VII Seminário da Pós-graduação em Engenharia Mecânica · na rotação do mesmo e elevados...
15
VII Seminário da Pós-graduação em Engenharia Mecânica INFLUÊNCIA DA RIGIDEZ E DA FONTE DE EXCITAÇÃO NA RESPOSTA DINÂMICA DE SISTEMA COM DESBALANCEAMENTO ROTATIVO Fabiano Gomes Madeira Aluno do Programa de Pós-Graduação em Engenharia Mecânica – Unesp – Bauru Prof. Dr. Bento Rodrigues de Pontes Junior Orientador – Depto de Engenharia Mecânica – Unesp – Bauru RESUMO O presente trabalho tem o objetivo de estudar o comportamento dinâmico de três sistemas: 1) sistema com desbalanceamento rotativo; 2) sistema não ideal linear e 3) sistema não ideal não linear. O comportamento dinâmico do sistema não ideal vem ganhando importância e destaque nos últimos anos, visto que traz uma maior aproximação com os sistemas reais. O estudo de vibração não linear também tem se destacado nos últimos tempos, pois o comportamento dos sistemas que apresentam esse tipo de vibração é complexo e provoca fenômenos interessantes para estudo na área de Engenharia. A metodologia do trabalho consiste na modelagem matemática do sistema dinâmico, através da dedução da equação de movimento na forma de equação diferencial, e na integração numérica da equação de movimento para obter a resposta dinâmica do sistema. Com a integração numérica é possível gerar as curvas de histórico no tempo, retrato de fase e FFT que auxiliam na análise do comportamento dinâmico do sistema. Com os resultados obtidos percebe-se a diferença no comportamento dinâmico dos sistemas estudados. No sistema com desbalanceamento rotativo vê-se o aumento da amplitude de vibração na região da ressonância. No sistema não ideal linear verifica-se o salto na curva de resposta em frequência e no sistema não ideal não linear constata-se a presença de caos. PALAVRAS-CHAVE: Sistema não ideal, vibração não linear, desbalanceamento rotativo. 1 INTRODUÇÃO Pesquisando-se os trabalhos publicados na área de vibrações é possível perceber que em muitos casos a influência do movimento do sistema na sua excitação é desprezada. Tal simplificação distancia o sistema dinâmico estudado do problema real, pois alguns comportamentos importantes são desprezados. Quando a excitação não é influenciada pela resposta do sistema a mesma é chamada de excitação ideal ou fonte ideal de energia. Seguindo o mesmo raciocínio, quando a excitação sofre influência da resposta do sistema a mesma é chamada de excitação não ideal ou fonte não ideal de energia. Assim, dependendo do tipo de sua excitação, o sistema é chamado de ideal ou não ideal. Em termos gerais o sistema não ideal é aquele que possui potência limitada, ou seja, o comportamento dinâmico se afasta do ideal à medida que a potência disponível se torna limitada. O primeiro relato do estudo da interação de um sistema vibratório e sua excitação faz referência a Sommerfeld (1904), o qual realizou um experimento em um suporte com um motor elétrico fixado em sua extremidade livre. Em homenagem ao primeiro homem que o observou, atualmente a literatura chama de efeito Sommerfeld o fenômeno que apresenta as
Transcript of VII Seminário da Pós-graduação em Engenharia Mecânica · na rotação do mesmo e elevados...

VII Seminário da Pós-graduação em Engenharia Mecânica
INFLUÊNCIA DA RIGIDEZ E DA FONTE DE EXCITAÇÃO NA RESPOSTA
DINÂMICA DE SISTEMA COM DESBALANCEAMENTO ROTATIVO
Fabiano Gomes Madeira
Aluno do Programa de Pós-Graduação em Engenharia Mecânica – Unesp – Bauru
Prof. Dr. Bento Rodrigues de Pontes Junior
Orientador – Depto de Engenharia Mecânica – Unesp – Bauru
RESUMO
O presente trabalho tem o objetivo de estudar o comportamento dinâmico de três
sistemas: 1) sistema com desbalanceamento rotativo; 2) sistema não ideal linear e 3) sistema
não ideal não linear. O comportamento dinâmico do sistema não ideal vem ganhando
importância e destaque nos últimos anos, visto que traz uma maior aproximação com os
sistemas reais. O estudo de vibração não linear também tem se destacado nos últimos tempos,
pois o comportamento dos sistemas que apresentam esse tipo de vibração é complexo e
provoca fenômenos interessantes para estudo na área de Engenharia.
A metodologia do trabalho consiste na modelagem matemática do sistema dinâmico,
através da dedução da equação de movimento na forma de equação diferencial, e na
integração numérica da equação de movimento para obter a resposta dinâmica do sistema.
Com a integração numérica é possível gerar as curvas de histórico no tempo, retrato de fase e
FFT que auxiliam na análise do comportamento dinâmico do sistema. Com os resultados
obtidos percebe-se a diferença no comportamento dinâmico dos sistemas estudados. No
sistema com desbalanceamento rotativo vê-se o aumento da amplitude de vibração na região
da ressonância. No sistema não ideal linear verifica-se o salto na curva de resposta em
frequência e no sistema não ideal não linear constata-se a presença de caos.
