SUAVIZAÇÃO DE SINAIS DE VIBRAÇÃO UTILIZANDO A...
19
Construindo Hoje a Engenharia do Amanhã Anais do XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial SUAVIZAÇÃO DE SINAIS DE VIBRAÇÃO UTILIZANDO A EMD Gabriel Welfany Rodrigues (1) ([email protected] ), Fabiano Bianchini Batista (1) ([email protected] ), Paulo Cezar Monteiro Lamim Filho (1) ([email protected] ), Jorge Nei Brito (1) ([email protected] ), Vinícius Augusto Diniz Silva (1) ([email protected] ) (1) Universidade Federal de São João del Rei (UFSJ); Departamento de Engenharia Mecânica RESUMO: A presença de ruídos, caracterizado por componentes em altas frequências em um sinal, e/ou de componentes oscilatórios em frequências indesejáveis representam um grande problema em muitos sistemas de aquisição de sinais. Suas origens estão relacionadas a fatores inerentes do próprio fenômeno que as originam, ou até mesmo próprio sistema de aquisição, fatores estes muitas vezes difíceis de serem identificados e/ou controlados. O uso de aparelhos e dispositivos mais eficientes e a aplicação de técnicas de processamento e pós-processamento, tais como filtragem e suavização, se tornam essenciais em muitas situações onde medidas mais precisas assim como a análise de somente determinadas faixas de frequências do sinal são requeridas. Neste trabalho, o método conhecido como Empirical Mode Decomposition (EMD) é utilizado para decompor sinais no tempo, obtidos de um sistema vibratório excitado por desbalanceamento rotativo, e identificar os componentes de diferentes faixas de frequências, altas e baixas, que constituem tais sinais. Por fim, reconstituir o sinal eliminando os componentes de frequências mais altas de forma a obter um sinal mais limpo e suavizado cuja frequência principal seja a mesma de excitação. PALAVRAS-CHAVE: suavização, vibrações, desbalanceamento rotativo, EMD. SMOOTHING OF VIBRATION SIGNALS USING THE EMD ABSTRACT: The presence of noise, characterized by high frequency components in a signal and/or oscillatory components in undesirable frequencies are a major problem in many data acquisition systems. Its origins are related to inherent factors of the phenomenon itself, or even of the acquisition system, these factors are often difficult to identify and/or controlled. The use of more efficient appliances, devices and the application of processing techniques and post-processing, such as filtering and smoothing, become essential in many situations where more accurate measurements as well as the analysis of only certain bands of the signal are required. Thus in this paper, the method known as Empirical Mode Decomposition (EMD) is used to decompose time signals obtained from a vibrating system excited by rotating unbalance, and identify the components of different frequency bands, high and low, forming such signals. Finally, to reconstruct the signal by eliminating higher frequency components to obtain a cleaner main signal and whose frequency is smoothed to the same excitation. KEYWORDS: smoothing, vibration, rotating unbalance, EMD.
Transcript of SUAVIZAÇÃO DE SINAIS DE VIBRAÇÃO UTILIZANDO A...

Construindo Hoje a Engenharia do Amanhã
Anais do XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial
SUAVIZAÇÃO DE SINAIS DE VIBRAÇÃO UTILIZANDO A EMD
Gabriel Welfany Rodrigues(1) ([email protected]), Fabiano Bianchini Batista(1) ([email protected]), Paulo Cezar Monteiro Lamim Filho(1) ([email protected]), Jorge Nei Brito(1)
([email protected]), Vinícius Augusto Diniz Silva(1) ([email protected])
(1) Universidade Federal de São João del Rei (UFSJ); Departamento de Engenharia Mecânica RESUMO: A presença de ruídos, caracterizado por componentes em altas frequências em um sinal, e/ou
de componentes oscilatórios em frequências indesejáveis representam um grande problema em muitos
sistemas de aquisição de sinais. Suas origens estão relacionadas a fatores inerentes do próprio fenômeno
que as originam, ou até mesmo próprio sistema de aquisição, fatores estes muitas vezes difíceis de serem
identificados e/ou controlados. O uso de aparelhos e dispositivos mais eficientes e a aplicação de técnicas
de processamento e pós-processamento, tais como filtragem e suavização, se tornam essenciais em muitas
situações onde medidas mais precisas assim como a análise de somente determinadas faixas de frequências
do sinal são requeridas. Neste trabalho, o método conhecido como Empirical Mode Decomposition (EMD)
é utilizado para decompor sinais no tempo, obtidos de um sistema vibratório excitado por
desbalanceamento rotativo, e identificar os componentes de diferentes faixas de frequências, altas e baixas,
que constituem tais sinais. Por fim, reconstituir o sinal eliminando os componentes de frequências mais
altas de forma a obter um sinal mais limpo e suavizado cuja frequência principal seja a mesma de
excitação.
PALAVRAS-CHAVE: suavização, vibrações, desbalanceamento rotativo, EMD.
SMOOTHING OF VIBRATION SIGNALS USING THE EMD
ABSTRACT: The presence of noise, characterized by high frequency components in a signal and/or
oscillatory components in undesirable frequencies are a major problem in many data acquisition systems.
Its origins are related to inherent factors of the phenomenon itself, or even of the acquisition system, these
factors are often difficult to identify and/or controlled. The use of more efficient appliances, devices and the
application of processing techniques and post-processing, such as filtering and smoothing, become essential
in many situations where more accurate measurements as well as the analysis of only certain bands of the
signal are required. Thus in this paper, the method known as Empirical Mode Decomposition (EMD) is
used to decompose time signals obtained from a vibrating system excited by rotating unbalance, and identify
the components of different frequency bands, high and low, forming such signals. Finally, to reconstruct the
signal by eliminating higher frequency components to obtain a cleaner main signal and whose frequency is
smoothed to the same excitation.
KEYWORDS: smoothing, vibration, rotating unbalance, EMD.
XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial
Auditório do Senai CIMATEC - Prédio 2 - 2º andar - Salvador - BA,
23 a 26 de Setembro de 2014
2
1 - INTRODUÇÃO
1.1 – O Estudo dos Fenômenos Vibratórios
O estudo de vibrações mecânicas e a compreensão dos fenômenos a elas associados tem se mostrado essencial na engenharia estrutural moderna. Muitas falhas estruturais prematuras estão, de alguma forma, vinculadas aos fenômenos vibratórios, como, por exemplo, as falhas por fadiga. Desgastes em peças como rolamentos, engrenagens, ruído excessivo e afrouxamento de elementos de fixação podem ter origem na vibração, Rao (2008). São várias as razões para que, na prática, torne necessária e justificável a medição da vibração, dentre elas Rao (2008):
1 – as exigências crescentes de produtividade mais alta e projetos econômicos exigem maquinaria cada vez mais sofisticada que operam, em geral, com altas velocidades. Como consequência, torna-se mais frequente a ocorrência de condições de ressonância durante a operação e reduz a confiabilidade do sistema. A medição periódica das características de vibração de maquinarias e estruturas garante margens de segurança adequadas permitindo que os efeitos vibratórios estejam sempre entre níveis toleráveis e aceitáveis. Qualquer alteração poderá assim ser observada indicando uma possível falha ou necessidade de manutenção;
2 – a medição das frequências naturais de uma estrutura ou máquina permite conhecer as velocidades de operação maléficas e, consequentemente, evitar condições de ressonância;
3 – as características da vibração de uma máquina ou estrutura podem apresentar valores diferentes quando comparados com o teórico. Isso devido às premissas adotadas na análise;
4 – através da medição da vibração é possível projetar isoladores de vibração ou mesmo fazer modificações estruturais que permitam minimizar seus efeitos;
5 – a medição de vibração permite verificar se um determinado sistema, projetado para vibrar, está realizando suas funções dentro do esperado. Ou também, verificar se uma máquina ou estrutura, instalada em um ambiente vibratório, consegue executar suas tarefas e sobreviver às condições especificadas;
6 – a medição de vibração permite a convalidação de modelos. Muitas vezes, por conveniência e simplificação, costuma-se aproximar sistemas contínuos como sistemas discretos com um número finito de graus de liberdade. Se as frequências naturais e formas modais medidas de um sistema contínuo real forem comparáveis com as respectivas do modelo aproximado, então se pode concluir que esta aproximação é válida;
7 – conhecer as características da vibração de entrada e de saída de um sistema através da medição ajuda a identificar este sistema em termos dos elementos de um sistema vibratório: massa, rigidez e amortecimento;
8 – informações sobre vibrações do solo, velocidades dos ventos, variação aleatória das ondas do mar e irregularidades das superfícies de uma rodovia são importantes no projeto de estruturas, máquinas, edifícios, plataformas de petróleo e sistemas de suspensão de veículos;
XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial
Auditório do Senai CIMATEC - Prédio 2 - 2º andar - Salvador - BA,
23 a 26 de Setembro de 2014
3
9 – com os sinais de resposta à vibração de estruturas ou máquinas torna-se possível encontrar as faixas de frequências onde estão os maiores níveis de deformação (ou seja, as maiores amplitudes de vibração).
