







Línguas
Páginas
Legal


ANÁLISE NUMÉRICA DO EFEITO DE ÁGUAS RASAS NA RESISTÊNCIA AO
AVANÇO
Mariana Viviani Candella
RIO DE JANEIRO
FEVEREIRO DE 2014
Projeto de Graduação apresentado ao Curso de Engenharia
Naval e Oceânica da Escola Politécnica, Universidade
Federal do Rio de Janeiro, como parte dos requisitos
necessários à obtenção do título de Engenheiro.
Orientador: Prof. Paulo de Tarso Themistocles Esperança
Co-Orientador: Marcelo de Araujo Vitola
ANÁLISE NUMÉRICA DO EFEITO DE ÁGUAS RASAS NA RESISTÊNCIA AO
AVANÇO
Mariana Viviani Candella
PROJETO FINAL SUBMETIDO AO CORPO DOCENTE DO DEPARTAMENTO DE
ENGENHARIA NAVAL E OCEÂNICA DA ESCOLA POLITÉCNICA DA
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COMO PARTE DOS REQUISITOS
NECESSÁRIOS PARA A OBTENÇÃO DO GRAU DE ENGENHEIRO NAVAL E
OCEÂNICO.
Aprovado por:
________________________________________________
Prof Paulo de Tarso Themistocles Esperança, DSc. (Orientador)
________________________________________________
Marcelo de Araujo Vitola, DSc. (Co-Orientador)
________________________________________________
Prof. Claudio Alexis Rodríguez Castillo, DSc.
________________________________________________
Ricardo Barreto Portella, MSc.
RIO DE JANEIRO, RJ - BRASIL
FEVEREIRO DE 2014

I
Candella, Mariana Viviani.
Análise Numérica do Efeito de Águas Rasas na
Resistência do Avanço/Mariana Viviani Candella – Rio de Janeiro:
UFRJ/ Escola Politécnica, 2014.
VII, 26 p.: il.; 29,7 cm.
Orientadores: Prof. Paulo de Tarso Themistocles
Esperança e Marcelo de Araujo Vitola.
Projeto de Graduação – UFRJ/ Escola Politécnica/ Curso
de Engenharia Naval e Oceânica, 2014.
Referências bibliográficas: p. 25 - 26.
1. Resistência ao Avanço de Navios. 2. Águas Rasas.
3.Hidrodinâmica. I. Esperança, Paulo de Tarso Thermistocles et al
II. Universidade Federal do Rio de Janeiro, Escola Politécnica,
Curso de Engenharia Engenharia Naval e Oceânica. III. Título.
II
Resumo do Projeto de Graduação apresentado à Escola Politécnica/ UFRJ como parte
dos requisitos necessários para a obtenção do grau de Engenheiro Naval e Oceânico.
ANÁLISE NUMÉRICA DO EFEITO DE ÁGUAS RASAS NA RESISTÊNCIA AO
AVANÇO
Mariana Viviani Candella
Fevereiro/2014
Orientador: Prof. Paulo de Tarso Themistocles Esperança
Co-Orientador: Marcelo de Araujo Vitola
Curso: Engenharia Naval e Oceânica
A previsão de efeitos de águas rasas na resistência ao avanço de uma
embarcação é essencial para o seu projeto, pois auxilia no dimensionamento do
sistema propulsivo. No presente trabalho, o software comercial CFX foi utilizado para a
análise numérica da resistência ao avanço de um casco da Série 60 (𝐶𝐵 = 0.6) para
lâminas d’água 2, 3, 4 e 5 vezes o calado da embarcação, variando o número de
Froude entre 0.18 e 0.34. Foram testadas malhas com e sem refinamento de camada
prismática na superfície livre e, para a primeira, foram analisadas as curvas de
resistência ao avanço, os padrões de onda gerados e os perfis de onda, comparando-
os com dados experimentais e fórmulas empíricas. Os resultados obtidos foram
coerentes com a literatura existente, porém indicaram a necessidade de maior
refinamento no casco e na superfície livre.
Palavras-chave: Resistência ao Avanço, Águas Rasas, CFD.
III
Abstract of Undergraduate Project presented to POLI/UFRJ as a partial fulfillment of the requirements for the degree of Engineer.
NUMERICAL ANALYSIS OF SHALLOW WATER EFFECT ON SHIP RESISTANCE
Mariana Viviani Candella
February/2014
Advisor: Prof. Paulo de Tarso Themistocles Esperança
Co-Advisor: Marcelo de Araujo Vitola
Course: Naval Engineering
The prediction of shallow water effects on ship resistance is an essential part of
its design process, as it supports the design of the propulsive system. In the present
paper, numerical analysis of ship resistance was performed with the commercial
software CFX using a benchmark hull from Series 60 (𝐶𝐵 = 0.6). The water depth was
varied from 2 to 5 times the hull’s draught and the Froude number range used was
between 0.18 and 0.34. Tests were performed using meshes with and without prismatic
layer on the free surface. For the first mesh, ship resistance curves, wave patterns and
wave profiles were analyzed and compared to data obtained from experimental test
and empirical formulas. The results were consistent with the existent theory, although
indicated a need for more refined mesh around the hull and on the free surface.
Keywords: Ship Resistance, Shallow Water, CFD

IV
Dedicatória
Ao meu avô Olavo, que sempre quis um engenheiro na família, mas não imaginou que
seria eu; Ao meu avô Waldir, que sempre me incentivou a ser o que eu quisesse.
Muitas saudades.

V
Agradecimentos
Agradeço aos meus pais, que me apoiaram e encorajaram incondicionalmente nos
bons e maus momentos durante os últimos cinco anos, sempre com paciência e
carinho. Ao meu co-orientador Marcelo Vitola, que além de ter sido fundamental para a
realização deste trabalho, foi também pai e conselheiro. Aos professores Paulo de
Tarso, Sergio Sphaier e Cláudio Rodriguez, pela dedicação e inspiração. Ao grande
amigo Oto Matos, parceiro de todos os trabalhos, pela paciência. Aos funcionários e
amigos do LabOceano e da Projemar, pelo carinho e apoio. Ao querido mestre
Haroldo, por acreditar desde o início. Aos amigos de ontem e de hoje, que, mesmo
sem notar, fizeram parte dessa história.
VI
SUMÁRIO
1 Introdução.................................................................................................................. 1
2 Resistência ao Avanço de um Navio ........................................................................ 2
3 Padrão de Ondas e Regimes de Escoamento ......................................................... 4
4 Revisão Bibliográfica ................................................................................................. 7
5 Modelo Matemático ................................................................................................... 9
6 Modelo Numérico .................................................................................................... 10
7 Geometria ................................................................................................................ 10
8 Domínio Computacional .......................................................................................... 11
9 Condições de Contorno .......................................................................................... 12
10 Malha ................................................................................................................... 12
11 Resultados e Discussão ...................................................................................... 17
11.1 Resistência em Águas Profundas ................................................................... 17
11.2 Resistência em Águas Rasas .......................................................................... 20
11.3 Perfil de Onda e Padrão de Ondas ................................................................. 22
12 Conclusão ............................................................................................................ 24
13 Bibliografia ........................................................................................................... 25

VII
SUMÁRIO DE ILUSTRAÇÕES Figura 1 – Componentes da resistência ao avanço (adaptado de BERTRAM, 2012) ... 3 Figura 2 - Padrão de ondas de Kelvin (adaptado de HARVALD, 1983) ......................... 4 Figura 3 - Regimes de Escoamento................................................................................. 5
Figura 4 – Representação do método de Schlichting (adaptado de HARVALD, 1983) . 7 Figura 5 - Função média mais flutuações ........................................................................ 9 Figura 6 – Características do casco Série 60, Cb=0.6 .................................................. 10 Figura 7 – Determinação da distância da fronteira lateral ............................................. 11
Figura 8 – Domínio Computacional................................................................................ 11 Figura 9 - Sistema de referência .................................................................................... 11 Figura 10 – Condições de contorno ............................................................................... 12 Figura 11 – Malha com camada prismática no casco e na superfície livre .................. 14
Figura 12 - Malha com camada prismática de 0.5 m na superfície livre ....................... 14 Figura 13 - Detalhe da malha com prismas na superfície livre ..................................... 15 Figura 14 – Detalhe da malha sem prismas .................................................................. 15
Figura 15 – Teste de malha com Fnl=0.18 .................................................................... 16
Figura 16 – Teste de malha com Fnl=0.34 .................................................................... 16
Figura 17 - Distribuição de VOF ..................................................................................... 16 Figura 18 - Comparação das curvas de resistência total .............................................. 17
Figura 19 – Teste de malha com prisma para Fnl=0.18 ................................................ 17
Figura 20 – Comparação de curvas de resistência em águas profundas ..................... 18 Figura 21 – Comparação entre curvas de resistência friccional ................................... 18
Figura 22 – Valores de y +na superfície do casco ........................................................ 19
Figura 23 – Curva de resistência total com parcela friccional do ITTC-78 ................... 19 Figura 24 – Resistência ao avanço em águas rasas e regimes de escoamento – (1)
subcrítico inferior, (2) subcrítico superior, (3) transcrítico, (4) supercrítico ................... 20
Figura 25 – Resistência em águas rasas em relação a Fnl .......................................... 21 Figura 26 – Comparação de curvas de resistência em h/T=2 ...................................... 21 Figura 27 - Comparação de curvas de resistência em h/T=3 ....................................... 22
Figura 28 – Padrão de ondas para h/T=2 – (a) Fnl=0.18, (b) Fnl=0.25, (c) Fnl=0.34... 23 Figura 30 – Comparação dos perfis de onda para h/T=3 .............................................. 23
SUMÁRIO DE TABELAS
Tabela 1 - Características das malhas sem prismas ..................................................... 15 Tabela 2 – Características das malhas com prismas .................................................... 15 Tabela 3 - Propriedades da camada prismática ............................................................ 15 Tabela 4 – Características do modelo experimental ..................................................... 18

