
Universidade Federal de Itajubá - saturno.unifei.edu.brsaturno.unifei.edu.br/bim/0030558.pdf · de...
94
Universidade Federal de Itajubá Programa de Pós-graduação em Engenharia Elétrica TÉCNICAS DE ANÁLISE PREDITIVA PARA FALHAS ELÉTRICAS EM MOTORES DE INDUÇÃO TRIFÁSICOS Frederico de Oliveira Assunção Itajubá, Março de 2006 Dissertação apresentada à Universidade Federal de Itajubá para a obtenção do grau de Mestre em Ciências em Engenharia Elétrica.
Transcript of Universidade Federal de Itajubá - saturno.unifei.edu.brsaturno.unifei.edu.br/bim/0030558.pdf · de...

Universidade Federal de Itajubá
Programa de Pós-graduação em Engenharia Elétrica
TÉCNICAS DE ANÁLISE PREDITIVA PARA FALHAS ELÉTRICAS EM MOTORES DE INDUÇÃO TRIFÁSICOS
Frederico de Oliveira Assunção
Itajubá, Março de 2006
Dissertação apresentada à Universidade Federal de Itajubá para a obtenção do grau de Mestre em Ciências em Engenharia Elétrica.
i
Frederico de Oliveira Assunção
TÉCNICAS DE ANÁLISE PREDITIVA PARA FALHAS ELÉTRICAS EM MOTORES DE INDUÇÃO TRIFÁSICOS
Itajubá, Março de 2006
Área de Concentração:
Automação e Sistemas Elétricos Industriais Orientador: Luiz Eduardo Borges da Silva Co-orientador:
Germano Lambert Torres
Dissertação apresentada à Universidade Federal de Itajubá para a obtenção do grau de Mestre em Ciências em Engenharia Elétrica.

ii
Aos meus pais, à minha querida namorada aos meus irmãos e a todos da comunidade Theotokos e da PS Soluções.

iii
Agradecimentos
Ao professor Luiz Eduardo pela orientação, incentivo e amizade que
resultaram deste trabalho.
Ao professor Germano pela co-orientação e apoio para solução dos mais
diferentes problemas.
Aos meus pais que sempre decisivamente me entusiasmaram e acreditaram
no meu sucesso que também é deles.
A minha namorada Gabriela que sempre com sua oração e seu carinho me
animou e sonhou junto comigo os passos futuros.
Aos amigos da PS Soluções que estimaram além do profissionalismo, o apoio
no conhecimento, nos recursos e no companheirismo.
Ao amigo Vantuil pela orientação, cuidando de mostrar o melhor caminho.
A empresa MPC Service por disponibilizar no site
http://www.mpcservice.com.br/paginas/artigo02.htm figuras de falhas em motores de
indução para download.
A Deus PAI, Filho e Espírito Santo, pelo dom da vida, pela vocação e pela
motivação maior dando me a capacidade de ser aquilo que Ele quis primeiro.
iv
Sumário
Agradecimentos .................................................................................................................. iii Sumário ............................................................................................................................... iv Resumo ............................................................................................................................... vi Abstract .............................................................................................................................. vii Lista de Figuras ................................................................................................................ viii Lista de Tabelas ................................................................................................................... x Glossário ............................................................................................................................. xi CAPÍTULO 1 ....................................................................................................................... 13
INTRODUÇÃO ................................................................................................................. 13 1.1 _ Considerações Iniciais ............................................................................................ 13 1.2 _ Objetivo ................................................................................................................... 14 1.3 _ Motivação................................................................................................................ 15 1.4 _ Organização da Dissertação ................................................................................... 15
CAPÍTULO 2 ....................................................................................................................... 16 TÉCNICAS DE ANÁLISE PREDITIVA DE FALHAS ELÉTRICAS EM MOTORES DE INDUÇÃO TRIFÁSICOS .................................................................................................. 16 2.1 _ Introdução ............................................................................................................... 16 2.2 _ MCSA ..................................................................................................................... 16 2.3 _ EPVA ...................................................................................................................... 22 2.4 _ Análise da impedância de seqüência negativa ........................................................ 27
2.4.1_ Componentes Simétricas .................................................................................. 28
2.4.2_ Impedância de seqüência negativa ................................................................... 29
2.5 _ Falhas Elétricas em motores de indução ................................................................. 31 2.5.1_ Falhas no estator ............................................................................................... 33
2.5.1.1_ Aterramento ................................................................................................ 33
2.5.1.2_ Falha no isolamento – Curto-circuito interno ............................................... 34
2.5.1.3_ Queima generalizada.................................................................................. 38
2.5.1.4_ Queima de uma ou duas fases – Falta de fase ........................................... 39
2.5.1.5_ Queima de uma ou duas fases – Tensões desbalanceadas ....................... 42
CAPÍTULO 3 ....................................................................................................................... 43 O SISTEMA DE MONITORAÇÃO PROPOSTO ............................................................... 43 3.1 _ Introdução ............................................................................................................... 43 3.2 _ O Sistema de Monitoração ...................................................................................... 44
3.2.1 _ Os Transdutores ............................................................................................... 45
3.2.2 _ O Circuito de Aquisição de Dados .................................................................... 48
3.2.3 _ O Processamento Digital do Sinal .................................................................... 49
3.3 _ Considerações Finais .............................................................................................. 51 CAPÍTULO 4 ....................................................................................................................... 52
RESULTADOS................................................................................................................. 52 4.1 _ Considerações Iniciais ............................................................................................ 52 4.2 _ A Montagem Utilizada em Laboratório .................................................................... 53 4.3 _ Identificação de falhas elétricas em MIT por MCSA, EPVA e Cálculo de impedância de sequência negativa ..................................................................................................... 57
4.3.1_ Curto-circuito entre espiras de uma mesma bobina ........................................... 58
4.3.2_ Curto-circuito entre espiras de fases diferentes ................................................. 75
4.3.3_ Desequilíbrio de tensão ..................................................................................... 76

v
4.3.4_ Perda de fase .................................................................................................... 83
CAPÍTULO 5 ....................................................................................................................... 87 CONCLUSÃO .................................................................................................................. 87 5.1 _ Trabalhos futuros .................................................................................................... 90
REFERÊNCIAS BIBLIOGRÁFICAS .................................................................................... 92
vi
Resumo
Cresce cada vez mais o interesse em se alcançar maior confiabilidade nos processos
produtivos. Os motores de indução têm papel importantíssimo em muitos desses processos.
Em vista desse crescimento muito tem sido discutido acerca da manutenção preditiva, como
solução de garantia de maior vida útil desses motores como também paradas programadas
efetivas. Vê-se muito o desenvolvimento de técnicas de manutenção preditiva de motores
quanto às falhas mecânicas no ambiente industrial, porém apesar de grande segurança das
partes mecânicas, na maioria das vezes tem-se o motor parando de forma não programada
por uma falha elétrica.
Na tentativa de oferecer soluções para esses problemas, muitas técnicas de análise
preditiva de falhas elétricas foram desenvolvidas e publicadas em muitos artigos e revistas.
Todas essas técnicas baseiam-se na análise de dados dos motores como tensão, corrente,
fluxos axiais dentre outros, que são medidos constantemente e processados de forma a
gerar um indicador da presença ou não de falha, sem a necessidade da parada do motor
apresentando também o tipo de falha existente e ainda seu grau de severidade.
O presente trabalho consiste no estudo, aplicação e comparação de três dessas
técnicas que são Extend Park´s Vector Approach (EPVA), Motor Current Signature Analisys
(MCSA) e cálculo da impedância de seqüência negativa a fim de apontar ao final deste as
vantagens, desvantagens e condições de aplicação para desenvolvimento de um sistema de
monitoração de falhas elétricas envolvendo cada uma delas.
O trabalho compreendeu os estudos das técnicas, desenvolvimento de um sistema
de simulação de falhas e aplicação de um sistema de monitoração a partir de cada uma das
técnicas, além do estudo de vários tipos de falhas potenciais em motores de indução, suas
causas e efeitos, a fim de demonstrar a importância no diagnóstico precoce evitando a
rebobinagem do motor ou o descarte deste precocemente. As falhas elétricas têm uma
particularidade de evoluir muitas vezes rapidamente, trazendo a combustão em um ponto do
estator e logo em seguida em todo o enrolamento e se não controlado pode chegar até
mesmo a perda total.
Foram discutidas vários pontos de cada uma das técnicas, como a sua
implementação, utilizando ferramentas matemáticas, equacionamentos, formas de
identificação de falha a partir de cada uma delas e verificação dos resultados destas
mediante a ocorrência de falhas como, curto-circuito entre espiras, curto-circuito entre fases,
desequilíbrio de tensão e perda de fase.
Os resultados dos estudos apontam à possibilidade da aplicação das técnicas no
diagnóstico das falhas elétricas e ainda observações a serem consideradas para um
diagnóstico seguro.
vii
Abstract
The interest is growing more and more for reaching better trust in productive
processes. The induction motors have an important role among these processes. In view of
this growing it has been discussing about preventive maintenance, as a solution of guaranty
of larger useful life of these engines and effective programmable stopping as well. It has
seen a great development of preventive maintenance techniques of engines relating to
mechanical faults at industrial environment, however the large security of mechanical parts,
most of the time the engine stops like a non programmable form because of electric fault.
Trying to offer solutions for these kinds of problems, many preventive analysis
techniques of electric faults were developed and published in several articles and
magazines. All these techniques are based on engines data analysis as a tension, current,
axial flow among others that are frequently measured and processed to create an indicator of
fault or not, without of need of engine stopping presenting the sort of existing fault besides its
degree of austerity.
The present job is a study, application and comparison of the three of these
techniques, Extend Park’s Vector Approach (EPVA), Motor Current Signature Analyses
(MCSA) and calculation of impedance of negative sequence in order to indicate the
advantages at the end, disadvantages and application conditions to develop a system of
electric fault monitoring including each one of them.
The work comprehended the study of techniques, development of a fault simulation
system and application of the monitoring system from each one of techniques, besides of
many kinds of potential faults in induction engines, their causes and effects, in order to
demonstrate the importance during early diagnostic avoiding coil of engine or discard it early.
The electric faults privately develop many times very quickly, bringing the combustion in a
certain point of the stator and right after all the coil. If you don’t control the electric faults you
can even have a total lost.
It was discussed many points of each one of the techniques, as their implementation,
using mathematics tools, solving problems, manners of fault identification from each one of
them and checking of results of faults through faults as short circuit between spires, short
circuit among phases, tension instability and lost of phase.
The results of the studies indicate the possibility of the application of the techniques
on the electric faults diagnostic even observations to be considered for a safe diagnostic.

viii
Lista de Figuras
Figura 2.1: Sistema básico para análise espectral da corrente [1]................................. 17 Figura 2.2: a) Espectro na escala linear b)Espectro na escala logarítmica [1] .............. 20 Figura 2.3: Padrão de falhas no estator MCSA. ............................................................... 20 Figura 2.4: Exemplo de espectro de corrente do estator monitorando o terceiro harmônico. ......................................................................................................................... 21 Figura 2.5: Exemplo de curva de tendência do terceiro harmônico. .............................. 22 Figura 2.6: Representação do Vetor de Park da corrente para uma situação ideal. [2] 23 Figura 2.7: Representação do vetor de Park para o caso de um motor com assimetria no estator (a) Representação do vetor de Park da corrente do motor ........................... 24 (b) Módulo do Vetor de Park da corrente do Motor. [2] ................................................... 24 Figura 2.8: exemplo de uma instalação de três sensores de corrente........................... 25 Figura 2.9: Diagrama em bloco da técnica EPVA [3] ....................................................... 25 Figura 2.10: Exemplos curva de tendência de desequilíbrio no espectro do vetor de Park. .................................................................................................................................... 27 Figura 2.11: Circuito equivalente de sequencia positiva de um motor de indução ...... 30 Figura 2.12: Circuito equivalente de sequencia negativa de um motor de indução ..... 31 Figura 2.15: Causas de falhas no estator [7] ................................................................... 33 Figura 2.16: Curto-circuito para massa na saída da ranhura [8] .................................... 34 Figura 2.17: Curto-circuito entre espiras [8] .................................................................... 35 Figura 2.18: Bobina Curto-circuitada [8] .......................................................................... 35 Figura 2.19: Curto-circuito entre espiras de fases diferentes [8] ................................... 36 Figura 2.20: Curto-circuito na conexão [8] ....................................................................... 36 Figura 2.21: Curto-circuito no interior da ranhura [8] ..................................................... 37 Figura 2.22: Isolamento furado por surto de tensão [8] .................................................. 37 Figura 2.23: Carbonização generalizada por sobrecarga intensa [8] ............................. 38 Figura 2.24: Rotor travado [8] ........................................................................................... 39 Figura 2.25: Correntes que circulam nos enrolametos devido a abertura de fase – motor ligado em delta [7] .................................................................................................. 40 Figura 2.26: Queima de uma fase – motor ligado em delta [8] ....................................... 40 Figura 2.27: Correntes que circulam nos enrolametos devido a abertura de fase – motor ligado em estrela [7] ............................................................................................... 41 Figura 2.28: Queima de duas fases – motor ligado em estrela [8] ................................. 41 Figura 2.29: Queima por correntes excessivas desequilibradas devido à .................... 42 aplicação de tensões desbalaceadas [8] ......................................................................... 42 Figura 3.1: Sistema de monitoração proposto, hardware e transdutores ..................... 44 Figura 3.2: Sistema de monitoração para aplicação das técninas de análise de falhas elétricas .............................................................................................................................. 44 Figura 3.3: Seleção escala transdutor .............................................................................. 45 Figura 3.4: Conector BNC do transdutor.......................................................................... 45 Figura 3.5: Transdutor de Corrente i200s ........................................................................ 46 Figura 3.6: Transdutor de Tensão DP120 ......................................................................... 46 Figura 3.7: Configuração transdutores Técnica EPVA.................................................... 47 Figura 3.8: Configuração transdutores Técnica MCSA ................................................... 48 Figura 3.9: Configuração transdutores Técnica Imedância de Sequencia Negativa..... 48 Figura 3.10: Hardware Preditor® PRC3 PS Soluções ....................................................... 49 Figura 3.11: Sistema on-line Preditor® ............................................................................. 51 Figura 4.1: Bancada de teste do laboratório .................................................................... 52 Figura 4.2: Montagem no laboratório sistema de simulação .......................................... 53 Figura 4.3: Esquema de ligação do sistema de teste ...................................................... 54 Figura 4.4: Motor modificado com taps em um grupo de bobina................................... 55
ix
Figura 4.5: Representação dos taps em bobina modificada........................................... 55 Figura 4.6: Caixa de Coneção dos taps da bobina e terminais de alimentação do motor ............................................................................................................................................ 56 Figura 4.7: Chave disjuntor para introdução do curto- circuito ..................................... 56 Figura 4.8: Resistor variável inserido em série com os curtos - circuitos .................... 57 Figura 4.9: Espectro de referência EPVA (motor “saudável”) ........................................ 58 Figura 4.10: Espectro de referência MCSA (motor “saudável”) ..................................... 59 Figura 4.11: Espectro EPVA com taps1 e 2 em curto-circuito com Rc de 9 ............... 60 Figura 4.12: Espectro MCSA com taps1 e 2 em curto e Rc de 9 .................................. 60
Figura 4.13: Espectro EPVA com taps1 e 2 em curto e Rc de 4................................... 61 Figura 4.14: Espectro MCSA com taps1 e 2 em curto e Rc de 4 .................................. 62 Figura 4.15: Espectro EPVA com taps1 e 2 em curto e Rc de 1................................... 63 Figura 4.16: Espectro MCSA com taps1 e 2 em curto e Rc de 1 .................................. 63 Figura 4.17: Curva de Tendência EPVA (a) Corrente e (b) tensão .................................. 64 Figura 4.18: Curva de Tendência MCSA Fase A, taps 1 e 2 ............................................ 65 Figura 4.19: Curva de Tendência Impedância Sequência Negativa, taps 1 e 2 ............. 66 Figura 4.20: Curva de Tendência EPVA Corrente, taps 1 e 3 .......................................... 67 Figura 4.21: Curva de Tendência MCSA Fase A, taps 1 e 3 ............................................ 67 Figura 4.22: Curva de Tendência Impedância Sequência Negativa, taps 1 e 3 ............. 68 Figura 4.23: Curva de Tendência EPVA Corrente taps 1 e 4 ........................................... 68 Figura 4.24: Curva de Tendência MCSA Fase A, taps 1 e 4 ............................................ 69
Figura 4.25: Curva de Tendência EPVA da Corrente Rc de 1 ...................................... 70 Figura 4.26: Curva de Tendência MCSA Fase A Rc 1 ................................................... 70 Figura 4.27: Curva de Tendência Impedância de Sequência Negativa Rc 1 ............... 71 Figura 4.28: Curva de tendência EPVA Corrente Rc 1 variando a carga do MIT ........ 72 Figura 4.29: Curva de tendência MCSA Rc 1 variando a carga do MIT ....................... 72
Figura 4.30: Curva de tendência EPVA Corrente Rc 1 variando a carga do MIT ........ 73 Figura 4.31: Curva de tendência MCSA Rc 1 variando a carga do MIT ....................... 73 Figura 4.32: Curva de tendência EPVA Corrente Rc 1 variando a carga do MIT ........ 74 Figura 4.33: Curva de tendência MCSA Rc 1 variando a carga do MIT ....................... 74 Figura 4.34: Curva de tendência EPVA Corrente curto-circuito entre fases.................. 75 Figura 4.35: Curva de tendência MCSA curto-circuito entre fases ................................ 76 Figura 4.36: Dispositivo para causar afundamento monofásico .................................... 77 Figura 4.37: Curva de tendência EPVA Corrente – Afundamento fase A ....................... 77 Figura 4.38: Curva de tendência MCSA FaseA – Afundamento fase A .......................... 78 Figura 4.39: Curva de tendência MCSA FaseB – Afundamento fase A .......................... 78 Figura 4.40: Curva de tendência MCSA FaseC – Afundamento fase A .......................... 79 Figura 4.41: Curva de tendência EPVA Corrente – Afundamento Fase A e CC entre espiras ................................................................................................................................ 80 Figura 4.42: Curva de tendência EPVA Tensão – Afundamento Fase A e CC entre espiras ................................................................................................................................ 81 Figura 4.43: Curva de tendência MCSA – Afundamento Fase A e CC entre espiras..... 81 Figura 4.44: Curva de tendência EPVA Corrente – Afundamento Fase A e CC entre espiras ................................................................................................................................ 82 Figura 4.45: Curva de tendência EPVA Tensão – Afundamento Fase A e CC entre espiras ................................................................................................................................ 82 Figura 4.46: Curva de tendência MCSA – Afundamento Fase A e CC entre espiras..... 83 Figura 4.47: Sinal no tempo das Correntes, fase C “vermelho” interrompida .............. 83 Figura 4.48: Curva de tendência EPVA Corrente – Perda da fase C .............................. 84 Figura 4.49: Curva de tendência EPVA Tensão – Perda da fase C ................................. 84 Figura 4.50: Curva de tendência MCSA – Perda da fase C ............................................. 85 Figura 4.51: Curva de tendência EPVA Corrente – Perda da fase C e curto-circuito .... 86 Figura 4.52: Curva de tendência MCSA – Perda da fase C e curto-circuito ................... 86
x
Lista de Tabelas
Tabela 2.1: Resoluções utilizadas no mercado [1] .......................................................... 19 Tabela 3.1: Características transdutor de corrente i200s ............................................... 46 Tabela 3.2: Características transdutor de tensão DP120 ................................................ 47 Tabela 4.1: Parâmetros do Motor de indução .................................................................. 54 Tabela 4.2: Parâmetros da Máquina de Corrente-Contínua ............................................ 55 Tabela 4.3: Tensões entre os terminiais p/ o curto-circuito entre fases ........................ 75
xi
Glossário
Δf Resolução espectral
Fs Freqüência de amostragem
N Número de amostras
Fmax Freqüência máxima de amostragem
F Freqüência fundamental de alimentação
id Corrente de eixo direto
iq Corrente de eixo quadratura
iA Corrente de Fase A
iB Corrente de Fase B
iC Corrente de Fase C
A Fase A
B Fase B
C Fase C
i+ Máximo valor da corrente de seqüência positiva
i- Máximo valor da corrente de seqüência negativa
w Freqüência angular de alimentação
t Tempo
d Eixo direto
q Eixo em quadratura
VA Tensão da Fase A
VB Tensão da Fase B
VC Tensão da Fase C
VA0 Tensão de seqüência nula da Fase A
VA1 Tensão de seqüência positiva da Fase A
VA2 Tensão de seqüência negativa da Fase A
a Unidade de vetor e+j120
ZA0 Impedância de seqüência nula da Fase A
ZA1 Impedância de seqüência positiva da Fase A
ZA2 Impedância de seqüência negativa da Fase A
IA0 Corrente de seqüência nula da Fase A
IA1 Corrente de seqüência positiva da Fase A
IA2 Corrente de seqüência negativa da Fase A
s Escorregamento
Rs Resistência do estator
xii
Rr Resistência do rotor
Xs Reatância do estator
Xr Reatância do rotor
Xm Reatância de magnetização
RV1 Resistência variável do rotor de seqüência positiva
RV2 Resistência variável do rotor de seqüência negativa
Z2ef Impedância de seqüência negativa efetiva
Cat Categoria
DC Componente contínua
Δ Ligação Delta

Capítulo 1 – Introdução
13
CAPÍTULO 1
INTRODUÇÃO
1.1 _ Considerações Iniciais
Existe um grande consenso envolvendo os estudos de manutenção, principalmente
de institutos como o IEEE e o Electric Power Research Institute (EPRI), que falhas no
estator tem sido uma das maiores causa de problemas em motores de indução [2]. Isto traz
uma grande preocupação, pois chega a 90% das aplicações elétricas de força motriz o
percentual de motores de indução sendo utilizado [12].
Esta estatística aponta para um grau de preocupação elevado onde as equipes de
manutenção apesar de bem treinadas, contam com poucos recursos frente ao problema da
degradação do isolamento no interior da máquina. Isto traz muitas conseqüências como a
falta de garantia do funcionamento do motor, paradas não programadas, perda de produção,
prejuízos financeiros além de tantos outros transtornos que somam a cada variável típica de
cada realidade que depende do bom funcionamento do motor de indução.
As equipes de manutenção preditiva atualmente contam com ótimas ferramentas no
diagnóstico de falhas mecânicas, principalmente a análise de vibração, com programas
inteligentes, com padrões bem definidos de falha, com sistemas on-line, vários tipos de
alertas, rotas automáticas além de outros recursos. Mas estas se vêem muitas vezes sem
iniciativa para predizer quando um motor vai parar, porque não dispõe de ferramentas
preditivas para análise de falhas elétricas. Na maioria dos casos, quando possível, as
equipes traçam rotas de manutenção preventiva e fazem a medição da resistência de
isolamento que já é bastante tradicional, porém pouco efetiva frente a um número muito
grande de motores e a velocidade de propagação de um defeito elétrico nesses.
Em conseqüência das preocupações acerca das falhas elétricas nos motores de
indução, diversas técnicas têm sido publicadas em artigos relacionados com a área de
manutenção de motores, como por exemplo, Descargas Parciais [13], Monitoração da
Vibração [13], análise de fluxo no eixo [14], potência instantânea [15], torque
eletromagnético [16], corrente de seqüência negativa [5] [6], EPVA [2], MCSA [1] [18] e
cálculo da impedância de seqüência negativa [6], que são algumas que propõe soluções
para falhas elétricas no estator de motores de indução.
Dentre todas essas técnicas, MCSA, EPVA e cálculo da impedância de seqüência
negativa, têm algumas vantagens, pois essas se baseiam no processamento de sinais de

Capítulo 1 – Introdução
14
corrente e/ou tensão, sinais esses facilmente obtidos em painéis de alimentação, centro de
controle de motores (CCM), sem a necessidade de contato com o motor o que facilita
principalmente para motores instalados em locais de difícil acesso, como torres, telhados,
tubulações, fundo do mar além de tantos outros. E os processamentos de sinais são simples
e de acordo com [1], [2] e [6], apresentam diagnósticos acerca de falhas elétricas em
motores de indução.
Estas três técnicas acima citadas são alvos de estudo deste trabalho, onde se
procurou observar os fundamentos de cada uma delas, implementando-as e aplicando-as
junto a um motor de indução trifásico (MIT) modificado com possibilidade de geração de
falhas elétricas no estator, com o propósito de comparar os diagnósticos gerados por cada
uma delas.
Para todo o desenvolvimento dos estudos, procedeu-se com:
Estudos das técnicas de manutenção preditiva;
Estudo das falhas elétricas em motores de indução trifásicos;
Escolha de um motor trifásico e rebobinagem deste inserindo meios de acesso
externo para geração de falhas;
Montagem de um sistema físico motor e carga em laboratório;
Escolha e preparação de um sistema de monitoração, hardware, sensores e
software;
Desenvolvimento de software dedicado para processamento;
Análise de dados e resultados;
Comparação de resultados de cada uma das técnicas.
1.2 _ Objetivo
O objetivo deste trabalho é avaliar o desempenho das técnicas de análise preditiva
Motor Current Signature to Analisys (MCSA), Extended Park´s Vector Approach (EPVA) e
cálculo da impedância de seqüência negativa frente aos problemas elétricos em estator de
MIT, bem como apontar as vantagens de cada uma delas em função de resultados,
implementação, aplicabilidade, e observações importantes. Com isto se objetiva também
verificar na prática, mesmo que simulado, se estas são capazes de atender as necessidades
de uma equipe de manutenção preditiva que enfrenta dúvidas diariamente se interfere ou
não em um motor, se deixa este funcionar por mais algum tempo ou troca o motor, além de

Capítulo 1 – Introdução
15
outros questionamentos que surgem por não ter uma ferramenta eficiente para se chegar a
um diagnóstico de falhas elétricas em um motor de indução.
1.3 _ Motivação
É necessária no crescimento de todas as técnicas elaboradas, a aplicação dessas,
para que se possa descartar ou até mesmo melhorá-la para que esta possa atingir as
necessidades existentes. Mediante o estudo e comparação das três técnicas de análise
preditiva de falhas elétricas em MIT, é possível chegar a um resumo de como aplicar cada
uma delas, quando aplicar, como são as resposta perante vários tipos de falhas e estes
também combinados e ainda apontar os caminhos de melhorias em cada uma delas para se
chegar a diagnósticos ainda mais confiáveis.
1.4 _ Organização da Dissertação
A dissertação compõe-se de cinco capítulos, onde são descritos todos os conteúdos
que atingem os objetivos traçados.
No capitulo II, é discutido as técnicas de análise preditiva, apresentando o
fundamento teórico de cada uma delas e também são apresentadas as falhas elétricas
típicas em MIT.
O capítulo III apresenta o sistema de monitoração proposto, que baseia na estrutura
montada e também em tudo que é necessário para aplicação das técnicas.
O mais longo desses capítulos é o IV, onde todos os resultados das simulações de
falhas criadas no sistema de motor e carga montado em laboratório para estudo das
técnicas, são discutidos, em forma de gráficos, curvas de tendência e observações.
O capítulo V traz as conclusões, que correspondem às comparações das técnicas,
as características individuais de cada uma delas a discussão dos resultados e também
sugestões para trabalhos futuros.

