





Línguas
Páginas
Legal


UNIVERSIDADE DE LISBOA
INSTITUTO SUPERIOR TÉCNICO
Análise e modelação da contribuição dos factores
humanos em acidentes marítimos
Iris Santana Pinheiro
Dissertação para obtenção do Grau de Mestre em
Engenharia e Arquitectura Naval
Júri
Presidente: Doutor Yordan Ivanov Garbatov
Orientador: Doutor Ângelo Manuel Palos Teixeira
Co-orientador: Doutor Carlos António Pancada Guedes Soares
Vogal: Doutora Maria Celeste Rodrigues Jacinto
Julho 2015


iii
Agradecimentos
Ao Professor Ângelo Teixeira pela orientação, disponibilidade e ensinamentos transmitidos durante a
realização deste trabalho.
Ao Professor Carlos Guedes Soares pela co-orientação deste estudo.
Aos parceiros do Projecto CyClaDes, em particular ao Prof. Nikolaos Ventikos do NTUA (National
Technical University of Athens) e ao Prof. Ângelo Teixeira, que disponibilizaram a rede Bayesiana
desenvolvida na tarefa 2.4 para as análises efectuadas no âmbito desta dissertação, e aos parceiros
da WMU (World Maritime University) que disponibilizaram a base de dados dos acidentes codificados
com a metodologia TRACEr.
Aos meus pais, Paulo e Rosa, pelo apoio e compreensão, pelas ausências e pelos muitos dias, ao
longo do meu percurso académico, em que vivi mais no Técnico do que na minha própria casa. Por
saberem que eles são a casa a que quero sempre voltar, obrigada.
Aos meus irmãos, Pedro, Lara e Miguel, porque há uma parte de mim que só existe porque eles
existem, porque enchemos uma casa e juntos temos a melhor gargalhada do meu mundo.
Aos meus avós, Regina, Maria e Fernando, pela presença e ajuda ao longo da vida. Ao meu avô Carlos,
com quem gostaria de partilhar este momento e de quem tenho uma saudade imensa.
Ao Jorge Miranda, pelo apoio incondicional e cumplicidade ao longo deste percurso que fizemos juntos.
À Sara Lourenço, pela presença e motivação, pela mão dada ao longo de todo o caminho.
Aos amigos do Técnico que se tornaram amigos para a vida. Aos que tão bem me receberam quando
aqui cheguei, aos que chegaram comigo e aos que eu recebi de braços abertos. Somos uma família e
sem eles isto não tinha tido graça nenhuma. Um agradecimento especial à Ana Pereira que, sem me
conhecer, me disse “vem” na hora certa, sem ela provavelmente hoje não estaria aqui.


v
Resumo
O objectivo desta dissertação é analisar e modelar a contribuição dos factores humanos na ocorrência
de acidentes marítimos. Embora estes acidentes possam ser o resultado da influência de diversos
factores, que incluem falhas de equipamentos e fenómenos meteorológicos, a maioria é causada
essencialmente por factores humanos e, portanto, esta dissertação centra-se na identificação dos erros
humanos e na modelação da sua influência nos acidentes marítimos.
O estudo da contribuição dos factores humanos nos acidentes marítimos é realizado a três níveis de
detalhe diferentes mas complementares. Primeiramente são identificados os principais factores (modos
de falha) que contribuem para os acidentes, nomeadamente colisões e encalhes, através da análise
sistemática de acidentes marítimos suportada por uma taxonomia de codificação do erro humano, Esta
análise preliminar é essencial para o desenvolvimento de modelos mais detalhados (de Redes
Bayesianas) que permitem estimar quantitativamente a influência dos diversos factores na
probabilidade de colisão. Por fim, são identificadas de forma sistemática as barreiras de prevenção de
colisões entre navios e de mitigação das suas consequências.
Neste contexto é utilizada a metodologia TRACEr (Technique for the Retrospective and predictive
Analysis of Cognitive Errors) para codificar as informações que constam nos relatórios de investigação
de acidentes marítimos. O TRACEr é uma metodologia de identificação do erro humano que se foca
na interface homem-máquina, sugerindo que os acidentes são desencadeados por erros cognitivos do
operador, cujo desempenho pode ser influenciado por factores externos ou internos.
Neste trabalho são analisados 125 acidentes marítimos codificados com a metodologia TRACEr, a que
correspondem 70 colisões e 55 encalhes. Esta análise permite identificar os factores que mais
contribuíram para a ocorrência de colisões e encalhes e apoia a construção de modelos mais
detalhados para os acidentes.
Considerando os factores contributivos identificados para as colisões, é posteriormente efectuada uma
análise de sensibilidades sobre um modelo de uma Rede Bayesiana, desenvolvido com base na
metodologia TRACEr, de forma a incluir o elemento humano na avaliação do risco. O objectivo é
estudar a variação da probabilidade de colisão a partir da mudança de estado das diferentes variáveis
consideradas, sendo possível identificar os parâmetros que mais influenciam a ocorrência de colisões.
Por fim é analisado o risco de colisão através de um modelo Bow-tie que identifica de uma forma
sistemática as barreiras de prevenção e de mitigação de colisões. Este modelo permite, de forma
gráfica, mostrar a robustez do sistema relativamente aos mecanismos de protecção implementados
tendo em vista a criação de sistemas/organizações mais resilientes, com capacidade de prever
alterações antes que ocorram falhas ou danos.
Palavras-chave: factores humanos, erro humano, análise de acidentes marítimos, TRACEr, colisões
eencalhes, Redes Bayesianas, análise de sensibilidades, modelos Bow-tie.

vi

vii
Abstract
The objective of this dissertation is to analyse and model the contribution of human factors in the
occurrence of maritime accidents. Although these accidents could be the result of the influence of
several factors, including equipment failures and meteorological phenomena, most are essentially
caused by human factors and, therefore, the emphasis of this thesis is on the identification of human
errors and on the modelling of their influence in maritime accidents.
The study of the contribution of human factors in maritime accidents is carried out in three different but
complementary levels of detail. First of all, the main factors (failure modes) that contribute to accidents
are identified, through a systematic analysis of maritime accidents supported by a human error coding
taxonomy. This preliminary analysis is essential for the development of more detailed models (Bayesian
Network) that allows the quantitative evaluation of the influence of various factors on the probability of
collision. Finally, the barriers that prevent collisions between ships and mitigate their consequences are
identified in a systematically way.
In this context the TRACEr (Technique for the Retrospective and predictive Analysis of Cognitive Errors)
methodology is used to encode the information presented in investigation reports of maritime accidents.
TRACEr is a human error identification methodology that focuses in human-machine interface,
suggesting that accidents are triggered by operator cognitive or psychological errors, whose
performance can be influenced by external or internal factors.
In this dissertation 125 maritime accidents are coded with TRACEr methodology, corresponding to 70
collisions and 55 groundings. This analysis allows the identification of the most important contributory
factors involved in a collisions or grounding scenario and supports the construction of more detailed
models of accidents.
Subsequently, a sensitivity analysis of a Bayesian network model developed based on the TRACER
methodology to include the human element in the risk assessment is performed considering the
contributory factors identified for collisions. The aim is to study the collision probability variation through
the state change of the different variables considered, being possible to identify the parameters that
influence the occurrence of collisions.
Finally the risk of collision is analysed by a Bow-tie model that identifies systematically the barriers in
place to prevent and mitigate collisions. This model shows graphically show the robustness of the
system for the implemented protection mechanisms and can support the creation of more resilient
systems/organizations with the ability of predicting changes before failures or damages occur.
Keywords: human factors, human error, maritime accidents analysis, TRACEr, collision and grounding
accidents, Bayesian networks, sensitivity analysis, Bow-tie models.

viii
ix
Índice
Agradecimentos ....................................................................................................................................... iii
Resumo ....................................................................................................................................................v
Abstract................................................................................................................................................... vii
Índice ....................................................................................................................................................... ix
Índice de Tabelas .................................................................................................................................... xi
Índice de Figuras .................................................................................................................................... xii
Lista de Abreviações .............................................................................................................................. xv
1 Introdução ........................................................................................................................................ 1
1.1 Objectivos ................................................................................................................................ 3
1.2 Estrutura da Dissertação ......................................................................................................... 3
2 Estado da arte: Erro Humano e Análise de Acidentes .................................................................... 5
2.1 Erro Humano ........................................................................................................................... 6
2.1.1 Identificação do Erro Humano ....................................................................................... 11
2.1.2 Análise da Fiabilidade Humana ..................................................................................... 11
2.1.3 Resiliência ..................................................................................................................... 15
2.2 Análise de Acidentes no Contexto Marítimo ......................................................................... 16
2.2.1 IMO ................................................................................................................................ 18
2.2.2 CASMET ........................................................................................................................ 20
2.2.3 EMCIP ........................................................................................................................... 23
2.2.4 TRACEr ......................................................................................................................... 25
3 Análise de acidentes com a metodologia TRACEr ....................................................................... 26
3.1 Metodologia de Codificação .................................................................................................. 26
3.2 Exemplo de Codificação ........................................................................................................ 31
4 Análise Estatística de acidentes marítimos ................................................................................... 37
5 As redes bayesianas na colisão de navios ................................................................................... 57
5.1 Introdução às redes bayesianas ........................................................................................... 57
5.2 Aplicação das redes bayesianas no contexto marítimo ........................................................ 64
5.3 Modelo para colisões ............................................................................................................. 66
5.4 Resultados ............................................................................................................................. 71
5.4.1 Estudo de caso 1 ........................................................................................................... 71
5.4.2 Estudo de caso 2 ........................................................................................................... 72
5.5 Análise de sensibilidade ........................................................................................................ 74
5.5.1 Selecção de variáveis .................................................................................................... 75
5.5.2 Resultados da Análise de Sensibilidade ....................................................................... 77
6 Análise de gestão do risco de colisão ........................................................................................... 85
6.1 Modelo Bow-tie do risco de colisão ....................................................................................... 87
7 Conclusões e Recomendações ..................................................................................................... 93

x
7.1 Conclusões ............................................................................................................................ 93
7.2 Recomendações para trabalhos futuros ............................................................................... 95
Referências ........................................................................................................................................... 97
Anexos ................................................................................................................................................. 101
Anexo A: TRACEr ................................................................................................................................ 103
Anexo B: Descrição dos nós da Rede Bayesiana ............................................................................... 113
Anexo C: Narrativa – Estudo de Caso 1 ............................................................................................. 127
Anexo D: Narrativa – Estudo de Caso 2 ............................................................................................. 129
Anexo E: Análise de sensibilidade ...................................................................................................... 131
E.1 Output: Collision ........................................................................................................................ 131
E.2 Output: OOW Performance ....................................................................................................... 133
E.3 Estudo de caso 3 – Output: Collision ........................................................................................ 135
Anexo F: Narrativa – Análise de sensibilidade .................................................................................... 137
Anexo G: Modelo Bow-tie para colisões ............................................................................................. 139
Anexo H: Modelo Bow-tie – Descrição ................................................................................................ 141

xi
Índice de Tabelas
Tabela 2.1 - Relação entre os tipos de erro de Reason e os três níveis de desempenho de Rasmussen
................................................................................................................................................................. 8
Tabela 2.2 - CPC e fiabilidade do desempenho, adaptado de (Hollnagel, 1998; p.114) ...................... 14
Tabela 2.3 - Elementos a submeter de acordo com o tipo de ocorrência (IMO, 2008) ........................ 19
Tabela 2.4 - Classificação de acontecimentos acidentais (Kristiansen et al., 1999) ............................ 22
Tabela 2.5 - Grupos causais básicos da metodologia CASMET (Kristiansen et al., 1999) .................. 22
Tabela 3.1 - Taxonomia TRACEr (Hofmann & Schröder-Hinrichs, 2013) ............................................ 27
Tabela 3.2 - Lista de tarefas e actividades disponíveis quando o erro ocorreu na ponte .................... 28
Tabela 3.3 - Informações gerais sobre o acidente com o Overseas Reymar ....................................... 32
Tabela 3.4 - Resumo da codificação dos erros detectados na codificação do acidente com o Overseas
Reymar .................................................................................................................................................. 35
Tabela 4.1 - Número de acidentes e erros codificados ......................................................................... 37
Tabela 4.2 - Dados relativos à gravidade das ocorrências codificadas ................................................ 37
Tabela 4.3 – Resumo dos factores com maior impacto na possível ocorrência de colisões ou encalhes
............................................................................................................................................................... 48
Tabela 4.4 - Condições definidas para colisões e encalhes em termos de localização do erro,
equipamento e tarefa ............................................................................................................................. 49
Tabela 5.1 - Exemplo de tabela de probabilidade condicional.............................................................. 58
Tabela 5.2 - Variáveis seleccionadas para a análise de sensibilidade do nó "Collision"...................... 76
xii
Índice de Figuras
Figura 2.1 - Modelo de classificação SRK do erro humano (Rasmussen & Member, 1983) ................. 7
Figura 2.2 - Modelo do processamento de informação humano (Wickens et al., 1998; p.122) ............. 9
Figura 2.3 - Taxonomia do erro baseada na intencionalidade da acção (Reason, 1990; p.207) ......... 10
Figura 2.4 - Modelo CoCoM, adaptado de (Hollnagel, 1998; p.155) .................................................... 13
Figura 2.5 - Modelo de classificação do CREAM, adaptado de (Hollnagel, 1998; p.160) .................... 13
Figura 2.6 - Modelo do "queijo suíço" de Reason (1997) ..................................................................... 17
Figura 2.7 - Relação entre o processo de análise e a estrutura da base de dados (Guedes Soares et
al., 2000) ................................................................................................................................................ 21
Figura 2.8 - Representação dos acontecimentos acidentais (CASMET) .............................................. 23
Figura 2.9 - Modelo do EMCIP, baseado no projecto CASMET ........................................................... 24
Figura 2.10 - Simple Model of Cognition (Hollnagel, 1998; p.100) ....................................................... 25
Figura 3.1 - TRACEr adaptado ao projecto CyClaDes (baseado em Shorrock & Kirwan, 2002) ......... 27
Figura 3.2 - IEMs e PEMs relacionados com o domínio cognitivo "memória" ...................................... 30
Figura 3.3 - San Francisco - Oakland Bay Bridge, informação relativa ao acidente com o Overseas
Reymar .................................................................................................................................................. 33
Figura 4.1 - Análise para os operadores responsáveis pela produção dos erros codificados ............. 38
Figura 4.2- Análise dos equipamentos utilizados na produção dos erros codificados ......................... 38
Figura 4.3 - Distribuição percentual das tarefas desempenhadas pelos operadores ........................... 39
Figura 4.4 - Distribuição percentual das actividades desempenhadas de acordo com a tarefa em
realização na produção dos erros codificados ...................................................................................... 40
Figura 4.5 - Distribuição percentual do nível de causalidade registado para os diferentes erros
codificados ............................................................................................................................................. 41
Figura 4.6 - Distribuição dos EEMs para os erros codificados ............................................................. 42
Figura 4.7 - Distribuição percentual dos domínios cognitivos identificados .......................................... 42
Figura 4.8 - Distribuição dos IEMs identificados ................................................................................... 43
Figura 4.9 - Distribuição percentual dos PEMs identificados ................................................................ 44
Figura 4.10 - Distribuição percentual dos PSF identificados de acordo com as categorias definidas . 45
Figura 4.11 - Distribuição percentual dos PSF identificados para os erros codificados ....................... 46
Figura 4.12 - Distribuição percentual das barreiras não sucedidas identificadas ................................. 47
Figura 4.13 - Distribuição percentual dos EEMs para colisões que ocorreram nas condições
estabelecidas ......................................................................................................................................... 49
Figura 4.14 - Distribuição percentual dos IEMs para colisões que ocorreram nas condições
estabelecidas ......................................................................................................................................... 50
Figura 4.15 - Distribuição percentual dos PEMs para colisões que ocorreram nas condições
estabelecida .......................................................................................................................................... 50
Figura 4.16 - Distribuição percentual dos PSF de acordo com as categorias principais para colisões que
ocorreram nas condições estabelecidas ............................................................................................... 51

xiii
Figura 4.17 - Distribuição percentual dos PSF para colisões que ocorreram nas condições estabelecidas
............................................................................................................................................................... 51
Figura 4.18 - Distribuição percentual dos EEMs para encalhes que ocorreram nas condições
estabelecidas ......................................................................................................................................... 52
Figura 4.19 - Distribuição percentual dos IEMs para encalhes que ocorreram nas condições
estabelecidas ......................................................................................................................................... 53
Figura 4.20 - Distribuição percentual dos PEMs para encalhes que ocorreram nas condições
estabelecidas ......................................................................................................................................... 53
Figura 4.21 - Distribuição percentual dos PSF de acordo com as categorias principais para encalhes
que ocorreram nas condições ............................................................................................................... 54
Figura 4.22 - Distribuição percentual dos PSF para encalhes que ocorreram nas condições
estabelecidas ......................................................................................................................................... 54
Figura 5.1 - Exemplo de rede bayesiana .............................................................................................. 58
Figura 5.2 - Rede bayesiana - Exemplo 1 ............................................................................................. 59
Figura 5.3 - Tabelas de probabilidade condicional - Exemplo 1 ........................................................... 60
Figura 5.4 - Probabilidade de atribuição de prémio e lucro, sem inferências ....................................... 60
Figura 5.5 - Propagação da evidência Lucro = Elevado ....................................................................... 60
Figura 5.6 - Rede Bayesiana - Exemplo 2 ............................................................................................ 62
Figura 5.7 - Tabelas de probabilidade condicional - Exemplo 2 ........................................................... 62
Figura 5.8 - Probabilidade do Power Supply, sem inferências ............................................................. 63
Figura 5.9 - Propagação da evidência Power Supply = Fail ................................................................. 63
Figura 5.10 - Principais grupos da Rede Bayesiana desenvolvida ....................................................... 68
Figura 5.11 - Rede Bayesiana final detalhada ...................................................................................... 69
Figura 5.12 - Estimativa da probabilidade de colisão para as evidências do estudo de caso 1 ........... 72
Figura 5.13 - Estimativa da probabilidade de colisão para as evidências do estudo de caso 2 ........... 73
Figura 5.14 - Análise de sensibilidade para o nó "Collision" ................................................................. 78
Figura 5.15 - Diferença máxima na probabilidade do estado “Yes” do nó “Collision” produzida pelas
variáveis no seu "pior" e "melhor" estado ............................................................................................. 78
Figura 5.16 – Análise de sensibilidade para o estado “Poor” da variável “OOW Performance“ ........... 79
Figura 5.17 - Diferença máxima da probabilidade do estado “Poor” para o nó “OOW Performance”
produzida pelas variáveis no seu “melhor” e “pior” estado ................................................................... 80
Figura 5.18 - Análise de sensibilidade para o estado "Yes" da variável de saída "Collision", com base
no cenário do estudo de caso 3 ............................................................................................................ 82
Figura 5.19 - Análise de sensibilidade do estado "Yes" para a variável de saída "Collision" no cenário
do estudo de caso 3,, excluindo a variável "OOW Assessment" .......................................................... 82
Figura 5.20 - Diferença máxima da probabilidade do estado “Yes” do nó “Collision” produzida pelas
variáveis no seu “melhor” e “pior” estado para o estudo de caso 3, excluindo a variável “OOW
Assessment” .......................................................................................................................................... 83
Figura 6.1 - Exemplo de um diagrama Bow-tie genérico ...................................................................... 86
Figura 6.2 - Modelo Bow-tie simplificado (ameaças e consequências) ................................................ 88

xiv
Figura 6.3 - Modelo Bow-tie: barreiras de prevenção ........................................................................... 88
Figura 6.4 - Modelo Bow-tie: factores de agravamento e respectivas barreiras secundárias para a
ameaça OOW Poor Performance ......................................................................................................... 89
Figura 6.5 - Modelo Bow-tie: Barreiras de mitigação ............................................................................ 91
Figura 6.6 - Modelo Bow-tie: factores de agravamento e respectivas barreiras secundárias para a
consequência Loss of life ...................................................................................................................... 91

xv
Lista de Abreviações
BN – Bayesian Network
CASMET – Casualty Analysis Methodology for Maritime Operations
CoCoM – Contextual Control Model
CPCs – Common Performance Conditions
CREAM – Cognitive Reliability and Error Analysis Method
DNV – Det Norske Veritas
ECDIS – Electronic Chart Display and Information System
EEM – External Error Mode
EMCIP – European Maritime Casualty Information Platform
EMSA – European Maritime Safety Agency
ENC – Electronic Navigation Charts
EPC – Error-producing Conditions
FSA – Formal Safety Assessment
FSS – Fire Safety Systems
GEMS – Generic Error Modelling Systems
GISIS – Global Integrated
HAZOP – Hazard and Operability Analysis
HCD – Human Centred Design
HEART – Human Error Assessment and Reduction Technique
HEI – Human Error Identification
HRA – Human Reliability Assessment
IEM – Internal Error Mode
ILO – International Labour Organization
IMO – International Maritime Organization
IS – Intact Stability Code
ISM – International Safety Management Code
IST – Instituto Superior Técnico
LSA – International Live-saving Appliance Code
MAIB – Marine Accident Investigation Branch
MARPOL – International Convention for the Prevention of Pollution from Ships
NTSB – National Transportation Safety Board
NTUA – National Technical University of Athens
OOW – Officer On Watch
OPRC – International Convention on Oil Pollution Preparedness, Response and Co-operation
PEM – Psychological Error Mechanism
PSF – Performance Shaping Factors
SAR – International Convention on Maritime Search and Rescue

xvi
SHEL – Software Hardware Environmental Liveware
SHERPA – Systematic Human Error Reduction and Prediction Approach
SMoC – Simple Model of Cognition
SOLAS – International Convention for the Safety of Life at Sea
SRK – Skill, Rule and Knowledge based
STCW – International Convention on Standards of Training, Certification and Watchkeeping for
Seafarers
STEP – Sequential Timed Events Plotting procedures
THERP – Technique for Human Error Prediction
TRACEr – Technique for the Retrospective and Predictive Analysis of Cognitive Errors
TSB – Transportation Safety Board of Canada
1
1 Introdução
No sector marítimo, tal como nas restantes indústrias em geral, as melhorias na segurança são
frequentemente desencadeadas após acidentes com consequências graves, que conseguem reunir
todos os intervenientes de forma a melhorar as políticas e procedimentos de segurança em vigor. Na
Europa, por exemplo, após o derrame de crude que resultou do afundamento do Prestige junto à costa
da Galiza em 2002, a União Europeia adoptou um pacote de medidas com o objectivo de reforçar a
segurança marítima e aumentar a capacidade de prevenção e resposta à poluição. Este é um exemplo
de como o impacto das consequências de falhas de segurança em termos de danos ambientais e perda
de vida, subjacentes a toda a actividade do sector marítimo, é encarado como algo a minimizar por
todos os envolvidos na indústria.
De facto, nos últimos anos o desenvolvimento tecnológico tem conduzido ao desenvolvimento
de sistemas mais fiáveis o que se traduz na redução do número de acidentes marítimos devido a falhas
técnicas. No entanto, não é possível discutir a fiabilidade de um sistema sem considerar a taxa de falha
de todos os seus componentes, o que inclui a componente humana (Madonna et. al, 2009). Aliás, a
análise de acidentes conduzida por diversos autores independentes mostra que mais de 80% dos
acidentes marítimos são causados por erros humanos (Guedes Soares et al., 2000). Segundo Hollnagel
(2005) o próprio erro humano deve considerar, não só aquele que é produzido por indivíduos ou
utilizadores finais, mas também pelas organizações, o que pode envolver a cultura, a estrutura ou as
políticas das empresas de navegação. Assim, o estudo dos factores humanos e da sua contribuição
para a ocorrência de acidentes marítimos torna-se essencial, de forma a garantir níveis de segurança
adequados à normal operação dos navios.
A análise de acidentes assume particular importância na medida em que permite obter
informações acerca dos intervenientes, condições de ocorrência ou factores contributivos que possam
estar relacionados com indivíduos ou organizações. Neste sentido, surgiu nos últimos anos a
necessidade de recorrer a diversos métodos de análise e avaliação de riscos inerentes ao transporte
marítimo, que se encontram ainda em difusão.
Nas últimas décadas surgiram diversas abordagens para a classificação do erro, inicialmente
aplicadas a processos industriais, tipicamente designada como identificação do erro humano (HEI –
Human Error Identification). Estas abordagens incluem por exemplo a SHERPA – Systematic Human
Error Reduction and Prediction Approach (Embrey, 1986), o GEMS – Generic Error Modelling System
(Reason, 1990) ou o CREAM - Cognitive Reliability and Error Analysis Method (Hollnagel, 1998). Muitas
destas técnicas de identificação do erro humano foram influenciadas pelo modelo de Rasmussen (1983)
baseado nas aptidões, regras e conhecimento (SRK) e/ou pela classificação de deslizes, lapsos,
enganos e violações proposta por Reason (1990) (Shorrock & Kirwan, 2002). Algumas destas
abordagens foram posteriormente adaptadas e aplicadas ao contexto marítimo, sendo usadas para a
codificação de acidentes com navios. Entre estas abordagens destaca-se a metodologia de
investigação de acidentes e a taxonomia de codificação de informação numa base de dados
2
desenvolvidas no âmbito do projecto de investigação CASMET – Casualty Analysis Methodology for
Maritime Operations (Caridis, 1999). Esta abordagem tornou-se num dos pilares da metodologia EMCIP
(European Marine Casualty Information Platform), desenvolvida pela EMSA (European Maritime Safety
Agency). Para além destas duas abordagens destaca-se ainda a metodologia de ocorrências da IMO
(2008), que estabelece os procedimentos de investigação de acidentes e incidentes marítimos, no
sentido de disponibilizar informações acerca de ocorrências graves e muito graves.
Mais recentemente a taxonomia TRACEr, originalmente desenvolvida no âmbito do controlo de
tráfego aéreo, foi adaptada ao contexto marítimo de forma a ser aplicada na investigação de acidentes
e incidentes com navios (Hofmann & Schröder-Hinrichs, 2013). O TRACEr é uma metodologia de
identificação do erro humano cujo foco principal é a interface homem-máquina, e que tem em conta os
erros cognitivos e psicológicos do operador e a influência de factores externos e internos no seu
desempenho. Nesta dissertação é adoptada a taxonomia TRACEr como metodologia de codificação
dos relatórios de investigação de encalhes e colisões que permitiu a criação de uma base de dados de
acidentes codificados. A análise estatística desta base de dados possibilita a identificação do contexto
do incidente – relativamente à tarefa e ao equipamento utilizado –, do contexto do operador – em termos
de domínio cognitivo, modos de erro e factores de desempenho – e das barreiras implementadas que
foram bem-sucedidas na prevenção da ocorrência. Esta análise permitirá assim identificar os factores
que mais contribuíram para a ocorrência de colisões e encalhes, apoiando a construção de modelos
mais detalhados de redes Bayesianas para ambos os tipos de acidentes.
A aplicação de redes bayesianas no sector marítimo é ainda muito reduzida, no entanto existem
alguns estudos efectuados nesta área, nomeadamente pela IMO que desenvolveu um modelo
bayesiano para avaliação da eficácia do ECDIS (Electronic Chart Display and Information System) e do
ENC (Electronic Navigational Charts) como medidas de mitigação de risco. Foram ainda desenvolvidos
outros estudos com vista a modelar os factores humanos por meio de redes bayesianas de onde se
destaca o trabalho de Antão & Guedes Soares (2010), que avaliam a contribuição do erro humano em
acidentes com diferentes condições de mar e a contribuição de ondas de grande amplitude na
ocorrência de determinados tipos de acidentes, ou o modelo desenvolvido por Ventikos & Vagias (2010)
que avalia a fadiga dos elementos da tripulação causada pelas condições do ambiente de trabalho.
Nesta dissertação serão identificados os factores que apresentam uma maior influência na
probabilidade de colisão, a partir de uma análise de sensibilidade efectuada a um modelo de rede
bayesiana previamente desenvolvido no âmbito do projecto CyClaDes para um cenário de colisão.
Com vista à redução do erro humano e à criação de organizações e sistemas resilientes, capazes
de prevenir acontecimentos críticos ou recuperar desses mesmos acontecimentos com consequências
mínimas, recorrer-se-á ao desenvolvimento de um diagrama Bow-tie. Os modelos Bow-tie identificam
de uma forma sistemática as barreiras existentes para reduzir o número de acidentes (barreiras de
prevenção) ou mitigar as consequências inerentes à ocorrência dos mesmos (barreiras de mitigação)
permitindo, de uma forma gráfica, mostrar a robustez do sistema relativamente às barreiras
implementadas. Neste sentido será desenvolvido um modelo Bow-tie para um cenário de colisão devida
à ocorrência de um erro humano, baseado na taxonomia TRACER e na rede bayesiana utilizada, sendo
considerado um perigo de navegação.
3
1.1 Objectivos
Nesta dissertação pretende-se analisar e modelar a contribuição dos factores humanos em acidentes
ocorridos no contexto marítimo, nomeadamente colisões e encalhes. Nesse sentido os objectivos a
atingir são os seguintes:
Apresentar uma revisão geral dos métodos de análise e identificação dos factores humanos e
organizacionais;
Aplicar a taxonomia TRACEr na codificação de relatórios de investigação de acidentes
marítimos, nomeadamente, colisões e encalhes;
Efectuar uma análise estatística sobre os acidentes codificados e inseridos na base de dados
MaRiSa
Identificar os factores que mais contribuem para a ocorrência de colisões e encalhes;
Desenvolver uma análise de sensibilidade que permita identificar os parâmetros com maior
influência na probabilidade de colisão calculada através de um modelo de Rede Bayesiana
desenvolvida no projecto CyClaDes;
Desenvolver um modelo Bow-tie para análise de resiliência com o objectivo de modelar
barreiras de prevenção e de mitigação à ocorrência de colisões.
1.2 Estrutura da Dissertação
Além do presente capítulo, a dissertação está dividida em cinco capítulos adicionais. O capítulo
2 refere-se ao estado da arte na vertente do erro humano e da análise de acidentes, sendo apresentada
uma revisão bibliográfica de abordagens de identificação e classificação do erro humano, métodos de
análise da fiabilidade humana e de metodologias de análise de acidentes no contexto marítimo. O
capítulo 3 aborda a análise de acidentes marítimos com a metodologia TRACEr, sendo apresentado o
método de codificação de acidentes e dado um exemplo de codificação. No capítulo 4 é apresentada
a análise estatística efectuada a partir da codificação de colisões e encalhes incluídos na base de
dados. No capítulo 5 são estudadas as redes bayesianas, sendo primeiramente apresentada uma
revisão bibliográfica da aplicação de redes bayesianas no contexto marítimo, e em seguida é efectuada
uma análise de sensibilidade a um modelo de rede bayesiana para um cenário de colisão.
Posteriormente, no capítulo 6, é desenvolvido um modelo Bow-tie, com o objectivo de analisar de uma
forma qualitativa a implementação de barreiras de prevenção ou de mitigação à ocorrência de colisões.
Por último, no capítulo 7, são apresentadas as conclusões e recomendações para trabalhos futuros.

4

5
2 Estado da arte: Erro Humano e Análise de
Acidentes
Um acidente pode ser definido como um acontecimento indesejado que resulta em danos para
os seres humanos, bens e/ou o meio ambiente (Kristiansen, 2005). Do ponto de vista legal, o termo
acidente pode significar que o dano não foi intencional e/ou que o acontecimento não pode envolver
qualquer tipo de crime (Harms-Ringdahl, 2013).
Os acidentes marítimos são normalmente classificados de acordo com o tipo de libertação de
energia envolvida, sendo que os tipos de acidentes típicos são: colisão, contacto, encalhe, naufrágio,
afundamento, incêndio e explosão, desaparecimento, entre outros. Em termos gerais estes acidentes
podem conduzir a diferentes consequências, tais como: danos aos seres humanos (lesões ou mortes),
poluição ambiental e perdas económicas relacionadas com danos ou perdas de navios e de carga. Por
outro lado, incidentes podem ser classificados como “acontecimentos indesejáveis que são detectados,
controlados ou neutralizados antes que destes ocorram resultados acidentais” (Kristiansen, 2005). A
ocorrência frequente de incidentes indicia a existência de um nível inadequado de segurança, pelo que
a incapacidade de controlo de um destes acontecimentos indesejáveis poderá resultar num acidente
com danos pessoais, materiais e/ou o meio ambiente.
A análise de acidentes conduz a uma aprendizagem na medida que os acidentes são estudados
de forma a compreender as suas causas e a evitá-las no futuro. Para que assim seja é necessária uma
abordagem que permita a recolha de todas as informações relacionadas com o acidente para que as
suas causas sejam identificadas.
Embora os acidentes possam ser causados por uma diversidade de factores, incluindo falhas de
equipamentos, factores meteorológicos, ou outros, o erro humano é ainda o principal responsável pela
maioria das ocorrências (Antão, 2011). A análise de acidentes conduzida por diversos autores
independentes mostra que mais de 80% dos acidentes marítimos são causados por erros humanos
(Guedes Soares et al., 2000). Importa ainda realçar que o erro humano e a sua interpretação podem
estar associados a factores individuais e intrínsecos mas também ao contexto onde estes ocorreram.
Deste modo torna-se clara a importância de conhecer as causas dos acidentes, executando uma
análise que permite obter informações acerca dos intervenientes, condições de ocorrência,
acontecimentos que conduziram a erros/falhas, causas imediatas, factores causais básicos
relacionados com os indivíduos ou organizações. Assim, neste capítulo da dissertação será então
discutido o tema do erro humano, sendo apresentadas diversas abordagens para a sua identificação e
classificação, e analisar-se-á a importância dos factores humanos no contexto marítimo. Será ainda
destacada a importância da análise de acidentes no sector marítimo, sendo apresentadas algumas das
metodologias existentes para codificação e análise de acidentes com navios.

6
2.1 Erro Humano
“Errar é humano…”
Alexander Pope – “Ensaio sobre a crítica”
“…entender as razões pelas quais o ser humano erra é ciência.” (Hollnagel, 1993)
A análise detalhada de acidentes evidencia que estes são, na sua maioria, causados por factores
humanos, tanto individuais como organizacionais. Desta forma torna-se evidente a importância da
análise dos factores humanos associados aos acidentes marítimos de forma a garantir níveis de
segurança mais adequados à normal operação dos navios.
Segundo Wickens et al. (1998) o erro humano pode ser definido como um “comportamento
inadequado que reduz os níveis de eficácia do sistema ou da sua segurança, e que pode ou não resultar
num acidente ou lesão”. O erro humano, se intencional ou não, é definido como qualquer acção humana
ou a sua falta que excede ou falha em atingir um determinado limite de aceitação, onde os limites de
desempenho humano são definidos pelo sistema (Kirwan, 1994).
Actualmente há uma compreensão mais generalizada de que os acidentes não são o resultado
de um erro do operador, isto é, um erro humano individual, mas sim o resultado de um conjunto de
factores que conduziram à ocorrência do erro, que culminou no acontecimento acidental. Segundo
Wickens et al. (1998) os factores humanos podem então ser definidos como “a integração e aplicação
dos conhecimentos científicos disponíveis sobre as pessoas, instalações e sistemas de gestão de forma
a melhorar as interacções no ambiente de trabalho”.
Fruto da visão integrada dos factores humanos tem sido dada particular atenção à contribuição
dos indivíduos na ocorrência de acidentes, o que se traduz no desenvolvimento de um elevado número
de abordagens no sentido de modelar e classificar o elemento humano. Assim a análise dos factores
humanos refere-se aos métodos de ciência comportamental que têm como propósito descrever, prever
e gerir o comportamento humano de forma a atingir objectivos operacionais (Hofmann & Schröder-
Hinrichs, 2013). Em engenharia, estes métodos são incorporados no projecto de sistemas,
equipamento e procedimentos numa tentativa de minimizar os erros associados à sua operação.
Em Wiegmann & Shappell (2001) são apresentadas cinco perspectivas sobre a natureza e a
causa do erro humano, com base em anteriores revisões de literatura. Estas perspectivas são as
seguintes:
Perspectiva cognitiva – em grande parte baseada na teoria de processamento de informação;
os modelos cognitivos estão direccionados para as diferentes etapas das operações mentais
que ocorrem entre a entrada sensorial e a execução da resposta. O tipo de erros que aqui se
define está relacionado com a falha de percepção do operador (falta de atenção, desorientação
espacial, falha na avaliação da situação).
Perspectiva da ergonomia e projecto de sistemas – segundo a qual o operador raramente é a
causa única da ocorrência de um erro ou acidente, já que o seu desempenho individual envolve
uma complexa interacção com diversos factores. Um dos modelos mais conhecidos nesta
perspectiva é o SHEL (Software Hardware Environment Liveware), desenvolvido por Edwards
(1972) que descreve quatro componentes básicos necessários para a optimização da interface
7
homem-máquina no projecto de sistemas: (1) Software – inclui regras e regulamentos que
descrevem os procedimentos de operação; (2) Hardware – inclui o equipamento, material e
outros recursos físicos; (3) Environment conditions – inclui as influências externas e factores
que condicionam as outras três componentes, tais como, clima social, pressão económica ou
factores meteorológicos; (4) Liveware – corresponde ao elemento humano, que inclui
operadores ou gestores e que interage com as restantes componentes.
Perspectiva fisiológica – relacionada sobretudo com a condição física do operador que pode
estar afectada por factores como: doença, fadiga, medicação, álcool ou drogas.
Perspectiva psico-social – relacionada com a interacção ente o pessoal, baseando-se na teoria
de que o desempenho do operador é directamente influenciado pela natureza e qualidade das
interacções entre os diferentes membros de um grupo. Os modelos psico-sociais defendem
que os erros e os acidentes ocorrem quando há uma quebra na dinâmica de grupo ou nas
comunicações interpessoais.
Perspectiva organizacional – considera a natureza complexa das causas de um acidente e o
papel desempenhado pela organização na génese e gestão do erro humano. Neste sentido, os
modelos organizacionais dão especial ênfase à falha no processo de decisão de gestores e
supervisores. O modelo organizacional do queijo suíço de Reason (1990) destaca-se entre os
vários modelos existentes e será explicado com maior detalhe no capítulo 2.2.
Deste modo foram desenvolvidas, nas últimas décadas, diversas abordagens para a
classificação do erro humano, sendo destacadas em seguida algumas destas taxonomias.
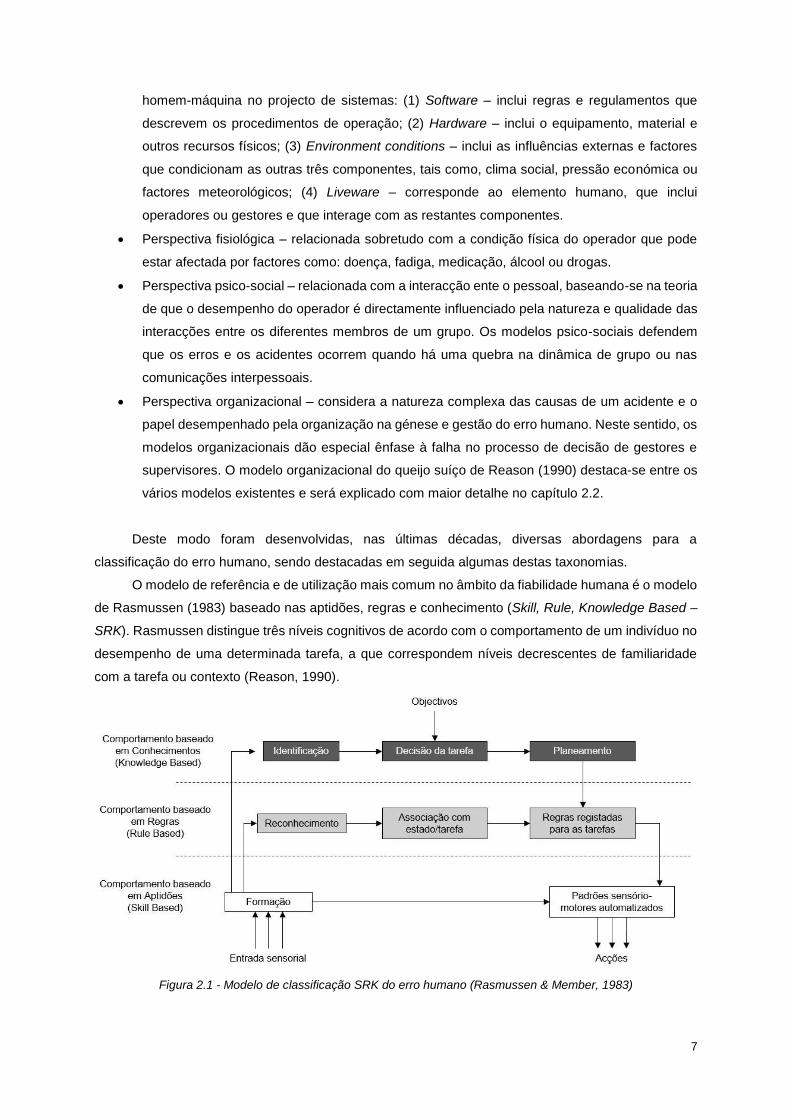
O modelo de referência e de utilização mais comum no âmbito da fiabilidade humana é o modelo
de Rasmussen (1983) baseado nas aptidões, regras e conhecimento (Skill, Rule, Knowledge Based –
SRK). Rasmussen distingue três níveis cognitivos de acordo com o comportamento de um indivíduo no
desempenho de uma determinada tarefa, a que correspondem níveis decrescentes de familiaridade
com a tarefa ou contexto (Reason, 1990).
Figura 2.1 - Modelo de classificação SRK do erro humano (Rasmussen & Member, 1983)

8
O nível baseado em aptidões (Skill Based) representa o desempenho sensório-motor durante a
realização de tarefas rotineiras que exigem menores níveis de atenção. As tarefas desempenhadas a
este nível são associadas a um desempenho de aptidões adquiridas, pelo que tipicamente não
requerem atenção ou controlo consciente. Os erros mais comuns estão relacionados com desatenção,
falhas de memória ou lapsos que conduzem a execuções incorrectas.
O nível seguinte é baseado em regras (Rule Based) e aplica-se a situações menos familiares e
mais complexas. Por não se tratar de uma acção rotineira, o operador não possui a experiência
suficiente mas a execução da tarefa é regida por regras bem definidas. A este nível os erros estão
tipicamente associados à inadequada aplicação de uma regra ou à incapacidade de classificar a
situação, o que se traduz na aplicação de uma regra errada.
O nível baseado nos conhecimentos (Knowledge Based) aplica-se a situações novas, em que
não foram adquiridas habilidades ou regras, e perante as quais as acções devem ser planeadas a um
nível conceptual mais elevado em que o desempenho é baseado nos conhecimentos adquiridos. As
acções a este nível são lentas, exigentes cognitivamente e altamente propensas a erros (Antão, 2011).
A este nível os erros resultam de análises ou decisões erradas que estão associadas a conhecimentos
incompletos ou incorrectos.
A partir da abordagem de Rasmussen anteriormente apresentada, Reason (1990) formulou o
modelo GEMS (Generic Error Modelling System). Esta estrutura deriva da taxonomia SKR proposta por
Rasmussen e identifica três tipos de erros humanos básicos: deslizes e lapsos baseados em aptidões
(Skill-based slips and lapses), enganos baseados em regras (Rule-based mistakes) e enganos
baseados em conhecimentos (Knowledge based mistakes). Os deslizes e lapsos são considerados
como acções não propositadas em virtude de falhas de memória ou falhas de atenção e os enganos
são acções intencionais cuja ocorrência se deve a uma aplicação incorrecta de regras ou
conhecimentos. Assim, na tabela 2.1 é possível observar a relação entre os três tipos de erro definidos
por Reason e os três níveis de desempenho considerados por Rasmussen.
Nível de desempenho Tipo de erro
Baseado em Aptidões Deslizes e Lapsos
Baseado em Regras Enganos baseados em regras
Baseado em Conhecimentos Enganos baseados em conhecimentos
Tabela 2.1 - Relação entre os tipos de erro de Reason e os três níveis de desempenho de Rasmussen
Segundo Reason (1990, p. 166) ao analisar a frequência de erros humanos por nível cognitivo
obtém-se a seguinte distribuição:
60.7% são erros Baseados em Aptidões
27.1% são erros Baseados em Regras
11.3% são erros Baseados em Conhecimentos
A partir destes resultados é possível percepcionar que a maior percentagem de erros ocorre na
realização de tarefas rotineiras, o que se prende com o facto da maioria das acções humanas se

9
desenrolar a este nível cognitivo. Se observarmos a proporção entre o número de erros e o número de
acções realizadas em cada nível conclui-se que a probabilidade de ocorrência de um erro aumenta
exponencialmente com a evolução do nível cognitivo. Desta forma, embora se desenvolvam poucas
acções em níveis cognitivos mais elevados, a taxa de sucesso é também reduzida.
Os erros podem também ser classificados segundo um sistema de processamento de
informação, onde é dada relevância à fase do processo cognitivo em que o erro ocorre. Em Wickens et
al. (1998) é apresentado um modelo representado por diferentes etapas nas quais a informação é
processada: (1) percepção da informação sobre o ambiente externo, (2) processamento central ou
transformação da informação, e (3) resposta à informação. Na primeira etapa a informação é
apreendida pelos sentidos e comparada com o conhecimento prévio armazenado na memória a longo
prazo, sendo-lhe atribuído um significado, isto é, uma interpretação significativa do que é
percepcionado. Por vezes esta informação pode ser directamente utilizada para seleccionar e executar
uma resposta, no entanto, é muito frequente que ocorra um atraso na acção, ou que esta não seja de
todo executada, enquanto a informação é processada na memória a curto prazo (memória de trabalho).
Nesta fase de processamento de informação desenvolvem-se várias actividades mentais como
planeamento, compreensão, visualização, tomada de decisão e resolução do problema. O mecanismo
de feedback permite a detecção e percepção de novas informações que são muito frequentemente
geradas pela acção. Na figura 2.2 podemos ainda observar que as etapas de processamento de
informação dependem de recursos mentais e cognitivos, isto é, a atenção que é de disponibilidade
limitada e que pode ser alocada aos processos conforme seja necessário.
Figura 2.2 - Modelo do processamento de informação humano (Wickens et al., 1998; p.122)

10
Swain & Guttmann (1983) propuseram um sistema de classificação onde distinguem dois tipos
de erro: erros por omissão e erros por comissão. Os erros de omissão caracterizam-se pela falta de
acção, quando a realização de uma tarefa é total ou parcialmente omitida devido a um lapso ou falha
de comunicação. Os erros de comissão caracterizam-se pela execução incorrecta de uma determinada
tarefa ou acção, embora o indivíduo aja com a motivação/intenção certa. Os erros por comissão podem
ser ainda classificados como erros na sequência de realização – o individuo realiza a tarefa ou sub-
tarefa fora da sequência correcta – ou erros no tempo de realização – o indivíduo realiza a tarefa ou
sub-tarefa dora do tempo permitido, quer seja muito rápido, muito lento, muito tarde ou muito cedo.
Realça-se ainda a introdução do conceito de intencionalidade, que foi posteriormente utilizado por
Reason (1990) que categoriza os erros básicos de acordo com a intencionalidade dos actos inseguros.
Assim os deslizes e lapsos, explicados anteriormente, são acções não propositadas, enquanto que os
enganos são acções intencionais. A esta categoria são adicionadas as violações que correspondem a
desvios deliberados aos procedimentos de operação estabelecidos e que Reason classificou como de
rotina, excepcionais ou actos de sabotagem. Na figura 2.3 é possível observar um resumo da
classificação dos actos inseguros de acordo com a intencionalidade da acção.
Figura 2.3 - Taxonomia do erro baseada na intencionalidade da acção (Reason, 1990; p.207)
Em muitos casos as violações resultam de motivações contraditórias como o desejo de poupar
tempo e esforço ou a tentativa de ajudar alguém. Na maioria das situações os operadores que violam
as regras não o fazem por maldade mas sim porque aparentemente existem boas razões para que isso
aconteça, pelo que as motivações devem ser analisadas se se pretender minimizar a ocorrência de
violações.

