






Línguas
Páginas
Legal

David Rodrigues Silva Dória
Arquitetura Interativa: Espaços interativos intermedia-
dos pela tecnologia.
Laranjeiras, 2014
UNIVERSIDADE FEDERAL DE SERGIPE
CAMPUS DE LARANJEIRAS
DEPARTAMENTO DE ARQUITETURA E URBANISMO
David Rodrigues Silva Dória
Arquitetura Interativa: Espaços interativos intermedi-
ados pela tecnologia
Trabalho apresentado à Disciplina Trabalho
de Conclusão de Curso II, do curso de Arqui-
tetura e Urbanismo da Universidade Federal
de Sergipe, sob a orientação do Prof.º Dsc.
Fernando Antônio Santos de Souza.
Aprovado em ____/____/_____
Banca Examinadora
_________________________________________________________
Prof.º Dsc. Fernando Antônio Santos de Souza Universidade Federal de Sergipe
_________________________________________________________
Prof.º Msc. Fernando de Medeiros Galvão
Universidade Federal de Sergipe
_________________________________________________________
Prof.º Msc. José Walter Teles Chou
Universidade Tiradentes - Membro Avaliador Externo

“If buildings become interactive they will provide much
more than just customizable or responsive spaces. While pos-
sessing the traits of traditional architecture, interactive archi-
tecture will also develop new traits unique to the context of
interactivity. Interactive architecture will serve us pro-actively
by creatively coming up with spatial alterations depending on
their constantly gathered, updated and validated knowledge.
Interactive architecture will provide unprecedented experi-
ences and aesthetics based on architectural qualities such as
continuously evolving and changing spatial processes, rather
than on traditional approaches that focus on singular states
of statically built spaces. Architecture will go beyond being a
medium.” (JASKIEWICZ, 2012, p. 185).
“Se os edifícios se tornarem interativos, eles proverão
mais do que espaços responsivos ou customizáveis. Enquanto
possui os aspectos da arquitetura tradicional, a arquitetura
interativa também irá desenvolver aspectos específicos ao
contexto da interatividade. A arquitetura interativa irá nos
servir pró-ativamente, através de alterações espaciais criati-
vas relativas ao conhecimento continuamente reunido, atua-
lizado e validado. A arquitetura interativa permitirá experiên-
cias e estéticas sem precedentes baseadas em qualidades ar-
quitetônicas como processos de evolução e mutação espacial
contínua, ao invés das abordagens tradicionais que focam em
estados singulares de espaços estaticamente construídos. A
arquitetura irá além de ser apenas um meio.” (JASKIEWICZ,
2012, p. 185).
Resumo
O presente trabalho trata de um estudo acerca de um dos ca-
minhos que a arquitetura pode percorrer na contemporaneidade: a
construção de espaços interativos. Através de pesquisas, revisão biblio-
gráfica e análise de projetos significativos, busca-se a construção de um
quadro do que consiste a construção de espaços interativos, especial-
mente no que diz respeito à utilização de tecnologias digitais, o contex-
to em que essa surge e como se concretiza. Como ferramenta de estu-
do, foi desenvolvido um projeto experimental, um pavilhão, cujo intuito
é demonstrar e ao mesmo tempo explorar as características e especifi-
cidades do processo projetivo de tal arquitetura. Ao final do trabalho,
considerações e questionamentos sobre do tema são levantados, per-
mitindo uma reflexão sobre os caminhos que a arquitetura percorre na
contemporaneidade e poderá continuar a explorar no futuro.
Palavras-chave: Arquitetura, interativa, tecnologia, espaço, ex-
perimentação, homem, meio.
Abstract
The present paper addresses the study about one of the paths
that architecture can follow in contemporaneity: the construction of
interactive spaces. Through research, literature review and the analysis
of significant projects, the creation of a theoretical frame is sought,
approaching what constitutes the construction of such spaces, specially
on what comes to the utilization of digital technology, its context and
how it becomes real. As a mean of study, it was also developed an ex-
perimental project, a pavilion, aiming to demonstrate and explore the
specificities and characteristics of the projective process of such archi-
tecture. In conclusion, questions and considerations around the ad-
dressed theme are raised, allowing a reflection on the paths that archi-
tecture follows in contemporaneity and might continue to follow in the
future.
Keywords: Architecture, interactive, technology, space, experi-
mentation, man, medium.
Lista de Figuras Pág.
Figura 1 – Cena do filme Sketches of Frank Gehry (SKETCHES, 2006).
17
Figura 2 – Cena do filme Sketches of Frank Gehry (SKETCHES, 2006).
17
Figura 3 – Modelo virtual do Walt Disney Concert Hall. 17
Figura 4 – Imagem do Walt Disney Concert Hall Construí-do.
17
Figura 5 – Casa Embriológica, Greg Lynn. 18
Figura 6 – Protótipo elaborado pelo Hyperbody TUDelft. 20
Figura 7 – Protótipo elaborado pelo Hyperbody TUDelft. 20
Figura 8 – Protótipo elaborado pelo Hyperbody TUDelft. 20
Figura 9 – Protótipo elaborado pelo Hyperbody TUDelft. 20
Figura 10 – Protótipo elaborado pelo Hyperbody TUDelft. 20
Figura 11 – Fachada do GreenPIX, projeto do escritório Simone Giostra & Partners e Arup.
21
Figura 12 – Fachada do GreenPIX, projeto do escritório Simone Giostra & Partners e Arup.
21
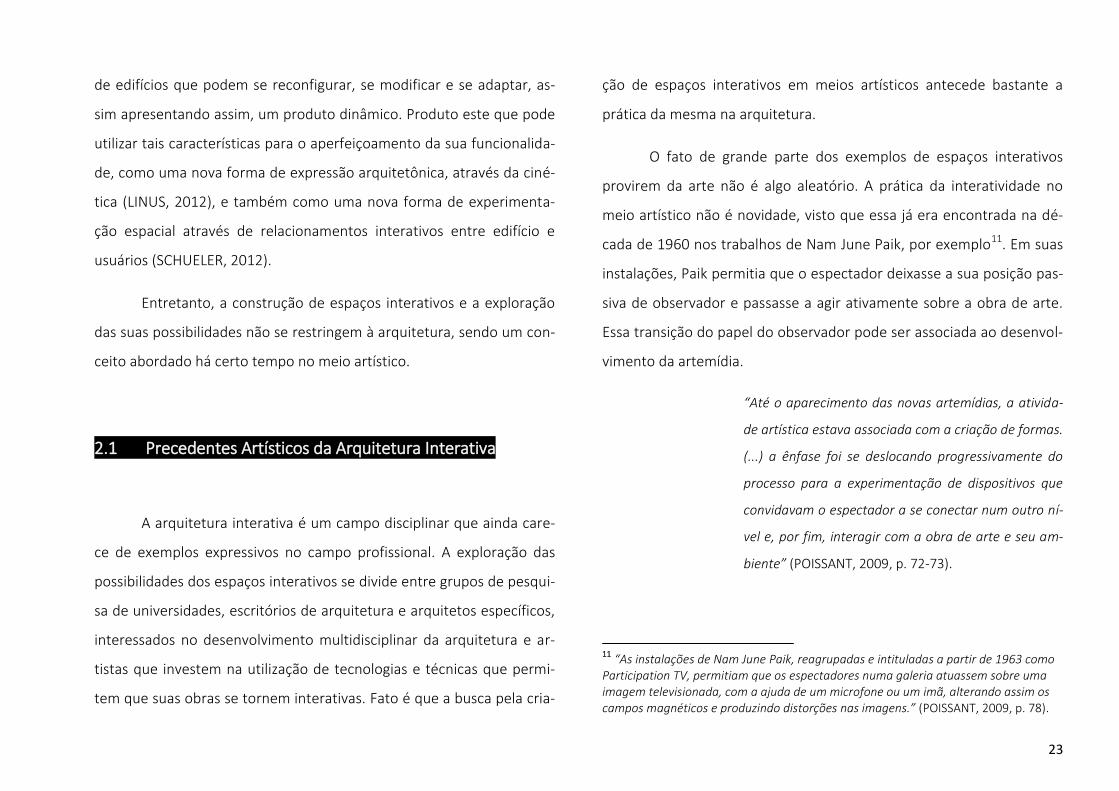
Figura 13 – Paik e uma das suas obras, modificando as imagens de uma televisão através da utilização de um imã.
24
Figura 14 – Instalação do Participation TV, de Paik. 24
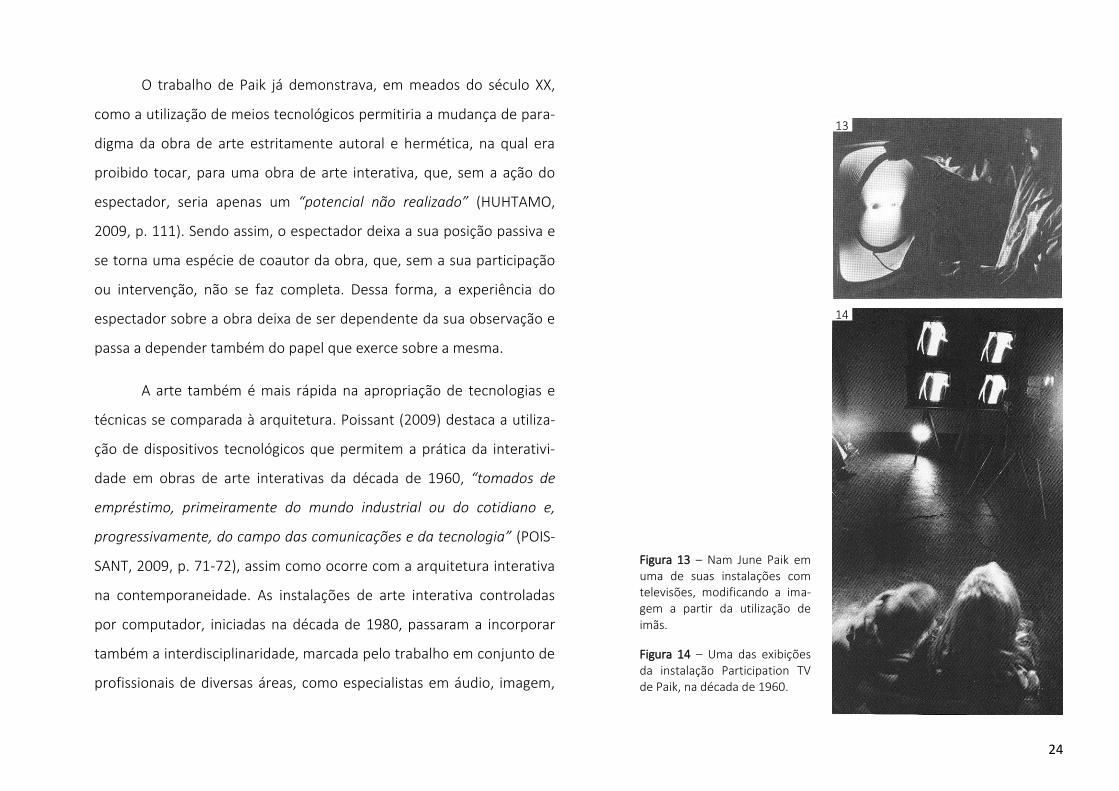
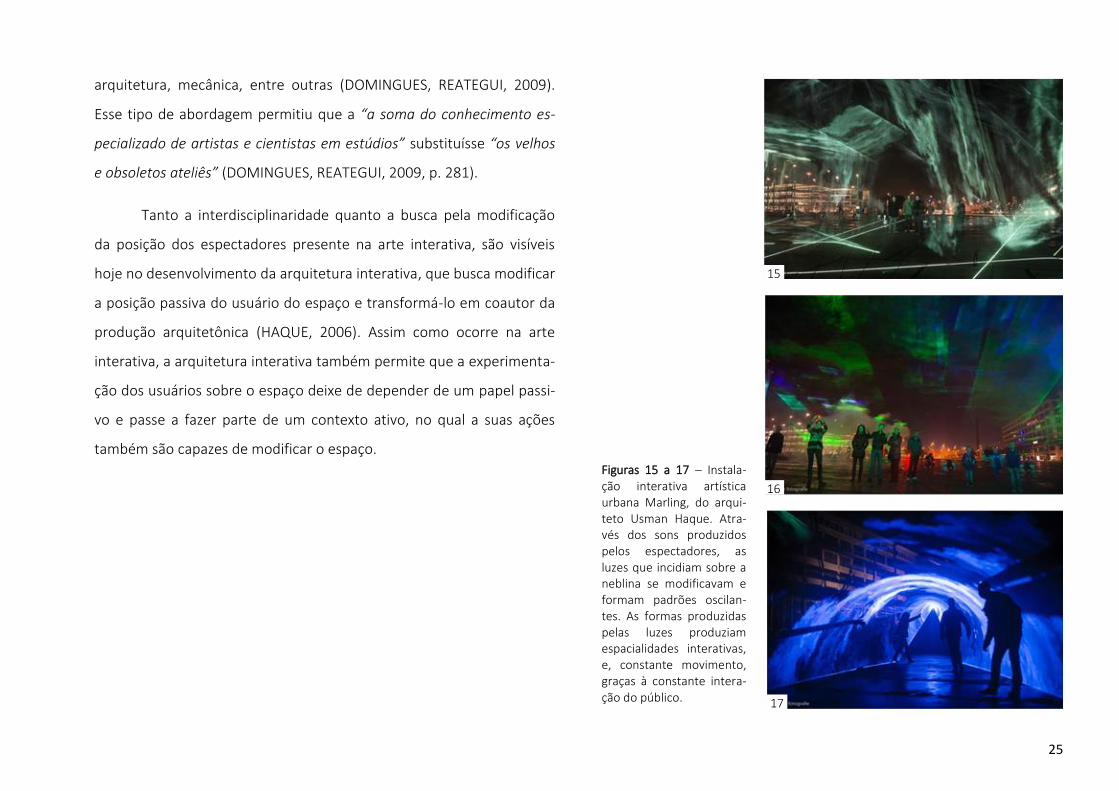
Figura 15 – Marling, de Usman Haque. Espaço artístico interativo contemporâneo.
25
Figura 16 – Marling, de Usman Haque. 25
Figura 17 – Marling, de Usman Haque. 25
Figura 18 – Fluxograma representativo do sistema intera-tivo, adaptado do esquema proposto por Linus (2012).
29
Figura 19 – Instalação artística Fearful Symmetry, realiza-da pelo arquiteto Ruairi Glynn.
32
Figura 20 - Instalação artística Fearful Symmetry, realiza-da pelo arquiteto Ruairi Glynn.
32
Figura 21 - Instalação artística Fearful Symmetry, realiza-da pelo arquiteto Ruairi Glynn.
32
Figura 22 – InteractiveWall do Hyperbody. 33
Figura 23 – Interface de input de dados (Sensor Ativo) da InteractiveWall, Hyperbody.
33
Figura 24 – Sensor de proximidade (Sensor Passivo) da InteractiveWall, Hyperbody.
33
Figura 25 – Exemplo de fluxograma de um algoritmo. 38
Figura 26 – Microcontrolador Arduino. 39
Figura 27 – Ambiente de programação do Arduino. 39
Figura 28 – Cosmic Quilt, The Principals. Ambiente que utiliza o Arduino.
39
Figura 29 – Hyposurface, do dECOi funcionando. 40
Figura 30 – Hyposurface, do dECOi funcionando. 40
Figura 31 – Hyposurface, do dECOi sendo programada e montada.
40
Figura 32 – Hyposurface, do dECOi módulo da superfície. 40
Figura 33 – Sistema de atuadores da Hyposurface, do dECOi.
40
Figura 34 – Sistema de atuadores da Hyposurface, do dECOi.
40
Figura 35 – Haunt, por Usman Haque, ambiente contro-lado por atuadores.
41
Figura 36 – Haunt, por Usman Haque, ambiente contro-lado por atuadores.
41
Figura 37 – Haunt, por Usman Haque, ambiente contro-lado por atuadores.
41
Figura 38 – Haunt, por Usman Haque, ambiente contro-lado por atuadores.
41
Figura 39 – Redução modernista na arte, Composition II in Red, Blue and Yellow de Piet Mondrian.
46
Figura 40 – Redução modernista na Arquitetura, Casa Schröder, Gerrit Rietveld.
46
Figura 41 – Complexidade na arte, design generativo utili-zando Processing. Processing Network de Abhinav.
47
Figura 42 – Complexidade na arquitetura, Hessing Cock-pit, Kas Oosterhuis.
47
Figura 43 – Rhino + Grasshopper. 51
Figura 44 – Revit + Dynamo. 51
Figura 45 – Revit + Dynamo, modificação de parâmetros. 51
Figura 46 – Vista externa do Pavilhão Son-o-House, de-monstrando suas superfícies interconectadas.
53
Figura 47 – Vista externa do Pavilhão Son-o-House, de-monstrando um de seus acessos.
53
Figura 48 – Vista externa do Pavilhão Son-o-House, com todo o corpo em vista, em fase de construção.
54
Figura 49 – Vista externa do Pavilhão Son-o-House, em detalhe, a sua superfície e suas interconexões.
54
Figura 50 – Vista interna do Pavilhão Son-o-House, com a estrutura e alto falantes (esferas) visíveis.
55
Figura 51 – Vista interna do Pavilhão Son-o-House, desta-que aos elementos estruturais que seguem as diversas curvaturas a superfície externa.
55
Figura 52 – Vista externa do Pavilhão Son-o-House, com o corpo completo já construído.
57
Figura 53 – InteractiveWall em movimento 58
Figura 54 – InteractiveWall, conjunto desalinhado. 58
Figura 55 – InteractiveWall, elementos iluminados por suas luzes internas.
60
Figura 56 – InteractiveWall, elementos iluminados por suas luzes internas e em movimento.
60
Figura 57 – InteractiveWall, elementos iluminados por suas luzes internas e interagindo com usuários.
60
Figura 58 – InteractiveWall, esquema de seu comporta-mento.
61
Figura 59 – MuscleBody, vista do conjunto. 62
Figura 60 – MuscleBody, usuário em seu interior. 62
Figura 61 – MuscleBody. 63
Figura 62 – MuscleBody, abertura do corpo para acesso. 64
Figura 63 – MuscleBody, abertura do corpo para acesso e usuários em seu interior.
64
Figura 64 – Pavilhão Barcelona, de Mies van der Rohe, 1929.
68
Figura 65 – Pavilhão Britânico para a Feira Internacional de Xangai, de Heatherwick Studio, 2010.
68
Figura 66 – Pavilhão Serpentine de Herzog & de Meuron e Ai Weiwei, 2012.
68
Figura 67 – Pavilhão Serpentine de Sou Fujimoto, 2013. 68
Figura 68 – Protótipo de estudo, modelo virtual. 69
Figura 69 – Protótipo de estudo, modelo físico. 69
Figura 70 – Croqui do espaço interno. 69
Figura 71 – Croqui do pórtico. 70
Figura 72 – Croqui das conexões entre as extremidades dos pistões.
70
Figura 73 – Detalhamento do pórtico e suportes, sem escala.
70
Figura 74 – Pistão cilíndrico telescópico do fabricante Univer.
70
Figura 75 – Pórtico com pistões visíveis. 71
Figura 76 – Elevação do pórtico. 71
Figura 77 – Árvore de nós geral do projeto no Dynamo. 72
Figura 78 – Árvore de nós do grupo de pistões na parede do pórtico.
73
Figura 79 – Porção da árvore de nós da parede responsá-vel pelo cálculo da variável Px.
73
Figura 80 – Árvore de nós do canto do pórtico. 75
Figura 81 – Porção da árvore de nós da parede responsá-vel pelo cálculo da variável Px.
75
Figura 82 – Árvore de nós dos pistões posicionados ao longo da viga do pórtico.
76
Figura 83 – Porção da árvore de nós responsável pelo cálculo da variável Px para os pistões localizados ao lon-go da viga do pórtico.
76
Figura 84 – Storyboard de percurso sob o pórtico. 77
Figura 85 – Conjunto de pórticos em perspectiva axono-métrica.
78
Figura 86 – Croqui do envelopamento. 79
Figura 87 – Planta Baixa do projeto. 79
Figura 88 – Detalhamento do envelopamento. 79
Figura 89 – Perspectiva interna diurna renderizada. 80
Figura 90 – Perspectiva Interna noturna renderizada. 80
Figura 91 – Corte longitudinal. 81
Figura 92 – Corte Transversal. 81
Figura 93 – Elevação Frontal. 81
Figura 94 – Elevação Lateral. 81
Figura 95 – Implantação do pavilhão. 82
Figura 96 – Perspectiva aérea renderizada. 83
Figura 97 – Perspectiva renderizada. 83
Figura 98 – Perspectiva renderizada. 83
Figura 99 – Corte da casa de compressor. 83
Figura 100 – Corte na escada da casa de compressor. 83
Figura 101 – Storyboard da configuração estática, posição retraída e estendida dos pistões.
85
Figura 102 – Storyboard da configuração semi-interativa. 87
Figura 103 – Storyboard da configuração interativa, estu-do com 01 usuário.
89
Figura 104 – Storyboard da configuração interativa, estu-do com 04 usuários.
91
Figura 105 – Storyboard da configuração interativa, estu-do com 08 usuários.
93
Figura 106 – Storyboard da configuração interativa, estu-do de instalação e presença de 04 usuários.
95
Figura 107 – Perspectiva do interior com instalação. 96
Figura 108 – Perspectiva do interior com instalação. 96
10
Sumário
1 Introdução ..................................................................... 11
2 Os novos caminhos da arquitetura ................................ 14
2.1 Precedentes Artísticos da Arquitetura Interativa .... 23
3 Interatividade na arquitetura: O Sistema Interativo ..... 26
3.1 Os graus de interação do sistema interativo........... 30
3.2 Os Componentes do sistema interativo .................. 33
4 Complexidade e Projeto ................................................ 44
4.1 O Paradigma da Complexidade ............................... 45
4.2 Complexidade e simulação na Arquitetura ............. 48
5 Estudos de caso: o projeto e o espaço interativo ......... 52
5.1 Projeto 01 Son-o-House ......................................... 53
5.2 Projetos 02 e 03 Hyperbody ................................... 57
6 O projeto experimental ................................................. 66
6.1 Concepção do projeto ............................................. 68
6.2 Estudos configuracionais .......................................... 84
7 Considerações Finais ..................................................... 97
8 Referências .................................................................. 100
8.1 Bibliográficas ......................................................... 101
8.2 Figuras ................................................................... 104
9 Projeto arquitetônico ................................................... 108

11
1 Introdução
12
O acelerado desenvolvimento tecnológico, tão presente na con-
temporaneidade, possibilitou o surgimento de tecnologias que influen-
ciam a vida em sociedade humana. Tal desenvolvimento também exer-
ce sua influência sobre a produção arquitetônica, seja direta ou indire-
tamente, atingindo áreas da arquitetura que vão desde o desenvolvi-
mento do projeto à execução e utilização do espaço, abrindo o campo
da profissão a novas possibilidades, especialmente através da incorpo-
ração de técnicas e tecnologias de outras disciplinas.
Desfrutando dessas possibilidades, surgem teorias e projetos
que propõem a incorporação da interatividade na arquitetura - intera-
ção entre espaços, usuários e meio, permitindo que a arquitetura ad-
quira características até então majoritariamente ausentes em sua práti-
ca. Sendo assim, esse trabalho se posiciona como um estudo das novas
possibilidades que surgem à produção arquitetônica contemporânea,
especificamente no que diz respeito à utilização de técnicas e tecnolo-
gias que permitem à arquitetura se tornar interativa.
Tal estudo se realiza, num primeiro momento, através de uma
revisão bibliográfica e pesquisas virtuais cujo intuito é a formulação de
um quadro que permita a compreensão dos conceitos e técnicas apli-
cados à arquitetura como uma forma de torná-la interativa. Assim, tal
quadro busca apresentar em que consiste a arquitetura interativa,
quais elementos tecnológicos podem ser utilizados em sua construção
e métodos que auxiliam o desenvolvimento projetivo. Destaca-se aqui a
importância de autores como Kas Oosterhuis, Usman Haque, Lev Ma-
novich, Henri Achten, Louise Poissant, Tomasz Jaskiewicz e Juhani Pal-
lasmaa, que permitiram o entendimento dos conceitos que constroem
a arquitetura interativa frente às características da sociedade contem-
porânea.
À construção do quadro, se segue a análise de projetos significa-
tivos que exploram a interatividade na arquitetura, como uma maneira
de se confrontar os conceitos estudados à prática na contemporanei-
dade. Foram escolhidos projetos de arquitetos e grupos de pesquisa
que já estudam e investem em práticas multidisciplinares que permi-
tem a construção de objetos e espaços interativos.
Como uma maneira de se estudar e demonstrar o processo pro-
jetivo da arquitetura interativa, com suas características e especificida-
des, também faz parte desse trabalho o desenvolvimento de um proje-
to arquitetônico de caráter experimental. O projeto consistiu em um
pavilhão, sem um terreno específico, cuja intenção principal foi funcio-
nar como uma ferramenta de estudo que colaborasse com a constru-
ção do presente trabalho.
13
Diversos caminhos se apresentam como possíveis à arquitetura
na contemporaneidade, enquanto essa se combina com outras discipli-
nas e os avanços tecnológicos da sociedade contemporânea. Compre-
endendo isso, esse trabalho se apresenta não como a expectativa de
previsão do que será a arquitetura nos próximos anos, e sim como a
exploração de um dos caminhos que arquitetura segue nos tempos
atuais e poderá seguir no futuro.
14
2 Os novos caminhos da ar-quitetura
15
Durante a história, a prática arquitetônica tem se transformado
seguindo gostos estéticos, contextos sociais, técnicas construtivas e
tecnologias que se encontravam à disposição do arquiteto, do constru-
tor e da sociedade. Dessa forma, a arquitetura esteve sempre ligada, de
alguma forma a seu tempo.
No início do século XX, a revolução industrial e o desenvolvi-
mento tecnológico dos processos construtivos impulsionaram o surgi-
mento do movimento moderno na arquitetura (GIEDION, 2004). Atu-
almente, o acelerado desenvolvimento tecnológico, especialmente na
área das tecnologias digitais, tem revolucionado a prática arquitetônica.
É nesse contexto que surgem projetos que, aliados à tecnologia
e à ciência, buscam promover a interatividade na arquitetura como
uma nova forma de se apreender e produzir o espaço arquitetônico.
Para entender como surge essa vertente arquitetônica, é necessário
compreender quais são as questões relativas à utilização da tecnologia
digital que influenciam e direcionam a produção da arquitetura con-
temporânea.
As discussões sobre tecnologias digitais aplicadas à arquitetura
abordam, entre outras, a questão da conscientização ecológica no
mundo. A. Krista Sykes (2013) destaca que essa conscientização faz
com que a arquitetura seja reconhecida como uma disciplina com res-
ponsabilidade ambiental, fato que enfatiza o “papel que ela [a arquite-
tura] pode desempenhar para deter, e talvez até corrigir, os danos eco-
lógicos infligidos pela sociedade moderna”(SYKES, 2013, p. 19). Vale
destacar que tal conscientização surge como um contraponto à cultura
industrial de consumo de produtos e exploração de recursos naturais,
acentuada de certa forma, pelo desenvolvimento tecnológico, através
do aumento da produção industrial para suprir as necessidades da
crescente população global, e o incentivo ao intenso consumo dos pro-
dutos, que logo se tornam obsoletos e são descartados. Frente a tais
questões, a arquitetura busca o desenvolvimento de projetos eficientes
e ambientalmente amigáveis. Para tanto, os arquitetos recorrem a
abordagens que diminuam o impacto causado pela arquitetura no meio
ambiente, do projeto à construção, utilizando softwares de análise de
performance1, escolhendo sistemas energéticos mais eficientes, especi-
ficando materiais reaproveitados e reaproveitáveis, entre outras. A per-
tinência dessa questão na realidade dos escritórios de arquitetura pode
1 A exemplo do Ecotec Analysis, da Autodesk, software cuja função é realizar análises
da performance de edifícios, de pontos de vista geral e específicos, gerando dados qualificadores da eficiência do mesmo. (Acessível em http://usa.autodesk.com/ecotect-analysis/, acessado em 29/08/2013).
16
ser percebida pela existência de um certificado internacional2 que
comprova a eficiência dos edifícios sustentáveis. Tal certificado, apesar
da carga propagandística que carrega, demonstra o destaque e a valori-
zação que um projeto obtém ao ser considerado sustentável, tornando
a sustentabilidade um objetivo a ser alcançado na arquitetura.
Outra questão é a influência direta das tecnologias da informa-
ção, que “apresentam à arquitetura uma pletora de oportunidades e
desafios, com implicações para todos os aspectos da disciplina arquite-
tônica.” (SYKES, 2013, p. 18). Tais avanços se refletem no desenvolvi-
mento de projetos, fabricação de componentes, representação gráfica
e na utilização do espaço.
No que diz respeito ao desenvolvimento de projetos, os avanços
tecnológicos possibilitam o surgimento de novas formas de projetar.
Amparados por softwares CAD3, arquitetos passam a desenvolver mo-
delos digitais de seus projetos, simulando-os em telas de computado-
res, investindo em técnicas de modelagem tridimensionais, desenvol-
vendo formas complexas e complicadas que seriam difíceis de ser re-
2 “LEED (Leadership in Energy and Environmental Design) é um sistema internacional
de certificação e orientação ambiental para edificações, utilizado em 143 países, e possui o intuito de incentivar a transformação dos projetos, obra e operação das edifi-cações, sempre com foco na sustentabilidade de suas atuações.” (Descrição extraída de <http://www.gbcbrasil.org.br/?p=certificacao>, acessado em 29/08/2013) 3 Computer aided design, ou desenho auxiliado por computador, em tradução livre.
presentadas e atingidas sem a ajuda do computador. Ao mesmo tempo,
a utilização de softwares permite a atualização e o controle constante
de informações relativas ao projeto, facilitando intercâmbios disciplina-
res, como entre o projeto arquitetônico e os seus complementares,
assim como analises a respeito da forma e do desempenho energético
do edifício.
As oportunidades suscitadas pelos avanços tecnológicos, entre-
tanto, não levam a abordagens uniformes. Por exemplo, enquanto o
arquiteto canadense Frank Gehry utiliza o computador apenas como
uma ferramenta de desenho, considerando que “qualquer imagem
produzida pelo computador deixa sem conteúdo qualquer ideia.” (STEE-
LE, 2001, p. 122), o arquiteto norte-americano, Greg Lynn é conhecido
por ter um escritório livre de papel (RAPPOLT, 2008).
A opinião de Frank Gehry pode parecer contraditória em um
primeiro momento, visto que o seu projeto para o Museu Guggenheim
em Bilbao, na Espanha (1997), é conhecido por ter sido pioneiro na
aplicação do CATIA4 na arquitetura. O CATIA é um software que era
utilizado, até então, no desenvolvimento de projetos das indústrias
4 Computer Aided Three-dimensional Interactive Application, ou Aplicativo Interativo
Tridimensional Auxiliada por Computador, desenvolvida pela Dassault Systèmes. (Mais informações disponíveis em <http://www.3ds.com/products-services/catia/welcome/>, acessado em 29/08/2013)
17
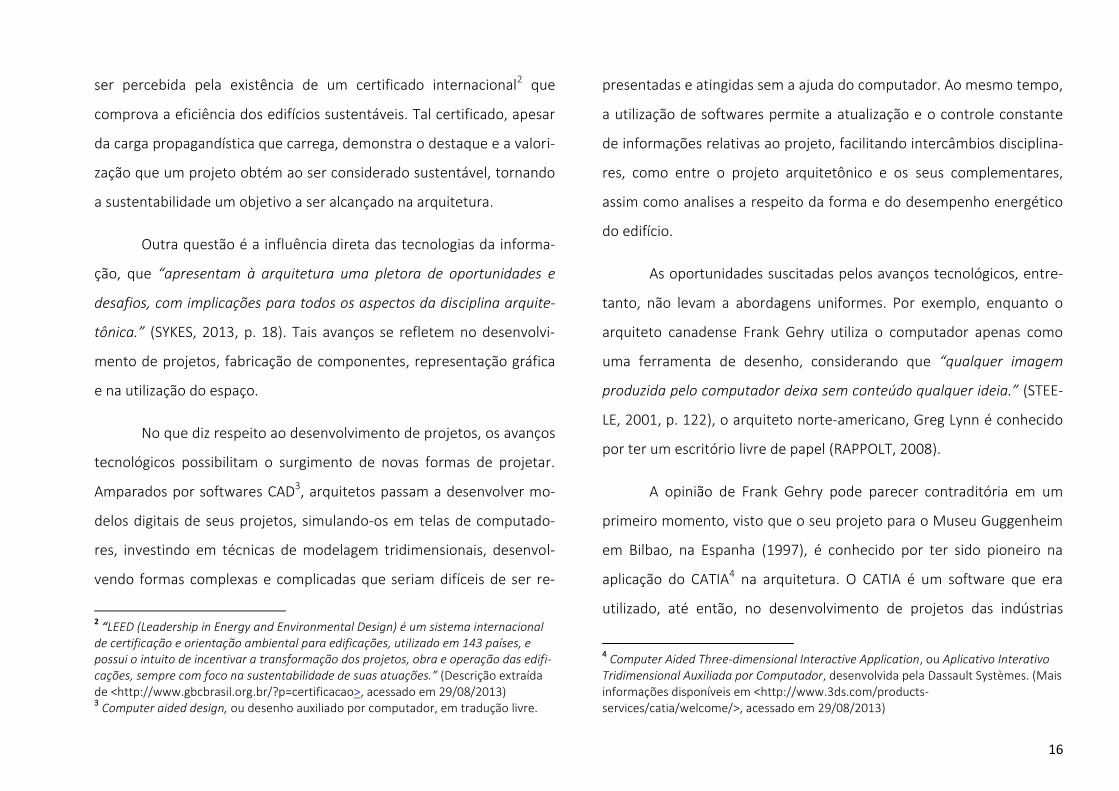
naval e aeronáutica, devido ao seu poder de conciliar diversos tipos de
componentes de um projeto, aliado à modelagem tridimensional preci-
sa dos mesmos. O que Gehry fez foi utilizar o software para agregar em
um só modelo virtual todos os componentes do seu edifício: elementos
arquitetônicos e estruturais, instalações elétricas, hidráulicas, entre
outros. O software, além de garantir a exequibilidade do projeto, atra-
vés da sua precisão e da utilização de uma geometria não cartesiana de
representação, também foi responsável pelo melhor aproveitamento
do tempo, orçamento e materiais disponíveis para a execução do proje-
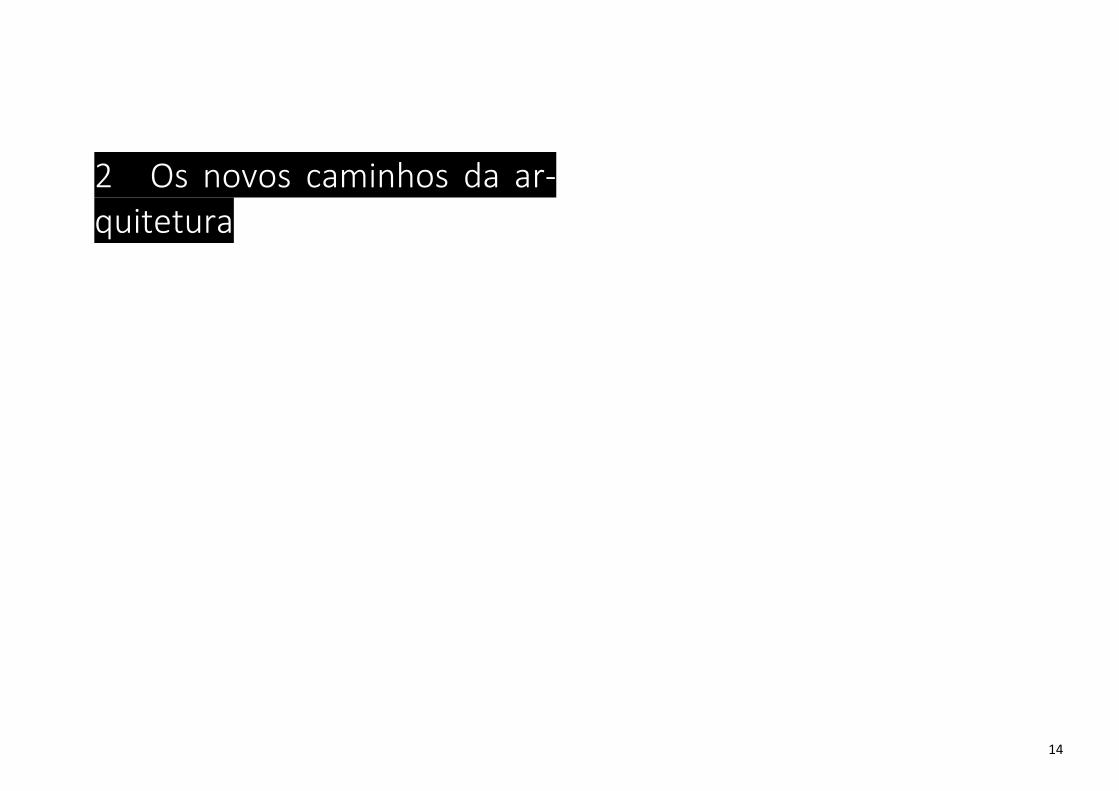
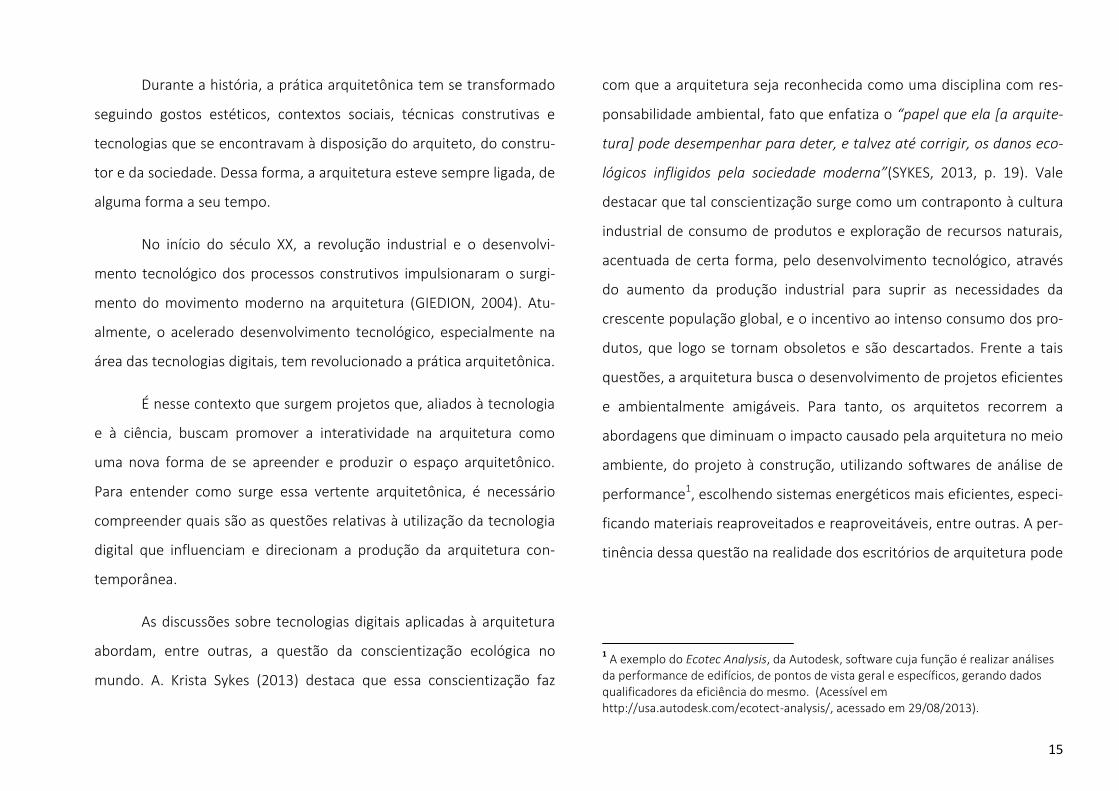
to (STEELE, 2001). Porém, mesmo utilizando o CATIA para a represen-
tação do projeto, o desenvolvimento não se deu no computador. O
processo projetivo do arquiteto tem início em croquis e em maquetes
físicas, que são digitalizados e transportados para o computador, onde
continua a representação do projeto5. O que acontece então no pro-
cesso projetivo de Gehry, é que a ideia, em quesitos formais, é conce-
bida pelo arquiteto de maneira tradicional, deixando as ferramentas
tecnológicas responsáveis pela representação gráfica e exequibilidade
do projeto.
5 O processo projetivo do arquiteto é demonstrado no documentário Sketches of
Frank Gehry, dirigido por Sydney Pollock e distribuído pela Sony Pictures Classics. O filme mostra o arquiteto montando maquetes físicas de estudo que são posterior-mente digitalizadas a partir de scanners tridimensionais, para então passar ao compu-tador.
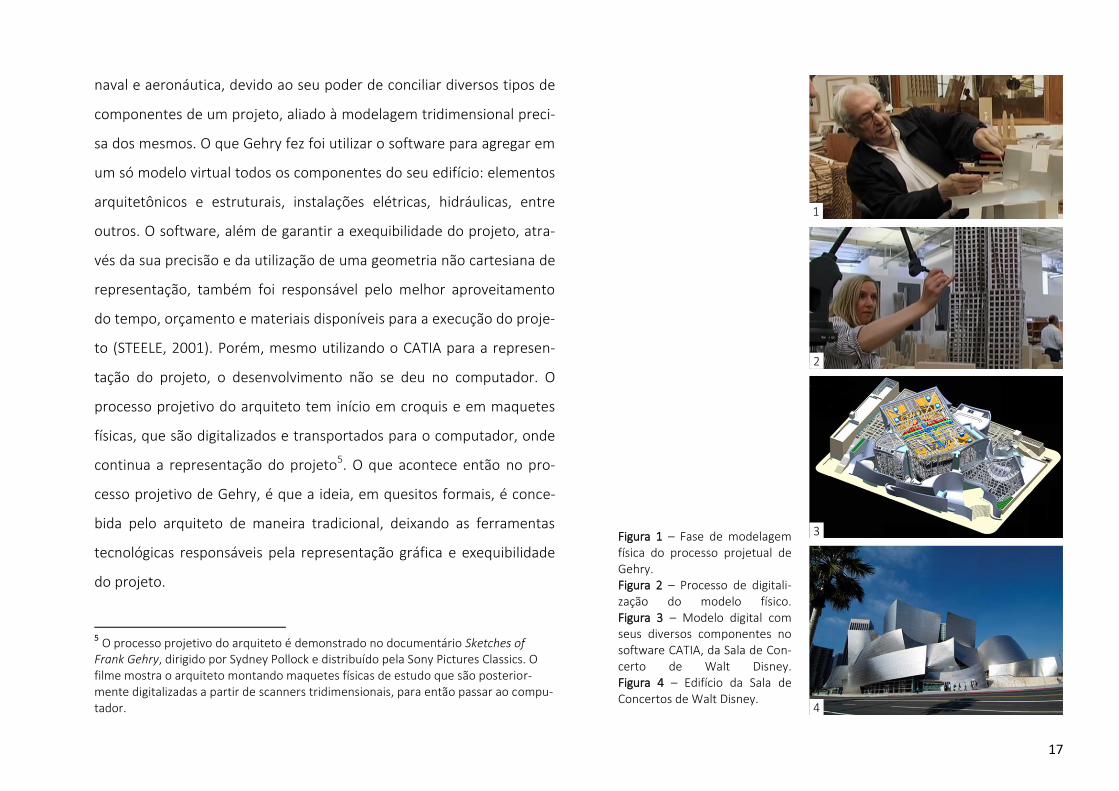
Figura 1 – Fase de modelagem física do processo projetual de Gehry. Figura 2 – Processo de digitali-zação do modelo físico. Figura 3 – Modelo digital com seus diversos componentes no software CATIA, da Sala de Con-certo de Walt Disney. Figura 4 – Edifício da Sala de Concertos de Walt Disney.
1
2
3
4
18
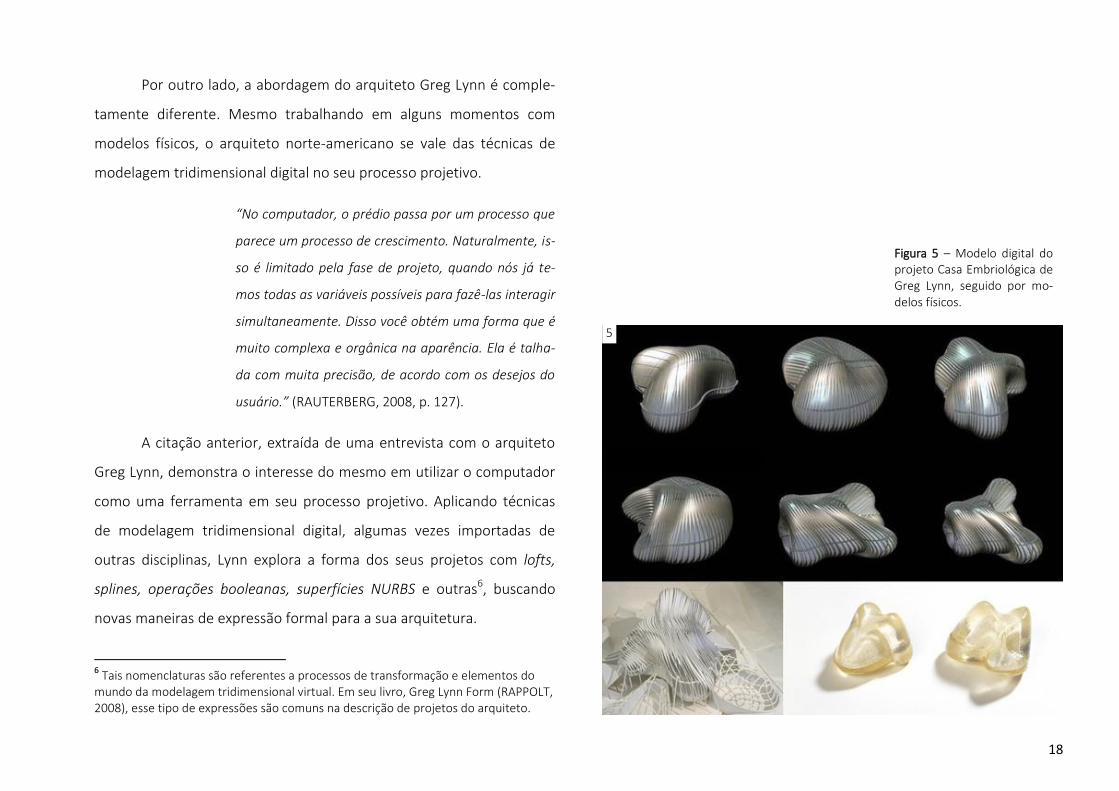
Por outro lado, a abordagem do arquiteto Greg Lynn é comple-
tamente diferente. Mesmo trabalhando em alguns momentos com
modelos físicos, o arquiteto norte-americano se vale das técnicas de
modelagem tridimensional digital no seu processo projetivo.
“No computador, o prédio passa por um processo que
parece um processo de crescimento. Naturalmente, is-
so é limitado pela fase de projeto, quando nós já te-
mos todas as variáveis possíveis para fazê-las interagir
simultaneamente. Disso você obtém uma forma que é
muito complexa e orgânica na aparência. Ela é talha-
da com muita precisão, de acordo com os desejos do
usuário.” (RAUTERBERG, 2008, p. 127).
A citação anterior, extraída de uma entrevista com o arquiteto
Greg Lynn, demonstra o interesse do mesmo em utilizar o computador
como uma ferramenta em seu processo projetivo. Aplicando técnicas
de modelagem tridimensional digital, algumas vezes importadas de
outras disciplinas, Lynn explora a forma dos seus projetos com lofts,
splines, operações booleanas, superfícies NURBS e outras6, buscando
novas maneiras de expressão formal para a sua arquitetura.
