
Trabalho De Conclusão de Curso -...
33
INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA DE SÃO PAULO. CAMPUS SÃO JOSÉ DOS CAMPOS Cassiana Aparecida Vilela Karina Teixeira Medeiros Murillo Joseph Piazza DESENVOLVIMENTO DE SOFTWARE EM LABVIEW PARA CONTROLE DE UM BRAÇO ROBÓTICO E UMA BASE MOVEL. Trabalho de Conclusão de Curso apresentado ao Instituto Federal de Educação, Ciência e Tecnologia de São Paulo – Campus São José dos Campos, como requisito para obtenção do Título de Técnico em Automação Industrial sob orientação do Professor Dr Valdeci Donizete Gonçalves. São José dos Campos 2014
Transcript of Trabalho De Conclusão de Curso -...

INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA DE
SÃO PAULO. CAMPUS SÃO JOSÉ DOS CAMPOS
Cassiana Aparecida Vilela Karina Teixeira Medeiros
Murillo Joseph Piazza
DESENVOLVIMENTO DE SOFTWARE EM LABVIEW PARA CONTROLE DE UM BRAÇO ROBÓTICO E UMA BASE MOVEL.
Trabalho de Conclusão de Curso apresentado ao Instituto Federal de Educação, Ciência e Tecnologia de São Paulo – Campus São José dos Campos, como requisito para obtenção do Título de Técnico em Automação Industrial sob orientação do Professor Dr Valdeci Donizete Gonçalves.
São José dos Campos 2014

ii
BANCA EXAMINADORA
Trabalho de Conclusão de Curso (TCC) defendido e aprovado em
18 de Junho de 2014, pela banca examinadora constituída pelos professores:
_______________________________________________
Prof. Valdeci Donizete Gonçalves
Orientador
_______________________________________________
Prof. Luiz Gustavo Oliveira
Co-orientador
_______________________________________________
Danilo Eduardo Braga
Engenheiro

iii
“O homem fraco espera pela oportunidade; o homem comum agarra-a quando ela vem; o
grande cria-a como ele a quer.” Adolf Tàrneros

iv
Agradecimentos
Primeiramente, agradecemos a Deus por todas as oportunidades que são
colocadas em nossas vidas, sendo que esta, de estar se formando, é apenas mais
uma de muitas outras bênçãos recebidas por ele.
Agradecemos com grande orgulho a nossa família, pois ela tem se dedicado
nos ajudando a conquistar essa vitória. Em todos os momentos pudemos contar com
o apoio, a disciplina e os conselhos que nos fizeram vencer.
Ao orientador, Valdeci Donizete Gonçalves, por acreditar em nossa
capacidade, valorizar o nosso trabalho e contribuir para o nosso crescimento
pessoal, intelectual e por ter dedicado uma parte de seu tão disputado tempo à
orientação desse trabalho, pela atenção dispensada em diversos momentos da
escolha e posterior delimitação do tema, pelos conselhos.
.
Agradecemos em especial, ao técnico de laboratório, engenheiro Danilo
Eduardo Braga, pelo auxílio, companhia, disposição, paciência e contribuição.
Prestamos nossos agradecimentos aos amigos de turma, companheiros em
momentos de desespero e trabalho árduo. Também aos nossos professores , que
promoveram a orientação necessária para concluir esta vitória hoje. Estes não só
transmitiram o conhecimento, mas também lições para a vida.
À banca examinadora, pelo convite aceito na apreciação deste trabalho.

v
SUMÁRIO LISTA DE TABELAS .................................................................................................. vii
LISTA DE FIGURAS ..................................................................................................viii
LISTA DE ABREVIATURAS E SÍMBOLOS ................................................................. ix
RESUMO ..................................................................................................................... x
ABSTRACT ................................................................................................................. 1
1. INTRODUÇÃO ........................................................................................................ 2
2. OBJETIVO .............................................................................................................. 4
3. REVISÃO BIBLIOGRÁFICA .................................................................................... 5
3.1. O LabVIEW ....................................................................................................... 5
3.2. Interface do usuário .......................................................................................... 6
3.3. Conectividade ................................................................................................... 6
3.4. Redução de custos ........................................................................................... 7
3.6. Múltiplas Plataformas ........................................................................................ 7
3.7. Múltiplas Plataformas ....................................................................................... 7
3.8. O motor de corrente continua ........................................................................... 7
3.9. Reverter Polaridade .......................................................................................... 8
3.10. Braço Robótico ............................................................................................... 8
4. MATERIAIS E MÉTODOS ....................................................................................... 9
4.1. Materiais ........................................................................................................... 9
4.2. Métodos ............................................................................................................ 9
4.2.1. Controle do Motor e Configuração dos canais de I/O ............................... 9
4.2.2. Diagrama de blocos ................................................................................. 10
4.2.3. Painel Frontal ........................................................................................... 12
4.2.4. Placa de aquisição National Instruments.................................................. 12
4.2.4. Plataforma LabVIEW ............................................................................... 13
4.2.5. Transmissão de dados via usb ................................................................ 13
4.2.6. Descrição do funcionamento da Base Móvel ........................................... 14
4.2.7. Descrição do funcionamento do Braço Robótico ...................................... 15

