![[Apostila] Tecnologia Mecânica - SENAI](https://static.fdocumentos.tips/doc/165x107/577ce5091a28abf1038faee6/apostila-tecnologia-mecanica-senai.jpg)







Línguas
Páginas
Legal


Prof.: Carlos Arthur Cavalcante 1
UNIVERSIDADE FEDERAL DA BAHIA
ESCOLA POLITÉNICA
PROF. CARLOS ARTHUR MATTOS TEIXEIRA CAVALCANTE
APOSTILA
ENG002 – MECÂNICA GERAL II
Versão v11_22022021
Salvador
Fevereiro, 2021

Prof.: Carlos Arthur Cavalcante 2
Sumário
SUMÁRIO ......................................................................................................................................................... 2
PREFÁCIO À 2ª VERSÃO .................................................................................................................................... 5
PREFÁCIO À 11ª VERSÃO .................................................................................................................................. 6
1 INTRODUÇÃO ............................................................................................................................................. 7
2 CINEMÁTICA DE PARTÍCULAS ...................................................................................................................... 8
2.1 VETOR POSIÇÃO ............................................................................................................................................ 9 2.2 VETOR VELOCIDADE ..................................................................................................................................... 10 2.3 VETOR ACELERAÇÃO ..................................................................................................................................... 11 2.4 COMPONENTES CARTESIANAS DOS VETORES POSIÇÃO, VELOCIDADE E ACELERAÇÃO ................................................. 12
2.5 ENTENDENDO A ARBITRARIEDADE DO SISTEMA DE COORDENADAS – EXEMPLOS ILUSTRATIVOS ................................... 22
2.6 ENTENDENDO A VINCULAÇÃO ENTRE O SISTEMA DE COORDENADAS E OS ÂNGULOS DOS VETORES –
EXEMPLOS ILUSTRATIVOS. .............................................................................................................................. 25
2.7 COMPONENTES TANGENCIAL E NORMAL DO VETOR ACELERAÇÃO ......................................................................... 28
2.8 SISTEMA DE COORDENADAS POLARES E COMPONENTES RADIAL E TRANSVERSAL DA VELOCIDADE E DA
ACELERAÇÃO ............................................................................................................................................... 53
2.9 SISTEMA DE COORDENADAS CILÍNDRICAS – COMPONENTES RADIAL, TRANSVERSAL E AXIAL ....................................... 65
2.10 MOVIMENTO RELATIVO DE UM SISTEMA DE COORDENADAS EM TRANSLAÇÃO ......................................................... 67
2.11 MOVIMENTOS DEPENDENTES ......................................................................................................................... 73
3 CINÉTICA DE PARTÍCULAS: APLICAÇÃO DIRETA DA 2ª LEI DE NEWTON ..................................................... 81
3.1 INTRODUÇÃO .............................................................................................................................................. 81 3.2 A 2ª LEI DE NEWTON DO MOVIMENTO ............................................................................................................ 81 3.3 SISTEMAS DE UNIDADES ................................................................................................................................ 84
3.4 EQUAÇÕES DE MOVIMENTO ........................................................................................................................... 86 3.5 EXEMPLOS ILUSTRATIVOS ............................................................................................................................... 87
Prof.: Carlos Arthur Cavalcante 3
4 CINÉTICA DE PARTÍCULAS: MÉTODO DO TRABALHO E ENERGIA ............................................................. 125
4.1 INTRODUÇÃO ............................................................................................................................................ 125 4.2 TRABALHO DE UMA FORÇA – DEFINIÇÃO ......................................................................................................... 126
4.3 ENERGIA CINÉTICA E O PRINCÍPIO DO TRABALHO E ENERGIA ............................................................................... 132
4.4 POTÊNCIA E EFICIÊNCIA ............................................................................................................................... 143
4.5 ENERGIA POTENCIAL ................................................................................................................................... 147 4.6 FORÇAS CONSERVATIVAS ............................................................................................................................. 149 4.7 CONSERVAÇÃO DE ENERGIA ......................................................................................................................... 151 4.8 EXEMPLOS ILUSTRATIVOS ............................................................................................................................. 153
5 CINÉTICA DE PARTÍCULAS: MÉTODO DO IMPULSO E QUANTIDADE DE MOVIMENTO ............................. 157
5.1 INTRODUÇÃO ............................................................................................................................................ 157 5.2 QUANTIDADE DE MOVIMENTO LINEAR DE UMA PARTÍCULA. TAXA DE VARIAÇÃO DA QUANTIDADE DE
MOVIMENTO LINEAR .................................................................................................................................. 157 5.3 PRINCÍPIO DO IMPULSO E QUANTIDADE DE MOVIMENTO ................................................................................... 158 5.4 MOVIMENTO IMPULSIVO ............................................................................................................................. 162 5.5 EXEMPLOS ILUSTRATIVOS ............................................................................................................................. 163
5.6 IMPACTO .................................................................................................................................................. 169 5.7 IMPACTO CENTRAL DIRETO .......................................................................................................................... 170
5.8 IMPACTO CENTRAL OBLÍQUO ....................................................................................................................... 176
5.9 IMPACTO CENTRAL OBLÍQUO COM RESTRIÇÃO DE MOVIMENTO ........................................................................... 179
5.10 PROBLEMAS ENVOLVENDO ENERGIA E QUANTIDADE DE MOVIMENTO .................................................................... 183
APÊNDICE A MOVIMENTO RETILÍNEO (1D) .............................................................................................. 187
APÊNDICE B MOVIMENTO SOB FORÇA CENTRAL E APLICAÇÃO À MECÂNICA ESPACIAL ........................... 209

Prof.: Carlos Arthur Cavalcante 4

Prof.: Carlos Arthur Cavalcante 5
Prefácio à 2ª Versão
Essa apostila apresenta o conteúdo ministrado na disciplina ENG002 – Mecânica Geral II da
Universidade Federal da Bahia (UFBA) no período letivo imediatamente subsequente ao
período letivo 2020.1 (anulado) e 2020.2 (denominado Semestre Letivo Suplementar – SLS),
semestres letivos radicalmente impactados pela pandemia do COVID-19.
Ainda sob o impacto e os recrudescimentos da pandemia do COVID-19 ao longo do ano de
2020, o período letivo 2021.1 iniciou-se com poucas incertezas quanto ao pífio desempenho
econômico e social do Brasil. Em um semestre letivo ainda ministrado por meio de aulas
virtuais remotas (e muitas vezes assíncronas ou precariamente gravadas), espero que esta
apostila seja efetivamente um instrumento de aprendizado dos estudantes de engenharia e
estimule o desenvolvimento de seus conhecimentos sobre Cinemática e Dinâmica da partícula.
A decisão de elaborá-la e torná-la acessível decorreu da solicitação de muitos alunos da UFBA
pela disponibilização do material apresentado em aulas. Creio realmente ter desenvolvido um
material didático mais apropriado às necessidades dos alunos e implementado um processo de
melhoria contínua no ensino da disciplina.
Considerando que a época atual é caracterizada pelo uso intensivo da computação eletrônica e
da álgebra vetorial, a abordagem adotada enfatiza o desenvolvimento da capacidade de modelar
os mais diversos problemas de cinemática e dinâmica da partícula por meio do cálculo vetorial.
A principal fonte bibliográfica utilizada foi o livro “Mecânica Vetorial para Engenheiros”, de
autoria dos Professores Ferdinand P. Beer e E. Russel Johnston, Jr. Pelo menos desde 1980,
professores da UFBA têm adotado o segundo volume (Dinâmica), como o livro texto para a
disciplina e, atualmente, ele se encontra na 9ª edição.
Por fim, espero que esta apostila inicie um processo virtuoso de melhoria contínua no ensino e
aprendizagem da disciplina Mecânica Geral II.
Prof. Dr. Carlos Arthur M T Cavalcante
Departamento de Engenharia Mecânica (DEM)
Universidade Federal da Bahia (UFBA)
Salvador, 03 de agosto de 2018

Prof.: Carlos Arthur Cavalcante 6
Prefácio à 11ª Versão
Essa apostila apresenta o conteúdo ministrado na disciplina ENG002 – Mecânica Geral II da
Universidade Federal da Bahia (UFBA) no semestre letivo 2021.1, imediatamente subsequente
ao semestre letivo suplementar (SLS) instituído no contexto da pandemia COVID-19.
Apesar mobilização e dos inauditos esforços do Sistema de Saúde (SUS), bem como do início
do processo de vacinação, os primeiros meses de 20121 caracterizou-se pela persistência da
pandemia COVID-19 que foi, inclusive, agravada pelo surgimento de novas variantes virai. Por
isso, no semestre letivo 2021.1 houve a regularização na inscrição de alunos em disciplinas,
porém com a persistência da diretriz se manter um cuidadoso distanciamento social através da
manutenção das aulas virtuais à distância, do mesmo modo como ocorreu no SLS. Devido às
especificidades do ensino virtual síncrono e assíncrono, as metodologias e ferramentas de
ensino e avaliação remotas manteve a sequência de tópicos abordados no SLS visando fornecer
ao estudante uma oportunidade de desenvolver sua aprendizagem de modos mais intuitivos e
autônomos.
Estou certo de que esta apostila continuará sendo um efetivo instrumento de aprendizado e
formação dos estudantes de engenharia no desenvolvimento de suas capacidades de
modelagem, simulação e solução de problemas reais de engenharia que se utilizam dos
conceitos e métodos da Dinâmica de Partículas.
As motivações iniciais em elaborá-la permanecem; e eu creio que o seu conteúdo didático, as
melhorias incrementais advindas da sua própria utilização da apostila como material didático
em sala, e as esporádicas porem sagazes sugestões de melhorias dos estudantes revelam o acerto
de se adotar esta apostila como um material mais do que apropriado às necessidades dos alunos
que seguramente implementou um processo de melhoria contínua no processo de ensino e
aprendizagem da disciplina.
Assim como nas versões anteriores, a abordagem adotada enfatiza o desenvolvimento da
capacidade do estudante em modelar os mais diversos problemas de dinâmica da partícula por
meio do cálculo vetorial, mantendo-o sintonizado com a época atual, fortemente caracterizada
pelo uso intensivo do cálculo computacional, da álgebra vetorial e do processamento de grandes
volumes de dados (Big Data).
A principal fonte bibliográfica utilizada para elaboração desta Apostila foi o livro “Mecânica
Vetorial para Engenheiros”, de autoria dos Professores Ferdinand P. Beer e E. Russel Johnston,
Jr. Pelo menos desde 1980, professores da UFBA têm adotado o segundo volume (Dinâmica),
como o livro texto para a disciplina e, atualmente, ele se encontra na 9ª edição.
Por fim, espero que esta apostila continue sendo um processo virtuoso de melhoria contínua no
ensino e aprendizagem da disciplina Mecânica Geral II.
Prof. Dr. Carlos Arthur M T Cavalcante
Departamento de Engenharia Mecânica (DEM)
Universidade Federal da Bahia (UFBA)
Salvador, 22 de fevereiro de 2021

Prof.: Carlos Arthur Cavalcante 7
1 Introdução
O Universo existe e nós podemos percebê-lo. Ele é grande. Tem bilhões de galáxias, cada uma
delas com bilhões de estrelas. Ele está se expandindo. Além da matéria comum (5% de toda a
matéria e energia visíveis), tem a matéria escura (25%) e tem a energia escura (70%). A Ciência
não encontrou, ainda, uma explicação definitiva para tudo isso, embora a teoria geral da
relatividade, a mecânica quântica e, mais recentemente, a teoria das cordas, venham
contribuindo para o entendimento científico da origem e comportamento do Universo.
Apesar de todos os avanços, a Mecânica Newtoniana (ou a Mecânica Clássica) permanece
válida e mais do que adequada para a modelagem e solução dos problemas de engenharia,
incluindo movimentos de planetas e satélites artificiais.
A Mecânica é a ciência que estuda a posição dos objetos no Espaço à medida em que o tempo
passa. Isto é, a Mecânica é a ciência que estuda o movimento dos objetos.
Os conceitos de Espaço e Tempo são conceitos fundamentais na Mecânica. São conceitos
fundamentais porque são considerados essenciais para a definição do conceito de movimento.
Mas isso não quer dizer que o conhecimento humano conseguiu decifrar o significado desses
conceitos. Quer dizer apenas que os conceitos (Newtonianos) de Espaço, de Tempo e de
Movimento são válidos e funcionam na solução de uma grande maioria dos problemas de
engenharia.
O estudo da Mecânica divide-se em duas partes: a Estática e a Dinâmica.
Estática é a parte da Mecânica que estuda os corpos em equilíbrio estático ou em repouso.
Dinâmica é a parte da Mecânica que estuda os corpos em movimento.
A Dinâmica divide-se em duas partes: Cinemática e Cinética.
Cinemática é a parte da Dinâmica que estuda o movimento dos corpos, sem considerar
as causas ou forças geradoras do movimento. Isto é, estuda o movimento dos corpos,
independentemente das forças ou das causas que são necessárias para que o movimento
ocorra.
Cinética é a parte da Dinâmica que estuda a relação existente entre as forças e os
movimentos dos corpos. A Cinética é usada para prever qual será o movimento de um
corpo em função das forças que atuam sobre ele; ou para determinar quais são as forças
necessárias para que um corpo tenha um movimento desejado.

Prof.: Carlos Arthur Cavalcante 8
2 Cinemática de Partículas
Todo e qualquer movimento de uma partícula ocorre nas três dimensões espaciais.
No caso mais geral, a partícula se move de tal modo que a sua trajetória é uma “curva no
espaço” e dizemos que a partícula realiza um “movimento no espaço”. Denominaremos este
movimento de Movimento 3D.
No caso particular em que a partícula se move de tal modo que a sua trajetória é uma “curva
no plano”, dizemos que partícula realiza um “movimento no plano”. Nesta apostila,
denominaremos este movimento de Movimento 2D. Para que fiquem bem entendidos conceitos e palavras: o movimento da partícula se dá nas três dimensões
do espaço, apenas ocorre que a sua trajetória pode ser representada por uma curva contida em um certo
plano (plano este que está no espaço tridimensional).
No caso mais particular ainda, em que a partícula se move de tal modo que a sua trajetória é
uma “linha reta”, dizemos que partícula realiza um “movimento retilíneo”. Nesta apostila,
denominaremos este movimento de Movimento 1D. Para que fiquem bem entendidos conceitos e palavras: o movimento da partícula se dá nas três dimensões
do espaço, apenas ocorre que a sua trajetória pode ser representada por uma certa reta (reta esta que está
no espaço tridimensional).
O estudo detalhado dos Movimentos 1D, seus diversos tipos e suas aplicações na solução de
diversos tipos de problemas de engenharia é apresentado no Apêndice A.

Prof.: Carlos Arthur Cavalcante 9
2.1 Vetor Posição
A posição de uma partícula em movimento (3D, 2D ou 1D), em qualquer instante 𝑡, é
determinada pelo seu vetor posição 𝑟 (a seta que vai da origem 𝑂 de um sistema de coordenadas
com o ponto 𝑃 ocupado pela partícula).
A posição de uma partícula em movimento (3D, 2D ou 1D), em
qualquer instante 𝑡, pode ser determinada também pela sua posição
escalar 𝑠 (o comprimento do arco de trajetória que vai de um ponto
de origem 𝑃𝑂 até o ponto 𝑃 ocupado pela partícula ao longo de sua
trajetória).
O vetor posição 𝑟 é uma função vetorial da variável escalar 𝑡, ou seja, 𝑟 = 𝑟(𝑡).
A posição escalar 𝑠 é uma função escalar da variável escalar 𝑡, ou seja, 𝑠 = 𝑠(𝑡). A função 𝑠 =𝑠(𝑡) é denominada de equação horária do movimento.
Prof.: Carlos Arthur Cavalcante 10
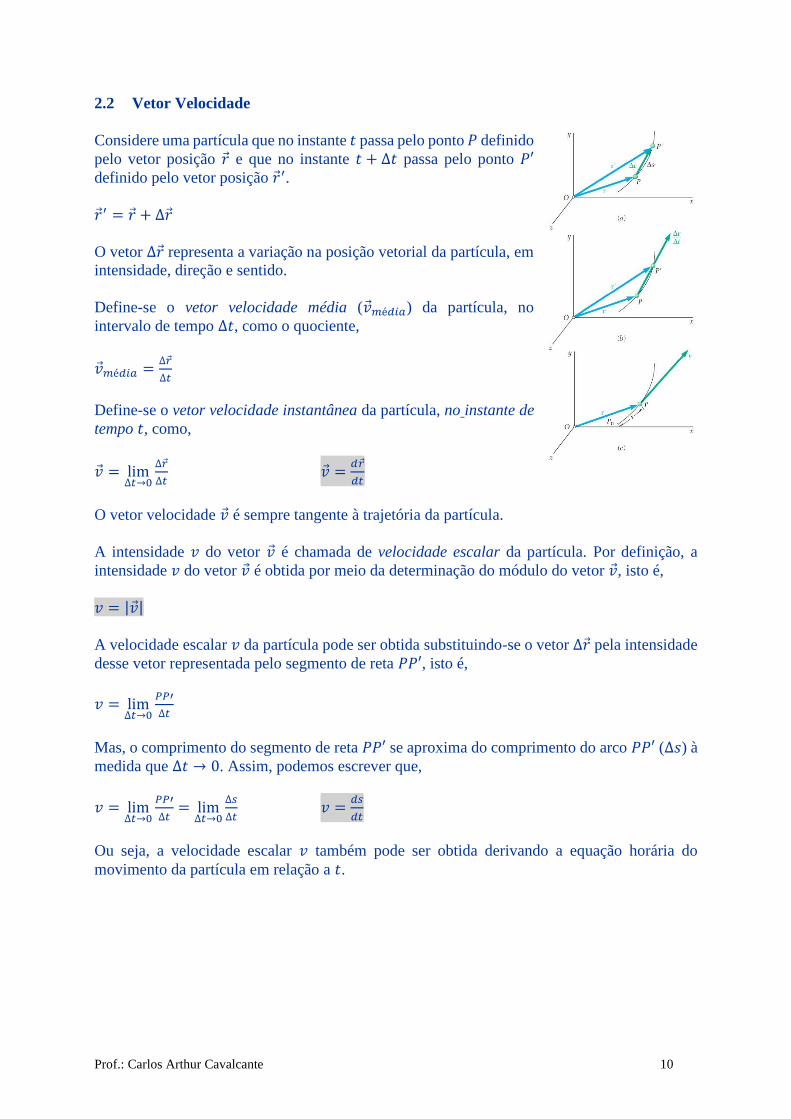
2.2 Vetor Velocidade
Considere uma partícula que no instante 𝑡 passa pelo ponto 𝑃 definido
pelo vetor posição 𝑟 e que no instante 𝑡 + ∆𝑡 passa pelo ponto 𝑃′ definido pelo vetor posição 𝑟′.
𝑟′ = 𝑟 + ∆𝑟
O vetor ∆𝑟 representa a variação na posição vetorial da partícula, em
intensidade, direção e sentido.
Define-se o vetor velocidade média (��𝑚é𝑑𝑖𝑎) da partícula, no
intervalo de tempo ∆𝑡, como o quociente,
��𝑚é𝑑𝑖𝑎 =∆𝑟
∆𝑡
Define-se o vetor velocidade instantânea da partícula, no instante de
tempo 𝑡, como,
�� = lim∆𝑡→0
∆𝑟
∆𝑡 �� =
𝑑𝑟
𝑑𝑡
O vetor velocidade �� é sempre tangente à trajetória da partícula.
A intensidade 𝑣 do vetor �� é chamada de velocidade escalar da partícula. Por definição, a
intensidade 𝑣 do vetor �� é obtida por meio da determinação do módulo do vetor ��, isto é,
𝑣 = |��|
A velocidade escalar 𝑣 da partícula pode ser obtida substituindo-se o vetor ∆𝑟 pela intensidade
desse vetor representada pelo segmento de reta 𝑃𝑃′, isto é,
𝑣 = lim∆𝑡→0
𝑃𝑃′
∆𝑡
Mas, o comprimento do segmento de reta 𝑃𝑃′ se aproxima do comprimento do arco 𝑃𝑃′ (∆𝑠) à
medida que ∆𝑡 → 0. Assim, podemos escrever que,
𝑣 = lim∆𝑡→0
𝑃𝑃′
∆𝑡= lim
∆𝑡→0
∆𝑠
∆𝑡 𝑣 =
𝑑𝑠
𝑑𝑡
Ou seja, a velocidade escalar 𝑣 também pode ser obtida derivando a equação horária do
movimento da partícula em relação a 𝑡.

Prof.: Carlos Arthur Cavalcante 11
2.3 Vetor Aceleração
Considere uma partícula que no instante 𝑡 passa pelo ponto 𝑃 com um vetor
velocidade �� e que no instante 𝑡 + ∆𝑡 passa pelo ponto 𝑃′ com um vetor
velocidade ��′.
Desenhamos os vetores �� e ��′ a partir de uma mesma origem 𝑂′ e
constatamos que,
��′ = �� + ∆��
O vetor ∆�� representa a variação da velocidade �� da partícula durante o
intervalo de tempo ∆𝑡. Observar que ∆�� representa tanto a variação na
direção do vetor velocidade ��, quanto a variação na velocidade escalar 𝑣 ou
intensidade do vetor velocidade ��.
Define-se o vetor aceleração média (��𝑚é𝑑𝑖𝑎) da partícula, no intervalo de
tempo ∆𝑡, como o quociente,
��𝑚é𝑑𝑖𝑎 =∆��
∆𝑡
Define-se o vetor aceleração instantânea da partícula no instante de tempo
𝑡 como o vetor,
�� = lim∆𝑡→0
∆��
∆𝑡 �� =
𝑑��
𝑑𝑡
Observamos que o vetor aceleração �� é tangente à curva descrita pela
extremidade do vetor �� (denominada de hodógrafa) quando este último é
desenhado a partir da origem fixa 𝑂′ e que, em geral, �� não é tangente à
trajetória da partícula.
Repetindo uma constatação importante, o vetor aceleração �� representa tanto
a variação na direção do vetor velocidade ��, quanto a variação na velocidade
escalar 𝑣 (intensidade do vetor velocidade ��).
Denomina-se de aceleração normal 𝑎𝑛 a componente do vetor aceleração �� responsável pela
variação na direção do vetor velocidade �� e denomina-se de aceleração tangencial 𝑎𝑡 a
componente do vetor aceleração �� responsável pela variação na intensidade do vetor velocidade
�� (velocidade escalar).

Prof.: Carlos Arthur Cavalcante 12
2.4 Componentes Cartesianas dos Vetores Posição, Velocidade e Aceleração
Quando o vetor posição de uma partícula for definido por suas coordenadas retangulares, isto
é, quando o vetor posição 𝑟 for expresso na forma,
𝑟 = 𝑥𝑖 + 𝑦𝑗 + 𝑧��
O vetor velocidade �� =𝑑𝑟
𝑑𝑡 será expresso por:
�� =𝑑𝑟
𝑑𝑡=
𝑑(𝑥𝑖+𝑦𝑗+𝑧��)
𝑑𝑡
�� =𝑑(𝑥𝑖)
𝑑𝑡+𝑑(𝑦𝑗)
𝑑𝑡+𝑑(𝑧��)
𝑑𝑡
�� = (𝑑𝑥
𝑑𝑡𝑖 + 𝑥
𝑑𝑖
𝑑𝑡) + (
𝑑𝑦
𝑑𝑡𝑗 + 𝑦
𝑑𝑗
𝑑𝑡) + (
𝑑𝑧
𝑑𝑡�� + 𝑧
𝑑��
𝑑𝑡)
�� =𝑑𝑥
𝑑𝑡𝑖 +
𝑑𝑦
𝑑𝑡𝑗 +
𝑑𝑧
𝑑𝑡��
�� = 𝑣𝑥𝑖 + 𝑣𝑦𝑗 + 𝑣𝑧 ��
O vetor aceleração �� =𝑑��
𝑑𝑡 será expresso por:
�� =𝑑��
𝑑𝑡=
𝑑(𝑣𝑥𝑖+𝑣𝑦𝑗+𝑣𝑧��)
𝑑𝑡
�� =𝑑(𝑣𝑥𝑖)
𝑑𝑡+𝑑(𝑣𝑦𝑗)
𝑑𝑡+𝑑(𝑣𝑧��)
𝑑𝑡
�� = (𝑑𝑣𝑥
𝑑𝑡𝑖 + 𝑣𝑥
𝑑𝑖
𝑑𝑡) + (
𝑑𝑣𝑦
𝑑𝑡𝑗 + 𝑣𝑦
𝑑𝑗
𝑑𝑡) + (
𝑑𝑣𝑧
𝑑𝑡�� + 𝑣𝑧
𝑑��
𝑑𝑡)
�� =𝑑𝑣𝑥
𝑑𝑡𝑖 +
𝑑𝑣𝑦
𝑑𝑡𝑗 +
𝑑𝑣𝑧
𝑑𝑡��
�� = 𝑎𝑥𝑖 + 𝑎𝑦𝑗 + 𝑎𝑧 ��
O uso de componentes retangulares é particularmente eficaz quando o movimento da partícula
na direção 𝑥, na direção 𝑦 e na direção 𝑧 podem ser estudados separadamente. Isto é, quando a
componente 𝑎𝑥 depende apenas de 𝑡, 𝑥 e/ou 𝑣𝑥 e quando, da mesma forma, 𝑎𝑦 depende apenas
de 𝑡, 𝑦 e/ou 𝑣𝑦 e 𝑎𝑧 depende apenas de 𝑡, 𝑧 e/ou 𝑣𝑧.

Prof.: Carlos Arthur Cavalcante 13
Neste caso, as equações 𝑎𝑥 =𝑑2𝑥
𝑑𝑡2, 𝑎𝑦 =
𝑑2𝑦
𝑑𝑡2 e 𝑎𝑧 =
𝑑2𝑧
𝑑𝑡2 podem integradas independentemente
e o comportamento de cada componente pode ser interpretado como um movimento retilíneo
da projeção da partícula sobre o eixo coordenado correspondente (para um estudo detalhado
dos Movimentos 1D, consulte o Apêndice A).
Por exemplo, no movimento de um projétil, e desde que adotemos o sistema
de coordenadas ilustrado na figura ao lado, temos que,
𝑎𝑥 =𝑑2𝑥
𝑑𝑡2= 0 𝑎𝑦 =
𝑑2𝑦
𝑑𝑡2= −𝑔 𝑎𝑧 =
𝑑2𝑧
𝑑𝑡2= 0
Se as condições iniciais de posição 𝑥0, 𝑦0 e 𝑧0 e as componentes iniciais da
velocidade 𝑣0𝑥, 𝑣0𝑦 e 𝑣0𝑧 forem conhecidas, as equações podem ser
integradas,
𝑣𝑥 = 𝑣0𝑥 𝑣𝑦 = 𝑣0𝑦 − 𝑔𝑡 𝑣𝑧 = 𝑣0𝑧
𝑥 = 𝑥0 + 𝑣0𝑥𝑡 𝑦 = 𝑦0 + 𝑣0𝑦𝑡 −1
2𝑔𝑡2 𝑧 = 𝑧0 + 𝑣0𝑧𝑡
Se, por exemplo, as condições iniciais fossem tais que,
𝑧0 = 0 𝑣0𝑧 = 0
As equações do movimento se reduzem para,
𝑣𝑥 = 𝑣0𝑥 𝑣𝑦 = 𝑣0𝑦 − 𝑔𝑡 𝑣𝑧 = 0
𝑥 = 𝑥0 + 𝑣0𝑥𝑡 𝑦 = 𝑦0 + 𝑣0𝑦𝑡 −1
2𝑔𝑡2 𝑧 = 0
• O movimento da partícula se dá no plano 𝑥𝑦 do sistema de coordenadas adotado – não
haverá movimento na direção 𝑧 pois 𝑣𝑧(𝑡) = 0 para qualquer instante 𝑡; • O movimento na direção horizontal é um movimento retilíneo uniforme;
• O movimento na direção vertical é um movimento retilíneo uniformemente acelerado.
Assim, o movimento pode ser estudado como dois movimentos retilíneos independentes. O
movimento da partícula pode ser entendido como a “combinação vetorial” destes dois
movimentos retilíneos independentes.

Prof.: Carlos Arthur Cavalcante 14
2.4.1 Exemplo-Ilustrativo 01 – Movimento 3D
Ver problema 11.178, pág. 685 – Beer, Johnston, Cornwell, 9a edição.
O movimento tridimensional de uma partícula está determinado pelo
seu vetor posição em função do tempo e dado por 𝑟 = Acos(2𝜋𝑡) 𝑖 +
B𝑡2𝑗 + A sin(2𝜋𝑡) ��. Adotando 𝐴 = 4 e 𝐵 = 3,
a) Determinar as componentes 𝑥, 𝑦 e 𝑧 do vetor posição 𝑟, em
função do tempo 𝑡; b) Determinar as componentes 𝑣𝑥, 𝑣𝑦 e 𝑣𝑧 do vetor velocidade
��, em função do tempo 𝑡; c) Determinar o vetor velocidade ��, em função do tempo 𝑡; d) Determinar a intensidade ou módulo 𝑣 do vetor velocidade ��, em função do tempo 𝑡; e) Determinar as componentes 𝑎𝑥, 𝑎𝑦 e 𝑎𝑧 do vetor aceleração ��, em função do tempo 𝑡;
f) Determinar o vetor aceleração ��, em função do tempo 𝑡; g) Determinar a intensidade ou módulo 𝑎 do vetor aceleração ��, em função do tempo 𝑡;
SOLUÇÃO:
Está explícito no problema que o movimento está sendo descrito por um sistema de coordenadas retangulares
𝑂𝑥𝑦𝑧 dextrogiro1. Além disso, não há nenhuma informação quanto ao “local do
universo” onde o movimento ocorre, mas podemos imaginar que ele ocorre
próximo à superfície de um planeta como o planeta Terra e, dessa forma,
podemos considerar que a direção 𝑥 é horizontal positiva para a “direita”, que a
direção 𝑦 é vertical positiva para “cima” e que a direção 𝑧 é horizontal positiva
para a “frente”.
Foi dado que o vetor posição 𝑟 em qualquer instante 𝑡 é,
𝑟 = 4 cos(2𝜋𝑡) 𝑖 + 3𝑡2𝑗 + 4 sin(2𝜋𝑡) �� ou 𝑟 = [4 cos(2𝜋𝑡)
3𝑡2
4 sin(2𝜋𝑡)]
Logo, as componentes retangulares (componentes 𝑥, 𝑦 e 𝑧) do vetor posição 𝑟 são dadas pelas seguintes
expressões,
𝑥 = 4 cos(2𝜋𝑡) 𝑦 = 3𝑡2 𝑧 = 4 sin(2𝜋𝑡)
Sabemos que,
�� =𝑑𝑟
𝑑𝑡 �� =
𝑑(𝑥𝑖+𝑦𝑗+𝑧𝑖)
𝑑𝑡
Portanto,
�� = (𝑑𝑥
𝑑𝑡) 𝑖 + (
𝑑𝑦
𝑑𝑡) 𝑗 + (
𝑑𝑧
𝑑𝑡) �� ou �� =
[ 𝑑𝑥
𝑑𝑡𝑑𝑦
𝑑𝑡𝑑𝑧
𝑑𝑡 ]
1 Sistema em que o sentido positivo do eixo 𝑧 (o sentido do vetor unitário ��) é obtido pela aplicação da regra da
mão direita ao produto vetorial do vetor unitário 𝑖 (sentido positivo do eixo 𝑥) e do vetor unitário 𝑗 (sentido positivo
do eixo 𝑦). Os alunos devem se valer dos conhecimentos adquiridos nas disciplinas básicas para desenvolver a
habilidade de definir e aplicar corretamente sistemas de coordenadas adequados aos problemas em questão.
𝑂
𝑦
𝑧
𝑥

Prof.: Carlos Arthur Cavalcante 15
�� = (𝑑(4 cos(2𝜋𝑡))
𝑑𝑡) 𝑖 + (
𝑑(3𝑡2)
𝑑𝑡) 𝑗 + (
𝑑(4 sin(2𝜋𝑡))
𝑑𝑡) �� ou �� =
[ 𝑑(4 cos(2𝜋𝑡))
𝑑𝑡
𝑑(3𝑡2)
𝑑𝑡𝑑(4 sin(2𝜋𝑡))
𝑑𝑡 ]
�� = (−4 sin(2𝜋𝑡) 2𝜋)𝑖 + (6𝑡)𝑗 + (4 cos(2𝜋𝑡) 2𝜋)�� ou �� = [
−4 sin(2𝜋𝑡) 2𝜋
6𝑡
4 cos(2𝜋𝑡) 2𝜋
]
�� = (−8𝜋 sin(2𝜋𝑡))𝑖 + (6𝑡)𝑗 + (8𝜋 cos(2𝜋𝑡))�� ou �� = [
−8𝜋 sin(2𝜋𝑡)
6𝑡
8𝜋 cos(2𝜋𝑡)
]
Logo, as componentes retangulares (componentes 𝑣𝑥, 𝑣𝑦 e 𝑣𝑧) do vetor velocidade �� são dadas pelas seguintes
expressões,
𝑣𝑥 = −8𝜋 sin(2𝜋𝑡) 𝑣𝑦 = 6𝑡 𝑣𝑧 = 8𝜋 cos(2𝜋𝑡)
E a intensidade ou módulo 𝑣 do vetor velocidade �� é,
𝑣 = √�� ∙ �� (A raiz quadrada do produto escalar do vetor �� por ele mesmo).
Relembrando a definição de produto escalar em termos de componentes retangulares, escrevemos que,
𝑣 = √𝑣𝑥𝑣𝑥 + 𝑣𝑦𝑣𝑦 + 𝑣𝑧𝑣𝑧 𝑣 = √(𝑣𝑥)2 + (𝑣𝑦)
2+ (𝑣𝑧)
2
𝑣 = √(−8𝜋 sin(2𝜋𝑡))2 + (6𝑡)2 + (8𝜋 cos(2𝜋𝑡))2
𝑣 = √64𝜋2 sin2(2𝜋𝑡) + 36𝑡2 + 64𝜋2 cos2(2𝜋𝑡)
𝑣 = √64𝜋2(sin2(2𝜋𝑡) + cos2(2𝜋𝑡)) + 36𝑡2
𝑣 = √64𝜋2(1) + 36𝑡2
𝑣 = +√64𝜋2 + 36𝑡2 O módulo ou intensidade de qualquer vetor deve ser um escalar positivo.
Sabemos que, �� =𝑑��
𝑑𝑡 e que, portanto,
�� = (𝑑𝑣𝑥
𝑑𝑡) 𝑖 + (
𝑑𝑣𝑦
𝑑𝑡) 𝑗 + (
𝑑𝑣𝑧
𝑑𝑡) �� ou �� =
[ 𝑑𝑣𝑥
𝑑𝑡𝑑𝑣𝑦
𝑑𝑡𝑑𝑣𝑧
𝑑𝑡 ]
�� = (𝑑(−8𝜋 sin(2𝜋𝑡))
𝑑𝑡) 𝑖 + (
𝑑(6𝑡)
𝑑𝑡) 𝑗 + (
𝑑(8𝜋 cos(2𝜋𝑡))
𝑑𝑡) �� ou �� =
[ 𝑑(−8𝜋 sin(2𝜋𝑡))
𝑑𝑡𝑑(6𝑡)
𝑑𝑡𝑑(8𝜋 cos(2𝜋𝑡))
𝑑𝑡 ]
�� = (−8𝜋 cos(2𝜋𝑡) 2𝜋)𝑖 + (6)𝑗 + (−8𝜋 sin(2𝜋𝑡) 2𝜋)�� ou �� = [
−8𝜋 cos(2𝜋𝑡) 2𝜋
6
−8𝜋 sin(2𝜋𝑡) 2𝜋
]

Prof.: Carlos Arthur Cavalcante 16
�� = (−16𝜋2 cos(2𝜋𝑡))𝑖 + (6)𝑗 + (−16𝜋2 sin(2𝜋𝑡))�� ou �� = [
−16𝜋2 cos(2𝜋𝑡)
6
−16𝜋2 sin(2𝜋𝑡)
]
Logo, as componentes retangulares (componentes 𝑎𝑥, 𝑎𝑦 e 𝑎𝑧) do vetor aceleração �� são dadas pelas seguintes
expressões,
𝑎𝑥 = −16𝜋2 cos(2𝜋𝑡) 𝑎𝑦 = 6 𝑎𝑧 = −16𝜋2 sin(2𝜋𝑡)
E a intensidade ou módulo 𝑎 do vetor velocidade �� é,
𝑎 = √�� ∙ �� (A raiz quadrada do produto escalar do vetor �� por ele mesmo).
Relembrando a definição de produto escalar em termos de componentes retangulares, escrevemos que,
𝑎 = √𝑎𝑥𝑎𝑥 + 𝑎𝑦𝑎𝑦 + 𝑎𝑧𝑎𝑧 𝑎 = √(𝑎𝑥)2 + (𝑎𝑦)
2+ (𝑎𝑧)
2
𝑎 = √(−16𝜋2 cos(2𝜋𝑡))2 + (6)2 + (−16𝜋2 sin(2𝜋𝑡))2
𝑎 = √(256𝜋4 cos2(2𝜋𝑡)) + (36) + (256𝜋4 sin2(2𝜋𝑡))
𝑎 = √256𝜋4(cos2(2𝜋𝑡) + sin2(2𝜋𝑡)) + (36)
𝑎 = √256𝜋4(1) + (36)
𝑎 = +√256𝜋4 + 36 O módulo ou intensidade de qualquer vetor deve ser um escalar positivo.

Prof.: Carlos Arthur Cavalcante 17
2.4.2 Exemplo-Ilustrativo 02 – Movimento 2D.
Um projétil é lançado (no planeta Terra) com velocidade
inicial ��0, de intensidade 𝑣0 = 160 𝑚/𝑠 e formando um
ângulo 𝛼 = 30° com a direção horizontal. O sistema de
coordenadas adotado para analisar o movimento é o
sistema 𝑂𝑥𝑦 ilustrado na figura ao lado. No sistema de
coordenadas 𝑂𝑥𝑦 adotado, a localização do ponto de
lançamento é dada por 𝑥0 = −50 𝑚 e 𝑦0 = 120 𝑚. Desprezando a resistência do ar, analisar o
movimento do projétil e determinar:
a) As componentes 𝑎𝑥 e 𝑎𝑦 do vetor aceleração ��, em função do tempo 𝑡;
b) O vetor aceleração ��, em função do tempo 𝑡; c) A intensidade ou módulo 𝑎 do vetor aceleração ��, em função do tempo 𝑡; d) As componentes 𝑣𝑥 e 𝑣𝑦 do vetor velocidade ��, em função do tempo 𝑡;
e) O vetor velocidade ��, em função do tempo 𝑡; f) A intensidade ou módulo 𝑣 do vetor velocidade ��, em função do tempo 𝑡; g) As componentes 𝑥, 𝑦 e 𝑧 do vetor posição 𝑟, em função do tempo 𝑡; h) O vetor posição 𝑟, em função do tempo 𝑡;
SOLUÇÃO:
Observação:
Como todo movimento, o movimento do projétil ocorre no espaço tridimensional. Adotar um sistema genérico
de coordenadas 𝑂𝑥𝑦𝑧, iria requerer que o movimento do projétil fosse descrito por suas três componentes de
posição – as componentes 𝑥, 𝑦 e 𝑧. O movimento do projétil segue uma trajetória (uma parábola) que está sempre
contida no plano vertical 𝑥𝑦, onde 𝑦 é a direção vertical e 𝑥 é a direção horizontal seja ela a direção norte, leste,
sul, oeste ou etc.). Assim, escolher um sistema de coordenadas 𝑂𝑥𝑦𝑧 de tal modo que os eixos 𝑥 e 𝑦 definam o
mesmo plano que contém a trajetória 2D do movimento é uma escolha inteligente que simplifica os cálculos
requeridos para a solução do problema.
Não importando qual tenha sido a direção 𝑥 do lançamento (norte, leste, sul, etc.), o projetil sempre descreverá
uma trajetória parabólica no plano vertical 𝑂𝑥𝑦 adotado.
�� = [
𝑎𝑥𝑎𝑦𝑎𝑧] = [
𝑎𝑥𝑎𝑦0] �� = [
𝑣𝑥𝑣𝑦𝑣𝑧] = [
𝑣𝑥𝑣𝑦0] 𝑟 = [
𝑥𝑦𝑧] = [
𝑥𝑦0]
Com uma escolha adequada do sistema de coordenas, os vetores no espaço 𝑅2.
�� = [𝑎𝑥𝑎𝑦] �� = [
𝑣𝑥𝑣𝑦] 𝑟 = [
𝑥𝑦]
O sistema de coordenadas foi escolhido de tal modo que os eixos 𝑥 e 𝑦 definem o plano vertical que contém o
vetor velocidade inicial ��0. Desse modo que pode ser descrito como um movimento 2D regido pelas seguintes
equações:
Movimento na direção 𝒙 Movimento na direção 𝑦
𝑎𝑥 = 0 𝑎𝑦 = −𝑔
𝑣𝑥 = 𝑣0𝑥 𝑣𝑦 = 𝑣0𝑦 − 𝑔𝑡
𝑥 = 𝑥0 + 𝑣0𝑥𝑡 𝑦 = 𝑦0 + 𝑣0𝑦𝑡 −1
2𝑔𝑡2
a) As componentes 𝑎𝑥 e 𝑎𝑦 do vetor aceleração ��, em função do tempo 𝑡;
𝑎𝑥 = 0 𝑎𝑦 = −9,81 𝑚 𝑠2⁄
𝑣0 𝑦
𝑥 𝑂
𝑦0 𝑥0

Prof.: Carlos Arthur Cavalcante 18
b) Determinar o vetor aceleração ��, em função do tempo 𝑡;
�� = [0
−9,81] Ou �� = 0𝑖 − 9,81𝑗
c) Determinar a intensidade ou módulo 𝑎 do vetor aceleração ��, em função do tempo 𝑡;
𝑎 = √�� ∙ �� Raiz quadrada do produto escalar do vetor �� por ele mesmo.
Assim, escrevemos,
𝑎 = √[0
−9,81] ∙ [
0−9,81
] 𝑎 = √(0)2 + (−9,81)2 𝑎 = √0 + 96,2361
𝑎 = 9,81 𝑚 𝑠2⁄
d) Determinar as componentes 𝑣𝑥 e 𝑣𝑦 do vetor velocidade ��, em função do tempo 𝑡;
𝑣𝑥 = 𝑣0𝑥 𝑣𝑦 = 𝑣0𝑦 − 𝑔𝑡
𝑣𝑥 = 𝑣0 cos 𝛼 𝑣𝑦 = 𝑣0 sin 𝛼 − 𝑔𝑡
𝑣𝑥 = 160 cos 30° 𝑣𝑦 = 160 sin 30° − 9,81𝑡
𝑣𝑥 = 160 cos 30° 𝑣𝑦 = 160 sin 30° − 9,81𝑡
𝑣𝑥 = 160√3
2 𝑣𝑦 = 160
1
2− 9,81𝑡
𝑣𝑥 = 80√3 𝑣𝑦 = 80 − 9,81𝑡
e) Determinar o vetor velocidade ��, em função do tempo 𝑡;
�� = [ 80√380 − 9,81𝑡
] Ou �� = (80√3)𝑖 + (80 − 9,81𝑡)𝑗
f) Determinar a intensidade ou módulo 𝑣 do vetor velocidade ��, em função do tempo 𝑡;
𝑣 = √�� ∙ �� Raiz quadrada do produto escalar do vetor �� por ele mesmo.
É equivalente a
𝑣 = √(𝑣𝑥)2 + (𝑣𝑦)
2
Assim, escrevemos,
𝑣 = √[ 80√380 − 9,81𝑡
] ∙ [ 80√380 − 9,81𝑡
] 𝑣 = √(80√3)2+ (80 − 9,81𝑡)2
𝑣 = √19200 + (80 − 9,81𝑡)2 𝑣 = √96,2361𝑡2 − 1569,6𝑡 + 25600
𝑣 = √96,2361𝑡2 − 1569,6𝑡 + 25600
Prof.: Carlos Arthur Cavalcante 19
g) Determinar as componentes 𝑥 e 𝑦 do vetor posição 𝑟, em função do tempo 𝑡;
𝑥 = 𝑥0 + 𝑣0𝑥𝑡 𝑦 = 𝑦0 + 𝑣0𝑦𝑡 −1
2𝑔𝑡2
𝑥 = −50 + 80√3𝑡 𝑦 = 120 + 80𝑡 −1
29,81𝑡2
h) Determinar o vetor posição 𝑟, em função do tempo 𝑡;
𝑟 = [−50 + 80√3𝑡
120 + 80𝑡 −1
29,81𝑡2
] Ou 𝑟 = (−50 + 80√3𝑡)𝑖 + (120 + 80𝑡 −1
29,81𝑡2) 𝑗

Prof.: Carlos Arthur Cavalcante 20
2.4.3 Exemplo-Ilustrativo 03 – Movimento 1D.
O movimento retilíneo de uma partícula é definido pela relação
𝑠 = 8𝑡3 − 18𝑡2 + 2𝑡 + 6,85, onde a posição 𝑠 é medida ao longo
da trajetória retilínea é expressa em metros e o tempo 𝑡 é expresso
em segundos. Analisar o movimento do projétil e determinar:
a) O vetor velocidade ��, em função do tempo 𝑡; b) O vetor aceleração ��, em função do tempo 𝑡.
SOLUÇÃO:
Trata-se de um movimento retilíneo (1D).
O sistema de coordenadas adotado é um eixo ordenado com origem em 𝑂 e sentido positivo conforme indicado na
figura.
Observação:
O movimento retilíneo ocorre no espaço tridimensional e, se fosse adotado um sistema de coordenadas 𝑂𝑥𝑦𝑧
qualquer, este mesmo movimento retilíneo seria descrito por suas componentes 𝑥, 𝑦 e 𝑧. Adotar um sistema de
coordenadas 𝑂𝑥𝑦𝑧 de tal modo que a direção de um dos eixos (no caso o eixo 𝑥) coincida com a trajetória retilínea
da partícula, apenas simplifica os cálculos requeridos para a solução do problema.
�� = [
𝑎𝑥𝑎𝑦𝑎𝑧] = [
𝑎𝑥00] �� = [
𝑣𝑥𝑣𝑦𝑣𝑧] = [
𝑣𝑥00] 𝑟 = [
𝑥𝑦𝑧] = [
𝑥00]
Com a escolha adequada do sistema de coordenas, os vetores serão vetores unidimensionais.
�� = [𝑎𝑥] �� = [𝑣𝑥] 𝑟 = [𝑥]
Isto é,
�� = 𝑎𝑥𝑖 �� = 𝑣𝑥𝑖 𝑟 = 𝑥𝑖
Adicionalmente, uma vez que o vetor aceleração ��, o vetor velocidade �� e o vetor posição 𝑟 terão sempre a
mesma direção 𝑖, eles estarão completamente especificados se especificarmos as suas componentes 𝑎𝑥, 𝑣𝑥 e 𝑥.
Ou seja, para especificarmos o vetor �� basta especificarmos o escalar 𝑎𝑥 (positivo ou negativo); para
especificarmos o vetor �� basta especificarmos o escalar 𝑣𝑥 (positivo ou negativo); e para especificarmos o vetor
𝑟 basta especificarmos o escalar 𝑥 (positivo ou negativo).
Por causa disso, é comum “renomear” o escalar 𝑎𝑥 (positivo ou negativo) simplesmente pela letra 𝑎; “renomear”
o escalar 𝑣𝑥 (positivo ou negativo) simplesmente pela letra 𝑣; e “renomear” o escalar 𝑥 (positivo ou negativo)
simplesmente pela letra... 𝑥.
Assim, quando se trata de um movimento retilíneo, denominamos de 𝑎 (um escalar positivo ou negativo) “a
componente 𝑎𝑥 do vetor aceleração da partícula” (e não o módulo desse vetor aceleração); denominamos por 𝑣
(um escalar positivo ou negativo) “a componente 𝑣𝑥 do vetor velocidade da partícula” (e não o módulo desse
vetor velocidade); e denominamos por 𝑥 (um escalar positivo ou negativo) “a componente 𝑥 do vetor posição da
partícula” (e não o módulo do vetor posição 𝑟).
Assim, temos que,
𝑠 = 8𝑡3 − 18𝑡2 + 2𝑡 + 6,85 𝑣 =𝑑𝑠
𝑑𝑡
𝑣 = 24𝑡2 − 36𝑡 + 2
𝑂
𝑠 𝑣0

Prof.: Carlos Arthur Cavalcante 21
𝑎 = 48𝑡 − 36
Assim, concluímos que,
�� = (24𝑡2 − 36𝑡 + 2)𝑖
𝑟 = (8𝑡3 − 18𝑡2 + 2𝑡 + 6,85)𝑖
E o movimento (retilíneo) fica determinado!

Prof.: Carlos Arthur Cavalcante 22
2.5 Entendendo a Arbitrariedade do Sistema de Coordenadas – Exemplos Ilustrativos
Para entender a questão da arbitrariedade do sistema de coordenadas adotado por cada
modelador do problema, apresentamos um problema bastante conhecido solucionado por
meio da adoção de diferentes sistemas de coordenadas, a fim de ilustrar que a escolha
(arbitrária) do sistema de coordenadas não afeta a solução de problemas.
2.5.1 Exemplo-Ilustrativo 04.
Um projétil é disparado de um platô a 120 𝑚 de altura do
solo com uma velocidade inicial de 160 𝑚/𝑠 em um
ângulo 30° com a horizontal. Adotando o sistema de
coordenadas 𝑂𝑥𝑦 ilustrado na figura ao lado, e
desprezando a resistência do ar, determinar: (a) a distância
horizontal 𝑑 entre o ponto de disparo e o ponto onde o
projétil atinge o solo; e; (b) a altura máxima alcançada
pelo projétil em relação ao solo.
SOLUÇÃO:
Considerando o sistema de coordenadas adotado, o movimento do projétil será regido pelas seguintes equações:
𝑎𝑥 = 0 𝑎𝑦 = −9,81
𝑣𝑥 = 80√3 𝑣𝑦 = 80 − 9,81𝑡
𝑥 = −50 + 80√3𝑡 𝑦 = 120 + 80𝑡 − 4,905𝑡2
a) A distância horizontal 𝑑 entre o ponto de disparo e o ponto onde o projétil atinge o solo.
O projétil atinge o solo quando 𝑦 = 0 e seja 𝑡1 o instante em que isso ocorre. Assim, podemos escrever que,
0 = 120 + 80𝑡1 − 4,905𝑡12 −4,905𝑡1
2 + 80𝑡1 + 120 = 0 𝑡1 = {−1,382817,693
Assim, a distância horizontal 𝑑 entre o ponto de disparo e o ponto onde o projétil atinge o solo é,
𝑑 = 𝑥(𝑡1) + 50 𝑑 = (−50 + 80√3(17,693)) + 50 𝑑 = 2.451,6 𝑚
b) A altura máxima alcançada pelo projétil em relação ao solo
A coordenada vertical 𝑦 assume seu valor máximo (𝑦𝑚á𝑥) quando 𝑣𝑦 = 0 e seja 𝑡2 o instante em que isso ocorre.
Assim, podemos escrever que,
0 = 80 − 9,81𝑡2 −80 = −9,81𝑡2 𝑡2 = 8,1549 𝑠
O valor de 𝑦𝑚á𝑥 é,
𝑦𝑚á𝑥 = 𝑦(𝑡2) = 120 + 80(𝑡2) − 4,905(𝑡2)2 𝑦𝑚á𝑥 = 446,20 𝑚
Observando a figura e considerando o sistema de coordenadas adotado, vemos que a altura máxima em relação ao
solo será:
𝐴𝑙𝑡𝑢𝑟𝑎 𝑚á𝑥𝑖𝑚𝑎 = 𝑦𝑚á𝑥 𝐴𝑙𝑡𝑢𝑟𝑎 𝑚á𝑥𝑖𝑚𝑎 = 446,20 𝑚
𝑣0 𝑦
𝑥 𝑂
50 𝑚 120 𝑚
𝑑

Prof.: Carlos Arthur Cavalcante 23
2.5.2 Exemplo-Ilustrativo 05.
Um projétil é disparado de um platô a 120 𝑚 de altura do
solo com uma velocidade inicial de 160 𝑚/𝑠 em um
ângulo 30° com a horizontal. Adotando o sistema de
coordenadas 𝑂𝑥𝑦 ilustrado na figura ao lado, e
desprezando a resistência do ar, determinar: (a) a distância
horizontal 𝑑 entre o ponto de disparo e o ponto onde o
projétil atinge o solo; e; (b) a altura máxima alcançada
pelo projétil em relação ao solo.
SOLUÇÃO:
Considerando o sistema de coordenadas adotado, o movimento do projétil será regido pelas seguintes equações,
𝑎𝑥 = 0 𝑎𝑦 = −9,81
𝑣𝑥 = 80√3 𝑣𝑦 = 80 − 9,81𝑡
𝑥 = −50 + 80√3𝑡 𝑦 = 0 + 80𝑡 − 4,905𝑡2
a) A distância horizontal 𝑑 entre o ponto de disparo e o ponto onde o projétil atinge o solo.
O projétil atinge o solo quando 𝑦 = −120 e seja 𝑡1 o instante em que isso ocorre. Assim, podemos escrever que,
−120 = 0 + 80𝑡1 − 4,905𝑡12 4,905𝑡1
2 − 80𝑡1 − 120 = 0
𝑡1 = {−1,382817,693
𝑡1 = 17,693 𝑠
Assim, a distância horizontal 𝑑 entre o ponto de disparo e o ponto onde o projétil atinge o solo é,
𝑑 = 𝑥(𝑡1) + 50 𝑑 = −50 + 80√3(17,693) + 50 𝑑 = 2.451,6 𝑚
b) A altura máxima alcançada pelo projétil em relação ao solo
A coordenada vertical 𝑦 assume seu valor máximo (𝑦𝑚á𝑥) quando 𝑣𝑦 = 0 e seja 𝑡2 o instante em que isso ocorre.
Assim, podemos escrever que,
0 = 80 − 9,81𝑡2 −80 = −9,81𝑡2 𝑡2 = 8,1550 𝑠
O valor de 𝑦𝑚á𝑥 é,
𝑦𝑚á𝑥 = 𝑦(𝑡2) = 0 + 80(𝑡2) − 4,905(𝑡2)2 𝑦𝑚á𝑥 = 326,20 𝑚
Observando a figura e considerando o sistema de coordenadas adotado, vemos que a altura máxima em relação ao
solo será:
𝐴𝑙𝑡𝑢𝑟𝑎 𝑚á𝑥𝑖𝑚𝑎 = 𝑦𝑚á𝑥 + 120 𝐴𝑙𝑡𝑢𝑟𝑎 𝑚á𝑥𝑖𝑚𝑎 = 326,20 + 120
𝐴𝑙𝑡𝑢𝑟𝑎 𝑚á𝑥𝑖𝑚𝑎 = 446,20 𝑚
𝑣0
𝑦
𝑥 𝑂
50 𝑚 120 𝑚
𝑑

Prof.: Carlos Arthur Cavalcante 24
2.5.3 Exemplo-Ilustrativo 06.
Um projétil é disparado de um platô a 120 𝑚 de altura do
solo com uma velocidade inicial de 160 𝑚/𝑠 em um
ângulo 30° com a horizontal. Adotando o sistema de
coordenadas 𝑂𝑥𝑦 ilustrado na figura ao lado, e
desprezando a resistência do ar, determinar: (a) a distância
horizontal 𝑑 entre o ponto de disparo e o ponto onde o
projétil atinge o solo; e; (b) a altura máxima alcançada pelo
projétil em relação ao solo.
SOLUÇÃO:
Considerando o sistema de coordenadas adotado, o movimento do projétil será regido pelas seguintes equações:
𝑎𝑥 = 0 𝑎𝑦 = +9,81
𝑣𝑥 = 80√3 𝑣𝑦 = −80 + 9,81𝑡
𝑥 = −50 + 80√3𝑡 𝑦 = 0 − 80𝑡 + 4,905𝑡2
a) A distância horizontal 𝑑 entre o ponto de disparo e o ponto onde o projétil atinge o solo.
O projétil atinge o solo quando 𝑦 = +120 e seja 𝑡1 o instante em que isso ocorre. Assim, podemos escrever que,
+120 = 0 − 80𝑡1 + 4,905𝑡12 +4,905𝑡1
2 − 80𝑡1 − 120 = 0 𝑡1 = {−1,382817,693
𝑡1 = 17,693 𝑠
Assim, a distância horizontal 𝑑 entre o ponto de disparo e o ponto onde o projétil atinge o solo é,
𝑑 = 𝑥(𝑡1) + 50 𝑑 = −50 + 80√3(17,693) + 50 𝑑 = 2.451,6 𝑚
b) A altura máxima alcançada pelo projétil em relação ao solo
A coordenada vertical 𝑦 assume seu valor mínimo (𝑦𝑚í𝑛) quando 𝑣𝑦 = 0 e seja 𝑡2 o instante em que isso ocorre.
Assim, podemos escrever que,
0 = −80 + 9,81𝑡2 +80 = +9,81𝑡2 𝑡2 = 8,1550 𝑠
O valor de 𝑦𝑚í𝑛 é,
𝑦𝑚í𝑛 = 𝑦(𝑡2) = 0 − 80(𝑡2) + 4,905(𝑡2)2 𝑦𝑚í𝑛 = 0 − 80(8,1550) + 4,905(8,1550)
2
𝑦𝑚í𝑛 = −326,20 𝑚
Observando a figura e considerando o sistema de coordenadas adotado, vemos que a altura máxima em relação ao
solo será:
𝐴𝑙𝑡𝑢𝑟𝑎 𝑚á𝑥𝑖𝑚𝑎 = |𝑦𝑚í𝑛| + 120 𝐴𝑙𝑡𝑢𝑟𝑎 𝑚á𝑥𝑖𝑚𝑎 = |−326,20| + 120
𝐴𝑙𝑡𝑢𝑟𝑎 𝑚á𝑥𝑖𝑚𝑎 = 446,20 𝑚
𝑣0
𝑦
𝑥 𝑂
50 𝑚 120 𝑚
𝑑
Prof.: Carlos Arthur Cavalcante 25
2.6 Entendendo a Vinculação entre o Sistema de Coordenadas e os Ângulos dos
Vetores – Exemplos Ilustrativos.
Nos exemplos ilustrativos a seguir apresentamos um mesmo problema bastante conhecido
para ser solucionado por meio da adoção de diferentes sistemas de coordenadas a fim de
ilustrar como a escolha (arbitrária) do sistema de coordenadas afeta a determinação dos
valores dos ângulos envolvidos.
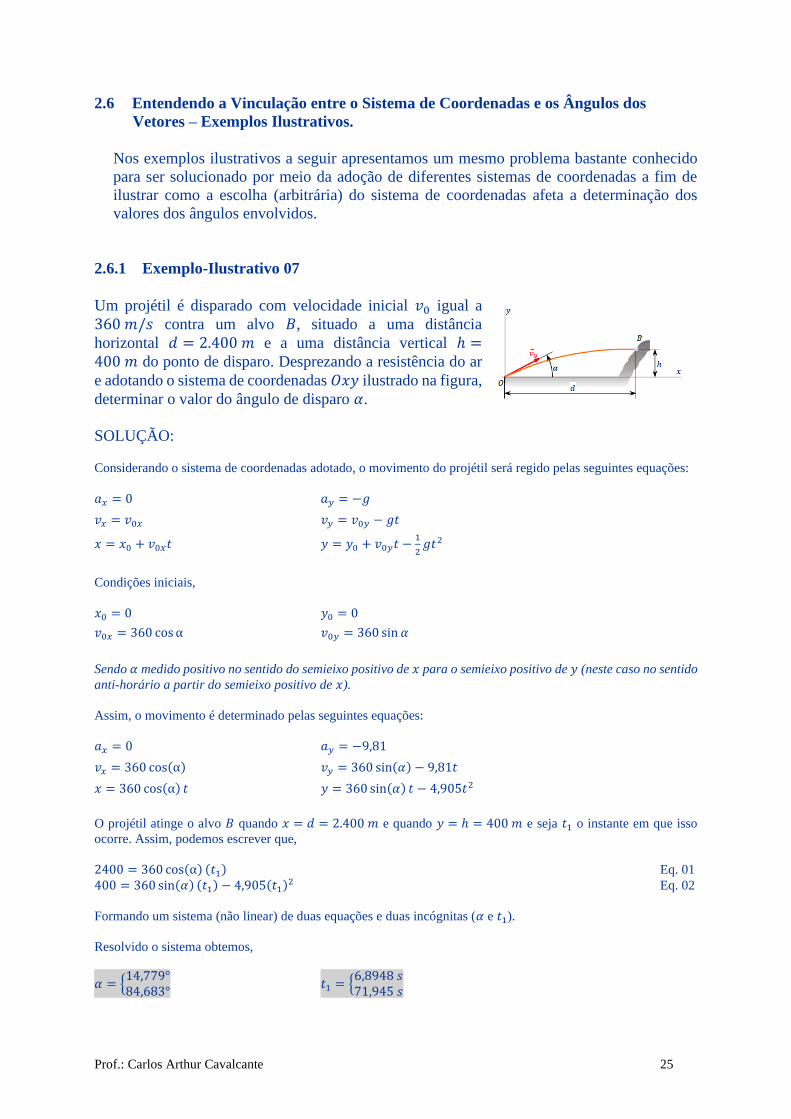
2.6.1 Exemplo-Ilustrativo 07
Um projétil é disparado com velocidade inicial 𝑣0 igual a
360 𝑚/𝑠 contra um alvo 𝐵, situado a uma distância
horizontal 𝑑 = 2.400 𝑚 e a uma distância vertical ℎ =400 𝑚 do ponto de disparo. Desprezando a resistência do ar
e adotando o sistema de coordenadas 𝑂𝑥𝑦 ilustrado na figura,
determinar o valor do ângulo de disparo 𝛼.
SOLUÇÃO:
Considerando o sistema de coordenadas adotado, o movimento do projétil será regido pelas seguintes equações:
𝑎𝑥 = 0 𝑎𝑦 = −𝑔
𝑣𝑥 = 𝑣0𝑥 𝑣𝑦 = 𝑣0𝑦 − 𝑔𝑡
𝑥 = 𝑥0 + 𝑣0𝑥𝑡 𝑦 = 𝑦0 + 𝑣0𝑦𝑡 −1
2𝑔𝑡2
Condições iniciais,
𝑥0 = 0 𝑦0 = 0
𝑣0𝑥 = 360 cos α 𝑣0𝑦 = 360 sin 𝛼
Sendo 𝛼 medido positivo no sentido do semieixo positivo de 𝑥 para o semieixo positivo de 𝑦 (neste caso no sentido
anti-horário a partir do semieixo positivo de 𝑥).
Assim, o movimento é determinado pelas seguintes equações:
𝑎𝑥 = 0 𝑎𝑦 = −9,81
𝑣𝑥 = 360 cos(α) 𝑣𝑦 = 360 sin(𝛼) − 9,81𝑡
𝑥 = 360 cos(α) 𝑡 𝑦 = 360 sin(𝛼) 𝑡 − 4,905𝑡2
O projétil atinge o alvo 𝐵 quando 𝑥 = 𝑑 = 2.400 𝑚 e quando 𝑦 = ℎ = 400 𝑚 e seja 𝑡1 o instante em que isso
ocorre. Assim, podemos escrever que,
2400 = 360 cos(α) (𝑡1) Eq. 01
400 = 360 sin(𝛼) (𝑡1) − 4,905(𝑡1)2 Eq. 02
Formando um sistema (não linear) de duas equações e duas incógnitas (𝛼 e 𝑡1).
Resolvido o sistema obtemos,
𝛼 = {14,779°84,683°
𝑡1 = {6,8948 𝑠71,945 𝑠

Prof.: Carlos Arthur Cavalcante 26
Constatamos que o alvo será atingido se qualquer um dos dois ângulos de disparo for utilizado (ver figura a seguir).
No primeiro caso (𝛼 = 14,779°) o alvo 𝐵 será atingido no instante 𝑡1 = 6,8948 𝑠 após o disparo. No segundo
caso, o alvo 𝐵 será atingido no instante 𝑡1 = 71,945 𝑠 após o disparo.
Solução do sistema equações.
Método da substituição.
Da Eq. 1 tiramos que,
𝑡1 =2400
360 cos(α) 𝑡1 =
20
3 cos(α)
Substituindo na Eq. 2,
400 = 360 sin(𝛼) (20
3 cos(α)) − 4,905 (
20
3 cos(α))2
400 =7200
3
sin(𝛼)
cos(α)− 4,905
400
9 cos2 𝛼
400 = 2400sin(𝛼)
cos(α)− 218
1
cos2 𝛼
Uma vez que 1
cos2 𝛼= sec2 𝛼 = 1 + tan2 𝛼 temos,
400 = 2400 tan 𝛼 − 218(1 + tan2 𝛼)
Ficamos com uma equação e uma incógnita (tan 𝛼).
Resolvendo a equação de 2º grau obtida teremos,
400 = 2400 tan 𝛼 − 218 − 218 tan2 𝛼
−218 tan2 𝛼 + 2400 tan 𝛼 − 218 − 400 = 0
−218 tan2 𝛼 + 2400 tan 𝛼 − 618 = 0
218 tan2 𝛼 − 2400 tan𝛼 + 618 = 0
tan 𝛼 =2400±√(−2400)2−4(218)(618)
2(218)
tan 𝛼 = {0,2638210,745
𝛼 = {tan−1(0,26382)
tan−1(10,745)
𝛼 = {0,25794 𝑟𝑎𝑑1,4780 𝑟𝑎𝑑
= {14,779°84,683°
Prof.: Carlos Arthur Cavalcante 27
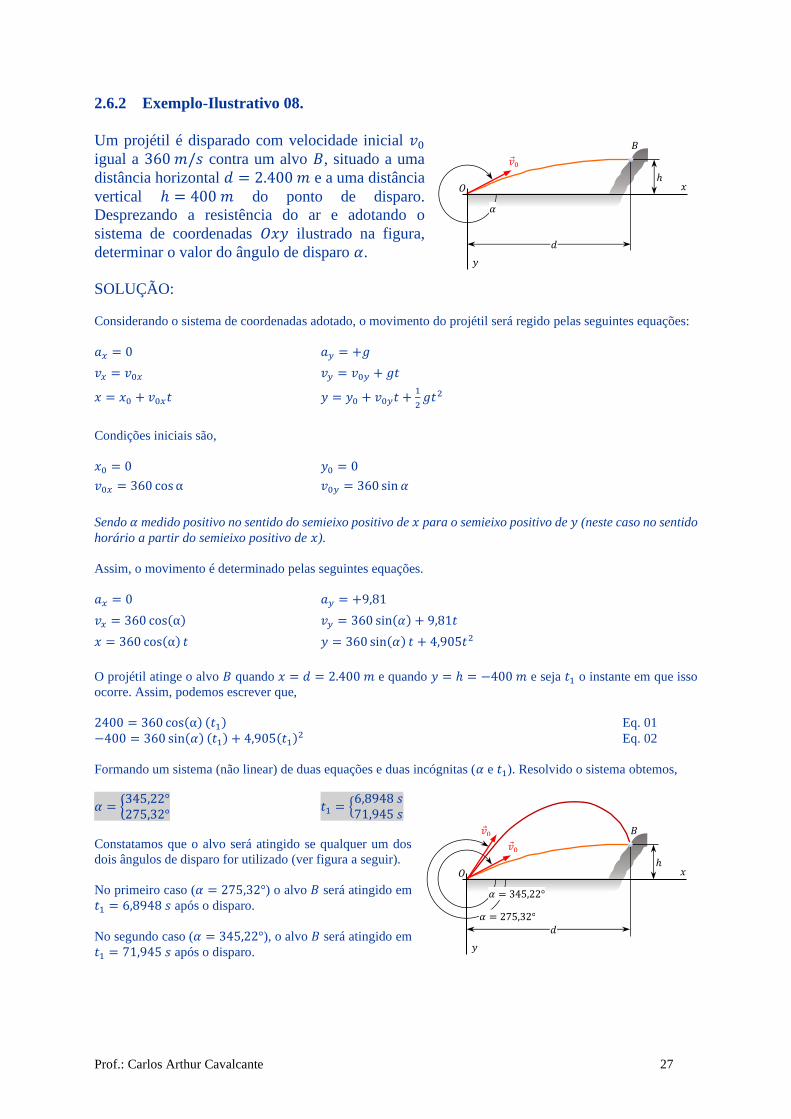
2.6.2 Exemplo-Ilustrativo 08.
Um projétil é disparado com velocidade inicial 𝑣0
igual a 360 𝑚/𝑠 contra um alvo 𝐵, situado a uma
distância horizontal 𝑑 = 2.400 𝑚 e a uma distância
vertical ℎ = 400 𝑚 do ponto de disparo.
Desprezando a resistência do ar e adotando o
sistema de coordenadas 𝑂𝑥𝑦 ilustrado na figura,
determinar o valor do ângulo de disparo 𝛼.
SOLUÇÃO:
Considerando o sistema de coordenadas adotado, o movimento do projétil será regido pelas seguintes equações:
𝑎𝑥 = 0 𝑎𝑦 = +𝑔
𝑣𝑥 = 𝑣0𝑥 𝑣𝑦 = 𝑣0𝑦 + 𝑔𝑡
𝑥 = 𝑥0 + 𝑣0𝑥𝑡 𝑦 = 𝑦0 + 𝑣0𝑦𝑡 +1
2𝑔𝑡2
Condições iniciais são,
𝑥0 = 0 𝑦0 = 0
𝑣0𝑥 = 360 cos α 𝑣0𝑦 = 360 sin 𝛼
Sendo 𝛼 medido positivo no sentido do semieixo positivo de 𝑥 para o semieixo positivo de 𝑦 (neste caso no sentido
horário a partir do semieixo positivo de 𝑥).
Assim, o movimento é determinado pelas seguintes equações.
𝑎𝑥 = 0 𝑎𝑦 = +9,81
𝑣𝑥 = 360 cos(α) 𝑣𝑦 = 360 sin(𝛼) + 9,81𝑡
𝑥 = 360 cos(α) 𝑡 𝑦 = 360 sin(𝛼) 𝑡 + 4,905𝑡2
O projétil atinge o alvo 𝐵 quando 𝑥 = 𝑑 = 2.400 𝑚 e quando 𝑦 = ℎ = −400 𝑚 e seja 𝑡1 o instante em que isso
ocorre. Assim, podemos escrever que,
2400 = 360 cos(α) (𝑡1) Eq. 01
−400 = 360 sin(𝛼) (𝑡1) + 4,905(𝑡1)2 Eq. 02
Formando um sistema (não linear) de duas equações e duas incógnitas (𝛼 e 𝑡1). Resolvido o sistema obtemos,
𝛼 = {345,22°275,32°
𝑡1 = {6,8948 𝑠71,945 𝑠
Constatamos que o alvo será atingido se qualquer um dos
dois ângulos de disparo for utilizado (ver figura a seguir).
No primeiro caso (𝛼 = 275,32°) o alvo 𝐵 será atingido em
𝑡1 = 6,8948 𝑠 após o disparo.
No segundo caso (𝛼 = 345,22°), o alvo 𝐵 será atingido em
𝑡1 = 71,945 𝑠 após o disparo.
𝑣0
𝑦
𝑥 𝑂 ℎ
𝑑
𝐵
𝛼
𝑣0
𝑦
𝑥 𝑂 ℎ
𝑑
𝐵 𝑣0
𝛼 = 275,32°
𝛼 = 345,22°

Prof.: Carlos Arthur Cavalcante 28
2.7 Componentes Tangencial e Normal do Vetor Aceleração
Em vários problemas de engenharia, é necessário, conveniente ou desejável decompor ou
expressar o vetor aceleração de uma partícula em suas componentes tangencial e normal à
trajetória.
Em geral, o vetor aceleração �� não é nem tangente nem perpendicular à trajetória e pode haver
interesse em decompô-lo nas suas componentes tangencial e normal.
O vetor velocidade �� de uma partícula é sempre tangente à trajetória.
O sistema de eixos coordenados tangencial e normal é um sistema que se presta apenas para a
determinação das componentes tangencial e normal do vetor aceleração. É um sistema que se
move junto com a partícula e “gira” conforme a trajetória de tal modo que o eixo na direção
tangencial tem sempre a direção positiva coincidente com o sentido do vetor velocidade em
cada instante e o eixo na direção normal tem sempre a direção positiva coincidente com a reta
que une a partícula ao centro de curvatura de sua trajetória em cada instante.
O movimento da partícula continua sendo descrito por meio de um sistema de coordenadas fixo
𝑂𝑥𝑦𝑧 mas, havendo interesse, o vetor aceleração pode ser decomposto em suas componentes
tangencial e normal.
Na figura ao lado, os vetores 𝑒𝑡 e 𝑒′ 𝑡 são vetores unitários tangentes
à trajetória da partícula nas posições 𝑃 e 𝑃’, respectivamente.
Quando os vetores 𝑒𝑡 e 𝑒′ 𝑡 são traçados a partir de uma mesma origem
𝑂′, é imediato constatar que ∆𝑒𝑡 = 𝑒′𝑡 − 𝑒𝑡.
Como 𝑒𝑡 e 𝑒′ 𝑡 têm comprimentos unitários, suas extremidades estão
sobre uma circunferência de raio igual a 1. Representando por ∆𝜃 é o ângulo por 𝑒𝑡 e 𝑒′ 𝑡, encontramos que a intensidade de ∆𝑒𝑡 é,
∆𝑒𝑡 = 2 sin(∆𝜃 2⁄ )
Considerando agora o vetor ∆𝑒𝑡 ∆𝜃⁄ , observamos que, à medida que
∆𝜃 tende a zero, este vetor se torna tangente à circunferência unitária,
isso é, se torna perpendicular ao vetor 𝑒𝑡 e com intensidade tendendo a,
lim∆𝜃→0
2 sin(∆𝜃 2⁄ )
∆𝜃= lim
∆𝜃→0
sin(∆𝜃 2⁄ )
∆𝜃 2⁄= 1
Portanto, no limite, o vetor obtido é um vetor unitário na direção normal à trajetória da partícula,
apontando no sentido para o qual 𝑒𝑡 gira. Representando este vetor por 𝑒𝑛 teremos,
𝑒𝑛 = lim∆𝜃→0
∆𝑒𝑡
∆𝜃
𝑒𝑛 =𝑑𝑒𝑡
𝑑𝜃

Prof.: Carlos Arthur Cavalcante 29
Como o vetor velocidade �� da partícula é sempre tangente à trajetória, ele pode ser expresso
como o produto da velocidade escalar 𝑣 pelo vetor unitário 𝑒𝑡. Isto é,
�� = 𝑣𝑒𝑡
Derivando em relação a 𝑡 e aplicando a regra da derivação do produto de uma função escalar
por uma função vetorial, obtemos,
�� =𝑑��
𝑑𝑡=
𝑑(𝑣.𝑒𝑡)
𝑑𝑡=
𝑑𝑣
𝑑𝑡𝑒𝑡 + 𝑣
𝑑𝑒𝑡
𝑑𝑡
Mas,
𝑑𝑒𝑡
𝑑𝑡=
𝑑𝑒𝑡
𝑑𝜃 𝑑𝜃
𝑑𝑆 𝑑𝑆
𝑑𝑡
𝑑𝑆
𝑑𝑡= 𝑣
𝑑𝑒𝑡
𝑑𝜃= 𝑒𝑛
𝑑𝜃
𝑑𝑆=
1
𝜌
Logo,
𝑑𝑒𝑡
𝑑𝑡= 𝑒𝑛
1
𝜌𝑣
𝑑𝑒𝑡
𝑑𝑡=
𝑣
𝜌𝑒𝑛
Substituindo em
�� =𝑑𝑣
𝑑𝑡𝑒𝑡 + 𝑣
𝑑𝑒𝑡
𝑑𝑡
Obtemos,
�� =𝑑𝑣
𝑑𝑡𝑒𝑡 + 𝑣
𝑣
𝜌𝑒𝑛 �� = (
𝑑𝑣
𝑑𝑡) 𝑒𝑡 + (
𝑣2
𝜌) 𝑒𝑛
Portanto, as componentes tangencial e normal do vetor aceleração são,
𝑎𝑡 =𝑑𝑣
𝑑𝑡 𝑎𝑛 =
𝑣2
𝜌
A componente tangencial da aceleração é igual à taxa de variação
da velocidade escalar da partícula. A componente normal da
aceleração é igual ao quadrado da velocidade escalar dividido pelo
raio de curvatura da trajetória.
Se a componente tangencial da aceleração 𝑎𝑡 é positiva, então o vetor ��𝑡 = 𝑎𝑡𝑒𝑡 tem o mesmo
sentido do vetor velocidade ��. Neste caso, a velocidade escalar da partícula (a intensidade 𝑣 do
vetor ��) estará aumentando.
Se a componente tangencial da aceleração 𝑎𝑡 é negativa, então o vetor ��𝑡 = 𝑎𝑡𝑒𝑡 tem o sentido
oposto ao sentido do vetor velocidade ��. Neste caso, a velocidade escalar da partícula (a
intensidade 𝑣 do vetor ��) estará diminuindo.

