
UNIVERSIDADE FEDERAL FLUMINENSE TEM - Departamento de ...
89
UNIVERSIDADE FEDERAL FLUMINENSE TCE - Escola de Engenharia TEM - Departamento de Engenharia Mecânica PROJETO DE GRADUAÇÃO Título do Projeto: SIMULAÇÃO DE DESLOCAMENTO DA CAMADA LIMITE COM TÉCNICAS DE PREVENÇÃO BASEADAS EM INJEÇÃO E SUCÇÃO DE MASSA Autor: FABIO JOSE SCHOR Orientador: RONEY LEON THOMPSON LUIZ EDUARDO SAMPAIO Data: 07 de julho de 2015
Transcript of UNIVERSIDADE FEDERAL FLUMINENSE TEM - Departamento de ...

UNIVERSIDADE FEDERAL FLUMINENSE
TCE - Escola de Engenharia
TEM - Departamento de Engenharia Mecânica
PROJETO DE GRADUAÇÃO
Título do Projeto:
SIMULAÇÃO DE DESLOCAMENTO DA CAMADA LIMITE COM TÉCNICAS DE PREVENÇÃO BASEADAS EM INJEÇÃO E SUCÇÃO DE MASSA
Autor:
FABIO JOSE SCHOR
Orientador:
RONEY LEON THOMPSON
LUIZ EDUARDO SAMPAIO
Data: 07 de julho de 2015

FABIO JOSE SCHOR
SIMULAÇÃO DE DESLOCAMENTO DA CAMADA LIMITE COM TÉCNICAS DE PREVENÇÃO BASEADAS EM INJEÇÃO E SUCÇÃO DE MASSA
Trabalho de Conclusão de Curso apresentado ao Curso de Engenharia Mecânica da Universidade Federal Fluminense, como requisito parcial para obtenção do grau de Engenheiro Mecânico.
Orientador:
Prof. RONEY LEON THOMPSON
Prof. LUIZ EDUARDO SAMPAIO
Niterói
07 de julho de 2015

Ficha Catalográfica elaborada pela Biblioteca da Escola de Engenharia e Instituto de Computação da UFF
S374 Schor, Fabio Jose
Simulação de deslocamento da camada limite com técnicas de
prevenção baseadas em injeção e sucção de massa / Fábio José
Schor. – Niterói, RJ : [s.n.], 2015.
88 f.
Trabalho (Conclusão de Curso) – Departamento de Engenharia
Mecânica, Universidade Federal Fluminense, 2015.
Orientadores Roney Leon Thompson, : Luiz Eduardo Sampaio.
1. Fluidodinâmica computacional. 2. Escoamento instável
(dinâmica dos fluidos). 3. Camada limite. 5. Turbulência. I. Título.
CDD 620.106



DEDICATÓRIA
Dedico à minha mãe, Doris, que me incentivou e proporcionou as condições
necessária para eu concluir o curso de engenharia.
AGRADECIMENTOS
Aos professores Luiz Eduardo Sampaio e Roney Leon Thompson que me orientaram.
À professora Maria Cindra pela sua dedicação e valores passados em sala de aula.
Ao professor Otton Teixeira da Silveira Filho pelas aulas de métodos numéricos.
Ao programa Ciências sem Fronteiras, que me proporcionou a oportunidade de
estudar métodos computacionais na The University of Manchester.
Ao professor Timothy Craft que muito me ensinou e orientou sobre fluidodinâmica
computacional.
A minha amiga Isalira que me ajudou a referenciar e formatar o trabalho.
RESUMO
Nas últimas décadas foram propostas várias técnicas de controle de
escoamento para aumentar a eficiência e estabilidade aerodinâmica. Muitas dessas
técnicas envolvem controle por sucção e injeção de massa, os quais são eficientes,
porém difíceis de serem aplicadas em escoamentos reais. Recentemente,
mecanismos de controle envolvendo jatos oscilatórios com balanço neutro de massa
se mostraram factíveis em aplicações industriais e eficientes no controle da separação
da camada limite. Métodos computacionais têm sido extensamente utilizados para
computar escoamentos oscilatórios. O objetivo do presente trabalho é simular o
escoamento incompressível ao redor de uma geometria propensa ao desprendimento
da camada limite, onde técnicas de controle de fluxo baseadas em sucção e injeção
de massa são aplicadas imediatamente antes da separação e os efeitos na bolha de
recirculação são analisados. As equações médias de Reynolds (RANS) e o modelo
de turbulência κ-ε com tratamento próximo a parede foram escolhidos para descrever
o escoamento. São descritas as etapas necessárias para se montar um modelo
numérico, a teoria envolvida na separação da camada limite e o método dos volumes
finitos. Os resultados mostram qualitativamente e quantitativamente os efeitos do
controle de fluxo. O controle oscilatório resulta em um recolamento da camada limite
em um ponto anterior ao caso sem controle de fluxo e posterior ao caso com controle
por sucção. O modelo de turbulência κ-ε falhou em prever corretamente os pontos de
recolamento.
Palavras-chave: Camada limite; Turbulência; Dinâmica dos fluidos computacional;
Modelo κ-ε

ABSTRACT
In recent decades, it has been proposed various flow control techniques to
increase efficiency and aerodynamic stability. Many of these techniques involve control
by suction and injection mass, which are efficient, but difficult to apply in real flows.
Recently, control mechanisms involving oscillating jets with neutral balance mass
proved doable and efficient in industrial applications to control the separation of the
boundary layer. Computational methods have been widely used for computing
oscillatory flow. The objective of this study is to simulate the incompressible flow
around a geometry prone to detachment of the boundary layer, where flow control
techniques based on suction and injection of mass are applied immediately before
separation and the effects in the recirculation bubble is analyzed. The Reynolds
Average Navier-Stokes equations (RANS) and the κ-ε turbulence model with enhanced
wall treatment were chosen to describe the flow. This work describes the steps
required to construct a numerical model, the theory involved in the separation of the
boundary layer and the finite volume method. The results qualitatively and
quantitatively show the effects of flow control. The oscillatory control results in a
reattachment of the boundary layer at a point prior to the case without flow control and
further to the case with suction control. The κ-ε turbulence model has failed to correctly
predict the reattachment point.
Key-Words: Boundary layer; Turbulence; Computational fluid dynamics; κ-ε model

LISTA DE FIGURAS
Figura 2.1 Modelo Experimental .......................................................................................... 18
Figura 2.2 Geometria 2D do modelo experimental ............................................................... 19
Figura 2.3 Detalhes da posição da abertura ........................................................................ 20
Figura 2.4 Detalhes da geometria arqueada ........................................................................ 21
Figura 2.5 Detalhes do Enclosure ........................................................................................ 21
Figura 2.6 Divisão em três linhas da geometria arqueada e sua projeção. .......................... 22
Figura 2.7 Exemplo da divisão de elementos na região da abertura. ................................... 23
Figura 2.8 Linhas do enclosure. ........................................................................................... 23
Figura 2.9 Malha grosseira (coarse). ................................................................................... 24
Figura 2.10 Malha normal (normal). ..................................................................................... 24
Figura 2.11 Malha fina (fine). ............................................................................................... 24
Figura 2.12 Malha Triangular. .............................................................................................. 24
Figura 2.13 Condições de contorno.. ................................................................................... 26
Figura 2.14 Condições de contorno no modelo com controle oscilatório .............................. 27
Figura 2.15 Ciclo do jato discretizado por 200 pontos. ......................................................... 28
Figura 2.16 Velocidade instantânea. .................................................................................... 30
Figura 2.17 Condição de não deslizamento ......................................................................... 34
Figura 2.18 Perfil de velocidade laminar e turbulento .......................................................... 34
Figura 2.19 (A) camada limite laminar e turbulenta. (B) subcamada viscosa. ...................... 35
Figura 2.20 Perfil de velocidade nas situações de (A) gradiente favorável de pressão e (B)
gradiente adverso de pressão. ............................................................................................. 37
Figura 3.1 Volume de Controle ............................................................................................ 39
Figura 3.2 Posição dos nós.................................................................................................. 40
Figura 3.3 Nós adjacentes. .................................................................................................. 41
Figura 4.1 Y+ Malhas ........................................................................................................... 48
Figura 4.2 Gráficos da flutuação de velocidade.. ................................................................. 50
Figura 4.3 Gráficos energia cinética de turbulência. ............................................................ 51
Figura 4.4 Gráficos da flutuação de velocidade. ................................................................. 53
Figura 4.5 Gráficos energia cinética de turbulência. ............................................................ 54
Figura 4.6 Gráficos do perfil de velocidade. ......................................................................... 56
Figura 4.7 Coeficiente de pressão na geometria arqueada .................................................. 57
Figura 4.8 Tensão cisalhante na geometria arqueada ......................................................... 58
Figura 4.9 Contorno de pressão. ......................................................................................... 59
Figura 4.10 Contorno de velocidade. ................................................................................... 60
Figura 4.11 Contorno de energia cinética turbulenta. ........................................................... 61
Figura 4.12 Contorno de razão de viscosidade (turbulenta e dinâmica). .............................. 62
Figura 4.13 Linha de corrente e velocidade. ........................................................................ 63
Figura 4.14 Coeficiente de pressão na geometria arqueada. ............................................... 64
Figura 4.15 Tensão cisalhante na geometria arqueada. ...................................................... 64
Figura 4.16 Contorno de pressão......................................................................................... 65
Figura 4.17 Contorno de velocidade. ................................................................................... 66
Figura 4.18 Vetor de velocidade. ......................................................................................... 67
Figura 4.19 Contorno de energia cinética turbulenta. ........................................................... 68
Figura 4.20 Contorno de razão de viscosidade (turbulenta e dinâmica). ............................. 69
Figura 4.21 Linha de corrente e velocidade. ....................................................................... 70
Figura 4.22 Coeficiente de pressão médio. .......................................................................... 71
Figura 4.23 Tensão Cisalhante media. ................................................................................ 72
Figura 4.24 Contorno de pressão médio. ............................................................................. 73
Figura 4.25 Contorno de velocidade média. ......................................................................... 74
Figura 4.26 Contorno de velocidade oscilatório. .................................................................. 75
Figura 4.27 Linha de corrente/velocidade oscilatório.. ......................................................... 76
Figura 4.28 Contorno de energia cinética de turbulência. .................................................... 77
Figura 4.29 Contorno da razão de viscosidade (turbulenta/dinâmica). ................................. 78
Figura 4.30 Contorno de velocidade média. (A) Caso 1, (B) Caso 2 e (C) Caso 3. .............. 79

LISTA DE TABELAS
Tabela 2.1 Quantidade de Elementos e Bias Factor por linha e malha ..................... 22
Tabela 2.2 Quantidade de elementos e Bias Factor por linha e malha no Enclosure
.................................................................................................................................. 23
Tabela 2.3 Quantidade de nós e elementos separados por malha ........................... 25
Tabela 2.4 Valores de Y+ por região ......................................................................... 36
Tabela 4.1 Ponto de Separação ................................................................................ 80
Tabela 4.2 Ponto de recolamento ............................................................................. 80
Tabela 8.1 Ponto escalado de recolamento para diversos modelos ........................ 89

SUMÁRIO
1 INTRODUÇÃO ............................................................................................................. 15
2 DEFINIÇÃO DO PROBLEMA E TEORIA ..................................................................... 18
2.1 O PROBLEMA (TERCEIRO CASO DO WORKSHOP) .......................................... 18
2.2 MODELO NUMÉRICO ........................................................................................... 20
2.2.1 Geometria ....................................................................................................... 20
2.2.2 Malhas ............................................................................................................ 21
2.3 SOLVER ................................................................................................................ 25
2.3.1 Definições gerais ............................................................................................ 25
2.3.2 Condições de contorno ................................................................................... 26
2.3.3 Iterações e Inicialização ................................................................................. 28
2.4 FORMULAÇÃO TEÓRICA ..................................................................................... 29
2.4.1 Equações Governantes (Momentum e Continuidade) ..................................... 29
2.4.2 Turbulência ..................................................................................................... 30
2.5 CAMADA LIMITE ................................................................................................... 33
2.5.1 Conceitos básicos .......................................................................................... 33
2.5.2 Escoamentos laminar e turbulento .................................................................. 34
2.5.3 Separação da camada limite .......................................................................... 36
2.5.4 Controle da separação da camada limite ........................................................ 38
3 METODOLOGIA NUMÉRICA....................................................................................... 39
3.1 MÉTODO DOS VOLUMES FINITOS ..................................................................... 39
3.2 DISCRETIZAÇÃO DOS TERMOS ......................................................................... 40

3.2.1 Termos difusivos ............................................................................................ 40
3.2.2 Termos convectivos ........................................................................................ 41
3.2.3 Termos Fonte ................................................................................................. 42
3.2.4 Discretização temporal ................................................................................... 42
3.3 MALHA NÃO UNIFORME ...................................................................................... 43
3.4 SOLUÇÃO DAS EQUAÇÕES DISCRETIZADAS .................................................. 43
3.5 TRATAMENTO DO ACOMPLAMENTO PRESSÃO-VELOCIDADE ....................... 44
3.6 FATORES DE RELAXAÇÃO ................................................................................. 44
3.7 RESIDUAIS ........................................................................................................... 45
3.8 PARÂMETROS DE TURBULÊNCIA ...................................................................... 45
3.9 INFLUÊNCIA DA GEOMETRIA UPSTREAM ......................................................... 47
4 RESULTADOS ............................................................................................................. 48
4.1 PRÉ-SIMULAÇÃO ................................................................................................. 48
4.1.1 Y+ ................................................................................................................... 48
4.1.2 PARÂMETROS DE TURBULÊNCIA ............................................................... 49
4.1.3 Influência da geometria upstream ................................................................... 55
4.2 ESCOAMENTO SEM CONTROLE DE FLUXO ..................................................... 57
4.3 ESCOAMENTO COM CONTROLE DE FLUXO DE SUCÇÃO ............................... 63
4.4 ESCOAMENTO COM CONTROLE DE FLUXO OSCILATÓRIO ............................ 70
4.5 COMPARAÇÃO DE RESULTADOS ...................................................................... 79
5 DISCUSSÃO ................................................................................................................ 81
6 CONCLUSÃO .............................................................................................................. 82
7 REFERÊNCIA BIBLIOGRÁFICA .................................................................................. 83
8 ANEXOS ...................................................................................................................... 86
8.1 TRATAMENTO PRÓXIMO À PAREDE ................................................................. 86
8.2 VELOCIDADE INLET PARA O ESCOAMENTO COM CONTROLE DE FLUXO
OSCILATÓRIO PROGRAMADA EM C ............................................................................ 88
8.3 PONTO ESCALADO DE RECOLAMENTO PARA DIVERSOS MODELOS ........... 89
15
1 INTRODUÇÃO
Nas últimas décadas foram propostas várias técnicas de controle de fluxo para
aumentar a eficiência e estabilidade aerodinâmica. Muitas dessas técnicas envolvem
controle por sucção e injeção de massa, os quais são eficientes, porém difíceis de
serem aplicadas em escoamentos reais. Recentemente, mecanismos de controle
envolvendo jatos oscilatórios com balanço neutro de massa se mostraram factíveis
em aplicações industriais e eficientes no controle da separação da camada limite (You,
Wang & Moin, 2005). A necessidade de se controlar a separação da camada limite se
dá por ela estar associada com perda de energia, formação de vórtices e aumento do
arrasto (Schlighting,1979).
Métodos computacionais têm sido extensamente utilizados para computar
escoamentos oscilatórios. Com o objetivo de uma maior compreensão das atuais
capacidades das diferentes metodologias para resolver escoamentos turbulentos e
prever a influência de escoamentos oscilatórios no controle da separação da camada
limite, o workshop Validation of Synthetic Jets and Turbulent Separation Control
(CFDVAL2004) foi realizado em Williamsburg, Virginia em março de 2004. Nesse
workshop, três diferentes casos (experimentos) foram estudados, modelados e
analisados em conjunto com os resultados obtidos experimentalmente pelo NASA
Langley Research Center (Rumsey, et al. 2004a). Os resultados obtidos estão
disponíveis em Rumsey, et al.(2004a). Além dele, inúmeras publicações a respeito de
diferentes modelagens numéricas e influência de diferentes
16
condições oscilatórias foram escritos posteriormente e estão listados online em
Rumsey e Gatski (2004b).
O terceiro caso do workshop consiste no escoamento sobre uma geometria
arqueada propensa a separação da camada limite, onde controles de fluxo, sucção e
oscilatório, são aplicados imediatamente antes do início da separação. Detalhes do
experimento podem ser encontrados em Greenblatt et al. (2004a) e resultados
numéricos para o método dos volumes finitos podem ser encontrados para LES em
You (2005), para DNS em Postl (2006) e para RANS em Rumsey, (2007).
Dentre os diferentes métodos numéricos existentes para se computar
escoamentos, pode-se citar o método dos volumes finitos, o método de lattice-
boltzmann, o método de smoothed particle hydrodynamics (SPH) e o método dos
elementos finitos como sendo os mais utilizados e recorrentes.
Foi utilizado neste trabalho o método dos volumes finitos, que consiste na
integração e discretização das equações de Navier-Stokes em um volume finito,
necessitando, portanto, do uso de uma malha por toda a região do escoamento. A
necessidade de gerar uma malha é uma das principais desvantagens deste método
(e dos métodos com malha), onde o custo computacional e o tempo de construção da
malha aumentam consideravelmente com o grau de refinamento da mesma. O grau
de refinamento necessário está relacionado com a complexidade do escoamento
(gradientes elevados, turbulento) e com a complexidade da geometria.
Dentre as diferentes abordagens computacionais existentes para se analisar
escoamentos turbulentos, pode-se citar:
Direct Numerical Simulation (DNS): as equações transientes de Navier-Stokes
são resolvidas diretamente, necessitando de uma malha muito refinada e possuindo
um custo computacional muito alto.
Large Eddy Simulation (LES): as equações médias de Navier-Stokes são
resolvidas espacialmente, onde os maiores vórtices são resolvidos diretamente e os
menores são modelados. O custo computacional é menor que o DNS, porém continua
muito alto.
17
Reynolds Averaged Navier-Stokes (RANS): as equações média de Reynolds
são resolvidas, e as escalas de turbulência são modeladas. Possui o menor custo
computacional e inúmeros modelos de turbulência
Com o objetivo de contornar as limitações computacionais e os esforços
relacionados com a construção da malha, e por muitas vezes, apenas o valor médio
de uma determinada propriedade ser de interesse, a RANS é a abordagem mais
utilizada.
Dois modelos são mais utilizados para resolver as equações médias de
Reynolds: o Reynolds-Stress model (RSM) e o Eddy Viscosity Models (EVM). O
primeiro é mais utilizado para escoamentos turbulentos tridimensionais e exige o
maior custo computacional, além de ser mais complexo, ele resolve diretamente o
tensor do Reynolds Stress. O último modela esse tensor utilizando uma viscosidade
turbulenta (numérica), onde os modelos mais utilizados são: Spalart‐Allmaras, k–ε, k–
ω e variantes.
Esse trabalho busca mostrar a teoria e todas as etapas necessárias para a
construção e simulação de um modelo numérico referentes ao terceiro caso do
workshop, assim como, os princípios envolvidos na separação da camada limite e seu
controle. Em particular, serão descritas a geometria, malhas, discretização das
equações governantes, definições do solver e o modelo de turbulência k–ε utilizados
na simulação. No final os resultados obtidos serão comparados com os resultados
experimentais e numéricos disponíveis.
O software utilizado para a geração da geometria, malha e resolver as
equações (solver) foram, respectivamente, ANSYS DesignModeler, ANSYS Meshing
e ANSYS Fluent. Esses softwares foram escolhidos por possuírem uma melhor
interface e facilidade de uso em relação a outros disponíveis no mercado. O Fluent é
um software de código fechado utilizado para a simulação de escoamentos, ele possui
diversas opções de escoamentos (multifases, energia, laminar/turbulento, entre
outros) e diversas opções de modelos de turbulência e de discretizações das
equações predefinidos. Utilizou-se os manuais fornecidos na documentação dos
softwares e o material das aulas introdutórias para familiarização, referências e
exemplos de simulação, e como guia para modelagem da turbulência (ANSYS 2011,
2012a-b, 2013a-d e 2014).
18
2 DEFINIÇÃO DO PROBLEMA E TEORIA
2.1 O PROBLEMA (TERCEIRO CASO DO WORKSHOP)
O experimento completo está descrito em Greenblatt et al. (2004a,2005). Ele
consiste em um escoamento sobre uma geometria arqueada propensa a
desprendimento da camada limite. A camada limite é sujeita a um gradiente de
pressão favorável na parte convexa (início da geometria) e se separa na parte
côncava. Técnicas de controle de escoamento, baseadas em injeção e sucção de
massa, são aplicadas imediatamente antes da parte côncava (aproximadamente 65%
da corda total). O objetivo desse experimento é analisar como essas técnicas de
controle influenciam no desprendimento da camada limite.
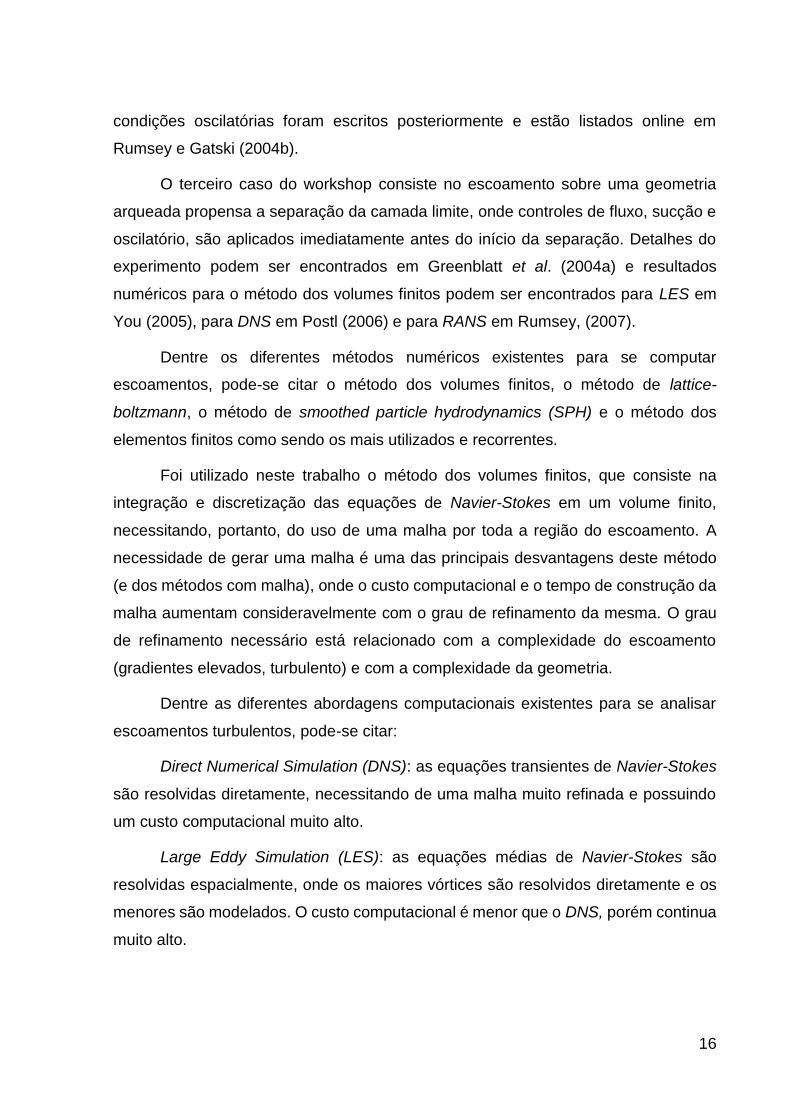
A geometria arqueada (Figura 2.1) é montada dentro do túnel de vento entre
duas placas de vidro (glass endplate) e sobre uma placa divisória (splitter plate). As
extremidades do modelo foram suavizadas para menor interferência com a placa
divisória.
Figura 2.1 Modelo Experimental (Fonte: GREENBLATT et al. 2004a).

