Topolox a de Super cies - cartagena99.com · Grao en Matem aticas G1011331 Topolox a de Super cies...
93
Grao en Matem´ aticas G1011331 Topolox´ ıa de Superficies Lecci ´ ons Prof. Xos´ e M. Masa V´azquez Departamento de Xeometr´ ıa e Topolox´ ıa Curso 2014-15 UNIVERSIDADE DE SANTIAGO DE COMPOSTELA
Transcript of Topolox a de Super cies - cartagena99.com · Grao en Matem aticas G1011331 Topolox a de Super cies...

Grao en MatematicasG1011331
Topoloxıa de Superficies
Leccions
Prof. Xose M. Masa Vazquez
Departamento de Xeometrıa e Topoloxıa
Curso 2014-15
UNIVERSIDADE DE SANTIAGO DE COMPOSTELA
Datos descritivos da materia
CODIGO: G1011331
Materia obrigatoria de terceiro curso do Grao en Matematicas, segundo cuadrimestre, de 4,5creditos.
Os principais prerrequisitos estudanse nas materias de Topoloxıa dos Espazos Euclidianos,do primeiro curso, e Topoloxıa Xeral, do primeiro cuadrimestre de terceiro. Precısanse, tamen,os conecementos sobre grupos e os seus homomorfismos, desenvoltos na materia EstruturasAlxebricas, do primeiro cuadrimestre de terceiro. E, en xeral, a madurez e cultura matematicaque se supon, pasado xa o ecuador dos estudos de Grao.

TOPOLOXIA DE SUPERFICIES Prof. Xose M. Masa
Indice
1. Conexidade 7Separacion e conexidade . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8Componentes conexas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11Exercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2. Conexidade por caminos 13Camino. Camino inverso. Produto de caminos . . . . . . . . . . . . . . . . . . . . . . . 13Conexidade por caminos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13Conexidade local por caminos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15Exercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
3. Compacidade 19Coberturas e subcoberturas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21Definicion de compacidade . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21Compacidade dun produto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23A propiedade de interseccion finita . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24Compacidade en espazos metricos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24Aplicacions propias e cocientes de espazos compactos . . . . . . . . . . . . . . . . . . . 25O conxunto de Cantor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26Exercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
4. Compacidade local 29Compacidade local . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29Compactificacion de Aleksandrov . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30Compactificacion e extension de funcions reais continuas limitadas . . . . . . . . . . . 31Apendice: Grupos topoloxicos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32Exercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
5. Superficies compactas 39Superficies. Superficies con bordo. Suma conexa de superficies . . . . . . . . . . . . . . 41Triangulacions. As superficies como cocientes de rexions planas . . . . . . . . . . . . . 44Orientabilidade . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45Exercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
6. Clasificacion das superficies compactas, I 49Sımbolo da presentacion dunha superficie . . . . . . . . . . . . . . . . . . . . . . . . . 49Reducion do sımbolo a unha forma canonica . . . . . . . . . . . . . . . . . . . . . . . . 50A caracterıstica de Euler dunha superficie . . . . . . . . . . . . . . . . . . . . . . . . . 51Apendice: Revestimento de orientacion dunha superficie . . . . . . . . . . . . . . . . . 52Exercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
7. Homotopıa 57Homotopıa de aplicacions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59Equivalencias e Tipo de homotopıa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59Retraccion e deformacion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60Espazos contractiles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61Exercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
Curso 2014-15 3

TOPOLOXIA DE SUPERFICIES Prof. Xose M. Masa
8. O Grupo Fundamental 63Homotopıa de caminos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63O Grupo Fundamental . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64Apendice: Categorıas e Functores . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68Exercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
9. Calculo do Grupo Fundamental 71Espazos simplemente conexos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71O Grupo Fundamental das esferas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71O Grupo Fundamental da circunferencia . . . . . . . . . . . . . . . . . . . . . . . . . . 72Teorema do punto fixo de Brouwer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74Apendice: Grupo fundamental dos grupos topoloxicos . . . . . . . . . . . . . . . . . . 74Apendice: Grao duna aplicacion de S1 en S1 . . . . . . . . . . . . . . . . . . . . . . . . 75Exercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
10. Clasificacion das Superficies Compactas, II 81Presentacion de grupos por xeradores e relacions. O abelianizado dun grupo . . . . . . 83O Grupo Fundamental das superficies compactas . . . . . . . . . . . . . . . . . . . . . 88Teorema de Clasificacion das Superficies Compactas . . . . . . . . . . . . . . . . . . . 89Apendice: Teorema de clasificacion das superficies compactas con bordo . . . . . . . . 91Exercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
Referencias 93
Curso 2014-15 4
TOPOLOXIA DE SUPERFICIES Prof. Xose M. Masa
Parte I
TOPOLOXIA XERAL
Nesta parte abordase o estudo das propiedades topoloxicas deconexidade e compacidade. Tomando como punto de partida o estudofeito no marco dos Espazos Euclidianos, dase un tratamento abstracto
hoxe moi depurado, que se ten amosado eficaz en contextos moidiversos e xerais.
Curso 2014-15 5
TOPOLOXIA DE SUPERFICIES Prof. Xose M. Masa
Curso 2014-15 6

TOPOLOXIA DE SUPERFICIES Prof. Xose M. Masa
Conexidade
Bernard Bolzano (1781-1848) foi profesor de filo-
sofıa da relixion en Praga. Tina profundos conecemen-
tos de matematicas e foi, como Cauchy, un pioneiro na
introduccion dun alto standard de rigor na analise ma-
tematica. O Teorema do valor intermedio debese a el.
Escribiu un tratado sobre os paradoxos do infinito, que
apareceu despois da sua morte.
A primeira nocion de conexidade que imos estudar responde a cuestion de se un espazo topoloxicose pode separar en varias partes. Idea que hai que precisar, dandolle un sentido topoloxico; porsuposto, calquera conxunto X con mais dun punto se pode separar en partes, X = A ∪ B, con Ae B subconxuntos disxuntos e non baleiros.
Vexamos os tres exemplos das figuras que seguen.
A B C
&%'$
���� ��
��................................................................................................................
.............................
.......................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................
.....................................
....................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................
....................................................................................................................................................................................................................................................
O espazo da figura A esta composto por duas circunferencias disxuntas no plano euclidiano. EnB representase ao espazo R, como union dos subconxuntos (−∞, 0) e [0,+∞). En fin, o espazo dafigura C e a union no plano dunha circunferencia e unha espiral que se achega a ela asintoticamente(por exemplo, S1 e o conxunto {(1 + 1/t) · e2πit, t > 1}). Poderiamos nos cuestionar se, en cadacaso, esa descomposicion do espazo en duas partes deberıa levarnos a concluır que non e conexo.Seguramente habera acordo en respostar afirmativamente no caso da figura A, pois, doutro modo,que espazo serıa non conexo?, e negativamente no caso da figura B, pois, doutro modo, que espazoserıa conexo?
No caso da figura C, a resposta semella menos clara. Unha formiga que recorrera a espiral e nonsoubera saltar, acadarıa a circunferencia? Hai un camino?
Unha ultima observacion, antes de entrar en materia: nestes exemplos tratase da topoloxıa usual.Nela a idea de conexidade conserva un contido intuitivo xeometrico forte. Outras topoloxıas esixenunha reelaboracion abstracta desa intuicion.
Curso 2014-15 7

TOPOLOXIA DE SUPERFICIES Prof. Xose M. Masa
Leccion 1. Conexidade
Separacion e conexidade
Para introducir o primeiro concepto de conexidade partimos da nocion de separacion.
1.1 Separacion (Separation) Unha separacion dun espazo topoloxico X e un par de subconxuntosU e V de X coas seguintes propiedades:
1. U e V son subconxuntos abertos;
2. A union de U e V e o espazo total, U ∪ V = X;
3. Os conxuntos U e V son disxuntos, U ∩ V = ∅.
A separacion dada por U e V denotase (U | V ). Se U ou V son o conxunto baleiro, a separaciondenomınase separacion trivial (trivial separation). �
1.2 Observacion A condicion 1. na definicion de separacion equivale a dicir que U e V sonsubconxuntos pechados, pois, polas outras duas condicions, son complementarios. Tamen se po-derıan substituır as tres condicions pola seguinte: U e un subconxunto aberto e pechado; daquela,a separacion serıa (U | X − U). �
1.3 Definicion Un espazo topoloxico dise conexo (connected) se so admite a separacion trivial.Un subconxunto dise conexo se e conexo como subespazo. A propiedade de ser conexo denomınaseconexidade (connectedness). �
De forma equivalente, podese dicir que un espazo topoloxico e conexo se non posue ningunsubconxunto propio (proper subset) (ou sexa, diferente do baleiro e de si mesmo), ao tempo abertoe pechado.
1.4 Exemplos
1. Sexa z un punto de R. Os conxuntos (−∞, z) e (z,+∞) constituen unha separacion deR − {z} coa topoloxıa usual. En particular, un subconxunto conexo de R, se conten douspuntos, conten todos os intermedios.
2. En Q coa topoloxıa usual os conxuntos (−∞,√
2) e (√
2,∞) definen unha separacion nontrivial.
3. Na recta de Kolmogorov todos os subconxuntos son conexos: non hai abertos non baleirosdisxuntos.
4. Na recta de Sorgenfrey os conxuntos (−∞, z) e [z,+∞) constituen unha separacion, calqueraque sexa o punto z. Cales son os subconxuntos conexos da recta de Sorgenfrey?
5. O intervalo unidade [0, 1], coa topoloxıa usual, e conexo. Para comprobalo, podese ensaiar oseguinte argumento. Suponamos (U | V ) unha separacion. Suponamos 0 ∈ U . Se V non e oconxunto baleiro tera un ınfimo, a. Resulta que a non pode ser punto de U nen de V .
�
Sexa S0 o subespazo {−1, 1} de R coa topoloxıa usual, ou sexa, o espazo topoloxico {−1, 1}coa topoloxıa discreta. O seguinte resultado, bastante obvio, da unha caracterizacion moi util daconexidade dun espazo.
Curso 2014-15 8

TOPOLOXIA DE SUPERFICIES Prof. Xose M. Masa
1.5 Un criterio de conexidade A existencia dunha separacion non trivial de X equivalea existencia dunha funcion continua e sobrexectiva de X no espazo S0. �
En efecto, se h : X → S0 e unha funcion tal, (h−1(0) | h−1(1)) e unha separacion non trivial de X.Reciprocamente, se (U | V ) e unha separacion non trivial de X, a funcion combinada que leva U a0 e V a 1 satisfai as condicions da funcion h.
1.6 Teorema A imaxe continua dun espazo topoloxico conexo e un conxunto conexo. �
Sexa f : X → Y unha funcion continua sobrexectiva. De existir unhafuncion continua sobrexectiva g : Y → S0 , a composicion g ◦ f deter-minarıa unha separacion non trivial de X.
En [14, Teorema 5.27, pax. 82] podese encontrar outra demostracion.Do Teorema deducese, en particular, que todo cociente dun espazoconexo e conexo. Deducese, tamen, o seguinte resultado fundamental:
1.7 Corolario A conexidade e unha propiedade topoloxica. �
X Y-
S0
JJJJJ
�
gg ◦ f
f
1.8 Teorema Un espazo topoloxico X e conexo se, e so se, toda funcion real continua con dominioX verifica o Teorema do Valor Intermedio; ou sexa, se a funcion alcanza dous valores a e b, alcanzacalquera valor intermedio. �
A demostracion deste teorema e un exercicio.
Poucas veces resulta eficaz usar directamente a definicion para concluır sobre a conexidade dunespazo. A seguinte proposicion e os seus corolarios aportan metodos indirectos utiles. Na bibliografıaproposta podes encontrar outros semellantes ou mais xerais.
1.9 Proposicion Sexa X un espazo, (U | V ) unha separacion de X, E un subconxunto conexo.Daquela E ⊂ U ou E ⊂ V . �
Se E contivera algun punto en U e algun punto en V , (E ∩ U | E ∩ V ) definirıa unha separacionnon trivial de E.
A primeira aplicacion e o seguinte corolario, que afirma como caso particular que a adherenciadun conxunto conexo e un conxunto conexo.
1.10 Corolario Se E ⊂ X e un conxunto conexo e p e un punto de acumulacion de E, aunion E ∪ {p} e un conxunto conexo. De forma mais xeral, se E e conexo, calquera conxunto Fcomprendido entre E e a sua adherencia,
E ⊂ F ⊂ Cl(E) ,
tamen e conexo. �
1.11 Exemplo Consideremos o subconxunto X de R2 union do grafo da aplicacion sen 1/x,definida en (0,+∞), e o segmento {(0, y) ∈ R2 | −1 ≤ y ≤ 1},
Curso 2014-15 9

TOPOLOXIA DE SUPERFICIES Prof. Xose M. Masa
0.05 0.1 0.15 0.2 0.25 0.3
-1
-0.5
0.5
1
X = {(x, sen 1/x) ∈ R2 | x > 0} ∪ {(0, y) ∈ R2 | −1 ≤ y ≤ 1} .
Dados x, y con x > 0, −1 ≤ y ≤ 1 e y = sen 1/x, sexa
1
xn=
1
x+ 2nπ, ou sexa, xn =
x
1 + 2nxπ.
A sucesion {xn} converxe a cero e sen 1/xn = y. Logo, {(xn, sen 1/xn)} , sucesion de puntos dografo, converxe a (0, y). Ası, cada punto (0, y) e punto de acumulacion do grafo de sen 1/x. Comoo grafo e un conxunto conexo (por que?), o conxunto X e conexo. �
1.12 Corolario
1. Un espazo topoloxico X e conexo sse cada dous puntos de X estan contidos nun subconxuntoconexo.
2. A union de dous conxuntos conexos cun punto comun e un conxunto conexo.
�
A primeira asercion deste corolario motiva a seguinte terminoloxıa: dous puntos x, y nun espazo Xdisen conectados (connected) se existe un subconxunto E conexo tal que x, y ∈ E. Ası, poderiamosreformular a primeira parte desta proposicion dicindo que un espazo X e conexo se, e so se, douspuntos calquera del estan conectados.
Como aplicacion do corolario, podese comprobar que todo subconxunto convexo de (Rp, τu)e conexo (recorda que un subconxunto E de Rp dise convexo se dados dous puntos x, y ∈ E,o segmento que os une esta completamente contido en E. O segmento e o conxunto de puntos{z ∈ Rp | z = (1 − t)x + ty, 0 ≤ t ≤ 1}). E que as esferas Sp son conexas (p.e., presentandoascomo union de dous hemisferios, cada un homeomorfo a unha bola pechada).
1.13 Conexidade dun produto O produto topoloxico X×Y e conexo sse cada factor e conexo.Dado que as proxeccions sobre cada factor son funcions continuas e sobrexectivas, se o produtoe conexo, cada factor sera tamen conexo. Para a implicacion recıproca, usaremos o Corolario 1.12.Sexan (x1, y1) e (x2, y2) dous puntos do produto. O conxunto
(X × {y1}) ∪ ({x2} × Y )
e conexo e conten os dous puntos dados. �
Curso 2014-15 10

TOPOLOXIA DE SUPERFICIES Prof. Xose M. Masa
Componentes conexas
Consideremos agora a seguinte relacion nun espazo topoloxico X: dous puntos x e y estanrelacionados se existe un subconxunto conexo E contendoos,
x ∼ y se existe E ⊂ X conexo, tal que x, y ∈ E .
Do Corolario 1.12.2 deducese que se trata dunha relacion de equivalencia; e que as clases deequivalencia son conxuntos conexos. Son os maiores subconxuntos conexos de X. Denomınansecomponentes conexas (connected components) de X. Para x ∈ X, a clase de equivalencia de xdenotarase C(x), e sera o maior subconxunto conexo de X contendo o punto x.
1.14 Observacion Se y ∈ C(x), C(x) = C(y), o punto x non xoga ningun papel especial, e unpunto arbitrario da componente conexa; e coma unha etiqueta, intercambiabel. �
1.15 Proposicion As componentes conexas, C(x), son conxuntos pechados. �
1.16 Cuestion Son as componentes conexas necesariamente conxuntos abertos? �
Exercicios
1.1 Para esta primeira incursion na conexidade so se precisan alguns conecementos do primeirocurso. Tratase de que os exercitedes. Sempre coa topoloxıa usual.
1. Sexan A e B subconxuntos non baleiros do intervalo unidade I tais que I = A∪B. Demostradeque A e B tenen un punto adherente comun (Recordade o Principio do supremo)
2. Comprobade que tamen e certo se se substitue I por R, unha semirecta ou un intervaloarbitrario
3. Deducide o Teorema do Valor Intermedio para funcions reais con dominio un destes conxuntos
4. Concluıde que R, as semirectas e os intervalos son conexos.
5. Hai algun outro subconxunto conexo de R?
1.2 Para relacionar o anterior exercicio coa definicion de espazo conexo, podedes demostrar oseguinte enunciado: un espazo topoloxico X e conexo sse dous subconxuntos non baleiros calqueraA e B con X = A ∪B tenen un punto adherente comun.
1.3 Sexa p : X → Y unha identificacion. Suponamos que Y e conexo e que cada subconxuntop−1(y), y ∈ Y , tamen e conexo. Demostrade que X e conexo. (Indicacion: se (U | V ) e unha separacion
de X, fixado y ∈ Y , ou p−1(y) ⊂ U ou p−1(y) ⊂ V ).
1.4 Sexan A e B subconxuntos conexos dun espazo topoloxico X. Demostrade que de verificarsea condicion Fr(A) ∩B 6= ∅, daquela A ∪B e conexo.
Ponede algun exemplo de conxuntos conexos e disxuntos, A e B, que verifiquen a condicion.
1.5 Sexa X un espazo topoloxico, C un subconxunto conexo de X e E un subconxunto arbitrariode X. Probade a seguinte implicacion:
Curso 2014-15 11

TOPOLOXIA DE SUPERFICIES Prof. Xose M. Masa
C ∩ E 6= ∅
C ∩ (X \ E) 6= ∅
=⇒ C ∩ Fr(E) 6= ∅.
1.6 Dise que unha funcion e localmente constante cando cada punto ten unha vecinanza na quea restricion da funcion e constante. Demostrade que un espazo topoloxico X e conexo sse todafuncion localmente constante con dominio X e constante.
1.7 Calculade as componentes conexas da Recta de Sorgenfrey e de Q coa topoloxıa usual.
1.8 Espazos localmente conexos Dise que un espazo topoloxico e localmente conexo (locallyconnected) nun punto x se para cada vecinanza U do punto existe unha vecinanza V conexa talque V ⊂ U . Dirase que e localmente conexo por caminos se o e en todos os puntos.
Demostrade que se un espazo X e localmente conexo, cada componente conexa e un subcon-xunto aberto.
1.9 Sexa X un espazo topoloxico. Denotemos por H0(X) o grupo abeliano libre xerado poloconxunto das suas componentes conexas.
Demostrade que toda funcion continua f : X → Y induce un homomorfismo
H0(f) : H0(X) −→ H0(Y ) ,
coas seguintes propiedades:
1. H0(idX) = idH0(X)
2. Se g : Y → Z e unha funcion continua, verifıcase
H0(g ◦ f) = H0(g) ◦ H0(f)
1.10 Estudade se os espazos X e Y da figura, subespazos de (R2, τu), son homeomorfos.
��
���
�����
�����
�����
�����
�����
X Y�����
�����
�����
�����
�����
�����
��
���
�
������
�������
������
�������
�������
������
������
�������
������
�������
�������
X = {(0, y) | −1 ≤ y ≤ 1}∪{(y − 1
n, y) | 0 ≤ y ≤ 1, n ∈ N}∪{(y + 1
n, y) | −1 ≤ y ≤ 0, n ∈ N} ,
Y = {(0, y) |−1 ≤ y ≤ 1}∪{(y − 1
n, y) | −1
3≤ y ≤ 1, n ∈ N}∪{(y + 1
n, y) | −1 ≤ y ≤ 1
3, n ∈ N}.
Curso 2014-15 12

TOPOLOXIA DE SUPERFICIES Prof. Xose M. Masa
Leccion 2. Conexidade por caminos
Camino. Camino inverso. Produto de caminos
Denotaremos por I ao intervalo unidade pechado coa topoloxıa usual, I = ([0, 1], τu).
2.1 Camino (Path) Un camino no espazo topoloxico X e unha funcion continua de dominio ointervalo unidade pechado I e rango X,
σ : [0, 1] −→ X .
Os puntos σ(0) e σ(1) denomınanse extremos do camino. �
A idea ordinaria de camino correspondese mais coa de curva que coa de aplicacion. A precision eoutras razons tecnicas (que e unha curva nun espazo topoloxico abstracto?) levan a definir caminocomo funcion. Agora compre ser precabidos, precabidas: o conxunto σ(I) pode diferir moito da ideaque temos dun camino. Por exemplo, o cadrado I× I e imaxe de I por unha funcion continua. Estee un feito importante, que debe ponernos en garda ante a intuicion naıf . Neste caso, tratase decurvas construıdas polo matematico italiano G. Peano (1858-1932). Nas paxinas 56-59 da referencia[2] encontraras un metodo relativamente elemental para construır estas funcions (vid., tamen, [17,§44]). A existencia de funciones continuas con tan peculiar comportamento xeometrico e causa demoitas dificultades tecnicas en topoloxıa.
2.2 Produto de caminos Dados dous caminos en X, σ e τ , verificando σ(1) = τ(0), defıneseo camino produto, σ · τ , por
σ · τ(t) =
σ(2t) se t ≤ 1/2 ,
τ(2t− 1) se t ≥ 1/2 .
O camino produto comeza en σ(0) e remata en τ(1). �
2.3 Camino inverso Dado un camino σ en X comezando nun punto x e terminando nun puntoy, defınese un novo camino σ−1, o camino inverso, entre y e x da seguinte forma:
σ−1(t) = σ(1− t) .
�
Observa que σ−1 e a composicion de σ coa funcion continua de I en I que leva t a 1− t.
Conexidade por caminos
2.4 Conexidade por caminos (Pathwise connectedness ou path connectedness) Diremos queun espazo X (ou un conxunto E ⊂ X) e conexo por caminos (path connected) se para cada parde puntos x, y ∈ X (resp., x, y ∈ E) existe un camino σ : I→ X (no seu caso, con σ(I) ⊂ E), talque σ(0) = x e σ(1) = y. �
2.5 Exemplo Se E e un subconxunto convexo de Rp, E e conexo por caminos. Dados douspuntos x, y ∈ E, a funcion σ : [0, 1]→ Rp dada por σ(t) = (1− t)x+ ty e un camino entre x e y.
�
Curso 2014-15 13

TOPOLOXIA DE SUPERFICIES Prof. Xose M. Masa
En R, os unicos conxuntos conexos por caminos son os convexos; ou sexa, o baleiro, os conxuntoscun so punto, os intervalos, as semi-rectas e todo R. Porque, polo Teorema do Valor Intermedio, senun subconxunto E de R un camino σ une dous puntos x e y, todos os puntos intermedios estanen σ(I) ⊂ E.
2.6 Teorema A imaxe continua dun espazo conexo por caminos e un espazo conexo por caminos.�
En efeito, sexa f : X → Y unha funcion continua e sobrexectiva e X un espazo conexo por caminos.Dados dous puntos y0 e y1 de Y e duas preimaxes deles, x0 e x1, existe un camino σ en X conσ(0) = x0 e σ(1) = x1. A composicion f ◦ σ e un camino en Y entre os puntos dados.
x0 r x1rX..............................................................................................................................................................................................................................
...........................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................
.............................................
...........................................................................................................................................................................
...............................................
.........................................................................................................................................................................................................................................
XXXXXXXXXXz
f Y
.........
.........
.........
.........
.....................................................................................................................................................................................................................................................................................
............................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................
................................................................................................................................................................................................................................................................
................................................................................................................................................................................................................................................................................................................................................
....................................
y0
ry1
rσ
f ◦ σ�����
����
����
����
�1
I@@@
�
�
2.7 Corolario A conexidade por caminos e unha propiedade topoloxica. �
2.8 Proposicion A union de dous conxuntos E e F , conexos por caminos e con interseccion nonbaleira, e un conxunto conexo por caminos. �
Sexan x ∈ E, y ∈ F e z ∈ E ∩ F . Para construır un camino entre x e y partese dun camino en Eentre x e z, outro entre z e y en F e faise o produto dos dous.
2.9 Exemplo Podese concluır que a esfera Sp e conexa por caminos expresandoa como unionde dous hemisferios. Tamen, dados dous puntos non antipodais na esfera, x, y, podese construır uncamino entre eles proxectando radialmente a corda que os une,
σ(t) =(1− t)x+ ty
‖(1− t)x+ ty‖.
Se os puntos fosen antipodais, escollese un terceiro punto e fanse, con este procedemento, douscaminos, de xeito que o produto sexa un camino unindo os puntos dados. �
Componentes conexas por caminos (Path-connected components)
Usando o produto de caminos e o camino inverso e doado comprobar que a seguinte e unharelacion de equivalencia:
x ∼ y se existe un camino σ verificando σ(0) = x , σ(1) = y .
Cada clase de equivalencia e un conxunto conexo por caminos: se y ∈ c(x), existe un camino σen X unindo x e y. Tratase de ver que σ(I) ⊂ c(x), e que, pois, σ define un camino en c(x). Ou
Curso 2014-15 14

TOPOLOXIA DE SUPERFICIES Prof. Xose M. Masa
sexa, hai que comprobar que σ(t) ∈ c(x) para todo t. Noutras verbas, que existe un camino en Xunindo x con σ(t). Ise camino pode ser σt(s) = σ(ts).
Cada conxunto c(x) denomınase componente conexa por caminos (path component) do espazoX. Son os maiores subconxuntos conexos por caminos de X. O conxunto de todas elas denotaseπ0(X). Para cada punto x, a componente conexa por caminos que o conten denotase c(x).
2.10 Exemplo: cono dun espazo Sexa X un espazo topoloxico arbitrario. Defınese o cono deX, denotado por C(X), como colapso a un punto de X × {1} en X × I, onde se considera nointervalo unidade I a topoloxıa usual. O punto v correspondente ao subconxunto colapsado chamasevertice do cono. Podemos ver que a componente conexa por caminos de v e todo C(X), e, pois,que C(X) e conexo por caminos. �
Conexidade local por caminos
2.11 Proposicion Todo espazo conexo por caminos e conexo. �
Dados dous puntos x, y de X e un camino σ que os una, σ(I) e un subconxunto conexo de Xcontendo x e y.
Como consecuencia desta proposicion, verifıcase a inclusion c(x) ⊂ C(x). O recıproco da Pro-posicion 11 non e certo. Imos estudar uns exemplos.
2.12 O Espazo Peite P (Comb Space)
P = {(x, y) ∈ R2 | 0 < x ≤ 1, y = 0} ∪ {(x, y) ∈ R2 | x = 1/n, 0 ≤ y ≤ 1 , n ∈ N}.
Traballaremos co espazo X = P ∪ {(0, 1)}, denominado Peite e Piollo (Comb and Flea). Porser conexo por caminos, P e conexo. Polo Corolario 1.10, X e conexo. Suponamos que existaun camino σ en X entre os puntos a = (1, 0) e b = (0, 1). A imaxe do camino ten que contertodos os puntos de X de coordenadas (x, 0), pois se quitamos un deles o espazo resultante none conexo; unha separacion non trivial de X − {(u, 0)} ven dada polos conxuntos
U = {(x, y) ∈ X | x < u} , V = {(x, y) ∈ X | x ≥ u} .
Polo tanto, a sucesion {(1/n, 0)} esta contida na imaxe de σ. Escollendo unha preimaxe tn decada un destes puntos, construımos unha sucesion no intervalo [0, 1]. Esta sucesion tera unhasubsucesion converxente a un certo punto t0 ∈ [0, 1], e terıa que ser σ(t0) = (0, 0).
b
a
q
q�
2.13 Exemplo Consideremos o espazo topoloxico X do Exemplo 1.11. Suponamos que σ : I→ Xsexa un camino empezando en (0, 1). Sexa Y = {(0, y) ∈ X}. Imos ver que o conxunto σ−1(Y )
Curso 2014-15 15
TOPOLOXIA DE SUPERFICIES Prof. Xose M. Masa
e aberto e pechado. Como e non baleiro e I e conexo, necesariamente e todo I. Certamente, e unconxunto pechado.
Vexamos que tamen e aberto. Sexa t ∈ I tal que σ(t) ∈ Y . Fixemos ε = 1/3. Por ser σ continua,existe un δ tal que os puntos de I ∩ (t− δ, t+ δ) tenen imaxe na bola X ∩B2(σ(t), 1/3). Como ointervalo I ∩ (t − δ, t + δ) e conexo, esta imaxe estara contida na componente conexa de σ(t) enX ∩B2(σ(t), 1/3), que esta contida en Y . �
Ambolos dous exemplos tenen unha caracterıstica comun: hai puntos que tenen vecinanzaspequenas que non son conexas por caminos.
2.14 Definicion Dise que un espazo topoloxico e localmente conexo por caminos (locally pathconnected ou locally pathwise connected) nun punto x se para cada vecinanza U do punto existeunha vecinanza V conexa por caminos tal que V ⊂ U . Dirase que e localmente conexo por caminosse o e en todos os puntos. �
Resulta inmediatamente da definicion que nun espazo topoloxico localmente conexo por caminoscada componente conexa por caminos c(x) e un conxunto aberto. Como X e a union disxunta dassuas componentes conexas por caminos, cada c(x) tamen e un conxunto pechado. Logo, c(x) =C(x). Deducese:
2.15 Teorema Todo espazo topoloxico conexo e localmente conexo por caminos e conexo porcaminos. �
A condicion de conexidade local por caminos neste resultado e suficiente, pero non necesaria:hai espazos conexos por caminos que non o son localmente! Por exemplo, a adherencia do espazopeite en R2. Ou o espazo do exercicio 2.8.
2.16 Observacion A propiedade de ser localmente conexo por caminos e, certamente, unhapropiedade topoloxica. E o que se denomina unha propiedade local, conservase por homeomorfismoslocais. Un homeomorfismo local e unha funcion que verifica: cada punto ten unha vecinanza abertatal que a funcion restrinxida a esa vecinanza e un homeomorfismo sobre a sua imaxe, que e unconxunto aberto. �
Exercicios
2.1 Estudade a conexidade por caminos da recta de Kolmogorov e do espazo de Sierpinski.
2.2 Estudade a conexidade por caminos do seguinte subespazo do plano euclidiano:
Y = {(0, 0)} ∪ {(1/t) · e2πit, t ≥ 1}
2.3 Estudade a conexidade por caminos do seguinte subespazo do plano euclidiano:
X = S1 ∪ {(1 + 1/t) · e2πit, t ≥ 1}
2.4 Sexa D un subconxunto enumerabel do plano euclidiano R2. Estudade se R2−D e conexo porcaminos. Un caso particular interesante e D = Q2, o subconxunto de puntos coas duas coordenadasracionais.
Curso 2014-15 16