vi
5. RESULTADOS E DISCUSSÕES ..................................................................................... 18
6. CONCLUSÃO ................................................................................................................. 22
7. REFERÊNCIAS BIBLIOGRÁFICAS .............................................................................. 23

vii
LISTA DE TABELAS Tabela 1 Parâmetros de rotação.................................................................... 4
Tabela 2. Parâmetros de direção................................................................... 7
viii
LISTA DE FIGURAS
Figura 1 - DAQ............................................................................................... 9
Figura 2 - Diagrama de Blocos da Base Móvel............................................. 10
Figura 3 - Diagrama de Blocos do Braço Robótico........................................ 11
Figura 4 - Painel Frontal do Programa LabVIEW..................................... 12
Figura 5 - Placa de aquisição NI USB 6212.................................................. 13
Figura 6 - Velocidade da transmissão de dados via USB.............................. 14
Figura 7 - Simulação da direção de dois motores......................................... 18
Figura 8 - Integração entre ponte H, a placa NI com a base móvel.............. 19
Figura 9 - Integração entre ponte H, a placa NI com o braço robótico........ 19
Figura10- Ligações da Base Móvel............................................................... 21
Figura 11 - Ligações do Braço Robótico........................................................ 21

ix
LISTA DE ABREVIATURAS E SÍMBOLOS
DAQ -
LabVIEW -
NI -
VI –
USB -
GND-
Data Acquisition Laboratory Virtual Instrument Engineering Workbech National Instruments Virtual Instrument Universal Serial Bus Entrada de alimentação negativa

x
RESUMO
Neste trabalho é apresentada a elaboração de um sistema de controle de uma base
móvel e de um braço robótico através de uma comunicação via USB com a placa
National Instruments 6212.O proposito deste trabalho é a criação de um software em
Labview para controlar um braço robótico e um carro robótico, estes sistemas
poderão operar juntos e separadamente Com resultado foi possível determinar a
eficácia do sistema desenvolvido com o modulo de aquisição utilizado.
Palavras chave: Labview, Instrumentação Virtual, Braço robótico, Base Móvel.

1
ABSTRACT
In this work the development of a control system of a mobile base and a robot arm is
presented through a communication via USB with the National Instruments board
6212.O purpose of this work is to create a software in Labview to control a robotic
arm and a robotic car, these systems can operate together and separately with the
result it was possible to determine the effectiveness of the developed system with the
acquisition module used.
Keywords: Labview, Virtual Instrumentation, Robotic Arm, Mobile Base.
2
1. INTRODUÇÃO
As inovações no desenvolvimento dos instrumentos tecnológicos têm
apresentado avanços significativos nos últimos anos, com a necessidade de realizar
tarefas eficientes e precisas. O uso de robôs contribui para substituir a ação humana
em tarefas difíceis ou até mesmo impossíveis. Neste sentido, a instrumentação
virtual vem crescendo cada vez mais presente no cotidiano, sendo eles dispositivos
de controle capazes de executa-las sem grandes riscos. As principais habilidades
necessárias em controle incluem modelagem, projeto do controlador e do sistema de
controle.
Após as análises das configurações dos modelos dos robôs, foi definido o
modelo de estrutura, desenvolveu-se um software em ambiente LabVIEW. LabVIEW
foi à linguagem gráfica de programação escolhida para o desenvolvimento do
software, pois possui grande potencial para resolver satisfatoriamente o problema
proposto e ajuda a tornar o código mais legível e modificável através da
manipulação de seus blocos funcionais além de possuir expansão para futuros
projetos ele realiza medições externas utilizando-se de técnicas e algoritmos de
processamento de sinais.
Este projeto é divido em quatro seções, sendo elas estrutura física do braço,
estrutura física da base móvel, elétrica e programação. Na realização do Trabalho de
Conclusão de Curso (TCC) fora proposto a nossa equipe o desenvolvimento da
programação, no qual o software permitirá a ampliação dele, de forma que ele possa
interagir com o ambiente externo através de sensores posicionados na garra do
braço robótico. Estes robôs possuem um controle de malha aberta, mas poderá ser
expandido para malha fechada, desde que seja inseridos um enconder para medir a
posição dos braços e dar o valor de referência para o processador, para a aquisição
de dados a comunicação é feita via USB, através da placa de aquisição NI 6212,o
controle é feito por um programa que é executado no próprio computador, a base
móvel poderá ser acionado manualmente.