6 Tais nomenclaturas são referentes a processos de transformação e elementos do
mundo da modelagem tridimensional virtual. Em seu livro, Greg Lynn Form (RAPPOLT, 2008), esse tipo de expressões são comuns na descrição de projetos do arquiteto.
Figura 5 – Modelo digital do projeto Casa Embriológica de Greg Lynn, seguido por mo-delos físicos.
5
19
Os arquitetos citados anteriormente, apesar de divergirem
quanto à maneira de utilização da tecnologia no desenvolvimento do
projeto, convergem numa mesma direção no que diz respeito ao pro-
cesso de execução de suas obras. Dadas as suas formas complexas e
complicadas, algumas peças e componentes dos seus edifícios não são
possíveis de ser produzidos de forma tradicional, em massa. Dada a
singularidade de grande parte de seus componentes, ambos os arquite-
tos dependem de uma forma de produção industrial que tem se desen-
volvido cada vez mais: a customização em massa.
Diferentemente do início do século XX, quando a indústria da
construção se apoiava na produção em massa de componentes, a es-
tandardização, nos tempos atuais tem se buscado o desenvolvimento
de processos de fabricação capazes de produzir, em grande escala, pe-
ças e componentes diferentes entre si, customizados. É então que se
aplicam as ideias de CAM (computer aided manufacturing, ou fabrica-
ção auxiliada por computador), CNC (computer numeric control, ou con-
trole numérico computadorizado) e F2F (file to factory, ou arquivo para
fábrica). Sobre tais processos, o arquiteto holandês Kas Oosterhuis7 fala
em entrevista:
7 O arquiteto Kas Oosterhuis, nascido em 1951, em Amersfoot, é professor na Facul-
dade de Arquitetura da Universidade de Delft e mantém um escritório de arquitetura chamado ONL.
“Nós desenvolvemos um arquivo inovador para fabri-
cação do processo de customização em massa (...). O
Processo F2F nos dá total controle sobre a arquitetura
que não é estandarte. No nosso design nós não cons-
truímos mais em repetição. Na Web of N-H, no Acous-
tic Barrier e no Cockpit8 nem um único elemento cons-
trutivo [painel de vidro, estrutura de aço] são o mes-
mo. Literalmente milhares de diferentes painéis de vi-
dro e estrutura de aço são cortados por CNC e monta-
dos conforme nosso processo F2F. Agora arquitetura
não padronizada se tornou o novo padrão.” 9.
A fala de Kas Oosterhuis transparece a sua busca por processos
construtivos e de fabricação que possibilitem a execução de edifícios
constituídos por elementos não padronizados.
Oosterhuis coordena um grupo de pesquisas na Faculdade de
Arquitetura na Universidade de Tecnologia de Delft, na Holanda, cha-
mado Hyperbody, cujo objetivo é “explorar técnicas e métodos para o
desenho e construção de arquiteturas não padronizadas, virtuais e inte-
8 Projetos do arquiteto, disponíveis em seu website
<http://www.oosterhuis.nl/quickstart/index.php?id=projects> , acessado em 30/01/2014. 9 Trecho de entrevista concedida ao arquiteto paulista Guto Requena. Disponível em <
http://www.gutorequena.com.br/site_mestrado/interviews_oosterhuis.htm>, aces-sado em 01/09/2013.
20
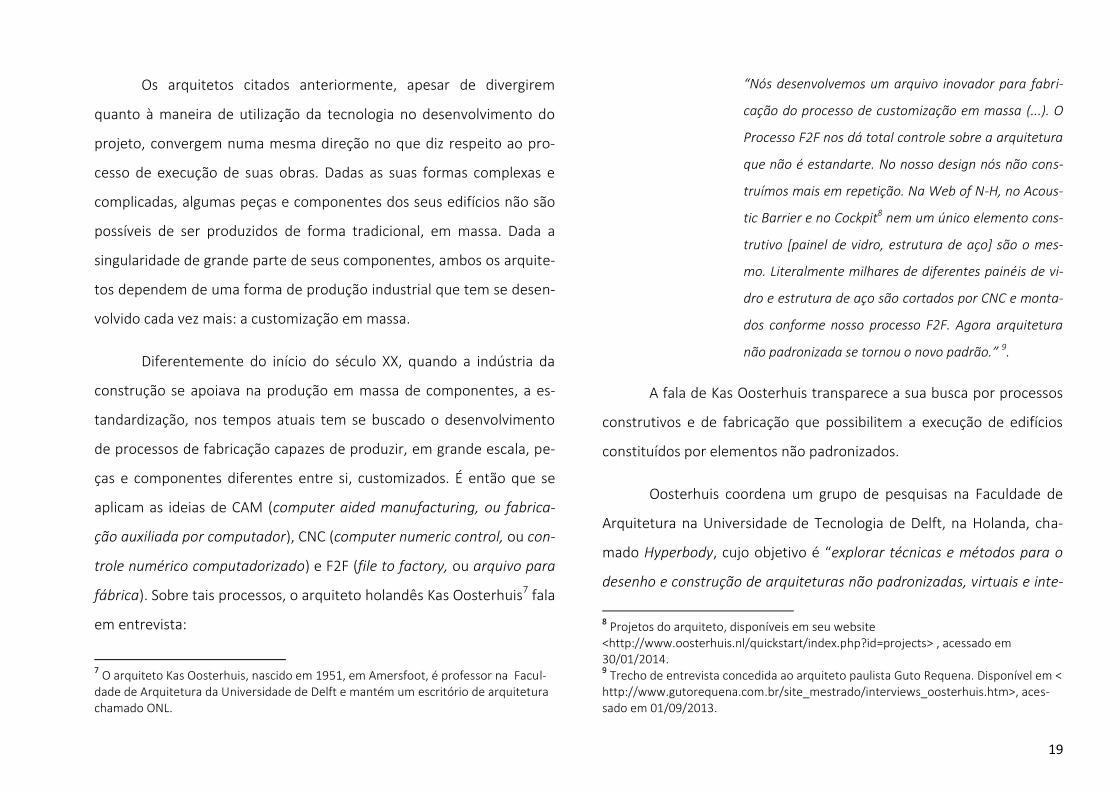
rativas” 10. Um dos trabalhos do grupo foi o desenvolvimento de um
protótipo, na escala 1:1, de uma estrutura autoportante, elaborada
através de softwares e construída com blocos de espuma. A execução
do modelo se deu transmitindo informações do modelo tridimensional
digital, elaborado em computador, a robôs CNC de braços articulados
equipados com fios de corte, que interpretam as informações do mo-
delo e cortam blocos de espuma no formato dos componentes, que são
posteriormente montados e dão forma ao protótipo. O método de de-
senvolvimento de tal projeto exemplifica o sistema de produção
CAD/CAM (passagem de informações de modelo produzido em compu-
tador diretamente para as máquinas que fabricam as peças), permitin-
do que as formas modeladas em computador, que seriam difíceis de
ser executadas e produzidas de forma tradicional, com plantas, cortes e
elevações cartesianas, se tornem reais.
Outra questão que surge frente às novas possibilidades da ar-
quitetura é a aplicação de sistemas e aparelhos tecnológicos que influ-
enciam diretamente a utilização do espaço. Seja através da incorpora-
ção de equipamentos de artemídia ou de sistemas interativos e reati-
vos, a presença de componentes tecnológicos no espaço arquitetônico
10
Descrição disponível em < http://www.hyperbody.nl/about/what/>, acessado em 01/09/2013.
Figuras 6 e 7 – Modelo digital do protó-tipo elaborado pelo Hyperbody. Figura 8 – Bloco de espuma sendo cortado pelo braço robótico CNC. Figuras 9 e 10 – Protótipo fabricado e montado.
6
7
8
9 10
21
aparece cada vez mais como uma possibilidade para a produção arqui-
tetônica.
A presença de componentes tecnológicos no espaço construído
da arquitetura atende a diversas finalidades, do aprimoramento de
aspectos funcionais e estéticos à experimentação espacial propriamen-
te dita. Alguns arquitetos investem na apropriação de elementos já
utilizados na artemídia, como telas de vídeo e iluminação, como uma
forma de fazer com que seus edifícios possam se comunicar com seu
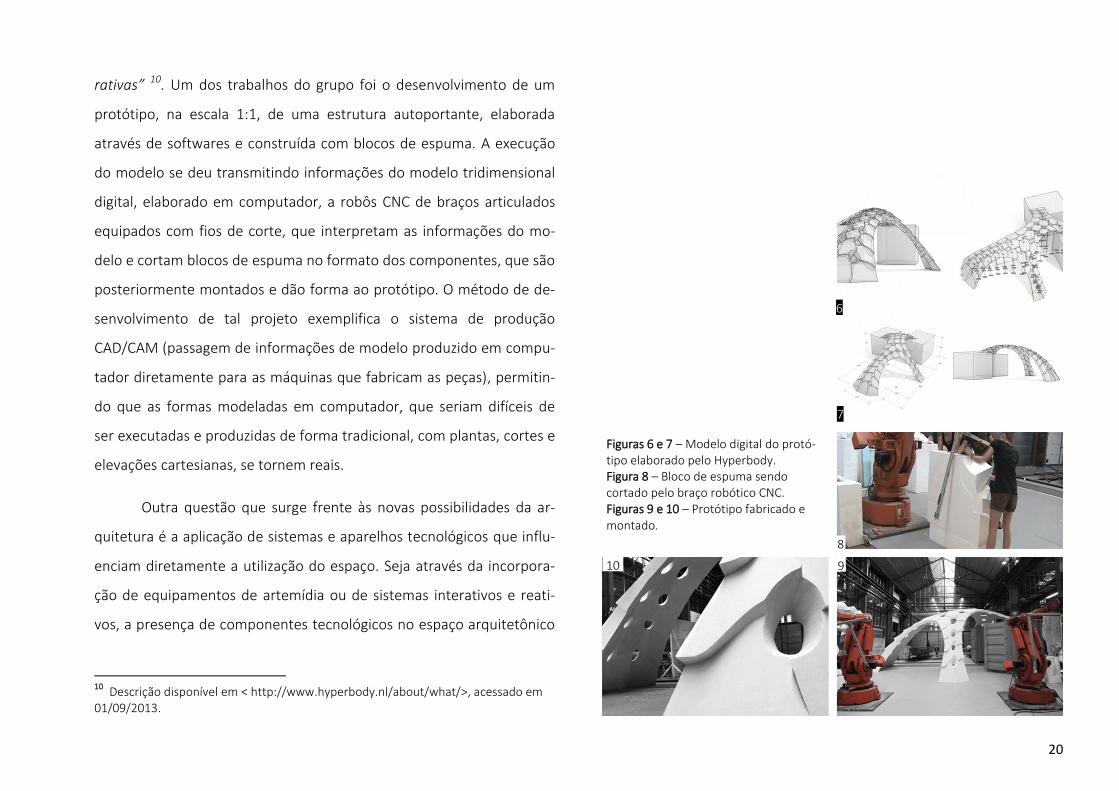
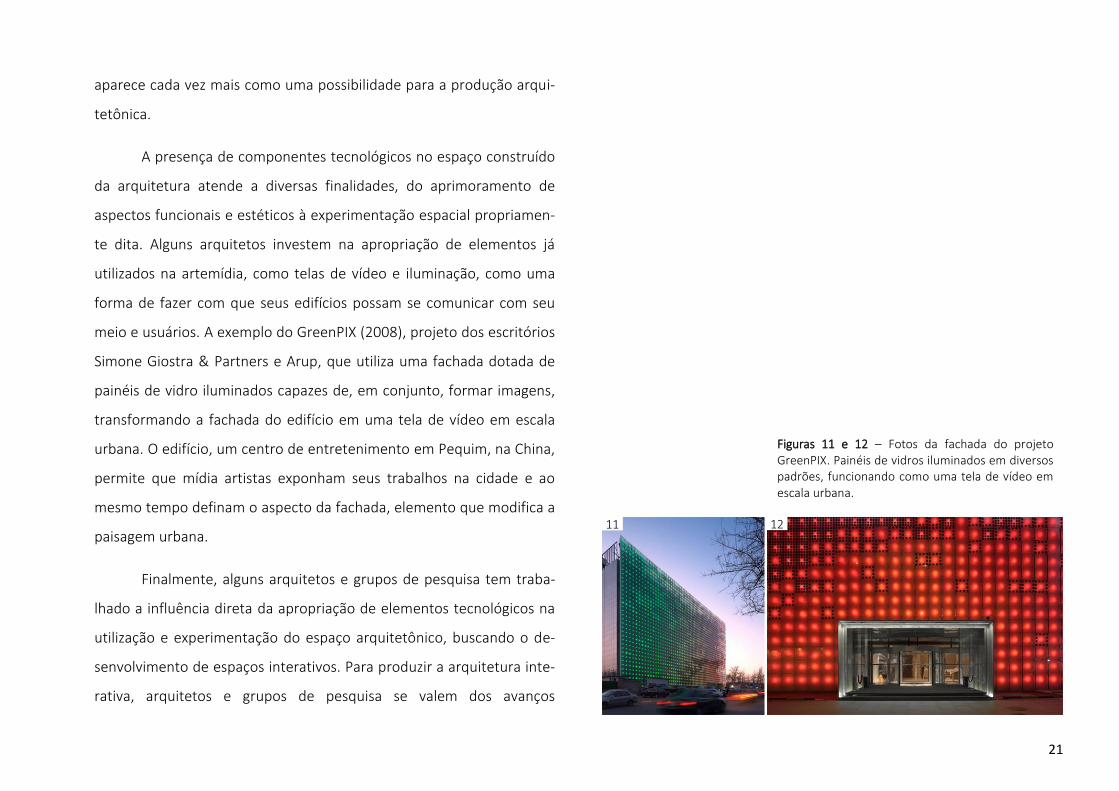
meio e usuários. A exemplo do GreenPIX (2008), projeto dos escritórios
Simone Giostra & Partners e Arup, que utiliza uma fachada dotada de
painéis de vidro iluminados capazes de, em conjunto, formar imagens,
transformando a fachada do edifício em uma tela de vídeo em escala
urbana. O edifício, um centro de entretenimento em Pequim, na China,
permite que mídia artistas exponham seus trabalhos na cidade e ao
mesmo tempo definam o aspecto da fachada, elemento que modifica a
paisagem urbana.
Finalmente, alguns arquitetos e grupos de pesquisa tem traba-
lhado a influência direta da apropriação de elementos tecnológicos na
utilização e experimentação do espaço arquitetônico, buscando o de-
senvolvimento de espaços interativos. Para produzir a arquitetura inte-
rativa, arquitetos e grupos de pesquisa se valem dos avanços
Figuras 11 e 12 – Fotos da fachada do projeto GreenPIX. Painéis de vidros iluminados em diversos padrões, funcionando como uma tela de vídeo em escala urbana.
11 12
22
tecnológicos citados anteriormente, utilizando ferramentas CAD para
desenvolver e simular projetos e seus comportamentos, novas técnicas
de fabricação para conseguir produzir componentes complexos e a uti-
lização de dispositivos como atuadores e sensores, que funcionam co-
mo intermediadores do processo interativo no espaço construído.
Apesar de existirem diversas abordagens a respeito dos novos
caminhos que a arquitetura pode percorrer na contemporaneidade,
alguns até aparentemente divergentes até, todas são, direta ou indire-
tamente, relacionadas ao rápido desenvolvimento tecnológico onipre-
sente na sociedade contemporânea (JASKIEWICZ, 2012). Com base nis-
so, Antonino Saggio (2005) compara o relacionamento entre arquitetu-
ra e tecnologia na contemporaneidade, no período renascentista e no
moderno.
“Assim como a arquitetura renascentista se transfor-
mou em algo ‘perspectivável’, e assim como a arquite-
tura funcionalista se reestruturou completamente pa-
ra se tornar ‘industrializável’, a arquitetura contempo-
rânea está lutando para se tornar ‘informatizável’: es-
tá lutando para incorporar em si a dinâmica, interco-
nectada e, acima de tudo, interativa essência das tec-
nologias da informação” (SAGGIO, 2005, p. 25).
A fala de Saggio traduz a sua observação acerca da apropriação
de técnicas e tecnologias pela arquitetura no passar dos anos, compa-
rando a influência da perspectiva para a arquitetura renascentista e a
industrialização para a arquitetura moderna com a disseminação das
tecnologias da informação para a arquitetura dos tempos atuais e que
ainda virão. Tais tecnologias, representadas por computadores, micro-
processadores, celulares, a internet e outros elementos, fazem cada
vez mais parte da vida do ser humano contemporâneo. Esses elemen-
tos se tornam também, cada vez mais parte do nosso cotidiano, desa-
percebidamente, através de objetos que passam a incorporar sistemas
computacionais (REQUENA, 2007).
A prática da interatividade na arquitetura se apresenta como
uma forma de a disciplina acompanhar os desenvolvimentos técnicos e
tecnológicos da contemporaneidade, tornando-a dinâmica, interconec-
tada e interativa justamente pela apropriação de elementos tecnológi-
cos de diferentes disciplinas, como a robótica e a computação. “A inte-
ratividade coloca em seu centro a subjetividade (variabilidade, reconfi-
gurabilidade e personalização) ao invés da natureza absoluta do objeto
(serialização, estandardização e duplicação)” (SAGGIO, 2005, p. 23), ou
seja, a arquitetura interativa permite que o seu produto, ao invés de
focar em algo definido, estático e replicável, foque no desenvolvimento
23
de edifícios que podem se reconfigurar, se modificar e se adaptar, as-
sim apresentando assim, um produto dinâmico. Produto este que pode
utilizar tais características para o aperfeiçoamento da sua funcionalida-
de, como uma nova forma de expressão arquitetônica, através da ciné-
tica (LINUS, 2012), e também como uma nova forma de experimenta-
ção espacial através de relacionamentos interativos entre edifício e
usuários (SCHUELER, 2012).
Entretanto, a construção de espaços interativos e a exploração
das suas possibilidades não se restringem à arquitetura, sendo um con-
ceito abordado há certo tempo no meio artístico.
2.1 Precedentes Artísticos da Arquitetura Interativa
A arquitetura interativa é um campo disciplinar que ainda care-
ce de exemplos expressivos no campo profissional. A exploração das
possibilidades dos espaços interativos se divide entre grupos de pesqui-
sa de universidades, escritórios de arquitetura e arquitetos específicos,
interessados no desenvolvimento multidisciplinar da arquitetura e ar-
tistas que investem na utilização de tecnologias e técnicas que permi-
tem que suas obras se tornem interativas. Fato é que a busca pela cria-
ção de espaços interativos em meios artísticos antecede bastante a
prática da mesma na arquitetura.
O fato de grande parte dos exemplos de espaços interativos
provirem da arte não é algo aleatório. A prática da interatividade no
meio artístico não é novidade, visto que essa já era encontrada na dé-
cada de 1960 nos trabalhos de Nam June Paik, por exemplo11. Em suas
instalações, Paik permitia que o espectador deixasse a sua posição pas-
siva de observador e passasse a agir ativamente sobre a obra de arte.
Essa transição do papel do observador pode ser associada ao desenvol-
vimento da artemídia.
“Até o aparecimento das novas artemídias, a ativida-
de artística estava associada com a criação de formas.
(...) a ênfase foi se deslocando progressivamente do
processo para a experimentação de dispositivos que
convidavam o espectador a se conectar num outro ní-
vel e, por fim, interagir com a obra de arte e seu am-
biente” (POISSANT, 2009, p. 72-73).
11
“As instalações de Nam June Paik, reagrupadas e intituladas a partir de 1963 como Participation TV, permitiam que os espectadores numa galeria atuassem sobre uma imagem televisionada, com a ajuda de um microfone ou um imã, alterando assim os campos magnéticos e produzindo distorções nas imagens.” (POISSANT, 2009, p. 78).
24
O trabalho de Paik já demonstrava, em meados do século XX,
como a utilização de meios tecnológicos permitiria a mudança de para-
digma da obra de arte estritamente autoral e hermética, na qual era
proibido tocar, para uma obra de arte interativa, que, sem a ação do
espectador, seria apenas um “potencial não realizado” (HUHTAMO,
2009, p. 111). Sendo assim, o espectador deixa a sua posição passiva e
se torna uma espécie de coautor da obra, que, sem a sua participação
ou intervenção, não se faz completa. Dessa forma, a experiência do
espectador sobre a obra deixa de ser dependente da sua observação e
passa a depender também do papel que exerce sobre a mesma.
A arte também é mais rápida na apropriação de tecnologias e
técnicas se comparada à arquitetura. Poissant (2009) destaca a utiliza-
ção de dispositivos tecnológicos que permitem a prática da interativi-
dade em obras de arte interativas da década de 1960, “tomados de
empréstimo, primeiramente do mundo industrial ou do cotidiano e,
progressivamente, do campo das comunicações e da tecnologia” (POIS-
SANT, 2009, p. 71-72), assim como ocorre com a arquitetura interativa
na contemporaneidade. As instalações de arte interativa controladas
por computador, iniciadas na década de 1980, passaram a incorporar
também a interdisciplinaridade, marcada pelo trabalho em conjunto de
profissionais de diversas áreas, como especialistas em áudio, imagem,
Figura 13 – Nam June Paik em uma de suas instalações com televisões, modificando a ima-gem a partir da utilização de imãs.
Figura 14 – Uma das exibições da instalação Participation TV de Paik, na década de 1960.
13
14
25
arquitetura, mecânica, entre outras (DOMINGUES, REATEGUI, 2009).
Esse tipo de abordagem permitiu que a “a soma do conhecimento es-
pecializado de artistas e cientistas em estúdios” substituísse “os velhos
e obsoletos ateliês” (DOMINGUES, REATEGUI, 2009, p. 281).
Tanto a interdisciplinaridade quanto a busca pela modificação
da posição dos espectadores presente na arte interativa, são visíveis
hoje no desenvolvimento da arquitetura interativa, que busca modificar
a posição passiva do usuário do espaço e transformá-lo em coautor da
produção arquitetônica (HAQUE, 2006). Assim como ocorre na arte
interativa, a arquitetura interativa também permite que a experimenta-
ção dos usuários sobre o espaço deixe de depender de um papel passi-
vo e passe a fazer parte de um contexto ativo, no qual a suas ações
também são capazes de modificar o espaço.
Figuras 15 a 17 – Instala-ção interativa artística urbana Marling, do arqui-teto Usman Haque. Atra-vés dos sons produzidos pelos espectadores, as luzes que incidiam sobre a neblina se modificavam e formam padrões oscilan-tes. As formas produzidas pelas luzes produziam espacialidades interativas, e, constante movimento, graças à constante intera-ção do público.
15
16
17
26
3 Interatividade na arquite-tura: O Sistema Interativo
27
Interatividade é um termo utilizado frequentemente, especial-
mente no que diz respeito aos objetos tecnológicos atuais, seja por
motivos de promoção comercial ou realmente para definir o compor-
tamento de um dispositivo (JASKIEWICZ, 2012). Dessa forma, pode se
tornar confuso o reconhecimento do que de fato define algo interativo,
e, consequentemente, a interatividade na arquitetura. Assim, torna-se
necessário entender de que trata a interatividade e a arquitetura inte-
rativa.
A interação pode ser definida como a “ação que se exerce mu-
tuamente entre duas ou mais coisas, ou duas ou mais pessoas.” (FER-
REIRA, 2001, p. 425), sendo algo interativo definido como o “recurso,
meio ou processo de comunicação que permite ao receptor interagir
ativamente com o emissor; relativo a sistemas, programas e procedi-
mentos em que o usuário pode ou deve continuamente intervir no curso
das atividades” (FERREIRA, 2001, p. 425).
Aplicando tais definições à arquitetura, entende-se que a arqui-
tetura interativa é aquela que possui a capacidade de interagir, ou seja,
trocar ações com seus usuários e/ou com o meio em que está inserida.
Esta definição amplia o entendimento da arquitetura, que deixa de ser
sinônimo de algo estático, imóvel e imutável, e passa a incorporar a
capacidade de agir e, consequentemente, a dinamicidade e a mutabili-
dade. Isso permite que edifícios possam aprimorar o seu desempenho
energético e funcional, praticar novas formas de relacionamento entre
espaço e usuário, assim como entre os próprios usuários (LINUS, 2012).
Além disso, incorporar novas possibilidades de expressão formal.
Porém, como pode a arquitetura ser interativa? Quais elemen-
tos da arquitetura podem interagir?
Para responder a essas perguntas, assume-se que o espaço é o
protagonista da arquitetura, sendo ele definido pelos limites estabele-
cidos pelo homem (ZEVI, 2002).
Não se pretende com essa abordagem restringir a produção
arquitetônica à definição de limites físicos e obstáculos, mas entender
que o espaço arquitetônico é definido de alguma forma e, para que seja
possível interagir com tal espaço, é necessário interagir com o que o
define. Para tanto, faz-se necessário notar que a apreensão do espaço
arquitetônico pelo usuário se dá através de uma experimentação mul-
tissensorial (PALLASMAA, 2011), possível de ser manipulada pelo arqui-
teto, definindo os componentes físicos de um edifício e conhecendo as
qualidades sensoriais que esses podem agregar ao espaço.
Sendo assim, a forma de se interagir com o espaço é através dos
seus elementos definidores e dos componentes físicos de um edifício.
28
Para que um componente de um edifício seja capaz de participar de um
relacionamento interativo, esse deve exercer uma ação sobre o usuário
ou o seu meio, reconfigurando a si me mesmo e ao espaço. Essa ação,
independente de sua natureza, não deve ser confundida com ações
cotidianas operadas por usuários, como abrir ou fechar portas e janelas
ou modificar a posição de divisórias deslizantes. Isso porque quando se
abre e fecha uma porta, por exemplo, por mais que esta tenha sofrido a
ação de girar em torno de um eixo, decorrente de uma ação praticada
pelo usuário, ela não é capaz de agir sobre o mesmo; portanto, não
ocorre uma troca de ações entre componente e usuário – característica
do relacionamento interativo, sendo que a ação sofrida pela porta foi
apenas uma reação física à ação do usuário. O que ocorre nesse caso é
um relacionamento reativo (HAQUE, 2006). Assim, para que os compo-
nentes possam exercer ações, é necessário que estes sejam dotados de
dispositivos que permitam que esses ajam autonomamente, sem a ne-
cessidade da ação direta de usuários. Esses mecanismos são denomi-
nados atuadores (ACHTEN, 2011), dispositivos que permitem que os
componentes físicos do edifício possam se reconfigurar, exercer ações
e serem dinâmicos.
É necessário ressaltar que em um relacionamento interativo as
trocas de ações não são arbitrárias. As ações praticadas pelos compo-
nentes, para que permitam a existência desse relacionamento entre
espaço, usuários e meio, devem se relacionar com estes de alguma
forma. Para que isso ocorra, usuário e edifício precisam trocar informa-
ções, mais especificadamente, o edifício precisa obter informações
acerca dos usuários e do seu meio, para que suas ações sejam direcio-
nadas aos usuários. Essas informações são captadas por sensores, dis-
positivos tecnológicos com a capacidade de receber estímulos e infor-
mações do meio e dos usuários (ACHTEN, 2011).
As informações captadas, para que possam se tornar ações a
serem executadas pelo edifício e seus componentes, devem ser inter-
pretadas de alguma maneira, estabelecendo relações diretas ou indire-
tas entre as informações captadas pelos sensores e as ações executa-
das pelos componentes do edifício. A interpretação é realizada por dis-
positivos tecnológicos configuráveis, os processadores. Como o nome
indica, processadores são dispositivos com a capacidade de receber
informações dos sensores, processá-las através de seus parâmetros, e
informar os componentes do edifício qual ação devem executar. O pro-
cessamento pode se dar de forma direta ou indireta, relacionando in-
formações captadas pelos sensores diretamente às ações executadas
pelos componentes ou não. O relacionamento entre sensores, proces-
sadores e componentes está presente, por exemplo, em portas auto-
29
máticas. Tais portas são equipadas com sensores que captam a presen-
ça do usuário, processando-a como a ação de abrir ou fechar a porta.
Em outras palavras, um sensor capta a presença do usuário, envia a
informação ao processador, que a interpreta como instrução para abrir
a porta. O atuador recebe a instrução e reproduz as ações mecânicas
que abrem a porta.
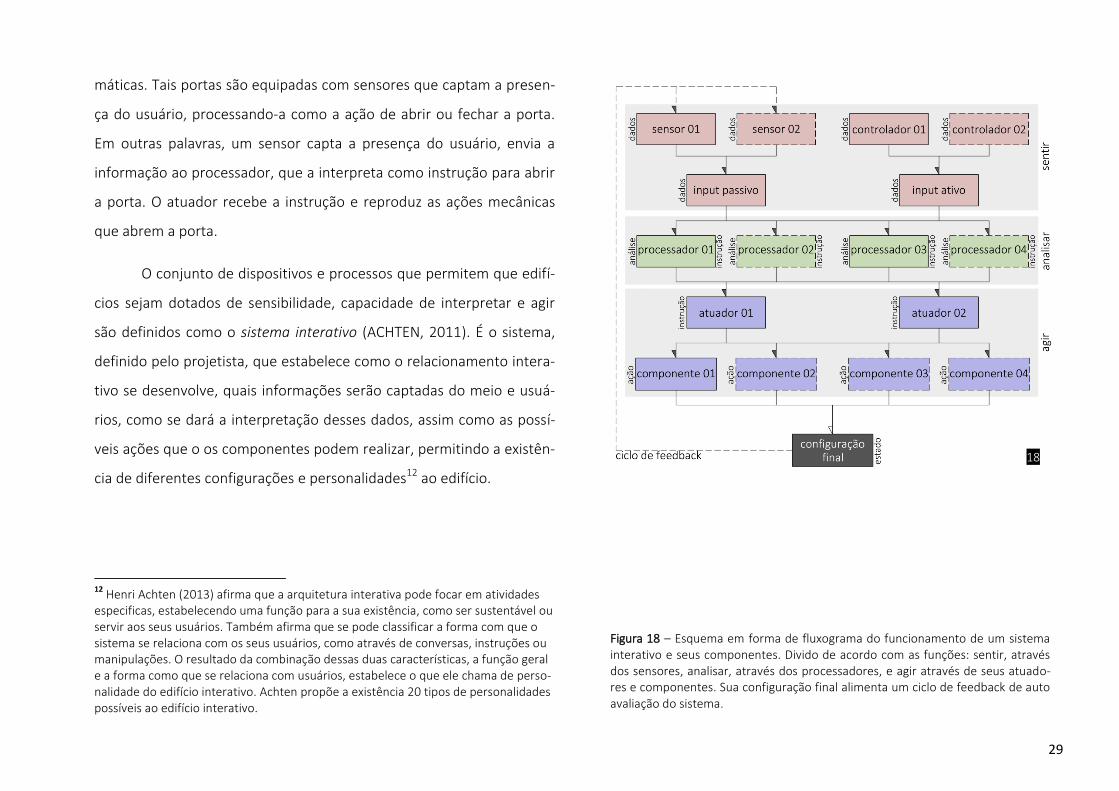
O conjunto de dispositivos e processos que permitem que edifí-
cios sejam dotados de sensibilidade, capacidade de interpretar e agir
são definidos como o sistema interativo (ACHTEN, 2011). É o sistema,
definido pelo projetista, que estabelece como o relacionamento intera-
tivo se desenvolve, quais informações serão captadas do meio e usuá-
rios, como se dará a interpretação desses dados, assim como as possí-
veis ações que o os componentes podem realizar, permitindo a existên-
cia de diferentes configurações e personalidades12 ao edifício.
12
Henri Achten (2013) afirma que a arquitetura interativa pode focar em atividades especificas, estabelecendo uma função para a sua existência, como ser sustentável ou servir aos seus usuários. Também afirma que se pode classificar a forma com que o sistema se relaciona com os seus usuários, como através de conversas, instruções ou manipulações. O resultado da combinação dessas duas características, a função geral e a forma como que se relaciona com usuários, estabelece o que ele chama de perso-nalidade do edifício interativo. Achten propõe a existência 20 tipos de personalidades possíveis ao edifício interativo.
Figura 18 – Esquema em forma de fluxograma do funcionamento de um sistema interativo e seus componentes. Divido de acordo com as funções: sentir, através dos sensores, analisar, através dos processadores, e agir através de seus atuado-res e componentes. Sua configuração final alimenta um ciclo de feedback de auto avaliação do sistema.
18
30
3.1 Os graus de interação do sistema interativo
Apesar de o relacionamento intermediado por dispositivos tec-
nológicos ser fundamental para a existência da arquitetura interativa,
este não determina a existência de um relacionamento interativo entre
edifício, usuários e meio.
Entendendo o problema, Henri Achten13 (2011) afirma que as
configurações dos “sistemas que permitem a interação não são todas
iguais. Existem vários graus de interação ou reação possíveis nesses
sistemas” (ACHTEN, 2011, p. 569). A partir de tal afirmação, Achten
propõe a classificação dos graus de interação dos sistemas em passivo,
reativo, autônomo e agente.
São classificados por Achten como passivos, os sistemas que
têm seus comportamentos determinados pelas leis da natureza. Siste-
mas passivos não possuem nenhum atributo que possa influenciar no
seu comportamento. Já os sistemas reativos apresentam mecanismos
capazes de modificar o modo como reagem a influencias externas, a
13
Henri Achten é holandês e mestre em arquitetura, formado pela Groep Ontwerp Methoden, e Ph. D. em ciências técnicas. Professor na Faculdade de Arquitetura da Universidade de Praga, República Tcheca, realiza pesquisas nas áreas de Computação do Design, Métodos de Design e Teoria do Design. Informações disponíveis em < http://cvut.academia.edu/HenriAchten>, acessado em 19/09/2013.
exemplo das portas automáticas, citadas anteriormente. Dessa forma,
cabe ao arquiteto formular quais são as reações do sistema interativo
para determinadas influências externas.
O arquiteto e pesquisador norte-americano Usman Haque14
(2006) classifica os sistemas reativos de forma semelhante, adicionando
à categoria o fato de que, apesar de uma ação externa ser responsável
por uma reação do sistema, o mesmo é incapaz de influenciar o agente
externo, não havendo um ciclo contínuo de troca de influência, carac-
terística fundamental de um relacionamento interativo. O sistema rea-
tivo é exemplificado por Haque em seu texto, através do relacionamen-
to que existe entre brise-soleils automatizados que rastreiam a posição
do sol, visando o melhor aproveitamento da luz natural, e o próprio sol,
afirmando que “quando brise-soleils rastreiam a direção do sol (...) eles
estão apenas respondendo a inputs de condições específicas, e como tal
não deveriam ser descritos como ‘interativos’, mas como ‘reativos’”
(HAQUE, 2006, p. 1). Ou seja, os brise-soleils respondem às ações do
sol, porém não exercem influencia alguma sobre o mesmo.
14
Usman Haque é arquiteto e diretor do escritório/laboratório londrino Haque Design + Research, especializado no desenvolvimento e pesquisa de sistemas interativos arquitetônicos. Informações disponíveis em <http://www.haque.co.uk/info.php>, acessado em 14/09/2013.
31
Os sistemas autônomos, descritos por Achten (2011), ao contrá-
rio de sistemas reativos, que respondem deterministicamente às in-
fluências externas, não possuem reações específicas relacionadas às
influências que recebe. Ao invés disso, tais sistemas são programados
com objetivos que buscam alcançar, aliados a processadores capazes
de determinar ações a serem tomadas para se alcançar esses objetivos.
Em outras palavras, sistemas autônomos são capazes receber influên-
cias externas, compará-las ao estado atual e aos seus objetivos e for-
mular as ações necessárias para se atingir a sua configuração objetivo.
Achten (2011) descreve o sistema agente como semelhante ao
autônomo, sendo diferenciado do segundo por não necessariamente
esperar por influências externas para praticar uma ação. Assim, “o sis-
tema agente está constantemente checando seu estado contra os seus
objetivos, podendo gerar um output ao mundo externo mesmo quando
não influenciado pelo seu meio.” (ACHTEN, 2011, p. 572).
Já Haque (2006) classifica os sistemas que realmente estabele-
cem os relacionamentos interativos em: de ciclo único e de ciclos múl-
tiplos. Os sistemas interativos de ciclo único, indicados por Haque como
a forma de interatividade mais básica, trabalham com inputs recebidos
de informações e ações de agentes externos e outputs que são capazes
de influenciar esse agente, direta ou indiretamente. Dessa maneira,
estabelece-se um ciclo onde agentes externos e sistema influenciam-se
mutuamente. Haque (ibid.) exemplifica esse sistema através da relação
entre uma instalação artística que gera efeitos visuais com base na mo-
vimentação dos espectadores no espaço e os próprios espectadores. O
espectador, através dos seus movimentos, se torna ator, uma vez que
estes movimentos geram modificações relativas na obra de arte. E a
obra de arte, ao se modificar, é capaz de modificar também a experiên-
cia do espectador. A questão a ser destacada nesse tipo sistema é que
as respostas geradas pelo mesmo para as diversas informações capta-
das do meio são determinadas pelo designer do sistema. Ou seja, ações
externas específicas gerarão respostas específicas, determinadas pela
estrutura do programa que gerencia o sistema, sendo essas definidas
ou não pelo designer.
Os sistemas interativos de ciclos múltiplos se assemelham aos
sistemas de ciclo único no fato de que ambos representam relações em
que sistema e agentes externos são capazes de influenciar-se mutua-
mente. A diferença entre tais tipos de sistema está, de acordo com Ha-
que (2006), no fato de que os de múltiplos ciclos buscam uma interação
construtiva e contínua, com base na acumulação de informações e a
constante atualização das mesmas, simulando um processo de aprendi-
zagem. Para tal, esses sistemas, ao invés de se valerem de parâmetros
32
e respostas predeterminadas, “negocia através de interfaces” (HAQUE,
2006, p. 3), permitindo que o sistema possa aprender e aperfeiçoar os
seus parâmetros, determinando um relacionamento construtivo. A de-
finição de tal sistema deriva da teoria da conversação do ciberneticista
britânico Gordon Pask15, uma “particularmente coerente, e potencial-
mente a mais produtiva, teoria sobre interação, abrangendo configura-
ções entre humanos, humanos e máquinas e máquinas em um mesmo
quadro.” (HAQUE, 2007, p. 54).
Independente da forma em que se pode classificar o formato do
relacionamento interativo e os seus graus de interatividade, o fator
mais importante a ser destacado na definição de um sistema interativo
é a existência da troca mútua de ações ou informações entre sistema e
agentes externos. É a troca, auxiliada através das interfaces digitais,
componentes do sistema interativo, que permite a existência da intera-
ção entre o edifício, o usuário e/ou seu meio.
15
Gordon Pask (1928 – 1996) foi um psicólogo e ciberneticista inglês que desenvolveu trabalhos relativos a sistemas interativos, chegando a construir máquinas que fossem capazes de reproduzir o comportamento desenvolvido em sua teoria da conversação, como o SAKI em 1956 (self-adaptive keyboard instructor, ou instrutor de teclado auto adaptativo), uma máquina cujo objetivo era ajudar pessoas a aprimorar suas técnicas de digitação, mimetizando a relação entre aluno e professor através de algoritmos e mecanismos analógicos (HAQUE, 2007).
19
20 21
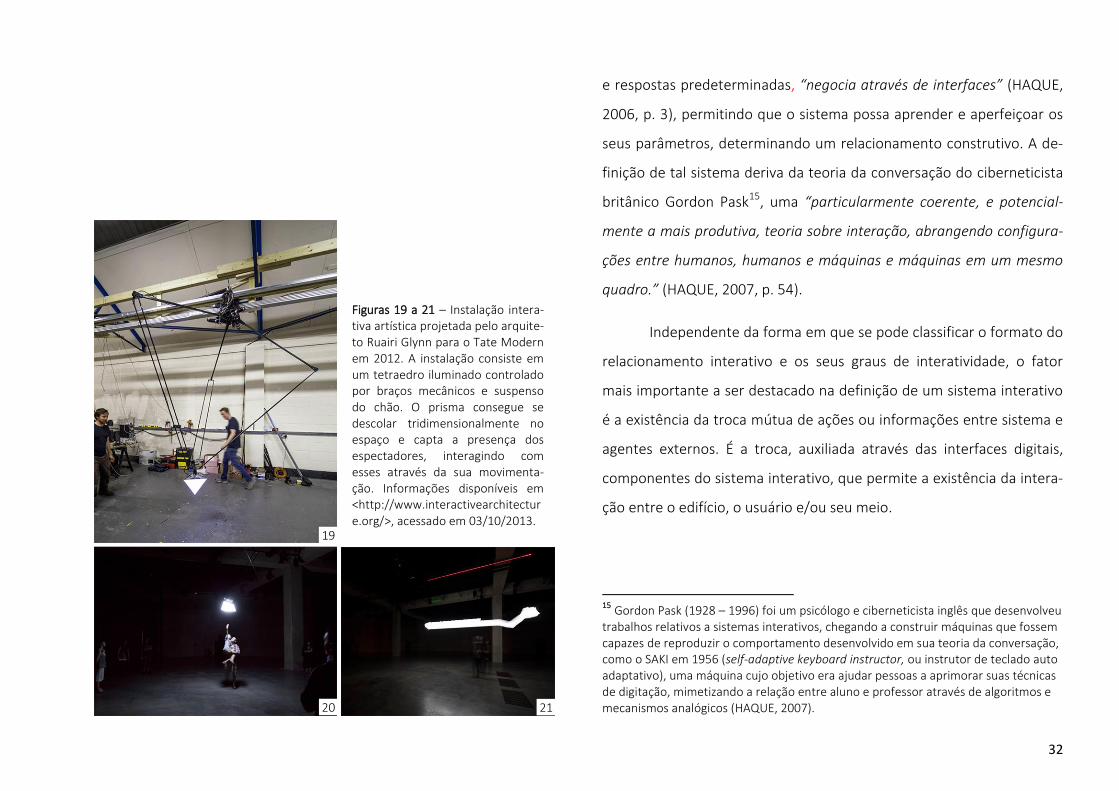
Figuras 19 a 21 – Instalação intera-tiva artística projetada pelo arquite-to Ruairi Glynn para o Tate Modern em 2012. A instalação consiste em um tetraedro iluminado controlado por braços mecânicos e suspenso do chão. O prisma consegue se descolar tridimensionalmente no espaço e capta a presença dos espectadores, interagindo com esses através da sua movimenta-ção. Informações disponíveis em <http://www.interactivearchitecture.org/>, acessado em 03/10/2013.
33
3.2 Os Componentes do sistema interativo
Como citado anteriormente, o sistema interativo é composto
por, no mínimo, quatro tipos de componentes, sendo eles os sensores,
os processadores, os atuadores e os componentes físicos do edifício (ver
figura 14). Para se entender melhor o papel desses componentes é ne-
cessário analisar quais as possiblidades que cada um traz à arquitetura
interativa, assim como quais são os dispositivos disponíveis que podem
cumprir o papel de cada um deles.
Sensores:
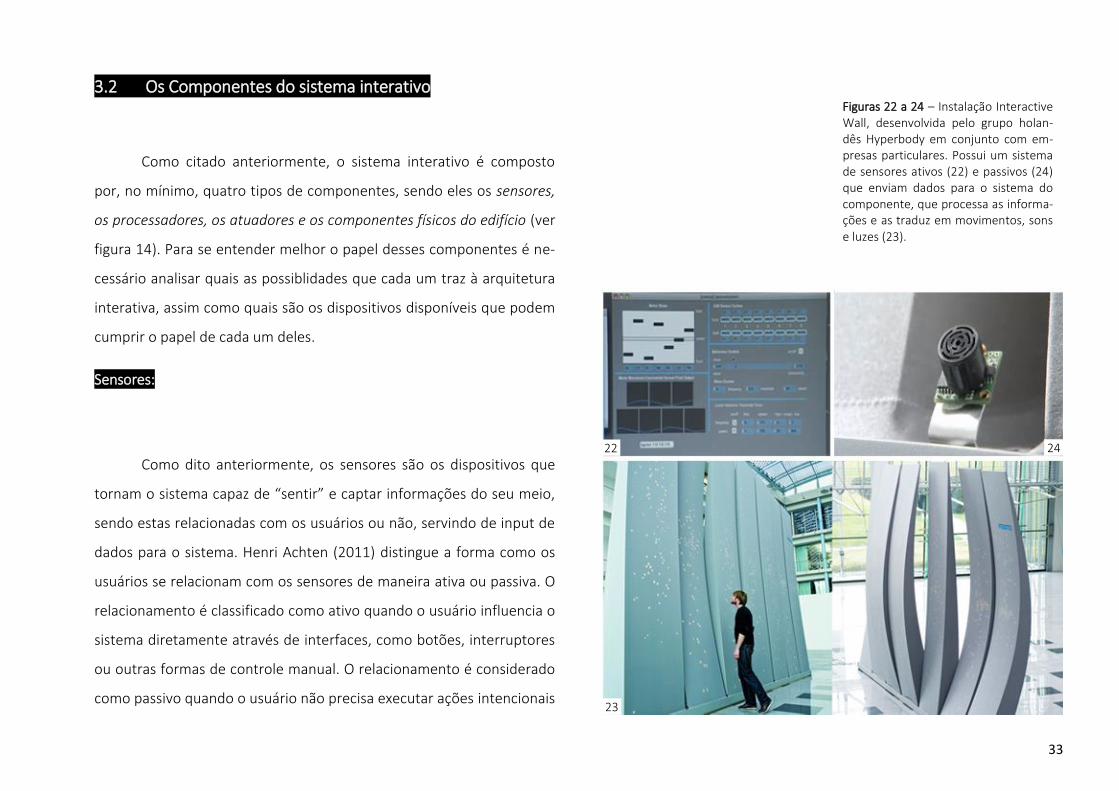
Como dito anteriormente, os sensores são os dispositivos que
tornam o sistema capaz de “sentir” e captar informações do seu meio,
sendo estas relacionadas com os usuários ou não, servindo de input de
dados para o sistema. Henri Achten (2011) distingue a forma como os
usuários se relacionam com os sensores de maneira ativa ou passiva. O
relacionamento é classificado como ativo quando o usuário influencia o
sistema diretamente através de interfaces, como botões, interruptores
ou outras formas de controle manual. O relacionamento é considerado
como passivo quando o usuário não precisa executar ações intencionais
Figuras 22 a 24 – Instalação Interactive Wall, desenvolvida pelo grupo holan-dês Hyperbody em conjunto com em-presas particulares. Possui um sistema de sensores ativos (22) e passivos (24) que enviam dados para o sistema do componente, que processa as informa-ções e as traduz em movimentos, sons e luzes (23).
22 24
23
34
diretamente no sistema para lhe enviar informações, sendo estas cap-
tadas através de dispositivos como sensores de presença, distância,
temperatura e outros.
Os sensores podem captar informações tanto relativas aos usu-
ários quanto ao seu meio. Partindo disso, Linus (2012) elaborou uma
lista de sensores que existem no mercado e que podem ser aplicados à
arquitetura interativa, dividindo-os entre os que captam informações
do meio e os que captam informações relativas aos usuários.