1
1 INTRODUÇÃO
Na engenharia naval, o cálculo da resistência ao avanço é fundamental para o
projeto de uma embarcação desde o seu começo, pois a partir dele pode-se
determinar a potência requerida pelo casco para atingir uma dada velocidade e,
portanto, selecionar o sistema propulsivo. Caso esse cálculo não seja realizado de
forma correta, o navio não conseguirá atingir a velocidade estipulada no contrato, o
que ocasiona prejuízos financeiros ao estaleiro ou ao projetista. Geralmente, uma
multa é designada ao responsável pelo projeto, porém, de acordo com a diferença de
desempenho da embarcação, o armador pode se recusar a receber a encomenda. Por
outro lado, se o navio ultrapassar a velocidade máxima requerida, significa que o
mesmo está supermotorizado, implicando em maiores gastos de compra do armador e
maior consumo do sistema.
Dependendo do estágio no qual o projeto da embarcação se encontra, existem
formas diferentes para estimativa e determinação da resistência ao avanço. A mais
tradicional delas é o teste com modelos em escala reduzida, podendo ser realizado
por meio de dois procedimentos: o teste de reboque e o teste em tanque de
recirculação. Os testes de reboque são executados movimentando o modelo em linha
reta por um tanque longo e largo, de forma que o escoamento possa se desenvolver e
alcançar o estágio permanente e que as fronteiras não influenciem o resultado. Já em
um ensaio em tanque de recirculação, o modelo permanece em um mesmo lugar,
enquanto o escoamento se movimenta na sua direção. Em ambos os casos, os
modelos podem ser mantidos fixos ou livres.
Do ponto de vista prático, a principal dificuldade relativa aos testes com
modelos em escala reduzida é extrapolar os resultados obtidos para os protótipos em
escala real. Em 1868, William Froude propôs um método que serviu de base para o
que é utilizado até os dias atuais em laboratórios no mundo inteiro. Para que seja
possível o uso desse método, é necessário que haja semelhança dinâmica entre
modelo e protótipo, isto é, que as relações entre forças gravitacionais, viscosas e
inerciais, representadas pelos números adimensionais de Reynolds e Froude, sejam
iguais para ambos. Entretanto, essa igualdade só seria alcançada caso o fluido
utilizado no teste fosse menos viscoso do que a água ou se a aceleração da gravidade
fosse maior do que a terrestre, condições reproduzidas em poucos laboratórios no
mundo. Onde isso não é possível, opta-se pela igualdade do número de Froude e,
portanto, pela reprodução da componente de resistência relativa a ondas, uma vez
que, pelo método de extrapolação, a componente viscosa é calculada por uma fórmula
empírica. Logo, ainda que os resultados obtidos em tanques de prova sejam
amplamente utilizados na indústria, o método de extrapolação apresenta limitações.
Além das dificuldades na escolha do método adequado de determinação da
resistência ao avanço, alguns fatores da embarcação devem ser levados em
consideração, entre eles a rota que a mesma percorrerá durante sua operação. É
sabido que um navio operando em regiões de águas rasas, como rios, canais e
costas, experimenta um aumento na resistência em relação ao mesmo casco em
águas profundas. Caso não seja previsto em projeto, esse efeito pode não permitir que
a embarcação atinja o desempenho desejado. Há também uma mudança no padrão
de ondas geradas pelo casco, o que afeta as margens, e efeitos como trim e squat,

2
que são acentuados em lâmina d’água limitada, podendo provocar acidentes e até
causar a perda da embarcação em casos extremos.
Tendo em vista a influência negativa que a limitação da lâmina d’água pode ter
em um projeto, a determinação dos efeitos de águas rasas é importante.
SCHLICHTING (1934) desenvolveu um método de estimativa do efeito da
profundidade na resistência ao avanço baseado em considerações teóricas e
experimentos em escala reduzida. Seu método, embora não seja teoricamente
rigoroso, é utilizado como uma simplificação de um problema de engenharia complexo
em estágios iniciais de um projeto.
A dinâmica de fluido computacional (Computacional Fluid Dynamics – CFD) é
uma ferramenta que vem se desenvolvendo rapidamente. MOCTAR (2008) observou
uma crescente aplicação dessa técnica durante o processo de projeto de navios para
diversas análises, sendo uma delas a determinação da resistência ao avanço.
Atualmente, essa técnica é utilizada em uma fase anterior aos testes com modelos em
escala reduzida, a fim de eliminar hipóteses e reduzir a matriz de testes, reduzindo
também os custos. Porém, segundo RAVEN et al (2008), ainda que as análises de
CFD não demandem simplificações como os testes em escala, mais estudos são
necessários antes que elas possam ser aplicadas diretamente em um projeto.
Neste trabalho, a influência da variação da profundidade na resistência ao
avanço de um casco da Série 60 (𝐶𝐵 = 0.6) foi estudada. Os dados numéricos foram
obtidos utilizando o software comercial ANSYS CFX. Os resultados foram comparados
com dados experimentais e teóricos e analisados com base na teoria de resistência ao
avanço em águas rasas já desenvolvida.
2 RESISTÊNCIA AO AVANÇO DE UM NAVIO
Fisicamente, a resistência ao avanço é uma força contrária ao deslocamento de
uma embarcação. Ao longo dos anos, constatou-se a necessidade de dividi-la em
componentes, de forma a possibilitar o entendimento do seu mecanismo. O
International Towing Tank Conference (ITTC) apresenta uma definição para as
componentes da resistência, as quais podem ser combinadas de diversas formas. Um
esquema dessas combinações pode ser visto na Figura 1.
A resistência friccional de placa plana é a componente relativa à resistência de
uma placa plana semelhante à embarcação, onde semelhante significa mesma área
molhada e número de Reynolds. Essa parcela é derivada dos experimentos com
placas realizados por Froude em tanques de reboque.
Embora a placa plana seja uma representação conveniente da embarcação, ela
não leva em consideração as curvaturas do casco. As transições da proa para o corpo
paralelo e do corpo paralelo para a popa causam mudanças na velocidade do
escoamento próximo a ele, levando a um aumento da resistência friccional se
comparado à placa plana. Este é o efeito da forma na fricção, uma parcela da
chamada resistência residual. Somando-se esse efeito à resistência de placa plana, é
obtida a resistência friccional, ou seja, a soma das componentes de força tangenciais
à superfície do casco.
Outra parcela da resistência residual é composta pela resistência de pressão,
proveniente das tensões normais ao casco. Esta pode ser dividida em resistência de
onda e de pressão viscosa.

