SSA Stec 470A - rev 01.pdf · Quando conectado a uma máquina injetora, o manipulador irá remover...
43
1. INTRODUÇÃO Quando conectado a uma máquina injetora, o manipulador irá remover os produtos de dentro do molde automaticamente e depositá-los em uma área ao lado da máquina injetora sobre uma área plana, esteira ou outro dispositivo ou meio próprio para ser depositado o produto. O meio de comunicação entre o operador e o manipulador é efetuado através de seu controlador, desenvolvido para cada modelo de robô contendo em cada um características particulares. Será esta operação que estudaremos a seguir com o manipulador ix-700sIII e o controlador STEC-470A. 1.1. Características do controlador 470A: • Tela colorida de cristal líquido, touch screen de 6,5” • Registro de programas em Compact Flash (CF) de 32Mb (capacidade para 999 moldes) • Programação NC na tela do controlador • Programação NC em PC • Customização do menu • Opção de descanso dos servo-motores • Sincronismo com ciclo de injeção da máquina injetora • Controle de energia • Controle de produção • Comunicação com PC 1.2. Especificação mecânica do manipulador Modelo iX-700SIII Fonte de energia 200 ~ 220V AC ± 15% 50/60Hz Capacidade de energia 4,6kVA Energia requerida 2,4kVA Pressão normal de ar 0.49MPa * Pressão máxima de ar 0,69MPa Método de movimento Vertical Produto Servo Motor AC Canal Longitudinal Produto Canal Transversal Posture Rotação Curso dos eixos Vertical Produto (mm) 700 Canal (mm) 750 Longitudinal Produto (mm) 525 (675) Canal (mm) Transversal (mm) 1400 Posture Rotação Carga máxima suportada pela garra, incluindo peso da garra 5kg Consumo de ar 2,9Nl/ciclo • Isento de umidade ou poeira SSA - 1 - Comércio de Peças para Robôs Ltda Rua Danilo Walbusa,363 – Caieiras – SP – CEP 07700-000 Fone: (11) 4441-1818
-
Upload
dangnguyet -
Category
Documents
-
view
214 -
download
0
Transcript of SSA Stec 470A - rev 01.pdf · Quando conectado a uma máquina injetora, o manipulador irá remover...
1. INTRODUÇÃO
Quando conectado a uma máquina injetora, o manipulador irá remover os produtos de dentro do molde automaticamente e depositá-los em uma área ao lado da máquina injetora sobre uma área plana, esteira ou outro dispositivo ou meio próprio para ser depositado o produto.
O meio de comunicação entre o operador e o manipulador é efetuado através de seu controlador, desenvolvido para cada modelo de robô contendo em cada um características particulares.
Será esta operação que estudaremos a seguir com o manipulador ix-700sIII e o controlador STEC-470A.
1.1. Características do controlador 470A:
• Tela colorida de cristal líquido, touch screen de 6,5”• Registro de programas em Compact Flash (CF) de 32Mb (capacidade para 999
moldes)• Programação NC na tela do controlador• Programação NC em PC• Customização do menu• Opção de descanso dos servo-motores• Sincronismo com ciclo de injeção da máquina injetora• Controle de energia• Controle de produção• Comunicação com PC
1.2. Especificação mecânica do manipulador
Modelo iX-700SIIIFonte de energia 200 ~ 220V AC ± 15% 50/60Hz
Capacidade de energia 4,6kVAEnergia requerida 2,4kVA
Pressão normal de ar 0.49MPa *Pressão máxima de ar 0,69MPa
Método de movimento
Vertical Produto
Servo Motor AC
Canal
Longitudinal ProdutoCanal
TransversalPostureRotação
Curso dos eixos
Vertical Produto (mm) 700Canal (mm) 750
Longitudinal Produto (mm) 525 (675)Canal (mm)Transversal (mm) 1400
PostureRotação
Carga máxima suportada pela garra, incluindo peso da garra 5kgConsumo de ar 2,9Nl/ciclo
• Isento de umidade ou poeira
SSA - 1 -Comércio de Peças para Robôs Ltda
Rua Danilo Walbusa,363 – Caieiras – SP – CEP 07700-000Fone: (11) 4441-1818

1. Área de Movimento do Manipulador
A área marcada com é perigosa. Entrando nessa área de movimento do manipulador, pode causar sérios danos físicos ao operador.
SSA - 2 -Comércio de Peças para Robôs Ltda
Rua Danilo Walbusa,363 – Caieiras – SP – CEP 07700-000Fone: (11) 4441-1818
SSA - 3 -Comércio de Peças para Robôs Ltda
Rua Danilo Walbusa,363 – Caieiras – SP – CEP 07700-000Fone: (11) 4441-1818
AVISOO maniupulador se movimenta na sua área em alta velocidade.Não entre na área de movimento do manipulado quando o mesmo estiver em operação automática.Sempre desligue a energia antes de entrar na área de movimento do manipulador para manutenção ou outras razões. Para detalhes, referente ao "4. LIGANDO E DESLIGANDO A ENERGIA” neste manual.
Precauções de Segurança
Na operação, do manipulador, se necessário construa uma cerca ou grades, para que o operador negligentemente entre na área de movimento do manipulador durante operação automática.Instale um sistema de segurança com grades de modo que quando for aberta, pare o movimento do manipulador.
SSA - 4 -Comércio de Peças para Robôs Ltda
Rua Danilo Walbusa,363 – Caieiras – SP – CEP 07700-000Fone: (11) 4441-1818

Precauções de Segurança
AVISO• Remover ou modificar tampas, sensores ou portas, que foram feitas para
sistema de segurança, é extremamente proibido sem o consentimento da Star Seiki Brasil Ltda.
• Não remova ou modifique partes que possam reduzir a segurança em relação ao manipulador.
• O manipulador deve ser operador por um , operador qualificado.
• Não opere o manipulador com luvas gastas.(Contudo, as luvas devem estar limpas para a manutenção do equipamento, limpeza e tratamento posterior.)
• Se houver quedas de energia, corte a energia primária imediatamente
• Se houver frequentes quedas de energia, devido a alta tensão ou outras causas, suspenda a operação do manipulador para prevenir danos nas placas e acidentes.
CUIDADO• Não toque em sensores ou chaves com as mãos molhadas ou sujas.
• Não opere o manipulador sem o completo entendimento entre os sensores e chaves e do movimento do manipulador.
• Não toque em chaves ou sensores que tenham encontros com a máquina e o manipulador.
SSA - 5 -Comércio de Peças para Robôs Ltda
Rua Danilo Walbusa,363 – Caieiras – SP – CEP 07700-000Fone: (11) 4441-1818

