SISTEMATIZAÇÃO DO PLANEJAMENTO DA FIXAÇÃO DE PEÇAS … · Proc-se de contato , dispositi vos...
6
40. SBAI- SimpósioBrasileirode Automação Inteligente, São Paulo, SP, 08-10 de Setembro de 1999 SISTEMATIZAÇÃO DO PLANEJAMENTO DA FIXAÇÃO DE PEÇAS VISANDO A SUA AUTOMAÇÃO Marcos Aurélio de Souza Escola Federal de Engenharia de Itajubá Departamento de Produção Av. BPS 1303, Itajubá MG CEP 37500-000 e-mail : [email protected] Abstract: In this work a study regarding the fixture planning of parts machining is made and this task aims to systematize its execution. The main objective of this systematization is to produce conditions for automation of the fixture planning. It is emphasized that this systematization differs from the existing ones in exploring ao interrelation between the planning activities of the fixture planning and the process planning. The final result of lhe proposed systematization is .a task framework, which accomplished in a methodical manner leads to an efficient scheme of parts fixation in machining operations. The developments are made considering the domain of application a milling of prismatic parts in machines with three axes. Finally lhe developed systematization is applied in a part representative of this field of action and the results obtained in this application are show. 1 INTRODUÇÃO Pode-se definir o planejamento da fixação, como sendo a determinação sistemática de todos os requisitos necessários para a correta orientação, sustentação e imobilização de uma determinada peça, de forma a possibilitar a execução de operações de fabricação com qualidade e da forma mais econômica possível. Tradicionalmente, este tem sido realizado através da experiência pessoal do planejador, que"lançando mão de um formalismo muito particular, elabora o processo de fabricação da peça e ao mesmo tempo o planejamento da fixação. No contexto da indústria, o planejamento da fixação faz parte de uma atividade maior, o planejamento do processo, que constitui o elo entre o projeto e a fabricação. Apesar desta função estratégica, o planejamento da fixação ainda não se encontra adequadamente sistematizado e mesmo a preocupação com esta sistematização é recente e iniciou-se por volta do final da década de 70, com um grande volume de trabalhos sendo publicados na segunda metade da década de 80. Isto se explica principalmente pelo fato de que por muito tempo o modelo de produção utilizado era o de"produção em grandes lotes. Mas esta realidade mudou a partir do final dos anos 70, e atualmente a maioria dos lotes são de poucas centenas (ver por exemplo GANDHI; THOMPSON (1989) e KOCH (1989a, 1989b». Muitos trabalhos já foram .desenvolvidos com respeito ao planejamento da fixação, mas a maioria deles assumem que a " posição da peça e de cada componente do dispositivo de fixação já tenha sido definidos pelo operador. Os sistemas propostos, proporcionam somente um suporte na escolha dos elementos de fixação (por exemplo NEE et al,85 e MARKUS,89), ou na análise das forças ou deformações na 268 Oswaldo Horikawa Escola Politécnica da Universidade de São Paulo Departamento de Mecânica Av. Prof. Mello Moraes, 2231- São Paulo SP CEP 05508-900 e-mail: [email protected] peça a ser fixada ( (CUTKOSKY et ai, HAYNES et al,87 e MENASSA et al,91). Existem trabalhos que abordaram o planejamento da fixação num contexto mais amplo. Mas muitos destes impuseram grandes restrições com respeito ao universo de objetos a serem fixados. ENGLEBERT et al,88, por exemplo, considerou somente a usinagem de placas planas. Somente poucos autores mostraram propostas com reais possibilidades de aplicação. É o caso de SAKURAI,90 e CHANG,C.H,92 que serão mencionados mais adiante. Mas mesmo estes, não chegaram a apresentar um desenvolvimento completo. Nesse contexto, este trabalho vem apresentar uma proposta de sistematização efetiva do planejamento da fixação. Tal sistematização é essencial para a definição de uma metodologia para um planejamento -eficiente e preciso da fixação. A sistematização é por outro lado um passo fundamental para a