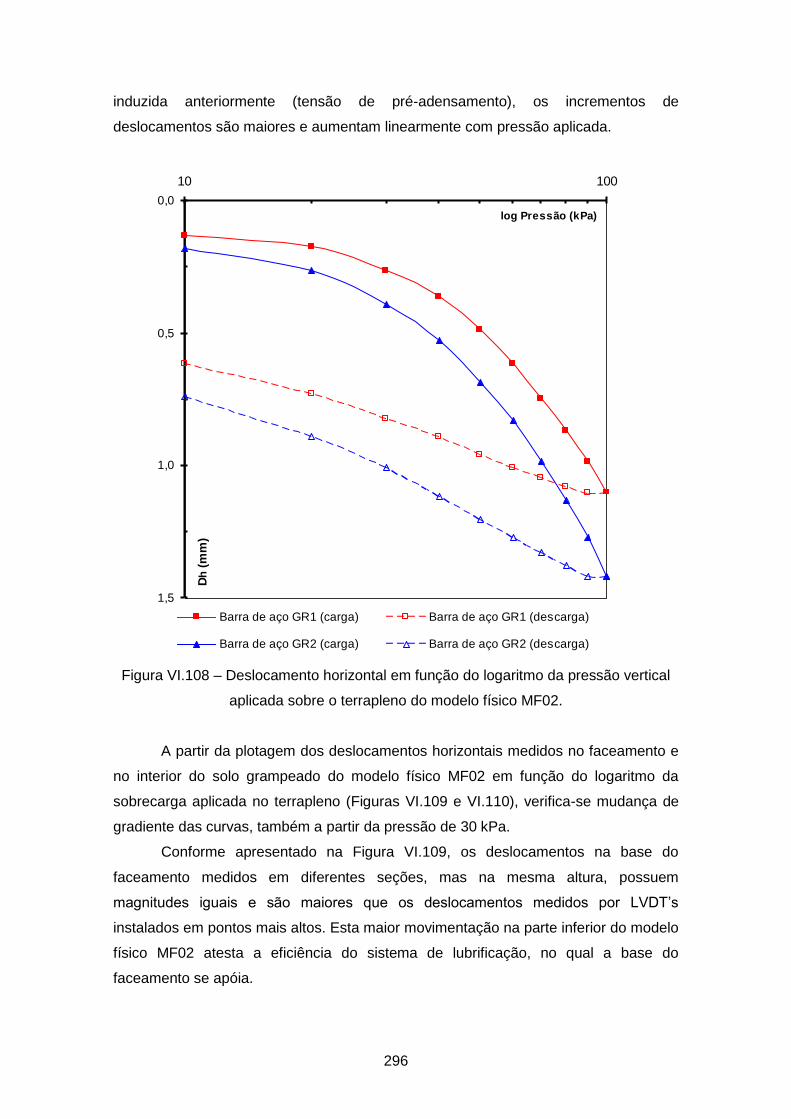
296
induzida anteriormente (tensão de pré-adensamento), os incrementos de
deslocamentos são maiores e aumentam linearmente com pressão aplicada.
Deslocamento versus log pressão vertical
0,0
0,5
1,0
1,5
10 100
log Pressão (kPa)
Dh
(m
m)
Barra de aço GR1 (carga) Barra de aço GR1 (descarga)
Barra de aço GR2 (carga) Barra de aço GR2 (descarga)
Figura VI.108 – Deslocamento horizontal em função do logaritmo da pressão vertical
aplicada sobre o terrapleno do modelo físico MF02.
A partir da plotagem dos deslocamentos horizontais medidos no faceamento e
no interior do solo grampeado do modelo físico MF02 em função do logaritmo da
sobrecarga aplicada no terrapleno (Figuras VI.109 e VI.110), verifica-se mudança de
gradiente das curvas, também a partir da pressão de 30 kPa.
Conforme apresentado na Figura VI.109, os deslocamentos na base do
faceamento medidos em diferentes seções, mas na mesma altura, possuem
magnitudes iguais e são maiores que os deslocamentos medidos por LVDT’s
instalados em pontos mais altos. Esta maior movimentação na parte inferior do modelo
físico MF02 atesta a eficiência do sistema de lubrificação, no qual a base do
faceamento se apóia.

297
Os resultados de deslocamentos crescentes com a profundidade são
consistentes com os acréscimos de tensão de contato do solo com a face, que
diminuem com a profundidade. Outro aspecto da relação dos deslocamentos com as
tensões do solo junto à face pode ser verificado através de uma análise comparativa
dos modelos físicos. Como os deslocamentos horizontais do experimento MF02 são
maiores que os medidos no MF01, neste último as tensões horizontais deveriam ser
maiores, e isto de fato aconteceu.
Deslocamento horizontal da face versus log pressão vertical
0,0
2,0
4,0
6,0
10 100
log Pressão (kPa)
Dh
(m
m)
PV-01 LVDT (h=0,3m) PV-01 LVDT (h=0,7m)
PV-02 LVDT (h=0,3m) PV-02 LVDT (h=1,1m)
Figura VI.109 – Deslocamento horizontal da face em função do logaritmo da pressão
vertical aplicada sobre o terrapleno do modelo físico MF02.
A Figura VI.110 apresenta, conforme esperado, uma maior movimentação na
zona ativa. Além disso, observa-se correspondência dos deslocamentos medidos
próximos à face (afastamento de 0,15 m) com aqueles medidos no faceamento.
Verifica-se que à medida que se afasta da face os deslocamentos diminuem em
direção à zona passiva.
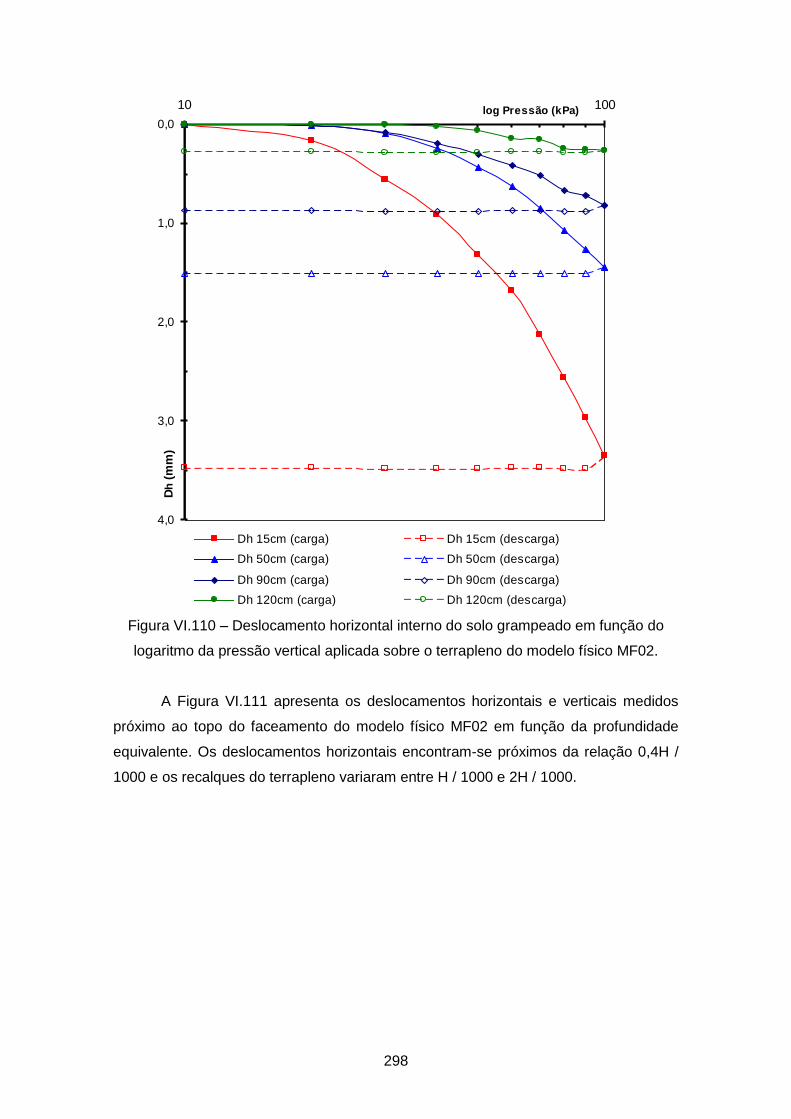
298
Deslocamento interno do solo versus log pressão vertical
0,0
1,0
2,0
3,0
4,0
10 100log Pressão (kPa)
Dh
(m
m)
Dh 15cm (carga) Dh 15cm (descarga)
Dh 50cm (carga) Dh 50cm (descarga)
Dh 90cm (carga) Dh 90cm (descarga)
Dh 120cm (carga) Dh 120cm (descarga)
Figura VI.110 – Deslocamento horizontal interno do solo grampeado em função do
logaritmo da pressão vertical aplicada sobre o terrapleno do modelo físico MF02.
A Figura VI.111 apresenta os deslocamentos horizontais e verticais medidos
próximo ao topo do faceamento do modelo físico MF02 em função da profundidade
equivalente. Os deslocamentos horizontais encontram-se próximos da relação 0,4H /
1000 e os recalques do terrapleno variaram entre H / 1000 e 2H / 1000.
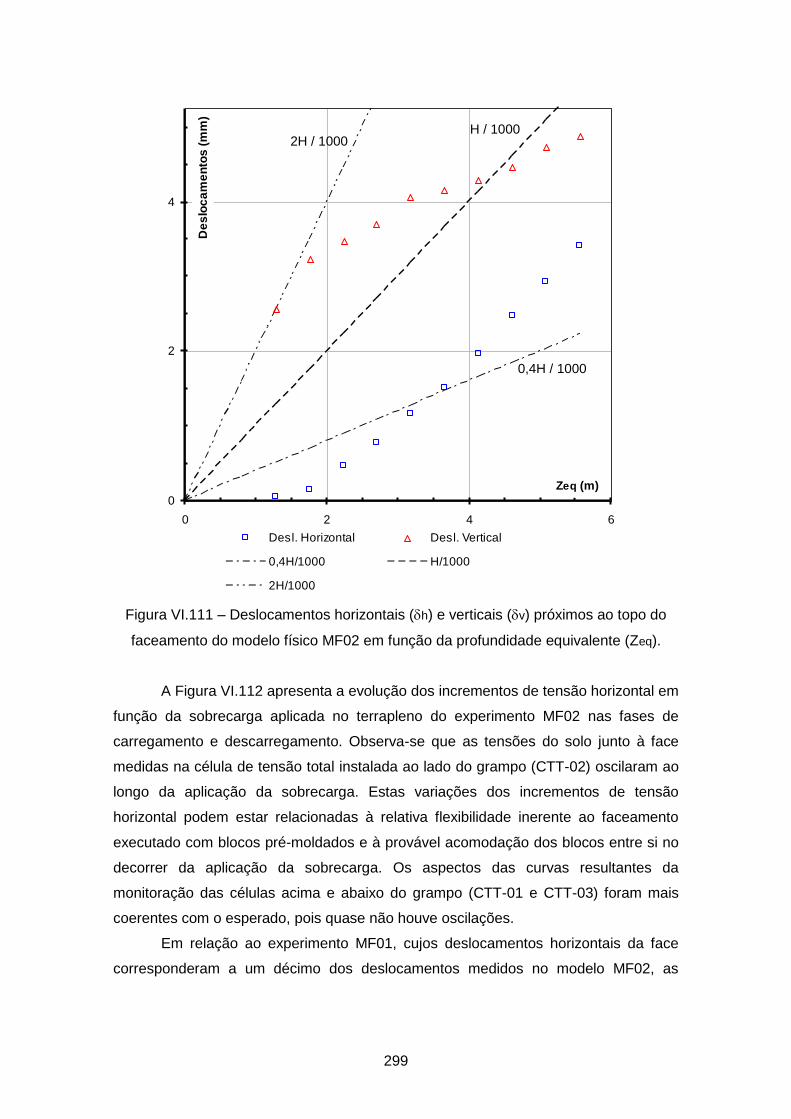
299
Relações dos deslocamentos vertical e horizontal com Zeq
0
2
4
0 2 4 6
Zeq (m)
De
slo
ca
me
nto
s (
mm
)
Desl. Horizontal Desl. Vertical
0,4H/1000 H/1000
2H/1000
Figura VI.111 – Deslocamentos horizontais (h) e verticais (v) próximos ao topo do
faceamento do modelo físico MF02 em função da profundidade equivalente (Zeq).
A Figura VI.112 apresenta a evolução dos incrementos de tensão horizontal em
função da sobrecarga aplicada no terrapleno do experimento MF02 nas fases de
carregamento e descarregamento. Observa-se que as tensões do solo junto à face
medidas na célula de tensão total instalada ao lado do grampo (CTT-02) oscilaram ao
longo da aplicação da sobrecarga. Estas variações dos incrementos de tensão
horizontal podem estar relacionadas à relativa flexibilidade inerente ao faceamento
executado com blocos pré-moldados e à provável acomodação dos blocos entre si no
decorrer da aplicação da sobrecarga. Os aspectos das curvas resultantes da
monitoração das células acima e abaixo do grampo (CTT-01 e CTT-03) foram mais
coerentes com o esperado, pois quase não houve oscilações.
Em relação ao experimento MF01, cujos deslocamentos horizontais da face
corresponderam a um décimo dos deslocamentos medidos no modelo MF02, as
H / 1000
0,4H / 1000
2H / 1000
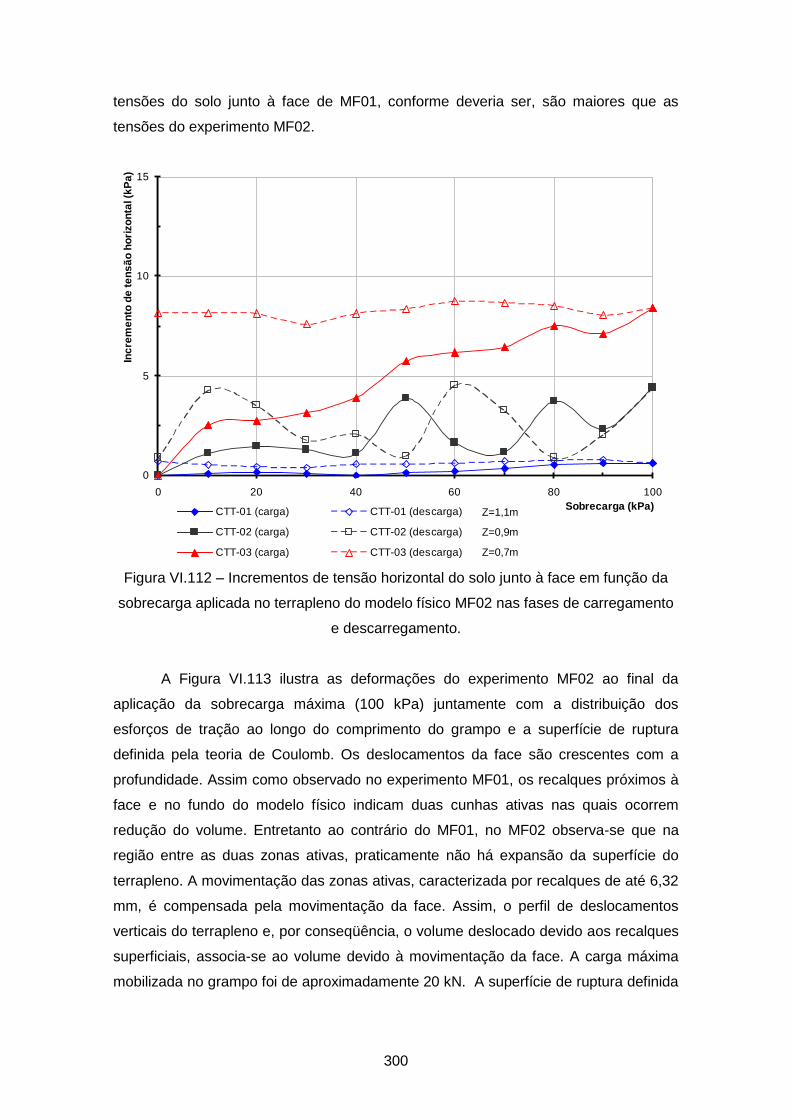
300
tensões do solo junto à face de MF01, conforme deveria ser, são maiores que as
tensões do experimento MF02.
Incremento de tensão do solo junto á face versus sobrecarga
0
5
10
15
0 20 40 60 80 100
Sobrecarga (kPa)
Inc
rem
en
to d
e t
en
sã
o h
ori
zo
nta
l (k
Pa
)
CTT-01 (carga) CTT-01 (descarga)
CTT-02 (carga) CTT-02 (descarga)
CTT-03 (carga) CTT-03 (descarga)
Figura VI.112 – Incrementos de tensão horizontal do solo junto à face em função da
sobrecarga aplicada no terrapleno do modelo físico MF02 nas fases de carregamento
e descarregamento.
A Figura VI.113 ilustra as deformações do experimento MF02 ao final da
aplicação da sobrecarga máxima (100 kPa) juntamente com a distribuição dos
esforços de tração ao longo do comprimento do grampo e a superfície de ruptura
definida pela teoria de Coulomb. Os deslocamentos da face são crescentes com a
profundidade. Assim como observado no experimento MF01, os recalques próximos à
face e no fundo do modelo físico indicam duas cunhas ativas nas quais ocorrem
redução do volume. Entretanto ao contrário do MF01, no MF02 observa-se que na
região entre as duas zonas ativas, praticamente não há expansão da superfície do
terrapleno. A movimentação das zonas ativas, caracterizada por recalques de até 6,32
mm, é compensada pela movimentação da face. Assim, o perfil de deslocamentos
verticais do terrapleno e, por conseqüência, o volume deslocado devido aos recalques
superficiais, associa-se ao volume devido à movimentação da face. A carga máxima
mobilizada no grampo foi de aproximadamente 20 kN. A superfície de ruptura definida
Z=1,1m
Z=0,9m
Z=0,7m
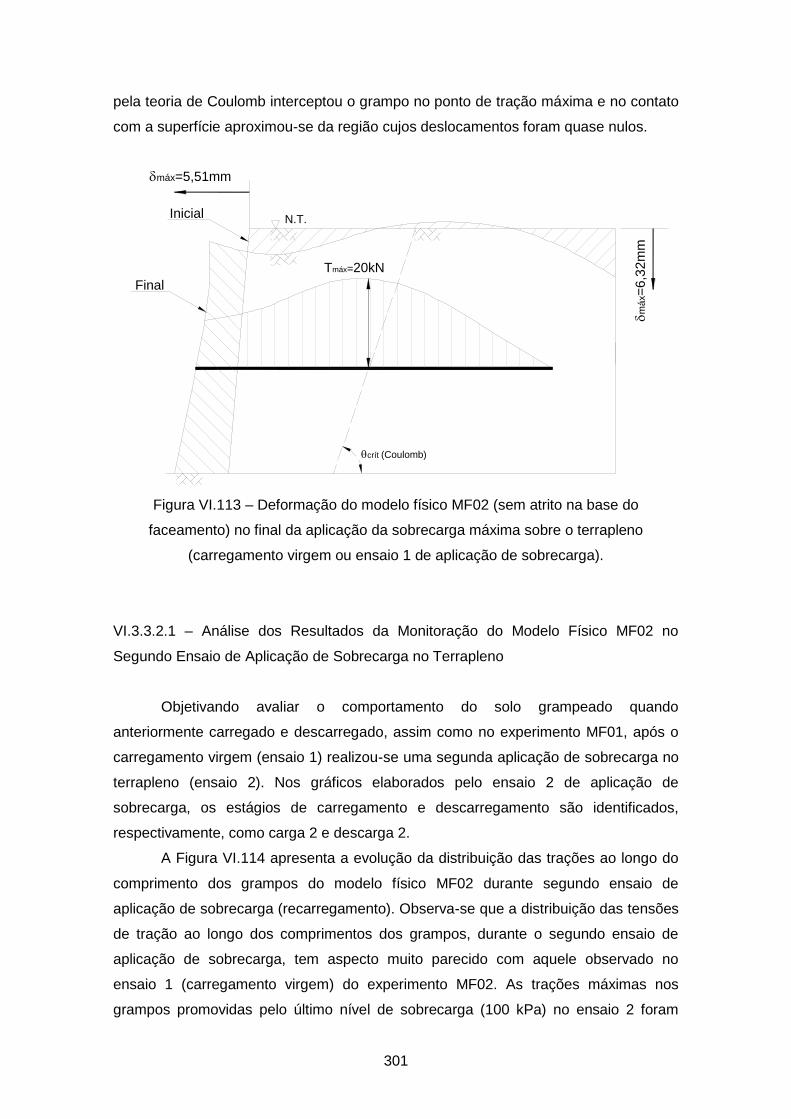
301
pela teoria de Coulomb interceptou o grampo no ponto de tração máxima e no contato
com a superfície aproximou-se da região cujos deslocamentos foram quase nulos.
Inicial
Final
N.T.
Tmáx=20kN
crít (Coulomb)
máx=5,51mm
m
áx=
6,3
2m
m
Figura VI.113 – Deformação do modelo físico MF02 (sem atrito na base do
faceamento) no final da aplicação da sobrecarga máxima sobre o terrapleno
(carregamento virgem ou ensaio 1 de aplicação de sobrecarga).
VI.3.3.2.1 – Análise dos Resultados da Monitoração do Modelo Físico MF02 no
Segundo Ensaio de Aplicação de Sobrecarga no Terrapleno
Objetivando avaliar o comportamento do solo grampeado quando
anteriormente carregado e descarregado, assim como no experimento MF01, após o
carregamento virgem (ensaio 1) realizou-se uma segunda aplicação de sobrecarga no
terrapleno (ensaio 2). Nos gráficos elaborados pelo ensaio 2 de aplicação de
sobrecarga, os estágios de carregamento e descarregamento são identificados,
respectivamente, como carga 2 e descarga 2.
