Sistema GNSS de guiado y control de empuje de un...
2
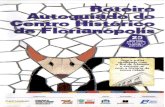
El viaducto de Arbizelay de 380 metros de largo, 6 vanos, 5 pilas y 12 m de ancho pertenece a la AP-1 Vitoria- San Sebastián a su paso por Mondragón. Gracias a la tecnología GNSS se realizó el empuje sobre las pilas y colocación de los 2 tableros que lo componen. Mediante el uso de 6 receptores GX1230 GG, 5 equipos móviles situados en la estructura del tablero y otro como referencia, controlamos totalmente el tablero y su empuje. Las comunicaciones entre los sensores GNSS y Leica Spider se realizó mediante Radio Modem. Otros modos de comunicación se descartaron por problemas de cobertura y la presencia de inhibidores de frecuencia. Los tableros se construyeron in situ mediante hormigonado de una estructura de acero. Una vez fraguados se empujaron mediante gatos hidraúlicos que los elevan y mueven en ciclos de 3 metros. Los gatos se desplazan sobre guías y empujan sobre apoyos soldados al acero. Además de los gatos de empuje el sistema cuenta con un sistema de retenida mediante cables para el frenado de emergencia de la estructura. En el centro del tablero se construyó un Pilono para el paso de cables de acero que se tensan para elevar la nariz de la estructura durante el empuje. Una vez situado sobre la Pila se baja el tablero para que apoye en las guías instaladas en los estribos. El proceso de empuje se realizó alternativamente entre los 2 tableros en 2 fases. El sistema al completo se trasladó y configuró 3 veces, de Empresa Dragados S.A. España Objetivo Guiado y control mediante técnicas GNSS del empuje del tablero del viaducto de la AP1 en Mondragón. Fecha Marzo de 2008 Ubicación Resumen del proyecto Instrumentos 6 Receptores GX1230 GG 6 Antenas AX1202 GG Software Leica GNSS Spider Leica GeoMos Leica Alignment Monitoring Comunicaciones Radio, 3G Ventajas - Control en Tiempo Real de posición 3D y cálculo de geometría de la estructura. - Cálculo de desplazamientos respecto a Ejes en 3D. - Empuje continuo gracias a la monitorización del proceso y el aviso mediante alarmas. - Registro total de observaciones, cálculos y resultados en la Base de Datos de Leica GeoMos. - Informes continuos e instantáneos del Empuje con Leica Alignment Monitoring. - Sistema de fácil traslado y configuración. - Software de manejo sencillo e intuitivo. Leica Geosystems TruStory Sistema GNSS de guiado y control de empuje de un tablero
Transcript of Sistema GNSS de guiado y control de empuje de un...
El viaducto de Arbizelay de 380metros de largo, 6 vanos, 5 pilasy 12 m de ancho pertenece a laAP-1 Vitoria- San Sebastián a supaso por Mondragón. Gracias a la tecnología GNSS se realizó elempuje sobre las pilas y colocación de los 2 tableros que lo componen.
Mediante el uso de 6 receptores
GX1230 GG, 5 equipos móviles
situados en la estructura del tablero
y otro como referencia, controlamos
totalmente el tablero y su empuje.
Las comunicaciones entre los
sensores GNSS y Leica Spider se
realizó mediante Radio Modem.
Otros modos de comunicación
se descartaron por problemas
de cobertura y la presencia de
inhibidores de frecuencia.
Los tableros se construyeron in situ
mediante hormigonado de una
estructura de acero. Una vez
fraguados se empujaron mediante
gatos hidraúlicos que los elevan y
mueven en ciclos de 3 metros. Los
gatos se desplazan sobre guías y
empujan sobre apoyos soldados al
acero.
Además de los gatos de empuje el
sistema cuenta con un sistema de
retenida mediante cables para el
frenado de emergencia de la
estructura.
En el centro del tablero se construyó
un Pilono para el paso de cables de
acero que se tensan para elevar la
nariz de la estructura durante el
empuje.
Una vez situado sobre la Pila se
baja el tablero para que apoye en
las guías instaladas en los estribos.
El proceso de empuje se realizó
alternativamente entre los 2 tableros
en 2 fases. El sistema al completo se
trasladó y configuró 3 veces, de
EmpresaDragados S.A. España
ObjetivoGuiado y control mediante técnicasGNSS del empuje del tablero del viaducto de la AP1 en Mondragón.
