Servomotor e Motor de Indução Bifásico com Enrolamentos Conectados em V : Aspectos Comparativos
7
Servomotor e Motor de Indução Bifásico com Enrolamentos Conectados em V : Aspectos Comparativos Flávia Borges de Oliveira, Franklin Veríssimo Matos da Silva e Luana Salviano Matos de Araujo Fundação Universidade Federal de Rondônia, Núcleo de Ciência e Tecnologia, Departamento de Engenharia Elétrica - DEE Bacharelado em Engenharia Elétrica - 7 o Período - Disciplina de Máquinas Elétricas Resumo—Tem-se por motor de indução aqueles que funcionam com velocidade variável, variando apenas com a carga mecânica aplicada ao eixo. O presente artigo tratará de motores de indução bifásicos. Primeiramente será feita uma breve introdução sobre motores de indução e sobre o caso geral de motores de indução bifásicos, seguida pela conceituação de servomotores. Na sequência teremos motor de indução bifásico alimentado por tensões bifásicas equilibradas em 120 o elétricos. Ao final do tratamento teórico do artigo, será feita uma discussão sobre as vantagens e desvantagens desses dois tipos de motores já citados. Index Terms—motores de indução, bifásico, servomotores, tensão equilibrada. I. I NTRODUÇÃO O Motor de indução converteu-se no tipo mais usado na indústria, porque a maioria dos sistemas atuais de distri- buição de energia elétrica é de corrente alternada (FRANCHI, 2008). Comparando motores de corrente contínua com motores de indução, este possui por vantagem sua simplicidade, tradu- zida por seu baixo custo e máxima eficácia com manutenção mínima. Possui rendimento elevado para cargas médias e máximas, e é possível alcançar um bom fator de potência com a seleção correta. Motores de indução são constituídos, basicamente, pelos seguintes elementos: • Um circuito magnético estático, composto por chapas ferromagnéticas empilhadas e isoladas entre si, também denominado estator, onde é localizada a carcaça que é a estrutura que também tem a função de suporte do conjunto. De construção robusta, o estator é normalmente feito de materiais resistentes à corrosão e aletas para a refrigeração. • Bobinas, que são enrolamentos localizados em cavas abertas no estatos e alimentadas pela rede de corrente alternada. Seu número varia de acordo com o número de grupos que caracterizam o motor monofásico ou polifásico. • Rotor, formado por um núcleo ferromagnético, também laminado, sobre o qual se encontra um enrolamento ou um conjunto de condutores paralelos, nos quais são induzidas correntes provocadas pela corrente alternada das bobinas do estator. [1] A figura 1 mostra um motor de indução. A partir da constituição da figura 1, pode-se dividir o motor em duas partes: estator e rotor. O estator é composto por: carcaça (1), núcleo de chapas (2) e enrolamento trifásico (3). Figura 1. Exemplo de motor de indução (motor gaiola de esquilo) Já o rotor pode ser dividido em eixo (7), núcleo de chapas (3) e barras e anéis de curto-circuito (12). As outras partes do motor mostradas na figura 1 são: tampa (4), ventilador (5), tampa defletora (6), caixa de ligação (9), terminais (10) e rolamentos (11). Na realidade, a maioria dos motores monofásicos de indução é construída na forma de motores bifásicos com dois enrola- mentos de estator em quadratura no espaço (FITZGERALD, 2006). Nesses casos, normalmente os enrolamentos principal e auxiliar são bem diferentes em relação ao número de espiras, espessura do fio e distribuição de espiras. Devido a esses aspectos, em combinação com o capacitor normalmente usado em série com o enrolamento auxiliar, garante que as FMMs produzidas pelas correntes dos dois enrolamentos serão bem desequilibradas, podendo apenas estar equilibradas em um ponto específico da operação. A seguir, serão conceituados os servomotores, bem como motores de indução bifásica com alimentação equilibrada em 120 o . II. MOTORES BIFÁSICOS DESEQUILIBRADOS: SERVOMOTORES São motores amplamente utilizados como atuadores de saída em sistemas de controle com realimentação e têm como uma de suas principais características de projeto uma resistência do rotor elevada, assegurando uma declividade negativa na característica de torque-velocidade ao longo de toda sua faixa de operação e, também, fornecendo ao motor amortecimento positivo, para boa estabilidade. O servomotor de C.A. frequentemente opera com tensões bifásicas desequilibradas (DEL TORO, 2009). Aplica-se uma
