Técnicas de Projeto Para Circuitos Lógicos
21
TÉCNICAS DE PROJETO PARA CIRCUITOS LÓGICOS Prof. Antônio M. C. Soares Júnior 1
-
Upload
flaviana-melo -
Category
Documents
-
view
22 -
download
1
Transcript of Técnicas de Projeto Para Circuitos Lógicos
TÉCNICAS DE PROJETO PARA CIRCUITOS LÓGICOS
Prof. Antônio M. C. Soares Júnior
1
1 CADEIA DE COMANDO
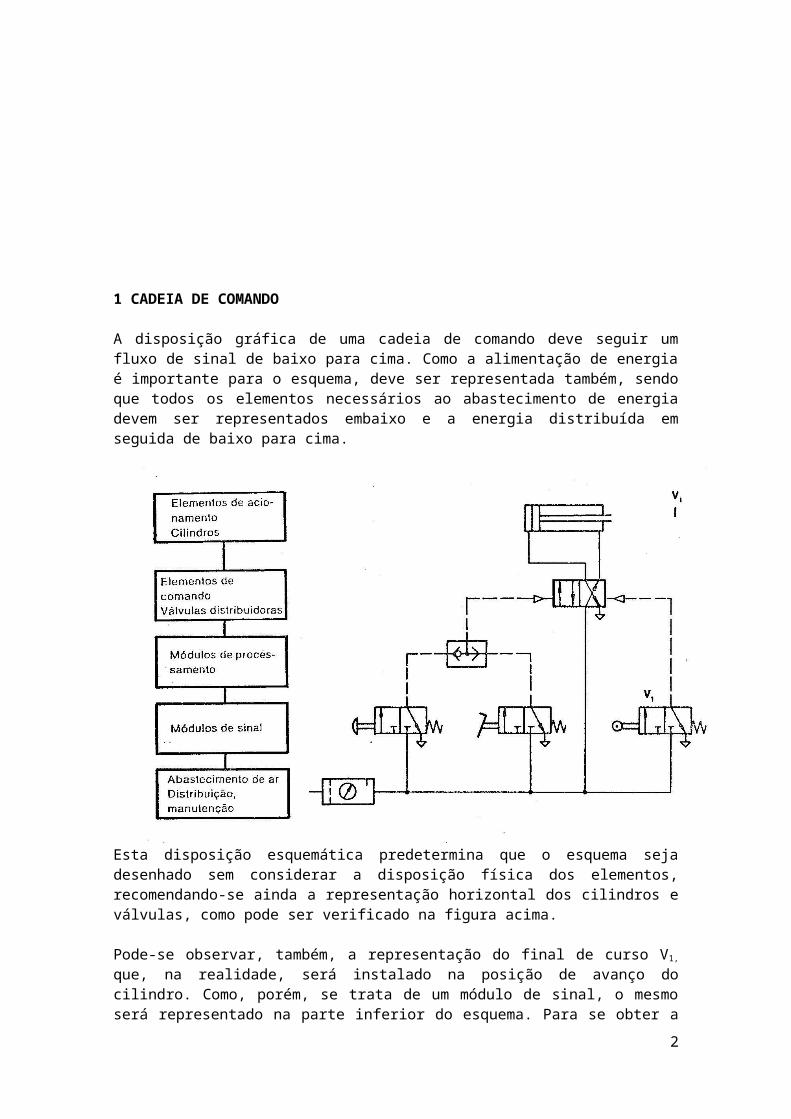
A disposição gráfica de uma cadeia de comando deve seguir um fluxo de sinal de baixo para cima. Como a alimentação de energia é importante para o esquema, deve ser representada também, sendo que todos os elementos necessários ao abastecimento de energia devem ser representados embaixo e a energia distribuída em seguida de baixo para cima.
Esta disposição esquemática predetermina que o esquema seja desenhado sem considerar a disposição física dos elementos, recomendando-se ainda a representação horizontal dos cilindros e válvulas, como pode ser verificado na figura acima.
Pode-se observar, também, a representação do final de curso V1, que, na realidade, será instalado na posição de avanço do cilindro. Como, porém, se trata de um módulo de sinal, o mesmo será representado na parte inferior do esquema. Para se obter a correspondência entre as duas disposições, a situação real é representada por um traço com o nome do dispositivo.
Em comando onde há vários elementos de trabalho, convém decompor o mesmo em várias cadeias de comando individuais, podendo se formar uma cadeia de comando para cada elemento de trabalho.
Convém que cada cadeia de comando seja representada, se possível, na sequência de transcurso do movimento, lado a lado.
1.1 Designação dos elementos
Dois tipos se podem encontrar frequentemente, que demonstram ser de grande vantagem.
- Por algarismos - Por letras
2

(a) Por algarismos
Divisão de grupos:
Grupo 0 Todos os elementos do abastecimento de energia.
Grupo 1.0, 2.0, 3.0 Designação das diversas cadeias de comando (normalmente o número dado ao cilindro)
Grupo .1 Todos os elementos de comando.