FechaMarzo de 2008
Ubicación
Resumen del proyectoInstrumentos6 Receptores GX1230 GG6 Antenas AX1202 GGSoftwareLeica GNSS Spider Leica GeoMosLeica Alignment MonitoringComunicacionesRadio, 3G
Ventajas- Control en Tiempo Real de posición
3D y cálculo de geometría de la estructura.
- Cálculo de desplazamientos respecto a Ejes en 3D.
- Empuje continuo gracias a la monitorización del proceso y el aviso mediante alarmas.
- Registro total de observaciones, cálculos y resultados en la Base de Datos de Leica GeoMos.
- Informes continuos e instantáneos del Empuje con Leica Alignment Monitoring.
- Sistema de fácil traslado y configuración.- Software de manejo sencillo e intuitivo.
Leica Geosystems TruStorySistema GNSS de guiado y controlde empuje de un tablero
manera rápida y sencilla. Se controló
en Tiempo Real no sólo la posición
del tablero durante el empuje sino
la inclinación del Pilono Central.
Con respecto a la Cota es importante
que durante el empuje la nariz del
tablero se encuentre por encima de
los apoyos en las pilas. En el centro
de control en la zona de empuje
Leica Spider recibe los datos de los
sensores GNSS y calcula las líneas
base. La Posición en Tiempo Real
se mandó a los Programas Leica
GeoMos y Leica Alignment
Monitoring mediante NMEA.
Leica Geomos se encargó del cálculo
de la posición e inclinación del