-
Upload
franklin-verissimo -
Category
Documents
-
view
283 -
download
1
Transcript of Servomotor e Motor de Indução Bifásico com Enrolamentos Conectados em V : Aspectos Comparativos

Servomotor e Motor de Indução Bifásico com EnrolamentosConectados em V : Aspectos Comparativos
Flávia Borges de Oliveira, Franklin Veríssimo Matos da Silva e Luana Salviano Matos de AraujoFundação Universidade Federal de Rondônia, Núcleo de Ciência e Tecnologia, Departamento de Engenharia Elétrica - DEE
Bacharelado em Engenharia Elétrica - 7o Período - Disciplina de Máquinas Elétricas
Resumo—Tem-se por motor de indução aqueles que funcionamcom velocidade variável, variando apenas com a carga mecânicaaplicada ao eixo. O presente artigo tratará de motores deindução bifásicos. Primeiramente será feita uma breve introduçãosobre motores de indução e sobre o caso geral de motores deindução bifásicos, seguida pela conceituação de servomotores.Na sequência teremos motor de indução bifásico alimentado portensões bifásicas equilibradas em 120o elétricos. Ao final dotratamento teórico do artigo, será feita uma discussão sobre asvantagens e desvantagens desses dois tipos de motores já citados.
Index Terms—motores de indução, bifásico, servomotores,tensão equilibrada.
I. INTRODUÇÃO
OMotor de indução converteu-se no tipo mais usado naindústria, porque a maioria dos sistemas atuais de distri-
buição de energia elétrica é de corrente alternada (FRANCHI,2008). Comparando motores de corrente contínua com motoresde indução, este possui por vantagem sua simplicidade, tradu-zida por seu baixo custo e máxima eficácia com manutençãomínima. Possui rendimento elevado para cargas médias emáximas, e é possível alcançar um bom fator de potência coma seleção correta.
Motores de indução são constituídos, basicamente, pelosseguintes elementos:
• Um circuito magnético estático, composto por chapasferromagnéticas empilhadas e isoladas entre si, tambémdenominado estator, onde é localizada a carcaça que éa estrutura que também tem a função de suporte doconjunto. De construção robusta, o estator é normalmentefeito de materiais resistentes à corrosão e aletas para arefrigeração.
• Bobinas, que são enrolamentos localizados em cavasabertas no estatos e alimentadas pela rede de correntealternada. Seu número varia de acordo com o númerode grupos que caracterizam o motor monofásico oupolifásico.
• Rotor, formado por um núcleo ferromagnético, tambémlaminado, sobre o qual se encontra um enrolamentoou um conjunto de condutores paralelos, nos quais sãoinduzidas correntes provocadas pela corrente alternadadas bobinas do estator. [1]
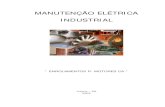
A figura 1 mostra um motor de indução.A partir da constituição da figura 1, pode-se dividir o motor
em duas partes: estator e rotor. O estator é composto por:carcaça (1), núcleo de chapas (2) e enrolamento trifásico (3).
Figura 1. Exemplo de motor de indução (motor gaiola de esquilo)
Já o rotor pode ser dividido em eixo (7), núcleo de chapas(3) e barras e anéis de curto-circuito (12). As outras partesdo motor mostradas na figura 1 são: tampa (4), ventilador(5), tampa defletora (6), caixa de ligação (9), terminais (10) erolamentos (11).
Na realidade, a maioria dos motores monofásicos de induçãoé construída na forma de motores bifásicos com dois enrola-mentos de estator em quadratura no espaço (FITZGERALD,2006). Nesses casos, normalmente os enrolamentos principal eauxiliar são bem diferentes em relação ao número de espiras,espessura do fio e distribuição de espiras. Devido a essesaspectos, em combinação com o capacitor normalmente usadoem série com o enrolamento auxiliar, garante que as FMMsproduzidas pelas correntes dos dois enrolamentos serão bemdesequilibradas, podendo apenas estar equilibradas em umponto específico da operação.