Prof.: Carlos Arthur Cavalcante 30
A componente normal da aceleração 𝑎𝑛 é sempre positiva e o vetor ��𝑛 = 𝑎𝑛𝑒𝑛 sempre aponta
para o centro de curvatura 𝐶 da trajetória. A componente normal da aceleração 𝑎𝑛 (ou o vetor
��𝑛), não afeta a velocidade escalar da partícula. Afeta apenas a direção do movimento.
A expressão para o vetor aceleração �� definidas para o movimento bidimensional permanecem
válidas quando o é movimento tridimensional. Isto é,
�� = (𝑑𝑣
𝑑𝑡) 𝑒𝑡 + (
𝑣2
𝜌) 𝑒𝑛
Sendo, as componentes tangencial e normal do vetor aceleração dadas por,
𝑎𝑡 =𝑑𝑣
𝑑𝑡 𝑎𝑛 =
𝑣2
𝜌
Entretanto, no movimento tridimensional, há um número infinito de
retas que são perpendiculares à reta tangente em um dado ponto 𝑃 de
uma curva no espaço. Torna-se necessário definir com mais precisão
a direção do vetor unitário 𝑒𝑛.
Consideramos novamente os vetores unitários 𝑒𝑡 e 𝑒′ 𝑡 tangentes à
trajetória da partícula em dois pontos vizinhos 𝑃 e 𝑃′ e o vetor ∆𝑒𝑡
que representa a diferença entre 𝑒𝑡 e 𝑒′ 𝑡.
Vamos supor agora um plano passando por 𝑃, paralelo ao plano
definido pelos vetores 𝑒𝑡, 𝑒′ 𝑡 e ∆𝑒𝑡.
Este plano contém a tangente à trajetória curva em 𝑃 e é paralelo à
tangente em 𝑃′. Se fizermos 𝑃′ tender a 𝑃 vamos obter, no limite, o
plano que melhor se ajusta à trajetória nas redondezas de 𝑃.
Este plano é chamado de plano osculador em 𝑃. Segue-se que o plano osculador contém o vetor
unitário 𝑒𝑛, uma vez que este vetor representa o limite do vetor ∆𝑒𝑡 𝜃⁄ .
A normal definida por 𝑒𝑛 está, então, contida no plano osculador e é
chamada de normal principal em 𝑃. O vetor unitário 𝑒𝑏 = 𝑒𝑡 × 𝑒𝑛
(produto vetorial), que completa o triedro positivo de vetores 𝑒𝑡, 𝑒𝑛 e
𝑒𝑏, define a binormal em 𝑃 (a binormal é, portanto, perpendicular ao
plano osculador).
Concluímos que a aceleração da partícula pode ser expressa mediante
dois componentes, um ao longo da tangente e o outro ao longo da
normal principal. Notar que a aceleração não tem nenhum
componente ao longo da binormal, demonstrando que, mesmo no movimento tridimensional,
as componentes tangencial e normal da aceleração são dadas por,
�� = (𝑑𝑣
𝑑𝑡) 𝑒𝑡 + (
𝑣2
𝜌) 𝑒𝑛
Prof.: Carlos Arthur Cavalcante 31
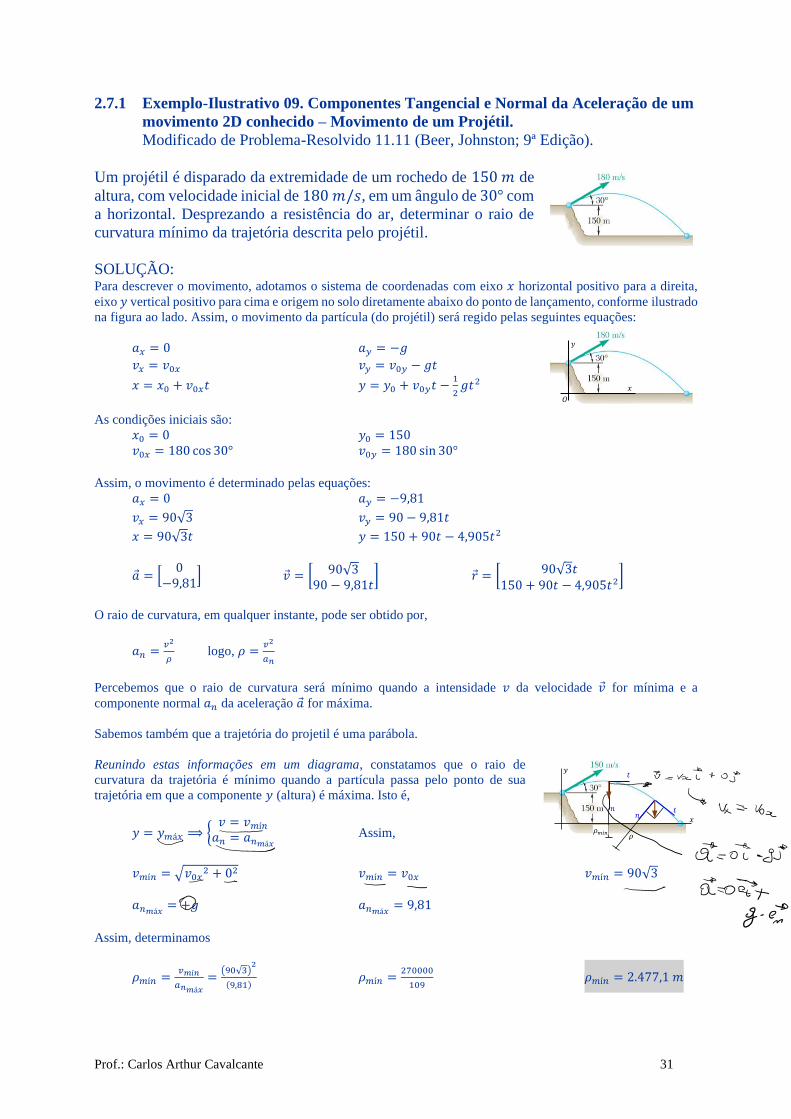
2.7.1 Exemplo-Ilustrativo 09. Componentes Tangencial e Normal da Aceleração de um
movimento 2D conhecido – Movimento de um Projétil.
Modificado de Problema-Resolvido 11.11 (Beer, Johnston; 9ª Edição).
Um projétil é disparado da extremidade de um rochedo de 150 𝑚 de
altura, com velocidade inicial de 180 𝑚/𝑠, em um ângulo de 30° com
a horizontal. Desprezando a resistência do ar, determinar o raio de
curvatura mínimo da trajetória descrita pelo projétil.
SOLUÇÃO: Para descrever o movimento, adotamos o sistema de coordenadas com eixo 𝑥 horizontal positivo para a direita,
eixo 𝑦 vertical positivo para cima e origem no solo diretamente abaixo do ponto de lançamento, conforme ilustrado
na figura ao lado. Assim, o movimento da partícula (do projétil) será regido pelas seguintes equações:
𝑎𝑥 = 0 𝑎𝑦 = −𝑔
𝑣𝑥 = 𝑣0𝑥 𝑣𝑦 = 𝑣0𝑦 − 𝑔𝑡
𝑥 = 𝑥0 + 𝑣0𝑥𝑡 𝑦 = 𝑦0 + 𝑣0𝑦𝑡 −1
2𝑔𝑡2
As condições iniciais são:
𝑥0 = 0 𝑦0 = 150
𝑣0𝑥 = 180 cos 30° 𝑣0𝑦 = 180 sin 30°
Assim, o movimento é determinado pelas equações:
𝑎𝑥 = 0 𝑎𝑦 = −9,81
𝑣𝑥 = 90√3 𝑣𝑦 = 90 − 9,81𝑡
𝑥 = 90√3𝑡 𝑦 = 150 + 90𝑡 − 4,905𝑡2
�� = [0
−9,81] �� = [ 90√3
90 − 9,81𝑡] 𝑟 = [ 90√3𝑡
150 + 90𝑡 − 4,905𝑡2]
O raio de curvatura, em qualquer instante, pode ser obtido por,
𝑎𝑛 =𝑣2
𝜌 logo, 𝜌 =
𝑣2
𝑎𝑛
Percebemos que o raio de curvatura será mínimo quando a intensidade 𝑣 da velocidade �� for mínima e a
componente normal 𝑎𝑛 da aceleração �� for máxima.
Sabemos também que a trajetória do projetil é uma parábola.
Reunindo estas informações em um diagrama, constatamos que o raio de
curvatura da trajetória é mínimo quando a partícula passa pelo ponto de sua
trajetória em que a componente 𝑦 (altura) é máxima. Isto é,
𝑦 = 𝑦𝑚á𝑥 ⟹ {𝑣 = 𝑣𝑚í𝑛𝑎𝑛 = 𝑎𝑛𝑚á𝑥
Assim,
𝑣𝑚í𝑛 = √𝑣0𝑥2 + 02 𝑣𝑚í𝑛 = 𝑣0𝑥 𝑣𝑚í𝑛 = 90√3
𝑎𝑛𝑚á𝑥 = +𝑔 𝑎𝑛𝑚á𝑥 = 9,81
Assim, determinamos
𝜌𝑚í𝑛 =𝑣𝑚í𝑛
𝑎𝑛𝑚á𝑥=
(90√3)2
(9,81) 𝜌𝑚í𝑛 =
270000
109 𝜌𝑚í𝑛 = 2.477,1 𝑚
𝑂
𝑥
𝑦
𝑥 𝑛
𝑛
𝑦 𝑡
𝜌𝑚𝑖𝑛
𝑡
𝜌

Prof.: Carlos Arthur Cavalcante 32
2.7.2 Exemplo-Ilustrativo 10. Componentes Tangencial e Normal da Aceleração de um
movimento 2D conhecido – Movimento Circular Uniformemente (Des) acelerado.
Problema-Resolvido 11.10 (Beer, Johnston; 9ª Edição)
Um motorista está percorrendo uma seção curva de uma rodovia de raio 𝑅 = 750 𝑚
a uma velocidade escalar 𝑣𝐴 = 90 𝑘𝑚 ℎ⁄ . O motorista de repente aciona os freios,
fazendo o automóvel reduzir sua velocidade escalar de forma constante. Sabendo que
após 8 𝑠 a velocidade escalar foi reduzida para 𝑣𝐵 = 72 𝑘𝑚 ℎ⁄ , determine a
aceleração do automóvel imediatamente após os freios terem sido aplicados.
SOLUÇÃO
O automóvel descreve um movimento curvilíneo uniformemente acelerado, ao longo de sua trajetória (que no caso
é um arco de circunferência). Portanto, o movimento ao longo de sua trajetória é regido pelas seguintes equações:
𝑣 = 𝑣0 + 𝑐𝑡𝑒. 𝑡 𝑠 = 𝑠0 + 𝑣0𝑡 +1
2𝑐𝑡𝑒. 𝑡2
Dados iniciais do movimento do automóvel ao longo de sua trajetória:
𝑣(𝑡=0) = 𝑣𝐴 = 25 𝑚 𝑠⁄ 𝑠(𝑡=0) = 𝑠𝐴 = 0
Portanto, o movimento do automóvel ao longo de sua
trajetória está determinado por,
𝑣 = 25 + 𝑐𝑡𝑒. 𝑡 𝑠 = 25𝑡 +1
2𝑐𝑡𝑒. 𝑡2
Componente tangencial da aceleração em 𝒕 = 𝟎 𝒔.
Foi dado que 𝑣(𝑡=8) = 𝑣𝐵 = 20 𝑚 𝑠⁄ . Assim, podemos escrever,
20 = 25 + 𝑐𝑡𝑒. (8) 𝑎𝑡 = 𝑐𝑡𝑒 = −5
8= −0,625 𝑚 𝑠2⁄
Dado que a aceleração tangencial é constante (𝑎𝑡 = 𝑐𝑡𝑒), é imediato concluir que,
𝑎𝑡(𝑡=0) = 𝑎𝑡𝐴 = −5
8= −0,625 𝑚 𝑠2⁄
Componente normal da aceleração em 𝒕 = 𝟎 𝒔.
𝑎𝑛(𝑡=0) = 𝑎𝑛𝐴 =𝑣𝐴
2
𝑅 𝑎𝑛𝐴 =
(25)2
750 𝑎𝑛𝐴 =
5
6= 0,83333 𝑚 𝑠2⁄
Intensidade e direção da aceleração.
A aceleração do automóvel imediatamente após os freios terem sido acionados.
𝑎𝐴 = √(𝑎𝑡𝐴)2 + (𝑎𝑛𝐴)
2 𝑎𝐴 = √(−5 8⁄ )2 + (5 6⁄ )2
𝑎𝐴 = √25 64⁄ + 25 36⁄
𝑎𝐴 = 25 24⁄ = 1,0417 𝑚 𝑠2⁄
𝛼 = tan−1 (|𝑎𝑛𝐴|
|𝑎𝑡𝐴|) 𝛼 = tan−1 (
5 6⁄
5 8⁄)
𝛼 = tan−1 (4
3) 𝛼 = 53,130°
𝑅
𝑣𝐴
𝑎𝑡 = 𝑐𝑡𝑒 𝑑𝑣
𝑑𝑡= 𝑐𝑡𝑒
∫ 𝑑𝑣𝑣
𝑣0= 𝑐𝑡𝑒 ∫ 𝑑𝑡
𝑡
0
𝑣 − 𝑣0 = 𝑐𝑡𝑒𝑡 𝑣 = 𝑣0 + 𝑐𝑡𝑒. 𝑡
𝑣 =𝑑𝑠
𝑑𝑡= 𝑣0 + 𝑐𝑡𝑒. 𝑡
𝑑𝑠 = (𝑣0 + 𝑐𝑡𝑒. 𝑡)𝑑𝑡
∫ 𝑑𝑠𝑠
𝑠0= ∫ (𝑣0 + 𝑐𝑡𝑒. 𝑡)𝑑𝑡
𝑡
0
𝑠 = 𝑠0 + 𝑣0𝑡 +1
2𝑐𝑡𝑒. 𝑡2

Prof.: Carlos Arthur Cavalcante 33
2.7.3 Exemplo-Ilustrativo 11. Análise completa de um movimento 2D conhecido
(movimento de projéteis) para consolidar conceitos e método de modelagem e
solução de problemas.
Neste exemplo ilustrativo é feita uma análise “completa” de um movimento conhecido
(movimento de um projétil) visando ilustrar a aplicação dos conceitos apresentados e a
abordagem adotada para a solução de problemas.
Consideramos um projétil, disparado com um vetor velocidade inicial ��0 conhecido (em geral
especificado por sua intensidade 𝑣0, pela sua direção 𝛼 em relação à horizontal e por um sentido
indicado numa figura). Assumiremos que o sistema de coordenadas adotado é um sistema
cartesiano 𝑂𝑥𝑦 no qual o eixo 𝑥 é horizontal positivo “para a direita” e o eixo 𝑦 é vertical
positivo “para cima”. Assumiremos também que o vetor posição 𝑟0 do ponto de lançamento
também é conhecido e dado por suas componentes 𝑥0 e 𝑦0.
O objetivo do exemplo é analisar o movimento do projétil, desprezando a resistência do ar, e
determinando:
a) As componentes 𝑎𝑥 e 𝑎𝑦 do vetor aceleração ��, em função do tempo 𝑡;
b) As componentes 𝑣𝑥 e 𝑣𝑦 do vetor velocidade ��, em função do tempo 𝑡;
c) As componentes 𝑥 e 𝑦 do vetor posição 𝑟, em função do tempo 𝑡; d) O vetor aceleração ��, em função do tempo 𝑡; e) O vetor velocidade ��, em função do tempo 𝑡; f) O vetor posição 𝑟, em função do tempo 𝑡; g) A intensidade 𝑎 do vetor aceleração ��, em função do tempo 𝑡; h) A intensidade 𝑣 do vetor velocidade ��, em função do tempo 𝑡; i) O vetor unitário 𝑒𝑡 tangente à trajetória, em função do tempo 𝑡; j) O vetor unitário 𝑒𝑛 normal à trajetória, em função do tempo 𝑡; k) A componente tangencial 𝑎𝑡 do vetor aceleração ��, em função do tempo 𝑡; l) A componente normal 𝑎𝑛 do vetor aceleração ��, em função do tempo 𝑡; m) A equação da trajetória 𝑦 = 𝑓(𝑥); n) A equação horária 𝑠 = 𝑠(𝑡) sobre a trajetória.
o) A velocidade escalar 𝑣, em função do tempo 𝑡; p) A expressão para o raio de curvatura 𝜌, em função do tempo 𝑡; q) O raio de curvatura mínimo da trajetória descrita pelo projétil;
r) O valor numérico de cada item anterior para o instante 𝑡 = 8 𝑠, sabendo que no sistema 𝑂𝑥𝑦
adotado 𝑥0 = 50 𝑚, 𝑦0 = 150 𝑚, 𝑣0𝑥 = 90√3 𝑚 𝑠⁄ e 𝑣0𝑦 = 90 𝑚 𝑠⁄ .
SOLUÇÃO:
Em conformidade com o sistema de coordenadas adotado, o movimento de projétil será determinado pelas
seguintes equações:
𝑎𝑥 = 0 𝑎𝑦 = −𝑔
𝑣𝑥 = 𝑣0𝑥 𝑣𝑦 = 𝑣0𝑦 − 𝑔𝑡
𝑥
𝑂 𝑥0
𝑦0
𝑠0
𝑦
𝑠
𝑣
𝑣𝑥
𝑣𝑦
𝑛
𝑡
�� 𝑡
𝑛
𝑎𝑛
𝑎𝑡

Prof.: Carlos Arthur Cavalcante 34
𝑥 = 𝑥0 + 𝑣0𝑥𝑡 𝑦 = 𝑦0 + 𝑣0𝑦𝑡 −1
2𝑔𝑡2
a) As componentes 𝑎𝑥 e 𝑎𝑦 do vetor aceleração ��, em função do tempo 𝑡;
𝑎𝑥 = 0 𝑎𝑦 = −𝑔
b) As componentes 𝑣𝑥 e 𝑣𝑦 do vetor velocidade ��, em função do tempo 𝑡;
𝑣𝑥 = 𝑣0𝑥 𝑣𝑦 = 𝑣0𝑦 − 𝑔𝑡
c) As componentes 𝑥 e 𝑦 do vetor posição 𝑟, em função do tempo 𝑡;
𝑥 = 𝑥0 + 𝑣0𝑥𝑡 𝑦 = 𝑦0 + 𝑣0𝑦𝑡 −1
2𝑔𝑡2
d) O vetor aceleração ��, em função do tempo 𝑡;
�� = [0−𝑔
] �� = 0𝑖 + (−𝑔)𝑗 A aceleração �� é um vetor constante.
e) O vetor velocidade ��, em função do tempo 𝑡;
�� = [𝑣0𝑥
𝑣0𝑦 − 𝑔𝑡] �� = 𝑣0𝑥𝑖 + (𝑣0𝑦 − 𝑔𝑡)𝑗
f) O vetor posição 𝑟, em função do tempo 𝑡;
𝑟 = [𝑥0 + 𝑣0𝑥𝑡
𝑦0 + 𝑣0𝑦𝑡 −1
2𝑔𝑡2
] 𝑟 = (𝑥0 + 𝑣0𝑥𝑡)𝑖 + (𝑦0 + 𝑣0𝑦𝑡 −1
2𝑔𝑡2) 𝑗
g) A intensidade 𝑎 do vetor aceleração ��, em função do tempo 𝑡;
𝑎 = +√(𝑎𝑥)2 + (𝑎𝑦)
2 𝑎 = +√(0)2 + (−𝑔)2
𝑎 = +√𝑔2 𝑎 = 𝑔
h) A intensidade 𝑣 do vetor velocidade ��, em função do tempo 𝑡;
𝑣 = √(𝑣𝑥)2 + (𝑣𝑦)
2 𝑣 = √(𝑣0𝑥)
2 + (𝑣0𝑦 − 𝑔𝑡)2
𝑣 = √𝑣0𝑥2 + 𝑣0𝑦
2 − 2𝑣0𝑦𝑔𝑡 + 𝑔2𝑡2
i) O vetor unitário 𝑒𝑡 tangente à trajetória, em função do tempo 𝑡;
Uma vez que o vetor velocidade é sempre tangente à trajetória, podemos escrever que,
�� = 𝑣. 𝑒𝑡 𝑒𝑡 =��
𝑣
Prof.: Carlos Arthur Cavalcante 35
𝑒𝑡 =[𝑣0𝑥
𝑣0𝑦−𝑔𝑡]
√𝑣0𝑥2+𝑣0𝑦
2−2𝑣0𝑦𝑔𝑡+𝑔2𝑡2
𝑒𝑡 =
[
𝑣0𝑥
√𝑣0𝑥2+𝑣0𝑦
2−2𝑣0𝑦𝑔𝑡+𝑔2𝑡2
𝑣0𝑦−𝑔𝑡
√𝑣0𝑥2+𝑣0𝑦2−2𝑣0𝑦𝑔𝑡+𝑔2𝑡2]
𝑒𝑡 =
[ 𝑣0𝑥√𝑣0𝑥
2+𝑣0𝑦2−2𝑣0𝑦𝑔𝑡+𝑔
2𝑡2
𝑣0𝑥2+𝑣0𝑦
2−2𝑣0𝑦𝑔𝑡+𝑔2𝑡2
𝑣0𝑦−𝑔𝑡√𝑣0𝑥2+𝑣0𝑦
2−2𝑣0𝑦𝑔𝑡+𝑔2𝑡2
𝑣0𝑥2+𝑣0𝑦
2−2𝑣0𝑦𝑔𝑡+𝑔2𝑡2 ]
j) O vetor unitário 𝑒𝑛 normal à trajetória, em função do tempo 𝑡;
1ª Opção:
O vetor unitário 𝑒𝑛 pode ser determinado por:
𝑒𝑛 =𝑑��𝑡𝑑𝑡
|𝑑��𝑡𝑑𝑡|
Cálculo do numerador 𝒅��𝒕
𝒅𝒕 para a determinação do vetor ��𝒏
Cálculo da componente 𝑥 do numerador 𝑑𝑒𝑡
𝑑𝑡
𝑑(𝑒𝑡𝑥)
𝑑𝑡=
𝑑(𝑣0𝑥
√𝑣0𝑥2+𝑣0𝑦
2−2𝑣0𝑦𝑔𝑡+𝑔2𝑡2
)
𝑑𝑡
𝑑(𝑒𝑡𝑥)
𝑑𝑡=
𝑔𝑣0𝑥(𝑣0𝑦−𝑔𝑡)√𝑣0𝑥2+𝑣0𝑦
2−2𝑣0𝑦𝑔𝑡+𝑔2𝑡2
(𝑣0𝑥2+𝑣0𝑦
2−2𝑣0𝑦𝑔𝑡+𝑔2𝑡2)
2
Cálculo da componente 𝑦 do vetor 𝑑𝑒𝑡
𝑑𝑡
𝑑(𝑒𝑡𝑦)
𝑑𝑡=
𝑑(𝑣0𝑦−𝑔𝑡
√𝑣0𝑥2+𝑣0𝑦
2−2𝑣0𝑦𝑔𝑡+𝑔2𝑡2
)
𝑑𝑡
𝑑(𝑒𝑡𝑦)
𝑑𝑡=
−𝑔𝑣0𝑥2√𝑣0𝑥
2+𝑣0𝑦2−2𝑣0𝑦𝑔𝑡+𝑔
2𝑡2
(𝑣0𝑥2+𝑣0𝑦
2−2𝑣0𝑦𝑔𝑡+𝑔2𝑡2)
2
Assim, o vetor 𝑑𝑒𝑡
𝑑𝑡, em qualquer instante, é dado por,
𝑑𝑒𝑡
𝑑𝑡= [
𝑑(𝑒𝑡𝑥)
𝑑𝑡
𝑑(𝑒𝑡𝑦)
𝑑𝑡
] 𝑑𝑒𝑡
𝑑𝑡=
[ 𝑔𝑣0𝑥(𝑣0𝑦−𝑔𝑡)√𝑣0𝑥
2+𝑣0𝑦2−2𝑣0𝑦𝑔𝑡+𝑔
2𝑡2
(𝑣0𝑥2+𝑣0𝑦
2−2𝑣0𝑦𝑔𝑡+𝑔2𝑡2)
2
−𝑔𝑣0𝑥2√𝑣0𝑥
2+𝑣0𝑦2−2𝑣0𝑦𝑔𝑡+𝑔
2𝑡2
(𝑣0𝑥2+𝑣0𝑦
2−2𝑣0𝑦𝑔𝑡+𝑔2𝑡2)
2]
Cálculo do denominador |𝒅��𝒕
𝒅𝒕| para a determinação do vetor ��𝒏
|𝑑𝑒𝑡
𝑑𝑡| = √(
𝑑(𝑒𝑡𝑥)
𝑑𝑡)2
+ (𝑑(𝑒𝑡𝑦)
𝑑𝑡)
2
|𝑑𝑒𝑡
𝑑𝑡| = √(
𝑔𝑣0𝑥(𝑣0𝑦−𝑔𝑡)√𝑣0𝑥2+𝑣0𝑦
2−2𝑣0𝑦𝑔𝑡+𝑔2𝑡2
(𝑣0𝑥2+𝑣0𝑦
2−2𝑣0𝑦𝑔𝑡+𝑔2𝑡2)
2 )
2
+ (−𝑔𝑣0𝑥
2√𝑣0𝑥2+𝑣0𝑦
2−2𝑣0𝑦𝑔𝑡+𝑔2𝑡2
(𝑣0𝑥2+𝑣0𝑦
2−2𝑣0𝑦𝑔𝑡+𝑔2𝑡2)
2 )
2

Prof.: Carlos Arthur Cavalcante 36
Após manipulações algébricas e simplificações,
|𝒅��𝒕
𝒅𝒕| = (
𝒈𝒗𝟎𝒙
𝒗𝟎𝒙𝟐+𝒗𝟎𝒚
𝟐−𝟐𝒈𝒗𝟎𝒚𝒕+𝒈𝟐𝒕𝟐)
Assim, o vetor unitário normal à trajetória (𝑒𝑛), em qualquer instante, é dado por,
𝑒𝑛 =𝑑��𝑡𝑑𝑡
|𝑑��𝑡𝑑𝑡| 𝑒𝑛 =
[ 𝑔𝑣0𝑥(𝑣0𝑦−𝑔𝑡)√𝑣0𝑥2+𝑣0𝑦2−2𝑣0𝑦𝑔𝑡+𝑔2𝑡2
(𝑣0𝑥2+𝑣0𝑦
2−2𝑣0𝑦𝑔𝑡+𝑔2𝑡2)
2
−𝑔𝑣0𝑥2√𝑣0𝑥
2+𝑣0𝑦2−2𝑣0𝑦𝑔𝑡+𝑔
2𝑡2
(𝑣0𝑥2+𝑣0𝑦
2−2𝑣0𝑦𝑔𝑡+𝑔2𝑡2)
2]
(𝒈𝒗𝟎𝒙
𝒗𝟎𝒙𝟐+𝒗𝟎𝒚
𝟐−𝟐𝒈𝒗𝟎𝒚𝒕+𝒈𝟐𝒕𝟐
)
𝑒𝑛 =
[ 𝑔𝑣0𝑥(𝑣0𝑦−𝑔𝑡)√𝑣0𝑥
2+𝑣0𝑦2−2𝑣0𝑦𝑔𝑡+𝑔
2𝑡2
(𝑣0𝑥2+𝑣0𝑦
2−2𝑣0𝑦𝑔𝑡+𝑔2𝑡2)
2 ∙𝑣0𝑥
2+𝑣0𝑦2−2𝑔𝑣0𝑦𝑡+𝑔
2𝑡2
𝑔𝑣0𝑥
−𝑔𝑣0𝑥2√𝑣0𝑥
2+𝑣0𝑦2−2𝑣0𝑦𝑔𝑡+𝑔
2𝑡2
(𝑣0𝑥2+𝑣0𝑦
2−2𝑣0𝑦𝑔𝑡+𝑔2𝑡2)
2 ∙𝑣0𝑥
2+𝑣0𝑦2−2𝑔𝑣0𝑦𝑡+𝑔
2𝑡2
𝑔𝑣0𝑥 ]
𝑒𝑛 =
[ 𝑔𝑣0𝑥(𝑣0𝑦−𝑔𝑡)√𝑣0𝑥
2+𝑣0𝑦2−2𝑣0𝑦𝑔𝑡+𝑔
2𝑡2
𝑣0𝑥2+𝑣0𝑦
2−2𝑔𝑣0𝑦𝑡+𝑔2𝑡2
∙1
𝑔𝑣0𝑥
−𝑔𝑣0𝑥2√𝑣0𝑥
2+𝑣0𝑦2−2𝑣0𝑦𝑔𝑡+𝑔
2𝑡2
𝑣0𝑥2+𝑣0𝑦
2−2𝑔𝑣0𝑦𝑡+𝑔2𝑡2
∙1
𝑔𝑣0𝑥 ]
𝑒𝑛 =
[ (𝑣0𝑦−𝑔𝑡)√𝑣0𝑥
2+𝑣0𝑦2−2𝑣0𝑦𝑔𝑡+𝑔
2𝑡2
𝑣0𝑥2+𝑣0𝑦
2−2𝑔𝑣0𝑦𝑡+𝑔2𝑡2
−𝑣0𝑥√𝑣0𝑥
2+𝑣0𝑦2−2𝑣0𝑦𝑔𝑡+𝑔
2𝑡2
𝑣0𝑥2+𝑣0𝑦
2−2𝑔𝑣0𝑦𝑡+𝑔2𝑡2 ]
2ª Opção:
O vetor unitário 𝑒𝑛 é perpendicular ao vetor unitário 𝑒𝑡, de modo que 𝑒𝑛 resulta de uma rotação 𝜃 = 90° (no
sentido anti-horário) no vetor 𝑒𝑡.
Para rotacionar um vetor (2D) em um ângulo 𝜃 multiplicamos o vetor pela matriz de transformação dada por:
𝑇 = [cos 𝜃 sin 𝜃− sin 𝜃 cos 𝜃
]
Assim, podemos escrever que,
𝑒𝑛 = [cos 𝜃 sin 𝜃− sin 𝜃 cos 𝜃
] 𝑒𝑡 𝑒𝑛 = [cos (
𝜋
2) sin (
𝜋
2)
− sin (𝜋
2) cos (
𝜋
2)] [𝑒𝑡𝑥𝑒𝑡𝑦]
𝑒𝑛 = [cos (
𝜋
2) 𝑒𝑡𝑥 + sin (
𝜋
2) 𝑒𝑡𝑦
−sin (𝜋
2) 𝑒𝑡𝑥 + cos (
𝜋
2) 𝑒𝑡𝑦
] 𝑒𝑛 = [0𝑒𝑡𝑥 + 1𝑒𝑡𝑦−1𝑒𝑡𝑥 + 0𝑒𝑡𝑦
]
𝑒𝑛 = [𝑒𝑡𝑦−𝑒𝑡𝑥
] 𝑒𝑛 =
[ (𝑣0𝑦−𝑔𝑡)√𝑣0𝑥
2+𝑣0𝑦2−2𝑣0𝑦𝑔𝑡+𝑔
2𝑡2
𝑣0𝑥2+𝑣0𝑦
2−2𝑔𝑣0𝑦𝑡+𝑔2𝑡2
−𝑣0𝑥√𝑣0𝑥
2+𝑣0𝑦2−2𝑣0𝑦𝑔𝑡+𝑔
2𝑡2
𝑣0𝑥2+𝑣0𝑦
2−2𝑔𝑣0𝑦𝑡+𝑔2𝑡2 ]

Prof.: Carlos Arthur Cavalcante 37
k) A componente tangencial 𝑎𝑡 do vetor aceleração ��, em função do tempo 𝑡;
Recordando que o produto escalar ou produto interno de dois vetores representa a projeção de um vetor sobre
o outro, a componente tangencial 𝑎𝑡 do vetor aceleração ��, pode ser dada por,
𝑎𝑡 = �� ∙ 𝑒𝑡 Produto escalar do vetor aceleração �� pelo vetor tangencial unitário 𝑒𝑡.
𝑎𝑡 = [0−𝑔
] ∙
[ 𝑣0𝑥√𝑣0𝑥
2+𝑣0𝑦2−2𝑣0𝑦𝑔𝑡+𝑔
2𝑡2
𝑣0𝑥2+𝑣0𝑦
2−2𝑣0𝑦𝑔𝑡+𝑔2𝑡2
𝑣0𝑦−𝑔𝑡√𝑣0𝑥2+𝑣0𝑦
2−2𝑣0𝑦𝑔𝑡+𝑔2𝑡2
𝑣0𝑥2+𝑣0𝑦
2−2𝑣0𝑦𝑔𝑡+𝑔2𝑡2 ]
𝑎𝑡 = 0(𝑣0𝑥√𝑣0𝑥
2+𝑣0𝑦2−2𝑣0𝑦𝑔𝑡+𝑔
2𝑡2
𝑣0𝑥2+𝑣0𝑦
2−2𝑣0𝑦𝑔𝑡+𝑔2𝑡2
)− 𝑔(𝑣0𝑦−𝑔𝑡√𝑣0𝑥
2+𝑣0𝑦2−2𝑣0𝑦𝑔𝑡+𝑔
2𝑡2
𝑣0𝑥2+𝑣0𝑦
2−2𝑣0𝑦𝑔𝑡+𝑔2𝑡2
)
𝑎𝑡 = −𝑔(𝑣0𝑦−𝑔𝑡)√𝑣0𝑥
2+𝑣0𝑦2−2𝑣0𝑦𝑔𝑡+𝑔
2𝑡2
𝑣0𝑥2+𝑣0𝑦
2−2𝑣0𝑦𝑔𝑡+𝑔2𝑡2
l) A componente normal 𝑎𝑛 do vetor aceleração ��, em função do tempo 𝑡;
A componente normal 𝑎𝑛 do vetor aceleração ��, em qualquer instante 𝑡, pode ser dado por,
𝑎𝑛 = �� ∙ 𝑒𝑛 (Produto escalar).
𝑎𝑛 = [0−𝑔
] ∙
[ (𝑣0𝑦−𝑔𝑡)√𝑣0𝑥
2+𝑣0𝑦2−2𝑣0𝑦𝑔𝑡+𝑔
2𝑡2
𝑣0𝑥2+𝑣0𝑦
2−2𝑔𝑣0𝑦𝑡+𝑔2𝑡2
−𝑣0𝑥√𝑣0𝑥
2+𝑣0𝑦2−2𝑣0𝑦𝑔𝑡+𝑔
2𝑡2
𝑣0𝑥2+𝑣0𝑦
2−2𝑔𝑣0𝑦𝑡+𝑔2𝑡2 ]
𝑎𝑛 = 0((𝑣0𝑦−𝑔𝑡)√𝑣0𝑥
2+𝑣0𝑦2−2𝑣0𝑦𝑔𝑡+𝑔
2𝑡2
𝑣0𝑥2+𝑣0𝑦
2−2𝑔𝑣0𝑦𝑡+𝑔2𝑡2
)− 𝑔(−𝑣0𝑥√𝑣0𝑥
2+𝑣0𝑦2−2𝑣0𝑦𝑔𝑡+𝑔
2𝑡2
𝑣0𝑥2+𝑣0𝑦
2−2𝑔𝑣0𝑦𝑡+𝑔2𝑡2
)
𝑎𝑛 =𝑔𝑣0𝑥√𝑣0𝑥
2+𝑣0𝑦2−2𝑣0𝑦𝑔𝑡+𝑔
2𝑡2
𝑣0𝑥2+𝑣0𝑦
2−2𝑔𝑣0𝑦𝑡+𝑔2𝑡2
m) A equação da trajetória 𝑦 = 𝑓(𝑥);
As equações das coordenadas 𝑥 e 𝑦 são as equações paramétricas da trajetória parametrizadas pelo parâmetro
𝑡 (tempo).
𝑥 = 𝑥0 + 𝑣0𝑥𝑡 𝑦 = 𝑦0 + 𝑣0𝑦𝑡 −1
2𝑔𝑡2
Para encontrar a equação da trajetória 𝑦 = 𝑓(𝑥), devemos eliminar o parâmetro 𝑡,
Da primeira equação tiramos que,
𝑡 =𝑥−𝑥0
𝑣0𝑥
Substituindo na equação de 𝑦, obtemos,

Prof.: Carlos Arthur Cavalcante 38
𝑦 = 𝑦0 + 𝑣0𝑦 (𝑥−𝑥0
𝑣0𝑥) −
1
2𝑔 (
𝑥−𝑥0
𝑣0𝑥)2
Após manipulações algébricas e simplificações, obtemos,
𝑦 = (−𝑔
2(𝑣0𝑥)2) 𝑥
2 + (𝑣0𝑥.𝑣0𝑦+𝑔.𝑥0
(𝑣0𝑥)2 ) 𝑥 + (𝑦0 −
𝑔.(𝑥0)2
2(𝑣0𝑥)2 −
𝑥0.𝑣0𝑦
𝑣0𝑥)
A equação obtida para a trajetória 𝑦 = 𝑓(𝑥), no sistema de coordenadas 𝑂𝑥𝑦 adotado, é uma parábola do tipo
𝑦 = 𝐴𝑥2 + 𝐵𝑥 + 𝐶 onde,
𝐴 = (−𝑔
2(𝑣0𝑥)2) 𝐵 = (
𝑣0𝑥.𝑣0𝑦+𝑔.𝑥0
(𝑣0𝑥)2 ) 𝐶 = (𝑦0 −
𝑔.(𝑥0)2
2(𝑣0𝑥)2 −
𝑥0.𝑣0𝑦
𝑣0𝑥)
n) A equação horária 𝑠 = 𝑠(𝑡) sobre a trajetória.
1ª Opção:
Utilizamos, (𝑑𝑠)2 = (𝑑𝑥)2 + (𝑑𝑦)2 Sabendo que,
𝑥 = 𝑥0 + 𝑣0𝑥𝑡 𝑦 = 𝑦0 + 𝑣0𝑦𝑡 −1
2𝑔𝑡2
Obtemos,
𝑑𝑥 = 𝑣0𝑥𝑑𝑡 𝑑𝑦 = (𝑣0𝑦 − 𝑔𝑡)𝑑𝑡
Assim,
(𝑑𝑠)2 = (𝑣0𝑥𝑑𝑡)2 + ((𝑣0𝑦 − 𝑔𝑡)𝑑𝑡)
2
𝑑𝑠 = √(𝑣0𝑥𝑑𝑡)2 + [(𝑣0𝑦 − 𝑔𝑡)𝑑𝑡]
2
𝑑𝑠 = √(𝑣0𝑥)2(𝑑𝑡)2 + (𝑣0𝑦 − 𝑔𝑡)
2(𝑑𝑡)2 𝑑𝑠 = √[(𝑣0𝑥)
2 + (𝑣0𝑦 − 𝑔𝑡)2] (𝑑𝑡)2
𝑑𝑠 = √(𝑣0𝑥2 + 𝑣0𝑦
2 − 2𝑣0𝑦𝑔𝑡 + 𝑔2𝑡2)(𝑑𝑡)2 𝑑𝑠 = (√𝑣0𝑥
2 + 𝑣0𝑦2 − 2𝑣0𝑦𝑔𝑡 + 𝑔
2𝑡2)𝑑𝑡
∫ 𝑑𝑠𝑠
𝑠0
= ∫ (√𝑣0𝑥2 + 𝑣0𝑦
2 − 2𝑣0𝑦𝑔𝑡 + 𝑔2𝑡2) 𝑑𝑡
𝑡
0
𝑠 − 𝑠0 = −1
2𝑔(𝑣0𝑥
2 ln(𝑣0𝑦 − 𝑔𝑡 + √𝑣0𝑥2 + 𝑣0𝑦
2 − 2𝑣0𝑦𝑔𝑡 + 𝑔2𝑡2) − 𝑣0𝑥
2 ln(𝑣0𝑦 + √𝑣0𝑥2 + 𝑣0𝑦
2) −
−𝑣0𝑦√𝑣0𝑥2 + 𝑣0𝑦
2 + (𝑣0𝑦 − 𝑔𝑡)√𝑣0𝑥2 + 𝑣0𝑦
2 − 2𝑣0𝑦𝑔𝑡 + 𝑔2𝑡2
)
𝑠 − 𝑠0 = −1
2𝑔(𝑣0𝑥
2 ln (𝑣0𝑦−𝑔𝑡+√𝑣0𝑥2+𝑣0𝑦2−2𝑣0𝑦𝑔𝑡+𝑔2𝑡2
𝑣0𝑦+√𝑣0𝑥2+𝑣0𝑦2) − 𝑣0𝑦√𝑣0𝑥
2 + 𝑣0𝑦2 + (𝑣0𝑦 − 𝑔𝑡)√𝑣0𝑥
2 + 𝑣0𝑦2 − 2𝑣0𝑦𝑔𝑡 + 𝑔
2𝑡2)
𝑠 = 𝑠0 +1
2𝑔(𝑣0𝑦√𝑣0𝑥
2 + 𝑣0𝑦2 − 𝑣0𝑥
2 ln (𝑣0𝑦−𝑔𝑡+√𝑣0𝑥2+𝑣0𝑦2−2𝑣0𝑦𝑔𝑡+𝑔2𝑡2
𝑣0𝑦+√𝑣0𝑥2+𝑣0𝑦2) − (𝑣0𝑦 − 𝑔𝑡)√𝑣0𝑥
2 + 𝑣0𝑦2 − 2𝑣0𝑦𝑔𝑡 + 𝑔
2𝑡2)
Para 𝑡 = 0 tem-se 𝑠 = 𝑠0 = 0. Assim,
𝑠 =1
2𝑔(𝑣0𝑦√𝑣0𝑥
2 + 𝑣0𝑦2 − 𝑣0𝑥
2 ln (𝑣0𝑦−𝑔𝑡+√𝑣0𝑥
2+𝑣0𝑦2−2𝑣0𝑦𝑔𝑡+𝑔
2𝑡2
𝑣0𝑦+√𝑣0𝑥2+𝑣0𝑦
2) − (𝑣0𝑦 − 𝑔𝑡)√𝑣0𝑥
2 + 𝑣0𝑦2 − 2𝑣0𝑦𝑔𝑡 + 𝑔
2𝑡2)

Prof.: Carlos Arthur Cavalcante 39
2ª Opção:
Utilizamos, 𝑣 =𝑑𝑠
𝑑𝑡 Quando sabemos que, 𝑣 = √𝑣0𝑥
2 + 𝑣0𝑦2 − 2𝑣0𝑦𝑔𝑡 + 𝑔
2𝑡2
Obtemos,
𝑑𝑠
𝑑𝑡= √𝑣0𝑥
2 + 𝑣0𝑦2 − 2𝑣0𝑦𝑔𝑡 + 𝑔
2𝑡2
Assim,
𝑑𝑠 = (√𝑣0𝑥2 + 𝑣0𝑦
2 − 2𝑣0𝑦𝑔𝑡 + 𝑔2𝑡2)𝑑𝑡
∫ 𝑑𝑠𝑠
0
= ∫ (√𝑣0𝑥2 + 𝑣0𝑦
2 − 2𝑣0𝑦𝑔𝑡 + 𝑔2𝑡2) 𝑑𝑡
𝑡
0
𝑠 =1
2𝑔(𝑣0𝑦√𝑣0𝑥
2 + 𝑣0𝑦2 − 𝑣0𝑥
2 ln (𝑣0𝑦−𝑔𝑡+√𝑣0𝑥
2+𝑣0𝑦2−2𝑣0𝑦𝑔𝑡+𝑔
2𝑡2
𝑣0𝑦+√𝑣0𝑥2+𝑣0𝑦
2) − (𝑣0𝑦 − 𝑔𝑡)√𝑣0𝑥
2 + 𝑣0𝑦2 − 2𝑣0𝑦𝑔𝑡 + 𝑔
2𝑡2)
o) A velocidade escalar 𝑣, em função do tempo 𝑡;
1ª Opção:
Utilizamos 𝑣 =𝑑𝑠
𝑑𝑡 Quando sabemos que,
𝑠 =1
2𝑔(𝑣0𝑦√𝑣0𝑥
2 + 𝑣0𝑦2 − 𝑣0𝑥
2 ln (𝑣0𝑦−𝑔𝑡+√𝑣0𝑥
2+𝑣0𝑦2−2𝑣0𝑦𝑔𝑡+𝑔
2𝑡2
𝑣0𝑦+√𝑣0𝑥2+𝑣0𝑦
2) − (𝑣0𝑦 − 𝑔𝑡)√𝑣0𝑥
2 + 𝑣0𝑦2 − 2𝑣0𝑦𝑔𝑡 + 𝑔
2𝑡2)
Após derivar e fazer as simplificações, encontramos,
𝑣 = √𝑣0𝑥2 + 𝑣0𝑦
2 − 2𝑣0𝑦𝑔𝑡 + 𝑔2𝑡2
2ª Opção:
Utilizamos 𝑑𝑣
𝑑𝑡= 𝑎𝑡 Quando sabemos que, 𝑎𝑡 =
−𝑔(𝑣0𝑦−𝑔𝑡)
√𝑣0𝑥2+𝑣0𝑦
2−2𝑣0𝑦𝑔𝑡+𝑔2𝑡2
Assim,
𝑑𝑣
𝑑𝑡=
−𝑔(𝑣0𝑦−𝑔𝑡)
√𝑣0𝑥2+𝑣0𝑦
2−2𝑣0𝑦𝑔𝑡+𝑔2𝑡2
∫ 𝑑𝑣𝑣
𝑣0= ∫
−𝑔(𝑣0𝑦−𝑔𝑡)
√𝑣0𝑥2+𝑣0𝑦
2−2𝑣0𝑦𝑔𝑡+𝑔2𝑡2𝑑𝑡
𝑡
0
𝑣 − 𝑣0 = −(√𝑣0𝑥2 + 𝑣0𝑦
2 − √𝑣0𝑥2 + 𝑣0𝑦
2 − 2𝑣0𝑦𝑔𝑡 + 𝑔2𝑡2)
𝑣 − 𝑣0 = −𝑣0 + √𝑣0𝑥2 + 𝑣0𝑦
2 − 2𝑣0𝑦𝑔𝑡 + 𝑔2𝑡2
𝑣 = √𝑣0𝑥2 + 𝑣0𝑦
2 − 2𝑣0𝑦𝑔𝑡 + 𝑔2𝑡2
3ª Opção:
Utilizamos 𝑣 = √(𝑣𝑥)2 + (𝑣𝑦)
2 (Ver resposta ao item h).

Prof.: Carlos Arthur Cavalcante 40
Quando sabemos que
𝑣𝑥 = 𝑣0𝑥 e que 𝑣𝑦 = 𝑣0𝑦 − 𝑔𝑡
Assim,
𝑣 = √(𝑣0𝑥)2 + (𝑣0𝑦 − 𝑔𝑡)
2 𝑣 = √𝑣0𝑥
2 + 𝑣0𝑦2 − 2𝑣0𝑦𝑔𝑡 + 𝑔
2𝑡2
p) A expressão para o raio de curvatura 𝜌, em função do tempo 𝑡;
1ª Opção:
𝜌 =𝑣2
𝑎𝑛 𝜌 =
(√𝑣0𝑥2+𝑣0𝑦
2−2𝑣0𝑦𝑔𝑡+𝑔2𝑡2)
2
𝑔𝑣0𝑥√𝑣0𝑥2+𝑣0𝑦
2−2𝑣0𝑦𝑔𝑡+𝑔2𝑡2
𝑣0𝑥2+𝑣0𝑦
2−2𝑔𝑣0𝑦𝑡+𝑔2𝑡2
𝜌 =𝑣0𝑥
2+𝑣0𝑦2−2𝑣0𝑦𝑔𝑡+𝑔
2𝑡2
𝑔𝑣0𝑥√𝑣0𝑥2+𝑣0𝑦
2−2𝑣0𝑦𝑔𝑡+𝑔2𝑡2
𝑣0𝑥2+𝑣0𝑦
2−2𝑔𝑣0𝑦𝑡+𝑔2𝑡2
𝜌 =(𝑣0𝑥
2+𝑣0𝑦2−2𝑔𝑣0𝑦𝑡+𝑔
2𝑡2)2
𝑔𝑣0𝑥√𝑣0𝑥2+𝑣0𝑦
2−2𝑣0𝑦𝑔𝑡+𝑔2𝑡2
𝜌 =√(𝑣0𝑥
2+𝑣0𝑦2−2𝑔𝑣0𝑦𝑡+𝑔
2𝑡2)3
𝑔𝑣0𝑥
2ª Opção:
𝜌 =|𝑑��
𝑑𝑡|3
|𝑑��
𝑑𝑡×𝑑2��
𝑑𝑡2|=
𝑣3
|����|=
(𝑑𝑠
𝑑𝑡)3
|��×��| 𝜌 =
(√𝑣0𝑥2+𝑣0𝑦
2−2𝑣0𝑦𝑔𝑡+𝑔2𝑡2)
3
|[𝑣𝑥𝑣𝑦]×[
𝑎𝑥𝑎𝑦]|
𝜌 =(√𝑣0𝑥
2+𝑣0𝑦2−2𝑣0𝑦𝑔𝑡+𝑔
2𝑡2)3
|[𝑣0𝑥
𝑣0𝑦−𝑔𝑡]×[
0−𝑔
]| 𝜌 =
(√(𝑣0𝑥)2+(𝑣0𝑦−𝑔𝑡)
2)
3
|[
00
−𝑔𝑣0𝑥
]|
𝜌 =(√𝑣0𝑥
2+𝑣0𝑦2−2𝑣0𝑦𝑔𝑡+𝑔
2𝑡2)3
√02+02+(−𝑔𝑣0𝑥)2
𝜌 =√(𝑣0𝑥
2+𝑣0𝑦2−2𝑔𝑣0𝑦𝑡+𝑔
2𝑡2)3
𝑔𝑣0𝑥
3ª Opção:
𝜌 =(1+(
𝑑𝑦
𝑑𝑥)2)
(32)
𝑑2𝑦
𝑑𝑥2
𝑦 = 𝐴𝑥2 + 𝐵𝑥 + 𝐶 𝑑𝑦
𝑑𝑥= 2𝐴𝑥 + 𝐵
𝑑2𝑦
𝑑𝑥2= 2𝐴
𝐴 = (−𝑔
2(𝑣0𝑥)2) 𝐵 = (
𝑣0𝑥.𝑣0𝑦+𝑔.𝑥0
(𝑣0𝑥)2 ) 𝐶 = (𝑦0 −
𝑔.(𝑥0)2
2(𝑣0𝑥)2 −
𝑥0.𝑣0𝑦
𝑣0𝑥)
Assim,
𝜌 =(1+(2𝐴𝑥+𝐵)2)
(32)
2𝐴 𝜌 =
(1+4𝐴2𝑥2+4𝐴𝐵𝑥+𝐵2)(32)
2𝐴

Prof.: Carlos Arthur Cavalcante 41
𝜌 =(1+4(−
𝑔
2𝑣0𝑥2)2(𝑥0+𝑣0𝑥.𝑡)
2+4(−𝑔
2𝑣0𝑥2)(
𝑣0𝑥.𝑣0𝑦+𝑔.𝑥0
(𝑣0𝑥)2 )(𝑥0+𝑣0𝑥.𝑡)+(
𝑣0𝑥.𝑣0𝑦+𝑔.𝑥0
(𝑣0𝑥)2 )
2)
(32)
2(−𝑔
2𝑣0𝑥2)
𝜌 =(𝑣0𝑥
2+𝑣0𝑦2−2𝑣0𝑦𝑔𝑡+𝑔
2𝑡2)(32)
𝑔𝑣0𝑥
q) O raio de curvatura mínimo da trajetória descrita pelo projétil;
O raio de curvatura será mínimo (ou máximo) quando,
𝑑𝜌
𝑑𝑡= 0
𝑑
𝑑𝑡((𝑔2𝑡2−2𝑔𝑣0𝑦𝑡+𝑣0𝑥
2+𝑣0𝑦2)(32)
𝑔𝑣0𝑥 ) = 0
−3(𝑣0𝑦−𝑔𝑡)√𝑔
2𝑡2−2𝑔𝑣0𝑦𝑡+𝑣0𝑥2+𝑣0𝑦
2
𝑣0𝑥 = 0
Resolvendo para encontrar o valor de 𝑡, 𝑡(𝜌𝑚𝑖𝑛) =𝑣0𝑦
𝑔
Logo,
𝜌𝑚𝑖𝑛 =(𝑣0𝑥
2+𝑣0𝑦2−2𝑣0𝑦𝑔(
𝑣0𝑦
𝑔)+𝑔2(
𝑣0𝑦
𝑔)2)
(32)
𝑔𝑣0𝑥 𝜌𝑚𝑖𝑛 =
𝑣0𝑥2
𝑔
r) O valor numérico de cada item anterior para o instante 𝑡 = 8 𝑠, sabendo que, no sistema 𝑂𝑥𝑦 adotado, 𝑥0 =
50 𝑚, 𝑦0 = 150 𝑚, 𝑣0𝑥 = 90√3 𝑚 𝑠⁄ e 𝑣0𝑦 = 90 𝑚 𝑠⁄ .
𝑎𝑥 = 0 𝑣𝑥 = 155,89 𝑚 𝑠⁄ 𝑥 = 1.297,1 𝑚
𝑎𝑦 = −9,81 𝑚 𝑠2⁄ 𝑣𝑦 = 11,520 𝑚 𝑠⁄ 𝑦 = 556,08 𝑚
�� = [0
−9,81] (𝑚 𝑠2⁄ ) �� = [
155,8911,520
] (𝑚 𝑠⁄ ) 𝑟 = [1.297,1556,08
] (𝑚)
𝑎 = 9,81 𝑚 𝑠2⁄ 𝑣 = 156,31 𝑚 𝑠⁄
𝑒𝑡 = [0,997280,07369
] 𝑒𝑛 = [0,07369 −0,99728
]
𝑎𝑡 = −0,72300 𝑚 𝑠2⁄ 𝑎𝑛 = 9,7833 𝑚 𝑠2⁄
𝑦 = 556,08 𝑚 𝑥 = 1.297,1 𝑚
𝑠 = 1.322,8 𝑚
𝑣 = 156,31 𝑚 𝑠⁄
𝜌 = 2.497,4 𝑚
𝜌𝑚𝑖𝑛 = 2.477,1 𝑚

Prof.: Carlos Arthur Cavalcante 42
2.7.4 Exemplo-Ilustrativo 12. Análise completa de um movimento 2D conhecido
(movimento circular uniformemente acelerado) para consolidar conceitos e
método de modelagem e solução de problemas.
Modificado de Problema-Resolvido 11.10 (Beer, Johnston; 9ª Edição)
Um motorista está percorrendo uma seção curva de uma rodovia de raio 𝑅 a uma
velocidade escalar 𝑣𝐴. O motorista aciona os freios fazendo o automóvel reduzir a sua
velocidade escalar de forma constante. Sabendo que em 𝑡𝐵 segundos a velocidade
escalar foi reduzida para 𝑣𝐵. Determinar:
a) A componente tangencial 𝑎𝑡 da aceleração, em função do tempo 𝑡; b) A velocidade escalar 𝑣, em função do tempo 𝑡; c) A equação horária 𝑠, em função do tempo 𝑡; d) A componente normal 𝑎𝑛 da aceleração, em função do tempo 𝑡; e) A equação da trajetória 𝑦 = 𝑓(𝑥); f) As componentes 𝑥 e 𝑦 do vetor posição 𝑟, em função do tempo 𝑡; g) As componentes 𝑣𝑥 e 𝑣𝑦 do vetor velocidade ��, em função do tempo 𝑡;
h) A intensidade 𝑣 do vetor velocidade, em função do tempo 𝑡 (conferir com a expressão encontrada para a
velocidade escalar 𝑣);
i) O valor numérico dos itens anteriores para os instantes de tempo 𝑡0 = 0 𝑠, 𝑡1 = 8 𝑠 e 𝑡2 = 40 𝑠, assumindo
que 𝑅 = 750 𝑚, 𝑣𝐴 = 90 𝑘𝑚 ℎ⁄ , 𝑡𝐵 = 8 𝑠 e 𝑣𝐵 = 72 𝑘𝑚 ℎ⁄ e fazendo o diagrama correspondente para cada
instante.
SOLUÇÃO:
Durante a frenagem, iniciada com o acionamento dos freios em 𝑡 = 𝑡0 = 0, o automóvel
realiza um movimento curvilíneo ao longo de um arco de circunferência, no sentido anti-
horário e com aceleração tangencial constante (𝑎𝑡 = 𝑐𝑡𝑒).
Portanto, ao longo de sua trajetória, a partícula realiza um movimento uniformemente
acelerado (𝑎𝑡 = 𝑐𝑡𝑒) regido pelas seguintes equações gerais:
𝑎𝑡 = 𝑐𝑡𝑒 𝑣 = 𝑣0 + 𝑎𝑡𝑡
𝑠 = 𝑠0 + 𝑣0𝑡 +1
2𝑎𝑡𝑡
2 𝑣2 = 𝑣02 + 2𝑎𝑡∆𝑠
a) A componente tangencial 𝑎𝑡 da aceleração, em função do tempo 𝑡;
Sabemos que 𝑎𝑡 = 𝑐𝑡𝑒 e foi dado que {𝑣𝐴 = 𝑣(𝑡=𝑡𝐴) = 𝑣(𝑡=0) = 𝑣0𝑣𝐵 = 𝑣(𝑡=𝑡𝐵)
Assim, podemos escrever,
𝑎𝑡 =𝑣𝐵−𝑣𝐴
𝑡𝐵−𝑡𝐴 𝑎𝑡 =
𝑣𝐵−𝑣𝐴
𝑡𝐵−0
𝑎𝑡 =𝑣𝐵−𝑣𝐴
𝑡𝐵
b) A velocidade escalar 𝑣, em função do tempo 𝑡;
𝑣 = 𝑣0 + 𝑎𝑡𝑡 𝑣 = 𝑣𝐴 + (𝑣𝐵−𝑣𝐴
𝑡𝐵) 𝑡
c) A equação horária 𝑠, em função do tempo 𝑡;
𝑅
𝑣𝐴

Prof.: Carlos Arthur Cavalcante 43
𝑠 = 𝑣𝐴𝑡 +1
2𝑎𝑡𝑡
2 𝑠 = 𝑣𝐴𝑡 +1
2(𝑣𝐵−𝑣𝐴
𝑡𝐵) 𝑡2
d) A componente normal 𝑎𝑛 da aceleração, em função do tempo 𝑡;
𝑎𝑛 =𝑣2
𝜌 𝑎𝑛 =
(𝑣𝐴+(𝑣𝐵−𝑣𝐴𝑡𝐵
)𝑡)2
𝑅
𝑎𝑛 =((𝑣𝐵−𝑣𝐴)𝑡−𝑣𝐴𝑡)
2
𝑅𝑡𝐵2
e) Determinar a equação da trajetória 𝑦 = 𝑓(𝑥);
Adotamos o sistema de coordenadas 𝑂𝑥𝑦 ilustrado ao lado de tal modo que o início do
acionamento freios corresponde ao ponto de coordenadas (𝑥0 = 𝑅, 𝑦0 = 0).
Como a trajetória do automóvel durante a frenagem é um arco de circunferência,
podemos escrever que,
𝑥2 + 𝑦2 = 𝑅2 𝑦 = √𝑅2 − 𝑥2
f) As componentes 𝑥 e 𝑦 do vetor posição 𝑟, em função do tempo 𝑡;
(𝑑𝑠)2 = (𝑑𝑥)2 + (𝑑𝑦)2
Da equação horária, obtemos,
𝑠 = 𝑣𝐴𝑡 +1
2𝑎𝑡𝑡
2 𝑑𝑠 = (𝑣𝐴 + 𝑎𝑡𝑡)𝑑𝑡
Da equação da trajetória, obtemos,
𝑥2 + 𝑦2 = 𝑅2 2𝑥𝑑𝑥 + 2𝑦𝑑𝑦 = 0 𝑥𝑑𝑥 = −𝑦𝑑𝑦
𝑑𝑥 = −𝑦
𝑥𝑑𝑦 𝑑𝑥 = −
𝑦
√𝑅2−𝑦2𝑑𝑦
Assim,
(𝑣𝐴 + 𝑎𝑡𝑡)2(𝑑𝑡)2 = (−
𝑦
√𝑅2−𝑦2𝑑𝑦)
2
+ (𝑑𝑦)2 (𝑣𝐴 + 𝑎𝑡𝑡)2(𝑑𝑡)2 = (
𝑦2
𝑅2−𝑦2) (𝑑𝑦)2 + (𝑑𝑦)2
(𝑣𝐴 + 𝑎𝑡𝑡)2(𝑑𝑡)2 = (
𝑦2
𝑅2−𝑦2+ 1) (𝑑𝑦)2 (𝑣𝐴 + 𝑎𝑡𝑡)
2(𝑑𝑡)2 = (𝑅2
𝑅2−𝑦2) (𝑑𝑦)2
(𝑣𝐴 + 𝑎𝑡𝑡)𝑑𝑡 =𝑅
√𝑅2−𝑦2𝑑𝑦
∫𝑅
√𝑅2−𝑦2𝑑𝑦
𝑦
𝑦0= ∫ (𝑣𝐴 + 𝑎𝑡𝑡)𝑑𝑡
𝑡
0 𝑅 sin−1 (
𝑦
𝑅) − 𝑅 sin−1 (
𝑦0
𝑅) = 𝑣𝐴𝑡 +
1
2𝑎𝑡𝑡
2
Condições iniciais,
𝑥0 = 𝑅 𝑦0 = 0
Assim,
𝑅 sin−1 (𝑦
𝑅) − 𝑅 sin−1 (
0
𝑅) = 𝑣𝐴𝑡 +
1
2𝑎𝑡𝑡
2
Prof.: Carlos Arthur Cavalcante 44
𝑅 sin−1 (𝑦
𝑅) − 𝑅 sin−1(0) = 𝑣𝐴𝑡 +
1
2𝑎𝑡𝑡
2
𝑅 sin−1 (𝑦
𝑅) − 0 = 𝑣𝐴𝑡 +
1
2𝑎𝑡𝑡
2 𝑅 sin−1 (𝑦
𝑅) =
2𝑣𝐴𝑡+𝑎𝑡𝑡2
2
sin−1 (𝑦
𝑅) =
2𝑣𝐴𝑡+𝑎𝑡𝑡2
2𝑅
𝑦
𝑅= sin (
2𝑣𝐴𝑡+𝑎𝑡𝑡2
2𝑅)
𝑦 = 𝑅 sin (2𝑣𝐴𝑡+𝑎𝑡𝑡
2
2𝑅)
E uma vez que 𝑥2 + 𝑦2 = 𝑅2 podemos escrever que,
𝑥2 + (𝑅 sin (2𝑣𝐴𝑡+𝑎𝑡𝑡
2
2𝑅))
2
= 𝑅2 𝑥2 = 𝑅2 − (𝑅 sin (2𝑣𝐴𝑡+𝑎𝑡𝑡
2
2𝑅))
2
𝑥2 = 𝑅2 (1 − sin2 (2𝑣𝐴𝑡+𝑎𝑡𝑡
2
2𝑅)) 𝑥2 = 𝑅2 cos2 (
2𝑣𝐴𝑡+𝑎𝑡𝑡2
2𝑅)
𝑥 = 𝑅 cos (2𝑣𝐴𝑡+𝑎𝑡𝑡
2
2𝑅)
O vetor posição 𝑟, em um instante qualquer, é dado por,
𝑟 = [𝑅 cos (
2𝑣𝐴𝑡+𝑎𝑡𝑡2
2𝑅)
𝑅 sin (2𝑣𝐴𝑡+𝑎𝑡𝑡
2
2𝑅)]
g) As componentes 𝑣𝑥 e 𝑣𝑦 do vetor velocidade ��, em função do tempo 𝑡;
𝑣𝑥 =𝑑𝑥
𝑑𝑡=
𝑑(𝑅 cos(2𝑣𝐴𝑡+𝑎𝑡𝑡
2
2𝑅))
𝑑𝑡 𝑣𝑥 = −(𝑣𝐴 + 𝑎𝑡𝑡) sin (
2𝑣𝐴𝑡+𝑎𝑡𝑡2
2𝑅)
𝑣𝑦 =𝑑𝑦
𝑑𝑡=
𝑑(𝑅 sin(2𝑣𝐴𝑡+𝑎𝑡𝑡
2
2𝑅))
𝑑𝑡 𝑣𝑦 = (𝑣𝐴 + 𝑎𝑡𝑡) cos (
2𝑣𝐴𝑡+𝑎𝑡𝑡2
2𝑅)
O vetor velocidade ��, em um instante qualquer, é dado por,
�� = [−(𝑣𝐴 + 𝑎𝑡𝑡) sin (
2𝑣𝐴𝑡+𝑎𝑡𝑡2
2𝑅)
(𝑣𝐴 + 𝑎𝑡𝑡) cos (2𝑣𝐴𝑡+𝑎𝑡𝑡
2
2𝑅)]
h) A intensidade 𝑣 do vetor velocidade, em função do tempo 𝑡 (conferir com a expressão encontrada para a
velocidade escalar 𝑣);
𝑣 = √(𝑣𝑥)2 + (𝑣𝑦)
2
𝑣 = √(−(𝑣𝐴 + 𝑎𝑡𝑡) sin (2𝑣𝐴𝑡+𝑎𝑡𝑡
2
2𝑅))
2
+ ((𝑣𝐴 + 𝑎𝑡𝑡) cos (2𝑣𝐴𝑡+𝑎𝑡𝑡
2
2𝑅))
2
𝑣 = √𝑣𝐴2 + 2𝑣𝐴𝑎𝑡𝑡 + 𝑎𝑡
2𝑡2 𝑣 = √(𝑣𝐴 + 𝑎𝑡𝑡)2
𝑣 = 𝑣𝐴 + 𝑎𝑡𝑡
Como era de se esperar, a expressão encontrada é a mesma expressão obtida para a velocidade escalar 𝑣 a partir
da equação horária 𝑣 = 𝑑𝑠 𝑑𝑡⁄ .

Prof.: Carlos Arthur Cavalcante 45
i) O valor numérico dos itens anteriores para os instantes de tempo 𝑡0 = 0 𝑠, 𝑡1 = 8 𝑠 e 𝑡2 = 40 𝑠, assumindo
que 𝑅 = 750 𝑚, 𝑣𝐴 = 90 𝑘𝑚 ℎ⁄ , 𝑡𝐵 = 8 𝑠 e 𝑣𝐵 = 72 𝑘𝑚 ℎ⁄ e fazendo o diagrama correspondente para cada
instante.
Item Valores para
𝒕 = 𝒕𝟎 = 𝟎 𝒔
Valores para
𝒕 = 𝒕𝟏 = 𝟖 𝒔
Valores para
𝒕 = 𝒕𝟐 = 𝟒𝟎 𝒔
Aceleração
tangencial 𝒂𝒕 𝑎𝑡 = −5 8⁄
𝑎𝑡 = −0,625 𝑚 𝑠2⁄
𝑎𝑡 = −5 8⁄
𝑎𝑡 = −0,625 𝑚 𝑠2⁄
𝑎𝑡 = −5 8⁄
𝑎𝑡 = −0,625 𝑚 𝑠2⁄
Velocidade
escalar 𝒗 𝑣 = 25 𝑚 𝑠⁄ 𝑣 = 20 𝑚 𝑠⁄ 𝑣 = 0
Posição 𝒔 𝑠 = 0 𝑚 𝑠 = 180 𝑚 𝑠 = 500 𝑚
Aceleração
normal 𝒂𝒏
𝑎𝑛 = 5 6⁄
𝑎𝑛 = 0,83333 𝑚 𝑠2⁄
𝑎𝑛 = 8/15
𝑎𝑛 = 0,53333 𝑚 𝑠2⁄ 𝑎𝑛 = 0
Componentes
𝒙 e 𝒚
𝑥 = 750 𝑚
𝑦 = 0 𝑚
𝑥 = 728,50 𝑚
𝑦 = 178,28 𝑚
𝑥 = 589,42 𝑚
𝑦 = 463,78 𝑚
Componentes
𝒗𝒙 e 𝒗𝒚
𝑣𝑥 = 0 𝑚 𝑠⁄
𝑣𝑦 = 25 𝑚 𝑠⁄
𝑣𝑥 = −4,7541 𝑚 𝑠⁄
𝑣𝑦 = 19,427 𝑚 𝑠⁄
𝑣𝑥 = 0
𝑣𝑦 = 0
Diagrama

Prof.: Carlos Arthur Cavalcante 46
2.7.5 Exemplo-Ilustrativo 13. Análise completa de um movimento 3D conhecido
(movimento helicoidal) para consolidar conceitos e método de modelagem e
solução de problemas.
O movimento de uma partícula é definido pelo vetor posição 𝑟 = (4 cos(2𝜋𝑡))𝑖 + (3𝑡2)𝑗 + (4 sin(2𝜋𝑡))��.
Determinar:
a) As componentes 𝑥, 𝑦 e 𝑧 do vetor posição 𝑟, em função do tempo 𝑡; b) O vetor posição 𝑟, em função do tempo 𝑡; c) As componentes 𝑣𝑥, 𝑣𝑦 e 𝑣𝑧 do vetor velocidade ��, em função do tempo 𝑡;
d) O vetor velocidade ��, em função do tempo 𝑡; e) A intensidade 𝑣 do vetor velocidade ��, em função do tempo 𝑡; f) As componentes 𝑎𝑥, 𝑎𝑦 e 𝑎𝑧 do vetor aceleração ��, em função do tempo 𝑡;
g) O vetor aceleração ��, em função do tempo 𝑡; h) A intensidade 𝑎 do vetor aceleração ��, em função do tempo 𝑡; i) O vetor unitário 𝑒𝑡 tangente à trajetória, em função do tempo 𝑡; j) O vetor unitário 𝑒𝑛 normal à trajetória, em função do tempo 𝑡; k) A componente tangencial 𝑎𝑡 do vetor aceleração ��, em função do tempo 𝑡; l) A componente normal 𝑎𝑛 do vetor aceleração ��, em função do tempo 𝑡; m) A expressão para o raio de curvatura 𝜌, em função do tempo 𝑡; n) A equação da trajetória 𝑦 = 𝑓(𝑥); o) A equação horária 𝑠 = 𝑠(𝑡) do movimento ao longo da trajetória.
SOLUÇÃO:
De acordo com o enunciado do problema, o movimento da partícula está determinado e seu vetor posição no
sistema de coordenadas 𝑂𝑥𝑦𝑧 é 𝑟 = (4 cos(2𝜋𝑡))𝑖 + (3𝑡2)𝑗 + (4 sin(2𝜋𝑡))��.
a) As componentes 𝑥, 𝑦 e 𝑧 do vetor posição 𝑟, em função do tempo 𝑡;
𝑥 = 4 cos(2𝜋𝑡) 𝑦 = 3𝑡2 𝑧 = 4 sin(2𝜋𝑡)
b) O vetor posição 𝑟, em função do tempo 𝑡;
𝑟 = [4 cos(2𝜋𝑡)
3𝑡2
4 sin(2𝜋𝑡)] Ou 𝑟 = (4 cos(2𝜋𝑡))𝑖 + (3𝑡2)𝑗 + (4 sin(2𝜋𝑡))��
c) As componentes 𝑣𝑥, 𝑣𝑦 e 𝑣𝑧 do vetor velocidade v, em função do tempo 𝑡;
𝑣𝑥 =𝑑𝑥
𝑑𝑡 𝑣𝑥 = −4 sin(2𝜋𝑡) 2𝜋 𝑣𝑥 = −8𝜋 sin(2𝜋𝑡)
𝑣𝑦 =𝑑𝑦
𝑑𝑡 𝑣𝑦 = (2)(3)𝑡 𝑣𝑦 = 6𝑡
𝑣𝑧 =𝑑𝑧
𝑑𝑡 𝑣𝑧 = 4 cos(2𝜋𝑡) 2𝜋 𝑣𝑧 = 8𝜋 cos(2𝜋𝑡)
d) O vetor velocidade ��, em função do tempo 𝑡;
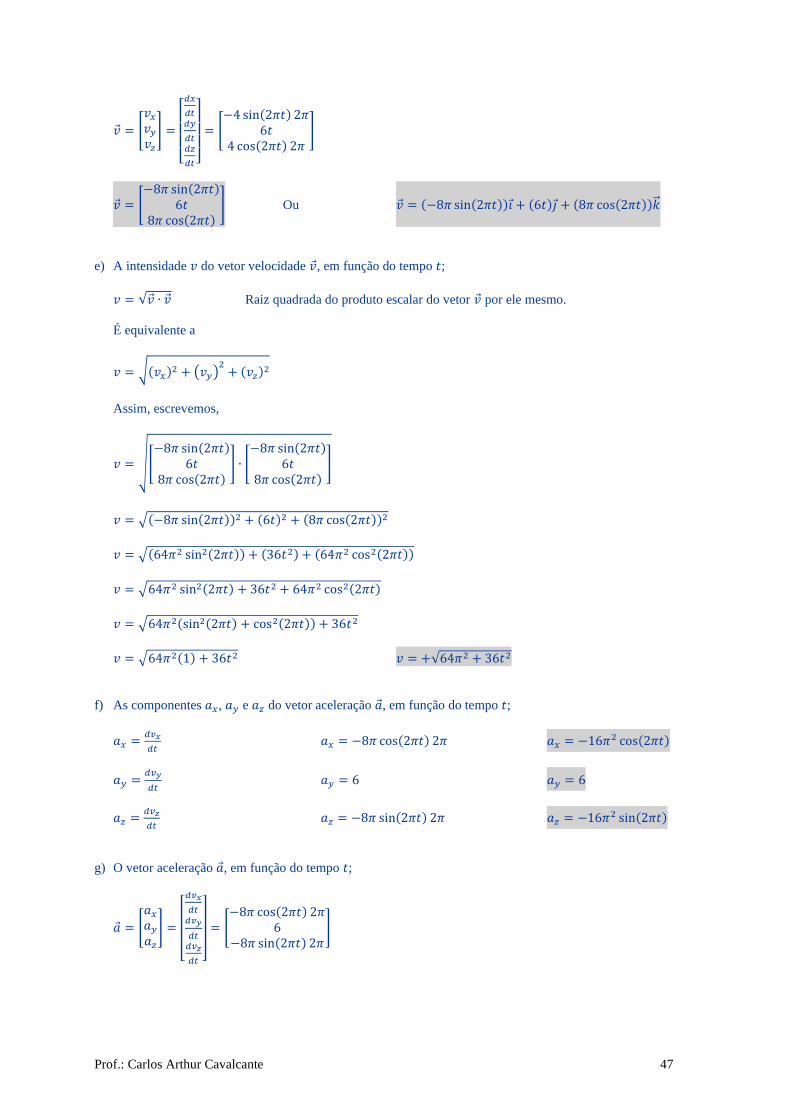
Prof.: Carlos Arthur Cavalcante 47
�� = [
𝑣𝑥𝑣𝑦𝑣𝑧] =
[ 𝑑𝑥
𝑑𝑡𝑑𝑦
𝑑𝑡𝑑𝑧
𝑑𝑡]
= [−4 sin(2𝜋𝑡) 2𝜋
6𝑡4 cos(2𝜋𝑡) 2𝜋
]
�� = [−8𝜋 sin(2𝜋𝑡)
6𝑡8𝜋 cos(2𝜋𝑡)
] Ou �� = (−8𝜋 sin(2𝜋𝑡))𝑖 + (6𝑡)𝑗 + (8𝜋 cos(2𝜋𝑡))��
e) A intensidade 𝑣 do vetor velocidade ��, em função do tempo 𝑡;
𝑣 = √�� ∙ �� Raiz quadrada do produto escalar do vetor �� por ele mesmo.
É equivalente a
𝑣 = √(𝑣𝑥)2 + (𝑣𝑦)
2+ (𝑣𝑧)
2
Assim, escrevemos,
𝑣 = √[−8𝜋 sin(2𝜋𝑡)
6𝑡8𝜋 cos(2𝜋𝑡)
] ∙ [−8𝜋 sin(2𝜋𝑡)
6𝑡8𝜋 cos(2𝜋𝑡)
]
𝑣 = √(−8𝜋 sin(2𝜋𝑡))2 + (6𝑡)2 + (8𝜋 cos(2𝜋𝑡))2
𝑣 = √(64𝜋2 sin2(2𝜋𝑡)) + (36𝑡2) + (64𝜋2 cos2(2𝜋𝑡))
𝑣 = √64𝜋2 sin2(2𝜋𝑡) + 36𝑡2 + 64𝜋2 cos2(2𝜋𝑡)
𝑣 = √64𝜋2(sin2(2𝜋𝑡) + cos2(2𝜋𝑡)) + 36𝑡2
𝑣 = √64𝜋2(1) + 36𝑡2 𝑣 = +√64𝜋2 + 36𝑡2
f) As componentes 𝑎𝑥, 𝑎𝑦 e 𝑎𝑧 do vetor aceleração ��, em função do tempo 𝑡;
𝑎𝑥 =𝑑𝑣𝑥
𝑑𝑡 𝑎𝑥 = −8𝜋 cos(2𝜋𝑡) 2𝜋 𝑎𝑥 = −16𝜋
2 cos(2𝜋𝑡)
𝑎𝑦 =𝑑𝑣𝑦
𝑑𝑡 𝑎𝑦 = 6 𝑎𝑦 = 6
𝑎𝑧 =𝑑𝑣𝑧
𝑑𝑡 𝑎𝑧 = −8𝜋 sin(2𝜋𝑡) 2𝜋 𝑎𝑧 = −16𝜋2 sin(2𝜋𝑡)
g) O vetor aceleração ��, em função do tempo 𝑡;
�� = [
𝑎𝑥𝑎𝑦𝑎𝑧] =
[ 𝑑𝑣𝑥
𝑑𝑡𝑑𝑣𝑦
𝑑𝑡𝑑𝑣𝑧
𝑑𝑡 ]
= [−8𝜋 cos(2𝜋𝑡) 2𝜋
6−8𝜋 sin(2𝜋𝑡) 2𝜋
]
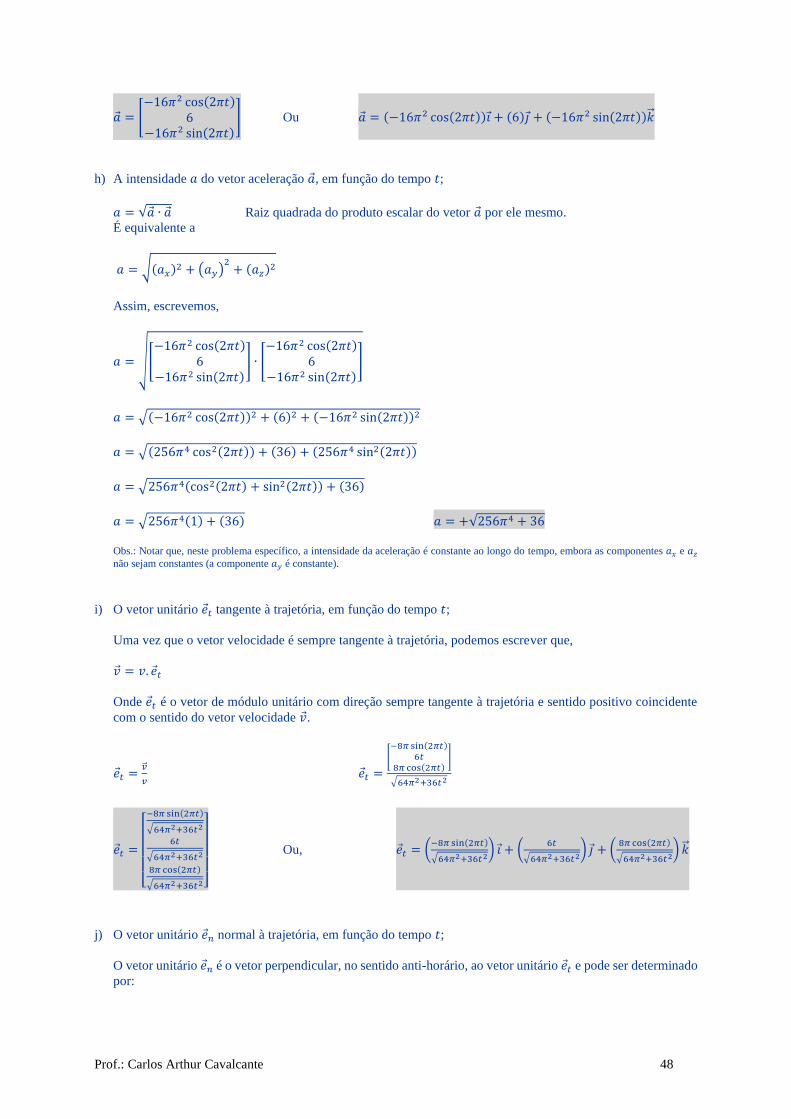
Prof.: Carlos Arthur Cavalcante 48
�� = [−16𝜋2 cos(2𝜋𝑡)
6−16𝜋2 sin(2𝜋𝑡)
] Ou �� = (−16𝜋2 cos(2𝜋𝑡))𝑖 + (6)𝑗 + (−16𝜋2 sin(2𝜋𝑡))��
h) A intensidade 𝑎 do vetor aceleração ��, em função do tempo 𝑡;
𝑎 = √�� ∙ �� Raiz quadrada do produto escalar do vetor �� por ele mesmo.
É equivalente a
𝑎 = √(𝑎𝑥)2 + (𝑎𝑦)
2+ (𝑎𝑧)
2
Assim, escrevemos,
𝑎 = √[−16𝜋2 cos(2𝜋𝑡)
6−16𝜋2 sin(2𝜋𝑡)
] ∙ [−16𝜋2 cos(2𝜋𝑡)
6−16𝜋2 sin(2𝜋𝑡)
]
𝑎 = √(−16𝜋2 cos(2𝜋𝑡))2 + (6)2 + (−16𝜋2 sin(2𝜋𝑡))2
𝑎 = √(256𝜋4 cos2(2𝜋𝑡)) + (36) + (256𝜋4 sin2(2𝜋𝑡))
𝑎 = √256𝜋4(cos2(2𝜋𝑡) + sin2(2𝜋𝑡)) + (36)
𝑎 = √256𝜋4(1) + (36) 𝑎 = +√256𝜋4 + 36
Obs.: Notar que, neste problema específico, a intensidade da aceleração é constante ao longo do tempo, embora as componentes 𝑎𝑥 e 𝑎𝑧 não sejam constantes (a componente 𝑎𝑦 é constante).
i) O vetor unitário 𝑒𝑡 tangente à trajetória, em função do tempo 𝑡;
Uma vez que o vetor velocidade é sempre tangente à trajetória, podemos escrever que,
�� = 𝑣. 𝑒𝑡
Onde 𝑒𝑡 é o vetor de módulo unitário com direção sempre tangente à trajetória e sentido positivo coincidente
com o sentido do vetor velocidade ��.
𝑒𝑡 =��
𝑣 𝑒𝑡 =
[−8𝜋 sin(2𝜋𝑡)
6𝑡8𝜋 cos(2𝜋𝑡)
]
√64𝜋2+36𝑡2
𝑒𝑡 =
[ −8𝜋 sin(2𝜋𝑡)
√64𝜋2+36𝑡2
6𝑡
√64𝜋2+36𝑡2
8𝜋 cos(2𝜋𝑡)
√64𝜋2+36𝑡2]
Ou, 𝑒𝑡 = (−8𝜋 sin(2𝜋𝑡)
√64𝜋2+36𝑡2) 𝑖 + (
6𝑡
√64𝜋2+36𝑡2) 𝑗 + (
8𝜋 cos(2𝜋𝑡)
√64𝜋2+36𝑡2) ��
j) O vetor unitário 𝑒𝑛 normal à trajetória, em função do tempo 𝑡;
O vetor unitário 𝑒𝑛 é o vetor perpendicular, no sentido anti-horário, ao vetor unitário 𝑒𝑡 e pode ser determinado
por:

Prof.: Carlos Arthur Cavalcante 49
𝑒𝑛 =𝑑𝑒𝑡
𝑑𝑡|𝑑𝑒𝑡
𝑑𝑡|⁄
Determinação de 𝒅��𝒕
𝒅𝒕
𝑑𝑒𝑡
𝑑𝑡=
𝑑(𝑒𝑡𝑥𝑖+𝑒𝑡𝑦𝑗+𝑒𝑡𝑧 ��)
𝑑𝑡
𝑑𝑒𝑡
𝑑𝑡=
𝑑(𝑒𝑡𝑥𝑖)
𝑑𝑡+
𝑑(𝑒𝑡𝑦𝑗)
𝑑𝑡+
𝑑(𝑒𝑡𝑧 ��)
𝑑𝑡
𝑑𝑒𝑡
𝑑𝑡= (
𝑑(𝑒𝑡𝑥)
𝑑𝑡𝑖 + 𝑒𝑡𝑥
𝑑(𝑖)
𝑑𝑡) + (
𝑑(𝑒𝑡𝑦)
𝑑𝑡𝑗 + 𝑒𝑡𝑦
𝑑(𝑗)
𝑑𝑡) + (
𝑑(𝑒𝑡𝑧)
𝑑𝑡�� + 𝑒𝑡𝑧
𝑑(��)
𝑑𝑡)
𝑑𝑒𝑡
𝑑𝑡= (
𝑑(𝑒𝑡𝑥)
𝑑𝑡𝑖 + 0) + (
𝑑(𝑒𝑡𝑦)
𝑑𝑡𝑗 + 0) + (
𝑑(𝑒𝑡𝑧)
𝑑𝑡�� + 0)
𝑑𝑒𝑡
𝑑𝑡=
𝑑(𝑒𝑡𝑥)
𝑑𝑡𝑖 +
𝑑(𝑒𝑡𝑦)
𝑑𝑡𝑗 +
𝑑(𝑒𝑡𝑧)
𝑑𝑡��
𝑑𝑒𝑡
𝑑𝑡=
𝑑(−8𝜋sin(2𝜋𝑡)
√64𝜋2+36𝑡2)
𝑑𝑡𝑖 +
𝑑(6𝑡
√64𝜋2+36𝑡2)
𝑑𝑡𝑗 +
𝑑(8𝜋cos(2𝜋𝑡)
√64𝜋2+36𝑡2)
𝑑𝑡��
Assim,
(𝑑𝑒𝑡
𝑑𝑡)𝑥= −
8𝜋2(16𝜋2+9𝑡2) cos(2𝜋𝑡)−36𝜋𝑡 sin(2𝜋𝑡)
(16𝜋2+9𝑡2)3 2⁄
(𝑑𝑒𝑡
𝑑𝑡)𝑦=
3(16𝜋2+9𝑡2)−27𝑡2
(16𝜋2+9𝑡2)3 2⁄
(𝑑𝑒𝑡
𝑑𝑡)𝑧= −
8𝜋2(16𝜋2+9𝑡2) sin(2𝜋𝑡)+36𝜋𝑡 cos(2𝜋𝑡)
(16𝜋2+9𝑡2)3 2⁄
Determinação de |𝒅��𝒕
𝒅𝒕|
|𝑑𝑒𝑡
𝑑𝑡| = √((
𝑑𝑒𝑡
𝑑𝑡)𝑥)2
+ ((𝑑𝑒𝑡
𝑑𝑡)𝑦)2
+ ((𝑑𝑒𝑡
𝑑𝑡)𝑧)2
|𝑑𝑒𝑡
𝑑𝑡| =
√(−8𝜋2(16𝜋2+9𝑡2) cos(2𝜋𝑡)−36𝜋𝑡 sin(2𝜋𝑡)
(16𝜋2+9𝑡2)3 2⁄ )2
+ (3(16𝜋2+9𝑡2)−27𝑡2
(16𝜋2+9𝑡2)3 2⁄ )2
+ (−8𝜋2(16𝜋2+9𝑡2) sin(2𝜋𝑡)+36𝜋𝑡 cos(2𝜋𝑡)
(16𝜋2+9𝑡2)3 2⁄ )2
Após manipulações algébricas e simplificações, encontramos,
|𝑑𝑒𝑡
𝑑𝑡| =
4𝜋√64𝜋4+36𝜋2𝑡2+9
16𝜋2+9𝑡2
Assim, o vetor unitário normal à trajetória 𝑒𝑛, em qualquer instante, é,
𝑒𝑛 =
(−8𝜋2(16𝜋2+9𝑡2)cos(2𝜋𝑡)−36𝜋𝑡sin(2𝜋𝑡)
(16𝜋2+9𝑡2)3 2⁄
)𝑖+(3(16𝜋2+9𝑡2)−27𝑡2
(16𝜋2+9𝑡2)3 2⁄
)𝑗+(−8𝜋2(16𝜋2+9𝑡2)sin(2𝜋𝑡)+36𝜋𝑡cos(2𝜋𝑡)
(16𝜋2+9𝑡2)3 2⁄
)��
4𝜋√64𝜋4+36𝜋2𝑡2+9
16𝜋2+9𝑡2
𝑒𝑛𝑥 =
−8𝜋2(16𝜋2+9𝑡2)cos(2𝜋𝑡)−36𝜋𝑡sin(2𝜋𝑡)
(16𝜋2+9𝑡2)3 2⁄
4𝜋√64𝜋4+36𝜋2𝑡2+9
16𝜋2+9𝑡2

Prof.: Carlos Arthur Cavalcante 50
𝑒𝑛𝑦 =
3(16𝜋2+9𝑡2)−27𝑡2
(16𝜋2+9𝑡2)3 2⁄
4𝜋√64𝜋4+36𝜋2𝑡2+9
16𝜋2+9𝑡2
𝑒𝑛𝑧 =
−8𝜋2(16𝜋2+9𝑡2)sin(2𝜋𝑡)+36𝜋𝑡cos(2𝜋𝑡)
(16𝜋2+9𝑡2)3 2⁄
4𝜋√64𝜋4+36𝜋2𝑡2+9
16𝜋2+9𝑡2
Após manipulações algébricas e simplificações,
𝑒𝑛𝑥 = −(2𝜋(16𝜋2+9𝑡2) cos(2𝜋𝑡)−9𝑡 sin(2𝜋𝑡))√(16𝜋2+9𝑡2)(64𝜋4+36𝜋2𝑡2+9)
324𝜋2𝑡4+(1152𝜋4+81)𝑡2+1024𝜋6+144𝜋2
𝑒𝑛𝑦 =12𝜋√(16𝜋2+9𝑡2)(64𝜋4+36𝜋2𝑡2+9)
324𝜋2𝑡4+(1152𝜋4+81)𝑡2+1024𝜋6+144𝜋2
𝑒𝑛𝑧 = −9𝑡√(16𝜋2+9𝑡2)(64𝜋4+36𝜋2𝑡2+9) cos(2𝜋𝑡)+(32𝜋3+18𝜋𝑡2)√−((16𝜋2+9𝑡2)(64𝜋4+36𝜋2𝑡2+9)(cos2(2𝜋𝑡)−1))
324𝜋2𝑡4+(1152𝜋4+81)𝑡2+1024𝜋6+144𝜋2
Assim, o vetor unitário normal à trajetória 𝑒𝑛, em qualquer instante, é
𝑒𝑡 = [
𝑒𝑛𝑥𝑒𝑛𝑦𝑒𝑛𝑧
] Ou, 𝑒𝑛 = 𝑒𝑛𝑥𝑖 + 𝑒𝑛𝑦𝑗 + 𝑒𝑛𝑧 ��
k) A componente tangencial 𝑎𝑡 do vetor aceleração ��, em função do tempo 𝑡;
Recordando que o produto escalar ou produto interno de dois vetores representa a projeção de um vetor sobre
o outro, a componente tangencial 𝑎𝑡 do vetor aceleração ��, pode ser obtida por meio de,
𝑎𝑡 = �� ∙ 𝑒𝑡 Produto escalar.
𝑎𝑡 = [−16𝜋2 cos(2𝜋𝑡)
6−16𝜋2 sin(2𝜋𝑡)
] ∙
[ −
4𝜋√16𝜋2+9𝑡2 sin(2𝜋𝑡)
16𝜋2+9𝑡2
3𝑡√16𝜋2+9𝑡2
16𝜋2+9𝑡2
4𝜋√16𝜋2+9𝑡2 cos(2𝜋𝑡)
16𝜋2+9𝑡2 ]
Após manipulações algébricas e simplificações, obtemos,
𝑎𝑡 =18𝑡√16𝜋2+9𝑡2
16𝜋2+9𝑡2
Alternativamente, recordando que a componente tangencial 𝑎𝑡 do vetor aceleração �� representa a aceleração
escalar, a componente tangencial 𝑎𝑡 também pode ser obtida por meio de:
𝑎𝑡 =𝑑𝑣
𝑑𝑡 𝑎𝑡 =
𝑑(√64𝜋2+36𝑡2)
𝑑𝑡 𝑎𝑡 =
36𝑡
√64𝜋2+36𝑡2
𝑎𝑡 =36𝑡
√4(16𝜋2+9𝑡2) 𝑎𝑡 =
36𝑡
2√16𝜋2+9𝑡2 𝑎𝑡 =
18𝑡
√16𝜋2+9𝑡2
l) A componente normal 𝑎𝑛 do vetor aceleração ��, em função do tempo 𝑡;
Recordando que o produto escalar ou produto interno de dois vetores representa a projeção de um vetor sobre
o outro, a componente tangencial 𝑎𝑛 do vetor aceleração ��, pode ser obtida por meio de,

Prof.: Carlos Arthur Cavalcante 51
𝑎𝑛 = �� ∙ 𝑒𝑛 Produto escalar.
𝑎𝑛 = [−16𝜋2 cos(2𝜋𝑡)
6−16𝜋2 sin(2𝜋𝑡)
] ∙
[ −
(2𝜋(16𝜋2+9𝑡2) cos(2𝜋𝑡)−9𝑡 sin(2𝜋𝑡))√(16𝜋2+9𝑡2)(64𝜋4+36𝜋2𝑡2+9)
324𝜋2𝑡4+(1152𝜋4+81)𝑡2+1024𝜋6+144𝜋2
12𝜋√(16𝜋2+9𝑡2)(64𝜋4+36𝜋2𝑡2+9)
324𝜋2𝑡4+(1152𝜋4+81)𝑡2+1024𝜋6+144𝜋2
−9𝑡√(16𝜋2+9𝑡2)(64𝜋4+36𝜋2𝑡2+9) cos(2𝜋𝑡)+(32𝜋3+18𝜋𝑡2)√−((16𝜋2+9𝑡2)(64𝜋4+36𝜋2𝑡2+9)(cos2(2𝜋𝑡)−1))
324𝜋2𝑡4+(1152𝜋4+81)𝑡2+1024𝜋6+144𝜋2 ]
𝑎𝑛 =16𝜋2 sin(2𝜋𝑡)(9𝑡√(16𝜋2+9𝑡2)(64𝜋4+36𝜋2𝑡2+9) cos(2𝜋𝑡)+(32𝜋3+18𝜋𝑡2+9)√−((16𝜋2+9𝑡2)(64𝜋4+36𝜋2𝑡2+9)(cos2(2𝜋𝑡)−1)))
324𝜋2𝑡4+(1152𝜋4+81)𝑡2+1024𝜋6+144𝜋2+
72𝜋√(16𝜋2+9𝑡2)(64𝜋4+36𝜋2𝑡2+9)+16𝜋2 cos(2𝜋𝑡)(2𝜋(16𝜋2+9𝑡2) cos(2𝜋𝑡)−9𝑡 sin(2𝜋𝑡))√(16𝜋2+9𝑡2)(64𝜋4+36𝜋2𝑡2+9)
324𝜋2𝑡4+(1152𝜋4+81)𝑡2+1024𝜋6+144𝜋2
Após manipulações algébricas e simplificações, obtemos,
𝑎𝑛 =√(16𝜋2+9𝑡2)(64𝜋4+36𝜋2𝑡2+9)(16𝜋2 sin2(2𝜋𝑡)(32𝜋3+18𝜋𝑡2+9)+72𝜋+32𝜋3(16𝜋2+9𝑡2) cos2(2𝜋𝑡))
324𝜋2𝑡4+(1152𝜋4+81)𝑡2+1024𝜋6+144𝜋2
m) A expressão para o raio de curvatura 𝜌, em função do tempo 𝑡;
𝑎𝑛 =𝑣2
𝜌 𝜌 =
𝑣2
𝑎𝑛
𝜌 =(√64𝜋2+36𝑡2)
2
√(16𝜋2+9𝑡2)(64𝜋4+36𝜋2𝑡2+9)(16𝜋2 sin2(2𝜋𝑡)(32𝜋3+18𝜋𝑡2+9)+72𝜋+32𝜋3(16𝜋2+9𝑡2)cos2(2𝜋𝑡))
324𝜋2𝑡4+(1152𝜋4+81)𝑡2+1024𝜋6+144𝜋2
Após simplificações,
𝜌 = −(1024𝜋6+1152𝜋4𝑡2+𝜋2(324𝜋4+144)+81𝑡2)√16𝜋2+9𝑡2
36𝜋2√64𝜋4+36𝜋2𝑡2+9 cos2(2𝜋𝑡)−(128𝜋5+72𝜋3𝑡2+36𝜋2+18𝜋)√64𝜋4+36𝜋2𝑡2+9
n) A equação da trajetória 𝑦 = 𝑓(𝑥);
Equações paramétricas da trajetória do movimento:
𝑥 = 4 cos(2𝜋𝑡) 𝑦 = 3𝑡2 𝑧 = 4 sin(2𝜋𝑡)
o) A equação horária 𝑠 = 𝑠(𝑡) do movimento ao longo da trajetória.
𝑑𝑠 = √(𝑑𝑥)2 + (𝑑𝑦)2 + (𝑑𝑧)2
Das equações paramétricas do movimento, obtemos,
𝑑𝑥 = −8𝜋 sin(2𝜋𝑡) 𝑑𝑡 𝑑𝑦 = 6𝑡𝑑𝑡 𝑑𝑧 = 8𝜋 cos(2𝜋𝑡) 𝑑𝑡
Assim,
𝑑𝑠 = √(−8𝜋 sin(2𝜋𝑡) 𝑑𝑡)2 + (6𝑡𝑑𝑡)2 + (8𝜋 cos(2𝜋𝑡) 𝑑𝑡)2
𝑑𝑠 = √64𝜋2 sin2(2𝜋𝑡) + 36𝑡2 + 64𝜋2 cos2(2𝜋𝑡) 𝑑𝑡

