Servo-motor de regime contínuo Kinetix VP Instruções de ... · Servo-motor de regime contínuo...
28
Instruções de instalação Tradução das instruções originais Servo-motor de regime contínuo Kinetix VP com tamanho de carcaça de 165 mm, 215 mm e 300 mm Números de catálogo VPC-B1652A, VPC-B1653A, VPC-B1652D, VPC-B1653D, VPC-B1654D, VPC-B21539, VPC-B21549, VPC-B2153A, VPC-B2154A, VPC-B2154D, VPC-B2155D, VPC-B2156D, VPC-B30029, VPC-B30039, VPC-B30049, VPC-B3002A, VPC-B3003A, VPC-B3004A, VPC-B3004D Resumo das alterações As correções foram feitas nas referências às normas de segurança na página 4 e na página 5 . Sobre os Motores de regime contínuo Kinetix VP Os motores de regime contínuo Kinetix® VP têm recursos de encoders absolutos de alta-resolução de giro único ou multigiro, disponíveis com ou sem freios de 24 Vcc. Estes servo-motores compactos sem escovas cumprem as especificações exigentes de sistemas de movimento de alto desempenho. Você é responsável pela inspeção do equipamento antes de aceitar a remessa da companhia de frete. Compare os itens recebidos com a ordem de compra. Notifique imediatamente a transportadora sobre danos de transporte ou itens faltantes. Armazene ou opere o motor em um local limpo e seco, conforme as Classificações ambientais na página 26 . Tópico Página Resumo das alterações 1 Sobre os Motores de regime contínuo Kinetix VP 1 Explicação do código de catálogo 2 Antes de instalar o motor 2 Segurança Funcional 4 Instalação do motor 5 Dimensões dos motores VPC-B165xx, VPC-B215xx e VPC-B300xx (conector simples) 8 Dimensões dos motores VPC-B165xx, VPC-B215xx e VPC-B300xx (conector de realimentação/potência do motor) 10 Dados de conectores 12 Capacidade de força de carga do motor 13 Classificações ambientais 26 Cabos de motor simples série 2090 26 Kits de vedação do eixo 26 Recursos adicionais 27 ATENÇÃO: Para evitar ferimentos pessoais e danos ao motor, não levante nem manipule o motor pelo eixo. A tampa do motor pode se soltar e fazer que você derrube o motor.
Transcript of Servo-motor de regime contínuo Kinetix VP Instruções de ... · Servo-motor de regime contínuo...

Instruções de instalação
Tradução das instruções originais
Servo-motor de regime contínuo Kinetix VP com tamanho de carcaça de 165 mm, 215 mm e 300 mmNúmeros de catálogo VPC-B1652A, VPC-B1653A, VPC-B1652D, VPC-B1653D, VPC-B1654D, VPC-B21539, VPC-B21549, VPC-B2153A, VPC-B2154A, VPC-B2154D, VPC-B2155D, VPC-B2156D, VPC-B30029, VPC-B30039, VPC-B30049, VPC-B3002A, VPC-B3003A, VPC-B3004A, VPC-B3004D
Resumo das alteraçõesAs correções foram feitas nas referências às normas de segurança na página 4 e na página 5.
Sobre os Motores de regime contínuo Kinetix VPOs motores de regime contínuo Kinetix® VP têm recursos de encoders absolutos de alta-resolução de giro único ou multigiro, disponíveis com ou sem freios de 24 Vcc. Estes servo-motores compactos sem escovas cumprem as especificações exigentes de sistemas de movimento de alto desempenho.
Você é responsável pela inspeção do equipamento antes de aceitar a remessa da companhia de frete. Compare os itens recebidos com a ordem de compra. Notifique imediatamente a transportadora sobre danos de transporte ou itens faltantes. Armazene ou opere o motor em um local limpo e seco, conforme as Classificações ambientais na página 26.
Tópico Página
Resumo das alterações 1
Sobre os Motores de regime contínuo Kinetix VP 1
Explicação do código de catálogo 2
Antes de instalar o motor 2
Segurança Funcional 4
Instalação do motor 5
Dimensões dos motores VPC-B165xx, VPC-B215xx e VPC-B300xx (conector simples) 8
Dimensões dos motores VPC-B165xx, VPC-B215xx e VPC-B300xx (conector de realimentação/potência do motor) 10
Dados de conectores 12
Capacidade de força de carga do motor 13
Classificações ambientais 26
Cabos de motor simples série 2090 26
Kits de vedação do eixo 26
Recursos adicionais 27
ATENÇÃO: Para evitar ferimentos pessoais e danos ao motor, não levante nem manipule o motor pelo eixo. A tampa do motor pode se soltar e fazer que você derrube o motor.

Servo-motor de regime contínuo Kinetix VP com tamanho de carcaça de 165 mm, 215 mm e 300 mm
Explicação do código de catálogo
(1) A hierarquia de velocidade nominal serve apenas para fins de comparação. Use o software Motion Analyzer para dimensionar e selecionar os motores para sua aplicação e/ou as especificações de desempenho no Kinetix 5700 Drive System Design Guide, publicação KNX-RM010.
(2) Consulte Dimensões dos motores VPC-B165xx, VPC-B215xx e VPC-B300xx (conector simples) na página 8 e Dimensões dos motores VPC-B165xx, VPC-B215xx e VPC-B300xx (conector de realimentação/potência do motor) na página 10 quanto à mudanças dimensionais (L, LB, LD e LE) resultantes do número de pilhas de magnéticas e do freio.
Antes de instalar o motorRealize essas etapas de inspeção e revise as orientações com relação a vedação de eixos, acoplamentos e polias, além de prevenção de ruído elétrico.
1. Remova o motor cuidadosamente do seu contêiner de transporte.
2. Inspecione o motor em busca de danos.
3. Examine a carcaça do motor, o eixo de saída frontal e o piloto de montagem em busca de defeitos.
4. Notifique imediatamente a transportadora sobre danos de transporte.
Remova a tampa do eixoRemova a tampa de proteção que está instalada no eixo do motor com a mão ou erga com alavanca com uma chave de fenda. Não use martelos nem outras ferramentas, pois podem danificar o eixo do motor.
ATENÇÃO: Não tente abrir nem modificar o motor, exceto a direção do conector, como descrito na página 5. Apenas técnicos qualificados Rockwell Automation podem fazer manutenção deste motor.
VP C - B xxx x x - x x x x F S
Opções de fábricaS = vedação do eixo, padrão (IP65)ArrefecimentoF = Ventilação forçadaFreio2 = Sem freio4 = Freio de 24 VccConector1 = Conector DIN SpeedTec simples, ângulo reto, rotação 325°7 = Conector DIN SpeedTec simples, radial, rotação 180°Chaveta do eixoJ = Chaveta do eixoK = Eixo suaveRealimentaçãoS = seno/cosseno 1024, encoder absoluto de giro único (Protocolo de hiperface) Q = encoder de 23 bits multigiro absoluto digital, classificação SIL2/nível de desempenho d, canal de segurança secundário de 12 bits (Protocolo de hiperface DSL)Y = Encoder de 25 bits, multigiro absoluto digital (Protocolo digital EnDat)Velocidade nominal (1) (2)
9 = 1.000 rpmA = 1.500 rpmD = 3.000 rpmComprimento da pilha magnética (pilhas 2, 3, 4, 5, 6) (2)
Diâmetro do círculo do parafuso (BCD) / Altura do eixo (SH)165 = IEC 165 mm BCD / SH 80 mm215 = IEC 215 mm BCD / SH 100 mm300 = IEC 300 mm BCD / SH 132 mmClasse de tensãoB = 400 V Tipo de sérieC = trabalho contínuoSérieVP = Servo-motores de ímã permanente que são otimizados para as classificações de inversores de frequência Kinetix 5700.
2 Publicação Rockwell Automation VPC-IN001B-PT-P - Abril 2017