• Tenha certeza de aprender o local do botão de parada de emergência para usá-lo a qualquer momento e em qualquer posição em que o robô estiver, durante operação.
• Tenha espaço suficiente para a máquina e remova objetos que possam obstruir o trabalho do mesmo.
• Para impedir resvalamento em alguma coisa, ou tropeços, mantenha o chão seco e livre de derramamentos de óleo ou água, e mantenha o ambiente limpo.
• Não sujeite a caixa de operação ou controlador a fortes vibrações ou choques.
• Não remova ou suje etiquetas de segurança contidas nos equipamentos.
• Trabalhadores com problemas médicos, utilizando medicação, ou alcoolizado não devem operar o manipulador.
SSA - 6 -Comércio de Peças para Robôs Ltda
Rua Danilo Walbusa,363 – Caieiras – SP – CEP 07700-000Fone: (11) 4441-1818
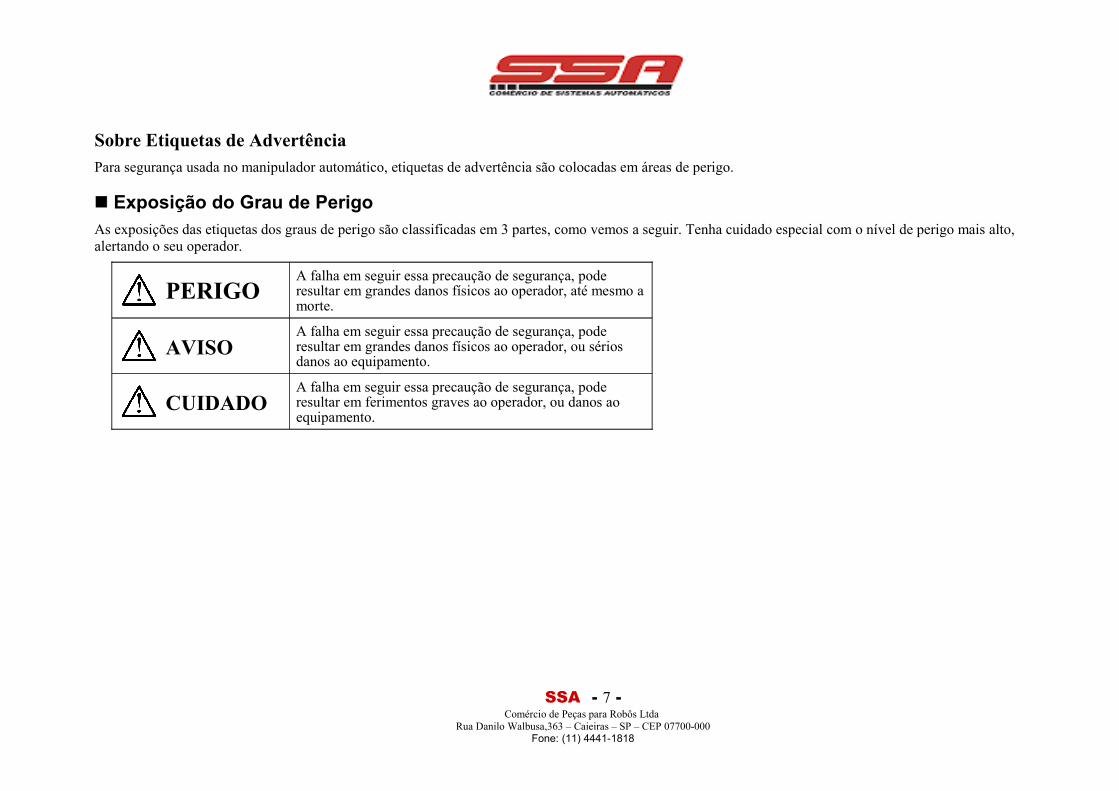
Sobre Etiquetas de AdvertênciaPara segurança usada no manipulador automático, etiquetas de advertência são colocadas em áreas de perigo.
Exposição do Grau de PerigoAs exposições das etiquetas dos graus de perigo são classificadas em 3 partes, como vemos a seguir. Tenha cuidado especial com o nível de perigo mais alto, alertando o seu operador.
PERIGOA falha em seguir essa precaução de segurança, pode resultar em grandes danos físicos ao operador, até mesmo a morte.
AVISOA falha em seguir essa precaução de segurança, pode resultar em grandes danos físicos ao operador, ou sérios danos ao equipamento.
CUIDADOA falha em seguir essa precaução de segurança, pode resultar em ferimentos graves ao operador, ou danos ao equipamento.
SSA - 7 -Comércio de Peças para Robôs Ltda
Rua Danilo Walbusa,363 – Caieiras – SP – CEP 07700-000Fone: (11) 4441-1818
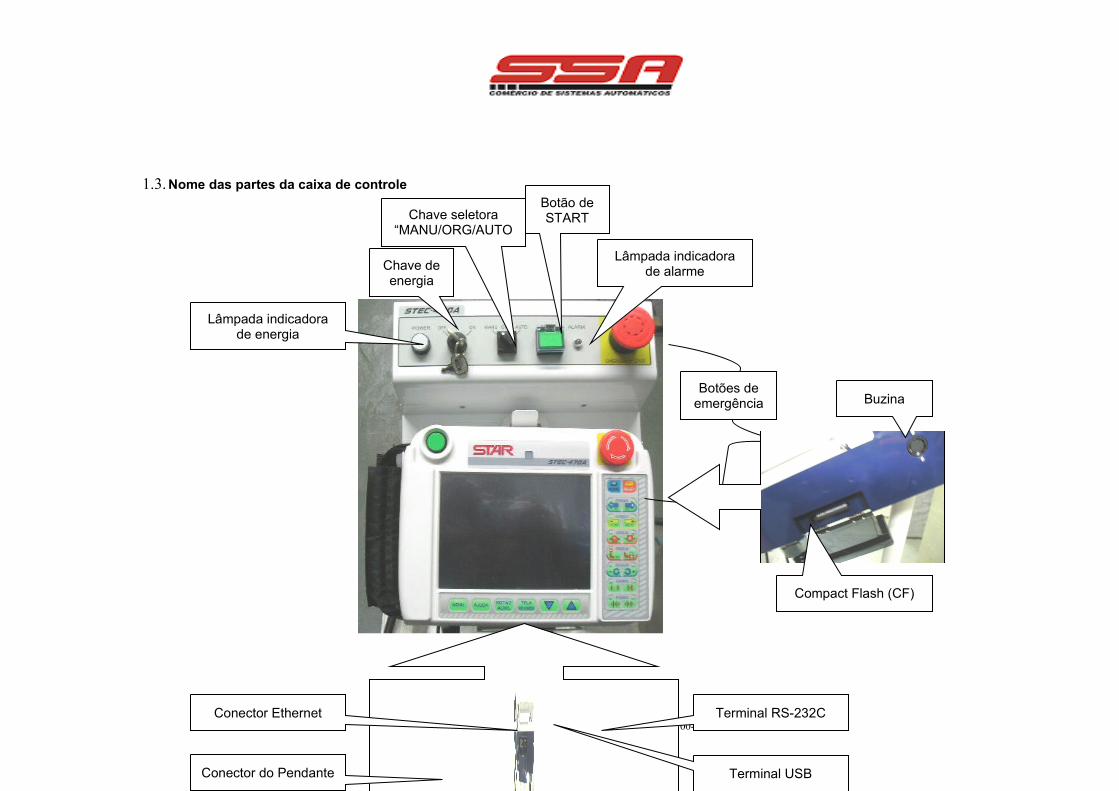
1.3. Nome das partes da caixa de controle
SSA - 8 -Comércio de Peças para Robôs Ltda
Rua Danilo Walbusa,363 – Caieiras – SP – CEP 07700-000Fone: (11) 4441-1818
Lâmpada indicadora de energia
Chave de energia
Chave seletora “MANU/ORG/AUTO
Botão de START
Botões de emergência
Lâmpada indicadora de alarme
Compact Flash (CF)
Buzina
Conector Ethernet Terminal RS-232C
Terminal USBConector do Pendante
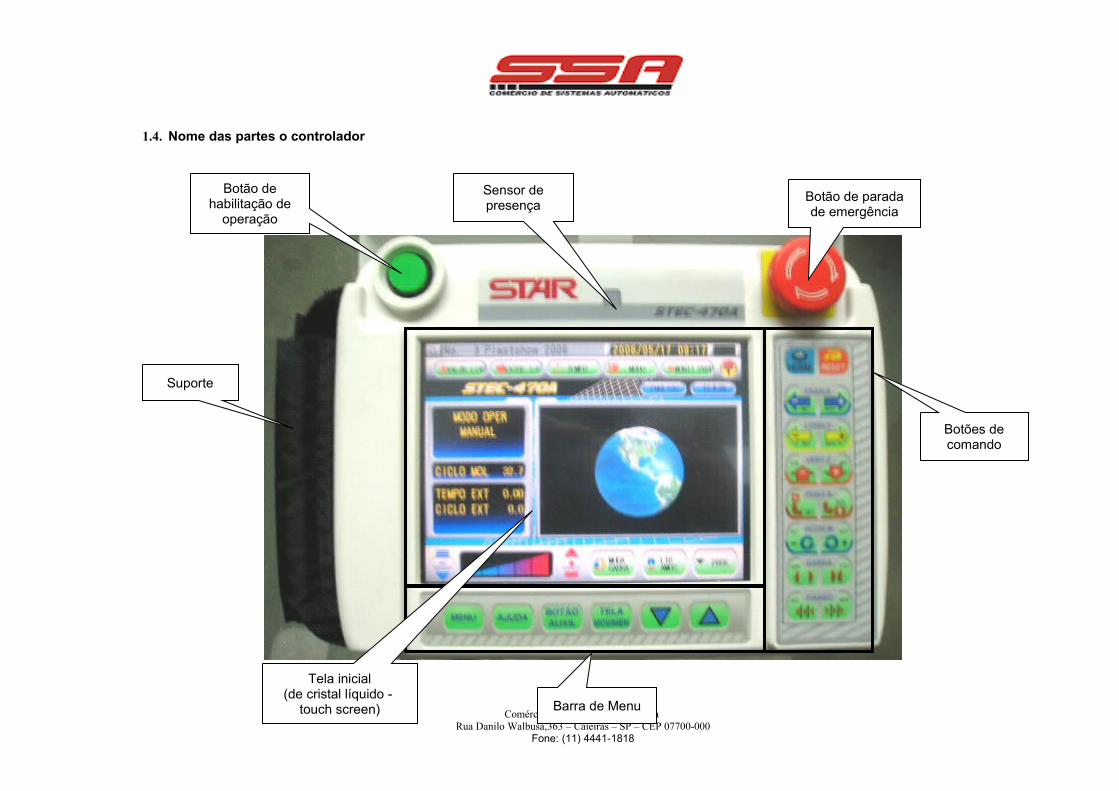
1.4. Nome das partes o controlador
SSA - 9 -Comércio de Peças para Robôs Ltda
Rua Danilo Walbusa,363 – Caieiras – SP – CEP 07700-000Fone: (11) 4441-1818
Botão de habilitação de
operação
Barra de Menu
Suporte
Sensor de presença
Botão de parada de emergência
Botões de comando
Tela inicial(de cristal líquido -
touch screen)
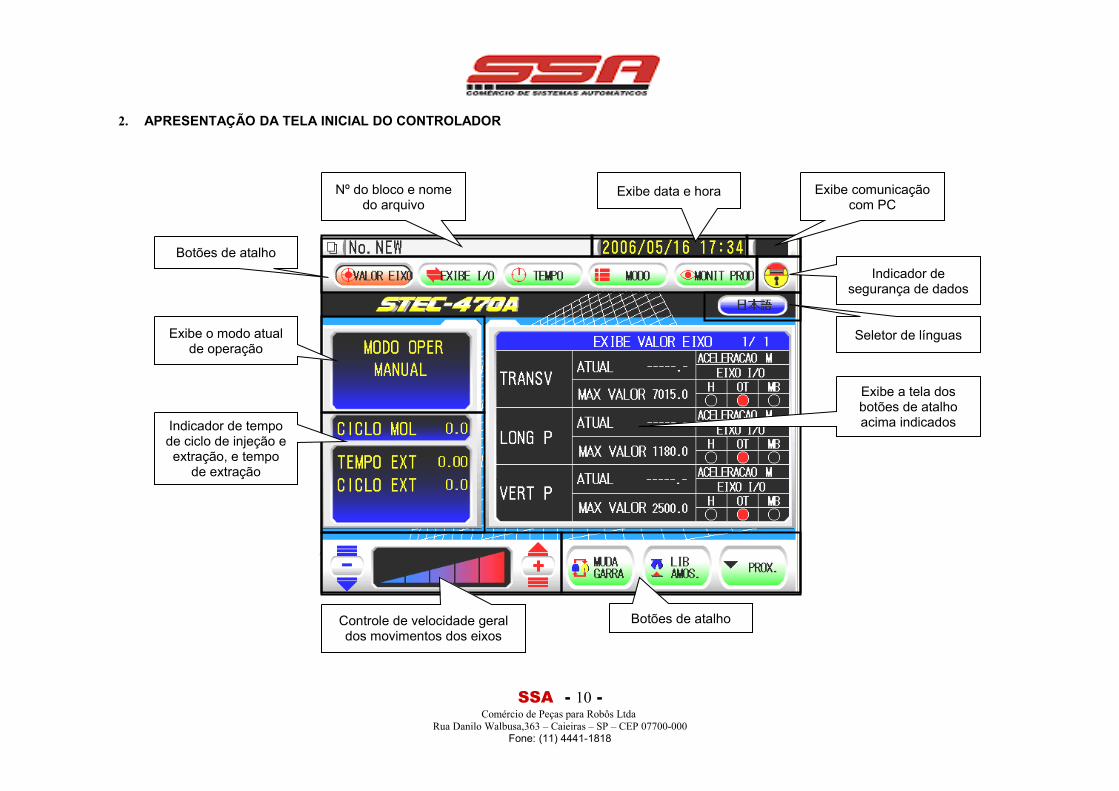
2. APRESENTAÇÃO DA TELA INICIAL DO CONTROLADOR
SSA - 10 -Comércio de Peças para Robôs Ltda
Rua Danilo Walbusa,363 – Caieiras – SP – CEP 07700-000Fone: (11) 4441-1818
Nº do bloco e nome do arquivo
Botões de atalho
Exibe o modo atual de operação
Indicador de tempo de ciclo de injeção e extração, e tempo
de extração
Seletor de línguas
Indicador de segurança de dados
Exibe comunicação com PC
Exibe data e hora
Controle de velocidade geral dos movimentos dos eixos
Botões de atalho
Exibe a tela dos botões de atalho acima indicados
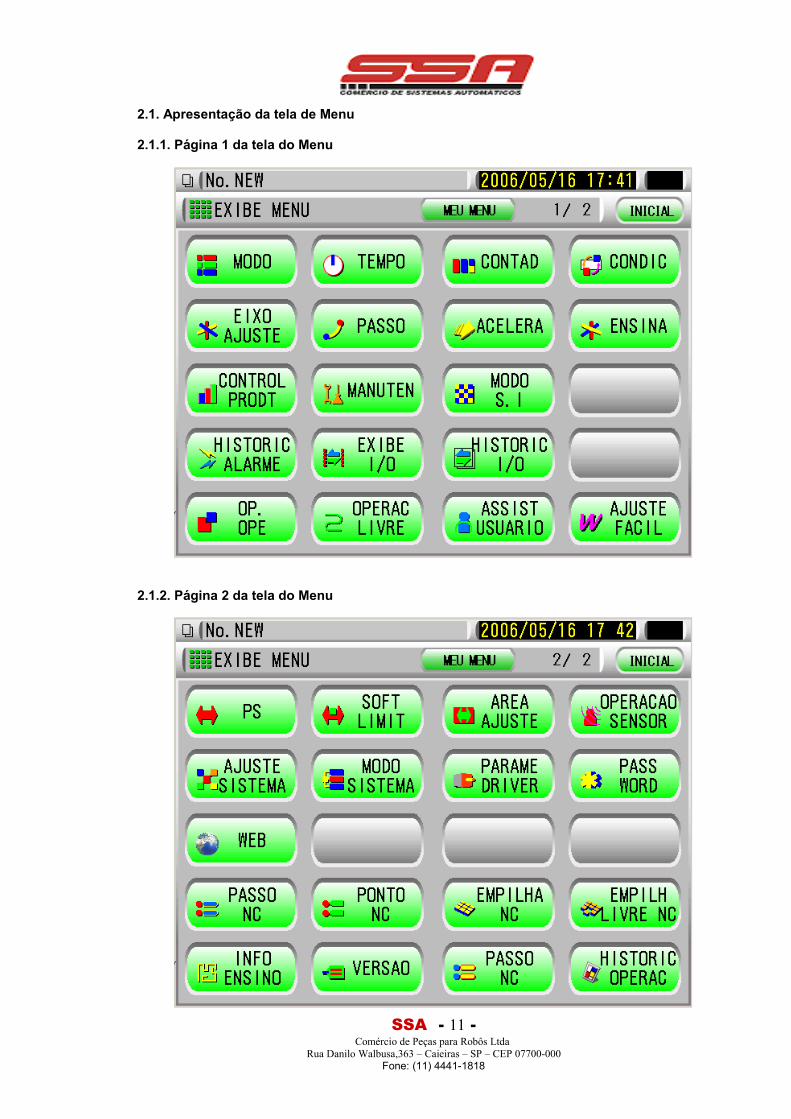
2.1. Apresentação da tela de Menu
2.1.1. Página 1 da tela do Menu
2.1.2. Página 2 da tela do Menu
SSA - 11 -Comércio de Peças para Robôs Ltda
Rua Danilo Walbusa,363 – Caieiras – SP – CEP 07700-000Fone: (11) 4441-1818

