UNIVERSIDADE FEDERAL DO SANTO CENTRO …edsonh/Repositorio/Mecatrônica... · Entre os defeitos...
65
UNIVERSIDADE FEDERAL DO ESPÍRITO SANTO CENTRO TECNOLÓGICO DEPARTAMENTO DE ENGENHARIA ELÉTRICA PROJETO DE GRADUAÇÃO DESENVOLVIMENTO DE UM SISTEMA DE MONITORAMENTO DE MÁQUINAS DE INDUÇÃO TRIFÁSICAS VISANDO ASSIMETRIAS DE ROTOR EM GAIOLA TIAGO SILVA BARBOSA VITÓRIA – ES FEVEREIRO/2008
Transcript of UNIVERSIDADE FEDERAL DO SANTO CENTRO …edsonh/Repositorio/Mecatrônica... · Entre os defeitos...
UNIVERSIDADE FEDERAL DO ESPÍRITO SANTO CENTRO TECNOLÓGICO
DEPARTAMENTO DE ENGENHARIA ELÉTRICA PROJETO DE GRADUAÇÃO
DESENVOLVIMENTO DE UM SISTEMA DE MONITORAMENTO DE
MÁQUINAS DE INDUÇÃO TRIFÁSICAS VISANDO ASSIMETRIAS
DE ROTOR EM GAIOLA
TIAGO SILVA BARBOSA
VITÓRIA – ES FEVEREIRO/2008

TIAGO SILVA BARBOSA
DESENVOLVIMENTO DE UM SISTEMA DE MONITORAMENTO DE MÁQUINAS DE INDUÇÃO TRIFÁSICAS VISANDO ASSIMETRIAS DE ROTOR EM GAIOLA
Parte manuscrita do Projeto de Graduação do aluno Tiago Silva Barbosa, apresentado ao Departamento de Engenharia Elétrica do Centro Tecnológico da Universidade Federal do Espírito Santo, para obtenção do grau de Engenheiro Eletricista.
VITÓRIA – ES FEVEREIRO/2008
TIAGO SILVA BARBOSA
DESENVOLVIMENTO DE UM SISTEMA DE MONITORAMENTO DE MÁQUINAS DE INDUÇÃO TRIFÁSICAS VISANDO ASSIMETRIAS DE ROTOR EM GAIOLA
COMISSÃO ORGANIZADORA: Profa. Dra. Carla César Martins Cunha Orientadora
Prof. Dr. Domingos Sávio Lyrio Simonetti Examinador
Prof. Gilberto Costa Drumond Sousa, Ph.D. Examinador
VITÓRIA – ES FEVEREIRO/2008

i
DEDICATÓRIA
AO DEUS ONIPOTENTE, ONISCIENTE E ONIPRESENTE.
AO ANDRÉ, IRMÃO E AMIGO INSEPARÁVEL.

ii
AGRADECIMENTOS Agradeço imensamente a todas as pessoas que, de alguma forma, me apoiaram com pensamentos positivos e demonstrações de carinho, para a realização desse trabalho. Agradeço à minha orientadora Carla César Martins Cunha, pela sua disponibilidade, competência e paciência, durante a condução desse projeto. Agradeço a minha família, em geral, pelo apoio oferecido. Ao meu irmão gêmeo, André, à minha mãe, Maria Francisca, ao meu pai, Adilson, à minha irmã, Rubia, e seu esposo, Eduardo e à minha linda sobrinha, Alice. Agradeço a essa nova família que tanto alegra o meu cotidiano. À Comunidade de Vida e Aliança Água Viva, pelo tempo frutificante em que passamos unidos. Aos amigos da UFES, que serão lembrados pelas conquistas e realizações dos objetivos. A todos os amigos, próximos ou nem tanto, pelas demonstrações de afeto e apoio que tanto contribuem para a minha formação.

iii
LISTA DE FIGURAS Figura 2.1 ‐ Painel frontal do ambiente LabVIEW.
Figura 2.2 ‐ Lista de controladores e indicadores disponíveis no painel frontal. Figura 2.3 ‐ Diagrama de blocos do exemplo citado. Figura 2.4 ‐ Lista de ferramentas disponíveis para programação em LabVIEW. Figura 2.5 ‐ Lista de loops e estruturas disponíveis para programação. Figura 3.1 ‐ Respostas do Método do Vetor de Park, com referencial fixo no estator, para:
(a) rotor simétrico; (b) rotor com 1 barra quebrada; (c) Rotor com 4 barras quebradas.
Figura 3.2 ‐ Gráfico de saída do Método do Vetor de Park, com o referencial fixo no rotor,
para: (a) barras 1, 2, 3 e 4 quebradas; (b) barras 3, 4, 5 e 6 quebradas. Figura 3.3 ‐ Diagrama de blocos do Modelo em Tensão. Figura 3.4 ‐ Diagrama de blocos do Modelo em Corrente. Figura 3.5 ‐ Localização dos vetores espaciais do fluxo e densidade de corrente do rotor. Figura 3.6 ‐ Corrente em uma barra assimétrica e desvio de torque versus ângulo do vetor
espacial fluxo de rotor. Figura 3.7 ‐ Estrutura em corte ilustrando os setores de avaliação da gaiola do rotor. Figura 4.1 ‐ Diagrama de blocos utilizado na substituição dos caracteres escolhidos.
Figura 4.2 ‐ Painel frontal do VI usado para a substituição do separador decimal. Figura 4.3 ‐ Loop for utilizado pelos métodos de detecção. Figura 4.4 ‐ Painel frontal do Sistema de Monitoramento de Motores de Indução. Figura 4.5 ‐ Diagramas de blocos do Sistema de Monitoramento.

iv
Figura 4.6 ‐ Etapa relacionada ao método MCSA. Figura 4.7 ‐ Espectro de freqüências das correntes de estator, com as tensões de
alimentação equilibradas, para os casos de: (a) gaiola simétrica, (b) gaiola com a barra #15 com defeito de relação 20, (c) gaiola com a barra #10 com defeito de relação 50, (d) gaiola com a barra #20 quebrada, (e) gaiola com as barras #20, #21, #22 e #23 quebradas.
Figura 4.8 ‐ Espectro de freqüências das correntes de estator, com tensões de
alimentação desequilibradas, com 0,1 pu de seqüência negativa, para o caso de gaiola com as barras #10, #11, #12, #13 quebradas. (a) Gráfico ilustrando a presença dos harmônicos. (b) Zoom realizado próximo à freqüência de 180Hz.
Figura 4.9 ‐ Parte do código referente ao Método do Vetor de Park. Figura 4.10 ‐ Gráficos do Método do Vetor de Park, com as correntes referenciadas no
estator e as tensões de alimentação equilibradas, para os casos de (a) máquina simétrica, (b) rotor com barra #10 com relação de defeito de 50, (c) rotor com barra #8 quebrada, (d) rotor com barras #8, #9, #10, #11 quebradas e (e) rotor com as barras #20, #21, #22, #23 quebradas.
Figura 4.11 ‐ Gráficos do Método do Vetor de Park, com as correntes referenciadas no
estator e as tensões de alimentação desequilibradas, com 0,1 pu de seqüência negativa, para os casos de (a) rotor com as barras #10, #11, #12 e #13 quebradas e (b) rotor simétrico.
Figura 4.12 ‐ Etapa de leitura e conformação dos dados no diagrama de blocos do Método
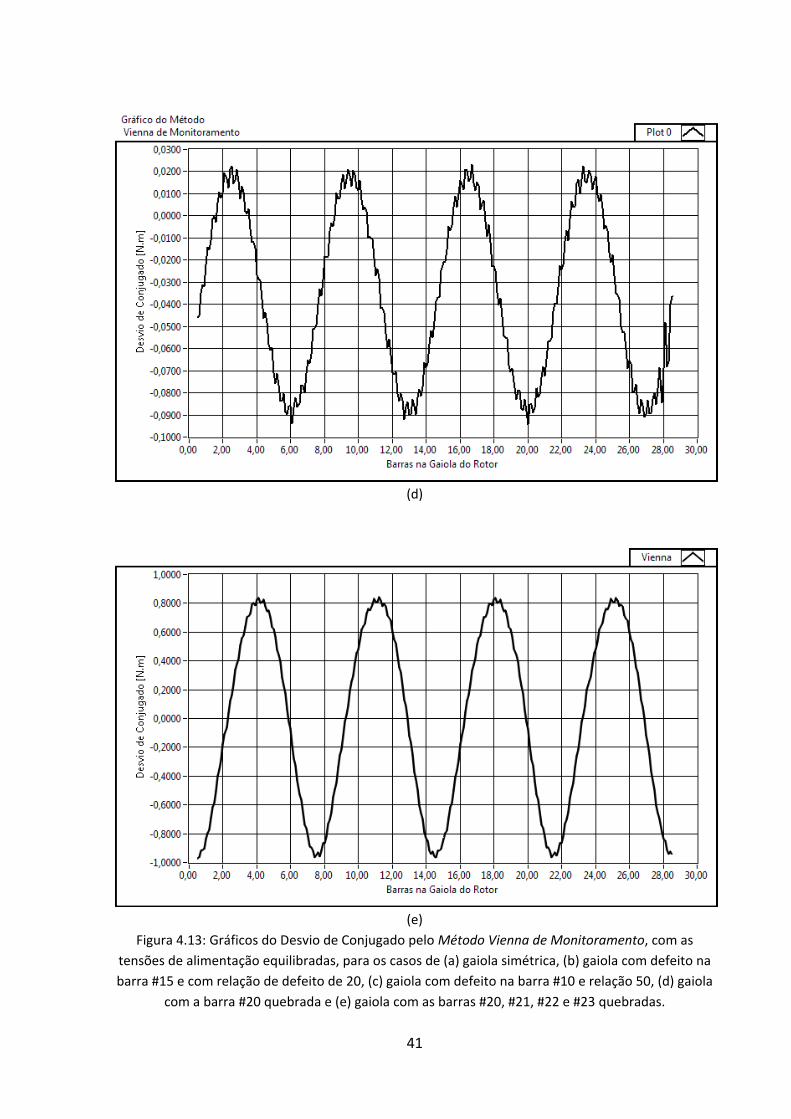
Vienna. Figura 4.13 ‐ Gráficos do Desvio de Conjugado pelo Método Vienna de Monitoramento,
com as tensões de alimentação equilibradas, para os casos de (a) gaiola simétrica, (b) gaiola com defeito na barra #15 e com relação de defeito de 20, (c) gaiola com defeito na barra #10 e relação 50, (d) gaiola com a barra #20 quebrada e (e) gaiola com as barras #20, #21, #22 e #23 quebradas.
Figura 4.14 ‐ Gráficos do Desvio de Conjugado pelo Método Vienna de Monitoramento,
com as tensões de alimentação desequilibradas, para o caso de gaiola com as barras #10, #11, #12 e #13 quebradas.

v
Figura 5.1 ‐ Operação do Sistema para os casos de: (a) gaiola simétrica e tensões de alimentação equilibradas, (b) gaiola simétrica e tensões de alimentação desequilibradas, (c) gaiola com as barras #8, #9, #10 e #11 quebradas e tensões de alimentação equilibradas e (d) gaiola com as barras #10, #11, #12 e #13 quebradas com tensões de alimentação desequilibradas.

vi
LISTA DE TABELAS Tabela 2.1 ‐ Cores representativas dos tipos de variáveis do LabVIEW. Tabela 4.1 ‐ Valores dos espessamentos do Método do Vetor de Park para casos de
assimetrias de rotor.

vii
SUMÁRIO
DEDICATÓRIA .................................................................................................. i
AGRADECIMENTOS ......................................................................................... ii
LISTA DE FIGURAS ......................................................................................... iii
LISTA DE TABELAS .......................................................................................... vi
SUMÁRIO ...................................................................................................... vii
RESUMO .........................................................................................................ix
1 ‐ INTRODUÇÃO ............................................................................................ 1
2 ‐ O SOFTWARE LABVIEW .............................................................................. 3
2.1 – CONSIDERAÇÕES INICIAIS........................................................................................ 3
2.2 – O PAINEL FRONTAL ................................................................................................. 4
2.3 – O DIAGRAMA DE BLOCOS ........................................................................................ 5
2.4 – A PROGRAMAÇÃO EM LABVIEW ............................................................................. 5
2.5 – CONSIDERAÇÕES FINAIS .......................................................................................... 8
3 ‐ OS MÉTODOS DE DETECÇÃO DE ASSIMETRIAS ........................................... 9
3.1 – CONSIDERAÇÕES INICIAIS........................................................................................ 9
3.2 – O MÉTODO DE ANÁLISE ESPECTRAL ‐ MCSA ............................................................ 9
3.2.1 – A TRANSFORMADA DE FOURIER............................................................................. 9
3.2.2 – O MÉTODO DE DETECÇÃO DE FALHAS ................................................................. 11
3.3 – ANÁLISE DE PADRÕES DO VETOR DE PARK DA CORRENTE DE ESTATOR ................. 12
3.3.1 – O MÉTODO DE DETECÇÃO PELO VETOR DE PARK ................................................ 12
3.4 – O MÉTODO VIENNA DE MONITORAMENTO – VMM .............................................. 15
3.4.1 – MODELO EM TENSÃO ........................................................................................... 15
3.4.2 – MODELO EM CORRENTE ....................................................................................... 17