PALAVRAS-CHAVE: Sistema não ideal, vibração não linear, desbalanceamento rotativo.
1 INTRODUÇÃO
Pesquisando-se os trabalhos publicados na área de vibrações é possível perceber que
em muitos casos a influência do movimento do sistema na sua excitação é desprezada. Tal
simplificação distancia o sistema dinâmico estudado do problema real, pois alguns
comportamentos importantes são desprezados. Quando a excitação não é influenciada pela
resposta do sistema a mesma é chamada de excitação ideal ou fonte ideal de energia. Seguindo
o mesmo raciocínio, quando a excitação sofre influência da resposta do sistema a mesma é
chamada de excitação não ideal ou fonte não ideal de energia. Assim, dependendo do tipo de
sua excitação, o sistema é chamado de ideal ou não ideal. Em termos gerais o sistema não
ideal é aquele que possui potência limitada, ou seja, o comportamento dinâmico se afasta do
ideal à medida que a potência disponível se torna limitada.
O primeiro relato do estudo da interação de um sistema vibratório e sua excitação faz
referência a Sommerfeld (1904), o qual realizou um experimento em um suporte com um
motor elétrico fixado em sua extremidade livre. Em homenagem ao primeiro homem que o
observou, atualmente a literatura chama de efeito Sommerfeld o fenômeno que apresenta as
VII Seminário da Pós-graduação em Engenharia Mecânica
seguintes particularidades (para um sistema não ideal): a) aumento da amplitude de vibração
do sistema na região de ressonância, fenômeno que ocorre quando a frequência da excitação
se iguala à frequência natural do sistema; b) descontinuidade (salto) na curva da amplitude de
vibração do sistema versus a frequência da excitação; c) a curva da amplitude de vibração do
sistema versus a frequência da excitação sofre uma inclinação. Comumente se diz que a curva
“deita”; d) aumento da potência necessária para que o sistema consiga ultrapassar a frequência
de ressonância. O efeito Sommerfeld aparece em sistema não ideal com potência limitada. Um
exemplo de fonte de energia não ideal com potência limitada é o motor elétrico de corrente
contínua. Assim, pensando num sistema dinâmico excitado por esse tipo de motor, à medida
que se aumenta a energia fornecida ao motor elétrico a sua rotação cresce de forma contínua,
porém, isso não ocorre infinitamente. Quando a rotação do motor se aproxima da frequência
de ressonância do sistema, uma quantidade maior de energia tem que ser fornecida para
aumentar a rotação do mesmo, pois parte dessa energia é absorvida pelo próprio sistema
(percebe-se isso devido ao aumento da amplitude de vibração do sistema). Assim, na região de
ressonância, grandes acréscimos na energia fornecida ao motor provocam pequenas mudanças
na rotação do mesmo e elevados aumentos na amplitude de vibração do sistema. Nessa
situação comumente se diz que a rotação do motor é “capturada” pela ressonância. Após o
sistema atingir determinado nível de energia, a rotação do motor consegue ultrapassar a
barreira da ressonância e, então, volta a aumentar, enquanto a amplitude de vibração do
sistema cai drasticamente. Tal fenômeno ocorre tanto no acréscimo quanto no decréscimo
gradativo da rotação do motor. Esse fenômeno não ocorre em sistema ideal.
Em Balthazar (2003) et al é feita uma revisão teórica sobre sistema não ideal. A
discussão se concentra na captura pela ressonância, efeito Sommerfeld e aumento da potência
da fonte de energia para ocorrer a passagem pela ressonância. Não são apresentados resultados
numéricos.
Cveticanin (2010) também faz uma revisão bibliográfica a respeito de sistema não
ideal, destacando o efeito Sommerfeld, a captura pela ressonância e a limitação de potência da
fonte de energia não ideal. Não são apresentados resultados numéricos. Apenas discutem-se,
teoricamente, as particularidades do comportamento do sistema não ideal.
Em Madeira et al (2013) compara-se o comportamento dinâmico de três sistemas
dinâmicos através da fonte de excitação: ideal e não ideal e da rigidez: linear e não linear.
Apresentam-se os valores de frequência de excitação a que cada parte do corpo humano pode
ser submetida sem causar enfermidade ou desconforto.
Nbendjo et al (2012) estudou um modelo dinâmico muito parecido com o
apresentado por Souza et al (2007). A principal diferença entre os dois modelos está no motor
(fonte de excitação). No caso apresentado por Nbendjo et al (2012) a tensão do motor é do
tipo alternada, enquanto que em Souza et al (2007) a mesma é contínua. Em Nbendjo et al
(2012) através do expoente de Lyapunov percebe-se a existência de regiões periódicas,
caóticas e também de hipercaos.