SSA - 12 -Comércio de Peças para Robôs Ltda
Rua Danilo Walbusa,363 – Caieiras – SP – CEP 07700-000Fone: (11) 4441-1818
Seleciona os modos de operação do manipulador.
Ajusta os tempos de cada movimento dos eixos.
Ajusta valores dos contadores para uso em operações opcionais.
Usado para salvar, ler, apagar, comparar e editar grupos dos programas salvos.
Ajusta os pontos e as velocidades dos eixos.
Ajusta o valor em que será efetuado o passo.
Ajusta a aceleração para cada eixo do manipulador.
Indica as ordens dos pontos para facilitar os ajustes dos mesmos.
Permite a visualização e controle da produção.
Exibe informações e período de manutenção do manipulador.
Efetua ajustes automáticos conforme suas 4 funções inteligentes.
Informa o histórico dos 25 últimos alarmes ocorridos.
Permite a visualização dos sinais de entrada e saída.
Exibe o histórico dos sinais de entrada e saída.
Permite a operação livre dos eixos, independente dos sinais da interface.
Permite que o botão de habilitação fiquei acionado temporariamente.
Orienta de forma simples como efetuar os ajustes dos modos, pontos e tempos.
Determina o curso máximo de cada eixo.
Usado para impor limitações nos valores dos eixos, dependendo de cada programa opcional.
Ajusta os limites máximos e mínimos das áreas de extração, descarga, etc.
Ajusta a sensibilidade e o tempo do sensor de presença.
Permite o ajuste da data, hora, brilho da tela, tempo do protetor de tela, etc.
Permite o ajuste de alguns modos específicos do controlador.
Efetua os ajustes dos dados dos drivers.
SSA - 13 -Comércio de Peças para Robôs Ltda
Rua Danilo Walbusa,363 – Caieiras – SP – CEP 07700-000Fone: (11) 4441-1818
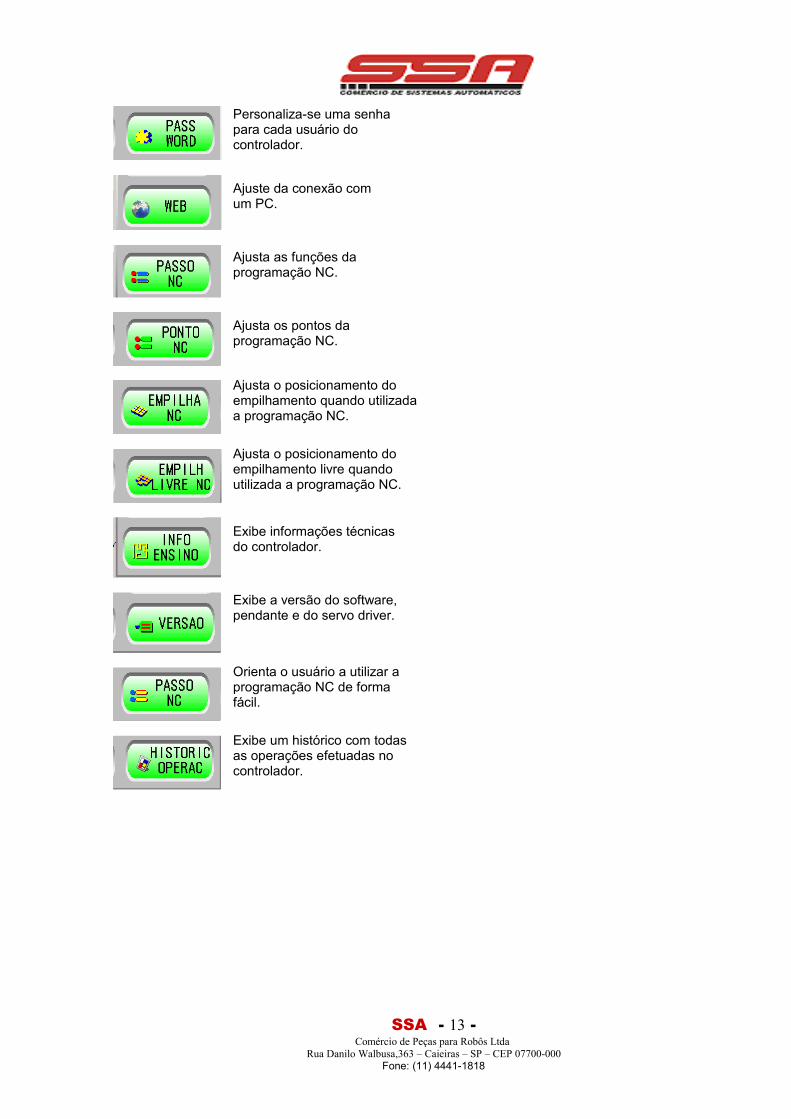
Exibe um histórico com todas as operações efetuadas no controlador.
Orienta o usuário a utilizar a programação NC de forma fácil.
Exibe a versão do software, pendante e do servo driver.
Exibe informações técnicas do controlador.
Ajusta o posicionamento do empilhamento livre quando utilizada a programação NC.
Ajusta o posicionamento do empilhamento quando utilizada a programação NC.
Ajusta os pontos da programação NC.
Ajusta as funções da programação NC.
Ajuste da conexão com um PC.
Personaliza-se uma senha para cada usuário do controlador.
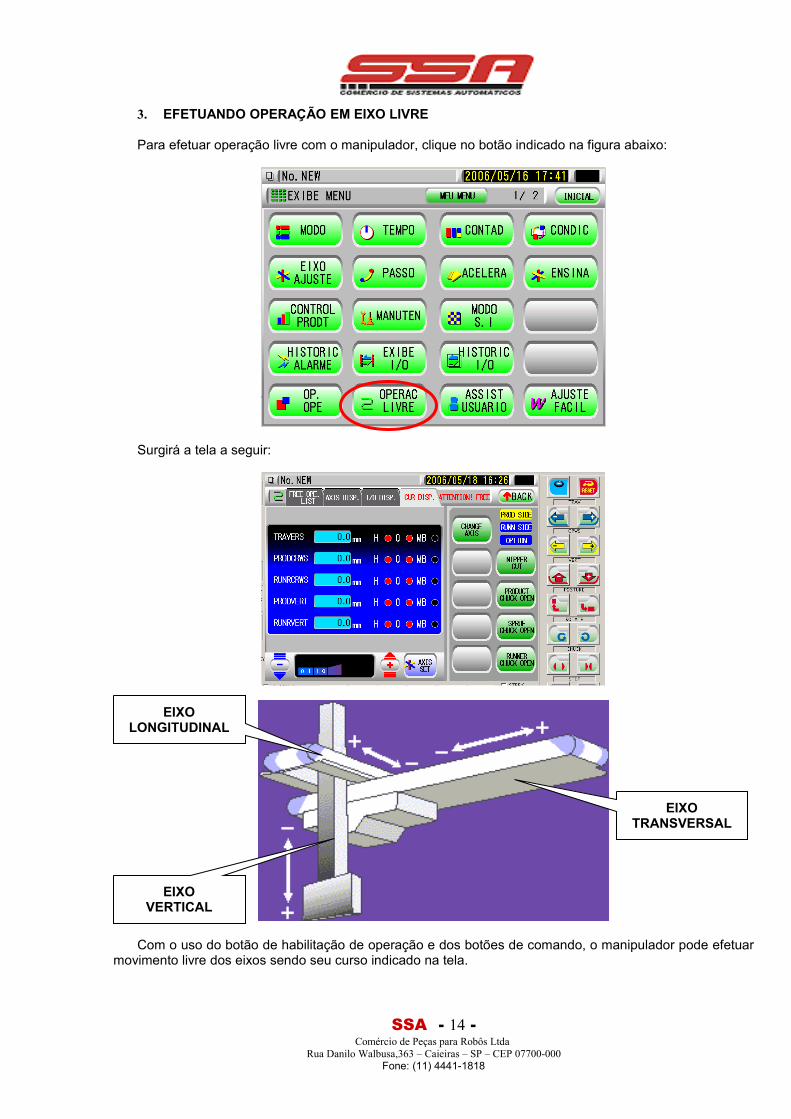
3. EFETUANDO OPERAÇÃO EM EIXO LIVRE
Para efetuar operação livre com o manipulador, clique no botão indicado na figura abaixo:
Surgirá a tela a seguir:
Com o uso do botão de habilitação de operação e dos botões de comando, o manipulador pode efetuar movimento livre dos eixos sendo seu curso indicado na tela.
SSA - 14 -Comércio de Peças para Robôs Ltda
Rua Danilo Walbusa,363 – Caieiras – SP – CEP 07700-000Fone: (11) 4441-1818
EIXOTRANSVERSAL
EIXOLONGITUDINAL
EIXOVERTICAL

CUIDADO: A operação em eixo livre é extremamente perigosa, pois todas as seguranças são liberadas, portanto, a interface de comunicação entre o manipulador e a máquina injetora não é respeitada.
SSA - 15 -Comércio de Peças para Robôs Ltda
Rua Danilo Walbusa,363 – Caieiras – SP – CEP 07700-000Fone: (11) 4441-1818