3
A resistência de pressão viscosa é a influência da forma e da viscosidade nas
tensões normais ao casco. Como se trata de um escoamento viscoso, há o
desenvolvimento de uma camada limite que afasta as linhas de corrente da popa e
causa um desbalanço entre as pressões à vante a à ré. A resistência viscosa é a
parcela devida à viscosidade do escoamento ao redor do casco, reunindo a resistência
friccional e a de pressão viscosa.
Figura 1 – Componentes da resistência ao avanço (adaptado de BERTRAM, 2012)
A resistência de onda é aquela relativa às ondas criadas pelo avanço da
embarcação e pode ser dividida em resistência de formação de onda e de quebra de
onda. Ao se deslocar, o navio tira partículas de água da posição de equilíbrio e forma
um sistema de ondas. A energia gasta nesse processo está associada à resistência de
formação de ondas. Quando as ondas formadas são grandes, elas podem quebrar e
essa energia é atribuída à resistência de quebra de onda.
Uma forma comum de representar a força de resistência e suas componentes são
os coeficientes adimensionais. O coeficiente adimensional de força 𝐶𝑇 é escrito como:
𝐶𝑇 =𝑅𝑇
12𝜌𝑆𝑉2
Onde
𝑅𝑇 é a força de resistência total
𝜌 é a densidade do meio fluido
𝑆 é a área da superfície molhada do casco
𝑉 é a velocidade de avanço da embarcação
Em um teste de resistência ao avanço com um modelo em escala reduzida, o
resultado final gerado é a força total. Para transpor tal resultado para a escala real,
Resistência Total
Resistência Residual Resistência Friccional
de Placa Plana
Resistência de Onda
Resistência de Pressão
Resistência de Quebra
de Onda
Resistência de
Formação de Onda
Resistência Friccional
Efeito da Forma na Fricção
Resistência de Pressão Viscosa
Resistência Viscosa
Resistência Total

4
existem dois métodos principais: o método de Froude e o método do ITTC-78.
Originalmente, o primeiro método considera a decomposição da resistência total em
uma parcela referente a uma placa plana equivalente, dependente do número de
Reynolds, e outra parcela residual, referente a todo o resto e dependente do número
de Froude. Atualmente, a porção da placa plana é substituída por um coeficiente de
resistência friccional do ITTC-57. A parcela residual é considerada como sendo
principalmente composta de resistência de onda. Assim, uma vez que o modelo e o
protótipo possuem a mesma relação entre as forças gravitacionais e as forças de
inércia, ou seja, são semelhantes, pode-se dizer que ambos possuem o mesmo
coeficiente de resistência residual.
O método do ITTC-78 é mais utilizado atualmente por levar em consideração
explicitamente a forma do casco. A resistência total é decomposta em resistência
viscosa, incluindo o efeito da forma na fricção e na pressão, e resistência de onda.
Obtém-se uma melhor divisão das componentes de resistência pela introdução de um
fator de forma, o qual é determinado pelo método de Prohaska, descrito por
LARSSON e RAVEN (2010).
3 PADRÃO DE ONDAS E REGIMES DE ESCOAMENTO
Uma embarcação navegando em águas profundas gera dois tipos de ondas
diferentes, as transversais e as divergentes. As transversais tem a direção do
deslocamento praticamente igual à direção do avanço do navio, enquanto as
divergentes formam um ângulo em relação ao eixo x (Figura 2). Juntas, essas ondas
formam um sistema envolvido por um formato triangular que, quando em regime
permanente, é constante e semelhante ao padrão de ondas de Kelvin. Os limites
dessa envoltória formam um ângulo de 19.5 graus com o eixo longitudinal.
Figura 2 - Padrão de ondas de Kelvin (adaptado de HARVALD, 1983)
Esse padrão é formado devido à diferença entre a celeridade das ondas
geradas, que é igual à velocidade do navio para as ondas transversais, e a velocidade
de grupo. Em águas profundas, a celeridade é duas vezes maior do que a velocidade
de grupo. Uma vez que a energia das ondas se propaga com a velocidade de grupo,

5
ela se torna defasada em relação ao avanço da embarcação, formando o padrão
triangular.
À medida que a lâmina d’água diminui, a diferença entre celeridade e
velocidade de grupo diminui, até que sejam iguais em águas rasas. Nesse estágio, as
duas passam a ser dependente apenas da lâmina d’água e, para as ondas
transversais, são iguais à velocidade da embarcação.
𝑉 = 𝑐 → 𝑉 = √𝑔ℎ
Essa relação é constante para uma mesma lâmina d’água e é semelhante ao
número de Froude, sendo chamado de número de Froude em função da profundidade.
𝑉
√𝑔ℎ= 𝑐𝑡𝑒 = 𝐹𝑛ℎ
Com base no comportamento das ondas geradas por um ponto de pressão,
são definidas quatro faixas de regimes de escoamento (Figura 3): subcrítico inferior,
subcrítico superior, transcrítico e supercrítico.
Figura 3 - Regimes de Escoamento
A primeira faixa representa o escoamento no regime subcrítico inferior, no qual
o número de Froude em função da profundidade 𝐹𝑛ℎ é inferior a 0.7, ou seja, a
velocidade da embarcação é menor do que 70% da velocidade máxima da onda
àquela profundidade. Nessa faixa, o padrão de onda não se altera em relação ao
padrão de águas profundas e é semelhante ao padrão de Kelvin.
Do ponto de vista da embarcação, embora não haja mudança no padrão de
onda, há outros sinais da influência do fundo no escoamento. Caso a razão entre a
profundidade e o calado do navio seja pequena, mesmo em baixas velocidades, o
escoamento é restringido nessa região e, portanto, o fluxo é acelerado. Isso causa
uma diminuição da pressão e um aumento do calado. Esse fenômeno é chamado de
squat e é tratado com ênfase experimental por ZERAATGAR et al (2010) e ênfase
numérica por TARAFDER e SUZUKI (2007).
Há ainda um aumento da área molhada, aumentando a resistência friccional, e
uma mudança no escoamento, que passa a seguir um caminho com maior curvatura,
criando um gradiente de pressão maior. Ambos os efeitos contribuem para o
crescimento da amplitude das ondas geradas, uma vez que aumentam a massa
deslocada abaixo da linha d’água.
A faixa seguinte de 𝐹𝑛ℎ, entre 0.7 e 0.9, é denominada subcrítica superior e
marca o início da mudança no padrão das ondas geradas pela embarcação. Com a
diminuição da relação entre a lâmina d’água e o comprimento de onda, a razão entre a
velocidade de grupo e a celeridade, que é de 0.5 para águas profundas, aumenta
0.7 0.9 1.0 1.1
Subcrítico
Inferior
Subcrítico
SuperiorTranscrítico
Supercrítico

6
gradativamente. Assim, o ângulo do padrão de ondas de Kelvin, determinado por essa
razão, também aumenta.
Como a celeridade das ondas transversais é igual à velocidade de avanço da
embarcação, o aumento da celeridade ou a diminuição da lâmina d’água (aumento de
𝐹𝑛ℎ) causam ao aumento do comprimento da onda transversal. As ondas transversais
são as primeiras a serem afetadas, uma vez que seu comprimento é maior do que o
das divergentes, cujo comprimento continua inalterado.
A faixa de 𝐹𝑛ℎ entre 0.9 e 1.1 é chamada de transcrítica, pois está em torno do
número crítico 1, isto é, a celeridade da onda gerada é igual à velocidade do próprio
navio e à velocidade de grupo. Uma vez que a energia da onda viaja com a velocidade
de grupo, então essa energia não se propagará pelo sistema, mas se deslocará com a
própria onda. Assim, o ângulo do padrão de ondas de Kelvin chega a 90 graus,
empurrando grande quantidade de água para frente e aumentando significativamente
a resistência ao avanço.
Segundo LARSSON e RAVEN (2010), os efeitos de águas rasas na faixa
transcrítica dependem do tamanho das ondas transversais geradas. A maioria dos
navios de deslocamento não consegue ultrapassar esta faixa, seja por falta de
potência ou pelo toque no fundo decorrente do trim dinâmico ou do squat. Por outro
lado, esses podem passar despercebidos para alguns tipos de cascos, em geral mais
esbeltos, que produzem principalmente ondas divergentes.
Quando a velocidade da embarcação supera a velocidade máxima das ondas
por ela geradas, ou seja, 𝐹𝑛ℎ é maior do que 1, tem-se o regime supercrítico e as
ondas transversais são inexistentes. O ângulo da envoltório do padrão de onda diminui
de 90° para 45°. Embora o padrão de ondas apresentado nessa faixa tenha formato
triangular, não pode ser denominado um padrão de ondas de Kelvin, pois seu ângulo
não depende da razão entre velocidade de grupo e celeridade da onda, mas sim da
razão entre a velocidade do navio e a celeridade máxima da onda.
Essas mudanças são acompanhadas ainda por uma redução da resistência ao
avanço, uma vez que não há mais o deslocamento de grande quantidade de água
como na faixa transcrítica. Há também redução do squat e do trim dinâmico.
SCHLICHTING (1934) desenvolveu um método de estimativa do efeito da
profundidade na resistência ao avanço baseado em considerações teóricas e
experimentos em escala reduzida. O método, esquematizado como na Figura 4,
expressa o aumento da resistência como uma redução na velocidade da embarcação,
ou seja, a mesma resistência total 𝑅𝑇 obtida para velocidade 𝑉 em águas profundas é
obtida para 𝑉ℎ em águas rasas. São feitas duas reduções de velocidade: a primeira
relativa à resistência de onda e a segunda devida à influência da profundidade na
parcela friccional.
A primeira redução é feita a partir da velocidade 𝑉 em águas profundas a uma
velocidade intermediária 𝑉𝐼 , para uma lâmina d’água h. O método de Schlichting
associa a resistência de onda ao comprimento da onda transversal gerada e considera
que essa componente permanece a mesma para águas rasas. Sendo assim, a
velocidade reduzida 𝑉𝐼 será a que possuir, em h, o mesmo comprimento de onda λ.
Como descrito anteriormente, a mudança na profundidade também influencia a
porção friccional da resistência. Por isso, se faz necessária uma segunda redução na
velocidade. Por meio de experimentos com modelos, Schlichting relacionou essa