viii
3.4.3 – O MÉTODO DE DETECÇÃO .................................................................................... 18
4 ‐ O SISTEMA DE MONITORAMENTO DE MOTORES DE INDUÇÃO COM ROTOR EM GAIOLA ................................................................................................... 20
4.1 – CONSIDERAÇÕES INICIAIS...................................................................................... 20
4.2 – DESENVOLVIMENTO DO SISTEMA ......................................................................... 20
4.2.1 – MÉTODO MCSA ..................................................................................................... 26
4.2.2 – MÉTODO DO VETOR DE PARK ............................................................................... 31
4.2.3 – MÉTODO VIENNA .................................................................................................. 37
5 ‐ CONCLUSÕES E TRABALHOS FUTUROS ..................................................... 43
REFERÊNCIAS BIBLIOGRÁFICAS ..................................................................... 46
ANEXO A ‐ CÓDIGO EM “C” PARA IMPLEMENTAÇÃO DO MÉTODO VIENNA DE MONITORAMENTO ....................................................................................... 48
ix
RESUMO É sabido que os motores de indução trifásicos com rotor em gaiola são largamente utilizados no ambiente industrial pela sua robustez e economia. Vários são os defeitos encontrados nas barras das gaiolas desses motores e/ou em seus anéis de curto‐circuito conduzindo‐os a uma situação assimétrica de operação. Diante disso, e com um objetivo claro de se otimizar os custos de manutenção, têm‐se desenvolvido várias metodologias eficientes de monitoramento de falhas, sendo estas sensíveis e cada vez mais imunes a ruído. Dentre esses métodos, os que serão enfocados nesse trabalho são: Análise Espectral da Corrente de Estator, Análise de Padrões do Vetor de Park e o Método Vienna de Monitoramento. Assim, será desenvolvido um Sistema de Monitoramento de Máquinas de Indução Trifásicas com Rotor em Gaiola no ambiente de programação LabVIEW. A tela principal deste sistema irá apresentar as respostas gráficas de cada método citado. Com esta ferramenta de suporte, o profissional da área será capaz de detectar essas assimetrias, utilizando‐se de um embasamento teórico descrito por cada um desses métodos. Finalmente, serão avaliadas algumas condições assimétricas de rotor, através de simulações computacionais, com a finalidade de testar e comprovar a eficácia do Sistema de Monitoramento em uma situação real.
1
Capítulo 1
INTRODUÇÃO As máquinas elétricas rotativas têm desempenhado um papel muito importante no ambiente industrial da atualidade. Funcionando incessantemente em diversos processos, elas são gradativamente mais exigidas nos quesitos confiabilidade, economia, segurança, robustez, entre outros. Assim, a busca por novas tecnologias de detecção de falhas e monitoramento contínuo de máquinas tem motivado pesquisadores e cientistas da área de Engenharia Elétrica. Muitos modelos de máquinas e métodos de detecção foram desenvolvidos para satisfazer a essa demanda. Entretanto, ainda existe muito a se conhecer. Entre os defeitos mais comuns encontrados em máquinas de indução com rotor em gaiola, destacam‐se as falhas nos rolamentos (cerca de 40% das falhas), falhas nos enrolamentos do estator (38%), assimetrias de rotor, tais como, quebra ou variação da impedância de barras ou segmentos de anéis de curto circuito (10%) e outros tipos de falhas, como por exemplo, excentricidade no eixo do rotor (que correspondem a 12% do total de falhas encontrados em máquinas de indução) [1]. As falhas no rotor acontecem, na maioria das vezes, em condições de sobrecarga, o que inferem esforços térmicos, bem como em situações de vibrações excessivas e/ou excentricidade, havendo esforços magnéticos. No local da falha de rotor pode ocorrer a não circulação de corrente (barra quebrada), ou ainda, um sobreaquecimento (barra trincada). Esses defeitos produzidos nas barras de uma gaiola de rotor, ou em anéis de curto circuito, ocasionam uma assimetria de operação, gerando correntes desbalanceadas nas barras da gaiola do rotor, distorção nas correntes de estator, conjugado pulsante, aumento das perdas e redução de conjugado médio, além de excessivo aquecimento [2]. Em virtude disso, faz‐se necessário o conhecimento mais aprofundado do comportamento do motor operando nessas situações, além da elaboração de métodos de detecção de falhas cada vez mais sensíveis e imunes a ruídos. Dentre os métodos de detecção de defeitos conhecidos pela comunidade científica, podem‐se citar: Análise de Vibração Mecânica, Análise Espectral de Corrente de Estator, Análise de Padrões do Vetor de Park, Método Vienna de Monitoramento, Análise Termográfica das Estruturas do Motor, Métodos baseados em Redes Neurais, entre outros.

2
Dessa maneira, a proposta de trabalho a seguir é realizar a construção de um Sistema de Monitoramento de Defeitos em um ambiente de programação bastante conhecido na Engenharia Elétrica – o LabVIEW – utilizando para isso dados obtidos a partir de um modelo já validado que simula um motor de indução com assimetrias de rotor. Dessa forma, a sua tela de exibição deverá conter, basicamente, o endereço do arquivo de simulação, bem como os gráficos característicos de três métodos de detecção, a saber, Análise Espectral da Corrente de Estator, Análise de Padrões do Vetor de Park e o Método Vienna de Monitoramento. Essa forma de abordagem do problema se revela em uma alternativa eficiente de trabalho, uma vez que recursos são economizados para a construção de uma bancada de testes física. Além disso, é possível realizar ajustes de código sem a interferência externa de ruídos e/ou outros problemas inerentes ao processo, proporcionando, assim, uma primeira análise do problema. A estrutura do texto é composta de cinco capítulos que explicam, com detalhes, as etapas de elaboração do Sistema de Monitoramento proposto. No Capítulo 2, são exibidos alguns tópicos relacionados à estrutura de programação em LabVIEW, assim como alguns elementos importantes para a otimização de códigos escritos nesse ambiente. No Capítulo 3 os métodos de detecção de falhas são explicitados, levando em consideração as entradas e saídas relativas a cada um deles. No Capítulo 4 é feita uma abordagem acerca da construção do Sistema de Monitoramento, mostrando as etapas de desenvolvimento de cada método de detecção. Finalmente, no Capítulo 5, são apresentados os resultados e algumas propostas de trabalho relacionadas ao assunto abordado nesse projeto.

3
Capítulo 2
O SOFTWARE LABVIEW 2.1 – CONSIDERAÇÕES INICIAIS Os softwares relacionados à utilização de conceitos da engenharia têm evoluído com bastante velocidade na atualidade. Eles são empregados na aquisição, conformação e armazenamento de alguns dados de campo, seja em projeto de sistemas de engenharia em geral ou em cálculos extremamente complexos. Nesse ramo de atuação encontram‐se a National Instruments™, a Mathworks, entre outras, com pacotes de softwares para engenharia bastante úteis. No projeto proposto foi utilizado o software LabVIEW, devido ao seu ambiente de programação facilitado, bem como a sua excelente performance com equipamentos de acesso a portas de entrada e saída de computadores. Além disso, o LabVIEW é compatível com outros softwares de engenharia e linguagens, o que propicia uma melhor familiarização do ambiente. O LabVIEW é descrito como um software de programação intuitiva baseada em blocos funcionais. É possível inferir um código de programação nessa plataforma com os mesmos conceitos da programação tradicional, com a diferença de que ela é realizada através de diagrama de blocos. Seu formato de programação é bastante simplificado, relativamente a outros softwares de programação estruturada, o que reduz drasticamente o tempo de desenvolvimento, bem como a correção de alguns trechos contendo falhas de código. O software é usado no projeto e simulação de sistemas complexos em geral nas diversas áreas da Engenharia, tais como: eletrônica, mecânica, instrumentação, computação, automação, etc. Os programas desenvolvidos em LabVIEW são chamados de VI’s (virtual instrumentations) devido à sua forma de operação que imita instrumentos de aquisição, manipulação e amostragem dos dados físicos, tais como, tensão elétrica, corrente elétrica, entre outras [3]. Nas seções seguintes serão apresentados alguns itens básicos para a construção de um VI no ambiente LabVIEW.
4
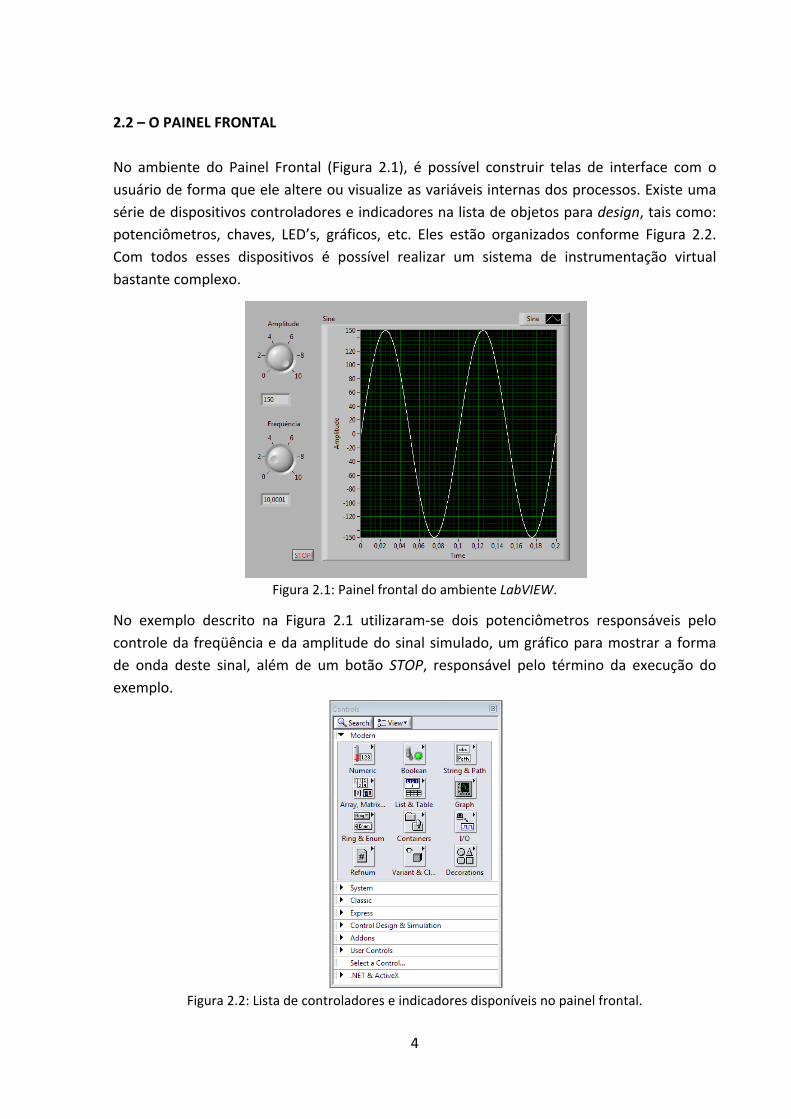
2.2 – O PAINEL FRONTAL No ambiente do Painel Frontal (Figura 2.1), é possível construir telas de interface com o usuário de forma que ele altere ou visualize as variáveis internas dos processos. Existe uma série de dispositivos controladores e indicadores na lista de objetos para design, tais como: potenciômetros, chaves, LED’s, gráficos, etc. Eles estão organizados conforme Figura 2.2. Com todos esses dispositivos é possível realizar um sistema de instrumentação virtual bastante complexo.
Figura 2.1: Painel frontal do ambiente LabVIEW.
No exemplo descrito na Figura 2.1 utilizaram‐se dois potenciômetros responsáveis pelo controle da freqüência e da amplitude do sinal simulado, um gráfico para mostrar a forma de onda deste sinal, além de um botão STOP, responsável pelo término da execução do exemplo.
Figura 2.2: Lista de controladores e indicadores disponíveis no painel frontal.
5
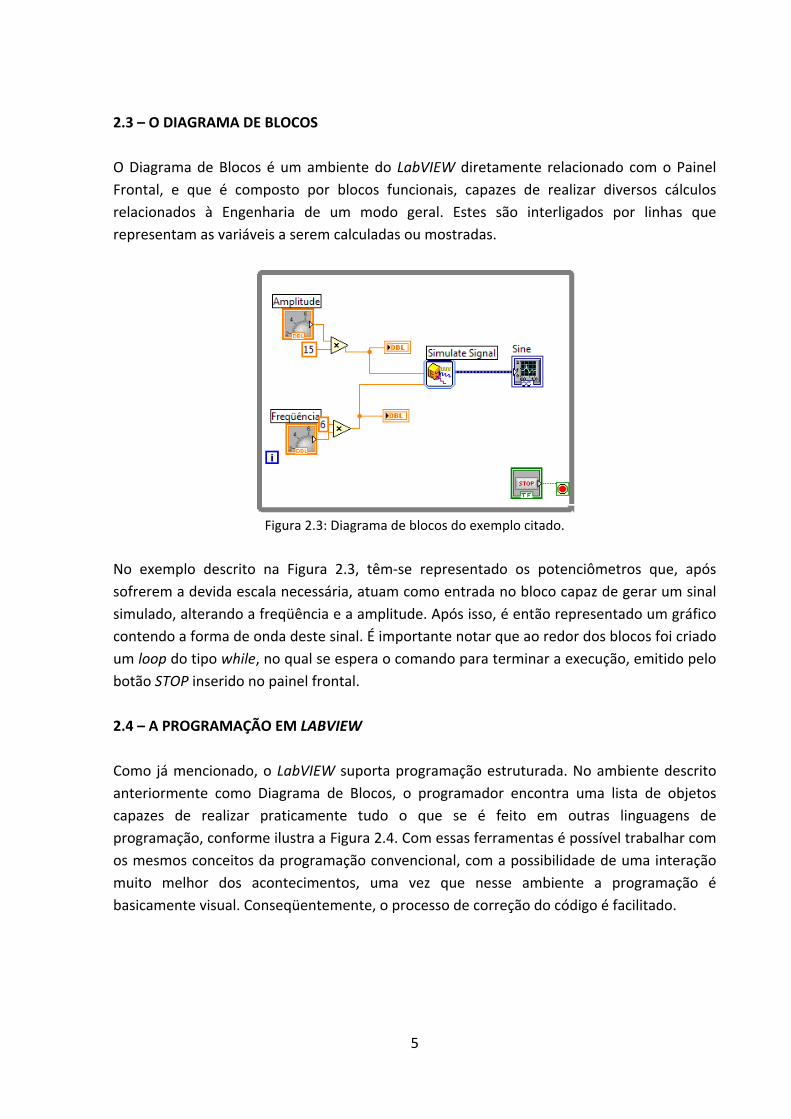
2.3 – O DIAGRAMA DE BLOCOS O Diagrama de Blocos é um ambiente do LabVIEW diretamente relacionado com o Painel Frontal, e que é composto por blocos funcionais, capazes de realizar diversos cálculos relacionados à Engenharia de um modo geral. Estes são interligados por linhas que representam as variáveis a serem calculadas ou mostradas.
Figura 2.3: Diagrama de blocos do exemplo citado.
No exemplo descrito na Figura 2.3, têm‐se representado os potenciômetros que, após sofrerem a devida escala necessária, atuam como entrada no bloco capaz de gerar um sinal simulado, alterando a freqüência e a amplitude. Após isso, é então representado um gráfico contendo a forma de onda deste sinal. É importante notar que ao redor dos blocos foi criado um loop do tipo while, no qual se espera o comando para terminar a execução, emitido pelo botão STOP inserido no painel frontal. 2.4 – A PROGRAMAÇÃO EM LABVIEW Como já mencionado, o LabVIEW suporta programação estruturada. No ambiente descrito anteriormente como Diagrama de Blocos, o programador encontra uma lista de objetos capazes de realizar praticamente tudo o que se é feito em outras linguagens de programação, conforme ilustra a Figura 2.4. Com essas ferramentas é possível trabalhar com os mesmos conceitos da programação convencional, com a possibilidade de uma interação muito melhor dos acontecimentos, uma vez que nesse ambiente a programação é basicamente visual. Conseqüentemente, o processo de correção do código é facilitado.