automação do planejamento da fixação e contribuirá na automação do planejamento de processo uma vez que o planejamento da fixação é parte do planejamento de processo. A nova sistematização do planejamento da fixação a ser apresentada neste trabalho terá ênfase na interação das atividades de planejamento da fixação com outras atividades do planejamento de processo. Para simplificar o problema, os desenvolvimentos serão realizados considerando o domínio da aplicação para peças prismáticas obtidas em fresadoras com 3 eixos. Mesmo com esta restrição, um universo de aproximadamente 54% das peças usinadas usuais ainda continua sendo coberto (HANADA et al,95). E por outro lado, com o propósito de organizar o problema, o planejamento da fixação será abordado em dois níveis. Um nível de macro aspectos, que trata da definição da posição e orientação das peças, das regiões da peça que podem ser acessadas pela ferramenta de corte e as remoções de material que devem ocorrer. E um segundo nível, de micro aspectos, que trata da definição dos acessórios a serem utilizados, as suas posições na montagem, os pontos de fixação e as forças de fixação. 2 OS MACROS ASPECTOS DO PLANEJAMENTO DA FIXAÇÃO A configuração da fixação afeta a seqüência de remoção de material e vice versa. Este aspecto foi considerado por dois autores: SAKURAI,90 e CHANG,C.H.,92. AFigura 1 mostra a estrutura de SAKURAI para o planejamento de processo incluindo o planejamento da fixação.
Transcript of SISTEMATIZAÇÃO DO PLANEJAMENTO DA FIXAÇÃO DE PEÇAS … · Proc-se de contato , dispositi vos...

40. SBAI- SimpósioBrasileirode Automação Inteligente, SãoPaulo, SP, 08-10 de Setembro de 1999
SISTEMATIZAÇÃO DO PLANEJAMENTO DA FIXAÇÃO DE PEÇAS VISANDOA SUA AUTOMAÇÃO
Marcos Aurélio de SouzaEscola Federal de Engenharia de Itajubá
Departamento de ProduçãoAv. BPS 1303, Itajubá MG CEP 37500-000
e-mail : [email protected]
Abstract: In this work a study regarding the fixture planningof parts machining is made and this task aims to systematize itsexecution. The main objective of this systematization is toproduce conditions for automation of the fixture planning. It isemphasized that this systematization differs from the existingones in exploring ao interrelation between the planningactivities of the fixture planning and the process planning. Thefinal result of lhe proposed systematization is .a taskframework, which accomplished in a methodical manner leadsto an efficient scheme of parts fixation in machiningoperations. The developments are made considering thedomain of application a milling of prismatic parts in machineswith three axes. Finally lhe developed systematization isapplied in a part representative of this field of action and theresults obtained in this application are show.
1 INTRODUÇÃOPode-se definir o planejamento da fixação, como sendo adeterminação sistemática de todos os requisitos necessáriospara a correta orientação, sustentação e imobilização de umadeterminada peça, de forma a possibilitar a execução deoperações de fabricação com qualidade e da forma maiseconômica possível. Tradicionalmente, este tem sido realizadoatravés da experiência pessoal do planejador, que "lançandomão de um formalismo muito particular, elabora o processo defabricação da peça e ao mesmo tempo o planejamento dafixação. No contexto da indústria, o planejamento da fixaçãofaz parte de uma atividade maior, o planejamento do processo,que constitui o elo entre o projeto e a fabricação. Apesar destafunção estratégica, o planejamento da fixação ainda não seencontra adequadamente sistematizado e mesmo a preocupaçãocom esta sistematização é recente e iniciou-se por volta do finalda década de 70, com um grande volume de trabalhos sendopublicados na segunda metade da década de 80. Isto se explicaprincipalmente pelo fato de que por muito tempo o modelo deprodução utilizado era o de "produção em grandes lotes. Masesta realidade mudou a partir do final dos anos 70, e atualmentea maioria dos lotes são de poucas centenas (ver por exemploGANDHI; THOMPSON (1989) e KOCH (1989a, 1989b».
