






Línguas
Páginas
Legal


Informática Industrial
AULA 04:
Introdução CLP
OBJETIVO:
Apresentar a historia do CLP, conceitos de hardware.
UNIDADE DE ENSINO:
controladores programáveis.
Professor: Diego Silva Cardoso 1
Informática Industrial
Histórico da evolução do clp;
• Historicamente os CLPs podem ser classificados nas seguintes categorias:
1ª geração: Programação em Assembly. Era necessário conhecer o hardware do equipamento, ou seja, a eletrônica do projeto do CLP. A programação era realizada junto com sua construção;
Professor: Diego Silva Cardoso 2

Informática Industrial
Histórico da evolução do clp;
• Historicamente os CLPs podem ser classificados nas seguintes categorias:
2ª geração: Apareceram as linguagens de programação de nível médio. Foi desenvolvido o “Programa monitor” que transformava para linguagem de máquina o programa inserido pelo usuário.
Professor: Diego Silva Cardoso 3

Informática Industrial
Histórico da evolução do clp;
• Historicamente os CLPs podem ser classificados nas seguintes categorias:
3ª geração: Os CLPs passam a ter uma entrada de programação que era feita através de um teclado, ou programador portátil, conectado ao mesmo.
Professor: Diego Silva Cardoso 4

Informática Industrial
Histórico da evolução do clp;
• Historicamente os CLPs podem ser classificados nas seguintes categorias:
4ª geração: É introduzida uma entrada para comunicação serial, e a programação passa a ser feita através de micro-computadores. Com este advento surgiu a possibilidade de testar o programa antes do mesmo ser transferido ao módulo do CLP, propriamente dito.
Professor: Diego Silva Cardoso 5
Informática Industrial
Histórico da evolução do clp;
• Historicamente os CLPs podem ser classificados nas seguintes categorias:
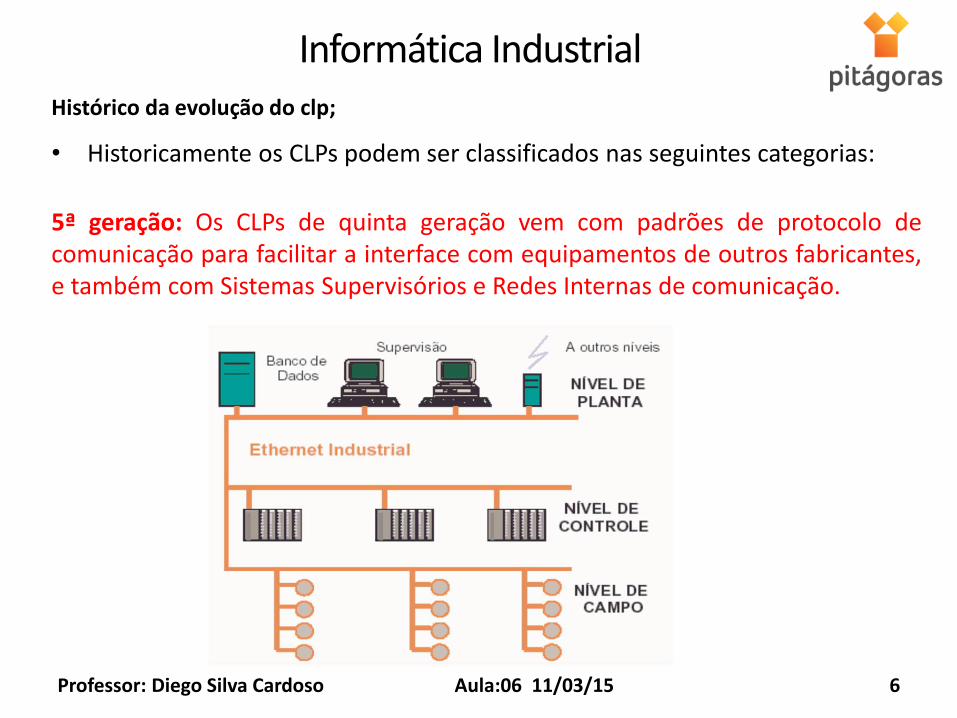
5ª geração: Os CLPs de quinta geração vem com padrões de protocolo de comunicação para facilitar a interface com equipamentos de outros fabricantes, e também com Sistemas Supervisórios e Redes Internas de comunicação.
Aula:06 11/03/15 Professor: Diego Silva Cardoso 6