4. FUNÇÕES E AJUSTES DOS MODOS, TEMPOS E PONTOS E VELOCIDADES
4.1. AJUSTE DOS MODOS:
O diagrama a seguir descreve os movimentos básicos do manipulador:
Para efetuar os ajustes dos modos a serem utilizados entre na página 1 do Menu e clique em “MODO”:
SSA - 16 -Comércio de Peças para Robôs Ltda
Rua Danilo Walbusa,363 – Caieiras – SP – CEP 07700-000Fone: (11) 4441-1818
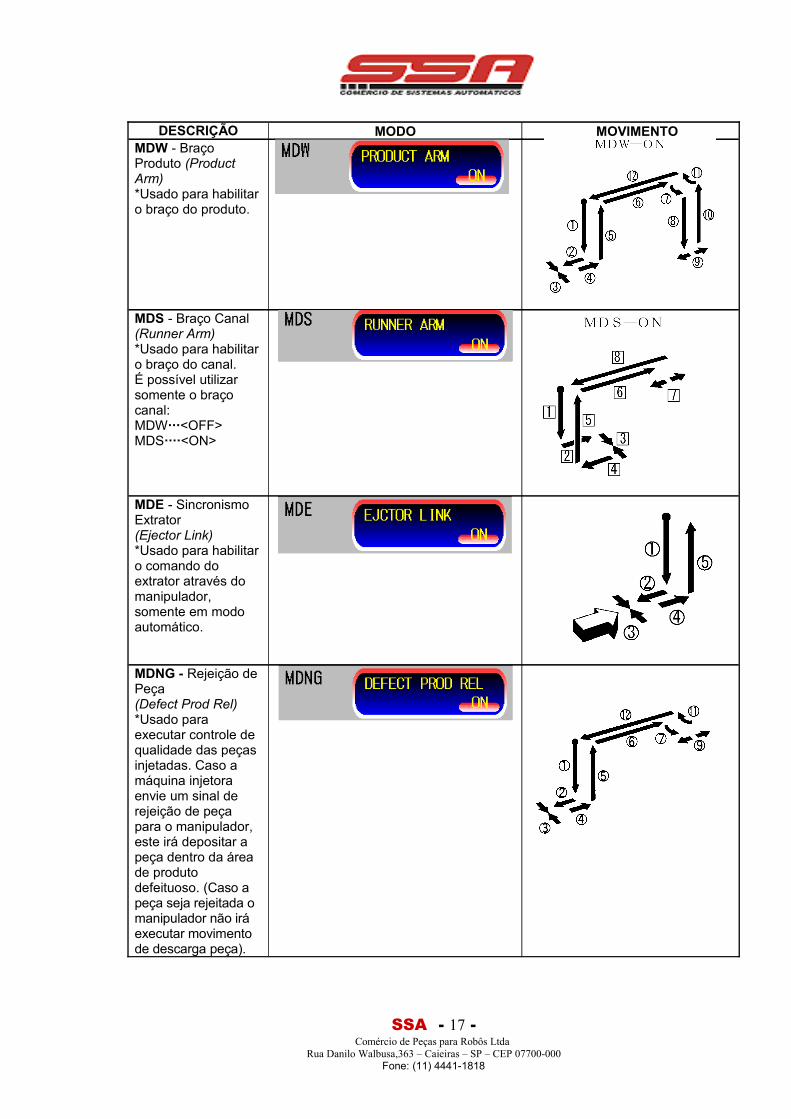
DESCRIÇÃO MODO MOVIMENTOMDW - Braço Produto (Product Arm)*Usado para habilitar o braço do produto.
MDS - Braço Canal (Runner Arm)*Usado para habilitar o braço do canal.É possível utilizar somente o braço canal: MDW<OFF>MDS<ON>
MDE - Sincronismo Extrator(Ejector Link)*Usado para habilitar o comando do extrator através do manipulador, somente em modo automático.
MDNG - Rejeição de Peça(Defect Prod Rel)*Usado para executar controle de qualidade das peças injetadas. Caso a máquina injetora envie um sinal de rejeição de peça para o manipulador, este irá depositar a peça dentro da área de produto defeituoso. (Caso a peça seja rejeitada o manipulador não irá executar movimento de descarga peça).
SSA - 17 -Comércio de Peças para Robôs Ltda
Rua Danilo Walbusa,363 – Caieiras – SP – CEP 07700-000Fone: (11) 4441-1818
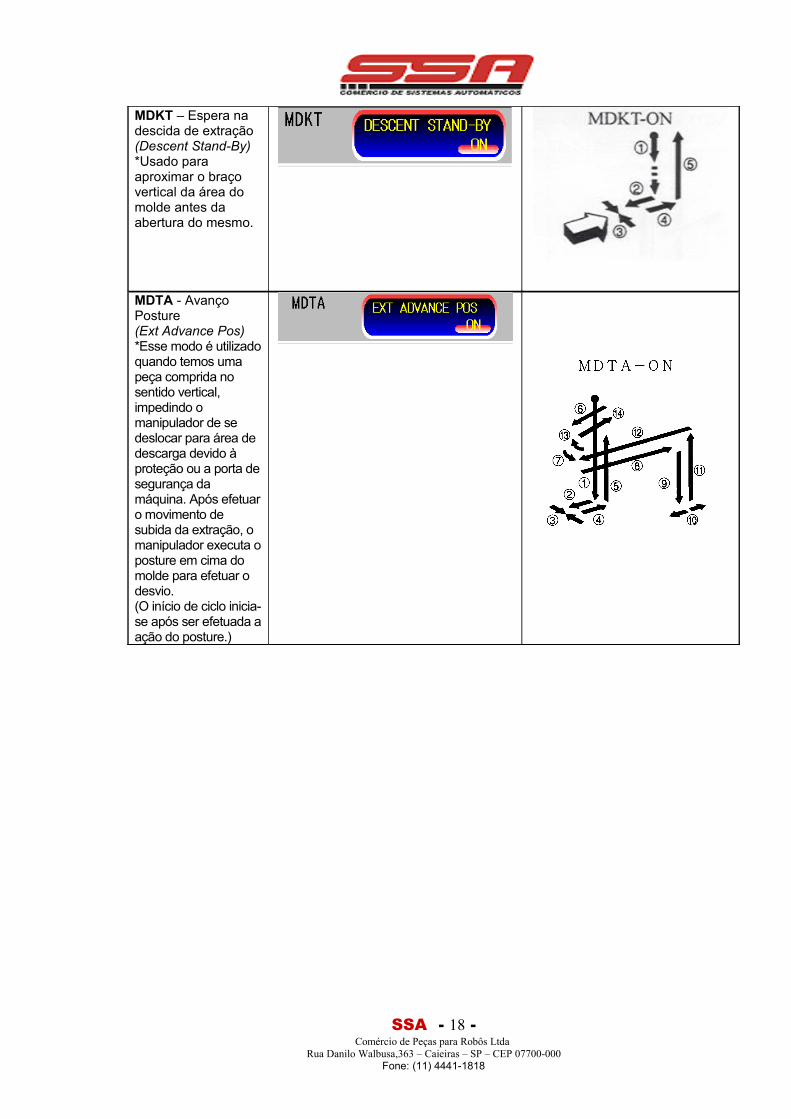
MDKT – Espera na descida de extração(Descent Stand-By)*Usado para aproximar o braço vertical da área do molde antes da abertura do mesmo.
MDTA - Avanço Posture(Ext Advance Pos)*Esse modo é utilizado quando temos uma peça comprida no sentido vertical, impedindo o manipulador de se deslocar para área de descarga devido à proteção ou a porta de segurança da máquina. Após efetuar o movimento de subida da extração, o manipulador executa o posture em cima do molde para efetuar o desvio.(O início de ciclo inicia-se após ser efetuada a ação do posture.)
SSA - 18 -Comércio de Peças para Robôs Ltda
Rua Danilo Walbusa,363 – Caieiras – SP – CEP 07700-000Fone: (11) 4441-1818
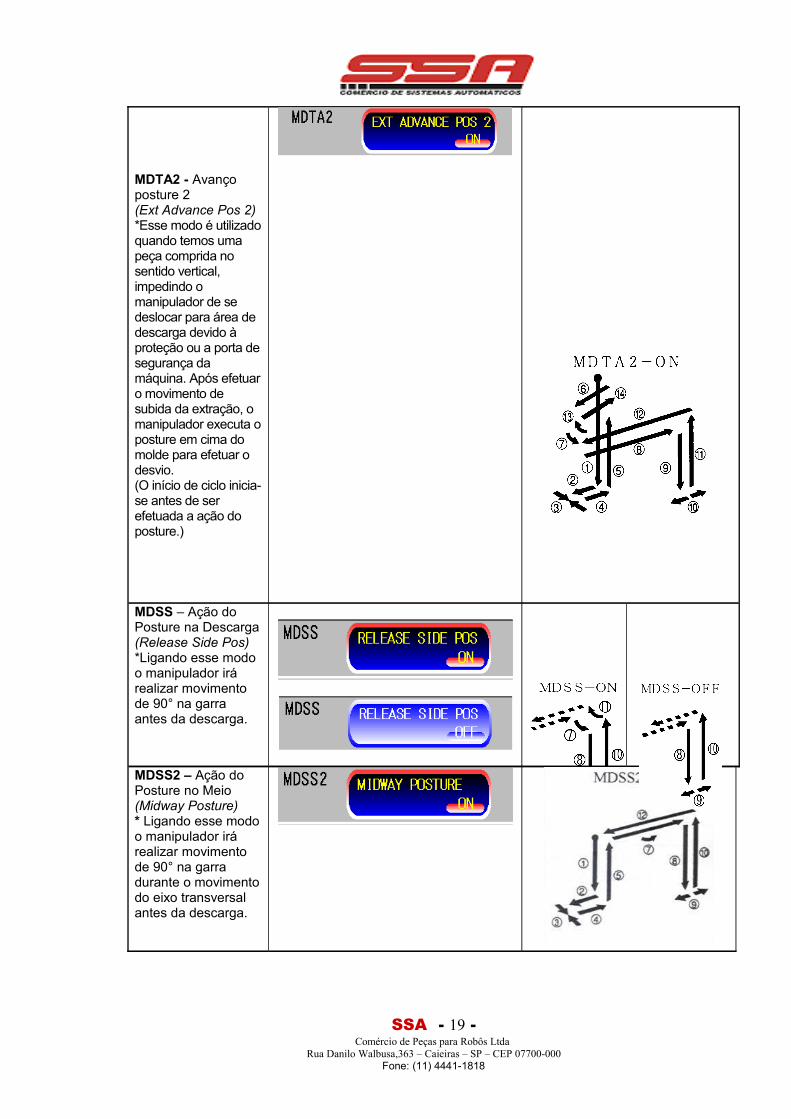
MDTA2 - Avanço posture 2(Ext Advance Pos 2)*Esse modo é utilizado quando temos uma peça comprida no sentido vertical, impedindo o manipulador de se deslocar para área de descarga devido à proteção ou a porta de segurança da máquina. Após efetuar o movimento de subida da extração, o manipulador executa o posture em cima do molde para efetuar o desvio.(O início de ciclo inicia-se antes de ser efetuada a ação do posture.)
MDSS – Ação do Posture na Descarga(Release Side Pos)*Ligando esse modo o manipulador irá realizar movimento de 90° na garra antes da descarga.
MDSS2 – Ação do Posture no Meio(Midway Posture)* Ligando esse modo o manipulador irá realizar movimento de 90° na garra durante o movimento do eixo transversal antes da descarga.
SSA - 19 -Comércio de Peças para Robôs Ltda
Rua Danilo Walbusa,363 – Caieiras – SP – CEP 07700-000Fone: (11) 4441-1818
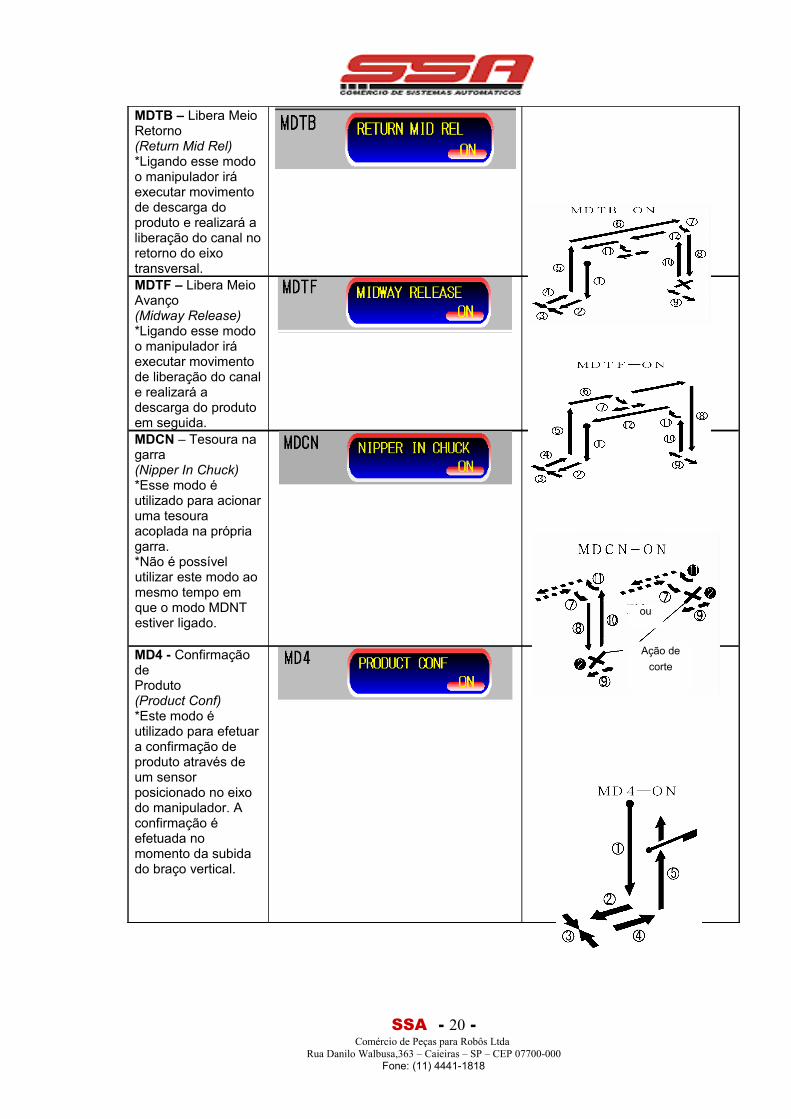
MDTB – Libera Meio Retorno(Return Mid Rel)*Ligando esse modo o manipulador irá executar movimento de descarga do produto e realizará a liberação do canal no retorno do eixo transversal.MDTF – Libera Meio Avanço(Midway Release)*Ligando esse modo o manipulador irá executar movimento de liberação do canal e realizará a descarga do produto em seguida.MDCN – Tesoura na garra(Nipper In Chuck)*Esse modo é utilizado para acionar uma tesoura acoplada na própria garra. *Não é possível utilizar este modo ao mesmo tempo em que o modo MDNT estiver ligado.
MD4 - Confirmação deProduto(Product Conf)*Este modo é utilizado para efetuar a confirmação de produto através de um sensor posicionado no eixo do manipulador. A confirmação é efetuada no momento da subida do braço vertical.
SSA - 20 -Comércio de Peças para Robôs Ltda
Rua Danilo Walbusa,363 – Caieiras – SP – CEP 07700-000Fone: (11) 4441-1818
ou
Ação de corte
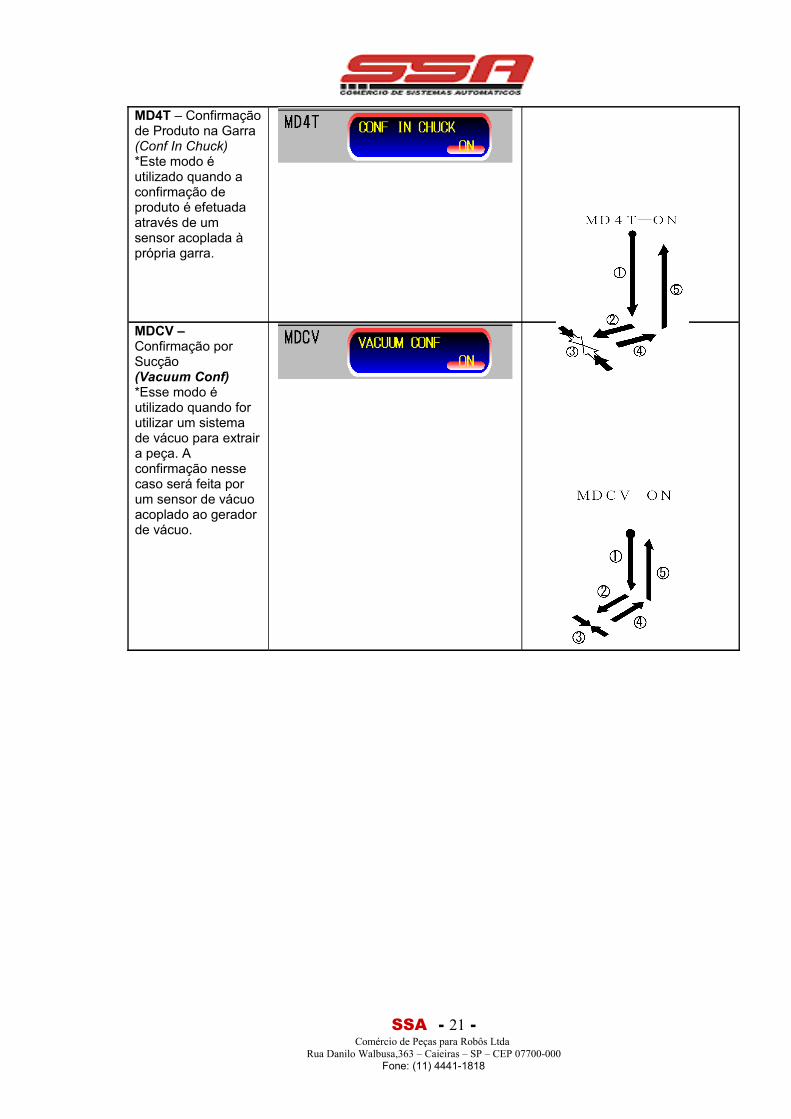
MD4T – Confirmação de Produto na Garra(Conf In Chuck)*Este modo é utilizado quando a confirmação de produto é efetuada através de um sensor acoplada à própria garra.
MDCV – Confirmação por Sucção(Vacuum Conf)*Esse modo é utilizado quando for utilizar um sistema de vácuo para extrair a peça. A confirmação nesse caso será feita por um sensor de vácuo acoplado ao gerador de vácuo.
SSA - 21 -Comércio de Peças para Robôs Ltda
Rua Danilo Walbusa,363 – Caieiras – SP – CEP 07700-000Fone: (11) 4441-1818

