Unidade_2.1_Cinemática Do Movimento Do Plano de Um Corpo Rígido
14
1 1 Cinemática do Movimento Plano de um Corpo Rígido Prof. Alexandre Mikowski Joinville - SC Universidade Federal de Santa Catarina Campus de Joinville Curso de Engenharia da Mobilidade 2 Conteúdos da Aula Movimento de um Corpo Rígido; Translação; Rotação em Torno de um Eixo Fixo; Análise do Movimento Absoluto; Análise do Movimento Relativo: Velocidade; Centro Instantâneo de Velocidade Nula; Análise do Movimento Relativo: Aceleração.
Transcript of Unidade_2.1_Cinemática Do Movimento Do Plano de Um Corpo Rígido

1
1
Cinemática do Movimento
Plano de um Corpo Rígido
Prof. Alexandre Mikowski
Joinville - SC
Universidade Federal de Santa CatarinaCampus de JoinvilleCurso de Engenharia da Mobilidade
2
Conteúdos da Aula
� Movimento de um Corpo Rígido;
� Translação;
� Rotação em Torno de um Eixo Fixo;
� Análise do Movimento Absoluto;
� Análise do Movimento Relativo: Velocidade;
� Centro Instantâneo de Velocidade Nula;
� Análise do Movimento Relativo: Aceleração.

2
3
Movimento de um Corpo RígidoImportante para o projeto de engrenagens, cames e
mecanismos usados em muitas operações mecânicas.
4
Movimento de um Corpo Rígido

3
5
Translação
6
Translação
� Posição :
/ BAAB
rrr +=
� Velocidade :
/
dt
rdvv
BA
AB+= ou
ABvv =
� Aceleração : AB
aa =
“Todos os pontos de um corpo rígido em movimento de translação retilínea ou curvilínea têm a mesma velocidade e aceleração”.

4
7
Rotação em Torno de Eixo FixoMovimento Angular
� Posição Angular:
definida pelo ângulo θθθθ.
� Deslocamento Angular:
mudança da posição angular dθθθθ.
� Velocidade Angular:
taxa de variação da posição angular.
dt
dθω =
Unidade no SI: rad/sSentido: anti-horário (+) e horário (-)
8
Rotação em Torno de Eixo FixoMovimento Angular
� Aceleração Angular:
taxa temporal de variação de ωωωω.
� Relação diferencial:
dt
dωα =
ωωθα dd =
� Aceleração Angular Constante:
cαα =

5
9
Cinemática do Movimento Angular
tdtdc
t
cαωωαω
ω
ω
+=⇒= ∫∫ 0
0
0
( ) 2
00
0
02
1
0
ttdttdc
t
cαωθθαωθ
θ
θ
++=⇒+= ∫∫
� Velocidade Angular como Função do Tempo:
� Posição Angular como Função do Tempo:
� Velocidade Angular como Função da Posição Angular:
( )0
2
0
22
00
θθαωωθαωωθ
θ
ω
ω
−+=⇒= ∫∫ ccdd
10
Rotação em Torno de Eixo FixoMovimento Angular
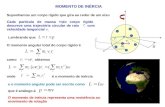
� Posição:
definida pelo vetor posição r.
� Movimento de um Ponto P:
trajetória circular contida no
plano sombreado.

6
11
Rotação em Torno de Eixo FixoMovimento Angular
� Velocidade:
módulo de v obtido de suas coordenadas polares.
θθ uvuvvrr
+=
onde
0.
== rvr
e
.
θθ rv =
rv ω=Pelo produto vetorial.
Prv ×= ω
rrvP
sen ωφω == rvrrP
×=⇒= ω
12
Rotação em Torno de Eixo FixoMovimento Angular
� Aceleração:
Expressa em termos de seus componentes normal e tangencial.
nnttuauaa +=
dtdvat
=onde
ρ2va
n=
com
e
r=ρ rv ω=, dtdωα =e
rat
α= ran
2ω=e

7
13
Rotação em Torno de Eixo FixoMovimento Angular
� Aceleração:
rat
α=
ran
2ω=
Componente tangencial da aceleração: representa a taxa temporal de variação da velocidade escalar.
Componente normal da aceleração: representa a taxa temporal de variação da direção da velocidade.
Em termos do produto vetorial:
dt
rdr
dt
d
dt
vda
P
P×+×== ω
ω
14
Rotação em Torno de Eixo FixoMovimento Angular
� Aceleração:
dt
rdr
dt
d
dt
vda
P
P×+×== ω
ω
Lembrando que:
dt
dωα = P
Prv
dt
rd×== ωe
Temos:
( )PP
rra ××+×= ωωα
rraaant
2ωα −×=×=
ou

8
15
Análise do Movimento Absoluto
� O movimento plano geral de um corpo é uma composição de uma translação com uma rotação;
� Para definir o movimento utiliza-se coordenada de posição retilínea s para situar o ponto em sua trajetória e uma coordenada de posição angular θθθθ para especificar a orientação da linha;
� A relação entre essas coordenadas são obtidas usando a geometria e/ou trigonometria;
� Para obter o movimento do ponto e o movimento angular aplica-se as equações diferenciais:
dtddtddtdvadtdsv ωαθω ==== e , ,
16
Análise do Movimento Absoluto
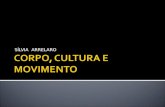
� Lei dos cossenos:
( )
( )θ
θ
cos2
ou
cos2
22
222
abbas
abbas
−+=
−+=
� Velocidade:
( )( ) ( )( )θθ sen 2cos22
12
122
ababbav−
−+=

9
17
Análise do Movimento Relativo: Velocidade
� Posição:
ABABrrr
/+=
18
Análise do Movimento Relativo: Velocidade
� Deslocamento:ABAB
rdrdrd/
+=
Devido à translação e à rotação.
Devido à translação de A.
Devido à rotação em torno de A.

10
19
Análise do Movimento Relativo: Velocidade
� Velocidade:
ABABvvv
/+=
módulo de vB/A:
ABABrv
//ω=
20
Análise do Movimento Relativo: Velocidade
� Velocidade: Efeito do movimento circular em torno de A.
ABABrvv
/×+= ω

11
21
Centro Instantâneo de Velocidade Nula
� Velocidade: Efeito do movimento circular em torno de CI.
0 mas ,/
=×+=AABAB
vrvv ω
Portanto:
CIBBrv
/×= ω
Onde o módulo é:
CIBBrv
/ ω=
22
Centro Instantâneo de Velocidade Nula
� Velocidade: Efeito do movimento circular em torno de CI.
CIBBrv
/×= ω onde o seu módulo é CIBB
rv/
ω=

12
23
Centro Instantâneo de Velocidade Nula
� Localização do CI:
24
Centro Instantâneo de Velocidade Nula
� Localização do CI:

13
25
Análise do Movimento Relativo: Aceleração
� Aceleração: Efeito do movimento circular em torno de CI.
( ) ( )nABtABAB
aaaa//
++=
Módulo das componentes tangencial e normal:
( )ABtAB
ra//
α= ( )ABnAB
ra/
2
/ ω=e
Componentes vetoriais tangencial e normal:
( )ABtAB
ra//
×= α ( )ABnAB
ra/
2
/ ω−=e
PortantoABABAB
rraa/
2
/ωα −×+=
26
Análise do Movimento Relativo: Aceleração

14
27
Referência Bibliográfica
� HIBBELER, R. C. Dinâmica – Mecânica para engenharia; 10ª edição, São Paulo: Pearson Prentice Hall, 2011.