Souza et al (2007) propôs um método de controle de vibração para eliminar o
comportamento caótico de um sistema tipo Duffing com fonte limitada de potência. A ideia
do método de controle é aplicar um sinal de pequena amplitude na fonte de excitação e não no
oscilador, a fim de alterar a curva característica do motor. Com isso conseguiu-se estabilizar o
sistema em uma órbita periódica que era originalmente caótica.
Em Zukovic e Cveticanin (2007) estudou-se um sistema tipo Duffing com fonte não
ideal de energia, representado por um motor elétrico com rotor desbalanceado e potência
limitada, acoplado a uma rigidez não linear e a um amortecedor viscoso linear. Nesse sistema
foi verificado: o efeito Sommerfeld (fenômeno de salto), o qual ocorre próximo da frequência
VII Seminário da Pós-graduação em Engenharia Mecânica
de ressonância do sistema, e o comportamento caótico para determinados valores dos
parâmetros. O comportamento dinâmico em regime caótico foi confirmado através do
expoente de Lyapunov, retrato de fase e diagrama de bifurcação. Para evitar o regime caótico
foi proposto um método de controle que consiste na adição de uma força externa atuando no
sistema, a qual estabilizou a resposta do sistema em determinadas condições.
No presente trabalho estuda-se o comportamento dinâmico de três sistemas, através de
modelos matemáticos e respostas dinâmicas obtidas através de integração numérica.
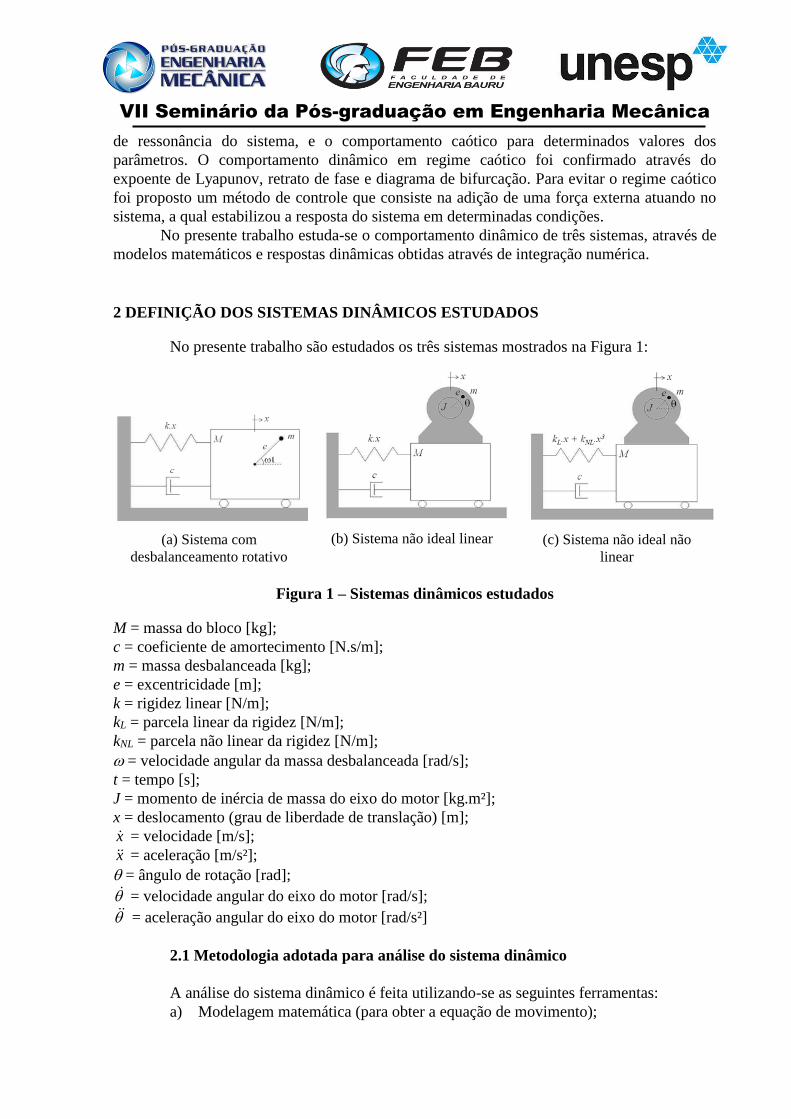
2 DEFINIÇÃO DOS SISTEMAS DINÂMICOS ESTUDADOS
No presente trabalho são estudados os três sistemas mostrados na Figura 1:
Figura 1 – Sistemas dinâmicos estudados
M = massa do bloco [kg];
c = coeficiente de amortecimento [N.s/m];
m = massa desbalanceada [kg];
e = excentricidade [m];
k = rigidez linear [N/m];
kL = parcela linear da rigidez [N/m];
kNL = parcela não linear da rigidez [N/m];
= velocidade angular da massa desbalanceada [rad/s];
t = tempo [s];
J = momento de inércia de massa do eixo do motor [kg.m²];
x = deslocamento (grau de liberdade de translação) [m];
x = velocidade [m/s];
x = aceleração [m/s²];
= ângulo de rotação [rad];
= velocidade angular do eixo do motor [rad/s];
= aceleração angular do eixo do motor [rad/s²]
2.1 Metodologia adotada para análise do sistema dinâmico
A análise do sistema dinâmico é feita utilizando-se as seguintes ferramentas:
a) Modelagem matemática (para obter a equação de movimento);
(b) Sistema não ideal linear (a) Sistema com
desbalanceamento rotativo
(c) Sistema não ideal não
linear
VII Seminário da Pós-graduação em Engenharia Mecânica
b) Integração numérica da equação de movimento (para obter a resposta dinâmica
do sistema).