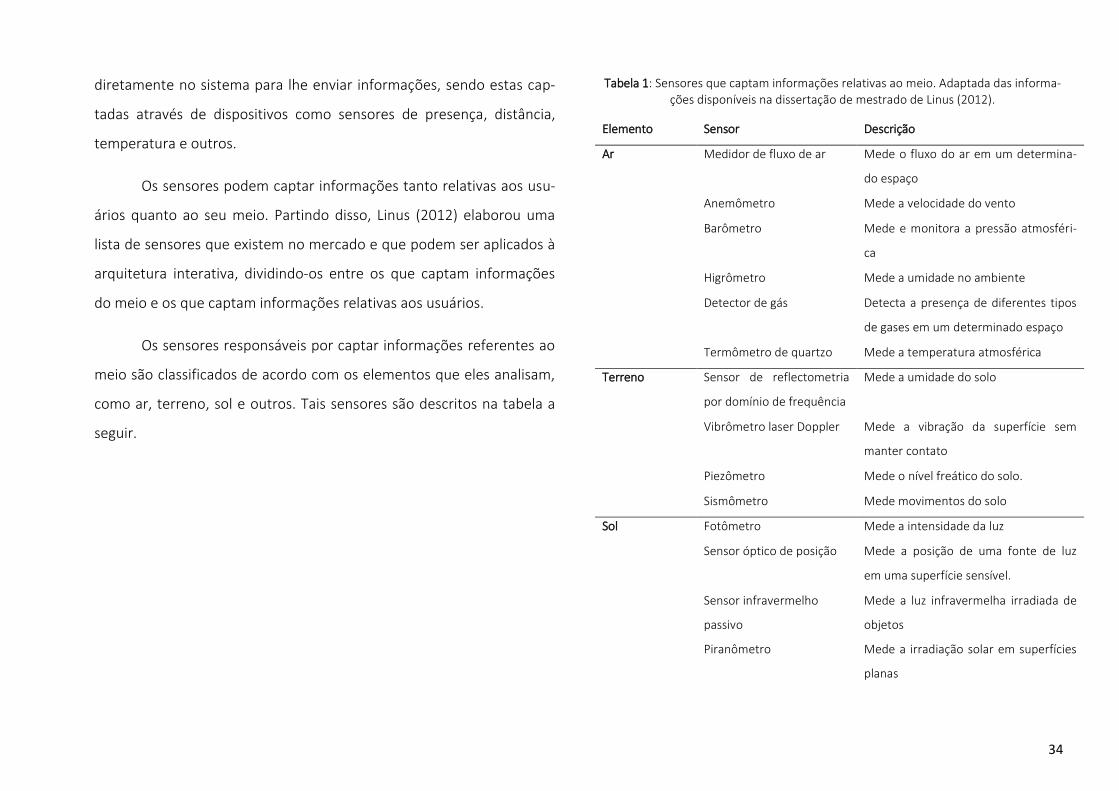
Os sensores responsáveis por captar informações referentes ao
meio são classificados de acordo com os elementos que eles analisam,
como ar, terreno, sol e outros. Tais sensores são descritos na tabela a
seguir.
Tabela 1: Sensores que captam informações relativas ao meio. Adaptada das informa-ções disponíveis na dissertação de mestrado de Linus (2012).
Elemento Sensor Descrição
Ar Medidor de fluxo de ar Mede o fluxo do ar em um determina-
do espaço
Anemômetro Mede a velocidade do vento
Barômetro Mede e monitora a pressão atmosféri-
ca
Higrômetro Mede a umidade no ambiente
Detector de gás Detecta a presença de diferentes tipos
de gases em um determinado espaço
Termômetro de quartzo Mede a temperatura atmosférica
Terreno Sensor de reflectometria
por domínio de frequência
Mede a umidade do solo
Vibrômetro laser Doppler Mede a vibração da superfície sem
manter contato
Piezômetro Mede o nível freático do solo.
Sismômetro Mede movimentos do solo
Sol Fotômetro Mede a intensidade da luz
Sensor óptico de posição Mede a posição de uma fonte de luz
em uma superfície sensível.
Sensor infravermelho
passivo
Mede a luz infravermelha irradiada de
objetos
Piranômetro Mede a irradiação solar em superfícies
planas
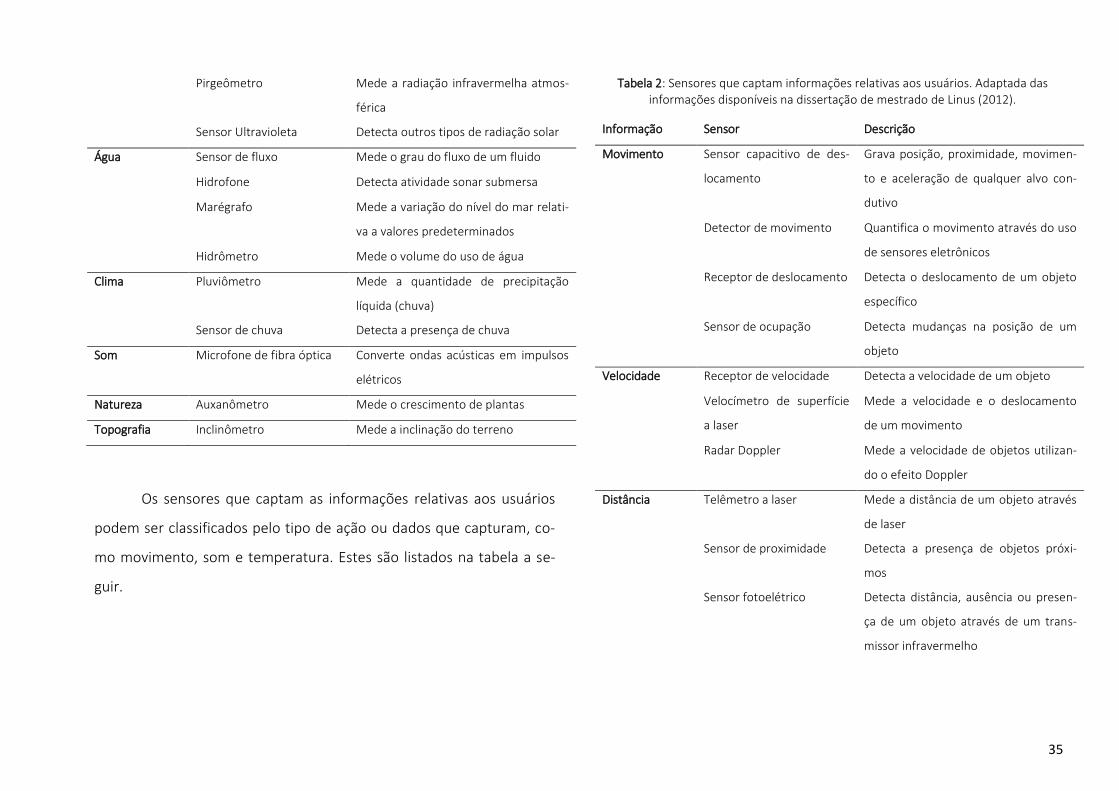
35
Pirgeômetro Mede a radiação infravermelha atmos-
férica
Sensor Ultravioleta Detecta outros tipos de radiação solar
Água Sensor de fluxo Mede o grau do fluxo de um fluido
Hidrofone Detecta atividade sonar submersa
Marégrafo Mede a variação do nível do mar relati-
va a valores predeterminados
Hidrômetro Mede o volume do uso de água
Clima Pluviômetro Mede a quantidade de precipitação
líquida (chuva)
Sensor de chuva Detecta a presença de chuva
Som Microfone de fibra óptica Converte ondas acústicas em impulsos
elétricos
Natureza Auxanômetro Mede o crescimento de plantas
Topografia Inclinômetro Mede a inclinação do terreno
Os sensores que captam as informações relativas aos usuários
podem ser classificados pelo tipo de ação ou dados que capturam, co-
mo movimento, som e temperatura. Estes são listados na tabela a se-
guir.
Tabela 2: Sensores que captam informações relativas aos usuários. Adaptada das informações disponíveis na dissertação de mestrado de Linus (2012).
Informação Sensor Descrição
Movimento Sensor capacitivo de des-
locamento
Grava posição, proximidade, movimen-
to e aceleração de qualquer alvo con-
dutivo
Detector de movimento Quantifica o movimento através do uso
de sensores eletrônicos
Receptor de deslocamento Detecta o deslocamento de um objeto
específico
Sensor de ocupação Detecta mudanças na posição de um
objeto
Velocidade Receptor de velocidade Detecta a velocidade de um objeto
Velocímetro de superfície
a laser
Mede a velocidade e o deslocamento
de um movimento
Radar Doppler Mede a velocidade de objetos utilizan-
do o efeito Doppler
Distância Telêmetro a laser Mede a distância de um objeto através
de laser
Sensor de proximidade Detecta a presença de objetos próxi-
mos
Sensor fotoelétrico Detecta distância, ausência ou presen-
ça de um objeto através de um trans-
missor infravermelho
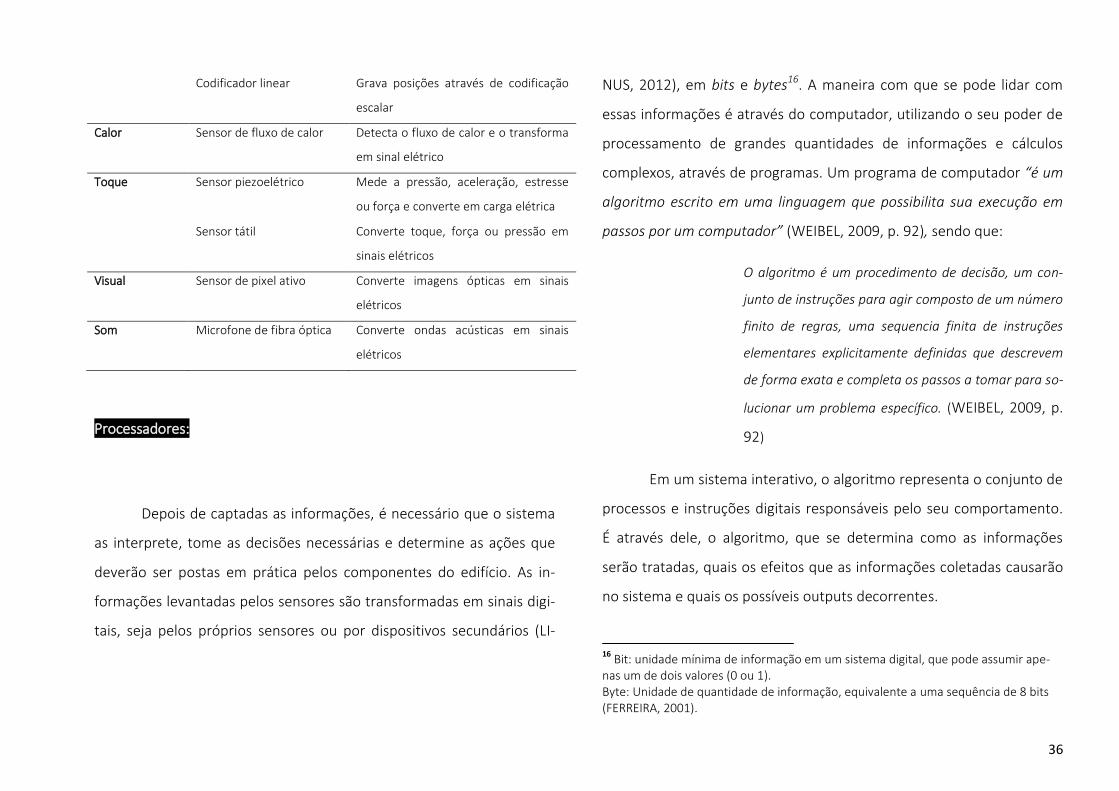
36
Codificador linear Grava posições através de codificação
escalar
Calor Sensor de fluxo de calor Detecta o fluxo de calor e o transforma
em sinal elétrico
Toque Sensor piezoelétrico Mede a pressão, aceleração, estresse
ou força e converte em carga elétrica
Sensor tátil Converte toque, força ou pressão em
sinais elétricos
Visual Sensor de pixel ativo Converte imagens ópticas em sinais
elétricos
Som Microfone de fibra óptica Converte ondas acústicas em sinais
elétricos
Processadores:
Depois de captadas as informações, é necessário que o sistema
as interprete, tome as decisões necessárias e determine as ações que
deverão ser postas em prática pelos componentes do edifício. As in-
formações levantadas pelos sensores são transformadas em sinais digi-
tais, seja pelos próprios sensores ou por dispositivos secundários (LI-
NUS, 2012), em bits e bytes16. A maneira com que se pode lidar com
essas informações é através do computador, utilizando o seu poder de
processamento de grandes quantidades de informações e cálculos
complexos, através de programas. Um programa de computador “é um
algoritmo escrito em uma linguagem que possibilita sua execução em
passos por um computador” (WEIBEL, 2009, p. 92), sendo que:
O algoritmo é um procedimento de decisão, um con-
junto de instruções para agir composto de um número
finito de regras, uma sequencia finita de instruções
elementares explicitamente definidas que descrevem
de forma exata e completa os passos a tomar para so-
lucionar um problema específico. (WEIBEL, 2009, p.
92)
Em um sistema interativo, o algoritmo representa o conjunto de
processos e instruções digitais responsáveis pelo seu comportamento.
É através dele, o algoritmo, que se determina como as informações
serão tratadas, quais os efeitos que as informações coletadas causarão
no sistema e quais os possíveis outputs decorrentes.
16
Bit: unidade mínima de informação em um sistema digital, que pode assumir ape-nas um de dois valores (0 ou 1). Byte: Unidade de quantidade de informação, equivalente a uma sequência de 8 bits (FERREIRA, 2001).
37
Porém, a utilização de dispositivos digitais controlados por algo-
ritmos, isto é, programas de computador, traz um problema à prática
da arquitetura interativa. Por tratar de assuntos complexos ligados à
informática, como o domínio da programação, cria a dependência do
conhecimento específico acerca do desenvolvimento de programas,
linguagens de programação17, lógica informacional e outros, que não
fazem parte do campo disciplinar tradicional da arquitetura. Esse é um
dos motivos que faz com que a prática da interatividade na arquitetura
se limite a escritórios, arquitetos e grupos de pesquisa que investem
em atividades multidisciplinares, agregando diferentes formas de co-
nhecimento à sua formação ou trabalhando em conjunto com profissi-
onais de outros campos de conhecimento. Entretanto, independente-
mente do desenvolvimento dos processos computacionais, ainda cabe
ao arquiteto o papel, assim como na arquitetura em geral, de planejar o
comportamento do edifício, seja esse dinâmico ou estático. Ou seja,
mesmo na arquitetura interativa, dependente de dispositivos digitais, é
o arquiteto quem projeta e planeja o edifício, tratando, nesse caso,
além dos problemas funcionais, estéticos e sociais, do comportamento
17
A linguagem de programação é um método padronizado para a descrição de um programa de computador, ou seja, um algoritmo. Java, PASCAL, Python, Processing, C# e PHP são exemplos de algumas linguagens existentes no mundo da programação. Fonte: <http://pt.wikipedia.org/wiki/Linguagem_de_programa%C3%A7%C3%A3o>, acessado 13/09/2013.
do edifício em um relacionamento interativo. Sendo assim, o arquiteto
pode desenvolver o formato do relacionamento interativo, planejando
os resultados ou a maneira como o sistema interpretará os dados, com
a possibilidade de utilizar algoritmos nesse processo.
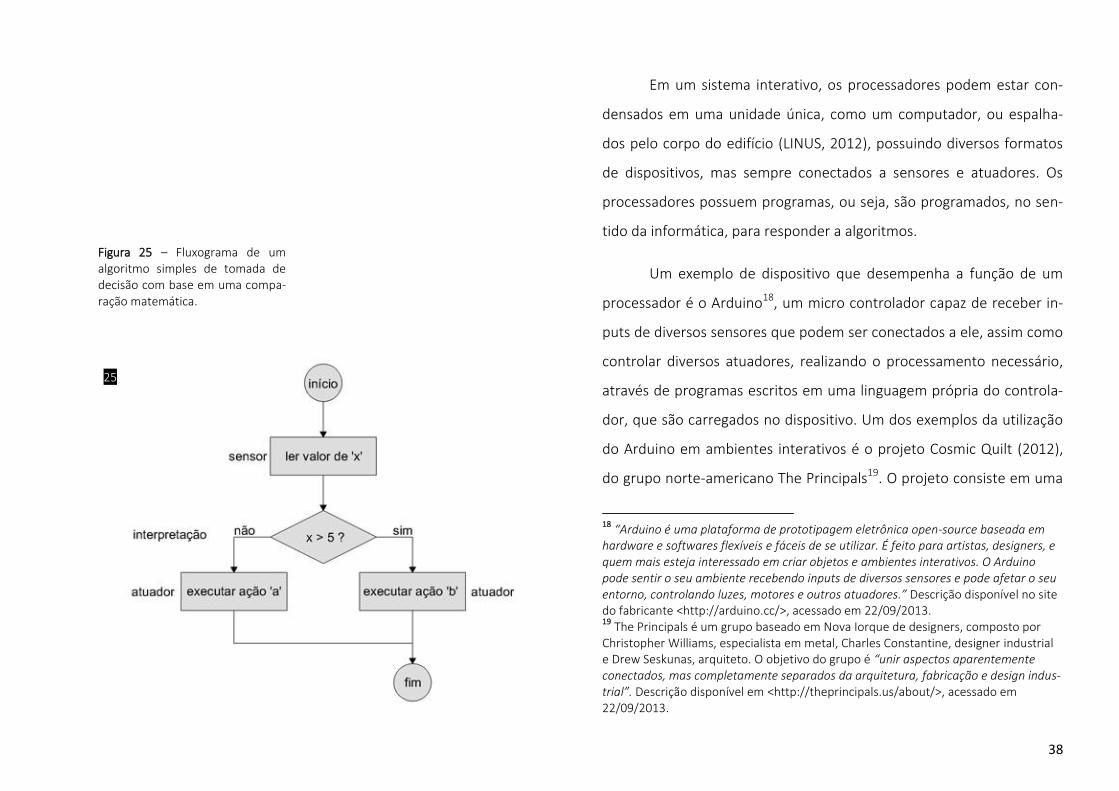
O algoritmo, quando não associado a um programa ou lingua-
gem de programação, pode ser representado na forma de uma descri-
ção narrativa, através de pseudocódigo ou diagramas de fluxo. A des-
crição narrativa representa o algoritmo através de uma descrição passo
a passo de cada processo do mesmo, enquanto o pseudocódigo o faz
através de uma estruturação semelhante a linguagens de programação
existentes (CHASE, 2012). Os diagramas de fluxo, ou fluxogramas, tra-
duzem os processos de um algoritmo através de uma sequencia de
símbolos e palavras, permitindo a leitura do fluxo das operações e
ações que o compõem (ibid.).
Através dessas formas de representação, o arquiteto que não
possui o conhecimento específico em programação consegue demons-
trar o comportamento e estabelecer as relações específicas de um rela-
cionamento interativo, de uma maneira condizente com o raciocínio da
programação, necessária para a execução do projeto.
38
Em um sistema interativo, os processadores podem estar con-
densados em uma unidade única, como um computador, ou espalha-
dos pelo corpo do edifício (LINUS, 2012), possuindo diversos formatos
de dispositivos, mas sempre conectados a sensores e atuadores. Os
processadores possuem programas, ou seja, são programados, no sen-
tido da informática, para responder a algoritmos.
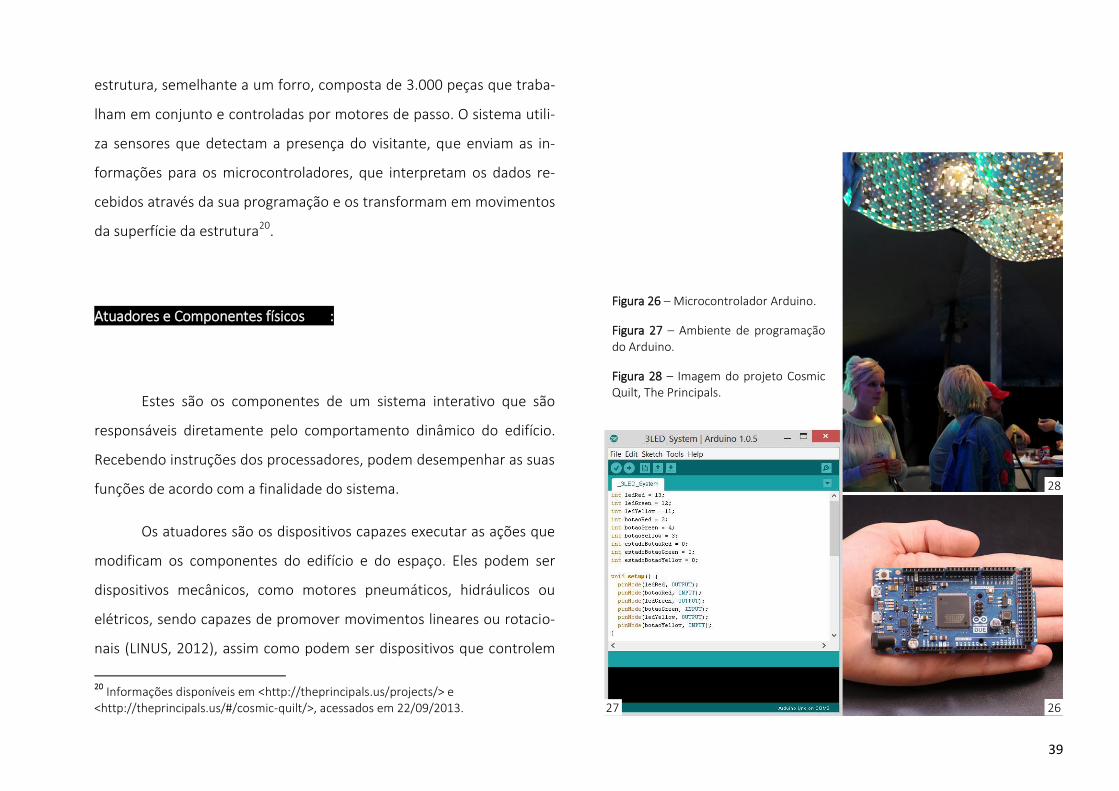
Um exemplo de dispositivo que desempenha a função de um
processador é o Arduino18, um micro controlador capaz de receber in-
puts de diversos sensores que podem ser conectados a ele, assim como
controlar diversos atuadores, realizando o processamento necessário,
através de programas escritos em uma linguagem própria do controla-
dor, que são carregados no dispositivo. Um dos exemplos da utilização
do Arduino em ambientes interativos é o projeto Cosmic Quilt (2012),
do grupo norte-americano The Principals19. O projeto consiste em uma
18
“Arduino é uma plataforma de prototipagem eletrônica open-source baseada em hardware e softwares flexíveis e fáceis de se utilizar. É feito para artistas, designers, e quem mais esteja interessado em criar objetos e ambientes interativos. O Arduino pode sentir o seu ambiente recebendo inputs de diversos sensores e pode afetar o seu entorno, controlando luzes, motores e outros atuadores.” Descrição disponível no site do fabricante <http://arduino.cc/>, acessado em 22/09/2013. 19
The Principals é um grupo baseado em Nova Iorque de designers, composto por Christopher Williams, especialista em metal, Charles Constantine, designer industrial e Drew Seskunas, arquiteto. O objetivo do grupo é “unir aspectos aparentemente conectados, mas completamente separados da arquitetura, fabricação e design indus-trial”. Descrição disponível em <http://theprincipals.us/about/>, acessado em 22/09/2013.
25
Figura 25 – Fluxograma de um algoritmo simples de tomada de decisão com base em uma compa-ração matemática.
39
estrutura, semelhante a um forro, composta de 3.000 peças que traba-
lham em conjunto e controladas por motores de passo. O sistema utili-
za sensores que detectam a presença do visitante, que enviam as in-
formações para os microcontroladores, que interpretam os dados re-
cebidos através da sua programação e os transformam em movimentos
da superfície da estrutura20.
Atuadores e Componentes físicos :
Estes são os componentes de um sistema interativo que são
responsáveis diretamente pelo comportamento dinâmico do edifício.
Recebendo instruções dos processadores, podem desempenhar as suas
funções de acordo com a finalidade do sistema.
Os atuadores são os dispositivos capazes executar as ações que
modificam os componentes do edifício e do espaço. Eles podem ser
dispositivos mecânicos, como motores pneumáticos, hidráulicos ou
elétricos, sendo capazes de promover movimentos lineares ou rotacio-
nais (LINUS, 2012), assim como podem ser dispositivos que controlem
20
Informações disponíveis em <http://theprincipals.us/projects/> e <http://theprincipals.us/#/cosmic-quilt/>, acessados em 22/09/2013.
Figura 26 – Microcontrolador Arduino.
Figura 27 – Ambiente de programação do Arduino.
Figura 28 – Imagem do projeto Cosmic Quilt, The Principals.
26 27
28
40
outras características dos componentes e do espaço, como luzes elétri-
cas, equipamentos de som e condicionadores de ar. Dispositivos mecâ-
nicos associados aos componentes físicos de um edifício permitem que
estes se expandam, retraiam, dobrem, girem, se desloquem entre ou-
tros tipos de comportamentos cinemáticos. Os outros dispositivos cita-
dos permitem que as ações praticadas pelo edifício alterem as suas
qualidades sensoriais, como a cor, a temperatura e a acústica do ambi-
ente. Através da utilização desses dispositivos o relacionamento entre
espaço e usuário torna-se dinâmico em um plano multissensorial, esti-
mulando sensações nos usuários além da visão.
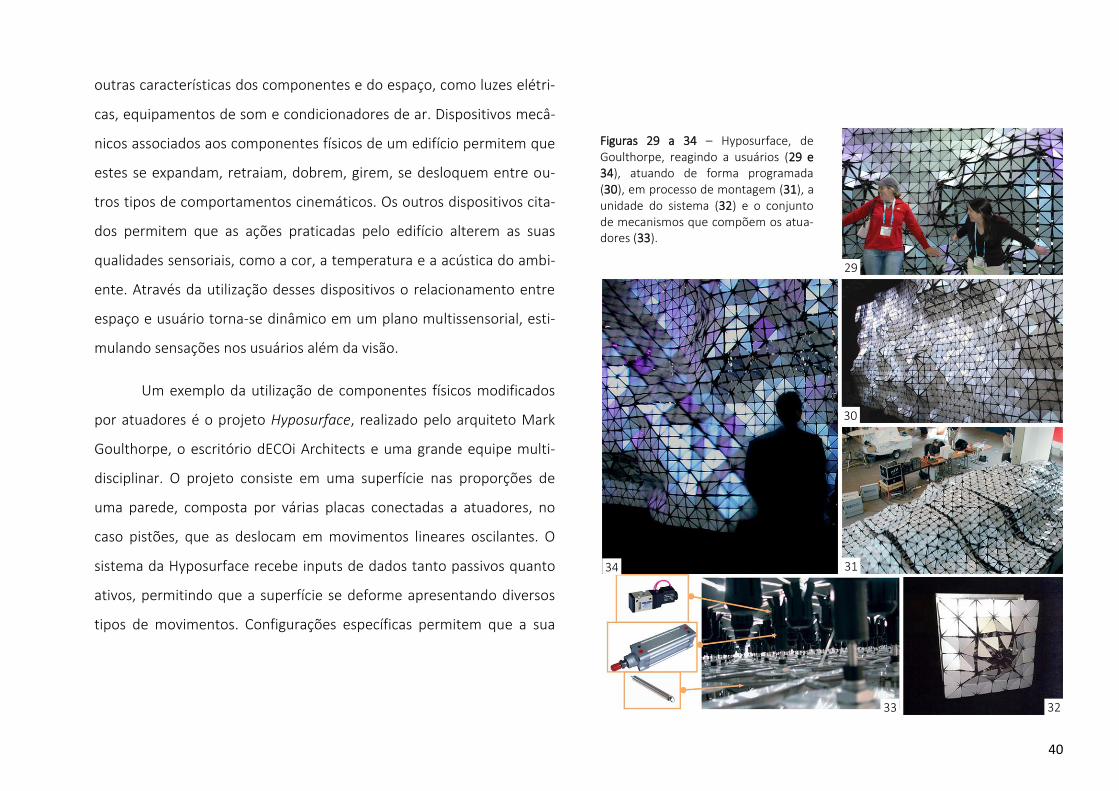
Um exemplo da utilização de componentes físicos modificados
por atuadores é o projeto Hyposurface, realizado pelo arquiteto Mark
Goulthorpe, o escritório dECOi Architects e uma grande equipe multi-
disciplinar. O projeto consiste em uma superfície nas proporções de
uma parede, composta por várias placas conectadas a atuadores, no
caso pistões, que as deslocam em movimentos lineares oscilantes. O
sistema da Hyposurface recebe inputs de dados tanto passivos quanto
ativos, permitindo que a superfície se deforme apresentando diversos
tipos de movimentos. Configurações específicas permitem que a sua
Figuras 29 a 34 – Hyposurface, de Goulthorpe, reagindo a usuários (29 e 34), atuando de forma programada (30), em processo de montagem (31), a unidade do sistema (32) e o conjunto de mecanismos que compõem os atua-dores (33).
29
30
31
32 33
34
41
superfície exiba mensagens, formando letras e imagens através do po-
sicionamento das placas21.
Através de inputs passivos captados pelos sensores do sistema,
a superfície interage com usuários, reproduzindo movimentos ondulan-
tes ou empurrando-os de perto de si.
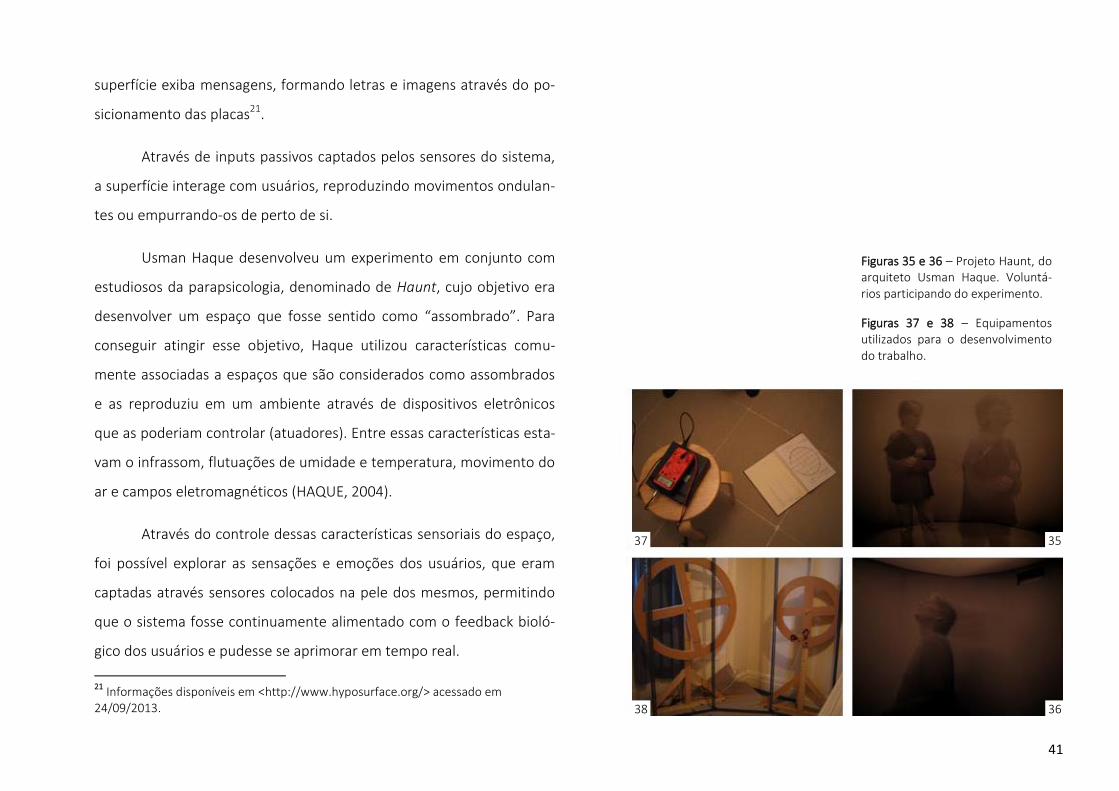
Usman Haque desenvolveu um experimento em conjunto com
estudiosos da parapsicologia, denominado de Haunt, cujo objetivo era
desenvolver um espaço que fosse sentido como “assombrado”. Para
conseguir atingir esse objetivo, Haque utilizou características comu-
mente associadas a espaços que são considerados como assombrados
e as reproduziu em um ambiente através de dispositivos eletrônicos
que as poderiam controlar (atuadores). Entre essas características esta-
vam o infrassom, flutuações de umidade e temperatura, movimento do
ar e campos eletromagnéticos (HAQUE, 2004).
Através do controle dessas características sensoriais do espaço,
foi possível explorar as sensações e emoções dos usuários, que eram
captadas através sensores colocados na pele dos mesmos, permitindo
que o sistema fosse continuamente alimentado com o feedback bioló-
gico dos usuários e pudesse se aprimorar em tempo real.
21
Informações disponíveis em <http://www.hyposurface.org/> acessado em 24/09/2013.
Figuras 35 e 36 – Projeto Haunt, do arquiteto Usman Haque. Voluntá-rios participando do experimento.
Figuras 37 e 38 – Equipamentos utilizados para o desenvolvimento do trabalho.
35
36
37
38
42
“Modelando padrões de outputs espaciais em algo-
ritmos de simulação de inteligência, os protótipos se
reconfiguravam continuamente baseados em como as
pessoas reagiam a eles. O sistema irá ‘melhorar’ no
que está fazendo com o passar do tempo, com a pas-
sagem de mais pessoas experimentando o sistema e
gerando um feedback biológico de quão bom foram os
vários componentes (infravermelho, qualidade do ar,
eletromagnética) em criar sensações de “assombra-
mento”. (HAQUE, 2004, p. 9).
O resultado desse experimento foi que os usuários relataram ter
experimentado sensações de assombramento e alucinações quando
expostos a características específicas geradas pelo sistema22.
O experimento elaborado por Haque serve como uma forma de
demonstrar a sua teoria que divide a arquitetura em Hardspace e
Softspace (HAQUE, 2002). De acordo com Haque, o espaço arquitetôni-
co é composto por aspectos materiais (hardspace) e imateriais (softs-
pace), analogamente aos componentes de um computador, hardware e
software. Em um computador, hardware são as suas peças, os seus
componentes físicos que permitem a execução de suas operações, en-
22
Informações a respeito do projeto e seus resultados disponíveis em <http://www.haque.co.uk/haunt.php>, acessado em 29/09/2013.
quanto software são os seus programas que permitem que a máquina
funcione de uma maneira determinada. Na arquitetura, Haque define
como hardspace os componentes físicos de um edifício, como pisos,
paredes, tetos e etc., enquanto o softspace compreende as caracterís-
ticas imateriais do edifício, como “os dinâmicos e efêmeros sons, chei-
ros, temperaturas e até ondas de rádio que nos cercam” (HAQUE, 2002,
p. 1). A teoria de Haque se relaciona com a visão de Pallasmaa (2011)
no ponto em que ambas enfatizam a existência de aspectos imateriais e
sensoriais inerentes à experimentação da arquitetura. A questão que
Haque busca desenvolver em Haunt é que, além dos componentes ma-
teriais (a exemplo da Hyposurface, citada anteriormente), as caracterís-
ticas imateriais da arquitetura também podem interagir com os usuá-
rios no campo das sensações e emoções.
Nora Schueler (2011), pesquisadora do grupo holandês Hyper-
body, da Universidade de Delft, reconhece na arquitetura interativa a
possibilidade de o arquiteto exercer maior controle sobre as sensações
e emoções que os usuários experimentam nos espaços projetados por
ele. De acordo com Schueler, as sensações e emoções dos usuários
dependem da avaliação que os mesmos fazem do espaço arquitetôni-
co, baseados em diversos fatores inerentes a cada um deles. Assim,
cada usuário pode ter uma sensação e emoção única relativa ao espa-
43
ço, dificultando a construção de uma abordagem de projeto que leve a
efeitos específicos em usuários na maioria dos casos. É justamente
através da promoção da interatividade que Schueler acredita ser possí-
vel que arquitetos consigam exercer uma influência maior nas sensa-
ções e emoções dos seus usuários na experimentação da arquitetura,
através da constante atuação do sistema e captação de feedback dos
usuários, tornando-o capaz de atualizar as suas definições e aprimorar
o relacionamento de acordo com os seus objetivos e as reações dos
usuários. Essa é a proposta de Usman Haque em Haunt, demonstrando
que um sistema capaz de se atualizar e aprender com as reações dos
usuários consegue não somente agir sobre as sensações e emoções
deles, mas até intensificá-las.
44
4 Complexidade e Projeto
45
4.1 O Paradigma da Complexidade
A arquitetura interativa pode ter suas raízes percebidas na arte,
pois esta tende a acompanhar os desenvolvimentos científicos e tecno-
lógicos mais rapidamente, fatores que determinam o clima intelectual
que permeia os processos criativos artísticos.
Lev Manovich (2009) utiliza esse pressuposto para contextuali-
zar o desenvolvimento da abstração na arte moderna no início do sécu-
lo XX. Ele afirma que apesar de diferentes filosofias políticas e estéticas,
assim como diferentes relações históricas, poderem ser vistas como as
raízes que levaram ao surgimento da abstração na arte, é possível
“apontar um paradigma que tanto diferencia a abstração moderna da
pintura realista do século XIX como a conecta simultaneamente com a
ciência moderna.” (MANOVICH, 2009, p. 411). Esse paradigma é o que
Manovich chama de redução modernista. Essa redução é caracterizada,
na arte, pela busca da desconstrução das formas e expressões estéticas
relacionadas a elementos simples e básicos, como as cores puras, as
linhas retas e as formas geométricas simples, a ponto de torná-las abs-
tratas. Exemplo disso são as pinturas de Wassily Kandinsky e Piet Mon-
drian, composições formadas a partir de elementos geométricos ele-
mentares. Manovich afirma que essa lógica reducionista também esta-
va presente nos desenvolvimentos científicos da época.
“A Física, a Química, a Psicologia experimental e ou-
tras ciências estavam engajadas na desconstrução dos
reinos inanimado, biológico e psicológico em elemen-
tos simples e indivisíveis, governados por leis simples e
universais. A Química e a Física postularam os níveis
de moléculas e átomos; posteriormente a Física cindiu
os átomos em partículas elementares. A Biologia viu o
surgimento dos conceitos de célula e cromossomo. A
Psicologia experimental aplicou a mesma lógica redu-
tiva à mente humana, postulando a existência de ele-
mentos sensoriais indivisíveis.” (MANOVICH, 2009,
p. 412).
É a partir da semelhança de raciocínio e da presença da lógica
reducionista que Manovich entende o relacionamento entre o clima
científico e o desenvolvimento da arte no início do século XX, afirman-
do que “já temos documentação de que, pelo menos em alguns casos,
os artistas estavam seguindo as pesquisas psicológicas” (MANOVICH,
2009, p. 413). Este relacionamento pode ser facilmente estendido à
prática arquitetônica da mesma época, por exemplo, através dos traba-
lhos do arquiteto neerlandês Gerrit Rietveld (1888-1965), que utilizava
geometrias puras, planos, linhas e cores primárias (Figura 40).
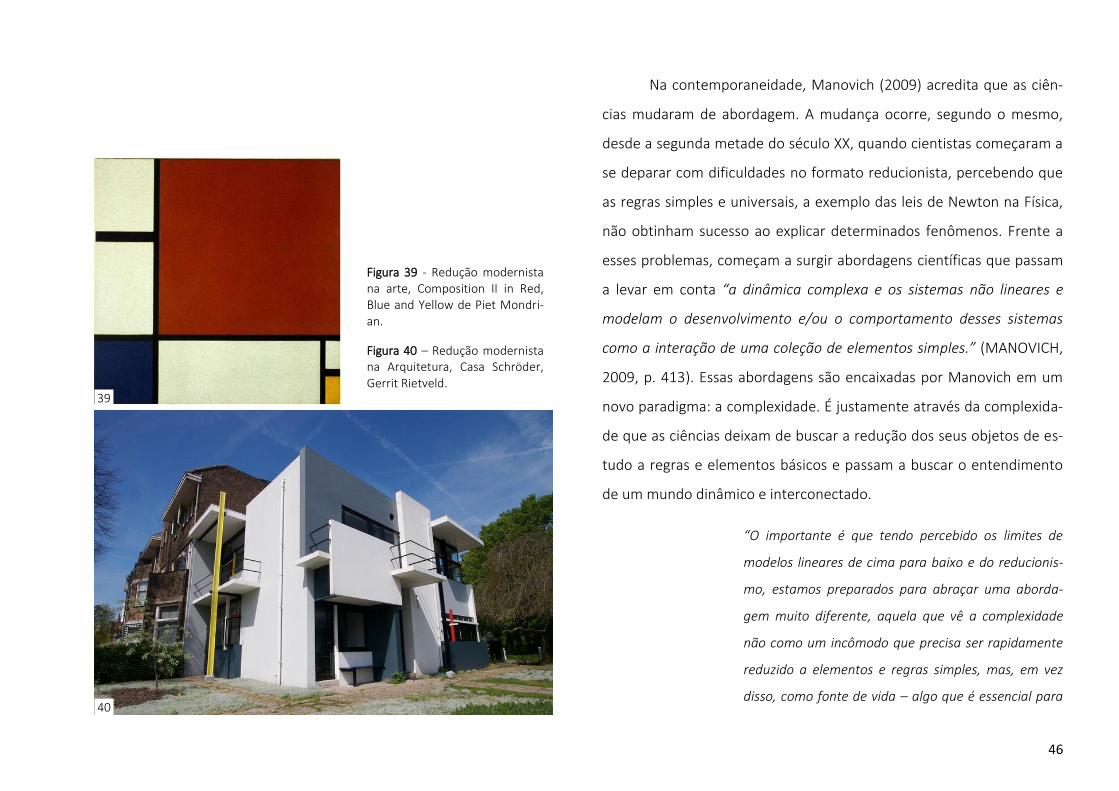
46
Na contemporaneidade, Manovich (2009) acredita que as ciên-
cias mudaram de abordagem. A mudança ocorre, segundo o mesmo,
desde a segunda metade do século XX, quando cientistas começaram a
se deparar com dificuldades no formato reducionista, percebendo que
as regras simples e universais, a exemplo das leis de Newton na Física,
não obtinham sucesso ao explicar determinados fenômenos. Frente a
esses problemas, começam a surgir abordagens científicas que passam
a levar em conta “a dinâmica complexa e os sistemas não lineares e
modelam o desenvolvimento e/ou o comportamento desses sistemas
como a interação de uma coleção de elementos simples.” (MANOVICH,
2009, p. 413). Essas abordagens são encaixadas por Manovich em um
novo paradigma: a complexidade. É justamente através da complexida-
de que as ciências deixam de buscar a redução dos seus objetos de es-
tudo a regras e elementos básicos e passam a buscar o entendimento
de um mundo dinâmico e interconectado.
“O importante é que tendo percebido os limites de
modelos lineares de cima para baixo e do reducionis-
mo, estamos preparados para abraçar uma aborda-
gem muito diferente, aquela que vê a complexidade
não como um incômodo que precisa ser rapidamente
reduzido a elementos e regras simples, mas, em vez
disso, como fonte de vida – algo que é essencial para
Figura 39 - Redução modernista na arte, Composition II in Red, Blue and Yellow de Piet Mondri-an.
Figura 40 – Redução modernista na Arquitetura, Casa Schröder, Gerrit Rietveld.
39
40
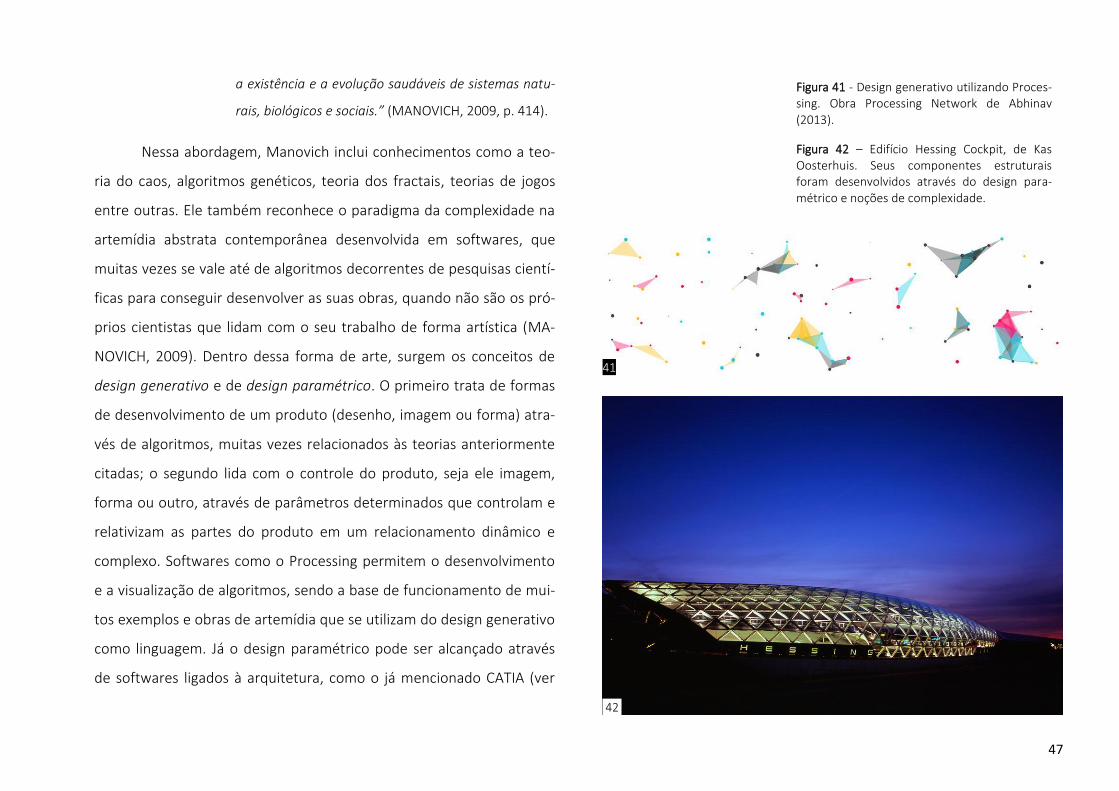
47
a existência e a evolução saudáveis de sistemas natu-
rais, biológicos e sociais.” (MANOVICH, 2009, p. 414).
Nessa abordagem, Manovich inclui conhecimentos como a teo-
ria do caos, algoritmos genéticos, teoria dos fractais, teorias de jogos
entre outras. Ele também reconhece o paradigma da complexidade na
artemídia abstrata contemporânea desenvolvida em softwares, que
muitas vezes se vale até de algoritmos decorrentes de pesquisas cientí-
ficas para conseguir desenvolver as suas obras, quando não são os pró-
prios cientistas que lidam com o seu trabalho de forma artística (MA-
NOVICH, 2009). Dentro dessa forma de arte, surgem os conceitos de
design generativo e de design paramétrico. O primeiro trata de formas
de desenvolvimento de um produto (desenho, imagem ou forma) atra-
vés de algoritmos, muitas vezes relacionados às teorias anteriormente
citadas; o segundo lida com o controle do produto, seja ele imagem,
forma ou outro, através de parâmetros determinados que controlam e
relativizam as partes do produto em um relacionamento dinâmico e
complexo. Softwares como o Processing permitem o desenvolvimento
e a visualização de algoritmos, sendo a base de funcionamento de mui-
tos exemplos e obras de artemídia que se utilizam do design generativo
como linguagem. Já o design paramétrico pode ser alcançado através
de softwares ligados à arquitetura, como o já mencionado CATIA (ver
Figura 41 - Design generativo utilizando Proces-sing. Obra Processing Network de Abhinav (2013).
Figura 42 – Edifício Hessing Cockpit, de Kas Oosterhuis. Seus componentes estruturais foram desenvolvidos através do design para-métrico e noções de complexidade.