3
O conceito básico do programa consiste em apresentar uma interface simples
e autoexplicativa que seja capaz de guiar o usuário através dos procedimentos de
controle e monitoramento do sistema.

4
2. OBJETIVO
O objetivo principal deste trabalho é desenvolver um sistema de controle e
monitoração para dois protótipos de robôs sendo eles uma base móvel e um braço
robótico, através da ferramenta de desenvolvimento LabVIEW ,sendo ele aplicado
em tarefas insalubres. Esse estudo foi também desenvolvido com alguns objetivos específicos, tais como:
• Estudar o funcionamento e os componentes experimentais;
• Especificar e desenvolver um programa de controle em plataforma LabVIEW
para a interface do computador com os elementos;
• Fazer testes experimentais.

5
3. REVISÃO BIBLIOGRÁFICA
3.1.LabVIEW
Segundo Sumathi e Surekha (2007), os primeiros programas de controle
instrumental, eram escritos em BASIC, pois era a linguagem dominante utilizada nos
controladores dedicados à instrumentação. Isso implicava na necessidade de
engenheiros e outros usuários se tornarem programadores antes de se tornarem
usuários deste tipo de instrumento, portanto era difícil explorar o potencial que a
instrumentação computadorizada poderia fornecer.
Entretanto, um grande marco na história de instrumentação virtual aconteceu
em 1986, quando a National Instruments introduziu o LabVIEW 1.0 em uma
plataforma de computador. Com ele, foram introduzidas a interface gráfica do
usuário e a programação visual em instrumentação computadorizada, juntando a
simplicidade da interface operacional do usuário à capacidade dos computadores.
Hoje, o computador é a plataforma na qual a maioria das medições é feita, e a
interface gráfica do usuário tornou as medições mais amigáveis. Como resultado, a
instrumentação virtual possibilitou a redução do custo de instrumentos. Como o
instrumento virtual depende muito pouco de hardware dedicado, um cliente pode
hoje utilizá-lo em seu próprio computador, enquanto os fabricantes de instrumentos
dedicados suprem apenas o que não é facilmente acessível ao usuário no mercado
convencional. LabVIEW (Laboratory Virtual Instruments Engeneering Workbench) é
uma linguagem de desenvolvimento de aplicativos assim como a linguagem C,
46Basic ou Delphi. A diferença marcante entre a linguagem de programação gráfica
(G) utilizada pelo LabVIEW e as outras convencionais é a forma de programação.
Embora ambas sejam linguagens cujos compiladores mais modernos simplificam o
processo de programação através de interfaces amigáveis com comandos, funções
e propriedades pré-definidas; existe uma diferença fundamental ente elas (Sumathi e
Surekha, 2007).
A linguagem G é uma ferramenta de programação gráfica, altamente
produtiva para a construção de sistemas de aquisição de dados, instrumentação e
controle, entre outras aplicações. A filosofia dos sistemas de programação,
normalmente são fundamentadas no uso de linguagem texto com abreviações de
palavras da língua inglesa para criar linhas de comandos que, quando compiladas,

6
geram códigos de programação interpretados ou compilados. Enquanto isso a
linguagem G permite usar uma estrutura em forma de gráficos (painel de interface) e
diagramas (instruções e funções lógicas) para criar os códigos de programação em
blocos, o que facilita o processo de aprendizagem permitindo que pessoas com
pouco treinamento sejam capazes de realizar tarefas que nas outras linguagens
demandariam muito mais tempo. Tais blocos podem ser facilmente aproveitados em
outros aplicativos o que não é tão trivial em outras linguagens. (Regazzi, 2005 )
Durante a instalação do programa pode-se optar por bibliotecas com
aplicações específicas para aquisição de dados com placas AD (analógico/digital) e
DA (digital/analógico), ou DAQ – Data Acquisition, instrumentos com interfaces GPIB
(General Purpose Interface Bus), e Serial, interfaces gráficas de análise de dados,
imagens e gravação, protocolos (OPC – OLE for Process Control), entre outros
módulos de cálculo, simulação e automação. (Sumathi e Surekha, 2007).
3.2.Interface do usuário
A ferramenta LabVIEW apresenta um ambiente de desenvolvimento de
aplicações gráficas nas quais é possível:
• Operar o programa de instrumentação;
• Controlar o hardware selecionado;
• Analisar os dados coletados;
• Mostrar resultados.
O usuário pode customizar os botões, indicadores e gráficos para emular
(simular) os painéis de controle convencionais dos instrumentos. Há uma grande
semelhança entre a linguagem gráfica e os diagramas de fluxo, ou fluxogramas, o
que torna a sua aprendizagem mais rápida. (REGAZZI, 2005).
3.3 Conectividade
O LabVIEW possui extensa funcionalidade de I/O para quase todos os tipos,
incluindo bibliotecas prontas para instalação de instrumentos autônomos, serial e
dispositivos para aquisição de dados. Na construção de um sistema de medição e
automação estas são as principais ferramentas utilizadas.

