UNIVERSIDADE DE SÃO PAULO ESCOLA DE ENGENHARIA … · SEM 5766 – Análise Modal de Estruturas 1...
83
1 Prof. Paulo S. Varoto SEM 5766 – Análise Modal de Estruturas SEM 5766 – ANÁLISE MODAL DE ESTRUTURAS UNIVERSIDADE DE SÃO PAULO ESCOLA DE ENGENHARIA DE SÃO CARLOS DEPARTAMENTO DE ENGENHARIA MECÂNICA Aula # 1 – Revisão de Conceitos – 01 GDL
Transcript of UNIVERSIDADE DE SÃO PAULO ESCOLA DE ENGENHARIA … · SEM 5766 – Análise Modal de Estruturas 1...

1 Prof. Paulo S. Varoto SEM 5766 – Análise Modal de Estruturas
SEM 5766 – ANÁLISE MODAL DE ESTRUTURAS
UNIVERSIDADE DE SÃO PAULO ESCOLA DE ENGENHARIA DE SÃO CARLOS
DEPARTAMENTO DE ENGENHARIA MECÂNICA
Aula # 1 – Revisão de Conceitos – 01 GDL

2 Prof. Paulo S. Varoto SEM 5766 – Análise Modal de Estruturas
As Rotas da Análise Modal
Modos de vibrar
Níveis de resposta
Modelo Espacial
Modelo Modal
Modelo de Resposta
[M] [C] [K] ωr [Φ] αjk(ω) h(t)
ANÁLISE MODAL TEÓRICA
Descrição da estrutura
Medidas da resposta
Modos de vibrar
Modelo estrutural
Modelo de Resposta
αjk(ω) h(t)
Modelo Modal
ωr [Φ]
Modelo Espacial
[M] [C] [K]
ANÁLISE MODAL EXPERIMENTAL

3 Prof. Paulo S. Varoto SEM 5766 – Análise Modal de Estruturas
Objetivos
Objetivo principal desta aula é realizar uma revisão de conceitos básicos da teoria de vibrações mecânicas relacionados com sistemas de 01 Grau de Liberdade (01 GDL). Serão cobertos os seguintes principais tópicos: • Resposta livre • Determinação experimental do fator de amortecimento modal • Resposta forçada harmônica – conceito de FRF • Propriedades da FRF • Excitação sísmica – conceito de transmissibilidade
Bibliografia:

4 Prof. Paulo S. Varoto SEM 5766 – Análise Modal de Estruturas
PARTE I
SISTEMAS COM 01 GDL
RESPOSTA LIVRE
5 Prof. Paulo S. Varoto SEM 5766 – Análise Modal de Estruturas
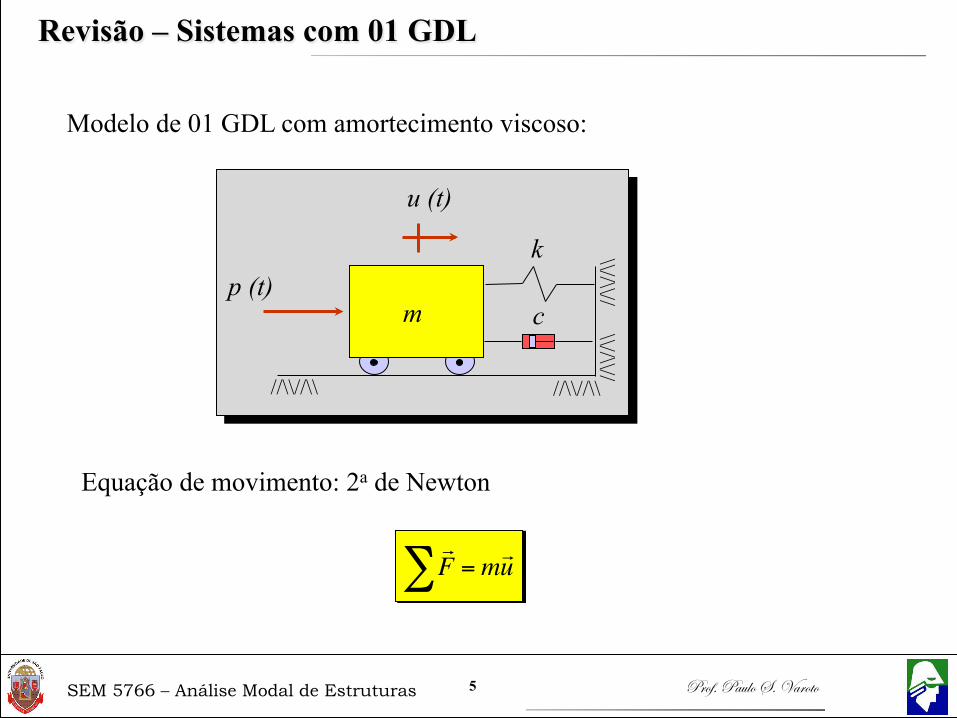
Revisão – Sistemas com 01 GDL
Modelo de 01 GDL com amortecimento viscoso:
m
k
c
//\\//\\ //\\//\\
//\\//
\\ //\
\//\\
p (t)
u (t)
Equação de movimento: 2a de Newton
F =mu∑

6 Prof. Paulo S. Varoto SEM 5766 – Análise Modal de Estruturas
Obtém-se então a seguinte equação diferencial do movimento:
0u0u =)(
Onde:
• é o termo de inércia
• é a força de amortecimento viscoso
• é a força de mola
• é a força de excitação externa
uc
)(tp
ku
um
Eq. 1
A Eq. 1 admite as seguintes condições iniciais
0u0u =)(
Posição em t = 0
Velocidade em t = 0
)(tpkuucum =++
Cont. ...

7 Prof. Paulo S. Varoto SEM 5766 – Análise Modal de Estruturas
A Eq. 1 pode ser reescrita em função dos chamados parâmetros modais:
)(22
2 tpk
uuu nnn ⎟
⎟⎠
⎞⎜⎜⎝
⎛=++
ωωςω
mk
n =2ω
crcc
=ς
kmkmcn
ncr 222 ===ω
ω
Onde :
Freqüência natural não amortecida do sistema em rad/s
Fator ou razão de amortecimento viscoso (admensional)
Constante de amortecimento crítico em Ns/m
(Propriedade do sistema que depende somente da massa e rigidez e não é função da excitação)
(Propriedade mensurável do sistema que exprime dissipação de energia)
Eq. 2
Cont. ...

8 Prof. Paulo S. Varoto SEM 5766 – Análise Modal de Estruturas
)()()( tututu cp +=
A solução da Eq. 2 é dada pela soma das soluções particular e complementar:
Eq. 3
Onde: • up(t) é a solução permanente ou de regime e depende somente da excitação p(t)
• uc(t) é a solução complementar ou homogênea e depende das CIs
02 2 =++ uuu nn ωςω
tseCtu =)(
0)2( 22 =++ tsnn eCss ωςω
Para o caso da vibração livre, consideramos p(t) = 0 e então
Eq. 4
E a solução geral da Eq. 4 é dada por:
Eq. 5
Substituindo, vem :
Eq. 6
01 GDL – Resposta Livre

9 Prof. Paulo S. Varoto SEM 5766 – Análise Modal de Estruturas
Desta última Eq. 6 obtemos a Equação Característica do Sistema Amortecido, que é dada por
0s2s 2nn
2 =++ ωςω Eq. 7
Esta última Eq. 7 é de fundamental importância nos estudos da vibração livre e também no controle da vibração. Conforme será visto, suas raízes fornecem informação importante sobre características físicas do sistema. Na teoria de controle clássico tais raízes são denominadas pólos do sistema e fornecem informações sobre a estabilidade do sistema. Estas raízes são geralmente complexas e possuem parte real negativa para sistemas estáveis !
Re
Im
Pólos do sistema
Cont. ...

10 Prof. Paulo S. Varoto SEM 5766 – Análise Modal de Estruturas
Resposta Livre Não Amortecida
Neste caso fazemos ζ = 0 na Eq. 4, obtendo assim
02 =+ uu nω
022 =+ ns ω
n21 is ω±=,
E a correspondente equação característica não amortecida é a seguinte
Eq. 8
Cujas raízes são dadas por: 1i −=
E recordando que
mk
n =ω
As raízes da eq. característica do sistema são complexas conjugadas e imaginárias puras. Elas são também dadas em função da frequência natural não amortecida do sistema !
Eq. 11
k m
u
Eq. 9
Eq. 10
11 Prof. Paulo S. Varoto SEM 5766 – Análise Modal de Estruturas
Eq. 12
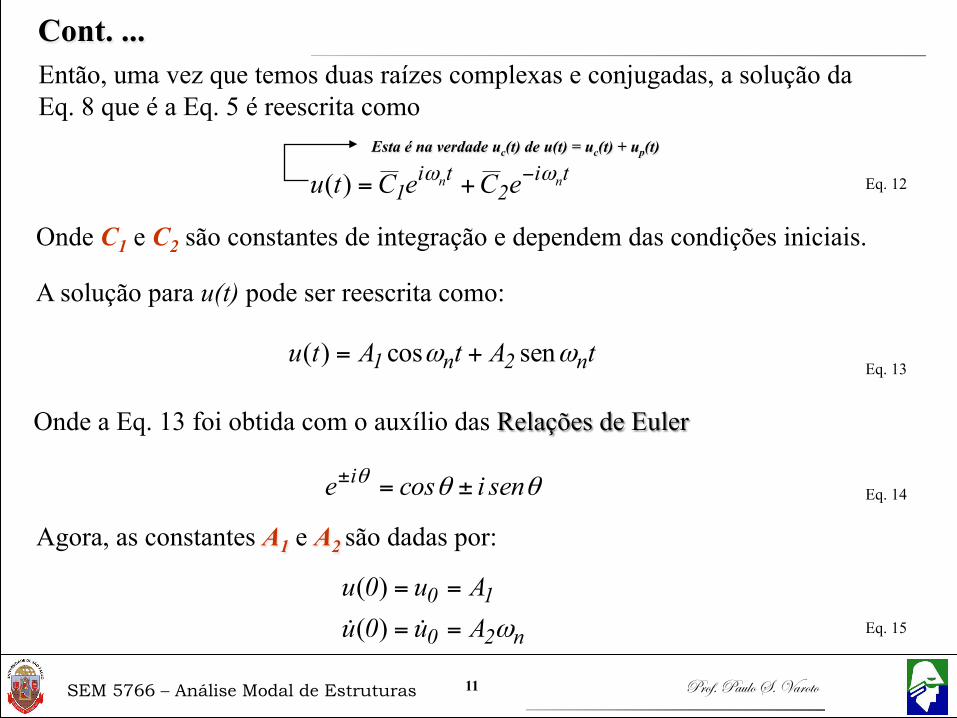
Então, uma vez que temos duas raízes complexas e conjugadas, a solução da Eq. 8 que é a Eq. 5 é reescrita como
ti2
ti1 nn eCeCtu ωω −+=)(
θθθ senicose i ±=±
tAtAtu n2n1 ωω sencos)( +=
n20
10Au0uAu0uω==
==
)()(
Onde C1 e C2 são constantes de integração e dependem das condições iniciais.
A solução para u(t) pode ser reescrita como:
Esta é na verdade uc(t) de u(t) = uc(t) + up(t)
Eq. 13
Onde a Eq. 13 foi obtida com o auxílio das Relações de Euler
Eq. 14
Agora, as constantes A1 e A2 são dadas por:
Eq. 15
Cont. ...

