trabalhos práticos
43
Trabalhos Práticos (Segmentação do lúmen da carótida em imagens B-mode, e sua projecção em 3-D) Tema Dissertação: Análise de Estruturas em Imagens Médicas: Aplicação ao Sistema Cardiovascular Jorge Miguel Silva Pereira MEB Junho de 2011
-
Upload
jorge-pereira -
Category
Documents
-
view
239 -
download
0
description
segmentaçao da carotida
Transcript of trabalhos práticos
Trabalhos Práticos
(Segmentação do lúmen da carótida em imagens B-mode, e
sua projecção em 3-D)
Tema Dissertação: Análise de Estruturas em Imagens Médicas: Aplicação ao Sistema Cardiovascular
Jorge Miguel Silva Pereira
MEB
Junho de 2011

2
Índice 1. Introdução............................................................................................................................. 5
1.1. Enquadramento ............................................................................................................ 5
1.2. Objectivos ..................................................................................................................... 5
2. Fundamentos Teórico ........................................................................................................... 6
2.1. Anatomia da carótida ................................................................................................... 6
2.2. Ultra-som .................................................................................................................... 10
2.3. Segmentação de imagem ........................................................................................... 13
2.3.1. Thresholding ....................................................................................................... 14
2.4. Detector de contornos................................................................................................ 15
2.5. Operadores morfológicos ........................................................................................... 16
3. Metodologia ....................................................................................................................... 21
4. Resultados ........................................................................................................................... 29
4.3. Dataset ........................................................................................................................ 29
4.4. Cálculo da recta no interior do lúmen ....................................................................... 30
4.5. Operador Sobel ........................................................................................................... 31
4.6. ROI (Região de interesse) ........................................................................................... 32
4.7. Detecção dos pontos de gradiente mais fortes e de maior dimensão ..................... 33
4.8. Interpolação ................................................................................................................ 35
4.9. Correcção de falhas .................................................................................................... 36
4.10. Imagem final ........................................................................................................... 38
4.11. Projecção 3-D do lúmen ......................................................................................... 40
5. Conclusão ............................................................................................................................ 42
Referências Bibliográficas ........................................................................................................... 43
3
Índice de Figuras
Figura 1 - Artérias do pescoço e cabeça [seeley 2004] ................................................................. 6
Figura 2 - Principais artérias da parte superior do corpo [seeley 2004] ....................................... 7
Figura 3- Reflexos baroreceptores e quimioreceptores [seeley 2004] ......................................... 8
Figura 4 - Esquema genérico de um ultra-som [adaptado de DOUGHERTY 2009] ..................... 10
Figura 5 - atenuação e reflexão de um ultra-som [adaptado de DOUGHERTY 2009] ................. 11
Figura 6 - Formação de uma imagem B-mode [adaptado de DOUGHERTY 2009] ...................... 12
Figura 7 - Tipos de segmentação [CAMPILHO 2011] ................................................................... 13
Figura 8 Limiar em histograma bimodal [adaptado de DOUGHERTY 2009] ............................... 14
Figura 9- imagem a escala de cinzentos e respectivo hsitograma [BAUERMNN 2008] .............. 15
Figura 10- Theresholding da imagem da figura 9 [BAUERMNN 2008] ........................................ 15
Figura 11 - Operações de Erosão e dilatação [CAMPILHO 2011] ............................................... 17
Figura 12 - Operação de dilatação [DOUGHERTY 2009] ............................................................. 18
Figura 13 - Operação de erosão [CAMPILHO 2011] .................................................................... 18
Figura 14- Operações de abertura e fecho [CAMPILHO 2011] ................................................... 19
Figura 15- Operação de abertura [DOUGHERTY 2009] ............................................................... 20
Figura 16 - Operação de fecho [DOUGHERTY 2009] ................................................................... 20
Figura 17- Visualização da recta contida no lúmen .................................................................... 21
Figura 18- Esquema da procura dos limites do lúmen a partir da recta detectada .................... 22
Figura 19- Magnitude do gradiente após aplicação do operador Sobel ..................................... 23
Figura 20- Visualização da ROI criada a partir da recta ............................................................... 23
Figura 21- Detecção dos gradientes mais fortes ......................................................................... 24
Figura 22- Selecção dos pontos mais proximos da recta verticalmente ..................................... 25
Figura 23- Correcção das descontinuídades pequenas com recurso a operadores morfológicos
..................................................................................................................................................... 25
Figura 24- interpolação das descontinuidades maiores ............................................................. 26
Figura 25- Falhas na detecção ..................................................................................................... 27
Figura 26- Segmentação final do lúme ........................................................................................ 27
Figura 27- Projecção 3-D do lúmen segmentado ........................................................................ 28
Figura 28 - Imagens originais....................................................................................................... 29
Figura 29 - Rectas dentro do lúmen ............................................................................................ 30
Figura 30- Operador Sobel aplicado às imagens ......................................................................... 31
Figura 31- Definição da ROI de cada imagem ............................................................................. 32
Figura 32 - Detecção dos pontos de gradiente mais significativos ............................................. 33
Figura 33- Selecção dos pontos do gradiente mais próximos da recta ....................................... 34
Figura 34 - Preenchimento das descontinuidades pequenas ..................................................... 35
Figura 35- Resultados da interpolação ........................................................................................ 36
Figura 36- correcção de falhas .................................................................................................... 37
Figura 37 - mascaras da segmentação ........................................................................................ 38
Figura 38 - Imagem original com os contornos detectados a verde e comparação ................... 38
Figura 39 - Imagem original com os contornos detectados a verde e comparação ................... 39
Figura 40- Imagem original com os contornos detectados a verde e comparação .................... 39
Figura 41 - Intervalo de 20 amostras (esquerda) e projecção 3-D (direita) ................................ 40
Figura 42 - intervalo de 5 amostras (esquerda) e projecção 3-D (direita) .................................. 41

4
Índice de Tabelas
Tabela 1 - Ramificações da artéria carótida ................................................................................ 9
Tabela 2 - valores constantes para diversos materiais sobre o efeito de uma onda sonora ..... 12

5
1. Introdução
1.1. Enquadramento
As artérias da carótida são de extrema importância, no fornecimento de sangue às zonas
do pescoço e da cabeça. Esta importância é muito maior no fornecimento de sangue ao
cérebro, já que se trata de um dos órgãos mais sensíveis do organismo. O cérebro recebe cerca
de 15% da circulação sanguínea e consome cerca de 20% do oxigénio e glucose do organismo,
devido à sua grande necessidade de energia sobre a forma de ATP (adenosina trifosfato) . Ele
trabalha baseado num metabolismo oxigenado e sofre facilmente perturbações, na ausência
desta molécula. Um simples intervalo de 10 segundo sem fornecimento de sangue ao cérebro
pode causar perda da consciência e se este período for expandido por 4 minutos ou mais, pode
resultar num dano irreversível no cérebro. [SEELEY 2004][MOORE2006]
A aterosclerose é uma das patologias que afectam esta função, onde lentamente vai
reduzindo o fluxo sanguíneo nas artérias da carótida. É uma das principais causas de acidentes
cerebrais, tornando-se rapidamente numa das maiores causas de morte no mundo ocidental.
Como é uma patologia fortemente associada às zonas onde ocorrem perturbação no fluxo
sanguíneo, a hemodinâmica tem vindo a estudar maneiras de a detectar e perceber o seu
funcionamento. O controlo da velocidade do fluído sanguíneo pode ser uma maneira de
detectar alguma anomalia e para isso a necessidade de criação de modelos que facilitem esse
estudo e detecção é de extrema importância. Partir de uma imagem B-mode para uma
projecção 3-D da mesma, para simular as condições de escorrimento do fluído, é uma área
prometedora para o auxilio do estudo e detecção antecipada desta patologia. [SEELEY
2004][MOORE2006] [MAURITS 2005]
1.2. Objectivos
A partir de imagens de ultra-som em B-mode, elaborar um algoritmo capaz de segmentar
automaticamente o lúmen da carótida e posteriormente efectuar uma projecção 3-D da
segmentação Realizada.
6
2. Fundamentos Teórico
2.1. Anatomia da carótida
A carótida encontra-se dividida em carótica comum direita e carótida comum
esquerda, que têm uma origem genérica a partir da crossa da aorta.
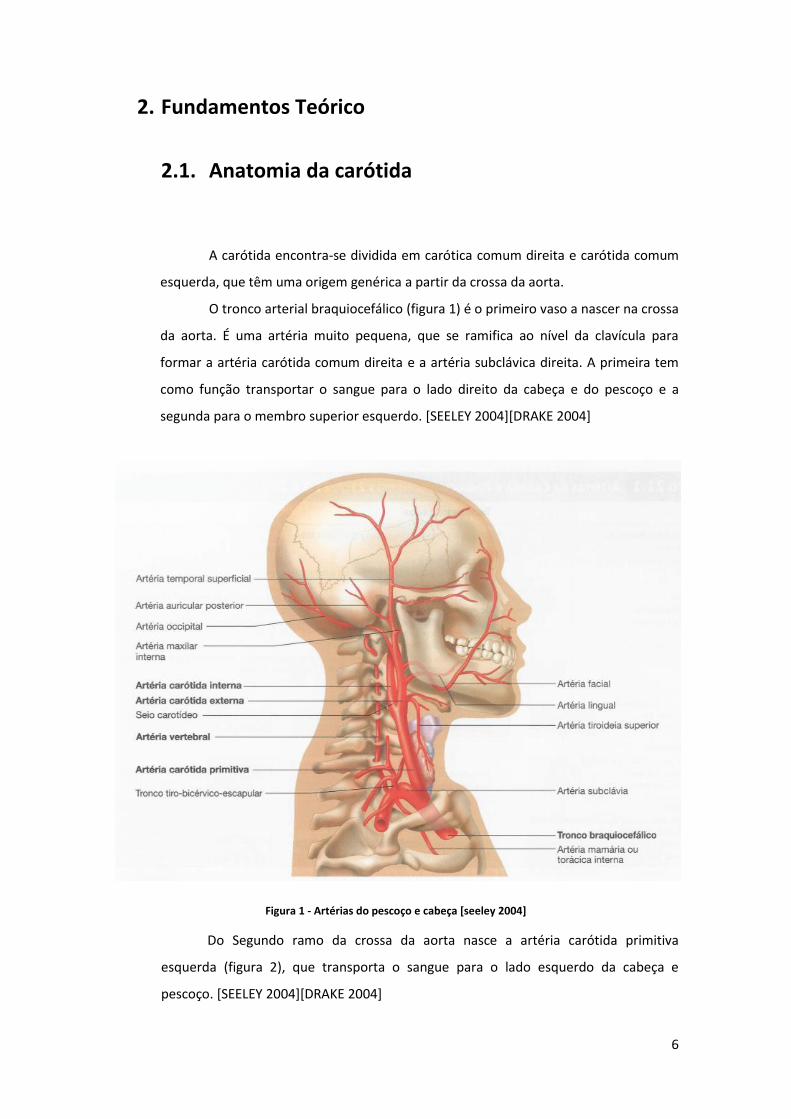
O tronco arterial braquiocefálico (figura 1) é o primeiro vaso a nascer na crossa
da aorta. É uma artéria muito pequena, que se ramifica ao nível da clavícula para
formar a artéria carótida comum direita e a artéria subclávica direita. A primeira tem
como função transportar o sangue para o lado direito da cabeça e do pescoço e a
segunda para o membro superior esquerdo. [SEELEY 2004][DRAKE 2004]
Figura 1 - Artérias do pescoço e cabeça [seeley 2004]
Do Segundo ramo da crossa da aorta nasce a artéria carótida primitiva
esquerda (figura 2), que transporta o sangue para o lado esquerdo da cabeça e
pescoço. [SEELEY 2004][DRAKE 2004]