A vibração mecânica pode ser um fenômeno desejável ou indesejável. Em alguns equipamentos tais como britadores, peneiras vibratórias, transportadores de peças baseados em movimentos vibratórios, entre outros, o efeito da vibração é algo desejável, projetado. Porém, na maioria das vezes, a vibração caracteriza um fenômeno indesejável e responsável por quebras de peças, geração de ruídos e transmissão de forças às fundações das máquinas.
1.2 – Vibração por Desbalanceamento Rotativo
Máquinas rotativas estão entre as classes de equipamentos mecânicos mais susceptíveis à problemas com vibrações. Este tipo de equipamento, como qualquer outro, está sujeito a falhas e defeitos, o que pode ocasionar perdas de qualidade no processo produtivo e problemas de segurança. Quando o centro de gravidade de um destes componentes não coincide com o seu centro de rotação, ou seja, a distribuição de massa não é homogênea, ocorrerá o fenômeno do desbalanceamento rotativo. Uma massa desbalanceada ou massa excêntrica irá ocasionar uma excitação harmônica na máquina. Quando ocorrem os desbalanceamentos, se acima de determinados valores, as forças transmitidas podem ocasionar avarias ao equipamento e diminuir o seu ciclo operacional. Nos últimos anos, vários esforços têm sido dedicados à interpretação automatizada de dados para diagnóstico de falhas em máquinas rotativas na indústria, já que estas possuem grande importância. E, neste campo, destacam-se as técnicas de análise de vibração utilizando métodos efetivos de processamento de sinais durante a análise dos sinais de resposta.
Para um sistema vibratório discreto com 1GDL, conforme ilustrado na Fig. 1, a equação diferencial de movimento pode ser escrita na forma:
( ) ( ) ( ) ( )mx t cx t kx t F t+ + =�� � (1)
onde m é a massa equivalente do sistema, k é a rigidez equivalente, c é a constante de amortecimento viscoso equivalente, F(t) é a força externa de excitação, x(t) é a coordenada generalizada que representa a direção do movimento da massa, ( ) ( )x t dx t dt=� é a velocidade e
( ) ( )2 2x t d x t dt=�� é aceleração. A Eq. (1) trata-se de uma equação diferencial não-homogênea cuja
solução total é composta por duas partes: solução homogênea, que representa a resposta transiente do sistema, e a solução particular, que representa a resposta permanente do sistema. Esta última, por sua vez, depende do tipo de excitação. Entende-se que a resposta seja de mesma natureza que a da excitação.
XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial
Auditório do Senai CIMATEC - Prédio 2 - 2º andar - Salvador - BA,
23 a 26 de Setembro de 2014
4
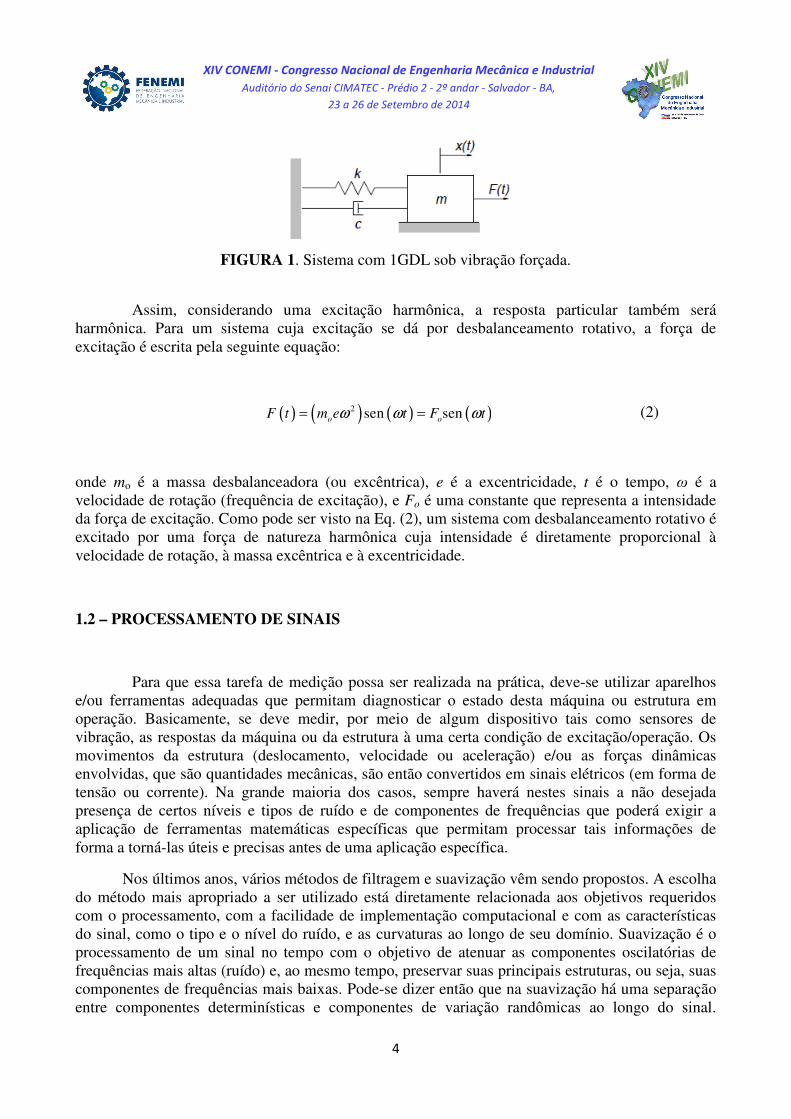
FIGURA 1. Sistema com 1GDL sob vibração forçada.
Assim, considerando uma excitação harmônica, a resposta particular também será harmônica. Para um sistema cuja excitação se dá por desbalanceamento rotativo, a força de excitação é escrita pela seguinte equação:
( ) ( ) ( ) ( )2 sen seno oF t m e t F tω ω ω= = (2)
onde mo é a massa desbalanceadora (ou excêntrica), e é a excentricidade, t é o tempo, ω é a velocidade de rotação (frequência de excitação), e Fo é uma constante que representa a intensidade da força de excitação. Como pode ser visto na Eq. (2), um sistema com desbalanceamento rotativo é excitado por uma força de natureza harmônica cuja intensidade é diretamente proporcional à velocidade de rotação, à massa excêntrica e à excentricidade.
1.2 – PROCESSAMENTO DE SINAIS
Para que essa tarefa de medição possa ser realizada na prática, deve-se utilizar aparelhos e/ou ferramentas adequadas que permitam diagnosticar o estado desta máquina ou estrutura em operação. Basicamente, se deve medir, por meio de algum dispositivo tais como sensores de vibração, as respostas da máquina ou da estrutura à uma certa condição de excitação/operação. Os movimentos da estrutura (deslocamento, velocidade ou aceleração) e/ou as forças dinâmicas envolvidas, que são quantidades mecânicas, são então convertidos em sinais elétricos (em forma de tensão ou corrente). Na grande maioria dos casos, sempre haverá nestes sinais a não desejada presença de certos níveis e tipos de ruído e de componentes de frequências que poderá exigir a aplicação de ferramentas matemáticas específicas que permitam processar tais informações de forma a torná-las úteis e precisas antes de uma aplicação específica.