Informática Industrial
CONTROLADOR LÓGICO PROGRAMÁVEL - CLP
São sistemas modulares compostos basicamente de:
– Fonte de alimentação;
– CPU;
– Memória;
– Módulos de entradas e saídas;
– Linguagens de programação;
– Dispositivos de programação;
– Módulos de comunicação;
– Módulos especiais (opcionais).
Professor: Diego Silva Cardoso 7
Informática Industrial
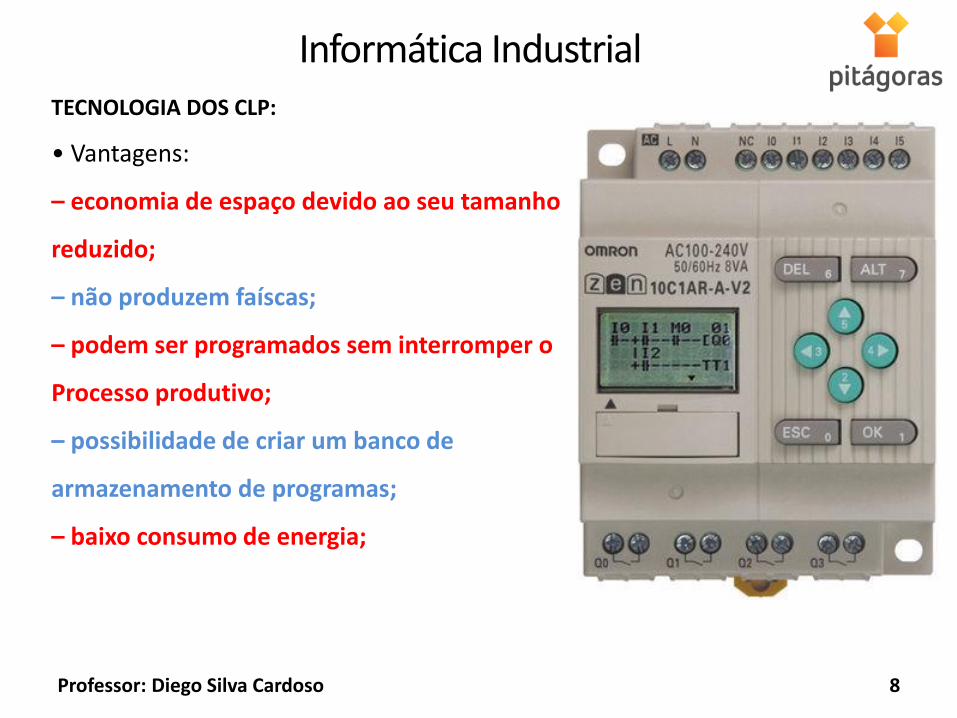
TECNOLOGIA DOS CLP:
• Vantagens:
– economia de espaço devido ao seu tamanho
reduzido;
– não produzem faíscas;
– podem ser programados sem interromper o
Processo produtivo;
– possibilidade de criar um banco de
armazenamento de programas;
– baixo consumo de energia;
Professor: Diego Silva Cardoso 8
Informática Industrial
TECNOLOGIA DOS CLP:
• Vantagens:
- necessita de uma reduzida equipe de
manutenção;
– tem a flexibilidade para expansão do
número de entradas e saídas;
– reutilizáveis;
– maior confiabilidade;
– maior flexibilidade;
– maior rapidez na elaboração dos projetos;
– interfaces de comunicação com outros CLPs
e computadores.
Professor: Diego Silva Cardoso 9
Informática Industrial
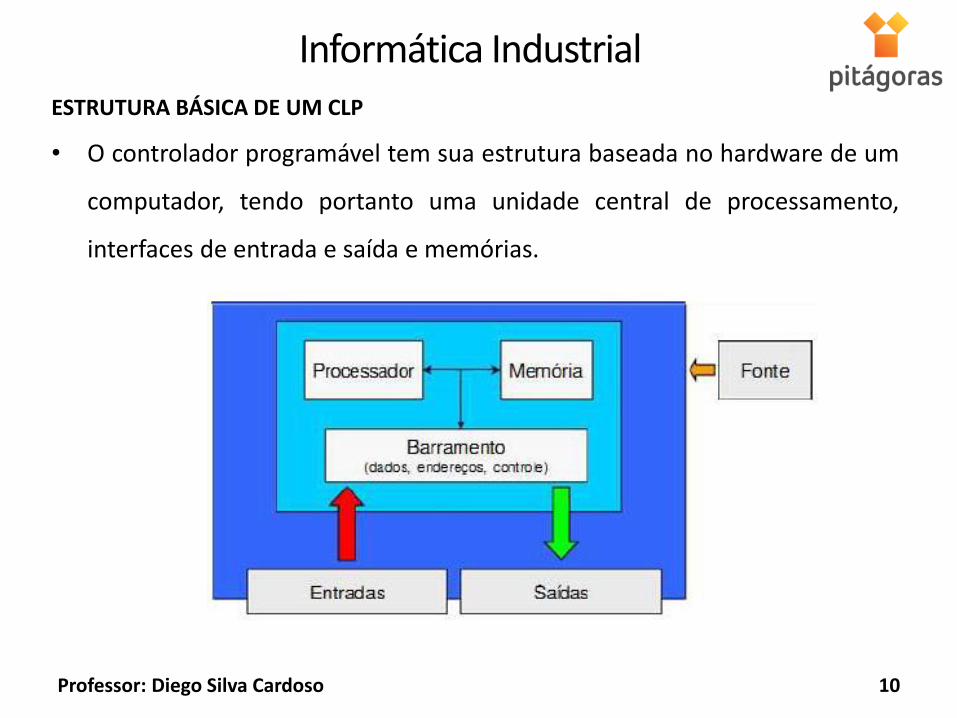
ESTRUTURA BÁSICA DE UM CLP
• O controlador programável tem sua estrutura baseada no hardware de um
computador, tendo portanto uma unidade central de processamento,
interfaces de entrada e saída e memórias.
Professor: Diego Silva Cardoso 10