Grupo .2, .4, .6 Todos os elementos de sinais e processamento de sinais que influenciam no avanço do elemento de trabalho considerado (número par).
Grupo .3, .5, .7 Todos os elementos de sinais e processamento de sinais que influenciam no retorno do elemento de trabalho considerado (número impar).
Grupo .01, .02, .03 Todos o elementos que auxiliam os movimentos (lentos e rápidos) dos elementos de trabalho. Para avanço número par e retorno número impar.
Como exemplo pode-se verificar o esquema da figura abaixo.
3

(b) Por letras
Grupo A, B, C Todos os elementos de trabalho (letras maiúsculas)
Grupo a0, b0, c0 Todos os elementos de sinais (fins de curso) que informam o estado de recuado dos elementos de trabalho, A, B, C,...
Grupo a1, b1, c1 Todos os elementos de sinais (fins de curso) que informam o estado de avançado dos elementos de trabalho, A, B, C,...
Neste caso, a designação se limita aos atuadores e seus fins de curso.
1.2 Possibilidades de representação da sequência dos movimentos
É de fundamental importância a representação das sequências dos movimentos de trabalho e de comando, de maneira facilmente visível, não necessitando de maiores esclarecimentos.
São colocadas a seguir as duas formas de representação mais utilizadas.
(a) Por sinais algébricos
Representação simplificada.
Avanço +Retorno -
A+ e A-, B+ e B-, etc.
(b) Diagrama de movimentos
- Diagrama trajeto-passo
Neste caso se representa a sequência de movimentos de um elemento de trabalho, levando-se ao diagrama, os movimentos e as suas condições operacionais. Isto é feito por meio de duas coordenadas, uma representa o trajeto dos elementos de trabalho e a outra o passo.
4
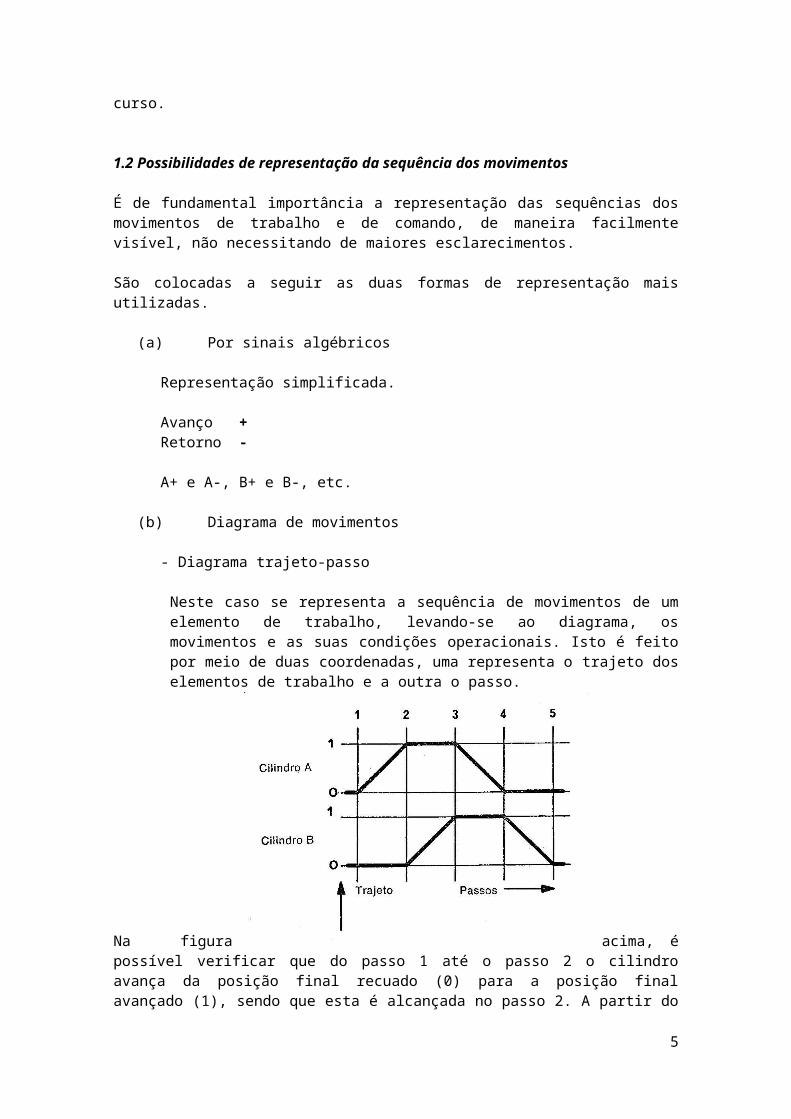
Na figura acima, é possível verificar que do passo 1 até o passo 2 o cilindro avança da posição final recuado (0) para a posição final avançado (1), sendo que esta é alcançada no passo 2. A partir do passo 4 o cilindro retorna novamente e alcança a posição final recuado no passo 5.
- Diagrama trajeto-tempo
O trajeto de um elemento em função do tempo. Contrariamente ao diagrama trajeto-passo, o tempo é representado linearmente nesse caso e constitui a ligação entre os diversos elementos.