A Figura VI.114 apresenta a evolução da distribuição das trações ao longo do
comprimento dos grampos do modelo físico MF02 durante segundo ensaio de
aplicação de sobrecarga (recarregamento). Observa-se que a distribuição das tensões
de tração ao longo dos comprimentos dos grampos, durante o segundo ensaio de
aplicação de sobrecarga, tem aspecto muito parecido com aquele observado no
ensaio 1 (carregamento virgem) do experimento MF02. As trações máximas nos
grampos promovidas pelo último nível de sobrecarga (100 kPa) no ensaio 2 foram
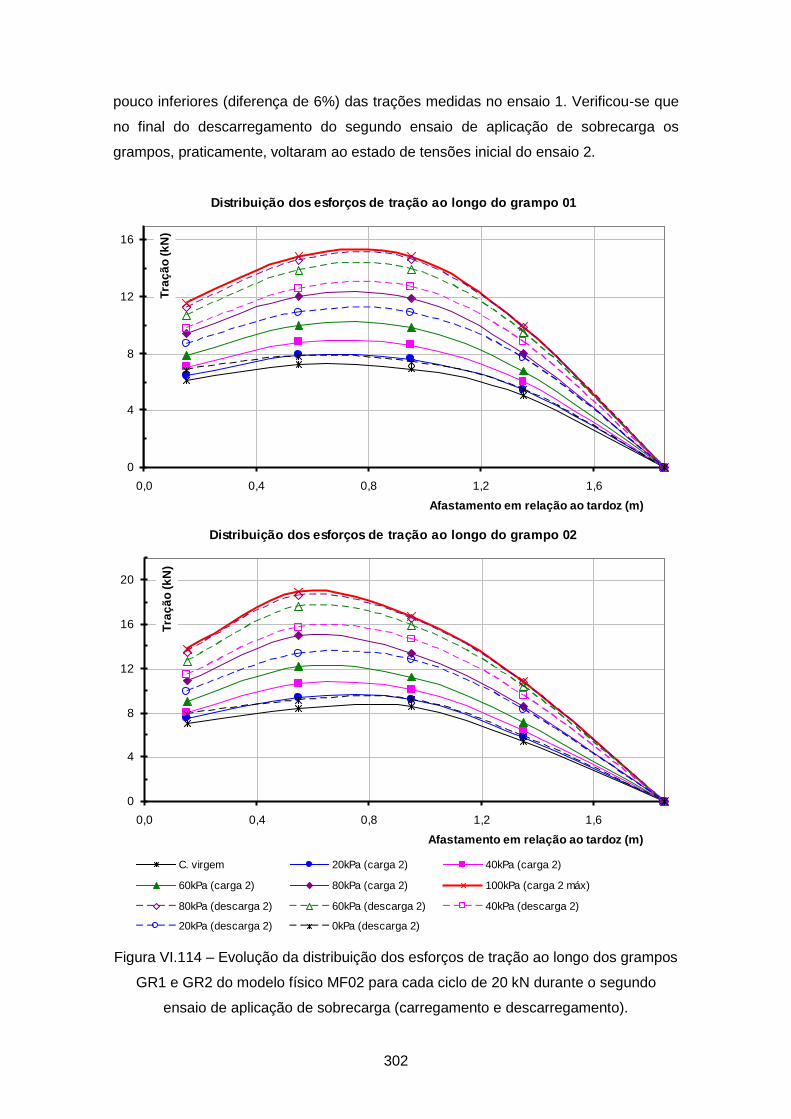
302
pouco inferiores (diferença de 6%) das trações medidas no ensaio 1. Verificou-se que
no final do descarregamento do segundo ensaio de aplicação de sobrecarga os
grampos, praticamente, voltaram ao estado de tensões inicial do ensaio 2.
Distribuição dos esforços de tração ao longo do grampo 01
0
4
8
12
16
0,0 0,4 0,8 1,2 1,6
Afastamento em relação ao tardoz (m)
Tra
çã
o (
kN
)
C. virgem 20kPa (carga 2) 40kPa (carga 2)
60kPa (carga 2) 80kPa (carga 2) 100kPa (carga 2 máx)
80kPa (descarga 2) 60kPa (descarga 2) 40kPa (descarga 2)
20kPa (descarga 2) 0kPa (descarga 2)
Distribuição dos esforços de tração ao longo do grampo 02
0
4
8
12
16
20
0,0 0,4 0,8 1,2 1,6
Afastamento em relação ao tardoz (m)
Tra
çã
o (
kN
)
C. virgem 20kPa (carga 2) 40kPa (carga 2)
60kPa (carga 2) 80kPa (carga 2) 100kPa (carga 2 máx)
80kPa (descarga 2) 60kPa (descarga 2) 40kPa (descarga 2)
20kPa (descarga 2) 0kPa (descarga 2)
Figura VI.114 – Evolução da distribuição dos esforços de tração ao longo dos grampos
GR1 e GR2 do modelo físico MF02 para cada ciclo de 20 kN durante o segundo
ensaio de aplicação de sobrecarga (carregamento e descarregamento).
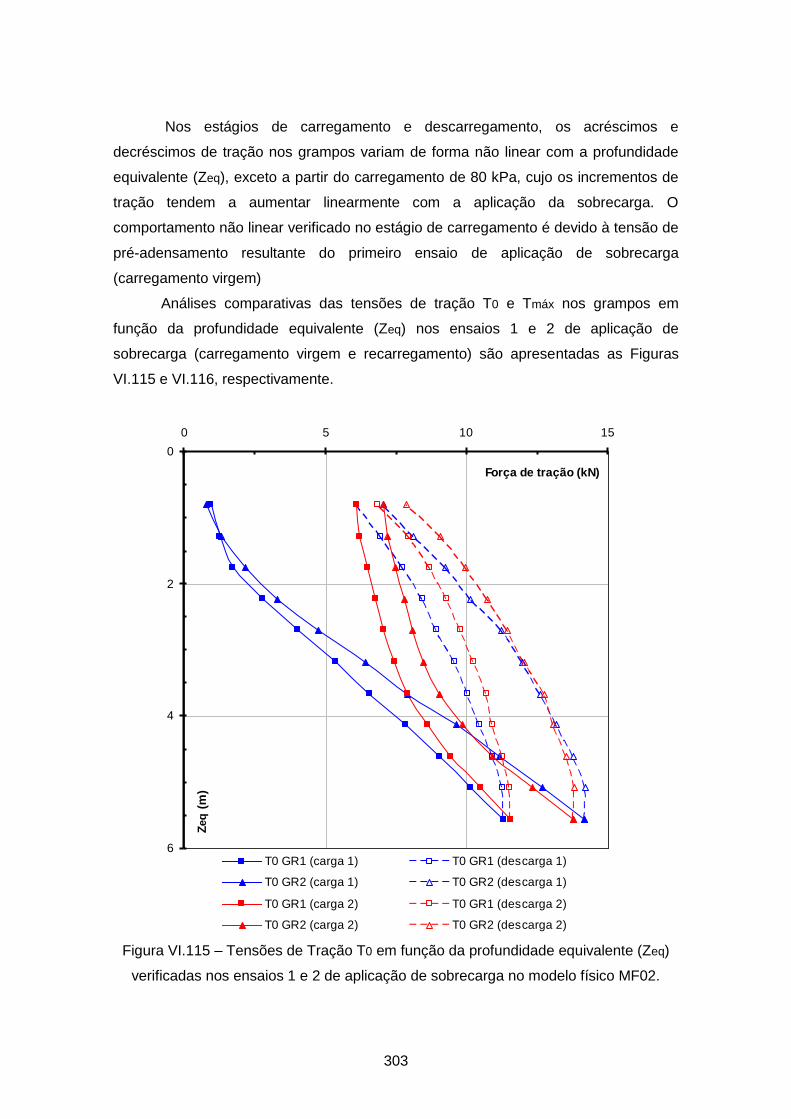
303
Nos estágios de carregamento e descarregamento, os acréscimos e
decréscimos de tração nos grampos variam de forma não linear com a profundidade
equivalente (Zeq), exceto a partir do carregamento de 80 kPa, cujo os incrementos de
tração tendem a aumentar linearmente com a aplicação da sobrecarga. O
comportamento não linear verificado no estágio de carregamento é devido à tensão de
pré-adensamento resultante do primeiro ensaio de aplicação de sobrecarga
(carregamento virgem)
Análises comparativas das tensões de tração T0 e Tmáx nos grampos em
função da profundidade equivalente (Zeq) nos ensaios 1 e 2 de aplicação de
sobrecarga (carregamento virgem e recarregamento) são apresentadas as Figuras
VI.115 e VI.116, respectivamente.
To nos grampos (ensaios 1 e 2 de sobrecarga)
0
2
4
6
0 5 10 15
Força de tração (kN)
Zeq
(m
)
T0 GR1 (carga 1) T0 GR1 (descarga 1)
T0 GR2 (carga 1) T0 GR2 (descarga 1)
T0 GR1 (carga 2) T0 GR1 (descarga 2)
T0 GR2 (carga 2) T0 GR2 (descarga 2)
Figura VI.115 – Tensões de Tração T0 em função da profundidade equivalente (Zeq)
verificadas nos ensaios 1 e 2 de aplicação de sobrecarga no modelo físico MF02.

304
Tmáx nos grampos (ensaios 1 e 2 de sobrecarga)
0
2
4
6
0 7 14 21
Força de tração (kN)
Zeq
(m
)
Tmáx GR1 (carga 1) Tmáx GR1 (descarga 1)
Tmáx GR2 (carga 1) Tmáx GR2 (descarga 1)
Tmáx GR1 (carga 2) Tmáx GR1 (descarga 2)
Tmáx GR2 (carga 2) Tmáx GR2 (descarga 2)
Figura VI.116 – Trações máximas (Tmáx) em função da profundidade equivalente (Zeq)
verificadas nos ensaios 1 e 2 de aplicação de sobrecarga no modelo físico MF02.
Conforme discutido, quando o modelo físico é submetido a carregamentos
maiores do que a pressão máxima aplicada no terrapleno, os incrementos de tração
aumentam e passam a variar linearmente com o logaritmo da pressão. No
carregamento virgem este comportamento pode ser observado após a tensão de pré-
adensamento promovida pela construção do modelo físico. Na segunda aplicação de
sobrecarga (recarregamento), o aumento e a variação linear dos incrementos de
tração são observados nos níveis de sobrecarga próximos ao valor do carregamento
final (100 kPa). Devido às mesmas magnitudes dos carregamentos máximos aplicados
no recarregamento e carregamento virgem, as curvas de descarregamento dos
ensaios 1 e 2 perfazem o mesmo caminho. Estes aspectos podem ser observados na
Figura VI.117, que apresenta as cargas máximas dos grampos nos ensaios 1 e 2 de
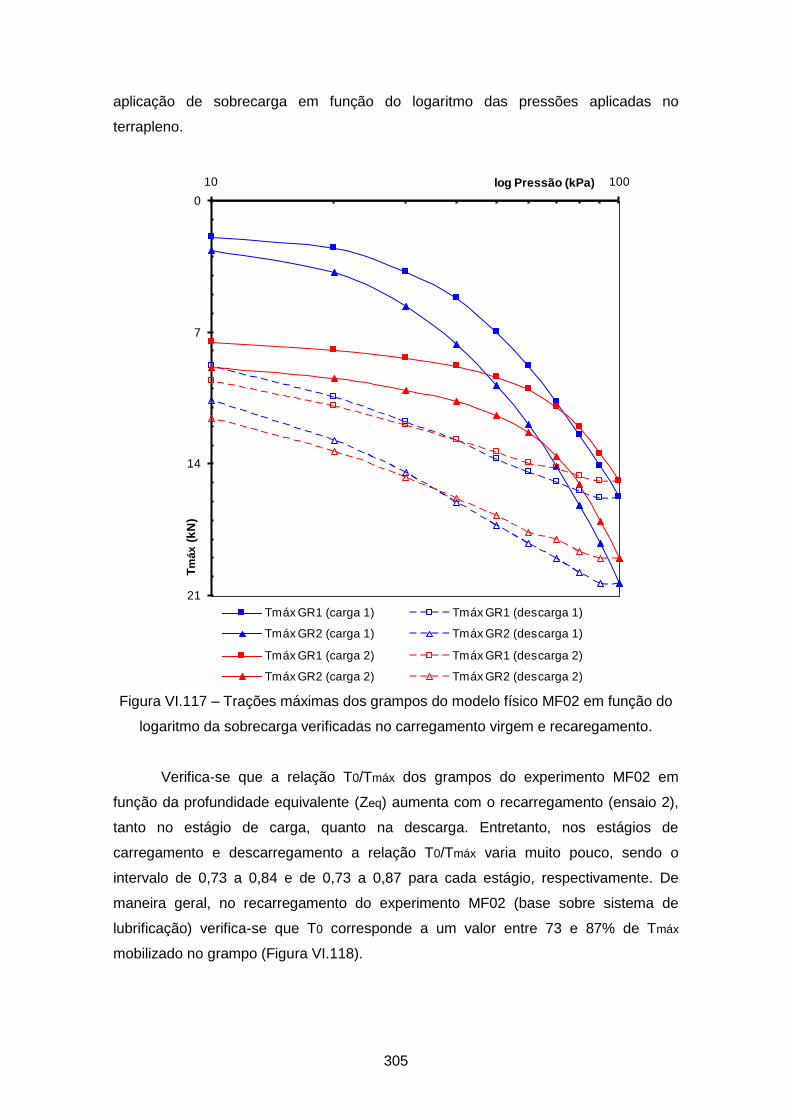
305
aplicação de sobrecarga em função do logaritmo das pressões aplicadas no
terrapleno.
Tmáx nos grampos (ensaios 1 e 2 de sobrecarga)
0
7
14
21
10 100log Pressão (kPa)T
máx
(k
N)
Tmáx GR1 (carga 1) Tmáx GR1 (descarga 1)
Tmáx GR2 (carga 1) Tmáx GR2 (descarga 1)
Tmáx GR1 (carga 2) Tmáx GR1 (descarga 2)
Tmáx GR2 (carga 2) Tmáx GR2 (descarga 2)
Figura VI.117 – Trações máximas dos grampos do modelo físico MF02 em função do
logaritmo da sobrecarga verificadas no carregamento virgem e recaregamento.
Verifica-se que a relação T0/Tmáx dos grampos do experimento MF02 em
função da profundidade equivalente (Zeq) aumenta com o recarregamento (ensaio 2),
tanto no estágio de carga, quanto na descarga. Entretanto, nos estágios de
carregamento e descarregamento a relação T0/Tmáx varia muito pouco, sendo o
intervalo de 0,73 a 0,84 e de 0,73 a 0,87 para cada estágio, respectivamente. De
maneira geral, no recarregamento do experimento MF02 (base sobre sistema de
lubrificação) verifica-se que T0 corresponde a um valor entre 73 e 87% de Tmáx
mobilizado no grampo (Figura VI.118).
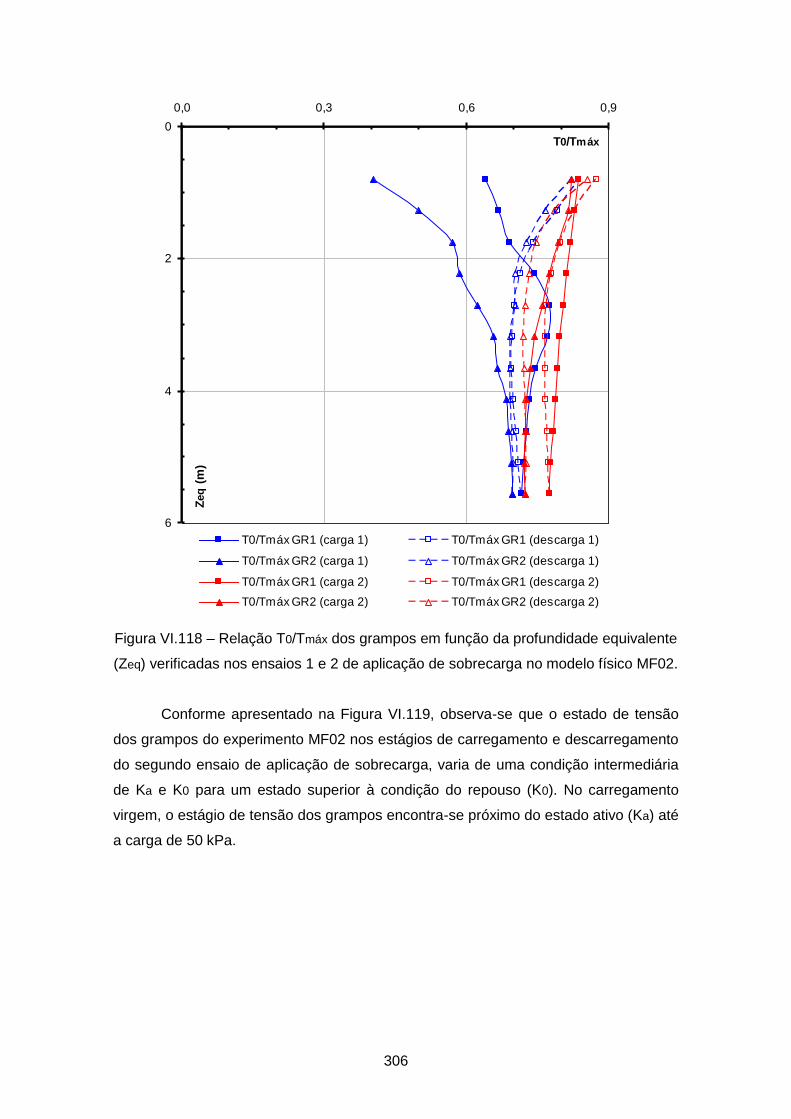
306
Relação To /Tmáx dos grampos (ensaios 1 e 2 de sobrecarga)
0
2
4
6
0,0 0,3 0,6 0,9
T0/Tmáx
Zeq
(m
)
T0/Tmáx GR1 (carga 1) T0/Tmáx GR1 (descarga 1)
T0/Tmáx GR2 (carga 1) T0/Tmáx GR2 (descarga 1)
T0/Tmáx GR1 (carga 2) T0/Tmáx GR1 (descarga 2)
T0/Tmáx GR2 (carga 2) T0/Tmáx GR2 (descarga 2)
Figura VI.118 – Relação T0/Tmáx dos grampos em função da profundidade equivalente
(Zeq) verificadas nos ensaios 1 e 2 de aplicação de sobrecarga no modelo físico MF02.
Conforme apresentado na Figura VI.119, observa-se que o estado de tensão
dos grampos do experimento MF02 nos estágios de carregamento e descarregamento
do segundo ensaio de aplicação de sobrecarga, varia de uma condição intermediária
de Ka e K0 para um estado superior à condição do repouso (K0). No carregamento
virgem, o estágio de tensão dos grampos encontra-se próximo do estado ativo (Ka) até
a carga de 50 kPa.
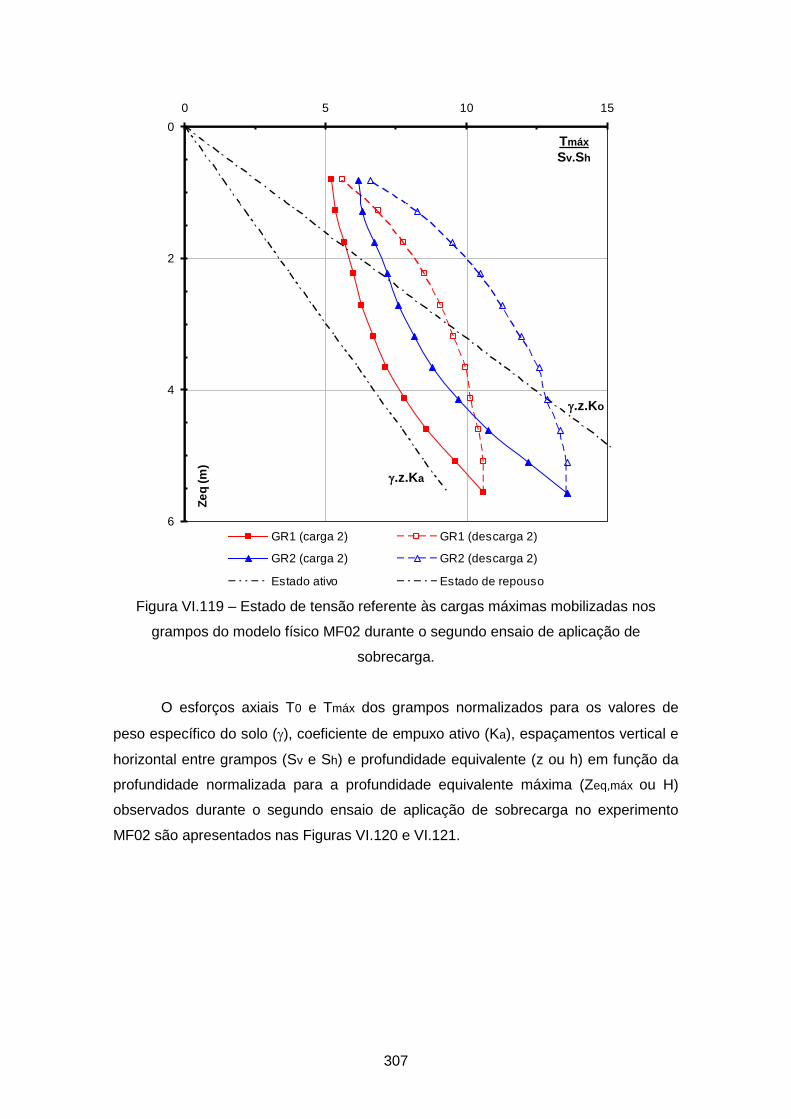
307
Estado de tensão (tração máxima mobilizada)
0
2
4
6
0 5 10 15
Ze
q (
m)
GR1 (carga 2) GR1 (descarga 2)
GR2 (carga 2) GR2 (descarga 2)
Estado ativo Estado de repouso
Figura VI.119 – Estado de tensão referente às cargas máximas mobilizadas nos
grampos do modelo físico MF02 durante o segundo ensaio de aplicação de
sobrecarga.
O esforços axiais T0 e Tmáx dos grampos normalizados para os valores de
peso específico do solo (), coeficiente de empuxo ativo (Ka), espaçamentos vertical e
horizontal entre grampos (Sv e Sh) e profundidade equivalente (z ou h) em função da
profundidade normalizada para a profundidade equivalente máxima (Zeq,máx ou H)
observados durante o segundo ensaio de aplicação de sobrecarga no experimento
MF02 são apresentados nas Figuras VI.120 e VI.121.
Tmáx
Sv.Sh
.z.Ko
.z.Ka

308
Tensão de tração na face normalizada em função de h/H
0,00
0,25
0,50
0,75
1,00
0,5 1,5 2,5 3,5 4,5
h / H
GR1 (carga 2) GR1 (descarga 2)
GR2 (carga 2) GR2 (descarga 2)
Figura VI.120 – Tensões de tração T0 normalizadas em função da relação h/H nos
grampos do modelo físico MF02 no segundo ensaio de aplicação de sobrecarga.
No recarregamento (ensaio 2 de sobrecarga) do experimento MF02, o padrão
de comportamento das tensões T0 e Tmáx normalizadas pode ser segmentado por dois
trechos, sendo o divisor destes a relação h/H igual a 0,5. Quando a relação h/H é
menor que 0,5 as tensões de tração normalizadas, nos estágios de carregamento e
descarregamento, apresentam uma variação significativa. Para h/H superior a 0,5, as
tensões de tração normalizadas variam pouco em relação ao segmento superior
(h/H<0,5) mas, ainda assim, esta variação é significativa.
As tensões de tração T0 normalizadas no segmento superior (h/H<0,5) nos
estágios de carregamento e descarregamento encontram-se na faixa de valores que
varia de 0,9 a 1,25 e de 0,9 a 1,80, respectivamente. No segmento inferior (h/H>0,5)
os valores das trações T0 normalizadas encontram-se no intervalo de 1,25 a 3,5 e de
1,8 a 3,95. Observa-se salto significativo quando se descarrega de 10 para 0 kPa.