Muitos trabalhos já foram .desenvolvidos com respeito aoplanejamento da fixação, mas a maioria deles assumem que a" posição da peça e de cada componente do dispositivo defixação já tenha sido definidos pelo operador. Os sistemaspropostos, proporcionam somente um suporte na escolha doselementos de fixação (por exemplo NEE et al,85 eMARKUS,89), ou na análise das forças ou deformações na
268
Oswaldo HorikawaEscola Politécnica da Universidade de São Paulo
Departamento de MecânicaAv. Prof. Mello Moraes, 2231- São Paulo SP CEP 05508-900
e-mail: [email protected]
peça a ser fixada ( (CUTKOSKY et ai, HAYNES et al,87 eMENASSA et al,91). Existem trabalhos que abordaram oplanejamento da fixação num contexto mais amplo. Masmuitos destes impuseram grandes restrições com respeito aouniverso de objetos a serem fixados. ENGLEBERT et al,88,por exemplo, considerou somente a usinagem de placas planas.Somente poucos autores mostraram propostas com reaispossibilidades de aplicação. É o caso de SAKURAI,90 eCHANG,C.H,92 que serão mencionados mais adiante. Masmesmo estes, não chegaram a apresentar um desenvolvimentocompleto.
Nesse contexto, este trabalho vem apresentar uma proposta desistematização efetiva do planejamento da fixação. Talsistematização é essencial para a definição de uma metodologiapara um planejamento -eficiente e preciso da fixação. Asistematização é por outro lado um passo fundamental para aautomação do planejamento da fixação e contribuirá naautomação do planejamento de processo uma vez que oplanejamento da fixação é parte do planejamento de processo.A nova sistematização do planejamento da fixação a serapresentada neste trabalho terá ênfase na interação dasatividades de planejamento da fixação com outras atividades doplanejamento de processo.
Para simplificar o problema, os desenvolvimentos serãorealizados considerando o domínio da aplicação para peçasprismáticas obtidas em fresadoras com 3 eixos. Mesmo comesta restrição, um universo de aproximadamente 54% das peçasusinadas usuais ainda continua sendo coberto (HANADA etal,95). E por outro lado, com o propósito de organizar oproblema, o planejamento da fixação será abordado em doisníveis. Um nível de macro aspectos, que trata da definição daposição e orientação das peças, das regiões da peça que podemser acessadas pela ferramenta de corte e as remoções dematerial que devem ocorrer. E um segundo nível, de microaspectos, que trata da definição dos acessórios a seremutilizados, as suas posições na montagem, os pontos de fixaçãoe as forças de fixação.
2 OS MACROS ASPECTOS DOPLANEJAMENTO DA FIXAÇÃO
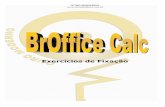
A configuração da fixação afeta a seqüência de remoção dematerial e vice versa. Este aspecto foi considerado por doisautores: SAKURAI,90 e CHANG,C.H.,92. AFigura 1 mostraa estrutura de SAKURAI para o planejamento de processoincluindo o planejamento da fixação.

x.--'./
. //
/ ..
Seleção dosprocessos,máquinas eferramentas
Geração de Definição dastrajetórias das sequências deferramentas e usinagemprogramação
NC
custos
y...... . .,J,..
Figura 4 Exemplo de um volume de exclusão para umafresa de facear
Figura 3 O vetor ferramenta-peça para usinagem de duas"features "diferentes da peça. "
A·:L" ,.• I <, / "1
•.<:: ....... '( i
/ '/ . ...... ...... . .
.............::j.......:J
(0,0,-')
y............
Documentação completa do processo
Figura 2 Inter-relação proposta para asatividades do Planejamento do Processo e da fixação,
Após a obtenção deste conjunto de informações para cada"feature", pode-se obter a chamada matriz de remoção. Amatriz de remoção que é apresentada na Figura 7 é umavadação da matriz proposta originalmente por HELEVI etal,95 e representa . as relações de dependência entre as"features". Esta matriz é útil para visualizar as possíveisalternativas para a seqüência de usinagem. A análise de suascolunas permite por exemplo, identificar as "features"independentes. Já a análise das linhas, permite identificar as"features" com o maior número de dependências. Definindo-seesta matriz de dependência, as condições de contorno para oplanejamento da fixação ficam definidas e os macro aspectos,resolvidos. O próximo passo consiste então em resolver I)S
micro aspectos, definindo-se o dispositivo de fixação.