Nos últimos anos, vários métodos de filtragem e suavização vêm sendo propostos. A escolha do método mais apropriado a ser utilizado está diretamente relacionada aos objetivos requeridos com o processamento, com a facilidade de implementação computacional e com as características do sinal, como o tipo e o nível do ruído, e as curvaturas ao longo de seu domínio. Suavização é o processamento de um sinal no tempo com o objetivo de atenuar as componentes oscilatórias de frequências mais altas (ruído) e, ao mesmo tempo, preservar suas principais estruturas, ou seja, suas componentes de frequências mais baixas. Pode-se dizer então que na suavização há uma separação entre componentes determinísticas e componentes de variação randômicas ao longo do sinal.

XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial
Auditório do Senai CIMATEC - Prédio 2 - 2º andar - Salvador - BA,
23 a 26 de Setembro de 2014
5
Existem, basicamente, dois tipos mais comuns de métodos de suavização: 1 – os baseados em filtragem passa-baixa, que são os métodos de médias e decomposição tais como os de média móvel como apresentado em Oppenheim (1989), Lyons (2001) e Orfanidis (1996), wavelets como descrito em Coifman et al (1992) , empirical mode decomposition (EMD) em Boudraa e Cexus (2007) , extreme envelope average (EEA) como em Batista (2012); e 2 – os baseados em regressões, tais como Regressive Discrete Fourier Serie (RDFS) apresentada por Arruda (1992 e 2010), como Lowess em Cleveland (1979), ajuste polinomial, e wavelets como em Antoniadis e Pham (1998). Estes métodos baseados em regressões são, em geral, exemplos de métodos de suavização mais eficientes quando aplicados em sinais melhores ajustáveis por funções harmônicas ou polinômios de ordens mais baixas. Eles não são métodos muito indicados para sinais que apresentam domínios muito irregulares com presença de descontinuidades ou mudanças bruscas. Isso porque para estes sinais em especial será necessário o uso de um número maior de linhas espectrais ou polinômios de ordem mais alta para ajustar tais regiões do domínio. Como consequência, componentes não requeridos de ruído também são ajustadas e não eliminadas ou atenuadas durante o processo de suavização. Por outro lado, se o número de linhas espectrais ou grau do polinômio for muito baixo poderá haver perda de informações requeridas do sinal.
A filtragem é o processamento de um sinal no tempo que resultará em alguma mudança nas características espectrais do sinal original. Esta mudança é, geralmente, a redução ou eliminação de alguns componentes espectrais de entrada não requeridas. Segundo Swith (1997-1998) os filtros têm basicamente dois usos: separação do sinal e restauração do sinal. Métodos de filtragem digital e linear são muito usados por serem mais fáceis de projetar e implementar computacionalmente, entretanto, não são muito efetivos quando os sinais analisados possuem cantos agudos e impulsos de curta duração. Swith (1197-1998) mostra que de acordo com o uso, os filtros digitais podem ser divididos em três categorias: domínio do tempo (usados, por exemplo, para suavização e remoção do nível DC); domínio da frequência (usados para separar uma banda de frequência de outra: passa-alta, passa-baixa, passa-banda, e bandas de rejeição); e, filtros especiais utilizados em aplicações mais elaborados que os filtros do domínio da frequência. Boa performance no domínio do tempo resulta em pobre performance no domínio da frequência, e vice-versa (Swith (1197-1998)). Os filtros digitais podem ser implementados de duas formas: por “convolução” (Finite Impulse Response – FIR); e, por “recursão” (Infinite Impulse).
2 – EMPIRICAL MODE DECOMPOSITION - EMD
O método Empirical Mode Decomposition (EMD) foi proposto por Huang et al (1998), e ao contrário de alguns métodos tradicionais, como Wavelets, Fourier e Funções Empíricas Ortogonais – EOF, a EMD trata-se de um método intuitivo, direto e adaptativo, onde as bases da decomposição são oriundas do dado real. Com isso pode-se utiliza-la em dados não lineares e não estacionários sem perder o senso físico e matemático, como em Tang et al (2011), fato este que tem atraído à atenção de pesquisadores no campo de diagnóstico de falhas, como descrito em Lei et al (2013). Desde que foi introduzia a EMD tem sido extensivamente estudada e aplicada nas mais diversas áreas, tais como, processos de controle, medicina e biologia, diagnóstico de falhas em rotores e eixos, entre outros. Em Lei et al (2013) tem-se uma revisão das recentes pesquisas e desenvolvimentos no uso da EMD para diagnóstico de falhas em máquinas rotativas, como rotores e eixos. São apresentadas algumas modificações no método bem como possíveis combinações com

XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial
Auditório do Senai CIMATEC - Prédio 2 - 2º andar - Salvador - BA,
23 a 26 de Setembro de 2014
6
outras técnicas, aplicadas em situações específicas em que é possível obter melhores resultados. Pode-se notar que é uma das técnicas mais poderosas para análise no tempo-frequência. O processo inicia-se com a decomposição do sinal em um número finito de Intrisic Mode Fuctions (IMF) ou Funções de Modo Intrínseco, que são funções simétricas com média local igual a zero e mesmo número de zeros e extremos. Uma IMF é uma função que satisfaz as seguintes condições: (1) para todo dado, o número de zeros e de extremos são iguais ou diferem de um, e (2) para qualquer ponto, o valor da média entre a envoltória máxima e a envoltória mínima é igual a zero, Amorim (2009). A IMF representa um modo oscilatório simples incorporado no sinal. Desta maneira, assumindo que qualquer sinal contém diferentes IMFs simples, a EMD decompõe o sinal em um número finito de IMFs. Segundo Amorim (2009) e Vatchev (2002), uma função f é decomposta, gerando finitas funções mono componentes Ψ onde a amplitude e a fase possuem significados físicos e matemáticos, como mostrado abaixo:
) ( )sen ( )t r t tθΨ( = , (3) onde, r representa a amplitude, θ a fase da função, e t o tempo. Desta maneira a soma das finitas funções de modo intrínseco (IMF’s) é igual ao dado original.
1
( ) ( )N
n
n
f t t=
= Ψ∑ (4)
onde n é o número de IMF’s. É preciso determinar os máximos e os mínimos do dado real. Definir a envoltória máxima (envelope de máximos), ( )U t , e a mínima (envelope de mínimos), ( )L t , para o desenvolvimento da EMD. Estes envelopes possuem o mesmo tamanho do dado original e são obtidos pela interpolação dos extremos locais, máximos e mínimos. Pode-se utilizar para este processo de interpolação o método Spline cúbica. Após determinados os envelopes, calcula-se média e subtrai do dado. O processo descrito é chamado sifting (“peneiramento”) e o dado resultante é uma IMF se satisfazer as condições necessárias citadas anteriormente.
1 1( ) ( )
2i i
i
U t L tm − −
+= (5)
onde, i representa o passo do processo de sifting, m representa a média, U o envelope de máximos locais e L o envelope de mínimos locais.