2 PROJETO DO SISTEMA DE PROCESSAMENTO DE INFORMAÇÕES
2.1 Introdução
Originalmente a automação de equipamentos e processos era de baixa complexidade e, no campo pneumático, solucionava-se o processamento de informações (sinais) utilizando somente componentes pneumáticos como válvulas ‘E’ e ‘OU’ e válvulas direcionais de pequeno porte. Gradualmente houve a aplicação de circuitos elétricos compostos de relés, chaves, contatoras, etc. em conjunto com válvulas direcionais eletropneumáticas. Nas décadas de 80-90 intensificou-se o emprego de CLP’s (Controladores Lógicos Programáveis) em substituição aos relés e às válvulas pneumáticas empregadas no processamento de informações.
Como consequência direta do aumento da complexidade dos sistemas de automação e da existência de três princípios tecnológicos que podem ser aplicados para processar informações, isto é, pneumática pura, eletropneumática e pneutrônica, houve o surgimento de vários métodos de projeto que podem ser classificados em métodos tradicionais e os métodos análiticos.
Enfatiza-se que todos estes métodos aplicam-se somente para o sistema de processamento de informações (sinais), porém, a aplicação dos métodos tradicionais exige a escolha antecipada da tecnologia que será empregada, impedindo que se possa prever qual das possíveis tecnologias será a mais eficiente na solução de um dado problema. Assim sendo, predefinindo-se o uso da eletropneumática (com relés), pode-se empregar o método eletropneumático intuitivo ou o método da sequencia mínima;escolhendo-se pneumática pura, tem-se á disposição o método pneumático intuitivo, método cascata e o método passo a passo. Nas aplicações empregando CLP’s, ainda é muito comum o desenvolvimento do programa sem um método definido, sendo fundamentado na experiência do projetista. Neste sentido, é que os métodos analíticos facilitam sobremaneira o desenvolvimento dos projetos utilizando CLP´s .
Assim sendo, o projeto tradicional de um sistema pneumático não inclui a determinação da tecnologia mais adequada para atender os requisitos de um cliente ou de um ambiente onde o sistema será usado. Sabe-se que cada tecnologia tem vantagens e desvantagens relacionadas a custos, manutenção, desempenho etc. que devem ser constantemente observadas durante a evolução de um projeto.
Alguns destes métodos tradicionais apresentam semelhanças quanto às soluções de projeto. Métodos como sequencia máxima e passo-a-passo tradicional apresentam similaridades quanto à existência de intertravamentos com a função de memória, dentro de uma sequencia de eventos. As soluções com memórias apresentam diagramas e esquemas geralmente mais complexos.
5
Com os métodos como sequência mínima e cascata conseguem-se soluções com menor número de componentes. No caso do método cascata, separam-se pelo menos duas linhas pneumáticas, uma para avanço e uma linha para retorno de cilindros. Para sequencia mínima, têm-se pelo menos duas linhas de corrente elétrica: uma para alimentação dos solenoides de avanço e outra para os solenoides de retorno dos cilindros. Estes métodos apresentam soluções similares uma vez que ambos separam movimentos de avanço e retorno. Por sua vez, os métodos analíticos possibilitam a concepção de sistemas de automação pneumática sem a pré-definição da tecnologia a ser utilizada no processamento de informações e permite desenvolver soluções com pneumática pura, eletropneumática e pneutrônica.
2.2 Método intuitivo para pneumática pura e eletropneumática
2.2.1 Comandos combinatórios
No caso dos comandos combinatórios, este método consiste na escolha dos elementos e das suas interligações baseando-se na experiência, em exemplos e em correções por tentativas e erros. Para um mesmo problema, podem resultar diversas soluções intuitivas, mais simples ou mais complexas, dependendo muito do projetista. Com isto, tornam-se mais difíceis a supervisão, a manutenção e a localização de defeitos à medida que aumentam o número de sinais de entrada e as condições adicionais de comando.
Etapas do método intuitivo para pneumática pura – Circuitos Combinatórios
Diagrama do circuito pneumático
1. Representação dos atuadores e válvulas direcionais e suas interligações;
2. Representação das válvulas de fim-de-curso (sensores) e botões de partida. Identificar a posição dos fins-de-curso junto aos atuadores;
3. Representação das válvulas de processamento de sinais e suas interligações com as válvulas de fim-de-curso. Esta etapa implementa a lógica operacional do sistema requerendo a intuição do projetista;
4. Definição dos tipos de acionamento das válvulas de fim-de-curso (roletes simples ou escamoteáveis)
5. Modificação do circuito e inserção de válvulas para a Inclusão de condições adicionais,como opção de ciclo único/ciclo contínuo e ações de emergência
Exemplo 2.1
A figura 2.1, abaixo, apresenta uma prensa de estampo comandada por um cilindro pneumático. Para o acionamento do cilindro deve-se considerar as adequadas combinações de sinais provenientes dos sensores B,H,P e R. Considerar as seguintes condições para o acionamento do atuador:
- A partida por comando local, comando à distância ou ambos;
6
- Retorno após um certo tempo;
- Condição inibidora: sempre que o atuador estiver avançado.