(0,0,1)t:!
40. SBAI- Simpósio Brasileiro de Automação Inteligente, São Paulo, SP, 08-10 de .Setembro de 1999
o Seleção da matériaprima; removido é necessário que um outro específico seja removidoo Obtenção dos modelos adequados 11 primeiro; dependência desejável: a observância da precedência
fabricação -o Seleção dos processos de fabricação; resulta em algum tipo de facilidade , mas caso não seja possívelo Seleção das máquinasc ferramentas: atender, não implica em nenhum problema técnico',o Cálculo dos parâmetros de corte; dependência por referência: a execução de uma "featurc"
exige a remoção prévia de um volume que gera o elemento dereferência ..
Figura 1 Estrutura proposta por SAKURAI,90.
O processo se inicia com a geração do modelo da peça baseadoem "features". Em seguida, as "features" são agrupadas deacordo com o processo de usinagem que são comum a elas. Deposse dessas informações, executa-se então o planejamento dafixação. Caso não se encontre nenhuma configuração possívelpara o dispositivo de fixação, altera-se a orientação da peça ouo critério de agrupamento das "features", A estruturaapresentada por CHANG é similar na concepção básica, excetoque, na sua estrutura , o planejamento da fixação é executadoapós a definição completa do processo de usinagem. Caso nãoseja encontrada nenhuma configuração possível, o processo deusinagem deve ser redefinido. Além disso, diferente deSAK.URAI, CHANG não entra em maiores detalhes acerca doplanejamento da fixação na sua estrutura.
Assim, com base na estrutura de SAK.URAI, propõe-se nestetrabalho uma nova arquitetura para a interação do planejamentoda fixação com as outras atividades do planejamento deprocesso. A Figura 2 mostra a arquitetura geral e a Figura 5,uma descrição mais detalhada. O processo se inicia com aseleção da peça em bruto através da ajuda de um banco dedados e com a obtenção do modelo da peça baseado em"features". Com base nessas informações, um sistemaespecialista associa cada "feature" a um processo de fabricaçãoadequado. Isto resulta num conjunto de informações tais como:• Opção: Os diversos processos possíveis ' de ' serem
utilizados serão classificados segundo um critérioespecífico, como por exemplo produtividade na remoção ea ordem que for ocupada nesta classificação estaráregistrada na coluna opção '(veja Tabela 1);
• Máquina: Indicação do equipamento necessário para aremoção da "feature / assim como do vetor que define aorientação do eixo principal da máquina;
. • Orientacão: Definido um sistema de coordenadas para apeça, explícita-se através de um vetor aqui denominadovetor ferramenta - peça, a direção e o sentido convenientepara o eixo da ferramenta, para que a mesma remova a"feature". A Figura 3 apresenta uma peça e os vetoresferramenta-peça. No caso do furo vertical, existem 2sentidos possíveis e portanto 2 vetores ferramenta peçapara a sua usinagem;
• Volume de exclusão: O volume ocupado pela ferramentaem tomo da peça durante seus movimentos deaproximação e de corte (ver exemplo na Figura 4);
• Relacões de dependência: São as relações hierárquicasexistentes entre os diversos volumes a serem removidos.Podem ser classificados da seguinte forma: independência: aremoção de um volume não interfere com o outro;dependência por seqüência: para que um dado volume seja
269

40. SBAI- Simpósio Brasileiro de Automação Inteligente, São Paulo, SP, 08-10 de Setembro de 1999
""'II,"II'I""
,""r
N
N
N
N
Retirara "feature" que está interf.,atual.os dadose realizarnova tentativa
Selecionar uma"feature" da matrizde remoção,encontrartodasas "features" que podemser usinadasl4- .
t-----------.tna mesmamontagem da "feature" selecionada e gemodelodamatéria-prima comas zonasde exclusão
Selecionaro plano terciário, 1" ptof---+---+/ de apoioe o localizadore.
I •. II .f '-'-'-'-'-'-'-!. I! .