12 Prof. Paulo S. Varoto SEM 5766 – Análise Modal de Estruturas
Então, em função dos parâmetros físicos temos:
u(t) = u0 cosωnt +u0ωn
!
"#
$
%&senωnt Eq. 16
Um exemplo gráfico
nn2Tωπ
=
πω2T
1n
n
nf ==
u(t) =U cos(ωnt −α) =U cosωn t − αωn
"
#$
%
&'
Outra forma da solução
Período natural não amortecido [s]
Frequência natural não amortecida [Hz]
Eq. 20
0 0.2 0.4 0.6 0.8 1
10
5
5
10
Des
loca
men
to
Tempo Tn
0u
U 0u nωα /
U = A1
2 + A22( )1/2
Módulo
α ângulo de fase
O sistema vibra na sua freqüência natural não
amortecida !
Eq. 17
Eq. 18
Eq. 19
Cont. ...

13 Prof. Paulo S. Varoto SEM 5766 – Análise Modal de Estruturas
Resposta Livre Amortecida
tseCtu =)(
0)2( 22 =++ tsnn eCss ωςω
0s2s 2nn
2 =++ ωςω
02 2 =++ uuu nn ωςω
Neste caso, a equação de movimento livre é dada por
Eq. 21
E como no caso não amortecido assumimos a solução como
Eq. 22
Substituindo-se a Eq. 22 na Eq. 21 temos
Eq. 23
De onde obtemos a equação característica do sistema amortecido
Eq. 24
14 Prof. Paulo S. Varoto SEM 5766 – Análise Modal de Estruturas
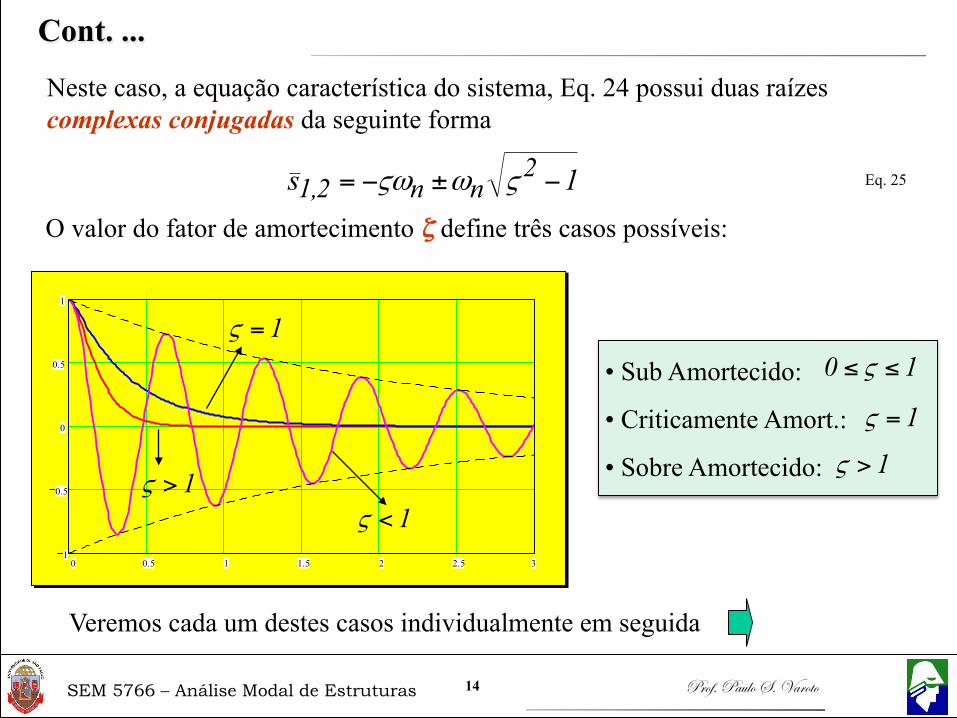
Neste caso, a equação característica do sistema, Eq. 24 possui duas raízes complexas conjugadas da seguinte forma
1s 2nn2,1 −±−= ςωςω Eq. 25
O valor do fator de amortecimento ζ define três casos possíveis:
• Sub Amortecido:
• Criticamente Amort.:
• Sobre Amortecido:
10 ≤≤ ς
1=ς
1>ς
0 0.5 1 1.5 2 2.5 31
0.5
0
0.5
1
1<ς
1=ς
1>ς
Veremos cada um destes casos individualmente em seguida
Cont. ...

15 Prof. Paulo S. Varoto SEM 5766 – Análise Modal de Estruturas
a) Sistema sub amortecido ζ < 1
Neste caso, escrevemos as raízes da equação característica como:
dn21 is ωςω ±−=,
2nd 1 ςωω −=
dd
2Tωπ
=
Onde neste caso, a constante ωd é frequencia natural amortecida (rad.s-1) do sistema:
E o período natural amortecido Td é dado por
Eq. 26
Deve-se notar que este caso (ζ < 1) é o caso mais importante sob o ponto de vista experimental e prático. As grandezas ωd e Td são as grandezas mensuráveis nos problemas reais.
Eq. 27
Eq. 28
Para a Análise Modal
o mais importante !
Cont. ...

16 Prof. Paulo S. Varoto SEM 5766 – Análise Modal de Estruturas
A solução para a vibração livre é então escrita como (Eq. 22):
Eq. 29 ( )tAtAetu d2d1tn ωωως sencos)( += −
⎥⎦
⎤⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛ ++= − tuutuetu d
d
0n0d0
tn ωωςω
ωςω sencos)( Eq. 30
Ou então em função das CIs
0 0.2 0.4 0.6 0.8 11
0.5
0
0.5
1
Tempo (s)
u c
e n t−ςω
e n t−ςω
Td
Td
O sistema vibra na freqüência natural
Amortecida !
Cont. ...

17 Prof. Paulo S. Varoto SEM 5766 – Análise Modal de Estruturas
Outra forma de escrevermos a solução seria:
Eq. 31 )cos()( αωως −= − tUetu dtn
Com: 2
d0n02
02 uuuU ⎟⎟
⎠
⎞⎜⎜⎝
⎛ ++=
ωςω
0d
0n0uuutg
ωςω
α+
=
Eq. 32
Eq. 33
Magnitude
Ângulo de fase
Cont. ...

18 Prof. Paulo S. Varoto SEM 5766 – Análise Modal de Estruturas
a) Sistema criticamente amortecido ζ = 1
ns ςω−=
t21 netCCtu ςω−+= )()(
t0n0 netuutu ςωςω −+= ])([)(
As raízes da equação característica são dadas por
Eq. 34
E a solução fica:
Eq. 35
Ou em função das condições iniciais
Eq. 36
b) Sistema sobre amortecido ζ > 1
12n −= ςωω*
Definimos: freqüência natural amortecida
para ζ > 1 Eq. 37
Cont. ...
19 Prof. Paulo S. Varoto SEM 5766 – Análise Modal de Estruturas
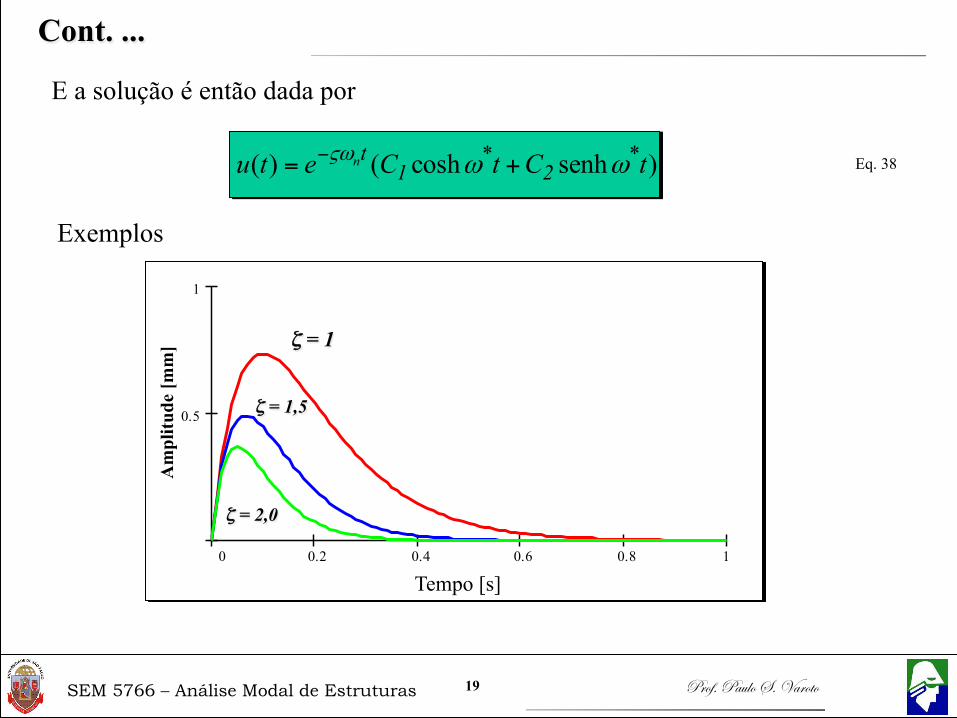
)senhcosh()( ** tCtCetu 21tn ωωςω += − Eq. 38
E a solução é então dada por
0 0.2 0.4 0.6 0.8 1
0.5
1
ζ = 1
ζ = 1,5
ζ = 2,0
Tempo [s]
Am
plitu
de [m
m]
Exemplos
Cont. ...