7
3.4 Redução de custos
Um único computador equipado com LabVIEW, pode ser utilizado para
inúmeras aplicações, uma vez que se trata de um software versátil. A redução de
custos pode ser considerada tanto no tempo necessário para desenvolver as
aplicações quanto na preservação de capital em longo prazo. Quando os usuários
atualizam o sistema, isso pode ser feito sem a necessidade de adquirir um novo
equipamento. O usuário pode ainda criar bibliotecas inteiras de instrumentação por
um custo muito menor que o de um único instrumento comercial tradicional.
(Sumathi e Surekha, 2007).
3.5 Múltiplas Plataformas
Um instrumento virtual desenvolvido em uma plataforma LabVIEW, tem
portabilidade a qualquer outra plataforma simplesmente abrindo a máquina virtual.
3.6 O motor de corrente contínua
O motor de corrente continua foi o motor escolhido para realizar a aplicação
de posicionamento. Quando aplicada a corrente elétrica ao rotor, surge um campo
magnético que induz uma força com o objetivo de alinhar o campo magnético gerado
na bobina do rotor com o campo magnética do estator, ocasionando assim, o
movimento do motor. Ao se movimentar o rotor, outra estrutura existente no motor,
chamada de comutador, é responsável por desenergizar a seguinte, causando um
novo desequilíbrio nas forças magnéticas, resultando em um novo impulso no rotor.
Conforme o movimento é realizado, o motor tende a continuar em movimento,
desde que seja suprida uma diferença de potencial entres seus terminais do motor,
suficiente para que a força exercida pela variação do fluxo magnético seja maior que
as forças que seguram o motor parado.

8
3.7 Reverter Polaridade
O maior problema com motores DC é controlar sua rotação e direção para
que você possa ter uma ampla gama de utilização. Devido a este problema,
utilizamos a ponte H onde vai ser possível controlar o sentido da rotação (horário ou
anti-horário).
3.8 Braço Robótico O sistema é formado por um braço robótico articulado com três graus de
liberdade, com juntas do tipo rotacional, acionamento direto por motores DC com
redução e no seu órgão terminal será utilizado um eletroímã.(Carrara.V, 2014)
Quando o programa está rodando, o computador envia sinais ativando
motores que movem o braço.

9
4. MATERIAIS E MÉTODOS
4.1. Materiais
Os materiais utilizados foram: Placa de Aquisição de Dados 6212 e Software
Labview 2012.
4.2. Métodos
4.2.1 Controle do Motor e Configuração dos canais de I/O.
O sinal de saída da placa de I/O para o driver deve ser um pulsos retangular,
quando o movimento do motor é desejado assim, é essencial que um canal de saída
digital da placa seja configurado pelo Measurement and Automation..
Ao inicializar o MAX (Measurement and Explorer), selecionam-se as opções
"Data Neighbornood" e "Create New", para que uma nova tarefa coordenada pelo
programa seja criada. Como se intenta aquisição e geração de dados pela placa de
I/O, seleciona-se a opção "NI-DAQmx Task ", referente à National Instruments e
data acquisition. Então as opções "acquire signal" e "generate signal" são mostradas
Figura 1 – DAQ. A partir do pressuposto, tem-se possibilidade de fazer aquisição ou
gerar sinais.

10
Figura 1-DAQ
4.2.2. DIAGRAMA DE BLOCOS
A programação na plataforma LabVIEW é executada através de uma interface
gráfica no diagrama de blocos, onde cada bloco é denominado VI, sendo ele
responsável por uma determinada função. (JAMAL, 1999)
O funcionamento do programa de controle é continuo, assim foi criado um
laço (While Loop) para o funcionamento em ciclos. O laço é interrompido por uma
determinada condição de parada, que neste caso é o acionamento do botão stop.
As Figuras 2 e 3 mostram uma visão geral da estrutura dos programas.
Figura 2 - Diagrama de Blocos da Base Móvel