7
redução com a razão √𝐴𝑋/ℎ, onde 𝐴𝑋 é a máxima área transversal do casco e a razão
𝑉ℎ/𝑉𝐼 , onde 𝑉ℎ é a velocidade reduzida final. Supondo conhecidas as curvas de
resistência total 𝑅𝑇 e friccional 𝑅𝐹 em águas profundas, a resistência relativa à
velocidade reduzida 𝑉ℎ é a soma da parcela friccional em 𝑉ℎ e a parcela de ondas de
𝑉.
Figura 4 – Representação do método de Schlichting (adaptado de HARVALD, 1983)
O método de Schlichting não é rigoroso do ponto de vista teórico, uma vez que
faz suposições notavelmente irreais, como a equivalência da parcela de onda da
resistência para águas rasas e profundas. Além disso, desconsidera o aumento da
amplitude das ondas geradas e a contribuição das ondas transversais na resistência.
Ainda assim, esse método é visto como uma boa solução de engenharia para um
problema complexo e continua sendo o mais utilizado na estimativa de resistência em
águas rasas.
4 REVISÃO BIBLIOGRÁFICA
As técnicas de CFD foram adotadas por diversos autores na determinação da
resistência ao avanço de embarcações. ZWART et al (2008) aplicaram o código
comercial CFX a dois cascos diferentes, o casco teórico Wigley e o combatente naval
DTMB 5415. Foram feitas simulações de escoamentos em regime permanente em
ambos os cascos utilizando malha hexaédrica. O casco Wigley foi simulado com
Fn=0.267 e Rn=4.9x106 e o modelo de turbulência adotado foi o 𝑘 − 𝜀, enquanto, para
o casco combatente, a simulação foi realizada com Fn=0.28 e Rn=1.27x107 e tanto o
modelo 𝑘 − 𝜀 quanto o 𝑘 − 𝜔. Compararam-se os resultados numéricos de elevação
do nível da água na superfície do casco Wigley com os resultados experimentais. Os
resultados do combatente para resistência e perfil de onda foram comparados com
experimentos.
Com o casco DTMB 5415 também foi simulada uma situação transiente com
velocidade de avanço, ondas regulares incidentes e Fn=0.28. Foi utilizado o modelo
de turbulência 𝑘 − 𝜀 com funções de parede. O perfil de onda no plano de simetria foi
8
analisado e resistência, força de heave e momento em pitch foram comparados com
resultados experimentais.
FONFACH e SOARES (2010) estudaram a otimização da forma de um navio de
forma a obter menor resistência ao avanço variando as dimensões do bulbo. Foi
conduzido um estudo numérico com um casco Série 60 com 𝐶𝐵 =0.6 utilizando o
software comercial CFX. A malha tetraédrica foi gerada no ICEM CFD e foram
testados 4 níveis de refinamento no casco e na superfície livre. Foram testados os
modelos 𝑘 − 𝜔 e 𝑘 − 𝜀 de turbulência. Foram analisados e comparados com
resultados experimentais os coeficientes de resistência total, o perfil de onda ao longo
do casco e o padrão de onda. A resistência foi reduzida nos cascos com bulbo quando
utilizado número de Froude a partir de 0.28.
BANKS, PHILLIPS et al (2010) simularam o escoamento ao redor de um casco de
porta-contentor KCS como etapa prévia para um estudo de propulsão. Foi
desenvolvida uma malha hexaédrica em todo o domínio. A malha foi avaliada pelo
software comercial CFX utilizando os modelos de turbulência SST e BSL para número
de Froude 0.26 e Reynolds 1.4x107. O casco foi mantido fixo em heave e pitch. Os
resultados de resistência total e do campo de ondas foram comparados com os
obtidos experimentalmente em tanque de reboque. Para relacionar o coeficiente de
resistência friccional numérico com o experimental, foi utilizada a correlação do ITTC.
A influência da profundidade sobre a resistência ao avanço vem sendo estudada
desde o início do século passado. O primeiro estudo sobre o assunto foi feito por
HAVELOCK (1921). Por meio de uma formulação analítica, ele estudou o efeito de
águas rasas sobre a resistência de onda de um ponto em movimento. A faixa de
Froude adotada foi 0.4 a 1.6, com lâminas d’água (h/L) de 0.75, 1, 1.43, 2 e infinita. Os
resultados analíticos foram comparados com resultados experimentais de resistência.
CHEN e SHARMA (1993) aplicaram o método demonstrado em trabalho anterior
para otimizar um casco da Taylor Standard Series (𝐶𝐵=0.64) para uma lâmina d’água
h/L=0.25 e número de Froude baseado no comprimento de 0.9. Os resultados
numéricos de resistência de onda são comparados com resultados experimentais.
Para o ponto de otimização, a resistência de onda diminuiu cerca de 8%, enquanto
para velocidades supercríticas (𝐹𝑛ℎ>1) diminui em 10%.
SAHA, SUZUKI et al (2003) trabalharam a otimização de cascos em águas rasas,
aplicando método dos painéis à superfície livre e um algoritmo numérico não-linear
quadrático. Foram escolhidos um casco Wigley e um Série 60, 𝐶𝐵 =0.6, para a
otimização da resistência de onda em lâminas d’água h/T=2.5, 3, 4 e 5 e Fn=0.316.
Foram feitas alterações somente nas bocas dos cascos. Para o casco Série 60, a
resistência de onda foi reduzida em cerca de 30% para h/T=4.
SAKAMOTO, WILSON et al (2007) simularam o escoamento em torno de um
casco Wigley utilizando um código RANS desenvolvido na Universidade de Iowa. Foi
desenvolvida uma malha estruturada e não-ortogonal para o estudo da resistência ao
avanço do casco em águas tranquilas e profundas, em diferentes velocidades. O
procedimento foi adotado para mais 4 lâminas d’água representativas de águas rasas.
Foram desconsiderados trim e sinkage e obtidos valores para coeficientes de
resistência total e pressão. Devido ao uso de um modelo monofásico para a
representação da superfície livre, efeitos provenientes de quebra de onda e spray, por
exemplo, são negligenciados. A análise dos resultados constatou que a contribuição
da resistência de pressão aumenta conforme a diminuição da profundidade.
9
5 MODELO MATEMÁTICO
As equações que regem um escoamento são as equações de continuidade e de
quantidade de movimento linear. Foi admitido um escoamento permanente,
desenvolvido, incompressível, homogêneo, newtoniano e tridimensional. Após tais
considerações, são obtidas as equações de continuidade e de Navier-Stokes:
∇ ∙ �⃗� = 0 (equação da continuidade)
∇ �⃗� ∙ �⃗� = −1
𝜌∇𝑝 + ν∇²�⃗� +
1
𝜌𝑔 (equação de Navier-Stokes)
Onde:
�⃗� é o vetor de velocidades
𝑝 é o vetor de pressões
𝑔 é o vetor de aceleração da gravidade
𝜌 é a densidade do fluido
ν é a viscosidade cinemática do fluido
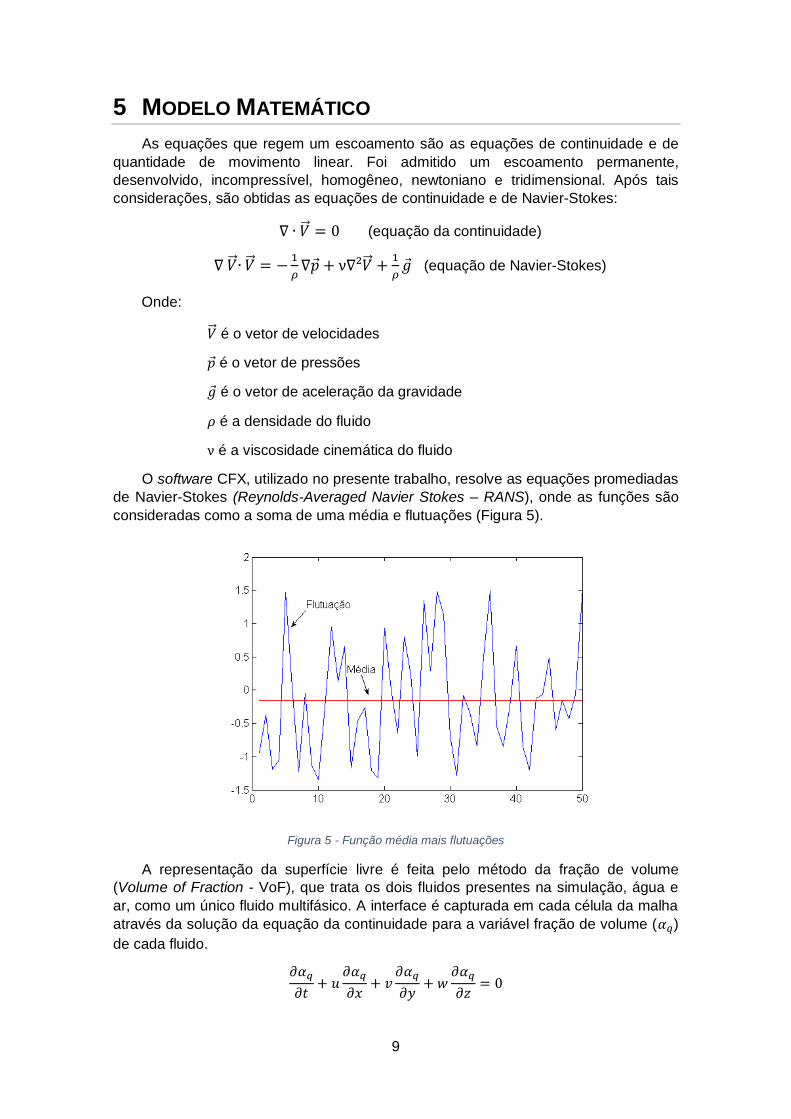
O software CFX, utilizado no presente trabalho, resolve as equações promediadas
de Navier-Stokes (Reynolds-Averaged Navier Stokes – RANS), onde as funções são
consideradas como a soma de uma média e flutuações (Figura 5).
Figura 5 - Função média mais flutuações
A representação da superfície livre é feita pelo método da fração de volume
(Volume of Fraction - VoF), que trata os dois fluidos presentes na simulação, água e
ar, como um único fluido multifásico. A interface é capturada em cada célula da malha
através da solução da equação da continuidade para a variável fração de volume (𝛼𝑞)
de cada fluido.
𝜕𝛼𝑞
𝜕𝑡+ 𝑢
𝜕𝛼𝑞
𝜕𝑥+ 𝑣
𝜕𝛼𝑞
𝜕𝑦+ 𝑤
𝜕𝛼𝑞
𝜕𝑧= 0