Informática Industrial Partes de um CLP:
Professor: Diego Silva Cardoso 11
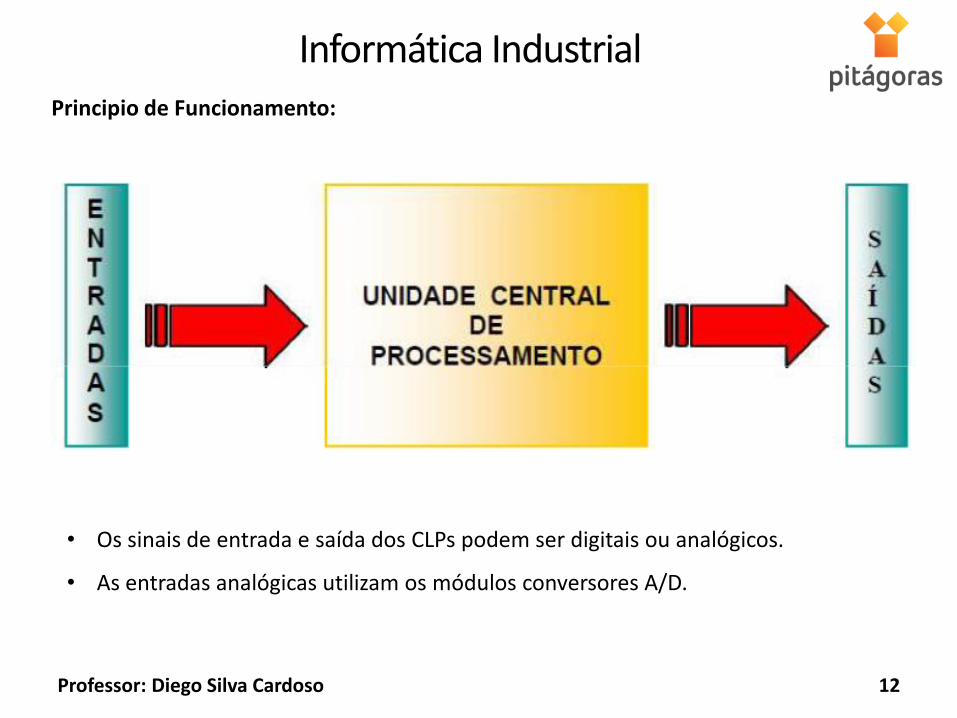
Informática Industrial Principio de Funcionamento:
Professor: Diego Silva Cardoso 12
• Os sinais de entrada e saída dos CLPs podem ser digitais ou analógicos.
• As entradas analógicas utilizam os módulos conversores A/D.