Prof.: Carlos Arthur Cavalcante 52
𝑑𝑠 = √64𝜋2(sin2(2𝜋𝑡) + cos2(2𝜋𝑡)) + 36𝑡2𝑑𝑡
𝑑𝑠 = √64𝜋2(1) + 36𝑡2𝑑𝑡 𝑑𝑠 = √64𝜋2 + 36𝑡2𝑑𝑡 ∫ 𝑑𝑠𝑠
𝑠0= ∫ √64𝜋2 + 36𝑡2𝑑𝑡
𝑡
0
𝑠 − 𝑠0 = −16𝜋2 ln(−3𝑡+√16𝜋2+9𝑡2)−16𝜋2 ln(4𝜋)−3𝑡√16𝜋2+9𝑡2
3
Fazendo 𝑠 = 0 para 𝑡 = 0, teremos 𝑠0 = 0,
𝑠 = −16𝜋2 ln(−3𝑡+√16𝜋2+9𝑡2)−16𝜋2 ln(4𝜋)−3𝑡√16𝜋2+9𝑡2
3
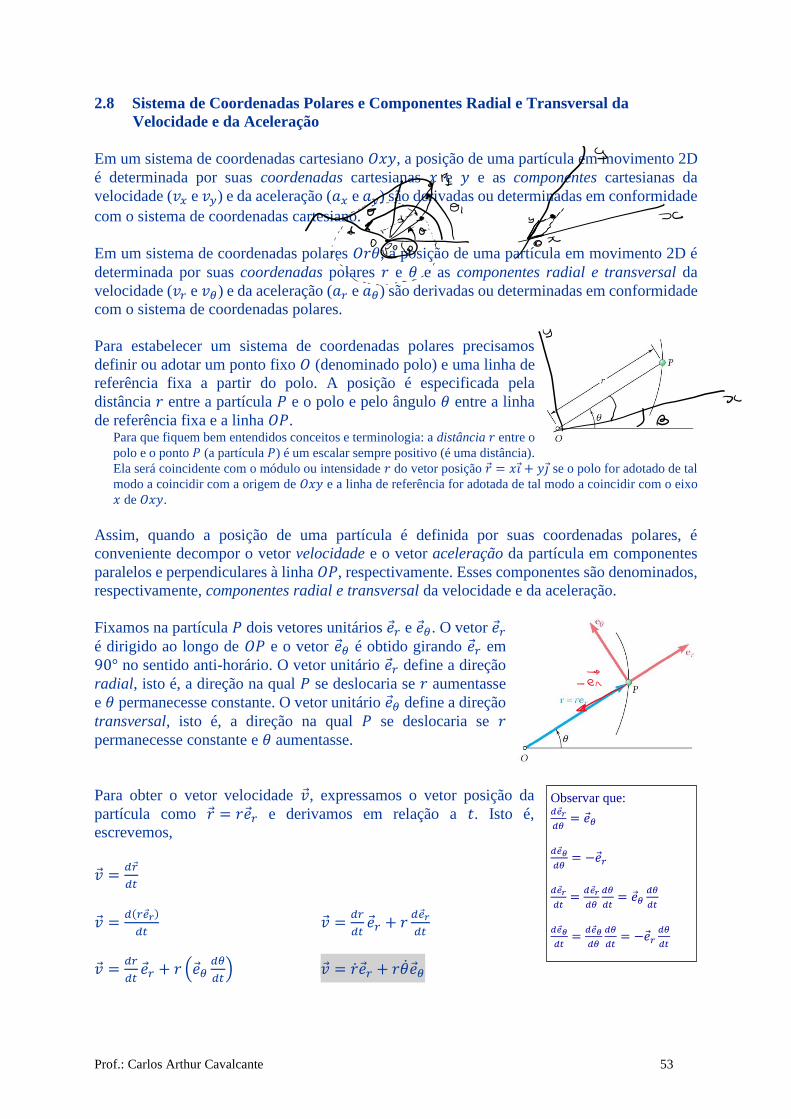
Prof.: Carlos Arthur Cavalcante 53
2.8 Sistema de Coordenadas Polares e Componentes Radial e Transversal da
Velocidade e da Aceleração
Em um sistema de coordenadas cartesiano 𝑂𝑥𝑦, a posição de uma partícula em movimento 2D
é determinada por suas coordenadas cartesianas 𝑥 e 𝑦 e as componentes cartesianas da
velocidade (𝑣𝑥 e 𝑣𝑦) e da aceleração (𝑎𝑥 e 𝑎𝑦) são derivadas ou determinadas em conformidade
com o sistema de coordenadas cartesiano.
Em um sistema de coordenadas polares 𝑂𝑟𝜃, a posição de uma partícula em movimento 2D é
determinada por suas coordenadas polares 𝑟 e 𝜃 e as componentes radial e transversal da
velocidade (𝑣𝑟 e 𝑣𝜃) e da aceleração (𝑎𝑟 e 𝑎𝜃) são derivadas ou determinadas em conformidade
com o sistema de coordenadas polares.
Para estabelecer um sistema de coordenadas polares precisamos
definir ou adotar um ponto fixo 𝑂 (denominado polo) e uma linha de
referência fixa a partir do polo. A posição é especificada pela
distância 𝑟 entre a partícula 𝑃 e o polo e pelo ângulo 𝜃 entre a linha
de referência fixa e a linha 𝑂𝑃. Para que fiquem bem entendidos conceitos e terminologia: a distância 𝑟 entre o
polo e o ponto 𝑃 (a partícula 𝑃) é um escalar sempre positivo (é uma distância).
Ela será coincidente com o módulo ou intensidade 𝑟 do vetor posição 𝑟 = 𝑥𝑖 + 𝑦𝑗 se o polo for adotado de tal
modo a coincidir com a origem de 𝑂𝑥𝑦 e a linha de referência for adotada de tal modo a coincidir com o eixo
𝑥 de 𝑂𝑥𝑦.
Assim, quando a posição de uma partícula é definida por suas coordenadas polares, é
conveniente decompor o vetor velocidade e o vetor aceleração da partícula em componentes
paralelos e perpendiculares à linha 𝑂𝑃, respectivamente. Esses componentes são denominados,
respectivamente, componentes radial e transversal da velocidade e da aceleração.
Fixamos na partícula 𝑃 dois vetores unitários 𝑒𝑟 e 𝑒𝜃. O vetor 𝑒𝑟
é dirigido ao longo de 𝑂𝑃 e o vetor 𝑒𝜃 é obtido girando 𝑒𝑟 em
90° no sentido anti-horário. O vetor unitário 𝑒𝑟 define a direção
radial, isto é, a direção na qual 𝑃 se deslocaria se 𝑟 aumentasse
e 𝜃 permanecesse constante. O vetor unitário 𝑒𝜃 define a direção
transversal, isto é, a direção na qual 𝑃 se deslocaria se 𝑟
permanecesse constante e 𝜃 aumentasse.
Para obter o vetor velocidade ��, expressamos o vetor posição da
partícula como 𝑟 = 𝑟𝑒𝑟 e derivamos em relação a 𝑡. Isto é,
escrevemos,
�� =𝑑𝑟
𝑑𝑡
�� =𝑑(𝑟𝑒𝑟)
𝑑𝑡 �� =
𝑑𝑟
𝑑𝑡𝑒𝑟 + 𝑟
𝑑𝑒𝑟
𝑑𝑡
�� =𝑑𝑟
𝑑𝑡𝑒𝑟 + 𝑟 (𝑒𝜃
𝑑𝜃
𝑑𝑡) �� = ��𝑒𝑟 + 𝑟��𝑒𝜃
Observar que: 𝑑𝑒𝑟
𝑑𝜃= 𝑒𝜃
𝑑𝑒𝜃
𝑑𝜃= −𝑒𝑟
𝑑𝑒𝑟
𝑑𝑡=
𝑑𝑒𝑟
𝑑𝜃
𝑑𝜃
𝑑𝑡= 𝑒𝜃
𝑑𝜃
𝑑𝑡
𝑑𝑒𝜃
𝑑𝑡=
𝑑𝑒𝜃
𝑑𝜃
𝑑𝜃
𝑑𝑡= −𝑒𝑟
𝑑𝜃
𝑑𝑡

Prof.: Carlos Arthur Cavalcante 54
Assim, as componentes radial e transversal do vetor velocidade são,
𝑣𝑟 = �� 𝑣𝜃 = 𝑟��
Para obter o vetor aceleração ��, fazemos,
�� =𝑑��
𝑑𝑡 �� =
𝑑
𝑑𝑡(��𝑒𝑟 + 𝑟��𝑒𝜃)
�� =𝑑
𝑑𝑡(��𝑒𝑟) +
𝑑
𝑑𝑡(𝑟��𝑒𝜃) �� = (
𝑑��
𝑑𝑡𝑒𝑟 + ��
𝑑𝑒𝑟
𝑑𝑡) + (
𝑑(𝑟��)
𝑑𝑡𝑒𝜃 + 𝑟��
𝑑𝑒𝜃
𝑑𝑡)
�� = (𝑑��
𝑑𝑡𝑒𝑟 + ��𝑒𝜃
𝑑𝜃
𝑑𝑡) + ((
𝑑𝑟
𝑑𝑡��𝑒𝜃 + 𝑟
𝑑��
𝑑𝑡𝑒𝜃) − (𝑟��𝑒𝑟
𝑑𝜃
𝑑𝑡))
�� = (𝑑2𝑟
𝑑𝑡2𝑒𝑟 + ��𝑒𝜃��) + ((����𝑒𝜃 + 𝑟
𝑑2𝜃
𝑑𝑡2𝑒𝜃) − (𝑟��𝑒𝑟��))
�� = (�� − 𝑟��2)𝑒𝑟 + (2���� + 𝑟��)𝑒𝜃
Assim, as componentes radial e transversal do vetor aceleração são,
𝑎𝑟 = �� − 𝑟��2 𝑎𝜃 = 2���� + 𝑟��
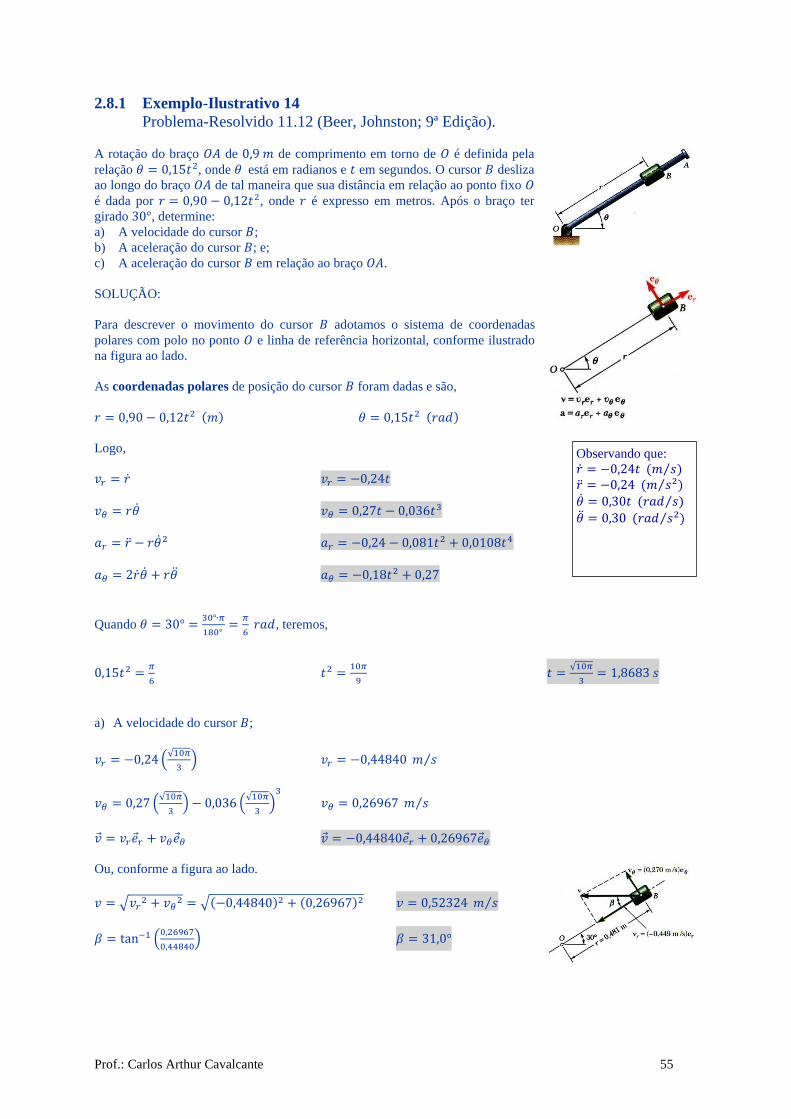
Prof.: Carlos Arthur Cavalcante 55
2.8.1 Exemplo-Ilustrativo 14
Problema-Resolvido 11.12 (Beer, Johnston; 9ª Edição).
A rotação do braço 𝑂𝐴 de 0,9 𝑚 de comprimento em torno de 𝑂 é definida pela
relação 𝜃 = 0,15𝑡2, onde 𝜃 está em radianos e 𝑡 em segundos. O cursor 𝐵 desliza
ao longo do braço 𝑂𝐴 de tal maneira que sua distância em relação ao ponto fixo 𝑂
é dada por 𝑟 = 0,90 − 0,12𝑡2, onde 𝑟 é expresso em metros. Após o braço ter
girado 30°, determine:
a) A velocidade do cursor 𝐵;
b) A aceleração do cursor 𝐵; e;
c) A aceleração do cursor 𝐵 em relação ao braço 𝑂𝐴.
SOLUÇÃO:
Para descrever o movimento do cursor 𝐵 adotamos o sistema de coordenadas
polares com polo no ponto 𝑂 e linha de referência horizontal, conforme ilustrado
na figura ao lado.
As coordenadas polares de posição do cursor 𝐵 foram dadas e são,
𝑟 = 0,90 − 0,12𝑡2 (𝑚) 𝜃 = 0,15𝑡2 (𝑟𝑎𝑑)
Logo,
𝑣𝑟 = �� 𝑣𝑟 = −0,24𝑡
𝑣𝜃 = 𝑟�� 𝑣𝜃 = 0,27𝑡 − 0,036𝑡3
𝑎𝑟 = �� − 𝑟��2 𝑎𝑟 = −0,24 − 0,081𝑡2 + 0,0108𝑡4
𝑎𝜃 = 2���� + 𝑟�� 𝑎𝜃 = −0,18𝑡2 + 0,27
Quando 𝜃 = 30° =30°∙𝜋
180° =
𝜋
6 𝑟𝑎𝑑, teremos,
0,15𝑡2 =𝜋
6 𝑡2 =
10𝜋
9 𝑡 =
√10𝜋
3= 1,8683 𝑠
a) A velocidade do cursor 𝐵;
𝑣𝑟 = −0,24 (√10𝜋
3) 𝑣𝑟 = −0,44840 𝑚 𝑠⁄
𝑣𝜃 = 0,27 (√10𝜋
3) − 0,036 (
√10𝜋
3)3
𝑣𝜃 = 0,26967 𝑚 𝑠⁄
�� = 𝑣𝑟𝑒𝑟 + 𝑣𝜃𝑒𝜃 �� = −0,44840𝑒𝑟 + 0,26967𝑒𝜃
Ou, conforme a figura ao lado.
𝑣 = √𝑣𝑟2 + 𝑣𝜃
2 = √(−0,44840)2 + (0,26967)2 𝑣 = 0,52324 𝑚 𝑠⁄
𝛽 = tan−1 (0,26967
0,44840) 𝛽 = 31,0°
Observando que:
�� = −0,24𝑡 (𝑚 𝑠⁄ ) �� = −0,24 (𝑚 𝑠2⁄ )
�� = 0,30𝑡 (𝑟𝑎𝑑 𝑠⁄ )
�� = 0,30 (𝑟𝑎𝑑 𝑠2⁄ )

Prof.: Carlos Arthur Cavalcante 56
b) A aceleração do cursor 𝐵;
𝑎𝑟 = −0,24 − 0,081 (√10𝜋
3)2
+ 0,0108 (√10𝜋
3)4
𝑎𝑟 = −0,39115 𝑚 𝑠2⁄
𝑎𝜃 = −0,18 (√10𝜋
3)2
+ 0,27 𝑎𝜃 = −0,35832 𝑚 𝑠2⁄
�� = −0,39115𝑒𝑟 − 0,35832𝑒𝜃
Ou, conforme a figura ao lado.
𝑎 = √a𝑟2 + 𝑎𝜃
2 = √(−0,39115)2 + (−0,35832)2 𝑎 = 0,53046 𝑚 𝑠⁄
𝛾 = tan−1 (0,35832
0,39115) 𝛾 = 0,742 𝑟𝑎𝑑 𝛾 = 42,5°
c) Determinar a aceleração do cursor 𝐵 em relação ao braço 𝑂𝐴.
O movimento do cursor 𝐵 em relação ao braço 𝑂𝐴 é um movimento retilíneo e
definido pela coordenada 𝑟:
𝑟𝐵 𝑂𝐴⁄ = 𝑟 = 0,90 − 0,12𝑡2
𝑣𝐵 𝑂𝐴⁄ =𝑑𝑟
𝑑𝑡= −0,24𝑡
𝑎𝐵 𝑂𝐴⁄ =𝑑2𝑟
𝑑𝑡2= −0,24 𝑎𝐵 𝑂𝐴⁄ = −0,24 𝑚 𝑠2⁄

Prof.: Carlos Arthur Cavalcante 57
2.8.2 Exemplo-Ilustrativo 15 – Análise completa de um movimento familiar para
consolidar conceitos metodologia.
Uma partícula se move ao longo de uma espiral logarítmica de tal maneira que sua
distância 𝑟 ao ponto 𝑂 em cada instante é dada por 𝑟 = 𝑒𝑏𝜃 (𝑟 em metros) e 𝜃 =𝑐𝑡2 (𝜃 em radianos e 𝑡 em segundos). Adotando o sistema de coordenadas polares
𝑂𝑟𝜃 mostrado na figura, determinar:
a) As coordenadas polares 𝑟 e 𝜃 do movimento da partícula, em função do tempo
𝑡; b) As componentes radial e transversal 𝑣𝑟 e 𝑣𝜃 do vetor velocidade ��, em função
de 𝑡; c) O vetor velocidade ��, em função de 𝑡; d) A intensidade 𝑣 do vetor velocidade ��, em função de 𝑡; e) As componentes radial e transversal 𝑎𝑟 e 𝑎𝜃 do vetor aceleração ��, em função de 𝑡; f) O vetor aceleração ��, em função de 𝑡; g) A intensidade 𝑎 do vetor aceleração ��, por suas componentes radial e transversal e em função de 𝑡; h) O vetor unitário 𝑒𝑡 tangente à trajetória, em função do tempo 𝑡; i) O vetor unitário 𝑒𝑛 normal à trajetória, em função do tempo 𝑡; j) A componente tangencial 𝑎𝑡 do vetor aceleração ��, em função do tempo 𝑡; k) A componente normal 𝑎𝑛 do vetor aceleração ��, em função do tempo 𝑡; l) A expressão para o raio de curvatura 𝜌, em função do tempo 𝑡; m) A equação da trajetória 𝑟 = 𝑓(𝜃); n) A equação horária 𝑠 = 𝑠(𝑡) sobre a trajetória;
o) A velocidade escalar 𝑣, em função do tempo 𝑡, a partir da equação horária;
p) A velocidade escalar 𝑣, em função do tempo 𝑡, a partir da aceleração tangencial 𝑎𝑡; q) A expressão de cada item anterior assumindo que 𝑏 = 3 10⁄ e 𝑐 = 3𝜋;
r) O valor numérico de cada item anterior para o instante 𝑡 = 1 𝑠.
SOLUÇÃO:
Movimento da partícula
Foi dado que a equação da trajetória da partícula em coordenadas polares é 𝑟 = 𝑒𝑏𝜃. Foi dado também que o
ângulo 𝜃 varia com o tempo de acordo com 𝜃 = 𝑐𝑡2. Assim, o movimento da partícula fica determinado por suas
coordenadas polares 𝑟 e 𝜃:
𝑟 = 𝑒𝑏𝑐𝑡2 𝜃 = 𝑐𝑡2
a) As coordenadas polares 𝑟 e 𝜃 do movimento da partícula, em função do tempo 𝑡;
𝑟 = 𝑒𝑏𝑐𝑡2 𝜃 = 𝑐𝑡2
b) As componentes radial e transversal 𝑣𝑟 e 𝑣𝜃 do vetor velocidade ��, em função de 𝑡;
𝑣𝑟 = �� 𝑣𝑟 = 2𝑏𝑐𝑡𝑒𝑏𝑐𝑡2
𝑣𝜃 = 𝑟�� 𝑣𝜃 = 2𝑐𝑡𝑒𝑏𝑐𝑡2
c) O vetor velocidade ��, em função de 𝑡;
�� = 𝑣𝑟𝑒𝑟 + 𝑣𝜃𝑒𝜃 �� = (2𝑏𝑐𝑡𝑒𝑏𝑐𝑡2)𝑒𝑟 + (2𝑐𝑡𝑒
𝑏𝑐𝑡2)𝑒𝜃
𝑟 𝜃
�� = 2𝑏𝑐𝑡𝑒𝑏𝑐𝑡2
�� = 2𝑐𝑡
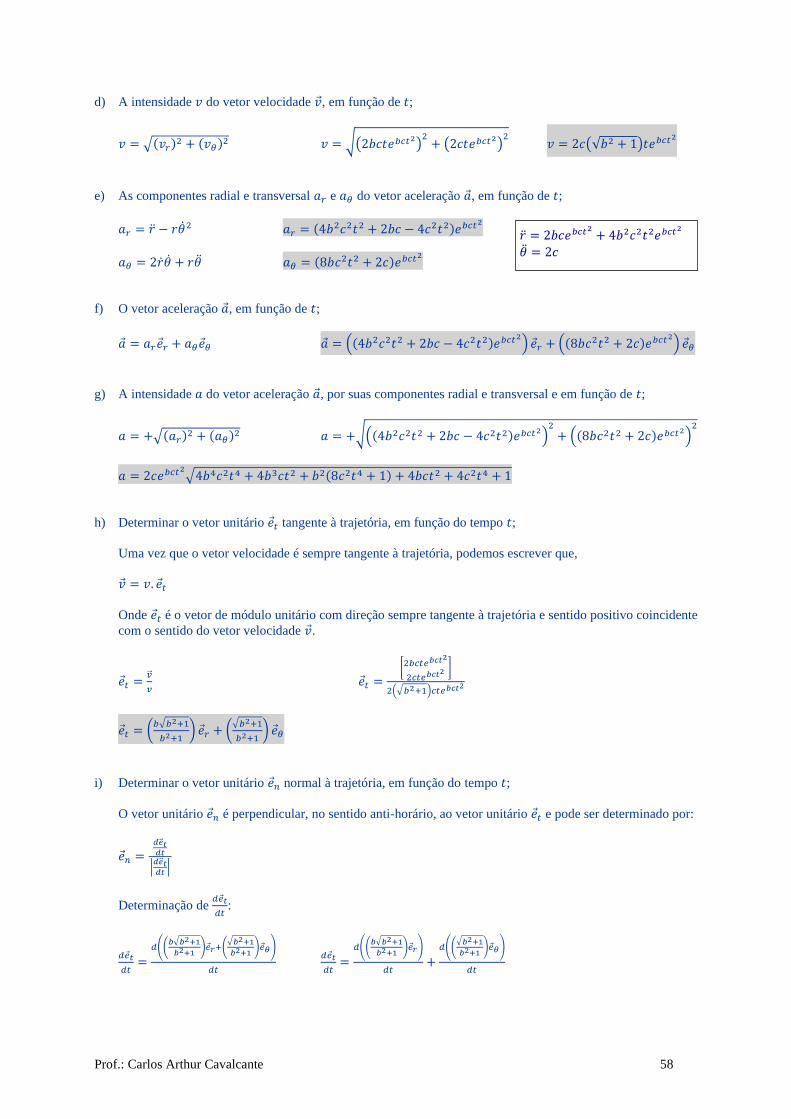
Prof.: Carlos Arthur Cavalcante 58
d) A intensidade 𝑣 do vetor velocidade ��, em função de 𝑡;
𝑣 = √(𝑣𝑟)2 + (𝑣𝜃)
2 𝑣 = √(2𝑏𝑐𝑡𝑒𝑏𝑐𝑡2)2+ (2𝑐𝑡𝑒𝑏𝑐𝑡
2)2 𝑣 = 2𝑐(√𝑏2 + 1)𝑡𝑒𝑏𝑐𝑡
2
e) As componentes radial e transversal 𝑎𝑟 e 𝑎𝜃 do vetor aceleração ��, em função de 𝑡;
𝑎𝑟 = �� − 𝑟��2 𝑎𝑟 = (4𝑏
2𝑐2𝑡2 + 2𝑏𝑐 − 4𝑐2𝑡2)𝑒𝑏𝑐𝑡2
𝑎𝜃 = 2���� + 𝑟�� 𝑎𝜃 = (8𝑏𝑐2𝑡2 + 2𝑐)𝑒𝑏𝑐𝑡
2
f) O vetor aceleração ��, em função de 𝑡;
�� = 𝑎𝑟𝑒𝑟 + 𝑎𝜃𝑒𝜃 �� = ((4𝑏2𝑐2𝑡2 + 2𝑏𝑐 − 4𝑐2𝑡2)𝑒𝑏𝑐𝑡2) 𝑒𝑟 + ((8𝑏𝑐
2𝑡2 + 2𝑐)𝑒𝑏𝑐𝑡2) 𝑒𝜃
g) A intensidade 𝑎 do vetor aceleração ��, por suas componentes radial e transversal e em função de 𝑡;
𝑎 = +√(𝑎𝑟)2 + (𝑎𝜃)
2 𝑎 = +√((4𝑏2𝑐2𝑡2 + 2𝑏𝑐 − 4𝑐2𝑡2)𝑒𝑏𝑐𝑡2)2
+ ((8𝑏𝑐2𝑡2 + 2𝑐)𝑒𝑏𝑐𝑡2)2
𝑎 = 2𝑐𝑒𝑏𝑐𝑡2√4𝑏4𝑐2𝑡4 + 4𝑏3𝑐𝑡2 + 𝑏2(8𝑐2𝑡4 + 1) + 4𝑏𝑐𝑡2 + 4𝑐2𝑡4 + 1
h) Determinar o vetor unitário 𝑒𝑡 tangente à trajetória, em função do tempo 𝑡;
Uma vez que o vetor velocidade é sempre tangente à trajetória, podemos escrever que,
�� = 𝑣. 𝑒𝑡
Onde 𝑒𝑡 é o vetor de módulo unitário com direção sempre tangente à trajetória e sentido positivo coincidente
com o sentido do vetor velocidade ��.
𝑒𝑡 =��
𝑣 𝑒𝑡 =
[2𝑏𝑐𝑡𝑒𝑏𝑐𝑡2
2𝑐𝑡𝑒𝑏𝑐𝑡2 ]
2(√𝑏2+1)𝑐𝑡𝑒𝑏𝑐𝑡2
𝑒𝑡 = (𝑏√𝑏2+1
𝑏2+1) 𝑒𝑟 + (
√𝑏2+1
𝑏2+1) 𝑒𝜃
i) Determinar o vetor unitário 𝑒𝑛 normal à trajetória, em função do tempo 𝑡;
O vetor unitário 𝑒𝑛 é perpendicular, no sentido anti-horário, ao vetor unitário 𝑒𝑡 e pode ser determinado por:
𝑒𝑛 =𝑑��𝑡𝑑𝑡
|𝑑��𝑡𝑑𝑡|
Determinação de 𝑑𝑒𝑡
𝑑𝑡:
𝑑𝑒𝑡
𝑑𝑡=
𝑑((𝑏√𝑏2+1
𝑏2+1)𝑒𝑟+(
√𝑏2+1
𝑏2+1)𝑒𝜃)
𝑑𝑡
𝑑𝑒𝑡
𝑑𝑡=
𝑑((𝑏√𝑏2+1
𝑏2+1)𝑒𝑟)
𝑑𝑡+
𝑑((√𝑏2+1
𝑏2+1)𝑒𝜃)
𝑑𝑡
�� = 2𝑏𝑐𝑒𝑏𝑐𝑡2+ 4𝑏2𝑐2𝑡2𝑒𝑏𝑐𝑡
2
�� = 2𝑐

Prof.: Carlos Arthur Cavalcante 59
𝑑𝑒𝑡
𝑑𝑡=
𝑑(𝑏√𝑏2+1
𝑏2+1)
𝑑𝑡𝑒𝑟 + (
𝑏√𝑏2+1
𝑏2+1)𝑑(𝑒𝑟)
𝑑𝑡+
𝑑(√𝑏2+1
𝑏2+1)
𝑑𝑡𝑒𝜃 + (
√𝑏2+1
𝑏2+1)𝑑(𝑒𝜃)
𝑑𝑡
Observando que
𝑑(𝑒𝑟)
𝑑𝑡=
𝑑(𝑒𝑟)
𝑑𝜃
𝑑𝜃
𝑑𝑡
𝑑(𝑒𝑟)
𝑑𝑡= 𝑒𝜃
𝑑(𝑐𝑡2)
𝑑𝑡
𝑑(𝑒𝑟)
𝑑𝑡= (2𝑐𝑡)𝑒𝜃
𝑑(𝑒𝜃)
𝑑𝑡=
𝑑(𝑒𝜃)
𝑑𝜃
𝑑𝜃
𝑑𝑡
𝑑(𝑒𝜃)
𝑑𝑡= −𝑒𝑟
𝑑(𝑐𝑡2)
𝑑𝑡
𝑑(𝑒𝜃)
𝑑𝑡= (−2𝑐𝑡)𝑒𝑟
Obtemos,
𝑑𝑒𝑡
𝑑𝑡=
𝑑(𝑏√𝑏2+1
𝑏2+1)
𝑑𝑡𝑒𝑟 + (
𝑏√𝑏2+1
𝑏2+1) (2𝑐𝑡)𝑒𝜃 +
𝑑(√𝑏2+1
𝑏2+1)
𝑑𝑡𝑒𝜃 + (
√𝑏2+1
𝑏2+1) (−2𝑐𝑡)𝑒𝑟
𝑑𝑒𝑡
𝑑𝑡= 0𝑒𝑟 +
2𝑏𝑐𝑡√𝑏2+1
𝑏2+1𝑒𝜃 + 0𝑒𝜃 −
2𝑐𝑡√𝑏2+1
𝑏2+1𝑒𝑟
𝑑𝑒𝑡
𝑑𝑡= (0 −
2𝑐𝑡√𝑏2+1
𝑏2+1) 𝑒𝑟 + (
2𝑏𝑐𝑡√𝑏2+1
𝑏2+1+ 0) 𝑒𝜃
𝒅��𝒕
𝒅𝒕= (−
𝟐𝒄𝒕√𝒃𝟐+𝟏
𝒃𝟐+𝟏) ��𝒓 + (
𝟐𝒃𝒄𝒕√𝒃𝟐+𝟏
𝒃𝟐+𝟏) ��𝜽
Determinação do módulo |𝑑𝑒𝑡
𝑑𝑡|,
|𝑑𝑒𝑡
𝑑𝑡| = √(−
2𝑐𝑡√𝑏2+1
𝑏2+1)2
+ (2𝑏𝑐𝑡√𝑏2+1
𝑏2+1)2
Após manipulações algébricas e simplificações, encontramos,
|𝒅��𝒕
𝒅𝒕| = 𝟐𝒄𝒕
Assim, o vetor unitário normal à trajetória 𝑒𝑛, em qualquer instante, é,
𝑒𝑛 =(−
2𝑐𝑡√𝑏2+1
𝑏2+1)𝑒𝑟+(
2𝑏𝑐𝑡√𝑏2+1
𝑏2+1)𝑒𝜃
2𝑐𝑡 𝑒𝑛 =
(−2𝑐𝑡√𝑏2+1
𝑏2+1)
2𝑐𝑡𝑒𝑟 +
(2𝑏𝑐𝑡√𝑏2+1
𝑏2+1)
2𝑐𝑡𝑒𝜃
𝑒𝑛 = (−√𝑏2+1
𝑏2+1) 𝑒𝑟 + (
𝑏√𝑏2+1
𝑏2+1) 𝑒𝜃
j) Determinar a componente tangencial 𝑎𝑡 do vetor aceleração ��, em função do tempo 𝑡;
Recordando que o produto escalar ou produto interno de dois vetores representa a projeção de um vetor sobre
o outro, a componente tangencial 𝑎𝑡 do vetor aceleração ��, pode ser dada por,
𝑎𝑡 = �� ∙ 𝑒𝑡
Uma vez que,
�� = ((4𝑏2𝑐2𝑡2 + 2𝑏𝑐 − 4𝑐2𝑡2)𝑒𝑏𝑐𝑡2) 𝑒𝑟 + ((8𝑏𝑐
2𝑡2 + 2𝑐)𝑒𝑏𝑐𝑡2) 𝑒𝜃
𝑒𝑡 = (𝑏√𝑏2+1
𝑏2+1) 𝑒𝑟 + (
√𝑏2+1
𝑏2+1) 𝑒𝜃

Prof.: Carlos Arthur Cavalcante 60
Obtemos,
𝑎𝑡 = ((4𝑏2𝑐2𝑡2 + 2𝑏𝑐 − 4𝑐2𝑡2)𝑒𝑏𝑐𝑡2) (
𝑏√𝑏2+1
𝑏2+1) + ((8𝑏𝑐2𝑡2 + 2𝑐)𝑒𝑏𝑐𝑡
2) (
√𝑏2+1
𝑏2+1)
𝑎𝑡 = (4𝑏𝑐2𝑡2 + 2𝑐)√𝑏2 + 1𝑒𝑏𝑐𝑡
2
Alternativamente, a componente tangencial 𝑎𝑡 do vetor aceleração ��, também pode ser obtida por:
𝑎𝑡 =𝑑𝑣
𝑑𝑡 𝑎𝑡 =
𝑑(2(√𝑏2+1)𝑐𝑡𝑒𝑏𝑐𝑡2)
𝑑𝑡
𝑎𝑡 = (4𝑏𝑐2𝑡2 + 2𝑐)√𝑏2 + 1𝑒𝑏𝑐𝑡
2
k) Determinar a componente normal 𝑎𝑛 do vetor aceleração ��, em função do tempo 𝑡;
A componente normal 𝑎𝑛 do vetor aceleração ��, em qualquer instante 𝑡, pode ser dado por,
𝑎𝑛 = �� ∙ 𝑒𝑛 (Produto escalar).
Uma vez que,
�� = ((4𝑏2𝑐2𝑡2 + 2𝑏𝑐 − 4𝑐2𝑡2)𝑒𝑏𝑐𝑡2) 𝑒𝑟 + ((8𝑏𝑐
2𝑡2 + 2𝑐)𝑒𝑏𝑐𝑡2) 𝑒𝜃
𝑒𝑛 = (−√𝑏2+1
𝑏2+1) 𝑒𝑟 + (
𝑏√𝑏2+1
𝑏2+1) 𝑒𝜃
Obtemos,
𝑎𝑛 = ((4𝑏2𝑐2𝑡2 + 2𝑏𝑐 − 4𝑐2𝑡2)𝑒𝑏𝑐𝑡2) (−
√𝑏2+1
𝑏2+1) + ((8𝑏𝑐2𝑡2 + 2𝑐)𝑒𝑏𝑐𝑡
2) (
𝑏√𝑏2+1
𝑏2+1)
𝑎𝑛 = 4√𝑏2 + 1𝑐2𝑡2𝑒𝑏𝑐𝑡2
l) Determinar a expressão para o raio de curvatura 𝜌, em função do tempo 𝑡;
𝑎𝑛 =𝑣2
𝜌 𝜌 =
𝑣2
𝑎𝑛 𝜌 =
(2(√𝑏2+1)𝑐𝑡𝑒𝑏𝑐𝑡2)2
4√𝑏2+1𝑐2𝑡2𝑒𝑏𝑐𝑡2
𝜌 = √𝑏2 + 1𝑒𝑏𝑐𝑡2
m) Determinar a equação da trajetória 𝑟 = 𝑓(𝜃);
A equação da trajetória em coordenadas polares foi dada no enunciado do problema,
𝑟 = 𝑒𝑏𝜃
n) Determinar a equação horária 𝑠 = 𝑠(𝑡) sobre a trajetória;
𝑑𝑠 = √(𝑑𝑟)2 + (𝑟𝑑𝜃)2
Das equações paramétricas do movimento,

Prof.: Carlos Arthur Cavalcante 61
𝑟 = 𝑒𝑏𝑐𝑡2 𝑑𝑟 = 2𝑏𝑐𝑡𝑒𝑏𝑐𝑡
2𝑑𝑡
𝜃 = 𝑐𝑡2 𝑑𝜃 = 2𝑐𝑡𝑑𝑡
Obtemos,
𝑑𝑠 = √(2𝑏𝑐𝑡𝑒𝑏𝑐𝑡2𝑑𝑡)
2+ (𝑒𝑏𝑐𝑡
22𝑐𝑡𝑑𝑡)
2
𝑑𝑠 = √(2𝑐)2𝑏2𝑡2(𝑒𝑏𝑐𝑡2)2(𝑑𝑡)2 + (𝑒𝑏𝑐𝑡
2)2(2𝑐)2𝑡2(𝑑𝑡)2
𝑑𝑠 = √(2𝑐)2(𝑒𝑏𝑐𝑡2)2𝑡2(𝑑𝑡)2(𝑏2 + 1) 𝑑𝑠 = √(2𝑐)2(𝑒𝑏𝑐𝑡
2)2𝑡2(𝑑𝑡)2√𝑏2 + 1
𝑑𝑠 = 2√𝑏2 + 1𝑐𝑡𝑒𝑏𝑐𝑡2𝑑𝑡
Integrando,
∫ 𝑑𝑠𝑠
𝑠0= ∫ (2√𝑏2 + 1𝑐𝑡𝑒𝑏𝑐𝑡
2)𝑑𝑡
𝑡
0
Encontramos,
𝑠 − 𝑠0 =√𝑏2+1(𝑒𝑏𝑐𝑡
2−1)
𝑏
Para 𝑡 = 0, temos 𝑠 = 𝑠0 = 0. Logo,
𝑠 =√𝑏2+1(𝑒𝑏𝑐𝑡
2−1)
𝑏
o) Determinar a velocidade escalar 𝑣, em função do tempo 𝑡, a partir da equação horária;
𝑣 =𝑑𝑠
𝑑𝑡 𝑣 =
𝑑(√𝑏2+1(𝑒𝑏𝑐𝑡
2−1)
𝑏)
𝑑𝑡
Após derivar e fazer as simplificações, encontramos,
𝑣 = 2√𝑏2 + 1𝑐𝑡𝑒𝑏𝑐𝑡2
p) Determinar a velocidade escalar 𝑣, em função do tempo 𝑡, a partir da aceleração tangencial 𝑎𝑡; 𝑑𝑣
𝑑𝑡= 𝑎𝑡
𝑑𝑣
𝑑𝑡= (4𝑏𝑐2𝑡2 + 2𝑐)√𝑏2 + 1𝑒𝑏𝑐𝑡
2
∫ 𝑑𝑣𝑣
𝑣0= ∫ (4𝑏𝑐2𝑡2 + 2𝑐)√𝑏2 + 1𝑒𝑏𝑐𝑡
2𝑑𝑡
𝑡
0
𝑣 − 𝑣0 = 2√𝑏2 + 1𝑐𝑡𝑒𝑏𝑐𝑡
2
Para 𝑡 = 0, temos 𝑣 = 𝑣0 = 0. Logo,
𝑣 = 2√𝑏2 + 1𝑐𝑡𝑒𝑏𝑐𝑡2
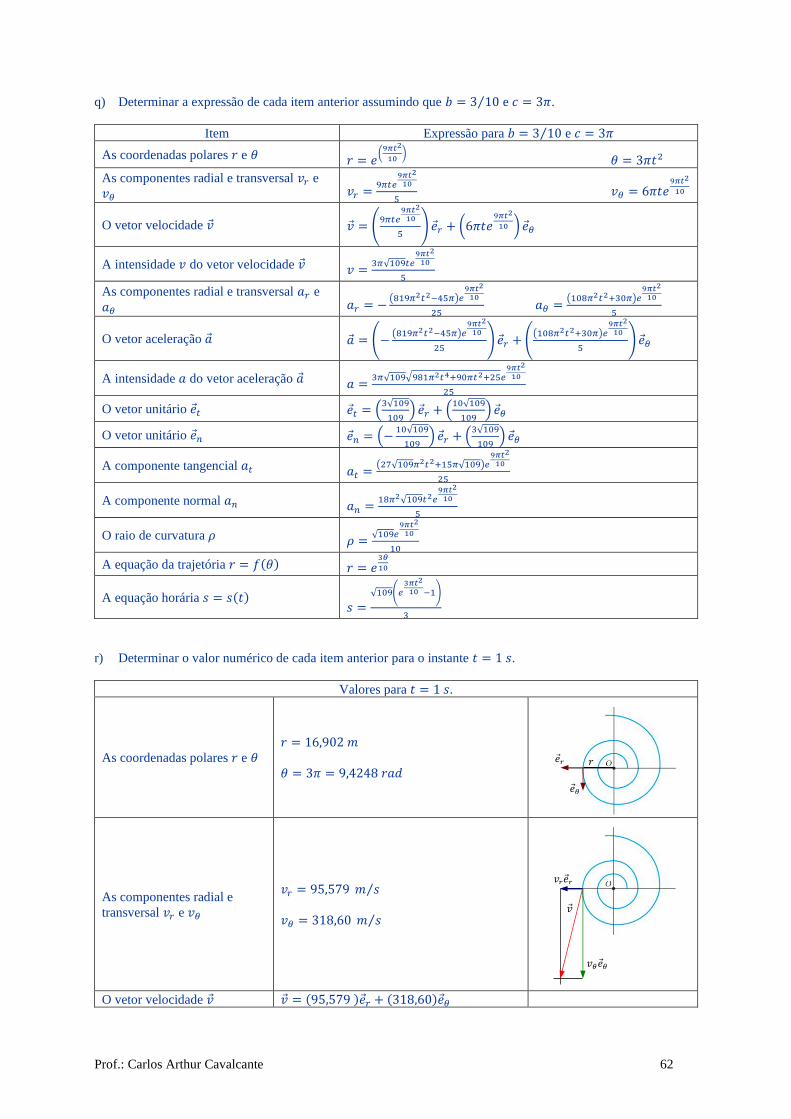
Prof.: Carlos Arthur Cavalcante 62
q) Determinar a expressão de cada item anterior assumindo que 𝑏 = 3 10⁄ e 𝑐 = 3𝜋.
Item Expressão para 𝑏 = 3 10⁄ e 𝑐 = 3𝜋
As coordenadas polares 𝑟 e 𝜃 𝑟 = 𝑒(9𝜋𝑡2
10) 𝜃 = 3𝜋𝑡2
As componentes radial e transversal 𝑣𝑟 e
𝑣𝜃 𝑣𝑟 =9𝜋𝑡𝑒
9𝜋𝑡2
10
5 𝑣𝜃 = 6𝜋𝑡𝑒
9𝜋𝑡2
10
O vetor velocidade �� �� = (9𝜋𝑡𝑒
9𝜋𝑡2
10
5)𝑒𝑟 + (6𝜋𝑡𝑒
9𝜋𝑡2
10 ) 𝑒𝜃
A intensidade 𝑣 do vetor velocidade �� 𝑣 =3𝜋√109𝑡𝑒
9𝜋𝑡2
10
5
As componentes radial e transversal 𝑎𝑟 e
𝑎𝜃 𝑎𝑟 = −(819𝜋2𝑡2−45𝜋)𝑒
9𝜋𝑡2
10
25 𝑎𝜃 =
(108𝜋2𝑡2+30𝜋)𝑒9𝜋𝑡2
10
5
O vetor aceleração �� �� = (−(819𝜋2𝑡2−45𝜋)𝑒
9𝜋𝑡2
10
25)𝑒𝑟 + (
(108𝜋2𝑡2+30𝜋)𝑒9𝜋𝑡2
10
5)𝑒𝜃
A intensidade 𝑎 do vetor aceleração �� 𝑎 =3𝜋√109√981𝜋2𝑡4+90𝜋𝑡2+25𝑒
9𝜋𝑡2
10
25
O vetor unitário 𝑒𝑡 𝑒𝑡 = (3√109
109) 𝑒𝑟 + (
10√109
109) 𝑒𝜃
O vetor unitário 𝑒𝑛 𝑒𝑛 = (−10√109
109) 𝑒𝑟 + (
3√109
109) 𝑒𝜃
A componente tangencial 𝑎𝑡 𝑎𝑡 =(27√109𝜋2𝑡2+15𝜋√109)𝑒
9𝜋𝑡2
10
25
A componente normal 𝑎𝑛 𝑎𝑛 =18𝜋2√109𝑡2𝑒
9𝜋𝑡2
10
5
O raio de curvatura 𝜌 𝜌 =√109𝑒
9𝜋𝑡2
10
10
A equação da trajetória 𝑟 = 𝑓(𝜃) 𝑟 = 𝑒3𝜃
10
A equação horária 𝑠 = 𝑠(𝑡) 𝑠 =
√109(𝑒3𝜋𝑡2
10 −1)
3
r) Determinar o valor numérico de cada item anterior para o instante 𝑡 = 1 𝑠.
Valores para 𝑡 = 1 𝑠.
As coordenadas polares 𝑟 e 𝜃
𝑟 = 16,902 𝑚
𝜃 = 3𝜋 = 9,4248 𝑟𝑎𝑑
As componentes radial e
transversal 𝑣𝑟 e 𝑣𝜃
𝑣𝑟 = 95,579 𝑚 𝑠⁄
𝑣𝜃 = 318,60 𝑚 𝑠⁄
O vetor velocidade �� �� = (95,579 )𝑒𝑟 + (318,60)𝑒𝜃
𝑟 𝑒𝑟
𝑒𝜃
𝑣
𝑣𝑟𝑒𝑟
𝑣𝜃𝑒𝜃
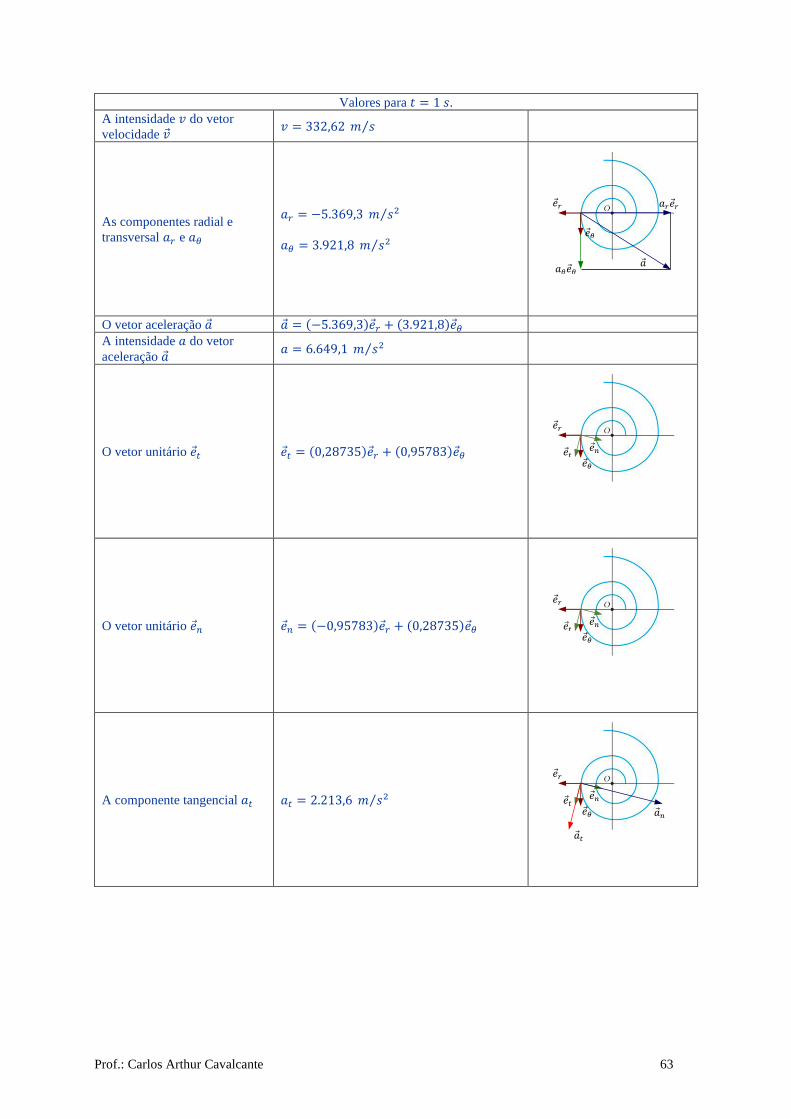
Prof.: Carlos Arthur Cavalcante 63
Valores para 𝑡 = 1 𝑠. A intensidade 𝑣 do vetor
velocidade �� 𝑣 = 332,62 𝑚 𝑠⁄
As componentes radial e
transversal 𝑎𝑟 e 𝑎𝜃
𝑎𝑟 = −5.369,3 𝑚 𝑠2⁄
𝑎𝜃 = 3.921,8 𝑚 𝑠2⁄
O vetor aceleração �� �� = (−5.369,3)𝑒𝑟 + (3.921,8)𝑒𝜃
A intensidade 𝑎 do vetor
aceleração �� 𝑎 = 6.649,1 𝑚 𝑠2⁄
O vetor unitário 𝑒𝑡 𝑒𝑡 = (0,28735)𝑒𝑟 + (0,95783)𝑒𝜃
O vetor unitário 𝑒𝑛 𝑒𝑛 = (−0,95783)𝑒𝑟 + (0,28735)𝑒𝜃
A componente tangencial 𝑎𝑡 𝑎𝑡 = 2.213,6 𝑚 𝑠2⁄
��
𝑎𝑟𝑒𝑟
𝑎𝜃𝑒𝜃
𝑒𝑟
𝑒𝜃
𝑒𝑟
𝑒𝜃
𝑒𝑛 𝑒𝑡
𝑒𝑟
𝑒𝜃
𝑒𝑛 𝑒𝑡
𝑒𝑟
𝑒𝜃
𝑒𝑛 𝑒𝑡
��𝑡
��𝑛
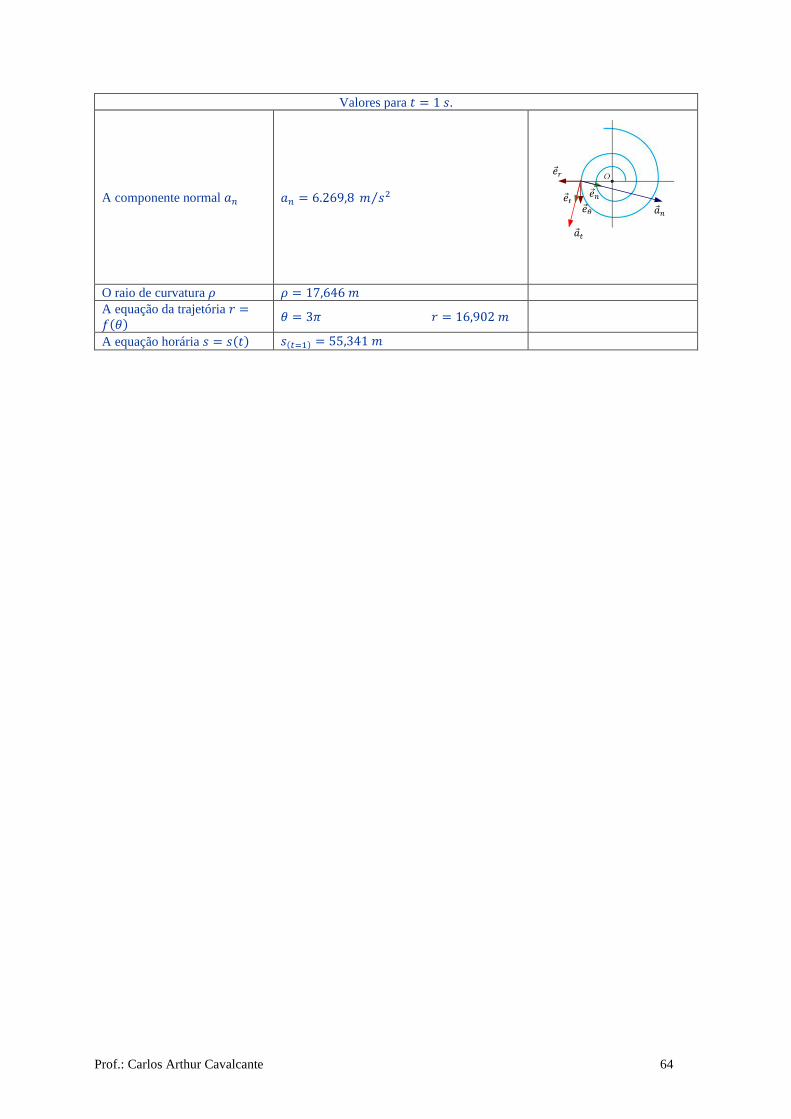
Prof.: Carlos Arthur Cavalcante 64
Valores para 𝑡 = 1 𝑠.
A componente normal 𝑎𝑛 𝑎𝑛 = 6.269,8 𝑚 𝑠2⁄
O raio de curvatura 𝜌 𝜌 = 17,646 𝑚
A equação da trajetória 𝑟 =𝑓(𝜃)
𝜃 = 3𝜋 𝑟 = 16,902 𝑚
A equação horária 𝑠 = 𝑠(𝑡) 𝑠(𝑡=1) = 55,341 𝑚
𝑒𝑟
𝑒𝜃
𝑒𝑛 𝑒𝑡
��𝑡
��𝑛

Prof.: Carlos Arthur Cavalcante 65
2.9 Sistema de Coordenadas Cilíndricas – Componentes Radial, Transversal e Axial
O movimento 3D de uma partícula também pode ser descrito por um
sistema de coordenadas cilíndricas. Em um sistema de coordenadas
cilíndricas 𝑂𝑅𝜃𝑧 a posição da partícula em movimento 3D é determinada
por suas coordenadas cilíndricas 𝑅, 𝜃 e 𝑧 e as componentes radial,
transversal e axial da velocidade (𝑣𝑅, 𝑣𝜃 e 𝑣𝑧) e da aceleração (𝑎𝑅, 𝑎𝜃 e 𝑎𝑧) são derivadas ou determinadas em conformidade com o sistema de
coordenadas cilíndricas.
Neste caso, é conveniente utilizar os vetores unitários 𝑒R, 𝑒𝜃 e ��. Expressando o vetor posição
𝑟 em termos desses vetores unitários, escrevemos,
𝑟 = 𝑅𝑒𝑅 + 𝑧��
Observando que os vetores unitários 𝑒𝑅 e 𝑒𝜃 definem, respectivamente, as
direções radial e transversal no plano 𝑥𝑦, e que o vetor unitário �� que define
a direção axial é constante em intensidade e direção, o vetor velocidade será
determinador por:
�� =𝑑𝑟
𝑑𝑡=
𝑑(𝑅𝑒𝑅+𝑧��)
𝑑𝑡 �� =
𝑑(𝑅𝑒𝑅)
𝑑𝑡+𝑑(𝑧��)
𝑑𝑡
�� =𝑑𝑅
𝑑𝑡𝑒𝑅 + 𝑅
𝑑𝑒𝑅
𝑑𝑡+𝑑𝑧
𝑑𝑡�� + 𝑧
𝑑��
𝑑𝑡 �� =
𝑑𝑅
𝑑𝑡𝑒𝑅 + 𝑅𝑒𝜃
𝑑𝜃
𝑑𝑡+𝑑𝑧
𝑑𝑡�� + 0
�� = ��𝑒𝑅 + 𝑅��𝑒𝜃 + ����
Assim, as componentes cilíndricas da velocidade são,
𝑣𝑅 = �� 𝑣𝜃 = 𝑅�� 𝑣𝑧 = ��
O vetor aceleração será dado por:
�� =𝑑��
𝑑𝑡=
𝑑(��𝑒𝑅+𝑅��𝑒𝜃+����)
𝑑𝑡
Desenvolvendo e simplificando, obtém-se:
�� = (�� − 𝑅��2)𝑒𝑟 + (𝑅�� + 2����)𝑒𝜃 + ����
As componentes cilíndricas da aceleração são,
𝑎𝑅 = �� − 𝑅��2 𝑎𝜃 = 𝑅�� + 2���� 𝑎𝑧 = ��

Prof.: Carlos Arthur Cavalcante 66
2.9.1 Exemplo-Ilustrativo 16
Problema 11.178 (Beer, Johnston; 9ª Edição).
O movimento de uma partícula sobre a superfície de um cilindro circular reto é
definido pelas relações (coordenadas cilíndricas) 𝑅 = 𝐴 𝜃 = 2𝜋𝑡 𝑧 = 𝐴𝑡2 4⁄ onde 𝐴 é uma constante. Determine as intensidades da
velocidade e da aceleração da partícula em qualquer instante 𝑡.
SOLUÇÃO:
𝑅 = 𝐴 �� = 0 �� = 0
𝜃 = 2𝜋𝑡 �� = 2𝜋 �� = 0
𝑧 = 𝐴𝑡2 4⁄ �� = 𝐴𝑡 2⁄ �� = 𝐴 2⁄
Assim, as componentes cilíndricas do vetor velocidade são.
𝑣𝑅 = �� 𝑣𝑅 = 0
𝑣𝜃 = 𝑅�� 𝑣𝜃 = 𝐴2𝜋 𝑣𝜃 = 2𝐴𝜋
𝑣𝑧 = �� 𝑣𝑧 = 𝐴𝑡 2⁄
E a intensidade 𝑣 do vetor �� pode ser obtida por:
𝑣 = √(𝑣𝑅)2 + (𝑣𝜃)
2 + (𝑣𝑧)2 𝑣 = √(0)2 + (2𝐴𝜋)2 + (𝐴𝑡 2⁄ )2 𝑣 = √4𝐴2𝜋2 + 𝐴2𝑡2 4⁄
𝑣 = √𝐴2(4𝜋2 + 𝑡2 4⁄ ) 𝑣 = 𝐴√4𝜋2 + 𝑡2 4⁄
As componentes cilíndricas do vetor aceleração são.
𝑎𝑅 = �� − 𝑅��2 𝑎𝑅 = 0 − 𝐴(2𝜋)2 𝑎𝑅 = 4𝐴𝜋2
𝑎𝜃 = 𝑅�� + 2���� 𝑎𝜃 = 𝐴(0) + 2(0)(2𝜋) 𝑎𝜃 = 0
𝑎𝑧 = �� 𝑎𝑧 = 𝐴 2⁄
E a intensidade 𝑎 do vetor �� pode ser obtida por:
𝑎 = √(𝑎𝑅)2 + (𝑎𝜃)
2 + (𝑎𝑧)2 𝑎 = √(4𝐴𝜋2)2 + (0)2 + (𝐴 2⁄ )2 𝑎 = √16𝐴2𝜋4 + 𝐴2 4⁄
𝑎 = 𝐴√16𝜋4 + 1 4⁄

Prof.: Carlos Arthur Cavalcante 67
2.10 Movimento Relativo de um Sistema de Coordenadas em Translação
Consideremos duas partículas 𝐴 e 𝐵 que se movem no espaço em relação a um sistema de
coordenadas fixo 𝑂𝑥𝑦𝑧. Assim, os vetores posição das partículas 𝐴 e 𝐵 em relação ao sistema
de coordenadas fixo 𝑂𝑥𝑦𝑧 serão, respectivamente, 𝑟𝐴 e 𝑟𝐵.
Adicionalmente, consideremos um sistema de coordenadas móvel
𝐴𝑥’𝑦’𝑧’ ligado à partícula 𝐴, movendo-se juntamente com a partícula
𝐴 e de tal modo que as direções 𝑥 e 𝑥’, 𝑦 e 𝑦’ e 𝑧 e 𝑧’ permanecem
respectivamente paralelas entre si2.
O vector 𝑟𝐵/𝐴 é o vetor posição da partícula 𝐵 em relação à partícula
𝐴, isto é, é o vetor posição da partícula 𝐵 em relação ao sistema de
referência móvel 𝐴𝑥’𝑦’𝑧’. Ou seja,
𝑟𝐵/𝐴 = 𝑟𝐵 − 𝑟𝐴
Derivando duas vezes obtemos,
��𝐵/𝐴 = ��𝐵 − ��𝐴
��𝐵/𝐴 = ��𝐵 − ��𝐴
2 O sistema de coordenadas móvel 𝐴𝑥′𝑦′𝑧′ está se movendo em relação ao sistema de coordenadas fixo 𝑂𝑥𝑦𝑧
apenas por translação, sem nenhuma rotação. No caso de movimento de partículas, esta condição deve ser sempre
verdadeira, pois não tem sentido dizer que sistema 𝐴𝑥′𝑦′𝑧′ (que se move preso a uma partícula ou a um ponto
material sem dimensão) sofre alguma “alteração da sua posição angular” em relação ao sistema 𝑂𝑥𝑦𝑧.

Prof.: Carlos Arthur Cavalcante 68
2.10.1 Exemplo-Ilustrativo 17 – Movimento Relativo 3D.
Uma partícula 𝐴 se desloca de acordo com o seu vetor posição dado por
𝑟𝐴 = 4 cos(2𝜋𝑡) 𝑖 + 3𝑡2𝑗 + 4 sin(2𝜋𝑡) ��.
Outra partícula 𝐵 se desloca de acordo com o seu vetor posição dado por
𝑟𝐵 = 𝑒−𝑡 2⁄ sin(8𝜋𝑡) 𝑖 + 𝑡𝑗 + 𝑒−𝑡 2⁄ cos(8𝜋𝑡) ��.
a) A aceleração da partícula 𝐵 em relação à partícula 𝐴, para qualquer instante 𝑡. b) A velocidade da partícula 𝐵 em relação à partícula 𝐴, para qualquer instante 𝑡. c) A posição da partícula 𝐵 em relação à partícula 𝐴, para qualquer instante 𝑡. d) A aceleração, a velocidade e a posição da partícula 𝐵 em relação à partícula 𝐴, no instante
𝑡 = 5 𝑠.
SOLUÇÃO:
Adotamos o sistema de coordenadas 𝑂𝑥𝑦𝑧 padrão e consideramos um outro sistema de coordenadas 𝑂′𝑥′𝑦′𝑧′ movendo-se apenas por translação e preso à partícula 𝐴.
Movimento da partícula 𝑨:
De acordo com o enunciado do problema,
𝑟𝐴 = [
𝑟𝑥𝐴𝑟𝑦𝐴𝑟𝑧𝐴] 𝑟𝐴 = [
4 cos(2𝜋𝑡)
3𝑡2
4 sin(2𝜋𝑡)]
Derivando, encontramos,
��𝐴 = [
𝑣𝐴𝑥𝑣𝐴𝑦𝑣𝐴𝑧
] ��𝐴 = [−8π sin(2𝜋𝑡)
6𝑡8π cos(2𝜋𝑡)
]
��𝐴 = [
𝑎𝐴𝑥𝑎𝐴𝑦𝑎𝐴𝑧
] ��𝐴 = [−16𝜋2 cos(2𝜋𝑡)
6−16𝜋2 sin(2𝜋𝑡)
]
Movimento da partícula 𝑩:
𝑟𝐵 = [
𝑥𝐵𝑦𝐵𝑧𝐵] 𝑟𝐵 = [
𝑒−𝑡 2⁄ sin(8𝜋𝑡)𝑡
𝑒−𝑡 2⁄ cos(8𝜋𝑡)]
Derivando, encontramos,
��𝐵 = [
𝑣𝐵𝑥𝑣𝐵𝑦𝑣𝐵𝑧
] ��𝐵 =
[ −
𝑒−𝑡 2⁄ (sin(8𝜋𝑡)−16𝜋 cos(8𝜋𝑡))
2
1
−𝑒−𝑡 2⁄ (cos(8𝜋𝑡)+16𝜋 sin(8𝜋𝑡))
2 ]
��𝐵 = [
𝑎𝐵𝑥𝑎𝐵𝑦𝑎𝐵𝑧
] ��𝐵 =
[ −
𝑒−𝑡 2⁄ ((256𝜋2−1) sin(8𝜋𝑡)+32𝜋 cos(8𝜋𝑡))
4
0𝑒−𝑡 2⁄ (32𝜋 sin(8𝜋𝑡)−(256𝜋2−1) cos(8𝜋𝑡))
4 ]

Prof.: Carlos Arthur Cavalcante 69
a) Determinar a aceleração da partícula 𝐵 em relação à partícula 𝐴, para qualquer instante 𝑡.
��𝐵 𝐴⁄ = ��𝐵 − ��𝐴 ��𝐵 𝐴⁄ =
[ −
𝑒−𝑡 2⁄ ((256𝜋2−1) sin(8𝜋𝑡)+32𝜋 cos(8𝜋𝑡))
4
0𝑒−𝑡 2⁄ (32𝜋 sin(8𝜋𝑡)−(256𝜋2−1)cos(8𝜋𝑡))
4 ]
− [−16𝜋2 cos(2𝜋𝑡)
6−16𝜋2 sin(2𝜋𝑡)
]
��𝐵 𝐴⁄ =
[ −
𝑒−𝑡 2⁄ ((256𝜋2−1) sin(8𝜋𝑡)+32𝜋 cos(8𝜋𝑡))
4− (−16𝜋2 cos(2𝜋𝑡))
0 − 6𝑒−𝑡 2⁄ (32𝜋 sin(8𝜋𝑡)−(256𝜋2−1) cos(8𝜋𝑡))
4− (−16𝜋2 sin(2𝜋𝑡)) ]
��𝐵 𝐴⁄ =
[ −
𝑒−𝑡 2⁄ ((256𝜋2−1) sin(8𝜋𝑡)+32𝜋 cos(8𝜋𝑡))
4+ 16𝜋2 cos(2𝜋𝑡)
−6𝑒−𝑡 2⁄ (32𝜋 sin(8𝜋𝑡)−(256𝜋2−1) cos(8𝜋𝑡))
4+ 16𝜋2 sin(2𝜋𝑡) ]
��𝐵 𝐴⁄ =
[ −
64𝜋2𝑒𝑡 2⁄ cos(2𝜋𝑡)−(32𝜋 cos(8𝜋𝑡)+(256𝜋2−1) sin(8𝜋𝑡))
4𝑒𝑡 2⁄
−6
−(256𝜋2−1)cos(8𝜋𝑡)−32𝜋 sin(8𝜋𝑡)−64𝜋2𝑒𝑡 2⁄ sin(2𝜋𝑡)
4𝑒𝑡 2⁄ ]
b) Determinar a velocidade da partícula 𝐵 em relação à partícula 𝐴, para qualquer instante 𝑡.
��𝐵 𝐴⁄ = ��𝐵 − ��𝐴 ��𝐵 𝐴⁄ =
[ −
𝑒−𝑡 2⁄ (sin(8𝜋𝑡)−16𝜋 cos(8𝜋𝑡))
2
1
−𝑒−𝑡 2⁄ (cos(8𝜋𝑡)+16𝜋 sin(8𝜋𝑡))
2 ]
− [−8π sin(2𝜋𝑡)
6𝑡8π cos(2𝜋𝑡)
]
��𝐵 𝐴⁄ =
[ −
𝑒−𝑡 2⁄ (sin(8𝜋𝑡)−16𝜋 cos(8𝜋𝑡))
2− (−8π sin(2𝜋𝑡))
1 − 6t
−𝑒−𝑡 2⁄ (cos(8𝜋𝑡)+16𝜋 sin(8𝜋𝑡))
2− 8π cos(2𝜋𝑡) ]
��𝐵 𝐴⁄ =
[ 16𝜋 cos(8𝜋𝑡)−sin(8𝜋𝑡)+16𝜋𝑒𝑡 2⁄ sin(2𝜋𝑡)
2𝑒𝑡 2⁄
1 − 6t
−16𝜋𝑒𝑡 2⁄ cos(2𝜋𝑡)+cos(8𝜋𝑡)+16𝜋 sin(8𝜋𝑡)
2𝑒𝑡 2⁄ ]
c) Determinar a posição da partícula 𝐵 em relação à partícula 𝐴, para qualquer instante 𝑡.
𝑟𝐵 𝐴⁄ = 𝑟𝐵 − 𝑟𝐴 𝑟𝐵 𝐴⁄ = [𝑒−𝑡 2⁄ sin(8𝜋𝑡)
𝑡𝑒−𝑡 2⁄ cos(8𝜋𝑡)
] − [4 cos(2𝜋𝑡)
3𝑡2
4 sin(2𝜋𝑡)]
𝑟𝐵 𝐴⁄ = [𝑒−𝑡 2⁄ sin(8𝜋𝑡) − 4 cos(2𝜋𝑡)
𝑡 − 3𝑡2
𝑒−𝑡 2⁄ cos(8𝜋𝑡) − 4 sin(2𝜋𝑡)
]
d) Determinar a aceleração, a velocidade e a posição da partícula 𝐵 em relação à partícula 𝐴, no instante 𝑡 = 5 𝑠.
Em 𝑡 = 5 𝑠, teremos,
Prof.: Carlos Arthur Cavalcante 70
��𝐵 𝐴⁄ =
[ −
64𝜋2𝑒5 2⁄ cos(2𝜋5)−(32𝜋 cos(8𝜋5)+(256𝜋2−1) sin(8𝜋5))
4𝑒5 2⁄
−6
−(256𝜋2−1)cos(8𝜋5)−32𝜋 sin(8𝜋5)−64𝜋2𝑒5 2⁄ sin(2𝜋5)
4𝑒5 2⁄ ]
��𝐵 𝐴⁄ =
[ 16𝜋2𝑒5 2⁄ −8𝜋
𝑒5 2⁄
−6
−256𝜋2−1
4𝑒5 2⁄ ]
��𝐵 𝐴⁄ = [155,85−6
−51,829]
��𝐵 𝐴⁄ =
[ 16𝜋 cos(8𝜋5)−sin(8𝜋5)+16𝜋𝑒5 2⁄ sin(2𝜋5)
2𝑒5 2⁄
1 − 6(5)
−16𝜋𝑒5 2⁄ cos(2𝜋5)+cos(8𝜋5)+16𝜋 sin(8𝜋5)
2𝑒5 2⁄ ]
��𝐵 𝐴⁄ = [
8𝜋
𝑒5 2⁄
−29
−16𝜋𝑒5 2⁄ +1
2𝑒5 2⁄
] ��𝐵 𝐴⁄ = [2,0630−29
−25,174]
𝑟𝐵 𝐴⁄ = [
𝑒−5 2⁄ sin(8𝜋5) − 4 cos(2𝜋5)
5 − 3(5)2
𝑒−5 2⁄ cos(8𝜋5) − 4 sin(2𝜋5)
]
𝑟𝐵 𝐴⁄ = [
−4−70
√𝑒5𝑒5⁄
] 𝑟𝐵 𝐴⁄ = [−4−70
0,08209]

Prof.: Carlos Arthur Cavalcante 71
2.10.2 Exemplo-Ilustrativo 18 – Movimento Relativo.
O automóvel 𝐴 está trafegando para leste com uma velocidade
constante de 𝑣𝐴 = 72 𝑘𝑚 ℎ⁄ . Quando ele passa pelo cruzamento
mostrado na figura, o automóvel 𝐵 parte do repouso de uma
posição 𝑑 = 40 𝑚 ao norte do cruzamento dirigindo-se para o sul
com uma aceleração constante de 𝑎𝐵 = 2,6 𝑚 𝑠2⁄ . Determinar:
a) A aceleração do automóvel 𝐵 em relação ao automóvel 𝐴, para
qualquer instante 𝑡. b) A velocidade do automóvel 𝐵 em relação ao automóvel 𝐴, para qualquer instante 𝑡. c) A posição do automóvel 𝐵 em relação ao automóvel 𝐴, para qualquer instante 𝑡. d) A aceleração, a velocidade e a posição do automóvel 𝐵 em relação ao automóvel 𝐴, no
instante 𝑡 = 5 𝑠.
SOLUÇÃO:
Adotamos o sistema de coordenadas com origem “no cruzamento” e os eixos
𝑥 e 𝑦 com sentidos positivos orientados, respectivamente, para leste e para
norte, conforme ilustrado na figura ao lado. Um outro sistema de coordenadas
𝑂′𝑥′𝑦′ move-se apenas por translação preso ao automóvel 𝐴.
Movimento do automóvel 𝑨:
��𝐴 = [𝑎𝐴𝑥𝑎𝐴𝑦
] ��𝐴 = [𝑣𝐴𝑥𝑣𝐴𝑦
] 𝑟𝐴 = [𝑥𝐴𝑦𝐴]
De acordo com o enunciado do problema, o automóvel 𝐴 desenvolve um Movimento Retilíneo Uniforme na
direção 𝑥 do sistema de coordenadas adotado. Isto é, 𝑎𝐴𝑥 = 0 e 𝑎𝐴𝑦 = 0. Assim,
��𝐴 = [00] ��𝐴 = [
𝑣0𝐴𝑥0] 𝑟𝐴 = [
𝑥0𝐴 + 𝑣0𝐴𝑥𝑡0
]
Notar que uma denominação apropriada das variáveis envolvidas é um item relevante para o desenvolvimento da
solução do problema.
Dados iniciais para o movimento do automóvel 𝐴 (em conformidade com o sistema de coordenadas adotado):
𝑎𝐴𝑥 = 0 𝑣0𝐴𝑥 = 72 𝑘𝑚 ℎ⁄ = 20 𝑚 𝑠⁄ 𝑥0𝐴 = 0
Portanto, o movimento do automóvel 𝐴 é determinado por:
��𝐴 = [00] ��𝐴 = [
200] 𝑟𝐴 = [
20𝑡0]
Movimento do automóvel 𝑩:
��𝐵 = [𝑎𝐵𝑥𝑎𝐵𝑦
] ��𝐵 = [𝑣𝐵𝑥𝑣𝐵𝑦
] 𝑟𝐵 = [𝑥𝐵𝑦𝐵]
De acordo com o enunciado do problema, o automóvel 𝐵 desenvolve um Movimento Retilíneo Uniformemente
Acelerado na direção 𝑦 do sistema de coordenadas adotado. Isto é, 𝑎𝐵𝑥 = 0 e 𝑎𝐵𝑦 = 𝑐𝑡𝑒 ≤ 0 (uma constante real
negativa). Assim,
��𝐵 = [0𝑎𝐵𝑦
] ��𝐵 = [0
𝑣0𝐵𝑦 + 𝑎𝐵𝑦𝑡] 𝑟𝐵 = [
0
𝑦0𝐵 + 𝑣0𝐵𝑦𝑡 +1
2𝑎𝐵𝑦𝑡
2]
𝑣𝐴
𝑣𝐵
𝑑
𝑣𝐴
𝑣𝐵 𝑦𝐵
𝑥
𝑦
𝑥𝐴
𝑦′
𝑥′ 𝑂

Prof.: Carlos Arthur Cavalcante 72
Notar que uma denominação apropriada para as variáveis envolvidas é um item relevante para o desenvolvimento
da solução do problema.
Dados iniciais para o movimento do automóvel 𝐵 (em conformidade com o sistema de coordenadas adotado):
𝑎𝐵𝑦 = −2,6 𝑚 𝑠2⁄ 𝑣0𝐵𝑦 = 0 𝑚 𝑠⁄ 𝑦0𝐵 = 40 𝑚
Portanto, o movimento do automóvel 𝐵 é determinado por:
��𝐵 = [0
−2,6] ��𝐵 = [
0−2,6𝑡
] 𝑟𝐵 = [0
40 − 1,3𝑡2]
a) Determinar a aceleração do automóvel 𝐵 em relação ao automóvel 𝐴, para qualquer instante 𝑡.
��𝐵 𝐴⁄ = ��𝐵 − ��𝐴
��𝐵 𝐴⁄ = [0
−2,6] − [
00] ��𝐵 𝐴⁄ = [
0 − 0−2,6 − 0
] ��𝐵 𝐴⁄ = [0
−2,6]
b) Determinar a velocidade do automóvel 𝐵 em relação ao automóvel 𝐴, para qualquer instante 𝑡.
��𝐵 𝐴⁄ = ��𝐵 − ��𝐴
��𝐵 𝐴⁄ = [0
−2,6𝑡] − [
200] ��𝐵 𝐴⁄ = [
0 − 20−2,6𝑡 − 0
] ��𝐵 𝐴⁄ = [−20−2,6𝑡
]
c) Determinar a posição do automóvel 𝐵 em relação ao automóvel 𝐴, para qualquer instante 𝑡.
𝑟𝐵 𝐴⁄ = 𝑟𝐵 − 𝑟𝐴
𝑟𝐵 𝐴⁄ = [0
40 − 1,3𝑡2] − [
20𝑡0] 𝑟𝐵 𝐴⁄ = [
0 − 20𝑡40 − 1,3𝑡2 − 0
] 𝑟𝐵 𝐴⁄ = [−20𝑡
40 − 1,3𝑡2]
d) Determinar a aceleração, a velocidade e a posição do automóvel 𝐵 em relação ao automóvel 𝐴, no instante 𝑡 =5 𝑠.
Para qualquer instante 𝑡 temos que,
��𝐵 𝐴⁄ = [0
−2,6] ��𝐵 𝐴⁄ = [
−20−2,6𝑡
] 𝑟𝐵 𝐴⁄ = [−20𝑡
40 − 1,3𝑡2]
Para o instante 𝑡 = 5 𝑠 teremos,
��𝐵 𝐴⁄ = [0
−2,6] ��𝐵 𝐴⁄ = [
−20−2,6(5)
] 𝑟𝐵 𝐴⁄ = [−20(5)
40 − 1,3(5)2]
��𝐵 𝐴⁄ = [0
−2,6] ��𝐵 𝐴⁄ = [
−20−13
] 𝑟𝐵 𝐴⁄ = [−1007,5
]
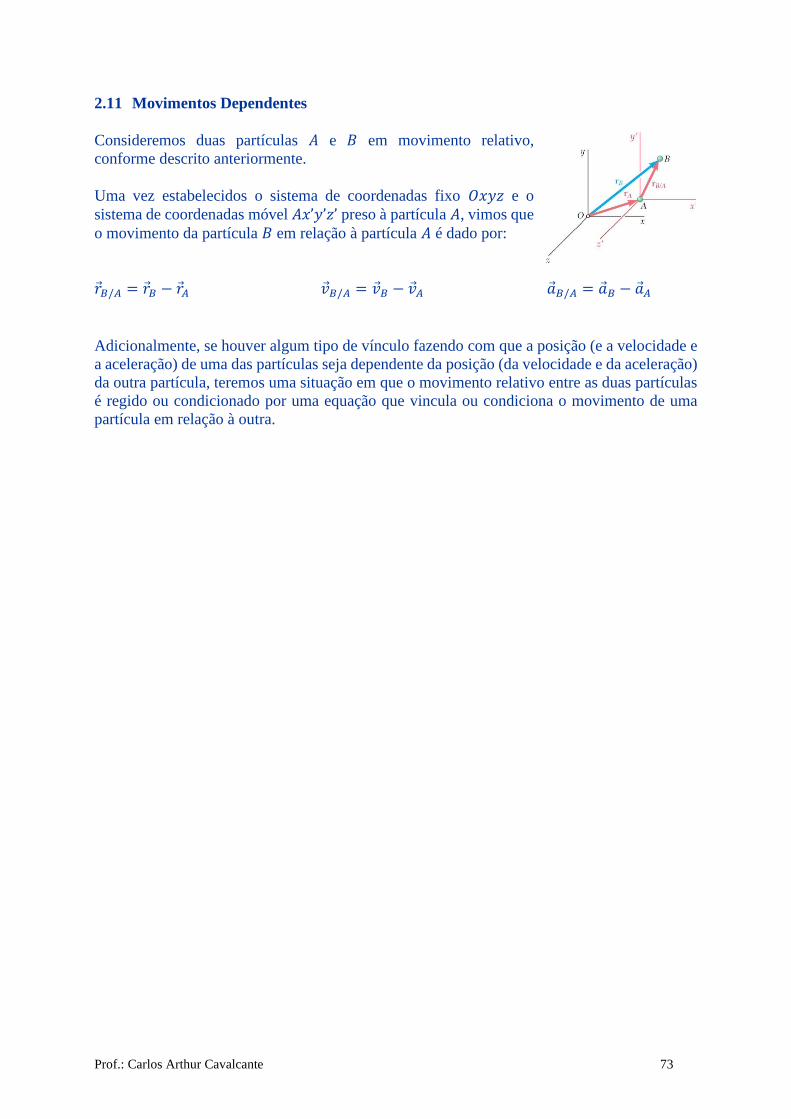
Prof.: Carlos Arthur Cavalcante 73
2.11 Movimentos Dependentes
Consideremos duas partículas 𝐴 e 𝐵 em movimento relativo,
conforme descrito anteriormente.
Uma vez estabelecidos o sistema de coordenadas fixo 𝑂𝑥𝑦𝑧 e o
sistema de coordenadas móvel 𝐴𝑥’𝑦’𝑧’ preso à partícula 𝐴, vimos que
o movimento da partícula 𝐵 em relação à partícula 𝐴 é dado por:
𝑟𝐵/𝐴 = 𝑟𝐵 − 𝑟𝐴 ��𝐵/𝐴 = ��𝐵 − ��𝐴 ��𝐵/𝐴 = ��𝐵 − ��𝐴
Adicionalmente, se houver algum tipo de vínculo fazendo com que a posição (e a velocidade e
a aceleração) de uma das partículas seja dependente da posição (da velocidade e da aceleração)
da outra partícula, teremos uma situação em que o movimento relativo entre as duas partículas
é regido ou condicionado por uma equação que vincula ou condiciona o movimento de uma
partícula em relação à outra.

Prof.: Carlos Arthur Cavalcante 74
2.11.1 Exemplo-Ilustrativo 19 – Movimentos Dependentes.
O automóvel 𝐴 está trafegando no sentido do Oeste para Leste com
aceleração constante 𝑎𝐴 e o automóvel 𝐵 está trafegando no
sentido do Norte para o Sul com aceleração constante 𝑎𝐵.
Quando o automóvel 𝐴 está passando pela posição 240 𝑚 a oeste
do cruzamento sua velocidade é de 52 𝑚 𝑠⁄ e o automóvel 𝐵 está
passando pela posição 120 𝑚 ao norte do cruzamento com uma
velocidade de 26 𝑚 𝑠⁄ . Além disso, até o instante 𝑡 = 4 𝑠, os
movimentos de 𝐴 e de 𝐵 são movimentos dependentes regidos pela
relação de dependência 𝑥𝐴 + 2𝑦𝐵 = 𝑐𝑡𝑒. Nestas condições, determinar:
a) A aceleração do automóvel 𝐵 em relação ao automóvel 𝐴, para qualquer instante 𝑡. b) A velocidade do automóvel 𝐵 em relação ao automóvel 𝐴, para qualquer instante 𝑡. c) A posição do automóvel 𝐵 em relação ao automóvel 𝐴, para qualquer instante 𝑡. d) A aceleração, a velocidade e a posição do automóvel 𝐵 em relação ao automóvel 𝐴, no
instante 𝑡 = 3 𝑠, sabendo que neste instante o automóvel 𝐵 está a uma distância de 33 𝑚 do
cruzamento.
e) Se os automóveis irão colidir ou não e, em caso afirmativo, o instante em que ocorre.
SOLUÇÃO:
Adotamos o sistema de coordenadas 𝑂𝑥𝑦 com origem “no cruzamento” e os
eixos 𝑥 e 𝑦 com sentidos positivos orientados, respectivamente, para leste e para
norte, conforme ilustrado na figura ao lado. Um outro sistema de coordenadas
𝐴𝑥′𝑦′ (não ilustrado na figura) move-se apenas por translação preso ao
automóvel 𝐴.
Movimento do automóvel 𝐴 (em relação ao sistema de coordenadas 𝑂𝑥𝑦):
��𝐴 = [𝑎𝐴𝑥𝑎𝐴𝑦
] ��𝐴 = [𝑣𝐴𝑥𝑣𝐴𝑦
] 𝑟𝐴 = [𝑥𝐴𝑦𝐴]
De acordo com o enunciado do problema o automóvel 𝐴 desenvolve um Movimento Retilíneo Uniformemente
Acelerado (𝑎𝐴 = 𝑐𝑡𝑒) na direção positiva 𝑥 do sistema de coordenadas 𝑂𝑥𝑦 adotado. Isto é,
𝑎𝐴𝑥 = +𝑎𝐴 𝑎𝐴𝑦 = 0
Assim, escrevemos,
��𝐴 = [𝑎𝐴0] ��𝐴 = [
𝑣0𝐴𝑥 + 𝑎𝐴𝑡0
] 𝑟𝐴 = [𝑥0𝐴 + 𝑣0𝐴𝑥𝑡 +
1
2𝑎𝐴𝑡
2
0]
Dados iniciais para o movimento do automóvel 𝐴 (em conformidade com o sistema de coordenadas 𝑂𝑥𝑦):
𝑣0𝐴𝑥 = 52 𝑚 𝑠⁄ 𝑥0𝐴 = −240 𝑚
Portanto,
��𝐴 = [𝑎𝐴0] ��𝐴 = [
52 + 𝑎𝐴𝑡0
] 𝑟𝐴 = [−240 + 52𝑡 +
1
2𝑎𝐴𝑡
2
0]
Movimento do automóvel 𝐵:
��𝐵 = [𝑎𝐵𝑥𝑎𝐵𝑦
] ��𝐵 = [𝑣𝐵𝑥𝑣𝐵𝑦
] 𝑟𝐵 = [𝑥𝐵𝑦𝐵]
𝑣𝐴
𝑣𝐵
𝑥
𝑦
𝑂
𝑣𝐴
𝑣𝐵 120 𝑚
240 𝑚
Prof.: Carlos Arthur Cavalcante 75
De acordo com o enunciado do problema o automóvel 𝐵 desenvolve um Movimento Retilíneo Uniformemente
Acelerado (𝑎𝐵 = 𝑐𝑡𝑒) na direção negativa 𝑦 do sistema de coordenadas 𝑂𝑥𝑦 adotado. Isto é,
𝑎𝐵𝑥 = 0 𝑎𝐵𝑦 = −𝑎𝐵
Assim,
��𝐵 = [0−𝑎𝐵
] ��𝐵 = [0
𝑣0𝐵𝑦 − 𝑎𝐵𝑡] 𝑟𝐵 = [
0
𝑦0𝐵 + 𝑣0𝐵𝑦𝑡 −1
2𝑎𝐵𝑡
2]
Dados iniciais para o movimento do automóvel 𝐵 (em conformidade com o sistema de coordenadas 𝑂𝑥𝑦):
𝑣0𝐵𝑦 = −26 𝑚 𝑠⁄ 𝑦0𝐵 = 120 𝑚
Portanto,
��𝐵 = [0−𝑎𝐵
] ��𝐵 = [0
−26 − 𝑎𝐵𝑡] 𝑟𝐵 = [
0
120 − 26𝑡 −1
2𝑎𝐵𝑡
2]
Dependência dos movimentos de 𝐴 e de 𝐵
Conforme o enunciado do problema, até o instante 𝑡 = 4 𝑠, os movimentos de 𝐴 e de 𝐵 são movimentos
dependentes regidos pela seguinte relação de dependência:
𝑥𝐴 + 2𝑦𝐵 = 𝑐𝑡𝑒
Isto é, a distância do automóvel 𝐴 até a origem, somada ao dobro da distância do automóvel 𝐵 até a origem, resulta
em um mesmo valor constante qualquer que seja o instante 𝑡, desde que 𝑡 ≤ 4 𝑠.
Derivando duas vezes a relação de dependência encontramos,
𝑑(𝑥𝐴+2𝑦𝐵)
𝑑𝑡=
𝑑(𝑐𝑡𝑒)
𝑑𝑡
𝑑(𝑥𝐴)
𝑑𝑡+ 2
𝑑(𝑦𝐵)
𝑑𝑡= 0 𝑣𝐴𝑥 + 2𝑣𝐵𝑦 = 0
𝑑(𝑣𝐴𝑥+2𝑣𝐵𝑦)
𝑑𝑡=
𝑑(0)
𝑑𝑡
𝑑(𝑣𝐴𝑥)
𝑑𝑡+ 2
𝑑(𝑣𝐵𝑦)
𝑑𝑡= 0 𝑎𝐴𝑥 + 2𝑎𝐵𝑦 = 0
Uma vez que,
𝑎𝐴𝑥 = +𝑎𝐴 𝑎𝐵𝑦 = −𝑎𝐵
Obtemos,
𝑎𝐴 − 2𝑎𝐵 = 0
a) Determinar a aceleração do automóvel 𝐵 em relação ao automóvel 𝐴, para qualquer instante 𝑡 (𝑡 ≤ 4 𝑠).
��𝐴 = [𝑎𝐴0] ��𝐵 = [
0−𝑎𝐵
]
��𝐵 𝐴⁄ = ��𝐵 − ��𝐴 = [0−𝑎𝐵
] − [𝑎𝐴0] = [
−𝑎𝐴−𝑎𝐵
]
Mas, 𝑎𝐴 = 2𝑎𝐵. Logo,
��𝐵 𝐴⁄ = [−2𝑎𝐵−𝑎𝐵
]
b) Determinar a velocidade do automóvel 𝐵 em relação ao automóvel 𝐴, para qualquer instante 𝑡 (𝑡 ≤ 4 𝑠).

