






Línguas
Páginas
Legal


1 As siglas para conversores comutados pela linha e para conversores fonte de tensão são mais usadas em inglês (LCC e VSC).
ANÁLISE DE CONVERSORES CMM EM PONTE SEMICOMPLETA FRENTE A CURTOS-
CIRCUITOS NA LINHA CC
JOSE R. LEBRE, EDSON H. WATANABE
Laboratório de Eletrônica de Potência, COPPE, Universidade Federal do Rio de Janeiro
Ilha do Fundão,CEP: 21945-970, Caixa Postal:68515, Rio de Janeiro – RJ E-mails: [email protected], [email protected]
Abstract Short-circuit on the DC line is the major deficiency of voltage sourced converters based high voltage direct current (HVDC) system. This paper describes a model of a MMC converter with chopper cells and semi-fullbridge cells and compares its
performance when submitted to faults in DC line of a HVDC transmission system. The semi-fullbridge cell adopted needs three
semiconductors switches instead of four and solves the redundancy problem from the operations modes of the fullbridge topolo-
gy. This study is motivated by the actual tendency for investments in very high power multi-terminal HVDC transmission sys-
tems which demands robustness against short-circuits. Furthermore, for these multi-terminal systems, there is a demand for a
good coordination between the elements of the protection system.
Keywords HVDC, MMC, Multilevel converters, DC faults.
Resumo O curto-circuito na linha c.c é a principal deficiência de sistemas CCAT (Corrente Contínua em Alta Tensão) basea-dos em conversores fonte de tensão (VSC). Este trabalho descreve um modelo de conversor CMM com submódulos em meia
ponte e ponte semicompleta e compara o desempenho dessas topologias frente a curtos-circuitos no lado c.c de um sistema de
transmissão em corrente contínua. O submódulo em ponte semicompleta adotado usa três chaves semicondutoras ao invés de
quatro e resolve o problema da redundância de modos de operação da topologia em ponte completa. Esse estudo é motivado pela
tendência atual por investimentos em sistemas de transmissão multiterminal em corrente contínua de alta potência que demandam
grande robustez contra curtos-circuitos. Além disso, para sistemas multiterminais em corrente contínua existe a demanda por uma
coordenação da proteção entre os diferentes pontos de conexão.
Palavras-chave CCAT, CMM, Conversores multinível, Curto-circuito CC.
1 Introdução
Para construção de sistemas CCAT (Corrente
Contínua em Alta Tensão), existem várias topologias
de conversores que transformam energia em corrente
alternada para corrente contínua. Dentre eles, existem
os chamados conversores do tipo fonte de corrente,
como o LCC1 (Line Commutated Converter), e os do
tipo fonte de tensão, como o Voltage Source Conver-
ter1 (VSC). Nos últimos anos ganhou força o Con-
versor Modular Multinível (CMM) (Marquadt,
2003), que possui vantagens quanto à robustez, con-
fiabilidade e capacidade de transmissão de potência
quando comparado aos VSC convencionais de dois e
três níveis. Com relação aos conversores fonte de
corrente, uma das principais desvantagens dos con-
versores fonte de tensão é a baixa robustez contra
curtos-circuitos na linha c.c (Kim, 2009), uma das
razões pelas quais o LCC ainda é o mais utilizado
para sistemas de transmissão CCAT usando linha
aérea. O CMM típico é constituído de submódulos
em meia ponte e, assim como o VSC de dois e três
níveis, depende de disjuntores c.a para bloquear a
corrente em caso de curto-circuito na linha c.c, o que
força a corrente de curto a passar pelo conversor, até
que a proteção do lado c.a atue.
Entretanto, forçando a corrente a passar através
dos capacitores de um CMM, é possível melhorar o
desempenho de sistemas CCAT contra curtos-
circuitos no lado c.c. Para tanto, podem-se usar sub-
módulos em ponte completa. Esta topologia de sub-
módulo foi apresentada em (Peng, 1995), para apli-
cação em conversores ligados em derivação com a
rede, como STATCOMs e filtros ativos. A partir
dessa topologia, é possível controlar três níveis na
saída (estado positivo, negativo e zero). Porém, para
aplicação no CMM, somente o estado positivo e o
zero são demandados em regime permanente. Por
isso, considera-se que alguns estados de operação do
submódulo em ponte completa são redundantes,
podendo ser eliminado o uso de uma das chaves,
reduzindo a quantidade de componentes necessários
para a realização do conversor.
Sistemas comerciais de CMMs com submódulos
em meia ponte (Gemmell, 2008) podem utilizar um
tiristor ultrarrápido através do qual ao corrente de
curto é desviada até que a proteção c.a atue.