41
42
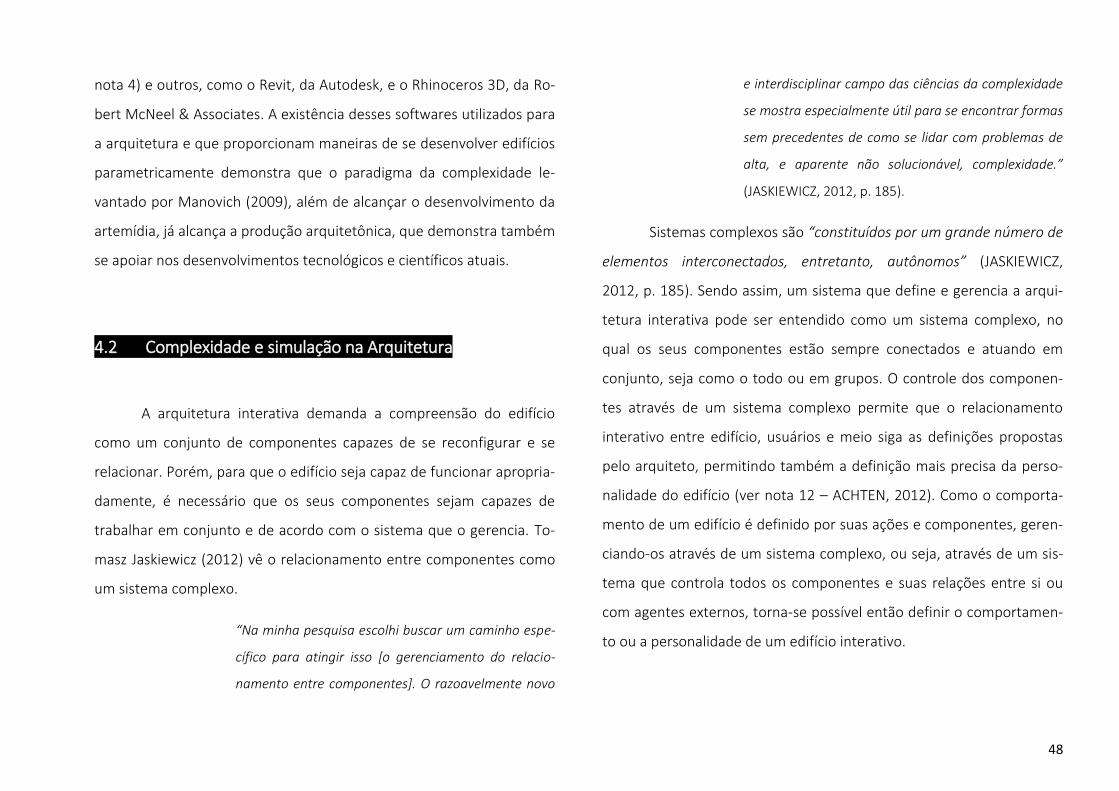
48
nota 4) e outros, como o Revit, da Autodesk, e o Rhinoceros 3D, da Ro-
bert McNeel & Associates. A existência desses softwares utilizados para
a arquitetura e que proporcionam maneiras de se desenvolver edifícios
parametricamente demonstra que o paradigma da complexidade le-
vantado por Manovich (2009), além de alcançar o desenvolvimento da
artemídia, já alcança a produção arquitetônica, que demonstra também
se apoiar nos desenvolvimentos tecnológicos e científicos atuais.
4.2 Complexidade e simulação na Arquitetura
A arquitetura interativa demanda a compreensão do edifício
como um conjunto de componentes capazes de se reconfigurar e se
relacionar. Porém, para que o edifício seja capaz de funcionar apropria-
damente, é necessário que os seus componentes sejam capazes de
trabalhar em conjunto e de acordo com o sistema que o gerencia. To-
masz Jaskiewicz (2012) vê o relacionamento entre componentes como
um sistema complexo.
“Na minha pesquisa escolhi buscar um caminho espe-
cífico para atingir isso [o gerenciamento do relacio-
namento entre componentes]. O razoavelmente novo
e interdisciplinar campo das ciências da complexidade
se mostra especialmente útil para se encontrar formas
sem precedentes de como se lidar com problemas de
alta, e aparente não solucionável, complexidade.”
(JASKIEWICZ, 2012, p. 185).
Sistemas complexos são “constituídos por um grande número de
elementos interconectados, entretanto, autônomos” (JASKIEWICZ,
2012, p. 185). Sendo assim, um sistema que define e gerencia a arqui-
tetura interativa pode ser entendido como um sistema complexo, no
qual os seus componentes estão sempre conectados e atuando em
conjunto, seja como o todo ou em grupos. O controle dos componen-
tes através de um sistema complexo permite que o relacionamento
interativo entre edifício, usuários e meio siga as definições propostas
pelo arquiteto, permitindo também a definição mais precisa da perso-
nalidade do edifício (ver nota 12 – ACHTEN, 2012). Como o comporta-
mento de um edifício é definido por suas ações e componentes, geren-
ciando-os através de um sistema complexo, ou seja, através de um sis-
tema que controla todos os componentes e suas relações entre si ou
com agentes externos, torna-se possível então definir o comportamen-
to ou a personalidade de um edifício interativo.
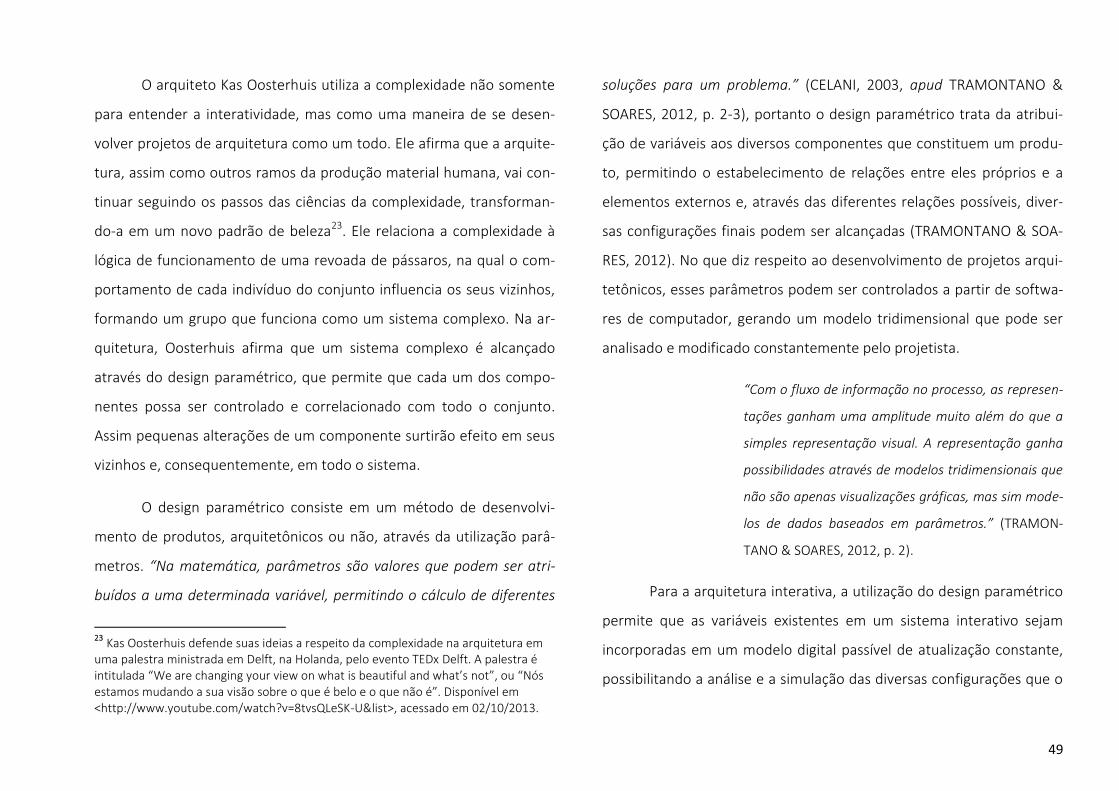
49
O arquiteto Kas Oosterhuis utiliza a complexidade não somente
para entender a interatividade, mas como uma maneira de se desen-
volver projetos de arquitetura como um todo. Ele afirma que a arquite-
tura, assim como outros ramos da produção material humana, vai con-
tinuar seguindo os passos das ciências da complexidade, transforman-
do-a em um novo padrão de beleza23. Ele relaciona a complexidade à
lógica de funcionamento de uma revoada de pássaros, na qual o com-
portamento de cada indivíduo do conjunto influencia os seus vizinhos,
formando um grupo que funciona como um sistema complexo. Na ar-
quitetura, Oosterhuis afirma que um sistema complexo é alcançado
através do design paramétrico, que permite que cada um dos compo-
nentes possa ser controlado e correlacionado com todo o conjunto.
Assim pequenas alterações de um componente surtirão efeito em seus
vizinhos e, consequentemente, em todo o sistema.
O design paramétrico consiste em um método de desenvolvi-
mento de produtos, arquitetônicos ou não, através da utilização parâ-
metros. “Na matemática, parâmetros são valores que podem ser atri-
buídos a uma determinada variável, permitindo o cálculo de diferentes
23
Kas Oosterhuis defende suas ideias a respeito da complexidade na arquitetura em uma palestra ministrada em Delft, na Holanda, pelo evento TEDx Delft. A palestra é intitulada “We are changing your view on what is beautiful and what’s not”, ou “Nós estamos mudando a sua visão sobre o que é belo e o que não é”. Disponível em <http://www.youtube.com/watch?v=8tvsQLeSK-U&list>, acessado em 02/10/2013.
soluções para um problema.” (CELANI, 2003, apud TRAMONTANO &
SOARES, 2012, p. 2-3), portanto o design paramétrico trata da atribui-
ção de variáveis aos diversos componentes que constituem um produ-
to, permitindo o estabelecimento de relações entre eles próprios e a
elementos externos e, através das diferentes relações possíveis, diver-
sas configurações finais podem ser alcançadas (TRAMONTANO & SOA-
RES, 2012). No que diz respeito ao desenvolvimento de projetos arqui-
tetônicos, esses parâmetros podem ser controlados a partir de softwa-
res de computador, gerando um modelo tridimensional que pode ser
analisado e modificado constantemente pelo projetista.
“Com o fluxo de informação no processo, as represen-
tações ganham uma amplitude muito além do que a
simples representação visual. A representação ganha
possibilidades através de modelos tridimensionais que
não são apenas visualizações gráficas, mas sim mode-
los de dados baseados em parâmetros.” (TRAMON-
TANO & SOARES, 2012, p. 2).
Para a arquitetura interativa, a utilização do design paramétrico
permite que as variáveis existentes em um sistema interativo sejam
incorporadas em um modelo digital passível de atualização constante,
possibilitando a análise e a simulação das diversas configurações que o
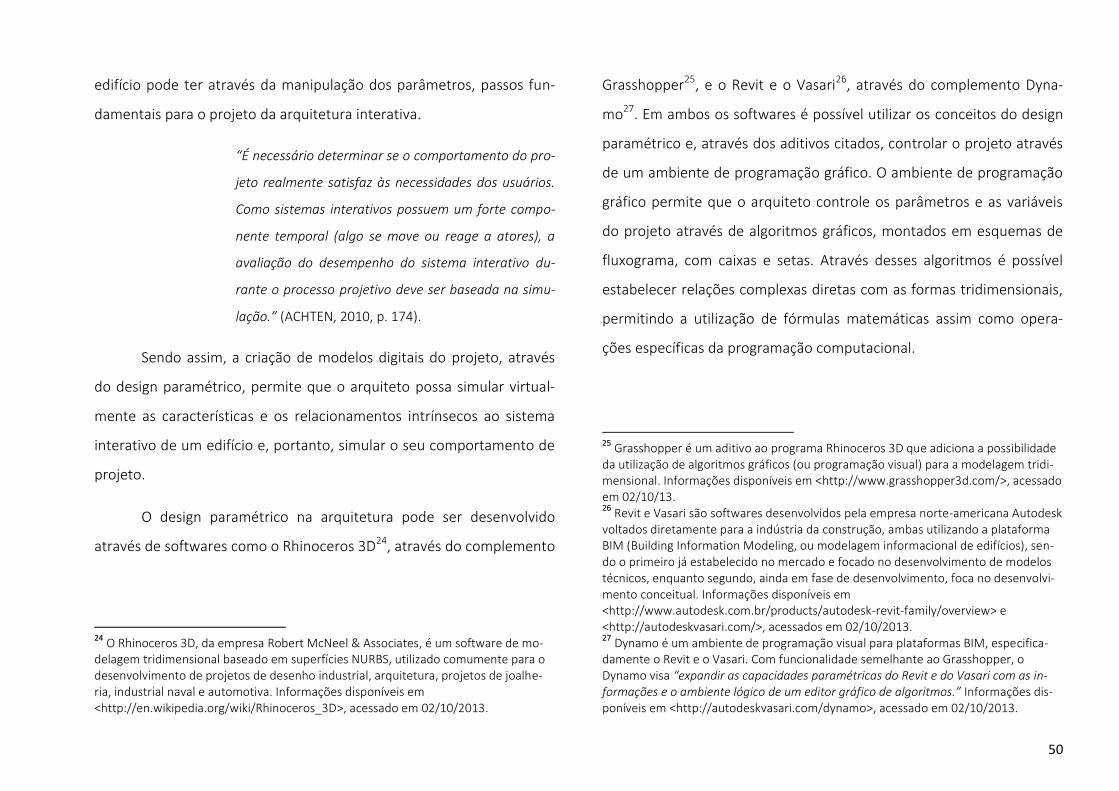
50
edifício pode ter através da manipulação dos parâmetros, passos fun-
damentais para o projeto da arquitetura interativa.
“É necessário determinar se o comportamento do pro-
jeto realmente satisfaz às necessidades dos usuários.
Como sistemas interativos possuem um forte compo-
nente temporal (algo se move ou reage a atores), a
avaliação do desempenho do sistema interativo du-
rante o processo projetivo deve ser baseada na simu-
lação.” (ACHTEN, 2010, p. 174).
Sendo assim, a criação de modelos digitais do projeto, através
do design paramétrico, permite que o arquiteto possa simular virtual-
mente as características e os relacionamentos intrínsecos ao sistema
interativo de um edifício e, portanto, simular o seu comportamento de
projeto.
O design paramétrico na arquitetura pode ser desenvolvido
através de softwares como o Rhinoceros 3D24, através do complemento
24
O Rhinoceros 3D, da empresa Robert McNeel & Associates, é um software de mo-delagem tridimensional baseado em superfícies NURBS, utilizado comumente para o desenvolvimento de projetos de desenho industrial, arquitetura, projetos de joalhe-ria, industrial naval e automotiva. Informações disponíveis em <http://en.wikipedia.org/wiki/Rhinoceros_3D>, acessado em 02/10/2013.
Grasshopper25, e o Revit e o Vasari26, através do complemento Dyna-
mo27. Em ambos os softwares é possível utilizar os conceitos do design
paramétrico e, através dos aditivos citados, controlar o projeto através
de um ambiente de programação gráfico. O ambiente de programação
gráfico permite que o arquiteto controle os parâmetros e as variáveis
do projeto através de algoritmos gráficos, montados em esquemas de
fluxograma, com caixas e setas. Através desses algoritmos é possível
estabelecer relações complexas diretas com as formas tridimensionais,
permitindo a utilização de fórmulas matemáticas assim como opera-
ções específicas da programação computacional.
25
Grasshopper é um aditivo ao programa Rhinoceros 3D que adiciona a possibilidade da utilização de algoritmos gráficos (ou programação visual) para a modelagem tridi-mensional. Informações disponíveis em <http://www.grasshopper3d.com/>, acessado em 02/10/13. 26
Revit e Vasari são softwares desenvolvidos pela empresa norte-americana Autodesk voltados diretamente para a indústria da construção, ambas utilizando a plataforma BIM (Building Information Modeling, ou modelagem informacional de edifícios), sen-do o primeiro já estabelecido no mercado e focado no desenvolvimento de modelos técnicos, enquanto segundo, ainda em fase de desenvolvimento, foca no desenvolvi-mento conceitual. Informações disponíveis em <http://www.autodesk.com.br/products/autodesk-revit-family/overview> e <http://autodeskvasari.com/>, acessados em 02/10/2013. 27
Dynamo é um ambiente de programação visual para plataformas BIM, especifica-damente o Revit e o Vasari. Com funcionalidade semelhante ao Grasshopper, o Dynamo visa “expandir as capacidades paramétricas do Revit e do Vasari com as in-formações e o ambiente lógico de um editor gráfico de algoritmos.” Informações dis-poníveis em <http://autodeskvasari.com/dynamo>, acessado em 02/10/2013.
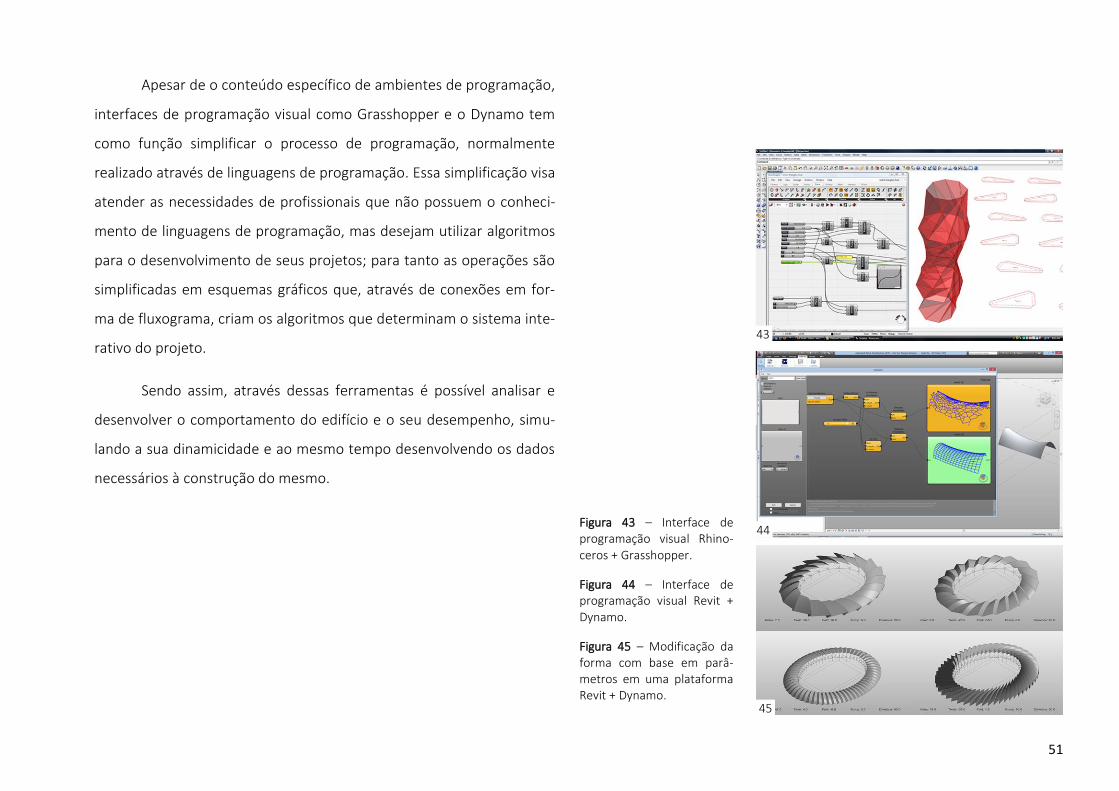
51
Apesar de o conteúdo específico de ambientes de programação,
interfaces de programação visual como Grasshopper e o Dynamo tem
como função simplificar o processo de programação, normalmente
realizado através de linguagens de programação. Essa simplificação visa
atender as necessidades de profissionais que não possuem o conheci-
mento de linguagens de programação, mas desejam utilizar algoritmos
para o desenvolvimento de seus projetos; para tanto as operações são
simplificadas em esquemas gráficos que, através de conexões em for-
ma de fluxograma, criam os algoritmos que determinam o sistema inte-
rativo do projeto.
Sendo assim, através dessas ferramentas é possível analisar e
desenvolver o comportamento do edifício e o seu desempenho, simu-
lando a sua dinamicidade e ao mesmo tempo desenvolvendo os dados
necessários à construção do mesmo.
Figura 43 – Interface de programação visual Rhino-ceros + Grasshopper.
Figura 44 – Interface de programação visual Revit + Dynamo.
Figura 45 – Modificação da forma com base em parâ-metros em uma plataforma Revit + Dynamo.
43
45
44
52
5 Estudos de caso: o projeto e o espaço interativo
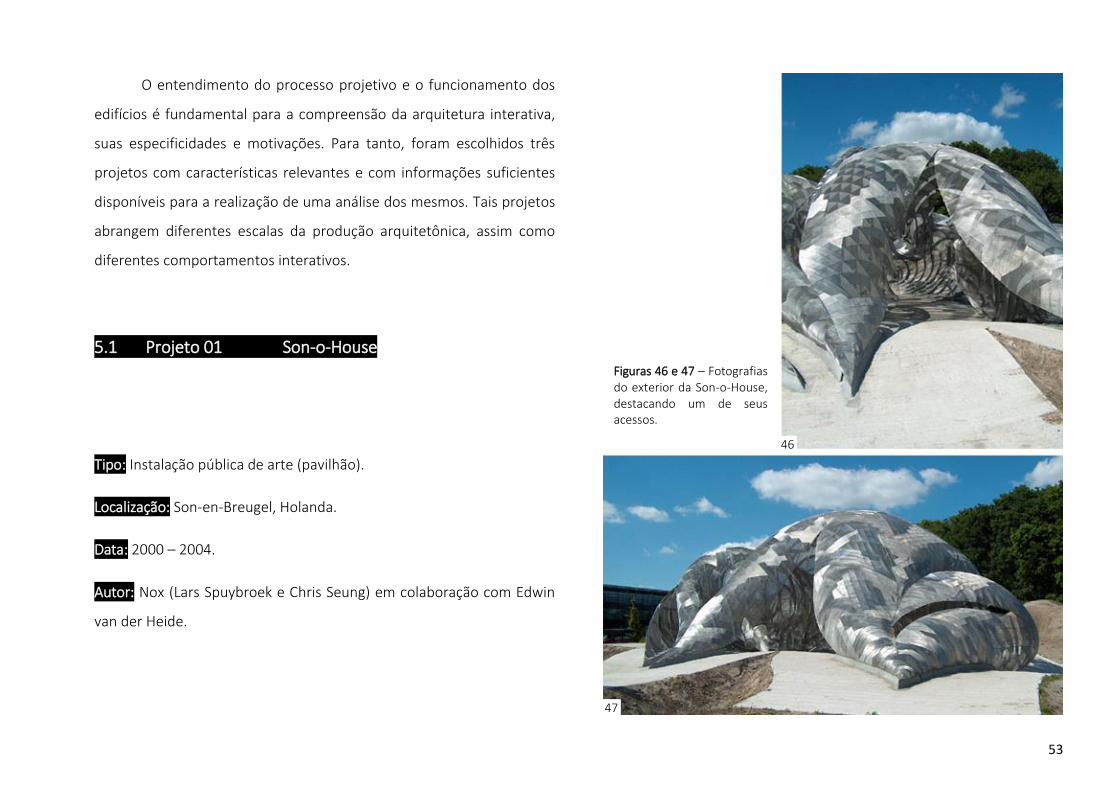
53
O entendimento do processo projetivo e o funcionamento dos
edifícios é fundamental para a compreensão da arquitetura interativa,
suas especificidades e motivações. Para tanto, foram escolhidos três
projetos com características relevantes e com informações suficientes
disponíveis para a realização de uma análise dos mesmos. Tais projetos
abrangem diferentes escalas da produção arquitetônica, assim como
diferentes comportamentos interativos.
5.1 Projeto 01 Son-o-House
Tipo: Instalação pública de arte (pavilhão).
Localização: Son-en-Breugel, Holanda.
Data: 2000 – 2004.
Autor: Nox (Lars Spuybroek e Chris Seung) em colaboração com Edwin
van der Heide.
Figuras 46 e 47 – Fotografias do exterior da Son-o-House, destacando um de seus acessos.
46
47
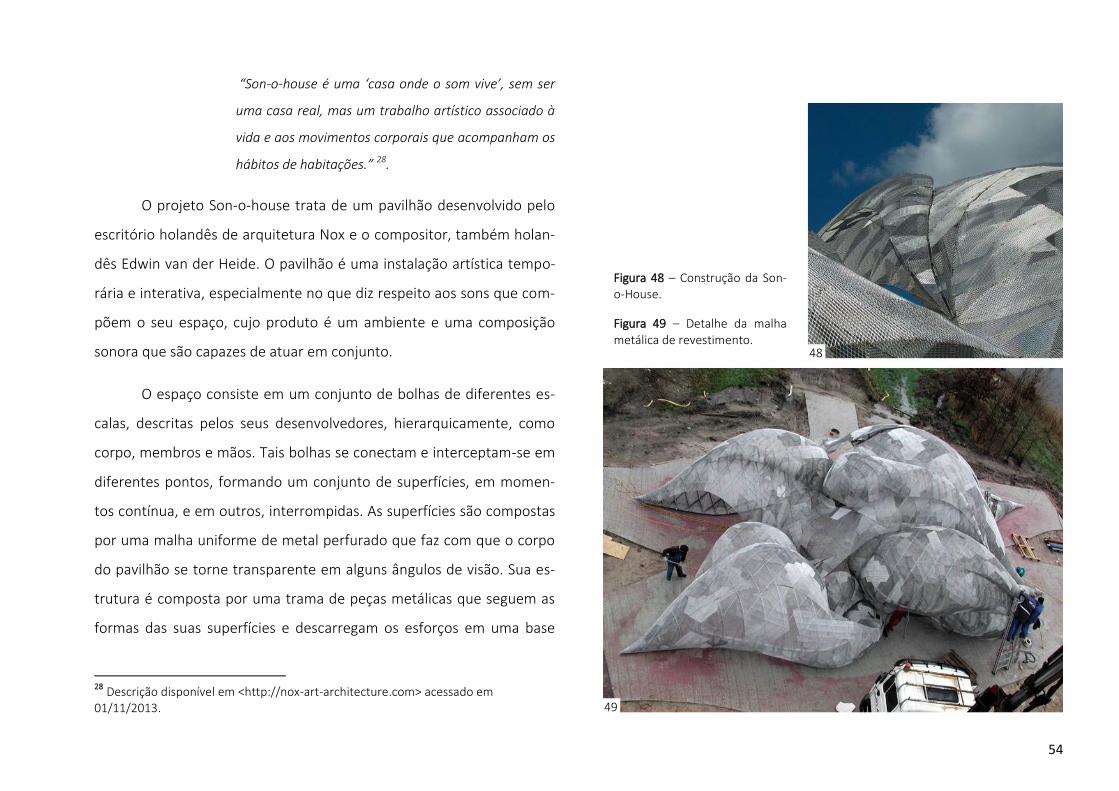
54
“Son-o-house é uma ‘casa onde o som vive’, sem ser
uma casa real, mas um trabalho artístico associado à
vida e aos movimentos corporais que acompanham os
hábitos de habitações.” 28.
O projeto Son-o-house trata de um pavilhão desenvolvido pelo
escritório holandês de arquitetura Nox e o compositor, também holan-
dês Edwin van der Heide. O pavilhão é uma instalação artística tempo-
rária e interativa, especialmente no que diz respeito aos sons que com-
põem o seu espaço, cujo produto é um ambiente e uma composição
sonora que são capazes de atuar em conjunto.
O espaço consiste em um conjunto de bolhas de diferentes es-
calas, descritas pelos seus desenvolvedores, hierarquicamente, como
corpo, membros e mãos. Tais bolhas se conectam e interceptam-se em
diferentes pontos, formando um conjunto de superfícies, em momen-
tos contínua, e em outros, interrompidas. As superfícies são compostas
por uma malha uniforme de metal perfurado que faz com que o corpo
do pavilhão se torne transparente em alguns ângulos de visão. Sua es-
trutura é composta por uma trama de peças metálicas que seguem as
formas das suas superfícies e descarregam os esforços em uma base
28
Descrição disponível em <http://nox-art-architecture.com> acessado em 01/11/2013.
Figura 48 – Construção da Son-o-House.
Figura 49 – Detalhe da malha metálica de revestimento.
48
49
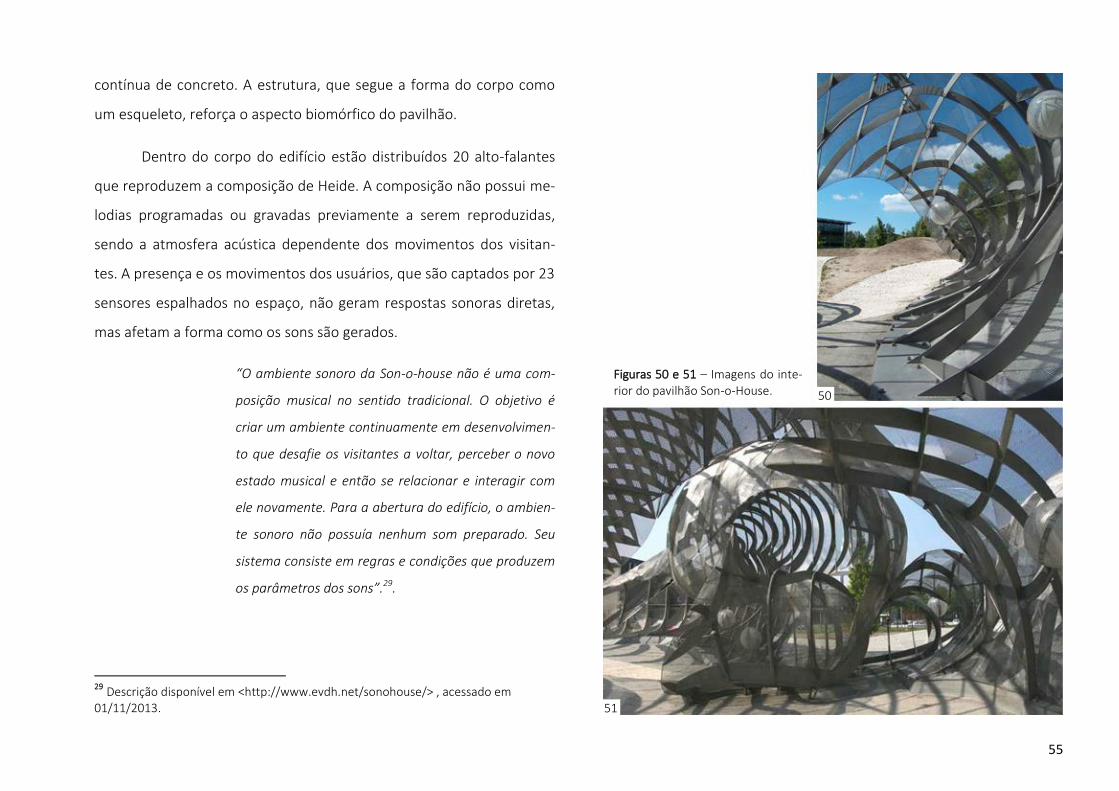
55
contínua de concreto. A estrutura, que segue a forma do corpo como
um esqueleto, reforça o aspecto biomórfico do pavilhão.
Dentro do corpo do edifício estão distribuídos 20 alto-falantes
que reproduzem a composição de Heide. A composição não possui me-
lodias programadas ou gravadas previamente a serem reproduzidas,
sendo a atmosfera acústica dependente dos movimentos dos visitan-
tes. A presença e os movimentos dos usuários, que são captados por 23
sensores espalhados no espaço, não geram respostas sonoras diretas,
mas afetam a forma como os sons são gerados.
“O ambiente sonoro da Son-o-house não é uma com-
posição musical no sentido tradicional. O objetivo é
criar um ambiente continuamente em desenvolvimen-
to que desafie os visitantes a voltar, perceber o novo
estado musical e então se relacionar e interagir com
ele novamente. Para a abertura do edifício, o ambien-
te sonoro não possuía nenhum som preparado. Seu
sistema consiste em regras e condições que produzem
os parâmetros dos sons”.29.
29
Descrição disponível em <http://www.evdh.net/sonohouse/> , acessado em 01/11/2013.
Figuras 50 e 51 – Imagens do inte-rior do pavilhão Son-o-House. 50
51
56
Sendo assim, o sistema gera os sons baseando-se nos dados captados
em tempo real pelos sensores e também nos dados antigos, de outros
visitantes, que são acumulados em um banco de dados, formando in-
formações estatísticas acerca dos usuários e as suas movimentações no
espaço. Essas informações influenciam os sons e a maneira como estes
se modificam para atingir o objetivo do sistema, seja ele atrair os visi-
tantes de um ponto para outro do pavilhão, ou afastá-los de um local
específico. Para tanto, são emitidos sons em diversas frequências, que
não necessariamente formam melodias, mas podem causar incômodos
aos visitantes ou despertar sua curiosidade. Tais sons são emitidos pe-
los alto-falantes que podem agir tanto individualmente, permitindo que
o usuário perceba a origem do som no espaço, ou em conjuntos, crian-
do campos e áreas sonoras no ambiente.
A Son-o-house se utiliza da interatividade como uma caracterís-
tica fundamental da obra artística sonora e, consequentemente, da
experiência vivida pelos usuários no ambiente, sendo a acústica uma
das qualidades do espaço arquitetônico. Através desse projeto é possí-
vel entender que a interatividade na arquitetura não se limita à recon-
figuração de elementos físicos, mas também no que diz respeito aos
elementos imateriais, definidos como o softspace para Usman Haque
(2002).
O projeto também demonstra como o sistema interativo é ca-
paz de promover uma experiência em contínuo desenvolvimento e se
aprimorar através das informações acumuladas com o tempo, forman-
do o que Haque (2006) chama de um sistema interativo de ciclo múlti-
plo. Sendo assim, o sistema permite que, ao longo do tempo, o usuário
tenha diferentes experiências no espaço, sempre relativas à memória
do sistema e aos seus objetivos. A existência desses objetivos que o
edifício busca alcançar, no caso atrair ou afastar os visitantes de áreas
específicas, caracteriza o seu sistema como autônomo, de acordo com
a categorização de Achten (2011).
Son-o-house, portanto, permite o entendimento de um sistema
interativo, como ele pode ser caracterizado e posto em prática, especi-
almente no que diz respeito à percepção e ao relacionamento interati-
vo entre usuários e as características imateriais do espaço arquitetôni-
co30.
30
As informações necessárias para o estudo foram obtidas em <http://www.evdh.net/sonohouse/>, <http://www.arcspace.com/features/nox/son-o-house/> e <http://www.nox-art-architecture.com>, acessados em 01/11/2013.
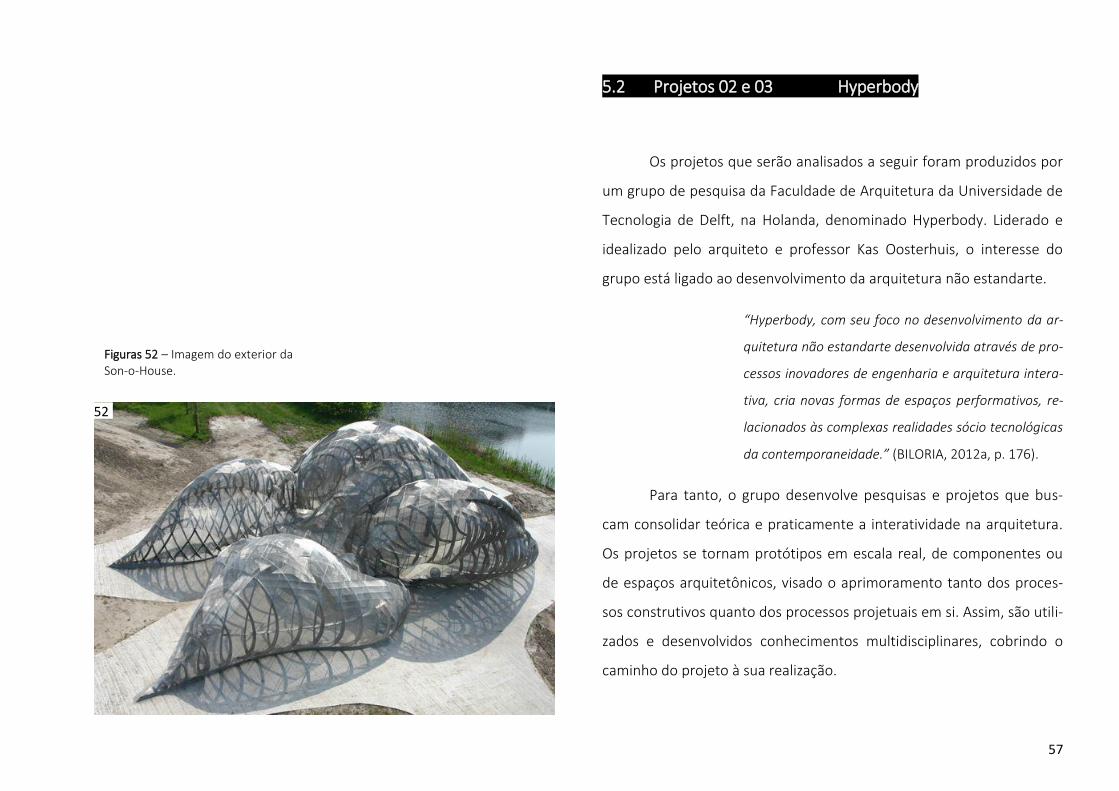
57
5.2 Projetos 02 e 03 Hyperbody
Os projetos que serão analisados a seguir foram produzidos por
um grupo de pesquisa da Faculdade de Arquitetura da Universidade de
Tecnologia de Delft, na Holanda, denominado Hyperbody. Liderado e
idealizado pelo arquiteto e professor Kas Oosterhuis, o interesse do
grupo está ligado ao desenvolvimento da arquitetura não estandarte.
“Hyperbody, com seu foco no desenvolvimento da ar-
quitetura não estandarte desenvolvida através de pro-
cessos inovadores de engenharia e arquitetura intera-
tiva, cria novas formas de espaços performativos, re-
lacionados às complexas realidades sócio tecnológicas
da contemporaneidade.” (BILORIA, 2012a, p. 176).
Para tanto, o grupo desenvolve pesquisas e projetos que bus-
cam consolidar teórica e praticamente a interatividade na arquitetura.
Os projetos se tornam protótipos em escala real, de componentes ou
de espaços arquitetônicos, visado o aprimoramento tanto dos proces-
sos construtivos quanto dos processos projetuais em si. Assim, são utili-
zados e desenvolvidos conhecimentos multidisciplinares, cobrindo o
caminho do projeto à sua realização.
Figuras 52 – Imagem do exterior da Son-o-House.
52
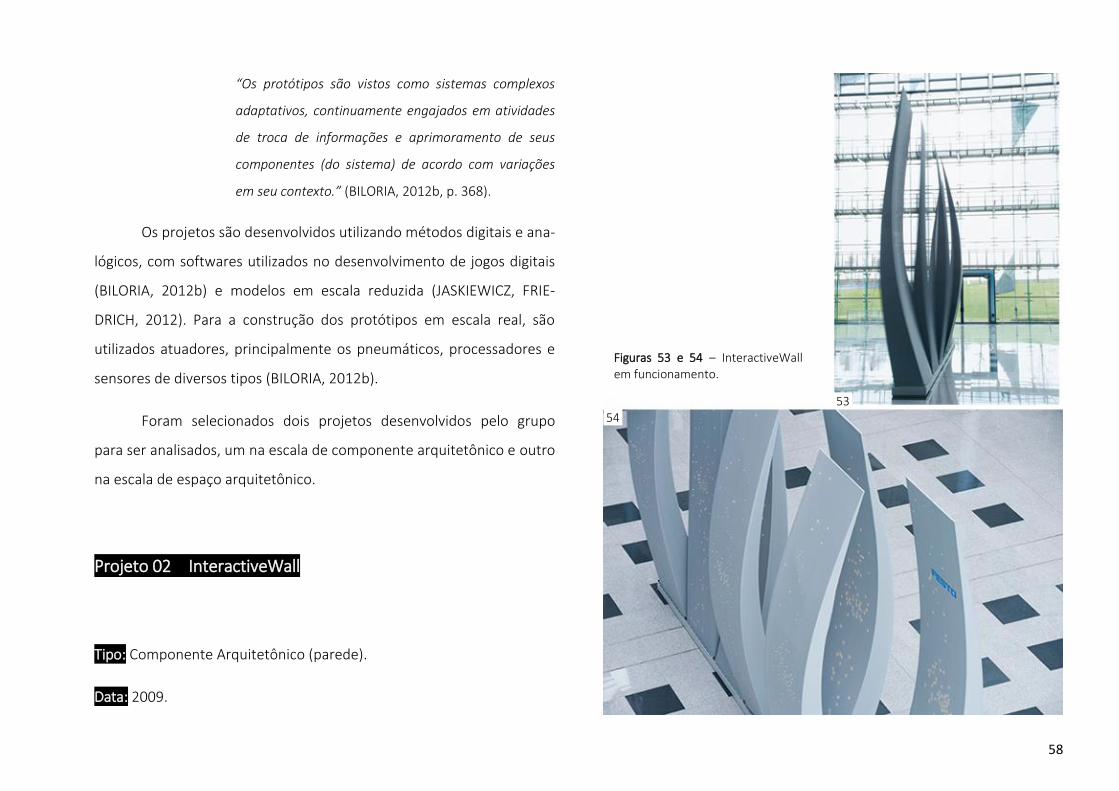
58
“Os protótipos são vistos como sistemas complexos
adaptativos, continuamente engajados em atividades
de troca de informações e aprimoramento de seus
componentes (do sistema) de acordo com variações
em seu contexto.” (BILORIA, 2012b, p. 368).
Os projetos são desenvolvidos utilizando métodos digitais e ana-
lógicos, com softwares utilizados no desenvolvimento de jogos digitais
(BILORIA, 2012b) e modelos em escala reduzida (JASKIEWICZ, FRIE-
DRICH, 2012). Para a construção dos protótipos em escala real, são
utilizados atuadores, principalmente os pneumáticos, processadores e
sensores de diversos tipos (BILORIA, 2012b).
Foram selecionados dois projetos desenvolvidos pelo grupo
para ser analisados, um na escala de componente arquitetônico e outro
na escala de espaço arquitetônico.
Projeto 02 InteractiveWall
Tipo: Componente Arquitetônico (parede).
Data: 2009.
Figuras 53 e 54 – InteractiveWall em funcionamento.
54
53
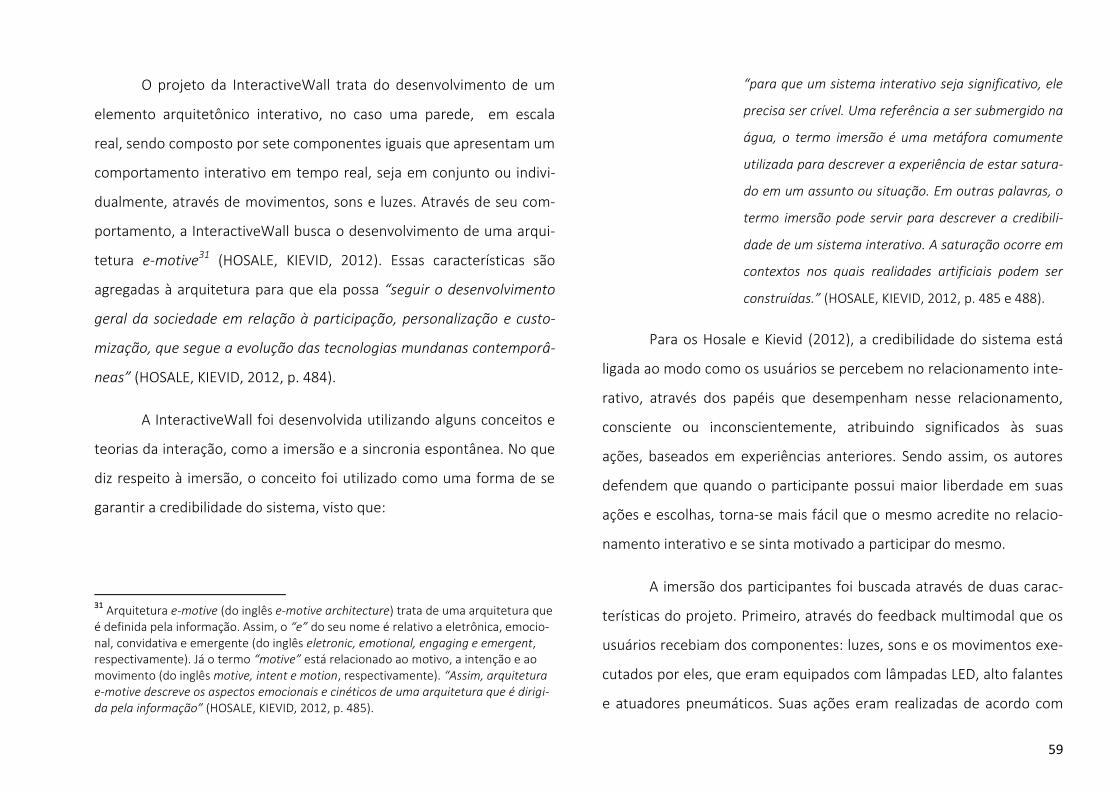
59
O projeto da InteractiveWall trata do desenvolvimento de um
elemento arquitetônico interativo, no caso uma parede, em escala
real, sendo composto por sete componentes iguais que apresentam um
comportamento interativo em tempo real, seja em conjunto ou indivi-
dualmente, através de movimentos, sons e luzes. Através de seu com-
portamento, a InteractiveWall busca o desenvolvimento de uma arqui-
tetura e-motive31 (HOSALE, KIEVID, 2012). Essas características são
agregadas à arquitetura para que ela possa “seguir o desenvolvimento
geral da sociedade em relação à participação, personalização e custo-
mização, que segue a evolução das tecnologias mundanas contemporâ-
neas” (HOSALE, KIEVID, 2012, p. 484).
A InteractiveWall foi desenvolvida utilizando alguns conceitos e
teorias da interação, como a imersão e a sincronia espontânea. No que
diz respeito à imersão, o conceito foi utilizado como uma forma de se
garantir a credibilidade do sistema, visto que:
31
Arquitetura e-motive (do inglês e-motive architecture) trata de uma arquitetura que é definida pela informação. Assim, o “e” do seu nome é relativo a eletrônica, emocio-nal, convidativa e emergente (do inglês eletronic, emotional, engaging e emergent, respectivamente). Já o termo “motive” está relacionado ao motivo, a intenção e ao movimento (do inglês motive, intent e motion, respectivamente). “Assim, arquitetura e-motive descreve os aspectos emocionais e cinéticos de uma arquitetura que é dirigi-da pela informação” (HOSALE, KIEVID, 2012, p. 485).
“para que um sistema interativo seja significativo, ele
precisa ser crível. Uma referência a ser submergido na
água, o termo imersão é uma metáfora comumente
utilizada para descrever a experiência de estar satura-
do em um assunto ou situação. Em outras palavras, o
termo imersão pode servir para descrever a credibili-
dade de um sistema interativo. A saturação ocorre em
contextos nos quais realidades artificiais podem ser
construídas.” (HOSALE, KIEVID, 2012, p. 485 e 488).
Para os Hosale e Kievid (2012), a credibilidade do sistema está
ligada ao modo como os usuários se percebem no relacionamento inte-
rativo, através dos papéis que desempenham nesse relacionamento,
consciente ou inconscientemente, atribuindo significados às suas
ações, baseados em experiências anteriores. Sendo assim, os autores
defendem que quando o participante possui maior liberdade em suas
ações e escolhas, torna-se mais fácil que o mesmo acredite no relacio-
namento interativo e se sinta motivado a participar do mesmo.