19
A seção de área do túnel de vento possui 71,12cm de largura por 50,80cm de
altura, a distância entre a placa divisória e a parede superior do túnel de vento é de
38,18cm. O modelo possui 42cm (c) de comprimento, 5,37cm de altura e 58,32cm de
largura (entre as duas placas de vidro). O comprimento da placa divisória upstream
ao modelo é de 193,52cm (4,61c) e o downstream é de 112,86cm (2,68c). A altura
das placas de vidro é de 23,50cm. Os comprimentos da placa divisória, do modelo e
distancia à parede superior do túnel do vento são mostradas na figura 2.2.
Figura 2.2 Geometria 2D do modelo experimental (Fonte: adaptado de NOELTING, 2008).
O controle de fluxo é aplicado por meio de uma abertura (0,432cm) plana que
se estende perpendicularmente à geometria arqueada (Figura 2.3). No experimento,
a sucção é realizada por uma bomba de sucção, onde o fluxo de massa de
0,01518kg/s é monitorado, e o controle oscilatório é realizado pelo movimento de um
pistão localizado sob a abertura, movido externamente por seis atuadores, onde a
velocidade do jato na abertura da geometria tem picos de 26,6m/s e frequência de
138,5Hz.

20
Figura 2.3 Detalhes da posição da abertura (Fonte: RUMSEYet al. 2004a).
Dessa forma, o experimento possui três conjuntos de dados: escoamento
permanente sem controle de fluxo; escoamento permanente com controle de sucção;
e escoamento transiente com controle oscilatório (injeção e sucção).
O escoamento livre possui velocidade de 34,6m/s, viscosidade dinâmica de
18,4x10-6kg/ms, densidade de 1,185kg/m3 e número de Reynolds de 9.36x105.O
coeficiente de pressão foi monitorado sobre a geometria e as condições de contorno
upstream à geometria foram medidas na posição x=-2.14c (velocidade média e
flutuação de velocidade u’).
2.2 MODELO NUMÉRICO
2.2.1 Geometria
O modelo numérico foi construído visando representar adequadamente todos
os efeitos presentes no experimento. A geometria do modelo numérico 2-D (Figura
2.4) foi construída a partir dos pontos coordenados disponíveis no caso 83 do banco
de dados online da ERCOFTAC (GREENBLATT et al. 2004b) e a região do
escoamento (enclosure) foi construída conforme figura 2.5:
21
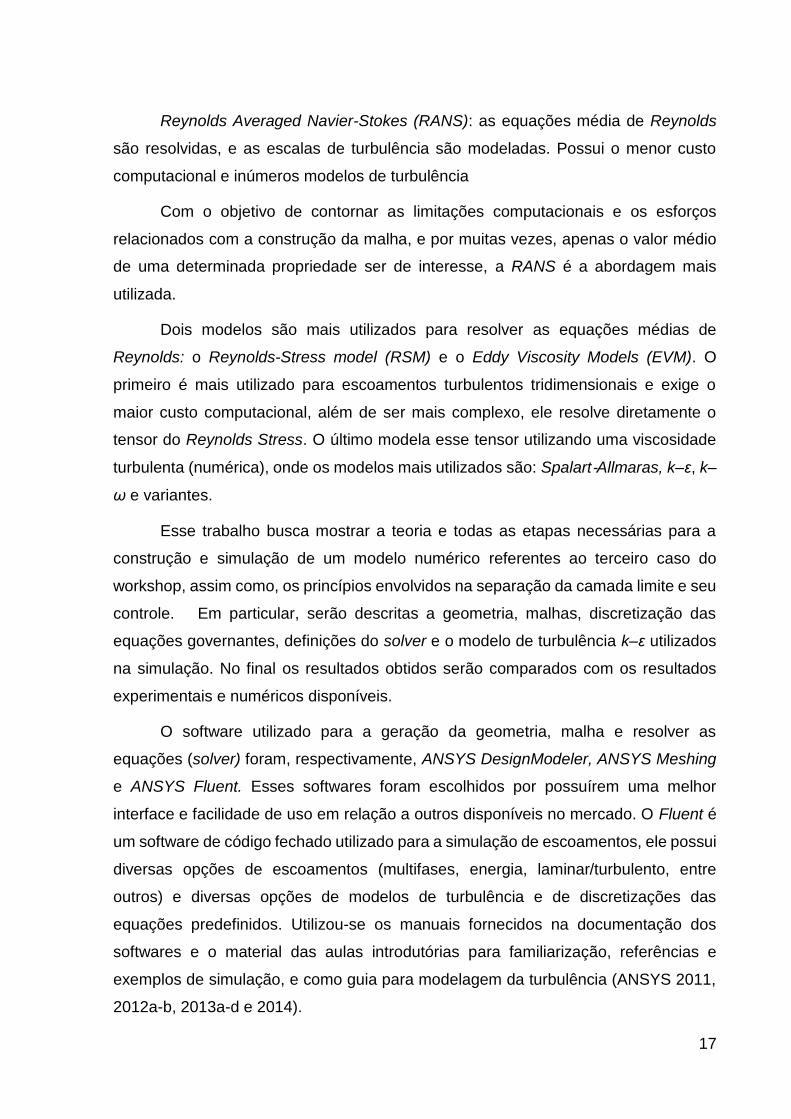
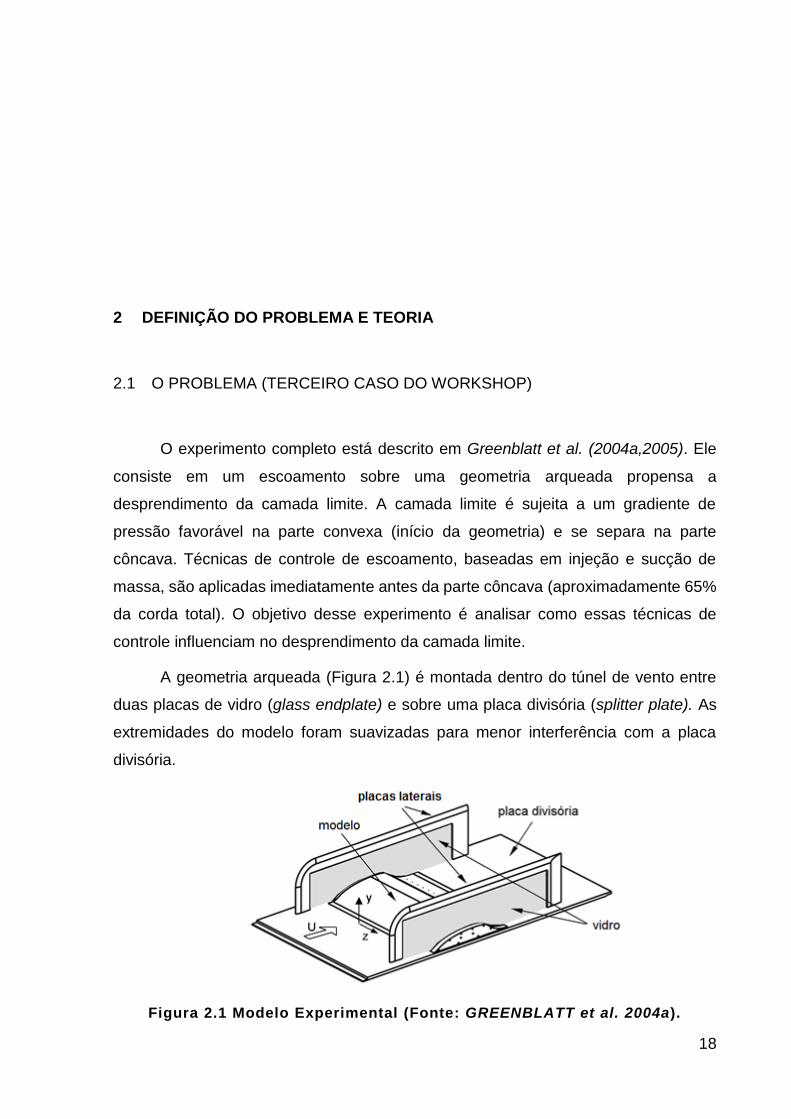
Figura 2.4 Detalhes da geometria arqueada (Figura do autor).
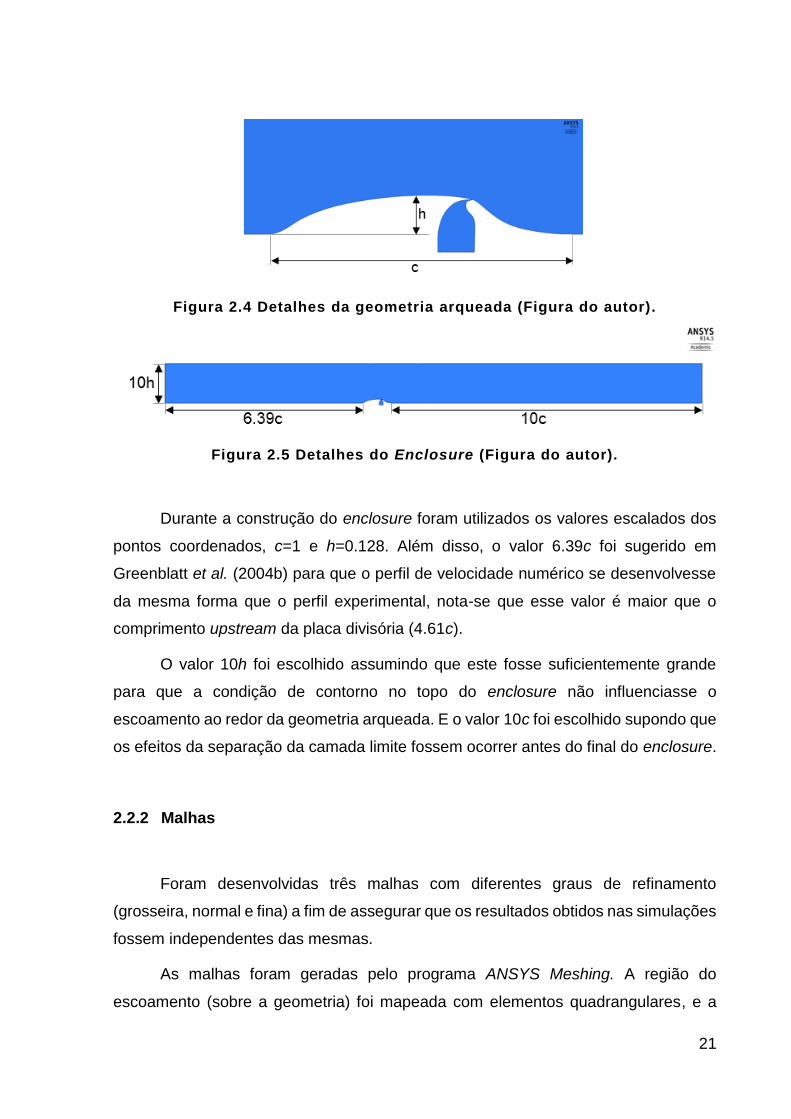
Figura 2.5 Detalhes do Enclosure (Figura do autor).
Durante a construção do enclosure foram utilizados os valores escalados dos
pontos coordenados, c=1 e h=0.128. Além disso, o valor 6.39c foi sugerido em
Greenblatt et al. (2004b) para que o perfil de velocidade numérico se desenvolvesse
da mesma forma que o perfil experimental, nota-se que esse valor é maior que o
comprimento upstream da placa divisória (4.61c).
O valor 10h foi escolhido assumindo que este fosse suficientemente grande
para que a condição de contorno no topo do enclosure não influenciasse o
escoamento ao redor da geometria arqueada. E o valor 10c foi escolhido supondo que
os efeitos da separação da camada limite fossem ocorrer antes do final do enclosure.
2.2.2 Malhas
Foram desenvolvidas três malhas com diferentes graus de refinamento
(grosseira, normal e fina) a fim de assegurar que os resultados obtidos nas simulações
fossem independentes das mesmas.
As malhas foram geradas pelo programa ANSYS Meshing. A região do
escoamento (sobre a geometria) foi mapeada com elementos quadrangulares, e a

22
região onde o fluxo de controle de sucção é aplicado foi gerada automaticamente com
elementos triangulares.
Escolheu-se construir a malha de tal forma que o entorno da geometria
arqueada (próximo à abertura) e a região próxima à superfície inferior (parede) fossem
mais refinados quando comparados a pontos distantes, e também apresentassem boa
ortogonalidade. Na região onde o fluxo de controle é aplicado, optou-se por elementos
triangulares com pouco refinamento, visto que os efeitos físicos nessa região não
interferem diretamente no escoamento sobre a geometria arqueada. A seguir são
apresentados detalhes da construção das mesmas.
Primeiramente dividiu-se a geometria arqueada e a região projetada acima em
três linhas (Figura 2.6 e Tabela 2.1), e definiu-se a quantidade de elementos e a razão
entre o maior e menor (Bias Factor) elemento para as três malhas. A partir do Bias
Factor e do comprimento da aresta (superfície) é possível calcular a proporção do
crescimento dos elementos na malha.
Figura 2.6 Divisão em três linhas da geometria arqueada e sua projeção (Figura do autor).
Tabela 2.1 Quantidade de Elementos e Bias Factor por linha e malha.
Malha Grosseira Malha Normal Malha Fina
Número de
divisões
Bias
Factor
Número de
divisões
Bias
Factor
Número de
divisões
Bias
Factor
A 80 20 160 20 320 20
B 4 No Bias 8 No Bias 16 No Bias
C 50 20 100 20 200 20

23
Figura 2.7 Exemplo da divisão de elementos na região da abertura (linha B). (1) Malha grosseira, quatro elementos. (2) Malha normal, oito elementos. (3)
Malha fina, dezesseis elementos. (Figuras do autor).
Depois definiu-se a quantidade de elementos e Bias Factor para as outras
superfícies (Figura 2.8 e Tabela 2.2):
Figura 2.8 Linhas do enclosure (Figura do autor).
Tabela 2.2 Quantidade de elementos e Bias Factor por linha e malha no Enclosure.
Malha Grosseira Malha Normal Malha Fina
Número de
divisões
Bias
Factor
Número de
divisões
Bias
Factor
Número de
divisões
Bias
Factor
A 75 1200 150 1400 150 1800
B 64 8 128 8 256 8
C 100 10 200 10 400 10
Detalhes da região próxima à abertura são mostrados na Figura 2.7 e as
diferenças entre os refinamentos das malhas são mostradas nas Figuras 2.9-2.11.
1
2
3
B
B
B

24
Figura 2.9 Malha grosseira (coarse) (Figura do autor).
Figura 2.10 Malha normal (normal) (Figura do autor).
Figura 2.11 Malha fina (fine) (Figura do autor).
A malha da cavidade onde o controle de fluxo de sucção é aplicado foi gerada
automaticamente com elementos triangulares, variando-se o refinamento automático
da malha (Figura 2.12):
Figura 2.12 Malha Triangular. (A) Malha grosseira. (B) Malha normal. (C) Malha fina. (Figura do autor).
A
B
A
C
25
A quantidade total dos nós e elementos é mostrada no Tabela 2.3:
Tabela 2.3 Quantidade de nós e elementos separados por malha.
Malha Grosseira Malha Normal Malha Fina
Nós 23 mil 90 mil 180 mil
Elementos 23 mil 90 mil 180 mil
2.3 SOLVER
2.3.1 Definições gerais
Para todas a simulações realizadas, a malha foi escalada por um fator de 0,42,
fazendo com que a geometria arqueada tivesse as mesmas dimensões do
experimento.
No software ANSYS Fluent foram definidos escoamento viscoso, modelo de
turbulência κ-ε com tratamento próximo a parede (Anexo 8.1), as propriedades do
fluido (densidade 1,185kg/m3 e viscosidade 1,84x10-5kg/ms), o esquema de
acoplamento pressão-velocidade (SIMPLE), a discretização das equações do
momento linear e turbulência (esquema Upwind de segunda ordem) e a velocidade
do escoamento livre (34,6m/s).

