IPCM Aula12&13(Investigação AdolescentesInstitucionalizados)

Solução de Modelos Descritos por
Equações Diferenciais
José Paulo Mota
Requimte/CQFB, Departamento de Química, Faculdade de Ciências e
Tecnologia, Universidade Nova de Lisboa, 2829-516 Caparica, Portugal
e-mail: [email protected]
Conteúdo
1 Classi�cação dos modelos processuais em Engenharia Química 2
1.1 Relativamente à dependência temporal das variáveis: . . . . . . . . . . . . 2
1.2 Relativamente ao número de variáveis independentes ou coordenadas: . . . 2
1.2.1 Classi�cação e caracterização das PDE's . . . . . . . . . . . . . . . 2
2 Métodos numéricos para resolução de PDE's 3
2.1 Método das diferenças �nitas . . . . . . . . . . . . . . . . . . . . . . . . . 6
2.2 Método dos volumes �nitos . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.3 Método dos resíduos ponderados . . . . . . . . . . . . . . . . . . . . . . . . 16
2.3.1 Método de colocação . . . . . . . . . . . . . . . . . . . . . . . . . . 19
2.3.2 Método de sub-domínio . . . . . . . . . . . . . . . . . . . . . . . . . 20
2.3.3 Método de mínimos quadrados . . . . . . . . . . . . . . . . . . . . . 21
2.3.4 Método dos momentos . . . . . . . . . . . . . . . . . . . . . . . . . 21
2.3.5 Método de Galerkin . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
2.3.6 Método de colocação ortogonal . . . . . . . . . . . . . . . . . . . . 22
3 Solução de sistemas mistos de equações diferenciais ordinárias e algé-
bricas 26
1

1 Classi�cação dos modelos processuais em Engenharia
Química
1.1 Relativamente à dependência temporal das variáveis:
• Modelos estacionários ; se nenhuma das variáveis dependentes do modelo varia
com o tempo. Neste caso, modelo é composto por um sistema de equações algébricas,
que podem ser lineares, não lineares, ou mistas.
• Modelos instacionários (ou de estado transiente); se uma ou mais variáveis
dependentes do modelo variam com o tempo. Este tipo de modelo é constituído por
um sistema de equações diferenciais ordinárias (ODE's)�lineares, não lineares, ou
mistas�que pode ser complementado por um conjunto de equações algébricas.
1.2 Relativamente ao número de variáveis independentes ou co-
ordenadas:
• Modelos de parâmetros agregados; se as variáveis do modelo são constantes ou
se só dependem da coordenada temporal. Neste caso, o modelo é descrito por um
sistema de equações algébricas, por um sistema de equações diferenciais ordinárias
(ODE's), ou por um sistema misto.
• Modelos com parâmetros distribuídos; se as equações envolvem uma ou mais
variáveis independentes ou coordenadas (normalmente espaciais) para além da co-
ordenada temporal. Um modelo deste tipo é regido por um sistema de equações
diferenciais às derivadas parciais (PDE's).
1.2.1 Classi�cação e caracterização das PDE's
A forma genérica de uma PDE linear de segunda ordem pode ser escrita da seguinte
forma:
P∂2z
∂x2+Q
∂2z
∂x∂y+R
∂2z
∂y2= S. (1)
Na eq. (1), a variável dependente é z = z(x, y); as variáveis independentes (ou
coordenadas) são x e y; os coe�cientes P , Q e R só podem depender de x e y,
2

enquanto que S pode depender de x, y, z, ∂z/∂x e ∂z/∂y.
A PDE pode ser classi�cada de acordo com o sinal do seu determinante,
∆ = Q2 − 4PR. (2)
A PDE é elíptica se ∆ < 0; parabólica se ∆ = 0; e hiperbólica se ∆ > 0.
Seguem-se alguns exemplos típicos de diferentes tipos de PDE's que podem ocorrer
em problemas de Engenharia Química.
Segunda lei de Fick:∂C
∂t= D
∂2C
∂x2, (3)
em que C(t, x) é a concentração de um soluto (no instante t e posição x) e D é a
sua difusividade molecular; esta PDE é parabólica porque P = D, Q = 0 e R = 0.
Lei de Newton para movimento ondulatório:
∂2u
∂t2= ρ
∂2u
∂x2, (4)
em que u(t, x) é a velocidade do �uído (no instante t e posição x) e ρ é a sua
densidade; esta PDE é hiperbólica porque P = 1, Q = 0 e R = −ρ.
Equação de Laplace para condução de calor:
∂2T
∂x2+
∂2T
∂y2= 0, (5)
em que T (x, y) é um campo bidimensional de temperatura (x e y são duas coorde-
nadas cartesianas); esta PDE é elíptica porque P = 1, Q = 0 e R = 1.
2 Métodos numéricos para resolução de PDE's
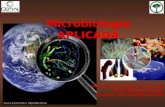
Os métodos apresentados em seguida serão ilustrados com a resolução numérica do pro-
blema estacionário de difusão e reacção química de primeira ordem numa partícula de
catalisador com forma de placa plana; a geometria do sistema está ilustrada na Fig. 1.
O balanço material diferencial ao reagente, em estado estacionário, origina
Ded2C
dr2− kC = 0, (6)
3

em que C(r) é a concentração do reagente ao longo da placa de catalisador, De a difusi-
vidade efectiva do reagente na partícula de catalisador, e k a constante cinética (kC é a
velocidade de reacção por unidade de volume do catalisador). O domínio do problema é
{r : 0 ≤ r ≤ R}; r = 0 corresponde ao centro da placa e r = R corresponde à superfície
externa da placa que está em contacto com o �uído externo; a concentração do reagente
no seio do �uído externo é C0.
A eq. (6) é uma PDE de segunda ordem, estando por isso sujeita a duas condições
fronteira, cada uma delas aplicável num dos extremo do domínio. As duas condições
fronteira são as seguintes:
dC
dr= 0 para r = 0; (7)
C = C0 para r = R. (8)
A primeira condição é uma condição de simetria, porque C(−r) = C(r), que impõe a
ausência de �uxo material no centro da placa de catalisador (como o reagente se desloca
por difusão, o seu �uxo é J = −D∂C/∂r); a segunda condição corresponde a uma situação
de �uxo convectivo elevado junto à superfície da partícula de catalisador, o que faz com
que a concentração do reagente nesse ponto seja sempre igual à concentração C0 no seio
do �uído em torno da partícula.
Por uma questão de conveniência, procede-se à adimensionalização da equação. Para
Figura 1: Difusão e reacção química numa placa plana de catalisador.
4