7
Figura 2 - Principais artérias da parte superior do corpo [seeley 2004]
A carótida comum expande-se superiormente ao longo de ambos os lados do
pescoço até alcançar o ângulo interior da mandíbula, onde cada artéria comum se
ramifica em externa e interna. No início da bifurcação do ramo interior da carótida, a
artéria é ligeiramente dilatada formando o seio carotídeo, local muito importante na
monitorização da pressão arterial devido ao reflexo barorrecptor. [SEELEY 2004]
[MOORE 2006] [SALADIN 2003]
Os barorceptores, também localizados na aorta, são sensores de pressão que
emitem informação contínua para o centro cardíaco. Se a pressão arterial desce, o
centro cardíaco é informado e aumenta a frequência cardíaca, subindo então a
pressão sanguínea. Por outro lado se a pressão arterial é muito alta, a resposta inversa
acontece e o centro cardíaco diminui a frequência cardíaca. [SEELEY 2004] [MOORE
2006] [SALADIN 2003]

8
Figura 3- Reflexos baroreceptores e quimioreceptores [seeley 2004]
Continuando a ascensão da artéria, a carótida interna, penetra a cavidade
craniana pelo canal carótideo do osso temporal, fornecendo sangue às órbitas e a
cerca de 80% do cérebro. A partir da cavidade craniana, a árteria carótida interna dá
origem a novos ramos para irrigação das diferentes partes alvo (tabela 1) Por seu lado
a artéria carótida externa, com os seus múltiplos ramos ao longo do lado exterior do
crânio, fornece sangue ao pescoço e as partes mais externas das estruturas da cabeça.
[MOORE 2006]
9
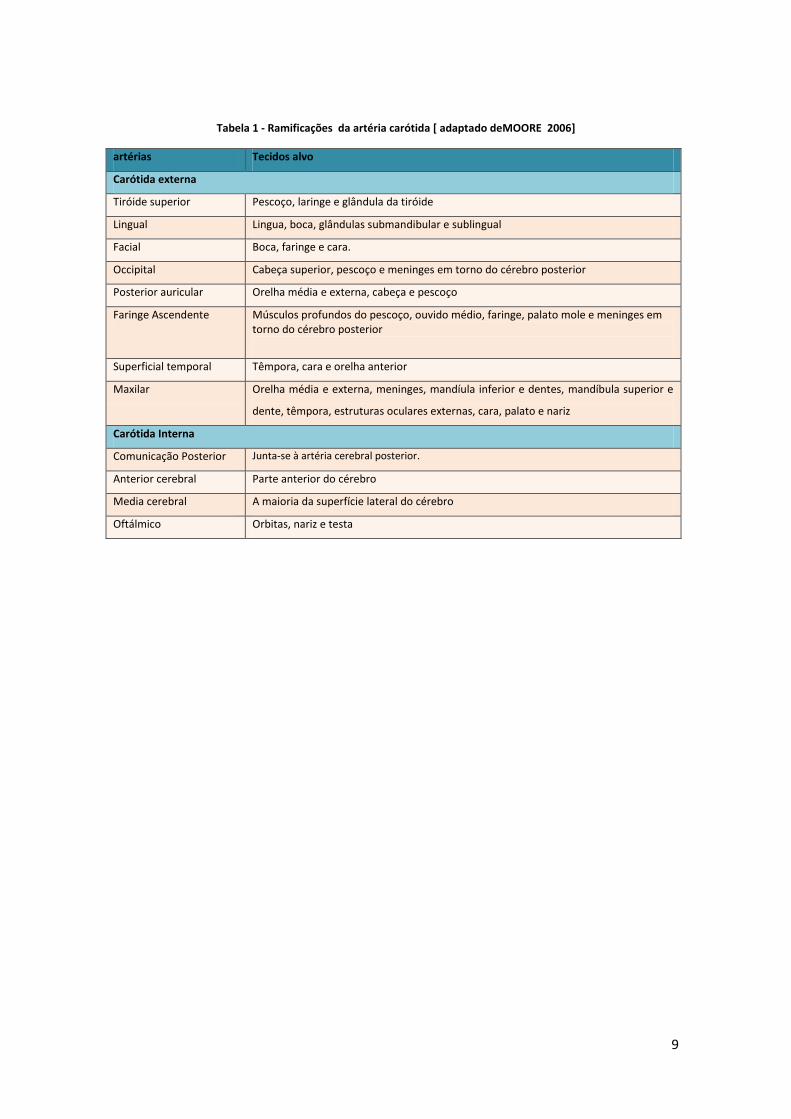
Tabela 1 - Ramificações da artéria carótida [ adaptado deMOORE 2006]
artérias Tecidos alvo
Carótida externa
Tiróide superior Pescoço, laringe e glândula da tiróide
Lingual Lingua, boca, glândulas submandibular e sublingual
Facial Boca, faringe e cara.
Occipital Cabeça superior, pescoço e meninges em torno do cérebro posterior
Posterior auricular Orelha média e externa, cabeça e pescoço
Faringe Ascendente Músculos profundos do pescoço, ouvido médio, faringe, palato mole e meninges em torno do cérebro posterior
Superficial temporal Têmpora, cara e orelha anterior
Maxilar Orelha média e externa, meninges, mandíula inferior e dentes, mandíbula superior e
dente, têmpora, estruturas oculares externas, cara, palato e nariz
Carótida Interna
Comunicação Posterior Junta-se à artéria cerebral posterior.
Anterior cerebral Parte anterior do cérebro
Media cerebral A maioria da superfície lateral do cérebro
Oftálmico Orbitas, nariz e testa
10
2.2. Ultra-som
A imagem de Ultra-som, que opera com ondas sonoras de alta frequência (1-10MHz) e
os seus ecos para produzir imagens que demonstrem o movimento do órgão em tempo real. O
facto de ser uma ferramenta clínica não-ionizante, ao contrário das ondas electromagnéticas
(raio-x, raio-γ), torna-a numa escolha bastante frequente e segura na prática clínica em
imagem. [DOUGHERTY 2009] [BOVIK 2009]
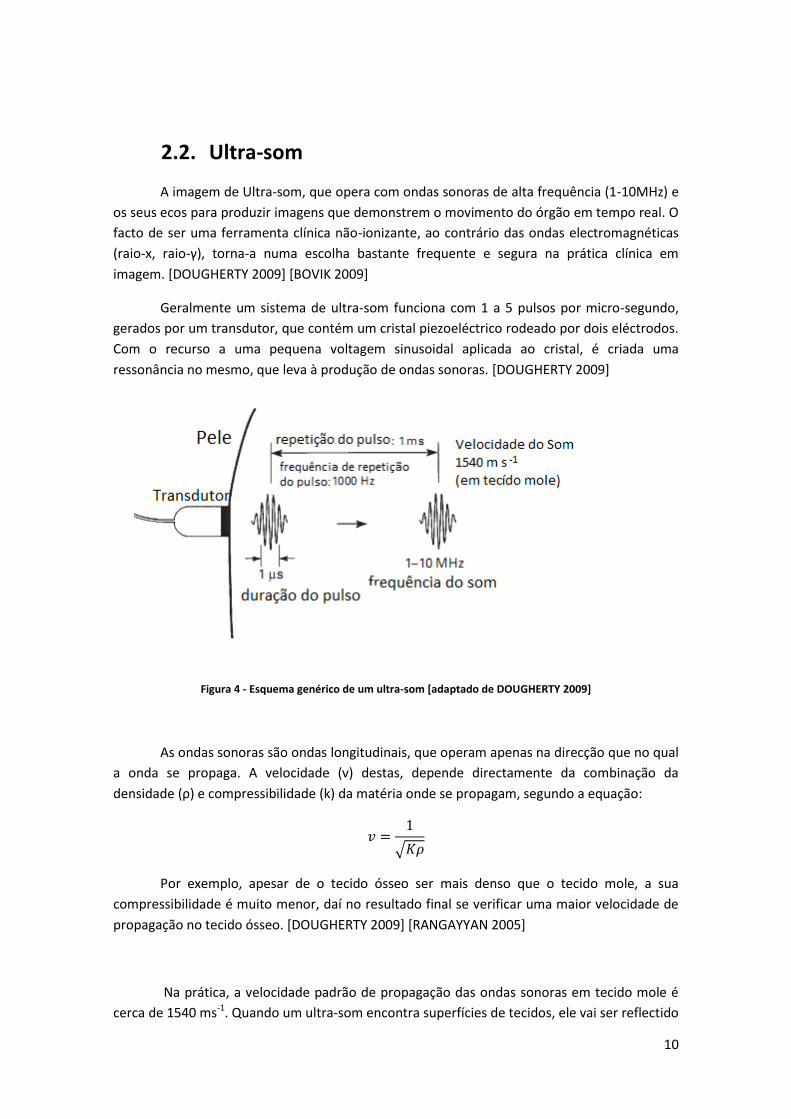
Geralmente um sistema de ultra-som funciona com 1 a 5 pulsos por micro-segundo,
gerados por um transdutor, que contém um cristal piezoeléctrico rodeado por dois eléctrodos.
Com o recurso a uma pequena voltagem sinusoidal aplicada ao cristal, é criada uma
ressonância no mesmo, que leva à produção de ondas sonoras. [DOUGHERTY 2009]
Figura 4 - Esquema genérico de um ultra-som [adaptado de DOUGHERTY 2009]
As ondas sonoras são ondas longitudinais, que operam apenas na direcção que no qual
a onda se propaga. A velocidade (v) destas, depende directamente da combinação da
densidade (ρ) e compressibilidade (k) da matéria onde se propagam, segundo a equação:
Por exemplo, apesar de o tecido ósseo ser mais denso que o tecido mole, a sua
compressibilidade é muito menor, daí no resultado final se verificar uma maior velocidade de
propagação no tecido ósseo. [DOUGHERTY 2009] [RANGAYYAN 2005]
Na prática, a velocidade padrão de propagação das ondas sonoras em tecido mole é
cerca de 1540 ms-1. Quando um ultra-som encontra superfícies de tecidos, ele vai ser reflectido
11
consoante as propriedades acústicas de cada tipo de tecido, até que seja detectado na volta
pelo transdutor. Devido ao comportamento longitudinal, apenas as ondas reflectidas a 180o, é
que vão contribuir para a construção da imagem. Esta construção é conseguida através do
cálculo do tempo dispendido pelos pulsos ultrasónicos, desde que são criados no transdutor,
em direcção ao corpo neste caso, até que voltam depois de uma reflexão nos tecidos
corporais. Sabendo também a velocidade de propagação no material (tecido mole), a
profundidade das diferentes componentes do alvo podem ser calculadas e visualizadas na
imagem. [DOUGHERTY 2009] [RANGAYYAN 2005]
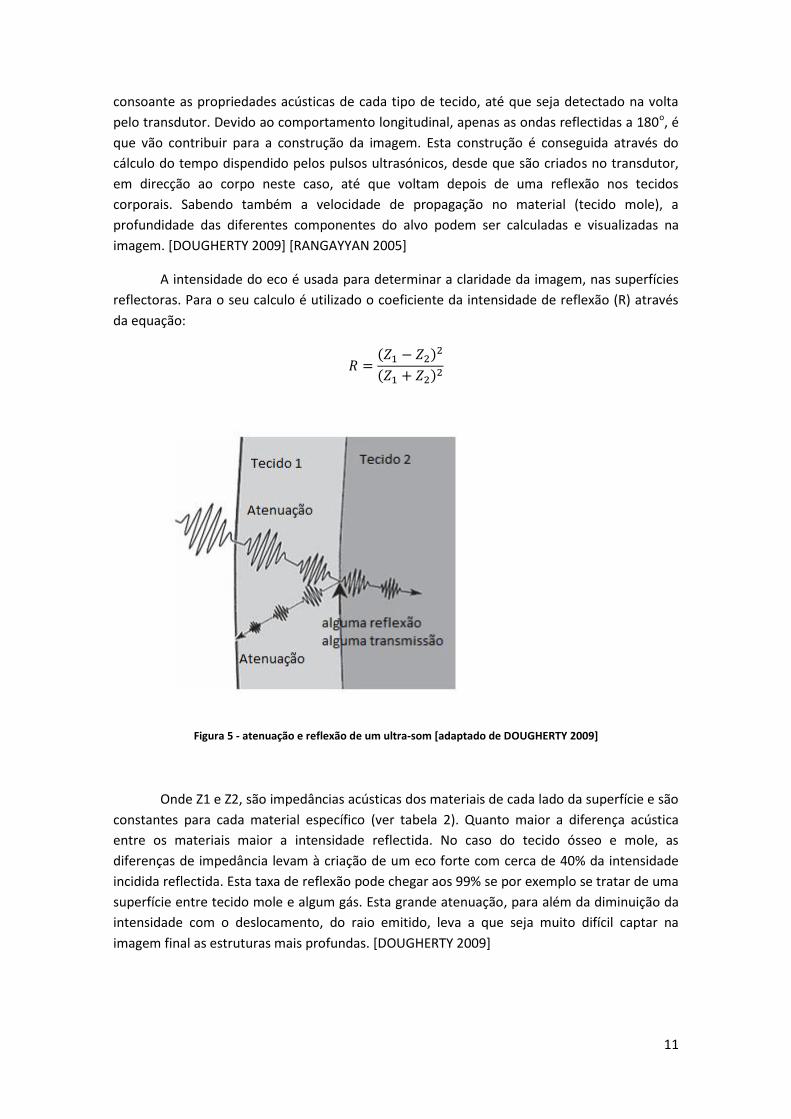
A intensidade do eco é usada para determinar a claridade da imagem, nas superfícies
reflectoras. Para o seu calculo é utilizado o coeficiente da intensidade de reflexão (R) através
da equação:
Figura 5 - atenuação e reflexão de um ultra-som [adaptado de DOUGHERTY 2009]
Onde Z1 e Z2, são impedâncias acústicas dos materiais de cada lado da superfície e são