Informática Industrial Principio de Funcionamento:
Professor: Diego Silva Cardoso 13
• O CLP funciona de forma sequencial, fazendo um ciclo de varredura em algumas
etapas.
• O tempo total para realizar o ciclo é denominado CLOCK.
• A não simultaneidade das operações justifica a exigência de processadores com
velocidades cada vez mais altas.

Informática Industrial Principio de Funcionamento:
Professor: Diego Silva Cardoso 14

Informática Industrial Principio de Funcionamento:
Professor: Diego Silva Cardoso 15
Informática Industrial
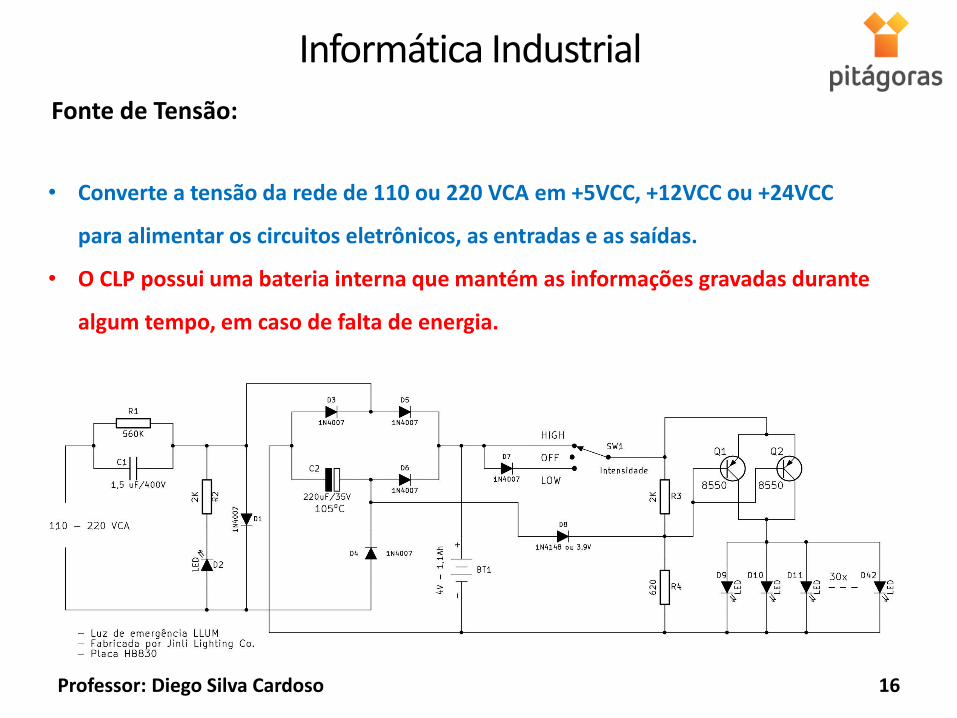
Fonte de Tensão:
Professor: Diego Silva Cardoso 16
• Converte a tensão da rede de 110 ou 220 VCA em +5VCC, +12VCC ou +24VCC
para alimentar os circuitos eletrônicos, as entradas e as saídas.
• O CLP possui uma bateria interna que mantém as informações gravadas durante
algum tempo, em caso de falta de energia.