isso, introduz-se as seguintes variáveis adimensionais:
y = C/C0; x = r/R.
A variável y passa a ser a variável dependente adimensional e x passa a ser a variável
independente (ou coordenada) adimensional; o domínio do problema passa a ser {x : 0 ≤
x ≤ 1}.
Fazendo estas substituições no balanço diferencial e nas condições fronteira obtém-se
d2y
dx2− ϕ2y = 0, (9)
dy
dx= 0 para x = 0; (10)
y = 1 para x = 1. (11)
Na eq. (9), o parâmetro ϕ = (kR2/De)1/2 é denominado módulo de Thiele; este parâmetro
mede a razão entre a velocidade da reacção e o �uxo difusional. Quando ϕ é grande
(k ≫ De/R2), a conversão do reagente é controlada pelo �uxo difusional do reagente
junto à parede do catalisador; quando ϕ é pequeno (k ≪ De/R2), a conversão do reagente
é controlada pela cinética da reacção química.
A quantidade que nos interessa é a velocidade aparente, ou efectiva, da reacção:
(kC)eff =1
V
∫VkC dV =
k
R
∫ R
0C(r) dr = kC0
∫ 1
0y(x) dx, (12)
O integral adimensional,
η =∫ 1
0y(x) dx, (13)
é denominado factor de e�ciência; introduzindo este factor na expressão da velocidade
aparente da reacção obtém-se
(kC)eff = kC0 · η ou η =(kC)effkC0
. (14)
Convém lembrar que existe uma expressão alternativa para o cálculo de η; Da de�nição
deste parâmetro e da eq. (9) obtém-se
η =∫ 1
0y(x) dx =
1
ϕ2
∫ 1
0ϕ2y(x) dx =
1
ϕ2
∫ 1
0
d2y
dx2dx =
1
ϕ2
∫ x=1
x=0d
(dy
dx
)
=1
ϕ2
[dy
dx
]x=1
x=0
=1
ϕ2
(dy
dx
)x=1
. (15)
5

A solução analítica da eq. (9), sujeita às condições fronteira das eqs. (10) e (11), é
y(x) =cosh(ϕx)
cosh(ϕ), (16)
o que permite calcular o factor de e�ciência:
η =∫ 1
0y(x) dx =
1
ϕ2
(dy
dx
)x=1
=tanh(ϕ)
ϕ. (17)
2.1 Método das diferenças �nitas
Este método consiste na substituição das variáveis dependentes, que são contínuas, por
variáveis discretas; em vez de se determinar uma solução contínua em todo o domínio
do problema, determina-se uma solução discreta, que consiste nos valores das variáveis
dependentes em determinados pontos do domínio.
Considere-se a expansão em série de Taylor de uma função y(x + ∆x) em torno do
ponto x:
y(x+∆x) = y(x) +dy(x)
dx∆x+
1
2
d2y(x)
dx2(∆x)2 +O(∆x3). (18)
A notação O(∆x3) signi�ca que a série contínua inde�nidamente, mas que a soma dos
termos não explicitados é proporcionl a (∆x)3 [para ser mais preciso, e se se lembrarem
de AM I, o termo correcto é (1/6)(∆x)3(d3y/dx3)x=ξ; ξ é desconhecido, mas sabe-se que
ξ ∈ (x, x+∆x)].
Se os termos de ordem 2 e superior forem ignorados, obtém-se
dy(x)
dx=
y(x+∆x)− y(x)
∆x+O(∆x) ≈ y(x+∆x)− y(x)
∆x. (19)
De forma semelhante, a expansão da função y(x−∆x) em torno de x origina
y(x−∆x) = y(x)− dy(x)
dx∆x+
1
2
d2y(x)
dx2(∆x)2 +O(∆x3). (20)
Desta formula, obtém-se a seguinte aproximação:
dy(x)
dx=
y(x)− y(x−∆x)
∆x+O(∆x) ≈ y(x)− y(x−∆x)
∆x. (21)
Subtraindo as eqs. (18) e (20) obtém-se uma aproximação alternativa da primeira
derivada:
dy(x)
dx=
y(x+∆x)− y(x−∆x)
2∆x+O(∆x2) ≈ y(x+∆x)− y(x−∆x)
2∆x. (22)
6

Esta aproximação é mais precisa do que as aproximações expressas nas eqs. (19) e (21),
porque na eq. (22) o erro da aproximação é proporcional a (∆x)2 enquanto que nas
eqs. (19) e (21) ele é proporcional a ∆x.
Para obter uma aproximação da segunda derivada, adicionam-se as eqs. (19) e (21) e
desprezam-se os termos de ordem superior a 2. A expressão assim obtida é
d2y(x)
dx2=
y(x−∆x)− 2y(x) + y(x+∆x)
(∆x)2+O(∆x2). (23)
Na prática divide-se o domínio do problema, {x : xL ≤ x ≤ xU} , em N intervalos
uniformes, sendo o comprimento de cada um deles dado por
∆x =xU − xL
N. (24)
Indexam-se os pontos em função do valor da coordenada x; isto é, de�ne-se o ponto i
como sendo o ponto com coordenada xL + i(∆x) e chama-se a esse ponto xi; o conjunto
de pontos assim obtido é
xi = xL + i(∆x) para i = 0, 1, 2, . . . , N. (25)
Desta forma, x0 = xL, xN = xU, xi+1 = xL + (i+ 1)∆x, xi−1 = xL + (i− 1)∆x, etc.
A variável dependente y correspondente ao ponto xi denota-se yi, isto é, y(xi) = yi.
Recorrendo às formulas anteriores, pode substituir-se, em cada ponto xi, as derivadas de
primeira e segunda ordem pelas seguintes aproximações:(dy
dx
)i
≈ yi+1 − yi∆x
ou≈ yi − yi−1
∆x
ou≈ yi+1 − yi−1
2∆x; (26)
(d2y
dx2
)i
≈ yi−1 − 2yi + yi+1
(∆x)2. (27)
Com estas substituições, transforma-se a equação diferencial original num sistema de N
equações algébricas. Tem que se ter, no entanto, atenção com o tratamento das condições
fronteira.
Exempli�quemos o método com a sua aplicação à resolução numérica do problema de
difusão e reacção química na pellet de catalisador. O domínio do problema é {x : 0 ≤
x ≤ 1}; portanto xL = 0 e xU = 1. O conjunto de pontos de discretização é
xi = i(∆x) para i = 0, 1, 2, . . . , N ; ∆x = 1/N. (28)
7

