Simulação do Pêndulo Simples - Lúcio Fassarella-Inicial · Simulação do Pêndulo Simples...
3
Simulação do Pêndulo Simples Lúcio Fassarella DMA/CEUNES/UFES Outubro de 2014 Simulação 1 Descrição: Plotagem dinâmica do pêndulo simples ideal, com parâmetros variáveis de massa, gravidade, comprimento , amplitude e duração do movimento. In[468]:= PrintA"Parâmetros:massa Hg L, gravidade Hms 2 L, comprimento HmL e amplitude inicial HgrausL, duração HsL:"E m = 1 g = 10 L = 1 Θi = 25 T = 10 PrintA"Ângulo e coordenadas da posição em função do tempo"E Θ@t_D = HΘi *Π 180L * CosB g L * tF X@t_D = L * Sin@Θ@tDD Y@t_D = L - L * Cos@Θ@tDD Print@"Plotagem das funções coordenadas em função do tempo:"D Plot@8X@tD,Y@tD<, 8t, 0, T<, AxesLabel fi 8t, "X & Y"<D Print@"Plotagem paramétrica da configuração do pêndulo:"D ParametricPlot@88X@tD,Y@tD<, 8t * X@0D T, L - t * HL - Y@0DL T<<, 8t, 0, T<, AxesLabel fi 8X, Y<, AspectRatio fi Automatic, PlotRange fi 88- L, L<, 80, L<<D Print@"Plotagem dinâmica da configuração do pêndulo:"D Animate@ ParametricPlot@88X@ΤD,Y@ΤD<, 8t * X@ΤD T, L - t * HL - Y@ΤDL T<<, 8t, 0, T<, AxesLabel fi 8X, Y<, AspectRatio fi Automatic, PlotRange fi 88- L, L<, 80, L<<D, 8Τ, 0, T<, AnimationRate fi 1, AnimationRunning fi FalseD Parâmetros:massa HgL, gravidade Hms 2 L, comprimento HmL e amplitude inicial HgrausL, duração HsL: Out[469]= 1 Out[470]= 10 Out[471]= 1 Out[472]= 25 Out[473]= 10 Ângulo e coordenadas da posição em função do tempo
Transcript of Simulação do Pêndulo Simples - Lúcio Fassarella-Inicial · Simulação do Pêndulo Simples...
Simulação do Pêndulo SimplesLúcio Fassarella
DMA/CEUNES/UFES
Outubro de 2014
Simulação 1
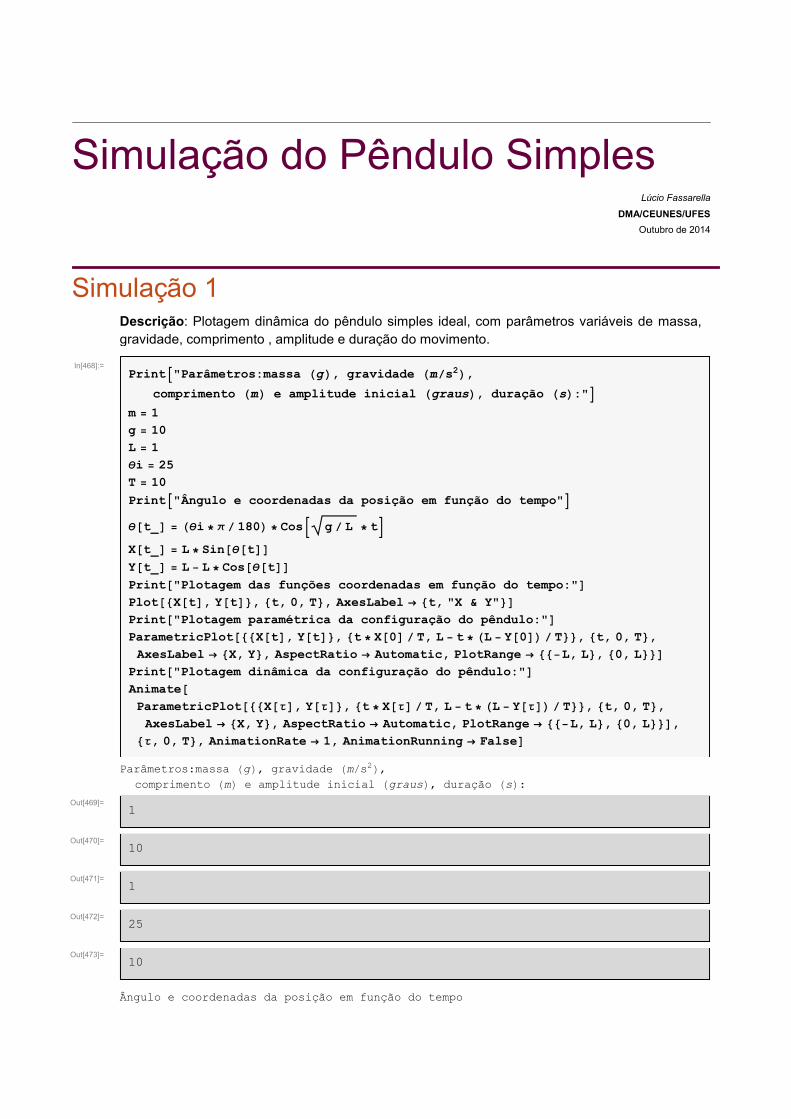
Descrição: Plotagem dinâmica do pêndulo simples ideal, com parâmetros variáveis de massa,
gravidade, comprimento , amplitude e duração do movimento.