Resumidamente a metodologia consiste em obter a equação de movimento do
sistema, escrita na forma de equação diferencial, através da equação de Lagrange (modelagem
matemática). Deduzida a equação de movimento faz-se a integração numérica da mesma para
obter a resposta dinâmica do sistema (deslocamento e velocidade). Conhecida a resposta é
possível gerar curvas que auxiliam na análise do comportamento dinâmico do sistema. Essas
curvas serão detalhadas ao longo da metodologia.
a) Modelagem matemática
Nesta seção do trabalho faz-se a modelagem matemática do sistema dinâmico,
escrevendo-se a equação de movimento na forma de equação diferencial.
Para escrever a equação do movimento do sistema dinâmico utiliza-se a equação de
Lagrange, a qual emprega as energias cinética e potencial do sistema escritas em termos das
coordenadas generalizadas (coordenadas independentes que correspondem aos graus de
liberdade do sistema). A equação de Lagrange é escrita da seguinte forma:
i
iii
V
q
T
q
T
dt
d
(1)
T = energia cinética [J];
V = energia potencial [J];
qi = coordenada generalizada (i = 1, 2, 3,..., n);
iq = velocidade generalizada (i = 1, 2, 3,..., n);
Qi = forças generalizadas (forças não conservativas);
iq
T
= derivada parcial da energia cinética em relação à velocidade generalizada iq ;
iq
T
= derivada parcial da energia cinética em relação à coordenada generalizada qi ;
iq
V
= derivada parcial da energia potencial em relação à coordenada generalizada qi ;
dt
d = derivada em relação ao tempo.
Maiores detalhes a respeito da equação de Lagrange podem ser encontrados em
Meirovitch (2001).
Sistema com desbalanceamento rotativo:
A equação de Lagrange para esse sistema é:
xcx
V
x
T
x
T
dt
d
(2)

VII Seminário da Pós-graduação em Engenharia Mecânica
As energias cinética e potencial do sistema são:
222 sen cos2
1
2
1tetexmxMT (3)
tmgekxV sen12
1 2 (4)
A equação de movimento do sistema é:
tmM
mex
mM
kx
mM
cx
cos
2
(5)
Sistema não ideal linear:
As equações de Lagrange para esse sistema são:
xcx
V
x
T
x
T
dt
d
(6)
ba
VTT
dt
d
(7)
Esse sistema dinâmico utiliza um motor de corrente contínua como fonte de
excitação. A força não conservativa é o torque líquido do motor elétrico, o qual resulta da
diferença entre o torque gerado pelo motor e o torque das forças resistivas internas do mesmo.
Adota-se o comportamento linear para a curva de torque líquido do motor em função da
velocidade angular , através da seguinte equação:
baT (8)
T = torque líquido do motor em função da velocidade angular [N.m];
a = constante de torque do motor [N.m];
b = coeficiente angular da reta;
Graficamente a Equação (8) é conhecida como curva característica do motor.
Figura 2 – Torque x velocidade angular do motor elétrico

VII Seminário da Pós-graduação em Engenharia Mecânica
0
ab (9)
20
0
f (10)
f0 = constante de frequência do motor [Hz];
0 = constante de velocidade angular do motor [rad/s];
As energias cinética e potencial do sistema são:
2222
2
1sen cos
2
1
2
1 JeexmxMT (11)
sen12
1 2 mgekxV (12)
Para simplificar as expressões faz-se o seguinte agrupamento de variáveis:
JmeIsist 2 (13)
As equações de movimento do sistema são:
sen cos2
mM
mex
mM
kx
mM
cx (14)
cossen gxI
me
I
b
I
a
sistsistsist
(15)
Analisando as Equações (14) e (15) percebe-se que existe um acoplamento entre as
equações de movimento do sistema e da fonte de excitação, ou seja, a resposta do grau de
liberdade de translação do sistema influencia na resposta do grau de liberdade de rotação da
fonte de excitação e vice-versa.
Sistema não ideal não linear:
As equações de Lagrange para esse sistema são:
xcx
V
x
T
x
T
dt
d
(16)
ba
VTT
dt
d
(17)

VII Seminário da Pós-graduação em Engenharia Mecânica
A curva característica do motor é a mesma utilizada para o sistema não ideal linear.