Servo-motor de regime contínuo Kinetix VP com tamanho de carcaça de 165 mm, 215 mm e 300 mm
Prolongue a vida útil do motor O projeto e a manutenção adequados podem aumentar a vida de um servo-motor. Siga estas diretrizes para maximizar a vida útil de um servo-motor operado de acordo com as Classificações ambientais na página 26:
• Providencie uma malha de gotejamento nos cabos do motor para afastar líquidos da conexão ao motor.• Sempre que possível, forneça blindagens que protejam o invólucro, o eixo, as vedações do motor e as suas junções contra contaminação por
corpo ou fluidos estranhos.• As vedações de eixo estão sujeitas a desgaste e precisam de inspeção e substituição periódicas. A substituição é recomendada a cada 3
meses, sem exceder 12 meses, dependendo do uso. Consulte Kits de vedação do eixo na página 26 para obter mais informações.• Verifique o motor e as vedações regularmente em busca de danos ou desgaste. Se detectar danos ou desgaste excessivo, faça a substituição.
Vedações do eixoO motor tem uma vedação do eixo como equipamento padrão. Uma vedação do eixo é necessária no eixo do motor próximo ao mancal frontal do motor se o eixo estiver exposto a quantidades significativas de poeira fina ou de fluidos, tais como óleo lubrificante de uma caixa de engrenagens.
Um grau de proteção IP65 para o motor exige uma vedação do eixo e conectores e cabos ambientalmente vedados.
• Consulte Classificações ambientais na página 26 para uma breve descrição das classificações IP para esses motores.• Consulte Kits de vedação do eixo na página 26 na para kits de vedação compatíveis com o motor.• Consulte Kinetix Rotary Motion Specifications Technical Data, publicação KNX-TD001, para encontrar conectores e cabos vedados
ambientalmente compatíveis com estes motores.
Acopladores e poliasAs conexões mecânicas ao eixo do motor, tais como acoplamentos e polias, necessitam de um acoplamento de rigidez torcional ou uma cinta de temporização reforçada. O desempenho altamente dinâmico dos servo-motores pode fazer com que os acoplamentos, polias ou cintas afrouxem ou escorreguem com o tempo. Uma conexão frouxa ou escorregadia causa instabilidade no sistema e pode danificar o eixo do motor. Todas as conexões entre o sistema e o eixo do servo-motor devem estar rígidas para alcançar uma resposta aceitável do sistema. Inspecione periodicamente as conexões para verificar a sua rigidez.
Quando montar acoplamentos ou polias no eixo do motor, verifique que as conexões estejam alinhadas adequadamente e que as cargas axiais e radiais estejam dentro das especificações do motor. Consulte Capacidade de força de carga do motor na página 13 para obter orientações de como alcançar 20.000 horas de vida do mancal do motor, ou a página 20 para obter orientações de como alcançar 40.000 horas vida do mancal do motor.
Prevenir Ruído ElétricoA interferência eletromagnética (EMI), chamada comumente de ruído elétrico, pode reduzir o desempenho do motor. Técnicas eficientes para agir contra interferência eletromagnética incluem a filtragem da alimentação CA, o uso de cabos blindados, a proteção dos cabos de sinal da fiação de potência, e a prática boas técnicas de aterramento.
Siga estas orientações para evitar os efeitos do EMI:
• Isole os transformadores de energia ou instale filtros de linha em todas as linhas de alimentação de entrada CA.• Não direcione cabos de motor sobre as aberturas de ventilação dos servo-drives.• Aterre todo o equipamento usando um sistema de aterramento paralelo de ponto simples que emprega barramentos de terra ou malhas
grandes. Se necessário, use técnicas adicionais de redução de ruído elétrico para reduzir a EMI em ambientes com ruído.
Consulte o Manual de referência do design de sistema para o controle de ruído elétrico, publicação GMC-RM001, para informação adicional sore a redução de EMI
ATENÇÃO: Podem ocorrer danos aos mancais do motor e ao dispositivo de alimentação se um forte impacto for aplicado ao eixo durante a instalação de acoplamentos e polias. Danos ao dispositivo de realimentação podem ocorrer se você aplicar força de alavanca à face de montagem do motor quando você remover dispositivos que estão montados no eixo do motor.
Não bata com as ferramentas no eixo, acoplamentos ou polias durante a instalação ou remoção. Use um puxador de rodas para aplicar pressão a partir da extremidade do usuário do eixo, quando tentar remover qualquer dispositivo do eixo do motor.
Publicação Rockwell Automation VPC-IN001B-PT-P - Abril 2017 3

Servo-motor de regime contínuo Kinetix VP com tamanho de carcaça de 165 mm, 215 mm e 300 mm
Instalar os cabosO roteamento inteligente dos cabos e a construção cuidadosa deles aprimora a compatibilidade eletromagnética do sistema (EMC).
Para instalar os cabos de alimentação do motor e do ventilador, observe estas orientações:
• Mantenha os comprimentos do cabo os mais curtos possíveis.• Aterre a blindagem do cabo para impedir que interferência eletromagnética afete outros equipamentos.
Segurança FuncionalMotores equipados com um sensor de realimentação com classe de segurança funcional Hiperface DSL são designados de acordo com os requisitos da seguinte documentação SICK STEGMANN GmbH para manter a classificação de segurança funcional do sensor de realimentação anexada. Consulte Explicação do código de catálogo na página 2 para obter detalhes de cada opção.
CertificaçãoO grupo TÜV Rheinland aprovou os servo-motores de regime contínuo Kinetix VP equipados com encoders digitais de segurança funcional com Hiperface DSL digital certificados. Sistemas que incluem esses motores podem alcançar uma classificação de nível de segurança funcional de até o nível de desempenho d (PLd) e categoria de segurança 3 (CAT. 3), de acordo com a ISO 13849-1 e SIL 2, de acordo com as IEC 61508, IEC 61800-5-2 e IEC 62061 quando usados com inversores de frequência variável de segurança funcional que atendam os requisitos do Manual de segurança da HIPERFACE DSL (SICK STEGMANN GmbH, publicação 8017596/Z991).
Para visualizar o certificado TÜV Rheinland e outras certificações de produto disponibilizados pela Rockwell Automation, visitehttp://www.rockwellautomation.com/global/certification/overview. page.
Considerações importantes de segurançaAdicionalmente às instruções encontradas neste documento, você também é responsável pelo seguinte:
• Conclusão da avaliação de risco de nível de máquina.• Certificação da máquina com o nível de desempenho ISO 13849-1 ou IEC 62061 SIL desejado.• Gestão de projeto e testes de prova em conformidade com a IEC 61800-5-2.• O sistema de realimentação do motor seguro tem um tempo de missão máximo de 20 anos. Depois deste período, o sistema de
realimentação deve ser tidado do serviço.• O sistema de realimentação do motor não suporta funções de segurança baseadas em posição absoluta sem medidas adicionais. No caso de
funções de segurança baseadas em posição absoluta segura, o sistema de realimentação do motor fornece apenas um canal sem diagnósticos relativos à segurança na energização. É necessário implementar um segundo canal usando outras medidas.
• O sistema de realimentação do motor não é capaz de criar um estado seguro para o sistema de acionamento independente. O sistema de acionamento cria um estado seguro como resposta a um erro exibido pelo sistema de realimentação do motor.
• Para planejar e usar motores equipados com sensores de realimentação de classificação de segurança são necessárias habilidades técnicas que não são explicadas neste documento.
ATENÇÃO: A blindagem geral nos cabos do motor e de potência e do ventilador deve estar aterrada para obter um sinal eficiente do encoder.
O sinal de dados do encoder é transmitido através de um par trançado com impedância balanceada que necessita de blindagem eficiente para um bom desempenho.
Certifique-se de que exista uma boa conexão entre as blindagens do cabo e o terra do sistema de acionamento.
ATENÇÃO: Alta tensão pode estar presente nas blindagens dos cabos do motor se as blindagens não estiverem aterradas.
Verifique se existe uma conexão com o terra para todas as blindagens dos cabos do motor.
Cat. motor Nº Documentação de referência da segurança funcional do sensor de realimentação (SICK STEGMANN GmbH)
VPC-xxxxxx-Q Manual de segurança HIPERFACE DSL, publicação 8017596/Z991
Instruções de operação dos sistemas de realimentação do motor seguro EFM50-2, publicação 8019321/2016-03-30
IMPORTANTEDe acordo com o fabricante do sensor de realimentação, é necessário instalar um sistema de realimentação do motor HIPERFACE DSL (usado para uma função de segurança) em uma situação de instalação com um classe de proteção mínima IP54, em conformidade com a norma IEC60529:1989 + A1:1999 + A2:2013.
4 Publicação Rockwell Automation VPC-IN001B-PT-P - Abril 2017