11
Figura 3 - Diagrama de Blocos do Braço Robótico.

12
4.2.3. Painel Frontal
O painel frontal conforme é denominado no Labview é uma interface gráfica
onde se faz comunicação entre o programa e o usuário, onde apresenta uma janela
com os comandos sendo eles, comutadores, botões, discos, e outros dispositivos de
entrada (National Instruments Corporation, 2001).
Na Figura 4 demonstra os acionamentos da base móvel e do braço robótico.
Figura 4 - Painel Frontal do Programa LabVIEW. 4.2.4 Placa de aquisição National Instruments
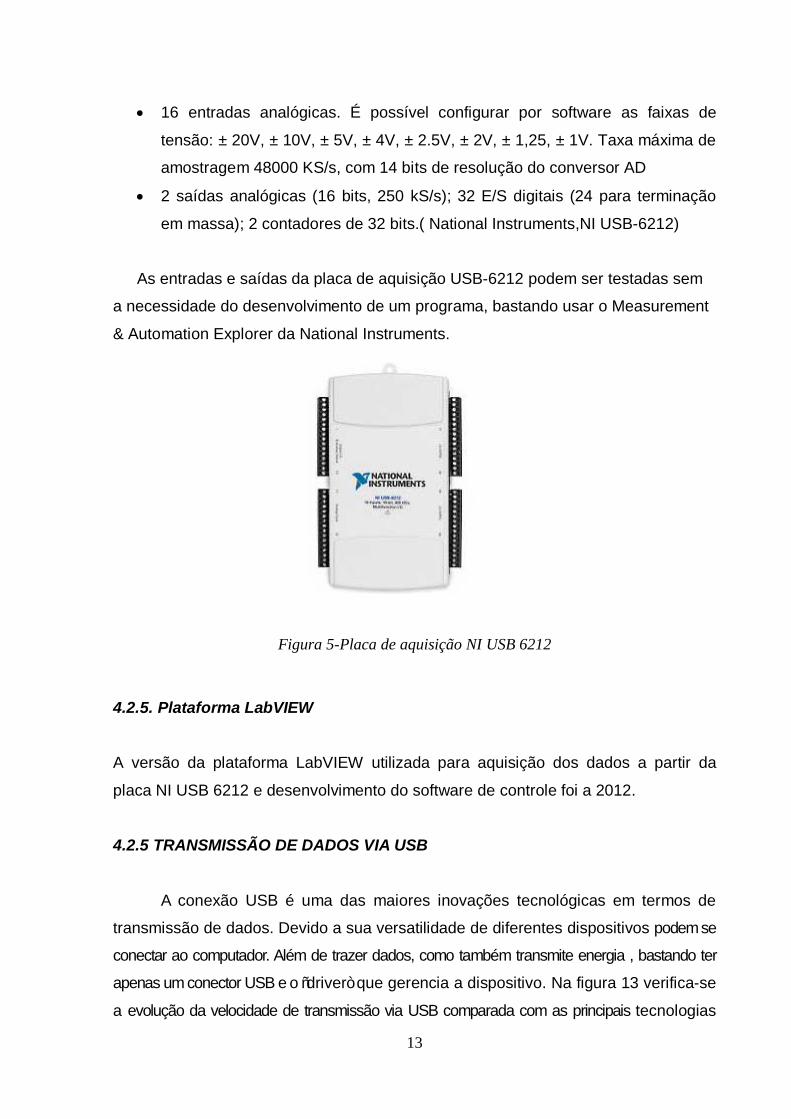
As principais características são as seguintes:
• • 12 canais digitais, que podem ser usados tanto como DI ou DO
(configurados individualmente).
13
• 16 entradas analógicas. É possível configurar por software as faixas de
tensão: ± 20V, ± 10V, ± 5V, ± 4V, ± 2.5V, ± 2V, ± 1,25, ± 1V. Taxa máxima de
amostragem 48000 KS/s, com 14 bits de resolução do conversor AD
• 2 saídas analógicas (16 bits, 250 kS/s); 32 E/S digitais (24 para terminação
em massa); 2 contadores de 32 bits.( National Instruments,NI USB-6212)
As entradas e saídas da placa de aquisição USB-6212 podem ser testadas sem
a necessidade do desenvolvimento de um programa, bastando usar o Measurement
& Automation Explorer da National Instruments.
Figura 5-Placa de aquisição NI USB 6212
4.2.5. Plataforma LabVIEW
A versão da plataforma LabVIEW utilizada para aquisição dos dados a partir da
placa NI USB 6212 e desenvolvimento do software de controle foi a 2012.
4.2.5 TRANSMISSÃO DE DADOS VIA USB
A conexão USB é uma das maiores inovações tecnológicas em termos de
transmissão de dados. Devido a sua versatilidade de diferentes dispositivos podem se
conectar ao computador. Além de trazer dados, como também transmite energia , bastando ter
apenas um conector USB e o “driver” que gerencia a dispositivo. Na figura 13 verifica-se
a evolução da velocidade de transmissão via USB comparada com as principais tecnologias