Em (Li, 2013) é proposto um método de supres-
são de defeitos no lado c.c com o uso de chaves bidi-
recionais baseadas em tiristores ultrarrápidos. Essa
técnica fecha um curto-circuito entre os braços do
conversor impedindo o sistema c.a de alimentar o
curto no lado c.c, que decai até que o sistema possa
ser novamente energizado. Em (Soto, 2010) e (Mar-
quardt, 2010), a capacidade do conversor baseado em
submódulos em ponte completa é abordada.
No presente trabalho é apresentada a estrutura
básica do conversor CMM usado no estudo, diferen-
ciando a topologia típica em Meia Ponte da nova
topologia proposta em Ponte Semicompleta. São
apresentados também, o sistema de controle e as
lógicas de operação adotadas para analisar o compor-
tamento do CMM, tanto no desligamento como no
religamento, quando o sistema CCAT é sujeito a um
curto-circuito do lado c.c, mostrando as vantagens da
topologia proposta.
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
2454

2 Topologia e Operação do CMM
A Figura 1(a) apresenta a estrutura básica do
CMM. Cada braço é formado por um número igual
de submódulos em série com uma indutância, que na
literatura é chamada de indutor buffer (Hagirawa,
2008), que serve para evitar altos di/dt nos instantes
de chaveamento. Cada submódulo contém um con-
junto de chaves e um capacitor c.c. O conversor
CMM típico é composto por submódulos como os da
Figura 1(b), em meia ponte. Na Figura 1(c) é apre-
sentada a configuração em ponte semicompleta, que
é o circuito utilizado neste trabalho.
A soma da tensão dos capacitores no modo co-
nectado de uma perna deve ser igual à tensão da
linha c.c. Logo, para a realização do controle, é ne-
cessário que em cada instante, metade dos submódu-
los de cada perna esteja no modo conectado.
Figura 1 (a) Diagrama do circuito do CMM com 4. (b) submódulo
em Meia Ponte; (c) submódulo em Ponte Semicompleta.
A Tabela 1 mostra os modos de operação de um
submódulo em meia ponte. Quando S1 está ligada, o
capacitor do submódulo correspondente está conec-
tado, seja carregando através de D1, ou descarregan-
do através de S1. Com S2 ligada, o submódulo fica
em estado de by-pass. Se S1 e S2 estiverem desliga-
das em todos os submódulos, ainda assim o conver-
sor pode atuar como um retificador, pela operação
dos diodos enquanto a rede c.a não for desconectada.
A Tabela 2 mostra os modos de operação de um
submódulo em ponte semicompleta para operação
em um CMM. Em regime permanente, o submódulo
trabalha de forma semelhante à meia ponte, com S4
ligada durante toda a operação e D3 fica ocioso.
Tabela 1 Modos de operação do CMM em meia ponte.
S1 S2 VT1 – VT2
(V)
Capacitor conectado 1 0 Vc
Capacitor desconectado 0 1 0
Tabela 2. Modos não redundantes de operação do CMM em ponte
semicompleta.
S1 S2 S4 VT1 – VT2
(V)
Capacitor conectado 1 0 1 Vc
Capacitor desconectado 0 1 1 0
3 Comportamento dos Conversores CMM Frente
a Curtos-Circuitos CC
No momento que ocorre um defeito na linha c.c,
a primeira ação de proteção é desligar as chaves
semicondutoras dos conversores, de tal modo a pro-
tegê-las. Porém, como pode ser visto na Figura 2,
durante um curto-circuito na linha c.c, o CMM atua
como um retificador, alimentando o curto-circuito
indefinidamente até que a proteção c.a atue, ou até
que algum diodo de potência seja destruído, abrindo
forçadamente o circuito. Além disso, as tensões nos
capacitores são mantidas nos valores em que estavam
no instante anterior ao desligamento das chaves.
Figura 2 Exemplo de caminho da corrente para CMM atuando
como retificador durante um curto-circuito na linha c.c.