26
2.3.2 Condições de contorno
As condições de contorno foram definidas no entorno do enclosure (arestas),
estão ilustradas na Figura 2.13:
Figura 2.13 Condições de contorno. (A) visão geral. (B) detalhe. (Figura do autor).
A condição de contorno Velocidade Inlet foi utilizada para definir por onde o
escoamento “entra” no enclosure. Nessa condição é possível especificar a velocidade
e os parâmetros da turbulência do escoamento. Ela ainda permite situações especiais
em que o escoamento esteja “saindo” (nessa situação, são usados valores da
velocidade normais a superfície). A condição de contorno Outflow foi utilizada para
definir por onde o escoamento “sai” do enclosure.
A condição de contorno Simetria foi utilizada para definir condições simétricas
no escoamento. Nesse modelo, optou-se por essa condição para que os efeitos de
uma camada-limite na superfície superior não interferissem no escoamento sobre a
geometria. A condição de contorno Parede foi utilizada para definir a condição de não
deslizamento nas paredes.
A condição de contorno Controle foi adaptada para cada caso da simulação.
No escoamento sem controle de fluxo (Caso 1) ela foi definida como parede, no
escoamento com controle de sucção (Caso 2) ela foi definida como Outflow (onde as
proporções do fluxo de massa pelos dois Outflow são especificadas) e no escoamento
com controle oscilatório (Caso 3) utilizou-se uma malha sem a região triangular e a
condição Velocidade Inlet foi especificada na linha B da geometria arqueada (Figura
2.7 e 2.14).
A B
27
As proporções do fluxo de massa especificados nas condições de contorno
Outflow para o Caso 2 (controle de sucção de 0,01518kg) foram calculados a partir do
fluxo de massa na entrada do escoamento calculado previamente no Caso 1 (sem
controle de fluxo). Conforme:
𝑓𝑙𝑢𝑥𝑜 𝑑𝑒 𝑚𝑎𝑠𝑠𝑎𝐼𝑛𝑙𝑒𝑡 = 22,042137 kg/s (2.01)
Considerando o fluxo de entrada como 100%, para obter a proporção do fluxo
de massa equivalente a 0,01518kg/s, faz-se:
𝑊𝐶𝑜𝑛𝑡𝑟𝑜𝑙 =0,01518
22,042137= 0,0006886852373 (2.02)
E para o outro Outflow:
𝑊𝑂𝑢𝑡𝑓𝑙𝑜𝑤 = 1 − 0,0006886852373 = 0,9993113148 (2.03)
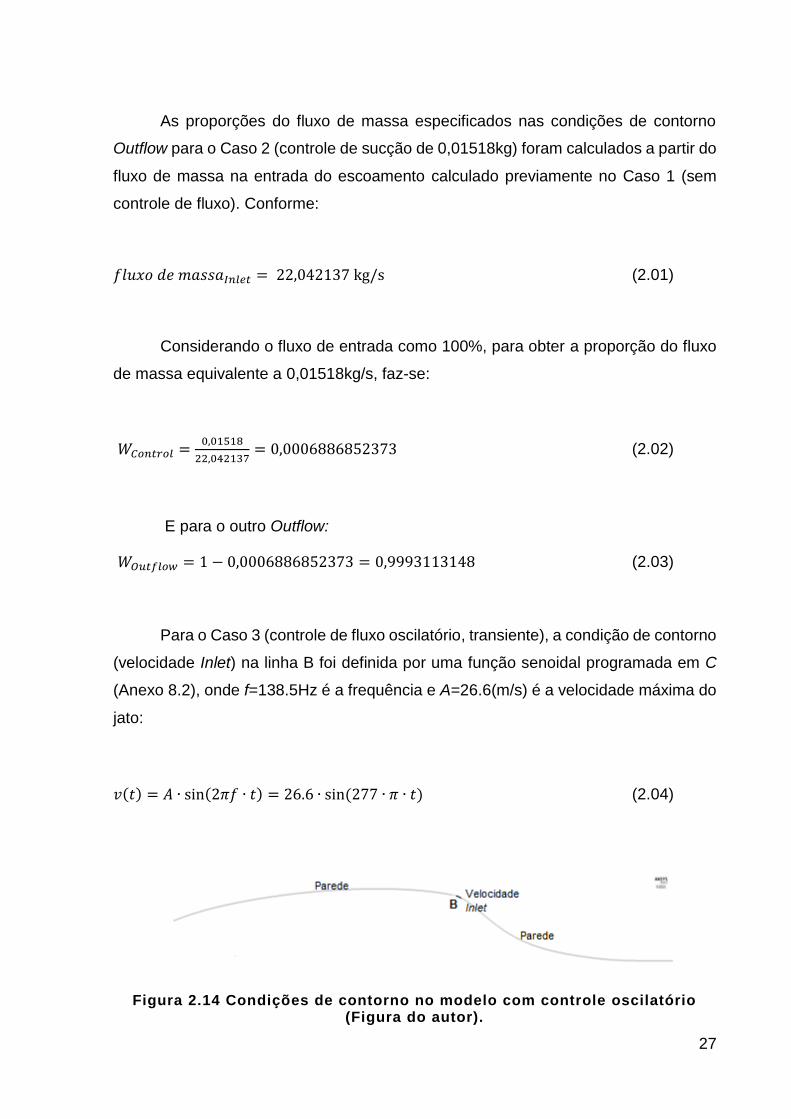
Para o Caso 3 (controle de fluxo oscilatório, transiente), a condição de contorno
(velocidade Inlet) na linha B foi definida por uma função senoidal programada em C
(Anexo 8.2), onde f=138.5Hz é a frequência e A=26.6(m/s) é a velocidade máxima do
jato:
𝑣(𝑡) = 𝐴 ∙ sin(2𝜋𝑓 ∙ 𝑡) = 26.6 ∙ sin (277 ∙ 𝜋 ∙ 𝑡) (2.04)
Figura 2.14 Condições de contorno no modelo com controle oscilatório (Figura do autor).
28
2.3.3 Iterações e Inicialização
No Caso 1 (modelo sem controle de fluxo, permanente) foram definidas 12 mil
iterações para a malha grosseira e 30mil iterações para as malhas normal e fina. Para
o Caso 2 (modelo com controle de fluxo de sucção, permanente), a simulação foi
inicializada a partir dos resultados do modelo anterior, tendo 12 mil iterações para a
malha grosseira e 30 mil iterações para as malhas normal e fina.
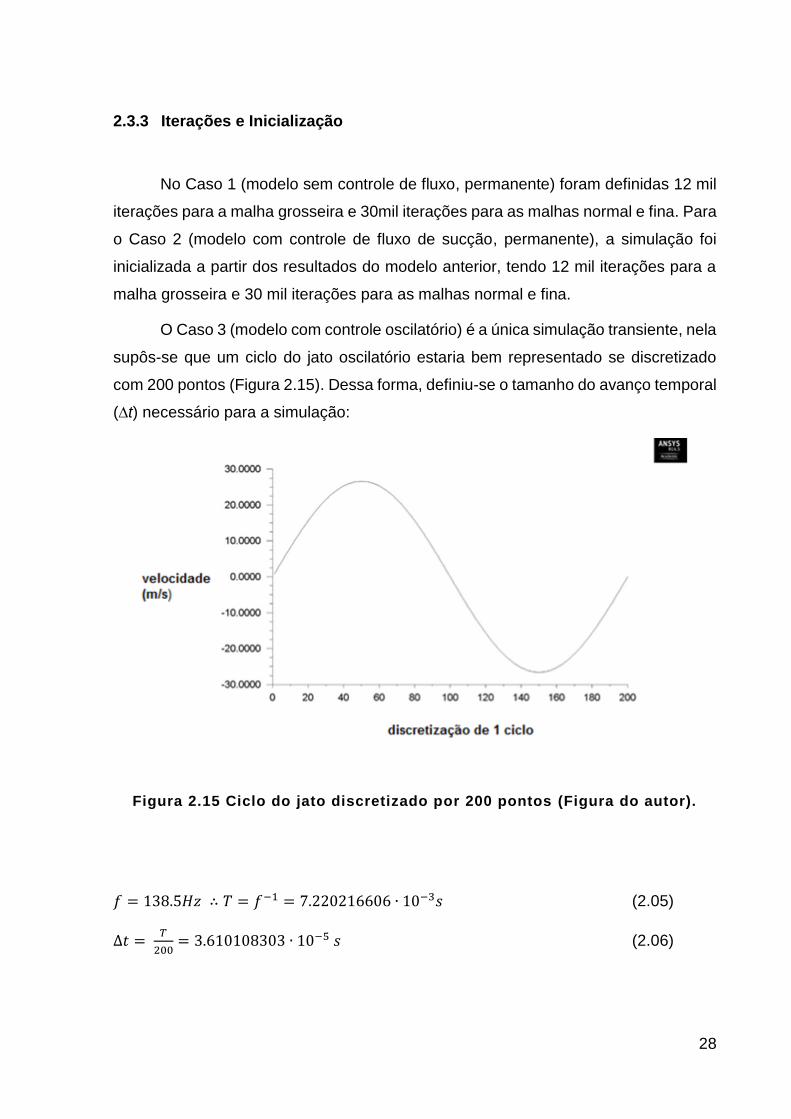
O Caso 3 (modelo com controle oscilatório) é a única simulação transiente, nela
supôs-se que um ciclo do jato oscilatório estaria bem representado se discretizado
com 200 pontos (Figura 2.15). Dessa forma, definiu-se o tamanho do avanço temporal
(∆t) necessário para a simulação:
Figura 2.15 Ciclo do jato discretizado por 200 pontos (Figura do autor).
𝑓 = 138.5𝐻𝑧 ∴ 𝑇 = 𝑓−1 = 7.220216606 ∙ 10−3𝑠 (2.05)
∆𝑡 = 𝑇
200= 3.610108303 ∙ 10−5 𝑠 (2.06)

29
Além disso, foi definido o número de 30 iterações por intervalo de tempo e um
total de 30 ciclos (6mil ∆t / 180 mil iterações). Esse caso também foi inicializado a
partir do primeiro modelo.
2.4 FORMULAÇÃO TEÓRICA
2.4.1 Equações Governantes (Momentum e Continuidade)
As equações de Navier-Stokes podem modelar o escoamento de fluidos.
Admitindo-se a continuidade de massa em macroescala, essas equações são escritas
em função das grandezas macroscópicas, como velocidade, pressão, densidade e
temperatura. Elas representam os princípios físicos da conservação de massa e
conservação do momentum. Podendo ser escritas no caso de escoamento
Newtoniano e incompressível como:
Continuidade (princípio da conservação de massa):
𝜕𝑈𝑗
𝜕𝑥𝑗= 0 (2.07)
Conservação do momentum:
𝜕𝑈𝑖
𝜕𝑡+ 𝑈𝑗
𝜕𝑈𝑖
𝜕𝑥𝑗= −
1
𝜌
𝜕𝑝
𝜕𝑥𝑖 +
𝜕
𝜕𝑥𝑗(𝜈
𝜕𝑈𝑖
𝜕𝑥𝑗) (2.08)
Para o transporte de uma propriedade qualquer ϕ:
𝜕𝜙𝑖
𝜕𝑡+ 𝑈𝑗
𝜕𝜙𝑖
𝜕𝑥𝑗=
𝜕
𝜕𝑥𝑗(𝐷𝜙
𝜕𝜙𝑖
𝜕𝑥𝑗) + 𝑆𝜙𝑖
(2.09)
Onde,
ϕ: velocidade em x, velocidade em y, temperatura ou concentração Dϕ: difusividade de ϕ em [m^2/s] Sϕ: termo fonte

30
2.4.2 Turbulência
A maioria dos escoamentos na natureza e na engenharia são turbulentos. As
equações de Navier-Stokes e o método dos volumes finitos (ou qualquer outro método
numérico) podem ser usados diretamente (Direct Numerical Simulation) para resolver
escoamentos turbulentos. Entretanto, uma malha extremamente refinada se faz
necessário para que os menores vórtices e as escalas temporais e espaciais da
turbulência sejam adequadamente representados. Essas restrições estão aquém da
capacidade da maioria dos computadores atuais.
No entanto, na maioria das aplicações de engenharia, os campos de velocidade
e pressões médias são normalmente de interesse e os detalhes dos vórtices
instantâneos de turbulência não são requeridos. Desse modo, a seguinte metodologia
é usada para se calcular esses valores médios.
É possível separar a velocidade instantânea �̃�𝑖 (ou pressão instantânea) em
duas partes: velocidade média 𝑈𝑖 (constante) e velocidade turbulenta 𝑢𝑖 (ou flutuação
da velocidade), conforme Figura 2.16:
Figura 2.16 Velocidade instantânea (Fonte: COTTON, 2014).
A velocidade média é formalmente definida como:
𝑈𝑖 = lim𝑇→∞
1
𝑇∫ 𝑈�̃�
𝑇
0(t) dt (2.10)
E a velocidade instantânea é escrita como:
𝑈�̃� = 𝑈𝑖 + 𝑢𝑖 (2.11)

31
Substituindo essa definição de velocidade e pressão instantânea nas equações
de Navier-Stokes e após algumas simplificações, obtém-se as equações conhecidas
na literatura por equações de Reynolds (RANS):
𝑈𝑗𝜕𝑈𝑖
𝜕𝑥𝑗= −
1
𝜌
𝜕𝑝
𝜕𝑥𝑖+
𝜕
𝜕𝑥𝑗(𝜈
𝜕𝑈𝑖
𝜕𝑥𝑗− 𝑢𝑖𝑢𝑗̅̅ ̅̅ ̅) (2.12)
As equações de Reynolds apresentam a vantagem de fornecer os valores
médios para as propriedades diretamente. E também, devido ao fato que as variações
dos valores médios serem menores que a variação dos valores instantâneos, é
possível utilizar uma malha menos refinada do que a malha necessária para resolver
as “verdadeiras” equações de turbulência, diminuindo significativamente o custo
computacional.
O termo 𝑢𝑖𝑢𝑗̅̅ ̅̅ ̅, chamado de Tensor de Reynolds, representa o efeito das
flutuações na velocidade média devido a turbulência. Por esse termo não poder ser
resolvido diretamente, é necessário o uso de equações constitutivas, que são os
modelos de turbulência.
O modelo de turbulência utilizado nesse trabalho é chamado de κ-ε, e ele
pertence à classe de modelos de turbulência conhecida como Eddy Viscosity Models
(EVMs). Nessa classe de modelos, o Reynolds Stress é relacionado com o campo de
velocidade média por uma viscosidade turbulenta (que não é uma propriedade do
fluido e precisa ser determinada).
Foi escolhido o modelo κ-ε por ele ser o modelo mais utilizado em aplicações
industriais e apresentar maior robustez, além de suas limitações e aplicações já terem
sido amplamente estudadas e serem conhecidas. Para contornar as limitações em se
resolver escoamentos próximos a parede inerente nesse modelo, optou-se por realizar
um tratamento próximo a parede descrito no Anexo 8.1.
Nessa classe de modelos (EVM), o tensor de Reynolds é escrito por:
−𝑢𝑖𝑢𝑗̅̅ ̅̅ ̅ = 𝜈𝑡 (𝜕𝑈𝑖
𝜕𝑥𝑗+
𝜕𝑈𝑗
𝜕𝑥𝑖) −
2
3𝛿𝑖𝑗𝑘 (2.13)

32
Onde, a energia cinética turbulenta e o delta de Kronecker são dados
respectivamente por:
𝑘 = 1
2(𝑢2 + 𝑣2 + 𝑤2) =
1
2 𝑢𝑖𝑢𝑖 (2.14)
𝛿𝑖𝑗 = 1, 𝑠𝑒 𝑖 = 𝑗
𝛿𝑖𝑗 = 0, 𝑠𝑒 𝑖 ≠ 𝑗 (2.15)
Fazendo as devidas substituições e simplificações, podemos reescrever RANS:
𝑈𝑗𝜕𝑈𝑖
𝜕𝑥𝑗= −
1
𝜌
𝜕𝑝
𝜕𝑥𝑖+
𝜕
𝜕𝑥𝑗(𝜈
𝜕𝑈𝑖
𝜕𝑥𝑗+ 𝜈𝑡
𝜕𝑈𝑖
𝜕𝑥𝑗) (2.16)
O termo 𝜈𝑡 é chamado de viscosidade turbulenta e ele varia espacialmente por
todo o escoamento. No modelo de turbulência κ-ε, essa viscosidade é escrita em
função da energia cinética turbulenta (κ) e da taxa de dissipação dessa energia (ε).
𝜈𝑡 ∝𝜅2
𝜀= 𝐶𝜇
𝜅2
𝜀 (2.17)
Assim, duas equações modeladas adicionais de transporte são necessárias
para resolve-lo, uma para κ e outra para ε:
𝑈𝑗𝜕𝜅
𝜕𝑥𝑗= −𝑢𝑖𝑢𝑗̅̅ ̅̅ ̅
𝜕𝑈𝑖
𝜕𝑥𝑗+
𝜕
𝜕𝑥𝑗((𝜈 +
𝜈𝑡
𝜎𝑘)
𝜕𝜅
𝜕𝑥𝑗) − 휀 (2.18)
𝑈𝑗𝜕𝜀
𝜕𝑥𝑗= 𝐶𝜀1
𝜀
𝜅(−𝑢𝑖𝑢𝑗̅̅ ̅̅ ̅
𝜕𝑈𝑖
𝜕𝑥𝑗) +
𝜕
𝜕𝑥𝑗((𝜈 +
𝜈𝑡
𝜎𝜀)
𝜕𝜀
𝜕𝑥𝑗) − 𝐶𝜀2
𝜀2
𝜅 (2.19)
Onde:
𝐶𝜀1 = 1,44 𝜎𝑘 = 1,0
𝐶𝜀2 = 1,92 𝜎𝜀 = 1,3
𝐶𝜇 = 0,09
As equações exatas para κ e ε podem ser obtidas das equações instantâneas
de Navier-Stokes, entretanto elas precisam ser modeladas para que o sistema de
equações possa ser resolvido. As constantes nessas equações foram determinadas