14
nessa área. A transmissão de energia é que faz possível a utilização da placa USB-
6212 da NI.
Figura 6-Velocidade da transmissão de dados via USB
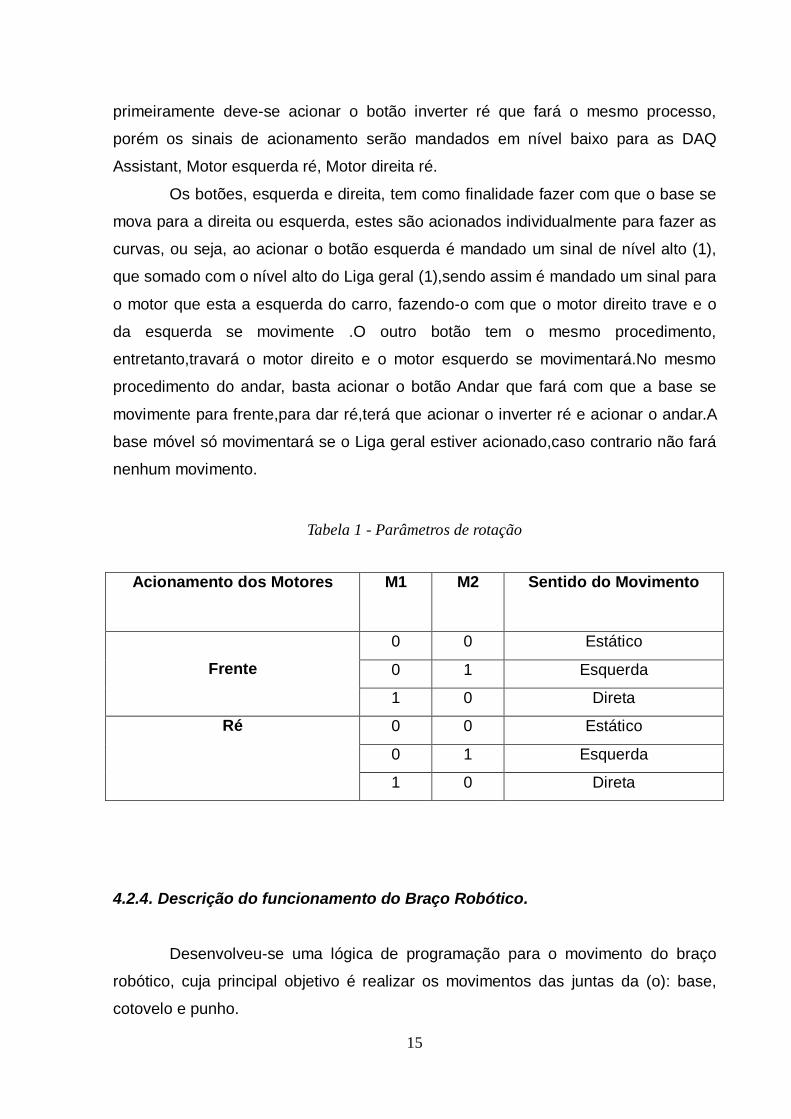
4.2.3. Descrição do funcionamento Base Móvel.
Foi desenvolvida uma lógica de programação para o sistema, cujas principais
funções são apresentadas a seguir. Na Figura 2 mostra-se a lógica de
implementação de controle do sistema através dos botões e na Tabela 1 demonstra
os parâmetros de rotação.
O programa consiste em seis botões, onde cada um corresponde a uma
determinada função sendo elas, desligamento total do programa, inverter a ré, ligar
todo o circuito, andar, virar à esquerda e a direita.
Primeiramente foi criada uma estrutura de condições, chamada “case”, onde ao
acionar o botão inverter ré, ele muda a condição, para verdadeiro ou falso, caso a
condição for falso a primeira linha permanece em um e a segunda em zero, se não a
estrutura inverte e troca os sinais, também foi criado uma estrutura de repetição que
será o WHILE LOOP principal.
Após esta etapa foi introduzindo os botões nos comandos Array, onde foi
feita a ligação entre as portas lógicas com os botões, cada porta segue uma liga de
condição AND ou OR.
Para o funcionamento do programa deve-se acionar o botão liga geral, que
mandara o nível lógico alto, com o nível alto da porta (correspondente do botão liga
geral), gera um termo que enviará sinal para as DAQ Assistant, onde comanda
motor esquerda frente, motor direita frente o sinal. Para acionar a ré da base,
15
primeiramente deve-se acionar o botão inverter ré que fará o mesmo processo,
porém os sinais de acionamento serão mandados em nível baixo para as DAQ
Assistant, Motor esquerda ré, Motor direita ré.
Os botões, esquerda e direita, tem como finalidade fazer com que o base se
mova para a direita ou esquerda, estes são acionados individualmente para fazer as
curvas, ou seja, ao acionar o botão esquerda é mandado um sinal de nível alto (1),
que somado com o nível alto do Liga geral (1),sendo assim é mandado um sinal para
o motor que esta a esquerda do carro, fazendo-o com que o motor direito trave e o
da esquerda se movimente .O outro botão tem o mesmo procedimento,
entretanto,travará o motor direito e o motor esquerdo se movimentará.No mesmo
procedimento do andar, basta acionar o botão Andar que fará com que a base se
movimente para frente,para dar ré,terá que acionar o inverter ré e acionar o andar.A
base móvel só movimentará se o Liga geral estiver acionado,caso contrario não fará
nenhum movimento.
Tabela 1 - Parâmetros de rotação
Acionamento dos Motores
M1 M2 Sentido do Movimento
Frente
0 0 Estático
0 1 Esquerda
1 0 Direta
Ré 0 0 Estático
0 1 Esquerda
1 0 Direta
4.2.4. Descrição do funcionamento do Braço Robótico.
Desenvolveu-se uma lógica de programação para o movimento do braço
robótico, cuja principal objetivo é realizar os movimentos das juntas da (o): base,
cotovelo e punho.