Figura 2.1
Segue o circuito pneumático de acionamento obtido pelo método intuitivo.
Figura.2.2
7
a1
H R
P
B
0.00 Bar
a1

2.2.2 Comandos Sequenciais
Neste caso, o desenvolvimento do circuito pneumático, apesar de chamado intuitivo, se baseia em um procedimento bem estabelecido, que é o de considerar o princípio de que, para ser sequencial, cada passo da sequência de ações possui como pré-condição mínima a ocorrência do passo anterior que é informada por meio do sensor correspondente.
Etapas do método intuitivo para pneumática pura – Circuitos Sequenciais
Diagrama do circuito pneumático
1. Representação dos atuadores e válvulas direcionais e suas interligações;
2. Representação das válvulas de fim de curso (sensores) e botões de partida. Identificar a posição dos fins de curso junto aos atuadores;
3. Representação das válvulas de processamento de sinais e suas interligações com as válvulas de fim de curso, seguindo o desenvolvimento da sequencia considerada, ou seja, com o auxílio do Diagrama Trajeto–Passo ou por meio da simbologia literal, o circuito vai sendo construído considerando a informação de cada sensor responsável pelo estado de cada atuador, desde que cada passo da sequência de ações possui como pré-condição mínima a ocorrência do passo anterior. Esta etapa implementa a lógica operacional do sistema.
4. Modificação do circuito e inserção de válvulas para a Inclusão de condições adicionais,como opção de ciclo único/ciclo contínuo e ações de emergência
Exemplo: Dispositivo de elevação de cargas
Segue solução para o automatismo, baseado na sequência estabelecida.
8

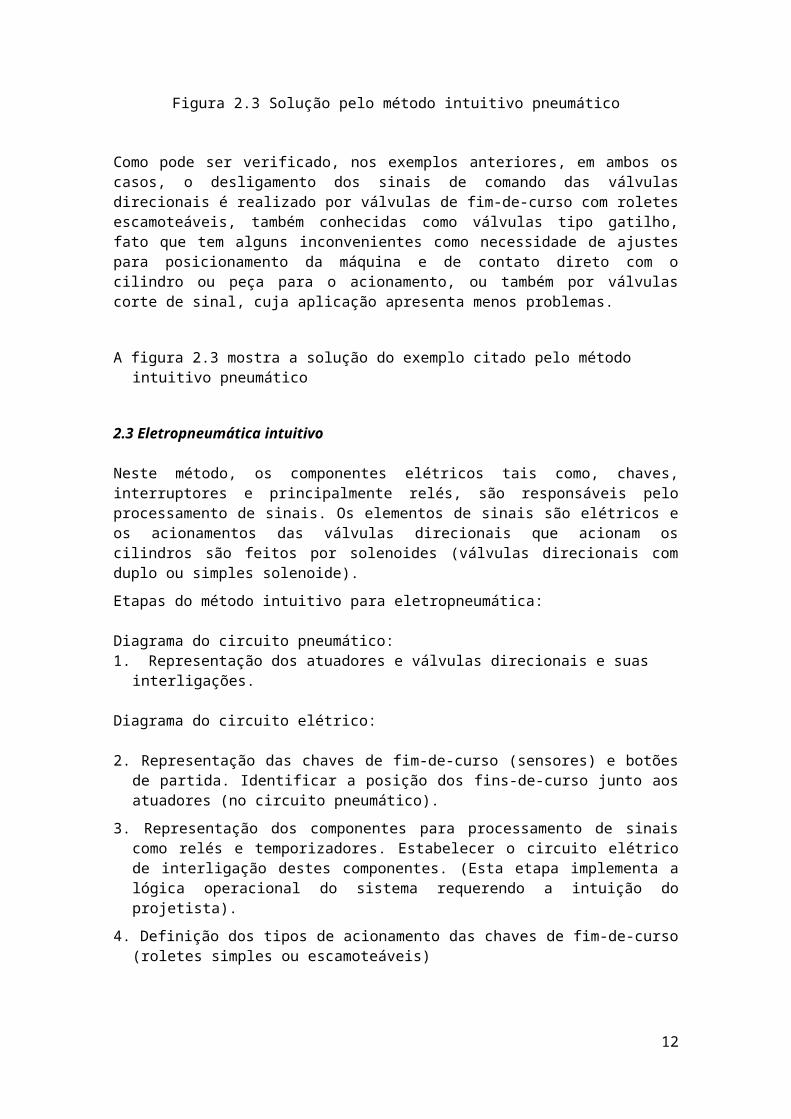
Figura 2.3 Solução pelo método intuitivo pneumático
Como pode ser verificado, nos exemplos anteriores, em ambos os casos, o desligamento dos sinais de comando das válvulas direcionais é realizado por válvulas de fim-de-curso com roletes escamoteáveis, também conhecidas como válvulas tipo gatilho, fato que tem alguns inconvenientes como necessidade de ajustes para posicionamento da máquina e de contato direto com o cilindro ou peça para o acionamento, ou também por válvulas corte de sinal, cuja aplicação apresenta menos problemas.