constantes para cada material específico (ver tabela 2). Quanto maior a diferença acústica
entre os materiais maior a intensidade reflectida. No caso do tecido ósseo e mole, as
diferenças de impedância levam à criação de um eco forte com cerca de 40% da intensidade
incidida reflectida. Esta taxa de reflexão pode chegar aos 99% se por exemplo se tratar de uma
superfície entre tecido mole e algum gás. Esta grande atenuação, para além da diminuição da
intensidade com o deslocamento, do raio emitido, leva a que seja muito difícil captar na
imagem final as estruturas mais profundas. [DOUGHERTY 2009]
12
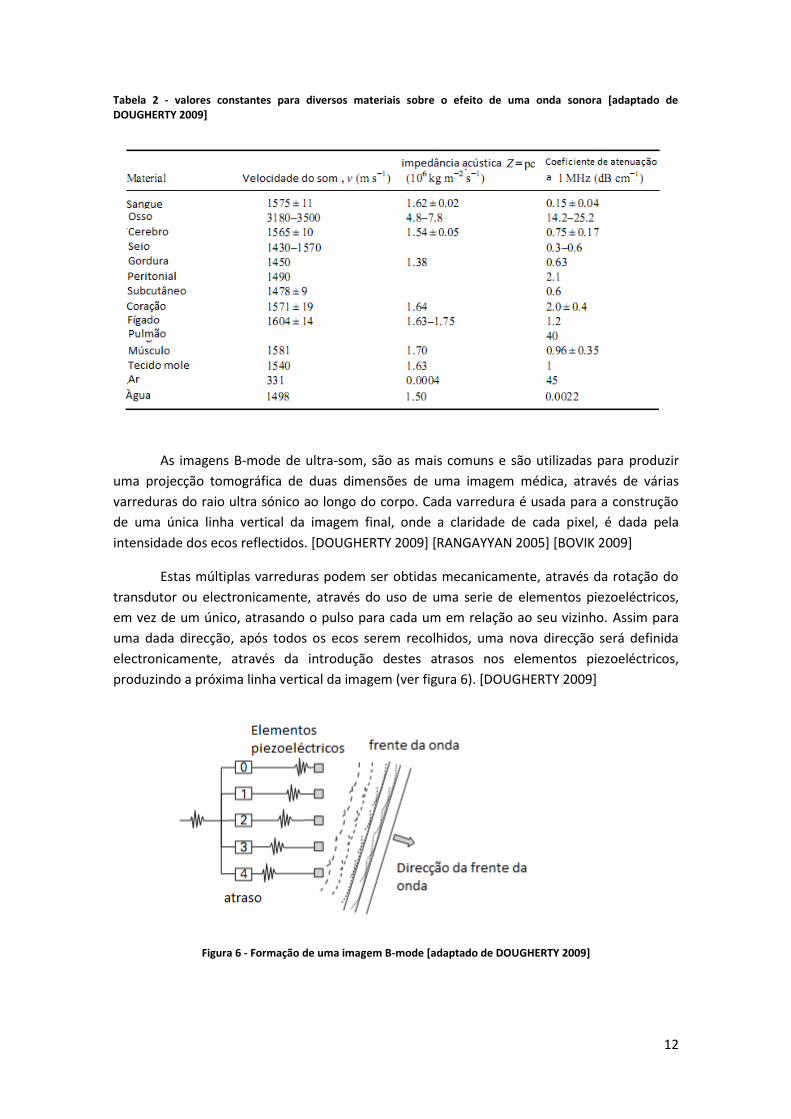
Tabela 2 - valores constantes para diversos materiais sobre o efeito de uma onda sonora [adaptado de DOUGHERTY 2009]
As imagens B-mode de ultra-som, são as mais comuns e são utilizadas para produzir
uma projecção tomográfica de duas dimensões de uma imagem médica, através de várias
varreduras do raio ultra sónico ao longo do corpo. Cada varredura é usada para a construção
de uma única linha vertical da imagem final, onde a claridade de cada pixel, é dada pela
intensidade dos ecos reflectidos. [DOUGHERTY 2009] [RANGAYYAN 2005] [BOVIK 2009]
Estas múltiplas varreduras podem ser obtidas mecanicamente, através da rotação do
transdutor ou electronicamente, através do uso de uma serie de elementos piezoeléctricos,
em vez de um único, atrasando o pulso para cada um em relação ao seu vizinho. Assim para
uma dada direcção, após todos os ecos serem recolhidos, uma nova direcção será definida
electronicamente, através da introdução destes atrasos nos elementos piezoeléctricos,
produzindo a próxima linha vertical da imagem (ver figura 6). [DOUGHERTY 2009]
Figura 6 - Formação de uma imagem B-mode [adaptado de DOUGHERTY 2009]
13
2.3. Segmentação de imagem
A segmentação é basicamente a divisão da imagem em regiões com uma dada
significância, normalmente com o objectivo de distinguir objectos ou regiões de interesse, do
resto da imagem. É comum ver aplicadas técnicas desta área na área médica, como os casos da
segmentação de órgãos, detecção de tecido patológico ou planeamento de tratamentos ou
cirurgias. [DOUGHERTY 2009] [CAMPILHO2011]
O caso mais simples de uma segmentação, é uma imagem binária, onde apenas
existem duas regiões. Os critérios de definição de regiões podem variar muito, sendo os mais
comuns e simples, a intensidade, cor ou textura ao longo imagem. [DOUGHERTY 2009]
[CAMPILHO2011]
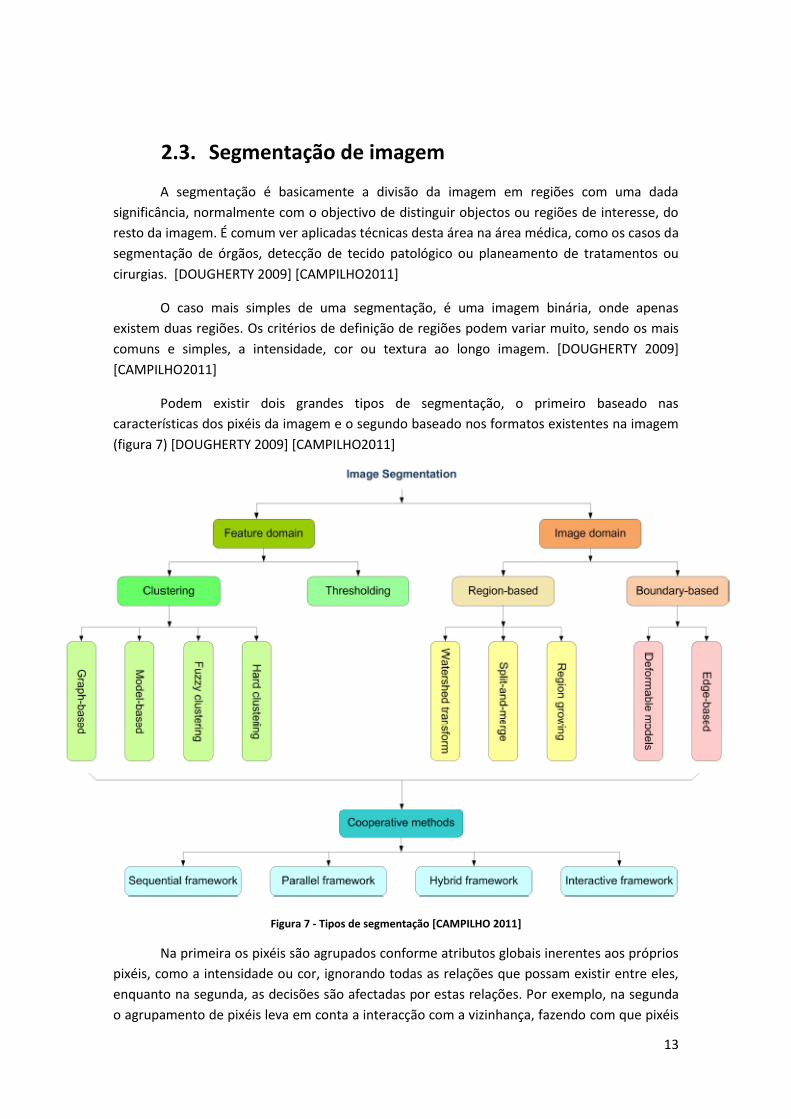
Podem existir dois grandes tipos de segmentação, o primeiro baseado nas
características dos pixéis da imagem e o segundo baseado nos formatos existentes na imagem
(figura 7) [DOUGHERTY 2009] [CAMPILHO2011]
Figura 7 - Tipos de segmentação [CAMPILHO 2011]
Na primeira os pixéis são agrupados conforme atributos globais inerentes aos próprios
pixéis, como a intensidade ou cor, ignorando todas as relações que possam existir entre eles,
enquanto na segunda, as decisões são afectadas por estas relações. Por exemplo, na segunda
o agrupamento de pixéis leva em conta a interacção com a vizinhança, fazendo com que pixéis
14
com valores de intensidade ou gradientes similares e encontrem-se perto um do outro,
formem uma região, introduzindo a característica espacial na segmentação. Esta metodologia
é útil para a definição de contornos e limites entre regiões próximas. [DOUGHERTY 2009]
[CAMPILHO2011]
2.3.1. Thresholding
O thresholding é uma das técnicas mais básicas de segmentação de imagem (ver figura
9 e figura 10). Consiste na definição de um limiar (threshold) para o qual a intensidade de cada
pixel da imagem é comparada. Caso a intensidade seja inferior, o pixel é considerado como
parte do fundo da imagem, caso seja maior, o pixel é considerado parte de alguma região ou
objecto. Na prática o thresholing resulta numa imagem binária, onde os pixéis brancos
correspondem aos pixéis da imagem original de intensidade superior ao limiar (objectos), e os
pixéis pretos aos inferiores (fundo). [DOUGHERTY 2009] [CAMPILHO2011] [GONZALEZ 2001]
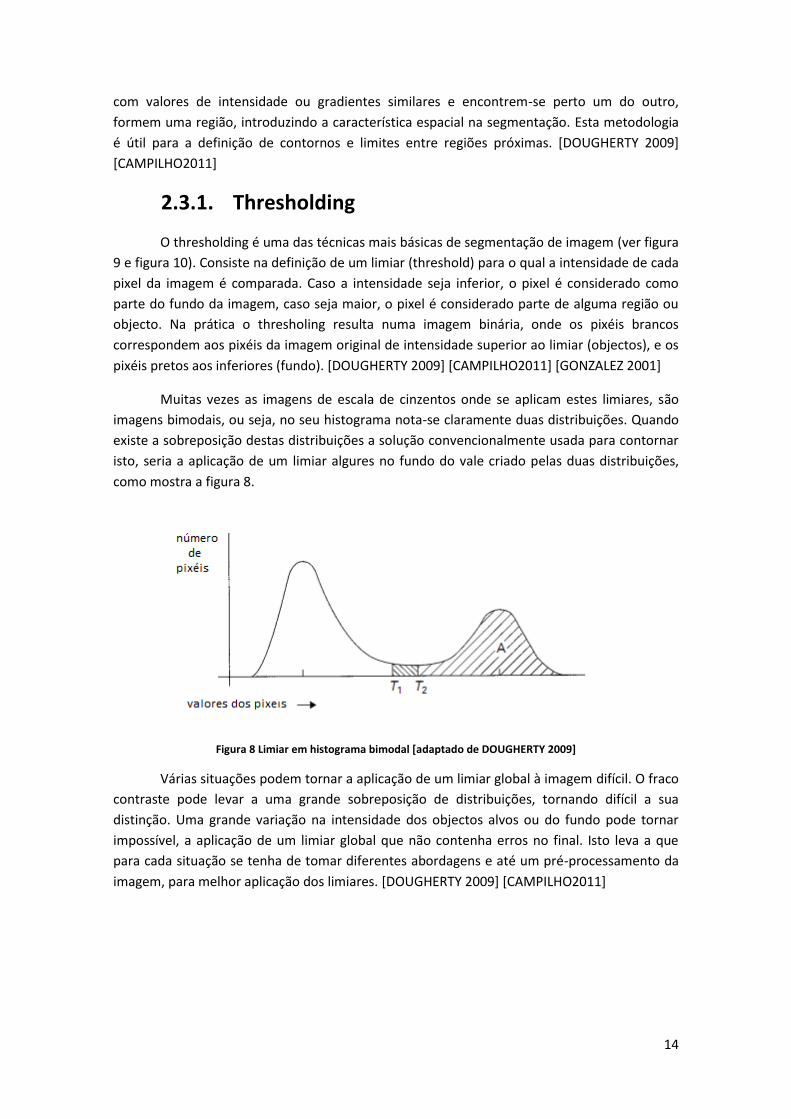
Muitas vezes as imagens de escala de cinzentos onde se aplicam estes limiares, são
imagens bimodais, ou seja, no seu histograma nota-se claramente duas distribuições. Quando
existe a sobreposição destas distribuições a solução convencionalmente usada para contornar
isto, seria a aplicação de um limiar algures no fundo do vale criado pelas duas distribuições,
como mostra a figura 8.
Figura 8 Limiar em histograma bimodal [adaptado de DOUGHERTY 2009]
Várias situações podem tornar a aplicação de um limiar global à imagem difícil. O fraco
contraste pode levar a uma grande sobreposição de distribuições, tornando difícil a sua
distinção. Uma grande variação na intensidade dos objectos alvos ou do fundo pode tornar
impossível, a aplicação de um limiar global que não contenha erros no final. Isto leva a que
para cada situação se tenha de tomar diferentes abordagens e até um pré-processamento da
imagem, para melhor aplicação dos limiares. [DOUGHERTY 2009] [CAMPILHO2011]