A imersão dos participantes foi buscada através de duas carac-
terísticas do projeto. Primeiro, através do feedback multimodal que os
usuários recebiam dos componentes: luzes, sons e os movimentos exe-
cutados por eles, que eram equipados com lâmpadas LED, alto falantes
e atuadores pneumáticos. Suas ações eram realizadas de acordo com
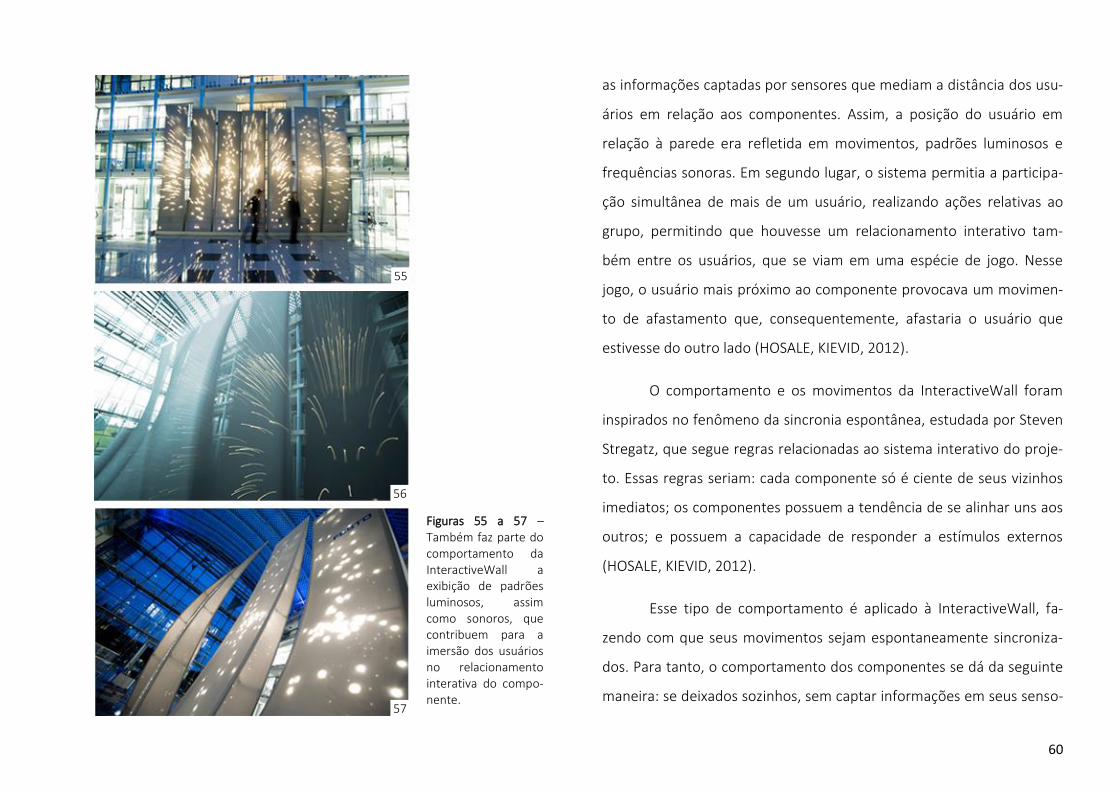
60
as informações captadas por sensores que mediam a distância dos usu-
ários em relação aos componentes. Assim, a posição do usuário em
relação à parede era refletida em movimentos, padrões luminosos e
frequências sonoras. Em segundo lugar, o sistema permitia a participa-
ção simultânea de mais de um usuário, realizando ações relativas ao
grupo, permitindo que houvesse um relacionamento interativo tam-
bém entre os usuários, que se viam em uma espécie de jogo. Nesse
jogo, o usuário mais próximo ao componente provocava um movimen-
to de afastamento que, consequentemente, afastaria o usuário que
estivesse do outro lado (HOSALE, KIEVID, 2012).
O comportamento e os movimentos da InteractiveWall foram
inspirados no fenômeno da sincronia espontânea, estudada por Steven
Stregatz, que segue regras relacionadas ao sistema interativo do proje-
to. Essas regras seriam: cada componente só é ciente de seus vizinhos
imediatos; os componentes possuem a tendência de se alinhar uns aos
outros; e possuem a capacidade de responder a estímulos externos
(HOSALE, KIEVID, 2012).
Esse tipo de comportamento é aplicado à InteractiveWall, fa-
zendo com que seus movimentos sejam espontaneamente sincroniza-
dos. Para tanto, o comportamento dos componentes se dá da seguinte
maneira: se deixados sozinhos, sem captar informações em seus senso-
Figuras 55 a 57 – Também faz parte do comportamento da InteractiveWall a exibição de padrões luminosos, assim como sonoros, que contribuem para a imersão dos usuários no relacionamento interativa do compo-nente.
55
56
57
61
res, os sete componentes se mantém alinhados e estáticos. Com a
aproximação dos visitantes, e a consequente captação de informações
através dos sensores, cada componente executa uma ação individual
de se afastar, relativa à posição do usuário. O movimento executado
por um componente é seguido pelos seus vizinhos, gerando movimen-
tos em cadeia, que buscam se alinhar novamente. O resultado é que o
conjunto todo irá se movimentar em busca de um objetivo programa-
do, que é voltar à posição de alinhamento, gerando padrões variados e
sincronizados de movimentos. Se deixados isolados e sem captar estí-
mulos externos, os componentes irão atingir seu estado estável de ali-
nhamento novamente.
O projeto da InteractiveWall demonstra a aplicação de concei-
tos de relacionamentos interativos e de comportamento de um sistema
interativo com a intenção de criar uma arquitetura semelhante a um
sistema vivo. Através de seus atuadores, processadores e sensores, cria
um componente arquitetônico em escala real capaz de se comportar da
forma como idealizaram a arquitetura interativa. A InteractiveWall
também demonstra como um componente arquitetônico interativo
pode se relacionar com grupos de pessoas, apresentando diversas
ações relativas ao seu contexto. Em suas formas de agir, utiliza como
conceito a pluralidade de formatos de feedback como uma forma de se 58
Figura 58 – Conjunto de figuras que demonstram o comportamento da InteractiveWall de acordo com o fe-nômeno da sincronia espontânea.
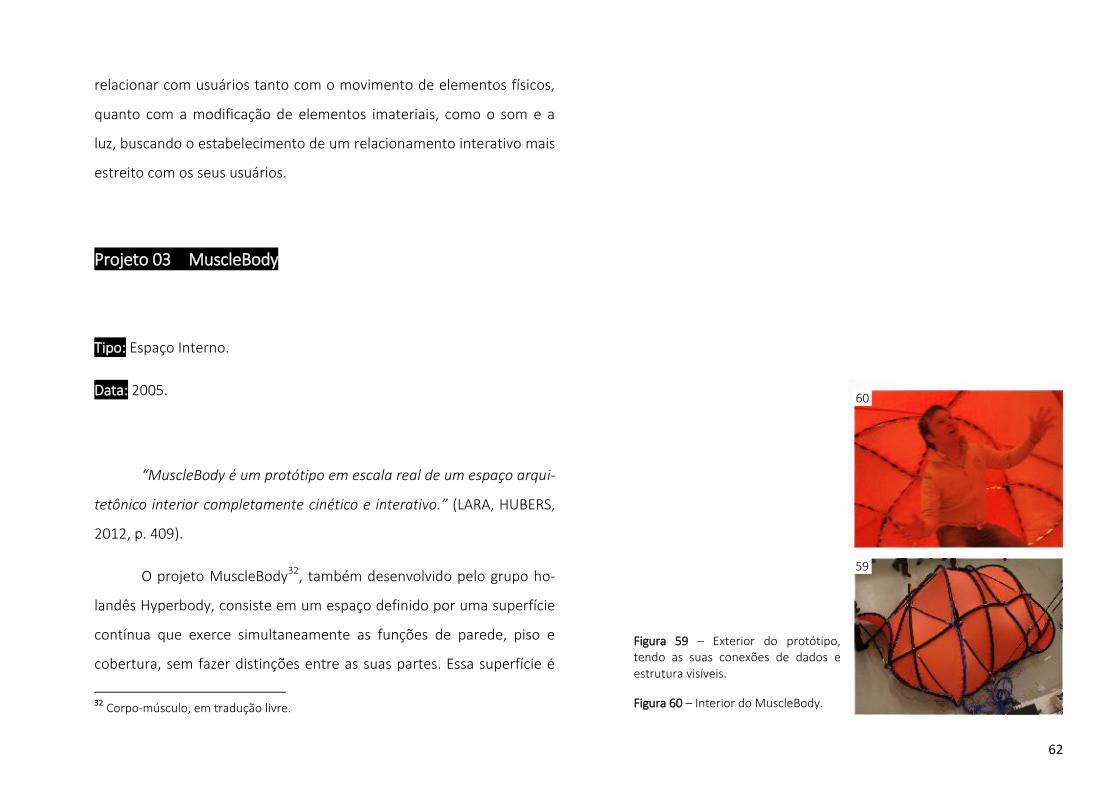
62
relacionar com usuários tanto com o movimento de elementos físicos,
quanto com a modificação de elementos imateriais, como o som e a
luz, buscando o estabelecimento de um relacionamento interativo mais
estreito com os seus usuários.
Projeto 03 MuscleBody
Tipo: Espaço Interno.
Data: 2005.
“MuscleBody é um protótipo em escala real de um espaço arqui-
tetônico interior completamente cinético e interativo.” (LARA, HUBERS,
2012, p. 409).
O projeto MuscleBody32, também desenvolvido pelo grupo ho-
landês Hyperbody, consiste em um espaço definido por uma superfície
contínua que exerce simultaneamente as funções de parede, piso e
cobertura, sem fazer distinções entre as suas partes. Essa superfície é
32
Corpo-músculo, em tradução livre.
Figura 59 – Exterior do protótipo, tendo as suas conexões de dados e estrutura visíveis.
Figura 60 – Interior do MuscleBody.
59
60
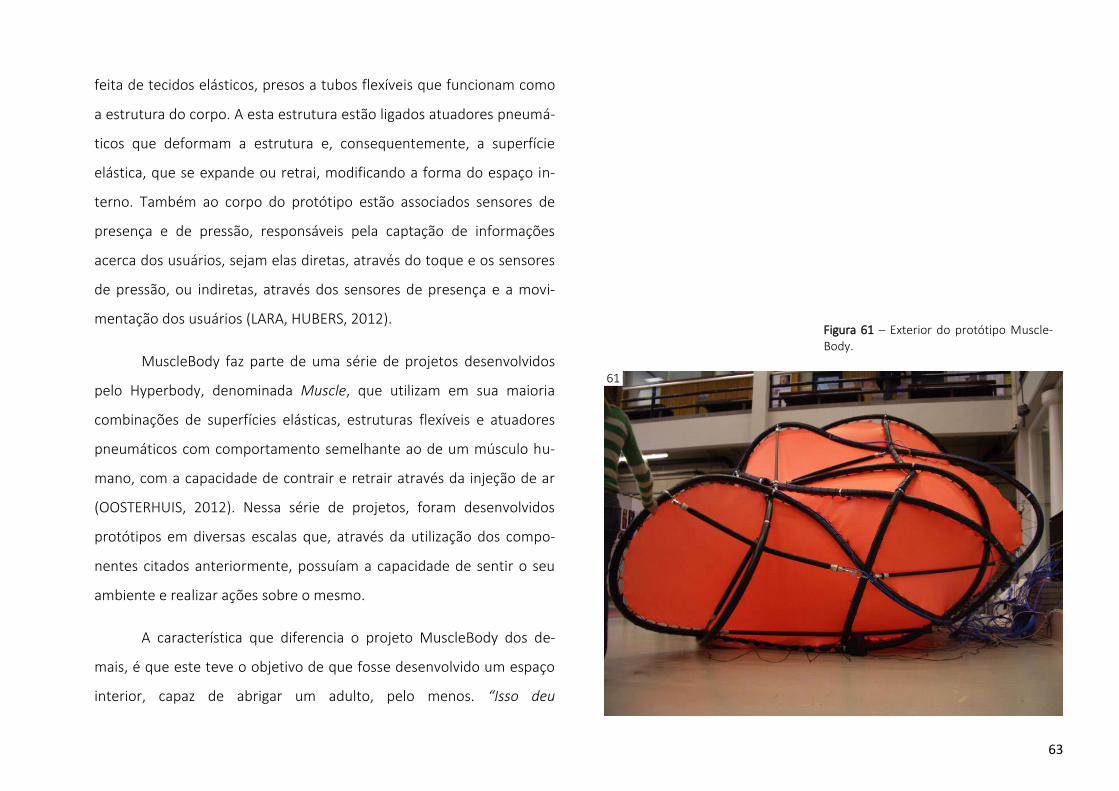
63
feita de tecidos elásticos, presos a tubos flexíveis que funcionam como
a estrutura do corpo. A esta estrutura estão ligados atuadores pneumá-
ticos que deformam a estrutura e, consequentemente, a superfície
elástica, que se expande ou retrai, modificando a forma do espaço in-
terno. Também ao corpo do protótipo estão associados sensores de
presença e de pressão, responsáveis pela captação de informações
acerca dos usuários, sejam elas diretas, através do toque e os sensores
de pressão, ou indiretas, através dos sensores de presença e a movi-
mentação dos usuários (LARA, HUBERS, 2012).
MuscleBody faz parte de uma série de projetos desenvolvidos
pelo Hyperbody, denominada Muscle, que utilizam em sua maioria
combinações de superfícies elásticas, estruturas flexíveis e atuadores
pneumáticos com comportamento semelhante ao de um músculo hu-
mano, com a capacidade de contrair e retrair através da injeção de ar
(OOSTERHUIS, 2012). Nessa série de projetos, foram desenvolvidos
protótipos em diversas escalas que, através da utilização dos compo-
nentes citados anteriormente, possuíam a capacidade de sentir o seu
ambiente e realizar ações sobre o mesmo.
A característica que diferencia o projeto MuscleBody dos de-
mais, é que este teve o objetivo de que fosse desenvolvido um espaço
interior, capaz de abrigar um adulto, pelo menos. “Isso deu
Figura 61 – Exterior do protótipo Muscle-Body.
61
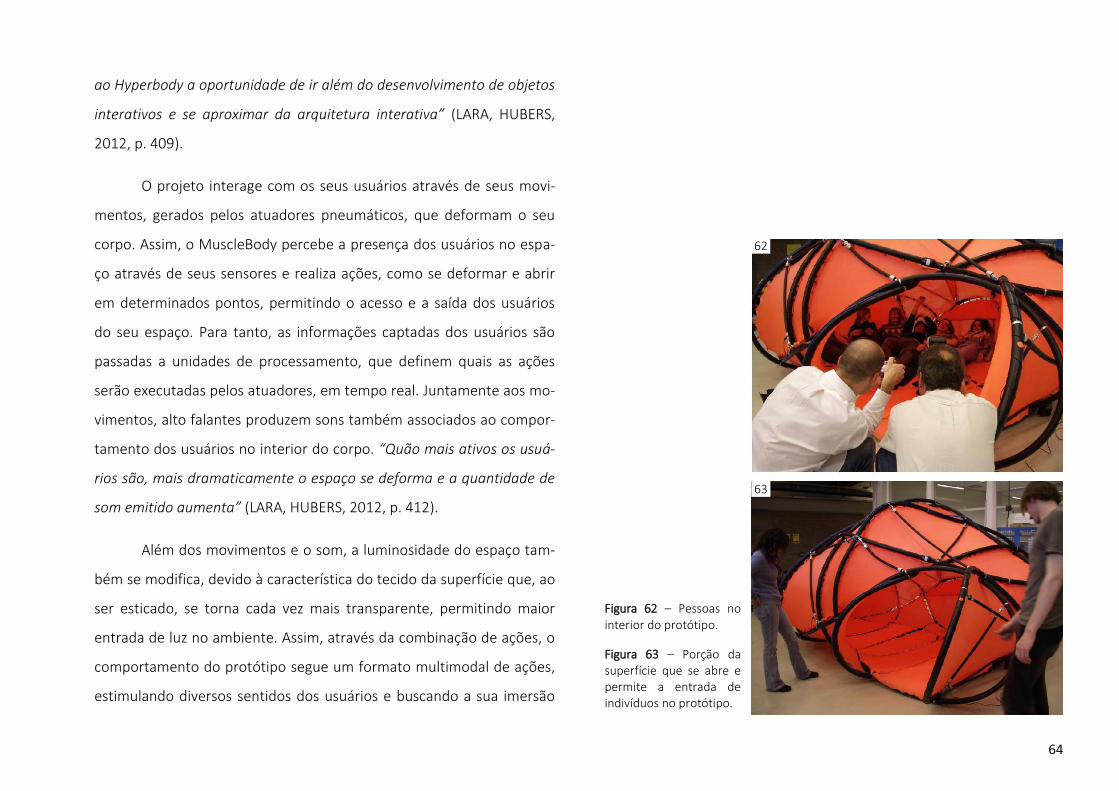
64
ao Hyperbody a oportunidade de ir além do desenvolvimento de objetos
interativos e se aproximar da arquitetura interativa” (LARA, HUBERS,
2012, p. 409).
O projeto interage com os seus usuários através de seus movi-
mentos, gerados pelos atuadores pneumáticos, que deformam o seu
corpo. Assim, o MuscleBody percebe a presença dos usuários no espa-
ço através de seus sensores e realiza ações, como se deformar e abrir
em determinados pontos, permitindo o acesso e a saída dos usuários
do seu espaço. Para tanto, as informações captadas dos usuários são
passadas a unidades de processamento, que definem quais as ações
serão executadas pelos atuadores, em tempo real. Juntamente aos mo-
vimentos, alto falantes produzem sons também associados ao compor-
tamento dos usuários no interior do corpo. “Quão mais ativos os usuá-
rios são, mais dramaticamente o espaço se deforma e a quantidade de
som emitido aumenta” (LARA, HUBERS, 2012, p. 412).
Além dos movimentos e o som, a luminosidade do espaço tam-
bém se modifica, devido à característica do tecido da superfície que, ao
ser esticado, se torna cada vez mais transparente, permitindo maior
entrada de luz no ambiente. Assim, através da combinação de ações, o
comportamento do protótipo segue um formato multimodal de ações,
estimulando diversos sentidos dos usuários e buscando a sua imersão
Figura 62 – Pessoas no interior do protótipo.
Figura 63 – Porção da superfície que se abre e permite a entrada de indivíduos no protótipo.
62
63
65
no relacionamento, assim como ocorre com a InteractiveWall, analisa-
da anteriormente.
O projeto busca demonstrar e pesquisar como espaços interio-
res podem interagir, através da composição de um sistema interativo,
com seus sensores, processadores e componentes físicos. Inputs dire-
tos e indiretos, captados com sensores de pressão e de proximidade
respectivamente, demonstram como as informações acerca dos usuá-
rios podem ser obtidas de diferentes formas, permitindo, consequen-
temente, diversas combinações de ações a serem executadas.
66
6 O projeto experimental
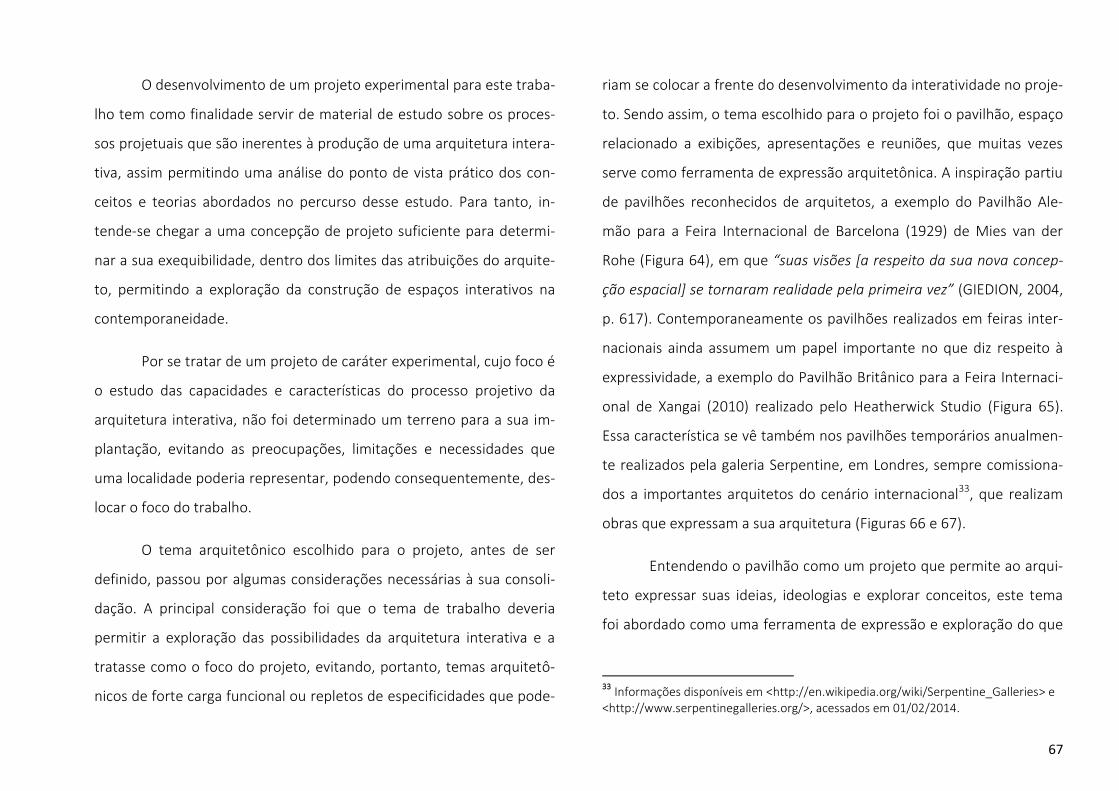
67
O desenvolvimento de um projeto experimental para este traba-
lho tem como finalidade servir de material de estudo sobre os proces-
sos projetuais que são inerentes à produção de uma arquitetura intera-
tiva, assim permitindo uma análise do ponto de vista prático dos con-
ceitos e teorias abordados no percurso desse estudo. Para tanto, in-
tende-se chegar a uma concepção de projeto suficiente para determi-
nar a sua exequibilidade, dentro dos limites das atribuições do arquite-
to, permitindo a exploração da construção de espaços interativos na
contemporaneidade.
Por se tratar de um projeto de caráter experimental, cujo foco é
o estudo das capacidades e características do processo projetivo da
arquitetura interativa, não foi determinado um terreno para a sua im-
plantação, evitando as preocupações, limitações e necessidades que
uma localidade poderia representar, podendo consequentemente, des-
locar o foco do trabalho.
O tema arquitetônico escolhido para o projeto, antes de ser
definido, passou por algumas considerações necessárias à sua consoli-
dação. A principal consideração foi que o tema de trabalho deveria
permitir a exploração das possibilidades da arquitetura interativa e a
tratasse como o foco do projeto, evitando, portanto, temas arquitetô-
nicos de forte carga funcional ou repletos de especificidades que pode-
riam se colocar a frente do desenvolvimento da interatividade no proje-
to. Sendo assim, o tema escolhido para o projeto foi o pavilhão, espaço
relacionado a exibições, apresentações e reuniões, que muitas vezes
serve como ferramenta de expressão arquitetônica. A inspiração partiu
de pavilhões reconhecidos de arquitetos, a exemplo do Pavilhão Ale-
mão para a Feira Internacional de Barcelona (1929) de Mies van der
Rohe (Figura 64), em que “suas visões [a respeito da sua nova concep-
ção espacial] se tornaram realidade pela primeira vez” (GIEDION, 2004,
p. 617). Contemporaneamente os pavilhões realizados em feiras inter-
nacionais ainda assumem um papel importante no que diz respeito à
expressividade, a exemplo do Pavilhão Britânico para a Feira Internaci-
onal de Xangai (2010) realizado pelo Heatherwick Studio (Figura 65).
Essa característica se vê também nos pavilhões temporários anualmen-
te realizados pela galeria Serpentine, em Londres, sempre comissiona-
dos a importantes arquitetos do cenário internacional33, que realizam
obras que expressam a sua arquitetura (Figuras 66 e 67).
Entendendo o pavilhão como um projeto que permite ao arqui-
teto expressar suas ideias, ideologias e explorar conceitos, este tema
foi abordado como uma ferramenta de expressão e exploração do que
33
Informações disponíveis em <http://en.wikipedia.org/wiki/Serpentine_Galleries> e <http://www.serpentinegalleries.org/>, acessados em 01/02/2014.
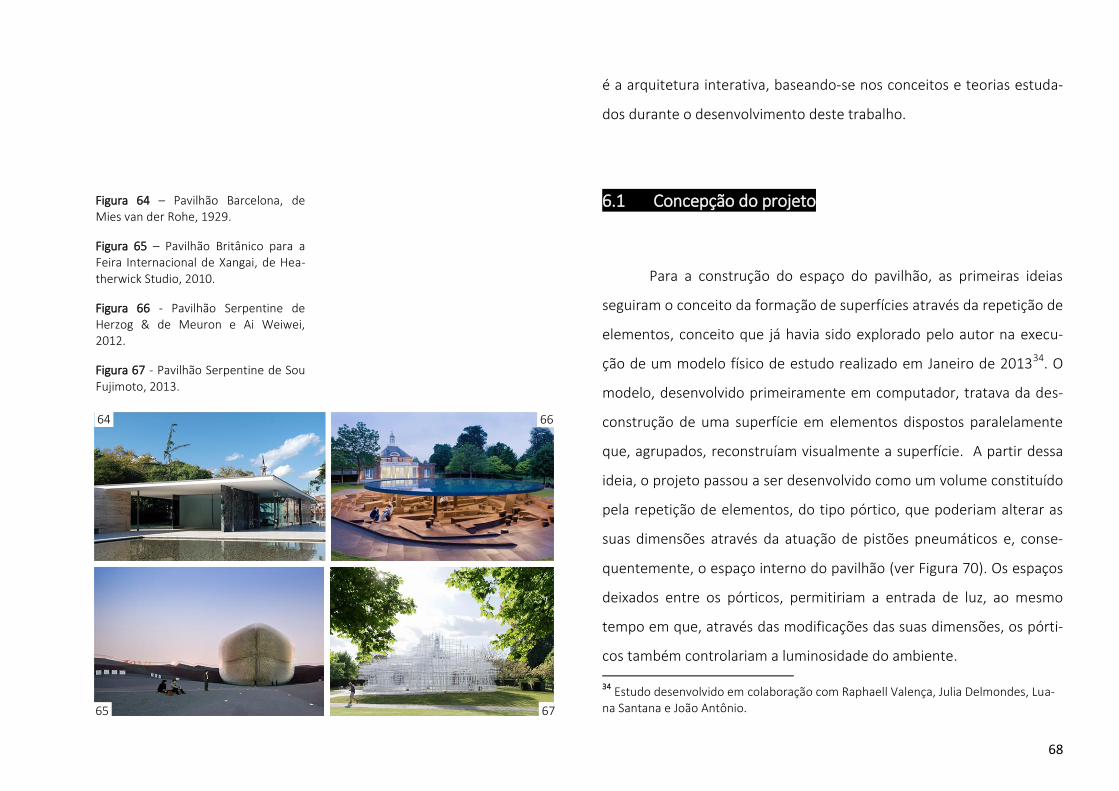
68
é a arquitetura interativa, baseando-se nos conceitos e teorias estuda-
dos durante o desenvolvimento deste trabalho.
6.1 Concepção do projeto
Para a construção do espaço do pavilhão, as primeiras ideias
seguiram o conceito da formação de superfícies através da repetição de
elementos, conceito que já havia sido explorado pelo autor na execu-
ção de um modelo físico de estudo realizado em Janeiro de 201334. O
modelo, desenvolvido primeiramente em computador, tratava da des-
construção de uma superfície em elementos dispostos paralelamente
que, agrupados, reconstruíam visualmente a superfície. A partir dessa
ideia, o projeto passou a ser desenvolvido como um volume constituído
pela repetição de elementos, do tipo pórtico, que poderiam alterar as
suas dimensões através da atuação de pistões pneumáticos e, conse-
quentemente, o espaço interno do pavilhão (ver Figura 70). Os espaços
deixados entre os pórticos, permitiriam a entrada de luz, ao mesmo
tempo em que, através das modificações das suas dimensões, os pórti-
cos também controlariam a luminosidade do ambiente. 34
Estudo desenvolvido em colaboração com Raphaell Valença, Julia Delmondes, Lua-na Santana e João Antônio.
64
65
66
67
Figura 64 – Pavilhão Barcelona, de Mies van der Rohe, 1929.
Figura 65 – Pavilhão Britânico para a Feira Internacional de Xangai, de Hea-therwick Studio, 2010.
Figura 66 - Pavilhão Serpentine de Herzog & de Meuron e Ai Weiwei, 2012.
Figura 67 - Pavilhão Serpentine de Sou Fujimoto, 2013.
69
O elemento pórtico, então, seria o responsável pelo caráter in-
terativo do pavilhão, permitindo que o volume e a luminosidade do
espaço fossem os meios ativos na interação com seus usuários. Esse
pórtico é constituído por pistões pneumáticos distribuídos horizontal,
vertical e diagonalmente ao longo da estrutura, com as suas extremi-
dades conectadas a elementos semirrígidos que permitem a deforma-
ção da sua superfície interna (Figura 71). Os pistões, de acordo com a
injeção de ar que recebem, criariam um movimento linear de extensão
ou retração que, agindo em conjunto com os outros pistões, modifica-
ria a forma da superfície interna, constituída por placas metálicas pin-
tadas na cor preta conectadas por faixas de elástico preto, que permiti-
ria que as conexões entre as extremidades dos pistões pudessem se
deformar e ao mesmo tempo manter a sua linearidade (Figura 72).
A composição final de projeto do pórtico possui 18 pistões que
são fixados em suportes metálicos, que por sua vez são fixados na es-
trutura do pórtico (Figura 73), constituída por duas colunas e uma viga
de aço de perfil “C” com dimensões de 11 x 10 cm. Cinco pistões são
posicionados horizontalmente em cada uma das colunas da estrutura,
outros seis pistões são posicionados verticalmente e distribuídos ao
longo da viga; mais dois pistões são posicionados diagonalmente em
cada encontro entre a viga e as colunas, permitindo a articulação entre
68 69
70
Figura 68 – Modelo virtual do protótipo de estudo.
Figura 69 – Modelo físico do protótipo de estudo.
Figura 70 – Croquis de estudo da constru-ção do espaço através de elementos repetidos.
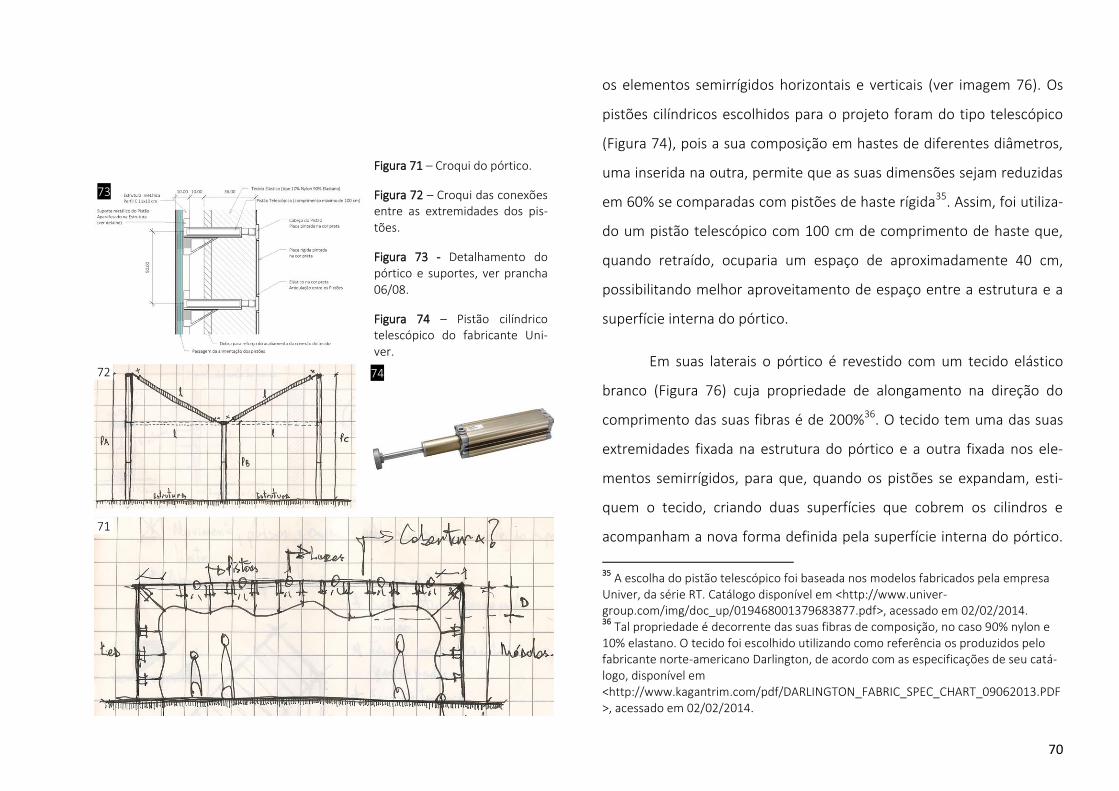
70
os elementos semirrígidos horizontais e verticais (ver imagem 76). Os
pistões cilíndricos escolhidos para o projeto foram do tipo telescópico
(Figura 74), pois a sua composição em hastes de diferentes diâmetros,
uma inserida na outra, permite que as suas dimensões sejam reduzidas
em 60% se comparadas com pistões de haste rígida35. Assim, foi utiliza-
do um pistão telescópico com 100 cm de comprimento de haste que,
quando retraído, ocuparia um espaço de aproximadamente 40 cm,
possibilitando melhor aproveitamento de espaço entre a estrutura e a
superfície interna do pórtico.
Em suas laterais o pórtico é revestido com um tecido elástico
branco (Figura 76) cuja propriedade de alongamento na direção do
comprimento das suas fibras é de 200%36. O tecido tem uma das suas
extremidades fixada na estrutura do pórtico e a outra fixada nos ele-
mentos semirrígidos, para que, quando os pistões se expandam, esti-
quem o tecido, criando duas superfícies que cobrem os cilindros e
acompanham a nova forma definida pela superfície interna do pórtico.
35
A escolha do pistão telescópico foi baseada nos modelos fabricados pela empresa Univer, da série RT. Catálogo disponível em <http://www.univer-group.com/img/doc_up/019468001379683877.pdf>, acessado em 02/02/2014. 36
Tal propriedade é decorrente das suas fibras de composição, no caso 90% nylon e 10% elastano. O tecido foi escolhido utilizando como referência os produzidos pelo fabricante norte-americano Darlington, de acordo com as especificações de seu catá-logo, disponível em <http://www.kagantrim.com/pdf/DARLINGTON_FABRIC_SPEC_CHART_09062013.PDF>, acessado em 02/02/2014.
71
72
73
74
Figura 71 – Croqui do pórtico.
Figura 72 – Croqui das conexões entre as extremidades dos pis-tões.
Figura 73 - Detalhamento do pórtico e suportes, ver prancha 06/08.
Figura 74 – Pistão cilíndrico telescópico do fabricante Uni-ver.
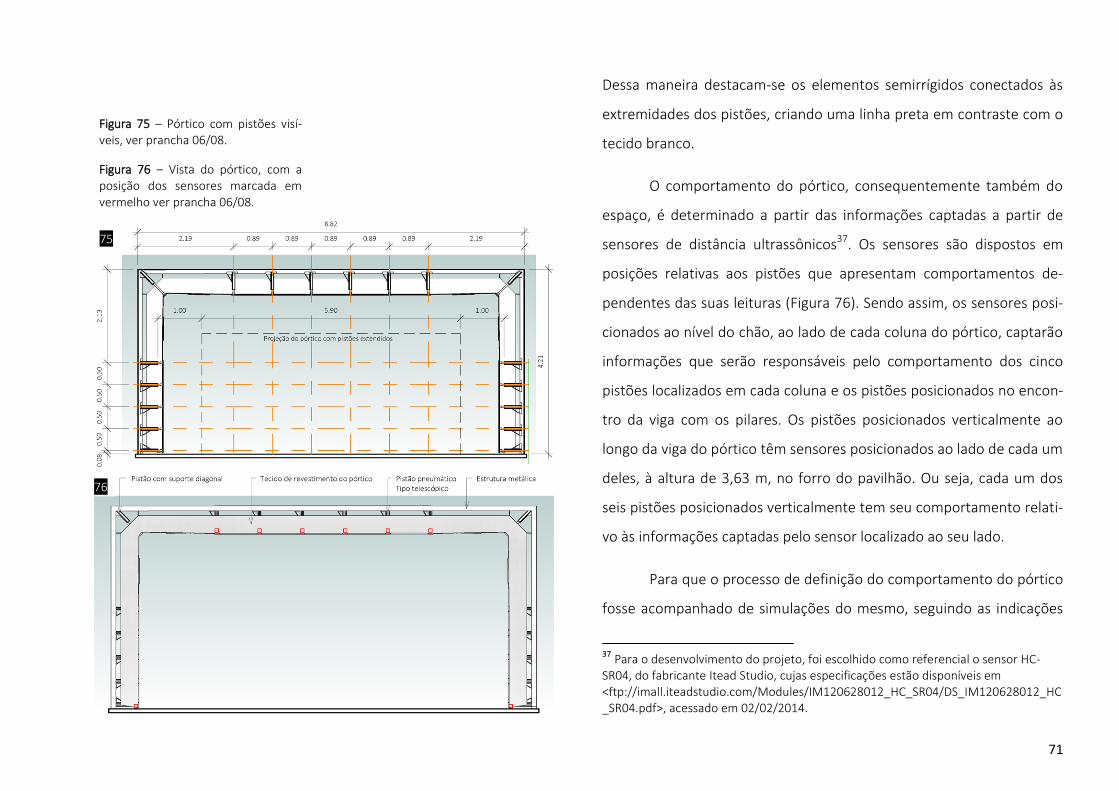
71
Dessa maneira destacam-se os elementos semirrígidos conectados às
extremidades dos pistões, criando uma linha preta em contraste com o
tecido branco.
O comportamento do pórtico, consequentemente também do
espaço, é determinado a partir das informações captadas a partir de
sensores de distância ultrassônicos37. Os sensores são dispostos em
posições relativas aos pistões que apresentam comportamentos de-
pendentes das suas leituras (Figura 76). Sendo assim, os sensores posi-
cionados ao nível do chão, ao lado de cada coluna do pórtico, captarão
informações que serão responsáveis pelo comportamento dos cinco
pistões localizados em cada coluna e os pistões posicionados no encon-
tro da viga com os pilares. Os pistões posicionados verticalmente ao
longo da viga do pórtico têm sensores posicionados ao lado de cada um
deles, à altura de 3,63 m, no forro do pavilhão. Ou seja, cada um dos
seis pistões posicionados verticalmente tem seu comportamento relati-
vo às informações captadas pelo sensor localizado ao seu lado.
Para que o processo de definição do comportamento do pórtico
fosse acompanhado de simulações do mesmo, seguindo as indicações
37
Para o desenvolvimento do projeto, foi escolhido como referencial o sensor HC-SR04, do fabricante Itead Studio, cujas especificações estão disponíveis em <ftp://imall.iteadstudio.com/Modules/IM120628012_HC_SR04/DS_IM120628012_HC_SR04.pdf>, acessado em 02/02/2014.
75
76
Figura 75 – Pórtico com pistões visí-veis, ver prancha 06/08.
Figura 76 – Vista do pórtico, com a posição dos sensores marcada em vermelho ver prancha 06/08.
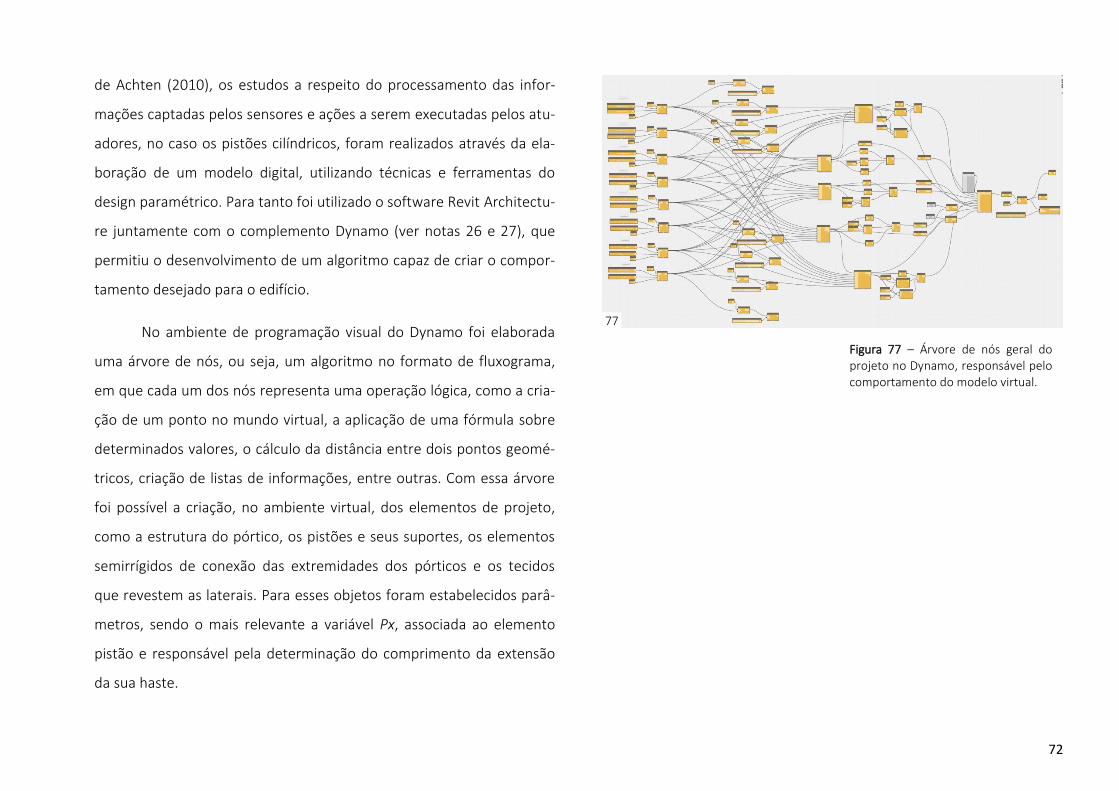
72
de Achten (2010), os estudos a respeito do processamento das infor-
mações captadas pelos sensores e ações a serem executadas pelos atu-
adores, no caso os pistões cilíndricos, foram realizados através da ela-
boração de um modelo digital, utilizando técnicas e ferramentas do
design paramétrico. Para tanto foi utilizado o software Revit Architectu-
re juntamente com o complemento Dynamo (ver notas 26 e 27), que
permitiu o desenvolvimento de um algoritmo capaz de criar o compor-
tamento desejado para o edifício.
No ambiente de programação visual do Dynamo foi elaborada
uma árvore de nós, ou seja, um algoritmo no formato de fluxograma,
em que cada um dos nós representa uma operação lógica, como a cria-
ção de um ponto no mundo virtual, a aplicação de uma fórmula sobre
determinados valores, o cálculo da distância entre dois pontos geomé-
tricos, criação de listas de informações, entre outras. Com essa árvore
foi possível a criação, no ambiente virtual, dos elementos de projeto,
como a estrutura do pórtico, os pistões e seus suportes, os elementos
semirrígidos de conexão das extremidades dos pórticos e os tecidos
que revestem as laterais. Para esses objetos foram estabelecidos parâ-
metros, sendo o mais relevante a variável Px, associada ao elemento
pistão e responsável pela determinação do comprimento da extensão
da sua haste.
77
Figura 77 – Árvore de nós geral do projeto no Dynamo, responsável pelo comportamento do modelo virtual.
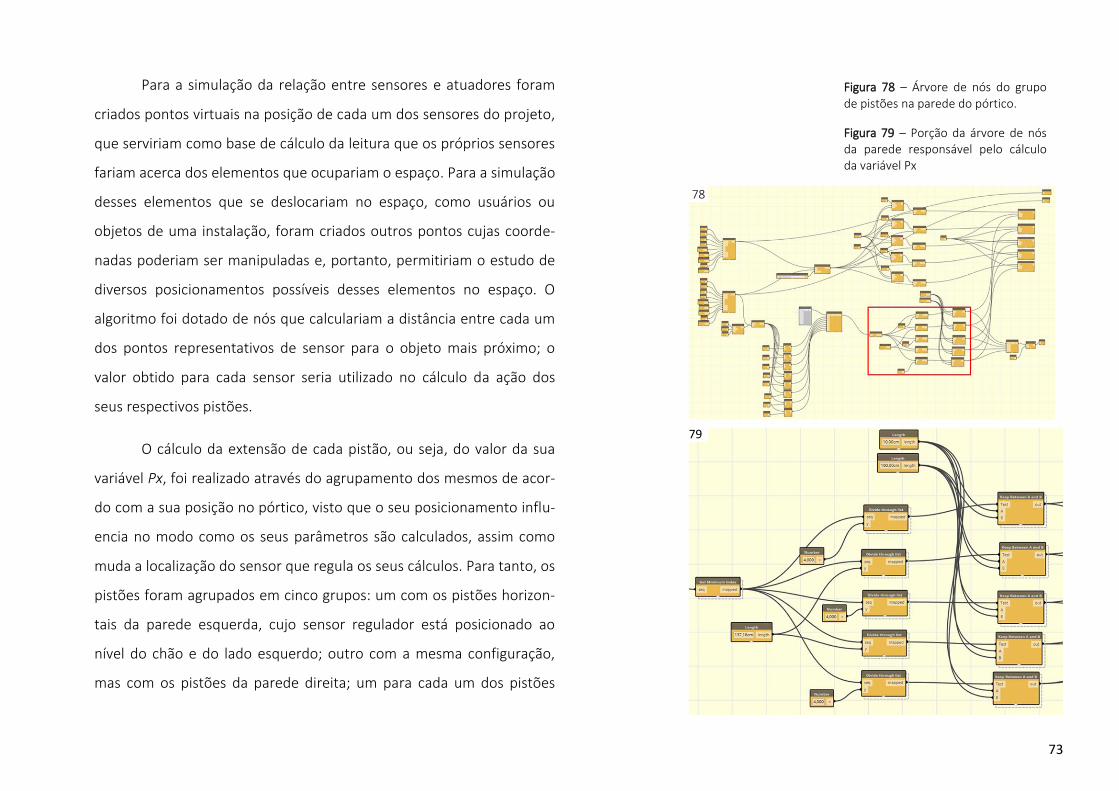
73
Para a simulação da relação entre sensores e atuadores foram
criados pontos virtuais na posição de cada um dos sensores do projeto,
que serviriam como base de cálculo da leitura que os próprios sensores
fariam acerca dos elementos que ocupariam o espaço. Para a simulação
desses elementos que se deslocariam no espaço, como usuários ou
objetos de uma instalação, foram criados outros pontos cujas coorde-
nadas poderiam ser manipuladas e, portanto, permitiriam o estudo de
diversos posicionamentos possíveis desses elementos no espaço. O
algoritmo foi dotado de nós que calculariam a distância entre cada um
dos pontos representativos de sensor para o objeto mais próximo; o
valor obtido para cada sensor seria utilizado no cálculo da ação dos
seus respectivos pistões.
O cálculo da extensão de cada pistão, ou seja, do valor da sua
variável Px, foi realizado através do agrupamento dos mesmos de acor-
do com a sua posição no pórtico, visto que o seu posicionamento influ-
encia no modo como os seus parâmetros são calculados, assim como
muda a localização do sensor que regula os seus cálculos. Para tanto, os
pistões foram agrupados em cinco grupos: um com os pistões horizon-
tais da parede esquerda, cujo sensor regulador está posicionado ao
nível do chão e do lado esquerdo; outro com a mesma configuração,
mas com os pistões da parede direita; um para cada um dos pistões
78
79
Figura 78 – Árvore de nós do grupo de pistões na parede do pórtico.