11
2.1.1 Identificação do Erro Humano
A identificação do erro humano (HEI – Human Error Identification) é normalmente uma parte da
avaliação da fiabilidade humana (HRA – Human Reliability Assessment), que determina o impacto do
erro humano e da recuperação do erro num determinado sistema.
Kirwan (1998) reviu trinta e oito abordagens de identificação do erro humano e considera que os
três maiores componentes do erro são:
Modos de Erro Externos (EEM – External Error Mode) – correspondem às manifestações
externas do erro.
Factores de desempenho (PSF – Performance Shaping Factors) – factores que influenciam a
probabilidade de ocorrência do erro
Mecanismos de erro psicológicos (PEM – Psychological Error Mechanism) – correspondem às
manifestações internas do erro (modo de falha do operador em termos psicológicos)
Shorrock & Kirwan (2002) desenvolveram uma técnica de identificação do erro humano aplicado
ao controlo de tráfico aéreo e baseado em outras taxonomias existentes. Esta técnica de identificação
do erro humano foi designada por TRACEr (Technique for the Retrospective and Predictive Analysis of
Cognitive Errors) e será apresentada detalhadamente mais tarde.
Os erros são classificados de acordo com um modelo cognitivo de decisões tendo sido
diferenciados os modos de erro internos dos mecanismos de erro psicológicos. Após a identificação do
modo e mecanismo de erro, o desempenho do indivíduo na tarefa depende dos factores de
desempenho também denominados por condições produtoras de erro (EPC – Error-producing
conditions), que não são vistas como causas do erro mas sim como factores da tarefa, ambiente,
equipamento ou pessoais que aumentam a probabilidade de ocorrência de erros. Os factores de
desempenho (PSF) podem ser classificados como internos – características internas do indivíduo que
podem ser inatas como a altura ou o género, ou adquiridas por treino ou experiência, por exemplo – ou
externos – características externas da tarefa, equipamento, ambiente físico e organizacional.
2.1.2 Análise da Fiabilidade Humana
Com o objectivo de incluir o elemento humano na análise riscos torna-se necessário actuar não
só sobre a probabilidade de falha, mas também na minimização das suas consequências. Os métodos
de fiabilidade humana reconhecem que os seres humanos não podem alcançar um desempenho
perfeito continuamente nem existem decisões ou acções livres de erros, pelo que visam estudar os
factores internos e externos que influenciam a eficiência e fiabilidade do desempenho do operador.
Esta análise é dotada de alguma complexidade na medida em que são necessários modelos de
comportamento humano que atribuam valores numéricos à probabilidade de erro, de forma a ser
possível prever e prevenir o comportamento inseguro.

12
A literatura apresenta várias técnicas de análise de fiabilidade humana destinadas a integrar a
falha humana na análise de risco: THERP - Technique for Human Error Prediction (Swain & Guttmann,
1983), HEART - Human Error Assessment and Reduction Technique (Williams, 1986), SHERPA -
Systematic Human Error Reduction and Prediction Approach (Embrey, 1986) e CREAM - Cognitive
Reliability and Error Analysis Method (Hollnagel, 1998).
Estas técnicas têm sido desenvolvidas de forma a quantificar a contribuição do erro humano para
a ocorrência de um acidente, fornecendo uma avaliação mais detalhada dos riscos inerentes ao sistema
e que estão associados ao factor humano. O desenvolvimento de métodos de HRA surgiu na sequência
de graves acidentes em indústrias (e.g. Chernobil, 1986) cuja exposição ao risco era evidente e em que
se detectou uma contribuição substancial do erro humano para a sua ocorrência.
Os métodos de análise da fiabilidade humana dividem-se em métodos de primeira e segunda
geração. A principal diferença entre um método de segunda geração e um de primeira geração, é a
ênfase dada à influência do contexto sobre o desempenho do operador. Além disso, enquanto nas
metodologias de primeira geração a definição do erro se baseia na dualidade omissão/comissão, que
deriva da função lógica sucesso/falha que descreve o comportamento de elementos mecânicos na
análise de fiabilidade, as metodologias de segunda geração baseiam-se num modelo que considera as
funções cognitivas do operador (Madonna et al., 2009).
Neste ponto da dissertação será abordado com maior detalhe o método de fiabilidade humana
CREAM.
2.1.2.1 CREAM
. O método CREAM desenvolvido por Hollnagel (1998) é um método de avaliação da fiabilidade
humana de segunda geração.
O modelo pode ser analisado sob um ponto de vista retrospectivo ou prospectivo. A análise
retrospectiva inicia-se com a avaliação dos acontecimentos acidentais, procurando reconstruir a
sequência de acontecimentos, de forma a traçar as causas básicas e poder assim desenvolver medidas
de prevenção. A análise prospectiva consiste em prever e avaliar os riscos e as consequências
decorrentes de um acidente, com o objectivo de desenvolver sistemas de controlo e protecção.
O método envolve três componentes: utilizar um modelo de cognição humana; elaborar um
sistema de classificação; e aplicar as influências das Condições de Desempenho Comum, explicando
como ocorrem e a sua interdependência.
O modelo cognitivo utilizado pelo CREAM é o CoCoM (Contextual Control Model), desenvolvido
por Hollnagel. Este método é uma evolução do modelo SMoC (Simple Model of Cognition) e baseia-se
na hipótese de que o comportamento humano é regulado por dois princípios fundamentais: a natureza
cíclica da cognição humana e a dependência dos processos cognitivos do contexto e das condições de
trabalho.

13
Figura 2.4 - Modelo CoCoM, adaptado de (Hollnagel, 1998; p.155)
Tal como se pode observar na figura 2.4 o CoCoM agrupa dois modelos: o modelo de
competência – onde se incluem as funções cognitivas essenciais, como a observação, interpretação,
planeamento e execução – e o modelo de controlo – que corresponde à selecção de tarefas e à gestão
da sua execução por parte do indivíduo. São distinguidos quatro modos de controlo: estratégico, táctico,
oportunista e desordenado.
O esquema de classificação deve ser capaz de descrever as manifestações dos erros e as suas
causas. Este esquema faz a distinção entre efeitos e causas, classificados com base na diferenciação
entre modos e manifestações do erro (fenótipos) e as suas causas (genótipos).
O CREAM organiza as interacções entre os indivíduos e o ambiente usando a tríade homem-
tecnologia-organização (Yoshimura et al., 2014), o que está relacionado com a estruturação das
causas.
Figura 2.5 - Modelo de classificação do CREAM, adaptado de (Hollnagel, 1998; p.160)

14
Para a predição do desempenho humano torna-se necessário determinar ou descrever o
contexto através das CPCs (Common Performance Conditions). Para isso são definidas nove CPCs,
apresentados na tabela 2.2, sendo que a cada uma corresponde uma lista de níveis qualitativos cuja
selecção permite verificar quais os factores que tiveram uma influência negativa sobre o desempenho
humano.
A avaliação das CPCs é feita através da obtenção do resultado combinado dos nove CPCs sendo
distinguidos os CPCs que reduzem, não alteram ou aumentam a fiabilidade do desempenho humano.
CPC Nível qualitativo Efeito esperado na
fiabilidade do desempenho
Adequação da organização
Muito eficiente Melhora
Eficiente Não significativo
Ineficiente Reduz
Deficiente Reduz
Condições de trabalho
Vantajosa Melhora
Compatível Não significativo
Incompatível Reduz
Adequação à interface homem-máquina e suporte
operacional
Apoiante Melhora
Adequada Não significativo
Tolerável Não significativo
Inapropriada Reduz
Disponibilidade de procedimentos
Apropriada Melhora
Aceitável Não significativo
Inapropriada Reduz
Número de objectivos simultâneos
Menor do que a capacidade Não significativo
De acordo com a capacidade Não significativo
Maior do que a capacidade Reduz
Tempo disponível
Adequado Melhora
Temporariamente inadequado Não significativo
Continuamente inadequado Reduz
Horário Diurno (ajustado) Não significativo
Nocturno (desajustado) Reduz
Adequação do treino e experiência
Adequado, experiência elevada Melhora
Adequado, experiência limitada Não significativo
Inadequado Reduz
Qualidade da colaboração da equipa
Muito eficiente Melhora
Eficiente Não significativo
Ineficiente Não significativo
Deficiente Reduz
Tabela 2.2 - CPC e fiabilidade do desempenho, adaptado de (Hollnagel, 1998; p.114)

15
Tal como já foi referido anteriormente, de forma a reduzir o impacto do erro em acidentes é
necessário avaliar, não só a probabilidade de ocorrência como os mecanismos de minimização de
consequências. É neste seguimento que surgem os métodos de fiabilidade humana, cujo objectivo é
entender os factores que afectam o desempenho humano e projectar sistemas resilientes a este tipo
de falhas.
2.1.3 Resiliência
O termo resiliência no contexto do risco e da segurança é definido como a capacidade de um
sistema reagir e recuperar de distúrbios e acontecimentos imprevistos (Hollnagel et al., 2006). Em
McDaniels (2008) são definidas duas propriedades fundamentais da resiliência: robustez e rapidez. A
robustez refere-se à capacidade de um sistema suportar uma certa quantidade de tensão no que diz
respeito à perda de função do sistema, ou como em Hansson (2003), é “a tendência de um sistema
permanecer inalterado, ou quase inalterado, quando exposto a perturbações”. A rapidez refere-se à
capacidade do sistema recuperar de um acontecimento indesejado no que diz respeito à velocidade de
recuperação.
Na teoria organizacional, resiliência refere-se à capacidade de uma organização projectar e
implementar comportamentos adaptativos correspondentes a mudanças situacionais imediatas
suportando o mínimo de tensão (Mansouri et al., 2009).
Woods (2000) sugere que uma medida de sucesso para uma organização resiliente é a
capacidade de prever alterações que podem anunciar mudanças no risco antes que ocorram falhas e
danos. Isto envolve estar consciente da maneira normal como a tomada de decisão e a mudança em
sistemas complexos podem conduzir à ocorrência de problemas.
A partir do trabalho desenvolvido por Reason, Hollnagel, Rasmussen, Woods e outros, surgiu o
conceito de organizações resilientes e “engenharia de resiliência”. A engenharia de resiliência procura
maneiras de melhorar a capacidade das organizações para criar processos robustos mas flexíveis, para
monitorizar e rever os modelos de risco e para utilizar os recursos de forma proactiva em face de
interrupções ou decurso da produção e das pressões económicas (Coss, 2011).
A redução do erro humano é possível a partir da compreensão dos objectivos de uma
determinada actividade e das tarefas a realizar para que esses objectivos sejam alcançados. Neste
sentido podem ser aplicadas diversas abordagens para de análise do erro humano, tais como o HAZOP
humano (Hazard and Operability Analysis), árvores de falhas, abordagens que utilizam a análise de
tarefas hierárquicas ou métodos com sistemas de classificação para a identificação de erros e
respectivo contexto, como o CREAM ou o GEMS.

16
2.2 Análise de Acidentes no Contexto Marítimo
Os acidentes marítimos estão frequentemente baseados numa cadeia de acontecimentos
resultando num acontecimento final/acidente. Desta forma a análise de acidentes marítimos é essencial
para sustentar a avaliação de riscos, com o objectivo de identificar as causas básicas, factores
contributivos e organizacionais que contribuíram para a ocorrência dos acontecimentos acidentais
(Antão, 2011; Guedes Soares et al., 2000; Kristiansen et al., 1999). Todos os países possuem
regulamentos que especificam em que situações os acidentes marítimos devem ser investigados,
sendo que os objectivos desta investigação são: identificar as causas e as medidas que poderão reduzir
o risco associado à ocorrência futura de acidentes similares, identificar as fraquezas nos regulamentos
em vigor e estabelecer uma conduta criminal (Kristiansen, 2005).
Embora consista num processo que permite o apuramento de responsabilidades entre os vários
intervenientes, é uma investigação que deve ter como principal objectivo aprender com os
acontecimentos que ocorreram de forma a prevenir a sua ocorrência no futuro.
Segundo Kristiansen (1995) uma metodologia ideal de análise de acidentes deve: reflectir a
sequência de acontecimentos e as duas interacções; identificar tarefas ou operações não realizadas
ou realizadas abaixo do que seria esperado; fazer uma distinção entre erros humanos, falhas técnicas
ou carga ambiental externa; relacionar as falhas aos módulos básicos do sistema (técnico, interface
homem-máquina, operador, procedimentos, organização de suporte e ambiente); identificar medidas
preventivas e de mitigação.
Reason (1990) considera que a maioria dos acidentes é resultado da falha ou inexistência de
barreiras que promovem a ocorrência de uma determinada acção insegura. O modelo de Reason
apresenta uma distinção entre falhas activas – que representam os actos inseguros e que têm efeito
quase imediato, isto é, foram parte activa da ocorrência estando associadas às acções incorrectas dos
operadores - e falhas latentes – que representam os factores pré-existentes para os actos inseguros
cujas consequências não são detectadas de imediato nem estão directamente relacionadas com o
acidente. A introdução das falhas latentes no processo de análise de acidentes possibilita a
identificação de factores contributivos que possam ter aumentado a probabilidade de ocorrência ou
escalado as suas consequências (Antão, 2011). Estes conceitos foram introduzidos no modelo de
acidentes formulado por Reason (1990) e conhecido por modelo do “queijo suíço”.
O modelo, que se apresenta na figura, considera a possibilidade de falha a quatro níveis:
influências organizacionais, supervisão insegura, pré-condições para actos inseguros e actos inseguros
propriamente ditos.

17
Figura 2.6 - Modelo do "queijo suíço" de Reason (1997)
No modelo as barreiras entre uma fonte de dano e uma perda são modeladas por uma série de
camadas de protecção, representadas por “fatias” de um “queijo suíço”. Cada uma destas camadas
tem falhas potenciais, lacunas individuais do sistema representadas por “buracos,” que mudam de
tamanho e posição com o tempo. Na possibilidade de alguns destes “buracos” se alinharem, isto é, se
estas falhas ocorrerem consecutivamente a fonte de dano prossegue a trajectória até à ocorrência de
um acidente que é interpretado como a efectivação de um perigo por inexistência ou ineficiência de
barreiras adequadas.
Considerando a importância que a análise de acidentes assume e que um acidente é o resultado
múltiplas sequências de acontecimentos é expectável a existência de um vasto número de
metodologias cujo objectivo é a identificação das causas das ocorrências. Embora alguns dos métodos
tenham sido desenvolvidos em contextos específicos, como o sector industrial ou do controlo de tráfego
aéreo, é frequente a transferência de alguns destes conceitos para outros contextos. Desta forma será
seguidamente apresentada uma revisão de algumas das metodologias utilizadas na análise de
acidentes.
Nas últimas décadas foram desenvolvidas diversas abordagens para a identificação do erro
humano no contexto industrial (Shorrock & Kirwan, 2002). Algumas destas abordagens foram
posteriormente adaptadas ao contexto marítimo, sendo usadas para a codificação de acidentes com
navios.
Entre estas abordagens destaca-se o Projecto CASMET (Casualty Analysis Methodology for
Maritime Operations), no qual foi desenvolvida uma metodologia de investigação de acidentes e uma
taxonomia de codificação de informação numa base de dados. Esta abordagem tornou-se num dos

18
pilares da metodologia EMCIP (European Marine Casualty Information Platform), desenvolvida pela
EMSA (European Maritime Safety Agency). Para além destas duas abordagens há que realçar ainda a
metodologia de ocorrências da IMO (International Maritime Organization), que estabelece os
procedimentos de investigação de acidentes e incidentes marítimos, no sentido de disponibilizar
informações acerca de ocorrências graves e muito graves (IMO, 2008). Esta informação encontra-se
no GISIS (Global Integrated Maritime Safety Agency), mais concretamente no tópico Marine Casualties
and Incidents,
Mais recentemente a taxonomia TRACEr, originalmente desenvolvida no âmbito do controlo de
tráfego aéreo, foi adaptada ao contexto marítimo de forma a ser aplicada na investigação de acidentes
e incidentes com navios (Hofmann & Schröder-Hinrichs, 2013).
2.2.1 IMO
A consideração dos factores humanos na análise de acidentes tem sido debatida pela IMO que
propôs um formato de relatório que permite a padronização dos conteúdos das bases de dados acerca
de acidentes marítimos ocorridos em diferentes países. Nesse sentido a Resolução A.849(20) (IMO,
1997) estabelece um código de investigação de acidentes e incidentes marítimos, numa metodologia
que consiste numa série de passos a serem seguidos no sentido de ser possível à entidade responsável
pela investigação identificar os factores subjacentes, potenciais problemas de segurança e desenvolver
acções preventivas. Esta resolução foi posteriormente actualizada com a Resolução A.884(21) onde
se apresenta adicionalmente o processo conjunto da IMO e da ILO (International Labour Organization)
para a investigação dos factores humanos (IMO, 2000). Este processo integra e adapta várias
abordagens relacionadas com os factores humanos, como o modelo SHEL (Hawkins, 1987), o GEMS
(Reason, 1990) e a taxonomia do erro de Rasmussen (1987).
Na circular MSC-MEPC.3/Circ.3 (IMO, 2008), a versão actualizada deste documento, são
definidos explicitamente os procedimentos de investigação de acidentes e incidentes sendo agregados
num único modelo todas as informações acerca dos diversos aspectos de uma determinada ocorrência.
A circular referida, designada por “Reports on Marine Casualties and Incident”, pressupõe a recolha de
informação relativa a dez anexos acerca da ocorrência. Para efeitos de elaboração de relatórios a IMO
classifica os acidentes com navios como: “Very Serious Casualties”, “Serious Casualties”, “Less Serious
Casualties” e “Marine Accidents”. De acordo com a classificação da ocorrência assim se definem quais
os anexos a serem entregues, sendo dada maior importância às ocorrências graves e muito graves,
pelo que estes casos pressupõem a submissão de anexos específicos. Uma ocorrência muito grave
envolve a perda total do navio, perda de vida ou poluição severa, enquanto que uma ocorrência grave
é definida como um acidente com um navio que não é classificado como muito grave e que envolve
fogo, explosão, colisão, encalhe, danos devidos ao mau tempo, fractura no casco ou suspeita de defeito
no casco resultando em danos estruturais tornando o navio incapaz de navegar, poluição ou na
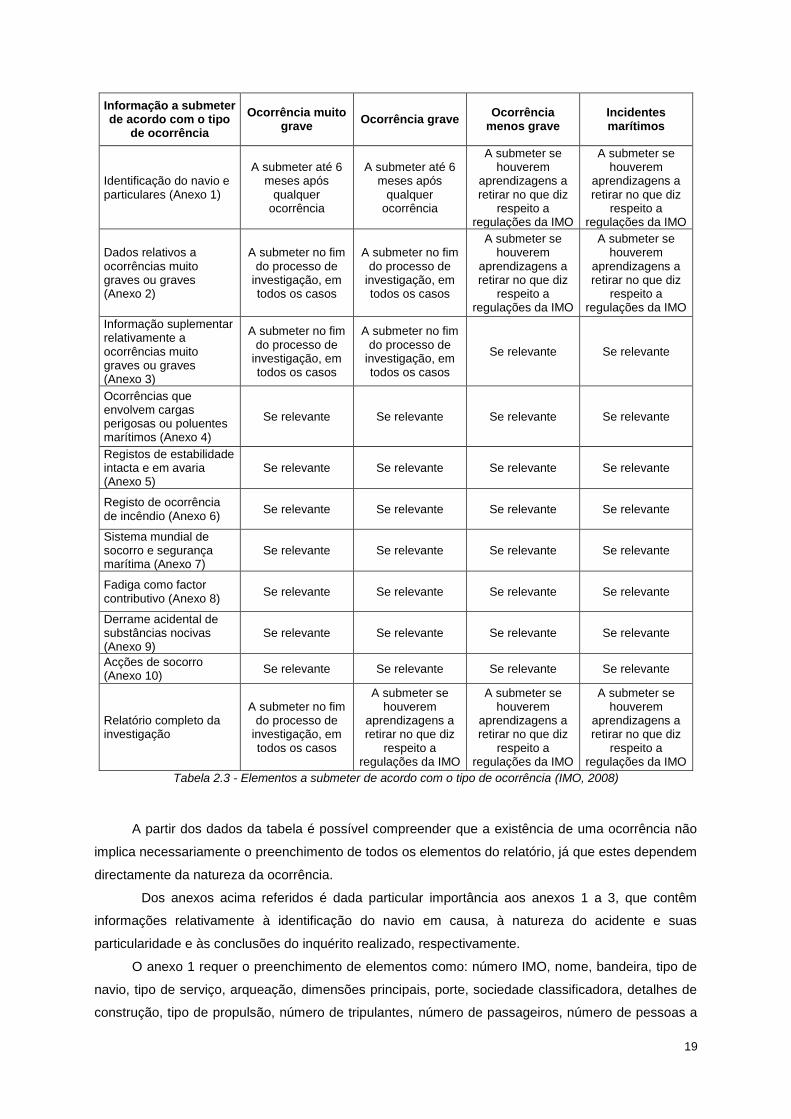
necessidade do navio ter que ser rebocado ou assistido em terra (IMO, 1997). Na tabela 2.3 são
identificados os dez anexos existentes no registo de acidentes e incidentes da IMO, bem como a
possível obrigatoriedade de submissão de acordo com o tipo de ocorrência.
19
Informação a submeter de acordo com o tipo
de ocorrência
Ocorrência muito grave
Ocorrência grave Ocorrência
menos grave Incidentes marítimos
Identificação do navio e particulares (Anexo 1)
A submeter até 6 meses após
qualquer ocorrência
A submeter até 6 meses após
qualquer ocorrência
A submeter se houverem
aprendizagens a retirar no que diz
respeito a regulações da IMO
A submeter se houverem
aprendizagens a retirar no que diz
respeito a regulações da IMO
Dados relativos a ocorrências muito graves ou graves (Anexo 2)
A submeter no fim do processo de
investigação, em todos os casos
A submeter no fim do processo de
investigação, em todos os casos
A submeter se houverem
aprendizagens a retirar no que diz
respeito a regulações da IMO
A submeter se houverem
aprendizagens a retirar no que diz
respeito a regulações da IMO
Informação suplementar relativamente a ocorrências muito graves ou graves (Anexo 3)
A submeter no fim do processo de
investigação, em todos os casos
A submeter no fim do processo de
investigação, em todos os casos
Se relevante Se relevante
Ocorrências que envolvem cargas perigosas ou poluentes marítimos (Anexo 4)
Se relevante Se relevante Se relevante Se relevante
Registos de estabilidade intacta e em avaria (Anexo 5)
Se relevante Se relevante Se relevante Se relevante
Registo de ocorrência de incêndio (Anexo 6)
Se relevante Se relevante Se relevante Se relevante
Sistema mundial de socorro e segurança marítima (Anexo 7)
Se relevante Se relevante Se relevante Se relevante
Fadiga como factor contributivo (Anexo 8)
Se relevante Se relevante Se relevante Se relevante
Derrame acidental de substâncias nocivas (Anexo 9)
Se relevante Se relevante Se relevante Se relevante
Acções de socorro (Anexo 10)
Se relevante Se relevante Se relevante Se relevante
Relatório completo da investigação
A submeter no fim do processo de
investigação, em todos os casos
A submeter se houverem
aprendizagens a retirar no que diz
respeito a regulações da IMO
A submeter se houverem
aprendizagens a retirar no que diz
respeito a regulações da IMO
A submeter se houverem
aprendizagens a retirar no que diz
respeito a regulações da IMO
Tabela 2.3 - Elementos a submeter de acordo com o tipo de ocorrência (IMO, 2008)
A partir dos dados da tabela é possível compreender que a existência de uma ocorrência não
implica necessariamente o preenchimento de todos os elementos do relatório, já que estes dependem
directamente da natureza da ocorrência.
Dos anexos acima referidos é dada particular importância aos anexos 1 a 3, que contêm
informações relativamente à identificação do navio em causa, à natureza do acidente e suas
particularidade e às conclusões do inquérito realizado, respectivamente.
O anexo 1 requer o preenchimento de elementos como: número IMO, nome, bandeira, tipo de
navio, tipo de serviço, arqueação, dimensões principais, porte, sociedade classificadora, detalhes de
construção, tipo de propulsão, número de tripulantes, número de passageiros, número de pessoas a
20
bordo no momento da ocorrência, dados preliminares da ocorrência (data e hora, posição/localização,
acontecimento inicial, consequências, resumo dos acontecimentos).
O anexo 2 inicia-se com o preenchimento de dados relativos a: data e hora da ocorrência,
coordenadas geográficas da localização, localização (atracado, porto, canal, etc.) e piloto a bordo.
Seguidamente é identificado o acontecimento inicial, isto é, o tipo de acidente (colisão, contacto,
encalhe, incêndio ou explosão, etc.) e o acontecimento subsequente que pode ser definido como
“aquele cuja ocorrência deriva da magnitude do seu percursor, como por exemplo uma colisão seguida
de um incêndio/explosão” (Antão, 2011). Em seguida são identificadas as consequências dos
acontecimentos para o navio, tripulação e passageiros e meio ambiente. Posteriormente são
identificadas as causas principais (causas imediatas) que dizem respeito unicamente ao acontecimento
inicial e que são divididas em causas internas – incluem violações e erro humano, falhas estruturais,
falhas de maquinaria/equipamento e falhas com a carga – e causas externas – existência de outro(s)
navio(s), condições do meio ambiente, infra-estrutura de apoio à navegação, actos criminosos ou outras
causas externas. Seguidamente são ainda identificados com maior detalhe os tipos de erro de acordo
com a taxonomia do erro de Reason (1990): violações, deslizes, lapsos e enganos. Finalmente são
identificados os factores subjacentes às causas primárias de acordo com o modelo SHEL, dividindo-se
em quatro áreas: liveware (condições fisiológicas, psicológicas e físicas), hardware (ergonomia,
manutenção, falha de projecto, indisponibilidade de equipamento), software (políticas da empresa,
procedimentos inadequados, gestão e supervisão) e environment (movimento do navio/efeitos
climatéricos, ruído, vibrações ou temperatura/humidade).
Assim na metodologia de análise e no registo de acidentes e incidentes são identificados apenas
dois acontecimentos, podendo estes serem ou não terminais. Além disso só são identificadas as causas
e os factores subjacentes para o acontecimento inicial, o que se limita a análise da ocorrência sendo
diminutas as causas identificadas. Em Guedes Soares et al. (2000) e em Antão (2011) foi ainda referido
que a definição de acontecimentos inicias e subsequentes sem o estabelecimento de uma relação
temporal entre estes, bem como a falta de ligação entre cada uma das causas principais e os factores
subjacentes constituem lacunas no sistema de codificação da IMO, já que esta informação é essencial
para a elaboração da sequência de acontecimentos e factores causais.
2.2.2 CASMET
Embora existam diversas metodologias utilizadas nos processos de investigação de análise de
acidentes marítimos, há ainda uma variedade de estudos desenvolvidos no âmbito de projecto
internacionais com o objectivo de exercer uma melhoria nos processos de investigação em vigor. É
nesse contexto que se insere o projecto CASMET (Casualty Analysis Methodology for Maritime
Operations), desenvolvido entre 1998 e 1999 por cinco unidades de investigação, nomeadamente, a
National Technical University of Athens (NTUA), a Det Norske Veritas (DNV), o Instituto Superior
Técnico (IST), a Norwegian Marine Technology Research Institute e o TNO Human Factors Research
Institute.

21
A metodologia desenvolvida possibilitava a obtenção dos dados necessários para explicar uma
determinada ocorrência, identificando a sequência de acontecimentos acidentais, as tarefas e
equipamento envolvido, os factores contributivos que facilitaram a ocorrência e por último as causas
básicas associadas a cada acontecimento acidental (Guedes Soares et al., 2000). As etapas principais
do processo de análise eram a recolha inicial de dados, a identificação e reconstrução de
acontecimentos, a análise dos factores humanos, a identificação das causas básicas e o resumo das
relações causais (Caridis, 1999). Em paralelo a este procedimento de análise era necessário explicar
de que forma é que a informação obtida seria representada na base de dados, o que requeria uma
estrutura de codificação de informação que estaria directamente ligada com o processo de análise
(Guedes Soares et al., 2000). Na figura 2.7 está representada a relação entre o processo de análise e
a estrutura da base de dados do método do CASMET.
Figura 2.7 - Relação entre o processo de análise e a estrutura da base de dados (Guedes Soares et al., 2000)
A sequência de acontecimentos acidentais será contruída por todos os acontecimentos que
sejam considerados essenciais para o desenvolvimento do acidente, isto é, sempre que seja afirmativa
a resposta à pergunta:
“Teria o acidente ocorrido se este acontecimento em particular não tivesse ocorrido?”
Assim, todos os acontecimentos que compõem a sequência são essenciais, já que se um deles não
tivesse ocorrido a cadeia teria sido interrompida e o acidente não teria ocorrido. De acordo com
Kristiansen et al. (1999) estes acontecimentos são classificados em cinco tipos e são apresentados na
tabela 2.4.

22
Tipo de acontecimento acidental Parâmetros
Materiais perigosos Material, Localização, Tipo de falha
Efeitos ambientais Fenómeno ambiental, Impacto
Falha de equipamento Sistema envolvido, Localização, Tipo de falha, Causa imediata
Erro humano Posição, Tarefa, Modo de desempenho, Tipo de erro
Outro agente ou navio Cargo, Tarefa, Modo de Execução, Tipo de erro
Tabela 2.4 - Classificação de acontecimentos acidentais (Kristiansen et al., 1999)
De acordo com Guedes Soares et al. (2000) as causas básicas podem ser explicadas por um
conjunto de factores que expressam as deficiências das pessoas, do equipamento, das condições de
trabalho e da gestão. Na tabela 2.5 são apresentados os grupos causais básicos da metodologia
CASMET, que incorpora a distinção entre operações diárias e gestão e recursos. A razão para serem
definidos dois níveis é a necessidade de fazer a distinção entre decisões operacionais e decisões
estratégicas ou de longo alcance. Assim o grupo de operações diárias está relacionado com decisões
e condições a bordo relativas à gestão, ao comportamento individual, ao equipamento e às condições
de trabalho. Já o grupo de gestão e recursos está relacionado com a cultura organizacional, o estilo de
gestão, a aquisição de navios e outro equipamento ou a contratação e formação de pessoal, decisões
que tipicamente dizem respeito aos níveis de gestão de topo e intermédio da organização (Caridis,
1999)..
Operações Diárias Gestão e Recursos
Ambiente social Enquadramento do negócio
Supervisão Organização e supervisão geral
Recursos humanos Supervisão de operações
Factores Pessoais Supervisão de segurança
Condições de trabalho Supervisão de saúde ocupacional
Esforço físico Supervisão de pessoal
Ferramentas e equipamento inadequado Conhecimento do sistema
Manutenção Projecto
Condições ambientais Políticas de manutenção
Preparação para situações de emergência Preparação para situações de emergência
Tabela 2.5 - Grupos causais básicos da metodologia CASMET (Kristiansen et al., 1999)
Assim esta metodologia permite, por oposição à metodologia da IMO, uma reunião de um conjunto
mais alargado de informação e a implementação explícita dos factores humanos na análise de
acidentes marítimos. No entanto verificam-se ainda algumas lacunas, nomeadamente a não
codificação dos factores contributivos, essenciais para a definição de procedimentos e regras, e a
inconsistência dos códigos relativos aos acontecimentos acidentais identificados como estando

23
relacionados com o erro humano (modo de execução, tipo de erro), que não permitem uma analogia
directa com métodos de fiabilidade consolidados (Antão, 2011).
2.2.3 EMCIP
Neste capítulo será apresentada a estrutura e a taxonomia por trás da base de dados da EMCIP
desenvolvida pela Agência Europeia de Segurança Marítima (EMSA) com o objectivo de providenciar
assistência técnica e científica à Comissão Europeia e Estados Membros no desenvolvimento e
implementação de legislação na área da segurança marítima, poluição e segurança a bordo.
O EMCIP é uma plataforma europeia comum baseada na web, constituída por uma base de
dados e uma rede de fornecimento de dados. A base de dados EMCIP possui meios para armazenar
dados e informações relativas a acidentes que envolvam todo o tipo de navios e acidentes de trabalho.
Estes dados poderão ser usados para efectuar análises estatísticas considerando os factores humanos,
técnicos, ambientais e organizacionais envolvidos em acidentes marítimos. A taxonomia utilizada pela
base de dados foi desenvolvida pela EMSA em colaboração com os estados membros e com base na
investigação europeia e nas práticas e procedimentos internacionais recomendados (Correia, 2010).
Figura 2.8 - Representação dos acontecimentos acidentais (CASMET)
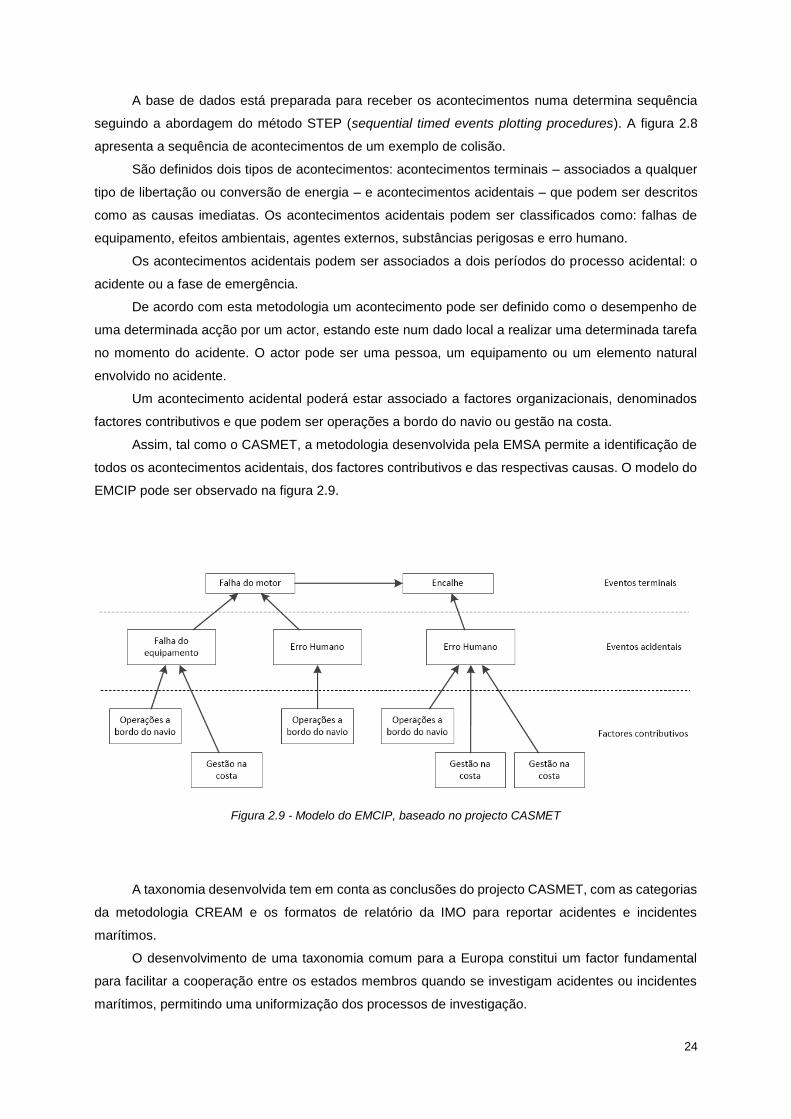
24
A base de dados está preparada para receber os acontecimentos numa determina sequência
seguindo a abordagem do método STEP (sequential timed events plotting procedures). A figura 2.8
apresenta a sequência de acontecimentos de um exemplo de colisão.
São definidos dois tipos de acontecimentos: acontecimentos terminais – associados a qualquer
tipo de libertação ou conversão de energia – e acontecimentos acidentais – que podem ser descritos
como as causas imediatas. Os acontecimentos acidentais podem ser classificados como: falhas de
equipamento, efeitos ambientais, agentes externos, substâncias perigosas e erro humano.
Os acontecimentos acidentais podem ser associados a dois períodos do processo acidental: o
acidente ou a fase de emergência.
De acordo com esta metodologia um acontecimento pode ser definido como o desempenho de
uma determinada acção por um actor, estando este num dado local a realizar uma determinada tarefa
no momento do acidente. O actor pode ser uma pessoa, um equipamento ou um elemento natural
envolvido no acidente.
Um acontecimento acidental poderá estar associado a factores organizacionais, denominados
factores contributivos e que podem ser operações a bordo do navio ou gestão na costa.
Assim, tal como o CASMET, a metodologia desenvolvida pela EMSA permite a identificação de
todos os acontecimentos acidentais, dos factores contributivos e das respectivas causas. O modelo do
EMCIP pode ser observado na figura 2.9.
Figura 2.9 - Modelo do EMCIP, baseado no projecto CASMET
A taxonomia desenvolvida tem em conta as conclusões do projecto CASMET, com as categorias
da metodologia CREAM e os formatos de relatório da IMO para reportar acidentes e incidentes
marítimos.
O desenvolvimento de uma taxonomia comum para a Europa constitui um factor fundamental
para facilitar a cooperação entre os estados membros quando se investigam acidentes ou incidentes
marítimos, permitindo uma uniformização dos processos de investigação.