( ) ( ) ( )i ih t f t m t= − (6)
onde representa uma IMF se satisfazer as duas condições características, f representa o dado original e m a média que será subtraída. Caso o resultado não satisfaça as condições necessárias que definem uma IMF, essa possível IMF deverá ser considerada como um novo sinal e o processo

XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial
Auditório do Senai CIMATEC - Prédio 2 - 2º andar - Salvador - BA,
23 a 26 de Setembro de 2014
7
descrito anteriormente deverá ser repetido até que se obtenha a IMF. Após a obtenção da IMF, subtrai-se esta do sinal de origem, e desta forma obtém-se o resíduo. Este resíduo torna-se o novo sinal e é submetido ao processo de sifting, como descrito anteriormente para obter-se a próxima IMF. Critérios de convergência são responsáveis para que se interrompa o processo de sifting. Este processo irá continuar até que o resíduo, r , seja uma função com no máximo três extremos, e desta forma, não podendo mais obter suas envoltórias:
( ) ( ) ( )i ir t f t h t= − (7)
Desta maneira a EMD decompõe o sinal original em um conjunto de IMF’s mais um resíduo ao final do processo, assim sendo, o sinal original pode ser reconstituído pela soma de todas as IMF’s e do último resíduo:
11
( )N
n n
n
f t r+
=
= Ψ +∑ (8)
O critério de convergência tem a finalidade de definir a necessidade de realizar outro sifting. É muito importante que o método EMD seja implementado adequadamente, respeitando os dois critérios de convergência de onde se definem as IMF’s. O primeiro critério tem como finalidade eliminar máximos negativos e mínimos positivos, desta forma um número de extremos e zeros tem que ser iguais ou diferente de um valor “S”, sendo tal número determinado pela necessidade desejada. Já com o objetivo de suavizar grandes diferenças de amplitudes se utiliza de um segundo critério. Um determinado valor de desvio padrão, ,SD deve ser menor que um valor pré-determinado.
O algoritmo da EMD pode ser então descrito pelos seguintes passos:
1º Passo: Fixar ϵ, � ← 1(��)
2º Passo: ���(t) ← �(�)(residual)
3º Passo: Obter a IMF�
a) ℎ�, ��(�) ← ���, ! ← 1(!númerodeiterações) b) Extrair os máximos e mínimos locais de ℎ�, ��(t) c) Estabelecer as envoltórias de máxima (�, ��(�)e mínima )�, ��(�), utilizando uma spline
cúbica que intercepta os extremos positivos e os negativos, respectivamente de ℎ�, ��(�).
d) Estabelecer a curva de média *�, ��(�) ← +,-,./0(1)23-,./0(1)+4
e) ℎ�, (�) ← ℎ�, ��(�) − *�, ��(�), ! ← ! + 1 f) Estabelecer o critério de parada de acordo com o desvio padrão:
78(!) = :+ℎ�, ��(�) − ℎ�, (�)+4(ℎ�, ��(�)4)
;
1<=
g) Repetir do passo b) até o f) até que SD< ?, e então fazer, ��(�) ← ℎ�, (�)
XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial
Auditório do Senai CIMATEC - Prédio 2 - 2º andar - Salvador - BA,
23 a 26 de Setembro de 2014
8
4º Passo: Atualizar o resíduo � ← ��� − ��(�).
5º Passo: Repetir o passo 3 com � ← � + 1 até que o numero de extremos em � < 2
A iteração é repetida diversas vezes, até que se encontre as verdadeiras IMF’s. Os resultados obtidos do processo de iteração são decompostos da seguinte maneira:
A(�) = ∑ ��(�) + C(�)D�<� (9)
sendo C a quantidade de iterações geradas na decomposição. Como critério de parada, deve-se determinar um valor de SD, geralmente entre 0,2 e 0,3.
2.1 – A EMD Como Um Método de Suavização
Em Wu e Huang (2004) pode-se perceber algumas características inerentes da EMD, o que permite sua aplicabilidade em sinais não lineares e não estacionários além de como esta abordagem permite uma filtragem do sinal eliminando os ruídos, e permitindo que dados relevantes permaneçam. Boudraa e Cexus (2007) propõem um método para a reconstrução do sinal original a partir das IMF’s geradas. O princípio básico do método é fazer uso da reconstrução parcial do sinal, com as IMF’s correspondentes às estruturas mais importantes do sinal. Segundo Boudraa e Cexus (2007) o método de filtragem depende da ideia de que a maior parte das estruturas que compõe o sinal está mais frequentemente concentrada nas IMFs de menor frequência, ou seja, as últimas, decrescendo em direção as de maior frequência, em outras palavras, as primeiras IMFs. Assim, pode-se promover uma filtragem do sinal eliminando as IMFs de maior frequência geralmente relacionadas aos ruídos presentes no sinal obtido. O sinal pode então ser reconstruído com apenas algumas IMF’s. Desta maneira, é proposta uma medida de distorção, chamada de erro quadrático consecutivo (CMSE), que não requer nenhum conhecimento sobre o sinal original para sua reconstrução, apenas das IMF’s. O valor de CMSE mede a distância Euclidiana ao quadrado entre dois sinais reconstruídos consecutivos. A utilização da EMD como um método de filtragem, como proposto por Boudraa e Cexus (2007), permite a conservação de dados relevantes do sinal em análise.
3 – RESULTADOS E DISCUSSÃO
Para que se possa analisar o sinal obtido e alcançar os dados que são desejados para uma análise efetiva, torna-se necessário o uso de algumas técnicas de processamento de sinais. Entretanto é um desafio desenvolver e adotar um método efetivo que seja capaz de revelar as informações relevantes do sinal em estudo. Nesse sentido, algumas ferramentas de análise de sinais de vibração têm sido estudadas e aplicadas com grande êxito, que, conforme foi comentado alhures, uma dessas técnicas é a chamada Empirical Mode Decomposition (EMD). Esta técnica tem apresentado resultados promissores em muitas situações e vem sendo largamente utilizada, apesar

XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial
Auditório do Senai CIMATEC - Prédio 2 - 2º andar - Salvador - BA,
23 a 26 de Setembro de 2014
9
de ser, como o próprio nome diz, um método empírico. Neste trabalho, o objetivo é criar um modelo com 1 grau de liberdade (1GDL) para o sistema mostrado na Fig. 2. Trata-se de uma viga em balanço com uma extremidade engastada e outra livre. Na extremidade livre, existe uma massa concentrada e uma força harmônica provocada pelo movimento com desbalanceamento rotativo.
FIGURA 2. Sistema proposto para estudo: viga em balanço com excitação na extremidade
Assim, a EMD é utilizada aqui com o objetivo de eliminar os componentes de frequência dos sinais de respostas diferentes da frequência de operação (velocidade angular de rotação do motor).
A Figura 3 mostra a bancada composta por: 1 - uma viga de aço-carbono 1045 de densidade 7,85 kg/cm3, perfil U, com módulo de elasticidade 208GPa (obtido por tabela), comprimento livre de 440mm, momento de inércia de área transversal 15,5 cm2 , e fator de amortecimento 0,0004 (tabela para o aço); 2 – um motor elétrico de indução trifásico da EBERLE modelo B 56 04 com 1/8 CV e massa de 3,71kg; 3 - um disco de alumínio para fixação das massas excêntricas com excentricidade de 6,7cm; 4 – um inversor de frequências da WEO modelo CFW 09 para controle da velocidade de rotação do motor; 5 – um condicionador para acelerômetros com filtro passa-baixa; 6 – uma placa de aquisição da National Instruments modelo NI USB 4251; 7 - um acelerômetro CE modelo CMSS 2100 SN S41633 com sensibilidade 100mV/g; 8 – cabos; 9 - computador.
FIGURA 3. Detalhes da bancada e os equipamentos.