A seguir, serão conceituados os servomotores, bem comomotores de indução bifásica com alimentação equilibrada em120o.
II. MOTORES BIFÁSICOS DESEQUILIBRADOS:SERVOMOTORES
São motores amplamente utilizados como atuadores de saídaem sistemas de controle com realimentação e têm como umade suas principais características de projeto uma resistênciado rotor elevada, assegurando uma declividade negativa nacaracterística de torque-velocidade ao longo de toda sua faixade operação e, também, fornecendo ao motor amortecimentopositivo, para boa estabilidade.
O servomotor de C.A. frequentemente opera com tensõesbifásicas desequilibradas (DEL TORO, 2009). Aplica-se uma

tensão fixa de referência ao seu enrolamento principal euma tensão variável ao enrolamento de controle, sendo estenormalmente alimentado a partir dos terminais de saída de umservoamplificador, possuindo normalmente tensão defasada em90o elétricos do enrolamento principal.
O estudo analítico em um servomotor bifásico desequili-brado pode ser realizado a partir do uso de componentessimétricos, um método de análise que permite que tensões de-sequilibradas sejam substituídas por dois ou mais conjuntos detensões equilibradas, sendo, assim, a máquina desequilibradaestudada em termos de considerações teóricas realizadas parauma máquina equilibrada.
A. Circuito Equivalente Baseado em Componentes Simétricos
O circuito equivalente do motor bifásico consiste em duaspartes, uma responsável pela representação da resposta domotor ao conjunto de tensões de sequência positiva e aoutra pela sequência negativa. Considerando cada sequênciaseparadamente um conjunto de tensões equilibrado, o circuitoequivalente pode ser representado a partir da figura 2.
Figura 2. Circuito equivalente em duas partes do servomotor bifásico, comtensões desequilibradas aplicadas
Onde:• (a) representa o circuito equivalente por fase do con-
junto de sequência positiva equilibrado e (b) o circuitoequivalente por fase do conjunto de sequência negativaequilibrado;
• A tensão aplicada ao estator é, neste caso, a tensão desequência positiva, V1;
• r1 representa a resistência do enrolamento do estator, porfase;
• A reatância de magnetização por fase é dada por xphi eas reatâncias de dispersão totais por fase do estator e dorotor são x1 e x
′
2, respectivamente;• r
′
2 é a resistência total do rotor por fase;• s representa o escorregamento do sistema.Ao considerar o enrolamento da fase a do motor idêntico
ao da fase b ( enrolamento principal e secundário, respectiva-mente), teremos circuitos equivalentes idênticos.
O uso da grandeza r′
2/s no circuito equivalente implica queo rotor gire no sentido do campo girante de sequência positiva[3]. Observa-se também que o resistor de perdas do núcleo nãoestá incluído, tornando as perdas desprezíveis pro sistema.
Para o circuito equivalente do motor em resposta ao con-junto de sequência negativa equilibrado, representado pela
figura 2 (b), os parâmetros de circuito possuem o mesmosignificado que em 2 (a). A figura 3 visa representar que oconjunto de tensões de sequência negativa é considerado comoaplicado aos mesmos enrolamentos de estator e produz suaspróprias reações no mesmo enrolamento do rotor.
Figura 3. Representação do servomotor bifásico desequilibrado em termosdas tensões de sequência positiva e negativa.
A figura 2 (a) e (b) diferem principalmente no quesito queo escorregamento da rotação real do rotor com relação aocampo girante do conjunto de tensões de sequência negativaé 2− s em lugar de s. Vale lembrar que, mesmo com tensõesdesequilibradas, o rotor pode girar em apenas uma velocidade.[3]
Em relação a sequência positiva, o escorregamento é:
s =ns − nns
(1)
Considerando que o conjunto de tensões positiva possuicampo oposto ao conjunto de sequência negativa, o escorre-gamento do rotor para sequência negativa é:
s2 =ns − (−n)
ns= 1 +
n
ns(2)
Colocando (2) em função de (1):
s2 = 1 +n
ns= 2− s (3)
O cálculo utilizado para encontrar o desempenho do servo-motor pode ser obtido imediatamente ao utilizar o conheci-mento da operação de um motor de indução polifásico, emresposta a tensões equilibradas aplicadas. Primeiramente, aimpedância de entrada da sequência positiva é obtida a partirda análise da figura 2 (b), sendo esta:
Z1 = z1 + Zp1 = r1 + jx1 +jxφ[(r
′
2/s) + jx′
2]
(r′2/s) + j(xφ + x
′2)
(4)
onde Zp1 é a impedância do arranjo paralelo dos elementos decircuito. O segundo subíndice 1 identifica a sequência positiva.
