
TÉCNICAS COMPUTACIONAIS PARA ELEMENTOS FINITOS ... · Aos Professores, Funcionários e Colegas do...
167
TÉCNICAS COMPUTACIONAIS PARA ELEMENTOS FINITOS ESTABILIZADOS NA SOLUÇÃO DE LEIS DE CONSERVAÇÃO HIPERBÓLICAS NÃO LINEARES Denis Araujo Filgueiras de Souza TESE SUBMETIDA AO CORPO DOCENTE DA COORDENAÇÃO DOS PROGRAMAS DE PÓS-GRADUAÇÃO DE ENGENHARIA DA UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COMO PARTE DOS REQUISITOS NECESSÁRIOS PARA A OBTENÇÃO DO GRAU DE DOUTOR EM CIÊNCIAS EM ENGENHARIA CIVIL. Aprovada por: Prof. Alvaro Luiz Gayoso de Azeredo Coutinho, D.Sc. Prof. José Luis Drummond Alves, D.Sc. Prof. Luiz Landau, D.Sc. Prof. Abimael Fernando Dourado Loula, D.Sc. Prof. Lucia Catabriga, D.Sc. RIO DE JANEIRO, RJ – BRASIL ABRIL DE 2008
Transcript of TÉCNICAS COMPUTACIONAIS PARA ELEMENTOS FINITOS ... · Aos Professores, Funcionários e Colegas do...
TÉCNICAS COMPUTACIONAIS PARA ELEMENTOS FINITOS ESTABILIZADOS
NA SOLUÇÃO DE LEIS DE CONSERVAÇÃO HIPERBÓLICAS NÃO LINEARES
Denis Araujo Filgueiras de Souza
TESE SUBMETIDA AO CORPO DOCENTE DA COORDENAÇÃO DOS
PROGRAMAS DE PÓS-GRADUAÇÃO DE ENGENHARIA DA UNIVERSIDADE
FEDERAL DO RIO DE JANEIRO COMO PARTE DOS REQUISITOS
NECESSÁRIOS PARA A OBTENÇÃO DO GRAU DE DOUTOR EM CIÊNCIAS
EM ENGENHARIA CIVIL.
Aprovada por:
Prof. Alvaro Luiz Gayoso de Azeredo Coutinho, D.Sc.
Prof. José Luis Drummond Alves, D.Sc.
Prof. Luiz Landau, D.Sc.
Prof. Abimael Fernando Dourado Loula, D.Sc.
Prof. Lucia Catabriga, D.Sc.
RIO DE JANEIRO, RJ – BRASIL
ABRIL DE 2008

ii
DE SOUZA, DENIS ARAUJO FILGUEIRAS
Técnicas Computacionais para Elementos
Finitos Estabilizados na Solução de Leis de
Conservação Hiperbólicas Não Lineares
[Rio de Janeiro] 2008
XV, 152 p. 29,7 cm (COPPE/UFRJ, D. Sc.,
Engenharia Civil, 2008)
Tese – Universidade Federal do Rio de
Janeiro, COPPE
1. Elementos Finitos Estabilizados
2. Escoamentos em Meios Porosos
3. Equações de Euler
I. COPPE/UFRJ II. Título (série)

iii
Para Francisca
iv
Agradecimentos
Ao professor Alvaro Luiz Gayoso de Azeredo Coutinho pela orientação e amizade.
Ao professor José Luis Drummond Alves pela orientação e amizade.
Ao professor Luiz Landau pela orientação e amizade.
Aos meus Pais, Irmãos, Familiares e Amigos pela paciência e apoio emocional, em
especial aos amigos Eldues, Fred, Josias, Pedro, Roberto, Rosenil, Vanessa, Vinícius e à
minha noiva Bárbara.
Ao colega Renato pelas valiosas discussões acerca das técnicas estudadas.
À Agência Nacional do Petróleo (ANP) e ao Conselho Nacional de Desenvolvimento
científico e Tecnológico (CNPq) pelo apoio financeiro.
Ao Laboratório de Métodos Computacionais em Engenharia (LAMCE) e ao Núcleo de
Atendimento em Computação de Alto Desempenho (NACAD).
Aos Professores, Funcionários e Colegas do PEC/COPPE, LAMCE, NACAD, LAB2M
e COPPE que contribuíram de maneiras distintamente importantes para minha
formação.

v
Resumo da Tese apresentada à COPPE/UFRJ como parte dos requisitos necessários
para a obtenção do grau de Doutor em Ciências (D. Sc.)
TÉCNICAS COMPUTACIONAIS PARA ELEMENTOS FINITOS ESTABILIZADOS
NA SOLUÇÃO DE LEIS DE CONSERVAÇÃO HIPERBÓLICAS NÃO LINEARES
Denis Araujo Filgueiras de Souza
Abril/2008
Orientadores: Alvaro Luiz Gayoso de Azeredo Coutinho
José Luis Drummond Alves
Programa: Engenharia Civil
É apresentado um estudo de técnicas computacionais utilizadas na solução de
leis de conservação hiperbólicas tipicamente não lineares e dependentes do tempo, com
o método dos elementos finitos estabilizados. Os problemas resolvidos são:
escoamentos em meios porosos (bifásico imiscível ou totalmente miscível) e
escoamentos compressíveis não viscosos, ou seja, as equações de Euler. Diversas
técnicas foram implementadas e avaliadas, entre elas, uma estrutura de dados por arestas
adotada em ambos os problemas. Uma estratégia de desativação dinâmica e a integração
reduzida do hexaedro foram implementadas para escoamentos em meios porosos. O
elemento tetraédrico também foi empregado. Para escoamentos compressíveis foi
adotado apenas o elemento tetráderico mas com opção de estrutura de dados
compactada e global para utilização de pré-condicionadores mais robustos. E também,
um operador de captura de choques mais simples, somente baseado em variáveis
conservativas.
Exemplos numéricos de validação e verificação são apresentados. E também
problemas de aplicação em malhas de tetraedros não estruturadas e de médio porte,
relacionados à engenharia de petróleo e aeroespacial.

vi
Abstract of Thesis presented to COPPE/UFRJ as a partial fulfillment of the
requirements for the degree of Doctor of Science (D. Sc.)
COMPUTATIONAL TECHNIQUES FOR THE SOLUTION NON LINEAR
HYPERBOLIC CONSERVATION LAWS WITH THE STABILIZED FINITE
ELEMENT
Denis Araujo Filgueiras de Souza
April/2008
Advisors: Alvaro Luiz Gayoso de Azeredo Coutinho
José Luis Drummond Alves
Department: Civil Engineering
It is presented a study of computational techniques used in the solution of
hyperbolic conservation laws that are typically non linear and time dependant, with the
stabilized finite element method. The problems solves are: porous media flows
(immiscible two-phase and totally miscible displacement) and compressible flows, that
is, the Euler equations. Several techniques were implemented and assessed, for instance
the edge-based data used in both problems. A strategy of dynamic deactivation and
hexahedron reduced integration for the porous media flows. Tetrahedra element was
also employed. As for the compressible flows, only the tetrahedron element was
adopted, and also a global compressed data structure that allows the use of more robust
preconditioners. Also a shock capturing operator solely based on conservation variables.
Numerical examples of validation and verifications are presented. And also,
application problems in unstructured tetrahedra and medium scale meshes, related to
petroleum and aerospace engineering.
vii
Índice
1 Considerações Iniciais..............................................................................1
1.1 Introdução....................................................................................................................1
1.2 A Simulação de Escoamentos em Meios Porosos.......................................................5
1.3 A Simulação de Escoamentos Compressíveis Não Viscosos......................................8
1.4 Técnicas Computacionais para Elementos Finitos....................................................10
1.5 Objetivos....................................................................................................................13
1.6 Organização do Texto................................................................................................13
2 Formulação Matemática e Numérica para Escoamentos em Meios
Porosos........................................................................................................15
2.1 Introdução..................................................................................................................15
2.2 Formulação Matemática............................................................................................16
2.2.1 Escoamento Bifásico Imiscível...................................................................16
2.2.2 Deslocamento Totalmente Míscivel...........................................................19
2.2.3 Sistema Unificado.......................................................................................20
2.2.4 Consideração de fluidos não-Newtonianos.................................................21
2.3 Formulação Numérica para a Notação Unificada......................................................22
2.4 Matrizes de Elemento para Equação da Pressão........................................................27
2.5 Matrizes de Elemento para Equação da Velocidade, a Técnica de pós-processamento
das velocidades para o T4................................................................................................28
viii
2.6 Matrizes de Elemento para Equação do Transporte..................................................29
2.7 Integração completa (2x2x2) para o H8....................................................................32
2.8 Sistemas Globais Resultantes....................................................................................33
2.9 Considerações sobre Conservação da massa e estabilizações...................................36
3 Exemplos Numéricos de Escoamentos em Meios Porosos..................38
3.1 Caso Imiscível: Injeção contínua de água................................................................39
3.2 Caso Miscível: Injeção de traçador...........................................................................41
3.3 SPE – injeção de água em reservatório heterogêneo.................................................43
3.4 Migração Secundária em um Bloco Sedimentar.......................................................47
4 Formulação Matemática e Numérica para Escoamentos
Compressíveis Não Viscosos.....................................................................51
4.1 Introdução..................................................................................................................51
4.2 Formulação Matemática............................................................................................52
4.3 Formulação Numérica...............................................................................................53
5 Exemplos Numéricos de Escoamentos Compressíveis Não Viscosos.60 5.1 Exemplos Unidimensionias Transientes: Tubos de Choque.....................................60
5.2 Exemplo Bidimensional Permanente: Choque Refletido..........................................64
5.3 Exemplo Bidimensional Transiente: Escoamento Supersônico através de um Canal
com Degrau......................................................................................................................66
5.4 Exemplo Tridimensional Permanente: Escoamento Supersônico ao Redor de uma
Esfera...............................................................................................................................69
6 Técnicas Computacionais para Elementos Finitos..............................71
6.1 Estruturas de dados......... ..........................................................................................72
6.1.1 Estrutura de dados por arestas....................................................................72
6.1.2 Estrutura de Dados CSR.............................................................................75
6.2 Técnica de Integração Reduzida com controle dos modos hourglass.......................75
6.3 Técnica de Desativação Dinâmica.............................................................................81
ix
6.3.1 Critério para seleção da partição ativa........................................................82
6.3.2 Detalhes da implementação........................................................................83
6.3.3 Eficiência da Desativação Dinâmica..........................................................84
6.4 Técnicas de Pré-condicionamento do Sistema de Equações.....................................86
6.4.1. Diagonal........................................................ ............................................87
6.4.2 LU-SGS (Lower-Upper Symmetric Gauss-Seidl) .....................................87
6.4.3 Fatoração Incompleta LU sem preenchimento (ILU(0)) ...........................88
6.4.4 Estudo comparativo entre os pré-condicionadores.....................................90
6.6 Estudo comparativo entre operadores de captura de choques na solução das
Equações de Euler...........................................................................................................97
7 Exemplos Numéricos de Aplicação.....................................................100
7.1 Introdução................................................................................................................100
7.2 Modelagem de Migração Secundária em uma Bacia Sedimentar...........................100
7.2.1 Métricas para Malhas de Tetraedros.........................................................103
7.2.2 Primeiros Passos em Direção ao Estudo de Caso Real.............................105
7.2.2.1 Modelagem Geométrica e Geração da Malha............................105
7.2.2.2 Avaliação da qualidade da malha através das métricas eleitas..109
7.2.2.3 Cálculo das normais unitárias ao contorno................................110
7.2.2.4 Propriedade das Rochas do modelo completo............................111
7.2.2.5 Propriedade dos Fuidos..............................................................113
7.2.2.6 Condições de Contorno..............................................................114
7.2.2.7 Condições Iniciais......................................................................115
7.3 Resultados da Simulação.........................................................................................115
7.4 Escoamento Mach 0.9 ao redor de um avião tipo YF17.........................................118
8 Conclusões.............................................................................................122
Referências Bibliográficas......................................................................130
Apêndice A...............................................................................................148

x
Índice de Figuras
Figura 3.1 Condições de contorno e inicial para pressão (a) e transporte (b)................39
Figura 3.2 Malhas de elementos finitos T4 e H8 para discretização de um quarto de
fivespot. ...........................................................................................................................39
Figura 3.3 Saturação de água em tempos inicial e final de simulação para os elementos
T4 (a) e H8 (b). ...............................................................................................................40
Figura 3.4 Comparação do volume total de óleo recuperado: (a) este trabalho,
(b) refrência [114]............................................................................................................41
Figura 3.5 Concentração inicial, intermediárias e final para T4 (esquerda) e H8
(direita). ..........................................................................................................................42
Figura 3.6 Concentrações intermediárias para referência [47].......................................42
Figura 3.7 Propriedades dos materiais já escalonadas: porosidades, permeabilidades
horizontal e vertical. .......................................................................................................44
Figura 3.8 Solução nos tempos t =1, 500, 1000 e 1500 dias. ........................................45
Figura 3.9 Solução nos tempos t = 2000, 25000, 3000 e 3500 dias...............................46
Figura 3.10 Detalhe das camadas do modelo (a) e da malha adotada (b)......................48
Figura 3.11 Evolução da migração do óleo. ..................................................................50
Figura 5.1 Soluções do problema de Sod em t=0.2: (a) massa específica, (b) velocidade
e (c) pressão........................................................................................................62
xi
Figura 5.2 Soluções do problema de Lax-Harden em t=0.15: (a) massa específica, (b)
velocidade e (c) pressão......................................................................................63
Figura 5.3 Descrição do problema de choque refletido..................................................64
Figura 5.4 Vista em detalhe da malha estruturada bem refinada. ..................................65
Figura 5.5 Soluções permanentes de massa específica, pressão e temperatura. ............66
Figura 5.6 Descrição do problema 5.3. ..........................................................................67
Figura 5.7 Malha do domínio total adotada no exemplo 5.3. ........................................67
Figura 5.8 Detalhe da malha do exemplo 5.3. ...............................................................67
Figura 5.9 Soluções transientes nos tempos: t=0.5 (a), t=1.0 (b), t=1.5(c), t=2.0 (d)....68
Figura 5.10 Descrição do exemplo 5.4. .........................................................................69
Figura 5.11 Vista externa da malha. ..............................................................................70
Figure 5.12 Solução permanente da massa específica....................................................70
Figura 6.1 Modos hourglass da direção x para o H8 regular.........................................76
Figura 6.2 Estrutura da matriz de massa consistente de Galerkin para o H8.................79
Figura 6.3 Solução inicial do exemplo SPE utilizando integração completa (a) e
integração reduzida (b)....................................................................................................81
Figura 6.4 Soluções para advecção diagonal: malhas estruturadas (a), malhas não
estruturada (b)..................................................................................................................92
Figura 6.5 Soluções para advecção rotacional: malhas estruturadas (a), malhas não
estruturada (b)..................................................................................................................94
Figura 6.6 Soluções o esemplo SPE: homogêneo isotrópico (a), heterogêneo com
kx=kx (b), heterogêneo com kx≠ky (c)............................................................................96
Figura 6.7 Comparação de soluções para o choque oblíquo, malha estruturada............98
Figura 6.8 Comparação de soluções para o choque oblíquo, malha não estruturada.....98
Figura 6.9 Comparação para o operador da advecção SUPG e SUGN..........................99
Figura 6.10 Comparação para o operador de captura de choques..................................99
Figura 7.1 Detalhe dos quatro blocos do modelo completo.........................................107
Figura 7.2 Malha do modelo adotado: vista superior, topografia.................................107
Figura 7.3 Malha do modelo adotado: vista inferior, embasamento............................108
Figura 7.4 Detalhe da malha do modelo adotado, falhas.............................................108
xii
Figura 7.5 Em azul os elementos com parâmetro η maior que o valor limite.............109
Figura 7.6 Em azul os elementos com parâmetro γ maior que o valor limite.............110
Figura 7.7 Vetores unitários e normais ao contorno.....................................................111
Figura 7.8 Detalhe das oito camadas sedimentares......................................................112
Figura 7.9 Migração Secundária do Óleo.....................................................................117
Figura 7.10 Detalhe da malha simétrica do avião YF17..............................................119
Figura 7.11 Solução permanente da massa específica..................................................120
Figura 7.12 Solução permanente da velocidade em magnitude...................................120
Figura 7.14 Representação dos vetores velocidade......................................................121
xiii
Índice de Tabelas
Tabela 2.1 Legenda para notação unificada....................................................................21
Tabela 2.2 Regra para integração numérica em hexaedros trilineares...........................32
Tabela 3.1 Definição das propriedades das camadas de cima para baixo......................48
Tabela 6.1 Comparação do custo computacional entre produtos matriz-vetor por
elementos e arestas, para escoamentos em meios porosos..............................................74
Tabela 6.2 Comparação do custo computacional entre produtos matriz-vetor por
elementos e arestas, para as equações de Euler...............................................................74
Tabela 6.3 Tempos relativos no exemplo fivespot imiscível..........................................84
Tabela 6.4 Tempos relativos no exemplo fivespot imiscível, considerando campos de
pressão e velocidade constantes no tempo......................................................................85
Tabela 6.5 Tempos de execução relativos para o exemplo 5.2.......................................86
Tabela 6.6 Tempos de execução relativos para o exemplo 5.4.......................................86
Tabela 6.7 Comparação entre os pré-condicionadores em termos de memória e flops..89
Tabela 6.8 Comparação entre pré-condicionadores para o exemplo de advecção
diagonal...........................................................................................................................91
Tabela 6.9 Comparação entre pré-condicionadores para o exemplo de advecção
rotacional.........................................................................................................................93
Tabela 6.10 Comparação entre pré-condicionadores no exemplo SPE 2D....................95

xiv
Tabela 6.11 Comparação entre pré-condicionadores no exemplo Sod, número de
iterações...........................................................................................................................96
Tabela 6.12 Comparação entre pré-condicionadores no exemplo do escoamento
supersônico ao redor da esfera, número de iterações e tempo relativo..........................97
Tabela 7.1 Propriedades das rochas: massa específica, porosidade e permeabilidades
horizontal e vertical.......................................................................................................113
Tabela 7.2 Propriedade dos fluidos..............................................................................114
xv
Índice de Quadros
Quadro 2.1 Integração temporal das equações para meios porosos...............................35
Quadro 4.1 Integração temporal das equações de Euler................................................59
1
Capítulo 1
Considerações Iniciais
1.1 Introdução
Os métodos numéricos são baseados em cálculos repetitivos para se alcançar uma solução
aproximada para diversas classes de problemas matemáticos. Dentro os métodos
numéricos, existem os métodos discretos que se baseiam em alguma subdivisão do
domínio matemático contínuo, em um domínio discreto. No surgimento desses métodos,
sua aplicabilidade era bastante limitada pois exigia um número de cálculos sobre-humano
e foram abordados meramente como métodos ilustrativos. Com o advento do computador
e as necessidades das engenharias e demais ciências, os métodos numéricos foram
ganhando cada vez mais espaço e utilização tanto em matemática aplicada como diversas
e distintas áreas do conhecimento. E assim, os métodos numéricos ou discretos passaram
a ser conhecidos também por métodos computacionais.
Atualmente, o computador, como “máquina de calcular” se encontra num nível avançado
de utilização, tanto pelo seu poder de memória e processamento, como também pelos
diversos pacotes de cálculo numérico [143], álgebra linear [144] e álgebra
simbólica [142,148] existentes para os mais diversos fins científicos e/ou industriais [66].
2
Mesmo com o computador aumentando sua capacidade, quase que, pelo menos
linearmente, nos últimos 50 anos [147], a necessidade por computações em larga escala,
em diversas áreas do conhecimento, levou ao desenvolvimento de ambientes
computacionais de alto desempenho. Sejam eles supercomputadores vetoriais que
processam dados ao mesmo tempo ou a utilização de computação paralela, que prevê a
distribuição dos dados e do processamento para diversos computadores, num sistema
chamado de clusters [51,62,115]. Ambas possibilidades de utilização da computação de
alto desempenho exigem uma programação específica para cada ambiente. E mais,
exigem uma implementação eficiente do código fonte para que o ganho computacional
desejado seja alcançado.
Uma vasta área de aplicação dos métodos computacionais é na solução de equações
diferenciais parciais não lineares que representem um fenômeno físico, químico e/ou
biológico. A Mecânica Computacional é uma área do conhecimento que utiliza métodos
numéricos na solução de problemas de mecânica aplicada, ou seja, na solução de
equações diferenciais parciais. Que usualmente também adotam recursos de computação
de alto desemprenho para uma solução em um tempo reduzido de processamento e para
possibilitar soluções em modelos de grande porte.
Em geral, a solução analítica das equações ou de um sistema de equações diferenciais
parciais, que regem um problema de mecânica computacional, não é uma tarefa trivial,
inclusive para alguns casos mais simples como domínios regulares e homogêneos, com
comportamento linear. Então, muito menos será, para problemas mais reais onde
geometrias complexas, heterogeneidade dos materiais, dependência temporal, múltiplas
físicas e escalas interagindo em eventos tipicamente não lineares, são necessárias. Os
métodos numéricos são utilizados para discretização, no espaço e no tempo, das equações
diferenciais para resolver o problema de forma aproximada. Para tal, substitui-se o
problema matemático contínuo e infinito por um problema numérico discreto e finito, ou
melhor, uma seqüência de sistemas de equações algébricas lineares ou não lineares, que é
equivalente e portanto, vai ter solução aproximada adequada se considerados
3
procedimentos de implementação, verificação e validação do código, certos níveis de
refinamento e tolerâncias para convergência.
Para a solução numérica de equações diferencias parciais existem alguns métodos
discretos, dentre os quais os mais utilizados são o métodos das Diferenças Finitas
(DF) [5,105,56,87], dos Volumes Finitos (VF) [94,52,53,45] e dos Elementos Finitos
(EF) [150,70].
O método das DFs é o mais adotado em algumas aplicações como é o caso de
simuladores comerciais de reservatórios de petróleo [140,145] e também no
processamento sísmico [98]. É um dos métodos precursores e é construído diretamente a
partir das equações governantes em suas formas diferenciais. O métodos das DFs faz,
geralmente, a discretização do domínio com uma malha estruturada. Uma malha
estruturada significa que o número de células vizinhas é o mesmo para qualquer célula.
Como qualquer método numérico de discretização, as DFs têm suas vantagens e
desvantagens. Ele é, em geral, rápido no processamento das matrizes e na solução do
sistema de equações, por gerar estruturas blocadas bem definidas, mas deixa a desejar
quando geometrias muito complexas são exigidas, ou seja, quando os próprios domínios
espaciais não são regulares.
Já o método dos VFs pode ser estruturado ou não estruturado. Sendo que ele se assemelha
ao método das DFs quando é estruturado e quando não, se parece, em certos aspectos,
com o método dos elementos finitos, que é tipicamente não estruturado. O método é
empregado na forma integral das equações governantes e apesar de não ter base
matemática muito sólida, vem sendo utilizado recentemente, com bons resultados na
simulação de mecânica dos fluidos [45,53]. Tem sido bastante utilizado para problemas
de fluxo pois conserva massa entre as faces dos volumes finitos, assim como as DFs
fazem entre células. Não se pode afirmar que haja uma boa eficiência computacional
deste método, pois nada tem sido reportado na literatura neste sentido, mas é razoável se
esperar que seja de ordem de complexidade próxima ou intermediária entre
implementações de DFs ou de EFs.
4
Já o método dos EFs é considerado o método de discretização com base matemática mais
sólida e consistente e é o mundialmente mais utilizado em diversas aplicações industrias
e pesquisas científicas. O método se aplica na forma fraca ou variacional das equações
diferenciais, ponderadas por uma função peso, e trata naturalmente geometrias
complicadas. Apesar disso, o método sofre uma certa rejeição, em certas aplicações, por
grande parte da comunidade acadêmica, científica e até da indústria. Mas também
considerada injusta e equivocada por muitos. É comum ouvir que o métodos dos EFs não
conserva massa, significando que ele não seria adequado para tratar problemas de fluxo.
Entretanto, tem-se apenas uma questão de ponto de vista, pois o método dos elementos
finitos é formulado através dos pontos nodais que podem estar num contexto global ou
local. Foi mostrado por HUGHES et al. em 2000 [72] e 2005 [73] que o método dos EFs
é conservativo globalmente e localmente, só que através dos pontos nodais. Isso significa
que a massa do sistema está sendo conservada, só que num contexto diferente das DFs e
dos VFs.
Com o avanço e utilização de métodos computacionais, a simulação numérica em
engenharia, mecânica computacional e demais ciências é uma área crescente de aplicação
industrial e pesquisa científica. Na verdade se mostra como um terceiro pilar
complementando as tradicionais bases teórica e experimental. A engenharia baseada na
simulação [14] já é uma realidade e cuidados como quão confiáveis podem ser essas
simulações é preocupação da comunidade científica [7]. Existe uma necessidade cada vez
maior de melhorar as simulações tanto em termos de refinamento, qualidade da solução,
precisão e incorporação de fenômenos multiescala e multifísicos.
Esta dissertação de doutorado se preocupa com a solução de equações diferenciais
parciais não lineares de problemas predominantemente advectivos através do métodos
dos elementos finitos estabilizados. Para tal é importante o estudo de fenômenos de
transporte, representados pela equação advecção-difusão de um escalar pois é a base para
formulação das equações da mecânica dos fluidos, ou seja, simulações numéricas da
mecânica dos fluidos computacional. Tais simulações numéricas são muito relevantes,
dadas as dificuldades em se realizar experimentos e na solução analítica de casos reais.
5
Os fenômenos de transporte têm vasta aplicação, como dispersão de contaminantes no ar
ou na água, escoamentos subterrâneos, movimentação de comunidades biológicas e
escoamentos de fluidos em geral.
Portanto, as equações tipo advecção-difusão de um escalar são base para a formulação de
leis de conservação, que geralmente são não lineares quando de interesse prático.
Problemas dominantemente advectivos são equações tipicamente hiperbólicas. Uma
equação de caráter hiperbólico é aquela que variações locais levam um tempo para se
propagar até outras regiões do domínio, além de tender não evoluir para um regime de
equilíbrio. Eis aqui os dois problemas, da mecânica dos fluidos computacional,
estudados: i) escoamentos através de meios porosos rígidos e; ii) escoamentos
compressíveis não viscosos. Uma revisão da literatura e um histórico dos
desenvolvimentos, com o método dos elementos finitos, para essas duas aplicações, é
apresentada a seguir.
1.2 A Simulação de Escoamentos em Meios Porosos
Os escoamentos em meios porosos rígidos têm marco inicial nos estudos precursores de
Darcy que conseguiu estabelecer uma Lei, ou seja, um modelo empírico, para descrever o
escoamento de água através de um meio poroso. A partir daí, a Lei de Darcy é a base para
a formulação de escoamentos em meios porosos de múltiplas fases ou componentes como
é o caso da simulação de reservatórios. A formulação matemática para esses problemas
específicos é abordada nos livros de AZIZ [5], PEACEMAN [105], CHAVANT E
JAFFRE [29], ERTEKIN [56] e CHEN [31,32] e bastante enriquecida pelos trabalhos de
LAKE et al. [82], LAKE [83], EWING [57] e CHEN [33]. Desde o início da necessidade
da solução de escoamentos em meios porosos, o método das diferenças finitas é o mais
utilizado em programas comerciais. Sendo que a utilização do métodos dos elementos
finitos para esse fim tem sido tema de pesquisa desde então. Hoje em dia não existe uma
metodologia bem definida para tratar o problema com elementos finitos. Tão pouco com
as diversas opções já incorporadas nos programas de diferenças finitas, como por
6
exemplo, modelos de poços, meios naturalmente fraturados e ajuste de histórico.
LANGTANGEN E DURLOFSKY [84,52] foram pioneiros na utilização de elementos
finitos, numa abordagem sequencialmente implícita como a adotada aqui neste trabalho.
A utilização de elementos finitos mistos, como no livro de CHEVANT E JAFFRE [29] e
nos trabalhos de EWING e CHAN [57,33], apesar de bastante robustos não foram
adotados aqui, por questões de eficiência computacional.
Para a utilização do método dos elementos finitos nas classes de problemas de
escoamentos em meios porosos, que são do tipo pressão-velocidade, são necessários
cuidados especiais e duas direções podem ser adotadas: (i) a utilização de métodos mistos
de elementos finitos, que resolve num mesmo elemento e formulação, o problema
acoplado pressão-velocidade, através de espaços mais complexos para as funções de
interpolação [70]; ou (ii) a utilização de métodos estabilizados para o cálculo adequado
do campo de velocidades, com mesma ordem de interpolação que a pressão [96]. Ambas
as opções vêm sendo utilizadas, com certo sucesso, em diversos trabalhos [114,38-
41,47,48,103,100] e a grande questão entre qual dos métodos adotar, paira na eficiência
computacional e precisão desejada. O método misto é mais preciso e matematicamente
robusto que os métodos de elementos finitos estabilizados. Contudo são muito mais
onerosos computacionalmente, de modo que um artigo, bastante citado, questiona se seria
um “luxo” o uso dos métodos mistos [102]. Já nos métodos estabilizados, as operações
são realizadas em um menor tempo computacional, mas também, sua precisão final é
variável em alguns casos, onde uma devida calibragem do parâmetro de estabilização
deve ser pré-definida. Mas também, recentemente vêm sendo desenvolvidos novos
métodos estabilizados, do tipo sub-malha que são não lineares e não dependem de ajuste
de parâmetros [111].
Também recentemente, uma união de elementos finitos mistos e estabilizados vem sendo
desenvolvida por MASUD E HUGHES [99] e BOCHEV e co-autores [16,17] numa
tentativa de resolver competitivamente o problema. Volumes finitos baseados em
elementos finitos também estão sendo adotados [53,45,37]. A questão é que não existe
um método de elementos finitos totalmente adequado e fechado para uma solução precisa
7
e eficiente do problema. Uma vez que métodos estabilizados vêm sendo utilizados com
sucesso na simulação de problemas da mecânica dos fluidos [130,131,68], nada mais
natural que adotá-los na simulação de escoamentos através de meios porosos. Portanto,
neste trabalho, foi adotado um método de elementos finitos estabilizado para resolver as
equações para escoamentos bifásicos imiscíveis e também para deslocamentos totalmente
miscíveis. Diversas etapas do desenvolvimento desses trabalhos foram apresentados em
congressos nacionais [119] e internacionais [125,127]. Mais recentemente no anuário de
revisão de mecânica dos fluidos, GERRITSEN E DURLOFSKY [60] fizeram
comentários acerca da modelagem e simulação de fluidos em reservatórios de petróleo,
com ênfase na eficiência e precisão da solução das equações devido a grande
heterogeneidade do meio e considerações sobre as necessidades de se incorporar as
escalas sub-malha para uma adequada representação dos efeitos numa escalas reduzida.
Muito esforço tem sido posto na percepção dos métodos estabilizados como métodos sub-
escala [71], uma vez que dada uma malha, existem escalas menores que sua dimensão e
que não estão sendo resolvidas corretamente e que devem ser levadas em consideração.
Exemplos teste tipo benchmark e outros mais realistas foram resolvidos para
escoamentos em meios porosos tanto para simulação se reservatórios como para análise
de bacias sedimentares. O algoritmo de solução adotado é sequencialmente implícito na
forma bloco-iterativa preditor/multicorretor. É em bloco, pois tem-se que avançar no
tempo a solução da pressão, da velocidade e da saturação, seqüencialmente. É iterativo
pois a solução dos sistemas de equações resultantes é realizada com os métodos iterativos
baseados em sub-espaços de Krylov, como o gradientes conjugados [70], com
précondicionamento diagonal para a pressão e bloco-diagonal para velocidade, e o
GMRES [109], com précondicionamento diagonal, para o transporte. O esquema
preditor/corretor é o método de integração temporal implícito propriamente dito e a
multicorreção trata as não linearidades do problema.
8
1.3 A Simulação de Escoamentos Compressíveis Não Viscosos
As equações de Euler têm sido extensivamente estudadas desde os anos 80 e 90, no
contexto do método dos elementos finitos, por TEZDUYAR E HUGHES, [130,131],
SHAKIB [112], LE BEAU E TEZDUYAR [85], ALIABADI et al. [1] e ALIABADI E
TEZDUYAR [2] e têm tido o interesse renovado recentemente CATABRIGA et al. [28],
TEZDUYAR E SENGA, [135,136] e TEZDUYAR et al. [137]. Uma das aplicações de
interesse na engenharia de petróleo é na simulação de explosões acidentais em
plataformas offshore [23] e na engenharia aeroespacial é no projeto de aeronaves e
afins [89,50]. Um dos métodos numéricos mais adotados para resolver esses problemas
com sucesso é o método dos elementos finitos estabilizados. Contudo, a solução de
problemas reais de grande porte e transientes, ou mesmo quando se deseja obter soluções
em regime permanente, são tarefas computacionalmente caras. Para resolver problemas
compressíveis em regime permanente, é usual se iniciar com uma condição inicial no
infinito, tipo far-field ou free-stream, ou seja, de escoamento em equilíbrio longe da
região de interesse e evoluir até um regime em equilíbrio seja atingido. Em outras
palavras, alcançar soluções permanente através de uma análise pseudo-transiente.
As equações de Euler são um sistema de leis de conservação hiperbólicas não lineares. A
solução dessa classe de problemas com o método dos elementos finitos só se tornou
possível após a introdução da formulação SUPG (Streamline Upwind Petrov-Galerkin) de
BROOKS E HUGHES [19], que tem sido amplamente adotada desde então. Essa
formulação prevê a utilização de funções peso descontínuas que contém uma ponderação
à montante na direção das linhas de fluxo. No contexto de escoamentos compressíveis
não viscosos, esses cálculos foram possíveis após trabalhos de TEZDUYAR E HUGHES
de 1982 e 1983) [130,131] quando a estabilização SUPG foi desenvolvida para as
equações de Euler e Navier-Stokes. Desde então, o método dos elementos finitos
estabilizados tem sido usados para simulação de escoamentos compressíveis viscosos ou
não [68,1]. Algumas etapas importantes para a aplicação dos métodos estabilizados para
escoamentos compressíveis foram a generalização do sistema de equações de Euler em
termos de variáveis de entropia em sua forma simétrica [69] e o desenvolvimento de
9
termos de captura de choque, por vezes denominados modelos de viscosidade artificial,
que são baseados no resíduo das equações como proposto por SHAKIB [112] e
ALMEIDA E GALEÃO [3]. Foi mostrado por LE BEAU E TEZDUYAR [85] que
quando a formulação SUPG for suplementada com um termo similar de captura e choque,
é comparável em precisão com a posta em variáveis de entropia.
Do ponto de vista teórico, avanços incluem a prova de convergência desses métodos para
sistemas de leis de conservação [76]. Uma dificuldade é encontrada na diminuição dos
resíduos ao longo da evolução dos passos de tempo e iterações não lineares. Diversas
alternativas são apresentadas na literatura, como a técnica de congelamento do operador
de captura de choques [26], a utilização de passo de tempo local [26] e a utilização de um
Jacobiano aproximado, que é uma abordagem alternativa conhecida por métodos JFNK
(Jacobian Free Newton-Krylov) baseados em JOHAN et al. [75] e KNOLL E KEYES
[80]. Esses métodos reduzem a demanda de memória e devem acelerar a convergência
não linear, conforme resultados de [78,79].
Na presente implementação para resolver as equações de Euler em três dimensões, são
adotadas variáveis conservativas, estendendo o trabalho de Catabriga [26]. Diversas
etapas do desenvolvimento desse trabalhos foram apresentados em congressos
nacionais [118,120,121,126] e internacionais [123,124] e aqui foi agrupada uma
coletânea desses estudos. Um algoritmo totalmente implícito preditor-multicorretor para
evolução temporal e elementos finitos estabilizados, baseado na formulação SUPG com
captura de choque, para discretização espacial, são empregados. Diversos exemplos teste
tipo benchmark e um mais realista foram resolvidos para escoamentos compressíveis não
viscosos. O sistema de equações não simétrico resultante é resolvido pelo algoritmo
GMRES [109] com a estrutura de dados por arestas ou comprimida por colunas, e pré-
condicionado por uma de três possibilidades estudadas. A estrutura de dados por arestas é
vista como uma técnica computacional para acelerar os produtos matriz-vetor inerentes
do método de solução de sistemas de equações, assim como os pré-condicionadores
também são vistos como técnicas computacionais, pois apesar de tornarem
matematicamente o problema melhor condicionado, seu objetivo real é um número
10
reduzido de iterações e uma convergência em menor tempo de processamento. Essas
técnicas, dentre outras são apresentadas na próxima seção e mais detalhadamente no
Capítulo 6.
1.4 Técnicas Computacionais para Elementos Finitos
Diversas técnicas podem ser adotadas, no contexto do método dos elementos finitos, para
se obter uma solução, em um tempo reduzido de processamento. Essas técnicas podem
ser numéricas, quando se pretende alcançar uma convergência em um menor número de
iterações ou quando se adota alguma matriz, operação ou expressão aproximada. Ou pode
ser matemática, quando se adota uma outra forma das expressões matemáticas que vão
levar a um menor número operações de ponto flutuante e uma implementação mais
simples do código fonte. Todas são tratadas aqui como técnicas computacionais para
elementos finitos e a seguir estão listadas as empregadas nesse trabalho e que serão
descritas em maiores detalhes no Capítulo 6.
A escolha de uma estrutura de dados para armazenar a matriz de coeficientes e realizar as
operações de ponto flutuante necessárias pode ser considerada uma técnica
computacional pois é uma questão chave na solução eficiente do sistema de equações
resultante. As estruturas de dados adotadas nesse trabalho foram a estrutura de dados por
arestas e compressão por linhas.
A utilização da estrutura de dados por arestas com o método dos elementos finitos foi
introduzida para cálculos explícitos de escoamentos compressíveis em malhas não
estruturadas de triângulos ou tetraedros [92,106]. Foi observado que o cálculo dos
resíduos com a estrutura de dados por arestas era mais rápido e necessitava de menos
memória que o esquema padrão baseado em elementos. A partir dessas idéias,
CATABRIGA E COUTINHO [27] derivaram uma esquema de estrutura de dados por
arestas para as equações de Euler em duas dimensões observando que as matrizes de
elemento podem ser desmembradas em suas contribuições nas arestas. Para um conjunto
11
de elementos que compartilham uma mesma aresta, deve-se somar essas contribuições e
armazenar matrizes locais pelas arestas de tal forma que os produtos matriz-vetor,
inerentes dos métodos de Krylov, são realizados aresta por aresta. Essa maneira promove
um ganho computacional tanto no armazenamento das matrizes como no número de
operações de ponto flutuante como já apresentado em diversos trabalhos [42,27,122,54] e
aqui será apresentado no contexto dos problemas de escoamentos em meios porosos e de
escoamentos compressíveis não viscosos tridimensionais. É importante notar que um há
um aumento no número de endereçamentos indiretos na montagem das matrizes por
arestas. Mas apesar da montagem das matrizes ser pouco mais custosa que a tradicional
abordagem baseada em elementos, os ganhos nos produtos matriz-vetor compensam com
folga esse pré-custo. Uma outra estrutura de dados, adotada aqui, é o armazenamento
comprimindo linhas, que é comumente denominada pela sigla em ingles, CSR
(Compressed Sparse Row). Essa estrutura de dados difere principalmente da anterior pois
armazena a matriz global ao invés das locais por elementos ou arestas. São armazenados
apenas os termos não nulos da matriz global e necessita de dois arranjos para
mapeamento. Os custos com preprocessamento, operações matriz-vetor e demanda de
memória são bastante comparáveis ao das arestas. Sua vantagem é na possibilidade de
utilização de pré-condicionadores mais robustos que exigem uma estrutura global. Um
custo que deve ser observado, em ambos os casos, é na montagem das estruturas de dados
em si. Se uma implementação eficiente não for desenvolvida para este fim, pode-se ter
um custo inicial comprometedor. Em geral, a utilização de tabelas hash [97] são
eficientes para essa montagem. Ribeiro e Ferreira testaram e comparação diversas
estruturas de dados em aplicações com o método dos elementos finitos em
2007 [107,108].
Como são tratados problemas tipicamente advectivos, numa outra técnica computacional,
se mostrou interessante simplificar o algoritmo Adaptativo Implícito-Explícito
(AIE) [117,122] para a técnica de Desativação Dinâmica (DD) [90]. Ambas
implementações são muito parecidas, diferindo apenas nos critérios adotados para
escolher a partição ativa e na não necessidade de resolver a parte inativa no esquema de
DD, o que era feito por um método explícito no esquema AIE. Portanto a DD é adotada
12
aqui na solução da equação da saturação ou concentração em escoamentos em meios
porosos como uma técnica computacional opcional. Essa técnica não foi implementada
na solução das equações de Euler.
Ainda na simulação de escoamentos em meios porosos, a utilização da integração
reduzida com um ponto para o elemento hexaedro trilinear também é vista como uma
técnica computacional, uma vez que reduz a o tempo de avaliação das matrizes locais.
Com origem na mecânica dos sólidos, na análise de placas e cascas, notou-se que ao se
utilizar a integração completa ocorria o fenômeno de travamento em certas aplicações. A
integração reduzida não representa modos de deformação tipo hourglass. Ao se somar
estabilizações para capturar esses efeitos, o problema de travamento foi contornado e a
integração reduzida começou a ser amplamente utilizada nesses problemas [13]. Aqui,
apesar do enfoque ser outro, a mesma técnica pode ser empregada para redução do tempo
computacional, como previamente realizado em duas dimensões [48]. Os termos
resultantes são exatos para matrizes simétricas tipo difusão e uma boa aproximação para
a matriz não simétrica de advecção. É importante ressaltar que os elementos hexaédricos
devem cumprir certas exigências para que a integração reduzida com a estabilização
hourglass produza matrizes com uma boa aproximação.
Pré-condicionadores são obrigatórios na solução de sistemas de equações lineares por
métodos iterativos baseados em espaços de Krylov [110,22], como gradientes conjugados
e GMRES. Inicialmente, o pré-condicionamento diagonal ou bloco-diagonal-nodal, que é
o mais simples foi adotado com resultados satisfatórios. Numa tentativa de se obter
ganhos computacionais, dois outros métodos de pré-condicionamento foram
implementados para fins de comparação: (i) a aproximação do tipo LU-SGS (Lower
Upper Symmetric Gauss-Seidl) e; (ii) a fatoração incompleta sem preenchimento
(ILU(0)). Esses pré-condicionadores mais rebustos foram implementados, apenas, para as
equações de Euler, junto com a estrutura de dados CSR, uma vez que são necessárias
soluções de sistemas triangulares, ou seja, operações de substituição pra trás e pra frente,
que são naturalmente relacionadas à matriz global.
13
Ainda na solução das equações de Euler, foram testadas algumas establizações de
advecção e de choques que são mais simples que as tipicamente adotadas, pois são
somente baseadas em variáveis conservativas. Elas são a estabilização SUGN para
advecção e YZβ para o choque. São mais simples, exigem menos operações de ponto
flutuante e portanto são vistas como técnicas com o objetivo de melhorar tanto o
desempenho computacional como a solução numérica.
1.5 Objetivos
Como objetivos principais desde estudo de doutorado reafirma-se a implementação de
métodos de elementos finitos estabilizados para solução dos problemas dominantemente
advectivos da mecânica dos fluidos computacional. Sendo eles: (i) escoamentos em
meios porosos (bifásicos imiscíveis e deslocamentos miscíveis), tipicamente relevantes
na engenharia de petróleo e; (ii) escoamento compressíveis não viscosos, tipicamente
relevantes na engenharia aeroespacial. Mais além, essa dissertação focada na solução
desses problemas da mecânica computacional visa contribuir com a implementação
eficiente e comparação de métodos, estruturas de dados e técnicas computacionais que
venham a reduzir a demanda de memória e acelerar o tempo de processamento na
obtenção de soluções mais confiáveis e precisas.
1.6 Organização do Texto
Resumidamente, essa dissertação encontra-se divida nos seguintes capítulos que contêm
como principais temas:
• Capítulo 2 - Formulação matemática e numérica para escoamentos em meios
porosos;
• Capítulo 3 - Exemplos numéricos para escoamentos em meios porosos;
14
• Capítulo 4 - Formulação matemática e numérica para escoamentos compressíveis
não viscosos;
• Capítulo 5 - Exemplos numéricos para escoamentos compressíveis não viscosos;
• Capítulo 6 - Técnicas computacionais desenvolvidas para melhorar a eficiência
dos códigos de elementos finitos implementados;
• Capítulo 7 - Exemplos de aplicação para os dois problemas;
• Capítulo 8 - Conclusões, discussões e direções de pesquisa futuras.
15
Capítulo 2
Formulação Matemática e Numérica para
Escoamentos em Meios Porosos
2.1 Introdução
As equações da mecânica dos fluidos são em geral descritas a partir da conservação da
massa (equação da continuidade), conservação da quantidade de movimento (equação do
movimento) e conservação da energia [50]. Os escoamentos em meios porosos aqui
estudados são tratados como isotérmicos, então a equação da energia pode ser
desprezada. Mais ainda, para meios porosos em formações geológicas (reservatórios de
petróleo ou aquíferos), onde o escoamento é lento (com baixo número de Reynolds),
utiliza-se a Lei de Darcy ao invés da equação do movimento. Portanto, a partir da
conservação da massa e da Lei de Darcy Generalizada [5], em um volume infinitesimal
de um meio poroso, pode-se expressar modelos matemáticos para escoamentos
multifásicos em meios porosos. Existem críticas quanto à Lei de Darcy Generalizada
[77], mas como é largamente utilizada, será aqui também adotada sem maiores
discussões. Nesta seção, serão apresentados modelos matemáticos para dois casos de
escoamentos de dois fluidos incompressíveis em um meio poroso rígido. Um para
escoamentos bifásicos imiscíveis e outro para deslocamentos miscíveis. Ambos modelos