25
2.2.4 TRACEr
O TRACEr (Technique for the Retrospective and predictive Analysis of Cognitive Errors) é uma
metodologia de identificação do erro humano, desenvolvida durante um estudo sobre a aplicabilidade
de técnicas de análise de fiabilidade humana no controlo de tráfego aéreo como uma técnica de análise
de incidentes retrospectiva e como identificação preditiva de erros humanos. A análise de fiabilidade
humana permite prever, compreender e avaliar a ocorrência de erro humano, estando, de acordo com
Kirwan (1994), dividida em três fases: identificar que erros podem ocorrer (identificação do erro
humano), decidir como é que é mais provável que estes erros ocorram (quantificação do erro humano)
e, se apropriado, aumentar a fiabilidade humana reduzindo esta probabilidade de erro (redução do erro
humano).
A metodologia do TRACEr foi desenvolvida com base em dois modelos: o Model of Human
Information Processing e o SMoC – Simple Model of Cognition.
O primeiro modelo foi desenvolvido por Christopher Wickens como base para a selecção de
tarefas e investigação do efeito dos parâmetros físicos sobre os processos cognitivos, tendo sido já
descrito anteriormente. Neste modelo, o desempenho cognitivo de um indivíduo é comparado com a
sua capacidade de processamento de informação, que embora não seja uma habilidade singular
envolve diferentes processos cognitivos (Liebl et al., 2012).
O SMoC foi desenvolvido por Hollnagel (1998) tendo como principal objectivo descrever as
características básicas da cognição humana, cujos elementos essenciais estão representados na figura
2.10.
Figura 2.10 - Simple Model of Cognition (Hollnagel, 1998; p.100)
As duas características fundamentais do SMOC são: (1) a distinção entre observação e
inferência e (2) a natureza cíclica da cognição humana. Houve necessidade de distinguir claramente o
que pode ser observado do que pode ser inferido a partir das observações, sendo que o que pode ser
observado é o comportamento manifesto, que corresponde às categorias de observação e execução
da acção. As restantes funções cognitivas só podem ser inferidas a partir de observações do que a
pessoa faz.

26
O principal foco da metodologia TRACEr é a interface homem-máquina, o que sugere que os
acidentes e incidentes são desencadeados por erros cognitivos do operador. Além disso o desempenho
do operador pode ser influenciado por factores externos (cultura organizacional, ambiente, supervisão,
fadiga, etc.) e internos (falta de percepção, tomada de decisão, violações de rotina, etc.) (Hofmann &
Schröder-Hinrichs, 2013).
O TRACEr tem uma estrutura modular compreendendo oito taxonomias ou esquemas de
classificação. Existem três tipos principais de taxonomia: os que descrevem o contexto no qual ocorreu
o erro, os que descrevem o contexto cognitivo de produção do erro e os que descrevem a recuperação
do erro (Shorrock & Kirwan, 2002)
A utilização do TRACEr é justificada não só pela sua flexibilidade, mas também devido ao seu
foco na interface homem-máquina que tem em conta tanto o contexto cognitivo do operador como os
factores de desempenho que influenciam a ocorrência de erros (Graziano et al., 2014).
Na presente dissertação será usada uma versão adaptada do TRACEr que se adequa melhor à
investigação de acidentes e incidentes no contexto marítimo. Assim a estrutura da metodologia e o
processo de codificação utilizados serão explicados mais detalhadamente no capítulo seguinte.
3 Análise de acidentes com a metodologia TRACEr
O processo de codificação executado está inserido numa sub-tarefa do projecto CyClaDes e tem
como objectivo a identificação de factores relacionados com a interface homem-máquina que
influenciam o trabalho no interior de um navio e que podem conduzir a acidentes. A partir desta
metodologia serão codificados acidentes que integrarão a base de dados MaRiSa.
É importante realçar que por se focar na interface homem-máquina, o TRACEr é aplicável num
cenário em que essa interface seja identificada.
De forma a ser utilizado no projecto CyClaDes, o TRACEr foi adaptado ao contexto marítimo
(Hofmann & Schröder-Hinrichs, 2013), sendo utilizadas as categorias originais da taxonomia mas
alterando a sua ordem garantindo uma melhor adequação às necessidades do projecto. Neste capítulo
será discutida a metodologia de codificação utilizada, sendo apresentado um exemplo de codificação
realizado.
3.1 Metodologia de Codificação
A taxonomia TRACEr adaptada ao projecto CyClaDes e utilizada no processo de codificação pode ser
observada na figura 3.1., onde as caixas a branco representam os dados que necessitam de ser
codificados, sendo complementada com uma outra categoria que corresponde à introdução de
informações gerais acerca do acidente e do navio em causa.

27
Figura 3.1 - TRACEr adaptado ao projecto CyClaDes (baseado em Shorrock & Kirwan, 2002)
No geral o processo de codificação pela metodologia TRACEr está dividido em dez etapas que
permitem a análise de um acidente. A partir da leitura e análise de um relatório de investigação de um
acidente é possível iniciar a primeira etapa de codificação que consiste na introdução de toda
informação geral acerca da ocorrência (data, local, tipo e gravidade do acidente) e do navio envolvido
(nome, número IMO, tipo, arqueação, peso bruto, etc.). A introdução de informações gerais acerca do
navio e da ocorrência garante que um mesmo acidente não é codificado duas vezes. Nesta secção é
ainda pedida uma breve descrição do sucedido, pelo que deve ser introduzida uma narrativa do
acidente que permita a outros leitores ter uma visão global do contexto em que ocorreu o acidente. As
restantes nove etapas da codificação podem ser observadas na tabela 3.1, sendo descritas
posteriormente.
TRACEr 1st level TRACEr 2nd level
Context of the incident
1. Task error
2. Error Information
3. Causality level
Operator Context
4. External Error Mode (EEM)
5. Cognitive Domain
6. Internal Error Mode (IEM)
7. Psychological Error Mechanism (PEM)
8. Performance Shaping Factors (PSF)
Error Recovery 9. Error Recovery
Tabela 3.1 - Taxonomia TRACEr (Hofmann & Schröder-Hinrichs, 2013)
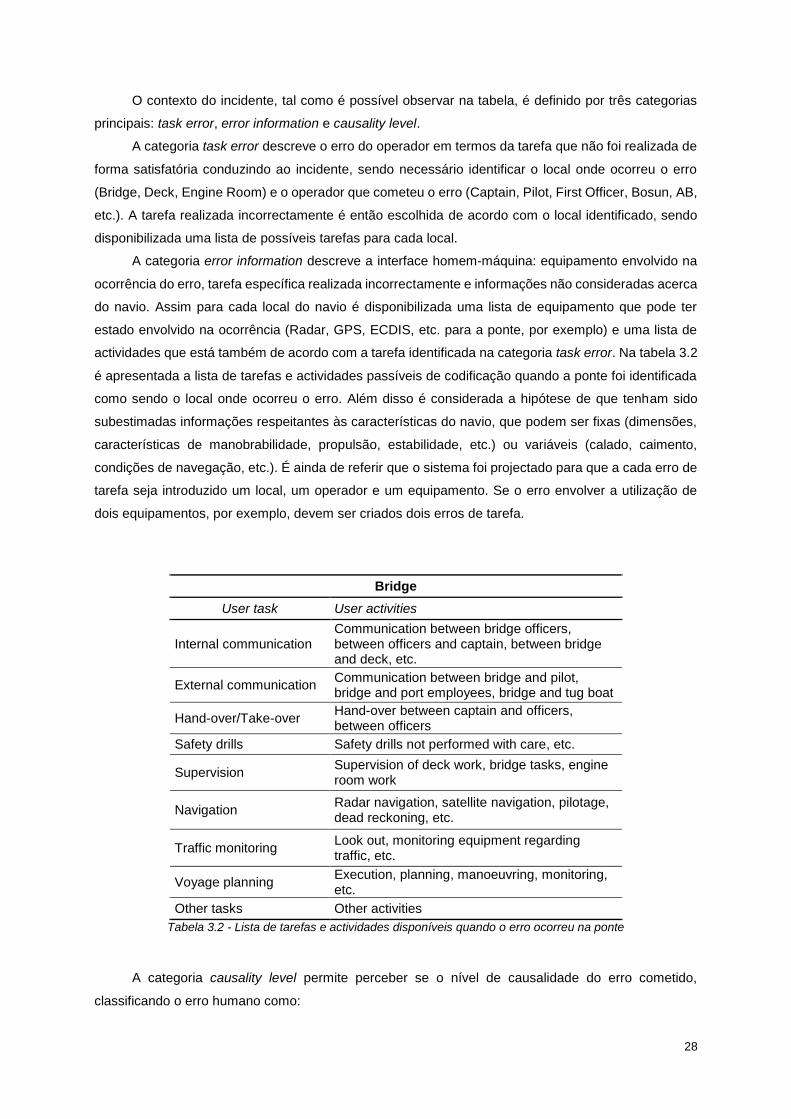
28
O contexto do incidente, tal como é possível observar na tabela, é definido por três categorias
principais: task error, error information e causality level.
A categoria task error descreve o erro do operador em termos da tarefa que não foi realizada de
forma satisfatória conduzindo ao incidente, sendo necessário identificar o local onde ocorreu o erro
(Bridge, Deck, Engine Room) e o operador que cometeu o erro (Captain, Pilot, First Officer, Bosun, AB,
etc.). A tarefa realizada incorrectamente é então escolhida de acordo com o local identificado, sendo
disponibilizada uma lista de possíveis tarefas para cada local.
A categoria error information descreve a interface homem-máquina: equipamento envolvido na
ocorrência do erro, tarefa específica realizada incorrectamente e informações não consideradas acerca
do navio. Assim para cada local do navio é disponibilizada uma lista de equipamento que pode ter
estado envolvido na ocorrência (Radar, GPS, ECDIS, etc. para a ponte, por exemplo) e uma lista de
actividades que está também de acordo com a tarefa identificada na categoria task error. Na tabela 3.2
é apresentada a lista de tarefas e actividades passíveis de codificação quando a ponte foi identificada
como sendo o local onde ocorreu o erro. Além disso é considerada a hipótese de que tenham sido
subestimadas informações respeitantes às características do navio, que podem ser fixas (dimensões,
características de manobrabilidade, propulsão, estabilidade, etc.) ou variáveis (calado, caimento,
condições de navegação, etc.). É ainda de referir que o sistema foi projectado para que a cada erro de
tarefa seja introduzido um local, um operador e um equipamento. Se o erro envolver a utilização de
dois equipamentos, por exemplo, devem ser criados dois erros de tarefa.
Bridge
User task User activities
Internal communication Communication between bridge officers, between officers and captain, between bridge and deck, etc.
External communication Communication between bridge and pilot, bridge and port employees, bridge and tug boat
Hand-over/Take-over Hand-over between captain and officers, between officers
Safety drills Safety drills not performed with care, etc.
Supervision Supervision of deck work, bridge tasks, engine room work
Navigation Radar navigation, satellite navigation, pilotage, dead reckoning, etc.
Traffic monitoring Look out, monitoring equipment regarding traffic, etc.
Voyage planning Execution, planning, manoeuvring, monitoring, etc.
Other tasks Other activities
Tabela 3.2 - Lista de tarefas e actividades disponíveis quando o erro ocorreu na ponte
A categoria causality level permite perceber se o nível de causalidade do erro cometido,
classificando o erro humano como:

29
Causal – a acção do operador foi a causa última, sem a qual o acidente não teria
ocorrido;
Contributivo – o erro contribuiu para o acidente, ocorrendo normalmente em adição ao
erro causal, mas sem o qual o acidente teria provavelmente ocorrido;
Compounding – erros que pioraram a situação e que ocorreram após o operador se
aperceber que a situação iria ocorrer;
Não contributivo – outros erros que se verificaram mas que não tiveram qualquer
influência no desenrolar da situação.
O cerne da metodologia TRACER é o processo cognitivo do operador e o contexto em que este
cometeu um erro no desempenho de uma determinada tarefa. Desta forma o contexto do operador
assume particular importância no processo de codificação sendo definido por cinco categorias: external
error mode, cognitive domain, internal error mode, psychological error mechanism e performance
shaping factors. Estas categorias encontram-se focadas no operador e permitem uma análise acerca
dos processos cognitivos que, em interacção com o equipamento, conduziram ao incidente.
A categoria External Error Mode (EEM) descreve a manifestação externa e observável do erro
actual ou potencial, sendo baseado no resultado do erro e independente do contexto ou de processos
cognitivos (Shorrock & Kirwan, 2002). A classificação dos modos de erro externos está dividida em três
áreas principais: selection and quality, timing and sequence e communication. Esta classificação
baseia-se na taxonomia de Swain e Guttmann que distinguia três categorias de erro: erros por omissão,
erros por comissão e actos estranhos. Dada a sua natureza pouco descritiva esta categoria é
frequentemente utilizada para efeitos de predição de erros.
A categoria Cognitive Domain foca-se no processo cognitivo do operador aplicado ao erro a
codificar. Esta categoria considera cinco domínios cognitivos:
Perception – prende-se com a recepção de informação e com a possibilidade do
operador não ter recebido a informação necessária de forma a poder processá-la.
Memory – considera que o operador recebeu a informação necessária mas não lidou
com a situação crítica percebida ou com a informação crucial da forma que devia por
não se lembrar de como o fazer correctamente ou por não saber o que fazer.
Decision-making – significa que o operador recebeu a informação crucial e processou-a
correctamente, no entanto chegou a uma conclusão incorrecta e por isso tomou uma
decisão errada.
Action – considera que o operador percebeu e processou a informação correctamente,
tomou uma decisão correcta mas cometeu um erro na implementação da acção.
Violation – diz respeito a uma violação deliberada das regras e regulamentos, o que
conduziu a um incidente.
A categoria Internal Error Mode (IEM) descreve qual o modo de erro interno em específico, isto
é, qual a função cognitiva que falhou e como falhou. A categoria Psychological Error Mode (PEM)
descreve a natureza psicológica do modo de erro interno, ou seja, que mecanismos psicológicos

30
conduziram à ocorrência do erro (Hofmann & Schröder-Hinrichs, 2013). Ambas as categorias estão
estritamente relacionadas com o domínio cognitivo seleccionado, pelo que a para cada domínio
cognitivo está associada uma lista limitada de IEMs e PEMs. Na figura 3.2 são apresentados os modos
de erro internos e psicológicos associados à memória.
Figura 3.2 - IEMs e PEMs relacionados com o domínio cognitivo "memória"
A categoria Performance Shaping Factors (PSF) classifica todos os factores que influenciam os
processos cognitivos do operador e o seu desempenho. Nesta categoria são considerados os seguintes
factores:
Personal factors (cognitive fatigue, bodily fatigue, stress, intoxication, emotional condition)
Aspects of communication/information (ambiguous information, lack of information, wrong
information, language problems, miscommunication)
Training/competence (lack of experience, lack of orientation, inadequate training/instruction)
Internal/external environment (weather, time of day, atmosphere on the vessel, business
climate)
Organisational factors (organisational culture, organisational structure, organisational policies,
operations, procedures, supervision, manning/staffing characteristics, time pressure)
Others
Tal como se pode verificar esta categoria permite identificar não só factores de desempenho
relacionados com o ambiente externo mas também factores relacionados com legislação marítima,
supervisão ou comunicação, pelo que a abordagem considera o elemento humano na vertente
operacional e organizacional.
A categoria de errror recovery foca-se nas barreiras existentes de forma a prevenir a ocorrência
de acidentes ou assistir na recuperação do erro. De acordo com Hollnagel (2004) podem ser
diferenciadas quatro tipos de barreiras:
Physical barriers – barreiras físicas ou materiais são barreias passivas cujo objectivo é a
protecção por bloqueio ou pela mitigação dos efeitos. Portas, paredes, capacetes, roupas de
31
segurança, portas corta-fogo ou vidros de segurança são alguns exemplos deste tipo de
barreira.
Functional barriers – os sistemas de barreiras funcionais funcionam na sua maioria quando
combinados com as barreiras físicas. Estas barreiras são activas ou estão preparadas para
funcionar na existência de uma condição específica. Estas barreiras podem ser, por exemplo,
fechaduras, palavras-passe, códigos de entrada, distância, extintores de incêndio ou air bags.
Symbolic barriers – as barreiras simbólicas trabalham indirectamente através do seu
significado, requerendo a interpretação de alguém. Este tipo de barreira está relacionado
sobretudo com instruções, procedimento, sinais, alarmes, avisos ou aprovações.
Incorporeal barriers – as barreiras imateriais carecem de forma material nas situações em que
devem ser aplicadas dependendo do operador para atingirem o seu propósito. Fazem parte
destas barreiras a orientação informal, como a ética moral ou social, e a orientação formal que
inclui regras, restrições, leis, proibições ou treino.
Assim torna-se claro que se a barreira for eficiente o acidente pode ser prevenido sendo
classificado como um quase-acidente (near-miss). No caso de se verificar uma falha da barreira o
acidente ocorrerá como consequência da propagação do erro.
3.2 Exemplo de Codificação
Neste tópico da dissertação será apresentado um exemplo de codificação de um dos acidentes
codificados a partir do respectivo relatório de investigação. Para proceder à codificação de acidentes
foram utilizados relatórios de investigação elaborados pelas agências nacionais do Reino Unido (MAIB
- Marine Accident Investigation Branch), do Canadá (TSB – Transportation Safety Board of Canada) e
dos Estados Unidos da América (NTSB – National Transportation Safety Board) sobre acidentes
ocorridos entre 2008 e 2013.
O exemplo de codificação apresentado diz respeito à investigação conduzida pela NTSB acerca
da colisão do navio tanque Overseas Reymar com um dos pilares (Echo Tower) da Bay Bridge que liga
são Francisco a Oakland, nos Estados Unidos da América. Serão apresentados todos os passos do
processo de codificação que se inicia, tal como todos os outros, com uma breve descrição do acidente
que é transcrita do relatório de investigação.
Narrativa:
On January 7, 2013, at 1118 local time, the 752-foot-long tanker Overseas Reymar allided with the
fendering system of the San Francisco‒Oakland Bay Bridge’s Echo tower. The vessel was outbound in
San Francisco Bay. No one was injured and no pollution was reported. Damage to the vessel was

32
estimated at $220,000, and the cost to repair the Echo tower’s fendering system was estimated at $1.4
million.
The National Transportation Safety Board determines that the probable cause of the Overseas
Reymar allision with the San Francisco–Oakland Bay Bridge was the pilot's decision to alter course from
the CD span to the DE span without sufficient time to avoid alliding with the bridge's Echo tower, and
the master's failure to properly oversee the pilot by engaging in a phone conversation during a critical
point in the transit.
General Information:
General Information
IMO vessel number 9275749
Vessel name Overseas Reymar
Date of occurrence 07/11/2013
Geographical position 37°48.49’ N, 122°21.34’ W
Vessel type Tanker
Vessel flag Marshall Islands
Vessel age 9
Gross tonnage 40038
Severity of occurrence Mitigated loss
Type of occurrence Collision
HMI Yes
Investigation report USA, MAB - 13/18 Tabela 3.3 - Informações gerais sobre o acidente com o Overseas Reymar
Tal como já foi referido a codificação pela metodologia TRACEr contempla nove etapas após ter
sido introduzida a informação geral acerca do acidente. De um modo geral estas etapas dizem respeito
à descrição do contexto do acidente, do contexto do operador e dos mecanismos de recuperação do
erro.
Neste acidente foram identificados dois erros sendo apresentados, separadamente, os dois task
errors agregados a esta ocorrência.
Task error 1
Este task error corresponde ao erro cometido pelo piloto que decidiu alterar o rumo do navio,
passando entre os pilares Delta e Echo em vez de manter a passagem entre os pilares Charlie e Delta.
O RACON do vão CD (transponder que emite um sinal que identifica o centro do vão e que é captado
pelo radar do navio) não estava a funcionar, o que conjuntamente com a reduzida visibilidade, motivou
a alteração de rumo. Contudo a decisão de alterar o rumo, para além de ter reduzido ainda mais a
visibilidade, não foi tomada com tempo suficiente de forma a evitar a colisão com o pilar Echo.

33
Figura 3.3 - San Francisco - Oakland Bay Bridge, informação relativa ao acidente com o Overseas Reymar
O erro a codificar trata-se de um erro de pilotagem, sub-tarefa que se insere na tarefa de
navegação. O piloto estava a utilizar o radar como material de auxílio à navegação. O erro é do tipo
causal, já que se este não tivesse ocorrido o acidente não tinha acontecido.
No contexto do operador inicia-se a codificação pela identificação do modo de erro externo tendo-
se manifestado uma acção na direcção errada que se inclui na categoria de selecção e qualidade. O
erro está associado a uma tomada de decisão, pelo que é esse o domínio cognitivo seleccionado.
O domínio cognitivo seleccionado foi o de decisão, uma vez que o operador recebeu a
informação, processou-a correctamente mas chegou a uma conclusão errada e por isso tomou uma
decisão incorrecta. O modo de erro interno, associado ao domínio cognitivo seleccionado, foi
identificado como uma decisão/planeamento executada demasiado tarde (“data from the vessel’s
voyage data recorder all indicate that by the time the pilot realized that the CD span RACON was out of
service, it was too late to safely transit through the DE span”).
O modo de erro psicológico identificado foi mindset, ou seja, a forma de pensar do operador teve
uma influência importante na tomada de decisão conduzindo a uma decisão errada.
Em termos de factores que influenciaram o desempenho do operador foram identificados a falta
de informação e as condições meteorológicas (“The pilot told investigators that because of the reduced
visibility and the absence of RACON information, he decided to change his path and instead transit
through the DE span”).
Task error 2
O segundo task error corresponde à falha do comandante que se encontrava a realizar uma
chamada telefónica, devendo estar a acompanhar o piloto durante aquela fase crítica da navegação.
Assim o erro foi cometido durante a pilotagem do navio, tarefa desempenhada no contexto de
navegação. Neste caso o operador é o comandante e não há qualquer equipamento técnico envolvido.
O erro codificado contribui para a ocorrência do acidente, pelo que é do tipo contributivo.

34
No contexto do operador é primeiramente identificado o modo de erro externo, que neste caso
se insere na categoria de selecção e qualidade, constituindo uma omissão. A percepção foi identificada
como domínio cognitivo, uma vez que o comandante não recebeu a informação necessária de forma a
poder lidar com a situação. Neste caso, por se encontrar a realizar chamadas telefónicas, o operador
não estava em posição de detectar que o navio já não se encontrava num rumo seguro. Desta forma o
modo de erro interno foi identificado como ausência de detecção.
O modo de erro psicológico associado ao domínio cognitivo da percepção é a distracção, já que
o operador, que deveria estar focado no auxílio ao piloto até entrar numa fase menos exigente da
manobra, estava distraído a efectuar chamadas telefónicas.
Tal como no primeiro erro codificado, as condições meteorológicas foram identificadas como
factor que influenciou o desempenho do operador e a ocorrência do acidente.
A transcrição seguinte resume todas as opções tomadas na codificação deste erro:
“The master’s phone conversations during a critical navigation phase―while the vessel was in a
confined, complex waterway in reduced visibility―degraded the safety of the vessel’s transit. Although
the pilot serves as the waterway expert, the master is the vessel expert. Masters and pilots, working
together, are integral to effective vessel team performance. They assist one another by verifying or
providing waterway and vessel information. By removing himself from the team because of his phone
conversations―which should have been postponed until the vessel entered a less demanding
phase―the master was unable to assist and oversee the pilot effectively. Consequently, he was not in
a position to recognize that the vessel was no longer on a safe course”.
Foram ainda identificadas, para ambos os erros, as barreiras que não foram bem-sucedidas e
que conduziram à materialização do acidente:
Distância e persistência (barreira funcional) - diz respeito à falha do RACON do vão CD que
esteve na base da mudança de rumo e cujo correcto funcionamento constituiria uma barreira
funcional que dificultaria a acção naquele espaço;
Instruções, procedimentos, precauções, condições, diálogos (barreira simbólica) – os
procedimentos e instruções que deveriam ter sido seguidos durante a navegação
(nomeadamente a utilização de outras ferramentas para alem do RACON), mas que estão
sujeitos à interpretação do operador, não foram suficientes para evitar a colisão;
Orientação formal (barreira imaterial) - que se justifica pelo facto de não terem sido cumpridas
as regras e procedimentos de treino, no que diz respeito à ausência do comandante durante
os factos relatados.
Na tabela 3.4 é apresentado um resumo da codificação dos erros identificados, que foram
inseridos na base de dados associados ao acidente em análise.

35
Task error 1 Task error 1
Task error
Location Bridge Bridge
Operator Pilot Captain
User task Navigation Navigation
Error information
User material Radar None
Subtask Pilotage Pilotage
Ship fixed information --- ---
Ship variable information --- ---
Causality level Type Causal Contributory
External Error Mode External error mode
Selection and quality
Selection and quality
Specific external error mode
Action in wrong direction
Omission
Cognitive domain Cognitive domain Decision-making Perception
Internal Error Mode
Internal error mode
Late decision/planning
No detection
Psychological Error Mode Psychological error mode
Mind set Distraction
Performance Shaping Factors
Personal factors --- ---
Aspects of communication/information
Lack of information ---
Training/competence --- ---
Internal/external environment Weather Weather
Organisational factors --- ---
Barriers not successful
Functional barriers not successful
Distance (too far away for being
touched by mistake),
persistence (dead-man button)
Distance (too far away for being
touched by mistake),
persistence (dead-man button)
Incorporeal barriers not successful
Formal guidance Formal guidance
Physical barriers not successful --- ---
Symbolic barriers not successful
Instructions, procedures, precautions, conditions, dialogues
Instructions, procedures, precautions, conditions, dialogues
Tabela 3.4 - Resumo da codificação dos erros detectados na codificação do acidente com o Overseas Reymar

36

37
4 Análise Estatística de acidentes marítimos
Neste capítulo da dissertação pretende-se executar uma análise estatística geral das
informações existentes na base de dados. Desta forma foram extraídos da base de dados todos os
dados existentes relativamente aos acidentes codificados, não só pelo IST mas também pelos restantes
parceiros do projecto. Uma vez que se pretendia que a análise incidisse sobre colisões e encalhes
numa vertente em que o erro ocorrido se relacionava com a interface homem-máquina, foram
considerados apenas os acidentes cuja codificação identificava estes parâmetros. Na data em que as
informações foram retiradas da base de dados existiam 70 colisões e 55 encalhes codificados, aos
quais estavam associados, respectivamente, 200 e 218 erros na tarefa.
Accidents Task errors
Collision 70 200
Grounding 55 218
Total 125 418 Tabela 4.1 - Número de acidentes e erros codificados
Posteriormente foram avaliados os dados relativos à gravidade da ocorrência, tanto para as
colisões como para os encalhes.
nnnnn
Severity of occurrence Collision Grounding
Total loss 2 2
Mitigated loss 68 49
Near-miss 0 4
Total 70 55 Tabela 4.2 - Dados relativos à gravidade das ocorrências codificadas
Foi também executada uma análise estatística para o operador responsável pela produção do
erro e para o material utilizado, tanto para as colisões como para os encalhes incluídos no estudo. As
figuras figura 4.1 e figura 4.2 apresentam a distribuição percentual dos 418 erros para os diferentes
operadores e equipamentos técnicos utilizados, respectivamente.

38
Figura 4.1 - Análise para os operadores responsáveis pela produção dos erros codificados
Figura 4.2- Análise dos equipamentos utilizados na produção dos erros codificados
Ao observar a figura 4.1 é possível verificar que o comandante, o primeiro-oficial e o piloto se
destacam entre os operadores responsáveis pela produção do erro. Em 28% das colisões e em 42.7%
dos encalhes o comandante é o operador responsável. Já o primeiro-oficial e o piloto são os operadores
responsáveis pelos erros cometidos em 24% e 16.5% das colisões e 19.7% e 11% dos encalhes,
respectivamente.
0%
5%
10%
15%
20%
25%
30%
35%
40%
45%
Operator
Soma deCollision
Soma deGrounding
0%
5%
10%
15%
20%
25%
30%
35%
40%
45%
AIS
Auto
pilo
t
BN
WA
S
De
cis
ion
su
pp
ort
syste
ms
EC
DIS
Ech
o S
oun
der
EC
S
Eng
ine
co
ntr
ol ro
om
contr
ols
Eng
ine
ro
om
co
ntr
ols
Exte
rnal e
qu
ipm
en
t
GP
S
Ha
nd
boo
ks
No
ne
Oth
er
co
mm
un
ication
de
vic
es
Oth
er
mate
ria
l
Pap
er
Ch
art
s
Passag
e P
lan
Ra
da
r
se
a c
hart
Ste
erin
g p
an
el
VH
F
Co
mm
un
icatio
n e
qu
ipm
en
t
Eng
ine
co
ntr
ol ro
om
pan
el
Main
en
gin
e
Oth
er
mate
ria
l
Bridge Engine Room
User Material
Collision
Grounding

39
Em termos do material utilizado na tarefa verifica-se, a partir da observação da figura 4.2, que
em 20.5% das colisões e 20.2% dos encalhes não há equipamento técnico envolvido. No entanto a
utilização do radar está envolvida em 40.5% das colisões e 12.8% dos encalhes.
Procedeu-se também à análise estatística das tarefas e actividades desempenhadas pelo
operador e que estiveram na génese do erro. A partir desta análise foram considerados apenas os
erros ocorridos na ponte uma vez que estes correspondem a 97.1% da totalidade dos erros observados,
sendo os restantes 2.9% registados na casa da máquina. A figura 4.3 pretende assim mostrar a
distribuição percentual das tarefas em que foram cometidos os erros na ponte, tanto no caso de se
tratar de uma colisão como no caso de se tratar de um encalhe. Já a figura 4.4 apresenta a distribuição
percentual das actividades de acordo com a tarefa para os erros registados.
Figura 4.3 - Distribuição percentual das tarefas desempenhadas pelos operadores
A partir da figura 4.3 é possível verificar que em situações de encalhe 35.7% dos erros são
cometidos em tarefas de navegação e 27.1% em tarefas relacionadas com a supervisão. Já para as
colisões verifica-se que 34.2% dos erros são cometidos em tarefas de monitorização do tráfego
marítimo e 31.1% em tarefas de navegação.
A figura 4.4 permite observar que no caso de se tratar de uma colisão 25.5% dos erros são
cometidos na monitorização de equipamento e 11.7% em pilotagem, actividades que se incluem nas
tarefas de monitorização de tráfego e navegação, respectivamente. No caso de se tratar de um encalhe
verifica-se que 16.7% dos erros ocorrem na supervisão das tarefas na ponte e 9.5% ocorrem em
pilotagem, actividades que se incluem nas tarefas de supervisão e navegação, respectivamente.
0%
5%
10%
15%
20%
25%
30%
35%
40%
Exte
rnal C
om
mu
nic
atio
n
Hand-o
ver,
take o
ver
Inte
rnal com
mu
nic
atio
n
Navig
atio
n
Oth
er
Su
perv
isio
n
Tra
ffic
Monitorin
g
Vo
yage p
lannin
g
Bridge
Task error
Collision
Grounding

40
Figura 4.4 - Distribuição percentual das actividades desempenhadas de acordo com a tarefa em realização na produção dos erros codificados
0%
5%
10%
15%
20%
25%
30%B
etw
ee
n P
ilots
Be
twe
en
Ve
ssels
Com
mu
nic
ation b
etw
een
ve
sse
ls
Off
ice
r a
nd p
ort
em
plo
yee
Oth
er
Pilo
t a
nd
Tu
gs
Ve
sse
l a
nd
VT
S
Ve
sse
l a
nd A
sho
re
Be
twe
en
Off
ice
rs
Be
twe
en
Off
ice
rs
Bri
dg
e T
ea
m a
nd S
up
.
Off
ice
r a
nd L
oo
ko
ut
Pilo
t a
nd
Bri
dg
e T
ea
m
Dea
d-r
eckon
ing
Oth
er
Pilo
tag
e
Rad
ar
Na
vig
ation
Sa
telli
te N
avig
atio
n
Oth
er
of
An
cho
ring
of
Bri
dg
e T
asks
of
Carg
o H
and
ling
of
Mo
ori
ng
Oth
er
Wa
tch
kee
pin
g
Lo
ok o
ut
Mon
ito
ring o
f C
ha
rts
Mon
ito
ring o
f E
qu
ipm
en
t
Oth
er
Ap
pra
isal
Exe
cu
tio
n, M
an
ou
ve
ring
Mon
ito
ring
Pla
nn
ing
External Communication Hand-over,takeover
Internal communication Navigation Other Supervision Traffic Monitoring Voyage planning
Bridge
Task error/User activities
Collision
Grounding

41
A figura 4.5 apresenta a distribuição percentual dos níveis de causalidade para todos os erros
codificados, sendo distinguidos os erros que resultaram em colisões dos que resultaram em encalhes.
A partir deste figura é possível verificar que para as colisões 46.4% dos erros cometidos são
contributivos e 45.9% dos erros são causais, pelo que a acção do operador foi a causa última da
ocorrência, No caso dos erros que resultaram em encalhes é possível verificar que 60.5% destes são
contributivos tendo a acção do operador contribuído para a ocorrência do acidente, e 36.7% dos erros
são causais pelo que na ausência destes os encalhes não teriam acontecido. Os erros do tipo
compounding e não contributivos assumem pouca relevância tanto para as colisões como para os
encalhes.
Figura 4.5 - Distribuição percentual do nível de causalidade registado para os diferentes erros codificados
Na figura 4.6 observa-se a distribuição percentual dos modos de erros externos para todos os
erros cometidos na ponte, de acordo com as três categorias distinguidas: selection and quality, timing
and sequence e communication.
Verifica-se que de um modo geral os EEM identificados concentram-se sobretudo na categoria
de selection and quality sendo que 65.3% da totalidade dos EEM, entre colisões e encalhes, são deste
tipo. Observando com maior detalhe é possível verificar que os principais EEM identificados para as
colisões são: omissão (24.5%), acção demasiado tarde (17.9%) e acção na direcção errada (13.8%).
Já para situações de encalhe as manifestações externas dos erros mais observadas são: omissão
(29.5%), acção na direcção errada (15.2%) e acção errada no objecto errado (10.5%).
0%
10%
20%
30%
40%
50%
60%
70%
Causal Contributory Compounding Non-Contributory
Bridge
Causality level
Collision
Grounding

42
Figura 4.6 - Distribuição dos EEMs para os erros codificados
Na figura 4.7 apresenta-se a distribuição percentual dos domínios cognitivos aplicados aos erros
codificados. Tal como já foi referido anteriormente deve ser seleccionado o domínio cognitivo em
questão - percepção, memória, decisão, acção ou violação – para que posteriormente se proceda à
identificação do modo de erro interno e dos modos de erro psicológicos que está directamente
relacionada com as funções cognitivas subjacentes a cada um dos domínios.
Figura 4.7 - Distribuição percentual dos domínios cognitivos identificados
0%
5%
10%
15%
20%
25%
30%In
com
ple
te in
form
ation
tra
nsm
itte
d
Incorr
ect in
form
atio
n r
ecoded
Info
rma
tio
n n
ot re
cord
ed
Info
rma
tio
n n
ot sought/obta
ined
Info
rma
tio
n n
ot tr
ansm
itte
d
Uncle
ar
info
rma
tio
n r
ecord
ed
Uncle
ar
info
rma
tio
n tra
nsm
itte
d
Not cle
ar
from
the r
eport
Actio
n in
wro
ng d
ire
ctio
n
Actio
n too
little
Actio
n too
mu
ch
Om
issio
n
Rig
ht actio
n o
n w
rong o
bje
ct
Wro
ng a
ctio
n o
n r
ight ob
ject
Wro
ng a
ctio
n o
n w
rong o
bje
ct
Actio
n too
early
Actio
n too
la
te
Actio
n too
lo
ng
Communication Notclear
Selection and quality Timing andSequence
Bridge
External error mode
Collision
Grounding
0%
5%
10%
15%
20%
25%
30%
35%
40%
45%
Action Decision-Making Memory Not clear fromthe report
Perception Violation
Bridge
Cognitive Domain
Collision
Grounding

43
Assim, através da figura 4.7, é permitido verificar que em 4.1% dos erros associados a situações
de colisão e em 3.3% dos erros associados a encalhes não foi possível identificar, a partir relatório de
análise do acidente, o domínio cognitivo em causa. A figura apresentada permite observar que é no
domínio da tomada de decisão que se verificam a maioria dos erros que conduziram a situações de
colisão (42.4%) ou a situações de encalhe (34.3%). No entanto é de realçar que uma elevada
percentagem de erros se manifesta no domínio da percepção, tanto para as colisões (28.6%) como
para os encalhes (31%).
Na figura 4.8 apresenta-se então a distribuição percentual dos modos de erro interno associados
a todos os erros codificados, o que está relacionado com os domínios cognitivos identificados
anteriormente.
Figura 4.8 - Distribuição dos IEMs identificados
Verifica-se assim que os principais modos de erro internos identificados são: fraca
decisão/planeamento - 17.9% para as colisões e 15.7% para os encalhes -, ausência de detecção -
17.4% para as colisões e 24.3% para os encalhes - e má projecção - 13.3% para as colisões e 10.5%
para os encalhes.
Posteriormente foram analisados os modos de erro psicológicos, também relacionados com o
domínio cognitivo seleccionado, tendo sido obtida a figura 4.9 que apresenta a distribuição dos PEM
tanto para colisões como para encalhes.
0%
5%
10%
15%
20%
25%
30%
Info
. no
t tr
an
sm
itte
d
Info
/data
entr
y e
rro
r
Non-p
erf
orm
ed a
ctio
n
Se
lectio
n e
rror
Tim
ing E
rro
r
Uncle
ar
Info
.
Uncle
ar
info
. R
ecord
ed
Uncle
ar
info
rma
tio
n r
ecord
ed
Late
de
cis
ion/p
lan
nin
g
Mis
pro
jectio
n
No d
ecis
ion/ p
lann
ing
Po
or
de
cis
ion/p
lan
nin
g
Fo
rget te
mp
ora
ry in
fo.
Fo
rget to
ask/s
hare
in
fo.
Fo
rget to
Mo
nito
r
Om
itte
d o
r la
te a
ctio
n
Not cle
ar
from
the r
eport
Late
de
tectio
n
Mis
hear
Mis
read
Mis
-see
No d
ete
ctio
n
Vis
ual m
isperc
eptio
n
Exceptio
nal V
iola
tio
n
Sa
bota
ge
Routine V
iola
tion
Action Decision-Making Memory Not clear Perception Violation
Bridge
Internal Error Mode
Collision
Grounding

44
Figura 4.9 - Distribuição percentual dos PEMs identificados
-
0%
2%
4%
6%
8%
10%
12%
14%
16%
Confu
sio
n
Dis
tractio
n/p
reoccupatio
n
Expecta
tio
n
Fa
tig
ue
Habit Intr
usio
n
Into
xic
atio
n
Ma
nual varia
bili
ty
None
Oth
er
Oth
er
slip
Com
pete
ncy p
roble
ms
Decis
ion fre
eze
or
overloa
d
Fa
ilure
to c
onsid
er
sid
e o
r lo
ng e
ffe
ct
Kn
ow
ledge/ C
om
pete
ncy p
roble
ms
Min
d s
et
Mis
inte
rpre
tatio
n
None
Oth
er
Ris
k c
ognitio
n failu
re
Dis
tractio
n
Fa
tig
ue
Me
mory
overlo
aded
Me
nta
l B
lock
None
Oth
er
Not cle
ar
from
the r
eport
Confu
sio
n
Dis
crim
inatio
n failu
re
Dis
tractio
n
Expecta
tio
n
None
Oth
er
Overload
ed
Tu
nnel V
isio
n
Vig
ilance
Expecta
tio
n
Fa
tig
ue
Into
xic
atio
n
Lack o
f know
ledge
None
Oth
er
Str
ess/p
ressure
Action Decision-Making Memory Not clear from thereport
Perception Violation
Bridge
Psychological Error Mode
Collision
Grounding

