
Síntese do mecanismo de 4 barras

of 9
-
Upload
ricardo-anjos -
Category
Documents
-
view
620 -
download
1
Transcript of Síntese do mecanismo de 4 barras
Mecanismos - PMR/EPUSP
S ntese
2006v1
Sntese de Mecanismos Planos de 4 Barras 1 Introduo ca
O mecanismo plano constituido por 4 elos de uma cadeia cinem tica fechada (com o formato de um a quadril tero) e bastante vers til e, portanto, comumente encontrado em v rios dispositivos mec nicos. a a a a Neste captulo veremos diversas t cnicas de sntese e an lise especcas para mecanismos planos de 4 e a elos. O projeto de um mecanismo que atenda a determinados requisitos e, em geral, um processo iterativo em que se alternam sntese e an lise. Desta forma, o projeto utilizando m todos analticos deve conter a e algoritmos tanto para sntese como para an lise do mecanismo em quest o. a a
2
Problema de Posio ca
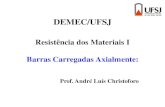
Considere um mecanismo de 4 elos montado utilizando apenas juntas de revolucao (tipo R). Esse mecanismo e denominado 4R. Para um determinado angulo de entrada q2 , a gura 1 mostra as duas formas possveis de montar esse mecanismo se forem conhecidos os comprimentos das barras entre as articulacoes. Uma forma e chamada aberta e a outra cruzada.
raio = R BA
Braio = R CB
A Elo 2 q2 C B
O Elo 1
Elo 1
Figura 1: Mecanismo de 4 barras com duas montagens poss veis.
Nesta apostila ser o vistos dois m todos analticos de resolucao deste problema. a e
M todo 1: Aplicacao da Lei dos Cossenos e A gura 2 mostra uma montagem aberta com um angulo de entrada 0 q2 . S o conhecidos os a comprimentos das barras: OA = a, AB = b, BC = c e CO = d. Unindo os pontos A e C s o formados a dois tri ngulos OAC e ABC com angulos de interesse mostrados na gura. O comprimento do lado e a pode ser determinado por aplicacao da Lei dos Cossenos ao tri ngulo OAC: a
1
Mecanismos - PMR/EPUSP
S ntese
b A a O q2 d 3
B
e
c
4 C
Figura 2: Mecanismo de 4 barras de montagem aberta e com 0 q2 .
e2 = a2 + d2 2ad cos(q2 ) Desta forma, os angulos da gura podem ser determinados pelas seguintes express es: o e2 + d2 a2 2ed e2 + b2 c2 = arccos 2eb e2 + c2 b2 = arccos 2ec = arccos
(2.1)
(2.2) (2.3) (2.4)
Assim, os angulos de interesse a determinar do problema de posicao (3 e 4 ) s o determinados na a seq encia: u 3 = 4 = O angulo de transmiss o e dado por: a = Ou ent o, a = arccos b2 + c2 e2 b2 + c2 a2 d2 + 2ad cos(q2 ) = arccos 2bc 2bc (2.8) (2.7)
(2.5) (2.6)
Quando o angulo de entrada < q2 < 2 temos a conguracao da gura 3. Determine voc mesmo as e alteracoes necess rias nas equacoes de c lculo de 3 e 4 . Numa simulacao no Matlab essas duas situacoes a a (q2 ou q2 > ) podem ser conseguidas com os comandos if e else. A montagem cruzada do mecanismo com as mesmas dimens es das barras e mostrada na gura 4. o Determine voc mesmo as equacoes equivalentes para esse sistema. e E se os pontos O e C n o estiverem alinhados na horizontal? Como ca o equacionamento? Ver gura 5. a O angulo tamb m deve ser conhecido. e
2
Mecanismos - PMR/EPUSP
S ntese
B O a A q2 b 3
c d e
4 C
Figura 3: Mecanismo de 4 barras de montagem aberta e com < q2 < 2.
A Elo 2 q2 C Elo 1
O Elo 1
B
Figura 4: Mecanismo de 4 barras de montagem cruzada.
b A a O q2
B3
ed
c
4 C
Figura 5: Mecanismo de 4 barras de montagem aberta com os pontos O e C desalinhados em relao ca a ` horizontal.
3
Mecanismos - PMR/EPUSP
S ntese
1
5
10
15
20
25
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %Mecanismo plano do tipo 4R %Simulacao em Matlab %Resolucao do problema de posicao %v01_2006 %Metodo: utilizacao da Lei dos Cossenos clear %limpa todas as variaveis em uso close %fecha todas as janelas graficas figure(3); %abre uma janela grafica de numero 3 a=1; %comprimento da barra OA b=2; %comprimento da barra AB c=2.5; %comprimento da barra BC d=2; %distancia entre os pinos fixos OC %o elo acoplador (elo 3) e um triangulo P=1.5; %distancia entre A e P Phi=25*pi/180; %angulo do lado AP do triangulo com o lado base AB. q2_0=pi/3; %q2 inicial= 60graus q2=q2_0; I=36; %I=numero de iteracoes desejadas for k=1:I %variacoes q2=(k-1)*(2*pi/I)+q2_0; %calculo do angulo q2 da sequencia de frames e=sqrt(a^2 + d^2 -2*a*d*cos(q2)); Beta=acos((e^2+d^2-a^2)/(2*e*d)); Psi=acos((e^2+b^2-c^2)/(2*e*b)); Lambda=acos((e^2+c^2-b^2)/(2*e*c)); if ??? EXERCICIO 1: Qual a condicao a preencher para 0













![aula antimicrobianos 190410.ppt [Modo de Compatibilidade] · Aminoglicosídeos Mecanismo: Inibição da síntese protéica e redução da fidelidade de tradução do RNAm no ribossomo.](https://static.fdocumentos.tips/doc/165x107/5bf4389d09d3f21b2a8cd8f9/aula-antimicrobianos-modo-de-compatibilidade-aminoglicosideos-mecanismo.jpg)