____T0____
.z.Ka.Sv.Sh
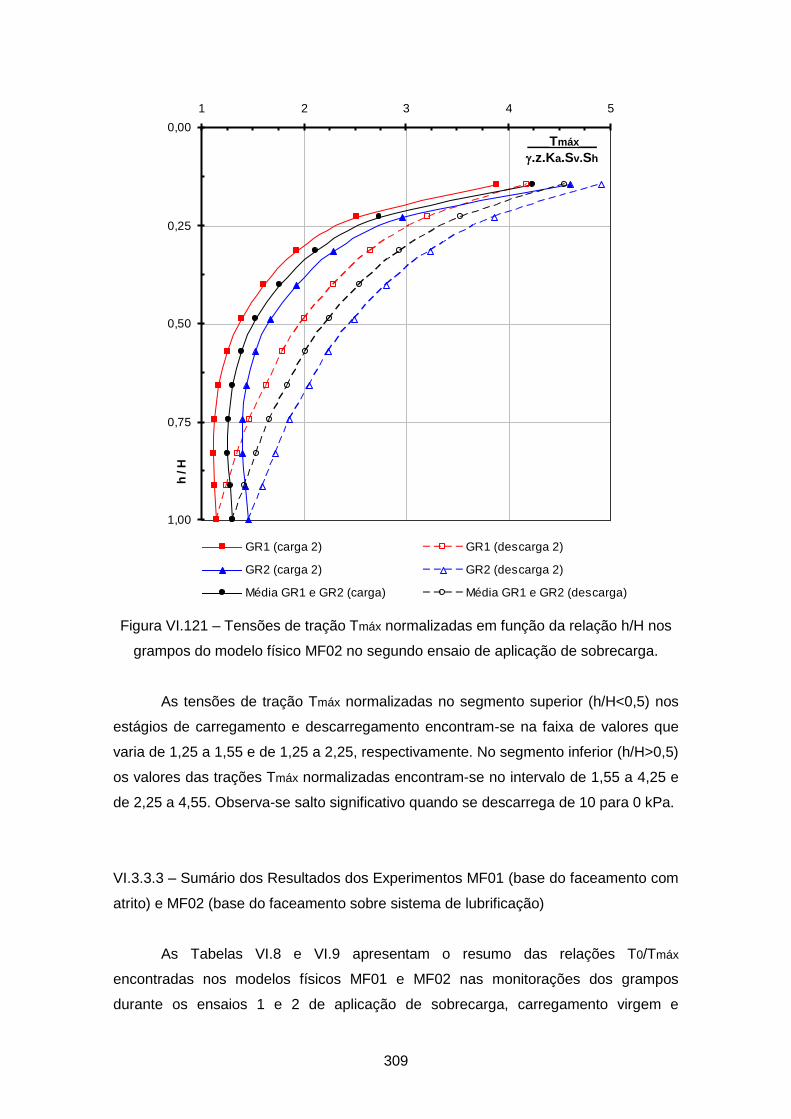
309
Tensão de tração máxima normalizada em função de h/H
0,00
0,25
0,50
0,75
1,00
1 2 3 4 5
h / H
GR1 (carga 2) GR1 (descarga 2)
GR2 (carga 2) GR2 (descarga 2)
Média GR1 e GR2 (carga) Média GR1 e GR2 (descarga)
Figura VI.121 – Tensões de tração Tmáx normalizadas em função da relação h/H nos
grampos do modelo físico MF02 no segundo ensaio de aplicação de sobrecarga.
As tensões de tração Tmáx normalizadas no segmento superior (h/H<0,5) nos
estágios de carregamento e descarregamento encontram-se na faixa de valores que
varia de 1,25 a 1,55 e de 1,25 a 2,25, respectivamente. No segmento inferior (h/H>0,5)
os valores das trações Tmáx normalizadas encontram-se no intervalo de 1,55 a 4,25 e
de 2,25 a 4,55. Observa-se salto significativo quando se descarrega de 10 para 0 kPa.
VI.3.3.3 – Sumário dos Resultados dos Experimentos MF01 (base do faceamento com
atrito) e MF02 (base do faceamento sobre sistema de lubrificação)
As Tabelas VI.8 e VI.9 apresentam o resumo das relações T0/Tmáx
encontradas nos modelos físicos MF01 e MF02 nas monitorações dos grampos
durante os ensaios 1 e 2 de aplicação de sobrecarga, carregamento virgem e
___Tmáx___
.z.Ka.Sv.Sh
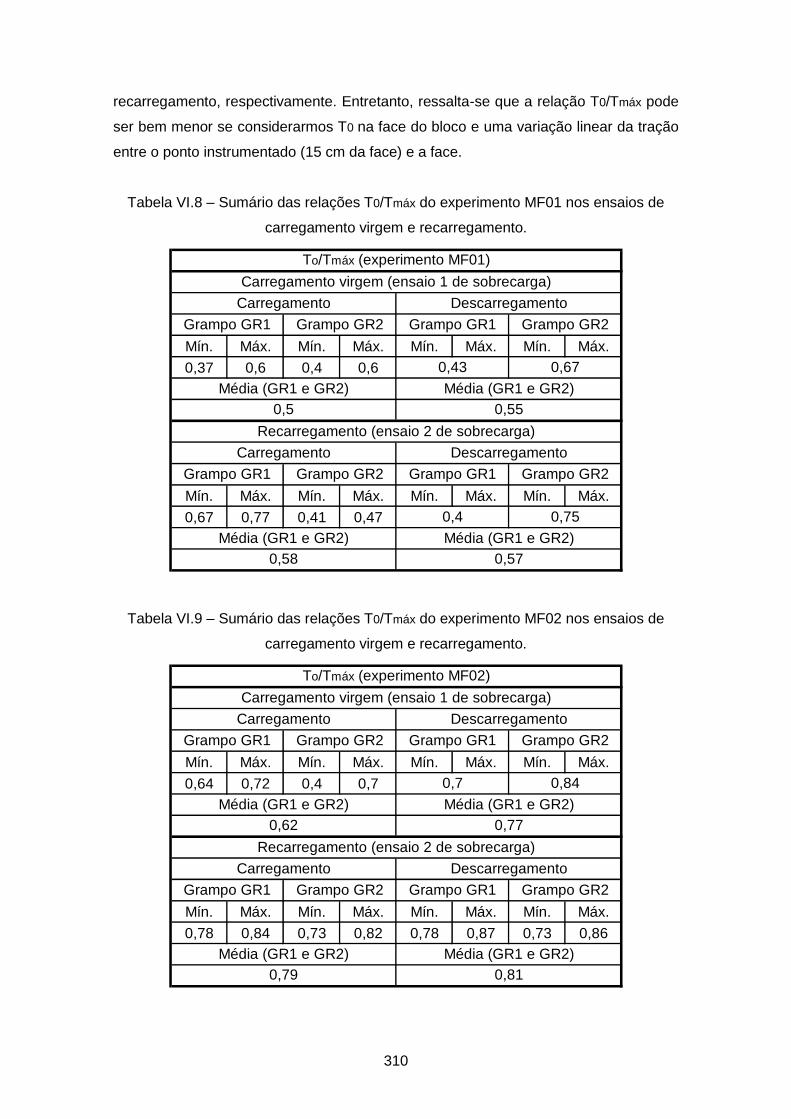
310
recarregamento, respectivamente. Entretanto, ressalta-se que a relação T0/Tmáx pode
ser bem menor se considerarmos T0 na face do bloco e uma variação linear da tração
entre o ponto instrumentado (15 cm da face) e a face.
Tabela VI.8 – Sumário das relações T0/Tmáx do experimento MF01 nos ensaios de
carregamento virgem e recarregamento.
Mín. Máx. Mín. Máx. Mín. Máx. Mín. Máx.
0,37 0,6 0,4 0,6
Mín. Máx. Mín. Máx. Mín. Máx. Mín. Máx.
0,67 0,77 0,41 0,47 0,4 0,75
Média (GR1 e GR2) Média (GR1 e GR2)
Grampo GR1 Grampo GR2
0,58 0,57
0,43 0,67
Média (GR1 e GR2) Média (GR1 e GR2)
0,5 0,55
Recarregamento (ensaio 2 de sobrecarga)
Carregamento Descarregamento
Grampo GR1 Grampo GR2
Carregamento Descarregamento
To/Tmáx (experimento MF01)
Carregamento virgem (ensaio 1 de sobrecarga)
Grampo GR1 Grampo GR2 Grampo GR1 Grampo GR2
Tabela VI.9 – Sumário das relações T0/Tmáx do experimento MF02 nos ensaios de
carregamento virgem e recarregamento.
Mín. Máx. Mín. Máx. Mín. Máx. Mín. Máx.
0,64 0,72 0,4 0,7
Mín. Máx. Mín. Máx. Mín. Máx. Mín. Máx.
0,78 0,84 0,73 0,82 0,78 0,87 0,73 0,86
0,79 0,81
Média (GR1 e GR2) Média (GR1 e GR2)
Grampo GR1 Grampo GR2 Grampo GR1 Grampo GR2
0,62 0,77
Recarregamento (ensaio 2 de sobrecarga)
Carregamento Descarregamento
0,7 0,84
Média (GR1 e GR2) Média (GR1 e GR2)
Grampo GR1 Grampo GR2 Grampo GR1 Grampo GR2
To/Tmáx (experimento MF02)
Carregamento Descarregamento
Carregamento virgem (ensaio 1 de sobrecarga)
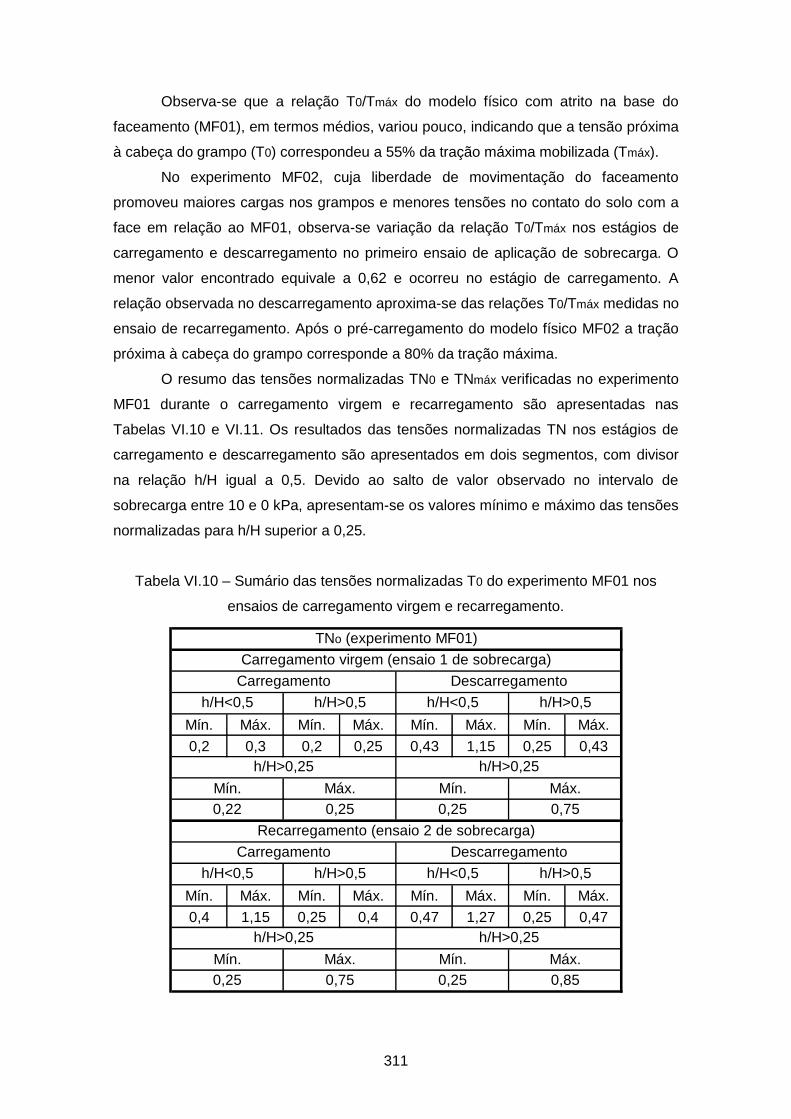
311
Observa-se que a relação T0/Tmáx do modelo físico com atrito na base do
faceamento (MF01), em termos médios, variou pouco, indicando que a tensão próxima
à cabeça do grampo (T0) correspondeu a 55% da tração máxima mobilizada (Tmáx).
No experimento MF02, cuja liberdade de movimentação do faceamento
promoveu maiores cargas nos grampos e menores tensões no contato do solo com a
face em relação ao MF01, observa-se variação da relação T0/Tmáx nos estágios de
carregamento e descarregamento no primeiro ensaio de aplicação de sobrecarga. O
menor valor encontrado equivale a 0,62 e ocorreu no estágio de carregamento. A
relação observada no descarregamento aproxima-se das relações T0/Tmáx medidas no
ensaio de recarregamento. Após o pré-carregamento do modelo físico MF02 a tração
próxima à cabeça do grampo corresponde a 80% da tração máxima.
O resumo das tensões normalizadas TN0 e TNmáx verificadas no experimento
MF01 durante o carregamento virgem e recarregamento são apresentadas nas
Tabelas VI.10 e VI.11. Os resultados das tensões normalizadas TN nos estágios de
carregamento e descarregamento são apresentados em dois segmentos, com divisor
na relação h/H igual a 0,5. Devido ao salto de valor observado no intervalo de
sobrecarga entre 10 e 0 kPa, apresentam-se os valores mínimo e máximo das tensões
normalizadas para h/H superior a 0,25.
Tabela VI.10 – Sumário das tensões normalizadas T0 do experimento MF01 nos
ensaios de carregamento virgem e recarregamento.
Mín. Máx. Mín. Máx. Mín. Máx. Mín. Máx.
0,2 0,3 0,2 0,25 0,43 1,15 0,25 0,43
Mín. Máx. Mín. Máx. Mín. Máx. Mín. Máx.
0,4 1,15 0,25 0,4 0,47 1,27 0,25 0,47
h/H<0,5
h/H>0,25 h/H>0,25
Recarregamento (ensaio 2 de sobrecarga)
Carregamento Descarregamento
h/H<0,5 h/H>0,5
h/H<0,5 h/H>0,5 h/H<0,5 h/H>0,5
TNo (experimento MF01)
Carregamento virgem (ensaio 1 de sobrecarga)
Carregamento Descarregamento
Mín. Máx. Mín. Máx.
h/H>0,5
0,25 0,85
h/H>0,25 h/H>0,25
Mín. Máx. Mín. Máx.
0,25 0,75
0,22 0,25 0,25 0,75
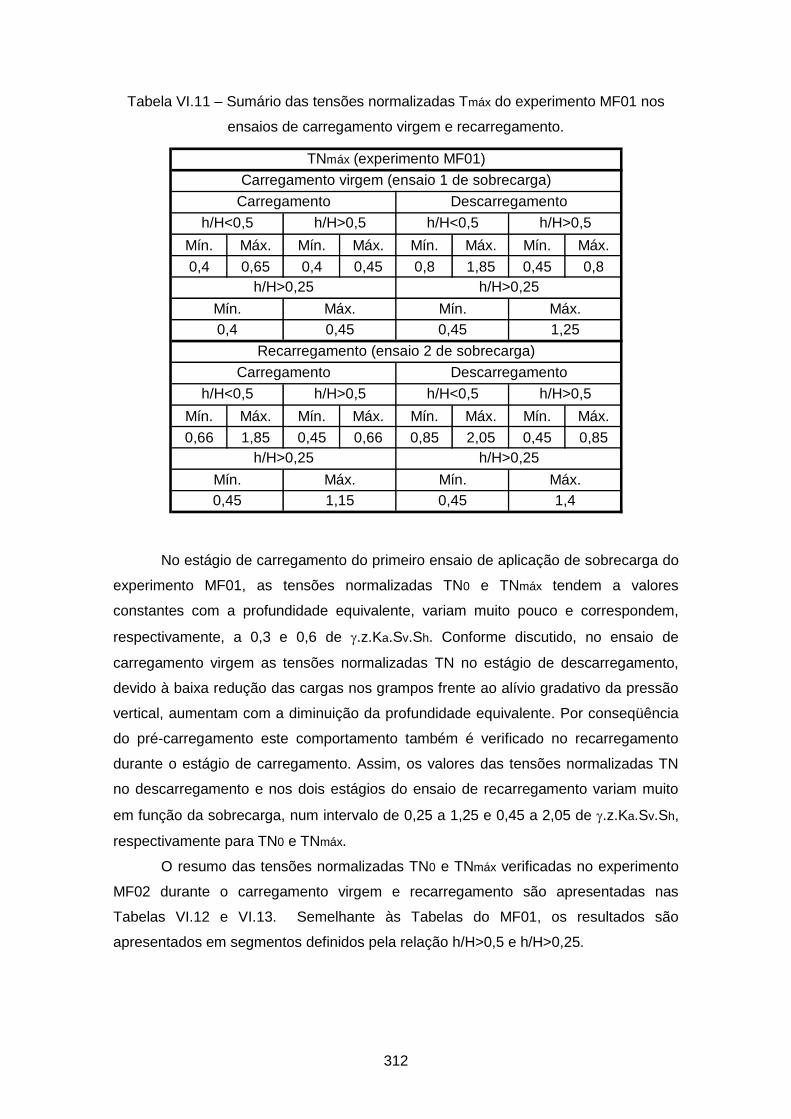
312
Tabela VI.11 – Sumário das tensões normalizadas Tmáx do experimento MF01 nos
ensaios de carregamento virgem e recarregamento.
Mín. Máx. Mín. Máx. Mín. Máx. Mín. Máx.
0,4 0,65 0,4 0,45 0,8 1,85 0,45 0,8
Mín. Máx. Mín. Máx. Mín. Máx. Mín. Máx.
0,66 1,85 0,45 0,66 0,85 2,05 0,45 0,85
Máx.
Máx.
0,45 1,15 0,45 1,4
Mín. Máx. Mín.
Carregamento Descarregamento
TNmáx (experimento MF01)
h/H>0,25 h/H>0,25
Mín.
h/H>0,5
h/H>0,25 h/H>0,25
Carregamento virgem (ensaio 1 de sobrecarga)
h/H<0,5 h/H>0,5 h/H<0,5 h/H>0,5
Mín. Máx.
Recarregamento (ensaio 2 de sobrecarga)
Carregamento Descarregamento
h/H<0,5 h/H>0,5 h/H<0,5
0,4 0,45 0,45 1,25
No estágio de carregamento do primeiro ensaio de aplicação de sobrecarga do
experimento MF01, as tensões normalizadas TN0 e TNmáx tendem a valores
constantes com a profundidade equivalente, variam muito pouco e correspondem,
respectivamente, a 0,3 e 0,6 de .z.Ka.Sv.Sh. Conforme discutido, no ensaio de
carregamento virgem as tensões normalizadas TN no estágio de descarregamento,
devido à baixa redução das cargas nos grampos frente ao alívio gradativo da pressão
vertical, aumentam com a diminuição da profundidade equivalente. Por conseqüência
do pré-carregamento este comportamento também é verificado no recarregamento
durante o estágio de carregamento. Assim, os valores das tensões normalizadas TN
no descarregamento e nos dois estágios do ensaio de recarregamento variam muito
em função da sobrecarga, num intervalo de 0,25 a 1,25 e 0,45 a 2,05 de .z.Ka.Sv.Sh,
respectivamente para TN0 e TNmáx.
O resumo das tensões normalizadas TN0 e TNmáx verificadas no experimento
MF02 durante o carregamento virgem e recarregamento são apresentadas nas
Tabelas VI.12 e VI.13. Semelhante às Tabelas do MF01, os resultados são
apresentados em segmentos definidos pela relação h/H>0,5 e h/H>0,25.
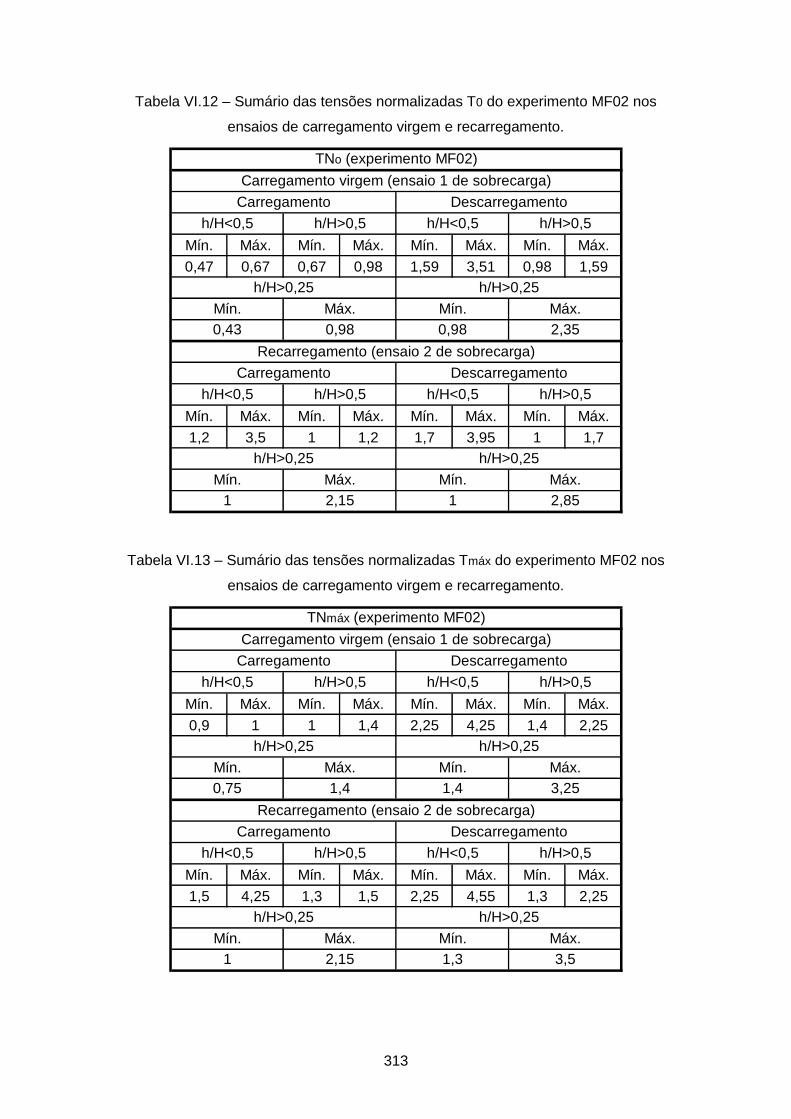
313
Tabela VI.12 – Sumário das tensões normalizadas T0 do experimento MF02 nos
ensaios de carregamento virgem e recarregamento.
Mín. Máx. Mín. Máx. Mín. Máx. Mín. Máx.
0,47 0,67 0,67 0,98 1,59 3,51 0,98 1,59
Mín. Máx. Mín. Máx. Mín. Máx. Mín. Máx.
1,2 3,5 1 1,2 1,7 3,95 1 1,7
Máx.
1 2,15 1 2,85
0,98 0,98 2,35
h/H>0,5
h/H>0,25 h/H>0,25
Mín. Máx. Mín.