45
A partir da figura 4.9 é possível observar-se que os modos de erro psicológicos maioritariamente
identificados como estando associados a colisões são: falha cognitiva na avaliação do risco (13.8%),
falha na consideração de efeitos colaterais ou a longo prazo (11.7%) – modos de erro que se
manifestam no domínio da tomada de decisão - e distracção (11.7%) – PEM que se verifica no domínio
da percepção. Para os encalhes verifica-se que os modos de erro psicológicos com maior taxa de
identificação são: falha cognitiva na avaliação do risco (13.3%), vigilância (9.5%) – modo de erro
associado ao domínio da percepção - e falha na consideração de efeitos colaterais ou a longo prazo
(7.6%).
Seguidamente serão analisados os resultados obtidos para os factores de desempenho (PSF)
que se dividem em comunicação, ambiente interno/externo, factores organizacionais,
treino/competência e factores pessoais. Na figura 4.10 pode ser observada a distribuição percentual
destes factores segundo as categorias distinguidas anteriormente. É de realçar que a cada erro
codificado podem corresponder vários factores de desempenho da mesma ou de outra categoria.
Figura 4.10 - Distribuição percentual dos PSF identificados de acordo com as categorias definidas
Através da figura 4.10 verifica-se que os factores que mais influenciam o desempenho do
operador estão associados ao ambiente externo/interno (33.2% para as colisões e 25.9% para os
encalhes) ou a questões de natureza organizacional (22.9% para as colisões e 31.9% para os
encalhes).
Na figura 4.11 a distribuição destes factores pode ser observada com maior detalhe, uma vez
que são distinguidos vários factores em cada uma das categorias definidas na taxonomia.
0%
5%
10%
15%
20%
25%
30%
35%
Aspects
of
com
munic
atio
n/in
form
atio
n
Inte
rnal/exte
rnal environm
ent
Org
anis
atio
nal fa
cto
rs
Tra
inin
g/c
om
pe
tence
Pe
rsonal fa
cto
rs
Oth
ers
Performance Shapping Factors
Performance Shaping Factors - General
Collision
Grounding
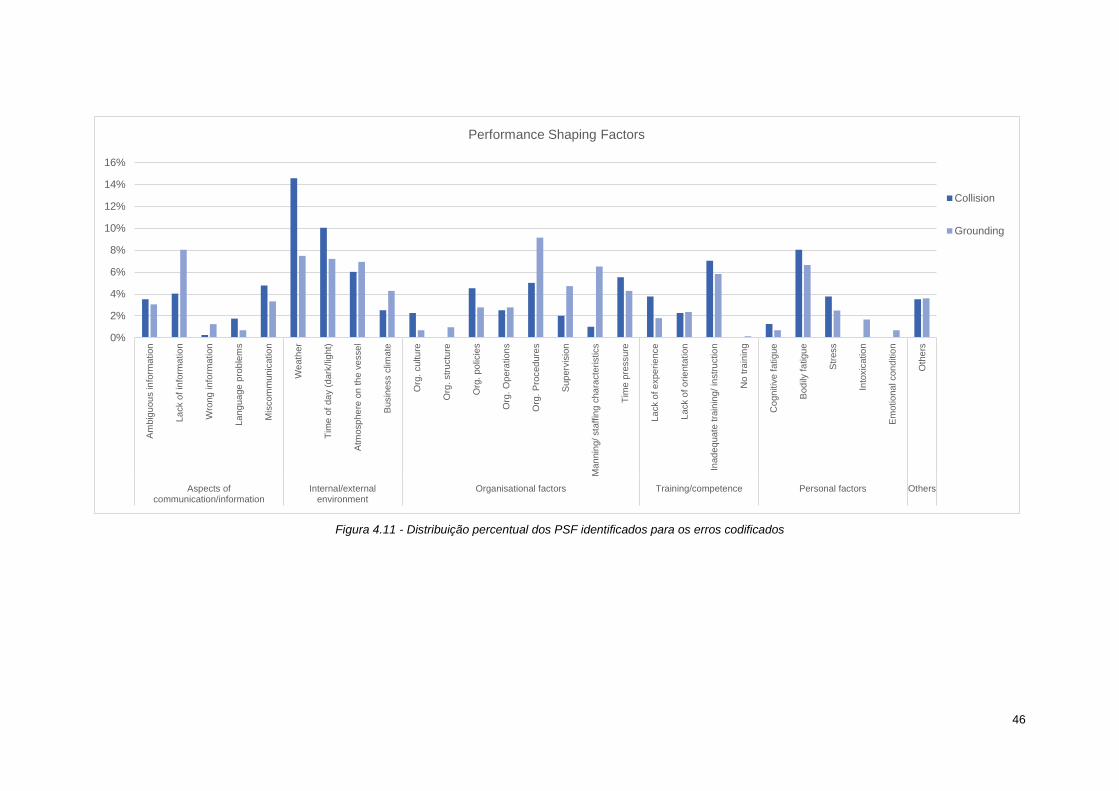
46
Figura 4.11 - Distribuição percentual dos PSF identificados para os erros codificados
0%
2%
4%
6%
8%
10%
12%
14%
16%
Am
big
uou
s in
form
ation
La
ck o
f in
form
atio
n
Wro
ng
info
rma
tion
La
ng
ua
ge
pro
ble
ms
Mis
com
munic
atio
n
We
ath
er
Tim
e o
f da
y (
dark
/lig
ht)
Atm
osp
he
re o
n th
e v
esse
l
Busin
ess c
limate
Org
. cultu
re
Org
. str
uctu
re
Org
. po
licie
s
Org
. O
pera
tion
s
Org
. P
roced
ure
s
Sup
erv
isio
n
Man
nin
g/ sta
ffin
g c
ha
racte
ristics
Tim
e p
ressure
La
ck o
f e
xpe
rie
nce
La
ck o
f o
rie
nta
tion
Inad
eq
uate
tra
inin
g/ in
str
uctio
n
No
tra
inin
g
Co
gn
itiv
e f
atig
ue
Bod
ily fa
tigu
e
Str
ess
Into
xic
atio
n
Em
otio
na
l con
ditio
n
Oth
ers
Aspects ofcommunication/information
Internal/externalenvironment
Organisational factors Training/competence Personal factors Others
Performance Shaping Factors
Collision
Grounding
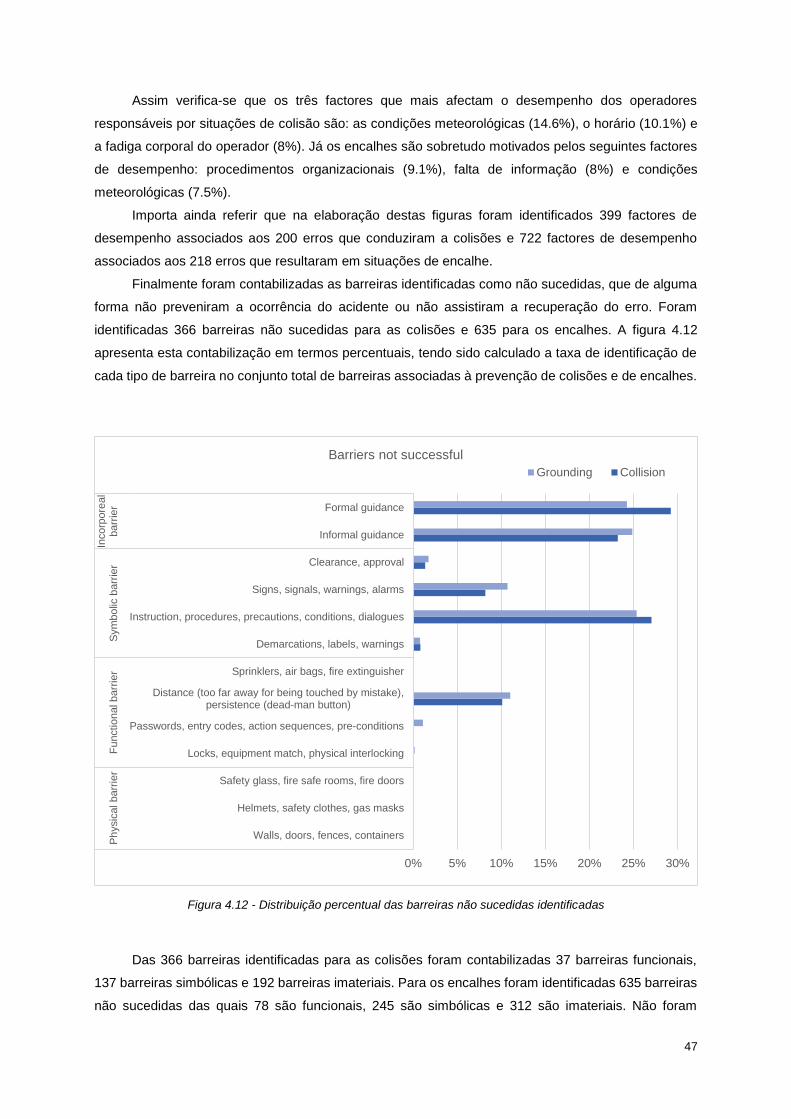
47
Assim verifica-se que os três factores que mais afectam o desempenho dos operadores
responsáveis por situações de colisão são: as condições meteorológicas (14.6%), o horário (10.1%) e
a fadiga corporal do operador (8%). Já os encalhes são sobretudo motivados pelos seguintes factores
de desempenho: procedimentos organizacionais (9.1%), falta de informação (8%) e condições
meteorológicas (7.5%).
Importa ainda referir que na elaboração destas figuras foram identificados 399 factores de
desempenho associados aos 200 erros que conduziram a colisões e 722 factores de desempenho
associados aos 218 erros que resultaram em situações de encalhe.
Finalmente foram contabilizadas as barreiras identificadas como não sucedidas, que de alguma
forma não preveniram a ocorrência do acidente ou não assistiram a recuperação do erro. Foram
identificadas 366 barreiras não sucedidas para as colisões e 635 para os encalhes. A figura 4.12
apresenta esta contabilização em termos percentuais, tendo sido calculado a taxa de identificação de
cada tipo de barreira no conjunto total de barreiras associadas à prevenção de colisões e de encalhes.
Figura 4.12 - Distribuição percentual das barreiras não sucedidas identificadas
Das 366 barreiras identificadas para as colisões foram contabilizadas 37 barreiras funcionais,
137 barreiras simbólicas e 192 barreiras imateriais. Para os encalhes foram identificadas 635 barreiras
não sucedidas das quais 78 são funcionais, 245 são simbólicas e 312 são imateriais. Não foram
0% 5% 10% 15% 20% 25% 30%
Walls, doors, fences, containers
Helmets, safety clothes, gas masks
Safety glass, fire safe rooms, fire doors
Locks, equipment match, physical interlocking
Passwords, entry codes, action sequences, pre-conditions
Distance (too far away for being touched by mistake),persistence (dead-man button)
Sprinklers, air bags, fire extinguisher
Demarcations, labels, warnings
Instruction, procedures, precautions, conditions, dialogues
Signs, signals, warnings, alarms
Clearance, approval
Informal guidance
Formal guidance
Ph
ysic
al barr
ier
Fu
nctio
nal barr
ier
Sym
bo
lic b
arr
ier
Incorp
ore
al
barr
ier
Barriers not successful
Grounding Collision

48
identificadas quaisquer barreiras físicas não sucedidas, tanto para as colisões como para os encalhes.
Na figura é possível verificar que a maioria das barreiras identificadas são do tipo instruções,
procedimentos, precauções, condições e diálogos (27% para as colisões e 25.4% para os encalhes),
orientação formal (29.2% para as colisões e 24.3% para os encalhes) e orientação informal (23.2%
para as colisões e 24.9% para os encalhes).
Neste momento, tendo já sido apresentadas as distribuições percentuais de todas as categorias
que integraram o processo de codificação, é efectuado um resumo final que permite os factores que
têm maior impacto na potencial ocorrência de uma colisão ou de um encalhe. Este resumo pode ser
observado na tabela 4.3. Para uma situação de encalhe são apresentados os dois domínios cognitivos
que mais se destacaram e os respectivos IEM e PEM, uma vez que os resultados não foram
consistentes entre as categorias. Isto é, embora a maioria dos erros ocorra no domínio da tomada de
decisão, o modo de erro interno que mais se destaca é a ausência de detecção que pertence ao domínio
da percepção.
Categories Collision Grounding
Operator Captain Captain
User material Radar No technical equipment involved
User task Traffic Monitoring Supervision
User activity Monitoring of equipment Supervision of Bridge tasks
Causality level Contributory Contributory
External Error Mode
Omission (Selection and quality)
Omission (Selection and quality)
Cognitive Domain Decision-making Perception Decision-making
Internal Error Mode Poor decision/planning No detection Poor decision/planning
Psychological Error Mode
Risk cognition failure Risk cognition
failure Risk cognition failure
Performance Shaping Factors
Weather (Internal/External environment)
Organisational Procedures (Organisational factors)
Barriers not successful Formal guidance
Instruction, procedures, precautions, conditions, dialogues
Tabela 4.3 – Resumo dos factores com maior impacto na possível ocorrência de colisões ou encalhes
Após ter sido efectuada a análise geral de todas as categorias inseridas na base de dados
pareceu relevante proceder a uma triagem de resultados para uma situação específica. Assim foi
definida uma situação em que se fixou o local de ocorrência do erro, o equipamento utilizado, a tarefa
e a sub-tarefa sendo posteriormente efectuada uma análise estatística das restantes categorias. Para
as categorias a fixar foram escolhidos os elementos cuja percentagem de identificação foi superior na
análise apresentada anteriormente. A tabela 4.4 apresenta as considerações aplicadas que
funcionaram como restrições à análise estatística efectuada posteriormente.

49
Fixed Categories
Collision Grounding
Location Bridge Bridge
User material Radar No technical equipment involved
User task Traffic Monitoring Supervision
User activity Monitoring of equipment Supervision of Bridge tasks
Tabela 4.4 - Condições definidas para colisões e encalhes em termos de localização do erro, equipamento e tarefa
Uma vez que no início desta análise são definidas diferentes condições para as colisões e para
os encalhes, estas situações serão tratadas separadamente. Seguidamente serão apresentadas
figuras relativos à análise das categorias de modo de erro externo (EEM), modo de erro interno (IEM),
modo de erro psicológico (PEM) e factores de desempenho (PSF) para as condições definidas na tabela
4.4.
As colisões consideradas na análise que se segue ocorreram na sequência de erros realizados
na ponte durante a realização de tarefas de monitorização de equipamento, incluídas no controlo de
tráfego marítimo, sendo identificado o radar como equipamento utilizado.
Figura 4.13 - Distribuição percentual dos EEMs para colisões que ocorreram nas condições estabelecidas
0%
5%
10%
15%
20%
25%
30%
35%
Info
rma
tio
n n
ot sought/obta
ined
Actio
n in
wro
ng d
ire
ctio
n
Actio
n too
little
Om
issio
n
Rig
ht actio
n o
n w
rong o
bje
ct
Wro
ng a
ctio
n o
n r
ight ob
ject
Actio
n too
la
te
Communication Selection and quality Timing and Sequence
Monitoring of Equipment
Traffic Monitoring
Radar
Bridge
EEM - Collision
Collision

50
Figura 4.14 - Distribuição percentual dos IEMs para colisões que ocorreram nas condições estabelecidas
Figura 4.15 - Distribuição percentual dos PEMs para colisões que ocorreram nas condições estabelecida
0%
5%
10%
15%
20%
25%
No
n-p
erf
orm
ed a
ctio
n
La
te d
ecis
ion
/pla
nn
ing
Mis
pro
jection
Poo
r d
ecis
ion
/pla
nn
ing
Forg
et
tem
pora
ry info
.
Forg
et
to M
onito
r
Om
itte
d o
r la
te a
ction
No
t cle
ar
fro
m t
he
re
po
rt
La
te d
ete
ction
No
de
tection
Vis
ual m
ispe
rce
ptio
n
Action Decision-Making Memory Not clearfrom thereport
Perception
Monitoring of Equipment
Traffic Monitoring
Radar
Bridge
Cognitive Domain and IEM - Collision
Collision
0%
5%
10%
15%
20%
25%
Man
ual vari
ab
ility
No
ne
Failu
re t
o c
on
sid
er
sid
e o
r lo
ng
effect
Mis
inte
rpre
tatio
n
Ris
k c
og
nitio
n f
ailu
re
Dis
traction
Fatig
ue
Oth
er
No
t cle
ar
fro
m t
he
re
po
rt
Dis
traction
Exp
ecta
tion
Oth
er
Tun
nel V
isio
n
Vig
ilance
Action Decision-Making Memory Notclearfromthe
report
Perception
Monitoring of Equipment
Traffic Monitoring
Radar
Bridge
Cognitive Domain and PEM - Collision
Collision

51
Figura 4.16 - Distribuição percentual dos PSF de acordo com as categorias principais para colisões que ocorreram nas condições estabelecidas
Figura 4.17 - Distribuição percentual dos PSF para colisões que ocorreram nas condições estabelecidas
0%
10%
20%
30%
40%
50%
Aspects ofcommunication/information
Internal/externalenvironment
Organisational factors Training/competence Personal factors Others
PSF categories - Collision
0%2%4%6%8%
10%12%14%16%18%20%
Am
big
uou
s in
form
ation
La
ck o
f in
form
atio
n
Wro
ng
info
rma
tion
La
ng
ua
ge
pro
ble
ms
Mis
com
munic
atio
n
We
ath
er
Tim
e o
f da
y (
dark
/lig
ht)
Atm
osp
he
re o
n th
e v
esse
l
Busin
ess c
limate
Org
. cultu
re
Org
. str
uctu
re
Org
. po
licie
s
Org
. O
pera
tion
s
Org
. P
roced
ure
s
Sup
erv
isio
n
Man
nin
g/ sta
ffin
gch
ara
cte
ristics
Tim
e p
ressure
La
ck o
f e
xpe
rie
nce
La
ck o
f o
rie
nta
tion
Inad
eq
uate
tra
inin
g/
instr
uction
No
tra
inin
g
Co
gn
itiv
e f
atig
ue
Bod
ily fa
tigu
e
Str
ess
Into
xic
atio
n
Em
otio
na
l con
ditio
n
Oth
ers
Aspects of communication/information Internal/external environment Organisational factors Training/competence Personal factors Others
PSF - Collision
Collision

52
Para as colisões identificadas como tendo ocorrido perante as condições estabelecidas na tabela
4.4 é possível observar, através da figura 4.13 uma maior identificação de omissões (33.3%) e acções
demasiado tarde (22.2%) como modos de erro externo.
A partir da figura 4.14 os principais modos de erro interno são: má projecção (22.2%) - no domínio
da tomada de decisão – detecção tardia (20%) e ausência de detecção (22%) – ambos no domínio da
percepção.
Já em termos de modos de erro psicológicos, a figura 4.15 permite uma maior identificação de
distracção (33.3%) – no domínio da percepção - e má interpretação (22.2%) – no domínio da decisão.
Na análise dos factores de desempenho, a figura 4.16 permite uma visão geral da distribuição
percentual dos vários factores identificados, segundo as categorias a que são associados. Assim é de
realçar a existência de 44.4% de factores associados ao ambiente interno e externo ao navio.
Posteriormente, efectuou-se uma análise mais detalhada, sendo possível identificar, a partir da figura
4.17, os factores de desempenho que mais se destacam: condições climatéricas (18.6%) e horário
(14.4%), ambos associados ao ambiente externo/interno. Num segundo plano surgem ainda, com uma
distribuição percentual de 9.3%, os seguintes factores: ambiente no navio (associado ao ambiente
externo/interno), pressão temporal (como factor organizacional), falta de experiência (associado à
categoria de treino/competência) e stresse (como factor pessoal).
Os encalhes considerados na análise que se segue ocorreram na sequência de erros realizados
durante a supervisão de tarefas na ponte, não estando envolvido qualquer equipamento técnico. Tal
como para as colisões, serão apresentados as figuras correspondentes à análise da distribuição
percentual dos EEMs, IEMs, PEMs e PSF.
Figura 4.18 - Distribuição percentual dos EEMs para encalhes que ocorreram nas condições estabelecidas
0%
10%
20%
30%
40%
50%
60%
Action in wrongdirection
Action too little Omission Wrong action onright object
Action too long
Selection and quality Timing andSequence
of Bridge Tasks
Supervision
None
Bridge
EEM - Grounding
Grounding

53
Figura 4.19 - Distribuição percentual dos IEMs para encalhes que ocorreram nas condições estabelecidas
Figura 4.20 - Distribuição percentual dos PEMs para encalhes que ocorreram nas condições estabelecidas
0%
10%
20%
30%
40%
50%
60%
Non-performedaction
Misprojection No decision/planning
ExceptionalViolation
IntendedViolation
RoutineViolation
Action Decision-Making Violation
of Bridge Tasks
Supervision
None
Bridge
Cognitive Domain and IEM - Grounding
Grounding
0%
5%
10%
15%
20%
25%
30%
Into
xic
atio
n
Fa
ilure
to c
onsid
er
sid
e o
r lo
ng e
ffe
ct
Mis
inte
rpre
tatio
n
Fatigue
Into
xic
atio
n
None
Str
ess/p
ressure
Action Decision-Making Violation
of Bridge Tasks
Supervision
None
Bridge
Cognitive Domain and PEM - Grounding
Grounding

54
Figura 4.21 - Distribuição percentual dos PSF de acordo com as categorias principais para encalhes que ocorreram nas condições
Figura 4.22 - Distribuição percentual dos PSF para encalhes que ocorreram nas condições estabelecidas
0%
5%
10%
15%
20%
25%
30%
35%
Aspects ofcommunication/information
Internal/externalenvironment
Organisational factors Training/competence Personal factors Others
PSF categories - Grounding
0%
2%
4%
6%
8%
10%
12%
Am
big
uous in
form
atio
n
Lack o
f in
form
atio
n
Wro
ng in
form
atio
n
Langua
ge p
roble
ms
Mis
com
munic
atio
n
Weath
er
Tim
e o
f day (
dark
/lig
ht)
Atm
osphere
on the v
essel
Bu
sin
ess c
lima
te
Org
. culture
Org
. str
uctu
re
Org
. polic
ies
Org
. O
pera
tio
ns
Org
. P
roced
ure
s
Su
perv
isio
n
Ma
nnin
g/ sta
ffin
gcha
racte
ristics
Tim
e p
ressure
Lack o
f experie
nce
Lack o
f orie
nta
tio
n
Inadequate
tra
inin
g/ in
str
uctio
n
No tra
inin
g
Cognitiv
e fatig
ue
Bo
dily
fatig
ue
Str
ess
Into
xic
atio
n
Em
otio
nal con
ditio
n
Oth
ers
Aspects ofcommunication/information
Internal/externalenvironment
Organisational factors Training/competence Personal factors Others
PSF - Grounding

55
Para os encalhes identificados como tendo ocorrido perante as condições estabelecidas na
tabela 4.4 é possível observar, através da figura 4.18, uma maior identificação de omissões (56.3%) e
acção errada no objecto correcto (18.8%) como modos de erro externo.
A observação da figura 4.19 permite verificar que os principais modos de erro interno são:
violações de rotina (56.3%) – no domínio das violações – má projecção (12.5%) e falta de
decisão/planeamento (12.5%) – ambos no domínio da tomada de decisão.
A figura 4.20 mostra que 25% dos modos de erro psicológicos estão associados ao domínio
da violação mas não correspondem a nenhuma das opções definidas na taxonomia. É possível ainda
uma maior identificação dos seguintes PEMs: fadiga (18.8%) e intoxicação (18.8%), ambos no domínio
da violação.
Na análise dos factores de desempenho, a figura 4.21 permite uma visão geral da distribuição
percentual dos vários factores identificados, segundo as categorias a que são associados. Assim é de
realçar a existência de 33.3% de factores organizacionais e 26.7% de factores associados ao ambiente
interno e externo ao navio. Posteriormente, efectuou-se uma análise mais detalhada, sendo possível
identificar, a partir da figura 4.22, os factores de desempenho que mais se destacam. Em primeiro
plano, com uma distribuição percentual de 11.1% surgem os seguintes factores: ambiente no navio e
horário (ambos associados ao ambiente externo/interno), stresse e condição emocional (como factores
pessoais). Num segundo plano surgem factores de desempenho de natureza organizacional -
características do pessoal/tripulação (8.9%), supervisão (6.7%) e pressão temporal (6.7%) –
associados à estrutura organizacional – e factores associados a treino/competência – falta de
experiência (6.7%).

56

57
5 As redes bayesianas na colisão de navios
A análise de acidentes que se efectuou nos capítulos anteriores demonstra a importância do
factor humano na ocorrência de acidentes com navios. Nesse sentido, a consideração do factor humano
numa análise quantitativa permitiria investigar medidas para reduzir as probabilidades de ocorrência de
acidentes ou consequências. Assim, no presente capítulo apresenta-se a aplicação de redes
bayesianas para a modelação de acidentes marítimos com integração dos factores humanos em
colisões.
Os modelos de redes bayesianas podem ser usados para: identificar todos os factores relevantes
que influenciam significativamente um acontecimento crítico; ilustrar numa rede as relações entre os
vários factores de influência de risco; calcular a probabilidade de ocorrência do acontecimento crítico;
identificar os factores contributivos mais importantes para a probabilidade de ocorrência do
acontecimento crítico.
A mais-valia das redes bayesianas é permitirem a aferição de determinados riscos de uma
estrutura gráfica de relações causa-efeito, utilizando dados históricos, opiniões de peritos ou uma
combinação de ambas (Antão, 2011).
Na presente dissertação foi utilizado o software GeNIe, que consiste numa ferramenta
informática para implementação gráfica de modelos probabilisticos e de decisão, tais como redes
bayesianas, diagramas de influência e modelos de equações estruturais. O GeNIe foi criado pelo
Decision Systems Laboratory of University of Pittsburg e é um editor gráfico que permite criar e
modificar modelos de rede (Kristiansen, 2010).
Neste capítulo apresentar-se-á uma breve introdução às redes bayesianas e a sua possível
aplicação em diferentes domínios. Pretende-se sobretudo descrever a aplicação das redes bayesianas
em colisões, tendo sido utilizado um modelo desenvolvido no âmbito do projecto CyClaDes onde se
incluem algumas das variáveis utilizadas na codificação de acidentes com a taxonomia TRACEr. Neste
sentido será apresentada a análise de sensibilidade do modelo.
5.1 Introdução às redes bayesianas
Uma rede Bayesiana (BN – Bayesian Network) é um gráfico acíclico constituído por nós e
relações de natureza probabilística que mostram a sua influência recíproca (Jansen, 2001). A
representação de uma rede bayesiana é feita através de um grafo direccionado no qual os nós
representam variáveis de um domínio e os arcos representam a dependência condicional entre as
variáveis.
Os modelos definidos permitem a avaliação da incerteza associada a um determinado
acontecimento a partir da aplicação do teorema de Bayes. Este teorema considera que a relação entre
as variáveis X1 e X2 é dada pela expressão:

58
𝑃(𝑋2|𝑋1) =𝑃(𝑋1|𝑋2) ∙ 𝑃(𝑋2)
𝑃(𝑋1)
A expressão representa a probabilidade do acontecimento X2 ser determinado estando já
estabelecida a probabilidade do acontecimento X1. Assim, de e um modo geral, uma rede bayesiana é
caracterizada por um conjunto 𝐺 = {𝑉, 𝐸} de variáveis e de relações de probabilidade condicionada, ou
respectivamente por um conjunto de variáveis 𝑉 = {𝑋1, 𝑋2, … , 𝑋𝑛} e de arcos 𝐸 𝑉 × 𝑉. As ligações
directas e acíclicas entre as vaiáveis definem a representação gráfica da rede bayesiana (Antão et al.,
2008).
Os nós que influenciam directamente ou antecedem um certo nó são denominados de pais desse
mesmo nó. Os nós que são influenciados condicionalmente por outras variáveis são definidos como
filhos. Variáveis pais que não influenciam qualquer outra variável (filho) possuem estados simplesmente
definidos pela designada probabilidade marginal. Por norma os estados de uma variável são definidos
pela Tabela de Probabilidade Condicional (TPC) que se obtém pela combinação entre os estados dos
nós pais e filhos.
Figura 5.1 - Exemplo de rede bayesiana
Como exemplo, olhemos para a rede bayesiana apresentada na figura 5.1. Para o nó Xn com
dois estados (s=sim, n=não) e dois pais (X1 e X3) com estados iguais, a tabela de probabilidade
condicional é dada por:
Xn
X1
s n
X3
s n s n
s p1 p2 p3 p4
n 1-p1 1-p2 1-p3 1-p4
Tabela 5.1 - Exemplo de tabela de probabilidade condicional
Na TPC cada coluna contém a probabilidade condicional de cada valor do nó para as
combinações de valores possíveis dos seus pais. O somatório das probabilidades apresentadas em
cada coluna deve ser 1. Acrescenta-se ainda que um nó sem pais tem apenas uma coluna, que
corresponde à probabilidade inicial de cada um dos estados definidos para esse mesmo nó.

59
Desta forma é possível, a partir da rede bayesiana definida, obter informação qualitativa – através
da estrutura da rede que identifica as relações causais entre as variáveis – e quantitativa – através das
tabelas de probabilidade condicional entre as variáveis, cujo resultado é dado pela expressão:
𝑃(𝑉) = ∏ 𝑃(𝑋𝑖|𝑝𝑎𝑟𝑒𝑛𝑡𝑠(𝑋𝑖))
𝑛
𝑖=1
Onde 𝑝𝑎𝑟𝑒𝑛𝑡𝑠(𝑋𝑖) representa o conjunto de variáveis pais de Xi. Deste modo, se for
suficientemente conhecida a estrutura da rede, em termos qualitativos, de forma a definir as relações
causa-efeito, é possível identificar as variáveis que sofrem a influência de um determinado contexto.
No entanto, o conhecimento quantitativo da rede depende da definição completa das tabelas de
probabilidade condicional, o que na maioria dos casos se revela de alguma dificuldade por não se
encontrarem disponíveis todas as informações necessárias à construção das tabelas.
Seguidamente serão apresentados dois exemplos de redes bayesianas simples, de modo a
descrever os mecanismos associados à utilização desta ferramenta.
O primeiro exemplo consiste numa rede com quatro nós, apresentada na figura 5.2, em que os
arcos entre os nós representam as relações causais ou de influência. Neste exemplo os nós
competência do vendedor e número de vendas influenciam a possível atribuição de prémio ao
vendedor. O nó número de vendas tem influência directa sobre o nó lucro da empresa.
Figura 5.2 - Rede bayesiana - Exemplo 1
Após ter sido definida a rede foram adicionadas as probabilidades de cada estado para as
variáveis sem pais, ou seja, para os nós Competência do vendedor e Número de vendas.
Posteriormente são definidas as probabilidades dos nós filhos que consistem numa combinação dos
estados dos nós pais, por exemplo, as probabilidades dos estados do nó Atribuição de prémio são o
resultado da combinação entre os estados dos nós Competência do vendedor e Número de vendas.
Na figura 5.3 apresentam-se as tabelas de probabilidade condicional a partir das quais é possível
observar, por exemplo, que a probabilidade da empresa ter um lucro elevado sabendo que o número
de vendas foi alto é de 0.9.
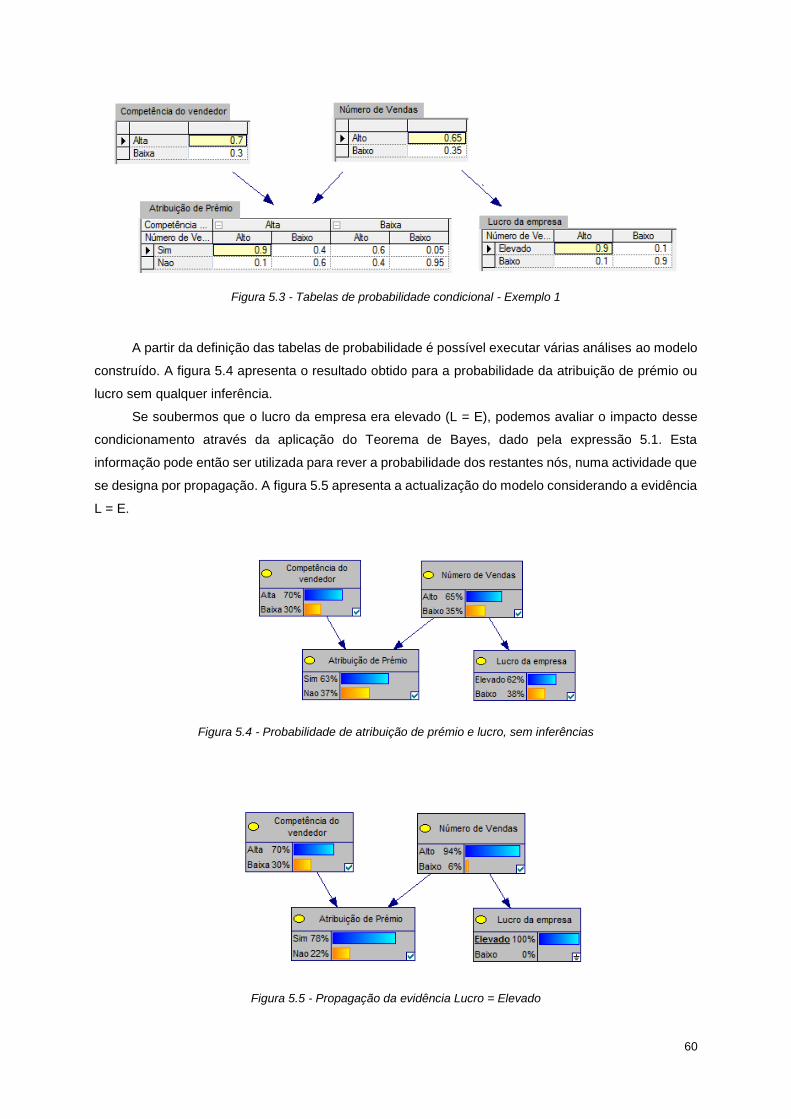
60
Figura 5.3 - Tabelas de probabilidade condicional - Exemplo 1
A partir da definição das tabelas de probabilidade é possível executar várias análises ao modelo
construído. A figura 5.4 apresenta o resultado obtido para a probabilidade da atribuição de prémio ou
lucro sem qualquer inferência.
Se soubermos que o lucro da empresa era elevado (L = E), podemos avaliar o impacto desse
condicionamento através da aplicação do Teorema de Bayes, dado pela expressão 5.1. Esta
informação pode então ser utilizada para rever a probabilidade dos restantes nós, numa actividade que
se designa por propagação. A figura 5.5 apresenta a actualização do modelo considerando a evidência
L = E.
Figura 5.4 - Probabilidade de atribuição de prémio e lucro, sem inferências
Figura 5.5 - Propagação da evidência Lucro = Elevado

61
A observação de que L = E conduziu a um aumento de 45% da probabilidade do número de
vendas ser alto (de 0.65 para 0.94). Por outro lado, a probabilidade de se verificar a atribuição de prémio
ao vendedor sofreu também um aumento de 0.63 para 0.78.
A probabilidade posterior do nó número de vendas dada a evidência no nó lucro pode, tal como
já foi mencionado, ser facilmente calculada pela aplicação do Teorema de Bayes. Assim a probabilidade
posterior do número de vendas ser alto (NV = A) é dada por:
𝑃(𝑁𝑉 = 𝐴|𝐿 = 𝐸) =𝑃(𝐿 = 𝐸|𝑁𝑉 = 𝐴) ∙ 𝑃(𝑁𝑉 = 𝐴)
𝑃(𝐿 = 𝐸)
Das tabelas de probabilidade condicional (ver figura 5.3) é simples verificar que a probabilidade
do lucro ser elevado dado que se observa um alto número de vendas é 0.9. Da mesma forma observa-
se que a probabilidade de o número de vendas ser alto é de 0.65. O denominador representa a
probabilidade marginal do lucro ser elevado e pode ser obtida através da seguinte expressão:
𝑃(𝐿 = 𝐸) = 𝑃(𝐿 = 𝐸|𝑁𝑉 = 𝐴) ∙ 𝑃(𝑁𝑉 = 𝐴) + 𝑃(𝐿 = 𝐸|𝑁𝑉 = 𝐵) ∙ 𝑃(𝑁𝑉 = 𝐵)
= 0.9 × 0.65 + 0.1 × 0.35
= 0.62
Assim é agora possível obter a probabilidade posterior pretendida:
𝑃(𝑁𝑉 = 𝐴|𝐿 = 𝐸) =0.9 × 0.65
0.62= 0.944
Este valor é igual ao obtido com a rede bayesiana, tal como era esperado. É de realçar que a
facilidade do cálculo executado se prende com a não complexidade do exemplo, em que se apresentam
poucos nós e poucas dependências entre estes.
O segundo exemplo que aqui se apresenta retracta um sistema de fornecimento de energia
constituído por um motor, uma fonte de combustível principal para o motor e cabos eléctricos que
distribuem a energia aos consumidores. Além disso é instalada uma fonte de combustível de reserva
com capacidade limitada. O sistema de fornecimento de energia falha se o consumidor fica privado da
recepção de energia, o que acontece se cabos eléctricos falharem ou o motor parar, que só ocorre se
for interrompido o fornecimento de combustível. Desta forma, para que o sistema funcione normalmente
e o consumidor receba energia, tanto o motor como os cabos eléctricos terão que funcionar. A rede
bayesiana que representa o sistema é apresentada na figura 5.6.
Após ter sido definida a rede foram adicionadas as probabilidades de cada estado para todas
as variáveis apresentadas. Na figura 5.7 apresentam-se as tabelas de probabilidade condicional para
todos os nós do exemplo.

62
Figura 5.6 - Rede Bayesiana - Exemplo 2
Figura 5.7 - Tabelas de probabilidade condicional - Exemplo 2
Neste exemplo os nós Engine e Power Supply apresentam estados binários, sendo o nó Engine
uma And-Gate – uma vez que o sistema falha se ambas as fontes de combustível, a principal e a de
reserva, falharem – e nó Power Supply uma Or-Gate – já que o sistema falha se, entre o motor e os
cabos eléctricos, se verificar a falha de um ou ambos os elementos.
A partir da definição das tabelas de probabilidade é possível executar várias análises ao modelo.
A figura 5.8 apresenta o resultado obtido para a probabilidade de falha do sistema de fornecimento de
energia sem qualquer inferência.

63
Figura 5.8 - Probabilidade do Power Supply, sem inferências
Figura 5.9 - Propagação da evidência Power Supply = Fail
As redes bayesianas possuem várias vantagens, sendo que uma delas é a capacidade de
fornecer um suporte de diagnóstico, isto é, se soubermos que o sistema de fornecimento de energia
falhou (PS = F) podemos utilizar esta informação para rever a probabilidade dos restantes nós. Ou seja,
ao condicionar o estado de fornecimento de energia à falha, podemos propagar essa informação na
rede e avaliar a causa ou os factores mais influentes. A figura 5.9 apresenta a propagação da evidência
PS = F no modelo e a actualização das probabilidades dos restantes nós.
Neste caso, ao assumirmos a falha do sistema, é possível verificar que a causa mais provável
é a falha dos cabos de distribuição de energia cuja probabilidade de falha aumentou para 99%. A falha
dos cabos de distribuição, embora o motor esteja a funcionar (a probabilidade de falha deste é baixa
porque o sistema de abastecimento de combustível é redundante), conduz à interrupção do
fornecimento de energia.
64
Este exemplo é um pouco mais complexo pelo que não são aqui apresentados os cálculos
referentes à aplicação do teorema de Bayes, no entanto podem sempre efectuar-se várias inferências
ao modelo com o objectivo de avaliar o impacto nas restantes variáveis. Nos casos mais complexos,
para qual quer conjunto de variáveis aleatórias, a probabilidade de qualquer estado pode ser calculada
a partir das probabilidades condicionais usando a expressão:
𝑃(𝑥1, … , 𝑥𝑛) = ∏ 𝑃(𝑥𝑖|𝑥1, … , 𝑥𝑖−1)
𝑛
𝑖=1
O grau de complexidade dos modelos está directamente ligado à disponibilidade de dados que
suportem o preenchimento das tabelas de probabilidade condicional. Tal como seria de esperar, o
modelo de rede bayesiana utilizado nesta dissertação é mais complexo já que se pretende incluir o
papel do operador na avaliação do risco associado às operações com navios.
5.2 Aplicação das redes bayesianas no contexto marítimo
Nas últimas décadas a IMO reconheceu a importância de adoptar procedimentos de avaliação
de riscos no seu processo de decisão, tendo desenvolvido e implementado a Avaliação Formal de
Segurança (FSA – Formal Safety Assessment), com vista a aumentar a segurança marítima, no que
diz respeito à protecção da vida humana, do ambiente e da propriedade. O uso e a eficácia da
modelação por redes bayesianas foi também avaliado pela IMO como parte do FSA, nomeadamente
na quantificação da eficácia de algumas medidas de mitigação do risco (IMO, 2006). Nesse documento,
a IMO realizou uma avaliação da eficácia do ECDIS (Electronic Chart Display and Information System),
do ENC (Electronic Navigational Charts) e do piloto automático. Os modelos bayesianos desenvolvidos
permitiram estimar a probabilidade de ocorrência e a taxa de mortalidade associada a diferentes tipos
de acidentes.
Contudo, os trabalhos desenvolvidos com a aplicação de modelos bayesianos no sector marítimo
é ainda muito reduzido quando comparado com outros sectores industriais. Além disso, a maioria dos
estudos desenvolvidos baseiam-se na opinião de peritos de forma a estimar as probabilidades dos nós,
sendo que cada nó tem um número reduzido de estados.
Em Clausen et al. (2001) foi utilizada uma base de dados contendo informação sobre 85000
navios para desenvolver uma rede que aferisse as relações entre os elementos principais de um navio
na fase inicial de projecto. Neste trabalho pretendia-se optimizar as características principais do navio
através da utilização de redes bayesianas.
Or & Kahraman (2002) abordaram o problema do tráfego marítimo em áreas congestionadas,
recorrendo às redes bayesianas de forma a analisar e simular os factores que contribuíram para
acidentes no Canal de Istambul. O desenvolvimento da rede bayesiana permitiu estimar as
probabilidades condicionais de acidentes marítimos, através da simulação de de condições que

65
correspondiam às características, regras e comportamentos típicos de navegação no canal. Os
resultados obtidos apontam para um aumento no número de acidentes em condições que envolvem
um maior número de travessias, uma maior densidade de tráfego, uma elevada percentagem de navios
com maior comprimento e condições meteorológicas adversas.
Antão et al. (2008) desenvolveram um estudo com o objectivo de desenvolver um modelo de
acidentes marítimos baseado em redes bayesianas, em que se inclui o tipo de acidente, a causa e as
consequências. Para tal recorreu-se à base de dados da Direcção-Geral da Autoridade Marítima
(DGAM), que inclui os registos de 857 acidentes ocorridos entre 1997 e 2006. Neste estudo as tabelas
de probabilidade condicional foram contruídas com base em dados reais que constituem a base de
dados, não sendo por isso baseada em opiniões de peritos o que permite reduzir a incerteza que,
normalmente, se associa a esse tipo de procedimento. A análise bayesiana desenvolvida permitiu,
perante determinados cenários, estimar as probabilidades condicionais de acidentes marítimos em
águas portuguesas. Os resultados deste estudo mostram que é possível desenvolver um modelo
simples, baseados em dados reais, de forma a analisar a contribuição dos principais factores de risco
e apoiar a tomada de decisão.
Helle et al. (2011) propõem um modelo bayesiano que visa avaliar a eficácia de diferentes
estratégias de combate a derrames de crude no golfo da Finlândia de forma a minimizar as
consequências negativas em seis espécies locais. O modelo desenvolvido permite criar diferentes
cenários de acidentes e avaliar o desempenho de diferentes acções de combate em condições de
incerteza, podendo ser usado como apoio à tomada de decisões.
Poderiam ser ainda referidos algumas aplicações de redes bayesianas desenvolvidas por Pedrali
et al. (2004), Trucco et al. (2006), Norrington et al. (2008) ou Zhang et al. (2013) em diferentes contextos
do sector marítimo.
Os trabalhos desenvolvidos para a aplicação de redes bayesianas com modelação de factores
humanos no contexto marítimo é ainda reduzido e bastante recente.
Trucco et al. (2008) utilizaram um modelo bayesiano na fase preliminar de projecto de
embarcações de alta velocidade de forma a quantificar os erros humanos e organizacionais na análise
de risco efectuada. A abordagem consiste num método de unificação de árvores de falha e redes
bayesianas, desenvolvido com base em colisões em mar aberto. Este estudo permitiu identificar
correlações entre os acontecimentos básicos contemplados nas árvores de falha para o cenário de
colisão, e as condições operacionais e organizacionais consideradas no modelo bayesiano.
Antão & Guedes Soares (2010) desenvolveram um modelo, baseado noutro dos mesmos autores
(Antão & Guedes Soares, 2009) no qual que introduziram dados da altura significativa de ondas, de
forma a avaliar as contribuições do erro humano em acidentes com diferentes condições de mar e a
contribuição de ondas de grande amplitude na ocorrência de determinados tipos de acidentes. Os
resultados obtidos mostram que elevadas alturas significativas de onda estão associadas à ocorrência
de acidentes específicos em determinadas épocas do ano. As conclusões obtidas neste estudo
apontam para a necessidade de implementar procedimentos de vigilância rigorosos de forma a que,
em estados de mar adversos, a navegação de navios de pesca seja efectivamente restrita. Por outro

66
lado é referida a necessidade de divulgação de informação acerca dos perigos subjacentes à
navegação de embarcações de recreio em épocas de elevado tráfego costeiro, que tipicamente se
observa no período de Verão. Além disso os resultados obtidos identificam a falta de experiência das
tripulações das embarcações de recreio como factor causal determinante à ocorrência de acidentes
com estes navios.
Ventikos & Vagias (2010) estudaram a aplicação de redes bayesianas na modelação da fadiga
humana no contexto marítimo. O modelo desenvolvido tem como objectivo avaliar a fadiga dos
elementos da tripulação causada pelo ambiente de trabalho, no que diz respeito às responsabilidades,
à condição física e sobretudo à qualidade do repouso acumulado. A garantia da qualidade do sono,
que está directamente relacionada com o horário de trabalho, e o bom funcionamento biológico são
considerados aspectos essenciais para a redução da fadiga humana. Neste caso as tabelas de
probabilidade condicional foram preenchidas com recurso a dados relativos à segurança rodoviária,
nomeadamente, em relação à fadiga dos motoristas.
A modelação do erro humano por redes bayesianas no sector marítimo foi, em alguns casos,
levada a cabo com recurso a métodos de fiabilidade humana, cujos valores de referência adoptado são
provenientes de contextos fora do sector marítimo. Martins & Maturana (2013) aplicaram as redes
bayesianas à operação de um navio tanque, tendo como foco a quantificação da contribuição do factor
humano em cenários de colisão. Para esse efeito utilizaram o THERP, que usa árvores de falha e
considera os factores de desempenho (PSF) na definição das probabilidades do erro humano,
permitindo a identificação das tarefas e actividades que mais contribuem para a ocorrência de colisões
de modo a propor medidas de mitigação.
Na presente dissertação foi utilizada uma rede bayesiana, desenvolvida com base na taxonomia
TRACEr – um método de identificação do erro humano – sendo que, neste caso, as tabelas de
probabilidade condicional foram preenchidas com recurso a dados da literatura e à opinião de peritos.
5.3 Modelo para colisões
Na presente secção será apresentada a rede bayesiana estudada, que foi desenvolvida no
âmbito do projecto CyClaDes com o objectivo de incluir adequadamente o elemento humano na
avaliação do risco. Nesse desenvolvimento destacam-se dois aspectos relevantes: a influência
quantificável do operador no risco associado a uma operação e a predição do desempenho humano
em operações críticas. No contexto da análise quantitativa foi desenvolvida uma metodologia que
incorporasse o factor humano e a avaliação dos factores contributivos. Esta abordagem baseia-se na
elaboração de um modelo com dois segmentos interactivos: o dinâmico e o estático. A parte dinâmica
foi desenvolvida a partir da utilização das redes bayesianas, integrando elementos do TRACEr, e foca-
se no cálculo da probabilidade de colisão. Esta probabilidade é inserida na parte estática que permite
o cálculo do risco humano, económico e ambiental. O modelo considera o desempenho humano em
67
condições normais, anormais e de operação crítica e implementa tarefas específicas que derivam da
análise desenvolvida para os erros nas tarefas desempenhadas em colisões.
No âmbito do projecto foram discutidas as diferentes abordagens para considerar o elemento
humano na análise de risco no que diz respeito à modelação estática e dinâmica, bem como na
consideração de aspectos de foco na interface homem-máquina. Foi decidido combinar as duas
abordagens e usar a modelação estática para a descrição dos cenários depois do acidente e a
modelação dinâmica para a fase que antecede o acidente e que inclui a análise dos factores que a ele
conduziram.
Nesta dissertação será abordado apenas o modelo dinâmico que foi desenvolvido de acordo
com a metodologia das redes bayesianas. O modelo dinâmico destina-se a quantificar e prever o
desempenho do operador em cenários específicos e a probabilidade de colisão (nós alvo).
A rede bayesina desenvolvida apresenta uma dupla utilidade, uma vez que permite a obtenção
da probabilidade de colisão e do desempenho humano de acordo com duas perspectivas: a reactiva –
segundo a qual deve manter-se o número de acidentes o menor possível, pelo que se foca no que
correu mal de forma a prevenir o risco – e a proactiva – segundo a qual o número de resultados positivos
ou aceitáveis deve ser o maior possível, focando-se no que correu bem e sustentando o desempenho
diário aceitável. Assim o modelo desenvolvido possui a capacidade de avaliar medidas reactivas (inputs
com influência negativa nos nós alvo) ou proactivas (inputs com influência positiva nos nós alvo) através
da análise de diferentes cenários.
O ponto de partida para o desenvolvimento do modelo foi a especificação de uma sequência de
acontecimentos com início na operação normal do navio que poderia terminar com uma colisão ou
manter a sua normalidade. Foram distinguidas três fases diferentes que caracterizam a situação em
relação ao tempo de análise e reacção disponível o que, por conseguinte, influencia o desempenho do
operador:
Operação normal – identificação do potencial rumo de colisão com recurso, por exemplo,
ao radar;
Operação anormal – embora limitado, o tempo disponível ainda permite identificar o
rumo de colisão (se este não tiver sido identificado antes) e desempenhar acções
correctivas (se essa acção não tiver sido desempenhada antes) ou corrigir esta acção
(se esta não foi desempenhada correctamente na situação normal);
Operação crítica – onde ainda é possível realizar uma acção de última hora, executando
uma manobra que evite a colisão.
Se a acção de última hora não for sucedida, ou se o a tripulação do navio não estiver consciente do
rumo de colisão até ao último momento, a colisão ocorre.
A figura ilustra a rede bayesiana inicial, onde se apresentam as variáveis agrupadas por cores e
as ligações de dependência entre estas. Esta rede foi a base do desenvolvimento da rede final, tendo
sido incorporados elementos do método TRACEr, o que se traduziu num aumento de detalhes e por
isso uma maior complexidade.