20 Prof. Paulo S. Varoto SEM 5766 – Análise Modal de Estruturas
Determinação Experimental do Amortecimento
Consiste em utilizar a resposta livre amortecida do sistema de 01 para se obter estimativas do fator de amortecimento modal ζ. Denomina-se de Método do decaimento logarítmico.
0 0.2 0.4 0.6 0.8 11
0.5
0
0.5
1
Tempo (s)
u c
t0 t1
uP uQ
e n t−ςω
e n t−ςω
21 Prof. Paulo S. Varoto SEM 5766 – Análise Modal de Estruturas
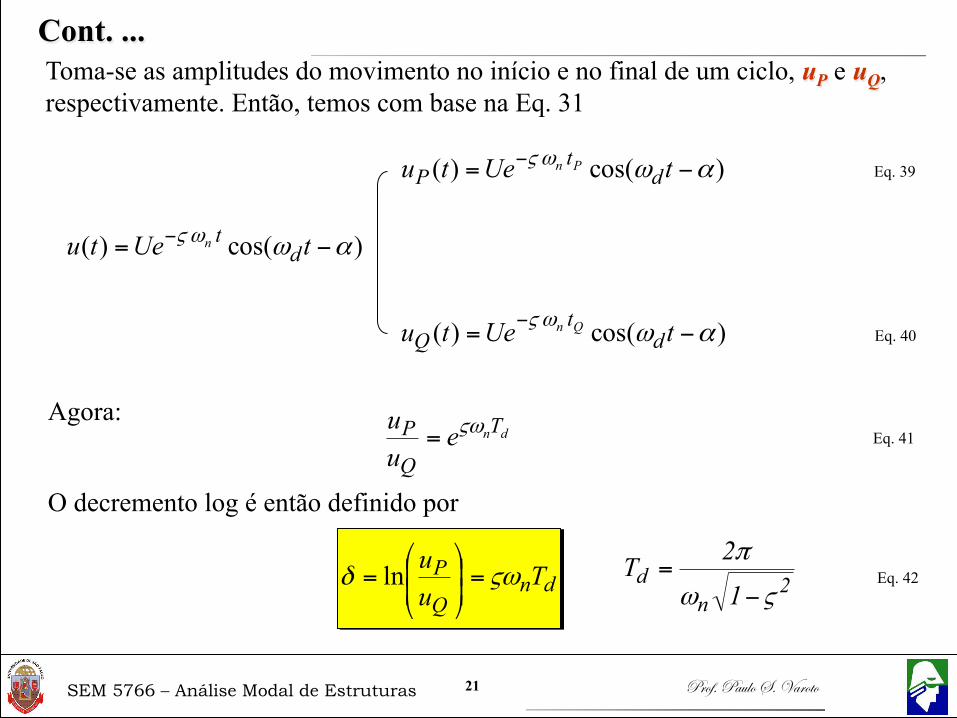
Eq. 39
Toma-se as amplitudes do movimento no início e no final de um ciclo, uP e uQ, respectivamente. Então, temos com base na Eq. 31
)cos()( αωως −= − tUetu dtn
)cos()( αωως −= − tUetu dt
P Pn
)cos()( αωως−=
− tUetu dt
QQn Eq. 40
Agora: dnT
Q
P euu ςω= Eq. 41
O decremento log é então definido por
dnQ
P Tuu
ςωδ =⎟⎟⎠
⎞⎜⎜⎝
⎛= ln 2
nd
1
2Tςω
π
−= Eq. 42
Cont. ...

22 Prof. Paulo S. Varoto SEM 5766 – Análise Modal de Estruturas
Então, das Eqs. 28 e 42 obtemos
2dn1
2Tς
πςςωδ
−==
De onde obtemos o valor de ζ. Para valores de ζ < 0,2
Eq. 43
πςδ 2≅Que é equivalente a
Eq. 44
⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎠⎞
⎜⎝⎛≅
Q
Puu
21 lnπ
ς Eq. 45
Cont. ...

23 Prof. Paulo S. Varoto SEM 5766 – Análise Modal de Estruturas
PARTE II
SISTEMAS COM 01 GDL
RESPOSTA FORÇADA
• Resposta harmônica – conceito de FRF • Resposta à excitação qualquer – Laplace, Fourier Duhamel
mu + c u + ku =
• senoidal • impulso • aleatória • pseudo-aleatória • chirp • degrau • rampa • acústica
24 Prof. Paulo S. Varoto SEM 5766 – Análise Modal de Estruturas
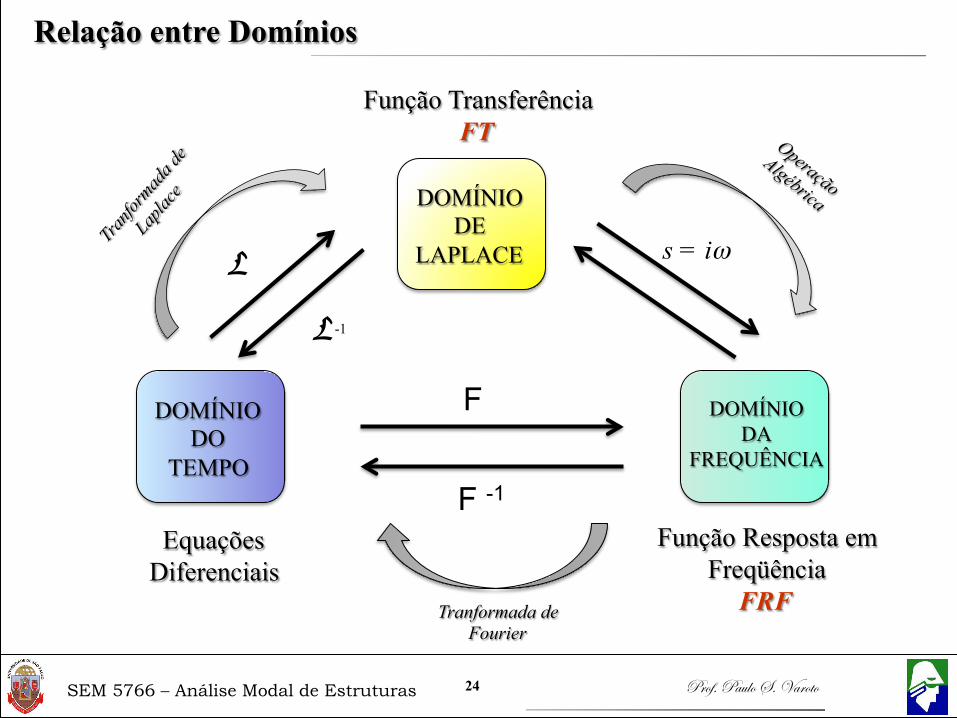
DOMÍNIO DO
TEMPO
DOMÍNIO DA
FREQUÊNCIA
DOMÍNIO DE
LAPLACE L
L-1
F
F -1
s = iω
Função Transferência FT
Função Resposta em Freqüência
FRF
Equações Diferenciais
Tranformada de Fourier
Relação entre Domínios
25 Prof. Paulo S. Varoto SEM 5766 – Análise Modal de Estruturas
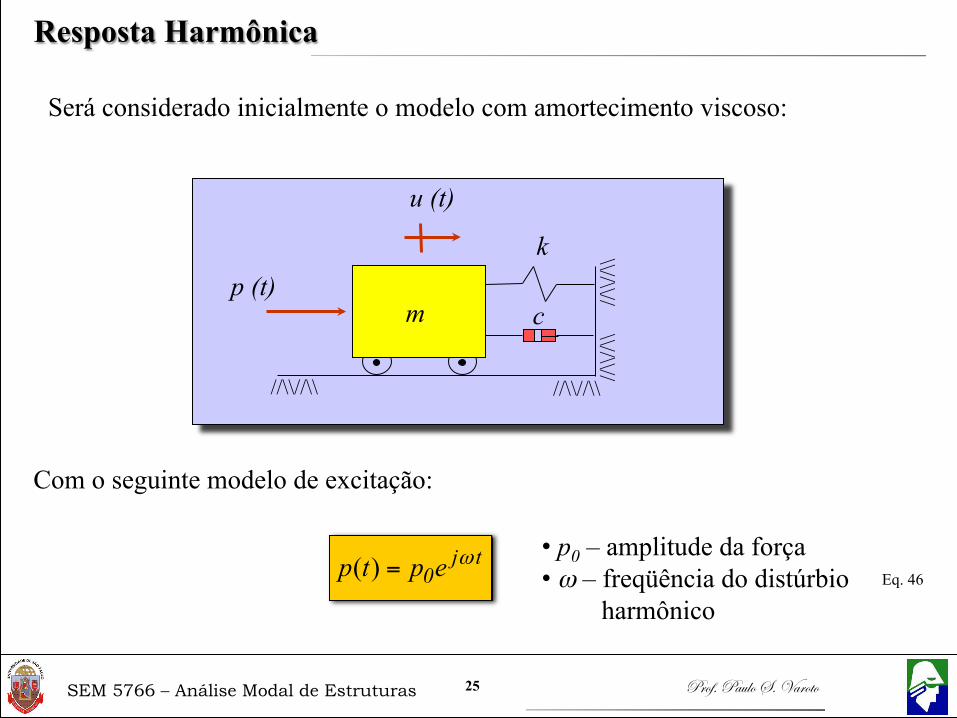
Resposta Harmônica
Será considerado inicialmente o modelo com amortecimento viscoso:
m
k
c
//\\//\\ //\\//\\
//\\//
\\ //\
\//\\
p (t)
u (t)
Com o seguinte modelo de excitação:
tj0eptp ω=)(
• p0 – amplitude da força • ω – freqüência do distúrbio harmônico
Eq. 46

26 Prof. Paulo S. Varoto SEM 5766 – Análise Modal de Estruturas
A equação de movimento é escrita como:
mu + c u + ku = p0e jω t
u + 2ςωn u +ωn
2u =ωn2
k
#
$%%
&
'((
p0e jωt
Ou em função dos parâmetros modais:
Baseado na hipótese de linearidade do sistema, assumimos uma solução da forma
u(t) =U0e jω t
A qual quando substituída na Eq. 34 fornece a solução para a amplitude U0
U0 =
p0k − mω 2 + jcω
U0 =
p0k
1− ωωn
#
$%&
'(
2
+ j2ζ ωωn
#
$%&
'(
Estudaremos o caso onde ζ < 1 !
Eq. 47
Eq. 48
Eq. 49
Eq. 51 Eq. 52
Cont. ...