TOPOLOXIA DE SUPERFICIES Prof. Xose M. Masa
2.5 Demostrade que o produto de dous espazos topoloxicos e conexo por caminos se, e so se,cada un deles e conexo por caminos.
2.6 Sexan En = {(x, y) ∈ R2 | xy = 1/n}, E∞ = {(x, y) ∈ R2 | xy = 0}. Considera o seguintesubespazo do plano euclidiano:
X =
(⋃n∈N
En
)∪ E∞ .
1. Describe as componentes conexas de X
2. Son abertas?
3. Estuda a conexidade local por caminos de X.
2.7 Considerade o subconxunto X do plano euclidiano formado por todos os segmentos que uneno punto (0, 1) cos puntos (q, 0), onde q ∈ Q e 0 ≤ q ≤ 1.
1. Demostrade que X e conexo por caminos e que non e localmente conexo por caminos enningun punto excepto o punto (0, 1).
2. Construıde un subconxunto conexo por caminos do plano euclidiano que non sexa localmenteconexo por caminos en ningun punto.
2.8 Estudade a conexidade, a conexidade por caminos e a conexidade local por caminos do espazo(Q, τ0), onde τ0 e a topoloxıa dada por:
τ0 = {U ∈ τu, se 0 /∈ U} ∪ {Q} .
2.9 ¶ Sexa X un espazo topoloxico, x ∈ X, un punto nel. Demostrade a equivalencia das seguintespropiedades:
1. Toda vecinanza U de x conten unha vecinanza V de x conexa por caminos
2. Toda vecinanza U de x conten unha vecinanza V de x tal que para todo punto y en V existeun camino en U ,
σy : I −→ U ,
con σy(0) = x e σy(1) = y.
2.10 Sexa X un espazo topoloxico. Denotemos por π0(X) o conxunto das suas componentesconexas por caminos.
Demostrade que toda funcion continua f : X → Y induce unha aplicacion
π0(f) : π0(X) −→ π0(Y ) ,
coas seguintes propiedades:
1. π0(idX) = idπ0(X)
2. Se g : Y → Z e unha funcion continua, verifıcase
π0(g ◦ f) = π0(g) ◦ π0(f)
Nota: O sımbolo ¶ indica que o exercicio e algo mais difıcil que os outros.
Curso 2014-15 17
TOPOLOXIA DE SUPERFICIES Prof. Xose M. Masa
Curso 2014-15 18

TOPOLOXIA DE SUPERFICIES Prof. Xose M. Masa
Compacidade
Emile Borel (1871-1881) estudante de Hermite, foi
profesor en Parıs e un dos matematicos mais influıntes
da sua epoca. Fixo numerosas e profundas contribucions
a analise e probabilidade. En 1895 probou que se unha
coleccion enumerabel de intervalos abertos e cobertu-
ra dun intervalo pechado, enton ten unha subcobertura
finita.
A nocion de espazo topoloxico compacto e unha abstraccion de certas propiedades importantesde conxuntos de numeros reais; por exemplo, do teorema que afirma que toda funcion real continuacon dominio un intervalo pechado acada o maximo. Este resultado e valido tomando como dominioda funcion calquera subconxunto pechado e limitado dun espazo euclidiano. Durante un temponon resultou claro como deberıa ser formulada, no marco dos espazos topoloxicos abstractos, apropiedade do dominio que garanta a validez do anterior teorema, optandose, nun primeiro momento,pola caracterizacion de que todo conxunto infinito de puntos tena un punto de acumulacion. OTeorema de Heine-Borel-Lebesgue de que toda cobertura aberta dun subconxunto pechado e limitadode Rn admite unha subcobertura finita levou a definicion moderna de compacidade, non tan naturalnen intuitiva como a anterior, pero moito mais eficaz.
Algunhas escolas, particularmente a rusa e a francesa, pioneiras no estudo deste concepto, reser-vaban o termo compacto para aqueles espazos que, ademais de satisfacer a propiedade enunciada,verificaban a propiedade de separacion de Hausdorff. A razon era que, nese caso, as propiedades doespazo eran moito mais regulares. Tina a desvantaxe de que a imaxe dun conxunto compacto nonsempre era compacto, de xeito que hoxe e unha opcion en desuso.
Curso 2014-15 19
TOPOLOXIA DE SUPERFICIES Prof. Xose M. Masa
Curso 2014-15 20

TOPOLOXIA DE SUPERFICIES Prof. Xose M. Masa
Leccion 3. Compacidade
Coberturas e subcoberturas
Sexa X un espazo e U = {Uλ, λ ∈ Λ} unha familia de conxuntos en X. Dise que U e unhacobertura (cover ou covering) de X se cada punto de X pertence a algun dos conxuntos Uλ dafamilia; ou sexa,
X =⋃λ∈Λ
Uλ .
Tamen se fala de cobertura dun conxunto E do espazo X. A diferencia e que agora os conxuntosUλ non son necesariamente subconxuntos de E; polo tanto, a condicion de cobertura para unconxunto e
E ⊂⋃λ∈Λ
Uλ .
A cobertura pode ser finita, cando Λ e un conxunto finito. Enumerabel, cando Λ e o conxunto Nou outro equipotente a el. Ou infinita non enumerabel, noutro caso.
Dada unha cobertura U = {Uλ, λ ∈ Λ} de X, denomınase subcobertura (subcover) a unhasubfamila V de U , digamos
V = {Uλ | λ ∈ Σ} ,
para un subconxunto Σ de Λ, que sexa aında unha cobertura de X.Diremos que U e unha cobertura aberta (open cover) se cada conxunto de U e aberto.
3.1 Exemplos
1. Na demostracion de que todo conxunto aberto U nun espazo metrico M e union de bolasabertas, construese unha cobertura aberta de U da seguinte maneira: para cada x ∈ Utomase unha bola BM (x, rx) completamente contida en U ; a familia {BM (x, rx), x ∈ U}e unha cobertura de U . Neste caso cumprese a igualdade,
U =⋃x∈U
BM (x, rx) .
2. A familia {Bp(0, n), n ∈ N} e unha cobertura aberta de (Rp, τu). Se tomamos como conxuntode ındices os naturais pares, teriamos unha subcobertura. Neste exemplo, non existe ningunhasubcobertura finita.
3. Sexan X un espazo topoloxico Hausdorff, E un subconxunto de X e p un punto de acumula-cion que non pertenza a E. Sexa Vp = {Vλ, λ ∈ Λ} unha base local en p. Sexa Uλ = X−Vλ.A coleccion {Uλ, λ ∈ Λ} e unha cobertura aberta de E. Tampouco neste exemplo podemosquedarnos cunha subcobertura finita. �
Definicion de compacidade
3.2 Definicion Un espazo (ou conxunto) dise compacto (compact) se toda cobertura abertaadmite unha subcobertura finita. �
3.3 Exemplos Os conxuntos finitos son compactos. O conxunto formado por los puntos dunhasucesion converxente e o punto lımite e compacto. �
3.4 Proposicion Todo subconxunto pechado dun espazo compacto e compacto. �
Curso 2014-15 21

TOPOLOXIA DE SUPERFICIES Prof. Xose M. Masa
3.5 Proposicion A imaxe continua dun conxunto compacto e un conxunto compacto. �
E consecuencia de ser aberta a imaxe recıproca dun aberto por unha funcion continua.
3.6 Teorema A compacidade (compactness) e unha propiedade topoloxica. �
Compactos no espazo euclidiano
O clasico Teorema de Heine-Borel afirma que o intervalo unidade pechado I en (R, τu) e com-pacto (actualmente, adoitase denominar Teorema de Heine-Borel a caracterizacion dos compactosdo espazo euclidiano como os conxuntos pechados e limitados). A demostracion usual deste resul-tado parte do Postulado dos Intervalos Encaixados, argumentando por reducion ao absurdo: dadaunha cobertura aberta, construese unha sucesion de intervalos encaixados tomando sucesivamenteintervalos metade e escollendo en cada etapa un intervalo que non admita unha subcobertura fini-ta. O mesmo argumento e valido para todo produto finito de intervalos pechados, substituındo oPostulado mencionado polo Teorema dos Bloques Encaixados.
Como Rn e Hausdorff, do exemplo 3.1.3 deducese que todo subconxunto compacto do espazoeuclidiano ten que ser pechado. Do exemplo 3.1.1 deducese que tamen ten que ser limitado. Comotodo conxunto limitado esta contido nun produto de intervalos pechados, se ademais e pechado,sera compacto, por ser subconxunto pechado dun compacto. Tense, pois o Teorema de Heine-Borel.
Nos espazos euclidianos estudamos outras caracterizacions da compacidade:
A condicion de Bolzano-Weierstrass: todo subconxunto infinito ten un punto de acumulacion,
A compacidade secuencial: toda sucesion ten unha subsucesion converxente.
Ningunha das duas e valida para espazos topoloxicos arbitrarios. Por exemplo, para deducir a con-dicion de Bolzano-Weierstrass a partir da compacidade precısase que en toda vecinanza dun puntode acumulacion haxa infinitos puntos do conxunto. Isto non e certo en xeral, pero se verifica secada punto e un conxunto pechado (o que se expresa dicindo que o espazo e de Frechet, ou T1).Para probar a implicacion inversa precısase que toda cobertura aberta admita unha subcoberturaenumerabel, o que se satisfai se o espazo e segundo enumerabel. En fin, para construır sucesionsapropiadas o espazo debe ser primeiro enumerabel. En presencia destas hipoteses, as tres condi-cions son equivalentes. E practicamente todos os espazos que estudaremos seran Frechet e segundoenumerabeis.
A condicion de compacidade secuencial podese modificar de xeito que resulte valida en espazostopoloxicos arbitrarios: tratase de substituır o concepto de sucesion polo concepto de rede (net).Se unha sucesion e unha funcion con dominio o conxunto dos numeros naturais, N, unha redee unha funcion con dominio un conxunto dirixido (directed set), conxunto Λ no que esta definidaunha relacion reflexiva e transitiva, ≤, coa propiedade de que dados dous elementos a e b existe unelemento c tal que a ≤ c e b ≤ c. Nos non utilizaremos esta tecnica.
Compacidade en espazos Hausdorff
En espazos Hausdorff a compacidade ten propiedades especialmente agradables. Comecemos cunlema:
3.7 Proposicion Sexa X un espazo Hausdorff, K un subconxunto compacto de X. Dado x /∈ K,existen conxuntos abertos disxuntos U, V en X tal que x ∈ U e K ⊂ V . �
Noutra linguaxe, nun espazo Hausdorff podense separar puntos e compactos por conxuntosabertos. Para demostrar o lema faise o seguinte: para cada punto y ∈ K, escollense abertos Uy e
Curso 2014-15 22

TOPOLOXIA DE SUPERFICIES Prof. Xose M. Masa
Vy, disxuntos, tais que x ∈ Uy, y ∈ Vy. Deste xeito, a coleccion {Vy, y ∈ K} forma unha coberturaaberta de K. Se {Vy1 , Vy2 , ... , Vyk} e unha subcobertura finita, a solucion ven dada polos abertos
U = Uy1 ∩ Uy2 ∩ ... ∩ Uyk , V = Vy1 ∪ Vy2 ∪ ... ∪ Vyk .
3.8 Corolario Todo conxunto compacto nun espazo Hausdorff e pechado. �
Este resultado tamen se pode concluır do Exemplo 3.1.3.
3.9 Proposicion Sexa X un espazo Hausdorff, K e L subconxuntos compactos disxuntos de X.Existen conxuntos abertos disxuntos U, V en X tais que K ⊂ U e L ⊂ V . �
3.10 Corolario Todo espazo Hausdorff compacto e normal �
3.11 Proposicion Unha aplicacion continua f : X → Y dun espazo compacto X nun espazoHausdorff Y e pechada. Se, ademais, f e inxectiva, e un mergullo. Se f e sobrexectiva, e unhaidentificacion. En fin, se e bixectiva, e un homeomorfismo. �
x
Y
V
����
������
����
��������
��������
������
������
��������
��
��
Compacidade dun produto
3.12 Teorema O produto de espazos compactos e un espazo compacto. �
Este resultado, no caso de produtos arbitrarios, e conecido como Teorema de Tychonoff, unprofundo teorema que equivale ao Axioma da Escolla. No caso de produtos finitos a proba e facil,consecuencia do seguinte:
3.13 Lema da vecinanza tubular Sexan X e Y espazos topoloxicos, Y compacto. Dado x ∈ Xe un conxunto aberto V en X × Y tal que {x} × Y ⊂ V , existe un aberto U en X contendo aopunto x tal que U × Y ⊂ V. �
3.14 Exemplo O espazo proxectivo En (Rn+1 − {0}, τu) definimos a seguinte relacion deequivalencia: dous puntos x, y son equivalentes se existe un numero real non nulo, a, tal que x = ay.O cociente, Pn (ou RPn), denomınase espazo proxectivo n-dimensional (n-dimensional projectivespace). E un espazo Hausdorff compacto.
Para comprobar o caracter Hausdorff, dados dous puntos distintos x, y do espazo proxectivo,tomamos preimaxes x, y ∈ Sn, e consideramos os seguintes conxuntos U e V de Rn+1 − {0}:
U = {z ∈ R3 − {0} | | 〈x, z〉 |>| 〈y, z〉 |} ; V = {z ∈ R3 − {0} | | 〈y, z〉 |>| 〈x, z〉 |} .
Son abertos, disxuntos e x ∈ U , y ∈ V . Ademais, son saturados (se pertence un punto z,pertence az para todo a diferente de cero); polo que p−1(U) = U e p−1(V ) = V ; logo p(U) e p(V )son abertos e disxuntos.
Curso 2014-15 23
TOPOLOXIA DE SUPERFICIES Prof. Xose M. Masa
Podese ver que e un espazo compacto, presentandoo como cociente da esfera Sn, pois a esferacorta a todas as clases de equivalencia.
�
A propiedade de interseccion finita
Volvendo aos espazos topoloxicos xerais, damos unha caracterizacion alternativa da compacida-de.
Sexa F = {Fλ, λ ∈ Λ} unha familia de subconxuntos de X. Dise que F ten a propiedade deinterseccion finita (finte intersection property) se toda subfamilia finita dela ten interseccion nonbaleira,
Fλ1∩ Fλ2
∩ ... ∩ Fλi6= ∅
para todo conxunto finito de ındices λ1, λ2, ... , λi.Por exemplo, toda sucesion {Kn, n ∈ N} de conxuntos non baleiros, encaixada, ou sexa, con
Kn ⊃ Kn+1, verifica a propiedade de interseccion finita.Por unha das Leis de De Morgan, que unha coleccion de conxuntos sexa unha cobertura de
X equivale a que a interseccion dos seus complementarios sexa baleira. En consecuencia, tense aseguinte caracterizacion da propiedade de compacidade:
3.15 Teorema Un espazo e compacto sse toda familia de subconxuntos pechados que verifique apropiedade de interseccion finita ten interseccion non baleira. �
Esta forma de expresar a compacidade e interesante en moitos casos. Aplicada a loxica, porexemplo, permite concluır que unha teorıa e consistente (ou sexa, non conduce a resultados contra-ditorios) se, e soamente se, calquera conxunto finito de proposicions da teorıa e consistente.
Compacidade en espazos metricos
Nos espazos euclidianos caracterizamos os compactos como os subconxuntos pechados e li-mitados. Naquel marco, ser pechado equivale a ser completo. Nos espazos metricos mais xerais a
condicion de ser limitados, en xeral, non chega. Se en R2 se considera a metrica d(x, y) = du(x,y)1+du(x,y) ,
define a mesma topoloxıa que a usual, e todo o espazo e limitado. Precısase ser completo e totalmen-te limitado, condicion esta que nos non imos estudar. Pero as outras caracterizacions da compacidadeque se estudaron nos espazos euclidianos seguen a ser validas (vid. [14, Cap. 14]). Isto e ası porqueos espazos metricos son Hausdorff e primeiro enumerabeis. Ademais, se son compactos, tenen boaspropiedades de numerabilidade:
3.16 Proposicion Todo espazo metrico compacto e segundo enumerabel. �
Os exemplos que nos van interesar son subespazos dos espazos euclidianos, polo que non nosimos demorar nestas cuestions.
Unha propiedade notable, que estudamos no marco dos espazos euclidianos, e que unha funcioncontinua entre espazos metricos, con dominio compacto, e uniformemente continua. Para chegar aoTeorema, nesta ocasion imos partir dun lema previo, que ten ineterese por si mesmo.
3.17 Lema de Lebesgue Sexa X un espazo metrico compacto, U unha cobertura aberta de X.Existe un numero δ > 0 tal que cada subconxunto de X de diametro menor que δ esta completa-mente contido nalgun aberto da cobertura. �
Un numero δ con esta propiedade denomınase numero de Lebesgue para a cobertura U .
Curso 2014-15 24

TOPOLOXIA DE SUPERFICIES Prof. Xose M. Masa
3.18 Vexamos unha aplicacion do Lema de Lebesgue, que sera moi util. Sexa σ : I→ X un caminonun espazo topoloxico X. Sexa U unha cobertura aberta de X. Por continuidade, σ−1(U) e unhacobertura aberta de I. Sexa δ o seu numero de Lebesgue desta cobertura de I. Tomemos un enteironatural N tal que 1/N < δ. Se dividimos o intervalo en N partes iguais, a imaxe de cada parte,[i/N, (i+ 1)/N ], esta completamente contida nun aberto de U .
�
3.19 Teorema da continuidade uniforme Se f : X → Y e unha funcion continua do espazometrico compacto X ao espazo metrico Y , enton f e uniformemente continua. �
Demostracions do Lema e do Teorema podense ler, por exemplo, na referencia [17] da bibliografıa.
Ampliacion
Aplicacions propias e cocientes de espazos compactos
Moitos dos espazos que imos estudar defınense como cocientes. No caso de que a aplicacioncociente sexa pechada, a propiedade de ser Hausdorff pasa ao cociente. Vexamos este e outrosresultados relacionados. Comezamos cun lema tecnico util.
3.20 Lema Sexa f : X → Y unha funcion sobrexectiva entre conxuntos X e Y . Sexa B unsubconxunto de Y . Verifıcase
f(X − f−1(B)) = Y −B .
Proba.-y ∈ f(X − f−1(B)) ⇐⇒ ∃x /∈ f−1(B) t. q. f(x) = y ⇐⇒ y /∈ B .
�
A seguinte proposicion podese considerar coma unha xeneralizacion do Lema da VecinanzaTubular:
3.21 Proposicion Sexa f : X → Y unha funcion continua, pechada e sobrexectiva. Dado unaberto U de X tal que f−1(y) ⊂ U , existe V , vecinanza aberta de y, tal que f−1(V ) ⊂ U .
Proba.- O conxunto V = Y − f(X − U) e aberto e conten o punto y. Vexamos que f−1(V )esta contido en U :
x ∈ f−1(V ) =⇒ f(x) /∈ f(X − U) =⇒ x /∈ X − U =⇒ x ∈ U .
�
3.22 Definicion Dise que unha funcion e propia (proper) se e continua e a imaxe recıproca detodo compacto e un compacto. �
Como se segue do seguinte corolario, equivale a que sexa pechada e cada fibra sexa compacta.
3.23 Corolario Sexa f : X → Y unha funcion continua e pechada tal que, para cada punto y ∈ Y ,o conxunto f−1(y) sexa compacto. Se K ⊂ Y e compacto, daquela f−1(K) tamen e compacto.
Proba.- (Idea) Sexa U unha cobertura aberta de f−1(K). Cada fibra f−1(y), y ∈ K, esta contidanunha union finita Vy de abertos de U . Os conxuntos abertos Y −f(X−Vy) forman unha coberturaaberta de K.
�
Curso 2014-15 25

TOPOLOXIA DE SUPERFICIES Prof. Xose M. Masa
3.24 Corolario Sexa f : X → Y unha funcion continua, pechada e sobrexectiva tal que, para cadapunto y ∈ Y , o conxunto f−1(y) sexa compacto. Se o espazo X e Hausdorff, Y tamen e Hausdorff.
Proba.-Consideremos duas fibras distintas, f−1(y1) e f−1(y2). Ao ser compactas e ser X Hausdorff,podense separar por conxuntos abertos disxuntos. A Proposicion 3.21 permite concluır.
�
3.25 Contraexemplo Conven dispor de contraexemplos de cocientes de espazos Hausdorff quenon sexan Hausdorff. O seguinte e tan sinxelo coma util:
Sexa X = R × {1, 2}, R coa topoloxıa usual, {1, 2} coa topoloxıa discreta. Sexa Z o cocientede X pola relacion de equivalencia xerada por (x, 1) ∼ (x, 2) se x < 0. Observese que a funcioncociente e sobrexectiva e ten fibras compactas, pero que o cociente non e Hausdorff. �
3.26 Proposicion Sexa X un espazo compacto e Hausdorff e f : X → Y unha identificacion. Asseguintes afirmacions son equivalentes:
1. Y e un espazo Hausdorff
2. ∆f = {(x1, x2) | f(x1) = f(x2)} e pechado en X ×X
3. f e pechada.
Proba.- Para ver que 1)⇒ 2), sexa (x1, x2) ∈ X×X, con f(x1) 6= f(x2). Sexan U e V vecinanzasabertas de f(x1) e f(x2), respectivamente, disxuntas. O conxunto f−1(U) × f−1(V ), aberto enX ×X, conten o punto (x1, x2) e non interseca ∆f .
Para demostrar 2)⇒ 3), podese usar a igualdade f−1f(A) = pr1(∆f ∩ (X ×A)), onde pr1 e aproxeccion de X ×X sobre o primeiro factor. Habera que usar, tamen, o Exercicio 3.6.
Vexamos a implicacion 3)⇒ 1). Como f e pechada e X Hausdorff, cada punto de Y e pechado.Como X e compacto, deducimos que cada f−1(y) e compacto. Logo, duas fibras distintas, f−1(y1)e f−1(y2), podense separar por conxuntos abertos disxuntos. A Proposicion 3.21 permite concluır.
�
O conxunto de Cantor
Comezaremos falando dos conxuntos que Cantor chamou perfectos: conxuntos nos que todosos seus puntos son de acumulacion. Necesitamos un lema auxiliar.
3.27 Lema Sexa X un espacio compacto e Hausdorff. Dados dous puntos distintos de X, x e y,e un aberto U contendo un deles, y ∈ U , existe un aberto V tal que y ∈ V, V ⊂ U e x /∈ V .
Proba.- Observese que non dicimos nada sobre se x pertence ou non a U . Consideramos osconxuntos pechados disxuntos {y} e (X −U)∪ {x}. Polo Corolario 3.10, existen abertos disxuntosV, W tales que
y ∈ V e (X − U) ∪ {x} ⊂W .
Por seren disxuntos, V ⊂ X −W . Por ser W aberto, tamen V ⊂ X −W . Seguese o lema. �
3.28 Proposicion Sexa X un espacio Hausdorff, compacto e non baleiro. Se cada punto de Xe de acumulacion, daquela X e non enumerabel.
Proba.- Imos supor que exista unha aplicacion sobrexectiva f : N→ X, e chegar a unha contra-diccion. Sexa xn = f(n). Fagamos U = X no lema anterior, x = x1 e y calquera punto diferentede x1, que necesariamente existe, pois se X so tivera un punto non serıa de acumulacion. Existe
Curso 2014-15 26
TOPOLOXIA DE SUPERFICIES Prof. Xose M. Masa
pois un aberto V1 non baleiro, verificando que x1 /∈ V 1. Agora aplicamos de novo o lema, tomandoU = V1 e x = x2. Como y tomamos un punto de V1 diferente de x2, que certamente existe, poisse V1 so contivera un punto, este non serıa de acumulacion. O lema permite concluır a existenciadun aberto non baleiro V2 tal que V2 ⊂ V1 e x /∈ V 2. Iterando o argumento, construımos abertosVn tales que Vn ⊂ Vn−1 e xn /∈ V n. Temos, pois, unha sucesion contractiva de compactos nonbaleiros,
V 1 ⊃ V 2 ⊃ ··· ⊃ V n−1 ⊃ V n ...
Existira pois un x ∈ ∩V n, logo un x diferente de calquera xn, contradicindo o caracter sobrexectivode f.
�
Introducimos aquı un importante conxunto, con notabeis aplicacions en xeometrıa e analise, oconxunto de Cantor, ou descontinuo de Cantor, ou conxunto ternario. Denotaremolo por K.
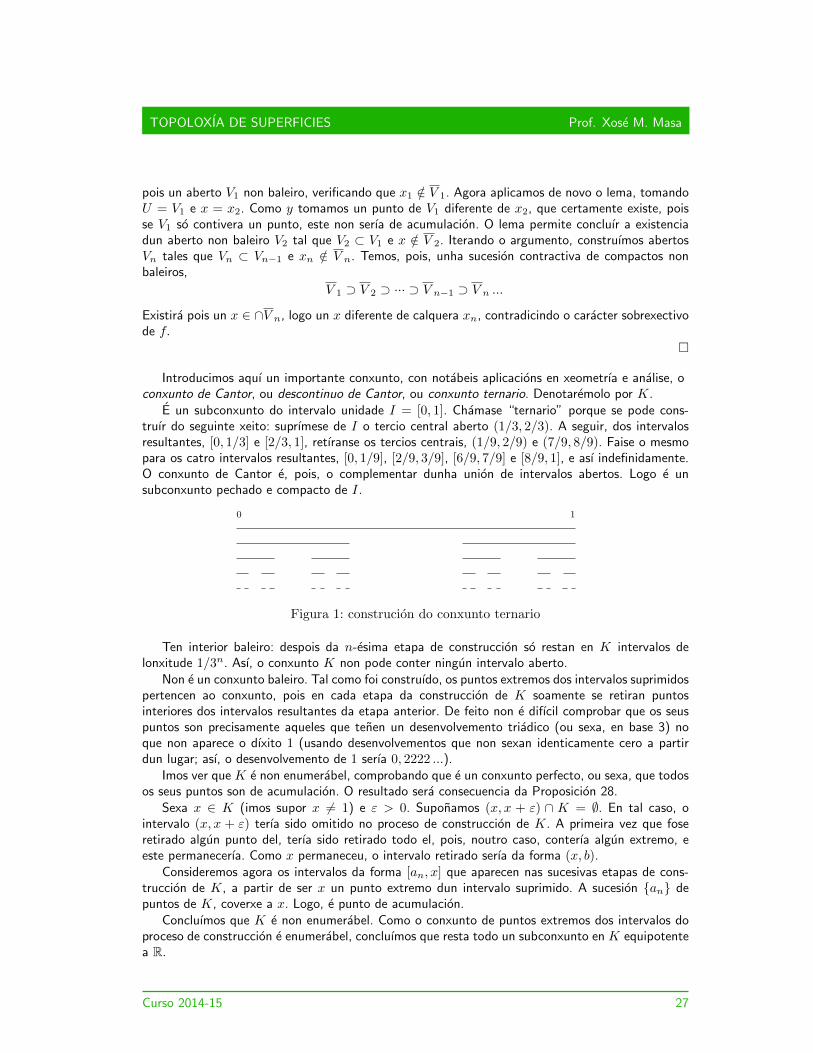
E un subconxunto do intervalo unidade I = [0, 1]. Chamase “ternario” porque se pode cons-truır do seguinte xeito: suprımese de I o tercio central aberto (1/3, 2/3). A seguir, dos intervalosresultantes, [0, 1/3] e [2/3, 1], retıranse os tercios centrais, (1/9, 2/9) e (7/9, 8/9). Faise o mesmopara os catro intervalos resultantes, [0, 1/9], [2/9, 3/9], [6/9, 7/9] e [8/9, 1], e ası indefinidamente.O conxunto de Cantor e, pois, o complementar dunha union de intervalos abertos. Logo e unsubconxunto pechado e compacto de I.
0 1
Figura 1: construcion do conxunto ternario
Ten interior baleiro: despois da n-esima etapa de construccion so restan en K intervalos delonxitude 1/3n. Ası, o conxunto K non pode conter ningun intervalo aberto.
Non e un conxunto baleiro. Tal como foi construıdo, os puntos extremos dos intervalos suprimidospertencen ao conxunto, pois en cada etapa da construccion de K soamente se retiran puntosinteriores dos intervalos resultantes da etapa anterior. De feito non e difıcil comprobar que os seuspuntos son precisamente aqueles que tenen un desenvolvemento triadico (ou sexa, en base 3) noque non aparece o dıxito 1 (usando desenvolvementos que non sexan identicamente cero a partirdun lugar; ası, o desenvolvemento de 1 serıa 0, 2222 ...).
Imos ver que K e non enumerabel, comprobando que e un conxunto perfecto, ou sexa, que todosos seus puntos son de acumulacion. O resultado sera consecuencia da Proposicion 28.
Sexa x ∈ K (imos supor x 6= 1) e ε > 0. Suponamos (x, x + ε) ∩ K = ∅. En tal caso, ointervalo (x, x + ε) terıa sido omitido no proceso de construccion de K. A primeira vez que foseretirado algun punto del, terıa sido retirado todo el, pois, noutro caso, conterıa algun extremo, eeste permanecerıa. Como x permaneceu, o intervalo retirado serıa da forma (x, b).
Consideremos agora os intervalos da forma [an, x] que aparecen nas sucesivas etapas de cons-truccion de K, a partir de ser x un punto extremo dun intervalo suprimido. A sucesion {an} depuntos de K, coverxe a x. Logo, e punto de acumulacion.
Concluımos que K e non enumerabel. Como o conxunto de puntos extremos dos intervalos doproceso de construccion e enumerabel, concluımos que resta todo un subconxunto en K equipotentea R.
Curso 2014-15 27