0,43
Recarregamento (ensaio 2 de sobrecarga)
Carregamento Descarregamento
h/H<0,5 h/H>0,5 h/H<0,5
h/H>0,25 h/H>0,25
Mín. Máx. Mín. Máx.
h/H<0,5 h/H>0,5 h/H<0,5 h/H>0,5
TNo (experimento MF02)
Carregamento virgem (ensaio 1 de sobrecarga)
Carregamento Descarregamento
Tabela VI.13 – Sumário das tensões normalizadas Tmáx do experimento MF02 nos
ensaios de carregamento virgem e recarregamento.
Mín. Máx. Mín. Máx. Mín. Máx. Mín. Máx.
0,9 1 1 1,4 2,25 4,25 1,4 2,25
Mín. Máx. Mín. Máx. Mín. Máx. Mín. Máx.
1,5 4,25 1,3 1,5 2,25 4,55 1,3 2,25
h/H<0,5 h/H>0,5 h/H<0,5 h/H>0,5
TNmáx (experimento MF02)
Carregamento virgem (ensaio 1 de sobrecarga)
Carregamento Descarregamento
h/H>0,25 h/H>0,25
Mín. Máx. Mín. Máx.
0,75 1,4 1,4 3,25
Recarregamento (ensaio 2 de sobrecarga)
Carregamento Descarregamento
h/H<0,5 h/H>0,5 h/H<0,5 h/H>0,5
h/H>0,25 h/H>0,25
Mín. Máx. Mín. Máx.
1 2,15 1,3 3,5
314
No estágio de carregamento do primeiro ensaio de aplicação de sobrecarga do
experimento MF02 as tensões normalizadas TN foram crescentes com a profundidade
equivalente e apresentaram variação de valores significativa, num intervalo de 0,43 a
0,98 e 0,75 a 1,4 de .z.Ka.Sv.Sh, respectivamente para TN0 e TNmáx. Os valores das
tensões normalizadas TN no descarregamento e nos dois estágios do ensaio de
recarregamento, por efeito do pré-carregamento e alívio gradativo das pressões
verticais frente a pouca redução das cargas nos grampos, são elevados e variam
muito em função da sobrecarga, encontrando-se entre valores médios de 1 a 4 de
.z.Ka.Sv.Sh, respectivamente para TN0 e TNmáx.

315
CAPÍTULO VII
CONCLUSÕES
VII.1 – Estrutura de Contenção em Solo Grampeado – Obra RJ123
Uma obra real em solo grampeado com faceamento em blocos segmentais
executada em solo residual de gnaisse não saturado foi monitorada. O desempenho
dos grampos foi analisado durante a fase construtiva e em períodos seco e chuvoso.
Acompanharam-se os teores de umidades no solo e as cargas nos grampos.
Prospecções e ensaios de laboratório permitiram definir o perfil do terreno e as
propriedades dos solos.
Solos residuais não saturados podem apresentar resistências bastante
significativas, principalmente quando associados a eficientes sistemas de drenagem.
Elevadas sucções foram estimadas como atuantes no maciço com base em curvas
características determinadas utilizando a técnica do papel filtro e os teores de umidade
medidos em períodos secos e úmidos.
As mobilizações observadas nos grampos devem, em linhas gerais, estar
relacionadas às alterações nos teores de umidade do solo. Os teores de umidade
determinados correspondem a valores de sucção superiores a 700 kPa, indicando
elevada resistência do maciço reforçado. Consistentemente com os valores de sucção
estimados, as cargas axiais medidas nos grampos se apresentaram baixas, indicando
que o maciço se encontra bastante afastado da ruptura. Desta forma, os resultados
apresentados indicam uma forte influência da sucção na estabilidade da obra.
Também se observou que o processo executivo da estrutura grampeada foi
responsável por acréscimos de força de tração próximo à cabeça do grampo. Esta
concentração de esforços próxima ao faceamento tem origem nas tensões induzidas
pela compactação do reaterro executado entre a superfície escavada e a face, a partir
do primeiro nível de grampeamento.
Desconsiderando o efeito da compactação e traçando o diagrama simplificado
da distribuição de esforços axiais ao longo dos grampos sugerido por BYRNE et al.
(1998) e LAZARTE et al. (2003) verificou-se que a relação T0/Tmáx corresponde a 0,5.
Observou-se que o ponto de máxima tração nos grampos coincide com a
interseção da superfície de ruptura obtida por método convencional de análise de
316
estabilidade de talude adaptado para considerar o efeito dos elementos que compõem
o sistema de contenção.
VII.2 – Modelos Físicos de Solo Grampeado – Escala 1:1
Avaliou-se o comportamento de dois modelos físicos de solo grampeado na
escala 1:1, diferenciados pela condição de movimentação da base (com e sem atrito
na base do faceamento). As movimentações do faceamento, recalques do terrapleno,
distribuição dos esforços axiais ao longo dos grampos, tensões do solo junto à face e
pressões verticais nas zonas ativa e passiva foram monitoradas com medidores de
deslocamentos vertical e horizontal, ―strain gauges‖ e células de tensão total. O
experimento dos modelos físicos consistiu da monitoração do solo grampeado sob
condição de aplicação de sobrecargas na superfície do terrapleno, cujos estágios de
carregamento e descarregamento buscaram representar situações representativas das
oriundas da saturação do solo e de alturas superiores à caixa de ensaio. Para cada
modelo físico avaliaram-se os resultados dos dois ensaios de aplicação de sobrecarga
realizados, carregamento virgem e recarregamento.
Nos ensaios 1 de aplicação de sobrecarga (carregamento virgem) observou-se
que o processo executivo empregado na construção dos modelos físicos induziu um
estado de tensões superior aos primeiros níveis de aplicação de sobrecarga. Na
segunda aplicação de sobrecarga, as sobrecargas aplicadas anteriormente também
ocasionaram um pré-carregamento. Assim, as tensões de pré-adensamento
resultantes da construção dos modelos físicos e do primeiro ensaio de sobrecarga
definiram dois padrões de comportamento, respectivamente, no carregamento virgem
e no recarregamento.
Devido às tensões de pré-adensamento resultantes da construção do modelo
físico e do carregamento virgem, a principal diferença do comportamento entre os
ensaios 1 e 2 de aplicação de sobrecarga pode ser observada quando os resultados
são apresentados em função do logaritmo das pressões aplicadas na superfície do
terrapleno. No carregamento virgem as tensões de tração nos grampos passaram a
apresentar maiores incrementos de tração variando linearmente com o logaritmo da
sobrecarga após a tensão de pré-adensamento oriunda do processo executivo
empregado na construção do modelo físico. Já no segundo ensaio, este aumento e
variação linear dos incrementos de tração são observados nos níveis de sobrecarga
próximos ao valor do carregamento final (100 kPa). Como as pressões máximas são
317
as mesmas nos dois ensaios de aplicação de sobrecarga, as curvas de
descarregamento perfazem o mesmo caminho.
Verificou-se que superfície de ruptura, definida pela teoria de Coulomb,
intercepta os grampos em posição próxima ao ponto de força de tração máxima. A
distribuição das trações nos grampos indica que em função da relação T0/Tmáx a
posição da tração máxima é um pouco deslocada para trás na fase descarregamento.
Menor relação T0/Tmáx resultou num pequeno deslocamento do ponto de tração
máxima. Entretanto, de maneira geral, nos ensaios de carregamento virgem e
recarregamento, a localização do ponto de tração máxima coincide com a interseção
da superfície potencial de ruptura, tanto no estágio de carregamento, quanto no
descarregamento.
Em vista das maiores deformações do modelo físico MF02 promovidas pela
liberdade de movimentação da base do faceamento a força de tração máxima nos
grampos atingiu o valor de 20 kN, enquanto no modelo físico com atrito na base
(MF01) a tração máxima foi de 6 kN. Análise comparativa das trações mobilizadas nos
grampos dos experimentos, MF01 e MF02, indica que as forças transmitidas aos
grampos dependem da magnitude e tipo de movimentação do solo grampeado,
notadamente os deslocamentos do faceamento.
Verificou-se que a relação T0/Tmáx do modelo físico MF01, em termos médios,
se manteve constante e igual a 55%. No experimento MF02 a relação T0/Tmáx no
estágio de carga do carregamento virgem foi de 62%. No descarregamento e estágios
do recarregamento, a relação aumentou para 80%.
Em relação às tensões normalizadas TN, no estágio de carga do carregamento
virgem do experimento MF01 as tensões normalizadas TN0 e TNmáx tendem a valores
constantes e correspondem, respectivamente, a 0,3 e 0,6 de .z.Ka.Sv.Sh. Por outro
lado, no experimento MF02 verificou-se que as tensões TN no estágio de carga do
carregamento virgem são crescentes com a pressão vertical e apresentaram variação
significativa, num intervalo de 0,43 a 0,98 e 0,75 a 1,4 de .z.Ka.Sv.Sh,
respectivamente para TN0 e TNmáx.
No estágio de descarga do carregamento virgem e nos estágios de carga e
descarga do ensaio de recarregamento, devido à baixa redução das trações nos
grampos frente ao alívio gradativo da pressão vertical, as tensões normalizadas
variam significativamente e aumentam com a diminuição da profundidade equivalente.
No experimento MF01, as tensões normalizadas variaram num intervalo de 0,25 a 1,25
e 0,45 a 2,05 de .z.Ka.Sv.Sh, respectivamente para TN0 e TNmáx. No experimento
MF02, as tensões normalizadas são elevadas e variaram muito em função da
318
sobrecarga, encontrando-se entre valores médios de 1 a 4 de .z.Ka.Sv.Sh,
respectivamente para TN0 e TNmáx.
Como esperado, verificou-se que o fator de segurança contra o arrancamento
diminui linearmente à medida que se reduz a pressão vertical sobre o grampo. Na
condição mais crítica o fator de segurança do experimento MF01 foi superior a 2,
enquanto que no MF02 o FS aproximou-se do valor unitário. Por outro lado, à medida
que se reduz pressão vertical, o fator de segurança contra a ruptura do elemento
resistente à tração aumenta, variando de forma não linear. O FS mais crítico foi
observado no experimento MF02, cujo valor (FS=3), ainda que superior ao
recomendado, corresponde a um terço daquele encontrado na condição mais
desfavorável do experimento MF01.
No experimento MF01, devido à baixa movimentação do faceamento (h<0,75
mm), uma parcela das tensões é transmitida para a face, resultando em menores
cargas nos grampos e maiores tensões do solo junto à face. A liberdade de
movimentação do MF02 mobiliza maiores esforços axiais nos grampos e induz
menores tensões do solo junto à face.
Quando os deslocamentos da face são impedidos, as tensões do solo junto à
face são significativamente maiores na linha de blocos onde as cabeças dos grampos
são conectadas. Este aspecto pode ser observado na construção dos dois modelos
físicos, cujo sistema de escora impediu a movimentação do faceamento e resultou
num aumento pronunciado nas pressões horizontais próximas à conexão das cabeças
dos grampos na face.
As movimentações observadas na face do MF01 sugerem que o perfil de
deslocamentos horizontais pode ser representado, grosseiramente, por dois
segmentos de reta. No ponto de inflexão do perfil, decorrente da menor deformação da
linha de ancoragem das cabeças dos grampos, as tensões horizontais são maiores
que aquelas medidas nas células de tensão total instaladas acima e abaixo do nível de
instalação dos grampos. Os acréscimos de tensões horizontais crescentes com a
profundidade observadas nestes pontos são consistentes com o perfil vertical de
deslocamentos horizontais da face, cuja magnitude máxima ocorre na crista da
estrutura.
No experimento MF02, os deslocamentos crescentes com a profundidade são
consistentes com os acréscimos de tensão de contato do solo com a face, que
diminuem com a profundidade. As menores tensões horizontais e a maior
movimentação verificada na base do modelo físico MF02 atestam a eficiência do
sistema de lubrificação utilizado para assentar a base do faceamento.
319
Análises comparativas dos experimentos MF01 e MF02 demonstram que a
imobilidade do faceamento resulta em estado de tensão tendendo para o estado ativo
(Ka) e quando há liberdade de movimentação, as cargas mobilizadas nos grampos
superam a condição de repouso (K0).
Nos experimentos os deslocamentos internos do ponto próximo ao tardoz
apresentaram boa correspondência com a medição dos deslocamentos horizontais
realizados na face e indicaram, como esperado, maiores movimentações na zona
ativa, cuja deformação diminui com a distância em relação à face.
A evolução dos deslocamentos verticais do terrapleno indica que além da zona
potencialmente instável entre a superfície de ruptura e o faceamento, ocorre outra
zona ativa após o final do comprimento do grampo, na qual, também, se observam
recalques. No experimento MF01 observa-se que entre as zonas ativas a massa de
solo reforçado se expande. A expansão da superfície do terreno na zona passiva é
associada à movimentação das zonas ativas, caracterizada por recalques de até 8,84
mm, e à quase imobilidade do faceamento, cuja deformação se apresentou muito
baixa (hmáx=0,75 mm). Se o sistema de contenção permitir movimentos horizontais da
face, menores poderão ser os recalques e, conseqüentemente, haverá menor
tendência de expansão da região situada entre as duas zonas de movimentação.
Consistentemente, no experimento MF02 nesta região intermediária, praticamente,
não houve uma expansão da superfície do terrapleno, pois os recalques foram
compensados pela movimentação da face dez vezes maiores que do modelo MF01.
Em comum aos dois modelos físicos, o ponto de deslocamento vertical nulo encontra-
se próximo à interseção da superfície de ruptura com o terrapleno.
No experimento MF01 os deslocamentos horizontais foram extremamente
baixos, da ordem de 0,15H / 1000 e os recalques do terrapleno variaram entre H /
1000 e 2H / 1000. Já no MF02 os deslocamentos horizontais encontram-se próximos
da relação 0,4H / 1000 e os recalques do terrapleno variaram entre H / 1000 e 2H /
1000.
Verificou-se que as pressões verticais aproximaram-se dos valores obtidos no
produto do peso específico pela profundidade equivalente do solo. Entretanto, devido
à movimentação da zona potencialmente instável, as pressões medidas na célula de
pressão total instalada nesta região apresentaram-se maiores que as pressões zona
passiva e a teórica (z).
320
VII.3 – Sugestões para Futuras Pesquisas
Construir e monitorar mais modelos físicos de solo grampeado na escala 1:1,
aproveitando e aperfeiçoando a metodologia, estrutura, instrumentos, equipamentos
existentes, buscando novas condições de contorno e solicitações.
Construir uma estrutura de solo grampeado em escala real, objetivando
monitorar carregamentos e descarregamentos mobilizados nos grampos, por efeito da
sucção, variando-se o teor de umidade no solo através da saturação do terrapleno,
independente de períodos seco e chuvoso. De forma análoga ao experimento número
1 do projeto CLOUTERRE (1991), pode-se criar um artifício para garantir presença de
lâmina d’água sobre a superfície do terrapleno, entretanto sem levar a estrutura de
contenção ao colapso, até que se tenha variado a sucção o suficiente para realizar
análises.
Nos programas de instrumentação e monitoração deve-se procurar quantidade
e tipo de instrumentos que permitam observar o máximo de informações possíveis,
tais como, deformações, pressões no solo, distribuição de tensões nos grampos. Em
particular, na instrumentação de campo deve-se prever a instalação de tensiômetros.
Prospecções e ensaios geotécnicos complementarão as atividades de pesquisa.
Análises comparativas dos resultados da campanha de monitoração com
modelagens numéricas, previsões teóricas e métodos de cálculo proporcionarão um
melhor entendimento do comportamento.
321
REFERÊNCIAS BIBLIOGRÁFICAS
ABRAMENTO, A., KOSHIMA, A., ZIRLIS, A.C., 1998, ‖Reforço do Terreno‖. In:
HACHICH, W., FALCONI, F. F, SAES, L.J., FROTA, R.G.Q., CARVALHO, C.S.,
NIYAMA, S. (eds), Fundações Teoria e Prática, ABMS/ABEF, 2 ed, cap.08, São Paulo,
SP, Editora Pini, pp. 641-690.
ALONSO, U. R., 2005, ―Recuperação com solo grampeado de um escorregamento
plano superficial em talude íngreme de aterro.‖ In: Anais IV Conferência Brasileira
sobre Estabilidade de Encostas (COBRAE), v. 2, pp. 665-669, Salvador, Setembro.
ALONSO, U. R., FALCONI, F. F., 2003, ―Solo grampeado sem concreto projetado.
Proposição para estabilização de taludes rodoviários‖. In: Anais do Workshop sobre
Solo Grampeado – Projeto, Execução, Instrumentação e Comportamento, ABMS, pp.
175-178, São Paulo, Outubro.
ANTHONIE, A., 1987, ―Stabilité d’une fouille renforcée par clouage.‖ In: Proc. 4 th
Franco Polish Conference. Stalility of na excavation stabilized by nailing.
ASSOCIAÇÃO BRASILEIRA DE NORMAS TÉCNICAS (ABNT).
NBR 11682, 2009 - ―Estabilidade de Encostas‖.
AZAMBUJA, E., STRAUSS, M., SILVEIRA, F. G., 2001, ―Caso histórico de um sistema
de contenção em solo grampeado em Porto Alegre, RS‖. In: Anais da III Conferência
Brasileira sobre Estabilidade de Encostas (COBRAE), v. único, pp. 435-443, Rio de
Janeiro, Novembro.
AZAMBUJA, E., STRAUSS, M., SILVEIRA, F. G., 2003, ―Sistemas de contenção em
solo grampeado na cidade de Porto Alegre, RS‖. In: Anais do Workshop sobre Solo
Grampeado – Projeto, Execução, Instrumentação e Comportamento, ABMS, pp. 21-
34, São Paulo, Outubro.
BARBOZA JÚNIOR, J. C., 2003, Estudo Através de Modelos Físicos da Influência da
Face e da Compactação em Muros de Solo Reforçado. Dissertação* de M.Sc.,
COPPE/UFRJ, Rio de Janeiro, RJ, Brasil.
322
BASSETT, R. H., LAST, H. C., 1978, ―Reinforced Earth below footings and
embankments‖. In: Proc. ASCE Symp: Earth Reinforcement, pp. 221-222, Pittsburgh,
Pennsylvania, April.
BRIAUD, J. L.; LIM, Y., 1997,‖Soil – nailed wall under piled bridge abutment: simulation
and guidelines‖, Journal of Geotechnical and Geoenvironmental Engineering, v. 123,
n. 11, pp. 1043 -1050.
BRIDLE, R.J., 1989, ―Soil nailing – analysis and design.‖ Ground Engineering, , pp: 52-
56, September.
BURLAND, J. B., WROTH, C. P., 1974, ―Allowable and differential settlements of
structures including drainage and soil-structure interaction.‖ In: Proc. Conf. on
Settlement of Structures, pp. 611-764, Pentech Press, London.
BUSTAMANTE, M., DOIX, B., 1985, ―Une Méthode Pour le Calcul des Tirants et des
Micropieux Injectées‖, Bulletin de Liaison des Laboratoire des Ponts et Chaussées, n.
140 (Nov/Dec), pp. 75-92, Paris.
BYRNE, R. J., COTTON, D., PORTERFIELD, J., WOLSCHLAG, C., UEBLACKER, G.,
1998, Manual for Design and Construction Monitoring of Soil Nail Walls. In: Report
FHWA-SA-96-069R, U.S. Department of Transportation, Federal Highway
Administration, Washington, October.
CAMARGO, V. E. L. B., 2005, Comparação de métodos de análise de estruturas de
solo grampeado. Tese* de D.Sc., Escola Politécnica da USP, São Paulo, SP, Brasil.
CARTIER, G., GIGAN, J. P., 1983, ―Experiments and observations on soil nailing
structures‖. In: Proceedings of the 8th European Conference on Soil Mechanics 220
and Foundation Engineering (ECSMFE), v. 2, Helsinki, Finland, May. Edited by H.G.
Rathmayer, K.H.O. Saari, A. A. Balkema, Rotterdam, The Netherlands, pp. 473-476.
CHANDLER, R. J., CRILLY, M. S., MONTGOMERY-SMITH, G., 1992, ―A Low-Cost
Method of Assessing Clay Desiccation for Low-Rise-Buildings‖, Proceeding of the
Institute of Civil Engineering, n. 2, pp. 82-89.
323
CLOUTERRE, 1991, Recomendations Clouterre – Soil Nailing Recommendations for
Designing, Calculating, Constructing and Inspecting Earth Support Systems Using Soil
Nailing (English Translation), Scientific Committee of the French National Project
Clouterre, ENPC, Paris, France. In: Report FHWA-SA-93-026, U.S. Department of
Transportation, Federal Highway Administration, Washington, DC, USA, July. Edited by
F. Schlosser.
COSTA, R. S., 2005, Um Novo Equipamento Triaxial para Ensaios de Solos na
Condição de Deformação Plana, Dissertação* de M.Sc, COPPE/UFRJ, Rio de Janeiro,
RJ, Brasil.
COSTA, R. S., 2008, Procedimento de Montagem e Ensaios de Modelos Físicos em
Solo Reforçado na Escala 1:1, Elaboração de Pesquisa de Doutorado, COPPE/UFRJ,
Rio de Janeiro, RJ, Brasil (em andamento).
DANTAS, B. T., EHRLICH, M., 2000, ―Discussion on paper, Limit Equilibrium as Basis
for Design of Geosynthetic‖. JGD, ASCE, v. 126, n. 3, pp.283-285.
DANTAS, M. E., 2000, ―Programa de informações para gestão territorial - Mapa
Geomorfológico – SF.23-Z-B-Folha Rio de Janeiro‖, Ministério de Minas e Energia,
Secretaria de Minas e Metalúrgica, CPRM - Serviço Geológico do Brasil, Escala 1 :
500.000. Rio de Janeiro, RJ.
DA SILVA, J.C., 1999, Análise Numérica de Estruturas Grampeadas, Dissertação* de
M.Sc., DEC/PUC, Rio de Janeiro, RJ, Brasil.
DIAS, P. H. V., 1992, ―Solo pregado – procedimento sugestão de norma‖, In: Anais I
Conferência Brasileira sobre Estabilidade de Encostas (COBRAE), ABMS, v. 1, pp. 75-
80, Rio de Janeiro, Novembro.
DIAS, P. H. V., SAYÃO, A. S. F. J., SPRINGER, F. O., 2006, "Estabilização de taludes:
tirantes ou grampos?". In: Anais do XIII Congresso Brasileiro de Mecânica dos Solos e
Engenharia Geotécnica (COBRAMSEG), IV Simpósio Brasileiro de Mecânica das
Rochas (SBMR), III Congresso Luso-Brasileiro de Geotecnia (CLBG), v. CD Rom,
Curitiba, Agosto.

324
DNIT – Departamento Nacional de Infra – Estrutura de Transportes. Gerência de
Projetos: Mapa Rodoviário do Rio de Janeiro, Rede Rodoviária do PNV – Divisão em
trechos 2001. Disponível em:
<http://1dnit.gov.br>. Acesso em: 25 de abril, 10:25:10
DUNCAN, J.M., SEED, R.B., ―Compaction-induced earth pressures under
ko-conditions‖, Journal of Geotechnical Engineering, ASCE, v. 112, n. 1, pp. 1-22,
Virginia, EUA.