27 Prof. Paulo S. Varoto SEM 5766 – Análise Modal de Estruturas
De onde extraímos a FRF do sistema
r2jr11
UUH 20 ςωω
+−== )()(
Onde r = ω/ωn é denominada razão admensional de freqüências
A última expressão também pode ser expressa em termos dos parâmetros físicos do sistema
)()()(
ωω
ωωω
DN
jcmk1H 2 =+−
=
Eq. 53
Eq. 54
Cont. ...

28 Prof. Paulo S. Varoto SEM 5766 – Análise Modal de Estruturas
Conforme mostra a última expressão, a FRF agora representa um quociente de dois polinômios complexos, sendo eles N(ω) e D(ω). Para o caso do polinômio do denominador, temos
)()()( ωωω IjRD +=
onde 2mkD ωω −=)(
ωω cI =)(
Sua raiz fornece ωn !
Relacionado com o amortecimento do sistema !
Já o polinômio do numerador é uma constante para o caso do sistema com 01 GDL !
Eq. 55
Cont. ...

29 Prof. Paulo S. Varoto SEM 5766 – Análise Modal de Estruturas
Portanto, quando escrevemos a excitação do sistema na forma de uma exponencial complexa, a solução para a FRF do sistema é essencialmente a mesma, com exceção de que agora H(ω) é uma função complexa da freqüência de excitação.
ωωω
jcmk1H 2 +−
=)(
2222 cmk
1Hωω
ω+−
=)(
)(
⎟⎠
⎞⎜⎝
⎛
−= −
21
mkctan)(ω
ωωα
Eq. 56
Eq. 57
Vejamos a ilustração gráficas destas duas últimas expressões em função de ω !
Cont. ...

30 Prof. Paulo S. Varoto SEM 5766 – Análise Modal de Estruturas
0 0.5 1 1.5 20
5
10
15
20
25
30Gráficos de H(ω)
0 0.5 1 1.5 20
50
100
150
200
Magnitude
Ângulo de Fase
r
ζ = 0,1
ζ = 0,6
ζ = 0,1
ζ = 0,6
222 r2r1k1H
)()(/)(
ςω
+−=
2r1r2
−=
ςαtan
Mais comentários adiante !

31 Prof. Paulo S. Varoto SEM 5766 – Análise Modal de Estruturas
0 0.5 1 1.5 2 2.5 32
1
0
1
2
Tempo [s]
Des
loca
men
to [m
]
A solução de regime permanente do sistema assume tj
02p epjcmk
1tu ω
ωω +−=)(
up (t,ω ) = H (ω ) p0 e jωt
Eq. 58
E a solução completa fica então
u(t) = e−ςωnt u0 cosωdt +u0 +ςωnu0
ωd
"
#$
%
&'senωdt
(
)*
+
,-+ p0H (ω)e
jω tEq. 59
Cont. ...

32 Prof. Paulo S. Varoto SEM 5766 – Análise Modal de Estruturas
0 20 40 60 80 100 1201
0.5
0
0.5
1
Fenômeno interessante: Batimento Ocorre quando ω ωd na Eq. 25
0 50 100 150 200 250 3001
0.5
0
0.5
1
Tempo [s]
Des
loca
men
to [m
]
≅
O Fenômeno do Batimento (“Beating”)

33 Prof. Paulo S. Varoto SEM 5766 – Análise Modal de Estruturas
A condição de ressonância é atingida quando a freqüência de excitação iguala-se à freqüência natural do sistema, ou seja,
ςω
21H 1r ==)(
( ) 0Hr
rpico =∂∂
= )(ω
O valor de r para o qual a FRF atinge seu valor máximo (valor de pico) é obtido a partir de
Esta derivada fornece
Eq. 60
Eq. 61
d
n2 2
1
12
1Hωω
ςςςω =
−=max)(
Eq. 63
2pico 21r ς−=
E
!1rpico ≠ Eq. 62
Resposta Ressonante
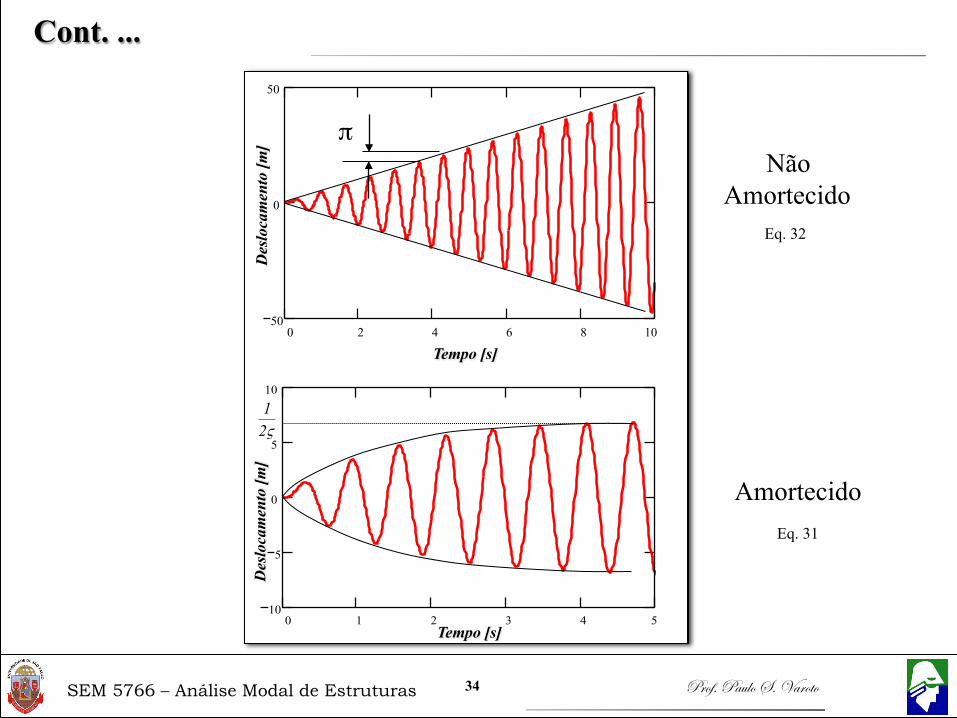
34 Prof. Paulo S. Varoto SEM 5766 – Análise Modal de Estruturas
0 2 4 6 8 1050
0
50
0 1 2 3 4 510
5
0
5
10
Tempo [s]
Des
loca
men
to [m
]
Não Amortecido
Amortecido
Eq. 32
Eq. 31
π
ς21
Tempo [s]
Des
loca
men
to [m
]
Cont. ...

35 Prof. Paulo S. Varoto SEM 5766 – Análise Modal de Estruturas
)()()()( αωω ωω −== tj0
tj0 epHepHtu
22 r1r2
mkctg
−=
−=
ς
ω
ωα
αωωωωω je)(H)(Hj)(Y ==
Como visto antes, a resposta de regime à entrada harmônica pode ser escrita
Eq. 64
Sendo o ângulo de fase dado por
Eq. 65
Duas outras FRF comumente usadas são as FRF de mobilidade e acelerância:
• Mobilidade: A variável de saída é a velocidade V = jωU
• Acelerância: A variável de saída é a aceleração A = (jω)2U
)(H)(Yj)(A 2 ωωωωω −==
Eq. 66
Eq. 67
Propriedades Importantes da FRF

36 Prof. Paulo S. Varoto SEM 5766 – Análise Modal de Estruturas
É uma representação gráfica da amplitude e fase da FRF como função da frequência de excitação.
Equação da FRF: Hk m j c
( )ωω ω
=− +
12
a) Quando ω <<< ωn :
b) Quando ω >>> ωn :
Hk
( )ω ≈1
( )log log1k
k⎛⎝⎜ ⎞⎠⎟ = −
Hm
( )ωω
≈12 log log( ) log( )1 22m
mω
ω⎛⎝⎜ ⎞
⎠⎟ = − −
c) Quando ω = ωn : Hc
( )ωω
=1
log log( ) log( )1c
cω
ω⎛⎝⎜ ⎞
⎠⎟ = − −
linear logarítmica
Eq. 70
Eq. 69
Eq. 68
Diagrama de Bode

37 Prof. Paulo S. Varoto SEM 5766 – Análise Modal de Estruturas
10 100 1 1031 10 7
1 10 6
1 10 5
1 10 4|H
( ω )|
(m/N
)
Frequência [rad/s]
massa
rigidez
amortecimento
A
B
Exemplo 1: 01 GDL viscoso - FRF Receptância
Cont. ...