33
a partir de experimentos para escoamentos turbulentos fundamentais. E mostraram-
se funcionar relativamente bem para uma variedade de aplicações.
2.5 CAMADA LIMITE
De acordo com Fox et al. (2010), o conceito de camada limite está relacionado
com a condição de não deslizamento. Essa condição é causada pelo atrito entre a
superfície (parede) e o escoamento, e requer que velocidade do escoamento em
contato com a superfície seja nula. Dessa forma, existirá uma camada (limite) delgada
no escoamento, adjacente a superfície, onde a velocidade varia do valor 0 (na
superfície) até a velocidade do escoamento livre.
2.5.1 Conceitos básicos
Para fluidos newtonianos, a tensão de cisalhamento exercida pela superfície no
fluido pode ser relacionada com a taxa de cisalhamento pela lei de Newton da
viscosidade:
𝜏 = 𝜇𝑑𝑢
𝑑𝑦 (2.20)
Onde μ é a viscosidade dinâmica do fluido.
A condição de não deslizamento é responsável por uma diminuição da
velocidade das partículas do fluido adjacentes a superfície, fazendo com que à medida
que avançamos na direção (downstream) do escoamento, cada vez mais partículas
são afetadas, resultando em um aumento da espessura da camada-limite (δ) (Figura
2.17). Em alguns casos, a desaceleração de partículas adjacentes pode acarretar em
um escoamento reverso e ao desprendimento da camada limite.
34
Figura 2.17 Condição de não deslizamento (Fonte: SCHLICHTING, 1979).
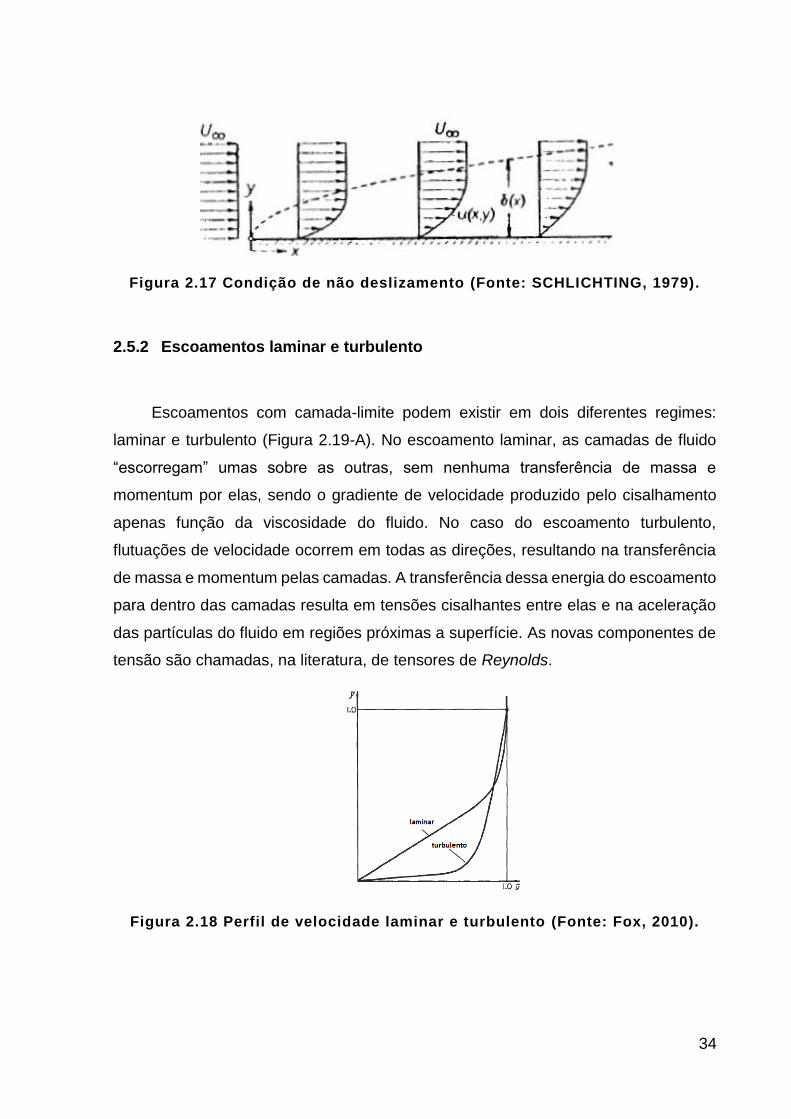
2.5.2 Escoamentos laminar e turbulento
Escoamentos com camada-limite podem existir em dois diferentes regimes:
laminar e turbulento (Figura 2.19-A). No escoamento laminar, as camadas de fluido
“escorregam” umas sobre as outras, sem nenhuma transferência de massa e
momentum por elas, sendo o gradiente de velocidade produzido pelo cisalhamento
apenas função da viscosidade do fluido. No caso do escoamento turbulento,
flutuações de velocidade ocorrem em todas as direções, resultando na transferência
de massa e momentum pelas camadas. A transferência dessa energia do escoamento
para dentro das camadas resulta em tensões cisalhantes entre elas e na aceleração
das partículas do fluido em regiões próximas a superfície. As novas componentes de
tensão são chamadas, na literatura, de tensores de Reynolds.
Figura 2.18 Perfil de velocidade laminar e turbulento (Fonte: Fox, 2010).
35
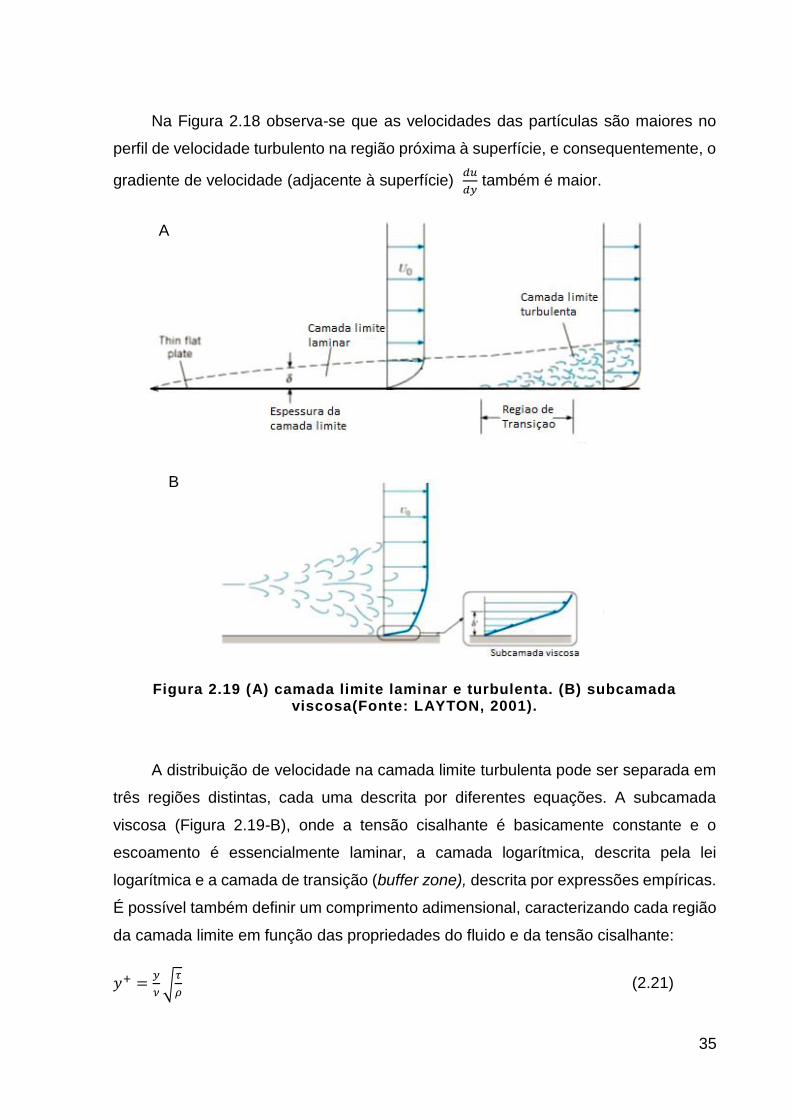
Na Figura 2.18 observa-se que as velocidades das partículas são maiores no
perfil de velocidade turbulento na região próxima à superfície, e consequentemente, o
gradiente de velocidade (adjacente à superfície) 𝑑𝑢
𝑑𝑦 também é maior.
Figura 2.19 (A) camada limite laminar e turbulenta. (B) subcamada viscosa(Fonte: LAYTON, 2001).
A distribuição de velocidade na camada limite turbulenta pode ser separada em
três regiões distintas, cada uma descrita por diferentes equações. A subcamada
viscosa (Figura 2.19-B), onde a tensão cisalhante é basicamente constante e o
escoamento é essencialmente laminar, a camada logarítmica, descrita pela lei
logarítmica e a camada de transição (buffer zone), descrita por expressões empíricas.
É possível também definir um comprimento adimensional, caracterizando cada região
da camada limite em função das propriedades do fluido e da tensão cisalhante:
𝑦+ =𝑦
𝜈√
𝜏
𝜌 (2.21)
B
A

36
Tabela 2.4 Valores de y+ por região.
Subcamada viscosa Buffer Zone Camada logarítmica
𝑦+ 0 - 5 5 - 70 70 – 500 ~1000
2.5.3 Separação da camada limite
A partir das equações 2D e incompressível da camada-limite de Prandtl
(equação de Navier-Stokes simplificadas) é possível determinar as condições
necessárias para separação da camada limite.
𝜕𝑢
𝜕𝑥+
𝜕𝑣
𝜕𝑦= 0 (2.22)
𝑢𝜕𝑢
𝜕𝑥+ 𝑣
𝜕𝑢
𝜕𝑦= −
1
𝜌
𝑑𝑃
𝑑𝑥+ 𝜈
𝜕2𝑢
𝜕𝑦2 (2.23)
Onde as condições de contorno da camada limite são: em y=0 ∶ u=v=0 e em
y→∞ ∶ u→U∞. Assim, em y=0, temos:
𝜇 (𝜕2𝑢
𝜕𝑦2)𝑦=0
=𝑑𝑃
𝑑𝑥 (2.24)
Observa-se que o perfil de velocidade na região imediatamente sobre a parede
é função apenas da pressão. Assim, o gradiente de pressão favorável (aquele em que
a pressão diminui ao longo do escoamento, 𝑑𝑃
𝑑𝑥< 0), implica que
𝜕2𝑢
𝜕𝑦2 < 0 em todo a
região da camada limite. Por outro lado, o gradiente de pressão adverso (aquele em
que a pressão aumenta ao longo do escoamento, 𝑑𝑃
𝑑𝑥> 0) implica em um ponto de
inflexão, 𝜕𝑢
𝜕𝑦= 0, indicando a separação da camada limite em algum ponto futuro
(downstream) ao escoamento. A Figura 2.20 ilustra as duas situações.
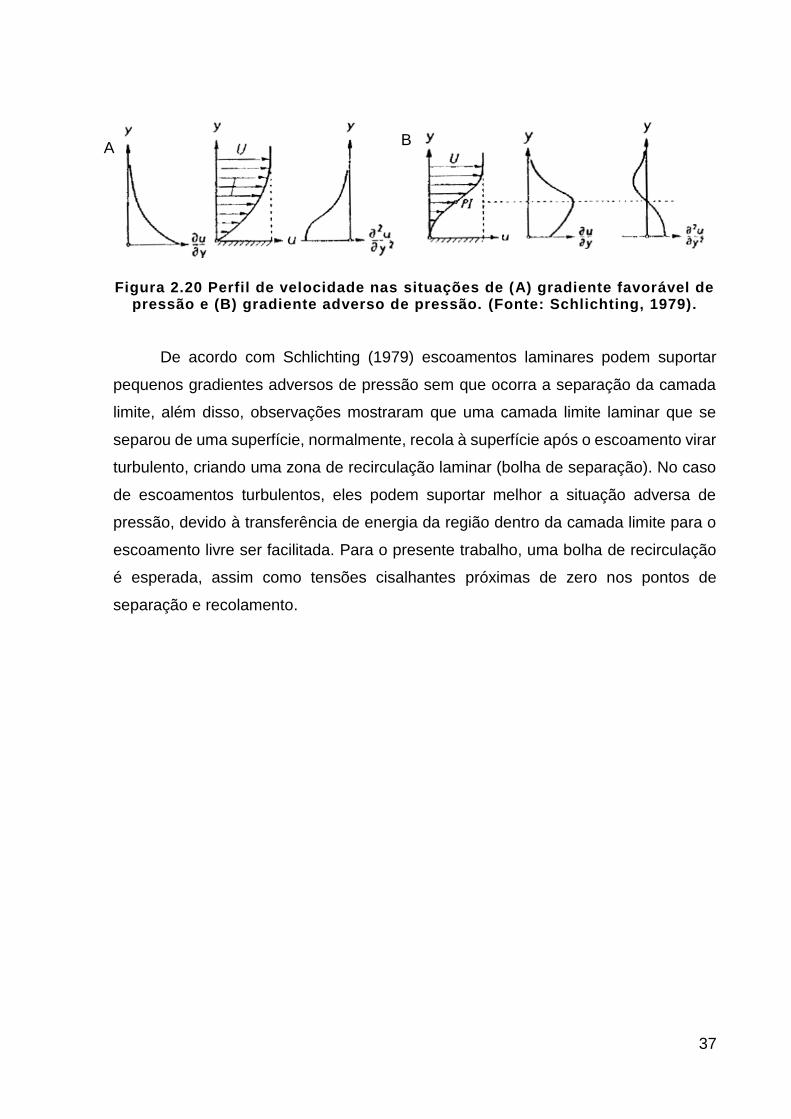
37
Figura 2.20 Perfil de velocidade nas situações de (A) gradiente favorável de pressão e (B) gradiente adverso de pressão. (Fonte: Schlichting, 1979).
De acordo com Schlichting (1979) escoamentos laminares podem suportar
pequenos gradientes adversos de pressão sem que ocorra a separação da camada
limite, além disso, observações mostraram que uma camada limite laminar que se
separou de uma superfície, normalmente, recola à superfície após o escoamento virar
turbulento, criando uma zona de recirculação laminar (bolha de separação). No caso
de escoamentos turbulentos, eles podem suportar melhor a situação adversa de
pressão, devido à transferência de energia da região dentro da camada limite para o
escoamento livre ser facilitada. Para o presente trabalho, uma bolha de recirculação
é esperada, assim como tensões cisalhantes próximas de zero nos pontos de
separação e recolamento.
A B

38
2.5.4 Controle da separação da camada limite
Existem vários métodos que foram desenvolvidos com o propósito de controlar
artificialmente o comportamento da camada limite. Dentre eles:
1. Movimento da superfície: ao movimentar a superfície na mesma direção do
escoamento, a diferença de velocidade entre o escoamento e a superfície
diminui, eliminando a causa da formação da camada limite.
2. Aceleração da camada limite (injeção de massa): consiste em fornecer
energia adicional às partículas de fluido que foram retardadas pela camada
limite por meio de injeção de massa pela parede.
3. Sucção: consiste em remover as partículas de fluido desacelerada através de
furos na parede antes que ocorra a separação, esse método também pode
ser utilizado para atrasar a transição para escoamento turbulento, reduzindo
o arrasto.
4. Forma: as características geométricas da superfície influenciam no gradiente
de pressão, afetando na separação da camada limite.