−2(∆x)2
+ ϕ2 2(∆x)2
1(∆x)2
−2(∆x)2
+ ϕ2 1(∆x)2
1(∆x)2
−2(∆x)2
+ ϕ2 1(∆x)2
. . . . . . . . .1
(∆x)2−2
(∆x)2+ ϕ2 1
(∆x)2
1
y0y1y2...
yN−1
yN
=
000...01
Figura 2: Discretização do modelo de difusão e reacção química por diferenças �nitascentradas de 2a ordem.
Desta forma, x0 = 0, x1 = ∆x, x1 = 2∆x, . . . , xN = 1. A variável dependente y(x)
correspondente ao ponto xi é y(xi) = yi. A substituição da segunda derivada na eq. (9)
pela diferença �nita correspondente origina a seguinte equação algébrica linear:
yi−1 − 2yi + yi+1
(∆x)2− ϕ2yi = 0, i = 1, 2, . . . , N − 1. (29)
Esta equação não é válida para os pontos fronteira. Para o ponto xN = 1 a condição
fronteira é yN = 1. Por outro lado, aplicando a eq. (29) no ponto x0 obtém-se
y−1 − 2y0 + y1(∆x)2
− ϕ2y0 = 0. (30)
Esta expressão contém y−1 ≡ y(x−1) que não pertence ao domínio do problema. No
entanto, aproximando a condição fronteira no ponto x0 por uma diferença �nita de 2a
ordem (para ser consistente com a aproximação à 2a derivada usada na eq. (29)) obtém-se
y1 − y−1
2∆x= 0 → y−1 = y1, (31)
o que permite eliminar y−1 da eq. (30) obtendo-se
2(y1 − y0)
(∆x)2− ϕ2y0 = 0. (32)
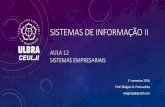
Resumindo: aproximando as derivadas parciais por diferenças �nitas, a PDE e respec-
tivas condições fronteira são substituídas por um sistema de equações algébricas; no caso
presente as equações são lineares, mas nem sempre é o caso. O sistema de equações está
indicado na Fig. 2.
O factor de e�ciência pode ser calculado de duas formas. Suponha-se que se calcula
através do integral dado na eq. (13). Este integral tem que necessariamente ser aproximado
por uma fórmula de quadratura. Por exemplo, se se utilizar a regra dos trapézios obtém-se
η =(y02
+ y1 + . . .+ yN−1 +YN
2
)∆x+O(∆x2). (33)
8

Em alternativa pode discretizar-se a eq. (15) usando uma diferença �nita consistente a
solução numérica de 2a ordem:
η =1
ϕ2
yN+1 − yN−1
2∆x+ (∆x2). (34)
Mas esta expressão contém yN+1 que não pertence ao domínio do problema. No entanto,
aplicando a PDE no ponto xN obtém-se
yN−1 − 2yN + yN+1
(∆x)2− ϕ2yN = 0 → yN+1 = (∆x)2ϕ2yN + 2yN − yN−1. (35)
Finalmente,
η =1
ϕ2
yN − yN−1
∆x+
∆x
2yN . (36)
O modelo pode ser facilmente implementado em matlab, GAMS, ampl, ou até em Excel.
Eu pre�ro a linguagem de programação matemática ampl que é equivalente ao GAMS mas
que eu considero ser mais intuitiva. O modelo ampl está listado na Fig. 3.
Para correr o programa abre-se uma consola Windows executando sw.exe; este cria
uma consola com um prompt �sw:�; nesta consola arranqua-se o ampl escrevendo ampl; o
prompt anterior é substituído por �ampl:�. Agora inclui-se o modelo em ampl; para isso
escreve-se
include eta.ampl; [ENTER]
No modelo ainda não foram atribuídos valores aos parâmetros phi e N; suponha-se que
se pretende resolver o problema para ϕ = 10 com 10 pontos de discretização; para isso
escreve-se
let phi := 10.0; let N := 10; [ENTER]
Para resolver o problema, basta agora escrever
solve; [ENTER]
O ampl responde com a seguinte informação:
Presolve eliminates 1 constraint and 1 variable.
Substitution eliminates 2 variables.
Adjusted problem:
10 variables, all linear
10 constraints, all linear; 28 nonzeros
0 objectives.
9

option substout 1 ;
option show_stats 1 ;
option solver "lpsolve" ;
param N integer > 1 ;
param dx = 1/N ;
param phi >= 0 ;
set PTS = 0..N ordered ;
param x { i in PTS } = dx * i ;
param w { i in PTS } = cosh( phi * x[i] ) / cosh( phi ) ;
param eta = tanh( phi ) / phi ;
var y { PTS } ;
s.t. LinSys { i in PTS } :
( if i = 0 then
2*(y[1] - y[0])/dx^2 - phi^2 * y[0]
else if i < N then
(y[i-1] - 2*y[i] + y[i+1])/dx^2 - phi^2 * y[i]
else
y[N] - 1 ) = 0 ;
var eta1 = dx * ( sum { i in PTS } y[i] - (y[0] + y[N])/2 ) ;
var eta2 = (y[N] - y[N-1])/dx / phi^2 + dx * y[N] / 2 ;
Figura 3: modelo ampl para a resolução por diferenças �nitas do problema de difusãoe reacção química numa pellet de catalisador; supõe-se que o modelo �ca gravado num�cheiro chamado eta.ampl.
LP_SOLVE 4.0.1.0: optimal, objective 0
10 simplex iterations
Para comparar a solução numérica com a solução analítica pode escrever-se:
display x, w, y; [ENTER]
o que faz a listagem dos valores de xi, wi (solução analítica) e yi. Para comparar os valor
analítico de η com a solução numérica, escreve-se
display eta, eta1, eta2; [ENTER]
obtendo-se
eta = 0.1
eta1 = 0.111803
10

eta2 = 0.111803
Para calcular η para ϕ = 100 com N = 10, pode escrever-se o seguinte:
let phi := 100.0; solve; display eta, eta1, eta2; [ENTER]
(Nota: N já era igual a 10 da simulação anterior.) A nova solução seria: eta = 0.01, eta1
= eta2 = 0.0509902. Neste caso o erro é apreciável. Para melhorar a solução é necessário
aumentar o número de pontos de discretização, e.g.,
let N := 50; solve; display eta, eta1, eta2; [ENTER]
o que origina: eta = 0.01, eta1 = eta2 = 0.0141421; melhorou bastante. Para N = 200:
let N := 200; solve; display eta, eta1, eta2; [ENTER]
obtém-se eta = 0.01, eta1 = eta2 = 0.0103078.
2.2 Método dos volumes �nitos
Este método á parecido com o método das diferenças �nitas, mas é particularmente apli-
cável às equações gerais de conservação (matéria, energia, ou quantidade de movimento),
que podem ser escritas na seguinte forma genérica:
∂
∂t(ρϕ) +∇ · (ρuϕ) = ∇ · (Γ∇ϕ) + S, (37)
em que ρ é a densidade do �uido, ϕ é a variável dependente a ser conservada (massa
total, quantidade de um componente, energia total, quantidade de movimento), Γ é um
coe�ciente de difusão, u = (u, v, w) é o vector velocidade, e S é um termo fonte; S é
positivo se gerar ϕ e negativo se consumir ϕ.
Por exemplo, a equação de conservação aplicada a um reagente A sujeito a uma reacção
de primeira ordem para escoamento unidimensional num tubo é
∂
∂t(ρwA) +
∂
∂x(ρuwA) =
∂
∂x
(ρDA
∂wA
∂x
)− kρwA, (38)
em que wA é a fracção mássica de A, u á a velocidade do �uido ao longo do tubo, DA
é a difusividade molecular, e k é a constante cinética da reacção. Em alternativa pode
substituir-se ρwA pela concentração mássica (ou molar), CA.
O método dos volumes �nitos consiste em dividir o domínio em N volumes de controlo,
i = 1, 2, . . . , N (que podem ser todos iguais ou não):
11