Informática Industrial Memória:
Professor: Diego Silva Cardoso 17
• O sistema de memória é uma parte de vital importância no processador de um CLP, pois armazena todas as instruções assim como o os dados necessários para executá-las.
Sistema Binário = 0 e 1
Sistema Octal = 0,1,2,3,4,5,6,7
Sistema Decimal = 0,1,2,3,4,5,6,7,8,9
Sistema Hexadecimal = 0,1,2,3,4,5,6,7,8,9 ,A,B,C,D,E,F
Informática Industrial Memória:
Aula:05 10/03/15 Professor: Diego Silva Cardoso 18
• O sistema de memória é uma parte de vital importância no processador de um CLP, pois armazena todas as instruções assim como o os dados necessários para executá-las.
Sistema Binário = 0 e 1
Sistema Octal = 0,1,2,3,4,5,6,7
Sistema Decimal = 0,1,2,3,4,5,6,7,8,9
Sistema Hexadecimal = 0,1,2,3,4,5,6,7,8,9 ,A,B,C,D,E,F
8, 16 ou 32 Bits
7 6 5 4 3 2 1 0

Informática Industrial
Professor: Diego Silva Cardoso 19

Informática Industrial
Professor: Diego Silva Cardoso 20
Entradas e Saídas:
• São os tipos de sinais mais comuns encontrados em sistemas automatizados com
CLP. Nestes tipos de interface a informação consiste em um estado binário da
variável de controle (ligado ou desligado)

Informática Industrial
Professor: Diego Silva Cardoso 21
Entradas digitais: chaves seletoras, sensores fotoelétricos, chaves de fim de curso, sensores de proximidade, etc Saídas digitais: alarmes, ventiladores, lâmpadas, solenóides, etc