Sabendo o valor da impedância de entrada da sequênciapositiva, a corrente de entrada de sequência positiva pode serencontrada a partir de:
I1 =V1Z1
(5)

O rotor produz uma corrente a partir da ação do campogirante de sequência positiva, sendo esta:
I′
21 =I1Zp1
(r′2/s) + jx
′2
(6)
que também pode ser encontrada por análise nodal da figura2 (a). A partir de (6) é possível obter a potência no entreferroassociada com o campo girante de sequência positiva, Pg1,sendo esta:
Pg1 = q(I′
21)2r′
2
s= 2(I
′
21)2r′
2
s(7)
O torque correspondente desenvolvido é, então
T1 =Pg1ω
(8)
sendo o torque dado em N−m, onde ω é a frequência angularsíncrona, expressa em radianos por segundo. [3]
Analogamente à sequência de fase positiva, é possível apli-car a mesma análise realizada anteriormente para sequênciade fase negativa. Teremos, então
Z2 = z1 + Zp2 = r1 + jx1 +jxφ[(r
′
2/2− s) + jx′
2]
(r′2/2− s) + j(xφ + x
′2)
(9)
onde Z2 é a impedância de entrada de sequência negativa e Zp2a impedância do arranjo em paralelo representado na figura 2(b). A corrente de sequência negativa na fase a do estator serádada por:
I2 =V2Z2
(10)
A corrente do rotor correspondente à sequência negativaserá:
I′
22 =I2Zp2
(r′2/2− s) + jx
′2
(11)
sendo, assim, a expressão para a potência transferida pelocampo girante de sequência negativa para o entreferro e otorque correspondente dados a seguir:
Pg2 = q(I′
22)2r′
2
2− s= 2(I
′
22)2r′
2
2− s(12)
T2 =Pg2ω
(13)
A partir das equações (8) e (13) é possível obter o torqueresultante produzido pelos efeitos simultâneos das tensões desequência positiva e negativa, dado a seguir:
T = T1 − T2 =1
ω(Pg1 − Pg2) (14)
Vale ressaltar que para servomotores operando como moto-res bifásicos de tensão desequilibrada usados em servomeca-nismos de instrumentos, o valor do torque em newton-metros éuma grandeza ínfima. Em tais ocasiões, normalmente refere-seao torque em termos de sua grandeza proporcional, a potência.
A corrente resultante da fase a é
Ia = I1 + I2 (15)
analogamente, faz-se, para a fase b
Ib = −jI1 + jI2 (16)
B. Curvas de Torque-Velocidade
A curva de torque-velocidade de um motor de induçãobifásico convencional alimentado por uma tensão bifásicaequilibrada tem um formato similar ao de um motor de induçãotrifásico (DEL TORO, 2009), conforme é possível visualizaratravés da figura 4.
Figura 4. Curvas de torque velocidade: (a) para um motor de indução bifásicaequilibrado com baixa resistência do rotor; (b) para o mesmo motor, comelevada resistência do rotor.
Motores de indução que se utilizam de tensão bifásicaequilibrada não tem seu uso possível em sistemas de controledevido a declividade positiva que prevalece na maior faixade velocidades de operação, conforme a curva a da figura 4.Esta declividade representa amortecimento negativo no sistemade controle, podendo levar a uma condição de instabilidade.Consequentemente, faz-se necessário modificar o projeto deum modo que assegure amortecimento positivo ao longo detoda a faixa de velocidades. Uma maneira simples de fazê-loé projetar o rotor com uma resistência elevada. Dessa forma, acaracterística de torque-velocidade assume o formato indicadopela curva b. Portanto, todo motor de indução bifásico em cujoprojeto a resistência de rotor seja elevada será um servomotorbifásico.