Servo-motor de regime contínuo Kinetix VP com tamanho de carcaça de 165 mm, 215 mm e 300 mm
Nível de desempenho (PL) e Nível de integridade de segurança (SIL)Para sistemas de controle relacionados à segurança, nível de desempenho (PL), de acordo com a ISO 13849-1, e os níveis SIL, de acordo com IEC 61508 e a IEC 62061, inclua uma classificação da capacidade do sistema de realizar suas funções de segurança. Todos os componentes relacionados à segurança do sistema de controle devem estar inclusos em uma apreciação de risco e na determinação dos níveis atingidos.
Consulte as normas ISO 13849-1, IEC 61508 e IEC 62061 para obter informações completas sobre os requisitos para determinação de PL e SIL.
Parâmetros relacionados à segurançaMotores equipados com um sensor de realimentação de classificação de segurança funcional Hiperface DSL foram projetados para manter a classificação de nível de segurança do sensor de realimentação acoplado. Os parâmetros de segurança do sensor de realimentação são os seguintes.
Instalação do motorA instalação do motor deve cumprir todas as regulações locais e as práticas de instalação e uso de equipamentos que promovam segurança e compatibilidade eletromagnética:
• Todos os motores incluem um piloto de instalação para alinhar o motor em uma máquina.• Todos os motores incluem os pés de montagem para montagem de opcionais. Para acessar os furos de montagem dos pés traseiros, remova
o subconjunto do ventilador.• Dê preferência a torquímetros de aço inoxidável.
Alteração da orientação do conectorKinetix VP motores de regime contínuo com número de catálogo VPC-Bxxxxx-Qx1xxx usam um modelo de conector que integra alimentação, freio e sinais de realimentação em um conector. Pode-se identificar o tipo de conector pelo número variável no grupo de catálogo do motor. Por exemplo, no número de catálogo VPC-B16539-QJ12FS, o 1 indica um conector SpeedTec simples, ângulo-reto, que pode girar 325° ou 330°. A velocidade nominal variável afeta o grau em que o conector pode girar. Os motores com uma corrente nominal de velocidade variável de 9 e A pode girar 325° e os motores com uma corrente nominal de velocidade variável D podem girar 330°.
Kinetix VP motores de regime contínuo com número de catálogo VPC-Bxxxxx-S/Yx7xxx usam dois conectores separados. Alimentação e freio estão em um conector e o outro é usado para a realimentação. Por exemplo, no número de catálogo VPC-B1653A-YJ72FS, o 7 indica dois conectores SpeedTec simples, ângulo-reto, rotatórios. Esses conectores podem girar a 180° a partir da linha de centro do motor.
O invólucro do conector rotativo permite mover o conector para uma posição que proteja melhor a conexão contra contaminantes ambientais e fornece um acesso fácil.
ATENÇÃO: Para evitar dano ao equipamento, não faça ou remova conexões elétricas com o sistema de realimentação do motor com a tensão ligada.
Atributo VPC-Bxxxxx-QxxxFx
Nível de integridade de segurança (SIL) SIL2 (IEC 61508), SIL CL2 (IEC 62061)
Probabilidade de falha perigosa por hora (PFH) 3,80 E-08 1/h
Categoria de segurança CAT. 3 (ISO 13849-1)
Nível de desempenho (PL) Nível de desempenho d (ISO 13849-1)
MTTF (anos) 305
ATENÇÃO: Motores não instalados, acoplamentos mecânicos desconectados, chavetas de eixo frouxas e cabos desconectados são perigosos se for aplicada alimentação a eles.
Identifique (com etiquetas) os equipamentos desmontados e restrinja o acesso (bloqueie) da alimentação elétrica.
Antes de ligar a alimentação do motor, remova a chaveta do eixo e outros acoplamentos mecânicos que possam se desencaixar do eixo.
ATENÇÃO: Verifique se os cabos estão instalados e presos para impedir uma tensão desigual ou uma flexão no conector. Providencie apoio a cada 3 m (10 pés) durante toda a passagem de cabo.
Força lateral excessiva e irregular no conector do cabo pode causar a vedação ambiental no conector para abrir e fechar conforme o cabo flexiona.
Publicação Rockwell Automation VPC-IN001B-PT-P - Abril 2017 5

Servo-motor de regime contínuo Kinetix VP com tamanho de carcaça de 165 mm, 215 mm e 300 mm
Siga estas etapas para girar um conector para uma nova posição.
1. Instale e coloque completamente um cabo compatível no conector do motor.O conector proporciona uma área maior de alcance e aumenta a força de alavancagem.
2. Encaixe o conector compatível e o plugue do cabo com as mãos, e gire lentamente o conector do motor para a nova posição.
3. Remova o plugue do cabo depois que o conector estiver alinhado.
Instale o Motor Siga estas etapas para instalar o motor.
1. Forneça espaço suficiente ao redor do motor e atrás do ventilador para a dissipação de calor de modo que o motor permaneça dentro da faixa de temperatura operacional especificada.
Consulte Classificações ambientais na página 26 para saber a faixa de temperatura operacional. Não confine o motor. Mantenha outros dispositivos que produzem calor afastados do motor.
2. Consulte Capacidade de força de carga do motor na página 13 para determinar as limitações de carga do eixo radial e axial do seu motor.
3. Se você estiver usando os pés de montagem opcionais, remova o subconjunto do ventilador para acessar os pés de montagem traseiros.
ATENÇÃO: Os conectores são projetados para serem girados para uma posição fixa durante a instalação do motor, e permanecer naquela posição sem ajustes posteriores. Limite estritamente as forças aplicadas e o número de vezes que o conector é girado para garantir que os conectores cumprem a classificação de proteção internacional (IP) conforme descrito em Classificações ambientais na página 26.
ATENÇÃO: Use apenas forças manuais quando mudar a orientação do conector.
Não aplique força nem puxe o cabo e não use ferramentas como alicates ou morsas de bancada para girar o conector.
ATENÇÃO: Podem ocorrer danos aos mancais do motor e ao dispositivo de alimentação se um forte impacto for aplicado ao eixo durante a instalação de acoplamentos e polias. Danos ao dispositivo de realimentação podem ocorrer se você aplicar força de alavanca à face de montagem do motor quando você remover dispositivos que estão montados no eixo do motor.
Não bata com as ferramentas no eixo, acoplamentos ou polias durante a instalação ou remoção. Use um puxador de rodas para aplicar pressão a partir da extremidade do usuário do eixo, quando tentar remover qualquer dispositivo do eixo do motor.
PERIGO DE QUEIMADURA: As superfícies externas do motor podem atingir uma temperatura elevada, 125 °C (257 °F), durante a operação do motor.
Tome precauções para impedir um contato acidental com estas superfícies quentes. Considere a temperatura da superfície do motor quando selecionar os cabos e conexões correspondentes do motor.
Parafusos de montagem do subconjunto do ventilador (4)
Pés de montagemexpostos
6 Publicação Rockwell Automation VPC-IN001B-PT-P - Abril 2017

Servo-motor de regime contínuo Kinetix VP com tamanho de carcaça de 165 mm, 215 mm e 300 mm
4. Instale e alinhe o motor.
5. Se você removeu o conjunto do ventilador, reconecte o subconjunto do ventilador e aplique torque nos parafusos de montagem do subconjunto nos valores mostrados.
6. Conecte os cabos do motor que transmitem a alimentação, a realimentação e os sinais do freio.a. Alinhe cuidadosamente o conector do cabo com o conector do motor.
A superfície lisa no topo do conector do motor e as superfícies lisas no conector do cabo devem estar alinhadas para que o conector do cabo combine com o conector do motor.
b. Com a-mão, aperte o anel serrilhado um quarto de volta para encaixar totalmente o conector do cabo.
c. Se aplicável, forme uma malha de gotejamento nos cabos para afastar líquidos dos conectores.
Cat. do ventilador Nº
Tamanho do parafuso de montagem
TorqueN•m (lb•in)
VPC-FAN165 M5 x 0,8 x 20 4,1…4,9 (36…43)
VPC-FAN215 M6 x 1 x 25 6,9…8,3 (61…73)
VPC-FAN300 M8 x 1,25 x 35 16,6…20,2 (147…179)
ATENÇÃO: Conectores com chave devem ser alinhados adequadamente e apertados manualmente.
Não use ferramentas nem aplique força excessiva quando combinar o cabo ao conector do motor. Se os conectores não se encaixarem com uma leve força manual, realinhe e tente novamente.
ATENÇÃO: A blindagem geral no cabo de motor único deve ser aterrada para obter um sinal de encoder eficiente.
O sinal de dados do encoder é transmitido através de um par trançado com impedância balanceada que necessita de blindagem eficiente para um bom desempenho.
Certifique-se de que há uma boa conexão entre a blindagem do cabo do motor único e o aterramento do sistema de acionamento.
Laço de gotejamento para motor montado sobre pé com
conectores na parte superior.
Laço de gotejamento para motor montado sobre flange
com conector na parte inferior.
Publicação Rockwell Automation VPC-IN001B-PT-P - Abril 2017 7