Selecionaros planosde fixação,1---+---+1 ptosde sujeiçãoe os sujeitadores.
r-".'",I""",I""",
Modelobaseadoem"features".
,"""",II',I
"",
""""""
_._._._._._._.- Selecionaros elementosauxiliares;Estimardeformações e adicionarsuportesse necessário.
,---------t Armazenar a configuração encontradaeatualizarosBancosde Dados.
S
"""">------------' ::""""':.."':.....
Segueparaas demais fasesdoPlanej. do Processo.
Volumesa removercom a correspondenteconfiguraçãodos
elementosde fixação.
Figura 5 Proposta de uma estrutura para as tarefas do Planejamento do Processo, que se relacionam de forma direta, com oplanejamento da fixação
270

40. SBAI- Simpósio Brasileiro de Automação Inteligente, São Paulo , SP, 08-10 de Setembro de 1999
3 OS MICROS ASPECTOS DO dos pontos de contato entre a peça e os elementos doPLANEJAMENTO DA FIXAÇÃO dispositivo podem ser encontrados em SOUZA,98 .
Os micros aspectos do planejamento da fixação, tratam daseleção dos componentes do dispositivo e a definição do seuleiaute de montagem. De acordo com a estrutura proposta(Figura 5), seleciona-se primeiro uma ''feature'' da matriz deremoção. Feita tal escolha, são encontradas todas as ''features''que tem em comum à mesma máquina e o mesmo vetorferramenta-peça, e que portanto, podem ser usinadas numamesma montagem. Em seguida é gerado um modelo da matériaprima associado com as zonas de exclusão relativas à cada"feature", de forma a ser possível identificar quais regiõespodem ser utilizadas para alocação dos dispositivos de fixação
Procede-se então a busca pelos planos de referência, pontos decontato, e dispositivos de fixação que possam realizar cadauma das tarefas. Caso não seja possível, obter qualquer umadas condições necessária para a fixação, remove-sesucessivamente "features" do grupo inicial, até que sejapossível a obtenção da condição de fixação. "
O passo seguinte é o de verificar se ocorre alguma deformaçãoinaceitável na peça em função das forças de fixação e asdisposições dos localizadores. Caso isto se verifique, devem serprovidenciados suportes para a configuração e se os suportesinterferirem com "a usinagem, a "feature" que está interferindoé eliminada. Resolvidas estas situações, estará definido umconjunto de ''features'' que podem ser usinadas em uma únicamontagem e as condições para tal. Isso feito, verifica-se seainda existem "features" a serem removidas e em casoafirmativo, reinicia-se todo processo. Este processo se repeteaté que não exista mais detalhes a usinar.
Para execução destas tarefas foram elaboradas regrasheurísticas que permitem a seleção dos pontos de apoio esujeição da peça bem como a seleção dos elementos que irãocompor o dispositivo de fixação.
Quanto a definição dos elementos componentes do dispositivode fixação, optou-se pela utilização "de sistemas modulares,através dos quais se compôs o Banco de Dados de elementosde fixação. Criou-se um método de classificação e codificaçãoque permite, quando aplicado junto com regras heurísticasespecíficas, a escolha de um elemento adequado à função. Paraseleção dos pontos de contato dos elementos de fixação com apeça, foi utilizado o principio 3-2-1 fartamente documentado(ROSSI,71, DONALDSON et al,73, POLLACK,76,BARSOV,78 e HOFFMAN,84). As leis que regem esteprincípio foram transformadas em regras heurísticas e o uso"combinado destas regras com a manipulação de informaçõesgeométricas "e topol6gicas da peça possibilitou uma formaracional de obter os pontos "de contato" da peça com oscomponentes do dispositivo.
4 APLICAÇÃO DA ESTRUTURAPara validar a estrutura proposta elegeu-se aleatoriamente umapeça prismática que tem como característica o fato denecessitar de usinagem em todas as suas faces e que possuialgumas "features" que s6 podem ser usinadas em uma direçãoespecífica, a Figura 6 apresenta esta peça.
