Sistema Lidar
11
Contacto: Alejandro Gómez e-mail: [email protected] Tel.: +34927290233 2011 09 [Captura de datos para la obtención de topografía mediante sistema LiDAR Montado en helicóptero ]
Transcript of Sistema Lidar

8/7/2019 Sistema Lidar
http://slidepdf.com/reader/full/sistema-lidar 1/11
2011
09
[Captura de datos para la
obtención de topografíamediante sistema LiDARMontado en helicóptero]

8/7/2019 Sistema Lidar
http://slidepdf.com/reader/full/sistema-lidar 2/11
2011
CARACTERÍSTICAS DEL SISTEMA
1. Sistema LiDAR aerotransportado
2. Descripción detallada del sistema
2.1. Equipo aerotransportado
2.1.1. Láser
2.1.2. INS (Inertial Navigation System)
2.1.3. Vídeos
2.1.4. Cámaras Fotográficas
2.2. Equipo terrestre
3. Tipo de aeronave a utilizar4. Características del vuelo
5. Precisión de las medidas en x,y,z
6. Productos a entregar

8/7/2019 Sistema Lidar
http://slidepdf.com/reader/full/sistema-lidar 3/11
2011
CARACTERÍSTICAS DEL SISTEMA
La presente documentación describe los equipos empleados por INSICA y suscaracterísticas.
1. Sistema LiDAR aerotransportado
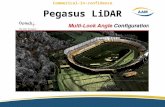
El sistema LiDAR aerotransportado es un sistema que utiliza una técnica de barridoóptico con pulsos láser para recoger información del terreno. El sistema escáner láser
genera coordenadas tridimensionales de millones de puntos sobre la superficie terrestreen un corto período de tiempo.

8/7/2019 Sistema Lidar
http://slidepdf.com/reader/full/sistema-lidar 4/11
2011
Imagen 2 Operación con el sistema LiDAR
Un paquete informático de procesamiento (FLIP 7) proporciona diferentes filtros y
f i lid d d CA li b l ill d lá i h f

8/7/2019 Sistema Lidar
http://slidepdf.com/reader/full/sistema-lidar 5/11
2011
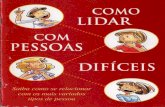
Ilustración 3 Diseño del sistema LiDAR
El armazón contiene todos los sensores, los cuales están conectados al ordenador centralubicado en la cabina del helicóptero.
El ordenador central registra los datos captados, calculando la información de
navegación en tiempo real y proporcionando “feedback” al piloto en la trayectoria de
vuelo.
Todo el sistema lo controla un operador usando un ordenador portátil conectado alordenador central. El operador dispone de un software avanzado con el que vacomprobando que se recubre la zona que debe ser captada. Además en dos pantallas devídeo observa las imágenes obtenidas por las cámaras.

8/7/2019 Sistema Lidar
http://slidepdf.com/reader/full/sistema-lidar 6/11

8/7/2019 Sistema Lidar
http://slidepdf.com/reader/full/sistema-lidar 7/11
2011
2.1.2. INS (Inertial Navigation System)
Los principales componentes del INS (Inertial Navigation System) o sistema denavegación inercial, son el IMU (Inertial Measurement Unit) o unidad de medicióninercial, un receptor GPS y una unidad de procesamiento. El sistema FLI-MAP utiliza elPOS AV (Position and Orientation System – Airborne Vehicles), sistema deposicionamiento y orientación para vehículos aerotransportados de APPLANIX.
La unidad IMU mide la rotación en los tres ejes espaciales (Roll, Pitch y Heading) así
como las velocidades y aceleraciones en las tres dimensiones, utilizando la combinaciónde giroscopios y acelerómetros. La unidad se instala solidariamente en la parte superiordel emisor láser.
Las mediciones del IMU y del GPS son utilizadas por el procesador para calcular conprecisión la posición, velocidad y orientación del helicóptero. Posteriormenteproporcionará el archivo POS EO, de orientación externa (External Orientation).
2.1.3. Vídeos
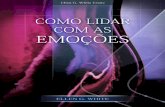
El sistema incorpora dos cámaras de vídeo digital fijas, para identificar elementos delpasillo objeto de medición.
Una cámara apunta hacia el frente con un ángulo de inclinación de 45º. La otra cámaraapunta hacia abajo mostrando aproximadamente el área cubierta por el láser.

8/7/2019 Sistema Lidar
http://slidepdf.com/reader/full/sistema-lidar 8/11
2011
Imagen 5 Puntos LiDAR, Fotografías y Vídeos

8/7/2019 Sistema Lidar
http://slidepdf.com/reader/full/sistema-lidar 9/11
2011
3. Tipo de aeronave a utilizar
El sistema FLI – MAP está certificado en todo el mundo por la American FederalAviation Authorities en 5 tipos de helicópteros diferentes: de la marca Bell el JetRanger y el Long Ranger, de la marca Eurocopter los modelos AS 350 y AS 355, y deMc Donald – Douglas el MD 500.
A los mandos de la aeronave se encontrará un piloto experimentado en trabajos con elsistema y en tierra un mecánico encargado del mantenimiento del aparato y de las
labores logísticas para el abastecimiento de combustible.
4. Características del vuelo
Se realizará un vuelo con especificaciones según las necesidades de cada cliente. En latabla a continuación podemos ver las propiedades obtenidas según las características delvuelo (Extraída de otra tabla al final de este documento).
PROPIEDADES DEL SISTEMA ALTITUD DE
VUELO 120 m 175 m 225 m 350 m
LÁSER ANCHO DE
LÁSER 102 m 153 m 200 m 316 m
1xVIDEO
PÍXEL 8 cm 12 cm 15 cm 24 cm ANCHO DE
VÍDEO 41 m 64 m 85 m 138 m
CÁMARAÁ
PÍXEL 3,2 cm 4 cm 6 cm 9,3 cm ANCHO DE

8/7/2019 Sistema Lidar
http://slidepdf.com/reader/full/sistema-lidar 10/11
2011
6. Productos a entregar
Los productos variarán según el tipo de trabajo a realizar, pero para un proyecto de unanueva línea eléctrica, podemos desglosar un listado básico de elementos entregables:
Cartografía 2D: Datos de planimetría digital en 2D (X, Y) del terreno en el áreacaptada en formato DXF a escala, representando los obstáculos y cruzamientos.
Límites de carreteras
Líneas eléctricas de Alta y Media Tensión
Límites de ríos
Edificios
Árboles
Vallados y linderoRaíles
Modelo Digital del Terreno (MDT): Entrega de un modelo en formato X, Y, Z delMDT del área captada en el vuelo.
Cartografía 3D: Obtención la cartografía digital de Líneas Eléctricas, Carreteras,

8/7/2019 Sistema Lidar
http://slidepdf.com/reader/full/sistema-lidar 11/11
Contacto: Alejandro Gómez
e-mail: [email protected]
Tel.: +34927290233