In[468]:=
PrintA"Parâmetros:massa HgL, gravidade Hm�s2L,
comprimento HmL e amplitude inicial HgrausL, duração HsL:"Em = 1
g = 10
L = 1
Θi = 25
T = 10
PrintA"Ângulo e coordenadas da posição em função do tempo"E
Θ@t_D = HΘi * Π � 180L * CosB g � L * tFX@t_D = L * Sin@Θ@tDDY@t_D = L - L * Cos@Θ@tDDPrint@"Plotagem das funções coordenadas em função do tempo:"DPlot@8X@tD, Y@tD<, 8t, 0, T<, AxesLabel ® 8t, "X & Y"<DPrint@"Plotagem paramétrica da configuração do pêndulo:"DParametricPlot@88X@tD, Y@tD<, 8t * X@0D � T, L - t * HL - Y@0DL � T<<, 8t, 0, T<,
AxesLabel ® 8X, Y<, AspectRatio ® Automatic, PlotRange ® 88-L, L<, 80, L<<DPrint@"Plotagem dinâmica da configuração do pêndulo:"DAnimate@
ParametricPlot@88X@ΤD, Y@ΤD<, 8t * X@ΤD � T, L - t * HL - Y@ΤDL � T<<, 8t, 0, T<,
AxesLabel ® 8X, Y<, AspectRatio ® Automatic, PlotRange ® 88-L, L<, 80, L<<D,