As energias cinética e potencial do sistema são:
2222
2
1sen cos
2
1
2
1 JeexmxMT (18)
sen14
1
2
1 42 mgexkxkV NLL (19)
As equações de movimento do sistema são:
sen cos23
mM
mex
mM
kx
mM
kx
mM
cx NLL (20)
cossen gxI
me
I
b
I
a
sistsistsist
(21)
b) Integração numérica da equação de movimento
Depois de deduzida a equação de movimento é necessário resolvê-la para obter-se a
resposta dinâmica do sistema.
No presente trabalho a equação de movimento (equação diferencial) é resolvida
numericamente (integração numérica).
Através da integração numérica da equação de movimento consegue-se obter o
deslocamento e a velocidade ao longo do tempo (resposta dinâmica do sistema). Com isso é
possível gerar curvas que auxiliam a entender o comportamento do sistema.
3 RESULTADOS E DISCUSSÕES
Os resultados apresentados a seguir foram obtidos através de integração numérica da
equação de movimento, usando o método de Runge-Kutta de quarta e quinta ordem.
A Tabela 1 mostra o valor dos parâmetros que foram mantidos constantes para
realizar a integração numérica.
O símbolo “-“ utilizado na Tabela 1 indica que o parâmetro não existe para o
respectivo sistema.
VII Seminário da Pós-graduação em Engenharia Mecânica
Tabela 1 – Parâmetros que foram mantidos constantes na integração numérica
Parâmetro [unidade]
Valor do parâmetro
Sistema com
desbalanceamento
rotativo
Sistema não ideal
linear
Sistema não ideal
não linear
M [kg] 5 5 5
m.e [kg.m] 1 1 1
k [N/m] 533 533 -
kL [N/m] - - -40
kNL [N/m] - - 400
c [N.s/m] 5 5 5
J [kg.m²] - 0,1 0,1
a [N.m] - 80 80
g [m/s²] 9,81 9,81 9,81
As condições iniciais de deslocamento e velocidade são nulas.
Sistema com desbalanceamento rotativo:
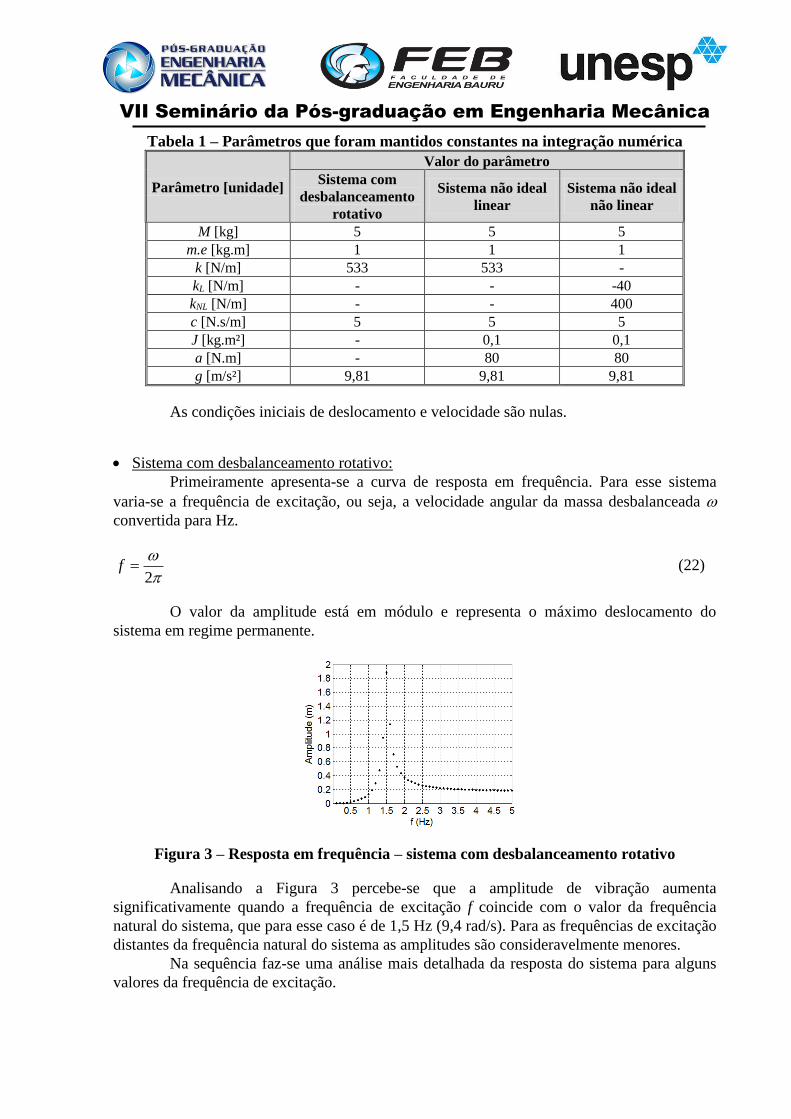
Primeiramente apresenta-se a curva de resposta em frequência. Para esse sistema
varia-se a frequência de excitação, ou seja, a velocidade angular da massa desbalanceada
convertida para Hz.
2f (22)
O valor da amplitude está em módulo e representa o máximo deslocamento do
sistema em regime permanente.