Prof.: Carlos Arthur Cavalcante 76
��𝐴 = [52 + 𝑎𝐴𝑡
0] ��𝐵 = [
0−26 − 𝑎𝐵𝑡
]
��𝐵 𝐴⁄ = ��𝐵 − ��𝐴 = [0
−26 − 𝑎𝐵𝑡] − [
52 + 𝑎𝐴𝑡0
] = [−52 − 𝑎𝐴𝑡−26 − 𝑎𝐵𝑡
]
Mas, 𝑎𝐴 = 2𝑎𝐵. Logo,
��𝐵 𝐴⁄ = [−52 − 2𝑎𝐵𝑡−26 − 𝑎𝐵𝑡
]
c) A posição do automóvel 𝐵 em relação ao automóvel 𝐴, para qualquer instante 𝑡 (𝑡 ≤ 4 𝑠).
𝑟𝐴 = [−240 + 52𝑡 +
1
2𝑎𝐴𝑡
2
0] 𝑟𝐵 = [
0
120 − 26𝑡 −1
2𝑎𝐵𝑡
2]
𝑟𝐵 𝐴⁄ = 𝑟𝐵 − 𝑟𝐴 = [0
120 − 26𝑡 −1
2𝑎𝐵𝑡
2] − [−240 + 52𝑡 +
1
2𝑎𝐴𝑡
2
0] = [
240 − 52𝑡 −1
2𝑎𝐴𝑡
2
120 − 26𝑡 −1
2𝑎𝐵𝑡
2]
Mas, 𝑎𝐴 = 2𝑎𝐵. Logo,
𝑟𝐵 𝐴⁄ = [240 − 52𝑡 − 𝑎𝐵𝑡
2
120 − 26𝑡 −1
2𝑎𝐵𝑡
2]
d) A aceleração, a velocidade e a posição do automóvel 𝐵 em relação ao automóvel 𝐴, em 𝑡 = 3 𝑠, sabendo que
neste instante o automóvel 𝐵 está a uma distância de 33 𝑚 do cruzamento.
𝑟𝐵 = √(𝑥𝐵)2 + (𝑦𝐵)
2 𝑟𝐵 = √(0)2 + (𝑦𝐵)
2
𝑟𝐵 = √(𝑦𝐵)2 𝑟𝐵 = +𝑦𝐵
𝑟𝐵 = +𝑦𝐵 = 120 − 26𝑡 −1
2𝑎𝐵𝑡
2
Para o instante 𝑡 = 3 𝑠 temos,
120 − 26(3) −1
2𝑎𝐵(3)
2 = 33 120 − 78 −9
2𝑎𝐵 = 33 −
9
2𝑎𝐵 = −9
9
2𝑎𝐵 = 9 𝑎𝐵 = 2 𝑚 𝑠2⁄
Logo, para o instante 𝑡 = 3 𝑠 temos,
��𝐵 𝐴⁄ = [−2𝑎𝐵−𝑎𝐵
] ��𝐵 𝐴⁄ = [−2(2)−2
] ��𝐵 𝐴⁄ = [−4−2]
��𝐵 𝐴⁄ = [−52 − 2𝑎𝐵𝑡−26 − 𝑎𝐵𝑡
] ��𝐵 𝐴⁄ = [−52 − 2(2)(3)
−26 − (2)(3)] ��𝐵 𝐴⁄ = [
−64−32
]
𝑟𝐵 𝐴⁄ = [240 − 52𝑡 − 𝑎𝐵𝑡
2
120 − 26𝑡 −1
2𝑎𝐵𝑡
2] 𝑟𝐵 𝐴⁄ = [240 − 52(3) − (2)(3)2
120 − 26(3) −1
2(2)(3)2
] 𝑟𝐵 𝐴⁄ = [6633]
e) Se os automóveis irão colidir ou não e, em caso afirmativo, o instante em que ocorre.
Haverá colisão se

Prof.: Carlos Arthur Cavalcante 77
𝑟𝐵 𝐴⁄ = [240 − 52𝑡 − 𝑎𝐵𝑡
2
120 − 26𝑡 −1
2𝑎𝐵𝑡
2] = 0 (Vetor nulo)
Seja 𝑡1 o instante de tempo em que a componente 𝑥𝐵 𝐴⁄ = 0 e seja 𝑡2 o instante de tempo em que a componente
𝑦𝐵 𝐴⁄ = 0. Haverá colisão se 𝑡1 = 𝑡2. Então,
240 − 52𝑡1 − (2)𝑡12 = 0 120 − 26𝑡2 −
1
2(2)𝑡2
2 = 0
240 − 52𝑡1 − (2)𝑡12 = 0 120 − 26𝑡2 −
1
2(2)𝑡2
2 = 0
𝑡1 = {4 𝑠−30 𝑠
𝑡2 = {4 𝑠−30 𝑠
Como
𝑡1 = 𝑡2 = 4 𝑠
Concluímos que haverá colisão, em 𝑡 = 4 𝑠! Justamente no cruzamento, que é o único ponto comum entre as
trajetórias dos dois automóveis.

Prof.: Carlos Arthur Cavalcante 78
2.11.2 Exemplo-Ilustrativo 20 – Movimentos Dependentes.
Problema-Resolvido 11.5 (Beer, Johnston; 9ª Edição).
A polia 𝐷 está presa a um cursor que é puxado para baixo com velocidade
constante de 7,5 𝑐𝑚/𝑠. No instante 𝑡 = 0, o cursor 𝐴 começa a se mover
para baixo a partir do ponto 𝐾 com aceleração constante e velocidade inicial
nula. Sabendo que a velocidade do cursor 𝐴 é de 30 𝑐𝑚/𝑠 ao passar pelo
ponto 𝐿, determine a variação na elevação, a variação na velocidade e a
variação na aceleração do bloco 𝐵 quando o bloco 𝐴 passar por 𝐿.
SOLUÇÃO:
São três partículas (o cursor 𝐴, a polia/ cursor 𝐷 e o bloco 𝐵), em movimentos dependentes
através do vínculo estabelecido pelo cabo e pelas polias.
Todos os movimentos são retilíneos e na mesma direção. Adotamos o sistema de
coordenadas como um eixo 𝑥 orientado positivo para baixo (todos os movimentos serão
estabelecidos por suas respectivas componentes 𝑥).
Movimento do cursor 𝑨.
O movimento do cursor 𝐴 é um Movimento Retilíneo Uniformemente Acelerado para baixo (no sentido positivo
do eixo 𝑥 adotado). Portanto, seu movimento é regido pelas seguintes equações:
𝑎𝐴 = 𝑐𝑡𝑒 ≥ 0
𝑣𝐴 = 𝑣0𝐴 + 𝑎𝐴𝑡 𝑣𝐴2 = 𝑣0𝐴
2 + 2𝑎𝐴(𝑥𝐴 − 𝑥0𝐴)
𝑥𝐴 = 𝑥0𝐴 + 𝑣0𝐴𝑡 +1
2𝑎𝐴𝑡
2
Dados do movimento do cursor 𝐴 (em conformidade com o eixo ordenado 𝑥 adotado para descrever os movimentos
retilíneos).
𝑥𝐴(𝐿) − 𝑥0𝐴 = 20 𝑐𝑚 𝑣𝐴(𝐿) = 30 𝑐𝑚 𝑠⁄ 𝑣0𝐴 = 0
Sendo 𝑡1 é o instante em que o cursor 𝐴 passa pelo ponto 𝐿, podemos escrever,
𝑣𝐴(𝑡1)2 = 𝑣0𝐴
2 + 2𝑎𝐴(𝑥𝐴(𝑡1) − 𝑥0𝐴)
Para obter,
302 = 02 + 2𝑎𝐴(20) 𝑎𝐴 = 22,5 𝑐𝑚 𝑠2⁄
E escrever que,
𝑣𝐴(𝑡1) = 𝑣0𝐴 + 𝑎𝐴(𝑡1)
Para obter,
30 = 0 + 22,5(𝑡1) 𝑡1 = 30 22,5⁄ = 1,3333 𝑠
Movimento da polia 𝑫.
O movimento da polia 𝐷 é um Movimento Retilíneo Uniforme para baixo (sentido positivo do eixo 𝑥 adotado).
Portanto, seu movimento é regido pelas seguintes equações:
𝑎𝐷 = 0 𝑣𝐷 = 𝑣0𝐷 𝑥𝐷 = 𝑥0𝐷 + 𝑣0𝐷𝑡
𝑥

Prof.: Carlos Arthur Cavalcante 79
Dados do movimento da polia 𝐷 (em conformidade com o eixo ordenado 𝑥 adotado para descrever os movimentos
retilíneos).
𝑣𝐷 = 𝑣0𝐷 = 7,5
Para o instante 𝑡1,
𝑥𝐷(𝑡1) = 𝑥0𝐷 + 7,5(𝑡1) 𝑥𝐷(𝑡1) − 𝑥0𝐷 = 7,5(30 22,5⁄ )
𝑥𝐷(𝑡1) − 𝑥0𝐷 = 10 𝑐𝑚
Movimento do bloco 𝑩.
Não foram fornecidas informações sobre o movimento do bloco 𝐵. Sabemos, porém, que é um movimento
dependente dos movimentos do cursor 𝐴 e da polia 𝐷.
Dependência dos movimentos.
Conforme o enunciado do problema, os movimentos são dependentes, através dos vínculos estabelecidos pelo cabo
e pelas polias. A relação de dependência entre os movimentos pode ser estabelecida observando-se que o
comprimento do cabo é constante. Isto é,
𝑥𝐴 + 𝑥𝐵 + 2𝑥𝐷 = 𝑐𝑡𝑒
Diferenciando, obtemos,
𝑣𝐴 + 𝑣𝐵 + 2𝑣𝐷 = 0 𝑎𝐴 + 𝑎𝐵 + 2𝑎𝐷 = 0
Concluímos que a relação de dependência permite concluir que,
No instante 𝒕𝟎 = 𝟎 No instante 𝒕𝟏 = 𝟑𝟎 𝟐𝟐, 𝟓⁄ = 𝟏, 𝟑𝟑𝟑𝟑 𝒔
𝑥0𝐴 + 𝑥0𝐵 + 2𝑥0𝐷 = 𝑐𝑡𝑒 𝑥𝐴(𝑡1) + 𝑥𝐵(𝑡1) + 2𝑥𝐷(𝑡1) = 𝑐𝑡𝑒
𝑣0𝐴 + 𝑣0𝐵 + 2𝑣0𝐷 = 0 𝑣𝐴(𝑡1) + 𝑣𝐵(𝑡1) + 2𝑣𝐷(𝑡1) = 0
𝑎0𝐴 + 𝑎0𝐵 + 2𝑎0𝐷 = 0 𝑎𝐴(𝑡1) + 𝑎𝐵(𝑡1) + 2𝑎𝐷(𝑡1) = 0
Portanto,
𝑥𝐴(𝑡1) + 𝑥𝐵(𝑡1) + 2𝑥𝐷(𝑡1) = 𝑥0𝐴 + 𝑥0𝐵 + 2𝑥0𝐷
𝑣𝐴(𝑡1) + 𝑣𝐵(𝑡1) + 2𝑣𝐷(𝑡1) = 𝑣0𝐴 + 𝑣0𝐵 + 2𝑣0𝐷
𝑎𝐴(𝑡1) + 𝑎𝐵(𝑡1) + 2𝑎𝐷(𝑡1) = 𝑎0𝐴 + 𝑎0𝐵 + 2𝑎0𝐷
(𝑥𝐴(𝑡1) − 𝑥0𝐴) + (𝑥𝐵(𝑡1) − 𝑥0𝐵) + 2(𝑥𝐷(𝑡1) − 𝑥0𝐷) = 0
(𝑣𝐴(𝑡1) − 𝑣0𝐴) + (𝑣𝐵(𝑡1) − 𝑣0𝐵) + 2(𝑣𝐷(𝑡1) − 𝑣0𝐷) = 0
(𝑎𝐴(𝑡1) − 𝑎0𝐴) + (𝑎𝐵(𝑡1) − 𝑎0𝐵) + 2(𝑎𝐷(𝑡1) − 𝑎0𝐷) = 0
∆𝑥𝐴 + ∆𝑥𝐵 + 2∆𝑥𝐷 = 0
∆𝑣𝐴 + ∆𝑣𝐵 + 2∆𝑣𝐷 = 0
∆𝑎𝐴 + ∆𝑎𝐵 + 2∆𝑎𝐷 = 0
Substituindo valores conhecidos e encontrados,
(20) + ∆𝑥𝐵 + 2(10) = 0
(30) + ∆𝑣𝐵 + 2(0) = 0 (0) + ∆𝑎𝐵 + 2(0) = 0
Encontramos,

Prof.: Carlos Arthur Cavalcante 80
∆𝑥𝐵 = −40 𝑐𝑚 ∆𝑣𝐵 = −30 𝑐𝑚 𝑠⁄ ∆𝑎𝐵 = 0
Além disso, temos que no instante 𝒕𝟏 vale a relação,
𝑎𝐴(𝑡1) + 𝑎𝐵(𝑡1) + 2𝑎𝐷(𝑡1) = 0 22,5 + 𝑎𝐵(𝑡1) + 2(0) = 0
𝑎𝐵(𝑡1) = −22,5
Como, ∆𝑎𝐵 = 0, concluímos que,
𝒂𝑩 = 𝒂𝑩(𝒕𝟏) = −𝟐𝟐, 𝟓 = 𝒄𝒕𝒆

Prof.: Carlos Arthur Cavalcante 81
3 Cinética de Partículas: Aplicação Direta da 2ª Lei de Newton
3.1 Introdução
A Dinâmica é a parte da Mecânica que estuda os corpos em movimento.
A Dinâmica divide-se em duas partes: Cinemática e Cinética.
• Cinemática
Estuda a ‘geometria’ ou a forma do movimento ao longo do tempo. Procura determinar
a posição, a velocidade e a aceleração do movimento ao longo do tempo, sem fazer
referência às causas (forças) geradoras do movimento.
• Cinética
Estuda a relação existente entre as forças que atuam sobre um corpo (causas do
movimento) e a Cinemática decorrente da ação dessas forças.
A cinética é usada para prever o movimento causado por forças conhecidas ou para
determinar as forças necessárias para produzir um movimento desejado.
A 1ª e a 3ª Leis de Newton são suficientes para o estudo de corpos em repouso (estática), ou
corpos em movimento sem nenhuma aceleração (em movimento retilíneo uniforme).
Quando um corpo sofre alguma aceleração (isto é, quando ocorre uma mudança no módulo ou
na direção do vetor velocidade), é necessário utilizar a 2ª Lei de Newton. O objetivo é encontrar
a relação (função) que existe entre as forças e a trajetória que o corpo segue.
3.2 A 2ª Lei de Newton do Movimento
A 2ª Lei de Newton pode ser enunciada como se segue:
Se a força resultante atuando sobre uma partícula não é zero, a partícula terá uma aceleração
proporcional ao módulo da força resultante e na mesma direção e sentido desta força resultante
(�� ∝ ��).
Experimento:
Considere uma partícula sujeita a uma força ��1 de direção
constante e intensidade 𝐹1 também constante. Sob a ação dessa
força (constante), observa-se que a partícula se desloca em uma
linha reta e na direção e sentido da força. Medindo-se a posição
da partícula em vários instantes, verifica-se que sua aceleração tem uma intensidade
constante 𝑎1.
Considere agora que o experimento é repetido (na mesma
partícula) várias vezes com a aplicação das forças ��2, ��3, ..., de
diferentes intensidades e/ou direções. Em todos os casos, constata-
se que a partícula se move na direção e sentido da força que atua

Prof.: Carlos Arthur Cavalcante 82
sobre ela que as intensidades 𝑎1, 𝑎2, 𝑎3, ..., das acelerações são proporcionais às intensidades
𝐹1, 𝐹2, 𝐹3, ..., das forças aplicadas, respectivamente.
Isto é, constata-se que,
𝐹1
𝑎1=
𝐹2
𝑎2=
𝐹3
𝑎3=⋅⋅⋅= 𝑐𝑡𝑒 = 𝑚𝑎𝑠𝑠𝑎 𝑚
O valor constante obtido é uma característica da partícula. É denominado de 𝑚𝑎𝑠𝑠𝑎 da
partícula e representado por 𝑚.
Assim, quando uma força �� atua sobre uma partícula de massa 𝑚, a força �� e a
aceleração �� dessa partícula devem satisfazer a seguinte relação.
�� = 𝑚��
Esta relação é uma formulação completa da 2ª Lei de Newton. Ela expressa não somente que
as intensidades 𝐹 e 𝑎 dos vetores �� e �� são proporcionais (𝐹 ∝ 𝑎), mas também que os vetores
�� e �� têm a mesma direção e o mesmo sentido (pois 𝑚 é um escalar sempre positivo).
A relação �� = 𝑚�� permanece válida mesmo quando �� não for constante. Quando o vetor ��
varia com o tempo em intensidade e/ou direção, a intensidade 𝑎 do vetor aceleração �� em cada
instante será proporcional à intensidade do vetor �� (𝑎 ∝ 𝐹) e o vetor aceleração �� terá a mesma
direção e sentido do vetor força �� em cada instante de tempo.
Quando uma partícula estiver sujeita simultaneamente à ação de várias forças, o seu vetor
aceleração �� terá, em cada instante, intensidade proporcional à intensidade do vetor força
resultante (|∑ ��|), com direção e sentido coincidentes com o vetor força resultante (∑ ��). Isto
é, quando mais de uma força atua sobre uma partícula, a 2ª Lei de Newton estabelece que,
∑ �� = 𝑚��
Deve-se observar que o sistema de coordenadas em relação ao qual o vetor aceleração �� e o
vetor força �� são determinados deve ser um sistema de referência newtoniano3. Um sistema de
eixos fixos na Terra, por definição, não se constitui em um sistema de referência newtoniano,
pois a Terra gira em relação às estrelas “fixas” e está acelerada em relação ao sol. Entretanto,
na grande maioria dos problemas de engenharia, a aceleração pode ser determinada em relação
a eixos liados à Terra e a equação ∑ �� = 𝑚�� pode ser usada sem qualquer erro apreciável. Por
outro lado, essa equação não vale se �� representa uma aceleração relativa, medida em relação
a eixos em movimento, tais como eixos ligados a carros em movimento acelerado ou a peças
rotativas em máquinas.
3 Um sistema de referência newtoniano é um sistema de coordenadas cujos eixos de referência têm orientação
constante (imutável) em relação às estrelas “fixas” com origem no sol ou deslocando-se com velocidade constante
em relação ao sol. Mais precisamente, o sistema deve ter sua origem localizada no centro de massa do sistema
solar (colocá-la no sol é uma aproximação) ou se deslocar com velocidade constante em relação a esse centro de
massa. Na realidade, uma vez que mesmo as estrelas mais distantes não são fixas, a definição de um sistema
newtoniano (também chamado de sistema inercial) é praticamente uma tautologia. Isto é, um sistema de referência
newtoniano (ou inercial) é todo sistema no qual a equação ∑ �� = 𝑚�� é (considerada) válida.

Prof.: Carlos Arthur Cavalcante 83
Por fim, vale lembrar que se a força resultante sobre uma partícula for zero, isto é, se ∑ �� = 0,
então a aceleração dessa partícula também será zero (�� = 0). Se a partícula está em repouso
(��0 = 0) em relação ao sistema coordenadas adotado, ela permanecerá em repouso (�� = 0). Se
a partícula estiver originalmente com uma velocidade ��0 ≠ 0, ela manterá essa velocidade
constante �� = ��0 (se moverá com velocidade escalar constante 𝑣0 e em uma linha reta – a 1ª
Lei de Newton é um caso particular da 2ª Lei).

Prof.: Carlos Arthur Cavalcante 84
3.3 Sistemas de Unidades
As leis da física exprimem relações entre grandezas (físicas) como comprimento, tempo, força,
energia e temperatura. A medição de cada uma dessas grandezas envolve a comparação com
um valor unitário adotado como padrão de comparação, chamado de unidade de medida.
Por exemplo, a medida mais antiga e básica é, possivelmente, a medida de distância (grandeza
de comprimento). Para medir a distância entre dois pontos é preciso dispor de uma unidade
básica padrão. Pode-se escolher o metro, o pé, a polegada, além de outras unidades de medida.
A afirmação de que uma distância vale 20 metros, significa que uma “régua”, de mesmo
tamanho que uma unidade de medida “metro”, cabe 20 vezes naquela distância.
Toda grandeza física necessita de uma unidade de medida como padrão de comparação.
Grandeza É um ente abstrato empregado para identificar os fenômenos físicos.
Exemplos: Comprimento, Tempo, Força.
Unidade É o padrão de comparação usado para medir a intensidade de uma grandeza.
Exemplos: metro, segundo, Newton.
Atualmente, ainda são utilizados diferentes sistemas de unidades como, por exemplo, o Sistema
Internacional de Unidades (SI), o Sistema Técnico MKS, e o Sistema Inglês BGS; embora a
tendência seja uma convergência para o Sistema Internacional de Unidades (SI). Por exemplo,
a pressão máxima permitida em um pneu pode vir expressa em unidades tais como: libras por
polegada quadrada (𝑝𝑠𝑖), Pascal (𝑃𝑎), milímetros de mercúrio (𝑚𝑚.𝑚𝑔), quilograma-força por
centímetro quadrado (𝑘𝑔𝑓 𝑐𝑚2⁄ ), dentre outras.
Na Mecânica, são quatro as grandezas essenciais: Comprimento (L), Massa (M), Tempo (T) e
Força (F).
Acontece que a 2ª Lei de Newton impõe que apenas três dessas quatro grandezas fundamentais
possam ter suas unidades de medida definidas de maneira arbitrária, pois, a quarta unidade de
medida fica condicionada a ter de respeitar a referida Lei. Isto é, três grandezas fundamentais
terão suas unidades básicas de medida definidas de modo arbitrário, mas a quarta grandeza
básica deverá ter sua unidade definida em função daquelas outras.
Um sistema de unidades pode ser um sistema decimal ou um sistema não-decimal. Em um
sistema decimal, os múltiplos e submúltiplos das unidades básicas são potências de base 10.
Por exemplo, 1𝑘𝑚 = 103𝑚 = 106𝑚𝑚. Caso contrário, o sistema é dito ser um sistema não-
decimal. Por exemplo, 1 𝑦𝑑 = 3 𝑓𝑡 = 36 𝑖𝑛 (uma jarda é igual a três pés que é igual a 36
polegadas).
Por motivos práticos, apresentaremos a seguir apenas o Sistema Internacional de Unidades (SI),
deixando para o aluno interessado o estudo de outros sistemas de unidades.

Prof.: Carlos Arthur Cavalcante 85
3.3.1 Sistema Internacional de Unidades (SI)
É um sistema 𝑀𝐿𝑇. As grandezas fundamentais são a Massa (M), o Comprimento (L) e o
Tempo (T).
As unidades básicas são o quilograma (𝑘𝑔), o metro (𝑚) e o segundo (𝑠). A unidade de força
é uma unidade básica derivada conforme a 2ª Lei de Newton.
• O quilograma (𝑘𝑔) é definido como a massa do protótipo internacional do quilograma.
• O metro (𝑚) é definido como o comprimento percorrido pela luz no vácuo durante um
intervalo de tempo de 1 299.792.458⁄ de segundo.
• O segundo (𝑠) é definido como a duração de 9.192.631.770 períodos da radiação
correspondente à transição entre dois níveis hiperfinos do estado fundamental do césio
133.
A unidade básica de força é denominada Newton (𝑁). É definida como a força que provoca
a aceleração de 1𝑚 𝑠2⁄ em uma massa de 1 𝑘𝑔.
1𝑁 = (1𝑘𝑔)(1𝑚 𝑠2⁄ )
Pegue um corpo com 1 𝑘𝑔 de massa (um corpo cuja a massa é igual à massa do protótipo
internacional do quilograma). Submeta este corpo a uma força e meça a aceleração por ele
alcançada. Altere a força até que a aceleração alcançada pelo corpo seja de 1 𝑚 𝑠2⁄ . Essa
força é a unidade básica de força (1 𝑁) no Sistema Internacional de Unidades (SI).
É um sistema absoluto. As três grandezas fundamentais são invariantes no espaço (e no
tempo) – não dependem do valor da gravidade do local onde o experimento é realizado para
determinar a unidade de força.
É um sistema decimal: múltiplos e submúltiplos das unidades são potências de base 10. Por
exemplo, 1 𝑘𝑚 = 103 𝑚 = 106 𝑚𝑚, 1 𝑘𝑔 = 103 𝑔 = 106 𝑚𝑔 e 1 𝑠 = 103 𝑚𝑠 = 106 𝜇𝑠 .

Prof.: Carlos Arthur Cavalcante 86
3.4 Equações de Movimento
Na aplicação da 2ª Lei de Newton �� = 𝑚�� para resolver problemas, é conveniente expressá-la por meio das componentes da força e da aceleração
no sistema de coordenadas adotado. O quadro abaixo exemplifica os casos mais comuns abordados neste curso.
Sistema
adotado
Tipo de
Movimento
Expressão vetorial da 2ª Lei de
Newton Equações de Movimento Figura ilustrativa
Componentes
cartesianas
𝑂𝑥𝑦
Todas as forças
estão contidas em
um mesmo
plano.
Movimento 2D.
�� = 𝑚��
𝐹𝑥𝑖 + 𝐹𝑦𝑗 = 𝑚(𝑎𝑥𝑖 + 𝑎𝑦𝑗)
𝐹𝑥 = 𝑚𝑎𝑥
𝐹𝑦 = 𝑚𝑎𝑦
Componentes
polares 𝑂𝑟𝜃
Todas as forças
estão contidas em
um mesmo
plano.
Movimento 2D.
�� = 𝑚��
𝐹𝑟𝑒𝑟 + 𝐹𝜃𝑒𝜃 = 𝑚(𝑎𝑟𝑒𝑟 + 𝑎𝜃𝑒𝜃)
𝐹𝑟 = 𝑚𝑎𝑟
𝐹𝜃 = 𝑚𝑎𝜃
Componentes
tangencial e
normal
Com ou sem
todas as forças
contidas no
mesmo plano.
Movimentos 2D
e 3D.
�� = 𝑚��
𝐹𝑡𝑒𝑡 + 𝐹𝑛𝑒𝑛 = 𝑚(𝑎𝑡𝑒𝑡 + 𝑎𝑛𝑒𝑛)
𝐹𝑡 = 𝑚𝑎𝑡 𝐹𝑡 = 𝑚𝑑𝑣
𝑑𝑡
𝐹𝑛 = 𝑚𝑎𝑛 𝐹𝑛 = 𝑚𝑣2
𝜌
𝑚 ��𝑥
��𝑦 ��
𝑥
𝑦
𝑚 𝑚𝑎𝑥
𝑚𝑎𝑦
𝑥
𝑦
𝜃
𝑟 𝑚
��𝑟 ��𝜃
��
𝜃
𝑟 𝑚
𝑚𝑎𝑟 𝑚𝑎𝜃
𝑚
��𝑛
��𝑡 ��
𝑚
𝑚𝑎𝑛
𝑚𝑎𝑡

Prof.: Carlos Arthur Cavalcante 87
3.5 Exemplos Ilustrativos
3.5.1 Exemplo-Ilustrativo 21
Um bloco de peso 𝑊 = 50 𝑁, está inicialmente em repouso sobre um piso horizontal.
O bloco é então empurrado por uma força horizontal 𝑃 = 200 𝑁. Desprezando o
atrito entre o bloco e o piso, determine a aceleração do bloco.
SOLUÇÃO:
Sabemos que o bloco irá se deslocar sobre o piso horizontal. Isto é, sabemos a que a
aceleração resultante do bloco terá direção horizontal e sentido para a direita. Este fato
independe do sistema de coordenadas que for adotado.
Adotamos o sistema de coordenadas 𝑂𝑥𝑦 e fazemos o Diagrama de Corpo Livre da partícula de interesse
(bloco), conforme figura abaixo,
Diagrama de Corpo Livre do Bloco
A aplicação (vetorial) da 2ª Lei de Newton consiste em,
∑ �� = 𝑚�� �� + �� + �� = 𝑚��
Expressando os vetores em suas componentes no sistema de coordenadas adotado, estabelecemos as Equações de
Movimento correspondente ao DCL da partícula,
+→ ∑𝐹𝑥 = 𝑚𝑎𝑥
𝑊𝑥 + 𝑃𝑥 + 𝑁𝑥 = 𝑚𝑎𝑥
+↑ ∑𝐹𝑦 = 𝑚𝑎𝑦
𝑊𝑦 + 𝑃𝑦 + 𝑁𝑦 = 𝑚𝑎𝑦
Onde:
𝑊𝑥 = 𝑊 cos 270° É a componente do vetor força peso �� no eixo 𝑥 ou a projeção do
vetor �� na direção 𝑖 (𝑊𝑥 = �� ∙ 𝑖). O escalar 𝑊𝑥 pode ser positivo
ou negativo, enquanto o escalar 𝑊 é a intensidade ou módulo do
vetor �� e é sempre positivo. O ângulo 𝜃 = 270° é o ângulo entre
o vetor �� e o vetor 𝑖 (ou entre o vetor �� e o semieixo positivo de
𝑥), medido no sentido anti-horário, salvo menção em contrário.
𝑊𝑦 = 𝑊 sin 270° É a componente do vetor força peso �� no eixo 𝑦 ou a projeção do vetor �� na direção 𝑗
(𝑊𝑦 = �� ∙ 𝑗). O escalar 𝑊𝑦 pode ser positivo ou negativo,
enquanto que o escalar 𝑊 é a intensidade ou módulo do vetor ��
e é sempre positivo. O ângulo 𝜃 = 270° é o ângulo entre o vetor
�� e o vetor 𝑖 (ou entre o vetor �� e o semieixo positivo de 𝑥),
medido no sentido anti-horário, salvo menção em contrário.
𝑥
𝑦 ��
��
��
𝒎. ��
��
𝑚��
��
𝑥
𝑦
270°
��
𝑥
𝑦
270°

Prof.: Carlos Arthur Cavalcante 88
𝑃𝑥 = 𝑃 cos 0° É a componente do vetor força �� no eixo 𝑥 ou a projeção do vetor
�� na direção 𝑖 (𝑃𝑥 = �� ∙ 𝑖). O escalar 𝑃𝑥 pode ser positivo ou
negativo, enquanto o escalar 𝑃 é a intensidade ou módulo do vetor
�� e é sempre positivo. O ângulo 𝜃 = 0° é o ângulo entre o vetor ��
e o vetor 𝑖 (ou entre o vetor �� e o semieixo positivo de 𝑥), medido
no sentido anti-horário, salvo menção em contrário.
𝑃𝑦 = 𝑃 sin 0° É a componente do vetor força �� no eixo 𝑦 ou a projeção do vetor
�� na direção 𝑗 (𝑃𝑦 = �� ∙ 𝑗). O escalar 𝑃𝑦 pode ser positivo ou
negativo, enquanto o escalar 𝑃 é a intensidade ou módulo do vetor
�� e é sempre positivo. O ângulo 𝜃 = 0° é o ângulo entre o vetor ��
e o vetor 𝑖 (ou entre o vetor �� e o semieixo positivo de 𝑥), medido
no sentido anti-horário, salvo menção em contrário.
𝑁𝑥 = 𝑁 cos 90° É a componente do vetor força normal �� no eixo 𝑥 ou a projeção
do vetor �� na direção 𝑖 (𝑁𝑥 = �� ∙ 𝑖). O escalar 𝑁𝑥 pode ser
positivo ou negativo, enquanto o escalar 𝑁 é a intensidade ou
módulo do vetor �� e é sempre positivo. O ângulo 𝜃 = 90° é o
ângulo entre o vetor �� e o vetor 𝑖 (ou entre o vetor �� e o semieixo
positivo de 𝑥), medido no sentido anti-horário, salvo menção em
contrário.
𝑁𝑦 = 𝑁 sin 90° É a componente do vetor força normal �� no eixo 𝑦 ou a projeção
do vetor �� na direção 𝑖 (𝑁𝑦 = �� ∙ 𝑗). O escalar 𝑁𝑦 pode ser
positivo ou negativo, enquanto o escalar 𝑁 é a intensidade ou
módulo do vetor �� e é sempre positivo. O ângulo 𝜃 = 90° é o
ângulo entre o vetor �� e o vetor 𝑖 (ou entre o vetor �� e o semieixo
positivo de 𝑥), medido no sentido anti-horário, salvo menção em
contrário.
Assim, as Equações de Movimento podem ser escritas como,
+→ ∑𝐹𝑥 = 𝑚𝑎𝑥
𝑊𝑥 + 𝑃𝑥 + 𝑁𝑥 = 𝑚𝑎𝑥
𝑊cos 270° + 𝑃 cos 0° + 𝑁 cos 90° = 𝑚𝑎𝑥
𝑊(0) + 𝑃(1) + 𝑁(0) = 𝑚𝑎𝑥
𝑃 = 𝑚𝑎𝑥
+↑ ∑𝐹𝑦 = 𝑚𝑎𝑦
𝑊𝑦 + 𝑃𝑦 + 𝑁𝑦 = 𝑚𝑎𝑦
𝑊sin 270° + 𝑃 sin 0° + 𝑁 sin 90° = 𝑚𝑎𝑦
𝑊(−1) + 𝑃(0) + 𝑁(1) = 𝑚𝑎𝑦
−𝑊 +𝑁 = 𝑚𝑎𝑦
Reunindo as (duas) equações obtidas a partir das Equações de Movimento temos,
𝑃 = 𝑚𝑎𝑥 Eq. 01
−𝑊 +𝑁 = 𝑚𝑎𝑦 Eq. 02
Observar que as equações formam um sistema de 2 equações com 3 incógnitas (𝑎𝑥 , 𝑎𝑦 𝑒 𝑁). Isto significa que
precisamos encontrar uma equação adicional relacionando as incógnitas envolvidas.
Adicionalmente às duas equações obtidas com as Equações de Movimento, neste problema específico a direção e
o sentido do vetor aceleração �� são conhecidos. Assim, podemos escrever que,
𝑎𝑥 = 𝑎 cos 0° 𝑎𝑦 = 𝑎 sin 0°
�� 𝑥
𝑦
0°
�� 𝑥
𝑦
0°
�� 𝑥
𝑦
90°
�� 𝑥
𝑦
90°

Prof.: Carlos Arthur Cavalcante 89
𝑎𝑥 = 𝑎 𝑎𝑦 = 0
Assim, obtemos um sistema com 4 equações e com 4 incógnitas (𝑎𝑥, 𝑎𝑦, 𝑎 e 𝑁),
𝑃 = 𝑚𝑎𝑥 Eq. 01a
−𝑊 +𝑁 = 𝑚𝑎𝑦 Eq. 02a
𝑎𝑥 = 𝑎 Eq. 03a
𝑎𝑦 = 0 Eq. 04a
É evidente que uma simples substituição de variáveis permite reduzir esse sistema para um outro sistema de 2
equações e 2 incógnitas (𝑎 e 𝑁),
𝑃 = 𝑚𝑎 Eq. 01b
−𝑊 +𝑁 = 0 Eq. 02b
Substituindo os valores numéricos dados, o sistema de equações a ser resolvido é,
200 = (50 9,81⁄ )𝑎 Eq. 01c
−50 + 𝑁 = 0 Eq. 02c
Resolvido o sistema, encontramos,
𝑎 =(9,81)(200)
(50) 𝑎 = 39,240 𝑚 𝑠2⁄
𝑁 = 50 𝑁 = 50 𝑁
Resposta ao problema “determinar a aceleração do bloco”:
�� = (39,24 )𝑖 + (0)𝑗 (𝑚 𝑠2⁄ ) ou, 𝑎 = 39,24 𝑚 𝑠2⁄ 𝜑 = 0°

Prof.: Carlos Arthur Cavalcante 90
Em resumo, um exemplo de memória de cálculo para o problema é:
Diagrama de Corpo Livre
∑ �� = 𝑚��
�� + �� + �� = 𝑚��
Equações de Movimento
+→ ∑𝐹𝑥 = 𝑚𝑎𝑥
𝑊𝑥 + 𝑃𝑥 + 𝑁𝑥 = 𝑚𝑎𝑥
𝑊cos 270° + 𝑃 cos 0° + 𝑁 cos 90° = 𝑚(𝑎 cos 0°)
𝑊(0) + 𝑃(1) + 𝑁(0) = 𝑚𝑎
𝑃 = 𝑚𝑎
+↑ ∑𝐹𝑦 = 𝑚𝑎𝑦
𝑊𝑦 + 𝑃𝑦 + 𝑁𝑦 = 𝑚𝑎𝑦
𝑊sin 270° + 𝑃 sin 0° + 𝑁 sin 90° = 𝑚(𝑎 sin 0°)
𝑊(−1) + 𝑃(0) + 𝑁(1) = 0
−𝑊 +𝑁 = 0
Equações obtidas:
𝑃 = 𝑚𝑎 Eq. 01
−𝑊 +𝑁 = 0 Eq. 02
200 = (50 9,81⁄ )𝑎 Eq. 01a
−50 + 𝑁 = 0 Eq. 02a
Resolvido o sistema, encontramos,
𝑎 = 39,240 𝑚 𝑠2⁄ 𝑁 = 50 𝑁
Resposta ao problema “determinar a aceleração do bloco”:
�� = (39,240)𝑖 + (0)𝑗 (𝑚 𝑠2⁄ ) Ou, 𝑎 = 39,240 𝑚 𝑠2⁄ 𝜃 = 0°
Observar que abordagem para solucionar problemas consiste em:
1) Interpretar o enunciado e identificar a “física” do problema;
2) Estabelecer um Sistema de Coordenadas;
3) Identificar as forças atuantes sobre a partícula de interesse e fazer o Diagrama de Corpo Livre da
partícula;
4) Estabelecer as Equações de Movimento de acordo com o sistema de coordenadas adotado;
5) Se necessário, estabelecer equações adicionais relacionando as incógnitas envolvidas;
6) Organizar e resolver o sistema de equações obtido;
7) Utilizar a solução do sistema de equações para fazer os cálculos adicionais necessários a fim obter
respostas para as perguntas formuladas no enunciado;
𝑥
𝑦 ��
��
��
𝒎. ��

Prof.: Carlos Arthur Cavalcante 91
3.5.2 Exemplo-Ilustrativo 22
Um bloco de peso 𝑊 = 50 𝑁 (módulo), está inicialmente em repouso sobre um
piso horizontal. O bloco é então puxado por uma força horizontal 𝑃 = 200 𝑁
(módulo). Desprezando o atrito entre o bloco e o piso, determine a aceleração do
bloco, adotando o sistema de coordenadas 𝑶𝒙𝒚 indicado na figura ao lado.
SOLUÇÃO:
DCL do Bloco
∑ �� = 𝑚��
�� + �� + �� = 𝑚��
Equações de Movimento
+↗ ∑𝐹𝑥 = 𝑚𝑎𝑥
𝑊𝑥 + 𝑃𝑥 + 𝑁𝑥 = 𝑚𝑎𝑥
𝑊cos 240° + 𝑃 cos 330° + 𝑁 cos 60° =𝑚(𝑎 cos 330°)
𝑊(−1
2) + 𝑃 (
√3
2) + 𝑁 (
1
2) = 𝑚 (𝑎
√3
2)
−𝑊
2+
𝑃√3
2+
𝑁
2=
𝑊
𝑔(𝑎√3
2)
+↖ ∑𝐹𝑦 = 𝑚𝑎𝑦
𝑊𝑦 + 𝑃𝑦 + 𝑁𝑦 = 𝑚𝑎𝑦
𝑊 sin 240° + 𝑃 sin 330° + 𝑁 sin 60° =𝑚(𝑎 sin 330°)
𝑊(−√3
2) + 𝑃 (−
1
2) + 𝑁 (
√3
2) = 𝑚 (−𝑎
1
2)
−𝑊√3
2−
𝑃
2+
𝑁√3
2= −
𝑊
𝑔(𝑎
2)
Observar que no desenvolvimento das Equações de Movimento acima foi utilizado o conhecimento de que:
A força �� é um vetor conhecido (em direção, sentido e intensidade).
A força peso �� também é um vetor conhecido (em direção, sentido e intensidade).
O vetor força normal �� é um vetor com direção e sentido conhecidos (vertical e para cima) e que apenas sua intensidade 𝑁 é desconhecida.
O vetor aceleração �� é um vetor com direção e sentido conhecidos (horizontal e para a direita) e que apenas sua intensidade 𝑎 é
desconhecida.
Por isso é que foi possível escrever que,
𝑃𝑥 = 200 cos330° 𝑃𝑦 = 200sin 330°
𝑊𝑥 = 50 cos240° 𝑊𝑦 = 50 sin 240°
𝑁𝑥 = 𝑁 cos60° 𝑁𝑦 = 𝑁 sin 60°
𝑎𝑥 = 𝑎 cos330° 𝑎𝑦 = 𝑎 sin 330°
Reunindo as equações obtidas com as Equações de Movimento,
�� ��
��
𝒎. ��
𝑥 𝑦
30°
��
𝑥
𝑦
330°
�� 𝑥
𝑦
60°
��
𝑥
𝑦
240°
��
𝑥
𝑦
330°
��
𝒙 𝒚
30°

Prof.: Carlos Arthur Cavalcante 92
−𝑊
2+
𝑃√3
2+
𝑁
2=
𝑊
𝑔(𝑎√3
2) Eq. 01
−𝑊√3
2−
𝑃
2+
𝑁√3
2= −
𝑊
𝑔(𝑎
2) Eq. 02
Verificamos que formam um sistema de 2 equações e 2 incógnitas (𝑎 e 𝑁).
Substituindo os valores dados,
−50
2+
200√3
2+
𝑁
2=
50
9,81(√3
2) 𝑎 Eq. 01a
−50√3
2−
200
2+
𝑁√3
2= −
50
9,81(1
2) 𝑎 Eq. 02a
Resolvido o sistema, encontramos:
𝑎 =(9,81)(200)
(50) 𝑎 = 39,240 𝑚 𝑠2⁄
𝑁 = 50 𝑁 = 50,000 𝑁
Resposta ao problema “determinar a aceleração do bloco”:
�� = (33,983)𝑖 − (19,620)𝑗 (𝑚 𝑠2⁄ ) Ou 𝑎 = 39,240 𝑚 𝑠2⁄ 𝜃 = 330°
Notar que os valores encontrados para a aceleração 𝑎 e para a força normal 𝑁 são iguais aos valores
encontrados no exemplo anterior, como era de se esperar.
Apenas ocorre que os valores para 𝑎𝑥 e para 𝑎𝑦 diferem, como também era de se esperar, já que
representam a decomposição do vetor aceleração �� em um sistema de coordenadas diferente. No sistema
de coordenadas adotado neste exemplo, tem-se que,
𝑎𝑥 = 𝑎 cos330° 𝑎𝑥 = (39,240 ) (√3
2) 𝑎𝑥 = 33,983 𝑚 𝑠2⁄
𝑎𝑦 = 𝑎 sin330° 𝑎𝑦 = (39,240 ) (−1
2) 𝑎𝑦 = −19,620 𝑚 𝑠2⁄
Observar que abordagem para solucionar problemas consiste em:
1) Interpretar o enunciado e identificar a “física” do problema;
2) Estabelecer um Sistema de Coordenadas;
3) Identificar as forças atuantes sobre a partícula de interesse e fazer o Diagrama de Corpo Livre da
partícula;
4) Estabelecer as Equações de Movimento de acordo com o sistema de coordenadas adotado;
5) Se necessário, estabelecer equações adicionais relacionando as incógnitas envolvidas;
6) Organizar e resolver o sistema de equações obtido;
7) Utilizar a solução do sistema de equações para fazer os cálculos adicionais necessários a fim obter
respostas para as perguntas formuladas no enunciado;
𝑥 𝑦
��
𝑎𝑥
𝑎𝑦

Prof.: Carlos Arthur Cavalcante 93
3.5.3 Exemplo-Ilustrativo 23
Um bloco de peso 𝑊 = 50 𝑁, inicialmente em repouso sobre um piso horizontal, é
puxado por uma força horizontal 𝑃 = 200 𝑁. Considerando que entre o bloco e o piso
o coeficiente de atrito estático é 𝜇𝑠 = 0,6 e o coeficiente de atrito cinético é 𝜇𝑘 = 0,4,
determinar a aceleração do bloco.
SOLUÇÃO:
As forças que atuam sobre o bloco são:
1) O vetor força ��.
Representa a ação de “alguma coisa” sobre o bloco (a ação de um cabo de tração, por exemplo). Embora esta
“coisa” não tenha sido especificada, o vetor força �� está completamente determinado pois, a sua intensidade,
direção e sentido foram dados no enunciado e na figura do problema.
2) O vetor força peso ��.
O vetor �� representa a força de atração gravitacional exercida pela Terra sobre o bloco. É um vetor que
completamente determinado, pois o valor da sua intensidade foi dado no problema (sua direção é vertical e o
seu sentido é para baixo).
3) O vetor força normal ��.
Representa uma das ações que o “piso horizontal” exerce sobre o bloco. Sabemos que esta força �� tem direção
perpendicular à superfície de contato entre que o piso e o bloco (por isso é chamada de força normal). Sabemos
também que a força �� tem direção vertical (pois a superfície de contato é horizontal) e tem sentido “do piso
para o bloco” ou para cima. Isto é, conhecemos a direção e o sentido da força normal ��, mas não conhecemos
(ainda) a sua intensidade.
4) O vetor força de atrito ��𝑎𝑡. Representa uma das ações que o piso exerce sobre o bloco (a outra ação é a força normal). Sabemos que a
força de atrito ��𝑎𝑡 tem direção paralela à superfície de contato entre o piso e o bloco. Sabemos também que
��𝑎𝑡 tem sentido contrário ao sentido do movimento do bloco, isto é, tem direção contrária ao sentido da
velocidade do bloco em relação ao piso. Como a única possibilidade é o bloco se deslocar “para a direita”,
concluímos que ��𝑎𝑡 terá o sentido “para a esquerda”. Isto é, conhecemos a direção e o sentido da força de
atrito ��𝑎𝑡, mas não conhecemos (ainda) a sua intensidade. Sabemos, porém, que a sua intensidade terá um
valor numericamente igual 𝜇𝑁.
A presença do atrito é um complicador interessante. Dependendo da força ��, do peso ��, da força �� e do
coeficiente de atrito estático 𝜇𝑠; tanto pode ocorrer do bloco se mover aceleradamente (para a direita) como
pode ocorrer de o bloco permanecer em equilíbrio estático.
De todo modo, sabemos que ou o bloco irá se deslocar na direção horizontal com sentido “para a direita”, ou então
não irá se deslocar. Isto é, o vetor aceleração �� do bloco será um vetor horizontal com sentido “para a direita” ou
então um será vetor nulo. O que precisamos determinar é apenas o módulo ou intensidade do vetor aceleração ��.
Todos estes conhecimentos, informações e conclusões devem ser adequadamente representados no Diagrama de
Corpo Livre (DCL) do bloco, o qual deve incluir também uma clara indicação do sistema de coordenadas que será
adotado na solução do problema.
Diagrama de corpo livre do Bloco
𝑥
𝑦
��
��
��
𝒎. �� ��𝒂𝒕
��

Prof.: Carlos Arthur Cavalcante 94
∑ �� = 𝑚��
�� + �� + �� + ��𝑎𝑡 = 𝑚��
Equações de Movimento
+→ ∑𝐹𝑥 = 𝑚𝑎𝑥
𝑃𝑥 +𝑊𝑥 + 𝑁𝑥 + 𝐹𝑎𝑡𝑥 = 𝑚𝑎𝑥
𝑃 cos 0° +𝑊 cos 270° + 𝑁 cos 90° +𝐹𝑎𝑡 cos 180° = 𝑚(𝑎 cos 0°)
𝑃 + 0 + 0 − 𝐹𝑎𝑡 = 𝑚(𝑎)
𝑃 − 𝐹𝑎𝑡 = 𝑚𝑎
Uma vez que 𝐹𝑎𝑡 = 𝜇𝑁, obtemos
𝑃 − 𝜇𝑁 = 𝑚𝑎
+↑ ∑𝐹𝑦 = 𝑚𝑎𝑦
𝑃𝑦 +𝑊𝑦 + 𝑁𝑦 + 𝐹𝑎𝑡𝑦 = 𝑚𝑎𝑦
𝑃 sin 0° +𝑊 sin 270° + 𝑁 sin 90° + 𝐹𝑎𝑡 sin 180° =𝑚(𝑎 sin 0°)
0 −𝑊 + 𝑁 + 0 = 𝑚(0)
−𝑊 +𝑁 = 0
Multiplicando por −1,
𝑊 −𝑁 = 0
Reunindo as equações obtidas com as Equações de Movimento,
𝑃 − 𝜇𝑁 = 𝑚𝑎 Eq. 01
𝑊 −𝑁 = 0 Eq. 02
Verificamos que são duas equações e três incógnitas: 𝑎, 𝑁 e 𝜇 (pois não sabemos qual o valor de 𝜇 devemos usar,
se o valor de 𝜇𝑠 ou o valor de 𝜇𝑘.
Se o bloco se mantiver em equilíbrio estático (mesmo que sob a ação da força ��), então a aceleração será nula
(�� = 0) e o coeficiente de atrito será o coeficiente de atrito estático 𝜇 = 𝜇𝑠.
Se o bloco não se mantiver em equilíbrio estático sob a ação da força ��, então a aceleração não será nula e o
coeficiente de atrito será o coeficiente de atrito cinético 𝜇 = 𝜇𝑘.
Seja 𝜇𝑠_𝑚𝑖𝑛 o menor coeficiente de atrito estático necessário para que o equilíbrio estático ocorra. Impondo a
condição de equilíbrio estático (�� = 0) com 𝜇 = 𝜇𝑠_𝑚𝑖𝑛 , teremos,
𝑃 − 𝜇𝑠_𝑚𝑖𝑛𝑁 = 0 Eq. 01a
𝑁 −𝑊 = 0 Eq. 02a
Obtemos um sistema (não linear) de 2 equações e 2 incógnitas: 𝜇𝑠_𝑚𝑖𝑛 e 𝑁.
Resolvido o sistema, encontramos,
𝜇𝑠_𝑚𝑖𝑛 =𝑃
𝑊 𝑁 = 𝑊
Assim, a condição para haver equilíbrio estático é que o coeficiente de atrito estático entre o bloco e o piso (𝜇𝑠) seja igual ou maior do que 𝜇𝑠_𝑚𝑖𝑛 . Isto é, a condição para haver equilíbrio estático é:
𝜇𝑠 ≥ 𝜇𝑠_𝑚𝑖𝑛 =𝑃
𝑊
Para 𝑊 = 50 𝑁, 𝑃 = 200 𝑁 e 𝜇𝑠 = 06 podemos verificar que
𝜇𝑠_𝑚𝑖𝑛 =𝑃
𝑊=
200
50= 4,0
Prof.: Carlos Arthur Cavalcante 95
Assim, constatamos que,
𝜇𝑠 = 0,6 < 𝜇𝑠_𝑚𝑖𝑛 = 4,0
Concluímos que não haverá equilíbrio estático e que o bloco irá se mover aceleradamente. O coeficiente de atrito
em vigor é o coeficiente de atrito cinético (𝜇𝑘).
Portanto, as equações que efetivamente representam o movimento do bloco são,
𝑃 − 𝜇𝑘𝑁 = 𝑚𝑎 Eq. 01b
𝑁 −𝑊 = 0 Eq. 02b
Verificamos que é um sistema (linear) de 2 equações e 2 incógnitas (𝑎 e 𝑁).
Resolvido o sistema, encontramos,
𝑎 =𝑔(𝑃−𝜇𝑘𝑊)
𝑊 𝑁 = 𝑊
Numericamente, os valores são:
𝑎 =𝑔(𝑃−𝜇𝑘𝑊)
𝑊 𝑎 =
(9,81)(200−(0,4)(50))
50 𝑎 = 35,316 𝑚 𝑠2⁄
𝑁 = 𝑊 𝑁 = 50 𝑁 = 50 𝑁
Resposta ao problema “determinar a aceleração do bloco”:
A aceleração do bloco é:
�� = (35,316)𝑖 + (0)𝑗 (𝑚 𝑠2⁄ ) Ou 𝑎 = 35,316 𝑚 𝑠2⁄ 𝜑 = 0°

Prof.: Carlos Arthur Cavalcante 96
Um exemplo de memória de cálculo para o problema é:
DCL do Bloco
∑ �� = 𝑚��
�� + �� + �� + ��𝑎𝑡 = 𝑚��
Equações de Movimento
+→ ∑𝐹𝑥 = 𝑚𝑎𝑥
𝑃𝑥 +𝑊𝑥 + 𝑁𝑥 + 𝐹𝑎𝑡𝑥 = 𝑚𝑎𝑥
𝑃 cos 0° +𝑊 cos 270° + 𝑁 cos 90° +𝐹𝑎𝑡 cos 180° = 𝑚(𝑎 cos 0°)
𝑃 + 0 + 0 − 𝐹𝑎𝑡 = 𝑚(𝑎)
𝑃 − 𝐹𝑎𝑡 = 𝑚𝑎
Uma vez que 𝐹𝑎𝑡 = 𝜇𝑁, obtemos
𝑃 − 𝜇𝑁 = 𝑚𝑎
+↑ ∑𝐹𝑦 = 𝑚𝑎𝑦
𝑃𝑦 +𝑊𝑦 + 𝑁𝑦 + 𝐹𝑎𝑡𝑦 = 𝑚𝑎𝑦
𝑃 sin 0° +𝑊 sin 270° + 𝑁 sin 90° + 𝐹𝑎𝑡 sin 180° =𝑚(𝑎 sin 0°)
0 −𝑊 + 𝑁 + 0 = 𝑚(0)
−𝑊 +𝑁 = 0
Multiplicando por −1,
𝑊 −𝑁 = 0
Reunindo as equações obtidas com as Equações de Movimento,
𝑃 − 𝜇𝑁 = 𝑚𝑎 Eq. 01
𝑊 −𝑁 = 0 Eq. 02
Verificação da condição de equilíbrio estático para 𝜇𝑠 = 0,6:
200 − (0,6)𝑁 = 0 Eq. 01a
50 − 𝑁 = 0 Eq. 02ª
Da (Eq. 02a) obtemos que,
𝑁 = 50
Substituindo na (Eq. 01a), obtemos que,
−(0,6)(50) + 200 = 0 −30 + 200 = 0 170 = 0
Incoerência!... A suposição de que haverá equilíbrio estático com 𝜇𝑠 = 0,6 resulta em uma falsa igualdade.
Concluímos que não haverá equilíbrio estático e que o bloco irá se mover aceleradamente. O coeficiente de atrito
em vigor é o coeficiente de atrito cinético (𝜇𝑘). O movimento do bloco é representado pelas equações,
200 − (0,4)𝑁 = 𝑚𝑎 Eq. 01b
𝑁 − 50 = 0 Eq. 02b
𝑥
𝑦
��
��
��
𝒎. �� ��𝑎𝑡
Prof.: Carlos Arthur Cavalcante 97
Resolvido o sistema, encontramos,
𝑎 = 35,316 𝑚 𝑠2⁄ 𝑁 = 50 𝑁
Resposta ao problema “determinar a aceleração do bloco”:
A aceleração do bloco é:
�� = (35,316)𝑖 + (0)𝑗 (𝑚 𝑠2⁄ ) Ou 𝑎 = 35,316 𝑚 𝑠2⁄ 𝜑 = 0°
Observar que abordagem para solucionar problemas consiste em:
1) Interpretar o enunciado e identificar a “física” do problema;
2) Estabelecer um Sistema de Coordenadas;
3) Identificar as forças atuantes sobre a partícula de interesse e fazer o Diagrama de Corpo Livre da
partícula;
4) Estabelecer as Equações de Movimento de acordo com o sistema de coordenadas adotado;
5) Se necessário, estabelecer equações adicionais relacionando as incógnitas envolvidas;
6) Organizar e resolver o sistema de equações obtido;
7) Utilizar a solução do sistema de equações para fazer os cálculos adicionais necessários a fim obter
respostas para as perguntas formuladas no enunciado;

Prof.: Carlos Arthur Cavalcante 98
3.5.4 Exemplo-Ilustrativo 24
Problema-Resolvido 12.1 (Beer, Johnston; 9ª Edição).
Um bloco de 900 N repousa sobre um plano horizontal. Encontre o módulo
da força �� necessária para fornecer ao bloco uma aceleração de 3 𝑚 𝑠2⁄
para a direita. O coeficiente de atrito cinético entre o bloco e o plano é
𝜇𝑘 = 0,25.
SOLUÇÃO:
O bloco irá se mover aceleradamente na direção horizontal, sentido para a direita e intensidade igual a 3 𝑚 𝑠2⁄ (o
vetor aceleração �� é um vetor conhecido).
O vetor força de atrito ��𝑎𝑡 terá direção horizontal e sentido para a esquerda. A sua intensidade é desconhecida,
mas é numericamente igual a 𝜇𝑘𝑁.
O coeficiente de atrito em vigor é o coeficiente de atrito cinético 𝜇𝑘 = 0,25 e o ângulo entre a força �� e direção
horizontal é 𝛽 = 30°.
DCL do Bloco
PAREI AQUI
Equações de Movimento Bloco
∑ �� = 𝑚��
�� + ��𝑎𝑡 + �� + �� = 𝑚��
+→ ∑𝐹𝑥 = 𝑚𝑎𝑥
𝑁𝑥 + 𝐹𝑎𝑡𝑥 +𝑊𝑥 + 𝑃𝑥 = 𝑚𝑎𝑥
−𝐹𝑎𝑡 + 𝑃 cos 𝛽 = 𝑚𝑎𝑥
−𝜇𝑘𝑁 + 𝑃 cos 𝛽 = 𝑚(𝑎 cos 0°)
−𝜇𝑘𝑁 + 𝑃 cos 𝛽 = 𝑚a
+↑ ∑𝐹𝑦 = 𝑚𝑎𝑦
𝑁𝑦 + 𝐹𝑎𝑡𝑦 +𝑊𝑦 + 𝑃𝑦 = 𝑚𝑎𝑦
+𝑁 −𝑊 − 𝑃 sin 𝛽 = 𝑚𝑎𝑦
+𝑁 −𝑊 − 𝑃 sin 𝛽 = 𝑚(0)
𝑁 −𝑊 − 𝑃 sin 𝛽 = 0
Reunindo as equações obtidas com as Equações de Movimento,
−𝜇𝑘𝑁 + (cos 𝛽)𝑃 =𝑊
𝑔𝑎 Eq. 01
𝑁 − (sin 𝛽)𝑃 = 𝑊 Eq. 02
Resolvendo o sistema para as incógnitas 𝑁 e 𝑃 encontramos:
𝑁 =(𝑎−𝜇𝑘𝑔)𝑊
𝜇𝑘𝑔 sin𝛽+𝑔 cos 𝛽 𝑃 =
𝑎𝑊 sin𝛽+𝑔𝑊cos𝛽
𝜇𝑘𝑔 sin𝛽+𝑔 cos 𝛽
Para os valores numéricos dados teremos:
𝑥
𝑦
��
��
��
𝒎. �� ��𝑎𝑡
𝑥
𝑦
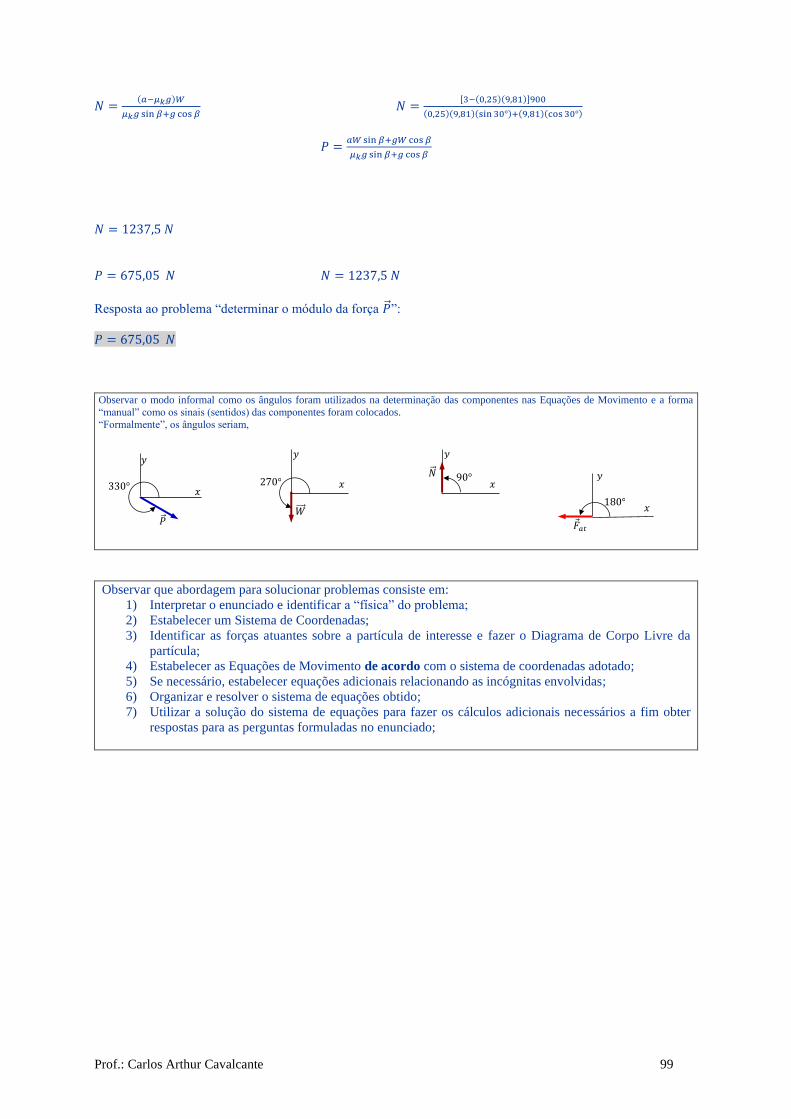
Prof.: Carlos Arthur Cavalcante 99
𝑁 =(𝑎−𝜇𝑘𝑔)𝑊
𝜇𝑘𝑔 sin𝛽+𝑔 cos 𝛽 𝑁 =
[3−(0,25)(9,81)]900
(0,25)(9,81)(sin 30°)+(9,81)(cos 30°)
𝑃 =𝑎𝑊sin𝛽+𝑔𝑊 cos𝛽
𝜇𝑘𝑔 sin𝛽+𝑔 cos𝛽
𝑁 = 1237,5 𝑁
𝑃 = 675,05 𝑁 𝑁 = 1237,5 𝑁
Resposta ao problema “determinar o módulo da força ��”:
𝑃 = 675,05 𝑁
Observar o modo informal como os ângulos foram utilizados na determinação das componentes nas Equações de Movimento e a forma
“manual” como os sinais (sentidos) das componentes foram colocados.
“Formalmente”, os ângulos seriam,
Observar que abordagem para solucionar problemas consiste em:
1) Interpretar o enunciado e identificar a “física” do problema;
2) Estabelecer um Sistema de Coordenadas;
3) Identificar as forças atuantes sobre a partícula de interesse e fazer o Diagrama de Corpo Livre da
partícula;
4) Estabelecer as Equações de Movimento de acordo com o sistema de coordenadas adotado;
5) Se necessário, estabelecer equações adicionais relacionando as incógnitas envolvidas;
6) Organizar e resolver o sistema de equações obtido;
7) Utilizar a solução do sistema de equações para fazer os cálculos adicionais necessários a fim obter
respostas para as perguntas formuladas no enunciado;
𝑥
𝑦
180°
��𝑎𝑡
�� 𝑥
𝑦
90°
��
𝑥
𝑦
270°
��
𝑥
𝑦
330°

Prof.: Carlos Arthur Cavalcante 100
3.5.5 Exemplo-Ilustrativo 25
Compare com o Exemplo-Ilustrativo 29
Um automóvel de massa 𝑚 = 1.000 kg está
percorrendo um declive com inclinação 𝛽 = 5° com
uma velocidade 𝑣 = 72 𝑘𝑚 ℎ⁄ quando seus freios são
acionados fazendo com que uma força de frenagem de
intensidade constante seja exercida sobre ele.
Determinar (a) a intensidade da força de frenagem
sabendo que o coeficiente de atrito estático entre os pneus e a pista é igual a 0,512 e, (b) a
distância 𝑑 percorrida pelo automóvel durante a frenagem até parar.
SOLUÇÃO:
O problema descreve o movimento de um automóvel que se desloca ao longo de uma trajetória retilínea na forma
de uma pista em declive sob a ação de uma força de atrito (força de frenagem) ��𝑎𝑡 que atua no sentido contrário
ao sentido do movimento.
Adotamos o sistema de coordenadas eixo 𝑥 horizontal positivo “para a direita” e eixo 𝑦 vertical positivo para cima
e fazemos o Diagrama de Corpo Livre mostrado na figura abaixo.
DCL do Automóvel
Equações de Movimento Automóvel
∑ �� = 𝑚��
�� + ��𝑎𝑡 + �� = 𝑚��
+→ ∑𝐹𝑥 = 𝑚𝑎𝑥
+𝑁 sin 𝛽 − 𝐹𝑎𝑡 cos 𝛽 = 𝑚𝑎𝑥
𝑁 sin𝛽 − 𝜇𝑠𝑁 cos 𝛽 = 𝑚(−𝑎 cos 𝛽)
𝑁(𝜇𝑠 cos 𝛽 − sin 𝛽) = 𝑚 cos𝛽 𝑎
+↑ ∑𝐹𝑦 = 𝑚𝑎𝑦
+𝑁 cos 𝛽 + 𝐹𝑎𝑡 sin 𝛽 −𝑊 = 𝑚𝑎𝑦
𝑁 cos 𝛽 + 𝜇𝑠𝑁 sin 𝛽 −𝑊 = 𝑚(+𝑎 sin 𝛽)
𝑁(cos𝛽 + 𝜇𝑠 sin 𝛽) −𝑚𝑔 = 𝑚 sin 𝛽 𝑎
Reunindo as equações obtidas com as Equações de Movimento obtemos um sistema linear de duas equações e
duas incógnitas (𝑎 e 𝑁).
(𝑚 cos𝛽)𝑎 − (𝜇𝑠 cos 𝛽 − sin 𝛽)𝑁 = 0 Eq. 01
(𝑚 sin 𝛽)𝑎 − (cos 𝛽 + 𝜇𝑠 sin 𝛽)𝑁 = −𝑚𝑔 Eq. 02
Resolvendo o sistema linear de equações pelo método de Gauss,
[𝑚 cos𝛽 −(𝜇𝑠 cos 𝛽 − sin 𝛽) 0
𝑚 sin 𝛽 −(cos𝛽 + 𝜇𝑠 sin 𝛽) −𝑚𝑔] Matriz Ampliada do sistema.
𝑥
𝑦
𝒎. ��
𝑥
𝑦
��𝒂𝒕 ��
��
𝛽
𝑑

Prof.: Carlos Arthur Cavalcante 101
[1 0 𝑔(𝜇𝑠 cos 𝛽 − sin 𝛽)
0 1 𝑚𝑔 cos 𝛽] Matriz Ampliada reduzida à forma escada.
Portanto, a solução do sistema de equações é:
{𝑎 = 𝑔(𝜇𝑠 cos 𝛽 − sin 𝛽)
𝑁 = 𝑚𝑔 cos 𝛽
Assim, para os valores dados no problema: 𝑚 = 1.000 kg, 𝛽 = 5°, 𝑣 = 72 𝑘𝑚 ℎ⁄ = 20 𝑚 𝑠⁄ e 𝜇𝑠 = 0,512,
calculamos que,
{𝑎 = (9,81)(0,512 cos 5° − sin 5°)
𝑁 = (1000)(9,81) cos 5° {
𝑎 = 4,1486 𝑚 𝑠2⁄
𝑁 = 9.772,7 𝑁
A intensidade da força de atrito durante a frenagem é,
𝐹𝑎𝑡 = 𝜇𝑠𝑁 = (0,512)(9.772,7 ) 𝐹𝑎𝑡 = 5.003,6 𝑁
Observar que a partir deste ponto o problema não é mais um problema de cinética. A questão de determinar a
distância 𝑑 é um problema de cinemática, isto é, de determinar a distância percorrida por uma partícula
descrevendo uma trajetória retilínea e sujeita a uma desaceleração constante.
Alternativa A:
Mantendo o sistema de coordenadas que foi adotado, identificamos as componentes 𝑎𝑥 e 𝑎𝑦 do vetor
aceleração.
𝑎𝑥 = −𝑎 cos 𝛽 𝑎𝑦 = +𝑎 sin 𝛽
Adotando o índice “1” para identificar o instante/posição inicial do movimento (instante/posição em que
os freios foram acionados), fazemos as integrações cabíveis e encontramos as Equações do Movimento
(retilíneo) apresentadas abaixo:
𝑣𝑥 = 𝑣1𝑥 − (𝑎 cos 𝛽)𝑡 𝑣𝑦 = 𝑣1𝑦 + (𝑎 sin 𝛽)𝑡
𝑣𝑥2 = 𝑣1𝑥
2 − 2(𝑎 cos 𝛽)∆𝑥 𝑣𝑦2 = 𝑣1𝑦
2 + 2(𝑎 sin 𝛽)∆𝑦
𝑥 = 𝑥1 + 𝑣1𝑥𝑡 −1
2(𝑎 cos𝛽)𝑡2 𝑦 = 𝑦1 + 𝑣1𝑦𝑡 +
1
2(𝑎 sin 𝛽)𝑡2
No instante/posição 2 ocorre que,
𝑣2𝑥 = 𝑣1𝑥 − (𝑎 cos𝛽)𝑡2 𝑣2𝑦 = 𝑣1𝑦 + (𝑎 sin 𝛽)𝑡2
0 = (𝑣1 cos 𝛽) − (𝑎 cos 𝛽)𝑡2 0 = (−𝑣1 sin 𝛽) + (𝑎 sin 𝛽)𝑡2
−𝑣1 cos 𝛽 = −(𝑎 cos 𝛽)𝑡2 𝑣1 sin 𝛽 = (𝑎 sin 𝛽)𝑡2
𝑥
𝑦
𝑑
�� 𝟏
𝟐
∆𝑥 = 𝑥2 − 𝑥1
∆𝑦 = 𝑦2 − 𝑦1

Prof.: Carlos Arthur Cavalcante 102
𝑣1 = 𝑎𝑡2 𝑣1 = 𝑎𝑡2
Concluímos que,
𝑡2 =𝑣1
𝑎 𝑡2 =
20
4,1486 𝑡2 =
20
4,1486
Sabendo o instante 𝑡2 no qual o automóvel atinge a velocidade nula, determinamos as coordenadas de
posição 𝑥2 e 𝑦2 onde isso ocorre,
𝑥2 = 𝑥1 + 𝑣1𝑥 (𝑣1
𝑎) −
1
2(𝑎 cos 𝛽) (
𝑣1
𝑎)2
𝑦2 = 𝑦1 + 𝑣1𝑦 (𝑣1
𝑎) +
1
2(𝑎 sin 𝛽) (
𝑣1
𝑎)2
𝑥2 − 𝑥1 = 𝑣1𝑥 (𝑣1
𝑎) −
1
2(𝑎 cos 𝛽) (
𝑣1
𝑎)2
𝑦2 − 𝑦1 = 𝑣1𝑦 (𝑣1
𝑎) +
1
2(𝑎 sin 𝛽) (
𝑣1
𝑎)2
∆𝑥 = 𝑣1𝑥 (𝑣1
𝑎) −
1
2(𝑎 cos 𝛽) (
𝑣1
𝑎)2
∆𝑦 = 𝑣1𝑦 (𝑣1
𝑎) +
1
2(𝑎 sin 𝛽) (
𝑣1
𝑎)2
∆𝑥 = (𝑣1 cos 𝛽) (𝑣1
𝑎) −
1
2(𝑎 cos𝛽) (
𝑣1
𝑎)2
∆𝑦 = (−𝑣1 sin 𝛽) (𝑣1
𝑎) +
1
2(𝑎 sin 𝛽) (
𝑣1
𝑎)2
∆𝑥 =𝑣12 cos𝛽
𝑎−
𝑣12 cos 𝛽
2𝑎 ∆𝑦 = −
𝑣12 sin𝛽
𝑎+
𝑣12 sin𝛽
2𝑎
∆𝑥 =𝑣12 cos𝛽
𝑎(1 −
1
2) ∆𝑦 =
𝑣12 sin 𝛽
𝑎(−1 +
1
2)
∆𝑥 =𝑣12 cos𝛽
𝑎(1
2) ∆𝑦 =
𝑣12 sin 𝛽
𝑎(−
1
2)
∆𝑥 =𝑣12 cos𝛽
2𝑎 ∆𝑦 = −
𝑣12 sin𝛽
2𝑎
Observando que 𝑑 = √(∆𝑥)2 + (∆𝑦)2,
𝑑 = √(∆𝑥)2 + (∆𝑦)2 𝑑 = √(𝑣12 cos𝛽
2𝑎)2
+ (−𝑣12 sin 𝛽
2𝑎)2
𝑑 = √𝑣14 cos2 𝛽
4𝑎2+
𝑣14 sin2 𝛽
4𝑎2 𝑑 = √
𝑣14(cos2 𝛽+sin2 𝛽)
4𝑎2
𝑑 = √𝑣14
4𝑎2 𝑑 =
𝑣12
2𝑎
𝑑 =(20)2
2(4,1486) 𝑑 =
(20)2
2(4,1486)
𝑑 = 48,209 𝑚
Alternativa B:
Mantendo o sistema de coordenadas que foi adotado, identificamos as componentes 𝑎𝑥 e 𝑎𝑦 do vetor
aceleração.
𝑎𝑥 = −𝑎 cos 𝛽 𝑎𝑦 = +𝑎 sin 𝛽
Adotando o índice “1” para identificar o instante/posição inicial do movimento (instante/posição em que
os freios foram acionados), fazemos as integrações cabíveis e encontramos as Equações do Movimento
(retilíneo) apresentadas abaixo:
𝑣𝑥 = 𝑣1𝑥 − (𝑎 cos 𝛽)𝑡 𝑣𝑦 = 𝑣1𝑦 + (𝑎 sin 𝛽)𝑡
𝑣𝑥2 = 𝑣1𝑥
2 − 2(𝑎 cos 𝛽)∆𝑥 𝑣𝑦2 = 𝑣1𝑦
2 + 2(𝑎 sin 𝛽)∆𝑦

Prof.: Carlos Arthur Cavalcante 103
𝑥 = 𝑥1 + 𝑣1𝑥𝑡 −1
2(𝑎 cos𝛽)𝑡2 𝑦 = 𝑦1 + 𝑣1𝑦𝑡 +
1
2(𝑎 sin 𝛽)𝑡2
No instante/posição 2 ocorre que,
𝑣2𝑥2 = 𝑣1𝑥
2 − 2(𝑎 cos 𝛽)∆𝑥 𝑣2𝑦2 = 𝑣1𝑦
2 + 2(𝑎 sin 𝛽)∆𝑦
(0)2 = (𝑣1 cos 𝛽)2 − 2(𝑎 cos𝛽)∆𝑥 (0)2 = (−𝑣1 sin 𝛽)
2 + 2(𝑎 sin 𝛽)∆𝑦
−𝑣12 cos2 𝛽 = −2(𝑎 cos 𝛽)∆𝑥 −𝑣1
2 sin2 𝛽 = +2𝑎 sin 𝛽 ∆𝑦
𝑣12 cos 𝛽 = 2(𝑎)∆𝑥 𝑣1
2 sin 𝛽 = −2𝑎∆𝑦
∆𝑥 =𝑣12 cos𝛽
2𝑎 ∆𝑦 = −
𝑣12 sin 𝛽
2𝑎
Observando que 𝑑 = √(∆𝑥)2 + (∆𝑦)2,
𝑑 = √(∆𝑥)2 + (∆𝑦)2 𝑑 = √(𝑣12 cos𝛽
2𝑎)2
+ (−𝑣12 sin 𝛽
2𝑎)2
𝑑 = √𝑣14 cos2 𝛽
4𝑎2+
𝑣14 sin2 𝛽
4𝑎2 𝑑 = √
𝑣14(cos2 𝛽+sin2 𝛽)
4𝑎2
𝑑 = √𝑣14
4𝑎2 𝑑 =
𝑣12
2𝑎
𝑑 =(20)2
2(4,1486) 𝑑 =
(20)2
2(4,1486)
𝑑 = 48,209 𝑚
Alternativa C:
Como a conclusão foi de que o automóvel descreve uma trajetória retilínea, podemos assumir um novo
sistema de coordenadas com eixo 𝑥 positivo na direção e sentido do movimento e escrever,
𝑎 = −𝑘 Onde 𝑘 = 4,1486 é uma constante positiva e 𝑎 representa a aceleração retilínea do
automóvel no novo sistema de coordenadas.
𝑎 = −𝑘 𝑑𝑣
𝑑𝑡= −𝑘
𝑑𝑣
𝑑𝑥
𝑑𝑥
𝑑𝑡= −𝑘
𝑑𝑣
𝑑𝑥𝑣 = −𝑘
𝑣𝑑𝑣 = (−𝑘)𝑑𝑥 ∫ 𝑣𝑑𝑣𝑣
𝑣0= ∫ (−𝑘)𝑑𝑥
𝑥
𝑥0
∫ 𝑣𝑑𝑣𝑣
𝑣0= (−𝑘) ∫ 𝑑𝑥
𝑥
𝑥0
1
2𝑣2 −
1
2𝑣0
2 = (−𝑘)(𝑥 − 𝑥0)
𝑥
𝑦
𝑑
�� 𝟏
𝟐
∆𝑥 = 𝑥2 − 𝑥1
∆𝑦 = 𝑦2 − 𝑦1

Prof.: Carlos Arthur Cavalcante 104
Observando que 𝑑 = 𝑥 − 𝑥0 temos que,
1
2(𝑣2 − 𝑣0
2) = (−𝑘)(𝑑) 𝑣2 − 𝑣02 = 2(−𝑘)(𝑑)
𝑑 =𝑣2−𝑣0
2
2(−𝑘) 𝑑 =
0−𝑣02
2(−𝑘)
𝑑 =𝑣02
2𝑘
Para o valor dado de 𝑣0 = 20 e para o valor
encontrado para 𝑘 = 4,1486 , encontramos,
𝑑 =(20)2
2(4,1486) =
400
8,2972
𝑑 = 48,209 𝑚
𝒗𝟏
𝒗𝟐 = 𝟎
𝒚
𝒙
𝒉
𝑵𝑹
∆𝒉
∆𝒚 = 𝟎 ��𝒂𝒕
��
��
𝟏
𝟐

Prof.: Carlos Arthur Cavalcante 105
3.5.6 Exemplo-Ilustrativo 26
Problema-Resolvido 12.2 (Beer, Johnston; 9ª Edição)
Os dois blocos mostrados partem do repouso. Não há atrito entre o plano
horizontal nem nas roldanas e as roldanas são assumidas como tendo
massas desprezíveis. Determine (a) a aceleração de cada bloco e (b) a tensão
em cada corda.
SOLUÇÃO:
Dinâmica do Bloco 𝑨:
Partindo do repouso e na ausência de atritos, o bloco 𝐴 se moverá para a direita (a direção e o sentido do vetor
aceleração ��𝐴 são conhecidos). Partindo do repouso e na ausência de atritos, o bloco 𝐵 se moverá para baixo (a
direção e o sentido do vetor aceleração ��𝐵 são conhecidos).
DCL do Bloco 𝐴 DCL do Bloco 𝐵
Equações de Movimento Bloco 𝐴 Equações de Movimento Bloco 𝐵
+→ ∑𝐹𝑥 = 𝑚𝐴𝑎𝐴𝑥
𝑇1 = 𝑚𝐴𝑎𝐴𝑥
𝑇1 = 𝑚𝐴(𝑎𝐴 cos 0°)
𝑇1 = 𝑚𝐴𝑎𝐴
+→ ∑𝐹𝑥 = 𝑚𝐵𝑎𝐵𝑥
0 = 𝑚𝐵𝑎𝐵𝑥
0 = 𝑚𝐵(𝑎𝐵 cos 270°)
0 = 0
+↑ ∑𝐹𝑦 = 𝑚𝐴𝑎𝐴𝑦
−𝑊𝐴 +𝑁 = 𝑚𝐴𝑎𝐴𝑦
−𝑊𝐴 +𝑁 = 𝑚𝐴(𝑎𝐴 sin 0°)
−𝑊𝐴 +𝑁 = 0
+↑ ∑𝐹𝑦 = 𝑚𝐵𝑎𝐵𝑦
𝑇2 −𝑊𝐵 = 𝑚𝐵𝑎𝐵𝑦
𝑇2 −𝑊𝐵 = 𝑚𝐵(𝑎𝐵 sin 270°)
𝑇2 −𝑊𝐵 = −𝑚𝐵𝑎𝐵
As equações obtidas com as Equações de Movimento dos blocos são as equações,
𝑇1 = 𝑚𝐴𝑎𝐴 Eq. 01
−𝑊𝐴 +𝑁 = 0 Eq. 02
𝑇2 −𝑊𝐵 = −𝑚𝐵𝑎𝐵 Eq. 03
Obtemos, portanto, um sistema de 3 equações com 5 incógnitas (𝑎𝐴, 𝑎𝐵 , 𝑇1, 𝑇2 e 𝑁).
Buscando equações adicionais relacionando as incógnitas do sistema de equações.
O comprimento de cada cabo é constante e podemos escrever que,
𝑥𝐴 + 2𝑦𝐶 = 𝑐𝑡𝑒 𝑦𝐵 − 𝑦𝐶 = 𝑐𝑡𝑒
𝑥
𝑦
��𝐴
��
𝒎𝑨��𝑨 ��1
𝑥
𝑦
��𝐵 𝒎𝑩��𝑩
��2

Prof.: Carlos Arthur Cavalcante 106
Assim,
𝑥𝐴 + 2(𝑦𝐵 − 𝑐𝑡𝑒) = 𝑐𝑡𝑒 𝑥𝐴 + 2𝑦𝐵 − 2𝑐𝑡𝑒 = 𝑐𝑡𝑒 𝑥𝐴 + 2𝑦𝐵 = 𝑐𝑡𝑒 + 2𝑐𝑡𝑒
𝑥𝐴 + 2𝑦𝐵 = 𝑐𝑡𝑒 𝑣𝐴𝑥 + 2𝑣𝐵𝑦 = 0 𝑎𝐴𝑥 + 2𝑎𝐵𝑦 = 0
Mas,
𝑎𝐴𝑥 = 𝑎𝐴 cos 0° 𝑎𝐴𝑥 = 𝑎𝐴
𝑎𝐵𝑦 = 𝑎𝐵 sin 270° 𝑎𝐵𝑦 = −𝑎𝐵
Então,
𝑎𝐴 − 2𝑎𝐵 = 0 Eq. 04
Além disso, a polia 𝐶 se move juntamente com o bloco 𝐵 (têm a mesma aceleração), de modo
que podemos escrever:
2𝑇1 − 𝑇2 = 𝑚𝐶𝑎𝐶
Como a massa da polia 𝐶 deve ser considerada desprezível (𝑚𝐶 = 0), temos,
2𝑇1 − 𝑇2 = 0 Eq. 05
Desse modo obtemos um sistema de 5 equações e 5 incógnitas (𝑎𝐴 , 𝑎𝐵 , 𝑇1, 𝑇2 e 𝑁) reapresentadas abaixo,
𝑇1 = 𝑚𝐴𝑎𝐴 Eq. 01
−𝑚𝐴𝑔 + 𝑁 = 0 Eq. 02
𝑇2 −𝑚𝐵𝑔 = −𝑚𝐵𝑎𝐵 Eq. 03
𝑎𝐴 − 2𝑎𝐵 = 0 Eq. 04
2𝑇1 − 𝑇2 = 0 Eq. 05
Organizado ordenadamente de acordo com as incógnitas envolvidas o sistema de equações tem a forma,
𝑚𝐴𝑎𝐴 + 0𝑎𝐵 − 1𝑇1 + 0𝑇2 + 0𝑁 = 0 Eq. 01b
0𝑎𝐴 + 0𝑎𝐵 + 0𝑇1 + 0𝑇2 + 1𝑁 = 𝑚𝐴𝑔 Eq. 02b
0𝑎𝐴 +𝑚𝐵𝑎𝐵 + 0𝑇1 + 1𝑇2 + 0𝑁 = 𝑚𝐵𝑔 Eq. 03b
1𝑎𝐴 − 2𝑎𝐵 + 0𝑇1 + 0𝑇2 + 0𝑁 = 0 Eq. 04b
0𝑎𝐴 + 0𝑎𝐵 + 2𝑇1 − 1𝑇2 + 0𝑁 = 0 Eq. 05b
Cuja matriz ampliada é,
[ 𝑚𝐴 0 −1 0 0 00 0 0 0 1 𝑚𝐴𝑔0 𝑚𝐵 0 1 0 𝑚𝐵𝑔1 −2 0 0 0 00 0 2 −1 0 0 ]
A qual, quando reduzida à sua forma escada linha reduzida é,
[ 1 0 0 0 0
2𝑚𝐵𝑔
4𝑚𝐴+𝑚𝐵
0 1 0 0 0𝑚𝐵𝑔
4𝑚𝐴+𝑚𝐵
0 0 1 0 02𝑚𝐴𝑚𝐵𝑔
4𝑚𝐴+𝑚𝐵
0 0 0 1 04𝑚𝐴𝑚𝐵𝑔
4𝑚𝐴+𝑚𝐵
0 0 0 0 1 𝑚𝐴𝑔 ]
𝑥
𝑦
Prof.: Carlos Arthur Cavalcante 107
Ou seja, a solução do sistema de equações é,
𝑎𝐴 =2𝑚𝐵𝑔
4𝑚𝐴+𝑚𝐵 𝑎𝐵 =
𝑚𝐵𝑔
4𝑚𝐴+𝑚𝐵
𝑇1 =2𝑚𝐴𝑚𝐵𝑔
4𝑚𝐴+𝑚𝐵 𝑇2 =
4𝑚𝐴𝑚𝐵𝑔
4𝑚𝐴+𝑚𝐵 𝑁 = 𝑚𝐴𝑔
Para os valores dados no problema, calculamos que,
𝑎𝐴 =2(300)(9,81)
4(100)+(300) 𝑎𝐴 =
2943
350 𝑎𝐴 = 8,4086 𝑚 𝑠2⁄
𝑎𝐵 =(300)(9,81)
4(100)+(300) 𝑎𝐵 =
2943
700 𝑎𝐵 = 4,2043 𝑚 𝑠2⁄
𝑇1 =2(100)(300)(9,81)
4(100)+(300) 𝑇1 =
5886
7 𝑇1 = 840,86 𝑁
𝑇2 =4(100)(300)(9,81)
4(100)+(300) 𝑇2 =
11772
7 𝑇2 = 1.681,7 𝑁
𝑁 = (100)(9,81) 𝑁 = 981 𝑁 = 981 𝑁
Respostas:
a) A aceleração de cada bloco:
��𝐴 = (8,4086)𝑖 + (0)𝑗 (𝑚 𝑠2⁄ ) Ou 𝑎𝐴 = 8,4086 𝑚 𝑠2⁄ 𝜑𝐴 = 0°
��𝐵 = (0)𝑖 + (−4,2043)𝑗 (𝑚 𝑠2⁄ ) Ou 𝑎𝐵 = 4,2043 𝑚 𝑠2⁄ 𝜑𝐵 = 270°
b) A tensão em cada corda:
𝑇1 = 840,86 𝑁 𝑇2 = 1.681,7 𝑁

Prof.: Carlos Arthur Cavalcante 108
Um exemplo de memória de cálculo para o problema é:
DCL do Bloco 𝐴 DCL do Bloco 𝐵
Equações de Movimento Bloco 𝐴 Equações de Movimento Bloco 𝐵
��1 + ��𝐴 + �� = 𝑚𝐴��𝐴 ��2 − ��𝐵 = 𝑚𝐵��𝐵
+→ ∑𝑭𝒙 = 𝒎𝑨𝒂𝑨𝒙
𝑇1 = 𝑚𝐴𝑎𝐴𝑥
𝑇1 = 𝑚𝐴(𝑎𝐴 cos 0°)
𝑇1 = 𝑚𝐴𝑎𝐴
+↑ ∑𝑭𝒚 = 𝒎𝑨𝒂𝑨𝒚
−𝑊𝐴 +𝑁 = 𝑚𝐴𝑎𝑦
−𝑊𝐴 +𝑁 = 𝑚𝐴(𝑎𝐴 sin 0°)
−𝑊𝐴 +𝑁 = 0
+→ ∑𝑭𝒙 = 𝒎𝑩𝒂𝑩𝒙
0 = 𝑚𝐵𝑎𝐵𝑥
0 = 𝑚𝐵(𝑎𝐵 cos 270°)
0 = 0
+↑ ∑𝑭𝒚 = 𝒎𝑩𝒂𝑩𝒚
𝑇2 −𝑊𝐵 = 𝑚𝐵𝑎𝐵𝑦
𝑇2 −𝑊𝐵 = 𝑚𝐵(𝑎𝐵 sin 270°)
𝑇2 −𝑊𝐵 = −𝑚𝐵𝑎𝐵
Reunindo as equações obtidas com as Equações de Movimento,
𝑇1 = 𝑚𝐴𝑎𝐴 Eq. 01
𝑊𝐴 − 𝑁 = 0 Eq. 02
𝑊𝐵 − 𝑇2 = 𝑚𝐵𝑎𝐵 Eq. 03
O bloco 𝐴 e o bloco 𝐵 estão ligados por um cabo de comprimento constante (movimento dependente) e podemos
afirmar que,
𝑎𝐴 = 2𝑎𝐵 Eq. 044
Fazendo o DCL da polia 𝐶 podemos escrever que,
2𝑇1 − 𝑇2 = 𝑚𝐶𝑎𝐶 Como 𝑚𝐶 ≅ 0
2𝑇1 − 𝑇2 = 0 Eq. 05
4 A equação apresentada é a finalização do processo de estabelecer a relação de dependência entre os movimentos
dos blocos, de modo consistente com o sistema de coordenadas adotado. As etapas necessárias para isso não
precisam ser, necessariamente, apresentadas de forma explícita na memória cálculo, pois não fazem parte do foco
da questão que está sendo solucionada. Obviamente, é esperado que a equação apresentada seja a conclusão correta
e o pressuposto é que o(a) aluno(a) conhece e tem experiência no estabelecimento da relação de dependência em
questão.
𝑥
𝑦
��𝐴
��
𝒎𝑨��𝑨 ��1
𝑥
𝑦
��𝐵 𝒎𝑩��𝑩
��2

Prof.: Carlos Arthur Cavalcante 109
Assim, obtemos um sistema de 5 equações e 5 incógnitas,
𝑇1 = 𝑚𝐴𝑎𝐴 Eq. 01
𝑊𝐴 − 𝑁 = 0 Eq. 02
𝑊𝐵 − 𝑇2 = 𝑚𝐵𝑎𝐵 Eq. 03
𝑎𝐴 = 2𝑎𝐵 Eq. 04
2𝑇1 − 𝑇2 = 0 Eq. 05
Resolvido o sistema de equações, encontramos,
𝑎𝐴 = 8,4086 𝑚 𝑠2⁄ 𝑎𝐵 = 4,2043 𝑚 𝑠2⁄
𝑇1 = 840,86 𝑁 𝑇2 = 1681,7 𝑁 𝑁 = 981 𝑁
Respostas:
a) A aceleração de cada bloco:
��𝐴 = (8,4086)𝑖 + (0)𝑗 (𝑚 𝑠2⁄ ) Ou 𝑎𝐴 = 8,4086 𝑚 𝑠2⁄ 𝜑𝐴 = 0°
��𝐵 = (0)𝑖 + (−4,2043)𝑗 (𝑚 𝑠2⁄ ) Ou 𝑎𝐵 = 4,2043 𝑚 𝑠2⁄ 𝜑𝐵 = 270°
b) A tensão em cada corda:
𝑇1 = 840,86 𝑁 𝑇2 = 1.681,7 𝑁
Observar que abordagem para solucionar problemas consiste em:
1) Interpretar o enunciado e identificar a “física” do problema;
2) Estabelecer um Sistema de Coordenadas;
3) Identificar as forças atuantes sobre a partícula de interesse e fazer o Diagrama de Corpo Livre da
partícula;
4) Estabelecer as Equações de Movimento de acordo com o sistema de coordenadas adotado;
5) Se necessário, estabelecer equações adicionais relacionando as incógnitas envolvidas;
6) Organizar e resolver o sistema de equações obtido;
7) Utilizar a solução do sistema de equações para fazer os cálculos adicionais necessários a fim obter
respostas para as perguntas formuladas no enunciado;

Prof.: Carlos Arthur Cavalcante 110
3.5.7 Exemplo-Ilustrativo 27
Um bloco de peso 𝑊 = 25 𝑁, inicialmente em repouso sobre um plano
inclinado de 𝛼 = 30°, é puxado por uma força 𝑃 = 20 𝑁, conforme
figura ao lado. Desprezando o atrito e adotando o sistema de coordenadas
indicado na figura, determine a aceleração do bloco.
SOLUÇÃO:
Aqui, um “detalhe” importante. Apesar da ausência de
atrito e da aplicação da força ��, pode não haver
movimento. Além disso, não sabemos em qual sentido o
bloco irá se mover? Se no sentido para cima do plano
inclinado ou no sentido para baixo. Isto vai depender da
intensidade das forças envolvidas.
Ou seja, ao contrário dos exemplos anteriores, não
sabemos qual é o sentido da aceleração resultante do bloco
(e não sabemos também a sua intensidade). Sabemos apenas a sua direção.
Neste caso, assumimos (supomos) um sentido para a aceleração resultante. Neste exemplo, o sentido suposto foi
o sentido indicado no DCL acima. Em seguida, após solucionar o problema, verificamos se o sentido que foi
suposto se confirma ou não, através do sinal obtido no cálculo da intensidade da aceleração – se o sinal obtido for
positivo, então o sentido suposto para a aceleração estará confirmado; caso contrário o sentido da aceleração é o
oposto ao sentido que foi assumido.
Equações de Movimento
+→ ∑𝐹𝑥 = 𝑚𝑎𝑥
𝑃𝑥 + 𝑁𝑥 = 𝑚𝑎𝑥
+𝑃 cos 𝛼 − 𝑁 sin 𝛼 = 𝑚(+𝑎 cos 𝛼)
𝑃 cos𝛼 − 𝑁 sin 𝛼 = 𝑚𝑎 cos 𝛼
+↑ ∑𝐹𝑦 = 𝑚𝑎𝑦
𝑃𝑦 +𝑊𝑦 + 𝑁𝑦 = 𝑚𝑎𝑦
𝑃 sin 𝛼 −𝑊 +𝑁 cos 𝛼 = 𝑚(+𝑎 sin 𝛼)
𝑃 sin 𝛼 −𝑊 +𝑁 cos 𝛼 = 𝑚𝑎 sin 𝛼
Reunindo as equações obtidas com as Equações de Movimento,
𝑃 cos𝛼 − 𝑁 sin 𝛼 = 𝑚𝑎 cos 𝛼 Eq. 01
𝑃 sin 𝛼 −𝑊 +𝑁 cos 𝛼 = 𝑚𝑎 sin 𝛼 Eq. 02
Constatamos que é um sistema (linear) de 2 equações e 2 incógnitas (𝑎 e 𝑁).
Resolvido o sistema, encontramos,
𝑎 =𝑔(𝑃−𝑊sin𝛼)
𝑊 Expressão solução encontrada para a intensidade ou módulo do vetor aceleração resultante,
na suposição de que o sentido de �� é o sentido assumido mostrado no DCL. Pode-se perceber
que, a depender do valor de 𝑃 e do valor de 𝑊sin𝛼, o valor de 𝑎 terá um valor positivo (𝑃 >𝑊 sin𝛼) ou negativo (𝑃 < 𝑊 sin𝛼). No primeiro caso, a suposição de sentido é confirmada.
No segundo caso, o sentido da aceleração é oposto ao que foi suposto (pois o módulo ou
intensidade de um vetor não pode ser um valor negativo). Se 𝑃 = 𝑊 sin 𝛼 então 𝑎 = 0.
𝑁 = 𝑊 cos 𝛼 Expressão solução encontrada para a intensidade ou módulo do vetor força normal (direção
e o sentido conhecidos previamente sem ambiguidade).
Para o problema em questão, os valores numéricos são,
DCL do Bloco
𝑥
𝑦
��
�� ��
𝑚. ��
Suposição.
Suposição.
𝑥
𝑦 ��
𝛼 = 30°
Suposição.

