Support Vector Machines (SVM) Eduardo Borges Gabriel Simões.
Upload
cristiano-rafael-steffensCategory
view
88download
0
Cristiano Rafael Steffens
Dr. Ricardo Nagel Rodrigues
Sistemas Computacionais e Tecnologias para Percepção
Grupo de Automação e Robótica Inteligente – NAUTEC
Centro de Ciências Computacionais - C3
UM SISTEMA DE DETECÇÃO DE CHAMAS UTILIZANDO SVM E RANDOM FORESTS
1
TRABALHOS RELACIONADOS
2
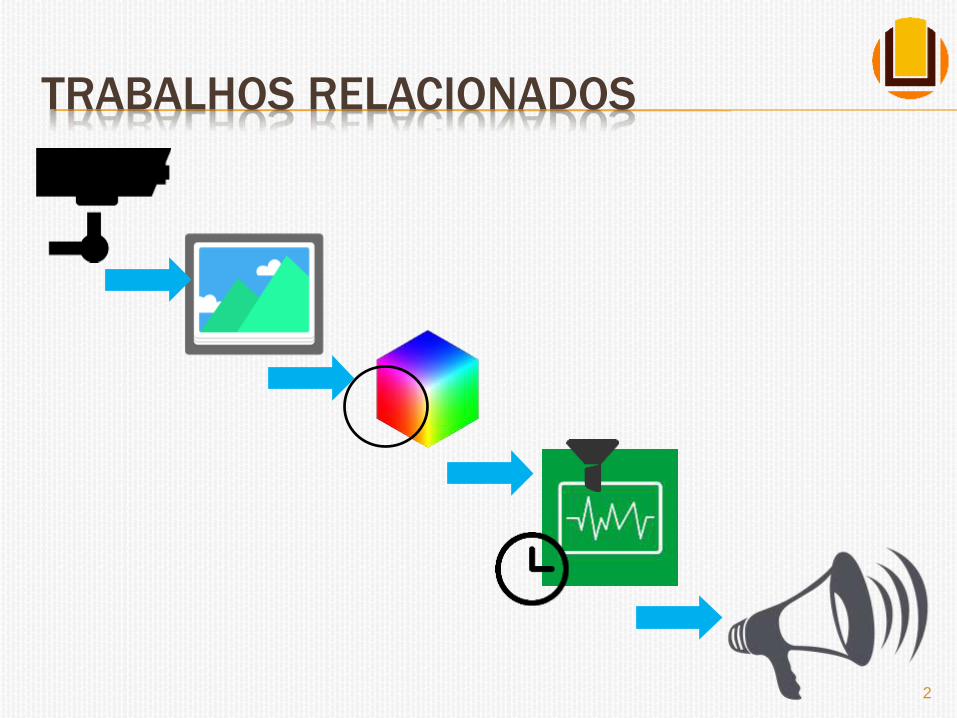
TRABALHOS RELACIONADOS
Classificação de cor:Tabela lookup RGB (Phillips, 2002);
Threshold fixo RGB (Chen, 2004);
Separação BG/FG utilizando MoG + modelo de relação entre cores(Celik, 2007);
Distância do pixel em relação à matiz ideal gera imagem em escalade cinza (Mueller, 2013)
Classificação da oscilação/pulsação:Variância no pixel (Phillips, 2002);
Mudança da contagem dos pixels com cor de fogo (Chen, 2004);
Média e variância das regiões com cor de fogo (Celik, 2007);
Mineração de padrões sequenciais utilizando PrefixSpan (Li, 2011);
Fluxo óptico com utilizando a classificação de cor (Mueller, 2013);
3
CONTEXTO DO TRABALHO PROPOSTO
Ground Truth público;
Validação e comparação;
Câmeras móveis e background complexo;
Processamento em tempo real;
Descoberta de conhecimento;
4
SOBRE
Etapas executadas no processo:
Extração de pixels para treinamento e testes;
Pré-processamento dos pixels e remoção deoutliers;
Escolha dos melhores atributos utilizando BestFirst;
Criação de um modelo de classificação de coresusando Random Forest;
Cálculo do desvio padrão para identificaroscilação do fogo com uso de SVM;