6
Figura 2.4: Lista de ferramentas disponíveis para programação em LabVIEW.
Em toda linguagem de programação conhecida se faz necessário o conhecimento e adequação em cada caso dos tipos das variáveis usadas no programa. Em LabVIEW, há uma diferenciação visual feita através das cores das linhas que ligam os blocos e dos seus traçados, conforme ilustrado na Tabela 2.1.
Tabela 2.1: Cores representativas dos tipos de variáveis do LabVIEW.
Tipo CorInteiro AzulPonto Flutuante LaranjaString RosaBooleano Verde
Nesse ambiente de programação existe também um novo tipo de variável a ser identificado: o Tipo de Dado Dinâmico ou DDT (do inglês Dynamic Data Type). Esse tipo é largamente usado em funções expressas dessa plataforma, as quais são extremamente simples em suas conexões e configurações. É interessante notar que esse tipo pode ser convertido de vários outros tipos conhecidos, tais como: números em inteiros, ponto flutuante ou booleano,

7
assim como vetores ou clusters desses mesmos tipos. Para isso é preciso uma função denominada From DDT ou To DDT, dependendo da ocasião na qual ela se aplica. Em LabVIEW, a estrutura de execução dos VI’s é baseada no fluxo de dados internos, onde as funções aguardam até que todas as suas entradas estejam presentes para então executar o código, para o qual foram designadas. Após isso, elas liberam os dados calculados ou conformados em suas respectivas saídas. É possível também a criação de Sub VI’s com o intuito de modularizar o código de programação. Para isso, é preciso identificar as saídas e entradas dessa Sub VI e editar um ícone que melhor se relacione com o que ela executa. Isso evita que a tela de programação seja “poluída” com itens desnecessários à compreensão do código. Da mesma maneira em que loops e estruturas são concebidos em outras linguagens de programação, elas podem ser utilizadas no ambiente LabVIEW. Estão disponíveis para o programador: os loops For, While; as estruturas Case e Sequence; e por último, os Formula Nodes, estruturas nas quais é possível inferir um código de programação baseado na linguagem C ou em Math Script, linguagem de programação do software Matlab.
Figura 2.5: Lista de loops e estruturas disponíveis para programação.
Dessa forma, o LabVIEW se mostra como um plataforma de desenvolvimento bastante completo para as diversas áreas da engenharia, sendo possível inferir códigos complexos com uma resposta equivalente a de outras linguagens de programação.
8
2.5 – CONSIDERAÇÕES FINAIS Conforme mencionado anteriormente, o ambiente descrito pelo LabVIEW é capaz de desenvolver aplicações complexas nas diversas áreas da Engenharia. Ao longo de 20 anos de história ele vem conquistando gradativamente clientes de sucesso, tais como Nasa e Microsoft, devido ao seu alto poder de processamento e solução de problemas. De acordo com as necessidades do projeto proposto, foi desenvolvida uma tela de monitoramento de algumas variáveis para uma melhor visualização do problema estudado. Para isso, foram utilizados vários dos elementos disponíveis para programação em LabVIEW, tais como: loops while, for, blocos de leitura de arquivos, blocos que executam códigos escritos, entre outros. Com estes elementos foi possível a realização de um ambiente capaz de atender ao problema proposto inicialmente.
9
Capítulo 3
OS MÉTODOS DE DETECÇÃO DE ASSIMETRIAS 3.1 – CONSIDERAÇÕES INICIAIS Atualmente, a manutenção preditiva tem se destacado no cenário industrial como uma boa técnica preventiva de falhas. Através de inspeção visual, ou de coleta e processamento de dados de campo, é possível obter estimativas quanto a uma parada futura, bem como avaliações em relação ao estado físico de equipamentos utilizados na indústria. Com base nisso, vários pesquisadores estudam os diferentes comportamentos de máquinas de indução defeituosas para se obter um comparativo com máquinas simétricas (sadias). Dessa forma, alguns trabalhos foram divulgados com modelos de máquinas de indução com assimetrias de rotor, e que apresentam boas respostas em relação ao modelo dinâmico clássico, como em [4], por exemplo, onde é proposto um modelo baseado no Modelo Dinâmico Vetorial, com as várias inserções de assimetrias de rotor. Esse modelo foi devidamente validado em [4, 5] e contribuirá para a simulação do sistema proposto nesse trabalho. Conforme dito anteriormente, vários são os métodos para a detecção de assimetrias de rotor conhecidos pela comunidade científica. Os que serão utilizados nesse trabalho são: o Método de Análise Espectral [6, 7]; a Análise de Padrões de Park da Corrente de Estator [8]; e o Método Vienna de Monitoramento [9, 10]. 3.2 – O MÉTODO DE ANÁLISE ESPECTRAL ‐ MCSA Para o método de análise espectral dos padrões da corrente de estator em um motor de indução com rotor em gaiola, faz‐se necessário um estudo mais aprofundado sobre a Transformada de Fourier e seus parâmetros de ajuste, bem como os seus resultados, apresentados a seguir. 3.2.1 – A TRANSFORMADA DE FOURIER A Transformada de Fourier (FT) é uma técnica que foi desenvolvida para que, conhecida a descrição de um sinal no domínio do tempo, também seja conhecida a sua descrição no domínio da freqüência. Uma característica predominante está no fato de sua operação ser baseada em funções exponenciais de números complexos.

10
Conforme descrito em [11], teoricamente, uma função periódica possui uma transformada de Fourier descrita por uma função impulso. Para o caso estudado, a função periódica no tempo que descreve a corrente no estator, possui componentes espectrais em todas as freqüências, porém com uma fundamental bem definida, o que caracteriza um caso real. É possível também fazer análise espectral em sinais discretos no tempo [12]. Para isso, faz‐se o uso de uma ferramenta baseada na transformada de Fourier, a chamada Transformada Discreta de Fourier (DFT). Alguns parâmetros devem ser conhecidos e bem definidos nessa análise, tais como:
• fs – Freqüência de amostragem do sinal;
• ΔT – Intervalo entre amostras no domínio do tempo;
• Δf – Intervalo entre amostras no domínio da freqüência;
• N – Número de amostras;
• T – Período de tempo total de amostragem. Relacionando‐se as grandezas, tem‐se:
NT
T =Δ (3.1)
Tfs Δ=
1 (3.2)
Além disso, o incremento de freqüência é definido como:
Tf
1=Δ (3.3)
Dessa forma, podem‐se obter alguns dos parâmetros para a amostragem dos sinais estudados. Em uma amostra contendo 400.000 pontos, em um intervalo de 4 segundos, o
intervalo de tempo entre as amostras (ΔT) é de 10‐5 segundos. Assim, tem‐se também que o
intervalo de freqüências (Δf) é de 0,25 Hz. Se o cálculo da Transformada Discreta de Fourier for realizado em um computador, ele pode ser acelerado utilizando a Transformada Rápida de Fourier (FFT), não apresentando quaisquer diferenças em relação aos cálculos apresentados anteriormente. Uma observação a ser feita acerca da FFT, é que, em alguns softwares que a utilizam, existe uma restrição a ser feita: o sinal a ser amostrado deve conter um número de amostras múltiplo de dois. No software LabVIEW, utilizado nesse projeto, o número de amostras não necessita dessa restrição.

11
3.2.2 – O MÉTODO DE DETECÇÃO DE FALHAS O método de detecção de falhas, chamado de Análise de Padrões da Corrente do Motor (do inglês Motor Current Signature Analysis – MCSA), é capaz de verificar assimetrias de rotor pela análise espectral da corrente de estator. As anomalias de rotor são percebidas na corrente de estator e dessa forma é possível estimar as condições reais de operação do motor, sem parada para inspeção ou acesso à parte interna da máquina. Assimetrias de rotor são equivalentes à adição de componentes espectrais conhecidas às grandezas de estator, denominadas bandas laterais. A trinca ou quebra de uma barra de rotor ou segmento de anel de curto circuito altera o valor da corrente que circula nesses locais, influenciando no espectro de freqüências das correntes e/ou tensões de estator, para o caso de inversores com controle de conjugado [1]. Essas componentes espectrais distam da freqüência fundamental de alimentação de 2sfe, onde s é o escorregamento e fe é a freqüência fundamental. Além disso, a componente do lado esquerdo é diretamente originada pelo efeito destrutivo na barra, enquanto a componente do lado direito é causada pelo ripple na velocidade [6,13]. Através de uma transformada rápida de Fourier (Fast Fourier Transform – FFT) é possível obter um gráfico contendo o espectro de freqüências das correntes do motor. O cálculo da freqüência das bandas laterais, conforme [7], pode ser descrito como:
( ) K,321 ,21 ,, kksff ebandas =∴±= (3.4)
onde: fe – Freqüência fundamental de alimentação do motor; s – Escorregamento da máquina. Dessa forma, com a operação de um motor a 1755 rpm – velocidade do motor de referência do projeto – implica em:
310251800
17551800 −⋅=−
=s
Logo,
Hzsfe 5,1601025 3 =⋅⋅= −
Assim, de acordo com (3.4), para o caso proposto deve‐se monitorar as componentes espectrais que distam lateralmente de múltiplos inteiros de duas vezes a freqüência de escorregamento da freqüência fundamental de 60 Hz. Para o caso em questão, 3Hz, 6Hz,... , ou seja, deve‐se monitorar as amplitudes das componentes espectrais em 54Hz, 57Hz e 63Hz, 66Hz.

12
É importante notar ainda que a análise pode ser prejudicada se a carga mecânica ligada ao eixo do motor for pulsante. Isso causa o aparecimento de componentes espectrais próximas às bandas laterais, podendo assim ser confundidas com os defeitos de rotor [14]. 3.3 – ANÁLISE DE PADRÕES DO VETOR DE PARK DA CORRENTE DE ESTATOR A técnica denominada Análise de Padrões do Vetor de Park da Corrente de Estator é baseada em uma inspeção visual realizada sobre um gráfico do universo dos números complexos, tendo como eixos as correntes calculadas a partir de dados do motor [8]. Embora essa técnica seja imprecisa e incapaz de apontar qual o tipo de falha aconteceu, ela se mostra bastante aplicável a ambientes industriais, devido ao seu baixíssimo processamento requerido (se comparado aos outros métodos utilizados nesse projeto), sua execução bastante simplificada, além de uma boa resposta quanto a possíveis defeitos em uma máquina de indução. Além disso, esse método permite, com um diagnóstico eficiente, evitar que uma barra trincada evolua para danos mais sérios na máquina. 3.3.1 – O MÉTODO DE DETECÇÃO PELO VETOR DE PARK O Método da Abordadem pelo Vetor de Park (Park’s Vector Aproach) utiliza como dados de entrada as correntes de estator de uma máquina de indução. É feita então uma transformação, com o referencial fixo no estator, segundo as equações (3.5) e (3.6).
( )⎥⎦⎤
⎢⎣⎡ +−⎟⎟⎠
⎞⎜⎜⎝
⎛=⎟
⎠⎞
⎜⎝⎛−⎟
⎠⎞
⎜⎝⎛−⎟⎟
⎠
⎞⎜⎜⎝
⎛= cbacba
sd iiiiiii
21
36
61
61
32
(3.5)
( )cbcbsq iiiii −=⎟
⎠⎞
⎜⎝⎛−⎟
⎠⎞
⎜⎝⎛=
22
2
1
2
1 (3.6)
No caso de uma máquina ideal, considerando as correntes de estator senoidais, com amplitudes idênticas e defasadas de 120o cada uma, tem‐se (3.7) e (3.8).
( )tsenii psd ω⎟⎟
⎠
⎞⎜⎜⎝
⎛=
26
(3.7)
⎟⎠⎞
⎜⎝⎛ −⎟⎟
⎠
⎞⎜⎜⎝
⎛=
226 πωtsenii p
sq (3.8)

13
onde: ids – Corrente de eixo direto, no referencial estatórico (eixo x);
iqs – Corrente de eixo em quadratura, no referencial estatórico (eixo y);
ia, ib, ic – Correntes de estator nas fases a, b, c, respectivamente; ip – Corrente de pico da fase a; ω – Velocidade angular relativa à freqüência fundamental de 60Hz; t – Tempo. Para o caso ideal, verifica‐se que a corrente de eixo direto está adiantada em 90o da corrente do eixo em quadratura, ambas com mesma amplitude. Dessa forma, observa‐se que nesse caso (máquina simétrica, e com tensões de alimentação equilibradas), a resposta do método deve ser um circulo de raio igual à amplitude dessas correntes. O motor de indução de testes analisado em [9] é trifásico, 50Hz, 4 pólos, 3kW, e com diversos rotores idênticos, porém apresentando diversos tipos de defeito, para cada situação a ser analisada. A Figura 3.1, representa as saídas produzidas pelo Método do Vetor de Park.
(a) (b)