Servo-motor de regime contínuo Kinetix VP com tamanho de carcaça de 165 mm, 215 mm e 300 mm
Dim
ensõ
es do
s mot
ores
VPC-B
165x
x, VP
C-B21
5xx e
VPC-B
300x
x (co
necto
r sim
ples
)
LEAD
HD
GE
F
LLB
L-LB SH
LAT
N
45°
LE BC
D
H
A
LD
P
ADHD
Cons
ulte o
de
talh
e A
Deta
lhe d
o eixo
com
chav
e
Tole
rânc
ias d
e diâ
met
ro d
o eix
o (D)
VPC-
B165
xx =
Ø 32
,002 a
32,01
8 (1,2
599 a
1,26
05)
VPC-
B215
xx =
Ø 38
,002 a
38,01
5 (1,4
961 a
1,49
68)
VPC-
B300
xx =
Ø 48
,002 a
48,01
8 (1,8
898 a
1,89
05)
Deta
lhe A
Diâm
etro
do
eixo
Orifí
cios d
e diâm
etro
Sem
diâm
etro
do cí
rculo
dos p
araf
usos
M
As d
imen
sões
estã
o em
mm
(pol
.)
Tole
rânc
ias d
o diâ
met
ro d
o pilo
to (N
)M
otor
es VP
C-B1
65xx
:Ø
129,8
98 a
130,0
14 (5
,1177
a 5,1
187)
Mot
ores
VPC-
B215
xx:
Ø 17
9,989
a 18
0,014
(7,08
62 a
7,087
1)M
otor
es VP
C-B3
00xx
:Ø
249,9
87 a
250,0
16 (9
,8420
a 9,8
431)
Tole
rânc
ias d
o eixo
, do p
iloto
e d
o ent
alhe
VP
C-B1
65xx
VPC-
B215
xxVP
C-B3
00xx
Exce
ntric
idade
do ei
xo (T
.I.R.)
0,05 (
0,002
)
Exce
ntric
idade
do pi
loto (
T.I.R
.)0,1
0 (0,0
039)
Exce
ntric
idade
de fa
ce m
áx.
(T.I.R
.)0,1
0 (0,0
039)
0,125
(0,00
49)
Prof
undid
ade d
o ent
alhe (
GE)
5,0…
5,2
(0,19
7…0,2
05)
5,5…
5,7
(0,21
6…0,2
24)
Larg
ura d
o ent
alhe (
F)9,9
64…
10,00
0 (0
,3923
…0,3
937
13,95
7…14
,000
(0,54
95…
0,551
2)
Chav
eta f
orne
cida
VPC-
B165
xx =
10 (+
0, –0
,036)
x 8 (+
0, –0
,090)
x 59 c
have
taVP
C-B2
15xx
= 10
(+0,
–0,03
6) x 8
(+0,
–0,09
0) x 5
9 cha
veta
VPC-
B300
xx =
14 (+
0, –0
,043)
x 9 (+
0, –0
,090)
x 79 c
have
ta
Diâm
etro
do pi
loto (
N)
Com
prim
ento
do e
ntal
heVP
C-B1
65xx
= 60
,0 (2
,36)
VPC-
B215
xx =
60,0
(2,36
)VP
C-B3
00xx
= 81
,0 (3
,19)
Tole
rânc
ias d
e altu
ra do
pilo
to (T
)VP
C-B1
65xx
= 2,
5 a 3,
5 (0,0
98 a
0,138
)VP
C-B2
15xx
= 3,
0 a 4,
0 (0,1
18 a
0,157
)VP
C-B3
00xx
= 3,
5 a 5,
0 (0,1
38 a
0,197
)
Prof
undid
ade
do ve
ntila
dor
Espa
ço
trase
iro
Prof
undi
dade
do
vent
ilado
r (re
ferê
ncia
)VP
C-B1
65xx
= 11
2 (4,4
0)VP
C-B2
15xx
= 13
2 (5,2
0)VP
C-B3
00xx
= 21
0 (8,3
0)
Veda
ção d
o eixo
Cons
ulte a
s inf
orm
açõe
sdo
kit d
e ved
ação
do ei
xopa
ra o
págin
a26 m
otor
Kine
tix VP
.
Os al
ojam
ento
s do c
onec
tor M
23 gi
ram
325°
Os
aloja
men
tos d
o con
ecto
r M40
gira
m 33
0°
Furo
com
rosc
a da p
onta
do e
ixo
Mot
ores
VPC-
B165
xx:
Rosc
a – M
10 x
1,5-6
H Pr
ofun
didad
e da r
osca
– 22
(0,86
)M
otor
es VP
C-B2
15xx
:Ro
sca –
M12
x 1,7
5-6H
Pr
ofun
didad
e da r
osca
– 28
(1,10
)M
otor
es VP
C-B3
00xx
:Ro
sca –
M16
x 2-
6H
Prof
undid
ade d
a ros
ca –
36 (1
,42)
Tole
rânc
ias d
o diâ
met
ro do
pé d
o fur
o de m
onta
gem
(K)
VPC-
B165
xx =
Ø 10
,00 a
10,36
(Ø 0,
394 a
0,40
8)VP
C-B2
15xx
= Ø
12,00
a 12
,43 (Ø
0,47
2 a 0,
489)
VPC-
B300
xx =
Ø 12
,00 a
12,43
(Ø 0,
472 a
0,48
9)
Tole
rânc
ias d
o diâ
met
ro do
círc
ulo d
o fu
ro d
o par
afus
o (S)
VPC-
B165
xx =
Ø 12
,00 a
12,43
(Ø 0,
472 a
0,48
9)VP
C-B2
15xx
= Ø
14,50
a 14
,93 (Ø
0,57
1 a 0,
588)
VPC-
B300
xx =
Ø 18
,50 a
19,02
(Ø 0,
728 a
0,74
9)
Cone
ctor
do m
otor
em
mot
ores
VPC
do c
ód. c
at.
Cat.
mot
or N
º
Cone
ctor M
23
VPC-
B165
2xVP
C-B1
653x
VPC-
B215
3xVP
C-B2
1549
Cone
ctor M
40
VPC-
B165
4DVP
C-B2
154A
VPC-
B215
4DVP
C-B2
155D
VPC-
B215
6DVP
C-B3
0029
VPC-
B300
2AVP
C-B3
0039
VPC-
B300
3AVP
C-B3
0049
Prof
undid
ade
do ve
ntila
dor
Cone
ctor s
impl
es M
23
Cone
ctor s
imple
s M40
Diâm
etro
dos f
uros
(K) a
travé
s dos
pés
Diâm
etro
do
eixo
Com
prim
ento
do en
talh
eCh
ave r
emov
ida pa
ra
fins d
e clar
eza
Tole
rânc
ias d
e altu
ra d
o eixo
(SH)
VPC-
B165
xx =
79,5
a 80,0
(3,13
a 3,1
5)VP
C-B2
15xx
= 99
,8 a 1
00,0
(3,92
a 3,9
4)VP
C-B3
00xx
= 13
1,5 a
132,0
(5,18
a 5,2
0)
8 Publicação da Rockwell Automation VPC-IN001B-PT-P - Abril 2017