16
Os parâmetros de direção estão representados na Tabela 2.Cada junta
possui uma estrutura case (While loop), que define true /false (verdadeiro ou falso)
para as condições dadas pelo o usuário por meio do painel frontal, enviando-se a
resposta através de uma lógica booleana.
Na Figura 3 mostra-se a lógica de implementação dos botões liga/desliga,
inverter (responsável por ativar o inversor deixando-o pronto para receber o sinal
inicial de movimento), base, cotovelo e punho.
Primeiramente deve-se acionar o botão inverter para a escolha do sentido
que se pretende trabalhar em cada junta.
Ao acionar o botão base, ele terá a função de envia-se um sinal alto (1) para
o VI base, que somado ao valor da condição false ,este mesmo fará com que o
motor gire em sentido horário (DAQ Assistant, esquerda direita), caso estiver
definido pelo botão INVERTER, a condição TRUE que adquire e converte a string de
forma de onda binária em um arranjo numérico (verdadeiro primeira linha sinal 1).
Para o movimento anti-horário basta acionar novamente o botão INVERTER,
a condição FALSE adquire o sinal e converte a string de forma de onda ASCII em
um arranjo numérico, fazendo com que o motor gire em sentido oposto (DAQ
Assistant, esquerda direita 1).O cotovelo possui a mesma lógica da base, portando,
ele se movimenta em sentido vertical.A garra por se tratar de um eletroímã, recebe
somente os sinais 0 ou 1 (liga/desliga). Quando o botão GARRA for acionado o
eletroímã será magnetizado e consecutivamente a garra irá se movimentar. Ao
pressionar novamente o mesmo botão o eletroímã recebe o sinal 0
desmagnetizando-o e logo parando seu movimento.Na tabela demonstra os
parâmetros de movimentos em que cada articulação faz.

17
Tabela 2 - Parâmetros de direção
Articulação dos Elos Níveis lógicos Sentido do Movimento das Juntas
Base
0 0 Estático
0 1 Esquerda
1 0 Direita
Braço
0 0 Estático
0 1 Esquerda
1 0 Direita
Punho
0 0 Estático
0 1 Esquerda
1 0 Direita
Garra
0 0 Estático
0 1 Em movimento
1 0 Estático

18
5. RESULTADOS E DISCUSSÕES
O primeiro teste foi enviar informações do programa, para a placa de
aquisição da NI-6212 para verificar a rotação e o sentido em que motor deve-se
comportar. Ao receber o sinal de pulso (1), comandado pelo painel frontal, este
mesmo energizava as saídas definidas pelo programa mandando sinal para o
protobord acionando os resistores em paralelos com os Leds.. Esta etapa não
apresentou dificuldades, pois ao enviar os sinais já era o suficiente para acender os
Leds.
Figura7 -Simulação da direção de dois motores
O segundo teste foi realizado junto à parte física da base, integrando à uma
placa de circuito eletrônico em ponte H, a qual direciona a corrente da bateria para o
motor e move o eixo do motor para frente e para trás (ré); esquerda e direita.
Testou-se a base móvel em duas posições, primeiro com suas rodas no chão,
e segunda com as rodas ao ar livre. Ao simular a programação na primeira posição,
a base móvel se movimentou lentamente e logo descontinuou seu trajeto sem a
interrupção do programa. Com isso pôde-se perceber um aumento na corrente
podendo ser maior que suportada pela placa em ponte H.
Colocado na segunda posição, esse por sua vez não apresentou problemas,
pois, não havia carga comprometendo o motor.