14
(c)
Figura 3.1: Respostas do Método do Vetor de Park, com referencial fixo no estator, para: (a) rotor simétrico; (b) rotor com 1 barra quebrada; (c) Rotor com 4 barras quebradas.
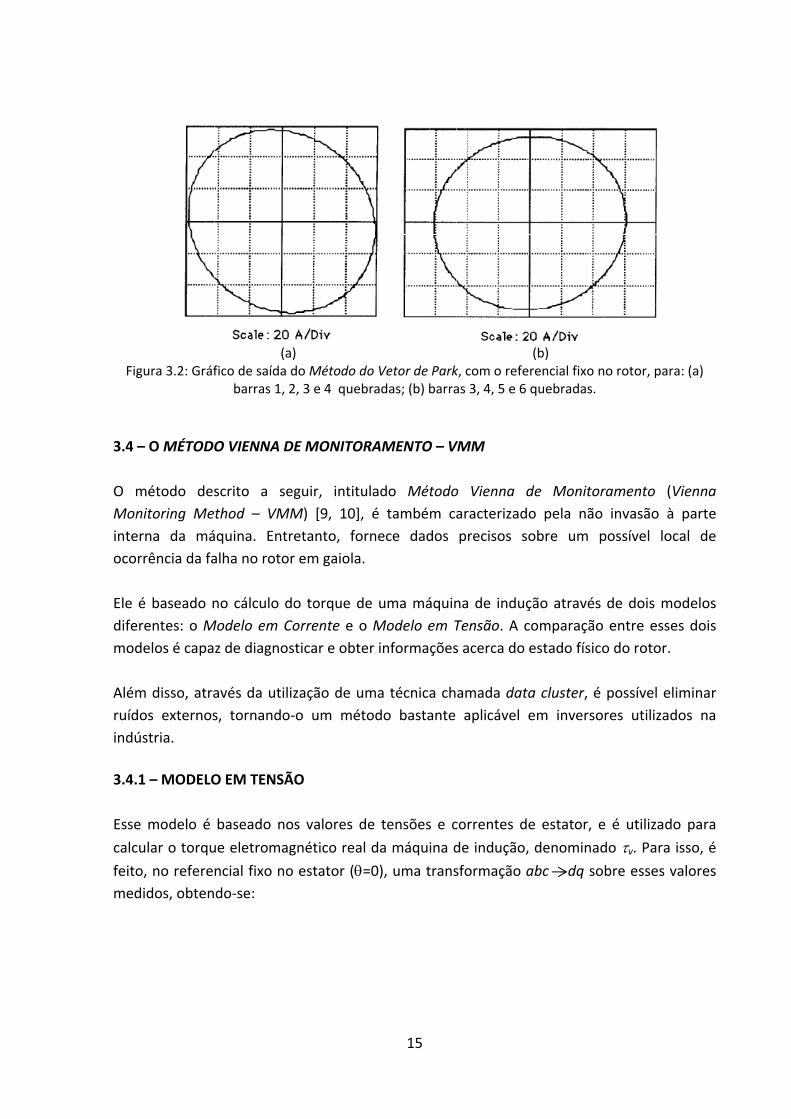
Observa‐se claramente que um defeito no rotor interfere diretamente na espessura do traçado da circunferência centrada no zero, de modo que, quanto mais grossa, maior a severidade do problema. Entretanto, após certo número de barras, essa severidade não se mantém linear, com o ponto de inflexão relacionado com o número de barras do rotor e o número de pólos da máquina [8]. Além disso, pode‐se ainda calcular as correntes de Park, com referencial fixo no rotor, conforme (3.9) e (3.10). Nesse caso, outra deformidade surge no gráfico: o círculo passa a sofrer um “achatamento”, de modo que a severidade do defeito no rotor contribui para o aumento da excentricidade da elipse formada. A posição angular do seu maior eixo aponta para a posição angular das barras quebradas, também dando uma idéia sobre a localização do defeito. O gráfico da Figura 3.2 foi gerado a partir da simulação de um motor de indução trifásico, 4 pólos, 28 barras na gaiola [8].
sd
jrd iei r ⋅= θ
(3.9)
sq
jrq iei r ⋅= θ
(3.10)
onde: idr – Corrente de eixo direto, no referencial rotórico;
ids – Corrente de eixo direto, no referencial estatórico;
iqr – Corrente de eixo em quadratura, no referencial rotórico;
iqs – Corrente de eixo em quadratura, no referencial estatórico;
θr – Posição angular instantânea do rotor.
15
(a) (b)
Figura 3.2: Gráfico de saída do Método do Vetor de Park, com o referencial fixo no rotor, para: (a) barras 1, 2, 3 e 4 quebradas; (b) barras 3, 4, 5 e 6 quebradas.
3.4 – O MÉTODO VIENNA DE MONITORAMENTO – VMM O método descrito a seguir, intitulado Método Vienna de Monitoramento (Vienna Monitoring Method – VMM) [9, 10], é também caracterizado pela não invasão à parte interna da máquina. Entretanto, fornece dados precisos sobre um possível local de ocorrência da falha no rotor em gaiola. Ele é baseado no cálculo do torque de uma máquina de indução através de dois modelos diferentes: o Modelo em Corrente e o Modelo em Tensão. A comparação entre esses dois modelos é capaz de diagnosticar e obter informações acerca do estado físico do rotor. Além disso, através da utilização de uma técnica chamada data cluster, é possível eliminar ruídos externos, tornando‐o um método bastante aplicável em inversores utilizados na indústria. 3.4.1 – MODELO EM TENSÃO Esse modelo é baseado nos valores de tensões e correntes de estator, e é utilizado para
calcular o torque eletromagnético real da máquina de indução, denominado τv. Para isso, é feito, no referencial fixo no estator (θ=0), uma transformação abc dq sobre esses valores medidos, obtendo‐se:

16
( ) ascsbsasjs
qs vvvvev =⎥⎦⎤
⎢⎣⎡ +−⎟⎠⎞
⎜⎝⎛⋅=
21
32θ
(3.11)
( ) ( )csbscsbsjs
ds vvvvev −−=⎥⎦
⎤⎢⎣
⎡−⎟
⎠⎞
⎜⎝⎛−⋅=
3
123
32θ
(3.12)
( ) ascsbsasjs
qs iiiiei =⎥⎦⎤
⎢⎣⎡ +−⎟⎠⎞
⎜⎝⎛⋅=
21
32θ
(3.13)
( ) ( )csbscsbsjs
ds iiiiei −−=⎥⎦
⎤⎢⎣
⎡−⎟
⎠⎞
⎜⎝⎛−⋅=
3
123
32θ
(3.14)
Para o cálculo do torque, é necessário ainda, obter o valor do fluxo magnético, conforme Figura 3.3, dado por:
sqss
sqs
sqs irv
dt
d⋅−=
λ (3.15)
sdss
sds
sds irv
dt
d⋅−=
λ (3.16)
Figura 3.3: Diagrama de blocos do Modelo em Tensão.
Assim, o conjugado τV é determinado a partir da equação (3.17):
( )sqs
sds
sds
sqsv ii
P λλτ ⋅−⋅=22
3 (3.17)
Observa‐se que, na prática, o bloco integrador presente no diagrama pode sofrer uma saturação, uma vez que o resultado em sua saída na maioria das vezes contém um offset inerente ao processo. Assim, na implementação física do diagrama, deve‐se analisar uma solução para o problema.

17
3.4.2 – MODELO EM CORRENTE Esse modelo, por ser baseado na força magneto‐motriz da máquina, não possui a influência das assimetrias do rotor no cálculo do torque. Dessa forma ele é utilizado como referência para as máquinas sadias (simétricas).
Para isso, as variáveis medidas devem ser adequadas no referencial fixo no rotor (θ=θr), fazendo uso da velocidade do motor, diferentemente do modelo em tensão. Logo, aplica‐se uma transformação abc dq nas grandezas requeridas.
( ) asj
csbsasjr
qs ieiiiei rr ⋅=⎥⎦⎤
⎢⎣⎡ +−⋅= θθ
21
32
(3.18)
( ) ( )csbsj
csbsjr
ds iieiiei rr −⋅⎟⎠
⎞⎜⎝
⎛−⋅=⎥⎦
⎤⎢⎣
⎡−⋅⎟
⎠⎞
⎜⎝⎛−⋅=
3
123
32 θθ
(3.19)
Figura 3.4: Diagrama de blocos do Modelo em Corrente.
Dessa forma, é possível estimar o valor do fluxo magnético de rotor através das equações diferenciais abaixo.
rdr
r
rrds
r
rmrdr
L
ri
L
rL
dt
dλ
λ−= (3.20)
rqr
r
rrqs
r
rmrqr
Lr
iLrL
dt
dλ
λ−= (3.21)
Por fim, o cálculo do torque τi é dado por:
( )rqr
rds
rdr
rqs
r
mi ii
LLP λλτ −=
223
(3.22)
18
3.4.3 – O MÉTODO DE DETECÇÃO Conforme dito anteriormente, o Método Vienna de Monitoramento é baseado no desvio do torque obtido pelos dois modelos conhecidos: o Modelo em Corrente e o Modelo em Tensão. Dessa forma, ele pode ser resumido conforme equação (3.23). Como resposta desse método, a priori, o desvio apresenta‐se na forma de uma função oscilante sem valor médio. Isso acontece devido a ambos os modelos apresentarem em sua resposta o mesmo valor médio, que justifica a carga à qual a máquina está ligada. Dessa forma a influência da carga é eliminada. No caso de uma máquina simétrica, ambos os modelos apresentam a mesma resposta, o que indica um valor nulo no desvio de torque.
iv τττ −=Δ (3.23)
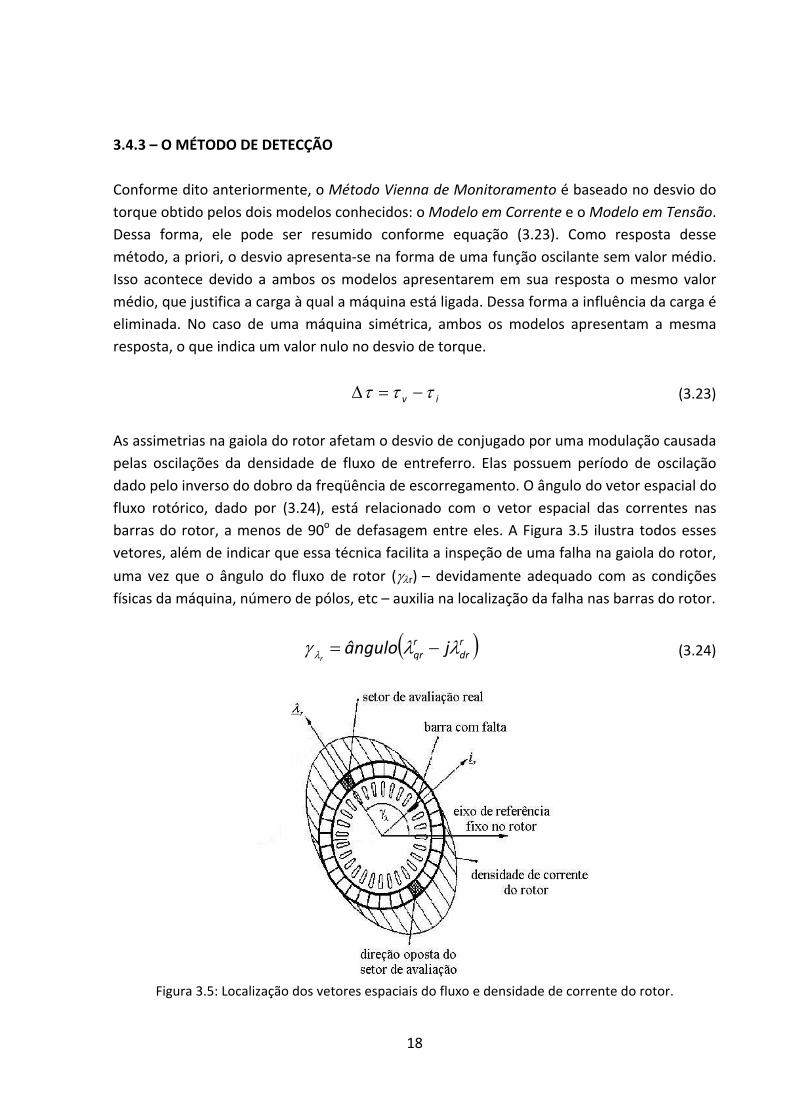
As assimetrias na gaiola do rotor afetam o desvio de conjugado por uma modulação causada pelas oscilações da densidade de fluxo de entreferro. Elas possuem período de oscilação dado pelo inverso do dobro da freqüência de escorregamento. O ângulo do vetor espacial do fluxo rotórico, dado por (3.24), está relacionado com o vetor espacial das correntes nas barras do rotor, a menos de 90o de defasagem entre eles. A Figura 3.5 ilustra todos esses vetores, além de indicar que essa técnica facilita a inspeção de uma falha na gaiola do rotor,
uma vez que o ângulo do fluxo de rotor (γλr) – devidamente adequado com as condições físicas da máquina, número de pólos, etc – auxilia na localização da falha nas barras do rotor.
( )rdr
rqr jângulo
rλλγ λ −= (3.24)
Figura 3.5: Localização dos vetores espaciais do fluxo e densidade de corrente do rotor.

19
Os pontos de máximo e mínimo e zeros alcançados pela corrente da barra em falta coincidem com os extremos do desvio de conjugado. Como o Método Vienna é baseado em vetores espaciais, os ângulos elétricos são avaliados, em detrimento dos ângulos mecânicos.
Conseqüentemente, a distância angular entre um par de pólos é de 2π radianos. Dessa maneira, a localização de uma barra em falta está relacionada à forma de onda do desvio de conjugado. Um ponto de mínimo no desvio de conjugado indica a presença de uma barra em falta, conforme Figura 3.6. Assim, para uma máquina de dois pólos, vão existir dois pontos de mínimo, e para uma máquina de quatro pólos, quatro pontos de mínimo.
Figura 3.6: Corrente em uma barra assimétrica e desvio de torque versus ângulo do vetor espacial
fluxo de rotor.
Após essas considerações, percebe‐se que a resposta do Método Vienna sofre perturbações devido a erros de integração, bem como ruídos provenientes de medições externas. Dessa forma, o gráfico do desvio de conjugado é constituído de várias oscilações sobrepostas, com ligeira diferença de amplitudes entre elas. Para solucionar esse problema, faz‐se necessária a utilização de uma técnica denominada data cluster, na qual se realizam as médias desses ciclos relativos a cada setor de avaliação, que podem ser segmentos de barras, ou até mesmo, as próprias barras. Dessa maneira, os ruídos citados anteriormente são eliminados, auxiliando na avaliação dos resultados do método.
Figura 3.7: Estrutura em corte ilustrando os setores de avaliação da gaiola do rotor.

20
Capítulo 4
O SISTEMA DE MONITORAMENTO DE MOTORES DE INDUÇÃO COM ROTOR EM GAIOLA 4.1 – CONSIDERAÇÕES INICIAIS O Sistema de Monitoramento se mostra eficiente na detecção de assimetrias em rotores em gaiola de motores de indução trifásicos. Com o auxílio dos métodos desenvolvidos no Capítulo 3, foi possível construir uma tela que apresentasse as respectivas saídas de cada um deles. Devido à proposta do trabalho ser baseada em uma simulação de dados, foi inicialmente atribuído que o sistema seria composto de cinco janelas de tempo com quatro segundos cada uma, o que corresponde a vinte segundos de simulação, incluindo os efeitos da partida do motor. Isso foi realizado a fim de simular uma aquisição e processamento de dados em tempo real. Os dados de entrada do sistema foram obtidos a partir de um código em C++, capaz de simular um motor de indução com alguns tipos de assimetrias de rotor [6]: rotor com n barras quebradas (consecutivas) e rotor com defeito (trinca) em uma barra, além, é claro, do motor simétrico. Nesse capítulo serão detalhados ainda a elaboração dos métodos no ambiente LabVIEW, bem como os problemas e soluções encontrados nessa tarefa. 4.2 – DESENVOLVIMENTO DO SISTEMA Como primeira etapa para a construção das telas do sistema, foi necessário estudar os vários formatos numéricos disponíveis em LabVIEW. Existem inúmeros deles e alguns foram escolhidos devido à necessidade do projeto.
• float32 – Formato em ponto flutuante, com 32 bits para representação de um número.
• float64 – Formato também em ponto flutuante, com 64 bits para representação de um número.
• int – Formato inteiro, com 16 bits para representação de um número.
• string – Formato seqüência de caracteres, para representação de texto.