Prof.: Carlos Arthur Cavalcante 111
𝑎 =9,81(20−25sin 30°)
25 𝑎 =
9,81(20−12,5)
25 𝑎 = +2,9430
O sinal positivo indica que o sentido assumido para a aceleração �� é o sentido correto.
Assim, podemos afirmar que,
𝑎𝑥 = 𝑎 cos 30° 𝑎𝑥 = 2,9430 (√3
2) 𝑎𝑥 = 2,5487
𝑎𝑦 = 𝑎 sin 30° 𝑎𝑦 = 2,9430 (1
2) 𝑎𝑦 = 1,4715
Resposta:
�� = (2,5487)𝑖 + (1,4715)𝑗 (𝑚 𝑠2⁄ ) ou 𝑎 = 2,9430 𝑚 𝑠2⁄ 𝜑 = 30°
Observar que abordagem para solucionar problemas consiste em:
1) Interpretar o enunciado e identificar a “física” do problema;
2) Estabelecer um Sistema de Coordenadas;
3) Identificar as forças atuantes sobre a partícula de interesse e fazer o Diagrama de Corpo Livre da
partícula;
4) Estabelecer as Equações de Movimento de acordo com o sistema de coordenadas adotado;
5) Se necessário, estabelecer equações adicionais relacionando as incógnitas envolvidas;
6) Organizar e resolver o sistema de equações obtido;
7) Utilizar a solução do sistema de equações para fazer os cálculos adicionais necessários a fim obter
respostas para as perguntas formuladas no enunciado;

Prof.: Carlos Arthur Cavalcante 112
3.5.8 Exemplo-Ilustrativo 28
Problema-Resolvido 12.3 (Beer, Johnston; 9ª Edição, pág. 705)
O bloco 𝐵 pesando 54 𝑁 parte do repouso e desliza sobre a cunha 𝐴 de
peso 135 𝑁 que está apoiada sobre uma superfície horizontal.
Desprezando o atrito e assumindo 𝛼 = 30°, determine os vetores
aceleração (a) da cunha, e, (b) do bloco.
SOLUÇÃO:
Na ausência de atrito, haverá movimento, tanto da cunha 𝐴 quanto do bloco 𝐵.
Porém, a cunha 𝐴 está restrita a se deslocar sobre a superfície horizontal. Portanto, o
seu movimento será na direção horizontal e com sentido para a direita. Isto é,
conhecemos a direção e o sentido do vetor aceleração ��𝐴 da cunha, restando apenas
determinar a sua intensidade.
O bloco 𝐵 está restrito a escorregar sobre a cunha. O movimento do bloco em relação
à cunha (��𝐵 𝐴⁄ ) será na direção do plano inclinado da cunha, com sentido para “baixo
↙” e o seu movimento em relação à superfície horizontal (��𝐵) será a soma vetorial
do seu movimento em relação à cunha com o movimento da cunha em relação à
superfície horizontal (��𝐵 = ��𝐵 𝐴⁄ + ��𝐴). Isto é, conhecemos a direção e o sentido do
vetor aceleração ��(𝐵 𝐴⁄ ), conhecemos a direção e o sentido do vetor aceleração ��𝐴 e
sabemos que ��𝐵 = ��(𝐵 𝐴⁄ ) + ��𝐴.
Observar que o vetor ��𝐵 é totalmente desconhecido. Não sabemos nem a sua direção,
nem o seu sentido e nem a sua intensidade. A direção, o sentido e a intensidade do
vetor ��𝐵 depende das intensidades de ��(𝐵 𝐴⁄ ) e de ��𝐴.
Adotamos um sistema de coordenadas 𝑂𝑥𝑦 fixo ao solo, com eixo 𝑥 horizontal sentido positivo para a direita
(+→) e eixo 𝑦 vertical sentido positivo para cima (+↑). Os Diagramas de Corpo Livre e as equações de movimento
para a cunha 𝐴 e para o bloco 𝐵 apresentados resumem as considerações acima mencionadas.
DCL da Cunha 𝐴
Equações de Movimento da cunha A
+→ ∑𝐹𝑥 = 𝑚𝐴𝑎𝐴𝑥
+𝑁2 sin 𝛼 = 𝑚𝐴𝑎𝐴𝑥
𝑁2 sin 𝛼 = 𝑚𝐴(𝑎𝐴 cos 0°)
𝑁2 sin 𝛼 = 𝑚𝐴𝑎𝐴
+↑ ∑𝐹𝑦 = 𝑚𝐴𝑎𝐴𝑦
−𝑊𝐴 −𝑁2 cos 𝛼 + 𝑁1 = 𝑚𝐴𝑎𝐴𝑦
−𝑊𝐴 −𝑁2 cos 𝛼 + 𝑁1 = 𝑚𝐴(𝑎𝐴 sin 0°)
−𝑊𝐴 −𝑁2 cos 𝛼 + 𝑁1 = 0
𝑥
𝑦
𝛼
��𝐴
��1
��2
𝑚𝐴��𝐴
𝑥
𝑦 𝐵
𝐴 𝛼
𝐴 ��𝐴
𝐵
𝛼
��𝐴
��(𝐵 𝐴⁄ )
𝐵
𝛼
��𝐴
��(𝐵 𝐴⁄ ) ��𝐵

Prof.: Carlos Arthur Cavalcante 113
DCL do Bloco 𝐵
Equações de Movimento do bloco B
+→ ∑𝐹𝑥 = 𝑚𝐵𝑎𝐵𝑥
−𝑁2 sin 𝛼 = 𝑚𝐵𝑎𝐵𝑥
+↑ ∑𝐹𝑦 = 𝑚𝐵𝑎𝐵𝑦
−𝑊𝐵 + 𝑁2 cos 𝛼 = 𝑚𝐵𝑎𝐵𝑦
Reunindo as equações obtidas, ficamos com 4 equações e 5 incógnitas (𝑎𝐴, 𝑎𝐵𝑥, 𝑎𝐵𝑦 , 𝑁1 e 𝑁2).
𝑁2 sin 𝛼 = 𝑚𝐴𝑎𝐴 Eq. 01
−𝑊𝐴 −𝑁2 cos 𝛼 + 𝑁1 = 0 Eq. 02
−𝑁2 sin 𝛼 = 𝑚𝐵𝑎𝐵𝑥 Eq. 03
−𝑊𝐵 + 𝑁2 cos 𝛼 = 𝑚𝐵𝑎𝐵𝑦 Eq. 04
Buscando equação adicional:
Os vetores ��𝐴 e ��𝐵 𝐴⁄ têm direção e sentido conhecidos, de modo que podemos expressá-los por suas componentes.
��𝐴 = [𝑎𝐴 cos 0°𝑎𝐴 sin 0°
] ��𝐴 = [𝑎𝐴0]
��𝐵 𝐴⁄ = [−𝑎(𝐵 𝐴⁄ ) cos 𝛼
−𝑎(𝐵 𝐴⁄ ) sin 𝛼]
Uma vez que, ��𝐵 = ��𝐴 + ��𝐵 𝐴⁄ , podemos escrever que,
��𝐵 = [𝑎𝐴𝑥𝑎𝐴𝑦
] + [𝑎(𝐵 𝐴⁄ )𝑥
𝑎(𝐵 𝐴⁄ )𝑦] ��𝐵 = [
𝑎𝐴0] + [
−𝑎(𝐵 𝐴⁄ ) cos 𝛼
−𝑎(𝐵 𝐴⁄ ) sin 𝛼]
��𝐵 = [𝑎𝐴 − 𝑎(𝐵 𝐴⁄ ) cos 𝛼
−𝑎(𝐵 𝐴⁄ ) sin 𝛼]
Assim, obtemos um sistema com 6 equações e 6 incógnitas (𝑎𝐴, 𝑎𝐵𝑥, 𝑎𝐵𝑦 , 𝑎(𝐵 𝐴⁄ ), 𝑁1 e 𝑁2,).
𝑁2 sin 𝛼 = 𝑚𝐴𝑎𝐴 Eq. 01a
−𝑚𝐴𝑔 − 𝑁2 cos 𝛼 + 𝑁1 = 0 Eq. 02a
−𝑁2 sin 𝛼 = 𝑚𝐵𝑎𝐵𝑥 Eq. 03a
−𝑚𝐵𝑔 + 𝑁2 cos 𝛼 = 𝑚𝐵𝑎𝐵𝑦 Eq. 04a
𝑎𝐵𝑥 = 𝑎𝐴 − 𝑎(𝐵 𝐴⁄ ) cos 𝛼 Eq. 05a
𝑎𝐵𝑦 = −𝑎(𝐵 𝐴⁄ ) sin 𝛼 Eq. 06a
Este sistema pode ser reduzido (algumas substituições para isso são bastante evidentes), ou mantido tal como foi
obtido.
𝑥
𝑦
𝛼
��𝐵
��2 𝑚𝐵��𝐴
𝑚𝐵��(𝐵 𝐴⁄ ) 𝛼

Prof.: Carlos Arthur Cavalcante 114
𝑚𝐴𝑎𝐴 + 0𝑎𝐵𝑥 + 0𝑎𝐵𝑦 + 0𝑎(𝐵 𝐴⁄ ) + 0𝑁1 − sin 𝛼 𝑁2 = 0 Eq. 01b
0𝑎𝐴 + 0𝑎𝐵𝑥 + 0𝑎𝐵𝑦 + 0𝑎(𝐵 𝐴⁄ ) + 1𝑁1 − cos 𝛼 𝑁2 = 𝑚𝐴𝑔 Eq. 02b
0𝑎𝐴 + 𝑚𝐵𝑎𝐵𝑥 + 0𝑎𝐵𝑦 + 0𝑎(𝐵 𝐴⁄ ) + 0𝑁1 + sin 𝛼 𝑁2 = 0 Eq. 03b
0𝑎𝐴 + 0𝑎𝐵𝑥 + 𝑚𝐵𝑎𝐵𝑦 + 0𝑎(𝐵 𝐴⁄ ) + 0𝑁1 − cos 𝛼 𝑁2 = −𝑚𝐵𝑔 Eq. 04b
1𝑎𝐴 − 1𝑎𝐵𝑥 + 0𝑎𝐵𝑦 − cos 𝛼 𝑎(𝐵 𝐴⁄ ) + 0𝑁1 + 0 𝑁2 = 0 Eq. 05b
0𝑎𝐴 + 0𝑎𝐵𝑥 − 1𝑎𝐵𝑦 − sin 𝛼 𝑎(𝐵 𝐴⁄ ) + 0𝑁1 + 0 𝑁2 = 0 Eq. 06b
Cuja matriz ampliada é,
[ 𝑚𝐴 0 0 0 0 − sin 𝛼 00 0 0 0 1 − cos 𝛼 𝑚𝐴𝑔0 𝑚𝐵 0 0 0 + sin 𝛼 00 0 𝑚𝐵 0 0 − cos 𝛼 −𝑚𝐵𝑔1 −1 0 − cos𝛼 0 0 00 0 −1 − sin 𝛼 0 0 0 ]
Resolvendo pelo método de Gauss-Jordan, encontramos,
[ 1 0 0 0 0 0
𝑊𝐵𝑔 sin 𝛼 cos 𝛼
𝑊𝐴+𝑊𝐵 sin2 𝛼
0 1 0 0 0 0 −𝑊𝐴𝑔 sin 𝛼 cos𝛼
𝑊𝐴+𝑊𝐵 sin2 𝛼
0 0 1 0 0 0 −(𝑊𝐴+𝑊𝐵)𝑔 sin
2 𝛼
𝑊𝐴+𝑊𝐵 sin2 𝛼
0 0 0 1 0 0(𝑊𝐴+𝑊𝐵)𝑔 sin 𝛼
𝑊𝐴+𝑊𝐵 sin2 𝛼
0 0 0 0 1 0𝑊𝐴
2+𝑊𝐴𝑊𝐵
𝑊𝐴+𝑊𝐵 sin2 𝛼
0 0 0 0 0 1𝑊𝐴𝑊𝐵 cos𝛼
𝑊𝐴+𝑊𝐵 sin2 𝛼 ]
Seja qual for o método de solução adotado, uma vez que o sistema de equações seja resolvido encontraremos:
𝑎𝐴 =𝑊𝐵𝑔 sin 𝛼 cos 𝛼
𝑊𝐴+𝑊𝐵 sin2 𝛼
𝑎𝐵𝑥 = −𝑊𝐴𝑔 sin 𝛼 cos 𝛼
𝑊𝐴+𝑊𝐵 sin2 𝛼
𝑎𝐵𝑦 = −(𝑊𝐴+𝑊𝐵)𝑔 sin
2 𝛼
𝑊𝐴+𝑊𝐵 sin2 𝛼
𝑎(𝐵 𝐴⁄ ) =(𝑊𝐴+𝑊𝐵)𝑔 sin𝛼
𝑊𝐴+𝑊𝐵 sin2 𝛼
𝑁1 =𝑊𝐴
2+𝑊𝐴𝑊𝐵
𝑊𝐴+𝑊𝐵 sin2 𝛼
𝑁2 =𝑊𝐴𝑊𝐵 cos𝛼
𝑊𝐴+𝑊𝐵 sin2 𝛼
Adotando-se os valores numéricos dados no problema (𝑊𝐴 = 135 𝑁, 𝑊𝐵 = 54 𝑁 e 𝛼 = 30° = 𝜋 6⁄ 𝑟𝑎𝑑),
encontramos:
𝑎𝐴 =981√3
1100 𝑎𝐴 = 1,5447𝑚 𝑠2⁄
𝑎𝐵𝑥 = −981√3
440 𝑎𝐵𝑥 = −3,8617𝑚 𝑠2⁄
𝑎𝐵𝑦 = −6867
2200 𝑎𝐵𝑦 = −3,1214𝑚 𝑠2⁄
𝑎(𝐵 𝐴⁄ ) =6867
1100 𝑎(𝐵 𝐴⁄ ) = 6,2427𝑚 𝑠2⁄
𝑁1 =1890
11 𝑁1 = 171,82 𝑁
𝑁2 =270√3
11 𝑁2 = 42,514 𝑁
Assim:
Aceleração da cunha 𝐴 é 𝑎𝐴 = 1,5447 𝑚 𝑠2⁄ 𝜑𝐴 = 0°
Aceleração do bloco 𝐵 é ��𝐵 = 𝑎𝐵𝑥𝑖 + 𝑎𝐵𝑦𝑗 ��𝐵 = (−3,8617)𝑖 + (−3,1214)𝑗
��𝐵
𝜑𝐵
𝑥
𝑦

Prof.: Carlos Arthur Cavalcante 115
Ou, 𝑎𝐵 = √𝑎𝐵𝑥2 + 𝑎𝐵𝑦
2 𝑎𝐵 = √(−3,8617)2 + (−3,1214)2 𝑎𝐵 = 4,9654𝑚 𝑠2⁄
𝜑𝐵 = tan−1 (|𝑎𝐵𝑦|
|𝑎𝐵𝑥|) 𝜑𝐵 = tan−1 (
3,1214
3,8617) 𝜑𝐵 = 38,95°

Prof.: Carlos Arthur Cavalcante 116
3.5.9 Exemplo-Ilustrativo 29
Problema-Resolvido 12.3 (Beer, Johnston; 9ª Edição, pág. 705)
O bloco 𝐵 pesando 54 𝑁 parte do repouso e desliza sobre a cunha 𝐴
de peso 135 𝑁 apoiada sobre uma superfície horizontal.
Desprezando o atrito e assumindo 𝛼 = 30°, determine os vetores
aceleração (a) da cunha, e, (b) do bloco.
SOLUÇÃO:
Na ausência de atrito, haverá movimento, tanto da cunha 𝐴 quanto do bloco 𝐵.
Porém, a cunha 𝐴 está restrita a se deslocar sobre a superfície horizontal. Portanto, o
seu movimento será na direção horizontal e com sentido para a direita. Isto é,
conhecemos a direção e o sentido do vetor aceleração ��𝐴 da cunha, restando apenas
determinar a sua intensidade.
O bloco 𝐵 está restrito a escorregar sobre a cunha. O movimento do bloco em relação
à cunha (��𝐵 𝐴⁄ ) será na direção do plano inclinado da cunha, com sentido para “baixo
↙” e o seu movimento em relação à superfície horizontal (��𝐵) será a soma vetorial
do seu movimento em relação à cunha com o movimento da cunha em relação à
superfície horizontal (��𝐵 = ��𝐵 𝐴⁄ + ��𝐴).
Observar que o vetor ��𝐵 é um vetor totalmente desconhecido. Não sabemos nem a
sua direção, nem o seu sentido e nem a sua intensidade. A direção, o sentido e a
intensidade do vetor ��𝐵 depende das intensidades de ��(𝐵 𝐴⁄ ) e de ��𝐴.
Em resumo, conhecemos a direção e o sentido do vetor aceleração ��(𝐵 𝐴⁄ ),
conhecemos a direção e o sentido do vetor aceleração ��𝐴 e sabemos que ��𝐵 =��(𝐵 𝐴⁄ ) + ��𝐴.
Adotamos um sistema de coordenadas 𝑂𝑥𝑦 fixo ao solo, com eixo 𝑥 paralelo ao plano inclinado da cunha e sentido
positivo “para cima” e com eixo 𝑦 perpendicular ao plano inclinado da cunha e sentido positivo “para cima”,
conforme indicado na figura. Os Diagramas de Corpo Livre e as equações de movimento para a cunha 𝐴 e para o
bloco 𝐵 apresentados abaixo explicitam estas considerações.
DCL da Cunha 𝐴 DCL do Bloco 𝐵
Equações de Movimento da cunha A Equações de Movimento do bloco B
+↗ ∑𝐹𝑥 = 𝑚𝐴𝑎𝐴𝑥
𝑁1 sin 𝛼 −𝑊𝐴 sin 𝛼 = 𝑚𝐴𝑎𝐴𝑥
𝑁1 sin 𝛼 −𝑊𝐴 sin 𝛼 = 𝑚𝐴(+𝑎𝐴 cos 𝛼) 𝑁1 sin 𝛼 −𝑊𝐴 sin 𝛼 = 𝑚𝐴 cos 𝛼 𝑎𝐴
+↖ ∑𝐹𝑦 = 𝑚𝐴𝑎𝐴𝑦
𝑁1 cos 𝛼 −𝑊𝐴 cos 𝛼 − 𝑁2 = 𝑚𝐴𝑎𝐴𝑦
𝑁1 cos 𝛼 −𝑊𝐴 cos 𝛼 − 𝑁2 = 𝑚𝐴(−𝑎𝐴 sin 𝛼) 𝑁1 cos 𝛼 −𝑊𝐴 cos 𝛼 − 𝑁2 = −𝑚𝐴 sin 𝛼 𝑎𝐴
+↗ ∑𝐹𝑥 = 𝑚𝐵𝑎𝐵𝑥
−𝑊𝐵 sin 𝛼 = 𝑚𝐵𝑎𝐵𝑥
+↖ ∑𝐹𝑦 = 𝑚𝐵𝑎𝐵𝑦
𝑁2 −𝑊𝐵 cos 𝛼 = 𝑚𝐵𝑎𝐵𝑦
𝑥
𝑦 𝛼
��𝐴
��1
��2 𝑚𝐴��𝐴
𝛼
𝛼
𝑥 𝑦
𝑥
𝑦 𝛼
��𝐵
��2
𝑚𝐵��𝐴
𝑚𝐵��(𝐵 𝐴⁄ ) 𝛼
𝛼
𝑥 𝑦 𝐵
𝐴 𝛼
𝐴 ��𝐴
𝐵
𝛼
��𝐴
��(𝐵 𝐴⁄ )
𝐵
𝛼
��𝐴
��(𝐵 𝐴⁄ ) ��𝐵

Prof.: Carlos Arthur Cavalcante 117
Reunindo as equações obtidas, ficamos com 4 equações e 5 incógnitas (𝑎𝐴, 𝑎𝐵𝑥, 𝑎𝐵𝑦 , 𝑁1 e 𝑁2,).
𝑁1 sin 𝛼 −𝑊𝐴 sin 𝛼 = 𝑚𝐴 cos 𝛼 𝑎𝐴 Eq. 01
𝑁1 cos 𝛼 −𝑊𝐴 cos 𝛼 − 𝑁2 = −𝑚𝐴 sin 𝛼 𝑎𝐴 Eq. 02
−𝑊𝐵 sin 𝛼 = 𝑚𝐵𝑎𝐵𝑥 Eq. 03
𝑁2 −𝑊𝐵 cos 𝛼 = 𝑚𝐵𝑎𝐵𝑦 Eq. 04
Buscando equação adicional:
Observando o DCL vemos que os vetores ��𝐴 e ��𝐵 𝐴⁄ têm direções e sentidos conhecidos, de modo que podemos
expressá-los por suas componentes.
O vetor ��𝐴 é dado por, ��𝐴 = [𝑎𝐴 cos 𝛼−𝑎𝐴 sin 𝛼
]
O vetor ��𝐵 𝐴⁄ é dado por, ��𝐵 𝐴⁄ = [−𝑎(𝐵 𝐴⁄ )
0]
Uma vez que, ��𝐵 = ��𝐴 + ��𝐵 𝐴⁄ , obtemos,
��𝐵 = [𝑎𝐴𝑥𝑎𝐴𝑦
] + [𝑎(𝐵 𝐴⁄ )𝑥
𝑎(𝐵 𝐴⁄ )𝑦] ��𝐵 = [
𝑎𝐴 cos 𝛼−𝑎𝐴 sin 𝛼
] + [−𝑎(𝐵 𝐴⁄ )
0] ��𝐵 = [
𝑎𝐴 cos 𝛼 − 𝑎(𝐵 𝐴⁄ )
−𝑎𝐴 sin 𝛼]
Assim, obtemos um sistema com 6 equações e 6 incógnitas (𝑎𝐴, 𝑎𝐵𝑥, 𝑎𝐵𝑦 , 𝑎(𝐵 𝐴⁄ ), 𝑁1 e 𝑁2,).
𝑁1 sin 𝛼 −𝑊𝐴 sin 𝛼 = 𝑚𝐴 cos 𝛼 𝑎𝐴 Eq. 01a
𝑁1 cos 𝛼 −𝑊𝐴 cos 𝛼 − 𝑁2 = −𝑚𝐴 sin 𝛼 𝑎𝐴 Eq. 02a
−𝑊𝐵 sin 𝛼 = 𝑚𝐵𝑎𝐵𝑥 Eq. 03a
𝑁2 −𝑊𝐵 cos 𝛼 = 𝑚𝐵𝑎𝐵𝑦 Eq. 04a
𝑎𝐵𝑥 = 𝑎𝐴 cos 𝛼 − 𝑎(𝐵 𝐴⁄ ) Eq. 05a
𝑎𝐵𝑦 = − sin 𝛼 𝑎𝐴 Eq. 06a
Organizando o sistema de equações, teremos,
𝑚𝐴 cos 𝛼 𝑎𝐴 + 0 𝑎𝐵𝑥 + 0 𝑎𝐵𝑦 + 0 𝑎(𝐵 𝐴⁄ ) − sin 𝛼 𝑁1 + 0 𝑁2 = −𝑚𝐴𝑔 sin 𝛼
−𝑚𝐴 sin 𝛼 𝑎𝐴 + 0 𝑎𝐵𝑥 + 0 𝑎𝐵𝑦 + 0 𝑎(𝐵 𝐴⁄ ) − cos 𝛼 𝑁1 + 1 𝑁2 = −𝑚𝐴𝑔 cos 𝛼
0 𝑎𝐴 + 𝑚𝐵 𝑎𝐵𝑥 + 0 𝑎𝐵𝑦 + 0 𝑎(𝐵 𝐴⁄ ) + 0 𝑁1 + 0 𝑁2 = −𝑚𝐵𝑔 sin 𝛼
0 𝑎𝐴 + 0 𝑎𝐵𝑥 + 𝑚𝐵 𝑎𝐵𝑦 + 0 𝑎(𝐵 𝐴⁄ ) + 0 𝑁1 − 1 𝑁2 = −𝑚𝐵𝑔 cos 𝛼
cos𝛼 𝑎𝐴 − 1 𝑎𝐵𝑥 + 0 𝑎𝐵𝑦 − 1 𝑎(𝐵 𝐴⁄ ) + 0 𝑁1 + 0 𝑁2 = 0
−sin 𝛼 𝑎𝐴 + 0 𝑎𝐵𝑥 − 1 𝑎𝐵𝑦 + 0 𝑎(𝐵 𝐴⁄ ) + 0 𝑁1 + 0 𝑁2 = 0
Eq. 01bEq. 02bEq. 03bEq. 04bEq. 05bEq. 06b
Cuja matriz ampliada é,
[ 𝑚𝐴 cos 𝛼 0 0 0 − sin 𝛼 0 −𝑚𝐴𝑔 sin 𝛼−𝑚𝐴 sin 𝛼 0 0 0 − cos 𝛼 1 −𝑚𝐴𝑔 cos𝛼
0 𝑚𝐵 0 0 0 0 −𝑚𝐵𝑔 sin 𝛼0 0 𝑚𝐵 0 0 −1 −𝑚𝐵𝑔 cos𝛼
cos 𝛼 −1 0 −1 0 0 0− sin 𝛼 0 −1 0 0 0 0 ]

Prof.: Carlos Arthur Cavalcante 118
Qualquer que seja o método de solução adotado para solucionar o sistema de equações obtido, encontraremos
solução dada por:
𝑎𝐴 =𝑚𝐵.𝑔.sin 𝛼.cos𝛼
𝑚𝐴+𝑚𝐵 sin2 𝛼
𝑎𝐵𝑥 = −𝑔 sin 𝛼
𝑎𝐵𝑦 = −𝑚𝐵.𝑔.sin
2 𝛼
𝑚𝐴+𝑚𝐵 sin2 𝛼
𝑎(𝐵 𝐴⁄ ) =(𝑚𝐴+𝑚𝐵).𝑔.sin𝛼
𝑚𝐴+𝑚𝐵 sin2 𝛼
𝑁1 =(𝑚𝐴
2+𝑚𝐴.𝑚𝐵).𝑔
𝑚𝐴+𝑚𝐵 sin2 𝛼
𝑁2 =𝑚𝐴.𝑚𝐵.𝑔.(sin
2 𝛼.cos𝛼+cos3 𝛼)
𝑚𝐴+𝑚𝐵 sin2 𝛼
Adotando os valores numéricos dados no problema (𝑊𝐴 = 135 𝑁, 𝑊𝐵 = 54 𝑁 e 𝛼 = 30° = 𝜋 6⁄ 𝑟𝑎𝑑),
encontramos:
𝑎𝐴 =54.sin(𝜋 6⁄ ).cos(𝜋 6⁄ )
(135 9,81⁄ )+(54 9,81⁄ ) sin2(𝜋 6⁄ ) 𝑎𝐴 =
981√3
1100 𝑎𝐴 = 1,5447𝑚 𝑠2⁄
𝑎𝐵𝑥 = −9,81 sin(𝜋 6⁄ ) 𝑎𝐵𝑥 = −981
200 𝑎𝐵𝑥 = −4,9050𝑚 𝑠2⁄
𝑎𝐵𝑦 = −54.sin2(𝜋 6⁄ )
(135 9,81⁄ )+(54 9,81⁄ ) sin2(𝜋 6⁄ ) 𝑎𝐵𝑦 = −
981√3
2200 𝑎𝐵𝑦 = −0,7723𝑚 𝑠2⁄
𝑎(𝐵 𝐴⁄ ) =(135+54).sin(𝜋 6⁄ )
(135 9,81⁄ )+(54 9,81⁄ ) sin2(𝜋 6⁄ ) 𝑎(𝐵 𝐴⁄ ) =
6867
1100 𝑎(𝐵 𝐴⁄ ) = 6,2427𝑚 𝑠2⁄
𝑁1 =((135 9,81⁄ )2+(135 9,81⁄ ).(54 9,81⁄ )).9,81
(135 9,81⁄ )+(54 9,81⁄ ) sin2(𝜋 6⁄ ) 𝑁1 =
1890
11 𝑁1 = 171,82 𝑁
𝑁2 =(135 9,81⁄ ).(54 9,81⁄ ).9,81.(sin2(𝜋 6⁄ ).cos(𝜋 6⁄ )+cos3(𝜋 6⁄ ))
(135 9,81⁄ )+(54 9,81⁄ ) sin2(𝜋 6⁄ ) 𝑁2 = 42,514 𝑁
Assim:
Aceleração da cunha 𝐴 é 𝑎𝐴 = 1,5447 𝑚 𝑠2⁄ 𝜑𝐴 = 0°
Aceleração do bloco 𝐵 é ��𝐵 = (−4,9050)𝑖 + (−0,7723)𝑗
𝑎𝐵 = √(−4,9050)2 + (−0,7723)2
𝑎𝐵 = 4,9654𝑚 𝑠2⁄
𝜑𝐵 = tan−1 (|𝑎𝐵𝑦|
|𝑎𝐵𝑥|) 𝜑𝐵 = tan−1 (
0,7723
4,9050) 𝜑𝐵 = 8,9483°
��𝐵
𝜑𝐵
𝑥 𝑦
𝛼

Prof.: Carlos Arthur Cavalcante 119
INCLUIR…

Prof.: Carlos Arthur Cavalcante 120
3.5.10 Exemplo-Ilustrativo 30
Problema-Resolvido 12.4 (Beer, Johnston; 9ª Edição, pág. 706)
A extremidade de um pêndulo de 2 𝑚𝑒𝑡𝑟𝑜𝑠 descreve um arco de
circunferência em um plano vertical. Se a tração na corda é 2,5 vezes o peso
do pêndulo para a posição mostrada na figura, encontre a velocidade e a
aceleração do pêndulo nessa posição.
SOLUÇÃO:
Trata-se de um movimento oscilatório harmônico simples (MHS), e a questão é determinar a velocidade e a
aceleração do pêndulo para posição mostrada.
Neste caso, escolhemos expressar as equações de movimento em
termos de suas componentes tangencial e normal, conforme indicado
no DCL. Não conhecemos a direção da aceleração resultante, mas
podemos expressá-la em termos de suas componentes tangencial 𝑎𝑡 e
normal 𝑎𝑛.
Notar que assumimos que o pêndulo está “voltando” de uma posição
mais alta, conforme o sentido positivo assumido para a direção
tangencial no instante mostrado. Notar também que não foi indicado
um sistema de coordenadas para descrever a posição do pêndulo, uma
vez que o interesse é apenas na velocidade e na aceleração.
Equações de Movimento (para a posição mostrada)
+↙ ∑𝐹𝑡 = 𝑚𝑎𝑡
𝑚𝑔 sin 30° = 𝑚𝑎𝑡 𝑎𝑡 = 𝑔 sin 30° 𝑎𝑡 = 9,81(0,5) 𝑎𝑡 = 4,9050 𝑚/𝑠2
+↖ ∑𝐹𝑛 = 𝑚𝑎𝑛
𝑇 − 𝑚𝑔 cos 30° = 𝑚𝑎𝑛
2,5𝑚𝑔 −𝑚𝑔 cos 30° = 𝑚𝑎𝑛
𝑎𝑛 = 9,81(2,5 − cos 30°) 𝑎𝑛 = 16,029 𝑚/𝑠2
𝑎 = √𝑎𝑡2 + 𝑎𝑛
2 𝑎 = √(4,9050)2 + (16,029)2
𝑎 = 16,764 𝑚 𝑠2⁄ 𝜑 = 72,986°
Determinação da velocidade para a posição mostrada.
𝑎𝑛 =𝑣2
𝜌 𝑣2 = 𝜌𝑎𝑛
𝑣2 = (2)(16,029) 𝑣2 = 32,059 𝑣 = 5,6620 𝑚/𝑠
DCL do Pêndulo
𝑡
30°
��
��
𝑚��𝑛
𝑛
𝑡
𝑛
𝑚��𝑡
𝜑
��𝑛
𝑡
𝑛
��𝑡

Prof.: Carlos Arthur Cavalcante 121
3.5.11 Exemplo-Ilustrativo 31
Problema-Resolvido 12.5 (Beer, Johnston; 9ª Edição)
Determinar a velocidade de segurança de uma curva inclinada de estrada de
raio constante 𝜌 = 120 𝑚 com inclinação lateral 𝜃 = 18°. A velocidade
de segurança de uma curva de estrada com inclinação lateral é a velocidade
com que um carro pode trafegar sem que nenhuma força de atrito lateral
seja exercida em suas rodas.
SOLUÇÃO:
Consideramos (modelamos) a partícula (carro) percorrendo uma trajetória circular num plano horizontal com
velocidade constante e igual à velocidade de segurança.
Como o carro está fazendo uma curva com velocidade constante, não há aceleração (ou força) tangencial e três são
as forças que atuam sobre carro: a força peso (��) e as forças normal (��) e de atrito (��𝑎) exercidas pela pista.
Como o carro está seguindo uma trajetória horizontal, a força (aceleração) resultante na direção 𝑦 é nula, podemos
afirmar que 𝑁𝑦 = 𝑊.
Como o carro está seguindo uma trajetória horizontal, também podemos afirmar que a força centrípeta é igual a (𝐹𝑎𝑛 + 𝑁𝑛).
DCL – Visão “de trás” DCL – Visão “de cima”
Escolhemos expressar as equações de movimento em termos de suas componentes tangencial e normal, conforme
indicado no DCL.
Equações de Movimento.
+← ∑𝐹𝑛 = 𝑚𝑎𝑛
𝑁 sin 𝜃 + 𝐹𝑎𝑡 cos 𝜃 = 𝑚𝑎𝑛
Porém, 𝑎𝑛 = 𝑣2 𝜌⁄
𝑁 sin 𝜃 + 𝜇𝑁 cos 𝜃 = 𝑚𝑣2
𝜌
+↑ ∑𝐹𝑦 = 𝑚𝑎𝑦
𝑁 cos 𝜃 − 𝐹𝑎𝑡 sin 𝜃 −𝑊 = 𝑚𝑎𝑦
Porém, 𝑎𝑦 = 0
𝑁 cos 𝜃 − 𝜇𝑁 sin 𝜃 −𝑊 = 0
Obtemos um sistema de duas equações com três incógnitas (𝑁, 𝜇 e 𝑣).
{𝑁 sin 𝜃 + 𝜇𝑁 cos 𝜃 = 𝑚
𝑣2
𝜌
𝑁 cos 𝜃 − 𝜇𝑁 sin 𝜃 −𝑊 = 0
Porém, para um carro trafegando em velocidade de segurança (𝑣𝑠𝑒𝑔), a força de atrito é nula (𝜇𝑁).
𝑦
𝑥 𝑛
��
��
��𝑎𝑡 𝑂
𝑚��𝑛
𝑧
𝑥 𝑛
��𝑎𝑡𝑛 𝑂
𝑚��𝑛 ��𝑛
𝑡

Prof.: Carlos Arthur Cavalcante 122
Neste caso, a equações se reduzem a,
{𝑁 sin 𝜃 = 𝑚𝑣𝑠𝑒𝑔
2
𝜌
𝑁 cos 𝜃 −𝑊 = 0
Note que a força de atrito só é nula no caso em que o carro realiza a curva com velocidade igual à velocidade de
segurança. Neste caso, obtemos um sistema (não linear) de duas equações com duas incógnitas (𝑁 e 𝑣𝑠𝑒𝑔).
Da segunda equação tiramos que, 𝑁 =𝑚𝑔
cos𝜃
Substituindo na primeira equação,
𝑚𝑔
cos𝜃sin 𝜃 = 𝑚
(𝑣𝑠𝑒𝑔)2
𝜌 𝑔
sin 𝜃
cos𝜃=
(𝑣𝑠𝑒𝑔)2
𝜌
(𝑣𝑠𝑒𝑔)2= 𝑔𝜌 tan 𝜃 𝑣𝑠𝑒𝑔 = √𝑔𝜌 tan 𝜃
Valores numéricos:
𝜌 = 120 𝑚 𝜃 = 18°
𝑣𝑠𝑒𝑔 = √(9,81)(120) tan(18°) 𝑣𝑠𝑒𝑔 = √382,50
𝑣𝑠𝑒𝑔 = 19,558 𝑚 𝑠⁄ 𝑣𝑠𝑒𝑔 = 70,407 𝑘𝑚 ℎ⁄

Prof.: Carlos Arthur Cavalcante 123
3.5.12 Exemplo-Ilustrativo 32
Problema 12.66 (Beer, Johnston; 9ª Edição)
A haste 𝑂𝐴 gira em torno de 𝑂 em um plano horizontal. O movimento do colar 𝐵 de
massa 𝑚 = 300 𝑔 é definido pelas relações 𝑟 = 300 + 100 cos (𝜋
2𝑡) e 𝜃 = 𝜋(𝑡2 − 3𝑡),
onde 𝑟 é expresso em milimetros, 𝑡 em segundos e 𝜃 em radianos. Determine as
componentes radial e transversal da força exercida sobre o colar quando (a) 𝑡 = 0; e; (b)
𝑡 = 0,5 𝑠.
SOLUÇÃO:
O movimento do colar 𝐵 já está definido por suas coordenadas polares (𝑟, 𝜃).
𝑟 = 300 + 100 cos (𝜋
2𝑡) 𝜃 = 𝜋(𝑡2 − 3𝑡)
A única força atuando sobre o colar 𝐵 é a força exercida pelo braço 𝑂𝐴 sobre o colar 𝐵 e é uma força que tem
(pode ter) uma componente radial e uma componente transversal. A componente 𝑧, atuando na direção vertical
(perpendicular ao papel) não é para ser considerada (conforme enunciado do problema) mas ela é a força exercida
pelo braço sobre o colar em reação à ação do colar sobre o braço devido ao peso do colar. Em outras palavras, a
componente 𝑧 que o braço exerce sobre o colar é uma força normal de módulo igual ao peso do colar e não será
incluída na solução do problema.
Portanto, a força exercida pelo braço 𝑂𝐴 tem apenas uma componente radial e outra componente transversal.
Convenientemente, denominaremos estas componentes por ��𝑟 e ��𝜃. Não sabemos qual é a direção da aceleração
(da força) resultante sobre o colar 𝐵. Entretanto, sabemos que ela terá uma componente radial ��𝑟 (𝑚��𝑟) e uma
componente transversal ��𝜃 (𝑚��𝜃), conforme o DCL abaixo.
Diagrama de corpo livre
Equações de Movimento (coordenadas polares).
∑𝐹𝑟 = 𝑚𝑎𝑟
𝐹𝑟 = 𝑚𝑎𝑟
∑𝐹𝜃 = 𝑚𝑎𝜃
𝐹𝜃 = 𝑚𝑎𝜃
Reunindo as equações de movimento obtidas,
𝐹𝑟 = 𝑚𝑎𝑟 Eq. 01
𝐹𝜃 = 𝑚𝑎𝜃 Eq. 02
Relembrando que,
𝑎𝑟 = �� − 𝑟��2 𝑎𝜃 = 𝑟�� + 2����
Portanto, podemos escrever que,
𝐹𝑟 = 𝑚(�� − 𝑟��2) Eq. 01a
𝐹𝜃 = 𝑚(𝑟�� + 2����) Eq. 02a
��𝑟 ��𝜃

Prof.: Carlos Arthur Cavalcante 124
Uma vez que
𝑟 = 300 + 100 cos (𝜋
2𝑡) 𝜃 = 𝜋(𝑡2 − 3𝑡).
�� = −50𝜋 sin (𝜋
2𝑡) �� = 𝜋(2𝑡 − 3)
�� = −25𝜋2 cos (𝜋
2𝑡) �� = 2𝜋
Podemos calcular,
𝑎𝑟 = �� − 𝑟��2 𝑎𝑟 = (−25𝜋2 cos (
𝜋
2𝑡)) − (300 + 100 cos (
𝜋
2𝑡)) (𝜋(2𝑡 − 3))
2
𝑎𝜃 = 𝑟�� + 2���� 𝑎𝜃 = (300 + 100 cos (𝜋
2𝑡)) (2𝜋) − 2 (50𝜋 sin (
𝜋
2𝑡)) (𝜋(2𝑡 − 3))
Em 𝑡 = 0 𝑠,
𝑎𝑟 = −3625𝜋2 𝑎𝑟 = −35777,32 𝑚𝑚 𝑠2⁄ 𝑎𝑟 = −35,777 𝑚 𝑠2⁄
𝑎𝜃 = 800𝜋 𝑎𝜃 = 2513,27 𝑚𝑚 𝑠2⁄ 𝑎𝜃 = 2,5133 𝑚 𝑠2⁄
Logo,
𝐹𝑟 = (0,3)(−35,777) 𝐹𝑟 = −10,733 𝑁
𝐹𝜃 = (0,3)(2,5133) 𝐹𝜃 = 0,7540 𝑁
Em 𝑡 = 0,5 𝑠
𝑎𝑟 = −(2400+425√2)𝜋2
2 𝑎𝑟 = −14809,54 𝑚𝑚 𝑠2⁄ 𝑎𝑟 = −14,810 𝑚 𝑠2⁄
𝑎𝜃 = 100𝜋√2(𝜋 + 1 + 3√2) 𝑎𝜃 = 3725,17 𝑚𝑚 𝑠2⁄ 𝑎𝜃 = 3,7252 𝑚 𝑠2⁄
Logo,
𝐹𝑟 = (0,3)(−14,810) 𝐹𝑟 = −4,4429 𝑁
𝐹𝜃 = (0,3)(3,7252) 𝐹𝜃 = 1,1175 𝑁

Prof.: Carlos Arthur Cavalcante 125
4 Cinética de Partículas: Método do Trabalho e Energia
4.1 Introdução
Até aqui, os problemas envolvendo a determinação do movimento de partículas sujeitas à ação
de várias forças foram resolvidos através da aplicação direta da 2ª Lei de Newton �� = 𝑚�� onde
�� é a força resultante atuando sobre a partícula.
Os problemas foram resolvidos de tal modo que a equação �� = 𝑚�� pôde ser montada em
termos das componentes e resolvida para determinar as componentes da aceleração ��. Em
seguida, a aceleração �� permitiu determinar a velocidade e a posição da partícula em qualquer
instante.
O emprego da equação �� = 𝑚��, em conjunto com os princípios da Cinemática, permite ainda
desenvolver dois métodos adicionais para a análise da Cinética do movimento. São eles:
• O Método do Trabalho e Energia;
• O Método do Impulso e Quantidade de Movimento.
A vantagem desses métodos é que tornam desnecessária a determinação prévia da aceleração
em função do tempo.
O Método de Trabalho e Energia estabelece uma relação direta entre força, massa,
velocidade e deslocamento (posição), sem necessidade de conhecer a função aceleração.
O Método do Impulso e Quantidade de Movimento estabelece uma relação direta entre
força, massa, velocidade e tempo, sem necessidade de conhecer a função aceleração.

Prof.: Carlos Arthur Cavalcante 126
4.2 Trabalho de uma força – Definição
Considere uma partícula em movimento. O vetor infinitesimal 𝑑𝑟
representa o deslocamento da partícula ao se mover da posição 𝐴 para
a posição 𝐴′.
Vamos agora admitir que uma força �� (que não é necessariamente a
força resultante) esteve atuando sobre a partícula durante este
deslocamento da posição 𝐴 para a posição 𝐴′.
O trabalho realizado pela força �� sobre a partícula durante o seu
deslocamento infinitesimal 𝑑𝑟, ao se mover da posição 𝐴 para a
posição 𝐴′, é definido pelo produto escalar
𝑑𝑈 = �� ∙ 𝑑𝑟
Portanto, por definição, o trabalho é uma quantidade escalar. Tem um valor e um sinal, mas não
tem nem direção nem sentido. No SI o trabalho é expresso em 𝑁.𝑚 e esta unidade é denominada
joule5 (1 𝐽 = 1 𝑁.𝑚).
Utilizando a definição de produto escalar6 e notando que para um deslocamento infinitesimal o
módulo do vetor 𝑑𝑟 coincide com o arco de trajetória 𝑑𝑠, podemos escrever
𝑑𝑈 = 𝐹 𝑑𝑟 𝑐𝑜𝑠𝛼 𝑑𝑟 = 𝑑𝑠 𝑑𝑈 = 𝐹 𝑑𝑠 𝑐𝑜𝑠𝛼
Em termos das componentes retangulares da força e do deslocamento,
𝑑𝑈 = 𝐹𝑥𝑑𝑥 + 𝐹𝑦𝑑𝑦 + 𝐹𝑧𝑑𝑧
Da equação 𝑑𝑈 = 𝐹 𝑑𝑠 𝑐𝑜𝑠𝛼 concluímos que {𝑆𝑒 0° < 𝛼 < 90° ⟹ 𝑑𝑈 > 0𝑆𝑒 𝛼 = 90° ⟹ 𝑑𝑈 = 0
𝑆𝑒 90° > 𝛼 < 180° ⟹ 𝑑𝑈 < 0
O trabalho realizado por uma força �� durante um deslocamento finito de uma partícula ao longo
de sua trajetória, desde uma posição identificada pelo ponto 𝐴1 até uma posição identificada
pelo ponto 𝐴2, é obtido pela integração da equação 𝑑𝑈 = �� ∙ 𝑑𝑟 e é representado por 𝑈1→2�� ou
simplesmente por 𝑈1→2, quando não houver ambiguidade de que se trata do trabalho realizado
pela força ��. Assim,
∫ 𝑑𝑈��𝐴2𝐴1
= 𝑈1→2�� = ∫ �� ∙ 𝑑𝑟
𝐴2𝐴1
= ∫ 𝐹 𝑑𝑠 𝑐𝑜𝑠𝛼𝑠2𝑠1
= ∫ 𝐹𝑥𝑑𝑥𝑥2𝑥1
+ ∫ 𝐹𝑦𝑑𝑦𝑦2𝑦1
+ ∫ 𝐹𝑧𝑑𝑧𝑧2𝑧1
5 O joule 𝐽 é a unidade de energia no SI, seja na forma mecânica (trabalho, energia potencial, energia cinética), ou
nas formas química, elétrica ou termina. Notar que embora 𝑁.𝑚 = 𝐽, o momento de uma força deve ser expresso
em 𝑁.𝑚 e não em joules, pois o momento de uma força não é uma forma de energia. 6 O produto escalar de dois vetores �� e �� é dado por �� ∙ �� = 𝑃𝑄 cos 𝛼 = 𝑃𝑥𝑄𝑥 + 𝑃𝑦𝑄𝑦 + 𝑃𝑧𝑄𝑧.

Prof.: Carlos Arthur Cavalcante 127
Quando utilizamos a equação 𝑑𝑈 = 𝐹 𝑑𝑠 𝑐𝑜𝑠𝛼 para determinar
o trabalho elementar 𝑑𝑈, notamos que 𝐹𝑐𝑜𝑠𝛼 representa a
componente tangencial 𝐹𝑡 e podemos expressar o trabalho 𝑈1→2��
por,
𝑈1→2�� = ∫ (𝐹𝑐𝑜𝑠𝛼)𝑑𝑠
𝑠2𝑠1
𝑈1→2�� = ∫ 𝐹𝑡𝑑𝑠
𝑠2𝑠1
Esta última expressão nos permite perceber que o trabalho 𝑈1→2��
é representado pela área sob a curva 𝐹𝑡 = 𝐹𝑐𝑜𝑠𝛼 em função de
𝑠.
Notamos também que existem problemas de cinética
envolvendo forças que não realizam trabalho, tais como:
• Forças que são aplicadas a partículas fixas ou impedidas de se mover. Nestes casos, o
deslocamento da partícula será nulo (𝑑𝑠 = 0) e, consequentemente, o trabalho realizado
por qualquer força aplicada sobre tais partículas também será nulo (𝑑𝑈 = 0);
• Forças que são aplicadas a partículas que se deslocam na direção perpendicular ou
normal à direção dessas forças aplicadas (𝛼 = 90°). Nestes casos, o 𝑐𝑜𝑠𝛼 será nulo
(𝑐𝑜𝑠𝛼 = 0) e, consequentemente, o trabalho realizado por tais forças perpendiculares
também será nulo (𝑑𝑈 = 0). São exemplos,
▪ A força peso �� em um corpo quando o centro de gravidade desse corpo (partícula)
se desloca horizontalmente;
▪ Força normal �� exercida por uma superfície em um corpo (partícula) quando esse
corpo (partícula) está em contato e se desloca paralelamente à superfície.

Prof.: Carlos Arthur Cavalcante 128
4.2.1 Trabalho de uma força constante sobre uma partícula em movimento retilíneo
Considere uma partícula descrevendo um movimento retilíneo
e que sobre ela atua uma força constante ��. Bem entendido: a
força �� não é a força resultante atuando sobre a partícula, mas
apenas uma das forças que atuam sobre ela e que, além disso, é
uma força que tem intensidade, direção e sentido constantes.
Obviamente, a força resultante sobre a partícula tem a mesma
direção da sua trajetória retilínea ou é um vetor nulo.
Podemos utilizar a expressão, 𝑈1→2�� = ∫ 𝐹 𝑑𝑠 𝑐𝑜𝑠𝛼
𝑠2𝑠1
Uma vez que a força �� é constante, decorre que,
𝑈1→2�� = ∫ 𝐹 𝑑𝑠 𝑐𝑜𝑠𝛼
𝑠2𝑠1
𝑈1→2�� = ∫ (𝐹𝑐𝑜𝑠𝛼)𝑑𝑠
𝑠2𝑠1
𝑈1→2�� = (𝐹𝑐𝑜𝑠𝛼) ∫ 𝑑𝑠
𝑠2𝑠1
Observamos que, no movimento retilíneo, a posição 𝑠 e o deslocamento 𝑑𝑠 ao longo da
trajetória se confundem respectivamente com a coordenada de posição 𝑥 e com o
diferencial 𝑑𝑥 ao longo do eixo 𝑥. Neste caso, podemos expressar o trabalho da força ��
como,
𝑈1→2�� = (𝐹𝑐𝑜𝑠𝛼) ∫ 𝑑𝑥
𝑥2𝑥1
𝑈1→2�� = 𝐹𝑥 ∫ 𝑑𝑥
𝑥2𝑥1
𝑈1→2�� = (𝐹𝑐𝑜𝑠𝛼)(𝑥2 − 𝑥1)
𝑈1→2�� = (𝐹𝑐𝑜𝑠𝛼)∆𝑥
Onde 𝛼 é o ângulo entre a força e a direção (retilínea) do movimento, e ∆𝑥 é o
deslocamento da partícula desde o ponto 𝐴1 (de coordenada 𝑥1) até o ponto 𝐴2 (de
coordenada 𝑥2) ao longo de sua trajetória retilínea.
Notar que:
No Movimento retilíneo,
𝑑𝑠 = 𝑑𝑥
Força constante,
𝐹𝑥 = 𝐹𝑐𝑜𝑠𝛼

Prof.: Carlos Arthur Cavalcante 129
4.2.2 Trabalho de uma força peso sobre uma partícula descrevendo um movimento
qualquer
Considere uma partícula se movendo ao longo de uma trajetória
qualquer (retilínea ou não retilínea) e que sobre ela atua a força peso
��, que é uma força constante (tem intensidade, direção e sentido
constantes). Bem entendido: o peso �� não é a força resultante sobre
a partícula, mas apenas uma das forças que atua sobre ela. Além disso,
sua direção é sempre vertical, sentido sempre para baixo e intensidade
igual a 𝑚𝑔.
A partícula se desloca ao longo de uma trajetória qualquer do ponto (posição) 𝐴1, de
coordenadas (𝑥1, 𝑦1), até o ponto (posição) 𝐴2, de coordenadas (𝑥2, 𝑦2).
Expressamos o trabalho da força �� como,
𝑑𝑈 = 𝑊𝑥𝑑𝑥 +𝑊𝑦𝑑𝑦 +𝑊𝑧𝑑𝑧 𝑈1→2�� = ∫ 𝑊𝑥𝑑𝑥 +𝑊𝑦𝑑𝑦 +𝑊𝑧𝑑𝑧
𝐴2𝐴1
𝑈1→2�� = ∫ 𝑊𝑥𝑑𝑥
𝑥2𝑥1
+ ∫ 𝑊𝑦𝑑𝑦𝑦2𝑦1
+ ∫ 𝑊𝑧𝑑𝑧𝑧2𝑧1
𝑈1→2�� = ∫ 0𝑑𝑥
𝑥2𝑥1
+ ∫ −𝑊𝑑𝑦𝑦2𝑦1
+ ∫ 0𝑑𝑧𝑧2𝑧1
𝑈1→2�� = ∫ −𝑊𝑑𝑦
𝑦2𝑦1
𝑈1→2�� = −𝑊∫ 𝑑𝑦
𝑦2𝑦1
𝑈1→2�� = −𝑊(𝑦2 − 𝑦1)
𝑈1→2�� = −𝑊∆𝑦
Onde ∆𝑦 é o deslocamento vertical desde a posição 𝐴1 até a posição 𝐴2 e dado pela diferença
de altura 𝑦2 − 𝑦1.
É importante observar que a expressão obtida para o trabalho 𝑈1→2 realizado pela força peso
�� é válida desde que a orientação positiva de 𝑦 seja para cima – de fato, ela foi obtida
assumindo que 𝑊𝑦 = −𝑊.
Concluímos que o trabalho da força peso �� é igual ao produto do módulo 𝑊 pelo deslocamento
vertical ∆𝑦.
Se ∆𝑦 > 0, então 𝑦2 − 𝑦1 > 0. Ou seja, 𝑦2 > 𝑦1 (a posição final é mais alta que a posição
inicial) e o trabalho da força peso �� é negativo (𝑈1→2�� < 0).
Se ∆𝑦 < 0, então 𝑦2 − 𝑦1 < 0. Ou seja, 𝑦2 < 𝑦1 (a posição final é mais baixa que a posição
inicial) e o trabalho da força peso �� é positivo (𝑈1→2�� > 0).
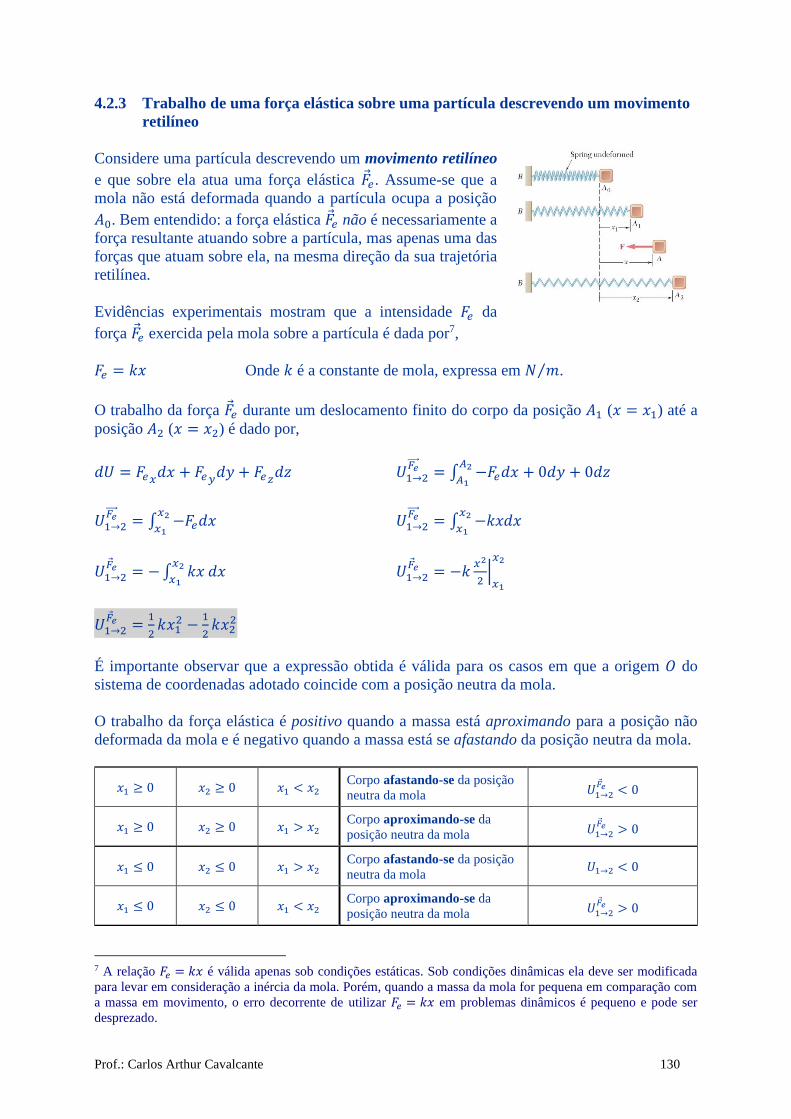
Prof.: Carlos Arthur Cavalcante 130
4.2.3 Trabalho de uma força elástica sobre uma partícula descrevendo um movimento
retilíneo
Considere uma partícula descrevendo um movimento retilíneo
e que sobre ela atua uma força elástica ��𝑒. Assume-se que a
mola não está deformada quando a partícula ocupa a posição
𝐴0. Bem entendido: a força elástica ��𝑒 não é necessariamente a
força resultante atuando sobre a partícula, mas apenas uma das
forças que atuam sobre ela, na mesma direção da sua trajetória
retilínea.
Evidências experimentais mostram que a intensidade 𝐹𝑒 da
força ��𝑒 exercida pela mola sobre a partícula é dada por7,
𝐹𝑒 = 𝑘𝑥 Onde 𝑘 é a constante de mola, expressa em 𝑁 𝑚⁄ .
O trabalho da força ��𝑒 durante um deslocamento finito do corpo da posição 𝐴1 (𝑥 = 𝑥1) até a
posição 𝐴2 (𝑥 = 𝑥2) é dado por,
𝑑𝑈 = 𝐹𝑒𝑥𝑑𝑥 + 𝐹𝑒𝑦𝑑𝑦 + 𝐹𝑒𝑧𝑑𝑧 𝑈1→2𝐹𝑒 = ∫ −𝐹𝑒𝑑𝑥 + 0𝑑𝑦 + 0𝑑𝑧
𝐴2𝐴1
𝑈1→2𝐹𝑒 = ∫ −𝐹𝑒𝑑𝑥
𝑥2𝑥1
𝑈1→2𝐹𝑒 = ∫ −𝑘𝑥𝑑𝑥
𝑥2𝑥1
𝑈1→2��𝑒 = −∫ 𝑘𝑥 𝑑𝑥
𝑥2𝑥1
𝑈1→2��𝑒 = −𝑘
𝑥2
2|𝑥1
𝑥2
𝑈1→2��𝑒 =
1
2𝑘𝑥1
2 −1
2𝑘𝑥2
2
É importante observar que a expressão obtida é válida para os casos em que a origem 𝑂 do
sistema de coordenadas adotado coincide com a posição neutra da mola.
O trabalho da força elástica é positivo quando a massa está aproximando para a posição não
deformada da mola e é negativo quando a massa está se afastando da posição neutra da mola.
𝑥1 ≥ 0 𝑥2 ≥ 0 𝑥1 < 𝑥2 Corpo afastando-se da posição
neutra da mola 𝑈1→2��𝑒 < 0
𝑥1 ≥ 0 𝑥2 ≥ 0 𝑥1 > 𝑥2 Corpo aproximando-se da
posição neutra da mola 𝑈1→2��𝑒 > 0
𝑥1 ≤ 0 𝑥2 ≤ 0 𝑥1 > 𝑥2 Corpo afastando-se da posição
neutra da mola 𝑈1→2 < 0
𝑥1 ≤ 0 𝑥2 ≤ 0 𝑥1 < 𝑥2 Corpo aproximando-se da
posição neutra da mola 𝑈1→2��𝑒 > 0
7 A relação 𝐹𝑒 = 𝑘𝑥 é válida apenas sob condições estáticas. Sob condições dinâmicas ela deve ser modificada
para levar em consideração a inércia da mola. Porém, quando a massa da mola for pequena em comparação com
a massa em movimento, o erro decorrente de utilizar 𝐹𝑒 = 𝑘𝑥 em problemas dinâmicos é pequeno e pode ser
desprezado.

Prof.: Carlos Arthur Cavalcante 131
𝑥1 ≥ 0 𝑥2 ≤ 0
Corpo aproximando-se e
depois afastando-se da posição
neutra da mola 𝑈1→𝑂��𝑒 > 0 𝑈𝑂→2
��𝑒 < 0
𝑥1 ≤ 0 𝑥2 ≥ 0
Corpo aproximando-se e
depois afastando-se da posição
neutra da mola 𝑈1→𝑂��𝑒 > 0 𝑈𝑂→2
��𝑒 < 0
Como a equação 𝐹𝑒 = 𝑘𝑥 é a equação de linha reta de coeficiente
angular 𝑘 passando pela origem, o trabalho 𝑈1→2��𝑒 da força elástica ��𝑒
durante o deslocamento de 𝐴1 até 𝐴2 pode ser obtido pela área do
trapézio mostrado na figura ao lado. Isto é,
Á𝑟𝑒𝑎 =(𝐹1+𝐹2)∆𝑥
2
E já que o trabalho da força ��𝑒 é positivo para um valor negativo de
∆𝑥, podemos escrever que,
𝑈1→2��𝑒 = −
(𝐹1+𝐹2)
2∆𝑥
Assim, o trabalho da força ��𝑒 exercida pela mola é igual ao negativo da área sob a curva de 𝐹𝑒
traçada em função de 𝑥.
Esta mesma conclusão poderia ter sido obtida observando-se que,
𝑈1→2��𝑒 =
1
2𝑘𝑥1
2 −1
2𝑘𝑥2
2 𝑈1→2��𝑒 =
1
2𝑘(𝑥1
2 − 𝑥22)
𝑈1→2��𝑒 =
1
2𝑘(𝑥1 + 𝑥2)(𝑥1 − 𝑥2) 𝑈1→2
��𝑒 =1
2(𝑘𝑥1 + 𝑘𝑥2)(𝑥1 − 𝑥2)
𝑈1→2��𝑒 =
1
2(𝐹1 + 𝐹2)(𝑥1 − 𝑥2) 𝑈1→2
��𝑒 = −1
2(𝐹1 + 𝐹2)(𝑥2 − 𝑥1)
𝑈1→2��𝑒 = −
1
2(𝐹1 + 𝐹2)∆𝑥

Prof.: Carlos Arthur Cavalcante 132
4.3 Energia Cinética e o Princípio do Trabalho e Energia
Considere uma partícula de massa 𝑚 sob a ação de uma força
resultante ��𝑹 enquanto se move ao longo de sua trajetória.
Decompondo a força resultante ��𝑅 em suas componentes tangencial
e normal, verificamos que a componente normal é sempre
perpendicular ao deslocamento e não realiza trabalho. Concluímos
que o trabalho da força resultante ��𝑅 se deve apenas ao trabalho da sua componente tangencial
𝐹𝑡.
𝑑𝑈 = ��𝑅 ∙ 𝑑𝑟 𝑑𝑈 = (��𝑡 + ��𝑛) ∙ 𝑑𝑟
𝑑𝑈 = ��𝑡 ∙ 𝑑𝑟 + ��𝑛 ∙ 𝑑𝑟 𝑑𝑈 = 𝐹𝑡 𝑑𝑟 𝑐𝑜𝑠0° + 𝐹𝑛 𝑑𝑟 𝑐𝑜𝑠90°
𝑑𝑈 = 𝐹𝑡 𝑑𝑟 (1) + 𝐹𝑛 𝑑𝑟 (0) 𝑑𝑈 = 𝐹𝑡 𝑑𝑟
𝑑𝑟 = 𝑑𝑠 𝑑𝑈 = 𝐹𝑡𝑑𝑠
∫ 𝑑𝑈𝐴2𝐴1
= ∫ 𝐹𝑡𝑑𝑠𝑠2𝑠1
𝑈1→2��𝑅 = ∫ 𝐹𝑡𝑑𝑠
𝑠2𝑠1
Assim, o termo∫ 𝐹𝑡 𝑑𝑠𝑠2𝑠1
representa o trabalho 𝑈1→2��𝑅 realizado pela força resultante ��𝑅 durante
o seu deslocamento da partícula da posição 𝐴1 até a posição 𝐴2.
Porém,
𝐹𝑡𝑑𝑠 = 𝑚𝑎𝑡𝑑𝑠 𝐹𝑡𝑑𝑠 = 𝑚𝑑𝑣
𝑑𝑡𝑑𝑠
𝐹𝑡𝑑𝑠 = 𝑚𝑣𝑑𝑣
Integrando desde a posição 𝐴1 onde 𝑠 = 𝑠1 e 𝑣 = 𝑣1, até a posição 𝐴2 onde 𝑠 = 𝑠2 e 𝑣 = 𝑣2,
escrevemos,
∫ 𝐹𝑡 𝑑𝑠𝑠2𝑠1
= 𝑚∫ 𝑣 𝑑𝑣𝑣2𝑣1
∫ 𝐹𝑡 𝑑𝑠𝑠2𝑠1
=1
2𝑚 𝑣2
2 −1
2𝑚 𝑣1
2
Assim, concluímos que,
𝑈1→2��𝑅 =
1
2𝑚 𝑣2
2 −1
2𝑚 𝑣1
2
A expressão 𝑇 =1
2𝑚 𝑣2 é também uma grandeza escalar e definida como a Energia Cinética
da partícula. Assim, escrevemos,
𝑈1→2��𝑅 = 𝑇2 − 𝑇1
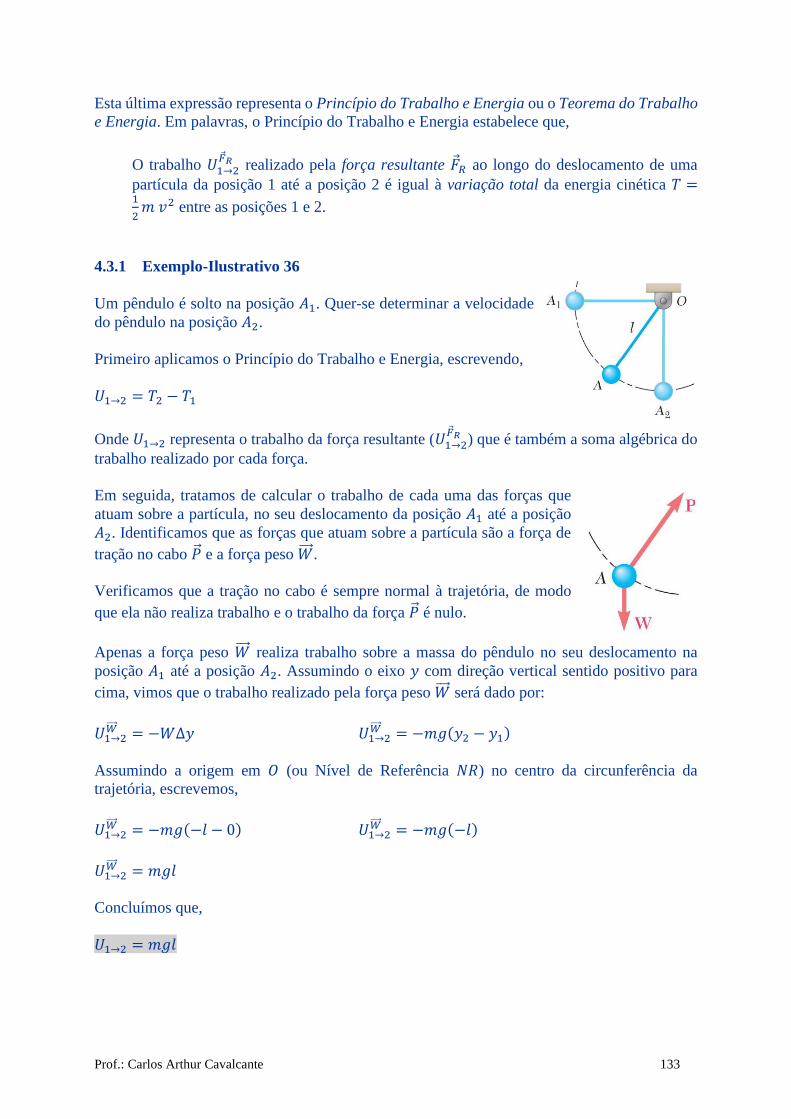
Prof.: Carlos Arthur Cavalcante 133
Esta última expressão representa o Princípio do Trabalho e Energia ou o Teorema do Trabalho
e Energia. Em palavras, o Princípio do Trabalho e Energia estabelece que,
O trabalho 𝑈1→2��𝑅 realizado pela força resultante ��𝑅 ao longo do deslocamento de uma
partícula da posição 1 até a posição 2 é igual à variação total da energia cinética 𝑇 =1
2𝑚 𝑣2 entre as posições 1 e 2.
4.3.1 Exemplo-Ilustrativo 36
Um pêndulo é solto na posição 𝐴1. Quer-se determinar a velocidade
do pêndulo na posição 𝐴2.
Primeiro aplicamos o Princípio do Trabalho e Energia, escrevendo,
𝑈1→2 = 𝑇2 − 𝑇1
Onde 𝑈1→2 representa o trabalho da força resultante (𝑈1→2��𝑅 ) que é também a soma algébrica do
trabalho realizado por cada força.
Em seguida, tratamos de calcular o trabalho de cada uma das forças que
atuam sobre a partícula, no seu deslocamento da posição 𝐴1 até a posição
𝐴2. Identificamos que as forças que atuam sobre a partícula são a força de
tração no cabo �� e a força peso ��.
Verificamos que a tração no cabo é sempre normal à trajetória, de modo
que ela não realiza trabalho e o trabalho da força �� é nulo.
Apenas a força peso �� realiza trabalho sobre a massa do pêndulo no seu deslocamento na
posição 𝐴1 até a posição 𝐴2. Assumindo o eixo 𝑦 com direção vertical sentido positivo para
cima, vimos que o trabalho realizado pela força peso �� será dado por:
𝑈1→2�� = −𝑊∆𝑦 𝑈1→2
�� = −𝑚𝑔(𝑦2 − 𝑦1)
Assumindo a origem em 𝑂 (ou Nível de Referência 𝑁𝑅) no centro da circunferência da
trajetória, escrevemos,
𝑈1→2�� = −𝑚𝑔(−𝑙 − 0) 𝑈1→2
�� = −𝑚𝑔(−𝑙)
𝑈1→2�� = 𝑚𝑔𝑙
Concluímos que,
𝑈1→2 = 𝑚𝑔𝑙

Prof.: Carlos Arthur Cavalcante 134
Em seguida tratamos de estabelecer ou calcular a Energia Cinética da partícula na posição 𝐴1
escrevendo,
𝑇1 =1
2𝑚 𝑣1
2
Como o pêndulo é solto do repouso na posição 𝐴1, temos que 𝑣1 = 0. Portanto,
𝑇1 =1
2𝑚 (0) 𝑇1 = 0
Estabelecemos ou calculamos a Energia Cinética da partícula na posição 𝐴2 escrevendo,
𝑇2 =1
2𝑚 𝑣2
2
Assim, escrevemos,
𝑈1→2 = 𝑇2 − 𝑇1 𝑚𝑔𝑙 =1
2𝑚 𝑣2
2 − 0
𝑔𝑙 =1
2 𝑣22 𝑣2
2 = 2𝑔𝑙
𝑣2 = √2𝑔𝑙
Observar que:
A velocidade pôde ser encontrada sem a necessidade de integrar uma expressão para a
aceleração.
Todas as quantidades envolvidas são escalares e puderam ser adicionadas diretamente,
sem o uso de componentes vetoriais.
A força que não realiza trabalho (a força de tração) não precisou ser incluída no
desenvolvimento da solução do problema.
Entretanto, o que é vantagem do método para resolver um problema pode se tornar uma
desvantagem para resolver outro. Por exemplo, o Princípio do Trabalho e Energia não pode ser
usado para se determinar diretamente a aceleração.
Em certos casos, porém, pode-se combinar a aplicação do
Princípio do Trabalho e Energia com a aplicação direta da 2ª
Lei de Newton. Por exemplo, para calcular a tração no cabo
especificamente na posição 𝐴2 aplicamos a 2ª Lei de Newton,
escrevendo:
Na posição 𝐴2:
Σ𝐹𝑛 = 𝑚𝑎𝑛 Σ𝐹𝑛 = 𝑚𝑣22
𝜌

Prof.: Carlos Arthur Cavalcante 135
𝑃 −𝑊 = 𝑚𝑣22
𝜌 𝑃 −𝑊 =
𝑊
𝑔
𝑣22
𝑙
𝑃 = 𝑊 +𝑊
𝑔
𝑣22
𝑙
Mas, pela aplicação do Princípio do Trabalho e Energia determinamos que 𝑣22 = 2𝑔𝑙
Assim, combinando os dois métodos podemos escrever que,
𝑃 = 𝑊 +𝑊
𝑔
2𝑔𝑙
𝑙 𝑃 = 𝑊 + 2𝑊 = 3𝑊
𝑃 = 3𝑊
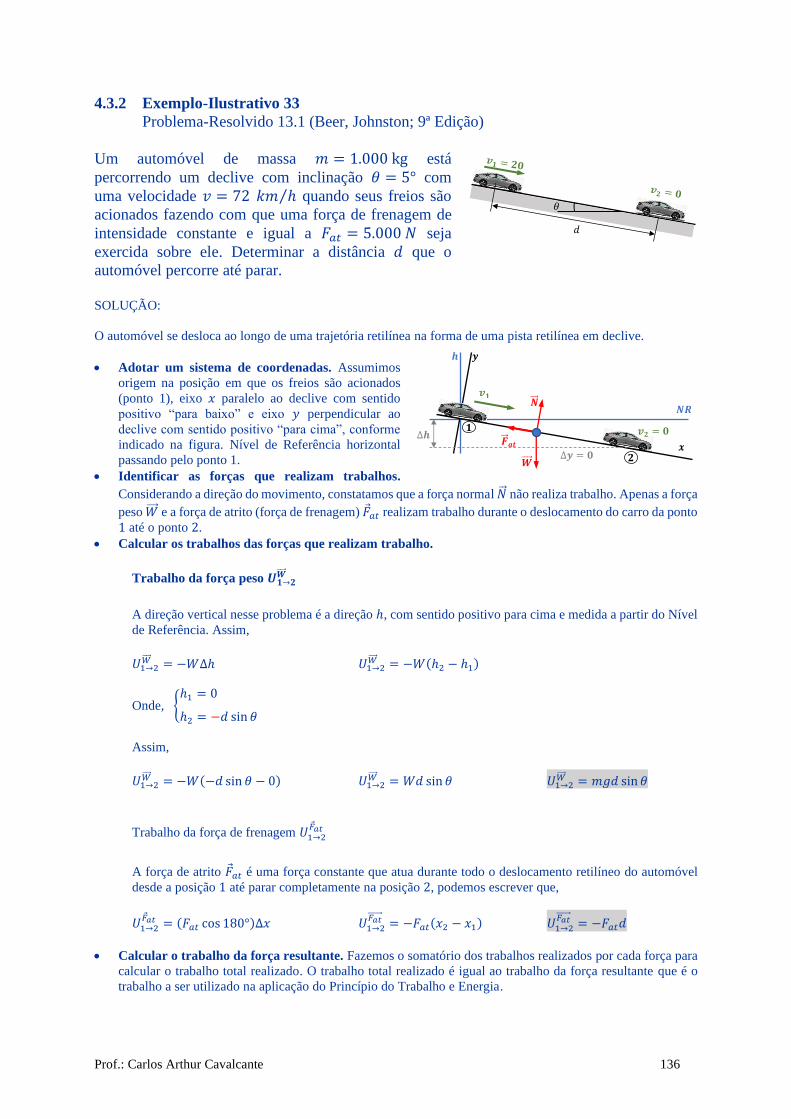
Prof.: Carlos Arthur Cavalcante 136
4.3.2 Exemplo-Ilustrativo 33
Problema-Resolvido 13.1 (Beer, Johnston; 9ª Edição)
Um automóvel de massa 𝑚 = 1.000 kg está
percorrendo um declive com inclinação 𝜃 = 5° com
uma velocidade 𝑣 = 72 𝑘𝑚 ℎ⁄ quando seus freios são
acionados fazendo com que uma força de frenagem de
intensidade constante e igual a 𝐹𝑎𝑡 = 5.000 𝑁 seja
exercida sobre ele. Determinar a distância 𝑑 que o
automóvel percorre até parar.
SOLUÇÃO:
O automóvel se desloca ao longo de uma trajetória retilínea na forma de uma pista retilínea em declive.
• Adotar um sistema de coordenadas. Assumimos
origem na posição em que os freios são acionados
(ponto 1), eixo 𝑥 paralelo ao declive com sentido
positivo “para baixo” e eixo 𝑦 perpendicular ao
declive com sentido positivo “para cima”, conforme
indicado na figura. Nível de Referência horizontal
passando pelo ponto 1.
• Identificar as forças que realizam trabalhos.
Considerando a direção do movimento, constatamos que a força normal �� não realiza trabalho. Apenas a força
peso �� e a força de atrito (força de frenagem) ��𝑎𝑡 realizam trabalho durante o deslocamento do carro da ponto
1 até o ponto 2.
• Calcular os trabalhos das forças que realizam trabalho.
Trabalho da força peso 𝑼𝟏→𝟐��
A direção vertical nesse problema é a direção ℎ, com sentido positivo para cima e medida a partir do Nível
de Referência. Assim,
𝑈1→2�� = −𝑊∆ℎ 𝑈1→2
�� = −𝑊(ℎ2 − ℎ1)
Onde, {ℎ1 = 0
ℎ2 = −𝑑 sin 𝜃
Assim,
𝑈1→2�� = −𝑊(−𝑑 sin 𝜃 − 0) 𝑈1→2
�� = 𝑊𝑑 sin 𝜃 𝑈1→2�� = 𝑚𝑔𝑑 sin 𝜃
Trabalho da força de frenagem 𝑈1→2��𝑎𝑡
A força de atrito ��𝑎𝑡 é uma força constante que atua durante todo o deslocamento retilíneo do automóvel
desde a posição 1 até parar completamente na posição 2, podemos escrever que,
𝑈1→2��𝑎𝑡 = (𝐹𝑎𝑡 cos 180°)∆𝑥 𝑈1→2
𝐹𝑎𝑡 = −𝐹𝑎𝑡(𝑥2 − 𝑥1) 𝑈1→2
𝐹𝑎𝑡 = −𝐹𝑎𝑡𝑑
• Calcular o trabalho da força resultante. Fazemos o somatório dos trabalhos realizados por cada força para
calcular o trabalho total realizado. O trabalho total realizado é igual ao trabalho da força resultante que é o
trabalho a ser utilizado na aplicação do Princípio do Trabalho e Energia.
𝒗𝟏
𝒗𝟐 = 𝟎
𝒚
𝒙
𝒉
𝑵𝑹
∆𝒉
∆𝒚 = 𝟎 ��𝒂𝒕
��
��
𝟏
𝟐
𝜃
𝑑
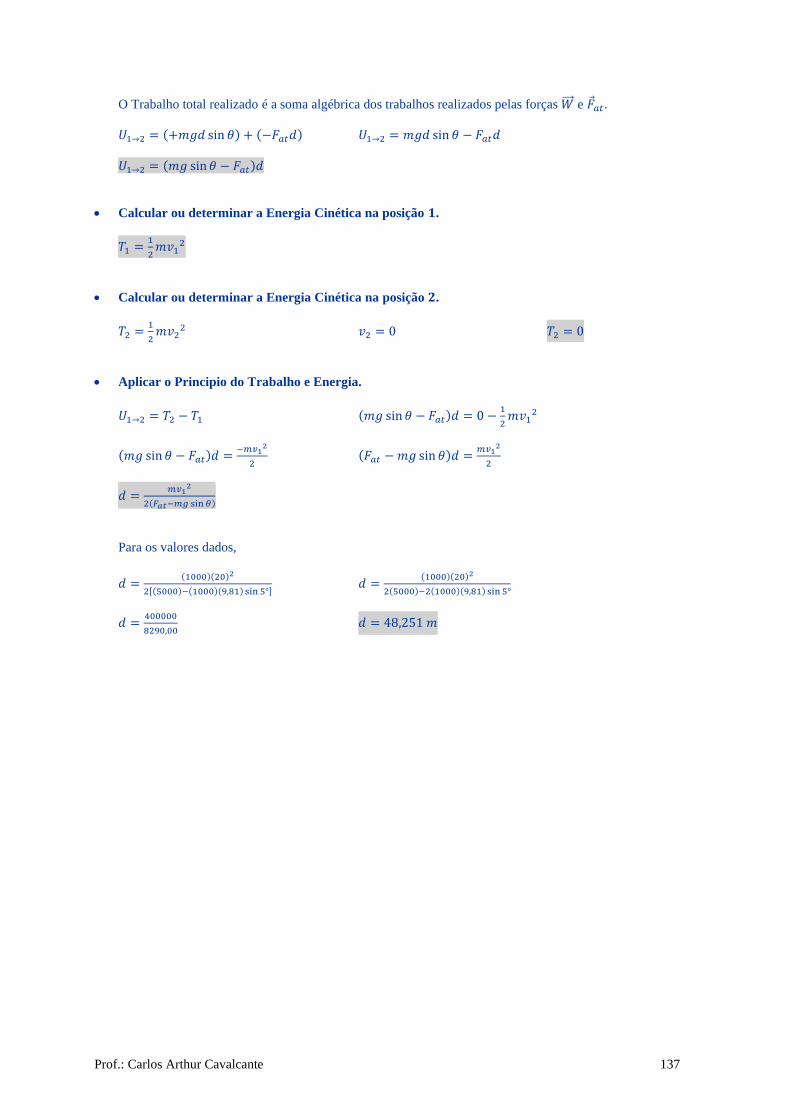
Prof.: Carlos Arthur Cavalcante 137
O Trabalho total realizado é a soma algébrica dos trabalhos realizados pelas forças �� e ��𝑎𝑡.
𝑈1→2 = (+𝑚𝑔𝑑 sin 𝜃) + (−𝐹𝑎𝑡𝑑) 𝑈1→2 = 𝑚𝑔𝑑 sin 𝜃 − 𝐹𝑎𝑡𝑑
𝑈1→2 = (𝑚𝑔 sin 𝜃 − 𝐹𝑎𝑡)𝑑
• Calcular ou determinar a Energia Cinética na posição 𝟏.
𝑇1 =1
2𝑚𝑣1
2
• Calcular ou determinar a Energia Cinética na posição 𝟐.
𝑇2 =1
2𝑚𝑣2
2 𝑣2 = 0 𝑇2 = 0
• Aplicar o Principio do Trabalho e Energia.
𝑈1→2 = 𝑇2 − 𝑇1 (𝑚𝑔 sin 𝜃 − 𝐹𝑎𝑡)𝑑 = 0 −1
2𝑚𝑣1
2
(𝑚𝑔 sin 𝜃 − 𝐹𝑎𝑡)𝑑 =−𝑚𝑣1
2
2 (𝐹𝑎𝑡 −𝑚𝑔 sin 𝜃)𝑑 =
𝑚𝑣12
2
𝑑 =𝑚𝑣1
2
2(𝐹𝑎𝑡−𝑚𝑔 sin 𝜃)
Para os valores dados,
𝑑 =(1000)(20)2
2[(5000)−(1000)(9,81) sin 5°] 𝑑 =
(1000)(20)2
2(5000)−2(1000)(9,81) sin 5°
𝑑 =400000
8290,00 𝑑 = 48,251 𝑚