Capítulo 2 – Técnicas de Análise Preditiva de Falhas Elétricas em MIT
16
CAPÍTULO 2
TÉCNICAS DE ANÁLISE PREDITIVA DE FALHAS ELÉTRICAS EM
MOTORES DE INDUÇÃO TRIFÁSICOS
Nos motores de indução, os problemas elétricos muitas vezes são os vilões de paradas não
programadas, já que poucas são as ferramentas de análise preditiva disponíveis no mercado. Neste
capítulo são apresentadas algumas das técnicas estudadas discutidas e empregadas em manutenção preditiva e ainda as principais falhas elétricas nesses motores.
2.1 _ Introdução
As técnicas de manutenção preditiva atualmente difundidas no mercado, salvo
daquelas que ainda não atingiram discussões acadêmicas e publicações em artigos, são:
MCSA (Motor Current Signature to Analisys);
EPVA (Extended Park´s Vector Approach);
Análise da impedância de seqüência negativa;
Descargas Parciais;
Análise de fluxo axial;
Potência instantânea;
Torque eletromagnético.
O que se pode afirmar que é comum se encontrar equipes fortemente capacitadas
em manutenção preditiva nas empresas, capazes de identificar problemas muito
complexos, mas que esperam muitas vezes um motor parar por falha elétrica de braços
cruzados, sem poder fazer nada, recorrendo a sentir talvez um fusível queimar e assim
realizar a medição do isolamento. No estudo dessas técnicas discutiu-se um pouco do
histórico de cada uma das técnicas seguido do apontamento das características de cada
uma delas frente às falhas elétricas mais comuns nos motores de indução trifásicos.
2.2 _ MCSA
Esta técnica, hoje bastante discutida nas duas últimas décadas, nasceu da
observação do comportamento da corrente elétrica em função da existência de um

Capítulo 2 – Técnicas de Análise Preditiva de Falhas Elétricas em MIT
17
problema, seja ele elétrico ou mecânico, e ainda das particularidades de se avaliar falhas
em motores inacessíveis fisicamente. Foi quando na década de 80 alguns pesquisadores
dentre eles, H. Okitsu, C Hargis e W. T. Thomson, perceberam ao avaliar também a
assinatura da corrente do estator bandas laterais em torno da fundamental que
correspondiam ao aparecimento de barras trincadas ou quebradas no rotor. Com o
prosseguir dos estudos verificou-se que esta técnica de também teria um grande potencial
para diagnósticos de falhas mecânicas como excentricidade estática e dinâmica sendo esta
relacionada ao próprio eixo do motor como também da carga. Nestes casos o motor então
passa a funcionar também como um transdutor dos efeitos da carga para a corrente do
estator, podendo esta enxergar defeitos como falha em rolamentos, problemas em correias,
polias, engrenagens, e todo tipo de carga acoplado ao motor desde que esta seja capaz de
gerar uma modulação característica no air-gap [1].
A técnica MCSA procede da modulação capaz de sensibilizar o air-gap, numa
freqüência característica e ainda do conteúdo harmônico adquirido por esta em função de
outras falhas, como por exemplo, problemas no estator bem como problemas com o
sistema de alimentação no qual o motor está inserido.
Esta técnica tem como característica e assim também uma vantagem o número
reduzido de transdutores empregados, onde se utiliza apenas um transdutor de corrente,
instalado no painel de alimentação. Outra grande vantagem está no fato desta não ser
invasiva, ou seja, não necessita a abertura e nem a parada do motor para análise e ainda
não necessita estar próximo à máquina, reduzindo riscos de acidentes e deslocamentos
excessivos.
O sistema é muito simples de ser implementado, como pode ser observado na figura
2.1.
Figura 2.1: Sistema básico para análise espectral da corrente [1]
Condicionador
de sinais
MIT
Analisador de
espectro
CT
3-phase
supply

Capítulo 2 – Técnicas de Análise Preditiva de Falhas Elétricas em MIT
18
CT: corresponde a um transdutor de corrente, que às vezes conta com dois
transdutores, um primário e outro secundário caso o motor seja de média ou alta
tensão, com relação a esses se soma apenas à especificação de faixa de
corrente de trabalho e também a faixa de freqüência, já que este pode funcionar
como um filtro para algumas freqüências importantes para caracterização da
falha. Na prática deve se empregar transdutores com banda de passagem acima
de 10kHz.
Condicionador de sinal: este circuito é importante para eliminar componentes
indesejáveis no sinal de corrente decorrentes, por exemplo, de ruídos
eletromagnéticos ou aliasing do sinal amostrado. Este último efeito aparece
quando os sinais adquiridos possuem freqüência maior que a metade da
freqüência de amostragem, o que não cumpre com o teorema de Nyquist. Na
prática deve-se adotar uma freqüência de amostragem maior que dez vezes a
maior freqüência a ser amostrada.
Analisador de Espectro: Este elemento constitui da transformação do sinal do
domínio do tempo, para o domínio da freqüência, onde se obtém a assinatura da
corrente. Este processamento é realizado a partir da Fast Fourier Transform
(FFT) que constitui um algoritmo que acelera a Discrete Fourier Transform (DFT).
A DFT que transforma um sinal do domínio do tempo a um conjunto de senos e
co-senos com amplitudes e freqüências diferentes que podem ser somados para
formar o sinal no domínio do tempo original.
A análise compreende localizar da freqüência de interesse (de falha) e comparar
a tendência de aumento da magnitude desta componente no tempo para verificar
se há ou não um processo de falha em progresso.
Na técnica MCSA, é importante se conseguir sinais com muita clareza, pois as
informações desejadas, muitas vezes estão em níveis muito baixos e muito susceptíveis de
serem confundidas, caso o espectro esteja “sujo”. Além dos cuidados acima apresentados, é
importante ainda garantir uma boa resolução do espectro.
Por resolução espectral entende-se como a distância entre duas raias espectrais e
esta é dada por:
(2.1)
N
ff s

Capítulo 2 – Técnicas de Análise Preditiva de Falhas Elétricas em MIT
19
Onde:
– f é a resolução espectral
– Fs é a freqüência de amostragem utilizada
– N é o número de amostras
O circuito de aquisição de dados utilizado neste trabalho foi o Preditor® este realiza
todo o condicionamento do sinal, além da conversão analógica para digital. Comparando
com os equipamentos existentes no mercado, a resolução deste apresenta-se bem superior.
Assim:
Tabela 2.1: Resoluções utilizadas no mercado [1]
A magnitude das componentes de freqüência na corrente é apresentada em dB
(decibéis), para que as magnitudes muito pequenas sejam maximizadas e melhor
visualizadas no espectro da corrente. Com base nesta escala, pode-se afirmar:
Uma diferença de 6 dB implica que uma componente é o dobro da outra
Uma diferença de 20 dB implica que uma componente é 10 vezes maior que a outra
Uma diferença de 40 dB implica que uma componente é 100 vezes maior que a outra
Uma diferença de 60 dB implica que uma componente é 1.000 vezes maior que a outra
Uma diferença de 80 dB implica que uma componente é 10.000 vezes maior que a outra
F s = 1638,4 F s = 8192
F max = 819,2 F max = 4096
100 256
200 512
400 1024
800 2048
1600 4096
3200 8192
6400 16384
12800 32768
25600 65536
51200 131072
102400 262144
Dados para Aquisição do Preditor
0,125
0,0625
0,03125
Linhas Amostras
Mercado
PREDITOR
32
16
8
4
2
1
0,5
0,25 0,05
0,025
0,0125
0,00625
6,4
3,2
1,6
0,8
0,4
0,2
0,1
Resolução

Capítulo 2 – Técnicas de Análise Preditiva de Falhas Elétricas em MIT
20
Figura 2.2: a) Espectro na escala linear b)Espectro na escala logarítmica [1]
Na figura 2.2.a é apresentado o espectro em escala linear. Já na 2.2.b tem-se o
espectro em escala logarítmica. É nítido que se tem muito mais informação disponível no
espectro do segundo caso. O que se justifica o emprego de escalas logarítmicas.
No acompanhamento da falha a partir do espectro de corrente, geralmente é
necessário acompanhar o comportamento da tendência da magnitude da componente de
falha. Para algumas falhas já existem cartas de severidade onde se tem uma relação direta
sobre o valor da magnitude em dB e a severidade da falha existente na máquina, como por
exemplo, a falha de “barra quebrada”.
Para o acompanhamento da falha a partir da assinatura de corrente, tem sido
estabelecido por diversos autores, um conjunto de padrões de falha, que procuram orientar
a busca das componentes de interesse. No caso de falhas elétricas que geram um
desequilíbrio elétrico no motor, tem-se que a componente relativa ao terceiro harmônico vai
indicar a presença ou não deste desequilíbrio [4].
Figura 2.3: Padrão de falhas no estator MCSA.

Capítulo 2 – Técnicas de Análise Preditiva de Falhas Elétricas em MIT
21
A componente de 3xF é de seqüência nula. O seu acréscimo no espectro diz respeito
a um desequilíbrio existente, porém esse pode ter como fonte um problema no estator ou
ainda um problema no sistema de alimentação. Uma estratégia simples de se separar estes
dois efeitos através da análise de corrente é comparar a mesma componente de terceiro
harmônico em motores instalados em um mesmo sistema de alimentação (mesmo
barramento), caso a componente venha a ter uma tendência progressiva em um caso,
enquanto no outro no mesmo barramento se mantém constante, isto corresponderá à
presença de uma falta no motor, por outro lado se os dois tem o mesmo comportamento,
isto pode caracterizar um problema com o sistema de alimentação.
A figura 2.4 permite a observação de um espectro da corrente tendo passado por
todos os passos da técnica. Pode-se observar a componente referente ao desequilíbrio
apontada e ainda com sua magnitude destacada sobre a componente. Neste caso tem-se
um motor operando sob um sistema de alimentação com freqüência de 60Hz.
Figura 2.4: Exemplo de espectro de corrente do estator monitorando o terceiro harmônico.
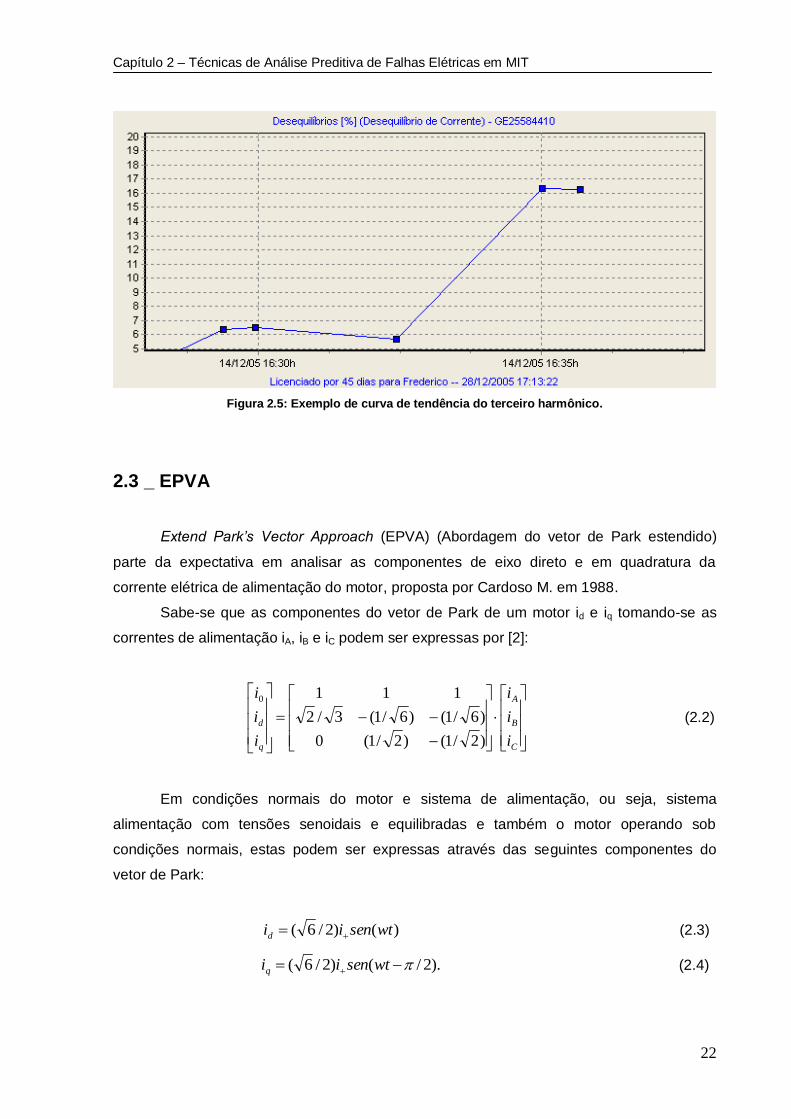
A figura 2.5 traz um exemplo de uma curva de tendência onde cada ponto
corresponde a magnitude da componente do terceiro harmônico em cada instante
monitorado. As magnitudes assumidas e a sua variação serão os parâmetros de avaliação
para diagnosticar a presença ou não da falha elétrica no motor ou no sistema de
alimentação.
Capítulo 2 – Técnicas de Análise Preditiva de Falhas Elétricas em MIT
22
Figura 2.5: Exemplo de curva de tendência do terceiro harmônico.
2.3 _ EPVA
Extend Park’s Vector Approach (EPVA) (Abordagem do vetor de Park estendido)
parte da expectativa em analisar as componentes de eixo direto e em quadratura da
corrente elétrica de alimentação do motor, proposta por Cardoso M. em 1988.
Sabe-se que as componentes do vetor de Park de um motor id e iq tomando-se as
correntes de alimentação iA, iB e iC podem ser expressas por [2]:
C
B
A
q
d
i
i
i
i
i
i
)2/1()2/1(0
)6/1()6/1(3/2
1110
(2.2)
Em condições normais do motor e sistema de alimentação, ou seja, sistema
alimentação com tensões senoidais e equilibradas e também o motor operando sob
condições normais, estas podem ser expressas através das seguintes componentes do
vetor de Park:
)()2/6( wtseniid (2.3)
).2/()2/6( wtseniiq (2.4)

Capítulo 2 – Técnicas de Análise Preditiva de Falhas Elétricas em MIT
23
Onde
i máximo valor da corrente de seqüência positiva (A);
w freqüência angular da alimentação (rad/s);
t variável tempo (s).
A representação correspondente é uma forma circular posicionada na origem dos
eixos coordenados. Neste caso o módulo do vetor de Park é constante:
Figura 2.6: Representação do Vetor de Park da corrente para uma situação ideal. [2]
Para condições anormais de operação, as expressões 2.3 e 2.4, não são aplicadas,
isto ocorre devido à presença de outras componentes na corrente de alimentação do motor
além das componentes de seqüência positiva, correspondendo uma representação diferente
da apresentada acima. Nestas condições o módulo do vetor de Park irá conter um nível dc e
um nível ac, que tem relação direta com a assimetria no motor ou no sistema de
alimentação no qual este está inserido.
No caso da existência de um curto-circuito interno no estator de um motor
assíncrono, sendo este alimentado sem neutro, um desequilíbrio irá aparecer na corrente e
esta pode ser expressa como a soma da componente de seqüência positiva e negativa.
Com isto pode-se apresentar que a existência destas duas componentes, traz uma
representação elíptica do vetor de Park da corrente, como pode ser visto na figura 2.7.
Observa-se também que o tamanho do eixo maior é diretamente proporcional a soma das
amplitudes das componentes de seqüência positiva e negativa da corrente de alimentação

Capítulo 2 – Técnicas de Análise Preditiva de Falhas Elétricas em MIT
24
do motor, enquanto a diferença dessas duas componentes é diretamente proporcional ao
tamanho do eixo menor.
Figura 2.7: Representação do vetor de Park para o caso de um motor com assimetria no estator.
(a) Representação do vetor de Park da corrente do motor
(b) Módulo do Vetor de Park da corrente do Motor. [2]
A partir da figura 2.7(b), que mostra a representação do módulo do vetor de Park no
domínio do tempo, pode ser observado que a presença da corrente de seqüência negativa
está diretamente relacionada com a assimetria presente no motor e que esta também pode
ser observada pela presença da componente duas vezes a freqüência fundamental de
alimentação (2xF) no espectro de freqüência do vetor de Park da corrente. Pode-se ainda
afirmar que a amplitude desta componente espectral está relacionada diretamente com a
magnitude da falta. Neste sentido, um indicador de grau de assimetria pode ser obtido com
o raio entre a amplitude da componente espectral com freqüência 2xF e o nível dc do vetor

Capítulo 2 – Técnicas de Análise Preditiva de Falhas Elétricas em MIT
25
de Park da corrente. Sabe-se também que a forma geométrica quanto as suas dimensões e
inclinação do eixo central são também um indicador de uma falha existente no motor ou no
sistema de alimentação.
Esta técnica necessita da medição das três correntes do motor de indução trifásico
apenas quando este for alimentado também com o neutro. Para os demais casos é possível
medir somente duas das correntes e a terceira é calculada.
Figura 2.8: exemplo de uma instalação de três sensores de corrente.
A figura 2.9 apresenta o diagrama em bloco do sistema de monitoração utilizando a
técnica EPVA.
Figura 2.9: Diagrama em bloco da técnica EPVA [3]

Capítulo 2 – Técnicas de Análise Preditiva de Falhas Elétricas em MIT
26
Aquisição de dados: Nesta etapa os dados são coletados a partir de
transdutores de corrente a exemplo da técnica MCSA, que são filtrados por
filtros anti-aliasing e então entregues a um conversor analógico/digital (A/D).
Aqui também todos os cuidados devem ser tomados, quanto à especificação
dos transdutores, que devem ter uma tolerância de corrente superior a de
trabalho do motor, faixa de freqüência compatível com as freqüências a
serem amostradas e nível de isolamento superior a área de trabalho. Busca-
se aqui também utilizar transdutores similares, porque como se trata do
estudo de desequilíbrio do motor ou do sistema de alimentação, é preciso
evitar que possa aparecer algum desequilíbrio proveniente de outra situação
que não sejam essas.
Tratamento dos dados: O tratamento dos dados é realizado pelas
transformações necessárias, ou seja, abc para Park e logo em seguida o
cálculo da assinatura do vetor de Park e a geração da representação
geométrica do vetor.
Vetor de Park da Corrente: Neste ponto são realizadas as análises da
representação geométrica e da assinatura do vetor de Park. Como
apresentado anteriormente, a forma geométrica bem como a componente
espectral (2xF) na assinatura do vetor de Park estão relacionados
diretamente com o nível de desequilíbrio existente no motor de indução ou no
sistema de alimentação.
O diagnóstico de um desequilíbrio no estator, passa pela análise da tendência da
magnitude da componente espectral (2xF). Esta forma de análise é necessária, quando não
se tem uma carta de severidade para a técnica, pois a magnitude apresentada pode estar
relacionada com as próprias características do motor analisado bem como do próprio
sistema de alimentação em que o motor está instalado. Na prática, a exemplo do sistema
Preditor®, faz-se também a análise do vetor de Park da tensão de alimentação do motor, já
que o desequilíbrio observado na corrente pode derivar do motor ou do sistema de
alimentação. Desta forma o diagnóstico é mais conclusivo, pois é possível diferenciar se o
aumento da magnitude da componente espectral ocorre somente no espectro do vetor de
Park da corrente ou também da tensão ou ainda só no da tensão. Assim é possível
diferenciar se o desequilíbrio provém do motor ou do sistema de alimentação. A figura 2.10

Capítulo 2 – Técnicas de Análise Preditiva de Falhas Elétricas em MIT
27
traz um exemplo de curvas de tendência da componente de 2xF do espectro de freqüência
do vetor de Park da tensão e da corrente.
Figura 2.10: Exemplos curva de tendência de desequilíbrio no espectro do vetor de Park.
2.4 _ Análise da impedância de seqüência negativa
Resultados de pesquisas recentes apontam para o fato da identificação da
impedância de seqüência negativa efetiva ser um poderoso indicador para o diagnóstico de
falha no estator de motores de indução bem como para o sistema de alimentação. Existem
algumas críticas sobre esses trabalhos como, por exemplo, Kliman em 1996 [18], onde
esses apontam que pequenos erros de medições, tais como, desequilíbrios dos ganhos dos
sensores de corrente, afetariam significativamente o valor da impedância de seqüência
negativa, inviabilizando a aplicação do método. Apesar deste fato, recentes resultados
apresentados apontam a eficiência ainda da técnica, mostrando que substanciais variações
na impedância de seqüência negativa ocorrem em função de pequenos problemas ocorridos
no estator [5].
É uma técnica simples de ser aplicada, porém é necessária a medição simultânea de
tensão e corrente, o que eleva o custo com os transdutores e também com os equipamentos
de aquisição.