21
Observou‐se que para realizar a transformação de dados em formato string em dados do tipo ponto flutuante, os primeiros devem possuir o caractere “,” como separador decimal. Caso contrário, haveria uma leitura equivocada dos valores contidos no arquivo. Dessa forma, optou‐se em fazer um novo VI cuja função seria substituir os possíveis separadores “.”, por caracteres “,”. Essa alternativa foi necessária, uma vez que não foi encontrada, no próprio ambiente do LabVIEW, uma ferramenta que convertesse os separadores citados anteriormente. A estrutura do VI é apresentada nas Figuras 4.1 e 4.2.
Figura 4.1: Diagrama de blocos utilizado na substituição dos caracteres escolhidos.

22
Figura 4.2: Painel frontal do VI usado para a substituição do separador decimal.
Nesse VI são utilizadas, inicialmente, as ferramentas Read Lines From File e Search and Replace, as quais realizam, respectivamente, a leitura e procura/substituição de linhas inteira em arquivos externos. Após a substituição do caractere definido nos labels Substituir e Por, o vetor de caracteres (string), representado pela linha rosa, é reescrito no mesmo arquivo de origem dos dados, utilizando a ferramenta Write to Text File. Durante as etapas do VI, foram inseridos mostradores dos dados de entrada e saída, a fim de verificar a substituição realizada no arquivo através do painel frontal (Figura 4.2). Esse VI foi amplamente utilizado nos arquivos de simulação, gerados pelo código em C++, para a adequação e leitura de dados em LabVIEW. Para a elaboração do Sistema de Monitoramento foi necessário, primeiramente, conhecer as ferramentas relacionadas ao tempo, em virtude da proposta inicial, além dos vários blocos disponíveis para leitura de arquivo. Dessa forma, optou‐se por executar uma estrutura que foi largamente utilizada, conforme indicado na Figura 4.3. Ela consiste basicamente de um loop for que se repete cinco vezes para a leitura, cálculo e amostragem dos dados. O espaço

23
interno será utilizado para a configuração dos métodos de detecção, com blocos variados relacionados a cada um, tais como, blocos de conformação e manipulação dos dados, entre outros.
Figura 4.3: Loop for utilizado pelos métodos de detecção.
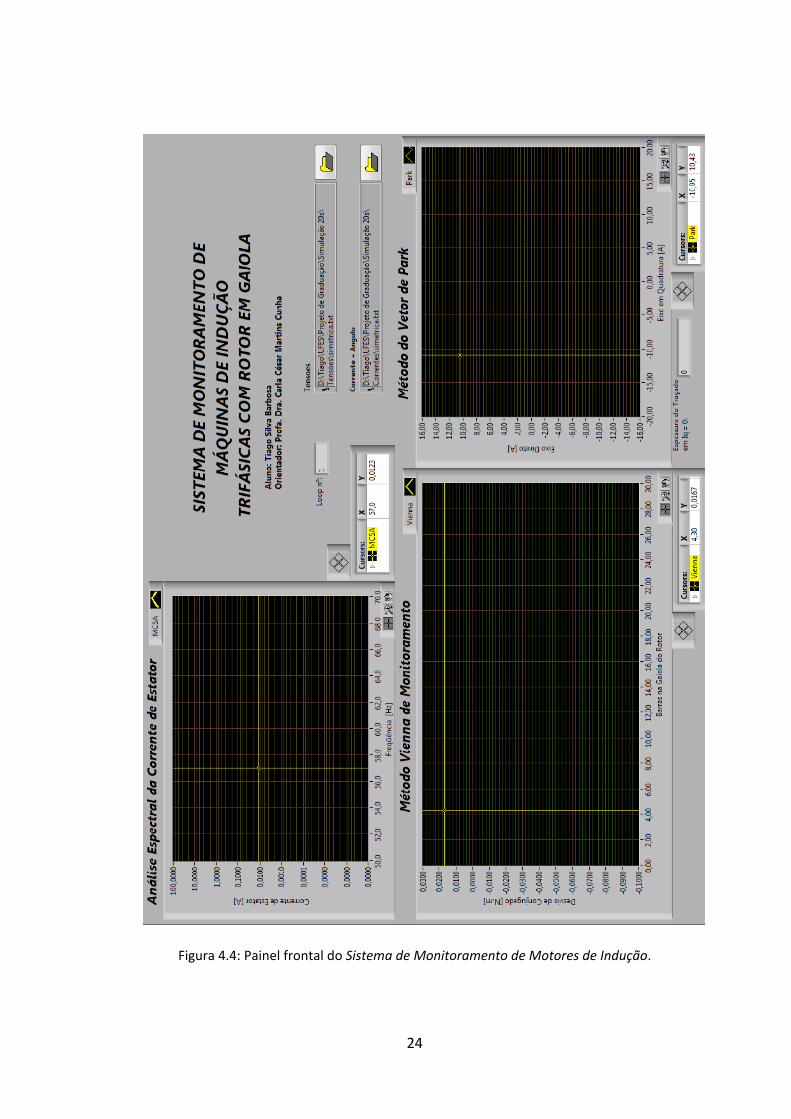
O código pode ser dividido em três partes: leitura, processamento e amostra dos sinais. A Figura 4.4 mostra o painel frontal do Sistema de Monitoramento, composto pelos gráficos referentes a cada um dos métodos de detecção estudados. A Figura 4.5 mostra o diagrama de blocos que realiza as operações necessárias para a determinação desses gráficos, desde a aquisição dos dados até os cálculos complexos que são inerentes a cada método.
24
Figura 4.4: Painel frontal do Sistema de Monitoramento de Motores de Indução.

25
Figura 4.5: Diagramas de blocos do Sistema de Monitoramento.

26
No lado esquerdo da Figura 4.5 encontram‐se os blocos responsáveis pela leitura e conversão dos dados provenientes dos arquivos simulados. Eles foram programados de forma que retirem apenas uma parcela de dados dos arquivos referentes a cada período de amostragem. No arquivo há 2.000.000 linhas contendo, em cada uma delas, as principais variáveis para o processamento dos métodos de detecção. Com um período de tempo de 4s em cada janela de amostragem, que corresponderiam a 400.000 linhas, têm‐se um
incremento de freqüência (Δf) igual a 0.25Hz, e um incremento no tempo (ΔT) igual a 10‐5s. Para que isso funcionasse a contento foi criado um artifício que funciona da seguinte maneira: a última linha lida pelo bloco Read Lines From File é realimentada de forma que ela funcione como um offset para a leitura do próximo conjunto de dados. Assim os dados serão lidos sempre dentro um intervalo no tempo pré‐estabelecido. 4.2.1 – MÉTODO MCSA Para a construção desse método, foi necessária uma ferramenta disponível para programação capaz de realizar a transformada rápida de Fourier (FFT) de um vetor contendo os valores da corrente de estator na fase A (é possível alterar a fase de análise para a corrente da fase B ou C, bastando fazer o redirecionamento correto). O diagrama de blocos está representado na Figura 4.6.
Figura 4.6: Etapa relacionada ao método MCSA.
O bloco de nome Spectral Measurements, designado por Transformada Rápida de Fourier na Figura 4.6, realiza o cálculo da Transformada de Fourier sobre o vetor corrente de estator. Esse bloco trabalha com os dados no formato ddt. Assim, é preciso converter o vetor de entrada para esse formato. Como resposta, ele apresenta um vetor com as componentes espectrais da corrente de estator, de zero até a metade da freqüência de amostragem de 100kHz. Finalmente, foi criado um vetor de freqüências auxiliar, através do bloco Formula Node, que funciona como um eixo das abcissas para o vetor do espectro de freqüências da corrente. Isso foi feito para que o espectro de freqüências fosse apresentado em um gráfico Amplitude versus Freqüência.

27
Na Figura 4.7(a) pode ser visto um gráfico do espectro de freqüências da corrente de estator para o caso de um motor de indução com o rotor simétrico, e com tensões trifásicas equilibradas, ou seja, somente com componente de seqüência positiva em sua tensão de alimentação. Assim, conforme o esperado, o espectro possui apenas a componente fundamental de 60Hz, ou seja, sem nenhuma banda lateral, servindo de base de comparação com os demais casos do motor com falhas. Já na Figura 4.7 (b) observa‐se o espectro de freqüências de um motor de indução com um defeito correspondente a uma relação de 20, ou seja, a resistência da barra com problema é 20 vezes maior que a de uma barra sã, conforme (4.1). O defeito ocorreu na barra #15 da gaiola do rotor. Percebe‐se claramente que as principais freqüências de inspeção são 57 e 63Hz, conforme determinado na seção 3.2 do Capítulo 3 desse trabalho. Na Figura 4.7 (c) aparece a indicação do defeito nessas mesmas freqüências. Nesse caso, o rotor possui uma trinca na barra #10 com uma relação de defeito de 50.
barras
defeitobarras
R
R _Defeito de Relação = (4.1)
À medida que a assimetria se agrava, a tendência é de que as amplitudes dessas freqüências de inspeção aumentem, conforme Figura 4.7 (d). Nessa situação, o rotor possui a barra #20 quebrada. Na Figura 4.7 (e), percebe‐se a influência no espectro de freqüências de um rotor com as barras #20, #21, #22 e #23 quebradas, onde se evidenciam as bandas laterais de segunda ordem.

28
(a)
(b)
(c)

29
(d)
(e)
Figura 4.7: Espectro de freqüências das correntes de estator, com as tensões de alimentação equilibradas, para os casos de: (a) gaiola simétrica, (b) gaiola com a barra #15 com defeito de relação 20, (c) gaiola com a barra #10 com defeito de relação 50, (d) gaiola com a barra #20
quebrada, (e) gaiola com as barras #20, #21, #22 e #23 quebradas.
30
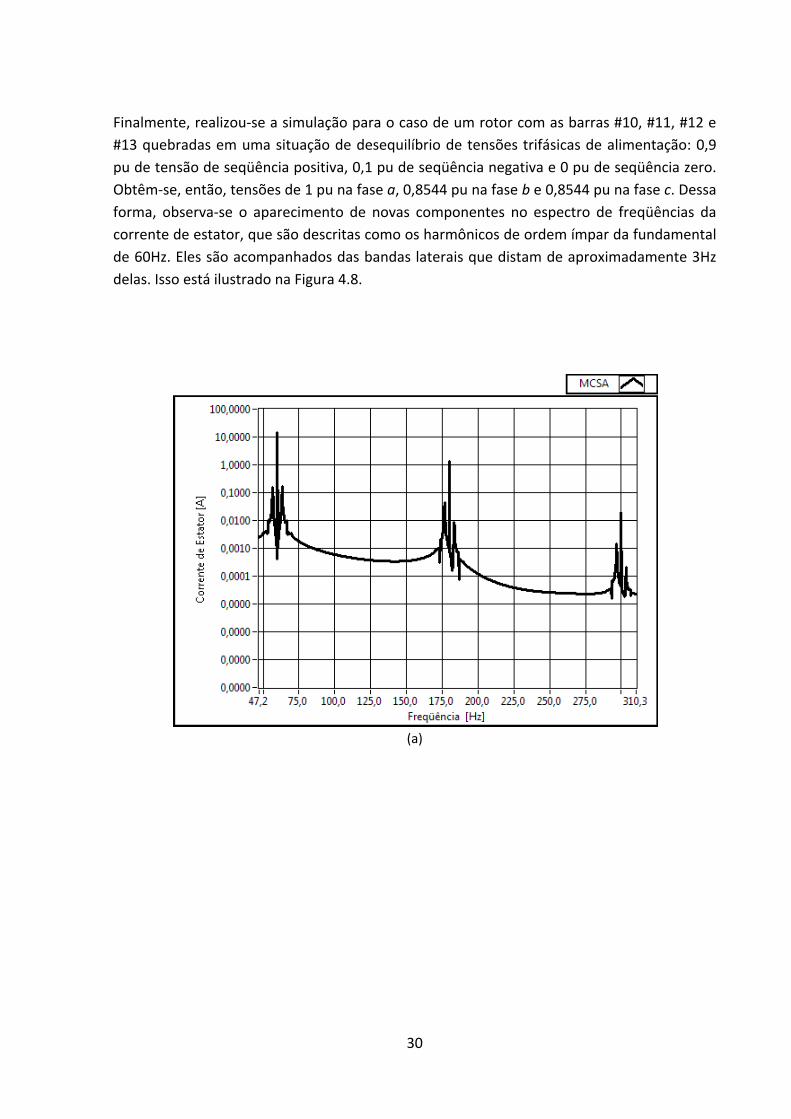
Finalmente, realizou‐se a simulação para o caso de um rotor com as barras #10, #11, #12 e #13 quebradas em uma situação de desequilíbrio de tensões trifásicas de alimentação: 0,9 pu de tensão de seqüência positiva, 0,1 pu de seqüência negativa e 0 pu de seqüência zero. Obtêm‐se, então, tensões de 1 pu na fase a, 0,8544 pu na fase b e 0,8544 pu na fase c. Dessa forma, observa‐se o aparecimento de novas componentes no espectro de freqüências da corrente de estator, que são descritas como os harmônicos de ordem ímpar da fundamental de 60Hz. Eles são acompanhados das bandas laterais que distam de aproximadamente 3Hz delas. Isso está ilustrado na Figura 4.8.
(a)