15
Figura 9- imagem a escala de cinzentos e respectivo hsitograma [BAUERMNN 2008]
Figura 10- Theresholding da imagem da figura 9 [BAUERMNN 2008]
2.4. Detector de contornos
A detecção de contornos é um dos processos mais utilizados em análise de imagem. A
definição correcta dos contornos das regiões e os seus limites, é de extrema importância para
a avaliação e classificação das mesmas. Este processo consiste na detecção de variações de
intensidade com recurso a operações de primeira e segunda derivadas. Estes operadores vão
actuar na imagem, calculando estas variações que serão traduzidas no seu gradiente. Como se
sabe que um contorno é normalmente definido por uma passagem de uma região para outra,
é de esperar que nesse local, exista uma variação mais acentuada da intensidade do que no
restante da imagem. Isto faz com que ao longo de um gradiente num dado local, o seu máximo
estará colocado na posição do contorno. [DOUGHERTY 2009] [CAMPILHO2011]
O cálculo do gradiente ao longo da imagem é realizado em duas direcções distintas. Por
um lado seguindo a variação da intensidade na direcção do eixo horizontal ( ) e por outro
lado seguindo-a na direcção do eixo vertical ( ). [CAMPILHO2011]

16
A magnitude do gradiente, ou seja, a grandeza da variação da intensidade é dada pela
seguinte equação:
A orientação do gradiente, ou seja, em que sentido está a ocorrer a passagem de uma
intensidade maior para uma menor, é dada pela seguinte expressão:
Na prática são utilizados operadores de gradiente para calcular uma aproximação do
gradiente ao longo da imagem. Um dos mais utilizados e conhecidos é o operador Sobel.
Os detectores de contornos normalmente obedecem a um conjunto de passos, até
chegarem à detecção final. [CAMPILHO2011]
Como os operadores de gradiente são muito sensíveis ao ruído, inicialmente começa-se
por se aplicar uma filtragem à imagem original de modo a diminuir a razão entre o sinal e o
ruído. Contudo é preciso ter cuidado, pois isto pode levar a um enfraquecimento dos pontos
contornos, que levaria a uma fraca definição destes. De seguida seria aplicado então um
operador de gradiente, de modo a fazer um realce nos locais com uma variação de intensidade
mais significativa. No final deste ponto, para fazer a detecção dos diversos pontos de
contorno, é necessário fazer uma selecção e etiquetagem destes, onde o método de
thresholding é uma escolha habitualmente muito usada. O processo de detecção de contornos
estaria finalizado com a localização do mesmo ao longo da imagem. [DOUGHERTY 2009]
2.5. Operadores morfológicos
O processamento morfológico de imagem, é uma ferramenta muito útil para
extrair ou modificar informação sobre a forma ou estrutura dos objectos contidos
numa imagem.
Existem muito operadores morfológicos, mas os dois mais fundamentais são a
dilatação e a erosão. Estes operadores actuam num alcance definido por cada
elemento estruturante. Para a aplicação destas operações, é necessária a criação de
um elemento estruturante, que representa uma forma espacial, que vai ser servir de
critério para as modificações ou detecções morfológicas das estruturas. [CAMPILHO
2011] [DOUGHERTY 2009]

17
Numa imagem binária a dilatação é genericamente uma operação que aumenta o
tamanho de determinadas estruturas na imagem (normalmente os pixéis brancos).
Isto é alcançado devido à aplicação do elemento estruturante na imagem. Se pelo
menos um pixel deste elemento coincidir com um pixel de uma estrutura na imagem,
incluindo o pixel em análise, o resultado desta operação local leva a que o pixel em
análise passe a ter também o valor da estrutura. Ou seja, os pixéis que faziam parte
das estruturas na imagem original, continuam iguais na imagem final, e alguns dos
pixéis do fundo da imagem original, passam a ser visualizados como pixéis das
estruturas na imagem final. Como estes pixéis modificados são aqueles que
normalmente se situam nas bordas dos pontos de contorno das estruturas, leva a que
as mesmas aumentem o seu tamanho, podendo até se fundir com outras. [CAMPILHO
2011] [DOUGHERTY 2009] [GONZALEZ 2001]
Figura 11 - Operações de Erosão e dilatação [CAMPILHO 2011]