16
se resumem num sistema de três equações diferenciais parciais não lineares. Essas
descrições seguem os livros [5,10,29,56,105], as teses [47,59,100,103,114] e os artigos
científicos [38-41,91].
2.2 Formulação Matemática
2.2.1 Escoamento Bifásico Imiscível
Em um domínio Ω ∈ R3 com contorno Γ no intervalo de tempo [Tini, Tfim] tem-se
TT Q=⋅∇ v (2.1)
KgΛΛv )( wwoow
w
cowmmpT s
ds
dpp λρλρ ++∇−∇−= (2.2)
wwaw Qst
s=∇+⋅∇+
∂
∂)( sDvφ (2.3)
mais as equações de fechamento
1=+ ow ss (2.4)
wowcow ppsp −=)( (2.5)
onde os índices w e o se referem as fases água e óleo respectivamente. Em geral, as fases
podem ser dois fluidos imiscíveis e incompressíveis quaisquer, desde que uma seja
sempre a molhante e a outra a não-molhante. Na eq. (2.1) owT vvv += é a velocidade
total [L/T] e QT = Qw + Qo a taxa de injeção volumétrica total [1/T]. A vazão volumétrica
é dada pela vazão mássica por unidade de volume [M/(TL3)] dividida pela massa
específica ρ [M/L3]. Na notação internacional, density não significa densidade, mas sim
massa específica e tem unidade, portanto recomenda-se cuidado com esse detalhe, que
em geral, causa má interpretação. Na eq. (2.2) pm é a pressão média das fases [F/L2], φ a

17
porosidade [ADIM], pcow a pressão capilar que é dependente da saturação da água sw.
Considerar os efeitos da pressão capilar significa introduzir uma não-linearidade segundo
uma curva típica, por exemplo, do tipo
+
+=
ε
ε
1ln)( w
wcow
sAsp (2.6)
segundo [105] e sua derivada em relação a sw é
ε+=
ww
cow
s
A
ds
dp (2.7)
sendo
+
=
ε
ε
1ln
)max( cowpA (2.8)
e ε um parâmetro de ajuste fixado em 10-3. Os tensores Λp e Λm são definidos como
KKΛ Twop λλλ =+= )( (2.9)
KΛ )(2
1wom λλ −= (2.10)
onde K o tensor de permeabilidade absoluta [L2] que é dependente do espaço e pode ser
anisotrópico, g é o vetor aceleração da gravidade dado pelas suas componentes
cartesianas Tg )( zyx gggzg =∇= , onde g é o módulo da aceleração gravitacional e z
a profundidade. A mobilidade das fases jλ é dada por
j
rj
j
k
µλ = , j = w, o (2.11)

18
sendo µ j a viscosidade [FT/L2] da fase j. As permeabilidades relativas krj [ADIM]
também são funções dependentes da saturação, caracterizando-se assim uma outra não-
linearidade para o problema. Diversos modelos podem ser utilizados [5,56,105], aqui é
adotado
2)( wwrw ssk = (2.12)
2)1()( wwro ssk −= (2.13)
Na eq. (2.3) a velocidade aparente av é dada por
])([ Kgvv a oowT
w
w
dS
dfλρρ −+= (2.14)
e o tensor de difusão Ds por
w
cowwo
ds
dpf KDs λ= (2.15)
onde fw é a função de fluxo fracional da água, dependente de sw, dada por
T
w
ow
www sf
λ
λ
λλ
λ=
+=)( (2.16)
e sua derivada em relação a saturação da água por
w
T
T
w
Tw
w
w
w
dS
d
dS
d
dS
df λ
λλ
λ
λ
2
11−= (2.17)
19
2.2.2 Deslocamento Totalmente Míscivel
Considerando, novamente, um domínio Ω ∈ R3 com contorno Γ no intervalo de tempo
[Tini, Tfim] tem-se
cQ=⋅∇ cv (2.18)
( )gK
vc ρµ
−∇−= cpc)(
(2.19)
cQcct
c=∇+⋅∇+
∂
∂))(( ccc vDvφ (2.20)
onde vc é a velocidade [L/T] e Qc a taxa de injeção volumétrica da
concentração/mistura [1/T]. Na equação (2.19) K é o tensor de permeabilidade
absoluta [L2], µ(c) a viscosidade [FT/L2], pc a pressão da mistura [F/L2], ρ a massa
específica da mistura [M/L3], constante no caso de fluidos incompressíveis, g o vetor
aceleração da gravidade, φ a porosidade [ADIM] e c a concentração da mistura nas
fontes/sumidouros. Também é importante definir a razão de mobilidade, M, que é a
relação entre a viscosidade do fluido residente e do injetado, como segue
i
rMµ
µ= (2.21)
A lei não-linear para a viscosidade da mistura pode ser dada por [30]
)1()( cRec
−=µ (2.22)
MR ln= , (2.23)
ou pode–se adotar ainda [41]
20
( ) rcMcc µµ425.01)(
−
+−= (2.24)
Ambas as leis (2.22) e (2.24) têm comportamento monotônico e diversas outras, inclusive
não monótonas, podem ser adotadas como em [39]. O tensor difusivo, segundo [105]
pode ser dado por
( )[ ] )()()( c3cc3cc vEIvEvIvD −++= tlm αααφ (2.25)
Tcc
c
c vvv
vE2
1)( = (2.26)
onde αm, αl e αt são os coeficientes de difusão molecular, de dispersão longitudinal e
transversal, respectivamente. Em geral [105], os efeitos de dispersão são fisicamente mais
importantes que os da difusão molecular, que podem ser negligenciados na maioria dos
casos (αm = 0), e além disso, é comum adotar αl ≈ 10αt.
Em escoamentos com alta razão de mobilidade ocorrem frentes de instabilidade
conhecidas como viscous fingers [29]. Note que o caso de deslocamentos totalmente
miscíveis não sugere efeitos capilares pois não há interface entre os fluidos, nem
permeabilidades relativas uma vez que somente, um fluido, isto é, a mistura é
considerada, como se fosse um escoamento monofásico. Por isso, a não linearidade
introduzida nesse caso é basicamente da lei de viscosidade. No caso de miscibilidades
parciais, um modelo composicional que permite troca de massa entre as fases, deve ser
utilizado [29].
2.2.3 Sistema Unificado
Visando a unificação da notação, das duas classes de escoamentos, e assumindo uma
conveniente forma advectiva da equação de transporte, isto é, divergente do campo

21
advectivo igual a vazão do elemento [84]. Portanto, o sistema segregado de equações
para ambos os casos podem ser escritas na seguinte forma genérica
vp cC ⋅∇−=∇⋅∇ Qp (2.27)
vp cCv +∇= p (2.28)
0=∇⋅∇+∇⋅+∂
∂uu
t
uDvuφ (2.29)
e condições de contorno apropriadas para p e iniciais e de contorno para u são necessárias
para fechar o problema matemático acima descrito. A Tabela 2.1 apresenta a legenda para
a notação unificada.
Tabela 2.1 Legenda para notação unificada.
Grandeza Caso imiscível Caso miscível
v vT vc
Q QT Qc
Cp pΛ− )(cµ
K−
p pm pc
cv KgΛ )( wwoow
w
cowm s
ds
dpλρλρ ++∇− ( )g
Kρ
µ−−
)(c
φ φ φ
u sw c
vu va vc
D Ds Dc
2.2.4 Consideração de fluidos não-Newtonianos
Para ambos os casos, imiscível ou miscível, pode-se tratar, um ou os dois fluidos como
não-Newtonianos, cuja reologia é uma relação não-linear entre a tensão cisalhante, τ e a
22
taxa de deformação, γ& . Isso caracterizaria outra fonte de não-linearidade, particular dos
fluidos, para o problema. Adotando, por exemplo, o modelo de Lei de Potências (Power
Law) tem-se
( )n
H γτ &= (2.30)
onde H e n são parâmetros típicos e conhecidos para essa reologia. Note que com H = µ e
n = 1, esse modelo pode ser utilizado como o de um fluido Newtoniano. Existem diversos
modelos empíricos para escoamentos de fluidos não-Newtonianos em meios porosos,
com a finalidade de se representar a viscosidade em função da velocidade. Baseado no
trabalho de CHIU et al. [34], tem-se a seguinte expressão, para escoamentos imiscíveis,
denominada modelo de Kozeny
( )1
2
1
1503
912
)(−
−
+=
nn
a
n
NNn
Haa vv φκµ (2.31)
onde κa é a permeabilidade absoluta na direção do escoamento.
Segundo AZAIEZ E SINGH [4], pode-se representar simplificadamente deslocamentos
miscíveis com um fluido injetado não-Newtoniano, pela seguinte expressão
( )( )( )
2
141),(
cn
NN cc−
+= cc vv µµ (2.32)
2.3 Formulação Numérica para a Notação Unificada
Nesta seção serão apresentadas as formas fracas das equações governantes, reorganizadas
de maneira conveniente a aplicar as aproximações de elementos finitos. Serão
apresentadas as matrizes de elemento, em sua forma integral, e detalhes de sua
implementação.

23
Para o desenvolvimento das formas fracas, define-sepgΓ e
ugΓ como a parcela do contorno
com graus de liberdade p e u prescritos com condições de contorno essenciais (tipo
Dirichlet), gp e gu, e os seguintes espaços de funções
0| 1Γ=∈= emwcomHwwVw (2.33)
| 1Γ=∈= emcom 0wHwwVw (2.34)
;| 1pgpp emgpHppS Γ=∈= (2.35)
| 1HvvS v ∈= (2.36)
;| 1uguu emguHuuS Γ=∈= (2.37)
onde Vw e Vw são espaços onde devem residir as funções peso escalar e vetorial
respectivamente e os demais espaços para as funções incógnitas dos graus de liberdade
considerados, isto é, Sp para a pressão, Sv para a velocidade e Su para o transporte. Note
que, H1 e H1 são espaços quadrado integráveis usuais [70].
Iniciar uma formulação de elementos finitos significa substituir ou aproximar as funções
incógnitas e pesos nas formas variacionais discretas, pelas suas interpolações nos
elementos. As formas variacionais discretas são apresnetadas a seguir.
A Forma variacional discreta de Galerkin para a equação da pressão é
Ω⋅∇−Ω=Ω∇⋅∇ ∫∫∫ ΩΩΩ
dwdQwdpwhhhhh
vp cC (2.38)
que integrando por partes os primeiro e terceiro termos tem-se
( )
Ω⋅∇+Γ−Ω=
+Ω∇⋅⋅∇−Γ∇⋅
∫∫∫
∫∫
ΩΓΩ
ΩΓ
dwdwdQw
dpwdpw
hhh
h
hhhh
vv
pp
cnc
CnC
ˆ
ˆ (2.39)

24
e considerando fluxo nulo no contorno e organizando sinais fica
( ) Ω⋅∇+Ω=Ω∇⋅⋅∇− ∫∫∫ ΩΩΩ
dwdQwdpwhhhhh
vp cC (2.40)
A forma variacional discreta da equação da velocidade é
Ω+∇⋅⋅=Ω⋅ ∫∫ ΩΩ
dpdhhhh )( vp cCwvw (2.41)
e a forma variacional discreta de Petrov-Galerkin da equação Saturação/Concentração é
( ) Ω=Ω
∇⋅⋅∇+∇⋅+
∂
∂
∫∫ ΩΩ
dQwduut
uw u
h
PG
hhh
h
PG Dvuφ (2.42)
que integrando por partes o fluxo difusivo e assumindo-o nulo no contorno fica
Ω=Ω∇⋅⋅∇−∇⋅+∂
∂
∫∫ ΩΩ
dQwduwut
uw
h
u
h
PG
hh
PG
hh
h
PG )( Dvuφ (2.43)
Essas formas variacionais discretas (2.41), (2.42) e (2.43), são as mais convenientes e são
obtidas a partir da aproximação das funções incóginitas e peso contínuas, pelas funções
discretas nodais ph, vh, uh, wh e wh que pertencem aos subespaços finitos Sh e Vh contidos
em S e V . Note que wPG é a função peso descontínua de Petrov-Galerkin, necessária na
equação predominantemente advectiva. O superíndice h indica o uso de uma malha de
elementos finitos. As funções incógnitas aproximadas locais, dentro de um elemento
finito, são interpoladas por
ei
nen
i
ih
uNu Nu==∑=1
(2.44)

25
e seu gradiente por
( ) enen
i
iiiiiih
uBuBuBu BuT==∇ ∑
=1321 (2.45)
onde nen é o número de nós do elemento, N uma matriz com as funções de interpolação e
B seu operador gradiente discreto. No caso de funções vetoriais, pode-se pensar em cada
componente cartesiana como se fosse um grau de liberdade, portanto sua interpolação é
semelhante a (2.44), só que com a matriz Nv como segue
ev vNv == ∑
×
=
i
nsdnen
i
vh
vNi
1
(2.46)
e seu operador divergente discreto tem a forma
ediv vBv ==⋅∇ ∑
×
=
nsdnen
i
idivh
vBi
1
(2.47)
onde nsd é o número de dimensões espaciais, no caso três dimensões. Aplicando essas
aproximações locais, à nível de elemento, nas formulações variacionais, gera-se as
formas discretas correspondentes aos nós da malha de elementos finitos, portanto uma
formulação matricial. Os sistemas locais, isto é para cada elemento, têm suas matrizes
com dimensão ngl x nen. As matrizes das funções de interpolação, N e Nv, bem como
seus operadores gradiente discretos B e divergente discreto Bdiv estão apresentados no
apêndice A, para o elementos tetraédricos.
A interpolação adotada para as funções peso é a mesma das funções incógnitas se o
método dos resíduos ponderados for o de Galerkin. Essa ponderação funciona muito bem
para problemas puramente difusivos (equações parabólicas) como é o caso da pressão,
mas é inadequado em casos predominantemente advectivos (equações hipérbólicas) como
a equação de transporte. Por isso, é adotada a ponderação linear à montante de Petrov-

26
Galerkin (SUPG) [19] para a equação do transporte. Mais ainda, como as frentes de
saturação/concentração são abruptas, um operador de Captura de
Descontinuidades (CD) [35,36] é acrescentado para suavizar tais efeitos. Esse
procedimento introduz uma fraca não-linearidade, de caráter numérico, no problema.
Fraca porque bastam poucas iterações para se obter o efeito desejado [117]. A
incorporação da ponderação SUPG e do operador CD geram uma formulação estabilizada
de elementos finitos variacionalmente consistente para a equação de transporte que pode
ser escrita como
0)()(11
=Ω∇∇+Ω∇⋅+Ω ∑∫∑∫∫=
Ω=
ΩΩ
NEL
e
e
hh
PG
eNEL
e
e
hh
PG
ehh
PGeee
duwduLwduLw δτvv
(2.48)
sendo o operador L(uh) definido por
h
u
hhhh
hQuwu
t
uuL −∇⋅⋅∇−∇⋅+
∂
∂= Dvuφ:)( (2.49)
O parâmetro a nível de elemento eτ da estabilização SUPG é calculado segundo
Codina [29] pela expressão
1
221
)(
)(
)(−
+=
e
hhu
e
h
e
h
uc
h
uc
vDτ (2.50)
onde c1 = 4 e c2 = 2 para elementos lineares e he uma estimativa para o tamanho do
elemento, adotado como a raíz cúbica do volume do elemento.
O parâmetro de difusão artificial eδ é avaliado segundo a formulação CAU (Consistent
Aproximate Upwind) de GALEÃO E DO CARMO [58] por

27
e
e
eup
e
u
uLh
∇
=
)(αδ (2.51)
onde αup é um parâmetro de upwinding que tem uma aproximação assintótica dada por
Codina [35] e )( euL é o valor absoluto do resíduo no interior do elemento.
Os elementos tetraedro linear de 4 nós (T4) e hexaedro trilinear de 8 nós (H8) foram
implementados para discretização espacial. A integração completa das matrizes do T4 é
direta enquanto que o H8 exige 2x2x2 pontos de Gauss para uma integração numérica
exata, o que pode ser computacionalmente oneroso. Contudo, ao se usar a integração
reduzida [12,13,81] pode-se também integrar as matrizes do H8 com 1 ponto. Assim,
troca-se oito laços de programação por apenas um, que exige menos operações de ponto
flutuante. Portanto a integração reduzida será vista como uma técnica computacional e
tratada no Capítulo 6. A integração reduzida surgiu em aplicações de placas e cascas para
superar o travamento por cortante [13], contudo, aqui é empregada apenas visando um
ganho no desempenho computacional, como já realizado em [47,48].
2.4 Matrizes de Elemento para Equação da Pressão
Para a equação da pressão tem-se as seguintes matrizes e vetor independente locais
ed
e
Ω−= ∫Ω
BCBk pTe
p (2.53)
ed
e
Ω+= ∫Ω
vTee
p cBQf (2.55)
como os valores de vazões mássicas q são por unidade de volume, deve-se multiplicá-los
por um volume de controle, por exemplo, o volume do poço, para que sejam aplicadas
diretamente nos nós gerando o vetor local eQ .
28
2.5 Matrizes de Elemento para Equação da Velocidade, a Técnica de pós-
processamento das velocidades para o T4
Já é bem conhecido que calcular as velocidades diretamente pela Lei de Darcy, isto é,
através da derivação numérica das pressões nodais é inadequada por ser uma
aproximação de baixa ordem. Métodos mistos podem ser utilizados para aproximar as
velocidades, contudo tais métodos requerem espaços de funções não usuais e seu tempo
computacional é expressivamente maior [102].
Para contornar esse obstáculo, MALTA et al. [96], acrescentaram à forma variacional da
Lei de Darcy (2.41), um termo, baseado na ponderação do resíduo da conservação da
massa, pelo divergente da função peso vetorial. Desta forma, pode-se aproximar o campo
de velocidades com a mesma ordem de interpolação da pressão. Esta técnica é conhecida
como pós-processamento das velocidades e sua análise numérica foi desenvolvida para
deslocamentos miscíveis [96]. Também, já foi usada com sucesso para escoamentos
bifásicos imiscíveis em duas dimensões [114,100] e deixa-se aqui sua análise numérica
como recomendação. A técnica de pós-processamento pode ser vista como uma
estabilização para a velocidade, baseada na adição, à sua forma variacional, da seguinte
expressão
( )∑∫=
ΩΩ−⋅∇⋅∇
nel
e
ehheppv dQC
e
1
vw (2.57)
onde a constante eppvC vale
2
eh
para o caso imiscível e 2
21
ehM para o caso miscível.
Finalmente as matrizes de elemento para a velocidade no T4 ficam
eeppv
edCd
ee
Ω+Ω= ∫∫ΩΩ
divTdivv
Tv
ev BBNNm (2.58)
29
eeppv
edQCd
ee
Ω+Ω+= ∫∫ΩΩ
)( 0 Tdivv
ep
Tv
ev BcBpCNf (2.59)
onde pe é o vetor local com valores nodais das pressões e 0Q a vazão avaliada no
centróide do elemento, a partir das vazões nodais.
Observação 2.1. A obtenção das velocidades para o H8 é feita utilizando diretamente a
Lei de Darcy com o operador gradiente discreto avaliado apenas no centróide do
elemento, pois alí reside um ponto de superconvergência para elementos de lados
paralelos [34]. Desta forma, para elementos não muito distorcidos, pode-se assim
dispensar a técnica de pós-processamento para elementos hexaédricos.
2.6 Matrizes de Elemento para Equação do Transporte
O sistema (não-simétrico) semi-discreto para o transporte é
eu
eeee fucum =+& (2.60)
e seu vetor independente
eu
eu Qf = (2.62)
Vale a mesma observação que a vazão aplicada para a equação da pressão para se obter
diretamente seus valores nodais. A matriz de massa do sistema é dado pela soma
epg
eg
e mmm += (2.64)
onde a matriz de massa consistente de Galerkin é dada por

30
eed
e
Ω= ∫Ω
NNm Teg φ (2.66)
ou ainda na forma diagonal (lumped) por
eeddiag
e
Ω= ∫Ω
)( Nmleg φ (2.67)
Já amatriz de massa de Petrov-Galerkin é dada por
eu
eed
e
Ω= ∫Ω
BvNm TTepg φτ (2.68)
A matriz de advecção-difusão é dada pelo somário
ecd
edpg
edg
eapg
eag
e kkkkkk ++++= (2.69)
onde a matriz de advecção de Galerkin é
eu d
e
Ω= ∫Ω
BvNk TTeag (2.71)
Observação 2.2. A matriz de advecção de Galerkin eagk é igual a transposta da matriz de
massa de Petrov-Galerkin, exceto pela multiplicação da constante eeτφ . Essa
particularidade é levada em consideração na implementação computacional.
A matriz de advecção de Petrov-Galerkin tem a expressão
euu
ed
e
Ω= ∫Ω
BvvBk TTeapg τ (2.72)
31
e a matriz de difusão de Galerkin
ed
e
Ω= ∫Ω
BDBk Tedg (2.73)
e a matriz de difusão de Petrov-Galerkin é nula
0k edpg = (2.74)
Observação 2.3. A matriz de difusão de Petrov-Galerkin edpgk é nula para elementos
lineares e tri-lineares pois envolve a segunda derivada das funções de interpolação,
portanto não será considerada daqui em diante. É importante também ressaltar que esse
termo, quando contínuo, isto é, antes da aproximação de elementos finitos, não pode ser
integrado por partes pois a função peso de Petrov-Galerkin é descontínua.
E finalmente a matriz do operador de captura de descontinuidades é dada por
eed
e
Ω= ∫Ω
BBk Tecd δ (2.75)
Observação 2.4. Matriz de difusão generalizada
Em termos de implementação pode-se pensar na matriz de difusão de Galerkin, de
advecção de Petrov-Galerkin e de captura de descontinuidades como uma única matriz
de difusão generalizada da forma
ed
e
Ω= ∫Ω
BDBk GTe
dg (2.76)
onde o tensor de difusão generalizado assume a contribuição das 3 matrizes

32
3T
G IvvDD euu
eδτ ++= (2.77)
Dessa forma, a implementação é mais simples e eficiente.
2.7 Integração completa (2x2x2) para o H8
A integração completa do H8, para a avaliação da integral de qualquer termo de uma
matriz genérica F, transformada em coordenadas naturais ξ, η e ζ, pode ser feita pela
regra
JFJFF det),,(det),,(),,(8
1
1
1
1
1
1
1
∑∫ ∫ ∫∫=− − −Ω
≅=Ω
i
iiiiiie ξwwwdddξdzyx
e
ζηζηξζη (2.78)
onde J é o Jacobiano da transformação entre coordenadas e os pontos de Gauss
iii eξ ζη, e seus pesos iw são fornecidos na Tabela 2.2.
Tabela 2.2 – Regra para integração numérica em hexaedros trilineares.
Pontos de integração de Gauss i
ξi ηi ζi Pesos wi
1 -xg -xg -xg 1.0
2 xg -xg -xg 1.0
3 xg xg -xg 1.0
4 -xg xg -xg 1.0
5 -xg -xg xg 1.0
6 xg -xg xg 1.0
7 xg xg xg 1.0
8 -xg xg xg 1.0
xg = 0.577 350 269 189 626...
33
Observação 2.5. A implementação é feita com dois laços de programação, sendo o menor
mais externo nos pontos de integração de Gauss e o maior mais interno, nos elementos,
obtendo-se assim proveito computacional em diversas arquiteturas.
2.8 Sistemas Globais Resultantes
Finalmente, após se obter as matrizes e vetores locais, explicitamente ou por uma regra
de integração numérica, soma-se suas contribuições respeitando a malha adotada, isto é,
faz-se o assembling para se chegar o sistema global resultante.
Todas as matrizes e vetores independentes, com as condições de contorno já
incorporadas, globais resultantes são obtidos a partir das contribuições dos elementos
através da operação de assembling A, como segue esquematizado
enel
emM
1=
= A (2.79)
gerando assim os seguintes sistemas globais:
• Sistema da pressão (simétrico)
pp FpK = (2.80)
onde Kp é a matriz de coeficientes da equação da pressão, Fp seu vetor independente e p
o vetor incógnita nodal global para a pressão.
• Sistema da velocidade (simétrico)
vv FvM = (2.81)
34
onde Mv é a matriz do pós-processamento da velocidade, Fv seu vetor independente e v o
vetor incógnita nodal global para velocidade. Para o H8, não há sistema para velocidade
pois ela é avaliada diretamente no centróide dos elementos, como já mencionado.
• Sistema semi-discreto do transporte (não-simétrico)
uFKuuM =+& (2.82)
onde u& é a derivada temporal de u, que é o vetor incógnita dos valores nodais globais
para a saturação/concentração. M é a matriz de massa global e K a de advecção-difusão,
também global. A aproximação temporal empregada na equação de transporte já é
amplamente utilizada em problemas de escoamentos em meios porosos [84,100,114]. O
esquema é sequencialmente implícito, isto é, segregado. Ele é proveniente da família de
métodos da regra trapezoidal [70], na forma de bloco iterativo preditor/multicorretor. É
em bloco, pois tem-se que avançar no tempo a solução da pressão, da velocidade e da
saturação, sequencialmente. É iterativo pois os métodos utilizados para a solução dos
sistemas de equações resultantes são o do gradientes conjugados, com
précondicionamento diagonal para a pressão e bloco-diagonal para velocidade, e o
GMRES [109] com précondicionamento diagonal para o transporte. O esquema
preditor/corretor é o método de integração temporal totalmente implícito propriamente
dito e a multicorreção é um esquema tipo Newton para tratar as não-linearidades.
Portanto o esquema de cálculo temporal resultante está esquematicamente apresentado no
Quadro 2.1.