TOPOLOXIA DE SUPERFICIES Prof. Xose M. Masa
Do interese deste conxunto pode dar idea o feito, que non demostraremos, de que todo espaciometrico compacto e cociente do conxunto de Cantor.
Exercicios
3.1 Demostrade que un subespazo X de (Rp, τu) e compacto sse toda funcion real continua condominio X alcanza o maximo.
3.2 Sexa U un conxunto aberto en (R2, τu) contendo a circunferencia unitaria S1. Demostradeque existe un ε > 0 tal que a coroa circular Vε = {x ∈ R2| 1− ε < ‖x‖ < 1 + ε} esta contida enU .
3.3 Describide os subconxuntos compactos de R con diversas topoloxıas.
3.4 Sexa (X, τ) un espazo topoloxico Hausdorff compacto. Demostrade que se τ1 e unha topoloxıaen X estrictamente mais fina que τ , daquela (X, τ1) non e compacto, e se τ0 e unha topoloxıa enX estrictamente menos fina que τ , daquela (X, τ0) non e Hausdorff.
3.5 Sexa Dn a bola pechada unitaria no espazo euclidiano Rn. Demostrade que o cocienteDn/Sn−1 e homeomorfo a Sn, verificando que a funcion f : Dn → Sn dada por
f(x) = (2√
1− ‖x‖2 · x , 2‖x‖2 − 1)
induce unha bixeccion entre Dn/Sn−1 e Sn.
3.6 Sexan X e Y espazos topoloxicos. A proxeccion prX : X×Y → X e unha aplicacion continuae aberta, pero, en xeral, non e pechada (pon un exemplo). Demostra que se Y e compacto, aproxeccion prX e pechada.
3.7 Demostrade que todo conxunto compacto verifica a condicion de Bolzano-Weierstrass: todosubconxunto infinito ten un punto de acumulacion.
Sexa X = N×{a, b}, onde en N se considera a topoloxıa discreta e en {a, b} a topoloxıa trivial.Sexa E o subconxunto N × {a}. Comproba que E non e compacto e que verifica a condicion deBolzano-Weierstrass.
3.8 Sexa X un espazo topoloxico segundo enumerabel. Demostrade que toda cobertura abertade X admite unha subcobertura enumerabel.
3.9 Sexa X un espazo topoloxico segundo enumerabel. Demostrade que se X e secuencialmentecompacto, daquela X e compacto.
3.10 Sexa f : X → Y unha funcion continua, pechada e sobrexectiva tal que, para cada puntoy ∈ Y , o conxunto f−1(y) sexa compacto. Demostrade que se, ademais, Y e compacto, daquela Xtamen e compacto. (Indicacion: se un aberto V conten f−1(y), existira un aberto U en Y , con y ∈ U , tal que
f−1(U) ⊂ V )
3.11 ¶ Sexa f : X×K → (R, τu) unha funcion continua. Suponamos que K e un espazo compacto.Definimos unha nova funcion g : X → (R, τu) por
g(x) = sup{f(x, y), y ∈ K}.
Demostrade que g e continua. (Indicacion: utilizade o Lema 3.10 da vecinanza tubular)
Curso 2014-15 28

TOPOLOXIA DE SUPERFICIES Prof. Xose M. Masa
Leccion 4. Compacidade local
A compacidade e unha propiedade forte, un espazo compacto, especialmente se tamen e Haus-dorff, e un espazo cunha estrutura moi regular. Agora imos introducir a version local da compacidade.Os espazos que a verifican seguen a ter unhas propiedades excepcionalmente regulares.
Compacidade local
4.1 Definicion Un espazo topoloxico e localmente compacto (locally compact) se cada vecinanzadun punto conten unha vecinanza compacta. �
4.2 Exemplo O espazo euclidiano Rn e localmente compacto. De forma mais xeral, unha variedadee localmente compacta. Unha variedade topoloxica n-dimensional M e un espazo topoloxico local-mente homeomorfo ao espazo euclidiano Rn; ou sexa, cada punto x de M ten unha vecinanza abertaU homeomorfa a Rn. Por exemplo, a esfera Sn e unha variedade n-dimensional. O produto dunhavariedade n-dimensional por unha veriedade m-dimensional e unha variedade n + m-dimensional.Ası, S1 × S1, o toro, e unha variedade 2-dimensional. Unha variedade e un espazo localmente com-pacto. Conven observar que unha variedade pode non ser Hausdorff; un exemplo e o cociente deduas copias disxuntas de R coa topoloxıa usual, digamos X e Y , no que se identifica cada numeroestrictamente negativo dunha copia co mesmo numero da outra. Case sempre se supon que unhavariedade e segundo enumerabel. �
4.3 Contra-exemplo O espazo Q dos numeros racionais, coa topoloxıa usual, non e localmentecompacto. �
Non e certo que a imaxe continua dun espazo localmente compacto sexa necesariamente lo-calmente compacto. A identidade de Q coa topoloxıa discreta en Q coa topoloxıa usual e uncontra-exemplo. Outro e o seguinte: sexa X o subespazo {−1} ∪ (0, 1) de R e Y o subespazode R2 dado por Y = {(0, 0)} ∪ {(x, sen 1
x ), 0 < x < 1}. A aplicacion obvia de X sobre Y e outrocontra-exemplo.
4.4 Proposicion A imaxe dun espazo localmente compacto por unha aplicacion continua e abertae un espazo localmente compacto �
4.5 Corolario A compacidade local e unha propiedade topoloxica. �
4.6 Proposicion Todo subespazo aberto dun espazo localmente compacto e localmente compacto.Todo subespazo pechado dun espazo localmente compacto e localmente compacto. �
4.7 Observazon Aparecen na literatura outras definicions de compacidade local, que nos nonutilizaremos; por exemplo:
(i) Un espazo topoloxico e localmente compacto se todo punto posue unha vecinanza compacta.(ii) Un espazo topoloxico e localmente compacto se todo punto posue unha vecinanza aberta
con adherencia compacta.
As tres definicions son equivalentes se o espazo e Hausdorff. Os exercicios 4.5 e 4.8 poden axudara ver a diferencia. �
4.8 Proposicion Todo espazo Hausdorff compacto e localmente compacto. �
Curso 2014-15 29

TOPOLOXIA DE SUPERFICIES Prof. Xose M. Masa
4.9 Proposicion Sexa K un subconxunto compacto dun espazo Hausdorff localmente compactoX. Sexa U un conxunto aberto contendo a K. Existe un conxunto aberto V con adherencia compactae tal que
K ⊂ V , V ⊂ U .
Proba.- Para cada punto x de K, sexa Lx unha vecinanza compacta contida en U . Como os seusinteriores recubren K, habera unha subcoleccion finita, digamos, Lx1 , Lx2 , ... , Lxr que recubran K.A sua union, ao ser unha coleccion finita, e un conxunto compacto L. Como X e Hausdorff, Lsera pechado. O conxunto V = Int(Lx1
)∪ Int(Lx2)∪ ...∪ Int(Lxr
) satisfai as condicions requeridas.�
De non ser Hausdorff o espazo, o resultado pode non ser certo. Un contraexemplo ven dado polarecta de Kolmogorov (vid. Exercicio 4.4).
4.10 Propiedade Sexa X un espazo Hausdorff e E un subespazo localmente compacto de X.Se E e denso, enton e aberto. �
Por ser E localmente compacto, cada punto x ∈ E ten en E unha vecinanza compacta, V . Ousexa, existe unha vecinanza U de x en X tal que V = E ∩ U , con V compacto. Como o espazoe Hausdorff, V e pechado. Ou sexa, E interseca U nun conxunto pechado. Logo
E ∩ U = Cl(E) ∩ U = U ,
U ⊂ E e x e un punto interior de E.
Compactificacion de Aleksandrov
4.11 Definicion Unha compactificacion dun espazo non compacto X e un par formado por unespazo compacto Y e un mergullo h : X → Y tal que h(X) sexa un subespazo denso de Y . �
4.12 Exemplo Tomemos como X calquera subconxunto limitado e non pechado do espazoeuclidiano Rn. A sua adherencia e unha compactificacion, coa inclusion como mergullo. �
Presentaremos aquı a compactificacion mais sinxela dun espazo non compacto X, a denominadacompactificacion por un punto (one-point compactification) ou compactificacion de Aleksandroff(Aleksandroff compactification). Sexa X∗ a union de X e un punto, que denominaremos puntodo infinito, e escribiremos X∗ = X ∪ {∞}. Definiremos unha topoloxıa τ∗ en X∗ como union deτ e os subconxuntos de X∗ contendo o punto do infinito e tales que o seu complementar sexa unsubconxunto pechado e compacto de X.
1. τ∗ e unha topoloxıa
2. X e un subespazo denso
3. X∗ e compacto
4.1 Exercicio Comprobade que a compactificacion de Aleksandroff de Q non e Hausdorff nenlocalmente compacto.
4.13 Teorema A compactificacion de Aleksandroff X∗ e Hausdorff sse X e Hausdorff e localmentecompacto.
Unha implicacion e trivial: sendo X un subespazo aberto do espazo Hausdorff e compactoX∗, sera necesariamente Hausdorff e localmente compacto. Para demostrar a implicacion recıproca
Curso 2014-15 30

TOPOLOXIA DE SUPERFICIES Prof. Xose M. Masa
abonda con encontrar abertos que separen o punto do infinito e calquera punto x ∈ X. Como Xe localmente compacato, o punto x tera unha vecinanza compacta K. Como X e Hausdorff, Ksera un conxunto pechado. Os abertos buscados son Int(K) e X∗ −K. �
Cando a compactificacion de Aleksandroff e Hausdorff, e unica, no sentido que precisa a seguinteproposicion.
4.14 Proposicion Sexa X un espazo topoloxico non compacto, Y e Z espazos compactosHausdorff, e sexan f : X → Y e g : X → Z dous mergullos tales que Y − f(X) = {y0} eZ − g(X) = {z0}. Daquela Y e Z son espazos homeomorfos. �
4.15 Exemplo A esfera Sn, coa inversa da proxeccion estereografica (stereographic projection)como mergullo, e a compactificacion de Aleksandroff de Rn. En efecto, a imaxe so deixa fora unpunto, o polo norte, e Sn e compacto e Hausdorff. �
4.2 Exercicio Calculade a compactificacion por un punto de N.
4.3 Exercicio: A recta enlazada Tratase de R con certa topoloxıa (vid. [14, Exercico 7.22 eExemplo 10.4]). E unha compactificacion por un punto de (R, τu)? E de (R− {0}, τu)?
Compactificacion e extension de funcions reais continuas limitadas
O conxunto de funcions reais continuas con dominio un espazo topoloxico, C(X), podese dotardunha estrutura de anel, usando a suma e o produto en R:
f, g ∈ C(X) , (f + g)(x) = f(x) + g(x) , (f · g)(x) = f(x) · g(x) .
A estrutura topoloxica do espazo e a estrutura alxebrica do anel estan estreitamente relacionadas, dexeito que, baixo certas hipoteses, existe unha equivalencia natural entre espazo e anel. Por exemplo,para espazos compactos Hausdorff, podese reconstruır o espazo a partir do anel. E para espazos noncompactos, pero con hipoteses de separacion apropiadas, podese construır unha compactificaciontal que o seu anel de funcions reais continuase o mesmo que o anel de funcions reais continuaslimitadas do espazo de partida.
4.16 Exercicio. Sexan f, g : (0, 1) → [0, 1] duas funcions continuas con dominio o intervalounidade aberto e rango o intervalo unidade pechado, sempre coa topoloxıa usual. Condideradea funcion
Φ : (0, 1) −→ [0, 1]× [0, 1]× [0, 1] ,
dada por Φ(t) = (t, f(t), g(t)). Demostrade que Z = Φ((0, 1)) e unha compactificacion de (0, 1)a que se poden estender as funcions f e g. �
Curso 2014-15 31

TOPOLOXIA DE SUPERFICIES Prof. Xose M. Masa
Apendice: Grupos topoloxicos
Un grupo topoloxico e un grupo G que ten tamen unha topoloxıa, e tal que as operacions dogrupo, produto e inverso, son continuas:
G×G −→ G ; G −→ G .
(g1, g2) g1 · g2 ; g g−1
4.17 Exemplos
1. (Rn,+), (Cn,+), (R − {0},×), (C − {0},×). Estes dous ultimos grupos adoitanse denotarpor R∗ e C∗, respectivamente.
2. O grupo Z2 = {−1, 1} podemos identificalo con S0, que ten a topoloxıa discreta.
3. O grupo S1 podese presentar como subgrupo e subespazo de C− {0}.
�
4.18 Algunhas peculiaridades topoloxicasSe A e B son subconxuntos de G, usaremos a notacion AB = Π(A × B) e A−1 = ι(A) para
denotar o conxunto de todos os produtos de elementos de A por elementos de B, nun caso, oconxunto de inversos de A, no outro.
1. Cada elemento g do grupo define tres homeomorfismos do grupo en si mesmo:
Lg(x) = gx ; Rg(x) = xg ; Ig(x) = gxg−1 .
2. Sexa V unha vecinanza do elemento neutro e. Existe unha vecinanza U de e contida en V etal que U · U−1 ⊂ V .
3. Sexa V unha vecinanza do elemento neutro e. Existe unha vecinanza U de e contida en V etal que U = U−1.
4. As vecinanzas U de e verificando U = U−1 forman unha base local.
5. Se H e un subgrupo de G, Cl(H) tamen. Se H e normal, a sua adherencia tamen o e.
6. Se un subgrupo H e aberto, tamen e pechado. Se non e aberto ten interior baleiro.
7. Sexa G conexo e U unha vecinanza do elemento neutro con U = U−1. Daquela,
G =
∞⋃n=1
Un .
�
4.19 A componente conexa do elemento neutroSexa G un grupo topoloxico, e ∈ G o seu elemento neutro. A componente conexa de e, C(e),
e un subgrupo normal de G.
Curso 2014-15 32
TOPOLOXIA DE SUPERFICIES Prof. Xose M. Masa
O cociente C(e)\G e un grupo topoloxico. Observese que C(e) e sempre un subconxunto pe-chado de G. Se ademais fose aberto, o cociente serıa un espazo discreto. �
4.20 Os grupos clasicos O grupo linear xeral, GL(n,R), matrices n × n inversibles, e os seussubgrupos, son grupos topoloxicos. Dotase dunha topoloxıa ao conxunto Mn(R) de todas as matrices
n×n identificandoo con Rn2
, facendo corresponder a cada matriz o elemento de Rn2
que ten comocoordenadas as entradas da matriz, lidas fila a fila.
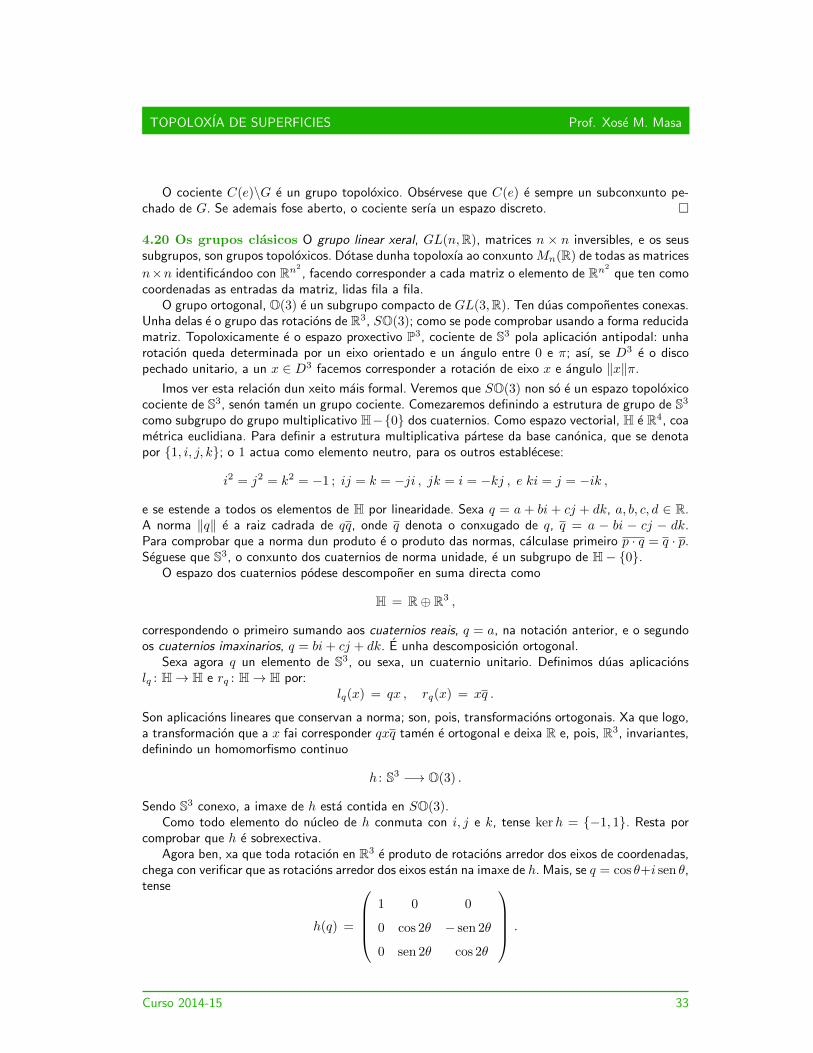
O grupo ortogonal, O(3) e un subgrupo compacto de GL(3,R). Ten duas componentes conexas.Unha delas e o grupo das rotacions de R3, SO(3); como se pode comprobar usando a forma reducidamatriz. Topoloxicamente e o espazo proxectivo P3, cociente de S3 pola aplicacion antipodal: unharotacion queda determinada por un eixo orientado e un angulo entre 0 e π; ası, se D3 e o discopechado unitario, a un x ∈ D3 facemos corresponder a rotacion de eixo x e angulo ‖x‖π.
Imos ver esta relacion dun xeito mais formal. Veremos que SO(3) non so e un espazo topoloxicocociente de S3, senon tamen un grupo cociente. Comezaremos definindo a estrutura de grupo de S3
como subgrupo do grupo multiplicativo H−{0} dos cuaternios. Como espazo vectorial, H e R4, coametrica euclidiana. Para definir a estrutura multiplicativa partese da base canonica, que se denotapor {1, i, j, k}; o 1 actua como elemento neutro, para os outros establecese:
i2 = j2 = k2 = −1 ; ij = k = −ji , jk = i = −kj , e ki = j = −ik ,
e se estende a todos os elementos de H por linearidade. Sexa q = a + bi + cj + dk, a, b, c, d ∈ R.A norma ‖q‖ e a raiz cadrada de qq, onde q denota o conxugado de q, q = a − bi − cj − dk.Para comprobar que a norma dun produto e o produto das normas, calculase primeiro p · q = q · p.Seguese que S3, o conxunto dos cuaternios de norma unidade, e un subgrupo de H− {0}.
O espazo dos cuaternios podese descomponer en suma directa como
H = R⊕ R3 ,
correspondendo o primeiro sumando aos cuaternios reais, q = a, na notacion anterior, e o segundoos cuaternios imaxinarios, q = bi+ cj + dk. E unha descomposicion ortogonal.
Sexa agora q un elemento de S3, ou sexa, un cuaternio unitario. Definimos duas aplicacionslq : H→ H e rq : H→ H por:
lq(x) = qx , rq(x) = xq .
Son aplicacions lineares que conservan a norma; son, pois, transformacions ortogonais. Xa que logo,a transformacion que a x fai corresponder qxq tamen e ortogonal e deixa R e, pois, R3, invariantes,definindo un homomorfismo continuo
h : S3 −→ O(3) .
Sendo S3 conexo, a imaxe de h esta contida en SO(3).Como todo elemento do nucleo de h conmuta con i, j e k, tense kerh = {−1, 1}. Resta por
comprobar que h e sobrexectiva.Agora ben, xa que toda rotacion en R3 e produto de rotacions arredor dos eixos de coordenadas,
chega con verificar que as rotacions arredor dos eixos estan na imaxe de h. Mais, se q = cos θ+i sen θ,tense
h(q) =
1 0 0
0 cos 2θ − sen 2θ
0 sen 2θ cos 2θ
.
Curso 2014-15 33

TOPOLOXIA DE SUPERFICIES Prof. Xose M. Masa
�
4.21 Accions de grupos Sexa G un grupo abstracto, X un conxunto. Unha accion de G sobreX e unha funcion
Φ: G×X −→ X
que verifica
1. Φ(e, x) = x, onde e e o elemento neutro do grupo e x calquera elemento do conxunto X.
2. Φ(g1,Φ(g2, x)) = Φ(g1 · g2, x), propiedade asociativa.
Normalmente escribese g ·x ou mesmo gx na vez de Φ(g, x). E para expresar que existe unha accionescrıbese Gy X. Para ser precisos, o definido e unha accion pola esquerda; analogamente se defineaccion pola dereita.
A accion define unha relacion de equivalencia: dous elementos x, y ∈ X son equivalentes seexiste un elemento g do grupo tal que y = g · x. As clases de equivalencia chamanse orbitas. Aorbita de x denotase Gx. O conxunto cociente denotase X/G. (Ou G\X cando convena explicitarque se trata dunha accion pola esquerda).
Para cada g ∈ G, a accion define unha funcion
ϕg : X → X ,
dada por ϕg(x) = Φ(g, x). Esta funcion e bixectiva.Sexa G un grupo topoloxico e X un espazo topoloxico. Se Φ e continua, dise que a accion
e continua, ou que G opera en X por homeomorfismos, pois neste caso cada ϕg e un homeomorfismo.A aplicacion cociente X → X/G e aberta. �
4.22 Cociente Hausdorff Se G e compacto e X e Hausdorff, o cociente, X/G, e Hausdorff.
E consecuencia de que, no caso de ser G compacto, a aplicacion cociente e pechada. Por con-seguinte, se X e Hausdorff, o cociente e Hausdorff (vid. Tema 3). Imos comprobar que a aplicacionΦ: G×X → X e pechada. Para poder utilizar converxencia de sucesions, imos supor que tanto X co-mo G son primeiro enumerabeis (hipotese que non e necesaria). Sexa A un subconxunto pechado deG×X. Sexa p un punto de acumulacion da sua imaxe, Φ(A). Sexa {yn} unha sucesion en Φ(A) con-verxendo ao punto p. Sexa {gn, xn} unha sucesion en A de preimaxes de {yn}. Como G e compacto,habera unha subsucesion converxente, {gnk
} → g0. A subsucesion das imaxes Φ(gnk, xnk
) = ynk
converxe a p. Ası, {Φ(g−1nk, gnk
xnk)} = {xnk
} → g−10 p; logo {(gnk
, xnk)} → (g0, g
−10 p) en A.
Finalmente, p = Φ(g0, g−10 p) ∈ Φ(A). �
Exemplos
1. O grupo multiplicativo R− {0} opera sobre Rn+1 − {0} polo produto escalar. O cociente daaccion e, por definicion, o espazo proxectivo real RPn.
2. Analogamente, o grupo multiplicativo C−{0} opera sobre Cn+1 −{0} polo produto escalar.O cociente da accion e o espazo proxectivo complexo CPn.
3. Para definir unha accion de Z2 nun espazo X chega con conecer φ−1 : X → X, que pode sercalquera involucion de X, ou sexa, unha aplicacion tal que feita duas veces dea a identidade.
E o caso da aplicacion antipodal a : Sn → Sn, a(x) = −x. O cociente por esta accion, Sn/Z2,e o espazo proxectivo real RPn, un espazo compacto e Hausdorff.
Curso 2014-15 34