e integrar a equação de conservação ao longo de cada volume de controlo. Por exemplo,
a integração de∂ϕ
∂t+
∂
∂x(uϕ) =
∂
∂x
(Γ∂ϕ
∂x
)+ S(x, ϕ), (39)
origina ∫ xi+1/2
xi−1/2
∂ϕ
∂tdx+ Ji+1/2 − Ji−1/2 =
∫ xi+1/2
xi−1/2
S(x, ϕ) dx, (40)
em que J = uϕ−Γ(∂ϕ/∂x) é o �uxo de transporte de ϕ. Supondo que ϕ(x) ≈ ϕi em todo
o volume de controlo, a equação anterior pode ser simpli�cada originando
dϕi
dt+
Ji+1/2 − Ji−1/2
∆xi
= S(xi, ϕi). (41)
Os �uxos de transporte de ϕ nas fronteiras do volume de controlo podem ser discretizados
através de diferenças �nitas:
Ji−1/2 =
(uϕ− Γ
∂ϕ
∂x
)i−1/2
≈ ui−1/2ϕi−1 + ϕi
2− Γ
ϕi − ϕi−1
xi − xi−1
, (42)
Ji+1/2 =
(uϕ− Γ
∂ϕ
∂x
)i+1/2
≈ ui+1/2ϕi + ϕi+1
2− Γ
ϕi+1 − ϕi
xi+1 − xi
. (43)
(44)
Introduzindo estas expressões na eq. (41) origina uma equação diferencial ordinária para
cada volume de controlo. Aparentemente, o método dos volumes �nitos é muito parecido
com o método das diferenças �nitas.
O método dos volumes de �nitos tem a vantagem de conservar globalmente a quanti-
dade ϕ. Somando as equações para todos os volumes de controlo, obtém-se:N∑i=1
∆xidϕi
dt+ (JN+1/2 − J1/2) =
N∑i=1
∆xiS(xi, ϕi), (45)
em que J1/2 = JxLé o �uxo na fronteira inferior do domínio e JN+1/2 = JxU
é o �uxo na
fronteira superior do domínio. Esta equação é equivalente à discretização da equação de
conservação global:
d
dt
∫ xU
xL
ϕ dx+
(uϕ− Γ
∂ϕ
∂x
)xU
−(uϕ− Γ
∂ϕ
∂x
)xL
=∫ xU
xL
S(x, ϕ) dx. (46)
12

Uma outra vantagem do método é a facilidade com que se aplicam métodos especí�cos
de discretização dos termos convectivos, (uϕ)i−1/2 e (uϕ)i+1/2, nas faces dos volumes de
controlo.
Para dar um pequeno exemplo das potencialidades do método, considere-se a resolução
numérica da equação estacionária de convecção-difusão da concentração de um soluto:
vdc
dz−D
d2c
dz2= 0, c|z=0 = C0, c|z=L = C1, (47)
em que c(z) é o per�l de concentração ao longo de uma coordenada espacial z, v é a
velocidade do �uído e D é o coe�ciente de difusão. Convém adimensionalizar a equação;
para isso introduz-se as seguintes adimensionalizações:
x = z/L, y = (c− C1)/(C0 − C1). (48)
A modelo adimensional é
dy
dx− 1
Pe
d2y
dx2= 0, y|x=0 = 1, y|x=1 = 0, (49)
em que Pe = vL/D é o número de Péclet: quando Pe é grande, o transporte do soluto
é essencialmente convectivo, podendo-se desprezar o efeito de dispersão devido à difusão
do soluto; quando Pe é pequeno o transporte do soluto é tem uma componente difusiva
não negligenciável.
A eq. (49) tem uma solução analítica simples:
y(x) =exp(Pe)− exp(Pe · x)
exp(Pe)− 1. (50)
A resolução da eq. (49) por diferenças �nitas centradas(dy
dx
)xi
=yi+1 − yi−1
2∆x,
(d2y
dx2
)xi
=yi−1 − 2yi + yi+1
(∆x)2,
origina o seguinte sistema de equações lineares:
y0 = 1,yi+1 − yi−1
2∆x− yi−1 − 2yi + yi+1
(∆x)2Pe= 0 (i = 1, . . . , N − 1), yN = 1. (51)
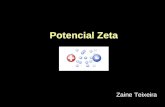
A Fig. 4 lista o programa ampl para resolver este sistema de equações. Se o problema
para Pe = 100 for resolvido com N = 20 obtêm-se os resultados reproduzidos na Fig. 5.
Como se pode observar, a solução numérica é oscilante na frente de concentração.
13

option substout 1 ;
option show_stats 1 ;
option solver "/amplcml/lpsolve" ;
param N integer > 0 ;
param dx = 1/N ;
param Pe >= 0 ;
set PTS = 0..N ordered ;
param x { i in PTS } = dx * i ;
param ya { i in PTS } = ( exp(Pe) - exp(Pe*x[i]) ) / ( exp(Pe) - 1 ) ;
var y { PTS } ;
s.t. LinSys { i in PTS } :
( if i = 0 then
y[0] - 1
else if i < N then
(y[i+1] - y[i-1])/(2*dx) - (y[i-1] - 2*y[i] + y[i+1])/(Pe*dx^2)
else
y[N] ) = 0 ;
Figura 4: modelo ampl para a resolução do problema de convecção-difusão por diferenças�nitas centradas de 2a ordem.
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
0.6 0.65 0.7 0.75 0.8 0.85 0.9 0.95 1
Figura 5: linha = Eq. (50), simbolos a cheio = solução da Eq. (51) para N = 20; simbolosocos = solução com diferença �nita de 1a ordem e N = 20.
14

O problema reside na discretização do termo convectivo, dy/dx. Uma forma de elimi-
nar a oscilação na solução numérica é substituir a diferença �nita centrada de 2a ordem
pela diferença �nita de primeira ordem desviada à esquerda:(dy
dx
)xi
=yi − yi−1
∆x. (52)
Resolvendo o problema com esta diferença �nita de 1a ordem obtém-se a solução represen-
tada pelos circulos ocos; a solução numérica deixou de ser oscilatória mas é mais dispersiva
do que a solução analítica. Vejamos porquê:(dy
dx
)i
=yi − yi−1
∆x+O(∆x) =
yi+1 − yi−1
2∆x− ∆x
2
yi−1 − 2yi + yi+1
(∆x)2. (53)
O primeiro termo na segunda igualdade é discretização de dy/dx com uma diferença �nita
centrada de 2a ordem e o segundo termo é a discretização de d2y/dx2 com uma diferença
�nita centrada de 2a ordem. Consequentemente, discretizar dy/dx com a diferença �nita
da Eq. (53) é equivalente a resolver a PDE
dy
dx−(∆x
2+
1
Pe
)d2y
dx2= 0, y|x=0 = 1, y|x=1 = 0, (54)
com diferenças �nitas centradas de 2a ordem, ou seja, a resolver o problema com um
coe�ciente de difusão aparente
D′ = D +vL
2∆x. (55)
Isto explica porque é que a solução numérica é mais difusiva do que a solução analítica.
Considermos agora a formulação de volumes �nitos. A integração num volume de
controlo genérico, e.g., o volume i, origina:
Ji+1/2 − Ji−1/2 = 0, Ji+1/2 =
(y − 1
Pe
dy
dx
)i+1/2
. (56)
Já vimos que o termo dispersivo é pací�co; portanto podemos discretizá-lo com uma
diferença �nita centrada:(1
Pe
dy
dx
)i−1/2
=1
Pe
yi − yi−1
∆x,
(1
Pe
dy
dx
)i+1/2
=1
Pe
yi+1 − yi∆x
. (57)
Os termos complicados são yi−1/2 e yi+1/2. Já vimos que não podemos usar as aproxi-
mações yi−1/2 = (yi−1 + yi)/2 e yi+1/2 = (yi + yi+1)/2 porque elas dão origem a expressão
15