Servo-motor de regime contínuo Kinetix VP com tamanho de carcaça de 165 mm, 215 mm e 300 mm
Os m
otor
es sã
o pr
ojet
ados
com
dim
ensõ
es m
étric
as. A
s dim
ensõ
es em
pol
egad
as sã
o co
nver
sões
apro
xim
adas
de m
ilím
etro
s. D
imen
sões
sem
tole
rânc
ia se
rvem
apen
as p
ara r
efer
ênci
a.
Dim
ensõ
es d
os m
otor
es V
PC-B
165x
x, VP
C-B2
15xx
e VP
C-B3
00xx
(con
ecto
r sim
ples
)
Cód.
Nº
AD mm
(p
ol.)
HD mm
(pol.
)
T (3)
mm
(p
ol.)
LA mm
(p
ol.)
LD (1
)
mm
(p
ol.)
(1)
Ao so
licita
r mot
ores
VPC-
B165
2 x co
m fr
eio, a
dicion
e 55,5
mm
(2,19
pol.)
para
as di
men
sões
L, LB
, LE,
LD e
B.Ao
solic
itar m
otor
es VP
C-B1
653 x
ou VP
C-B1
654D
com
freio
, adic
ione 4
0,5 m
m (1
,59 po
l.) pa
ra as
dim
ensõ
es L,
LB, L
E, LD
e B.
Ao so
licita
r mot
ores
VPC-
B215
3x, V
PC-B
2154
x ou V
PC-B
2156
D co
m fr
eio, a
dicion
e 81,0
mm
(3,19
pol.)
para
as di
men
sões
L, LB
, LE,
LD e
B.Ao
solic
itar m
otor
es VP
C-B2
155D
com
freio
, adic
ione 1
21,5
mm
(4,78
pol.)
para
as di
men
sões
L, LB
, LE,
LD e
B.Ao
solic
itar m
otor
es VP
C-B3
002x
com
freio
, adic
ione 4
7,5 m
m (1
,87 po
l.) pa
ra as
dim
ensõ
es L,
LB, L
E, LD
e B.
Ao so
licita
r mot
ores
VPC-
B300
3x co
m fr
eio, a
dicion
e 95,0
mm
(3,74
pol.)
para
as di
men
sões
L, LB
, LE,
LD e
B.Ao
solic
itar m
otor
es VP
C-B3
004x
com
freio
, adic
ione 1
42,5
mm
(5,61
pol.)
para
as di
men
sões
L, LB
, LE,
LD e
B.
LE (1
)
mm
(p
ol.)
L (1)
mm
(p
ol.)
LB (1
)
mm
(p
ol.)
L-LB
(2)
mm
(p
ol.)
(2)
A to
lerân
cia pa
ra es
tas d
imen
sões
é de
±0,7
mm
(±0,0
28 po
l.).
A mm
(p
ol.)
B (1
)
mm
(p
ol.)
C mm
(p
ol.)
SH (3
)
mm
(p
ol.)
H mm
(p
ol.)
D (3
)
mm
(p
ol.)
M (3
)
mm
(p
ol.)
S (3)
mm
(p
ol.)
K (3
)
mm
(p
ol.)
N (3
)
mm
(pol.
)
P mm
(p
ol.)
GE (3
)
mm
(p
ol.)
(3)
Para
diâm
etro
do ei
xo, o
diâm
etro
do fu
ro de
mon
tage
m, o
diâm
etro
do pi
loto e
toler
ância
s do e
ntalh
e, co
nsul
te a
figur
a na p
ágin
a8.
F (3)
mm
(p
ol.)
VPC-
B165
2x12
0,5
(4,75
)20
0,3(7
,89)
3,5
(0,14
)14
,3(0
,56)
251,9
(9,92
)21
1,9(8
,34)
427,6
(16,8
3)34
7,6(1
3,69)
80,0
(3,15
)12
5,0(4
,92)
216,9
(8,54
)
34,0
(1,34
)80
,0(3
,15)
62,5
(2,46
)32
,00(1
,260)
165,0
0(6
,496)
12,00
(0,47
2)10
,00(0
,394)
130,0
0(5
,118)
168,9
(6,65
)5,0
0(0
,198)
10,00
(0,39
4)VP
C-B1
653x
307,4
(12,1
0)26
7,4(1
0,53)
483,1
(19,0
2)40
3,1(1
5,87)
272,4
(10,7
2)
VPC-
B165
4D14
0,0(5
,51)
219,0
8(8
,65)
352,1
(13,8
6)28
1,1(1
1,07)
523,6
(20,6
1)44
3,6(1
7,46)
312,9
(12,3
2)
VPC-
B215
3x14
0,5(5
,53)
240,5
(9,47
)
4,0
(0,16
)18
,4(0
,72)
328,4
(12,9
3)28
8,5(1
1,36)
520,1
(20,4
8)44
0,1(1
7,33)
80,0
(3,15
)16
0,0(6
,30)
284,9
(11,2
2)
43,0
(1,69
)10
0,00
(3,94
)80
,0(3
,15)
38,00
(1,49
6)21
5,00
(8,46
5)14
,50(0
,571)
12,00
(0,47
2)18
0,00
(7,08
7)21
0,9(8
,30)
5,00
(0,19
8)10
,00(0
,394)
VPC-
B215
4936
8,9(1
4,52)
329,0
(12,9
5)56
0,6(2
2,07)
480,6
(18,9
2)32
5,4(1
2,81)
VPC-
B215
4A
160,5
(6,32
)26
0,5(1
0,25)
297,9
(11,7
3)VP
C-B2
154D
VPC-
B215
5D40
9,4
(16,1
2)33
8,4(1
3,32)
601,1
(23,6
7)52
1,1(2
0,52)
365,9
(14,4
1)
VPC-
B215
6D44
9,9
(17,7
1)37
8,9(1
4,92)
641,6
(25,2
6)56
1,6(2
2,11)
406,4
(16,0
0)
VPC-
B300
2x
192,0
(7,56
)32
4,0(1
2,75)
5,0
(0,20
)22
,9(0
,90)
400,7
(1
5,78)
329,7
(12,9
8)69
2,1(2
7,23)
582,1
(22,9
2)11
0,0(4
,33)
216,0
(8,50
)
344,7
(13,5
7)53
,0(2
,09)
132,0
0(5
,20)
108,0
(4,25
)48
,00(1
,890)
300,0
0(1
1,811
)18
,50(0
,728)
12,00
(0,47
2)25
0,00
(9,84
3)27
5,9(1
0,86)
5,50
(0,21
7)14
,00(0
,551)
VPC-
B300
3x
VPC-
B300
4944
8,2(1
7,65)
377,2
(14,8
5)73
9,6(2
9,12)
629,6
(24,7
9)39
2,2(1
5,44)
Publicação da Rockwell Automation VPC-IN001B-PT-P - Abril 2017 9