Capítulo 2 – Técnicas de Análise Preditiva de Falhas Elétricas em MIT
28
A técnica constitui-se basicamente na obtenção primeiramente das componentes
simétricas da tensão e da corrente, e em seguida através da relação entre elas chega-se a
impedância de seqüência negativa.
2.4.1_ Componentes Simétricas
As componentes simétricas de um sistema trifásico incluem as componentes de
seqüência zero, positiva e negativa. As componentes de seqüência positiva possuem
magnitudes iguais e são defasadas de 120o com vetor de rotação A-B-C. As componentes
de seqüência negativa possuem também magnitudes iguais e defasagem de 120o, mas a
rotação do vetor é C-B-A. A componente de seqüência zero tem magnitudes iguais, porém
sem ângulo de defasagem.
Para as tensões de fase, estas podem ser obtidas a partir da soma das componentes
de seqüência zero, positiva e negativa como pode ser observado em (2.6)-(2.8) para as
tensões VA, VB e VC [5]. As mesmas relações valem também para a corrente substituindo V
por I.
210 AAAA VVVV (2.6)
210 BBBB VVVV (2.7)
210 CCCC VVVV (2.8)
Essas equações são simplificadas trocando a representação do vetor e+j120 por “a” e
realizando as substituições apropriadas como é apresentado na equação (2.9).
2
1
0
2
2
1
1
111
A
A
A
C
B
A
V
V
V
aa
aa
V
V
V
(2.9)
A expressão (2.9) corresponde a transformação de componentes de seqüência para
as componentes de fase ABC.
A ordem inversa, ou seja, a obtenção das componentes de seqüência, pode ser
obtida como ilustrado na equação (2.10).
Capítulo 2 – Técnicas de Análise Preditiva de Falhas Elétricas em MIT
29
C
B
A
A
A
A
V
V
V
aa
aa
V
V
V
2
2
2
1
0
1
1
111
3
1 (2.10)
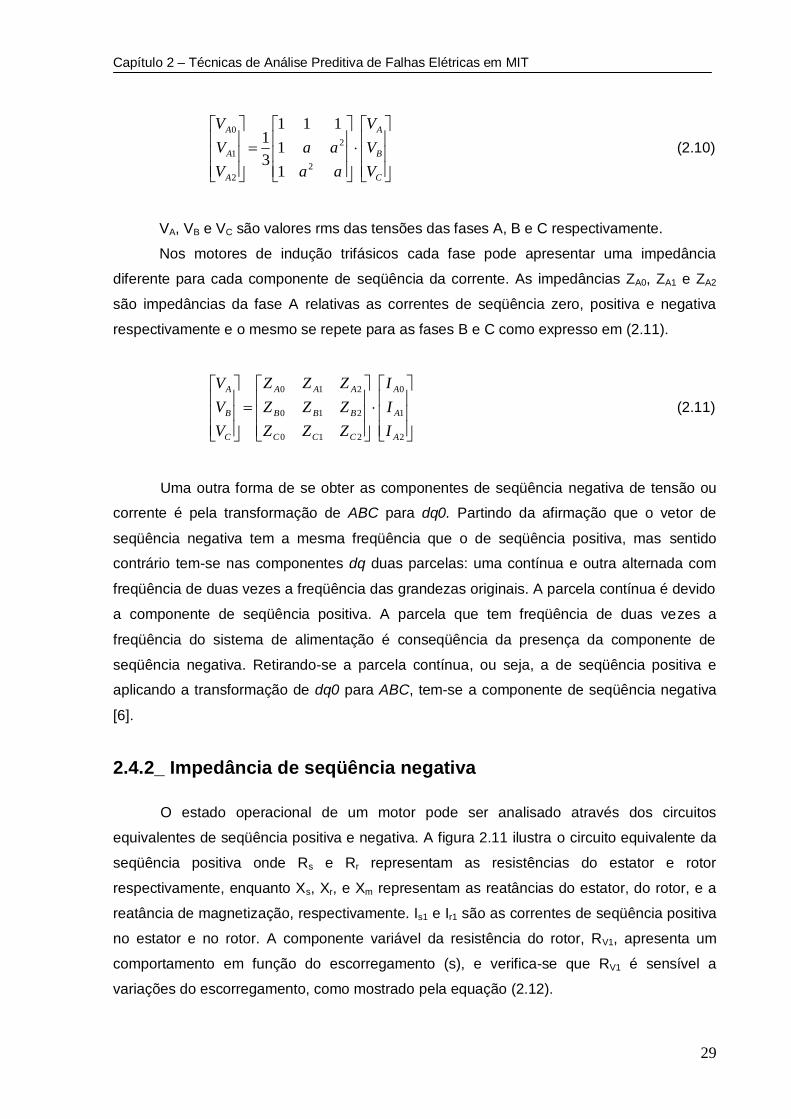
VA, VB e VC são valores rms das tensões das fases A, B e C respectivamente.
Nos motores de indução trifásicos cada fase pode apresentar uma impedância
diferente para cada componente de seqüência da corrente. As impedâncias ZA0, ZA1 e ZA2
são impedâncias da fase A relativas as correntes de seqüência zero, positiva e negativa
respectivamente e o mesmo se repete para as fases B e C como expresso em (2.11).
2
1
0
210
210
210
A
A
A
CCC
BBB
AAA
C
B
A
I
I
I
ZZZ
ZZZ
ZZZ
V
V
V
(2.11)
Uma outra forma de se obter as componentes de seqüência negativa de tensão ou
corrente é pela transformação de ABC para dq0. Partindo da afirmação que o vetor de
seqüência negativa tem a mesma freqüência que o de seqüência positiva, mas sentido
contrário tem-se nas componentes dq duas parcelas: uma contínua e outra alternada com
freqüência de duas vezes a freqüência das grandezas originais. A parcela contínua é devido
a componente de seqüência positiva. A parcela que tem freqüência de duas vezes a
freqüência do sistema de alimentação é conseqüência da presença da componente de
seqüência negativa. Retirando-se a parcela contínua, ou seja, a de seqüência positiva e
aplicando a transformação de dq0 para ABC, tem-se a componente de seqüência negativa
[6].
2.4.2_ Impedância de seqüência negativa
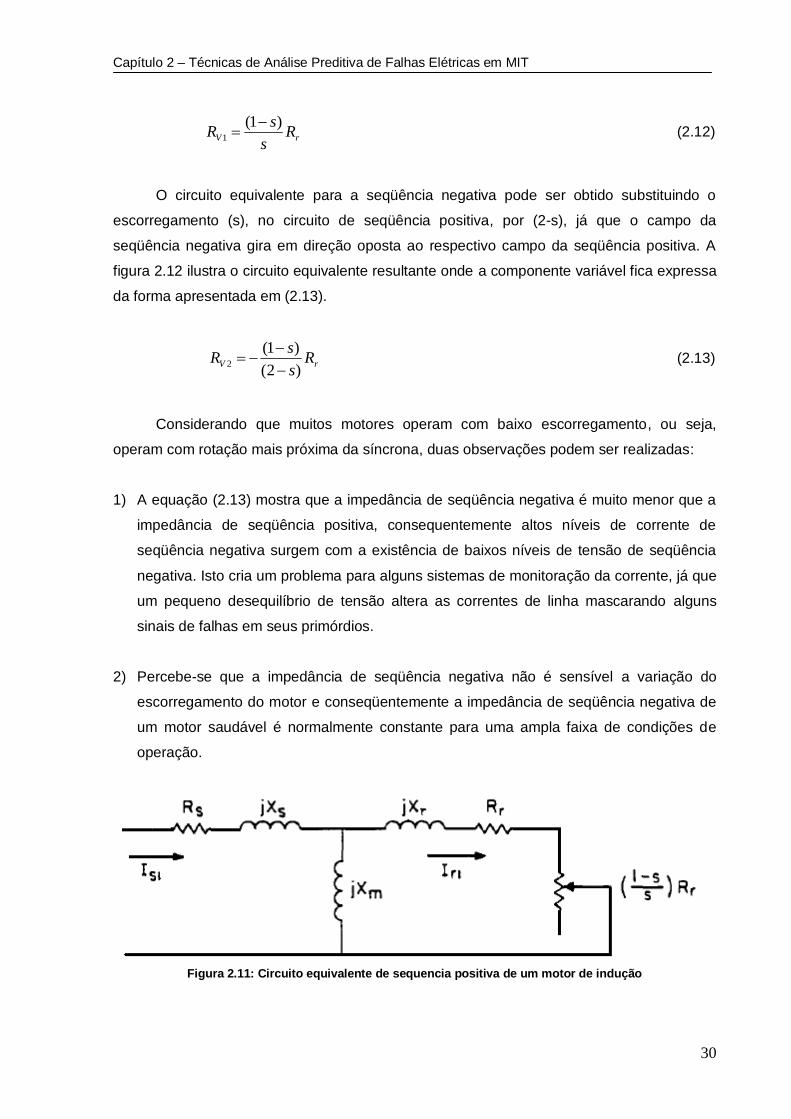
O estado operacional de um motor pode ser analisado através dos circuitos
equivalentes de seqüência positiva e negativa. A figura 2.11 ilustra o circuito equivalente da
seqüência positiva onde Rs e Rr representam as resistências do estator e rotor
respectivamente, enquanto Xs, Xr, e Xm representam as reatâncias do estator, do rotor, e a
reatância de magnetização, respectivamente. Is1 e Ir1 são as correntes de seqüência positiva
no estator e no rotor. A componente variável da resistência do rotor, RV1, apresenta um
comportamento em função do escorregamento (s), e verifica-se que RV1 é sensível a
variações do escorregamento, como mostrado pela equação (2.12).
Capítulo 2 – Técnicas de Análise Preditiva de Falhas Elétricas em MIT
30
rV Rs
sR
)1(1
(2.12)
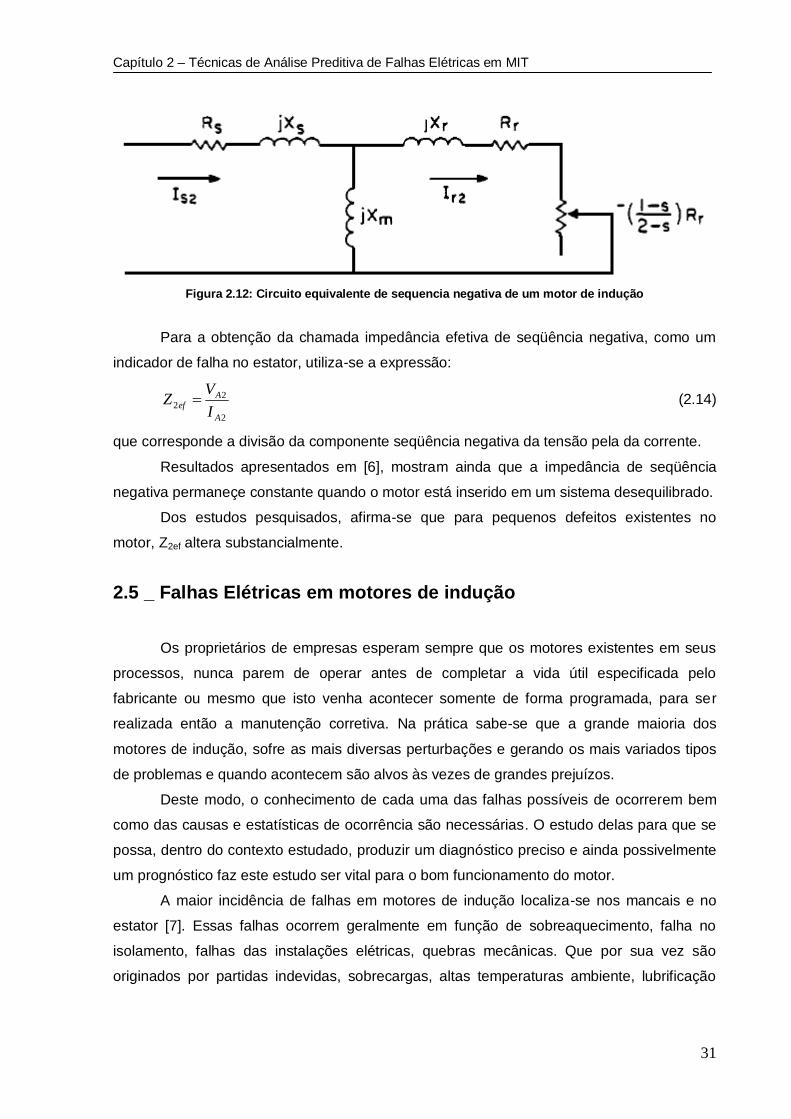
O circuito equivalente para a seqüência negativa pode ser obtido substituindo o
escorregamento (s), no circuito de seqüência positiva, por (2-s), já que o campo da
seqüência negativa gira em direção oposta ao respectivo campo da seqüência positiva. A
figura 2.12 ilustra o circuito equivalente resultante onde a componente variável fica expressa
da forma apresentada em (2.13).
rV Rs
sR
)2(
)1(2
(2.13)
Considerando que muitos motores operam com baixo escorregamento, ou seja,
operam com rotação mais próxima da síncrona, duas observações podem ser realizadas:
1) A equação (2.13) mostra que a impedância de seqüência negativa é muito menor que a
impedância de seqüência positiva, consequentemente altos níveis de corrente de
seqüência negativa surgem com a existência de baixos níveis de tensão de seqüência
negativa. Isto cria um problema para alguns sistemas de monitoração da corrente, já que
um pequeno desequilíbrio de tensão altera as correntes de linha mascarando alguns
sinais de falhas em seus primórdios.
2) Percebe-se que a impedância de seqüência negativa não é sensível a variação do
escorregamento do motor e conseqüentemente a impedância de seqüência negativa de
um motor saudável é normalmente constante para uma ampla faixa de condições de
operação.
Figura 2.11: Circuito equivalente de sequencia positiva de um motor de indução
Capítulo 2 – Técnicas de Análise Preditiva de Falhas Elétricas em MIT
31
Figura 2.12: Circuito equivalente de sequencia negativa de um motor de indução
Para a obtenção da chamada impedância efetiva de seqüência negativa, como um
indicador de falha no estator, utiliza-se a expressão:
2
22
A
Aef
I
VZ (2.14)
que corresponde a divisão da componente seqüência negativa da tensão pela da corrente.
Resultados apresentados em [6], mostram ainda que a impedância de seqüência
negativa permaneçe constante quando o motor está inserido em um sistema desequilibrado.
Dos estudos pesquisados, afirma-se que para pequenos defeitos existentes no
motor, Z2ef altera substancialmente.
2.5 _ Falhas Elétricas em motores de indução
Os proprietários de empresas esperam sempre que os motores existentes em seus
processos, nunca parem de operar antes de completar a vida útil especificada pelo
fabricante ou mesmo que isto venha acontecer somente de forma programada, para ser
realizada então a manutenção corretiva. Na prática sabe-se que a grande maioria dos
motores de indução, sofre as mais diversas perturbações e gerando os mais variados tipos
de problemas e quando acontecem são alvos às vezes de grandes prejuízos.
Deste modo, o conhecimento de cada uma das falhas possíveis de ocorrerem bem
como das causas e estatísticas de ocorrência são necessárias. O estudo delas para que se
possa, dentro do contexto estudado, produzir um diagnóstico preciso e ainda possivelmente
um prognóstico faz este estudo ser vital para o bom funcionamento do motor.
A maior incidência de falhas em motores de indução localiza-se nos mancais e no
estator [7]. Essas falhas ocorrem geralmente em função de sobreaquecimento, falha no
isolamento, falhas das instalações elétricas, quebras mecânicas. Que por sua vez são
originados por partidas indevidas, sobrecargas, altas temperaturas ambiente, lubrificação
Capítulo 2 – Técnicas de Análise Preditiva de Falhas Elétricas em MIT
32
inadequada, falha de ventilação, envelhecimento natural do motor entre outros que fogem
das condições normais de operação dos motores.
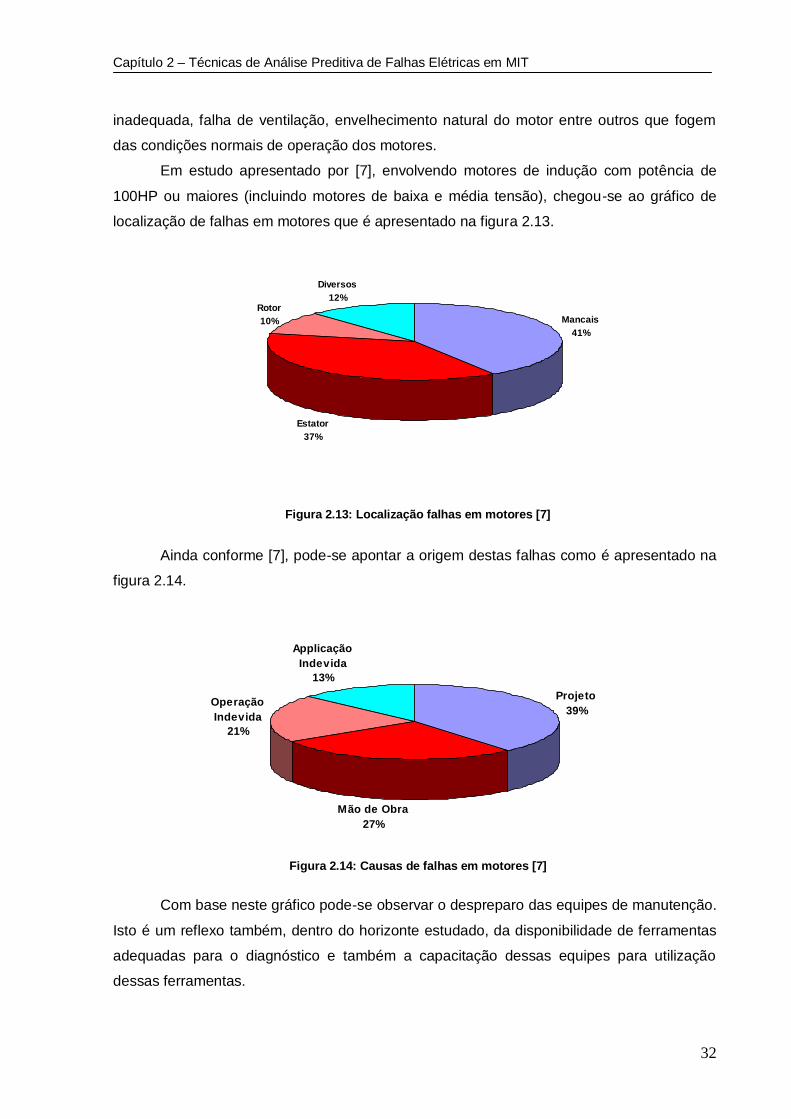
Em estudo apresentado por [7], envolvendo motores de indução com potência de
100HP ou maiores (incluindo motores de baixa e média tensão), chegou-se ao gráfico de
localização de falhas em motores que é apresentado na figura 2.13.
Mancais
41%
Estator
37%
Rotor
10%
Diversos
12%
Ainda conforme [7], pode-se apontar a origem destas falhas como é apresentado na
figura 2.14.
Projeto
39%
Mão de Obra
27%
Operação
Indevida
21%
Applicação
Indevida
13%
Com base neste gráfico pode-se observar o despreparo das equipes de manutenção.
Isto é um reflexo também, dentro do horizonte estudado, da disponibilidade de ferramentas
adequadas para o diagnóstico e também a capacitação dessas equipes para utilização
dessas ferramentas.
Figura 2.13: Localização falhas em motores [7]
Figura 2.14: Causas de falhas em motores [7]

Capítulo 2 – Técnicas de Análise Preditiva de Falhas Elétricas em MIT
33
2.5.1_ Falhas no estator
As falhas no estator somam 37% das ocorrências de falhas no motor como já
apresentado na figura 2.13. Elas são de diversos tipos, sendo esses relacionados
principalmente com as sobretemperaturas que causam a degradação do isolamento,
levando ao curto-circuito. As causas mais comuns de falhas no estator são apresentadas a
seguir, onde também são apresentadas as suas estatísticas de ocorrência segundo [7].
23%
4%3%
1% 1% 1%
4%
Aterramento
Isolamento entre espiras
Grampo de Pressão
Cunhas Frouxas
Carcaça
Núcleo Frouxo
Outros
Figura 2.15: Causas de falhas no estator [7]
A seguir são apresentadas algumas das falhas mais comuns no estator, cada uma
delas foi ensaiada em laboratório e analisada com as técnicas aqui estudadas, assunto do
capítulo seguinte. Estas falhas na prática derivam principalmente do sobreaquecimento do
motor ou então de problemas ocorridos no sistema de alimentação. Vale ressaltar que as
falhas elétricas muitas vezes têm um avanço muito rápido, e muitas vezes é inevitável uma
manutenção corretiva, ou seja, a troca de todo o enrolamento do estator.
2.5.1.1_ Aterramento
Esta falha consiste no rompimento do isolamento da espira de uma bobina que entra
em contato com a carcaça após a degradação do isolamento por esforço mecânico ou
envelhecimento do isolamento.
É a causa mais comum nos motores como apresentado na figura 2.15. Esta tem
como causa principal, o movimento da cabeça da bobina que está próxima à ranhura. Este
movimento ocorre devido a partidas brusca, ou ainda muita exigência do motor na partida
acima da especificação do motor. Ficando sem apoio a bobina então se desloca no interior

Capítulo 2 – Técnicas de Análise Preditiva de Falhas Elétricas em MIT
34
da ranhura e tocando na sua extremidade comprometendo o isolamento. A figura 2.16 ilustra
a conseqüência desta falha.
Figura 2.16: Curto-circuito para massa na saída da ranhura [8]
Dentre as causas apresentadas aponta-se ainda a contaminação do isolamento,
abrasão, vibração e surtos de tensão [8]. Pode também ser conseqüência da deficiência na
montagem do isolamento das ranhuras, no momento do enrolamento do estator, ou mesmo
emprego de materiais inadequados, incompatíveis com a classe térmica e de tensão, ou
ainda erros durante o processo de bobinagem.
2.5.1.2_ Falha no isolamento – Curto-circuito interno
A falha no isolamento tem como característica um ponto do enrolamento com
isolamento danificando, isolamento “furado”, que entra em contato com um outro ponto na
mesma condição. Este pode ser causado por:
Surtos de tensão, que ocorrem devido a curtos-circuitos fase-terra em sistemas
isolados ou sistemas aterrados através de impedâncias de alto valor, resultando
num acréscimo da tensão fase-neutro nas fases sadias. Pode também ser
causado pela saída súbita de cargas [9], ou por falha em semicondutores de
potência;
Aquecimento proveniente de sobrecargas;
Envelhecimento do isolamento por contaminação, sujeira, abrasão, etc;
Capítulo 2 – Técnicas de Análise Preditiva de Falhas Elétricas em MIT
35
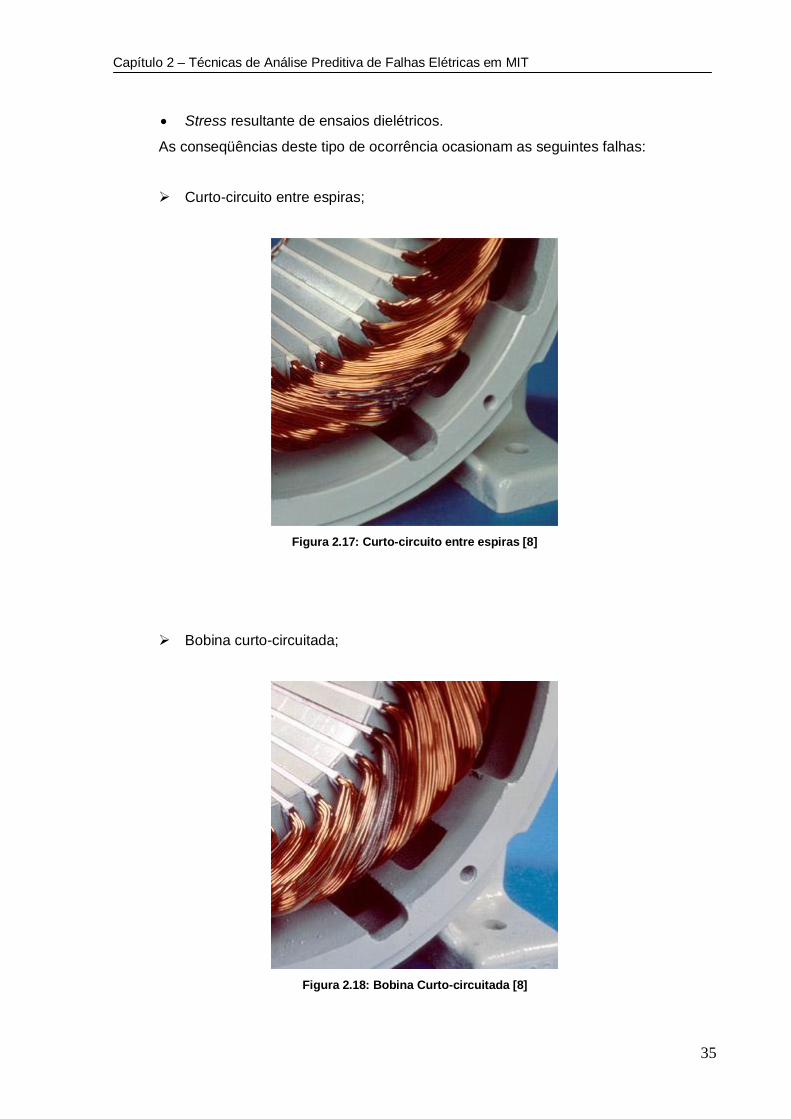
Stress resultante de ensaios dielétricos.
As conseqüências deste tipo de ocorrência ocasionam as seguintes falhas:
Curto-circuito entre espiras;
Figura 2.17: Curto-circuito entre espiras [8]
Bobina curto-circuitada;
Figura 2.18: Bobina Curto-circuitada [8]