Figura 3 – Resposta em frequência – sistema com desbalanceamento rotativo
Analisando a Figura 3 percebe-se que a amplitude de vibração aumenta
significativamente quando a frequência de excitação f coincide com o valor da frequência
natural do sistema, que para esse caso é de 1,5 Hz (9,4 rad/s). Para as frequências de excitação
distantes da frequência natural do sistema as amplitudes são consideravelmente menores.
Na sequência faz-se uma análise mais detalhada da resposta do sistema para alguns
valores da frequência de excitação.

VII Seminário da Pós-graduação em Engenharia Mecânica
Tabela 2 – Parâmetro que foi variado – sistema com desbalanceamento rotativo
f [Hz]
[rad/s]
1,0
6,3
1,5
9,4
2,0
12,6
As Figuras 4 a 6 apresentam a resposta do sistema para as frequências de excitação
especificadas na Tabela 2, onde (a) é o histórico do deslocamento e (b) é o retrato de fase.
Figura 4 – Resposta – f = 1,0 Hz (3,1 rad/s) – sistema com desbalanceamento rotativo
Figura 5 – Resposta – f = 1,5 Hz (9,4 rad/s) – sistema com desbalanceamento rotativo
Figura 6 – Resposta – f = 2,0 Hz (12,6 rad/s) – sistema com desbalanceamento rotativo
Observando o histórico do deslocamento percebe-se que a resposta desse sistema
apresenta período 1 (resposta periódica).
(a) (b)
(a) (b)
(a) (b)
VII Seminário da Pós-graduação em Engenharia Mecânica
Sistema não ideal linear:
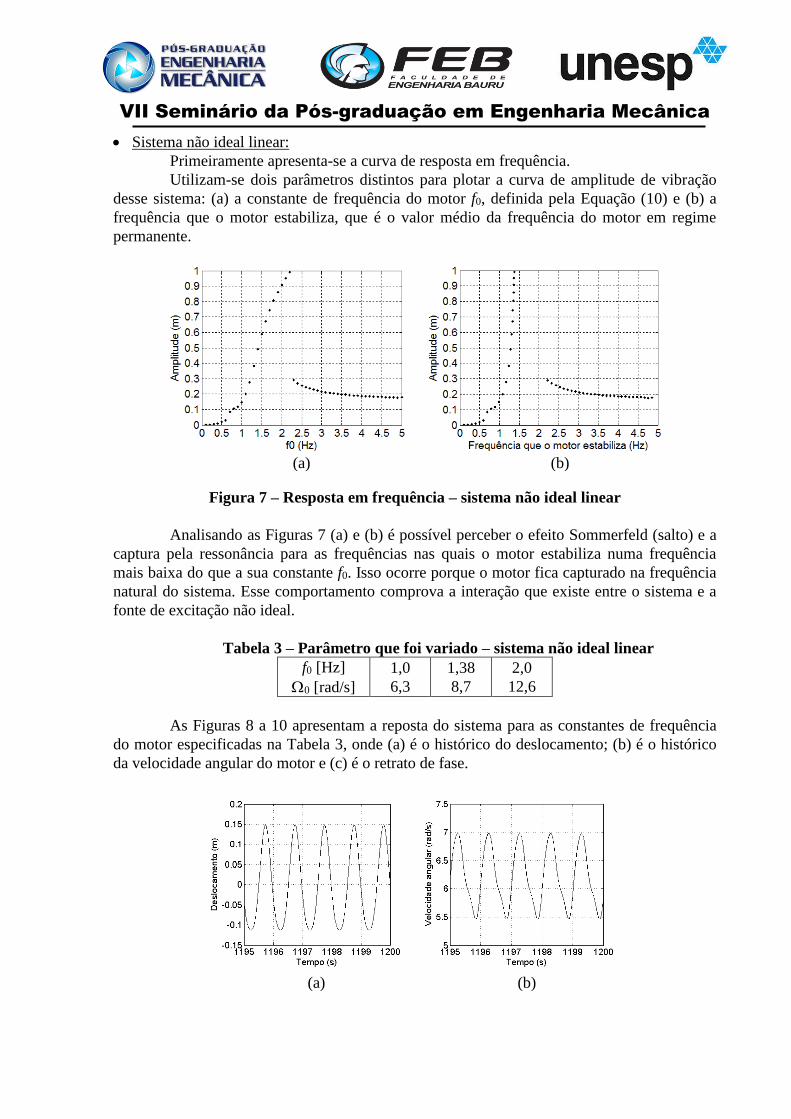
Primeiramente apresenta-se a curva de resposta em frequência.
Utilizam-se dois parâmetros distintos para plotar a curva de amplitude de vibração
desse sistema: (a) a constante de frequência do motor f0, definida pela Equação (10) e (b) a
frequência que o motor estabiliza, que é o valor médio da frequência do motor em regime
permanente.