18
Figura 12 - Operação de dilatação [DOUGHERTY 2009]
A erosão funciona de forma análoga à dilatação, logo genericamente leva a uma
diminuição do tamanho das estruturas, em função de um crescimento do fundo da
imagem. Se pelo menos um pixel do elemento estruturante coincidir com o fundo da
imagem original, então o resultado desta operação local leva a que na imagem de
saída este pixel tenha o valor do fundo. Ou seja, no final os pixéis que na imagem
original faziam parte do fundo, continuam a fazer parte deste, e alguns pixéis que
faziam parte das estruturas passam a fazer parte do fundo. Como os pixéis em causa
são normalmente aqueles que fazem parte dos contornos das estruturas, isto leva a
que diminua o tamanho destas, podendo mesmo existir divisão da estrutura em alguns
casos. [CAMPILHO 2011] [DOUGHERTY 2009]
Figura 13 - Operação de erosão [CAMPILHO 2011]
19
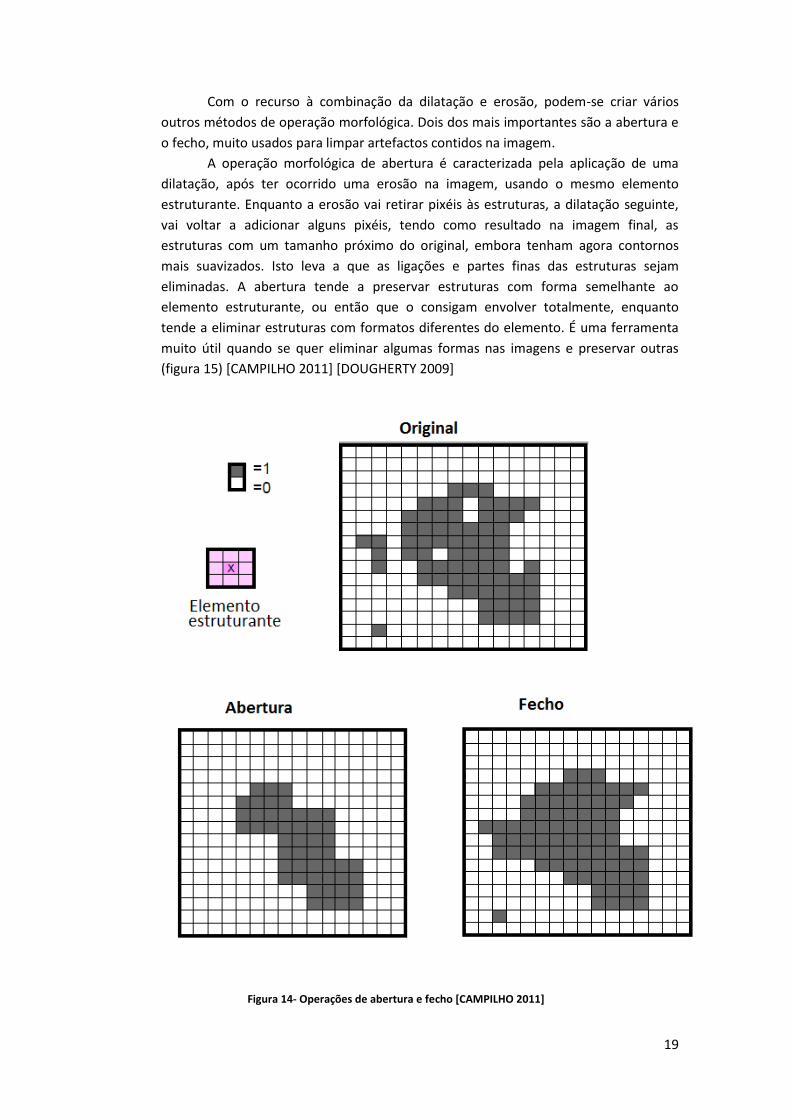
Com o recurso à combinação da dilatação e erosão, podem-se criar vários
outros métodos de operação morfológica. Dois dos mais importantes são a abertura e
o fecho, muito usados para limpar artefactos contidos na imagem.
A operação morfológica de abertura é caracterizada pela aplicação de uma
dilatação, após ter ocorrido uma erosão na imagem, usando o mesmo elemento
estruturante. Enquanto a erosão vai retirar pixéis às estruturas, a dilatação seguinte,
vai voltar a adicionar alguns pixéis, tendo como resultado na imagem final, as
estruturas com um tamanho próximo do original, embora tenham agora contornos
mais suavizados. Isto leva a que as ligações e partes finas das estruturas sejam
eliminadas. A abertura tende a preservar estruturas com forma semelhante ao
elemento estruturante, ou então que o consigam envolver totalmente, enquanto
tende a eliminar estruturas com formatos diferentes do elemento. É uma ferramenta
muito útil quando se quer eliminar algumas formas nas imagens e preservar outras
(figura 15) [CAMPILHO 2011] [DOUGHERTY 2009]
Figura 14- Operações de abertura e fecho [CAMPILHO 2011]

20
Figura 15- Operação de abertura [DOUGHERTY 2009]
O operador morfológico de fecho opera na ordem inversa da abertura, onde
uma erosão é aplicada numa imagem que já tenha sofrido dilatação, usando o mesmo
elemento estruturante. Apesar de também suavizar alguns contornos da estrutura, a
operação de fecho, leva a que pequenas distâncias entre estruturas ou pequenos
buracos ou pequenas falhas ao longo do seu contorno sejam preenchidos e passem a
fazer parte das mesmas. A figura 16 ilustra como o operador de fecho pode ser
utilizado para remover pequenos buracos numa imagem binária. [CAMPILHO 2011]
[DOUGHERTY 2009]
Figura 16 - Operação de fecho [DOUGHERTY 2009]

21
3. Metodologia
Todos procedimentos realizados no presente relatório, foram desenvolvidos com
recurso a imagens de ultra-som B-mode da carótida, obtidas no Hospital de S. João no âmbito
do projecto “Simulação computacional do sistema cardiovascular tendo em vista aplicação
hospitalar” e gentilmente cedidas pelo Professor Doutor João Tavares e Tatiana Silva.
Inicialmente foi desenvolvido um procedimento para a detecção automática de pontos
dentro do lúmen, ao longo do eixo horizontal. Este procedimento é baseado na hipoecogenia
(região escura) habitual do lúmen [ROCHA 2010]. Procura-se assim ao longo da imagem, o
local com a maior homogeneidade e sucessão de pixéis representativos dessa hipoecogenia.
Esse local é considerado como o mais provável a que a sua recta, paralela ao eixo horizontal,
esteja contida no lúmen.
Figura 17- Visualização da recta contida no lúmen
Esta recta é considerada o local de partida para a procura dos pontos que definem os
limites do lúmen, ou seja os limites da parede Íntima da carótida. Partido do princípio que esta
recta, contida no lúmen, nunca está sobreposta nos seus limites, realiza-se uma busca na
vertical em ambos os sentidos, superior e inferior. Assim para cada ponto contido na recta
anteriormente definida, estarão outros dois pontos associados, do limite inferior e superior da
íntima em relação ao próprio ponto. Na prática o algoritmo estaria a afastar-se verticalmente
do ponto em questão da recta até encontrar algum ponto da íntima.
22
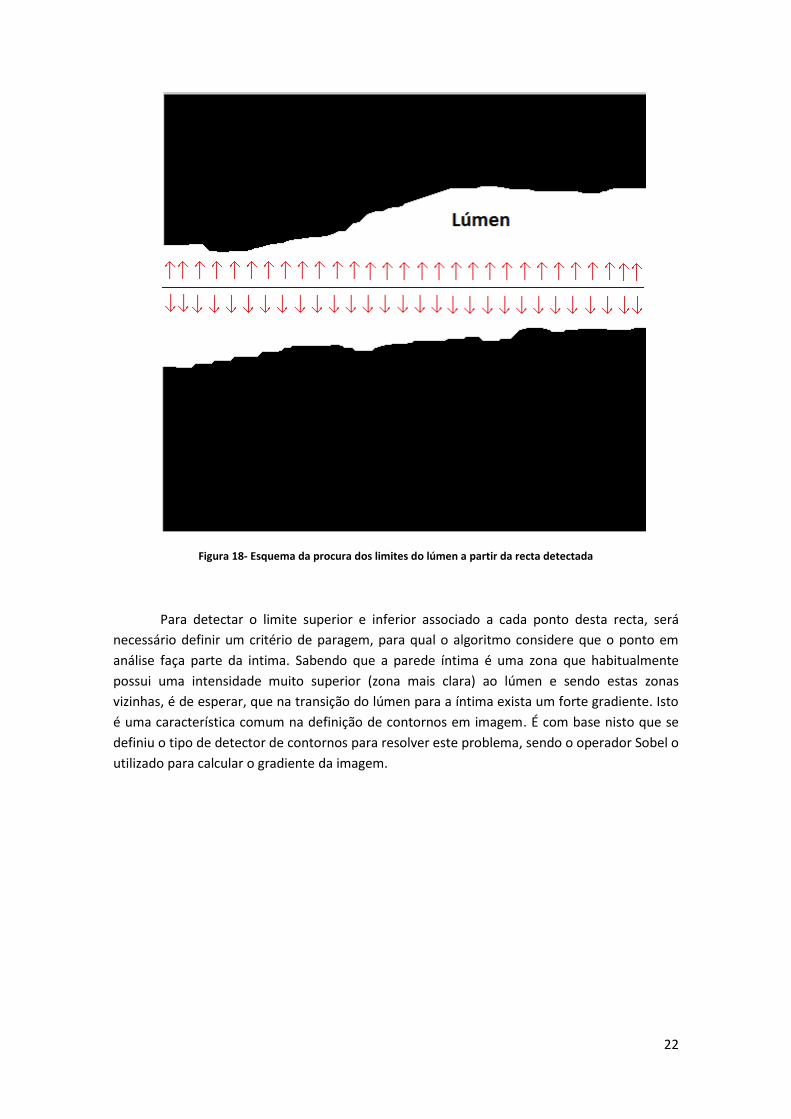
Figura 18- Esquema da procura dos limites do lúmen a partir da recta detectada
Para detectar o limite superior e inferior associado a cada ponto desta recta, será
necessário definir um critério de paragem, para qual o algoritmo considere que o ponto em
análise faça parte da intima. Sabendo que a parede íntima é uma zona que habitualmente
possui uma intensidade muito superior (zona mais clara) ao lúmen e sendo estas zonas
vizinhas, é de esperar, que na transição do lúmen para a íntima exista um forte gradiente. Isto
é uma característica comum na definição de contornos em imagem. É com base nisto que se
definiu o tipo de detector de contornos para resolver este problema, sendo o operador Sobel o
utilizado para calcular o gradiente da imagem.

23
Figura 19- Magnitude do gradiente após aplicação do operador Sobel
A partir recta definida, é definida também uma ROI da imagem. Apenas se trabalhará
com dados da imagem que estejam contidos dentro de uma distância máxima vertical em
relação a essa recta (tanto para cima, como para baixo da recta). Assume-se que o lúmen da
carótida nunca sai fora dessa ROI, sendo portanto possível ignorar tudo que está fora dessa
zona.
Figura 20- Visualização da ROI criada a partir da recta
Devido à elevada presença de ruído nas imagens de ultra-som, há que ter algum
cuidado com a aplicação do gradiente, pois facilmente a presença de ruído no lúmen, pode
originar uma zona de gradiente considerável no Operador Sobel, levando a que o algoritmo
defina mal o limite da parede. Para evitar esta situação é aplicado primeiramente um
24
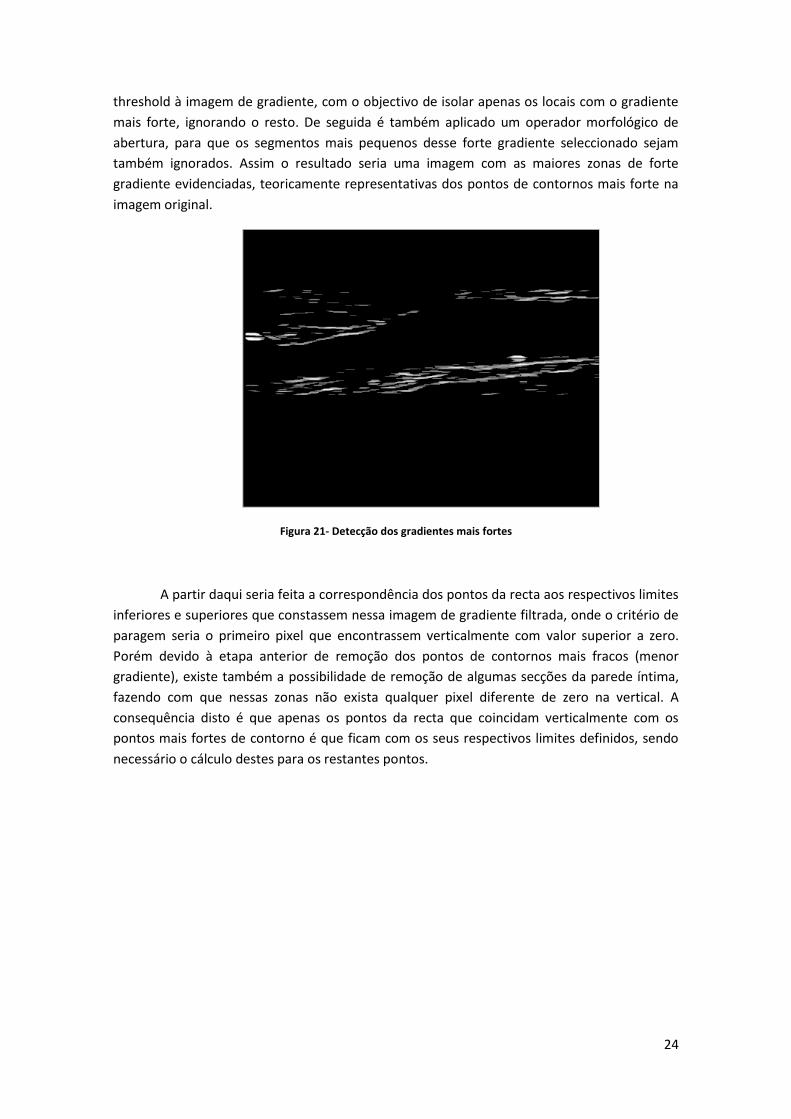
threshold à imagem de gradiente, com o objectivo de isolar apenas os locais com o gradiente
mais forte, ignorando o resto. De seguida é também aplicado um operador morfológico de
abertura, para que os segmentos mais pequenos desse forte gradiente seleccionado sejam
também ignorados. Assim o resultado seria uma imagem com as maiores zonas de forte
gradiente evidenciadas, teoricamente representativas dos pontos de contornos mais forte na
imagem original.
Figura 21- Detecção dos gradientes mais fortes
A partir daqui seria feita a correspondência dos pontos da recta aos respectivos limites
inferiores e superiores que constassem nessa imagem de gradiente filtrada, onde o critério de
paragem seria o primeiro pixel que encontrassem verticalmente com valor superior a zero.
Porém devido à etapa anterior de remoção dos pontos de contornos mais fracos (menor
gradiente), existe também a possibilidade de remoção de algumas secções da parede íntima,
fazendo com que nessas zonas não exista qualquer pixel diferente de zero na vertical. A
consequência disto é que apenas os pontos da recta que coincidam verticalmente com os
pontos mais fortes de contorno é que ficam com os seus respectivos limites definidos, sendo
necessário o cálculo destes para os restantes pontos.