39
3 METODOLOGIA NUMÉRICA
3.1 MÉTODO DOS VOLUMES FINITOS
O método dos volumes finitos é um procedimento utilizado para discretizar as
equações do transporte. Ele consiste na integração dessas equações diferenciais
parciais em uma região finita do espaço (volume). O resultado desse procedimento é
um balanço entre os termos convectivo, difusivos e fonte. A região do espaço é
discretizada com o uso de uma malha, e cada célula dessa malha representa um
volume de controle.
(𝐶𝑜𝑛𝑣𝑒𝑐çã𝑜 𝑑𝑒 𝜙) = (𝐷𝑖𝑓𝑢𝑠ã𝑜 𝑑𝑒 𝜙) + (𝐺𝑒𝑟𝑎çã𝑜 𝑑𝑒 𝜙) (3.01)
Supondo uma propriedade transportada ϕ e um volume de controle 2D,
representando uma célula da malha (Figura 3.1). Os fluxos convectivos e difusivos
atravessam as fronteiras desse volume, e o termo fonte de geração atua por todo o
volume.
Figura 3.1 Volume de Controle. (Fonte: COTTON, 2014).
40
Assim, integrando a equação de transporte no volume de controle:
∫ ∫ 𝑈𝜕𝜙
𝜕𝑥
𝑒
𝑤𝑑𝑥𝑑𝑦 +
𝑛
𝑠∫ ∫ 𝑉
𝜕𝜙
𝜕𝑦
𝑛
𝑠
𝑒
𝑤𝑑𝑦𝑑𝑥 = ∫ ∫
𝜕
𝜕𝑥(𝐷𝜙
𝜕𝜙
𝜕𝑥 )
𝑒
𝑤𝑑𝑥𝑑𝑦
𝑛
𝑠+ ∫ ∫
𝜕
𝜕𝑦(𝐷𝜙
𝜕𝜙
𝜕𝑦 )
𝑛
𝑠
𝑒
𝑤𝑑𝑦𝑑𝑥 +
∫ ∫ 𝑆𝜙𝑤
𝑒
𝑛
𝑠𝑑𝑥𝑑𝑦 (3.02)
Resolvendo-se a primeira integral, obtém-se a equação exata (3.3):
∫ (𝜙𝑈)𝑒 − (𝜙𝑈)𝑤 𝑑𝑦𝑛
𝑠+ ∫ (𝜙𝑉)𝑛 − (𝜙𝑉)𝑠 𝑑𝑥
𝑒
𝑤= ∫ (𝐷𝜙
𝜕𝜙
𝜕𝑥)
𝑒
𝑛
𝑠− (𝐷𝜙
𝜕𝜙
𝜕𝑥)
𝑤𝑑𝑦 +
∫ (𝐷𝜙𝜕𝜙
𝜕𝑦)
𝑛
𝑒
𝑤− (𝐷𝜙
𝜕𝜙
𝜕𝑦)
𝑠𝑑𝑥 + ∫ ∫ 𝑆𝜙
𝑤
𝑒
𝑛
𝑠𝑑𝑥𝑑𝑦 (3.03)
3.2 DISCRETIZAÇÃO DOS TERMOS
Para discretização das equações integradas do transporte, baseados nas aulas
de Cotton e Craft (2014) é necessário primeiro definir os nós em que as variáveis
serão armazenadas. Os nós são a única localização em que a informações do
escoamento são armazenadas, para outras posições é necessário utilizar de
aproximações (interpolações).
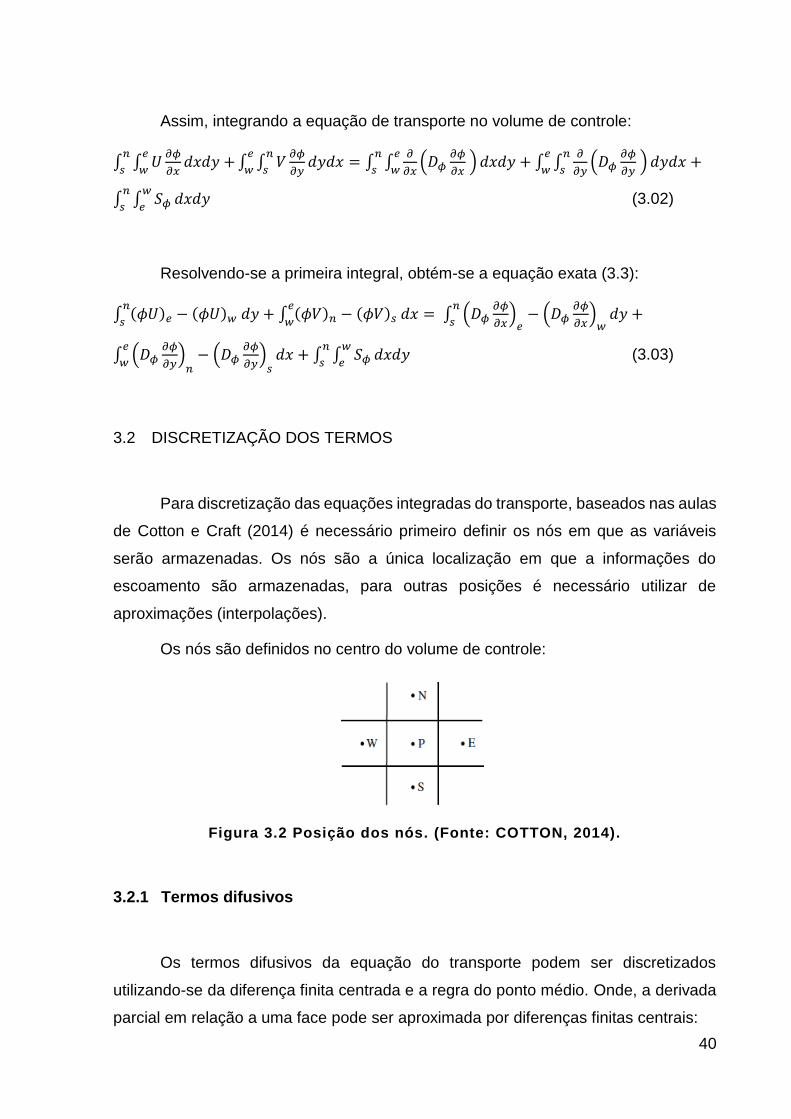
Os nós são definidos no centro do volume de controle:
Figura 3.2 Posição dos nós. (Fonte: COTTON, 2014).
3.2.1 Termos difusivos
Os termos difusivos da equação do transporte podem ser discretizados
utilizando-se da diferença finita centrada e a regra do ponto médio. Onde, a derivada
parcial em relação a uma face pode ser aproximada por diferenças finitas centrais:

41
(𝜕𝜙
𝜕𝑥)
𝑒=
𝜙𝐸−𝜙𝑃
∆𝑥 (3.04)
Os subíndices maiúsculos referem-se aos valores nos nós E e P, conforme:
Figura 3.3 Nós adjacentes. (Fonte: COTTON, 2014).
A regra do ponto médio é utilizada para resolver a integral. Aproxima-se a
integral, pelo produto entre o valor sendo integrado no centro do volume de controle e
a área da face (ou aresta nas malhas 2D).
Assim:
∫ (𝐷𝜙𝜕𝜙
𝜕𝑥)
𝑒
𝑛
𝑠𝑑𝑦 ≈ 𝐷𝜙 (
𝜙𝐸−𝜙𝑃
∆𝑥) ∆𝑦 (3.05)
Essa discretização pode ser usada de forma análoga para os outros termos
difusivos. É importante ressaltar que tanto a diferença finita centrada e a regra do valor
médio são aproximações com o erro de segunda ordem.
3.2.2 Termos convectivos
Os termos convectivos serão discretizados utilizando-se do Upwind difference
Scheme de segunda ordem.
A convecção causa o transporte de uma propriedade apenas na direção do
escoamento, dessa forma, é possível aproximar os valores das faces do volume de
controle pelos valores nos nós a montante no escoamento (assumindo-se um
escoamento da esquerda para direita, o valor da propriedade na face e, será
aproximada pela interpolação dos valores nos nós P e W).

42
Através da expansão em série de Taylor referente a face e dos valores em P e
W, é possível demonstrar que ϕe pode ser aproximado por:
𝜙𝑒 ≈3𝜙𝑃−𝜙𝑊
2 (3.06)
Assim, o termo ∫ (𝜙𝑈)𝑒𝑑𝑦𝑛
𝑠 pode ser integrado utilizando a regra do valor
médio:
∫ (𝜙𝑈)𝑒𝑑𝑦𝑛
𝑠= (𝑈𝑒∆𝑦)𝜙𝑒 (3.07)
O termo entre parênteses é o fluxo volumétrico, e ele é conhecido de uma
interação anterior. Dessa forma, apenas o valor ϕe é aproximado. Essa aproximação
também é de segunda ordem e pode ser analogamente demonstrada para as outras
faces.
3.2.3 Termos fonte
Os termos fonte podem ser aproximados pela regra do valor médio e também
são de segunda ordem:
∫ ∫ 𝑆𝜙𝑤
𝑒
𝑛
𝑠𝑑𝑥𝑑𝑦 ≈ 𝑆𝜙∆𝑥∆𝑦 (3.08)
3.2.4 Discretização temporal
Escolheu-se discretizar o problema utilizando-se um esquema implícito de
segunda ordem descritos na aula de Craft (2014). O esquema implícito foi utilizado
por ser incondicionalmente estável.
Considerando um termo genérico dependente do tempo:
𝜕𝜙
𝜕𝑡= 𝑓(𝑡, 𝜙(𝑡)) (3.09)

43
E integrando ele em relação ao tempo e isolando o termo no instante futuro:
𝜙(𝑛+1) = 𝜙(𝑛) + ∫ 𝑓(𝑡, 𝜙(𝑡)) 𝑡+Δ𝑡
𝑡𝑑𝑡 (3.10) (3.10)
Na equação 3.10 a integral pode ser aproximada utilizando a regra do trapézio
(ponderando-se os valores finais e iniciais de f):
𝜙(𝑛+1) = 𝜙(𝑛) +Δ𝑡
2[𝑓(𝑡, 𝜙𝑛) + 𝑓(𝑡 + Δ𝑡, 𝜙𝑛+1) ] (3.11)
Para o caso da equação transiente convecção-difusão, utilizando diferenças
finitas centrais nos termos convectivos:
𝜙𝑖(𝑛+1)
= 𝜙𝑖(𝑛)
−UΔ𝑡
2(
𝜙𝑖+1(𝑛+1)
−𝜙𝑖−1(𝑛+1)
2Δx) +
ΓΔ𝑡
2(
𝜙𝑖+1(𝑛+1)
−2𝜙𝑖(𝑛+1)
+𝜙𝑖−1(𝑛+1)
(Δx)2) −
UΔ𝑡
2(
𝜙𝑖+1(𝑛)
−𝜙𝑖−1(𝑛)
2Δx) +
ΓΔ𝑡
2(
𝜙𝑖+1(𝑛)
−2𝜙𝑖(𝑛)
+𝜙𝑖−1(𝑛)
(Δx)2 ) (3.12)
3.3 MALHA NÃO UNIFORME
Na maioria dos casos, assim como no presente trabalho, a malha não é
uniforme (a distância entre os nós varia).
A variação do espaçamento foi feita para que a malha seja mais refinada nas
regiões em que se tem maior gradiente. Dessa forma, a ordem do erro das equações
discretizadas aumenta, porém o erro de truncamento diminui consideravelmente
nessas regiões mais refinadas.
3.4 SOLUÇÃO DAS EQUAÇÕES DISCRETIZADAS
Após discretizar as equações para cada volume de controle, é possível montar
um sistema do tipo 𝐴𝜙 = 𝑆𝜙 e utilizar de um algoritmo para a solução do mesmo. É
importante destacar que os valores nas faces dos volumes de controle na fronteira da
geometria são condições de contorno, ou seja, esses valores são conhecidos e
permitem a solução para toda a malha.

44
3.5 TRATAMENTO DO ACOMPLAMENTO PRESSÃO-VELOCIDADE
A solução das equações discretizadas do momentum são complicadas pelo fato
delas apresentarem termos de gradientes de pressão e não existir uma equação
independente para a pressão. Entretanto, é possível utilizar a equação da
continuidade para obter valores para a pressão nos nós.
O acoplamento de pressão-velocidade é uma imposição de restrição para que
o campo de pressão seja consistente com a velocidade, satisfazendo a equação de
continuidade.
No presente trabalho, optou-se pelo algoritmo SIMPLE (Semi-Implicit Method
for Pressure-Linked Equations). Para cada iteração no algoritmo SIMPLE, os valores
da pressão e velocidade são atualizados em todos os nós. E o processo de iteração
é repetido até que um critério de convergência seja atingido (CRAFT, 2014).
O algoritmo SIMPLE possui duas etapas de iteração:
1) Na primeira etapa resolve-se as equações do momentum utilizando os valores
da pressão da etapa anterior, desse modo obtém-se valores de velocidade
(intermediário) que não satisfazem a equação da continuidade.
2) Na segunda etapa os valores da pressão são corrigidos (utilizando os valores
intermediários de velocidade e o princípio da continuidade). Após achar o valor
da pressão corrigida, as equações do momentum são resolvida novamente.
3.6 FATORES DE RELAXAÇÃO
Em uma solução sequencial (ou segregada) das equações, cada variável é
resolvida em turno. Ou seja, para se obter o valor de uma nova iteração, utiliza-se
valores de interações anteriores. Dessa forma, faz-se necessário limitar a variação em
cada iteração, para que os coeficientes e termos fontes das outras equações não
sejam afetados mais do que o necessário (diminuindo a velocidade de convergência).
A técnica utilizada para impedir esse problema é o fator de relaxação. Esse fator
pondera o valor da correção a ser aplicado.
45
3.7 RESIDUAIS
Em um método número é importante se ter um critério para determinar quando
a solução convergiu adequadamente (e o resultado não se altere significativamente
em novas iterações). Esse critério de parada pode ser definido em função dos
residuais.
Os residuais são obtidos a partir do somatório da diferença entre os termos
ponderados utilizados para se calcular o valor em determinado nó e o valor do nó em
questão:
𝑅𝜑 = ∑ |𝑎𝐸𝜑𝐸 + 𝑎𝑊𝜑𝑊 + 𝑎𝑁𝜑𝑁 + 𝑎𝑆𝜑𝑆 + (𝑆𝜑)𝑃
− 𝑎𝑃𝜑𝑃|𝑝 (3.13)
O critério de parada é na maioria das vezes definido em função de um residual
escalado para todas as equações a serem resolvidas:
𝑅𝜑 =∑ |𝑎𝐸𝜑𝐸+ 𝑎𝑊𝜑𝑊+ 𝑎𝑁𝜑𝑁+ 𝑎𝑆𝜑𝑆+ (𝑆𝜑)
𝑃−𝑎𝑃𝜑𝑃|𝑃
∑ |𝑎𝑃𝜑𝑃|𝑃 (3.14)
3.8 PARÂMETROS DE TURBULÊNCIA
A turbulência na entrada (Inlet) do escoamento também precisa ser
especificada a fim de resolver as equações de transporte. Entretanto, a viscosidade
turbulenta, que foi escrita em função de κ e ε, é uma propriedade que só existe
numericamente (ela não é uma propriedade do fluido) e precisa ser relacionada com
os dados experimentais. Essa relação pode ser obtida a partir das seguintes
definições:
A) Intensidade de turbulência:
𝐼 =𝑢′
𝑈 (3.15)
Em experimentos em tuneis de vento, um valor aproximado médio esperado é
5% de intensidade de turbulência.

46
B) Comprimento da escala de turbulência (para escoamentos externos):
𝑙 ≈ 0.1ℎ (3.16)
O comprimento da escala de turbulência é um comprimento físico relacionado
com o tamanho dos vórtices que contem mais energia a ser dissipada. Assim, é
esperado que esse tamanho não seja maior que um decimo da altura da geometria
arqueada. Outra aproximação possível, é relacionar esse comprimento com 40% do
tamanho da camada limite em escoamentos externos a placas.
A intensidade turbulência e a escala de comprimento de turbulência podem ser
escritos em função de κ e ε conforme:
𝐼 =1
𝑈∙ √
2
3𝜅 (3.17)
𝑙 = 𝐶𝜇
3
4𝜅
32
𝜀 (3.18)
A partir dos dados disponíveis no caso 83 do banco de dados online da
ERCOFTAC (GREENBLATT et al. 2004b) referentes ao escoamento na posição x⁄c=-
2.14 pode-se comparar os resultados experimentais com os numéricos e determinar
um valor para a Intensidade de turbulência e o comprimento da escala de turbulência
no modelo numérico.
Inicialmente, utilizou-se o comprimento da geometria upstream à superfície
arqueada de -6,39c para testar a sensibilidade a alterações nos parâmetros de
turbulência. Simulou-se o escoamento sem controle de fluxo (Caso 1).
Além disso, foram definidas a variável numérica uprime (velocidade de flutuação)
e a energia cinética de turbulência em função dos dados experimentais (TKE):
𝑢𝑝𝑟𝑖𝑚𝑒 = √𝑘2
3 (3.19)
𝑇𝐾𝐸 = 𝑢′2 3
2 (3.20)
Onde k é a energia cinética de turbulência e é calculada pelo software e u’ é a
velocidade de flutuação fornecida pelos dados experimentais.
Em uma primeira simulação, o comprimento da escala de turbulência foi
mantido constante em 𝑙≈0.005376m e variou-se a intensidade de turbulência I em
47
0.05%, 0,1%, 0,2%, 0,4%, 0,5%, 1,0% e 2,0%. Em um segundo modelo, a intensidade
de turbulência foi mantida constante em I=0,1% e variou-se o comprimento da escala
de turbulência em 0,0005376m, 0,005276m e 0,5376m. A partir dos resultados
obtidos, decidiu-se adotar para todas as simulações: 𝑙=0,005376m e I=0,4%.
3.9 INFLUÊNCIA DA GEOMETRIA UPSTREAM
Para validar o comprimento 6,39c upstream à geometria arqueada, foram
simulados diferentes comprimentos (4c, 5,89c, 6,39c, 6,89c e 10c) e analisados a
influencia no perfil de velocidade. Nesse modelo, os parâmetros de turbulência foram
mantidos em I=0,1% e 𝑙=0,005376m, e foram comparados perfis de velocidade na
posição x=-2,14c=-0,8988m.

48
4 RESULTADOS
4.1 PRÉ-SIMULAÇÃO
4.1.1 Y+
A Figura 4.1 mostra o valor de Y+ (distância adimensional da parede até o
primeiro nó) para as três malhas referente aos casos de pré-simulação. A partir desse
gráfico é possível perceber que as três malhas são suficientemente refinadas para
resolver a subcamada viscosa (Y+ < 5).
Figura 4.1 Y+ Malhas.

49
4.1.2 PARÂMETROS DE TURBULÊNCIA
4.1.2.1 Variando a intensidade de turbulência
A partir dos gráficos de flutuação de velocidade u' (Figura 4.2) e energia cinética
de turbulência TKE (Figura 4.3) obtidos na posição x=-2.14c observa-se que os
resultados foram independentes da malha. Na ordenada está a distância à parede (y)
e na abcissa os valores obtidos para as variáveis (u’ e TKE). Após comparar as curvas
obtidas para diversos valores de intensidade de turbulência (I) com o valor
experimental (vermelho) definiu-se a intensidade de turbulência na entrada do
escoamento I=0.4%.

50
Figura 4.2 Gráficos da flutuação de velocidade. (A) Malha grosseira (B) Malha normal. (C) Malha fina. Linha vermelha: valor experimental, outras
linhas: valores testados para a intensidade de turbulência.
A
B
C

51
Figura 4.3 Gráficos energia cinética de turbulência. (A) Malha grosseira (B) Malha normal. (C) Malha fina. Linha vermelha: valor experimental, outras
linhas: valores testados para a intensidade de turbulência.
A
B
C

52
4.1.2.2 Variando o comprimento da escala de turbulência
A partir dos gráficos de flutuação de velocidade u' (Figura 4.4) e energia cinética
de turbulência TKE (Figura 4.5) obtidos na posição x=-2.14c observa-se que os
resultados foram independentes da malha. Na ordenada está a distância à parede (y)
e na abcissa os valores obtidos para as variáveis (u’ e TKE). Após comparar as curvas
obtidas para diversos valores do comprimento da escala de turbulência (𝑙) com o valor
experimental (vermelho), observou-se que a variação no comprimento da escala de
turbulência não acarretou em nenhuma mudança na curva dos gráficos. Esse fato era
esperado, pois a dissipação de energia pelos vórtices com mais energia se adapta a
esse comprimento. Assim ficou definido 𝑙=0,005376m, referente a um décimo da
altura máxima da geometria arqueada.

53
Figura 4.4 Gráficos da flutuação de velocidade. (A) Malha grosseira (B) Malha normal. (C) Malha fina. Linha vermelha: valor experimental, outras
linhas: valores testados para o comprimento da escala de turbulência.
A
B
C

54
Figura 4.5 Gráficos energia cinética de turbulência. (A) Malha grosseira (B) Malha normal. (C) Malha fina. Linha vermelha: valor experimental, outras
linhas: valores testados para o comprimento da escala de turbulência.
A
B
C
55
4.1.3 Influência da geometria upstream
A partir da análise dos gráficos do perfil de velocidade (Figura 4.6) na posição
x=-2.14c observa-se que os resultados foram independentes da malha, é possível ver
que quanto maior o comprimento da geometria upstream, maiores são os efeitos da
viscosidade no perfil de velocidade. A geometria upstream de 6.39c obteve os
resultados mais próximos aos resultados experimentais obtidos para uma geometria
upstream da placa divisória de 4.61c (em vermelho).