35
Quadro 2.1 – Integração temporal das equações para meios porosos.
Onde o parâmetro da integração temporal α é igual a 0.5 para um método totalmente
implícito de segunda ordem. Existe ainda a possibilidade e a necessidade (devido as
fortes não-linearidades) da utilização de um esquema com um passo de tempo variável.
Diversos controladores já foram utilizados com sucesso [139]. Nesse trabalho, essa opção
não está implementada, mas deixa-se aqui a menção de sua relevância e sua futura
incorporação. Deixa-se também o intuito de introduzir esquemas totalmente explícitos
(tipo Runge-Kutta), que podem ter precisão de mais alta ordem. E também, que em
conjunto com um passo de tempo adaptativo, controlado pela condição de CFL,
promoverá sempre um método totalmente explícito estável. Recentemente, os
trabalhos [64,65] mostraram a estabilidade para diversos métodos de integração temporal
para a equação advecção-difusão, inclusive esquemas espaço-tempo de elementos finitos.
lê condições iniciais para o transporte 0
0=
=
n
iU
do loop 1 tempo n
monta vetor fonte, constante no passo de tempo t∆
predição do transporte ( ) 10
100 1
~ −−∆−+=
nnnUtUU &α
monta vetor com as condições de contorno
do loop 2 multicorreção (iterações não lineares i)
resolve equação da pressão para o incremento n
iP∆
atualiza solução da pressão n
in
in
i PPP ∆+=−1
resolve equação da velocidade para o incremento n
iV∆
atualiza solução da velocidade n
in
in
i VVV ∆+=−1
resolve equação do transporte para o incremento da derivada temporal n
iU&∆
corrige solução do transporte
n
i
n
i
n
i UUU &&& ∆+=−1
n
i
n
i
n
i UtUU 11 −−∆∆+= &α
checa convergência não-linear
fim do loop 2
impressão dos resultados parciais
fim do loop 1
36
2.9 Considerações sobre Conservação da massa e estabilizações
Desde os primórdios dos elementos finitos existe um desentendimento quando afirmam
que o método dos elementos finitos é não-conservativo ou que não conserva massa. Na
verdade ele é globalmente conservativo [73], mas localmente entre elementos em apenas
alguns casos. Para as equações de advecção-difusão e de Navier-Stokes incompressível,
em regimes permanente ou transiente, a conservação da massa é provada em [72] para os
métodos de Galerkin e para os métodos estabilizados SUPG, GLS e multi-escala. Note
que como o campo de velocidades, portanto o campo advectivo, é obtido numericamente,
não se pode garantir que ele tenha divergente nulo, daí não se garante as propriedades de
conservação. Então, surgem duas opções para se contornar isso, a primeira é considerar a
equação de transporte em sua forma conservativa, o que não é usual e onde é considerado
o termo do divergente de vu. A outra, proposta recentemente em [72] é adicionar um
termo de estabilização, baseado em princípios multiescala que corrige o desequilíbrio no
balaço de massa. Portanto, somando as seguintes integrais no interior dos elementos nas
equações do transporte tem-se
∑∫∑∫=
Ω=
ΩΩ∇⋅−′∇⋅−+Ω∇−
nel
e
ehp
hp
nel
e
ehp
hduwduw
ee
11
)()()( ev
ev
ev rrr ττττ (2.83)
na forma variacional da equação de transporte, fica garantida a conservação mesmo para
campos de velocidade não-solenoidais, isto é, de divergente não necessariamente nulo,
que é o caso dos campos advectivos numéricos. O parâmetro τ ′ pode ser aproximado por
evrp
eh
ττ =′ (2.84)
e pτ é um coeficiente de estabilização tipo pressão (no caso de Navier-Stokes
incompressível), que pode ser adotado como eppvC , uma vez que o campo advectivo é
originado do pós-processamento das velocidades e evr é o resíduo da equação desse
37
campo advectivo numérico, isto é da equação da velocidade, avaliado no interior do
elemento.
Observação 2.4. É interessante notar que 4 estabilizações de elementos finitos foram
empregadas, com a finalidade de:
i. controlar as oscilações espúrias provenientes da advecção (SUPG)
ii. suavizar frentes descontínuas/abruptas (CD)
iii. interpolar velocidades (pós-processamento) com mesma ordem que as demais
variáveis no T4
iv. garantir propriedades de conservação na equação de transporte
No Capítulo 6 será também introduzida a estabilização para capturar os modos
hourglass na integração reduzida do H8, o que é vista, aqui, como uma técnica de
aceleração computacional.
A seguir, os exemplos numéricos de validação e verificação das equações para meios
porosos.
38
Capítulo 3
Exemplos Numéricos de Escoamentos em Meios
Porosos
Os exemplos numéricos apresentados aqui têm o objetivo de validar [6] a implementação
computacional tridimensional para escoamentos em meios porosos e verificá-las [6] com
soluções analíticas e/ou problemas já bem conhecidos em duas dimensões. As unidades
são omitidas quando consideradas num sistema coerente. Para os exemplos 3.1 e 3.2 tem-
se um domínio que representa um quarto da configuração tipo fivespot. A descrição das
condições de contorno e inicial se encontram na Figura 3.1. A malha de elementos finitos
adotada é uma discretização de 20x20x1 como apresentado na Figura 3.2. A malha de
tetraedros foi obtida a partir da divisão de cada hexaedro em cinco elementos. O meio é
homogêneo e efeitos de gravidade, dispersão/difusão e pressão capilar foram
desconsiderados. É aplicada a condição de contorno de fluxo nulonos contornos esternos
dos meios porosos.
Neste capítulo serão ainda apresentados mais dois exemplos. Um primeiro de
reservatórios de petróleo baseados em dados reais do décimo exercício comparativo do
SPE [143], onde dados são colocados à disposição de diversas empresas para que cada
uma faça uma simulação para fins de comparação de tempo de processamento, técnicas
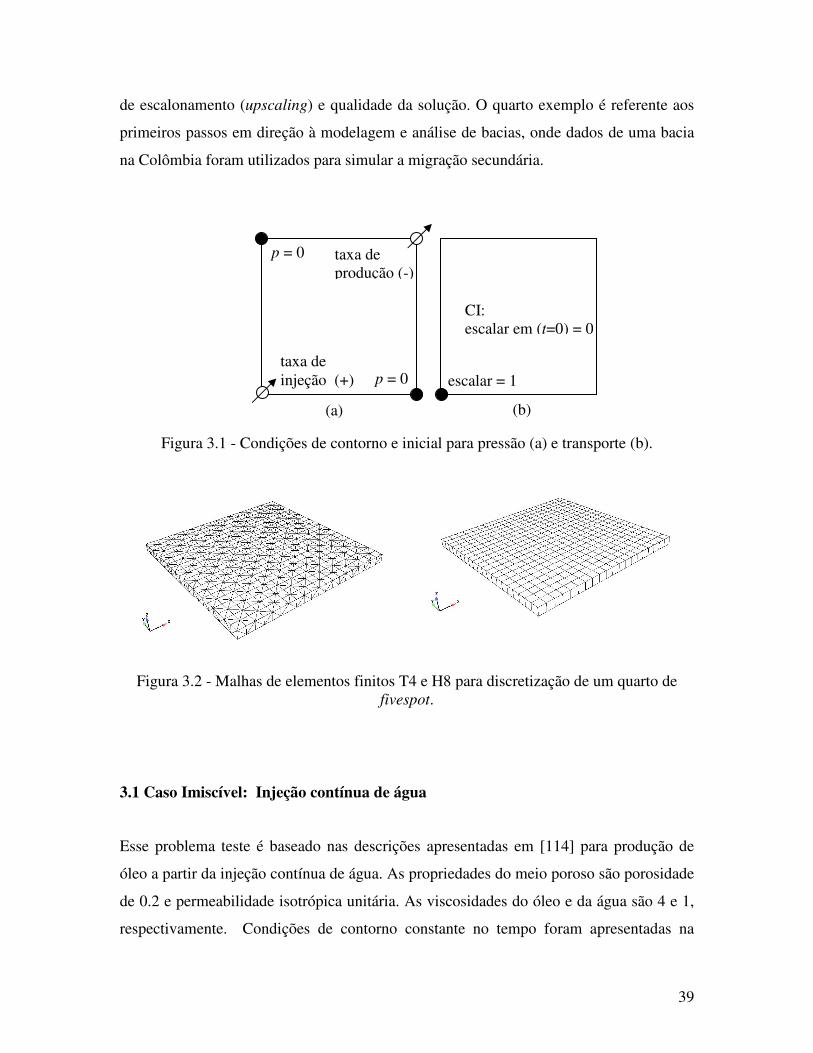
39
de escalonamento (upscaling) e qualidade da solução. O quarto exemplo é referente aos
primeiros passos em direção à modelagem e análise de bacias, onde dados de uma bacia
na Colômbia foram utilizados para simular a migração secundária.
Figura 3.1 - Condições de contorno e inicial para pressão (a) e transporte (b).
Figura 3.2 - Malhas de elementos finitos T4 e H8 para discretização de um quarto de fivespot.
3.1 Caso Imiscível: Injeção contínua de água
Esse problema teste é baseado nas descrições apresentadas em [114] para produção de
óleo a partir da injeção contínua de água. As propriedades do meio poroso são porosidade
de 0.2 e permeabilidade isotrópica unitária. As viscosidades do óleo e da água são 4 e 1,
respectivamente. Condições de contorno constante no tempo foram apresentadas na
(b) (a)
p = 0
p = 0
taxa de produção (-)
taxa de injeção (+)
CI: escalar em (t=0) = 0
escalar = 1
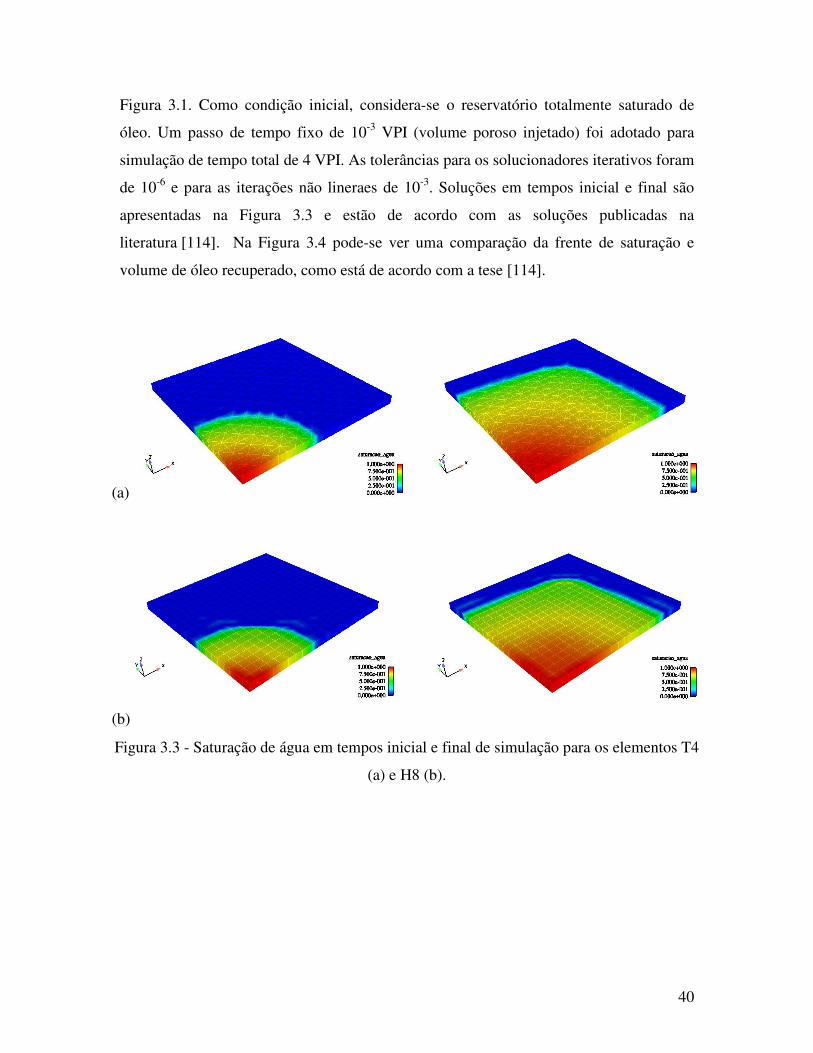
40
Figura 3.1. Como condição inicial, considera-se o reservatório totalmente saturado de
óleo. Um passo de tempo fixo de 10-3 VPI (volume poroso injetado) foi adotado para
simulação de tempo total de 4 VPI. As tolerâncias para os solucionadores iterativos foram
de 10-6 e para as iterações não lineraes de 10-3. Soluções em tempos inicial e final são
apresentadas na Figura 3.3 e estão de acordo com as soluções publicadas na
literatura [114]. Na Figura 3.4 pode-se ver uma comparação da frente de saturação e
volume de óleo recuperado, como está de acordo com a tese [114].
(a)
(b)
Figura 3.3 - Saturação de água em tempos inicial e final de simulação para os elementos T4
(a) e H8 (b).
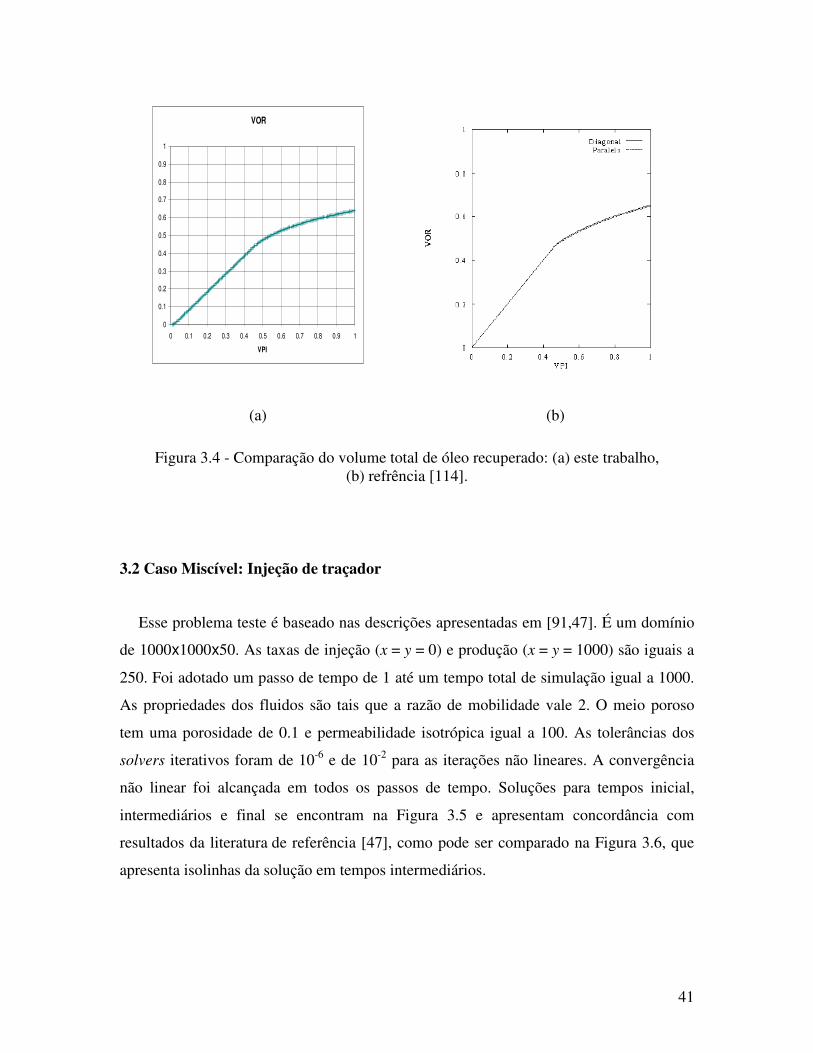
41
VOR
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
VPI
(a) (b)
Figura 3.4 - Comparação do volume total de óleo recuperado: (a) este trabalho, (b) refrência [114].
3.2 Caso Miscível: Injeção de traçador
Esse problema teste é baseado nas descrições apresentadas em [91,47]. É um domínio
de 1000x1000x50. As taxas de injeção (x = y = 0) e produção (x = y = 1000) são iguais a
250. Foi adotado um passo de tempo de 1 até um tempo total de simulação igual a 1000.
As propriedades dos fluidos são tais que a razão de mobilidade vale 2. O meio poroso
tem uma porosidade de 0.1 e permeabilidade isotrópica igual a 100. As tolerâncias dos
solvers iterativos foram de 10-6 e de 10-2 para as iterações não lineares. A convergência
não linear foi alcançada em todos os passos de tempo. Soluções para tempos inicial,
intermediários e final se encontram na Figura 3.5 e apresentam concordância com
resultados da literatura de referência [47], como pode ser comparado na Figura 3.6, que
apresenta isolinhas da solução em tempos intermediários.
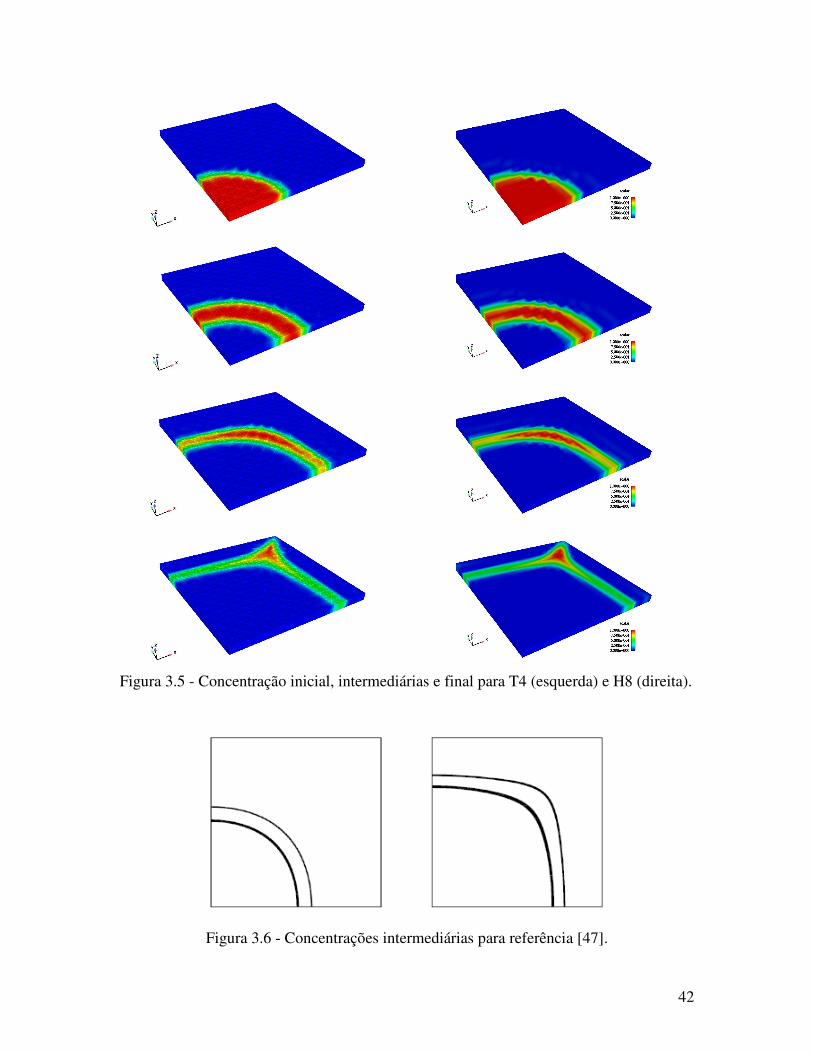
42
Figura 3.5 - Concentração inicial, intermediárias e final para T4 (esquerda) e H8 (direita).
Figura 3.6 - Concentrações intermediárias para referência [47].
43
3.3 SPE – injeção de água em reservatório heterogêneo
Este exemplo é uma simplificação do décimo estudo comparativo do SPE [146] de um
reservatório totalmente heterogêneo na parte Upper Ness do Mar do Norte. Apesar do
modelo original ser trifásico tipo black oil, foi aqui simplificado para o escoamento
bifásico óleo-água. Mais além, foi feito um escalonamento (upscaling), por uma média
harmônica, do modelo que contemplava mais de 1 milhão de elementos para um modelo
reduzido com 8976 elementos hexaédricos e 10530 nós. O reservatório contempla 4
poços produtores nos cantos e 1 injetor no meio, do domínio. As propriedades dos
materiais já escalonados se encontram na Figura 3.7, onde as permeabilidades estão em
mD. O domínio contempla 1200x2200x170 ft, a viscosidade dos fluidos foi de 3 cp para o
óleo e 0.3 cp para água. Efeitos gravitacionais, capilares e difusivos foram
negligenciados.
Como condições de contorno para pressão, foram prescritas pressões de fundo de poço de
4000 psi nos poços produtores e de 10000 psi no injetor. A vazão de injeção é de
5000 barris/dia no poço injetor. Como condição de contorno para saturação da água é
prescrito unitária no poço injetor, simulando injeção contínua. Como condição inicial, é
adotado o reservatório totalmente preenchido e óleo e pressão nula.
Apesar do modelo comparativo prever curvas de recuperação para 2000 dias de
produção, aqui foi analisado mais tempo de injeção, contemplando a chegada de água nos
poços produtores. Soluções nos tempos 1, 500, 1000, 1500 e 2000 dias são apresentadas
na Figura 3.8 e 2000, 2500, 3000 e 3500 na Figura 3.9. com esse exemplo tem-se o
objetivo de resolver um problema completo de reservatórios com dados reais. A solução
comprova a capacidade do programa em representar o escoamento devido as
heterogeneidades do meio.
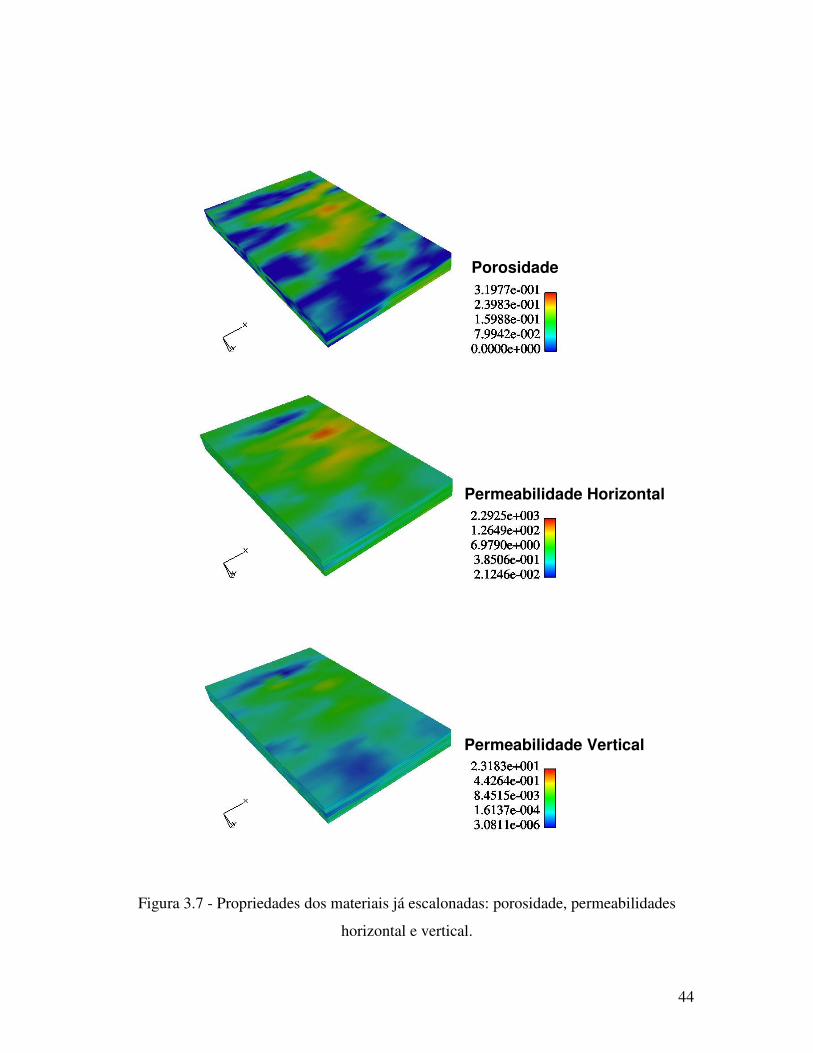
44
Figura 3.7 - Propriedades dos materiais já escalonadas: porosidade, permeabilidades
horizontal e vertical.
Porosidade
Permeabilidade Horizontal
Permeabilidade Vertical
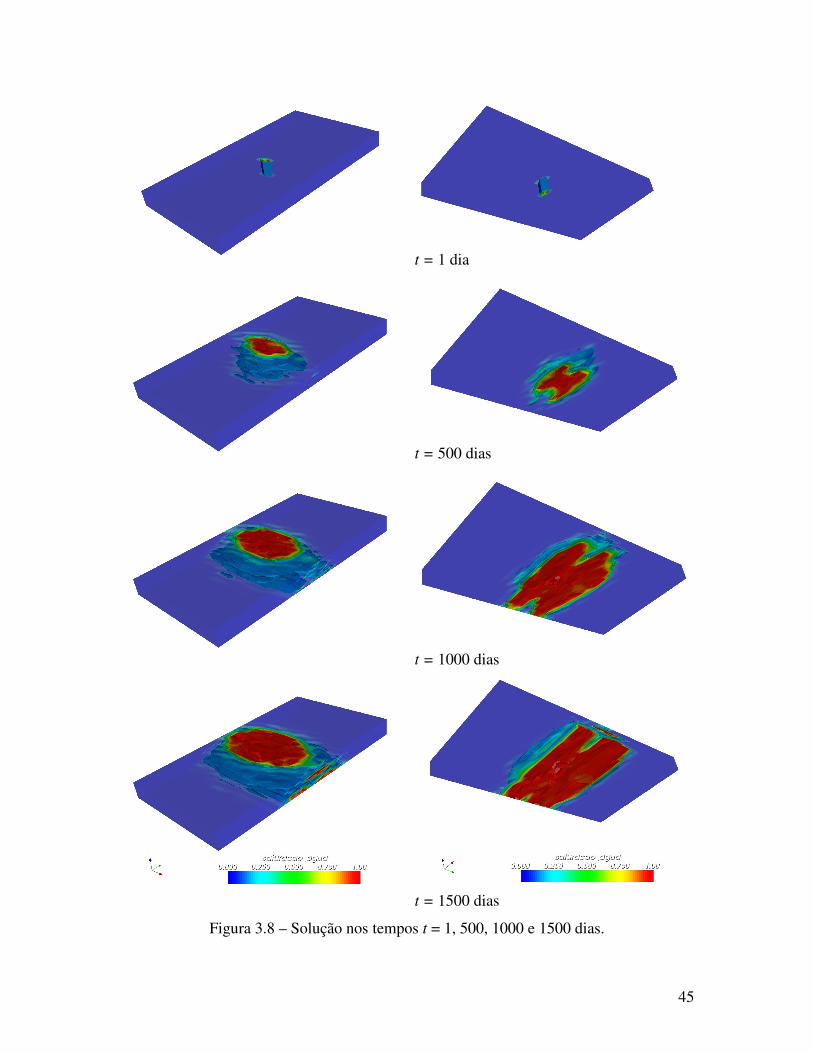
45
t = 1 dia
t = 500 dias
t = 1000 dias
t = 1500 dias
Figura 3.8 – Solução nos tempos t = 1, 500, 1000 e 1500 dias.
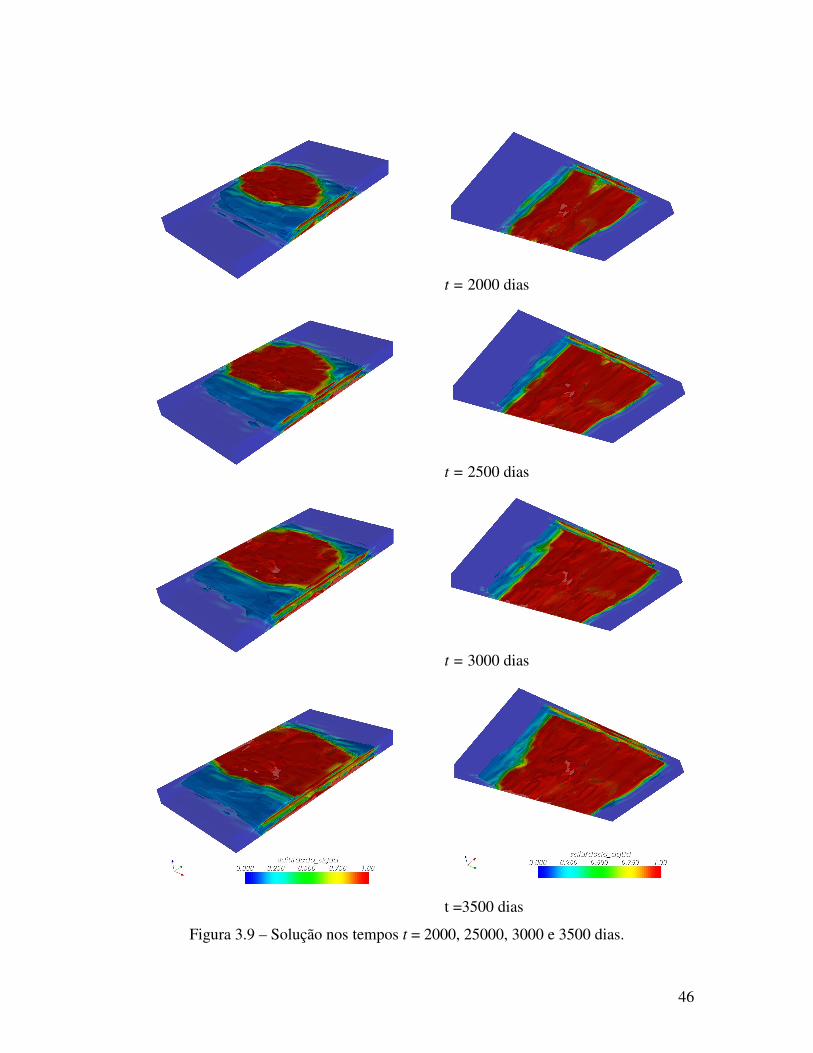
46
t = 2000 dias
t = 2500 dias
t = 3000 dias
t =3500 dias
Figura 3.9 – Solução nos tempos t = 2000, 25000, 3000 e 3500 dias.
47
3.4 Migração Secundária em um Bloco Sedimentar
A partir de um bloco modelado no Gocad [141] foi possível gerar uma malha volumétrica
de tetraedros no próprio programa para se executar uma análise teste. A qualidade desta
malha é questionável, mas foi adotada mesmo assim para análises preliminares. O
domínio modelado tem aproximadamente 22x80x23 km de extensão. A definição das
propriedades de porosidade e permeabilidade das camadas se encontram na Tabela 3.1 e a
Figura 3.10 mostra as camadas e a malha de elementos finitos. As condições de contorno
adotadas foram de uma pressão atmosférica prescrita no topo e de 0.45 da profundidade
na base. A saturação de água também é prescrita constante na base. Como condições
iniciais, a camada da rocha geradora foi totalmente preenchida com óleo e as demais com
água. Efeitos de pressão capilar e gravidade foram desconsiderados.
O tempo total de análise foi até o óleo atingir a rocha reservatório o que durou
aproximadamente 50 mil anos, sendo o passo de tempo utilizado de 1 mil anos.
A partir da evolução desse cenário tem-se o óleo migrando da rocha geradora em direção
à camada reservatório, seguindo a geometria do modelo, conforme apresentado nas
imagens da Figura 3.1. Como foi utilizado o elemento tetraédrico foi adotado o pós-
processamewnto para as velocidades. A convergência não linear da solução foi boa pois
obteve convergência na maioria dos passos de tempo.
Esse modelo inicial foi desenvolvido visando futuras análises de aplicações em diversos
cenários de interesse e serviu de base para o exemplo mais completo, de aplicação real,
apresentado no Capítulo 7. Um dos maiores objetivos desses exemplos sobre análise de
bacias foi de se estabelecer uma metodologia para tratar o problema em diferentes
cenários. A metodologia, melhor explicada no Capítulo 7, engloba a geração de uma
malha não estruturada de tetraedros a partir de modelos GoCad [141], a definição das
propriedades dos materiais, condições iniciais e de contorno, cenários para estudos de
caso.
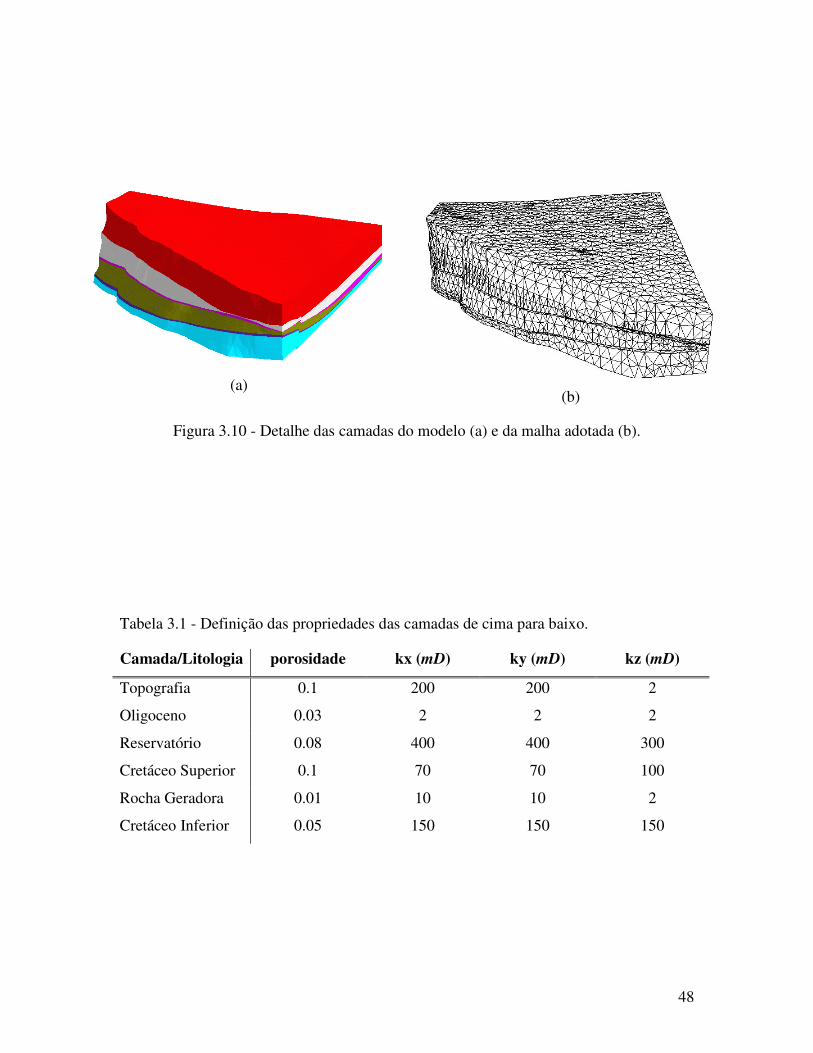
48
Tabela 3.1 - Definição das propriedades das camadas de cima para baixo.
(a)
(b)
Figura 3.10 - Detalhe das camadas do modelo (a) e da malha adotada (b).
Camada/Litologia porosidade kx (mD) ky (mD) kz (mD)
Topografia 0.1 200 200 2
Oligoceno 0.03 2 2 2
Reservatório 0.08 400 400 300
Cretáceo Superior 0.1 70 70 100
Rocha Geradora 0.01 10 10 2
Cretáceo Inferior 0.05 150 150 150
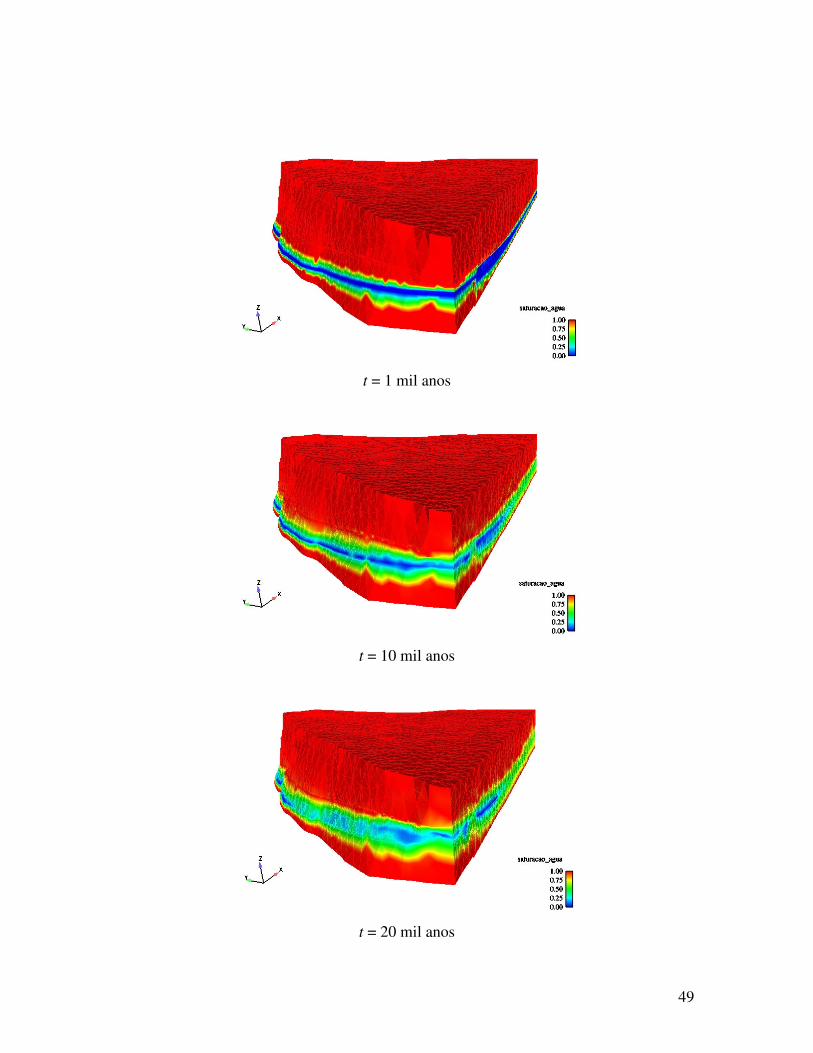
49
t = 1 mil anos
t = 10 mil anos
t = 20 mil anos
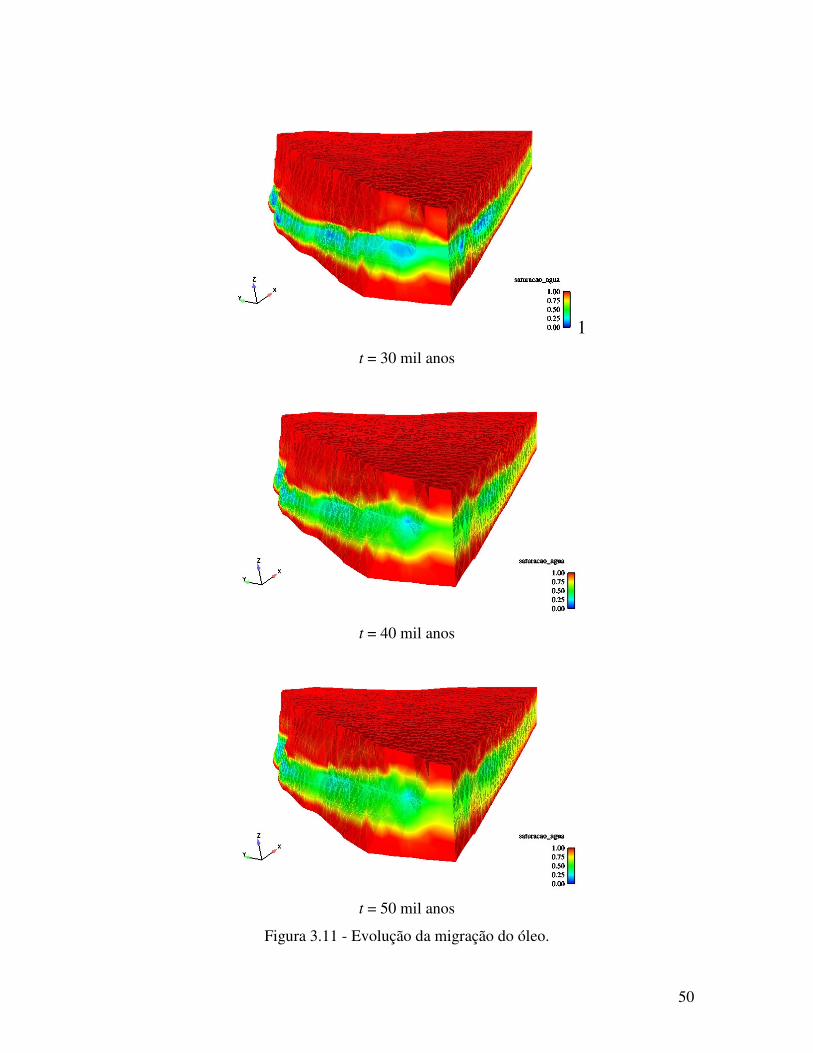
50
1
t = 30 mil anos
t = 40 mil anos
t = 50 mil anos
Figura 3.11 - Evolução da migração do óleo.
51
Capítulo 4
Formulação Matemática e Numérica para
Escoamentos Compressíveis Não Viscosos
4.1 Introdução
Como já mencionado no Capítulo 2, as equações da mecânica dos fluidos são descritas a
partir da conservação da massa (equação da continuidade), conservação da quantidade de
movimento e conservação da energia [50]. A dedução formal das equações a partir de
volumes infinitesimais não será apresentada aqui e recomenda-se [67] para maiores
detalhes. Aqui será apresentada a forma quase-linear final das equações governantes de
escoamentos compressíveis não viscosos, ou seja, as equações de Euler. A formulação
matemática e numérica, conforme apresentadas e organizadas neste capítulo, seguem
principalmente as referências [26,67,150,68-69,85-86,130-132,] .

52
4.2 Formulação Matemática
A forma quase-linear e tridimensional das equações de Euler em varáveis conservativas e
sem termo fonte pode ser representada num domínio espaço-tempo ],[ fi tt×Ω , seguindo
HIRSCH [67], por
0)( =+++= zzyyxxtL U,AU,AU,AU,U (4.1)
onde U é o vetor das variáveis conservativas dado por
=
=
T
z
y
x
e
u
u
u
U
U
U
U
U 1
5
4
3
2
1
ρU , (4.2)
e Ax, Ay e Az são as matrizes 5x5 dos fluxos de Euler, como definidas em [68,69]. Em
(4.1), a vírgula denota diferenciação. Na equação (4.2), as variáveis nodais são ρ, a massa
específica do fluido, que aparece multiplicando também as demais variáveis,
u = [ux, uy, uz]T que é o vetor velocidade e eT que é a densidade de energia total, dada pela
soma da energia interna ei e da densidade de energia cinética ||u||2/2. Assumindo que o
fluido obedece uma lei de gases ideais, a relação constitutiva é dada pelas seguintes
expressões,
Tce vi = (4.3)
( ) iep ργ 1−= (4.4)
onde p é a pressão termodinâmica, cv é o calor específico a volume constante, T a
temperatura absoluta, γ = cp/cv e cp o calor específico à pressão constante.

53
4.3 Formulação Numérica
A forma variacional discreta da equação (4.1) é
( ) 0)()(11
=Ω∂
∂⋅
∂
∂+Ω⋅
∂
∂+Ω⋅ ∑∫∑∫∫
=Ω
=ΩΩ
e
i
h
i
hnel
e
eeh
i
hnel
e
eTh
i
hhd
xxdL
xdL
ee
UWU
WτAUW δ (4.5)
onde Uh é a função incógnita discreta e Wh a função peso discreta, as quais devem
pertencer à espaços de funções de dimensão finita típicos de elementos finitos, e a matriz
de estabilização SUPG, τ é definida como diagonal. Essa forma de estabilização foi
inicialmente introduzida por HUGHES E TEZDUYAR [68] e melhorada por ALIABADI
et al. [1]. A matriz τe = τI é definido através do parâmetro τ, como:
)](21
2,0max[
δττ
α
αττ −
++= ae
e
lCFL
CFL (4.6)
aelCFL
τα
τ)21(3
2
+= (4.7)
)(2 uβ+=
e
e
ac
hτ (4.8)
2)( uβ+=
e
e
c
δτ
δ (4.9)
onde ce é a velocidade acústica do elemento, τl é o parâmetro de estabilização
correspondente aos termos dependentes do tempo, τa aos termos advectivos e τδ desconta
os efeitos do operador de captura de choques. O número de Courant-Friedrichs-Lewy ou
simplesmente CFLe é definido como
e
e
e
h
tcCFL
∆+=
)( uβ (4.10)
e β é um vetor arbitrário normalizado e dado por

54
2
2
*
2
*
U
Uβ
∇
∇=
(4.11)
onde 2*
.. = ou 1-
0A~
. , α é o parâmetro que controla estabilidade e precisão do algoritmo
de marcha, adotado como α = 0.5 para um esquema totalmente implícito de segunda
ordem com um passo de tempo ∆t fixo.
As equações de Euler podem ser rescritas em uma forma simétrica através de uma
mudança de variáveis conforme HUGHES et al. [69] mostrou em 1986, e para tal define-
se a função escalar denominada função de entropia generalizada por
sρ=)H(U (4.12)
onde s = ln(p/ργ) + s0, é a entropia física por unidade de massa e s0 uma entropia de
referência. Então, as variáveis de entropia podem ser introduzidas V = H,U onde vale a
relação U → V dada por,
−
−++−
=
=
1
4
3
2
5
5
4
3
2
1 )1(
1
U
U
U
U
seU
e
V
V
V
V
V T
T
γρ
ρV (4.13)
e finalmente as equações de Euler em variáveis de entropia podem ser alternativamente
escritas como
0
0VAVA =+ iit,
~,
~ (4.14)
55
Então, as equações de Euler rescritas em sua forma simétrica através de uma mudança de
variáveis conservativas U, para variáveis de entropia V. Portanto, as equações em
variáveis de entropia ficam definidas pelas matrizes Ã0 = U,V que é simétrica e positiva
definida e Ãi = AiÃ0 que é também simétrica. Essa mudança de variáveis é importante na
definição de operadores de captura de choque baseados em variáveis de entropia, como o
parâmetro δe avaliado por
1-
0
1-
0
A
U
UA
UA
UA
A
~
~
h
h
z
h
y
h
x
ezyx
ξ
δ
∇
∂
∂+
∂
∂+
∂
∂
= (4.15)
com
1-
0
1-
0
1-
0
1-
0
A
A
A
UUU
UUU
UUUU
A
~333
~222
~111~
z
z
y
y
x
x
z
z
y
y
x
x
z
z
yy
x
x
x
hhh
hhh
hhhh
∂
∂
∂
∂+
∂
∂
∂
∂+
∂
∂
∂
∂+
+∂
∂
∂
∂+
∂
∂
∂
∂+
∂
∂
∂
∂+
+∂
∂
∂
∂+
∂
∂
∂
∂+
∂
∂
∂
∂=∇
ξξξ
ξξξ
ξξξξ
(4.16)
se 0~
≠∇1-
0A
Uh
ξ e assumindo valor nulo (δe=0), caso contrário. As componentes
ji ξx ∂∂ são termos da matriz de transformação entre as coordenadas globais e locais (a
nível dos elementos). Esse operador foi deduzido a partir de sua definição em variáveis
de entropia dadas em ALMEIDA E GALEÃO [3] utilizando transformações inversas.
Mais recentemente, diversos outros parâmetros de estabilização foram desenvolvidos,
como em CATABRIGA et al. em 2005 [28], tanto para advecção quanto para captura de
choques. Incluindo também operadores baseados somente em variáveis
conservativas [134] que têm sido exaustivamente testados [135-137], tendo em mente que
a mudança de variáveis é um inconveniente uma vez que as variáveis a serem resolvidas

56
estão na forma conservativa. A Formulação SUGN para advecção e YZβ para captura de
choques, com os novos operadores, podem ser definidos como
( )
∇⋅+∇⋅= ∑
=
nen
a
a
h
aSUGN NNc1
1 Ujτ (4.17)
onde
h
h
ρ
ρ
∇
∇=j (4.18)
22
tSUGN
∆=τ (4.19)
r
SUGNSUGN
SUGN
1
21
11−
+=
τττ (4.20)
com o inteiro r = 2, tipicamente. E a definição do operador de captura de choques SHOCδ
pode ser feita por
=
refref
ref
z
ref
ref
y
ref
ref
x
ref
ref
e
u
u
u
ρ
ρ
ρ
ρ
ρ
0000
0000
0000
0000
0000
Y (4.21)
i
hh
i
h
xt ∂
∂+
∂
∂=
UA
UZ , ou apenas
i
hh
ix∂
∂UA (4.22)
ββ
β
δ
∂
∂=
−−
−
=
−− ∑ 2
11
12
1
11 SHOChnsd
i i
h
SHOC
h
xUY
UYZY (4.23)
( )212
1==
+=ββ
δδδ SHOCSHOCSHOC (4.24)
57
Sobre esses novos parâmetros de estabilização, em alguns testes preliminares realizados,
pode-se concluir que seriam mais adequados e convenientes uma vez que a formulação
está em variáveis conservativas, não necessitando a mudança de variáveis e acelerando,
mesmo que pouco, as operações de ponto flutuante inerentes das matrizes de elemento.
Contudo, sua utilização depende de valores de referência e da calibração de diversos
outros parâmetros. Apesar de funcionar bem, não foram obtidos resultados melhores que
o operador [1,112] que não exige valores de referência e que é matematicamente
fundamentado e portanto mais robusto.
Assim como definido no capítulo anterior, emprega-se o elemento tetraedro T4 com
funções de interpolação lineares para se obter as matrizes locais. Como aqui, tratamos de
5 graus de liberdade, cada termo das matrizes N e B são multiplicados pela matriz
identidade 5x5, gerando as matrizes de interpolação N5 e o operador gradiente discreto
B5.
A matriz de massa, que inclui as derivadas temporais, é dada pela soma
epg
eg
e mmm += (4.25)
onde
ed
e
Ω= ∫Ω
5T5
eg NNm (4.27)
é a matriz de massa consistente de Galerkin e
[ ] e
zyx
ed
e
Ω= ∫Ω
5T5
epg BAAANm τ (4.28)
é a matriz de massa de Petrov-Galerkin. Já a matriz de advecção é dada pela soma de três
matrizes, como segue

58
ecc
eapg
eag
e cccc ++= (4.29)
onde
[ ] e
zyx de
Ω= ∫Ω
5T5
eag BAAANc (4.31)
e
zzyzxz
zyyyxy
zxyxxx
ed
e
Ω
= ∫Ω
T5
T5
eapg B
AAAAAA
AAAAAA
AAAAAA
Bc τ (4.32)
eed
e
Ω= ∫Ω
5T
5ecc BBc δ (4.33)
são as matrizes de advecção de Galerkin, de advecção de Petrov-Galerkin e do operador
de captura de choques, respectivamente.
O sistema global resultante é obtido pelo assembling das matrizes locais que leva ao
seguinte sistema semi-discreto de equações não lineares.
( ) ( ) 0UUCUUM =+& (4.34)
o qual é resolvido pelo algoritmo preditor-multicorretor totalmente implícito [70], com
α=½, como já mencionado no capítulo 2 e como esquematizado no Quadro 3.1 e
observando também que condições de contorno e iniciais apropriadas devem ser
especificadas.