25
Figura 22- Selecção dos pontos mais proximos da recta verticalmente
Para completar a definição dos limites do lúmen, primeiramente são aplicados
operadores morfológicos de fecho. Estes operadores vão permitir que as zonas de
descontinuidade mais pequenas entre segmentos da parede íntima, já definidos, se unam a
estes, ficando assim também definidos e alinhavados com os respectivos pontos da recta.
Figura 23- Correcção das descontinuídades pequenas com recurso a operadores morfológicos
Ficam então por definir as zonas de maior descontinuidade. A solução usada para
resolver este problema, é um recurso a uma interpolação, que preenche essas zonas, baseada

26
na posição do último ponto definido da parede íntima e o próximo. Por outras palavras, os
extremos ao longo do eixo horizontal que caracterizam essa secção, são ligados através da
criação de uma recta por interpolação, que os liga. No final desta interpolação, são utilizados
mais uma vez operadores morfológicos de fecho para unir todos os pontos criados e definidos.
Figura 24- interpolação das descontinuidades maiores
Após conclusão destes passos todos é feita uma revisão pelos pontos todos definidos,
podendo existir ajustes, caso se detecte alguma falha neles. Um problema possível de
acontecer, é encontrarem-se pontos sucessivos com uma grande variação vertical (ver figura
25).. Como se sabe que é morfologicamente impossível a existência de tal variação em tão
curto espaço, opta-se por eliminar parte desse traçado e fazer uma interpolação que ligue o
ponto mais a frente, tornando mais suave a curvatura. Outro problema que pode acontecer é a
falta de definição do inicio do limite do lúmen (ver figura 25). Para isto faz-se outra
interpolação desde o primeiro valor do limite até ao seu valor reflectido na origem do eixo
vertical. Mais uma vez no final desta revisão e caso haja alguma alteração serão aplicados
operadores morfológicos de fecho para unir os novos ajustes.
27
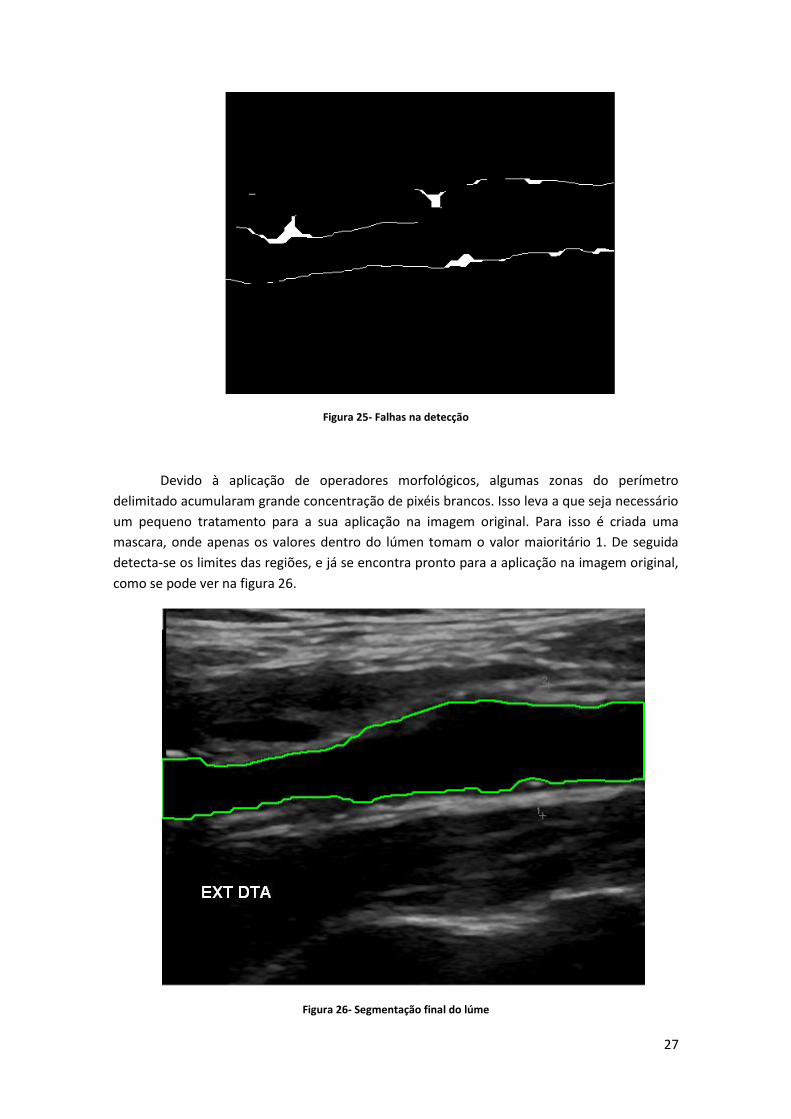
Figura 25- Falhas na detecção
Devido à aplicação de operadores morfológicos, algumas zonas do perímetro
delimitado acumularam grande concentração de pixéis brancos. Isso leva a que seja necessário
um pequeno tratamento para a sua aplicação na imagem original. Para isso é criada uma
mascara, onde apenas os valores dentro do lúmen tomam o valor maioritário 1. De seguida
detecta-se os limites das regiões, e já se encontra pronto para a aplicação na imagem original,
como se pode ver na figura 26.
Figura 26- Segmentação final do lúme
28
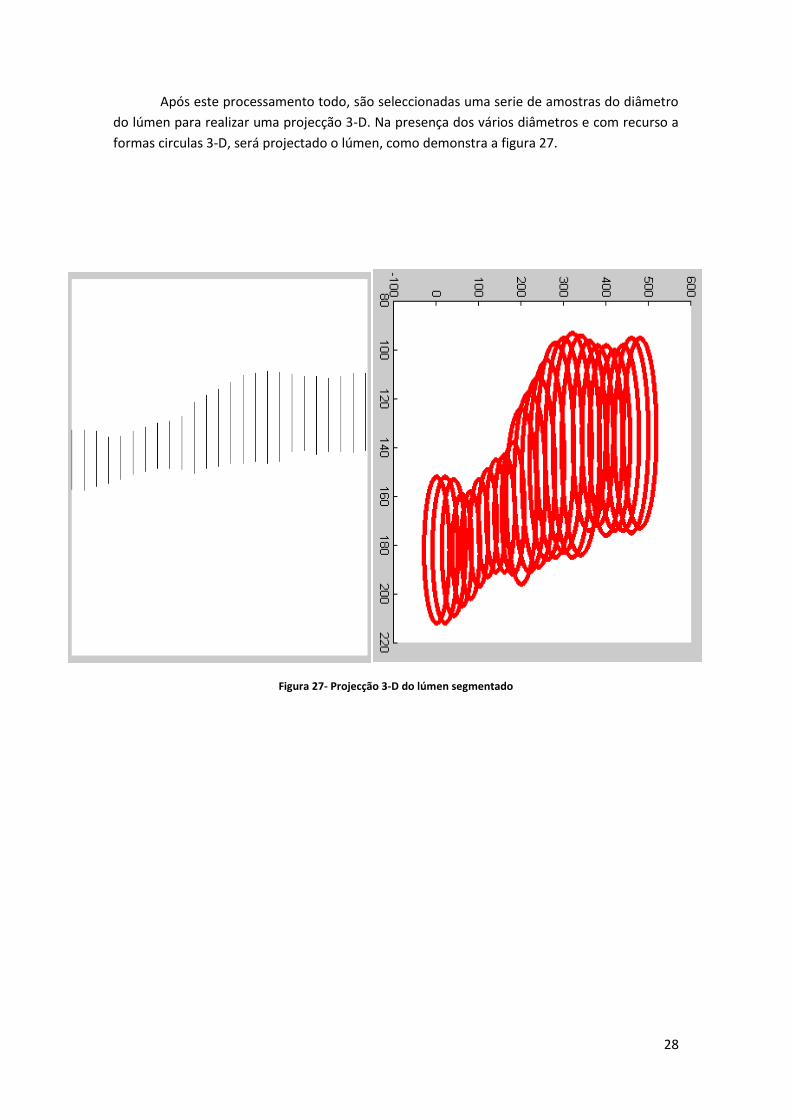
Após este processamento todo, são seleccionadas uma serie de amostras do diâmetro
do lúmen para realizar uma projecção 3-D. Na presença dos vários diâmetros e com recurso a
formas circulas 3-D, será projectado o lúmen, como demonstra a figura 27.
Figura 27- Projecção 3-D do lúmen segmentado

29
4. Resultados
4.3. Dataset
Como as imagens, no âmbito do Projecto previamente referido, foram obtidas numa
fase preliminar e de teste, a quantidade destas não é muito significativa, daí o
presente trabalho ter sido desenvolvido apenas sobre três imagens B- mode da
carótida, com o lúmen relativamente óbvio.
Figura 28 - Imagens originais

30
4.4. Cálculo da recta no interior do lúmen
O método explicado previamente na metodologia, para a detecção automática de pontos
dentro do lúmen em forma de uma recta foi aplicado a todas as imagens, sendo os resultados
visíveis a baixo.
Figura 29 - Rectas dentro do lúmen
Para todas as imagens foi possível a obtenção da recta desejada, sem que o ruído contido
nelas tenha prejudicado a sua obtenção, fazendo também uso da boa disposição espacial do
lúmen das mesmas, visto que estão todos sensivelmente orientados pelo eixo horizontal.