56
Figura 4.6 Gráficos do perfil de velocidade. (A) Malha grosseira (B) Malha normal. (C) Malha fina. Linha vermelha: valor experimental, outras linhas:
valores testados para o comprimento da geometria upstream.
A
B
C

57
4.2 ESCOAMENTO SEM CONTROLE DE FLUXO
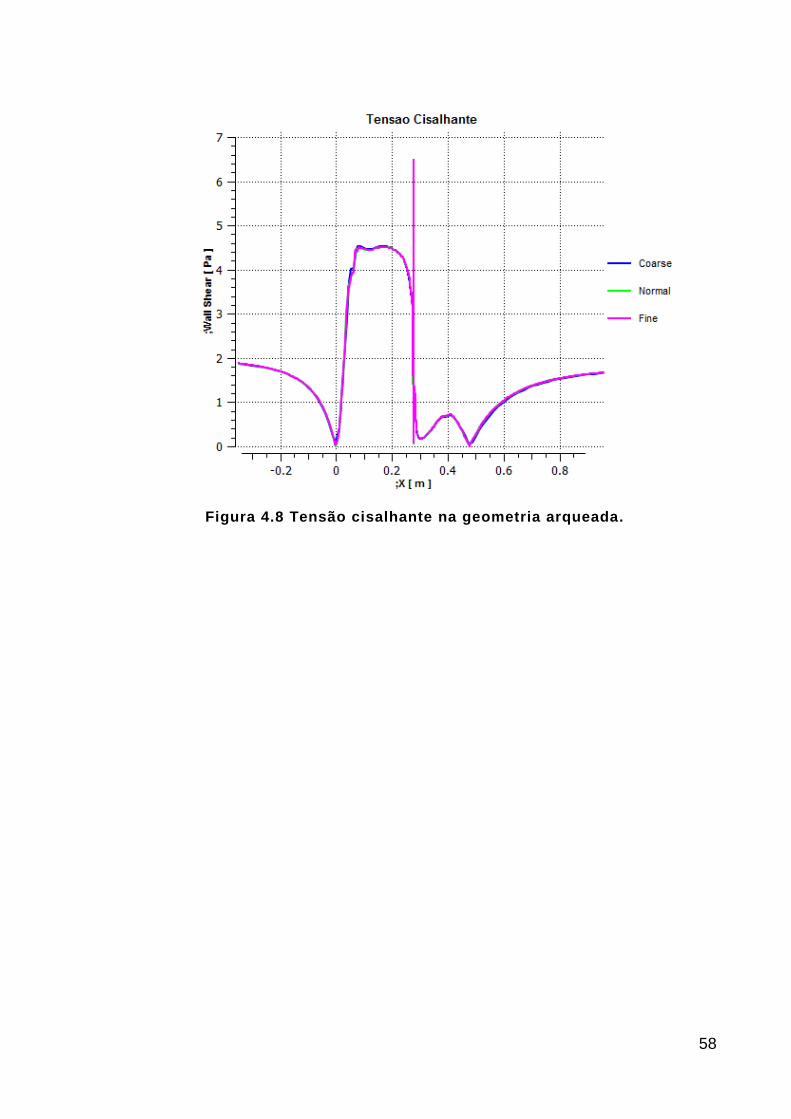
A partir dos gráficos de coeficiente de pressão e tensão cisalhante sobre a
geometria arqueada (Figuras 4.7 e 4.8) observa-se que os valores foram
independentes das malhas. Os valores absolutos do coeficiente de pressão
experimental sobre a geometria foram maiores que os encontrados numericamente.
Os pontos de separação e recolamento do escoamento foram definidos a partir dos
valores mínimos de tensão cisalhante após a geometria arqueada.
Figura 4.7 Coeficiente de pressão na geometria arqueada.
58
Figura 4.8 Tensão cisalhante na geometria arqueada.
59
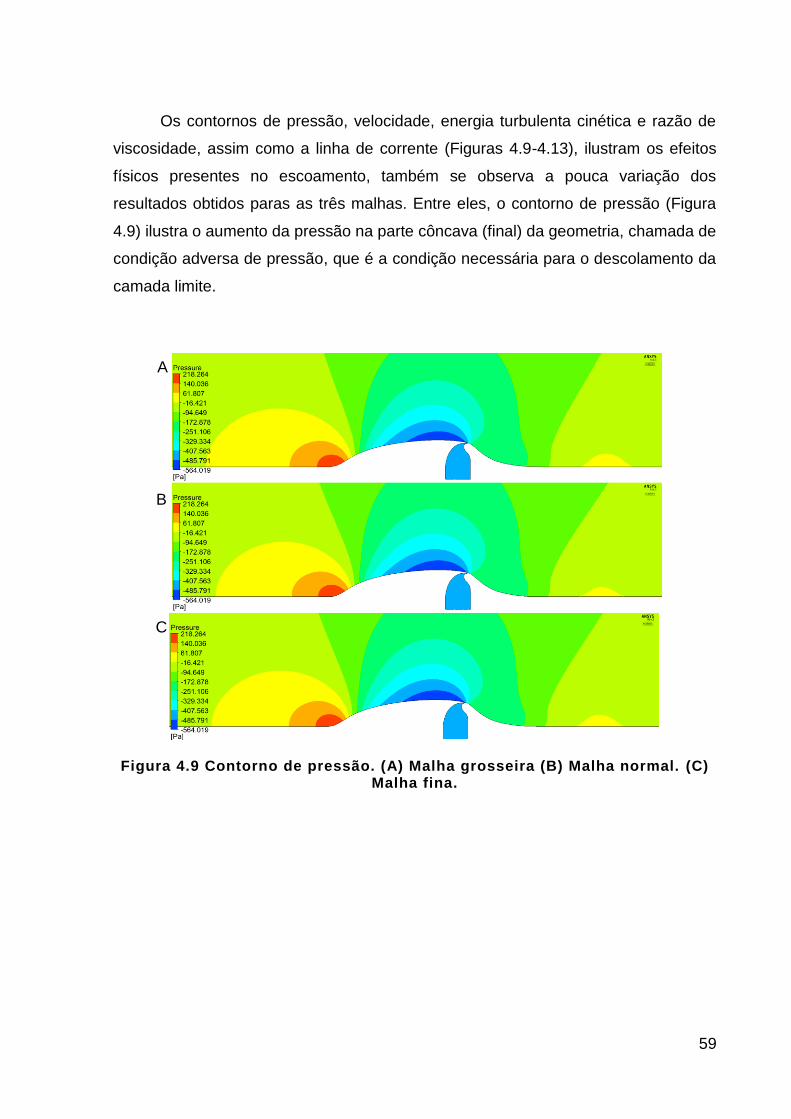
Os contornos de pressão, velocidade, energia turbulenta cinética e razão de
viscosidade, assim como a linha de corrente (Figuras 4.9-4.13), ilustram os efeitos
físicos presentes no escoamento, também se observa a pouca variação dos
resultados obtidos paras as três malhas. Entre eles, o contorno de pressão (Figura
4.9) ilustra o aumento da pressão na parte côncava (final) da geometria, chamada de
condição adversa de pressão, que é a condição necessária para o descolamento da
camada limite.
Figura 4.9 Contorno de pressão. (A) Malha grosseira (B) Malha normal. (C) Malha fina.
A
B
C
60
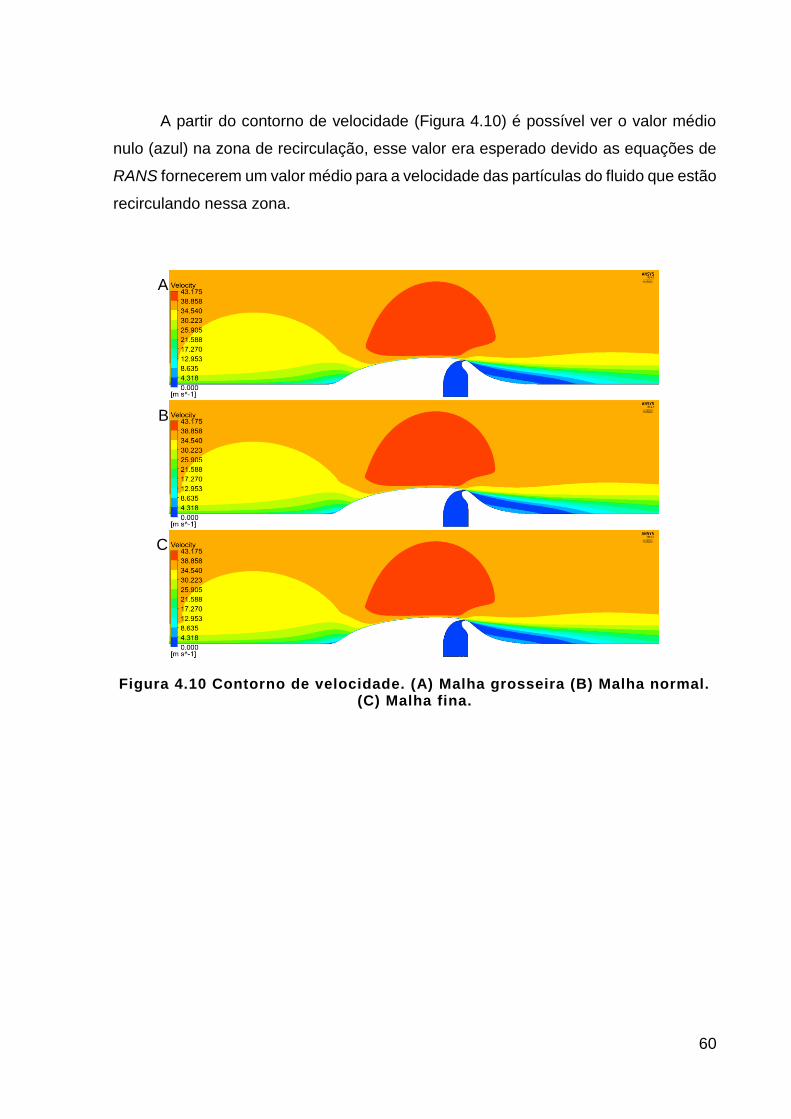
A partir do contorno de velocidade (Figura 4.10) é possível ver o valor médio
nulo (azul) na zona de recirculação, esse valor era esperado devido as equações de
RANS fornecerem um valor médio para a velocidade das partículas do fluido que estão
recirculando nessa zona.
Figura 4.10 Contorno de velocidade. (A) Malha grosseira (B) Malha normal. (C) Malha fina.
A
B
C
61
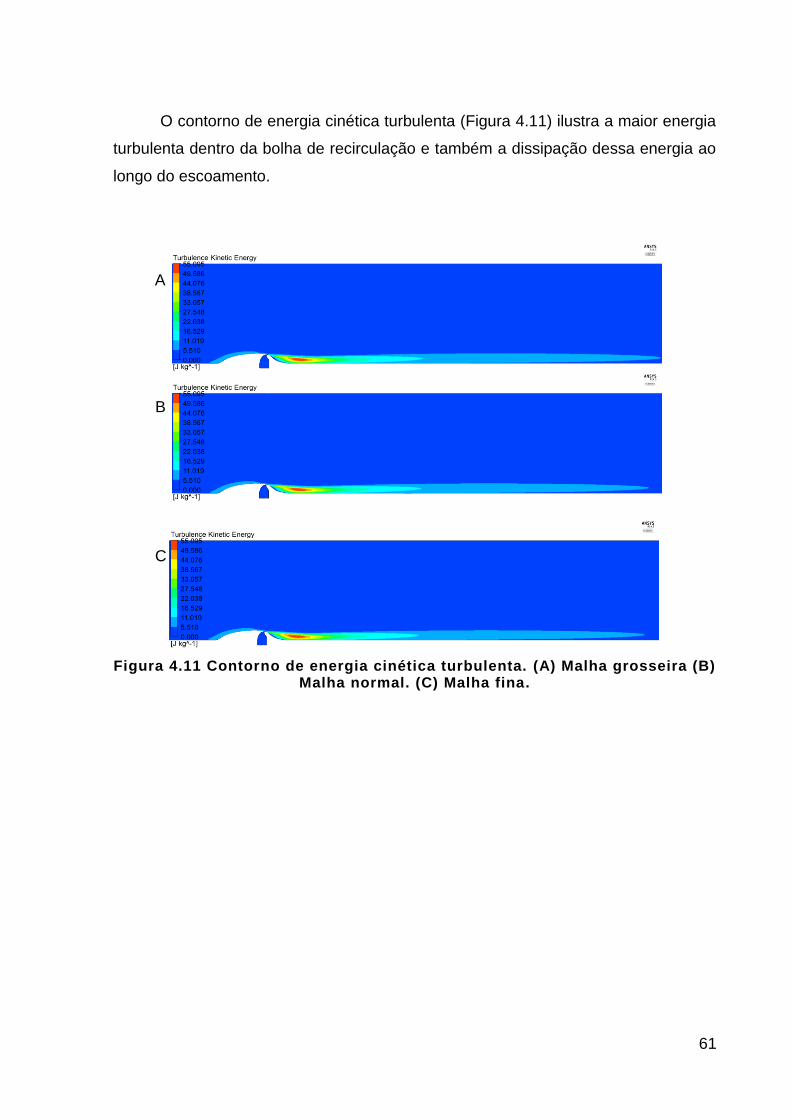
O contorno de energia cinética turbulenta (Figura 4.11) ilustra a maior energia
turbulenta dentro da bolha de recirculação e também a dissipação dessa energia ao
longo do escoamento.
Figura 4.11 Contorno de energia cinética turbulenta. (A) Malha grosseira (B) Malha normal. (C) Malha fina.
B
C
A
62
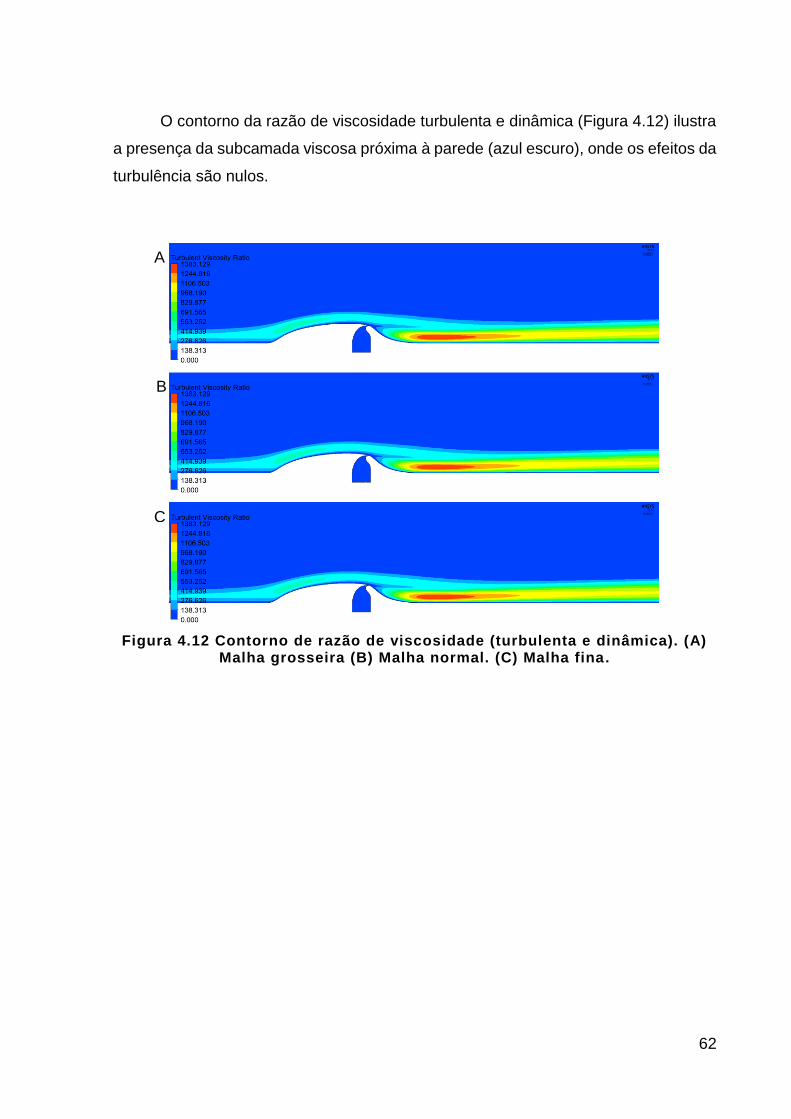
O contorno da razão de viscosidade turbulenta e dinâmica (Figura 4.12) ilustra
a presença da subcamada viscosa próxima à parede (azul escuro), onde os efeitos da
turbulência são nulos.
Figura 4.12 Contorno de razão de viscosidade (turbulenta e dinâmica). (A) Malha grosseira (B) Malha normal. (C) Malha fina.
B
A
C

63
A Figura 4.13 ilustra a linha de corrente, nela é possível ver a zona de
recirculação.
Figura 4.13 Linha de corrente e velocidade. (A) Malha grosseira (B) Malha normal. (C) Malha fina.
4.3 ESCOAMENTO COM CONTROLE DE FLUXO DE SUCÇÃO
As observações dos resultados encontrados para o caso com controle de fluxo
de sucção são análogas ao caso sem controle de fluxo.
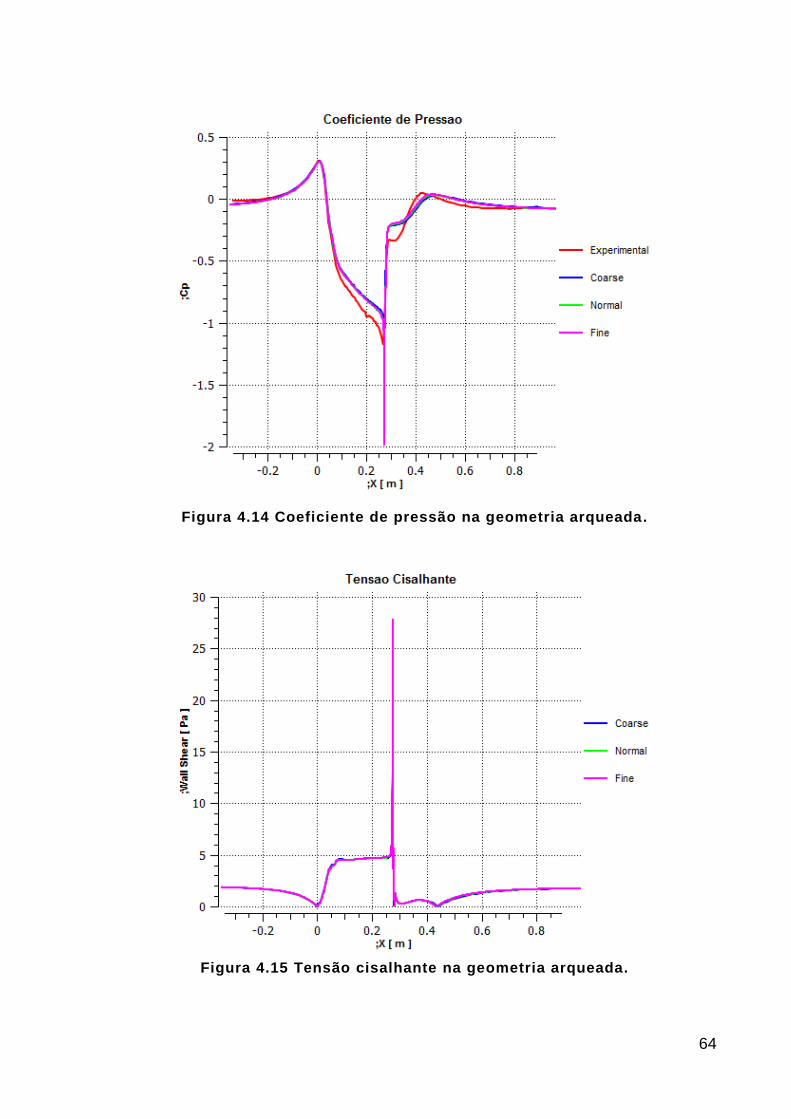
Nos gráficos de coeficiente de pressão e tensão cisalhante (Figuras 4.14 e
4.15) observa-se uma descontinuidade na curva devido ao efeito da sucção na região
aberta da geometria.
B
A
C
64
Figura 4.14 Coeficiente de pressão na geometria arqueada.
Figura 4.15 Tensão cisalhante na geometria arqueada.