TOPOLOXIA DE SUPERFICIES Prof. Xose M. Masa
4. A accion de C − {0} sobre Cn+1 − {0} define unha accion de S1 sobre S2n+1. O cociente,S2n+1/S1, e o espazo proxectivo CPn, un espazo compacto e Hausdorff. Podese demostrarque CP1 e homeomorfo a S2 Indicacion: Considerade a funcion de S3 sobre S2 dada por f(z1, z2) =
(z1z1 − z2z2, 2Im(z1z2),−2Re(z1z2)) Comparade co cociente de S3 por S1 calculado abaixo.
4.23 Espazos homoxeneos. Se H e un subgrupo de G, podemos considerar a accion de Hsobre G dada pola multiplicacion pola esquerda. Neste caso o cociente denotase H\G. Se a accione pola dereita, G/H. Estes espazos topoloxicos, cocientes dun grupo pola accion dun subgrupo,denomınanse espazos homoxeneos (homogeneous spaces).
Se H e un subgrupo discreto ( ou sexa, a topoloxıa inducida en H e a discreta) e G e Hausdorff,daquela G/H tamen e Hausdorff.
Indicacion: Primeiro vemos que, en xeral, se H e un subgrupo de G, G/H e Hausdorff sse H e pechado.Desde logo, e unha condicion necesaria. Vexamos a outra implicacion. Sexan [x] e [y] elementos distintos docociente. Sexan x, y ∈ G representantes. Sexa H ⊂ G×G o grafo da relacion de equivalencia definida polaaccion de H. E un pechado, imaxe recıproca de H pola funcion de G × G en G dada por (x, y) → xy−1.Como (x, y) ∈ G×G−H, existe unha vecinanza aberta U × V contida en G×G−H. As proxeccion deU e V son abertos do cociente que separan a [x] e [y].
Agora vemos que se G e Hausdorff e H discreto, daquela H e pechado. Se g e punto de acumulacion
de H, toda vecinanza terıa infinitos puntos de H. Dada unha vecinanza U de e con U ∩H = {e}, sexa V
vecinanza de e con V · V ⊂ U . gV e vecinanza de g; se gs, gt ∈ gV ∩H, resulta s−1t ∈ U ∩H.
1. O subgrupo Z opera sobre o grupo aditivo R. O cociente e homeomorfo e isomorfo ao grupotopoloxico S1.
2. Podemos considerar SO(2) ⊂ SO(3) identificando SO(2) co subgrupo das rotacions de R3
que deixan fixo o eixo z. O cociente e homeomorfo a S2.
Indicacion: Se z = (0, 0, 1) e o polo norte, traballade coa aplicacion φ de SO(3) en S2 dada por
φ(g) = g−1 · z.
3. Consideremos o subgrupo S1 de S3, actuando pola dereita. O cociente S3/S1 e homeomorfoa S2.
Indicacion: Se q = (a, b, c, d) e un cuaternio unitario, traballade coa aplicacion φ de S3 en S2 dada
por φ(q) = (a2 + b2 − c2 − d2, 2(ad+ bc), 2(bd− ac)).
�
Dise que un grupo G de homeomorfismos de X opera propiamente discontinuamente (properlydiscontinuously) se para todo x ∈ X hai unha vecinanza aberta V tal que V ∩ gV = ∅ para todog 6= e en G. Neste caso, a proxeccion cociente e un homeomorfismo local.
1. Dise que un grupo opera libremente ou sen puntos fixos se gx = x implica g = e.
Calquera grupo finito operando sen puntos fixos sobre un espazo Hausdorff opera propiamentediscontinuamente.
Sexan p e q enteiros primos entre si. Defınese unha accion do grupo aditivo Zp en S3 porϕ1(z0, z1) = (e2πi/pz0, e
2πiq/pz1). O cociente e unha variedade conexa e compacta denotadaL(p, q); e un espazo lente (lens space), espazos que xogan un papel destacado no estudo dasvariedades 3-dimensionais.
2. A accion do subgrupo Z2 en R2 e propiamente discontinua. O cociente e o toro, S1 × S1.
Curso 2014-15 35

TOPOLOXIA DE SUPERFICIES Prof. Xose M. Masa
3. Sexan ϕ(x, y) = (x, y + 1), ψ(x, y) = (x + 1,−y) dous homeomorfismos do plano. Definenun grupo G = {ϕ,ψ | ψ−1ϕψϕ} que opera sobre R2 de forma propiamente discontinua. Ocociente e a Garrafa de Klein, K.
Exercicios
4.4 Demostrade que a recta de Kolmogorov e un espazo topoloxico localmente compacto. Probadeque, non obstante, ningun aberto ten adherencia compacta. Concluıde que a recta de Kolmogorovnon verifica a Proposicion 4.9.
4.5
1. Consideremos en Q a topoloxıa τ0 dada por
τ0 = {U ∈ τu, se 0 /∈ U} ∪ {Q} .
Describide os subconxuntos compactos do espazo (Q, τ0). Comprobade que non e localmentecompacto.
2. Comprobade que o espazo (Q, τ0) e unha compactificacion do subconxunto Q−{0} de Q coatopoloxıa usual. Definide outras topoloxıas no conxunto Q, de xeito que os espazos resultantessexan compactos, induzcan a topoloxıa usual en Q−{0} e non sexan homeomorfos a (Q, τ0).
4.6 Sexan f, g : (0, 1)→ [0, 1] duas funcions continuas con dominio o intervalo unidade aberto erango o intervalo unidade pechado, sempre coa topoloxıa usual. Condiderade a funcion
Φ : (0, 1) −→ [0, 1]× [0, 1]× [0, 1] ,
dada por Φ(t) = (t, f(t), g(t)). Demostrade que Z = Φ((0, 1)) e unha compactificacion de (0, 1)a que se poden estender as funcions f e g.
4.7 Comprobade que a compactificacion de Aleksandroff de Q non e Hausdorff nen localmentecompacto.
4.8 Sexa ((0, 1), τ) o espazo definido no intervalo (0, 1) pola topoloxıa
τ = {∅, Y } ∪ {(0, 1− 1/n), n = 2, 3, ...} .
1. Que conxuntos abertos son compactos?
2. Que conxuntos pechados son compactos?
3. E o espazo Y localmente compacto?
4. Saberias dar unha caracterizacion sinxela de todos os subconxuntos compactos?
4.9 A recta enlazada. Tratase de R coa topoloxıa que ten como base
β = {(a, b), a < b, a, b ∈ R, 0 /∈ (a, b)} ∪ {(−ε, ε) ∪ (−∞,−n) ∪ (n,∞), ε > 0, n ∈ N} .
(Vid. [14, Exercico 7.22 e Exemplo 10.4]).
E unha compactificacion de (R, τu)? E de (R− {0}, τu)?
Curso 2014-15 36
TOPOLOXIA DE SUPERFICIES Prof. Xose M. Masa
Parte II
SUPERFICIES
Defınense as superficies, construense modelos a partir derepresentacions planas, e reducense, mediante tecnicas combinatorias,
a certos modelos canonicos, demostrando unha primeira parte doteorema de clasificacion para superficies compactas.
Curso 2014-15 37

TOPOLOXIA DE SUPERFICIES Prof. Xose M. Masa
Curso 2014-15 38

TOPOLOXIA DE SUPERFICIES Prof. Xose M. Masa
Superficies
Bernhard Riemann (1826-1866) En palabras de
Bourbaki, —os seus traballos sobre as funcions alxebri-
cas e as suas integrais e as suas reflexions (considera-
blemente inspiradas polo estudo dos traballos de Gauss)
sobre os fundamentos da xeometrıa, por outra, levaron
a Riemann a formular un programa de estudos que e o
mesmo da topoloxıa moderna. (...) Comezou a levar a
cabo este programa grandioso, definindo os numeros de
Betti dunha superficie...
Unha das propiedades de natureza topoloxica mais antigas e a que afirma que a suma do numerode caras dun poliedro, mais o numero de vertices, menos o numero de arestas e sempre igual a 2,
C + V − A = 2 .
Xa fora probada por Descartes (1630), aında que foi Euler quen a deu a conecer (1752) e Poin-care quen demostrou a sua natureza topoloxica e a xeneralizou a figuras n-dimensionais. Na segundametade do s.XIX, a raiz dos estudos de Riemann sobre funcions holomorfas, e as superficies que llesasocia, houbo un interese grande no estudo das supeficies, ao que contribuıron, entre outros, ade-mais do propio Riemann, matematicos como Mobius e Jordan, que deron demostracions do Teoremade Clasificacion, nin completas nin moi rigorosas, nos anos 1861 e 1866, respectivamente. Grazasa triangulacion, division das superficies en pequenas rexions curvas a semellanza de triangulos nunpoliedro, podese aplicar a anterior formula, que define un numero conecido como caracterıstica deEuler. Numero distinto para cada superficie, e que permite distinguilas, clasificalas topoloxicamente,no sentido de que calquera delas esta completamente determinada, salvo homeomorfismo, pola suacaracterıstica de Euler (tratase, neste momento, de superficies orientabeis). Os seguintes son osprimeiros modelos:
Unha demostracion completa (incluındo as superficies non orientabeis) publicarıase a principiosdo s.XX, polos matematicos Dehn e Heegaard.
Curso 2014-15 39
TOPOLOXIA DE SUPERFICIES Prof. Xose M. Masa
Curso 2014-15 40

TOPOLOXIA DE SUPERFICIES Prof. Xose M. Masa
Leccion 5. Superficies compactas
Superficies. Superficies con bordo. Suma conexa de superficies
5.1 Definicion Unha superficie (surface) e unha variedade 2-dimensional, 20 enumerabel, Haus-dorff e conexa. �
5.2 Exemplo O plano euclidiano e unha superficie. Calquera subespazo aberto e conexo dunhasuperficie e unha superficie. �
5.3 Exemplo A esfera S2 e unha superficie. Ademais, e un espazo topoloxico compacto, e unhasuperficie compacta. �
5.4 Exemplo O toro S1 × S1 e unha superficie. Denotemos por T 2 este espazo. Como produtode dous subespazos de R2, podese considerar como subespazo de R4. Pero se pode mergullar enR3, que e como habitualmente se presenta. Por exemplo, a aplicacion h : S1 × S1 → R3 dada por:
h(s, t, u, v) = ((2 + u)s, (2 + u)t, v)
e inxectiva e continua. Ademais, como S1 × S1 e compacto, pois e un subconxunto pechado elimitado de R4, e como R3 e Hausdorff, h tamen e pechada, logo e un mergullo. A sua imaxe e asuperficie dunha rosquilla. Vexamos como se construe h.
���
�����
BBBB
���
........
........
............................................................................................................................
......................................................................................................................................................................................................................................................................................................................................................
............................................................................................
..................................................................................................................
.
.................................................................................................................................................................................................................................................................................................................................................................................................................
................................
..................................................................................................................................................................
rr
(s, t)
u
v
φ
x
y
z
Para un punto arbitrario, (s, t, u, v), as primeiras coordenadas obtenense proxectando a lonxitude2 + u sobre os respectivos eixos x e y, o que corresponde a multiplicar polo coseno e o seno doangulo φ que determina o punto (s, t), ou sexa, por s e por t, respectivamente.
�
5.5 Exemplo No Exemplo 3.14 introducıronse os espazos proxectivos. O espazo proxectivo dedimension 2, P 2, denomınase plano proxectivo. Definıase como cociente de R3 − {0} pola relacionde equivalencia dada por:
x ∼ y se existe un a ∈ R, a 6= 0, tal que x = ay .
Comprobemos que e unha superficie compacta. Sexa p : R3 − {0} → P 2 a proxeccion cociente.
a) Conexidade.- Como R3 − {0} e conexo, o plano proxectivo e un espazo topoloxico conexo.
b) Compacidade.- Cada recta pola orixe en R3 corta a esfera S2. Polo tanto, a restricion daaplicacion cociente a S2 e sobrexectiva, o que implica que o plano proxectivo e un espazotopoloxico compacto.
Curso 2014-15 41
TOPOLOXIA DE SUPERFICIES Prof. Xose M. Masa
c) Caracter localmente euclidiano.- Imos ver que tanto p como p |S2 son aplicacions abertas. Enefecto, son as proxeccions cocientes asociadas a accions de grupos, nun caso do grupo R−{0},noutro caso do grupo Z2.
Outra forma de argumentar (para p |S2 , que e o que nos interesa): sexa h : R3−{0} → R3−{0}o homeomorfismo h(x) = −x. Sexa r : R3 − {0} → S2 a retraccion r(x) = x/‖x‖. Para cadaconxunto U ⊂ S2, verifıcase
p−1p(U) = r−1(U) ∪ h(r−1(U)) .
Logo, se U e un conxunto aberto, p(U) sera aberto.
Sendo p |S2 aberta, restrinxida a un hemisferio aberto, ao ser inxectiva e aberta, e un homeo-morfismo sobre a sua imaxe, que e un subconxunto aberto de P 2 homeomorfo, pois, ao planoeuclidiano.
cociente de S2 pola relacion que identifica puntos antipodais: un punto (x, y, z) de S2 iden-tifıcase co punto (−x,−y,−z).
d) Caracter Hausdorff.- Sexan x e y dous puntos diferentes de P 2, x e y duas preimaxes enS2 (poderiamos traballar so en S2). Tratase de construır abertos U e V contendo a x e y,respectivamente, e tais que p(U) ∩ p(V ) = ∅. Se tomamos r ≤ mın{d(x, y)/2, d(x,−y)/2},abonda coller U = B2(x, r), V = B2(y, r).
Sempre partindo de x, y ∈ S2, outra solucion, mais elegante, e considerar os seguintes conxuntosU e V de R3 − {0}:
U = {z ∈ R3 − {0} | | 〈x, z〉 |>| 〈y, z〉 |} ; V = {z ∈ R3 − {0} | | 〈y, z〉 |>| 〈x, z〉 |} .
Son abertos, disxuntos e x ∈ U , y ∈ V . Ademais, son saturados (se pertence un punto z,pertence az para todo a diferente de cero); polo que as suas imaxes tamen son disxuntas.
e) Condicion de enumerabilidade.- Por ser localmente euclidiano e compacto, P 2 e segundo enu-merabel.
O plano proxectivo podese mergullar en R4. Unha forma de facelo consiste en partir da funcionf : S2 → R4 dada por
f(x, y, z) = (x2 − y2, xy, xz, yz) .
Tratase de comprobar que esta funcion pasa ao cociente, definindo unha funcion continua
h : P 2 → R4 .
E que, ademais, h e inxectiva (f(x, y, z) = f(x′, y′, z′) sse (x, y, z) = ±(x′, y′, z′), un pequenocalculo, que se reduce a resolver unha ecuacion cuadratica). Ası, h sera unha funcion inxectiva,continua, con dominio compacto e rango Hausdorff. �
5.6 Espazos segundo enumerabeis A condicion de ser 20-enumerabel e importante, porquedescarta espazos patoloxicos. No caso destes tres exemplos, tanto a esfera como o toro como o planoproxectivo son segundo enumerabeis, por ser subespazos de R3 ou de R4. No caso de superficiescompactas, que son as que imos estudar, a condicion de ser segundo enumerabel podese deducirde seren compactas e localmente euclidianas: son unions finitas de subespazos abertos segundoenumerabeis! �
Curso 2014-15 42

TOPOLOXIA DE SUPERFICIES Prof. Xose M. Masa
Con frecuencia presentaremos as superficies como cocientes de rexions planas. Normalmente,tratarase de rexions poligonais cun numero par de arestas, identificadas duas a duas. Por exemplo,o toro podese construır a partir do cadrado unitario I2, coa topoloxıa usual. Partimos da relacion deequivalencia en I2 xerada por:
(x, 0) ∼ (x, 1) ,
(0, y) ∼ (1, y) .r rr
rCando dicimos “xerada por”, significa que non damos todo o conxunto R que define a relacion
de equivalencia, senon un subconxunto que o determina completamente, sendo R o menor conxuntoque e unha relacion de equivalencia e conten o conxunto dado. Para ter a relacion completa haberıaque engadir (x, y) ∼ (x, y) para todo punto (x, y) de I2, as relacions (x, 1) ∼ (x, 0) e (1, y) ∼ (0, y),e, finalmente, (0, 0) ∼ (1, 1) e (1, 1) ∼ (0, 0).
Imos demostrar que este cociente e homeomorfo ao toro. Paraiso imos construır unha identificacion f de I2 en S1 × S1 quedefina en I2 a mesma relacion de equivalencia que a dada.Esta condicion equivale a que exista unha aplicacion bixectivah entre o cociente e S1×S1, facendo conmutativo o diagrama.
I2 -pI2/ ∼
T 2
@@@R
h��
�f
Sexaf(s, t) = (cos 2πs, sen 2πs, cos 2πt, sen 2πt) .
A funcion f e claramente continua, e define a relacion de equivalencia apropiada. Ademais e pechada:efectivamente, o seu dominio e un compacto en R2, a sua imaxe esta en R4.
5.7 A Faixa de Mobius Imos construır agora un exemplo notable; non vai ser unha superficiecompacta, como os exemplos anteriores. Sera un cociente do produto do intervalo pechado polointervalo aberto, [0, 1]× (0, 1), pola relacion de equivalencia xerada por (0, y) ∼ (1, 1− y).
rr
O cociente, M, e a faixa de Mobius (Mobius strip). (Se queres construır unha faixa de Mobiuscon papel ou cartulina, parte dun rectangulo, mellor que dun cadrado).
1. Identifica o cociente dos conxuntos bermello e verde.
2. Construe unha funcion continua de M sobre S1.
�
Suma conexa de superficies
Sexan S1 e S2 duas superficies, D1 e D2 discos pechados en S1 e S2, respectivamente; ousexa, subconxuntos homeomorfos a un disco pechado no plano euclidiano. Imos supor que cadadisco escollido esta contido nun aberto da superficie homeomorfo a R2. As fronteiras dos discos,Fr(Di), i = 1, 2, son homeomorfas a S1. Sexa φ : Fr(D1)→ Fr(D2) un homeomorfismo. Na union
Curso 2014-15 43

TOPOLOXIA DE SUPERFICIES Prof. Xose M. Masa
disxunta (S1− Int(D1))∪ (S2− Int(D2)) consideramos a relacion de equivalencia ∼φ determinadapor x ∼ φ(x) se x ∈ Fr(D1). Construımos o cociente
S1#S2 = [(S1 − Int(D1)) t (S2 − Int(D2))] / ∼φ .
5.8 Lema O cociente S1#S2 e unha superficie. �
5.9 Cuestion Comprobade que o cociente e Hausdorff, localmente euclidiano e conexo. (Podese
considearar S1#S2 como union de tres subespazos abertos: S1 menos un disco pechado, S2 menos un disco
pechado e un cilindro) �
5.10 Definicion A superficie S1#S2 denomınase suma conexa (connected sum) das superficiesS1 e S2. �
A construccion depende das escollas feitas (D1, D2 e φ), pero ao variar a escolla as superfi-cies resultantes son homeomorfas. Non e difıcil construır o homeomorfismo pertinente, pero nosdeduciremos este feito do Teorema de Clasificacion.
5.11 Observacion O Teorema de Clasificacion permitira concluır que a operacion # ten, noconxunto de tipos de homeomorfıa das superficies, as boas propiedades da suma dos numerosenteiros, salvo non ter oposto: e conmutativa, asociativa e ten elemento neutro, a esfera S2; tenestrutura de semigrupo. �
Superficies con bordo
Hai unha definicion de variedade topoloxica mais xeral da que temos dado. Sera un espazotopoloxico M no que cada punto tena unha vecinanza aberta homeomorfa a Rn ou ao semi-espazo{(x1, x2, ... , xn) | xn ≥ 0}. O conxunto de puntos que non admiten ningunha vecinanza homeomorfaa Rn denomınase bordo (boundary) da variedade. E diremos que M e unha variedade con bordo(manifold with boundary). O bordo denotase ∂(M).
No caso de ser n = 2 e de se verificar as restantes propiedades topoloxicas que consideramos nadefinicion de superficie, teremos unha superficie con bordo (bordered surface).
5.12 Exemplos O semiplano superior pechado, ou o disco pechado, son superficies con bordo.O cilindro S1 × I e unha supeficie con bordo. A Faixa de Mobius, construıda partindo dun cadradopechado, e unha superficie con bordo. Dada unha superficie sen bordo, se consideramos nela unhacolleccion finita de discos pechados disxuntos, se quitamos os interiores deses discos teremos unhasuperficie con bordo. �
Cando falemos de superficies neste curso, de non explicitar o contrario, entenderemos que setrata de superficies sen bordo.
Triangulacions. As superficies como cocientes de rexions planas
Temos presentado algunhas superficies como cocientes de rexions planas. Imos ver agora quetoda supeficie compacta se pode presentar desta forma. Para iso, comezaremos por triangular asuperficie, ou sexa, dividir a superficie en trozos pechados homeomorfos a triangulos, de xeito queestos triangulos se peguen ben. A triangulacion e un tipo de estrutura combinatoria (combinatorialstructure). As estruturas combinatorias tenen grande interese en moitas ramas da matematica,tamen na topoloxıa. Nos imos apenas rozala, polo que non faremos un tratamento sistematico. Imosfalar de triangulos, entendendo por tais conxuntos pechados homeomorfos a un triangulo xeometrico.
Curso 2014-15 44

TOPOLOXIA DE SUPERFICIES Prof. Xose M. Masa
E nestes conxuntos imos distinguir vertices, arestas e cara, en correspondencia polo homeomorfismocos vertices, as arestas e o interior do triangulo xeometrico.
5.13 Definicion Unha triangulacion (triangulation) dunha superficie compacta S e unha coleccionde triangulos en S, T = {T1, ... , Tn}, tal que se verifica:
1. S = ∪ni=1Ti
2. dous triangulos Ti, Tj , ou son disxuntos, ou tenen en comun un punto, que corresponde a unvertice dos triangulos, ou tenen en comun un conxunto que corresponde a unha aresta (cosseu vertices!).
3. toda aresta e compartida por exactamente dous triangulos
4. todo vertice pertence a varios triangulos, que poden ser dispostos en orde cıclico; isto e, se x0
e un vertice, o conxunto de triangulos que o contenen poden ser enumerados como Ti1 , ... , Tikde xeito que Tij ∩ Tij+1
sexa unha aresta (facendo Tik+1= Ti1).
�
Sobre o Toro, nas figuras abaixo, (a) e (b) non serıan triangulacions, (c), si.
��������@
@@@@@@@
r r
r
r(a)
r r
r
r�����
���
���
���
AAA
���
�����
���
(b)
r r
r
r�����
��������
���
�����
���
(c)
5.14 Curiosidade Cal e o numero mınimo de triangulos necesarios para triangular a esfera? �
E bastante natural admitir que toda superficie compacta posue unha triangulacion, pero istorequire unha demostracion. Unha demostracion rigorosa deste feito e menos elemental do que sepoidera un imaxinar, desborda o tempo de que dispomos e non ten especial interese para nos, poloque non a faremos. Algun dos seus argumentos, de un valor formativo maior no contexto do nosoprograma, abordaremolo como exercicio.(Para a xente moi animosa: Moise, Edwin E., Geometric topology in dimensions 2 and 3, Springer-Verlag, 1977)
Sexa agora S unha superficie compacta, cunha triangulacion T = {T1, T2, ... , Tk}. A partir deT construese un polıgono, coas arestas identificadas de duas en duas, tal que o seu cociente e asuperficie de partida. Para facelo, asociamos a cada Ti un triangulo xeometrico T ′i en R2. Partindodun deles, por exemplo, T ′1, imos pegando os outros por algunha das arestas que estan identificadasna triangulacion. Os detalles poden consultarse no libro de Massey [15, Capıtulo I, Seccion 7].
Orientabilidade
Vivimos nun planeta orientado: en calquera punto, se miramos cara o Polo Norte, temos o Estea nosa dereita. Ou, mirando ao Polo Sur, teriamos o Este a nosa esquerda, que e o mesmo en cantoa orientacion.
Outro exemplo practico: unha mesa chea de comensais; podemos pensar nunha mesa redonda,que e mais visual. Co servizo de cada comensal, situado lateralmente, hai un anaco de pan. Na nosacultura adoitase adxudicar a cada comensal o pan que ten a sua esquerda. Pero acontece a miudo
Curso 2014-15 45