10
Como restrições, tem-se que o somatório de 𝛼𝑞 em cada célula deve ser 1 e, para
fluidos incompressíveis, a fração de volume de um fluido em uma célula não muda
com o tempo. Portanto:
𝜕𝛼𝑞
𝜕𝑡= 0
As propriedades, como densidade e viscosidade, são calculadas nos elementos
como uma média ponderada pela fração de volume de cada fluido.
𝜌 = ∑𝛼𝑞𝜌𝑞
6 MODELO NUMÉRICO
O software ANSYS CFX utiliza o método dos volumes finitos para resolver as
equações promediadas de Navier-Stokes. Esse método subdivide o domínio em um
número finito de volumes de controle, onde é aplicada a forma integral da equação da
continuidade (FERZIGER e PERIC, 2002). Os valores das variáveis são calculados
nos nós, localizados no centro de cada volume. Uma interpolação é feita para
expressar esses valores nas superfícies dos volumes.
A solução das equações promediadas de Navier-Stokes requer a estimativa de
um termo que correlaciona componentes de flutuação de velocidade. Para isso, são
utilizados os modelos de turbulência. Neste trabalho, foi utilizado o modelo Shear
Stress Transport k-ω (SST), adotado em trabalhos semelhantes.
7 GEOMETRIA
Foi adotado um casco da série 60 com coeficiente de bloco de 0.6, um navio
tanque amplamente adotado para ensaios de benchmark em tanques de prova.
Figura 6 – Características do casco Série 60, Cb=0.6
Comprimento (L) 25.5 m
Boca (B) 3.389 m
Calado (T) 1 m
Área Molhada (S) 45.17 m²

11
8 DOMÍNIO COMPUTACIONAL
Foi modelado apenas um bordo do casco, o qual foi inserido em um domínio
computacional retangular. As distâncias das fronteiras de entrada e saída do
escoamento ao casco, assim como a fronteira de topo, foram determinadas com base
em trabalhos semelhantes.
A largura do domínio foi estabelecida de forma a ser suficiente para representar
as ondas de Kelvin em águas profundas. Considerando o ângulo de 19.5° (Figura 7),
para o comprimento de 2.6Lpp à ré, foi necessária uma largura de 32.5m para
representar as ondas de Kelvin. Por arredondamento, adotou-se uma largura de
1.5Lpp, ou seja, 38.25m.
Figura 7 – Determinação da distância da fronteira lateral
A Figura 8 mostra as dimensões do domínio computacional.
Figura 8 – Domínio Computacional
O eixo de referência foi fixado à meia-nau e no calado, com o eixo X no sentido do
avanço da embarcação.
Figura 9 - Sistema de referência

12
9 CONDIÇÕES DE CONTORNO
A definição de condições de contorno no domínio computacional é uma importante
etapa na construção do modelo, pois influencia na solução final. A Figura 10 mostra a
localização de cada condição de contorno adotada neste trabalho.
Para simular o avanço do casco, que foi mantido fixo no domínio, foi definida uma
velocidade constante e com direção contrária para o escoamento na superfície de
entrada. A superfície de saída foi definida como uma condição do tipo “Outlet”, que
impede a reentrada de fluido. Nela, foi determinado um perfil de pressão hidrostática
ao longo da lâmina d’água.
Uma condição de simetria foi colocada na superfície que corta o casco no plano
diametral para a que a mesma não fosse interpretada pelo solver como uma fronteira.
No casco, foi definida uma condição de não-deslizamento, ou seja, a velocidade
do fluido em sua superfície é nula. A imposição dessa condição permite o
desenvolvimento da camada limite, a qual é importante para a parcela viscosa da
resistência. Nas superfícies de fundo e topo, foi colocada uma condição de
escorregamento, ou seja, sem atrito com o escoamento e, portanto, sem
desenvolvimento de camada limite. Dessa forma, tem-se uma situação equivalente ao
navio avançando.
Figura 10 – Condições de contorno
10 MALHA
A geração de malha para simulações de CFD não é um problema trivial. Quando o
objeto é simples e regular, como um paralelepípedo ou um cilindro, a malha do tipo
hexaédrica é comumente utilizada, pois seus elementos tendem à ortogonalidade, o
que facilita a solução do algoritmo. Porém, no caso de um objeto mais complexo,
como um casco com diversas curvaturas, é necessária uma malha com maior
flexibilidade para se ajustar à geometria. Nesses casos, pode-se utilizar uma malha
tetraédrica, que possui maior poder de adaptação.

13
O software gerador de malha ICEM CFD, da ANSYS, suporta ambos os tipos de
malha. Devido às curvaturas acentuadas do casco utilizado e por razões de
simplicidade, as malhas deste trabalho foram feitas com elementos tetraédricos.
Um maior refinamento no casco é necessário para captar a camada limite e a
resistência viscosa, enquanto na superfície livre ele possibilita a representação das
ondas e, portanto, da resistência de onda. O tamanho máximo de um elemento de
malha próximo ao casco foi relacionado ao comprimento das ondas transversais
geradas com o avanço da embarcação. Sabe-se que são necessários 10 elementos,
no mínimo, ao longo de uma onda para representá-la. Em águas profundas, o
comprimento de uma onda é dado por:
𝜆 =2𝜋𝑉2
𝑔
Onde
𝑉 é a celeridade da onda transversal e da embarcação
𝑔 é a aceleração da gravidade
Para o caso mais crítico tratado neste trabalho, no qual tem-se a menor
velocidade (𝐹𝑛𝑙=0.18), o comprimento de onda associado é de 5.19 m. Assim, o
tamanho máximo de um elemento para representar essa onda é de 52 cm.
No sentido de aumentar o refinamento tanto no casco quanto na superfície livre,
foram adicionadas camadas prismáticas nessas regiões. O tamanho 𝑦 do primeiro
elemento da camada prismática do casco foi determinado pelo parâmetro
adimensional 𝑦+, que, segundo ITTC (2011), deve estar entre 30 e 100.
𝑦
𝐿𝑝𝑝=
𝑦+
𝑅𝑒√𝐶𝑓
2
𝐶𝑓 =0.075
(log𝑅𝑒 − 2)2
Onde
𝐶𝑓 é o coeficiente de fricção do ITTC
Adotando 𝑦+ igual a 60, o tamanho do primeiro elemento da camada limite foi de
0.6 mm.
O tamanho total da camada prismática na superfície livre foi estimado
considerando a máxima razão de aspecto antes da quebra da maior onda transversal
gerada:
𝐻
𝜆=
1
7
Onde
𝐻 é a altura da onda
Para uma onda de 3.4 m de comprimento, obteve-se uma altura de 0.5 m. A
Figura 11 mostra a implementação das duas camadas prismáticas na malha

14
tetraédrica. A Figura 12 mostra a implementação da camada prismática apenas na
superfície livre. Observou-se uma degeneração dos elementos nos encontros entre as
duas camadas e próximos ao casco, de forma que não foi possível realizar as análises
nessas malhas.
(a)
(b)
Figura 11 – Malha com camada prismática no casco e na superfície livre
Figura 12 - Malha com camada prismática de 0.5 m na superfície livre
Optou-se por testar uma malha sem prismas e uma com camada prismática de
menor altura e apenas na superfície livre (Figura 13 e Figura 14). Para a malha sem
prismas, foram testados 4 níveis de refinamento em torno do casco e da superfície