SM 1
SM 2
SM 3
SM 4
a b c
SM 1
SM 2
SM 3
SM 4
SM 1
SM 2
SM 3
SM 4
SM 1
SM 2
SM 3
SM 4
SM 1
SM 2
SM 3
SM 4
SM 1
SM 2
SM 3
SM 4
ccv
Braço
Submódulo
S1 D1
D2
C
S1 D1
S2 D2
D3
S4 D4
C
S2
T1
T2
T1 T2
(b) (c)
(a)
Perna
CA
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
2455
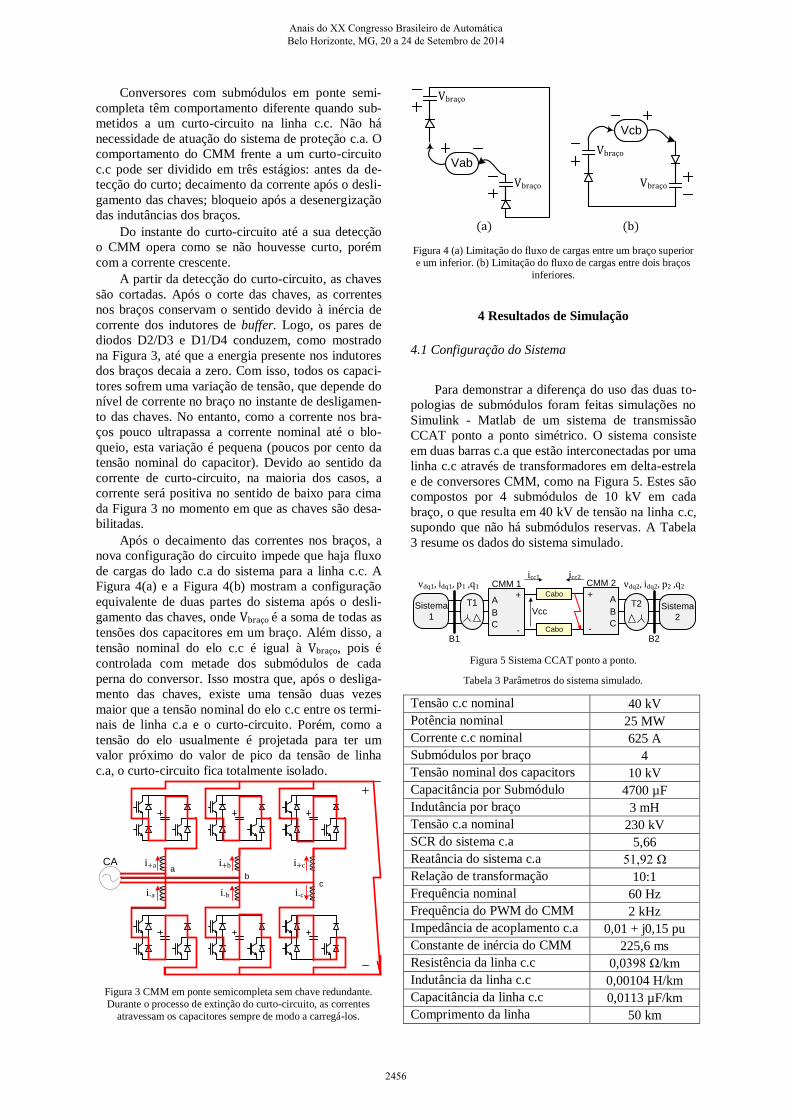
Conversores com submódulos em ponte semi-
completa têm comportamento diferente quando sub-
metidos a um curto-circuito na linha c.c. Não há
necessidade de atuação do sistema de proteção c.a. O
comportamento do CMM frente a um curto-circuito
c.c pode ser dividido em três estágios: antes da de-
tecção do curto; decaimento da corrente após o desli-
gamento das chaves; bloqueio após a desenergização
das indutâncias dos braços.
Do instante do curto-circuito até a sua detecção
o CMM opera como se não houvesse curto, porém
com a corrente crescente.
A partir da detecção do curto-circuito, as chaves
são cortadas. Após o corte das chaves, as correntes
nos braços conservam o sentido devido à inércia de
corrente dos indutores de buffer. Logo, os pares de
diodos D2/D3 e D1/D4 conduzem, como mostrado
na Figura 3, até que a energia presente nos indutores
dos braços decaia a zero. Com isso, todos os capaci-
tores sofrem uma variação de tensão, que depende do
nível de corrente no braço no instante de desligamen-
to das chaves. No entanto, como a corrente nos bra-
ços pouco ultrapassa a corrente nominal até o blo-
queio, esta variação é pequena (poucos por cento da
tensão nominal do capacitor). Devido ao sentido da
corrente de curto-circuito, na maioria dos casos, a
corrente será positiva no sentido de baixo para cima
da Figura 3 no momento em que as chaves são desa-
bilitadas.
Após o decaimento das correntes nos braços, a
nova configuração do circuito impede que haja fluxo
de cargas do lado c.a do sistema para a linha c.c. A
Figura 4(a) e a Figura 4(b) mostram a configuração
equivalente de duas partes do sistema após o desli-
gamento das chaves, onde Vbraço é a soma de todas as
tensões dos capacitores em um braço. Além disso, a
tensão nominal do elo c.c é igual à Vbraço, pois é
controlada com metade dos submódulos de cada
perna do conversor. Isso mostra que, após o desliga-
mento das chaves, existe uma tensão duas vezes
maior que a tensão nominal do elo c.c entre os termi-
nais de linha c.a e o curto-circuito. Porém, como a
tensão do elo usualmente é projetada para ter um
valor próximo do valor de pico da tensão de linha
c.a, o curto-circuito fica totalmente isolado.
Figura 3 CMM em ponte semicompleta sem chave redundante.