Figura 79 – Porção da árvore de nós da parede responsável pelo cálculo da variável Px
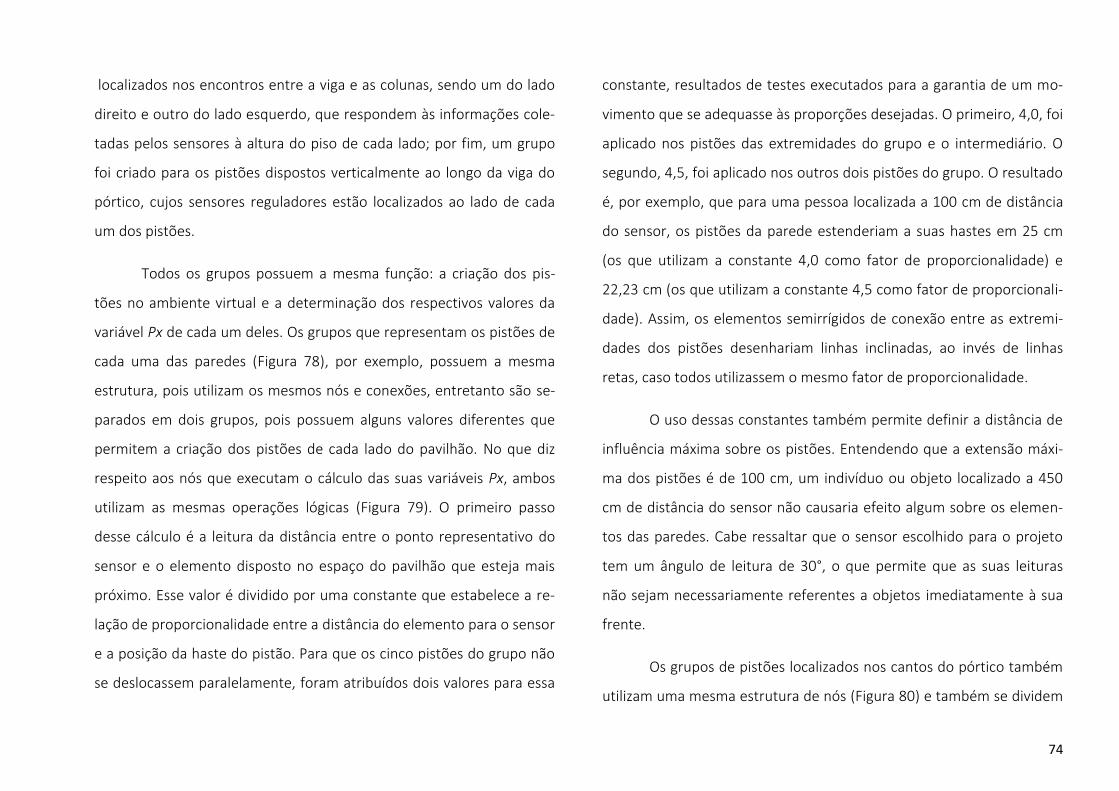
74
localizados nos encontros entre a viga e as colunas, sendo um do lado
direito e outro do lado esquerdo, que respondem às informações cole-
tadas pelos sensores à altura do piso de cada lado; por fim, um grupo
foi criado para os pistões dispostos verticalmente ao longo da viga do
pórtico, cujos sensores reguladores estão localizados ao lado de cada
um dos pistões.
Todos os grupos possuem a mesma função: a criação dos pis-
tões no ambiente virtual e a determinação dos respectivos valores da
variável Px de cada um deles. Os grupos que representam os pistões de
cada uma das paredes (Figura 78), por exemplo, possuem a mesma
estrutura, pois utilizam os mesmos nós e conexões, entretanto são se-
parados em dois grupos, pois possuem alguns valores diferentes que
permitem a criação dos pistões de cada lado do pavilhão. No que diz
respeito aos nós que executam o cálculo das suas variáveis Px, ambos
utilizam as mesmas operações lógicas (Figura 79). O primeiro passo
desse cálculo é a leitura da distância entre o ponto representativo do
sensor e o elemento disposto no espaço do pavilhão que esteja mais
próximo. Esse valor é dividido por uma constante que estabelece a re-
lação de proporcionalidade entre a distância do elemento para o sensor
e a posição da haste do pistão. Para que os cinco pistões do grupo não
se deslocassem paralelamente, foram atribuídos dois valores para essa
constante, resultados de testes executados para a garantia de um mo-
vimento que se adequasse às proporções desejadas. O primeiro, 4,0, foi
aplicado nos pistões das extremidades do grupo e o intermediário. O
segundo, 4,5, foi aplicado nos outros dois pistões do grupo. O resultado
é, por exemplo, que para uma pessoa localizada a 100 cm de distância
do sensor, os pistões da parede estenderiam a suas hastes em 25 cm
(os que utilizam a constante 4,0 como fator de proporcionalidade) e
22,23 cm (os que utilizam a constante 4,5 como fator de proporcionali-
dade). Assim, os elementos semirrígidos de conexão entre as extremi-
dades dos pistões desenhariam linhas inclinadas, ao invés de linhas
retas, caso todos utilizassem o mesmo fator de proporcionalidade.
O uso dessas constantes também permite definir a distância de
influência máxima sobre os pistões. Entendendo que a extensão máxi-
ma dos pistões é de 100 cm, um indivíduo ou objeto localizado a 450
cm de distância do sensor não causaria efeito algum sobre os elemen-
tos das paredes. Cabe ressaltar que o sensor escolhido para o projeto
tem um ângulo de leitura de 30°, o que permite que as suas leituras
não sejam necessariamente referentes a objetos imediatamente à sua
frente.
Os grupos de pistões localizados nos cantos do pórtico também
utilizam uma mesma estrutura de nós (Figura 80) e também se dividem
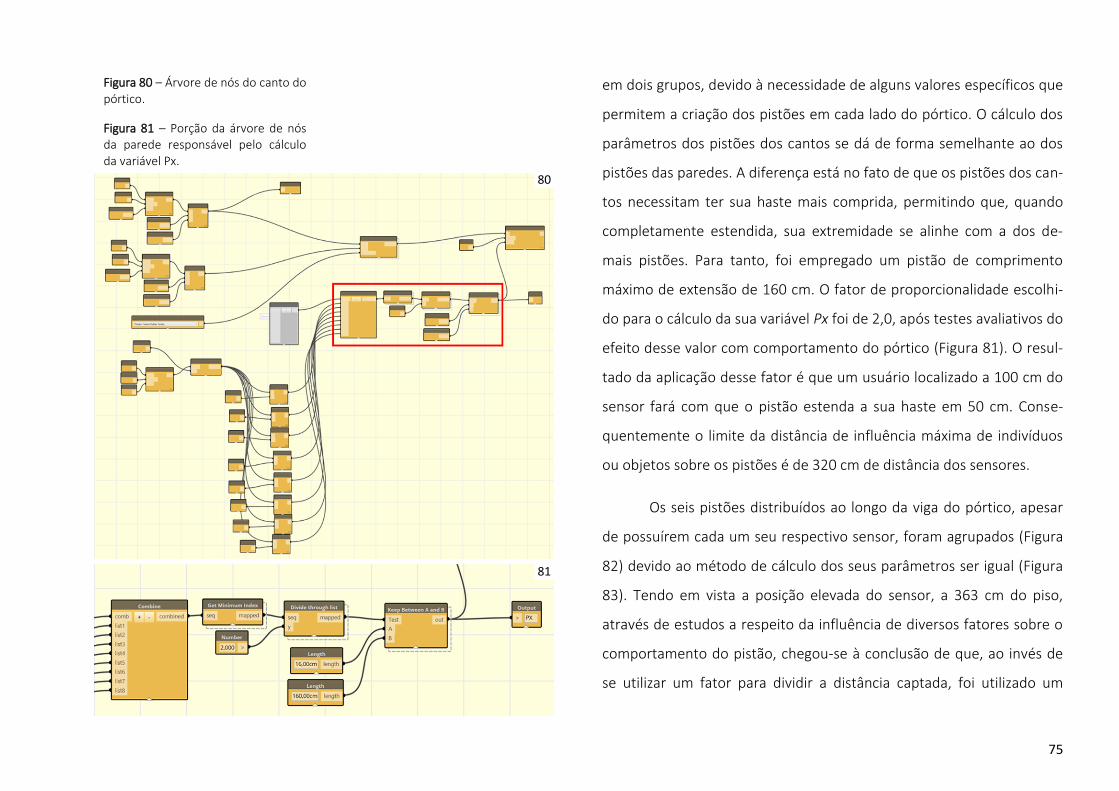
75
em dois grupos, devido à necessidade de alguns valores específicos que
permitem a criação dos pistões em cada lado do pórtico. O cálculo dos
parâmetros dos pistões dos cantos se dá de forma semelhante ao dos
pistões das paredes. A diferença está no fato de que os pistões dos can-
tos necessitam ter sua haste mais comprida, permitindo que, quando
completamente estendida, sua extremidade se alinhe com a dos de-
mais pistões. Para tanto, foi empregado um pistão de comprimento
máximo de extensão de 160 cm. O fator de proporcionalidade escolhi-
do para o cálculo da sua variável Px foi de 2,0, após testes avaliativos do
efeito desse valor com comportamento do pórtico (Figura 81). O resul-
tado da aplicação desse fator é que um usuário localizado a 100 cm do
sensor fará com que o pistão estenda a sua haste em 50 cm. Conse-
quentemente o limite da distância de influência máxima de indivíduos
ou objetos sobre os pistões é de 320 cm de distância dos sensores.
Os seis pistões distribuídos ao longo da viga do pórtico, apesar
de possuírem cada um seu respectivo sensor, foram agrupados (Figura
82) devido ao método de cálculo dos seus parâmetros ser igual (Figura
83). Tendo em vista a posição elevada do sensor, a 363 cm do piso,
através de estudos a respeito da influência de diversos fatores sobre o
comportamento do pistão, chegou-se à conclusão de que, ao invés de
se utilizar um fator para dividir a distância captada, foi utilizado um
Figura 80 – Árvore de nós do canto do pórtico.
Figura 81 – Porção da árvore de nós da parede responsável pelo cálculo da variável Px.
80
81
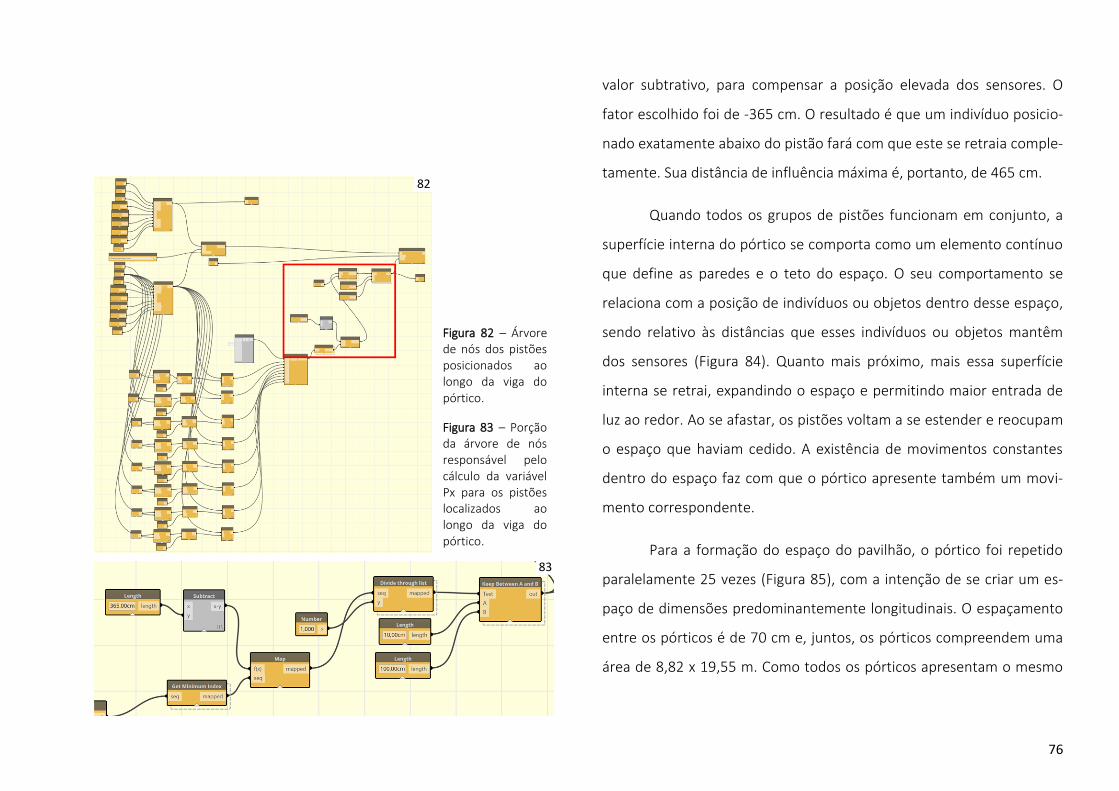
76
valor subtrativo, para compensar a posição elevada dos sensores. O
fator escolhido foi de -365 cm. O resultado é que um indivíduo posicio-
nado exatamente abaixo do pistão fará com que este se retraia comple-
tamente. Sua distância de influência máxima é, portanto, de 465 cm.
Quando todos os grupos de pistões funcionam em conjunto, a
superfície interna do pórtico se comporta como um elemento contínuo
que define as paredes e o teto do espaço. O seu comportamento se
relaciona com a posição de indivíduos ou objetos dentro desse espaço,
sendo relativo às distâncias que esses indivíduos ou objetos mantêm
dos sensores (Figura 84). Quanto mais próximo, mais essa superfície
interna se retrai, expandindo o espaço e permitindo maior entrada de
luz ao redor. Ao se afastar, os pistões voltam a se estender e reocupam
o espaço que haviam cedido. A existência de movimentos constantes
dentro do espaço faz com que o pórtico apresente também um movi-
mento correspondente.
Para a formação do espaço do pavilhão, o pórtico foi repetido
paralelamente 25 vezes (Figura 85), com a intenção de se criar um es-
paço de dimensões predominantemente longitudinais. O espaçamento
entre os pórticos é de 70 cm e, juntos, os pórticos compreendem uma
área de 8,82 x 19,55 m. Como todos os pórticos apresentam o mesmo
82
83
Figura 82 – Árvore de nós dos pistões posicionados ao longo da viga do pórtico.
Figura 83 – Porção da árvore de nós responsável pelo cálculo da variável Px para os pistões localizados ao longo da viga do pórtico.
77
comportamento, em conjunto eles representam uma superfície seg-
mentada que se retrai ou expande, agindo de acordo com a área de
influência dos indivíduos e objetos que ocupam o espaço.
A intenção de projeto era que a estrutura do pórtico de pistões
não fosse visível, seja com os pistões retraídos ou estendidos. Para tan-
to os pórticos foram envelopados com paredes e forros, construídos
com o sistema painel + montantes, semelhante ao utilizado em veda-
ções do tipo Drywal (Figura 86). O envelopamento tem a sua face vol-
tada ao interior do pavilhão, alinhada à extremidade dos elementos
semirrígidos de cada pórtico, na posição dos seus pistões retraídos.
Assim, quando os pistões se retraem ao máximo, a linha de cor preta
definida pelos elementos semirrígidos alinha-se aos painéis das paredes
e forros do envelopamento. Os painéis de vedação internos possuem
acabamento metálico pintado na cor branca, servindo como fundo de
contraste para os elementos semirrígidos, destacando-os, mesmo
quando completamente retraídos.
O envelopamento com os painéis citados anteriormente não
compreende todo o espaço do projeto. Como o tipo pórtico esteve pre-
sente no processo projetivo, e o direcionou, houve a intenção de que
ele fosse perceptível na composição dos elementos arquitetônicos.
Para tanto, o envelopamento foi realizado a partir de grupos de dois e
84
Figura 84 – Storyboard de percurso de um indivíduo sob o pórtico.
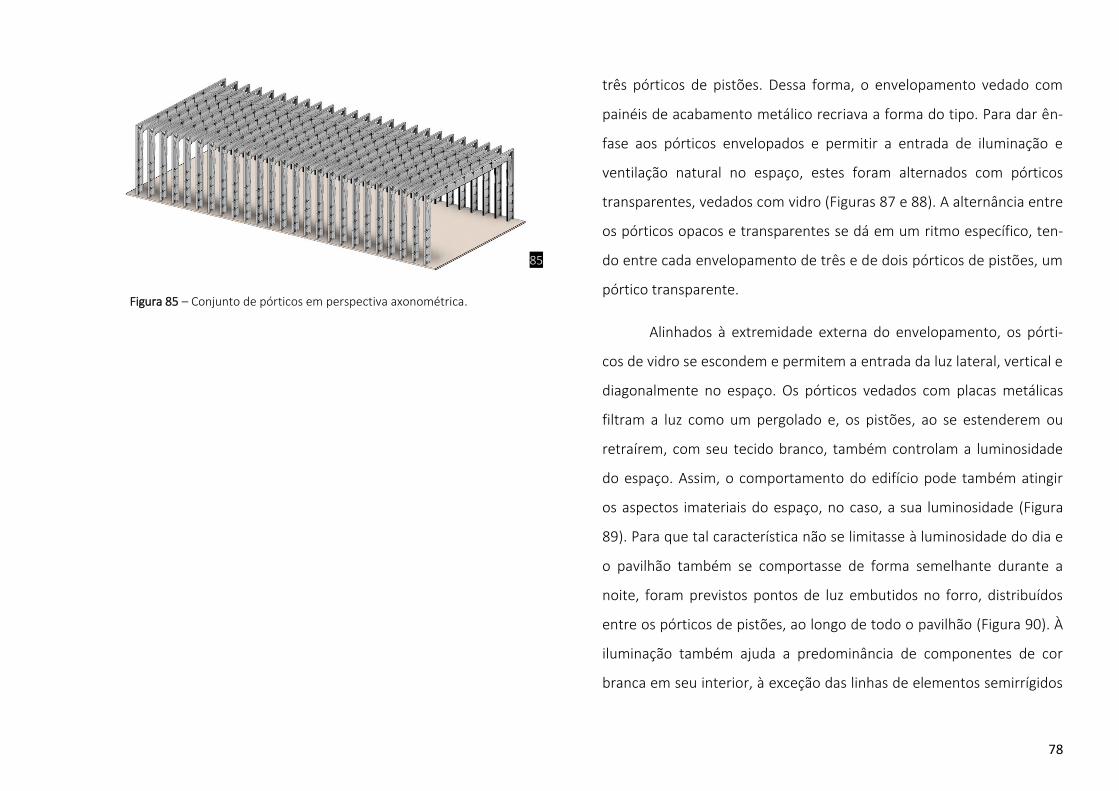
78
três pórticos de pistões. Dessa forma, o envelopamento vedado com
painéis de acabamento metálico recriava a forma do tipo. Para dar ên-
fase aos pórticos envelopados e permitir a entrada de iluminação e
ventilação natural no espaço, estes foram alternados com pórticos
transparentes, vedados com vidro (Figuras 87 e 88). A alternância entre
os pórticos opacos e transparentes se dá em um ritmo específico, ten-
do entre cada envelopamento de três e de dois pórticos de pistões, um
pórtico transparente.
Alinhados à extremidade externa do envelopamento, os pórti-
cos de vidro se escondem e permitem a entrada da luz lateral, vertical e
diagonalmente no espaço. Os pórticos vedados com placas metálicas
filtram a luz como um pergolado e, os pistões, ao se estenderem ou
retraírem, com seu tecido branco, também controlam a luminosidade
do espaço. Assim, o comportamento do edifício pode também atingir
os aspectos imateriais do espaço, no caso, a sua luminosidade (Figura
89). Para que tal característica não se limitasse à luminosidade do dia e
o pavilhão também se comportasse de forma semelhante durante a
noite, foram previstos pontos de luz embutidos no forro, distribuídos
entre os pórticos de pistões, ao longo de todo o pavilhão (Figura 90). À
iluminação também ajuda a predominância de componentes de cor
branca em seu interior, à exceção das linhas de elementos semirrígidos
85
Figura 85 – Conjunto de pórticos em perspectiva axonométrica.
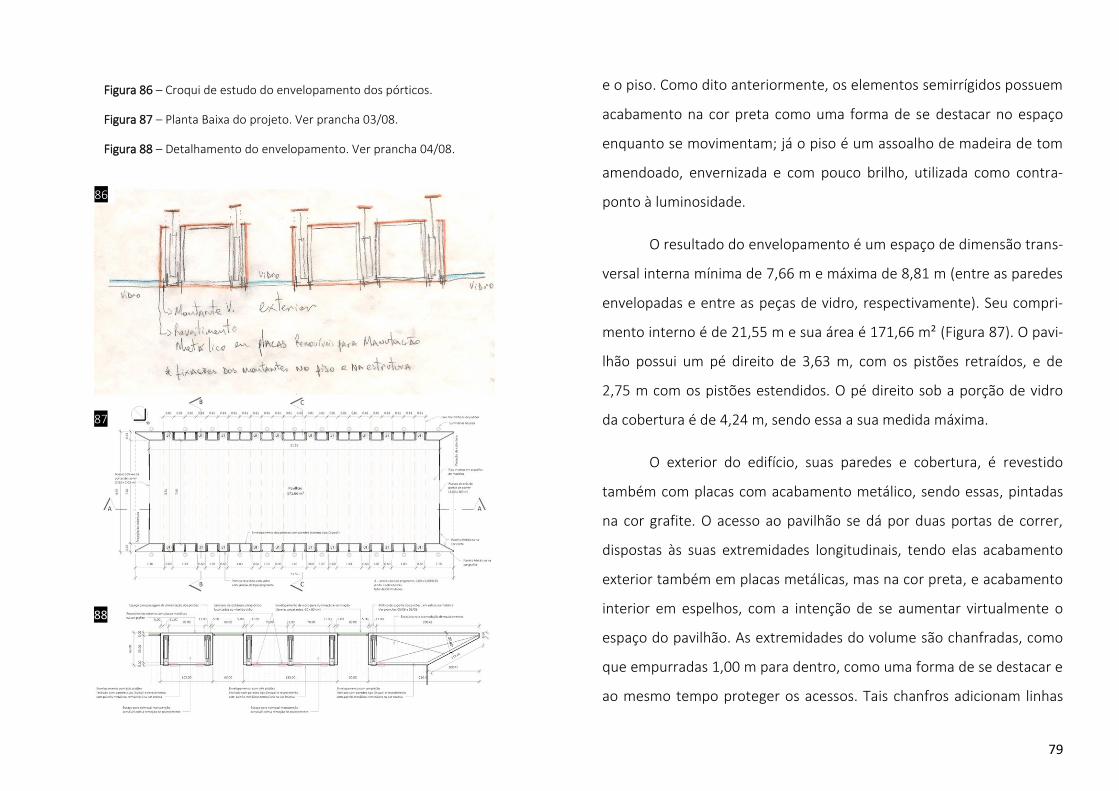
79
e o piso. Como dito anteriormente, os elementos semirrígidos possuem
acabamento na cor preta como uma forma de se destacar no espaço
enquanto se movimentam; já o piso é um assoalho de madeira de tom
amendoado, envernizada e com pouco brilho, utilizada como contra-
ponto à luminosidade.
O resultado do envelopamento é um espaço de dimensão trans-
versal interna mínima de 7,66 m e máxima de 8,81 m (entre as paredes
envelopadas e entre as peças de vidro, respectivamente). Seu compri-
mento interno é de 21,55 m e sua área é 171,66 m² (Figura 87). O pavi-
lhão possui um pé direito de 3,63 m, com os pistões retraídos, e de
2,75 m com os pistões estendidos. O pé direito sob a porção de vidro
da cobertura é de 4,24 m, sendo essa a sua medida máxima.
O exterior do edifício, suas paredes e cobertura, é revestido
também com placas com acabamento metálico, sendo essas, pintadas
na cor grafite. O acesso ao pavilhão se dá por duas portas de correr,
dispostas às suas extremidades longitudinais, tendo elas acabamento
exterior também em placas metálicas, mas na cor preta, e acabamento
interior em espelhos, com a intenção de se aumentar virtualmente o
espaço do pavilhão. As extremidades do volume são chanfradas, como
que empurradas 1,00 m para dentro, como uma forma de se destacar e
ao mesmo tempo proteger os acessos. Tais chanfros adicionam linhas
86
87
Figura 86 – Croqui de estudo do envelopamento dos pórticos.
Figura 87 – Planta Baixa do projeto. Ver prancha 03/08.
Figura 88 – Detalhamento do envelopamento. Ver prancha 04/08.
88
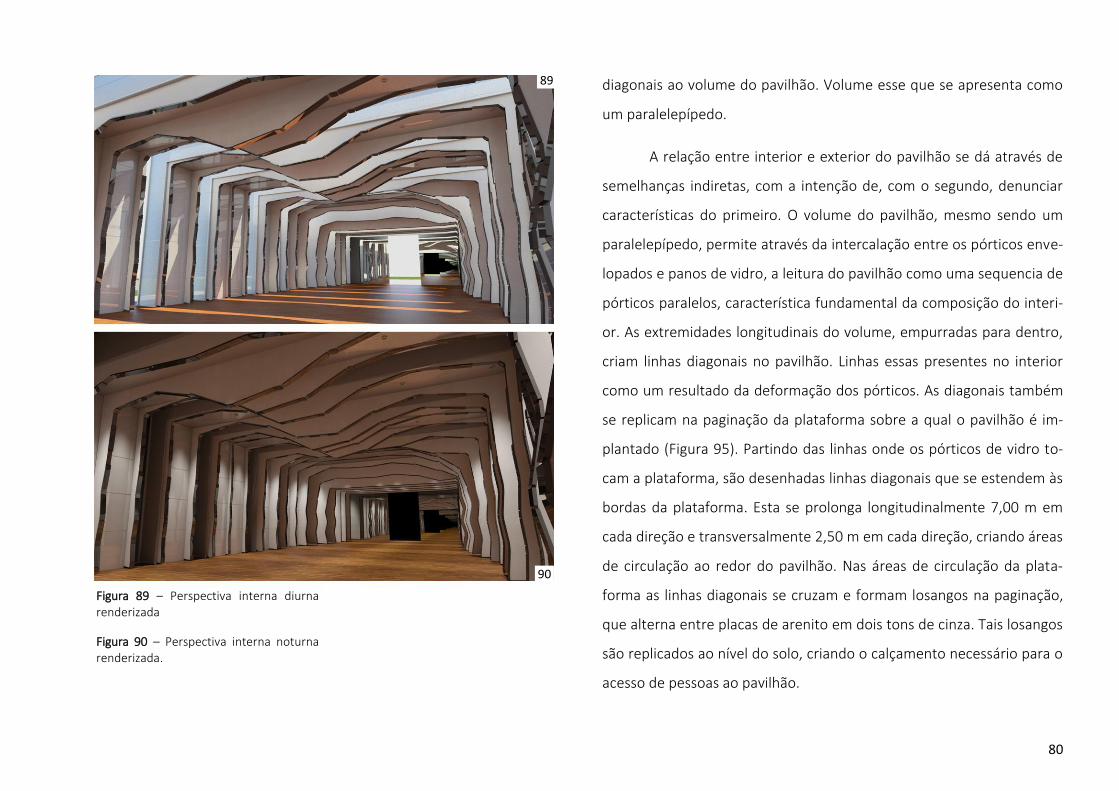
80
diagonais ao volume do pavilhão. Volume esse que se apresenta como
um paralelepípedo.
A relação entre interior e exterior do pavilhão se dá através de
semelhanças indiretas, com a intenção de, com o segundo, denunciar
características do primeiro. O volume do pavilhão, mesmo sendo um
paralelepípedo, permite através da intercalação entre os pórticos enve-
lopados e panos de vidro, a leitura do pavilhão como uma sequencia de
pórticos paralelos, característica fundamental da composição do interi-
or. As extremidades longitudinais do volume, empurradas para dentro,
criam linhas diagonais no pavilhão. Linhas essas presentes no interior
como um resultado da deformação dos pórticos. As diagonais também
se replicam na paginação da plataforma sobre a qual o pavilhão é im-
plantado (Figura 95). Partindo das linhas onde os pórticos de vidro to-
cam a plataforma, são desenhadas linhas diagonais que se estendem às
bordas da plataforma. Esta se prolonga longitudinalmente 7,00 m em
cada direção e transversalmente 2,50 m em cada direção, criando áreas
de circulação ao redor do pavilhão. Nas áreas de circulação da plata-
forma as linhas diagonais se cruzam e formam losangos na paginação,
que alterna entre placas de arenito em dois tons de cinza. Tais losangos
são replicados ao nível do solo, criando o calçamento necessário para o
acesso de pessoas ao pavilhão.
89
90
Figura 89 – Perspectiva interna diurna renderizada
Figura 90 – Perspectiva interna noturna renderizada.
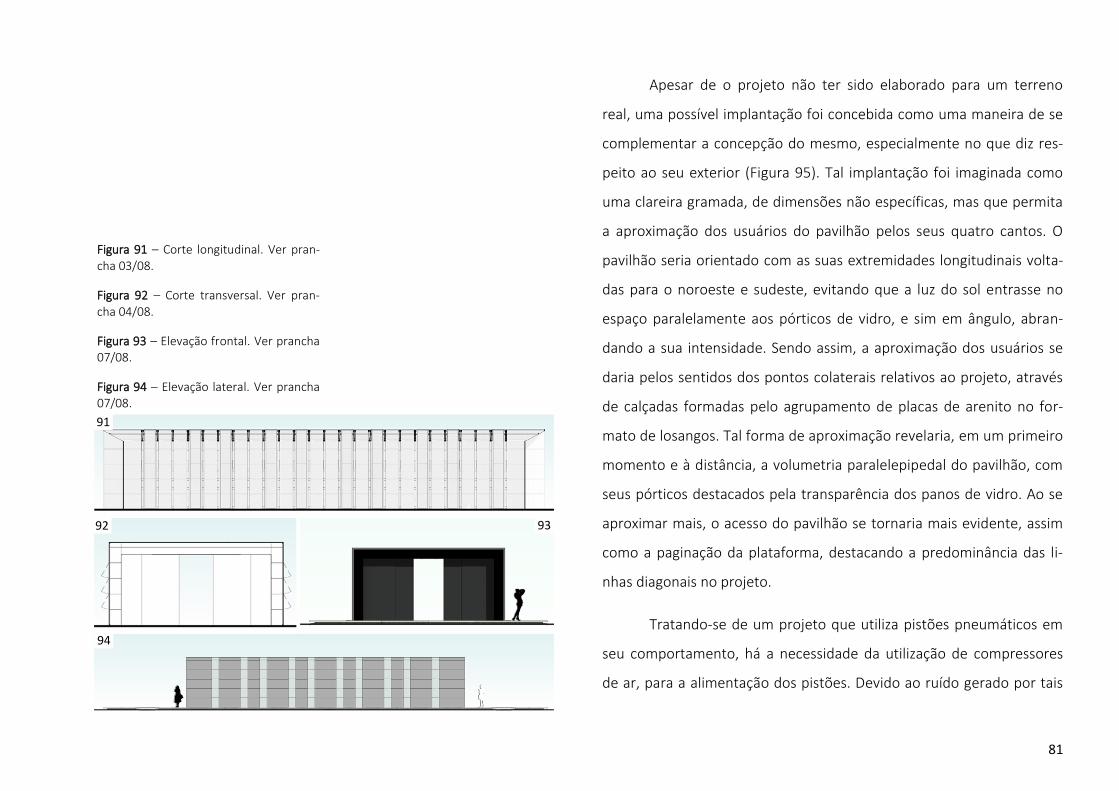
81
Apesar de o projeto não ter sido elaborado para um terreno
real, uma possível implantação foi concebida como uma maneira de se
complementar a concepção do mesmo, especialmente no que diz res-
peito ao seu exterior (Figura 95). Tal implantação foi imaginada como
uma clareira gramada, de dimensões não específicas, mas que permita
a aproximação dos usuários do pavilhão pelos seus quatro cantos. O
pavilhão seria orientado com as suas extremidades longitudinais volta-
das para o noroeste e sudeste, evitando que a luz do sol entrasse no
espaço paralelamente aos pórticos de vidro, e sim em ângulo, abran-
dando a sua intensidade. Sendo assim, a aproximação dos usuários se
daria pelos sentidos dos pontos colaterais relativos ao projeto, através
de calçadas formadas pelo agrupamento de placas de arenito no for-
mato de losangos. Tal forma de aproximação revelaria, em um primeiro
momento e à distância, a volumetria paralelepipedal do pavilhão, com
seus pórticos destacados pela transparência dos panos de vidro. Ao se
aproximar mais, o acesso do pavilhão se tornaria mais evidente, assim
como a paginação da plataforma, destacando a predominância das li-
nhas diagonais no projeto.
Tratando-se de um projeto que utiliza pistões pneumáticos em
seu comportamento, há a necessidade da utilização de compressores
de ar, para a alimentação dos pistões. Devido ao ruído gerado por tais
91
92 93
94
Figura 91 – Corte longitudinal. Ver pran-cha 03/08.
Figura 92 – Corte transversal. Ver pran-cha 04/08.
Figura 93 – Elevação frontal. Ver prancha 07/08.
Figura 94 – Elevação lateral. Ver prancha 07/08.
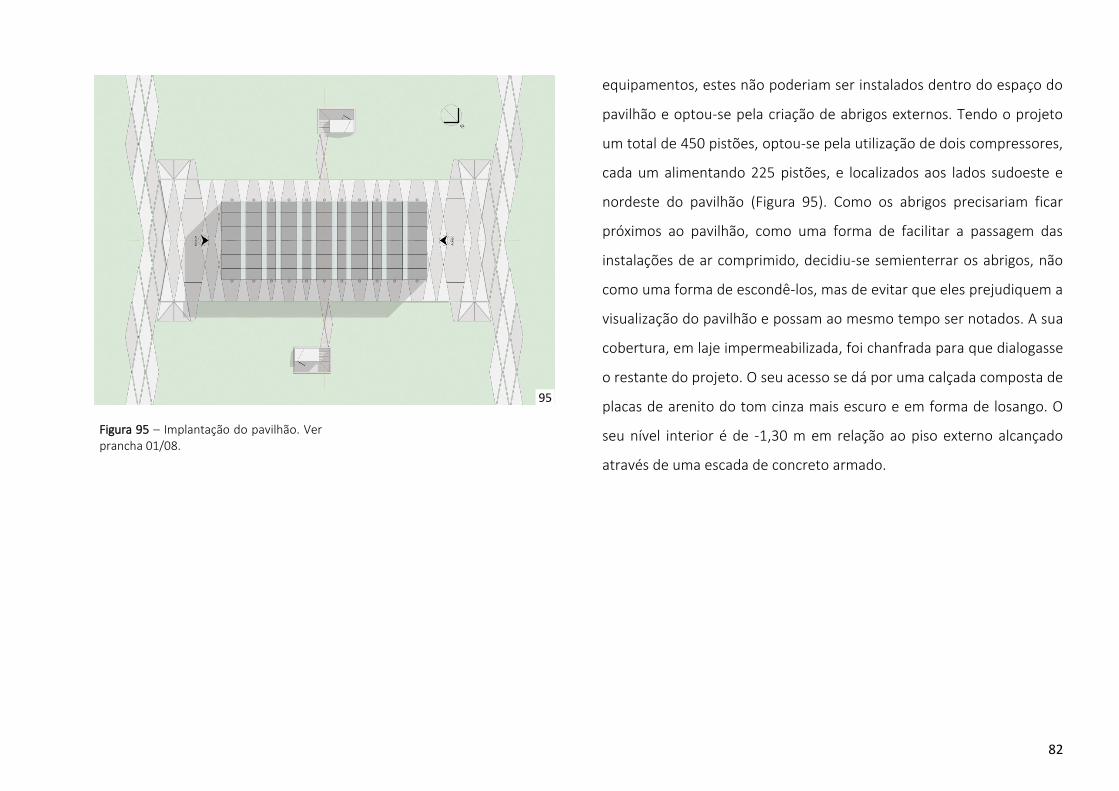
82
equipamentos, estes não poderiam ser instalados dentro do espaço do
pavilhão e optou-se pela criação de abrigos externos. Tendo o projeto
um total de 450 pistões, optou-se pela utilização de dois compressores,
cada um alimentando 225 pistões, e localizados aos lados sudoeste e
nordeste do pavilhão (Figura 95). Como os abrigos precisariam ficar
próximos ao pavilhão, como uma forma de facilitar a passagem das
instalações de ar comprimido, decidiu-se semienterrar os abrigos, não
como uma forma de escondê-los, mas de evitar que eles prejudiquem a
visualização do pavilhão e possam ao mesmo tempo ser notados. A sua
cobertura, em laje impermeabilizada, foi chanfrada para que dialogasse
o restante do projeto. O seu acesso se dá por uma calçada composta de
placas de arenito do tom cinza mais escuro e em forma de losango. O
seu nível interior é de -1,30 m em relação ao piso externo alcançado
através de uma escada de concreto armado.
95
Figura 95 – Implantação do pavilhão. Ver prancha 01/08.
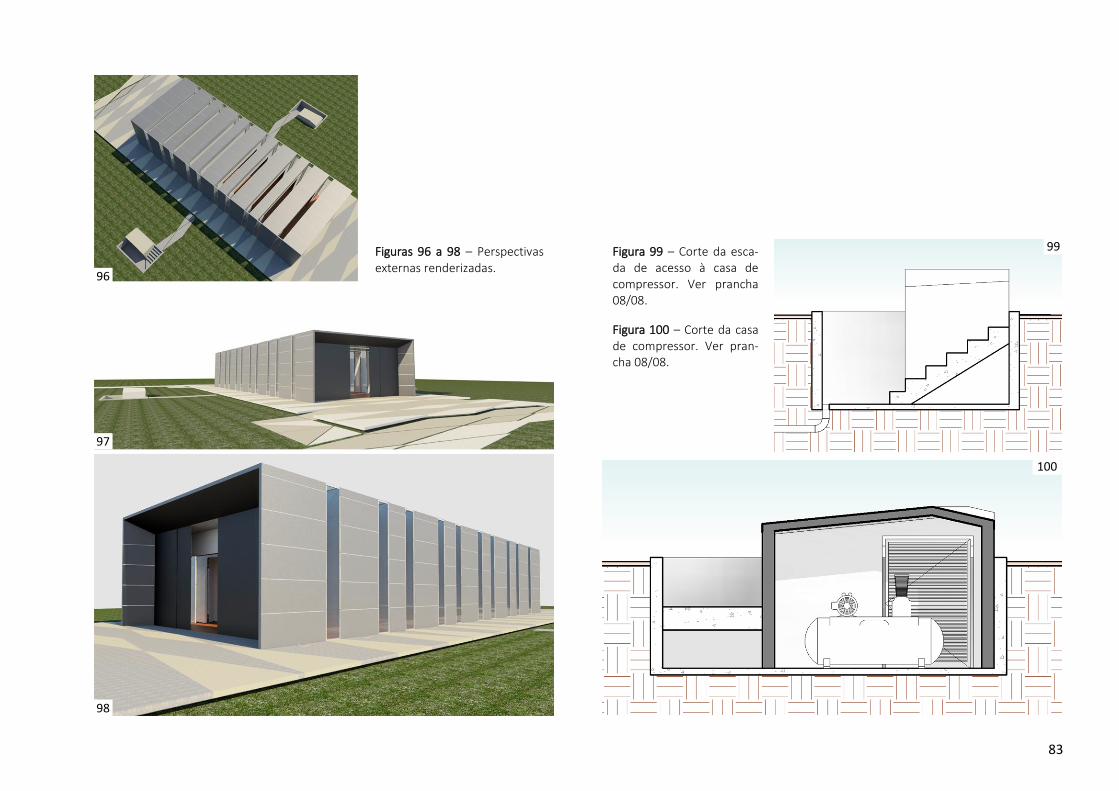
83
96
97
98
99
100
Figuras 96 a 98 – Perspectivas externas renderizadas.
Figura 99 – Corte da esca-da de acesso à casa de compressor. Ver prancha 08/08.
Figura 100 – Corte da casa de compressor. Ver pran-cha 08/08.
84
6.2 Estudos configuracionais
A construção do comportamento do edifício levou à percepção
de que esse poderia se dar de diversas formas, com efeitos e espaços
resultantes diferentes. Sendo assim, ao invés do estabelecimento de
uma configuração comportamental específica, decidiu-se pelo estudo
de três configurações possíveis e análise dos seus efeitos e espaços
através da simulação. O produto das simulações são representações em
planta baixa, corte longitudinal e perspectiva renderizada, para análise
do efeito sobre o volume e a iluminação do espaço das diversas confi-
gurações.
A primeira configuração (Figura 101) foi denominada estática, a
qual, como o próprio nome indica, não apresentaria nenhum compor-
tamento, variando apenas no que diz respeito à posição dos seus pis-
tões. Estes poderiam estar completamente retraídos ou completamen-
te estendidos, resultando em dois espaços diferentes. Tal configuração
permitiu a análise do efeito que as posições extremas dos pistões tra-
zem ao espaço. Quando completamente retraídos, revelam-se as pare-
des e o forro envelopados e brancos, alinhados às faixas pretas dos
pórticos. A iluminação do espaço é a máxima possível, criando faixas de
luz que percorrem paredes e teto, sendo refletidas pelo revestimento
com acabamento metálico branco. Já com os pistões completamente
estendidos, o espaço diminui, perdendo dimensões transversalmente
em suas paredes e teto. Consequentemente o espaço também perde
luminosidade, visto que o tecido que reveste o pórtico dos pistões blo-
queia parcialmente a difusão da luz pelo espaço.
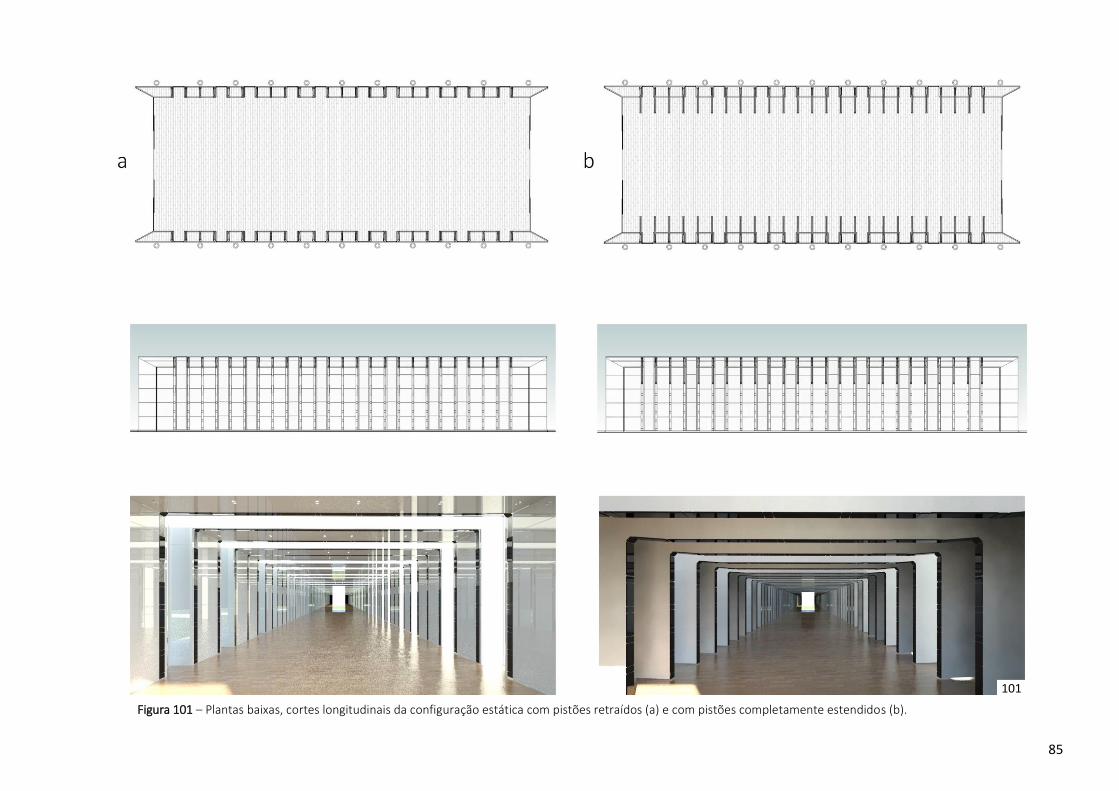
85
101
Figura 101 – Plantas baixas, cortes longitudinais da configuração estática com pistões retraídos (a) e com pistões completamente estendidos (b).
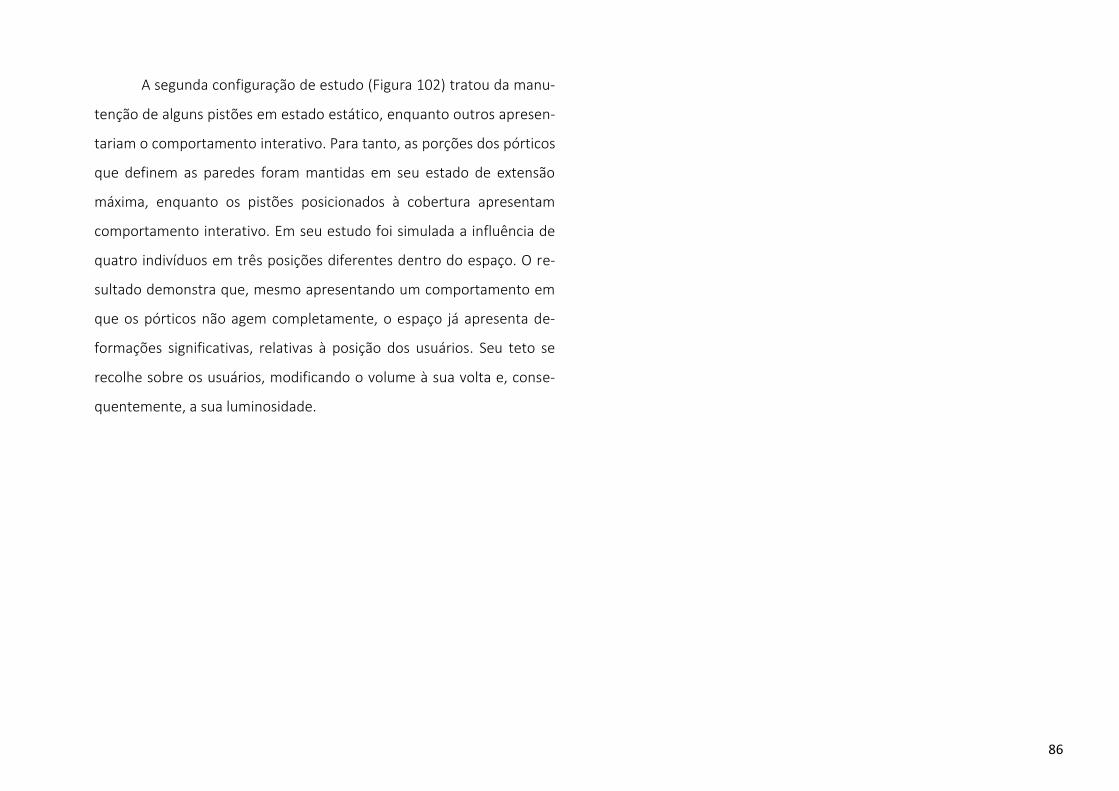
86
A segunda configuração de estudo (Figura 102) tratou da manu-
tenção de alguns pistões em estado estático, enquanto outros apresen-
tariam o comportamento interativo. Para tanto, as porções dos pórticos
que definem as paredes foram mantidas em seu estado de extensão
máxima, enquanto os pistões posicionados à cobertura apresentam
comportamento interativo. Em seu estudo foi simulada a influência de
quatro indivíduos em três posições diferentes dentro do espaço. O re-
sultado demonstra que, mesmo apresentando um comportamento em
que os pórticos não agem completamente, o espaço já apresenta de-
formações significativas, relativas à posição dos usuários. Seu teto se
recolhe sobre os usuários, modificando o volume à sua volta e, conse-
quentemente, a sua luminosidade.