68
Figura 5.10 - Principais grupos da Rede Bayesiana desenvolvida
A partir da observação da figura 5.10 é possível distinguir os seguintes grupos de variáveis:
Colisão (a amarelo) – é o nó alvo desta rede, sendo o seu principal objectivo o cálculo
da probabilidade posterior;
Nós relacionados com a detecção (a azul escuro) – estes nós descrevem se o operador
detectou ou não o perigo, quer por meios visuais quer pela utilização de equipamentos
de navegação;
Nós relacionados com o equipamento fora da ponte (a laranja) – estes nós descrevem a
possibilidade dos equipamento falharem, bem como se as rotinas de manutenção dos
sistemas técnicos são seguidas;
Comunicação externa (a vermelho) – este nó descreve se o oficial recebeu ou não um
aviso de alerta externo;
Nós relacionados com o human centred design (a azul claro) – estes nós descrevem se
a ponte foi projectada de forma a possibilitar que o operador realize as suas tarefas de
forma adequada. Reflectem o arranjo da ponte, a interface com o utilizador e as
condições ergonómicas.
Nós relacionados com a colisão (a verde claro) – estes nós descrevem a distância até à
colisão e o tipo de encontro entre os navios.
Nós relacionados com o operador (a violeta) – estes nós reflectem a atitude do operador
para a tarefa pré-definida a realizar e indicam as funções pela quais este é responsável.
O desenvolvimento da rede passou por várias etapas de consolidação, sendo adicionados
alguns elementos e retirados outros, sempre com base na abordagem genérica apresentada

69
anteriormente que se manteve aproximadamente intacta. Além disso, foram adicionados os factores de
desempenho considerados na codificação de acidentes pela taxonomia TRACEr nas suas diferentes
categorias: factores pessoais, organizacionais, de comunicação/informação, de treino/competência e
de ambiente externo/interno.
A rede bayesiana final, apresentada na figura 5.11, é constituída por grupos de nós que se
caracterizam em seguida.
Figura 5.11 - Rede Bayesiana final detalhada
1. Colisão (a amarelo)
O principal objectivo deste nó é o cálculo da probabilidade posterior de colisão. A rede
bayesiana permite, por um lado, identificar os factores que influenciaram a ocorrência da
colisão ou, por outro, identificar os factores que contribuíram para evitar o acidente, já que estes
factores não são necessariamente os mesmos.

70
2. Nós relacionados com os factores pessoais (a azul claro)
Estes nós (condição emocional, stresse, fadiga e intoxicação) descrevem os factores que
influenciam o elemento humano a um nível pessoal assumindo uma importância significativa
para a condição física e emocional da tripulação.
3. Nós relacionados com a organização (a azul escuro)
Estes nós descrevem o conjunto de operações, regras, procedimentos e opiniões que
representam a acção da organização sob o ponto de vista da segurança. De modo resumido,
os factores organizacionais incluem o clima de segurança e a cultura da organização.
4. Nós relacionados com o treino (a cinzento)
Estes nós descrevem o nível de treino, a experiência e a orientação que caracteriza a tripulação
do navio.
5. Nós relacionados com as condições de trabalho (a verde escuro)
São os nós que descrevem os factores que descrevem o ambiente de trabalho, numa
perspectiva interna e externa. Assim considera-se que tanto as condições meteorológicas como
a atmosfera no navio contribuem para moldar o ambiente onde o elemento humano
desempenha as suas funções.
6. Nós relacionados com a comunicação (a vermelho)
Estes nós dizem respeito aos factores de comunicação interna do navio, o que inclui os factores
que determinam a qualidade da comunicação entre os membros da tripulação (falta ou má
comunicação, comunicação errada ou problemas de linguagem).
7. Nós relacionados com a detecção dos sistemas de navegação (a rosa)
Estes nós que descrevem se o operador detectou o perigo através da utilização de
equipamentos de auxílio à navegação, onde se inclui o radar, o ECDIS e as cartas de
navegação.
8. Nós relacionados com a detecção visual (a lilás)
Nós que descrevem se o operador detectou o perigo por meios visuais.
9. Nós relacionados com os equipamentos fora da ponte (a laranja)
Nós que descrevem se os equipamentos externos à ponte podem falhar, bem como se as
rotinas de manutenção destes equipamentos foram seguidas.
10. Nó relacionado com a comunicação externa (a verde fluorescente)
Nó que descreve se o operador recebeu um sinal de alerta externo.

71
11. Nós relacionados com o HCD (a azul pálido)
Estes nós descrevem se a ponte foi projectada de forma a possibilitar que o operador realize
as suas tarefas de forma adequada. Consideram o arranjo da ponte, a interface com o utilizador
e as condições ergonómicas.
12. Nós relacionados com a colisão (a verde claro)
Estes nós descrevem a distância até à colisão e o tipo de encontro entre os navios.
13. Nós relacionados com o operador (a violeta)
Estes nós reflectem a atitude do operador para a tarefa pré-definida a realizar e indicam as
funções pela quais este é responsável. Neste grupo inclui-se a competência, o desempenho, a
tarefa/responsabilidade, a detecção, a avaliação e a acção do operador.
No anexo B é possível observar, de forma mais detalhada, os nós definidos e os seus estados. Deve
ainda referir-se que as probabilidades iniciais de cada estado foram definidas com base em revisões
de literatura ou opiniões de peritos, o que permitiu também o preenchimento das tabelas de
probabilidade condicional, que se apresentam no mesmo anexo conjuntamente com a fonte de
informação utilizada.
5.4 Resultados
Nesta secção serão apresentados alguns resultados obtidos com o modelo descrito anteriormente,
nomeadamente, a partir de acidentes reais incluídos na base de dados. Nesse sentido foram estudados
dois relatórios de investigação, sendo seleccionadas as evidências a adicionar sucessivamente. A
probabilidade de colisão inicial, isto é, a probabilidade de colisão sem inferências, é de 0.0045. As
evidências são então introduzidas sucessivamente e a cada nova introdução é revista a probabilidade
de colisão. A probabilidade posterior de colisão é assim obtida após a inclusão de todas as evidências
no modelo.
5.4.1 Estudo de caso 1
Este estudo de caso corresponde à colisão do navio Cosco Hong Kong com o navio Zhe Ling Yu Yun
135, cujo relatório de investigação produzido pelo MAIB foi utilizado para a codificação com a
metodologia TRACER, sendo parte integrante da base de dados analisada. As evidências que se
apresentam em seguida derivam da narrativa apresentada no Anexo C:
Time of day: Night (e1)
Weather: Storm_Rain (e2)
Visibility: Greater than 1 nm (e3)
Mis-see: Yes (e4)
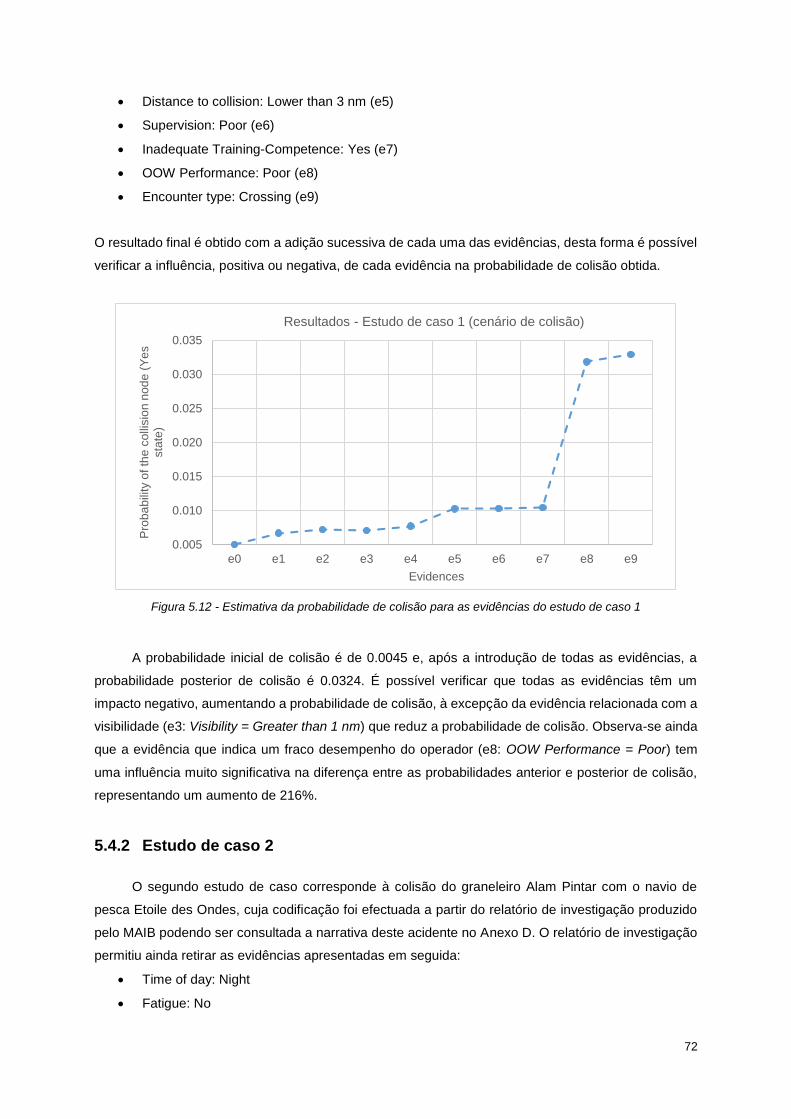
72
Distance to collision: Lower than 3 nm (e5)
Supervision: Poor (e6)
Inadequate Training-Competence: Yes (e7)
OOW Performance: Poor (e8)
Encounter type: Crossing (e9)
O resultado final é obtido com a adição sucessiva de cada uma das evidências, desta forma é possível
verificar a influência, positiva ou negativa, de cada evidência na probabilidade de colisão obtida.
Figura 5.12 - Estimativa da probabilidade de colisão para as evidências do estudo de caso 1
A probabilidade inicial de colisão é de 0.0045 e, após a introdução de todas as evidências, a
probabilidade posterior de colisão é 0.0324. É possível verificar que todas as evidências têm um
impacto negativo, aumentando a probabilidade de colisão, à excepção da evidência relacionada com a
visibilidade (e3: Visibility = Greater than 1 nm) que reduz a probabilidade de colisão. Observa-se ainda
que a evidência que indica um fraco desempenho do operador (e8: OOW Performance = Poor) tem
uma influência muito significativa na diferença entre as probabilidades anterior e posterior de colisão,
representando um aumento de 216%.
5.4.2 Estudo de caso 2
O segundo estudo de caso corresponde à colisão do graneleiro Alam Pintar com o navio de
pesca Etoile des Ondes, cuja codificação foi efectuada a partir do relatório de investigação produzido
pelo MAIB podendo ser consultada a narrativa deste acidente no Anexo D. O relatório de investigação
permitiu ainda retirar as evidências apresentadas em seguida:
Time of day: Night
Fatigue: No
0.005
0.010
0.015
0.020
0.025
0.030
0.035
e0 e1 e2 e3 e4 e5 e6 e7 e8 e9
Pro
ba
bili
ty o
f th
e c
olli
sio
n n
od
e (
Ye
s
sta
te)
Evidences
Resultados - Estudo de caso 1 (cenário de colisão)

73
Lack of experience: Yes
Supervision: Poor
Organisational policies: Poor
OOW Competence: Low (acção insuficiente para evitar a colisão)
Visibility: Greater than 1 nm
Radar detection: Yes
Visual misperception: Yes
External communication: No
Na figura apresentam-se os resultados obtidos para a probabilidade do estado “Yes” do nó alvo
“Collision”, a partir da introdução sucessiva de cada uma das evidências indicadas acima.
Figura 5.13 - Estimativa da probabilidade de colisão para as evidências do estudo de caso 2
Tal como no primeiro estudo de caso a probabilidade inicial de colisão é de 0.0045 e, após a
introdução de todas as evidências, a probabilidade posterior de colisão é 0.0194. É possível verificar
que todas a maioria das evidências têm um impacto negativo, aumentando a probabilidade de colisão.
As evidências relacionadas com a fadiga (e2: Fatigue = No), a visibilidade (e7: Visibility = Greater than
1 nm) e a detecção através do radar (e8: Radar detection = Yes), por outro lado, têm um impacto
positivo reduzindo a probabilidade de colisão.
Verifica-se ainda que a evidência que identifica uma fraca competência do operador (e6: OOW
Competence = Low), que neste caso é motivada pela acção insuficiente para evitar a colisão, causa o
impacto mais significativo na diferença entre as probabilidades anterior e posterior de colisão,
representando um aumento de 107%. As evidências relacionadas com o horário nocturno (e1: Time of
day = Night) e com a falta de comunicação externa (e10: External communication = No) apresentam
uma influência de cerca de 37% na variação da probabilidade de colisão.
0.005
0.007
0.009
0.011
0.013
0.015
0.017
0.019
0.021
e0 e1 e2 e3 e4 e5 e6 e7 e8 e9 e10
Pro
ba
bili
ty o
f th
e c
olli
sio
n n
od
e (
Ye
s
sta
te)
Evidences
Resultados - Estudo de caso 2 (cenário de colisão)

74
5.5 Análise de sensibilidade
Nesta secção da dissertação pretende-se proceder a uma análise de sensibilidade do modelo
utilizado. Esta análise terá como objectivo avaliar a influências de algumas variáveis seleccionadas em
dois nós: “Collision” e “OOW Performance”. Neste processo as evidências são estudadas em separado,
sendo considerados dois cenários probabilísticos básicos:
Estado “0” – este estado representa a probabilidade inicial de cada evidência
Pior cenário – a evidência é considerada como um acontecimento certo, pelo que a
probabilidade da evidência é igual a 1
Com base nestes cenários a resposta dos nós “Collision” e “OOW Performance” foi identificada
e estudada tendo sido produzidas figuras para ambos os nós, nos diferentes cenários em análise. Para
efectuar esta análise foram consideradas diferentes medidas. A primeira abordagem consiste em
introduzir uma evidência num estado particular de uma variável. Isto corresponde à alteração da
probabilidade anterior do estado (SPo) para 1, de forma a simular o “pior cenário” da variável. Desta forma
a variação da probabilidade do estado é ∆𝑥𝑖 = (1 − 𝑆𝑃𝑜).
O efeito de ∆𝑥𝑖 na probabilidade da variável em estudo (“Collision” e “OOW Performance”) é
então avaliada através da rede bayesiana desenvolvida. Posteriormente foram criadas figuras para a
análise de sensibilidades para as diferentes variáveis em estudo para os casos abordados.
No caso em que a variável alvo é a colisão, a probabilidade prévia de colisão (𝑃𝐶,𝑖𝑜 ) é alterada
para 𝑃𝐶,𝑖𝑒 pelo efeito da introdução da evidência (e) na variável (i), cuja probabilidade de estado sofre o
incremento ∆𝑥𝑖.
Através do cálculo da diferença entre a probabilidade final e inicial de colisão ∆𝑃𝐶,𝑖 = (𝑃𝐶,𝑖𝑒 − 𝑃𝐶,𝑖
𝑜 )
foram consideradas as seguintes medidas de sensibilidade:
𝑆𝑖 =∆𝑃𝐶,𝑖
𝑃𝑐𝑜
(1)
𝑆𝑖 =∆𝑃𝐶,𝑖
∆𝑥𝑖
(2)
A equação (1) estabelece a variação normalizada da probabilidade de colisão dada pelo rácio
ente a variação de probabilidade ∆𝑃𝐶,𝑖 e a probabilidade inicial de colisão (𝑃𝐶𝑜). A equação (2) representa
a relação ente a variação de probabilidade de colisão e a variação da probabilidade de estado ∆𝑥𝑖 após
ser introduzida a evidência. A equação (2) traduz assim a derivada parcial de 𝑃𝑐 em torno da variável
(i). Estas medidas de sensibilidade serão igualmente aplicadas para o nó alvo “OOW Performance”.
Foi ainda considerada uma medida de sensibilidade alternativa, baseada em Hänninen & Kujala
(2012). Esta abordagem consiste em calcular a variação máxima da probabilidade do nó alvo que a
variável (i) pode produzir. Por outras palavras, a probabilidade do estado a observar é igualada a 1

75
enquanto que a probabilidade dos restantes estados da variável passa a ser nula. A diferença entre as
probabilidades de colisão produzidas por cada estado da variável Y é calculada por:
∆𝑃𝐶𝑚𝑎𝑥 = max
jP ("Collision" = "Yes"|Y = yi) − min
kP ("Collision" = "Yes"|Y = yk) (3)
Onde 𝑦𝑗 e 𝑦𝑘 correspondem aos estados da variável Y que produzem a maior e a menor probabilidade
de colisão, respectivamente. A diferença ∆𝑃𝐶𝑚𝑎𝑥 descreve a variação máxima da probabilidade de
colisão que uma determinada variável pode produzir. De outra forma, ∆𝑃𝐶𝑚𝑎𝑥 pode ser vista como a
variação da probabilidade de colisão produzida por uma variável entre o seu pior estado (o estado que
induz a maior probabilidade de colisão) e o seu melhor estado (o estado que induz a menor
probabilidade de colisão). Assim esta variação máxima pode ser representada por:
∆Pcmax = PCworst state − PC
best state (4)
5.5.1 Selecção de variáveis
Para proceder à análise de sensibilidade do modelo da rede bayesiana foram seleccionada vinte
e quatro variáveis. A maioria destas variáveis foram escolhidas com base nos resultados obtidos com
a análise estatística da base de dados, executada no capítulo 4 desta dissertação. No capítulo 4 foram
analisadas 70 colisões, anteriormente codificadas segundo a taxonomia TRACEr. A análise da base de
dados permitiu a identificação das principais variáveis envolvidas num cenário de colisão para
categorias como: equipamento técnico, IEM, PEM e PSF. Após terem sido identificados os factores
dentro destas categorias que mais influenciaram a ocorrência de colisões foi analisada a sua possível
aplicabilidade à rede bayesiana em estudo.
A partir da análise da figura 4.2 o radar foi identificado como o equipamento técnico envolvido
em 41.33% das colisões.
Na figura 4.8 pode ser observada a distribuição percentual dos modos de erro internos para as
colisões codificadas. Sabendo que no desenvolvimento da rede bayesiana apenas se considerou a
categoria percepção, todas variáveis seleccionadas a partir desta figura estão incluídas nesta categoria.
Desta forma foram seleccionadas as seguintes variáveis: ausência de detecção (17.35%), detecção
tardia (8.67%) e má percepção visual (1.53%).
Considerando os resultados apresentados na figura 4.9 é possível identificar os principais modos
de erro psicológicos associados às colisões codificadas, no entanto nenhum desses factores foi
considerado no desenvolvimento da rede bayesiana, pelo que os resultados obtidos não foram
utilizados neste ponto.
Os factores de desempenho têm um importante papel na rede bayesiana, em particular, e nesta
dissertação em geral, pelo que a maioria das variáveis seleccionadas pertencem a esta categoria. A
base de dados identificou 398 factores de desempenho associados às colisões codificadas e a figura

76
4.11 apresenta uma distribuição percentual destes factores, agrupados por categorias. Contudo apenas
alguns destes factores foram considerados no desenvolvimento da rede bayesiana, pelo que os PSF
seleccionados foram os seguintes:
Condições meteorológicas (14.57%), horário (10.05%) e ambiente no navio (6.03%) – factores
associados ao ambiente interno/externo;
Má comunicação (4.77%), falta de informação (4.02%) e problemas de linguagem (1.76%) –
aspectos de comunicação/informação;
Pressão temporal (5.53%), procedimentos (5.03%), políticas organizacionais (4.52%),
operações (2.51%), cultura organizacional (2.26%), supervisão (2.01%) e características do
pessoal/tripulação (1.01%) – factores organizacionais;
Treino/competência inadequados (7.04%), falta de experiência (3.77%), falta de orientação
(2.26%) – factores associados a treino/competência;
Fadiga corporal (8.04%), stresse (3.77%) e fadiga cognitiva (1.26%) – factores pessoais.
Adicionalmente foram ainda considerados três factores que não se incluem na base de dados mas que
foram inseridos na rede bayesiana: detecção do sistema de navegação, visibilidade e familiarização. A
tabela sumariza todas as variáveis consideradas no processo de análise de sensibilidade para o nó
alvo “Collision”.
TRACER Category Variables
Material Radar detection
IEM
Late detection
No detection
Visual misperception
PSF - Aspects of communication /
information
Lack of information
Miscommunication
Language Problems
PSF - Internal/external environment
Weather
Time of day
Atmosphere on the vessel
PSF - Organizational factors
Time pressure
Procedures
Organizational policies
Operations
Organizational culture
Supervision
Manning/Staffing characteristics
PSF - Training / competence
Inadequate training
Lack of experience/orientation
PSF - Personal factors Fatigue
Stress
--- Navigation System detection
--- Visibility
--- Familiarisation Tabela 5.2 - Variáveis seleccionadas para a análise de sensibilidade do nó "Collision"

77
Para o nó alvo “OOW Performance” além destas variáveis foi ainda adicionada a variável “HMI
Problems”. A interface homem-máquina pode ser descrita como o ponto de comunicação entre o
utilizador e o equipamento, sendo que problemas na interface homem-máquina consistem na
interrupção (ou redução de qualidade) do fluxo de informação entre estes.
5.5.2 Resultados da Análise de Sensibilidade
A análise de sensibilidade apresentada anteriormente foi aplicada para três objectivos diferentes:
analisar a influência das variáveis no nó “Collision”, analisar a influência das variáveis no nó “OOW
Performance” e ainda analisar a resposta do nó “Collision” à introdução de evidências de um caso de
estudo específico.
5.5.2.1 “Collision” – Caso Genérico
A figura 5.14 apresenta a sensibilidade da variável de saída “collision” à introdução de cada
uma das variáveis seleccionadas nos estados “negativos”. A figura apresenta em simultâneo as
diferentes medidas de sensibilidade, descritas anteriormente - ∆𝑃𝐶 , ∆𝑃𝐶 𝑃0⁄ e ∆𝑃𝐶 ∆𝑥𝑖⁄ – que foram
avaliadas com base na variação da probabilidade de colisão ∆𝑃𝐶 induzida pela introdução da evidência
(e) no modelo. Pode observar-se que as medidas de sensibilidade fornecem resultados semelhantes e
termos da importância relativa de cada variável na variação da probabilidade de colisão.
A figura 5.15 apresenta a variação máxima na probabilidade de colisão produzida pelas
variáveis no seu “pior” estado (o estado que produz o maior valor de 𝑃𝐶) e no seu “melhor” estado
(aquele que induz o menor valor de 𝑃𝐶).

78
Figura 5.14 - Análise de sensibilidade para o nó "Collision"
Figura 5.15 - Diferença máxima na probabilidade do estado “Yes” do nó “Collision” produzida pelas variáveis no seu "pior" e "melhor" estado
0.0 2.0 4.0 6.0 8.0
0.000 0.010 0.020 0.030 0.040
Language problems = Yes
Miscommunication = Yes
Lack of information = Yes
Org. culture = poor
Org. policies = poor
Operations = poor
Procedures = poor
Staffing characteristcs = poor
Time pressure = yes
Supervision = Poor
Lack of experience/orientation = yes
Inadequate training = Yes
Late detection = Yes
No detection = Yes
Atmosphere on the vessel = poor
Stress = High
Fatigue = Yes
Visual misperception = Yes
Weather = fog
Visibility = lower_than_1nm
Radar detection = No
Time of day = night
Familiarisation = not_familiar
Navigation system detection = No
ΔPc/ΔXi
ΔPc ΔPc/ P0
Sensitivity Analysis
ΔPc/ΔXi
ΔPc
ΔPc/P0
0.000 0.005 0.010 0.015 0.020 0.025 0.030 0.035
Lack of informationLanguage Problems
MiscommunicationProcedures
Staffing characteristicsTime pressure
Org. cultureOrg. policies
OperationsSupervision
Lack of experience/orientationInadequate training
Late detectionNo detection
FatigueAtmosphere on the vessel
StressVisual misperception
VisibilityWeather
Radar detectionTime of day
FamiliarisationNavigation system detection
ΔPc max

79
A análise da Figura 5.15 permite verificar que a variável “detecção do sistema de navegação” é
a que produz a maior variação na probabilidade de colisão (∆𝑃𝐶𝑚𝑎𝑥 = 0.033). A familiarização e o horário
(diurno/nocturno) são variáveis que produzem uma variação considerável da probabilidade de colisão,
0.0063 e 0.0034, respectivamente. Os aspectos relacionados com a comunicação, factores
organizacionais e de treino/competência apresentam uma baixa influência na variação da probabilidade
de colisão.
Os resultados obtidos na análise de sensibilidade do modelo para o nó alvo “Collision” podem
ser observados em detalhe no Anexo E.1.
5.5.2.2 “OOW Performance” – Caso Genérico
Foram desenvolvidos cálculos semelhantes para a variável de saída “OOW Performance”, sendo os
resultados obtidos apresentados na figura 5.16. Esta figura apresenta em simultâneo a diferença entre
a probabilidade final e inicial do estado “poor” da variável “OOW Performance” (∆𝑃𝑂𝑂𝑊 𝑝𝑜𝑜𝑟 𝑝𝑒𝑟𝑓), o rácio
entre este valor e a probabilidade inicial de um mau desempenho (∆𝑃𝑜𝑜𝑤 𝑝𝑜𝑜𝑟 𝑝𝑒𝑟𝑓 𝑃0 ⁄ ) e o rácio entre o
mesmo valor e ∆𝑥𝑖, que corresponde à variação da probabilidade de estado após ter sido introduzida
uma determinada evidência (∆𝑃𝑜𝑜𝑤 𝑝𝑜𝑜𝑟 𝑝𝑒𝑟𝑓 ∆𝑥𝑖⁄ ).
Figura 5.16 – Análise de sensibilidade para o estado “Poor” da variável “OOW Performance“
0.00 0.05 0.10 0.15 0.20 0.25
0.000 0.010 0.020 0.030
Radar detection = NoFamiliarisation = not_familiar
Language problems = YesMiscommunication = YesWrong information = Yes
Late detection = YesNo detection = YesProcedures = poor
Time pressure = yesOrg. culture = poor
Org. policies = poorOperations = poor
Staffing characteristcs = poorSupervision = poor
Lack of experience/orientation = yesInadequate training = Yes
Navigation system detection = NoVisual misperception = Yes
HMI Problems = YesTime of day = night
Atmosphere on the vessel = poorFatigue = Yes
Visibility = lower_than_1nmWeather =fogStress = High
ΔP oow poor perf/ΔXi
ΔP oow poor perf ΔP oow poor perf/ P0
Sensivity Analysis
ΔP_oow perf/ΔXi
ΔP_oow perf
ΔP_oow perf / Po
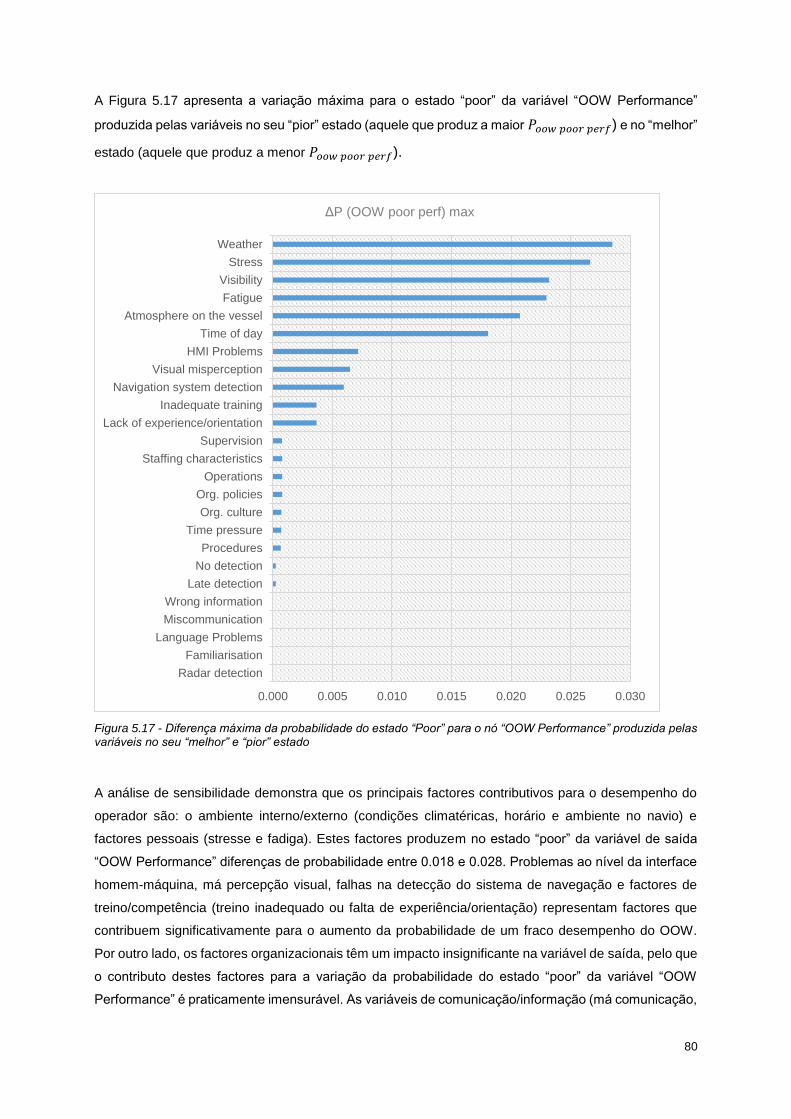
80
A Figura 5.17 apresenta a variação máxima para o estado “poor” da variável “OOW Performance”
produzida pelas variáveis no seu “pior” estado (aquele que produz a maior 𝑃𝑜𝑜𝑤 𝑝𝑜𝑜𝑟 𝑝𝑒𝑟𝑓) e no “melhor”
estado (aquele que produz a menor 𝑃𝑜𝑜𝑤 𝑝𝑜𝑜𝑟 𝑝𝑒𝑟𝑓).
Figura 5.17 - Diferença máxima da probabilidade do estado “Poor” para o nó “OOW Performance” produzida pelas variáveis no seu “melhor” e “pior” estado
A análise de sensibilidade demonstra que os principais factores contributivos para o desempenho do
operador são: o ambiente interno/externo (condições climatéricas, horário e ambiente no navio) e
factores pessoais (stresse e fadiga). Estes factores produzem no estado “poor” da variável de saída
“OOW Performance” diferenças de probabilidade entre 0.018 e 0.028. Problemas ao nível da interface
homem-máquina, má percepção visual, falhas na detecção do sistema de navegação e factores de
treino/competência (treino inadequado ou falta de experiência/orientação) representam factores que
contribuem significativamente para o aumento da probabilidade de um fraco desempenho do OOW.
Por outro lado, os factores organizacionais têm um impacto insignificante na variável de saída, pelo que
o contributo destes factores para a variação da probabilidade do estado “poor” da variável “OOW
Performance” é praticamente imensurável. As variáveis de comunicação/informação (má comunicação,
0.000 0.005 0.010 0.015 0.020 0.025 0.030
Radar detection
Familiarisation
Language Problems
Miscommunication
Wrong information
Late detection
No detection
Procedures
Time pressure
Org. culture
Org. policies
Operations
Staffing characteristics
Supervision
Lack of experience/orientation
Inadequate training
Navigation system detection
Visual misperception
HMI Problems
Time of day
Atmosphere on the vessel
Fatigue
Visibility
Stress
Weather
ΔP (OOW poor perf) max

81
informação errada e problemas de linguagem), familiarização e detecção (detecção tardia ou ausência
desta) não têm qualquer impacto na probabilidade da variável de saída.
Os resultados obtidos na análise de sensibilidade do modelo para o nó alvo “OOW Performance”
podem ser observados em detalhe no Anexo E.2
5.5.2.3 “Collision” – Estudo de caso 3
Ainda no capítulo da análise de sensibilidade do modelo foi conduzido um estudo da variação da
probabilidade de colisão num cenário específico. Este cenário foi proposto no âmbito do projecto
CyClaDes e diz respeito a um acidente real com o navio de carga Joshu Maru. A narrativa principal do
acidente em causa é apresentada no Anexo F.
As evidências aplicadas à rede bayesiana derivam da narrativa apresentada e do relatório de
investigação do caso de estudo, e são as seguintes:
Time of day: Night (e1)
Lack of experience/orientation (e2)
Weather: Windy (e3)
Procedures: Poor (e4)
Visual Misperception: Yes (e5)
Visibility: Greater than1 nm (e6)
Radar detection: No (e7) – Not directly stated in the report, rather “No” considering scanty radar
OOW Assessment: Wrong (e8)
A Figura 5.18 apresenta a sensibilidade da variável de saída “Collision” para alterações nas
probabilidades de estado das variáveis seleccionadas, isto é, após a introdução da evidência (e) para
a variável (i) que muda a sua probabilidade de estado em ∆𝑥𝑖.
A Figura 5.19 apresenta os mesmos resultados com exclusão da variável “OOW Assessment”,
uma que esta têm uma influência substancialmente superior na probabilidade de colisão, quando
comparada com as restantes variáveis.
Os resultados obtidos para este estudo de caso são apresentados em detalhe no Anexo E.3.
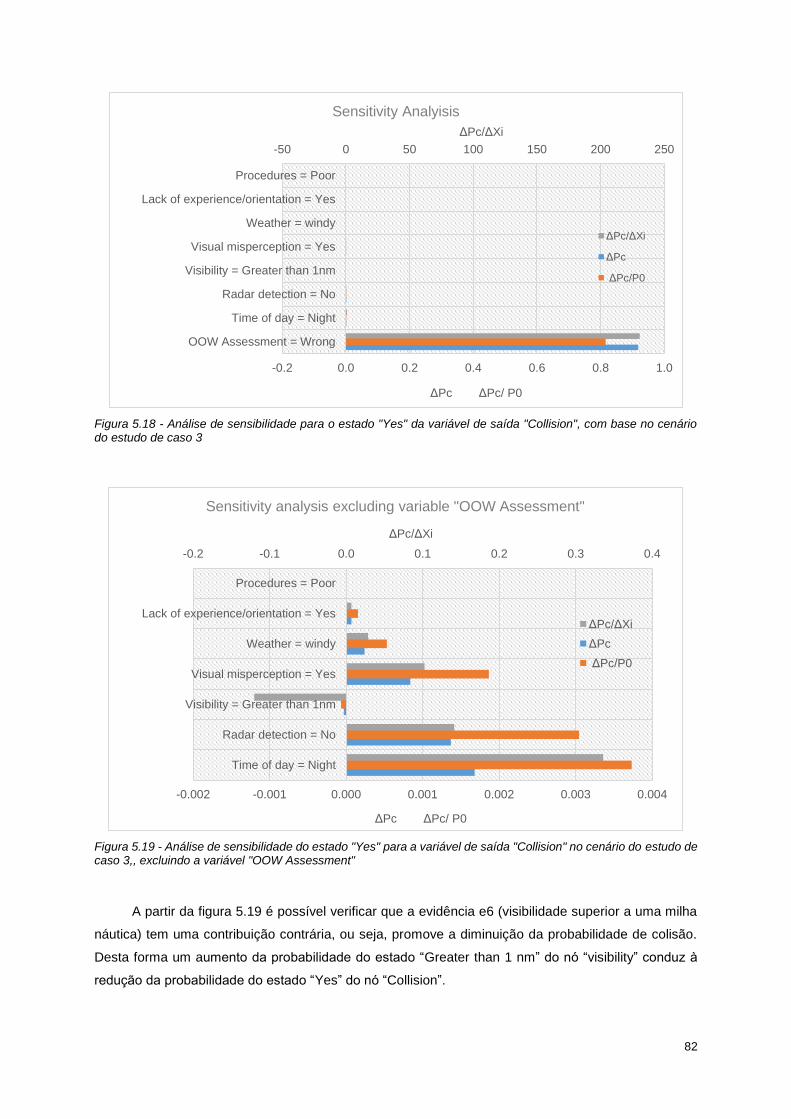
82
Figura 5.18 - Análise de sensibilidade para o estado "Yes" da variável de saída "Collision", com base no cenário do estudo de caso 3
Figura 5.19 - Análise de sensibilidade do estado "Yes" para a variável de saída "Collision" no cenário do estudo de caso 3,, excluindo a variável "OOW Assessment"
A partir da figura 5.19 é possível verificar que a evidência e6 (visibilidade superior a uma milha
náutica) tem uma contribuição contrária, ou seja, promove a diminuição da probabilidade de colisão.
Desta forma um aumento da probabilidade do estado “Greater than 1 nm” do nó “visibility” conduz à
redução da probabilidade do estado “Yes” do nó “Collision”.
-50 0 50 100 150 200 250
-0.2 0.0 0.2 0.4 0.6 0.8 1.0
OOW Assessment = Wrong
Time of day = Night
Radar detection = No
Visibility = Greater than 1nm
Visual misperception = Yes
Weather = windy
Lack of experience/orientation = Yes
Procedures = Poor
ΔPc/ΔXi
ΔPc ΔPc/ P0
Sensitivity Analyisis
ΔPc/ΔXi
ΔPc
ΔPc/P0
-0.2 -0.1 0.0 0.1 0.2 0.3 0.4
-0.002 -0.001 0.000 0.001 0.002 0.003 0.004
Time of day = Night
Radar detection = No
Visibility = Greater than 1nm
Visual misperception = Yes
Weather = windy
Lack of experience/orientation = Yes
Procedures = Poor
ΔPc/ΔXi
ΔPc ΔPc/ P0
Sensitivity analysis excluding variable "OOW Assessment"
ΔPc/ΔXi
ΔPc
ΔPc/P0

83
A Figura 5.20 apresenta a diferença máxima na probabilidade de colisão produzida pelas
variáveis seleccionadas no seu “pior” estado (aquele que produz a maior 𝑃𝐶) e no seu “melhor” estado
(aquele que induz a menor 𝑃𝐶) para o caso de estudo 1, excluindo a variável “OOW Assessment”. Esta
variável, aplicada isoladamente, produz uma variação da probabilidade de colisão de ∆𝑃𝑐𝑚𝑎𝑥 = 0.923
que é significativamente superior às demais.
Figura 5.20 - Diferença máxima da probabilidade do estado “Yes” do nó “Collision” produzida pelas variáveis no seu “melhor” e “pior” estado para o estudo de caso 3, excluindo a variável “OOW Assessment”
Esta análise de sensibilidade mostra que o horário é o factor que mais contribui para a variação
da probabilidade de colisão neste cenário em particular. A diferença na probabilidade de colisão é de
0.0034 quando se varia o estado da variável de “mau” para “bom”, isto é, quando o estado do nó “time
of day” é alterado de “night” para “day”. A detecção do radar, as condições climatéricas, a visibilidade
e a percepção visual apresentam também contribuições significativas para o modelo. Os procedimentos
organizacionais não têm qualquer influência na variável de saída, que representa a probabilidade de
ocorrência de uma colisão.
O modelo dinâmico desenvolvido no âmbito do projecto CyClaDes, que se centra na rede
bayesiana analisada, permite a inclusão do elemento humano no cálculo da probabilidade de colisão
considerando factores característicos do desempenho do operador. Mais tarde este modelo pode
fornecer as informações necessárias para proceder a uma análise de custo-benefício sobre a
implementação de melhorias no projecto de navios centrado no elemento humano, podendo ser
utilizado para o desenvolvimento e introdução de novas concepções.
0.0000 0.0005 0.0010 0.0015 0.0020 0.0025 0.0030 0.0035 0.0040
Procedures
Lack of experience/orientation
Visual misperception
Visibility
Weather
Radar detection
Time of day
ΔPcmax

84

85
6 Análise e gestão do risco de colisão
Neste momento existem diversas técnicas para identificar ameaças e cenários de forma a avaliar
e gerir os riscos. Entre as técnicas existentes o método Bowtie tem apresentado uma popularidade
crescente ao longo das últimas décadas, sobretudo no sector de petróleo e gás offshore. Esta
abordagem pretende demonstrar a identificação dos maiores perigos e a gestão dos riscos, e devido à
sua natureza gráfica, é particularmente útil para a comunicação de risco. O diagrama Bow-tie possui
características importantes que o tornam bastante útil para a modelação e análise de resiliência,
podendo revelar particularidades interessantes do sistema. Além disso a utilização de diagramas Bow-
tie permite também analisar e melhorar qualquer sistema, incluindo navios e sistemas marítimos através
de uma estratégia de duas camadas: uma que cria uma série de barreiras com o propósito de proteger
o sistema de perturbações externas e internas – absorvendo o choque e reduzindo a incerteza; e outra
que fornece ao sistema a aplicação de mecanismos de contingência e emergência, de forma a
minimizar as consequências negativas das interrupções que não puderam ser prevenidas –
caracterizando um plano de mitigação ou recuperação (Mansouri et al., 2009).
Os benefícios associados à utilização dos diagramas Bow-tie para gestão de risco têm sido
percepcionados por diversas organizações em variados sectores, pelo que a sua aplicabilidade foi
estendida para abranger o risco em vertentes como, por exemplo, financeira, estratégica, segurança,
qualidade, projecto ou recursos humanos. Também conhecidos como diagramas de barreira, consistem
num modelo estruturado de causas e efeitos de acontecimentos e possibilitam uma representação
gráfica do processo de avaliação de risco que pode ser facilmente entendido por indivíduos não
especializados.
Basicamente a abordagem possibilita uma visualização intuitiva das relações entre as causas de
acontecimentos indesejáveis, a intensificação de tais acontecimentos a uma gama de resultados
possíveis, as barreiras que previnem a ocorrências desses acontecimentos e as medidas existentes
que limitam as consequências. As medidas de prevenção e de mitigação podem estar ligadas a tarefas,
procedimentos, indivíduos responsáveis ou competências.
A análise é iniciada no acontecimento/interrupção indesejável, apresentado a meio do diagrama,
estando este tipicamente relacionado com um perigo específico. À esquerda estão ilustradas as
possíveis causas dos acontecimentos indesejáveis, e as consequências que se podem seguir estão
apresentadas à direita. Estão implementadas diversas barreiras e funções de segurança que previnem
a ocorrência de um acontecimento indesejável, ou que mitigam as consequências dada a ocorrência
desse mesmo acontecimento. A eficácia de cada uma das barreiras definidas pode ser afectada por
factores externos ou internos. Estes factores ou modos de falha da barreira podem ser modelados
como factores de agravamento (escalation factors), que por sua vez podem ser regulados por controlos
de factores de agravamento (escalation factor control), que podem ser entendidos como barreiras
secundárias.