TOPOLOXIA DE SUPERFICIES Prof. Xose M. Masa
que a primeira persoa colla o pan que mais lle entre polos ollos; dise, enton, que orientou a mesa(no sentido das agullas do reloxo, se optou polo pancino da esquerda, no contrario, noutro caso).
Que e unha orientacion? Nun espazo vectorial de dimension finita, pensade en R2 ou R3, primeiro,dadas duas bases ordenadas existe unha matriz de cambeo de base, matriz que ten determinantediferente de cero. Podese definir unha relacion de equivalencia no conxunto de bases ordenadas:duas seran equivalentes se o determinante da matriz de cambeo de base e positivo. So hai duasclases de equivalencia. Cada clase de equivalencia denomınase orientacion (orientation).
En dimensions baixas e doado visualizar o concepto de orientacion. En R reducese a sentido. EnR2, dada unha base v1, v2, se nos movemos sobre a circunferencia unitaria, por exemplo, de v1 a v2
polo angulo mais pequeno, faremos un recorrido no sentido das agullas do reloxo ou no contrario,en funcion da clase de equivalencia a que pertenza a base; no plano, orientacion e o mesmo quesentido de xiro. Para facer un sımil en R3, na vez dun reloxo podese usar un tirarrollas.
Como trasladar esta nocion a unha superficie? De dispor das ferramentas da Xeometrıa Di-ferencial, unha orientacion da superficie nun punto serıa unha orientacion do seu plano tanxente.Localmente poderiamos trasladar unha orientacion de R2 a todos os puntos dunha carta coordenada.Se tiveramos unha cobertura por cartas coordenadas tais que os jacobianos dos cambeos de cartasforan positivos, teriamos unha orientacion en cada punto compatible coa escolla local. A superficieestarıa orientada.
Sempre se pode definir orientacion nun punto da superficie, duas orientacions en cada punto,de feito. Pero non sempre e posible facelo de forma coherente: cando e posible dise que a superficiee orientabel (orientabel), e non orientabel noutro caso.Pero nos non imos usar unha estrutura diferenciable. Poderiamosutilizar a estrutura combinatoria dada polas triangulacions. Porexemplo, podemos numerar os vertices dunha triangulacion. E orien-tar arestas e triangulos segundo a orde crecente dos vertices. Asorientacions de dous triangulos adxacentes disen coherentes se in-ducen na aresta comun orientacions contrarias. Se todas son cohe-rentes, definiran unha orientacion na superficie. E un bo metodopara traballar exemplos.A orientabilidade e unha propiedade topoloxica, e se pode definirpara calquera variedade topoloxica, sen recorrer a tecnicas diferen-ciais nin combinatorias. Nos imos dar unha definicion moi particular,util para o caso das superficies.
........
........
........
...................................................................................................
..........................
.....................................
................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................
......................................................................................................................................................................
r
r r
r
r
r
rrr
````
"""���
\\\\
����
bbbAAA
�����
BBBBB
1
2 1
2
3
3
5
64
Triangulacion do Plano Proxectivo
Comezaremos facendo unha discusion intuitiva, informal. Para esta discusion, identificaremosorientacion nun punto da superficie con sentido de xiro sobre unha pequena circunferencia debuxadana superficie, arredor do punto.
Imos traballar sobre a Faixa de Mobius, que a pensamos como cociente do rectangulo da figura:
rrrr��
������
����
}}}
oo
�
........................................................................................................................
...........................
...........................................
........................................................................................................
Fixada unha orientacion no punto central e desprazandoa ao longo da circunferencia (lina vermella),ao volver ao mesmo punto a orientacion inverteuse. Isto levanos a concluır que a Faixa de Mobiuse non orientabel. Esta idea podese usar como definicion: unha superficie serıa orientabel se despra-zando unha orientacion ao longo dun camino pechado, esta non muda. Pero nos imos dar aındaoutra definicion, que sera mais comoda, e abonda para as nosas necesidades.
Curso 2014-15 46

TOPOLOXIA DE SUPERFICIES Prof. Xose M. Masa
5.15 Definicion Diremos que unha superficie e orientabel se non conten ningun subespazo ho-meomorfo a unha Faixa de Mobius. Noutro caso diremos que e non orientabel. �
E doado comprobar que o Plano Proxectivo e a Garrafa de Klein son superficies non orientabeis.A Esfera e o Toro, por contra, son superficies orientabeis. Pero isto non o poderemos concluırcabalmente ata ter demostrado o Teorema de Clasificacion.
Chegados aquı, parece inescusable engadir que o plano e unha superficie orientable. Se non ofora, se contivera unha copia da faixa de Mobius, como a bola aberta e homeomorfa ao plano,ningunha superficie serıa orientabel! Polo comentado arriba, demostrado o Teorema de Clasificacionsaberiamos que isto non e ası. Pero non parece razoable esperar tanto. Certamente, fixada unhaorientacion do plano como espazo vectorial, as translacions determinan orientacions coherentes encada punto, como superficie. Pero esta non e a definicion dada por nos. Teriamos que comprobarque non existe un mergullo da faixa de Mobius no plano. Imos indicar como se pode facer.
Imos aceptar un resultado moi intuitivo, pero non inmediato, o Teorema de separacion de Jordan(vid. [17]). Di que toda copia de S1 divide ao plano en duas componentes conexas. Suposto Mmergullada en R2, a circunferencia media separarıa puntos proximos, que estan conectados en M.
Admitido que o plano e orientable, podemos concluır que a esfera tamen e orientable: se contiveraunha faixa de Mobius sen bordo, logo non compacta, M, a proxeccion estereografica, feita a partirdun punto de S2 −M, a levarıa ao plano.
Exercicios
5.1 Comprobade que o cociente do disco coa identificacion que se indica na Figura 1 e homeomorfoa esfera.
5.2 Comprobade que o cociente do disco coa identificacion que se indica na Figura 2 e homeomorfoao plano proxectivo.
........
........
..........................................................................
.............................
...............................................................................................................................................................................................................................................................................................................................................................................................................
.......................................................................................................................... ........
........
..........................................................................
.............................
...............................................................................................................................................................................................................................................................................................................................................................................................................
..........................................................................................................................
rr
rr
rr
rr
Figura 1 Figura 2
rrr
rK
Figura 3
5.3 Expresade analiticamente a relacion de equivalencia que se indica en I2, na Figura 3, edemostrade que o cociente e unha superficie. Denomınase Garrafa de Klein (Klein Bottle)
5.4 Demostrade que todo espazo compacto e localmente euclidiano e segundo enumerabel (Indi-
cacion: podese expresar como union finita de subconxuntos abertos homeomorfos ao espazo euclidiano).
5.5 Buscade un argumento formal para xustificar que unha triangulacion dunha superficie compactanon pode ter unha infinidade de triangulos.
5.6 Construe unha funcion continua e sobrexectiva da faixa de Mobius sobre S1.
Curso 2014-15 47

TOPOLOXIA DE SUPERFICIES Prof. Xose M. Masa
5.7 Construe un mergullo do toro T 2 = S1 × S1 en R3.
5.8 Se na definicion de superficie admitimos puntos que tenan vecinanzas abertas homeomorfasao semiplano pechado, {(x, y) | y ≥ 0}, os espazo resultante denomınase superficie con bordo. Obordo e o conxunto de puntos que non admiten vecinanzas homeomorfas a R2.
Comprobade que o cilindro, S1 × [0, 1], e a faixa de Mobius son superficies con bordo.
5.9 Partindo da funcion f : S2 → R4 dada por
f(x, y, z) = (x2 − y2, xy, xz, yz) ,
construe un mergullo de P 2 en R4.
5.10 Sexa K un subconxunto compacto, convexo e con interior non baleiro do plano euclidiano.Demostrade que existe un homeomorfismo φ : D2 → K entre o disco unitario pechado e K, queleva S1 na fronteira Fr(K) de K. (Podedes supor, sen perda de xeneralidade, D2 ⊂ K)
Curso 2014-15 48

TOPOLOXIA DE SUPERFICIES Prof. Xose M. Masa
Leccion 6. Clasificacion das superficies compactas, I
Sımbolo da presentacion dunha superficie
Como temos visto, toda superficie compacta se pode presentar como cociente dun polıgono,coas arestas identificadas duas a duas. A cada unha destas presentacions asociaremos un sımbolo(symbol). Para iso, etiquetamos cada aresta cunha letra. Etiquetada unha aresta, por exemplocoa letra a, a aresta coa que se identifica denotaremola por a ou por a−1: fixado un sentido delectura do polıgono, se o primeiro vertice que encontramos da aresta a se identifica ao primeiro queencontramos da sua parella, a etiquetaremos como a. En caso contrario, como a−1. Para indicarcomo se identifican as arestas, non se marcan puntos a identificar, como vinamos facendo; indıcaseunicamente o sentido da identificacion, mediante unha frecha. A superficie resultante non dependedo homeomorfismo, soamente do sentido, da imaxe dos extremos (poderıa un extremo do segmentoter como imaxe un punto do interior do segmento?). A continuacion ponemos como exemplosrepresentacions do Toro, o Plano Proxectivo e a Garrafa de Klein. As representacions, certamente,non son unicas, como teremos ocasion de comprobar. Aında menos o sımbolo. Neste caso, paraescribir os sımbolos, empezamos a ler o polıgono polo vertice superior da esquerda.
? ?b b
a
a
-
-aba−1b−1
6 ?
-
�
b b
a
a
abab
6 ?
-
-
b b
a
a
aba−1b
Non resulta difıcil comprobar que un sımbolo da suma conexa de duas superficies podese formarunindo os sımbolos das duas superficies. Imolo ver nun exemplo.
6.1 O dobre toro O dobre toro, como se in-dica na figura, e a suma conexa de dous toros.Imos partir da presentacion de dous toros, consımbolos aba−1b−1 e cdc−1d−1, e imos chegarao sımbolo aba−1b−1cdc−1d−1 para o dobre to-ro. Quitamos un disco aberto na rexion poligonalde cada toro; as modificamos para obter novasrexions poligonais, agora con cinco arestas (a no-va corresponde a fronteira do disco). Finalmentepegamos as duas rexions por esta aresta impar.O proceso indıcase na figura abaixo. �
Curso 2014-15 49

TOPOLOXIA DE SUPERFICIES Prof. Xose M. Masa
a
a
ee e
a
a
b
bb
b
b
b
a
a
c
c
c
c
d
d
d
d
d
d
c
c
6.2 Observacion.- Se no sımbolo dunha superficie hai duas arestas co mesmo exponente, digamos... a ... a ..., daquela a superficie e non orientabel. En efecto, unindo os extremos destas arestasformase unha faixa de Mobius. Reciprocamente, se a superficie conten unha faixa de Mobius, podeseconstruır unha triangulacion comezando por unha da faixa de Mobius, que contena duas arestas comesmo exponente. �
Reducion do sımbolo a unha forma canonica
O Teorema de Clasificacion vai dicir que toda supeficie compacta e homeomorfa ou a unha esfera,ou a unha suma conexa de toros, ou a unha suma conexa de planos proxectivos. A esfera admitecomo sımbolo aa−1. A suma conexa de n toros admite como sımbolo a1b1a
−11 b−1
1 ... anbna−1n b−1
n .A suma conexa de n planos proxectivos admite como sımbolo c1c1 ... cncn. Tratase de ver que todosımbolo se pode reducir a un destes. Iso e o que faremos agora.
6.3 Observacion Tamen e comun utilizar outra linguaxe: denomınase asa (handle) a un toromenos o interior dun disco pechado; a suma conexa de n toros e tamen unha esfera con n asas.Analogamente, un bonete cruzado (cross-cap) e un plano proxectivo menos o interior dun discopechado; a suma conexa de n planos proxectivos e tamen unha esfera con n bonetes cruzados. �
O proceso de reducion de calquera sımbolo a un destes esta descrito na maiorıa dos textos sobresuperficies, por exemplo, en [15]. Tal como nos o faremos, esta disponıbel neste curso virtual nunhapresentacion cos principais argumentos.
Agora quedara por demostrar que dous sımbolos diferentes representan superficies non homeo-morfas. Isto precisara novas ideas, novas tecnicas. Nos utilizaremos a homotopıa e o Grupo Funda-mental, polo que teremos que agardar ata o Tema 10 para rematar a demostracion..
No proceso de reducion, se o sımbolo ten arestas cos mesmos exponentes, reducirase a unhasuma conexa de planos proxectivos. Noutro caso, a esfera ou a unha suma conexa de toros. Dacordocoa Observacion 6.2, a esfera e a suma conexa de toros seran as superficies orientabeis, a sumaconexa de espazos proxectivos, as non orientabeis.
Temos demostrado, pois, o seguinte
6.4 Teorema de Clasificacion Toda superficie compacta e homeomorfa a unha esfera, ou aunha suma conexa de toros ou a unha suma conexa de planos proxectivos. �
Resta por demostrar que estas superficies non son homeomorfas entre si, o que faremos no ultimotema.
Curso 2014-15 50

TOPOLOXIA DE SUPERFICIES Prof. Xose M. Masa
A caracterıstica de Euler dunha superficieIntroducion
Tomemos un poliedro calquera; un tetraedro, un cubo, un octaedro,...Sumade o numero das suascaras e dos seus vertices e restade o numero de arestas. O resultado e 2. Se engadides novasarestas, para que todas as caras sexan triangulos, o resultado non varıa. Se proxectades estas figurasdesde o centro sobre unha esfera, obtedes unha triangulacion da esfera. Se agora colledes calqueratriangulacion da esfera e facedes o mesmo calculo, sempre obteredes 2 como resultado.
Podemos facer un calculo analogo para triangulacions doutras superficies. Podes probar co toroe co plano proxectivo. Para cada superficie imos obter sempre o mesmo numero, con independenciada triangulacion considerada.
Ese numero e un invariante topoloxico da superficie, denominado caracterıstica de Euler (Eulercharacteristic). Denotase χ(S).
Podense facer argumentos de tipo combinatorio para concluır a independenza deste numero arespeito da triangulacion. Pero son argumentos longos, que se alonxan dos metodos e obxectivos docurso. Ademais, podese definir a caracterıstica de Euler para espazos topoloxicos moito mais xerais,nos que estas tecnicas non se aplican, e si outras, que usan teorıa de homoloxıa, como se podeestudar na materia Topoloxıa Alxebrica, do 40 curso do Grao. Do que faremos hoxe e do Teorema deClasificacion poderemos concluır que a caracterıstica de Euler non depende da triangulacion, e uninvariante topoloxico.
Caracterıstica de Euler da suma conexa de duas superficies
6.5
χ(S1#S2) = χ(S1) + χ(S2) − 2
�
6.1 Calculade a caracterıstica de Euler χ(#nT 2) da suma conexa de n toros, e a caracterıstica deEuler χ(#nP2) da suma conexa de n planos proxectivos.
Calculo de χ(S) a partir do sımbolo dunha presentacion plana
6.2 Obtense χ(S) considerando a presentacion como unha soia cara, o polıgono, e os verticese arestas que resulten de facer as identificacions. Para comprobalo, partese dunha triangulacion,suprımese un vertice interior e todas as arestas que o contenen, e a suma de caras mais verticesmenos arestas non se altera, considerando o novo polıgono que aparece, que non sera necesariamenteun triangulo, como cara. Feito isto para todos os vertices interiores, suprımense os vertices que atriangulacion poidera ter introducido sobre a lina poligonal, deixando unicamente os vertices e asarestas dadas polo sımbolo, e unha unica cara.
6.3 Utilizando o metodo anterior, reconecede as seguintes superficies:
a1a2 ... ana−11 a−1
2 ... a−1n−1an ; a1a2 ... ana
−11 a−1
2 ... a−1n−1a
−1n .
(Para o segundo sımbolo, os casos con n par e n impar son diferentes)
6.4 Comprobade que a caracterıstica de Euler non se altera en cada paso da reducion do sımboloa forma canonica.
Curso 2014-15 51

TOPOLOXIA DE SUPERFICIES Prof. Xose M. Masa
Apendice: Revestimento de orientacion dunha superficie
A toda superficie non orientabel se pode asociar unha superficie orientabel. Se partıramos dunhadefinicion de orientacion local, unha idea para a sua construcion poderıa ser a seguinte: de cada pe-queno aberto da superficie dada se toman duas copias, unha cunha orientacion, outra coa contraria.Para formar a nova superficie tomamos a suma topoloxica disxunta de todos estes conxuntos, coaproxeccion obvia sobre S, e facemos o cociente pola relacion de ter a mesma proxeccion e a mesmaorientacion.
Nos non dimos unha definicion local, consideramos unha definicion global de superficie orientabel,e ımonos contentar cunha descricion mais sinxela. En todo caso, a nocion que esta en xogo e a derevestimento:
6.5 Definicion Unha funcion continua p : E → X denomınase proxeccionde revestimento (covering projection) se para todo punto x de X existe unhavecinanza aberta U tal que
1. p−1(U) =⋃x∈p−1(x) Ux, onde Ux son subconxuntos abertos disxun-
tos, e
2. para cada Ux, p |Ux: Ux → U e un homeomorfismo.
Os abertos de X con esta propiedade denomınanse abertos lisos (evenly cove-red). Cada aberto Ux e unha lamina (sheet). O dominio dunha proxeccion derevestimento e un espazo de revestimento ou revestimento (covering space,cover) de X, que e o espazo base (base space).
E
X
?
p
6.6 Exemplos A aplicacion exponencial, R → S1, a aplicacion cociente da esfera sobre o planoproxectivo, S2 → P2, a k-esima potencia S1 → S1, son proxeccions de revestimento. O produtocartesiano dun numero finito de proxeccions de revestimento e unha proxeccion de revestimento.
Propiedades
6.7 Toda proxeccion de revestimento e unha aplicacion aberta e sobrexectiva.
6.8 Se E e conexo, todas as fibras p−1(x) de p : E → X tenen a mesma cardinalidade.
6.9 A fibra p−1(x) dunha proxeccion de revestimento p : E → X e un subespazo discreto doespazo E.
Ası, se E e compacto, o cardinal da fibra e finito. Cando este cardinal e k, dise que se trata dunrevestimento de k laminas (k-fold cover).
6.10 Sexa E conexo e segundo enumerabel. Se p : E → S e unha proxeccion de revestimento e Se unha superficie, E e tamen unha superficie.
6.11 Sexan S e S superficies compactas, p : S → S unha proxeccion de revestimento de k laminas.Daquela
χ(S) = kχ(S) .
(Indicacion: usar unha triangulacion de S con triangulos contidos en abertos lisos. Construır a partir dela
unha triangulacion de S)
6.12 Construcion do revestimento de orientacion A clase de homeomorfıa dunha supe-ficie non orientabel ven determinada pola sua caracterıstica de Euler, que sera un numero enteiro
Curso 2014-15 52

TOPOLOXIA DE SUPERFICIES Prof. Xose M. Masa
necesariamente menor ou igual que 1. Se S e non orientabel, e a suma conexa de 2− χ(S) planosproxectivos.
6.13 Exercicio Reconecede as seguintes superficies:
a1a2 ... ana−11 a−1
2 ... a−1n−1an ; a1a2 ... ana
−11 a−1
2 ... a−1n−1a
−1n .
(Para o segundo sımbolo, os casos con n par e n impar son diferentes)
Polo exercicio anterior, a suma conexa de n + 1 planos proxectivos admite unha presentacionpoligonal de sımbolo
a1a2 ... anc a−11 a−1
2 ... a−1n c
Imos considerar outra copia desta superficie; escribiremos o seu sımbolo como
bnbn−1 ... b1c b−1n b−1
n−1 ... b−11 c
Agora construımos unha nova superficie a partir destas duas copias; formamos unha nova rexionpoligonal pegando unha aresta c de cada copia.
Tratase de identificar a nova superficie, S, comprobar que e orientabel, definir unha funcionp : S → S e verificar que e unha proxeccion de revestimento.
6.14 Exercicio Mostrade explicitamente os revestimentos de orientacion da Garrafa de Klein edo plano proxectivo.
Exercicios
6.15 Considera as rexions planas con sımbolos
a b c d a−1 b−1 c d−1 ,
a b c d a−1 b−1 d−1 c−1 .
Cantos vertices distintos tenen?
6.16 Demostrade o homeomorfismo K ≈ P 2#P 2.
6.17 Demostrade o homeomorfismo T 2#P 2 ≈ P 2#P 2#P 2.
Esquema:
Curso 2014-15 53
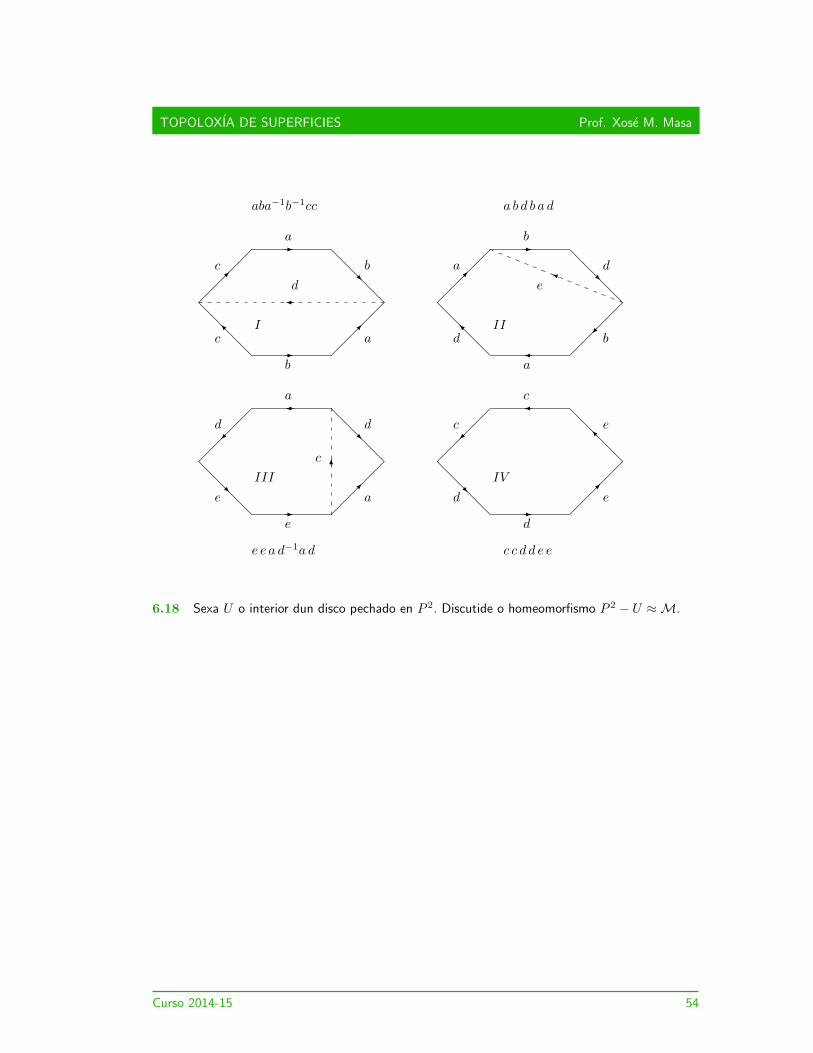
TOPOLOXIA DE SUPERFICIES Prof. Xose M. Masa
e e a d−1a d
RR
R
RR
- -
--
-
� �
�
�
� �
��
�
I
II
6
i
����
@@@@
@@
@@
��
��
III
c
d
e
a
e
d
a
����
@@@@
@@
@@
��
��
IV
c c d d e e
c
d
c
d
e
e
����
@@@@
@@
@@
��
��
I
aba−1b−1cc
d
c
c
a
b
b
a
����
@@@@
@@
@@
��
��
II
a b d b a d
e
a
d
b
a
d
b
6.18 Sexa U o interior dun disco pechado en P 2. Discutide o homeomorfismo P 2 − U ≈M.
Curso 2014-15 54
TOPOLOXIA DE SUPERFICIES Prof. Xose M. Masa
Parte III
HOMOTOPIA
Para discernir entre os modelos canonicos construıdos, comprobandoque son todos topoloxicamente diferentes, vaise usar unha ferramentade Topoloxıa Alxebrica, o Grupo Fundamental ou Grupo de Poincare.
A sua introducion e estudo adıcase esta parte, que conclue coademostracion plena do teorema de clasificacion de superficies.
Curso 2014-15 55

TOPOLOXIA DE SUPERFICIES Prof. Xose M. Masa
Curso 2014-15 56
TOPOLOXIA DE SUPERFICIES Prof. Xose M. Masa
Homotopıa
Henri Poincare (1854-1912) De intelixencia porten-
tosa, fixo grandes aportacions en teorıa de funcions,
ecuacions diferenciais, xeometrıa hiperbolica, fısica re-
lativista, filosofıa da ciencia,... A descuberta do grupo
de transformacions da xeometrıa non euclidiana, co pa-
pel que xogan na presentacion das superficies como co-
cientes de rexions planas, e os seus estudos de topoloxıa
combinatoria conducıronno a construccion do grupo fun-
damental.
Que propiedade topoloxica dun espazo reflicte a diferencia entre, por exemplo, un disco e unhacoroa no plano euclidiano? Noutras palabras, como detectar a presencia dun burato sen facer usode ningunha ferramenta non topoloxica, como distancia ou angulo?
........
........
........
...................................................................................................
..........................
.....................................
................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................
..............................................................................................................................................................................
........................................
................................................................................................................................................................................................................................
rr
.........................................................................................................
............................................................................................................................................................
........
........
........
........
.........
.........
.........
..........
..........
..........
...........
............
............
...........................................................................................................................................................................................................................................................................................................................................................
........
........
........
...................................................................................................
..........................
.....................................
................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................
......................................................................................................................................................................
.........................................................................................................
............................................................................................................................................................
..........................................................................................................................................................................................................
.................................................................................................................................................................................................
................................................
........
........
........
.....................................................................................................................................................................................................................................................................................................................
........
........
........
........
.........
.........
.........
..........
..........
..........
...........
............
............
...........................................................................................................................................................................................................................................................................................................................................................
rr
A razon, de feito, de introducir neste curso a homotopıa e a necesidade de distinguir entresuperficies non homeomorfas, como a esfera e un toro.
Non faremos unha teorıa xeral, limitaremonos, esencialmente, a consideracion de homotopıade caminos. No caso dos exemplos citados, dous caminos cos mesmos extremos no disco podensedeformar un no outro con continuidade; na linguaxe que imos introducir, son homotopos. Isto nonacontece sempre na coroa.
Esta idea sinxela vaise elaborar ata dar lugar a construccion dun grupo, o grupo de Poincare doespazo, que sera un invariante topoloxico.
Curso 2014-15 57
TOPOLOXIA DE SUPERFICIES Prof. Xose M. Masa
Curso 2014-15 58

TOPOLOXIA DE SUPERFICIES Prof. Xose M. Masa
Leccion 7. Homotopıa
Homotopıa de aplicacions
7.1 Definicion Sexan f, g : X → Y duas funcions continuas. Unha homotopıa (homotopy) entref e g e unha funcion continua
H : X × I −→ Y
tal que H(x, 0) = f(x) e H(x, 1) = g(x). Habitualmente denotase H(x, t) = ht(x); con estanotacion serıa h0 = f, h1 = g,
{ht : X −→ Y , t ∈ I } .
De existir tal homotopıa dise que f e g son funcions homotopas (homotopic functions). �
O feito de ser H unha homotopıa entre f e g denotase H : f ' g. Se non interesa explicitar ahomotopıa, escrıbese f ' g.