38 Prof. Paulo S. Varoto SEM 5766 – Análise Modal de Estruturas
Exemplo 2: 01 GDL viscoso - FRF Mobilidade
|Y( ω
)| (m
/s/N
)
Frequência [rad/s] 10 100 1 103
1 10 5
1 10 4
0.001
0.01
massa
rigidez
amortecimento
A
B
Cont. ...
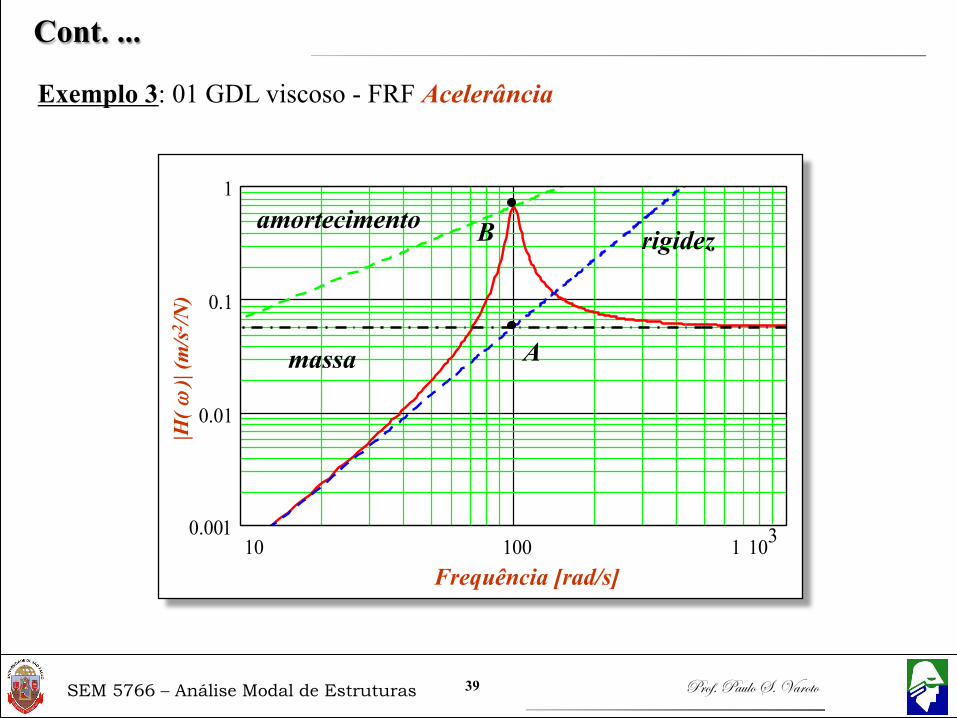
39 Prof. Paulo S. Varoto SEM 5766 – Análise Modal de Estruturas
10 100 1 1030.001
0.01
0.1
1
Exemplo 3: 01 GDL viscoso - FRF Acelerância
|H( ω
)| (m
/s2 /N
)
Frequência [rad/s]
massa
rigidez amortecimento
A
B
Cont. ...
40 Prof. Paulo S. Varoto SEM 5766 – Análise Modal de Estruturas
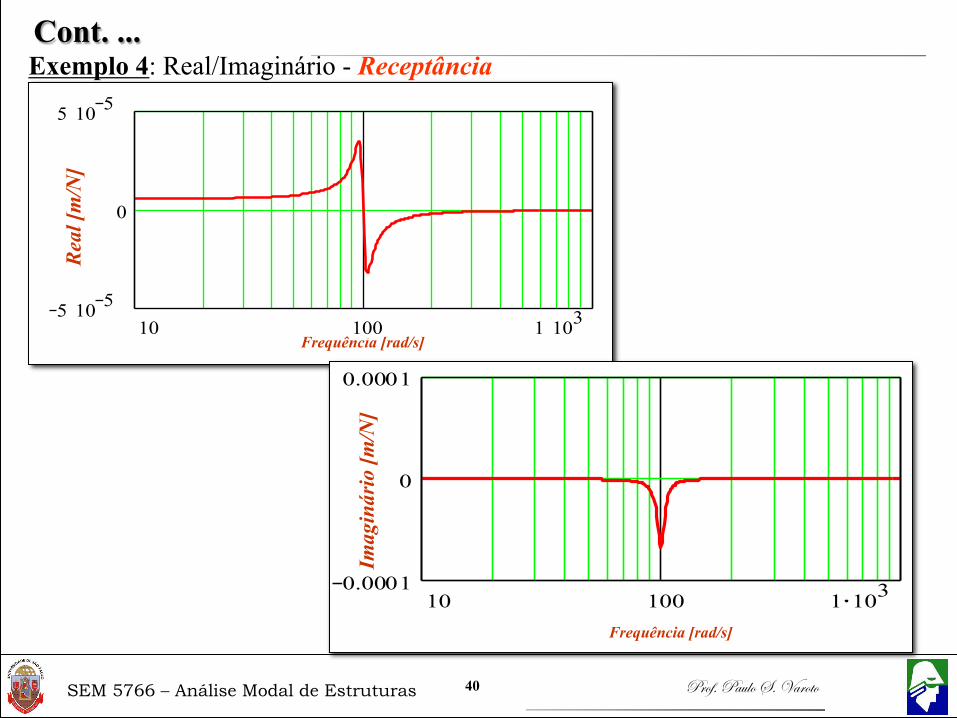
Exemplo 4: Real/Imaginário - Receptância R
eal [
m/N
]
Frequência [rad/s] 10 100 1 103
5 10 5
0
5 10 5
10 100 1 1030.0001
0
0.0001
Frequência [rad/s]
Imag
inár
io [m
/N]
Cont. ...

41 Prof. Paulo S. Varoto SEM 5766 – Análise Modal de Estruturas
Exemplo 5: Diagrama de Nyquist - viscoso
4 10 52 10 5 0 2 10 54 10 58 10 5
6 10 5
4 10 5
2 10 5
0
Real
Im
A
B C
D
O
Receptância
0 0.002 0.004 0.006 0.0080.004
0.002
0
0.002
0.004
Real
A=D
B
C
Im
Mobilidade
Cont. ...
42 Prof. Paulo S. Varoto SEM 5766 – Análise Modal de Estruturas
O modelo de amortecimento histerético (estrutural) é aquele onde a força de amortecimento é proporcional ao deslocamento mas em fase com a velocidade:
uuukfD
ς=Eq. 71
Logo a Equação de movimento para o sistema de 01 GDL fica
)(tpkuuuukum =++
ς Eq. 72
Outra maneira de escrever a equação de movimento é usando o conceito de rigidez complexa
)()( tukjtfD η= Eq. 73
01 GDL – Amortecimento Histerético ou Estrutural

43 Prof. Paulo S. Varoto SEM 5766 – Análise Modal de Estruturas
Assim temos a nova equação de movimento para excitação harmônica
tj0 epuj1kum ωη =++ )( Eq. 74
tj0 eUtu ω=)(
02n
20
0 Fj1
k1jkmk
pUηωωηω +−
=+−
=)/(/
ηωωω
j1k1H 2n +−
=)/(/)(
Assumindo uma solução da forma
Temos como solução para a amplitude de vibração
E a FRF do sistema com amortecimento histerético é
Eq. 75
Eq. 76
Eq. 77 Importante: a parte imaginária
de H(ω) não depende de ω !
Cont. ...

44 Prof. Paulo S. Varoto SEM 5766 – Análise Modal de Estruturas
0 50 100 150 200 2500.001
0.01
0.1
1
0 50 100 150 200 250100
50
0
η1 = 0.01
η4 = 0.25
Frequência [Hz]
Gráfico:
ηωωω
j1k1H 2n +−
=)/(/)(
Cont. ...

45 Prof. Paulo S. Varoto SEM 5766 – Análise Modal de Estruturas
Neste caso o modelo é o seguinte
m
k
c
//\\//\\ //\\//\\
//\\//\\ //\\//\\
u (t) x (t)
umuxcuxk =−+− )()(
Definindo agora o deslocamento relativo ente a base e a massa:
uxz −=
Eq. 78
E a equação de movimento é a seguinte:
Eq. 79
A entrada é o movimento via suporte, típico em
problemas de isolação !
Excitação Sísmica – Isolação de Vibração
46 Prof. Paulo S. Varoto SEM 5766 – Análise Modal de Estruturas
xckxkuucum +=++
Eq. 80
Temos então que a equação de movimento no deslocamento relativo é:
)(tpkzzczm eff=++
xmtpeff −=)(
O lado direito da Eq. 80 é o carregamento efetivo que é dado por:
Eq. 81
Observem que esta ¨força efetiva¨ é na verdade uma pseudo força de inércia, pois é dada pelo produto da aceleração da base pela massa m ! E portanto, a massa responde à esta força como sendo a fonte de distúrbio do sistema. De forma alternativa, podemos expressar a equação de movimento, Eq. 80 em função do deslocamento absoluto da massa m. Neste caso temos:
Eq. 82
Cont. ...

47 Prof. Paulo S. Varoto SEM 5766 – Análise Modal de Estruturas
xckxkuucum +=++)(tpkzzczm eff=++
Comparando-se os dois modelos acima descritos, Eq. 80 e Eq. 81, temos:
• Descrita em termos do deslocamento absoluto u. • Experimentalmente requer que apenas u seja medido • A excitação é dada pela soma de parte das forças de mola e amortecedor !
• Descrita em termos do deslocamento relativo z. • Experimentalmente requer que x e u sejam medidos e então z calculado ! • A excitação é dada pela pseudo força de inércia
Veremos em seguida a solução de ambos os modelos para entradas harmônicas. Inicialmente, consideramos o modelo descrito pela Eq. 83, definimos
Eq. 83 Eq. 84
tj0eff emXtp ω−=)( Eq. 85
Agora, substituindo-se a Eq. 85 nas Eqs. 83 e 84 e rearranjando temos
Cont. ...
48 Prof. Paulo S. Varoto SEM 5766 – Análise Modal de Estruturas
tj0eXjckkuucum ωω)( +=++ tj
02 eXmkzzczm ωω−=++
Assumindo agora soluções harmônicas em z e u
tj0eZtz ω=)( tj
0eUtu ω=)(
Substituição das Eqs. 88 e 89 nas Eqs. 86 e 87 fornecem as amplitudes
02
20 X
jcmkmZ
ωω
ω
+−
−= 020 X
jcmkjckU
ωω
ω
+−
+=
)(
Reparem que a equação característica nos dois modelos é a mesma !
Eq. 86 Eq. 87
Eq. 88 Eq. 89
Eq.90 Eq. 91
Cont. ...