Capítulo 2 – Técnicas de Análise Preditiva de Falhas Elétricas em MIT
36
Curto-circuito entre fases;
Figura 2.19: Curto-circuito entre espiras de fases diferentes [8]
Curto-circuito na conexão;
Figura 2.20: Curto-circuito na conexão [8]
Capítulo 2 – Técnicas de Análise Preditiva de Falhas Elétricas em MIT
37
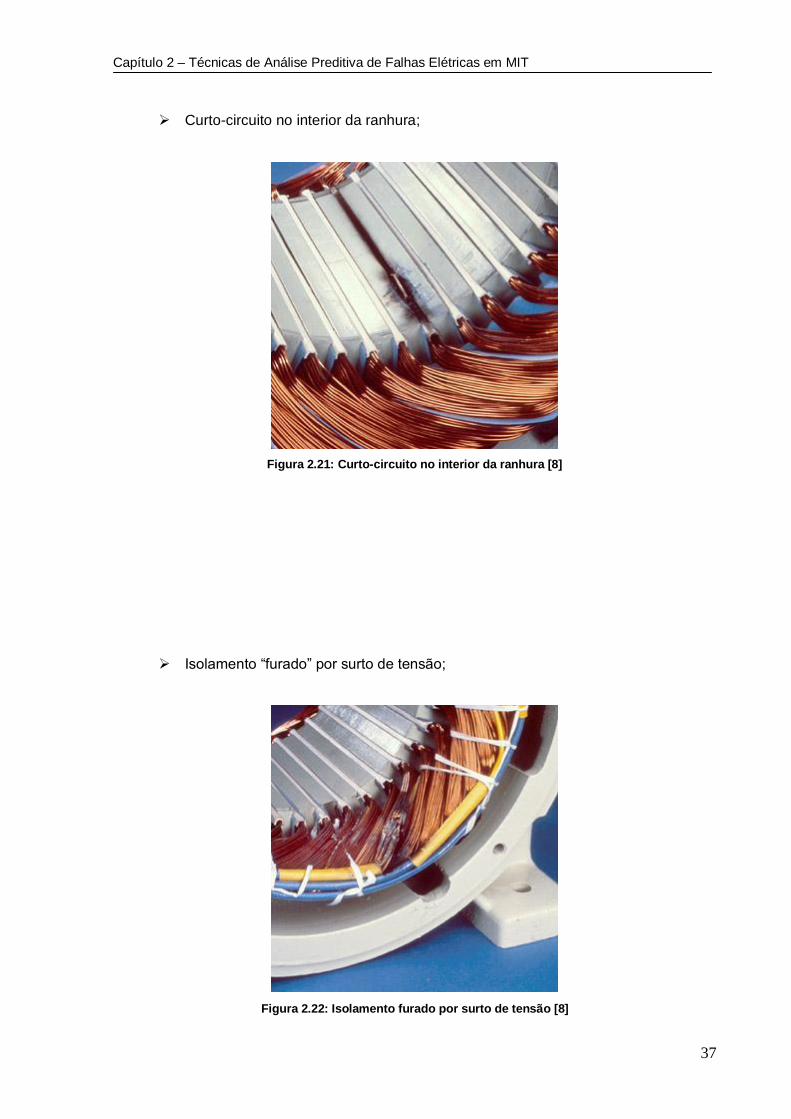
Curto-circuito no interior da ranhura;
Figura 2.21: Curto-circuito no interior da ranhura [8]
Isolamento “furado” por surto de tensão;
Figura 2.22: Isolamento furado por surto de tensão [8]

Capítulo 2 – Técnicas de Análise Preditiva de Falhas Elétricas em MIT
38
2.5.1.3_ Queima generalizada
A queima generalizada no motor ocorre devido à sobreaquecimento do estator, que
tem como principal causa a circulação de corrente acima do permitido em um intervalo
acima do especificado, o que leva a carbonização de todo o enrolamento do estator como
mostra a figura 2.23. As sobrecorrentes nos motores ocorrem geralmente devido a três tipos
de falhas:
1) Sobrecarga: ocasionado por uma exigência excessiva ao motor sem que o relé
de sobrecarga enxergue. Isto ocorre por uma falha no relé ou pelo fato deste ter
sido mal ajustado, ou ainda da falta dele. Outro fator possível é o erro no
dimensionamento do motor para partidas, quando este é submetido a uma
partida prolongada além da sua capacidade. Este efeito aparece também quando
o motor sofre um travamento do rotor, quando este chega a exigir cerca de 4 a 8
vezes a corrente nominal;
2) Ligação incorreta: Quando o motor foi instalado incorretamente, como por
exemplo, um fechamento incorreto dos seus terminais no circuito de
acionamento;
3) Sub ou sobretensão: ocasionado por uma instalação do motor em lugar
impróprio, saída ou entrada de grandes blocos de carga, variação de
compensação reativa (entrada ou saída de banco de capacitores), ou ainda
ajuste incorreto de tap de transformadores.
Figura 2.23: Carbonização generalizada por sobrecarga intensa [8]

Capítulo 2 – Técnicas de Análise Preditiva de Falhas Elétricas em MIT
39
Figura 2.24: Rotor travado [8]
2.5.1.4_ Queima de uma ou duas fases – Falta de fase
A queima de uma ou duas fases, ocorre em razões da falta de uma fase. Esta falta
ocorre principalmente em função de um fusível que queima, ou ainda da desconexão de um
dos cabos de alimentação do motor ou até do rompimento deste. O fato é que esta
ocorrência pode trazer grande prejuízo para a máquina, como apresentado na figura 2.26 e
2.28, já que os níveis de corrente que circulam o motor nesta condição são muito elevados.
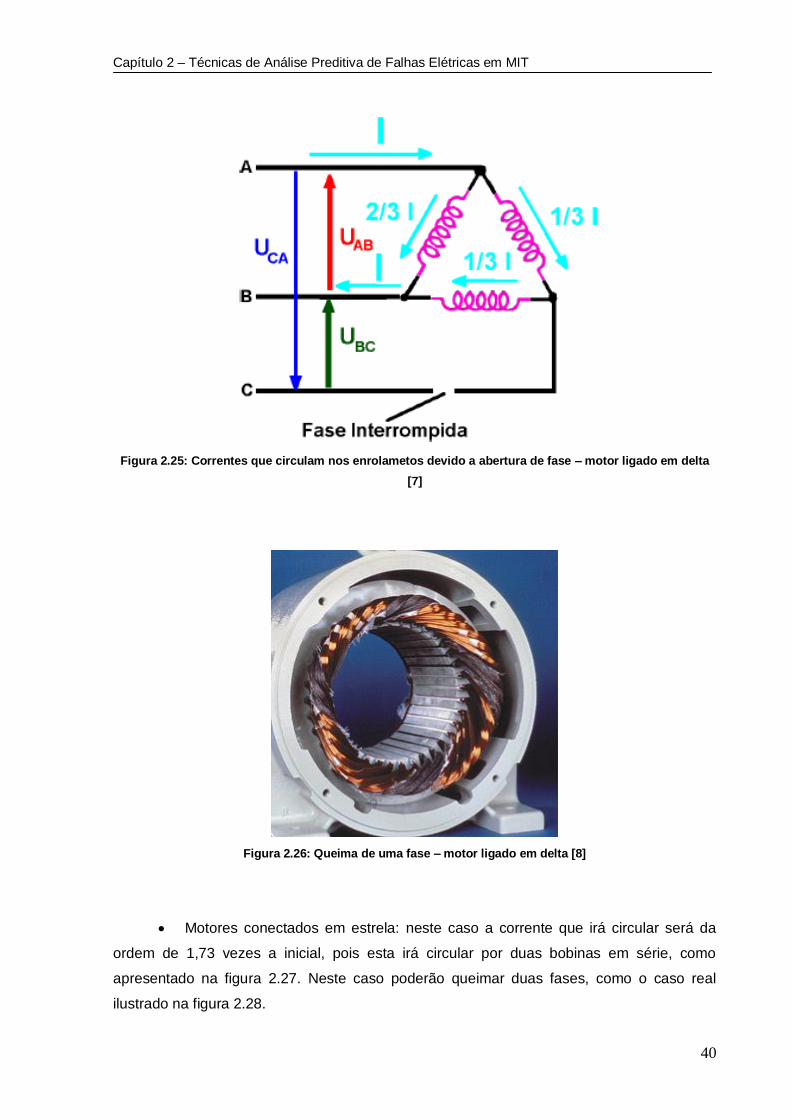
Motores conectados em delta: a falta de uma das fases do alimentador resultará
na circulação de corrente de 2 a 2,5 vezes a corrente inicial na bobina ligada às fases que
ficaram conectadas [7], como ilustra a figura 2.25. Neste caso a velocidade é reduzida, e
assim também a ventilação e consequentemente ocorre a queima da bobina submetida a
maior corrente.
Capítulo 2 – Técnicas de Análise Preditiva de Falhas Elétricas em MIT
40
Figura 2.25: Correntes que circulam nos enrolametos devido a abertura de fase – motor ligado em delta
[7]
Figura 2.26: Queima de uma fase – motor ligado em delta [8]
Motores conectados em estrela: neste caso a corrente que irá circular será da
ordem de 1,73 vezes a inicial, pois esta irá circular por duas bobinas em série, como
apresentado na figura 2.27. Neste caso poderão queimar duas fases, como o caso real
ilustrado na figura 2.28.

Capítulo 2 – Técnicas de Análise Preditiva de Falhas Elétricas em MIT
41
Figura 2.27: Correntes que circulam nos enrolametos devido a abertura de fase – motor ligado em estrela
[7]
Figura 2.28: Queima de duas fases – motor ligado em estrela [8]

Capítulo 2 – Técnicas de Análise Preditiva de Falhas Elétricas em MIT
42
2.5.1.5_ Queima de uma ou duas fases – Tensões desbalanceadas
Sistemas de alimentação desequilibrados hoje é bastante comum. Isto se deve
principalmente as cargas monofásicas conectadas em circuitos trifásicos, queima de fusíveis
em uma das fases em bancos trifásicos e a ausência de transposição completa de linhas de
transmissão [11]. Sabe-se que mesmo que seja pequeno o nível de desequilíbrio na
máquina, os prejuízos que este traz para o motor são enormes [10]. O motor na presença de
um sistema desequilibrado, devido à deformação do campo girante, passa a apresentar
mais ruído, esforços mecânicos axiais e radiais, vibração, batimento, desgaste e
aquecimento excessivo dos mancais [7]. Estes encadeamentos de efeitos se dão
principalmente com o aparecimento de correntes de seqüência negativa, que geram também
torques contrários na máquina, aumentando aí o consumo de energia.
As conseqüências desses efeitos na máquina, dependendo da sua magnitude, é um
aumento de perdas, diminuição do rendimento, alteração do fator de potência,
superaquecimento e redução da vida útil.
O superaquecimento que acelera a degradação do isolamento pode de maneira
diferenciada em cada uma das fases, devido ao desequilíbrio, levar o enrolamento à
carbonização, como ilustra a figura 2.29.
Figura 2.29: Queima por correntes excessivas desequilibradas devido à
aplicação de tensões desbalaceadas [8]
Capítulo 3 – O Sistema de Monitoração Proposto
43
CAPÍTULO 3
O SISTEMA DE MONITORAÇÃO PROPOSTO
A utilização das técnicas de manutenção preditiva para falhas elétricas em MIT, representa um grande avanço no diagnóstico precoce desse tipo de falha, que são responsáveis por 37% das
paradas não programadas dos motores. Neste capítulo é apresentado um sistema de monitoração
capaz de atender as exigências de cada uma das técnicas.
3.1 _ Introdução
O sistema de monitoração utilizado foi desenvolvido para disponibilizar todos os
recursos necessários para aplicação das técnicas.
As técnicas de manutenção preditiva de MIT para falhas elétricas aqui estudadas,
representam um grande potencial a ser utilizado pelas equipes de manutenção preditiva, já
que estas trazem vantagens tais como:
Diagnóstico precoce;
Acompanhamento da progressão da falha;
Não invasivas;
Fácil utilização;
Redução no consumo de energia;
Aumento da vida útil motor;
Monitoramento pode ser realizado sem ter acesso ao motor, apenas pelos seus
condutores de alimentação;
Fácil diagnóstico com baixo tempo de treinamento para análise.
O sistema proposto constitui basicamente de um circuito de aquisição, de um
programa de processamento e análise, de um microcomputador para carregar o programa e
também dos sensores de tensão e corrente.
Em vista da utilização das técnicas EPVA, MCSA e Cálculo da Impedância de
Seqüência Negativa, um robusto sistema de monitoração é necessário, o que atualmente
com os progressos da eletrônica analógica e digital não representa um problema insolúvel.

Capítulo 3 – O Sistema de Monitoração Proposto
44
3.2 _ O Sistema de Monitoração
Figura 3.1: Sistema de monitoração proposto, hardware e transdutores
O sistema de monitoração segue o diagrama apresentado na figura 3.2, constituídos
pelos equipamentos apresentados na figura 3.1. Neste sistema, têm-se os transdutores que
convertem as grandezas tensão e corrente em sinais de tensão compatíveis ao hardware, e
este filtra, amplifica, transforma o sinal analógico em digital e depois transmite para um
microcomputador para análise. No microcomputador é empregado um programa de análise
para realizar, além do gerenciamento dos dados, o processamento dos sinais aplicando as
ferramentas matemáticas inerentes a cada uma das técnicas. Por exemplo, as
transformações do domínio do tempo para a freqüência, o cálculo do vetor de Park, as
gerações das tendências além de outros recursos que são necessários ao diagnóstico.
Figura 3.2: Sistema de monitoração para aplicação das técninas de análise de falhas elétricas

Capítulo 3 – O Sistema de Monitoração Proposto
45
3.2.1 _ Os Transdutores
Os transdutores utilizados para implementar a técnica são de tensão e corrente.
Estes são constituidos de sensores do tipo transformador de corrente ou tensão, sondas de
efeito hall, sondas de efeito Rogowski.
A escolha dos transdutores é extremamente importante para garantir a qualidade dos
sinais em termos de informação e clareza. Os transdutores a serem empregados no uso das
técnicas devem atender aos parâmetros a seguir:
o Faixa de operação (corrente e/ou tensão): Essa deve ser escolhida de
acordo com os níveis máximos de operação que este será submetido e
também de acordo com as opções de mercado.
o Sinal de saída: em tensão.
o Relação de transformação: Essa deve ser escolhida tal que a saída máxima
do transdutor seja inferior a 5V ou do especificado pelo hardware utilizado.
Figura 3.3: Seleção escala transdutor
o Faixa de isolação: Essa dever ser de acordo com o ambiente de operação e
níveis de tensão de operação. Ex.: CATIII-600V.
o Cabo: Isolado com terminação BNC ou outro dependendo do equipamento
empregado.
Figura 3.4: Conector BNC do transdutor
o Freqüência: A faixa de freqüência de operação deverá ser de DC a 10kHz.
(atenuação de 3db na faixa)

Capítulo 3 – O Sistema de Monitoração Proposto
46
Os transdutores utilizados no experimento foram os seguintes:
1) Corrente
I200s da FLUKE
Figura 3.5: Transdutor de Corrente i200s
Características:
Tabela 3.1: Características transdutor de corrente i200s
Faixa de operação 0-200A
Saída Tensão
Terminação BNC
Categoria Isolação CatIII-600V
Faixas Seleção 20A (100mV/A) e 200A(10mV/A)
Faixa de Freqüência 40Hz a 10kHz
Abertura máxima 21mm
2) Tensão
DP120 da FLUKE
Figura 3.6: Transdutor de Tensão DP120