A estratégia apresentada na Figura 5 foi aplicada manualmentee todos os procedimentos propostos foram executados de formarígida, evitando-se quaisquer decisões subjetivas. Conformeprevisto na estrutura proposta, todos os dados necessários paraa fabricação da peça foram incorporados no seu modelobaseado em "features". A Tabela 1 mostra os dadoscorrespondentes à "feature" "RI4" e na Figura 7, a matriz deremoção da peça. Como resultado, foram obtidas 4 fixaçõespara a usinagem completa da peça. A título de exemplo, oprimeiro e o último leiaute gerado pela estrutura proposta sãoapresentados nas Figuras 8 e 9. Além de definir as ''features'' aserem removidas em cada etapa, a estrutura indicou inclusive aorientação da peça, a especificação completa dos elementos dodispositivo de fixação e a posição dos pontos de contato dapeça com os elementos do dispositivo de fixação. Estesresultados sugerem a validade da estrutura proposta, ao menospara a classe de peças tratadas neste trabalho.
Figura 6 Peça a ser utilizada como exemplo, mostrando as''features'' a serem removidas.
O conjunto completo de critérios criados para codificação eseleção dos elementos de fixação bem como para a obtenção
" "R14"Tabela 1 Dados de abrlcacão para a' eature .ID da "feature" R14 DADOS PARA FABRICACÃOOocão Máa. Ferram. Orient. VoI. exclusão Dep. seqüência DeD. desejável DeD. referência1 Fresadora. Fresa topo 0,0,1 Cubo (115,30,-1) RI2&R13 RI &R15
(0,0,1) c!l1O 040,-1O,cx:)2 Fresadora. Fresa topo 0,0,-1 Cubo (115,30,21) R13 RI &R15
(0,0,1) c!l1O (140,-1O,-cx:)
271

40. SBAI- Simpósio Brasileiro de Automação Inteligente, São Paulo, SP, 08-10 de Setembro de 1999
VOLUMF.,8 (''FEATURES'') A SEREM REMOVIDASRI R2 R3 R4 RS R6 R7 R8 R9 RIO Rll RI2 RI3 R14 RIS
RI I I I 1R2
..-. R3t:I)R4 I I I 1RS I I
tE-< R6<Z R7 I Ir-. Cl R8 It:l)U R9
RIO::sE-<;;;,Z RII..;l<O RI2 2 2 2:> RI3 2
RI4RIS I I I- . A ..A A1. depend ência por referência e/ou sequenci a 2. dependência desej ável
Figura 1Matriz de remoção para o caso exemplo.
". .// . . / . ">. .
"/ , '.'("/ ....... . r">; .' .. ' '''o ' ./ . ./ <:»:.A.. . / "" J/"" , .A.. . / ",• , . ' X ,/ . / , .. ./-, /"':. .?, " »< /-' .'' ,/ ' ",' I' < ,»: " ./ ' / ' ,/
(b)Figura 8 Em (a) O leiaute da 18 fixação indicada pela
estrutura e em (b) a peça usinada já com as ''features'' RI,R2, R4, RIO, RI3, R14 e RIS removidas.
Figura 9 Em (c) O leiaute da 48 (última) fixação indicadapela estrutura e em (d) a peça usinada com as ''features''
R3 e R9 já removidas.
272

Muitas das tarefas previstas na estrutura proposta, forambaseadas em regras heurísticas. Espera-se dessa forma queexistam casos em que o funcionamento correto da estruturaimplique num enriquecimento destas regras.
540. SBAI- Simpósio Brasileiro de Automação Inteligente, São Paulo, SP, 08-10 de Setembro de 1999
CONCLUSÕES ENGLERT,P. J. andWRIGHT, P. K. PrincipIes for part setupand workholding in automated manufacturing. Journalof Manufacturing Systems, Vol 7 N°2, p. 147-161,1988
HALEVI, G. and WEILL, RD. PrincipIes of processplanning.,London, Chapman & Hall, 1995
A substituição das regras heurísticas por algoritmos baseadosem uma análise mais rigorosa da atividade de fixação pode serum caminho a ser utilizado para melhorar o range de aplicaçãoda estrutura.