Informática Industrial
Professor: Diego Silva Cardoso 22
Entradas Analógicas: transdutor de temperatura, pressão, transdutores óticos, de umidade, de fluxo, conversor D/A, etc Saídas Analógicas: válvula analógica, acionamento de um motor, atuador analógico, etc
Informática Industrial
Professor: Diego Silva Cardoso 23
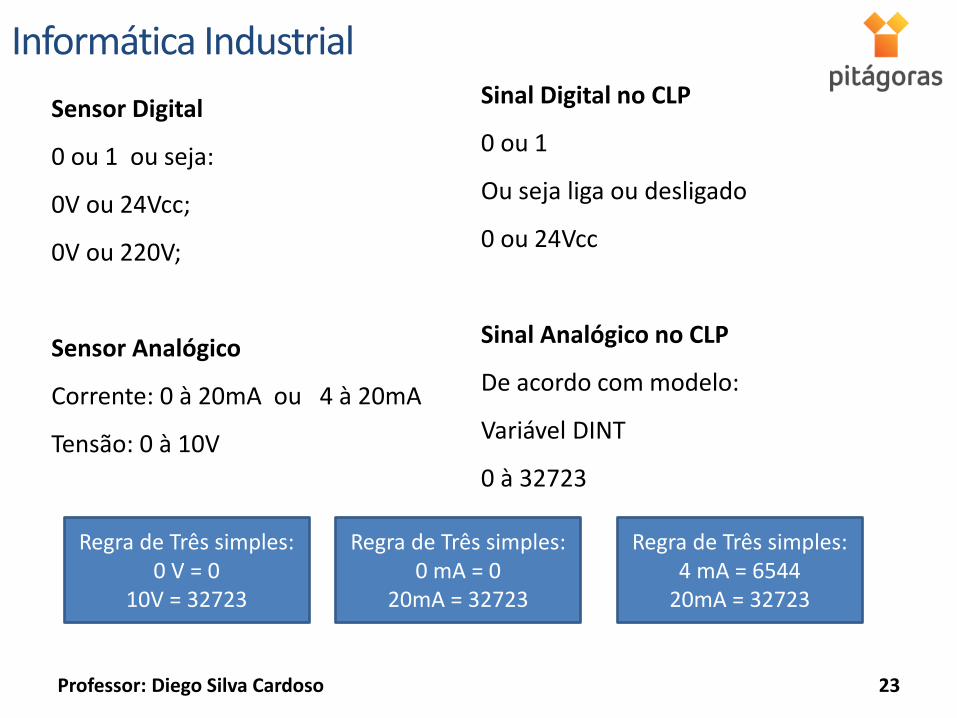
Sensor Digital
0 ou 1 ou seja:
0V ou 24Vcc;
0V ou 220V;
Sensor Analógico
Corrente: 0 à 20mA ou 4 à 20mA
Tensão: 0 à 10V
Sinal Digital no CLP
0 ou 1
Ou seja liga ou desligado
0 ou 24Vcc
Sinal Analógico no CLP
De acordo com modelo:
Variável DINT
0 à 32723
Regra de Três simples: 0 V = 0
10V = 32723
Regra de Três simples: 0 mA = 0
20mA = 32723
Regra de Três simples: 4 mA = 6544
20mA = 32723

Informática Industrial
Professor: Diego Silva Cardoso 24
“ CAPACIDADE ” DE UM C.L.P.
Podemos ressaltar que, com a popularização dos micro - controladores e a redução dos
custos de desenvolvimento e produção houve uma avalanche no mercado de tipos e
modelos de C.L.P.s , os quais podemos dividir em :
Nano e Micro - C.L.P.s :
São C.L.P.s de pouca capacidade de E/S ( máximo 16 Entradas e 16 Saídas ),
normalmente só digitais,
composto de um só módulo ( ou placa ) , baixo custo e reduzida capacidade de memória
( máximo 512 passos ).
Informática Industrial
Professor: Diego Silva Cardoso 25
C.L.P. s de Médio Porte :
São C.L.P.s com uma capacidade de Entrada e Saída de até 256 pontos, digitais e
analógicas , podendo ser formado por um módulo básico, que pode ser expandido.
Costumam permitir até 2048 passos de memória , que poder interna ou externa (
Módulos em Cassetes de Estato - Sólido , Soquetes de Memória , etc ), ou podem
ser totalmente modulares.
C.L.P.s de Grande Porte :
Os C.L.P.s de grande porte se caracterizam por uma construção modular , constituída por
uma Fonte de alimentação , C.P.U. principal , CPUs auxiliares , CPUs Dedicadas , Módulos
de E/S digitais e Analógicos, Módulos de E/S especializados, Módulos de Redes Locais ou
Remotas , etc, que são agrupados de acordo com a necessidade e complexidade da
automação. Permitem a utilização de até 4096 pontos de E/S. São montados em um
Bastidor ( ou Rack ) que permite um Cabeamento Estruturado .