31
(b)
Figura 4.8: Espectro de freqüências das correntes de estator, com tensões de alimentação desequilibradas, com 0,1 pu de seqüência negativa, para o caso de gaiola com as barras #10, #11,
#12, #13 quebradas. (a) Gráfico ilustrando a presença dos harmônicos. (b) Zoom realizado próximo à freqüência de 180Hz.
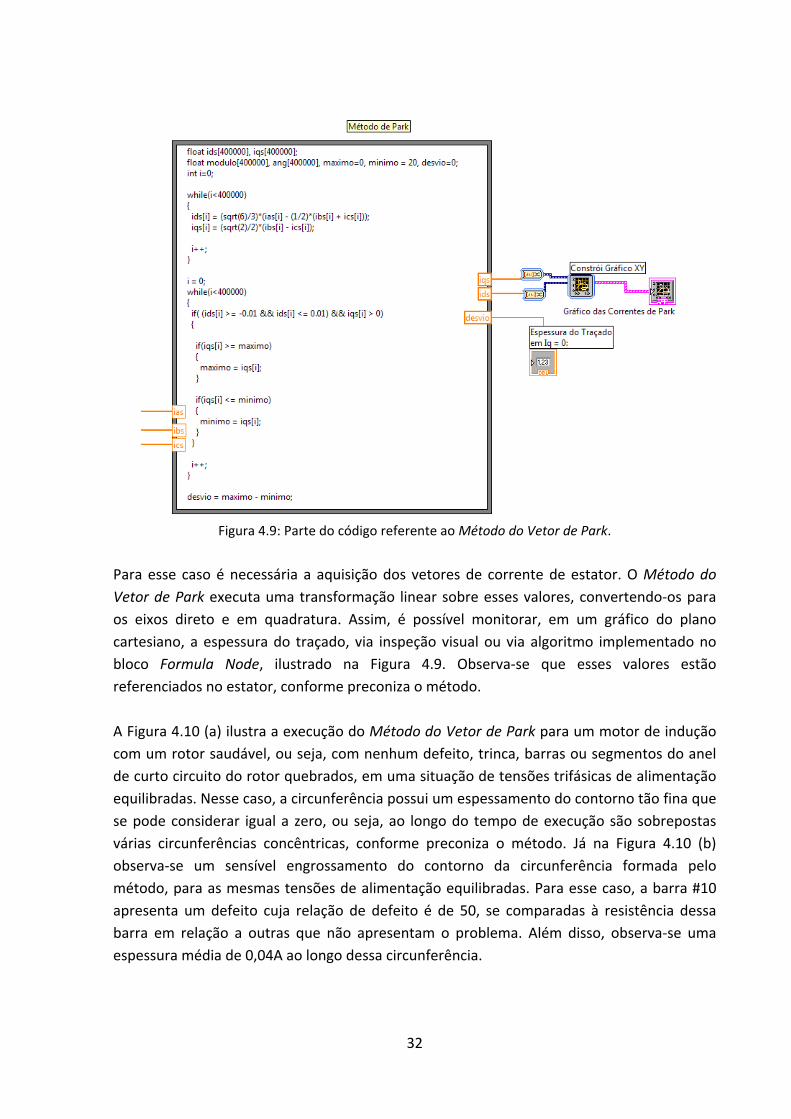
4.2.2 – MÉTODO DO VETOR DE PARK Para a implementação desse método, utilizaram‐se alguns conceitos da seção anterior, com adaptações para a nova estrutura a ser inserida. A Figura 4.9 ilustra o diagrama de blocos para o Método do Vetor de Park.
32
Figura 4.9: Parte do código referente ao Método do Vetor de Park.
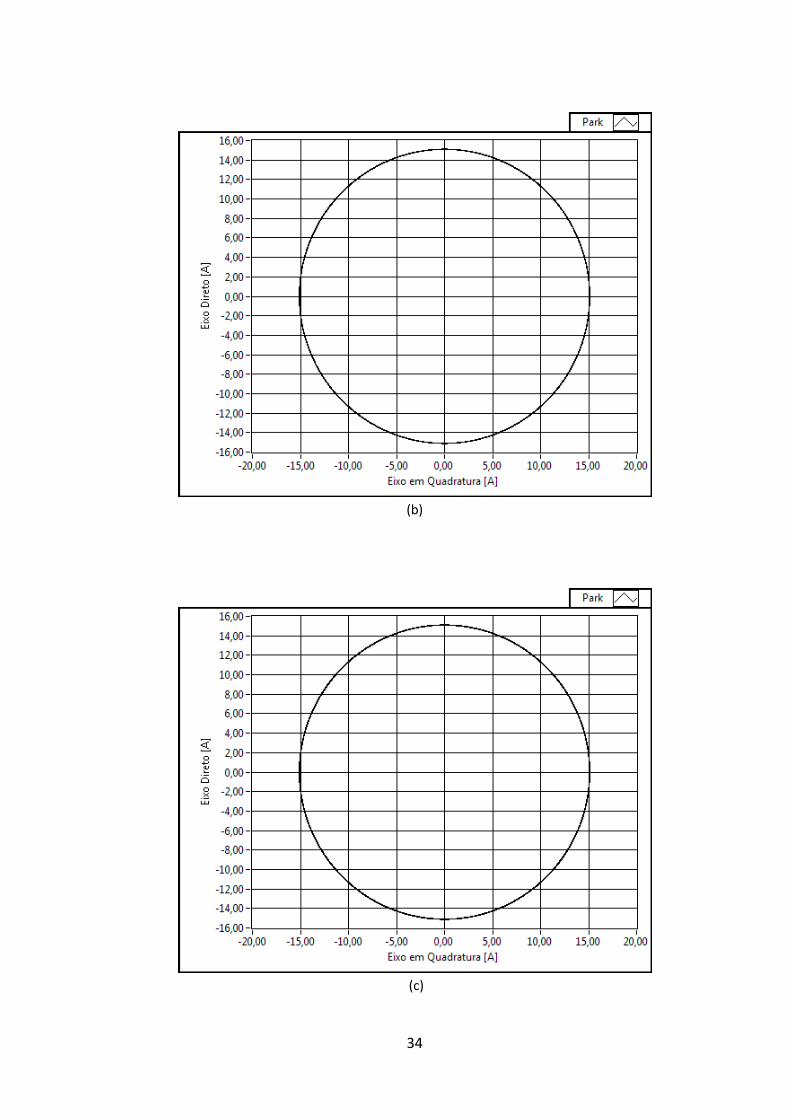
Para esse caso é necessária a aquisição dos vetores de corrente de estator. O Método do Vetor de Park executa uma transformação linear sobre esses valores, convertendo‐os para os eixos direto e em quadratura. Assim, é possível monitorar, em um gráfico do plano cartesiano, a espessura do traçado, via inspeção visual ou via algoritmo implementado no bloco Formula Node, ilustrado na Figura 4.9. Observa‐se que esses valores estão referenciados no estator, conforme preconiza o método. A Figura 4.10 (a) ilustra a execução do Método do Vetor de Park para um motor de indução com um rotor saudável, ou seja, com nenhum defeito, trinca, barras ou segmentos do anel de curto circuito do rotor quebrados, em uma situação de tensões trifásicas de alimentação equilibradas. Nesse caso, a circunferência possui um espessamento do contorno tão fina que se pode considerar igual a zero, ou seja, ao longo do tempo de execução são sobrepostas várias circunferências concêntricas, conforme preconiza o método. Já na Figura 4.10 (b) observa‐se um sensível engrossamento do contorno da circunferência formada pelo método, para as mesmas tensões de alimentação equilibradas. Para esse caso, a barra #10 apresenta um defeito cuja relação de defeito é de 50, se comparadas à resistência dessa barra em relação a outras que não apresentam o problema. Além disso, observa‐se uma espessura média de 0,04A ao longo dessa circunferência.

33
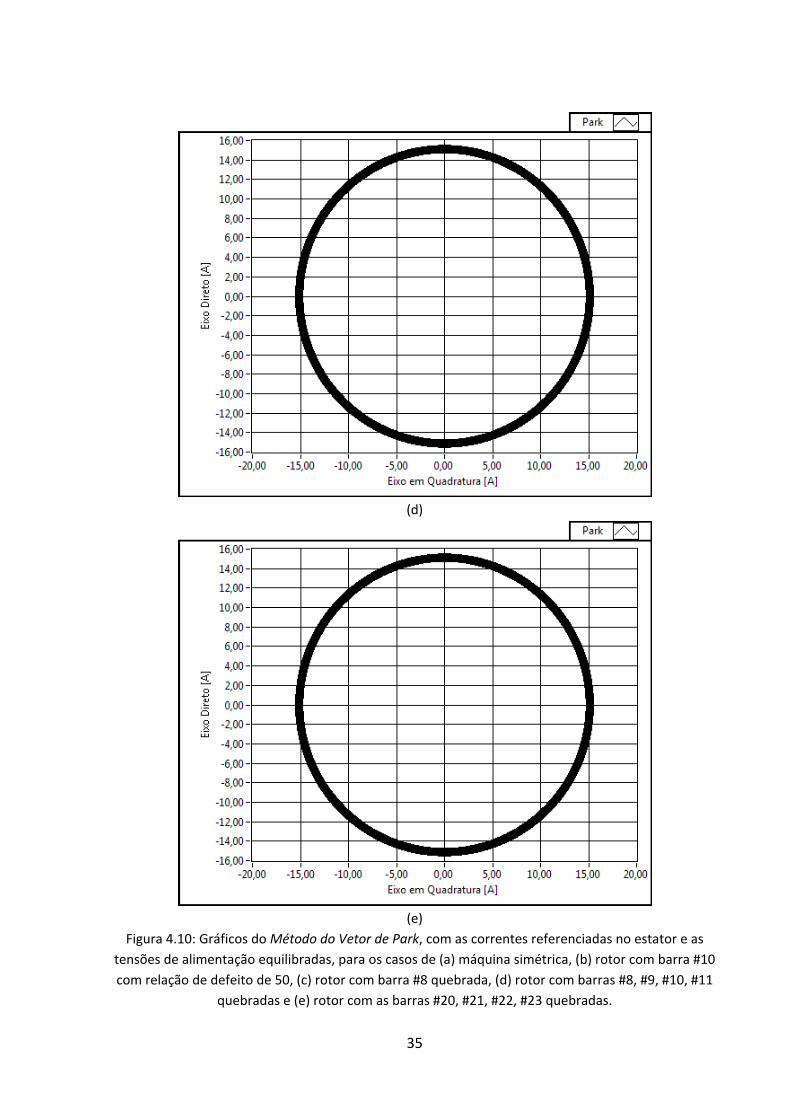
Na Figura 4.10 (c) tem‐se que a espessura do traçado possui valor médio de 0,05A, indicando também uma situação de atenção. Para esse caso, a barra #8 está quebrada. As Figuras 4.10 (d) e (e) mostram um engrossamento considerável dos contornos de suas circunferências, em torno de 0,8A, indicando assim uma maior severidade do defeito na gaiola do rotor. No primeiro caso, as barras #8, #9, #10 e #11 estão quebradas, enquanto que no segundo, as quebradas são as barras #20, #21, #22 e #23. De modo ilustrativo, a Tabela 4.1 compara os diferentes espessamentos obtidos em cada tipo de assimetria de rotor. Dessa forma, é possível perceber que a severidade do problema está diretamente relacionada com o espessamento do traçado da circunferência. Tabela 4.1 – Valores dos espessamentos do Método do Vetor de Park para casos de assimetrias de
rotor.
Tipo de Assimetria Espessamento [A]Rotor Simétrico 0Barra #10 com relação de defeito de 50 0,04Barra #8 quebrada 0,05Barras #8 a #11 quebradas 0,8Barras #20 a #23 quebradas 0,8
(a)
34
(b)
(c)
35
(d)
(e)
Figura 4.10: Gráficos do Método do Vetor de Park, com as correntes referenciadas no estator e as tensões de alimentação equilibradas, para os casos de (a) máquina simétrica, (b) rotor com barra #10 com relação de defeito de 50, (c) rotor com barra #8 quebrada, (d) rotor com barras #8, #9, #10, #11
quebradas e (e) rotor com as barras #20, #21, #22, #23 quebradas.
36
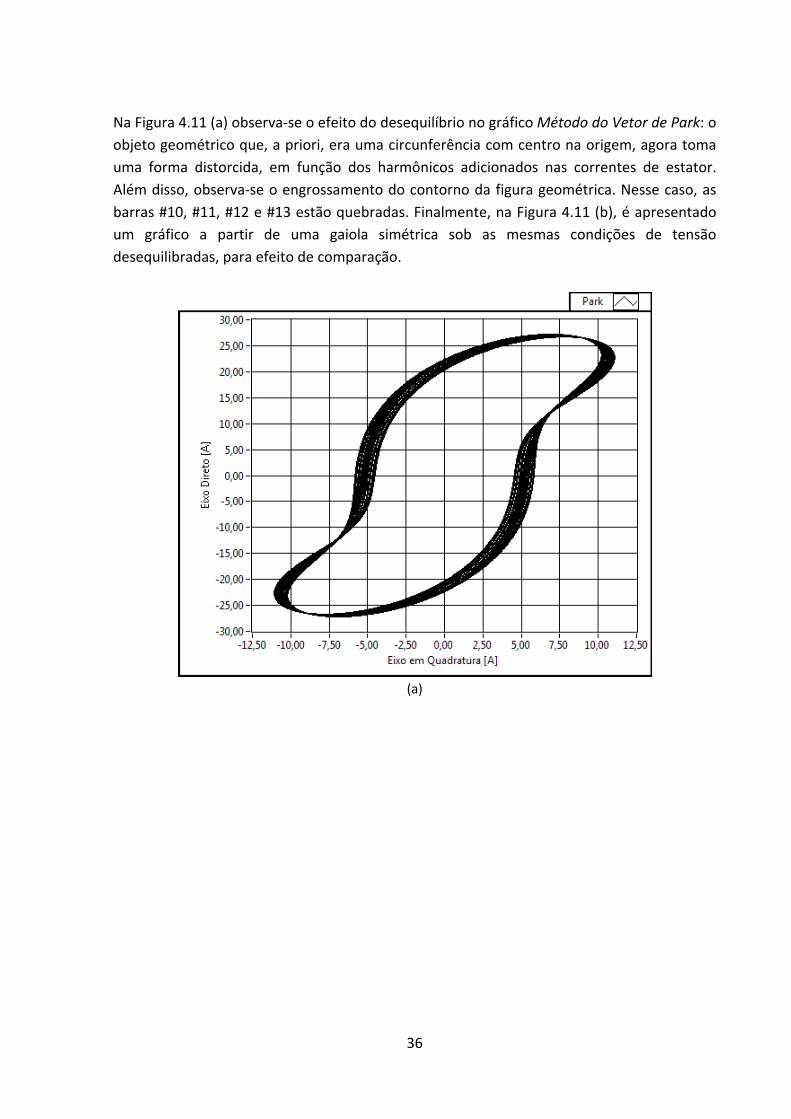
Na Figura 4.11 (a) observa‐se o efeito do desequilíbrio no gráfico Método do Vetor de Park: o objeto geométrico que, a priori, era uma circunferência com centro na origem, agora toma uma forma distorcida, em função dos harmônicos adicionados nas correntes de estator. Além disso, observa‐se o engrossamento do contorno da figura geométrica. Nesse caso, as barras #10, #11, #12 e #13 estão quebradas. Finalmente, na Figura 4.11 (b), é apresentado um gráfico a partir de uma gaiola simétrica sob as mesmas condições de tensão desequilibradas, para efeito de comparação.
(a)

37
(b)
Figura 4.11: Gráficos do Método do Vetor de Park, com as correntes referenciadas no estator e as tensões de alimentação desequilibradas, com 0,1 pu de seqüência negativa, para os casos de (a)
rotor com as barras #10, #11, #12 e #13 quebradas e (b) rotor simétrico.
4.2.3 – MÉTODO VIENNA Na construção do sistema referente ao Método Vienna de Monitoramento, foi necessário ir mais fundo no estudo das ferramentas do LabVIEW. Entre elas, a modularização, cuja função foi diminuir algumas etapas de código escrito e facilitar a sua compreensão. Além disso, o método se mostra bastante efetivo e preciso na detecção de assimetrias de rotor, embora requeira um processamento de máquina superior aos dos métodos citados anteriormente. Isso foi o principal motivo para dividir o arquivo de origem dos dados de simulação em dois: o primeiro contém as tensões monofásicas de estator, necessárias no cálculo do modelo em tensão, conforme explicado anteriormente; o segundo apresenta as correntes monofásicas de estator e o valor instantâneo da posição angular do rotor, utilizados em ambos os modelos. A Figura 4.12 ilustra o diagrama de blocos do Sistema de Monitoramento responsável pela execução do Método Vienna.