31
4.5. Operador Sobel
O operador sobel aplicado às imagens originais, e o calculo referente à magnitude do
gradiente apurado, são reflectidos nas imagens a baixo.
Figura 30- Operador Sobel aplicado às imagens
Como se pode verificar, a presença de ruído ao longo da imagem, nota-se muito no cálculo
do gradiente, o que justifica as diversas operações seguintes para a selecção dos pontos de
gradiente significante para a detecção dos limites do lúmen.

32
4.6. ROI (Região de interesse)
Partindo da recta definida anteriormente, os parâmetros de definição da ROI, foram
aplicados a todas as imagens e os resultados podem ser visualizados a baixo.
Figura 31- Definição da ROI de cada imagem
Como se pode verificar, todos os lúmens teoricamente visualizados, ficaram contidos na
ROI resultante do processamento.

33
4.7. Detecção dos pontos de gradiente mais fortes e de
maior dimensão
Figura 32 - Detecção dos pontos de gradiente mais significativos
Grande parte do ruído e informação que não interessa na definição dos limites do lúmen,
foi eliminando, começando-se agora a deslumbrar-se melhor alguns dos seus contornos.
Porém pode-se ver que alguns dos limites verdadeiros do lúmen foram também eliminados,
devido à situação de remoção da informação anterior.
Continuando o processamento das imagens resultantes, é agora feito um processamento
vertical ponto a ponto na recta, onde se regista, a localização do primeiro valor do gradiente
que se encontra, sendo os restantes ignorados. Este processamento é feito de forma
independente nos sentidos superior e inferior da recta. Os resultados podem-se verificar nas
imagens a baixo.

34
Figura 33- Selecção dos pontos do gradiente mais próximos da recta
Como se pode ver a detecção preliminar dos pontos de contornos mais fortes na imagem
está concluída, possuindo no entanto várias descontinuidades de diversos tamanhos.
Para resolver o problema nas descontinuidades mais pequenas, foi aplicado o
operador morfológico de fecho definido (figura 32).
35
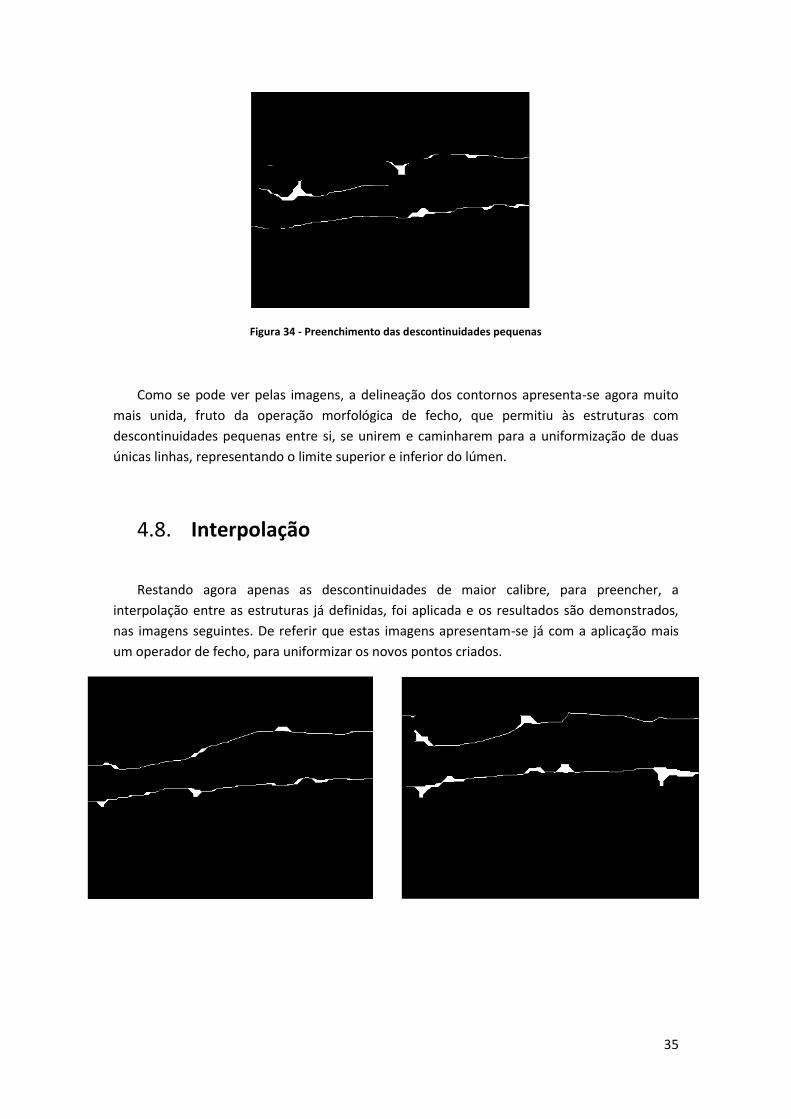
Figura 34 - Preenchimento das descontinuidades pequenas
Como se pode ver pelas imagens, a delineação dos contornos apresenta-se agora muito
mais unida, fruto da operação morfológica de fecho, que permitiu às estruturas com
descontinuidades pequenas entre si, se unirem e caminharem para a uniformização de duas
únicas linhas, representando o limite superior e inferior do lúmen.
4.8. Interpolação
Restando agora apenas as descontinuidades de maior calibre, para preencher, a
interpolação entre as estruturas já definidas, foi aplicada e os resultados são demonstrados,
nas imagens seguintes. De referir que estas imagens apresentam-se já com a aplicação mais
um operador de fecho, para uniformizar os novos pontos criados.

36
Figura 35- Resultados da interpolação
Pode-se visualizar que através da interpolação, foi possível preencher os espaços
existentes entre as estruturas e aumentar a uniformização das linhas. Porém algumas falhas
ocorrem e são facilmente visualizadas, como é o caso das descontinuidades no inicio do eixo
horizontal, ou então da sobreposição de mais que um limite ao longo do eixo vertical
4.9. Correcção de falhas
As imagens resultantes do processo anterior serão submetidas a uma inspecção, com o
objecto de corrigir falhas caso estas existam. Se existirem essa falha será eliminada, com
recurso ao método explicado na metodologia para esse efeito.

37
Figura 36- correcção de falhas
Pode-se visualizar que para a primeira imagem não ocorre nenhuma modificação em
relação à etapa anterior, o que quer dizer que não foi encontrada nenhuma falha, podendo-se
comprovar o mesmo visualmente. Nas restantes duas imagens, onde de facto de visualizavam
falhas, foram corrigidas e o resultado final da detecção dos pontos de limite do lúmen
finalizado.
Devido às operações morfológicas efectuadas, algumas zonas dos limites do lúmen
encontram-se com grandes concentrações de pixéis de valor unitário 1. Apesar de em nada
afectar o resultado, dado que só o primeiro pixel de cada sentido vertical é que conta, torna
difícil a sua aplicação directa, na imagem original, para melhor visualização. Para contornar isto
foi criada uma mascara das imagens obtidas, onde posteriormente se retira apenas a
localização dos pontos de contorno.