De acordo com a teoria (Eq. 2), a força F(t) gerada por um desbalanceamento rotativo é uma força harmônica atuante na direção radial cuja frequência de excitação é a velocidade angula ω do motor. As Figs. 4 e 5 mostram 4 sinais de resposta temporal da aceleração obtidos para as seguintes combinações: 1 - mo = 19 g e ω = 1000 rpm (16,67 Hz); 2 - mo = 19 g e ω = 1700 rpm (28,33 Hz); 3
XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial
Auditório do Senai CIMATEC - Prédio 2 - 2º andar - Salvador - BA,
23 a 26 de Setembro de 2014
10
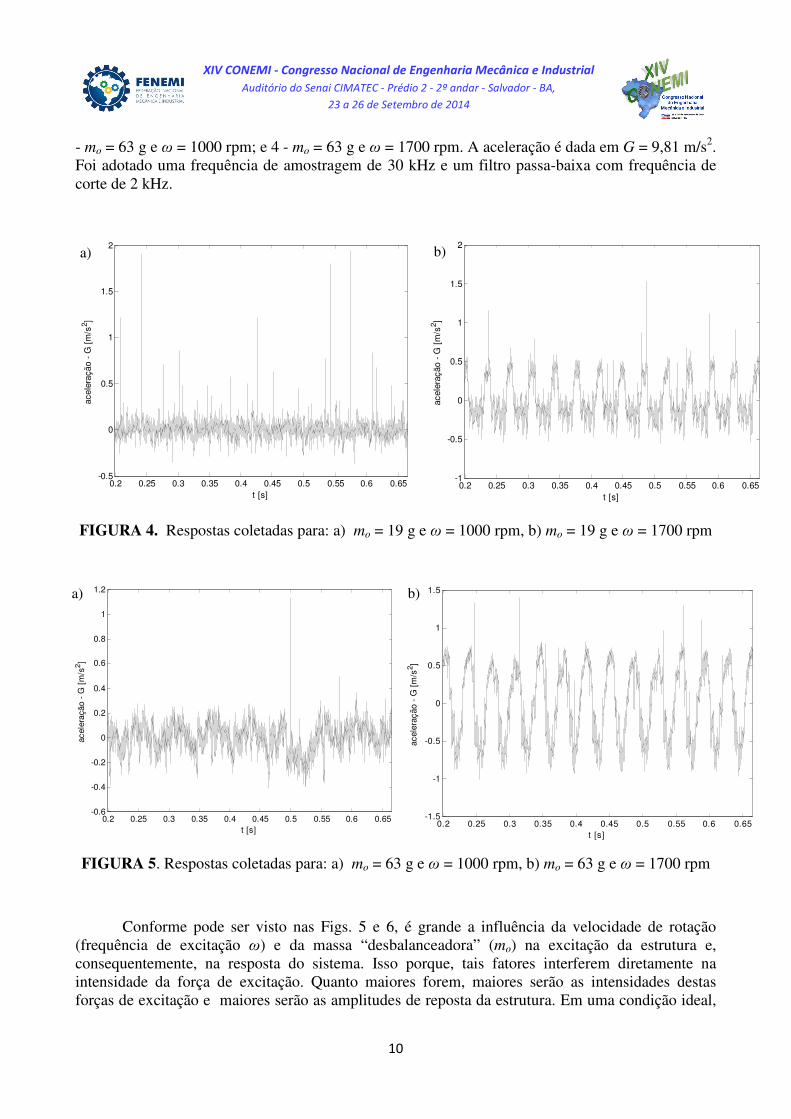
- mo = 63 g e ω = 1000 rpm; e 4 - mo = 63 g e ω = 1700 rpm. A aceleração é dada em G = 9,81 m/s2. Foi adotado uma frequência de amostragem de 30 kHz e um filtro passa-baixa com frequência de corte de 2 kHz.
FIGURA 4. Respostas coletadas para: a) mo = 19 g e ω = 1000 rpm, b) mo = 19 g e ω = 1700 rpm
FIGURA 5. Respostas coletadas para: a) mo = 63 g e ω = 1000 rpm, b) mo = 63 g e ω = 1700 rpm
Conforme pode ser visto nas Figs. 5 e 6, é grande a influência da velocidade de rotação (frequência de excitação ω) e da massa “desbalanceadora” (mo) na excitação da estrutura e, consequentemente, na resposta do sistema. Isso porque, tais fatores interferem diretamente na intensidade da força de excitação. Quanto maiores forem, maiores serão as intensidades destas forças de excitação e maiores serão as amplitudes de reposta da estrutura. Em uma condição ideal,
0.2 0.25 0.3 0.35 0.4 0.45 0.5 0.55 0.6 0.65-0.5
0
0.5
1
1.5
2
t [s]
acele
ração -
G [
m/s
2]
0.2 0.25 0.3 0.35 0.4 0.45 0.5 0.55 0.6 0.65-1
-0.5
0
0.5
1
1.5
2
t [s]
acele
ração -
G [
m/s
2]
0.2 0.25 0.3 0.35 0.4 0.45 0.5 0.55 0.6 0.65-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
1.2
t [s]
acele
ração -
G [
m/s
2]
0.2 0.25 0.3 0.35 0.4 0.45 0.5 0.55 0.6 0.65-1.5
-1
-0.5
0
0.5
1
1.5
t [s]
acele
ração -
G [
m/s
2]
a) b)
b) a)
XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial
Auditório do Senai CIMATEC - Prédio 2 - 2º andar - Salvador - BA,
23 a 26 de Setembro de 2014
11
onde somente o grau de liberdade referente à direção de medição é excitado e onde não há a presença de ruído, a resposta do sistema em regime permanente seria um sinal harmônico de mesma frequência da força de excitação. Porém, como pode ser visto nas Figs 4 e 5, a presença de outras componentes de frequência (harmônicos) diferentes da frequência de excitação é bem expressiva em todas as medições, o que torna a identificação visual desta harmônica específica nem sempre tão nítida. Tal fato pode ser justificado principalmente pelos seguintes fatores: 1 – presença de várias outras componentes de frequência diferentes da frequência de excitação (rotação do motor) que são ruídos (inerentes do experimento cujas origens são diversas e estão relacionadas a fatores como equipamentos e dispositivos utilizados) e/ou outros modos de viga causados pelas excitações em várias direções (não somente no grau de liberdade na direção de instalação do acelerômetro); 2 – fatores inerentes à montagem da bancada, que são as faltas de: alinhamento perfeito do eixo do motor com relação à viga; alinhamento perfeito do disco de fixação das massas excêntricas com o eixo do motor; alinhamento espacial perfeito da viga; instalação precisa do motor; fixação correta da viga (extremidade que fica engastada); correta instalação do dispositivo de medição (acelerômetro) na posição exata da viga que permita ler, de acordo com a teoria, somente o grau de liberdade de interesse; 3 - interferência dos elementos de fixação do motor na viga (que podem causar movimentos relativos entre o motor e a viga); 4 - posição exata de atuação da força de excitação na direção vertical (grau de liberdade previsto no modelo) juntamente com a força peso do motor fazendo com que a excitação ocorra somente no grau de liberdade desejado (a força gerada pelo desbalanceamento atua na direção radial à medida que o disco gira e, assim, há excitações em outras direções, não somente na vertical); 5 – fatores associados aos ensaios, tais como ajustes dos equipamentos e presença de outras fontes de excitação não desejáveis no ambiente de medições que são perceptíveis pelos acelerômetros. Na grande maioria, estes fatores são muito difíceis de serem devidamente corrigidos e controlados experimentalmente, e, por isso, exigem que os dados coletados (sinais) sejam processados (filtrados, suavizados e decompostos) na intenção de extrair, de forma mais precisa possível, as informações desejáveis em uma determinada aplicação ou análise. Assim, por meio de um pós-processamento dos sinais de resposta utilizando, como por exemplo, um método de decomposição como Wavelets e EMD, torna-se possível enxergar de forma mais clara as componentes que compõem o sinal e, assim, permitir eliminar àquelas que não são requeridas em uma determinada análise e aplicação destes sinais. Aqui, foi utilizado a EMD por apresentar resultados muito satisfatórios para os tipos de sinais e para o objetivo pretendido aqui, que é somente a suavização.