59
Quadro 4.1 – Integração temporal das equações de Euler.
A seguir serãs apresentados exemplos de validação e verificação da impelmentação das
equações de Euler em uma, duas e três dimensões.
lê condições iniciais 00
=
=
n
iU
do loop 1 nos passos de tempo n (integração temporal)
predição: ( ) 10
100 1
~ −−∆−+=
nnntUUU &α
monta vetor com as condições de contorno
do loop 2 nas iterações não lineares i (multicorreção)
incorpora condições de contorno tipo NO-FLOW, se houver
monta matriz de coeficientes e avalia resíduo
resolve sistema efetivo para n
iU&∆
corrige solução:
n
i
n
i
n
i UUU &&& ∆+=−1
n
i
n
i
n
i t 11 −−∆∆+= UUU &α
checa convergência não-linear
fim do loop 2
impressão dos resultados parciais
fim do loop 1
60
Capítulo 5
Exemplos Numéricos de Escoamentos
Compressíveis Não Viscosos
Os exemplos numéricos apresentados aqui têm o objetivo de validar [6] a implementação
computacional das equações de Euler em três dimensões e verificar [6] com soluções
analíticas e/ou problemas já bem conhecidos. Para tal são apresentados exemplos em
uma, duas e três dimensões, tanto em regime permanente como transiente. Um exemplo
de aplicação real simulando um escoamento supersônico ao redor de um avião é
apresentado no Capítulo 7. As unidades estão omitidas por estarem num sistema coerente
e/ou adimensionalizadas.
5.1 Exemplos Unidimensionias Transientes: Tubos de Choque
Dois exemplos unidimensionais clássicos foram analisados para fins de validação, pois
têm solução analítica conhecida. Eles são os problemas de tubo de choque de Sod e Lax-
Harden [93] onde o escoamento se dá a partir de um tubo, de comprimento unitário,
61
pressurizado com uma condição inicial, que vai evoluindo no tempo até uma
configuração de equilíbrio. As malhas utilizadas compreendem 100 e 1000 divisões, com
5 tetraedros em cada divisão. Os dados para esses exemplos foram extraídos de [93].
Apesar das soluções analíticas não terem sido fornecidas, a solução com 1000 divisões
aqui calculada e a solução exata apresentada em [93] são muito próximas. As condições
iniciais para o problema de Sod são
ρ = 1.000, ux=0 e p=1.0 em 5.00 <≤ x
ρ = 0.125, ux =0 e p=0.1 em 15.0 ≤≤ x
e para Lax-Harden
ρ = 0.445, ux =0.698876404 e p=3.52773 em 5.00 <≤ x
e ρ = 0.500, ux =0 e p=0.57100 em 15.0 ≤≤ x .
que também são as condições de contorno prescritas em x=0 e x=1. Como o problema é
unidimensional, as velocidades nas componentes cartesianas y e z são prescritas nulas
durante toda análise. Para ambos os casos, o passo de tempo foi de 10-3.
Para o exemplo Sod foram adotados 30 vetores de Krylov, 10 ciclos máximos e
tolerância 10-9 no GMRES. A tolerância não linear foi de 10-3. No exemplo de Lax-
Harden foram utilizados 50 vetores, 10 ciclos máximos e a tolerância do GMRES fixada
em 10-6 e não-linear em 10-2. A convergência não linear foi atingida em todos os passos
de tempo A Figura 5.1 mostra a solução das variáveis massa específica, velocidade e
pressão para o exemplo Sod no tempo t=0.2 e a Figura 5.2 para o caso de Lax-Harden em
t=0.15.
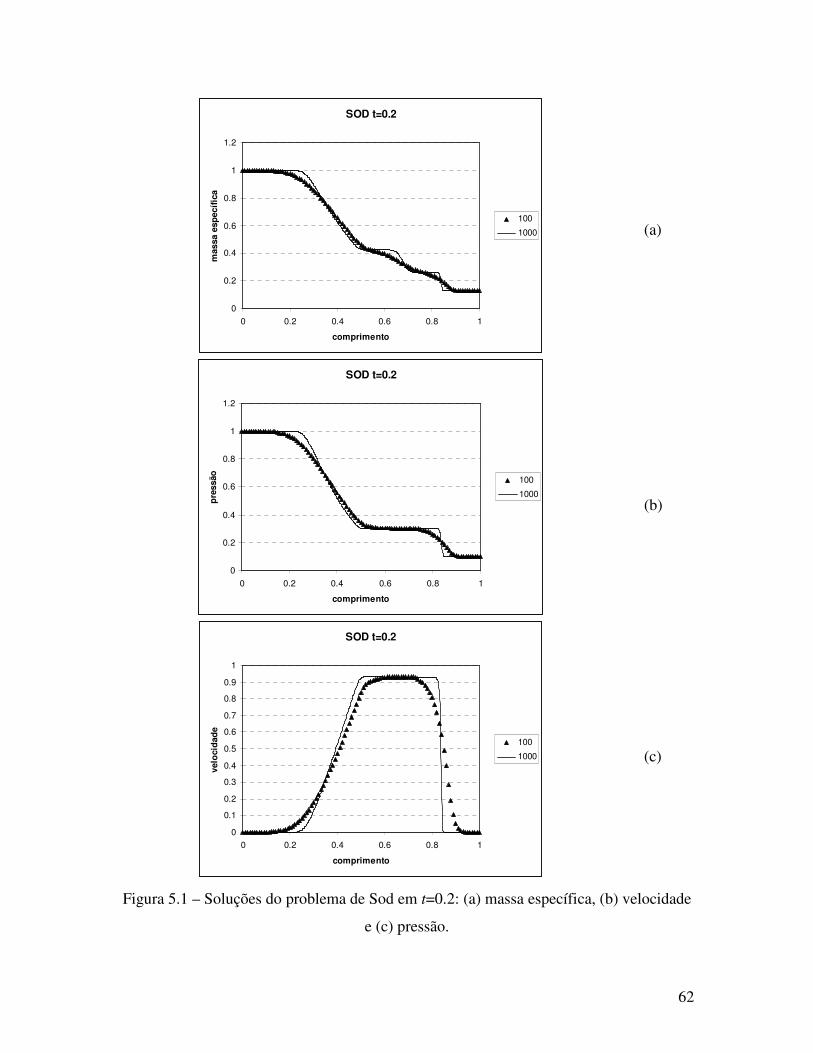
62
SOD t=0.2
0
0.2
0.4
0.6
0.8
1
1.2
0 0.2 0.4 0.6 0.8 1
comprimento
massa e
sp
ecíf
ica
100
1000
SOD t=0.2
0
0.2
0.4
0.6
0.8
1
1.2
0 0.2 0.4 0.6 0.8 1
comprimento
pressão
100
1000
SOD t=0.2
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0 0.2 0.4 0.6 0.8 1
comprimento
velo
cid
ad
e
100
1000
Figura 5.1 – Soluções do problema de Sod em t=0.2: (a) massa específica, (b) velocidade
e (c) pressão.
(a)
(b)
(c)
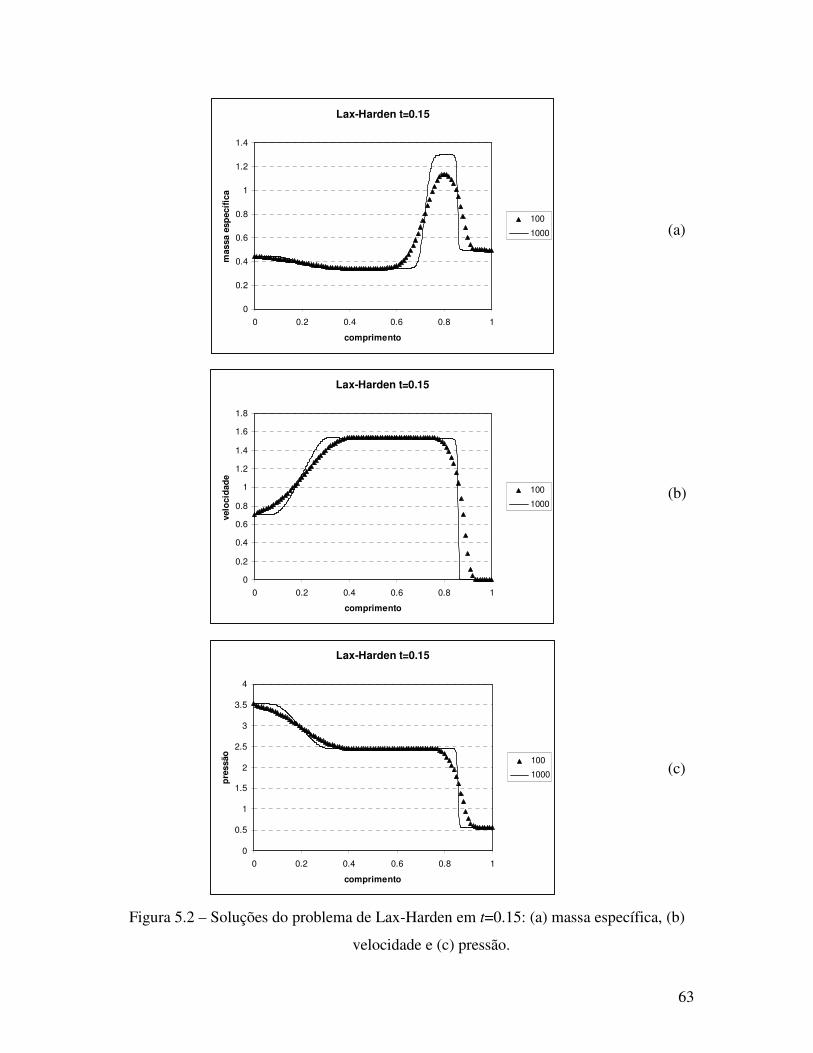
63
Lax-Harden t=0.15
0
0.2
0.4
0.6
0.8
1
1.2
1.4
0 0.2 0.4 0.6 0.8 1
comprimento
massa e
sp
ecíf
ica
100
1000
Lax-Harden t=0.15
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
0 0.2 0.4 0.6 0.8 1
comprimento
velo
cid
ad
e
100
1000
Lax-Harden t=0.15
0
0.5
1
1.5
2
2.5
3
3.5
4
0 0.2 0.4 0.6 0.8 1
comprimento
pressão
100
1000
Figura 5.2 – Soluções do problema de Lax-Harden em t=0.15: (a) massa específica, (b)
velocidade e (c) pressão.
(a)
(b)
(c)
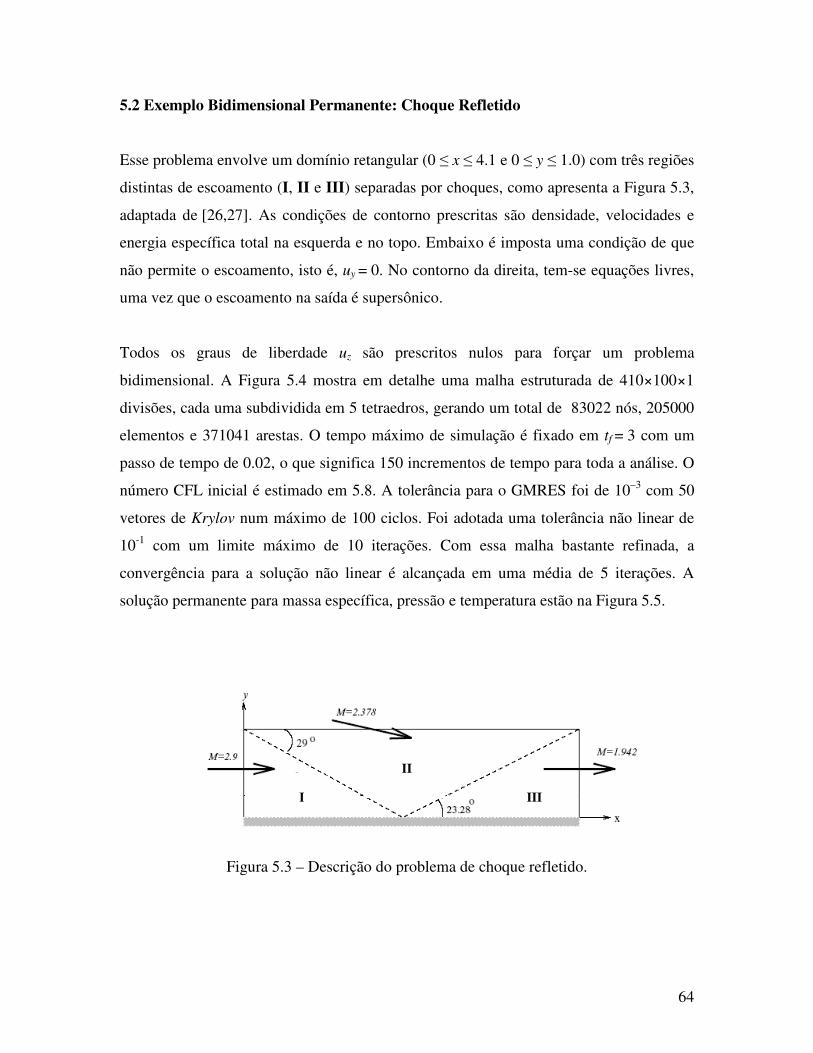
64
5.2 Exemplo Bidimensional Permanente: Choque Refletido
Esse problema envolve um domínio retangular (0 ≤ x ≤ 4.1 e 0 ≤ y ≤ 1.0) com três regiões
distintas de escoamento (I, II e III) separadas por choques, como apresenta a Figura 5.3,
adaptada de [26,27]. As condições de contorno prescritas são densidade, velocidades e
energia específica total na esquerda e no topo. Embaixo é imposta uma condição de que
não permite o escoamento, isto é, uy = 0. No contorno da direita, tem-se equações livres,
uma vez que o escoamento na saída é supersônico.
Todos os graus de liberdade uz são prescritos nulos para forçar um problema
bidimensional. A Figura 5.4 mostra em detalhe uma malha estruturada de 410×100×1
divisões, cada uma subdividida em 5 tetraedros, gerando um total de 83022 nós, 205000
elementos e 371041 arestas. O tempo máximo de simulação é fixado em tf = 3 com um
passo de tempo de 0.02, o que significa 150 incrementos de tempo para toda a análise. O
número CFL inicial é estimado em 5.8. A tolerância para o GMRES foi de 10–3 com 50
vetores de Krylov num máximo de 100 ciclos. Foi adotada uma tolerância não linear de
10-1 com um limite máximo de 10 iterações. Com essa malha bastante refinada, a
convergência para a solução não linear é alcançada em uma média de 5 iterações. A
solução permanente para massa específica, pressão e temperatura estão na Figura 5.5.
Figura 5.3 – Descrição do problema de choque refletido.
I
II
III
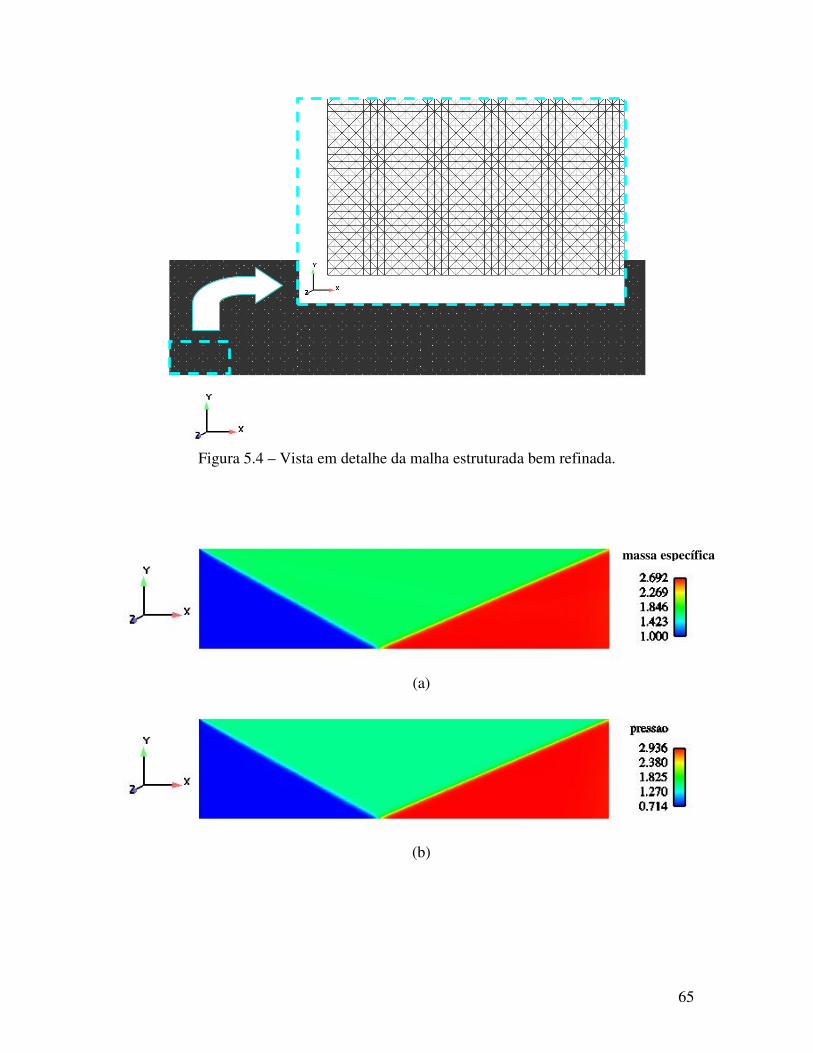
65
Figura 5.4 – Vista em detalhe da malha estruturada bem refinada.
(a)
(b)
massa específica
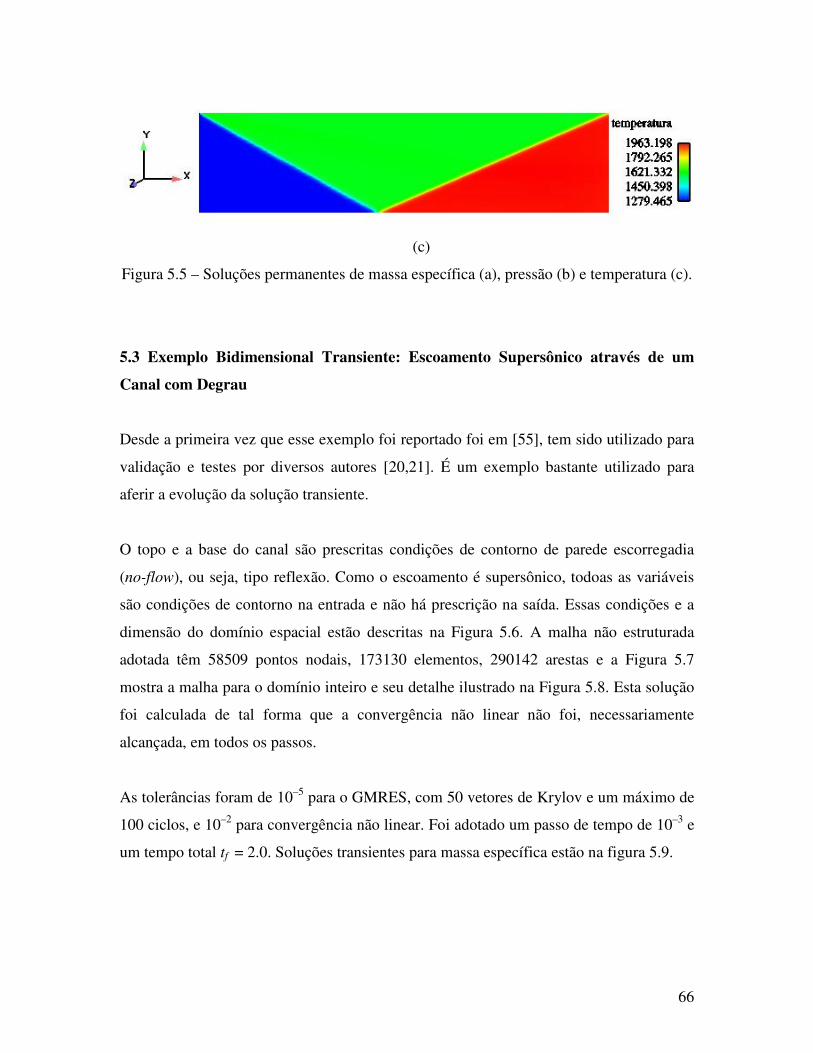
66
(c)
Figura 5.5 – Soluções permanentes de massa específica (a), pressão (b) e temperatura (c).
5.3 Exemplo Bidimensional Transiente: Escoamento Supersônico através de um
Canal com Degrau
Desde a primeira vez que esse exemplo foi reportado foi em [55], tem sido utilizado para
validação e testes por diversos autores [20,21]. É um exemplo bastante utilizado para
aferir a evolução da solução transiente.
O topo e a base do canal são prescritas condições de contorno de parede escorregadia
(no-flow), ou seja, tipo reflexão. Como o escoamento é supersônico, todoas as variáveis
são condições de contorno na entrada e não há prescrição na saída. Essas condições e a
dimensão do domínio espacial estão descritas na Figura 5.6. A malha não estruturada
adotada têm 58509 pontos nodais, 173130 elementos, 290142 arestas e a Figura 5.7
mostra a malha para o domínio inteiro e seu detalhe ilustrado na Figura 5.8. Esta solução
foi calculada de tal forma que a convergência não linear não foi, necessariamente
alcançada, em todos os passos.
As tolerâncias foram de 10–5 para o GMRES, com 50 vetores de Krylov e um máximo de
100 ciclos, e 10–2 para convergência não linear. Foi adotado um passo de tempo de 10–3 e
um tempo total tf = 2.0. Soluções transientes para massa específica estão na figura 5.9.
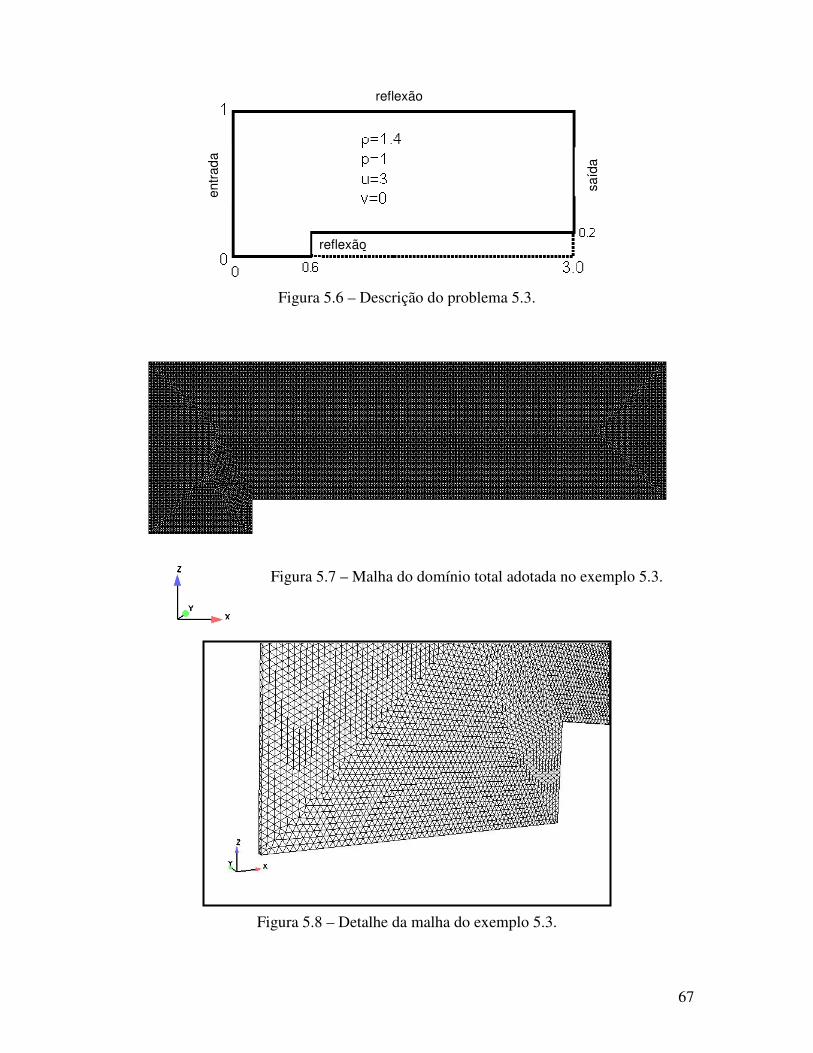
67
Figura 5.6 – Descrição do problema 5.3.
Figura 5.8 – Detalhe da malha do exemplo 5.3.
reflexão
entrad
a
saída
reflexão
Figura 5.7 – Malha do domínio total adotada no exemplo 5.3.
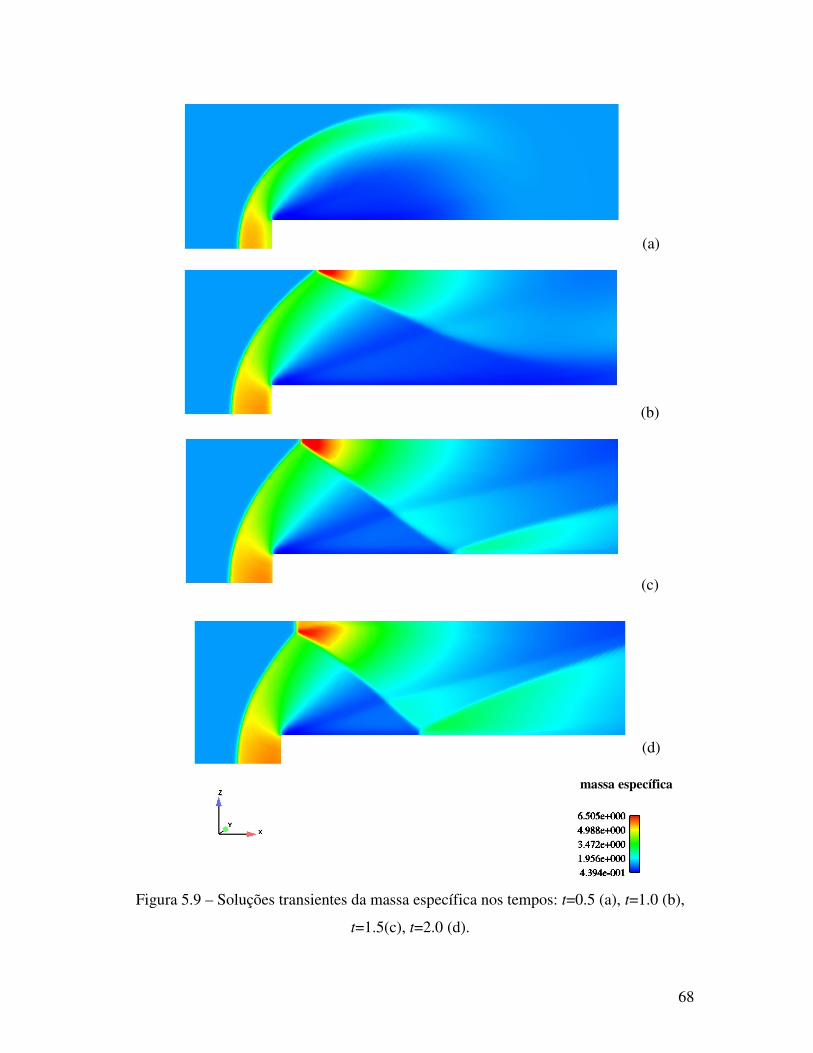
68
(a)
(b)
(c)
Figura 5.9 – Soluções transientes da massa específica nos tempos: t=0.5 (a), t=1.0 (b),
t=1.5(c), t=2.0 (d).
massa específica
(d)
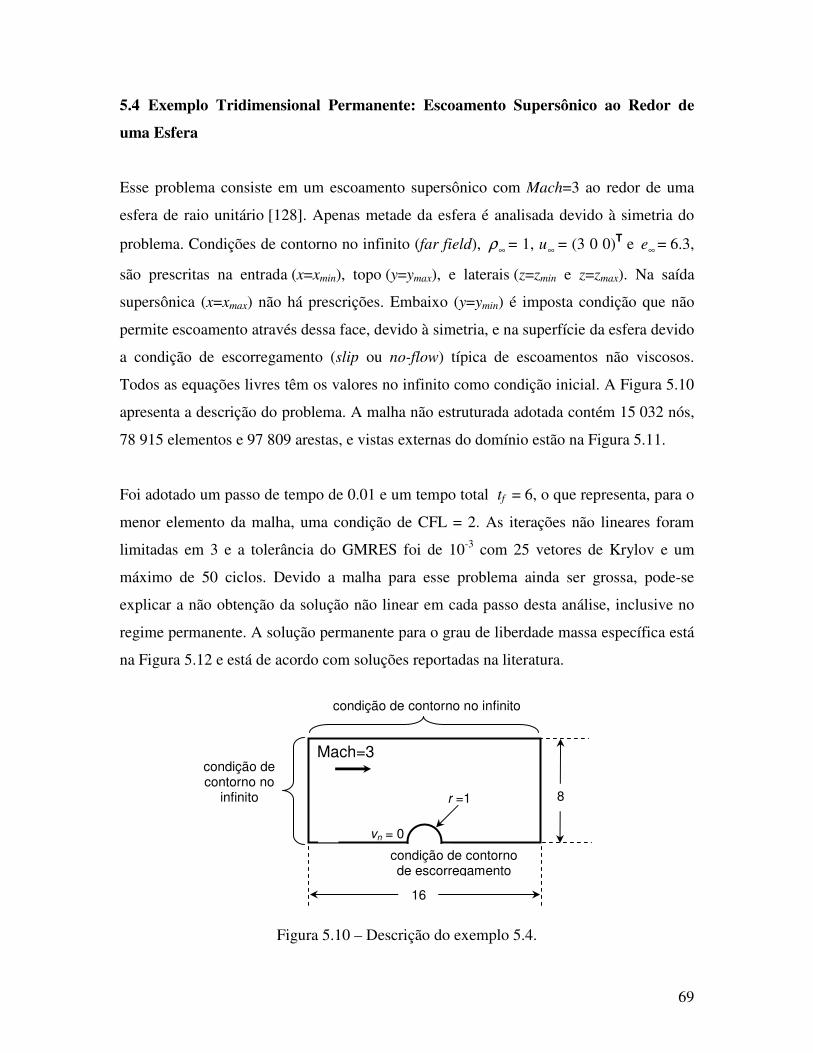
69
5.4 Exemplo Tridimensional Permanente: Escoamento Supersônico ao Redor de
uma Esfera
Esse problema consiste em um escoamento supersônico com Mach=3 ao redor de uma
esfera de raio unitário [128]. Apenas metade da esfera é analisada devido à simetria do
problema. Condições de contorno no infinito (far field), ∞
ρ = 1,∞
u = (3 0 0)T e ∞
e = 6.3,
são prescritas na entrada (x=xmin), topo (y=ymax), e laterais (z=zmin e z=zmax). Na saída
supersônica (x=xmax) não há prescrições. Embaixo (y=ymin) é imposta condição que não
permite escoamento através dessa face, devido à simetria, e na superfície da esfera devido
a condição de escorregamento (slip ou no-flow) típica de escoamentos não viscosos.
Todos as equações livres têm os valores no infinito como condição inicial. A Figura 5.10
apresenta a descrição do problema. A malha não estruturada adotada contém 15 032 nós,
78 915 elementos e 97 809 arestas, e vistas externas do domínio estão na Figura 5.11.
Foi adotado um passo de tempo de 0.01 e um tempo total tf = 6, o que representa, para o
menor elemento da malha, uma condição de CFL = 2. As iterações não lineares foram
limitadas em 3 e a tolerância do GMRES foi de 10-3 com 25 vetores de Krylov e um
máximo de 50 ciclos. Devido a malha para esse problema ainda ser grossa, pode-se
explicar a não obtenção da solução não linear em cada passo desta análise, inclusive no
regime permanente. A solução permanente para o grau de liberdade massa específica está
na Figura 5.12 e está de acordo com soluções reportadas na literatura.
Figura 5.10 – Descrição do exemplo 5.4.
condição de contorno no infinito
r =1
16
8
Mach=3
condição de
contorno no
infinito
vn = 0
condição de contorno
de escorregamento
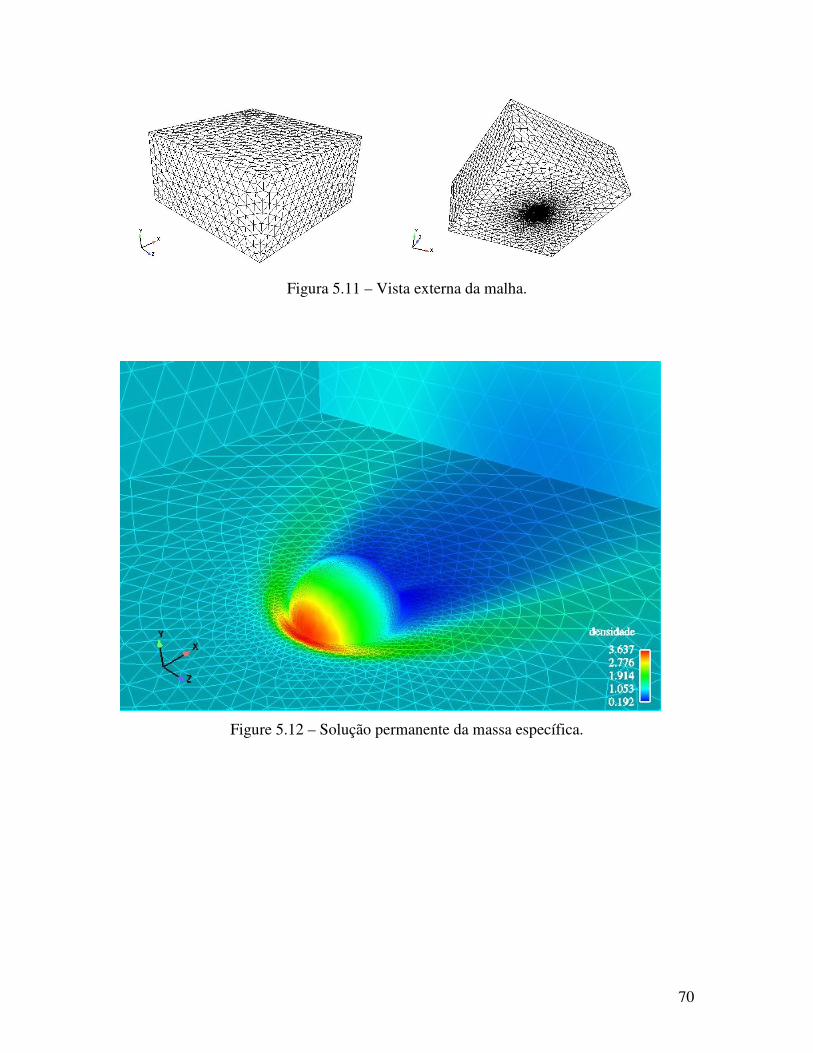
70
Figura 5.11 – Vista externa da malha.
Figure 5.12 – Solução permanente da massa específica.
71
Capítulo 6
Técnicas Computacionais para Elementos Finitos
Esse capítulo descreve as técnicas computacionais para elementos finitos que foram
estudadas e implementadas com o objetivo de se melhorar o desempenho
computacional, isto é, reduzir o tempo de processamento, sem aumentar
significantemente a demanda de memória. Primeiramente é feita uma consideração
sobre duas estruturas de dados quanto a economia de memória ao se armazenar a matriz
de coeficientes e ao custo reduzido das operações matriz-vetor inerentes aos métodos
iterativos de solução do sistema de equações lineares, as duas etapas mais onerosas
computacionalmente. É apresentada a técnica de desativação dinâmica para ser utilizada
em problemas de transporte predominantemente advectivos, como os problemas aqui
estudados. Também é descrita a integração reduzida com um ponto para o elemento
hexaedro trilinear, considerada como uma técnica computacional pois reduz o tempo de
avaliação das matrizes de elemento. E também, a descrição e comparação de três
métodos de pré-condicionamento com o objetivo de reduzir o número de iterações dos
métodos iterativos de solução de sistemas de equações algébricas lineares e portanto, o
tempo total de análise. Ao longo do capítulo serão apresentados os ganhos alcançados
com as estratégias computacionais em exemplos apresentados nos capítulos 3 e 5.
72
6.1 Estruturas de dados
Em uma implementação eficiente, deve-se considerar a estrutura das matrizes em
questão para se otimizar as operações. No caso do método dos elementos finitos sabe-se
que as matrizes são muito esparsas. O armazenamento de todos os termos da matriz é
desnecessário e impraticável. Portanto a escolha de uma estrutura de dados para
armazenar poucos ou nenhum termo nulo deve ser empregada. Foram utilizadas duas
estruturas de dados: i) uma local, pelas arestas dos elementos e; ii) outra de um
armazenamento global que comprime as linhas, denominado CSR (Compressed Sparse
Row). A estrutura de dados por arestas demanda menos memória que a abordagem
tradicional elemento por elemento e ainda permite a realização das operações matriz-
vetor num menor tempo de processamento. Já a abordadem CSR prevê o
armazenamento da matriz global, contudo apenas dos termos não-nulos localizados por
dois arranjos de mapeamento a serem descritos mais adiante. A utilização da segunda
estrutura de dados foi necessária na implementação de alguns pré-condicionadores pois
requerem operações de substituição pra trás e pra frente, o que deve ser feito ordenado
para cada linha, o que não é natural nem direto de se realizar com a estrutura de dados
local (por elementos ou arestas). Uma comparação entre as duas estruturas de dados não
foi desenvolvida, até mesmo porque, as duas estruturas são eficientes, mas sua escolha
está intimamente ligada aos métodos de solução, ao tipo de implementação e ao
problema sendo resolvido. Não se pode afirmar que uma estrutura é melhor que a outra,
como no caso de aresta-por-arestas ser mais eficiente que elemento-por-elemento, pois
em alguns casos uma estrutura de dados por arestas pode ser mais interessantes e em
outros casos a CSR pode ser mais adequada.
6.1.1 Estrutura de dados por arestas
Pode-se derivar estruturas de dados baseadas nas arestas dos elementos finitos pois as
matrizes de elemento podem ser desmembradas em contribuições por arestas. Isso não
torna o método pelas arestas, na verdade a interpolação ainda é dentro dos elementos,
apenas o armazenamento da matriz e as operações realizadas com elas que são feitas por

73
uma entidade mais interessante, no caso, as arestas. Ao se passear por todos os
elementos das malha calculando as matrizes locais, basta somar as contribuições de
elementos para cada aresta, chegando nas matrizes locais das arestas [122]. Para os
problemas aqui estudados, as matrizes resultantes são simétricas para pressão e
velocidades e não simétricas para a equação do transporte, no caso dos escoamentos em
meios porosos, e também não simétrica para os escoamentos compressíveis não
viscosos.
O produto matriz-vetor por arestas, necessário nos solucionadores iterativos do presente
trabalho, pode ser escrito como,
s
ned
s
sxAAx ∑=
=
1 (6.1)
onde ned é o número total de arestas da malha e xs é a restrição do vetor x para a aresta
local s. Tem-se a opção de armazenar apenas os termos fora da diagonal, na utilização
de armazenamento local. No caso das arestas tem sido armazenado os termos fora da
diagonal apenas e a diagonal ou bloco-diagonal globalmente, com fins de otimização.
Portanto, de forma alternativa, o produto pode ser realizado em dois passos,
multiplicando a diagonal global e os termos fora da diagonal aresta-por-aresta de forma
cumulativa como segue
∑=
−+=
ned
s
sssdiagdiag
1
))(()( xAAxAAx (6.2)
Essa é uma variante do que foi originalmente proposto por GIJZEN [29] para cálculos
por elementos. A tabela 6.1 apresenta uma comparação, para o problema de
escoamentos em meios porosos, em termos de demanda de memória, operações de
ponto flutuante (flops) e endereçamentos indiretos (e.i.) utilizando apenas os termos fora
da diagonal das matrizes de elementos e arestas em malhas de tetraedros. A medida de
comparação desta tabela é nn, o número total de nós numa malha de elementos finitos.
De acordo com Löhner [30], as seguintes estimativas são válidas para malhas não
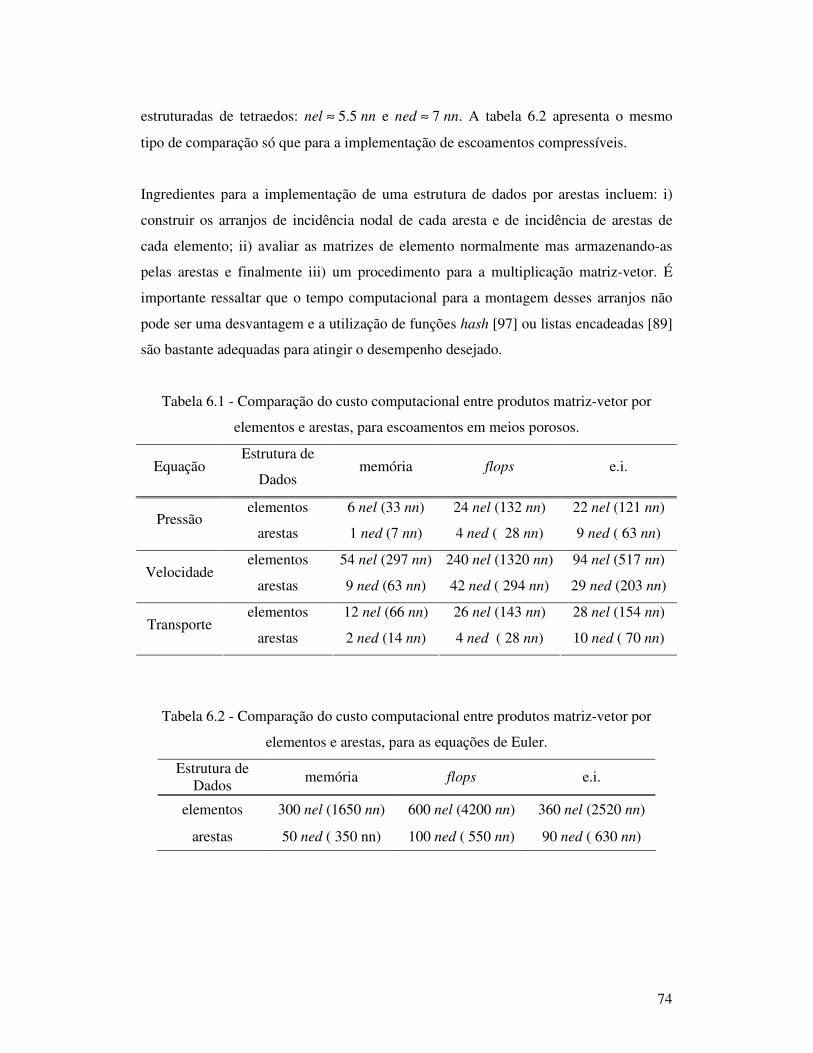
74
estruturadas de tetraedos: nel ≈ 5.5 nn e ned ≈ 7 nn. A tabela 6.2 apresenta o mesmo
tipo de comparação só que para a implementação de escoamentos compressíveis.
Ingredientes para a implementação de uma estrutura de dados por arestas incluem: i)
construir os arranjos de incidência nodal de cada aresta e de incidência de arestas de
cada elemento; ii) avaliar as matrizes de elemento normalmente mas armazenando-as
pelas arestas e finalmente iii) um procedimento para a multiplicação matriz-vetor. É
importante ressaltar que o tempo computacional para a montagem desses arranjos não
pode ser uma desvantagem e a utilização de funções hash [97] ou listas encadeadas [89]
são bastante adequadas para atingir o desempenho desejado.
Tabela 6.1 - Comparação do custo computacional entre produtos matriz-vetor por
elementos e arestas, para escoamentos em meios porosos.
Equação Estrutura de
Dados memória flops e.i.
elementos 6 nel (33 nn) 24 nel (132 nn) 22 nel (121 nn) Pressão
arestas 1 ned (7 nn) 4 ned ( 28 nn) 9 ned ( 63 nn)
elementos 54 nel (297 nn) 240 nel (1320 nn) 94 nel (517 nn) Velocidade
arestas 9 ned (63 nn) 42 ned ( 294 nn) 29 ned (203 nn)
elementos 12 nel (66 nn) 26 nel (143 nn) 28 nel (154 nn) Transporte
arestas 2 ned (14 nn) 4 ned ( 28 nn) 10 ned ( 70 nn)
Tabela 6.2 - Comparação do custo computacional entre produtos matriz-vetor por
elementos e arestas, para as equações de Euler.
Estrutura de Dados
memória flops e.i.
elementos 300 nel (1650 nn) 600 nel (4200 nn) 360 nel (2520 nn)
arestas 50 ned ( 350 nn) 100 ned ( 550 nn) 90 ned ( 630 nn)
75
6.1.2 Estrutura de Dados CSR
A estrutura de dados CSR é bastante adotada em diversas aplicações de álgebra
linear [110]. A idéia dessa estrutura de dados é simples, mas não necessariamente sua
geração e utilização. Dada uma matriz de coeficientes, deve-se armazenar apenas os
termos não nulos de cada linha e sua posição. Contudo, sua aplicação pode ser
complicada, se algoritmos para montagem dos arranjos necessários e para realizar as
operações de forma eficiente não estiverem disponíveis.
Ingredientes para a implementação de uma estrutura de dados CSR incluem: i) construir
os arranjos denominados ia e ja com o número de termos de cada linha (ia), e sua
posição coluna (ja). É Interessante montar esse estrutura ordenada para agilizar as
operações com esses arranjos. Também é comum montar um outro arranjo com a
posição dos termos da diagonal. Para se realizar a montagem da matriz global
(assembling) é necessário um arranjo de mapeamento de elemento, que é local, para as
equações que são globais; ii) avaliar as matrizes de elemento normalmente mas
inserindo as posições globais com auxílio do arranjo de mapeamento elemento-equação
e; iii) um algoritmo para a multiplicação matriz-vetor. É importante ressaltar que, assim
como era para estrutura de dados por arestas, o tempo computacional para a montagem
desses arranjos não pode ser ineficiente e a utilização de funções hash ou listas
encadeadas são necessárias.
A utilização dessa estrutura de dados foi necessária devido a implementação de métodos
de pré-condicionamento mais eficientes, que necessitam operações globais, como a ser
descrito ainda neste capítulo.
6.2 Técnica de Integração Reduzida com controle dos modos hourglass
O objetivo ao se integrar as matrizes do H8 com um número reduzido de pontos é de se
obter um ganho considerável no desempenho computacional. Contudo se os modos
denominados hourglass não forem bem representados gera-se oscilações indesejáveis na
76
solução. Esses modos apresentam 4 configurações em cada direção cartesiana e a Figura
6.1 extraída de [12] ilustra esses modos para direção x em um H8 regular. Como a
estabilização hourglass surgiu em aplicações da mecânica dos sólidos e engenharia
estrutural, tais modos são conhecidos por dois de flexão, um de torção e um, dito não
físico.
Figura 6.1 Modos hourglass da direção x para o H8 regular.
A integração reduzida empregada aqui é com apenas um ponto de integração, sendo este
o centróide do elemento )0,0,0( === ζηξ . O desenvolvimento da formulação para
integração com um ponto com controle hourglass segue o trabalho [95]. O operador
gradiente discreto B0 avaliado no centróide do elemento tem que ser acrescido de certos
termos para que seja capaz de capturar o campo constante t e os campos H1, H2, H3 e
H4 que representam os modos hourglass da figura 2.1. Tais campos são dados por
[ ]Tt 11111111= (6.3)
[ ]TH 111111111 −−−−= (6.4)
[ ]TH 111111112 −−−−= (6.5)
[ ]TH 111111113 −−−−= (6.6)
[ ]TH 111111114 −−−−= (6.7)
Portanto, a interpolação da função escalar incógnita deve ter a forma

77
eTeeT3
eeT2
eeT1
eT uγuzbuybuxbuC αα huh
++++= )( (6.8)
onde o sub-índice α varia de 1 a 4 (número de modos hourglass), bi são sub-matrizes
linha do operador B0 e xe, ye, ze os arranjos locais com as coordenadas nodais do
elemento. Os operadores C e αγ são dados por
[ ]3eT
2eT
1eT bztbytbxttC )()()(
8
1−−−= (6.9)
[ ]3eT
2eT
1eT bzHbyHbxHHγ )()()(
1ααααα −−−=
eV
(6.10)
e as funções αh por
ξη81
eV
h = (6.11)
ηζ82
eV
h = (6.12)
ξζ83
eV
h = (6.13)
ξηζ84
eV
h = (6.14)
Portanto, incorporando às funções de interpolação usuais, os termos adicionais acima, o
controle dos modos hourglass se resume na adição de matrizes de estabilização
(perturbação hourglass), às matrizes avaliadas com o operador B0, tal que qualquer
matriz de elemento me é avaliada pela soma
h0e mmm += (6.15)
Observação 6.1. Para elementos de lados paralelos a integração é exata para difusão
(simétrico) e tem uma aproximação muito boa para advecção (não-simétrico). A
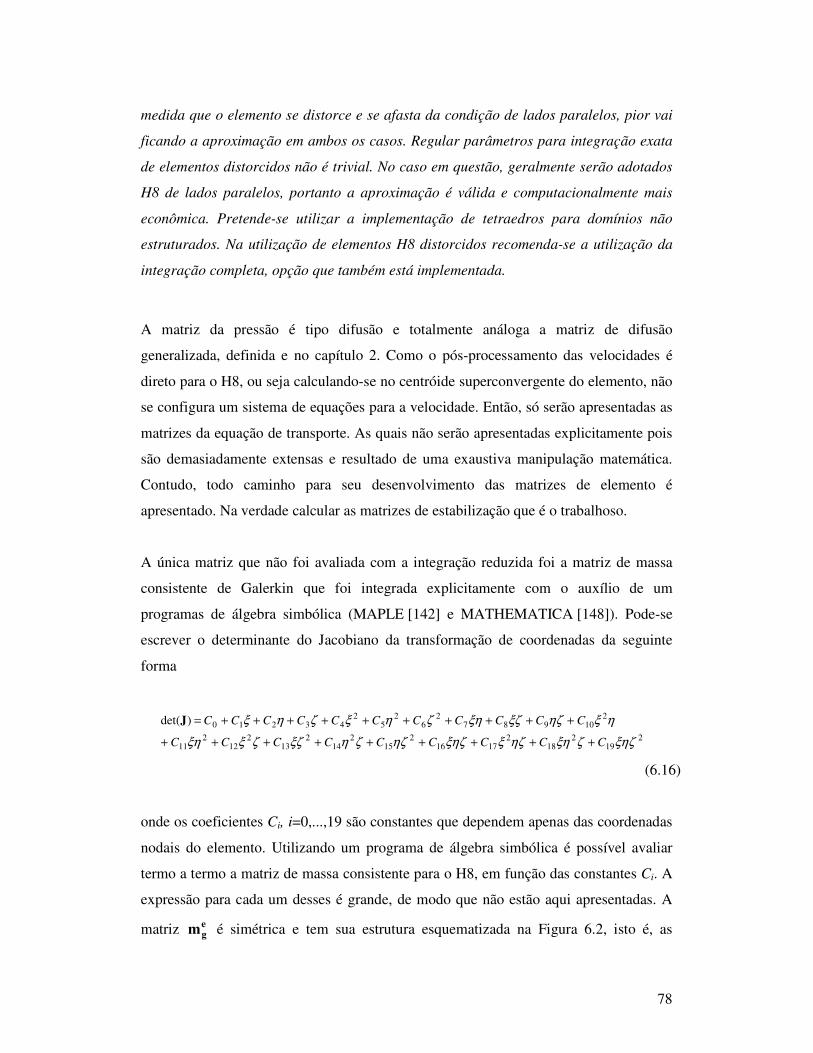
78
medida que o elemento se distorce e se afasta da condição de lados paralelos, pior vai
ficando a aproximação em ambos os casos. Regular parâmetros para integração exata
de elementos distorcidos não é trivial. No caso em questão, geralmente serão adotados
H8 de lados paralelos, portanto a aproximação é válida e computacionalmente mais
econômica. Pretende-se utilizar a implementação de tetraedros para domínios não
estruturados. Na utilização de elementos H8 distorcidos recomenda-se a utilização da
integração completa, opção que também está implementada.
A matriz da pressão é tipo difusão e totalmente análoga a matriz de difusão
generalizada, definida e no capítulo 2. Como o pós-processamento das velocidades é
direto para o H8, ou seja calculando-se no centróide superconvergente do elemento, não
se configura um sistema de equações para a velocidade. Então, só serão apresentadas as
matrizes da equação de transporte. As quais não serão apresentadas explicitamente pois
são demasiadamente extensas e resultado de uma exaustiva manipulação matemática.
Contudo, todo caminho para seu desenvolvimento das matrizes de elemento é
apresentado. Na verdade calcular as matrizes de estabilização que é o trabalhoso.
A única matriz que não foi avaliada com a integração reduzida foi a matriz de massa
consistente de Galerkin que foi integrada explicitamente com o auxílio de um
programas de álgebra simbólica (MAPLE [142] e MATHEMATICA [148]). Pode-se
escrever o determinante do Jacobiano da transformação de coordenadas da seguinte
forma
219
218
21716
215
214
213
212
211
210987
26
25
243210)det(
ξηζζξηηζξξηζηζζηξζζξξη
ηξηζξζξηζηξζηξ
CCCCCCCCC
CCCCCCCCCCC
+++++++++
++++++++++=J
(6.16)
onde os coeficientes Ci, i=0,...,19 são constantes que dependem apenas das coordenadas
nodais do elemento. Utilizando um programa de álgebra simbólica é possível avaliar
termo a termo a matriz de massa consistente para o H8, em função das constantes Ci. A
expressão para cada um desses é grande, de modo que não estão aqui apresentadas. A
matriz egm é simétrica e tem sua estrutura esquematizada na Figura 6.2, isto é, as

79
posições onde a numeração é repetida possui termos iguais. Isso é importante pois
fazendo proveito dessa estrutura na implementação computacional, reduz-se ainda mais
as operações de ponto flutuante necessárias. Além disso, para elementos de lados
paralelos muitas dessas constantes são nulas, surgindo assim um foco particular de
otimização, que apesar de não ter sido implementado, deixa-se como recomendação
caso somente elementos com essa propriedade forem ser empregados. A matriz de
massa lumped apresenta resultados muito difusivos [48] e não foi implementada.
×
××
××
×××
××
×××
×××
××××
=
.
7
7
634
653
3521
4321
sim
egm
Figura 6.2 – Estrutura da matriz de massa consistente de Galerkin para o H8.
Sabe-se que a matriz de massa de Petrov-Galerkin, que é não-simétrica, é igual a
transposta da de advecção de Galerkin, a menos de uma constante, conforme frisado na
Observação 2.2. Como a estabilização hourglass foi desenvolvida para advecção, optou-
se por deixar a definição para a matriz original eagk .
A matriz de difusão generalizada (simétrica) é dada por
hdg
0dg
edg kkk += (6.17)
0GT0
0dg BDBk e
V= (6.18)
Tiiij H βα
αβγγDk G
hdg )(= (6.19)

80
onde
i, j = x, y, z ou 1, 2, 3
α,β = 1,4
e a matriz de advecção de Galerkin (não simétrica) por
hag
0ag
eag kkk += (6.20)
)(8 0
TT0ag Bvtk u
eV
= (6.21)
TT0
hag γvBk α
α
uijX= (6.22)
eag
epg km ee
φτ= (6.23)
As integrais da estabilização hourglass para para difusão e advecção são
respectivamente
eii
hii dhhH
e
Ω= ∫Ω
,, βα
αβε (6.24)
eij
hij dhxX
e
Ω= ∫Ω
,α
αε (6.25)
onde xj são as coordenadas no sistema global e a vírgula denota diferenciação em uma
das direções. Note que nas expressões acima a notação matricial foi mesclada com uma
indicial para simplificar sua apresentação.
O parâmetro de estabilização hourglass hε assume valores no intervalo entre [0,1]. Ele
vale 1 para elementos de lados paralelos e assume valores mais próximos de 0 a medida
que o elemento se distorce. A escolha desse parâmetro para elementos de lados não
paralelos não é trivial e é tema de pesquisa, principalmente em problemas estruturais
que consideram grandes deformações [13].
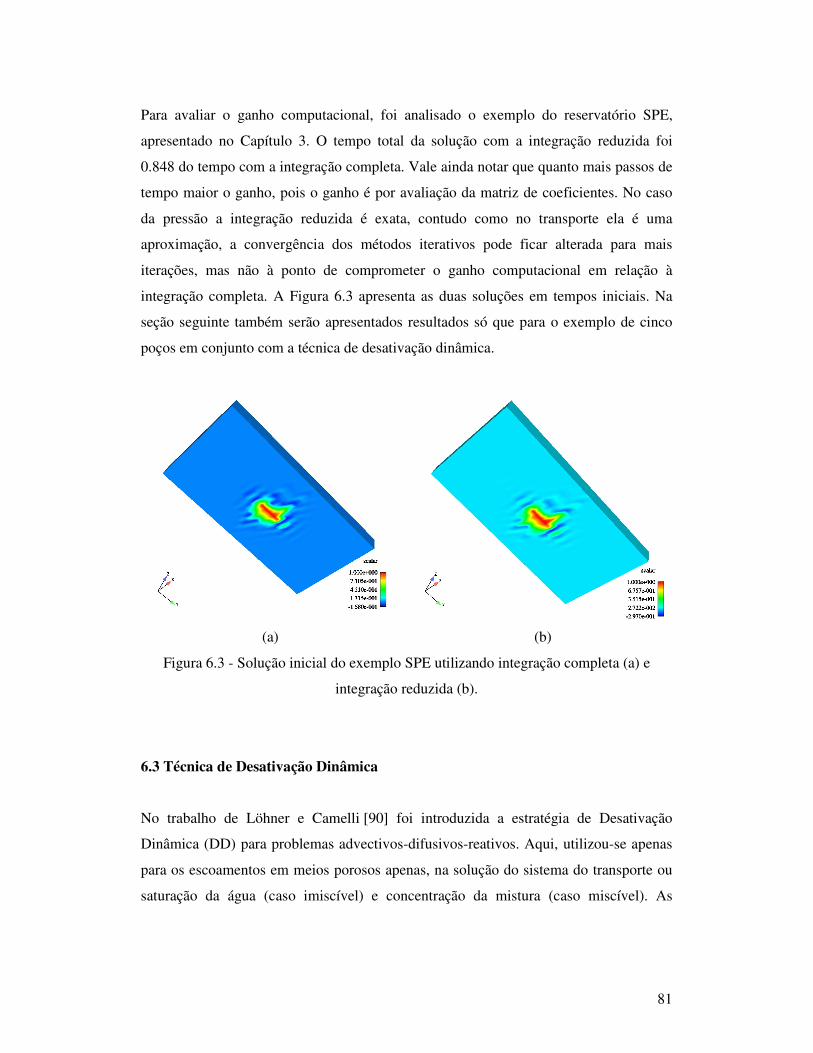
81
Para avaliar o ganho computacional, foi analisado o exemplo do reservatório SPE,
apresentado no Capítulo 3. O tempo total da solução com a integração reduzida foi
0.848 do tempo com a integração completa. Vale ainda notar que quanto mais passos de
tempo maior o ganho, pois o ganho é por avaliação da matriz de coeficientes. No caso
da pressão a integração reduzida é exata, contudo como no transporte ela é uma
aproximação, a convergência dos métodos iterativos pode ficar alterada para mais
iterações, mas não à ponto de comprometer o ganho computacional em relação à
integração completa. A Figura 6.3 apresenta as duas soluções em tempos iniciais. Na
seção seguinte também serão apresentados resultados só que para o exemplo de cinco
poços em conjunto com a técnica de desativação dinâmica.
(a)
(b)
Figura 6.3 - Solução inicial do exemplo SPE utilizando integração completa (a) e
integração reduzida (b).
6.3 Técnica de Desativação Dinâmica
No trabalho de Löhner e Camelli [90] foi introduzida a estratégia de Desativação
Dinâmica (DD) para problemas advectivos-difusivos-reativos. Aqui, utilizou-se apenas
para os escoamentos em meios porosos apenas, na solução do sistema do transporte ou
saturação da água (caso imiscível) e concentração da mistura (caso miscível). As
82
variáveis pressão e velocidade, continuam sendo avaliadas para todo o domínio, pois
são equações parabólicas.
A DD é bastante semelhante ao algoritmo denominado Adaptativo Implícito/Explícito
(AIE), introduzido em [33,38] e já utilizado em diversas aplicações de forma bastante
satisfatória [117,122]. São semelhantes pois em ambos os casos a malha é particionada
em dois grupos de elementos/arestas/equações, ativos ou desativos no caso da DD e
implícitos ou explícitos no AIE. A diferença principal é que, na DD, ao invés de tratar
parte do domínio implicitamente e sua contra-parte explicitamente, simplesmente não se
resolve os elementos/equações não selecionados. Considera-se as soluções nodais
constantes dentro de um intervalo de tempo, ou até mesmo dentro de alguns intervalos,
pois existe a opção de se atualizar as partições de tantos em tantos passos, sendo este
controle fornecido como dado de entrada. Note também que para as soluções ativas
pode ser empregado um método implícito ou explícito. O critério de CFL, que era
utilizado para seleção das partições implícitas do algoritmo AIE em [122] foi
abandonado para a ativação/desativação dos elementos/arestas/equações no
procedimento de DD, uma vez que essa escolha não tem mais relação com a
estabilidade da integração temporal. É importante observar, que o critério de CFL pode
ser considerado na utilização de uma estratégia de controle de passo de tempo,
promovendo assim, esquemas de integração temporais desejavelmente mais estáveis e
eficientes.
6.3.1 Critério para seleção da partição ativa
O critério para seleção das partições pode ser feito, calculando-se em um laço de
programação através dos elementos, as normas dos gradientes de
saturação/concentração u, de cada elemento,
se me
uu ∇≥∇ η então ATIVOe ∈
(6.26)