DURAND, R. D. F., 2008, Análise Tridimensional de Estruturas Geotécnicas
Submetidas a Reforço e Drenagem. Tese* de D.Sc., Departamento de Engenharia
Civil e Ambiental, Universidade de Brasília, Brasília, DF, Brasil.
DYER, N.R., MILLIGAN, G.W.E., 1984, ―A photoelastic investigation of the interaction
of a cohesionaless soil with reinforcement placed at different orientations‖. Anais: Proc.
Int. Conf. On In Situ Soil and Rock Reinforcement, pp. 257-262.
DYMINSKY, A.S., Análise de estabilidade e desempenho de taludes com inclusões
passivas. Dissertação* de M.Sc, DEC/PUC, Rio de Janeiro, RJ, Brasil.
EHRLICH, M., 1979, ―Sobre um novo medidor de deslocamentos verticais‖, Revista
Solos e Rochas, ABMS, v. 1, n. 3 (Mar), pp. 41-52.
EHRLICH, M., 2003, ―Solos grampeados – comportamento e procedimentos de
análise‖. In: Anais do Workshop sobre Solo Grampeado – Projeto, Execução,
Instrumentação e Comportamento, pp. 127-137, São Paulo, Outubro.
EHRLICH, M., ALMEIDA, M.S.S. & LIMA, A. M. L., 1996, ―Parametric Numerical
Analysis of Soil Nailing System‖, In: 2nd International Conference on Soil
Reinforcement, pp. 747-752, Fukuoka, Japão, November.
EHRLICH, M., MITCHELL, J. K., 1994, ―Working Stress Design Method for Reinforced
Soil Walls‖, Journal of Geotechnical Engeneering, v. 120, n. 4 (April), pp. 625-645.
EHRLICH, M. & SILVA, L. F. M., 1992, "Sistemas de Contenção de Solos Reforçados",
In: Anais I Conferência. Brasileira sobre Estabilidade de Encostas (COBRAE), ABMS,
vol. 1, pp. 35-45, Rio de Janeiro, Novembro.

325
ELIAS, V., JURAN, I., 1989, Manual of Practice for Soil Nailing. In: U.S Department of
Transportation, Federal Highway Administration, FHWA – RD89.
FALCONI, F. F., ALONSO, V. R., 1996, ―Considerações sobre o dimensionamento de
uma estrutura de contenção em solo grampeado‖. In: Anais do 3° Simpósio de
Engenharia de Fundações Especiais e Geotecnia, pp. 301-308, São Paulo, Novembro.
FEIJÓ, R. L., 2007, Monitoração de uma Escavação Experimental Grampeada em
Solo Residual Gnáissico Não Saturado, Tese* de D.Sc., COPPE/UFRJ, Rio de
Janeiro, RJ, Brasil.
FEIJÓ, R. L., EHRLICH, M., 2001, ―Resultados de ensaios de arrancamento em
grampos injetados em dois pontos do município do Rio de Janeiro‖. In: Anais da III
Conferência Brasileira sobre Estabilidade de Encostas (COBRAE), v. único, pp. 517-
524, Rio de Janeiro, Novembro.
FEIJÓ, R. L., EHRLICH, M., 2003, ―Nail pullout tests in residual soils in Rio de Janeiro
– Brazil‖. In: Proceedings of the XII Panamerican Conference of Soil Mechanics and
Geotechnical Engineering (PCSMGE), v. 2, pp. 2133-2138, Boston, June.
FEIJÓ, R. L., EHRLICH, M., 2005, ―Resultados do monitoramento de uma obra
experimental em solo grampeado‖. In: Anais da IV Conferência Brasileira sobre
Estabilidade de Encostas (COBRAE), v. 2, pp. 633-642, Salvador, Setembro.
FRANK, R., ZHAO, S. R., 1982, Estimation par les Paramètres Pressiométriques de
l’Enfoncement Sous Charge Axiale de Pieux Forés dans des Sols Fins. Bulletin de
Liaison des Laboratoire des Ponts et Chaussées, n. 119, pp. 17-24, Paris.
FRANÇA, F. A. N., 2007, Ensaios de arrancamento em solo grampeado executados
em laboratório. Dissertação* de M.Sc., Escola de Engenharia de São Carlos,
Universidade de São Paulo, São Carlos, SP, Brasil.
FRANZÉN, G., 1998, Soil Nailing – A Laboratory and Field Study of Pull-Out Capacity,
Ph.D. thesis, Department of Geotechnical Engineering, Chalmers University of
Technology, Göteborg, Sweden.
326
GÄSSLER, G., 1993, The first two field tests in the history of soil nailing on nailed walls
pushed to failure. Civil Engineering European Courses, Renforcement des sols:
experiméntations en vraie des annés 80, Paris, France, pp. 7-34.
GASSLER, G., GUDEHUS, G., 1981, "Soil Nailing — Some Aspects of a New
Technique", In: Anais 10 th International Conference on Soil Mechanics and
Foundation Engineering - ISSMFE, V. 3, Session 12, pp. 665-670,Stockholm.
GASSLER, G., GUDEHUS, G., 1983, ―Soil Nailing. Statitiscal Design.‖ In: Proc. 8 th
ECSMFE, pp. 401-494, Helsinki.
GOOGLE. Google Earth, Version 4.0.1693 (beta). 2007. USA. Acesso em 11 de
agosto de 2007.
GOMES, R. C., AZAMBUJA, E., ERLICH, M., SAYÃO, A. S. F. J., 2004, ―Manual
Brasileiro de Geossintéticos‖. Aplicações em reforço de solos – Muros e Taludes
Reforçados, 1 ed, cap. 4-5, São Paulo, SP, Editora Edgard Blücher .
GOMES SILVA, A. M. B., 2006, Condicionantes Geológico-Geotécnicos de Escavação
grampeada em Solo Residual de Gnaisse. Dissertação* de M.Sc., COPPE/UFRJ,Rio
de Janeiro, RJ, Brasil.
GEORIO, 2000, ―Ancoragens e Grampos‖. In: Ortigão, J.A.R., Sayão, A.S.F.J.
(editores), Manual Técnico de Encostas, 2 ed, v. 4, Rio de Janeiro, Fundação Instituto
de Geotécnica do Município do Rio de Janeiro – GeoRio.
GRUPO DE PESQUISA EM RECURSOS HÍDRICOS (GPRH), 2006, Chuvas Intensas
para o Brasil. DEA UFV, Pluvio version 2.1. Disponível em:
<http://www.ufv.br/dea/gprh/softwares.htm>. Acesso em: abril de 2010.
GUEDES, V. C. P., 2004, Estudo da Compactação, do tipo de Inclinação da Face no
Comportamento de Muros de Solo Reforçado. Dissertação* de M.Sc., COPPE/UFRJ,
Rio de Janeiro, RJ, Brasil.
GUIDICINI, G., NIEBLE, C.M., 1983, Estabilidade de taludes naturais e de escavação.
2 ed., São Paulo, SP, Editora Edgard Blücher Ltda,.
327
GUILLOUX, A., JAILLOUX, J. M., 1979, ‖Comportement d’un mur experimental em
terre armee vis-a-vis de la corrosion.‖ In: Proc.International Conference on Soil
Reinforced Earth and Other Techniques, v. 2, pp. 503-508, Paris.
GUILLOUX, A., SCHOLOSSER, F., 1982, ―Soil nailing: practical aplications.‖ In: Proc.
Of Symposium on soil and rock improvement techniques, including geotextiles,
Reinforced Earth and modern piling methods, Bangkok, November-December.
GUIMARÃES, G. V. M, 2007, A utilização do Ensaio de Dilatômetro para o
Dimensionamento de Estacas Rígidas Carregadas Transversalmente. Dissertação* de
M.Sc., COPPE/UFRJ, Rio de Janeiro, RJ, Brasil.
HENRIQUES JUNIOR, P. R. D., 2007, Simulação Numérica de Ensaios de
Arrancamento de Grampos. Dissertação* de M.Sc., COPPE/UFRJ, Rio de Janeiro, RJ,
Brasil.
IBGE, 1979, Carta Geográfica da Região Sudeste do Brasil, Folha de Itaipava / RJ.
Instituto Brasileiro de Geografia e Estatística.
JEWELL, R.A., 1980, Some Effects of Reinforcement on the Mechanical Behavior of
Soils, Doctor of Philosophy Thesis, Cambridge University.
JEWELL, R. A., PAINE, N., WOODS, R. I., 1984, ―Design methods for steep reinforced
embankments.‖ In: Anais Proc. of the International Conference on Polymer Grid
Reinforcement in Civil Engineering, pp. 70-81, Londres.
JURAN, I., BAUDRAND, G., FARRAG, K., ELIAS, V., 1988, ―Kinematical limit analysis
approach for the design of nailed soil retaining structures.‖ In: Geotechnical
Symposium on Theory and Practice of Earth Reinforcement, pp. 301-306, Fukuoka,
Japão,
JURAN, I., BAUDRAND, G., FARRAG, K., ELIAS, V., 1990, ―Kinematical Limit Analysis
for Design of Soil-Nailed Structures.‖. Journal of Geotechnical, v. 116 n. 01(Jan), pp.
54-72.

328
JURAN, I., BAUDRAND, G., FARRAG, K., ELIAS, V., 1990, ―Design of soil nailed
retaining structures‖. In: Proceedings of the Conference on Design and Performance of
Earth Retaining Structures, Cornell University, Ithaca, EUA, June. Edited by P. Lambe,
L.A. Hansen, Geotechnical Special, pp. 644-659.
JURAN, I., ELIAS, V. 1991, "Ground Anchors and Soil Nails in Retaining Structures‖.
In: FANG, H. Y. (ed), Foundation Engineering Handbook, 2nd Ed, cap.26, New York,
NY, Van Nostrand Reinhold, pp. 868-905.
JURAN, I., ELIAS, V., 1987, ―Soil Nailed Retaining Structures: Analysis of Case:
Histories", Soil Improvement, ASCE Geotechnical Special Publication, NQ 12, ASCE,
New York, N.Y, pp. 232-244.
JURAN, I., SHAFFIE, S., SCHOLOSSER, F., 1985, ―Les soutènements par clouage –
Étude sur modèles numériques.‖ In: Proc: 11th International Conference on Soil
Mechanics and Foundation Engineering, Support by nailing – study of numerical
models, pp. 1713-1716, San Francisco, USA..
KRANZ, E., 1953, Uber Verankerung von Spundwanden. Verlag von Wilhelm Ernst &
Sohn, Berlin.
LAZARTE, C. A., ELIAS, V., ESPINOZA, R. D., SABATINI, P. J., 2003, Soil nail walls.
In: Report FHWA0-IF-03-017, Geotechnical Engineering Circular, n. 7, U.S.
Department of Transportation, Federal Highway Administration, Washington, DC, USA,
March.
LEITE, R. A., 2007, Mobilização de Resistência ao Arrancamento de Grampos com
Fibras de Polipropileno. Dissertação* de M.Sc., COPPE/UFRJ, Rio de Janeiro, RJ,
Brasil.
LIMA, A. M. L., 1996, Análise Numérica do Comportamento de Solos Grampeados,
Dissertação* de M.Sc., COPPE/UFRJ, Rio de Janeiro, RJ, Brasil.
LIMA, A. P., 2002, Deformabilidade e Estabilidade de Taludes em Solo Grampeado,
Dissertação* de D.Sc., DEC/PUC-Rio, Rio de Janeiro, RJ, Brasil.
329
LIMA, A. P., 2007, Comportamento de uma Escavação Grampeada em Solo Residual
de Gnaisse, Tese* de D.Sc., DEC/PUC-Rio, Rio de Janeiro, RJ, Brasil.
LIMA, A. P.; GERSCOVICH, D. M. S. E SAYÃO, A. S. F. J., 2002, Modelagem
numérica de escavações grampeadas. In: I Congresso Luso-Brasileiro de Geotecnia (I
CLBG), São Paulo. v. único, pp. 447-457.
MAGALHÃES, M. A., 2005, Resistência ao Arrancamento de Grampos com Fibras de
Polipropileno. Dissertação* de M.Sc., COPPE/UFRJ, Rio de Janeiro, RJ, Brasil.
MARINHO, F. A. M., 1994, ―Medição de sucção com o método do papel filtro.‖ In: X
Congresso Brasileiro de Mecânica dos Solos e Engenharia de Fundações, v. 2, pp.
515-522, Foz do Iguaçu, Novembro.
MARINHO, F. A. M., ANDRADE, M. C. J., JUCÁ, J. F. T., 2001, ―Air and Water
Permeability of a Compacted Soil Used in a Solid Waste Landfill in Recife, Brazil‖. In:
3rd BGA Conference Geoenvironmental Engineering, Edinburg, Scotland., pp. 437-
442.
MITCHELL, J. K., VILLET, W. C. B., 1987, Reinforcement of Earth Slopes and
Embankments. In: Report NCHRP 290, U.S.A. Transportation Research Board,
National Research Council, Washington, DC, USA, June.
MONTEZUMA, P.R.M., 1998, Solo Pregado (Soil Nailing): Análise da técnica para
reforços de solos. Dissertação* de M.Sc., Escola Politécnica da USP, São Paulo, SP,
Brasil.
MORAES JUNIOR, L. J., ARDUINO, E. G. A., 2003, ―Estabilização de taludes por solo
grampeado em Manaus – AM‖. In: Anais do Workshop sobre Solo Grampeado –
Projeto, Execução, Instrumentação e Comportamento, ABMS, pp. 121-125, São Paulo,
Outubro.
NAJAR JIMÉNEZ, A.G., 2008, Análises tensão-deformação de estruturas de solo
grampeado. Dissertação* de M.Sc., Departamento de Engenharia de Estruturas e
Geotécnica, Escola Politécnica da Universidade de São Paulo, São Paulo, SP, Brasil.
330
OLIVEIRA, G. A., 2006, Verificação da Influência da Rigidez do Reforço em Muros de
Solo Reforçado Através de Modelos Físicos. Dissertação* de M.Sc., COPPE/UFRJ,
Rio de Janeiro, RJ, Brasil.
ORTIGÃO, J. A. R., 1997, ―Ensaios de Arrancamento para Projetos de Solo
Grampeado‖, Nota Técnica, Revista Solos e Rochas, ABMS, v. 20, n. 1 (Abr), pp. 39-
43.
ORTIGÃO, J. A. R., D’ÁVILA, C. J. R., SILVA, S. P., MAIA, H. S., 1992, ―Solo
grampeado no morro da formiga, RJ‖. In: Anais da I Conferência Brasileira sobre
Estabilidade de Encostas (COBRAE), v. 1, pp. 47-56, Rio de Janeiro, Novembro.
ORTIGÃO, J. A. R. & PALMEIRA, E. M., 1992, ―Solo Grampeado: técnica para
estabilização de encostas e escavações‖, In: Anais da I Conferência Brasileira sobre
Estabilidade de Encostas (COBRAE), ABMS, vol. 1, pp. 57-74, Rio de Janeiro,
Novembro.
ORTIGÃO, J. A. R., PALMEIRA, E. M., 1997, ―Optimised design for soil nailed walls‖.
In: Proceedings of the 3rd International Conference on Ground Improvement
Geosystems (GIGS), London, UK, June. Edited by M.C.R. Davies, F. Schlosser,
Ground Improvement Geosystems, Thomas Telford, London, pp. 368-374.
ORTIGÃO, J.A.R., ZIRLIS, A. & PALMEIRA, E. M., 1993, ―Experiência com solo
grampeado no Brasil - 1970-1993‖. Revista Solos e Rochas, ABMS, v. 16, n. 4, pp.
291-304, Dezembro.
PINTO, C. P., SILVEIRA, J., 2001, ―Projeto e execução de contenções na Linha
Amarela – RJ‖. In: Anais da III Conferência Brasileira sobre Estabilidade de Encostas
(COBRAE), v. único, pp. 531-538, Rio de Janeiro, Novembro.
PITTA, C. A., SOUZA, G. J. T., ZIRLIS, A. C., 2003, ―Solo grampeado: alguns detalhes
executivos – Ensaios – Casos de obras‖. In: Anais do Workshop sobre Solo
Grampeado – Projeto, Execução, Instrumentação e Comportamento, ABMS, pp. 1-20,
São Paulo, Outubro.
PLUMELLE, C., 1979, Étude Expérimentale du Comportement des Tirants d´Ancrage,
Thèse de doctorat (Ph.D.), Université Pierre et Marie Curie, Paris, France.
331
PLUMELLE, C. (1986), "Full Scale Experimental Nailed Soil Retaining Structures",
Revue Française de Geotechnique, n. 40, pp. 45 - 50.
PLUMELLE, C., SCHLOSSER, F., DELAGE, P., KNOCHENMUS, G., 1990, ―French
national research project on soil nailing: Clouterre‖. In: Proceedings of the Conference
on Design and Performance of Earth Retaining Structures, Cornell University, Ithaca,
NY, June. Edited by P. Lambe, L.A. Hansen, Geotechnical Special Publication n. 25,
Geotechnical Engineering Division of the ASCE, New York, EUA, pp. 660-675.
PROTO SILVA, T., 2005, Resistência ao Arrancamento de Grampos em Solo Residual
de Gnaisse, Dissertação* de M.Sc., DEC/PUC-Rio, Rio de Janeiro, RJ, Brasil.
PROTO SILVA, T., SAYÃO, A. S. F. J., NUNES, A. L. L. S., DIAS, P. H. V. D., 2006,
―Avaliação semi-empírica da resistência ao arrancamento de grampos‖. In: Anais do
XIII Congresso Brasileiro de Mecânica dos Solos e Engenharia Geotécnica
(COBRAMSEG), IV Simpósio Brasileiro de Mecânica das Rochas (SBMR), III
Congresso Luso-Brasileiro de Geotecnia (CLBG), v. CD-ROM, Curitiba, Agosto.
RABCEWICS, L. V., 1964, ―The New Austrian Tunnelling Method‖, Parte 1 a 3, Water
Power, Londres, dezembro.
RANZINI, S.M.T, NEGRO JR., A., 1998, ‖Obras de Contenção: tipos, métodos
construtivos, dificuldades executivas‖, In: Fundações: Teoria e Prática, ABMS / ABEF,
2 ed, Editora PINI, pp. 497-515.
RICCIO FILHO, M. V., 2007, Comportamento de um Muro de Solo Reforçado com
Solos Finos Tropicais, Tese* de D.Sc., COPPE/UFRJ, Rio de Janeiro, RJ, Brasil.
SALCEDO, D. A., 1997, ―Estruturas de Contention como Técnica de Estabilizacion.
Earth Retention Structures as a Stabilization Technique‖. In: II Pan-Am. Sym.
Landslides e II Conferência Brasileira sobre Estabilidade de Encostas (COBRAE), v. 2,
pp. 165-249, Rio de Janeiro, Novembro.
SANDRONI, S. S.; da SILVA, S. R. B., 2005, ―Projeto de Contenção de Taludes – Um
Ponto de Vista‖. In: Anais da IV Conferência Brasileira sobre Estabilidade de Encostas
(COBRAE), Salvador, BA, Setembro, 28 p.
332
SANTOS, G. B., GERSCOVICH, D. M. S., 2009, ―Influência das condições de contorno
na simulação numérica de escavação reforçada com grampos‖. In: V Conferência
Brasileira sobre Estabilidade de Encostas (COBRAE), v. 1, pp. 133-140, São Paulo,
SP, Novembro.
SARAMAGO, R. P., 2002, Estudo da Influência da Compactação no Comportamento
de Muros de Solo Reforçado com a Utilização de Modelos Físicos, Tese* de D.Sc.,
COPPE/UFRJ, Rio de Janeiro, RJ, Brasil.
SARAMAGO, R. P., MENDONÇA, M. B., BRUGGER, P. J., FERREIRA JR., J. A.,
2005, ―Muro de solo grampeado com face em blocos pré-moldados‖, In: IV
Conferência Brasileira sobre Estabilidade de Encostas (COBRAE), ABMS, v. 2, pp.
827-833, Salvador, Setembro.
SCHAEFER, R. V., 1997, ―Soil Nailed Retainning Structures‖. Geotechnical Special
Publication ASCE, Ground Improvement, Ground Reinforcement , Ground Treatment
Developments‖. , n. 69, pp. 201-233.
SCHLOSSER, F., 1982, ―Behavior and design of soil nailing‖. In: Proceedings of the
International Conference on Recent Developments in Ground Improvement
Techniques, pp. 399-413, Bangkok, Thailand.
SCHLOSSER, F., 1983, ―Analogies et différences dans le comportement et le calcul
dês ouvrages de soutènement en terre armée et par le clouage des sols‖. Annales de
l’Institut Technique du Bâtiment et des Travaux Publics, n. 418, Paris.
SCHLOSSER, F., ELIAS, V., 1978, ―Friction in reinforced earth‖. In: Proceedings of the
Symposium Earth Reinforcement, ASCE, pp. 735-763, Pittsburgh, Pennsylvania, April.
SCHLOSSER, F., UNTERREINER, P., 1990, ―Soil nailing in France – research and
practice‖. In: Proceedings of the 1st International Seminar on Soil Mechanics and
Foundation Engineering of Iran, Iranian Geotechnical Society, v. 2, pp. 436-468, Iran.
SHAFIEE, S., 1986, Simulation numérique du comportement des sols cloués.
Interaction sol renforcement et comportement de l'ouvrage, Thèse* D.Sc., l'Ecole
Nationale des Ponts et Chaussées, Paris.

333
SHEN, C. K., HERRMAN, L. R., BANG, S., 1981, ―Ground Movement Analysis of Earth
Support System‖, Journal of the Geotechnical Engineering Division, ASCE, v. 107, n.
12 (Dec), pp. 1609-1624.
SILVA, A. E. F., VIDAL, D.,1999, ‖Estruturas em solo reforçado e os métodos de
dimensionamento por equilíbrio limite. In: Simpósio Brasileiro sobre Aplicações de
Geossintéticos, ABMS, v. 3, pp. 139-147, Rio de Janeiro.
SILVA, D. D., VALVERDE, A. E. L., PRUSKI, F. F., GONÇALVES, R. A. B., 1999,
―Estimativa e espacialização dos parâmetros da equação de intensidade, duração e
frequência da precipitação para o Estado de São Paulo.‖ Revista Engenharia na
Agricultura, v. 7, n. 2, pp. 70 -87.
SILVA, D. P., BUENO, B.S., 2009, ―Avaliação de Diferentes Metodologias Executivas
de Chumbador a partir de Ensaios de Arrancamento em Campo.‖ In V Conferência
Brasileira sobre Estabilidade de Encosta (COBRAE), v. 1, pp. 291-300, São Paulo,
Novembro.
SILVA, R. C., EHRLICH, M., 2010, ―Monitoração de Estrutura de Contenção em Solo
Grampeado com Faceamento em Blocos Segmentais‖. In: Anais do XV Congresso
Brasileiro de Mecânica dos Solos e Engenharia Geotécnica (COBRAMSEG), V
Congresso Luso-Brasileiro de Geotecnia (LUSOBRASILEIRO), v. CD-ROM, Gramado,
RS, Agosto.