Informática Industrial
Professor: Diego Silva Cardoso 26
A LINGUAGEM LADDER
• Foi a primeira que surgiu para programação dos Controladores Lógicos Programáveis.
• Considerando que na época, os técnicos e engenheiros eletricistas eram normalmente
os encarregados na manutenção no chão de fábrica, a linguagem Ladder deveria ser algo
familiar para esses profissionais.
• Assim ela foi desenvolvida com os mesmos conceitos dos diagramas de comandos
elétricos que utilizam bobinas e contatos.

Informática Industrial
Professor: Diego Silva Cardoso 27
DIAGRAMA DE CONTATOS EM LADDER
• A função principal de um programa em linguagem Ladder é controlar o
acionamento de saídas, dependendo da combinação lógica dos contatos de entrada.
• O diagrama de contatos Ladder é uma técnica adotada para descrever uma função
lógica utilizando contatos e relés. Sua notação é bastante simples. Um diagrama de
contatos é composto de duas barras verticais que representam os pólos positivos e
negativo de uma bateria.

Informática Industrial
Professor: Diego Silva Cardoso 28
DIAGRAMA DE CONTATOS EM LADDER
• A idéia por trás da linguagem ladder é representar graficamente um fluxo de
“eletricidade virtual” entre duas barras verticais energizadas. Essa “eletricidade
virtual” flui sempre do pólo positivo em direção ao negativo.
Informática Industrial
Professor: Diego Silva Cardoso 29
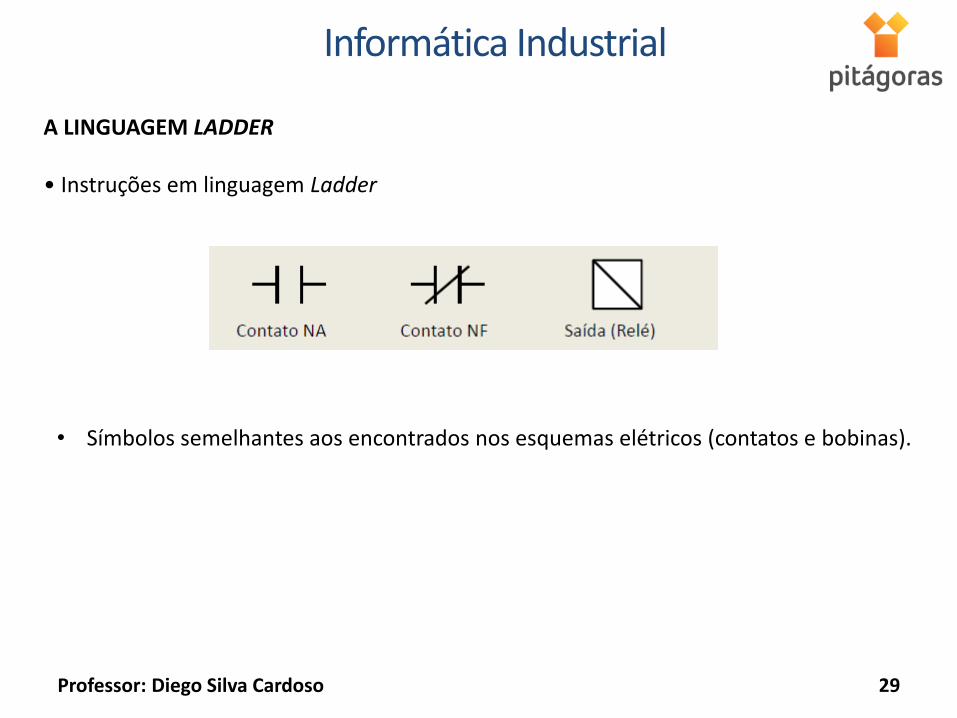
A LINGUAGEM LADDER • Instruções em linguagem Ladder
• Símbolos semelhantes aos encontrados nos esquemas elétricos (contatos e bobinas).

Informática Industrial
Professor: Diego Silva Cardoso 30
Estudo CLP Zelio
Top Related