Durante o processo de extinção do curto-circuito, as correntes
atravessam os capacitores sempre de modo a carregá-los.
Figura 4 (a) Limitação do fluxo de cargas entre um braço superior
e um inferior. (b) Limitação do fluxo de cargas entre dois braços
inferiores.
4 Resultados de Simulação
4.1 Configuração do Sistema
Para demonstrar a diferença do uso das duas to-
pologias de submódulos foram feitas simulações no
Simulink - Matlab de um sistema de transmissão
CCAT ponto a ponto simétrico. O sistema consiste
em duas barras c.a que estão interconectadas por uma
linha c.c através de transformadores em delta-estrela
e de conversores CMM, como na Figura 5. Estes são
compostos por 4 submódulos de 10 kV em cada
braço, o que resulta em 40 kV de tensão na linha c.c,
supondo que não há submódulos reservas. A Tabela
3 resume os dados do sistema simulado.
Figura 5 Sistema CCAT ponto a ponto.
Tabela 3 Parâmetros do sistema simulado.
Tensão c.c nominal 40 kV
Potência nominal 25 MW
Corrente c.c nominal 625 A
Submódulos por braço 4
Tensão nominal dos capacitors 10 kV
Capacitância por Submódulo 4700 µF
Indutância por braço 3 mH
Tensão c.a nominal 230 kV
SCR do sistema c.a 5,66
Reatância do sistema c.a 51,92 Ω
Relação de transformação 10:1
Frequência nominal 60 Hz
Frequência do PWM do CMM 2 kHz
Impedância de acoplamento c.a 0,01 + j0,15 pu
Constante de inércia do CMM 225,6 ms
Resistência da linha c.c 0,0398 Ω/km
Indutância da linha c.c 0,00104 H/km
Capacitância da linha c.c 0,0113 µF/km
Comprimento da linha 50 km
CAa
bc
i+a
i-a
i+b
i-b
i+c
i-c
Vbraço
Vab
Vbraço
Vbraço
Vcb
Vbraço
(a) (b)
Sistema
1
T2 Sistema
2
CMM 1
+
-
A
C
B
CMM 2
+
-
A
C
B
Cabo
Cabo
VccT1
B1 B2
icc1 icc2vdq2, idq2, p2 ,q2vdq1, idq1, p1 ,q1
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
2456
4.2 Controle do CMM
Para controlar a tensão na linha c.c e o fluxo de
potência do sistema foi utilizado um controle desa-
coplado baseado em (Haileselassie, 2008), com dois
laços de realimentação, um para correntes de referên-
cia e outro para as tensões de referência nos eixos
estacionários que fornecem o sinal de controle para a
modulação. A convenção de sentido de corrente
considera positiva a corrente que sai do conversor.
Para otimizar a resposta, foram inseridos incrementos
na referência de sinal baseado no controle descrito
em (Guan, 2011). A partir da transformada de Park
com potência constante, tem-se que:
(1)
(2)
(3)
A corrente de referência do eixo direto , para cada
conversor é calculada por:
(4)
(5)
onde corresponde a corrente de referência do
conversor que controla o fluxo de potência e é a
corrente de referência do conversor que controla a
tensão no elo. A equação (4) é acrescentada em (5)
para acelerar o controle de tensão na linha c.c. Para a
corrente de referência do eixo em quadratura , a
diferença entre os dois conversores é a potência rea-
tiva de referência desejada em cada barra CA:
(6)
As tensões de referência são obtidas da seguinte
forma:
(7)
. (8)
A Figura 6 apresenta o diagrama de blocos do
sistema de controle. Os comandos “Reset” atuam no
momento de religar o sistema, pois o mesmo ficaria
com o controle saturado se mantivesse o sinal acu-
mulado desde o curto-circuito. As variáveis vd1, vq1, id1, iq1, q1, vd2, vq2, id2, iq2 p2 e q2 são medidas nas
barras B1 e B2, respectivamente (Figura 5). A tensão
c.c vcc é medida nos terminais do CMM 1. O conver-
sor CMM 1 é o responsável pelo controle da tensão
na linha c.c e pela potência reativa na barra do Sis-
tema 1. Enquanto isso, o conversor CMM 2 é respon-
sável pelo controle do fluxo de potência transmitido
pela linha e pela potência reativa do Sistema 2. Com
isso a potência real na barra do Sistema 1 é igual à
potência na barra do Sistema 2 somadas as perdas na
linha c.c. A Tabela 4 mostra os ganhos adotados na
simulação. Todos os valores estão em pu.
Tabela 4 Ganhos utilizados na simulação.
Kp1 Kp2 Kp3 Kp4 Kp5 Kp6 Kp7 Kp8
10 0.2 0,5 0,2 0,2 0,2 0,2 0,2
Ki1 Ki2 Ki3 Ki4 Ki5 Ki6 Ki7 Ki8
10 2 5 2 2 2 2 2
Figura 6 Diagrama dos blocos dos controladores da (a) tensão c.c;
(b) potência reativa no CMM 1; (c) potência real no CMM 2; (d)
potência reativa no CMM 2.