idênticas às diferenças �nitas centradas de 2a ordem. A utilização de diferenças �nitas
descentrada de 1a ordem é equivalente a considerar
yi−1/2 = yi−1 e yi+1/2 = yi. (58)
Isto faz sentido para transporte fortemente convectivo porque nestas condições o valor da
variável numa face do volume de controlo é bem aproximado pelo valor da variável no
seio do volume de controlo que se encontra a montante. No entanto, já vimos que esta
abordagem introduz dispersão numérica excessiva.
Para resolver o problema temos que utilizar métodos mais complicados. Uma hipó-
tese é utilizar uma interpolação descentrada de ordem mais elevada. Por exemplo, para
determinar yi+1/2 usa-se o polinómio que interpola yi−1, yi e yi+1. A fórmula assim obtida
é
yi+1/2 =3yi+1 + 6yi − yi−1
8=
yi + yi+1
2− yi−1 − 6yi + yi+1
8. (59)
Para determinar yi−1/2 usa-se o polinómio que interpola yi−2, yi−1 e yi. A fórmula é
yi−1/2 =3yi + 6yi−1 − yi−2
8=
yi−1 + yi2
− yi−2 − 6yi−1 + yi8
. (60)
Este esquema de discretização é conhecido como o esquema Quick ; o método corresponde
a uma discretização desviada a montante de 3a ordem do termo dy/dx.
Outra alternativa é utilizar-se um método de discretização não linear; estes métodos
são denominados limitadores de �uxo. Por exemplo, o esquema harmónico de van Leer é
yi−1/2 = yi−1 +max
{0,
(yi−1 − yi−2)(yi − yi−1)
yi − yi−2
}, (61)
yi+1/2 = yi +max
{0,
(yi − yi−1)(yi+1 − yi)
yi+1 − yi−1
}. (62)
2.3 Método dos resíduos ponderados
Considere-se o problema de difusão e reacção química numa pellet de catalisador, regido
pelas eqs. (9)�(11), re-escrito na seguinte forma compacta:
L(y) ≡ ∂2y
∂x2− ϕ2y = 0, M(y) ≡
∂y(0)
∂x
y(1)− 1
= 0. (63)
A ideia principal do método de resíduos ponderados é a construção de uma solução apro-
ximada y que satisfaça a eq. (63) segundo um determinado critério de minimização do
16
erro de aproximação. Porque a solução y é aproximada, em geral ela não satisfaz a PDE
nem as condições fronteira, isto é,
L(y) = R = 0 e M(y) = Rb = 0. (64)
Nesta equação, R e Rb são os resíduos da aproximação. Se y for construída de forma
a que a equação diferencial seja satisfeita exactamente (isto é, R = 0) então o método
chama-se método de fronteira; se y for construída de forma a que as condições fronteira
sejam satisfeitas exactamente, então o método chama-se método interior ; �nalmente, se
nem a equação diferencial nem as condições fronteira forem satisfeitas exactamente, o
método diz-se misto.
O método dos resíduos ponderados requer dois tipos de funções: uma é denominada
função de aproximação; a outra é denominada função de ponderação. A função de aproxi-
mação é usada para construir a solução numérica y; a outra função é utilizada como base
de critério para minimizar o resíduo da solução aproximada (um resíduo pequeno implica
que a solução numérica aproxima a solução real com um erro pequeno).
Para minimizar o resíduo, que normalmente é uma função da variável independente
x, é necessário converter R num escalar para que se possa proceder a uma optimização
do valor do resíduo. Isto faz-se através de uma forma de ponderação média do resíduo
em todo o domínio do problema, o que no caso presente equivale a um produto interno
de funções. Este último pode ser visto como uma medida de distância média entre duas
funções num determinado domínio da variável independente; no caso do método dos
resíduos ponderados, a distância média medida é calculada entre a função residual e as
funções de ponderação.
Consideremos o método interior. A aproximação numérica da PDE pode ser escrita
como uma expansão polinomial, por exemplo,
y = y0 +n∑
i=1
aiϕi(x). (65)
em que y0 e as funções de aproximação ϕi(x) têm que ser escolhidas por forma a satisfaze-
rem as condições fronteira, isto é, M(y) = 0. Os n coe�cientes ai são desconhecidos e são
determinados pelo método dos resíduos ponderados forçando a solução y(x; a1, . . . , an) a
satisfazer o melhor possível a PDE.
17

Substituindo y na PDE obtém-se a equação residual:
R(x) = L(y) = L
[n∑
i=1
aiϕi(x)
]. (66)
Dado que o resíduo é geralmente uma função de x, é necessário minimizá-lo em todo o
domínio de interesse. No método dos resíduos ponderados utiliza-se o seguinte integral
como medida média do resíduo: ∫VR(x)wk(x) dx, (67)
onde V é o domínio de interesse e wk(x) é uma k-gésima função de ponderação seleccionada
de um conjunto (k = 1, 2, . . . , n) de funções independentes, denominadas funções de
ponderação. Este integral denomina-se produto interno das funções no domínio V e é
normalmente escrito na seguinte forma compacta:
(R,wk)V . (68)
Dado que a solução numérica tem n coe�cientes desconhecidos ai, para determinar
or seus valores força-se a que o produto interno do resíduo com as primeiras n funções
de ponderação seja igual a zero. Isto origina n equações algébricas, normalmente não
lineares,
(R,wk)V = 0 para k = 1, 2, . . . , n, (69)
que podem ser resolvidas para obter os valores dos n coe�cientes ai.
Retomemos o exemplo do problema de difusão e reacção química. É evidente que é
mais fácil escrever uma função de aproximação que satisfaça as condições fronteira do que
uma que satisfaça a PDE em todo o domínio do problema. Por exemplo, suponha-se que
se opta por escrever a função de aproximação como a soma de n polinómios. Dado que
a solução é simétrica, isto é, y(−x) = y(x), os polinómios seleccionados têm que envolver
potências pares de x. Para além disso, a soma dos polinómios tem que ser igual a 1 para
x = 1 e a primeira derivada tem que ser nula para x = 0. É fácil concluir que a função
de aproximação será
y(x) = 1 +n∑
i=1
ai(1− x2i), (70)
porque y(1) = 1 e (dy/dx)x=0 = 0. O resíduo da aproximação é
R(x) = L(y) =d2y
dx2− ϕ2y. (71)
18