SOARES, J. E. S., GOMES, R. C., 2003, ―Um caso de solo grampeado na encosta da
BR-101 em Angra dos Reis, RJ‖. In: Anais do Workshop sobre Solo Grampeado –
Projeto, Execução, Instrumentação e Comportamento, ABMS, pp. 49-56, São Paulo,
Outubro.
SOUZA, G. J. T., PITTA, C. A., ZIRLIS, A. C., 2005, ―Solo grampeado – aspectos
executivos do chumbador‖. In: Anais da IV Conferência Brasileira sobre Estabilidade
de Encostas (COBRAE), v. 2, pp. 835-844, Salvador, Setembro.
SPRINGER, F. O., 2001, Estudos de deformabilidade de escavações com solo
grampeado, Dissertação* M.Sc., DEC/PUC-Rio, Rio de Janeiro, RJ, Brasil.
334
SPRINGER, F. O., 2006, Ensaios de Arrancamento de Grampos em Solo Residual de
Gnaisse, Tese* de D.Sc., DEC/PUC-Rio, Rio de Janeiro, RJ, Brasil.
SPRINGER, F. O.; GERCOVICH, D. M. S; SAYÃO, A. S.F.J, 2001, ―Deformabilidade
de Taludes Estabilizados com Solo Grampeado‖, In: Anais da III Conferência Brasileira
sobre Estabilidade de Encostas (COBRAE), v. único, pp. 483-490, Rio de Janeiro,
Novembro.
SPRINGER, F. O., NUNES, A. L. L. S., SAYÃO, A. S. F. J., DIAS, P. H. V., 2008,
―Arrancamento de Grampos em Solo Residual Maduro de Gnaisse‖. In: Anais XIV
Congresso Brasileiro de Mecânica dos Solos e Engenharia Geotécnica
(COBRAMSEG), v. único, pp. 176 -183, Rio de Janeiro, Agosto.
STOCKER, M. F.; KORBER, G.W.; GASSLER, G.; GUDEHUS, G., 1979, ―Soil nailing:
loutage du sol‖, In: Proceedings of the International Conference on Soil Reinforcement:
reinforced earth and other techniques, Ecole des Ponts et Chaussées, v. 2, pp. 463-
474, Paris, France.
TERZAGHI, K., PECK, R. B., MERSI, G., 1996, Soil Mechanics in Engineering Pratice.
3 ed, New York, John Wiley and Sons Co. 549 p.
THOMPSON, S.R. MILLER, I.R., 1990, ―Design, Construction and Performance of a
Soil Nailed Wall in Seattle, Washington.‖ In: Design and Performance of Earth
Retaining Structures (P.C. Lambe and L.A. Hansen, Eds.), Geotechnical Special
Publication n. 25, American Society of Civil Engineers, New York, pp. 629-643.
VASCONCELOS, S., 2009, Estudo através de modelos físicos em escala 1:1 da
influência de carregamentos externos em muros de solo reforçado, Elaboração de
Pesquisa de Mestrado, COPPE/UFRJ, Rio de Janeiro, RJ, Brasil (em andamento).
VIEIRA, G. R., 1996, Estudo da Análise de Estabilidade de Estrutura em Solo
Grampeado, Dissertação* de M.SC., Departamento de Engenharia Civil, Universidade
de Brasília, Brasília, DF, Brasil.
ZEE - Zoneamento Ecológico Econômico, Análise e Qualificação Sócio-Ambiental do
Estado do Rio de Janeiro, escala 1 : 100.000. Disponível em:
<http://zeerj.bem-vindo.net/portal>. Acesso em: 12 abril, 15:22:15.
335
ZIRLIS, A. C.; PITTA, C. A., 1992, ―Soil nailing: chumbamento de solos – experiência
de uma equipe na aplicação do método‖, In: I Conferência Brasileira sobre
Estabilidade de Encostas (COBRAE), ABMS, v. 1, pp. 81-99, Rio de Janeiro,
Novembro.
ZIRLIS, A. C., PITTA, C. A., 2000, ―Chumbadores injetados: a qualidade do solo
grampeado‖. In: Anais do 4° Seminário de Engenharia de Fundações Especiais e
Geotecnia ( SEFE), v. 2, pp. 541-547, São Paulo, Julho.
ZIRLIS, A.C., PITTA, C.A., SOUZA, G.J.T., 2003, ―Solo Grampeado – Alguns detalhes
executivos: Ensaios – Casos de obra.‖ In: Anais do Workshop Solo Grampeado:
Projeto, Execução, Instrumentação e Comportamento, ABMS – Sinduscon, São Paulo,
pp. 1-20.
ZIRLIS, A. C., VAL, E. C. do, NEME, P. A., 1999, ‖Solo grampeado: projeto, execução
e instrumentação‖. In: Workshop sobre solo grampeado, ABMS, pp. 1-69, São Paulo,
Novembro.
ZOMBERG, J., SITTAR, N., MITCHELL, J. K., 1999, ―Performance of Geosynthetic
Reinforced Slopes at Faillure.‖ JGD, ASCE, v. 124, n. 8, pp. 670-683.
336
APÊNDICE A
OBRA RJ123
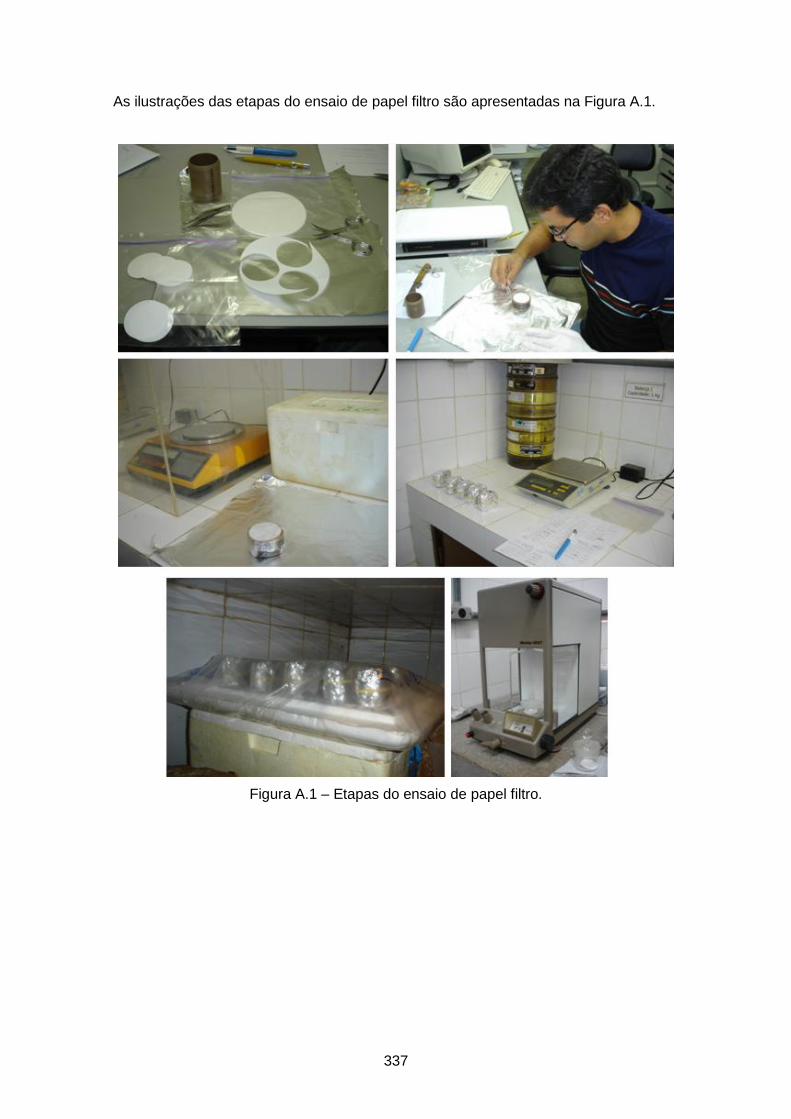
337
As ilustrações das etapas do ensaio de papel filtro são apresentadas na Figura A.1.
Figura A.1 – Etapas do ensaio de papel filtro.
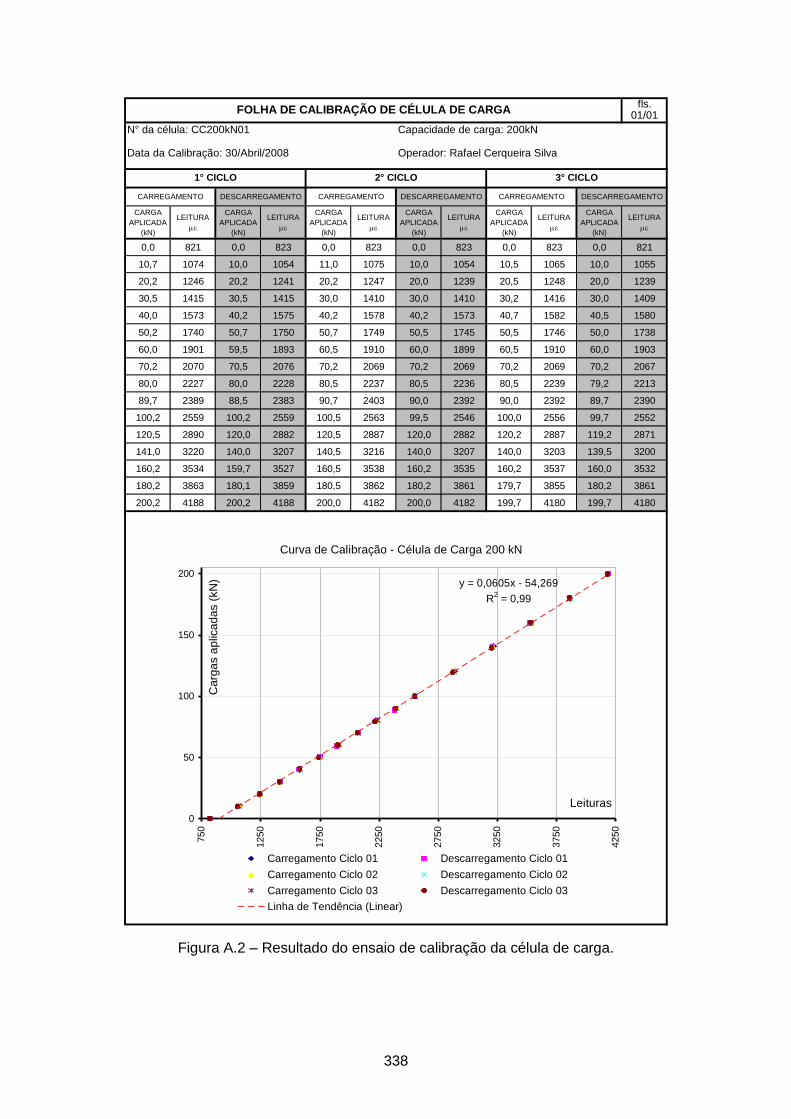
338
fls.01/01
N° da célula: CC200kN01 Capacidade de carga: 200kN
Data da Calibração: 30/Abril/2008 Operador: Rafael Cerqueira Silva
CARGA
APLICADA
(kN)
LEITURA
CARGA
APLICADA
(kN)
LEITURA
CARGA
APLICADA
(kN)
LEITURA
CARGA
APLICADA
(kN)
LEITURA
CARGA
APLICADA
(kN)
LEITURA
CARGA
APLICADA
(kN)
LEITURA
0,0 821 0,0 823 0,0 823 0,0 823 0,0 823 0,0 821
10,7 1074 10,0 1054 11,0 1075 10,0 1054 10,5 1065 10,0 1055
20,2 1246 20,2 1241 20,2 1247 20,0 1239 20,5 1248 20,0 1239
30,5 1415 30,5 1415 30,0 1410 30,0 1410 30,2 1416 30,0 1409
40,0 1573 40,2 1575 40,2 1578 40,2 1573 40,7 1582 40,5 1580
50,2 1740 50,7 1750 50,7 1749 50,5 1745 50,5 1746 50,0 1738
60,0 1901 59,5 1893 60,5 1910 60,0 1899 60,5 1910 60,0 1903
70,2 2070 70,5 2076 70,2 2069 70,2 2069 70,2 2069 70,2 2067
80,0 2227 80,0 2228 80,5 2237 80,5 2236 80,5 2239 79,2 2213
89,7 2389 88,5 2383 90,7 2403 90,0 2392 90,0 2392 89,7 2390
100,2 2559 100,2 2559 100,5 2563 99,5 2546 100,0 2556 99,7 2552
120,5 2890 120,0 2882 120,5 2887 120,0 2882 120,2 2887 119,2 2871
141,0 3220 140,0 3207 140,5 3216 140,0 3207 140,0 3203 139,5 3200
160,2 3534 159,7 3527 160,5 3538 160,2 3535 160,2 3537 160,0 3532
180,2 3863 180,1 3859 180,5 3862 180,2 3861 179,7 3855 180,2 3861
200,2 4188 200,2 4188 200,0 4182 200,0 4182 199,7 4180 199,7 4180
CARREGAMENTO DESCARREGAMENTOCARREGAMENTO DESCARREGAMENTO CARREGAMENTO DESCARREGAMENTO
FOLHA DE CALIBRAÇÃO DE CÉLULA DE CARGA
1° CICLO 2° CICLO 3° CICLO
Curva de Calibração - Célula de Carga 200 kN
y = 0,0605x - 54,269
R2 = 0,99
0
50
100
150
200
750
1250
1750
2250
2750
3250
3750
4250
Leituras
Ca
rga
s a
plic
ad
as (
kN
)
Carregamento Ciclo 01 Descarregamento Ciclo 01
Carregamento Ciclo 02 Descarregamento Ciclo 02
Carregamento Ciclo 03 Descarregamento Ciclo 03
Linha de Tendência (Linear)
Figura A.2 – Resultado do ensaio de calibração da célula de carga.
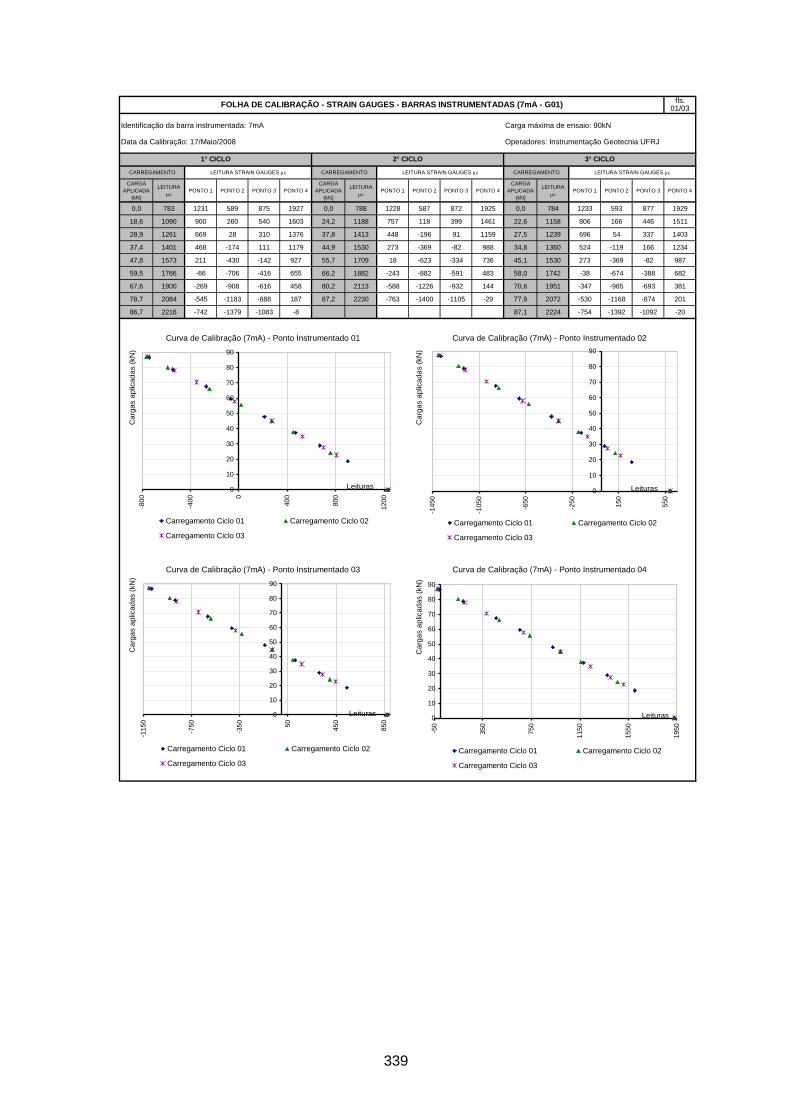
339
fls.01/03
Identificação da barra instrumentada: 7mA Carga máxima de ensaio: 90kN
Data da Calibração: 17/Maio/2008 Operadores: Instrumentação Geotecnia UFRJ
CARGA
APLICADA
(kN)
LEITURA
PONTO 1 PONTO 2 PONTO 3 PONTO 4
CARGA
APLICADA
(kN)
LEITURA
PONTO 1 PONTO 2 PONTO 3 PONTO 4
CARGA
APLICADA
(kN)
LEITURA
PONTO 1 PONTO 2 PONTO 3 PONTO 4
0,0 783 1231 589 875 1927 0,0 788 1228 587 872 1925 0,0 784 1233 593 877 1929
18,6 1090 900 260 540 1603 24,2 1188 757 118 399 1461 22,6 1158 806 166 446 1511
28,9 1261 669 28 310 1376 37,8 1413 448 -196 91 1159 27,5 1239 696 54 337 1403
37,4 1401 468 -174 111 1179 44,9 1530 273 -369 -82 988 34,8 1360 524 -119 166 1234
47,8 1573 211 -430 -142 927 55,7 1709 18 -623 -334 736 45,1 1530 273 -369 -82 987
59,5 1766 -66 -706 -416 655 66,2 1882 -243 -882 -591 483 58,0 1742 -38 -674 -388 682
67,6 1900 -269 -908 -616 458 80,2 2113 -588 -1226 -932 144 70,6 1951 -347 -985 -693 381
78,7 2084 -545 -1183 -888 187 87,2 2230 -763 -1400 -1105 -29 77,9 2072 -530 -1168 -874 201
86,7 2216 -742 -1379 -1083 -8 87,1 2224 -754 -1392 -1092 -20
FOLHA DE CALIBRAÇÃO - STRAIN GAUGES - BARRAS INSTRUMENTADAS (7mA - G01)
CARREGAMENTO CARREGAMENTOLEITURA STRAIN GAUGES LEITURA STRAIN GAUGES
3° CICLO
CARREGAMENTO LEITURA STRAIN GAUGES
1° CICLO 2° CICLO
Curva de Calibração (7mA) - Ponto Instrumentado 01
0
10
20
30
40
50
60
70
80
90
-800
-400 0
400
800
1200
Leituras
Ca
rga
s a
plic
ad
as (
kN
)
Carregamento Ciclo 01 Carregamento Ciclo 02
Carregamento Ciclo 03
Curva de Calibração (7mA) - Ponto Instrumentado 02
0
10
20
30
40
50
60
70
80
90
-1450
-1050
-650
-250
150
550
Leituras
Ca
rga
s a
plic
ad
as (
kN
)
Carregamento Ciclo 01 Carregamento Ciclo 02
Carregamento Ciclo 03
Curva de Calibração (7mA) - Ponto Instrumentado 03
0
10
20
30
40
50
60
70
80
90
-1150
-750
-350
50
450
850
Leituras
Ca
rga
s a
plic
ad
as (
kN
)
Carregamento Ciclo 01 Carregamento Ciclo 02
Carregamento Ciclo 03
Curva de Calibração (7mA) - Ponto Instrumentado 04
0
10
20
30
40
50
60
70
80
90
-50
350
750
1150
1550
1950
Leituras
Ca
rga
s a
plic
ad
as (
kN
)
Carregamento Ciclo 01 Carregamento Ciclo 02
Carregamento Ciclo 03
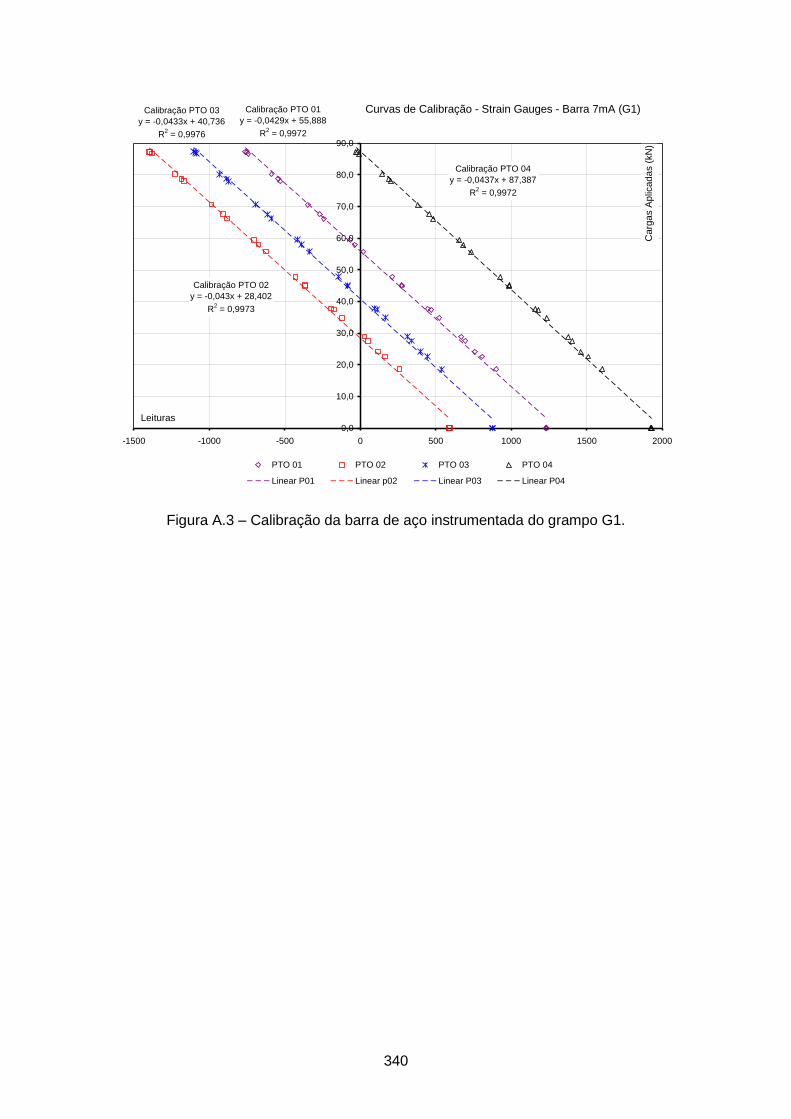
340
Curvas de Calibração - Strain Gauges - Barra 7mA (G1)Calibração PTO 01
y = -0,0429x + 55,888
R2 = 0,9972
Calibração PTO 02
y = -0,043x + 28,402
R2 = 0,9973
Calibração PTO 03
y = -0,0433x + 40,736
R2 = 0,9976
Calibração PTO 04
y = -0,0437x + 87,387
R2 = 0,9972
0,0
10,0
20,0
30,0
40,0
50,0
60,0
70,0
80,0
90,0
-1500 -1000 -500 0 500 1000 1500 2000
Leituras
Carg
as A
plic
ada
s (
kN
)
PTO 01 PTO 02 PTO 03 PTO 04
Linear P01 Linear p02 Linear P03 Linear P04
Figura A.3 – Calibração da barra de aço instrumentada do grampo G1.