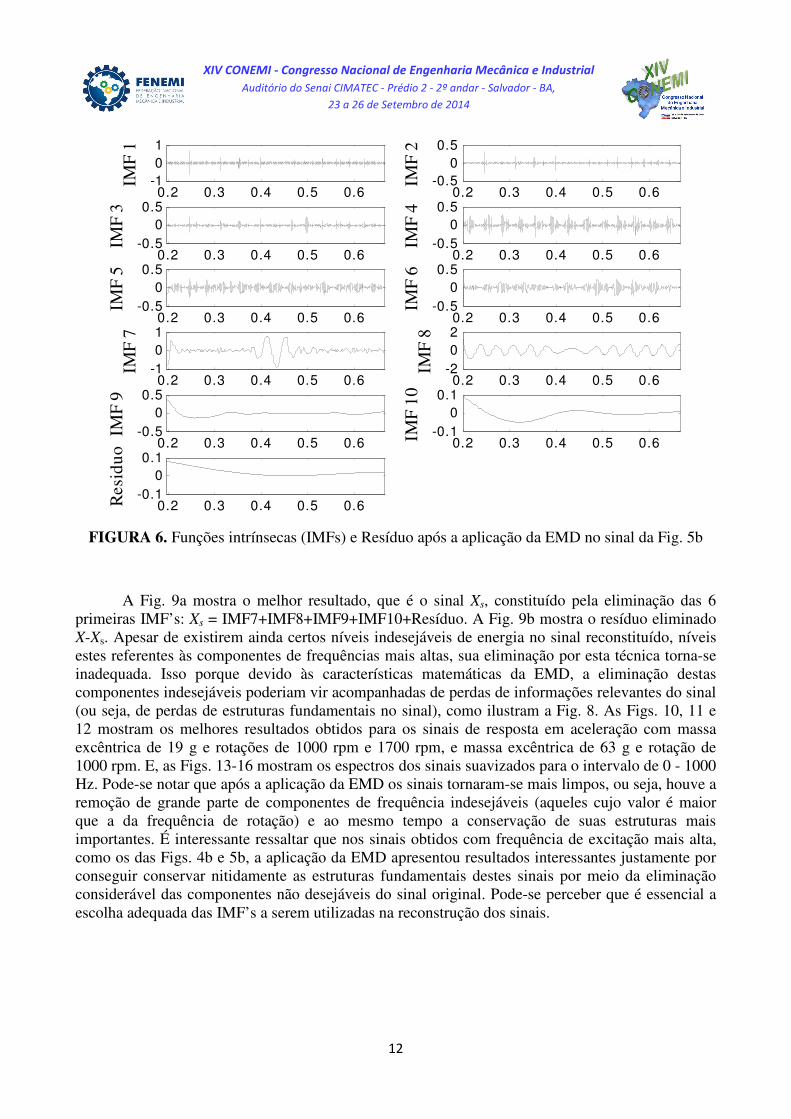
Somente para ilustrar a eficiência da técnica na suavização, foi utilizado primeiramente o sinal da Fig. 5b (sinal de resposta em aceleração obtido com massa excêntrica de 63 g e rotação de 1700 rpm). A Fig. 6 mostra as IMF’s e o resíduo obtidos após a aplicação da EMD. Conforme pode ser visto, as primeiras IMF’s representam os componentes com frequências mais altas que decrescem à medida que se caminha para as últimas IMF’s. Assim, em um processo de filtragem com o objetivo de suavizar um sinal, deve-se eliminar durante a reconstituição do sinal àquelas IMF’s que representam o ruído e/ou as oscilações indesejáveis em altas frequências, mantendo as componentes principais que constituem as estruturas fundamentais do sinal original X. As Figs. 7 e 8 mostram os sinais reconstruídos, ou seja, os sinais suavizados Xs, através da eliminação das IMF’s.
XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial
Auditório do Senai CIMATEC - Prédio 2 - 2º andar - Salvador - BA,
23 a 26 de Setembro de 2014
12
FIGURA 6. Funções intrínsecas (IMFs) e Resíduo após a aplicação da EMD no sinal da Fig. 5b
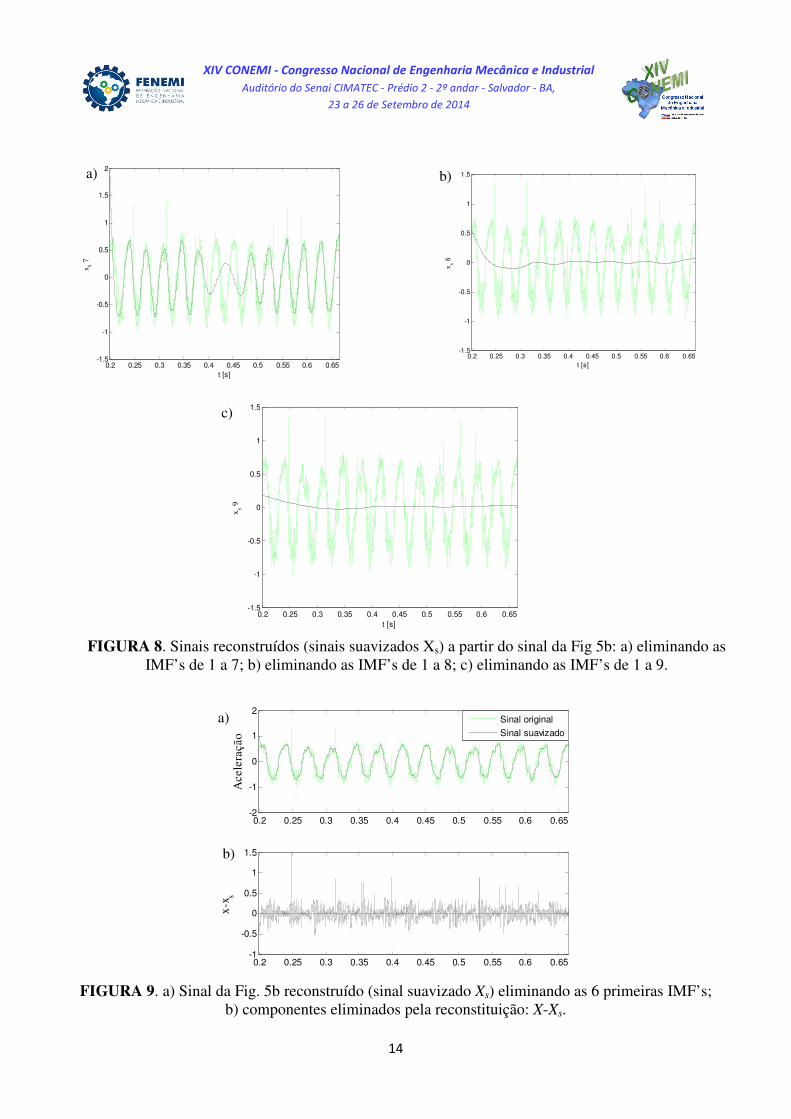
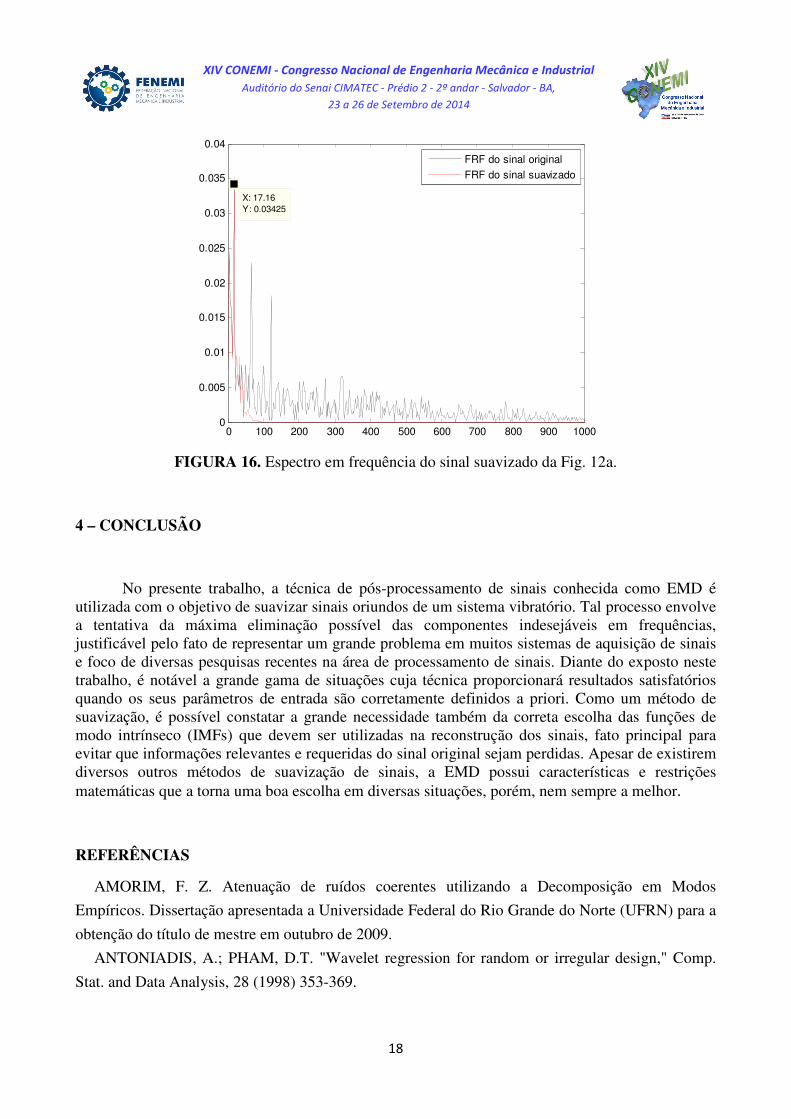
A Fig. 9a mostra o melhor resultado, que é o sinal Xs, constituído pela eliminação das 6 primeiras IMF’s: Xs = IMF7+IMF8+IMF9+IMF10+Resíduo. A Fig. 9b mostra o resíduo eliminado X-Xs. Apesar de existirem ainda certos níveis indesejáveis de energia no sinal reconstituído, níveis estes referentes às componentes de frequências mais altas, sua eliminação por esta técnica torna-se inadequada. Isso porque devido às características matemáticas da EMD, a eliminação destas componentes indesejáveis poderiam vir acompanhadas de perdas de informações relevantes do sinal (ou seja, de perdas de estruturas fundamentais no sinal), como ilustram a Fig. 8. As Figs. 10, 11 e 12 mostram os melhores resultados obtidos para os sinais de resposta em aceleração com massa excêntrica de 19 g e rotações de 1000 rpm e 1700 rpm, e massa excêntrica de 63 g e rotação de 1000 rpm. E, as Figs. 13-16 mostram os espectros dos sinais suavizados para o intervalo de 0 - 1000 Hz. Pode-se notar que após a aplicação da EMD os sinais tornaram-se mais limpos, ou seja, houve a remoção de grande parte de componentes de frequência indesejáveis (aqueles cujo valor é maior que a da frequência de rotação) e ao mesmo tempo a conservação de suas estruturas mais importantes. É interessante ressaltar que nos sinais obtidos com frequência de excitação mais alta, como os das Figs. 4b e 5b, a aplicação da EMD apresentou resultados interessantes justamente por conseguir conservar nitidamente as estruturas fundamentais destes sinais por meio da eliminação considerável das componentes não desejáveis do sinal original. Pode-se perceber que é essencial a escolha adequada das IMF’s a serem utilizadas na reconstrução dos sinais.