Observando criticamente a estrutura pode-se notar que ovolume de informações necessárias ao funcionamento éexpressivo, o que implica na construção, manutenção emanipulação de Bancos de Dados de grande porte. Dentre estesBancos de Dados, o ' que sem dúvida apresenta maiordificuldade em sua implementação é o de processos, máquinase ferramentas, que deverá conter informações de processos defabricação, relacionados a cada tipo de "feature". Uma soluçãopara este problema é o da restrição do domínio de usinagens aserem consideradas pela estrutura, reduzindo com isso o portedo Banco de Dados. Outra solução seria fazer com que a tarefade atribuir informações de processo de fabricação para cada"feature", seja feita de forma interativa entre o homem e osistema, ou seja o sistema apresenta em forma gráfica todas as"features" a remover e o homem define as informações de:máquina, ferramenta, vetor ferramenta-peça, volume deexclusão e de dependências por seqüência para cada "feature",A partir destas informações o sistema reassume a execuçãoautomática das tarefas.
Outro ponto a ser analisado é o da manipulação dasinformações de ordem geométrica e topológicas. A princípio,todas as ferramentas necessárias à manipulação destasinformações já existem. Resta verificar como seria seufuncionamentode forma integrada na estrutura.
A estrutura proposta apresenta uma forma lógicae ordenada demanipular as informações fazendo com que o planejamento dafixação e a definição das seqüências de usinagem ocorram deforma interativa, ela representa sem dúvida uma sistematizaçãodo Planejamento da Fixação e portanto serve como ponto departida para a automação desta tarefa.
6 BIBLIOGRAFIA
BARSOV, A. ' Cutt ing toll production. Moscow, MirPublishers, 1978. Cap.2, p.60-127: Work-holdingdevices in cutting-tool production
CHANG, C. H. Computer assisted fixture planning formachining processes. Manufacturing Review, VOL 5W I, p. 15-28, 1992
CHANG, T. C. Expert process planning for manufacturing.Addison-Wwesley Publishing Company, 1990
CUTKOSKY, M. R and LEE, S. H. Fixture planning withfriction. ASME Journal of Engineering for Industry,VOL 113, p.320-327, Aug.1991
273
HANADA, T. ; BANDYOPADHYAY, B. P. and HOSHI, T.Implementation of low-volume FMS for prismaticcomponents. Journal ofManufacturing Systems, Vol14N°2,p.91-108,1995
HOFFMAN, E. G. FundamentaIs of too) designo 2° edição,Dearborn - Michigan, Society of ManufacturingEngineers, 1984
KOCH, D. H. Modular fixtures build fast, hold fast. In :DROZDA, T. J., ed. ,PGS AND FIXTURES. 3.ed.Dearborn,Michigan, SME, pp.70-71, 1989.
KOCH, D. H. Undedicatedftxturing: a solution. In:DROZDA, T. J.,ed. ,PGS AND FIXTURES. 3.ed.Dearborn,Michigan, SME, pp.74-83, 1989
LEE, J. D andoHAYNES, L. S. Finite-element analysis oftlexible fixturing system. ASME .loDrna) ofEngineering for Industrv, VOL 109, p.134-139, May1987
A. Strategies for the automated generation ofmodular fixtures. In Proceedings ManufacturingInternational, Vol3 p. 97-104, ASME, 1988
MENASSA,R J. and DeVRIES,W. R. Optimization methodsapplied to selecting support positions in fixture designoASME 10um3l of Engineering for Industry; VOL113, p.412-418, Nov. 1991
NEE, A. Y. C. et all A knowledge-based CAD of jigs andfixtures, SME Technicai Paper # TE85-902, 1985
RAMSAY, J. M. G. Introduccion aI diseõo de jigs vfiiaciones. Arica - Chile, Universidad de Taparacá,1984.
SAKURAT, H. Automatic setup 'planning and fIxture designfor machining. Tese (Doutorado) - Department ofMechanical Engineering, Massachusetts Institute ofTechnology, 1990
SOUZA, M. A. Formalização do planejamento da fixação depeças visando sua automação. São Paulo 1998. 176 p..Dissertação (Mestrado) - Escola Politécnica,Universidade de São Paulo.