As tensões de referência são enviadas para um
sistema de modulação do tipo PDPWM (phase dis-
position pulse width modulation) (Carrara, 1992),
com 2 kHz de frequência de chaveamento. Este mé-
todo é usado devido ao pequeno número de submó-
dulos no estudo. Com o uso de mais submódulos os
métodos de modulação tendem a ter menos chavea-
mentos por ciclo, proporcionando consideravelmente
menos perdas (Qingrui, 2011).
Para balanceamento da tensão nos capacitores de
cada conversor foi utilizada a lógica de que cada
capacitor deve conduzir nos dois sentidos de corrente
o mesmo intervalo de tempo. Logo, a cada mudança
de nível na saída do controle de modulação, os sub-
módulos são acionados de acordo com o valor de
tensão instantânea e o sentido da corrente no braço
em que o submódulo está inserido.
Em regime permanente, as tensões de linha na
saída c.a do conversor são conforme mostrado na
Figura 7(a), com nove níveis. A corrente c.a, com
baixo conteúdo harmônico é obtida conforme mos-
trado na Figura 7(b). As tensões e as correntes nos
capacitores em regime permanente são conforme
mostrado nas Figura 7(c) e Figura 7(d). As correntes
possuem valor médio diferente de zero devido a
componente c.c da corrente que circula entre os con-
versores.
4.3 Resposta do CMM em Meia Ponte
Para a simulação, os capacitores começam car-
regados, de tal modo que um transitório inicial ocorre
devido à energização inicial da linha. Uma rampa de
potência é dada até que o sistema se aproxime do
Vcc*
vcc
PI1
id2*
id1*
id1
vd1*
vd1
R
iq1L
q1
Q1*
PI2iq1*
iq1
vq1*
vq1
R
id1L
PI5
PI6
p2
P2*
PI3id2*
id2
vd2*
vd2
R
iq2L
PI7
q2
Q2*
PI4iq2*
iq2
vq2*
vq2
R
id2L
PI8
2/(3*vd1)
3/2
2/(3*vd2)
3/2
2/(3*vd2)
3/2
Reset Reset
Reset Reset
Reset Reset
Reset Reset
(c)
(b)
(a)
(d)
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
2457

regime permanente e então, no instante t = 1 s, ocorre
um curto-circuito de baixa impedância (1 Ω) entre os
dois polos da linha de transmissão c.c no extremo
próximo ao conversor que controla o fluxo de potên-
cia. Então, quando a corrente na linha c.c atinge 1,6
vezes a corrente nominal em algum dos extremos,
considera-se que há um curto na linha. Então é inici-
ado o processo de proteção e religamento. A primeira
ação é desligar todas as chaves dos conversores para
evitar que a corrente de curto passe pelos IGBTs.
Figura 7 (a) Tensões na saída c.a do CMM 1 em regime permanen-
te. (b) Correntes na saída c.a do CMM 1. (c) Tensão nos capacito-
res. (d) Corrente que atravessa os capacitores de um braço superior
do conversor que controla a tensão.
Segue-se que, após o curto-circuito, a proteção
c.a demora 150 ms para atuar (ONS, 2001), abrindo
o circuito e permitindo a desenergização da linha c.c.
No momento em que a corrente chega ao patamar de
5 A, é considerada a extinção do curto-circuito. En-
tão, uma chave é acionada para conectar os polos em
cada extremidade através de uma resistência, o que
termina de descarregar a linha c.c. Para sistemas
bipolares é possível o uso do disjuntor de retorno
pelo solo (MRTB - Metalic Return Transfer Breaker)
que força a extinção do curto-circuito mais rapida-
mente (Hara, 2001). Após a extinção do curto-
circuito, se espera mais 200 ms de tempo morto (Su-
nabe, 2000) para desenergização da linha e então é
enviado o comando para o disjuntor religar, ao qual é
dado mais 20 ms de atraso. Neste instante é dado o
comando para religar os conversores.
A Figura 8 mostra as correntes c.c medidas no
ponto de conexão dos conversores com a linha. A
partir do instante em que se dá o defeito, os sistemas
c.a de ambos os lados da linha fornecem energia,
sendo o CMM 2 o que sofre o maior efeito por se
encontrar mais próximo ao curto-circuito. Até o
momento em que a proteção c.a atua, os diodos de
potência devem suportar a corrente de curto cerca de
10 vezes maior que a nominal. A corrente provenien-
te do CMM 1 demora mais a decair após a abertura
da proteção c.a devido a maior impedância vista do
defeito. A Figura 9 mostra a tensão na linha c.c me-
dida no conversor CMM 1. Durante o tempo de espe-
ra para a atuação da proteção c.a, a tensão oscilou na
frequência da linha com valores abaixo da tensão
nominal. No momento do religamento, ocorre uma
breve sobretensão na linha devido ao carregamento
da mesma. A Figura 10 compara a potência real das
barras c.a, que flui do Sistema 1 para o Sistema 2.