86
Figura 6.1 - Exemplo de um diagrama Bow-tie genérico
A análise de diagramas Bow-tie para um único perigo envolve os passos seguintes (Rausand,
2011):
Especificar o acontecimento perigoso (qual é, onde e quando ocorre);
Identificar as ameaças ou acontecimentos que podem desencadear, de forma singular ou
combinada, a ocorrência do acontecimento perigoso;
Listar as barreiras proactivas existentes e viáveis, relacionadas com o acontecimento perigoso
e com os riscos identificados, e inseri-las no diagrama;
Identificar os possíveis acontecimentos sequenciais que se dão após o acontecimento
perigoso;
Listar as barreiras reactivas existentes e viáveis que podem interromper a sequência ou reduzir
as consequências, e inseri-las no diagrama;
Listar todas as possíveis consequências que resultam do acontecimento indesejável;
Identificar influências da engenharia, manutenção e actividade operacional nas várias barreiras
e ilustrar essas influências no diagrama.
Um dos passos mais importantes da análise Bow-tie é a identificação das barreiras que, por norma,
são uma combinação de medidas técnicas, humanas e organizacionais que previnem ou protegem o
sistema de um efeito adverso. A categorização de barreiras baseada na análise de um modelo bow-tie
faz a distinção entre barreiras de redução de frequência – que podem ser de evitação ou de prevenção
– e barreiras de redução de consequências – que podem ser de controlo ou de mitigação.
Reason (1997) classifica as barreiras de acordo com objectivos práticos, sendo sugeridos os seguintes
sete objectivos (adaptado de Rausand (2011)):
1. Criar compreensão e consciencialização dos perigos locais;
2. Dar uma orientação clara de como operar em segurança;
3. Providenciar alarmes e avisos quando o perigo é eminente;

87
4. Restaurar o estado seguro do sistema perante uma situação fora do normal;
5. Interpor barreiras de segurança entre os perigos e os potenciais danos;
6. Conter e eliminar os perigos que escaparem a esta barreira;
7. Providenciar meios de evacuação e salvamento caso falhe a barreira de contenção.
É ainda considerada uma importante distinção entre funções de barreira, isto é o seu propósito,
e sistemas de barreira que descrevem os meios pelos quais as funções de barreira são levados a cabo.
Hollnagel (2008) apresentou uma classificação de sistemas de barreira baseado em quatro categorias
principais: sistemas de barreiras físicas ou materiais, sistemas de barreiras funcionais, sistemas de
barreiras simbólicas e sistemas de barreiras imateriais. A descrição destas barreiras foi desenvolvida
no capítulo 3, uma vez que esta abordagem foi utilizada pela metodologia TRACEr para a codificação
das barreiras existentes, aquando da análise de acidentes desempenhada anteriormente.
Trbojevic & Carr (2000) desenvolveram uma aplicação do método Bow-tie no sector marítimo
para melhorar a segurança nos portos. Neste estudo a identificação dos perigos e a avaliação
qualitativa do risco foram realizados de forma a estabelecer barreiras que estão ou deveriam estar
implementadas de modo a prevenir a progressão dos perigos. Neste caso o acontecimento principal é
um erro de pilotagem, que pode ter início num comando inapropriado dado pelo piloto ou numa falha
de execução do comando cometida pela tripulação. As consequências definidas neste estudo podem
ser um encalhe, perda de vida ou um derrame. A cada ameaça está associada uma ou mais barreiras,
que podem prevenir ou minimizar a probabilidade de ocorrência do acontecimento perigoso. Este
estudo inclui ainda factores de agravamento, associados a algumas barreiras, e ainda os respectivos
controlos ou barreiras secundárias.
6.1 Modelo Bow-tie do risco de colisão
Nesta secção pretende-se desenvolver um modelo Bow-tie adaptado a acidentes marítimos,
mais concretamente a colisões. Para isso foi utilizado uma versão experimental de um software
comercial, o BowTie Pro. Este modelo foi desenvolvido a partir da rede bayesiana apresentada
anteriormente e da metodologia TRACEr, sobretudo através da utilização dos factores de desempenho
e das barreiras definidas.
O desenvolvimento do modelo iniciou-se com a definição do perigo e do acontecimento crítico,
tendo sido considerado um perigo de navegação que pode originar uma colisão devida a um erro
humano. Posteriormente foram definidas as ameaças, à esquerda do acontecimento, e as
consequências, à direita do mesmo. Desta forma considerou-se como ameaças: uma falha na
detecção, a baixa competência do operador, um fraco desempenho do operador ou uma acção errada
por parte do operador. À direita é possível observar que como possíveis consequências podemos
registar perda de vida humana ou danos ambientais. Na figura 6.2 é apresentada uma versão

88
simplificada do modelo Bow-tie para colisões, onde se observam apenas as ameaças, o acontecimento
acidental e possíveis consequências.
Figura 6.2 - Modelo Bow-tie simplificado (ameaças e consequências)
Figura 6.3 - Modelo Bow-tie: barreiras de prevenção
O modelo Bow-tie desenvolvido pode ser observado na íntegra no anexo G, dada a
impossibilidade de o apresentar neste capítulo devido à sua dimensão. No entanto, o modelo será aqui
descrito através de alguns exemplos de forma a melhor se perceber o seu funcionamento.
Tal como foi explicado anteriormente são implementadas diversas barreiras e funções de
segurança que previnem a ocorrência do acontecimento indesejável, neste caso a colisão devido a um
erro humano, ou que mitigam as consequências dada a ocorrência da colisão. Para o desenvolvimento
do modelo foram identificadas diversas barreiras entre cada uma das ameaças e a ocorrência de
colisão, que podem ser observadas na figura 6.3. Por exemplo, quando um fraco desempenho do
operador é considerado como ameaça, foram identificadas as seguintes barreiras:
Influência positiva dos factores pessoais;

89
Boas condições de trabalho;
Comunicação eficaz com a equipa da ponte;
Correcta avaliação da situação por parte do operador.
Figura 6.4 - Modelo Bow-tie: factores de agravamento e respectivas barreiras secundárias para a ameaça OOW Poor Performance
Foram ainda identificados os factores de agravamento eventualmente associados a cada uma
das barreiras, bem como os respectivos controlos ou barreiras secundárias. Na figura 6.4 podem ser

90
observados os factores de agravamento e respectivos controlos associados às barreiras de prevenção
implementadas quando um mau desempenho do operador é uma ameaça à ocorrência de uma colisão.
Por exemplo, a barreira influência positiva dos factores pessoais está associada aos seguintes factores
de agravamento:
Fadiga, que pode ser controlado pela variação das horas de trabalho ou por procedimentos
organizacionais;
Intoxicação, que pode ser controlado pelas orientações formais (regras, restrições, leis,
orientações ou proibições) e informais (auto-contenção, normas éticas, morais, pressão social
ou grupal).
Nível de stresse elevado, passível de controlo a partir de uma correcta alocação de tarefas e
responsabilidades.
De uma forma geral as barreiras definidas consideram os factores de desempenho incluídos na
metodologia TRACEr – factores pessoais, comunicação, treino/experiência, aspectos relacionados com
o ambiente externo e interno e factores organizacionais -, a utilização de determinados equipamentos,
o comportamento/acção do operador, as barreiras consideradas no TRACEr e convenções/códigos
implementados pela IMO. Os factores de agravamento foram seleccionados tendo em vista os
resultados obtidos com a análise estatística efectuada anteriormente à base de dados tendo sido
considerados, na sua maioria, aqueles que se afiguravam como mais influenciadores da ocorrência de
colisões. Por exemplo, no caso da barreira boas condições de trabalho foram considerados como
factores de agravamento o horário nocturno, as condições meteorológicas e um mau ambiente a bordo
do navio (ver figura 4.11).
Após terem sido definidas as barreiras de prevenção foram identificadas, entre o acontecimento
acidental e cada uma das possíveis consequências, as barreiras de mitigação que podem ser
observadas na figura 6.5. Por exemplo, quando se analisou a perda de vida humana como
consequência de colisões entre navios foram identificadas as seguintes barreiras de mitigação:
Características do projecto do navio;
Secções 7 (Shipboard Operations) e 8 (Emergency Preparedness) do ISM (International Safety
Management) Code;
Plano e instruções de evacuação eficientes;
Capítulo III (Life-saving appliances and arrangement) da convenção internacional SOLAS
(Safety Of Life At Sea);
LSA (Live-saving Appliance) Code implementado pela IMO;
Capítulo VI (Emergency, occupational safety, medical care and survival functions) da
convenção internacional STCW (Standards of Training, Certification and Watchkeeping for
Seafarers);
Convenção internacional SAR (Maritime Search and Rescue)
Eficácia das operações de busca e salvamento
Assistência médica

91
Figura 6.5 - Modelo Bow-tie: Barreiras de mitigação
Figura 6.6 - Modelo Bow-tie: factores de agravamento e respectivas barreiras secundárias para a consequência Loss of life

92
Tal como para as barreiras de prevenção foram ainda identificados os factores de agravamento
eventualmente associados a cada uma das barreiras de mitigação, bem como os respectivos controlos
ou barreiras secundárias. Na figura 6.6 podem ser observados os factores de agravamento e
respectivas barreiras secundárias implementadas quando se analisa a perda de vida humana como
consequência de uma colisão. Por exemplo, para a barreira plano e instruções de evacuação eficientes
foi identificado como factor de agravamento a possibilidade de se tratar de um navio de passageiros.
Neste caso são implementadas as seguintes barreiras secundárias:
Identificação dos passageiros de acordo com a regulação 27 do capítulo III da convenção
internacional SOLAS;
IMO MSC/Circ.1238, que fornece orientações para a análise de evacuação de navios de
passageiros;
Capítulo V da convenção internacional STCW que define os requisitos de treino específico para
a tripulação de navios de passageiros, tais como, treino para gestão de multidões.
No anexo H é apresentada uma descrição completa das ameaças, barreiras, factores de
agravamento e respectivos controlos considerados no desenvolvimento do modelo.

93
7 Conclusões e Recomendações
7.1 Conclusões
Nesta dissertação foram analisados em detalhe 70 colisões e 55 encalhes codificados com a
metodologia TRACEr em que os erros ocorridos se relacionavam com a interface homem-máquina.
Foram identificados 418 erros de tarefa, dos quais 97.1% foram desempenhados na ponte e os
restantes 2.9% na casa da máquina. O estudo desenvolvido permitiu observar que para a totalidade
dos acidentes codificados a maioria dos erros ocorre em tarefas de navegação (33.5%), monitorização
do tráfego marítimos (21.1%) e supervisão (19.21%). Quando se observam separadamente os
resultados para os dois tipos de acidentes marítimos conclui-se que para as colisões a maioria dos
erros ocorre em tarefas de monitorização do tráfego marítimo (34.2%) e em tarefas de navegação
(31.1%). Já em situações de encalhe é em tarefas de navegação (35.7%) e supervisão (27.1%) que se
identifica a maioria dos erros cometidos. Foi possível ainda identificar que as sub-tarefas em que ocorre
a maioria erros sendo estas, monitorização de equipamento (25.5%) para as colisões e supervisão das
tarefas na ponte (16.%) para os encalhes. Estes erros manifestam-se sob a forma de omissões, sendo
esse o principal modo de erro externo observado tanto para colisões (24.5%) como para encalhes
(29.5%). Olhando para o contexto interno em que o operador desempenhou o erro, os principais
domínios cognitivos envolvidos são a tomada de decisão (42.4% para colisões e 34.3% para encalhes)
e a percepção (28.6% para colisões e 31% para encalhes), o que sugere que o operador recebeu uma
informação crucial, processou-a correctamente mas, no entanto, chegou a uma conclusão errada e por
isso tomou uma decisão incorrecta, ou por outro lado, o operador não recebeu qualquer informação de
forma a poder processá-la e poder decidir em conformidade.
A análise destes acidentes marítimos permitiu ainda identificar quais os factores que afectaram
o desempenho do operador, estando a sua maioria associada ao ambiente externo/interno (33.2% para
colisões e 29.5% para encalhes) ou a factores de natureza organizacional (22.9% para colisões e 31.9%
para encalhes). Quando se observam estes factores de forma mais detalhada verifica-se que, para
situações de colisão, é nas condições meteorológicas (14.6%), no horário (10.1%) e na fadiga corporal
do operador (8%) que residem os principais factores de agravamento. Para os encalhes analisados os
principais factores de desempenho identificados são os procedimentos organizacionais (9.1%), a falta
de informação (8%) e as condições meteorológicas (7.5%).
De uma forma geral, para um cenário de colisão, a maioria dos erros ocorre na monitorização
de equipamento associada ao controlo do tráfego marítimo, sendo o radar o principal equipamento
técnico envolvido (40.5%). Ainda que a ponte seja eficaz do ponto de vista ergonómico, os resultados
obtidos mostram que, em muitas situações, o operador confia num só equipamento esquecendo-se de
monitorizar outros equipamentos auxiliares ou não utiliza o equipamento em causa de forma
apropriada. Este facto explica que os principais modos de erro interno sejam uma decisão ou
planeamento incorrecto, associado ao domínio da tomada de decisão, e a ausência de detecção que
se relaciona com a percepção do operador. Quando a esta problemática se associam factores
ambientais externos, como as condições meteorológicas ou o período nocturno, ou ainda factores de

94
ordem pessoal como a fadiga corporal do operador, estão reunidas condições de risco que podem
resultar numa colisão.
Para um cenário de encalhe regista-se uma elevada percentagem de erros associados à
supervisão de tarefas na ponte, o que denuncia um ambiente frágil, muitas vezes motivado pela
ausência de uma supervisão eficaz, e mais susceptível à influência negativa de factores
organizacionais. Embora os factores ambientais externos/internos, como as condições meteorológicas,
o horário e o ambiente a bordo, apresentem uma importância significativa são os factores de natureza
organizacional como os procedimentos, a supervisão e as características da tripulação que mais
influenciam o desempenho do operador.
Posteriormente foi efectuada uma análise de sensibilidade com o objectivo de identificar os
parâmetros com maior influência na probabilidade de colisão calculada através de uma rede bayesiana.
A rede bayesiana estudada foi desenvolvida no âmbito do projecto CyClaDes e integra elementos da
metodologia TRACEr focando-se no cálculo da probabilidade de colisão. Foram aplicadas diferentes
medidas de sensibilidade para dois nós: o nó “collision” - que avalia a influência das variáveis sobre a
probabilidade de colisão – e o nó “OOW Performance” – que estuda o impacto das variáveis
seleccionadas na probabilidade de um fraco desempenho por parte do operador.
A análise de sensibilidades mostrou que as variáveis com maior influência na probabilidade de
colisão são: a detecção do sistema de navegação – que compreende o auxílio à navegação pelos
diferentes sistemas (radar, ECDIS e cartas de navegação) –, a familiarização do operador com a
navegação numa dada área e o horário (diurno/nocturno). Outras variáveis como as condições
meteorológicas, a utilização do radar como sistema de detecção, a visibilidade, a percepção visual, o
ambiente a bordo ou o stresse e a fadiga do operador têm também um impacto significativo na
probabilidade de colisão. Os factores relacionados com a comunicação, treino/competência ou os
factores organizacionais apresentam uma influência muito reduzida sobre o nó “colisão”.
Relativamente ao nó “OOW Performance” verifica-se que as variáveis que induzem uma maior
variação da probabilidade de um fraco desempenho do operador são: as condições meteorológicas, o
stresse, a visibilidade, a fadiga, o ambiente a bordo e o horário. A possibilidade de ocorrerem problemas
relacionados com a interface homem-máquina, uma má percepção visual, uma falha no sistema de
detecção, treino inadequado ou a falta de experiência/orientação influenciam também
significativamente o desempenho do operador. Embora produzam alterações no desempenho
individual, os factores organizacionais, como a supervisão, as características da tripulação ou os
procedimentos, apresentam um impacto pouco significativo.
As observações registadas permitem verificar que a rede bayesiana estudada atribui particular
importância à detecção, quer visual - motivo pelo qual factores como a visibilidade, as condições
meteorológicas ou a familiarização se assumem como variáveis determinantes - quer por parte dos
sistemas de apoio à navegação, onde se inclui a utilização do radar ou a interface homem-máquina.
Desta forma verifica-se que a análise de sensibilidades efectuada para ambos os nós (colisão e
desempenho do operador) corrobora a análise de acidentes apresentada anteriormente, onde a maioria
dos erros ocorria em tarefas relacionadas com a monitorização do tráfego marítimo e em que a
ausência de detecção surge como uma das principais fontes de erro.

95
Posteriormente, e tendo sido percepcionada a importância da existência de barreiras que
previnam a ocorrência de acidentes ou que mitiguem as consequências a estes associadas foi
desenvolvido um modelo bow-tie adaptado a acidentes marítimos, mais concretamente a um cenário
de colisão, para análise de resiliência com o objectivo de modelar barreiras de prevenção e de
mitigação à ocorrência de colisões. O modelo desenvolvido a partir da rede bayesiana estudada e da
metodologia TRACEr considera como acontecimento crítico a colisão devida a um erro humano, tendo
sido definidas ameaças à ocorrência do acidente – falha na detecção, baixa competência, fraco
desempenho ou acção errada do operador – e as consequências do mesmo – perda de vida humana
e danos ambientais. Os resultados obtidos na análise de acidentes possibilitaram a selecção de
variáveis que se manifestaram influentes em cenário de colisão, permitindo assim a definição de
barreiras de prevenção e de mitigação de acordo com as ameaças e as consequências a analisar. De
um modo geral as barreiras implementadas consideram não só as barreiras e os factores de
desempenho que integram a metodologia TRACEr (factores pessoais, comunicação,
treino/experiência, ambiente externo/interno e factores organizacionais), mas também a utilização de
determinados equipamentos ou o comportamento/acção do operador. Além disto foi feito um esforço
por incluir as convenções e códigos implementados pela IMO que abrangem um variado leque de áreas,
desde requisitos estruturais até às operações de busca e salvamento passando por planos de combate
a incêndios ou poluição.
Através da representação do diagrama Bow-tie é possível obter uma visão global clara dos
diferentes cenários, bem como a identificação das barreiras de segurança presentes em cada cenário.
A aplicação de medidas e sistemas de controlo de risco tem como objectivo a redução da probabilidade
da ocorrência de acidentes, da gravidade da consequência ou ambos. Embora a prioridade seja
eliminar as ameaças, o que nem sempre é possível, é importante que se desenvolvam sistemas e
organizações cada vez mais resilientes, capazes de recuperar de um erro a partir da implementação
de barreiras de prevenção e de mitigação.
7.2 Recomendações para trabalhos futuros
Os estudos desenvolvidos ao longo deste trabalho no domínio da análise de acidentes podem ser
aprofundados através de:
Análise da fiabilidade das codificações efectuadas, o que permitiria verificar se diferentes
peritos codificam um determinado acidente da mesma forma;
Análise de um sub-grupo de acidentes de colisões e encalhes ocorridos em condições
ambientais adversas, de forma a identificar padrões de desempenho das tripulações em
cenários mais severos.
Aplicação da metodologia TRACEr a outro tipo de acidentes marítimos, como por exemplo,
incêndios ou explosões;

96
Análise de determinados acidentes com diferentes metodologias, por exemplo o TRACEr e o
EMCIP, o que permitiria avaliar a capacidade das diferentes metodologias na análise de
acidentes e a possibilidade destas se complementarem. Além disso podem ser incluídas
medidas de avaliação dos factores humanos internos e cognitivos procedentes do TRACEr na
metodologia EMCIP;
Em relação à Rede Bayesiana estudada, tal como já foi mencionado, esta pode ser utilizada para
proceder a uma análise de custo-benefício sobre a implementação de melhorias no projecto de navios
centrado no elemento humano.
O diagrama Bow-tie desenvolvido poderia ser futuramente utilizado como modelo de quantificação
do risco, permitindo a identificação de possíveis soluções com o objectivo de reduzir o risco e as
consequências inerentes ao cenário de colisão. A junção do modelo Bow-tie com diferentes modelos
matemáticos para avaliação de risco constitui uma possível evolução. Além disto, a análise de
resiliência efectuada nesta dissertação não considerou efeitos simultâneos nem dependência entre
barreiras, que tem que ser tida em conta numa análise de resiliência. Para isso teriam que ser aplicados
outros métodos, como por exemplo o FRAM (Functional Resonance Analysis Method) sugerido por
Hollnagel, com o objectivo de modelar as funções de um sistema e os potenciais acoplamentos entre
funções.

97
Referências
Antão, P. (2011). O Factor Humano na Segurança do Transporte Marítimo. Universidade Técnica de Lisboa - Instituto Superior Técnico.
Antão, P., Grande, O., Trucco, P., & Guedes Soares, C. (2008). Analysis of maritime accident data with BBN modeling. In S. Martorell, C. Guedes Soares, & J. Barnett (Eds.), Safety, Reliability and Risk Analysis - Theory, Methods and Applications (pp. 3265–3274). Balkema, Taylor & Francis Group.
Antão, P., & Guedes Soares, C. (2009). Análise de dados de Acidentes Marítimos Através de um Modelo de Redes Bayesianas. In C. G. Soares, C. Jacinto, A. P. Teixeira, & P. Antão (Eds.), Riscos Industriais e Emergentes (pp. 877–893). Lisboa: Edições Salamandra.
Antão, P., & Guedes Soares, C. (2010). Analysis of the Influence of Waves in the Occurrence of Accidents in the Portuguese Coast Using Bayesian Belief Networks. Journal of Konbin, 13(Safety and Reliability Systems), 105–116.
Caridis, P. (1999). Casualty Analysis Methodology for Maritime Operations. In Final Report of the European Research Project CASMET.
Clausen, H. B., Lützen, M., Friis-Hansen, A., & Bjørneboe, N. (2001). Bayesian and Neural Networks For Preliminary Ship Design. In Pratical Design of Ships and Other Floating Structures (pp. 349–356). Proceedings of the International Symposium on Practical Design of Ships and Other Floating Structures, 16 - 21 Setembro 2001, Shangai, China.
Correia, P. (2010). European Marine Casualty Information Platform a common EU taxonomy. In 5th International Conference on Collision and Grounding of Ships (pp. 13–16). Espoo , Finland.
Coss, J. (2011). Tools for Anticipating Potential Problems in Biosecurity Applications ACERA Project No . 0606.
Edwards, E. (1972). Man and machine: Systems for safety. In B. A. P. Associations (Ed.), Proc. of British Airline Pilots Associations Technical Symposium (pp. 21–36). London.
Embrey, D. E. (1986). SHERPA: A Systematic Human Error Reduction and Prediction Approach. In Proceedings of the International Topical Meeting on Advances in Human Factors in Nuclear Power Plants (pp. 184–193). American Nuclear Society.
Graziano, A., Teixeira, A. P., & Guedes Soares, C. (2014). Application of the TRACEr taxonomy for the codification of grounding and collision accidents. In C. Guedes Soares & T. Santos (Eds.), Maritime Technology and Engineering (pp. 215–226). CRC Press.
Guedes Soares, C., Teixeira, A. P., & Antão, P. (2000). Accounting for Human Factors in the Analysis of Maritime accidents. In J. Cottam, M.P., Harvey, D.W., Pape, R.P. & Tait (Ed.), Foresight & Precaution (pp. 521–528). Edimburgh, Scotland: Balkema.
Hänninen, M., & Kujala, P. (2012). Influences of variables on ship collision probability in a Bayesian belief network model. Reliability Engineering & System Safety, 102, 27–40. doi:10.1016/j.ress.2012.02.008
Hansson, S. O., & Helgesson, G. (2003). What is stability? Synthese, 136, 219–235.
Harms-Ringdahl, L. (2013). Guide to safety analysis for accident prevention. Stockholm, Sweden: IRS Riskhantering AB.

98
Helle, I., Lecklin, T., Jolma, A., & Kuikka, S. (2011). Modeling the effectiveness of oil combating from an ecological perspective - A Bayesian network for the Gulf of Finland; the Baltic Sea. Journal of Hazardous Materials, 185, 182–192.
Hofmann, S., & Schröder-Hinrichs, J. (2013). CyClaDes Task 1.2 Incident and accident analysis. World Maritime University, Sweden.
Hollnagel, E. (1993). The phenotype of erraneous actions. International Journal of Man-MAchine Studies, 39(1), 1–32.
Hollnagel, E. (1998). CREAM - Cognitive Reliability and Error Analysis Method. Oxford: Elsevier Science.
Hollnagel, E. (2004). Barriers and Accident Prevention. Aldershot, UK: Ashgate.
Hollnagel, E. (2005). Human Reliability Assessment in Context. Nuclear Engineering and Technology, 37(2), 159–166.
Hollnagel, E. (2008). Risk + barriers = safety? Safety Science, 46(2), 221–229.
Hollnagel, E., Woods, D. D., & Leveson, N. (Eds.). (2006). Resilience engineering: Concepts and precepts. Aldershot: Ashgate Publishing Limited.
IMO. (1997). Code for the investigation of marine casualties and incidents. Resolução A.849(20).
IMO. (2000). Amendments to the code for the investigation of marine casualties and incidents (resolution A.849(20)). Resolução A.884(21).
IMO. (2006). Formal Safety Assessment - Consideration on utilization of Bayesian network at step 3 of FSA - Evaluation of the effect of ECDIS, ENC and Track control by using Bayesian natwork. MSC 81/18/1.
IMO. (2008). Casualty-related matters, Reports on marine casualties and inicdents - Revised harmonized reporting procedures - reports required under SOLAS regulation I/21and MARPOL 73/78 articles 8 and 12. MSC-MEPC.3/Circ.3.
Jansen, F. (2001). Bayesian Networks and Decision Graphs. New York: Springer-Verlag.
Kirwan, B. (1994). A guide to practical Human Reliability Assessment. London, UK: Taylor & Francis.
Kirwan, B. (1998). Human error identification techniques for risk assessment of high risk systems; Part 1: Review and evaluation of techniques. Applied Ergonomics, 29(3), 157–177.
Kristiansen, S. (1995). An Approach for Systematic Learning from Accidents. In IMAS’95: Management and Operation of Ships. London, UK: The Institute of Marine Engineers.
Kristiansen, S. (2005). Maritime Transportation: Safety Management and Risk Analysis. Elsevier Butterworth-Heinemann.
Kristiansen, S. (2010). A BBN approach for analysis of maritime accident scenarios. In B. J. M. Ale, I. A. Papazoglou, & E. Zio (Eds.), Reliability, Risk and Safety (pp. 382–389). London: Taylor & Francis Group.
Kristiansen, S., Koster, E., Schmidt, W. F., Olofsson, M., Guedes Soares, C., & Caridis, P. (1999). A New Methodology for Marine Casualty Analysis Accounting for Human and Organisational Factors. Londres: Proceedings of the International Conference on Learning from Marine Incidents.

99
Liebl, A., Haller, J., Jödicke, B., Baumgartner, H., Schlittmeier, S., & Hellbrück, J. (2012). Combined effects of acoustic and visual distraction on cognitive performance and well-being. Applied Ergonomics, 43(2), 424–34.
Madonna, M., Martella, G., Monica, L., Maini, E. P., & Tomassini, L. (2009). The Human factor in risk assessment: methodological comparison between human reliability analysis techniques. Prevention Today, 5(1/2), 67–83.
Mansouri, M., Mostashari, A., & Nilchiani, R. (2009). A Decision Analysis Framework for Resilience Strategies in Maritime Systems.
Martins, M. R., & Maturana, M. C. (2013). Application of Bayesian Belief networks to the human reliability analysis of an oil tanker operation focusing on collision accidents. Reliability Engineering & System Safety, 110, 89–109.
McDaniels, T., Chang, S., Cole, D., Mikawoz, J., & Longstaff, H. (2008). Fostering resilience to extreme events within infrastructure systems: Characterizing decision contexts for mitigation and adaptation. Globe Environmental Change, 18(2), 310–318.
Norrington, L., Quigley, J., Russell, A., & Van der Meer, R. (2008). Modellig the reliability of search and rescue operations with Bayesian Networks. Reliability Engineering & System Safety, 93(7), 940–949.
Or, I., & Kahraman, I. (2002). A simulation study of the accident risk in the Istanbul Channel. International Journal of Emergency Management, 1, No.2, 110–124.
Pedrali, M., Trucco, P., Cagno, E., & Ruggeri, F. (2004). Using BBN for Integrating Human and Organisational Factors in Risk Analysis. A Case Study for the Marine Industry. In 2nd International ASRANet. Barcelona, Spain.
Rasmussen, J. (1987). The definition of human error and taxonomy for technical system design. In J. Rasmussen, K. Duncan, & J. Leplat (Eds.), New technology and human error. Toronto: John Wiley & Sons.
Rasmussen, J., & Member, S. (1983). Skills , Rules , and Knowledge ; Signals , Signs , and Symbols , and Other Distinctions in Human Performance Models. IEEE Transactions on Systems, Man and Cybernetics, 13(3), 257–266.
Rausand, M. (2011). Risk Assessment: Theory, Methods and Applications. Statistics in Practice: John Wiley & Sons.
Reason, J. (1990). Human Error. Cambridge, United Kingdom: Cambridge University Press.
Reason, J. (1997). Managing the Risks of Organizational Accidents. Aldershot, UK: Ashgate.
Shorrock, S. T., & Kirwan, B. (2002). Development and application of a human error identification tool for air traffic control. Applied Ergonomics, 33(4), 319–36.
Swain, A. D., & Guttmann, H. E. (1983). Handbook of human reliability analysis with emphasis on nuclear power plant applications. Washington DC, USA: US Nuclear Regulatory Commission, Report No. NUREG/CR-1278.
Trbojevic, V. M., & Carr, B. J. (2000). Risk based methodology for safety improvements in ports. Journal of Hazardous Materials, 71, 467–480.
Trucco, P., Cagno, E., Grande, O., & Ruggeri, F. (2006). A Bayesian Approach for Integrating Organizational Factors in Risk Analysis: A Case Study in Maritime. In C. Guedes Soares & E. Zio

100
(Eds.), Safety and Reliability for Managing Risk (pp. 443–450). Balkema, Taylor & Francis Group, Volume I.
Trucco, P., Cagno, E., Ruggeri, F., & Grande, O. (2008). A Bayesian Belief Network modelling of organisational factors in risk analysis: A case study in maritime transportation. Reliability Engineering & System Safety, 93(6), 845–856.
Ventikos, N., & Vagias, N. (2010). A Bayesian Network Application for the prediction of human fatigue in maritime industry. Athens, Greece: National Technical University of Athens.
Wickens, C. D., Gordon, S., & Liu, Y. (1998). Introduction to Human Factors Engineering (1a ed.). Nova Iorque, EUA: Addison-Wesley-Longman.
Wiegmann, D. A., & Shappell, S. A. (2001). Human Error Perspectives in Aviation. The International Journal of AviationPsychology, 11(4), 341–357.
Williams, J. C. (1986). HEART - a proposed method for assessing and reducing human error. In 9th Advances in Reliability Technology Symposium. University of Bradford.
Woods, D. D. (2000). Behind human error: Human factors research to improve patient safety. In National summit on medical errors and patient safety research. Washington: Quality Inter-agency Coordination Task Force and Agency for Healthcare Research and Quality.
Yoshimura, K., Takemoto, T., Murata, S., & Mitomo, N. (2014). A Study for Adapting a Human Reliability Analysis Technique to Marine Accidents. In Probabilistic Safety Assessment and Management PSAM 12. Honolulu, Hawaii.
Zhang, D., Yan, X. P., Yang, Z. L., Wall, A., & Wang, J. (2013). Incorporation of formal safety assessment and Bayesian network in navigational risk estimation of the Yangtze River. Reliability Engineering & System Safety, 118, 93–105.

101
Anexos

102

103
Anexo A: TRACEr
1. General Information
IMO vessel number/call sign
Note the IMO vessel number, when indicated. Otherwise please note the call sign of the vessel for identification.
Name of vessel Name of the vessel at the time of the occurrence as indicated in the report.
Date of occurrence The date of the occurrence as indicated in the report.
Geographical position Insert the GPS location of the vessel when the incident occurred.
Severity of occurrence Mitigated or total loss; Near-miss
Type of occurrence Fire, Explosion, Grounding, Foundering, Stranding, Capsized, Listed, Flooded, Collision, Hull, Machinery, others
Flag state The flag state of the vessel at the time of the occurrence (when indicated in the report)
Type of vessel Tankers, combined carriers, product carriers, gas carriers, chemical carriers, bulk carriers, Ro-Ro, tween deckers, container carriers, reefers, cruise, ferry
Deadweight or GRT The deadweight or GRT of the vessel as indicated in the report.
Age of vessel The age of the vessel at the time of occurrence, in years should be noted. Please chose the correct age from the drop-down list.
Station on the vessel The location on the vessel where the incident was triggered should be chosen from the drop-down list.
2. Task error
Operator performing the task error
Bridge Chose the operator from the drop-down list
Deck Chose the operator from the drop-down list
Engine (Control)Room Chose the operator from the drop-down list
Others Please indicate in writing
User Task
Bridge
Internal communication Communication between crew members.
External communication Communication between a crew member and a third party on another vessel or ashore.
Hand-over/take-over Some relevant information was not passed on during the hand-over process. This information was crucial and led or contributed to the accident.
Safety drills The safety drills were not performed according to the regulations. This led to a situation where an emergency could not get under control.
Supervision Supervision was not performed with care. A mistake was not noticed and led to the incident.
Navigation A navigational error occurred and led to an emergency situation.
Traffic monitoring The traffic was not monitored with enough attention, critical information was not perceived and this led to an incident.
Voyage planning incl. preparation
An error occurred during voyage planning. The error was not discovered and led to a risky situation.
Other tasks Any other task related to the bridge personnel which was not performed properly and had serious consequences.
Deck
Internal communication Communication between crew members.
External communication Communication between a crew member and a third party on another vessel or ashore.
Hand-over/take-over Some relevant information was not passed on during the hand-over process. This information was crucial and led or contributed to the accident.
Safety drills The safety drills were not performed according to the regulations. This led to a situation where an emergency could not be controlled.
Supervision Supervision was not performed with care. A mistake was not noticed and led to an incident.