38
Figura 37 - mascaras da segmentação
4.10. Imagem final
Para melhor visualização dos contornos, estes foram aplicados à imagem original com uma
cor diferente (verde) e os resultados podem ser visualizados nas figuras a baixo
Figura 38 - Imagem original com os contornos detectados a verde e comparação
39
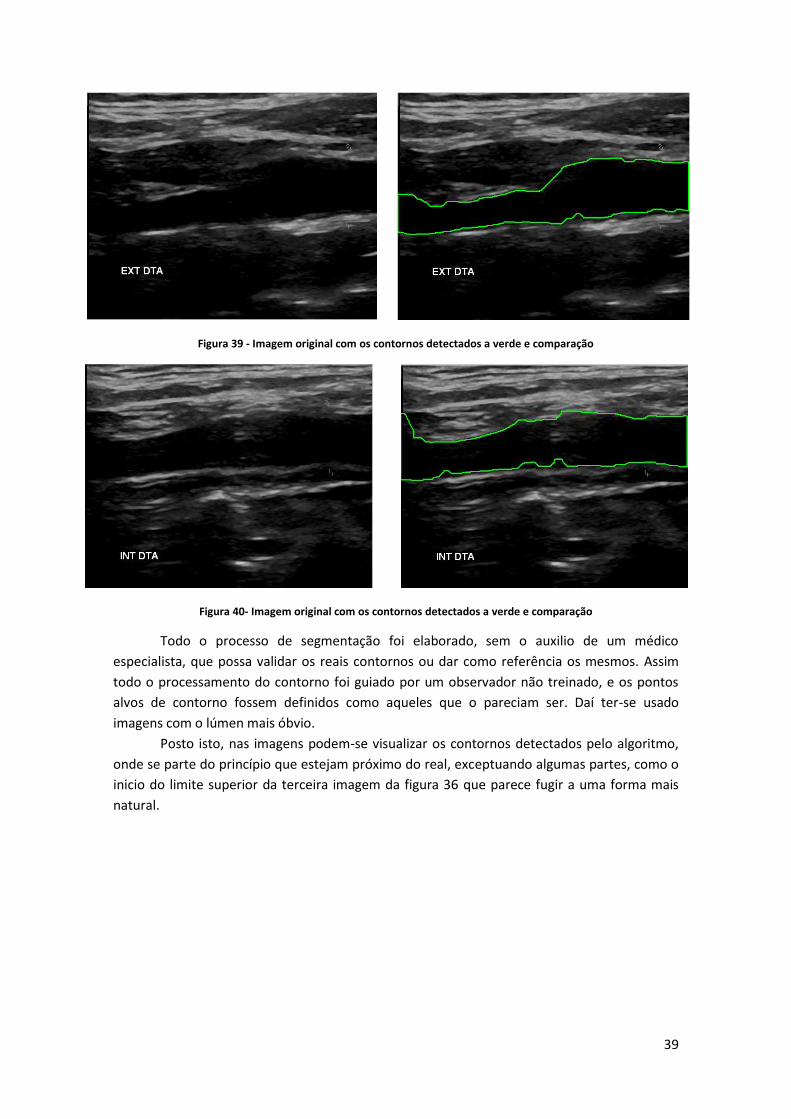
Figura 39 - Imagem original com os contornos detectados a verde e comparação
Figura 40- Imagem original com os contornos detectados a verde e comparação
Todo o processo de segmentação foi elaborado, sem o auxilio de um médico
especialista, que possa validar os reais contornos ou dar como referência os mesmos. Assim
todo o processamento do contorno foi guiado por um observador não treinado, e os pontos
alvos de contorno fossem definidos como aqueles que o pareciam ser. Daí ter-se usado
imagens com o lúmen mais óbvio.
Posto isto, nas imagens podem-se visualizar os contornos detectados pelo algoritmo,
onde se parte do princípio que estejam próximo do real, exceptuando algumas partes, como o
inicio do limite superior da terceira imagem da figura 36 que parece fugir a uma forma mais
natural.
40
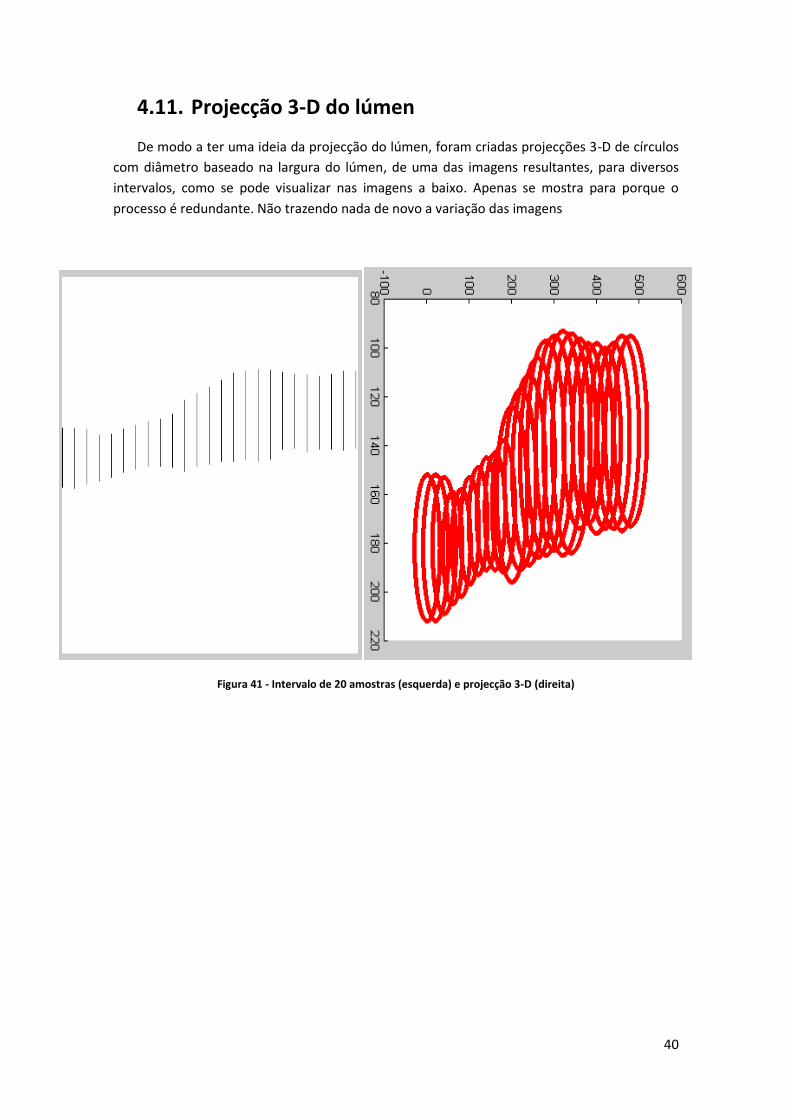
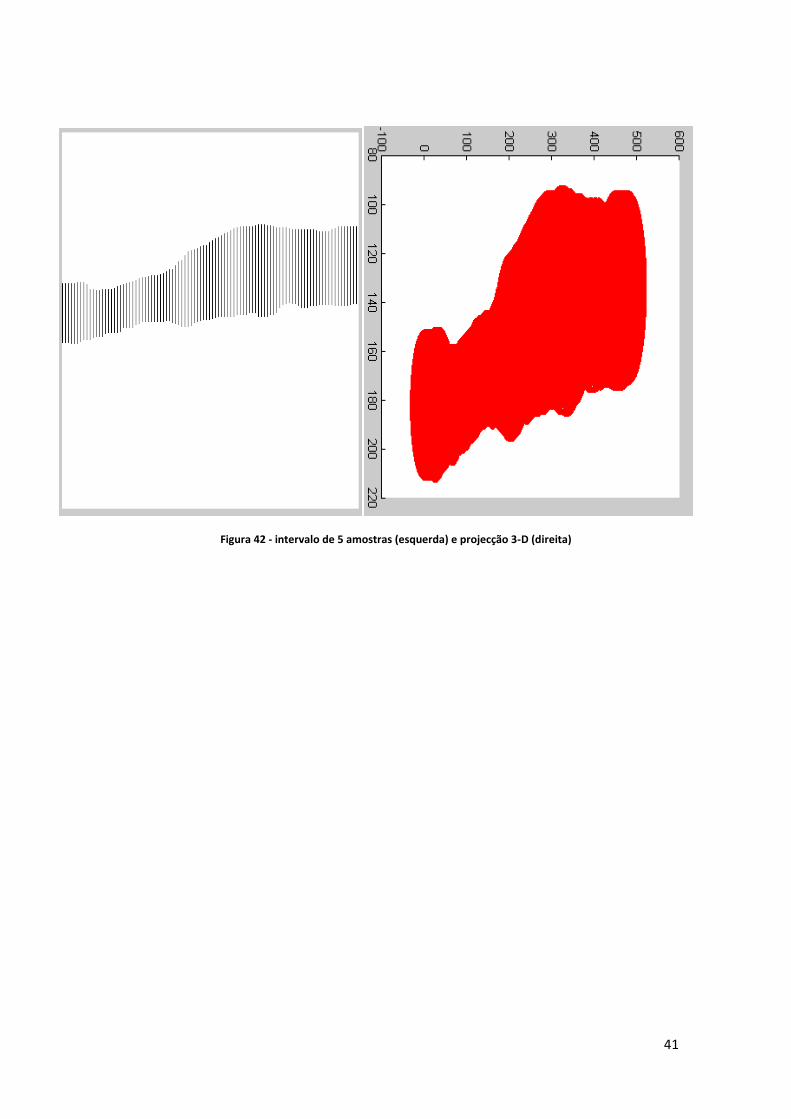
4.11. Projecção 3-D do lúmen
De modo a ter uma ideia da projecção do lúmen, foram criadas projecções 3-D de círculos
com diâmetro baseado na largura do lúmen, de uma das imagens resultantes, para diversos
intervalos, como se pode visualizar nas imagens a baixo. Apenas se mostra para porque o
processo é redundante. Não trazendo nada de novo a variação das imagens
Figura 41 - Intervalo de 20 amostras (esquerda) e projecção 3-D (direita)
41
Figura 42 - intervalo de 5 amostras (esquerda) e projecção 3-D (direita)

42
5. Conclusão
Para o conjunto de imagens disponível, e apesar de não ser possível fazer uma
verificação dos contornos, tendo em conta uma referência médica, pode-se dizer que os
resultados foram satisfatórios, por várias razões.
Primeiramente e como era de esperar uma imagem ultrasom é de muito difícil
trabalho, devido ao imenso ruído que contém. Nesta primeira abordagem ao tema, foi possível
ver muitas dessas dificuldades na prática e contorná-las à medida que apareciam. A detecção
automática de pontos dentro do lúmen, que por si só já constitui um desafio, foi conseguida
com sucesso através da obtenção de uma recta dentro do lúmen. Porém beneficiou do
alinhamento horizontal do lúmen na imagem. Seria benéfico no futuro que esta recta possa
tomar outras direcções de forma a adaptar-se ao eixo criado por cada lúmen. Também para a
zona de bifurcação teriam de ser tomados novos cuidados, pois seria no mínimo necessário
criar 3 rectas distintas, uma para cada direcção apresentada na zona de pré e pós bifurcação
em forma geral de “Y”.
Na parte do detector de contornos, produziu bons resultados, para os gradientes
fortes que seleccionou, ajudando a eliminar muito ruído e informação que não interessava.
Apesar disto o uso de outro tipo de detector de contornos, mais específico para tratamento de
imagens de ultra-som, como o ICOV [ROCHA 2010] poderia trazer algumas melhorias teóricas,
o que seria bom no futuro se implementar e comprovar.
A resolver o problema das descontinuidades e remoção de artefactos, os operadores
morfológicos mostraram-se bastante eficazes, produzindo bons resultados sem alterações
significativas na disposição dos limites previamente definidos. Já as interpolações realizadas,
mostraram ser um método satisfatório para o preenchimento de descontinuidades mais
significativas. Porém quando maior a descontinuidade maior será o erro delas, já que se
traduzem numa ligação em linha recta entre os pontos extremos, e como se sabe não
representa uma forma morfológica natural. A melhor definição dos contornos pelo detector
poderá melhorar isto, encurtando as descontinuidades e minimizando os erros. A solução ideal
seria chegar a tal ponto da detecção de contornos, que a interpolação não seria mais
necessária.
Verificou-se que a partir de um lúmen segmentado facilmente se poderá fazer uma
projecção 3-D do mesmo, sendo que quando menor o intervalo de amostragem dos diâmetros,
mais fidedigno ficará. Porém o método de usar círculos para projectar em 3-D uma dada
secção do lúmen pode ser melhorado através da criação de algum polinómio representativo de
uma forma morfologicamente mais natural e mais aproximada de um lúmen real que um
simples circulo, aproximando-se ainda mais da realidade.
Em suma o trabalho realizado deixou boas perspectivas para o futuro, e com vários
caminhos novos a poder serem tomados e melhoramentos estudados.

43
Referências Bibliográficas
BAUERMNN, Gabriela (2008)- Threshold - Processamento de imagens na prática. Image Survey.
Consultado a 13 de Maio de 2011 http://www.imagesurvey.com.br/2008/09/threshold-simples-e-
funciona-mas-nao-para-todos/
BOVIK, AL(2009)- The essential Guide to image Processing.
Elsevier. ISBN:9780123744579
CAMPILHO, Aurélio (2011) - Image Segmentation (part1). Biomedical Image Analysis. Master Degree on
Biongineering. Acetato 8
CAMPILHO, Aurélio (2011) – Edge and Corner Detection. Biomedical Image Analysis. Master Degree on
Biongineering.
CAMPILHO, Aurélio (2011) – Morphological imaging Processing. Biomedical Image Analysis. Master
Degree on Biongineering.
DRAKE, Richard L., VOGL, Wayne, MITCHELL, Adam W.M. (2004) - Gray's Anatomy for
Students.Churchill Livingstone.Elsevier Health Sciences.ISBN 13:9780443066122
DOUGHERTY, Geoff (2009) – Digital Image Processing for Medical Applications.
Cambridge University PRESS. ISBN:9780511533433
GONZALEZ, Rafael C.; WOODS, Richard E.- Digital image Processing (2001) – 2nd Edition.
Prentice Hall. ISBN:0201180758
MAURITS, N.M. ; LOOTS, G.E (2005)- The influence of vessel wall elasticity and peripheral
resistanc on the carotid artery flow wave form: A CFD model compare to in vivo ultrasound
measurements
MOORE, Keith L.; DALLEY, Arthur F. (2006) - Clinically Oriented Anatomy.5th
Edition.Lippincott Williams & Wilkins. ISBN 13:9780781736398
NETTER, F. H. (2002) - Atlas of Human Anatomy.3rd Edition. Saunders.
ROCHA, Rui (2010) Segmentation of the Carotid Artery
in Ultrasound Images. Biomedical Image Analysis. Master Degree on Biongineering.
RANGAYYAN, Rangaraj M. (2005) – Biomedical Image Analysis.
CRC PRESS. ISBN:0849396956
SALADIN, Kenneth S. (2003) - Anatomy & Physiology: The Unity of Form and Function. 3th
Edition. ISBN: 0072919264
SEELEY, Rod R., STEPHENS, Trent D., TATE, Philip (2004) – Anatomia e Fisiologia- 6º edição.
Loures: Lusociência – Edições Técnicas e Científicas, Lda. ISBN 972-8930-07-0