15
livre, com quantidade crescente de elementos. As propriedades dessas malhas se
encontram na Tabela 1.
Figura 13 - Detalhe da malha com prismas na superfície
livre
Figura 14 – Detalhe da malha sem prismas
Tabela 1 - Características das malhas sem prismas
Malha Tamanho do Elemento no
Casco
Tamanho do Elemento na
Superfície Livre
Número de Elementos
(h/T=2)
1 0.51 0.51 1.647.704
2 0.1275 0.51 1.982.717
3 0.1275 0.255 6.905.158
4 0.06375 0.255 7.785.369
Para a malha com prismas na superfície livre, foram testados três níveis de
refinamento distintos, sendo modificado apenas o tamanho máximo dos elementos
próximos ao casco e à superfície livre (Tabela 2 e Tabela 3).
Tabela 2 – Características das malhas com prismas
Malha Tamanho do Elemento no
Casco
Tamanho do Elemento na
Superfície Livre
Número de Elementos
(h/T=2)
1 0.51 0.51 2.149.750
2 0.1275 0.51 2.481.362
3 0.1275 0.255 8.372.907
Tabela 3 - Propriedades da camada prismática
Altura inicial 0.02
Razão de crescimento 1.08893
Número de camadas 6
Altura total 0.15
Cada malha foi testada com 4 lâminas d’água – h/T=2, h/T=3, h/T=4 e h/T=5 – e 7
números de Froude – 0.18, 0.22, 0.25, 0.28, 0.3, 0.32 e 0.34 –, em um total de 112
simulações.
Para determinar a malha mais adequada para a análise proposta, foram
comparados os coeficiente de resistência total. A Figura 15 mostra os resultados com
o menor número de Froude para as malhas sem prismas. O comportamento oscilatório
pode ser explicado pela alternância entre refinamento no casco e na superfície livre,

16
cuja influência foi maior em um número de Froude menor. Observando apenas o
refinamento no casco, nota-se uma tendência de convergência dos valores de 𝐶𝑇.
Figura 15 – Teste de malha com 𝐹𝑛𝑙=0.18
A análise das curvas para 𝐹𝑛𝑙=0.34 (Figura 16) também mostrou uma tendência à
convergência do coeficiente de resistência total, porém sem a oscilação anteriormente
registrada.
Figura 16 – Teste de malha com 𝐹𝑛𝑙=0.34
Apesar da convergência dos coeficientes, analisando a distribuição de VOF na
superfície livre do modelo numérico (Figura 17), notou-se que a faixa de transição
entre os fluidos ocupa grande parte do pontal. A linha em vermelho indica uma iso-
superfície com VOF=0.99 e a linha em azul indica VOF=0.01. Logo, a superfície livre
não está bem definida e os dados obtidos para resistência ao avanço se tornam
inexatos, como pode ser observado na Figura 18.
Figura 17 - Distribuição de VOF
0
0.001
0.002
0.003
0.004
0.005
0.006
0.007
0.008
1 2 3 4
CT
Malha
h/T=2
h/T=3
h/T=4
h/T=5
0.000
0.005
0.010
0.015
0.020
0.025
1 2 3 4
CT
Malha
h/T=2
h/T=3
h/T=4
h/T=5
17
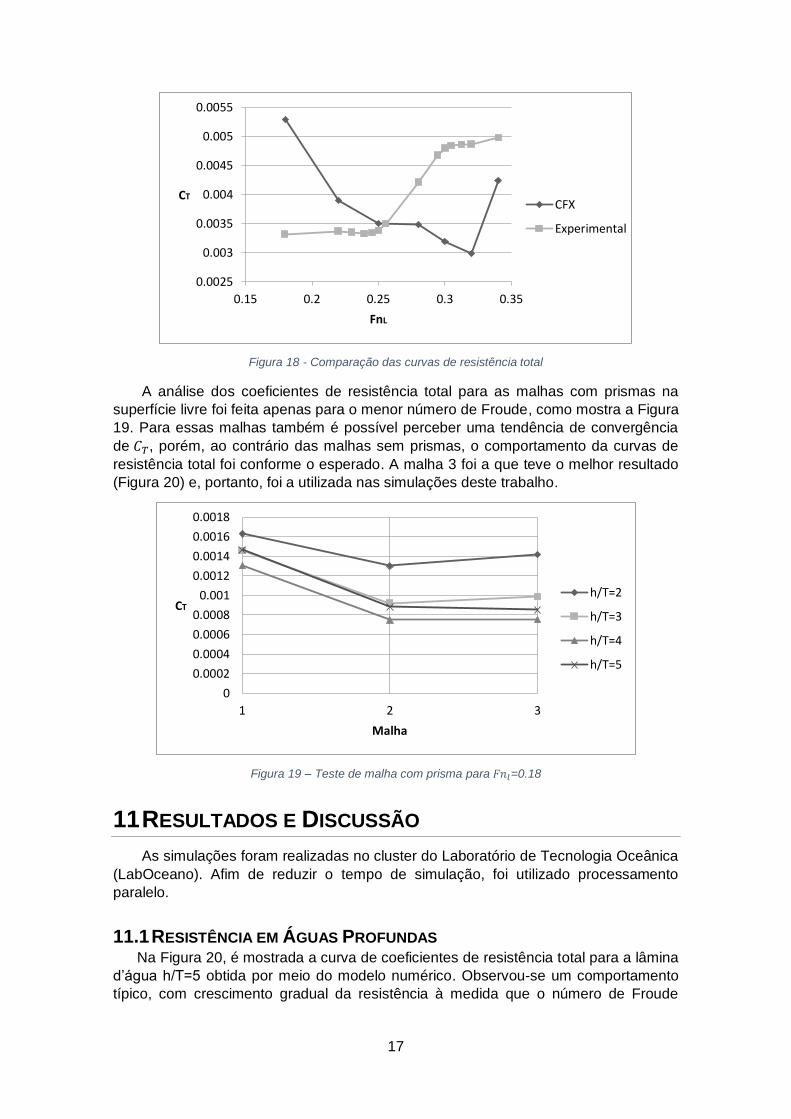
Figura 18 - Comparação das curvas de resistência total
A análise dos coeficientes de resistência total para as malhas com prismas na
superfície livre foi feita apenas para o menor número de Froude, como mostra a Figura
19. Para essas malhas também é possível perceber uma tendência de convergência
de 𝐶𝑇, porém, ao contrário das malhas sem prismas, o comportamento da curvas de
resistência total foi conforme o esperado. A malha 3 foi a que teve o melhor resultado
(Figura 20) e, portanto, foi a utilizada nas simulações deste trabalho.
Figura 19 – Teste de malha com prisma para 𝐹𝑛𝑙=0.18
11 RESULTADOS E DISCUSSÃO
As simulações foram realizadas no cluster do Laboratório de Tecnologia Oceânica
(LabOceano). Afim de reduzir o tempo de simulação, foi utilizado processamento
paralelo.
11.1 RESISTÊNCIA EM ÁGUAS PROFUNDAS Na Figura 20, é mostrada a curva de coeficientes de resistência total para a lâmina
d’água h/T=5 obtida por meio do modelo numérico. Observou-se um comportamento
típico, com crescimento gradual da resistência à medida que o número de Froude
0.0025
0.003
0.0035
0.004
0.0045
0.005
0.0055
0.15 0.2 0.25 0.3 0.35
CT
FnL
CFX
Experimental
0
0.0002
0.0004
0.0006
0.0008
0.001
0.0012
0.0014
0.0016
0.0018
1 2 3
CT
Malha
h/T=2
h/T=3
h/T=4
h/T=5