Em muitas aplicações do servomotor em sistemas de con-trole com realimentação, a fase a é energizada com umatensão nominal fixa (usada como referência), enquanto a faseb é energizada com uma tensão de controle variável, que énormalmente obtida de um estágio amplificador precedente.O arranjo nessa configuração é tal que a tensão de controleé frequentemente ajustada para ficar exatamente 90o fora defase com a tensão aplicada na fase a [3]. Continuando com ahipótese que a tensão de referência Va e a tensão de controle Vbestão sempre defasadas de 90o, podemos definir uma grandezaρ tal que
ρ ≡ VbVa
(17)
A figura 5 indica um conjunto de curvas torque-velocidadereais para um servomotor, correspondendo a diversos valoresda tensão de controle, expressa por ρ.

Figura 5. Curvas de torque-velocidade de um servomotor bifásico para váriosvalores de ρ.
O ponto de operação onde ρ = 1 representa a operaçãoequilibrada do motor. Porém à medida que o valor de Vb éreduzido, a característica de torque-velocidade associada setorna francamente limitada (DEL TORO, 2009).
Além das já citadas, outra característica útil do servomotor éa descrição do torque como uma função da tensão de controle,Vb, tendo a velocidade do sistema como parâmetro.
III. MOTOR DE INDUÇÃO BIFÁSICO COM ENROLAMENTOSCONECTADOS EM V
Esse tipo de motor possui como principal característica acapacidade de desenvolver torque de partida sem a necessidadede um dispositivo auxiliar de partida para o seu funciona-mento. Isso ocorre devido a sua alimentação realizada portensões defasadas de 120o elétricos, bem como suas correntesconsequentemente defasadas da mesma forma.
O motor de indução bifásico possui enrolamentos do estatorconstituídos por dois enrolamentos defasados de 60o elétricosno espaço (NETO, 2002), sendo os enrolamentos da fase a eda fase b idênticos no espaço.
Outras características desse motor podem ser citadas aseguir, tais como:
• Campo magnético girante uniforme no entreferro;• Força Magnetomotriz uniforme no entreferro;• Velocidade constante;• Conjugado de partida;• Permite inversão do sentido de rotação pela inversão da
sequência de fases.
Consequentemente tal motor não necessita de componentesque seriam essenciais para o funcionamento de outros tipos demotores, tais como: capacitores de partida, chave centrifugae inversores de tensão (comuns em outros tipos de motoresde indução bifásicos simétricos, o que torna sua construçãomais simplificada. Possui a construção idêntica a de um motortrifásico convencional, porém é desprovido de uma de suasfases.
A. Motor Bifásico com Tensões a 120o
É sabido que existe uma infinidade de possibilidades paraa obtenção de campos girantes, porém nosso interesse seráfocado na situação em que o ângulo de defasagem entre oseixos das fases da máquina bifásica no espaço, α, é 120o
e o ângulo de defasagem entre as correntes da máquinabifásica no tempo, ϕ, é 60o. O resultado sugere a idéia dese usar as tensões bifásicas disponíveis na rede residencial,para alimentar motores de indução especialmente construídospara esta finalidade [4].
Sendo fornecidas duas tensões defasadas de 120o , se umadestas for considerada de forma invertida, a partir da inversãodos condutores, serão obtidas duas tensões com defasagemde 60o entre si. Para esse caso, o motor deve ser construídode tal forma que seus enrolamentos sejam geometricamentedefasados de 120o elétricos. Sendo assim não serão necessárioscapacitores ou qualquer outro meio para possibilitar a partidadeste motor.
O motor bifásico possui torque de partida não nulo e umcampo magnético girante uniforme de amplitude
√3/2 que
gira no sentido anti-horário (NETO, 2002).
B. Campo Girante Uniforme
Ao aplicar um sistema de alimentação bifásico ao enrola-mento bifásico do estator, um campo magnético é criado e, porefeito transformador, induz uma força eletromotriz de trabalhoao enrolamento do rotor, sendo assim chamada pois tem porfunção fazer uma corrente circular através dos condutoresexistentes no enrolamento do rotor. Essa fem associada àonda de densidade de fluxo girante produz o torque. Conse-quentemente, considera-se o campo girante como a chave daoperação do motor de indução [4].