Capítulo 3 – O Sistema de Monitoração Proposto
47
Características:
Tabela 3.2: Características transdutor de tensão DP120
Faixa de operação 0-1000V
Saída Tensão
Terminação BNC
Categoria Isolação CatIII-600V e CatII-1000V
Faixas Seleção 20X e 200X
Faixa de Freqüência DC a 20MHz
Alimentação Bateria 9V
Os transdutores de tensão foram instalados para medir as tensões de linha em todas
as aquisições, os de corrente foram instalados para medir as correntes de linha usadas nas
técnicas MCSA e EPVA. Para obtenção da impedância de seqüência negativa foram
instalados os sensores de corrente monitorando as correntes de fase. As figuras 3.7, 3.8 e
3.9, ilustram a utilização dos transdutores de tensão e corrente em cada uma das técnicas.
Figura 3.7: Configuração transdutores Técnica EPVA
Capítulo 3 – O Sistema de Monitoração Proposto
48
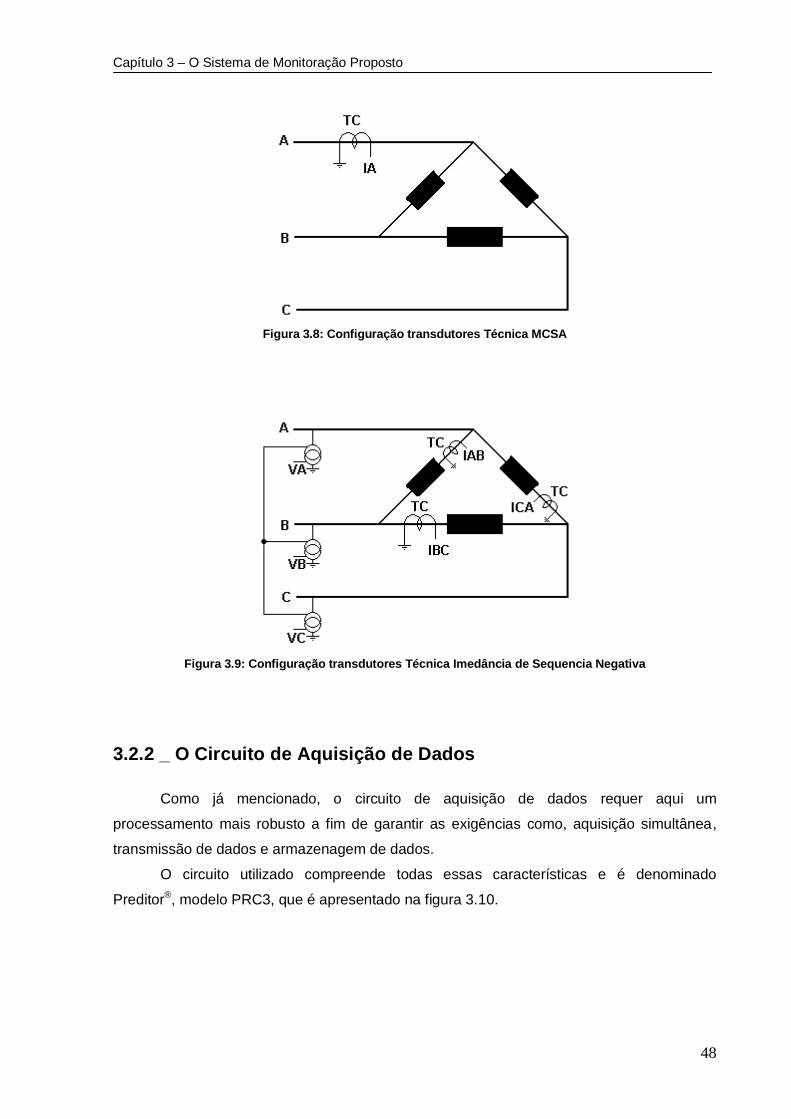
Figura 3.8: Configuração transdutores Técnica MCSA
Figura 3.9: Configuração transdutores Técnica Imedância de Sequencia Negativa
3.2.2 _ O Circuito de Aquisição de Dados
Como já mencionado, o circuito de aquisição de dados requer aqui um
processamento mais robusto a fim de garantir as exigências como, aquisição simultânea,
transmissão de dados e armazenagem de dados.
O circuito utilizado compreende todas essas características e é denominado
Preditor®, modelo PRC3, que é apresentado na figura 3.10.
Capítulo 3 – O Sistema de Monitoração Proposto
49
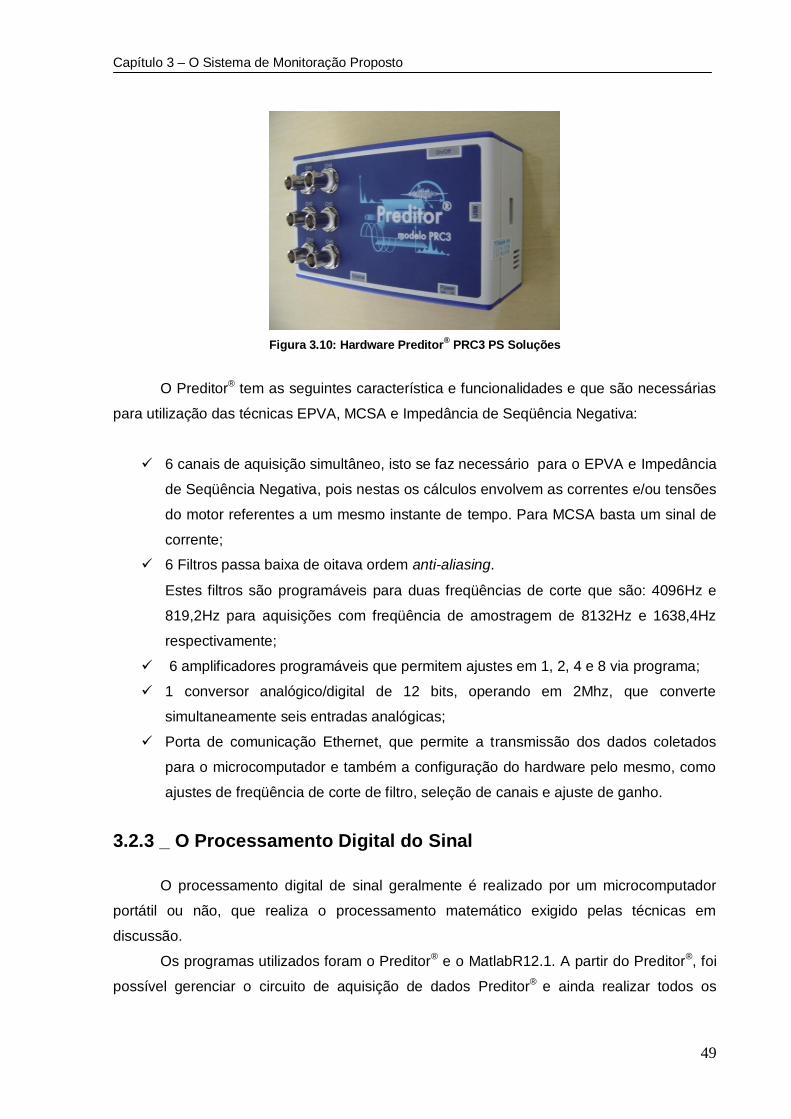
Figura 3.10: Hardware Preditor® PRC3 PS Soluções
O Preditor® tem as seguintes característica e funcionalidades e que são necessárias
para utilização das técnicas EPVA, MCSA e Impedância de Seqüência Negativa:
6 canais de aquisição simultâneo, isto se faz necessário para o EPVA e Impedância
de Seqüência Negativa, pois nestas os cálculos envolvem as correntes e/ou tensões
do motor referentes a um mesmo instante de tempo. Para MCSA basta um sinal de
corrente;
6 Filtros passa baixa de oitava ordem anti-aliasing.
Estes filtros são programáveis para duas freqüências de corte que são: 4096Hz e
819,2Hz para aquisições com freqüência de amostragem de 8132Hz e 1638,4Hz
respectivamente;
6 amplificadores programáveis que permitem ajustes em 1, 2, 4 e 8 via programa;
1 conversor analógico/digital de 12 bits, operando em 2Mhz, que converte
simultaneamente seis entradas analógicas;
Porta de comunicação Ethernet, que permite a transmissão dos dados coletados
para o microcomputador e também a configuração do hardware pelo mesmo, como
ajustes de freqüência de corte de filtro, seleção de canais e ajuste de ganho.
3.2.3 _ O Processamento Digital do Sinal
O processamento digital de sinal geralmente é realizado por um microcomputador
portátil ou não, que realiza o processamento matemático exigido pelas técnicas em
discussão.
Os programas utilizados foram o Preditor® e o MatlabR12.1. A partir do Preditor®, foi
possível gerenciar o circuito de aquisição de dados Preditor® e ainda realizar todos os
Capítulo 3 – O Sistema de Monitoração Proposto
50
processamentos referentes as técnicas EPVA e MCSA. Apenas o cálculo da impedância de
seqüência negativa foi realizado a partir do Matlab.
a) Programa Preditor® (EPVA e MCSA)
Este programa permite ajustar todas as configurações do motor a ser monitorado,
dos transdutores empregados e adquirir os sinais a partir do hardware Preditor®.
No processamento dos sinais das técnicas MCSA e EPVA são realizados os
seguintes passos para chegar ao diagnóstico a partir das técnicas:
1) Cadastro do motor
Incluindo informações de rotação nominal, corrente nominal, freqüência nominal,
número de pólos e tensão nominal.
2) Cadastro dos transdutores
Informar em qual canal está instalado os sensores, qual a saída de cada
transdutor (por ex.: mV/A, 20X, 200X) e ainda ajustar via software o ganho a ser
aplicada para cada transdutor;
3) Seleção da freqüência de amostragem, para ajuste da freqüência de aquisição e
também da freqüência de corte dos filtros;
4) Aquisição dos sinais
Se for MCSA, apenas um sinal de corrente é adquirido, na freqüência
selecionada e é exibido o sinal no tempo e também o espectro de freqüência,
onde automaticamente é estimada a rotação do motor e também a freqüência do
sinal de alimentação.
Para EPVA, são adquiridas as três correntes e três tensões de alimentação do
motor. Após a aquisição, todos os sinais no tempo são carregados e também é
realizado o cálculo do vetor de Park e do seu espectro de freqüência que são
exibidos em um gráfico;
5) Cálculo das componentes de falha
No caso de MCSA, para análise do desequilíbrio, foi avaliada a componente de
três vezes a freqüência fundamental, esta é calculada e marcada pelo software,
sobre o espectro de freqüência.
No caso do EPVA, para a análise do desequilíbrio, foi analisada a componente de
duas vezes a freqüência fundamental no espectro do vetor de Park da tensão e
da corrente. Esta componente foi calculada e identificada no gráfico;
6) Análise da tendência
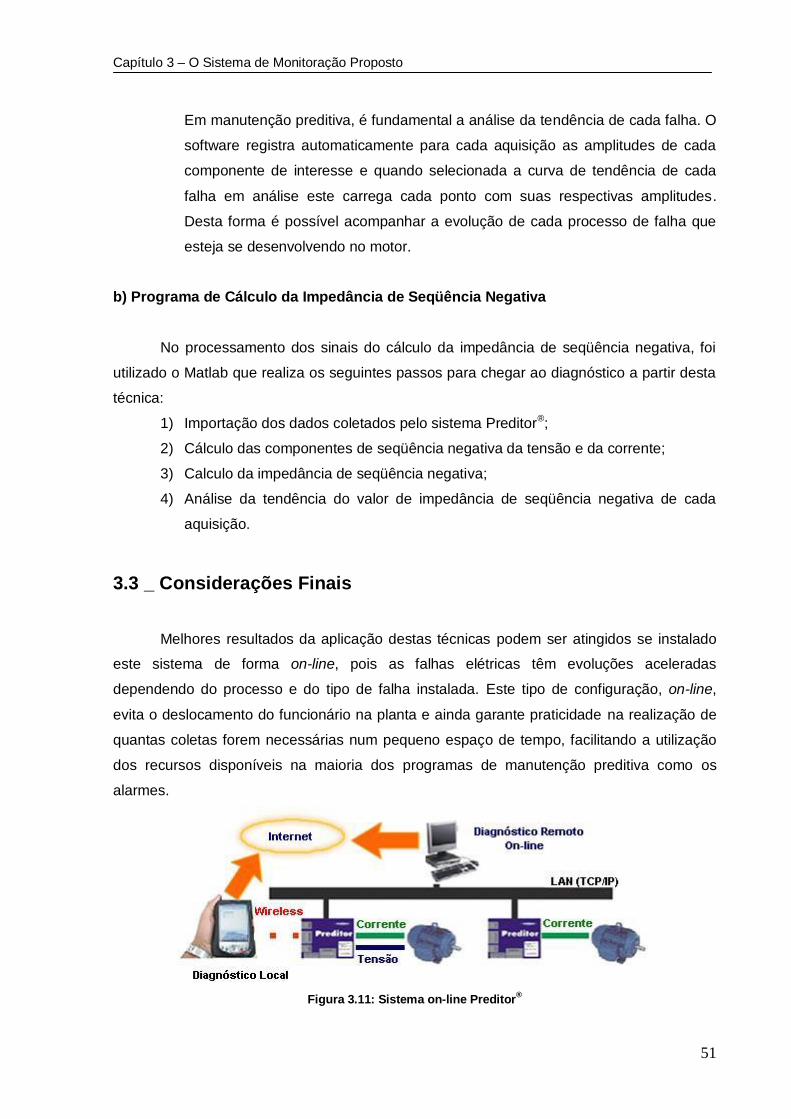
Capítulo 3 – O Sistema de Monitoração Proposto
51
Em manutenção preditiva, é fundamental a análise da tendência de cada falha. O
software registra automaticamente para cada aquisição as amplitudes de cada
componente de interesse e quando selecionada a curva de tendência de cada
falha em análise este carrega cada ponto com suas respectivas amplitudes.
Desta forma é possível acompanhar a evolução de cada processo de falha que
esteja se desenvolvendo no motor.
b) Programa de Cálculo da Impedância de Seqüência Negativa
No processamento dos sinais do cálculo da impedância de seqüência negativa, foi
utilizado o Matlab que realiza os seguintes passos para chegar ao diagnóstico a partir desta
técnica:
1) Importação dos dados coletados pelo sistema Preditor®;
2) Cálculo das componentes de seqüência negativa da tensão e da corrente;
3) Calculo da impedância de seqüência negativa;
4) Análise da tendência do valor de impedância de seqüência negativa de cada
aquisição.
3.3 _ Considerações Finais
Melhores resultados da aplicação destas técnicas podem ser atingidos se instalado
este sistema de forma on-line, pois as falhas elétricas têm evoluções aceleradas
dependendo do processo e do tipo de falha instalada. Este tipo de configuração, on-line,
evita o deslocamento do funcionário na planta e ainda garante praticidade na realização de
quantas coletas forem necessárias num pequeno espaço de tempo, facilitando a utilização
dos recursos disponíveis na maioria dos programas de manutenção preditiva como os
alarmes.
Figura 3.11: Sistema on-line Preditor®
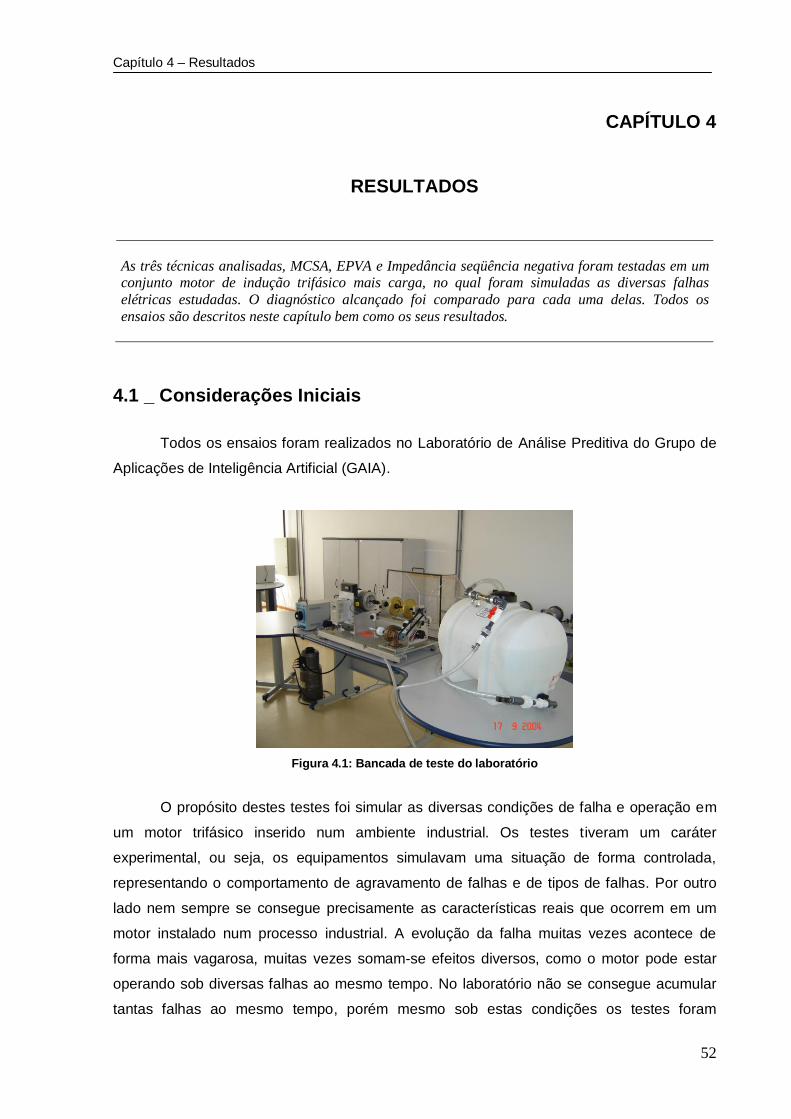
Capítulo 4 – Resultados
52
CAPÍTULO 4
RESULTADOS
As três técnicas analisadas, MCSA, EPVA e Impedância seqüência negativa foram testadas em um conjunto motor de indução trifásico mais carga, no qual foram simuladas as diversas falhas
elétricas estudadas. O diagnóstico alcançado foi comparado para cada uma delas. Todos os
ensaios são descritos neste capítulo bem como os seus resultados.
4.1 _ Considerações Iniciais
Todos os ensaios foram realizados no Laboratório de Análise Preditiva do Grupo de
Aplicações de Inteligência Artificial (GAIA).
Figura 4.1: Bancada de teste do laboratório
O propósito destes testes foi simular as diversas condições de falha e operação em
um motor trifásico inserido num ambiente industrial. Os testes tiveram um caráter
experimental, ou seja, os equipamentos simulavam uma situação de forma controlada,
representando o comportamento de agravamento de falhas e de tipos de falhas. Por outro
lado nem sempre se consegue precisamente as características reais que ocorrem em um
motor instalado num processo industrial. A evolução da falha muitas vezes acontece de
forma mais vagarosa, muitas vezes somam-se efeitos diversos, como o motor pode estar
operando sob diversas falhas ao mesmo tempo. No laboratório não se consegue acumular
tantas falhas ao mesmo tempo, porém mesmo sob estas condições os testes foram

Capítulo 4 – Resultados
53
satisfatórios podendo-se concluir sobre as potencialidades e dificuldades de cada uma das
técnicas de análise preditiva de falhas elétricas.
4.2 _ A Montagem Utilizada em Laboratório
A montagem utilizada é constituída de um conjunto motor e carga. O motor de
indução trifásico utilizado possui as características apresentadas na tabela 4.1. Este motor
foi conectado a uma máquina de corrente-contínua (MCC), operando como um gerador,
seus parâmetros estão na tabela 4.2. A máquina de corrente contínua aqui funcionou como
uma carga controlada para o MIT. Este controle é obtido de duas formas, a primeira pelo
controle da tensão de excitação do campo, usando um vari-volt, e a segunda pela alocação
de mais ou menos carga ao gerador, carga esta de característica resistiva.
Figura 4.2: Montagem no laboratório sistema de simulação
A figura 4.2 ilustra a montagem completa usada nos testes. E em seguida são
identificados cada um dos equipamentos utilizados.
1 – MIT
2 – MCC
3 – Resistência de Curto-circuito
1 2
3
4 5
6 7 8
9
10 11
12
13

Capítulo 4 – Resultados
54
4 – Microcomputador de análise
5 – Osciloscópio medindo a tensão de excitação do campo
6 – Banco de resistência operando como carga para a MCC
7 – Retificador
8 – Vari-volt
9 – Caixa de conexão dos taps da bobina a ser curto-circuitada e terminais do MIT
10 – Multímetro medindo a corrente de uma das fases de alimentação do MIT
11 – Disjuntor de fechamento do curto-circuito
12 – Voltímetro de painel medindo a tensão entre duas fases de alimentação
13 – Capacitor correção do ripple do retificador
A figura 4.3, apresenta o circuito elétrico de acionamento e de medição
correspondente à montagem descrita.
Figura 4.3: Esquema de ligação do sistema de teste
Tabela 4.1: Parâmetros do Motor de indução
Tensão 220V
Corrente 8,84 A
Potência 3CV
Número de pólos 4
Velocidade 1760 RPM
Freqüência 60 Hz
Classe de isolação B
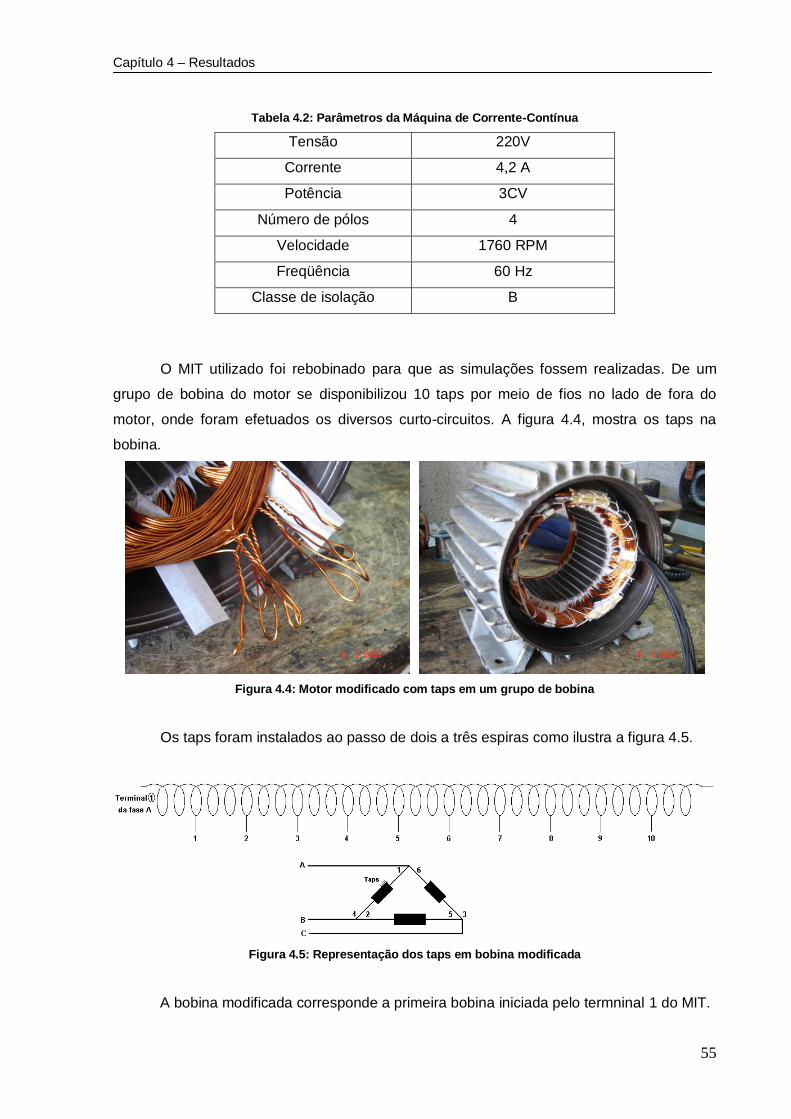
Capítulo 4 – Resultados
55
Tabela 4.2: Parâmetros da Máquina de Corrente-Contínua
Tensão 220V
Corrente 4,2 A
Potência 3CV
Número de pólos 4
Velocidade 1760 RPM
Freqüência 60 Hz
Classe de isolação B
O MIT utilizado foi rebobinado para que as simulações fossem realizadas. De um
grupo de bobina do motor se disponibilizou 10 taps por meio de fios no lado de fora do
motor, onde foram efetuados os diversos curto-circuitos. A figura 4.4, mostra os taps na
bobina.
Figura 4.4: Motor modificado com taps em um grupo de bobina
Os taps foram instalados ao passo de dois a três espiras como ilustra a figura 4.5.
Figura 4.5: Representação dos taps em bobina modificada
A bobina modificada corresponde a primeira bobina iniciada pelo termninal 1 do MIT.

Capítulo 4 – Resultados
56
Todos os taps, foram disponibilizados em uma caixa, para que se pudesse realizar
simulação das diversas condições de curto-circuito.
Figura 4.6: Caixa de Coneção dos taps da bobina e terminais de alimentação do motor
As bobinas quando curto-circuitadas, simulam várias condições de curto-circuito
entre espiras de mesma fase e fases diferentes no MIT. Foi utilizada uma chave disjuntor,
apresentada na figura 4.7, para controlar o instante de chaveamento do curto-circuito e sua
duração. Foi introduzida também uma resistência em série com o curto, para amenizar o
efeito de um curto-circuito franco, ou seja, a destruição do isolamento da bobina. Com o
resistor em série, pode-se ainda simular as respostas das técnicas de monitoração perante
a variação da degradação do isolamento, que na prática, ocorre progressivamente até que o
curto seja franco, ou seja, com resistência nula. O resistor utilizado tem uma potência de
dissipação máxima de 2000W e resistência máxima de 20.
Figura 4.7: Chave disjuntor para introdução do curto- circuito
1 2 3 4 5 6 7 8 9 10
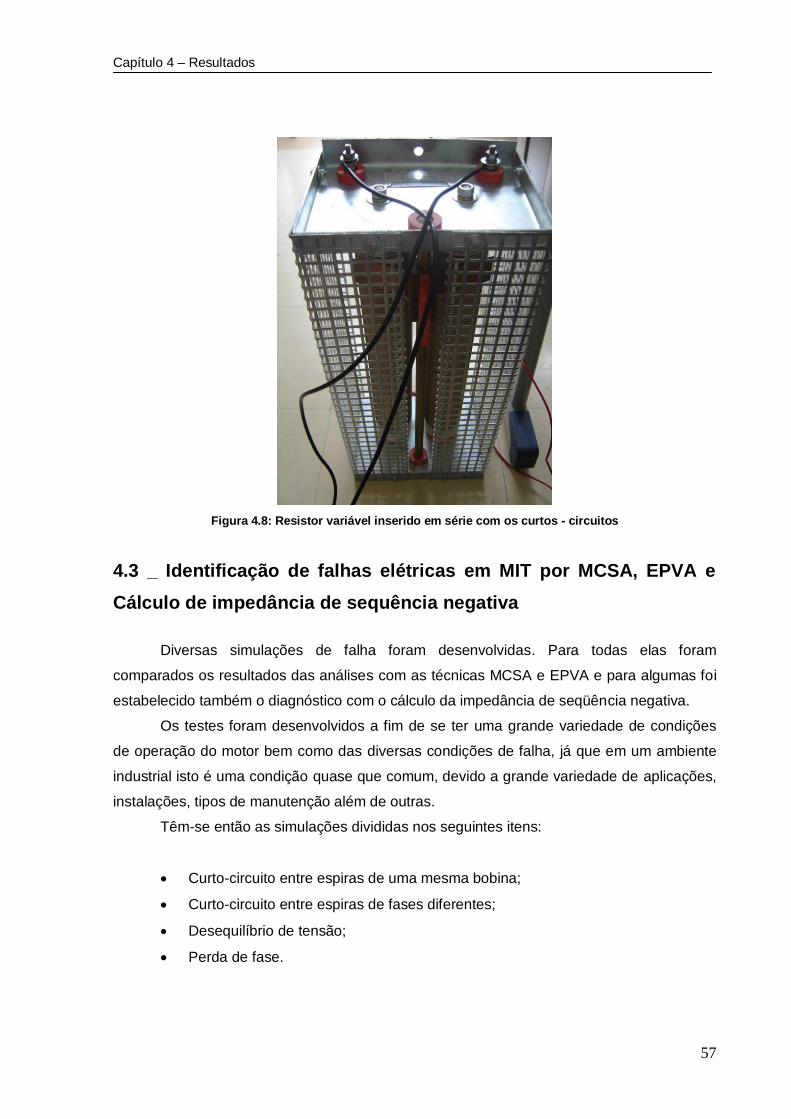
Capítulo 4 – Resultados
57
Figura 4.8: Resistor variável inserido em série com os curtos - circuitos
4.3 _ Identificação de falhas elétricas em MIT por MCSA, EPVA e
Cálculo de impedância de sequência negativa
Diversas simulações de falha foram desenvolvidas. Para todas elas foram
comparados os resultados das análises com as técnicas MCSA e EPVA e para algumas foi
estabelecido também o diagnóstico com o cálculo da impedância de seqüência negativa.
Os testes foram desenvolvidos a fim de se ter uma grande variedade de condições
de operação do motor bem como das diversas condições de falha, já que em um ambiente
industrial isto é uma condição quase que comum, devido a grande variedade de aplicações,
instalações, tipos de manutenção além de outras.
Têm-se então as simulações divididas nos seguintes itens:
Curto-circuito entre espiras de uma mesma bobina;
Curto-circuito entre espiras de fases diferentes;
Desequilíbrio de tensão;
Perda de fase.

Capítulo 4 – Resultados
58
4.3.1_ Curto-circuito entre espiras de uma mesma bobina
Esta falha que é muito comum, em se tratando de falhas elétricas em MIT, foi
simulada levando-se em conta a degradação da isolação por meio da variação da
resistência de curto-circuito, e também o número de espiras em curto-circuito.
a) comparação da evolução da degradação do isolamento
Foram simulados curtos entre os taps 1-2, 1-3 e 1-4 para MCSA e EPVA e entre os
taps 1-2 e 1-3 para cálculo da Impedância de Seqüência Negativa, variando-se a resistência
de curto de 9, 4 e 1.
1) Condição Normal
Carga (C)
50% da nominal
Tensão entre taps (Vt)
Sem curto
Resistência Curto (Rc)
Sem curto
Corrente no curto-
circuito (ICCE)
Sem curto
EPVA
Espectro de freqüência do vetor de Park da corrente do motor saudável. A
componente apontada, bem como a sua magnitude corresponde a componente de
2xF.
Figura 4.9: Espectro de referência EPVA (motor “saudável”)

Capítulo 4 – Resultados
59
MCSA
Espectro de freqüência da corrente da fase A do motor saudável. A componente
apontada, bem como a sua magnitude corresponde a componente de 3xF.
Figura 4.10: Espectro de referência MCSA (motor “saudável”)
Impedância de seqüência negativa
A partir dos valores rms das tensões e correntes de fase A, B e C em pu,
tomando como base os valores de tensão e corrente nominal de fase. Aplicou-se a
matriz de transformação das componentes simétricas para as tensões e para as
correntes. Dividindo a componente de seqüência negativa da tensão pela
componente de seqüência negativa chegou-se a impedância em pu de seqüência
negativa para o motor saudável de 0,355.
2) Curto-circuito entre taps 1 e 2
2.1)
Carga (C)
50% da nominal
Tensão entre taps (Vt)
11,66V
Resistência
Curto (Rc)
9
Corrente no curto-
circuito (ICCE)
1,27A

Capítulo 4 – Resultados
60
EPVA
Espectro de freqüência do vetor de Park da corrente do motor operando com
curto-circuito entre os taps 1 e 2 a partir de um Rc de 9. A componente apontada,
bem como a sua magnitude corresponde a componente de 2xF.
Figura 4.11: Espectro EPVA com taps1 e 2 em curto-circuito com Rc de 9
MCSA
Espectro de freqüência da corrente da fase A do motor operando com curto-
circuito entre os taps 1 e 2 a partir de um Rc de 9. A componente apontada, bem
como a sua magnitude corresponde a componente de 3xF.
Figura 4.12: Espectro MCSA com taps1 e 2 em curto e Rc de 9