Prof.: Carlos Arthur Cavalcante 138
4.3.3 Exemplo-Ilustrativo 34
Problema-Resolvido 13.4 (Beer, Johnston; 9ª Edição)
Um carrinho de montanha-russa de 1.000 𝑘𝑔 parte do repouso no
ponto 1 e se move pista abaixo, sem atrito. Determine (a) a força
exercida pela pista sobre o carro no ponto 2, onde o raio de curvatura
da pista é de 6 𝑚 e (b) o valor mínimo de segurança do raio de
curvatura no ponto 3.
SOLUÇÃO:
Escolhemos um sistema de coordenadas com o eixo 𝑥 horizontal positivo
para a direita e o eixo 𝑦 vertical positivo para cima, e com origem no Nível
de Referência (𝑁𝑅) no mesmo nível da posição 2.
Determinação da força exercida pela pista sobre o carrinho na posição
2.
Aplicando o Princípio do Trabalho e Energia entre a posição 1 (posição inicial) e a posição 2, temos,
Energia Cinética:
𝑇1 =1
2𝑚𝑣1
2 =1
2𝑚(0)2 𝑇1 = 0
𝑇2 =1
2𝑚𝑣2
2 =1
2(1.000)𝑣2
2 𝑇2 = 500𝑣22
Trabalho:
Como não há atrito, apenas a força peso �� realiza trabalho.
Trabalho da força peso ��:
𝑈1→2�� = −𝑊∆𝑦 𝑈1→2
�� = −𝑚𝑔(𝑦2 − 𝑦1)
Em conformidade com o Nível de Referência (sistema de coordenadas) adotado, escrevemos,
𝑈1→2�� = −(1.000)(9,81)(0 − 12) 𝑈1→2
�� = −(9.810)(−12)
𝑈1→2�� = +117.720 𝐽
Aplicando o Princípio do Trabalho e Energia, entre a posição 1 e a posição 2, escrevemos,
𝑈1→2 = 𝑇2 − 𝑇1 117.720 = 500𝑣22 − 0
500𝑣22 = 117.720 𝑣2
2 =5886
25
𝑣2 =3√654
5 𝑣2 = 15,344 𝑚 𝑠⁄
𝑦
𝑥 𝑂 𝑁𝑅
𝒉

Prof.: Carlos Arthur Cavalcante 139
Para determinar a força exercida pela pista sobre o carrinho no ponto 2, fazemos uso da
aplicação direta da 2ª Lei de Newton no ponto 2. Primeiramente identificamos as forças
atuantes sobre o carrinho (DCL) nessa posição e aplicamos a 2ª Lei de Newton, escrevendo,
+↑ Σ𝐹𝑛 = 𝑚𝑎𝑛 𝑁 −𝑊 = 𝑚𝑎𝑛
𝑁 −𝑊 = 𝑚𝑣22
𝜌2 𝑁 = 𝑚
𝑣22
𝜌2+𝑊
𝑁 = (1.000) (5886 25⁄
6) + (1.000)(9,81) 𝑁 = (1.000) (
981
25) + 9.810
𝑁 = 39.240 + 9.810 𝑁 = 49.050 𝑁
Determinação do valor mínimo de segurança do raio de curvatura no ponto 3.
Aplicando o Princípio do Trabalho e Energia entre a posição 2 e a posição 3, temos,
Energia Cinética:
𝑇2 =1
2𝑚𝑣2
2 =1
2(1.000) (
3√654
5)2
𝑇2 = 117.720 𝐽
𝑇3 =1
2𝑚𝑣3
2 =1
2(1.000)𝑣3
2 𝑇3 = 500𝑣32
Trabalho:
Trabalho da força peso ��:
𝑈2→3�� = −𝑊∆𝑦 𝑈2→3
�� = −𝑊(𝑦3 − 𝑦2)
𝑈2→3�� = −(1.000)(9,81)(4,5 − 0) 𝑈2→3
�� = −(9.810)(4,5)
𝑈2→3�� = −44.145 𝐽
Aplicando o Princípio do Trabalho e Energia, entre a posição 2 e a posição 3, escrevemos,
𝑈2→3 = 𝑇3 − 𝑇2 −44.145 = 500𝑣32 − 117.720
500𝑣32 = 73.575 𝑣3
2 =2943
20
𝑣3 =3√1635
10 𝑣3 = 12,131 𝑚 𝑠⁄
Aplicamos a 2ª Lei de Newton no ponto 3, escrevendo,
+↓ Σ𝐹𝑛 = 𝑚𝑎𝑛 𝑊 −𝑁 = 𝑚𝑎𝑛
O valor mínimo de segurança do raio 𝜌3 ocorre quando 𝑁 = 0. Assim,
𝑊 − 0 = 𝑚𝑣32
𝜌𝑠𝑒𝑔 𝑊𝜌𝑠𝑒𝑔 = 𝑚𝑣3
2
𝑚𝑔𝜌𝑠𝑒𝑔 = 𝑚𝑣32 𝑔𝜌𝑠𝑒𝑔 = 𝑣3
2
𝜌𝑠𝑒𝑔 =𝑣32
𝑔 𝜌𝑠𝑒𝑔 =
147,15
9,81 𝜌𝑠𝑒𝑔 = 15 𝑚
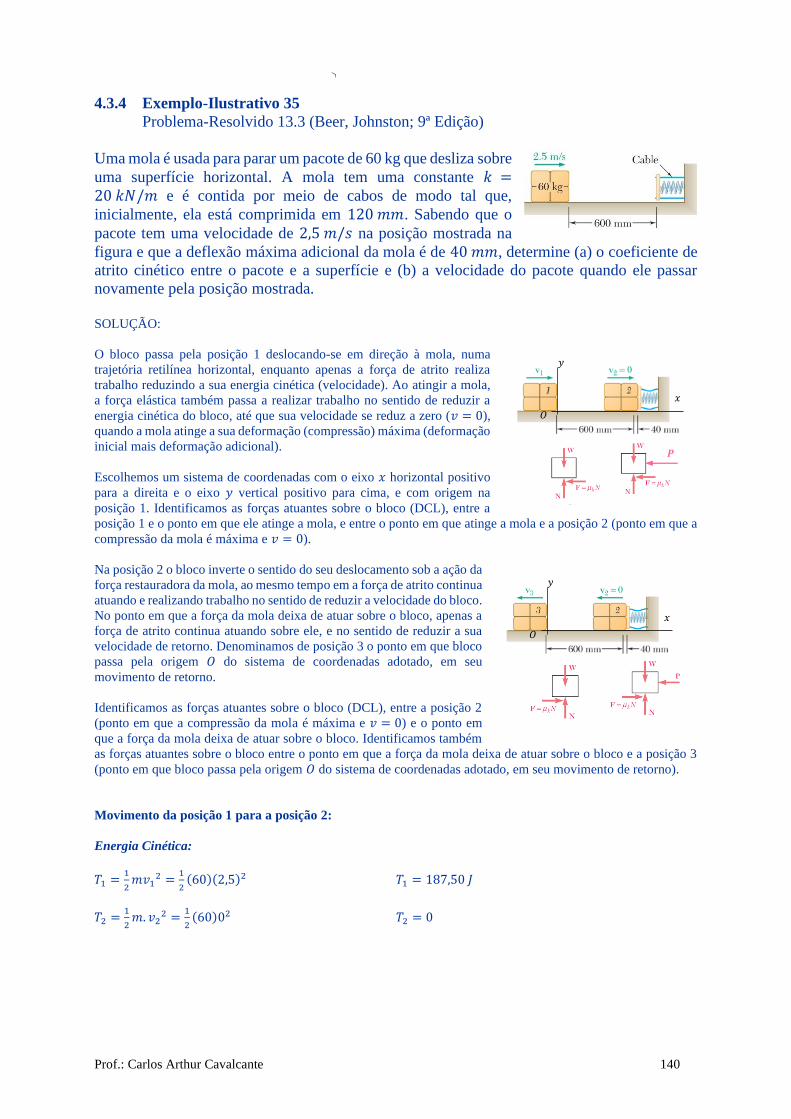
Prof.: Carlos Arthur Cavalcante 140
4.3.4 Exemplo-Ilustrativo 35
Problema-Resolvido 13.3 (Beer, Johnston; 9ª Edição)
Uma mola é usada para parar um pacote de 60 kg que desliza sobre
uma superfície horizontal. A mola tem uma constante 𝑘 =20 𝑘𝑁/𝑚 e é contida por meio de cabos de modo tal que,
inicialmente, ela está comprimida em 120 𝑚𝑚. Sabendo que o
pacote tem uma velocidade de 2,5 𝑚/𝑠 na posição mostrada na
figura e que a deflexão máxima adicional da mola é de 40 𝑚𝑚, determine (a) o coeficiente de
atrito cinético entre o pacote e a superfície e (b) a velocidade do pacote quando ele passar
novamente pela posição mostrada.
SOLUÇÃO:
O bloco passa pela posição 1 deslocando-se em direção à mola, numa
trajetória retilínea horizontal, enquanto apenas a força de atrito realiza
trabalho reduzindo a sua energia cinética (velocidade). Ao atingir a mola,
a força elástica também passa a realizar trabalho no sentido de reduzir a
energia cinética do bloco, até que sua velocidade se reduz a zero (𝑣 = 0),
quando a mola atinge a sua deformação (compressão) máxima (deformação
inicial mais deformação adicional).
Escolhemos um sistema de coordenadas com o eixo 𝑥 horizontal positivo
para a direita e o eixo 𝑦 vertical positivo para cima, e com origem na
posição 1. Identificamos as forças atuantes sobre o bloco (DCL), entre a
posição 1 e o ponto em que ele atinge a mola, e entre o ponto em que atinge a mola e a posição 2 (ponto em que a
compressão da mola é máxima e 𝑣 = 0).
Na posição 2 o bloco inverte o sentido do seu deslocamento sob a ação da
força restauradora da mola, ao mesmo tempo em a força de atrito continua
atuando e realizando trabalho no sentido de reduzir a velocidade do bloco.
No ponto em que a força da mola deixa de atuar sobre o bloco, apenas a
força de atrito continua atuando sobre ele, e no sentido de reduzir a sua
velocidade de retorno. Denominamos de posição 3 o ponto em que bloco
passa pela origem 𝑂 do sistema de coordenadas adotado, em seu
movimento de retorno.
Identificamos as forças atuantes sobre o bloco (DCL), entre a posição 2
(ponto em que a compressão da mola é máxima e 𝑣 = 0) e o ponto em
que a força da mola deixa de atuar sobre o bloco. Identificamos também
as forças atuantes sobre o bloco entre o ponto em que a força da mola deixa de atuar sobre o bloco e a posição 3
(ponto em que bloco passa pela origem 𝑂 do sistema de coordenadas adotado, em seu movimento de retorno).
Movimento da posição 1 para a posição 2:
Energia Cinética:
𝑇1 =1
2𝑚𝑣1
2 =1
2(60)(2,5)2 𝑇1 = 187,50 𝐽
𝑇2 =1
2𝑚. 𝑣2
2 =1
2(60)02 𝑇2 = 0
𝑦
𝑥
𝑂
𝑷
𝑦
𝑥
𝑂

Prof.: Carlos Arthur Cavalcante 141
Trabalhos:
Trabalho da força de atrito ��𝑎𝑡:
O trabalho de uma força constante ao longo de um deslocamento retilíneo é dado por:
𝑈1→2�� = �� cos 𝛼 ∆𝑥
Assim, o trabalho da força de atrito será:
𝑈1→2��𝑎𝑡 = −𝐹𝑎𝑡∆𝑥 𝑈1→2
��𝑎𝑡 = −𝜇𝑘𝑁∆𝑥
∆𝑥 = 0,600 + 0,040 ∆𝑥 = 0,640 𝑚
𝑁 = 𝑊 = (60)(9,81) 𝑁 = 588,60 𝑁
Assim, o trabalho da força de atrito ��𝑎𝑡 entre a posição 1 e a posição 2 é dado por,
𝑈1→2��𝑎𝑡 = −𝜇𝑘(588,60)(0,640) 𝑈1→2
��𝑎𝑡 = −376,70𝜇𝑘
Trabalho da força ��𝑒𝑙 (força elástica da mola).
Há duas formas de calcular o Trabalho da força elástica da mola:
𝑼𝟏→𝟐��𝒆𝒍 =
𝟏
𝟐𝒌𝒙𝟏
𝟐 −𝟏
𝟐𝒌𝒙𝟐
𝟐 𝑼𝟏→𝟐��𝒆𝒍 = −
𝟏
𝟐(𝑭𝟏 + 𝑭𝟐)∆𝒙
𝑈1→2��𝑒𝑙 =
1
2𝑘(𝑥1
2 − 𝑥22)
Onde,
𝑘 = 20000 𝑁 𝑚⁄
𝑥1 = 0,120 𝑚
𝑥2 = 0,120 + 0,040 𝑥2 = 0,160 𝑚
𝑈1→2��𝑒𝑙 =
1
2(20000)((0,120)2 − (0,160)2)
𝑈1→2��𝑒𝑙 = (10000)(0,0144 − 0,0256)
𝑈1→2��𝑒𝑙 = (10000)(−0,0112)
𝑈1→2��𝑒𝑙 = −112,0 𝐽
𝑈1→2��𝑒𝑙 = −
1
2(𝐹1 + 𝐹2)∆𝑥
Onde,
𝐹1 = 𝑘𝑥1
𝐹2 = 𝑘𝑥2
𝑘 = 20000 𝑁 𝑚⁄
𝑥1 = 0,120 𝑚
𝑥2 = 0,120 + 0,040 𝑥2 = 0,160 𝑚
∆𝑥 = 𝑥2 − 𝑥1 ∆𝑥 = 0,040 𝑚
𝐹1 = (20000)(0,120) 𝐹1 = 2.400 𝑁
𝐹2 = (20000)(0,160) 𝐹2 = 3.200 𝑁
𝑈1→2��𝑒𝑙 = −
1
2(2400 + 3200)(0,040)
𝑈1→2��𝑒𝑙 = −112,0 𝐽
Assim, o Trabalho total realizado pelas forças (que realizam Trabalho) é,
𝑈1→2 = 𝑈1→2��𝑎𝑡 + 𝑈1→2
��𝑒𝑙 𝑈1→2 = (−376,70𝜇𝑘) + (−112,0)
𝑈1→2 = −376,70𝜇𝑘 − 112,0
Aplicando o Princípio do Trabalho e Energia entre a posição 1 e a posição 2, escrevemos,
𝑈1→2 = 𝑇2 − 𝑇1 −376,70𝜇𝑘 − 112,0 = 0 − 187,50

Prof.: Carlos Arthur Cavalcante 142
−376,70𝜇𝑘 = −187,50 + 112,0 −376,70𝜇𝑘 = −75,500
𝜇𝑘 = 0,20
Movimento da posição 2 para a posição 3:
Energia Cinética:
𝑇2 =1
2𝑚𝑣2
2 =1
2(60)(0)2 𝑇2 = 0
𝑇3 =1
2𝑚𝑣3
2 =1
2(60)𝑣3
2 𝑇3 = 30𝑣32
Trabalho:
Trabalho da força de atrito ��𝑎𝑡:
No movimento de retorno do bloco (se deslocando para a esquerda), a força de atrito tem a mesma
intensidade e como sempre atua no sentido contrário ao deslocamento. Uma vez que o deslocamento do
bloco no retorno também é igual a ∆𝑥 = 0,640 𝑚, podemos afirmar que,
𝑈2→3��𝑎𝑡 = −376,70𝜇𝑘 𝑈2→3
��𝑎𝑡 = −376,70(0,20)
𝑈2→3��𝑎𝑡 = −75,500 𝐽
Trabalho da força ��𝑒𝑙 (força elástica da mola).
Já foi calculado anteriormente. Porém, agora, o trabalho realizado pela força elástica é positivo, pois atua
no sentido de aumentar a velocidade do bloco. Assim, escrevemos,
𝑈2→3��𝑒𝑙 = +112,00 𝐽
Trabalho total realizado pelas forças que realizam Trabalho no retorno do bloco é,
𝑈2→3 = 𝑈2→3��𝑎𝑡 + 𝑈2→3
��𝑒𝑙 𝑈2→3 = (−75,500) + (112,00)
𝑈2→3 = 36,500 𝐽
Finalmente, aplicando o Princípio do Trabalho e Energia entre a posição 2 e a posição 3, escrevemos,
𝑈2→3 = 𝑇3 − 𝑇2 36,500 = 30𝑣32 − 0
30𝑣32 = 36,500 𝑣3
2 =36,500
30
𝑣32 = 1,2167 𝑣3 = 1,1030 𝑚 𝑠⁄
Prof.: Carlos Arthur Cavalcante 143
4.4 Potência e Eficiência
Potência
Potência é definida como a taxa temporal de realização de trabalho, ou a quantidade de trabalho
realizada na unidade de tempo.
Na seleção de uma máquina ou de um motor, a potência (ou a “velocidade” com que o motor
realiza trabalho) é um critério muito mais importante do que a quantidade de trabalho total a
ser realizado – um “pequeno” motor pode levar “horas” para realizar o mesmo trabalho total
que um motor “maior” ou mais potente realizaria em “segundos”.
Se ∆𝑈 é o trabalho realizado durante o intervalo de tempo ∆𝑡, então a potência média durante
esse intervalo é,
𝑃𝑜𝑡ê𝑛𝑐𝑖𝑎 𝑀é𝑑𝑖𝑎 =∆𝑈
∆𝑡
Fazendo ∆𝑡 tender a zero, obtemos, no limite,
𝑃𝑜𝑡ê𝑛𝑐𝑖𝑎 =𝑑𝑈
𝑑𝑡
Substituindo 𝑑𝑈 por �� ∙ 𝑑𝑟 podemos escrever também que,
𝒫 =��∙𝑑𝑟
𝑑𝑡 𝒫 = �� ∙
𝑑𝑟
𝑑𝑡
𝒫 = �� ∙ �� Produto escalar. 𝒫 = 𝐹𝑣 cos 𝛼
A unidade de potência no SI é,
1𝑊(𝑤𝑎𝑡𝑡) = 1 𝐽 𝑠⁄ = 1 𝑁𝑚 𝑠⁄
Porém, é muito comum que a potência seja expressa em ℎ𝑝 (horse-power), cabendo lembrar
que,
1 ℎ𝑝 = 746 𝑊
Eficiência
A eficiência mecânica de uma máquina é definida como a razão entre o trabalho de saída e o
trabalho de entrada.
𝜂 =𝑈𝑠𝑎í𝑑𝑎
𝑈𝑒𝑛𝑡𝑟𝑎𝑑𝑎
Esta definição de potência baseia-se na hipótese de que o trabalho é realizado a uma taxa
constante. Neste caso, a razão entre os trabalhos de saída e de entrada é igual à razão entre as
taxas de realização dos trabalhos (potências) de saída e de entrada. Neste caso,

Prof.: Carlos Arthur Cavalcante 144
𝜂 =𝑃𝑜𝑡ê𝑛𝑐𝑖𝑎 𝑑𝑒 𝑠𝑎í𝑑𝑎
𝑃𝑜𝑡ê𝑛𝑐𝑖𝑎 𝑑𝑒 𝑒𝑛𝑡𝑟𝑎𝑑𝑎=
𝒫𝑠𝑎í𝑑𝑎
𝒫𝑒𝑛𝑡𝑟𝑎𝑑𝑎
Por causa das perdas de energia devido ao atrito, o trabalho (potência) de saída é sempre menor
do que o trabalho (potência) de entrada (𝒫𝑠𝑎í𝑑𝑎 < 𝒫𝑒𝑛𝑡𝑟𝑎𝑑𝑎). Logo, a eficiência mecânica de
uma máquina é sempre menor do que 1.

Prof.: Carlos Arthur Cavalcante 145
4.4.1 Exemplo-Ilustrativo 37
Problema-Resolvido 13.5 (Beer, Johnston; 9ª Edição)
O elevador 𝐷 e sua carga têm uma massa combinada de 300 𝑘𝑔, enquanto o
contrapeso 𝐶 tem massa de 400 𝑘𝑔. Determine a potência liberada pelo motor
elétrico 𝑀 quando o elevador (a) se move para cima com velocidade constante de
2,5 𝑚/𝑠 e (b) se move com uma velocidade instantânea de 2,5 𝑚/𝑠 e uma
aceleração de 1,0 𝑚/𝑠2, ambas orientadas para cima.
SOLUÇÃO:
O elevador 𝐷 move-se pela ação da força de tração ��𝑀 exercida pelo cabo do motor e pela força de tração ��𝐶
exercida pelo cabo do contrapeso 𝐶.
Como a força ��𝑀 exercida pelo cabo do motor tem o mesmo sentido do vetor velocidade ��𝐷,
a potência librada pelo motor é dada por 𝑃 = 𝐹𝑀𝑣𝐷, de modo que precisamos conhecer o
valor de 𝐹𝑀 e de 𝑣𝐷 nas duas situações.
Observamos ainda que o movimento do elevador 𝐷 é dependente do movimento do
contrapeso 𝐶, e vice-versa. Escolhemos um sistema de coordenadas com o eixo 𝑥 horizontal
positivo para a direita e o 𝑦 vertical, positivo para cima (o posicionamento da origem 𝑂 não tem relevância para
este problema).
Determinação da força ��:
DCL do contrapeso 𝐶 DCL do elevador 𝐷
Equações de Movimento Contrapeso 𝐶 Equações de Movimento Elevador 𝐷
+→ ∑𝐹𝑥 = 𝑚𝐶𝑎𝐶𝑥
0 = 0
+↑ ∑𝐹𝑦 = 𝑚𝐶𝑎𝐶𝑦
2𝐹𝐶 −𝑊𝐶 = 𝑚𝐶(−𝑎𝐶)
+→ ∑𝐹𝑥 = 𝑚𝐷𝑎𝐷𝑥
0 = 0
+↑ ∑𝐹𝑦 = 𝑚𝐷𝑎𝐷𝑦
𝐹𝐶 + 𝐹𝑀 −𝑊𝐷 = 𝑚𝐷(𝑎𝐷)
Obtemos 2 equações com 4 incógnitas (𝐹𝐶, 𝐹𝑀, 𝑎𝐶 e 𝑎𝐷).
2𝐹𝐶 −𝑊𝐶 = −𝑚𝐶𝑎𝐶 Eq. 01
𝐹𝐶 + 𝐹𝑀 −𝑊𝐷 = 𝑚𝐷𝑎𝐷 Eq. 02
Determinação da potência liberada pelo motor elétrico 𝑴 quando o elevador se move para cima com
velocidade constante.
Se o movimento do elevador (e consequentemente do contrapeso) é uniforme, então ocorre que,
𝑦
𝑥 𝑂
𝟒𝟎𝟎𝒈 𝟑𝟎𝟎𝒈
𝑦
𝑥 𝑂
𝟑𝟎𝟎.𝒈 𝟒𝟎𝟎.𝒈
Prof.: Carlos Arthur Cavalcante 146
𝑎𝐶 = 𝑎𝐷 = 0
Assim, podemos escrever,
2𝐹𝐶 −𝑊𝐶 = 0 Eq. 01a
𝐹𝐶 + 𝐹𝑀 −𝑊𝐷 = 0 Eq. 02a
Ficamos com 2 equações e 2 incógnitas (𝐹𝐶 e 𝐹𝑀).
Resolvendo o sistema, encontramos,
𝐹𝑀 = 981 𝑁 𝐹𝐶 = 1962 𝑁
Assim, a potência liberada pelo motor elétrico 𝑀 quando o elevador se move para cima com velocidade constante
de 𝑣𝐷 = 2,5 𝑚/𝑠 é,
𝒫 = 𝐹𝑣𝐷 𝒫 = (981)(2,5) 𝒫 = 2.452,5 𝑊
Determinação da potência liberada pelo motor elétrico 𝑴 quando o elevador se move com uma velocidade
instantânea de 𝟐, 𝟓 𝒎/𝒔 e uma aceleração de 𝟏, 𝟎 𝒎/𝒔𝟐, ambas orientadas para cima
Retomamos as equações,
2𝐹𝐶 −𝑊𝐶 = −𝑚𝐶𝑎𝐶 Eq. 01
𝐹𝐶 + 𝐹𝑀 −𝑊𝐷 = 𝑚𝐷𝑎𝐷 Eq. 02
No movimento acelerado ocorre que 𝑎𝐶 ≠ 0 e 𝑎𝐷 ≠ 0. Como os movimentos do contrapeso e do elevador estão
vinculados pelo cabo, é imediato constatar que,
𝑎𝐷 = 2𝑎𝐶 Além disso, foi dado que, 𝑎𝐷 = 1 𝑚 𝑠2⁄
Assim, podemos escrever que,
𝑊𝐶 − 2𝐹𝐶 = 𝑚𝐶𝑎𝐶 Eq. 01b
𝐹𝐶 + 𝐹𝑀 −𝑊𝐷 = 𝑚𝐷𝑎𝐷 Eq. 02b
2𝑎𝐶 − 𝑎𝐷 = 0 Eq. 03b
𝑎𝐷 = 1 Eq. 04b
𝑚𝐶𝑎𝐶 + 0𝑎𝐷 + 2𝐹𝐶 + 0𝐹𝑀 = 𝑊𝐶 Eq. 01c
0𝑎𝐶 −𝑚𝐷𝑎𝐷 + 1𝐹𝐶 + 1𝐹𝑀 = 𝑊𝐷 Eq. 02c
2𝑎𝐶 − 1𝑎𝐷 + 0𝐹𝐶 + 0𝐹𝑀 = 0 Eq. 03c
0𝑎𝐶 + 1𝑎𝐷 + 0𝐹𝐶 + 0𝐹𝑀 = 1 Eq. 04c
Ficamos com 4 equações e 4 incógnitas (𝐹𝐶 , 𝐹𝑀, 𝑎𝐶 e 𝑎𝐷).
Resolvendo o sistema, além obviamente de “encontrar” 𝑎𝐶 = 1 2⁄ e 𝑎𝐷 = 1, encontramos,
𝐹𝑀 = 1.381 𝑁 𝐹𝐶 = 1862 𝑁
Assim, a potência liberada pelo motor elétrico 𝑀 quando o elevador se move com uma velocidade instantânea de
2,5 𝑚/𝑠 e uma aceleração de 1,0 𝑚/𝑠2, ambas orientadas para cima, é,
A potência da força �� é,
𝒫 = 𝐹𝑣𝐷 𝒫 = (1.381)(2,5) 𝒫 = 3.452,5 𝑊

Prof.: Carlos Arthur Cavalcante 147
4.5 Energia Potencial
Energia Potencial da Força Peso 𝑾 = 𝒎𝒈.
Vamos considerar novamente um corpo de peso W que se move ao
longo de uma trajetória curvilínea desde uma posição 𝐴1 (com
elevação 𝑦1), até a posição 𝐴2 (com elevação de 𝑦2).
Deduzimos que o trabalho da força peso W durante este deslocamento
é dado por 𝑈1→2�� = −𝑊∆𝑦, assumindo eixo 𝑦 vertical positivo para
cima.
𝑈1→2�� = −𝑊∆𝑦 𝑈1→2
�� = −𝑊(𝑦2 − 𝑦1) 𝑈1→2�� = −𝑊𝑦2 +𝑊𝑦1
𝑈1→2�� = 𝑊𝑦1 −𝑊𝑦2
Assim, o trabalho da força peso �� é obtido subtraindo-se o valor da função 𝑊𝑦 correspondente
à posição inicial do corpo, do valor da função 𝑊𝑦, correspondente à sua posição final.
Concluímos que o trabalho da força peso �� é independente da trajetória percorrida pela
partícula e depende apenas dos valores inicial e final da função 𝑊𝑦.
A função 𝑾𝒚 é denominada Energia Potencial da força peso �� e é representada por 𝑉𝑊.
Assim, podemos escrever que,
𝑈1→2�� = 𝑉𝑊1 − 𝑉𝑊2 Onde, 𝑉𝑊 é a função da variável 𝑦 dada por 𝑉𝑊 = 𝑊𝑦.
Se 𝑉𝑊2 > 𝑉𝑊1 então a energia potencial aumenta durante o
deslocamento do corpo desde a posição inicial até a posição final,
como é o caso ilustrado na figura ao lado. Neste caso, o trabalho do
peso �� é negativo (𝑈1→2�� < 0) e o corpo se desloca no sentido de se
afastar verticalmente da superfície do planeta (𝑦2 > 𝑦1).
Se 𝑉𝑊2 < 𝑉𝑊1, então a energia potencial diminui durante o
deslocamento do corpo desde a posição inicial até a posição final.
Neste caso, o trabalho do peso �� é positivo (𝑈1→2�� > 0) e o corpo se desloca no sentido de se
aproximar verticalmente da superfície do planeta (𝑦2 < 𝑦1).
Logo a variação da energia potencial 𝑉𝑊 fornece uma medida do trabalho que a força peso ��
pode realizar sobre o corpo. E uma vez que apenas a variação da energia potencial (não o valor
absoluto de 𝑉𝑊) está envolvido na equação 𝑈1→2�� = 𝑉𝑊1 − 𝑉𝑊2, o Nível de Referência a partir
do qual a elevação 𝑦 é medido pode ser escolhido arbitrariamente.

Prof.: Carlos Arthur Cavalcante 148
Energia Potencial da Força Elástica 𝑭𝑬 = 𝒌𝒙.
Vimos que o trabalho de uma força elástica ��𝐸 exercida por uma
mola sobre um corpo é dado por,
𝑈1→2��𝐸 =
1
2𝑘𝑥1
2 −1
2𝑘𝑥2
2
Assim, o trabalho da força elástica ��𝐸 pode ser obtido
subtraindo-se o valor da função 1
2𝑘𝑥2, correspondente à posição
inicial do corpo (𝑥1), do valor da função 1
2𝑘𝑥2, correspondente
à sua posição final (𝑥2). Concluímos que o trabalho da força elástica ��𝐸 é independente da
trajetória percorrida pela partícula e depende apenas dos valores inicial e final da função 1
2𝑘𝑥2,
isto é, depende apenas das deflexões inicial e final da mola em relação à sua posição neutra.
A função 𝟏
𝟐𝒌𝒙𝟐 é denominada Energia Potencial da Força Elástica ��𝑬 e é representada por
𝑉𝐸. Assim, podemos escrever que,
𝑈1→2��𝐸 = 𝑉𝐸1 − 𝑉𝐸2 Onde, 𝑉𝐸 =
1
2𝑘𝑥2
Se 𝑉𝐸2 > 𝑉𝐸1, então a energia potencial da força elástica aumentou durante o deslocamento do
corpo da posição inicial para a posição final. Neste caso, o trabalho da força elástica ��𝐸 é
negativo (𝑈1→2��𝐸 < 0) e a força elástica agiu no sentido de reduzir a energia cinética.
Se 𝑉𝐸2 < 𝑉𝐸1, então a energia potencial da força elástica diminui durante o deslocamento do
corpo da posição inicial para a posição final. Neste caso, o trabalho da força elástica ��𝐸 é
positivo (𝑈1→2��𝐸 > 0) e a força elástica agiu no sentido de aumentar a energia cinética do corpo.
Observar que a expressão anterior para 𝑉𝐸 =1
2𝑘𝑥2 (Energia Potencial da força elástica), só é
aplicável para valores de 𝑥 medidos a partir de posição não deformada da mola.
Observar também que a equação 𝑈1→2��𝐸 =
𝑉𝐸1 − 𝑉𝐸2 pode ser utilizada mesmo quando a
mola for girada em torno de sua extremidade
fixa pois, neste caso, o trabalho da força
elástica também dependerá apenas das
deflexões inicial e final da mola.

Prof.: Carlos Arthur Cavalcante 149
4.6 Forças Conservativas
O conceito de energia potencial pode ser usado para outras forças envolvidas além da força
peso, da força gravitacional e da força elástica. O conceito de energia potencial permanece
válido sempre que o trabalho da força considerada for independente da trajetória percorrida
pelo seu ponto de aplicação à medida que este ponto de aplicação se desloca juntamente com
o corpo. Tais forças são denominadas forças conservativas.
Uma força �� é uma força conservativa se o trabalho que ela realiza sobre a partícula 𝑈1→2�� é for
independente da trajetória percorrida pela partícula ao se deslocar da posição 𝐴1 até a posição
𝐴2. Se a força �� é uma força conservativa, então,
𝑈1→2�� = 𝑉(𝑥1, 𝑦1, 𝑧1) − 𝑉(𝑥2, 𝑦2, 𝑧2)
Ou de modo resumido
𝑈1→2�� = 𝑉1 − 𝑉2
A função 𝑉(𝑥, 𝑦, 𝑧) é denominada energia potencial ou
função potencial da força conservativa ��.
Notemos que se 𝐴2 coincide com 𝐴1, isto é, se a partícula
descreve uma trajetória fechada, tem-se 𝑉1 = 𝑉2 e o trabalho é
nulo.
Logo, para qualquer força conservativa �� podemos escrever
∮ �� ∙ 𝑑𝑟 = 0
Aplicando a equação 𝑈1→2�� = 𝑉(𝑥1, 𝑦1, 𝑧1) − 𝑉(𝑥2, 𝑦2, 𝑧2) entre dois pontos
infinitesimalmente próximos 𝐴(𝑥, 𝑦, 𝑧) e 𝐴′(𝑥 + 𝑑𝑥, 𝑦 + 𝑑𝑦, 𝑧 + 𝑑𝑧), podemos expressar
o trabalho elementar 𝑑𝑈, correspondente aos deslocamento infinitesimal 𝑑𝑟 de 𝐴 até 𝐴′, por:
𝑑𝑈 = 𝑉(𝑥, 𝑦, 𝑧) − 𝑉(𝑥 + 𝑑𝑥, 𝑦 + 𝑑𝑦, 𝑧 + 𝑑𝑧)
Ou,
𝑑𝑈 = −𝑑𝑉(𝑥, 𝑦, 𝑧) O trabalho elementar de uma força conservativa é um diferencial exato.
Uma vez que 𝑑𝑈 = ��𝑑𝑟, substituindo temos:
��𝑑𝑟 = −𝑑𝑉(𝑥, 𝑦, 𝑧)
De modo que
𝐹𝑥𝑑𝑥 + 𝐹𝑦𝑑𝑦 + 𝐹𝑧𝑑𝑧 = −𝑑𝑉(𝑥, 𝑦, 𝑧)
E relembrando que

Prof.: Carlos Arthur Cavalcante 150
𝑑𝑉(𝑥, 𝑦, 𝑧) =𝜕𝑉
𝜕𝑥𝑑𝑥 +
𝜕𝑉
𝜕𝑦𝑑𝑦 +
𝜕𝑉
𝜕𝑧𝑑𝑧
Resulta:
𝐹𝑥 = −𝜕𝑉
𝜕𝑥 𝐹𝑦 = −
𝜕𝑉
𝜕𝑦 𝐹𝑧 = −
𝜕𝑉
𝜕𝑧
Fica claro que as componentes da força conservativa �� devem ser funções das coordenadas
𝑥, 𝑦, 𝑧 e a condição necessária (mas não suficiente) para que uma força seja conservativa é que
ela dependa apenas do seu ponto de aplicação.
As relações
𝐹𝑥 = −𝜕𝑉
𝜕𝑥 𝐹𝑦 = −
𝜕𝑉
𝜕𝑦 𝐹𝑧 = −
𝜕𝑉
𝜕𝑧
Podem ser expressas de modo mais conciso como
�� = 𝐹𝑥𝑖 + 𝐹𝑦𝑗 + 𝐹𝑧 �� = − (𝜕𝑉
𝜕𝑥𝑖 +
𝜕𝑉
𝜕𝑦𝑗 +
𝜕𝑉
𝜕𝑧��)
O vetor entre parênteses é conhecido como gradiente de uma função escalar 𝑉 e é representado
por 𝑔𝑟𝑎𝑑 𝑉
Assim, para qualquer força conservativa, escrevemos
�� = 𝑔𝑟𝑎𝑑 𝑉

Prof.: Carlos Arthur Cavalcante 151
4.7 Conservação de Energia
Quando uma partícula se desloca apenas sob a ação de forças conservativas, então:
O trabalho total realizado pelas forças (que no caso são forças conservativas) é o somatório dos
trabalhos por elas realizados e esse trabalho total é também o trabalho realizado pela força
resultante a qual é também, uma força conservativa. Assim, o trabalho total realizado pelas
forças pelas forças conservativas ou o trabalho realizado pela força conservativa resultante é,
𝑈1→2�� = 𝑉1 − 𝑉2
Como se trata do trabalho total realizado podemos aplicar o Princípio do Trabalho e Energia
escrevendo,
𝑈1→2�� = 𝑇2 − 𝑇1
Assim, se apenas forças conservativas atuam sobre a partícula ocorrerá que,
𝑉1 − 𝑉2 = 𝑇2 − 𝑇1 𝑉1 + 𝑇1 = 𝑉2 + 𝑇2
Ou seja, ocorrerá que,
𝐸𝑀 = 𝑉 + 𝑇 = 𝑐𝑡𝑒
Como exemplo considere o pêndulo já analisado anteriormente e que
é liberado com velocidade nula em 𝐴1 para oscilar em um plano
vertical.
𝑉1 = 𝑊𝑙 𝑇1 = 0 𝐸𝑀1 = 𝑉1 + 𝑇1 = 𝑐𝑡𝑒 𝐸𝑀1 = 𝑊𝑙
𝑉2 = 0 𝑇2 =1
2𝑚𝑣2
2 =1
2
𝑊
𝑔(2𝑔𝑙) = 𝑊𝑙
𝐸𝑀2 = 𝑉2 + 𝑇2 = 𝑐𝑡𝑒 𝐸𝑀2 = 𝑊𝑙
Assim, quando uma partícula se move apenas sob a ação de forças conservativas, a Energia
Mecânica total 𝐸 é constante.
Forças de atrito não são forças conservativas. O trabalho de uma força de atrito não pode ser
expresso como a variação de uma energia potencial. O trabalho de uma força de atrito depende
da trajetória percorrida pelo seu ponto de aplicação. Enquanto o trabalho de uma força
conservativa 𝑈1→2 = 𝑉1 − 𝑉2 pode ser positivo ou negativo de acordo com o sentido do
movimento, o trabalho de uma força de atrito é sempre negativo. A Energia Mecânica de um
sistema envolvendo atrito sempre diminui.
Dizemos que a Energia Mecânica é “dissipada” pelo atrito porque ele converte parte desta
energia mecânica em outras formas de energia, como energia térmica, energia sonora etc.
Entretanto, se todas as formas de energia (térmica, sonora, química, eletrica, etc.) forem

Prof.: Carlos Arthur Cavalcante 152
consideradas, a energia do sistema pode ser considerada constante e o princípio da conservação
de energia permanece válido.

Prof.: Carlos Arthur Cavalcante 153
4.8 Exemplos Ilustrativos
4.8.1 Exemplo-Ilustrativo 38
Problema-Resolvido 13.6 (Beer, Johnston; 9ª Edição)
Um colar de 1,5 𝑘𝑔 está preso a uma mola e desliza sem atrito ao
longo de uma haste circular em um plano horizontal. A mola tem um
comprimento indeformado de 150 𝑚𝑚 e uma constante de
400 𝑁/𝑚. Sabendo que o colar está em equilíbrio no ponto 𝐴 e recebe
um leve impulso para se mover, determine a velocidade do colar (a)
quando ele passa por 𝐵, e, (b) quando passa por 𝐶.
SOLUÇÃO:
O colar parte do ponto 𝐴 com 𝑣𝐴 = 0. Neste ponto a energia potencial elástica
é máxima e igual à energia mecânica do sistema. Não há forças dissipativas
atuando, de modo que há conservação de energia e podemos aplicar o Princípio
da Conservação de Energia. Adotamos o sistema de coordenadas com centro
em 𝑂, conforme ilustrado na figura ao lado.
Velocidade do colar no ponto 𝑩.
Energia Mecânica no ponto 𝐴:
𝑇𝐴 =1
2𝑚𝑣A
2 =1
2𝑚(0)2 𝑇𝐴 = 0
𝑉𝐸𝐴 =1
2𝑘𝑙𝐴
2 Onde 𝑙𝐴 é a elongação da mola no ponto 𝐴, medida a partir da posição neutra da mola.
𝑙𝐴 = (0,175 + 0,250) − 0,150 𝑙𝐴 = 0,425 − 0,150 𝑙𝐴 = 0,275 𝑚
𝑉𝐸𝐴 =1
2(400)(0,275)2 𝑉𝐸𝐴 = 15,125 𝐽
𝐸𝑀𝐴 = 𝑇𝐴 + 𝑉𝐴 𝐸𝑀𝐴 = 0 + 15,125 𝐸𝑀𝐴 = 15,125 𝐽
Energia Mecânica no ponto 𝐵:
𝑇𝐵 =1
2𝑚𝑣B
2 𝑇𝐵 = 0,75𝑣B2
𝑉𝐸𝐵 =1
2𝑘𝑙𝐵
2 Onde 𝑙𝐵 é a elongação da mola no ponto 𝐵, medida a partir da posição neutra da mola.
𝑙𝐵 = √(0,175 + 0,125)2 + (0,125)2 − 0,150 𝑙𝐵 = √(0,300)
2 + (0,125)2 − 0,150
𝑙𝐵 = √0,105625 − 0,150 𝑙𝐵 = 0,175 𝑚
𝑉𝐸𝐵 =1
2(400)(0,175)2 𝑉𝐸𝐵 = 6,125 𝐽
𝐸𝑀𝐵 = 𝑇𝐵 + 𝑉𝐵 𝐸𝑀𝐵 = 0,75𝑣B2 + 6,125
Aplicando o Princípio da Conservação de Energia, escrevemos,
𝐸𝑀𝐴 = 𝐸𝑀𝐵 15,125 = 0,75𝑣B2 + 6,125
0,75𝑣B2 = 15,125 − 6,125
3
4𝑣B
2 = 9
𝑦
𝑥
Prof.: Carlos Arthur Cavalcante 154
𝑣B2 = 12 𝑣B = √12
𝑣B = 3,4641 𝑚 𝑠⁄
Velocidade do colar no ponto 𝑪.
Energia Mecânica no ponto 𝐴:
𝐸𝑀𝐴 = 15,125 𝐽
Energia Mecânica no ponto 𝐶:
𝑇𝐶 =1
2𝑚𝑣C
2 𝑇𝐶 = 0,75𝑣C2
𝑉𝐸𝐶 =1
2𝑘𝑙𝐶
2 Onde 𝑙𝐶 é a elongação da mola no ponto 𝐶, medida a partir da posição neutra da mola.
𝑙𝐶 = (0,175 − 0,150) 𝑙𝐶 = 0,025 𝑚
𝑉𝐸𝐶 =1
2(400)(0,025)2 𝑉𝐸𝐶 = 0,125 𝐽
𝐸𝑀𝐶 = 𝑇𝐶 + 𝑉𝐶 𝐸𝑀𝐶 = 0,75𝑣C2 + 0,125
Aplicando o Princípio da Conservação de Energia, escrevemos,
𝐸𝑀𝐴 = 𝐸𝑀𝐶 15,125 = 0,75𝑣C2 + 0,125
0,75𝑣C2 = 15,125 − 0,125
3
4𝑣C
2 = 15
𝑣C2 = 20 𝑣C = √20
𝑣C = 4,4721 𝑚 𝑠⁄

Prof.: Carlos Arthur Cavalcante 155
4.8.2 Exemplo-Ilustrativo 39
Problema-Resolvido 13.7 (Beer, Johnston; 9ª Edição)
Um bloco de massa 𝑚 = 0,25 𝑘𝑔 é empurrado contra a mola
em 𝐴 e liberado do repouso. Desprezando o atrito, determine
a menor deflexão da mola para que o bloco dê a volta em torno
do laço 𝐴𝐵𝐶𝐷𝐸 e permaneça o tempo todo em contato com
ele.
SOLUÇÃO:
Apenas forças conservativas estão presentes: a força peso �� e a força elástica ��𝐸𝑙𝑎𝑠𝑡 . Aplicamos o Princípio da
Conservação de Energia, adotamos Nível de Referência horizontal passando pelo ponto 𝐴.
Energia Mecânica no ponto 𝐴:
𝑇𝐴 =1
2𝑚𝑣A
2 =1
2𝑚(0)2 𝑇𝐴 = 0
𝑉𝑊𝐴 = 𝑊𝑦𝐴 𝑉𝑊𝐴 = 𝑊(0) 𝑉𝑊𝐴 = 0
𝑉𝐸𝐴 =1
2𝑘𝑙𝐴
2 𝑉𝐸𝐴 =
1
2600𝑙𝐴
2 𝑉𝐸𝐴 = 300𝑙𝐴
2
Onde 𝑙𝐴 é a deformação da mola no ponto 𝐴 medida a partir da posição indeformada da mola.
𝐸𝑀𝐴 = 0 + 0 + 300𝑙𝐴2 𝐸𝑀𝐴 = 300𝑙𝐴
2
Energia Mecânica no ponto 𝐷:
𝑇𝐷 =1
2𝑚𝑣D
2 𝑇𝐷 = 0,125𝑣D2
𝑉𝑊𝐷 = 𝑊𝑦𝐷 𝑉𝑊𝐷 = (0,25)(9,81)(1) 𝑉𝑊𝐷 = 2,4525 𝐽
𝑉𝐸𝐷 = 0
𝐸𝑀𝐷 = 0,125𝑣D2 + 2,4525 + 0 𝐸𝑀𝐷 = 0,125𝑣D
2 + 2,4525
Aplicando o Princípio da Conservação de Energia, escrevemos,
𝐸𝑀𝐴 = 𝐸𝑀𝐷 300𝑙𝐴2 = 0,125𝑣D
2 + 2,4525
Para que o bloco dê a volta em torno do laço 𝐴𝐵𝐶𝐷𝐸 e permaneça o tempo todo em contato
com ele deve ocorrer que a força �� exercida pelo laço sobre o bloco seja igual ou maior
do que zero. Fazendo �� = 0 no ponto 𝐷 encontramos a menor velocidade possível 𝑣D.
+↓ ∑𝐹𝑛 = 𝑚𝑎𝑛 𝑊 = 𝑚𝑎𝑛
𝑚𝑔 = 𝑚𝑎𝑛 𝑎𝑛 = 𝑔
𝑣D
2
𝜌= 𝑔 𝑣D
2 = 𝜌𝑔 𝑣D2 = (0,5)(9,81)
𝑣D2 = 4,905 𝑣D = √4,905 𝑣D = 2,2147 𝑚 𝑠⁄
Substituindo o valor de 𝑣D2, obtemos,
𝑘 = 600 𝑁 𝑚⁄ 500 𝑚𝑚
𝑚 = 0,25 𝑘𝑔

Prof.: Carlos Arthur Cavalcante 156
300𝑙𝐴2 = 0,125(4,905) + 2,4525
Resolvendo para 𝑙𝐴, encontramos,
300𝑙𝐴2 = 0,125(4,905) + 2,4525 300𝑙𝐴
2 = 3,0656
𝑙𝐴2 = 0,0102 𝑙𝐴 = √0,0102
𝑙𝐴 = 0,1011 𝑚

Prof.: Carlos Arthur Cavalcante 157
5 Cinética de Partículas: Método do Impulso e Quantidade de Movimento
5.1 Introdução
Um terceiro método básico para solução de problemas que tratam dos movimentos partículas é
o método baseado no Princípio do Impulso e Quantidade de Movimento. Geralmente é usado
para resolver problemas que envolvem força, massa, velocidade e tempo. É especialmente útil
na solução de problemas que envolvem movimentos impulsivos e impactos.
5.2 Quantidade de Movimento Linear de uma Partícula. Taxa de Variação da
Quantidade de Movimento Linear
Substituindo, na equação da 2ª Lei de Newton, a aceleração �� pela derivada da velocidade,
temos:
�� = 𝑚�� �� = 𝑚𝑑��
𝑑𝑡 Onde �� é a força resultante.
Se a massa 𝑚 for constante, podemos fazer
�� =𝑑(𝑚��)
𝑑𝑡
O vetor 𝑚�� é denominado quantidade de movimento linear da partícula. Assim, podemos
afirmar que a força resultante que atua sobre uma partícula de massa constante é igual à
taxa de variação da quantidade de movimento linear dessa partícula.
Representando por �� a quantidade de movimento linear da partícula, escrevemos,
�� = 𝑚��
Representando por �� (�� ponto) a derivada de �� em relação ao tempo 𝑡, podemos escrever a
equação da 2ª Lei de uma maneira alternativa,
�� = ��

Prof.: Carlos Arthur Cavalcante 158
As equações �� =𝑑(𝑚��)
𝑑𝑡 e �� = ��
são válidas quando a massa 𝑚 é constante. Portanto, não devem
ser utilizadas para resolver problemas envolvendo o movimento de corpos tais como foguetes
e outros corpos que perdem ou ganham massa durante o seu movimento, ainda que seus
movimentos possam ser modelados como movimentos de pontos materiais. Tais problemas são
tratados no estudo de sistemas de partículas.
Por fim, vale mencionar o Princípio da Conservação da Quantidade de Movimento Linear: se
a força resultante sobre uma partícula é zero, a quantidade de movimento linear da partícula
permanece constante tanto em intensidade, quanto em direção e sentido.
�� = 0 ⟹ 𝑑��
𝑑𝑡= 0 ⟹ �� = 𝑐𝑜𝑛𝑠𝑡𝑎𝑛𝑡𝑒
5.3 Princípio do Impulso e Quantidade de Movimento
Considere uma partícula de massa 𝑚 submetida a uma força resultante ��. Conforme já vimos,
a 2ª Lei de Newton pode ser expressa na forma,
�� =𝑑��
𝑑𝑡 �� =
𝑑(𝑚��)
𝑑𝑡
Multiplicando ambos os termos por 𝑑𝑡, obtemos,
��𝑑𝑡 = 𝑑(𝑚��)
Integrando esta última expressão de um instante 𝑡1 até um instante 𝑡2, obtemos,
∫ ��𝑑𝑡𝑡2𝑡1
= 𝑚∫ 𝑑����2��1
∫ ��𝑑𝑡𝑡2𝑡1
= 𝑚��2 −𝑚��1
Assim, podemos escrever que,
𝑚��1 + ∫ ��𝑑𝑡𝑡2𝑡1
= 𝑚��2
A integral ∫ ��𝑑𝑡𝑡2𝑡1
é um vetor conhecida como o Impulso Linear da força �� ou, simplesmente,
Impulso da força ��, durante o intervalo de tempo ∆𝑡 = 𝑡2 − 𝑡1.
𝐼𝑚𝑝 1→2 = ∫ ��𝑑𝑡
𝑡2𝑡1
Vetor Impulso da força �� durante o intervalo de tempo 𝑡2 − 𝑡1.
Assim, o vetor quantidade de movimento linear inicial da
partícula (��1 = 𝑚��1), somado ao vetor Impulso da força
�� (𝐼𝑚𝑝 1→2), resulta no vetor quantidade de movimento
linear final da partícula (��2 = 𝑚��2),
𝑚��1 + 𝐼𝑚𝑝 1→2 = 𝑚��2
Decompondo �� em suas componentes retangulares, escrevemos,

Prof.: Carlos Arthur Cavalcante 159
𝐼𝑚𝑝 1→2 = (∫ 𝐹𝑥𝑑𝑡
𝑡2𝑡1
) 𝑖 + (∫ 𝐹𝑦𝑑𝑡𝑡2𝑡1
) 𝑗 + (∫ 𝐹𝑧𝑑𝑡𝑡2𝑡1
) ��
Pode-se notar então que as componentes do Impulso da força �� são,
respectivamente, iguais às áreas sob as curvas obtidas plotando as
componentes 𝐹𝑥, 𝐹𝑦 e 𝐹𝑧 em função de 𝑡.
Assim, se a força �� for constante (intensidade, direção e sentido
constantes), então o impulso será dado pelo vetor ��(𝑡2 − 𝑡1), isto é, o
impulso será um vetor que tem a mesma direção e sentido da força �� e
intensidade igual 𝐹∆𝑡.
Em unidades SI, o módulo ou intensidade do vetor impulso de uma força é
expresso em 𝑁𝑠 (newton vezes segundo) ou 𝑘𝑔𝑚 𝑠⁄ , a mesma unidade para
quantidade de movimento linear.
𝑁𝑠 = (𝑘𝑔𝑚 𝑠2⁄ )𝑠 = 𝑘𝑔𝑚 𝑠⁄
Observe-se que, enquanto a Energia Cinética e o Trabalho são grandezas escalares, a
Quantidade de Movimento (da partícula) e o Impulso (da força ��) são grandezas vetoriais.
Para obter uma solução analítica é necessário utilizar as equações das componentes
correspondentes no sistema de coordenadas adotado
𝑚𝑣𝑥1 + ∫ 𝐹𝑥𝑑𝑡𝑡2𝑡1
= 𝑚𝑣𝑥2
𝑚𝑣𝑦1 + ∫ 𝐹𝑦𝑑𝑡𝑡2𝑡1
= 𝑚𝑣𝑦2
𝑚𝑣𝑧1 + ∫ 𝐹𝑧𝑑𝑡𝑡2𝑡1
= 𝑚𝑣𝑧2
Quando diversas forças agem sobre uma mesma partícula, o vetor impulso de cada força deve
ser considerado. Expressamos isso escrevendo,
𝑚��1 + ∑ 𝐼𝑚𝑝 1→2 = 𝑚��2
Novamente, a equação obtida representa uma relação entre grandezas vetoriais, de modo que
para obter uma solução analítica, ela deve ser substituída pelas equações correspondentes das
suas componentes (𝑥, 𝑦, 𝑧).
Quando um problema envolve mais de uma partícula, cada partícula pode ser considerada
separadamente e a equação 𝑚��1 + ∑ 𝐼𝑚𝑝 1→2 = 𝑚��2 pode ser escrita para cada uma delas.
Podemos também somar vetorialmente as quantidades de movimento de todas as partículas e
os impulsos de todas as forças envolvidas. Escrevemos então,
∑𝑚��1 + ∑𝐼𝑚𝑝 1→2 = ∑𝑚��2
Como as forças de interação entre as partículas (forças internas ao sistema de partículas),
formam pares de ação e reação exercidas pelas partículas entre si, e como o intervalo de tempo

Prof.: Carlos Arthur Cavalcante 160
de 𝑡1 a 𝑡2 é comum para todas as forças envolvidas, os impulsos das forças de ação e reação se
cancelam, e apenas os impulsos das forças externas precisam ser considerados8.
Se nenhuma força externa é exercida sobre as partículas, ou de modo mais geral, se a soma das
forças externas é nula, todas as partículas estarão em movimento retilíneo uniforme, o impulso
será nulo (∑ 𝐼𝑚𝑝 1→2 = 0) e a quantidade de movimento no instante 𝑡1 (��1 = 𝑚��1) será igual à
quantidade de movimento no instante 𝑡2 (��2 = 𝑚��2). Isto é, haverá conservação da quantidade
de movimento e a equação reduz-se a,
∑𝑚��1 = ∑𝑚��2
Como exemplo consideremos dois barcos de massa 𝑚𝐴 e 𝑚𝐵, inicialmente em repouso e sendo
puxados juntos. Desprezando a resistência (atrito) da água, as únicas forças externas atuando
em cada barco são a força peso e a força de empuxo da água, as quais, respectivamente a cada
um deles, tem resultante nula. Em outras palavras, a soma vetorial das forças externas que atuam
sobre as partículas (barcos) é zero – as forças externas não geram impulso. E como os impulsos
das forças internas (ação e reação) se cancelam mutuamente, há conservação da quantidade de
movimento e podemos escrever,
∑𝑚��1 = ∑𝑚��2
𝑚𝐴𝑣𝐴1 +𝑚𝐵𝑣𝐵1 = 𝑚𝐴𝑣𝐴2 +𝑚𝐵𝑣𝐵2
0 + 0 = 𝑚𝐴𝑣𝐴2 +𝑚𝐵𝑣𝐵2
𝑚𝐴𝑣𝐴2 = −𝑚𝐵𝑣𝐵2
Detalhamento:
Notar que se trata de uma equação vetorial de modo que a obtenção de uma solução analítica
requer que as relações sejam expressas em termos de suas componentes.
Quantidade de Movimento Inicial ��1 de cada partícula:
��𝐴1 = 𝑚𝐴��𝐴1
𝐿𝐴𝑥1 = 𝑚𝐴𝑣𝐴𝑥1 𝐿𝐴𝑥1 = 0
𝐿𝐴𝑦1 = 𝑚𝐴𝑣𝐴𝑦1 𝐿𝐴𝑦1 = 0
��𝐴1 = 0𝑖 + 0𝑗
��𝐵1 = 𝑚𝐵��𝐵1
𝐿𝐵𝑥1 = 𝑚𝐵𝑣𝐵𝑥1 𝐿𝐵𝑥1 = 0
𝐿𝐵𝑦1 = 𝑚𝐵𝑣𝐵𝑦1 𝐿𝐵𝑦1 = 0
��𝐵1 = 0𝑖 + 0𝑗
8 Enquanto a soma dos vetores impulso das forças de ação e reação é sempre um vetor nulo, a soma dos trabalhos
realizados pelas forças de ação e reação é nula apenas em condições especiais como, por exemplo, quando os
corpos envolvidos estiverem conectados por cordas inextensíveis ou barras rígidas, de modo a terem
deslocamentos coerentes com essas ligações.

Prof.: Carlos Arthur Cavalcante 161
Quantidade de Movimento Inicial Total
��1 = ��𝐴1 + ��𝐵1
��1 = (0𝑖 + 0𝑗) + (0𝑖 + 0𝑗)
��1 = 0𝑖 + 0𝑗
Quantidade de Movimento Final ��2 de cada partícula:
��𝐴2 = 𝑚𝐴��𝐴2
𝐿𝐴𝑥2 = 𝑚𝐴𝑣𝐴𝑥2 𝐿𝐴𝑥2 = 𝑚𝐴𝑣𝐴𝑥2
𝐿𝐴𝑦2 = 𝑚𝐴𝑣𝐴𝑦2 𝐿𝐴𝑦2 = 0
��𝐴2 = (𝑚𝐴𝑣𝐴𝑥2)𝑖 + 0𝑗
��𝐵2 = 𝑚𝐵��𝐵2
𝐿𝐵𝑥2 = 𝑚𝐵𝑣𝐵𝑥2 𝐿𝐵𝑥2 = 𝑚𝐵𝑣𝐵𝑥2
𝐿𝐵𝑦2 = 𝑚𝐵𝑣𝐵𝑦2 𝐿𝐵𝑦2 = 0
��𝐵2 = (𝑚𝐵𝑣𝐵𝑥2)𝑖 + 0𝑗
Quantidade de Movimento Final Total
��2 = ��𝐴2 + ��𝐵2
��2 = (𝑚𝐴𝑣𝐴𝑥2𝑖 + 0𝑗) + (𝑚𝐵𝑣𝐵𝑥2𝑖 + 0𝑗)
��2 = (𝑚𝐴𝑣𝐴𝑥2 +𝑚𝐵𝑣𝐵𝑥2)𝑖 + 0𝑗
Conservação da Quantidade de Movimento:
��1 = ��2
0𝑖 + 0𝑗 = (𝑚𝐴𝑣𝐴𝑥2 +𝑚𝐵𝑣𝐵𝑥2)𝑖 + 0𝑗
𝑚𝐴𝑣𝐴𝑥2 +𝑚𝐵𝑣𝐵𝑥2 = 0
𝑚𝐴𝑣𝐴𝑥2 = −𝑚𝐵𝑣𝐵𝑥2
0 = 0

Prof.: Carlos Arthur Cavalcante 162
5.4 Movimento Impulsivo
Uma força que age sobre uma partícula, durante um intervalo de tempo muito curto, mas que é
grande o suficiente para causar uma mudança significativa na Quantidade de Movimento de
uma partícula é chamada de força impulsiva e o movimento produzido é denominado
movimento impulsivo.
Por exemplo, quando uma bola de beisebol é golpeada, o
contato entre o bastão e a bola ocorre durante um intervalo
de tempo muito curto, mas o valor médio da força de
golpe é muito grande, e o impulso ��∆𝑡 é grande o bastante
para alterar o sentido do movimento da bola.
Quando forças impulsivas agem sobre uma partícula, a equação 𝑚��1 + ∑ 𝐼𝑚𝑝 1→2 = 𝑚��2 se
torna,
𝑚��1 + ∑ ��∆𝑡 = 𝑚��2
Qualquer força não impulsiva pode ser desprezada pois o impulso correspondente ��∆𝑡 é
desprezível. Isto é, considera-se que o impulso resultante das forças que agem sobre a partícula
é apenas a soma vetorial dos impulsos das forças impulsivas (dados por ��∆𝑡) e que os impulsos
das forças não impulsivas podem ser desprezados. Forças não impulsivas podem incluir o peso
do corpo, a força exercida por uma mola, ou qualquer outra força conhecida que seja
considerada pequena quando comparada com as forças impulsivas envolvidas. No exemplo
acima, ilustrando uma bola de beisebol sendo golpeada por um bastão, o impulso da força peso
�� foi considerado desprezível (��∆𝑡~0).
O método do Impulso e Quantidade de Movimento é particularmente eficaz na análise de
movimentos impulsivos pois envolve apenas as velocidades inicial e final da partícula e os
impulsos das forças impulsivas atuando sobre ela. A aplicação direta da 2ª Lei de Newton, por
outro lado, exigiria a determinação das forças como função do tempo e a integração das
equações de movimento sobre o intervalo de tempo ∆𝑡.
No caso de diversas partículas em movimento impulsivo, a equação ∑𝑚��1 + ∑𝐼𝑚𝑝 1→2 =
∑𝑚��2 se reduz a
∑𝑚��1 + ∑ ��∆𝑡 = ∑𝑚��2
Onde apenas as forças impulsivas externas são consideradas.
Se todas as forças externas que agem sobre as partículas forem não impulsivas, a quantidade de
movimento total das partículas se conserva e a equação se reduz a,
∑𝑚��1 = ∑𝑚��2
Tal situação ocorre, por exemplo, quando duas partículas que se movem livremente colidem
uma com a outra. A Quantidade de Movimento total das partículas geralmente se conserva, mas
a energia total, em geral, não se conserva.
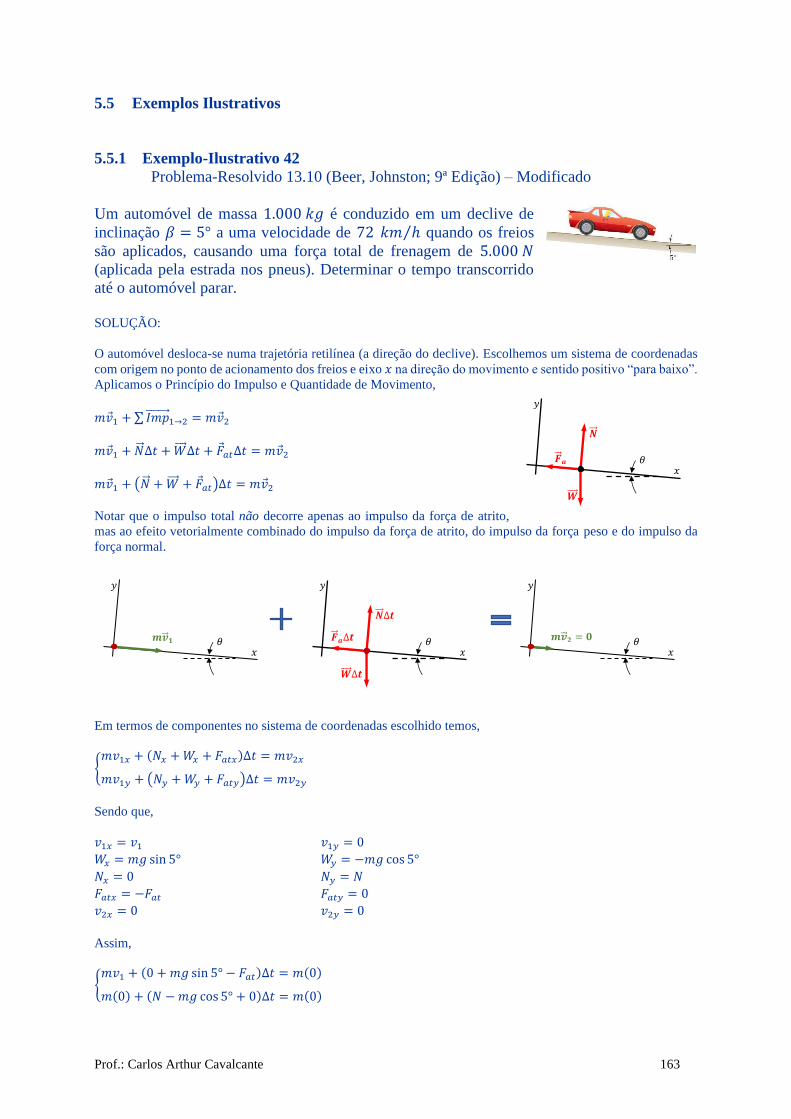
Prof.: Carlos Arthur Cavalcante 163
5.5 Exemplos Ilustrativos
5.5.1 Exemplo-Ilustrativo 42
Problema-Resolvido 13.10 (Beer, Johnston; 9ª Edição) – Modificado
Um automóvel de massa 1.000 𝑘𝑔 é conduzido em um declive de
inclinação 𝛽 = 5° a uma velocidade de 72 𝑘𝑚 ℎ⁄ quando os freios
são aplicados, causando uma força total de frenagem de 5.000 𝑁
(aplicada pela estrada nos pneus). Determinar o tempo transcorrido
até o automóvel parar.
SOLUÇÃO:
O automóvel desloca-se numa trajetória retilínea (a direção do declive). Escolhemos um sistema de coordenadas
com origem no ponto de acionamento dos freios e eixo 𝑥 na direção do movimento e sentido positivo “para baixo”.
Aplicamos o Princípio do Impulso e Quantidade de Movimento,
𝑚��1 +∑ 𝐼𝑚𝑝1→2 = 𝑚��2
𝑚��1 + ��∆𝑡 + ��∆𝑡 + ��𝑎𝑡∆𝑡 = 𝑚��2
𝑚��1 + (�� + �� + ��𝑎𝑡)∆𝑡 = 𝑚��2
Notar que o impulso total não decorre apenas ao impulso da força de atrito,
mas ao efeito vetorialmente combinado do impulso da força de atrito, do impulso da força peso e do impulso da
força normal.
Em termos de componentes no sistema de coordenadas escolhido temos,
{𝑚𝑣1𝑥 + (𝑁𝑥 +𝑊𝑥 + 𝐹𝑎𝑡𝑥)∆𝑡 = 𝑚𝑣2𝑥
𝑚𝑣1𝑦 + (𝑁𝑦 +𝑊𝑦 + 𝐹𝑎𝑡𝑦)∆𝑡 = 𝑚𝑣2𝑦
Sendo que,
𝑣1𝑥 = 𝑣1 𝑣1𝑦 = 0
𝑊𝑥 = 𝑚𝑔 sin 5° 𝑊𝑦 = −𝑚𝑔 cos 5°
𝑁𝑥 = 0 𝑁𝑦 = 𝑁
𝐹𝑎𝑡𝑥 = −𝐹𝑎𝑡 𝐹𝑎𝑡𝑦 = 0
𝑣2𝑥 = 0 𝑣2𝑦 = 0
Assim,
{𝑚𝑣1 + (0 + 𝑚𝑔 sin 5° − 𝐹𝑎𝑡)∆𝑡 = 𝑚(0)
𝑚(0) + (𝑁 −𝑚𝑔 cos 5° + 0)∆𝑡 = 𝑚(0)
𝑥
𝑦
𝜃
��∆𝒕
��𝒂∆𝒕
��∆𝒕
𝑥
𝑦
𝜃 𝒎��𝟏 𝑥
𝑦
𝜃 𝒎��𝟐 = 𝟎
𝑥
𝑦
𝜃
��
��𝒂
��

Prof.: Carlos Arthur Cavalcante 164
{𝑚𝑣1 +𝑚𝑔 sin 5° ∆𝑡 − 𝐹𝑎𝑡∆𝑡 = 0
𝑁∆𝑡 −𝑚𝑔 cos 5° ∆𝑡 = 0 {
𝑚𝑣1 +𝑚𝑔 sin 5° ∆𝑡 − 𝐹𝑎𝑡∆𝑡 = 0
∆𝑡(𝑁 − 𝑚𝑔 cos 5°) = 0
{𝑚𝑣1 +𝑚𝑔 sin 5° ∆𝑡 − 𝐹𝑎𝑡∆𝑡 = 0
𝑁 −𝑚𝑔 cos 5° = 0
Substituindo os valores conhecidos,
{(1.000)(20) + (1.000)(9,81) sin 5° ∆𝑡 − 5.000∆𝑡 = 0
𝑁 = (1.000)(9,81) cos 5°
∆𝑡 = 4,8251 𝑠 Resposta do problema.

Prof.: Carlos Arthur Cavalcante 165
5.5.2 Exemplo-Ilustrativo 43
Problema-Resolvido 13.11 (Beer, Johnston; 9ª Edição)
Uma bola de beisebol de 120 𝑔 é arremessada com uma velocidade de
36 𝑚/𝑠 em direção a um batedor. Depois que a bola é golpeada pelo bastão
𝐵, ela passa a ter uma velocidade de 24 𝑚/𝑠 na direção mostrada na figura.
Se a bola e o bastão ficam em contato por 0,015 𝑠, determine a força
impulsiva média exercida sobre bola durante o impacto.
SOLUÇÃO:
A bola de beisebol recebe o impulso da força impulsiva exercida pelo bastão que altera
a sua quantidade de movimento, conforme figura. As forças atuantes sobre a bola é
uma força impulsiva exercida pelo bastão e a força peso ��. Como a força impulsiva
exercida pelo bastão é uma força de intensidade muito grande que atua durante um
intervalo de tempo muito pequeno, consideramos que o impulso que ela exerce é equivalente ao impulso de uma
força constante �� e de intensidade igual ao valor médio da força impulsiva exercida pelo bastão. Isto é, assumimos
que 𝐼𝑚𝑝1→2 = ��∆𝑡. A força peso �� é uma força de intensidade comparativamente muito menor. Por isso,
podemos considerar desprezível o impulso que ela exerce durante o pequeno intervalo de tempo de duração do
golpe pelo bastão. Para ilustrar isso, vamos incluir (e não desprezar) o impulso da força peso. E como o peso é
uma força constante, o impulso que exerce será dado por 𝐼𝑚𝑝1→2 = ��∆𝑡. Escolhemos um sistema de coordenadas
com origem no ponto de golpe do bastão com eixo 𝑥 horizontal positivo para a direita e eixo 𝑦 vertical positivo
para cima. Identificamos as forças atuantes e representamos este entendimento com o DCL ilustrado ao lado.
Aplicamos o Princípio do Impulso e Quantidade de Movimento para a bola de
beisebol escrevendo,
𝑚��1 +∑ 𝐼𝑚𝑝1→2 = 𝑚��2 𝑚��1 + ��∆𝑡 + ��∆𝑡 = 𝑚��2
Em termos das componentes 𝑥 e 𝑦 no sistema de coordenadas adotado, teremos,
𝑚𝑣1𝑥 + 𝐹𝑥∆𝑡 +𝑊𝑥∆𝑡 = 𝑚𝑣2𝑥
𝑚𝑣1𝑦 + 𝐹𝑦∆𝑡 +𝑊𝑦∆𝑡 = 𝑚𝑣2𝑦
(0,12)(−36) + 𝐹𝑥(0,015) + (0)(0,015) = (0,12)(24 cos 40°) (0,12)(0) + 𝐹𝑦(0,015) − (0,12)(9,81)(0,015) = (0,12)(24 sin 40°)
Resolvido o sistema de equações paras as duas incógnitas (𝐹𝑥 e 𝐹𝑦), obtemos,
𝐹𝑥 = 435,08 𝑁 𝐹𝑦 = 124,59 𝑁
𝐹 = √𝐹𝑥2 + 𝐹𝑦
2 = 452,57 𝛼 = 15,980°
Caso a força peso fosse desprezada (não incluída), a solução teria sido,
𝐹𝑥 = 435,08 𝑁 𝐹𝑦 = 123,42 𝑁
𝐹 = √𝐹𝑥2 + 𝐹𝑦
2 = 452,24 𝛼 = 15,942°
A resposta teria um “erro” de 452,57−452,24
452,57= 0,0713%.
𝑦
𝑥

Prof.: Carlos Arthur Cavalcante 166
5.5.3 Exemplo-Ilustrativo 44
Problema-Resolvido 13.12 (Beer, Johnston; 9ª Edição)
Um pacote de 10 𝑘𝑔 cai de uma rampa dentro de um carrinho de
25 𝑘𝑔 com uma velocidade de 3 𝑚/𝑠. Sabendo que o carro está
inicialmente em repouso e que pode rolar livremente, determine (a) a
velocidade final do carrinho, (b) o impulso exercido pelo carrinho
sobre o pacote, e (c) a fração da energia inicial perdida no impacto.
SOLUÇÃO:
O sistema pacote-carrinho tem uma quantidade de movimento inicial. Com a queda do pacote, a única força externa
que exercerá impulso sobre o sistema, é a força de reação do piso sobre o carrinho. Após a queda do pacote, o
sistema pacote-carrinho terá uma quantidade de movimento final, em que tanto o pacote quanto o carrinho têm a
mesma velocidade 𝑣2.
Escolhemos um sistema de coordenadas com o eixo
𝑥 horizontal positivo para a direita e eixo 𝑦 vertical
positivo para cima. Identificamos as forças (e seus
impulsos) e representamos este entendimento com
o DCL ilustrado.
Aplicamos o Princípio do Impulso e Quantidade de Movimento ao sistema pacote-carrinho escrevendo,
∑𝑚��1 +∑ 𝐼𝑚𝑝1→2 = ∑𝑚��2
𝑚𝑃��𝑃1 +𝑚𝐶��𝐶1 + ��∆𝑡 = 𝑚𝑃��𝑃2 +𝑚𝐶��𝐶2
Uma vez que ��𝑃2 = ��𝐶2 = ��2,
𝑚𝑃��𝑃1 +𝑚𝐶��𝐶1 + ��∆𝑡 = 𝑚𝑃��2 +𝑚𝐶��2 𝑚𝑃��𝑃1 +𝑚𝐶��𝐶1 + ��∆𝑡 = (𝑚𝑃 +𝑚𝐶)��2
Em termos das componentes 𝑥 e 𝑦 no sistema de coordenadas adotado, teremos,
𝑚𝑃𝑣𝑃1𝑥 +𝑚𝐶𝑣𝐶1𝑥 + 𝑅𝑥∆𝑡 = (𝑚𝑃 +𝑚𝐶)𝑣2𝑥
𝑚𝑃𝑣𝑃1𝑦 +𝑚𝐶𝑣𝐶1𝑦 + 𝑅𝑦∆𝑡 = (𝑚𝑃 +𝑚𝐶)𝑣2𝑦
𝑣2𝑥 = 𝑣2 𝑣2𝑦 = 0
𝑅𝑥 = 0 𝑅𝑦 = 𝑅
𝑚𝑃𝑣𝑃1𝑥 +𝑚𝐶𝑣𝐶1𝑥 = (𝑚𝑃 +𝑚𝐶)𝑣2
𝑚𝑃𝑣𝑃1𝑦 +𝑚𝐶𝑣𝐶1𝑦 + 𝑅∆𝑡 = 0
Valores conhecidos:
𝑚𝑃 = 10 𝑚𝐶 = 25
𝑣𝑃1𝑥 = 3 cos 30° 𝑣𝑃1𝑦 = −3 sin 30°
𝑣𝐶1𝑥 = 0 𝑣𝐶1𝑦 = 0
(10)(3 cos 30°) + (25)(0) = (10 + 25)𝑣2 (10)(−3 sin 30°) + (25)(0) + 𝑅∆𝑡 = 0
15√3 = 35𝑣2
−15 + 𝑅∆𝑡 = 0
35𝑣2 = 15√3 Eq. 01
𝑅∆𝑡 = 15 Eq. 02
𝑦
𝑥
Prof.: Carlos Arthur Cavalcante 167
É imediato perceber que a equação Eq. 01 pode ser resolvida para determinar o valor de 𝑣2.
𝑣2 =15√3
35 𝑣2 =
3√3
7 𝑣2 = 0,74231 𝑚 𝑠⁄
Aplicamos o Princípio do Impulso e Quantidade de Movimento para o pacote isoladamente.
𝑚𝑃��𝑃1 + ��∆𝑡 = 𝑚𝑃��𝑃2
Mas, ��𝑃2 = ��2
𝑚𝑃��𝑃1 + ��∆𝑡 = 𝑚𝑃��2
Em termos das componentes 𝑥 e 𝑦 no sistema de coordenadas adotado, teremos,
𝑚𝑃𝑣𝑃1𝑥 + 𝐹𝑥∆𝑡 = 𝑚𝑃𝑣2𝑥
𝑚𝑃𝑣𝑃1𝑦 + 𝐹𝑦∆𝑡 = 𝑚𝑃𝑣2𝑦
Mas, 𝑣2𝑥 = 𝑣2 e 𝑣2𝑦 = 0
𝑚𝑃𝑣𝑃1𝑥 + 𝐹𝑥∆𝑡 = 𝑚𝑃𝑣2
𝑚𝑃𝑣𝑃1𝑦 + 𝐹𝑦∆𝑡 = 0
Substituindo valores conhecidos,
(10)(3 cos 30°) + 𝐹𝑥∆𝑡 = 10𝑣2 15√3 + 𝐹𝑥∆𝑡 = 10𝑣2 (10)(−3 sin 30°) + 𝐹𝑦∆𝑡 = 0 −15 + 𝐹𝑦∆𝑡 = 0
𝐹𝑥∆𝑡 = 10𝑣2 − 15√3
𝐹𝑦∆𝑡 = 15
Considerando que 𝑣2 =3√3
7= 0,74231 𝑚 𝑠⁄
𝐹𝑥∆𝑡 = −75√3
7 𝐹𝑥∆𝑡 = −18,558 𝑁𝑠
𝐹𝑦∆𝑡 = 15 𝐹𝑦∆𝑡 = 15 𝑁𝑠
Energia Mecânica inicial do sistema carrinho-pacote:
𝑇1 =1
2𝑚𝑃𝑣𝑃1
2 𝑇1 =1
2(10)(3)2 𝑇1 = 45 𝐽
Considerando que a energia potencial inicial do pacote desprezível,
𝐸𝑀1 = 45 𝐽
Energia Mecânica final do sistema carrinho-pacote:
𝑇2 =1
2(𝑚𝑃 +𝑚𝐶)𝑣2
2 𝑇2 =1
2(10 + 25) (
3√3
7)2
𝑇2 =135
14 𝐽
𝐸𝑀2 =135
14 𝐽
Reposta ao item (a): velocidade final do carrinho (+pacote)
𝑣2 = 0,74231 𝑚 𝑠⁄
𝑦
𝑥

Prof.: Carlos Arthur Cavalcante 168
Resposta item (b): impulso exercido pelo carrinho sobre o pacote
𝐹𝑥∆𝑡 = −18,558 𝑁𝑠 𝐹𝑦∆𝑡 = 15 𝑁𝑠
Reposta item (c): fração da energia inicial perdida no impacto
𝐸𝑀1−𝐸𝑀2
𝐸𝑀1=
45−135
14
45
𝐸𝑀1−𝐸𝑀2
𝐸𝑀1=
11
14
𝐸𝑀1−𝐸𝑀2
𝐸𝑀1= 78,57%
Após a queda do pacote, o sistema carrinho-pacote possui apenas 21,43% da energia que possuia inicialmente.
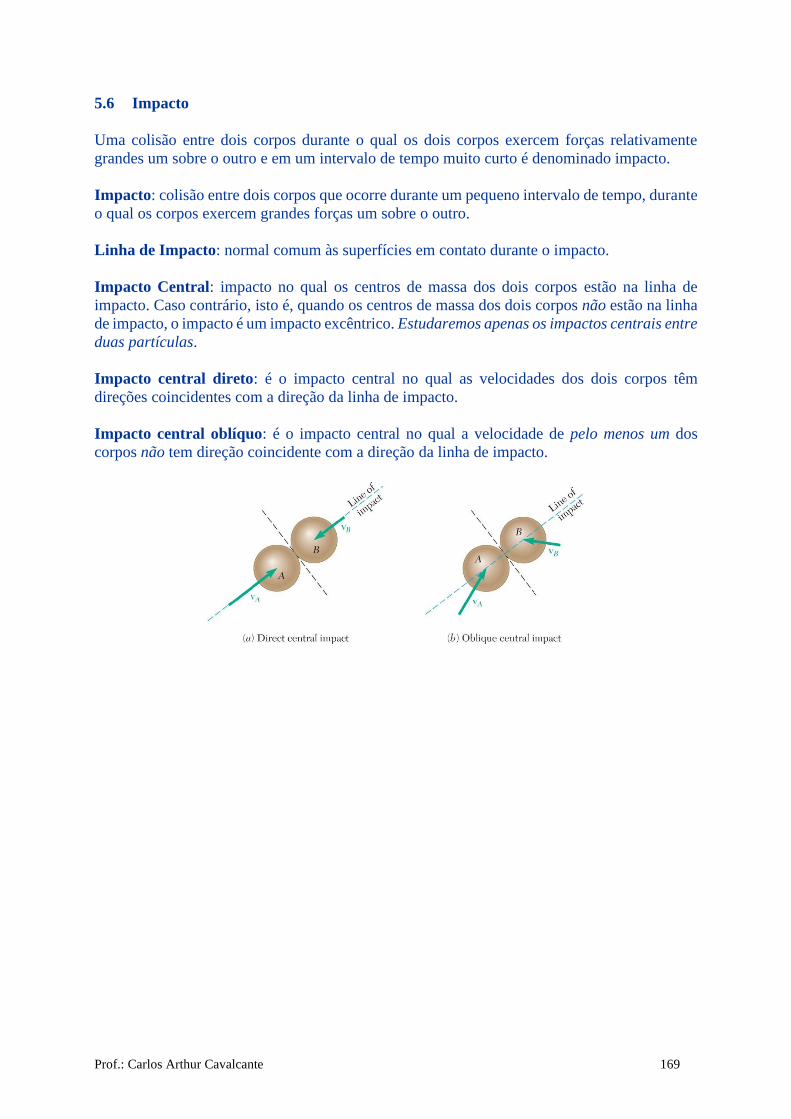
Prof.: Carlos Arthur Cavalcante 169
5.6 Impacto
Uma colisão entre dois corpos durante o qual os dois corpos exercem forças relativamente
grandes um sobre o outro e em um intervalo de tempo muito curto é denominado impacto.
Impacto: colisão entre dois corpos que ocorre durante um pequeno intervalo de tempo, durante
o qual os corpos exercem grandes forças um sobre o outro.
Linha de Impacto: normal comum às superfícies em contato durante o impacto.
Impacto Central: impacto no qual os centros de massa dos dois corpos estão na linha de
impacto. Caso contrário, isto é, quando os centros de massa dos dois corpos não estão na linha
de impacto, o impacto é um impacto excêntrico. Estudaremos apenas os impactos centrais entre
duas partículas.
Impacto central direto: é o impacto central no qual as velocidades dos dois corpos têm
direções coincidentes com a direção da linha de impacto.
Impacto central oblíquo: é o impacto central no qual a velocidade de pelo menos um dos
corpos não tem direção coincidente com a direção da linha de impacto.