O campo magnético girante produzido provém de con-tribuições dos enrolamentos de fase deslocados no espaçoconduzindo correntes apropriadas deslocadas no tempo. Parauma máquina bifásica construída tendo como base de projetouma máquina trifásica simétrica, os enrolamentos das fases ae b individuais idênticos do estator, são deslocados uns dosoutros 60o ao longo do entreferro, conforme ilustrado pelafigura 6.
Figura 6. Enrolamento de um estator bifásico.
As bobinas de passo pleno mostradas na figura a cimasão retratadas como enrolamentos distribuídos produzindo

senóides de fmm centradas nos eixos magnéticos de suasrespectivas fases.
Em condições bifásicas, as correntes instantâneas são:
ia = Imcosωt (18)
ib = Imcos(ωt− 120o) (19)
Sendo Im a corrente máxima para a fase de referência e aorigem do tempo tomada arbitrariamente como o máximopositivo da corrente da fase a. Tomando a sequência de fasescomo ab, a figura 7 indica as correntes instantâneas.
Figura 7. Correntes bifásicas alternadas equilibradas.
Utilizando, porém, para a análise do campo magnético operíodo correspondente a uma volta (0o até 360o), a forçamagnetomotriz resultante no tempo para um motor de indu-ção bifásico com enrolamentos em V será dada conforme arepresentação feita pela figura 8.
Figura 8. Fmm resultante para uma volta.
C. Circuito Equivalente para o Motor de Indução Bifásicocom Enrolamentos em V
Análogos ao motor trifásico, os parâmetros do circuitoequivalente do motor de indução bifásico com enrolamentosem V serão expressos por fase. A figura 9 indica o circuitoequivalente relacionado ao estator, entreferro e ao circuitomagnético do estator e rotor.
Nota-se que esse circuito é composto pela resistência doenrolamento de fase do estator, r1, numa reatância de dispersãodo enrolamento da fase do estator, x1 e numa impedância demagnetização, formada pelo resistor de perdas do núcleo, rce da reatância de magnetização, xm. [4]
Para começar a análise do circuito equivalente do rotor, pri-meiramente é necessário averiguar sua condição de operaçãopor fase. A corrente do rotor por fase para qualquer condição
Figura 9. Circuito equivalente do estator, incluindo entreferro e ramomagnetizante.
de carga especificada que necessita de um valor específico doescorregamento s, é
I2 =sE2
r2 + jsx2(20)
sendo E2 e x2 valores em repouso. A representação de circuitopara (20) é dada pela figura 10, mostrando que I2 é umacorrente na frequência de escorregamento produzida pela femde escorregamento atuando num circuito do rotor (NETO,2002).
Figura 10. Circuito real do rotor, por fase.
Analisando o circuito mostrado pela figura 10 tambémchega-se ao resultado da impedância do rotor por fase, sendoeste r2 + jsx2. A quantidade real de potência envolvida nessecircuito é, na verdade, a representação das perdas no cobre dorotor, por fase, sendo dada por:
Pcu = q2r2I22 (21)
sendo q2 o número de fases do rotor.O circuito equivalente do rotor é expresso pela figura 11,
onde
I2 =E2
(r2/s) + jx2(22)
sendo I2 uma corrente de frequência de rede.Na figura 11 pode-se, também, substituir a resistência
variável pela resistência real do enrolamento do rotor, r2, euma resistência variável que representa a carga mecância noeixo [4]. Então,
Rm =r2s
(1− s) (23)

Figura 11. Circuito do rotor.
Na figura 11 (b) segue a representação do circuito equiva-lente do rotor modificado.
Por fim, a partir do circuito equivalente do rotor e docircuito equivalente do estator, é possível obter-se o circuitoequivalente total para o motor de indução bifásico, sendo estefornecido pela figura 12.
Figura 12. Circuito equivalente completo para motor de indução bifásico.
D. Estimativa do torque-velocidade
Para realizar a estimativa de torque-velocidade, a figura 12será analisada novamente, sendo seu circuito reduzido para umcircuito em série equivalente através do teorema de Thevenin,conforme a figura 13.
Figura 13. Circuito equivalente reduzido pelo teorema de Thevenin.