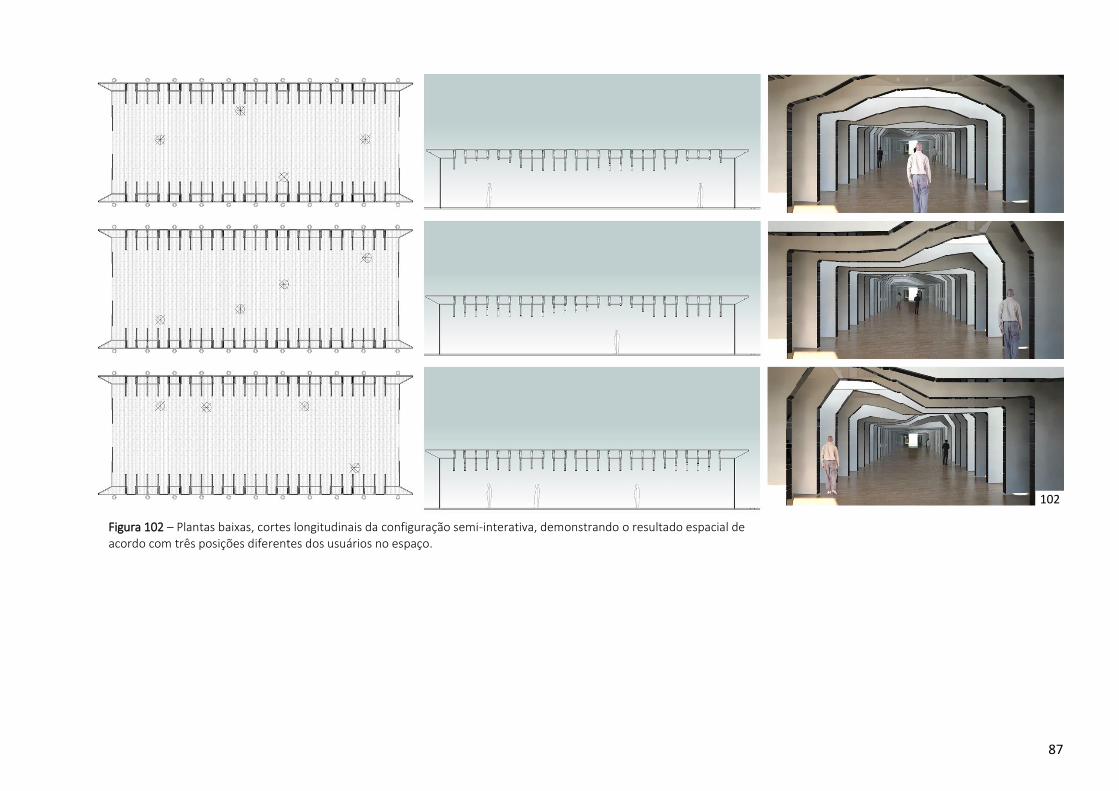
87
102
Figura 102 – Plantas baixas, cortes longitudinais da configuração semi-interativa, demonstrando o resultado espacial de acordo com três posições diferentes dos usuários no espaço.
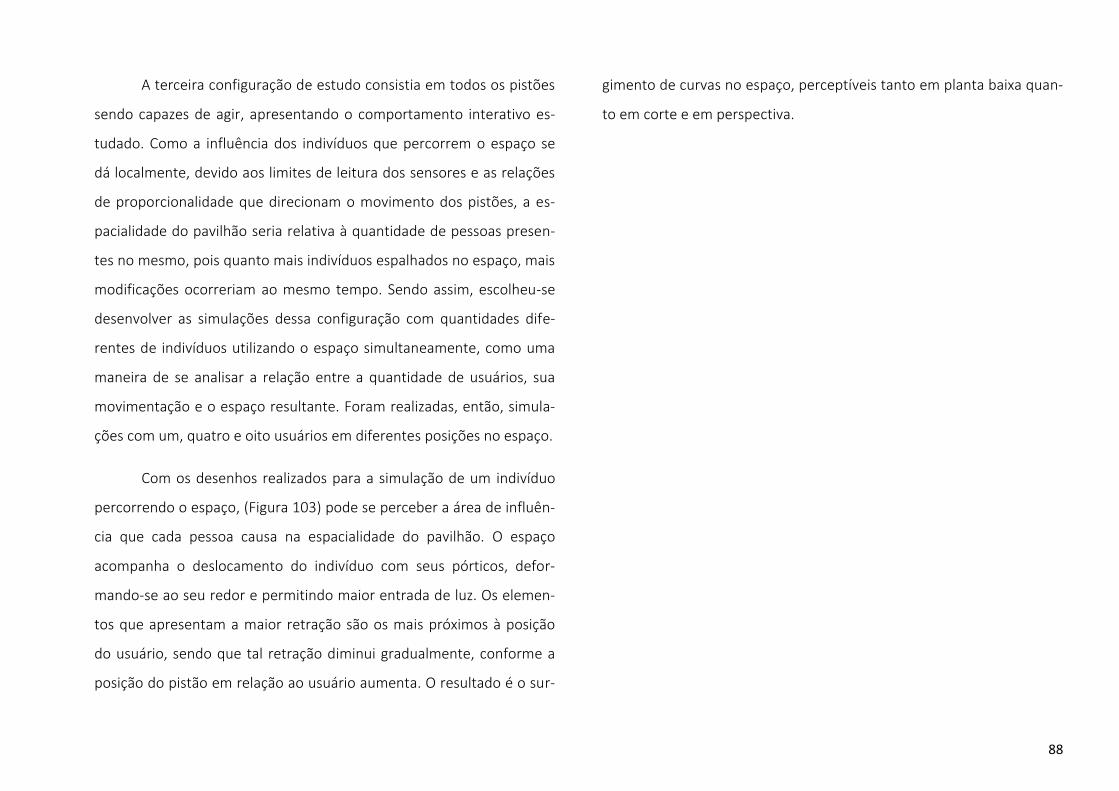
88
A terceira configuração de estudo consistia em todos os pistões
sendo capazes de agir, apresentando o comportamento interativo es-
tudado. Como a influência dos indivíduos que percorrem o espaço se
dá localmente, devido aos limites de leitura dos sensores e as relações
de proporcionalidade que direcionam o movimento dos pistões, a es-
pacialidade do pavilhão seria relativa à quantidade de pessoas presen-
tes no mesmo, pois quanto mais indivíduos espalhados no espaço, mais
modificações ocorreriam ao mesmo tempo. Sendo assim, escolheu-se
desenvolver as simulações dessa configuração com quantidades dife-
rentes de indivíduos utilizando o espaço simultaneamente, como uma
maneira de se analisar a relação entre a quantidade de usuários, sua
movimentação e o espaço resultante. Foram realizadas, então, simula-
ções com um, quatro e oito usuários em diferentes posições no espaço.
Com os desenhos realizados para a simulação de um indivíduo
percorrendo o espaço, (Figura 103) pode se perceber a área de influên-
cia que cada pessoa causa na espacialidade do pavilhão. O espaço
acompanha o deslocamento do indivíduo com seus pórticos, defor-
mando-se ao seu redor e permitindo maior entrada de luz. Os elemen-
tos que apresentam a maior retração são os mais próximos à posição
do usuário, sendo que tal retração diminui gradualmente, conforme a
posição do pistão em relação ao usuário aumenta. O resultado é o sur-
gimento de curvas no espaço, perceptíveis tanto em planta baixa quan-
to em corte e em perspectiva.
89
103
Figura 103 – Plantas baixas, cortes longitudinais da configuração interativa, demonstrando o resultado espacial de acordo com o percurso realizado por um indivíduo.
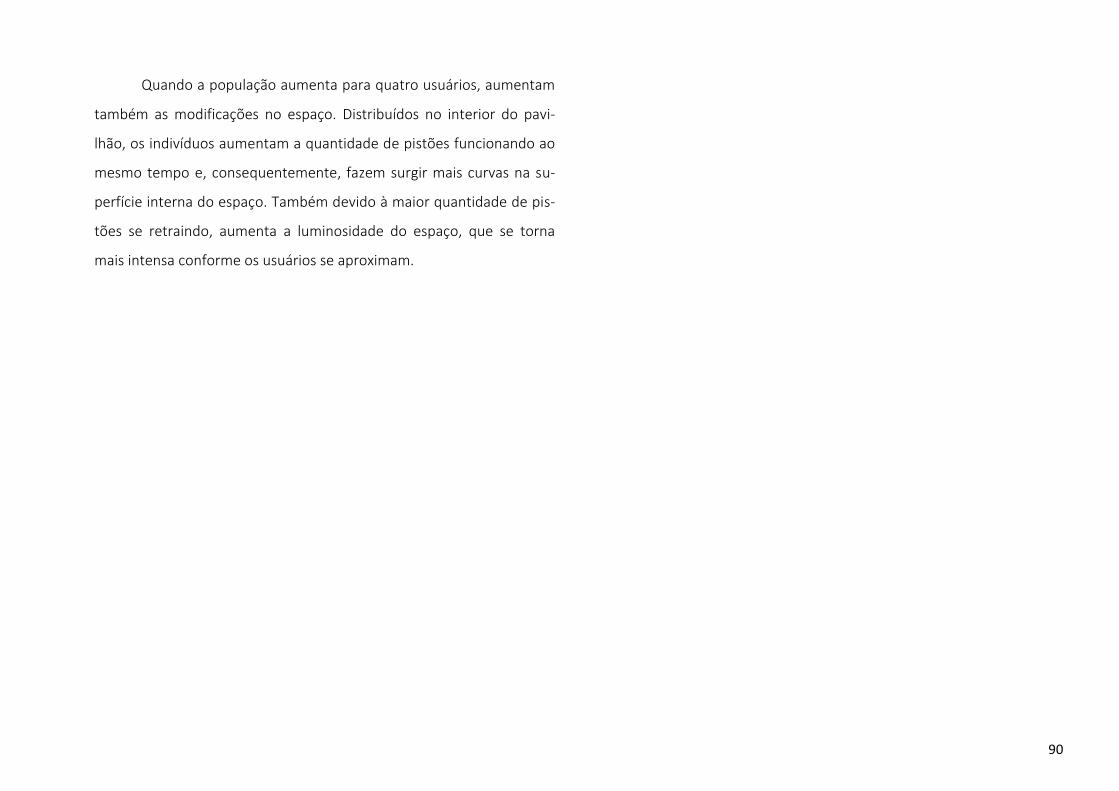
90
Quando a população aumenta para quatro usuários, aumentam
também as modificações no espaço. Distribuídos no interior do pavi-
lhão, os indivíduos aumentam a quantidade de pistões funcionando ao
mesmo tempo e, consequentemente, fazem surgir mais curvas na su-
perfície interna do espaço. Também devido à maior quantidade de pis-
tões se retraindo, aumenta a luminosidade do espaço, que se torna
mais intensa conforme os usuários se aproximam.
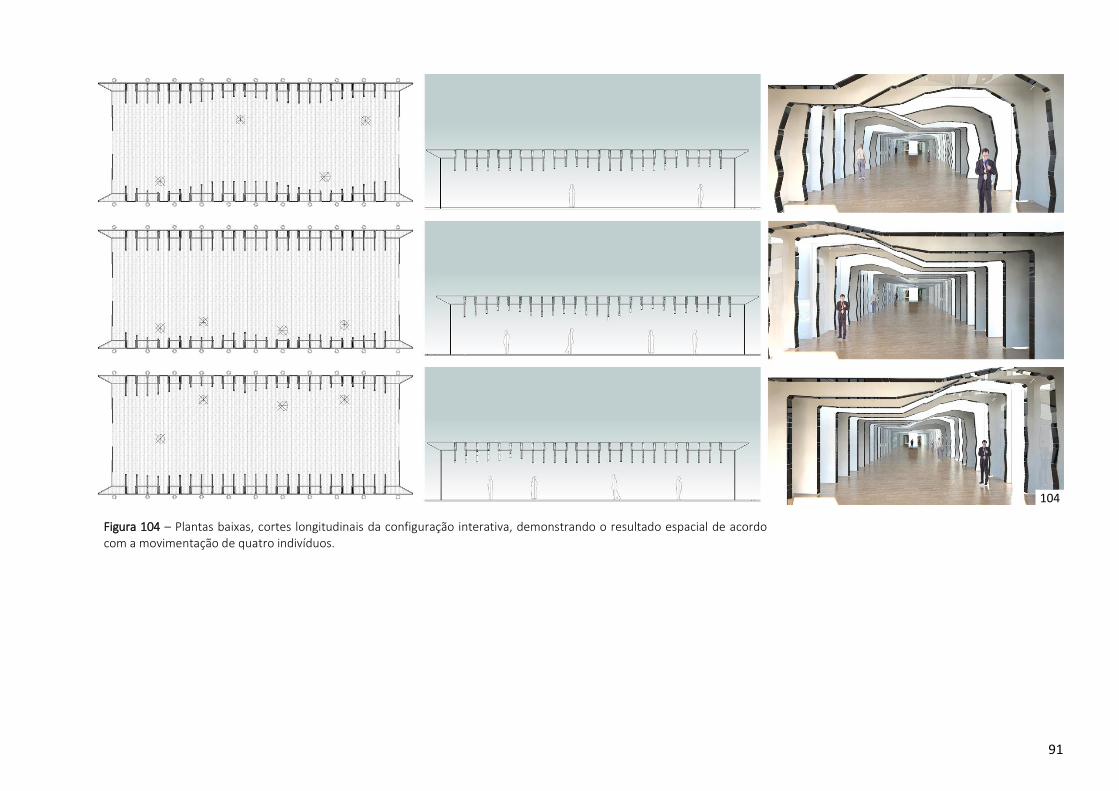
91
104
Figura 104 – Plantas baixas, cortes longitudinais da configuração interativa, demonstrando o resultado espacial de acordo com a movimentação de quatro indivíduos.
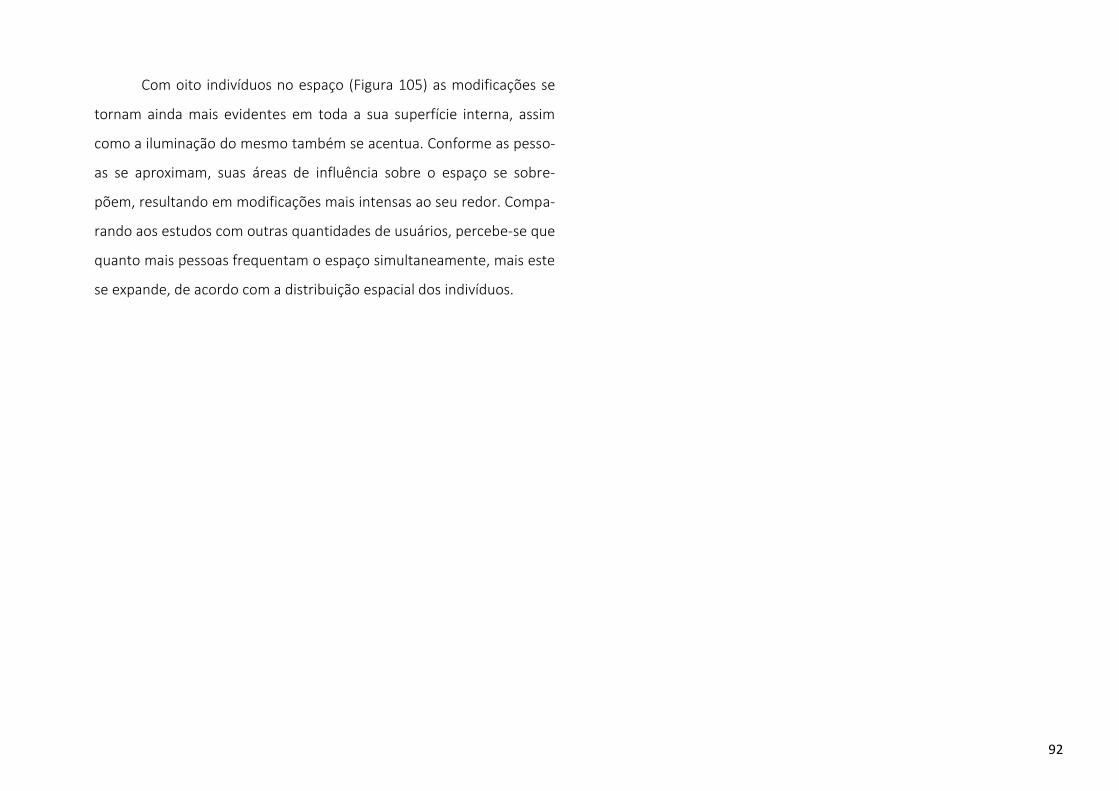
92
Com oito indivíduos no espaço (Figura 105) as modificações se
tornam ainda mais evidentes em toda a sua superfície interna, assim
como a iluminação do mesmo também se acentua. Conforme as pesso-
as se aproximam, suas áreas de influência sobre o espaço se sobre-
põem, resultando em modificações mais intensas ao seu redor. Compa-
rando aos estudos com outras quantidades de usuários, percebe-se que
quanto mais pessoas frequentam o espaço simultaneamente, mais este
se expande, de acordo com a distribuição espacial dos indivíduos.
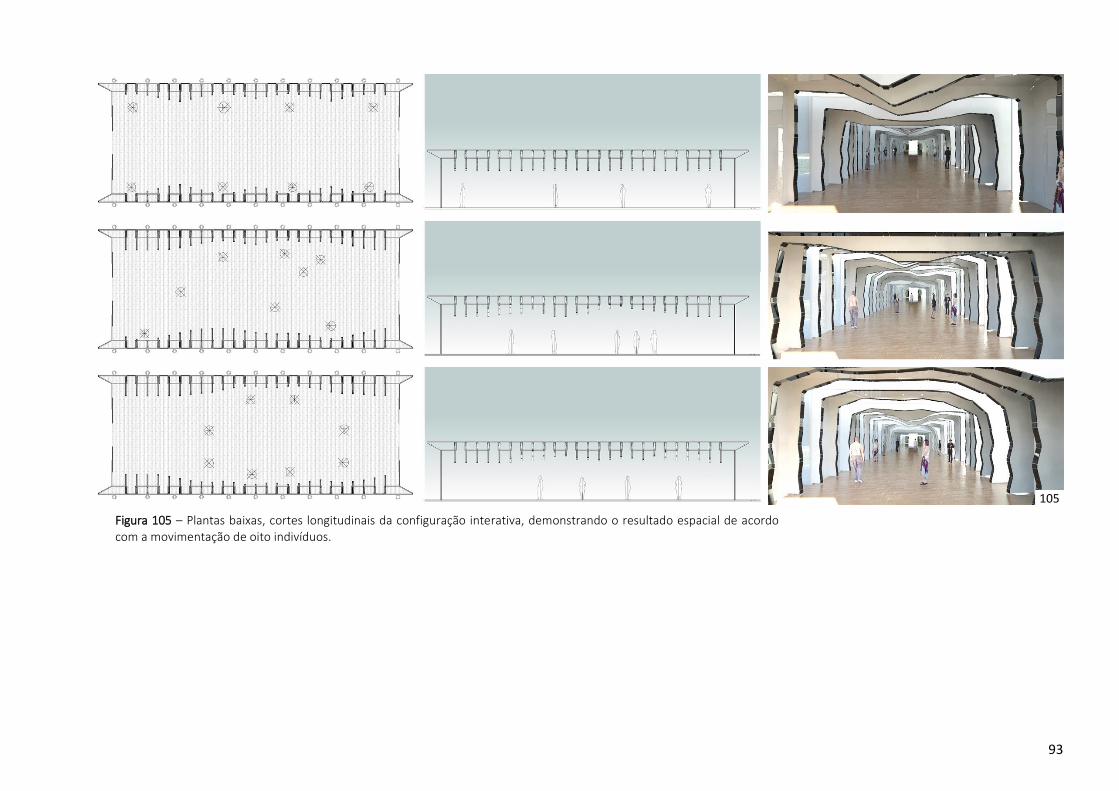
93
105
Figura 105 – Plantas baixas, cortes longitudinais da configuração interativa, demonstrando o resultado espacial de acordo com a movimentação de oito indivíduos.
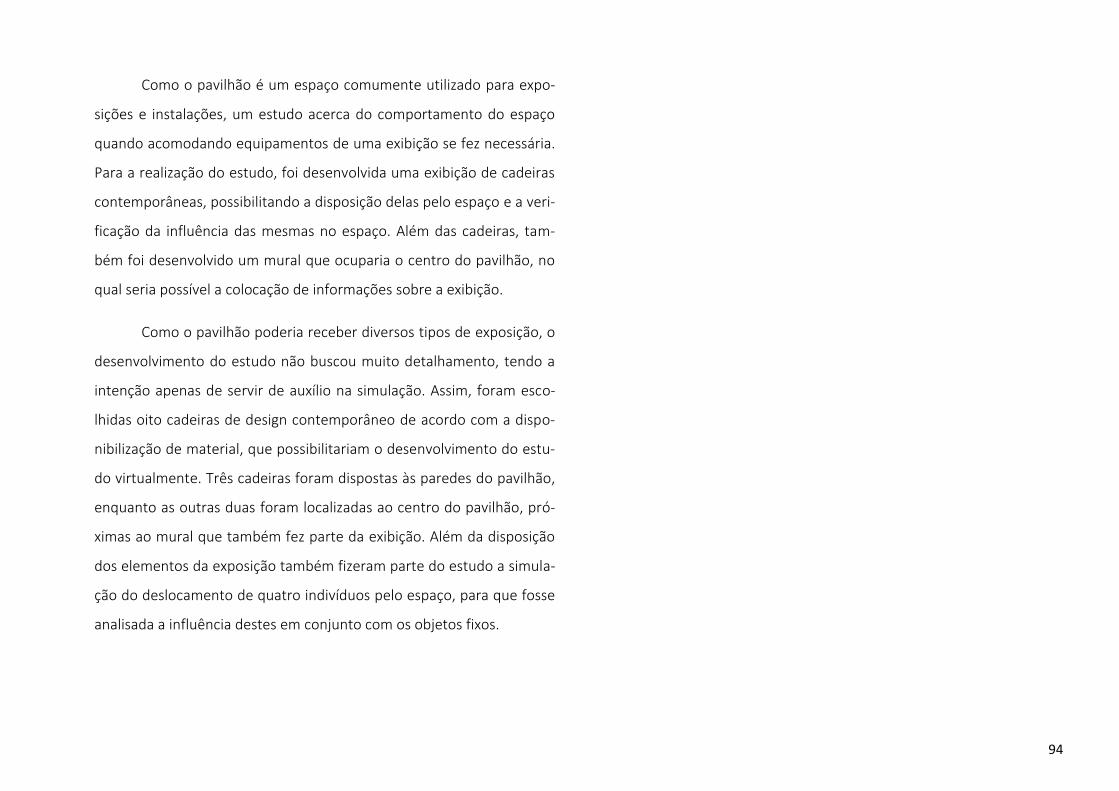
94
Como o pavilhão é um espaço comumente utilizado para expo-
sições e instalações, um estudo acerca do comportamento do espaço
quando acomodando equipamentos de uma exibição se fez necessária.
Para a realização do estudo, foi desenvolvida uma exibição de cadeiras
contemporâneas, possibilitando a disposição delas pelo espaço e a veri-
ficação da influência das mesmas no espaço. Além das cadeiras, tam-
bém foi desenvolvido um mural que ocuparia o centro do pavilhão, no
qual seria possível a colocação de informações sobre a exibição.
Como o pavilhão poderia receber diversos tipos de exposição, o
desenvolvimento do estudo não buscou muito detalhamento, tendo a
intenção apenas de servir de auxílio na simulação. Assim, foram esco-
lhidas oito cadeiras de design contemporâneo de acordo com a dispo-
nibilização de material, que possibilitariam o desenvolvimento do estu-
do virtualmente. Três cadeiras foram dispostas às paredes do pavilhão,
enquanto as outras duas foram localizadas ao centro do pavilhão, pró-
ximas ao mural que também fez parte da exibição. Além da disposição
dos elementos da exposição também fizeram parte do estudo a simula-
ção do deslocamento de quatro indivíduos pelo espaço, para que fosse
analisada a influência destes em conjunto com os objetos fixos.
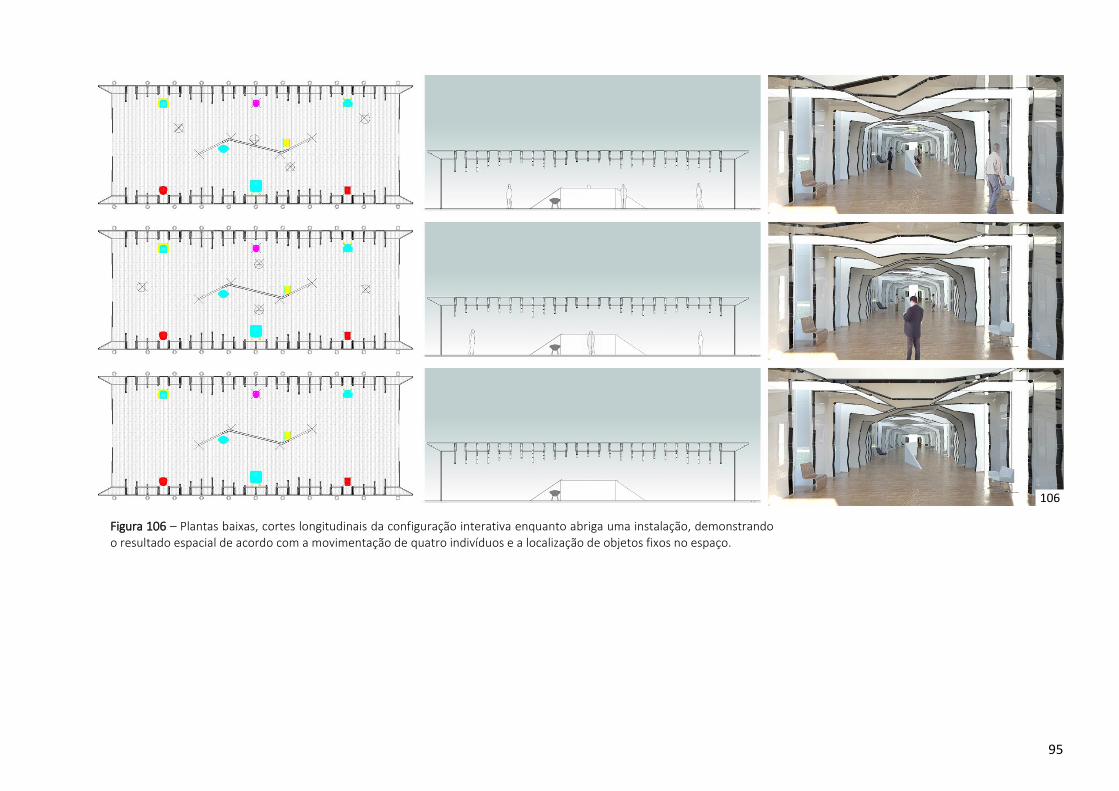
95
106
Figura 106 – Plantas baixas, cortes longitudinais da configuração interativa enquanto abriga uma instalação, demonstrando o resultado espacial de acordo com a movimentação de quatro indivíduos e a localização de objetos fixos no espaço.
96
As informações captadas pelos sensores são referentes aos obs-
táculos posicionados em sua área de leitura. Assim, tais informações
seriam interpretadas da mesma forma e gerariam o mesmo comporta-
mento, sejam elas captadas em relação a um indivíduo ou a um objeto
posicionado no espaço. O resultado no espaço (Figura 106) é que algu-
mas áreas apresentariam deformações mesmo sem a presença de indi-
víduos no espaço, porém agiriam frente à aproximação destes. Outra
característica relativa à exposição é que as peças posicionadas no espa-
ço criam uma retração dos pórticos ao seu redor, que acabam por ilu-
miná-las.
107
108
Figuras 107 e 108 – Perspectivas internas renderizadas da configura-ção comportamental interativa con-tendo apenas os objetos da exibição no espaço.
97
7 Considerações Finais
98
O estudo sobre a criação de espaços interativos permite a com-
preensão de uma esfera da arquitetura ainda pouco comum e em de-
senvolvimento, mas que não deixa de já ser uma realidade. Permite
também entender uma maneira através da qual o espaço pode se rela-
cionar com o homem e seu meio. O homem contemporâneo, acostu-
mado às trocas de informações em meios digitais, encontraria na arqui-
tetura interativa uma possibilidade de se relacionar de maneira mais
intensa, no que diz respeito à troca de ações, com o espaço em que
habita. O espaço dotado da capacidade de captar e interpretar infor-
mações e, a partir destas, agir e se modificar, poderia participar de um
relacionamento com o homem e com o seu meio pró-ativamente, atua-
lizando-se e evoluindo. Assim, a arquitetura se torna capaz de acompa-
nhar os desenvolvimentos tecnológicos que permeiam a vida na socie-
dade atual.
O desenvolvimento do estudo deixou clara a necessidade de
uma abordagem multidisciplinar no desenvolvimento e construção de
um espaço interativo. A arquitetura não interativa também depende da
multidisciplinaridade para a sua construção, sendo os projetos de insta-
lações prediais e de estruturas os mais comuns. Assim, a formação atu-
al do arquiteto contempla tais conhecimentos, dotando-o da compre-
ensão necessária para a construção de seus espaços. Entretanto, o de-
senvolvimento de espaços interativos, como abordados nesse trabalho,
demanda conhecimentos de disciplinas que (ainda?) não fazem parte
da formação do arquiteto, como eletrônica, mecânica, mecatrônica e
ciências da computação. Tal fato torna importante o investimento do
profissional interessado na construção de espaços interativos em ad-
quirir tais conhecimentos posteriormente à sua formação ou em traba-
lhar junto a equipes multidisciplinares para a construção dos seus pro-
jetos.
O desenvolvimento do projeto experimental demonstrou a di-
versidade de questões que precisam ser tratadas na arquitetura intera-
tiva, especialmente no que diz respeito ao desenvolvimento do com-
portamento do espaço. Investigações sobre os materiais a serem utili-
zados, assim como os elementos que fariam o papel dos sensores e
atuadores no sistema interativo do pavilhão, demonstraram a impor-
tância de pesquisas fora dos materiais comumente utilizados pela ar-
quitetura. Pesquisas estas que, sem o conhecimento específico em dis-
ciplinas como a mecatrônica e a computação, não foram suficientes
para a completa elaboração do projeto no nível de execução. Assim,
entende-se que o projeto experimental apresentado neste trabalho
carece do desenvolvimento de projetos como o dimensionamento e a
especificação dos equipamentos pneumáticos utilizados no pavilhão,
99
como os pistões, válvulas de controle, compressores e dutos de ar;
também a especificação do componente ideal para desempenhar o
papel do processador no sistema e que seja capaz de por em prática os
processamentos necessários para a execução do comportamento de-
senvolvido para o projeto.
O estabelecimento da relação entre arquitetura interativa e
sistema complexo permitiu uma melhor compreensão do que trata o
paradigma da complexidade (MANOVICH, 2009) e também as possibili-
dades que se apresentam ao processo projetivo através da utilização do
design paramétrico, dois conceitos característicos da contemporanei-
dade. O primeiro direcionou a concepção do pavilhão como uma série
de elementos semelhantes que apresentam um comportamento indivi-
dual e ao mesmo tempo são responsáveis pelo comportamento do to-
do. O segundo permitiu a criação do edifício em ambiente virtual, seu
controle e simulação, fato de extrema importância para a definição
final do comportamento do projeto.
Esse estudo não possui um caráter final sobre o tema, enten-
dendo que a arquitetura interativa é ainda um caminho em desenvol-
vimento em aberto. Ficam, então, questões ainda sem resposta: será
que a arquitetura interativa fará parte do cotidiano das sociedades fu-
turas? Como? Quais os conhecimentos são fundamentais à formação
do arquiteto contemporâneo? É possível definir todas as suas áreas de
atuação? Até que ponto a interatividade é significativa para a arquite-
tura? Até que ponto a tecnologia é necessária e influencia a produção
arquitetônica na contemporaneidade? A algumas destas questões, ca-
berá apenas à história futura responder.
O presente trabalho se valeu do seu caráter teórico e prático
como uma exploração de uma das faces que a arquitetura pode assu-
mir frente às especificidades do mundo atual. Tal exploração não ten-
tou apenas tatear o que pode vir a ser da arquitetura nos próximos
anos ou décadas, mas buscou entender e apresentar uma das formas
em que a arquitetura contemporânea pode apresentar o espírito do
seu tempo.
100
8 Referências
101
8.1 Bibliográficas
ACHTEN, Henri. A Design Methodological Framework for Interactive
Architecture. In: Future Cities (28th eCAADe Conference), Zurique,
Suíça. Future Cities: Proceedings of the 28th conference on Education
in Computer Aided Architectural Design in Europe. Zurique, Suíça: ETH
Zurich, 2010. p. 169-177. Disponível em <
http://www.academia.edu/283463/A_Design_Methodological_Framew
ork_for_Interactive_Architecture>, acessado em 02/10/2013.
ACHTEN, Henri. Buildings With an Attitude: Personality traits for the
design of interactive architecture. In: Computation and Performance
(31st eCAADe Conference), 2013, Universidade de Tecnologia de Delft,
Faculdade de Arquitetura, Delft, Holanda. Computation and Perfor-
mance: Proceedings of the 31st eCAADe Conference, Volume 1. Delft,
Holanda: Delft University of Technology, 2013, p. 477-485. Disponível
em <
http://cumincad.architexturez.net/system/files/pdf/ecaade2013_096.c
ontent.pdf> , acessado em 02/10/2013.
ACHTEN, Henri. Degrees of interaction: towards a classification. In: Res-
pecting Fragile Places (29th eCAADe Conference), 2011, Universidade
de Ljubljana, Faculdade de Arquitetura, Eslovênia. Respecting Fragile
Places: Proceedings of the 29th Conference on Education in Computer
Aided Architectural Design in Europe. Ljubljana, Eslovênia: University of
Ljubljana, 2011. p. 565-572. Disponível em <
http://www.academia.edu/832797/Degrees_of_interaction_-
_Towards_a_classification>, acessado em 02/10/2013.
ASCOTT, Roy. Existe amor no abraço telemático? In: DOMINGUES, Diana
(org.). Arte, Ciência e Tecnologia: Passado, presente e desafios. São
Paulo: Editora UNESP, 2009.
BIER, Henriette. Introduction: Non-standard and Interactive Architec-
ture in education. In: OOSTERHUIS, Kas (org.), Hyperbody: First decade
of interactive architecture. Delft, Holanda: Jap Sam Books, 2012.
BILORIA, Nimish. Adaptive Corporate Environments. In: OOSTERHUIS,
Kas (org.), Hyperbody: First decade of interactive architecture. Delft,
Holanda: Jap Sam Books, 2012c.
BILORIA, Nimish. Introduction: Hyperbody: Engineering an innovative
architectural future. In: OOSTERHUIS, Kas (org.), Hyperbody: First dec-
ade of interactive architecture. Delft, Holanda: Jap Sam Books, 2012a.
BILORIA, Nimish. Introduction: Real-time interactive environments: A
multidisciplinary approach towards developing real-time performative
spaces. In: OOSTERHUIS, Kas (org.), Hyperbody: First decade of interac-
tive architecture. Delft, Holanda: Jap Sam Books, 2012b.
BILORIA, Nimish. Introduction: Real-time Interactive Environments. A
Multidisciplinary Approach Towards Developing Real-time Performative
Spaces. In: OOSTERHUIS, Kas (org.), Hyperbody: First decade of interac-
tive architecture. Delft, Holanda: Jap Sam Books, 2012d.
BROECKMANN, Andreas. Imagem, processo, performance, máquina:
aspectos de uma estética do maquínico. In: DOMINGUES, Diana (org.).
Arte, Ciência e Tecnologia: Passado, presente e desafios. São Paulo:
Editora UNESP, 2009.
102
CELANI, G. CAD criativo. Rio de Janeiro: Editora Campus, 2003.
CHASE, Otavio. Técnicas em programação: Uma Abordagem Sistêmica
Aplicada a Ciências do Ambiente e do Meio Agrário. Universidade Fede-
ral Rural da Amazônia, Amazonas. Disponível em
<http://www.lab.ufra.edu.br/lasic/images/AULAS/PROF_CHASE/TEC_PR
OG_I/UFRA_TEC_PROG_P_01.pdf>, acesso em: 13/09/2013.
DOMINGUES, Diana; RATEGUI, Eliseo. Práticas colaborativas transdisci-
plinares em ciberarte: da multimídia às instalações em software art. In:
DOMINGUES, Diana (org.). Arte, Ciência e Tecnologia: Passado, presen-
te e desafios. São Paulo: Editora UNESP, 2009.
FERREIRA, Aurélio Buarque de Holanda. Miniaurélio Século XXI: O mini-
dicionário da língua portuguesa. Rio de Janeiro: Nova Fronteira, 2001.
GIEDION, Sigfried. Espaço, tempo e arquitetura: O desenvolvimento de
uma nova tradição, São Paulo: Martins Fontes, 2004.
HAQUE, Usman. Architecture, interaction, systems. 2006. Disponível em
<http://www.haque.co.uk/papers/ArchInterSys.pdf>, Acesso em
29/09/2013.
HAQUE, Usman. Hardspace, softspace and the possibilities of open
source architecture. 2002. Disponível em <
http://www.haque.co.uk/papers/hardsp-softsp-open-so-arch.PDF>,
acessado em 29/09/2013.
HAQUE, Usman. The architectural relevance of Gordon Pask. In: BULLI-
VANT, Lucy (org.). 4d social – Interactive Design Environments. Coleção
Architectural Design. Londres: John Wiley & Sons, 2007.
HAQUE, Usman. The choreography of sensations: three case studies of
responsive environment interfaces. In: VSMM 2004 10th International
Conference on Virtual Systems and Multimedia, 2004, Ogaki City,
Japão. Hybrid realities & digital partners: explorations in art, heritage,
Science & the human factor; proceedings of the tenth International
Conference on Virtual Systems and Multimedia. Ogaki City, Japão: IOS
Press, Amsterdã, 2004.
HOSALE, MarkDavid; KIEVID, Chris. InteractiveWall: a prototype for an e-
motive architecture component. In: OOSTERHUIS, Kas (org.), Hyper-
body: First decade of interactive architecture. Delft, Holanda: Jap Sam
Books, 2012.
HUHTAMO, Erkki. Twin-touch-test-redux: abordagem arqueológica da
mídia para a arte, interatividade e tatibilidade. In: DOMINGUES, Diana
(org.). Arte, ciência e tecnologia: passado, presente e desafios. São Pau-
lo: Editora UNESP, 2009.
JASKIEWICZ, Tomasz. (In)Formed complexity: approaching interactive
architecture as a complex system. In: OOSTERHUIS, Kas (org.), Hyper-
body: First decade of interactive architecture. Delft, Holanda: Jap Sam
Books, 2012.
JASKIEWICZM, Tomasz, FRIEDRICH, Christian. MuscleSpace. In: OOSTER-
HUIS, Kas (org.), Hyperbody: First decade of interactive architecture.
Delft, Holanda: Jap Sam Books, 2012.
KLUSZCZYNSKI, Ryszard W.. Do filme à arte interativa: transformações
na artemídia. In: DOMINGUES, Diana (org.). Arte, Ciência e Tecnologia:
Passado, presente e desafios. São Paulo: Editora UNESP, 2009.
103
LARA, Max Cohen de; HUBERS, Hans. MuscleBody. In: OOSTERHUIS, Kas
(org.), Hyperbody: First decade of interactive architecture. Delft, Hol-
anda: Jap Sam Books, 2012.
LINUS, Tan LiHuang. Interactive Architecture. 153 f. Tese de Design
(Mestrado em Arquitetura). University of Melbourne, Faculty of Archi-
tecture, Building and Planning Melbourne School of Design. Melbourne,
Victória, Austrália, 2012.
MANOVICH, Lev. Abstração e complexidade. In: DOMINGUES, Diana
(org.). Arte, ciência e tecnologia: passado, presente e desafios. São Pau-
lo: Editora UNESP, 2009.
MITCHELL, W. J. T.. Não existem mídias visuais. In: DOMINGUES, Diana
(org.). Arte, Ciência e Tecnologia: Passado, presente e desafios. São
Paulo: Editora UNESP, 2009.
OOSTERHUIS, Kas. Introduction. In: OOSTERHUIS, Kas (org.), Hyperbody:
First decade of interactive architecture. Delft, Holanda: Jap Sam Books,
2012.
PALLASMAA, Juhani. Os Olhos da Pele: A Arquitetura e os Sentidos. Por-
to Alegre: Bookman, 2011.
PIAZZALUNGA, Renata. A virtualização da arquitetura. Campinas: Papi-
rus, 2005.
POISSANT, Louise. A passagem do material para a interface. In: DO-
MINGUES, Diana (org.). Arte, Ciência e Tecnologia: Passado, presente e
desafios. São Paulo: Editora UNESP, 2009.
PRATSCHKE, Anja. ; TRAMONTANO, Marcelo. Interfaces ou o querer-se
flutuar entre. Arquiteturarevista (UNISINOS), Unisinos, São Leopoldo,
RS, v. 01, n. ano 1, p. 01, 2005. 210mm x 297mm.8 pp. Disponível em:
<http://www.nomads.usp.br/site/livraria/livraria.html>. Acessado em:
09 / 02 / 2014.
RAPPOLT, Mark. Greg Lynn Form. Nova Iorque: Rizzoli International Pu-
blications, 2008.
RAUTERBERG, Hanno. Entrevista com Arquitetos. Rio de Janeiro: Viana
& Mosley, 2008.
REQUENA, Carlos Augusto Joly. Habitar híbrido : interatividade e experi-
ência na era da cibercultura / Carlos Augusto Joly Requena ; orientador
Marcelo Tramontano. –- São Carlos, 2007.
SAGGIO, Antonino. Interactivity at the Centre of Avant-Garde Architec-
tural Research. In: BULLIVANT, Lucy. Architectural Design Vol. 75:
4dspace: Interactive Architecture. Londres: John Wiley & Sons, 2005.
SCHUELER, Nora. Sensory perception to design and enhance interactive
e-motive architecture. In: OOSTERHUIS, Kas (org.), Hyperbody: First
decade of interactive architecture. Delft, Holanda: Jap Sam Books,
2012.
SKETCHES of Frank Gehry. Sydney Pollack. Estados Unidos da América:
Sony Pictures Classics, 2006. 1 DVD (86 min.): DVD, NTSC, son., color.
Legendado. Port.
104
SOMMER, Bernhard. Continuously Variable Systems. A Topological Ar-
chitecture. In: OOSTERHUIS, Kas (org.), Hyperbody: First decade of in-
teractive architecture. Delft, Holanda: Jap Sam Books, 2012.
STEELE, James. Arquitectura y revolución digital. Barcelona: Gustavo
Gili, SA de CV, 2001.
SYKES, A. Krista. Introdução. In: SYKES, A. Krista (org.). O Campo amplia-
do da arquitetura: antologia teórica 1993-2009, São Paulo: Cosac Naify,
2013.
TRAMONTANO, Marcelo; SOARES, João Paulo. Arquitetura emergente,
design paramétricos e o representar através de modelos de informa-
ção. V!RUS, São Carlos, n. 8, dezembro 2012. Disponível em:
<http://www.nomads.usp.br/virus/virus08/?sec=7&item=1&lang=pt>.
Acesso em: 02/10/2013.
VAN TOORN, Roemer. Acabaram-se os sonhos? A paixão pela realidade
na nova arquitetura holandesa... E suas limitações. In: SYKES, A. Krista
(org.). O Campo ampliado da arquitetura: antologia teórica 1993-2009,
São Paulo: Cosac Naify, 2013.
VERDE, Marco. Performative Design Processes for Architecture: [p]a. In:
OOSTERHUIS, Kas (org.), Hyperbody: First decade of interactive archi-
tecture. Delft, Holanda: Jap Sam Books, 2012.
WEIBEL, Peter. É proibido não tocar: Algumas observações sobre (par-
tes esquecidas da) história da interatividade e da virtualidade. In: DO-
MINGUES, Diana (org.). Arte, Ciência e Tecnologia: Passado, presente e
desafios. São Paulo: Editora UNESP, 2009.
ZEVI, Bruno. Saber ver a arquitetura. São Paulo: Martins Fontes, 2002.
8.2 Figuras
Figuras 1 e 2 – SKETCHES, 2006.
Figura 3 – Disponível em <http://www.vbtllc.com/images/dch3.jpg>,
acessado em 30/08/2013.
Figura 4 – Disponível em <http://www.garuyo.com/arte-y-
cultura/frank-ghery-un-arquitecto-de-vanguardia>, acessado em
30/08/2013.
Figura 5 – Disponível em
<http://parolenonnelvuoto.files.wordpress.com/2012/05/embryologic-
house.jpg>, acesso em 31/08/2013.
Figuras 6 a 10 – Protótipo elaborado pelo Hyperbody TUDelft. Disponí-
vel em <http://www.recitymagazine.com/project-856-tu-delft-faculty-
of-architecture-msc2-hyperbody-11-prototypes>, acesso em
01/09/2013.
Figuras 11 e 12 – Disponíveis em
<http://www.greenpix.org/download.php>, acesso em 10/09/2013.
105
Figura 13 – Disponível em
<http://fast.mediamatic.nl/f/sjnh/image/843/16918-549-477.jpg>,
acessado em 30/09/2013.
Figura 14 – Disponível em
<http://dreher.netzliteratur.net/4_Medienkunst_Paik_ParticipationTV.j
pg>, acessado em 30/09/2013.
Figuras 15 a 17 –. Disponíveis em
<http://www.haque.co.uk/marling.php>, acessado em 30/09/2013.
Figura 18 – Fonte: David Dória, 2014.
Figuras 19 a 21 – Disponíveis em
<http://www.interactivearchitecture.org/fearful-symmetry-at-the-
tate.html>, acessado em 19/09/2013.
Figura 22 – Disponível em
<http://www.bk.tudelft.nl/fileadmin/Faculteit/BK/Actueel/Nieuws/Nieu
wsberichten_2010/img/overview-1392-768.jpg>, acessado em
13/09/2013.
Figuras 23 e 24 –. Imagens extraídas do vídeo <Interacti-
ve_Wall_FootageDV Pal.mp4>. Disponível em
<http://www.youtube.com/watch?v=dvw12WRN3HQ>, acessado em
13/09/2013.
Figura 25 – Fonte: David Dória, 2014.
Figura 26 – Disponível em <http://arduino.cc/en/>, acessado em
22/09/2013.
Figura 27 – Fonte: David Dória, 2014.
Figura 28 – Disponível em <http://theprincipals.us/#/cosmic-quilt/>,
acessado em 22/09/2013.
Figura 29 – Disponível em <http://www.awidernet.com/wp-
content/uploads/2007/05/surprise1.JPG>, acessado em 13/09/2013.
Figura 30 – Disponível em < http://blog.kineticarchitecture.net/wp-
content/uploads/2008/12/hyposurface_3.jpg>, acessado em
24/09/2013.
Figura 31 – Disponível em < http://fluxwurx.com/installation/wp-
content/uploads/2011/01/PR_2003_hyposurface_001_p.jpeg>, aces-
sado em 24/09/2013.
Figura 32 – Disponível em <http://www.mediaarchitecture.org/wp-
content/uploads/2006/06/digi1gn.jpg>, acessado em 24/09/2013.
Figura 33 – Disponível em
<http://digitalprovocations.files.wordpress.com/2011/11/hyposurface2
.jpg>, acessado em 13/09/2013.
Figura 34 – Disponível em <http://lab-
au.com/mediaruimte/digital_territories/projects/cybernetic/images/ae
gis-04.jpg>, acessado em 28/09/2013.
Figuras 35 a 38 – Disponíveis em < http://www.haque.co.uk/haunt >,
acessado em 29/09/2013.
106
Figura 39 – Disponível em
<http://en.wikipedia.org/wiki/File:Mondrian_Composition_II_in_Red,_
Blue,_and_Yellow.jpg>, acessado em 01/10/2013.