Figura 7 – Resposta em frequência – sistema não ideal linear
Analisando as Figuras 7 (a) e (b) é possível perceber o efeito Sommerfeld (salto) e a
captura pela ressonância para as frequências nas quais o motor estabiliza numa frequência
mais baixa do que a sua constante f0. Isso ocorre porque o motor fica capturado na frequência
natural do sistema. Esse comportamento comprova a interação que existe entre o sistema e a
fonte de excitação não ideal.
Tabela 3 – Parâmetro que foi variado – sistema não ideal linear
f0 [Hz]
0 [rad/s]
1,0
6,3
1,38
8,7
2,0
12,6
As Figuras 8 a 10 apresentam a reposta do sistema para as constantes de frequência
do motor especificadas na Tabela 3, onde (a) é o histórico do deslocamento; (b) é o histórico
da velocidade angular do motor e (c) é o retrato de fase.
(a) (b)
(a) (b)

VII Seminário da Pós-graduação em Engenharia Mecânica
Figura 8 – Resposta – f0 = 1,0 Hz (3,1 rad/s) – sistema não ideal linear
Figura 9 – Resposta – f0 = 1,38 Hz (8,7 rad/s) – sistema não ideal linear
(c)
(a) (b)
(c)
(a) (b)

VII Seminário da Pós-graduação em Engenharia Mecânica
Figura 10 – Resposta – f0 = 2,0 Hz (12,6 rad/s) – sistema não ideal linear
Observando o histórico do deslocamento percebe-se que a resposta desse sistema
apresenta período 1 (resposta periódica). Observando o histórico da velocidade angular do
motor percebe-se que a mesma apresenta flutuação, comprovando a interação que existe entre
o sistema e a fonte de excitação não ideal.
Sistema não ideal não linear:
A rigidez adotada nesse sistema é resultante da associação de uma parcela linear com
sinal negativo e de uma parcela não linear com sinal positivo (conhecido sistema Duffing). A
energia potencial elástica desse sistema (Equação (19) sem o termo referente à energia
potencial gravitacional da massa desbalanceada) apresenta o seguinte comportamento:
Figura 11 – Energia potencial elástica x deslocamento – sistema não ideal não linear
Através da Figura 11 percebe-se que existem três pontos de equilíbrio, sendo dois
deles estáveis (ponto do lado direito e ponto do lado esquerdo) e um instável (ponto central).
Devido a esse comportamento diz-se que o sistema apresenta energia potencial elástica com
dois poços de potencial.
Utilizam-se dois parâmetros distintos para plotar a curva de amplitude de vibração
desse sistema: (a) a constante de frequência do motor f0, definida pela Equação (10) e (b) a
frequência que o motor estabiliza, que é o valor médio da frequência do motor em regime
permanente.
(c)

VII Seminário da Pós-graduação em Engenharia Mecânica
Figura 12 – Resposta em frequência – sistema não ideal não linear
Tabela 4 – Parâmetro que foi variado – sistema não ideal não linear
f0 [Hz]
0 [rad/s]
1,0
6,3
1,5
9,4
2,0
12,6
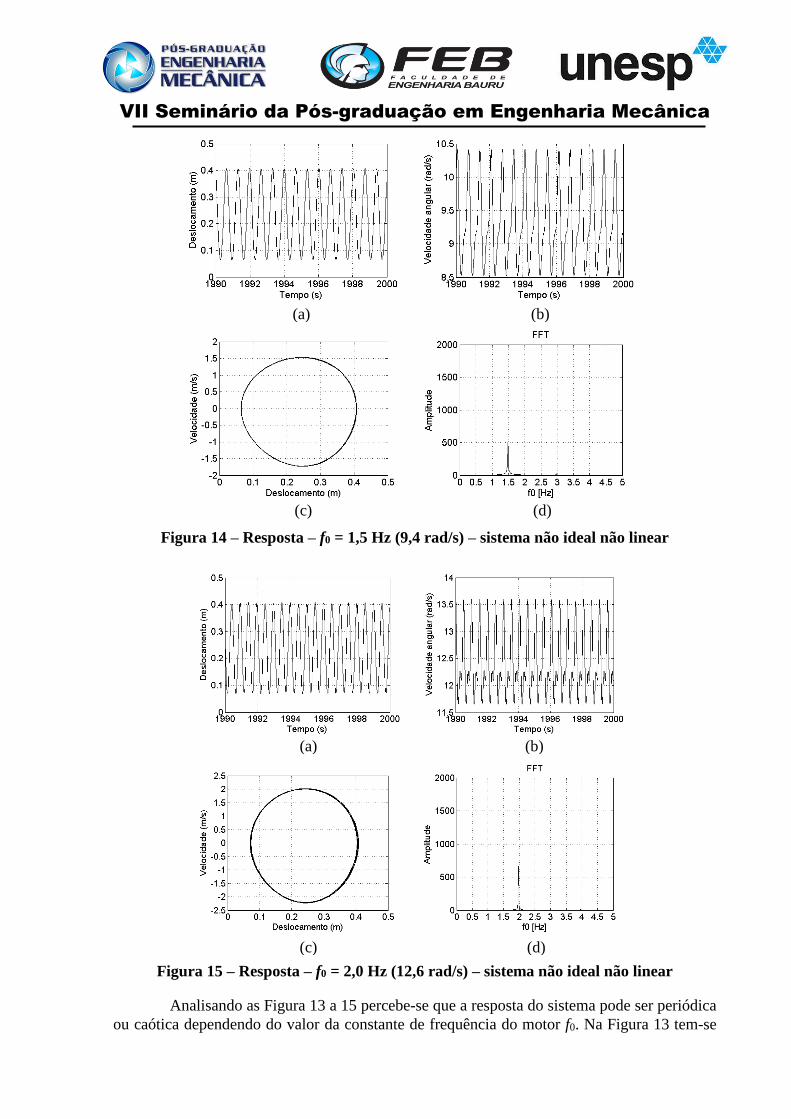
As Figuras 13 a 15 apresentam a resposta do sistema para as constantes de frequência
do motor especificadas na Tabela 4, onde (a) é o histórico do deslocamento; (b) é o histórico
da velocidade angular do motor; (c) é o retrato de fase e (d) é a curva da FFT.