0.2 0.3 0.4 0.5 0.6-1
0
1IM
F 1
0.2 0.3 0.4 0.5 0.6-0.5
0
0.5
IMF
2
0.2 0.3 0.4 0.5 0.6-0.5
0
0.5
IMF
3
0.2 0.3 0.4 0.5 0.6-0.5
0
0.5
IMF
4
0.2 0.3 0.4 0.5 0.6-0.5
0
0.5
IMF
5
0.2 0.3 0.4 0.5 0.6-0.5
0
0.5
IMF
6
0.2 0.3 0.4 0.5 0.6-1
0
1
IMF
7
0.2 0.3 0.4 0.5 0.6-2
0
2
IMF
80.2 0.3 0.4 0.5 0.6
-0.5
0
0.5
IMF
9
0.2 0.3 0.4 0.5 0.6-0.1
0
0.1
IMF
10
0.2 0.3 0.4 0.5 0.6-0.1
0
0.1
Res
iduo

XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial
Auditório do Senai CIMATEC - Prédio 2 - 2º andar - Salvador - BA,
23 a 26 de Setembro de 2014
13
0.2 0.25 0.3 0.35 0.4 0.45 0.5 0.55 0.6 0.65-1.5
-1
-0.5
0
0.5
1
1.5
x s 2
t [s]
e) f)
0.2 0.25 0.3 0.35 0.4 0.45 0.5 0.55 0.6 0.65-1.5
-1
-0.5
0
0.5
1
1.5
x s 1
t [s]
a) b)
d) c)
0.2 0.25 0.3 0.35 0.4 0.45 0.5 0.55 0.6 0.65-1.5
-1
-0.5
0
0.5
1
1.5
x s 5
t [s]
FIGURA 7. Sinais reconstruídos (sinais suavizados Xs) a partir do sinal da Fig 5b: a) eliminando a IMF1; b) eliminando as IMF’s 1 e 2; c) eliminando as IMF’s de 1 a 3; d) eliminando as IMF’s de 1 a 4;
e) eliminando a IMF’s de 1 a 5; f) eliminando as IMF’s de 1 a 6.
0.2 0.25 0.3 0.35 0.4 0.45 0.5 0.55 0.6 0.65-1.5
-1
-0.5
0
0.5
1
1.5
x s 3
t [s]
0.2 0.25 0.3 0.35 0.4 0.45 0.5 0.55 0.6 0.65-1.5
-1
-0.5
0
0.5
1
1.5
x s 4
t [s]
0.2 0.25 0.3 0.35 0.4 0.45 0.5 0.55 0.6 0.65-1.5
-1
-0.5
0
0.5
1
1.5
x s 6
t [s]
XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial
Auditório do Senai CIMATEC - Prédio 2 - 2º andar - Salvador - BA,
23 a 26 de Setembro de 2014
14
FIGURA 9. a) Sinal da Fig. 5b reconstruído (sinal suavizado Xs) eliminando as 6 primeiras IMF’s; b) componentes eliminados pela reconstituição: X-Xs.
0.2 0.25 0.3 0.35 0.4 0.45 0.5 0.55 0.6 0.65-2
-1
0
1
2
Ace
lera
ção
Sinal original
Sinal suavizado
0.2 0.25 0.3 0.35 0.4 0.45 0.5 0.55 0.6 0.65-1
-0.5
0
0.5
1
1.5
x-x s
c)
b)
a) b)
0.2 0.25 0.3 0.35 0.4 0.45 0.5 0.55 0.6 0.65-1.5
-1
-0.5
0
0.5
1
1.5
2
x s 7
t [s]
0.2 0.25 0.3 0.35 0.4 0.45 0.5 0.55 0.6 0.65-1.5
-1
-0.5
0
0.5
1
1.5
x s 8
t [s]
0.2 0.25 0.3 0.35 0.4 0.45 0.5 0.55 0.6 0.65-1.5
-1
-0.5
0
0.5
1
1.5
x s 9
t [s]
FIGURA 8. Sinais reconstruídos (sinais suavizados Xs) a partir do sinal da Fig 5b: a) eliminando as IMF’s de 1 a 7; b) eliminando as IMF’s de 1 a 8; c) eliminando as IMF’s de 1 a 9.
a)

XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial
Auditório do Senai CIMATEC - Prédio 2 - 2º andar - Salvador - BA,
23 a 26 de Setembro de 2014
15
FIGURA 10. a) Sinal da Fig. 4a reconstruído (sinal suavizado Xs) eliminando as 6 primeiras IMF’s; b) componentes eliminados pela reconstituição: X-Xs.
FIGURA 11. a) Sinal da Fig. 4b reconstruído (sinal suavizado Xs) eliminando as 7 primeiras IMF’s; b) componentes eliminados pela reconstituição: X-Xs.