A figura 2.3 mostra a solução do exemplo citado pelo método intuitivo pneumático
2.3 Eletropneumática intuitivo
Neste método, os componentes elétricos tais como, chaves, interruptores e principalmente relés, são responsáveis pelo processamento de sinais. Os elementos de sinais são elétricos e os acionamentos das válvulas direcionais que acionam os cilindros são feitos por solenoides (válvulas direcionais com duplo ou simples solenoide).
Etapas do método intuitivo para eletropneumática:
Diagrama do circuito pneumático:1. Representação dos atuadores e válvulas direcionais e suas interligações.
9
A
B
0
1
0
1
A+, B+, B-,A-
1.0 2.0
1.1 2.1
14
23
1.2 1.6
1.8
22 231314
13
22
1.5
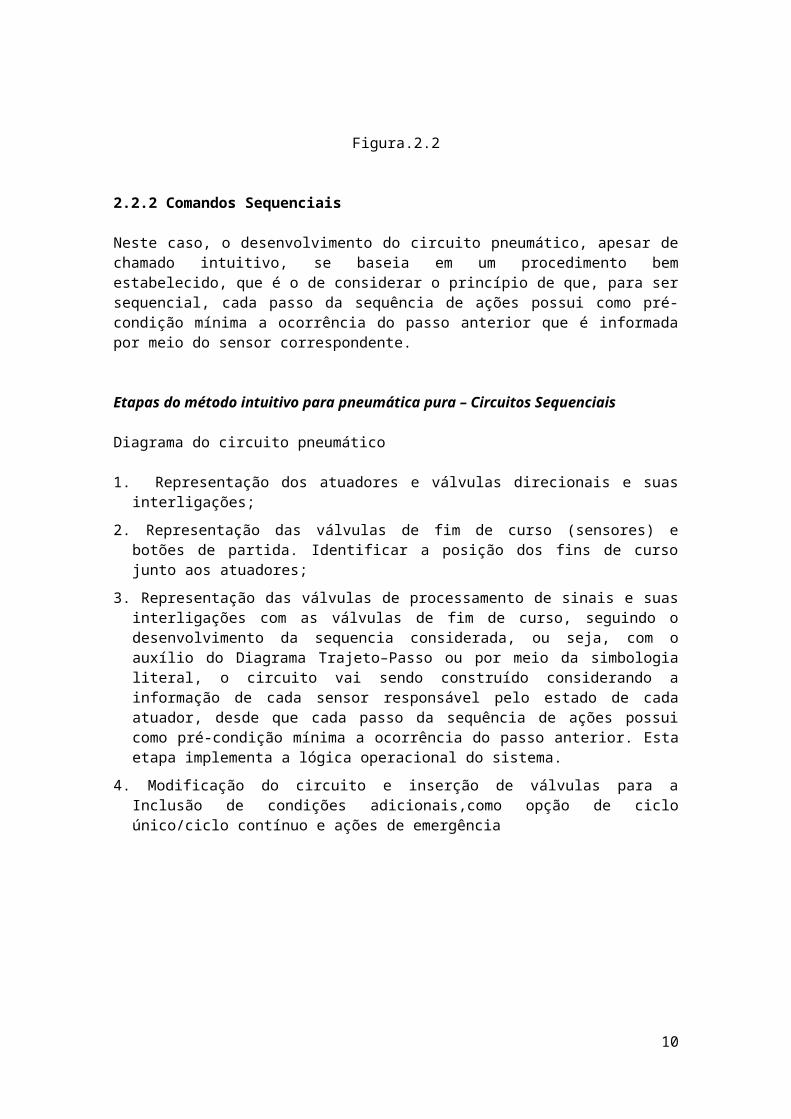
Diagrama do circuito elétrico:
2. Representação das chaves de fim-de-curso (sensores) e botões de partida. Identificar a posição dos fins-de-curso junto aos atuadores (no circuito pneumático).
3. Representação dos componentes para processamento de sinais como relés e temporizadores. Estabelecer o circuito elétrico de interligação destes componentes. (Esta etapa implementa a lógica operacional do sistema requerendo a intuição do projetista).
4. Definição dos tipos de acionamento das chaves de fim-de-curso (roletes simples ou escamoteáveis)
5. Modificação do circuito e inserção de chaves e relés para a inclusão de condições adicionais, como opção de ciclo único/ciclo contínuo e ações de emergência.
3. Métodos Sistemáticos
3.1 Divisão da sequência em grupos de sinais compatíveis
Um dos procedimentos iniciais desses métodos é uma análise da representação da sequência, fazendo-se nela a divisão dos movimentos em grupos. Em cada grupo, é permitido somente um movimento de avanço ou de retorno por cilindro.
A ideia básica é se obter sinais diferenciadores para cada grupo de movimentos, de modo a evitar a presença do mesmo sinal na ocorrência de ambos os movimentos (avanço e recuo) de um mesmo atuador, o que implicaria na existência de “contra-sinais”.