19
Analisando as respostas da simulação chegou-se a conclusão, que ao simular
o programa um erro na estrutura física da base, devido ao alto torque no motor pelo
peso de sua estrutura e um mau alinhamento nas rodas.
Figura 8 - Integração entre ponte H, a placa NI com a base móvel
Na realização do terceiro teste, foi simulada a integração das quatro
pontes H com a placa da NI e o braço robótico. Ao simular não houve dificuldades,
obtendo-se a resposta desejada. Seus movimentos foram executados com êxito.
Figura 9 - Integração entre ponte H,a placa NI com o braço robótico

20
• Diagrama de/para
A Figura 10 demonstra integração entre as ligações entre as Ponte H e as
saídas da placa de aquisição do LabVIEW. Em cada ponte devem ser ligado a
tensão da bateria (0V e 12V), os dois cabos do motor, correspondente a sua rotação,
e as saídas da placa, que vai de A00 a A03, não esquecendo da saída digital da
placa (GND), que deve ser ligada no pólo negativo da bateria. As saídas também
devem ser nomeadas (habilitadas) na programação, na aquisição de dados
(DAQassistant).
A Figura 11 representa a ligação entre as Pontes H, a bateria, os motores que
são as juntas do braço robótico e o eletroímã. Existe uma ponte H para cada motor,
todos são ligados, respectivamente, em cada uma de suas Ponte H referente (cada
pólo do motor), também, na Ponte H, são ligados os pólos da bateria e os cabos que
correspondem as saídas da placa de aquisição do LabView, que vão de A04 a A10,
cada qual, composta de dois cabos (duas saídas), que correspondem ao sentido da
rotação do motor. Em especial, na Ponte H do eletroímã só é ligada um cabo que
provem da placa de aquisição (saída A10), além dos pólos da bateria e dos dois
cabos do eletroímã, pois este dispositivo funciona como uma chave normal aberta,
acionado ao pressionar o botão no programa e desligado ao soltar o botão. Também
devem ser nomeadas na programação todas as saídas que foram utilizadas (A04 a
A10)

21
Figura 10- Ligações da Base Móvel

22
Figura 11 - Ligação do Braço Robótico
6. CONCLUSÃO.
Conforme os objetivos estabelecidos, pode-se dizer que a proposta inicial de
criar um ambiente de programação foi atingida, porém esta programação pode ser o
começo de trabalhos futuros, ou da própria melhoria deste, visto que ainda podem-
se atribuir outras funções que não foram abordadas aqui.
A princípio houve dificuldades, pois, não havia uma familiaridade com o
software proposto para programação. Com isso apresentou-se partir desde a
aprendizagem teórica, que possibilitou uma visão geral, a experimentos simples
simulados através de circuitos com led’s conectando-se as saídas dos mesmos às
entradas da placa de aquisição, ao surgimento da ideia inicial da primeira
programação que se baseia na base móvel e no braço robótico. Ao término dos
testes iniciais deu-se abertura à simulação propriamente dita.
Com as estruturas físicas montadas fez-se a interface. Simula-se com êxito o
projeto, apresentando apenas algumas falhas na base móvel que foram corrigidas
pelo grupo responsável, não interferindo o programa.
Para finalizar, resta dizer que este projeto é um estudo interessante que
merece ser continuado com o intuito de obter resultados que poderão ser
importantes tanto para a área da programação quanto na robótica.
Propõe-se para trabalhos futuros, para o braço criar um Virtual Instruments
em malha fechada, onde sejam colocados enconder para medir a posição dos
braços e dar o valor de referência para processá-lo os dados, para base ser
controlado a velocidade e precisão por PWM fazendo o monitoramento através de
gráficos, aquisição de áudio e visual.

23
7. REFERÊNCIAS BIBLIOGRÁFICAS 01. SUMATHI, S., & SUREKHA, P. (2007). LabVIEW based advanced instrumentation systems. New York, 2007
02. [JAMAL, 1999] JAMAL; PICHLIK. LabVIEW :applications and solutions.
UpperSaddle River: Prentice Hall PTR, c1999. 468 p. 1999.
03. NATIONAL INSTRUMENTS CORPORATION. LabVIEW Básico 1: Manual do de treinamento do LabVIEW. Versão 6.0. Ed. de novembro. 2001.
04 . REGAZZI. Soluções práticas de instrumentação e automação. Rio de
Janeiro: Isegnet, 2005.
05. Carrara, V .Apostila de Robótica, Disponível em <http:\\
http:/2.dem.inpe.br/val/homepage/cursos/rb_apostila.pdf>. Acesso em: 06 junho.
2014
06. NATIONAL INSTRUMENTS. NI USB-6212, Disponível em
<http://sine.ni.com/nips/cds/view/p/lang/pt/nid/207096>.Acesso 26 junho 2014.