49 Prof. Paulo S. Varoto SEM 5766 – Análise Modal de Estruturas
ωω
ωωω
jcmkm
XZTRr 2
2
0
0+−
−== )()(
ωω
ωωω
jcmkjck
XUTRa 20
0+−
+== )()(
Com base nas Eqs. 74 e 75, podemos definir a Função de Resposta em Freqüência de Transmissibilidade de Movimento, ou simplesmente Transmissibilidade
Eq. 92 Eq. 93
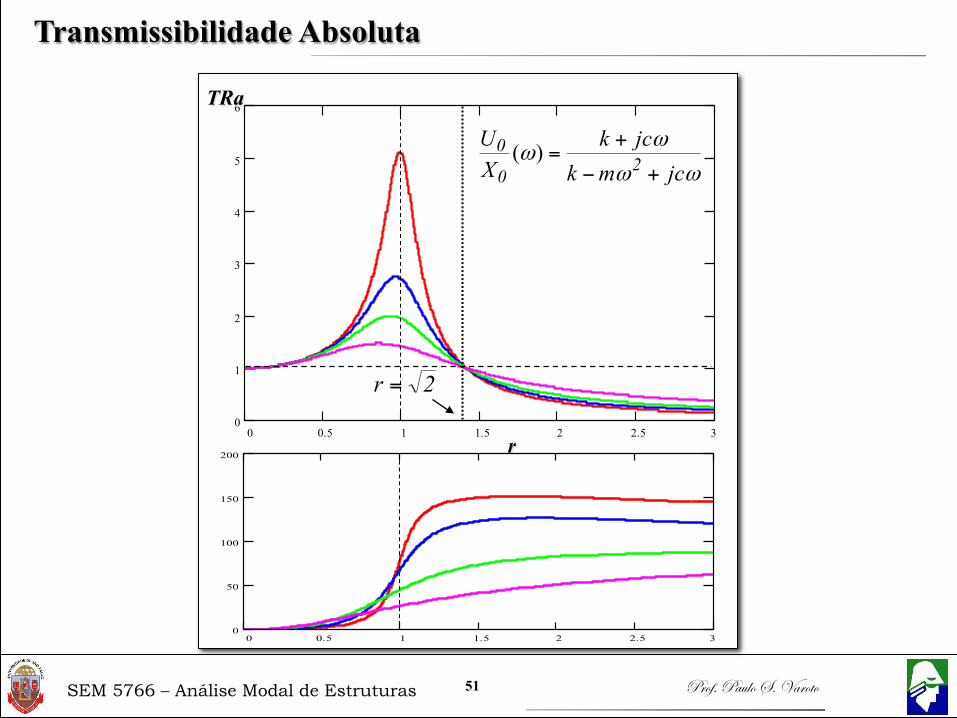
As FRF definidas pelas Eqs. 92 e 93 são importantíssimas no estudo da isolação de vibração pois elas definem a quantidade de movimento transmitida pela base para a massa m por unidade de movimento de entrada no suporte. São grandezas adimensionais. A Eq. 92 define a transmissibilidade relativa pois a variável de saída é o movimento relativo (z = x - u) entre a base e a massa m. A Eq. 93 define a transmissibilidade absoluta, pois é definida em termos do deslocamento absoluto da massa m. Em função da razão de freqüências r = ω /ωn temos :
Vejamos agora os gráficos das duas TR(ω)
r2jr1r2j1TRa 2 ς
ςω
+−
+=)(
r2jr1rTRr 2
2
ςω
+−
−=)( Eq. 94 Eq. 95
Cont. ...

50 Prof. Paulo S. Varoto SEM 5766 – Análise Modal de Estruturas
TRr
r 0 0.5 1 1.5 2 2.5 3
0
1
2
3
4
5
6
r2jr1rTRr 2
2
ςω
+−
−=)(
0 0.5 1 1.5 2 2.5 30
50
100
150
200
Transmissibilidade Relativa
51 Prof. Paulo S. Varoto SEM 5766 – Análise Modal de Estruturas
0 0.5 1 1.5 2 2.5 30
1
2
3
4
5
6
2r =
TRa
r
ωω
ωω
jcmkjck
XU
20
0+−
+=)(
0 0.5 1 1.5 2 2.5 30
50
100
150
200
Transmissibilidade Absoluta
52 Prof. Paulo S. Varoto SEM 5766 – Análise Modal de Estruturas
O Método da Transformada de Laplace A transformada de Laplace de uma função real e contínua por partes é dada por
( )[ ] ( ) ( ) 0tdtetfsFtf0
st >== ∫∞
−L Eq. 1
Onde s = σ + jω é denominada variável de Laplace, possuindo partes real e imaginária. O operador L é denominado operador de Laplace. Algumas características desta transformada na solução de EDOs são:
• Transforma a EDO em uma equação algébrica ! • Solução completa incluindo as CIs é obtida em um único passo • Não existe dúvida de quais CIs deveriam ser usadas, já que a transformada as requer automaticamente • A transformada de Laplace lida com entradas não contínuas de forma mais simplificada
Domínio do Tempo => t
Domínio de Laplace => s
Transformação

53 Prof. Paulo S. Varoto SEM 5766 – Análise Modal de Estruturas
( ) ( )[ ] ( ) ( )sFasFatfatfa 22112211 +=+L
( ) ( )0fssFdtdf
−=⎥⎦⎤
⎢⎣⎡L
( ) ( ) ( )0dtdf0sfsFs
dtfd 22
2−−=⎥
⎦
⎤⎢⎣
⎡L
• Propriedade da Linearidade
• Diferenciação
( ) ( ) ( ) ( )0dt
fd0dtdfs0fssFs
dtfd
1n
1n2n1nn
n
n
−
−−− −−−−=⎥
⎦
⎤⎢⎣
⎡…L
Eq. 2
Eq. 3
Eq. 4
Eq. 5
Propriedades Importantes
54 Prof. Paulo S. Varoto SEM 5766 – Análise Modal de Estruturas
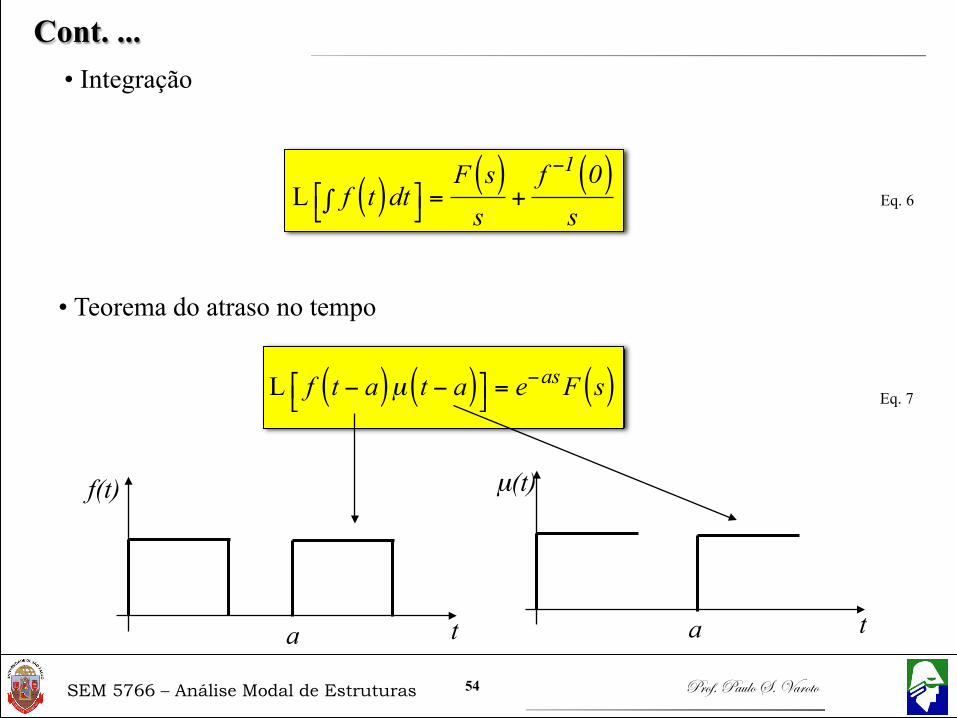
L f t( )dt∫"# $% =
F s( )s
+f −1 0( )
s
• Integração
Eq. 6
L f t − a( )µ t − a( )"# $% = e−asF s( )
• Teorema do atraso no tempo
Eq. 7
a t
f(t)
a t
µ(t)
Cont. ...

55 Prof. Paulo S. Varoto SEM 5766 – Análise Modal de Estruturas
1 1 δ(t)
F(s) f(t)
s1/1nt
1n1 −
− )!( ns1
atsen 22 ass+
atcos 22 asa+
ate− as1+
t2s1
Algumas transformadas úteis são dadas abaixo
Cont. ...
56 Prof. Paulo S. Varoto SEM 5766 – Análise Modal de Estruturas
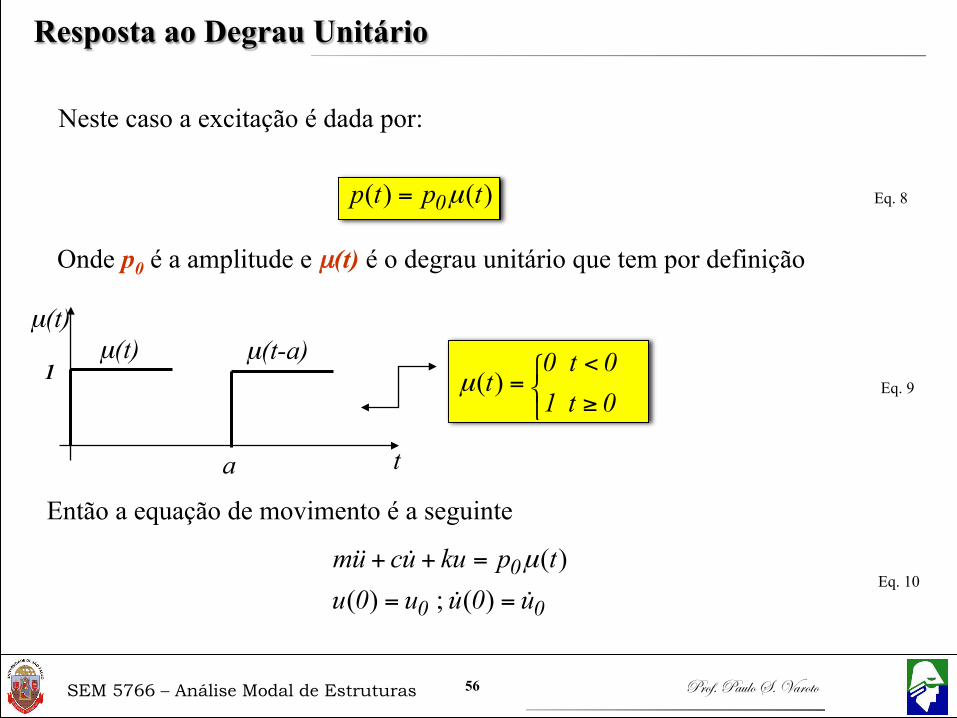
Neste caso a excitação é dada por:
)()( tptp 0µ=
Onde p0 é a amplitude e µ(t) é o degrau unitário que tem por definição
⎩⎨⎧
≥
<=
0t10t0
t)(µ
a t
µ(t)
1 µ(t) µ(t-a)
Eq. 8
Então a equação de movimento é a seguinte
00
0u0uu0utpkuucum
==
=++
)(;)()(µ
Eq. 9
Eq. 10
Resposta ao Degrau Unitário
57 Prof. Paulo S. Varoto SEM 5766 – Análise Modal de Estruturas
Ilustraremos o processo de solução usando as duas técnicas conhecidas. Inicialmente, pelo método clássico a solução da EDO, Eq. 10 é dada por
)()()( tututu PH += Eq. 12
A solução homogênea uH(t) é obtida a partir da solução da EDO homogênea associada, como visto anteriormente fazendo-se p(t) = 0. Temos para ζ < 1
( )tAtAetu d2d1t
H n ωωως sencos)( += −
A Eq. 10 pode ainda ser rescrita como:
)(tpk
uu2u 0
2n2
nn µω
ωςω ⎟⎟⎠
⎞⎜⎜⎝
⎛=++ Eq. 11
Eq. 13
Onde A1 e A2 dependem das condições iniciais (ainda não usadas !)
Cont. ...