3.2 Princípio dos métodos sistemáticos
O caminho mais simples para a construção de qualquer comando e de forma segura, consiste em desconectar o sinal quando este não é mais necessário, o que significa a anulação após cada passo ou operação.
Um método sistemático se caracteriza por:
- O número de sinais de entrada igual ao número de sinais de saída.
- A cada sinal de entrada lhe corresponde um único sinal de saída.
- Os sinais de saída são memorizados, ou seja, devem permanecer até que exista um novo sinal de entrada.
- Somente deve existir um único sinal de saída e deve ser desconectado de forma controlada.
- Os sinais de entrada devem ter efeito, somente seguindo uma ordem pré-estabelecida.
3.3 Uso da válvula de inversão
São utilizadas válvulas direcionais de duplo piloto pneumático 3/2, 4/2/ ou 5/2 vias, que possuem efeito memória, para o desligamento de sinais, de forma sistemática.Pode ser caracterizada como o método cascata de duas linhas.
10

Figura 3.1. Circuito para a sequência A+, B+/B-,A-
3.4 Método cascata
3.4.1 Método cascata para pneumática pura
Este método é denominado cascata porque as conexões de válvulas são representadas em forma escalonada, ou seja, em série. Isso garante a alimentação de ar em uma só linha pneumática. Todas as outras linhas estão conectadas para escape.
O método cascata baseia-se no emprego de válvulas direcionais 5/2 ou 4/2 com acionamento por duplo piloto, as quais atuam como válvulas inversoras e estão interligadas de forma que apenas a válvula que fornece sinal à ação a ser executada esteja alimentada por ar comprimido. Deste modo, elimina-se a necessidade de uso de roletes escamoteáveis e obtem-se maior garantia quanto a ocorrência da sequência desejada.
O método consiste das seguintes etapas:
Diagrama do circuito pneumático:
1. Representação dos atuadores e válvulas direcionais de duplo piloto e suas interligações.
2. A partir do diagrama trajeto-passo, escrever a sequência desejada utilizando os códigos de identificação dos atuadores e os sinais ’+’ para designar avanço e ‘-‘ para designar o retorno.
Ex.: A- A+ B+ A+ (B- A-)
11
a0 a1e0 e1
a0
a1
e1
e0
X´X
S
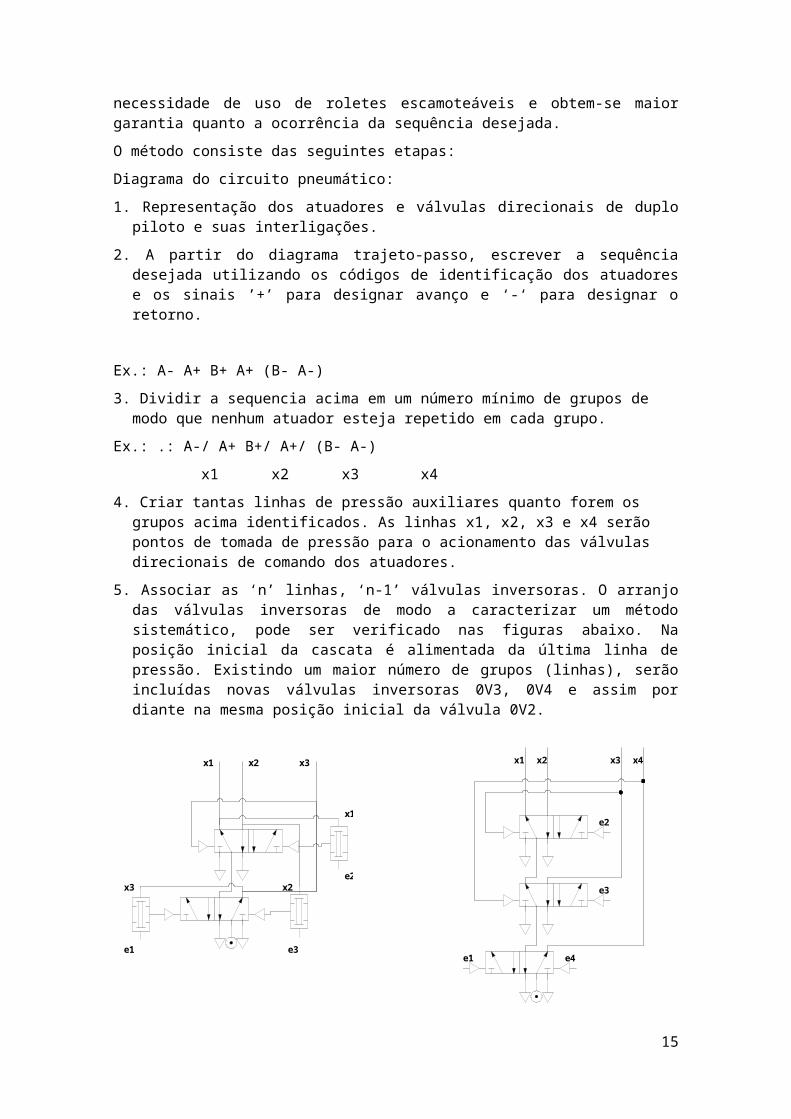
3. Dividir a sequencia acima em um número mínimo de grupos de modo que nenhum atuador esteja repetido em cada grupo.
Ex.: .: A-/ A+ B+/ A+/ (B- A-)
x1 x2 x3 x4
4. Criar tantas linhas de pressão auxiliares quanto forem os grupos acima identificados. As linhas x1, x2, x3 e x4 serão pontos de tomada de pressão para o acionamento das válvulas direcionais de comando dos atuadores.