104
Mooring operations During mooring operations a mistake was made that had negative consequences.
Cargo-work During cargo-handling work a mistake led to an emergency situation.
Maintenance work During maintenance work an error led to a risky situation.
Other tasks Any other task that was performed by the deck personnel and which was performed faultily and led to an incident.
Engine (Control) Room
Internal communication Communication between crew members.
Hand-over/take-over Some relevant information was not passed on during the hand-over process. This information was crucial and led or contributed to the accident.
Safety drills The safety drills were not performed according to the regulations. This led to a situation where an emergency could not be controlled.
Supervision Supervision was not performed with care. A mistake was not noticed and led to the incident.
Monitoring of engine room control panel
The monitoring of the engine room control panel was not performed with enough care and this action led to an emergency.
Maintenance of equipment During maintenance work an error led to a risky situation.
Other tasks Any other task that was performed by the engine room personnel and which was performed faultily and led to an incident
3. Error Information
User Material
Bridge
Radar Information from the radar was read out or interpreted wrongly or not taken into account.
GPS Information from the GPS was read out or interpreted wrongly or not taken into account.
ECDIS Information from the ECDIS was read out or interpreted wrongly or not taken into account.
AIS Information from the AIS was read out or interpreted wrongly or not taken into account.
Echo Sounder Information from the echo sounder was read out or interpreted wrongly or not taken into account.
Autopilot Faulty interaction with the autopilot led to the incident.
Steering panel Faulty interaction with the steering panel led to the incident.
External equipment Faulty interaction with the external equipment led to the incident.
Sea chart Information from the sea chart was read out or interpreted wrongly or not taken into account.
VHF Problems with the VHF led to the occurrence of an error.
Other communication devices Problems with the other communication devices led to the occurrence of an error
Alarm panels Information from alarm panels was read out or interpreted wrongly or not taken into account.
Engine room controls Information from engine room controls was read out or interpreted wrongly or not taken into account.
Checklists, Forms… Checklists or forms were not filled out as required leading to an incidence.
Handbooks Information from handbooks was read out or interpreted wrongly or not taken into account.
Decision support system (paper, electronic)
Faulty interaction with the decision support systems led to the incident.
Stairs, ladders An error occurred while the operator was using the stairs or ladders.
Other material Other material was used when the error occurred.
No technical equipment involved
The task error did not involve a human-machine/tool-interface
Deck
Communication devices Problems with communication devices led to the occurrence of an error.
Monitoring devices Problems with monitoring devices led to the occurrence of an error

105
Loading devices (cranes, pumps)
Problems with loading devices led to the occurrence of an error
Mooring equipment Problems with mooring equipment led to the occurrence of an error
Forms, checklists Checklists or forms were not filled out as required leading to an incidence.
Other working tools Other working tools were used when the error occurred.
Ladders, staircases, … An error occurred while the operator was using the stairs or ladders.
Emergency response equipment
Problems with emergency response equipment led to the occurrence of an error
Other material Other material was used when the error occurred.
No technical equipment involved
The task error did not involve a human-machine/tool-interface
Engine (Control) Room
Main engine Problems with the main engine led to the occurrence of an error.
Auxiliary engine Problems with an auxiliary engine led to the occurrence of an error.
Engine control room panel Information from the Engine control room panel was read out or interpreted wrongly or not taken into account.
Fuel pumps Problems with fuel pumps led to the occurrence of an error.
Boilers Problems with boilers led to the occurrence of an error.
Turbo chargers Problems with turbo chargers led to the occurrence of an error.
Separators Problems with separators led to the occurrence of an error.
Ballast water pumps Problems with ballast water pumps led to the occurrence of an error.
Communication equipment Problems with communication equipment led to the occurrence of an error.
Forms, checklists Checklists or forms were not filled out as required leading to an incidence.
Handbooks Information from handbooks was read out or interpreted wrongly or not taken into account.
Generators Problems with generators led to the occurrence of an error.
Electricity control panel Problems with electricity control panel led to the occurrence of an error.
Stairs, ladders… An error occurred while the operator was using the stairs or ladders.
Steering system Problems with the steering system led to the occurrence of an error.
Other material Other material was used when the error occurred.
No technical equipment involved
The task error did not involve a human-machine/tool-interface
User activities
Bridge
Internal communication Communication between bridge officers, between officers and captain, between bridge and deck, between bridge and engine room, between bridge officers and helms man
External communication Communication between bridge and pilot, bridge and port employees, bridge and tug boat
Hand-over/take-over Hand-over between captain and officers, between officers
Safety drills Safety drills not performed with care
Supervision Supervision of deck work, bridge tasks, engine room work
Navigation Dead reckoning, radar navigation, satellite navigation, pilotage, …
Traffic monitoring Look out, monitoring equipment regarding traffic
Voyage planning incl. preparation Appraisal, planning, Manoeuvring, and monitoring
Other tasks Other tasks were performed unsatisfactorily leading to the error. Please indicate in writing.
Deck
Internal communication Communication between ABs/OSs, between bosun and AB/OS, between bridge and deck, between deck and engine room
External communication Communication between deck personnel and pilot, port employees, tug boat…
Hand-over/take-over Hand-over of tasks between AB/OS, between bosun and AB/OS
Safety drills Safety drills not performed with care
Supervision Supervision of deck work
Mooring operations Mooring in harbour, anchoring
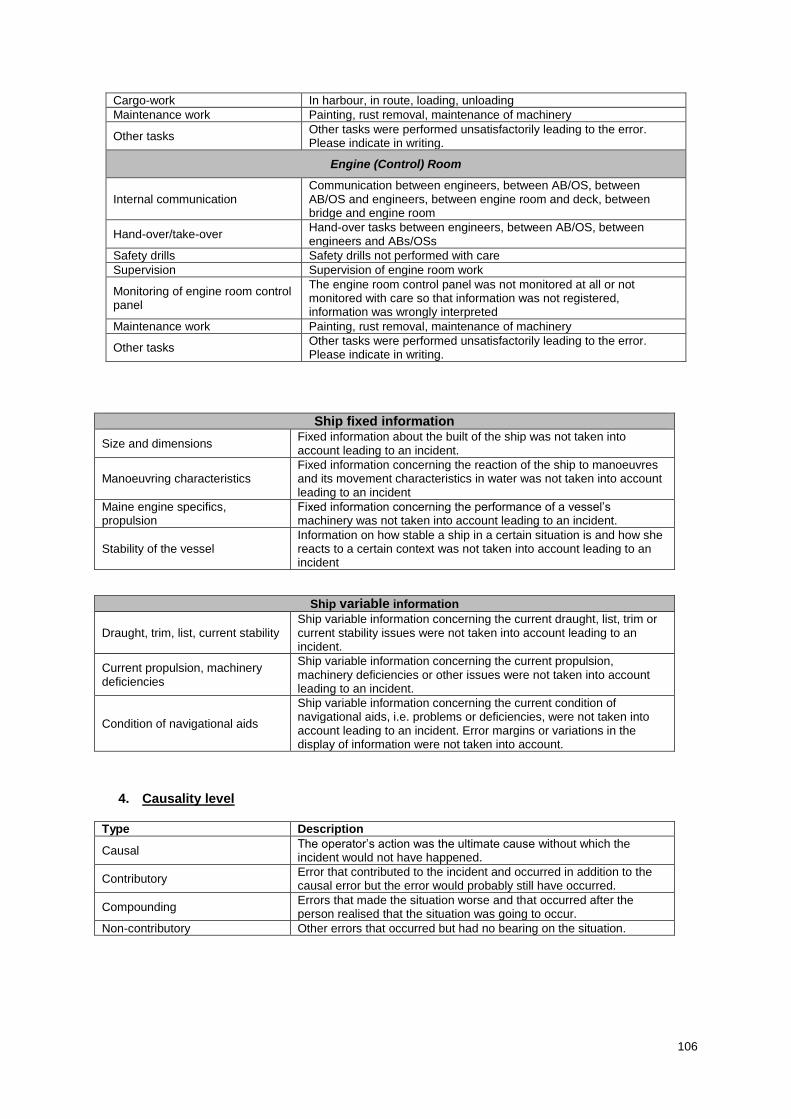
106
Cargo-work In harbour, in route, loading, unloading
Maintenance work Painting, rust removal, maintenance of machinery
Other tasks Other tasks were performed unsatisfactorily leading to the error. Please indicate in writing.
Engine (Control) Room
Internal communication Communication between engineers, between AB/OS, between AB/OS and engineers, between engine room and deck, between bridge and engine room
Hand-over/take-over Hand-over tasks between engineers, between AB/OS, between engineers and ABs/OSs
Safety drills Safety drills not performed with care
Supervision Supervision of engine room work
Monitoring of engine room control panel
The engine room control panel was not monitored at all or not monitored with care so that information was not registered, information was wrongly interpreted
Maintenance work Painting, rust removal, maintenance of machinery
Other tasks Other tasks were performed unsatisfactorily leading to the error. Please indicate in writing.
Ship fixed information
Size and dimensions Fixed information about the built of the ship was not taken into account leading to an incident.
Manoeuvring characteristics Fixed information concerning the reaction of the ship to manoeuvres and its movement characteristics in water was not taken into account leading to an incident
Maine engine specifics, propulsion
Fixed information concerning the performance of a vessel’s machinery was not taken into account leading to an incident.
Stability of the vessel Information on how stable a ship in a certain situation is and how she reacts to a certain context was not taken into account leading to an incident
Ship variable information
Draught, trim, list, current stability Ship variable information concerning the current draught, list, trim or current stability issues were not taken into account leading to an incident.
Current propulsion, machinery deficiencies
Ship variable information concerning the current propulsion, machinery deficiencies or other issues were not taken into account leading to an incident.
Condition of navigational aids
Ship variable information concerning the current condition of navigational aids, i.e. problems or deficiencies, were not taken into account leading to an incident. Error margins or variations in the display of information were not taken into account.
4. Causality level
Type Description
Causal The operator’s action was the ultimate cause without which the incident would not have happened.
Contributory Error that contributed to the incident and occurred in addition to the causal error but the error would probably still have occurred.
Compounding Errors that made the situation worse and that occurred after the person realised that the situation was going to occur.
Non-contributory Other errors that occurred but had no bearing on the situation.

107
5. External Error Mode
Selection and quality Timing and sequence Communication
Omission
Action too much
Action too little
Action in wrong direction
Wrong action on right object
Right action on wrong object
Wrong action on wrong object
Extraneous act
Action too long
Action too short
Action too early
Action too late
Action repeated
Mis-ordering
Unclear information transmitted
Unclear information recorded
Information not sought/obtained
Information not transmitted
Information not recorded
Incomplete information transmitted
Incomplete information recorded
Incorrect information transmitted
Incorrect information recorded
6. Cognitive Domain
Perception Deals with the input of information and the question of whether or not the user received the necessary information in order to be able to process it
Memory Means that the user did perceive the information, but did not deal with the perceived critical situation or the crucial information in the way the he should have due to not remembering correctly or not knowing what to do
Decision-making Means that the user received the crucial information and processed it correctly, but came to a wrong conclusion and therefore took a wrong decision
Action Means that the user perceived and processed the information correctly, decided on a correct decision, but then made a mistake in the implementation of the action
Violation Means an intended violation of rules and regulations that finally led to the incident
7. Internal Error Mode
Perception
Mishear The signal(s) of technical equipment were not heard accurately.
Mis-see The signal of technical equipment was not seen properly. This aspect focusses on the ergonomic or physical part of human perception.
No detection (audio/visual) The signal of technical equipment was not seen or heard.
Late detection The signal of technical equipment was only detected when it was too late to correct the situation.
Repeat error Repeating a mistake leading to a worsening of the situation.
Misread The information from the technical equipment was misread.
Visual misperception The visual signal was inaccurately perceived/ misperceived by the operator.
Memory
Forget to monitor The operator forgot to monitor the technical equipment.
Omitted or late action The occurrence can be traced back to an operator who omitted to act or reacted late to a warning signal.
Forget temporary information The occurrence can be traced back to a user who temporarily forgot relevant information.
Forget store information The occurrence can be traced back to a failure in storing relevant information.
Mis-recall information/action The user recalls inaccurate information and provides an inaccurate account of his actions post incident.
Prospective memory failure Post-incident failure in recalling the event as it happened.
Forget to ask / share information The operator suffered from a lack of information as he forgot to ask for relevant information/ share relevant information with other crew members.

108
Decision making
Mis-projection Faulty interpretation of information.
Poor decision/planning A wrong decision taken that led to or could not prevent the occurrence.
Late decision/planning The decision was taken too late to prevent the occurrence.
No decision/planning No decision was taken to prevent the occurrence.
Action
Information/data entry error Wrong information was entered into the technical equipment
Selection error Wrong technical equipment was selected for performing a certain task.
Unclear information The information transferred to another party via technical equipment was not clear.
Incorrect information The information transferred to another involved party via technical equipment was not correct.
Non-performed action No action was taken in order to prevent the occurrence.
Timing error
The action taken was not faulty itself, but occurred at the wrong moment
Unclear information recorded The information that was recorded was not clear.
Information not transmitted Necessary information was not transmitted / transferred to the involved parties.
Violation
Routine violations On the vessel some informal work practise followed instead of complying with the formal rules. The formal rule was therefore routinely disobeyed.
Exceptional violation The formal rule was not followed only in this one scenario which led to the incident.
Sabotage The official rule was not followed with the intention to cause harm.
8. Psychological Error Mode
Perception
Expectation Information was not perceived properly as the operator was influenced by an expectation bias, i.e. the operator did only perceive the information that was expected and supported his view of the situation.
Confusion The operator confused the perceived information with something else.
Discrimination failure The operator perceived the information, but did not process it as he perceived it to be irrelevant
Tunnel vision The operator focused on one single technical equipment or piece of information, ignoring all the others and not perceiving the relevant information.
Overloaded The operator was overloaded with other information and therefore did not perceive the new information
Vigilance The operator did not perceive the necessary information due to lack of vigilance
Distraction The operator was distracted and therefore did not perceive the information
Memory
Memory confusion The operator got confused and used the wrong information for the given situation
Memory overloaded The Operator’s memory was overloaded as he was simultaneously processing other information.
Insufficient familiarisation The operator was not familiar with the kind of information that he should process and therefore erred in processing it.
Mental block Operator could not access the relevant information.
Distraction The operator was processing other information and therefore did not realize the relevance of the new information and failed to process it.
Similarity interference Due to the similarity of the character of the information the operator processed the information based on wrong assumptions.

109
Decision making
Misinterpretation The data were misinterpreted leading to a wrong decision.
Failure to consider side or long effects
The operator did not consider the long term or the side effects of the situation.
Mind set The mind set and world view of the operator had an important influence on the decision making and eventually led to a wrong decision.
Knowledge/competency problems The operator did not have the necessary competency or knowledge to make the right decision.
Decision freeze or overloaded The operator was overloaded with information or tasks and was therefore unable to make a decision.
Risk cognition failure The operator failed to recognize the risk in a given situation or the decision taken by him.
Action
Manual Variability The risky situation occurred due to a mistake in the manual handling of technical equipment.
Confusion The operator got confused and used the wrong technical equipment for the action he wanted to perform.
Habit intrusion Out of habit the operator handled the technical equipment in a certain way. However, this action led to a mistake in the given situation.
Distraction/preoccupation The operator was distracted or preoccupied with something else and therefore did not perform the necessary action.
Other slip Any other slip that occurred in the connection with the handling of technical equipment.
Violation
Stress/pressure Stress and pressure to perform lead to risky actions consciously violating existing rules.
Fatigue Bodily and cognitive fatigue leading to risk taking behaviour/risky decisions taken consciously.
Intoxication The operator is intoxicated due to alcohol, drugs or medicines and takes a risky decision consciously.
Lack of knowledge The operator takes a risk knowing about the rules that are being violated, but not being aware of/not knowing the potential consequences.
Emotional condition The operator is dissatisfied or emotional unstable leading him to willingly not follow the procedures and rules in place.
9. Performance Shaping Factors
Personal factors
Cognitive fatigue Cognitive fatigue influenced a person’s performance in an emergency situation.
Bodily fatigue Bodily fatigue influenced a person’s performance in an emergency situation.
Stress A person being qualitatively or quantitatively overloaded or under challenged which influenced his or her performance.
Intoxication A person was intoxicated either by alcohol, drugs, medicine or by engine fumes. This led to a limitation in the performance.
Emotional condition The person was preoccupied with some emotional matters and did therefore not perform according to usual level.
Aspects of communication/information
Ambiguous information The information received from technical equipment or other persons was ambiguous and the person therefore did not know which information to rely on.
Lack of information The person did not have the crucial information to hand in order to come to a good conclusion in a certain situation.
Wrong information The received information for a decision-making was wrong.
Language problems Misunderstandings occurred due to language problems.
Miscommunication Miscommunication occurred for various reasons.
Training/competence
Lack of experience The person was working under a lack of experience and could not perform up to expected standards.

110
Lack of orientation A person had not the necessary orientation in a certain situation and this decreased his performance level.
Inadequate training/instruction The person had only inadequate instruction and training on how to react/what to do in a certain situation and therefore could not perform to the expected standards.
No training The person had no training and could not perform to expected standards.
Internal/external environment
Weather The weather/climate and related issues had an influence on the operator or the technical equipment and influenced his/her/its performance.
Time of day Sunshine or darkness influenced the operator’s performance.
Atmosphere on the vessel The atmosphere in the group influenced the individual behaviour of the operator leading to worse performance.
Business climate The business climate of the company has had an influence on the performance on board via e.g. budget restrictions.
Organisational factors
Organisational culture The organisational culture of the shipping company had an influence in the performance on the ship.
Organisational structure The organisational structure of the shipping company had an influence in the performance on the ship.
Organisational policies The organisational policies of the shipping company had an influence in the performance on the ship
Operations The organisational operations of the shipping company had an influence in the performance on the ship
Procedures The organisational procedures of the shipping company had an influence in the performance on the ship
Supervision A lack of supervision had a negative influence on the shipboard operations.
Manning/staffing characteristics Manning policies, i.e. international crewing, has an influence on the performance of the individual operators on board the vessel.
Time pressure Time pressure put on shipping operations by the shipping company led to decreased performance by the operators.
Others
Other factors Any other factors that had a negative influence on the performance of the operators.
10. Error Recovery
Physical barrier
Wall, doors, fences, containers… Prevents penetration of people into unsafe areas
Helmets, safety clothes, gas masks… Prevents penetration of dangerous material to the human body.
Safety glass, fire safe rooms, fire doors… Prevents penetration of dangerous material into a place/space.
Functional barrier
Locks, equipment match, physical interlocking…
Preventing movement or action concerning “hardware”.
Passwords, entry codes, action sequences, pre-conditions…
Preventing movement or action concerning “software”.
Distance (too far away for being touched by mistake), persistence (dead-man button), …
Hindering or impeding actions in a spatio-temporal sense.
Sprinklers, air bags, fire extinguisher… Dissipating energy, quenching, extinguishing.

111
Symbolic barrier
Demarcations, labels, warnings… Countering, preventing or thwarting actions.
Instructions, procedures, precautions, conditions, dialogues
Regulating actions.
Signs, signals, warnings, alarms, … Indicating system status or conditions.
Clearance, approval, … Communication and interpersonal dependency.
Incorporeal barrier
Informal guidance: Self-restraint, ethical norms, morals, social or group pressure…
Complying with or conforming to those rules will help to recover from an accident.
Formal guidance: Rules, restrictions, laws, guidelines, prohibitions, training…
Complying with or conforming to those rules will help to recover from an accident.

112

113
Anexo B: Descrição dos nós da Rede Bayesiana
Variable Description States Parent Nodes Parent states Probabilities Reference
Intoxication
The influence of the use of drugs, alcohol and other substances (per scripted or not) on mariner’s performance.
Yes --- 0.02 literature review (Akhtar and Utne, 2012) No --- 0.98
Emotional condition
The effect of an individual’s general emotional condition
Unstable --- 0.01 literature review (Ventikos and Vagias, 2010) Stable --- 0.99
Stress Introduction of the stress factor on operator's performance
High --- 0.24 literature review (Ventikos and Vagias, 2010) Normal --- 0.76
Fatigue
The fatigue node quantifies fatigue, in order to access if operator's competence is decreased
Yes --- 0.05 literature review (Ventikos & Papamichalis, 2008) No --- 0.95
Staffing characteristics
Evaluation of manning levels in terms of lack of the resquested characteristics to complete their tasks
Good --- 0.9938 literature review (Cai et. al, 2013) Poor --- 0.0062
Operations
In this node all the facts or conditions of a ship’s functioning based on human element are included
Good --- 0.9969 literature review (Cai et. al, 2013) Poor --- 0.0031
Supervision
This node highlights the crucial role of supervision, as an organizational factor
Good --- 0.9919 literature review (Cai et. al, 2013) Poor --- 0.0081
Procedures
In this node, the importance of following good procedures inside the environment of a ship is included
Good --- 0.55 literature review (Akhtar and Utne, 2012) Poor --- 0.45
Organisational Policies
This node includes all the courses or principles of actions adopted by the crew members and the organization in general, which are proposed by governments or other organisations
Good --- 0.9981
literature review (Cai et. al, 2013)
Poor --- 0.0019
Organisational Structure
Organizational structure defines how activities such as task allocation, coordination and supervision are directed towards the achievement of organisational aims.
Good --- 0.9942
literature review (Cai et. al, 2013)
Poor --- 0.0058
Time Pressure
This node contains the significant importance of timing to the procedures, tasks and action on board a ship.
No --- 0.68 literature review (Akhtar and Utne, 2012) Yes --- 0.32
Organisational culture
Organisational culture is the behaviour of humans within an organisation and the meaning that people attach to those behaviours
Excellent --- 0.25
literature review (DNV, 2006)
Standard --- 0.5
Poor --- 0.25
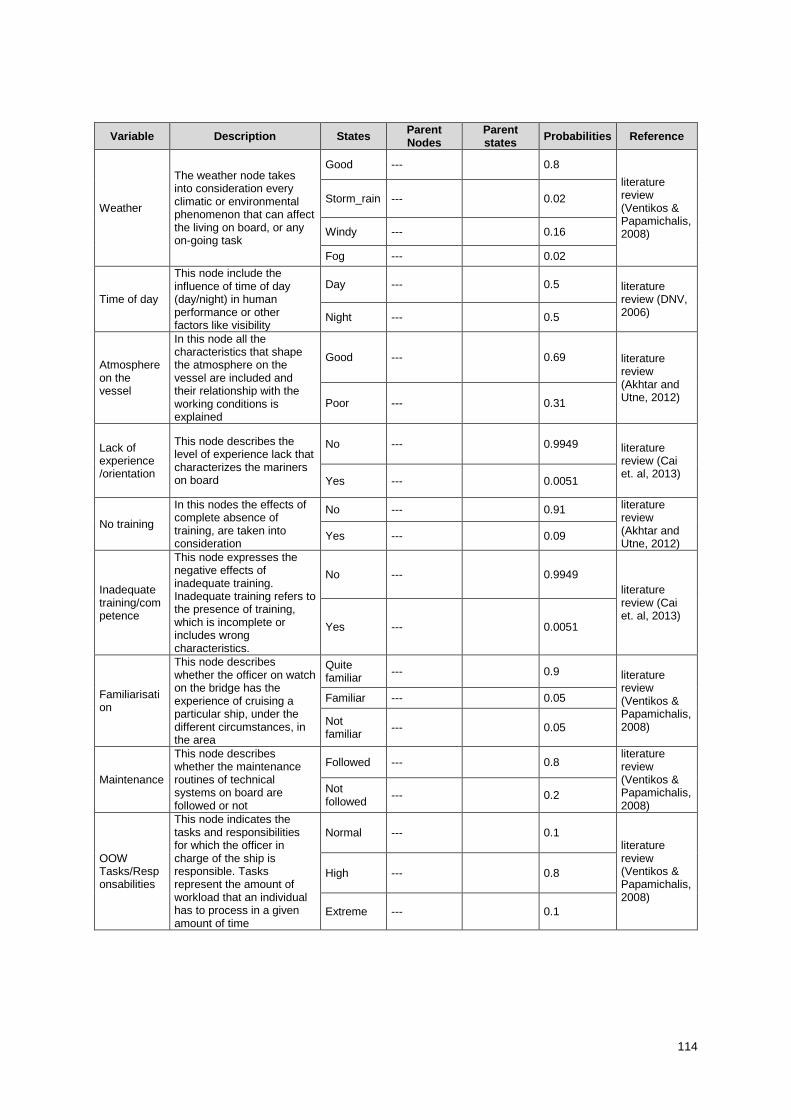
114
Variable Description States Parent Nodes
Parent states
Probabilities Reference
Weather
The weather node takes into consideration every climatic or environmental phenomenon that can affect the living on board, or any on-going task
Good --- 0.8
literature review (Ventikos & Papamichalis, 2008)
Storm_rain --- 0.02
Windy --- 0.16
Fog --- 0.02
Time of day
This node include the influence of time of day (day/night) in human performance or other factors like visibility
Day --- 0.5 literature review (DNV, 2006) Night --- 0.5
Atmosphere on the vessel
In this node all the characteristics that shape the atmosphere on the vessel are included and their relationship with the working conditions is explained
Good --- 0.69 literature review (Akhtar and Utne, 2012)
Poor --- 0.31
Lack of experience /orientation
This node describes the level of experience lack that characterizes the mariners on board
No --- 0.9949 literature review (Cai et. al, 2013)
Yes --- 0.0051
No training
In this nodes the effects of complete absence of training, are taken into consideration
No --- 0.91 literature review (Akhtar and Utne, 2012)
Yes --- 0.09
Inadequate training/competence
This node expresses the negative effects of inadequate training. Inadequate training refers to the presence of training, which is incomplete or includes wrong characteristics.
No --- 0.9949
literature review (Cai et. al, 2013)
Yes --- 0.0051
Familiarisation
This node describes whether the officer on watch on the bridge has the experience of cruising a particular ship, under the different circumstances, in the area
Quite familiar
--- 0.9 literature review (Ventikos & Papamichalis, 2008)
Familiar --- 0.05
Not familiar
--- 0.05
Maintenance
This node describes whether the maintenance routines of technical systems on board are followed or not
Followed --- 0.8 literature review (Ventikos & Papamichalis, 2008)
Not followed
--- 0.2
OOW Tasks/Responsabilities
This node indicates the tasks and responsibilities for which the officer in charge of the ship is responsible. Tasks represent the amount of workload that an individual has to process in a given amount of time
Normal --- 0.1 literature review (Ventikos & Papamichalis, 2008)
High --- 0.8
Extreme --- 0.1

115
Variable Description States Parent Nodes Parent states Probabilities Reference
External Communication
This node describes the level and quality of communication between crew members located on the bridge of the ship or on board another ship, with which the vessel is in collision course with
Yes --- 0.3
literature review (Ventikos & Papamichalis, 2008)
No --- 0.7
Paper chart detection
This node describes the ability to detect a dangerous course on the paper chart given that the paper chart is updated with information of danger causes
Yes --- 0.95
literature review (DNV, 2006) No --- 0.05
ECDIS used This node describes whether the ECDIS is in use or not
Yes --- 0.999 literature review (DNV, 2006) No --- 0.001
Radar detection
The radar detection node, determines whether the officer has the ability to detect danger through the radar.
Yes --- 0.97 literature review (DNV, 2006) No --- 0.3
Language problems
In this node the effect of language problems, to the internal communication factor, are suggested.
No --- 0.87 literature review (Akhtar and Utne, 2012)
Yes --- 0.13
Wrong communication
This node includes the effects of wrong communication between crew members
No --- 0.995 literature review (Cai et. al, 2013) Yes --- 0.005
Lack of communication
This node represents the complete absence between crew members, which increases the probability of error.
No --- 0.995 literature review (Cai et. al, 2013) Yes --- 0.005
Miscommunication
This node includes the effects of miscommunication between crew members. Miscommunication consists of both the wrong message dispatch, as well as the wrong message reception.
No --- 0.995
literature review (Cai et. al, 2013) Yes --- 0.005
Mis-see
This node represents the wrong reading, both from the officer on watch and from the detection systems.
No --- 0.74 literature review (Akhtar and Utne, 2012) Yes --- 0.26
Mishear This node contains the influence of wrong detection by hearing
No --- 0.74 literature review (Akhtar and Utne, 2012) Yes --- 0.26
Visual misperception
This node describes the wrong impression created on the human element, from the act of visual detection.
No --- 0.82 literature review (Ventikos & Papamichalis, 2008)
Yes --- 0.18
Late detection
This node describes the delay of the detection process from both the human element and the machine factor
No --- 0.74 literature review (Akhtar and Utne, 2012)
Yes --- 0.26

116
Variable Description States Parent Nodes
Parent states
Probabilities Reference
Timing error
This node describes the effects of timing error in human-machine interface. Timing error is the poorly timed interaction of human and machines
No --- 0.75 Selected from expert group judgements
Yes --- 0.25
No detection
This node represents the negative effects of the complete absence of the detection process, either from the navigational systems or from the OOW
No --- 0.74 literature review (Akhtar and Utne, 2012)
Yes --- 0.26
Distance to collision (CPA)
This node describes the geometrical distance of two ships in collision course
More than 3 miles
--- 0.5 Selected from expert group judgements
Less than 3 miles
--- 0.5
Encounter type
This node describes the geometrical trajectories of two ships in collision course
Overtaking --- 0.22 literature review (Przywarty, 2008)
Head on --- 0.2
Crossing --- 0.58
Personal factors
This node describes the physical and mental state of the officer on watch and indicates his ability to perform his duties as navigator of the ship.
Poor
Fatigue Yes 0.7
Selected from expert group judgements and the literature review (DNV, 2006)
Intoxication Yes 0.35
Emotional condition
Unstable 0.3
Stress High 0.7
Good
Fatigue Yes 0.3
Intoxication Yes 0.65
Emotional condition
Ustable 0.7
Stress High 0.7
Training competence
This node describes the quality of training with which the human element on board a ship has been shaped. This term also refers to previous experiences and orientations that make crew members more efficient.
Adequate
No training
No 0.9
literature review (Ventikos and Vagias, 2010)
Yes 0
Inadequate training
No 0.9
Yes 0
Lack of experience
No 0.9
Yes 0
Acceptable
No training No 0.1
Yes 0
Inadequate training
No 0.1
Yes 0
Lack of experience
No 0.1
Yes 0
Inadequate
No training No 0
Yes 1
Inadequate training
No 0
Yes 1
Lack of experience
No 0
Yes 1

117
Variable Description States Parent Nodes Parent states
Probabilities Reference
Organisational factors
This node describes how well the vessel operator deals with organisational issues and how well the operator promotes a good organisational mind-set among its employees. The “organisational factors” term, refers work procedures, instructions, drills and attitude.
Good
Time pressure No 1
Selected from expert
group judgements
Yes 0
Org. policies Good 1
Poor 0
Org. culture
Excellent 1
Standard 1
Poor 0
Org. structure Good 1
Poor 0
Staffing characteristics
Good 1
Poor 0
Procedures Good 1
Poor 0
Operations Good 1
Poor 0
Supervision Good 1
Poor 0
Poor
Time pressure No 0
Yes 1
Org. policies Good 0
Poor 1
Org. culture
Excellent 0
Standard 0
Poor 1
Org. structure Good 0
Poor 1
Staffing characteristics
Good 0
Poor 1
Procedures Good 0
Poor 1
Operations Good 0
Poor 1
Supervision Good 0
Poor 1

118
Variable Description States Parent Nodes Parent states
Probabilities Reference
OOW Competence
Competence is a combination of knowledge skills and attitude. This node reflects the officer’s on watch knowledge, the level of training, the way he utilizes the given knowledge and the attitude he has towards his tasks.
Excellent
Personal factors Poor 0
Selected from expert group judgements
Good 0
Organizational factors
Good 0
Poor 0
Training competence
Adequate 1
Acceptable 0
Inadequate 0
Standard
Personal factors Poor 0
Good 1
Organizational factors
Good 1
Poor 0
Training competence
Adequate 0
Acceptable 1
Inadequate 0
Low
Personal factors Poor 1
Good 0
Organizational factors
Good 0
Poor 1
Training competence
Adequate 0
Acceptable 0
Inadequate 1
Navigational system detection
The node describes whether the OOW has detected the danger on either the charts, the radar or because of a collision alarm
Yes
Probability matrix presented separately
literature review (DNV, 2006), (Ventikos and Vagias, 2010)
No
OOW Performance
The node describes how well the OOW performs his tasks. It includes personal condition, bridge design and competence.
Excellent
Probability matrix presented separately
Selected from expert group judgements and the literature review (DNV, 2006), (Ventikos and Vagias, 2010)
Standard
Poor
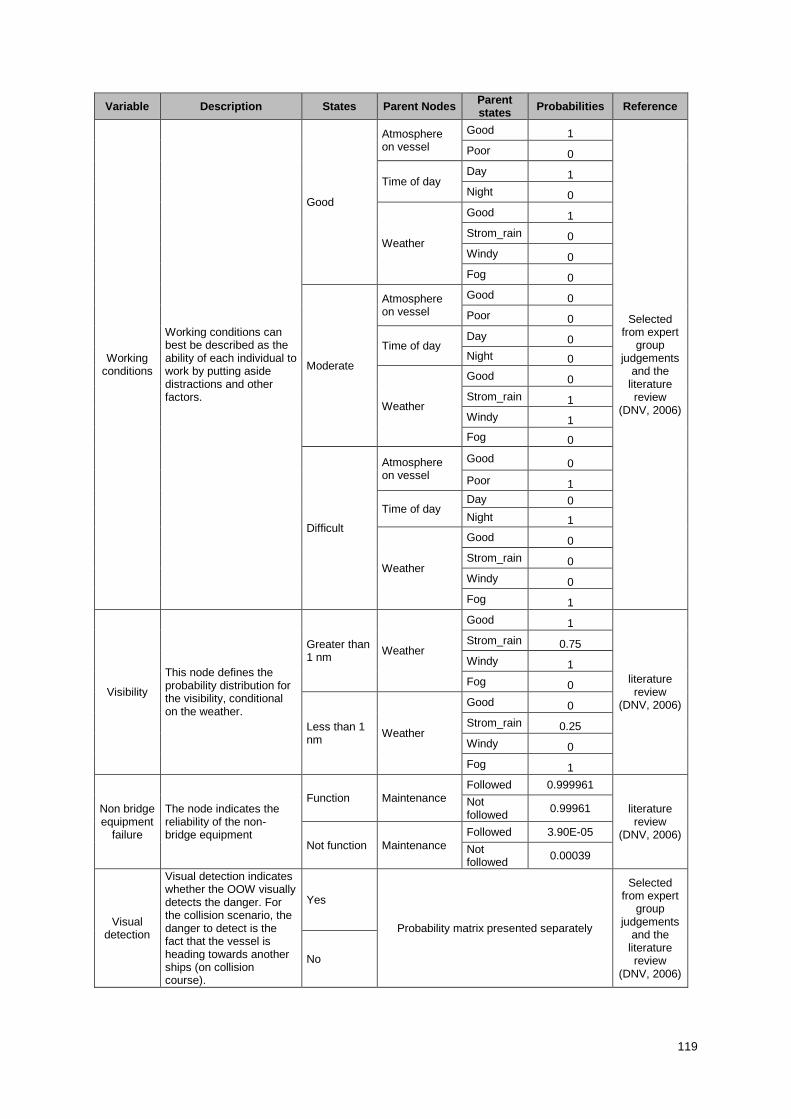
119
Variable Description States Parent Nodes Parent states
Probabilities Reference
Working conditions
Working conditions can best be described as the ability of each individual to work by putting aside distractions and other factors.
Good
Atmosphere on vessel
Good 1
Selected from expert
group judgements
and the literature review
(DNV, 2006)
Poor 0
Time of day Day 1
Night 0
Weather
Good 1
Strom_rain 0
Windy 0
Fog 0
Moderate
Atmosphere on vessel
Good 0
Poor 0
Time of day Day 0
Night 0
Weather
Good 0
Strom_rain 1
Windy 1
Fog 0
Difficult
Atmosphere on vessel
Good 0
Poor 1
Time of day Day 0
Night 1
Weather
Good 0
Strom_rain 0
Windy 0
Fog 1
Visibility
This node defines the probability distribution for the visibility, conditional on the weather.
Greater than 1 nm
Weather
Good 1
literature review
(DNV, 2006)
Strom_rain 0.75
Windy 1
Fog 0
Less than 1 nm
Weather
Good 0
Strom_rain 0.25
Windy 0
Fog 1
Non bridge equipment
failure
The node indicates the reliability of the non-bridge equipment
Function Maintenance Followed 0.999961
literature review
(DNV, 2006)
Not followed
0.99961
Not function Maintenance
Followed 3.90E-05
Not followed
0.00039
Visual detection
Visual detection indicates whether the OOW visually detects the danger. For the collision scenario, the danger to detect is the fact that the vessel is heading towards another ships (on collision course).
Yes
Probability matrix presented separately
Selected from expert
group judgements
and the literature review
(DNV, 2006)
No

120
Variable Description States
Parent Nodes Parent states Probabilities Reference
HMI Problems
The human–computer interface can be described as the point of communication between the human user and the computer. The flow of information between the human and computer is defined as the loop of interaction. HMI problems consist of the interruption (or decrease in quality) of this flow.
No
Mis-see No 1
Selected from expert
group judgements
Yes 0
Mishear No 1
Yes 0
Visual misperception No 1
Yes 0
Timing error Good 1
Poor 0
No detection No 1
Yes 0
Late detection No 1
Yes 0
Yes
Mis-see No 0
Yes 1
Mishear No 0
Yes 1
Visual misperception No 0
Yes 1
Timing error Good 0
Poor 1
No detection No 0
Yes 1
Late detection No 0
Yes 1
Communication with Bridge
Team
Depending on the existence of a Bridge Resource Management system, the node describes the level and the quality of the communication between the bridge personnel.
Beyond standard
Wrong communication No 0.1
Selected from expert
group judgements
Yes 0
Miscommunication No 0.1
Yes 0
Lack of communication
No 0.1
Yes 0
Language problems No 0.1
Yes 0
Standard
Wrong communication No 0.9
Yes 0
Miscommunication No 0.9
Yes 0
Lack of communication
No 0.9
Yes 0
Language problems No 0.9
Yes 0
Substandard
Wrong communication No 0
Yes 1
Miscommunication No 0
Yes 1
Lack of communication
No 0
Yes 1
Language problems No 0
Yes 1
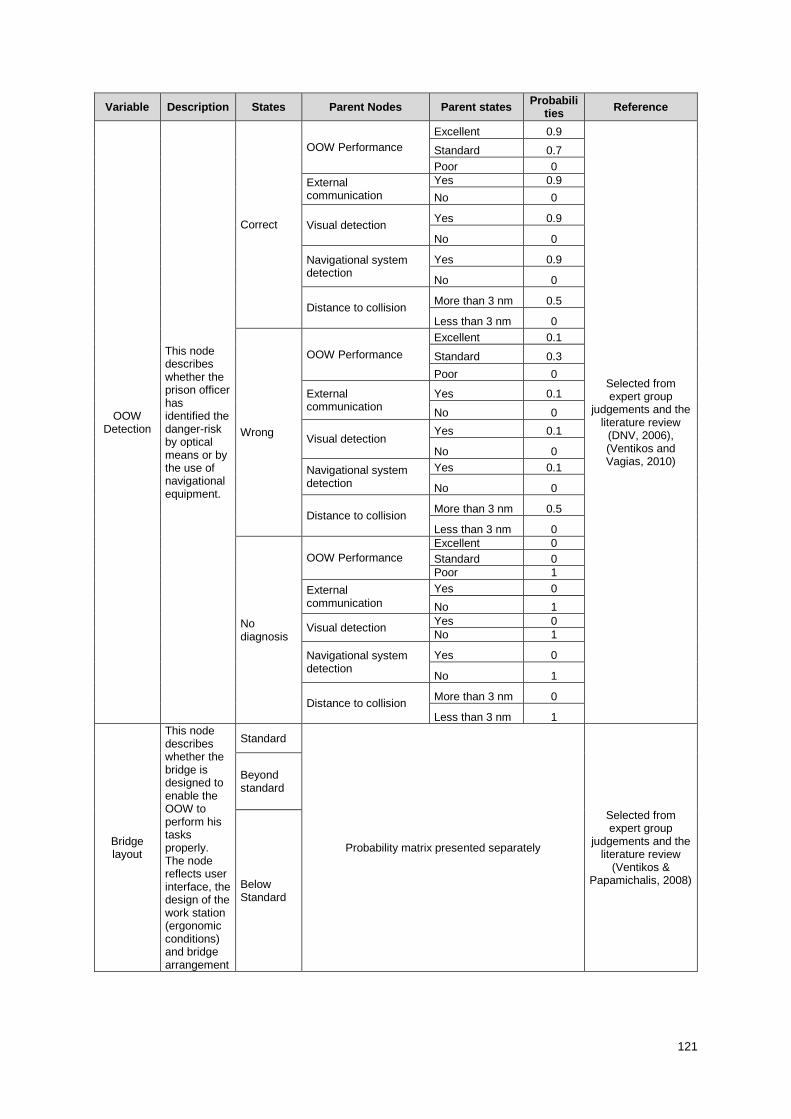
121
Variable Description States Parent Nodes Parent states Probabili
ties Reference
OOW Detection
This node describes whether the prison officer has identified the danger-risk by optical means or by the use of navigational equipment.
Correct
OOW Performance
Excellent 0.9
Selected from expert group
judgements and the literature review
(DNV, 2006), (Ventikos and Vagias, 2010)
Standard 0.7
Poor 0
External communication
Yes 0.9
No 0
Visual detection Yes 0.9
No 0
Navigational system detection
Yes 0.9
No 0
Distance to collision More than 3 nm 0.5
Less than 3 nm 0
Wrong
OOW Performance
Excellent 0.1
Standard 0.3
Poor 0
External communication
Yes 0.1
No 0
Visual detection Yes 0.1
No 0
Navigational system detection
Yes 0.1
No 0
Distance to collision More than 3 nm 0.5
Less than 3 nm 0
No diagnosis
OOW Performance
Excellent 0
Standard 0
Poor 1
External communication
Yes 0
No 1
Visual detection Yes 0
No 1
Navigational system detection
Yes 0
No 1
Distance to collision More than 3 nm 0
Less than 3 nm 1
Bridge layout
This node describes whether the bridge is designed to enable the OOW to perform his tasks properly. The node reflects user interface, the design of the work station (ergonomic conditions) and bridge arrangement
Standard
Probability matrix presented separately
Selected from expert group
judgements and the literature review
(Ventikos & Papamichalis, 2008)
Beyond standard
Below Standard

122
Variable Description States Parent
Nodes Parent states Probabilities Reference
OOW Assessment
This node describes whether the OOW is making the correct assessment of the situation based on his observations
Correct Probability matrix presented
separately literature review
(Ventikos and Vagias, 2010)
Wrong
OOW Action
The node defines whether the OOW, given he or someone else has discovered the danger, acts correct or not to avoid an accident
Correct
Probability matrix presented separately
Selected from expert group judgements and the literature
review (DNV, 2006), (Ventikos and Vagias,
2010)
Wrong
Collision
The node defines whether the OOW, given he or someone else has discovered the danger, acts correct or not to avoid an accident
No
Probability matrix presented separately
Selected from expert group judgements and theliterature
review (Ventikos & Papamichalis, 2008)
Yes
VISUAL DETECTION
Parents Parents States
Familiarisation Quite familiar
Visibility Greater than 1 nm Lower than 1 nm
Bridge layout standard beyond
standard below standard standard beyond standard below standard
Time of day day night day night day night day night day night day night
Node states
Yes 0,99 0,8 0,99 0,9 0,73 0,7 0,9 0,85 0,95 0,8 0,65 0,6
No 0,01 0,2 0,01 0,1 0,27 0,3 0,1 0,15 0,05 0,2 0,35 0,4
Familiarisation Familiar
Visibility Greater than 1 nm Lower than 1 nm
Bridge layout standard beyond
standard below standard standard beyond standard below standard
Time of day day night day night day night day night day night day night
Node states
Yes 0,95 0,85 0,98 0,9 0,87 0,8 0,99 0 1 1 0,984 0
No 0,05 0,15 0,02 0,1 0,13 0,2 0,01 1 0 0 0,016 1
Familiarisation Not familiar
Visibility Greater than 1 nm Lower than 1 nm
Bridge layout standard beyond
standard below standard standard beyond standard below standard
Time of day day night day night day night day night day night day night
Node states
Yes 0,984 0 0,99 0 1 0 0,984 0 0,99 0 0,984 0
No 0,016 1 0,01 1 0 1 0,016 1 0,01 1 0,016 1
OOW ASSESSMENT
Parents Parent states
OOW
Performance Excellent Standard Poor
OOW
Detection Correct Wrong No
diagnosis Correct Wrong No
diagnosis Correct Wrong No
diagnosis
Node states
Correct 0,999988 0 0 0,999984 0 0 0,999968 0 0
Wrong 1,20E-05 1 1 1,60E-05 1 1 3,20E-05 1 1

123
BRIDGE LAYOUT
Parents Parent states
HMI Problems No
Visual misperception No Yes
Mis-see No Yes No Yes
Mishear No Yes No Yes No Yes No Yes
Node states
Standard 0,8 0,75 0,75 0,7 0,75 0,7 0,7 0,65
Beyond Standard 0,2 0,1 0,1 0,05 0,1 0,05 0,05 0,02
Below Standard 0 0,15 0,15 0,25 0,15 0,25 0,25 0,33
HMI Problems No
Visual misperception No Yes
Mis-see No Yes No Yes
Mishear No Yes No Yes No Yes No Yes
Node states
Standard 0,75 0,7 0,7 0,65 0,7 0,2 0,2 0,1
Beyond Standard 0,1 0,05 0,95 0,02 0,05 0 0 0
Below Standard 0,15 0,25 0,25 0,33 0,25 0,8 0,8 0,9
NAVIGATIONAL SYSTEM DETECTION
Parents Parent states
Paper chart detection Yes
HMI Problems No Yes
ECDIS used Yes No Yes No
Radar detection Yes No Yes No Yes No Yes No
Node states
Yes 1 1 1 0 0,8 0,8 0,8 0
No 0 0 0 1 0,2 0,2 0,2 1
Paper chart detection Yes
HMI Problems No Yes
ECDIS used Yes No Yes No
Radar detection Yes No Yes No Yes No Yes No
Node states
Yes 1 0 0,8 0 0,8 0 0,8 0
No 0 1 0,2 1 0,2 1 0,2 1
OOW ACTION
Parents Parents states
Non bridge equipment Function
OOW Assessment Correct Wrong
Communication with bridge
Beyond standard Standard
Substandard
Beyond standard
Standard
Substandard
Node state
s
Correct action 0,999996 0,99999
2 0,99998 0 0 0
Wrong action 4,00E-06 8,00E-06 2,00E-05 1 1 1
Non bridge equipment Not function
OOW Assessment Correct Wrong
Communication with bridge
Beyond standard Standard
Substandard
Beyond standard
Standard
Substandard
Node state
s
Correct action 0,001 0,001 0,001 0,001 0,001 0,001
Wrong action 0,999 0,999 0,999 0,999 0,999 0,999