Como após a identificação do defeito o controle dos
conversores é desligado, o fluxo de potência no con-
versor CMM 2 se inverte para alimentar o defeito.
No instante de religamento percebe-se um transitório
diferente do registrado no início da simulação. Isso
ocorre devido ao esforço do controle para regular a
tensão dos capacitores de volta para o patamar pré-
falha, pois, como é mostrado na Figura 11, as tensões
nos capacitores são mantidas no patamar em que
estavam no momento em que o controle desativou e
bloqueou as chaves.
Figura 8 Correntes c.c na saída dos conversores em meia ponte.
Figura 9 Tensão na c.c medida junto ao CMM 1.
2.9 2.92 2.94 2.96 2.98 3-1000
-500
0
500
1000
Tempo (s)
Corr
ente
(A
)
Correntes nos capacitores dos submódulos
2.9 2.92 2.94 2.96 2.98 39.5
10
10.5
Tempo (s)
Tensão (
kV
)
Tensões nos capacitores dos submódulos
2.9 2.92 2.94 2.96 2.98 3
-1000
0
1000
Tempo (s)
Corr
ente
(A
)
Correntes na saída do conversor CMM 1
2.9 2.92 2.94 2.96 2.98 3-50
0
50
Tempo (s)
Tensão (
kV
)
Tensões na saída do conversor CMM 1
(c)
(d)
(a)
(b)
0 0.5 1 1.5 2 2.5 3-2000
0
2000
4000
6000
Tempo (s)
Corr
ente
(A
)
Icc 1
Icc 2
0 0.5 1 1.5 2 2.5 3
0
20
40
60
Tempo (s)
Tensão (
kV
)
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
2458
Figura 10 Potência real nas barras c.a.
Figura 11 Tensão nos capacitores.
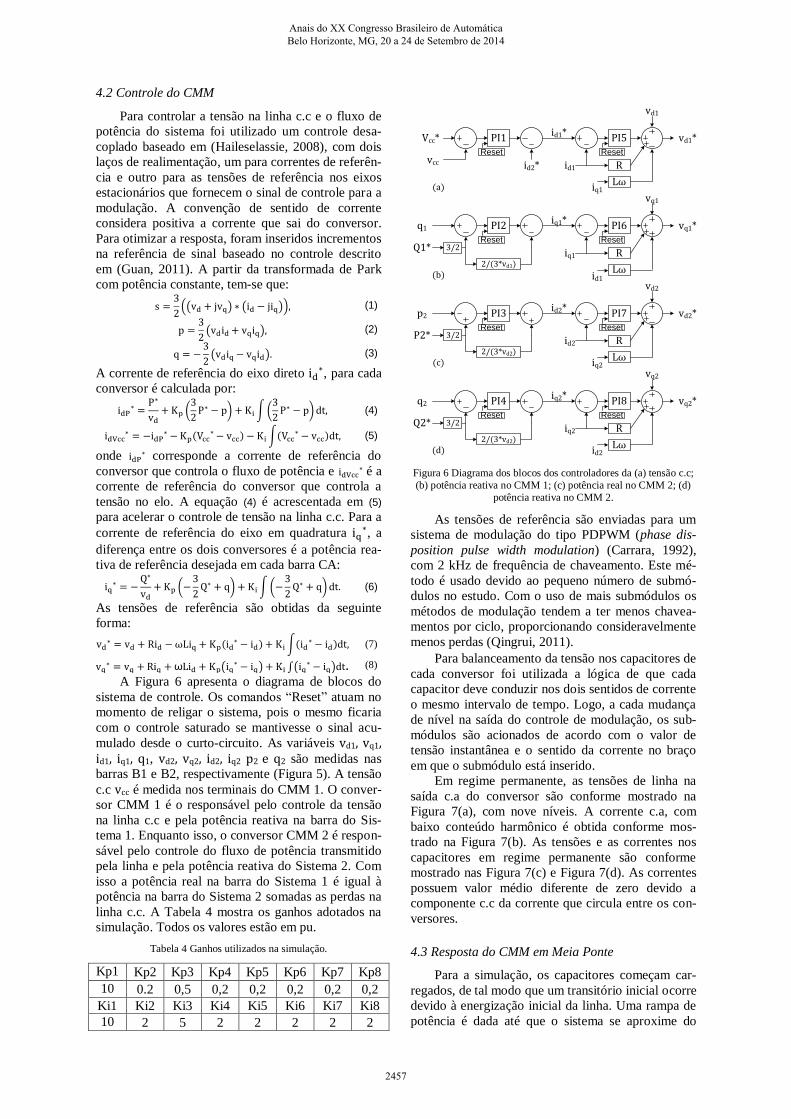
4.4 Resposta do CMM em Ponte Semicompleta
Com o uso do CMM provido de submódulos em
ponte semicompleta, a corrente c.c proveniente do
sistema c.a é bloqueada quase que instantaneamente
após o curto-circuito. Então, em menos de 2 ms a
corrente presente na linha é descarregada, como pode
ser visto na Figura 12, e, com mais detalhe, na Figura
13. No momento em que o curto-circuito é conside-
rado extinto, aciona-se uma chave que conecta os
polos do sistema através de uma resistência nas duas
extremidades para terminar de descarregar a linha.