5. Associar as ‘n’ linhas, ‘n-1’ válvulas inversoras. O arranjo das válvulas inversoras de modo a caracterizar um método sistemático, pode ser verificado nas figuras abaixo. Na posição inicial da cascata é alimentada da última linha de pressão. Existindo um maior número de grupos (linhas), serão incluídas novas válvulas inversoras 0V3, 0V4 e assim por diante na mesma posição inicial da válvula 0V2.
6. Inserção das válvulas de acionamento (botões, pedais etc) e de fim-de-curso (rolete simples). Identificar a posição dos fins-de-curso junto aos atuadores (no circuito pneumático).
7. Interligação das linhas de pilotagem das válvulas de comando dos cilindros com as linhas de pressão auxiliares
8. Representação das válvulas de processamento de sinais adicionais e suas interligações. (Incluir temporizadores, válvulas ‘e’ e ‘ou’ etc.
9. Modificação do circuito e inserção de válvulas para a Inclusão de condições adicionais, como opção de ciclo único/ciclo contínuo e ações de emergência
A figura 3.2 mostra a solução para o exemplo referente á sequência A+,B+,B-,B+,B-,A-, segundo este método.
A grande limitação desse método vem da alimentação de energia que, no caso, é realizada através de uma única válvula. O ar que passa através de todas as válvulas sofre uma considerável queda depressão, o que é prejudicial quando se necessita rapidez em alguns momentos do processo. Esta queda de pressão aumenta em decorrência de maior número de válvulas.
12
x1 x2 x3 x4
e1
e2
e3
e4
x1 x2 x3
e1
e2
e3
x1
x2x3
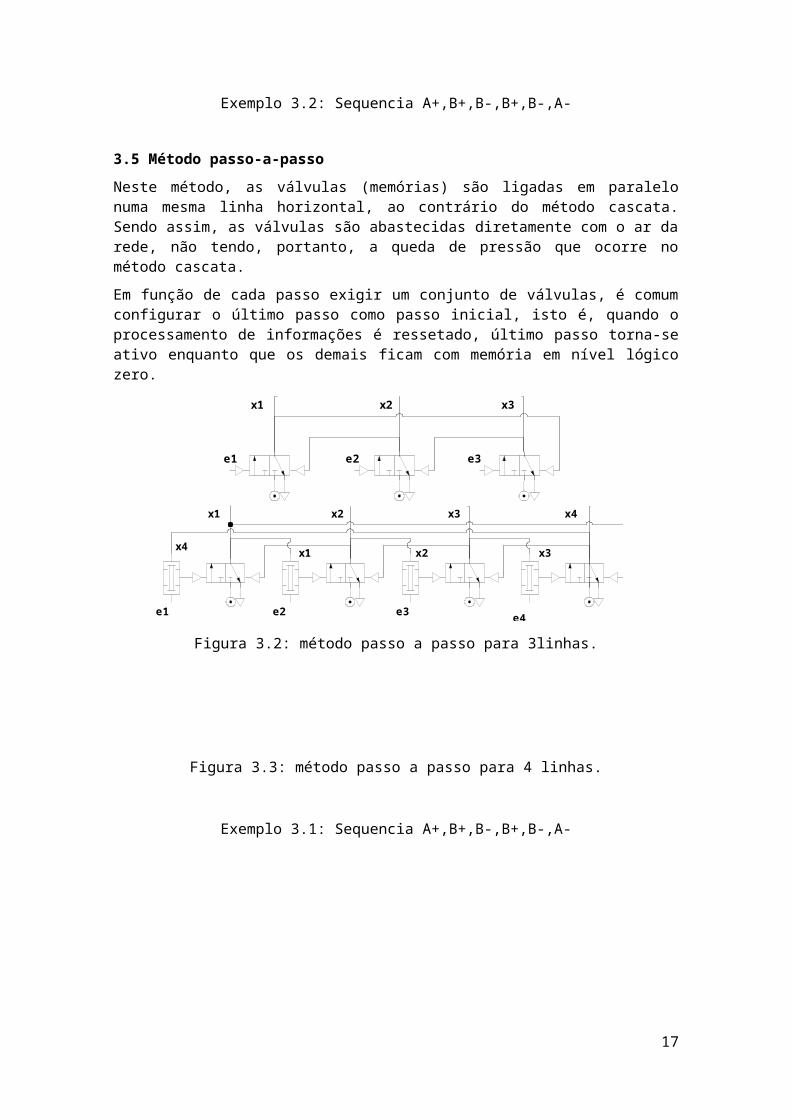
Exemplo 3.2: Sequencia A+,B+,B-,B+,B-,A-
3.5 Método passo-a-passo
Neste método, as válvulas (memórias) são ligadas em paralelo numa mesma linha horizontal, ao contrário do método cascata. Sendo assim, as válvulas são abastecidas diretamente com o ar da rede, não tendo, portanto, a queda de pressão que ocorre no método cascata.