4.2. AJUSTE DOS TEMPOS:
O diagrama a seguir ilustra operação dos tempos dos movimentos básicos do manipulador:
Para efetuar os ajustes dos tempos a serem utilizados entre na página 1 do Menu e clique em “TEMPO”:
SSA - 22 -Comércio de Peças para Robôs Ltda
Rua Danilo Walbusa,363 – Caieiras – SP – CEP 07700-000Fone: (11) 4441-1818
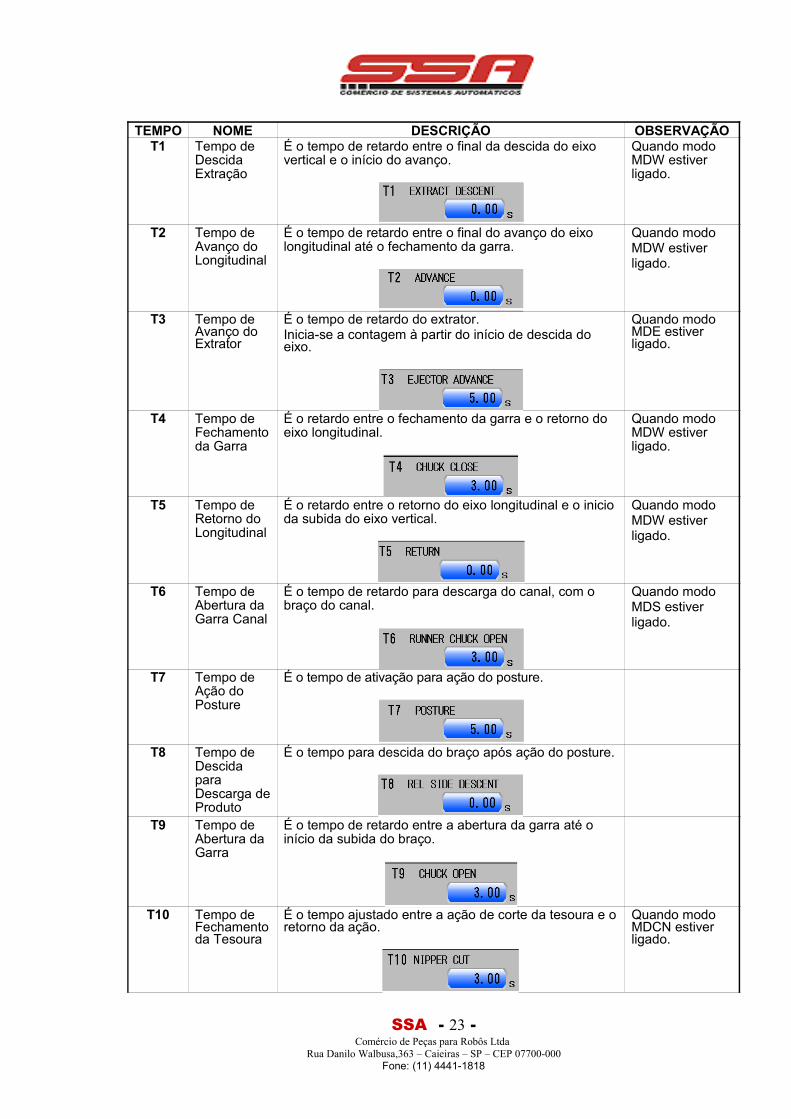
TEMPO NOME DESCRIÇÃO OBSERVAÇÃOT1 Tempo de
Descida Extração
É o tempo de retardo entre o final da descida do eixo vertical e o início do avanço.
Quando modo MDW estiver ligado.
T2 Tempo de Avanço do Longitudinal
É o tempo de retardo entre o final do avanço do eixo longitudinal até o fechamento da garra.
Quando modo MDW estiver ligado.
T3 Tempo de Avanço do Extrator
É o tempo de retardo do extrator.Inicia-se a contagem à partir do início de descida do eixo.
Quando modo MDE estiver ligado.
T4 Tempo de Fechamento da Garra
É o retardo entre o fechamento da garra e o retorno do eixo longitudinal.
Quando modo MDW estiver ligado.
T5 Tempo de Retorno do Longitudinal
É o retardo entre o retorno do eixo longitudinal e o inicio da subida do eixo vertical.
Quando modo MDW estiver ligado.
T6 Tempo de Abertura da Garra Canal
É o tempo de retardo para descarga do canal, com o braço do canal.
Quando modo MDS estiver ligado.
T7 Tempo de Ação do Posture
É o tempo de ativação para ação do posture.
T8 Tempo de Descida para Descarga de Produto
É o tempo para descida do braço após ação do posture.
T9 Tempo de Abertura da Garra
É o tempo de retardo entre a abertura da garra até o início da subida do braço.
T10 Tempo de Fechamento da Tesoura
É o tempo ajustado entre a ação de corte da tesoura e o retorno da ação.
Quando modo MDCN estiver ligado.
SSA - 23 -Comércio de Peças para Robôs Ltda
Rua Danilo Walbusa,363 – Caieiras – SP – CEP 07700-000Fone: (11) 4441-1818
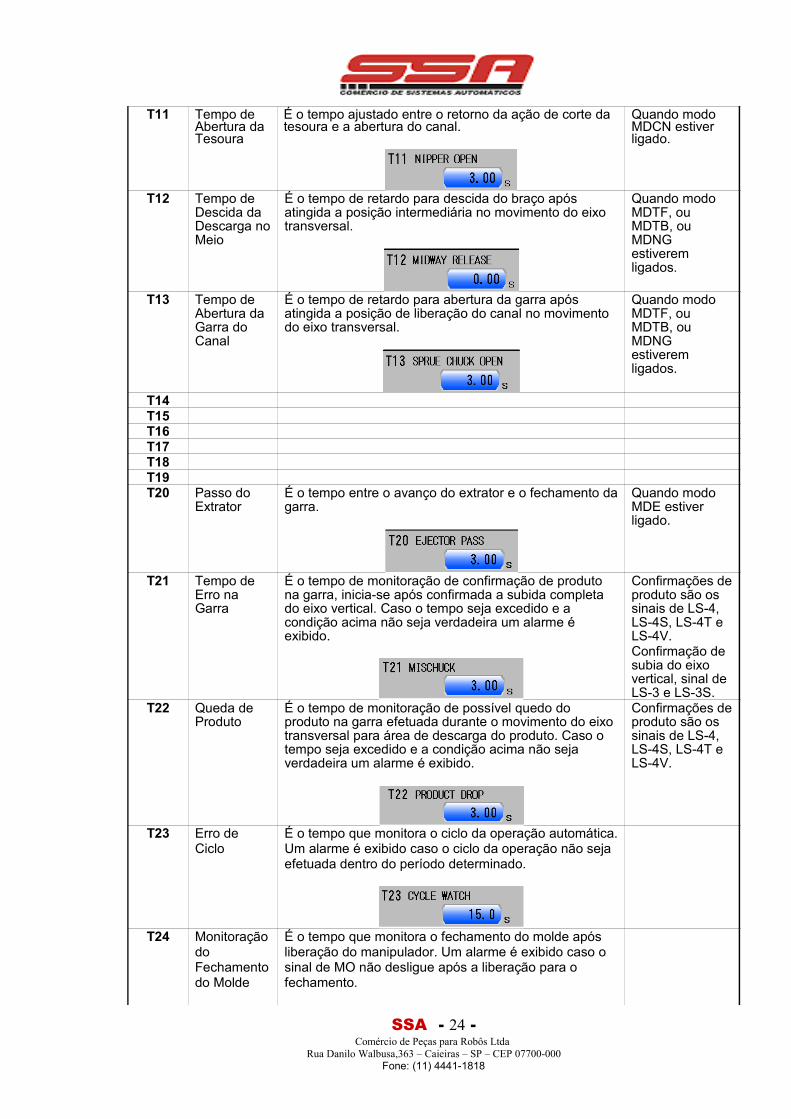
T11 Tempo de Abertura da Tesoura
É o tempo ajustado entre o retorno da ação de corte da tesoura e a abertura do canal.
Quando modo MDCN estiver ligado.
T12 Tempo de Descida da Descarga no Meio
É o tempo de retardo para descida do braço após atingida a posição intermediária no movimento do eixo transversal.
Quando modo MDTF, ou MDTB, ou MDNG estiverem ligados.
T13 Tempo de Abertura da Garra do Canal
É o tempo de retardo para abertura da garra após atingida a posição de liberação do canal no movimento do eixo transversal.
Quando modo MDTF, ou MDTB, ou MDNG estiverem ligados.
T14T15T16T17T18T19T20 Passo do
ExtratorÉ o tempo entre o avanço do extrator e o fechamento da garra.
Quando modo MDE estiver ligado.
T21 Tempo de Erro na Garra
É o tempo de monitoração de confirmação de produto na garra, inicia-se após confirmada a subida completa do eixo vertical. Caso o tempo seja excedido e a condição acima não seja verdadeira um alarme é exibido.
Confirmações de produto são os sinais de LS-4, LS-4S, LS-4T e LS-4V.Confirmação de subia do eixo vertical, sinal de LS-3 e LS-3S.
T22 Queda de Produto
É o tempo de monitoração de possível quedo do produto na garra efetuada durante o movimento do eixo transversal para área de descarga do produto. Caso o tempo seja excedido e a condição acima não seja verdadeira um alarme é exibido.
Confirmações de produto são os sinais de LS-4, LS-4S, LS-4T e LS-4V.
T23 Erro de Ciclo
É o tempo que monitora o ciclo da operação automática. Um alarme é exibido caso o ciclo da operação não seja efetuada dentro do período determinado.
T24 Monitoração do Fechamento do Molde
É o tempo que monitora o fechamento do molde após liberação do manipulador. Um alarme é exibido caso o sinal de MO não desligue após a liberação para o fechamento.
SSA - 24 -Comércio de Peças para Robôs Ltda
Rua Danilo Walbusa,363 – Caieiras – SP – CEP 07700-000Fone: (11) 4441-1818

T25 Desliga o sinal de RY3
É o tempo para o sinal de inicio de ciclo ser liberado. Este sinal desliga-se quando o sinal de MO desligar-se, mesmo que o tempo de RY3 não tenha se excedido ainda.
T26 Monitora Queda de Pressão de Ar
É o tempo de monitoração de queda de pressão de ar. Um alarme é exibido caso a pressão de ar seja menor que 0,3MPa e o sensor de pressurização fique desligado por um período maior que o determinado.
Sensor de pressurização é o sensor de PS.
T27T28 Retardo na
Área de Descarga
O tempo determinado deve ser menor que 1 segundo.
T29 Retardo na Descida de Extração
É o tempo de retardo para descida do eixo vertical para extração de produto. O tempo inicia-se após o eixo atingir a posição de espera para extração.
Modo de espera na descida para extração MDKT.
T30T31T32T33T34T35T36T37 Tempo de
Descida de Extração do Canal
É o tempo de retardo entre o final da descida do eixo vertical e o início do avanço para pega do canal.
Quando modo MDS estiver ligado.
T38 Tempo de Avanço do Longitudinal para Extração do Canal
É o tempo de retardo entre o final do avanço do eixo longitudinal até o fechamento da garra.
Quando modo MDS estiver ligado.
T39 Tempo de Fechamento da Pinça
É o retardo entre o fechamento da pinça e o retorno do eixo longitudinal.
MDS estiver ligado.
SSA - 25 -Comércio de Peças para Robôs Ltda
Rua Danilo Walbusa,363 – Caieiras – SP – CEP 07700-000Fone: (11) 4441-1818

T40 Tempo de Retorno do Longitudinal
É o retardo entre o retorno do eixo longitudinal e o inicio da subida do eixo vertical.
MDS estiver ligado.
T41T42T43T44T45T46T47T48T49T50T51T52T53T54T55T56T57T58T59T60T61T62T63T64T65T66T67T68T69T70T71T72T73T74T75T76T77T78T79T80
SSA - 26 -Comércio de Peças para Robôs Ltda
Rua Danilo Walbusa,363 – Caieiras – SP – CEP 07700-000Fone: (11) 4441-1818