Com efeito, não há necessidade de atuação do siste-
ma de proteção c.a. A Figura 14 mostra a tensão na
linha c.c que, no momento do desligamento dos con-
versores, sofre um transitório para aproximadamente
-1 p.u. Este ocorre devido à inércia de corrente dos
indutores dos braços do conversor, que conectam os
capacitores invertidos no circuito. No detalhe, a Fi-
gura 15 mostra o comportamento da tensão durante o
transitório. A Figura 16 e a Figura 17 mostram as
correntes nos diodos D2 e D3 de um submódulo.
Essa corrente de decaimento dos diodos passa pelos
capacitores, provocando um pequeno carregamento.
O transitório de religamento é mostrado na Figura
18, que mostra a potência real nas barras c.a. Dessa
vez, como o defeito é sanado rapidamente, não ocor-
rem sobrecorrentes no lado c.a nem reversão de fluxo
de potência do CMM 2. A Figura 19 mostra as ten-
sões nos capacitores de um braço do conversor CMM
1. O transitório de desligamento foi de baixa potência
e não fez a tensão ultrapassar o pico do ripple.
Enquanto a ponte semicompleta demora poucos
milissegundos para eliminar o defeito, o sistema em
meia ponte demanda o tempo do sistema de proteção
c.a, tanto para desligar como para ligar. Além disso,
o decaimento da corrente de curto-circuito começa
num patamar mais elevado, fazendo o tempo de reli-
gamento ser maior.
Figura 12 Correntes c.c dos conversores em ponte semicompleta.
Figura 13 Detalhe das correntes c.c no momento do defeito.
Figura 14 Tensão no elo c.c medida nos terminais do conversor
CMM 1.
Figura 15 No detalhe, o comportamento transitório da tensão
medida no CMM 1 durante o descarregamento da linha c.c após o
curto-circuito.
Figura 16 No detalhe, a corrente em D2 durante o transitório de
desligamento em um dos submódulos do CMM 1.
0 0.5 1 1.5 2 2.5 3-100
-50
0
50
100
Tempo (s)
Potê
ncia
(M
W)
P1
P2
0 0.5 1 1.5 2 2.5 30.95
1
1.05
Tempo (s)
Tensão (
pu)
0 0.5 1 1.5 2 2.5 3-1500
-1000
-500
0
500
1000
1500
Tempo (s)
Corr
ente
(A
)
Icc 1
Icc 2
0.999 1 1.001 1.002 1.003 1.004-1500
-1000
-500
0
500
1000
1500
Tempo (s)
Corr
ente
(A
)
Icc 1
Icc 2
0 0.5 1 1.5 2 2.5 3
-100
-50
0
50
Tempo (s)
Tensão (
kV
)
0.999 1 1.001 1.002 1.003 1.004-100
-50
0
50
100
Tempo (s)
Tensão (
kV
)
0.999 1 1.001 1.002 1.003 1.004
-500
0
500
1000
1500
Tempo (s)
Corr
ente
(A
)
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
2459

Figura 17 No detalhe, a corrente em D3 durante o transitório de
desligamento em um dos submódulos do CMM 1.
Figura 18 Potências reais em cada barra c.a.
Figura 19 Tensão nos capacitores.
5 Conclusões
Os resultados obtidos nas simulações mostram
como a topologia em ponte semicompleta bloqueia
curtos-circuitos na linha c.c de forma praticamente
instantânea, ao passo que o sistema em meia ponte
demanda a operação do sistema de proteção c.a, além
de outros dispositivos, como tiristores ultrarrápidos e
disjuntores MRTB. Também por sua operação rápi-
da, o sistema em ponte semicompleta evita o alto
crescimento da corrente de curto-circuito que ocorre
até a proteção c.a atuar no caso do sistema em meia
ponte. Com isso, a recuperação do sistema em ponte
semicompleta praticamente só depende do tempo
estimado de deionização da linha após a eliminação
do defeito, que no caso foi assumido como 200 ms.