83
onde o parâmetro de controle [ ]1,0∈η regula a faixa de elementos a serem selecionados
como ativos. Para 0=η todos os elementos são selecionados como ativos e para 1=η
a partição mais estreita possível é selecionada. Deve-se avaliar também um gradiente
relativo médio dos elementos, mu∇ pela seguinte expressão
nel
u
u
nel
e
e
m
∑=
∇
=∇1 (6.27)
sendo nel o número de elementos da malha e ainda, deve ser eleito como ativo, se
existirem fontes/sumidouros ef não nulas associadas ao nó de algum elemento e, pelo
critério
se 0≠e
f então ATIVOe ∈
(6.28)
6.3.2 Detalhes da implementação
Ao se escolher os elementos ativos pelos critérios apresentados faz-se uma marcação,
nos nós desses elementos bem como nas suas equações de transporte, como ativas. A
seguir, os elementos adjacentes à essas equações também são marcados. Portanto tem-se
um grupo de elementos ou arestas marcados diretamente pelos critérios e um segundo
grupo de elementos adjacentes às equações, marcados indiretamente. Na equação de
advecção-difusão, tudo se passa como se a malha fosse apenas os elementos ativos, de
modo que a montagem da matriz de massa efetiva é realizada através de um loop apenas
através dos elementos ativos, não havendo a necessidade de alterar a maneira usual de
se calcular as matrizes de elemento.
Na implementação do algoritmo AIE em [117] houve uma melhora com a troca do
cálculo do erro pelo gradiente relativo, pois não se está interessado em obter uma
estimativa para o erro da solução no elemento, como se é feito ao tratar malhas
adaptativas [150], mas sim em conhecer as regiões de variação na solução, ou seja, de
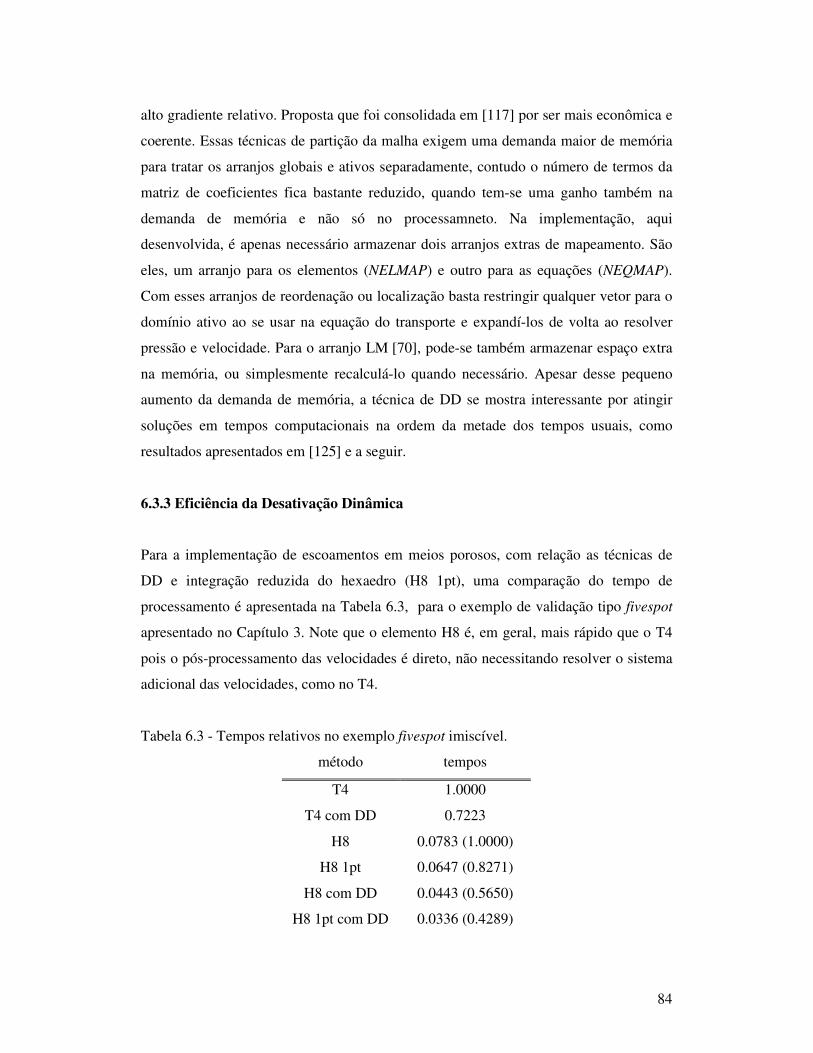
84
alto gradiente relativo. Proposta que foi consolidada em [117] por ser mais econômica e
coerente. Essas técnicas de partição da malha exigem uma demanda maior de memória
para tratar os arranjos globais e ativos separadamente, contudo o número de termos da
matriz de coeficientes fica bastante reduzido, quando tem-se uma ganho também na
demanda de memória e não só no processamneto. Na implementação, aqui
desenvolvida, é apenas necessário armazenar dois arranjos extras de mapeamento. São
eles, um arranjo para os elementos (NELMAP) e outro para as equações (NEQMAP).
Com esses arranjos de reordenação ou localização basta restringir qualquer vetor para o
domínio ativo ao se usar na equação do transporte e expandí-los de volta ao resolver
pressão e velocidade. Para o arranjo LM [70], pode-se também armazenar espaço extra
na memória, ou simplesmente recalculá-lo quando necessário. Apesar desse pequeno
aumento da demanda de memória, a técnica de DD se mostra interessante por atingir
soluções em tempos computacionais na ordem da metade dos tempos usuais, como
resultados apresentados em [125] e a seguir.
6.3.3 Eficiência da Desativação Dinâmica
Para a implementação de escoamentos em meios porosos, com relação as técnicas de
DD e integração reduzida do hexaedro (H8 1pt), uma comparação do tempo de
processamento é apresentada na Tabela 6.3, para o exemplo de validação tipo fivespot
apresentado no Capítulo 3. Note que o elemento H8 é, em geral, mais rápido que o T4
pois o pós-processamento das velocidades é direto, não necessitando resolver o sistema
adicional das velocidades, como no T4.
Tabela 6.3 - Tempos relativos no exemplo fivespot imiscível.
método tempos
T4 1.0000
T4 com DD 0.7223
H8 0.0783 (1.0000)
H8 1pt 0.0647 (0.8271)
H8 com DD 0.0443 (0.5650)
H8 1pt com DD 0.0336 (0.4289)
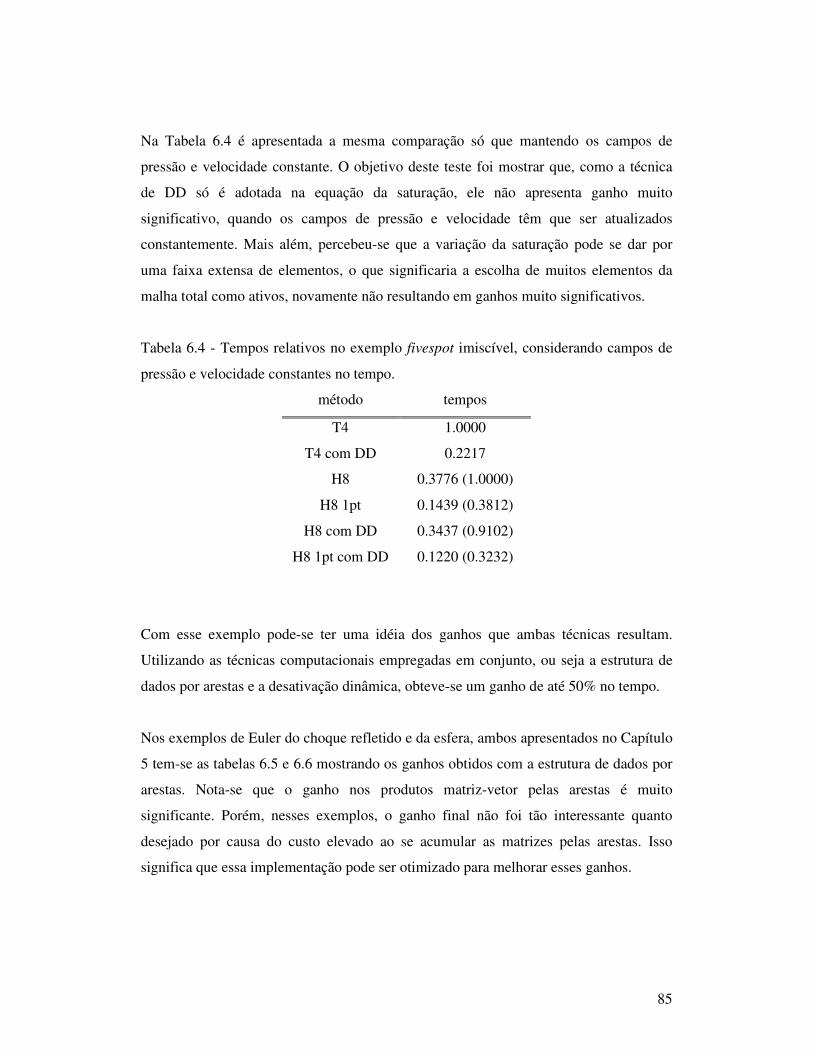
85
Na Tabela 6.4 é apresentada a mesma comparação só que mantendo os campos de
pressão e velocidade constante. O objetivo deste teste foi mostrar que, como a técnica
de DD só é adotada na equação da saturação, ele não apresenta ganho muito
significativo, quando os campos de pressão e velocidade têm que ser atualizados
constantemente. Mais além, percebeu-se que a variação da saturação pode se dar por
uma faixa extensa de elementos, o que significaria a escolha de muitos elementos da
malha total como ativos, novamente não resultando em ganhos muito significativos.
Tabela 6.4 - Tempos relativos no exemplo fivespot imiscível, considerando campos de
pressão e velocidade constantes no tempo.
método tempos
T4 1.0000
T4 com DD 0.2217
H8 0.3776 (1.0000)
H8 1pt 0.1439 (0.3812)
H8 com DD 0.3437 (0.9102)
H8 1pt com DD 0.1220 (0.3232)
Com esse exemplo pode-se ter uma idéia dos ganhos que ambas técnicas resultam.
Utilizando as técnicas computacionais empregadas em conjunto, ou seja a estrutura de
dados por arestas e a desativação dinâmica, obteve-se um ganho de até 50% no tempo.
Nos exemplos de Euler do choque refletido e da esfera, ambos apresentados no Capítulo
5 tem-se as tabelas 6.5 e 6.6 mostrando os ganhos obtidos com a estrutura de dados por
arestas. Nota-se que o ganho nos produtos matriz-vetor pelas arestas é muito
significante. Porém, nesses exemplos, o ganho final não foi tão interessante quanto
desejado por causa do custo elevado ao se acumular as matrizes pelas arestas. Isso
significa que essa implementação pode ser otimizado para melhorar esses ganhos.
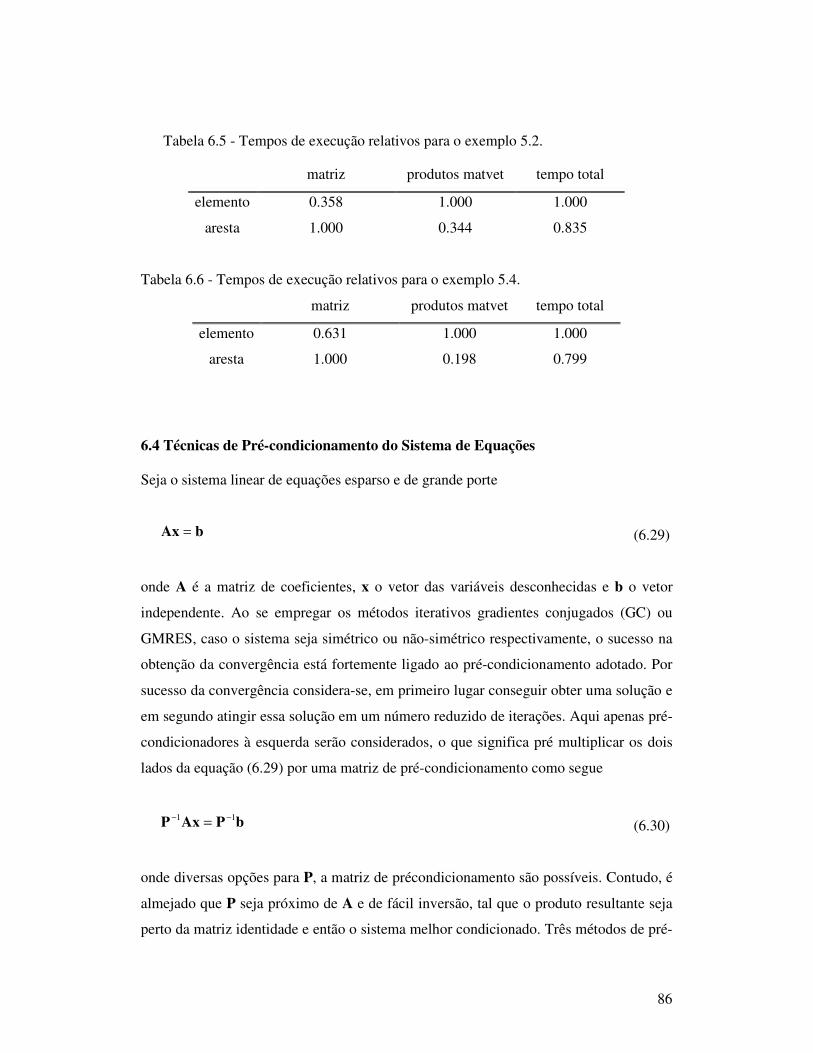
86
Tabela 6.5 - Tempos de execução relativos para o exemplo 5.2.
matriz produtos matvet tempo total
elemento 0.358 1.000 1.000
aresta 1.000 0.344 0.835
Tabela 6.6 - Tempos de execução relativos para o exemplo 5.4.
matriz produtos matvet tempo total
elemento 0.631 1.000 1.000
aresta 1.000 0.198 0.799
6.4 Técnicas de Pré-condicionamento do Sistema de Equações Seja o sistema linear de equações esparso e de grande porte
bAx = (6.29)
onde A é a matriz de coeficientes, x o vetor das variáveis desconhecidas e b o vetor
independente. Ao se empregar os métodos iterativos gradientes conjugados (GC) ou
GMRES, caso o sistema seja simétrico ou não-simétrico respectivamente, o sucesso na
obtenção da convergência está fortemente ligado ao pré-condicionamento adotado. Por
sucesso da convergência considera-se, em primeiro lugar conseguir obter uma solução e
em segundo atingir essa solução em um número reduzido de iterações. Aqui apenas pré-
condicionadores à esquerda serão considerados, o que significa pré multiplicar os dois
lados da equação (6.29) por uma matriz de pré-condicionamento como segue
bPAxP 11 −−= (6.30)
onde diversas opções para P, a matriz de précondicionamento são possíveis. Contudo, é
almejado que P seja próximo de A e de fácil inversão, tal que o produto resultante seja
perto da matriz identidade e então o sistema melhor condicionado. Três métodos de pré-
87
condicionamneto foram pesquisadas e implementadas para fins de comparação, o
Diagonal, o LU-SGS (Lower-Upper Symmetric Gauss-Seidl) inicialmente proposto
em [74] e a fatoração incompleta LU sem preenchimento (ILU(0)) bem ilustrada em
[110], a serem descritas a seguir.
6.4.1 Diagonal
Pode-se adotar a matriz de pré-condicionamento como sendo
)(ADP diag== (6.31)
onde D é uma matriz diagonal, cuja inversão é trivial. Esse foi o pré-condiciomanento
adotado desde o início das implementações. Pode ser facilmente utilizado tanto com a
estrutura de dados por arestas como CSR e tem as seguintes características: i) não exige
memória extra e; ii) o pré-condicionamento consiste em operações vetor-vetor que são
de baixo custo computacional. No caso de um problemas com mais de um grau de
liberdade, pode ser usado o pré-condicionamento diagonal ou bloco-diagonal-nodal que
promove um ganho em termos de redução do número de iterações mas requer que cada
submatriz blocada seja invertida. No caso das velocidades tem-se três graus de liberdade
e das equações de Euler onde se trabalha com cinco graus de liberdade, é necessária a
inversão de uma matriz 3x3 ou 5x5 para cada nó livre. A partir de um programa de
álgebra simbólica foi possível obter as expressões para a inversão de uma matriz 5x5
qualquer, de tal forma que a implementação para essas operações foi realizada de forma
explícita.
6.4.2 LU-SGS
Pode-se mostrar que
xULDbAxUDDLD )()()( 11 −−+=++ (6.32)
88
é equivalente ao sistema de equações (6.29), onde L e U são as decomposições, e não
fatorações, abaixo e acima da diagonal de A. Ao se ignorar o termo xULD )( 1− , tem-se a
uma matriz de pré-condicionamento próxima da matriz A, dada por
)()( 1 UDDLDP ++=−
(6.33)
Note que aqui não é necessária uma fatoração da matriz A, mas apenas sua
decomposição, o que seria sua separação direta nas partes triangulares superior e
inferior.
O pré-condicionamento LU-SGS tem as seguintes características: i) baixa demanda de
memória, isto é, apenas um arranjo auxiliar na ordem do número de equações e; ii) um
maior, mas não muito elevado, número de operações de ponto flutuante, que não se
configura uma desvantagem, uma vez que o ganho substancial ao se reduzir o número
de operações e portanto o número de operações matriz-vetor é compensatório.
6.4.3 Fatoração Incompleta LU sem preenchimento (ILU(0))
Fatorações incompletas são obtidas através do processo de eliminação de Gauss
ignorando alguns termos em posições não diagonais [110]. A fatoração ILU(0) de uma
matriz esparsa é uma versão da fatoração LU sem preenchimento, isso significa que a
matriz de pré-condicionamento P tem o mesmo padrão de esparsidade de A. Esse é um
ponto interessante pois utiliza a mesma estrutura CSR já existente, porém, necessita de
muita memória extra, pois a mesma quantidade de termos da matriz de coeficientes tem
que ser armazenada para a matriz P, sendo esse o maior espaço de memória exigido
num programa de elementos finitos.
O pré-condionamento ILU(0) tem as seguintes características: i) uma demanda de
memória extra considerávelmente maior que o caso Diagonal ou LU-SGS, pois é
necessária armazenar uma matriz de pré-condionamento na mesma ordem da matriz de
coeficientes; ii) e um pouco menos de operações de ponto flutuante que o LU-SGS.
Contudo, assim como para pré-condicionamento Bloco-Diagonal-Nodal, é necessária
inversão de todos os blocos a priori das iterações, a fatoração ILU(0) da matriz de
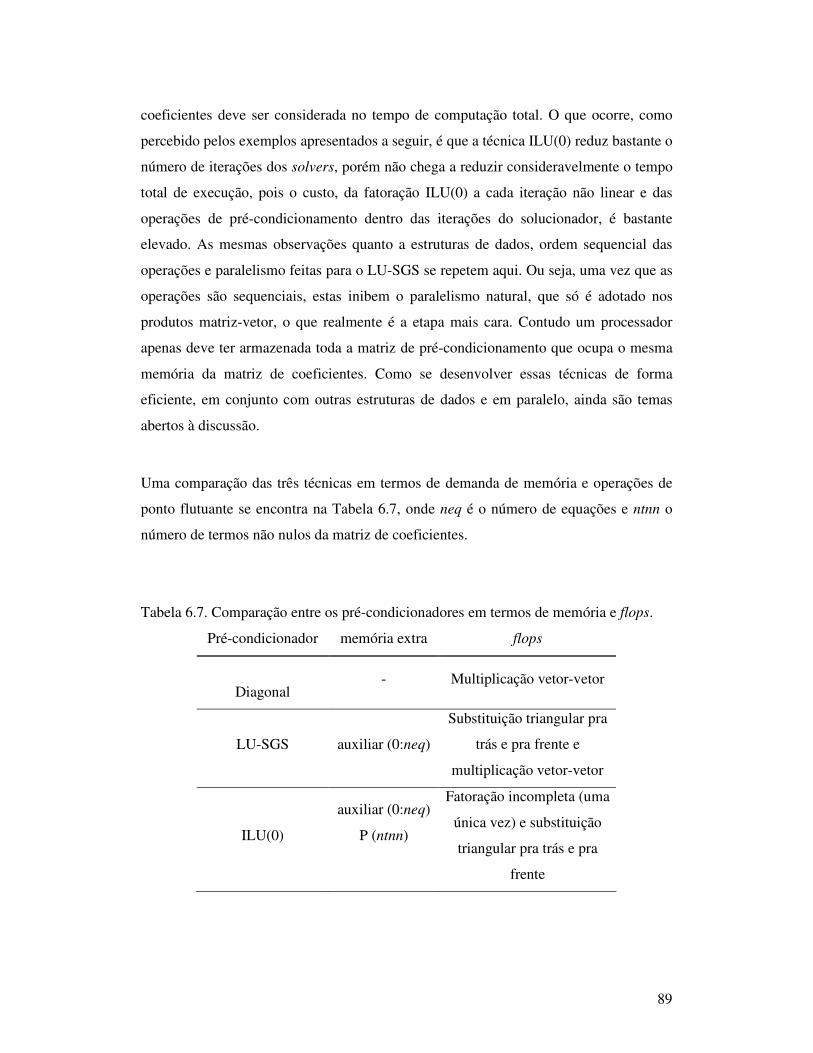
89
coeficientes deve ser considerada no tempo de computação total. O que ocorre, como
percebido pelos exemplos apresentados a seguir, é que a técnica ILU(0) reduz bastante o
número de iterações dos solvers, porém não chega a reduzir consideravelmente o tempo
total de execução, pois o custo, da fatoração ILU(0) a cada iteração não linear e das
operações de pré-condicionamento dentro das iterações do solucionador, é bastante
elevado. As mesmas observações quanto a estruturas de dados, ordem sequencial das
operações e paralelismo feitas para o LU-SGS se repetem aqui. Ou seja, uma vez que as
operações são sequenciais, estas inibem o paralelismo natural, que só é adotado nos
produtos matriz-vetor, o que realmente é a etapa mais cara. Contudo um processador
apenas deve ter armazenada toda a matriz de pré-condicionamento que ocupa o mesma
memória da matriz de coeficientes. Como se desenvolver essas técnicas de forma
eficiente, em conjunto com outras estruturas de dados e em paralelo, ainda são temas
abertos à discussão.
Uma comparação das três técnicas em termos de demanda de memória e operações de
ponto flutuante se encontra na Tabela 6.7, onde neq é o número de equações e ntnn o
número de termos não nulos da matriz de coeficientes.
Tabela 6.7. Comparação entre os pré-condicionadores em termos de memória e flops.
Pré-condicionador memória extra flops
Diagonal - Multiplicação vetor-vetor
LU-SGS auxiliar (0:neq)
Substituição triangular pra
trás e pra frente e
multiplicação vetor-vetor
ILU(0)
auxiliar (0:neq)
P (ntnn)
Fatoração incompleta (uma
única vez) e substituição
triangular pra trás e pra
frente

