Topicos ISO 1283

of 27
-
Upload
anderson-costa -
Category
Documents
-
view
14 -
download
0
Transcript of Topicos ISO 1283
-
1Norma ISO 1283Norma ISO 1283
RRoobb iinndduussttrriiaall ddee mmaanniippuullaaoo
SSeegguurraannaa
(UNI EN 775)(UNI EN 775)
-
2Rob industrial de manipulao
Manipulador com:9 mltiplos graus de liberdade9 comandado automaticamente9 re-programvel9 multi-escopo9 fixo ou mvel9 destinado a aplicaes de
automao industrial
-
3Rob industrial de manipulao
Consideraes requisitos de segurana para o rob e o
sistema robtico quando um rob usado como parte de uma
instalao complexa, normalmente provido de ferramentas e dispositivos que interagem com outras mquinas.
a norma no se refere a segurana das ferramentas ou dispositivos ou entidades de risco geradas pelo uso do rob em tais instalaes.
-
4Escopo e campo de aplicaEscopo e campo de aplicaoo
A norma ISO 10218 fornece um guia sobre: consideraes de utilizao segurana para o projeto construo programao funcionamento manuteno de robs industriais de
manipulao e sistemas robticos
-
5SISTEMAS para SEGURANA
BarreiraFsica
Barreira luminosa
Luzes lampejantes
Sistemas deseguranaSinal de perigo
Sistemas eltricos e
eletrnicos
Sistema inteligente
-
6DefiniDefinies da Norma..es da Norma..
Termos gerais aplicados
pessoa: qualquer simples indivduo
pessoal: Pessoas especificamente empregadas e adestradas no uso e vigilncia de um sistema robtico.
-
7Termos especTermos especficosficos
Eixos principais - brao manipulador
Elementos mecnicos interconectados por articulaes e juntas motorizadas, que permitem deslocar, posicionar e orientar o pulso e/ou dispositivo fixado a extremidade
-
8Termos especTermos especficosficos
modo automtico: Modo operacional no qual o sistema de comando do rob pode funcionar sob controle direto do programa de trabalho.
dispositivo de habilitao: Dispositivo para funcionamento manual destinado a consentir o movimento do rob somente enquanto o mesmo seja mantido em uma posio pr-determinada
-
9Termos especTermos especficosficos
Anteparo Elemento usado de modo especifico para
fornecer proteo a uma condio de perigo
cobertura de proteo porta barreira fsica
Perigo Situao que pode gerar uma leso ou
dano
-
10
Delimitao de reas operacionais
Espaos9 restrito9 protegido9 mximo
-
11
Delimitao de reas operacionais
-
12
Delimitao de reas operacionais
-
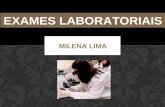
13
Delimitao de reas operacionais
9 1-Rob 9 2-Dispositivo Efetuador9 3 Pea de trabalho9 4-Equipamento de
comando/potncia9 5-Equipamento associado
(mesa, esteira)9 6-Proteo (barreira ou
dispositivo de presena)9 7-espao restrito9 8 (+7) - Espao mximo9 9-Porta inter-bloqueada9 10-Dispositivo de inter-
bloqueio
-
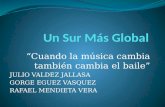
14
Delimitao de reas operacionais
| dispositivo de inter-bloqueio (proteo)
| Montagem que interconecte um anteparo ou dispositivo ao comando do rob e/ou ao sistema de alimentao dos acionamentos dorob e aos equipamento associadosao mesmo
-
15
Delimitao de reas operacionais
espao mximoespao que pode ser coberto pelas partes
em movimento. Limitado pelo rob, como definido pelo fabricante, mais o espao que pode ser coberto pelo dispositivo efetuador e a pea em trabalho
-
16
Delimitao de reas operacionais
espao restritoz Parte do espao mximo definido por
limitadores de curso que estabelecem os limites a no serem superados no caso qualquer previso de mau funcionamento do sistema robtico
espao protegidoz espao delimitado pelas protees
-
17
Termos especTermos especficos ficos (norma)(norma)
velocidade reduzida| velocidade selecionvel, indicada pelo
fabricante, do rob que limita automaticamente a operao do rob ao valor especificado.
| Definida para que permita ao operador desviar e interromper a tempo movimentos em situaes perigosas.
-
18
Termos especTermos especficosficos
Condio de segurana
Mtodos para a proteo das pessoas usando meios, dispositivos e procedimentos de trabalho para garantia da segurana
-
19
ConsideraConsideraes geraises gerais
Localizao (pesquisa) de defeitoAo para determinar metodicamente a
razo pela qual um sistema robtico pode errar na execuo de uma tarefa ou funo prevista
-
20
ConsideraConsideraes geraises gerais
Os procedimentos tcnicos para a preveno de infortnios devem basear-se em dois princpios fundamentais:
1. A ausncia de pessoas no espao protegido durante o funcionamento automtico
2. A eliminao ou pelo menos reduo deperigos, durante os intervenes (seja para treinamento ou verificao de programas) no espao protegido
-
21
Projeto e construProjeto e construo de robso de robs
parada de emergncia
Todo rob deve ser equipado para conexo a dispositivos externos para bloqueio de emergncia, proteo ou inter-bloqueio a circuitos desligamento de emergncia.
Aspectos de comandoAspectos de comando
-
22
Projeto e construProjeto e construo de robso de robs
Unidade de comando porttila) a unidade de comando porttil deve ser
projetada seguindo princpios ergonmicos de modo que possa ser usada de modo confivel mesmo em movimento;
b) por todo o tempo no qual a unidade porttil seja usada no espao protegido, no deve ser possvel comutar o rob ao modo de funcionamento automtico;
-
23
Sistema robtico
9 o rob ("hardware" e "software") 9 dispositivo efetuador9 qualquer equipamento, dispositivo, ou
sensor, necessrio ao rob para executar uma tarefa;
9 qualquer interface de comunicao que faa funcionar e governe o rob,
9 equipamento, ou sensor, desde que esses dispositivos perifricos sejam controlados pelo sistema de comando do rob.
-
24
Anlise de Segurana
9 Definir tarefas necessrias junto a instalao avaliando necessidade de acesso ou contato na rea operacional
9 Identificar fontes de perigo, incluindo modos de desgaste e ruptura de qualquer equipamento associado
-
25
Anlise de Segurana
9 considerar que a posio final, em caso de paradas de emergncia no pode ser precisada em funo da energia cintica aplicada
9 considerar estratgias de segurana que minimizem riscos em nveis aceitveis na fase de projeto da instalao
-
26
Anlise de Segurana
9 definir velocidades de trabalho compatveis com a aplicao.
9 nveis de risco podem ser minimizados pelas condies operacionais adotadas..
-
27
Anlise de Segurana
Minimizar riscos a nveis aceitveis com:9 barreiras e protees fsicas9 aplicao de sistemas de
sinalizao e alarmes9 uso de bloqueios e sensores
associados9 rotinas de manuteno e limpeza
das instalaes