Figura 40 – Disponível em <http://4.bp.blogspot.com/-
RQaG-
pExYEls/TfipRVsw8TI/AAAAAAAACWM/pCvLPA4ecp8/s1600/Rietveld_S
chroder_House-image-4.jpg> , acessado em 01/10/2013.
Figura 41 – Disponível em <
http://www.openprocessing.org/sketch/111878>, acessado em
01/10/2013.
Figura 42 – Disponível em <
http://www.frankenfotografie.nl/images/hessing.jpg>, acessado em
01/10/2013.
Figura 43 – Disponível em < http://mlab.cca.edu/wp-
content/uploads/2009/08/toronto-workshop_screen13.jpg>, acessado
em 02/10/2013.
Figura 44 – Disponível em
<http://api.ning.com/files/HyAZoDDH6YpHS5FqZK*VUan3pXgt9qIir*3H
hEF*jBOFJScOYAqS3CRofeP-qnr20r-
iavf1wJV4zwhwIgWyMvGZ*LirWyMA/Watch3D.PNG>, acessado em
02/10/2013.
Figura 45 - Disponível em http://1.bp.blogspot.com/-
aPaL1VdnzAM/Ui9NBC0FyTI/AAAAAAAAEug/Ba_DN5i0Fr4/s1600/2013-
09-10_1246_001.png>, acessado em 02/10/2013.
Figuras 46 a 50 – Disponíveis em <http://www.evdh.net/sonohouse/>,
acessado em 02/11/2013.
Figuras 51 e 52 – Disponíveis em < http://www.nox-art-
architecture.com/ >, acessado em 02/11/2013.
Figura 53 – Disponível em <http://www.archispass.org/wp-
content/uploads/2009/07/interwall-2.jpg>, acessado em 04/11/2013.
Figuras 54 a 58 – Disponíveis em <http://www.chriskievid.nl >, acessado
em 04/11/2013.
Figura 59 – Disponível em
<http://www.bk.tudelft.nl/fileadmin/Faculteit/BK/Over_de_faculteit/Af
delin-
gen/Hyperbody/Research/Applied_research_Projects/img/muscle_bod
y1.jpg>, acessado em 04/11/2013.
Figura 60 – Disponível em
<http://www.bk.tudelft.nl/fileadmin/Faculteit/BK/Over_de_faculteit/Af
delin-
gen/Hyperbody/Research/Applied_research_Projects/img/muscle_bod
y4.jpg>, acessado em 04/11/2013.
Figura 61 – Disponível em <http://www.interactivearchitecture.org/wp-
content/imagebank/muscle.jpg>, acessado em 04/11/2013.
Figura 62 – Disponível em <http://www.organicui.org/wp-
content/uploads/2008/06/fig-5b.jpg>, acessado em 04/11/2013.
107
Figura 63 – Disponível em <http://i.archi.ru/i/650/113714.jpg>, acessa-
do em 04/11/2013.
Figura 64 – Disponível em <http://maytepiragibe.com/wp-
content/uploads/2013/06/Barcelona-Pavilion-by-van-der-rohe.jpg> ,
acessado em 01/02/2014.
Figura 65 – Disponível em <http://www.heatherwick.com/wp-
content/uploads/2010/06/Expo2010-Heatherwick-4170-
1280x853.jpg>, acessado em 01/02/2014.
Figura 66 – Disponível em <http://4.bp.blogspot.com/-
bTG-
MNh7x1cg/UR4dG1eQRlI/AAAAAAAAYws/zx4QsyTHEDg/s1600/Serpent
ine%2BGallery%2BPavilion%2B2012%2Bby%2BHerzog%2B%26%2Bde%
2BMeuron01.jpg>, acessado em 01/02/2014.
Figura 67 – Disponível em
<http://www.serpentinegalleries.org/sites/default/files/images/A%20M
ain%20image%20serpentine_gallery_pavilion_sou_fujimoto_2013_2.jp
g> , acessado em 01/02/2014.
Figura 68s a 73 – Fonte: David Dória, 2013.
Figura 74 – Pistão cilíndrico telescópico do fabricante Univer. Disponível
em <http://www.univer-
group.com/img/img_up/636643001375705084.jpg>, acessado em
02/02/2014.
Figuras 75 a 108 – Fonte: David Dória, 2014.
108
9 Projeto arquitetônico

Universidade Federal de Sergipe DAU-CAMPUSLAR
Aluno
David Rodrigues Silva Dória Orientador
Prof.º Dsc. Fernando Antônio Santos de Souza Título do trabalho
Arquitetura Interativa Conteúdo
Planta de Implantação Data Escala Prancha
Fevereiro / 2014 1 : 150 01/08
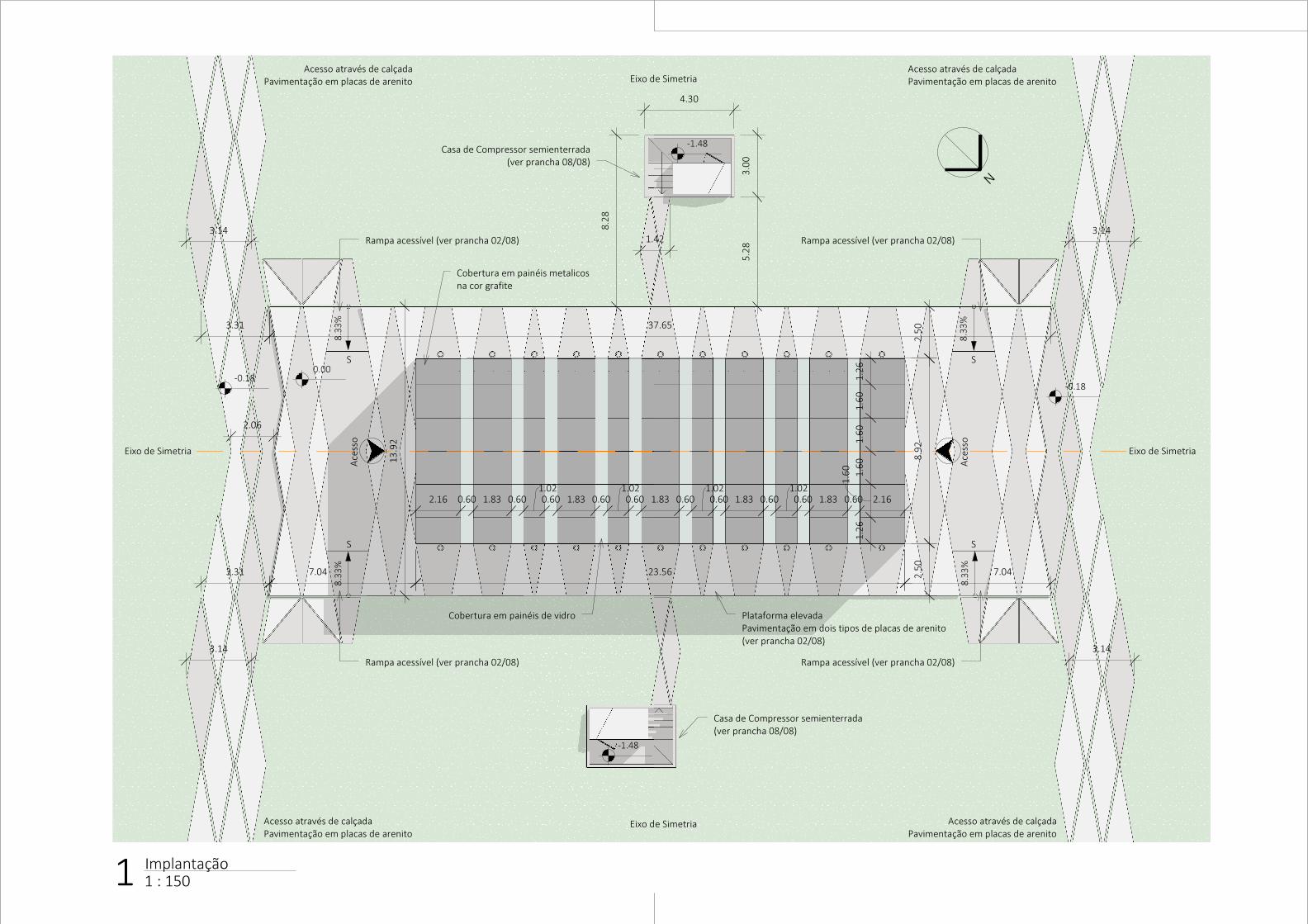
N
13.92
37.65
2.50
2.50
23.56 7.047.04
8.92
0.00
-0.18
-0.18
-1.48
-1.483.00
5.28
4.30
8.28
1.42
2.06
3.31
3.14
3.31
3.14
3.14 3.14
Eixo de Simetria
Plataforma elevada
Pavimentação em dois tipos de placas de arenito
(ver prancha 02/08)
Casa de Compressor semienterrada
(ver prancha 08/08)
Acesso através de calçada
Pavimentação em placas de arenito
Acesso através de calçada
Pavimentação em placas de arenito
Acesso através de calçada
Pavimentação em placas de arenito
Acesso através de calçada
Pavimentação em placas de arenito
Casa de Compressor semienterrada
(ver prancha 08/08)
8.33%
8.33%
8.33%
8.33%
Cobertura em painéis metalicos
na cor grafite
Cobertura em painéis de vidro
1.26
1.60
1.60
1.60
1.60
1.26
2.16 0.60 1.83 0.601.020.60 1.83 0.60
1.020.60 1.83 0.60
1.020.60 1.83 0.60
1.020.60 1.83 0.60 2.16
Rampa acessível (ver prancha 02/08) Rampa acessível (ver prancha 02/08)
Rampa acessível (ver prancha 02/08) Rampa acessível (ver prancha 02/08)
Eixo de Simetria
Eixo de Simetria
Eixo de Simetria
S S
S SAcesso
Acesso
1 : 150Implantação
1

Universidade Federal de Sergipe DAU-CAMPUSLAR
Aluno
David Rodrigues Silva Dória Orientador
Prof.º Dsc. Fernando Antônio Santos de Souza Título do trabalho
Arquitetura Interativa Conteúdo
Planta de Paginação da Plataforma e Detalhes Data Escala Prancha
Fevereiro / 2014 Indicada 02/08
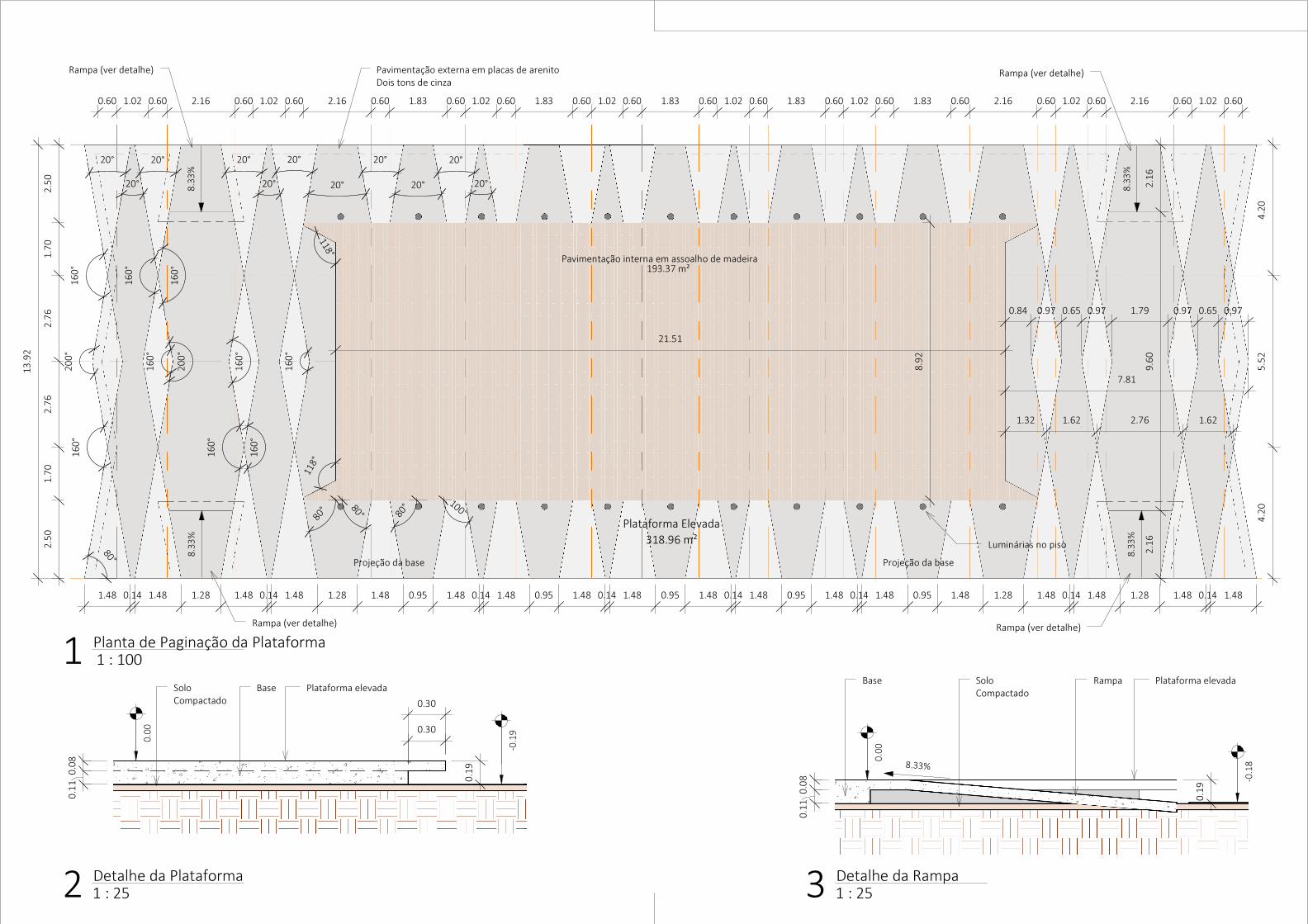
0.60 1.02 0.60 2.16 0.60 1.02 0.60 2.16 0.60 1.83 0.60 1.02 0.60 1.83 0.60 1.02 0.60 1.83 0.60 1.02 0.60 1.83 0.60 1.02 0.60 1.83 0.60 2.16 0.60 1.02 0.60 2.16 0.60 1.02 0.60
2.50
1.70
2.76
2.76
1.70
2.50
4.20
5.52
4.20
1.48 0.14 1.48 1.28 1.48 0.14 1.48 1.28 1.48 0.95 1.48 0.14 1.48 0.95 1.48 0.14 1.48 0.95 1.48 0.14 1.48 0.95 1.48 0.14 1.48 0.95 1.48 1.28 1.48 0.14 1.48 1.28 1.48 0.14 1.48
20°
20° 20° 20°
20°
20°
20°
20°
20°
20°
20°
160°
160°
200°
160°
160°
160°
160°
160°
80°
80°
100°80°
118°
118°
160°
200°
160°
80°
13.92
Pavimentação interna em assoalho de madeira
Pavimentação externa em placas de arenito
Dois tons de cinza
Luminárias no piso
8.33%
8.33%
8.33%
8.33%
Rampa (ver detalhe)
Rampa (ver detalhe) Rampa (ver detalhe)
Rampa (ver detalhe)
2.16
9.60
2.16
1.32 1.62 2.76 1.62
0.84 0.97 0.65 0.97 1.79 0.97 0.65 0.97
318.96 m²
Plataforma Elevada
193.37 m²
Projeção da base Projeção da base
7.81
21.51
8.92
0.19
0.11
0.08
8.33%
0.00
-0.18
Rampa Plataforma elevadaBase Solo
Compactado
0.19
0.11
0.08
0.00
Plataforma elevadaBase
0.30
0.30
-0.19
Solo
Compactado
1 : 100Planta de Paginação da Plataforma
1
1 : 25Detalhe da Rampa
31 : 25Detalhe da Plataforma
2

Universidade Federal de Sergipe DAU-CAMPUSLAR
Aluno
David Rodrigues Silva Dória Orientador
Prof.º Dsc. Fernando Antônio Santos de Souza Título do trabalho
Arquitetura Interativa Conteúdo
Planta Baixa e Corte AA Data Escala Prancha
Fevereiro / 2014 1 : 75 03/08
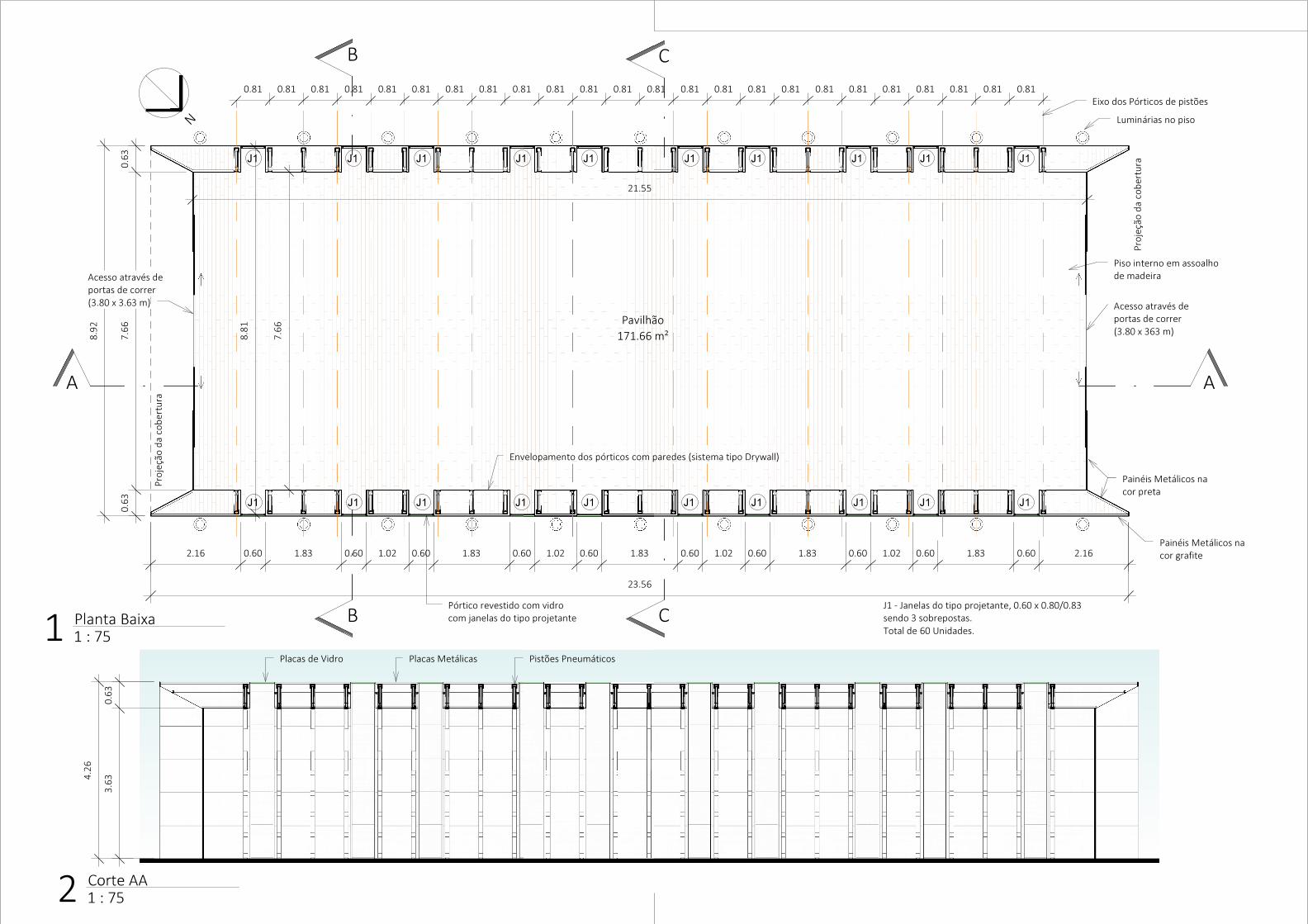
0.81 0.81 0.81 0.81 0.81 0.81 0.81 0.81 0.81 0.81 0.81 0.81 0.81 0.81 0.81 0.81 0.81 0.81 0.81 0.81 0.81 0.81 0.81 0.818
.92
2.16 0.60 1.83 0.60 1.02 0.60 1.83 0.60 1.02 0.60 1.83 0.60 1.02 0.60 1.83 0.60 1.02 0.60 1.83 0.60 2.16
0.6
37
.66
0.6
3Luminárias no piso
Acesso através de
portas de correr
(3.80 x 363 m)
Acesso através de
portas de correr
(3.80 x 3.63 m)
Painéis Metálicos na
cor preta
Painéis Metálicos na
cor grafite
Pórtico revestido com vidro
com janelas do tipo projetante
23.56
Piso interno em assoalho
de madeira
AA
B
B
Pro
jeçã
o d
a c
ob
ert
ura
Pro
jeçã
o d
a c
ob
ert
ura
N
C
C
171.66 m²
Pavilhão
21.55
7.6
6
8.8
1
Eixo dos Pórticos de pistões
Envelopamento dos pórticos com paredes (sistema tipo Drywall)
J1 J1 J1 J1 J1 J1 J1 J1 J1 J1
J1J1J1J1J1J1J1J1J1J1
J1 - Janelas do tipo projetante, 0.60 x 0.80/0.83
sendo 3 sobrepostas.
Total de 60 Unidades.
0.6
33
.634
.26
Placas de Vidro Placas Metálicas Pistões Pneumáticos
1 : 75
Planta Baixa
1
1 : 75
Corte AA
2

Universidade Federal de Sergipe DAU-CAMPUSLAR
Aluno
David Rodrigues Silva Dória Orientador
Prof.º Dsc. Fernando Antônio Santos de Souza Título do trabalho
Arquitetura Interativa Conteúdo
Detalhe do Envelopamento e Cortes Transversais Data Escala Prancha
Fevereiro / 2014 Indicada 04/08
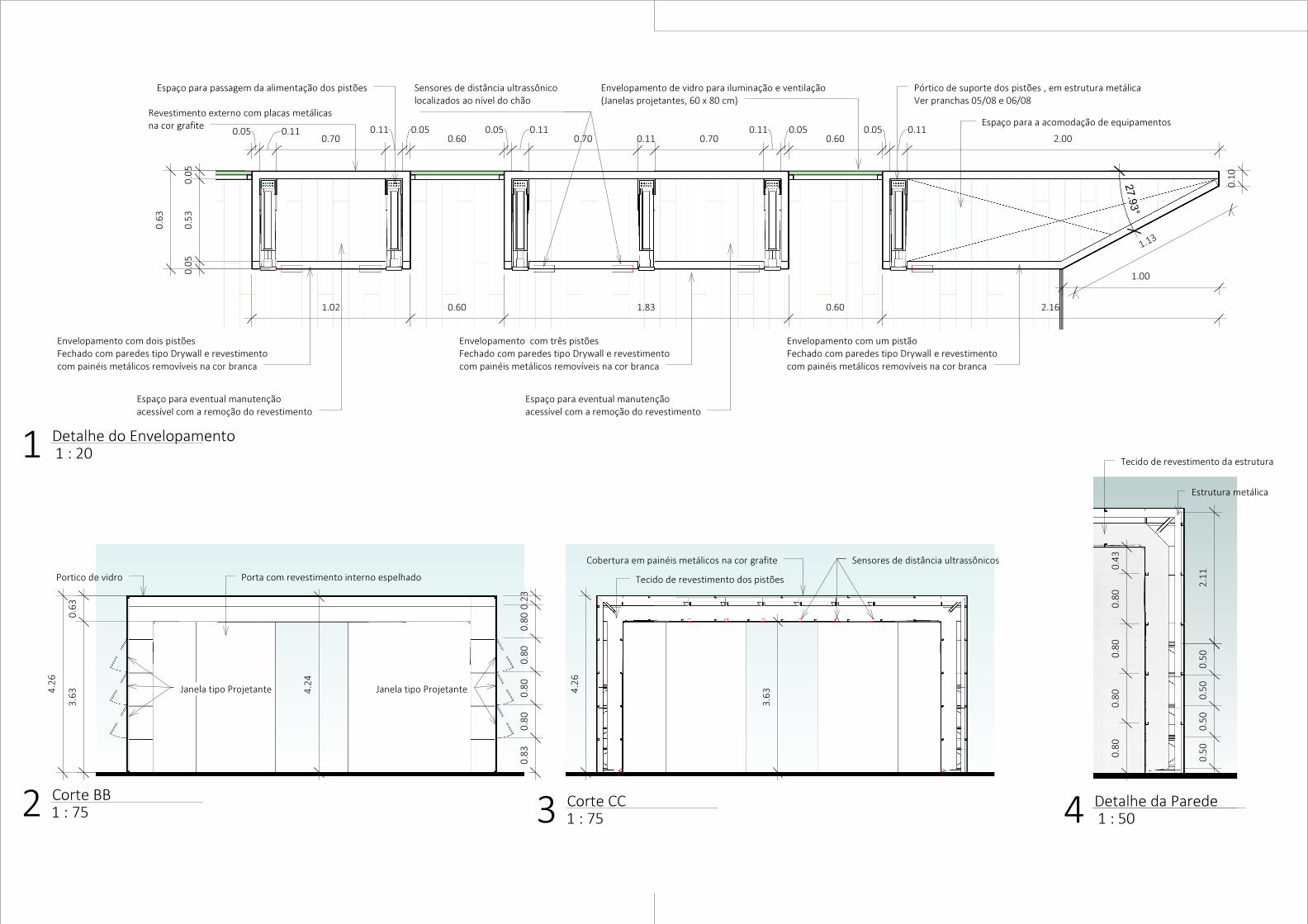
1.02 0.60 1.83 0.60 2.16
0.05 0.110.70
0.11 0.050.60
0.05 0.110.70 0.11 0.70
0.11 0.050.60
0.05 0.112.00
0.05
0.53
0.05
0.63
27.93°
1.00
Espaço para a acomodação de equipamentos
Envelopamento de vidro para iluminação e ventilação
(Janelas projetantes, 60 x 80 cm)
Envelopamento com dois pistões
Fechado com paredes tipo Drywall e revestimento
com painéis metálicos removíveis na cor branca
Revestimento externo com placas metálicas
na cor grafite
Envelopamento com três pistões
Fechado com paredes tipo Drywall e revestimento
com painéis metálicos removíveis na cor branca
Espaço para eventual manutenção
acessível com a remoção do revestimento
Envelopamento com um pistão
Fechado com paredes tipo Drywall e revestimento
com painéis metálicos removíveis na cor branca
Espaço para eventual manutenção
acessível com a remoção do revestimento
Sensores de distância ultrassônico
localizados ao nível do chão
Espaço para passagem da alimentação dos pistões Pórtico de suporte dos pistões , em estrutura metálica
Ver pranchas 05/08 e 06/08
1.13
0.10
0.63
3.634.26
Porta com revestimento interno espelhadoPortico de vidro
Janela tipo Projetante Janela tipo Projetante
0.23
0.80
0.80
0.80
0.80
0.83
4.24
4.26
3.63
Tecido de revestimento dos pistões
Cobertura em painéis metálicos na cor grafite Sensores de distância ultrassônicos
0.43
0.80
0.80
0.80
0.80
0.50
0.50
0.50
0.50
2.11
Tecido de revestimento da estrutura
Estrutura metálica
1 : 20Detalhe do Envelopamento
1
1 : 75Corte BB
21 : 75Corte CC
3 1 : 50Detalhe da Parede
4

Universidade Federal de Sergipe DAU-CAMPUSLAR
Aluno
David Rodrigues Silva Dória Orientador
Prof.º Dsc. Fernando Antônio Santos de Souza Título do trabalho
Arquitetura Interativa Conteúdo
Vista Superior dos Pórticos e Perspectivas Data Escala Prancha
Fevereiro / 2014 Indicada 05/08
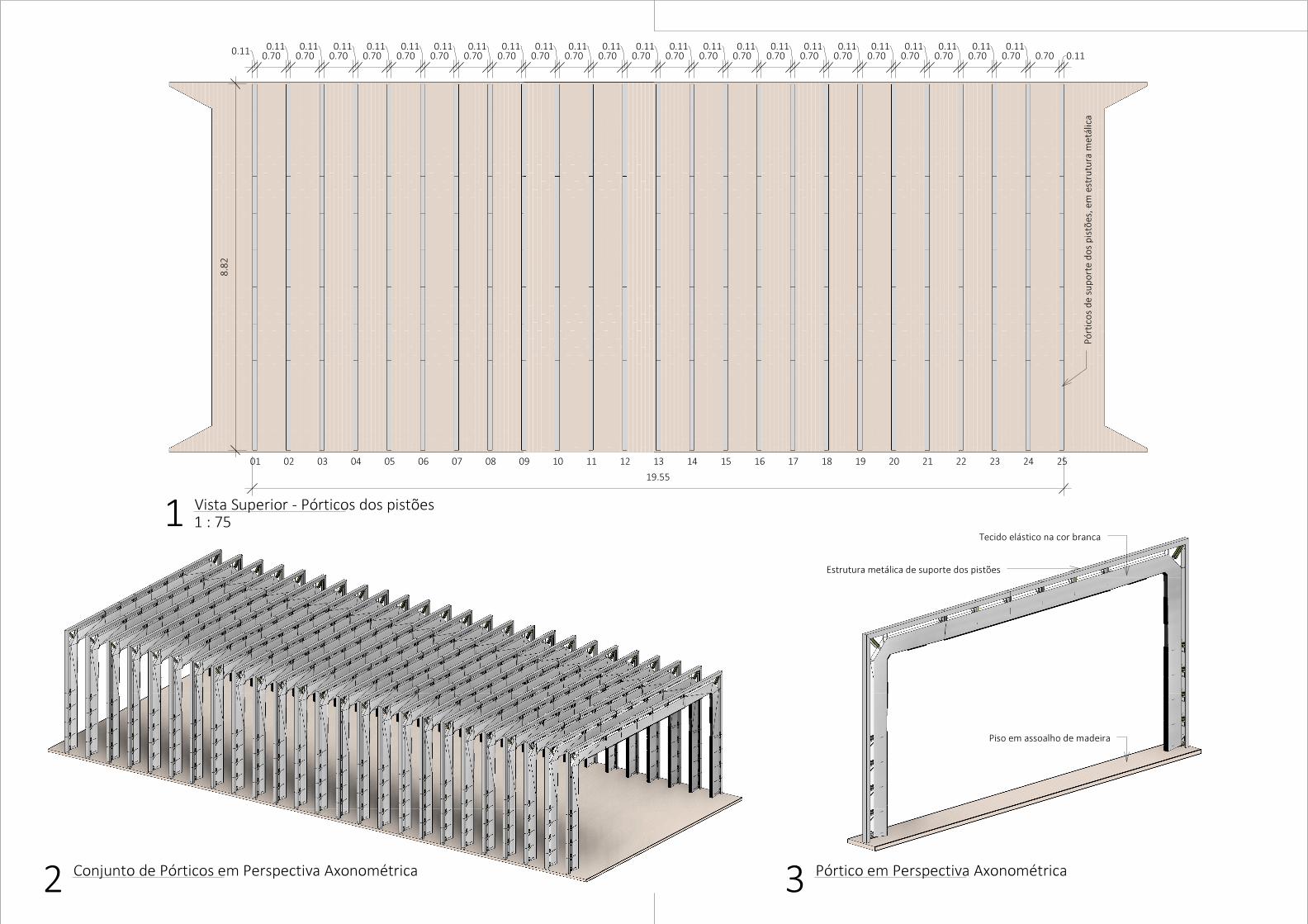
0.110.700.11
0.700.11
0.700.11
0.700.11
0.700.11
0.700.11
0.700.11
0.700.11
0.700.11
0.700.11
0.700.11
0.700.11
0.700.11
0.700.11
0.700.11
0.700.11
0.700.11
0.700.11
0.700.11
0.700.11
0.700.11
0.700.11
0.700.11
0.70 0.11
19.55
8.8
2
Pó
rtic
os
de
su
po
rte
do
s p
istõ
es,
em
est
rutu
ra m
etá
lica
01 02 03 04 05 06 07 08 09 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25
Tecido elástico na cor branca
Piso em assoalho de madeira
Estrutura metálica de suporte dos pistões
1 : 75Vista Superior - Pórticos dos pistões
1
Conjunto de Pórticos em Perspectiva Axonométrica2
Pórtico em Perspectiva Axonométrica3

Universidade Federal de Sergipe DAU-CAMPUSLAR
Aluno
David Rodrigues Silva Dória Orientador
Prof.º Dsc. Fernando Antônio Santos de Souza Título do trabalho
Arquitetura Interativa Conteúdo
Detalhamento do Pórtico de Suporte dos Pistões Data Escala Prancha
Fevereiro / 2014 Indicada 06/08
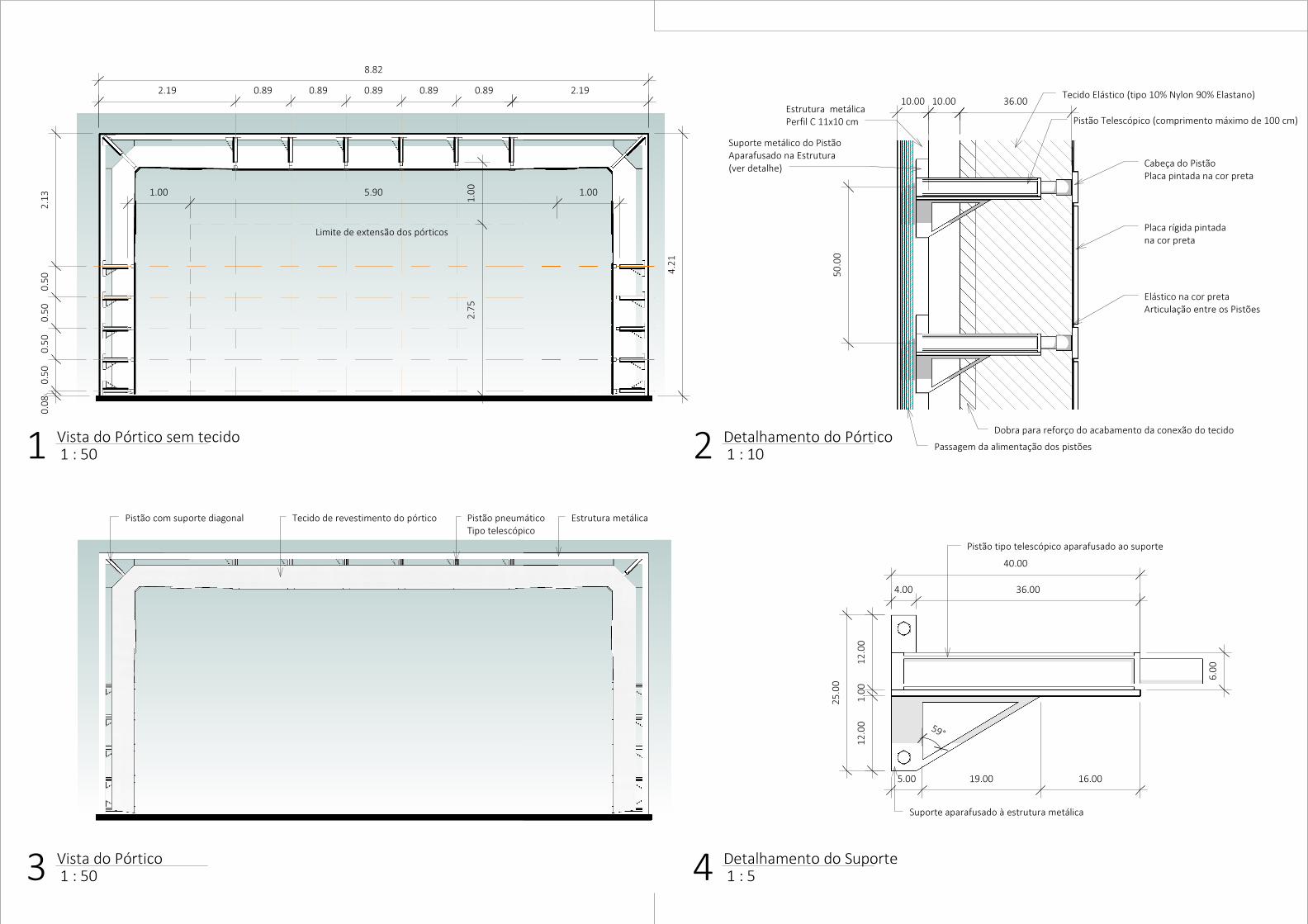
2.13
0.50
0.50
0.50
0.50
0.08
2.19 0.89 0.89 0.89 0.89 0.89 2.19
4.21
8.82
Limite de extensão dos pórticos
1.00 5.90 1.00
1.00
2.75
Estrutura metálica
Perfil C 11x10 cm Pistão Telescópico (comprimento máximo de 100 cm)
Cabeça do Pistão
Placa pintada na cor preta
Suporte metálico do Pistão
Aparafusado na Estrutura
(ver detalhe)
Placa rígida pintada
na cor preta
Elástico na cor preta
Articulação entre os Pistões
10.00 10.00Tecido Elástico (tipo 10% Nylon 90% Elastano)
Passagem da alimentação dos pistões
Dobra para reforço do acabamento da conexão do tecido
50.00
36.00
Estrutura metálicaTecido de revestimento do pórtico Pistão pneumático
Tipo telescópico
Pistão com suporte diagonal
4.00 36.00
12.00
1.00
12.00
25.00
40.00
59°
5.00 19.00 16.00
6.00
Pistão tipo telescópico aparafusado ao suporte
Suporte aparafusado à estrutura metálica
1 : 50Vista do Pórtico sem tecido
1 1 : 10Detalhamento do Pórtico
2
1 : 50Vista do Pórtico
3 1 : 5Detalhamento do Suporte
4

Universidade Federal de Sergipe DAU-CAMPUSLAR
Aluno
David Rodrigues Silva Dória Orientador
Prof.º Dsc. Fernando Antônio Santos de Souza Título do trabalho
Arquitetura Interativa Conteúdo
Elevação Frontal, Lateral e Perspectivas Data Escala Prancha
Fevereiro / 2014 Indicada 07/08
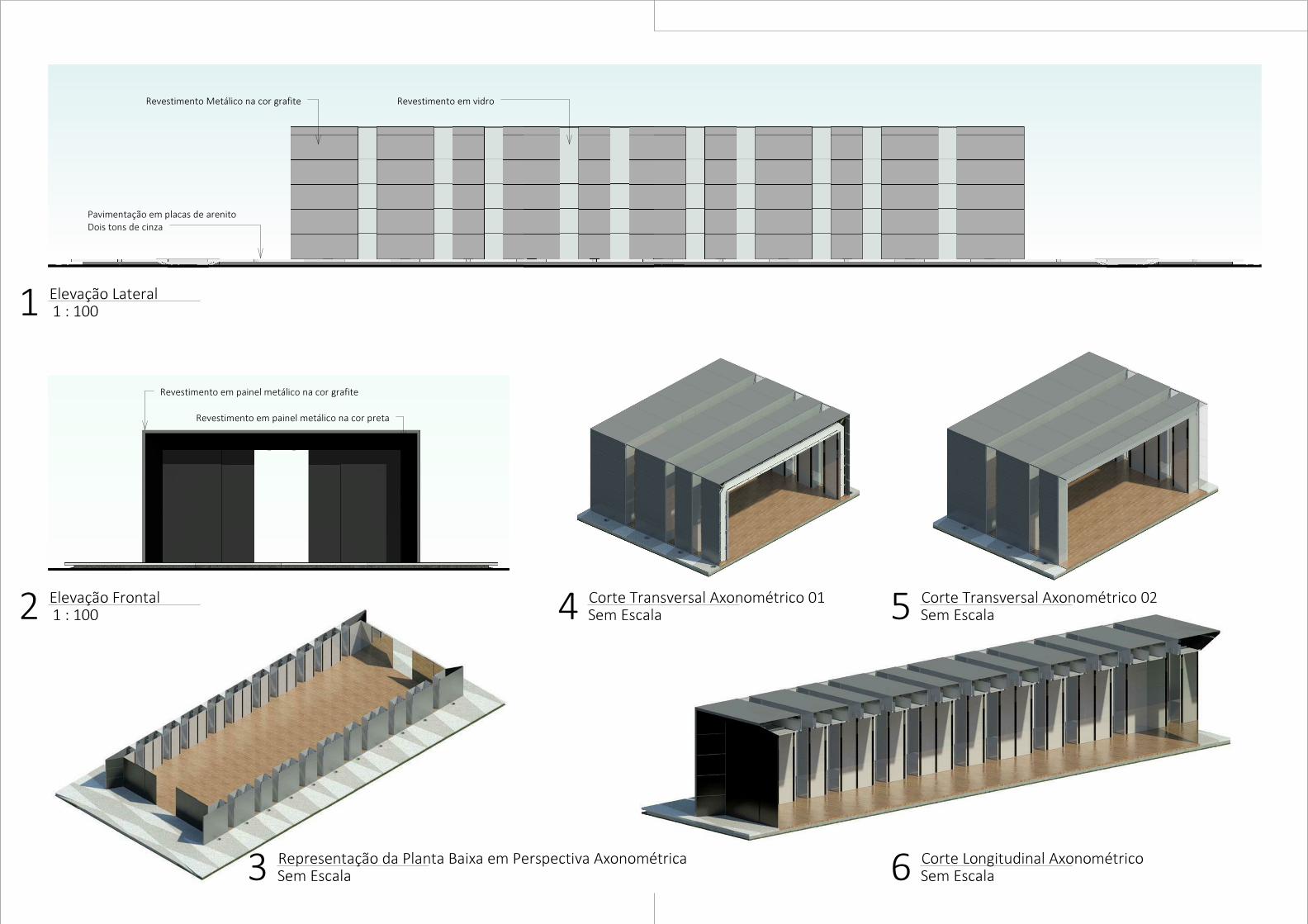
Revestimento Metálico na cor grafite Revestimento em vidro
Pavimentação em placas de arenito
Dois tons de cinza
Revestimento em painel metálico na cor grafite
Revestimento em painel metálico na cor preta
1 : 100Elevação Lateral
1
1 : 100Elevação Frontal
2
Sem EscalaRepresentação da Planta Baixa em Perspectiva Axonométrica
3 Sem EscalaCorte Longitudinal Axonométrico
6
Sem EscalaCorte Transversal Axonométrico 01
4 Sem EscalaCorte Transversal Axonométrico 02
5

Universidade Federal de Sergipe DAU-CAMPUSLAR
Aluno
David Rodrigues Silva Dória Orientador
Prof.º Dsc. Fernando Antônio Santos de Souza Título do trabalho
Arquitetura Interativa Conteúdo
Detalhamento da Casa de Compressor Data Escala Prancha
Fevereiro / 2014 1 : 50 08/08
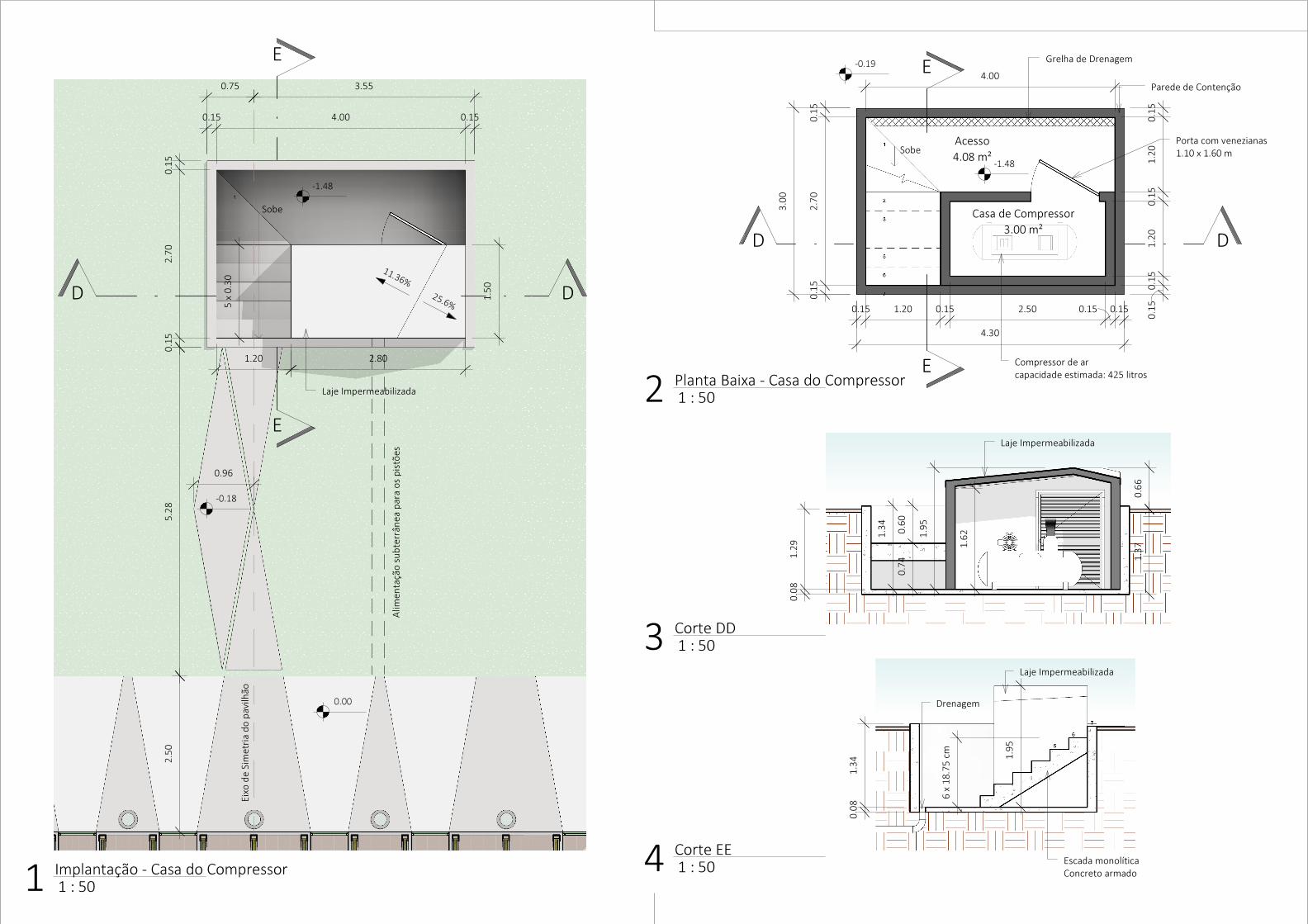
11.36%
25.6%
0.15 4.00 0.15
0.1
52
.70
0.1
5
2.80
1.5
0
5 x
0.3
0
3.550.75
Eix
o d
e S
ime
tria
do
pa
vilh
ão
0.96
0.00
-0.18
-1.48
5.2
82
.50
1.20
Laje Impermeabilizada
DD
E
E
Alim
en
taçã
o s
ub
terr
ân
ea
pa
ra o
s p
istõ
es
Sobe
DD
E
E
0.1
52
.70
0.1
5
3.0
0
0.1
51
.20
0.1
51
.20
0.1
50
.15
0.15 1.20 0.15 2.50 0.15 0.15
4.30
4.00
-1.48
-0.19
Porta com venezianas
1.10 x 1.60 m
Compressor de ar
capacidade estimada: 425 litros
Parede de Contenção
3.00 m²
Casa de Compressor
4.08 m²
Acesso
Grelha de Drenagem
Sobe
1.2
90
.08
1.3
4
0.6
00
.74
1.9
5
0.6
6
1.6
2
1.3
7
Laje Impermeabilizada
0.0
81
.34 1
.95
6 x
18
.75
cm
Escada monolítica
Concreto armado
Laje Impermeabilizada
Drenagem
1 : 50Implantação - Casa do Compressor
1
1 : 50Planta Baixa - Casa do Compressor
2
1 : 50Corte DD
3
1 : 50Corte EE
4
Top Related