38
Figura 4.12: Etapa de leitura e conformação dos dados no diagrama de blocos do Método Vienna.
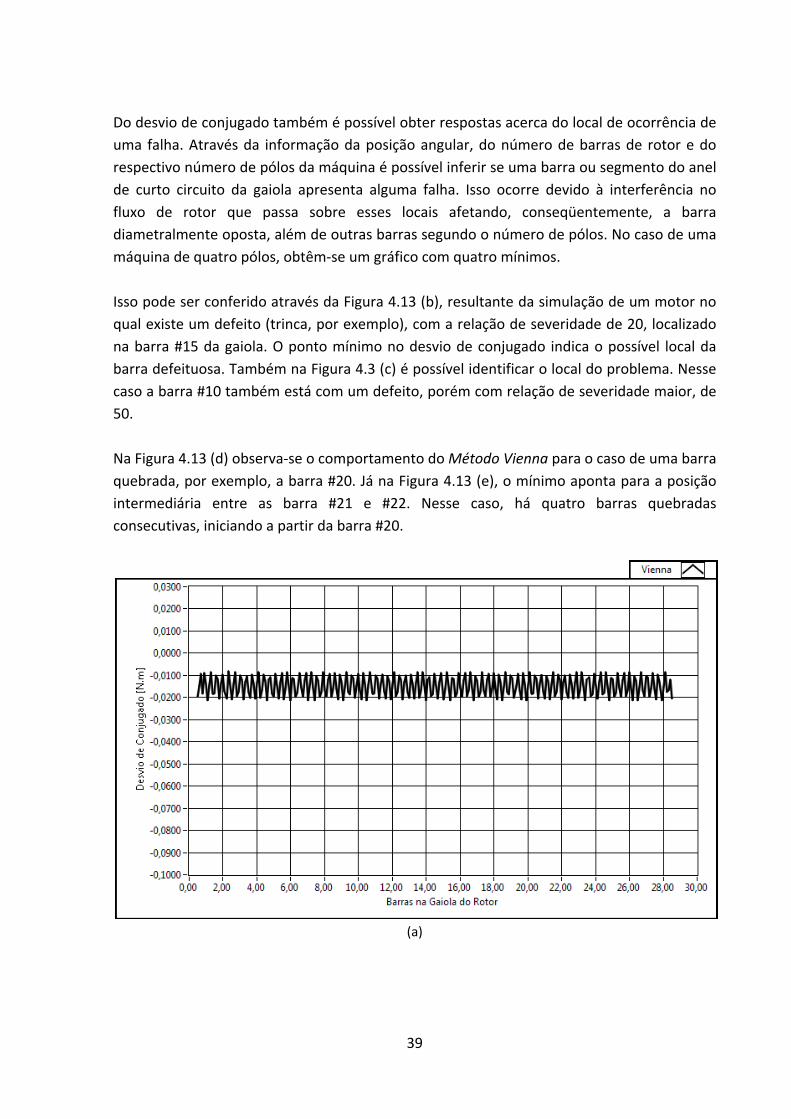
Os blocos no lado esquerdo da Figura 4.12 representam uma modularização utilizada na construção do Sistema. Eles realizam a transformação abc dq do Método tendo como entradas vetores de tensão e correntes nas fases A, B ou C. Esse artifício reduziu o número de linhas do código escrito dentro do bloco Formula Node, conforme descrito no Anexo A. Observa‐se ainda a presença de algumas variáveis realimentadas nesse bloco. Isso foi feito para que ao final de cada período de amostragem os novos cálculos dos fluxos pudessem obter os valores iniciais como sendo os últimos valores disponíveis na janela de tempo anterior. Vale lembrar que, no código escrito no bloco, existem duas integrações numéricas, relativas aos fluxos dos modelos em tensão e em corrente, conforme mencionado no Capítulo 3. O método utilizado para essa integração foi o trapezoidal, com passo de integração de acordo com o intervalo de tempo dos dados nos arquivos de simulação, de 10‐5s. O desvio de conjugado calculado em (3.21) produz, no caso de rotor simétrico, uma oscilação de alta freqüência com amplitude relativamente desprezível e valor médio próximo de zero, o que representaria ruído ou erros de integração. Assim, na Figura 4.13 (a), observa‐se um gráfico do Método Vienna de Monitoramento cuja análise é realizada em um rotor sadio. À medida que são inseridas as assimetrias no modelo, o método apresenta um desvio de conjugado senoidal, com período de oscilação igual ao inverso do dobro da freqüência de escorregamento. Além disso, esse desvio de conjugado, em função do ângulo espacial do fluxo de rotor, indica, através de seus mínimos, as posições angulares com maior probabilidade de se encontrar os defeitos.
39
Do desvio de conjugado também é possível obter respostas acerca do local de ocorrência de uma falha. Através da informação da posição angular, do número de barras de rotor e do respectivo número de pólos da máquina é possível inferir se uma barra ou segmento do anel de curto circuito da gaiola apresenta alguma falha. Isso ocorre devido à interferência no fluxo de rotor que passa sobre esses locais afetando, conseqüentemente, a barra diametralmente oposta, além de outras barras segundo o número de pólos. No caso de uma máquina de quatro pólos, obtêm‐se um gráfico com quatro mínimos. Isso pode ser conferido através da Figura 4.13 (b), resultante da simulação de um motor no qual existe um defeito (trinca, por exemplo), com a relação de severidade de 20, localizado na barra #15 da gaiola. O ponto mínimo no desvio de conjugado indica o possível local da barra defeituosa. Também na Figura 4.3 (c) é possível identificar o local do problema. Nesse caso a barra #10 também está com um defeito, porém com relação de severidade maior, de 50. Na Figura 4.13 (d) observa‐se o comportamento do Método Vienna para o caso de uma barra quebrada, por exemplo, a barra #20. Já na Figura 4.13 (e), o mínimo aponta para a posição intermediária entre as barra #21 e #22. Nesse caso, há quatro barras quebradas consecutivas, iniciando a partir da barra #20.
(a)

40
(b)
(c)
41
(d)
(e)
Figura 4.13: Gráficos do Desvio de Conjugado pelo Método Vienna de Monitoramento, com as tensões de alimentação equilibradas, para os casos de (a) gaiola simétrica, (b) gaiola com defeito na barra #15 e com relação de defeito de 20, (c) gaiola com defeito na barra #10 e relação 50, (d) gaiola
com a barra #20 quebrada e (e) gaiola com as barras #20, #21, #22 e #23 quebradas.

42
Finalmente, em uma situação em que as tensões trifásicas de alimentação estão desequilibradas, percebe‐se que o Método Vienna sofre alguma distorção, mas que não afeta o resultado apresentado. A Figura 4.14 apresenta a resposta do método para o caso de quatro barras consecutivas quebradas, iniciando a partir da barra #10 e considerando um desequilíbrio de 0,1 pu de seqüência negativa, para 0,9 pu de seqüência positiva.
Figura 4.14 Gráficos do Desvio de Conjugado pelo Método Vienna de Monitoramento, com as tensões de alimentação desequilibradas, para o caso de gaiola com as barras #10, #11, #12 e #13 quebradas.
43
Capítulo 5
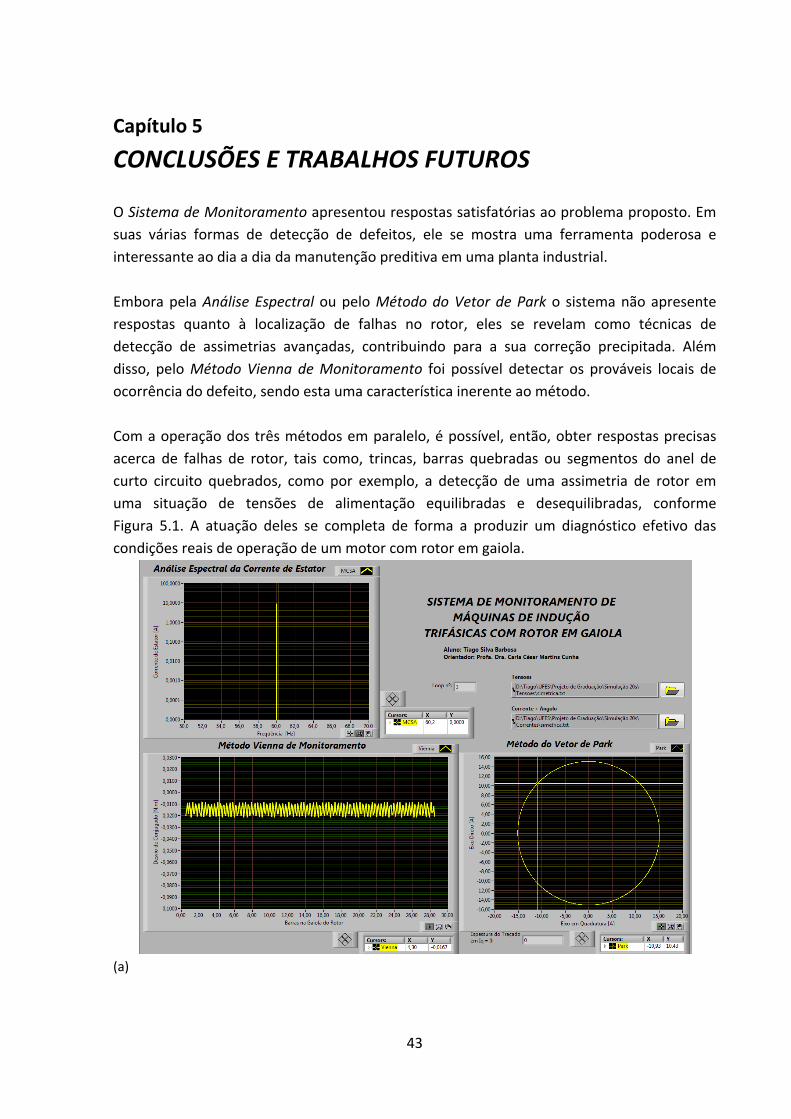
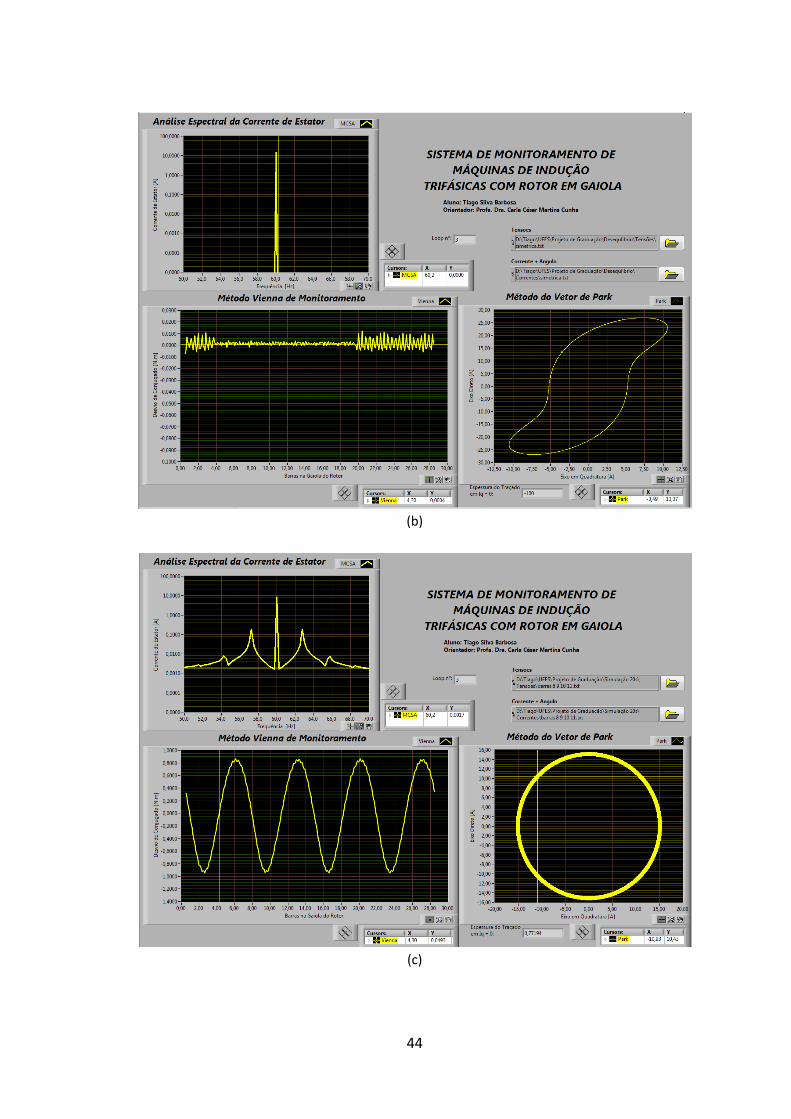
CONCLUSÕES E TRABALHOS FUTUROS O Sistema de Monitoramento apresentou respostas satisfatórias ao problema proposto. Em suas várias formas de detecção de defeitos, ele se mostra uma ferramenta poderosa e interessante ao dia a dia da manutenção preditiva em uma planta industrial. Embora pela Análise Espectral ou pelo Método do Vetor de Park o sistema não apresente respostas quanto à localização de falhas no rotor, eles se revelam como técnicas de detecção de assimetrias avançadas, contribuindo para a sua correção precipitada. Além disso, pelo Método Vienna de Monitoramento foi possível detectar os prováveis locais de ocorrência do defeito, sendo esta uma característica inerente ao método. Com a operação dos três métodos em paralelo, é possível, então, obter respostas precisas acerca de falhas de rotor, tais como, trincas, barras quebradas ou segmentos do anel de curto circuito quebrados, como por exemplo, a detecção de uma assimetria de rotor em uma situação de tensões de alimentação equilibradas e desequilibradas, conforme Figura 5.1. A atuação deles se completa de forma a produzir um diagnóstico efetivo das condições reais de operação de um motor com rotor em gaiola.
(a)
44
(b)
(c)
45
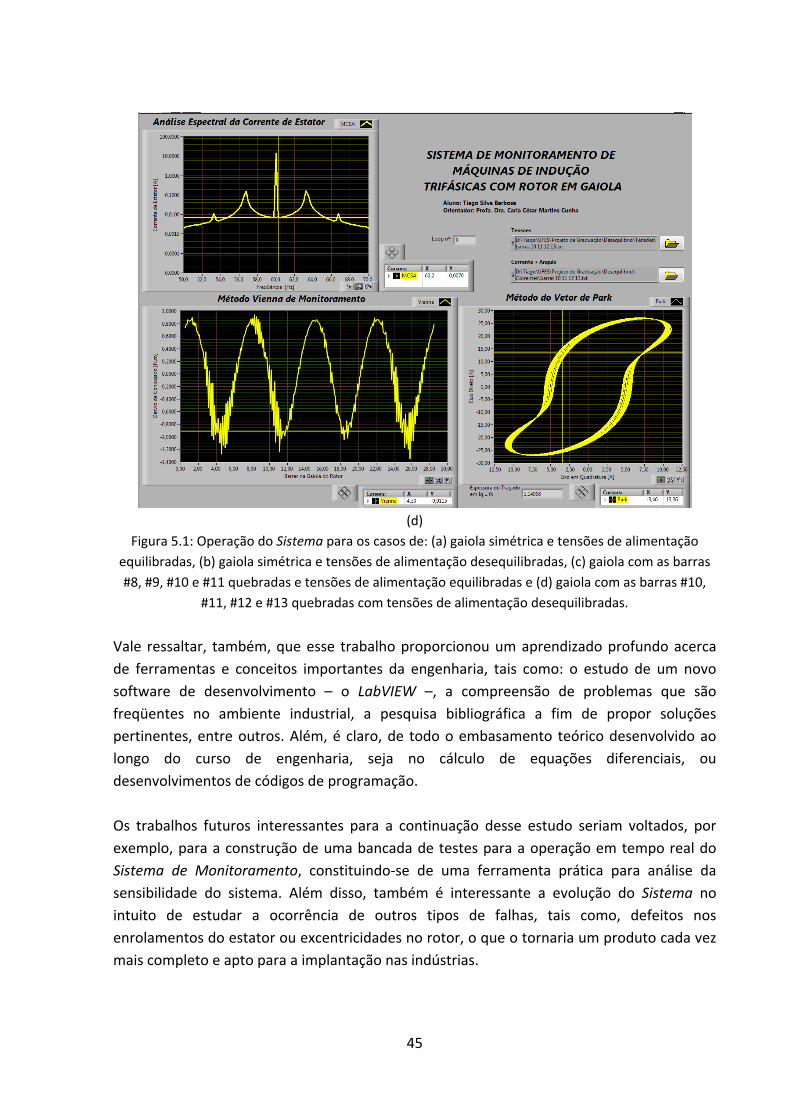
(d)
Figura 5.1: Operação do Sistema para os casos de: (a) gaiola simétrica e tensões de alimentação equilibradas, (b) gaiola simétrica e tensões de alimentação desequilibradas, (c) gaiola com as barras #8, #9, #10 e #11 quebradas e tensões de alimentação equilibradas e (d) gaiola com as barras #10,
#11, #12 e #13 quebradas com tensões de alimentação desequilibradas.
Vale ressaltar, também, que esse trabalho proporcionou um aprendizado profundo acerca de ferramentas e conceitos importantes da engenharia, tais como: o estudo de um novo software de desenvolvimento – o LabVIEW –, a compreensão de problemas que são freqüentes no ambiente industrial, a pesquisa bibliográfica a fim de propor soluções pertinentes, entre outros. Além, é claro, de todo o embasamento teórico desenvolvido ao longo do curso de engenharia, seja no cálculo de equações diferenciais, ou desenvolvimentos de códigos de programação. Os trabalhos futuros interessantes para a continuação desse estudo seriam voltados, por exemplo, para a construção de uma bancada de testes para a operação em tempo real do Sistema de Monitoramento, constituindo‐se de uma ferramenta prática para análise da sensibilidade do sistema. Além disso, também é interessante a evolução do Sistema no intuito de estudar a ocorrência de outros tipos de falhas, tais como, defeitos nos enrolamentos do estator ou excentricidades no rotor, o que o tornaria um produto cada vez mais completo e apto para a implantação nas indústrias.
46
REFERÊNCIAS BIBLIOGRÁFICAS [1] M.L. Sin, W.L. Soong and N. Ertugrul. Induction Machine On‐Line Condition Monitoring
and Fault Diagnosis – A Survey. Proceedings of the Australasian Universities Power Engineering Conference – AUPEC 2003. Paper No. 32. September / October, 2003.
[2] S. Nandi and H.A. Toliyat. Fault Diagnosis of Electrical Machines – A Review.
Proceedings of the IEEE International Electric Machines and Drives Conference – IEMD 1999, pp. 219‐221. May, 1999.
[3] LabVIEWTM – User Manual. National Instruments. April, 2003. [4] C.C.M. Cunha. Modelagem, Análise e Detecção de Assimetrias de Rotor em Máquinas
de Indução. Tese de Doutorado. Universidade Federal de Minas Gerais. Belo Horizonte – MG. 2006.
[5] V. B. S. Varejão. Modelos de Motores de Indução de Rotor em Gaiola com Assimetrias
de Rotor: Um Estudo Comparativo. Projeto de Graduação. Universidade Federal do Espírito Santo. Vitória – ES. 2007.
[6] A. Bellini, F. Filippetti, G. Franceschini, C. Tassoni, R. Passaglia, M. Saottini, G. Tontini,
M. Giovannini and A. Rossi. On‐Field Experience With Online Diagnosis of Large Induction Motors Cage Failures Using MCSA. Industry Aplications Society Annual Metting. Rome, Italy. October, 2002.
[7] S.M.A. Cruz, J.M. Cardoso and H.A. Toliyat. Diagnosis of Stator, Rotor and Airgap
Eccentricity Faults in Three‐Phase Induction Motor Based on the Multiple Reference Frames Theory. Proceedings of the 38th IEEE Industry Applications Society Annual Meeting – IAS 2003. Vol. 2. pp. 1340‐1346. October, 2003.