8Τ, 0, T<, AnimationRate ® 1, AnimationRunning ® FalseD
Parâmetros:massa HgL, gravidade Hm�s2L,
comprimento HmL e amplitude inicial HgrausL, duração HsL:
Out[469]=
1
Out[470]=
10
Out[471]=
1
Out[472]=
25
Out[473]=
10
Ângulo e coordenadas da posição em função do tempo
Out[475]= 5
36Π CosA 10 tE
Out[476]=
SinB5
36Π CosA 10 tEF
Out[477]=
1 - CosB5
36Π CosA 10 tEF
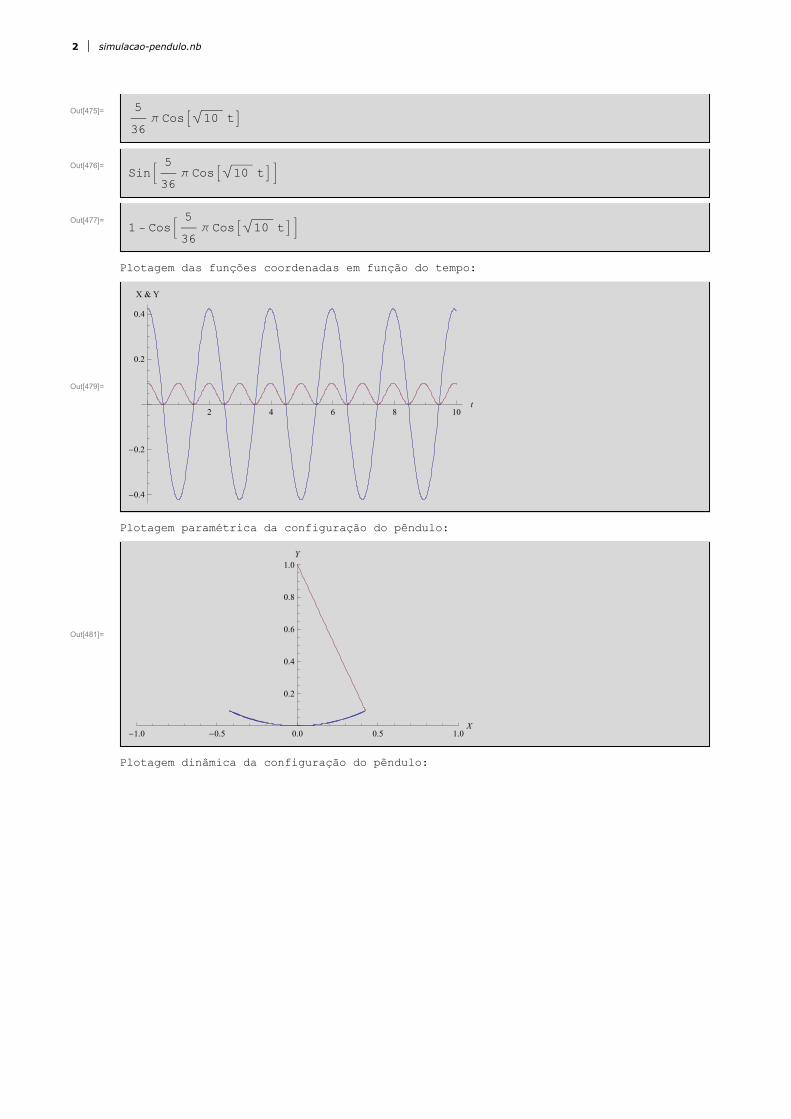
Plotagem das funções coordenadas em função do tempo:
Out[479]=
2 4 6 8 10
t
-0.4
-0.2
0.2
0.4
X & Y
Plotagem paramétrica da configuração do pêndulo:
Out[481]=
-1.0 -0.5 0.0 0.5 1.0
X
0.2
0.4
0.6
0.8
1.0
Y
Plotagem dinâmica da configuração do pêndulo:
2 simulacao-pendulo.nb
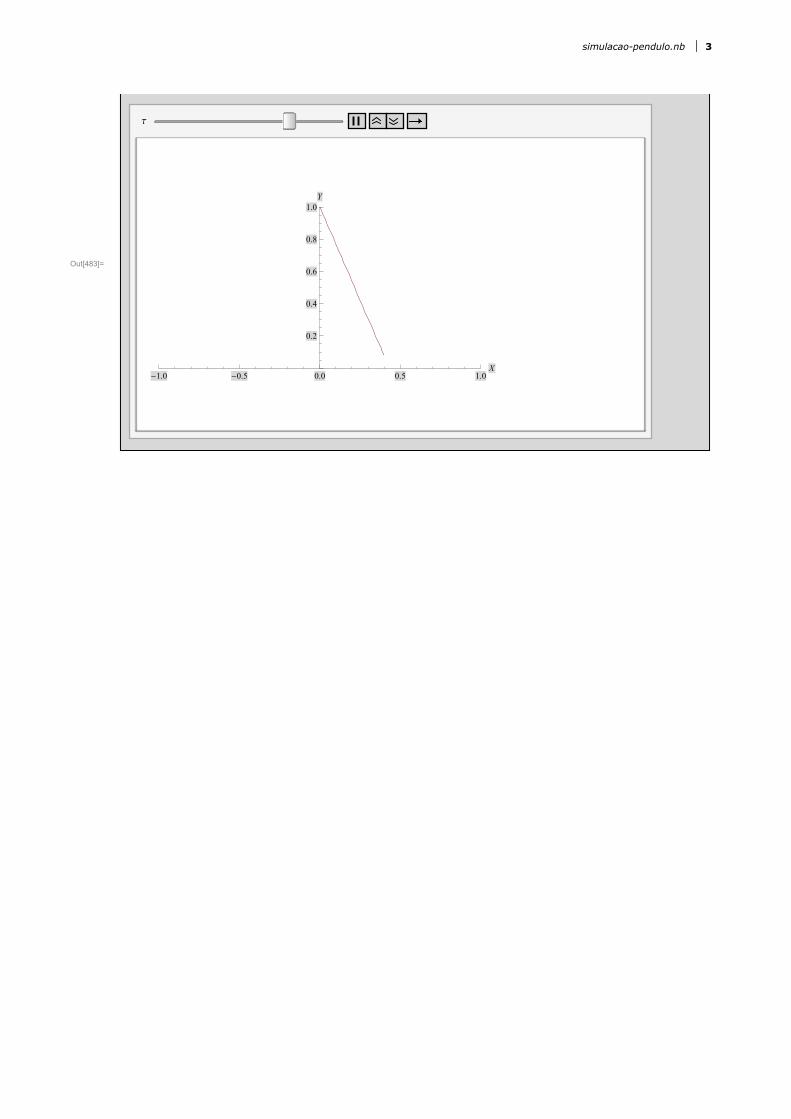
Out[483]=
Τ
-1.0 -0.5 0.0 0.5 1.0
X
0.2
0.4
0.6
0.8
1.0
Y
simulacao-pendulo.nb 3