Figura 13 – Resposta – f0 = 1,0 Hz (3,1 rad/s) – sistema não ideal não linear
(a) (b)
(a) (b)
(c) (d)
VII Seminário da Pós-graduação em Engenharia Mecânica
Figura 14 – Resposta – f0 = 1,5 Hz (9,4 rad/s) – sistema não ideal não linear
Figura 15 – Resposta – f0 = 2,0 Hz (12,6 rad/s) – sistema não ideal não linear
Analisando as Figura 13 a 15 percebe-se que a resposta do sistema pode ser periódica
ou caótica dependendo do valor da constante de frequência do motor f0. Na Figura 13 tem-se
(a) (b)
(c) (d)
(a) (b)
(c) (d)
VII Seminário da Pós-graduação em Engenharia Mecânica
resposta caótica (irregular) e nas Figuras 14 e 15 a resposta é periódica (regular). A existência
de caos é comprovada pelo gráfico da FFT. Na Figura 13 (d) vê-se o espectro da FFT bastante
perturbado, indicando a existência de várias frequências na resposta do sistema e nas Figuras
14 (d) e 15 (d) tem-se apenas uma frequência predominante, caracterizando uma resposta
periódica (período 1).
4 CONCLUSÕES
Na curva de resposta em frequência do sistema com desbalanceamento rotativo
(Figura 3) observa-se que a amplitude de vibração ocorre quando a frequência de excitação
coincide com a frequência natural do sistema. A resposta é sempre periódica. No caso do
sistema não ideal linear a curva de resposta em frequência (Figura 7) apresenta um salto
(descontinuidade), conhecido como efeito Sommerfeld. Nesse sistema também é percebido o
efeito de captura pela ressonância, condição na qual a energia fornecida ao motor elétrico
provoca um pequeno aumento na sua rotação e um grande aumento na amplitude de vibração
do sistema. No caso do sistema não ideal não linear, o comportamento dinâmico se torna
bastante complexo devido à rigidez não linear com energia potencial elástica com dois poços
de potencial. Pequenas variações na constante de frequência do motor provocam grandes
mudanças na resposta do sistema. Para esse sistema a resposta é periódica ou caótica,
dependendo do valor da constante de frequência do motor.
5 AGRADECIMENTOS
Os autores agradecem os auxílios concedidos pela CAPES, CNPq e FAPESP.
6 REFERÊNCIAS BIBLIOGRÁFICAS
BALTHAZAR, J.M., MOOK, D.T., WEBER, H.I., BRASIL, R.M.L.R.F., FENILI, A., Belato,
D., FELIX, J.L.P. An Overview on Non-Ideal Vibrations. Meccanica, 38, p. 613-621, 2003.
CVETICANIN, L. Dynamics of the non-ideal mechanical systems: A review. Journal of the
Serbian Society for Computational Mechanics, v.4, nº2, p. 75-86, 2010.
MADEIRA, F.G.; PONTES JR, B.R.; SILVEIRA, M.; BALTHAZAR, J.M. Vibração caótica
no ambiente industrial: uma análise através de modelos virtuais de sistema dinâmico com
desbalanceamento rotativo. SIMPEP, 2013.
NBENDJO, B.R.N., CALDAS, I.L., and VIANA, R.L. Dynamical changes from harmonic
vibrations of a limited power supply driving a Duffing oscillator. Nonlinear Dyn, 70, p. 401-
407, 2012.
SOUZA, S.L.T., CALDAS, I.L., VIANA, R.L., BATHAZAR, J.M., BRASIL, R.M.L.R.F. A
simple feedback control for a chaotic oscillator with limited power supply. Journal of Sound
and Vibration, 299, p. 664-671, 2007.
ZUKOVIC, M. and CVETICANIN, L. Chaotic Responses in a Stable Duffing System of Non-
ideal Type. Journal of Vibration and Control, 13(6), p. 751-767, 2007.
MEIROVITCH, L. Fundamentals of Vibrations. New York. McGraw-Hill, 2001, p. 262-
277.