4.3. AJUSTE DOS PONTOS E VELOCIDADES:
Para efetuar os ajustes dos pontos a serem utilizados entre na página 1 do Menu e clique em “EIXO AJUSTE”:
SSA - 27 -Comércio de Peças para Robôs Ltda
Rua Danilo Walbusa,363 – Caieiras – SP – CEP 07700-000Fone: (11) 4441-1818
Exibe valor atual dos eixos.
Exibe valor ajustado aos eixos.
Exibe valor atual das velocidades dos eixos.
Exibe os pontos da área de extração.
Exibe os pontos da área de descarga.
Tecla de operação livre.
Incremento e decremento dos valores dos pontos
através das unidades em ±0,1; ±1,0 e ±10,0mm.
Tecla de confirmação de ajuste dos pontos.
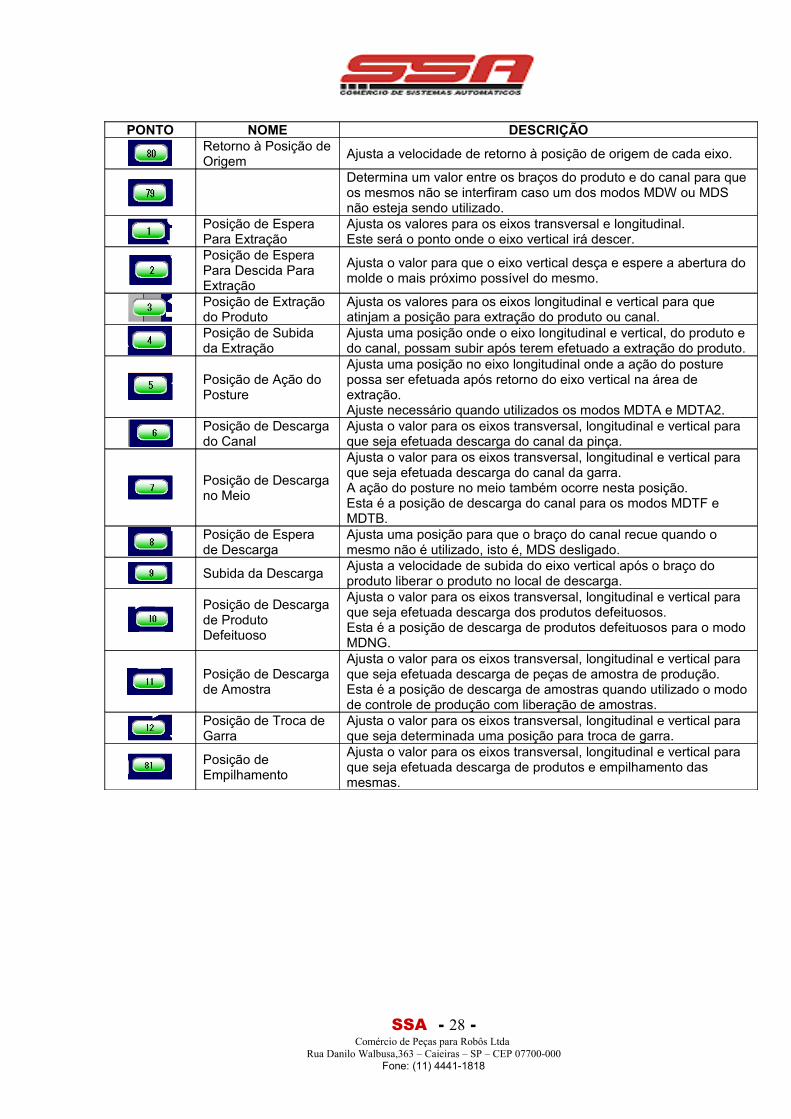
PONTO NOME DESCRIÇÃORetorno à Posição de Origem Ajusta a velocidade de retorno à posição de origem de cada eixo.
Determina um valor entre os braços do produto e do canal para que os mesmos não se interfiram caso um dos modos MDW ou MDS não esteja sendo utilizado.
Posição de Espera Para Extração
Ajusta os valores para os eixos transversal e longitudinal.Este será o ponto onde o eixo vertical irá descer.
Posição de Espera Para Descida Para Extração
Ajusta o valor para que o eixo vertical desça e espere a abertura do molde o mais próximo possível do mesmo.
Posição de Extração do Produto
Ajusta os valores para os eixos longitudinal e vertical para que atinjam a posição para extração do produto ou canal.
Posição de Subida da Extração
Ajusta uma posição onde o eixo longitudinal e vertical, do produto e do canal, possam subir após terem efetuado a extração do produto.
Posição de Ação do Posture
Ajusta uma posição no eixo longitudinal onde a ação do posture possa ser efetuada após retorno do eixo vertical na área de extração.Ajuste necessário quando utilizados os modos MDTA e MDTA2.
Posição de Descarga do Canal
Ajusta o valor para os eixos transversal, longitudinal e vertical para que seja efetuada descarga do canal da pinça.
Posição de Descarga no Meio
Ajusta o valor para os eixos transversal, longitudinal e vertical para que seja efetuada descarga do canal da garra.A ação do posture no meio também ocorre nesta posição.Esta é a posição de descarga do canal para os modos MDTF e MDTB.
Posição de Espera de Descarga
Ajusta uma posição para que o braço do canal recue quando o mesmo não é utilizado, isto é, MDS desligado.
Subida da Descarga Ajusta a velocidade de subida do eixo vertical após o braço do produto liberar o produto no local de descarga.
Posição de Descarga de Produto Defeituoso
Ajusta o valor para os eixos transversal, longitudinal e vertical para que seja efetuada descarga dos produtos defeituosos.Esta é a posição de descarga de produtos defeituosos para o modo MDNG.
Posição de Descarga de Amostra
Ajusta o valor para os eixos transversal, longitudinal e vertical para que seja efetuada descarga de peças de amostra de produção.Esta é a posição de descarga de amostras quando utilizado o modo de controle de produção com liberação de amostras.
Posição de Troca de Garra
Ajusta o valor para os eixos transversal, longitudinal e vertical para que seja determinada uma posição para troca de garra.
Posição de Empilhamento
Ajusta o valor para os eixos transversal, longitudinal e vertical para que seja efetuada descarga de produtos e empilhamento das mesmas.
SSA - 28 -Comércio de Peças para Robôs Ltda
Rua Danilo Walbusa,363 – Caieiras – SP – CEP 07700-000Fone: (11) 4441-1818
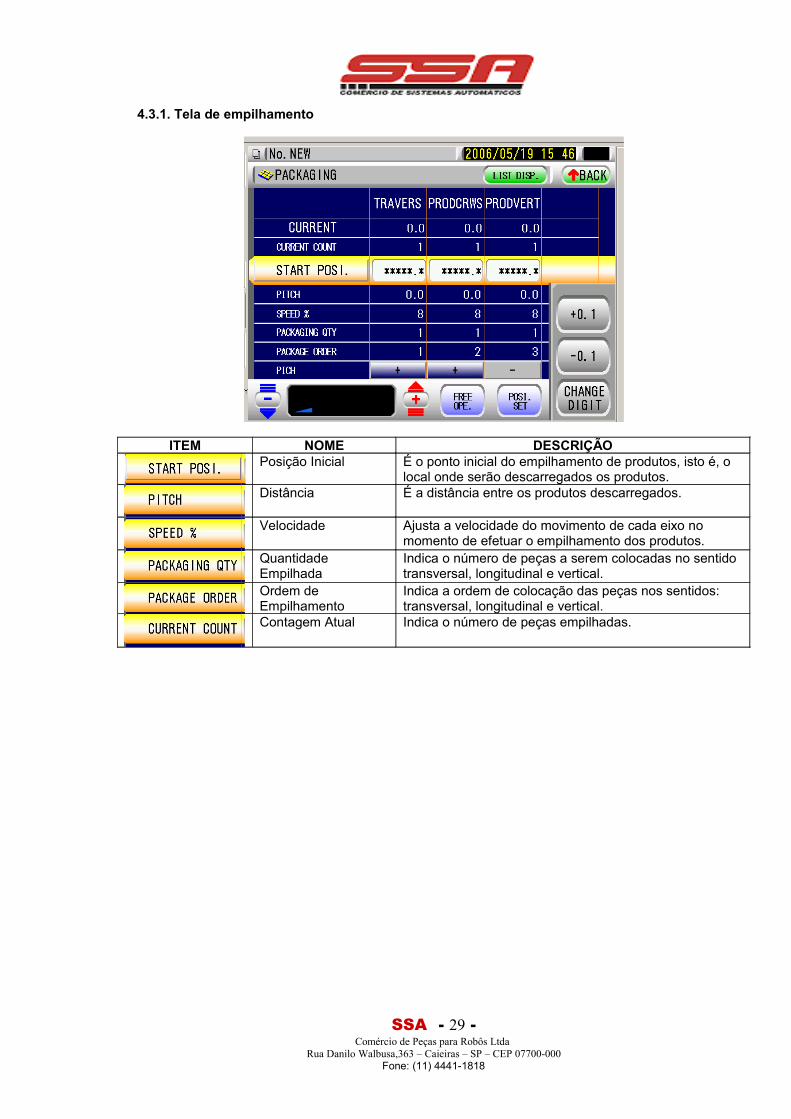
4.3.1. Tela de empilhamento
ITEM NOME DESCRIÇÃOPosição Inicial É o ponto inicial do empilhamento de produtos, isto é, o
local onde serão descarregados os produtos.Distância É a distância entre os produtos descarregados.
Velocidade Ajusta a velocidade do movimento de cada eixo no momento de efetuar o empilhamento dos produtos.
Quantidade Empilhada
Indica o número de peças a serem colocadas no sentido transversal, longitudinal e vertical.
Ordem de Empilhamento
Indica a ordem de colocação das peças nos sentidos: transversal, longitudinal e vertical.
Contagem Atual Indica o número de peças empilhadas.
SSA - 29 -Comércio de Peças para Robôs Ltda
Rua Danilo Walbusa,363 – Caieiras – SP – CEP 07700-000Fone: (11) 4441-1818
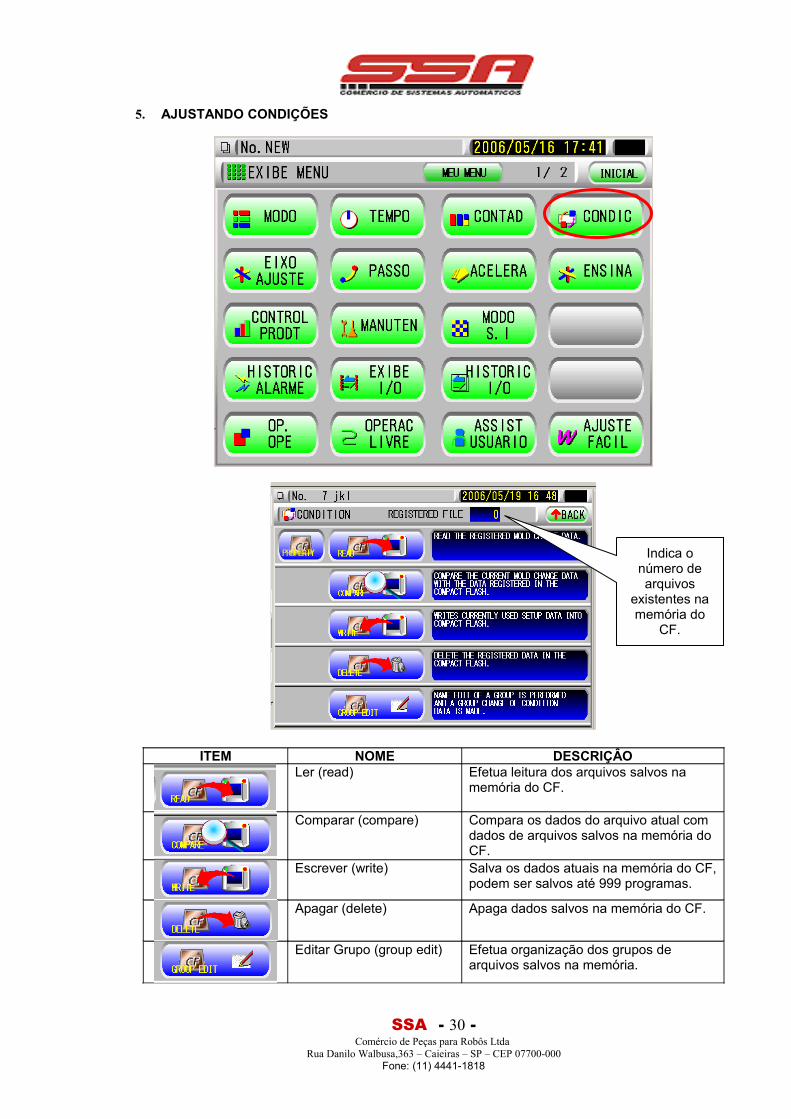
5. AJUSTANDO CONDIÇÕES
ITEM NOME DESCRIÇÂOLer (read) Efetua leitura dos arquivos salvos na
memória do CF.
Comparar (compare) Compara os dados do arquivo atual com dados de arquivos salvos na memória do CF.
Escrever (write) Salva os dados atuais na memória do CF, podem ser salvos até 999 programas.
Apagar (delete) Apaga dados salvos na memória do CF.
Editar Grupo (group edit) Efetua organização dos grupos de arquivos salvos na memória.
SSA - 30 -Comércio de Peças para Robôs Ltda
Rua Danilo Walbusa,363 – Caieiras – SP – CEP 07700-000Fone: (11) 4441-1818
Indica o número de arquivos
existentes na memória do
CF.