47
[8] A.J. Marques Cardoso, S.M.A. Cruz, J.F.S. Carvalho and E.S. Saraiva. Rotor Cage Fault Diagnosis in Three‐Phase Induction Motors, by Park's Vector Approach. Conference Record of the 1995 IEEE Thirtieth Industry Applications Society Annual Meeting Conference, 1995 ‐ IAS '95. Volume 1, 8‐12 Oct. 1995, pp. 642 – 646.
[9] C. Kral, F. Pirker, G. Pascoli and W. Berghold. A LabVIEW Based Rotor Fault Diagnosis
Tool for Inverter Fed Induction Machines by Means of the Vienna Monitoring Method at Variable Speed. Conference Record of the VII International Power Electronics Congress – CIEP'2000. pp. 858‐865. October, 2000.
[10] L. P. Coutinho. Análise do Método Vienna de Monitoramento para Detecção de Defeitos na Gaiola de Motores de Indução Trifásicos. Projeto de Graduação. Universidade Federal do Espírito Santo. Vitória – ES. 2007.
[11] R. M. Carvalho. Princípios de Comunicações. Ed. Tropical. Julho de 1999. [12] W.T. Cochran, J.W. Cooley, D.L. Favin, H.D. Helms, R.A. Kaenel, W.W. Lang, G.C. Jr.
Maling, D.E. Nelson, C.M. Rader, P.D. Welch. What is the fast Fourier transform? Proceedings of the IEEE. Volume 55, Issue 10, Oct. 1967, pp. 1664 – 1674.
[13] F. Filippetti, G. Francheschini, C. Tassoni, and P. Vas. AI techniques in induction
machines diagnosis including the speed ripple effect. IEEE Trans. Ind. Applicat., vol 34, pp. 98 – 108, Jan./Feb. 1998.
[14] R.R. Schoen and T.G. Habetler. Effects of Time‐Varying Loads on Rotor Fault Detection
in Induction Machines. IEEE Transactions on Industry Applications. Vol. 31. No. 4. pp. 900‐906. July / August, 1995

48
ANEXO A
CÓDIGO EM “C” PARA IMPLEMENTAÇÃO DO MÉTODO VIENNA DE MONITORAMENTO float32 ids_r[400000], iqs_r[400000], fluxodr[400000], fluxoqr[400000], fluxods[400000], fluxoqs[400000], Tv[400000], Ti[400000]; int i=0, k=0, polos=4, controle=0; float32 rs=0.531, h=1E‐5, Lm=0.0847, Llr=0.00252, Lr=Llr + Lm, rr=0.408, c=pi/15, soma_v, soma_i, media_v, media_i, gama[400000],t[400000],b=4*j, aux_teta, aux_ds, aux_qs, aux_dr, aux_qr, saida_teta, saida_ds, saida_qs, saida_dr, saida_qr, Nbar[400000], Nbar_menor[4000], Nbar2[281] , Nb = 28, alpha = 2*pi/(Nb/(polos/2)), deltaT[400000], deltaT_menor[4000], deltaT2[281], num[281], soma[281], acumula=0, cluster[281], contador=100; /*Inicializando os vetores*/ i=0; while(i<400000) { fluxods[i] = 0; fluxoqs[i] = 0; fluxodr[i] = 0; fluxoqr[i] = 0; Nbar[i] = 0; Tv[i] = 0; Ti[i] = 0; i++; } i=0; while(i<281) { deltaT2[i] = 0; Nbar2[i] = 0; num[i] = 0; soma[i] = 0; i++; }

49
/*Vetor de Tempo*/ i = 0; while(i<400000) { b += 0.00001; t[i] = b; i++; } /*Atualizando as entradas*/ if(j==0) { entrada_ds = 0; entrada_qs = 0; entrada_dr = 0; entrada_qr = 0; } aux_ds = entrada_ds; aux_qs = entrada_qs; aux_dr = entrada_dr; aux_qr = entrada_qr; /*Calculo dos fluxos e do Torque nos modelos em tensao e em corrente*/ i=0; soma_v = 0; soma_i = 0; while (i<400000) { /*Transformadas ABC ‐ DQ feitas externamente*/ iqs_r[i] = iqs[i]*cos(tetar[i]) ‐ ids[i]*sin(tetar[i]); /*Referencial no rotor*/ ids_r[i] = iqs[i]*sin(tetar[i]) + ids[i]*cos(tetar[i]); aux_ds += (vds[i] ‐ rs*ids[i])*h; /*Integral dos fluxos em Tensao*/ aux_qs += (vqs[i] ‐ rs*iqs[i])*h; fluxods[i] = aux_ds; fluxoqs[i] = aux_qs; aux_dr += (Lm*rr*ids_r[i]/Lr ‐ rr*aux_dr/Lr)*h; /*Integral dos fluxos em Corrente*/ aux_qr += (Lm*rr*iqs_r[i]/Lr ‐ rr*aux_qr/Lr)*h;

50
fluxodr[i] = aux_dr; fluxoqr[i] = aux_qr; gama[i] = atan2(‐aux_dr,aux_qr) ‐ pi/2; /*Calculo do angulo*/ if(gama[i]<0) { /*Angulo variando de 0 a 2*pi*/ gama[i] = gama[i] + 2*pi; } Tv[i] = 0.75*polos*(iqs[i]*fluxods[i] ‐ ids[i]*fluxoqs[i]); /*Calculo do Torque do modelo em Tensao*/ Ti[i] = 0.75*polos*(Lm/Lr)*(iqs_r[i]*fluxodr[i] ‐ ids_r[i]*fluxoqr[i]); /*Calculo do Torque do modelo em Corrente*/ soma_v += Tv[i]; soma_i += Ti[i]; i++; } /*Fim do While dos Torques*/ media_i = soma_i/400000; /*Retirando as medias do Torque*/ media_v = soma_v/400000; i=0; while (i<400000) { Tv[i] = Tv[i] ‐ media_v; Ti[i] = Ti[i] ‐ media_i; deltaT[i] = Tv[i] ‐ Ti[i]; /*Calculando o Delta T*/ i++; } /*Metodo Vienna*/ i=0; while(i<399999) { if(gama[i+1] < gama[i]) { controle = controle + 1; if (controle == 2) {
51
controle = 0; } } Nbar[i] = (gama[i]/alpha) + 0.5 + controle*Nb/2; Nbar[i] = 10*Nbar[i]; /*Arrendondamento para a barra mais proxima*/ Nbar[i] = int(Nbar[i]); Nbar[i] = Nbar[i]/10; i++; } /*Fim do While*/ /*Reduzindo alguns vetores importantes*/ i=0; k=0; while(i<400000) { if(contador == 100) { contador = 0; Nbar_menor[k] = Nbar[i]; deltaT_menor[k] = deltaT[i]; k++; } contador = contador+1; i++; } /*Inicializando os vetores*/ k=0; while(k<281) { soma[k] = 0; num[k] = 0; deltaT2[k] = 0; Nbar2[k] = 0; cluster[k] = 0; k++; } /*Inicializando os vetores*/ k=0; while(k<281)
52
{ soma[k] = 0; num[k] = 0; deltaT2[k] = 0; Nbar2[k] = 0; cluster[k] = 0; k++; } /*Implementando o Cluster*/ i = 0; Nbar2[0] = 0.5; /*Criacao do Vetor de Nbar2*/ while(i<280) { Nbar2[i+1] = Nbar2[i] + 0.1; Nbar2[i+1] = Nbar2[i+1]*10; Nbar2[i+1] = int(Nbar2[i+1]); Nbar2[i+1] = Nbar2[i+1]/10; i++; } i = 0; while (i<3999) { k = 0; while (Nbar_menor[i] != Nbar2[k]) { k++; } cluster[k] = cluster[k] + deltaT_menor[i]; num[k] = num[k] + 1; i++; } i=0; while(i<281) { deltaT2[i] = cluster[i]/num[i]; i++; }

53
/*Atualizando as saidas*/ saida_teta = aux_teta; saida_ds = aux_ds; saida_qs = aux_qs; saida_dr = aux_dr; saida_qr = aux_qr;