Adoitase dicir que as funcions {ht, t ∈ I} definidas a partir de H son unha familia continuade funcions. En efecto, podese introducir unha topoloxıa no conxunto Map(X,Y ) de aplicacionscontinuas de X en Y de xeito que a funcion de I en Map(X,Y ) que a cada t fai corresponder htsexa continua (vid. [9, Chap. V, Sect. 3]).
7.2 Exemplo Sexan f, g : X → Rn funcions continuas con rango Rn. Son homotopas. A funcionH : X × I→ Rn dada por
H(x, t) = (1− t)f(x) + tg(x)
define unha homotopıa entre elas. Poderıase ter substituıdo Rn por calquera subespazo convexo.�
7.3 Proposicion Sexan X e Y espazos topoloxicos. Ser homotopas e unha relacion de equivalenciano conxunto Map(X,Y ) de aplicacions continuas. �
Vexamos, por exemplo, que se verifica a propiedade transitiva. Sexan f, g, h : X → Y funcionscontinuas. Sexa H : f ' g e K : g ' h homotopıas. Tratase de construır unha homotopıa L entre f eh. A idea e utilizar H na primeira metade do intervalo, e K na segunda. Indo ao dobre de velocidade:
L(x, t) =
H(x, 2t) se 0 ≤ t ≤ 1/2
K(x, 2t− 1) se 1/2 ≤ t ≤ 1H
K
I
X
- YL
A clase de equivalencia dunha funcion f : X → Y denomınase clase de homotopıa (homotopicclass) de f , e denotase por [f ], e o conxunto cociente de Map(X,Y ) pola relacion de homotopıadenotase [X,Y ]:
[X,Y ] = Map(X,Y )/ ' .
Equivalencias e Tipo de homotopıa
Unha aplicacion f : X → Y e unha equivalencia de homotopıa (homotopy equivalence) se, eso se, existe unha aplicacion continua g : Y → X tal que as composicions
g ◦ f : X −→ X , f ◦ g : Y −→ Y
Curso 2014-15 59

TOPOLOXIA DE SUPERFICIES Prof. Xose M. Masa
son homotopas as aplicacions identidade de X e Y , respectivamente, g ◦ f ' idX
f ◦ g ' idY(1)
Cando entre dous espazos X e Y existe unha equivalencia de homotopıa, dise que tenen o mesmotipo de homotopıa (homotopy type).
As relacions na formula (1) tamen se poden escribir
[g] ◦ [f ] = [idX ] , [f ] ◦ [g] = [idY ] .
Se f : X → Y e g : Y → Z son funcions continuas, ten sentido componer as suas clases dehomotopıa,
[g] ◦ [f ] = [g ◦ f ] .
Efectivamente, non depende dos representantes escollidos. Por exemplo, se H : f ' f ′ e unhahomotopıa entre f e f ′, g ◦H e unha homotopıa entre g ◦ f e g ◦ f ′.
Retraccion e deformacion
7.4 Definicion Un subespazo E de X e un retracto (retract) se a aplicacion inclusion i : E → Xten unha inversa pola esquerda, ou sexa, se existe unha aplicacion continua r : X → E verificandor ◦ i = idE . Dito doutro xeito, unha aplicacion r que fai conmutativo o diagrama:
X -r E
E
������7
SSSSSSo
idEi
�
Unha aplicacion r con esta propiedade denomınase retraccion (retraction) . Ası, unha retraccione unha aplicacion continua do espazo sobre o subespazo, que non move os puntos deste.
7.5 Exemplo A esfera unitaria, Sn−1, e un retracto de Rn−{0}. Unha retraccion e r(x) = x/‖x‖.�
7.6 Definicion Dado un espazo X, unha deformacion (deformation) e unha homotopıa
H : X × I −→ X ,
con h0 = idX . �
7.7 Exemplo A homotopıa de Rn − {0} → Rn − {0} dada por ht(x) = x/‖x‖t e unhadeformacion. �
7.8 Retracto por deformacion Sexa E un retracto de X, r : X → E unha retraccion. Dise queE e un retracto por deformacion (deformation retract) cando a retraccion composta coa inclusione unha deformacion. Se iE e a inclusion, ser retracto por deformacion sinifica que se verifica
Curso 2014-15 60

TOPOLOXIA DE SUPERFICIES Prof. Xose M. Masa
1. r ◦ iE = idE , e
2. iE ◦ r ' idX .
Consideremos, por exemplo, como X a union S1∪L no plano euclidiano,onde L e a recta y = 1. A circunferencia e un retracto por deformacion.
........
........
..................................................................
.....................................
.........................................................................................................................................................................................................................................................................................................................................................................................................................................................
�
Espazos contractiles
7.9 Definicion Unha deformacion
H : X × I −→ X ,
con h1 constante denomınase contraccion (contraction). Se existe unha contraccion, dise que oespazo X e contractil (contractible). �
7.10 Exemplo O espazo euclidiano Rn e contractil. Calquera subespazo convexo del, tamen. �
7.11 Exercicios
1. Ser contractil equivale a ter o mesmo tipo de homotopıa que o espazo dun punto.
2. Se E e un retracto por deformacion de X, X e E tenen o mesmo tipo de homotopıa.
�
Homotopıas que pasan a cocientes
Sexa p : X → Y unha identificacion, Z un espazo topoloxico arbitrario. Non sempre a funcionproduto cartesiano de p pola identidade de Z,
p× idZ : X × Z −→ Y × Z ,
e unha identificacion. Vexase [17, Exemplo 7,§22] para un contra-exemplo.Con frecuencia imos precisar construır homotopıas en cocientes, para o que resulta moi util que
p× idI sexa unha identificacion. Pois ben, neste caso, e certo.
7.12 Proposicion Sexa p : X → Y unha identificacion, Z un espazo localmente compacto.Daquela, p× idz : X × Z → Y × Z �
Proba.- Sexa U un subconxunto de Y ×Z tal que V = (p× idZ)−1(U) sexa un conxunto abertoen X × Y . Tratase de demostrar que, daquela, U e un conxunto aberto.
Sexa (y, z) un punto de U . Sexan x ∈ X unha preimaxe de y, p(x) = y, e K unha vecinanzacompacta de z en Z tal que {x} ×K ⊂ V . Consideremos o seguinte conxunto:
W = {w ∈ X | {w} ×K ⊂ V } = {w | p(w)×K ⊂ U} .
Un argumento semellante ao usado na proba do lema da vecinanza tubular permite concluır que We un conxunto aberto. Ademais, p−1(p(W )) = W , polo que p(W ) e aberto; finalmente
(y, z) ∈ p(W )×K ⊂ U .
Curso 2014-15 61

TOPOLOXIA DE SUPERFICIES Prof. Xose M. Masa
Exercicios
7.1 Demostrade que unha funcion continua f : S1 → Y e homotopa a unha funcion constante sseadmite unha extension F : D2 → Y .
7.2 Sexa X un espazo topoloxico, C(X) o cono de X (vid. Exemplo 2.10). Considerase X comosubespazo de C(X) identificando cada punto x de X co punto [(x, 0)] do cono. Como xeneralizaciondo anterior, demostrade que unha funcion continua f : X → Y e homotopa a unha funcion constantesse admite unha extension F : C(X)→ Y .
7.3 Demostrade que unha funcion continua f : X → Sn non sobre-xectiva e homotopa a unha funcion constante. (Indicacion: tede presente
que toda funcion con rango Rn e homotopa a unha constante; xogade coa inversa
da proxeccion estereografica, ou, mellor, co mergullo j : Rn → Sn que induce)
7.4 Sexa D2 × I o cilindro solido, subespazo do espazo euclidianoR3. Demostrade que o subconxunto D2×{0} ∪ S1× I e un retractopor deformacion do cilindro. (Indicacion: o debuxo debe axudar a visualizar
xeometricamente a transformacion)
7.5 Demostrade que a Faixa de Mobius M ten o mesmo tipo dehomotopıa que S1. (Considerade a Faixa de Mobius pechada, cociente do
cadrado I× I. Pensade inicialmente en I× I)
7.6 Demostrade que un espazo X e contractil sse para todo espazo Y duas aplicacions continuascalquera f, g : Y → X son homotopas.
Curso 2014-15 62

TOPOLOXIA DE SUPERFICIES Prof. Xose M. Masa
Leccion 8. O Grupo Fundamental
Homotopıa de caminos
Un camino e unha funcion, logo ten sentido falar de homotopıa de caminos tal como a vimos dedefinir. Pero cando se fala de homotopıa de caminos, habitualmente se introduce unha condicion amaiores:
8.1 Definicion Sexan σ e τ dous caminos en X cos mesmos extremos,
σ(0) = x0 = τ(0) , σ(1) = x1 = τ(1) .
Diremos que H : I × I → X e unha homotopıa entre σ e τ relativa aos extremos (relative to theend points) se se verifica:
1. H(s, 0) = σ(s) para todo s ∈ I
2. H(s, 1) = τ(s) para todo s ∈ I
3. H(0, t) = x0 para todo t ∈ I
4. H(1, t) = x1 para todo t ∈ IDe existir tal homotopıa dirase que os caminos σ e τ son homotopos relativamente aos extremos.
�
x0 x1
σ
τ
- XH
..............................................................................................................................................................................................................................................
.........................................................
........................................................
.......................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................
.............................................................................
................................................................................
...................................................................................
......................................................................
.........................................................................................................
............................................................................................................................................................
..........................................................................................................................................................................................................
.................................................................................................................................................................................................
................................................
........
........
........
.....................................................................................................................................................................................................................................................................................................................
..................................................................................................................................................................................................................................................................................................................................................
rr
x0
x1
Na literatura e frecuente encontrar unha das duas seguintes formas de denotar tal homotopıa:
H : σ ' τ rel (0, 1) ou H : σ ' τ .
Cando falemos de homotopıa de caminos case sempre se tratara de homotopıa relativa aos extremos,polo que enfatizaremos o feito contrario, cando o usemos.
8.2 Definicion Un lazo (loop) en x0 e un camino que empeza e termina no mesmo punto x0,
σ(0) = x0 = σ(1) .
Dise tamen que x0 e o punto base (base point) do lazo. �
Fixemos un punto x0 ∈ X. Imos denotar por Λ(X,x0) ao conxunto de lazos de X con puntobase x0.
8.3 Proposicion A homotopıa relativa aos extremos define unha relacion de equivalenvia noconxunto Λ(X,x0) de lazos con punto base x0. �
A clase de equivalencia dun lazo σ denotase [σ] e denomınase clase de homotopıa (homotopicclass) do lazo.
Curso 2014-15 63

TOPOLOXIA DE SUPERFICIES Prof. Xose M. Masa
8.4 Cuestion Sexan σ, σ′, τ e τ ′ lazos en X no punto x0. Sexan F : σ'σ′ e G : τ'τ ′ homotopıas.Construıde unha homotopıa
H : στ 'σ′τ ′ .
Concluıde que se pode definir sen ambiguidade o produto de clases de homotopıa de lazos. �
O Grupo Fundamental
O produto de caminos define unha operacion interna no conxunto Λ(X,x0),
Λ(X,x0) × Λ(X,x0) −→ Λ(X,x0) , (σ, τ) στ .
Asociar a cada camino o seu camino inverso tamen define unha funcion
Λ(X,x0) −→ Λ(X,x0) , σ σ−1 .
Imos denotar por cx0o lazo constante, cx0
(s) = x0 para todo s ∈ I.Con estas vimias, poderiamos pensar que o conxunto Λ(X,x0) poidera ter unha estrutura de
grupo. Non e ası, nen o produto e asociativo, nen o lazo constante e un elemento neutro, nen ocamino inverso, un inverso alxebrico. Pero todas estas propiedades son certas salvo homotopıa (upto homotopy). Vexamolo de forma concreta.
8.5 Observacion Nos tres lemas que seguen podense substituır lazos por caminos, sempre quetena sentido. �
8.6 Lema Sexa σun lazo en X con punto base x0. Verifıcase
σcx0'σ e cx0
σ 'σ .
�
Tratase de construır unha funcion continua H : I×I→ X que nos bordos do cadrado se comporteconforme esta indicado na figura, para que sexa a homotopıa relativa requerida.
��������������
(0,−1)���������������r(s, t)
r2r1
x0 x0
σ
σ
cx0
Ecuacion da recta que pasa polos puntos (s1, t1) e (s2, t2)(suposto s1 6= s2 e t1 6= t2):
x− s2
s1 − s2=
y − t2t1 − t2
.
r1: y = 2x− 1 r2: y =1 + t
sx− 1
A recta r1 divide ao cadrado en duas rexions. Na rexion dadireita, a homotopıa H vai ser a funcion constante en x0.Na esquerda, proxectase desde (0,−1) o punto (s, t) no ladosuperior do cadrado e aplıcase σ:
H(s, t) =
σ
(2s
1 + t
)se 0 ≤ s ≤ 1 + t
2
x0 se1 + t
2≤ s ≤ 1
Curso 2014-15 64

TOPOLOXIA DE SUPERFICIES Prof. Xose M. Masa
De maneira analoga se construe a segunda homotopıa deste Lema, e as de os dous lemasseguintes, para as que proponemos unhas formulas (non unicas, por suposto), coa indicacion graficapara o seu calculo.
8.7 Lema Sexa σun lazo en X con punto base x0. Verifıcase
σσ−1 ' cx0.
� ......................................................................................................................................................................................................................................................
..................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................
.............................................................................................................................................................................................................................................
........................
ht
x0
σr
�������
AAAAAAA
r rt
x0 x0
σ
cx0
σ−1
H(s, t) =
σ(2s) se 0 ≤ s ≤ (1− t)/2
σ(1− t) se (1− t)/2 ≤ s ≤ (1 + t)/2
σ−1(2s− 1) se (1 + t)/2 ≤ s ≤ 1
8.8 Lema Sexan σ, τ e γ tres lazos en X con punto base x0. Verifıcase
(στ)γ 'σ(τγ) .
�
�������
�������
σ τ γ
x0 x0
σ τ γ
H(s, t) =
σ(4s
1 + t) se 0 ≤ s ≤ 1 + t
4
τ(4s− t− 1) se1 + t
4≤ s ≤ 2 + t
4
γ(4s− t− 2
2− t) se
2 + t
4≤ s ≤ 1
Agora imos ler o resultado destes lemas usando clases de homotopıa de lazos. Xa vimos antesque ten sentido falar de produto de clases de homotopıa de caminos. Denotamos por e a clase docamino constante, e = [cx0 ]. Verifıcase:
e[σ] = [σ]e = [σ] ; [σ][σ−1] = e = [σ−1][σ] ; ([σ][τ ])[γ] = [σ]([τ ][γ]) .
O que significa que o conxunto de clases de homotopıa de lazos, ou sexa, o conxunto cociente deΛ(X,x0) pola relacion de equivalencia dada pola homotopıa relativa aos extremos, ten estruturade grupo. Denotase π1(X,x0) e denomınase grupo fundamental (fundamental group) ou grupo dePoincare de X con punto base x0,
π1(X,x0) : = Λ(X,x0)/'
Curso 2014-15 65

TOPOLOXIA DE SUPERFICIES Prof. Xose M. Masa
Desta forma, a cada par espazo topoloxico, punto base, asociamos un grupo,
(X,x0) π1(X,x0) .
Agora imos considerar outro espazo con punto, (Y, y0), e unha funcion continua f : X → Y tal quef(x0) = y0, unha funcion entre espazos con punto base, que denotamos por
f : (X,x0) −→ (Y, y0) .
A esta funcion imos asociar un homomorfismo de grupos,
π1(f) : π1(X,x0) −→ π1(Y, y0) .
Dado un lazo en X, σ : I→ X, a composicion f ◦ σ define un lazo en Y . Definimos
π1(f)[σ] = [f ◦ σ] .
Para ver que e unha funcion ben definida, ou sexa, que non depende do representante escollido daclase de homotopıa [σ], debemos comprobar que se H : σ'σ′, daquela f ◦H : f ◦σ'f ◦σ′. Resultaigualmente inmediato comprobar que e un homomorfismo de grupos, pois, se σ e τ son lazos de Xen x0, f ◦ στ = (f ◦ σ)(f ◦ τ).
E un feito obvio, pero mais importante do que poidera parecer, que para calquera espazo X epunto x0 ∈ X, se verifıca
π1(idX) = idπ1(X,x0) . (2)
8.9 Proposicion Sexan f : (X,x0) → (Y, y0) e g : (Y, y0) → (Z, z0) duas funcions continuas.Verifıcase:
π1(g ◦ f) = π1(g) ◦ π1(f) . (3)
�
Para comprobalo, aplicamos os dous membros da igualdade a un elemento [σ] do grupo funda-mental.
π1(g ◦ f)([σ]) = [(g ◦ f) ◦ σ] ; π1(g) ◦ π1(f)([σ]) = π1(g)(π1(f)([σ])) = [g ◦ (f ◦ σ)] .
Pola propiedade asociativa da composicion de funcions, (g ◦ f) ◦ σ = g ◦ (f ◦ σ).
Suponamos agora que X e Y son espazos homeomorfos. Teran grupos fundamentais isomorfos?Sexa h : X → Y un homeomorfismo e x0 un punto de X. E doado comprobar que π1(h) e unisomorfismo entre π1(X,x0) e π1(Y, h(x0)), pois o seu inverso e π1(h−1). Agora ben, se na vezde h(x0) tomo como punto base en Y un punto y0 calquera, os grupos seguen a ser isomorfos? Aresposta xeral e non, como poderas concluır a pouco que reflexiones, pero a resposta interesante, aresposta para espazos conexos por caminos, e si, como se deduce da seguinte proposicion.
8.10 Proposicion Sexan x0 e x1 puntos dun espazo topoloxico X e ω un camino entre eles.Daquela, os grupos fundamentais π1(X,x0) e π1(X,x1) son isomorfos. �
Coa axuda do camino ω, definimos unha aplicacion hω : Λ(X,x1)→ Λ(X,x0) por
hω(σ) = (ωσ)ω−1 .
Curso 2014-15 66

TOPOLOXIA DE SUPERFICIES Prof. Xose M. Masa
Pasando a clases de homotopıa, esta funcion define un homomorfismo
h[ω] : π1(X,x1) −→ π1(X,x0) , h[ω]([σ]) = [ωσω−1] .
Na formula desta funcion, ao ser o produto de caminos asociativosalvo homotopıa, non escribimos parenteses. Hai que comprobarque a funcion esta ben definida, ou sexa, que non depende do re-presentante escollido da clase de homotopıa [σ]; e que e multipli-cativa, o que se reduce a constatar que ωστω−1'ωσω−1ωτω−1.Tamen se pode comprobar que so dependa da clase de homotopıade ω, de ahı a notacion. Finalmente, h[ω−1] e o homomorfismoinverso.
..............................................................................................................................................................................................................................................
.........................................................
........................................................
.......................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................
.............................................................................
................................................................................
...................................................................................
......................................................................
.....................................................................................................................................
.................................................................................................................................................................................................................................................................................................................................................................................
.....
X
ωq
W σ
x0 x1
rr
8.11 Corolario Se X e conexo por caminos e Y e homeomorfo a X, daquela os seus gruposfundamentais son isomorfos. �
Abordaremos agora outra cuestion moi relacionada con ista. Se temos duas funcions homotopas,H : f ' g : X → Y , que relacion existe entre π1(f) e π1(g)? Dado [σ] ∈ π1(X,x0), de se verificarf ◦ σ'g ◦ σ, enton π1(f) e π1(g) serıan a mesma aplicacion. Isto non vai ser certo sempre. Ahomotopıa H induce unha homotopıa H ◦ (σ× idI) : f ◦σ ' g ◦σ, que non e, en xeral, relativa aosextremos. Para salvar esta dificultade e obter unha forte relacion entre π1(f) e π1(g) , usaremos oseguinte lema tecnico:
8.12 Lema Sexa H : I× I→ X unha funcion continua. A partir dela, definamos caminos en X porα(t) = H(0, t), β(t) = H(1, t), γ(s) = H(s, 0) e δ(s) = H(s, 1), tal como se indica no diagrama:
α β
γ
δ
H6
-
6
-
Enton γ 'αδβ−1. �
A homotopıa buscada construese a partir dos tres diagramas seguintes:
α
α
x0
L
@@
@@@
@@
@@
-
6α β
γ
δ
H6
-
6
-
β x1
β
���������
K6
�
onde x0 = γ(0), x1 = γ(1), e
L(s, t) =
x0 se s+ t ≤ 1
α(s+ t− 1) se s+ t ≥ 1 ;K(s, t) =
β(t− s) se s ≤ t
x1 se s ≥ t .
Curso 2014-15 67

TOPOLOXIA DE SUPERFICIES Prof. Xose M. Masa
Voltemos a cuestion proposta. Sexan f, g : X → Y funcions homotopas, H : f ' g unha homo-topıa entre elas. Sexa x0 ∈ X, e definamos un camino ω en Y entre H(x0, 0) e H(x0, 1) por
ω(t) = H(x0, t) .
8.13 Proposicion Con esta notacion, o seguinte diagrama e conmutativo:
π1(X,x0) - π1(Y, g(x0))π1(g)
ZZZZZZZ~
π1(Y, f(x0))
π1(f)?
h[ω]
�
A demostracion reducese a aplicar o lema anterior a aplicacion H ◦ (σ × idI).
8.14 Corolario Se f e g son funcions homotopas entre X e Y , π1(f) e un isomorfismo sse π1(g)o e. �
8.15 Corolario Se h : X → Y e unha equivalencia de homotopıa, π1(h) e un isomorfismo. �
En efecto, sexa k : Y → X unha inversa homotopica de h. A composicion k ◦ h e homotopaa identidade de X, logo π1(k ◦ h) = π1(k) ◦ π1(h) e un isomorfismo, o que implica que π1(h) e unmonomorfismo. Analogamente, π1(h) ◦ π1(k) e un isomorfismo, polo que π1(h) e un epimorfismo.
Ser contractil equivale a ter o mesmo tipo de homotopıa que un punto. No espazo dun puntoso existe o lazo constante. En consecuencia,
8.16 Corolario Un espazo contractil ten grupo fundamental trivial. �
Apendice: Categorıas e Functores
En Topoloxıa traballase con espazos topoloxicos e, para cada dous espazos topoloxicos, tense oconxunto das aplicacions continuas entre eles. Este esquema non e exclusivo da topoloxıa, e, porcontra, moi xeral nas teorıas matematicas. En moitos casos resulta util formalizar este punto departida, para poder utilizar unha linguaxe comun e, mesmo, resultados validos para calquera destasestruturas. Unha estrutura tal denomınase categorıa (category), e agora ımola definir formalmente.
Unha categorıa consiste, dunha parte, dunha clase O de obxectos (objects). E para cada dousobxectos A,B ∈ O, un conxunto hom(A,B) de morfismos (morphisms). Ademais, dados tresobxectos A,B,C ∈ O, existe unha lei de composicion
hom(A,B)× hom(B,C) −→ hom(A,C) , (f, g)→ g ◦ f ,
de xeito que se verifican as duas condicions seguintes:
1. (existencia de identidade) para cada A ∈ O existe un morfismo idA ∈ hom(A,A) tal quef = f ◦ idA para todo f ∈ hom(A,B), e g = idA ◦ g para todo g ∈ hom(B,A),
2. (propiedade asociativa) se f ∈ hom(A,B), g ∈ hom(B,C) e h ∈ hom(C,D), daquela(h ◦ g) ◦ f = h ◦ (g ◦ f).
Curso 2014-15 68
TOPOLOXIA DE SUPERFICIES Prof. Xose M. Masa
Exemplos de categorıas son os conxuntos e as funcions entre eles, os espazos vectoriais e as apli-cacions lineares, os espazos topoloxicos e as aplicacions continuas e, tamen, os espazos topoloxicoscon punto base e as aplicacions continuas entre eles que conservan os puntos base.
Un functor (functor) entre duas categorıas e unha correspondencia que a cada obxecto daprimeira asocia un obxecto da segunda, a cada morfismo, un morfismo, e de xeito compatible coacomposicion. Por exemplo, o grupo fundamental e un functor da categorıa de espazos topoloxicoscon punto base a categorıa de grupos e homomorfismos.
Non insistiremos nesta linguaxe, pero teremos ocasion de comprobar, nalgun exemplo, a suaeficacia. Veremos como o grupo fundamental traduce unha cuestion xeometrica noutra alxebrica,normalmente mais sinxela; e a solucion desta da informacion sobre o problema xeometrico inicial.
Exercicios
8.1 Sexan σ, γ e τ caminos nun espazo X verificando σ(1) = γ(0) = τ(0). Probade que existeunha homotopıa
H : σττ−1γ 'σγ .
8.2 Demostrade que un espazo conexo por caminos e simplemente conexo sse dous caminos cosmesmos puntos extremos son homotopos.
8.3 Sexan (X,x0) e (Y, y0) dous espazos topoloxicos con punto base. Construıde un isomorfismo
π1(X × Y, x0 × y0) −→ π1(X,x0)× π1(Y, y0) .
(Indicacion: Primeiro, recorda que o produto directo de dous grupos G e H e un grupo que ten como conxunto
o produto cartesiano G×H e no que a operacion interna defınese por (g1, h1) · (g2, h2) = (g1 · g2, h1 · h2).
Segundo, relaciona lazos no produto e lazos en cada factor, ao estilo do que se fixo ao estudar conexidade
por caminos dun produto. Finalmente, ten presente que un isomorfismo e un homomorfismo de grupos que
ten un homomorfismo inverso)
Curso 2014-15 69
TOPOLOXIA DE SUPERFICIES Prof. Xose M. Masa
Curso 2014-15 70

TOPOLOXIA DE SUPERFICIES Prof. Xose M. Masa
Leccion 9. Calculo do Grupo Fundamental
O grupo fundamental π1(X,x0) so depende da componente conexa por caminos de x0. Polotanto, cando se trata de calculalo, consideranse espazos conexos por caminos. O grupo mais sinxeloposible e o que se reduce ao elemento neutro, π1(X,x0) = {e}. En xeral, o grupo fundamental none conmutativo, polo que sempre usaremos notacion multiplicativa, e non aditiva.
Espazos simplemente conexos
9.1 Definicion Dise que un espazo X e simplemente conexo (simply connected) se e conexo porcaminos e ten grupo fundamental trivial. Tamen se di 1-conexo. �
9.2 Exemplo Os espazos contractiles son conexos por caminos e tenen o tipo de homotopıa dunpunto, polo que o seu grupo fundamental e trivial. Son o primeiro exemplo de espazos simplementeconexos. �
O Grupo Fundamental das esferas
Os espazos contractiles non son os unicos espazos simplemente conexos. Imos ver que as esferas,Sn, con n ≥ 2, son tamen espazos simplemente conexos. Para iso, imos demostrar un caso particulardo denominado Teorema de Van Kampen. A seguinte proposicion e a primeira parte do teorema:
9.3 Proposicion Suponamos X = U ∪ V , onde U e V son conxuntos abertos e U ∩ V e nonbaleiro e conexo por caminos. Tomemos x0 ∈ U ∩V . Todo elemento [σ] ∈ π1(X,x0) podese escribircomo produto
[σ] = [τ0] [τ1] ··· [τk] ,
onde cada [τi] pertence a π1(U, x0) ou a π1(V, x0). �
Neste enunciado cometemos un pequeno abuso de linguaxe: se denotamos iU a inclusion de Uen X e se τ e un lazo en U , na formula do enunciado deberiamos escribir [iU ◦ τ ]. E o mesmo nocaso de V , coa inclusion iV .
..........................
....................................................................................................................................................................................................................................................................................................................................................................................
.........................................
...................................................
..................................................................................
..............................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................
........................................................
...........................................
....................................
................................
..............................
................................
.................................
...................................
.....................................
........................................
.........................................................................................................................................