Em função de cada passo exigir um conjunto de válvulas, é comum configurar o último passo como passo inicial, isto é, quando o processamento de informações é ressetado, último passo torna-se ativo enquanto que os demais ficam com memória em nível lógico zero.
Figura 3.2: método passo a passo para 3linhas.
13
x1 x2 x3
e1 e2 e3
1.0 2.0
1.1 2.1
22 231314
23
14
13
22
1.2 1.6
1.8
x1 x2 x3 x4
e1
e2
e3
e4

Figura 3.3: método passo a passo para 4 linhas.
Exemplo 3.1: Sequencia A+,B+,B-,B+,B-,A-
1.0 2.0
1.1 2.1
22 231314
23
13
22
x1x2 x3 x4
e1 e2 e3 e4
1.2 1.6
1.8
14
3.6 Método sequencia mínima para eletropneumática
Este método é equivalente ao método cascata da pneumática pura. O esquema de solução é visto na figura 3.7. A vantagem deste método em relação ao método intuitivo é a eliminação de sobreposição de sinais que inibem movimentos de avanço e retorno. Assim evita-se a colocação de dispositivos mecânicos e elementos temporizadores.
O método consiste das seguintes etapas:
Diagrama do circuito pneumático:
1. Representação dos atuadores e válvulas direcionais de duplo piloto e suas interligações. Diagrama do circuito elétrico:
14
x1 x2 x3 x4
e1 e2 e3e4
x1 x2 x3x4
2. A partir do diagrama trajeto-passo, escrever a seqüência desejada utilizando os códigos de identificação dos atuadores e os sinais ’+’ para designar avanço e ‘-‘ para designar o retorno.
Ex.: 1A- 2A+ 1A+ 3A+ (3A- 2A-)
3. Dividir a sequência acima em um número mínimo de grupos de modo que nenhum atuador esteja repetido em cada grupo.
Ex.: 1A- 2A+ / 1A+ 3A+ / (3A- 2A-)
I II III
4. Criar tantas linhas de sianis auxiliares quanto forem os grupos acima identificados. As linhas I, II e III serão pontos energizados para o acionamento das válvulas direcionais de comando dos atuadores.
5. Associar as ‘n’ linhas, ‘n-1’ relés com circuitos de auto-retenção. A condição inicial do circuito elétrico na forma mostrada na figura 6.9 permitindo a energização da última linha de tensão. Existindo um maior número de grupos (linhas), serão incluídas novos relés com circuitos de auto-retenção K3, K4 e assim por diante.
A figura 6.9 mostra a solução para o exemplo em estudo e a figura 6.10 um circuito em cascata para o caso de 4 grupos.
6. Identificação das chaves de acionamento (botões) e de fins-de-curso (rolete simples)
7. Inclusão no circuito dos solenoides das válvulas de comando dos cilindros interligando-os às linhas de tensão auxiliares.
8. Representação das chaves e circuitos para processamento de sinais adicionais. (Incluir temporizadores, circuitos em série ou paralelo etc.)
9. Modificação do circuito e inserção de chaves e relés para a Inclusão de condições adicionais, como opção de ciclo único/ciclo contínuo e ações de emergência
Figura 3.4: método sequencia mínima para 2 e 3 linhas.
15
K1
K1e1K1K1
x1 x2
e2
X2X1
K1
K1
K1K1
K2
K2
K2 e3
K2
K2
x3
e1 e2
K1

Figura 3.6: método sequencia mínima para 4 linhas.
y4y3
a0 a1 b0 b1
y2y1
y1 y2y3 y4
a0
b1
K1
K1START
b0
K1
K2 K3
K3
K5K4
K1 K2
K2 K3
K4 K2 K3
K2
K3
x1 x2 x3
x4
e1 e2 e3
e4K5
a1
K5
K4
K2K1
Figura 3.7: Sequencia A+,B+,B-,B+,B-,A-
16
X2X1
K1
K1
K1
K1
K2
K2
K2 K3
K3
K2
K2
x3
K3
x4
K3
e1 e2 e3
K1
e4
K2
K2
4 Condições Marginais
Além da sequência de movimentos necessários no comando, na prática encontramos outras exigências que não pertencem diretamente ao funcionamento normal do comando. Estas condições chamadas de “condições marginais” podem ser, por exemplo:
- Partida
- Manual / automático (ciclo único e ciclo contínuo)
- Parada
- Reposição a zero
- Parada de emergência
- Contagem
-Temporização
Estas condições se, por um lado, significam instrumentos de simplificação ou comodidade no serviço, por outro são funções adicionais no comando que são, especialmente, importantes para o funcionamento dos sisstemas.
17