5
DADOS DE TREINAMENTO
6
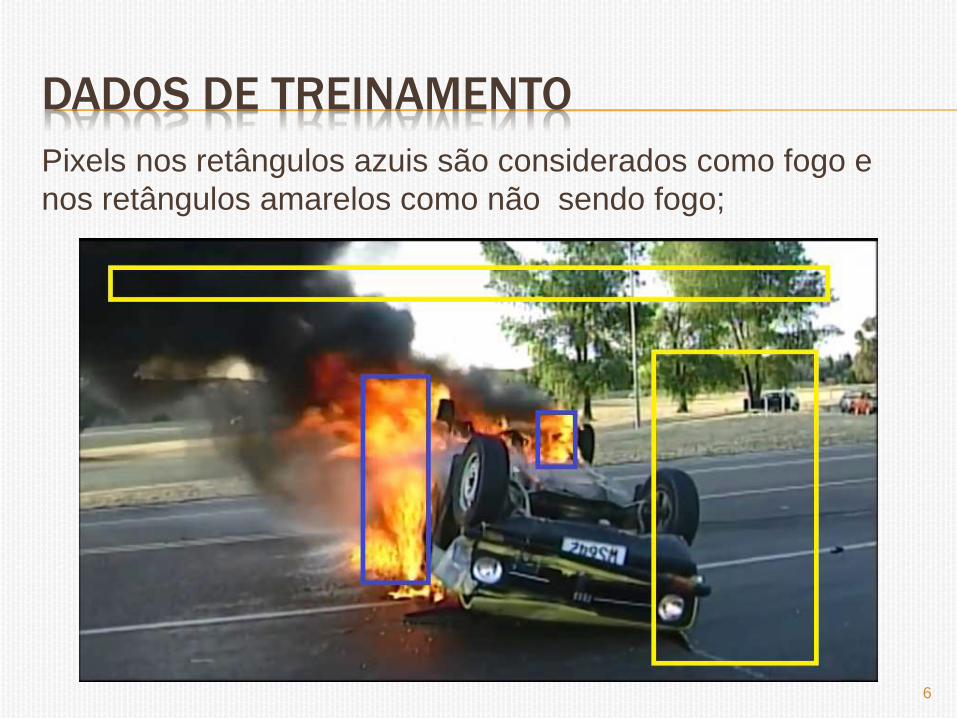
Pixels nos retângulos azuis são considerados como fogo e
nos retângulos amarelos como não sendo fogo;
100 mil pixels extraídos;
30 mil registros dos pixels extraídos como sendo
de fogo foram eliminadas:
O “red channel” tem valor menor que o “blue
channel”;
Não há movimento nos últimos 10 pixels da
região coletada;
PRÉ-PROCESSAMENTO
7

PRÉ-PROCESSAMENTO
Seleção dos atributos com o algoritimo BestFirstutilizando a plataforma WEKA.
Melhores atributos:B channel no sistema de cor Lab;
Hue channel no sistema de cor HSV;
Blue-difference croma (Cb) no sistema de cor YCbCr;
Registro dos valores assumidos por um pixel durante umintervalo de frames.
Atributos escolhidos:Sistemas de cores RGB e HSV (correlação entre os sistemas,custo computacional);
Vetor dos valores assumidos pelo pixel no tempo;
8
RANDOM FORESTS
Um algoritmo que computa várias árvores de
decisão para uma mesma base de dados;
Cada árvore construída tem os atributos
escolhidos aleatoriamente;
Cada árvore classifica a instância de forma
independente,
A classificação da instância é dada pela
moda;
9
RANDOM FORESTS
10
Foram construídas 100 árvores dividindo aleatoriamenteos HSV e RGB, segundo as condições:
Fator de confiança igual a 0,25;
Suporte mínimo igual a 50 instâncias;
Critério de poda: 10 níveis;
Conjunto de treino:2/3 dos pixels coletados,
Conjunto de teste (OOB):1/3 dos pixels coletados,
Foram classificadas corretamente 98,72% das instâncias.