Capítulo 4 – Resultados
61
Impedância de seqüência negativa
Não foi realizado cálculo da impedância de seqüência negativa para esta condição.
2.2)
Carga (C)
50% da nominal
Tensão entre taps (Vt)
11,66V
Resistência
Curto (Rc)
4
Corrente no curto-
circuito (ICCE)
2,9A
EPVA
Espectro de freqüência do vetor de Park da corrente do motor operando com
curto-circuito entre os taps 1 e 2 a partir de um Rc de 4. A componente apontada,
bem como a sua magnitude corresponde a componente de 2xF.
Figura 4.13: Espectro EPVA com taps1 e 2 em curto e Rc de 4
MCSA
Espectro de freqüência da corrente da fase A do motor operando com curto-
circuito entre os taps 1 e 2 a partir de um Rc de 4. A componente apontada, bem
como a sua magnitude corresponde a componente de 3xF.
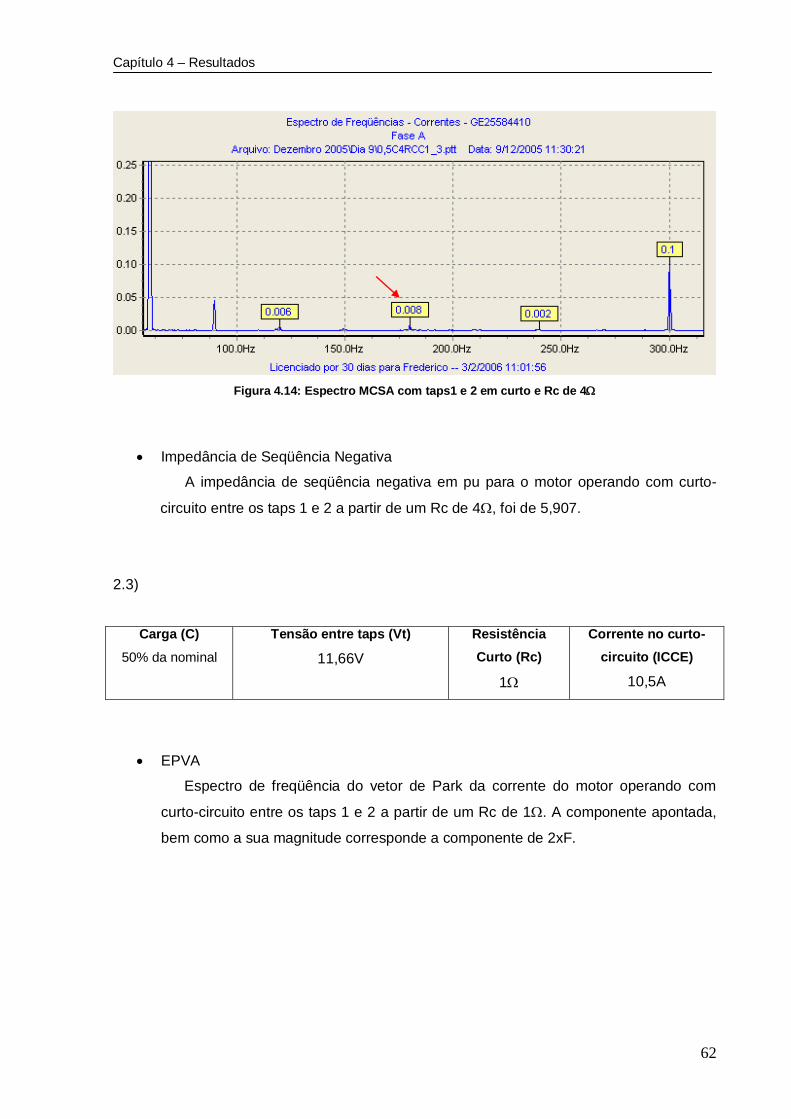
Capítulo 4 – Resultados
62
Figura 4.14: Espectro MCSA com taps1 e 2 em curto e Rc de 4
Impedância de Seqüência Negativa
A impedância de seqüência negativa em pu para o motor operando com curto-
circuito entre os taps 1 e 2 a partir de um Rc de 4, foi de 5,907.
2.3)
Carga (C)
50% da nominal
Tensão entre taps (Vt)
11,66V
Resistência
Curto (Rc)
1
Corrente no curto-
circuito (ICCE)
10,5A
EPVA
Espectro de freqüência do vetor de Park da corrente do motor operando com
curto-circuito entre os taps 1 e 2 a partir de um Rc de 1. A componente apontada,
bem como a sua magnitude corresponde a componente de 2xF.
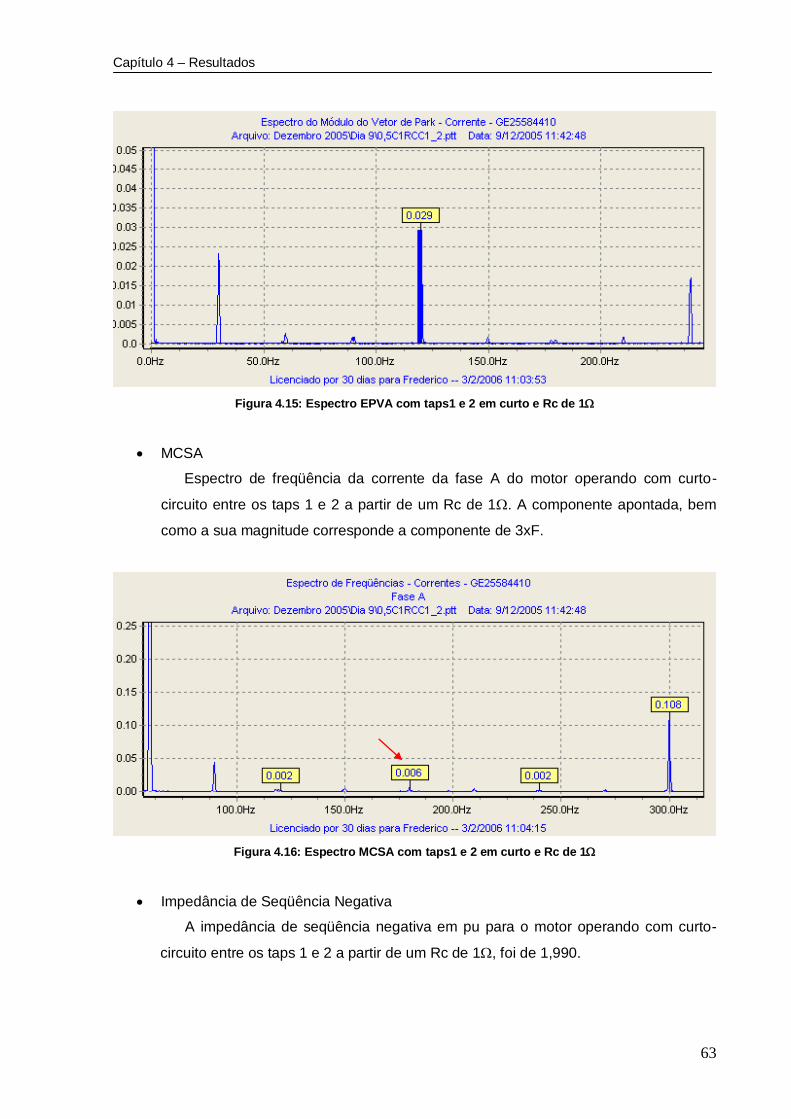
Capítulo 4 – Resultados
63
Figura 4.15: Espectro EPVA com taps1 e 2 em curto e Rc de 1
MCSA
Espectro de freqüência da corrente da fase A do motor operando com curto-
circuito entre os taps 1 e 2 a partir de um Rc de 1. A componente apontada, bem
como a sua magnitude corresponde a componente de 3xF.
Figura 4.16: Espectro MCSA com taps1 e 2 em curto e Rc de 1
Impedância de Seqüência Negativa
A impedância de seqüência negativa em pu para o motor operando com curto-
circuito entre os taps 1 e 2 a partir de um Rc de 1, foi de 1,990.

Capítulo 4 – Resultados
64
Colocando os resultados em uma curva de tendência, o que naturalmente é realizado
na prática, podemos perceber a resposta de cada uma das técnicas relacionada a cada uma
das condições apresentadas anteriormente, ou seja, curto-circuito entre os taps 1 e 2,
variando o Rc em 9, 4 e 1. As curvas referentes as técnicas EPVA e MCSA foram
apresentadas nas figuras 4.17 e 4.18 respectivamente.
(a)
(b)
Figura 4.17: Curva de Tendência EPVA (a) Corrente e (b) tensão
Nas curvas apresentadas acima, verifica-se a progressão do nível de desequilíbrio
em função do aumento da degradação do isolamento. Verificou-se também na figura 4.17(a)
Normal
9
4
1
Normal 9 4 1

Capítulo 4 – Resultados
65
que para um Rc de 4, o nível de desequilíbrio diminuiu ao invés de aumentar como era
esperado. Isto ocorreu apenas para o curto ocasionado nos taps 1 e 2. A razão deste
resultado pode ser que nesta condição o motor acabou por chegar a uma configuração
melhor de desequilíbrio de que quando estava sem curto-circuito algum. Mas este
comportamento não atrapalhou no acompanhamento da falha, já que esta tem um caráter
progressivo e logo pôde se observar isto, ainda mais que os níveis subiram rapidamente
com a maior degradação do isolamento como no caso de Rc de 1.
Na figura 4.17 (b), foi apresentada a curva de tendência EPVA de tensão das
mesmas aquisições da curva de tendência EPVA da corrente. Isto se faz necessário, uma
vez que o desequilíbrio a ser analisado é o da corrente, mas este pode ser originado por um
desequilíbrio na tensão causado por uma falha no sistema de alimentação além de outras
razões. No caso apresentado acima se verificou que o desequilíbrio da tensão permaneceu
praticamente constante, reafirmando que o desequilíbrio observado na corrente decorre
então de um desequilíbrio no MIT.
Todas as aquisições foram realizadas três vezes para cada simulação, para se
anular efeitos aleatórios.
MCSA Tendência FaseA Desequilíbrio
0,012
0,019
0,008
0,006
0
0,005
0,01
0,015
0,02
Normal 9 4 1
Rc(ohm)
Figura 4.18: Curva de Tendência MCSA Fase A, taps 1 e 2
A figura 4.18, mostra que a resposta da técnica MCSA para esta severidade de falha,
não foi satisfatório, pois a mesma apresentou uma curva de tendência regressiva em virtude
da falha progressiva, além de magnitudes muito baixas.

Capítulo 4 – Resultados
66
Figura 4.19: Curva de Tendência Impedância Sequência Negativa, taps 1 e 2
A figura 4.19 ilustra a resposta da técnica da Impedância de Seqüência Negativa
para esta falha, não foi satisfatório, pois a mesma apresentou uma curva de tendência
regressiva em virtude da falha progressiva.
Esta mesma simulação de degradação do isolamento foi realizada para curtos entre
os taps 1 e 3 e taps 1 e 4, e a seguir são apresentadas as curvas de tendência para cada
uma das simulações. Cada patamar na curva tem dois ou três pontos o que corresponde a
duas ou três aquisições numa mesma condição de ensaio.
3) Curto-circuito entre taps 1 e 3
A análise das figuras 4.20, 4.21 e 4.22 mostra que o comportamento da curva de
tendência EPVA se comportou de acordo com o esperado, apresentando um caráter
progressivo em função da diminuição do resistor de curto-circuito e para este caso não
ocorreu mais a variação como ocorrido no caso anterior para Rc de 4, ficando toda a curva
crescente. Já para a técnica MCSA, o comportamento da curva também se mostrou
compatível da evolução da falha, porém este ainda apresentou magnitudes muito baixas. A
curva da Impedância de Seqüência Negativa, continuou apresentando um comportamento
regressivo em relação a elevação da degradação do isolamento.
Impedancia de Seqüência Negativa - Tendência Desequilíbrio
0,355
5,907
1,99
0
1
2
3
4
5
6
7
Normal Rc 4ohm Rc 1ohm

Capítulo 4 – Resultados
67
Figura 4.20: Curva de Tendência EPVA Corrente, taps 1 e 3
A curva de tendência EPVA da tensão para esta condição, foi observada também
com um comportamento constante.
MCSA Tendência FaseA Desequilíbrio
0,007
0,011
0,015
0
0,002
0,004
0,006
0,008
0,01
0,012
0,014
0,016
9 4 1
Rc(ohm)
Figura 4.21: Curva de Tendência MCSA Fase A, taps 1 e 3
9
4
1
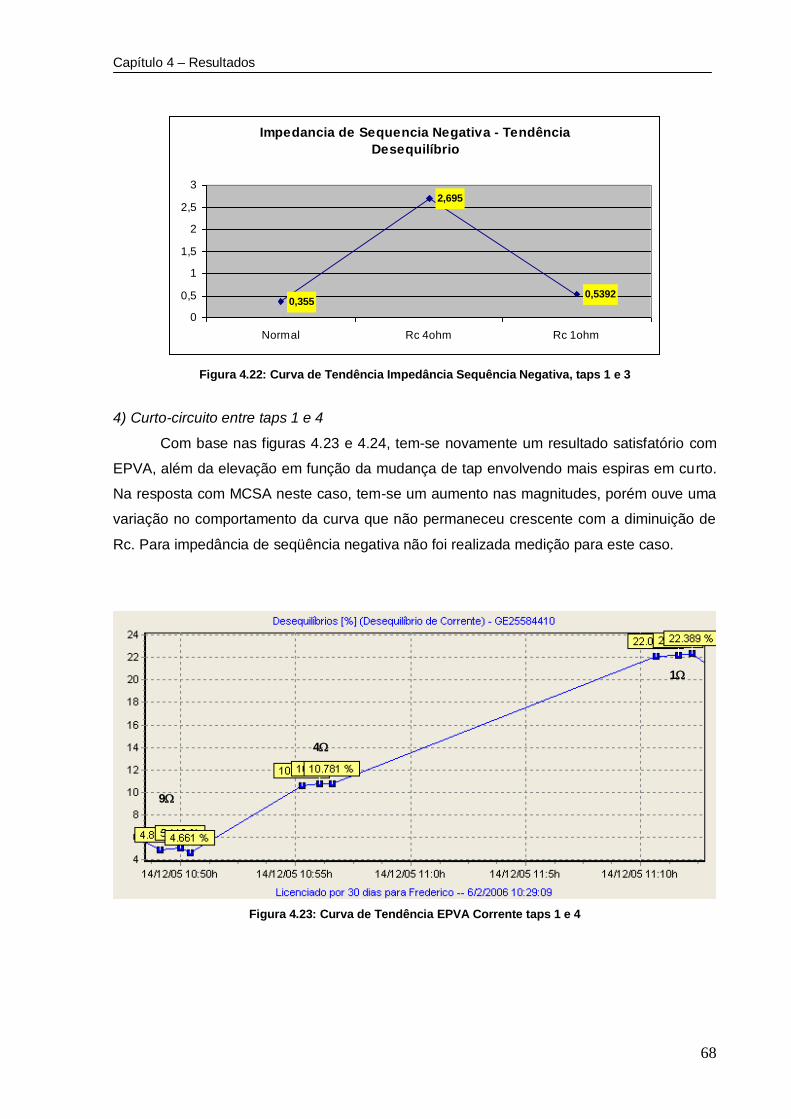
Capítulo 4 – Resultados
68
Impedancia de Sequencia Negativa - Tendência
Desequilíbrio
0,355
2,695
0,5392
0
0,5
1
1,5
2
2,5
3
Normal Rc 4ohm Rc 1ohm
Figura 4.22: Curva de Tendência Impedância Sequência Negativa, taps 1 e 3
4) Curto-circuito entre taps 1 e 4
Com base nas figuras 4.23 e 4.24, tem-se novamente um resultado satisfatório com
EPVA, além da elevação em função da mudança de tap envolvendo mais espiras em curto.
Na resposta com MCSA neste caso, tem-se um aumento nas magnitudes, porém ouve uma
variação no comportamento da curva que não permaneceu crescente com a diminuição de
Rc. Para impedância de seqüência negativa não foi realizada medição para este caso.
Figura 4.23: Curva de Tendência EPVA Corrente taps 1 e 4
9
4
1
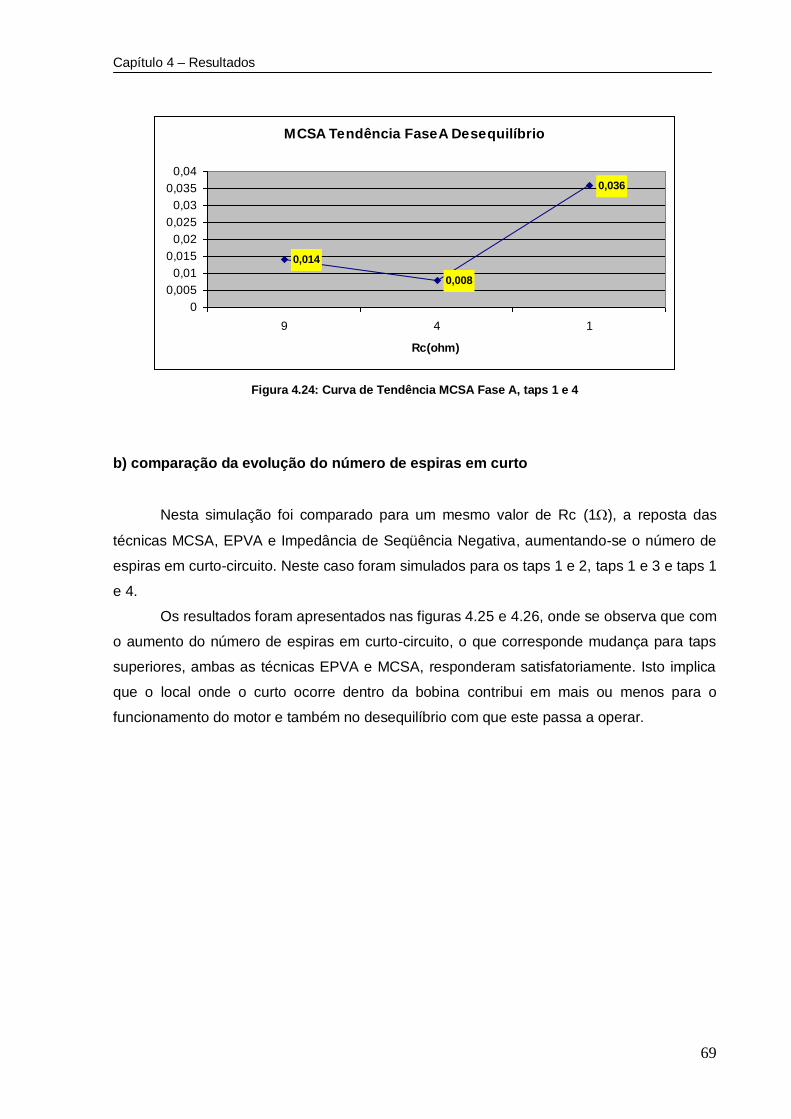
Capítulo 4 – Resultados
69
MCSA Tendência FaseA Desequilíbrio
0,014
0,008
0,036
0
0,005
0,01
0,015
0,02
0,025
0,03
0,035
0,04
9 4 1
Rc(ohm)
Figura 4.24: Curva de Tendência MCSA Fase A, taps 1 e 4
b) comparação da evolução do número de espiras em curto
Nesta simulação foi comparado para um mesmo valor de Rc (1), a reposta das
técnicas MCSA, EPVA e Impedância de Seqüência Negativa, aumentando-se o número de
espiras em curto-circuito. Neste caso foram simulados para os taps 1 e 2, taps 1 e 3 e taps 1
e 4.
Os resultados foram apresentados nas figuras 4.25 e 4.26, onde se observa que com
o aumento do número de espiras em curto-circuito, o que corresponde mudança para taps
superiores, ambas as técnicas EPVA e MCSA, responderam satisfatoriamente. Isto implica
que o local onde o curto ocorre dentro da bobina contribui em mais ou menos para o
funcionamento do motor e também no desequilíbrio com que este passa a operar.
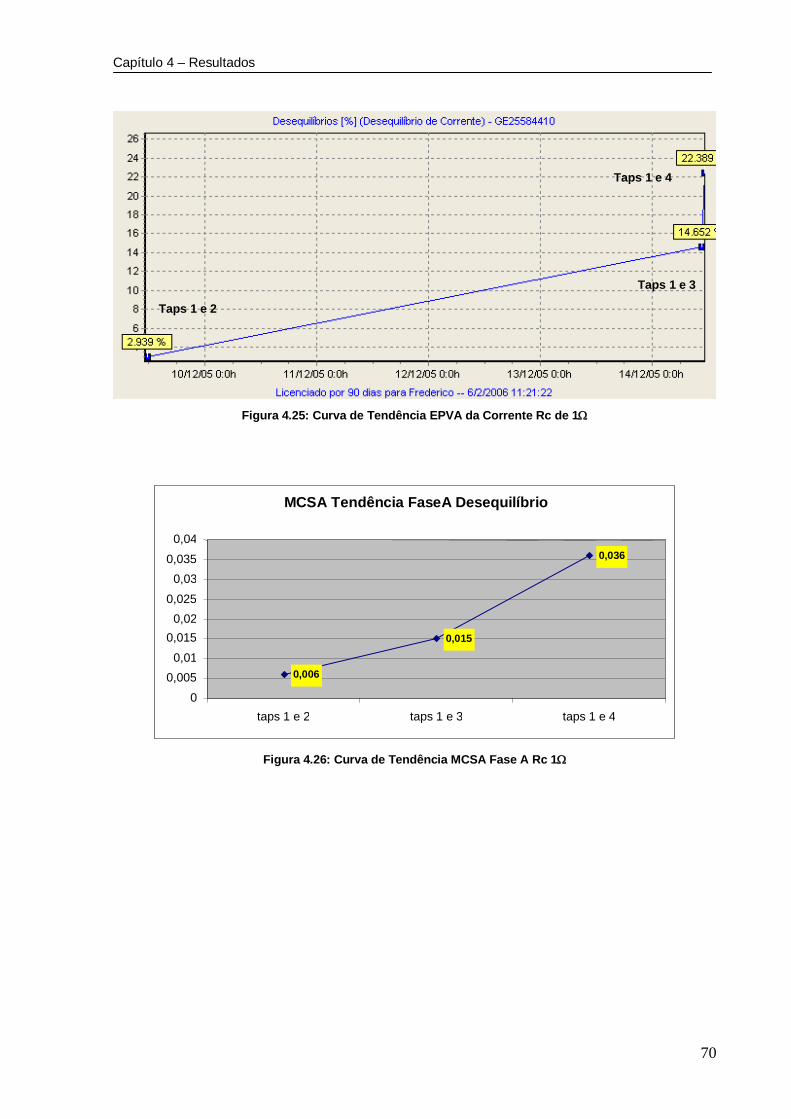
Capítulo 4 – Resultados
70
Figura 4.25: Curva de Tendência EPVA da Corrente Rc de 1
Figura 4.26: Curva de Tendência MCSA Fase A Rc 1
MCSA Tendência FaseA Desequilíbrio
0,006
0,015
0,036
0
0,005
0,01
0,015
0,02
0,025
0,03
0,035
0,04
taps 1 e 2 taps 1 e 3 taps 1 e 4
Taps 1 e 2
Taps 1 e 3
Taps 1 e 4
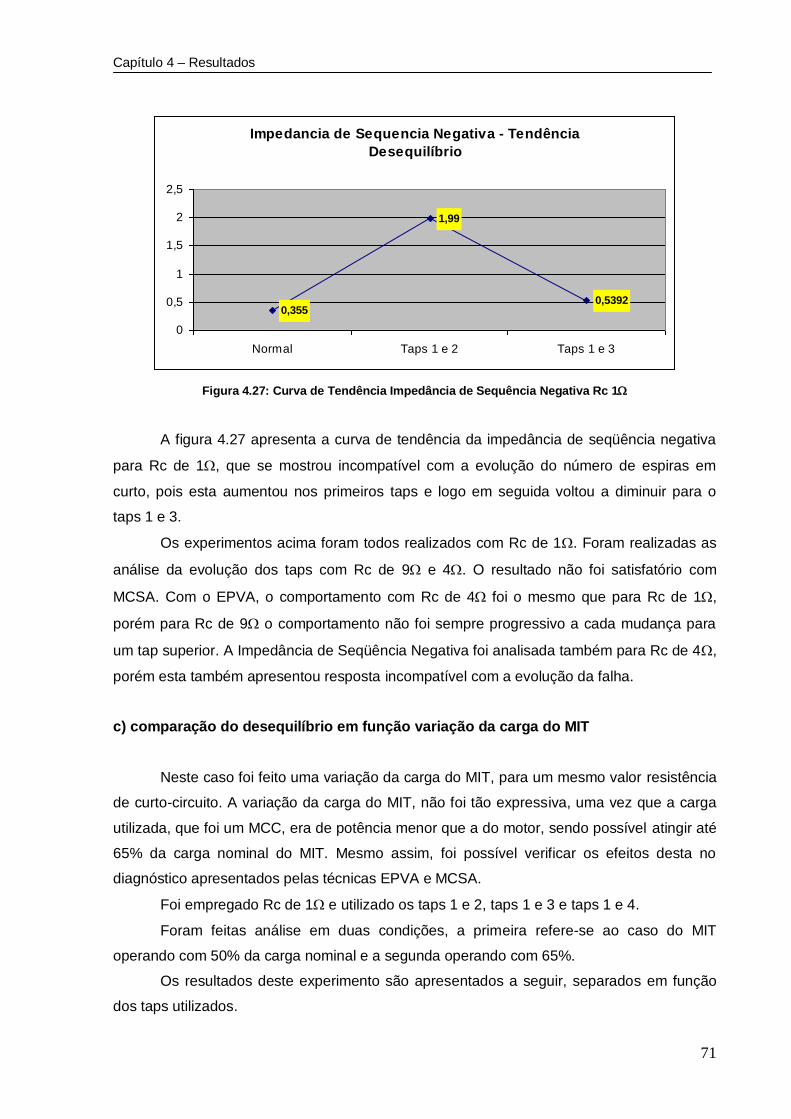
Capítulo 4 – Resultados
71
Impedancia de Sequencia Negativa - Tendência
Desequilíbrio
0,355
1,99
0,5392
0
0,5
1
1,5
2
2,5
Normal Taps 1 e 2 Taps 1 e 3
Figura 4.27: Curva de Tendência Impedância de Sequência Negativa Rc 1
A figura 4.27 apresenta a curva de tendência da impedância de seqüência negativa
para Rc de 1, que se mostrou incompatível com a evolução do número de espiras em
curto, pois esta aumentou nos primeiros taps e logo em seguida voltou a diminuir para o
taps 1 e 3.
Os experimentos acima foram todos realizados com Rc de 1. Foram realizadas as
análise da evolução dos taps com Rc de 9 e 4. O resultado não foi satisfatório com
MCSA. Com o EPVA, o comportamento com Rc de 4 foi o mesmo que para Rc de 1,
porém para Rc de 9 o comportamento não foi sempre progressivo a cada mudança para
um tap superior. A Impedância de Seqüência Negativa foi analisada também para Rc de 4,
porém esta também apresentou resposta incompatível com a evolução da falha.
c) comparação do desequilíbrio em função variação da carga do MIT
Neste caso foi feito uma variação da carga do MIT, para um mesmo valor resistência
de curto-circuito. A variação da carga do MIT, não foi tão expressiva, uma vez que a carga
utilizada, que foi um MCC, era de potência menor que a do motor, sendo possível atingir até
65% da carga nominal do MIT. Mesmo assim, foi possível verificar os efeitos desta no
diagnóstico apresentados pelas técnicas EPVA e MCSA.
Foi empregado Rc de 1 e utilizado os taps 1 e 2, taps 1 e 3 e taps 1 e 4.
Foram feitas análise em duas condições, a primeira refere-se ao caso do MIT
operando com 50% da carga nominal e a segunda operando com 65%.
Os resultados deste experimento são apresentados a seguir, separados em função
dos taps utilizados.
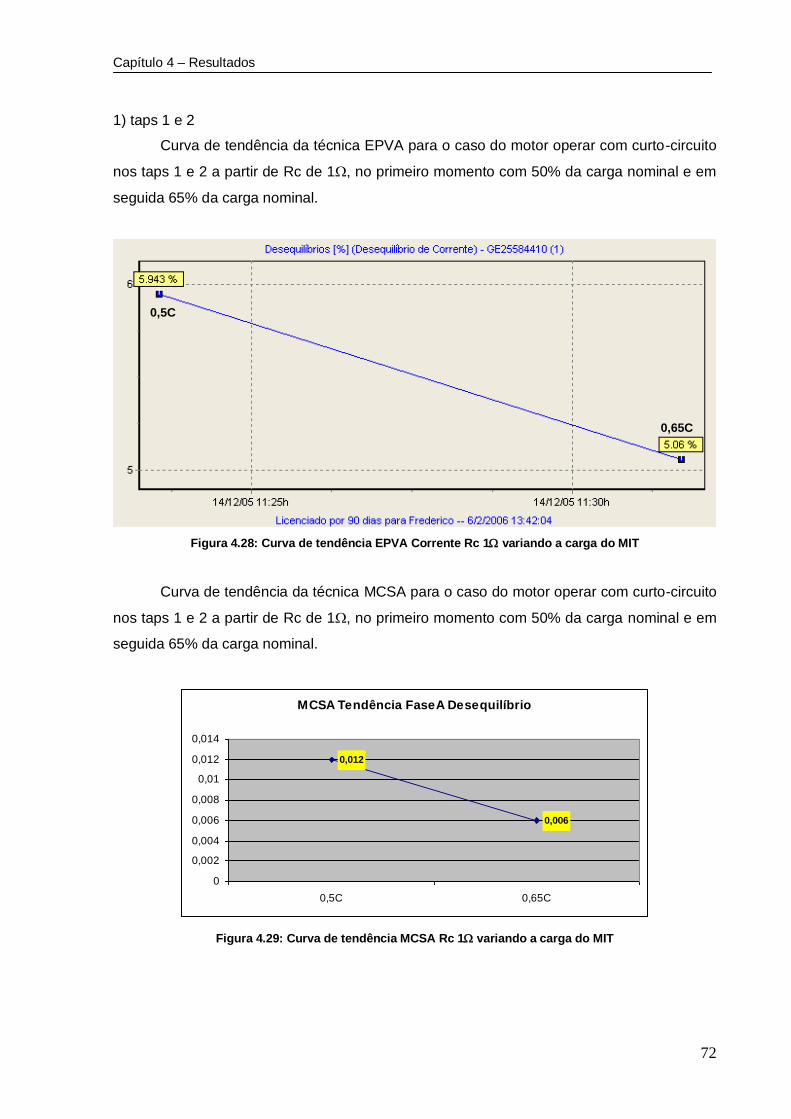
Capítulo 4 – Resultados
72
1) taps 1 e 2
Curva de tendência da técnica EPVA para o caso do motor operar com curto-circuito
nos taps 1 e 2 a partir de Rc de 1, no primeiro momento com 50% da carga nominal e em
seguida 65% da carga nominal.
Figura 4.28: Curva de tendência EPVA Corrente Rc 1 variando a carga do MIT
Curva de tendência da técnica MCSA para o caso do motor operar com curto-circuito
nos taps 1 e 2 a partir de Rc de 1, no primeiro momento com 50% da carga nominal e em
seguida 65% da carga nominal.
MCSA Tendência FaseA Desequilíbrio
0,012
0,006
0
0,002
0,004
0,006
0,008
0,01
0,012
0,014
0,5C 0,65C
Figura 4.29: Curva de tendência MCSA Rc 1 variando a carga do MIT
0,5C
0,65C