Prof.: Carlos Arthur Cavalcante 170
5.7 Impacto Central Direto
Considere duas partículas 𝐴 e 𝐵, de massas 𝑚𝐴 e 𝑚𝐵, que se movem na mesma linha reta para
a direita com velocidades conhecidas ��𝐴1 e ��𝐵1 e tais que
𝑣𝐴1 > 𝑣𝐵1 (o que inclui a situação em que ��𝐵1 em
sentido oposto ao sentido de ��𝐴1 ou seja, 𝑣𝐴1 > 0 e
𝑣𝐵1 < 0).
Nestas condições, inevitavelmente haverá um momento
em que a partícula 𝐴 atingirá a partícula 𝐵.
Imediatamente após a partícula 𝐴 atingir a partícula 𝐵,
as duas partículas experimentarão um período de
deformação e, ao final desse período de deformação, as
duas partículas terão a mesma velocidade ��. Segue-se
então o período de restituição, ao final do qual,
dependendo da intensidade da força de impacto e dos
materiais envolvidos, as partículas retornarão à suas
formas originais ou ficarão permanentemente
deformadas.
Nosso propósito é determinar as velocidades das partículas ao final do período de restituição,
isto é, determinar ��𝐴2 e ��𝐵2.
Primeiramente consideramos as duas partículas como um único sistema e constatamos que não
há forças externas impulsivas atuando sobre elas. Logo, a quantidade de movimento é
conservada e podemos escrever a equação que expressa a conservação da quantidade de
movimento das duas partículas,
𝑚𝐴��𝐴1 +𝑚𝐵��𝐵1 = 𝑚𝐴��𝐴2 +𝑚𝐵��𝐵2
Como todas as velocidades consideradas são orientadas ao longo da mesma direção da linha
de impacto, podemos substituir a equação vetorial acima pela expressão abaixo, envolvendo
apenas as componentes escalares na direção da linha de impacto9
𝑚𝐴𝑣𝐴1 +𝑚𝐵𝑣𝐵1 = 𝑚𝐴𝑣𝐴2 +𝑚𝐵𝑣𝐵2
Temos duas incógnitas (𝑣𝐴2 e 𝑣𝐵2) e apenas uma equação. Para obter os valores de 𝑣𝐴2 e 𝑣𝐵2 é
necessário estabelecer uma equação adicional envolvendo as grandezas escalares 𝑣𝐴2 e 𝑣𝐵2.
Com objetivo de estabelecermos uma equação adicional envolvendo as grandezas escalares 𝑣𝐴2
e 𝑣𝐵2, vamos aplicar o Método do Impulso e Quantidade de Movimento para a partícula 𝐴
durante o período de deformação.
9 Notar que ao fazer isso estamos efetivamente escolhendo um sistema de coordenadas com um dos eixos
coincidindo com a direção da linha de impacto (digamos o eixo 𝑥) e expressando as componentes das velocidades
ao longo deste eixo. As componentes das velocidades ao longo do outro eixo (digamos o eixo 𝑦) são todas nulas,
razão pelas quais não há necessidade de especificar que as componentes ao longo da linha de impacto têm o índice
𝑥. O sentido positivo do eixo “𝑥” é igualmente arbitrado, de modo que as componentes positivas correspondem a
vetores velocidade orientados para o sentido positivo do eixo “𝑥” e as componentes negativas correspondem a
vetores velocidade orientados para o sentido negativo do eixo “𝑥” ou da linha de impacto
��𝑨𝟏 ��𝑩𝟏
��𝑨𝟐 ��𝑩𝟐
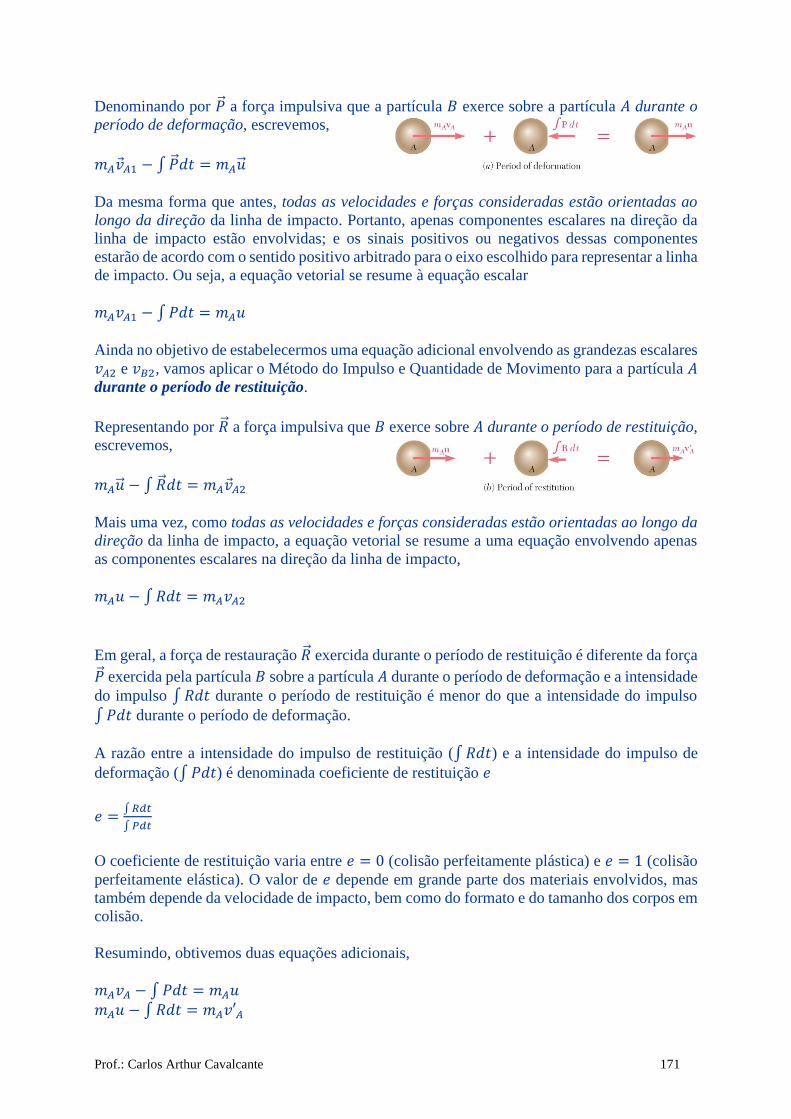
Prof.: Carlos Arthur Cavalcante 171
Denominando por �� a força impulsiva que a partícula 𝐵 exerce sobre a partícula 𝐴 durante o
período de deformação, escrevemos,
𝑚𝐴��𝐴1 − ∫ ��𝑑𝑡 = 𝑚𝐴��
Da mesma forma que antes, todas as velocidades e forças consideradas estão orientadas ao
longo da direção da linha de impacto. Portanto, apenas componentes escalares na direção da
linha de impacto estão envolvidas; e os sinais positivos ou negativos dessas componentes
estarão de acordo com o sentido positivo arbitrado para o eixo escolhido para representar a linha
de impacto. Ou seja, a equação vetorial se resume à equação escalar
𝑚𝐴𝑣𝐴1 − ∫𝑃𝑑𝑡 = 𝑚𝐴𝑢
Ainda no objetivo de estabelecermos uma equação adicional envolvendo as grandezas escalares
𝑣𝐴2 e 𝑣𝐵2, vamos aplicar o Método do Impulso e Quantidade de Movimento para a partícula 𝐴
durante o período de restituição.
Representando por �� a força impulsiva que 𝐵 exerce sobre 𝐴 durante o período de restituição,
escrevemos,
𝑚𝐴�� − ∫ ��𝑑𝑡 = 𝑚𝐴��𝐴2
Mais uma vez, como todas as velocidades e forças consideradas estão orientadas ao longo da
direção da linha de impacto, a equação vetorial se resume a uma equação envolvendo apenas
as componentes escalares na direção da linha de impacto,
𝑚𝐴𝑢 − ∫𝑅𝑑𝑡 = 𝑚𝐴𝑣𝐴2
Em geral, a força de restauração �� exercida durante o período de restituição é diferente da força
�� exercida pela partícula 𝐵 sobre a partícula 𝐴 durante o período de deformação e a intensidade
do impulso ∫𝑅𝑑𝑡 durante o período de restituição é menor do que a intensidade do impulso
∫𝑃𝑑𝑡 durante o período de deformação.
A razão entre a intensidade do impulso de restituição (∫𝑅𝑑𝑡) e a intensidade do impulso de
deformação (∫𝑃𝑑𝑡) é denominada coeficiente de restituição 𝑒
𝑒 =∫𝑅𝑑𝑡
∫𝑃𝑑𝑡
O coeficiente de restituição varia entre 𝑒 = 0 (colisão perfeitamente plástica) e 𝑒 = 1 (colisão
perfeitamente elástica). O valor de 𝑒 depende em grande parte dos materiais envolvidos, mas
também depende da velocidade de impacto, bem como do formato e do tamanho dos corpos em
colisão.
Resumindo, obtivemos duas equações adicionais,
𝑚𝐴𝑣𝐴 − ∫𝑃𝑑𝑡 = 𝑚𝐴𝑢
𝑚𝐴𝑢 − ∫𝑅𝑑𝑡 = 𝑚𝐴𝑣′𝐴

Prof.: Carlos Arthur Cavalcante 172
Resolvendo estas duas equações respectivamente para o impulso de deformação e para o
impulso de restituição obtemos,
∫𝑃𝑑𝑡 = 𝑚𝐴𝑣𝐴 −𝑚𝐴𝑢
∫𝑅𝑑𝑡 = 𝑚𝐴𝑢 −𝑚𝐴𝑣′𝐴
Fazendo o quociente das equações acima e substituindo 𝑒 =∫𝑅𝑑𝑡
∫𝑃𝑑𝑡, obtemos,
∫𝑅𝑑𝑡
∫𝑃𝑑𝑡=
𝑚𝐴𝑢−𝑚𝐴𝑣′𝐴
𝑚𝐴𝑣𝐴−𝑚𝐴𝑢 𝑒 =
𝑚𝐴(𝑢−𝑣′𝐴)
𝑚𝐴(𝑣𝐴−𝑢) 𝑒 =
𝑢−𝑣′𝐴
𝑣𝐴−𝑢
Ainda no objetivo de estabelecer uma relação adicional entre as velocidades 𝑣′𝐴 e 𝑣′𝐵,
consideremos o movimento da partícula 𝑩 durante o período de deformação, bem como
durante o período de restituição, aplicando o Princípio do Impulso e Quantidade de
Movimento. Isto é, uma análise do movimento de 𝐵 durante os períodos de deformação e de
restituição resulta na seguinte expressão,
𝑒 =𝑣′𝐵−𝑢
𝑢−𝑣𝐵
Uma vez que o valor de 𝑒 é o mesmo nos dois casos, podemos escrever que
𝑒 =𝑢−𝑣′𝐴
𝑣𝐴−𝑢=
𝑣′𝐵−𝑢
𝑢−𝑣𝐵
Ou seja, podemos escrever que,
𝑒 =(𝑢−𝑣′𝐴)+(𝑣
′𝐵−𝑢)
(𝑣𝐴−𝑢)+(𝑢−𝑣𝐵)
Portanto,
𝑒 =𝑣′𝐵−𝑣
′𝐴
𝑣𝐴−𝑣𝐵
Ou seja,
𝑒(𝑣𝐴 − 𝑣𝐵) = 𝑣′𝐵− 𝑣′𝐴
Obtemos assim uma segunda expressão relacionando as velocidades 𝑣′𝐴 e 𝑣′𝐵 e passamos a ter
as duas equações, abaixo reproduzidas,
𝑚𝐴𝑣𝐴 +𝑚𝐵𝑣𝐵 = 𝑚𝐴𝑣′𝐴 +𝑚𝐵𝑣′𝐵
𝑒(𝑣𝐴 − 𝑣𝐵) = 𝑣′𝐵 − 𝑣
′𝐴
Obs.1: Notar que (𝑣′𝐵 − 𝑣
′𝐴) representa o negativo da velocidade relativa da partícula 𝐴 em relação à
partícula 𝐵 após o impacto (−𝑣′𝐴 𝐵⁄ ); e que (𝑣𝐴 − 𝑣𝐵) representa a velocidade relativa da partícula 𝐴
em relação à partícula 𝐵 antes do impacto (𝑣𝐴 𝐵⁄ ). Assim, podemos escrever que, 𝑣𝐴 𝐵⁄ ∙ 𝑒 = −𝑣′𝐴 𝐵⁄ .
Isto é, a velocidade relativa das duas partículas após o impacto pode ser obtida multiplicando-se a
velocidade relativa antes do impacto pelo coeficiente de restituição.

Prof.: Carlos Arthur Cavalcante 173
Obs.2: Lembrar que a dedução das equações acima baseou-se na consideração de que a partícula 𝐵 está
à direita de 𝐴 e que ambas estão incialmente se movendo para a direita (que foi o sentido positivo
adotado para a direção que coincide com a direção da linha de impacto). Se a partícula 𝐵 estiver se
movendo inicialmente para a esquerda, o escalar 𝑣𝐵 deve ser considerado negativo. A mesma convenção
de sinais vale para as velocidades após o impacto: um sinal positivo para 𝑣′𝐴 indicará que a partícula 𝐴
move-se para a direita após o impacto e um sinal negativo indicará que ela se move para a esquerda.
Na solução do sistema de duas equações obtido, há dois casos particulares de impacto central
direto que são de particular interesse:
• Impacto central direto perfeitamente plástico (𝑒 = 0) e;
• Impacto central direto perfeitamente elástico (𝑒 = 1).
Impacto central direto perfeitamente plástico (𝒆 = 𝟎):
Quando 𝑒 = 0, teremos,
𝑚𝐴𝑣𝐴 +𝑚𝐵𝑣𝐵 = 𝑚𝐴𝑣′𝐴 +𝑚𝐵𝑣′𝐵 𝑚𝐴𝑣𝐴 +𝑚𝐵𝑣𝐵 = 𝑚𝐴𝑣′𝐴 +𝑚𝐵𝑣′𝐵
(0)(𝑣𝐴 − 𝑣𝐵) = 𝑣′𝐵 − 𝑣′𝐴 0 = 𝑣′𝐵 − 𝑣
′𝐴
𝑚𝐴𝑣𝐴 +𝑚𝐵𝑣𝐵 = 𝑚𝐴𝑣′𝐴 +𝑚𝐵𝑣′𝐵
𝑣′𝐴 = 𝑣′𝐵
Ou seja, se 𝑒 = 0, não haverá período de restituição e as partículas permanecerão juntas após
impacto. Denominando a velocidade final comum de ambas as partículas por 𝑣′ = 𝑣′𝐴 = 𝑣′𝐵
e substituindo na primeira equação obtemos,
𝑚𝐴𝑣𝐴 +𝑚𝐵𝑣𝐵 = (𝑚𝐴 +𝑚𝐵)𝑣′ Quando 𝑒 = 0.
Impacto central direto perfeitamente elástico (𝒆 = 𝟏):
Quando 𝑒 = 1, teremos,
𝑚𝐴𝑣𝐴 +𝑚𝐵𝑣𝐵 = 𝑚𝐴𝑣′𝐴 +𝑚𝐵𝑣′𝐵 (1)(𝑣𝐴 − 𝑣𝐵) = 𝑣′𝐵 − 𝑣
′𝐴
𝑚𝐴𝑣𝐴 +𝑚𝐵𝑣𝐵 = 𝑚𝐴𝑣′𝐴 +𝑚𝐵𝑣′𝐵
𝑣𝐴 − 𝑣𝐵 = 𝑣′𝐵 − 𝑣
′𝐴
Ou seja, se 𝑒 = 1, as velocidades relativas antes (𝑣𝐴 𝐵⁄ ) e depois (−𝑣′𝐴 𝐵⁄ ) do impacto são iguais.
Os impulsos durante o período de deformação e durante o período de restituição também são
iguais. As partículas se movem para longe uma da outra após o impacto com a mesma
velocidade relativa com que se aproximaram antes do impacto. As velocidades podem então
ser obtidas resolvendo-se o sistema de duas equações.
𝑚𝐴𝑣𝐴 +𝑚𝐵𝑣𝐵 = 𝑚𝐴𝑣′𝐴 +𝑚𝐵𝑣′𝐵
𝑣𝐴 − 𝑣𝐵 = 𝑣′𝐵 − 𝑣
′𝐴
} Quando 𝑒 = 1

Prof.: Carlos Arthur Cavalcante 174
Cabe notar que, no caso de um impacto perfeitamente elástico, tanto a energia total das duas
partículas se conserva, bem como sua quantidade de movimento total. Nos casos mais genéricos
em que 0 ≤ 𝑒 < 1, a energia total não se conserva).

Prof.: Carlos Arthur Cavalcante 175
5.7.1 Exemplo-Ilustrativo 45 – Impacto Central direto
Problema-Resolvido 13.13 (Beer, Johnston; 9ª Edição)
Um vagão ferroviário de 20 𝑀𝑔 move-se a uma velocidade de 0,5 𝑚 𝑠⁄ para a direita quando
colide com um vagão de 35 𝑀𝑔 que está em repouso. Se após a colisao o vagão de 35 𝑀𝑔 é
observado movemndo-se para a direita a uma velocidade de 0,3 𝑚 𝑠⁄ , determine o coeficiente
de restituição entre os vagões.
SOLUÇÃO:
Choque de duas partículas. Forças externas não são forças impulsivas (peso e forças normal). Impacto central
direto. Linha de impacto é a direção horizontal. Compatível com a aplicação direta das fórmulas:
𝑚𝐴𝑣𝐴 +𝑚𝐵𝑣𝐵 = 𝑚𝐴𝑣𝐴′ +𝑚𝐵𝑣𝐵
′
𝑒(𝑣𝐴 − 𝑣𝐵) = 𝑣𝐵′ − 𝑣𝐴
′
(20)(0,5) + (35)(0) = 20𝑣𝐴
′ + (35)(0,3) 𝑒(0,5 − 0) = 0,3 − 𝑣𝐴
′
Duas equações e duas incógnitas (𝑣𝐴′ e 𝑒). Resolvido o sistema, encontramos,
𝑣𝐴′ = −0,025 𝑚 𝑠⁄ 𝑒 = 0,65

Prof.: Carlos Arthur Cavalcante 176
5.8 Impacto Central Oblíquo
No caso em que pelo menos uma das velocidades não está orientada ao longo da linha de
impacto, temos um impacto central oblíquo. Como os vetores velocidades ��𝐴′ e ��𝐵
′ após o
impacto são desconhecidas tanto em direção quanto em intensidade, sua determinação
requererá quatro equações independentes.
Escolhemos como eixos coordenados o eixo normal 𝑛 ao longo da
linha de impacto (perpendicular à superfície em contato), e o eixo
tangencial 𝑡 (paralelo à superfície em contato).
Assumido que as partículas sejam perfeitamente lisas e sem atrito (o
que significa dizer que não há forças na direção tangencial), os únicos
impulsos sobre as partículas durante o impacto são devidos às forças
internas orientadas ao longo da linha de impacto (ao longo do eixo normal 𝑛).
Assim,
1) A componente na direção do eixo tangencial 𝑡 do vetor quantidade de movimento de
cada partícula se conserva. Portanto, as componentes das velocidades de cada partícula
na direção tangencial 𝑡 não se altera e podemos escrever que,
𝑣𝐴𝑡 = 𝑣𝐴𝑡′ 𝑣𝐵𝑡 = 𝑣𝐵𝑡
′
2) A componente na direção do eixo normal 𝑛 do vetor quantidade de movimento total das
duas partículas se conserva. Podemos escrever que,
𝑚𝐴𝑣𝐴𝑛 +𝑚𝐵𝑣𝐵𝑛 = 𝑚𝐴𝑣𝐴𝑛′ +𝑚𝐵𝑣𝐵𝑛
′
3) A componente na direção do eixo normal 𝑛 da velocidade relativa das duas partículas
após o impacto é obtida multiplicando-se a componente 𝑛 da velocidade relativa antes
do impacto pelo coeficiente de restituição. Isto é,
𝑒(𝑣𝐴𝑛 − 𝑣𝐵𝑛) = 𝑣𝐵𝑛′ − 𝑣𝐴𝑛
′
Assim, obtemos 4 equações independentes que podem ser resolvidas para as duas componentes
da velocidade de 𝐴 (𝑣𝐴𝑡′ e 𝑣𝐴𝑛
′ ) e para as duas componentes da velocidade de 𝐵 (𝑣𝐵𝑡′ e 𝑣𝐵𝑛
′ ).
𝑣𝐴𝑡 = 𝑣𝐴𝑡′ 𝑣𝐵𝑡 = 𝑣𝐵𝑡
′
𝑚𝐴𝑣𝐴𝑛 +𝑚𝐵𝑣𝐵𝑛 = 𝑚𝐴𝑣𝐴𝑛′ +𝑚𝐵𝑣𝐵𝑛
′ 𝑒(𝑣𝐴𝑛 − 𝑣𝐵𝑛) = 𝑣𝐵𝑛′ − 𝑣𝐴𝑛
′

Prof.: Carlos Arthur Cavalcante 177
5.8.1 Exemplo-Ilustrativo 46
Problema-Resolvido 13.15 (Beer, Johnston; 9ª Edição)
A intensidade e a direção das velocidades de duas bolas idênticas
antes de se chocarem sem atrito estão mostradas na figura. Admitindo
que 𝑒 = 0,90, determine a intensidade e a direção da velocidade de
cada bola após o impacto.
SOLUÇÃO:
Sem atrito a quantidade de movimento na direção tangencial à superfície de contato se conserva. A linha de
impacto que define a direção normal 𝑛 é a linha que liga os centros das bolas (conforme a figura e também porque
é a direção perpendicular à superfície de contato).
Impacto central oblíquo. Compatível com a aplicação direta das fórmulas:
𝑣𝐴𝑡 = 𝑣𝐴𝑡′
𝑣𝐵𝑡 = 𝑣𝐵𝑡′
𝑚𝐴𝑣𝐴𝑛 +𝑚𝐵𝑣𝐵𝑛 = 𝑚𝐴𝑣𝐴𝑛′ +𝑚𝐵𝑣𝐵𝑛
′
𝑒(𝑣𝐴𝑛 − 𝑣𝐵𝑛) = 𝑣𝐵𝑛′ − 𝑣𝐴𝑛
′
Movimento na direção tangencial 𝑡. Conservação da quantidade de movimento de cada partícula na direção
tangencial.
𝑣𝐴𝑡′ = 𝑣𝐴𝑡 = 9 sin 30° 𝑣𝐴𝑡
′ = 𝑣𝐴𝑡 = 4,5 𝑚 𝑠⁄
𝑣𝐵𝑡′ = 𝑣𝐵𝑡 = 12 sin 60° 𝑣𝐵𝑡
′ = 𝑣𝐵𝑡 = 10,392 𝑚 𝑠⁄
Movimento na direção normal 𝑛. Conservação da quantidade de movimento total das duas partículas na direção
normal e velocidades relativas antes e depois (coeficiente de restituição).
𝑚(9 cos 30°) + 𝑚(−12 cos 60°) = 𝑚𝑣𝐴𝑛′ +𝑚𝑣𝐵𝑛
′ 9 cos 30° − 12 cos 60° = 𝑣𝐴𝑛′ + 𝑣𝐵𝑛
′
0,90(9 cos 30° − (−12 cos 60°)) = 𝑣𝐵𝑛′ − 𝑣𝐴𝑛
′ 0,90(9 cos 30° + 12 cos 60°) = 𝑣𝐵𝑛′ − 𝑣𝐴𝑛
′
9√3 2⁄ − 6 = 𝑣𝐴𝑛′ + 𝑣𝐵𝑛
′
0,90(9√3 2⁄ + 6) = 𝑣𝐵𝑛′ − 𝑣𝐴𝑛
′
Resolvido o sistema, encontramos,
𝑣𝐴𝑛′ = −5,3103 𝑚 𝑠⁄ 𝑣𝐵𝑛
′ = 7,1045 𝑚 𝑠⁄
𝑣𝐴′ = √(𝑣𝐴𝑡
′ )2 + (𝑣𝐴𝑛′ )2 𝑣𝐴
′ = √(4,5 )2 + (−5,3103)2 𝑣𝐴′ = 6,9605 𝑚 𝑠⁄
𝛼 = tan−1 (|𝑣𝐴𝑡′ |
|𝑣𝐴𝑛′ |) 𝛼 = tan−1 (
4,5
5,3103) 𝛼 = 40,278°
𝑣𝐵′ = √(𝑣𝐵𝑡
′ )2 + (𝑣𝐵𝑛′ )2 𝑣𝐵
′ = √(10,392 )2 + (7,1045)2 𝑣𝐵′ = 12,589 𝑚 𝑠⁄
𝛽 = tan−1 (|𝑣𝐵𝑡′ |
|𝑣𝐵𝑛′ |) 𝛽 = tan−1 (
10,392
7,1045) 𝛽 = 55,642°

Prof.: Carlos Arthur Cavalcante 178
5.8.2 Exemplo-Ilustrativo 47
Problema-Resolvido 13.14 (Beer, Johnston; 9ª Edição)
A bola é lançada contra uma parede vertical, sem atrito. Imediatamente antes da bola bater na
parede, sua velocidade tem um módulo 𝑣 e forma um ângulo de 30° com a horizontal. Sabendo
que 𝑒 = 0,90, determinar a módulo e a direção da velocidade da bola, quando ela rebate da
parede.
SOLUÇÃO:
Sem atrito entre a bola (partícula 𝐴) e a parede (partícula 𝐵), então a força da parede e o impulso que ela exerce
sobre a bola é perpendicular à parede e a quantidade de movimento na direção tangencial à superfície de impacto
se conserva. A direção normal 𝑛 que define a linha de impacto é perpendicular à parede. Impacto central oblíquo.
Compatível com a aplicação direta das fórmulas:
𝑣𝐴𝑡 = 𝑣𝐴𝑡′
𝑣𝐵𝑡 = 𝑣𝐵𝑡′
𝑚𝐴𝑣𝐴𝑛 +𝑚𝐵𝑣𝐵𝑛 = 𝑚𝐴𝑣𝐴𝑛′ +𝑚𝐵𝑣𝐵𝑛
′
𝑒(𝑣𝐴𝑛 − 𝑣𝐵𝑛) = 𝑣𝐵𝑛′ − 𝑣𝐴𝑛
′
𝑣 sin 30° = 𝑣𝑡′
0 = 0
𝑚𝐴(𝑣 cos 30°) + (∞)(0) = 𝑚𝐴𝑣𝐴𝑛′ + (∞)(0)
0,90(𝑣 cos 30° − 0) = 0 − 𝑣𝑛′
Como a massa da parede (e da Terra) é, para os efeitos práticos de solução deste problema essencialmente infinita,
a expressão de a quantidade de movimento total da bola e da parede se conserva não fornece informação útil.
Ficamos com duas equações já resolvidas para as duas incógnitas (𝑣𝑡′ e 𝑣𝑛
′ ),
𝑣 sin 30° = 𝑣𝑡′
0,90𝑣 cos 30° = −𝑣𝑛′
𝑣𝑡′ = (1 2⁄ )𝑣
𝑣𝑛′ = (−9√3 20⁄ )𝑣
𝑣𝐴′ = √(𝑣𝑡
′)2 + (𝑣𝑛′ )2 𝑣𝐴
′ = √((1 2⁄ )𝑣)2+ ((−9√3 20⁄ )𝑣)
2
𝑣𝐴′ = (7√7 20⁄ )𝑣
𝛼 = tan−1 (|𝑣𝑡′|
|𝑣𝑛′ |) 𝛼 = tan−1 (
(1 2⁄ )
(9√3 20⁄ )) 𝛼 = 32,680°

Prof.: Carlos Arthur Cavalcante 179
5.9 Impacto Central Oblíquo com restrição de movimento
Até agora, nossa análise do impacto central oblíquo de duas partículas resultou em 4 equações
e se baseou na consideração de que ambas as partículas podem se mover livremente antes e
depois do impacto. No caso em que uma ou ambas as partículas em colisão estejam restringidas
em seu movimento, é porque há impulsos externos atuando restringindo o movimento.
Por exemplo, na figura ao lado o bloco 𝐴 está restrito a se mover
ao longo da superfície horizontal e bola 𝐵 é livre para mover-se
no plano da figura.
Considerando que não há atrito entre o bloco e a bola, e entre o
bloco e a superfície horizontal, observamos que os impulsos
exercidos sobre o sistema consistem dos impulsos das forças
internas �� e −�� orientados ao longo da linha de impacto (eixo 𝑛), e do impulso da força externa
��𝑒𝑥𝑡 exercida pela superfície horizontal sobre o bloco 𝐴, e orientada ao longo da direção
vertical, com sentido para cima.
As velocidades do bloco 𝐴 e da bola 𝐵 imediatamente após o impacto são representadas por
três incógnitas: a intensidade da velocidade ��𝐴 do bloco 𝐴, que é conhecida como horizontal; e
a intensidade e a direção da velocidade ��𝐵′ da bola 𝐵.
Nestas condições, pode-se escrever três equações para expressar que,
1) A componente ao longo do eixo tangencial 𝑡 da quantidade de movimento da bola 𝐵 se
conserva. Logo, a componente 𝑡 da velocidade da bola 𝐵 permanece inalterada e
podemos escrever que,
𝑣𝐵𝑡 = 𝑣𝐵𝑡′
2) A componente na direção do eixo horizontal 𝑥 do vetor Quantidade de Movimento total
do sistema bloco–bola é conservada. Isto é, podemos escrever que,
𝑚𝐴𝑣𝐴𝑥 +𝑚𝐵𝑣𝐵𝑥 = 𝑚𝐴𝑣𝐴𝑥′ +𝑚𝐵𝑣𝐵𝑥
′
E como,
𝑣𝐴𝑥 = 𝑣𝐴 𝑣𝐴𝑥′ = 𝑣𝐴
′
Obtemos,
𝑚𝐴𝑣𝐴 +𝑚𝐵𝑣𝐵𝑥 = 𝑚𝐴𝑣𝐴′ +𝑚𝐵𝑣𝐵𝑥
′

Prof.: Carlos Arthur Cavalcante 180
3) A componente na direção normal 𝑛 da velocidade relativa do bloco 𝐴 e da bola 𝐵 após
o impacto é obtida multiplicando-se a componente na direção 𝑛 da velocidade relativa
antes do impacto pelo coeficiente de restituição. Isto é,
𝑣𝐵𝑛′ − 𝑣𝐴𝑛
′ = 𝑒(𝑣𝐴𝑛 − 𝑣𝐵𝑛)
Assim, obtemos 3 equações independentes que podem ser resolvidas para uma componente da
velocidade de 𝐴 (𝑣𝐴𝑥′ ) e para duas componentes da velocidade de 𝐵 (𝑣𝐵𝑡
′ e 𝑣𝐵𝑛′ ).
Em resumo, as 3 equações são,
𝑣𝐵𝑡 = 𝑣𝐵𝑡′
𝑚𝐴𝑣𝐴 +𝑚𝐵𝑣𝐵𝑥 = 𝑚𝐴𝑣𝐴′ +𝑚𝐵𝑣𝐵𝑥
′
𝑣𝐵𝑛′ − 𝑣𝐴𝑛
′ = 𝑒(𝑣𝐴𝑛 − 𝑣𝐵𝑛)

Prof.: Carlos Arthur Cavalcante 181
5.9.1 Exemplo-Ilustrativo 48 – Impacto Central Oblíquo com restrição de movimento
Problema-Resolvido 13.16 (Beer, Johnston; 9ª Edição)
A bola 𝐵 está pendurada em uma corda inextensível 𝐵𝐶. Uma bola idêntica 𝐴 é
solta do repouso quando apenas toca na corda e adquire uma velocidade 𝑣0 antes
de atingir a bola 𝐵. Considerando um impacto perfeitamente elástico (𝑒 = 1) e
sem atrito, determine a velocidade de cada bola imediatamente após o impacto.
SOLUÇÃO:
Impacto central oblíquo, com restrição de movimento de uma das partículas. A bola 𝐵 está obrigada a se mover
em um círculo de centro 𝐶, e sua velocidade imediatamente após o impacto deve ser horizontal
para a esquerda. Problema quase compatível com a aplicação direta das fórmulas reproduzidas
abaixo:
𝑣𝐵𝑡 = 𝑣𝐵𝑡′
𝑚𝐴𝑣𝐴𝑥 +𝑚𝐵𝑣𝐵𝑥 = 𝑚𝐴𝑣𝐴𝑥′ +𝑚𝐵𝑣𝐵𝑥
′
𝑒(𝑣𝐴𝑛 − 𝑣𝐵𝑛) = 𝑣𝐵𝑛′ − 𝑣𝐴𝑛
′
Com a “sutil” diferença de que as fórmulas acima foram obtidas para o caso em que a partícula 𝐴 é a partícula que
tem restrição de movimento, enquanto no problema em questão é a partícula 𝐵 que tem restrição de movimento
numa direção definida (no caso a direção 𝑥). Assim, adotamos,
𝑣𝐴𝑡 = 𝑣𝐴𝑡′
𝑚𝐵𝑣𝐵𝑥 +𝑚𝐴𝑣𝐴𝑥 = 𝑚𝐵𝑣𝐵𝑥′ +𝑚𝐴𝑣𝐴𝑥
′
𝑒(𝑣𝐵𝑛 − 𝑣𝐴𝑛) = 𝑣𝐴𝑛′ − 𝑣𝐵𝑛
′
A direção normal 𝑛 (linha de impacto) e a direção tangencial 𝑡 estão
ilustradas na figura ao lado. Adotamos a direção 𝑥 horizontal positiva para a
direita.
Princípio do impulso e quantidade de movimento sobre a bola 𝑨.
𝑣𝐴𝑡 = 𝑣𝐴𝑡′ 𝑣0 sin 30° = 𝑣𝐴𝑡
′
𝑣𝐴𝑡′ = (1 2⁄ )𝑣0
Princípio do impulso e quantidade de movimento total sobre as bolas 𝑨 e 𝑩 (direção 𝒙).
𝑚𝐵𝑣𝐵𝑥 +𝑚𝐴𝑣𝐴𝑥 = 𝑚𝐵𝑣𝐵𝑥′ +𝑚𝐴𝑣𝐴𝑥
′ 𝑚(0) + 𝑚(0) = 𝑚𝐵𝑣𝐵𝑥′ +𝑚𝑣𝐴𝑥
′
Observando que:
𝑣𝐵𝑥′ = −𝑣𝐵
′ 𝑣𝐴𝑥′ = 𝑣𝐴𝑡
′ cos 30° − 𝑣𝐴𝑛′ cos 60°
Substituindo,
0 = −𝑚𝑣𝐵′ +𝑚(𝑣𝐴𝑡
′ cos 30° − 𝑣𝐴𝑛′ cos 60°) 0 = −𝑣𝐵
′ + 𝑣𝐴𝑡′ (√3 2⁄ ) − 𝑣𝐴𝑛
′ (1 2⁄ )
(√3 2⁄ )𝑣𝐴𝑡′ − (1 2⁄ )𝑣𝐴𝑛
′ − 𝑣𝐵′ = 0
Velocidades relativas antes e depois na direção da linha de impacto (direção 𝒏) – coeficiente de restituição.

Prof.: Carlos Arthur Cavalcante 182
𝑒(𝑣𝐵𝑛 − 𝑣𝐴𝑛) = 𝑣𝐴𝑛′ − 𝑣𝐵𝑛
′
Observando que:
𝑒 = 1 𝑣𝐴𝑛 = 𝑣0 cos 30° 𝑣𝐵𝑛′ = 𝑣𝐵
′ sin 30°
Substituindo,
(1)(0 − 𝑣0 cos 30°) = 𝑣𝐴𝑛′ − 𝑣𝐵
′ sin 30° −𝑣0(√3 2⁄ ) = 𝑣𝐴𝑛′ − 𝑣𝐵
′ (1 2⁄ )
(1 2⁄ )𝑣𝐵′ − 𝑣𝐴𝑛
′ = (√3 2⁄ )𝑣0
Assim, obtivemos três equações com três incógnitas (𝑣𝐴𝑡′ , 𝑣𝐴𝑛
′ e 𝑣𝐵′ ),
𝑣𝐴𝑡′ = (1 2⁄ )𝑣0
(√3 2⁄ )𝑣𝐴𝑡′ − (1 2⁄ )𝑣𝐴𝑛
′ − 𝑣𝐵′ = 0
(1 2⁄ )𝑣𝐵′ − 𝑣𝐴𝑛
′ = (√3 2⁄ )𝑣0
[
1 0 0 (1 2⁄ )𝑣0
√3 2⁄ −1 2⁄ −1 0
0 −1 1 2⁄ (√3 2⁄ )𝑣0
]
Resolvido o sistema, encontramos,
𝑣𝐴𝑡′ = (1 2⁄ )𝑣0 𝑣𝐴𝑛
′ = (−3√3 10⁄ )𝑣0 𝑣𝐵′ = (2√3 5⁄ )𝑣0
𝑣𝐴𝑡′ = 0,5𝑣0 𝑣𝐴𝑛
′ = −0,5192𝑣0 𝑣𝐵′ = 0,69282𝑣0
𝑣𝐴′ = √(𝑣𝐴𝑡
′ )2 + (𝑣𝐴𝑛′ )2 𝑣𝐴
′ = √(0,5𝑣0 )2 + (−0,5192𝑣0)
2 𝑣𝐴′ = 0,72111𝑣0
𝛼 = tan−1 (|𝑣𝐴𝑛′ |
|𝑣𝐴𝑡′ |) − 30° 𝛼 = tan−1 (
0,5192
0,5) − 30° 𝛼 = 16,102°
𝑣𝐵′ = 0,69282𝑣0 𝛽 = 180°

Prof.: Carlos Arthur Cavalcante 183
5.10 Problemas envolvendo energia e quantidade de movimento
Temos agora três métodos para a análise e solução de problemas de Cinética:
• Aplicação direta da 2ª Lei de Newton
• Método do Trabalho e Energia
• Método do Impulso e Quantidade de Movimento
Selecionar o método mais adequado para resolver um problema ou parte dele. Por exemplo,
O movimento foi divido em três partes: a primeira e a terceira foram resolvidas pelo Método
do Trabalho e Energia, enquanto a segunda foi resolvida pelo Método do Impulso e Quantidade
de Movimento. Caso fosse desejado determinar a tensão nas cordas, a solução precisaria ser
complementada pela aplicação direta da 2ª Lei de Newton (∑ �� = 𝑚��).

Prof.: Carlos Arthur Cavalcante 184
5.10.1 Exemplo-Ilustrativo 49 – Problemas envolvendo energia e quantidade de
movimento
Problema-Resolvido 13.17 (Beer, Johnston; 9ª Edição)
Um bloco de 30 𝑘𝑔 é solto de uma altura de 2 𝑚 sobre o prato de
10 𝑘𝑔 de uma balança de mola. Considerando que o impacto seja
perfeitamente plástico, determine a máxima deflexão da mola. A
constante da mola é 𝑘 = 20 𝑘𝑁 𝑚⁄ .
SOLUÇÃO:
O bloco é solto de uma certa altura (2 𝑚) convertendo sua energia potencial em energia cinética. Em seguida, o
bloco e o prato se chocam em uma colisão perfeitamente plástica (𝑒 = 0). Em seguida o bloco e o prato juntos
comprimem a mola convertendo energia cinética em energia potencial elástica.
Assim, dividimos a solução do problema em três partes, conforme ilustrado na figura abaixo,
1ª Parte. Conservação de energia do sistema bloco-prato, entre as posições 𝟏 e 𝟐.
Posição 1:
𝑇𝐴1 =1
2𝑚𝐴𝑣𝐴1
2 𝑇𝐴1 =1
230(0)2 𝑇𝐴1 = 0
𝑇𝐵1 =1
2𝑚𝐵𝑣𝐵1
2 𝑇𝐵1 =1
210(0)2 𝑇𝐵1 = 0
𝑉𝑊𝐴1 = 𝑊𝐴𝑦𝐴1 𝑉𝑊𝐴1 = (30)(9,81)(2) 𝑉𝑊𝐴1 = 588,6 𝐽
𝑉𝑊𝐵1 = 𝑊𝐵𝑦𝐵1 𝑉𝑊𝐵1 = (10)(9,81)(0) 𝑉𝑊𝐵1 = 0
𝑉𝐸𝐴1 =1
2𝑘𝑥𝐴1
2 𝑉𝐸𝐴1 =1
2(20.000)(0)2 𝑉𝐸𝐴1 = 0
𝑉𝐸𝐵1 =1
2𝑘𝑥𝐵1
2 𝑉𝐸𝐵1 =1
2(20.000) (
98,1
20.000)2
𝑉𝐸𝐵1 = 0,24059 𝐽
Posição 2:
𝑇𝐴2 =1
2𝑚𝐴𝑣𝐴2
2 𝑇𝐴2 =1
230𝑣𝐴2
2 𝑇𝐴2 = 15𝑣𝐴22
𝑇𝐵2 =1
2𝑚𝐵𝑣𝐵2
2 𝑇𝐵2 =1
210(0)2 𝑇𝐵2 = 0
𝑉𝑊𝐴2 = 𝑊𝐴𝑦𝐴2 𝑉𝑊𝐴2 = (30)(9,81)(0) 𝑉𝑊𝐴2 = 0
𝑉𝑊𝐵2 = 𝑊𝐵𝑦𝐵2 𝑉𝑊𝐵2 = (10)(9,81)(0) 𝑉𝑊𝐵2 = 0

Prof.: Carlos Arthur Cavalcante 185
𝑉𝐸𝐴2 =1
2𝑘𝑥𝐴2
2 𝑉𝐸𝐴2 =1
2(20.000)(0)2 𝑉𝐸𝐴2 = 0
𝑉𝐸𝐵2 =1
2𝑘𝑥𝐵2
2 𝑉𝐸𝐵2 =1
2(20.000) (
98,1
20.000)2
𝑉𝐸𝐵2 = 0,24059 𝐽
Princípio da conservação de energia entre as posições 1 e 2
𝑇𝐴1 + 𝑇𝐵1 + 𝑉𝑊𝐴1 + 𝑉𝑊𝐵1 + 𝑉𝐸𝐴1 + 𝑉𝐸𝐵1 = 𝑇𝐴2 + 𝑇𝐵2 + 𝑉𝑊𝐴2 + 𝑉𝑊𝐵2 + 𝑉𝐸𝐴2 + 𝑉𝐸𝐵2
0 + 0 + 588,6 + 0 + 0 + 0,24059 = 15𝑣𝐴22 + 0 + 0 + 0 + 0 + 0,24059
588,6 = 15𝑣𝐴22 𝑣𝐴2
2 =588,6
15 𝑣𝐴2 = √
588,6
15
𝑣𝐴2 = 6,2642 𝑚 𝑠⁄
2ª Parte. Impacto. Conservação da quantidade de movimento, entre as posições 𝟐 e 𝟑.
O impacto do bloco com o prato é um impacto central direto, perfeitamente plástico (𝑒 = 0). Neste caso, podemos
escrever que,
𝑚𝐴𝑣𝐴2 +𝑚𝐵𝑣𝐵2 = (𝑚𝐴 +𝑚𝐵)𝑣𝐴𝐵3
Obs.: considerando que a massa da mola seja desprezível.
(30)(6,2642) + (10)(0) = (30 + 10)𝑣𝐴𝐵3
𝑣𝐴𝐵3 = (3
4) (6,2642) 𝑣𝐴𝐵3 = 4,6981 𝑚 𝑠⁄
3ª Parte. Conservação de energia do sistema bloco-prato, entre as posições 𝟑 e 𝟒.
Posição 3:
𝑇𝐴𝐵3 =1
2(𝑚𝐴 +𝑚𝐵)𝑣𝐴𝐵3
2 𝑇𝐴𝐵3 =1
240(4,6981)2 𝑇𝐴𝐵3 = 441,45 𝐽
𝑉𝑊𝐴𝐵3 = 𝑊𝐴𝐵𝑦𝐴𝐵3 𝑉𝑊𝐴𝐵3 = (40)(9,81)(0) 𝑉𝑊𝐴𝐵3 = 0
𝑉𝐸𝐴𝐵3 =1
2𝑘𝑥𝐴𝐵3
2 𝑉𝐸𝐴𝐵3 =1
2(20.000) (
98,1
20.000)2
𝑉𝐸𝐴𝐵3 = 0,24059 𝐽
Posição 4:
𝑇𝐴𝐵4 =1
2(𝑚𝐴 +𝑚𝐵)𝑣𝐴𝐵4
2 𝑇𝐴𝐵4 = 20𝑣𝐴𝐵42
𝑉𝑊𝐴𝐵4 = 𝑊𝐴𝐵𝑦𝐴𝐵4 𝑉𝑊𝐴𝐵4 = (40)(9,81)(−ℎ) 𝑉𝑊𝐴𝐵4 = −392,4ℎ
𝑉𝐸𝐴𝐵4 =1
2𝑘𝑥𝐴𝐵4
2 𝑉𝐸𝐴𝐵4 =1
2(20.000) (
98,1
20.000+ ℎ)
2
𝑉𝐸𝐴𝐵4 = 10.000 (98,1
20.000+ ℎ)
2
Princípio da conservação de energia entre as posições 3 e 4
𝑇𝐴𝐵3 + 𝑉𝑊𝐴𝐵3 + 𝑉𝐸𝐴𝐵3 = 𝑇𝐴𝐵4 + 𝑉𝑊𝐴𝐵4 + 𝑉𝐸𝐴𝐵4
Prof.: Carlos Arthur Cavalcante 186
441,45 + 0 + 0,24059 = 20𝑣𝐴𝐵42 − 392,4ℎ + 10.000 (
98,1
20.000+ ℎ)
2
441,69 = 20𝑣𝐴𝐵42 − 392,4ℎ + 10.000 (
98,1
20.000+ ℎ)
2
Na deflexão máxima do conjunto bloco-prato, ocorre que 𝑣𝐴𝐵4 = 0.
441,69 = 20(0) − 392,4ℎ + 10.000 (981
200.000+ ℎ)
2
441,69 = −392,4ℎ + 10.000 (981
200.000+ ℎ)
2
Resolvendo a equação obtida para ℎ encontramos,
ℎ = 0,29371 𝑚 ℎ = 294 𝑚𝑚

Prof.: Carlos Arthur Cavalcante 187
APÊNDICE A Movimento Retilíneo (1D)
Uma partícula está em movimento retilíneo quando seu movimento é.… retilíneo, isto é, quando
a partícula se move ao longo de uma linha reta. Em outras palavras, uma partícula está em
movimento retilíneo quando a sua trajetória é uma linha reta.
Considere uma partícula movendo-se no espaço ao longo de uma trajetória retilínea. A posição
𝑠 da partícula, medida ao longo da linha reta que ela percorre no espaço é dada pela equação
horária 𝑠(𝑡) = 6𝑡2 − 𝑡3. A velocidade escalar da partícula, em qualquer instante 𝑡, é dada por
𝑣 =𝑑𝑆
𝑑𝑡 e tal que as suas coordenadas de posição 𝑥, 𝑦 𝑒 𝑧 são dadas pelas seguintes equações:
𝑥(𝑡) = 𝑥0 + 𝑣0𝑥𝑡
O movimento da partícula ocorre no espaço, mas a sua trajetória é retilínea. Isto é, a “curva” no
espaço que define a trajetória da partícula é a linha reta dada por 𝑧 = 𝑓(𝑥, 𝑦).
A.1. Posição, Velocidade e Aceleração em Movimentos Retilíneos (1D)
A posição de uma partícula em movimento retilíneo é definida
pela distância da partícula, positiva ou negativa, a uma origem fixa
na linha (reta) em que ela se desloca.
Na verdade, a posição é definida como um vetor que vai da origem
até a partícula. Entretanto, como estes vetores terão sempre a
mesma direção da própria trajetória reta da partícula, basta
indicarmos a intensidade deste vetor, precedida por um sinal de + (quando a ‘ponta’ do vetor
estiver no lado escolhido como positivo) ou por um sinal de – (quando a ‘ponta’ do vetor estiver
no lado escolhido como negativo). Ou seja, na prática, o tratamento vetorial é dispensável nos
movimentos retilíneos porque a trajetória (retilínea) da partícula sempre está contida no próprio
eixo orientado adotado para descrever o movimento.
O movimento de uma partícula é dito conhecido quando a coordenada de posição da partícula
é conhecida para cada instante do tempo 𝑡. Isto é, quando a função 𝑥 = 𝑓(𝑡) é conhecida ou foi
determinada.
O movimento da partícula é, em geral, expresso na forma
de uma função como, por exemplo,
𝑥 = 6𝑡2 − 𝑡3
Ou ainda na forma de um gráfico de 𝑥 versus de 𝑡 como,
por exemplo, na figura ao lado.
Define-se velocidade escalar média de uma partícula como o quociente entre o deslocamento
∆𝑥 e o intervalo de tempo ∆𝑡.
𝑣𝑒𝑙𝑜𝑐𝑖𝑑𝑎𝑑𝑒 𝑒𝑠𝑐𝑎𝑙𝑎𝑟 𝑚é𝑑𝑖𝑎 =∆𝑥
∆𝑡
0,00
5,00
10,00
15,00
20,00
25,00
30,00
35,00
0,00 1,00 2,00 3,00 4,00 5,00 6,00 7,00
x

Prof.: Carlos Arthur Cavalcante 188
Por definição, a velocidade escalar instantânea 𝑣 é,
𝑣 = lim∆𝑡→0
∆𝑥
∆𝑡=
𝑑𝑥
𝑑𝑡
A velocidade escalar 𝑣 é representada por um número real, que pode ser positivo, negativo ou
nulo10.
Se o valor de 𝑣 for negativo (𝑣 < 0), a partícula estará se movendo no sentido negativo do eixo
coordenado que foi adotado para descrever o seu movimento (retilíneo).
Se a partícula tiver em uma posição negativa (𝑥 < 0), a intensidade do vetor posição estará
aumentando. A partícula estará afastando-se da origem no sentido negativo e o número
(negativo) que representa a sua coordenada de posição será cada vez menor.
Se a partícula estiver em uma posição positiva (𝑥 > 0), a intensidade do vetor posição
estará diminuindo. A partícula estará aproximando-se da origem no sentido negativo e o
número (positivo) que representa a sua coordenada de posição será cada vez menor.
Se o valor de 𝑣 for positivo (𝑣 > 0), a partícula estará se movendo no sentido positivo do eixo
coordenado que foi adotado para descrever o seu movimento (retilíneo).
Se a partícula tiver em uma posição negativa (𝑥 < 0), a intensidade do vetor posição estará
diminuindo. A partícula estará aproximando-se da origem no sentido positivo e o número
(negativo) que representa a sua coordenada de posição será cada vez menor.
Se a partícula estiver em uma posição positiva (𝑥 > 0), a intensidade do vetor posição
estará aumentando. A partícula estará afastando-se da origem no sentido positivo e o
número (positivo) que representa a sua coordenada de posição será cada vez maior.
𝑽𝒆𝒍𝒐𝒄𝒊𝒅𝒂𝒅𝒆 (𝒗) 𝑷𝒐𝒔𝒊𝒄𝒂𝒐 (𝒙) Análise Interpretativa
𝑣 < 0
𝑥 < 0
A intensidade do ‘vetor’ posição aumenta.
O valor de 𝒙 diminui (torna-se um número negativo cada vez menor).
A partícula está se afastando da origem, no sentido negativo.
𝑥 > 0
A intensidade do ‘vetor’ posição diminui.
O valor de 𝒙 diminui (torna-se um número positivo cada vez menor).
A partícula está se aproximando da origem, no sentido negativo.
𝑣 > 0
𝑥 < 0
A intensidade do ‘vetor’ posição diminui.
O valor de 𝒙 aumenta (torna-se um número negativo cada vez maior).
A partícula estará se aproximando da origem, no sentido positivo.
𝑥 > 0
A intensidade do ‘vetor’ posição aumenta.
O valor de 𝒙 aumenta (torna-se um número positivo cada vez maior).
A partícula está se afastando da origem, no sentido positivo.
Define-se aceleração escalar média de uma partícula como o quociente entre ∆𝑣 e o intervalo
de tempo ∆𝑡.
𝑎𝑐𝑒𝑙𝑒𝑟𝑎𝑐𝑎𝑜 𝑒𝑠𝑐𝑎𝑙𝑎𝑟 𝑚é𝑑𝑖𝑎 =∆𝑥
∆𝑡
Por definição, a aceleração escalar instantânea 𝑎 é,
10 Na verdade, a velocidade é um vetor. Entretanto, no movimento retilíneo, a direção do vetor velocidade é sempre
coincidente com a direção retilínea (conhecida e fixa) do movimento tal que �� = 𝑣𝑖 sempre. Por isso, para
especificar o vetor velocidade, é suficiente (e conveniente) especificar apenas o seu módulo (𝑣) e o seu sentido
(sinal positivo ou negativo).

Prof.: Carlos Arthur Cavalcante 189
𝑎 = lim∆𝑡→0
∆𝑣
∆𝑡=
𝑑𝑣
𝑑𝑡=
𝑑2𝑥
𝑑𝑡2
A aceleração escalar 𝑎 é representada por um número real, que pode ser positivo, negativo ou
nulo11.
Se o valor de 𝑎 for negativo (𝑎 < 0), a partícula estará acelerando no sentido negativo do eixo
coordenado que foi adotado para descrever o seu movimento (retilíneo).
Se a partícula tiver uma velocidade negativa (𝑣 < 0), a
intensidade do vetor velocidade (speed) estará aumentando. A
partícula move-se cada vez mais rápido no sentido negativo e o
valor de 𝑣 torna-se um número (negativo) cada vez menor.
Aceleração de uma partícula movendo-se no sentido negativo.
Se a partícula tiver uma velocidade positiva (𝑣 > 0), a
intensidade do vetor velocidade (speed) estará diminuindo. A
partícula move-se cada vez mais devagar no sentido positivo e o
valor de 𝑣 torna-se um número (positivo) cada vez menor.
Desaceleração de uma partícula movendo-se no sentido positivo.
𝑨𝒄𝒆𝒍𝒆𝒓𝒂𝒄𝒂𝒐 (𝒂) 𝑽𝒆𝒍𝒐𝒄𝒊𝒅𝒂𝒅𝒆 (𝒗) Análise Interpretativa
𝑎 < 0
𝑣 < 0
A intensidade do ‘vetor’ velocidade (speed) aumenta.
O valor de 𝒗 torna-se um número negativo cada vez menor.
Aceleração de uma partícula movendo-se no sentido negativo.
𝑣 > 0
A intensidade do ‘vetor’ velocidade (speed) diminui.
O valor de 𝒗 torna-se um número positivo cada vez menor.
Desaceleração de uma partícula movendo-se no sentido positivo.
𝑎 > 0
𝑣 < 0
A intensidade do ‘vetor’ velocidade (speed) diminui.
O valor de 𝒗 torna-se um número negativo cada vez maior.
Desaceleração de uma partícula movendo-se no sentido negativo.
𝑣 > 0
A intensidade do ‘vetor’ velocidade (speed) aumenta.
O valor de 𝒗 torna-se um número positivo cada vez maior.
Aceleração de uma partícula movendo-se no sentido positivo.
Se o valor de 𝑎 for positivo (𝑎 > 0), a partícula estará acelerando no sentido positivo do eixo
coordenado que foi adotado para descrever o seu movimento (retilíneo).
Se a partícula tiver uma velocidade negativa (𝑣 < 0), a
intensidade do vetor velocidade (speed) estará diminuindo. A
partícula move-se cada vez mais devagar no sentido negativo e o
valor de 𝑣 torna-se um número (negativo) cada vez menor.
Desaceleração de uma partícula movendo-se no sentido negativo.
Se a partícula tiver uma velocidade positiva (𝑣 > 0), a
intensidade do vetor velocidade (speed) estará aumentando. A
partícula move-se cada vez mais rápido no sentido positivo e o
11 Na verdade, a aceleração é um vetor. Entretanto, no movimento retilíneo, a direção do vetor aceleração é sempre
coincidente com a direção retilínea (conhecida e fixa) do movimento tal que �� = 𝑎𝑖 sempre. Por isso, para
especificar o vetor aceleração, é suficiente (e conveniente) especificar apenas o seu módulo (𝑎) e o seu sentido
(sinal positivo ou negativo).

Prof.: Carlos Arthur Cavalcante 190
número (positivo) que representa a sua velocidade será cada vez maior. Aceleração de uma
partícula movendo-se no sentido positivo.
Para exemplificar, considere uma partícula que se desloca ao longo de uma linha reta de tal
modo que a sua posição em qualquer instante nessa linha reta é dada pela expressão 𝑥 = −𝑡3 +6𝑡2. Plotar os gráficos de 𝑥(𝑡), 𝑣(𝑡) e 𝑎(𝑡).
Solução:
𝑥 = −𝑡3 + 6𝑡2 𝑣 =𝑑𝑥
𝑑𝑡= 12𝑡 − 3t2 𝑎 =
𝑑𝑣
𝑑𝑡= 12 − 6𝑡
A.2. Determinação do Movimento (Retilíneo) de uma Partícula
Na solução de problemas envolvendo movimentos retilíneos, há dois casos típicos de
problemas a resolver:
1) No primeiro caso, a função de posição da partícula em movimento retilíneo é dada ou
foi previamente estabelecida como a equação de posição desejada. Ou seja, a função 𝑥(𝑡) é conhecida.
O problema a resolver consiste na determinação de 𝑣(𝑡) e de 𝑎(𝑡). A solução deste problema requer ‘simplesmente’ que a função conhecida 𝑥(𝑡) seja
derivada duas vezes para determinar a função velocidade 𝑣(𝑡) e a função aceleração
𝑎(𝑡).
2) No segundo caso, é a função aceleração da partícula que é dada ou é previamente
estabelecida como a aceleração (retilínea) desejada. Ou seja, a função aceleração é
conhecida.
O problema a resolver consiste na determinação da função velocidade e da função
posição.
A solução requer que a função aceleração seja integrada de modo que a função
velocidade e a função posição sejam determinadas. Para isso, é necessário conhecer
também as condições iniciais do problema, em geral expressas na forma de 𝑣0 e de 𝑥0.
Nos casos em que a função aceleração da partícula é conhecida, existem três casos mais
comuns:
1) A aceleração é uma dada função do tempo, 𝑎 = 𝑎(𝑡) 2) A aceleração é uma dada função da velocidade, 𝑎 = 𝑎(𝑣) 3) A aceleração é uma dada função da posição, 𝑎 = 𝑎(𝑥)
0,00
5,00
10,00
15,00
20,00
25,00
30,00
35,00
0,00 1,00 2,00 3,00 4,00 5,00 6,00 7,00
x
-40,00
-30,00
-20,00
-10,00
0,00
10,00
20,00
0,00 1,00 2,00 3,00 4,00 5,00 6,00 7,00
v
-30,00
-25,00
-20,00
-15,00
-10,00
-5,00
0,00
5,00
10,00
15,00
0,00 1,00 2,00 3,00 4,00 5,00 6,00 7,00
a

Prof.: Carlos Arthur Cavalcante 191
A.2.1. A Aceleração é uma Função do Tempo 𝒂 = 𝒂(𝒕).
A aceleração é uma função do tipo 𝑎 = 𝑎(𝑡) e a integração da função 𝑎(𝑡) permite
determinar a velocidade 𝑣 em função do tempo 𝑡, isto é, permite determinar a função 𝑣 =𝑣(𝑡).
𝑎 = 𝑎(𝑡) 𝑑𝑣
𝑑𝑡= 𝑎(𝑡) 𝑑𝑣 = 𝑎(𝑡)𝑑𝑡
∫ 𝑑𝑣𝑣
𝑣0= ∫ 𝑎(𝑡)𝑑𝑡
𝑡
0 𝑣 − 𝑣0 = ∫ 𝑎(𝑡)𝑑𝑡
𝑡
0 𝑣 = 𝑣0 + ∫ 𝑎(𝑡)𝑑𝑡
𝑡
0
Uma vez que a função 𝑣 = 𝑣(𝑡) tenha sido determinada, a sua integração permite determinar
a posição 𝑥 em função do tempo 𝑡.
𝑣 = 𝑣(𝑡) 𝑑𝑥
𝑑𝑡= 𝑣(𝑡) 𝑑𝑥 = 𝑣(𝑡)𝑑𝑡
∫ 𝑑𝑥𝑥
𝑥0= ∫ 𝑣(𝑡)𝑑𝑡
𝑡
0 𝑥 − 𝑥0 = ∫ 𝑣(𝑡)𝑑𝑡
𝑡
0
𝒙 = 𝒙𝟎 + ∫ 𝒗(𝒕)𝒅𝒕𝒕
𝟎
Dois casos são particularmente importantes e comuns de ocorrer: o caso particular em que a
aceleração é constante e o caso particular em que a aceleração é zero.
1) A aceleração é constante.
Neste caso particular, a função aceleração é uma função constante não nula, isto é, 𝑎 =𝑎(𝑡) = 𝑘 ≠ 0.
Movimento Retilíneo Uniformemente Acelerado.
Integrando a função 𝑎 = 𝑎(𝑡) para encontrar a função 𝑣 = 𝑣(𝑡),
𝑎 = 𝑎(𝑡) = 𝑘 𝑑𝑣
𝑑𝑡= 𝑘 𝑑𝑣 = 𝑘𝑑𝑡
∫ 𝑑𝑣𝑣
𝑣0= ∫ 𝑘𝑑𝑡
𝑡
0 𝑣 − 𝑣0 = 𝑘 ∫ 𝑑𝑡
𝑡
0
𝒗 = 𝒗𝟎 + 𝒌𝒕
Além disso, podemos aplicar a regra da cadeia e obter uma equação para a velocidade 𝑣
em função da posição 𝑥, isto é, para obter a função 𝑣(𝑥):
𝑎 = 𝑎(𝑡) = 𝑘 𝑑𝑣
𝑑𝑡= 𝑘
𝑑𝑣
𝑑𝑥
𝑑𝑥
𝑑𝑡= 𝑘
𝑑𝑣
𝑑𝑥𝑣 = 𝑘 𝑣𝑑𝑣 = 𝑘𝑑𝑥 ∫ 𝑣𝑑𝑣
𝑣
𝑣0= ∫ 𝑘𝑑𝑥
𝑥
𝑥0
1
2𝑣2 −
1
2𝑣0
2 = 𝑘(𝑥 − 𝑥0) 𝑣2 − 𝑣02 = 2𝑘(𝑥 − 𝑥0)

Prof.: Carlos Arthur Cavalcante 192
𝒗𝟐 = 𝒗𝟎𝟐 + 𝟐𝒌(𝒙 − 𝒙𝟎)
Por fim, a integração da função 𝑣 = 𝑣(𝑡) permite determinar a função posição 𝑥 = 𝑥(𝑡).
𝑣 = 𝑣(𝑡) = 𝑣0 + 𝑘𝑡 𝑑𝑥
𝑑𝑡= 𝑣0 + 𝑘𝑡 𝑑𝑥 = (𝑣0 + 𝑘𝑡)𝑑𝑡
∫ 𝑑𝑥𝑥
𝑥0= ∫ (𝑣0 + 𝑘𝑡)𝑑𝑡
𝑡
0 𝑥(𝑡) − 𝑥0 = 𝑣0𝑡 +
1
2𝑘𝑡2
𝒙 = 𝒙𝟎 + 𝒗𝟎𝒕 +𝟏
𝟐𝒌𝒕𝟐
2) A aceleração é zero.
Neste caso particular, a função aceleração, além de ser constante, é uma função nula, isto
é, 𝑎 = 𝑎(𝑡) = 0.
Movimento Retilíneo Uniforme.
𝑎 = 𝑎(𝑡) = 0 𝑑𝑣
𝑑𝑡= 0 𝑑𝑣 = 0
∫ 𝑑𝑣𝑣
𝑣0= 0 𝑣 − 𝑣0 = 0 𝒗 = 𝒗𝟎
Integrando a função 𝑣 = 𝑣(𝑡) para encontrar a função posição 𝑥,
𝑣 = 𝑣(𝑡) = 𝑣0 𝑑𝑥
𝑑𝑡= 𝑣0 𝑑𝑥 = 𝑣0𝑑𝑡
∫ 𝑑𝑥𝑥
𝑥0= ∫ 𝑣0𝑑𝑡
𝑡
0 𝑥 − 𝑥0 = 𝑣0𝑡 𝒙 = 𝒙𝟎 + 𝒗𝟎𝒕
Prof.: Carlos Arthur Cavalcante 193
A.2.1.1. Exemplo-Ilustrativo A_01: Problema tipo 𝒂 = 𝒂(𝒕).
A aceleração de uma partícula em movimento retilíneo é diretamente proporcional
ao tempo 𝑡 e sabe-se que em quando 𝑡 = 0 a partícula está na posição 𝑥 = 24 𝑚.
Sabendo que em 𝑡 = 6 𝑠 a posição da partícula era 𝑥 = 96 𝑚 e que sua velocidade
era 𝑣 = 18 𝑚 𝑠⁄ , expresse 𝑥 e 𝑣 em função de 𝑡.
SOLUÇÃO:
Foi dado que:
𝑎 = 𝑘𝑡 𝑥(𝑡=0) = 24 𝑚 {𝑥(𝑡=6) = 96 𝑚
𝑣(𝑡=6) = 18 𝑚 𝑠⁄
Assim,
𝑎 = 𝑘𝑡 𝑑𝑣
𝑑𝑡= 𝑘𝑡 𝑑𝑣 = (𝑘𝑡)𝑑𝑡
∫ 𝑑𝑣𝑣
𝑣0= ∫ (𝑘𝑡)𝑑𝑡
𝑡
0 𝑣|𝑣0
𝑣 =1
2𝑘𝑡2|
0
𝑡
𝑣 − 𝑣0 =1
2𝑘𝑡2 −
1
2𝑘(0)2
𝑣 − 𝑣0 =1
2𝑘𝑡2 − 0 𝒗 = 𝒗𝟎 +
𝟏
𝟐𝒌𝒕𝟐
Conhecendo a expressão para a velocidade 𝑣 em função do tempo, podemos determinar que,
𝑣 = 𝑣0 +1
2𝑘𝑡2
𝑑𝑥
𝑑𝑡= 𝑣0 +
1
2𝑘𝑡2 𝑑𝑥 = (𝑣0 +
1
2𝑘𝑡2) 𝑑𝑡
∫ 𝑑𝑥𝑥
𝑥0= ∫ (𝑣0 +
1
2𝑘𝑡2) 𝑑𝑡
𝑡
0 𝑥|𝑥0
𝑥 = 𝑣0𝑡 +1
2𝑘1
3𝑡3|
0
𝑡
𝑥 − 𝑥0 = 𝑣0𝑡 +1
6𝑘𝑡3 𝒙 = 𝒙𝟎 + 𝒗𝟎𝒕 +
𝟏
𝟔𝒌𝒕𝟑
Em conformidade com as três condições dadas podemos escrever que:
{
24 = 𝑥0 + 𝑣0(0) +
1
6𝑘(0)3
96 = 𝑥0 + 𝑣0(6) +1
6𝑘(6)4
18 = 𝑣0 +1
2𝑘(6)2
{
1𝑥0 + 0𝑣0 + 0𝑘 = 241𝑥0 + 6𝑣0 + 108𝑘 = 960𝑥0 + 1𝑣0 + 72𝑘 = 18
Obtemos um sistema linear de três equações e três incógnitas (𝑥0, 𝑣0 e 𝑘).
Para resolver o sistema (de equações lineares) pelo método de Gauss-Jordan, montamos
primeiramente a matriz ampliada do sistema:
[1 0 0 241 6 108 960 1 72 18
]
Reduzindo a matriz ampliada à forma escada linha reduzida, obtemos:
[
1 0 0 240 1 0 10
0 0 11
9
]
Isto é, obtemos que a solução é

Prof.: Carlos Arthur Cavalcante 194
𝑥0 = 24 𝑣0 = 10 𝑘 =1
9
Assim, as expressões para 𝑥 de 𝑣 em termos de 𝑡 são:
𝑥(𝑡) = 𝑥0 + 𝑣0𝑡 +1
12𝑘𝑡4 𝑥(𝑡) = 24 + 10𝑡 +
1
12
1
9𝑡4 𝑥(𝑡) = 24 + 10𝑡 +
1
108𝑡4
𝑣(𝑡) = 𝑣0 +1
3𝑘𝑡3 𝑣(𝑡) = 10 +
1
3
1
9𝑡3 𝑣(𝑡) = 10 +
1
27𝑡3

Prof.: Carlos Arthur Cavalcante 195
A.2.1.2. Exemplo-Ilustrativo A_02: Problema tipo 𝒂 = 𝒂(𝒕) = 𝒄𝒕𝒆.
Problema 11.9 (Beer, Johnston; 9ª Edição).
A aceleração de uma partícula é definida pela relação 𝑎 = −8 𝑚 𝑠2⁄ . Sabendo que
𝑥 = 20 𝑚 quando 𝑡 = 4 𝑠 e que 𝑥 = 4 𝑚 quando 𝑣 = 16 𝑚 𝑠⁄ , determine (a) o
tempo quando a velocidade é zero, (b) a velocidade e distância total percorrida
quando 𝑡 = 11 𝑠.
SOLUÇÃO:
Este é um exemplo de problema em que a aceleração é uma função constante do tempo, isto é, a
aceleração é uma função do tipo 𝑎 = 𝑓(𝑡) = 𝑘, caracterizando, portanto, um Movimento Retilíneo
Uniformemente Acelerado (MRUA).
Foi dado que:
𝑎(𝑡) = −8 {𝑡 = 4 𝑠 ⇒ 𝑥 = 20 𝑚𝑥 = 4 𝑚 ⇒ 𝑣 = 16 𝑚 𝑠⁄
Aceleração é constante (MRUA) de modo que o movimento é regido pelas seguintes equações gerais:
𝑎 = −8
𝑣 = 𝑣0 − 8𝑡 𝑣2 = 𝑣0
2 − 16(𝑥 − 𝑥0) 𝑥 = 𝑥0 + 𝑣0𝑡 − 4𝑡
2
Em conformidade com as duas condições dadas podemos escrever que:
20 = 𝑥0 + 𝑣0(4) − 4(4)2 (16)2 = 𝑣0
2 − 16(4 − 𝑥0)
𝑥0 + 4𝑣0 − 64 = 20 256 = 𝑣02 − 64 + 16𝑥0
𝑥0 + 4𝑣0 = 84 16𝑥0 + 𝑣02 = 320
Temos, portanto, um sistema (não linear) de duas equações e duas incógnitas:
𝑥0 + 4𝑣0 = 84 Eq. (1)
16𝑥0 + 𝑣02 = 320 Eq. (2)
Resolvendo o sistema (não linear) pelo Método da Substituição de variáveis, fazemos:
Da equação (2) tiramos que 𝑥0 =320−𝑣0
2
16
Substituindo na equação (1) teremos,
320−𝑣0
2
16+ 4𝑣0 = 84
320−𝑣02+64𝑣0
16= 84
320 − 𝑣02 + 64𝑣0 = 1344 −𝑣0
2 + 64𝑣0 = 1024
−𝑣02 + 64𝑣0 − 1024 = 0 𝑣0
2 − 64𝑣0 + 1024 = 0
𝑣0 =64±√(−64)2−4∙1∙1024
2∙1 𝑣0 =
64±0
2
𝑣0 = 32 𝑚 𝑠⁄
Assim,
Prof.: Carlos Arthur Cavalcante 196
𝑥0 =320−(32)2
16 𝑥0 =
−704
16 𝑥0 = −44 𝑚
Resumindo,
𝑣(𝑡) = 𝑣0 − 8𝑡 𝑣(𝑡) = 32 − 8𝑡
𝑣(𝑥)2 = 𝑣02 − 2 ∙ 8(𝑥 − 𝑥0) 𝑣(𝑥)2 = 1024 − 16(𝑥 + 44)
𝑥 = 𝑥0 + 𝑣0𝑡 − 4𝑡2 𝑥 = −44 + 32𝑡 − 4𝑡2
Item (a): Determinação do tempo para o qual a velocidade é zero.
𝑣(𝑡) = 0 ⇒ 0 = 32 − 8𝑡(𝑣=0) 𝑡(𝑣=0) = 4 𝑠
Item (b): A velocidade quando 𝒕 = 𝟏𝟏 𝒔.
𝑣(𝑡=11) = 32 − 8(11) 𝑣(𝑡=11) = −56,0 𝑚 𝑠⁄
Item (c): A distância total percorrida quando 𝒕 = 𝟏𝟏 𝒔.
Primeiro, devemos verificar se há ou não há inversão no sentido da velocidade entre 𝑡 = 0 e 𝑡 = 11.
Já constatamos que há inversão no sentido da velocidade (𝑣 = 0) no instante 𝑡 = 4 𝑠.
Assim, a distância percorrida até o instante 𝑡 = 11 𝑠 será dada por:
∆𝑡=0𝑡=11= ∆𝑡=0
𝑡=4 + ∆𝑡=4𝑡=11= |𝑥(𝑡=4) − 𝑥(𝑡=0)| + |𝑥(𝑡=11) − 𝑥(𝑡=4)|
𝑥(𝑡=0) = 𝑥0 = −44 𝑥(𝑡=0) = −44 𝑚
𝑥(𝑡=4) = −44 + 32(4) − 4(4)2 𝑥(𝑡=4) = 20 𝑚
𝑥(𝑡=11) = −44 + 32(11) − 4(11)2 𝑥(𝑡=11) = −176 𝑚
Assim,
∆𝑡=0𝑡=11= |20 − (−44)| + |−176 − (20)| ∆𝑡=0
𝑡=11= |20 + 44| + |−176 − 20|
∆𝑡=0𝑡=11= |64| + |−196| ∆𝑡=0
𝑡=11= 64 + 196
∆𝑡=0𝑡=11= 260 𝑚

Prof.: Carlos Arthur Cavalcante 197
A.2.1.3. Exemplo-Ilustrativo A_03: Problema tipo 𝒂 = 𝒂(𝒕) = 𝟎.
Uma partícula desloca-se com velocidade constante de 16 𝑚 𝑠⁄ ao longo de uma
trajetória retilínea. Sabendo que 𝑥 = 20 𝑚 quando 𝑡 = 4 𝑠, determine (a) a posição
da partícula quando 𝑡 = 6 𝑠, (b) a velocidade e a distância total percorrida quando
𝑡 = 11 𝑠.
SOLUÇÃO:
Este é um exemplo de problema em que a aceleração é nula: um caso específico do caso particular em
a aceleração é uma função constante do tempo. A aceleração é uma função do tipo 𝑎 = 𝑓(𝑡) = 𝑘 =0, caracterizando, portanto, um Movimento Retilíneo Uniforme (MRU).
Dados:
𝑎 = 0 𝑣 = 𝑣0 = 16 𝑚 𝑠⁄ Em 𝑡 = 4 𝑠 ⇒ 𝑥 = 20 𝑚
Aceleração é nula. Logo, o movimento é um MRU. Portanto, é regido pelas seguintes equações gerais:
𝑎 = 0 𝑣 = 𝑣0 = 16 𝑥 = 𝑥0 + 16𝑡 Em conformidade com a condição dada podemos escrever que:
20 = 𝑥0 + 16(4) 𝑥0 = 20 − 64 𝑥0 = −44
Assim,
𝑥 = 𝑥0 + 16𝑡 𝑥 = −44 + 16𝑡
Item (a): Determinação da posição da partícula quando 𝒕 = 𝟔 𝒔.
𝑥(𝑡=6) = −44 + 16(6) 𝑥(𝑡=6) = −44 + 96 𝑥(𝑡=6) = 52 𝑚
Item (b): A velocidade quando 𝒕 = 𝟏𝟏 𝒔.
𝑣(𝑡=11) = 𝑣0 = 16 𝑣(𝑡=11) = 16 𝑚 𝑠⁄
Item (c): A distância total percorrida quando 𝒕 = 𝟏𝟏 𝒔.
Não há inversão no sentido da velocidade, pois é um MRU.
Assim, a distância percorrida até o instante 𝑡 = 11 𝑠 será dada por:
∆𝑡=0𝑡=11= |𝑥(𝑡=0) − 𝑥(𝑡=11)|
𝑥(𝑡=0) = 𝑥0 = −44 𝑥(𝑡=0) = −44 𝑚
𝑥(𝑡=11) = −44 + 16(11) 𝑥(𝑡=11) = 132 𝑚
Assim,
∆𝑡=0𝑡=11= |−44 − 132| ∆𝑡=0
𝑡=11= |−176| ∆𝑡=0𝑡=11= 176 𝑚

Prof.: Carlos Arthur Cavalcante 198

Prof.: Carlos Arthur Cavalcante 199
A.2.2. A Aceleração é uma Função da Velocidade 𝒂 = 𝒂(𝒗).
A integração da função 𝑎(𝑣) permite determinar a velocidade 𝑣 em função do tempo 𝑡, isto
é, permite determinar a função 𝑣(𝑡).
𝑎 = 𝑎(𝑣) 𝑑𝑣
𝑑𝑡= 𝑎(𝑣)
𝑑𝑣
𝑎(𝑣)= 𝑑𝑡
∫𝑑𝑣
𝑎(𝑣)
𝑣
𝑣0= ∫ 𝑑𝑡
𝑡
0 ∫
𝒅𝒗
𝒂(𝒗)
𝒗
𝒗𝟎= 𝒕
Alternativamente, podemos fazer a integração da função 𝑎(𝑣) aplicando a regra da cadeia,
de modo a determinarmos a velocidade 𝑣 em função da posição 𝑥, isto é, determinar a função
𝑣 = 𝑓(𝑥).
𝑎 = 𝑎(𝑣) 𝑑𝑣
𝑑𝑡= 𝑎(𝑣)
𝑑𝑣
𝑑𝑥
𝑑𝑥
𝑑𝑡= 𝑎(𝑣)
𝑑𝑣
𝑑𝑥𝑣 = 𝑎(𝑣)
𝑣
𝑎(𝑣)𝑑𝑣 = 𝑑𝑥 ∫ (
𝑣
𝑎(𝑣))𝑑𝑣
𝑣
𝑣0= ∫ 𝑑𝑥
𝑥
𝑥0
∫ (𝒗
𝒂(𝒗))𝒅𝒗
𝒗
𝒗𝟎= 𝒙 − 𝒙𝟎
Dois casos são particularmente importantes e comuns de ocorrer: o caso particular em que a
aceleração é proporcional à velocidade e o caso particular em que a aceleração é proporcional
ao quadrado velocidade.
1) A aceleração é proporcional à velocidade.
Neste caso particular, a função aceleração é uma função proporcional à velocidade, isto
é, 𝑎(𝑣)~𝑣. Um dos casos mais comuns em problemas de engenharia é 𝑎 = 𝐶 − 𝑘𝑣, onde
𝐶 é uma constante e 𝑘 é uma constante estritamente positiva (𝑘 > 0). Neste caso, a
aceleração da partícula é diretamente proporcional à sua velocidade e no sentido oposto
ao sentido da velocidade. Quanto mais rápida a partícula está, mais intensa é a sua
desaceleração.
Integrando a função 𝑎(𝑣) para determinar a função 𝑣(𝑡),
𝑎 = 𝑎(𝑣) = 𝐶 − 𝑘𝑣 𝑑𝑣
𝑑𝑡= 𝐶 − 𝑘𝑣
𝑑𝑣
𝐶−𝑘𝑣= 𝑑𝑡
∫ (1
𝐶−𝑘𝑣)
𝑣
𝑣0𝑑𝑣 = ∫ 𝑑𝑡
𝑡
0
ln(𝑘𝑣0−𝐶)−ln(𝐶−𝑘𝑣)
𝑘= (𝑡 − 0)
ln (𝑘𝑣0−𝐶
𝐶−𝑘𝑣) = 𝑘𝑡 𝑒ln(
𝑘𝑣0−𝐶
𝐶−𝑘𝑣) = 𝑒𝑘𝑡
𝑘𝑣0−𝐶
𝐶−𝑘𝑣= 𝑒𝑘𝑡
𝒗(𝒕) = −𝒌𝒗𝟎−(𝒆
𝒌𝒕+𝟏)𝑪
𝒌𝒆𝒌𝒕
No caso em que 𝐶 = 0, a expressão para 𝑣(𝑡) reduz-se a:
Prof.: Carlos Arthur Cavalcante 200
𝑣 = −𝑣0
𝑒𝑘𝑡 𝒗 = 𝒗𝟎𝒆
−𝒌𝒕
Integrando a função 𝑎(𝑣) para determinar a função 𝑣(𝑥),
𝑎 = 𝑎(𝑣) = 𝐶 − 𝑘𝑣 𝑑𝑣
𝑑𝑡= 𝐶 − 𝑘𝑣
𝑑𝑣
𝑑𝑥
𝑑𝑥
𝑑𝑡= 𝐶 − 𝑘𝑣
𝑑𝑣
𝑑𝑥𝑣 = 𝐶 − 𝑘𝑣
𝑣
𝐶−𝑘𝑣𝑑𝑣 = 𝑑𝑥 ∫
𝑣
𝐶−𝑘𝑣𝑑𝑣
𝑣
𝑣0= ∫ 𝑑𝑥
𝑥
𝑥0
𝐶 ln(𝑘𝑣 − 𝐶) − 𝐶 ln(𝑘𝑣0 − 𝐶) − 𝑘𝑣0 + 𝑘𝑣 = 𝑘2(𝑥 − 𝑥0)
𝐶[ln(𝑘𝑣 − 𝐶) − ln(𝑘𝑣0 − 𝐶)] − 𝑘𝑣0 + 𝑘𝑣 = 𝑘2(𝑥 − 𝑥0)
𝐶 ln (𝑘𝑣−𝐶
𝑘𝑣0−𝐶) − 𝑘𝑣0 + 𝑘𝑣 = 𝑘
2(𝑥 − 𝑥0)
𝒙(𝒗) = −𝒌𝒗𝟎−(𝒌𝒗+𝒌
𝟐𝒙𝟎+𝑪𝐥𝐧(𝒌𝒗−𝑪
𝒌𝒗𝟎−𝑪))
𝒌𝟐
No caso em que 𝐶 = 0, a expressão para 𝑥 = 𝑥(𝑣) reduz-se a:
𝒙(𝒗) = −𝒗𝟎−(𝒌𝒙𝟎+𝒗)
𝒌
Esta expressão pode ser resolvida para 𝑣, de modo que,
𝑣 = −(𝑘𝑥0 − 𝑘𝑥 − 𝑣0) 𝑣 = −𝑘𝑥0 + 𝑘𝑥 + 𝑣0
𝒗(𝒙) = 𝒗𝟎 − 𝒌(𝒙 − 𝒙𝟎)
Adicionalmente, uma vez que a função
𝑣(𝑡) = −𝑘𝑣0−(𝑒
𝑘𝑡+1)𝐶
𝑘𝑒𝑘𝑡
foi explicitamente determinada, podemos integrar 𝑣(𝑡) para determinar 𝑥(𝑡):
𝑣(𝑡) = −𝑘𝑣0−(𝑒
𝑘𝑡+1)𝐶
𝑘𝑒𝑘𝑡
𝑑𝑥
𝑑𝑡= −
𝑘𝑣0−(𝑒𝑘𝑡+1)𝐶
𝑘𝑒𝑘𝑡
𝑑𝑥 = (−𝑘𝑣0−(𝑒
𝑘𝑡+1)𝐶
𝑘𝑒𝑘𝑡)𝑑𝑡 ∫ 𝑑𝑥
𝑥
𝑥0= ∫ (−
𝑘𝑣0−(𝑒𝑘𝑡+1)𝐶
𝑘𝑒𝑘𝑡)𝑑𝑡
𝑡
0
𝑥 − 𝑥0 = −(𝑘𝑣0−𝐶𝑘𝑡−𝐶)𝑒
𝑘𝑡−𝑘𝑣0+𝐶
𝑘2𝑒𝑘𝑡 𝒙(𝒕) = 𝒙𝟎 −
(𝒌𝒗𝟎−𝑪𝒌𝒕−𝑪)𝒆𝒌𝒕−𝒌𝒗𝟎+𝑪
𝒌𝟐𝒆𝒌𝒕
No caso em que 𝐶 = 0, a expressão para 𝑥 = 𝑥(𝑡) reduz-se a:
𝑥(𝑡) = 𝑥0 −(𝑘𝑣0−0−0)𝑒
𝑘𝑡−𝑘𝑣0+0
𝑘2𝑒𝑘𝑡 𝑥(𝑡) = 𝑥0 −
𝑘𝑣0𝑒𝑘𝑡−𝑘𝑣0
𝑘2𝑒𝑘𝑡

Prof.: Carlos Arthur Cavalcante 201
𝑥(𝑡) = 𝑥0 −𝑣0(𝑘𝑒
𝑘𝑡−𝑘)
𝑘2𝑒𝑘𝑡 𝑥(𝑡) = 𝑥0 −
𝑘𝑣0(𝑒𝑘𝑡−1)
𝑘2𝑒𝑘𝑡
𝑥(𝑡) = 𝑥0 −𝑣0(𝑒
𝑘𝑡−1)
𝑘𝑒𝑘𝑡 𝒙(𝒕) = 𝒙𝟎 +
𝒗𝟎
𝒌(𝟏 − 𝒆−𝒌𝒕)
2) A aceleração é proporcional ao quadrado da velocidade.
Neste caso particular, a função aceleração é uma função proporcional ao quadrado da
velocidade, isto é, 𝑎(𝑣)~𝑣2. Um dos casos mais comuns em problemas de engenharia é
𝑎 = 𝐶 − 𝑘𝑣2, onde 𝐶 é uma constante e 𝑘 é uma constante estritamente positiva (𝑘 >0). Neste caso, a aceleração da partícula é diretamente proporcional ao quadrado da sua
velocidade e no sentido oposto ao sentido da velocidade. Quanto mais rápida a partícula
está, “muito” mais intensa é a sua desaceleração.
Integrando a função 𝑎(𝑣) para determinar a função 𝑣(𝑡) obtemos,
𝑎 = 𝑎(𝑣) = 𝐶 − 𝑘𝑣2 𝑑𝑣
𝑑𝑡= 𝐶 − 𝑘𝑣2
𝑑𝑣
𝐶−𝑘𝑣2= 𝑑𝑡
∫1
𝐶−𝑘𝑣2
𝑣
𝑣0𝑑𝑣 = ∫ 𝑑𝑡
𝑡
0
√𝐶𝑘 ln (−𝐶+𝑘𝑣2+2(√𝐶𝑘)𝑣
𝐶−𝑘𝑣2) − √𝐶𝑘 ln (
𝑣0√𝑘+√𝐶
𝑣0√𝑘−√𝐶) = 2𝐶𝑘𝑡
√𝐶𝑘 [ln (−𝐶+𝑘𝑣2+2(√𝐶𝑘)𝑣
𝐶−𝑘𝑣2) − ln (
𝑣0√𝑘+√𝐶
𝑣0√𝑘−√𝐶)] = 2𝐶𝑘𝑡
No caso em que 𝐶 = 0, a expressão para 𝑣(𝑡) reduz-se a:
𝑑𝑣
𝑑𝑡= −𝑘𝑣2
𝑑𝑣
𝑣2= −𝑘𝑑𝑡 ∫
1
𝑣2
𝑣
𝑣0𝑑𝑣 = −𝑘 ∫ 𝑑𝑡
𝑡
0
1
𝑣−
1
𝑣0= +𝑘𝑡 𝒗 =
𝒗𝟎
𝒗𝟎𝒌𝒕+𝟏
Integrando a função 𝑎(𝑣) para determinar a função 𝑣(𝑥) obtemos,
𝑎 = 𝑎(𝑣) = 𝐶 − 𝑘𝑣2 𝑑𝑣
𝑑𝑡= 𝐶 − 𝑘𝑣2
𝑑𝑣
𝑑𝑥
𝑑𝑥
𝑑𝑡= 𝐶 − 𝑘𝑣2
𝑑𝑣
𝑑𝑥𝑣 = 𝐶 − 𝑘𝑣2
𝑣
𝐶−𝑘𝑣2𝑑𝑣 = 𝑑𝑥
𝑑𝑣
𝑣= −𝑘𝑑𝑥
∫𝑣
𝐶−𝑘𝑣2𝑑𝑣
𝑣
𝑣0= ∫ 𝑑𝑥
𝑥
𝑥0
ln(𝑘𝑣2 − 𝐶) − ln(𝑘𝑣02 − 𝐶) = 2𝑘(𝑥0 − 𝑥)
No caso em que 𝐶 = 0, a expressão para 𝑥 = 𝑥(𝑣) reduz-se a:
𝑎 = 𝑎(𝑣) = −𝑘𝑣2 𝑑𝑣
𝑑𝑡= −𝑘𝑣2
𝑑𝑣
𝑑𝑥
𝑑𝑥
𝑑𝑡= −𝑘𝑣2