Conhecendo-se os valores de ai pode calcular-se o factor de e�ciência:
η =∫ 1
0y(x) dx = 1 +
n∑i=1
ai
(1− 1
2i+ 1
)(72)
=1
ϕ2
(dy
dx
)x=1
= − 2
ϕ2
n∑i=1
aii. (73)
Nos exemplos desenvolvidos em seguida vai-se considerar a aproximação mais simples,
isto é, a aproximação para n = 1:
y(x) = 1 + a1(1− x2), η = 1 +2a13
= −2a1ϕ2
. (74)
O resíduo para esta aproximação é
R(x) = −2a1 − ϕ2[1 + a1(1− x2)]. (75)
Para efeitos de cálculo, o módulo de Thiele vai ser �xado a ϕ = 1; o factor de e�ciência
para estas condições é η = tanh(1)/1 = 0.7616.
A escolha do tipo de funções teste origina diferentes variações do método dos resíduos
ponderados:
1. Método de colocação;
2. Método de sub-domínio;
3. Método de mínimos quadrados;
4. Método de momentos;
5. Método de Galerkin;
6. Método de colocação ortogonal.
2.3.1 Método de colocação
Neste método a função de teste é um delta de Dirac em n pontos interiores (chamados
pontos de colocação) do domínio de interesse:
wk = δ(x− xk). (76)
Uma das propriedades da função delta de Dirac é a seguinte:∫ xk+b
xk−af(x)δ(x− xk) dx = f(xk) (a > 0, b > 0). (77)
19

Se os n pontos interiores forem raízes de um polinómio ortogonal de Jacobi de ordem
n, então o método de colocação diz-se ser de colocação ortogonal. Aplicando a eq. (77)
em (69), obtém-se
R(xk) = 0 para k = 1, 2, . . . , n, (78)
ou seja: força-se o resíduo a ser nulo nos pontos interiores de colocação x1, . . . , xn.
Por exemplo, suponha-se que se escolhe x1 = 0.5 como ponto de colocação para o
problema de difusão-reacção; x1 = 0.5 corresponde ao ponto localizado a meio do domínio.
Anulando o resíduo neste ponto obtém-se
R(x1) = −2a1 − ϕ2[1 + a1(1− x21)] = 0 → a1 = − ϕ2
2 + ϕ2(1− x21)
= −0.3636. (79)
A estimativa do factor de e�ciência é
η = 1 +2a13
= 0.7576 (80)
= −2a1ϕ2
= 0.7273. (81)
Estes valores indicam que a solução obtida pelo método de colocação concorda razoavel-
mente bem com a solução analítica.
2.3.2 Método de sub-domínio
Neste caso o domínio é dividido em n sub-domínios Vi e as funções de ponderação esco-
lhidas são
wk =
1, no interior do sub-domínio Vk
0, no exterior do sub-domínio Vk
. (82)
Ou seja, anula-se o integral do resíduo sobre cada um dos sub-domínios.
Para n = 1 o sub-domínio coincide com o domínio completo do problema. Logo,
(R,w1)V =∫ 1
0R(x)w1 dx =
∫ 1
0{−2a1 − ϕ2[1 + a1(1− x2
1)]}(1) dx (83)
Forçando o produto interno a ser nulo obtém-se
(R,w1)V = 0 → a1 = −3
8, (84)
o que permite o cálculo do factor de e�ciência:
η = 1 +2a13
= 0.75 (85)
= −2a1ϕ2
= 0.75. (86)
20

Estes valores indicam que a solução obtida pelo método do sub-domínio também concorda
razoavelmente bem com a solução analítica.
2.3.3 Método de mínimos quadrados
Neste método a função de ponderação é
wk =∂R
∂ak. (87)
Com esta de�nição, o integral que de�ne o resíduo pode ser escrito da seguinte forma:∫VR∂R
∂akdx =
1
2
∂
∂ak
∫VR2 dx. (88)
A equação anterior mostra que os coe�cientes ak são determinados através da minimização
de (R,R).
No caso do problema em estudo,
(R,w1)V =1
2
∂
∂a1
∫ 1
0{−2a1 − ϕ2[1 + a1(1− x2
1)]}2 dx = 0. (89)
Integrando esta equação para ϕ = 1 e depois diferenciando em ordem a a1, obtém-se
(R,w1)V =1
2
(216
15a1 +
16
3
)= 0 → a1 = −10
27. (90)
As estimativas do factor de e�ciência são
η = 1 +2a13
= 0.7531 (91)
= −2a1ϕ2
= 0.7407. (92)
Novamente, estes valores comparam bem com a solução analítica.
2.3.4 Método dos momentos
Neste método as funções de ponderação são
wk = xk−1 para k = 1, 2, . . . , n. (93)
Portanto, anulam-se os seguintes produtos internos para calcular os coe�cientes ai:
(R, 1)V = 0, (R, x)V = 0, , (R, x2)V = 0, . . . , (R, xn−1)V = 0. (94)
Como temos estado a considerar soluções para n = 1, observa-se que para n = 1 o
método dos momentos é idêntico ao método dosub-domínio, porque o produto interno a
anular é simplesmente
(R, 1)V = 0. (95)
21

2.3.5 Método de Galerkin
Neste método as funções de ponderação são escolhidas da mesma família das funções de
aproximação:
wk = ϕk(x). (96)
Portanto, no método de Galerkin anulam-se os seguintes produtos internos:
(R, ϕ1)V = 0, (R, ϕ2)V = 0, , (R, ϕ2)V = 0, . . . , (R, ϕ2)V = 0. (97)
A solução do problema de difusão/reacção pelo Método de Galerkin com n = 1 equivale
a anular o seguinte produto interno:
(R,w1)V = 0, w1(x) = 1− x2 (98)
(R,w1)V =∫ 1
0{−2a1 − ϕ2[1 + a1(1− x2
1)]}(1− x2) dx = 0 (99)
(R,w1)V = −2
3(1 + 2a1)−
8
15a1 = 0. (100)
Resolvendo em ordem a a1 obtém-se
a1 = −10
28→
η = 1 +
2a13
= 0.7619
= −2a1ϕ2
= 0.7143. (101)
Este resultado parece mostrar que o método de Galerkin é o método mais preciso para o
problema em análise.
2.3.6 Método de colocação ortogonal
Apesar do método de Galerkin ser o mais preciso na resolução do problema de difu-
são/reacção com n = 1, quando se aumenta o número de funções de aproximação (n > 1)
observa-se que o método de Galerkin apresenta muito mais di�culdades analíticas do que
o método de colocação. De facto, com excepção do método de colocação, todos os outros
métodos de resíduos ponderados requerem uma integração da forma
∫VR(x)w(x) dx, (102)
que pode exigir a integração numérica se a integração analítica for impossível ou difícil
de determinar.
22