0.2 0.25 0.3 0.35 0.4 0.45 0.5 0.55 0.6 0.65-0.5
0
0.5
1
1.5
2
Ace
lera
ção
Sinal original
Sinal suavizado
0.2 0.25 0.3 0.35 0.4 0.45 0.5 0.55 0.6 0.65-0.5
0
0.5
1
1.5
2
x-x s
0.2 0.25 0.3 0.35 0.4 0.45 0.5 0.55 0.6 0.65-1
0
1
2
Ace
lera
ção
Sinal original
Sinal suavizado
0.2 0.25 0.3 0.35 0.4 0.45 0.5 0.55 0.6 0.65-1
-0.5
0
0.5
1
1.5
x-x s
b)
a)
b)
a)

XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial
Auditório do Senai CIMATEC - Prédio 2 - 2º andar - Salvador - BA,
23 a 26 de Setembro de 2014
16
FIGURA 12. a) Sinal da Fig. 5a reconstruído (sinal suavizado Xs) eliminando as 6 primeiras IMF’s; b) componentes eliminados pela reconstituição: X-Xs.
FIGURA 13. Espectro em frequência do sinal suavizado da Fig. 9a.
0.2 0.25 0.3 0.35 0.4 0.45 0.5 0.55 0.6 0.65-0.5
0
0.5
1
1.5
Ace
lera
ção
Sinal original
Sinal suavizado
0.2 0.25 0.3 0.35 0.4 0.45 0.5 0.55 0.6 0.65-0.5
0
0.5
1
1.5
x-x s
0 100 200 300 400 500 600 700 800 900 10000
0.05
0.1
0.15
0.2
0.25
0.3
0.35
X: 27.89
Y: 0.3058
FRF do sinal original
FRF do sinal suavizado
b)
a)

XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial
Auditório do Senai CIMATEC - Prédio 2 - 2º andar - Salvador - BA,
23 a 26 de Setembro de 2014
17
FIGURA 14. Espectro em frequência do sinal suavizado da Fig. 10a.
FIGURA 15. Espectro em frequência do sinal suavizado da Fig. 11a.
0 100 200 300 400 500 600 700 800 900 10000
0.002
0.004
0.006
0.008
0.01
0.012
0.014
0.016
0.018
0.02
X: 17.16
Y: 0.0112
X: 120.1
Y: 0.01835
FRF do sinal original
FRF do sinal suavizado
0 100 200 300 400 500 600 700 800 900 10000
0.02
0.04
0.06
0.08
0.1
0.12
0.14
X: 27.89
Y: 0.1312
FRF do sinal original
FRF do sinal suavizado
XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial
Auditório do Senai CIMATEC - Prédio 2 - 2º andar - Salvador - BA,
23 a 26 de Setembro de 2014
18
FIGURA 16. Espectro em frequência do sinal suavizado da Fig. 12a.
4 – CONCLUSÃO
No presente trabalho, a técnica de pós-processamento de sinais conhecida como EMD é utilizada com o objetivo de suavizar sinais oriundos de um sistema vibratório. Tal processo envolve a tentativa da máxima eliminação possível das componentes indesejáveis em frequências, justificável pelo fato de representar um grande problema em muitos sistemas de aquisição de sinais e foco de diversas pesquisas recentes na área de processamento de sinais. Diante do exposto neste trabalho, é notável a grande gama de situações cuja técnica proporcionará resultados satisfatórios quando os seus parâmetros de entrada são corretamente definidos a priori. Como um método de suavização, é possível constatar a grande necessidade também da correta escolha das funções de modo intrínseco (IMFs) que devem ser utilizadas na reconstrução dos sinais, fato principal para evitar que informações relevantes e requeridas do sinal original sejam perdidas. Apesar de existirem diversos outros métodos de suavização de sinais, a EMD possui características e restrições matemáticas que a torna uma boa escolha em diversas situações, porém, nem sempre a melhor.
REFERÊNCIAS
AMORIM, F. Z. Atenuação de ruídos coerentes utilizando a Decomposição em Modos
Empíricos. Dissertação apresentada a Universidade Federal do Rio Grande do Norte (UFRN) para a
obtenção do título de mestre em outubro de 2009.
ANTONIADIS, A.; PHAM, D.T. "Wavelet regression for random or irregular design," Comp.
Stat. and Data Analysis, 28 (1998) 353-369.
0 100 200 300 400 500 600 700 800 900 10000
0.005
0.01
0.015
0.02
0.025
0.03
0.035
0.04
X: 17.16
Y: 0.03425
FRF do sinal original
FRF do sinal suavizado
XIV CONEMI - Congresso Nacional de Engenharia Mecânica e Industrial
Auditório do Senai CIMATEC - Prédio 2 - 2º andar - Salvador - BA,
23 a 26 de Setembro de 2014
19
ARRUDA, J. R. F. Analysis of non-equally spaced data using a regressive discrete Fourier
series, Journal of Sound and Vibration, 156 (3) (1992) 571-574.
ARRUDA, J. R. F. A robust one-dimensional regressive discrete Fourier Series, Mechanical
System and Signal Processing, 24 (2010) 835-840.
BATISTA, F. B. One-dimensional smoothing using extreme envelope average. Mechanical
System and Signal Processing, 28 (2012) 432-442.
BOUDRAA, A. Q.; CEXUS J. C. EMD-Based Signal Filtering, IEEE Transactions on
Instrumentation and Measurement, 56 (6) (2007) 2196-2202.
CLEVELAND, W. S. Robust locally weighted regression and smoothing scatterplots, Journal of
the American Statistical, 74 (1979) 829-836.
COIFMAN, R. R.; MEYER, Y.; WICKERHAUSER, M.V. "Wavelet analysis and signal
processing," in Wavelets and their applications, M.B. Ruskai et al. (Eds.), (1992) 153-178.
HUANG, N.E.; SHEN, Z.; LONG, S.R.; WU, M.C.; Shin, H.H.; ZHENG, Q.; Yen, N.C.;
TUNG, C.C.; and LIU, H.H. “The Empirical Mode Decomposition and the Hilbert Spectrum for
nonlinear and non-stationary time series analisys” Proc. Royal SOC. London A, Vol. 454, PP. 903-
995, 1998.
Curve Fitting Toolbox User’s Guide, ®COPYRIGHT 1984–2009, The MathWorks, Inc.
LEI, Y.; LIN, J.; HE, Z.; ZUO, M. J. A review on empirical mode decomposition in fault
diagnosis of rotating machinery, Mechanical Systems and Signal Processing, 35 (2013) 108–126.
TANG, J.; ZHAO, L. J.; YUE, H. Vibration analysis of based on empirical mode decomposition
and partial least square, Procedia Eng. 16 (2011) 646–652.
VATCHEV, V. The Analysis of the empirical mode decomposition method, 2002.
WU, Z.; HUANG, N. E. A study of the characteristics of white noise using the empirical mode
decomposition method, R. Soc. Lond.A (2004) 460, 1597–1611.
LYONS, R. G. Understanding Digital Signal Processing, Prentice-Hall, 2001.
OPPENHEIM, A. V.; SCHAFER, R. W. Discrete-Time Signal Processing, Pretice-Hall Signal
Processing Series, Pretice-Hall, Englewood Cliffs, 1989.
RAO, S.S.(2008): Vibrações Mecânicas, Quarta edição, Pearson Prentice Hall, 2008.
ORFANIDIS, S. J. Introduction to Signal Processing, Prentice-Hall, Englewood Cliffs, NJ, 1996.
SWITH, S. W., The Scientist and Engineer’s Guide to Digital Signal Processing,
®COPYRIGHT 1997–1998, www.DSPguide.com.
Wavelet Toolbox User’s Guide, ®COPYRIGHT 1997 – 2005, The MathWorks, Inc.
Agradecimentos
Ao CNPq pelo apoio financeiro concedido para a realização do presente projeto.