Pilono central, así como de las
tolerancias y alarmas en tiempo
real. La opción “Virtual Sensor”
de Leica Geomos permite el cálculo
de cualquier fórmula con las
magnitudes observadas (desplome,
convergencia, inclinaciones, gradi-
entes...)
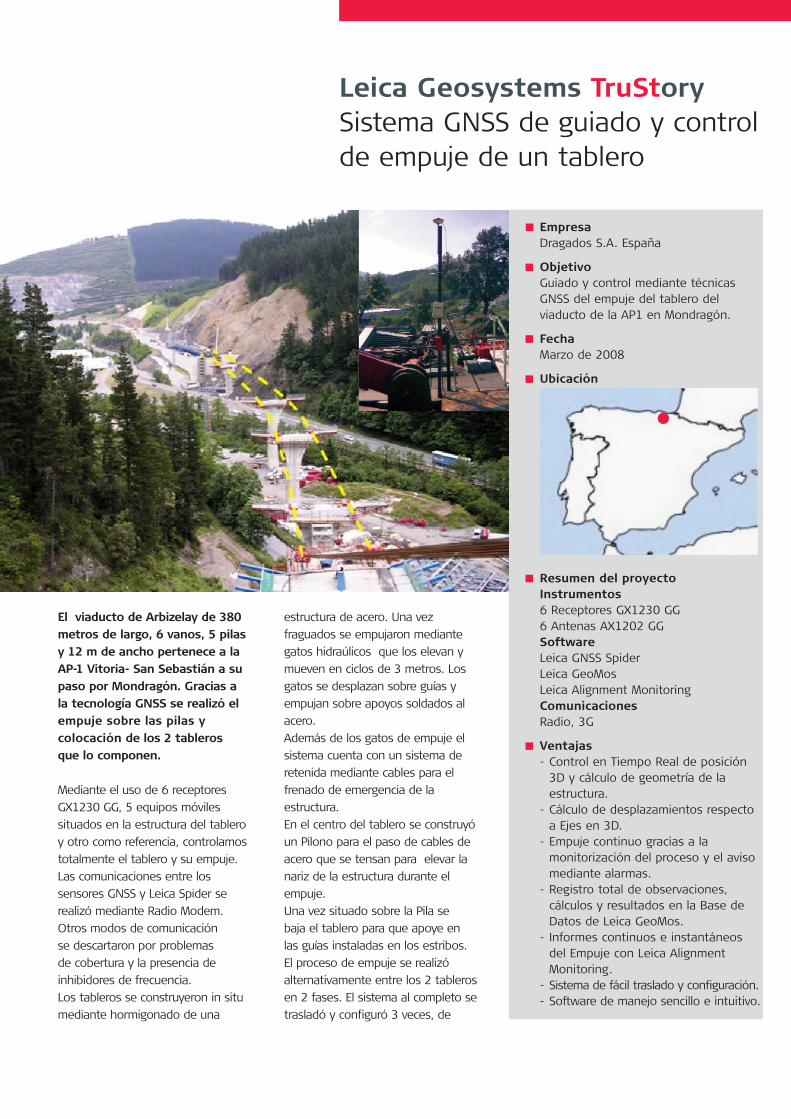
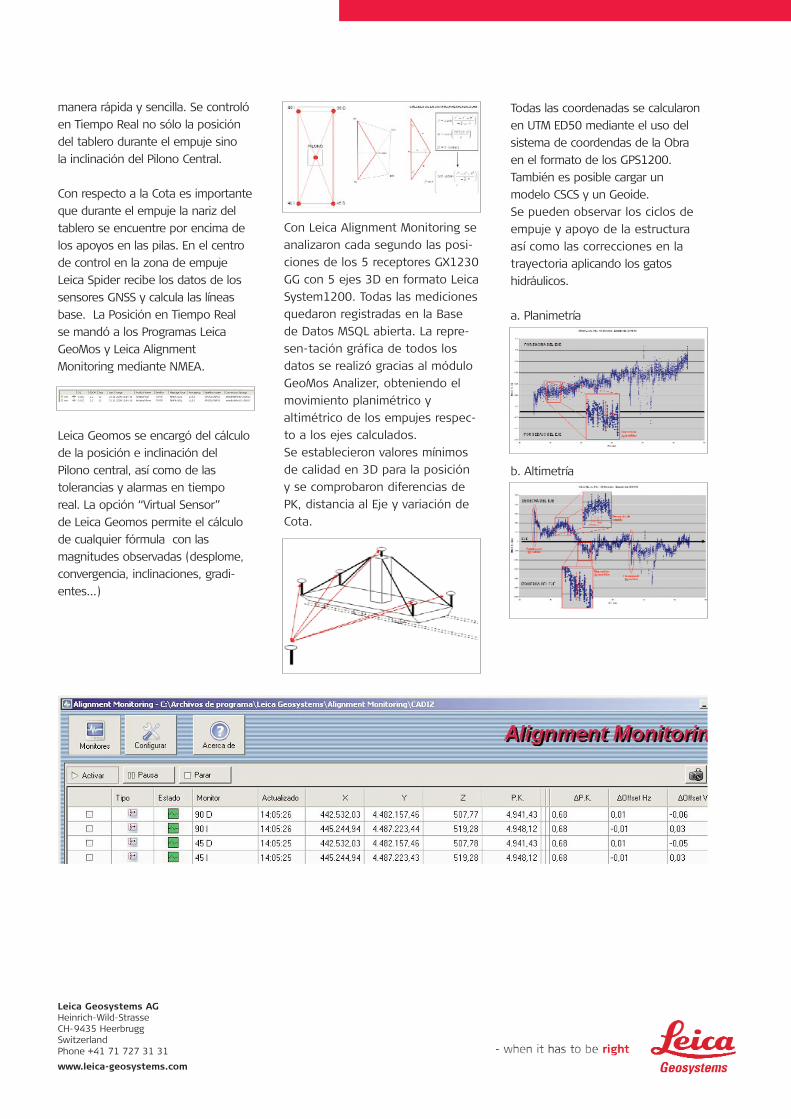
Con Leica Alignment Monitoring se
analizaron cada segundo las posi-
ciones de los 5 receptores GX1230
GG con 5 ejes 3D en formato Leica
System1200. Todas las mediciones
quedaron registradas en la Base
de Datos MSQL abierta. La repre-
sen-tación gráfica de todos los
datos se realizó gracias al módulo
GeoMos Analizer, obteniendo el
movimiento planimétrico y
altimétrico de los empujes respec-
to a los ejes calculados.
Se establecieron valores mínimos
de calidad en 3D para la posición
y se comprobaron diferencias de
PK, distancia al Eje y variación de
Cota.
Todas las coordenadas se calcularon
en UTM ED50 mediante el uso del
sistema de coordendas de la Obra
en el formato de los GPS1200.
También es posible cargar un
modelo CSCS y un Geoide.
Se pueden observar los ciclos de
empuje y apoyo de la estructura
así como las correcciones en la
trayectoria aplicando los gatos
hidráulicos.
a. Planimetría
b. Altimetría
Leica Geosystems AGHeinrich-Wild-Strasse CH-9435 Heerbrugg Switzerland Phone +41 71 727 31 31
www.leica-geosystems.com