σ
PPPPPPPPP
������������
����*σ
U
V
x0
..................................................................................................
.................................................................................................
..............................................................
.......................................................................................................................
..................................................................
...........................................................................................
......................................................................................................................................................................................................................................................................................................................................................
.................................................................................................................................................................
..............................................
............................................................................................
...................................................................................................................................................................................
....................................................................................................................................................................................................................................................................................................................................................................................................
.................................
.............................................
......................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................
........................
........................
........................
....................................................................................................................................
........................
............
........................
........................
........................................................................................................................
........................
........................
........................
rr
rr
..............................................................................................................................
y1
................................
..............................
..............................
............................
....................................................................................................................................................................................................................................................................................................
y3
.....................................................
............................................................................................................................................................................................................................................................
y2
Dado o lazo σ, σ−1({U, V }) e unha cobertura aberta do intervalo. Fixemos un enteiro naturalN tal que 1/N sexa menor que o numero de Lebesgue desta cobertura. Dividimos o intervalo enN partes iguais, [i/N, (i+ 1)/N ], 0 ≤ i ≤ N − 1. Cada σ([i/N, (i+ 1)/N ]) esta contido en U ouen V . Sexa xi = σ(i/N). Quedamonos con aqueles xi que pertenzan a U ∩ V , e os renombramos,y0, y1, ... , yk, por orde crecente dos puntos da particion. Designamos por ti o elemento da particiondo intervalo que corresponda a yi, ou sexa, se yi tina inicialmente o nome xj , sera ti = j/N . Temos
Curso 2014-15 71

TOPOLOXIA DE SUPERFICIES Prof. Xose M. Masa
construıdo unha particion {0, t1, ... , tk, 1} do intervalo tal que σ([ti, ti+1]) esta contido en U ouen V , e cada σ(ti) ∈ U ∩ V . Agora, para cada punto yi, 1 ≤ i ≤ k, fixamos un camino γi entrex0 e yi, contido en U ∩ V . Definimos agora caminos σi, que van ser, salvo reparametrizacion, asrestriccions σ |[ti,ti+1] de σ; son as composicions:
I −→ [ti, ti+1] −→ X
s (1− s)ti + sti+1 σ((1− s)ti + sti+1)
Os lazos buscados son τ0 = σ0γ−11 ,τi = γiσiγ
−1i+1, para 1 ≤ i ≤ k − 1 e, finalmente, τk = γkσk.
Agora cumprese σ0γ−11 γ1σ1γ
−12 γ2σ2 ··· γ−1
k γkσk'σoσ1 ···σk, pois cada γ−1i γi e homotopo ao
lazo constante. E σoσ1 ···σk e homotopo a σ, pois tan so se diferencian na parametrizacion.
9.4 Corolario Supongamos X = U ∪ V , onde U e V son conxuntos abertos e U ∩ V e nonbaleiro e conexo por caminos, x0 ∈ U ∩ V . Se π1(U, x0) e π1(V, x0) son triviais, enton π1(X,x0)tamen e trivial. �
Como consecuencia do corolario, as esferas son espazos simplemente conexos,
π1(Sn) = {e} , n ≥ 2 .
Tratase de aplicar o resultado anterior a Sn = U ∪ V , con U e V a esfera menos o polo norte, opolo sur, respectivamente. Usando a proxeccion estereografica, U e V son homeomorfos a Rn, logocontractiles.
O Grupo Fundamental da circunferencia
−1
0
1
2
p?
................................................................
......................................................................................................................
................................................................................................................................................................
.................................
.....................................
................................................
A circunferencia, S1, vai ser o primeiro exemplo de espazo topoloxico congrupo fundamental non trivial que imos estudar. O calculo e un compendiode ideas sencillas pero interesantes, que van dar lugar a unha teorıa xeralmoi fecunda, que se abordara na materıa de Topoloxıa Alxebrica (AlgebraicTopology), no ano proximo.Pensaremos S1 como subconxunto de C, o corpo dos numeros complexos.Son, xustamente, os numeros complexos de modulo unidade. Todo nume-ro complexo se pode escribir na forma λe2πit, onde λ e un numero realnon negativo, modulo do numero complexo, e t e un numero real arbitra-rio. Os elementos de S1 son, pois, os numeros e2πit, aında que infinidadede elementos desta forma corresponden ao mesmo punto de S1. De feito,e2πit = e2πi(t+n) para calquera n ∈ Z. O produto define en S1 unha es-trutura de grupo abeliano. A aplicacion que a cada t fai corresponder e2πit
denomınase aplicacion exponencial (exponential map),
p : R −→ S1 ,
aplicacion sobrexectiva, que e un homomorfismo do grupo aditivo R no grupo multiplicativo S1:p(s + t) = e2πi(s+t) = e2πis · e2πit. O seu nucleo e Z. Visualmente, se pensamos R coma unhahelice sobre o cilindro de raio unidade, a aplicacion exponencial consistirıa en aplastala sobre S1.
A imaxe por p do intervalo aberto (x−1/n, x+1/n) e un arco aberto en S1. Abonda comprobalopara intervalos da forma (−1/n, 1/n), para os que e ben conecido. Se denominamos Un a sua imaxe,a imaxe de (x− 1/n, x+ 1/n) e o resultado de aplicar a rotacion de angulo 2πx ao conxunto Un,
Curso 2014-15 72

TOPOLOXIA DE SUPERFICIES Prof. Xose M. Masa
pois tal rotacion e xustamente multiplicar por e2πix, e e2πi(x+t) = e2πix · e2πit. Logo, e aberta. Enparticular, p aplica o intervalo (−1/2, 1/2) homeomorficamente sobre S1 − {−1}; denotemos por qa funcion inversa sobre este conxunto. Como inversa parcial da funcion exponencial, e unha ramado logaritmo.
Para o calculo do grupo fundamental tomaremos como punto base oelemento neutro, o 1. O calculo vaise fundamentar nos dous lemas se-guintes. Primeiro, unha definicion.
9.5 Levantamento dun camino (Lifting of a path) Dado un caminoσ en S1 con σ(0) = 1, denomınase levantamento de σ a un camino σen R tal que p ◦ σ = σ. � (I, 0) - (S1, 1)
(R, 0)
?
7
σ
σ p
Aquı imos considerar levantamentos con σ(0) = 0.
9.6 Lema de levantamento (Lifting Lemma) Dado un camino σ en S1 con σ(0) = 1, existe ununico levantamento σ en R verificando σ(0) = 0. �
9.7 Lema de levantamento de homotopıas (Covering Homotopy Lemma) Dados dous ca-minos σ e τ en S1, con σ(0) = τ(0) = 1, e unha homotopıa H : σ'τ entre eles, existe unha unica
homotopıa H : σ'τ entre os seus levantamentos.�
Probaremos os dous lemas ao mesmo tempo. Para iso, denotaremos por Y o intervalo I ouo cadrado I × I, 0 ∈ Y sera 0 ou (0, 0), f : Y → S1 sera σ ou H. Xa que Y e un espazometrico compacto, f e uniformemente continua. Ası, fixado ε = 2, existira un δ > 0 tal que‖y − y′‖ < δ ⇒ ‖f(y) − f(y′‖ < 2. En particular, para tais y e y′, f(y) 6= −f(y′), de formaque q(f(y)/f(y′)) esta definido. Podemos encontrar N ∈ N suficientemente grande como para que‖y‖/N < δ para todo y ∈ Y . Definimos
f(y) = q
(f(y)
f(N−1N y
)) + q
(f(N−1N y
)f(N−2N y
)) + ··· + q
(f( 1
N y)
f(0)
)
A funcion f : Y → R ası definida e continua e verifica f(0) = 0 e p ◦ f = f .
De existir outra funcion f ′ : Y → R coas mesmas propiedades, a funcion diferencia f − f ′ serıaunha funcion continua con imaxe no nucleo de p, ou sexa, en Z. Como Y e conexo, a imaxe serıaconstante. Como o 0 vai no 0, a constante serıa cero, as duas funcions serıan a mesma.
No caso Y = I × I, f = H, f = H, compre verificar que H e unha homotopıa relativa aosextremos. Isto e ası porque, debido a relacion p ◦ H = H, os conxuntos {0} × I e {1} × I tenenimaxe en Z, logo, son constantes.
9.8 Corolario O punto extremo de σ depende unicamente da clase de homotopıa de σ. �
Agora imos construır unha aplicacion
χ : π1(S1, 1) −→ Z
por:
χ([σ]) = σ(1) .
O corolario xustifica que esta ben definida. Comprobemos que e un homomorfismo de grupos:sexan [σ], [τ ] ∈ π1(S1, 1). Sexa m = σ(1) e n = τ(1). Sexa τ ′ o camino de m a m+ n en R dado
Curso 2014-15 73

TOPOLOXIA DE SUPERFICIES Prof. Xose M. Masa
por τ ′(s) = τ(s) +m. O camino produto στ ′ e un levantamento de στ , e o seu extremo e m+ n.De aquı,
χ([σ][τ ]) = χ([σ]) + χ([τ ]) .
Vexamos que χ e sobre: dado n ∈ Z, consideremos o camino en R dado por σ(s) = n · s. Seσ = p ◦ σ, χ([σ]) = n.
Comprobemos, por ultimo, que χ e un monomorfismo: suponamos χ([σ]) = 0, de maneira que
σ e un lazo en R con punto base 0. Como R e contractil, existe unha homotopıa H : σ'c0. Acomposicion p ◦ H e unha homotopıa entre σ e o camino constante c1 en S1, logo [σ] = 1.
Ası concluımos:
π1(S1, 1) ∼= Z .
Teorema do punto fixo de Brouwer
Vexamos agora algun exemplo da eficacia do functor grupo fundamental.
9.9 Teorema A circunferencia non e un retracto do disco unitario pechado. �
Suponamos que r : D2 → S1 foseunha retraccion, e i : S1 → D2 a inclusion; serıa r ◦ i = idS1 .Aplicando π1 teriamos que a composicion
π1(S1, 1)π1(i)−−−−→ π1(D2, (1, 0))
π1(r)−−−−→ π1(S1, 1)
terıa que ser a identidade, ou sexa, que Z→ 0→ Z fose a identidade, o que e imposible.
9.10 Corolario Calquera aplicacion continua do disco pechado en si mesmo ten un punto fixo. �
Este e o Teorema do punto fixo de Brouwer para n = 2. E certo para calquera dimension.Suponamos que f : D2 → D2 non tivera puntos fixos. Construımos unha retraccion de D2 en S1
da seguinte maneira: tracexamos unha recta desde f(x) hacia x, ata cortar S1. O punto de cortesera r(x).
Apendice: Grupo fundamental dos grupos topoloxicos
No curso calculamos o grupo fundamental de S1 utilizando o feito de que S1 e o grupo cocientede R polo seu subgrupo Z, que e normal e discreto, e que R e simplemente conexo. Examinando ademostracion feita, comprobamos que este calculo so depende destas hipoteses, polo que se deduceo seguinte resultado:
9.1 Teorema ([8, Theorem 4.5]). Dado un grupo topoloxico G simplemente conexo, e un subgrupoH normal e discreto, para o espazo cociente G/H, que aında e un grupo topoloxico, tense:
π1(G/H, e) ∼= H .
Para demostrar que a funcion f : (Y, y0)→ (G/H, e) se levanta a G, no teorema demostrado nocurso usouse a continuidade uniforme de f . Agora G/H non e un espazo metrico, temos que adaptaro argumento. Para iso, partindo dunha vecinanza aberta U de e en G verificando U ∩ H = {e},tomamos outras V e W , con W ⊂ V ⊂ U e V −1·V ⊂ U , W−1·W ⊂ V . A proxeccion p restrinxida aV e un homeomorfismo sobre a sua imaxe, en p(V ) existe unha inversa local, q. Agora consideramosa cobertura aberta W de G/H formada polos conxuntos da forma p(gW ), g ∈ G. Formamos acobertura aberta f−1(W) de Y e escollemos un enteiro natural N tal que ‖y‖/N < δ, o numero deLebesgue da cobertura, para todo y ∈ Y . Daquela, para cada y e cada i, 0 ≤ i ≤ N − 1, existe un
Curso 2014-15 74

TOPOLOXIA DE SUPERFICIES Prof. Xose M. Masa
g ∈ G tal que f(N−iN y) e f(N−i−1N y) pertenzan a p(gW ); ou sexa, sexan da forma p(gxi) e p(gxi+1)
con xi, xi+1 ∈W . Logo (gxi+1)−1 · gxi ∈ V , e podo aplicar ao produto (f(N−i−1N y))−1 · f(N−iN y)
a inversa local construıda.
9.2 Isto podese aplicar a S1×n
... ×S1 = Tn = Rn/Zn, π1(Tn) = Zn; tamen ao grupo das rotacionsde R3, SO(3): como temos visto o tratar dos grupos clasicos, este grupo e isomorfo e homeomorfoa S3/Z2, resultando π1(SO(3)) = Z2.
9.3 Exercicio Un subgrupo normal discreto H dun grupo topoloxico conexo G e central. Enconsecuencia, π1(G/H, e) e abeliano.
O Grupo Fundamental dun grupo topoloxico e abeliano
Sexa X un espazo topoloxico conexo por caminos, e un punto de X. Sexa ϕ : X×X → X unhafuncion continua tal que
1. ϕ(e, e) = e
2. As funcions ϕ1, ϕ2 : X → X definidas por ϕ1(x) = ϕ(x, e) e ϕ2(x) = ϕ(e, x), son homotopasa identidade, mediante homotopıas que deixan fixo o punto e (ou sexa, homotopıas H1 e H2
tais que Hi(e, t) = e, i = 1, 2)
A este obxecto, ((X, e), ϕ) denomınaselle espazo de Hopf.
9.4 Proposicion Sexa ((X, e), ϕ) un espazo de Hopf. O seu grupo fundamental, π1(X, e), e abe-liano.
Dados lazos σ, τ , podese facer o seu produto como lazos, ou definir novos lazos ((produto)), σ∗τ :
σ ∗ τ(t) = ϕ(σ(t), τ(t)) .
Tratase de demostrar que existen homotopıas
σ ∗ τ 'στ ; σ ∗ τ ' τσ .
(Vid. [8, Part I-6]). Se definimos σ1(s) = ϕ(σ(s), e) ou σ2(s) = ϕ(e, σ(s)), sera util comprobar queσ'σi, i = 1, 2.
9.5 Corolario Sexa G un grupo topoloxico conexo por caminos, e ∈ G o seu elemento neutro.π1(G, e) e un grupo abeliano.
Apendice: Grao duna aplicacion de S1 en S1
9.6 Os grupos [S1,S1] e [S1,S1]1. Consideremos funcions continuas f : (S1, 1) → (S1, 1) e
homotopıas H que conserven tamen o punto base, ou sexa, tais que H(1, t) = 1 para calquera t;e o que se denomina homotopıa relativa ao punto 1. Segue a ser unha relacion de equivalencia, e oconxunto de clases de homotopıa relativa denotase [S1,S1]1.
Dadas duas funcions f, g : S1 → S1, utilizando o produto de S1 definimos a funcion produto porf ? g(z) = f(z) · g(z). Se H : f ' f ′ e K : g ' g′, e doado definir H ?K : f ? g ' f ′ ? g′.
Desta forma, os conxuntos [S1,S1] e [S1,S1]1 tenen estrutura de grupo. Estos grupos son iso-morfos. Construımos un isomorfismo ι,
Curso 2014-15 75

TOPOLOXIA DE SUPERFICIES Prof. Xose M. Masa
[S1,S1]ι−−−−→ [S1,S1]1 ,
asociando a clase dunha funcion f a clase da funcion f definida por f(z) = f(z)/f(1). A unha
homotopıa H entre f e g asociase unha homotopıa relativa H entre f e g dada por H(z, t) =H(z, t)/H(1, t).
9.7 Definicion de grao Sexa p : R → S1 a funcion exponencial, p(t) = e2πit. Imos denominarα a restricion de p ao intervalo unidade. Ası, α : I→ S1 e un lazo en S1, que define un xerador deπ1(S1, 1); no isomorfismo construıdo con Z, correspoondese co 1.
Sexa agora f : S1 → S1 unha funcion continua arbitraria, f a funcion asociada conservando opunto base. Denotaremos por σf ao camino f ◦α. Sexa σf o camino levantado de σf , con σf (0) = 0.
Definimos
deg(f) = σf (1)
9.8 Observacion Dada unha funcion continua f : (S1, 1)→ (S1, 1), o homomorfismo π1(f) queda
determinado por π1(f)([α]), ou sexa, por [f ◦ α].
9.9 Propiedades do grao
1. deg(f) = deg(g) se, e so se, f ' g.
2. Para unha funcion constante c, deg(c) = 0.
3. deg(idS1) = 1
4. deg(zn) = n.
5. Denotando por z o conxugado complexo, deg(z) = −1.
6. deg : [S1,S1] → Z .
7. deg(f ? g) = deg(f) + deg(g).
8. Partindo do isomorfismo construıdo entre π1(S1, 1) e Z, o homomorfismo π1(f) consiste noproduto polo enteiro deg(f).
9. deg(g ◦ f) = deg(g) · deg(f).
En particular, deg define un isomorfismo entre [S1,S1] e Z.
9.10 Teorema fundamental da alxebra Todo polinomio complexo
p(z) = zk + c1zk−1 + ···+ ck
con k > 0, ten un cero.
Proba.- Suponamos que p non ten ceros sobre S1. Sexa p(z) : S1 → S1 a funcion dada por
p(z) =p(z)
‖p(z)‖.
Daquela,
Curso 2014-15 76

TOPOLOXIA DE SUPERFICIES Prof. Xose M. Masa
1. se p(z) 6= 0 para ‖z‖ ≤ 1, enton deg(p) = 0;
2. se p(z) 6= 0 para ‖z‖ ≥ 1, enton deg(p) = k.
Para comprobar 1) podese usar a homotopıa H(z, t) = p(tz).
Para comprobar 2) definimos q(z, t) = tkp(zt
)e usamos a homotopıa H(z, t) =
q(z, t)
‖q(z, t)‖. A
funcion q e continua, pois q(z, t) = zk + t{c1zk−1 + tc2zk−2 + ···+ tk−1ck}.
9.11 Corolario O polinomio p(z) descomponse en
p(z) = (z − z1)(z − z2) ... (z − zk) ,
onde z1, z2, ... , zk son as suas raices.
9.12 Sexa f : (S1, 1) → (S1, 1) unha funcion que verifique f(−x) = −f(x). Daquela, deg(f)e impar.Indicacion: Sexa σf o levantamento de σf = f ◦α. De f(−1) = −f(1) = −1 deducese σf (1/2) = n+1/2.Daquela
p(σf (1/2 + t)) = f(e2πi(1/2+t)) = −σf (t) = p[σf (1/2) + σf (t)] .
Como o levantamento e unico, σf (1/2 + t) = σf (1/2) + σf (t). En consecuencia, σf (1) = σf (1/2) +
σf (1/2)) = 2n+ 1.
Se f : S1 → S1 e unha funcion continua tal que f(−x) = −f(x), daquela a funcion asociada ftamen verifica esta condicion; logo, deg(f) e impar.
9.13 Teorema de Borsuk-Ulam Non existe ningunha funcion continua f : S2 → S1 que envıepuntos antipodais en puntos antipodais.
De existir, definirıa unha funcion coa mesma propiedade de S1 (o ecuador) en S1, que terıa graoimpar; pero, por estenderse a todo o hemisferio, serıa homotopa a unha constante e, pois, terıa grao0.
9.14 Corolario Toda aplicacion continua f : S2 → R debe enviar algun par de puntos antipodaisao mesmo punto.
Usar a funcion de S2 en S1 dada por
g(x) =f(x)− f(−x)
‖f(x)− f(−x)‖.
9.15 Consecuencia En cada instante hai, na superficie da terra, dous puntos antipodais coamesma temperatura e a mesma presion barometrica.
9.16 Indice dun campo de vectores (vector field). Unha funcion continua v : R2 → R2
podese interpretar como un campo de vectores continuo no plano. Imos supor que v non toma ovalor 0 sobre S1. A v asociamos a funcion fv : S1 → S1 dada por fv(z) = v(z)/‖v(z)‖. No caso deque o campo tome o valor 0 nun unico punto da bola unitaria B2(0, 1), o grao de fv denomınaseındice (index) do campo v no cero (o punto no que v toma o valor 0). Denotaremolo ι(v).
Curso 2014-15 77

TOPOLOXIA DE SUPERFICIES Prof. Xose M. Masa
9.17 Exercicio Se para cada z ∈ S1 se verifica v(z) 6= az, a ∈ R, daquela ι(v) 6= 0; e, logo,v ten necesariamente un cero en B2(0, 1). (Indicacion: a hipotese permite concluır que a aplicacion fve homotopa a identidade; de non ter un cero na bola, serıa homotopa a unha constante).
Os seguintes son uns exemplos tomados do libro Topology from the differentiable viewpoint, deJohn W. Milnor: (ver o curso virtual ou, mellor, o libro de Milnor)
Os exemplos reproducidos corresponden a campos de vectores diferenciables, definidos por unhaecuacion diferencial ordinaria; as curvas debuxadas son as solucions da ecuacion.
Outra aproximacion
R F−−−−→ R
p
y p
yS1 f−−−−→ S1
(4)
Para cada n ∈ N, sexa fn : [−n, n] → S1 a composicion da restricion de p con f . Utilizando omesmo argumento que na construccion do levantamento de caminos, construımos unha funcionunica Fn : [−n, n]→ R, con Fn(0) = 0 e tal que p ◦ Fn = f ◦ pn, denotando por pn a restricion de
p. A funcion buscada, F , vai ser a funcion combinada de todas as Fn.Sexa agora f : S1 → S1 unha funcion continua arbitraria. Asociamoslle f e F como antes.
Escollamos F (0), un punto calquera de R tal que p(F (0)) = f(1). A partir desta escolla definimos
unha funcion F : R→ R por F (t) = F (t) + F (0). Verifica p ◦ F = f ◦ p,
R F−−−−→ R
p
y p
yS1 f−−−−→ S1
Curso 2014-15 78

TOPOLOXIA DE SUPERFICIES Prof. Xose M. Masa
Observese que hai tantas funcions F facendo este diagrama conmutativo como escollas validas deF (0).Indicacion: Imos facer alguns calculos. Fixado un enteiro n, definamos a funcion Ln : R→ R por
Ln(t) = F (t+ n)− F (n) .
Esta funcion verifica Ln(0) = 0, e tamen fai o diagrama (4) conmutativo. Como existe unha unica funcion que satisfai
estas condicions, resulta Ln(t) = F (t), ou sexa,
F (t+ n) = F (t) + F (n) (5)
para todo enteiro n. Logo,F (n) = F (n− 1) + F (1) = nF (1) .
Sexan agora f e g duas funcions co mesmo grao; ou sexa, con F (1) = G(1). A homotopıa H : R× I→ R dadapor
H(s, t) = (1− t)F (s) + tG(s) ,
verificaH(s+ n, t) = H(s, t) + nH(1, t) , (6)
para todo enteiro n, polo que pasa ao cociente e define unha homotopıa
H : f '1 g : S1 × I −→ S1
relativa a 1.Reciprocamente, unha homotopıa H : f '1 g levantase a unha homotopıa
H : R× I −→ R
entre F e G. Ou sexa, unha homotopıa que fai conmutativo o diagrama
R× I H−−−−−→ Ryp×idI ypS1 × I H−−−−−→ S1
(7)
A existencia e propiedades de H probase da mesma maneira que a de F . Do feito de que p ◦ H(1, t) = 1 e de que Ze discreto, deducese que H(1, t) e constante. Logo,
F (1) = H(1, 0) = H(1, 1) = G(1) .
Exercicios
9.18 Demostrade que todo homeomorfismo h : D2 → D2 leva a circunferencia na circunferencia.(Indicacion: Para que puntos e D2 − {x} simplemente conexo?)
9.19 Demostrade que R2 non e homeomorfo a Rn se n 6= 2.
9.20 Demostrade que o plano euclidiano, R2, non e homeomorfo ao semi-plano superior pechado,X = {(x, y) ∈ R2 | y ≥ 0}.
(Indicacion: suponede que h : X → R2 e un homeomorfisfo. Sexa x0 = h(0). Comprobade que X −{0}e contractil e que R2 − {x0} ten o tipo de homotopıa de S1)
Deste exercicio deducese que o bordo dunha superficie con bordo esta ben definido, que un puntonon pode verificar mais que unha das condicions locais da definicion, ou esta no bordo, ou esta nointerior.
9.21 Demostrade que un espazo conexo por caminos e simplemente conexo sse dous caminos cosmesmos puntos extremos son homotopos.
Curso 2014-15 79

TOPOLOXIA DE SUPERFICIES Prof. Xose M. Masa
Curso 2014-15 80
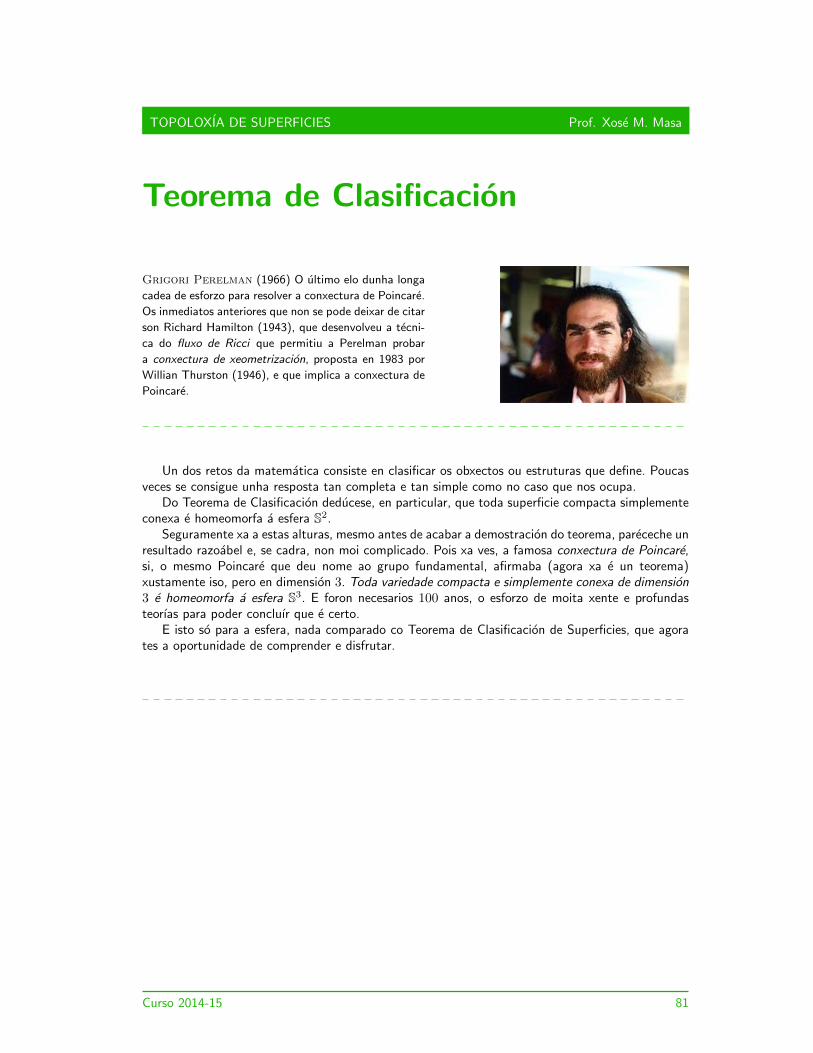
TOPOLOXIA DE SUPERFICIES Prof. Xose M. Masa
Teorema de Clasificacion
Grigori Perelman (1966) O ultimo elo dunha longa
cadea de esforzo para resolver a conxectura de Poincare.
Os inmediatos anteriores que non se pode deixar de citar
son Richard Hamilton (1943), que desenvolveu a tecni-
ca do fluxo de Ricci que permitiu a Perelman probar
a conxectura de xeometrizacion, proposta en 1983 por
Willian Thurston (1946), e que implica a conxectura de
Poincare.
Un dos retos da matematica consiste en clasificar os obxectos ou estruturas que define. Poucasveces se consigue unha resposta tan completa e tan simple como no caso que nos ocupa.
Do Teorema de Clasificacion deducese, en particular, que toda superficie compacta simplementeconexa e homeomorfa a esfera S2.
Seguramente xa a estas alturas, mesmo antes de acabar a demostracion do teorema, pareceche unresultado razoabel e, se cadra, non moi complicado. Pois xa ves, a famosa conxectura de Poincare,si, o mesmo Poincare que deu nome ao grupo fundamental, afirmaba (agora xa e un teorema)xustamente iso, pero en dimension 3. Toda variedade compacta e simplemente conexa de dimension3 e homeomorfa a esfera S3. E foron necesarios 100 anos, o esforzo de moita xente e profundasteorıas para poder concluır que e certo.
E isto so para a esfera, nada comparado co Teorema de Clasificacion de Superficies, que agorates a oportunidade de comprender e disfrutar.
Curso 2014-15 81
TOPOLOXIA DE SUPERFICIES Prof. Xose M. Masa
Curso 2014-15 82

TOPOLOXIA DE SUPERFICIES Prof. Xose M. Masa
Leccion 10. Clasificacion das Superficies Compactas, II
Presentacion de grupos por xeradores e relacions. O abelianizado dungrupo
Para os calculos que imos facer, usaremos sempre grupos finitamente xerados. Ou sexa, grupospara os que existe un conxunto finito de elementos tais que calquera elemento se pode expresarcomo produto deses e dos seus inversos. Moitos dos grupos que usaremos seran libres, pero, enxeral, non seran abelianos; seran 0, Z ou un produto libre de un numero finito de copias de Z, oque denotamos
Z ∗ Z ∗k
... ∗Z .
Como estes grupos non son abelianos, utilizamos notacion multiplicativa; ası, en particular, os ele-mentos de cada copia de Z seran as potencias do seu xerador. Os elementos do produto son as pa-labras que podamos formar con elementos de cada copia como letras, por exemplo κn1
1 κn22 ···κnr
r ,onde cada κi e xerador dalgunha copia de Z, non necesariamente a que ocupa o lugar do ındi-ce; de feito, nunha palabra pode aparecer moitas veces o mesmo xerador en lugares diferentes.As palabras son finitas, pero poden ter calquera lonxitude. Escrito ası, sen ningunha condicionrestrictiva, cada elemento pode ter infinitos nomes, pois, por exemplo, se κi = κi+1, o mesmoxerador escollido para unha copia, o elemento κn1
1 ···κnii κni+1
i+1 ···κnrr e o mesmo que o elemento
κn11 ···κ
ni+ni+1
i κni+2
i+2 ···κnrr . Para evitar isto, as veces usanse palabras reducidas, duas letras con-
secutivas corresponden a xeradores de copias de Z diferentes, e todos os exponentes son diferentesde cero. O elemento neutro expresase pola palabra baleira. Na argumentacion que nos imos facernon sempre usaremos palabras reducidas. O produto de duas palabras e a palabra que ten comoletras as da primeira seguidas das da segunda, poidendo substituır duas letras consecutivas polo seuproduto cando as duas pertenzan ao mesmo grupo do produto, ou sexa, cando sexan potencias domesmo xerador.
Non sempre usaremos grupos libres. Se temos dous grupos arbitrarios, G e H, podemos describiro seu produto libre,
G ∗H
como as palabras κ1κ2 ···κr, con κi ∈ G ou κi ∈ H, indistintamente. De novo, poderiamosusar palabras reducidas, non permitindo duas letras consecutivas no mesmo grupo. Pero para aargumentacion que imos facer convennos admitir esa posibilidade.
Todo grupo se pode expresar como cociente dun grupo libre por un subgrupo normal N . Para ocalculo dos grupos fundamentais das superficies compactas chega con considerar grupos finitamente
xerados, polo que todo grupo se podera presentar como un cociente de Z ∗ Z ∗k
... ∗Z, para uncerto k ∈ N. Para determinar ou describir o subgrupo normal correspondente, un procedementohabitual e dar un conxunto de elementos do grupo libre, e o subgrupo N sera o menor subgruponormal que os contena. Estos elementos denomınanse relacions (relations). Ası, o grupo G encuestion vira determinado por un certo numero de xeradores (generators), k, na notacion queestamos empregando, e unha coleccion de relacions. Escribiriamos:
G = (κ1, ... ,κk, {r1, ... , rl}) .
E o que se denomina unha presentacion (presentation) de G por xeradores e relacions. O gruposera, pois, o cociente
G ∼=Z ∗
k
... ∗ZN
,
Curso 2014-15 83

TOPOLOXIA DE SUPERFICIES Prof. Xose M. Masa
con N o menor subgrupo normal que conten aos elementos r1, ... , rl. Incluır unha relacion, r,significa que, en G, r = e, o elemento neutro. Por exemplo, se r = κsκtκ−1
s κ−1t , no cociente
sera κsκtκ−1s κ−1
t = e, e, logo, κsκt = κtκs (utilizamos o mesmo sımbolo para o elemento en
Z ∗k
... ∗Z que para o seu correspondente no cociente G, para non recargar a notacion; serıa maiscorrecto escribir, por exemplo, κ para a imaxe en G).
Os elementos da forma κυκ−1υ−1 denomınanse conmutadores (commutators). Se os incluımostodos como relacions (chega con facelo para os xeradores), o grupo cociente resultante sera abeliano.Partindo dun grupo G = (κ1, ... ,κk, {r1, ... , rl}), se engadimos estas relacions obtemos o que sedenomina abelianizado (abelianized) de G. O subgrupo normal de G xerado polos conmutadoresdenomınase conmutador (commutator) e denotase [G,G]. Ası, o abelianizado de G e o grupoG/[G,G].
Dadas duas presentacions non e doado concluır se os grupos correspondentes son isomorfos ounon.
10.1 Exemplo Imos ver que as seguintes presentacions definen grupos isomorfos:
G1 = (κ1,κ2, {κ21κ2
2}) ; G2 = (υ1, υ2, {υ1υ2υ−11 υ2}) .
Para definir un homomorfismo, abonda con dar as imaxes dos xeradores. Definimos h : G1 → G2
porh(κ1) = υ1 , h(κ2) = υ−1
1 υ2 .
O inverso ven dado por k(υ1) = κ1, k(υ2) = κ1κ2.
O abelianizado de G2 e Z⊕ Z2. �
Teorema de Van Kampen
Dado un espazo X = U ∪ V , union de dous subespazos abertos e conexos por caminos, e taisque U ∩ V sexa non baleiro e conexo por caminos, o Teorema de Van Kampen expresa o grupofundamental π1(X,x0) en funcion de π1(U, x0), π1(V, x0) e π1(U ∩ V, x0), x0 ∈ U ∩ V .
Se iU , iV denotan as inclusions de U e V en X, vimos na Proposicion 9.3 que todo elementode π1(X,x0) se pode expresar como produto π1(iU )([τ1])π1(iV )([τ2]) ... π1(iU )([τk−1])π1(iV )([τk]).Dun xeito alxebricamente mais acaıdo, poderiamos dicir que as inclusions inducen un homomorfismosobrexectivo do produto libre de π1(U, x0) e π1(V, x0) en π1(X,x0),
π1(U, x0) ∗ π1(V, x0) −→ π1(X,x0) .
Para expresar o grupo fundamental de X como cociente do produto libre, todo o que necesitamose conecer o nucleo deste homomorfismo. Se denotamos por jU e jV as inclusions de U∩V en U e V ,respectivamente, e [σ] ∈ π1(U ∩ V, x0), un elemento sinxelo do nucleo vai ser, como resulta obvio,π1(jU )[σ]π1(jV )[σ−1]. O Teorema de Van Kampen afirma que o nucleo e o subgrupo normal deπ1(U, x0) ∗ π1(V, x0) xerado por estes elementos.
Nos xa vimos o caso particular mais simple do Teorema de Van Kampen, que aplicamos aocalculo do grupo fundamental das esferas, o caso onde π1(U, x0) e π1(V, x0) son triviais. Imosestudar outros dous casos particulares, que e canto necesitamos neste momento. A demostracionque faremos, no que fai os argumentos topoloxicos, sera case completa; pero a presentacion alxebricado resultado, que xa para estes casos particulares faremos dun xeito algo sucinto, precisarıa abondomais de tempo para expresar de forma precisa o caso xeral. Nos nosos exemplos, os grupos π1(U, x0),π1(V, x0) e π1(U ∩ V, x0) seran sempre libres, e un dos tres, trivial.
Curso 2014-15 84

TOPOLOXIA DE SUPERFICIES Prof. Xose M. Masa
Vexamos agora como, efectivamente, o nucleo do epimorfismo
π1(U, x0) ∗ π1(V, x0) −→ π1(X,x0)
e o menor subgrupo normal N que conten aos elementos da forma π1(jU )[σ]π1(jV )[σ−1], onde σe un lazo en U ∩ V . Como a notacion que teremos que empregar vai ser algo farragosa, cando nonhaxa peligro de confusion imos denominar un camino pola mesma letra, aında que o consideremosen espazos distintos (por exemplo, en U ∩ V , ou en U , ou en X).
O menor subgrupo normal que conten aos elementos da forma π1(jU )[σ]π1(jV )[σ−1], con [σ]pertencente a π1(U ∩ V ), esta formado polos elementos do produto libre da forma
a(π1(jU )[σ])(π1(jV )[σ−1])a−1 ,
onde a e un elemento calquera do produto, os seus inversos e produtos deles. Obviamente, este grupoN esta contido no nucleo. Para comprobar a inclusion recıproca, imos partir dun elemento do nucleo,digamos [σ1][σ2] ··· [σr]. Imos modificar este elemento mediante unha serie de transformacions ataobter a palabra baleira, ou sexa, o elemento neutro. As transformacions, ou ben non modificano elemento, aında que si a palabra, ou modifican o elemento pero sen sair de N ; desta forma, sechegamos a un elemento de N , como pode ser o elemento neutro, sera que partimos necesariamentedun elemento de N .
Que [σ1][σ2] ··· [σr] estea no nucleo equivale a que exista unha homotopıa
H : I× I −→ X , H : σ1σ2 ···σr ' ctx0,
entre o lazo produto en X e o lazo constante. Dividimos I× I en rectangulos, facendo particions decada intervalo, de xeito que a imaxe por H de cada rectangulo estea completamente contida en Uou en V , e que a particion de I× {0} inclua os extremos dos lazos σi. Para cada punto H(i, j) deX, sendo i e j elementos da particion de cada intervalo, fixamos un camino γi,j de x0 a H(i, j),completamente contido en U , V ou U ∩ V , segundo o punto en cuestion pertenza a un destesconxuntos. De ser H(i, j) = x0, collemos o camino constante.
Primeira transformacion: cando un σl tena, no seu dominio, puntos da particion distintos dosextremos, o substituımos polo produto dos lazos formados polas restricions e os γ correspondentes;por exemplo, se o dominio de σl e o conxunto [t1, t2], e o punto intermedio i esta na particion,substituımos σl polo produto dos lazos σl |[t1,i] γ
−1i,0 e γi,0σl |[i,t2].
Neste momento, temos unha homotopıa como indica o diagrama
-H
Xx0 x0
x0
σ1 σ2 σ3 σ4
U
V
U
U
U
V
V
U
V
V
U
V
U
V
U
U
As seguintes transformacions van permitir ir subindo a fila de abaixo, onde esta o camino inicial,ata a fila superior, onde esta o camino constante. Debuxemos un rectangulo da cuadrıcula:
Curso 2014-15 85

TOPOLOXIA DE SUPERFICIES Prof. Xose M. Masa
� @
� @
γi,j γi+1,j
γi,j+1 γi+1,j+1
αi,j
βi+1,jβi,j
αi,j+1
Aqui temos catro lazos en x0:
γi,jαi,jγ−1i+1,j , γi+1,jβi+1,jγ
−1i+1,j+1 , γi,jβi,jγ
−1i,j+1 , γi,j+1αi,j+1γ
−1i+1,j+1 .
Os caminos α e β venen dados pola aplicacion H, non se modifican no proceso que imos realizar,pero as palabras das que forman parte si poderan sufrir transformacions. Os γ foron construıdos pornos. Estes lazos poden ter imaxe en U , en V ou mesmo en U ∩V ; pero nos estamos traballando enπ1(U, x0) ∗ π1(V, x0), estamos transformando un elemento deste grupo, non podemos intercambiarsen mais, en principio, elementos dun e doutro grupo.
Suponamos que, no proceso que estamos a facer, o primeiro lazo, o lazo γi,jαi,jγ−1i+1,j , represente
un elemento de π1(U, x0). Poden darse duas situacions diferentes: que todo o rectangulo tena imaxeen U , ou que non.
Analicemos a primeira posibilidade. Polo Lema 8.12,
(γi,jβi,jγ−1i,j+1)−1(γi,jαi,jγ
−1i+1,j)(γi+1,jβi+1,jγ
−1i+1,j+1) ' γi,j+1αi,j+1γ
−1i+1,j+1 .
Tratase dunha homotopıa en U , polo que poderiamos substituır o lazo con αi,j polo lazo conαi,j+1. Que pasa cos lazos en que aparece β? Vai aparecer o mesmo lazo, pero con exponente oposto,cando considermos o rectangulo adxacente; se ese rectangulo esta nas mesmas hipoteses, estariamostraballando en π1(U, x0), e se cancelarıan, un con outro. Noutro caso, serıan lazos provenentes dunlazo en U ∩ V , un, imaxe por jU , outro, imaxe do mesmo lazo por jV , con exponentes opostos.Logo introducen unha modificacion permitida, unha modificacion dentro do nucleo.
Consideremos agora a segunda posibilidade, que o lazo γi,jαi,jγ−1i+1,j , represente un elemento de
π1(U, x0) pero a imaxe do rectangulo non estea contida en U , senon en V . Neste caso, o noso lazoten imaxe en U ∩ V . Digamos que e un lazo do tipo jU ◦ τ , con τ un lazo en U ∩ V . O elementodo produto libre que temos entre mans serıa da forma a[jU ◦ τ ]b, con a e b elementos arbitrarios doproduto. Neste caso, a substitucion deste elemento por a[jV ◦ τ ]b e unha trasformacion que non saedo nucleo:
a[jU ◦ τ ]b −→ (a[jU ◦ τ ][jV ◦ τ ]−1a−1)(a[jV ◦ τ ]b) ,
e a[jU ◦ τ ][jV ◦ τ ]−1a−1 e un elemento do nucleo. Ası, reducimos este caso ao anterior.Deste xeito comprobamos que todo elemento do nucleo esta en N ; ou sexa, que N e o nucleo
do epimorfismo de π1(U, x0) ∗ π1(V, x0) en π1(X,x0). Temos demostrado, pois, o Teorema de VanKampen:
10.2 Teorema de Van Kampen Sexan X = U ∪ V , x0 ∈ U ∩ V , U, V e U ∩ V abertos econexos por caminos. Verifıcase:
π1(X,x0) ∼= (π1(U, x0) ∗ π1(V, x0) ) /N .
�
Curso 2014-15 86

TOPOLOXIA DE SUPERFICIES Prof. Xose M. Masa
Para manexar dun xeito eficaz este resultado, compre presentalo de forma mais categorica. Ocociente que vimos de construır e o que se denomina suma amalgamada dos homomorfismos π1(jU )e π1(jV ), obxecto que ten a propiedade que expresa, referido a π1(X,x0), o seguinte diagrama:
π1(U ∩ V, x0)
π1(V, x0)
π1(U, x0)
π1(X,x0) G
������3
QQQQQQs
QQQQQQs
������3
PPPPPPPPPPPPPPPPPPq
����
����
����
����
��1-
jU∗
jV∗
iU∗
iV∗
hU
hV
hX
Dados homomorfismos hU e hV con rango un grupo arbitrario G facendo o diagrama exteriorconmutativo, existe un homomorfismo unico hX : π1(X,x0)→ G facendo os diagramas triangularesconmutativos. Como nos so imos facer calculos en casos particulares, onde ou π1(U ∩V ) ou π1(V )son triviais, non precisaremos desta interpretacion.
10.3 Grupo fundamental da rosa de n-petalos Considerade n copias disxuntas da circunfe-rencia S1, e facede o cociente que identifica todos os puntos (1, 0) entre si. E o que se denominawedge de n circunferencias ou rosa de n-petalos (n-leaved rose). Denotaremolo por Rn.
.......................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................
..............................................................................................................................................................................................................................................
.................................
..........................................
....................................................................................................................................................................................................................................................................................................................................................................
...........................................
.......................................................................................................................
...........................................................................................................................................................................................................................................................................................................................................................................................................
....................................
...............................
Imos calcular o seu grupo fundamental con punto base o punto identificado, usando abertos Ue V como se indica na figura, e procedendo por inducion:
............................................................................................................................. ...............................................................................................................................................................................................................................................................................................................................................................................................................................................
..............................................................................................................................................................................................................................................
.................................
..........................................
....................................................................................................................................................................................................................................................................................................................................................................
...........................................
.......................................................................................................................
...........................................................................................................................................................................................................................................................................................................................................................................................................
....................................
...............................
U
.................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................. .........
.....................................................................................................................................
.................................
....................................................
.......................
......................................................
...................................................................................................................................................
.................................................
......................................................
........................................
...............................
VResulta ser U do tipo de homotopıa de Rn−1, V do tipo de homotopıa de S1 e U ∩ V contractil.
Sabemos π1(S1) ∼= Z. Facemos a hipotese de inducion π1(Rn−1) ∼= Z∗n−1
... ∗Z e deducimos
π1(Rn) ∼= Z ∗n
... ∗Z
�
Curso 2014-15 87

TOPOLOXIA DE SUPERFICIES Prof. Xose M. Masa
O Grupo Fundamental das superficies compactas
Partimos dunha superficie S, cociente dunha rexion poligonal plana cun numero par de arestas,digamos, 2k. Suponemos a rexion poligonal P en forma canonica, de xeito que todos os verticescorresponden a un mesmo punto da superficie. Sexa q : P → S a aplicacion cociente. Escollemossubconxuntos abertos U e V da superficie nas hipoteses do Teorema de Van Kampen como segue:tomamos abertos U ′ e V ′ na rexion plana, que sexan saturados a respeito da identificacion, ousexa, tais que q−1(q(U ′)) = U ′ e q−1(q(V ′)) = V ′; ası, as suas imaxes na superficie seran tamenconxuntos abertos, e seran os U e V requeridos, U = q(U ′), V = q(V ′). Como U ′ tomamos un discoaberto cuxa fronteira non corte ao polıgono Fr(P). Fixamos agora un disco pechado dentro de U ′
e como V ′ tomamos o seu complementar. Compre observar que a aplicacion cociente q restrinxidaao interior da rexion poligonal P e un homeomorfismo sobre a sua imaxe.
........
..............
........... ........... ......................
............................................
..............................
...
.................................
........... ........... ........... ........... .................................
...........
......................
........................................................
......................
......................
V
U
Os abertos U e V
........
..............
........... ........... ......................
............................................
......................
V
� -
6
?
@@I
���
��
@@R
A retraccion rV
........
........................................................
........................................................................................................................................................................................................................................................................................................................................................................
..............
........... ........... ......................
............................................
..............................
...
.................................
........... ........... ........... ........... .................................
...........
......................
........................................................
......................
......................� -
6
?
I �
R
�-
6
?
I�
R
A retraccion rU∩V
O aberto U e contractil, logo π1(U) e trivial. U ∩ V ten o tipo de homotopıa de S1, que e unrectracto por deformacion; logo π1(U ∩ V ) ∼= Z.
Vexamos que o aberto V ten o tipo de homotopıa da rosa de k-petalos, que e un retracto pordeformacion. Sexa r′ : V ′ → Fr(P) a aplicacion radial. E unha retraccion por deformacion. SexaH ′ : V ′ × I→ V ′ a deformacion. H ′ pasa ao cociente,
V ′ × I H′−−−−→ V ′yq×idI yqV × I H−−−−→ V
Certamente, existe unha funcion H facendo o diagrama conmutativo. Para concluır que e continua,poderiamos argumentar que q× idI e unha identificacion; o produto de duas identificacions, mesmose unha delas e a identidade, non sempre e unha identificacion, pero neste caso e certo por ser Ilocalmente compacto (vid. [17, Exercicio 29.11]). Mais sinxelo, o que imos facer vai ser traballar coas
adherencias de V ′ e de V , pois H ′ se estende a H ′ : V′× I→ V
′; daquela q× idI : V
′× I→ V × Ie identificacion por ser sobrexectiva con dominio compacto e rango Hausdorff. O cociente do polıgonoFr(P) e Rk, a rosa de k-petalos. Concluımos, pois, que Rk e un retracto por deformacion de V , e,
logo, π1(V ) ∼= Z ∗k
... ∗Z.Para aplicar o Teorema de Van Kampen temos que calcular o grupo N polo que se cocienta
π1(U, x0)∗π1(V x0). Como π1(U) e trivial, so hai que considerar os elementos [jV (σ)], onde jV e ainclusion de U ∩ V en V . Como, ademais, π1(U ∩ V ) e Z, abonda considerar a imaxe dun xerador,π1(X) admitira unha presentacion con k xeradores e unha relacion, a imaxe en π1(V ) dun xeradorde π1(U ∩ V ). Temos que calcular esa imaxe.
Curso 2014-15 88

TOPOLOXIA DE SUPERFICIES Prof. Xose M. Masa
Fixamos un punto base x0 ∈ U ∩V . Suponemos que o punto x0 ten como imaxe pola retracciono vertice. Un lazo σ en x0, recorrendo unha circunferencia C en U ∩ V no sentido contrario o dasagullas do reloxio, define un xerador de π1(U ∩ V ). Temos que calcular a clase de jV ◦ σ en π1(V ).
Para calcular π1(jV ) usamos os isomorfismos que acabamos de construır, substituındo jV polacompposicion das tres aplicacions do diagrama:
U ∩ V jV−−−−→ V
r0
y i
xC
q−−−−→ Rk
Tomando cada aresta con exponente positivo no sımbolo da rexion plana como dominio, ocociente define un lazo no petalo correspondente, que tomamos como xerador do seu grupo funda-mental. Denominando cos mesmos nomes arestas e lazos, a relacion buscada ten a mesma formaque o sımbolo. De forma concreta:
10.4 Grupo fundamental da suma conexa de n toros A rexion poligonal ten sımbolo
α1β1α−11 β−1
1 α2β2α−12 β−1
2 ... αnβnα−1n β−1
n .
Se denominamos αi e βi aos xeradores correspondentes, sera
π1(#nT2) = (α1, β1, α2, β2, ... αn, βn; {α1β1α
−11 β−1
1 α2β2α−12 β−1
2 ... αnβnα−1n β−1
n })
�
10.5 Grupo fundamental da suma conexa de n planos proxectivos A rexion poligonalten sımbolo
α21α
22 ... α
2n .
Se denominamos αi aos xeradores correspondentes, sera
π1(#nP2) = (α1, α2, ... , αn; {α2
1α22 ... α
2n})
�
Teorema de Clasificacion das Superficies Compactas
Temos xa unha presentacion do grupo fundamental de cada supeficie. Pero non e facil discernirse son isomorfos ou non. O que imos facer e abelianizalos, cocientalos polo respectivo subgrupode conmutadores. Os cocientes son todos diferentes, o que permitira concluır que as superficiesconsideradas son todas distintas. Imos denominar H1(X) ao abelianizado de π1(X).
H1(#nT2) ∼= Z⊕
2n
... ⊕Z
H1(#nP2) ∼= Z⊕
n−1
... ⊕Z ⊕ Z2
Curso 2014-15 89

TOPOLOXIA DE SUPERFICIES Prof. Xose M. Masa
No caso da suma conexa de planos proxectivos, o abelianizar a presentacion dada, obtense ungrupo abeliano con n xeradores e a unica relacion
2α1 + 2α2 + ··· + 2αn .
Para reconecer o grupo resultante facemos unha escolla apropiada do conxunto de xeradores, to-mamdo os seguintes:
α1, α2, ... , αn−1, α1 + α2 + ··· + αn .
Do Teorema de clasificacion dos grupos abelianos finitamente xerados deducese que todos estesgrupos son diferentes. Resulta:
10.6 Teorema de Clasificacion Toda superficie compacta e homeomorfa a unha esfera, ou aunha suma conexa de n toros, para algun n ∈ N, ou a unha suma conexa de n planos proxectivospara para algun n ∈ N. Ademais, estas superficies corresponden todas a tipos de homeomorfıadiferentes. �
Outra definicion da Caracterıstica de Euler
A notacion empregada para o abelianizado do grupo fundamental non e casual. Para calqueraespazo topoloxico conexo por caminos, X, o abelianizado de π1(X) e H1(X), o seu primeiro grupode homoloxıa (first homology group). En xeral, para calquera espazo X, defınense os seus gruposde homoloxıa, Hn(X), n ≥ 0, grupos abelianos que son invariantes topoloxicos do espazo. H0(X),por exemplo, e o grupo abeliano libre con tantos xeradores como componentes conexas por caminostena o espazo. No caso de ser finito, o rango de Hn(X) denomınase n-esimo numero de Betti deX, que se denota βn,
βn = rango Hn(X) .
Para unha variedade topoloxica compacta, M , de dimension n, estos numeros son finitos. Ademais,Hi(M) = 0 se i > n. Ası, ten sentido a seguinte definicion de caracterıstica de Euler de M :
χ(M) =
n∑i=0
(−1)iβi .
Para unha superficie compacta S, verifıcase
H2(S) =
Z se S e orientabel
0 se S e non orientabel ,
recuperando un resultado que xa obtiveramos calculando a caracterıstica de Euler dunha sumaconexa:
Superficie Caracterıstica de Euler
Esfera 2
Suma conexa de n toros 2− 2n
Suma conexa de n planos proxectivos 2− n
Curso 2014-15 90

TOPOLOXIA DE SUPERFICIES Prof. Xose M. Masa
Poderiamos agora dar un novo enunciado do Teorema de Clasificacion:
10.7 Teorema Duas superficies compactas, S1 e S2, son homeomorfas se, e so se, as suas carac-terısticas de Euler son iguais e ambalas duas son orientabels ou ambalas duas son non orientabels.
�
O xenero dunha superficie
Outro invariante clasico das superficies e o seu xenero (genus). Foi introducido por Riemann, noestudo das funcions alxebricas e as suas integrais (funcions alxebricas ou curvas alxebricas, que sonsuperficies; xa fora considerado nalgunha medida por Abel, ao describir a parametrizacion destascurvas; o nome foi usado por primeira vez por Clebsch, outro matematico do XIX).
Neste contexto clasico, o xenero aparece como o numero maximo de curvas pechadas simples edisxuntas que se poden tracexar sobre unha superficie sen desconectala (vid. [10, Teorema 5.7]). Oxenero da esfera e 0, o xenero dunha suma conexa de n toros e n, o xenero dunha suma conexa den planos proxectivos e n. Ası, a relacion entre xenero e caracterıstica de Euler e:
g(S) = 12 (2− χ(S)) se S e orientabel
g(S) = 2− χ(S) se S e non orientabel
Tamen e comun utilizar outra linguaxe: denomınase asa (handle) a un toro menos o interiordun disco pechado; a suma conexa de n toros e tamen unha esfera con n asas. Analogamente,un bonete cruzado (cross-cap) e un plano proxectivo menos o interior dun disco pechado; a sumaconexa de n planos proxectivos e tamen unha esfera con n bonetes cruzados. Ası, o xenero e onumero de asas ou o numero de bonetes cruzados, segundo o caso.
Apendice: Teorema de clasificacion das superficies compactas con bor-do
Exercicios
10.1 Dados dous espazos con punto base, (X,x0) e (Y, y0), denomınase wedge ou union por unpunto, e se denota X ∨ Y , ao cociente da union disxunta de X e Y resultante de identificar x0 ey0,
X ∨ Y = (X t Y )/x0 ∼ y0 .
Utilizando o Teorema de Van Kampen, calculade o grupo fundamental de S1 ∨ S2. (Observacion:
en xeral, o wedge depende da escolla dos puntos base; no caso das esferas, non)
10.2 Sexa S unha superficie compacta, U1 e U2 dous subconxuntos abertos disxuntos, homeo-morfos a R2. Sexan D1 ⊂ U1 e D2 ⊂ U2 dous discos pechados. Sexan C1 e C2 as fronteirasdos discos e ϕ : C1 → C2 un homeomorfismo. Conecida S, identificade a superficie cociente deS − (Int(D1) ∪ Int(D2)) pola relacion xerada por x ∼ ϕ(x), se x ∈ C1.
Curso 2014-15 91
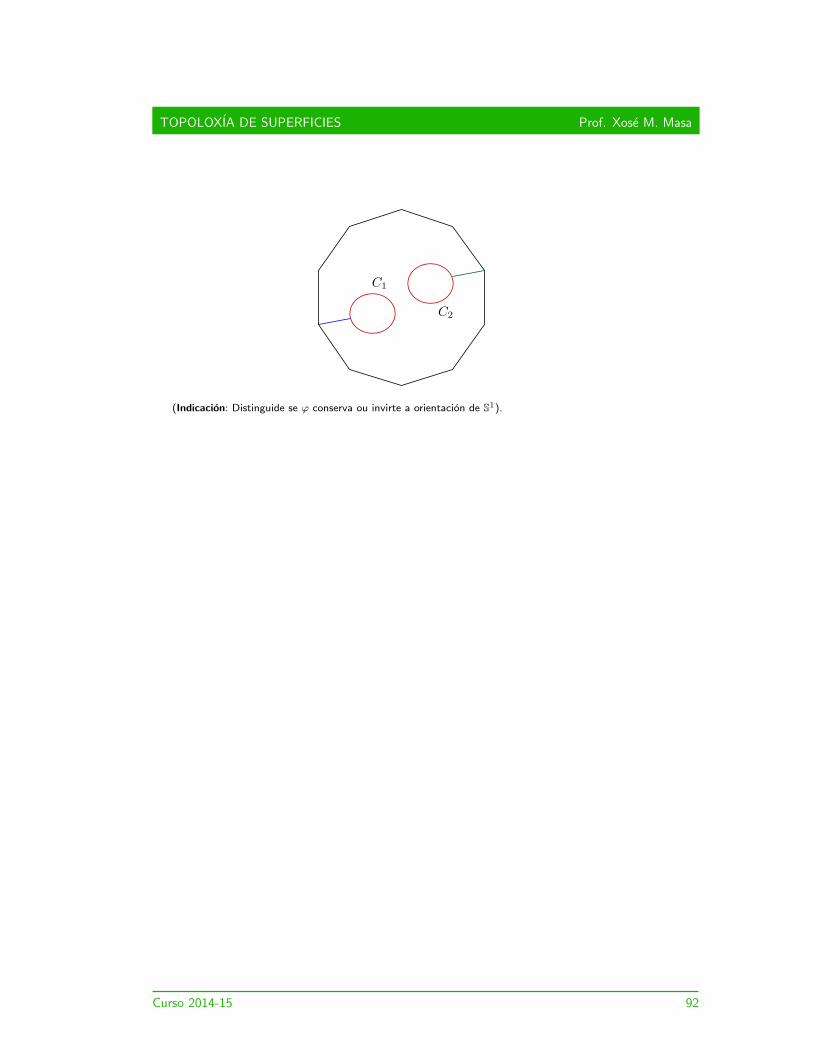
TOPOLOXIA DE SUPERFICIES Prof. Xose M. Masa
C1
C2
(Indicacion: Distinguide se ϕ conserva ou invirte a orientacion de S1).
Curso 2014-15 92

TOPOLOXIA DE SUPERFICIES Prof. Xose M. Masa
Referencias
[1] Armstrong, M. A., Topologıa Basica, Editorial Reverte, Barcelona, 1987.
[2] Buskes, G. and van Rooij, A. Topological Spaces: From Distance to Neighborhood.Springer-Verlag. New york, 1997
[3] Crossley, M. D., Essential Topology. Springer-Verlag, London, 2005.
[4] Godbillon, C., Elements de Topologie Algebrique, Hermann, Paris, 1971
[5] Gallier, J. and Xu, D. A guide to the classification theorem for compact surfaces. Geometryand Computing, Springer, 2013.
[6] Goodman, S. E., Beginning Topology. Undergraduat Texts, 10, AMS, Providence, Rhode Island,2009
[7] Gramain, A., Topologie des Surfaces. Presses Universitaires de France, Paris, 1971
[8] Greenberg, M. J. and Harper, J. R., Algebraic Topology: a first course, Benjamin, Massachu-setts, 1981.
[9] Hu, S.-T., Elements of General Topology. Holden-Day, Inc, San Francisco, 1964
[10] Katok, A., Climenhaga, V., Lectures on Surfaces: (almost) everything you wanted to knowabout them. Student Math. Library, 46, AMS, Providence, R.I., 2008
[11] Kinsey, L. C., Topology of Surfaces. Undergraduate Texts in Mathematics, Springer-Verlag,New York, 1993
[12] Lee, J. M., Introduction to topological manifolds Graduate texts in mathematics, Springer-Verlag, New York, 2000
[13] McCleary, J., A First Course in Topology. Continuity and Dimension. Student Math. Library,31, AMS, Providence, R. I., 2006.
[14] Masa Vazquez, X.M., Topoloxıa xeral. Introduccion aos espacios euclidianos, metricos e to-poloxicos. Manuais universitarios, 1. Universidade de Santiago de Compostela, 1999.
[15] Massey, W. S., Introduccion a la Topologıa Algebraica, Editorial Reverte, Barcelona, 1972.
[16] Messer, R., Straffin, P., Topology Now ! The Mathematical Association of America, Washing-ton, DC, 2006.
[17] Munkres, J. R., Topologıa, Prentice Hall, Madrid, 2002
[18] Outerelo Domınguez, E., Sanchez Abril, J. M., Elementos de Topologıa, Editorial Sanz Torres,Madrid, 2008.
[19] Reid, M. and Szendroi, B., Geometry and Topology , Cambridge University Press, 2005
[20] Sutherland, W.A., Introduction to metric and topological spaces.Clarendon Press, Oxford, 1998.
Curso 2014-15 93