341
fls.02/03
Identificação da barra instrumentada: 6m Carga máxima de ensaio: 95kN
Data da Calibração: 17/Maio/2008 Operadores: Instrumentação Geotecnia UFRJ
CARGA
APLICADA
(kN)
LEITURA
PONTO 5 PONTO 6 PONTO 7 PONTO 8
CARGA
APLICADA
(kN)
LEITURA
PONTO 5 PONTO 6 PONTO 7 PONTO 8
CARGA
APLICADA
(kN)
LEITURA
PONTO 5 PONTO 6 PONTO 7 PONTO 8
0,0 779 479 687 1065 137 0,0 795 470 678 1053 128 0,0 790 466 673 1052 125
21,8 1139 88 300 667 -256 25,0 1209 10 224 588 -334 19,8 1117 116 328 693 -228
43,5 1498 -345 -129 237 -680 36,1 1392 -212 4 370 -550 25,5 1212 3 214 583 -340
48,1 1574 -452 -234 132 -784 46,9 1570 -444 -226 139 -777 37,8 1415 -243 -26 340 -580
58,9 1753 -690 -460 -105 -1017 59,0 1771 -713 -492 -128 -1040 48,5 1592 -472 -255 112 -805
65,3 1859 -833 -611 -247 -1157 64,9 1867 -842 -621 -257 -1167 59,2 1769 -709 -489 -125 -1036
79,4 2091 -1148 -922 -563 -1466 78,8 2097 -1155 -930 -568 -1472 67,3 1902 -892 -670 -306 -1215
86,8 2214 -1312 -1085 -725 -1626 89,5 2274 -1390 -1161 -802 -1702 77,6 2072 -1122 -897 -535 -1440
92,2 2314 -1444 -1215 -856 -1755
FOLHA DE CALIBRAÇÃO - STRAIN GAUGES - BARRAS INSTRUMENTADAS (6m - G02)
CARREGAMENTO CARREGAMENTOLEITURA STRAIN GAUGES LEITURA STRAIN GAUGES
3° CICLO
CARREGAMENTO LEITURA STRAIN GAUGES
1° CICLO 2° CICLO
Curva de Calibração (6m) - Ponto Instrumentado 05
0
10
20
30
40
50
60
70
80
90
-1500
-1200
-900
-600
-300 0
300
Leituras
Ca
rga
s a
plic
ad
as (
kN
)
Carregamento Ciclo 01 Carregamento Ciclo 02
Carregamento Ciclo 03
Curva de Calibração (6m) - Ponto Instrumentado 06
0
10
20
30
40
50
60
70
80
90
-1300
-1000
-700
-400
-100
200
500
Leituras
Ca
rga
s a
plic
ad
as (
kN
)
Carregamento Ciclo 01 Carregamento Ciclo 02
Carregamento Ciclo 03
Curva de Calibração (6m) - Ponto Instrumentado 07
0
10
20
30
40
50
60
70
80
90
-900
-600
-300 0
300
600
900
Leituras
Ca
rga
s a
plic
ad
as (
kN
)
Carregamento Ciclo 01 Carregamento Ciclo 02
Carregamento Ciclo 03
Curva de Calibração (6m) - Ponto Instrumentado 08
0
10
20
30
40
50
60
70
80
90
-1800
-1500
-1200
-900
-600
-300 0
Leituras
Ca
rga
s a
plic
ad
as (
kN
)
Carregamento Ciclo 01 Carregamento Ciclo 02
Carregamento Ciclo 03
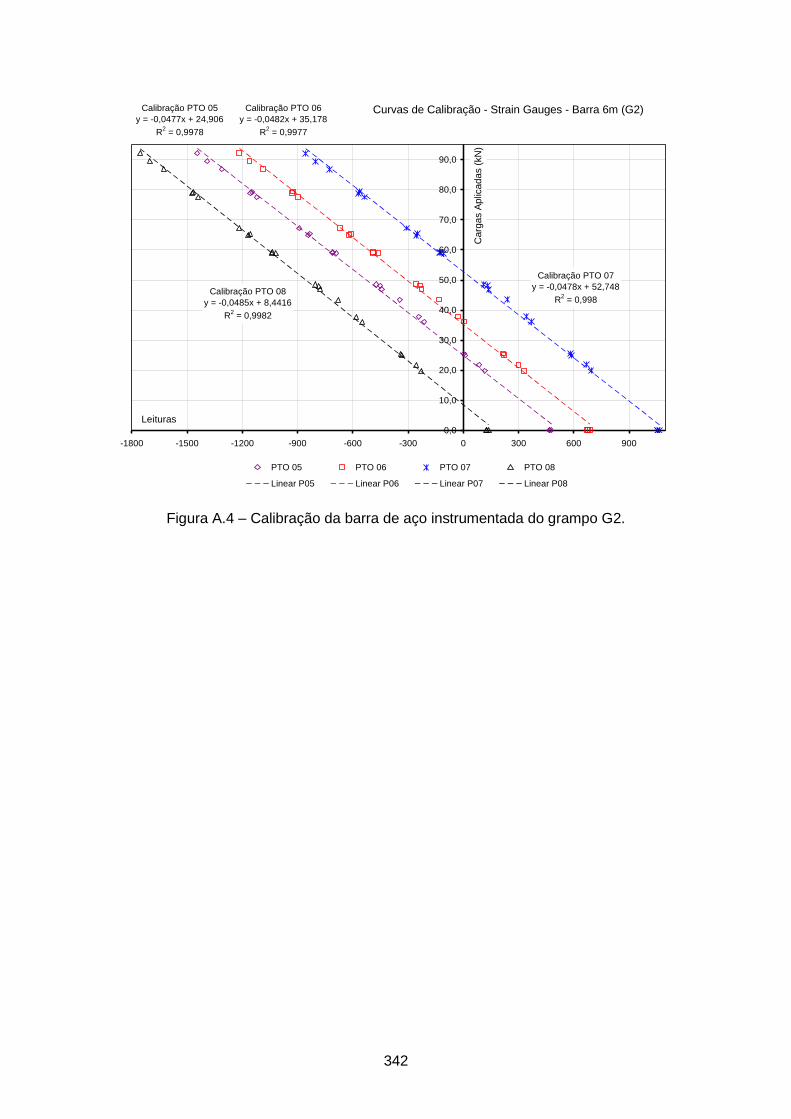
342
Curvas de Calibração - Strain Gauges - Barra 6m (G2)Calibração PTO 05
y = -0,0477x + 24,906
R2 = 0,9978
Calibração PTO 06
y = -0,0482x + 35,178
R2 = 0,9977
Calibração PTO 07
y = -0,0478x + 52,748
R2 = 0,998
Calibração PTO 08
y = -0,0485x + 8,4416
R2 = 0,9982
0,0
10,0
20,0
30,0
40,0
50,0
60,0
70,0
80,0
90,0
-1800 -1500 -1200 -900 -600 -300 0 300 600 900
Leituras
Ca
rga
s A
plic
ad
as (
kN
)PTO 05 PTO 06 PTO 07 PTO 08
Linear P05 Linear P06 Linear P07 Linear P08
Figura A.4 – Calibração da barra de aço instrumentada do grampo G2.
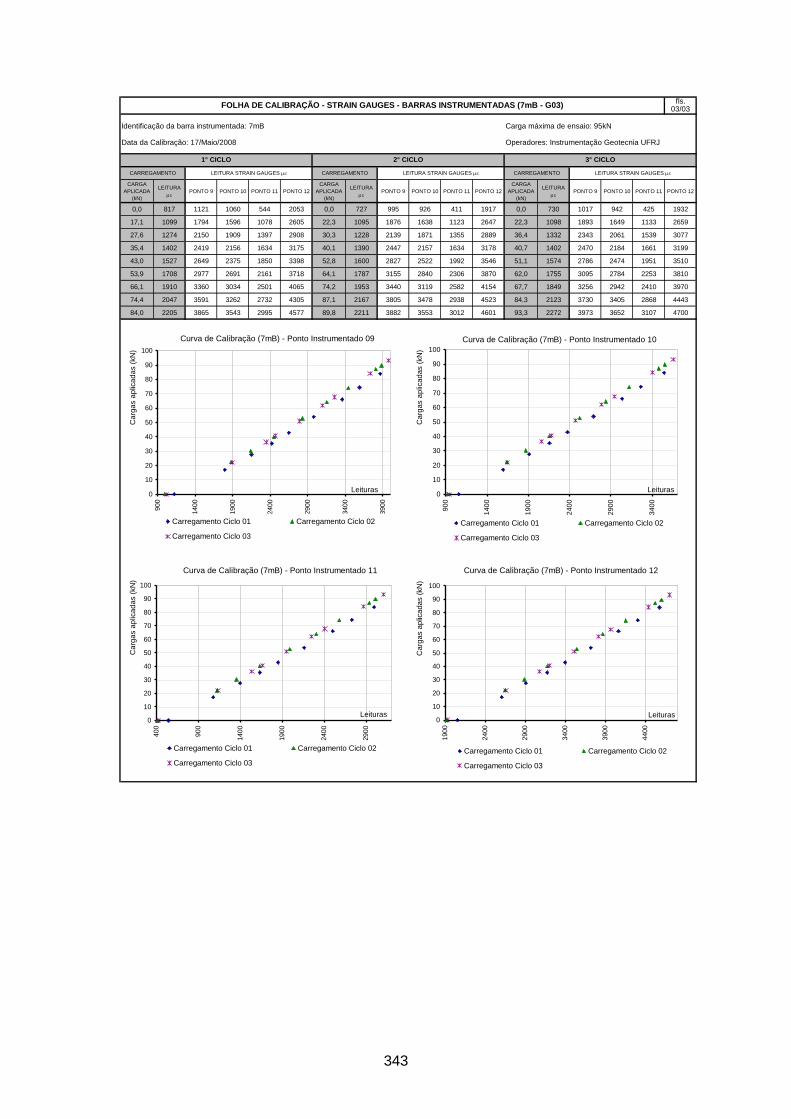
343
fls.03/03
Identificação da barra instrumentada: 7mB Carga máxima de ensaio: 95kN
Data da Calibração: 17/Maio/2008 Operadores: Instrumentação Geotecnia UFRJ
CARGA
APLICADA
(kN)
LEITURA
PONTO 9 PONTO 10 PONTO 11 PONTO 12
CARGA
APLICADA
(kN)
LEITURA
PONTO 9 PONTO 10 PONTO 11 PONTO 12
CARGA
APLICADA
(kN)
LEITURA
PONTO 9 PONTO 10 PONTO 11 PONTO 12
0,0 817 1121 1060 544 2053 0,0 727 995 926 411 1917 0,0 730 1017 942 425 1932
17,1 1099 1794 1596 1078 2605 22,3 1095 1876 1638 1123 2647 22,3 1098 1893 1649 1133 2659
27,6 1274 2150 1909 1397 2908 30,3 1228 2139 1871 1355 2889 36,4 1332 2343 2061 1539 3077
35,4 1402 2419 2156 1634 3175 40,1 1390 2447 2157 1634 3178 40,7 1402 2470 2184 1661 3199
43,0 1527 2649 2375 1850 3398 52,8 1600 2827 2522 1992 3546 51,1 1574 2786 2474 1951 3510
53,9 1708 2977 2691 2161 3718 64,1 1787 3155 2840 2306 3870 62,0 1755 3095 2784 2253 3810
66,1 1910 3360 3034 2501 4065 74,2 1953 3440 3119 2582 4154 67,7 1849 3256 2942 2410 3970
74,4 2047 3591 3262 2732 4305 87,1 2167 3805 3478 2938 4523 84,3 2123 3730 3405 2868 4443
84,0 2205 3865 3543 2995 4577 89,8 2211 3882 3553 3012 4601 93,3 2272 3973 3652 3107 4700
FOLHA DE CALIBRAÇÃO - STRAIN GAUGES - BARRAS INSTRUMENTADAS (7mB - G03)
CARREGAMENTO CARREGAMENTOLEITURA STRAIN GAUGES LEITURA STRAIN GAUGES
3° CICLO
CARREGAMENTO LEITURA STRAIN GAUGES
1° CICLO 2° CICLO
Curva de Calibração (7mB) - Ponto Instrumentado 09
0
10
20
30
40
50
60
70
80
90
100
900
1400
1900
2400
2900
3400
3900
Leituras
Ca
rga
s a
plic
ad
as (
kN
)
Carregamento Ciclo 01 Carregamento Ciclo 02
Carregamento Ciclo 03
Curva de Calibração (7mB) - Ponto Instrumentado 10
0
10
20
30
40
50
60
70
80
90
100
90
0
14
00
19
00
24
00
29
00
34
00
Leituras
Ca
rga
s a
plic
ad
as (
kN
)
Carregamento Ciclo 01 Carregamento Ciclo 02
Carregamento Ciclo 03
Curva de Calibração (7mB) - Ponto Instrumentado 11
0
10
20
30
40
50
60
70
80
90
100
400
900
1400
1900
2400
2900
Leituras
Ca
rga
s a
plic
ad
as (
kN
)
Carregamento Ciclo 01 Carregamento Ciclo 02
Carregamento Ciclo 03
Curva de Calibração (7mB) - Ponto Instrumentado 12
0
10
20
30
40
50
60
70
80
90
100
1900
2400
2900
3400
3900
4400
Leituras
Ca
rga
s a
plic
ad
as (
kN
)
Carregamento Ciclo 01 Carregamento Ciclo 02
Carregamento Ciclo 03
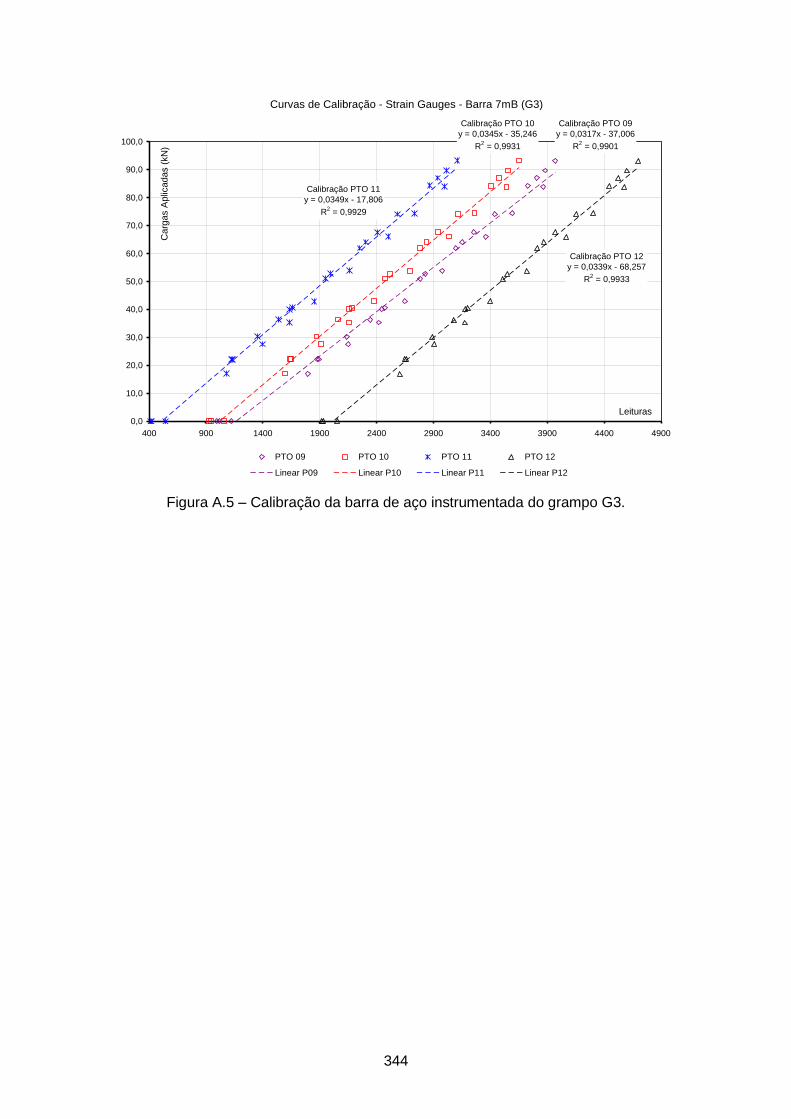
344
Curvas de Calibração - Strain Gauges - Barra 7mB (G3)
Calibração PTO 09
y = 0,0317x - 37,006
R2 = 0,9901
Calibração PTO 10
y = 0,0345x - 35,246
R2 = 0,9931
Calibração PTO 11
y = 0,0349x - 17,806
R2 = 0,9929
Calibração PTO 12
y = 0,0339x - 68,257
R2 = 0,9933
0,0
10,0
20,0
30,0
40,0
50,0
60,0
70,0
80,0
90,0
100,0
400 900 1400 1900 2400 2900 3400 3900 4400 4900
Leituras
Carg
as A
plic
adas (
kN
)
PTO 09 PTO 10 PTO 11 PTO 12
Linear P09 Linear P10 Linear P11 Linear P12
Figura A.5 – Calibração da barra de aço instrumentada do grampo G3.