Prof.: Carlos Arthur Cavalcante 202
𝑑𝑣
𝑑𝑥𝑣 = −𝑘𝑣2
𝑑𝑣
𝑑𝑥= −𝑘𝑣
𝑑𝑣
𝑣= −𝑘𝑑𝑥
∫1
𝑣𝑑𝑣
𝑣
𝑣0= ∫ −𝑘𝑑𝑥
𝑥
𝑥0 ln 𝑣 − ln 𝑣0 = −𝑘(𝑥 − 𝑥0)
ln𝑣
𝑣0= −𝑘(𝑥 − 𝑥0) 𝑒
ln𝑣
𝑣0 = 𝑒−𝑘(𝑥−𝑥0) 𝑣
𝑣0= 𝑒−𝑘(𝑥−𝑥0)
𝒗(𝒙) = 𝒗𝟎𝒆−𝒌(𝒙−𝒙𝟎)
Adicionalmente, no caso particular em que 𝐶 = 0, e para o qual a função 𝑣(𝑡) =𝑣0
𝑣0𝑘𝑡+1
foi explicitamente determinada, podemos integrar 𝑣(𝑡) para determinar 𝑥(𝑡):
𝑣(𝑡) =𝑣0
𝑣0𝑘𝑡+1
𝑑𝑥
𝑑𝑡=
𝑣0
𝑣0𝑘𝑡+1 𝑑𝑥 = (
𝑣0
𝑣0𝑘𝑡+1)𝑑𝑡
∫ 𝑑𝑥𝑥
𝑥0= ∫ (
𝑣0
𝑣0𝑘𝑡+1)𝑑𝑡
𝑡
0 𝑥 − 𝑥0 = ln (
𝑣0𝑘𝑡+1
𝑘)
𝒙 = 𝒙𝟎 + 𝐥𝐧 (𝒗𝟎𝒌𝒕+𝟏
𝒌)
A.2.2.1. Exemplo-Ilustrativo A_04: Problema tipo 𝒂 = −𝒌𝒗.
Problema 11.23 (Beer, Johnston; 9ª Edição).
A aceleração de uma partícula é definida pela relação 𝑎 = −0,8𝑣 onde 𝑎 é expressa
em 𝑚𝑚 𝑠2⁄ e 𝑣 é expressa em 𝑚𝑚 𝑠⁄ . Sabendo que em 𝑡 = 0 a velocidade é
40 𝑚 𝑠⁄ , determine: (a) a distância que a partícula percorrerá antes de ficar em
repouso, (b) o tempo necessário para a partícula ficar em repouso, (c) o tempo
necessário para a partícula tenha a sua velocidade reduzida em 50% do valor inicial.
SOLUÇÃO:
Este é um exemplo de problema em que a aceleração é uma função proporcional à velocidade do tipo
𝑎(𝑣) = −𝑘𝑣, onde 𝑘 é uma constante estritamente positiva (𝑘 > 0). A aceleração da partícula, é
diretamente proporcional à sua velocidade e no sentido inverso – quanto mais rápida a partícula está,
mais intensa é a sua desaceleração.
Dados:
𝑎(𝑣) = −0,8𝑣 𝑣0 = 40
Aceleração é do tipo 𝑎(𝑣) = −𝑘𝑣. Portanto, seu movimento será regido pelas seguintes equações
gerais:
𝑣 = 𝑣0𝑒−𝑘𝑡 𝑣 = 𝑣0 − 𝑘(𝑥 − 𝑥0) 𝑥 = 𝑥0 +
𝑣0
𝑘(1 − 𝑒−𝑘𝑡)
Substituindo o valor de 𝑘 e o valor de 𝑣0 dados no problema, ficamos com:
𝑣 = 40𝑒−0,8𝑡 𝑣 = 40 − 0,8(𝑥 − 𝑥0) 𝑥 = 𝑥0 +40
0,8(1 − 𝑒−0,8𝑡)

Prof.: Carlos Arthur Cavalcante 203
Item (a): Determinação da distância que a partícula percorrerá antes de ficar em repouso.
0 = 40 − 0,8(𝑥 − 𝑥0) −40
−0,8= (𝑥 − 𝑥0) (𝑥 − 𝑥0) = 50 𝑚
Item (b): Determinação do tempo necessário para a partícula ficar em repouso.
Para expressar 𝑡 como uma função de 𝑣, fazemos,
𝑣 = 40𝑒−0,8𝑡 𝑣
40= 𝑒−0,8𝑡 ln (
𝑣
40) = −0,8𝑡
ln (40
𝑣) = 0,8𝑡 𝑡 = 1,25 ln (
40
𝑣)
Quando 𝑣 = 0 teremos,
𝑡(𝑣=0) = 1,25 ln (40
0) 𝑡(𝑣=0) = ∞
Item (c): Determinação do tempo necessário para a partícula tenha a sua velocidade reduzida em 50%
do valor inicial.
𝑡(𝑣=50%𝑣0) = 1,25 ln (40
20) 𝑡(𝑣=50%𝑣0) = 1,25 ln 2 𝑡(𝑣=50%𝑣0) = 0,8664 𝑚 𝑠⁄
A.2.2.2. Exemplo-Ilustrativo A_05: Problema tipo 𝒂 = −𝒌𝒗𝟐.
Problema 11.24 (Beer, Johnston; 9ª Edição).
Uma bola de boliche é solta de um barco e atinge a superfície
de um lago com a velocidade de 8 𝑚 𝑠⁄ . Considerando que
a bola experimenta uma desaceleração de 𝑎 = 10 − 0,9𝑣2
quando atinge a água, determine a velocidade da bola
quando ela atinge o fundo do lago.
SOLUÇÃO:
Este é um exemplo de problema em que a aceleração é uma função
proporcional ao quadrado da velocidade do tipo 𝑎(𝑣) = 𝐶 − 𝑘𝑣2, onde 𝑘 é uma constante
estritamente positiva (𝑘 > 0).
Dados:
𝑎(𝑣) = 10 − 0,9𝑣2 𝑣0 = 8
Aceleração é do tipo 𝑎(𝑣) = 𝐶 − 𝑘𝑣2, onde 𝐶 = 10 e 𝑘 = 0,9.
Portanto, o movimento será regido pela seguinte equação geral:
ln(𝑘𝑣2 − 𝐶) − ln(𝑘𝑣02 − 𝐶) = 2𝑘(𝑥0 − 𝑥)
Substituindo os valores das constantes 𝐶 = 10 e 𝑘 = 0,9, bem como as
condições iniciais 𝑣0 = 8 e 𝑥0 = 0 teremos,
ln(0,9𝑣2 − 10) − ln(0,9(8)2 − 10) = 2(0,9)(0 − 𝑥)
𝑥

Prof.: Carlos Arthur Cavalcante 204
ln(0,9𝑣2 − 10) − ln(47,6) = −1,8𝑥 ln (0,9𝑣2−10
47,6) = −1,8𝑥
0,9𝑣2−10
47,6= 𝑒−1,8𝑥 0,9𝑣2 = 10 + 47,6𝑒−1,8𝑥 𝑣2 = 11,1 + 52,9𝑒−1,8𝑥
𝑣 = +√11,1 + 52,9𝑒−1,8𝑥
Quando a bola de boliche atinge o fundo do lago, o valor da sua posição é 𝑥 = 10 𝑚. Logo,
𝑣(𝑥=10)2 = √11,1 + 52,9𝑒−1,8(10) 𝑣(𝑥=10)
2 = √11,1 + 52,9𝑒−18
𝑣(𝑥=10)2 = √11,1 + (8,05 × 10−7) 𝑣(𝑥=10)
2 = √11,1
𝑣(𝑥=10) = 3,333 𝑚 𝑠⁄
A.2.2.3. Exemplo-Ilustrativo A_06: Problema tipo 𝒂 = 𝒂(𝒗) genérico.
Problema 11.21 (Beer, Johnston; 9ª Edição).
Partindo de 𝑥 = 0 e sem velocidade inicial, uma partícula sofre uma aceleração dada
por 𝑎 = 0,8√𝑣2 + 49 onde 𝑎 e 𝑣 são expressos em 𝑚 𝑠2⁄ e 𝑚 𝑠⁄ , respectivamente.
Determinar (a) a posição da partícula quando 𝑣 = 24 𝑚 𝑠⁄ , (b) a velocidade escalar
da partícula quando 𝑥 = 40 𝑚.
SOLUÇÃO:
Exemplo de problema em que a aceleração é uma função qualquer da velocidade, isto é, a aceleração
é uma função do tipo 𝑎 = 𝑓(𝑣).
Dados:
𝑎(𝑣) = 0,8√𝑣2 + 49 𝑥0 = 0 𝑣0 = 0
O movimento pode ser determinado por meio da integração das seguintes equações:
∫𝑑𝑣
𝑎(𝑣)
𝑣
𝑣0
= 𝑡 ∫ (𝑣
𝑎(𝑣)) 𝑑𝑣
𝑣
𝑣0
= 𝑥 − 𝑥0
Por razões didáticas, apresentaremos o resultado
da integração desta equação. Entretanto, cabe
mencionar que não será utilizada na solução
deste problema específico, uma vez que não é
solicitado responder qual o valor da velocidade
para algum instante 𝑡.
Apresentaremos o resultado da integração desta
equação e a mesma será efetivamente utilizada
na solução deste problema, pois tanto a resposta
ao item (a) quanto a resposta ao item (b) são
referentes à função que relaciona a velocidade 𝑣
com a posição 𝑥.
Procedendo com a integração das equações, teremos:
∫𝑑𝑣
𝑎(𝑣)
𝑣
𝑣0
= 𝑡 ∫ (𝑣
𝑎(𝑣)) 𝑑𝑣
𝑣
𝑣0
= 𝑥 − 𝑥0
∫𝑑𝑣
0,8√𝑣2 + 49
𝑣
𝑣0
= 𝑡 ∫ (𝑣
0,8√𝑣2 + 49)𝑑𝑣
𝑣
𝑣0
= 𝑥 − 𝑥0
1,25 ln (√𝑣02 + 49 − 𝑣0) − 1,25 ln (√𝑣
2 + 49 − 𝑣) = 𝑡 −1,25√𝑣2 + 49 + 1,25√𝑣02 + 49 = 𝑥0 − 𝑥
ln (√𝑣0
2 + 49 − 𝑣0
√𝑣2 + 49 − 𝑣) =
1
1,25𝑡 1,25√𝑣2 + 49 − 1,25√𝑣0
2 + 49 = 𝑥 − 𝑥0

Prof.: Carlos Arthur Cavalcante 205
Uma vez que 𝑣0 = 0, teremos, Uma vez que 𝑣0 = 0 e que 𝑥0 = 0, teremos,
ln (√(0) + 49 − (0)
√𝑣2 + 49 − 𝑣) = 0,8𝑡 1,25√𝑣2 + 49 − 1,25√(0) + 49 = 𝑥 − (0)
ln (√49
√𝑣2 + 49 − 𝑣) = 0,8𝑡 1,25√𝑣2 + 49 − 1,25√49 = 𝑥
√49
√𝑣2 + 49 − 𝑣= 𝑒0,8𝑡 1,25√𝑣2 + 49 − 8,75 = 𝑥
√𝑣2 + 49 − 𝑣 = 7𝑒−0,8𝑡 𝑥 = 1,25√𝑣2 + 49 − 8,75
Assim,
√𝑣2 + 49 − 𝑣 = 7𝑒−0,8𝑡 𝑥 = 1,25√𝑣2 + 49 − 8,75
Item (a): Determinação da posição da partícula quando 𝑣 = 24 𝑚 𝑠⁄
𝑥(𝑣=24) = 1,25√(24)2 + 49 − 8,75 𝑥(𝑣=24) = 22,5 𝑚
Item (b): Determinação da velocidade escalar da partícula quando 𝑥 = 40 𝑚.
40 = 1,25√(𝑣(𝑥=40))2+ 49 − 8,75 √(𝑣(𝑥=40))
2+ 49 =
48,75
1,25
(𝑣(𝑥=40))2+ 49 = (39)2 (𝑣(𝑥=40))
2= 1521 − 49
𝑣(𝑥=40) = ±√1472 𝑣(𝑥=40) = ±38,37 𝑚 𝑠⁄
Resposta: 𝑣(𝑥=40) = 38,37 𝑚 𝑠⁄

Prof.: Carlos Arthur Cavalcante 206
A.2.3. A Aceleração é uma Função da Posição 𝒂 = 𝒂(𝒙).
A integração da função 𝑎(𝑥), com a aplicação da regra da cadeia, permite determinar a
velocidade 𝑣 em função da posição 𝑥, isto é, permite determinar a função 𝑣(𝑥).
𝑎 = 𝑎(𝑥) 𝑑𝑣
𝑑𝑡= 𝑎(𝑥)
𝑑𝑣
𝑑𝑥
𝑑𝑥
𝑑𝑡= 𝑎(𝑥)
𝑑𝑣
𝑑𝑥𝑣 = 𝑎(𝑥) 𝑣𝑑𝑣 = 𝑎(𝑥)𝑑𝑥 ∫ 𝑣𝑑𝑣
𝑣
𝑣0= ∫ 𝑎(𝑥)𝑑𝑥
𝑥
𝑥0
𝟏
𝟐𝒗𝟐 −
𝟏
𝟐𝒗𝟎
𝟐 = ∫ 𝒂(𝒙). 𝒅𝒙𝒙
𝒙𝟎
Um caso particular é comum em problemas de engenharia: o caso particular em que a
aceleração é proporcional ao quadrado da posição.
1) A aceleração é proporcional à posição.
Neste caso particular, a função aceleração é uma função proporcional à posição, isto é,
𝑎(𝑥)~𝑥. Um dos casos comuns em problemas de engenharia é 𝑎 = −𝑘𝑥, onde 𝑘 é uma
constante estritamente positiva (𝑘 > 0).
A aceleração (ou a desaceleração) da partícula, é diretamente proporcional à sua posição.
Quanto mais distante da origem a partícula estiver, e com uma velocidade afastando-se
da origem, mais intensa será a sua desaceleração (diminuição da intensidade da
velocidade). Quanto mais distante da origem a partícula estiver, e com uma velocidade
aproximando-se da origem, mais intensa será a sua aceleração (aumento da intensidade
da velocidade). Movimento Oscilatório em Relação à Origem (𝑥 = 0).
Integrando a função 𝑎(𝑥) para determinar a função 𝑣(𝑥) obtemos,
𝑎 = 𝑎(𝑥) = −𝑘𝑥 𝑑𝑣
𝑑𝑡= −𝑘𝑥
𝑑𝑣
𝑑𝑥
𝑑𝑥
𝑑𝑡= −𝑘𝑥
𝑑𝑣
𝑑𝑥𝑣 = −𝑘𝑥 𝑣𝑑𝑣 = −𝑘𝑥𝑑𝑥 ∫ 𝑣𝑑𝑣
𝑣
𝑣0= ∫ −𝑘𝑥𝑑𝑥
𝑥
𝑥0
𝑣2−𝑣02
2=
𝑘𝑥02−𝑘𝑥2
2 𝑣2 − 𝑣0
2 = 𝑘(𝑥02 − 𝑥2)
𝒗𝟐 = 𝒗𝟎𝟐 + 𝒌(𝒙𝟎
𝟐 − 𝒙𝟐)
Observar que a relação obtida relaciona o quadrado da velocidade (𝑣2) com o quadrado
da posição (𝑥2).

Prof.: Carlos Arthur Cavalcante 207
A.2.3.1. Exemplo-Ilustrativo A_07: Problema tipo 𝒂 = −𝒌𝒙.
Problema 11.19 (Beer, Johnston; 9ª Edição).
Um equipamento eletrônico que está protegido por um
material de embalagem cai de modo que ele atinge o solo
com uma velocidade de 4 𝑚 𝑠⁄ . Depois do impacto, o
equipamento experimenta uma aceleração de 𝑎 = −𝑘𝑥,
onde 𝑘 é uma constante e 𝑥 é a compressão do material de embalagem. Se o material
de embalagem experimenta uma compressão máxima de 20 𝑚𝑚, determine a
máxima aceleração do equipamento.
SOLUÇÃO:
O equipamento cai na direção vertical, direção esta que é
identificada no enunciado do problema como sendo a direção 𝑥.
É dado que 𝑎 = −𝑘𝑥.
Isto é, a aceleração experimentada pelo equipamento ao tocar o
solo tem intensidade igual a 𝑘𝑥 e sentido oposto ao sentido da deformação 𝑥 do material de
embalagem.
Vamos adotar que o sentido positivo de 𝑥 é o sentido ‘para cima’. Assim, quando a embalagem atinge
o solo (𝑥0 = 0), a sua velocidade é 𝑣0 = −4 𝑚 𝑠⁄ .
𝑑𝑣
𝑑𝑡= −𝑘𝑥
𝑑𝑣
𝑑𝑥
𝑑𝑥
𝑑𝑡= −𝑘𝑥
𝑑𝑣
𝑑𝑥𝑣 = −𝑘𝑥 𝑣𝑑𝑣 = −𝑘𝑥𝑑𝑥
∫ 𝑣𝑑𝑣𝑣
𝑣0= ∫ −𝑘𝑥𝑑𝑥
𝑥
𝑥0 ∫ 𝑣𝑑𝑣
𝑣
𝑣0= −𝑘 ∫ 𝑥𝑑𝑥
𝑥
𝑥0
1
2𝑣2 −
1
2𝑣0
2 = −𝑘 (1
2𝑥2 −
1
2𝑥0
2) 𝑣2 − 𝑣02 = −𝑘(𝑥2 − 𝑥0
2)
𝑣2 − 𝑣02 = 𝑘(𝑥0
2 − 𝑥2)
Substituindo os valores iniciais dados, e de acordo com o sistema de coordenadas adotado, obtemos,
𝑣2 − (−4)2 = 𝑘((0)2 − 𝑥2)
𝑣2 − 16 = 𝑘(0 − 𝑥2)
𝑣2 − 16 = −𝑘𝑥2
Na deformação máxima (𝑥𝑚á𝑥 = −20 𝑚𝑚 = −0,02 𝑚), a velocidade 𝑣 é zero.
Isto é,
(0)2 − 16 = −𝑘(−0,02)2
−16 = −𝑘(−0,02)2
Resolvendo para 𝑘 encontramos
𝑘 = 16
(0,02)2 𝑘 = 40000
𝑥
𝑦
Prof.: Carlos Arthur Cavalcante 208
Uma vez que 𝑎 = −𝑘𝑥 (onde 𝑘 = 𝑐𝑜𝑛𝑠𝑡𝑎𝑛𝑡𝑒), é imediato escrever que
𝑎𝑚á𝑥 = −𝑘𝑥𝑚á𝑥 𝑎𝑚á𝑥 = −(40000)(−0,02)
𝑎𝑚á𝑥 = +800 𝑚 𝑠2⁄
Ou seja,
𝑎𝑚á𝑥 = 800 𝑚 𝑠2⁄ ↑

Prof.: Carlos Arthur Cavalcante 209
APÊNDICE B Movimento sob Força Central e Aplicação à Mecânica
Espacial
B.1. Movimento sob uma força conservativa central
Quando uma partícula se move sob a ação de uma força conservativa central, tanto o Princípio
da Conservação da Quantidade de Movimento Angular quanto o Princípio da Conservação de
Energia podem ser usados para estudar o seu movimento.
Considere um veículo espacial de massa 𝑚 movendo-se sob a ação
da força gravitacional da Terra. Admita que ele inicia seu voo livre
no ponto 𝑃0 a uma distância inicial 𝑟0 do centro da Terra, com uma
velocidade inicial 𝑣0 que faz um ângulo 𝜑0 com o raio vetor 𝑂𝑃0.
Sendo 𝑃 um ponto da trajetória a uma distância 𝑟 do ponto 𝑂 (centro
da Terra), �� a velocidade do veiculo em 𝑃 e 𝜑 o ângulo entre �� e o
raio vetor 𝑂𝑃, podemos aplicar o Princípio da Conservação da
Quantidade de Movimento Angular escrevendo,
𝑟0𝑚𝑣0 sin 𝜙0 = 𝑟𝑚𝑣 sin𝜙 Eq. 01
Podemos aplicar também o Princípio da Conservação de Energia escrevendo,
𝑇0 + 𝑉0 = 𝑇 + 𝑉
1
2𝑚𝑣0
2 −𝐺𝑀𝑚
𝑟0=
1
2𝑚𝑣2 −
𝐺𝑀𝑚
𝑟 Eq. 02
Assim, para um dado valor de 𝑟, a equação Eq. 02 pode ser resolvida para determinar a
velocidade 𝑣 no ponto 𝑃. Com o valor de 𝑣 a equação Eq. 01 pode então ser usada para
determinar o ângulo 𝜙
As equações Eq. 01 e Eq. 02 também podem ser usadas para
determinar os valores máximo e mínimo de 𝑟 no caso de um satélite
lançado de 𝑃0 em uma direção que forma um ângulo 𝜑0 com a vertical
𝑂𝑃0. Os valores de 𝑟𝑚á𝑥 de 𝑟𝑚í𝑛 são obtidos fazendo 𝜑 = 90° na
equação Eq. 01 e em seguida eliminando 𝑣 entra as equações Eq. 01
e Eq. 02.
Deve-se observar que a aplicação dos princípios da Conservação da
Quantidade de Movimento Angular e da Conservação de Energia
conduz a uma formulação dos problemas de mecânica espacial mais fundamental do que o
método da aplicação direta da 2ª Lei de Newton. Em todos os cálculos envolvendo lançamentos
oblíquos, essa formulação também resultará em cálculos bem mais simples. Embora o método
da aplicação direta da 2ª Lei de Newton deva ser usado quando a trajetória ou o período orbital
tiverem de ser calculados, os cálculos serão simplificados se os princípios de conservação forem
antes aplicados ao cálculo dos valores máximo e mínimo do raio vetor 𝑟.

Prof.: Carlos Arthur Cavalcante 210
B.2. Quantidade de Movimento Angular de uma partícula
Considere uma partícula 𝑃 de massa 𝑚 que se move em relação a um sistema de referência
𝑂𝑥𝑦𝑧.
A quantidade de movimento linear da partícula é �� = 𝑚��.
O momento do vetor �� em relação a 𝑂, definido pelo produto vetorial
do vetor posição 𝑟 e do vetor ��, é denominado Momento da
Quantidade de Movimento ou Quantidade de Movimento Angular da
partícula em relação ao ponto 𝑂.
��0 = 𝑟 × �� ��0 = 𝑟 × 𝑚��
O vetor ��0 é perpendicular ao plano que contém os vetores 𝑟 e ��. O sentido de ��0 é determinado
pela regra da mão direita. No SI, a unidade de ��0 é 𝑘𝑔𝑚2 𝑠⁄ .
O módulo de ��0 é dado por,
𝐻0 = 𝑟𝑚𝑣 sin𝜙
Em termos de componentes cartesianas (retangulares), ��0 = 𝑟 × 𝑚�� é dado por,
��0 = |𝑖 𝑗 ��𝑥 𝑦 𝑧𝑚𝑣𝑥 𝑚𝑣𝑦 𝑚𝑣𝑧
|
As componentes cartesianas de ��𝑂, que representam os momentos da quantidade de movimento
linear �� em relação aos eixos coordenados, são obtidos da expansão do “determinante”.
𝐻𝑥 = 𝑚(𝑦𝑣𝑧 − 𝑧𝑣𝑦)
𝐻𝑦 = 𝑚(𝑧𝑣𝑥 − 𝑥𝑣𝑧)
𝐻𝑧 = 𝑚(𝑥𝑣𝑦 − 𝑦𝑣𝑥)

Prof.: Carlos Arthur Cavalcante 211
B.2.1. Quantidade de Movimento Angular no movimento 2D
Quando a partícula se move em um plano, temos 𝑧 = 0 e 𝑣𝑧 = 0. Neste caso, ocorre que,
𝐻𝑥 = 0𝐻𝑦 = 0
𝐻𝑧 = 𝑚(𝑥𝑣𝑦 − 𝑦𝑣𝑥)
Ou seja, quando o movimento da partícula é um movimento plano (2D), os vetores 𝑟 e �� estão
no plano do movimento de modo que o vetor ��𝑂 é perpendicular a ele e apenas a sua
componente z é não nula.
��𝑂 = 0𝑖 + 0𝑗 + 𝑚(𝑥𝑣𝑦 − 𝑦𝑣𝑥)��
Assim, no movimento 2D, o vetor ��𝑂 é perpendicular ao plano 𝑥𝑦 e fica completamente
definido pelo escalar (o módulo de ��𝑂 com sinal)
𝐻0 = 𝐻𝑧 = 𝑚(𝑥𝑣𝑦 − 𝑦𝑣𝑥)
O sinal de 𝐻0 = 𝐻𝑧 vai ser positivo ou negativo de acordo com “sentido” que a partícula se
move em relação a 𝑂.

Prof.: Carlos Arthur Cavalcante 212
B.2.2. Quantidade de Movimento Angular no movimento 2D em coordenadas
polares
Quando a partícula se move em um plano e o seu movimento
2D é descrito em coordenadas polares (componentes radial e
transversal), temos, como antes, que,
��0 = 𝑟 × �� ��0 = 𝑟 × 𝑚��
Agora, porém, expressamos o vetor posição 𝑟 e o vetor
quantidade de movimento linear �� por suas componentes radial
e transversal. Assim, escrevemos,
��𝑂 = 𝑟 × (𝑚��𝑟 +𝑚��𝜃)
��𝑂 = 𝑟 × 𝑚��𝑟 + 𝑟 × 𝑚��𝜃 Propriedade distributiva do produto vetorial.
��𝑂 = 0 + 𝑟 × 𝑚��𝜃 Vetores paralelos, produto vetorial é nulo.
Assim, a expressão para a quantidade de movimento angular de uma partícula em movimento
2D e descrito por suas componentes radial e transversal se reduz a,
��𝑂 = 𝑟 × 𝑚��𝜃
Os vetores 𝑟 e 𝑚��𝜃 estão no mesmo plano e são perpendiculares entre si (𝑟 ⊥ 𝑚��𝜃). Assim,
concluímos que o vetor ��𝑂 é um vetor normal ao plano dos vetores 𝑟 e 𝑚��𝜃 (o plano do
movimento) com módulo igual a,
𝐻0 = 𝑟𝑚𝑣𝜃 sin 90°
𝐻0 = 𝑟𝑚𝑣𝜃
Observação:
Esta última expressão também poderia ter sido obtida por,
��𝑂 = 𝑟 × 𝑚�� Quantidade de movimento angular da partícula.
Os vetores 𝑟 e 𝑚�� estão no mesmo plano. Assim, concluímos que o vetor ��𝑂 é um vetor
normal ao plano dos vetores 𝑟 e 𝑚�� (o plano do movimento) com módulo igual a,
𝐻0 = 𝑟𝑚𝑣 sin𝜙 Definição de produto vetorial.
𝑣 sin𝜙 = 𝑣𝜃
𝐻0 = 𝑟𝑚𝑣𝜃

Prof.: Carlos Arthur Cavalcante 213
Recordando que 𝑣𝜃 = 𝑟��, obtemos,
𝐻0 = 𝑟𝑚𝑣𝜃 𝐻0 = 𝑟𝑚(𝑟��) 𝐻0 = 𝑚𝑟2��
Assim, em resumo,
𝐻0 = 𝑟𝑚𝑣 sin𝜙 = 𝑟𝑚𝑣𝜃 = 𝑚𝑟2��

Prof.: Carlos Arthur Cavalcante 214
B.3. Variação da Quantidade de Movimento Angular
Calculemos a derivada da quantidade de movimento angular (��0) em relação ao tempo,
��0 =𝑑��0
𝑑𝑡 ��0 =
𝑑(𝑟×𝑚��)
𝑑𝑡
��0 =𝑑(𝑟)
𝑑𝑡×𝑚�� + 𝑟 ×
𝑑(𝑚��)
𝑑𝑡 ��0 = �� × 𝑚�� + 𝑟 × 𝑚
𝑑(��)
𝑑𝑡
��0 = 0 + 𝑟 × 𝑚��
��0 = 𝑟 × �� Onde �� é a força resultante atuando sobre a partícula,
Porém 𝑟 × �� é o momento da força �� em relação ao ponto 𝑂, isto é,
𝑟 × �� = ��𝑂��
Assim,
��0 = ��𝑂��
Ou seja, decorre da 2ª Lei de Newton que a taxa de variação da quantidade de movimento
angular de uma partícula em relação ao ponto 𝑂 (��0) em qualquer instante é igual ao momento
da força resultante em relação ao ponto 𝑂 (��𝑂��) no respectivo instante.

Prof.: Carlos Arthur Cavalcante 215
B.4. Movimento sujeito a uma Força Central.
B.4.1. Trabalho de uma força gravitacional
A intensidade 𝐹𝐺 da força gravitacional ��𝐺 entre duas partículas de massas 𝑀 e 𝑚 a uma
distância 𝑟 uma da outra é dada por,
𝐹𝐺 = 𝐺𝑀𝑚
𝑟2
Consideremos que a partícula 𝑀 ocupe uma posição fixa 𝑂 enquanto
a partícula 𝑚 se move ao longo da trajetória mostrada na figura.
O trabalho da força ��𝐺 exercida sobre a partícula de massa 𝑚 durante
um deslocamento infinitesimal de 𝐴 até 𝐴′ pode ser obtido
multiplicando-se a intensidade 𝐹𝐺 da força pela componente radial 𝑑𝑟
do deslocamento. Como ��𝐺 é orientada para 𝑂, o trabalho é negativo
e escrevemos,
𝑑𝑈 = −𝐹𝐺𝑑𝑟 𝑑𝑈 = −𝐺𝑀𝑚
𝑟2𝑑𝑟
O trabalho da força gravitacional ��𝐺 durante um deslocamento finito de 𝐴1 (𝑟 = 𝑟1) até 𝐴2 (𝑟 =𝑟2) é,
𝑈1→2��𝐺 = −∫
𝐺𝑀𝑚
𝑟2𝑑𝑟
𝑟2𝑟1
𝑈1→2��𝐺 =
𝐺𝑀𝑚
𝑟2−𝐺𝑀𝑚
𝑟1
Energia Potencial da Força Gravitacional 𝑭 = 𝑮𝑴𝒎 𝒓𝟐⁄ .
Para um corpo deslocando-se ao longo de uma trajetória distante da superfície da Terra (um
satélite ou um veículo espacial), a força de atração gravitacional (𝐹𝐺 =𝐺𝑀𝑚
𝑟2) variará em função
da distância do corpo ao centro da Terra.
Já vimos que o trabalho de uma força gravitacional é dado por,
𝑈1→2��𝐺 = 𝐺
𝑀𝑚
𝑟2− 𝐺
𝑀𝑚
𝑟1

Prof.: Carlos Arthur Cavalcante 216
Logo, o trabalho da força gravitacional pode ser obtido subtraindo-se
o valor da função −𝐺𝑀𝑚 𝑟⁄ , correspondente à posição final do
corpo, do valor da função −𝐺𝑀𝑚 𝑟⁄ , correspondente à sua posição
inicial do corpo. Concluímos que o trabalho da força gravitacional ��𝐺
é independente da trajetória percorrida pela partícula e depende
apenas dos valores inicial e final da função −𝐺𝑀𝑚 𝑟⁄ .
A função −𝐺𝑀𝑚 𝑟⁄ é denominada Energia Potencial da força
gravitacional ��𝑮 e é representada por 𝑽𝑮. Assim, podemos escrever
que,
𝑈1→2��𝐺 = 𝑉𝐺1 − 𝑉𝐺2 Onde, 𝑉𝐺 = −𝐺𝑀𝑚 𝑟⁄
A expressão 𝑉𝐺 = −𝐺𝑀𝑚 𝑟⁄ deve ser usada em substituição à expressão 𝑉𝑊 = 𝑊𝑦 sempre
que a variação da gravidade não puder ser desprezada. Isto é, devemos usar a expressão 𝑉𝐺 =−𝐺𝑀𝑚 𝑟⁄ sempre que 𝑟 ≫ 𝑅 (𝑟 muito maior que 𝑅).
Note-se que a expressão 𝑉𝐺 = −𝐺𝑀𝑚 𝑟⁄ também pode ser expressa por,
𝑉𝐺 = −𝐺𝑀𝑚
𝑟= −
𝑊𝑅2
𝑟
Note-se também que o valor de 𝑉𝐺 sempre é negativo e tende para zero à medida que o valor
de 𝑟 aumenta.
Se 𝑉𝐺2 > 𝑉𝐺1 (por exemplo, 𝑉𝐺1 = −10 e 𝑉𝐺2 = −6), a energia potencial aumenta durante o
deslocamento do corpo da posição inicial para a posição final. Neste caso, o trabalho da força
gravitacional ��𝐺 é negativo (𝑈1→2��𝐺 < 0). No exemplo, 𝑈1→2
��𝐺 = 𝑉𝐺1 − 𝑉𝐺2 = −10 − (−6) =−4.
Se 𝑉𝐺2 < 𝑉𝐺1 (por exemplo, 𝑉𝐺1 = −10 e 𝑉𝐺2 = −12), a energia potencial diminui durante o
deslocamento do corpo da posição inicial para a posição final. Neste caso, o trabalho da força
gravitacional ��𝐺 é positivo (𝑈1→2��𝐺 > 0). No exemplo, 𝑈1→2
��𝐺 = 𝑉𝐺1 − 𝑉𝐺2 = −10 − (−12) =+2.
B.4.2. Conservação da Quantidade de Movimento Angular.

Prof.: Carlos Arthur Cavalcante 217
Quando a única força que atua sobre uma partícula (ou quando a
resultante das forças que atuam sobre ela) é uma força cuja a linha de
ação sempre passa por um ponto fixo 𝑂, diz-se que a partícula está
realizando um movimento sob a ação de uma Força Central.
Como a linha de ação de �� passa por 𝑂, ocorre que ��𝑂�� = 0. Portanto,
ocorre que a taxa de variação da quantidade de movimento angular de
uma partícula em movimento sob a ação de uma força central é,
��0 = ��𝑂�� = 0
��0 = 𝑐𝑡𝑒
Concluímos então que a Quantidade de Movimento Angular ��0 de uma partícula em
movimento sob a ação de uma força central é um vetor constante. Isto significa que o
movimento de toda partícula sob a ação de uma força central é um movimento 2D. De fato, se
��0 = 𝑐𝑡𝑒 então 𝑟 × 𝑚�� = 𝑐𝑡𝑒 e isto significa que o plano que contém os vetores 𝑟 e �� não
muda e este plano é o plano perpendicular a ��0. Embora os vetores 𝑟 e �� estejam variando com
o tempo, o vetor 𝑟 × 𝑚�� = ��0 permanece o mesmo.
O vetor ��𝟎 e o plano fixo são definidos pelo vetor posição inicial
��𝟎 e pela velocidade inicial ��𝟎.
Como a Quantidade de Movimento Angular ��0 é constante, então a
intensidade 𝐻0 é constante, e podemos escrever que,
𝐻0 = 𝑟𝑚𝑣 sin𝜙 = 𝑐𝑡𝑒
Ou seja, podemos escrever que,
𝑟𝑚𝑣 sin𝜙 = 𝑟0𝑚𝑣0 sin𝜙0
Além disso, recordando que em coordenadas polares 𝐻0 = 𝑚𝑟2��, podemos escrever que,
𝑚𝑟2�� = 𝐻0 = 𝑐𝑡𝑒
Dividindo por 𝑚 e representando por ℎ a Quantidade de Movimento Angular por unidade de
massa,
𝑟2 �� =𝐻0
𝑚= ℎ = 𝑐𝑡𝑒
Enfim, podemos escrever que,
𝑟𝑣 sin𝜙 = 𝑟0𝑣0 sin 𝜙0 = 𝑟2�� = ℎ = 𝑐𝑡𝑒
Interpretação geométrica da equação 𝑟2�� = ℎ.
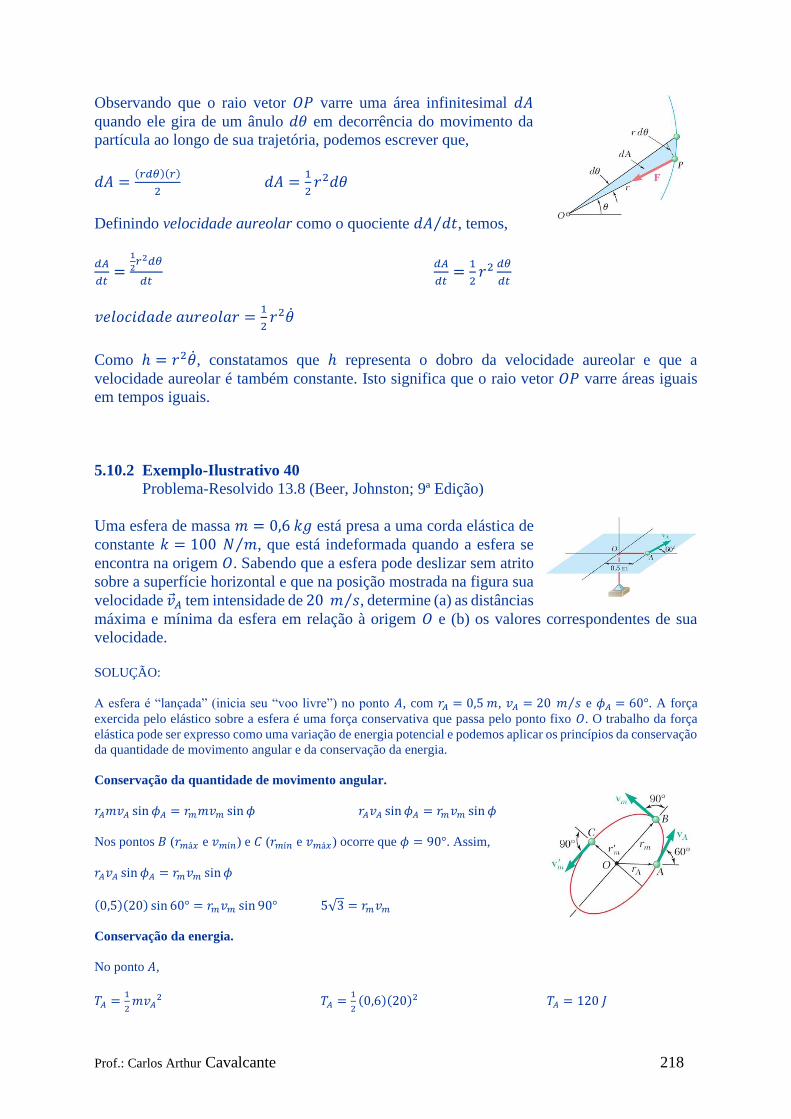
Prof.: Carlos Arthur Cavalcante 218
Observando que o raio vetor 𝑂𝑃 varre uma área infinitesimal 𝑑𝐴
quando ele gira de um ânulo 𝑑𝜃 em decorrência do movimento da
partícula ao longo de sua trajetória, podemos escrever que,
𝑑𝐴 =(𝑟𝑑𝜃)(𝑟)
2 𝑑𝐴 =
1
2𝑟2𝑑𝜃
Definindo velocidade aureolar como o quociente 𝑑𝐴 𝑑𝑡⁄ , temos,
𝑑𝐴
𝑑𝑡=
1
2𝑟2𝑑𝜃
𝑑𝑡
𝑑𝐴
𝑑𝑡=
1
2𝑟2
𝑑𝜃
𝑑𝑡
𝑣𝑒𝑙𝑜𝑐𝑖𝑑𝑎𝑑𝑒 𝑎𝑢𝑟𝑒𝑜𝑙𝑎𝑟 =1
2𝑟2��
Como ℎ = 𝑟2��, constatamos que ℎ representa o dobro da velocidade aureolar e que a
velocidade aureolar é também constante. Isto significa que o raio vetor 𝑂𝑃 varre áreas iguais
em tempos iguais.
5.10.2 Exemplo-Ilustrativo 40
Problema-Resolvido 13.8 (Beer, Johnston; 9ª Edição)
Uma esfera de massa 𝑚 = 0,6 𝑘𝑔 está presa a uma corda elástica de
constante 𝑘 = 100 𝑁 𝑚⁄ , que está indeformada quando a esfera se
encontra na origem 𝑂. Sabendo que a esfera pode deslizar sem atrito
sobre a superfície horizontal e que na posição mostrada na figura sua
velocidade ��𝐴 tem intensidade de 20 𝑚 𝑠⁄ , determine (a) as distâncias
máxima e mínima da esfera em relação à origem 𝑂 e (b) os valores correspondentes de sua
velocidade.
SOLUÇÃO:
A esfera é “lançada” (inicia seu “voo livre”) no ponto 𝐴, com 𝑟𝐴 = 0,5 𝑚, 𝑣𝐴 = 20 𝑚 𝑠⁄ e 𝜙𝐴 = 60°. A força
exercida pelo elástico sobre a esfera é uma força conservativa que passa pelo ponto fixo 𝑂. O trabalho da força
elástica pode ser expresso como uma variação de energia potencial e podemos aplicar os princípios da conservação
da quantidade de movimento angular e da conservação da energia.
Conservação da quantidade de movimento angular.
𝑟𝐴𝑚𝑣𝐴 sin 𝜙𝐴 = 𝑟𝑚𝑚𝑣𝑚 sin 𝜙 𝑟𝐴𝑣𝐴 sin𝜙𝐴 = 𝑟𝑚𝑣𝑚 sin 𝜙
Nos pontos 𝐵 (𝑟𝑚á𝑥 e 𝑣𝑚í𝑛) e 𝐶 (𝑟𝑚í𝑛 e 𝑣𝑚á𝑥) ocorre que 𝜙 = 90°. Assim,
𝑟𝐴𝑣𝐴 sin 𝜙𝐴 = 𝑟𝑚𝑣𝑚 sin𝜙
(0,5)(20) sin 60° = 𝑟𝑚𝑣𝑚 sin 90° 5√3 = 𝑟𝑚𝑣𝑚
Conservação da energia.
No ponto 𝐴,
𝑇𝐴 =1
2𝑚𝑣𝐴
2 𝑇𝐴 =1
2(0,6)(20)2 𝑇𝐴 = 120 𝐽
Prof.: Carlos Arthur Cavalcante 219
𝑉𝐴 =1
2𝑘𝑟𝐴
2 𝑉𝐴 =1
2(100)(0,5)2 𝑉𝐴 = 12,5 𝐽
No ponto 𝐵 (ou no ponto 𝐶),
𝑇𝐵 =1
2𝑚𝑣𝑚
2 𝑇𝐵 =1
2(0,6)𝑣𝑚
2 𝑇𝐵 = 0,3𝑣𝑚2
𝑉𝐵 =1
2𝑘𝑟𝑚
2 𝑉𝐵 =1
2(100)(𝑟𝑚)
2 𝑉𝐵 = 50𝑟𝑚2
Aplicando o Princípio da Conservação de Energia,
𝑇𝐴 + 𝑉𝐴 = 𝑇𝐵 + 𝑉𝐵 120 + 12,5 = 0,3𝑣𝐵2 + 50𝑟𝐵
2 132,5 = 0,3𝑣𝐵2 + 50𝑟𝐵
2
Obtemos duas equações com duas incógnitas (𝑟𝑚 e 𝑣𝑚),
𝑟𝑚𝑣𝑚 = 5√3 Eq. 01
0,3𝑣𝐵2 + 50𝑟𝐵
2 = 132,5 Eq. 02
Resolvido o sistema, encontramos,
𝑟𝑚 = {𝑟𝐵 = 1,571 𝑚𝑟𝐶 = 0,427 𝑚
𝑣𝑚 = {𝑣𝐵 = 5,51 𝑚 𝑠⁄
𝑣𝐶 = 20,3 𝑚 𝑠⁄

Prof.: Carlos Arthur Cavalcante 220
5.10.3 Exemplo-Ilustrativo 41
Problema-Resolvido 13.9 (Beer, Johnston; 9ª Edição)
Um satélite é lançado em uma direção paralela à superfície da Terra
com uma velocidade de 36.900 𝑘𝑚 ℎ⁄ de uma altitude de 500 𝑘𝑚.
Determine (a) a altitude máxima alcancada pelo satélite e (b) o erro
máximo admissível na direção de lançamento do satélite para que
ele entre em órbita e não se aproxime em até 200 𝑘𝑚 da superfície
da Terra.
SOLUÇÃO:
O satélite realiza voo livre a partir do ponto de lançamento 𝑟0 com velocidade 𝑣0 e passa pelo ponto da órbita mais
afastado da Terra 𝑟1 com velocidade 𝑣1.
Aplicamos o Princípio da Conservação de Energia,
𝑇0 + 𝑉0 = 𝑇1 + 𝑉1
1
2𝑚𝑣0
2 −𝐺𝑀𝑚
𝑟0=
1
2𝑚𝑣1
2 −𝐺𝑀𝑚
𝑟1
Como o satélite se move sob a ação de uma força central (força da gravidade), a quantidade de movimento angular
é conservada (é constante).
𝑟0𝑚𝑣0 = 𝑟1𝑚𝑣1 𝑣1 = 𝑣0𝑟0
𝑟1
Substituindo essa expressão de 𝑣1 na primeira equação, obtemos,
1
2𝑚𝑣0
2 −𝐺𝑀𝑚
𝑟0=
1
2𝑚(𝑣0
𝑟0
𝑟1)2
−𝐺𝑀𝑚
𝑟1
𝑚𝑣02
2−
𝐺𝑀𝑚
𝑟0=
𝑚𝑣02𝑟0
2
2𝑟12 −
𝐺𝑀𝑚
𝑟1
𝑣02
2−
𝐺𝑀
𝑟0=
𝑣02𝑟0
2
2𝑟12 −
𝐺𝑀
𝑟1
𝑣02
2−
𝑣02𝑟0
2
2𝑟12 =
𝐺𝑀
𝑟0−
𝐺𝑀
𝑟1
𝑣02
2(1 −
𝑟02
𝑟12) =
𝐺𝑀
𝑟0(1 −
𝑟0
𝑟1) (1 −
𝑟02
𝑟12) =
2𝐺𝑀
𝑟0𝑣02 (1 −
𝑟0
𝑟1)
(1 +𝑟0
𝑟1) (1 −
𝑟0
𝑟1) =
2𝐺𝑀
𝑟0𝑣02 (1 −
𝑟0
𝑟1) (1 +
𝑟0
𝑟1) =
2𝐺𝑀
𝑟0𝑣02
𝑟0
𝑟1=
2𝐺𝑀
𝑟0𝑣02 − 1
𝑟0
𝑟1=
2𝐺𝑀−𝑟0𝑣02
𝑟0𝑣02
𝑟1
𝑟0=
𝑟0𝑣02
2𝐺𝑀−𝑟0𝑣02 𝑟1 =
𝑟02𝑣0
2
2𝐺𝑀−𝑟0𝑣02
Valores dados:
𝑟0 = 6.371 𝑘𝑚 + 500 𝑘𝑚 = 6.871 𝑘𝑚 𝑟0 = 6,871 × 106 𝑚
𝑣0 = 36.900 𝑘𝑚 ℎ⁄ 𝑣0 = 10.250 𝑚 𝑠⁄
𝐺𝑀 = 𝑔𝑅2 = (9,81)(6,371 × 106)2 𝐺𝑀 = 3,9818 × 1014 𝑚3 𝑠2⁄
Substituindo os valores dados na expressão encontrada para 𝑟1, obtemos,
𝑟1 = 6,6600 × 107 𝑚
𝐴𝑙𝑡 𝑚á𝑥 = 𝑟1 − 𝑅 𝐴𝑙𝑡 𝑚á𝑥 = 6,6600 × 107 𝑚 − 6,3710 × 106 𝑚

Prof.: Carlos Arthur Cavalcante 221
𝐴𝑙𝑡 𝑚á𝑥 = 6,0230 × 104 𝑚 𝐴𝑙𝑡 𝑚á𝑥 = 60.230 𝑘𝑚
Determinação do erro máximo admissível na direção de lançamento do satélite para que ele entre em órbita e não
se aproxime em até 200 𝑘𝑚 da superfície da Terra.
Consideremos que o satélite seja lançado do ponto 𝑃0 em uma direção que faz um
ângulo 𝜙0 com o raio vetor 𝑂𝑃0 (ver figura). O valor de 𝜙0 correspondente a 𝑟𝑚í𝑛 =6.371 𝑘𝑚 + 200 𝑘𝑚 = 6.571 𝑘𝑚 é obtido pela aplicação dos princípios da
conservação da energia e da conservação da quantidade de movimento angular entre
o ponto 𝑃0 e o ponto 𝐴.
1
2𝑚𝑣0
2 −𝐺𝑀𝑚
𝑟0=
1
2𝑚𝑣𝑚á𝑥
2 −𝐺𝑀𝑚
𝑟𝑚í𝑛
𝑟0𝑚𝑣0 sin𝜙0 = 𝑟𝑚í𝑛𝑚𝑣𝑚á𝑥 sin 90°
Resolvendo essa última equação para 𝑣𝑚á𝑥 , encontramos,
𝑟0𝑣0 sin 𝜙0 = 𝑟𝑚í𝑛𝑣𝑚á𝑥 𝑣𝑚á𝑥 =𝑟0𝑣0 sin𝜙0
𝑟𝑚í𝑛
Substituindo na primeira equação,
1
2𝑚𝑣0
2 −𝐺𝑀𝑚
𝑟0=
1
2𝑚(
𝑟0𝑣0 sin𝜙0
𝑟𝑚í𝑛)2
−𝐺𝑀𝑚
𝑟𝑚í𝑛
1
2𝑣0
2 −𝐺𝑀
𝑟0=
1
2(𝑟0𝑣0 sin𝜙0
𝑟𝑚í𝑛)2
−𝐺𝑀
𝑟𝑚í𝑛
𝑣02
2−
𝐺𝑀
𝑟0=
𝑟02𝑣0
2 sin2𝜙0
2𝑟𝑚í𝑛2 −
𝐺𝑀
𝑟𝑚í𝑛
𝑣02
2−
𝑟02𝑣0
2 sin2𝜙0
2𝑟𝑚í𝑛2 =
𝐺𝑀
𝑟0−
𝐺𝑀
𝑟𝑚í𝑛
−𝑟02𝑣0
2 sin2𝜙0
2𝑟𝑚í𝑛2 =
𝐺𝑀
𝑟0−
𝐺𝑀
𝑟𝑚í𝑛−
𝑣02
2
𝑟02𝑣0
2 sin2𝜙0
2𝑟𝑚í𝑛2 = −
𝐺𝑀
𝑟0+
𝐺𝑀
𝑟𝑚í𝑛+
𝑣02
2
sin2 𝜙0 =2𝑟𝑚í𝑛
2
𝑟02𝑣0
2 (−𝐺𝑀
𝑟0+
𝐺𝑀
𝑟𝑚í𝑛+
𝑣02
2) sin𝜙0 = √
2𝑟𝑚í𝑛2
𝑟02𝑣0
2 (−𝐺𝑀
𝑟0+
𝐺𝑀
𝑟𝑚í𝑛+
𝑣02
2)
Valores:
𝑟0 = 6,871 × 106 𝑚
𝑟𝑚í𝑛 = 6.371 𝑘𝑚 + 200 𝑘𝑚 = 6.571 𝑘𝑚 𝑟𝑚í𝑛 = 6,571 × 106 𝑚
𝑣0 = 10.250 𝑚 𝑠⁄
𝐺𝑀 = 3,9818 × 1014 𝑚3 𝑠2⁄
Substituindo os valores, encontramos,
sin𝜙0 = 0,9801 𝜙0 = {78,558°101,44°
Assim,
𝑒𝑟𝑟𝑜− = 78,558° − 90° 𝑒𝑟𝑟𝑜− = −11,442°
𝑒𝑟𝑟𝑜+ = 101,44° − 90° 𝑒𝑟𝑟𝑜+ = +11,442°
Prof.: Carlos Arthur Cavalcante 222

Prof.: Carlos Arthur Cavalcante 223
A.1. Lei da Gravitação Universal de Newton
A força gravitacional exercida pelo Sol sobre um planeta ou pela Terra sobre um satélite são
importantes exemplos de força central.
Lei da Gravitação Universal: Duas partículas de massa 𝑀 e 𝑚 a
uma distância 𝑟 uma da outra se atraem com forças iguais e
opostas �� e −��. A intensidade comum das duas forças é:
𝐹 =𝐺𝑀𝑚
𝑟2
𝐺 = 6,6730 × 10−11 𝑚3 𝑘𝑔𝑠2⁄ Constante de gravitação universal
Para partículas de massa 𝑚 que estão se movendo na superfície da Terra ou próximo a ela, a
força gravitacional costuma ser denominada de força peso e é identificada pela letra 𝑊 (weight,
ou peso, em inglês).
Assim, a aplicação da Lei da Gravitação Universal para um corpo de massa 𝑚 sobre a superfície
da Terra resulta em:
𝑊 =𝐺𝑀𝑚
𝑅2 𝑊 =
𝐺𝑀𝑚
𝑅2 𝑊 = 𝑚(
𝐺𝑀
𝑅2)
A constante (𝐺𝑀
𝑅2) é denominada aceleração da gravidade e identificada pela letra 𝑔. Assim,
𝑊 = 𝑚𝑔
Considerando que, para o planeta Terra12,
𝑀 = 5,9671 × 1024 𝑘𝑔 𝑅 = 6,3710 × 106 𝑚
O valor de 𝑔 é,
𝑔 =(6,6730×10−11 𝑚3 𝑘𝑔.𝑠2⁄ )(5,9671×1024 𝑘𝑔)
(6,3710×106 𝑚)2
𝑔 = 9,8100 𝑚 𝑠2⁄
12 Na realidade, a Terra não é uma esfera perfeita e a distância 𝑟 do centro até um ponto em sua superfície depende
da latitude. Ao invés de considerar um único valor para 𝑟 (𝑟 = 𝑅), qualquer valor desde o raio polar
(6,357 × 106 𝑚) até o raio equatorial (6,378 × 106 𝑚) pode ser utilizado, de acordo com a necessidade e o
“modelo de Terra” adotado. O raio da terra para uma dada latitude geodésica 𝜑 é 𝑅(𝜑) = √(𝑎2 cos𝜑)2+(𝑏2 sin𝜑)2
(𝑎 cos𝜑)2+(𝑏 sin𝜑)2,
onde 𝑎 e 𝑏 são, respectivamente, o raio equatorial e raio polar. Assumindo que a Terra seja uma esfera perfeita de
volume igual, o raio correspondente obtido é 6,3710 × 106 𝑚, também identificado como o raio médio da Terra
(https://pt.wikipedia.org/wiki/Raio_terrestre, acessado em 24/09/2016).

Prof.: Carlos Arthur Cavalcante 224
A.1.1.1. Exemplo Ilustrativo B-01
Problema-Resolvido 12.7 (Beer, Johnston; 9ª Edição)
Um satélite é lançado em uma direção paralela à superfície
da Terra com velocidade de 30.000 𝑘𝑚/ℎ de uma altitude
de 400 𝑘𝑚. Determinar a velocidade do satélite quando
atinge sua altitude máxima de 4.000 𝑘𝑚. O raio da Terra é
6.370 𝑘𝑚.
SOLUÇÃO:
Uma vez que o satélite está se movendo sob a ação de uma força central, a quantidade de movimento angular
é constante. Assim,
𝑟𝑚𝑣 sin 𝜙 = 𝑐𝑡𝑒
𝑟𝐴𝑚𝑣𝐴 sin𝜙𝐴 = 𝑟𝐵𝑚𝑣𝐵 sin 𝜙𝐵
Observando que 𝜙 é o ângulo entre o vetor 𝑟 e o vetor �� = 𝑚��,
verificamos que
𝜙𝐴 = 90° 𝜙𝐵 = 90°
Assim,
𝑟𝐴 𝑣𝐴 = 𝑟𝐵 𝑣𝐵 𝑣𝐵 = 𝑣𝐴𝑟𝐴
𝑟𝐵
𝑣𝐵 = 30000(6370+400)
(6370+4000) 𝑣𝐵 = 30000
(6770)
(10370) 𝑣𝐵 = 19.585 𝑘𝑚 ℎ⁄
30.000 𝑘𝑚 ℎ⁄
400 𝑘𝑚
4.000 𝑘𝑚
Prof.: Carlos Arthur Cavalcante 225
A.2. Trajetória de uma partícula sob a ação de uma Força Central
Considere uma partícula 𝑃 que se move sob a ação de uma força central ��. Nossa proposta é
obter a equação diferencial que defina a sua trajetória.
Para uma partícula movendo-se sob a ação de uma força central �� as equações de movimento
são:
∑𝐹𝑟 = 𝑚𝑎𝑟 −𝐹 = 𝑚𝑎𝑟 −𝐹 = 𝑚(�� − 𝑟��2)
∑𝐹𝜃 = 𝑚𝑎𝜃 0 = 𝑚𝑎𝜃 0 = 𝑚(𝑟�� + 2����)
Ou seja,
𝑚(�� − 𝑟��2) = −𝐹 Eq. 01
𝑚(𝑟�� + 2����) = 0 Eq. 02
A segunda equação (Eq. 02) é equivalente à equação 𝑟2�� = ℎ = 𝑐𝑡𝑒. Isto pode ser verificado
diferenciando esta última equação em relação a 𝑡. Preferimos utilizar 𝑟2�� = ℎ porque ela é
mais conveniente para eliminar a variável independente 𝑡 da primeira equação (Eq. 01).
𝑚(�� − 𝑟��2) = −𝐹 Eq. 03
𝑟2�� = ℎ Eq. 04
A equação Eq. 04 pode ser utilizada para eliminar a variável independente 𝑡 da equação Eq. 03.
Resolvendo a equação Eq. 04 para �� ou 𝑑𝜃 𝑑𝑡⁄ obtemos,
𝑑𝜃
𝑑𝑡=
ℎ
𝑟2 Eq. 05
Da qual também podemos obter que,
�� =𝑑𝑟
𝑑𝑡=
𝑑𝑟
𝑑𝜃
𝑑𝜃
𝑑𝑡=
𝑑𝑟
𝑑𝜃
ℎ
𝑟2= −ℎ
𝑑
𝑑𝜃(1
𝑟) Eq. 06
�� =𝑑��
𝑑𝑡=
𝑑��
𝑑𝜃
𝑑𝜃
𝑑𝑡=
𝑑��
𝑑𝜃
ℎ
𝑟2 Eq. 07
Substituindo a expressão de �� da equação Eq. 06 na última expressão para �� (Eq. 07) obtemos,
�� =ℎ
𝑟2𝑑��
𝑑𝜃 �� =
ℎ
𝑟2𝑑
𝑑𝜃[−ℎ
𝑑
𝑑𝜃(1
𝑟)]
�� = −ℎ2
𝑟2𝑑2
𝑑𝜃2(1
𝑟) Eq. 08
Substituindo a expressão para �� da equação Eq. 05 e a expressão para �� da equação Eq. 08 na
equação Eq. 03 obtemos,
𝑚(�� − 𝑟��2) = −𝐹 𝑚(−ℎ2
𝑟2𝑑2
𝑑𝜃2(1
𝑟) − 𝑟 (
ℎ
𝑟2)2) = −𝐹

Prof.: Carlos Arthur Cavalcante 226
𝑚(−ℎ2
𝑟2𝑑2
𝑑𝜃2(1
𝑟) − 𝑟
ℎ2
𝑟4) = −𝐹 𝑚(−
ℎ2
𝑟2𝑑2
𝑑𝜃2(1
𝑟) −
ℎ2
𝑟3) = −𝐹
𝑚(−ℎ2
𝑟2𝑑2
𝑑𝜃2(1
𝑟) −
ℎ2
𝑟21
𝑟) = −𝐹 𝑚
ℎ2
𝑟2(−
𝑑2
𝑑𝜃2(1
𝑟) −
1
𝑟) = −𝐹
−𝑑2
𝑑𝜃2(1
𝑟) −
1
𝑟= −
𝐹𝑟2
𝑚ℎ2
𝑑2
𝑑𝜃2(1
𝑟) +
1
𝑟=
𝐹𝑟2
𝑚ℎ2
Finalmente, introduzindo a função 𝑢 = 1 𝑟⁄ obtemos,
𝑑2𝑢
𝑑𝜃2+ 𝑢 =
𝐹
𝑚ℎ2𝑢2 Eq. 09
Cabe destacar que:
• Na dedução da equação Eq. 09 a força �� foi considerada como dirigida para 𝑂. Portanto,
o valor de 𝐹 na equação Eq. 09 deve ser feito positivo, se �� realmente estiver dirigida
da partícula para 𝑂 (força atrativa), e deve ser feito negativo, se �� estiver dirigida de
𝑂 para a partícula (força repulsiva).
• Se 𝐹 é uma função conhecida de 𝑟 (ou de 𝑢 = 1 𝑟⁄ ), a equação Eq. 09 é uma equação
diferencial em 𝑢 e 𝜃. Essa equação diferencial define a trajetória de uma partícula sob
a ação de uma força central ��. A equação da trajetória pode ser obtida resolvendo-se a
equação diferencial Eq. 09 para 𝑢 como uma função de 𝜃, sendo que as constantes de
integração são determinadas pelas condições iniciais.

Prof.: Carlos Arthur Cavalcante 227
A.3. Aplicação de Mecânica Espacial
Após o último estágio do foguete lançador ter queimado seu
combustível, os satélites artificiais e outros veículos espaciais ficam
sujeitos apenas à atração gravitacional da Terra13 e seus movimentos
tornam-se, portanto, movimentos sob a ação de uma força central (a
força de atração gravitacional) que podem ser determinados pelas
equações Eq. 04 e Eq. 09, abaixo reproduzidas e renumeradas.
𝑟2�� = ℎ Eq. 10 𝑑2𝑢
𝑑𝜃2+ 𝑢 =
𝐹
𝑚ℎ2𝑢2 Eq. 11
Substituindo 𝐹, na equação Eq. 11, pela expressão para o valor da força de atração gravitacional,
obtemos,
𝑑2𝑢
𝑑𝜃2+ 𝑢 =
𝐺𝑀𝑚𝑢2
𝑚ℎ2𝑢2
𝑑2𝑢
𝑑𝜃2+ 𝑢 =
𝐺𝑀
ℎ2 Eq. 12
A equação Eq. 12 é uma equação diferencial ordinária (EDO) de segunda ordem, linear, com
coeficientes constantes e cujo lado direito também é uma constante. Sua solução é obtida
somando-se a solução particular
𝑢 =𝐺𝑀
ℎ2
Com a solução geral da equação diferencial homogênea correspondente à Eq. 12, dada por,
𝑢 = 𝐶 cos(𝜃 − 𝜃0)
Onde 𝐶 é uma constante de integração definida pelas condições
iniciais.
Escolhendo o eixo polar de tal modo que 𝜽𝟎 = 𝟎, escrevemos,
𝑢 =1
𝑟=
𝐺𝑀
ℎ2+ 𝐶 cos(𝜃) Eq. 13
Enfatizamos que a equação Eq. 13 é a equação da trajetória 𝑟 = 𝑓(𝜃) de uma partícula em
movimento sob a ação exclusiva de uma força central gravitacional. A origem 𝑂 do sistema de
coordenadas polares está no centro do planeta e o eixo polar é escolhido de tal forma que 𝜃0 =0. Na utilização prática da equação Eq. 13 para resolver problemas é necessário certificar-se
que essas condições estejam satisfeitas.
13 Assume-se que os movimento de veículos espaciais aqui estudados são atraídos unicamente pelo planeta Terra
e que suas massas são desprezíveis quando comparadas com a massa da Terra. Se um veículo se desloca para
muito longe da Terra, sua trajetória pode ser afetada pela atração de outros corpos, como o sol, a lua ou outros
planetas.
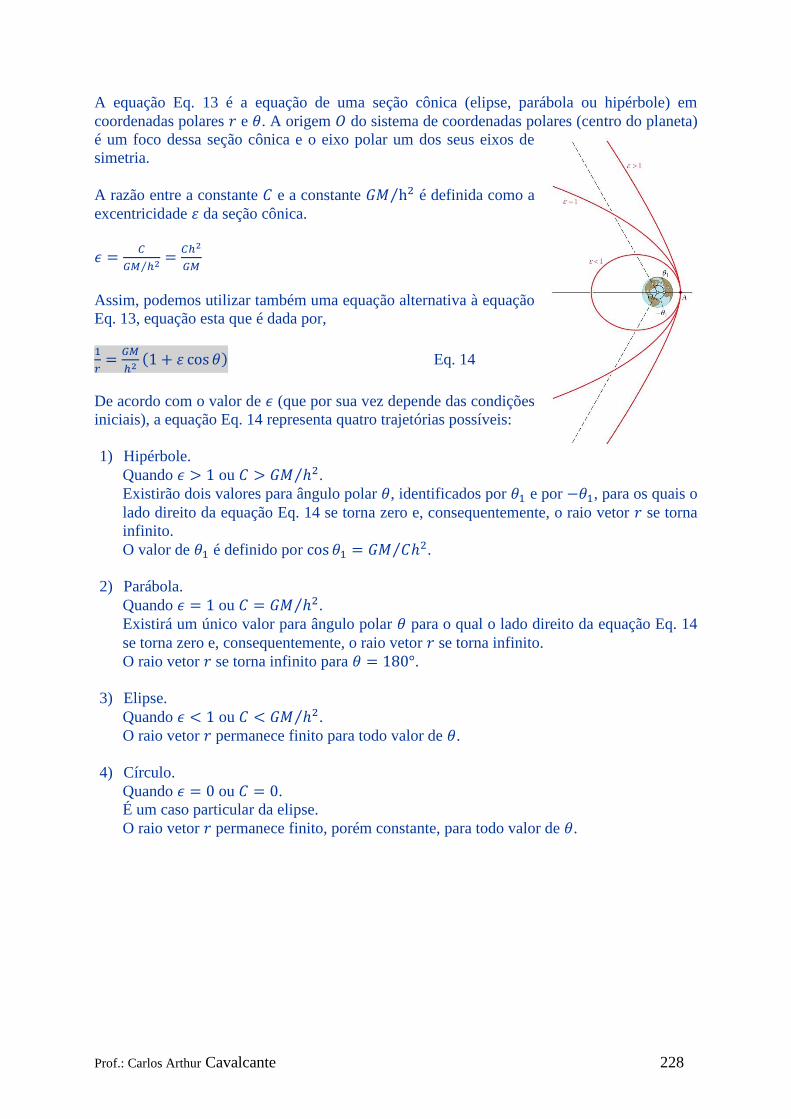
Prof.: Carlos Arthur Cavalcante 228
A equação Eq. 13 é a equação de uma seção cônica (elipse, parábola ou hipérbole) em
coordenadas polares 𝑟 e 𝜃. A origem 𝑂 do sistema de coordenadas polares (centro do planeta)
é um foco dessa seção cônica e o eixo polar um dos seus eixos de
simetria.
A razão entre a constante 𝐶 e a constante 𝐺𝑀 h2⁄ é definida como a
excentricidade 𝜀 da seção cônica.
𝜖 =𝐶
𝐺𝑀 ℎ2⁄=
𝐶ℎ2
𝐺𝑀
Assim, podemos utilizar também uma equação alternativa à equação
Eq. 13, equação esta que é dada por,
1
𝑟=
𝐺𝑀
ℎ2(1 + 𝜀 cos 𝜃) Eq. 14
De acordo com o valor de 𝜖 (que por sua vez depende das condições
iniciais), a equação Eq. 14 representa quatro trajetórias possíveis:
1) Hipérbole.
Quando 𝜖 > 1 ou 𝐶 > 𝐺𝑀 ℎ2⁄ .
Existirão dois valores para ângulo polar 𝜃, identificados por 𝜃1 e por −𝜃1, para os quais o
lado direito da equação Eq. 14 se torna zero e, consequentemente, o raio vetor 𝑟 se torna
infinito.
O valor de 𝜃1 é definido por cos 𝜃1 = 𝐺𝑀 𝐶ℎ2⁄ .
2) Parábola.
Quando 𝜖 = 1 ou 𝐶 = 𝐺𝑀 ℎ2⁄ .
Existirá um único valor para ângulo polar 𝜃 para o qual o lado direito da equação Eq. 14
se torna zero e, consequentemente, o raio vetor 𝑟 se torna infinito.
O raio vetor 𝑟 se torna infinito para 𝜃 = 180°.
3) Elipse.
Quando 𝜖 < 1 ou 𝐶 < 𝐺𝑀 ℎ2⁄ .
O raio vetor 𝑟 permanece finito para todo valor de 𝜃.
4) Círculo.
Quando 𝜖 = 0 ou 𝐶 = 0.
É um caso particular da elipse.
O raio vetor 𝑟 permanece finito, porém constante, para todo valor de 𝜃.

Prof.: Carlos Arthur Cavalcante 229
A.3.1. Determinação das constantes 𝑪 e 𝑮𝑴 𝒉𝟐⁄ a partir das condições iniciais.
As constantes 𝐶 e 𝐺𝑀 ℎ2⁄ são determinadas a partir das condições iniciais, isto é, a partir da
posição e da velocidade da partícula no início de seu voo livre.
Vamos assumir a situação mais usual que é o veículo espacial
(partícula) iniciando o seu voo livre no vértice 𝐴 de sua trajetória e
com velocidade inicial paralela à superfície da Terra14 nesse ponto
(ver figura ao lado). Isto é, a fase propulsada do veículo é
programada de tal modo que sua velocidade é paralela à superfície
da Terra quando o último estágio do foguete de lançamento termina
e o semento 𝑂𝐴 determina o eixo polar (𝜃0 = 0).
Em outras palavras, assumiremos que o veículo inicia o seu voo livre no vértice 𝐴 de sua
trajetória (quando 𝑟 = 𝑟0) e com velocidade 𝑣0 paralela à superfície da Terra.
Representando o raio vetor e a velocidade escalar do veículo no início de seu voo livre por 𝑟0 e
𝑣0, respectivamente, observamos que a velocidade se reduz à sua componente transversal, isto
é,
𝑣0 = 𝑣0𝜃 E como 𝑣𝜃 = 𝑟��, podemos escrever que
𝑣0 = 𝑟0��0
Recordando que 𝑟2�� = ℎ (equação Eq. 10), podemos expressar a quantidade de movimento
angular por unidade de massa ℎ como:
ℎ = 𝑟02��0 ℎ = 𝑟0(𝑟0��0)
ℎ = 𝑟0𝑣0 Eq. 15
O valor obtido para ℎ permite determinar a constante 𝐺𝑀 ℎ2⁄ da equação Eq. 13 (ou da equação
Eq. 14) e essa, por sua vez, permite determinar a constante de integração 𝐶 (ou a excentricidade
𝜀) ao fazermos 𝑟 = 𝑟0 para 𝜃 = 0. Isto é,
1
𝑟=
𝐺𝑀
ℎ2+ 𝐶 cos 𝜃 Eq. 13
1
𝑟=
𝐺𝑀
(𝑟0𝑣0)2+ 𝐶 cos 𝜃
Fazendo 𝑟 = 𝑟0 para 𝜃 = 0,
1
𝑟0=
𝐺𝑀
(𝑟0𝑣0)2+ 𝐶 cos 0°
Encontramos,
1
𝑟=
𝐺𝑀
ℎ2(1 + 𝜀 cos 𝜃) Eq. 14
1
𝑟=
𝐺𝑀
(𝑟0𝑣0)2(1 + 𝜀 cos 𝜃)
Fazendo 𝑟 = 𝑟0 para 𝜃 = 0,
1
𝑟0=
𝐺𝑀
(𝑟0𝑣0)2(1 + 𝜀 cos 0°)
Encontramos,
14 Problemas envolvendo lançamentos oblíquos, isto é, com velocidades iniciais não paralelas à superfície da Terra
no ponto de início do voo livre, serão considerados posteriormente utilizando o Método do Trabalho e Energia.

Prof.: Carlos Arthur Cavalcante 230
𝐶 =1
𝑟0−
𝐺𝑀
(𝑟0𝑣0)2
Assim, a equação da trajetória fica
completamente determinada por
1
𝑟=
𝐺𝑀
(𝑟0𝑣0)2+ (
1
𝑟0−
𝐺𝑀
(𝑟0𝑣0)2) cos 𝜃
Onde,
𝐺 = 6,6730 × 10−11 𝑚3 𝑘𝑔𝑠2⁄
E, para o planeta Terra,
𝑀 = 5,9671 × 1024 𝑘𝑔
𝐺𝑀 = 3,9818 × 1014 𝑚3 𝑠2⁄
𝐺𝑀 = 𝑔𝑅2
𝑔 = 9,81 𝑚 𝑠2⁄
𝑅 = 6,3710 × 106 𝑚
𝑅2 = 4,0590 × 1013 𝑚2
𝑔𝑅2 = 3,9818 × 1014 𝑚3 𝑠2⁄
𝜀 =𝑟0𝑣0
2
𝑔𝑅2− 1
Assim, a equação da trajetória fica
completamente determinada por
1
𝑟=
𝐺𝑀
(𝑟0𝑣0)2(1 + (
𝑟0𝑣02
𝐺𝑀− 1) cos 𝜃)
Onde,
𝐺 = 6,6730 × 10−11 𝑚3 𝑘𝑔𝑠2⁄
E, para o planeta Terra,
𝑀 = 5,9671 × 1024 𝑘𝑔
𝐺𝑀 = 3,9818 × 1014 𝑚3 𝑠2⁄
𝐺𝑀 = 𝑔𝑅2
𝑔 = 9,81 𝑚 𝑠2⁄
𝑅 = 6,3710 × 106 𝑚
𝑅2 = 4,0590 × 1013 𝑚2
𝑔𝑅2 = 3,9818 × 1014 𝑚3 𝑠2⁄
Em resumo, utilizamos a equação Eq. 13 ou a equação Eq. 14 para especificar a trajetória – a
que for mais conveniente. Assim, escrevemos,
1
𝑟=
𝐺𝑀
ℎ2+ 𝐶 cos 𝜃 Eq. 13
Onde,
𝐶 =1
𝑟0−
𝐺𝑀
(𝑟0𝑣0)2 Eq. 13’
1
𝑟=
𝐺𝑀
ℎ2(1 + 𝜀 cos 𝜃) Eq. 14
Onde,
𝜀 =𝑟0𝑣0
2
𝐺𝑀− 1 Eq. 14’

Prof.: Carlos Arthur Cavalcante 231
A.3.2. Utilizando as condições iniciais (𝒓𝟎 e 𝒗𝟎) para constatar o tipo de
trajetória (Hiperbólica, Parabólica, Elíptica ou Circular).
Consideremos, em primeiro lugar, as condições iniciais para que trajetória seja parabólica, isto
é, as condições iniciais para 𝐶 = 𝐺𝑀 ℎ2⁄ ou 𝜀 = 1.
Tomamos as equações Eq. 13’ e impomos a condição 𝐶 = 𝐺𝑀 ℎ2⁄ = 𝐺𝑀 (𝑟0𝑣0)2⁄ . Isto é,
fazemos,
𝐶 =1
𝑟0−
𝐺𝑀
(𝑟0𝑣0)2 𝐶 =
𝐺𝑀
(𝑟0𝑣0)2
Então,
1
𝑟0−
𝐺𝑀
(𝑟0𝑣0)2=
𝐺𝑀
(𝑟0𝑣0)2
1
𝑟0=
2𝐺𝑀
𝑟02𝑣02 𝑣0
2 =2𝐺𝑀
𝑟0
𝑣0 = √2𝐺𝑀
𝑟0
Concluímos que, dados os valores de 𝑟0 e de 𝑣0 (condições iniciais), ocorrerá que,
Se 𝑣0 > √2𝐺𝑀
𝑟0, então trajetória será hiperbólica – veículo não orbitará o planeta.
Se 𝑣0 = √2𝐺𝑀
𝑟0, então trajetória será parabólica – veículo não orbitará o planeta.
Se 𝑣0 < √2𝐺𝑀
𝑟0, então trajetória será elíptica (ou circular) – veículo orbitará o planeta.
Como o valor de 𝑣0 obtido para uma trajetória parabólica é o menor valor de 𝑣0 para que o
veículo não retorne ao seu ponto de partida (menor valor de 𝑣0 para ele não entrar em órbita),
a expressão √2𝐺𝑀
𝑟0 é denominada velocidade de escape na posição 𝑟0.
𝑣escape = √2𝐺𝑀
𝑟0 𝑣escape = √
2𝑔𝑅2
𝑟0
Em resumo, dados os valores de 𝑟0 e de 𝑣0 (condições iniciais), ocorrerá que,
Se 𝑣0 > 𝑣escape Trajetória hiperbólica – veículo não orbitará o planeta.
Se 𝑣0 = 𝑣escape Trajetória parabólica – veículo não orbitará o planeta.
Se 𝑣0 < 𝑣escape Trajetória elíptica (ou circular) – veículo orbitará o planeta.
A órbita circular ocorre quando 𝐶 = 0 e é de especial interesse. O valor de 𝑣0 correspondente
a uma órbita circular (a partir de uma posição 𝑟0) é facilmente determinado como,
𝑣circular = √𝐺𝑀
𝑟0 𝑣circular = √
𝑔𝑅2
𝑟0

Prof.: Carlos Arthur Cavalcante 232
Observando a figura ao lado, verificamos que, para um dado valor de 𝑟0 (ponto 𝐴), pode ocorrer
que,
Se 𝑣𝑐𝑖𝑟𝑐𝑢𝑙𝑎𝑟 < 𝑣0 < 𝑣𝑒𝑠𝑐𝑎𝑝𝑒, a trajetória será uma elipse
com perigeu no ponto 𝐴 e apogeu no ponto 𝐴′.
Se 𝑣0 = 𝑣𝑐𝑖𝑟𝑐𝑢𝑙𝑎𝑟 a trajetória será um círculo com
perigeu/apogeu no ponto 𝐴 – perigeu e apogeu têm
valores iguais.
Se 𝑣0 < 𝑣𝑐𝑖𝑟𝑐𝑢𝑙𝑎𝑟 a trajetória será uma elipse com perigeu
no ponto 𝐴′′ e apogeu no ponto 𝐴.
Se 𝑣0 ≪ 𝑣𝑐𝑖𝑟𝑐𝑢𝑙𝑎𝑟 a trajetória será uma elipse com apogeu
no ponto 𝐴 e perigeu em uma fração do raio do planeta –
o veículo não entra em órbita e intercepta (cai) na superfície do planeta. Mísseis balísticos, que
são projetados para atingir a superfície da Terra, também se deslocam ao longo de trajetórias
elípticas com 𝑣0 ≪ 𝑣circular. De fato, deve-se compreender que qualquer objeto lançado em
voo livre no vácuo, a partir de uma posição 𝑟0 com uma velocidade inicial 𝑣0 < 𝑣escape irá se
deslocar ao longo de uma trajetória elíptica. Somente quando as distâncias envolvidas são
pequenas é que o campo gravitacional da Terra pode ser considerado constante e apenas nestes
casos é que a trajetória elíptica pode ser aproximada para uma trajetória parabólica adotada ao
se analisar Lançamento de Projéteis.

Prof.: Carlos Arthur Cavalcante 233
A.3.3. Período orbital das trajetórias elípticas e circulares.
Uma característica importante do movimento de um satélite em órbita elíptica ou circular é o
tempo requerido para ele completar uma órbita. Esse tempo é conhecido como período do
satélite e é representado 𝜏.
Observando que 𝜏 pode ser obtido dividindo-se a área interior da órbita pela velocidade
aureolar, temos,
Á𝑟𝑒𝑎 𝑒𝑙𝑖𝑝𝑠𝑒 = 𝜋𝑎𝑏
𝑣𝑒𝑙𝑜𝑐𝑖𝑑𝑎𝑑𝑒 𝑎𝑢𝑟𝑒𝑜𝑙𝑎𝑟 =𝑑𝐴
𝑑𝑡=
1
2𝑟2�� =
1
2ℎ
Logo, o período 𝜏 é dado por:
𝜏 =2𝜋𝑎𝑏
ℎ
No caso de um satélite lançado em uma direção paralela à superfície da Terra, já vimos que ℎ
pode ser facilmente determinado a partir de 𝑟0 e de 𝑣0.
Por outro lado, os semieixos 𝑎 e 𝑏 não estão diretamente relacionados às condições iniciais.
Entretanto, os valores de 𝑟0 e de 𝑟1 correspondentes respectivamente ao perigeu e ao apogeu
podem ser facilmente determinados a partir da equação
1
𝑟=
𝐺𝑀
h2+ 𝐶 cos 𝜃
Ou seja, isto significa dizer que é sempre possível fazer com que o ponto 𝐴 (início do voo livre)
seja feito coincidente com o perigeu e que, correspondentemente, o ponto 𝐴′ coincida com o
seu apogeu, de modo que os semieixos 𝑎 e 𝑏 sejam expressos em termos de 𝑟0 e de 𝑟1
(Equivalente a fazer com que 𝜃0 = 0 coincida com o eixo polar).
Considerando a órbita elíptica mostrada na figura, o centro da Terra
está localizado em 𝑂 e coincide com um dos focos da elipse, enquanto
os pontos 𝐴 e 𝐴′ representam, respectivamente, o perigeu e o apogeu.
Com isto, podemos verificar que,
𝑟0 + 𝑟1 = 2𝑎 𝑎 =1
2(𝑟0 + 𝑟1)
Além disso, recordando que a soma das distâncias de cada um dos focos a qualquer ponto da
elipse é constante, podemos verificar que,
𝑏 = √𝑟0𝑟1
Uma vez que 𝑟0 e 𝑟1 tenham sido determinados, os semieixos podem ser facilmente
determinados e substituídos na expressão de 𝜏.

Prof.: Carlos Arthur Cavalcante 234
Assim, o período 𝜏 é dado por:
𝜏 =𝜋(𝑟0+𝑟1)√𝑟0𝑟1
𝑟0𝑣0
A.3.4. Leis de Kepler do movimento planetário.
As equações obtidas para a trajetória de satélites em torno da Terra também podem ser aplicadas
para descrever o movimento da Lua ao redor da Terra e de planetas ao redor do Sol. Entretanto,
a massa da Lua não é desprezível quando comparada à massa da Terra, modo que os resultados
obtidos não serão totalmente exatos. No caso dos planetas, um outro possível erro é desprezar
as forças exercidas pelos planetas uns sobre os outros, entretanto, mesmo assim, a aproximação
obtida ainda é excelente.
As propriedades das órbitas planetárias em torno do sol foram determinadas através de
observações astronômicas por Johann Kepler (1571-1630), antes mesmo de Newton
desenvolver a sua teoria da gravitação.
As três leis do movimento planetário de Kepler podem ser enunciadas como se segue:
1) Cada planeta descreve uma elipse, com o sol localizado em um dos seus focos
2) O vetor raio desenhado do sol até um planeta varre áreas iguais em tempos iguais.
3) Os quadrados dos períodos dos planetas são proporcionais aos cubos dos semieixos de suas
órbitas.
A 1ª lei enuncia o caso do movimento elíptico, a 2ª expressa que a velocidade aureolar é
constante. A 3ª lei também pode ser deduzida pelas equações obtidas.
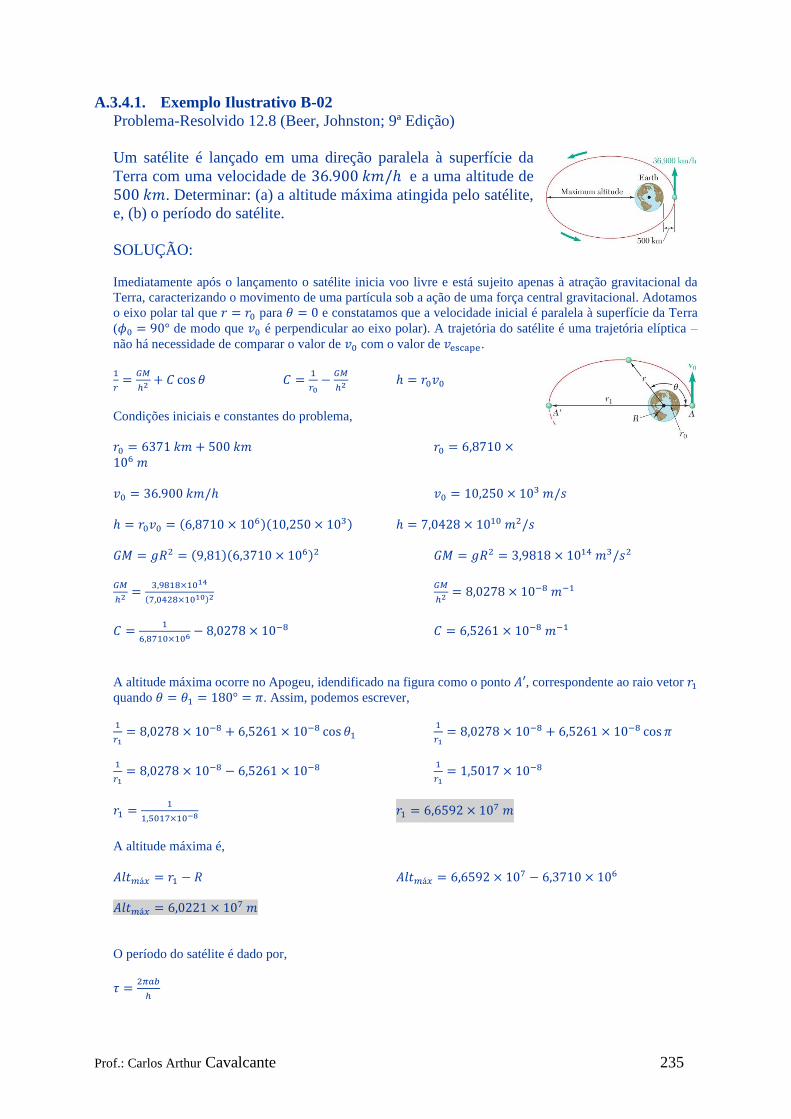
Prof.: Carlos Arthur Cavalcante 235
A.3.4.1. Exemplo Ilustrativo B-02
Problema-Resolvido 12.8 (Beer, Johnston; 9ª Edição)
Um satélite é lançado em uma direção paralela à superfície da
Terra com uma velocidade de 36.900 𝑘𝑚/ℎ e a uma altitude de
500 𝑘𝑚. Determinar: (a) a altitude máxima atingida pelo satélite,
e, (b) o período do satélite.
SOLUÇÃO:
Imediatamente após o lançamento o satélite inicia voo livre e está sujeito apenas à atração gravitacional da
Terra, caracterizando o movimento de uma partícula sob a ação de uma força central gravitacional. Adotamos
o eixo polar tal que 𝑟 = 𝑟0 para 𝜃 = 0 e constatamos que a velocidade inicial é paralela à superfície da Terra
(𝜙0 = 90° de modo que 𝑣0 é perpendicular ao eixo polar). A trajetória do satélite é uma trajetória elíptica –
não há necessidade de comparar o valor de 𝑣0 com o valor de 𝑣escape.
1
𝑟=
𝐺𝑀
ℎ2+ 𝐶 cos 𝜃 𝐶 =
1
𝑟0−
𝐺𝑀
ℎ2 ℎ = 𝑟0𝑣0
Condições iniciais e constantes do problema,
𝑟0 = 6371 𝑘𝑚 + 500 𝑘𝑚 𝑟0 = 6,8710 ×106 𝑚
𝑣0 = 36.900 𝑘𝑚/ℎ 𝑣0 = 10,250 × 103 𝑚/𝑠
ℎ = 𝑟0𝑣0 = (6,8710 × 106)(10,250 × 103) ℎ = 7,0428 × 1010 𝑚2/𝑠
𝐺𝑀 = 𝑔𝑅2 = (9,81)(6,3710 × 106)2 𝐺𝑀 = 𝑔𝑅2 = 3,9818 × 1014 𝑚3/𝑠2
𝐺𝑀
ℎ2=
3,9818×1014
(7,0428×1010)2
𝐺𝑀
ℎ2= 8,0278 × 10−8 𝑚−1
𝐶 =1
6,8710×106− 8,0278 × 10−8 𝐶 = 6,5261 × 10−8 𝑚−1
A altitude máxima ocorre no Apogeu, idendificado na figura como o ponto 𝐴′, correspondente ao raio vetor 𝑟1
quando 𝜃 = 𝜃1 = 180° = 𝜋. Assim, podemos escrever,
1
𝑟1= 8,0278 × 10−8 + 6,5261 × 10−8 cos 𝜃1
1
𝑟1= 8,0278 × 10−8 + 6,5261 × 10−8 cos 𝜋
1
𝑟1= 8,0278 × 10−8 − 6,5261 × 10−8
1
𝑟1= 1,5017 × 10−8
𝑟1 =1
1,5017×10−8 𝑟1 = 6,6592 × 10
7 𝑚
A altitude máxima é,
𝐴𝑙𝑡𝑚á𝑥 = 𝑟1 − 𝑅 𝐴𝑙𝑡𝑚á𝑥 = 6,6592 × 107 − 6,3710 × 106
𝐴𝑙𝑡𝑚á𝑥 = 6,0221 × 107 𝑚
O período do satélite é dado por,
𝜏 =2𝜋𝑎𝑏
ℎ

Prof.: Carlos Arthur Cavalcante 236
Onde,
𝑎 =𝑟0+𝑟1
2 𝑎 =
6,8710×106+6,6592×107
2 𝑎 = 3,6732 × 107 𝑚
𝑏 = √𝑟0𝑟1 𝑏 = √(6,8710 × 106)(6,6592 × 107) 𝑏 = 2,1391 × 107 𝑚
Assim,
𝜏 =2𝜋𝑎𝑏
ℎ 𝜏 =
2𝜋(3,6732×107)(2,1391×107)
7,0428×1010
𝜏 = 70.096,56 𝑠
𝜏 = 19,471 ℎ𝑜𝑟𝑎𝑠 𝜏 = 19ℎ 28𝑚 17𝑠