Servo-motor de regime contínuo Kinetix VP com tamanho de carcaça de 165 mm, 215 mm e 300 mm
Dim
ensõ
es do
s mot
ores
VPC-B
165x
x, VP
C-B21
5xx e
VPC-B
300x
x (co
necto
r de r
ealim
enta
ção/
potê
ncia
do m
otor
)
HD
P
B
A
CD
F
GE
AD
H
ADHD
LE
LD
ADHD
LE
45°
N
LBL-LB
LAT
L
LE
SH
Tole
rânc
ias d
o eix
o, d
o pilo
to e
do en
talh
eVP
C-B1
65xx
VPC-
B215
xxVP
C-B3
00xx
Exce
ntric
idade
do ei
xo (T
.I.R.)
0,05 (
0,002
)
Exce
ntric
idade
do pi
loto (
T.I.R
.)0,1
0 (0,0
039)
Exce
ntric
idade
de fa
ce m
áx. (
T.I.R
.)0,1
0 (0,0
039)
0,125
(0,00
49)
Prof
undid
ade d
o ent
alhe (
GE)
5,00…
5,20
(0,19
7…0,2
05)
5,50…
5,70
(0,21
6…0,2
24)
Larg
ura d
o ent
alhe (
F)9,9
64…
10,00
0(0
,3927
…0,3
937)
13,95
7…14
,000
(0,54
95…
0,551
2)
Cons
ulte o
deta
lhe A
Chav
eta f
orne
cida
VPC-
B165
xx =
10 (+
0, –0
,036)
x 8 (+
0, –0
,090)
x 59 c
have
taVP
C-B2
15xx
= 10
(+0,
–0,03
6) x 8
(+0,
–0,09
0) x 5
9 cha
veta
VPC-
B300
xx =
14 (+
0, –0
,043)
x 9 (+
0, –0
,090)
x 79 c
have
ta
Deta
lhe d
o eixo
com
chav
eTo
lerâ
ncia
s de d
iâm
etro
do e
ixo (
D)VP
C-B1
65xx
= Ø
32,01
8 a 32
,002 (
1,260
5 a 1,
2599
)VP
C-B2
15xx
= Ø
38,01
8 a 38
,002 (
1,496
8 a 1,
4961
)VP
C-B3
00xx
= Ø
48,01
8 a 48
,002 (
1,890
5 a 1,
8898
)
Deta
lhe A
Diâm
etro
do
eixoOrifí
cios d
e diâm
etro
Sem
diâm
etro
do cí
rculo
dos p
araf
usos
MFu
ro co
m ro
sca d
a pon
ta do
eixo
Mot
ores
VPC-
B165
xx:
Rosc
a – M
10 x
1,5-6
HPr
ofun
didad
e da r
osca
– 22
(0,86
)M
otor
es VP
C-B2
15xx
:Ro
sca –
M12
x 1,7
5-6H
Prof
undid
ade d
a ros
ca –
28 (1
,10)
Mot
ores
VPC-
B300
xx:
Rosc
a – M
16 x
2,0-6
HPr
ofun
didad
e da r
osca
– 36
(1,42
)
Veda
ção d
o eixo
Cons
ulte a
s inf
orm
açõe
sdo
kit d
e ved
ação
do ei
xopa
ra o
págin
a26
mot
or Ki
netix
VP.
As d
imen
sões
estã
o em
mm
(pol
.)
Os al
ojam
ento
s dos
cone
ctore
s M23
e M
40 gi
ram
18
0°. O
s aloj
amen
tos d
o con
ecto
r M58
não g
iram
.Co
mpr
imen
to do
enta
lhe
VPC-
B165
xx =
60,0
(2,36
)VP
C-B2
15xx
= 60
,0 (2
,36)
VPC-
B300
xx =
81,0
(3,19
)
Diâm
etro
do pi
loto (
N)
Tole
rânc
ias d
e altu
ra do
pilo
to (T
)VP
C-B1
65xx
= 2,
5 a 3,
5 (0,0
98 a
0,138
)VP
C-B2
15xx
= 3,
0 a 4,
0 (0,1
18 a
0,157
)VP
C-B3
00xx
= 3,
5 a 5,
0 (0,1
38 a
0,197
)
Tole
rânc
ias d
o diâ
met
ro d
o pilo
to (N
)M
otor
es VP
C-B1
65xx
:Ø
129,9
89 a
130,0
14 (5
,1177
a 5,1
187)
Mot
ores
VPC-
B215
xx:
Ø 17
9,989
a 18
0,014
(7,08
62 a
7,087
1)M
otor
es VP
C-B3
00xx
:Ø
249,9
87 a
250,0
16 (9
,8420
a 9,8
431)
Potê
ncia/
freio
M40
e Co
necto
res d
e re
alim
enta
ção M
23
Potê
ncia/
freio
M23
e Co
necto
res d
e rea
limen
taçã
o M23
Cone
ctor
es d
e pot
ência
/fren
agem
em
de m
otor
es V
PC d
o cód
. cat
.Ca
t. m
otor
Nº
Cone
ctor M
23
VPC-
B165
2xVP
C-B1
653x
VPC-
B215
3xVP
C-B2
1549
Cone
ctor M
40
VPC-
B165
4DVP
C-B2
154A
VPC-
B215
4DVP
C-B2
155D
VPC-
B215
6DVP
C-B3
002x
VPC-
B300
3xVP
C-B3
0049
Cone
ctor M
58VP
C-B3
004A
VPC-
B300
4D
Potê
ncia/
freio
M58
e Co
necto
res d
e re
alim
enta
ção M
23
Com
prim
ento
do en
talh
eCh
ave r
emov
idapa
ra fin
s de c
larez
a
Espa
ço
trase
iro
Prof
undid
ade
do ve
ntila
dor
Prof
undid
ade
do ve
ntila
dor
Diâm
etro
dos f
uros
(K)
atra
vés d
os pé
s
Prof
undi
dade
do ve
ntila
dor
(refe
rênc
ia)
VPC-
B165
xx =
112 (
4,40)
VPC-
B215
xx =
132 (
5,20)
VPC-
B300
xx =
210 (
8,30)
Tole
rânc
ias d
o diâ
met
ro do
círc
ulo d
o fur
o do p
araf
uso (
S)VP
C-B1
65xx
= Ø
12,00
a 12
,43 (0
,472 a
0,48
9)VP
C-B2
15xx
= Ø
14,50
a 14
,93 (0
,571 a
0,58
8)VP
C-B3
00xx
= Ø
18,50
a 19
,02 (0
,728 a
0,74
9)
Tole
rânc
ias d
o diâ
met
ro d
o pé d
o fur
o de m
onta
gem
(K)
VPC-
B165
xx =
Ø 10
,00 a
10,36
(0,39
4 a 0,
408)
VPC-
B215
xx =
Ø 12
,00 a
12,43
(0,47
2 a 0,
489)
VPC-
B300
xx =
Ø 12
,00 a
12,43
(0,47
2 a 0,
489)
Tole
rânc
ias d
e altu
ra d
o eixo
(SH)
VPC-
B165
xx =
79,5
a 80,0
(3,13
a 3,1
5)VP
C-B2
15xx
= 99
,8 a 1
00,0
(3,92
a 3,9
4)VP
C-B3
00xx
= 13
1,5 a
132,0
(5,18
a 5,2
0)
10 Publicação da Rockwell Automation VPC-IN001B-PT-P - Abril 2017

Servo-motor de regime contínuo Kinetix VP com tamanho de carcaça de 165 mm, 215 mm e 300 mm
Dim
ensõ
es d
os m
otor
es V
PC-B
165x
x, VP
C-B2
15xx
e VP
C-B3
00xx
(con
ecto
r de r
ealim
enta
ção/
potê
ncia
do m
otor
)
Os m
otor
es sã
o pr
ojet
ados
com
dim
ensõ
es m
étric
as. A
s dim
ensõ
es em
pol
egad
as sã
o co
nver
sões
apro
xim
adas
de m
ilím
etro
s. D
imen
sões
sem
tole
rânc
ia se
rvem
apen
as p
ara r
efer
ênci
a.
Cód.
Nº
AD mm
(p
ol.)
HD mm
(p
ol.)
T (3)
mm
(p
ol.)
LA mm
(p
ol.)
LD (1
)
mm
(p
ol.)
(1)
Ao so
licita
r mot
ores
VPC-
B165
2 x co
m fr
eio, a
dicion
e 55,5
mm
(2,19
pol.)
para
as di
men
sões
L, LB
, LE,
LD e
B.Ao
solic
itar m
otor
es VP
C-B1
653 x
ou VP
C-B1
654D
com
freio
, adic
ione 4
0,5 m
m (1
,59 po
l.) pa
ra as
dim
ensõ
es L,
LB, L
E, LD
e B.
Ao so
licita
r mot
ores
VPC-
B215
3x, V
PC-B
2154
x ou V
PC-B
2156
D co
m fr
eio, a
dicion
e 81,0
mm
(3,19
pol.)
para
as di
men
sões
L, LB
, LE,
LD e
B.Ao
solic
itar m
otor
es VP
C-B2
155D
com
freio
, adic
ione 1
21,5
mm
(4,78
pol.)
para
as di
men
sões
L, LB
, LE,
LD e
B.Ao
solic
itar m
otor
es VP
C-B3
002x
com
freio
, adic
ione 4
7,5 m
m (1
,87 po
l.) pa
ra as
dim
ensõ
es L,
LB, L
E, LD
e B.
Ao so
licita
r mot
ores
VPC-
B300
3x co
m fr
eio, a
dicion
e 95,0
mm
(3,74
pol.)
para
as di
men
sões
L, LB
, LE,
LD e
B.Ao
solic
itar m
otor
es VP
C-B3
004x
com
freio
, adic
ione 1
42,5
mm
(5,61
pol.)
para
as di
men
sões
L, LB
, LE,
LD e
B.
LE (1
)
mm
(p
ol.)
L (1)
mm
(p
ol.)
LB (1
)
mm
(p
ol.)
L-LB
(2)
mm
(p
ol.)
(2)
A to
lerân
cia pa
ra es
tas d
imen
sões
é de
±0,7
mm
(±0,0
28 po
l.).
A mm
(p
ol.)
B (1
)
mm
(p
ol.)
C mm
(p
ol.)
SH (3
)
mm
(p
ol.)
H mm
(p
ol.)
D (3
)
mm
(p
ol.)
(3)
Para
diâm
etro
do ei
xo, o
diâm
etro
do fu
ro de
mon
tage
m, o
diâm
etro
do pi
loto e
toler
ância
s do e
ntalh
e, co
nsul
te a
figur
a na p
ágin
a10.
M (3
)
mm
(p
ol.)
S (3)
mm
(p
ol.)
K (3
)
mm
(p
ol.)
N (3
)
mm
(pol.
)
P mm
(p
ol.)
GE (3
)
mm
(p
ol.)
F (3)
mm
(p
ol.)
VPC-
B165
2x12
0,5
(4,75
)20
0,3(7
,89)
3,5 (0,14
)14
,3(0
,56)
251,9
(9,92
)21
1,9(8
,34)
427,6
(16,8
3)34
7,6(1
3,69)
80,0
(3,15
)12
5,0(4
,92)
216,9
(8,54
)
34,0
(1,34
)80
,0(3
,15)
62,5
(2,46
)32
,0(1
,260)
165,0
(6,49
6)12
,00(0
,472)
10,00
(0,39
4)13
0,0(5
,118)
168,9
(6,65
)5,0
0(0
,198)
10,00
(0,39
4)VP
C-B1
653x
307,4
(12,1
0)26
7,4(1
0,53)
483,1
(19,0
2)40
3,1(1
5,87)
272,4
(10,7
2)
VPC-
B165
4D14
0,0(5
,51)
219,9
(8,66
)35
2,1(1
3,86)
281,1
(11,0
7)52
3,6(2
0,61)
443,6
(17,4
6)31
2,9(1
2,32)
VPC-
B215
3x14
0,5(5
,53)
240,5
(9,47
)
4,0 (0,16
)18
,4(0
,72)
328,4
(12,9
3)28
8,5(1
1,40)
520,1
(20,4
8)44
0,1(1
7,33)
80,0
(3,15
)16
0,0(6
,30)
284,9
(11,2
2)
43,0
(1,69
)10
0,00
(3,94
)80
,00(3
,15)
38,00
(1,49
6)21
5,00
(8,46
5)14
,50(0
,571)
12,00
(0,47
2)18
0,00
(7,08
7)21
0,9(8
,30)
5,00
(0,19
8)10
,00(0
,394)
VPC-
B215
4936
8,9(1
4,52)
329,0
(12,9
5)56
0,6(2
2,07)
480,6
(18,9
2)32
5,4(1
2,81)
VPC-
B215
4A
160,1
(6,30
)26
0,1(1
0,24)
297,9
(11,7
3)VP
C-B2
154D
VPC-
B215
5D40
9,4(1
6,12)
338,4
(13,3
2)60
1,1(2
3,67)
521,1
(20,5
2)36
5,9(1
4,41)
VPC-
B215
6D44
9,9(1
7,71)
378,9
(14,9
2)64
1,6(2
5,26)
561,6
(22,1
1)40
6,4(1
6,00)
VPC-
B300
2x
192,0
(7,56
)32
4,0(1
2,76)
5,0 (0,20
)22
,9(0
,90)
400,7
(15,7
8)32
9,7(1
2,98)
692,1
(27,2
3)58
2,1(2
2,92)
110,0
(4,33
)21
6,0(8
,50)
344,7
(13,5
7)
53,0
(2,09
)13
2,00
(5,20
)10
8,0(4
,25)
48,00
(1,89
0)30
0,00
(11,8
11)
18,50
(0,72
8)12
,00(0
,472)
250,0
0(9
,843)
275,9
(10,8
6)5,5
0(0
,217)
14,00
(0,55
1)
VPC-
B300
3x
VPC-
B300
4944
8,2(1
7,65)
377,2
(14,8
5)73
9,6(2
9,12)
629,6
(24,7
9)39
2,2(1
5,44)
VPC-
B300
4A20
3,3(8
,00)
335,3
(13,2
)40
0,2(1
5,76)
VPC-
B300
4D
Publicação da Rockwell Automation VPC-IN001B-PT-P - Abril 2017 11