18
aumenta. Esse comportamento é também observado na literatura, em FONFACH e
SOARES (2010) e BANKS, PHILLIPS et al (2010), entre outros.
Figura 20 – Comparação de curvas de resistência em águas profundas
A curva obtida pelo modelo numérico é comparada com a obtida em teste de
reboque na Figura 20. Os dados experimentais foram obtidos com um modelo em
escala menor (Tabela 4) e sem semelhança de deslocamento, ou seja, mesmo com
escalas iguais, os calados são distintos. Além disso, o experimento foi realizado com o
modelo livre para trim e sinkage.
Tabela 4 – Características do modelo experimental
Comprimento (L) 7.000 m
Boca (B) 0.933 m
Calado (T) 0.373 m
Área Molhada (S) 8.349 m²
Uma curva de coeficientes de resistência friccional, obtida numericamente, é
apresentada na Figura 21 e comparada com a curva calculada pelo método do ITTC-
78. Apesar dos erros inerentes a um método empírico como o ITTC-78, a diferença
observada entre as curvas não foi considerada aceitável.
Figura 21 – Comparação entre curvas de resistência friccional
0.000
0.001
0.002
0.003
0.004
0.005
0.006
0.15 0.20 0.25 0.30 0.35
CT
FnL
Experimental
CFX
0
0.0005
0.001
0.0015
0.002
0.0025
0.1 0.15 0.2 0.25 0.3 0.35 0.4
CF
FnL
ITTC-78
CFX
19
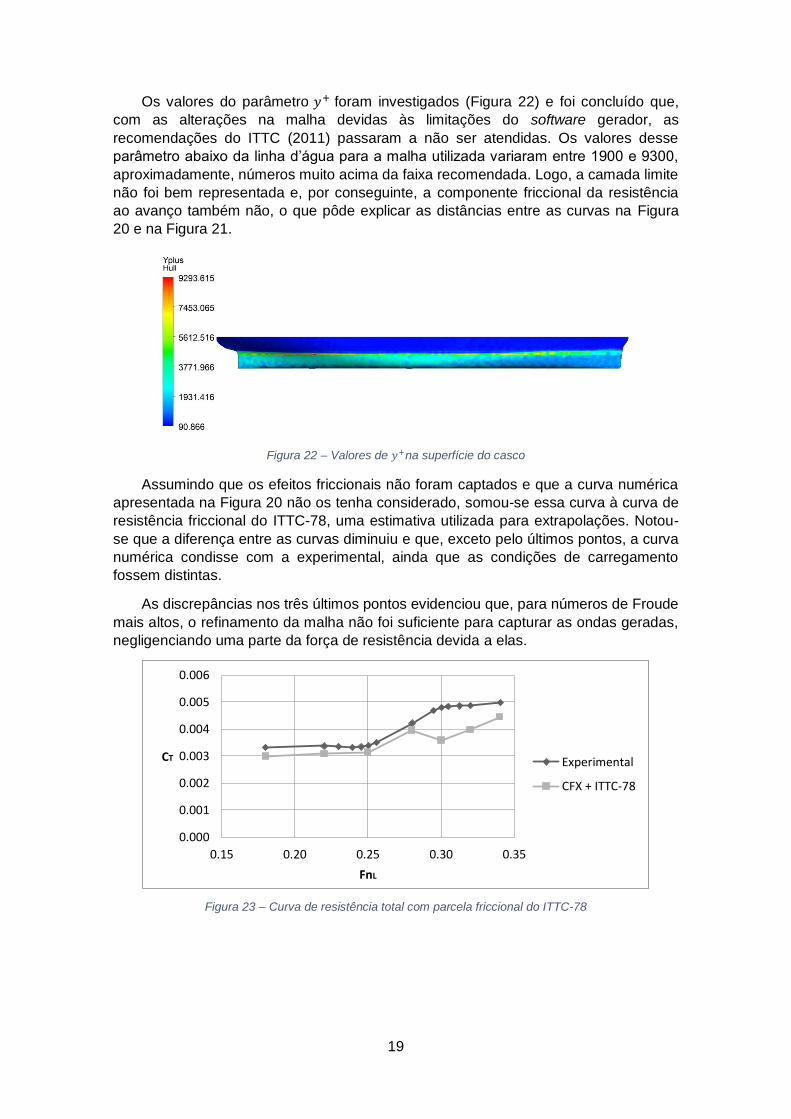
Os valores do parâmetro 𝑦+ foram investigados (Figura 22) e foi concluído que,
com as alterações na malha devidas às limitações do software gerador, as
recomendações do ITTC (2011) passaram a não ser atendidas. Os valores desse
parâmetro abaixo da linha d’água para a malha utilizada variaram entre 1900 e 9300,
aproximadamente, números muito acima da faixa recomendada. Logo, a camada limite
não foi bem representada e, por conseguinte, a componente friccional da resistência
ao avanço também não, o que pôde explicar as distâncias entre as curvas na Figura
20 e na Figura 21.
Figura 22 – Valores de 𝑦+na superfície do casco
Assumindo que os efeitos friccionais não foram captados e que a curva numérica
apresentada na Figura 20 não os tenha considerado, somou-se essa curva à curva de
resistência friccional do ITTC-78, uma estimativa utilizada para extrapolações. Notou-
se que a diferença entre as curvas diminuiu e que, exceto pelo últimos pontos, a curva
numérica condisse com a experimental, ainda que as condições de carregamento
fossem distintas.
As discrepâncias nos três últimos pontos evidenciou que, para números de Froude
mais altos, o refinamento da malha não foi suficiente para capturar as ondas geradas,
negligenciando uma parte da força de resistência devida a elas.
Figura 23 – Curva de resistência total com parcela friccional do ITTC-78
0.000
0.001
0.002
0.003
0.004
0.005
0.006
0.15 0.20 0.25 0.30 0.35
CT
FnL
Experimental
CFX + ITTC-78

20
11.2 RESISTÊNCIA EM ÁGUAS RASAS A análise dos coeficientes de resistência total em águas rasas foi realizada
considerando o número de Froude em função da profundidade. Baseado na literatura,
esperava-se que a curva de coeficientes de resistência total fosse semelhante àquela
obtida para águas profundas em todo a faixa de regime subcrítico ( 𝐹𝑛ℎ <0.7),
aumentando à medida que se aproximasse do ponto crítico (𝐹𝑛ℎ=1) e diminuindo ao
alcançar o regime supercrítico (𝐹𝑛ℎ>1.1).
Na Figura 24, é apresentada a curva de resistência em águas rasas obtida na
análise numérica, com os regimes de escoamento delimitados. Notou-se que as
curvas seguem o esperado pela teoria, exceto pelo ponto de maior resistência, que se
encontra deslocado em relação ao estabelecido na literatura. Como esse ponto
permanece na região transcrítica, o resultado é aceitável, pois sabe-se que a divisão
de regimes é uma adaptação de estudos realizados para um ponto de pressão.
Figura 24 – Resistência ao avanço em águas rasas e regimes de escoamento – (1) subcrítico inferior, (2) subcrítico superior, (3) transcrítico, (4) supercrítico
O efeito da profundidade sobre o coeficiente de resistência total também pode
ser analisado a partir da Figura 25. A variação de 𝐹𝑛𝑙 , nesse caso, significa uma
variação de velocidade. Além do aumento da resistência de acordo com o aumento de
𝐹𝑛𝑙, observou-se o seu aumento com a diminuição da lâmina d’água. Ou seja, para um
mesmo número de Froude, o coeficiente de resistência total foi maior quanto menor a
profundidade, o que condisse com o previsto pela teoria.
O resultado numérico foi comparado com os dados experimentais
disponibilizados pelo ITTC Resistance and Flow Commitee em MUSKER, ALÁEZ et al
(1993). Esses dados são resultado de um experimento colaborativo sobre resistência
ao avanço em águas rasas realizados por diversas instituições independentemente,
utilizando um casco da Série 60 (𝐶𝐵 = 0.6) como modelo. As dimensões do modelo
não foram apresentadas. As curvas são apresentadas na Figura 26 e na Figura 27.
0
0.005
0.01
0.015
0.02
0.025
0.40 0.60 0.80 1.00 1.20
CT
Fnh
h/T=2
h/T=3
h/T=4
h/T=5

21
Figura 25 – Resistência em águas rasas em relação a 𝐹𝑛𝑙
Também é possível observar na Figura 26 e na Figura 27 uma comparação
com dados obtidos pelo método de Schlichting, descrito anteriormente neste trabalho.
Para h/T=3, notou-se uma proximidade entre a curva obtida numericamente e a obtida
pelo método semi-empírico. Uma vez que o método de Schlichting se utiliza da curva
de resistência friccional obtida numericamente para calcular as reduções de
velocidade, acredita-se que essa proximidade comprove a eficácia do método como
um estimador da parcela de ondas.
Figura 26 – Comparação de curvas de resistência em h/T=2
0
0.005
0.01
0.015
0.02
0.025
0.15 0.2 0.25 0.3 0.35
CT
FnL
h/T=2
h/T=3
h/T=4
h/T=5
0.00000
0.00500
0.01000
0.01500
0.02000
0.02500
0.15 0.2 0.25 0.3 0.35
CT
FnL
Experimental
CFX
Schlichting