90
Versões em bloco, desses pré-condicionadores, são adotados para mais de um grau de
liberdade. No caso diagonal, basta utilizar o bloco-diagonal-nodal ao invés da diagonal,
mas a inversão prévia e armazenamento dos blocos é necessária. No caso do LU-SGS a
mesma decomposição (6.32) é válida usando o bloco-diagonal ao invés da diagonal e
com isso um pré-condicionador mais adequado para mais graus de liberdade. O
assembling em bloco pode ser feito como se fosse um grau de liberdade e armazenando
todos os blocos diagonais não nulos. Dessa forma alguns termos nulos vão ser
armazenados, mas a demanda de memória muito reduzida em relação a armazenar todas
as posições da matriz de coeficientes. Como já comentado, uma vez que uma matriz tem
uma estrutura, no caso de mais de um grau de liberdade, ela é uma matriz em bloco, a
consideração dessa propriedade vai proporcionar um algoritmo mais eficiente seja no
processamento ou na demanda de memória.
6.4.4 Estudo comparativo entre os pré-condicionadores
Nesta seção será analisado o comportamento dos três pré-condiconadores
implementados. Inicialmente para o problema modelo da equação advecção-difusão, em
duas dimensões, permanente e linear, que é descrita na sua forma
advectiva [Hughes_conservative] por
0)()( =∇⋅∇−∇⋅= uuuL Da (6.34)
onde a é o campo advectivo, D o tensor de difusão e u o escalar sendo transportado. A
forma variacional discreta dada por
0)()(
1
=Ω∇⋅+Ω ∑∫∫=
ΩΩ
nel
e
e
hhehh
e
duLwduLwaa
τ
(6.35)
onde wh é a função peso discreta e eτ o parâmetro SUPG à nivel de elemento, avaliado
segundo [35] por
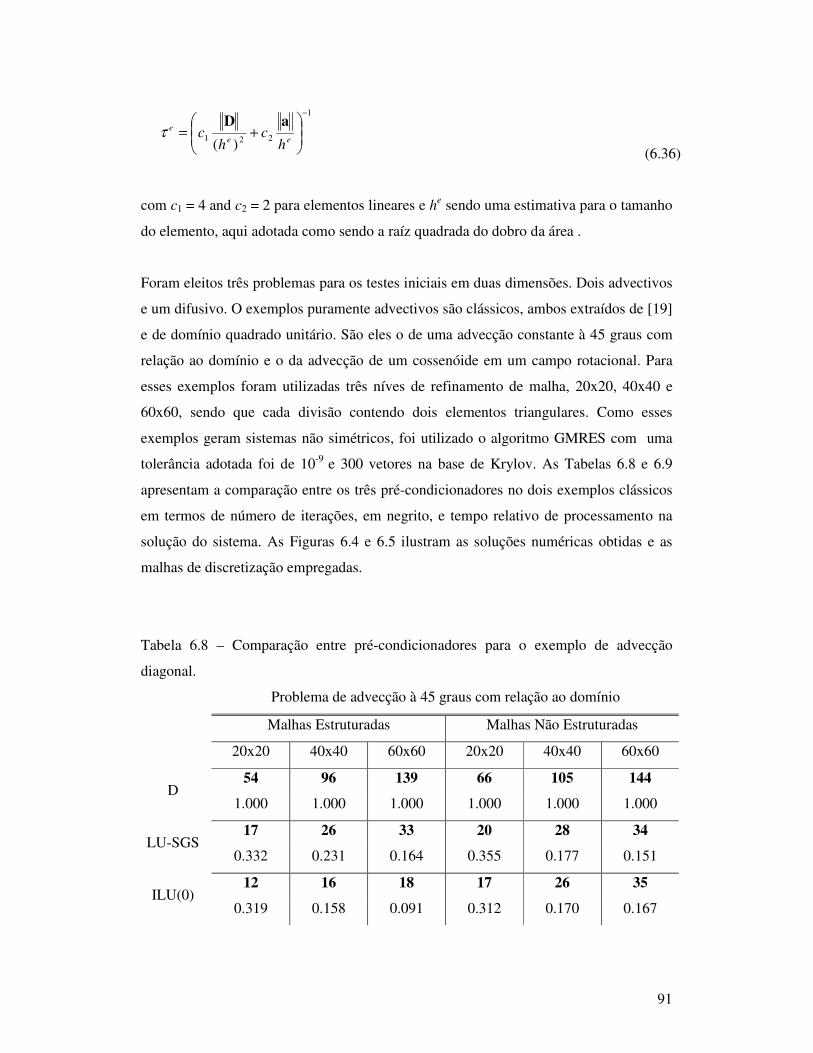
91
1
221 )(
−
+=
ee
e
hc
hc
aDτ
(6.36)
com c1 = 4 and c2 = 2 para elementos lineares e he sendo uma estimativa para o tamanho
do elemento, aqui adotada como sendo a raíz quadrada do dobro da área .
Foram eleitos três problemas para os testes iniciais em duas dimensões. Dois advectivos
e um difusivo. O exemplos puramente advectivos são clássicos, ambos extraídos de [19]
e de domínio quadrado unitário. São eles o de uma advecção constante à 45 graus com
relação ao domínio e o da advecção de um cossenóide em um campo rotacional. Para
esses exemplos foram utilizadas três níves de refinamento de malha, 20x20, 40x40 e
60x60, sendo que cada divisão contendo dois elementos triangulares. Como esses
exemplos geram sistemas não simétricos, foi utilizado o algoritmo GMRES com uma
tolerância adotada foi de 10-9 e 300 vetores na base de Krylov. As Tabelas 6.8 e 6.9
apresentam a comparação entre os três pré-condicionadores no dois exemplos clássicos
em termos de número de iterações, em negrito, e tempo relativo de processamento na
solução do sistema. As Figuras 6.4 e 6.5 ilustram as soluções numéricas obtidas e as
malhas de discretização empregadas.
Tabela 6.8 – Comparação entre pré-condicionadores para o exemplo de advecção
diagonal.
Problema de advecção à 45 graus com relação ao domínio
Malhas Estruturadas Malhas Não Estruturadas
20x20 40x40 60x60 20x20 40x40 60x60
54 96 139 66 105 144 D
1.000 1.000 1.000 1.000 1.000 1.000
17 26 33 20 28 34 LU-SGS
0.332 0.231 0.164 0.355 0.177 0.151
12 16 18 17 26 35 ILU(0)
0.319 0.158 0.091 0.312 0.170 0.167
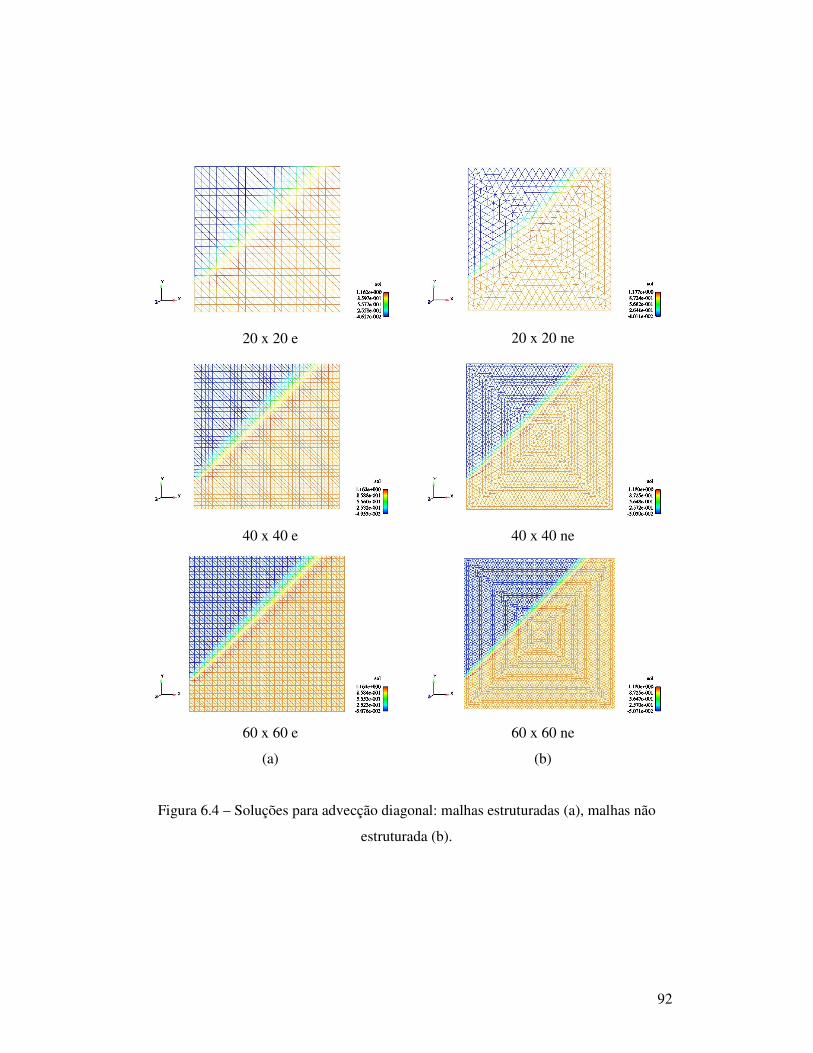
92
20 x 20 e
20 x 20 ne
40 x 40 e
40 x 40 ne
60 x 60 e
(a)
60 x 60 ne
(b)
Figura 6.4 – Soluções para advecção diagonal: malhas estruturadas (a), malhas não
estruturada (b).
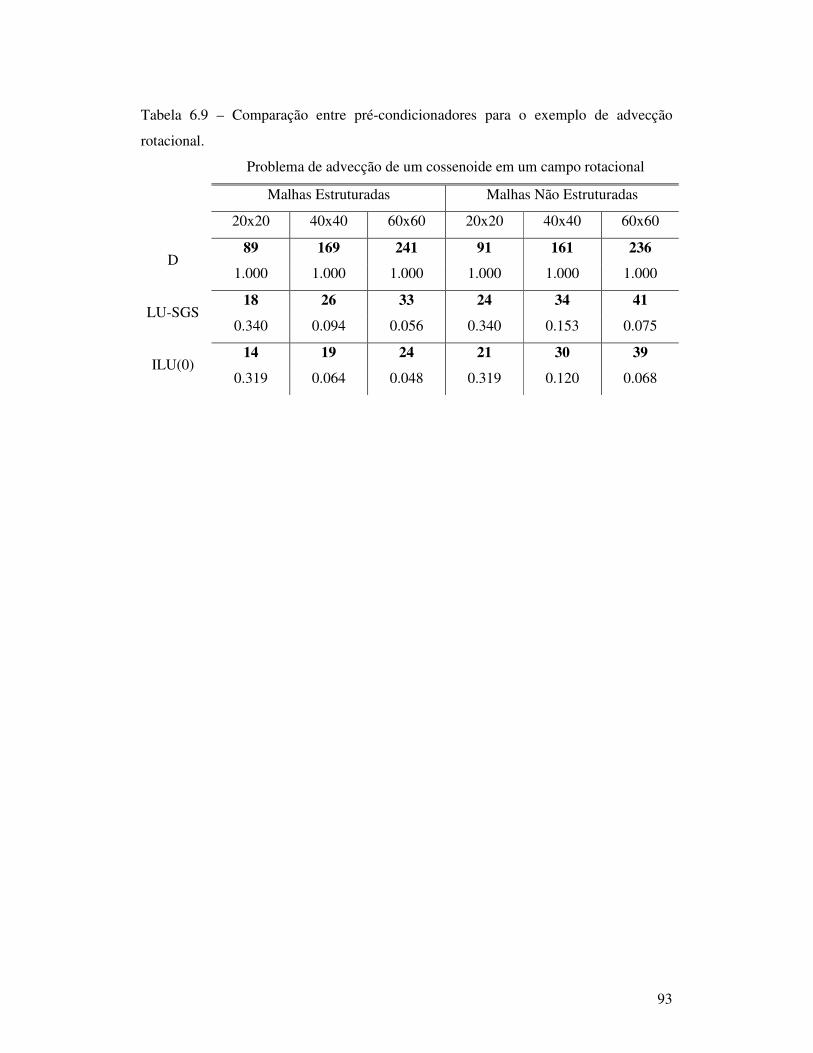
93
Tabela 6.9 – Comparação entre pré-condicionadores para o exemplo de advecção
rotacional.
Problema de advecção de um cossenoide em um campo rotacional
Malhas Estruturadas Malhas Não Estruturadas
20x20 40x40 60x60 20x20 40x40 60x60
89 169 241 91 161 236 D
1.000 1.000 1.000 1.000 1.000 1.000
18 26 33 24 34 41 LU-SGS
0.340 0.094 0.056 0.340 0.153 0.075
14 19 24 21 30 39 ILU(0)
0.319 0.064 0.048 0.319 0.120 0.068
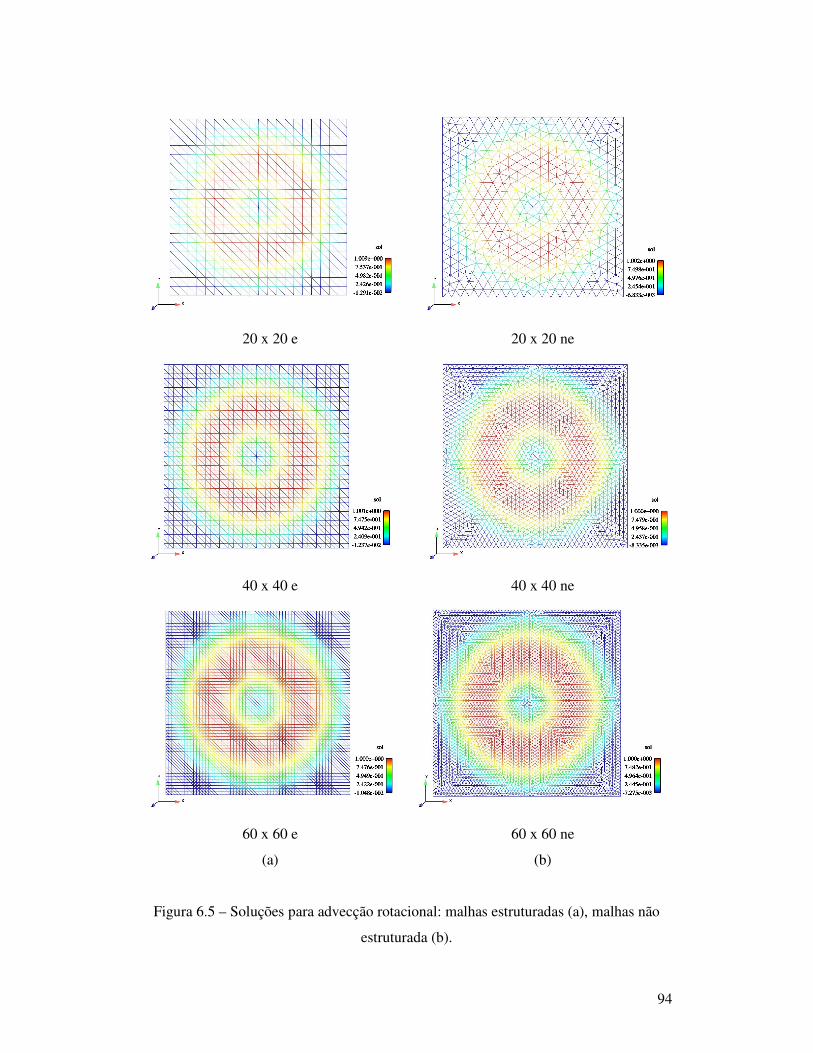
94
20 x 20 e
20 x 20 ne
40 x 40 e
40 x 40 ne
60 x 60 e
(a)
60 x 60 ne
(b)
Figura 6.5 – Soluções para advecção rotacional: malhas estruturadas (a), malhas não
estruturada (b).
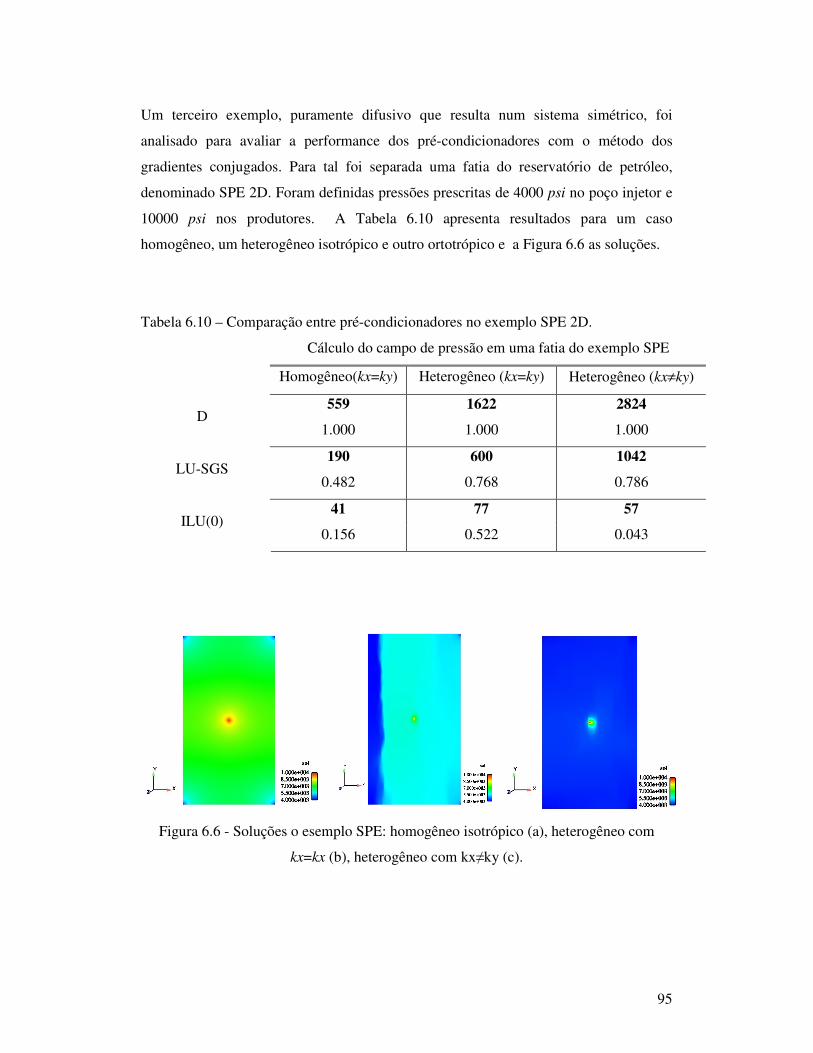
95
Um terceiro exemplo, puramente difusivo que resulta num sistema simétrico, foi
analisado para avaliar a performance dos pré-condicionadores com o método dos
gradientes conjugados. Para tal foi separada uma fatia do reservatório de petróleo,
denominado SPE 2D. Foram definidas pressões prescritas de 4000 psi no poço injetor e
10000 psi nos produtores. A Tabela 6.10 apresenta resultados para um caso
homogêneo, um heterogêneo isotrópico e outro ortotrópico e a Figura 6.6 as soluções.
Tabela 6.10 – Comparação entre pré-condicionadores no exemplo SPE 2D.
Cálculo do campo de pressão em uma fatia do exemplo SPE
Homogêneo(kx=ky) Heterogêneo (kx=ky) Heterogêneo (kx≠ky)
559 1622 2824 D
1.000 1.000 1.000
190 600 1042 LU-SGS
0.482 0.768 0.786
41 77 57 ILU(0)
0.156 0.522 0.043
Figura 6.6 - Soluções o esemplo SPE: homogêneo isotrópico (a), heterogêneo com
kx=kx (b), heterogêneo com kx≠ky (c).
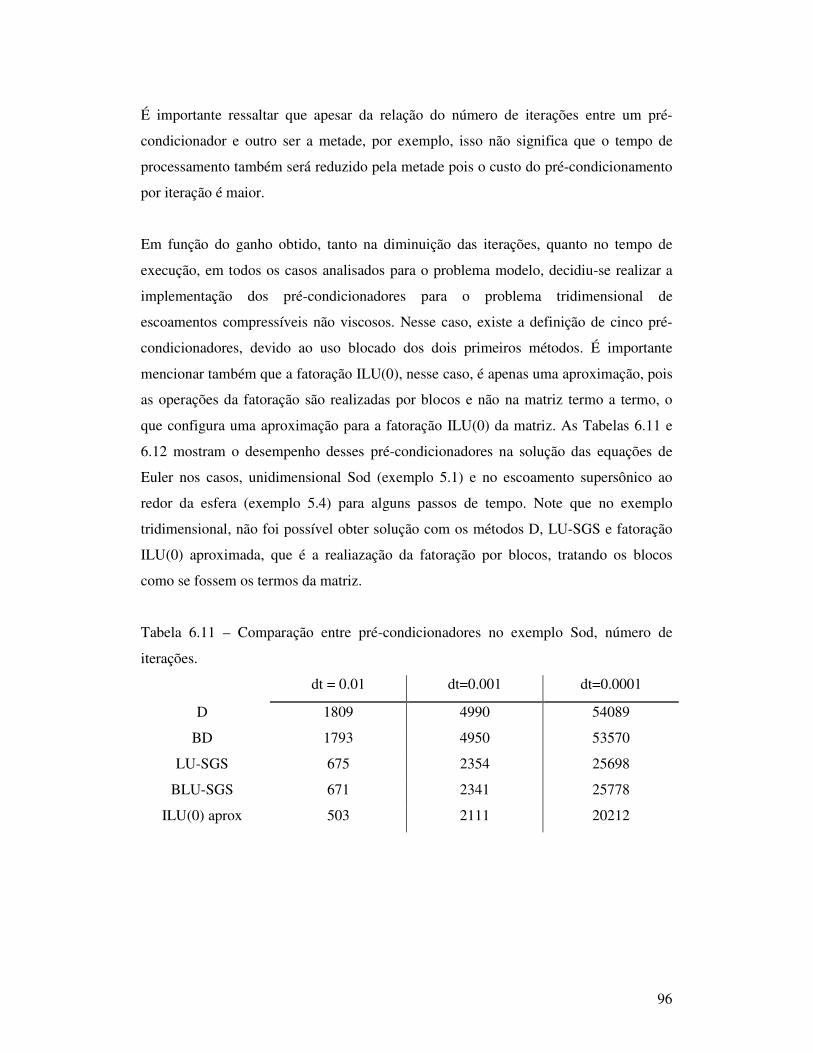
96
É importante ressaltar que apesar da relação do número de iterações entre um pré-
condicionador e outro ser a metade, por exemplo, isso não significa que o tempo de
processamento também será reduzido pela metade pois o custo do pré-condicionamento
por iteração é maior.
Em função do ganho obtido, tanto na diminuição das iterações, quanto no tempo de
execução, em todos os casos analisados para o problema modelo, decidiu-se realizar a
implementação dos pré-condicionadores para o problema tridimensional de
escoamentos compressíveis não viscosos. Nesse caso, existe a definição de cinco pré-
condicionadores, devido ao uso blocado dos dois primeiros métodos. É importante
mencionar também que a fatoração ILU(0), nesse caso, é apenas uma aproximação, pois
as operações da fatoração são realizadas por blocos e não na matriz termo a termo, o
que configura uma aproximação para a fatoração ILU(0) da matriz. As Tabelas 6.11 e
6.12 mostram o desempenho desses pré-condicionadores na solução das equações de
Euler nos casos, unidimensional Sod (exemplo 5.1) e no escoamento supersônico ao
redor da esfera (exemplo 5.4) para alguns passos de tempo. Note que no exemplo
tridimensional, não foi possível obter solução com os métodos D, LU-SGS e fatoração
ILU(0) aproximada, que é a realiazação da fatoração por blocos, tratando os blocos
como se fossem os termos da matriz.
Tabela 6.11 – Comparação entre pré-condicionadores no exemplo Sod, número de
iterações.
dt = 0.01 dt=0.001 dt=0.0001
D 1809 4990 54089
BD 1793 4950 53570
LU-SGS 675 2354 25698
BLU-SGS 671 2341 25778
ILU(0) aprox 503 2111 20212
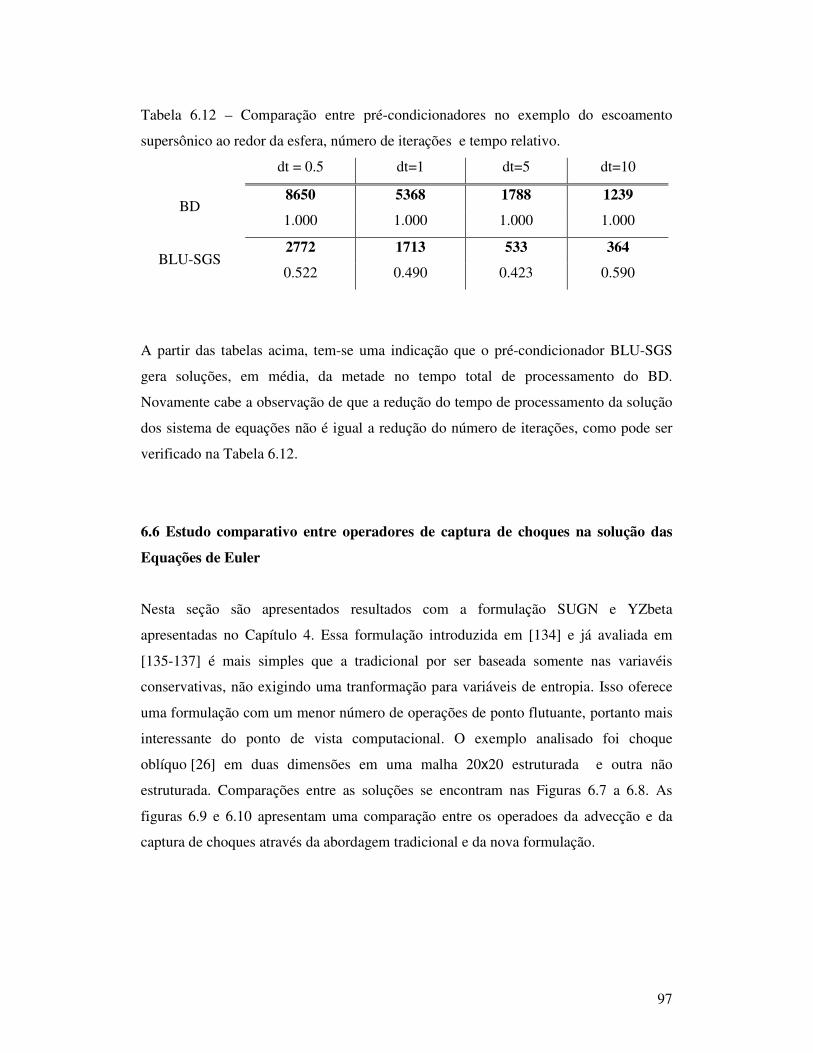
97
Tabela 6.12 – Comparação entre pré-condicionadores no exemplo do escoamento
supersônico ao redor da esfera, número de iterações e tempo relativo.
dt = 0.5 dt=1 dt=5 dt=10
8650 5368 1788 1239 BD
1.000 1.000 1.000 1.000
2772 1713 533 364 BLU-SGS
0.522 0.490 0.423 0.590
A partir das tabelas acima, tem-se uma indicação que o pré-condicionador BLU-SGS
gera soluções, em média, da metade no tempo total de processamento do BD.
Novamente cabe a observação de que a redução do tempo de processamento da solução
dos sistema de equações não é igual a redução do número de iterações, como pode ser
verificado na Tabela 6.12.
6.6 Estudo comparativo entre operadores de captura de choques na solução das
Equações de Euler
Nesta seção são apresentados resultados com a formulação SUGN e YZbeta
apresentadas no Capítulo 4. Essa formulação introduzida em [134] e já avaliada em
[135-137] é mais simples que a tradicional por ser baseada somente nas variavéis
conservativas, não exigindo uma tranformação para variáveis de entropia. Isso oferece
uma formulação com um menor número de operações de ponto flutuante, portanto mais
interessante do ponto de vista computacional. O exemplo analisado foi choque
oblíquo [26] em duas dimensões em uma malha 20x20 estruturada e outra não
estruturada. Comparações entre as soluções se encontram nas Figuras 6.7 a 6.8. As
figuras 6.9 e 6.10 apresentam uma comparação entre os operadoes da advecção e da
captura de choques através da abordagem tradicional e da nova formulação.
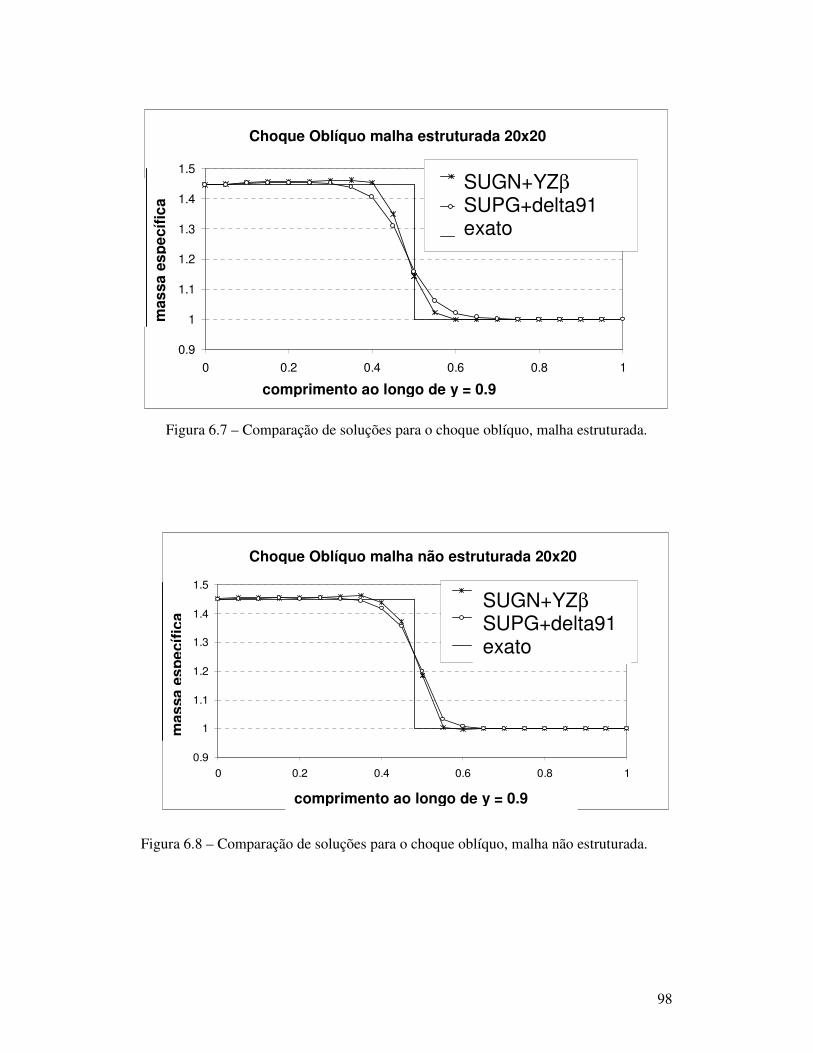
98
Choque Oblíquo 20x20
0.9
1
1.1
1.2
1.3
1.4
1.5
0 0.2 0.4 0.6 0.8 1
comprimento
ma
ss
a e
sp
ec
ífic
a
Novo (SUGN+YZB)
Típico (SUPG +delta91)
exact
Figura 6.7 – Comparação de soluções para o choque oblíquo, malha estruturada.
Figura 6.8 – Comparação de soluções para o choque oblíquo, malha não estruturada.
Oblique Shock unstructured mesh
0.9
1
1.1
1.2
1.3
1.4
1.5
0 0.2 0.4 0.6 0.8 1
along plot line x=0.9
den
sity
New_SUPG + delta_shoc
(includ. tau2)
SUPG + delta_91
exact
comprimento ao longo de y = 0.9
mas
sa e
sp
ecíf
ica
SUGN+YZβ
SUPG+delta91
exato
SUGN+YZβ
SUPG+delta91
exato
Choque Oblíquo malha não estruturada 20x20
comprimento ao longo de y = 0.9
mas
sa e
sp
ecíf
ica
Choque Oblíquo malha estruturada 20x20
SUGN+YZβ
SUPG+delta91
exato
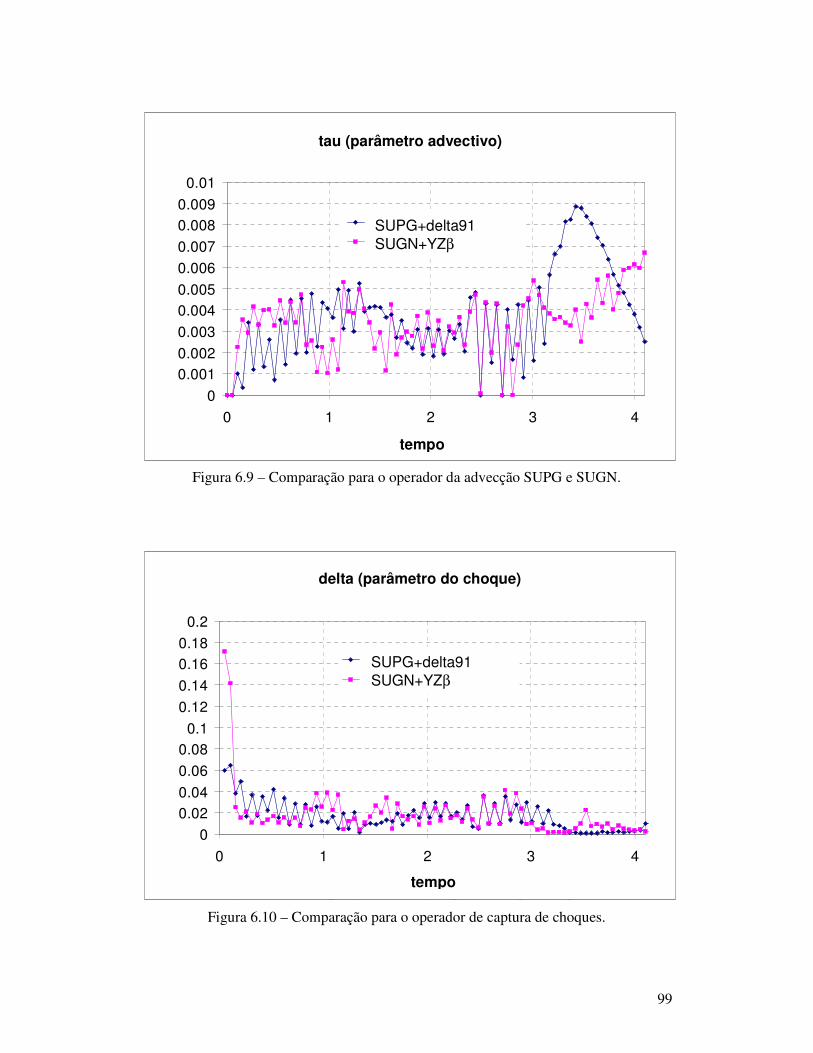
99
Figura 6.9 – Comparação para o operador da advecção SUPG e SUGN.
Figura 6.3 – Comparação de soluções para o choque oblíquo.
Figura 6.10 – Comparação para o operador de captura de choques.
tau (SUPG parameter)
0
0.001
0.002
0.003
0.004
0.005
0.006
0.007
0.008
0.009
0.01
0 1 2 3 4
distance along plot line y=0.25
tau
(S
UP
G p
ara
me
ter)
SUPG+delta91
SUPG_new+delta_shoc
tau (parâmetro advectivo)
SUPG+delta91
SUGN+YZβ
tempo
delta (SC parameter)
0
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0.16
0.18
0.2
0 1 2 3 4
distance along plot line y=0.25
de
lta
(S
C p
ara
me
ter) SUPG+delta91
SUPG_new+delta_shoc
tempo
delta (parâmetro do choque)
SUPG+delta91
SUGN+YZβ
100
Capítulo 7
Exemplos Numéricos de Aplicação
7.1 Introdução
Os exemplos numéricos têm o objetivo de apresentar aplicações reais para as
implementações desenvolvidas. No caso de escoamentos em meios porosos é estudado
um problemas de análise de bacias onde é avaliado um possível caminho de migração
secundária de petróleo em uma região de interesse da bacia de Llanos Orientales, na
Colômbia. Para as equações de Euler, foi resolvido um escoamento quase supersônico ao
redor de um avião tipo YF17.
7.2 Modelagem de Migração Secundária em uma Bacia Sedimentar
A modelagem de bacias não é uma tarefa trivial, principalmente porque envolve
fenômenos em milhares e milhões de anos passados o que dificulta uma exata definição
de geometria, materiais e eventos envolvidos. A grande contribuição em trazer
simulações numéricas para a modelagem e análise de bacias é no sentido de prover mais
uma ferramenta, onde o analista possa testar diversos cenários e ter uma melhor
101
conclusão acerca dos caminhos preferencias de óleo e zonas de acumulação, dentre
outros fenômenos, visando a exploração de campos de interesse.
Diversas dificuldades foram encontradas na modelagem e simulação de bacias
sedimentares. A idéia aqui é comentar o caminho utilizado na solução deste problema e
os pontos-chave que devem ser atentados nesse processo. É de grande importância que
haja interação entre diversos profissionais como geólogos, geofísicos, químicos,
engenheiros de petróleo e computacionais, entre outros. A modelagem de bacias é uma
disciplina amplamente multidisciplinar, de tal forma que não havendo essa troca de
experiências o trabalho torna-se praticamente inviável. É conveniente então, definir as
etapas que devem ser seguidas, que resumidamente são: gerar o modelo geométrico, gerar
uma malha de discretização, definir fenômenos a serem modelados e em que condições,
carrear a simulação numérica através de programas comercias ou desenvolvidos pela
própria equipe e visualizar e analisar os resultados. No caso da simulação de fluidos é
conveniente, comum e interessante utilizar programas de reservatórios de petróleo.
Existem complicações em todas essas etapa. É necessária uma descrição adequada da
geometria da bacia, o que geralmente é realizado com um programa de CAD (Computer
Aided Design), no caso o GoCad [141] que é específico para realizar essa modelagem
geométrica de bacias sedimentares, como já comentado no exemplo anterior do Capítulo
3. Portanto a segunda grande dificuldade a ser mencionada seria uma definição e
representação da geometria real, suas camadas e falhas, com certas simplificações, que
somente um geólogo com experiência no campo, pode ter. Os métodos numéricos
utilizados nas simulações numéricas têm suas limitações, de tal forma que não se deseja
gerar uma geometria bastante complexa, onde a geração de uma malha ou até mesmo a
evolução de soluções numéricas podem vir a ser impraticáveis. O que se aconselha é
capturar as estruturas geométricas de maior porte e relevância nos eventos físicos e serem
simulados. Note que para diferentes físicas, diferentes estruturais podem ser relevantes.
As superfícies devem ser suavizadas ao máximo para facilitar a geração da malha e a
convergência da solução. No caso real simulado neste trabalho, não houve essa
preocupação inicial de tal forma que o modelo geométrico apresenta irregularidades
como quinas e bicos totalmente desnecessários e inadequados para a análise do problema.
102
Uma outra dificuldade é, feito um modelo geométrico com a aprovação dos profissionais
envolvidos, deve-se partir para geração da malha de discretização, a qual é mais
interessante que seja de tetraedros por sua maior flexibilidade de acomodação em
domínios irregulares. Essa etapa tem basicamente duas complicações. Primeiro, a própria
geração da malha numa estrutura geométrica bastante complexa e pouco suave. Em
segundo, a geração de uma malha de qualidade. Uma malha de qualidade significa ter
relativamente poucos elementos distorcidos segundo alguma métrica de avaliação dos
elementos. Em geral, desenvolver um gerador de malhas de qualidade, por si só, já é um
tema de pesquisa [8], de tal forma que foram utilizados programas comercias ou de
domínio público para essa finalidade. Inicialmente, a idéia era utilizar as próprias malhas
de tetraedros geradas a partir do GoCad, onde já estava o modelo geométrico. Contudo,
esse programa não se preocupa com a qualidade das malhas geradas de tal forma que sua
utilização impossibilita a convergência nessas malhas. Portanto partiu-se para a eleição
de algum programa que conseguisse gerar uma malha de tetraedros de qualidade a partir
das superfícies externas triangularizadas. É claro que esses triângulos devem ser regulares
e suaves, mas controlar essas superfícies no GoCad é natural, uma vez que isso por si só
já faz parte da modelagem geométrica, enquanto que a geração da malha de volume é
feito por um algoritmo interno sem controle pelo usuário. Após utilizar métricas para
qualidades de malhas como as apresentadas no capítulo anterior, ficou claro que essa
malha continha muitos elementos distorcidos. Em geral, na modelagem de bacias existe a
geração de elementos irregulares devido a presença de camadas mutios finas com relação
a outras vizinhas mais espessas e a presença de falhas. Tal que, como já dito, a
simplificação de certas geometrias irrelevantes para os fenômenos estuados estarão
gerando um grande complicador nessa questão da geração de uma malha de qualidade.
Foi então eleito um programa aberto a estudos científicos, denominado TetGen [129], que
é um gerador de tetraedos de qualidade a partir de superfícies triangularizadas fechadas.
Mesmo com esse programa, a conclusão de uma malha não foi tarefa simples, devido à
não observações às simplificações e suavizações, onde diversos triângulos estavam
superpostos ou o domínio com furos. Foi necesário um trabalho manual, muito cuidadoso
para gerar uma triangularização adequada em todo o domínio. Uma vez feito isso o
gerador de malhas TetGen foi capaz de gerar uma malha que apesar de ainda conter
103
elementos ainda bastantes distorcidos eles representam menos de 5% dos elementos totais
da malha, o que já indica a possibilidade de realizar simulações numéricas.
Tendo o modelo geométrico definido, quanto mais suave e simplificado melhor, e sua
malha tetraédrica de qualidade, ou pelo menos o melhor possível, parte-se para a
simulação dos fenômenos físcios propriamente ditos, aqui escoamento de fluidos
bifásicos imiscíveis em meios porosos. Poderiam ser escoamentos multifásicos
composicionais, deformações elastoplásticas, histórico térmicos da bacia, ou ainda
melhor uma acoplamento entre diversos destes fenômenos. Mas para a avaliação
qualitativa dos caminhos preferenciais e acumulações de óleo, resolver uma física tipo
óleo e água é razoável. Para a definição de condições inicias de contorno e propriedades
com valores respeitando unidades de eventos em tempos geológicos, geram muitas
dificuldades por serem pouco usuais na engenharia civil. Daí, novamente é reforçada a
idéia de grupos multidisciplinares.
A seguir serão apresentadas a malha adotada, as propriedades das rochas e dos fluidos, as
condições iniciais e de contorno bem como os resultados obtidos com essa simulação em
uma região, em produção e de grande interesse, na bacia colombiana de Llanos
Orientales [9].
No trabalho de mestrado [116], foi realizada uma simulação numérica para estudar a
migração secundária em bacias sedimentares. Neste trabalho, muitas direções para definir
parâmetors e constantes foram adotados aqui nessa metodologia.
7.2.1 Métricas para Malhas de Tetraedros
Métricas para verificação da qualidade de malhas de elementos finitos são muito
utilizadas na geração de malhas e na solução de problemas utilizando técnicas de
adaptatividade [Zicka,elano]. A utilização de elementos distorcidos é possível, contudo é
importante que a malha respeite pelo menos alguma métrica de qualidade, pois os

104
elementos distorcidos podem influenciar a solução, obtendo-se assim uma resposta
inadequada. Numa análise mais qualitativa, o uso de uma quantidade razoável de
elementos distorcidos é aceitável. Neste trabalho adotamos duas métricas (η e γ )
denominadas respectivamente, mean ratio [49] e aspect ratio [101], para avaliação do
nível de distorção dos elementos da malha da bacia. Um esquema de cálculo é
apresentado a seguir e descreve sucintamente a utilização dessas métricas. É importante
ressaltar que os parâmetros η e γ variam entre [0-1] e que quanto mais perto de 1, mais
regular é o elemento e quanto mais perto de 0, mais distorcido. Para a avaliação destas
métricas é necessário o cálculo dos comprimentos di de cada uma das 6 arestas,
222iiii zyxd ++= i = 1, ... , 6 (1)
onde xi, yi e zi são as diferenças das coordenadas dos nós da aresta em questão. O
parâmetro η, conhecido como mean ratio segundo [49], é avaliado como,
( )
∑=
62
3
2
312
i
id
Vη (2)
regularη
ηη = (3)
onde V é o volume do elemento em questão e regularη o valor de η para um tetraedro
regular equivalente, isto é, equilátero. Já o parâmetro γ, conhecido como aspect ratio
segundo [101], é
V
di
i
2
36
6
1
=
∑γ (4)
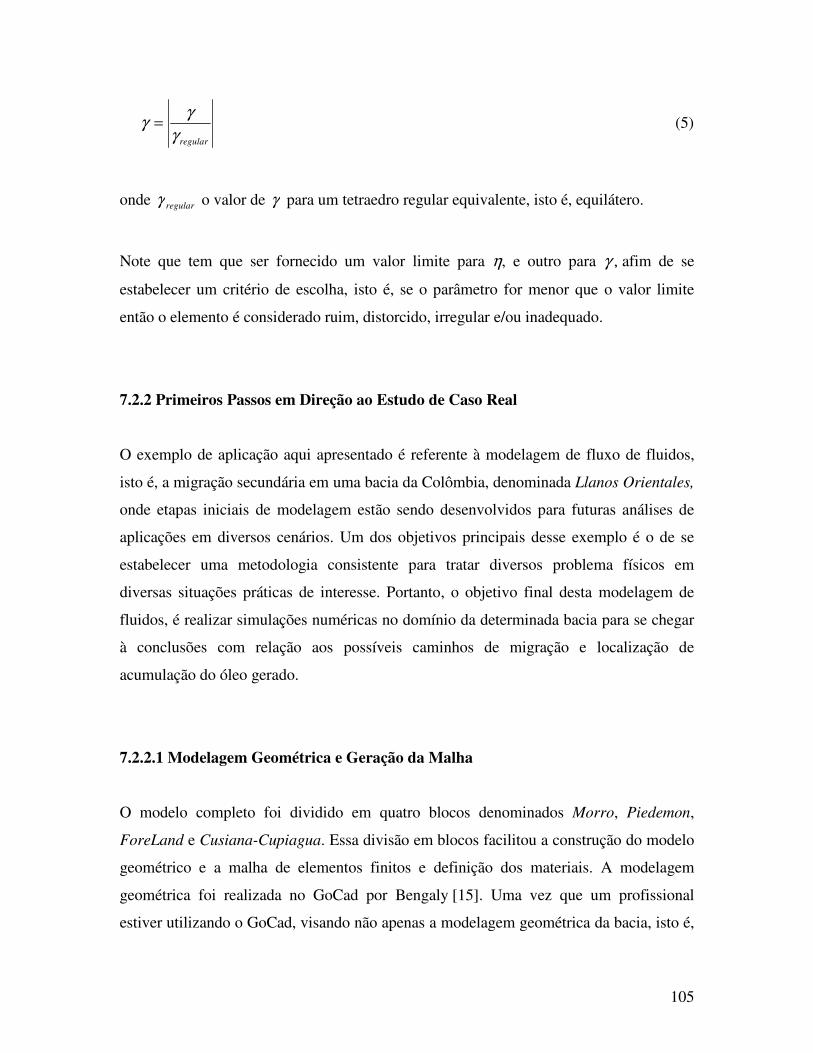
105
regularγ
γγ = (5)
onde regularγ o valor de γ para um tetraedro regular equivalente, isto é, equilátero.
Note que tem que ser fornecido um valor limite para η, e outro para γ , afim de se
estabelecer um critério de escolha, isto é, se o parâmetro for menor que o valor limite
então o elemento é considerado ruim, distorcido, irregular e/ou inadequado.
7.2.2 Primeiros Passos em Direção ao Estudo de Caso Real
O exemplo de aplicação aqui apresentado é referente à modelagem de fluxo de fluidos,
isto é, a migração secundária em uma bacia da Colômbia, denominada Llanos Orientales,
onde etapas iniciais de modelagem estão sendo desenvolvidos para futuras análises de
aplicações em diversos cenários. Um dos objetivos principais desse exemplo é o de se
estabelecer uma metodologia consistente para tratar diversos problema físicos em
diversas situações práticas de interesse. Portanto, o objetivo final desta modelagem de
fluidos, é realizar simulações numéricas no domínio da determinada bacia para se chegar
à conclusões com relação aos possíveis caminhos de migração e localização de
acumulação do óleo gerado.
7.2.2.1 Modelagem Geométrica e Geração da Malha
O modelo completo foi dividido em quatro blocos denominados Morro, Piedemon,
ForeLand e Cusiana-Cupiagua. Essa divisão em blocos facilitou a construção do modelo
geométrico e a malha de elementos finitos e definição dos materiais. A modelagem
geométrica foi realizada no GoCad por Bengaly [15]. Uma vez que um profissional
estiver utilizando o GoCad, visando não apenas a modelagem geométrica da bacia, isto é,