65
No contorno de pressão (Figura 4.16) observa-se um valor absoluto da pressão
(~1000Pa) maior que o valor absoluto no caso sem controle de fluxo (~400Pa) na
cavidade onde a sucção é aplicada.
Figura 4.16 Contorno de pressão. (A) Malha grosseira (B) Malha normal. (C) Malha fina.
A
B
C
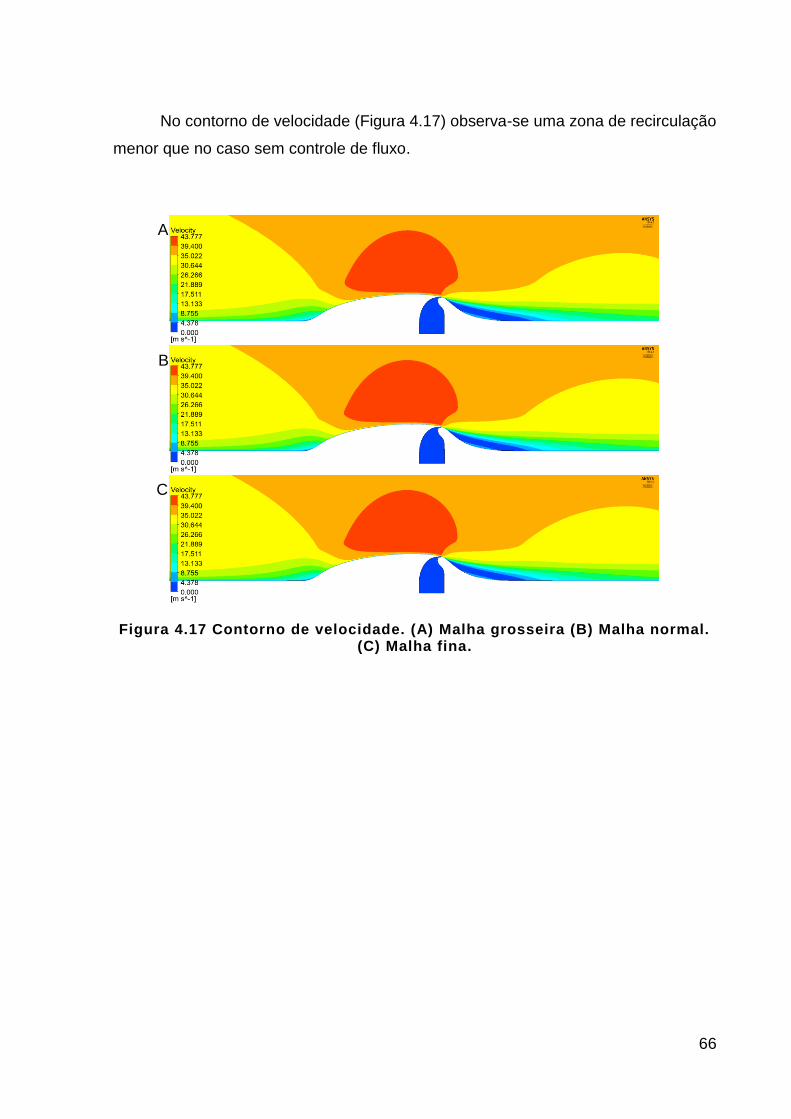
66
No contorno de velocidade (Figura 4.17) observa-se uma zona de recirculação
menor que no caso sem controle de fluxo.
Figura 4.17 Contorno de velocidade. (A) Malha grosseira (B) Malha normal. (C) Malha fina.
A
B
C

67
A Figura 4.18 ilustra a sucção na abertura para as três malhas. A condição de
contorno no caso com sucção permanente é aplicada na cavidade, dessa forma é
possível ver o escoamento entrando pela abertura da geometria.
Figura 4.18 Vetor de velocidade. (A) Malha grosseira (B) Malha normal. (C) Malha fina.
B
C
A

68
No contorno de energia cinética turbulenta (Figura 4.19) e razão da viscosidade
turbulenta e dinâmica (Figura 4.20) observa-se maiores efeitos de turbulência na zona
de recirculação.
Figura 4.19 Contorno de energia cinética turbulenta. (A) Malha grosseira (B) Malha normal. (C) Malha fina.
B
C
A
69
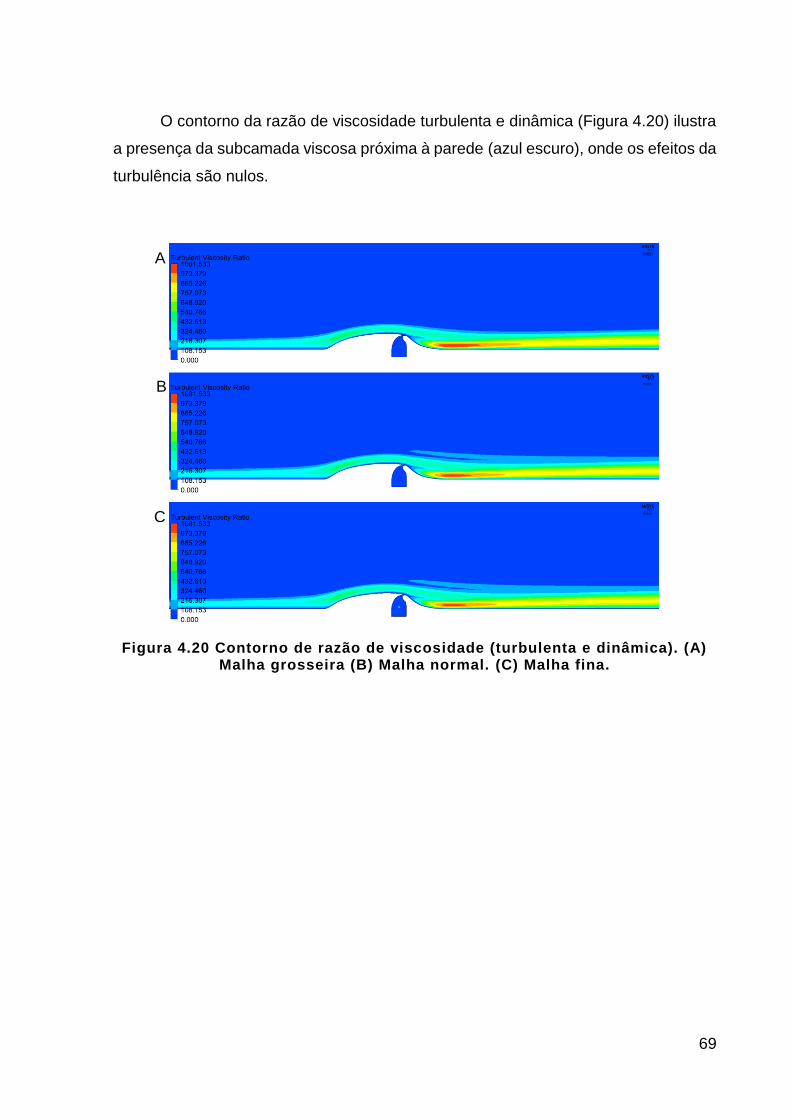
O contorno da razão de viscosidade turbulenta e dinâmica (Figura 4.20) ilustra
a presença da subcamada viscosa próxima à parede (azul escuro), onde os efeitos da
turbulência são nulos.
Figura 4.20 Contorno de razão de viscosidade (turbulenta e dinâmica). (A) Malha grosseira (B) Malha normal. (C) Malha fina.
B
C
A

70
A Figura 4.21 ilustra a linha de corrente para o caso com controle de fluxo de
sucção, nela é possível ver a zona de recirculação.
Figura 4.21 Linha de corrente e velocidade. (A) Malha grosseira, (B) Malha normal, (C) Malha fina.
4.4 ESCOAMENTO COM CONTROLE DE FLUXO OSCILATÓRIO
Os gráficos e figuras para o caso com controle de fluxo oscilatório (Figuras 4.22-
4.25) foram feitos em função do valor médio calculado para os 30 ciclos e estão sendo
mostradas para as três malhas. Os contornos de velocidade (Figura 4.26), linha de
corrente (Figura 4.27), contorno da energia cinética turbulenta (Figura 4.28) e contorno
da razão de viscosidade (Figura 4.29) foram feitos durante o último ciclo e apenas o
resultado para malha com o refinamento médio está sendo mostrado. O semi-ciclo de
injeção de massa ocorre durante o intervalo de 0° a 180° e o semi-ciclo de sucção de
massa ocorre durante o intervalo de 180° a 360°.
B
A
C

71
Para o caso com controle de fluxo oscilatório, a condição de contorno foi aplicada
diretamente na geometria, não havendo, por tanto, a presença da cavidade.
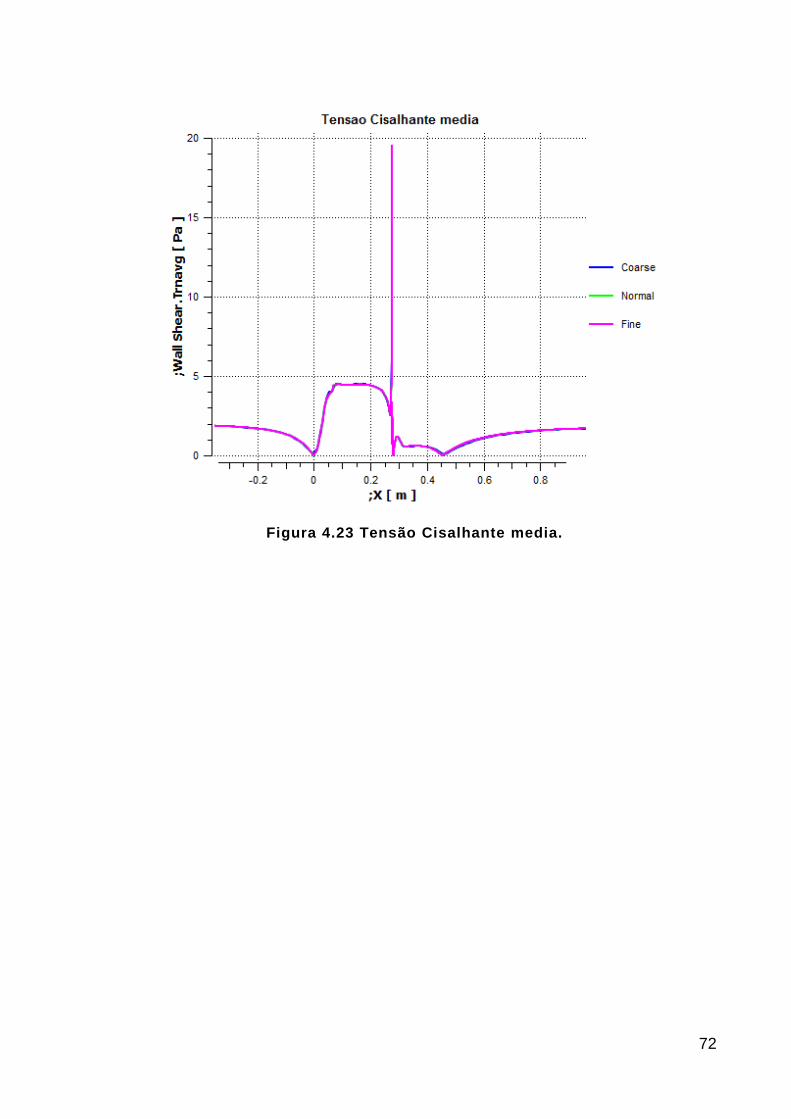
Nos gráficos de coeficiente de pressão e tensão cisalhante (Figuras 4.22 e 4.23)
observa-se uma descontinuidade na curva devido ao efeito do controle de fluxo que
está sendo aplicado.
Figura 4.22 Coeficiente de pressão médio.
72
Figura 4.23 Tensão Cisalhante media.

73
O contorno de pressão (Figura 4.24) ilustra o aumento da pressão na parte
côncava (final) da geometria, chamada de condição adversa de pressão que é a
condição necessária para o descolamento da camada limite.
Figura 4.24 Contorno de pressão médio. (A) Malha grosseira (B) Malha normal. (C) Malha fina.
A
B
C

74
A partir do contorno de velocidade (Figura 4.25) é possível ver o valor médio
nulo (azul) na zona de recirculação, esse valor nulo era esperado devido a ele ser um
valor médio durante os 30 ciclos e também devido a formulação RANS que fornece o
valor médio diretamente.
Figura 4.25 Contorno de velocidade média. (A) Malha grosseira (B) Malha normal. (C) Malha fina.
A
B
C

75
A Figura 4.26 ilustra o contorno de velocidade média durante o último ciclo da
simulação. Durante o semi-ciclo de injeção (A-D) é possível observar uma zona de
recirculação maior que a zona de recirculação durante o semi-ciclo de sucção (E-H).
Figura 4.26 Contorno de velocidade oscilatório. (A) representa o início da fase de injeção de massa (0°), tendo o seu máximo representado em (C) (90°). (B) e (D) representam momentos intermediários no semi-ciclo de injeção de massa (45° e 135°). (E) representa o início da fase de sucção de massa (180°), tendo o seu máximo representado em (G) (270°). (F) e (H) representam momentos intermediários no semi-ciclo de succção de massa (225°e 315°).
A
C
E
G
B
D
F
H

76
A Figura 4.27 ilustra a recirculação presente na bolha de separação durante o
último ciclo, observa-se a formação de duas zonas de recirculação.
Figura 4.27 Linha de corrente/velocidade oscilatório. Figura 4.28 Contorno de velocidade oscilatório. (A) representa o início da fase de injeção de massa (0°), tendo o seu máximo representado em (C) (90°). (B) e (D) representam momentos intermediários no semi-ciclo de injeção de massa (45° e 135°). (E) representa o início da fase de sucção de massa (180°), tendo o seu máximo representado em (G) (270°). (F) e (H) representam momentos intermediários no semi-ciclo de succção de massa (225°e 315°).
A
C
E
G
B
D
F
H