Considerando a eliminação da redundância de
uma chave em relação à ponte completa, a topologia
adotada tem o incremento de dois diodos e apenas
uma chave potência em relação ao sistema em meia
ponte. Entretanto, dispensa-se o uso de outros dispo-
sitivos de proteção, como os tiristores ultrarrápidos.
Há tempos fala-se na literatura sobre a importân-
cia de sistemas CCAT multiterminais. No entanto,
estes sistemas ainda não foram implementados com
conversores fonte de tensão por não existirem disjun-
tores c.c viáveis no mercado. O conversor aqui estu-
dado pode ser a solução para futuros sistemas de
transmissão em c.c multiterminais que também pode-
rão ser construídos com linhas aéreas no lugar de
cabos blindados.
Agradecimentos
O primeiro autor agradece a Capes pela bolsa de mestrado. O segundo autor foi apoiado pelo CNPq (Proc. 305114/2009-3) e pela FAPERJ (E-26/ 102.974/2011).
Referências Bibliográficas
Carrara, G., Gardella, S., & Marchesoni, M.
(1992). A new multilevel PWM method: a theoretical
analysis. Power Electronics, IEEE Transactions on ,
7 (3), pp. 497-505.
Gemmell, B., Dorn, J., Retzmann, D., &
Soerangr, D. (2008). Prospects of multilevel VSC
technologies for power transmission. Transmission
and Distribution Conference and Exposition, 2008. T
#x00026;D. IEEE/PES , pp. 1-16.
Guan, M., Xu, Z., & Chen, H. (2011). Control
and modulation strategies for modular multilevel
converter based HVDC system. In IECON 2011-37th
Annual Conference on IEEE Industrial Electronics
Society , pp. 849-854.
Haileselassie, T. M. (2008). Control of multi-
terminal VSC-HVDC systems.
Hara, S., Hirose, M., Hatano, M., Kinoshita, S.,
Ito, H., & Ibuki, K. (2001). Fault protection of metal-
lic return circuit of Kii channel HVDC system. AC-
DC Power Transmission, 2001. Seventh International
Conference on , pp. 132-137. 28-30 November 2001.
Kim, C., Sood, V., Jang, G., Lim, S., & Lee, S.
(2009). HVDC transmission: power conversion ap-
plications in power systems. John Wiley & Sons.
Lesnicar, A., & Marquardt, R. (2003). An inno-
vative modular multilevel converter topology suita-
ble for a wide power range. (IEEE, Ed.) Power Tech
Conference Proceedings, 2003 IEEE Bologna , pp.
vol.3, no., pp.6 pp. Vol.3, 23-26 June 2003.
Li, X., Song, Q., Liu, W., Rao, H., Xu, S., & Li,
L. (2013). Protection of nonpermanent faults on DC
overhead lines in MMC-based HVDC systems. Pow-
er Delivery, IEEE Transactions on , 28 (1), 483-490.
Marquardt, R. (2010). Modular Multilevel Con-
verter: An universal concept for HVDC-Networks
and extended DC-Bus-applications. Power Electro-
nics Conference (IPEC), 2010 International , pp.
502-507. 21-24 June 2010.
ONS, Procedimentos de Rede. (2001). Submó-
dulo 23.3–Diretrizes e Critérios para Estudos Elétri-
cos.
Peng, F. Z., Lai, J.-S., McKeever, J., &
VanCoevering, J. (1995). A multilevel voltage-
source inverter with separate DC sources for static
VAr generation. Industry Applications Conference,
1995. Thirtieth IAS Annual Meeting, IAS '95., Con-
0.999 1 1.001 1.002 1.003 1.004
-500
0
500
1000
1500
Tempo (s)
Corr
ente
(A
)
0 0.5 1 1.5 2 2.5 3-25
0
25
50
Tempo (s)
Potê
ncia
(M
W)
P1
P2
0 0.5 1 1.5 2 2.5 30.95
1
1.05
Tempo (s)
Tensão (
kV
)
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
2460

ference Record of the 1995 IEEE. vol.3, no., pp.
2541-2548, 8-12 Oct. 1995.
Qingrui, T., Zheng , X., & Lie , X. (2011). Re-
duced Switching-Frequency Modulation and Circu-
lating Current Suppression for Modular Multilevel
Converters. Power Delivery, IEEE Transactions on,
26 (3), pp. 2009-2017, July.
Soto-Sanchez, D., & Green, T. (2011). Control
of a modular multilevel converter-based HVDC
transmission system. In Power Electronics and Ap-
plications (EPE 2011), Proceedings of the 2011-14th
European Conference on , 1-10.
Sunabe, K., Goda, Y., Tanaka, S. (2000). Influ-
ence of starting voltage waveform on time sequence
to restart DC transmission lines. Electrical Engineer-
ing in Japan, 133, n. 4, 2000. 63-70.
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
2461
Top Related