Capítulo 4 – Resultados
73
2) taps 1 e 3
Curva de tendência da técnica EPVA para o caso do motor operar com curto-circuito
nos taps 1 e 3 a partir de Rc de 1, no primeiro momento com 50% da carga nominal e em
seguida 65% da carga nominal.
Figura 4.30: Curva de tendência EPVA Corrente Rc 1 variando a carga do MIT
Curva de tendência da técnica MCSA para o caso do motor operar com curto-circuito
nos taps 1 e 3 a partir de Rc de 1, no primeiro momento com 50% da carga nominal e em
seguida 65% da carga nominal.
MCSA Tendência FaseA Desequilíbrio
0,018
0,014
0
0,002
0,004
0,006
0,008
0,01
0,012
0,014
0,016
0,018
0,02
0,5C 0,65C
Figura 4.31: Curva de tendência MCSA Rc 1 variando a carga do MIT
0,5C
0,65C

Capítulo 4 – Resultados
74
3) taps 1 e 4
Curva de tendência da técnica EPVA para o caso do motor operar com curto-circuito
nos taps 1 e 4 a partir de Rc de 1, no primeiro momento com 50% da carga nominal e em
seguida 65% da carga nominal.
Figura 4.32: Curva de tendência EPVA Corrente Rc 1 variando a carga do MIT
Curva de tendência da técnica MCSA para o caso do motor operar com curto-circuito
nos taps 1 e 4 a partir de Rc de 1, no primeiro momento com 50% da carga nominal e em
seguida 65% da carga nominal.
MCSA Tendência FaseA Desequilíbrio
0,044
0,042
0,041
0,0415
0,042
0,0425
0,043
0,0435
0,044
0,0445
0,5C 0,65C
Figura 4.33: Curva de tendência MCSA Rc 1 variando a carga do MIT
0,5C
0,65C

Capítulo 4 – Resultados
75
Como mencionado em [2], era esperado que o fator de desequilíbrio do MIT
diminuísse em função do aumento da carga. Este efeito ocorreu em todos os casos com as
técnicas EPVA e MCSA, com um mesmo Rc e para as três posições de curto-circuito.
4.3.2_ Curto-circuito entre espiras de fases diferentes
Esta falha foi simulada conectando a partir do resistor de curto-circuito, os taps
disponíveis de uma bobina da fase A, com um dos terminais da fase B, que coincide com a
primeira espira da primeira bobina da fase B.
O resistor de curto-cicuito foi ajustado em 9, em razão dos níveis de tensão
envolvidos e consequentemente possíveis correntes de curto-circuito. A tabela 4.3,
apresenta as tensões entre os taps e a fase B no instante do ensaio.
Tabela 4.3: Tensões entre os terminiais p/ o curto-circuito entre fases
Terminais Tensão entre os terminais
Tap1 e Terminal da Fase B 111V
Tap2 e Terminal da Fase B 99V
Tap3 e Terminal da Fase B 87,4V
Tap4 e Terminal da Fase B 74,7V
Figura 4.34: Curva de tendência EPVA Corrente curto-circuito entre fases
Tap 1 e Fase B
Tap 2 e Fase B
Tap 3 e Fase B
Tap 4 e Fase B
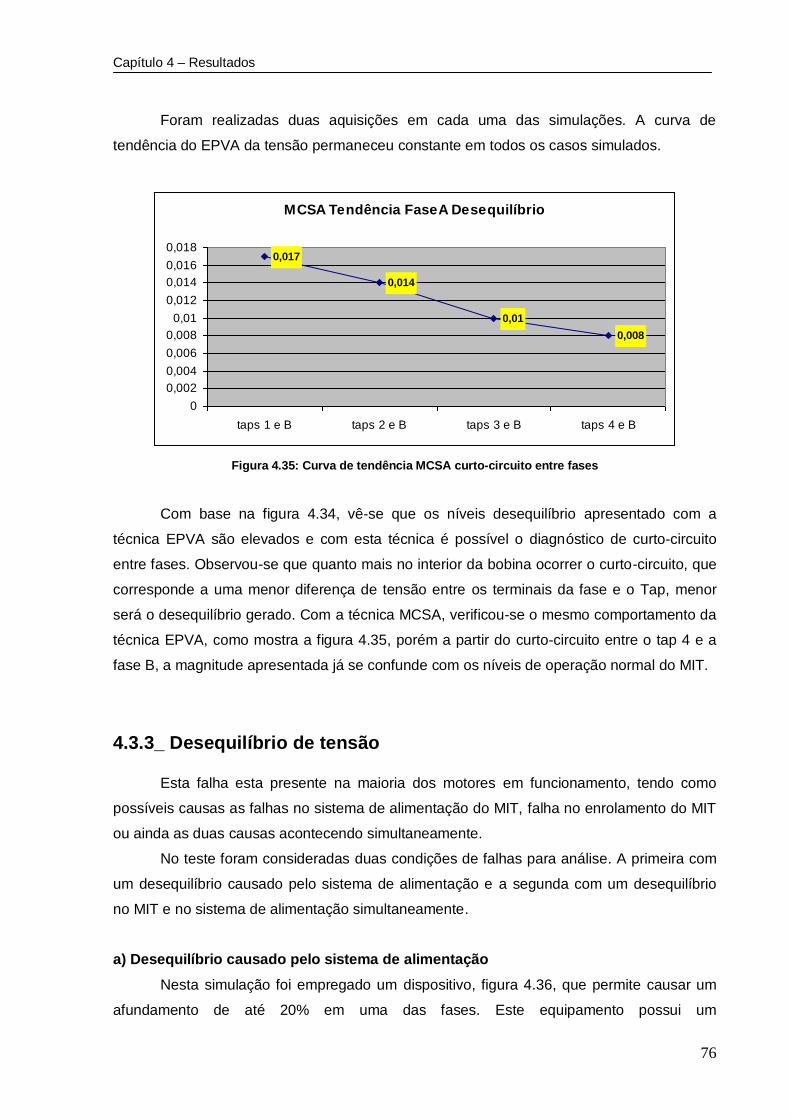
Capítulo 4 – Resultados
76
Foram realizadas duas aquisições em cada uma das simulações. A curva de
tendência do EPVA da tensão permaneceu constante em todos os casos simulados.
MCSA Tendência FaseA Desequilíbrio
0,017
0,014
0,01
0,008
0
0,002
0,004
0,006
0,008
0,01
0,012
0,014
0,016
0,018
taps 1 e B taps 2 e B taps 3 e B taps 4 e B
Figura 4.35: Curva de tendência MCSA curto-circuito entre fases
Com base na figura 4.34, vê-se que os níveis desequilíbrio apresentado com a
técnica EPVA são elevados e com esta técnica é possível o diagnóstico de curto-circuito
entre fases. Observou-se que quanto mais no interior da bobina ocorrer o curto-circuito, que
corresponde a uma menor diferença de tensão entre os terminais da fase e o Tap, menor
será o desequilíbrio gerado. Com a técnica MCSA, verificou-se o mesmo comportamento da
técnica EPVA, como mostra a figura 4.35, porém a partir do curto-circuito entre o tap 4 e a
fase B, a magnitude apresentada já se confunde com os níveis de operação normal do MIT.
4.3.3_ Desequilíbrio de tensão
Esta falha esta presente na maioria dos motores em funcionamento, tendo como
possíveis causas as falhas no sistema de alimentação do MIT, falha no enrolamento do MIT
ou ainda as duas causas acontecendo simultaneamente.
No teste foram consideradas duas condições de falhas para análise. A primeira com
um desequilíbrio causado pelo sistema de alimentação e a segunda com um desequilíbrio
no MIT e no sistema de alimentação simultaneamente.
a) Desequilíbrio causado pelo sistema de alimentação
Nesta simulação foi empregado um dispositivo, figura 4.36, que permite causar um
afundamento de até 20% em uma das fases. Este equipamento possui um

Capítulo 4 – Resultados
77
autotransformador instalado em série com a fase afetada. Foram então consideradas três
condições, a primeira sem afundamento, mas sendo alimentado através do equipamento, a
segunda com 10% de afundamento na fase A e a terceira com 20% de afundamento na fase
A.
Figura 4.36: Dispositivo para causar afundamento monofásico
A figura 4.37 apresenta a resposta analisada pela técnica EPVA, na presença de um
afundamento monofásico. Como pode ser observado a curva de tendência apresentou um
comportamento crescente em função do agravamento do afundamento monofásico.
Figura 4.37: Curva de tendência EPVA Corrente – Afundamento fase A
As figuras 4.38, 4.39 e 4.40, apresentam as respostas analisadas pelas técnica
MCSA, para as fases A, B e C respectivamente. Isto foi necessário para atestar que se caso
Normal
10% afundamento
20% afundamento

Capítulo 4 – Resultados
78
esteja monitorando apenas uma das fases, como é comum de se observar em MCSA,
verificar se mesmo o desequilíbrio ocorrer na fase que não está sendo monitorada as
demais enxergariam a falha presente no sistema de alimentação.
A figura 4.38, 4.39 e 4.40 exibem a curva de tendência a partida da técnica MCSA,
monitorando as fases A, B e C respectivamente para o caso do agravamento do
afundamento no sistema de alimentação.
MCSA Tendência FaseA Desequilíbrio
0,02
0,098
0,087
0
0,02
0,04
0,06
0,08
0,1
0,12
Normal 10%Af 20%Af
Figura 4.38: Curva de tendência MCSA FaseA – Afundamento fase A
MCSA Tendência FaseB Desequilíbrio
0,027
0,0550,058
0
0,01
0,02
0,03
0,04
0,05
0,06
0,07
Normal 10%Af 20%Af
Figura 4.39: Curva de tendência MCSA FaseB – Afundamento fase A

Capítulo 4 – Resultados
79
MCSA Tendência FaseC Desequilíbrio
0,041
0,0760,07
0
0,01
0,02
0,03
0,04
0,05
0,06
0,07
0,08
Normal 10%Af 20%Af
Figura 4.40: Curva de tendência MCSA FaseC – Afundamento fase A
Com base nos resultados das figuras 4.38, 4.39 e 4.40, observa-se que monitorando
a penas a fase A, onde foi provocado o afundamento, seria possível diagnosticar o
afundamento ocorrido, já que o comportamento da curva foi crescente em função do
aumento do afundamento. Pode-se observar ainda que mesmo a partir da monitoração das
fases que não foram afetadas pelo afundamento, seria possível verificar um aumento no
nível do desequilíbrio.
b) Desequilíbrio causado pelo sistema de alimentação e também curto-circuito entre
espiras
Essa ocorrência de desequilíbrio no sistema de alimentação é comum, uma vez que
na maioria dos casos este efeito existe, mesmo que seja pequeno. Diante desta condição
conclui-se que na maioria dos casos, quando ocorrer um curto-circuito, existirá também um
desequilíbrio presente. Foram simuladas duas condições, a primeira com 10% de
afundamento na fase A e inserindo um Rc de 4 e de 1 nos taps 1 e 3. Para cada Rc duas
aquisições. A segunda com o mesmo procedimento da primeira, porém com 20% de
afundamento na fase A.

Capítulo 4 – Resultados
80
1) Afundamento de 10% na fase A
Figura 4.41: Curva de tendência EPVA Corrente – Afundamento Fase A e CC entre espiras
A figura 4.41 mostra que ouve uma diminuição no fator de desequilíbrio, porém esta
foi pequena. A razão para este fato está do curto-circuito inserido ter corrigido de maneira
sensível o desequilíbrio já existente devido ao desequilíbrio do sistema de alimentação. Pela
análise dos níveis apresentados, não ficaria tão claro a origem do desequilíbrio.
Complementando ainda a análise, observa-se que a curva de tendência apresentada na
figura 4.42 obtida pela técnica EPVA, só que analisando a tensão, que o problema seria
derivado do sistema de alimentação, já que esta tem um comportamento crescente.
O risco do diagnóstico errado a partir de EPVA, não traria tantos transtornos. Uma
vez sanado o desequilíbrio no sistema de alimentação concluído pela técnica a partir da
análise da corrente e da tensão, ainda ficaria apontada um nível elevado de desequilíbrio
em função da presença de curto-circuito. Este diagnóstico levaria ainda uma segunda
manutenção, agora do enrolamento do MIT.
Sem Rc
4
1

Capítulo 4 – Resultados
81
Figura 4.42: Curva de tendência EPVA Tensão – Afundamento Fase A e CC entre espiras
Figura 4.43: Curva de tendência MCSA – Afundamento Fase A e CC entre espiras
Na figura 4.43 percebe-se o mesmo efeito na curva de tendência apresentada pela
técnica MCSA. Com o aumento do curto-circuito, o desequilíbrio diminuiu, porém como os
níveis não são tão elevados, essa diminuição caminha para a anulação do diagnóstico onde
as magnitudes apresentadas para esta técnica indicam um motor “saudável”.
MCSA Tendência FaseA Desequilíbrio
0,098
0,084
0,028
0
0,02
0,04
0,06
0,08
0,1
0,12
Sem Rc Rc 4ohm Rc 1ohm
4
1
Sem Rc

Capítulo 4 – Resultados
82
2) Afundamento de 20% na fase A
Figura 4.44: Curva de tendência EPVA Corrente – Afundamento Fase A e CC entre espiras
Como no caso do afundamento de 10%, houve um aumento no fator de desequilíbrio
em função da presença do desequilíbrio e também do curto-circuito, porém ao invés de uma
pequena diminuição, agora percebe-se um comportamento crescente em função da
diminuição de Rc. O diagnóstico caminharia da mesma forma, ou seja, primeiramente uma
falha no sistema de alimentação, pois a curva da tensão exibida na figura 4.45, apresentou
também um acréscimo e em seguida uma falha no MIT.
Figura 4.45: Curva de tendência EPVA Tensão – Afundamento Fase A e CC entre espiras
4
1
4
1
Sem Rc
Sem Rc
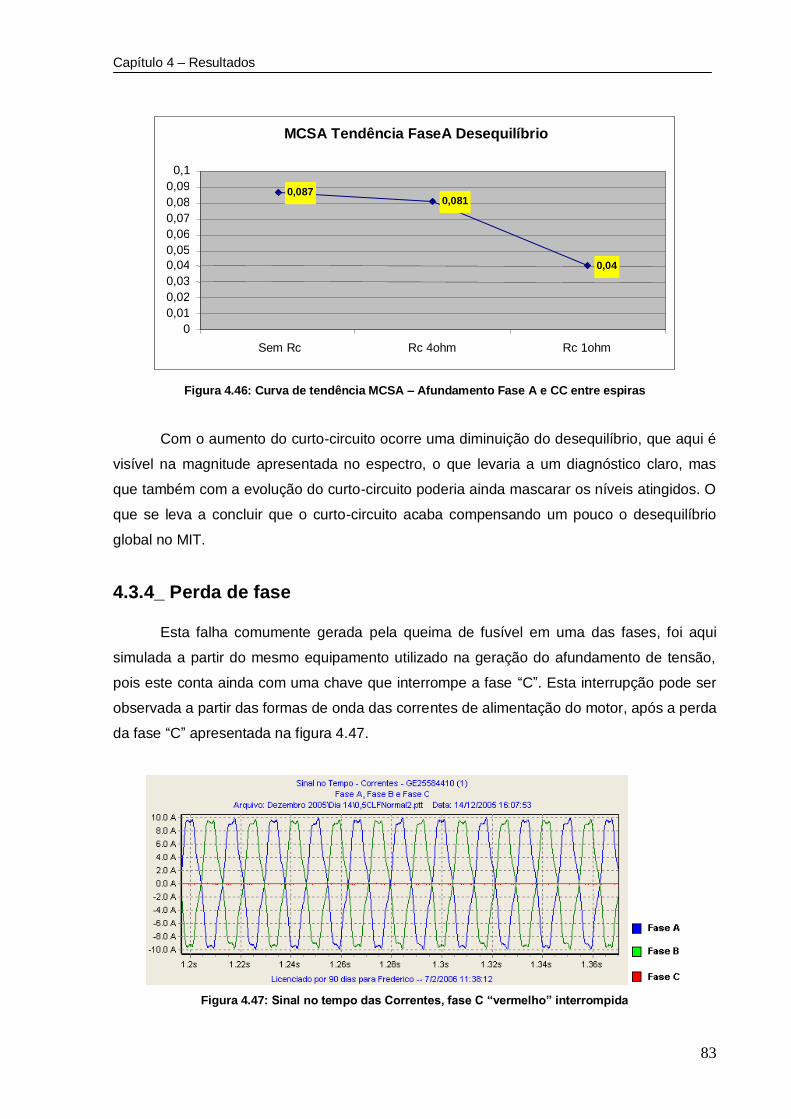
Capítulo 4 – Resultados
83
Figura 4.46: Curva de tendência MCSA – Afundamento Fase A e CC entre espiras
Com o aumento do curto-circuito ocorre uma diminuição do desequilíbrio, que aqui é
visível na magnitude apresentada no espectro, o que levaria a um diagnóstico claro, mas
que também com a evolução do curto-circuito poderia ainda mascarar os níveis atingidos. O
que se leva a concluir que o curto-circuito acaba compensando um pouco o desequilíbrio
global no MIT.
4.3.4_ Perda de fase
Esta falha comumente gerada pela queima de fusível em uma das fases, foi aqui
simulada a partir do mesmo equipamento utilizado na geração do afundamento de tensão,
pois este conta ainda com uma chave que interrompe a fase “C”. Esta interrupção pode ser
observada a partir das formas de onda das correntes de alimentação do motor, após a perda
da fase “C” apresentada na figura 4.47.
Figura 4.47: Sinal no tempo das Correntes, fase C “vermelho” interrompida
MCSA Tendência FaseA Desequilíbrio
0,087 0,081
0,04
0 0,01 0,02 0,03 0,04 0,05 0,06 0,07 0,08 0,09
0,1
Sem Rc Rc 4ohm Rc 1ohm

Capítulo 4 – Resultados
84
Com o motor operando a meia carga foi simulado primeiramente a perda de fase e
logo em seguida a inserção de um curto-circuito com Rc de 1 nos taps 1 e 3, juntamente
com a perda de fase.
1) Perda de fase “C”
Foi tomada primeiramente a magnitude do motor operando sem falha “saudável” e
também operando sem a fase C. A figura 4.48 e 4.49 apresenta o comportamento das
curvas de tendência da técnica EPVA para a corrente e para a tensão respectivamente em
função da perda de fase.
Figura 4.48: Curva de tendência EPVA Corrente – Perda da fase C
Figura 4.49: Curva de tendência EPVA Tensão – Perda da fase C
Normal
Perda de Fase
Normal
Perda de Fase