22
Figura 27 - Comparação de curvas de resistência em h/T=3
11.3 PERFIL DE ONDA E PADRÃO DE ONDAS O aumento da resistência ao avanço em águas rasas é diretamente relacionado à
parcela de resistência de onda. Essa relação é devida tanto à mudança no perfil da
onda gerada quanto à variação do padrão de ondas.
A Figura 28 mostra a evolução do padrão de ondas gerado no modelo numérico
de acordo com o aumento do número de Froude. Em (a), (b) e (c) notaram-se as
características particulares de cada regime de escoamento. Em (a), onde o
escoamento é subcrítico, não houve alterações em relação ao padrão de águas
profundas. O ponto representado em (b) está na faixa transcrítica, ou seja, a altura das
ondas aumentou, assim como o ângulo de Kelvin, que se aproximou de 90°. Já em (c),
notou-se uma tendência de diminuição do ângulo da envoltória de 90° para 45°. Como
o ponto máximo na curva de resistência em águas rasas está deslocado, é aceitável
que, mesmo em regime supercrítico, o padrão de ondas não esteja completamente de
acordo com o previsto para essa faixa de 𝐹𝑛ℎ.
(a)
0.00000
0.00200
0.00400
0.00600
0.00800
0.01000
0.01200
0.01400
0.01600
0.15 0.2 0.25 0.3 0.35
CT
FnL
Experimental
CFX
Schlichting

23
(b)
(c)
Figura 28 – Padrão de ondas para h/T=2 – (a) 𝐹𝑛𝑙=0.18, (b) 𝐹𝑛𝑙=0.25, (c) 𝐹𝑛𝑙=0.34
As figuras (b) e (c) apresentam falhas na fronteira dos níveis da superfície livre.
Tais falhas ocorrem porque as alturas das ondas formadas ultrapassam a camada
prismática. Na figura (c) também é possível observar uma reflexão da onda transversal
na fronteira lateral, indicando que a distância estipulada não foi suficiente para impedir
a influência sobre o resultado. Nesse caso, uma solução seria aumentar a distância
dessa fronteira ao plano de simetria.
Na Figura 29, é realizada uma comparação dos perfis de onda para quatro
número de Froude na lâmina d’água h/T=3. É possível notar o aumento da altura da
onda à medida que Fnl aumenta, como previsto pela teoria.
Figura 29 – Comparação dos perfis de onda para h/T=3
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
-15 -10 -5 0 5 10 15
z [m]
x [m]
Fn=0.18
Fn=0.25
Fn=0.3
Fn=0.34

24
12 CONCLUSÃO
O presente trabalho abordou a influência da restrição da lâmina d’água na
resistência ao avanço de uma embarcação Série 60 (𝐶𝐵 = 0.6 ). Foram utilizadas
malhas hexaédricas com camadas prismáticas na superfície livre e as simulações
foram realizadas no software comercial ANSYS CFX. Obtiveram-se os coeficientes de
resistência total e friccional através da variação do número de Froude e da
profundidade.
As curvas de resistência ao avanço em água profundas foram comparadas com
dados experimentais obtidos com um modelo da mesma série de cascos, porém sem
semelhança dimensional. Mesmo com o maior deslocamento do modelo experimental,
os coeficientes obtidos por ele foram maiores do que o esperado. Através de uma
análise do parâmetro 𝑦+, constatou-se que o mesmo se encontrava acima da faixa
recomendada em todo o casco e, portanto, a parcela friccional da resistência não
estava bem representada, o que explicou a diferença encontrada anteriormente.
As curvas de resistência ao avanço em águas rasas concordaram com o previsto
pela teoria. Elas apresentaram comportamento semelhante às curvas de águas
profundas na faixa subcrítica inferior de Fnl, divergindo das mesmas a partir da faixa
subcrítica superior e alcançando o ponto máximo na faixa transcrítica. O padrão de
ondas geradas também foi condizente com a literatura, tendo seu ângulo aumentado
em relação ao ângulo de Kelvin a partir do regime subcrítico superior até atingir 90
graus no transcrítico. Ao ultrapassar para o regime supercrítico, observou-se uma
tendência de redução do ângulo para 45 graus.
Da comparação dos resultados obtidos para águas rasas com fórmulas teóricas,
foi possível concluir que o método de Schlichting é uma boa aproximação para a
parcela relativa a ondas da resistência, já que a parcela friccional, utilizada no cálculo
do método, foi considerada muito pequena e a curva de resistência total gerada
concordou com a curva numérica. A comparação com dados experimentais
(FONFACH e SOARES, 2010 e MUSKER, ALÁEZ et al, 1993) indicou uma grande
discrepância entre as curvas, podendo essa ser devida a diferenças em fatores
omitidos do modelo e do experimento, como deslocamento e propriedades da água
adotadas.
De modo geral, este trabalho mostrou o potencial de aplicação de uma ferramenta
de hidrodinâmica computacional para a determinação da resistência ao avanço no
projeto de um navio. A geração da malha foi considerada o ponto crítico, pois a
impossibilidade de construi-la da forma desejada prejudicou os resultados obtidos,
incapacitando uma comparação direta com resultados experimentais. Ainda assim, é
uma ferramenta poderosa, que possibilita a diminuição de gastos e tempo de trabalho.

25
13 BIBLIOGRAFIA
BANKS, J., PHILLIPS, A. B., TURNOCK, S. R., 2010, “Free Surface CFD Prediction of
Components of Ship Resistance for KCS”. In: 13th Numerical Towing Tank Symposium,
Duisburg, 10-12 Outubro 2010, pp. 6.
BERTRAM, V., 2012, Practical Ship Hydrodynamics. 2 ed. Waltham, Elsevier.
CHEN, X. N., SHARMA, S. D., 1993, “Optimization of Ship Wave Resistance in
Shallow Water”. In: 8th International Workshop on Water Waves and Floating Bodies,
vol. 1, 21-24.
FALTINSEN, O. M., 2010, Hydrodynamics of High-Speed Marine Vessels. 3 ed.
New York, Cambridge University Press.
FERZIGER, J. H., PERIC, M., 2002, Computational Methods for Fluid Dynamics. 3
ed. New York, Springer.
FONFACH, J. M. A., SOARES, C. G., 2010, “Improving the Resistance of a Series 60
Vessel with a Cfd Code”. In: V European Conference on Computational Fluid
Dynamics, Lisboa, Junho. 2010.
GOMES, F. L., 2009, Desenvolvimento de um Modelo Numérico em CFD para a
Estimativa da Resistência de Gerações de Ondas. Trabalho de conclusão do curso de
Engenharia Naval, Escola Politécnica/UFRJ, Rio de Janeiro, RJ, Brasil.
HARVALD, S. A, 1983, Resistance and Propulsion of Ships. 1 ed. New York, John
Wiley & Sons.
HAVELOCK, T. H., 1921, “The Effect of Shallow Water on Wave Resistance”. In:
Proceeding of the Royal Society of London, Series A, Containing Papers of a
Mathematical and Physical Character, vol 100, n 706, pp. 499-505.
ITTC, 2011, “Practical Guidelines for Ship CFD Applications”. In: Recommended
Procedures and Guidelines, rev. 01. 2011.
LARSSON, L., RAVEN, H. C., 2010, “Ship Resistance and Flow”. In: The Principles of
Naval Architecture Series. 1 ed. New York, The Society of Naval Architectures and
Marine Engineers.
MOCTAR, B., 2008, “State-of-the-Art CFD Simulation for Ship Design”. In: EKC2008
Proceedings of the EU-Korea Conference on Science and Technology, vol. 124, pp.
61-68.
MUSKER, A. J., ALÁEZ, J. A., CHENG, E. S. et al, 1993, “The Resistance and Flow
Comitee Report”. In: 20th International Towing Tank Conference, San Franscico, 1993.
RAVEN, H. C., PLOEG, A., STARKE, A. R., EÇA, L., 2008, “Towards a CFD-Based
Prediction of Ship Performance – Progress in Predicting Full-Scale Resistance and
Scale Effects”, International Journal of Maritime Engineering, vol 150 – A4
SAHA, G. K., SUZUKI, K., KAI, H., 2003, “Hydrodynamic Optimization of Ship Hull
Forms in Shallow Water”, Journal of Marine Science and Technology, vol. 9, pp. 51-
62.

26
SAKAMOTO, N., WILSON, R. V., STERN, F., 2007, “Reynolds-Averaged Navier-
Stokes Simulations for High-Speed Wigley Hull in Deep and Shallow Water”, Journal
of Ship Research, vol. 51, no. 3 (Setembro), pp. 187-203.
SCHLICHTING, O., 1934, “Ship resistance in Water of Limited Depth - Resistance of
Sea-Going Vessels in Shallow Water”, Jahrbuch der STG, Vol. 35, pp. 127-148.
TARAFDER, M. D. S, SUZUKI, K., 2007, “Sinkage and Trim of Series 60 Hull at Finite
Depth of Water”, Applied Mechanics and Engineering, vol. 12, pp. 235-254.
ZERAATGAR, H., VAKILABADI, K. A., YOUSEFNEJAD, R., 2012, “Parametric
Analysis of Ship Squat in Shallow Water by Model Test”, Brodo Gradnja, pp. 37-43,
Março. 2010.
ZWART, P. J., GODIN, P. G., PENROSE, J., RHEE, S. H., 2008, “Simulation of
unsteady free-surface flow around a ship hull using a fully coupled multi-phase flow
method”, Journal of Marine Science and Technology, vol. 13, no. 4 (Novembro), pp.
346-355.
Top Related