Servo-motor de regime contínuo Kinetix VP com tamanho de carcaça de 165 mm, 215 mm e 300 mm
Dados de conectoresEsta coluna identificou os pinos de alimentação, realimentação e freio nos conectores do motor.
Pinagens do conector de motor único
Alimentação do motor/pinagens do conector de frenagem
Pino Descrição do sinal M23 Pino Descrição do sinal M40
A Fase U U Fase U
B Fase V V Fase V
C Fase W W Fase W
terra terra
E DATA+ 1 MBRK+
F MBRK+ 2 MBRK–
G MBRK– L DATA+
H DATA– H DATA–
L Reservado + –
– –
N –
Pino Descrição do sinal M23
A Fase U
B Fase V
C Fase W
terra
E Reservado
F MBRK+
G MBRK–
HReservado
L
Pino Descrição dos sinais M40/M58
U Fase U
V Fase V
W Fase W
terra
+ MBRK+
– MBRK–
1Reservado
2
A
B C
G
HL EF
Conector simples M23
N
U V
WLH1
+2
Conector simples M40
A
B C
G
HL EF
Conector simples M23
Conector M40 de potência do motor/de frenagem
V
W U1
+-
2
W U
21
V +-
Conector M58 de potência do motor/de frenagem
12 Publicação Rockwell Automation VPC-IN001B-PT-P - Abril 2017

Servo-motor de regime contínuo Kinetix VP com tamanho de carcaça de 165 mm, 215 mm e 300 mm
Pinos do conector de realimentação
Descrições da caixa de terminal do ventilador
Especificações do ventilador
Consulte o Kinetix VP Continuous Duty Motor Fan Kits Installation Instructions, publicação VPC-IN002, para obter mais informações sobre o ventilador.
Capacidade de força de carga do motorOs motores podem operar com uma carga contínua sobre o eixo. A localização e direção das forças de carga radiais e axiais são mostradas na figura, e os valores de máximos de classificação de carga estão nas tabelas.
Forças de carga no eixo
As tabelas a seguir representam a duração da fadiga do mancal L10 após 20.000 e 40.000 horas sob várias cargas e velocidades. Esta vida do mancal de 20.000 e 40.000 horas não conta como possível redução de vida específica da aplicação, tal como a contaminação de graxa do mancal por fontes externas.
Pino Opção Encoder em S (1)
(1) Seno/cosseno 1024, encoder de giro único absoluto (Protocolo de hiperface).
Opção Encoder em Y (2)
(2) 25 bits, encoder digital multigiro absoluto (protocolo digital EnDat).
Pino Opção Encoder em S (1) Opção Encoder em Y (2)
1 SIN+ Reservado
11 EPWR_9V Reservado
2 SIN– 12 ECOM
3 COS+ CLOCK+ 13 TS+ TS+
4 COS– CLOCK– 14 TS– TS–
5 DATA+ DATA+ 15
Reservado Reservado 6 DATA– DATA– 16
7
Reservado
Reservado 17
8
9 EPWR_5 V
10 ECOM
IMPORTANTEA rotação da lâmina do ventilador VPC-F300 deve corresponder à direção indicada na placa de identificação do ventilador, anexada na proteção do ventilador. Se a rotação da lâmina não corresponder às marcações na placa de identificação, troque dois dos fios de alimentação (L1, L2, L3) para reverter a rotação da lâmina do ventilador.
Atributo VPC-FAN165 VPC-FAN215 VPC-FAN300
Tensão 208/240 Vcarms, 1 PH 208/240 Vcarms, 1 PH 400/480 Vcarms, 3 PH
Corrente 0,12 Arms 0,30 Arms 0,18 Arms
Frequência 50/60 Hz 50/60 Hz 50/60 Hz
12123
6
1515
12
4
57
8
9
1010
1111
1313
14141717
1616
Conector de realimentação M23
Motores VPC-B165xx Motores VPC-B215xx
Conexões depotência da
entrada
Conexõesde terra
L1
PE
L2
L3
L1
L2
L3
Motores VPC-B300xx
Conexões depotência da
entrada
Conexõesde terra
Fiação da caixa de ligação do VPC-FAN300
Caixa de ligação do ventilador
MARROMPRETOAZUL
VERDE/AMARELO
Motor do ventilador
PE
Força de carga axial aplicada ao centro do eixo.
Força de carga radial aplicada ao ponto central da extensão do eixo.
Publicação Rockwell Automation VPC-IN001B-PT-P - Abril 2017 13