345
APÊNDICE B
MODELOS FÍSICOS

346
Curvas de Calibração - Linear Variable Displacement Transducers - LVDT-01
LVDT-01 (ENSAIO 01)
y = 1E-05x + 0,1953
R2 = 0,9991
LVDT-01 (ENSAIO 02)
y = 1E-05x + 0,3011
R2 = 0,999
0
5
10
15
20
25
0 1.000.000 2.000.000 3.000.000
Leitura SAD
Mic
rôm
etr
o (
mm
)
LVDT-01_E1 LVDT-01_E2
LVDT-01 (ENSAIO 01) LVDT-01 (ENSAIO 02)
Curvas de Calibração - Linear Variable Displacement Transducers - LVDT-02
LVDT-02 (ENSAIO 01)
y = 1E-05x + 0,826
R2 = 0,9977
LVDT-02 (ENSAIO 02)
y = 1E-05x + 0,8417
R2 = 0,9976
0
5
10
15
20
25
0 1.000.000 2.000.000 3.000.000
Leitura SAD
Mic
rôm
etr
o (
mm
)
LVDT-02_E1 LVDT-02_E2
Linear (LVDT-02_E1) LVDT-02 (ENSAIO 02)
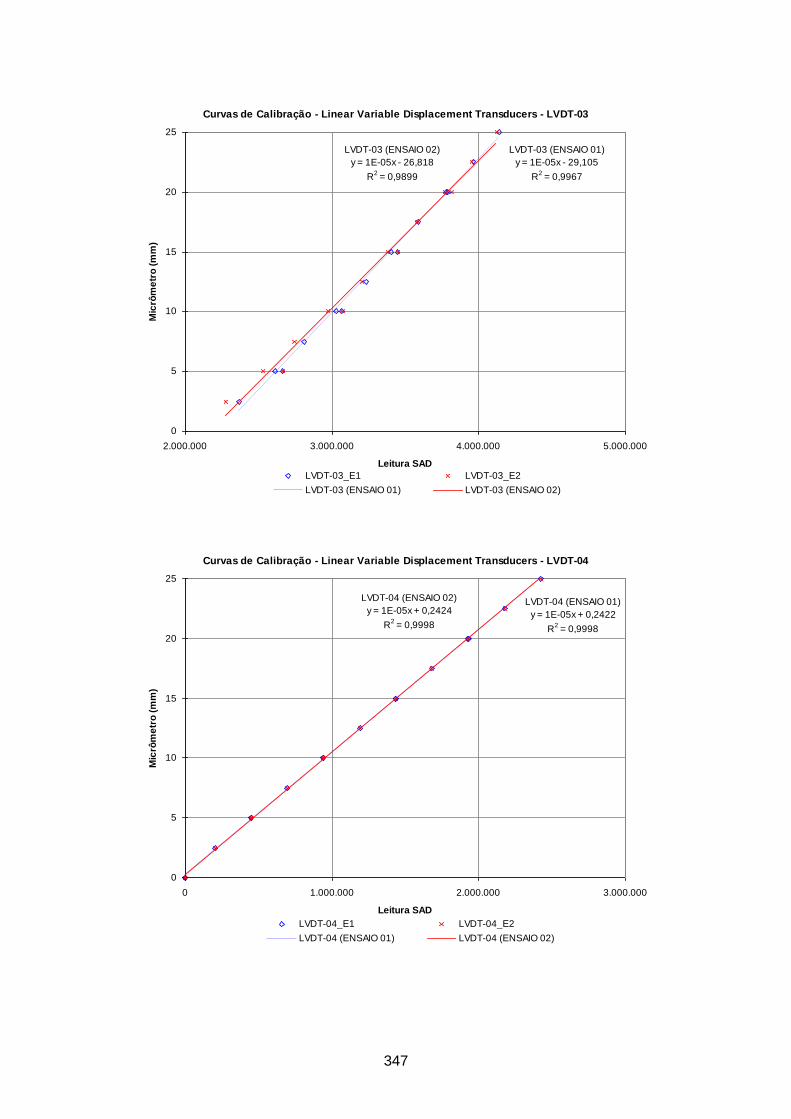
347
Curvas de Calibração - Linear Variable Displacement Transducers - LVDT-03
LVDT-03 (ENSAIO 01)
y = 1E-05x - 29,105
R2 = 0,9967
LVDT-03 (ENSAIO 02)
y = 1E-05x - 26,818
R2 = 0,9899
0
5
10
15
20
25
2.000.000 3.000.000 4.000.000 5.000.000
Leitura SAD
Mic
rôm
etr
o (
mm
)
LVDT-03_E1 LVDT-03_E2
LVDT-03 (ENSAIO 01) LVDT-03 (ENSAIO 02)
Curvas de Calibração - Linear Variable Displacement Transducers - LVDT-04
LVDT-04 (ENSAIO 01)
y = 1E-05x + 0,2422
R2 = 0,9998
LVDT-04 (ENSAIO 02)
y = 1E-05x + 0,2424
R2 = 0,9998
0
5
10
15
20
25
0 1.000.000 2.000.000 3.000.000
Leitura SAD
Mic
rôm
etr
o (
mm
)
LVDT-04_E1 LVDT-04_E2
LVDT-04 (ENSAIO 01) LVDT-04 (ENSAIO 02)
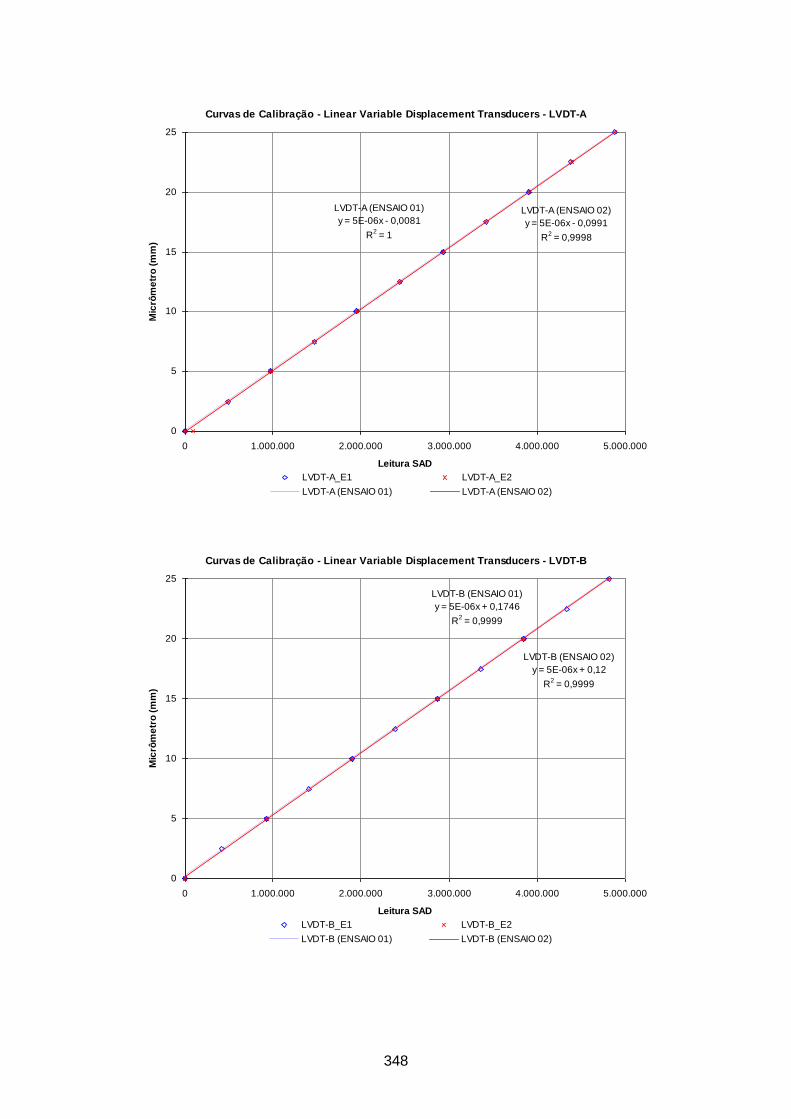
348
Curvas de Calibração - Linear Variable Displacement Transducers - LVDT-A
LVDT-A (ENSAIO 01)
y = 5E-06x - 0,0081
R2 = 1
LVDT-A (ENSAIO 02)
y = 5E-06x - 0,0991
R2 = 0,9998
0
5
10
15
20
25
0 1.000.000 2.000.000 3.000.000 4.000.000 5.000.000
Leitura SAD
Mic
rôm
etr
o (
mm
)
LVDT-A_E1 LVDT-A_E2
LVDT-A (ENSAIO 01) LVDT-A (ENSAIO 02)
Curvas de Calibração - Linear Variable Displacement Transducers - LVDT-B
LVDT-B (ENSAIO 01)
y = 5E-06x + 0,1746
R2 = 0,9999
LVDT-B (ENSAIO 02)
y = 5E-06x + 0,12
R2 = 0,9999
0
5
10
15
20
25
0 1.000.000 2.000.000 3.000.000 4.000.000 5.000.000
Leitura SAD
Mic
rôm
etr
o (
mm
)
LVDT-B_E1 LVDT-B_E2
LVDT-B (ENSAIO 01) LVDT-B (ENSAIO 02)
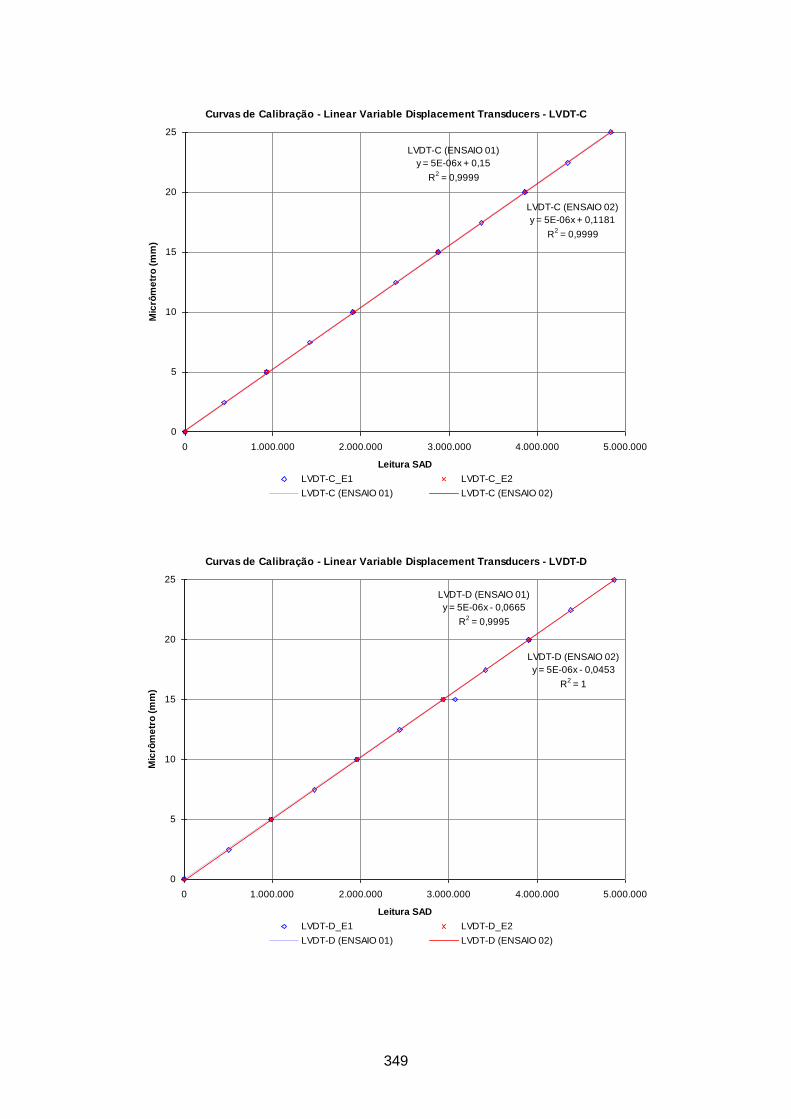
349
Curvas de Calibração - Linear Variable Displacement Transducers - LVDT-C
LVDT-C (ENSAIO 01)
y = 5E-06x + 0,15
R2 = 0,9999
LVDT-C (ENSAIO 02)
y = 5E-06x + 0,1181
R2 = 0,9999
0
5
10
15
20
25
0 1.000.000 2.000.000 3.000.000 4.000.000 5.000.000
Leitura SAD
Mic
rôm
etr
o (
mm
)
LVDT-C_E1 LVDT-C_E2
LVDT-C (ENSAIO 01) LVDT-C (ENSAIO 02)
Curvas de Calibração - Linear Variable Displacement Transducers - LVDT-D
LVDT-D (ENSAIO 01)
y = 5E-06x - 0,0665
R2 = 0,9995
LVDT-D (ENSAIO 02)
y = 5E-06x - 0,0453
R2 = 1
0
5
10
15
20
25
0 1.000.000 2.000.000 3.000.000 4.000.000 5.000.000
Leitura SAD
Mic
rôm
etr
o (
mm
)
LVDT-D_E1 LVDT-D_E2
LVDT-D (ENSAIO 01) LVDT-D (ENSAIO 02)
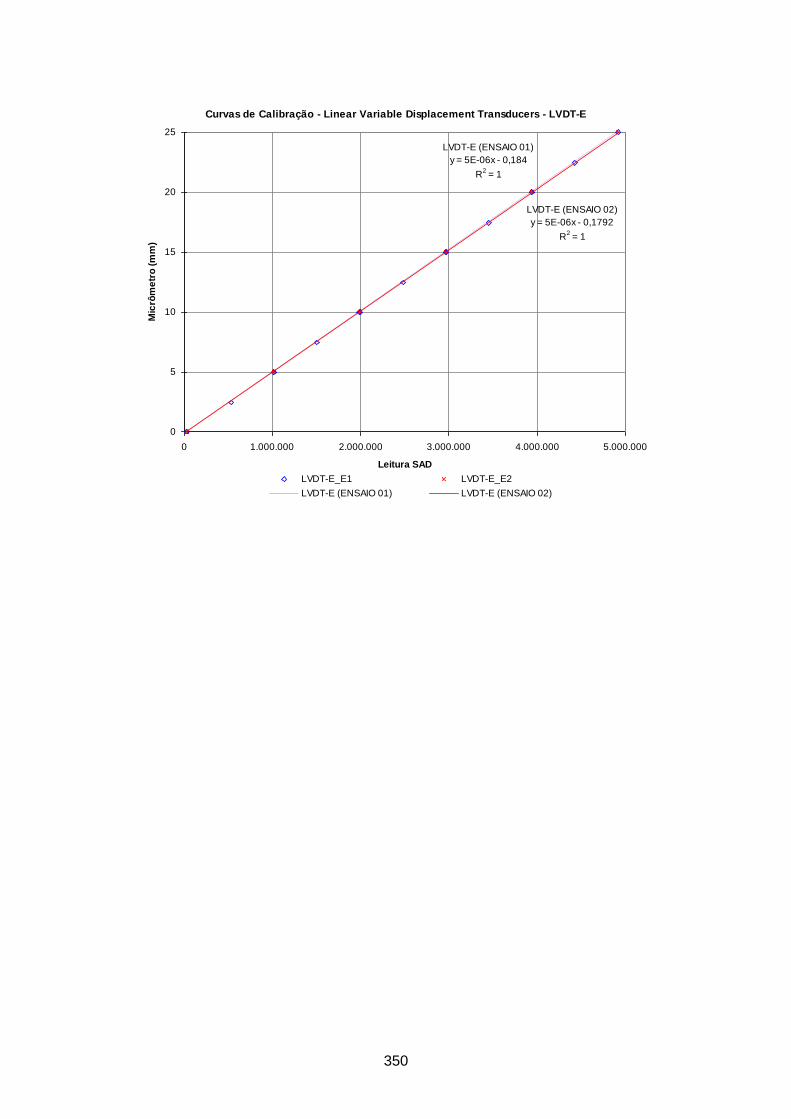
350
Curvas de Calibração - Linear Variable Displacement Transducers - LVDT-E
LVDT-E (ENSAIO 01)
y = 5E-06x - 0,184
R2 = 1
LVDT-E (ENSAIO 02)
y = 5E-06x - 0,1792
R2 = 1
0
5
10
15
20
25
0 1.000.000 2.000.000 3.000.000 4.000.000 5.000.000
Leitura SAD
Mic
rôm
etr
o (
mm
)
LVDT-E_E1 LVDT-E_E2
LVDT-E (ENSAIO 01) LVDT-E (ENSAIO 02)
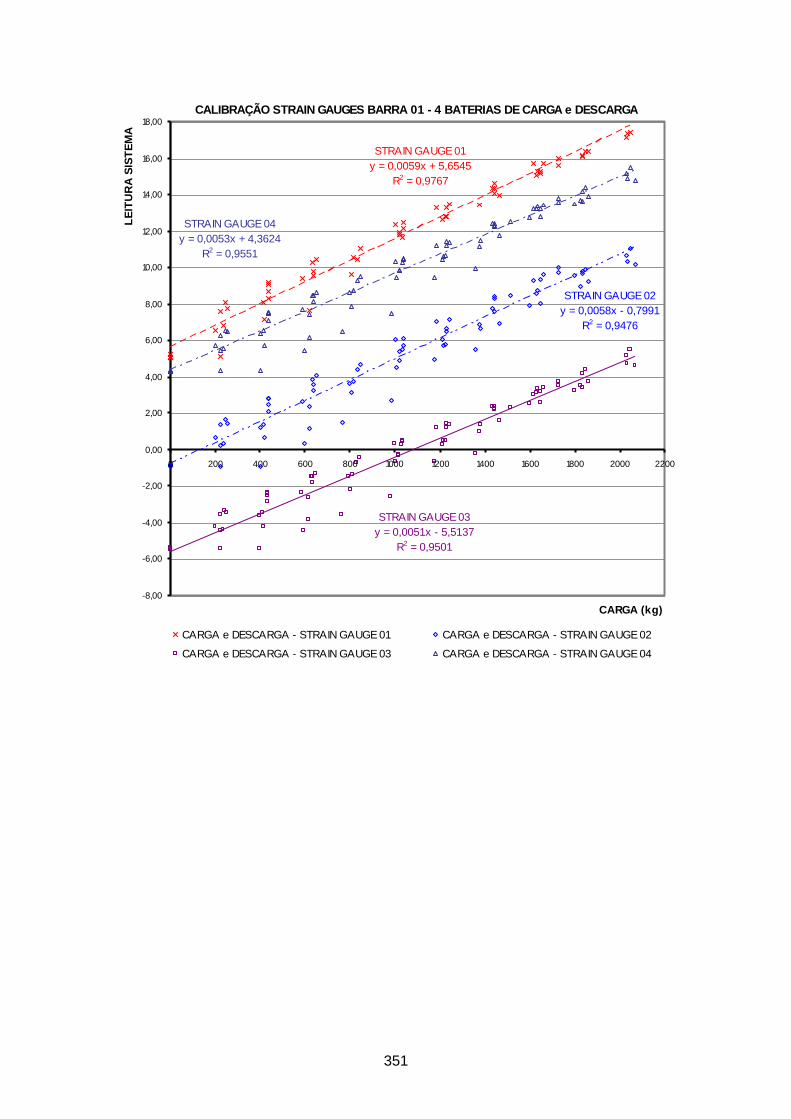
351
CALIBRAÇÃO STRAIN GAUGES BARRA 01 - 4 BATERIAS DE CARGA e DESCARGA
STRAIN GAUGE 01
y = 0,0059x + 5,6545
R2 = 0,9767
STRAIN GAUGE 02
y = 0,0058x - 0,7991
R2 = 0,9476
STRAIN GAUGE 03
y = 0,0051x - 5,5137
R2 = 0,9501
STRAIN GAUGE 04
y = 0,0053x + 4,3624
R2 = 0,9551
-8,00
-6,00
-4,00
-2,00
0,00
2,00
4,00
6,00
8,00
10,00
12,00
14,00
16,00
18,00
0 200 400 600 800 1000 1200 1400 1600 1800 2000 2200
CARGA (kg)
LE
ITU
RA
SIS
TE
MA
CARGA e DESCARGA - STRAIN GAUGE 01 CARGA e DESCARGA - STRAIN GAUGE 02
CARGA e DESCARGA - STRAIN GAUGE 03 CARGA e DESCARGA - STRAIN GAUGE 04

352
CALIBRAÇÃO STRAIN GAUGES BARRA 02 - 7 BATERIAS DE CARGA e DESCARGA
STRAIN GAUGE 05
y = 0,0056x + 7,6076
R2 = 0,9959
STRAIN GAUGE 06
y = 0,0053x + 3,6341
R2 = 0,9847
STRAIN GAUGE 07
y = 0,0054x + 9,6841
R2 = 0,9866
STRAIN GAUGE 08
y = 0,0056x + 8,1599
R2 = 0,996
2,00
4,00
6,00
8,00
10,00
12,00
14,00
16,00
18,00
20,00
22,00
0 200 400 600 800 1000 1200 1400 1600 1800 2000 2200
CARGA (kg)
LE
ITU
RA
SIS
TE
MA
CARGA e DESCARGA - STRAIN GAUGE 05 CARGA e DESCARGA - STRAIN GAUGE 06
CARGA e DESCARGA - STRAIN GAUGE 07 CARGA e DESCARGA - STRAIN GAUGE 08
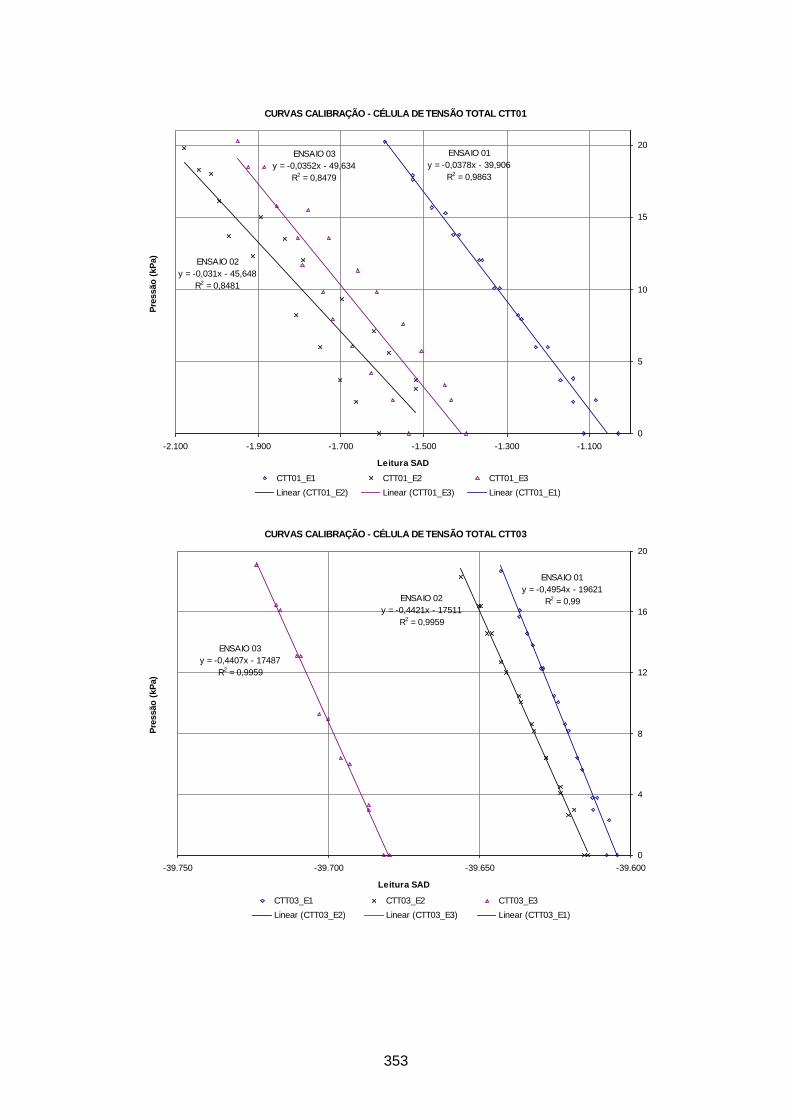
353
CURVAS CALIBRAÇÃO - CÉLULA DE TENSÃO TOTAL CTT01
ENSAIO 02
y = -0,031x - 45,648
R2 = 0,8481
ENSAIO 03
y = -0,0352x - 49,634
R2 = 0,8479
ENSAIO 01
y = -0,0378x - 39,906
R2 = 0,9863
0
5
10
15
20
-2.100 -1.900 -1.700 -1.500 -1.300 -1.100
Leitura SAD
Pre
ssão
(kP
a)
CTT01_E1 CTT01_E2 CTT01_E3
Linear (CTT01_E2) Linear (CTT01_E3) Linear (CTT01_E1)
CURVAS CALIBRAÇÃO - CÉLULA DE TENSÃO TOTAL CTT03
ENSAIO 02
y = -0,4421x - 17511
R2 = 0,9959
ENSAIO 03
y = -0,4407x - 17487
R2 = 0,9959
ENSAIO 01
y = -0,4954x - 19621
R2 = 0,99
0
4
8
12
16
20
-39.750 -39.700 -39.650 -39.600
Leitura SAD
Pre
ssão
(kP
a)
CTT03_E1 CTT03_E2 CTT03_E3
Linear (CTT03_E2) Linear (CTT03_E3) Linear (CTT03_E1)
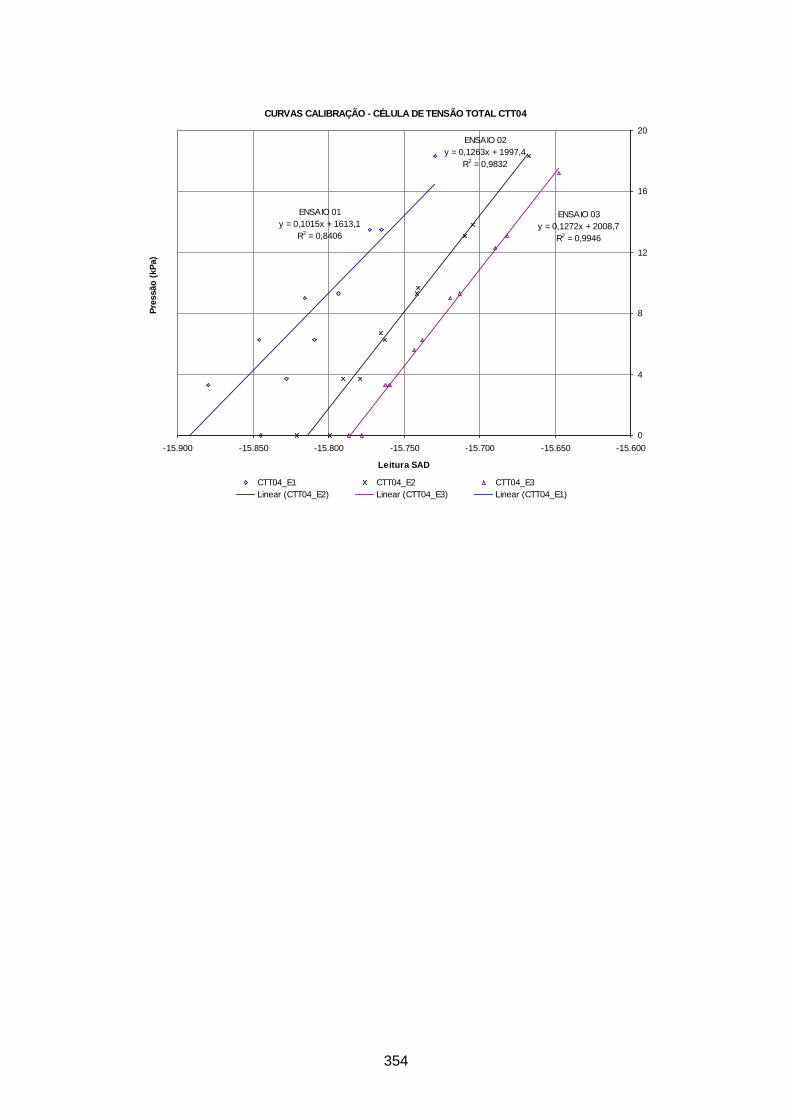
354
CURVAS CALIBRAÇÃO - CÉLULA DE TENSÃO TOTAL CTT04
ENSAIO 02
y = 0,1263x + 1997,4
R2 = 0,9832
ENSAIO 03
y = 0,1272x + 2008,7
R2 = 0,9946
ENSAIO 01
y = 0,1015x + 1613,1
R2 = 0,8406
0
4
8
12
16
20
-15.900 -15.850 -15.800 -15.750 -15.700 -15.650 -15.600
Leitura SAD
Pre
ssão
(kP
a)
CTT04_E1 CTT04_E2 CTT04_E3
Linear (CTT04_E2) Linear (CTT04_E3) Linear (CTT04_E1)
Top Related