124
OOW PERFORMANCE
Parents Parent states
Working conditions Good
Bridge layout Standard Beyond standard Below standard
OOW tasks/responsabilities Normal High Extreme Normal High Extreme Normal High Extreme
OOW competence E S L E S L E S L E S L E S L E S L E S L E S L E S L
Node states
Excellent 0,93 0,8 0,35 0,8 0,6 0,15 0,7 0,55 0,1 0,95 0,85 0,4 0,8 0,6 0,15 0,55 0,1 0,9 0,75 0,75 0,3 0,8 0,6 0,15 0,7 0,55 0,1
Standard 0,07 0,2 0,6 0,2 0,4 0,6 0,3 0,45 0,55 0,05 0,15 0,55 0,2 0,4 0,6 0,45 0,55 0,1 0,25 0,25 0,65 0,2 0,4 0,6 0,3 0,45 0,55
Poor 0 0 0,05 0 0 0,25 0 0 0,35 0 0 0,05 0 0 0,25 0 0,35 0 0 0 0,05 0 0 0,25 0 0 0,35
Working conditions Moderate
Bridge layout Standard Beyond standard Below standard
OOW tasks/responsabilities Normal High Extreme Normal High Extreme Normal High Extreme
OOW competence E S L E S L E S L E S L E S L E S L E S L E S L E S L
Node states
Excellent 0,8 0,6 0,15 0,7 0,55 0,1 0,6 0,5 0 0,9 0,7 0 0,75 0,6 0 0,7 0,55 0 0,75 0,55 0 0,6 0,5 0 0,5 0,4 0
Standard 0,2 0,4 0,6 0,3 0,45 0,55 0,4 0,5 0,2 0,1 0,3 0,2 0,25 0,4 0,2 0,3 0,45 0,1 0,25 0,45 0,2 0,4 0,5 0,2 0,5 0,5 0,1
Poor 0 0 0,25 0 0 0,35 0 0 0,8 0 0 0,8 0 0 0,8 0 0 0,9 0 0 0,8 0 0 0,8 0 0,1 0,9
Working conditions Difficult
Bridge layout Standard Beyond standard Below standard
OOW tasks/responsabilities Normal High Extreme Normal High Extreme Normal High Extreme
OOW competence E S L E S L E S L E S L E S L E S L E S L E S L E S L
Node states
Excellent 0,7 0,55 0 0,6 0,5 0 0,5 0,4 0 0,75 0,6 0 0,7 0,55 0 0,6 0,5 0 0,6 0,5 0 0,5 0,4 0 0,1 0 0
Standard 0,3 0,45 0,2 0,4 0,5 0,2 0,5 0,5 0,1 0,25 0,4 0,2 0,3 0,45 0,2 0,4 0,4 0,1 0,4 0,5 0,1 0,5 0,5 0,1 0,5 0,4 0,05
Poor 0 0 0,8 0 0 0,8 0 0,1 0,9 0 0 0,8 0 0 0,8 0 0,1 0,9 0 0 0,9 0 0,1 0,9 0,4 0,6 0,95
(OOW Competence: E – Excellent; S – Standard; L – Low)
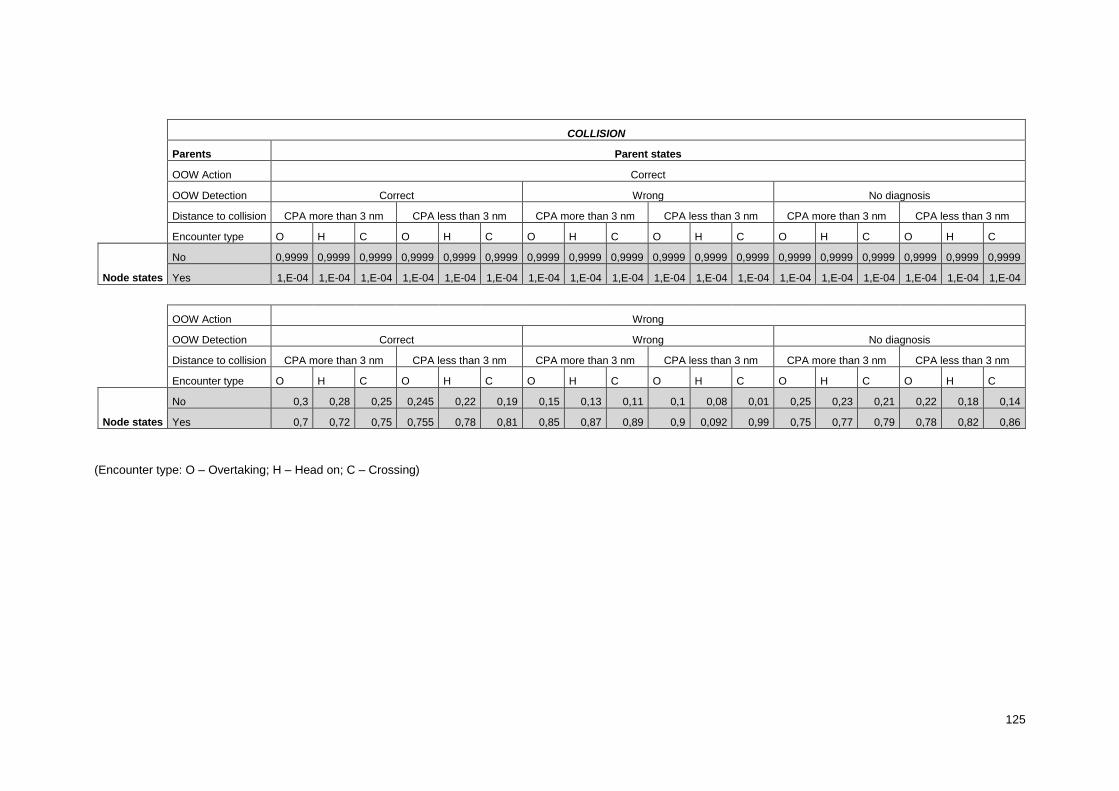
125
COLLISION
Parents Parent states
OOW Action Correct
OOW Detection Correct Wrong No diagnosis
Distance to collision CPA more than 3 nm CPA less than 3 nm CPA more than 3 nm CPA less than 3 nm CPA more than 3 nm CPA less than 3 nm
Encounter type O H C O H C O H C O H C O H C O H C
Node states
No 0,9999 0,9999 0,9999 0,9999 0,9999 0,9999 0,9999 0,9999 0,9999 0,9999 0,9999 0,9999 0,9999 0,9999 0,9999 0,9999 0,9999 0,9999
Yes 1,E-04 1,E-04 1,E-04 1,E-04 1,E-04 1,E-04 1,E-04 1,E-04 1,E-04 1,E-04 1,E-04 1,E-04 1,E-04 1,E-04 1,E-04 1,E-04 1,E-04 1,E-04
OOW Action Wrong
OOW Detection Correct Wrong No diagnosis
Distance to collision CPA more than 3 nm CPA less than 3 nm CPA more than 3 nm CPA less than 3 nm CPA more than 3 nm CPA less than 3 nm
Encounter type O H C O H C O H C O H C O H C O H C
Node states
No 0,3 0,28 0,25 0,245 0,22 0,19 0,15 0,13 0,11 0,1 0,08 0,01 0,25 0,23 0,21 0,22 0,18 0,14
Yes 0,7 0,72 0,75 0,755 0,78 0,81 0,85 0,87 0,89 0,9 0,092 0,99 0,75 0,77 0,79 0,78 0,82 0,86
(Encounter type: O – Overtaking; H – Head on; C – Crossing)

126

127
Anexo C: Narrativa – Estudo de Caso 1
At 0218 on 6 March 2011, the UK registered container ship Cosco Hong Kong collided with the China
registered fish transportation vessel Zhe Ling Yu Yun 135. The accident occurred in international waters
off the coast of Zhejiang Province, China. Zhe Ling Yu Yun 135 sank almost immediately, with the loss
of 11 lives. Cosco Hong Kong was not damaged.
Factors that led to the collision included:
• The performance of Cosco Hong Kong’s OOW fell well short of expected standards. He did not
correctly apply the collision regulations or follow onboard instructions.
• Zhe Ling Yu Yun 135 and Cosco Hong Kong turned towards each other at about the same time when
only about 1.5nm apart and with a closing speed of over 20kts.
• Cosco Hong Kong’s OOW was the sole lookout. In darkness, in adverse weather conditions, and
among large concentrations of fishing vessels, he did not see that Zhe Ling Yu Yun 135 was
approaching.
• Even though many fishing vessels were concentrated in the area, Cosco Hong Kong’s master or OOW
did not consider amending the voyage plan, reducing speed, or enhancing the bridge manning.
Analysis for evidences selection:
Time of day = night
Mis-see = Yes
Cosco Hong Kong’s OOW was the sole lookout. In darkness, in adverse weather conditions,
and among large concentrations of fishing vessels, he did not see that Zhe Ling Yu Yun 135
was approaching.
OOW Performance = poor
The performance of Cosco Hong Kong’s OOW fell well short of expected standards. He did not
correctly apply the collision regulations or follow onboard instructions.
There were serious departures from regulation, guidance and best practice that bring the OOW’s
knowledge and application of the COLREGS, his judgment, and his overall competency into
question. Although the second officer was qualified for his rank, aspects of his bridge
watchkeeping on board Cosco Hong Kong on the morning of 6 March 2011 fell well short of the
standard required by STCW.
Distance < 3 nm
Zhe Ling Yu Yun 135 and Cosco Hong Kong turned towards each other at about the same time
when only about 1.5nm apart and with a closing speed of over 20kts.
Weather = Rain
Visibility > 1 nm

128
The visibility was 3nm in rain, the sea state was moderate, and the wind was from the north-
north-west force 5.
Inadequate Training-Competence = Yes
The second officer’s apparent lack of competency, the previous accidents involving Cosmar
managed vessels and the subsequent unsatisfactory results of the rule of the road tests, indicate
that there is an underlying problem with the continuation and refresher training provided to deck
officers by COSCO Shanghai, and possibly other COSCO subsidiaries.
In allowing the lookout to leave the bridge at a critical time, when the vessel was on a night
passage through dense shipping in adverse weather conditions, the second officer appears
not to have appreciated the value of the lookout or the dangers developing ahead.
Supervision = Poor
Had the master been on the bridge, he could have enhanced the effectiveness of the bridge
team through his knowledge and experience. He would also have been best placed to assess
and mitigate the risks posed by the concentrations of fishing vessels by amending the vessel’s
route or by reducing speed. It is highly unlikely that the master would have allowed the lookout
to leave the bridge.
Encounter type: Crossing
Cosco Hong Kong’s OOW failed to comply with fundamental requirements of the COLREGS,
the master’s night orders, the vessel’s onboard instructions and MCA guidance. In particular,
he: (…) altered the container ship’s heading to port when Cosco Hong Kong was the stand on
vessel in a crossing situation.
129
Anexo D: Narrativa – Estudo de Caso 2
At 1851 on 20 December 2009 the Singapore registered bulk carrier Alam Pintar was in collision with
the UK registered fishing vessel Etoile des Ondes 15 nm north of the
Cherbourg peninsula. As a result of the collision the fishing vessel sank; one of her four crew, Chris
Wadsworth, tragically lost his life.
Alam Pintar was on an east-north-easterly course between the Casquets and the
Dover Strait traffic separation schemes (TSS) on her way to Hamburg. The bridge was manned by an
inexperienced officer and an unqualified deck cadet.
The officer of the watch (OOW) had seen Etoile des Ondes and realised there was a risk of collision,
but his initial alterations of course to avoid collision were rendered ineffective when the fishing vessel
also changed course to start shooting her pots.
Finally, Alam Pintar’s OOW ordered the wheel hard-a-starboard, but this was too late to be effective in
preventing the collision.
The master and OOW of Alam Pintar were aware of the collision, but failed to stop.
They made no attempt to confirm if Etoile des Ondes and her crew were safe, and failed to report the
incident. There is evidence to suggest that the crew of Alam Pintar subsequently attempted to alter
recorded contemporaneous data to mask the vessel’s involvement in the accident.
Analysis for evidences selection:
Lack of experience = Yes
Alam Pintar was on an east-north-easterly course between the Casquets and the Dover Strait
traffic separation schemes (TSS) on her way to Hamburg. The bridge was manned by an
inexperienced officer and an unqualified deck cadet.
Supervision = Poor
OOW Assessment = Poor
The actions taken by Alam Pintar to avoid collision with Etoile des Ondes were ineffective.
Although the initial action was in good time it was not substantial.
The OOW on Alam Pintar lacked experience and was unsure about the actions of Etoile des
Ondes, however he did not consider calling the master for assistance. There was no effective
lookout.
Fatigue = No
The hours of work records of Alam Pintar’s crew were examined and found to be in accordance
with the ILO Hours of Work Convention C180 which ensures that seafarers receive a minimum
of 10 hours rest in any 24 hour period, and a minimum of 77 hours rest in any 7 day period. The
working arrangements on Etoile des Ondes were discussed with the crew and, although they
worked intensively during the day, they were all able to get sufficient, good quality rest overnight.
Fatigue is not considered a contributory factor in this accident.

130
Visual misperception = No
Time of day = Night
Radar detection = Yes
The OOW on Alam Pintar first saw the lights and radar target of Etoile des Ondes at a range of
between 3 and 4 miles, on his starboard bow. After acquiring the radar target, using the ARPA,
he realised there was a risk of collision and made a small alteration to starboard of 5º, which
placed Etoile des Ondes on the vessel’s port bow. This decision was based mainly on the ARPA
information as he found it difficult to positively distinguish the fishing vessel’s navigation lights
visually, due to the glare produced by her deck working lights. The bearing of Etoile des Ondes
opened to port as the fishing vessel continued on her northerly heading while hauling her pots.
The OOW later noticed that the target had once again drawn ahead. At this time, Etoile des
Ondes had probably picked up the end of the string and was heading east-south-east,
repositioning for shooting. The OOW then made a second alteration, of 10º to port, to place her
on his starboard bow. However, this action probably coincided with Etoile des Ondes resuming
shooting on a 27 northerly heading, which made the action ineffective. Once again the lights
drew ahead and the OOW’s subsequent emergency action of a large alteration to starboard was
too late to be effective in avoiding the collision
Visibility = Good
At the time of the collision visibility was good, with the shore lights of France clearly visible from
Etoile des Ondes. The wind and sea conditions were slight and there was a clear sky.
Organisational Policies = Poor
At the time of the accident the bridge team of Alam Pintar consisted of the 4th officer, and a
deck cadet who was not qualified to form part of the navigational watch.
The company did not provide any formal training in BTM for its masters or deck officers.
However, chief officers were sent on a bridge simulator course before taking their first command,
but this was not a recognised BTM course.

131
Anexo E: Análise de sensibilidade
E.1 Output: Collision
X 𝑆𝑃𝑜 ∆𝑥𝑖
𝑃𝑐
𝑜 𝑃𝑐
𝑒 ∆𝑃𝑐
∆𝑃𝑐
/𝑃𝑐𝑜
∆𝑃𝑐 /∆𝑥𝑖
Language problems = Yes 0.13 0.87 0.0045 0.00450 0.00000 0.00000 0.00000
Miscommunication = Yes 0.005 0.995 0.0045 0.00450 0.00000 0.00000 0.00000
Lack of information = Yes 0.005 0.995 0.0045 0.00450 0.00000 0.00000 0.00000
Org. culture = poor 0.25 0.75 0.0045 0.00451 0.00001 0.00222 0.00001
Org. policies = poor 0.0019 0.9981 0.0045 0.00451 0.00001 0.00222 0.00001
Operations = poor 0.0031 0.9969 0.0045 0.00451 0.00001 0.00222 0.00001
Procedures = poor 0.55 0.45 0.0045 0.00451 0.00001 0.00222 0.00002
Staffing characteristics = poor 0.0062 0.9938 0.0045 0.00451 0.00001 0.00222 0.00001
Time pressure = yes 0.32 0.68 0.0045 0.00451 0.00001 0.00222 0.00001
Supervision = Poor 0.0081 0.9919 0.0045 0.00451 0.00001 0.00222 0.00001
Lack of experience/orientation = yes 0.0051 0.9949 0.0045 0.00457 0.00007 0.01556 0.00007
Inadequate training = Yes 0.0051 0.9949 0.0045 0.00457 0.00007 0.01556 0.00007
Late detection = Yes 0.26 0.74 0.0045 0.00468 0.00018 0.04000 0.00024
No detection = Yes 0.26 0.74 0.0045 0.00468 0.00018 0.04000 0.00024
Atmosphere on the vessel = poor 0.31 0.69 0.0045 0.00474 0.00024 0.05333 0.00035
Stress = High 0.24 0.76 0.0045 0.00477 0.00027 0.06000 0.00036
Fatigue = Yes 0.05 0.95 0.0045 0.00479 0.00029 0.06444 0.00031
Visual misperception = Yes 0.18 0.82 0.0045 0.00534 0.00084 0.18667 0.00102
Weather = fog 0.02 0.98 0.0045 0.00576 0.00126 0.28000 0.00129
Visibility = lower_than_1nm 0.025 0.975 0.0045 0.00574 0.00124 0.27556 0.00127
Radar detection = No 0.03 0.97 0.0045 0.00587 0.00137 0.30444 0.00141
Time of day = night 0.5 0.5 0.0045 0.00618 0.00168 0.37333 0.00336
Familiarisation = not_familiar 0.05 0.95 0.0045 0.01051 0.00601 1.33556 0.00633
Navigation system detection = No 0.03175 0.96825 0.0045 0.03647 0.03197 7.10444 0.03302
Worst and Best state 𝑆𝑃𝑜 𝑃𝑐
𝑒 ∆𝑃𝑐𝑚𝑎𝑥
Radar detection Radar detection = Yes 0.97 0.0045
0.00137
Radar detection = No 0.03 0.00587
Navigation system detection
Navigation system detection =Yes 0.96825 0.00346 0.03301
Navigation system detection = No 0.03175 0.03647
Late detection Late detection = No 0.74 0.00444
0.00024
Late detection = Yes 0.26 0.00468
No detection No detection = No 0.74 0.00444
0.00024
No detection = Yes 0.26 0.00468
Visual misperception Visual misperception = No 0.82 0.00432
0.00102
Visual misperception = Yes 0.18 0.00534
Lack of information Lack of information = No 0.995 0.0045 0.00000

132
Lack of information = Yes 0.005 0.0045
Language Problems Language problems = No 0.87 0.0045
0.00000
Language problems = Yes 0.13 0.0045
Miscommunication Miscommunication = No 0.995 0.0045
0.00000
Miscommunication = Yes 0.005 0.0045
Weather
Weather = Good 0.8 0.00441
0.00135 Weather = storm_rain 0.02 0.00496
Weather = windy 0.16 0.00474
Weather = fog 0.02 0.00576
Time of day Time of day = day 0.5 0.00283
0.00335
Time of day = night 0.5 0.00618
Atmosphere on the vessel Atmosphere on the vessel = good 0.69 0.00440
0.00034
Atmosphere on the vessel = poor 0.31 0.00474
Org. culture
Org. culture = excellent 0.25 0.0045
0.00001
Org. culture = standard 0.5 0.0045
Org. culture = poor 0.25 0.00451
Org. policies Org. policies = good 0.9981 0.0045
0.00001 Org. policies = poor 0.0019 0.00451
Operations Operations = good 0.9969 0.0045
0.00001 Operations = poor 0.0031 0.00451
Procedures Procedures = good 0.45 0.0045
0.00000 Procedures = poor 0.55 0.0045
Staffing characteristics Staffing characteristics = good 0.9938 0.0045
0.00001 Staffing characteristics = poor 0.0062 0.00451
Time pressure Time pressure = no 0.68 0.0045
0.00001 Time pressure = yes 0.32 0.00451
Lack of experience/orientation Lack of experience/orientation = no 0.9949 0.0045
0.00007 Lack of experience/orientation = yes 0.0051 0.00457
Inadequate training Inadequate training = No 0.9949 0.0045
0.00007 Inadequate training = Yes 0.0051 0.00457
Supervision Supervision = Good 0.9918 0.0045
0.00001 Supervision = Poor 0.0081 0.00451
Fatigue Fatigue = No 0.95 0.00449
0.00030 Fatigue = Yes 0.05 0.00479
Stress Stress = Normal 0.76 0.00442
0.00035 Stress = High 0.24 0.00477
Visibility Visibility = greater_than_1nm 0.975 0.00447
0.00127 Visibility = lower_than_1nm 0.025 0.00574
Familiarisation
Familiarisation = quite_ familiar 0.9 0.0042
0.00631
Familiarisation = familiar 0.05 0.00395
Familiarisation = not_familiar 0.05 0.01051

133
E.2 Output: OOW Performance
X 𝑆𝑃𝑜 ∆𝑥𝑖
𝑃𝑂𝑂𝑊 𝑃𝑒𝑟𝑓𝑜𝑟𝑚𝑎𝑛𝑐𝑒=𝑃𝑜𝑜𝑟 ∆𝑃
∆𝑃 /𝑃
𝑜 ∆𝑃 /∆𝑥𝑖
Radar detection = No 0.03 0.97 0.10934 0.00000 0.00000 0.00000
Familiarisation = not_familiar 0.05 0.95 0.10934 0.00000 0.00000 0.00000
Language problems = Yes 0.13 0.87 0.10934 0.00000 0.00000 0.00000
Miscommunication = Yes 0.005 0.995 0.10934 0.00000 0.00000 0.00000
Wrong information = Yes 0.005 0.995 0.10934 0.00000 0.00000 0.00000
Late detection = Yes 0.26 0.74 0.10951 0.00017 0.00155 0.00023
No detection = Yes 0.26 0.74 0.10951 0.00017 0.00155 0.00023
Procedures = poor 0.55 0.45 0.10963 0.00029 0.00265 0.00064
Time pressure = yes 0.32 0.68 0.10981 0.00047 0.00430 0.00069
Org. culture = poor 0.25 0.75 0.10987 0.00053 0.00485 0.00071
Org. policies = poor 0.0019 0.9981 0.1101 0.00076 0.00695 0.00076
Operations = poor 0.0031 0.9969 0.1101 0.00076 0.00695 0.00076
Staffing characteristics = poor 0.0062 0.9938 0.1101 0.00076 0.00695 0.00076
Supervision = poor 0.0081 0.9919 0.11010 0.00076 0.00691 0.00076
Lack of experience/orientation = yes 0.0051 0.9949 0.11298 0.00364 0.03329 0.00366
Inadequate training = Yes 0.0051 0.9949 0.11298 0.00364 0.03329 0.00366
Navigation system detection = No 0.03175 0.96825 0.1151 0.00576 0.05268 0.00595
Visual misperception = Yes 0.18 0.82 0.11464 0.00530 0.04847 0.00646
HMI Problems = Yes 0.15132 0.84868 0.1154 0.00606 0.05542 0.00714
Time of day = night 0.5 0.5 0.11837 0.00903 0.08259 0.01806
Atmosphere on the vessel = poor 0.31 0.69 0.12365 0.01431 0.13088 0.02074
Fatigue = Yes 0.05 0.95 0.13116 0.02182 0.19956 0.02297
Visibility = lower_than_1nm 0.025 0.975 0.13196 0.02262 0.20688 0.02320
Weather =fog 0.02 0.98 0.13377 0.02443 0.22343 0.02493
Stress = High 0.24 0.76 0.12958 0.02024 0.18511 0.02663
worst and best state 𝑆𝑃𝑜 𝑃𝑂𝑂𝑊 𝑃𝑒𝑟𝑓𝑜𝑟𝑚𝑎𝑛𝑐𝑒=𝑃𝑜𝑜𝑟
∆𝑃
Radar detection Radar detection = Yes 0.97 0.10934
0.00000
Radar detection = No 0.03 0.10934
Navigation system detection
Navigation system detection =Yes 0.96825 0.10915 0.00595
Navigation system detection = No 0.03175 0.1151
Late detection Late detection = No 0.74 0.10927
0.00024
Late detection = Yes 0.26 0.10951
No detection No detection = No 0.74 0.10927
0.00024
No detection = Yes 0.26 0.10951
Visual misperception Visual misperception = No 0.82 0.10817
0.00647
Visual misperception = Yes 0.18 0.11464

134
Wrong information Wrong information = No 0.995 0.10934
0.00000
Wrong information = Yes 0.005 0.10934
Language Problems Language problems = No 0.87 0.10934
0.00000
Language problems = Yes 0.13 0.10934
Miscommunication Miscommunication = No 0.995 0.10934
0.00000
Miscommunication = Yes 0.005 0.10934
Weather
Weather = Good 0.8 0.10526
0.02851 Weather = storm_rain 0.02 0.12472
Weather = windy 0.16 0.12472
Weather = fog 0.02 0.13377
Time of day Time of day = day 0.5 0.10031
0.01806
Time of day = night 0.5 0.11837
Atmosphere on the vessel Atmosphere on the vessel = good 0.69 0.10290
0.02075
Atmosphere on the vessel = poor 0.31 0.12365
Org. culture
Org. culture = excellent 0.25 0.10916
0.00071 Org. culture = standard 0.5 0.10916
Org. culture = poor 0.25 0.10987
Org. policies Org. policies = good 0.9981 0.10933
0.00077
Org. policies = poor 0.0019 0.1101
Operations Operations = good 0.9969 0.10933
0.00077
Operations = poor 0.0031 0.1101
Procedures Procedures = good 0.45 0.10898
0.00065
Procedures = poor 0.55 0.10963
Staffing characteristics Staffing characteristics = good 0.9938 0.10933
0.00077
Staffing characteristics = poor 0.0062 0.1101
Time pressure Time pressure = no 0.68 0.10911
0.00070
Time pressure = yes 0.32 0.10981
Lack of experience/orientation Lack of experience/orientation = no 0.9949 0.10932
0.00366
Lack of experience/orientation = yes 0.0051 0.11298
Inadequate training Inadequate training = No 0.9949 0.10932
0.00366
Inadequate training = Yes 0.0051 0.11298
Supervision Supervision = Good 0.9918 0.10933
0.00077
Supervision = Poor 0.0082 0.11010
Fatigue Fatigue = No 0.95 0.10819
0.02297
Fatigue = Yes 0.05 0.13116
Stress Stress = Normal 0.76 0.10294
0.02664
Stress = High 0.24 0.12958
Visibility Visibility = greater_than_1nm 0.975 0.10876
0.02320
Visibility = lower_than_1nm 0.025 0.13196
Familiarisation
Familiarisation = quite_ familiar 0.9 0.10934
0.00000 Familiarisation = familiar 0.05 0.10934
Familiarisation = not_familiar 0.05 0.10934
HMI Problems HMI Problems = No 0.84868 0.10825
0.00715
HMI Problems = Yes 0.15132 0.1154

135
E.3 Estudo de caso 3 – Output: Collision
𝑆𝑃𝑜 ∆𝑥𝑖
𝑃𝑐𝑒 ∆𝑃𝑐
∆𝑃𝑐 /𝑃𝑐
𝑜 ∆𝑃𝑐 /∆𝑥𝑖
OOW Assessment = Wrong 0.00467 0.99533 0.92297 0.91847 204.10444 0.92278
Time of day = Night 0.5 0.5 0.00618 0.00168 0.37333 0.00336
Radar detection = No 0.03 0.97 0.00587 0.00137 0.30444 0.00141
Visibility = Greater than 1nm 0.975 0.025 0.00447 -0.00003 -0.00667 -0.00120
Visual misperception = Yes 0.18 0.82 0.00534 0.00084 0.18667 0.00102
Weather = windy 0.16 0.84 0.00474 0.00024 0.05333 0.00029
Lack of experience/orientation = Yes 0.0051 0.9949 0.00457 0.00007 0.01556 0.00007
Procedures = Poor 0.55 0.45 0.0045 0.00000 0.00000 0.00000
worst and best state 𝑆𝑃𝑜 𝑃𝑐
𝑒 ∆𝑃𝑐𝑚𝑎𝑥
OOW Assessment OOW Assessment = Correct 0.99533 0.00019
0.92278
OOW Assessment = Wrong 0.00467 0.92297
Time of day Time of day = day 0.5 0.00283
0.00335
Time of day = night 0.5 0.00618
Radar detection Radar detection = Yes 0.97 0.0045
0.00137
Radar detection = No 0.03 0.00587
Visibility Visibility = greater_than_1nm 0.975 0.00447
0.00127
Visibility = lower_than_1nm 0.025 0.00574
Visual misperception Visual misperception = No 0.82 0.00432
0.00102
Visual misperception = Yes 0.18 0.00534
Weather
Weather = Good 0.8 0.00441
0.00135 Weather = storm rain 0.02 0.00496
Weather = windy 0.16 0.00474
Weather = fog 0.02 0.00576
Lack of experience/orientation Lack of experience/orientation = no 0.9949 0.0045
0.00007
Lack of experience/orientation = yes 0.0051 0.00457
Procedures Procedures = good 0.45 0.0045
0.00000
Procedures = poor 0.55 0.0045

136

137
Anexo F: Narrativa – Análise de sensibilidade
“At about 2147 local time on 14 November 2009, the Hong Kong registered general cargo ship Joshu
Maru collided with the Republic of Korea fishing vessel No.3 Dae Kyung in approximate position 32_
13.7’ N 127_ 21.3’ E, about 72 nm (nautical miles) southeast of Seogwipo, Jeju-Do (Cheju-Do), the
Republic of Korea. At the time of the collision, the weather was cloudy, the visibility was about 3 to 6
nm, the wind was northwest to west force about 7 to 6 and the sea state was rough with heavy swells.
Following the collision, No.3 Dae Kyung took in water, became semi-submerged and finally foundered
on the next day. Seven out of the total nine crewmembers onboard were lost (four dead and three
missing). The remaining two were rescued by the crew of Joshu Maru and afterwards conveyed by
Korea Coast Guard to hospital for treatment in Seogwipo. On the other hand Joshu Maru incurred some
scratches to paintwork and slight indentation in the ship’s stem and at the port bow. The investigation
revealed the following contributory factors: The Third Officer of Joshu Maru did not comply with Rule 7,
Rule 8 and Rule 15 of COLREGS1. Based on scanty radar information, he first took actions by making
a succession of small alterations of course to port just to keep own ship further away from No.3 Dae
Kyung when he saw the light (the masthead light) of No.3 Dae Kyung at about 20_ on own ship’s
starboard bow at ranges of 6 and 3 nm respectively. He did not call the Master even though the
movement of No.3 Dae Kyung was causing concern afterwards. He continued altering course slowly
then hard to port instead of taking action to avoid crossing ahead of No.3 Dae Kyung when he saw the
red light (the port sidelight) of No.3 Dae Kyung at about 20_ and 10_ on own ship’s starboard bow
(crossing situation) at ranges of 1.5 and 0.5 nm respectively until collision occurred, and The bridge
team of No.3 Dae Kyung did not comply with Rule 5 of COLREGS. They did not maintain a proper and
effective lookout and, consequently, not aware of the presence of Joshu Maru until the moment collision
occurred.
Narrative (Radar, Lack of experience):
Based on scanty radar information and assumption that the target would be set towards own ship by the
prevailing strong wind and heavy swells, he took avoiding actions by making a succession of small
alterations i.e. 10° of course to port just to keep own ship further away from the target. Despite the
actions taken at about 2125 and 2135 respectively, the target was observed remaining on almost the
same visual bearing on own ship’s starboard bow but at a closer range. This indicated that risk of
collision still existed.
External Error mode: The 3rd officer misinterpreted the data from the radar thinking that the other vessel
was on an opposite course.
Internal Error mode: He changed his course to port in order to give the other vessel more space to pass
on an opposite direction. He did not realize that he should change course to starboard.
Training Competency Experience: He just started keeping the “8 to 12” watch independently as the
OOW when he joined Joshu Maru in April 2009.”
(CyClaDes 2.1, 2014)

138
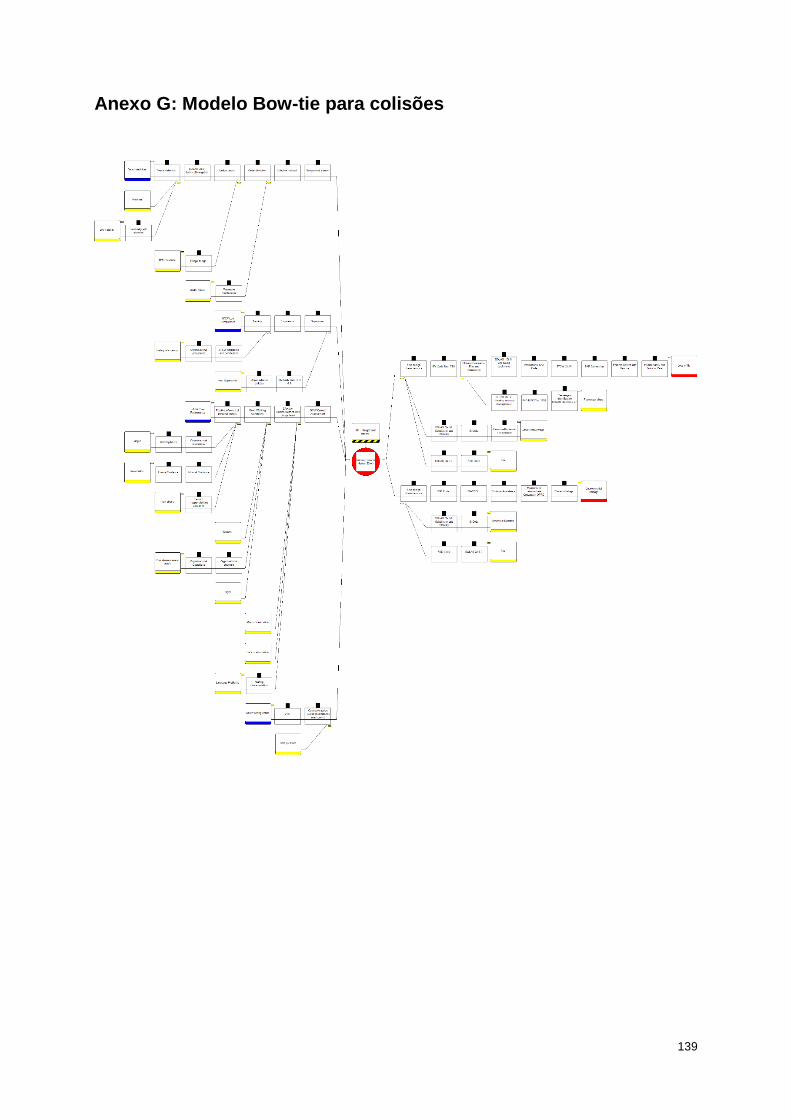
139
Anexo G: Modelo Bow-tie para colisões

140
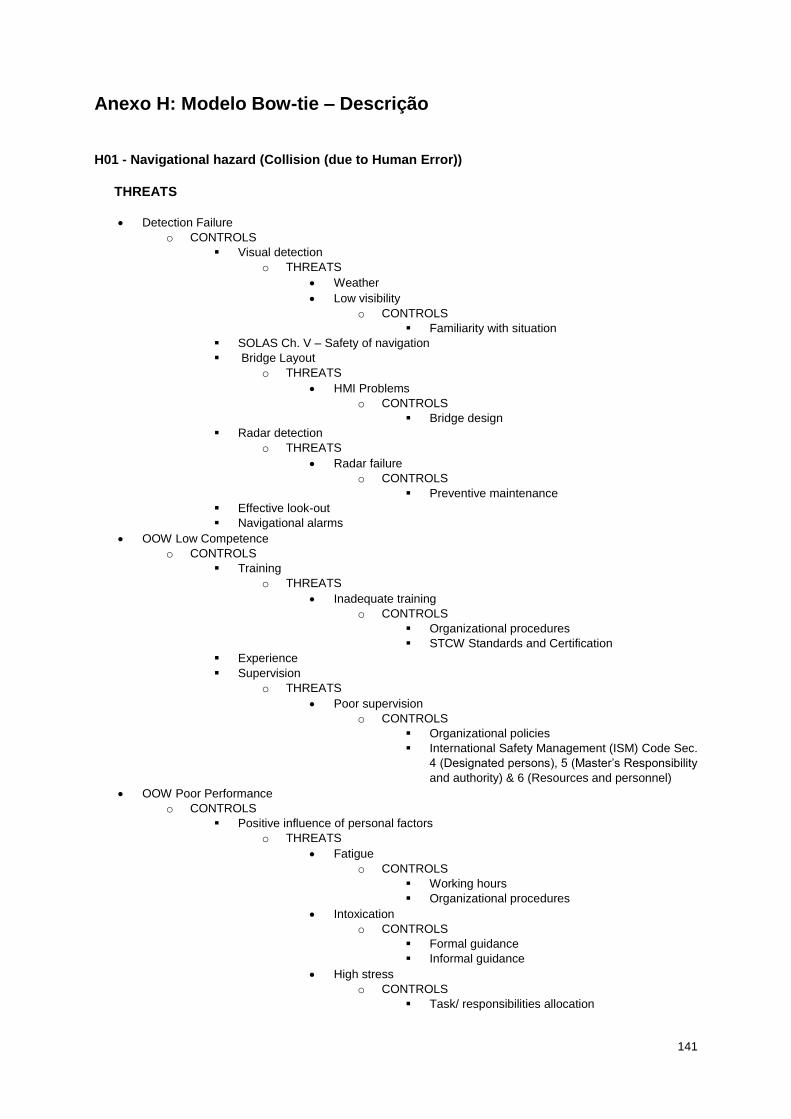
141
Anexo H: Modelo Bow-tie – Descrição
H01 - Navigational hazard (Collision (due to Human Error))
THREATS Detection Failure
o CONTROLS
Visual detection
o THREATS
Weather
Low visibility
o CONTROLS
Familiarity with situation
SOLAS Ch. V – Safety of navigation
Bridge Layout
o THREATS
HMI Problems
o CONTROLS
Bridge design
Radar detection
o THREATS
Radar failure
o CONTROLS
Preventive maintenance
Effective look-out
Navigational alarms
OOW Low Competence
o CONTROLS
Training
o THREATS
Inadequate training
o CONTROLS
Organizational procedures
STCW Standards and Certification
Experience
Supervision
o THREATS
Poor supervision
o CONTROLS
Organizational policies
International Safety Management (ISM) Code Sec.
4 (Designated persons), 5 (Master’s Responsibility
and authority) & 6 (Resources and personnel)
OOW Poor Performance
o CONTROLS
Positive influence of personal factors
o THREATS
Fatigue
o CONTROLS
Working hours
Organizational procedures
Intoxication
o CONTROLS
Formal guidance
Informal guidance
High stress
o CONTROLS
Task/ responsibilities allocation
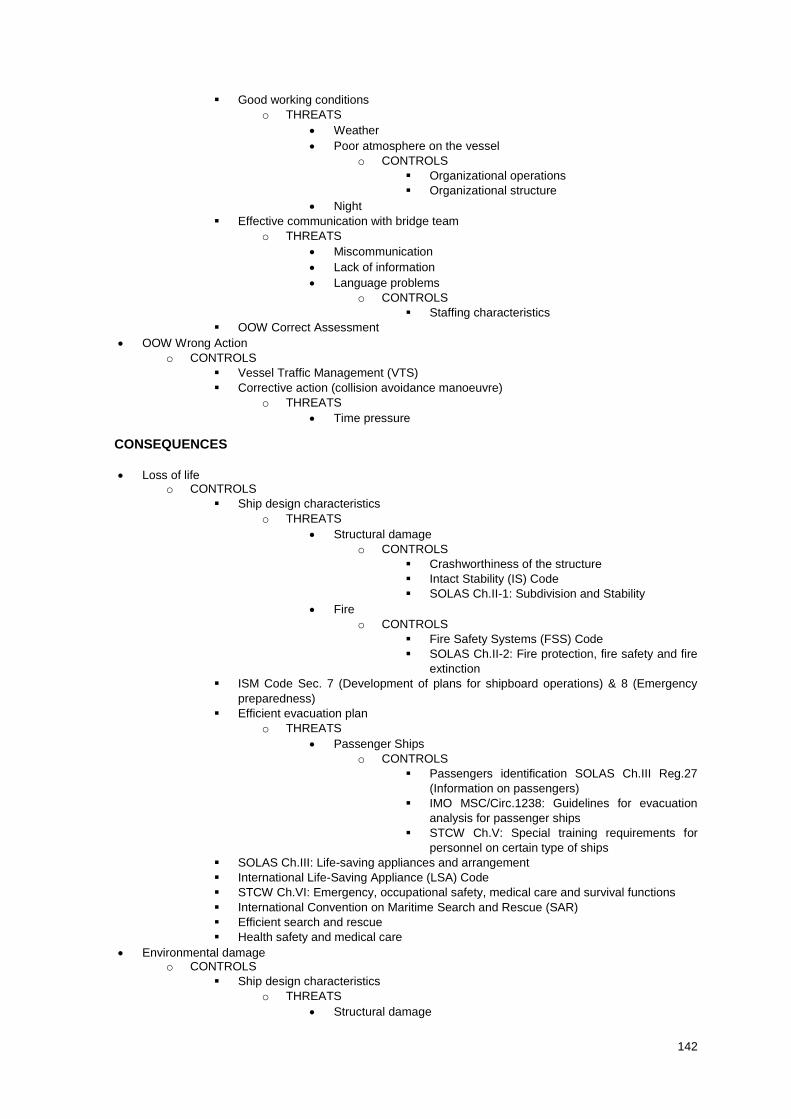
142
Good working conditions
o THREATS
Weather
Poor atmosphere on the vessel
o CONTROLS
Organizational operations
Organizational structure
Night
Effective communication with bridge team
o THREATS
Miscommunication
Lack of information
Language problems
o CONTROLS
Staffing characteristics
OOW Correct Assessment
OOW Wrong Action
o CONTROLS
Vessel Traffic Management (VTS)
Corrective action (collision avoidance manoeuvre)
o THREATS
Time pressure
CONSEQUENCES Loss of life
o CONTROLS
Ship design characteristics
o THREATS
Structural damage
o CONTROLS
Crashworthiness of the structure
Intact Stability (IS) Code
SOLAS Ch.II-1: Subdivision and Stability
Fire
o CONTROLS
Fire Safety Systems (FSS) Code
SOLAS Ch.II-2: Fire protection, fire safety and fire
extinction
ISM Code Sec. 7 (Development of plans for shipboard operations) & 8 (Emergency
preparedness)
Efficient evacuation plan
o THREATS
Passenger Ships
o CONTROLS
Passengers identification SOLAS Ch.III Reg.27
(Information on passengers)
IMO MSC/Circ.1238: Guidelines for evacuation
analysis for passenger ships
STCW Ch.V: Special training requirements for
personnel on certain type of ships
SOLAS Ch.III: Life-saving appliances and arrangement
International Life-Saving Appliance (LSA) Code
STCW Ch.VI: Emergency, occupational safety, medical care and survival functions
International Convention on Maritime Search and Rescue (SAR)
Efficient search and rescue
Health safety and medical care
Environmental damage o CONTROLS
Ship design characteristics
o THREATS
Structural damage

143
o CONTROLS
Intact Stability (IS) Code
SOLAS Ch.II-1: Subdivision and Stability
Fire
o CONTROLS
Fire Safety Systems (FSS) Code
SOLAS Ch.II-2: Fire protection, fire safety and fire
extinction
ISM Code
MARPOL – International convention for the prevention of pollution from ships
Onshore assistance
Measures of International Convention on Oil Pollution, Preparedness, Response and
Co-operation (OPRC)
Places of refuge
Top Related