A fonte de tensão equivalente de Thevenin é dada por
Vth =jxm
r1 + j(xm + x1)V1 (24)
Dessa forma, a impedância de Thevenin será
Zth =jxm(r1 + jx1)
r1 + j(x1 + xm)= Rth + jXth (25)
A curva torque-velocidade será estimada a partir da equa-ções (26) e (27).
Tm =
√3p
2ωs
[V 2th
(r2s
)(Rth + r2
s
)2+ (Xth + x2)
2
](26)
Tc = a+ b(1− s)2 (27)
sendo a a representação matemática das perdas e b dascaracterísticas da carga.
A figura 14 mostra a curva torque-velocidade, sendo Tm otorque magnético e Tc o torque de carga.
Figura 14. Curva torque-velocidade estimada para torque eletromagnético etorque de carga.
IV. DISCUSSÃO E CONCLUSÕES
Servomotores e motores de indução bifásicos com enrola-mentos conectados em V possuem inúmeras diferenças, quevão além de sua alimentação e campo girante. O servomotorde C.A. na maioria das vezes opera com tensões bifásicasdesequilibradas, enquanto o motor de indução bifásico citadoneste trabalho opera com tensão bifásica equilibrada, comdefasagem de 120o entre si.
Estruturalmente, o servomotor é caracterizado pela ausênciado resistor de perdas de núcleo, bem como pelo fato de seurotor girar no sentido do campo magnético girante de sequên-cia positiva. O motor de indução bifásico com enrolamentosconectados em V , por sua vez, é constituído de tal forma queseus enrolamentos sejam defasados geometricamente de 120o
elétricos; possui também enrolamentos individuais e idênticospara fase a e b no estator (sendo o deslocamento entre estes de60o ao longo do entreferro). Além de possuir campo giranteuniforme no entreferro, esse tipo de motor bifásico tambémpermite a inversão do sentido de rotação pela inversão dasequência de fases.
Ao analisar a relação torque-velocidade para o servomotor,nota-se que seu rotor é projetado com elevada resistência,o que o torna mais estável para operação em sistemas de

controle, pois possui maior estabilidade e amortecimentopositivo ao longo de toda a faixa de velocidades. Tomandocomo base a figura 5, porém, é possível visualizar claramenteque servomotores só possuem operação equilibrada no pontoρ = 1.
É interessante notar que para o motor de indução bifásicocom enrolamentos conectados em V o torque máximo éindependente da resistência de enrolamento do rotor, ou seja,ao aumentar a resistência do rotor ocorrerá um deslocamentoda curva torque-velocidade do motor bifásico, mas o valor dotorque máximo permanecerá inalterado. Observa-se tambémque para resistência elevada o escorregamento para torquemáximo é unitário, sendo, portanto, o torque máximo igualao torque de partida [4].
Quanto ao uso de cada tipo de motor no mercado consu-midor, servomotores mostram maior eficácia em aplicaçõesrelacionadas a sistemas de controle. Motores bifásicos comenrolamentos conectados em V teriam utilização mais provei-tosa quando utilizados em ocasiões onde estejam presentes astensões bifásicas da rede elétrica, as quais são defasadas de120o entre si, tais como: máquinas de lavar roupa, lavadoras deprato, geladeiras e outros, que seriam economicamente maisinteressantes se utilizassem esse tipo de motor.
Por fim, devido à ampla utilização de motores de induçãoC.A. na indústria, a importância do tema abordado torna-seaparente, visando esclarecer dúvidas quanto o funcionamento,construção e aplicação de cada um desses tipos de motores.
REFERÊNCIAS
[1] FRANCHI, Claiton Moro. Acionamentos Elétricos. 4. Ed. São Paulo:Érica, 2008.
[2] FITZGERALD, A. E. Máquinas Elétricas. 6. Ed. Porto Alegre: Bookman,2006.
[3] DEL TORO, Vincent. Fundamentos de Máquinas Elétricas. Rio deJaneiro: LTC, 2009.
[4] NETO, Lindolfo Marra de Castro. O Motor de Indução Bifásico comEnrolamentos Conectados em V . 2002.




![Especiais 05 Servomotor [Modo de Compatibilidade]](https://static.fdocumentos.tips/doc/165x107/616a16e911a7b741a34eb052/especiais-05-servomotor-modo-de-compatibilidade.jpg)