106
sua representação visual, mas também a geração de uma malha de elementos finitos, é
desejável e recomendado o uso correto das ferramentas do GoCad para conseguir gerar
uma malha em tempo hábil e com um mínimo de qualidade. O que observamos e
podemos destacar como equívoco à época, foi a falta de atenção nessa questão. Agora,
com maior experiência, percebeu-se que a construção do modelo geométrico deve ser
conduzida já se pensando na geração da malha. Pois assim, haverá a positiva interação
entre o profissional responsável pela modelagem e o profissional responsável pela
simulação, sejam eles geólogos, geofísicos ou engenheiros, pois a união de diversas áreas
do conhecimento são indispensáveis no sucesso das questões técnicas e científicas
provenientes das necessidades da indústria do petróleo. O modelo completo comtemplava
quatro blocos conforme Figura 7.1. Inicialmente, uma malha gerada pelo Gocad foi
utilizada para o domínio completo, ou seja, os quatros blocos. Mas nessa malha, houve a
constatação de muitos elementos achatados (sliver) e não foi possível utilizá-la. Para tal,
foi feita uma ligeira suavização das malhas de superfíces triangulares, houve o descarte
do bloco 1 (azul), de pequeno valor exploratório, e foi então utilizado o programa
acadêmico TetGen [129] para gerar uma malha tetraédrica de qualidade a partir das
superf ícies externas. Resutando assim numa malha com 75736 nós, 413516 elementos e
506524 arestas. Tem 17972 nós residindo no contorno. A Figura 7.2 apresenta uma vista
superior, da topografia, a Figura 7.3 uma vista inferior, do embasamento e a Figura 7.4
um detalhe. Aqui já é oportuno comentar que a topografia, no caso as montanhas foram
retiradas do modelo, uma vez que apenas a simulação de eventos de subsuperfície são
considerados.
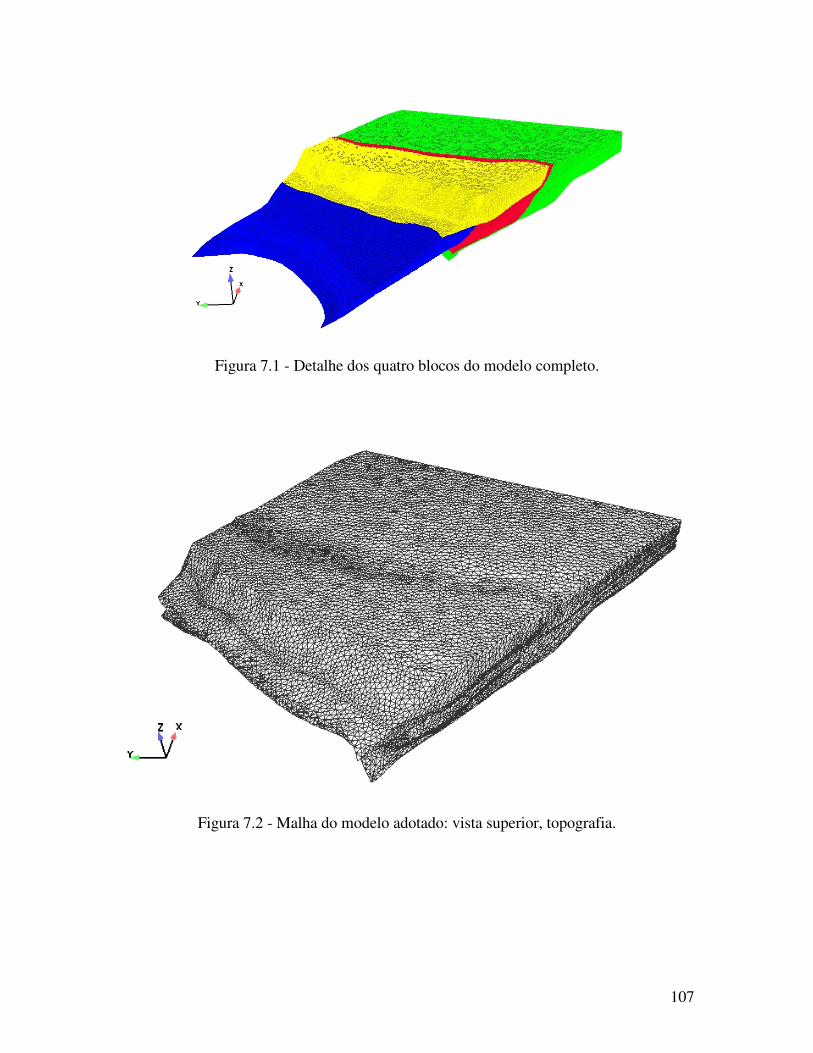
107
Figura 7.1 - Detalhe dos quatro blocos do modelo completo.
Figura 7.2 - Malha do modelo adotado: vista superior, topografia.
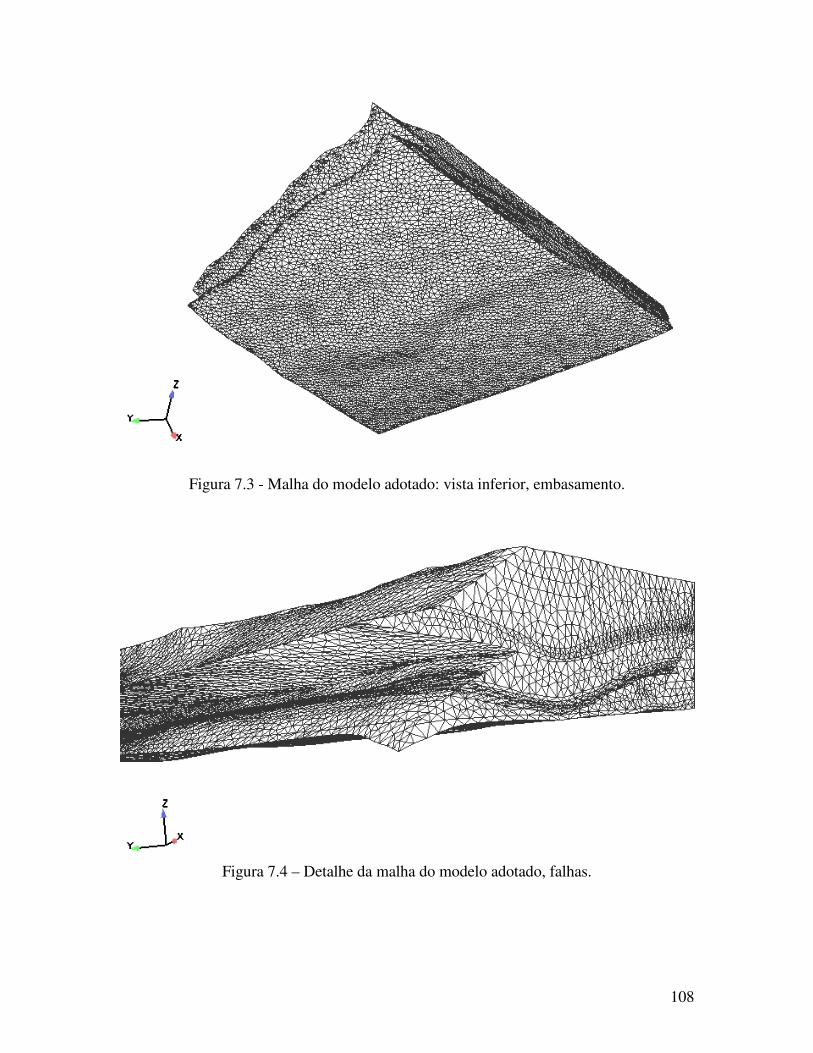
108
Figura 7.3 - Malha do modelo adotado: vista inferior, embasamento.
Figura 7.4 – Detalhe da malha do modelo adotado, falhas.
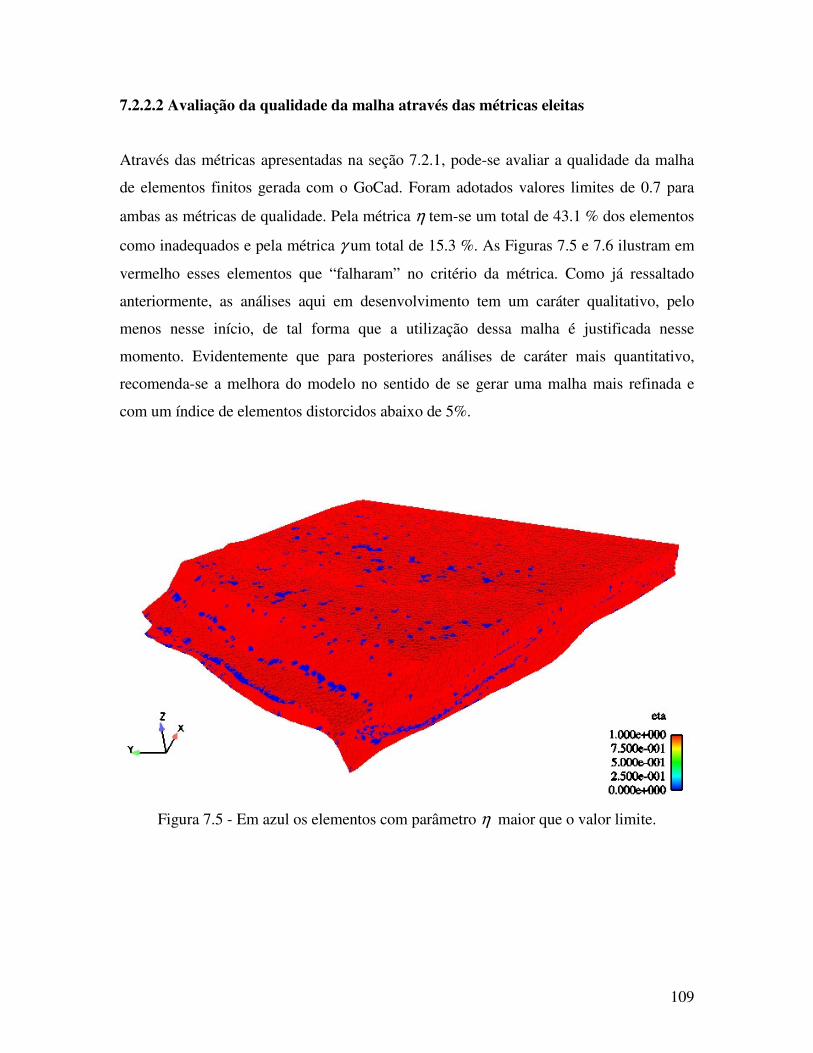
109
7.2.2.2 Avaliação da qualidade da malha através das métricas eleitas
Através das métricas apresentadas na seção 7.2.1, pode-se avaliar a qualidade da malha
de elementos finitos gerada com o GoCad. Foram adotados valores limites de 0.7 para
ambas as métricas de qualidade. Pela métrica η tem-se um total de 43.1 % dos elementos
como inadequados e pela métrica γ um total de 15.3 %. As Figuras 7.5 e 7.6 ilustram em
vermelho esses elementos que “falharam” no critério da métrica. Como já ressaltado
anteriormente, as análises aqui em desenvolvimento tem um caráter qualitativo, pelo
menos nesse início, de tal forma que a utilização dessa malha é justificada nesse
momento. Evidentemente que para posteriores análises de caráter mais quantitativo,
recomenda-se a melhora do modelo no sentido de se gerar uma malha mais refinada e
com um índice de elementos distorcidos abaixo de 5%.
Figura 7.5 - Em azul os elementos com parâmetro η maior que o valor limite.
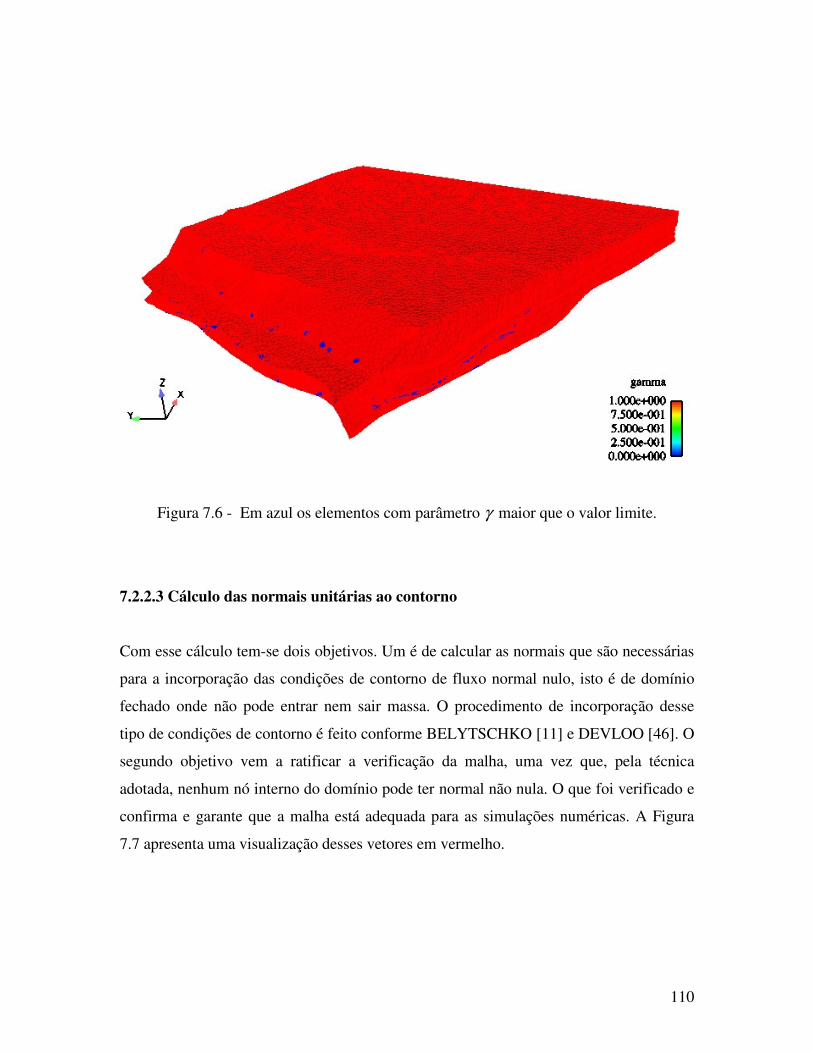
110
Figura 7.6 - Em azul os elementos com parâmetro γ maior que o valor limite.
7.2.2.3 Cálculo das normais unitárias ao contorno
Com esse cálculo tem-se dois objetivos. Um é de calcular as normais que são necessárias
para a incorporação das condições de contorno de fluxo normal nulo, isto é de domínio
fechado onde não pode entrar nem sair massa. O procedimento de incorporação desse
tipo de condições de contorno é feito conforme BELYTSCHKO [11] e DEVLOO [46]. O
segundo objetivo vem a ratificar a verificação da malha, uma vez que, pela técnica
adotada, nenhum nó interno do domínio pode ter normal não nula. O que foi verificado e
confirma e garante que a malha está adequada para as simulações numéricas. A Figura
7.7 apresenta uma visualização desses vetores em vermelho.
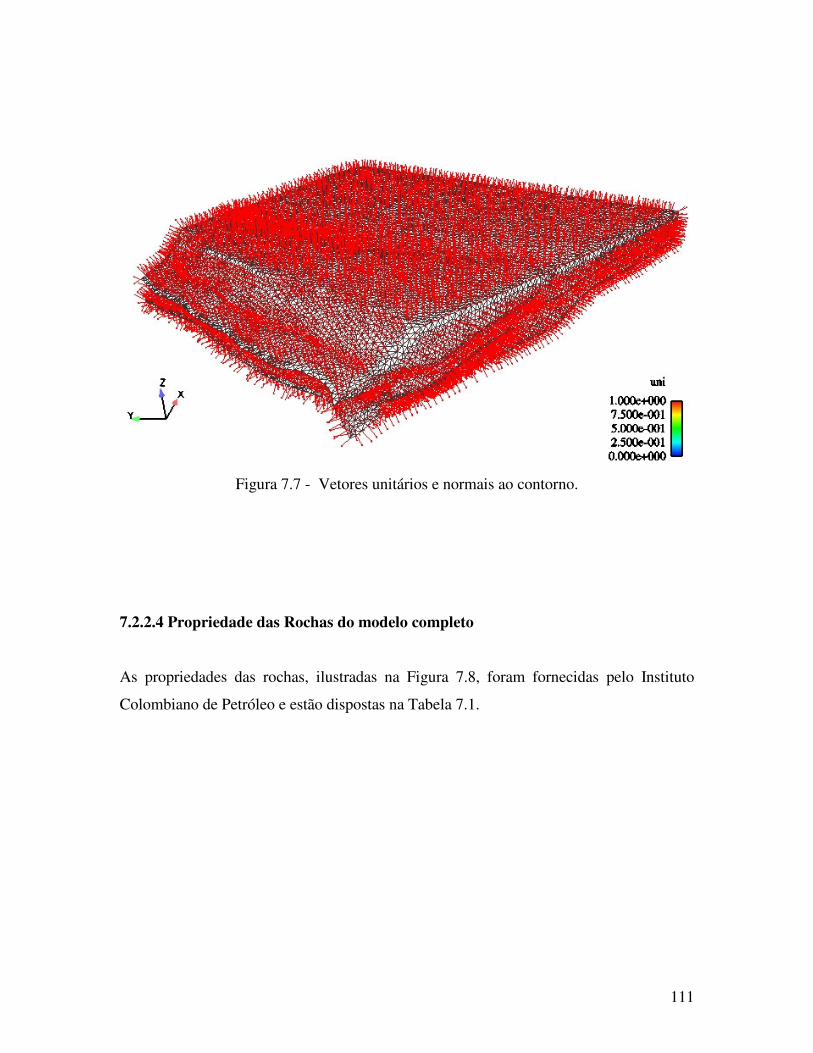
111
Figura 7.7 - Vetores unitários e normais ao contorno.
7.2.2.4 Propriedade das Rochas do modelo completo
As propriedades das rochas, ilustradas na Figura 7.8, foram fornecidas pelo Instituto
Colombiano de Petróleo e estão dispostas na Tabela 7.1.
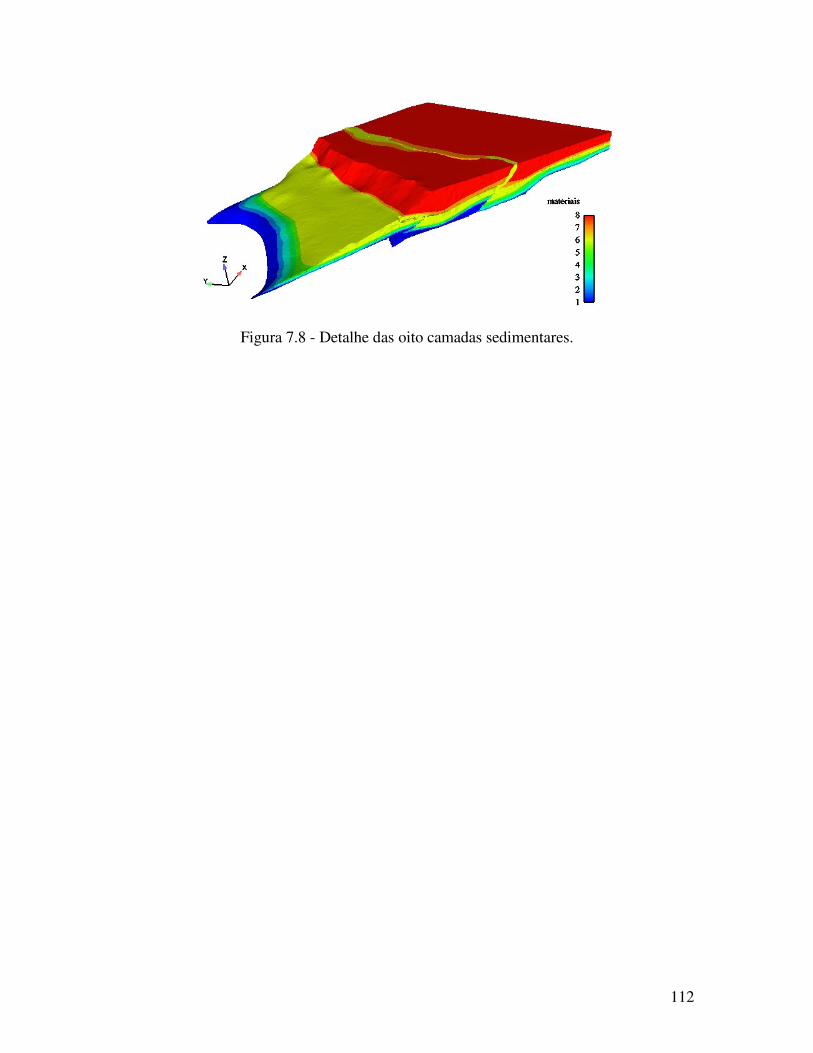
112
Figura 7.8 - Detalhe das oito camadas sedimentares.
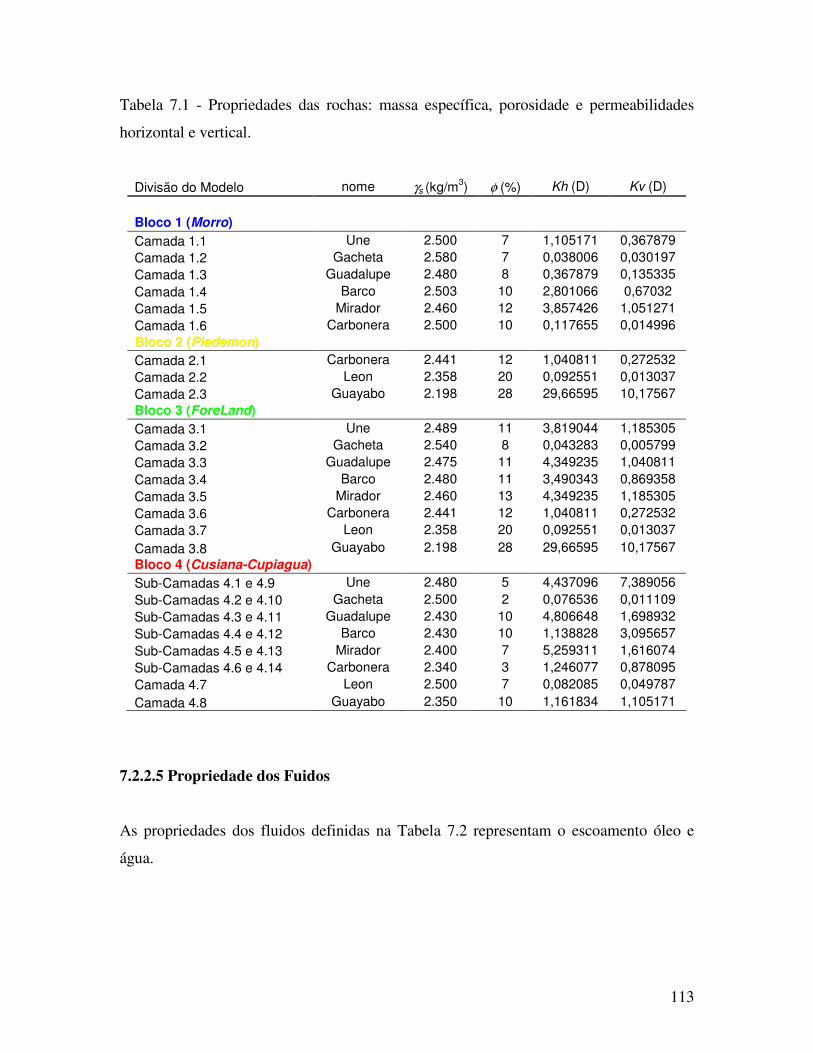
113
Tabela 7.1 - Propriedades das rochas: massa específica, porosidade e permeabilidades
horizontal e vertical.
Divisão do Modelo nome γs (kg/m3
) φ (%) Kh (D) Kv (D)
Bloco 1 (Morro)
Camada 1.1 Une 2.500 7 1,105171 0,367879
Camada 1.2 Gacheta 2.580 7 0,038006 0,030197
Camada 1.3 Guadalupe 2.480 8 0,367879 0,135335
Camada 1.4 Barco 2.503 10 2,801066 0,67032
Camada 1.5 Mirador 2.460 12 3,857426 1,051271
Camada 1.6 Carbonera 2.500 10 0,117655 0,014996
BBllooccoo 22 ((PPiieeddeemmoonn))
Camada 2.1 Carbonera 2.441 12 1,040811 0,272532
Camada 2.2 Leon 2.358 20 0,092551 0,013037
Camada 2.3 Guayabo 2.198 28 29,66595 10,17567
Bloco 3 (ForeLand)
Camada 3.1 Une 2.489 11 3,819044 1,185305
Camada 3.2 Gacheta 2.540 8 0,043283 0,005799
Camada 3.3 Guadalupe 2.475 11 4,349235 1,040811
Camada 3.4 Barco 2.480 11 3,490343 0,869358
Camada 3.5 Mirador 2.460 13 4,349235 1,185305
Camada 3.6 Carbonera 2.441 12 1,040811 0,272532
Camada 3.7 Leon 2.358 20 0,092551 0,013037
Camada 3.8 Guayabo 2.198 28 29,66595 10,17567
Bloco 4 (Cusiana-Cupiagua)
Sub-Camadas 4.1 e 4.9 Une 2.480 5 4,437096 7,389056
Sub-Camadas 4.2 e 4.10 Gacheta 2.500 2 0,076536 0,011109
Sub-Camadas 4.3 e 4.11 Guadalupe 2.430 10 4,806648 1,698932
Sub-Camadas 4.4 e 4.12 Barco 2.430 10 1,138828 3,095657
Sub-Camadas 4.5 e 4.13 Mirador 2.400 7 5,259311 1,616074
Sub-Camadas 4.6 e 4.14 Carbonera 2.340 3 1,246077 0,878095
Camada 4.7 Leon 2.500 7 0,082085 0,049787
Camada 4.8 Guayabo 2.350 10 1,161834 1,105171
7.2.2.5 Propriedade dos Fuidos
As propriedades dos fluidos definidas na Tabela 7.2 representam o escoamento óleo e
água.
114
Tabela 7.2 - Propriedade dos fluidos.
Grandeza Símbolo Valor Unidade
massa específica
do óleo ρo 700 kg/m3
massa específica
da água ρw 1000 kg/m3
viscosidade do óleo µo 3.2 x 10-5 N.106ano/m2
viscosidade da água µw 1.0 x 10-5 N. 106ano/m2
gravidade g 9.8 na direção -z m/s2
Pressão capilar pcow 0.0 N/m2
passo de tempo ∆t ~1.0 103ano
7.2.2.6 Condições de Contorno
Para a equação da pressão, deverá ser prescrita uma pressão atmosférica no topo do
domínio e uma pressão, calculada a partir do peso específico dos fluidos das camadas
superiores, deverá ser prescrita no embasamento. Esse cálculo foi feito através da
expressão
( )
b
nmat
i
iif
baseA
gV
P
∑=
γ
(6)
onde nmat é o número de materiais do modelo, ( )ifγ é a massa específica do fluido e Vi o
volume de cada material i, g é o valor da gravidade e Ab é a área do embasamento. Deve-
se somar a essa expressão um percentual extra devido as montanhas da topografia que
foram retiradas do modelo.
Para a saturação, decidiu-se por prescrever tanto no topo como na base uma saturação
constante de água igual a 1.
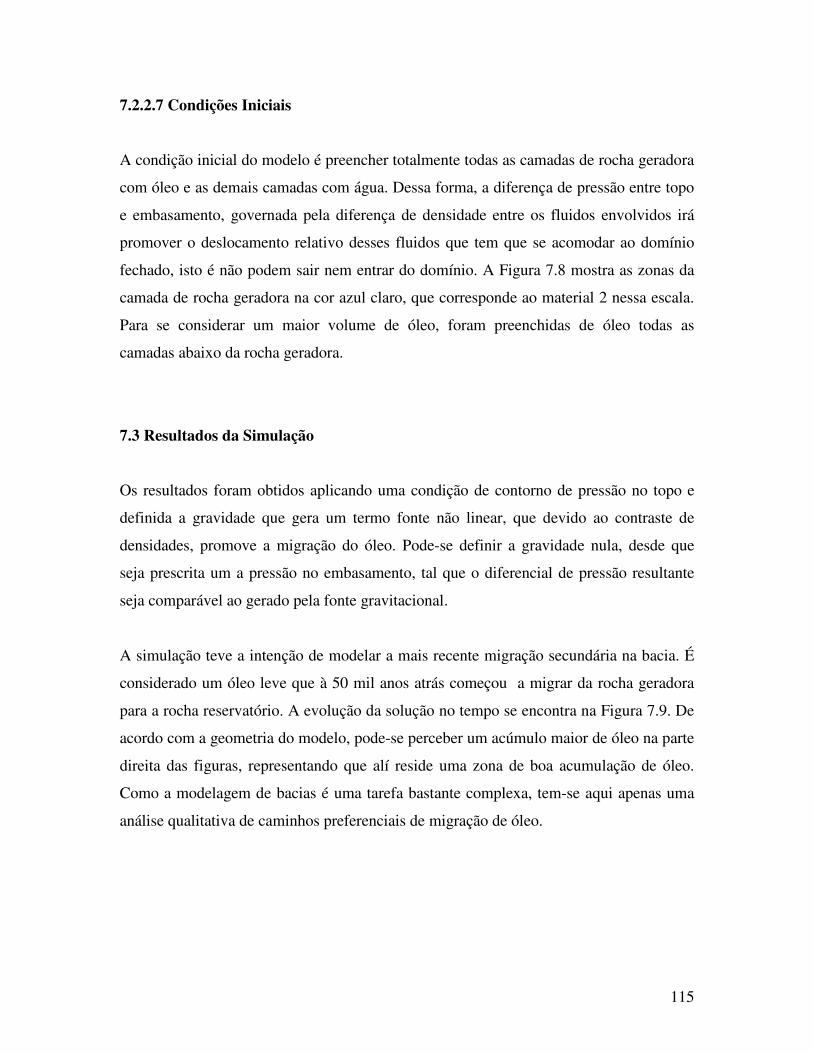
115
7.2.2.7 Condições Iniciais
A condição inicial do modelo é preencher totalmente todas as camadas de rocha geradora
com óleo e as demais camadas com água. Dessa forma, a diferença de pressão entre topo
e embasamento, governada pela diferença de densidade entre os fluidos envolvidos irá
promover o deslocamento relativo desses fluidos que tem que se acomodar ao domínio
fechado, isto é não podem sair nem entrar do domínio. A Figura 7.8 mostra as zonas da
camada de rocha geradora na cor azul claro, que corresponde ao material 2 nessa escala.
Para se considerar um maior volume de óleo, foram preenchidas de óleo todas as
camadas abaixo da rocha geradora.
7.3 Resultados da Simulação
Os resultados foram obtidos aplicando uma condição de contorno de pressão no topo e
definida a gravidade que gera um termo fonte não linear, que devido ao contraste de
densidades, promove a migração do óleo. Pode-se definir a gravidade nula, desde que
seja prescrita um a pressão no embasamento, tal que o diferencial de pressão resultante
seja comparável ao gerado pela fonte gravitacional.
A simulação teve a intenção de modelar a mais recente migração secundária na bacia. É
considerado um óleo leve que à 50 mil anos atrás começou a migrar da rocha geradora
para a rocha reservatório. A evolução da solução no tempo se encontra na Figura 7.9. De
acordo com a geometria do modelo, pode-se perceber um acúmulo maior de óleo na parte
direita das figuras, representando que alí reside uma zona de boa acumulação de óleo.
Como a modelagem de bacias é uma tarefa bastante complexa, tem-se aqui apenas uma
análise qualitativa de caminhos preferenciais de migração de óleo.
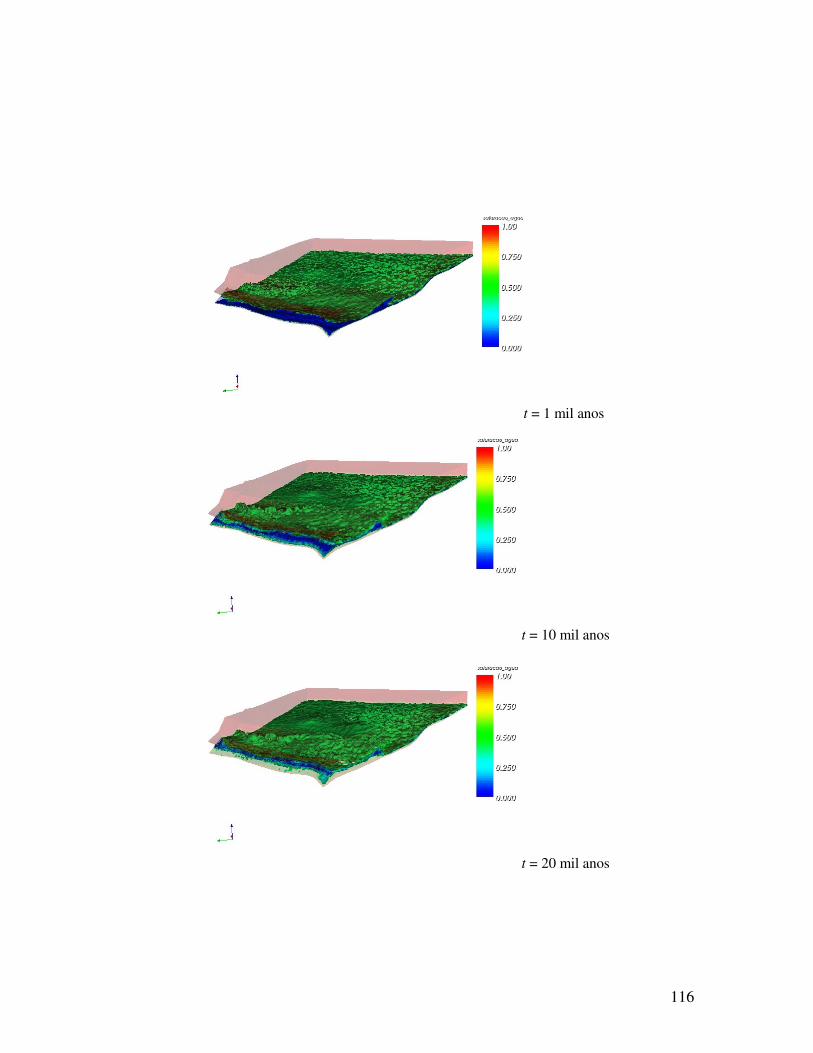
116
t = 1 mil anos
t = 10 mil anos
t = 20 mil anos
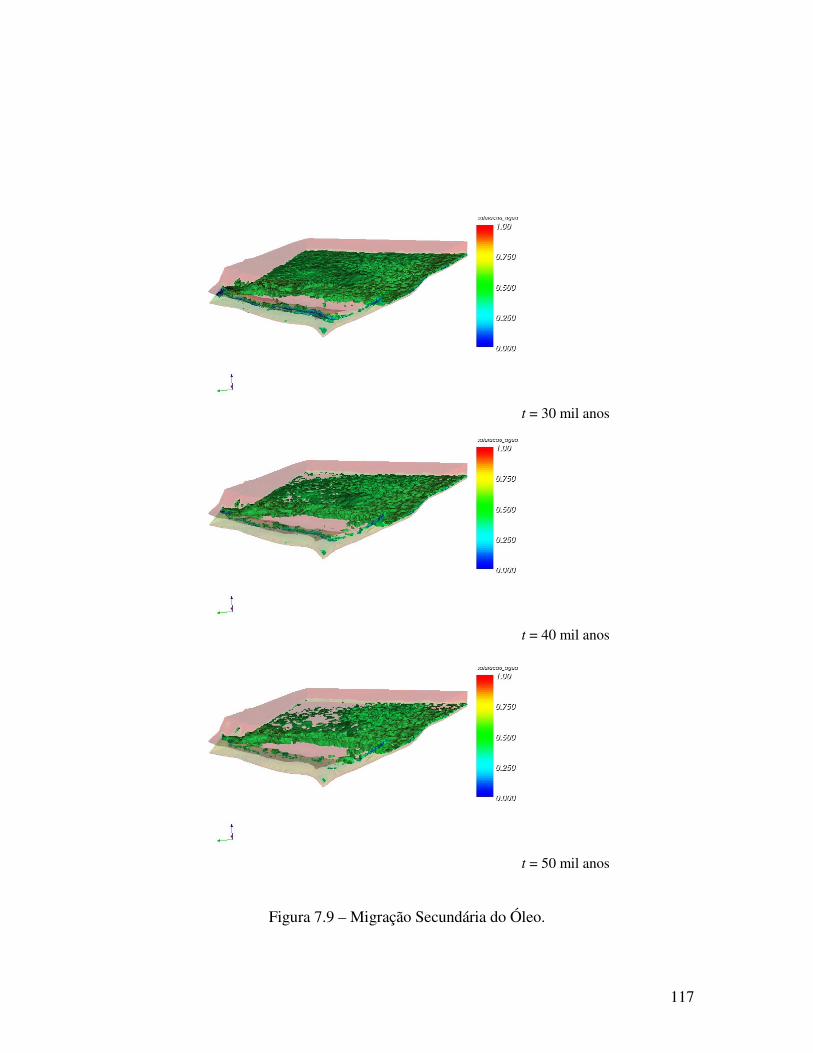
117
t = 30 mil anos
t = 40 mil anos
t = 50 mil anos
Figura 7.9 – Migração Secundária do Óleo.
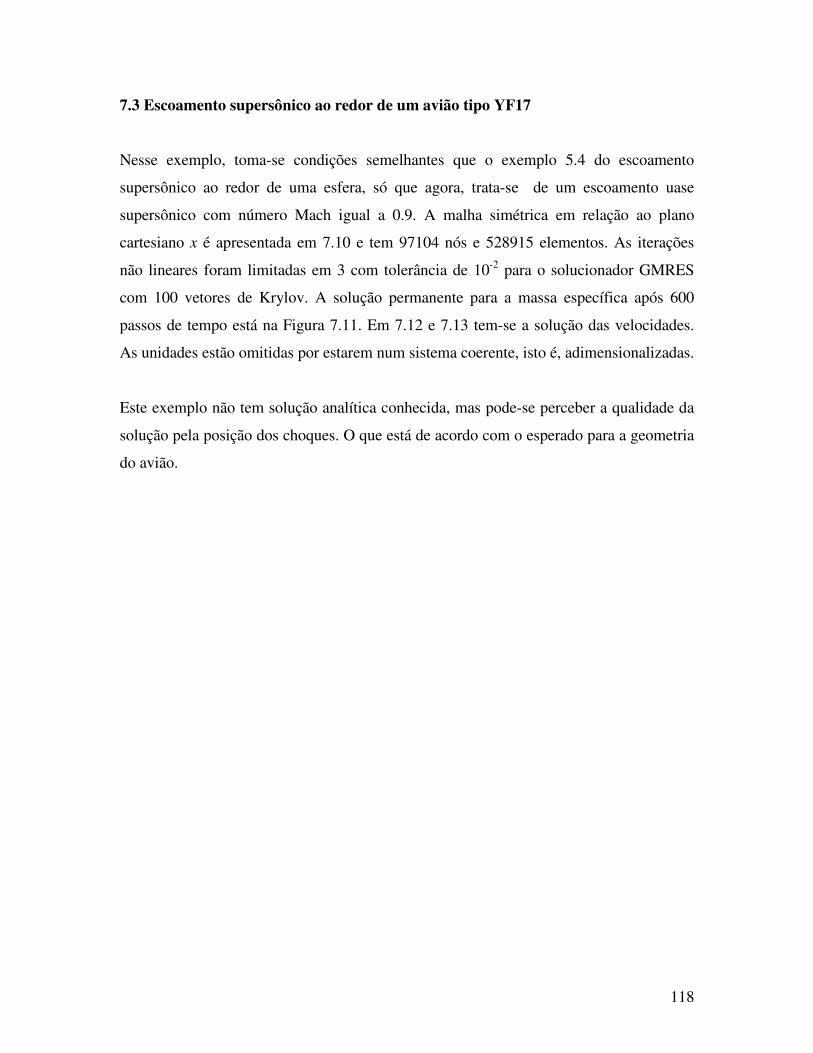
118
7.3 Escoamento supersônico ao redor de um avião tipo YF17
Nesse exemplo, toma-se condições semelhantes que o exemplo 5.4 do escoamento
supersônico ao redor de uma esfera, só que agora, trata-se de um escoamento uase
supersônico com número Mach igual a 0.9. A malha simétrica em relação ao plano
cartesiano x é apresentada em 7.10 e tem 97104 nós e 528915 elementos. As iterações
não lineares foram limitadas em 3 com tolerância de 10-2 para o solucionador GMRES
com 100 vetores de Krylov. A solução permanente para a massa específica após 600
passos de tempo está na Figura 7.11. Em 7.12 e 7.13 tem-se a solução das velocidades.
As unidades estão omitidas por estarem num sistema coerente, isto é, adimensionalizadas.
Este exemplo não tem solução analítica conhecida, mas pode-se perceber a qualidade da
solução pela posição dos choques. O que está de acordo com o esperado para a geometria
do avião.
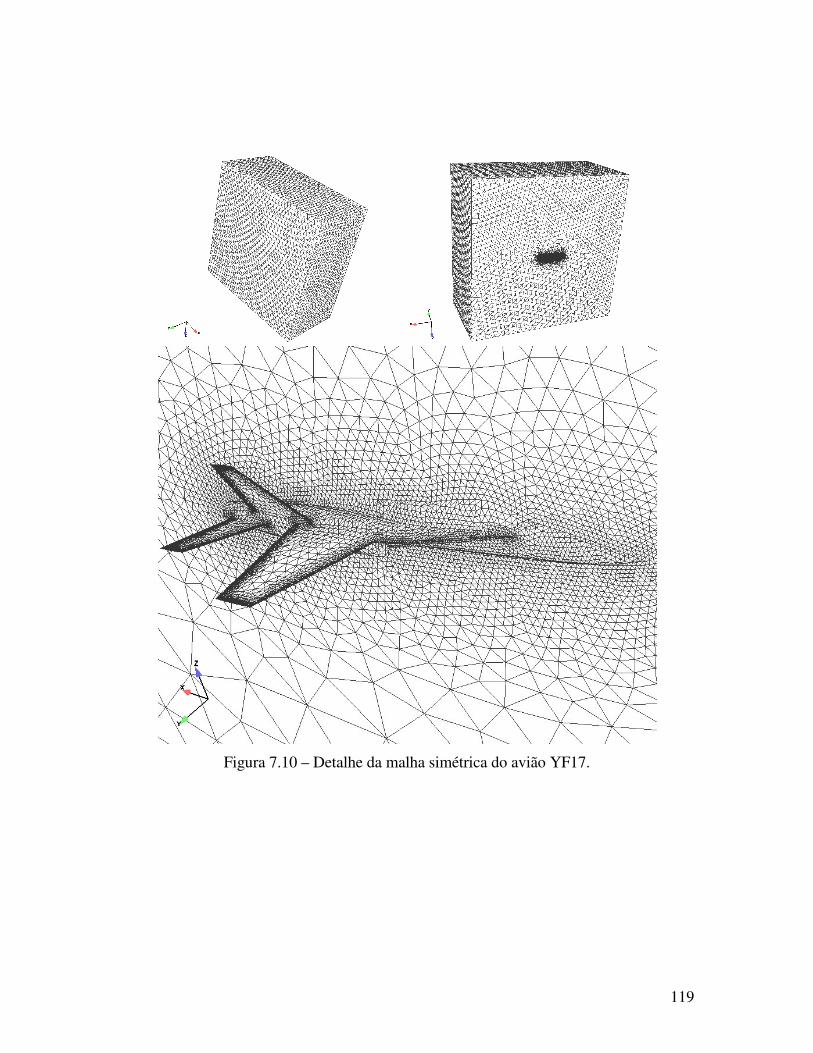
119
Figura 7.10 – Detalhe da malha simétrica do avião YF17.
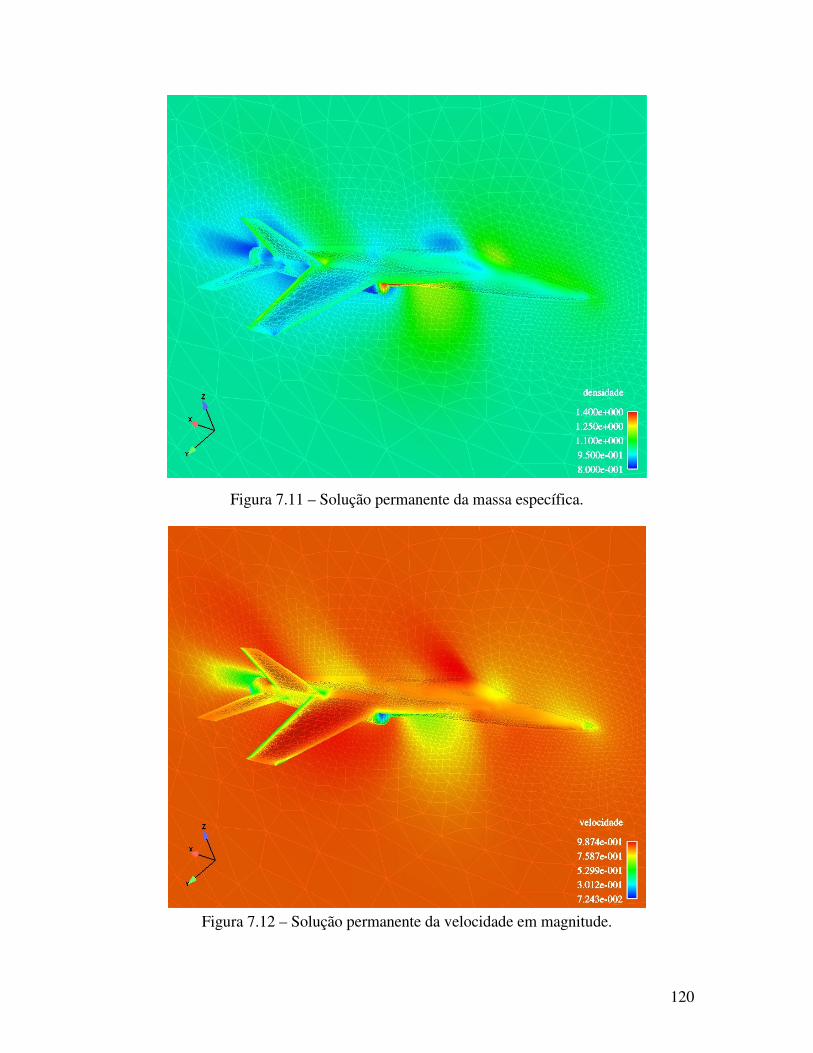
120
Figura 7.11 – Solução permanente da massa específica.
Figura 7.12 – Solução permanente da velocidade em magnitude.
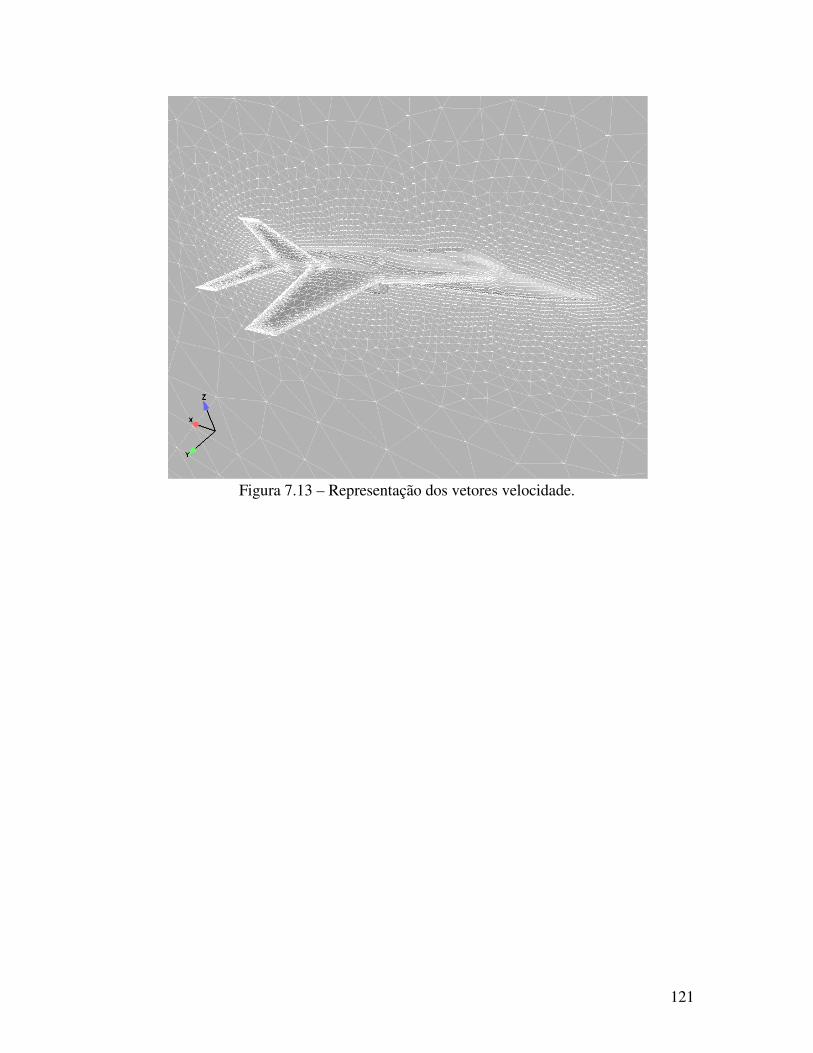
121
Figura 7.13 – Representação dos vetores velocidade.
122
Capítulo 8
Conclusões
Esta dissertação de Doutorado teve como principais objetivos a implementação
computacional do método dos elementos finitos estabilizados para solução de problemas
predominante advectivos, da mecânica dos fluidos computacional, relevantes nas
engenharias de petróleo e aeroespacial. São eles, escoamentos através de meios porosos
e escoamentos compressíveis não viscosos. Além da solução aproximada destes, existe
uma preocupação especial com técnicas computacionais e sua implementação eficiente
visando um ganho computacional na redução do tempo de processamento, e em alguns
casos, até viabilizar a solução de problemas de grande porte. Um balanço dessas
técnicas, suas vantagens e desvantagens e considerações finais são apresentadas.
No Capítulo 2 foi descrita a formulação matemática e numérica para escoamentos
bifásicos imiscíveis e deslocamentos totalmente miscíveis em meios porosos rígidos.
Um sistema unificado foi definido para o desenvolvimento de um programa
computacional comum aos dois casos. Foram também citadas expressões de modelos
empíricos para tratar um dos fluidos como um fluido não-Newtoniano, baseados na
reologia da Lei de Potências, mas recomenda-se que demais reologias e
comportamentos sejam avaliados de acordo com o interesse da indústria de petróleo.
123
Após descrever as equações governantes do escoamento, foi feita uma apresentação
detalhada do esquema numérico adotado. Para a discretização espacial foi empregado o
método dos elementos finitos estabilizados com tetraédros lineares (T4) e hexaedros tri-
lineares (H8). Para o H8 foi implementada a opção de integração reduzida com 1 ponto
e controle dos modos hourglass. A integração reduzida promove ganho na avaliação
dessas matrizes de elemento e por isso foi considerada uma técnica computacional e
tratada no Capítulo 6.
A equação da pressão é resolvida com a tradicional discretização de Galerkin. Para os
elementos T4, foi adotada uma técnica de pós-processamento das velocidades, para que
sejam interpoladas com a mesma precisão da pressão, sem ter que se utilizar o elemento
misto, que é computacionamente oneroso. Para o H8 regular, bastaria calcular as
velocidades com o gradiente da pressão avaliado no centróide do elemento, pois ali
reside um ponto de superconvergência [24]. Contudo para problemas muito não-lineares
percebe-se a ineficiência dessa aproximação. Já a equação do transporte, foi discretizada
pelo método dos elementos finitos estabilizados, com a formulação SUPG devido seu
caráter predominantemente advectivo e com um operador de captura de
descontinuidades, suavizando frentes descontínuas.
No Capítulo 4, da mesma forma que no Capítulo 2, foram descritas as equações de
Euler que governam escoamentos compressíveis não viscosos e a formulação numérica
empregada. Essas equações foram postas em variáveis conservativas, sendo que há
necessidade de utilizar variáveis de entropia na definição do operador de captura de
choques. Um novo operador de captura de choques [134], baseado somente em
variáveis conservativas foi implementado, e em alguns testes produziu melhores e em
outros piores resultados no sentido de capturar mais adequadamente o choque. A
vantagem inicialmente desejada, em se obter um ganho computacional não tendo que
fazer a transformação de variáveis, não se mostrou relevante frente à todos os cálculos
necessários para montar as matrizes de elemento. A formulação numérica é semelhante
à anterior, diferindo basicamente na quantidade de graus de liberdade e na existência de
um único sistema e não três separados como no caso seqencialmente implícito adotado
para meios porosos.
124
Nos Capítulos 3 e 5 foram apresentados exemplos numéricos de validação e verificação
das implementações computacionais. Alguns desses exemplos foram utilizados no
Capítulo 6 para testar as técnicas computacionais implementadas. Pelos exemplos de
validação apresentados,e de acordo com a literatura de refreência, pode-se confiar nas
implementações realizadas.
Portanto, o Capítulo 6 apresenta um conjunto de opções que aqui são chamadas de
técnicas computacionais. Tais técnicas compreendem a utilização de estruturas de dados
mais eficientes, importantes no armazenamento dos termos da matriz de coeficientes e
nas operações matriz-vetor inerentes dos métodos iterativos de solução dos sistemas de
equações lineares. Também, o elemento hexaedro com um ponto de integração foi
implementado na solução de escoamentos em meios porosos, apesar de inicialmente
desenvolvido para as equações de Euler [95], o que promove um ganho na avaliação das
matrizes de elemento. Também foi estudada a estratégia de desativação dinâmica que
prevê a desativação de elementos onde não há variação da solução ou termos fontes, não
havendo necessidade de calcular a solução advectiva para todo o domínio, adotado
também para as equações de meios porosos. E finalmente, pré-condicionadores que
possam levar a um melhor desempenho na solução dos sistemas de equações lineares
resultante através de métodos iterativos foram empregados com a estrutura de dados
CSR no programa para as equações de Euler.
Quanto à estruturas de dados, foram estudadas uma local e outra global. A local é a
estrutura de dados por arestas, que já se mostrou mais eficiente [27,42,122,54], que a
tradicional estrutura de dados por elementos. Contudo, essa estrutura local não é
interessante quando pré-condicionadores que necessitam realizar operações na matriz
global são utilizados. Portanto, para se poder testar novos pré-condicionadores, foi
utilizada uma estrutura de dados comprimida por linhas, denominada CSR, do inglês
Compressed Sparse Row. Essa estrutura de dados armazena a matriz global, apenas
onde há previsão de termos não nulos, isto é, posições onde há incidência entre
elementos. É importante ressaltar que apesar do caráter das técnicas ser distinto, isto é,
uma ser local e a outra global, ambas necessitam de um pré-processamento adequado.
Tanto o tempo gasto na geração dessas estruturas (pré-processamento), como nas
125
operações matriz-vetor (processamento) para as duas estruturas é equivalente. O
importante é realizar um implementação eficiente para que os ganhos desejados sejam
sempre atingidos. De modo que, seria inadequado eleger uma estrutura como melhor
que a outra. A vantagem da estrutura CSR é exatamente na facilidade de utilização
direta de pré-condiconadores não diagonais. A estrutura de dados por arestas poderia ser
utilizada mas necessita arranjos extras, que podem demandar muita memória e aumentar
o tempo de execução das operações de pré-condicionamento.
Quanto a técnica computacional de Desativação Dinâmica (DD), já foi mencionado que
é muito semelhante ao esquema Adaptativo Implícito/Explicito [122], já adotado
anteriormente, só que ainda mais eficiente por não exigir a solução da parte inativa, que
antes era tratada explicitamente. Contudo, essa técnica se mostra bastante eficaz em
problemas advectivos onde não há extensa faixa de variação do escalar transportado.
Esse é o caso da marcação em casos de superfície livre, onde a técnica tem sido
utilizada, em paralelo, com bastante êxito [54]. No caso de escoamentos em meios
porosos, existem valores intermédiarios que produzem uma faixa de elementos grande,
sendo que quase todo o domínio é eleito como ativo. Por isso não se mostrou uma
técnica muito atraente para caso de simulação de reservatórios ou análises de bacias,
mas sim de fonte pontuais como dispersão de contaminantes em corpos d’água ou
cidades [89]. No exemplo típico em um quarto de fivespot, além da verificação do
programa representar os fenômenos físicos, buscou-se também avaliar os tempos
computacionais e ganhos obitidos com a utilização das técnicas para redução do tempo
de execução. Para o H8 com integração completa ou reduzida, percebe-se que as
soluções são equivalentes, mesmo sabendo que a aproximação com a integração
reduzida não é exata para a adveçcção. O ganho computacional final não é muito
grande, mas considerável na avaliação das matrizes, operação que deve ser realizada a
cada iteração não-linear. Além disso, com a incorporação das técnicas, atuando em
conjunto, deseja-se obter ganho total bastante expressivo. Ainda nesse experimento, foi
avalidada a implementação e a performance computacional da DD. Já foi mencionado
que reduz consideravelmente o número de operações de ponto flutuante em cada passo
de tempo pois as equações são resolvidas apenas para uma partição ativa da malha, que
é, em geral, menos da metade da malha total. Os casos analiados com o T4 mostraram
126
pouco ganho com a DD. Como a DD, só é utilizada na equação do transporte, mas
pressão e velocidade são avaliadas para toda a malha, o ganho com a DD foi pequeno
comparado com o tempo total de análise. Para se aferir isso, avaliou-se um caso teste
com campos de pressão e velocidades constantes no tempo, e assim, o ganho com a DD
para o T4 foi adequado.
Para o H8, como não é necessário resolver um sistema extra para as velocidades, a
técnica de DD já obteve ganho considerável, mesmo tendo-se que resolver pressão e
velocidade para todo o domínio computacional, reduzindo tempo de processamento em
até menos da metade. Infelizmente, como a integração reduzida no caso da advecção
não é exata percebeu-se um pior condicionamento na matriz de coeficientes que levou
mais iterações para resolver o sistema linear. Isso foi considerada uma desvantagem,
inclusive com a necessidade de se utilizar elementos de lados paralelos que vai contra a
idéia original do método dos elementos finitos.
A implementação da estrutura de dados CSR e dos pré-condicionadores LU-SGS e
ILU(0) foram inicialmente realizadas para o problema permanente e linear de advecção-
difusão de um escalar em duas dimensões. Nesse problemas teste, ganhos muito
relevantes foram alcaçados em alguns casos, tanto para problemas simétricos com o
método dos gradientes conjugados como sistemas não simétricos utilizando o GMRES.
Os ganhos foram maiores quanto mais refinadas as malhas. Com esses ótimos
resultados, partiu-se para implementação de um código de Euler em três dimensões com
a estrutura CSR. Foram analisados um exemplo unidimensional e um tipicamnete
tridimensional. No exemplo 1D todos os cinco métodos de pré-condicionamneto
obtiveram resultados e ganhos em tempo de processamneto. No caso tridimensional do
escoamento ao redor de uma esfera, o método da fatoração ILU(0) aproximada por
blocos não atingiu solução, assim como os métodos puramente diagonal ou LU-SGS.
Apenas os métodos Bloco-diagonal e BlocoLU-SGS alcançaram soluções. De forma
que pode-se concluir que em problemas blocados, isto é, com mais de um grau de
liberdade, deve-se utilizar a forma em bloco, até mesmo para se alcançar uma solução.
Como o pré-condicionamneto ILU(0) não foi etstado para as equações de Euler, sua
127
versão aproximada não se mostrou interssante por não ter apresentado convergência no
caso 3D e por ter sido muioto semelhnate ao ganho do LU-SDGS no exemplo 1D.
No Capítulo 6 foi ainda realizada uma breve comparação entre operadores de
estabilização da advecção e de captura de choques para as equações de Euler. Os novos
operadores são mais simples por serem baseados somente em variáveis conservativas, e
necessitando assim, de menos operações de ponto flutuante para seus cálculos. Contudo,
os novos operadores necessitam de valores de referência e calibragem de parâmetros
para que funcionem bem. Isto não é necessário para os operadores tradicionais, que
apesar de baseados em variáveis de entropia, são automáticos, não necessitando valores
de referência, nem calibração.
O Capítulo 7 teve o objetivo de apresentar soluções de aplicação. Para o caso de
escoamentos em meios porosos foi estudada a migração secundária de petróleo na bacia
sedimentar de Llanos Orientales na Colômbia. Para tal foi definido um escoamento
imiscível tipo óleo e água. Esse estudo faz parte do convênio COPPE/ICP com a
finalidade de se promover um intercâmbio entre esses países. A metodolodia se mostrou
eficaz para tratar o problema de forma qualitativa onde, algumas rotas de migração e
zonas preferencias de acumulação puderam ser observadas. Contudo, para se tomar uma
medida mais quantitativa dessas soluções deve-se melhorar o modelo geométrico, a
malha de elementos finitos, os cenários de interesse, bem como os dados atuais que
possam vir a calibrar ou melhorar a confiança das soluções obtidas com esse modelo.
Ainda nesse capítulo, só que para escoamentos compressíveis, foi estudado o
escoamento à Mach=0.9 ao redor de um avião supersônico tipo Fighter YF-17. Valores
adimensionais foram empregados para forçar um escoamento desse tipo. Novamente,
nesse exemplo a utilização da estrutura de dados por arestas ou da CSR com pré-
condicionamento BLU-SGS promoveram um ganho significativo, no tempo de
processamento, da solução.
128
Como futuros desenvolvimentos [104] e linhas de pesquisa pretende-se avaliar as
sequintes técnicas computacionais:
• esquemas bloco estruturado/não estruturado [44,149,88,113];
• recursos de computação paralela [115,54].
• estrutura de dados por arestas em conjunto com as técnicas de pré-
condicionamento, e que já se mostrou eficiente em diversas
aplicações [27,42,122,54], inclusive com técnicas de reordenação [43].
• Métodos Multigrid [18] para solução de malhas de grande porte;
• Adaptatividade de malha [25].
Pretende-se também avaliar as sequintes questões físicas:
Equações para meios porosos
• O aclopamento das equações governantes do escomento com a deformação não-
linear da matriz porosa, isto é, o efeito geomecânico do reservatório. Este
acoplamento ainda é tratado simplificadamente em simuladores comerciais e é
tema de pesquisa para tratar reservatórios pouco consolidados, naturalmente
fraturados, ou na indução de fraturas em direções preferenciais para formação de
canais de escoamento, uma técnica de recuperação avançada de petróleo.
Equações de Euler
• Equações de Navier-Stokes e turbulência para escoamentos compressíveis.
Pretende-se também avaliar as sequintes questões matemáticas:
• Desenvolvimento de uma técnica de integração reduzida, que não seja somente
uma boa aproximação como na advecção, mas como no caso difusivo seja extata
para elementos de lados paralelos.
Pretende-se também avaliar as sequintes questões numéricas:

129
• A eficiência computacional do método dos elementos finitos mistos frente ao
método estabilizado ou dos volumes finitos, na solução do problema acoplado
pressão-velocidade
130
Referências Bibliográficas
[1] ALIABADI, S.K., RAY, S.E., TEZDUYAR, T.E. “SUPG Finite Element
Computation of Viscous Compressible Flows Based on The Conservation and Entropy
Variables Formulations”. Computational Mechanics, 11, 300-312. 1993.
[2] ALIABADI S.K., TEZDUYAR T.E. “Parallel Fluid Dynamics Computations in
Aerospace Applications”. International Journal for Numerical Methods in Fluids, 21,
783-805, 1995.
[3] ALMEIDA, R.C., GALEÃO, A.C. “An Adaptative Petrov-Galerkin Formulation
for the Compressible Euler and Navier-Stokes Equations”. Computer Methods in
Applied Mechanics and Engineering, 129, 157-176, 1996.
[4] AZAIEZ, J., SINGH, B. “Stability of Miscible Displacements of Shear Thinning
Fluids in a Hele-Shaw Cell”. Physics Fluids, 14 (5), 2002.
[5] AZIZ, K., SETTARI, A. Petroleum Reservoir Simulation. Chapman &
Hall, 1979.
[6] BABUSKA, I., ODEN T.J. “Verification and Validation in Computational
Engineering and Science: Basic Concepts”. Computer Methods in Applied Mechanics
and Engineering, 193, 4057-4066, 2004.
131
[7] BABUSKA, I, ODEN, T. “The Reliability of Computer Predictions: Can They
be Trusted?”. International Journal of Numerical Analysis and Modeling, 1, 1, 1-18,
2005.
[8] BATISTA, V.H.F. Geração de Malhas Não-Estruturadas Tetraédricas
Utilizando um Método de Avanço de Fronteira. Tese de M.Sc., COPPE/UFRJ, Rio de
Janeiro, RJ, 2005.
[9] BAUTISTA, D.F.G. Estudo dos Sistemas Petrolíferos no Setor Central da Bacia
dos "Llanos Orientales", Colombia. Um Modelo para Explicar as Mudanças na
Qualidade do Petróleo. Tese de D.Sc., COPPE/UFRJ, Rio de Janeiro, RJ, 2008.
[10] BEAR, J. Dynamics of Fluids in Porous Media. Dover Publications, 1988.
[11] BELYTSCHKO, T. LIN, J.I. “A Three-Dimensional Impact-Penetration
Algorithm with Erosion, Computers and Structures, 25, 95-104, 1987.
[12] BELYTSCHKO, T., ONG, J.S., LIU, W.K., KENNEDY, J.M. “Hourglass
Control in Linear and Nonlinear Problems”. Computer Methods in Applied Mechanics
and Engineering, 43, 251-276, 1984.
[13] BELYTSCHKO, T., LIU, W.K., MORAN, B. Nonlinear Finite Element for
Continua and Structures. John Wiley & Sons, 2000.
[14] BELYTSCHKO, T., FISH, J. HUGHES, T.J.R., ODEN, T. Simulation Based
Engeneering, a Report on a Workshop Held Under the Auspices of the National Science
Foundation, Arlington, Virginia, 2004.
[15] BENGALY, A.P. Modelagem Geométrica e Mecânica Tridimensional de uma
Bacia Sedimentar Submetida ao Regime Compressional de Tensões. Seminário de
Qualificação ao Doutorado COPPE/UFRJ, 2006.
132
[16] BOCHEV P.B., DOHRMANN, C. R. “A Computational Study of Stabilized,
Low-Order C0 Finite Element Approximations of Darcy Equations”. Computational
Mechanics, 38, 4-5, 323-333, 2006.
[17] BOCHEV, P.B., DOHRMANN, C.R., GUNZBURGER M.D. “Stabilization of
Low-Order Mixed Finite Elements for the Stokes Equations”. SIAM Journal on
Numerical Analysis, 44, 1, 82-101, 2007.
[18] BRIGGS W.L., HENSON, V.E., McCORMICK, S.F. A Multigrid Tutorial, 2nd
edition, SIAM, 2000.
[19] BROOKS, A.N., HUGHES, T.J.R. “Streamline Upwind/Petrov-Galerkin
Formulation for Convection Dominated Flows with Particular Emphasis on the
Incompressible Navier-Stokes Equations”. Computer Methods in Applied Mechanics
and Engineering, 32, 199-259, 1982.
[20] BURMAN, E. “Adaptive Finite Element Methods for Compressible Flow”.
Computer Methods in Applied Mechanics and Engineering, 190, 1137-1162, 2000.
[21] CALLE, J.L.D., DEVLOO, P.R.B., GOMES, S.M. "Stabilized Discontinuous
Galerkin Method for Hyperbolic Equations". Computer Methods in Applied Mechanics
and Engineering, 194, 17, 1861-1874, 2005.
[22] CAMPOS, F. F. Algoritmos Numéricos. LTC, 2001.
[23] CANT, R.S., DAWES, W.N., SAVILL, A.M. “Advanced CFD and Modeling of
Accidental Explosions”, Annual Review of Fluid Mechanics, 36, 97–119, 2004.
[24] CAREY, G.F. Computational Grids – Generation, Adpation and Solution
Strategies. Taylor and Francis, 1997.
133
[25] CAREY, G. “A Perspective on Adaptive Modeling and Meshing (AM&M)”.
Computer Methods in Applied Mechanics and Engineering, 195, 214–235, 2006.
[26] CATABRIGA, L. Soluções Implícitas das Equações de Euler empregando
Estrutura de Dados por Arestas, Tese de D.Sc., COPPE/UFRJ, Rio de Janeiro, RJ,
2000.
[27] CATABRIGA, L., COUTINHO, A.L.G.A. “Implicit SUPG solution of Euler
equations using edge-based data structures”, Computer Methods in Applied Mechanics
and Engineering, 191 (32), 3477-3490, 2002.
[28] CATABRIGA, L., COUTINHO, A.L.G.A., TEZDUYAR, T.E. “Compressible
Flow SUPG Parameters Computed from Element Matrices”. Communications in
Numerical Methods in Engineering, 21, n.9, 465-476, 2005.
[29] CHAVENT, G., JAFFRE, J. Mathematical Models and Finite Elements for
Reservoir Simulation. Elsevier Science Publishers B.V., 1986.
[30] CHEN, C-Y, MEIBURG, E. “Miscible Porous Media Displacements in the
Quarter Five-Spot Configuration. Part 1. The homogeneus Case. J. Fluid Mech, 371,
233-268, 1998.
[31] CHEN, Z. Reservoir Simulation – Mathematical Techniques in Oil Recovery.
SIAM, 2007.
[32] CHEN, Z., HUAN, G., MA, Y. Computational Methods for Multiphase Flows in
Porous Media, SIAM, 2006.
[33] CHEN, Z. “Formulations And Numerical Methods of the Black Oil Model in
Porous Media”. SIAM Journal of Numerical Analysis, 38, 2, 489–514, 2000.
134
[34] CHIU, T.W., WAKEMAN, R.J., Harris, P.R., Meuric, O.F.J. “Effects of Non-
Newtonian Fluid and Porous Media Parameters on Two-Phase Flow in Porous Media”.
Trans IchemE, 74(A), 220-231, 1996.
[35] CODINA, R. “On Stabilized Finite Element Methods for Linear Systems of
Convection-Diffusion-Reaction Equations”. Computer Methods in Applied Mechanics
and Engineering, 188, 61–82, 2000.
[36] CODINA, R. “A Discontinuity-Capturing Crosswind-Dissipation for the Finite
Element Solution of the Convection-Diffusion Equation”. Computer Methods in
Applied Mechanics and Engineering, 110, 325-342, 1993.
[37] CORREA, M.R., LOULA, A.F.D. “Stabilized velocity post- processings for
Darcy flow in heterogeneous porous media”, Communications in Numerical Methods in
Engineering, 23, 461-489, 2007.
[38] COUTINHO, A.L.G.A., ALVES, J.L.D., LANDAU, L., EBECKEN, N.F.F. “A
Dynamic Mesh Partition Algorithm for the Finite Element Solution of Two-Phase
Immiscible Flow in Oil Reservoirs”. Finite Elements in Fluids: New Trends and
Applications: CIMNE, v.2, 856-865, Pineridge Press, Barcelona, 1993.
[39] COUTINHO, A.L.G.A., ALVES, J.L.D. “Finite Element Simulation of
Nonlinear Viscous Fingering in Miscible Displacements with Anisotropic Dispersion
and Nonmonotonic Viscosity Profiles”. Computational Mechanics, 23, 108-116, 1999.
[40] COUTINHO, A.L.G.A., SILVA, A.S., DEVLOO, P.R.B. “Uma Comparação de
Esquemas de Estabilização para a Simulação por Elementos Finitos de Escoamentos
Imiscíveis Bifásicos em Meios Porosos”. Revista Internacional de Métodos Numéricos
para Cálculo y Diseño en Ingeniería, 19, 279-294, 2003.
[41] COUTINHO, A.L.G.A., DIAS, C.M., ALVES, J.L.D., LANDAU, L., LOULA,
A.F.D., MALTA, S.M.C., CASTRO, R.G.S., GARCIA, E.L.M. “Stabilized Methods
135
and Post-Processing Techniques for Miscible Displacements”. Computer Methods in
Applied Mechanics and Engineering, 193, 1421-1436, 2004.
[42] COUTINHO, A.L.G.A., MARTINS, M.A.D., ALVES, J.L.D., LANDAU, L.,
MORAIS, A. “Edge-Based Finite Element Techniques for Nonlinear Solid Mechanics
Problems”. International Journal for Numerical Methods in Engineering, 50 (9), 2053-
2068, 2001.
[43] COUTINHO, A.L.G.A., MARTINS, M.A.D., SYDENSTRICKER, R.M.,
ELIAS, R.N., “Performance Comparison Of Data-Reordering Algorithms for Sparse
Matrix-Vector Multiplication in Edge-Based Unstructured Grid Computations”.
International Journal for Numerical Methods in Engineering, 66, 3 , 431 – 460, 2007.
[44] DARVE, E., LÖHNER, R. “Advanced Structured-Unstructured Solver for
Electromagnetic Scattering from Multimaterial Objects”. AIAA-97-0863, 1997.
[45] DE CARVALHO, D.K.E.; WILLMERSDORF, R.B.; LYRA, P.R.M. “A Node-
Centered Finite Volume Formulation for the Solution of Two-Phase Flows in Non-
Homogeneous Porous Media”. International Journal for Numerical Methods in Fluids,
53, 1197-1219, 2006.
[46] DEVLOO, P. “The Implementation of Directional Boundary conditions for finite
element Computations with Iterative Solvers”. Communications in Applied Numerical
Methods, 3 259-264, 1987.
[47] DIAS, C.M., Técnicas de Integração Reduzida para Simulação de Problemas
Não-lineares de Transporte pelo Método dos Elementos Finitos, Tese de D.Sc.,
COPPE/UFRJ, Rio de Janeiro, RJ, 2001.
[48] DIAS, C.M., COUTINHO, A.L.G.A. “Stabilized Finite Element Methods with
Reduced Integration Techniques for Miscible Displacements in Porous Media”.
International Journal for Numerical Methods in Engineering, 59, 475–492, 2004.
136
[49] DOMPIERRE J., LABBÉ P., GUIBAULT, F., CAMARERO R. “Proposal of
Benchmarks for 3D Unstructured Tetrahedral Mesh Optimization”. Report CERCA
R98-91, Montreal, Canada, 1998.
[50] DONEA, J., HUERTA, A. Finite elements Methods for flow Problems. John
Wiley & Sons, 2003.
[51] DONGARRA, J., FOSTER, J., FOX ,G., GROPP, W.,KENNEDY,
K.,TORCZON, L., WHITE, A. Sourcebook of Parallel Computing. Elsevier, 2003.
[52] DURLOFSKY, L.J. “A Triangle Based Mixed Finite Element-Finite Volume
Technique for Modeling Two Phase Flow Through Porous Media”. Journal of
Computational Physics, 105, 252-266, 1993.
[53] EFENDIEV, Y.; GINTING, V.; HOU, T.; EWING, R. “Accurate Multiscale
Finite Element Methods for Two-Phase Flow Simulations”. Journal of Computational
Physics, 220, 155–174, 2006.
[54] ELIAS, R.N. Estruturas de Dados por Arestas para a Simulação Paralela de
Escoamentos Incompressíveis pelo Método Estabilizado de Elementos Finitos. Tese de
D.Sc., COPPE/UFRJ, Rio de Janeiro, RJ, 2007.
[55] EMERY, A.F. “An Evaluation of Several Differecing Methods for Inviscid Fluid
Flow Problems”. Journal of Computational Physics, 2, 306-331, 1968.
[56] ERTEKIN, T., ABOU-KASSEM, J.H., KING, G.R. Basic Applied Reservoir
Simulation. SPE textbook series vol. 7, 2001.
[57] EWING, R.E., CHEN, Z. “Comparison of Various Formulations of Three-Phase
Flow in Porous Media”. Journal of Computational Physics, 132, 362–373, 1997.
137
[58] GALEÃO, A.C., DO CARMO, E.G.D. “A Consistent Approximate Upwind
Petrov-Galerkin Method for Convection-Dominated Problems”. Computer Methods in
Applied Mechanics and Engineering, 68, 83-95, 1988.
[59] GARCIA, E.L.M. Formulações de Elementos Finitos Bi e Tridimensionais para
Simulação em Paralelo de Escoamentos em Reservatórios de Petróleo. Tese de D.Sc.,
COPPE/UFRJ, Rio de Janeiro, RJ, 1997.
[60] GERRITSEN, M.G., DURLOFSKY, L.J. “Modeling Fluid flow in Oil
Reservoirs”. Annual Review of Fluid Mechanics, 37, 211-238, 2005.
[61] GIJZEN, M.B.V., “Large Scale Finite Element Computations with GMRES-
Like Methods on a Cray Y-MP”, Applied Numerical Mathematics, 19, 51-62, 1995.
[62] GROPP, W., LUSK, E., SKJELLUM, A. Using MPI. MIT, 1999.
[63] HALL, S.M. Estudo Comparativo de Métodos dos Volumes Finitos e Misto de
Elementos Finitos na Solução de Problemas de Darcy. Tese de M.Sc., COPPE/UFRJ,
Rio de Janeiro, RJ, 2006.
[64] HAUKE, G., DOWEIDAR, M.H. “Fourier Analysis of Semi-Discrete and
Space–Time Stabilized Methods for the Advective–Diffusive–Reactive Equation: I.
SUPG”. Computer Methods in Applied Mechanics and Engineering, 194, 45-81, 2005.
[65] HAUKE, G., DOWEIDAR, M.H. “Fourier Analysis of Semi-Discrete and
Space–Time Stabilized Methods for the Advective–Diffusive–Reactive Equation: II.
SGS”. Computer Methods in Applied Mechanics and Engineering, 194, 691-725, 2005.
[66] HEATH, M.T., Scientific Computing – An Introductory Survey, WCB/McGraw
Hill, 1997.
138
[67] HIRSCH, C. Numerical Computation of Internal And External Flows, volumes 1
& 2, John Wiley and Sons Ltd, Chichester, 1992.
[68] HUGHES T.J.R., TEZDUYAR T.E. “Finite Element Methods for First-Order
Hyperbolic Systems with Particular Emphasis on the Compressible Euler Equations”.
Computer Methods in Applied Mechanics and Engineering, 45, 217-284, 1984.
[69] HUGHES, T.J.R., FRANCA, L.P., MALLET, M., “A New Finite Element
Formulation for Computational Fluid Dynamics: I. Symmetric Forms of The
Compressible Euler and Navier-Stokes Equations and The Second Law of
Thermodynamics”. Computer Methods in Applied Mechanics and Engineering, 54, 223-
234, 1986.
[70] HUGHES, T.J.R. Finite Element Method, Linear Static and Dynamic Finite
Element Analysis. Prentice-Hall, 1987.
[71] HUGHES, T.J.R. “Multiscale Phenomena: Green's Functions, The Dirichlet-To-
Neumann Formulation, Subgrid Scale Models, Bubbles snd the Origins of Stabilized
Methods”. Computer Methods in Applied Mechanics and Engineering, 127, 1-4, 387-
401,1995.
[72] HUGHES, T.J.R., ENGEL, G., MAZZEI, L., LARSON, M.G. “The Continuous
Galerkin Method is Locally Conservative”. Journal of Computational Physics, 163,
467-488, 2000.
[73] HUGHES, T.J.R., WELLS, G.N. “Conservation Properties for the Galerkin and
Stabilised Forms of the Advection-Diffusion and Incompressible Navier-Stokes
Equations”. Computer Methods in Applied Mechanics and Engineering 194, 1141–
1159, 2005.
[74] JAMESON, A., YOON, S. “Lower-Upper Implicit Schemes with Multiple Grids
for the Euler Equations”. AIAA JOURNAL, 25, 7, 929-935, 1987.
139
[75] JOHAN, Z., HUGHES, T.J.R., SHAKIB, F. “A Globally Convergent Matrix-
Free Algorithm for Implicit Time-Marching Schemes arising in Finite Element Analysis
in Fluids”. Computer Methods in Applied Mechanics and Engineering, 87, 281-304,
1991.
[76] JOHNSON, C., SZEPESSY, A. “On the Convergence of a Finite Element
Method for a Nonlinear Hyperbolic Conservation Law”. Mathematics of Computation,
49, 180, 427-444, 1987.
[77] JUANES, R. Displacement Theory and Multiscale Numerical Modeling of
Three-Phase flow in Porous Media. Ph.D. Thesis, Stanford, California, 2003.
[78] KIRK, B.S. Adaptive Finite Element Simulation of Flow and Transport
Applications on Parallel Computers. PhD thesis, The University of Texas at
Austin, 2007.
[79] KIRK, B.S., CAREY, G.F. “Development and Validation of a SUPG Finite
Element Scheme for the Compressible Navier-Stokes Equations using a Modi_ed
Inviscid Flux Discretization”. International Journal for Numerical Methods in Fluids,
57(3), 265-293, 2008.
[80] KNOLL, D.A.; KEYS, D.E. “Jacobian-Free Newton–Krylov Methods: a Survey
of Approaches and Applications”. Journal of Computational Physics, 193, 357–397,
2004.
[81] KOH, B.C., KIKUCHI, N. “New Improved Hourglass Control for Bilinear and
Trilinear Elements in Anisotropic Linear Elasticity”. Computer Methods in Applied
Mechanics and Engineering, 65, 1-46, 1987.
140
[82] LAKE, L., POPE, G., CAREY, G.F., SEPEHRNOORI, K. “Isothermal,
Multiphase, Multicomponent Fluid Flow in Permeable Media: Part 1 - Theory, Part 2 -
Numerical Modelling”. In Situ, 1984.
[83] LAKE, L.W. Enhanced Oil Recovery, Prentice Hall, 1996.
[84] LANGTANGEN, H.P. “Implicit Finite Element Methods for Two-Phase Flow in
Oil Reservoirs”. International Journal for Numerical Methods in Engineering, 10, 651–
681, 1990.
[85] LE BEAU, G.J., TEZDUYAR, T.E. “Finite Element Cmputation Of
Compressible Flows With The SUPG Formulation”. Advances in Finite Element
Analysis in Flud Dynamics (eds. Dhaubhadel, M.N., Engelmean M.S. e Reddy J.N),
ASME, New York, 21-27, 1991.
[86] LE BEAU G. J., RAY S. E., ALIABADI S. K. and TEZDUYAR, T. E. “SUPG
Finite Element Computations of Compressible Flows with the Entropy and
Conservation Variables Formulations”, Computer Methods in Applied Mechanics and
Engineering, 104, 397-422. 1993.
[87] LI, B., CHEN, Z., HUAN, G. “Comparison of Solution Schemes for Black Oil
Reservoir Simulations with Unstructured Grids”. Computer Methods in Applied
Mechanics and Engineering, 193, 319–355, 2004.
[88] LIOU, M.-S., ZHENG, Y. “A Novel Approach of Three-Dimensional Hybrid
Grid Methodology: Part 2. Flow Solution”. Computer Methods in Applied Mechanics
and Engineering, 192, 4173–4193, 2003.
[89] LÖHNER, R. Applied CFD Techniques – An Introduction Based on Finite
Element Methods, John Wiley & Sons, 2001.
141
[90] LÖHNER, R., CAMELLI, F. “Dynamic Deactivation for Advection-Dominated
Contaminant Transport”. Communications in Numerical Methods in Engineering 20,
639-646, 2004.
[91] LOULA, A.F.D., GARCIA, E.L.M.. & COUTINHO, A.L.G.A. “Miscible
Displacement Simulation by Finite Element Methods in Distributed Memory
Machines”. Computer Methods in Applied Mechanics and Engineering, 174, 339-354,
1999.
[92] LUO, H, BAUM, J.D., LÖHNER, R. “Edge-Based Finite Element Scheme for
the Euler Equations”, AIAA Journal, 32 (6), 1183-1190, 1994.
[93] LUO, H., BAUM , J.D., LÖHNER, R. “A Hybrid Cartesian Grid and Gridless
Method for Compressible Flows”. Journal of Computational Physics, 214, 618-632,
2006.
[94] MALISKA, C.R. Transferência de Calor e Mecânica dos Fluidos Coputacional.
LTC, 2ª edição, 2004.
[95] MALLET, M., POIRIER, C., SHAKIB, F. “A New Finite Element Formulation
for Computational Fluid Dynamics: Development of an Hourglass Control Operator for
Multidimensional Advective-Diffusive Systems”. Computer Methods in Applied
Mechanics and Engineering, 94, 429-442, 1992.
[96] MALTA, S.M.C., LOULA, A.F.D., GARCIA A.L.M. “A Post-Processing
Technique to Approximate the Velocity Filed in Miscible Displacement Simulations”.
Matemática Contemporânea, 8, 239-268, 1995.
[97] MARTINS, M.A.D. Estrutura de Dados por Arestas para Solução de problemas
de Plasticidade Computacional, Tese de D.Sc., COPPE/UFRJ, Rio de Janeiro, RJ,
2001.
142
[98] MARTINS, E.O. Modelagem Sísmica em Meios Complexos. Tese de MSc.
COPPE/UFRJ, Rio de Janeiro, 2003.
[99] MASUD, A; HUGHES T.J.R. “A Stabilized Mixed Finite Element Method for
Darcy Flow”. Computer Methods in Applied Mechanics and Engineering, 191 (39-40),
4341-4370, 2002.
[100] MENDONÇA, A.L. Simulação Numérica de Escoamentos Incompressíveis
Bifásicos de Fluidos Não-Newtonianos e Imiscíveis em Meios Porosos via Método dos
Elementos Finitos. Tese de M.Sc., COPPE/UFRJ, Rio de Janeiro, RJ, 2003.
[101] MORETTI, C.O. Um Sistema Computacional Paralelo Aplicado à Simulação de
Propagação Tridimensional de Fissuras, Tese de Doutorado, Escola Politécnica da
Universidade de São Paulo, São Paulo, 2001.
[102] MOSÉ, R., SIEGEL, P., ACKERER, P., CHAVENT G. “Application of the
Mixed Hybrid Finite Element Approximation in a Groundwater Flow Model: Luxury or
Necessity ?”. Water Resources Research, 30 (11), 3001-3012, 1994.
[103] NEY, W.G. Um Estudo Comparativo sobre Formulações Estabilizadas e
Adaptatividade na Simulação de Deslocamentos Miscíveis em Meios Porosos pelo
Método dos Elementos Finitos. Tese de M.Sc., COPPE/UFRJ, Rio de Janeiro, RJ, 2002.
[104] ODEN, J.T., BELYTSCHKO, T., BABUSKA, I., HUGHES, T.J.R. “Research
Directions in Computational Mechanics”. Computer Methods in Applied Mechanics and
Engineering, 192, 913–922, 2003.
[105] PEACEMAN, D. Fundamentals of Numerical Reservoir Simulation. Elsevier,
1977.
[106] PERAIRE, J., PEIRO, J., MORGAN, K. A 3D Finite Element Multigrid Solver
for the Euler Equations, AIAA Paper 92-0449, 1992.
143
[107] RIBEIRO, F. L. B., COUTINHO, A. L. G. A., “Comparison between Element,
Edge and Compressed Storage Schemes for Iterative Solutions in Finite Element
Analysis”, International Journal for Numerical Methods in Engineering, 36(4), 659-
685, 2005.
[108] RIBEIRO, F. L. B, FERREIRA, I. A., “Parallel Implementation of the Finite
Element Method Using Compressed Data Structures”, Computational Mechanics,
41,31-48, 2007.
[109] SAAD, Y., SCHULTZ, M.H., “GMRES: Generalized Minimal Residual
Algorithm for Solving Non-Symmetric Systems”. SIAM Journal of Scientifc and
Statistical Computing 7, 856-869, 1996.
[110] SAAD, Y. Iterative Methods for Sparse Linear Systems, Second Edition. SIAM,
2003.
[111] SANTOS, I.P., ALMEIDA, R.C. “A Nonlinear Subgrid Method for Advection–
Diffusion Problems”. Computer Methods in Applied Mechanics and Engineering, 196,
45-48, 2007.
[112] SHAKIB, F., Finite Element Analysis of the Compressible Euler and Navier-
Stokes Equations. Ph.D. Thesis, Stanford University, 1988.
[113] SHAW, J.A., PEACE, A.J. “Simulating Three-Dimensional Aeronautical Flows
on Mixed Block-Structured/Semi-Structured/Unstructured Meshes”. International
Journal for Numerical Methods in Fluids, 39, 213-246, 2002.
[114] SILVA, A.S. Elementos Finitos Adaptativos para Escoamentos Bi-Fásicos
Imiscíveis Ligeiramente Compressíveis. Tese de D.Sc., COPPE/UFRJ, Rio de Janeiro,
RJ, 2001.
144
[115] SIMON, D.H. Parallel Computational Fluid Dynamics, Implementations and
Results. MIT, 1992.
[116] SOUTO FILHO, J. D. Utilização de Simulador Numérico na Análise do
Proecesso de Migração Secundária de Petróleo. Dissertação de Mestrado, UNICAMP,
1994.
[117] SOUZA, D.A.F. Algoritmo Adaptativo Implícito/Explícito por Arestas para
Solução de Problemas de Transporte Tridimensionais, Tese de M.Sc., COPPE/UFRJ,
Rio de Janeiro, RJ, 2002.
[118] SOUZA, D.A.F., SESINI, P.A., COUTINHO, A.L.G.A. “Three-Dimensional
SUPG Finite Element Solution of the Euler Equations in Conservation Variables”,
CILAMCE, Ouro Preto, MG, 2003.
[119] SOUZA, D.A.F., COUTINHO, A.L.G.A., ALVES, J.L.D. “Three-Dimensional
Finite Element Solutions of Immiscible Two-Phase Flow through Porous Media”.
CILAMCE, Recife, PE, 2004.
[120] SOUZA, D.A.F., SESINI, P.A., COUTINHO, A.L.G.A. “Implicit Three-
Dimensional Finite Element Solution of the Euler Equations in Conservation
Variables”. ENCIT, Rio de Janeiro, RJ, 2004.
[121] SOUZA, D.A.F., SESINI, P.A., COUTINHO, A.L.G.A “3D SUPG Solutions of
Inviscid Compressible High Speed Flows”. LNCC, Petrópolis, RJ, 2004.
[122] SOUZA, D.A.F., MARTINS, M.A.D., COUTINHO, A.L.G.A. “Edge-based
Adaptive Implicit/Explicit Finite Element Procedures for Three-Dimensional Transport
Problems”. Communications in Numerical Methods in Engineering, 21, 545-552, 2005.
[123] SOUZA, D.A.F., SESINI, P.A., SENGA, M., COUTINHO, A.L.G.A.,
TEZDUYAR, T.E. “Comparison of Shock Capturing Methods in 3D Computations
145
based on the SUPG Formulation of the Euler Equations in Conservation Variables”.
FEF05, Wales, UK, 2005.
[124] SOUZA, D.A.F., SESINI, P.A., SENGA, M., COUTINHO, A.L.G.A.,
TEZDUYAR, T.E. “Shock Capturing Methods in 3D Computations based on the SUPG
Formulation of the Euler Equations in Conservation Variables”. USNCCM8, Austin,
TX, 2005.
[125] SOUZA, D.A.F., COUTINHO A.L.G.A, ALVES, J.L.D. “A Stabilized Finite
Element Method for 3D Immiscible Two-Phase Flows in Porous Media”. USNCCM8,
Austin, TX, 2005.
[126] SOUZA, D.A.F., COUTINHO, A.L.G.A. “Edge-based Stabilized Finite Element
Solutions of 3D Inviscid Compressible Flows”. SIMMEC, Rio de Janeiro, RJ, 2006.
[127] SOUZA, D.A.F., COUTINHO, A.L.G.A., ALVES, J.L.D. “Fast Numerical
Simulation of Prous Media Flows”. ECCM, Lisboa, Portugal, 2006.
[128] TEIXEIRA, P.R.F, AWRUCH, A.M. “Three-dimesional Simulation of High
compressible flows Using a Multi-Step Integration Technique with Subcycles”. Applied
Mathematical Modeling, 25, 613-627, 2001.
[129] tetgen.berlios.de/
[130] TEZDUYAR, T.E., HUGHES, T.J.R. “Development of Time-Accurate Finite
Element Techniques for First-Order Hyperbolic Systems with Particular Emphasis on
the Compressible Euler Equations”. NASA Technical Report NASA-CR-204772,
NASA, 1982.
[131] TEZDUYAR, T.E., HUGHES, T.J.R. “Finite Element Formulations for
Convection Dominated Flows with Particular Emphasis on the Compressible Euler
Equations”, 21st Aerospace Sciences Meeting, Reno, Nevada, AIAA, 83-0125. 1983.
146
[132] TEZDUYAR, T.E., Park, Y.J. “Discontinuity-Capturing Finite Element
Formulations for Nonlinear Convection-Diffusion-Reaction Equations”. Computer
Methods in Applied Mechanics and Engineering, 59, 307-325, 1986.
[133] TEZDUYAR, T.E., LIOU, J. “Adaptive Implicit-Explicit Finite Element
Algorithms for Fluid Mechanics Problems”. Computer Methods in Applied Mechanics
and Engineering, 78, 165-180, 1990.
[134] TEZDUYAR, T.E. “Finite Element Methods for Fluid Dynamics with Moving
Boundaries and Interfaces”, Chapter 17 in Encyclopedia of Computational Mechanics,
Volume 3: Fluids (eds. E. Stein, R. De Borst and T.J.R. Hughes), John Wiley & Sons,
2004.
[135] TEZDUYAR, T.E., SENGA, M. “Stabilization and Shock-Capturing Parameters
in SUPG Formulation of Compressible Flows”. Computer Methods in Applied
Mechanics and Engineering, 195, 1621-1632, 2006.
[136] TEZDUYAR, T.E., SENGA, M. “SUPG Finite Element Computation of
Inviscid Supersonic Flows with YZβ Shock-Capturing”, Computers and Fluids, 36,1,
147-159, 2007.
[137] TEZDUYAR, T.E., SENGA, M., VICKER, D., “Computation of Inviscid
Supersonic Flows around Cylinders and Spheres With the SUPG Formulation and YZβ
Shock-Capturing”, Computational Mechanics, 38, 469–481, 2006.
[138] TWORZYDLO, W.W., ODEN, J.T., THORNTON, E.A., “Adaptive
Implicit/Explicit Finite Element Methods for Compressible Viscous Flows”. Computer
Methods in Applied Mechanics and Engineering, 95, 397-440, 1992.
[139] VALLI, A.M.P., CAREY, G.F., COUTINHO, A.L.G.A. “Control Strategies for
Timestep Selection in FE Simulation of Incompressible Flows and Coupled Reaction-
147
Convection-Diffusion Processes”. International Journal for Numerical Methods in
Fluids, 47, 201-231, 2005.
[140] www.cmgroup.com/software/imex.htm
[141] www.gocad.com
[142] www.maplesoft.com
[143] www.mathworks.com/products/matlab/
[144] www.netlib.org
[145] www.oilfield.slb.com/content/services/software/reseng/eclipse_simulators/
[146] www.spe.org/csp/datasets/set02.htm
[147] www.top500.org/
[148] www.wolfram.com/products/mathematica
[149] ZHENG Y., LIOU, M.-S. “A Novel Approach of Three-Dimensional Hybrid
Grid Methodology: Part 1. Grid Generation”. Computer Methods in Applied Mechanics
and Engineering, 192, 4147–4171, 2003.
[150] ZIENKIEWICZ, O.C., TAYLOR, R.L. The Finite Element Method, vols. 1, 2 e
3. 5th edition, Butterworth-Heinemann, 2000.
[151] ZWILLINGER, D. Handbook of Differential Equations, Second Edition.
Academic Press, 1992, 1989.
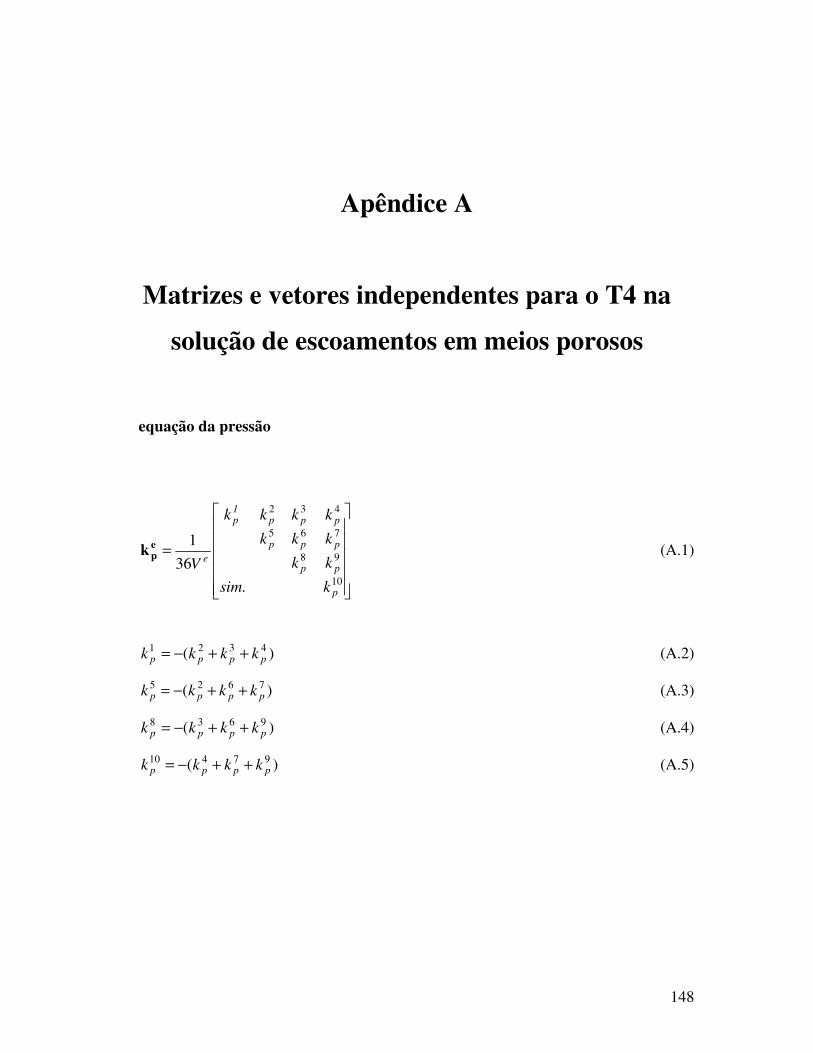
148
Apêndice A
Matrizes e vetores independentes para o T4 na
solução de escoamentos em meios porosos
equação da pressão
=
10
98
765
432
.
36
1
p
pp
ppp
ppp1p
e
ksim
kk
kkk
kkkk
V
epk (A.1)
)( 4321pppp kkkk ++−= (A.2)
)( 7625pppp kkkk ++−= (A.3)
)( 9638pppp kkkk ++−= (A.4)
)( 97410pppp kkkk ++−= (A.5)
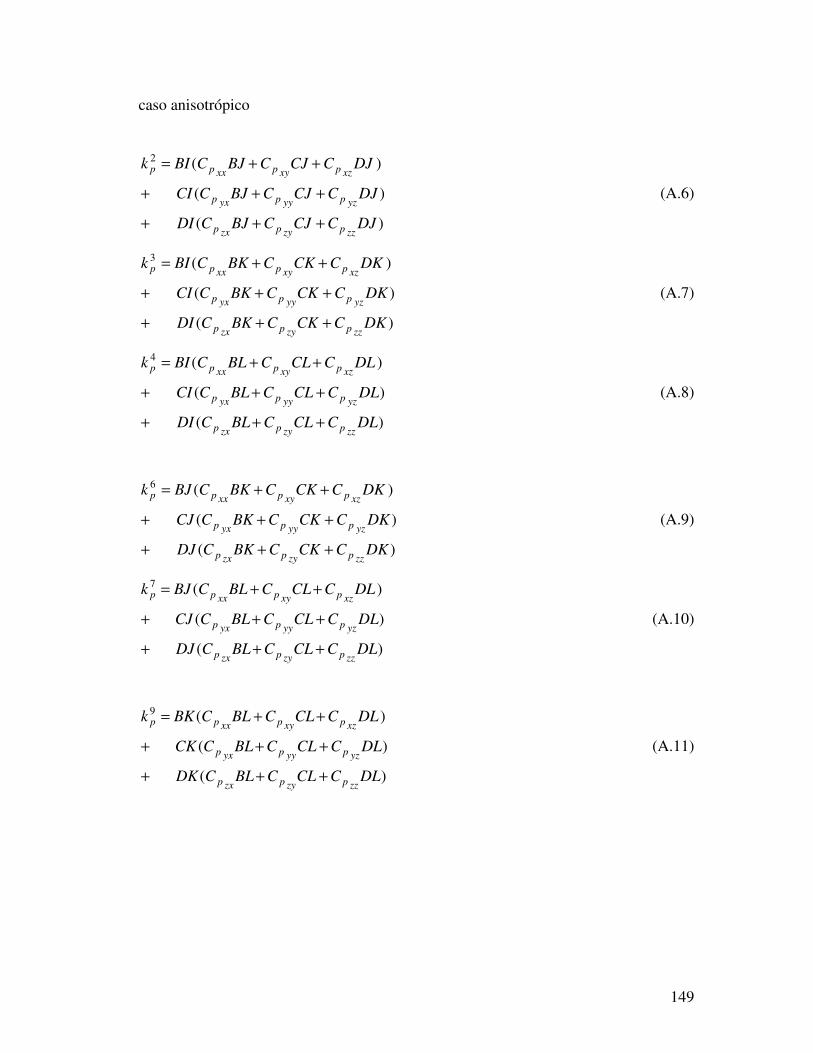
149
caso anisotrópico
)(
)(
)(2
DJCCJCBJCDI
DJCCJCBJCCI
DJCCJCBJCBIk
zzpzypzxp
yzpyypyxp
xzpxypxxpp
+++
+++
++=
(A.6)
)(
)(
)(3
DKCCKCBKCDI
DKCCKCBKCCI
DKCCKCBKCBIk
zzpzypzxp
yzpyypyxp
xzpxypxxpp
+++
+++
++=
(A.7)
)(
)(
)(4
DLCCLCBLCDI
DLCCLCBLCCI
DLCCLCBLCBIk
zzpzypzxp
yzpyypyxp
xzpxypxxpp
+++
+++
++=
(A.8)
)(
)(
)(6
DKCCKCBKCDJ
DKCCKCBKCCJ
DKCCKCBKCBJk
zzpzypzxp
yzpyypyxp
xzpxypxxpp
+++
+++
++=
(A.9)
)(
)(
)(7
DLCCLCBLCDJ
DLCCLCBLCCJ
DLCCLCBLCBJk
zzpzypzxp
yzpyypyxp
xzpxypxxpp
+++
+++
++=
(A.10)
)(
)(
)(9
DLCCLCBLCDK
DLCCLCBLCCK
DLCCLCBLCBKk
zzpzypzxp
yzpyypyxp
xzpxypxxpp
+++
+++
++=
(A.11)
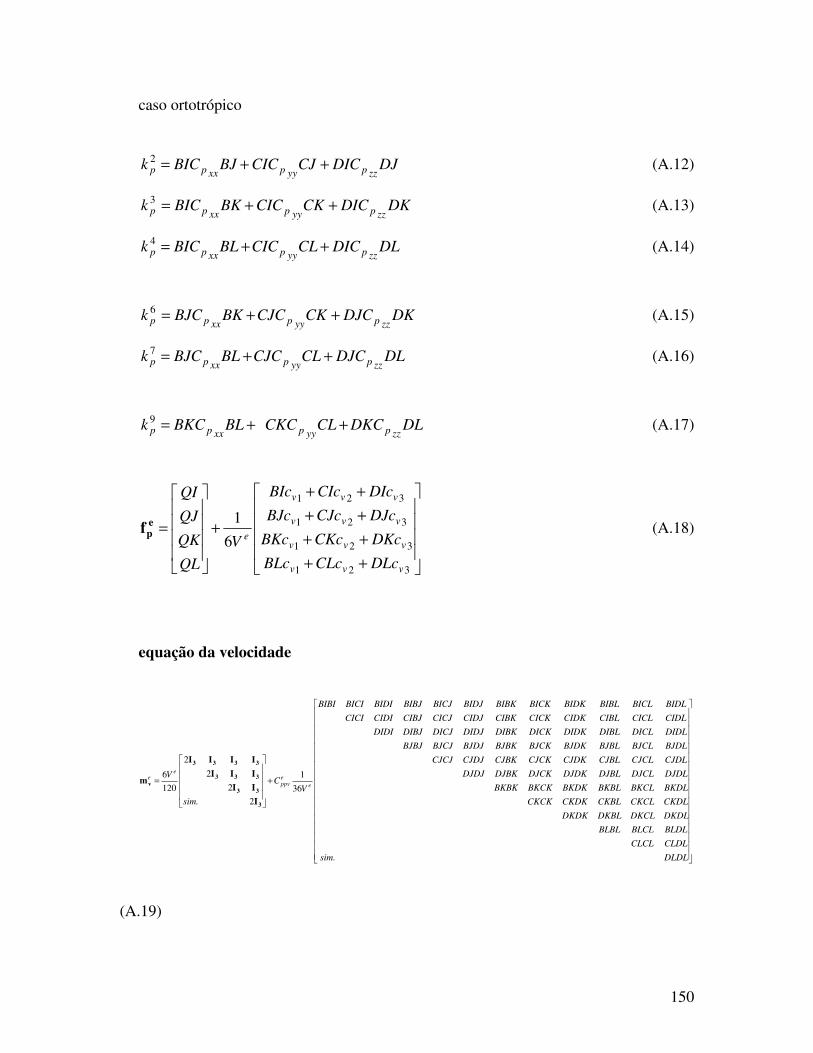
150
caso ortotrópico
DJDICCJCICBJBICkzzpyypxxpp ++=
2 (A.12)
DKDICCKCICBKBICkzzpyypxxpp ++=
3 (A.13)
DLDICCLCICBLBICkzzpyypxxpp ++=
4 (A.14)
DKDJCCKCJCBKBJCkzzpyypxxpp ++=
6 (A.15)
DLDJCCLCJCBLBJCkzzpyypxxpp ++=
7 (A.16)
DLDKCCLCKCBLBKCkzzpyypxxpp ++=
9 (A.17)
++
++
++
++
+
=
321
321
321
321
6
1
vvv
vvv
vvv
vvv
e
DLcCLcBLc
DKcCKcBKc
DJcCJcBJc
DIcCIcBIc
V
QL
QK
QJ
QI
epf (A.18)
equação da velocidade
+
=
DLDLsim
CLDLCLCL
BLDLBLCLBLBL
DKDLDKCLDKBLDKDK
CKDLCKCLCKBLCKDKCKCK
BKDLBKCLBKBLBKDKBKCKBKBK
DJDLDJCLDJBLDJDKDJCKDJBKDJDJ
CJDLCJCLCJBLCJDKCJCKCJBKCJDJCJCJ
BJDLBJCLBJBLBJDKBJCKBJBKBJDJBJCJBJBJ
DIDLDICLDIBLDIDKDICKDIBKDIDJDICJDIBJDIDI
CIDLCICLCIBLCIDKCICKCIBKCIDJCICJCIBJCIDICICI
BIDLBICLBIBLBIDKBICKBIBKBIDJBICJBIBJBIDIBICIBIBI
VC
sim
Ve
eppv
ee
.
36
1
2.
2
2
2
120
6
3
33
333
3333
v
I
II
III
IIII
m
(A.19)
151
( )( )( )( )
+
+
+
+
+
=
DL
CL
BL
DK
CK
BK
DJ
CJ
BJ
DI
CI
BI
QCVeppv
e
624
60
ve
p3
ve
p3
ve
p3
ve
p3
ev
cBpCI
cBpCI
cBpCI
cBpCI
f (A.20)
equação do transporte (advecção-difusão)
matriz de massa consistente de Galerkin (simétrica)
=
2111
1211
1121
1112
120
6 ee V
φegm (A.21)
ou matriz de massa diagonal ou lumped de Galerkin (simétrica)
=
1000
0100
0010
0001
24
6 ee V
φegml (A.22)

152
matriz de massa de Petrov-Galerkin (não-simétrica)
=
4444
3333
2222
1111
24
pgpgpgpg
pgpgpgpg
pgpgpgpg
pgpgpgpg
ee
mmmm
mmmm
mmmm
mmmm
τφ
epgm (A.23)
onde
zuyuxupg DIvCIvBIvm ++=1 (A.24)
zuyuxupg DJvCJvBJvm ++=2 (A.25)
zuyuxupg DKvCKvBKvm ++=3 (A.26)
zuyuxupg vDLvCLvBLm ++=4 (A.27)
matriz de advecção de Galerkin (não-simétrica)
( )Te
ageag mk
eφτ
1= (A.28)
matriz de difusão generalizada (simétrica)
Essa matriz tem a mesma estrutura da matriz da pressão epk tomando GD ao invés
de pC . O vetor independente para a equação de transporte é
=
LQ
KQ
JQ
IQ
u
u
u
u
euf (A.29)


