58 Prof. Paulo S. Varoto SEM 5766 – Análise Modal de Estruturas
Já a solução de regime permanente segue a forma da excitação, ou seja:
kptu 0
P =)( Eq. 14
E então a solução completa é
( )kptAtAetu 0
d2d1tn ++= − ωωως sencos)( Eq. 15
Agora usamos as condições iniciais do problema para determinar as constantes de integração A1 e A2
kpuA 0
01 −=
⎟⎠⎞
⎜⎝⎛ −
−+=
kpu
1
uA 002d
02
ς
ςω
Eq. 16
Eq. 17
Cont. ...

59 Prof. Paulo S. Varoto SEM 5766 – Análise Modal de Estruturas
Cont. ...
Usando agora a transformada de Laplace, voltamos à Eq. 11
L u + 2ςωn u +ωn
2u( ) = Lωn2
k
#
$%%
&
'((
p0µ t( ))
*
++
,
-
.
.Eq. 18
Usando as propriedades previamente definidas e a tabela fornecida obtemos
s2U (s)− su0 − u0( ) + 2ςωn sU (s)− u0( ) +ωn
2U (s) =ωn2
k
$
%&&
'
())
p01s
Eq. 19
Repare então que a Eq. 19
• é agora uma equação algébrica na transformada U(s) de u(t)
• contém de imediato todas as condições iniciais do problema !
Agora podemos então resolver a Eq. 19 para U(s) algebricamente !
60 Prof. Paulo S. Varoto SEM 5766 – Análise Modal de Estruturas
Rearranjando os termos na Eq. 19 temos
s2 + 2ςωn s +ωn
2( )U (s) =ωn2
k
#
$%%
&
'((
p01s+ s + 2ςωn( )u0 + u0
Eq. característica
E podemos então resolver a Eq. 20 para U(s)
Eq. 20
( )2nn
20
02nn
2n
0
2n
2nn
2 s2suu
s2s2sp
ks2ss1sU
ωςωωςω
ςωω
ωςω +++
++
++⎟
⎟⎠
⎞⎜⎜⎝
⎛
++=
)()(
A solução completa no tempo pode então ser obtida calculando-se a transformada inversa de cada um dos termos do lado direito da Eq. 21. Embora existam tabelas extensas com muitas transformadas, uma forma simples de calcular as inversas é reduzindo os polinômios quadráticos do denominador em monômios usando-se para tanto a técnica das frações parciais !
Eq. 21
Cont. ...

61 Prof. Paulo S. Varoto SEM 5766 – Análise Modal de Estruturas
Cont. ...
Por exemplo, se assumirmos que o sistema é sub-amortecido, (ζ < 1) então
))(( 212nn
2 sssss2s −−=++ ωςω Eq. 22
Onde:
dn21 is ωςω ±−=, Eq. 23
2nd 1 ςωω −=
São as raízes da equação característica do sistema sub-amortecido e
Eq. 24
Então a Eq. 21 pode ser escrita como
( )))(())(())((
)(21
00
21
n0
2n
21 ssssuu
ssss2sp
ksssss1sU
−−+
−−+
+⎟⎟⎠
⎞⎜⎜⎝
⎛
−−=
ςωωEq. 25

62 Prof. Paulo S. Varoto SEM 5766 – Análise Modal de Estruturas
Cont. ... E então podemos expandir cada um dos termos em frações parciais, por exemplo
)()())(( 2121 ssB
ssA
ssss1
−+
−=
−−Eq. 26
))(()()(
)()())(( 21
21
2121 ssssAsBssBA
ssB
ssA
ssss1
−−+−+
=−
+−
=−−
Eq. 27
Em seguida procedemos a igualdade dos coeficientes do numerador das expressões indicadas acima na Eq. 27
0BA =+
1AsBs 21 =+− )(
De onde obtemos
Eq. 28
Eq. 29
d2i1Bω−
=
d2i1Aω
=
Eq. 30
Eq. 31
63 Prof. Paulo S. Varoto SEM 5766 – Análise Modal de Estruturas
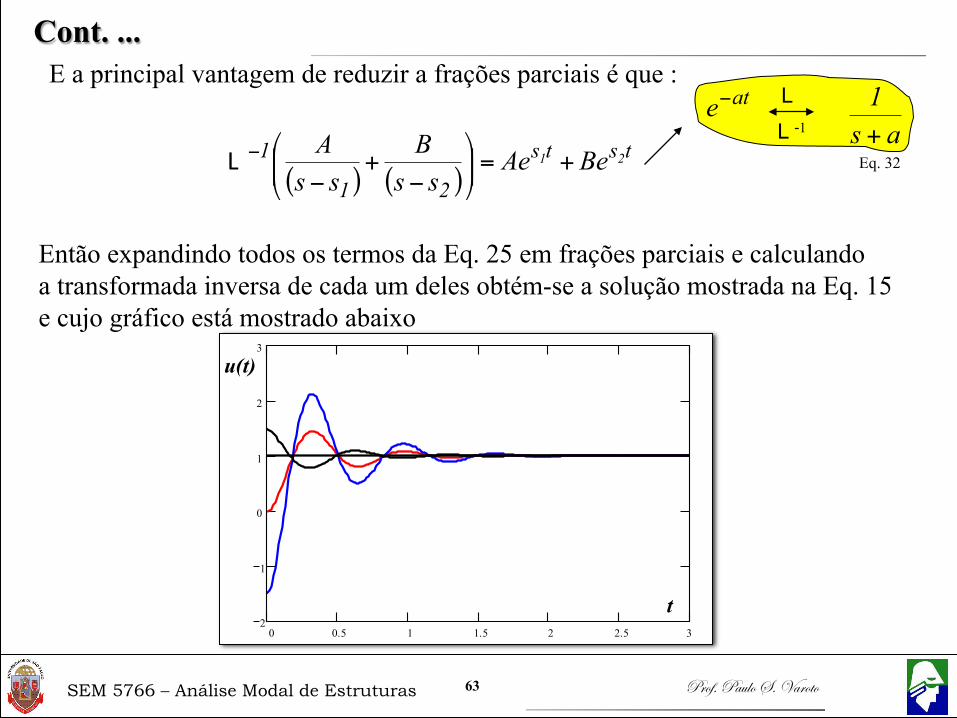
Cont. ... E a principal vantagem de reduzir a frações parciais é que :
( ) ( )tsts
21
1 21 BeAessB
ssA
+=⎟⎟⎠
⎞⎜⎜⎝
⎛
−+
−−L Eq. 32
Então expandindo todos os termos da Eq. 25 em frações parciais e calculando a transformada inversa de cada um deles obtém-se a solução mostrada na Eq. 15 e cujo gráfico está mostrado abaixo
0 0.5 1 1.5 2 2.5 32
1
0
1
2
3
t
u(t)
ate−as1+
L
L -1

64 Prof. Paulo S. Varoto SEM 5766 – Análise Modal de Estruturas
Resposta à Rampa Unitária
Neste caso a excitação é dada por:
)()( ttptp 0 µ= Eq. 33
E a presença da função degrau unitário na Eq. 33 serve apenas para indicar que a excitação é válida apenas para t > 0 ! Então a equação de movimento é
p(t)
t
00
0u0uu0uttpkuucum
==
=++
)(;)()(µ
Eq. 34
tpk
uu2u 0
2n2
nn ⎟⎟⎠
⎞⎜⎜⎝
⎛=++
ωωςω
Esta última Eq. 34 também pode ser escrita como:
Eq. 35

65 Prof. Paulo S. Varoto SEM 5766 – Análise Modal de Estruturas
Cont. ... O processo de solução é similar ao caso anterior, podemos resolver pelo método clássico ou Transformada de Laplace. Neste último caso, temos que calcular a transformada da função rampa, dada pela tabela em anexo
20spsP =)( Eq. 35
Aplicando então a transformada de Laplace à Eq. 34 temos
Aplicando a mesma técnica usada no caso do degrau (frações parciais) achamos A solução para condições iniciais nulas é
Eq. 36
u(t) =ωn2
kp0t −
2ςωn2 p0
k1− e−ςωnt
2ς 1−ς 2sen ωn 1−ς 2 t +ϕ%
&'()*
+
,
--
.
/
00 Eq. 37
(s2 + 2ςωn s +ωn
2 )U (s) =ωn2
k
#
$%%
&
'((
p01s2+ s + 2ςωn( )u0 + u0

66 Prof. Paulo S. Varoto SEM 5766 – Análise Modal de Estruturas
Onde φ é o ângulo de fase
1212tg 2
2
−
−=
ς
ςςφ Eq. 38
0 0.5 1 1.5 2 2.5 3 3.5 410
0
10
20
30
40
t
u(t)
Cont. ...

67 Prof. Paulo S. Varoto SEM 5766 – Análise Modal de Estruturas
Resposta ao Impulso Unitário
Neste caso a excitação é dada por:
)()( ttp δ=
Eq. 40
p(t)
t
δ(t) δ(t-a)
a
A equação de movimento é então
)(tk
uu2u2n2
nn δω
ωςω ⎟⎟⎠
⎞⎜⎜⎝
⎛=++
Eq. 39
Assumindo condições iniciais nulas, a transformada de Laplace fica
ksUs2s
2n2
nn2 ω
ωςω =++ )()( Eq. 41

68 Prof. Paulo S. Varoto SEM 5766 – Análise Modal de Estruturas
E a solução é
2nn
2
2n
s2s1
ksU
ωςω
ω
++=)( Eq. 42
Ou ainda
))(()(
21
2n
ssss1
ksU
−−=ω
Eq. 43
Calculando a transformada inversa temos a solução no tempo ao impulso unitário com condições iniciais nulas
u(t) = h(t) =
ωn2
kAes1t + Bes2t( ) Eq. 44
Cont. ...