RANDOM FORESTS
11
12
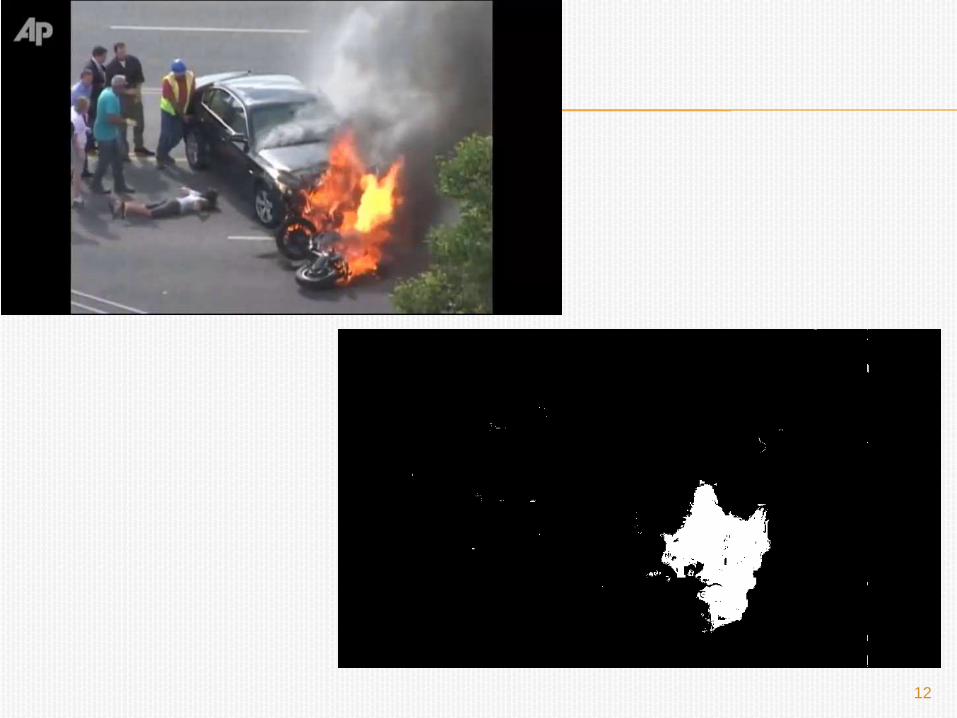
Considera os valores assumidos por pixels em umintervalo de frames para encontrar comportamentosque condizem com fogo;
Últimos 20 frames considerando que vídeos sãogravados em 24 FPS;
Desvio padrão em R, G e B em cada pixel;
Visualmente é possível identificar que desviospadrão altos condizem com fogo;
CLASSIFICAÇÃO COM BASE NA OSCILAÇÃO
13
Estabelece uma função de distância entre 2 pontos de dados quaisquer num hiperplano;
Consegue separar linearmente hiperplanos para a classificação de classes em n dimensões;
Consegue classificar novas instâncias, a partir, do modelo gerado;
SUPORT VECTOR MACHINE (SVM)
14

Cross validation separando os dados em 10 folds;
Algoritmo padrão de SVM (C-SVM);
Kernel Gaussiano (Radial);
Resultados:
Foram classificadas corretamente 97,16% dasinstâncias;
A taxa de falso positivos ficou em 0,064;
SUPORT VECTOR MACHINE (SVM)
15

CONSIDERAÇÕES
16
Custo computacional;
Paralelização;
Resultados em câmeras móveis;
Estado atual do trabalho;
Online Training;
CONCLUSÃO
A abordagem proposta combina as técnicas de
segmentação de cor e detecção de movimento
para dar suporte na identificação de fogo em
imagens estáticas ou com pouco movimento.
Enquanto o Random Forests classifica como
fogo ou não fogo a partir da cor, o SVM
estabelece a separação com base na
oscilação. Os resultados mostram que a
solução é funcional para classificação
individual dos pixels.17