Propriedade (property) Mostra a capacidade de armazenamento da memória do CF (32Mb).
SSA - 31 -Comércio de Peças para Robôs Ltda
Rua Danilo Walbusa,363 – Caieiras – SP – CEP 07700-000Fone: (11) 4441-1818

6. OPERANDO EM MODO AUTOMÁTICO
Para iniciar a operação do manipulador em modo automático, efetue a operação de retorno à origem da seguinte forma:
Aguarde a mensagem de confirmação de conclusão da operação de retorno à origem e sem seguida, coloque o manipulador em modo automático da seguinte maneira:
Para parar o manipulador e colocá-lo em modo MANUAL, basta posicionar a chave seletora para a posição MANU.
SSA - 32 -Comércio de Peças para Robôs Ltda
Rua Danilo Walbusa,363 – Caieiras – SP – CEP 07700-000Fone: (11) 4441-1818
1. Posicione a chave seletora na posição “ORG”
2. Em seguida, pressione o botão “START”
1. Posicione a chave seletora na posição “AUTO”
2. Em seguida, pressione o botão “START”
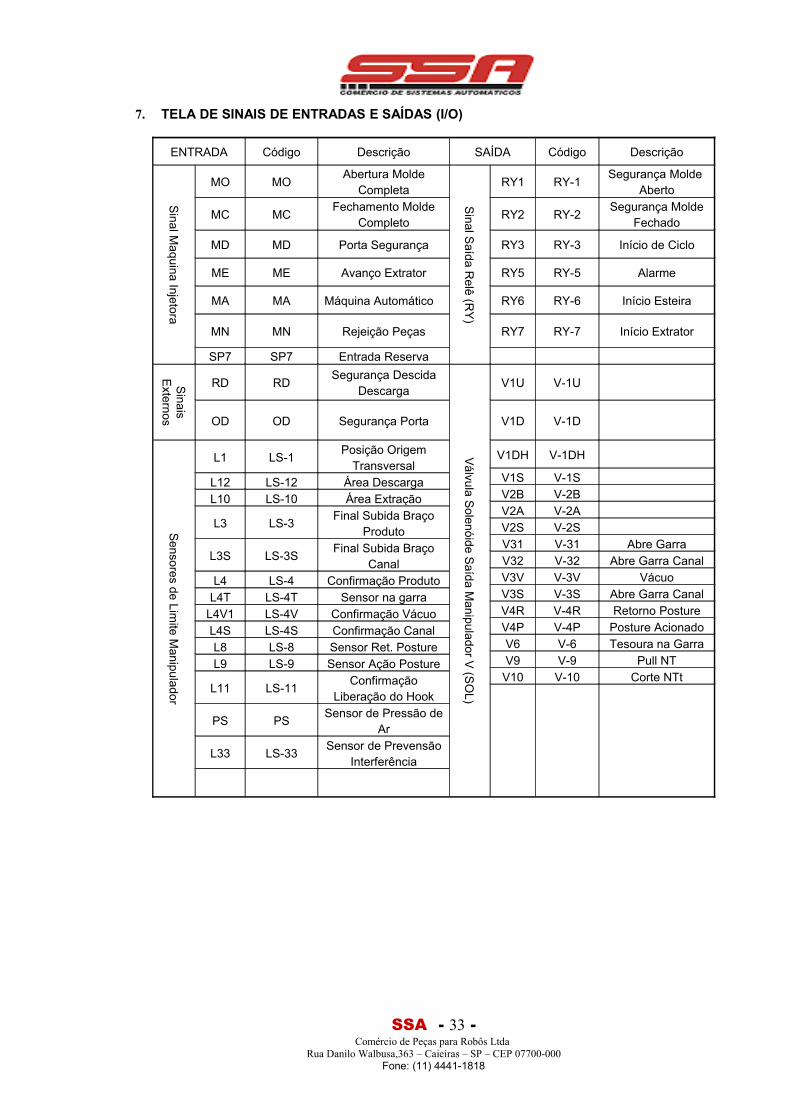
7. TELA DE SINAIS DE ENTRADAS E SAÍDAS (I/O)
ENTRADA Código Descrição SAÍDA Código Descrição
Sinal M
aquina Injetora
MO MOAbertura Molde
Completa
Sinal S
aída Relê (R
Y)
RY1 RY-1Segurança Molde
Aberto
MC MCFechamento Molde
CompletoRY2 RY-2
Segurança Molde Fechado
MD MD Porta Segurança RY3 RY-3 Início de Ciclo
ME ME Avanço Extrator RY5 RY-5 Alarme
MA MA Máquina Automático RY6 RY-6 Início Esteira
MN MN Rejeição Peças RY7 RY-7 Início Extrator
SP7 SP7 Entrada Reserva
Sinais
Externos
RD RDSegurança Descida
Descarga
Válvula S
olenóide Saída M
anipulador V (S
OL)
V1U V-1U
OD OD Segurança Porta V1D V-1D
Sensores de Lim
ite Manipulador
L1 LS-1 Posição Origem Transversal
V1DH V-1DH
V1S V-1SL12 LS-12 Área DescargaV2B V-2BL10 LS-10 Área ExtraçãoV2A V-2A
L3 LS-3 Final Subida Braço Produto V2S V-2S
V31 V-31 Abre GarraL3S LS-3S Final Subida Braço
Canal V32 V-32 Abre Garra CanalV3V V-3V VácuoL4 LS-4 Confirmação ProdutoV3S V-3S Abre Garra CanalL4T LS-4T Sensor na garraV4R V-4R Retorno PostureL4V1 LS-4V Confirmação VácuoV4P V-4P Posture AcionadoL4S LS-4S Confirmação CanalV6 V-6 Tesoura na GarraL8 LS-8 Sensor Ret. PostureV9 V-9 Pull NTL9 LS-9 Sensor Ação Posture
V10 V-10 Corte NTtL11 LS-11 Confirmação
Liberação do Hook
PS PS Sensor de Pressão de Ar
L33 LS-33 Sensor de Prevensão Interferência
SSA - 33 -Comércio de Peças para Robôs Ltda
Rua Danilo Walbusa,363 – Caieiras – SP – CEP 07700-000Fone: (11) 4441-1818

Para exibir a tela de monitoramente de sinais de entradas e saídas (I/O) do manipulador, entre na página 1 da tela do MENU e clique em “EXIBE I/O”.
SSA - 34 -Comércio de Peças para Robôs Ltda
Rua Danilo Walbusa,363 – Caieiras – SP – CEP 07700-000Fone: (11) 4441-1818
Exibe os sinais de entrada para o manipulador (sensores – “L”)
Exibe os sinais de saída do manipulador (válvulas – “V”)
Exibe os sinais de entrada para o manipulador (da máquina injetora) e sinais
externos
Exibe os sinais de saída do manipulador (para a máquina injetora)
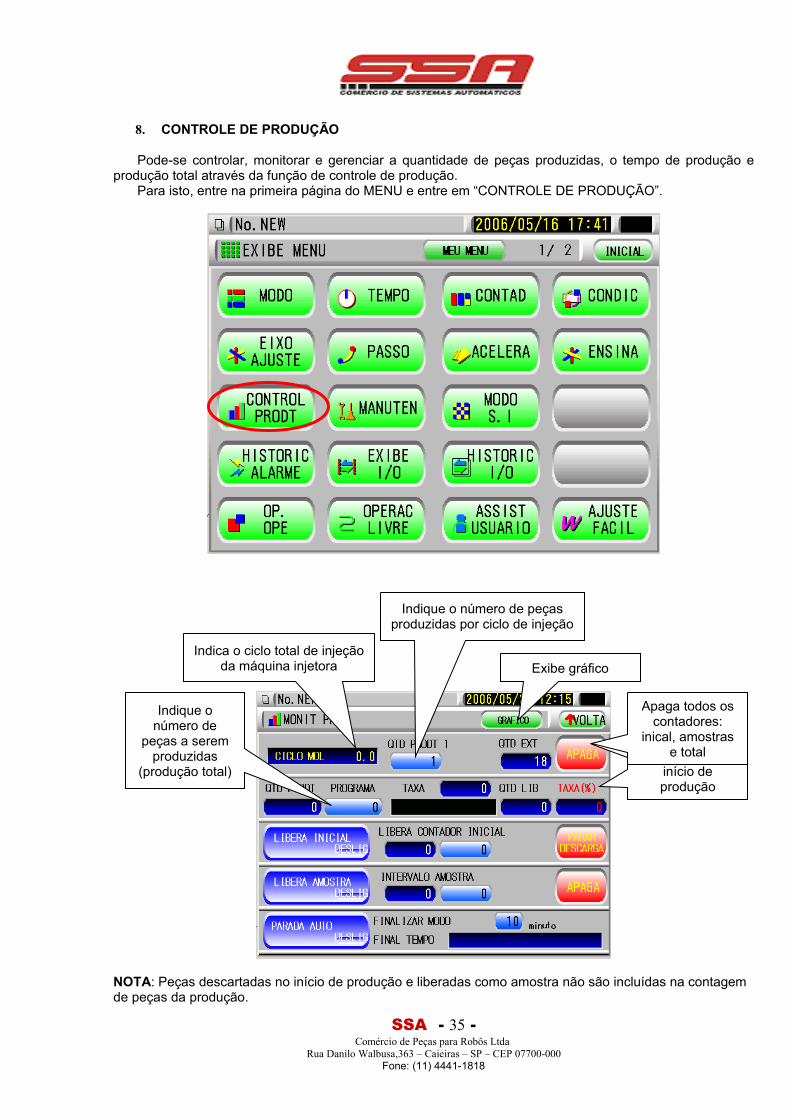
8. CONTROLE DE PRODUÇÃO
Pode-se controlar, monitorar e gerenciar a quantidade de peças produzidas, o tempo de produção e produção total através da função de controle de produção.
Para isto, entre na primeira página do MENU e entre em “CONTROLE DE PRODUÇÃO”.
NOTA: Peças descartadas no início de produção e liberadas como amostra não são incluídas na contagem de peças da produção.
SSA - 35 -Comércio de Peças para Robôs Ltda
Rua Danilo Walbusa,363 – Caieiras – SP – CEP 07700-000Fone: (11) 4441-1818
Indica o ciclo total de injeção da máquina injetora
Indique o número de peças produzidas por ciclo de injeção
Indique o número de
peças a serem produzidas
(produção total)
Exibe gráfico
Zera o contador de peças
liberadas como amostra
Pára a descarga de peças de
início de produção
Apaga todos os contadores:
inical, amostras e total
ITEM NOME DESCRIÇÃOLibera Peças de Produção Inicial
Determine um número de peças para que o manipulador descarte no início de produção a fim de garantir que a produção se inicie apenas com peças boas.
Libera Amostras Determine um intervalo entre as peças produzidas para que o manipulador libere uma peça para análise de controle de qualidade, etc.
Parada de Produção Automática
Determine um período antes do fim da produção para que o manipulador envie uma mensagem na tela.
SSA - 36 -Comércio de Peças para Robôs Ltda
Rua Danilo Walbusa,363 – Caieiras – SP – CEP 07700-000Fone: (11) 4441-1818

9. MODOS S.I.
O manipulador pode fazer alguns ajustes automaticamente através do “MODO S.I.” na página 1 da tela do MENU.
ITEM NOME DESCRIÇÃOModo S.I. 1 O manipulador calcula automaticamente o tempo T3 para
liberar o avanço do extrator, quando o modo MDE estiver ligado.
Modo S.I. 2 O manipulador ajusta automaticamente a velocidade dos eixos vertical e longitudinal para efetuar a extração do produto.
Modo S.I. 3 O manipulador ajusta automaticamente a velocidade e a aceleração dos eixos de acordo com o tempo do ciclo de injeção.
Modo S.I. 4 O manipulador desliga automaticamente a energia dos servo motores quando os mesmos não forem utilizados até o limite do tempo determinado.
SSA - 37 -Comércio de Peças para Robôs Ltda
Rua Danilo Walbusa,363 – Caieiras – SP – CEP 07700-000Fone: (11) 4441-1818