77
A Figura 4.28 ilustra o contorno da energia cinética turbulenta durante o último
ciclo, observa-se maiores efeitos da turbulência dentro da zona de recirculação e a
dissipação dessa energia ao longo do escoamento.
Figura 4.29 Contorno de energia cinética de turbulência. Figura 4.30 Contorno de velocidade oscilatório. (A) representa o início da fase de injeção de massa (0°), tendo o seu máximo representado em (C) (90°). (B) e (D) representam momentos intermediários no semi-ciclo de injeção de massa (45° e 135°). (E) representa o início da fase de sucção de massa (180°), tendo o seu máximo representado em (G) (270°). (F) e (H) representam momentos intermediários no semi-ciclo de succção de massa (225°e 315°).
A
C
E
G
B
D
F
H
78
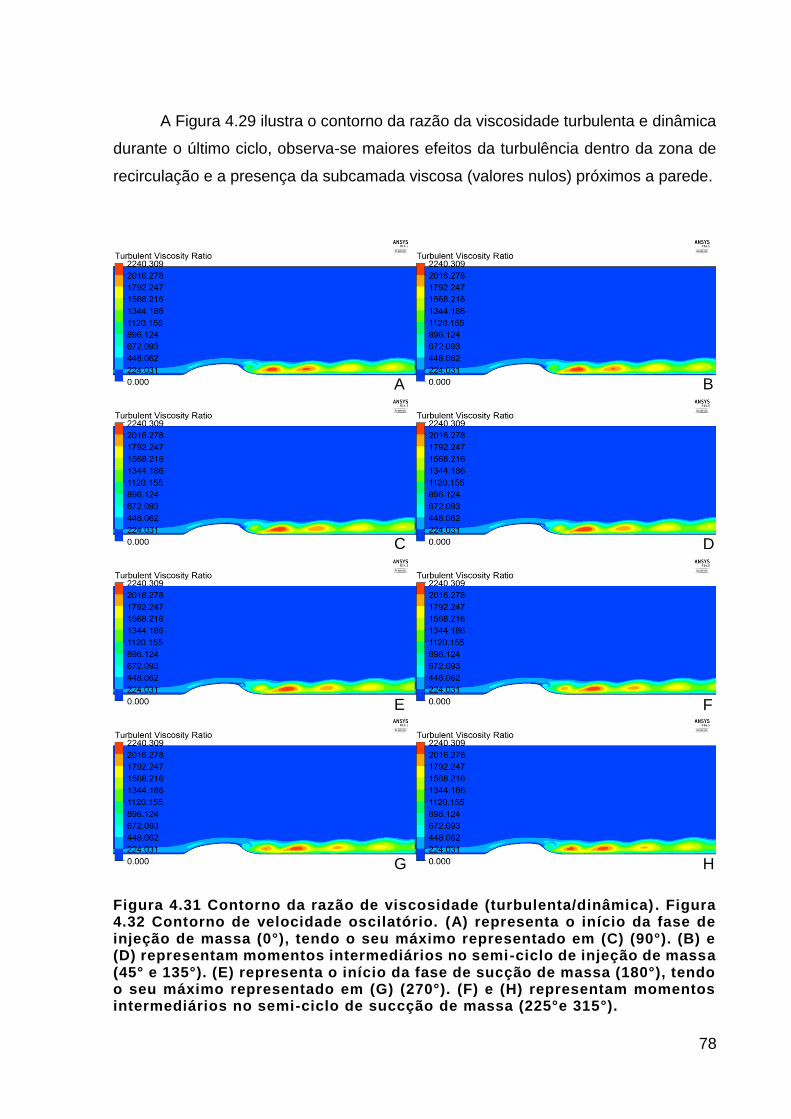
A Figura 4.29 ilustra o contorno da razão da viscosidade turbulenta e dinâmica
durante o último ciclo, observa-se maiores efeitos da turbulência dentro da zona de
recirculação e a presença da subcamada viscosa (valores nulos) próximos a parede.
Figura 4.31 Contorno da razão de viscosidade (turbulenta/dinâmica) . Figura 4.32 Contorno de velocidade oscilatório. (A) representa o início da fase de injeção de massa (0°), tendo o seu máximo representado em (C) (90°). (B) e (D) representam momentos intermediários no semi-ciclo de injeção de massa (45° e 135°). (E) representa o início da fase de sucção de massa (180°), tendo o seu máximo representado em (G) (270°). (F) e (H) representam momentos intermediários no semi-ciclo de succção de massa (225°e 315°).
A
C
E
G
B
D
F
H
79
4.5 COMPARAÇÃO DE RESULTADOS
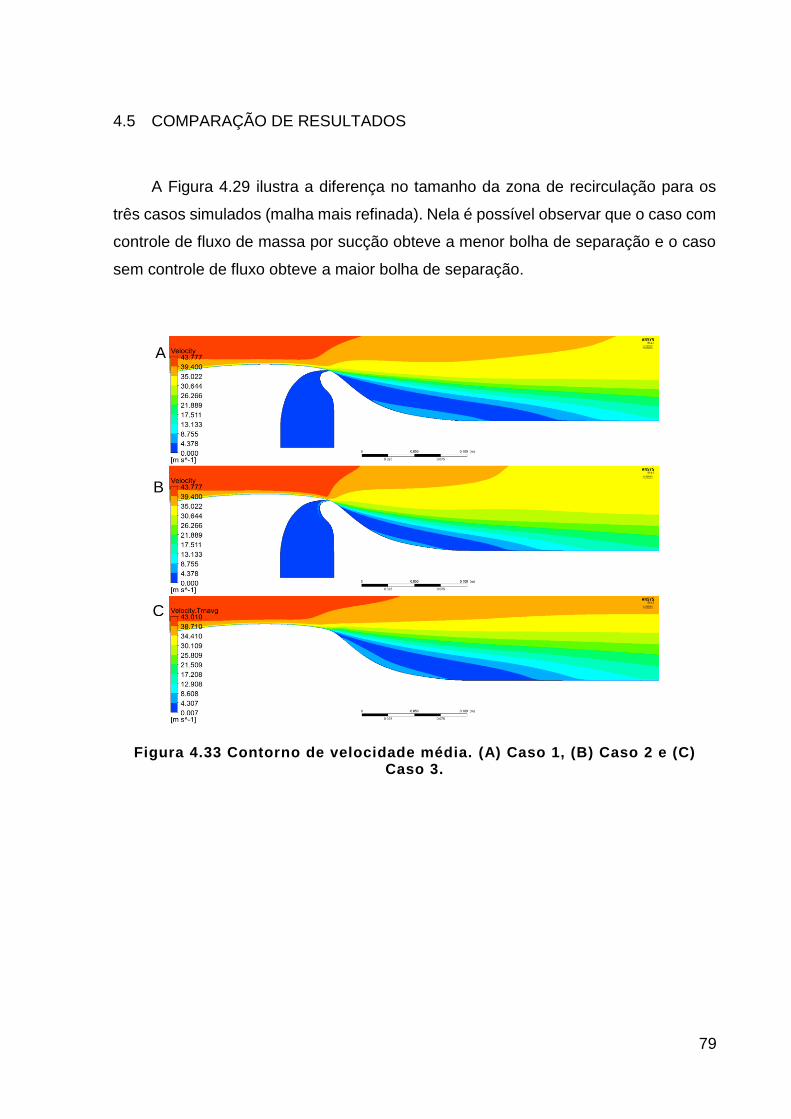
A Figura 4.29 ilustra a diferença no tamanho da zona de recirculação para os
três casos simulados (malha mais refinada). Nela é possível observar que o caso com
controle de fluxo de massa por sucção obteve a menor bolha de separação e o caso
sem controle de fluxo obteve a maior bolha de separação.
Figura 4.33 Contorno de velocidade média. (A) Caso 1, (B) Caso 2 e (C) Caso 3.
A
B
C

80
Na Tabela 4.1 é mostrada os valores encontrados para o ponto de separação
referentes aos três casos simulados e as três malhas.
Tabela 4.1 Ponto de Separação.
Malhas Sem Controle de
Fluxo
Com Controle de
fluxo de Sucção
Com Controle de
Fluxo Oscilatório
Grosseira 0.278531 0.280932 0.280932
Normal 0.278298 0.281352 0.280685
Fina 0.278316 0.281743 0.280888
Na Tabela 4.2 é mostrada os valores encontrados para o ponto de recolamento
referentes aos três casos simulados e as três malhas, e também os valores
experimentais.
Tabela 4.2 Ponto de recolamento.
Malhas Sem Controle de
Fluxo
Com Controle de
fluxo de Sucção
Com Controle de
Fluxo Oscilatório
Grosseira 0.476085 0.441655 0.464341
Normal 0.476515 0.436273 0.453121
Fina 0.476729 0.433575 0.453249
Experimental 0.4662 ±0.00126 0.3948±0.0021 0.4116
81
5 DISCUSSÃO
Existem inúmeras publicações, com diferentes métodos numéricos, que visam
modelar o experimento descrito previamente. Em relação aos modelos numéricos
utilizados, eles são 2D ou 3D com condições de contorno aplicadas na cavidade
modelada ou diretamente na geometria arqueada.
No geral, a maioria dos modelos falharam em calcular a pressão sobre a
geometria (0.2 < x/c <0.6) e previram maiores valores para pressão na região da
separação (x/c=1). De acordo com Morgan (2006), essa discrepância dos resultados
pode ser devida, em parte, ao efeito de bloqueio causado pelas placas laterais. Alguns
casos 3D, que levaram em consideração as placa laterais, e 2D, que corrigiram a
geometria da superfície superior para considerar os efeitos de bloqueio, resultaram
em valores para o coeficiente de pressão mais próximos dos valores experimentais.
Os modelos também falharam em prever o ponto de recolamento,
principalmente para o caso oscilatório. Uma possível razão para isso foi apontada em
razão da maioria dos modelos e métodos preverem menores valores para a tensão
cisalhante turbulenta na região de separação, indicando uma menor mistura da
turbulência em relação ao experimento.
Essa consistência dos resultados, para diferentes modelos, mostrou que
nenhuma técnica de CFD é melhor que outra (para esse experimento) e que apenas
foi possível validar os modelos qualitativamente. É necessário, por tanto, melhorar,
desenvolver e calibrar os métodos numéricos para que no futuro essa modelagem
possa ser completamente validada (RUMSEY et al., 2004a). O Anexo 8.3 ilustra o
ponto de recolamento para diversos modelos.
82
6 CONCLUSÃO
O modelo de turbulência κ-ε utilizado falha em prever corretamente os pontos
de recolamento para os casos com controle de fluxo aplicado ao escoamento. Os
valores encontrados são aproximadamente 10% maior que o experimental.
A diferença entre aos valores experimentais e numéricos presente nos gráficos
do coeficiente de pressão para os três casos é devida aos efeitos de bloqueio na
pressão decorrente das placas laterais (glass endplate), que não foram levadas em
consideração no modelo numérico.
Entretanto, a simulação representou qualitativamente os efeitos físicos
esperados para o escoamento, onde o controle de fluxo de sucção apresentou o
menor valor para o ponto de recolamento.

83
7 REFERÊNCIA BIBLIOGRÁFICA
ANSYS, Inc. Fluent UDF Manual. ANSYS Fluent. 2013a.
ANSYS, Inc. Fluent User's Guide. ANSYS Fluent. 2014.
ANSYS, Inc. Introduction to ANSYS DesignModeler. 2012a.
ANSYS, Inc. Introduction to ANSYS FLUENT. 2012b.
ANSYS, Inc. Introduction to ANSYS Meshing. 2011.
ANSYS, Inc. Theory Guide. ANSYS Fluent. 2013b.
ANSYS, Inc. Tutorial Guide. ANSYS Fluent. 2013c.
ANSYS, Inc..User Defined Functions in ANSYS Fluent.2013d.
COTTON, M. Modelling and Simulation 3: Fluid Mechanics/CFD, Curso de
Engenharia Mecânca. Universidade de Manchester. 2014. Notas de Aula.
CRAFT, T.J. Advanced Modelling and Simulation: CFD, Curso de Engenharia
Mecânca. Universidade de Manchester.2014. Notas de Aula.
FOX, W. et al. Introdução à Mecânica dos Fluidos. Editora Gen|LTC, 7ª Edição,
2010.
GREENBLATT, D. et al. A Separation Control CFD Validation Test Case Part 1:
Baseline & Steady Suction. 2ª AIAA Flow Control Conference, 2004a.
84
_____. Wall-Mounted 2-D Hump with Oscillatory Zero-Mass-Flux Jet or Suction
through a Slot. Case 83. ERCOFTAC Classic Database Collection. 2004b.
Disponível em <http://cfd.mace.manchester.ac.uk/cgi-
bin/cfddb/prpage.cgi?83&EXP&database/cases/case83/Case_data&database/cases/
case83&cas83_head.html&cas83_desc.html&cas83_meth.html&cas83_data.html&ca
s83_refs.html&cas83_rsol.html&1&0&0&0&0 >. Acesso em: 15 junho 2015.
_____. A Separation Control CFD Validation Test Case Part 2. Zero Efflux
Oscillatory Blowing. 43º AIAA Aerospace Sciences Meeting and Exhibit, Reno, NV
2005.
JONGEN, T. Simulation and Modeling of Turbulent Incompressible Flows. PhD
thesis. EPF Lausanne, Lausanne, Switzerland. 1992 apud ANSYS, Inc. Theory
Guide. ANSYS Fluent. 2013b.
LAYTON, J. A. R.; CROWE, T.; ELGER, D. F. Engineering Fluid Mechanics.
Editora John Wiley and Sons, Inc., 7ª Edição, 2001.
MORGAN, P. E.; RIZZETTA, D. P.; VISBAL, M. R. High-Order Numerical
Simulation of Turbulent Flow over a Wall-Mounted Hump. AIAA Journal Vol. 44,
No. 2, 2006.
NOELTING, S. et al. Lattice Boltzmann Simulations of the Flow over a Hump
with Flow Control. 26º AIAA Applied Aerodynamics Conference, 2008.
POSTL, D.; FASEL, H. F. Direct Numerical Simulation of Turbulent Flow
Separation from a Wall-Mounted Hump. AIAA Journal Vol. 44, No. 2, 2006.
RUMSEY, C. L. et al. Summary of the 2004 CFD Validation Workshop on
Synthetic Jets and Turbulent Separation Control. AIAA Journal, 2004a.
RUMSEY, C. L. Reynolds-Averaged Navier–Stokes Analysis of Zero Efflux Flow
Control over a Hump Model. Journal of Aircraft Vol. 44, No. 2, 2007.
RUMSEY, C. L.; GATSKI, T. B. CFD Validation of Synthetic Jets
and Turbulent Separation Control. Langley Research Center Workshop, 2004b.
Disponível em: <http://cfdval2004.larc.nasa.gov/results.html>. Acesso em 05 de
junho de 2015.

85
SARIC, S. et al. Computational analysis of locally forced flow over a wall-
mounted hump at high-Re number. International Journal of Heat and Fluid Flow,
No 27, 2006.
SCHLICHTING, H. Boundary Layer Theory. Editora McGraw-Hill, 1979.
WOLFSHTEIN, M. The Velocity and Temperature Distribution of One-
Dimensional Flow with Turbulence Augmentation and Pressure Gradient. Int. J.
Heat Mass Transfer. 12. 301–318. 1969 apud ANSYS, Inc. Theory Guide. ANSYS
Fluent. 2013b.
YOU, D.; WANG, M.; MOIN, P. Large-eddy simulation of flow over a wall-
mounted hump with separation control. Center for Turbulence Research Annual
Research Briefs, 2005.
86
8 ANEXOS
8.1 TRATAMENTO PRÓXIMO À PAREDE
O Fluent possui a opção de melhorar o tratamento próximo a parede para a
equação ε, dessa forma o modelo κ-ε pode ser usado para escoamentos com camada
limite. Esse tratamento consiste em modelar a região próxima a parede com um
método que combina um modelo de duas camadas e uma função de parede.
Primeiramente, é necessário que a malha próxima à parede seja suficientemente
refinada para resolver a subcamada viscosa (y+≈1). Assim, o domínio do escoamento
é divido em uma região afetada pela viscosidade e uma região completamente
turbulenta, delimitada por um número de Reynolds, Rey, definido por:
𝑅𝑒𝑦 =𝜌𝑦√𝜅
𝜇 (8.1)
Onde y é a distância do centro da célula de volume à parede mais próxima.
Na região completamente turbulenta (Rey>200), o modelo κ-ε é utilizado. E na
região afetada pela viscosidade (Rey<200), o modelo de uma equação de Wolfstein
(1969 apud ANSYS ,2013b) é utilizado.
Nesse modelo de uma equação, as equações do momentum e de κ são mantidas
conforme a descrição do modelo κ-ε, entretanto a viscosidade turbulenta é definida
por:
𝜇𝑡,2𝑐𝑎𝑚𝑎𝑑𝑎𝑠 = 𝜌𝐶𝜇𝑙𝜇√𝜅 (8.2)

87
Onde:
𝑙𝜇 = 𝑦𝐶𝑙∗(1 − 𝑒
𝑅𝑒𝑦
𝐴𝜇 ) (8.3)
Além disso, para que o tratamento próximo a parede esteja completo, o valor
da viscosidade turbulenta para o modelo de duas camadas (uma equação) é
ponderado com o valor definido pelo modelo κ-ε, como o proposto por Jongen (1992
apud ANSYS, 2013b).
𝜇𝑡,𝑡𝑟𝑎𝑡𝑎𝑑𝑜 = 𝜆𝜀𝜇𝑡 + (1 − 𝜆𝜀)𝜇𝑡,2𝑐𝑎𝑚𝑎𝑑𝑎𝑠 (8.4)
Onde λε é uma função ponderação.
E o valor de ε na região afetado pela viscosidade é calculado conforme:
휀 =𝜅3/2
𝑙𝜀 (8.5)
Onde:
𝑙𝜀 = 𝑦𝐶𝑙∗(1 − 𝑒
−𝑅𝑒𝑦
𝐴𝜀 ) (8.6)
Os valores para ε também são ponderados, e as constantes presente nas
equações 8.3-8.6 são dadas por:
𝐶𝑙∗ = 𝜅𝐶𝜇
−3/4 𝐴𝜇 = 70 𝐴𝜀 = 2𝐶𝑙∗

88
8.2 VELOCIDADE INLET PARA O ESCOAMENTO COM CONTROLE DE FLUXO
OSCILATÓRIO PROGRAMADA EM C
#include "udf.h" #define PI 3.141592654 DEFINE_PROFILE(inlet_velocity, ft, var) { real flow_time; face_t f; /* indexador de face */ flow_time = CURRENT_TIME; /* macro do Fluent */ begin_f_loop(f,ft) /* macro do Fluent para loop */ { F_PROFILE(f,ft,var) = 26.6 * sin(277*PI*flow_time); } end_f_loop(f,ft); }
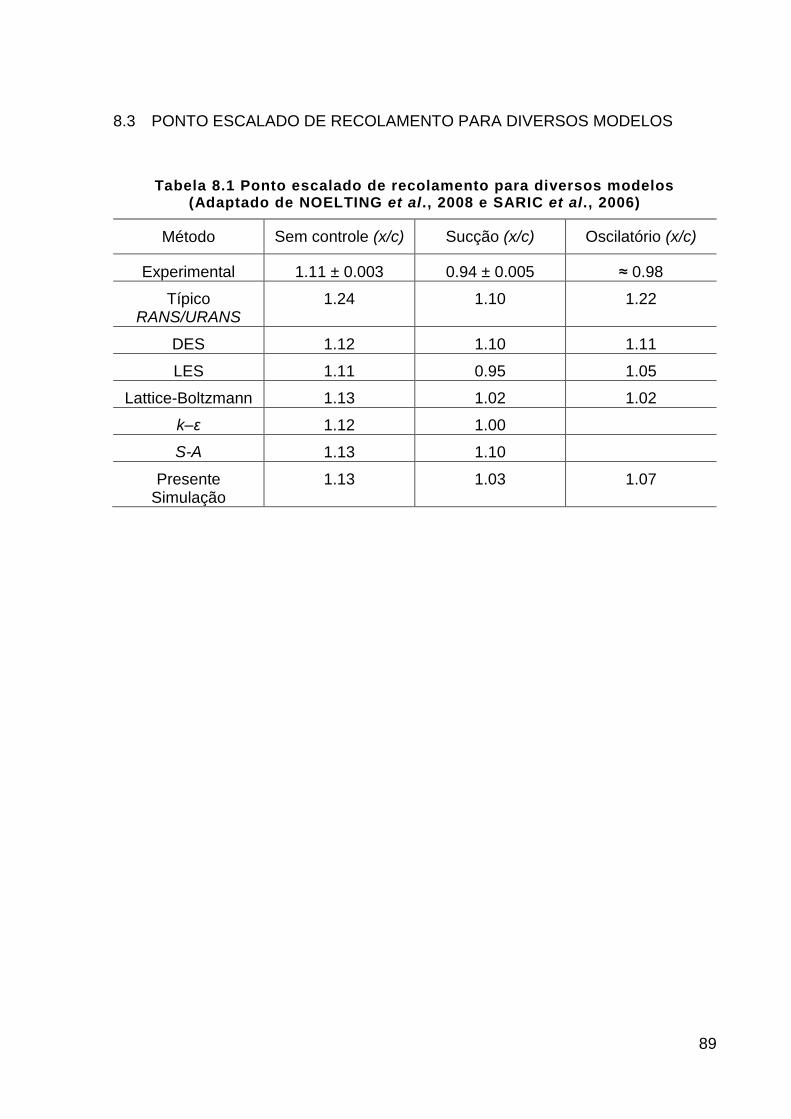
89
8.3 PONTO ESCALADO DE RECOLAMENTO PARA DIVERSOS MODELOS
Tabela 8.1 Ponto escalado de recolamento para diversos modelos (Adaptado de NOELTING et al., 2008 e SARIC et al., 2006)
Método Sem controle (x/c) Sucção (x/c) Oscilatório (x/c)
Experimental 1.11 ± 0.003 0.94 ± 0.005 ≈ 0.98
Típico RANS/URANS
1.24 1.10 1.22
DES 1.12 1.10 1.11
LES 1.11 0.95 1.05
Lattice-Boltzmann 1.13 1.02 1.02
k–ε 1.12 1.00
S-A 1.13 1.10
Presente Simulação
1.13 1.03 1.07


