Capítulo 4 – Resultados
85
A partir dos valores obtidos pela aplicação da técnica e EPVA podemos perceber
uma grande elevação do fator de desequilíbrio em função da perda de fase. Esta falha
precisa ser rapidamente identificada devido aos danos para o processo, pois o motor perde
muito torque e ainda devido ao motor que apresenta um maior aquecimento. Pode-se ainda,
a partir da curva gerada pela técnica EPVA para a tensão, perceber que a falha está no
sistema de alimentação, pois esta teve um comportamento muito ascendente, chegando a
um diagnóstico preciso.
MCSA Tendência FaseA Desequilíbrio
0,02
0,056
0
0,01
0,02
0,03
0,04
0,05
0,06
Normal Perda de Fase
Figura 4.50: Curva de tendência MCSA – Perda da fase C
Apesar do diagnóstico a partir da técnica MCSA para o caso da perda de fase não
ser conclusivo apenas pela análise espectral, analisando uma só corrente, sem analisar a
tensão, é possível se perceber uma elevação da componente de 3xF no espectro como
mostra a curva de tendência da figura 4.50. Vale ressaltar que este mesmo comportamento
aconteceu para a fase “B”, porém se a fase monitorada fosse a “C”, onde ocorreu a perda,
perceberia um sinal constante e de magnitude zero. Isto acarretaria vários diagnósticos
possíveis como: motor desligado, erro no transdutor de corrente ou ainda perda de fase.
Ficaria então o motor apenas sob a segurança dos equipamentos de proteção, caso
existam, no sistema de acionamento.
2) Perda da fase “C” e curto-circuito entre espiras
Além da perda de fase foi inserido um curto-circuito no MIT a fim de se analisar, a
partir das técnicas em estudo, a resposta na presença das duas falhas simultaneamente.
A fase interrompida continua sendo a “C” e o curto-circuito foi inserido a partir do
resistor Rc de 1 nos taps 1 e 3.
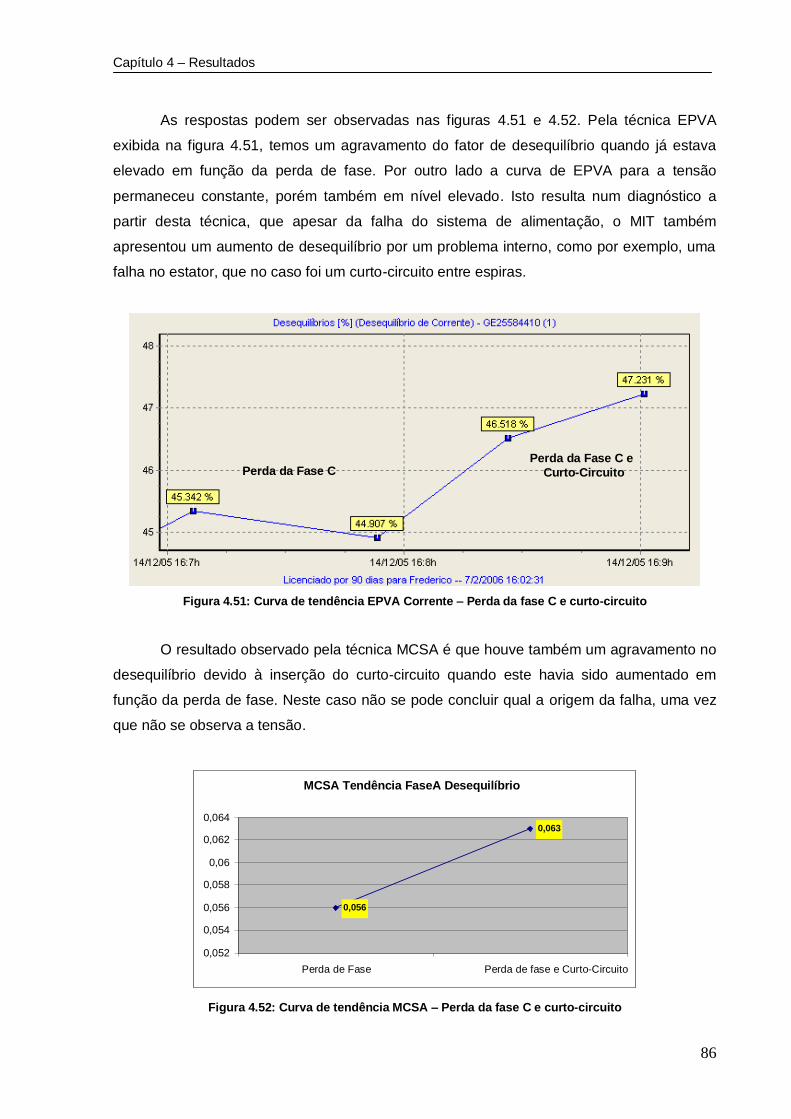
Capítulo 4 – Resultados
86
As respostas podem ser observadas nas figuras 4.51 e 4.52. Pela técnica EPVA
exibida na figura 4.51, temos um agravamento do fator de desequilíbrio quando já estava
elevado em função da perda de fase. Por outro lado a curva de EPVA para a tensão
permaneceu constante, porém também em nível elevado. Isto resulta num diagnóstico a
partir desta técnica, que apesar da falha do sistema de alimentação, o MIT também
apresentou um aumento de desequilíbrio por um problema interno, como por exemplo, uma
falha no estator, que no caso foi um curto-circuito entre espiras.
Figura 4.51: Curva de tendência EPVA Corrente – Perda da fase C e curto-circuito
O resultado observado pela técnica MCSA é que houve também um agravamento no
desequilíbrio devido à inserção do curto-circuito quando este havia sido aumentado em
função da perda de fase. Neste caso não se pode concluir qual a origem da falha, uma vez
que não se observa a tensão.
Figura 4.52: Curva de tendência MCSA – Perda da fase C e curto-circuito
MCSA Tendência FaseA Desequilíbrio
0,056
0,063
0,052
0,054
0,056
0,058
0,06
0,062
0,064
Perda de Fase Perda de fase e Curto-Circuito
Perda da Fase C Perda da Fase C e
Curto-Circuito
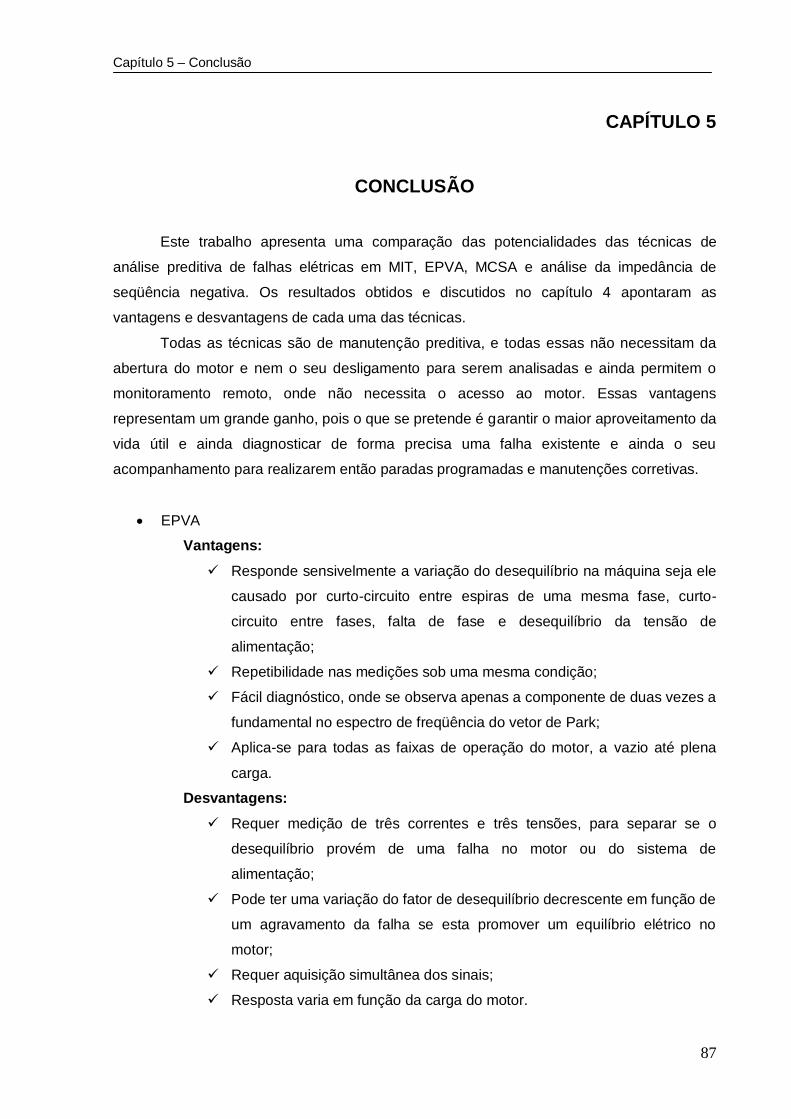
Capítulo 5 – Conclusão
87
CAPÍTULO 5
CONCLUSÃO
Este trabalho apresenta uma comparação das potencialidades das técnicas de
análise preditiva de falhas elétricas em MIT, EPVA, MCSA e análise da impedância de
seqüência negativa. Os resultados obtidos e discutidos no capítulo 4 apontaram as
vantagens e desvantagens de cada uma das técnicas.
Todas as técnicas são de manutenção preditiva, e todas essas não necessitam da
abertura do motor e nem o seu desligamento para serem analisadas e ainda permitem o
monitoramento remoto, onde não necessita o acesso ao motor. Essas vantagens
representam um grande ganho, pois o que se pretende é garantir o maior aproveitamento da
vida útil e ainda diagnosticar de forma precisa uma falha existente e ainda o seu
acompanhamento para realizarem então paradas programadas e manutenções corretivas.
EPVA
Vantagens:
Responde sensivelmente a variação do desequilíbrio na máquina seja ele
causado por curto-circuito entre espiras de uma mesma fase, curto-
circuito entre fases, falta de fase e desequilíbrio da tensão de
alimentação;
Repetibilidade nas medições sob uma mesma condição;
Fácil diagnóstico, onde se observa apenas a componente de duas vezes a
fundamental no espectro de freqüência do vetor de Park;
Aplica-se para todas as faixas de operação do motor, a vazio até plena
carga.
Desvantagens:
Requer medição de três correntes e três tensões, para separar se o
desequilíbrio provém de uma falha no motor ou do sistema de
alimentação;
Pode ter uma variação do fator de desequilíbrio decrescente em função de
um agravamento da falha se esta promover um equilíbrio elétrico no
motor;
Requer aquisição simultânea dos sinais;
Resposta varia em função da carga do motor.

Capítulo 5 – Conclusão
88
MCSA
Vantagens:
Repetibilidade sob uma mesma condição;
Fácil diagnóstico, onde se observa apenas a componente de três vezes a
fundamental no espectro de freqüência da corrente;
Aplica-se para todas as faixas de operação do motor, a vazio até plena
carga;
Requer medição de apenas uma corrente, contudo se ocorrer uma perda
da fase monitorada o diagnóstico não será conclusivo;
O efeito percebido a partir da monitoração de uma das correntes
independe da fase escolhida.
Desvantagens:
Não responde sensivelmente a todas as falhas, pois depende da
magnitude do desequilíbrio. Em muitos casos o diagnóstico permaneceu
como de um motor saudável mesmo da presença de falhas instaladas;
Pode ter uma variação do fator de desequilíbrio decrescente em função de
um agravamento da falha se esta promover um equilíbrio elétrico no
motor;
Caso ocorra uma perda de fase na mesma fase monitorada, o diagnóstico
não é conclusivo;
Resposta varia em função da carga do motor.
Cálculo da Impedância de seqüência negativa
Vantagens:
Repetibilidade sob uma mesma condição;
Fácil diagnóstico, onde se observa apenas a magnitude da impedância de
seqüência negativa calculada;
Aplica-se para todas as faixas de operação do motor, a vazio até a plena
carga.
Desvantagens:
Não responde sensivelmente a todas as falhas, pois na maioria dos casos
a resposta se mostrou decrescente em função do agravamento da falha;
Requer medição de três correntes e três tensões simultâneas;

Capítulo 5 – Conclusão
89
É necessária a medição das correntes de fase, para que se meça a
impedância de seqüência negativa de fase;
Resposta varia em função da carga do motor.
É comum a todas essas técnicas a análise por curva de tendência, ou seja, em
função da variação das magnitudes das componentes de falha é que se conclui do
diagnóstico da falha. Com isso é necessário primeiramente a construção de um histórico
que permitirá, no futuro, a identificação de uma falha existente somente a partir do valor
assumido pela componente no espectro ou mesmo da magnitude assumida no caso da
impedância de seqüência negativa e não apenas pela sua variação, o que facilitaria para um
diagnóstico simplificado e rápido.
As técnicas não excluem o analista, uma vez que muitas comparações “sentimentos”
são necessárias para um correto diagnóstico. Existem muitas variáveis na manutenção do
MIT, que podem mascarar ou até mesmo confundir na investigação de uma falha. Por
exemplo, um tipo de motor que já vem de fábrica com um desequilíbrio implícito, uma carga
que varia muito causando variação no desequilíbrio do sistema de alimentação ou mesmo
um sistema desequilibrado, todas são variáveis que poderiam apontar uma falha no motor
ou uma ordem de serviço de manutenção, mas que não corresponde na prática uma falha
existente.
Viu-se das falhas analisadas, que o desequilíbrio na máquina está relacionado com o
curto-circuito provocado pela degradação do isolamento do enrolamento e este varia no
decorrer do tempo e da utilização do motor. Está relacionado com o local onde acontece o
curto-circuito na bobina e também com o sistema de alimentação. O desequilíbrio no
sistema de alimentação pode estar relacionado com perda de fase ou com tensões
desequilibradas. O nível de carga que o motor está operando também influencia no
desequilíbrio.
Mesmo que estas técnicas tenham apresentado diagnósticos confiáveis para a
maioria das falhas elétricas, não se limita a elas o acompanhamento de uma falha em
potencial na máquina, o que se vê muitas vezes hoje, é a manutenção preditiva reprogramar
a manutenção preventiva, o que é muito importante, onde se podem realizar medidas de
temperatura do motor, escutar o nível de ruído, inspecionar visualmente e outras atividades
que vão somando ao longo do tempo um conhecimento que permite refinar as respostas de
cada uma das técnicas, além de alcançar um diagnóstico mais preciso, a fim de garantirem
paradas programadas efetivas, aumentando a confiabilidade no processo industrial e
aumentando a vida útil do motor.
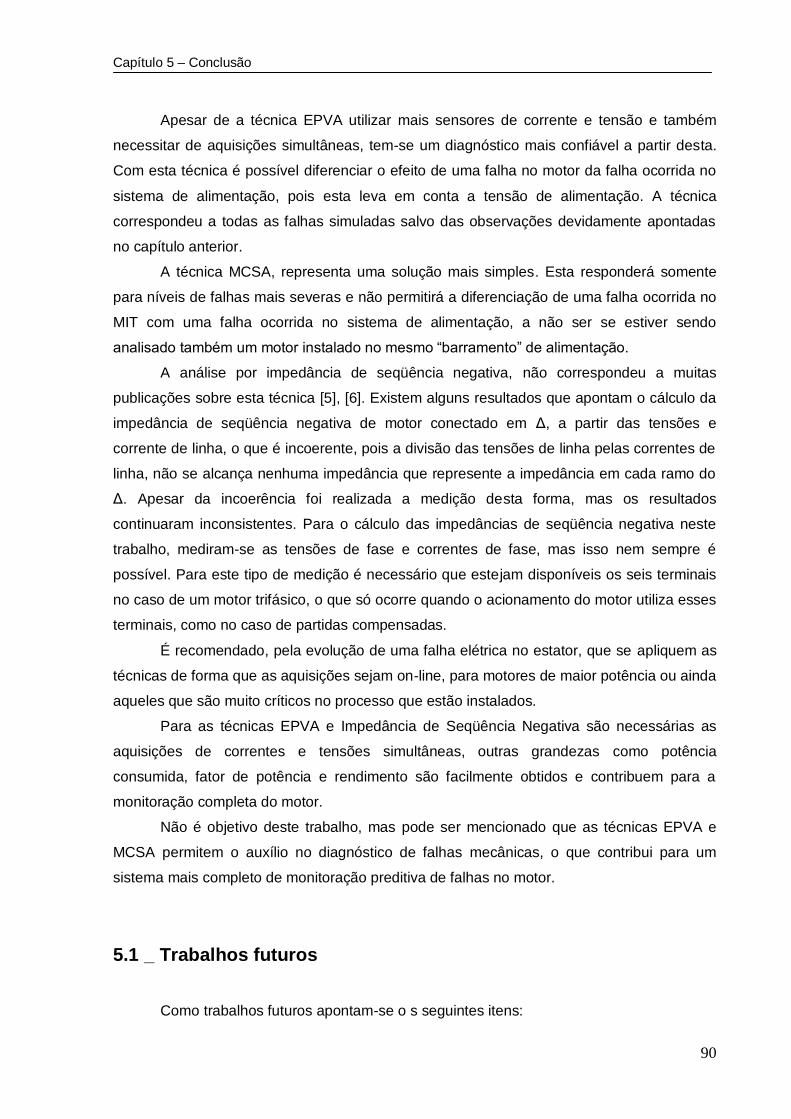
Capítulo 5 – Conclusão
90
Apesar de a técnica EPVA utilizar mais sensores de corrente e tensão e também
necessitar de aquisições simultâneas, tem-se um diagnóstico mais confiável a partir desta.
Com esta técnica é possível diferenciar o efeito de uma falha no motor da falha ocorrida no
sistema de alimentação, pois esta leva em conta a tensão de alimentação. A técnica
correspondeu a todas as falhas simuladas salvo das observações devidamente apontadas
no capítulo anterior.
A técnica MCSA, representa uma solução mais simples. Esta responderá somente
para níveis de falhas mais severas e não permitirá a diferenciação de uma falha ocorrida no
MIT com uma falha ocorrida no sistema de alimentação, a não ser se estiver sendo
analisado também um motor instalado no mesmo “barramento” de alimentação.
A análise por impedância de seqüência negativa, não correspondeu a muitas
publicações sobre esta técnica [5], [6]. Existem alguns resultados que apontam o cálculo da
impedância de seqüência negativa de motor conectado em Δ, a partir das tensões e
corrente de linha, o que é incoerente, pois a divisão das tensões de linha pelas correntes de
linha, não se alcança nenhuma impedância que represente a impedância em cada ramo do
Δ. Apesar da incoerência foi realizada a medição desta forma, mas os resultados
continuaram inconsistentes. Para o cálculo das impedâncias de seqüência negativa neste
trabalho, mediram-se as tensões de fase e correntes de fase, mas isso nem sempre é
possível. Para este tipo de medição é necessário que estejam disponíveis os seis terminais
no caso de um motor trifásico, o que só ocorre quando o acionamento do motor utiliza esses
terminais, como no caso de partidas compensadas.
É recomendado, pela evolução de uma falha elétrica no estator, que se apliquem as
técnicas de forma que as aquisições sejam on-line, para motores de maior potência ou ainda
aqueles que são muito críticos no processo que estão instalados.
Para as técnicas EPVA e Impedância de Seqüência Negativa são necessárias as
aquisições de correntes e tensões simultâneas, outras grandezas como potência
consumida, fator de potência e rendimento são facilmente obtidos e contribuem para a
monitoração completa do motor.
Não é objetivo deste trabalho, mas pode ser mencionado que as técnicas EPVA e
MCSA permitem o auxílio no diagnóstico de falhas mecânicas, o que contribui para um
sistema mais completo de monitoração preditiva de falhas no motor.
5.1 _ Trabalhos futuros
Como trabalhos futuros apontam-se o s seguintes itens:
Capítulo 5 – Conclusão
91
Relacionar o fator de desequilíbrio apontado pelas técnicas com o nível de
isolamento do motor;
Criar cartas de severidade para cada tipo de falha e para cada tipo de motor e ordem
de grandeza;
Realizar mais estudos com a técnica de cálculo da impedância de seqüência
negativa, envolvendo mais casos para melhor avaliação da técnica e também
comparação dos resultados alcançados pelas publicações consultadas;
Aplicar essas mesmas técnicas em motores síncronos.
Referências Bibliográficas
92
REFERÊNCIAS BIBLIOGRÁFICAS
[1] Erik Leandro Bonaldi, “Diagnóstico Preditivo de Avarias em Motores de Indução Trifásicos
com MCSA e Teoria de Conjuntos Aproximados”. Itajubá, UNIFEI 2006.
[2] Sérgio M. A. Cruz and A. J. Marques Cardoso, “Stator Winding Diagnosis in Three-Phase
Synchronous and Asynchronous Motors, by the Extend Park´s Vector Approach”. IEEE
Transactions on Industry Applications, Vol. 37, NO. 5, September/October 2001, pp.
1227-1233.
[3] Hamid Nejjari and Mohamed El Hachemi Benbouzid, “Monitoring and Diagnosis of Induction
Motors Electrical Faults Using a Current Park´s Vector Pattern Learning Approach”. IEEE
Transactions on Industry Applications, Vol. 36, NO. 3, Mayo/June 2000, pp. 730-735.
[4] Mohamed El Hachemi Benbouzid, Michelle Vieira, and Céline Theys. “Induction Motor's
Faults Detection and localization Using Stator Current Advanced Signal Processing
Techniques”. IEEE Transactions on Power Electronics, Vol. 14, NO. 1, January 1999, pp.
14-22.
[5] Joseph Sattile and Jeffery L. Kolhler. “An On-line Method to Detect Incipient Failure of Turn
Insulation in Random-Wound Motors”. IEEE Transactions on Energy Conversion, Vol. 8, NO.
4, December 1993, pp. 762-768.
[6] Lane Maria Rabelo Baccarini. “Detecção e Diagnóstico de Falhas em Motores de Indução”.
Belo Horizonte, UFMG 2005.
[7] Antônio T. L. de Almeida, Marcelo E. C. Paulino. “Manutenção e Operação de Motores de
Indução Trifásicos”. Itajubá, FUPAI 2001.
[8] MPC Service. “Causas Típicas de Falhas em Enrolamentos de Estatores Trifásicos”,
http://www.mpcservice.com.br/paginas/artigo02.htm.
[9] Délvio F. Bernardes, Jocélio S. Sá, José M. C. Filho, José P. G. Abreu e Thiago C. Oliveira,
“Qualidade da Energia Elétrica”. Itajubá, FUPAI 2002
[10] José Policarpo G. Abreu and Eigeles Emanuel, “Induction motors loss of life due to voltage
imbalance and harmonics: a preliminary study” ICHQP Vol. 1, October 2000, pp. 75-80.
[11] Frederico O. Assunção, Erik L. Bonaldi, Luiz E. B. Silva, Germano L. Torres, André C.
Bertolini e Levy E. L. Oliveira, “Classificador Baseado na Teoria de Conjuntos Aproximados

Referências Bibliográficas
93
Aplicado ao Diagnóstico de Falhas em Motores de Indução Trifásicos Monitorados Através de
Sinais Acústicos Elétricos e de Vibração”. São Paulo, SBAI 2003.
[12] Dernando J. T. E. Ferrreira e Anibal T. Almeida, “Tecnologias de Manutenção Curativa de
Motores de Indução Trifásicos de Baixa Tensão com Rotor em Gaiola de Esquilo”. Portugal –
Coimbra, Universidade de Coimbra.
[13] Greg C. Stone e Howard G. Sedding, “In-Service Evaluation of Motor and Generator Stator
Windings Using Partial Discharge Tests”. IEEE Transactions on Industry Applications Vol. 31,
NO. 2, March/April 1995, pp. 299-303.
[14] Voitto Kokko, “Condition Monitoring of Squirrel-Cage Motors By Axial Magnetic Flux
Measurements”. OULU, Universidade de Oulu 2003.
[15] Reinhard Maier, “Protection of Squirrel-Cage Induction Motor Utilizing Instantaneous Power
and Phase Information”. IEEE Transactions on Industry Applications Vol. 28, NO. 2,
March/April 1992, pp. 376-380.
[16] J. S. Hsu, “Monitoring of Defects in Induction Motors Through Air-gap Torque Observation”.
IEEE Transactions on Industry Applications Vol. 28, March/April 1992, pp. 376-380.
[17] Bradley S. Payne, “A Head-to-Head Assessment of the Relative Fault Detection and
Diagnosis Capabilities of Conventional Vibration and Airborne Acoustic Monitoring”.
Manchester, Manchester School of Engineering.
[18] Kliman, G. B., Premerlani, W. J. and Koegl, “A new approach to on-line turn detection
in ac motors”. IEEE Conference Record, Vol. 1, 1996, pp. 687-693.


