69 Prof. Paulo S. Varoto SEM 5766 – Análise Modal de Estruturas
d2i1Bω−
=
d2i1Aω
=
Com Eq. 45
Eq. 46
dn21 is ωςω ±−=,
Eq. 47
0 1 2 3 4 5 60.1
0.05
0
0.05
0.1
t
u(t) tem1th d
t
dn ω
ωςω sen)( −
⎟⎟⎠
⎞⎜⎜⎝
⎛=
tm1th nn
ωω
sen)( ⎟⎟⎠
⎞⎜⎜⎝
⎛=
Eq. 48
Eq. 49
Para ζ = 0
Cont. ...

70 Prof. Paulo S. Varoto SEM 5766 – Análise Modal de Estruturas
A Integral de Duhamel
O método de obtenção da resposta baseado na Integral de Duhamel pode ser desenvolvido a partir da resposta ao impulso unitário discutida no caso anterior. Esta técnica é baseada no princípio da superposição, válido apenas para sistemas lineares. Veja a figura abaixo
p(t)
t
τ dτ
dI = p(τ)dτ
Impulso de duração dτ A resposta ao impulso de duração dτ é:
)(sen)( τωω
−⎟⎟⎠
⎞⎜⎜⎝
⎛= tmdItdu nn
Eq. 50
E a resposta total será a soma de todas as respostas incrementais, ou seja:
ττωτω
dtp1tut
0n
n∫ −⎟⎟⎠
⎞⎜⎜⎝
⎛= )(sen)()( Eq. 51

71 Prof. Paulo S. Varoto SEM 5766 – Análise Modal de Estruturas
Cont. ...
τττ dthptut
0∫ −= )()()( Eq. 52
Ou simplesmente
E para o sistema de 01 GDL amortecido temos
∫ −⎟⎟⎠
⎞⎜⎜⎝
⎛= −−
t
0d
t
ddtep
m1tu n ττωτω
τςω )(sen)()( )( Eq. 53
Estas duas últimas expressões são denominadas Integrais de Duhamel sendo que a Eq. 52 é uma integral de convolução. As Eqs. 52 e 53 se prestam à obtenção da resposta do sistema de 01 GDL à entradas gerais e condições iniciais nulas.

72 Prof. Paulo S. Varoto SEM 5766 – Análise Modal de Estruturas
Resposta à Excitação Periódica Geral – Séries de Fourier
x(t)
t
T
)()( txTtx =+
Veremos uma ferramenta muito útil na obtenção da resposta forçada do sistema de 01 GDL a excitações periódicas: as Séries de Fourier !
Seja o sinal abaixo, periódico e de período igual a T
Então Eq. 57
Periódico !
T2
0π
ω =
Freqüência Fundamental:
Eq. 56

73 Prof. Paulo S. Varoto SEM 5766 – Análise Modal de Estruturas
0 1 2 3 45
0
5
Tempo [s]
x(t)
0 1 2 3 41
0
1
Tempo [s]
x1(t)
0 1 2 3 42
0
2
Tempo [s]
x2(t)
0 1 2 3 41
0
1
Tempo [s]
x3(t)
=
+
Idéia central: compor o sinal periódico Através de sinais conhecidos !
Estes sinais conhecidos são na verdade senos e cossenos cuja freqüência seja múltipla da freqüência fundamental do sinal periódico !
Sinal Periódico
Har
môn
icas
x1(t)
x2(t)
xN(t)
…++
++≅
)cos()sen()cos()sen()(tBtAtBtAtx
2222
1111ωω
ωω
01 1ωω =
02 2ωω =
0N Nωω =

74 Prof. Paulo S. Varoto SEM 5766 – Análise Modal de Estruturas
Um sinal que seja periódico e contínuo por partes, satisfazendo a Eq. 57 pode ser expandido em séries de Fourier de acordo com a seguinte expressão
∑ ∑∞
=
∞
=
++=1p 1p
0p0p0 tpbtpa2atx )sen()cos()( ωω
Onde ω0 é a freqüência fundamental do sinal, conforme definido pela Eq. 56 e Os coeficientes a0, ap e bp são denominados coeficientes da série de Fourier, E são definidos de acordo com as seguintes expressões
∫+
=0T
T2
0 dttxaτ
τ
)(
∫+
=0T
0T2
p dttptxaτ
τ
ω )cos()(
∫+
=0T
0T2
p dttptxbτ
τ
ω )sen()(
Eq. 58
Eq. 59
Eq. 60
Eq. 61
Cont. ...

75 Prof. Paulo S. Varoto SEM 5766 – Análise Modal de Estruturas
Resposta do Sistema
Determinaremos agora a resposta do sistema de 01 GDL à uma entrada periódica qualquer usando as Séries de Fourier. Lembrando que
)(tpkuucum =++ Eq. 62
Onde p(t) é um sinal de força periódico geral. Realizando a expansão por Fourier e substituindo-se o resultado na Eq. 62 temos
∑∑∞
=
∞
=
++=++1p
0p1p
0p0 tpbtpa2pkuucum ωω sencos Eq. 63
A Eq. 63 é equivalente a
2pkuucum 0=++
tpakuucum 0p ωcos=++
tpbkuucum 0p ωsen=++
Eq. 64
Eq. 65
Eq. 66

76 Prof. Paulo S. Varoto SEM 5766 – Análise Modal de Estruturas
Já são sabidas as soluções de regime das Eqs. 64, 65 e 66
k2atu 0
1 =)(
)cos()()(
)( p2222ka
2 tppr2rp1
tup
φως
−+−
=
)sen()()(
)( p2222kb
3 tppr2rp1
tup
φως
−+−
=
Com
⎟⎟⎠
⎞⎜⎜⎝
⎛
−= −
221
prp1pr2ς
φ tan
Eq. 67
Eq.687
Eq. 69
Eq. 70
Cont. ...

77 Prof. Paulo S. Varoto SEM 5766 – Análise Modal de Estruturas
E então a solução completa fica sendo
∑∞
=
+−+−
+=1p
p2222ka
0 tppr2rp1k2
atup
)cos()()(
)( φως
∑∞
=
−+−
+1p
p2222kb
tppr2rp1
p
)sen()()(
φως
Eq. 71
Note que a Eq. 71 representa apenas a solução de regime permanente da resposta do sistema de 01 GDL. Se as condições iniciais são nulas, então a solução transiente é nula e a Eq. 71 é a resposta total do sistema.
Cont. ...

78 Prof. Paulo S. Varoto SEM 5766 – Análise Modal de Estruturas
cos pω0t = 1
2e jpω0t + e− jpω0t#$%
&'(
sen pω0t = 1
2e jpω0t − e− jpω0t#$%
&'(
A base das Séries de Fourier complexas estão nas seguintes relações
Eq. 72
Eq. 73
Elas são definidas pela seguinte expressão
tpj
pp 0eXtx ω∑
∞
−∞=
=)( Eq. 74
A Eq. 74 estabelece que um sinal periódico e contínuo por partes pode ser expandido como a soma de exponenciais complexas cada uma delas numa freqüência múltipla inteira da freqüência fundamental do sinal !
Séries de Fourier Complexas

79 Prof. Paulo S. Varoto SEM 5766 – Análise Modal de Estruturas
Os coeficientes Xp representam coeficientes de correlação entre o sinal x(t) e as exponenciais complexas, e são dados pela integral de Fourier
∫ −=T
0
tpjp 0etxT1X ω)( Eq. 75
O par de equações dado pelas Eqs. 74 e 75 é freqüentemente chamado de par de transformada de Fourier para sinais periódicos
)(,,,,)()(
1N210petxN1X N
p2j1N
1iip −=≅
−−
=∑ …
π
Na prática, quando dispõe-se de uma amostra do sinal periódico, os Xp podem ser calculados a partir da seguinte expressão
Eq. 76
Cont. ...

80 Prof. Paulo S. Varoto SEM 5766 – Análise Modal de Estruturas
∫∞
∞−
= ωωπ
ω deX21tx tj)()(
∫∞
∞−
−= dtetxX tjωω )()(
Eq. 77
Eq. 78
Cont. ...
Para um sinal não periódico as relações de Fourier são as seguintes

81 Prof. Paulo S. Varoto SEM 5766 – Análise Modal de Estruturas
Resposta ao Impulso vs Resposta em Freqüência
Lembramos que a resposta ao impulso de um sistema de 01 GDL com Amortecimento viscoso (ζ < 1) é dada por
tem1th d
t
dn ω
ωςω sen)( −
⎟⎟⎠
⎞⎜⎜⎝
⎛= Eq. 79
Usando a Eq. 78 podemos calcular a transformada de Fourier da Eq. 79
1dtetem1dtetxX tj
dt
d
tj n === −∞
∞−
−∞
∞−
− ∫∫ ωςωω ωω
ω sen)()( Eq. 80
Desta forma, através das definições acima é possível concluirmos que
∫∞
∞−
= ωωπ
ω deH21th tj)()( Eq. 81
Ou seja, a resposta ao impulso é a transformada inversa de Fourier da resposta em Freqüência e vice-versa !

82 Prof. Paulo S. Varoto SEM 5766 – Análise Modal de Estruturas
Cont. ...
0 1 2 3 4 50.01
0.005
0
0.005
0.01
Tempo [s]
h(t)
0 5 10 15 20 25 301 10 6
1 10 5
1 10 4
0.001
Frequencia [Hz]
|H(w
)|
TRA
NSF
OR
MA
DA
DIR
ETA
TRA
NSF
OR
MA
DA
INV
ER
SA

83 Prof. Paulo S. Varoto SEM 5766 – Análise Modal de Estruturas
Entrada - f (t)
h (t)
Saída - x (t)
F (ω)
H (ω)
X (ω)
TFP
TFT
TFIT
TFT
TFP
TFIT
convolução multiplicação
TEMPO FREQUÊNCIA
DOMÍNIO
Fechando a idéia !