10. HISTORICO DE ALARMES
Se algum problema ocorrer no manipulador (durante seu manuseio, em operação automática, etc.) uma mensagem de alarme é exibida na tela do controlador.
Estes alarmes são classificados em três formas:
TIPO DE ALARME DESCRIÇAÕ OCORRÊNCIA
Alarme de Sistema
Este tipo de alarme ocorre quando há falha no sistema, falha na leitura e execução de dados, corte ou falha na comunicação, etc. Se algum destes erros ocorrer, uma mensagem será exibida na tela e o problema persistirá mesmo que a alimentação seja desligada e ligada novamente.
Parada Total
Alarme de SPC Este tipo de alarme ocorre quando há falha no circuito e nos controles dos eixos e no sistema dos drivers. Parada Total
Alarme de ErroEste tipo de alarme ocorre quando há falha nos sinais de entrada e saída do manipulador, na comunicação com a máquina injetora, etc.
Parada Total, Automática ou Temporária
Parada Total: Este tipo de alarme pára todos os movimentos do manipulador. Se ligado a um Alarme de Sistema a alimentação deve ser desligada e ligada novamente.
Parada Automática: Este tipo de alarme ocorre quando o manipulador está para iniciar uma etapa em modo automático. Caso a causa da parada seja eliminada o manipulador operará normalmente.
Parada Temporária: Este tipo de alarme ocorre quando alguma operação a ser executada não estiver de acordo com as condições permitidas.
Este alarmes ficam arquivados em um histórico com as 25 úlitmas mensagens exibidas. Para visualizar estas mensagens clique no botão “HISTORICO DE ALARME” na página 1 do MENU.
SSA - 38 -Comércio de Peças para Robôs Ltda
Rua Danilo Walbusa,363 – Caieiras – SP – CEP 07700-000Fone: (11) 4441-1818
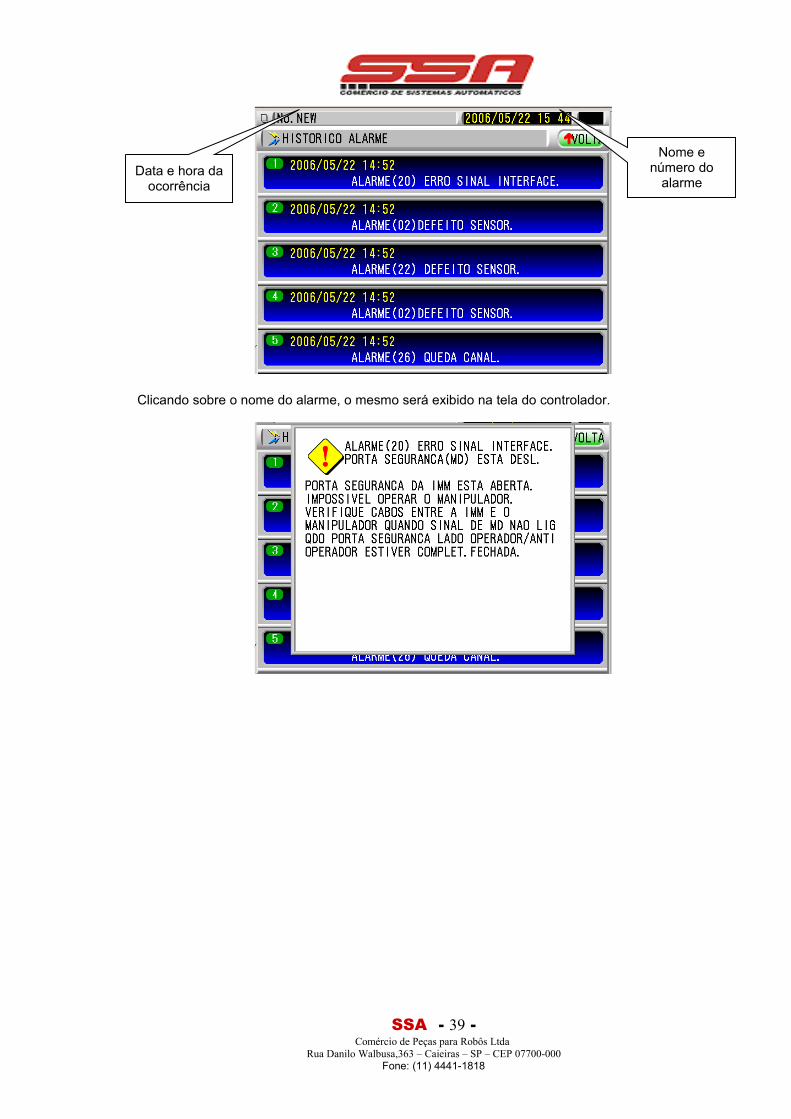
Clicando sobre o nome do alarme, o mesmo será exibido na tela do controlador.
SSA - 39 -Comércio de Peças para Robôs Ltda
Rua Danilo Walbusa,363 – Caieiras – SP – CEP 07700-000Fone: (11) 4441-1818
Data e hora da ocorrência
Nome e número do
alarme
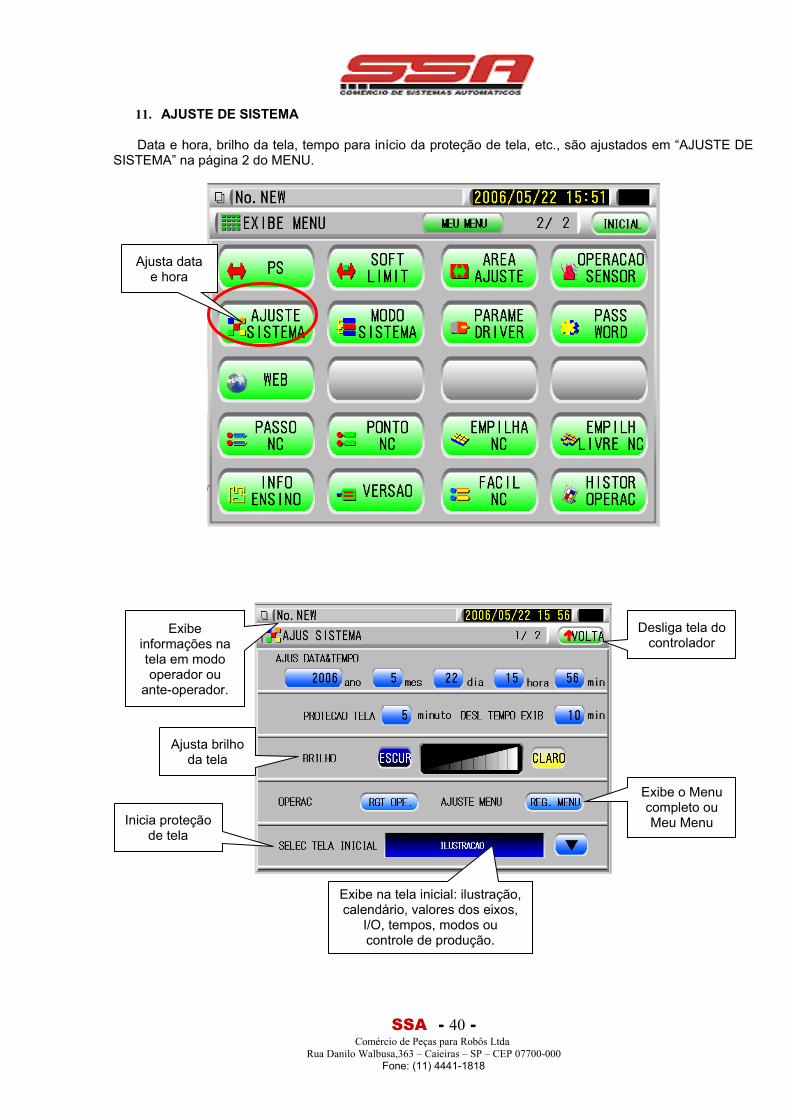
11. AJUSTE DE SISTEMA
Data e hora, brilho da tela, tempo para início da proteção de tela, etc., são ajustados em “AJUSTE DE SISTEMA” na página 2 do MENU.
SSA - 40 -Comércio de Peças para Robôs Ltda
Rua Danilo Walbusa,363 – Caieiras – SP – CEP 07700-000Fone: (11) 4441-1818
Ajusta data e hora
Exibe informações na tela em modo operador ou
ante-operador.
Ajusta brilho da tela
Inicia proteção de tela
Desliga tela do controlador
Exibe o Menu completo ou Meu Menu
Exibe na tela inicial: ilustração, calendário, valores dos eixos,
I/O, tempos, modos ou controle de produção.
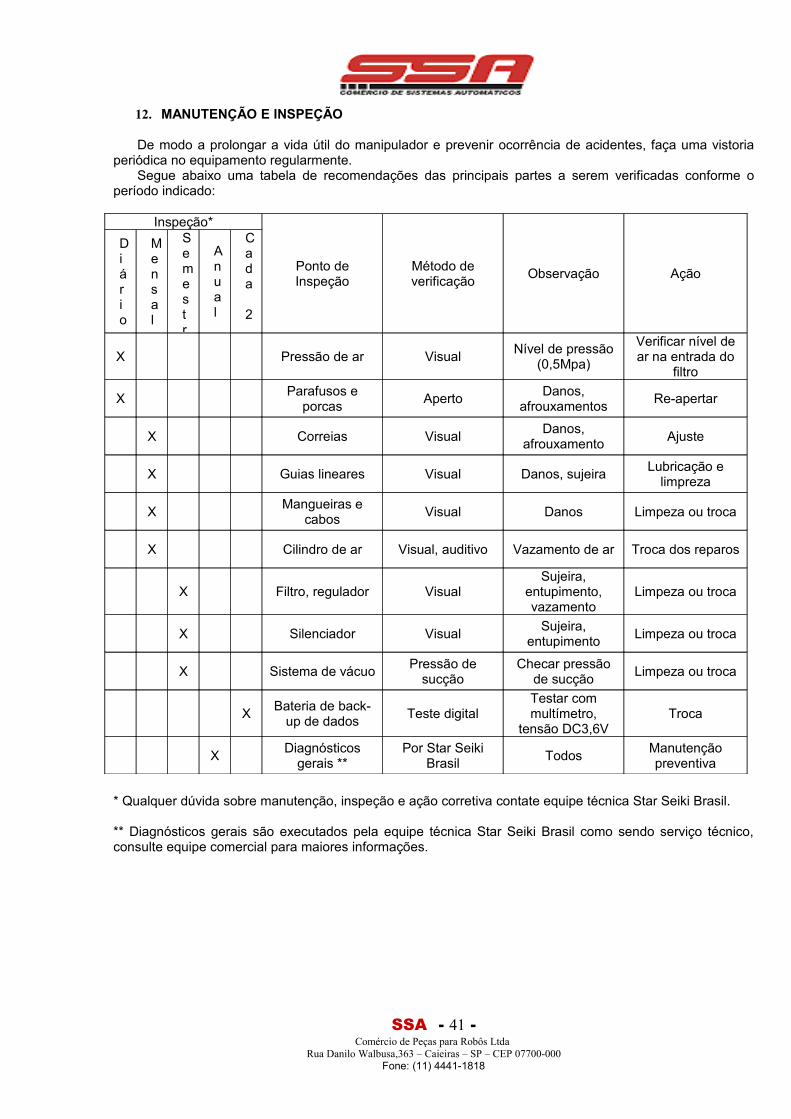
12. MANUTENÇÃO E INSPEÇÃO
De modo a prolongar a vida útil do manipulador e prevenir ocorrência de acidentes, faça uma vistoria periódica no equipamento regularmente.
Segue abaixo uma tabela de recomendações das principais partes a serem verificadas conforme o período indicado:
Inspeção*
Ponto de Inspeção
Método de verificação Observação Ação
Diário
Mensal
Semestr
Anual
Cada 2
X Pressão de ar Visual Nível de pressão (0,5Mpa)
Verificar nível de ar na entrada do
filtro
X Parafusos e porcas Aperto Danos,
afrouxamentos Re-apertar
X Correias Visual Danos, afrouxamento Ajuste
X Guias lineares Visual Danos, sujeira Lubricação e limpreza
X Mangueiras e cabos Visual Danos Limpeza ou troca
X Cilindro de ar Visual, auditivo Vazamento de ar Troca dos reparos
X Filtro, regulador VisualSujeira,
entupimento, vazamento
Limpeza ou troca
X Silenciador Visual Sujeira, entupimento Limpeza ou troca
X Sistema de vácuo Pressão de sucção
Checar pressão de sucção Limpeza ou troca
X Bateria de back-up de dados Teste digital
Testar com multímetro,
tensão DC3,6VTroca
X Diagnósticos gerais **
Por Star Seiki Brasil Todos Manutenção
preventiva
* Qualquer dúvida sobre manutenção, inspeção e ação corretiva contate equipe técnica Star Seiki Brasil.
** Diagnósticos gerais são executados pela equipe técnica Star Seiki Brasil como sendo serviço técnico, consulte equipe comercial para maiores informações.
SSA - 41 -Comércio de Peças para Robôs Ltda
Rua Danilo Walbusa,363 – Caieiras – SP – CEP 07700-000Fone: (11) 4441-1818

O controlador 470A possui um programa especial para monitoração periódica de manutenção na página 1 do Menu, em “MANUTENÇÃO”:
A tela a seguir indica as informações do programa de manutenção:
SSA - 42 -Comércio de Peças para Robôs Ltda
Rua Danilo Walbusa,363 – Caieiras – SP – CEP 07700-000Fone: (11) 4441-1818
Habilita a mensagem de
período de manutenção
Ajusta o intervalo entre os períodos de manutenção
Exibe milhagem de
cada eixo
Exibe a lista de verificação

SSA - 43 -Comércio de Peças para Robôs Ltda
Rua Danilo Walbusa,363 – Caieiras – SP – CEP 07700-000Fone: (11) 4441-1818
Exibe o item a ser verificado
Exibe o histórico das 2 últimas manutenções realizadas
Grava a data da atual verificação