A precisão do método de colocação pode ser melhorada se os pontos de colocação
forem judiciosamente escolhidos. No caso do problema de difusão/reacção, observemos o
integral que de�ne a variável macroscópica que nos interessa:
η =∫ 1
0y(x) dx,
(dy
dx
)x=0
= 0, y(1) = 1. (103)
Suponha-se que se utiliza uma fórmula de quadratura para calcular este integral numeri-
camente; uma fórmula de quadratura não é mais do que a média ponderada dos valores da
função a integrar em determinados pontos do intervalo de integração. No caso presente,
podemos escrever a quadratura da seguinte forma:
η =∫ 1
0y(x) dx ≈
m∑k=1
αky(xk) + αm+1y(1); 0 ≤ x1 < x2 < . . . < xm < 1. (104)
Quantos mais pontos foram incluídos na fórmula mais precisa ela será. É por este motivo
que incluí o ponto x = 1 no conjunto de pontos de quadratura; para x = 1 conhece-se
o valor analítico da solução, por isso é um ponto extra que se obtém de borla: seria um
desperdício não o incluir.
O problema que se coloca agora é: quais deverão ser os valores dos coe�cientes αk e
dos pontos de quadratura xk para que a fórmula seja o mais precisa possível. Considere-se
a fórmula de quadratura mais simples, com um único ponto interno de quadratura:
η = α1y(x1) + α2y(1). (105)
Esta fórmula de quadratura tem 3 incógnitas: α1, α2 e x1; são, portanto, necessárias três
equações para as determinar. Se a solução fosse constante em todo o domínio, isto é,
y(x) = 1, a aplicação da fórmula de quadratura originaria:
η = (α1)(1) + (α2)(1) = 1 → α1 + α2 = 1. (106)
Já temos a primeira equação. Suponha-se aqora que o per�l de concentração é um poli-
nómio de segundo grau:
y(x) = 1 + a1(1− x2). (107)
Se a fórmula de quadratura for válida para y(x) = 1 e y(x) = 1 − x2 então ela será
necessariamente válida para y(x) = 1 + a1(1 − x2) por ser uma combinação linear dos
polinómios anteriores. Por uma questão de simplicidade usar-se-á então y(x) = 1 − x2.
23

Aplicando a fórmula de quadratura ao integral obtém-se
∫ 1
0y(x) dx = 2/3 = (α1)(1− x2
1) + α2(1− 12) (108)
2/3 = (α1)(1− x21) (109)
Já temos a segunda equação.
Para obter a terceira equação considere-se y(x) = 1− x4; se a fórmula de quadratura
for válida para y(x) = 1, y(x) = 1−x2 e y(x) = 1−x4, então ela será válida para qualquer
polinómio do tipo y(x) = 1 + a1(1− x2) + a2(1− x4). Para y(x) = 1− x4, obtém-se
∫ 1
0y(x) dx = 4/5 = (α1)(1− x4
1) + (α2)(1− 14) (110)
4/5 = (α1)(1− x41) (111)
Agora já temos o conjunto de equações necessárias para a determinação de α1, α2 e x1:
α1 + α2 = 1 (112)
(1− x21)α1 = 2/3 (113)
(1− x41)α1 = 4/5 (114)
A solução deste sistema de equações é:
x1 = 0.44721, α1 = 0.83333, α2 = 0.16667. (115)
Voltemos, agora, a resolver o problema de difusão/reacção pelo método de colocação
com n = 1 e x1 = 0.44721 em vez de x1 = 0.5. Anulando o resíduo neste ponto obtém-se
R(x1) = −2a1 − ϕ2[1 + a1(1− x21)] = 0 → a1 = − ϕ2
2 + ϕ2(1− x21)
= −0.35714. (116)
Magia da magias, −0.35714 = −10/28 que é precisamente o valor obtido pelo método de
Galerkin!!! (Conseguem perceber porquê?) Conseguimos melhorar a precisão do método
de colocação ortogonal através da escolha judiciosa do ponto de colocação.
O ponto x1 = 0.44721 funcionou bem porque ele é um zero de um polinómio de Jacobi
especí�co que está relacionado com o problema em questão. O polinómio de Jacobi de
grau N tem um seguinte representação em série de potências:
J(α,β)N (x) =
N∑i=0
(−1)N−iγN,ixi, (117)
24

com γN,0 = 1. Os coe�cientes γN,i são constantes e α e β caracterizam o tipo de polinómio.
Os polinómios de Jacobi pertencem a uma classe de polinómios ortogonais porque
satisfazem a seguinte condição de ortogonalidade no domínio [0, 1]:
∫ 1
0[xβ(1− x)α]J
(α,β)j (x)J
(α,β)N (x) dx = 0 (118)
para j = 0, 1, 2, . . . , (N − 1), isto é, todos os polinómios de Jacobi são ortogonais a todos
os outros exceptuando a eles próprios (isto é, quando j = N).
Pode demonstrar-se que o polinómio J (α,β)N (x) tem exactamente N zeros distintos todos
eles localizados no intervalo [0, 1]. Se o domínio do sistema PDE a resolver, por exemplo
x ∈ [a, b], for convertido no domínio [0, 1] através da mudança de variável
x′ = (x− a)/(b− a), (119)
então pode demonstrar-se que os zeros do polinómio J(α,β)N (x) são excelentes pontos de
colocaçãoo para resolução da PDE pelo métodos dos resíduos ponderados. Em apêndice
lista-se vários tipos de polinómios ortogonais.
Para ver como surge o ponto x1 = 0.44721, note-se primeiro que os polinómios de
Jacobi são séries de polinómios com potências impares e potências pares de x. No en-
tanto, no problema que temos usado como exemplo, a função de aproximação é a soma
de polinómios com potências pares de x. Para poder utilizar-se uma função de aproxima-
ção envolvendo polinómios com potências impares e pares de x pode fazer-se a seguinte
substituição de variável: z = x2. Obtém-se:
dy
dx=
dz
dx
dy
dz= 2
√zdy
dz,
d2y
dx2=
dz
dx
d
dz
(dy
dx
)= 4z
d2y
dz2+ 2
dy
dz. (120)
Aplicando estas transformações nas eqs. (9)�(11), obtém-se
4zd2y
dz2+ 2
dy
dz− ϕ2y = 0, (121)
y = 1 para x = 1. (122)
A condição fronteira (dy/dx)x=0 = 0 é automaticamente satisfeita pela transformação de
variável, z = x2, pelo não necessita de ser incluída. O factor de e�ciência é
η =∫ 1
0y(x) dx = 2
∫ 1
0y(z)z1/2 dz. (123)
25

Comparando este integral com a condição de ortogonalidade, dada pela eq. (118), conclui-
se que factor de ponderação comum a ambos os integrais é obtido para α = 0 e β = 1/2.
Se utilizarmos um ponto interior de colocação, o integral é dado por uma fórmula de
quadratura idêntica à da eq. (104):
η = 2∫ 1
0y(z)z1/2 dz ≈ 2
m∑k=1
z1/2k αky(zk) + 11/2αm+1y(1); 0 ≤ z1 < z2 < . . . < zm < 1.
(124)
Um quadratura que inclui um dos pontos da fronteira do domínio de integração,
denomina-se quadratura de Radau (ver apêndice E.6); os pontos óptimos de quadra-
tura são os zeros do polinómio de Jacobi J (Nα, β + 1)(x) (ver tabela 12.2 no apêndice).
No caso presente, estamos interessados no zero do polinômio J(10, 3/2)(x). Procurando
em Tabelas desses polinómios, obtém-se z1 = 0.2, α1 = 0.83333 e α2 = 0.16667. Como
z = x2, o ponto de colocação equivalente na coordenada x será x1 =√(z) = 0.44721; este
ponto é idêntico ao que tinhamos obtido anteriormente.
3 Solução de sistemas mistos de equações diferenciais
ordinárias e algébricas
Um sistema misto de equações diferenciais ordinárias e algébricas pode ser escrito na
seguinte forma genérica:
F(x,y,y′, t) = 0 (125)
G(x,y, t) = 0, (126)
em que y = (y1, . . . , yn) é um conjunto de variáveis diferenciais, y′ é uma notação con-
densada para dy/dt, e x = (x1, . . . , xm) é um conjunto de m variáveis algébricas. Este
sistema diferencial necessita de n equações iniciais:
H(x0,y0,y′0) = 0 para t = 0. (127)
Em muitos casos o sistema é puramente diferencial, isto é, m = 0, e para além disso
F(y,y′, t) = 0 pode ser reescrita numa forma explicita em ordem a y′:
y′(t) = f(t,y(t)), y(0) = y0. (128)
26

Certamente devem ter aprendido métodos de Runge-Kutta explícitos para a resolução
da Eq. (128). Por exemplo, o método de Runge-Kutta-Gill corresponde ao seguinte es-
quema de integração, em que conhecido o valor de y para o instante tn, isto é yn = y(tn),
se pretende avançar a solução para o instante de tempo tn+1 = tn + h.
yn+1 = yn +1
6(k1 + k4) +
1
3( bk2 + dk3), (129)
em que
k1 = h f(tn,yn) (130)
k2 = h f
(tn +
h
2,yn +
1
2k1
)(131)
k3 = h f
(tn +
h
2,yn + ak1 + bk2
)(132)
k4 = h f(tn + h,yn + ck2 + dk3) (133)
com
a =
√2− 1
2, b =
2−√2
2, c = −
√2
2, d = 1 +
√2
2. (134)
Os métodos explícitos não são frequentemente utilizados na integração de modelos
diferenciais em Engenharia Química porque os métodos explícitos não são incondicional-
mente estáveis. Por esta razão, vou-me concentrar na resolução do sistema DAE dado na
Eq. (125). O método mais simples é o método implícito de Euler. Este método decorre
directamente da aproximação de dy/dt em série de Taylor dada na Eq. (20) e que se
reproduz em seguida:
y(x−∆x) = y(x)− dy(x)
dx∆x+O(∆x2). (135)
Desta expressão decorre imediatamente que
y′n+1 =
yn+1 − yn
h+O(h). (136)
Portanto, para determinar xn+1 e yn+1 em tn+1 = tn + h, conhecidos xn e yn, resolve-se
o sistema algébrico
F(xn+1,yn+1,
yn+1 − yn
h, tn+1
)= 0 (137)
G(xn+1,yn+1, tn+1) = 0. (138)
27

Este método é incondicionalmente estável, mas exige a resolução de um sistema de equa-
ções algébricas que em muitos casos são não lineares. A desvantagem do método é ser um
método de 1a ordem.
Um método de 2a ordem estável, muito utilizado, é o método dos trapézios também
conhecido por método de Crank-Nicholson. Das várias diferenças �nitas apresentadas
anteriormente, é fácil deduzir a seguinte fórmula:
y′n+1/2 =
(dy
dt
)tn+1/2
=yn+1 − yn
h+O(h2). (139)
Esta equação é idêntica à eq. (136) mas há uma diferença fundamental: a eq. (136)
aproxima dy/dt para tn+1 = tn + h; a eq. (139) aproxima dy/dt para tn+1/2 = tn + h/2.
Por isso é que a eq. (136) é uma aproximação de 1a ordem, enquanto que a eq. (139) é
uma aproximação de 2a ordem. Para resolver o sistema (125) em tn+1/2 é necessário ter
expressões para xn+1/2 e yn+1/2. É fácil deduzir que as seguintes fórmulas:
xn+1/2 =xn + xn+1
2+O(h2), yn+1/2 =
yn + yn+1
2+O(h2). (140)
Estas fórmulas são consistentes com a aproximação de 2a ordem dada na eq. (139). Resu-
mindo, para se calcular a solução no instante de tempo tn+1 usando o método de Crank-
Nicholson resolve-se o seguinte sistema de equações algébricas:
F(xn + xn+1
2,yn + yn+1
2,yn+1 − yn
h, tn+1/2
)= 0 (141)
G(xn + xn+1
2,yn + yn+1
2, tn+1/2
)= 0. (142)
Actualmente, os métodos de integração mais usados são os métodos implícitos de
ordem variável e passo variável baseados nas fórmulas BDF de diferenciação de Gear.
Sucintamente, y′n+1 é aproximado pela diferenciação do polinómio que interpola yn+1 e os
valores da solução nos k passos de integração anteriores. Por exemplo, o polinómio que
interpola yn+1 e yn é
p1(t) = yn +yn+1 − yn
h(t− tn). (143)
A diferenciação dá directamente a fórmula implícita de Euler:
y′n+1 =
yn+1 − yn
h. (144)
Portanto a fórmula BDF de primeira ordem é equivalente ao método implícito de Euler.
28

Para deduzir uma fórmula de 2a ordem, determina-se o polinómio que interpola yn+1,
yn e yn−1. O resultado é
p2(t) = yn +yn+1 − yn
h(t− tn) +
yn−1 − 2yn + yn+1
2h2(t− tn)(t− tn+1) (145)
Diferenciando este polinómio em tn+1 obtém-se
y′n+1 =
yn+1 − yn
h+
yn−1 − 2yn + yn+1
2h. (146)
Em qualquer caso, o sistema algébrico que é necessário resolver para calcular a solução
no instante tn+1 é do tipo
F(xn+1,yn+1, αyn+1 +w, tn+1) = 0 (147)
G(xn+1,yn+1, tn+1) = 0, (148)
em que α e w são constantes que variam de passo para passo.
29