Servo-motor de regime contínuo Kinetix VP com tamanho de carcaça de 165 mm, 215 mm e 300 mm
Motores de regime contínuo Kinetix VP (20.000 horas de duração da fadiga do mancal)
Capacidade de força de carga radial (máxima) para motor sem freio
Cat.motor Nº(1)
(1) 1,0 N = 0,225 lb. = 0,102 kgf
Velocidade, máx RPM
RPM
500N (lb.)
1000N (lb.)
1500N (lb.)
2000N (lb.)
2500N (lb.)
3000N (lb.)
3500N (lb.)
4000N (lb.)
4500N (lb.)
5000N (lb.)
VPC-B1652A 4500 2719(611,3)
2158(485,2)
1885(423,8)
1713(385,1)
1590(357,5)
1496(336,4)
1421(319,5)
1359(305,6)
1307(293,9) –
VPC-B1653A 4500 2871(645,5)
2279(512,3)
1991(447,6)
1809(406,6)
1679(377,5)
1580(355,2)
1501(337,4)
1436(322,7)
1380(310,3) –
VPC-B1652D 5000 2719(611,3)
2158(485,2)
1885(423,8)
1713(385,1)
1590(357,5)
1496(336,4)
1421(319,5)
1359(305,6)
1307(293,9)
1262(283,7)
VPC-B1653D 5000 2871(645,5)
2279(512,3)
1991(447,6)
1809(406,6)
1679(377,5)
1580(355,2)
1501(337,4)
1436(322,7)
1380(310,3)
1333(299,6)
VPC-B1654D 5000 2952(663,7)
2343(526,7)
2047(460,2)
1860(418,1)
1726(388,1)
1625(365,2)
1543(346,9)
1476(331,8)
1419(319,1)
1370(308,0)
VPC-B21539 3000 3763(846,1)
2987(671,5)
2609(586,6)
2371(533,0)
2201(494,8)
2071(465,6) – – – –
VPC-B21549 3000 3862(868,3)
3066(689,2)
2678(602,0)
2433(547,0)
2259(507,8)
2126(477,8) – – – –
VPC-B2153A 4500 3763(846,1)
2987(671,5)
2609(586,6)
2371(533,0)
2201(494,8)
2071(465,6)
1967(442,3)
1882(423,0)
1809(406,7) –
VPC-B2154A 4500 3862(868,3)
3066(689,2)
2678(602,0)
2433(547,0)
2259(507,8)
2126(477,8)
2019(453,9)
1931(434,1)
1857(417,4) –
VPC-B2154D 5000 3862(868,3)
3066(689,2)
2678(602,0)
2433(547,0)
2259(507,8)
2126(477,8)
2019(453,9)
1931(434,1)
1857(417,4)
1793(403,0)
VPC-B2155D 5000 3941(886,1)
3128(703,3)
2733(614,4)
2483(558,2)
2305(518,2)
2169(487,6)
2060(463,2)
1971(443,0)
1895(426,0)
1829(411,3)
VPC-B2156D 5000 4006(900,6)
3180(714,8)
2778(624,4)
2524(567,3)
2343(526,7)
2205(495,6)
2094(470,8)
2003(450,3)
1926(433,0)
1859(418,0)
VPC-B30029 3000 5702(1282,0)
4526(1017,5)
3954(888,9)
3592(807,6)
3335(749,7)
3138(705,5) – – – –
VPC-B30039 3000 5702(1282,0)
4526(1017,5)
3954(888,9)
3592(807,6)
3335(749,7)
3138(705,5) – – – –
VPC-B30049 3000 5861(1317,7)
4652(1045,9)
4064(913,6)
3692(830,1)
3428(770,6)
3226(725,2) – – – –
VPC-B3002A 4000 5702(1282,0)
4526(1017,5)
3954(888,9)
3592(807,6)
3335(749,7)
3138(705,5)
2981(670,2)
2851(641,0) – –
VPC-B3003A 3500 5702(1282,0)
4526(1017,5)
3954(888,9)
3592(807,6)
3335(749,7)
3138(705,5)
2981(670,2) – – –
VPC-B3004A 3500 5861(1317,7)
4652(1045,9)
4064(913,6)
3692(830,1)
3428(770,6)
3226(725,2)
3064(688,8) – – –
VPC-B3004D 4000 5861(1317,7)
4652(1045,9)
4064(913,6)
3692(830,1)
3428(770,6)
3226(725,2)
3064(688,8)
2931(658,8) – –
14 Publicação Rockwell Automation VPC-IN001B-PT-P - Abril 2017

Servo-motor de regime contínuo Kinetix VP com tamanho de carcaça de 165 mm, 215 mm e 300 mm
Capacidade de força de carga axial (carga radial máxima) para motor sem freio
Cat.motor Nº(1)
(1) 1,0 N = 0,225 lb. = 0,102 kgf
Velocidade, máx RPM
RPM
500N (lb.)
1000N (lb.)
1500N (lb.)
2000N (lb.)
2500N (lb.)
3000N (lb.)
3500N (lb.)
4000N (lb.)
4500N (lb.)
5000N (lb.)
VPC-B1652A 4500 927(208,4)
686(154,2)
575(129,3)
508(114,1)
461(103,6)
426(95,7)
398(89,5)
376(84,4)
357(80,2) –
VPC-B1653A 4500 927(208,4)
686(154,2)
575(129,3)
508(114,1)
461(103,6)
426(95,7)
398(89,5)
376(84,4)
357(80,2) –
VPC-B1652D 5000 927(208,4)
686(154,2)
575(129,3)
508(114,1)
461(103,6)
426(95,7)
398(89,5)
376(84,4)
357(80,2)
341(76,6)
VPC-B1653D 5000 927(208,4)
686(154,2)
575(129,3)
508(114,1)
461(103,6)
426(95,7)
398(89,5)
376(84,4)
357(80,2)
341(76,6)
VPC-B1654D 5000 927(208,4)
686(154,2)
575(129,3)
508(114,1)
461(103,6)
426(95,7)
398(89,5)
376(84,4)
357(80,2)
341(76,6)
VPC-B21539 3000 1196(269,0)
885(199,0)
742(166,9)
655(147,3)
594(133,6)
549(123,5) – – – –
VPC-B21549 3000 1196(269,0)
885(199,0)
742(166,9)
655(147,3)
594(133,6)
549(123,5) – – – –
VPC-B2153A 4500 1196(269,0)
885(199,0)
742(166,9)
655(147,3)
594(133,6)
549(123,5)
514(115,5)
485(109,0)
460(103,5) –
VPC-B2154A 4500 1196(269,0)
885(199,0)
742(166,9)
655(147,3)
594(133,6)
549(123,5)
514(115,5)
485(109,0)
460(103,5) –
VPC-B2154D 5000 1196(269,0)
885(199,0)
742(166,9)
655(147,3)
594(133,6)
549(123,5)
514(115,5)
485(109,0)
460(103,5)
440(98,9)
VPC-B2155D 5000 1196(269,0)
885(199,0)
742(166,9)
655(147,3)
594(133,6)
549(123,5)
514(115,5)
485(109,0)
460(103,5)
440(98,9)
VPC-B2156D 5000 1196(269,0)
885(199,0)
742(166,9)
655(147,3)
594(133,6)
549(123,5)
514(115,5)
485(109,0)
460(103,5)
440(98,9)
VPC-B30029 3000 1820(409,2)
1347(302,8)
1129(253,9)
997(224,1)
905(203,3)
836(187,9) – – – –
VPC-B30039 3000 1820(409,2)
1347(302,8)
1129(253,9)
997(224,1)
905(203,3)
836(187,9) – – – –
VPC-B30049 3000 1820(409,2)
1347(302,8)
1129(253,9)
997(224,1)
905(203,3)
836(187,9) – – – –
VPC-B3002A 4000 1820(409,2)
1347(302,8)
1129(253,9)
997(224,1)
905(203,3)
836(187,9)
782(175,7)
737(165,8) – –
VPC-B3003A 3500 1820(409,2)
1347(302,8)
1129(253,9)
997(224,1)
905(203,3)
836(187,9)
782(175,7) – – –
VPC-B3004A 3500 1820(409,2)
1347(302,8)
1129(253,9)
997(224,1)
905(203,3)
836(187,9)
782(175,7) – – –
VPC-B3004D 4000 1820(409,2)
1347(302,8)
1129(253,9)
997(224,1)
905(203,3)
836(187,9)
782(175,7)
737(165,8) – –
Publicação Rockwell Automation VPC-IN001B-PT-P - Abril 2017 15

Servo-motor de regime contínuo Kinetix VP com tamanho de carcaça de 165 mm, 215 mm e 300 mm
Capacidade de força de carga axial (carga radial zero) para motor sem freio
Cat.motor Nº(1)
(1) 1,0 N = 0,225 lb. = 0,102 kgf
Velocidade, máx RPM
RPM
500N (lb.)
1000N (lb.)
1500N (lb.)
2000N (lb.)
2500N (lb.)
3000N (lb.)
3500N (lb.)
4000N (lb.)
4500N (lb.)
5000N (lb.)
VPC-B1652A 4500 2713(610,0)
2008(451,5)
1684(378,6)
1486(334,1)
1349(303,3)
1246(280,2)
1166(262,1)
1100(247,3)
1045(235,0) –
VPC-B1653A 4500 2713(610,0)
2008(451,5)
1684(378,6)
1486(334,1)
1349(303,3)
1246(280,2)
1166(262,1)
1100(247,3)
1045(235,0) –
VPC-B1652D 5000 2713(610,0)
2008(451,5)
1684(378,6)
1486(334,1)
1349(303,3)
1246(280,2)
1166(262,1)
1100(247,3)
1045(235,0)
998(224,5)
VPC-B1653D 5000 2713(610,0)
2008(451,5)
1684(378,6)
1486(334,1)
1349(303,3)
1246(280,2)
1166(262,1)
1100(247,3)
1045(235,0)
998(224,5)
VPC-B1654D 5000 2713(610,0)
2008(451,5)
1684(378,6)
1486(334,1)
1349(303,3)
1246(280,2)
1166(262,1)
1100(247,3)
1045(235,0)
998(224,5)
VPC-B21539 3000 3502(787,3)
2592(582,7)
2174(488,6)
1918(431,3)
1741(391,4)
1609(361,6) – – – –
VPC-B21549 3000 3502(787,3)
2592(582,7)
2174(488,6)
1918(431,3)
1741(391,4)
1609(361,6) – – – –
VPC-B2153A 4500 3502(787,3)
2592(582,7)
2174(488,6)
1918(431,3)
1741(391,4)
1609(361,6)
1505(338,2)
1420(319,2)
1349(303,3) –
VPC-B2154A 4500 3502(787,3)
2592(582,7)
2174(488,6)
1918(431,3)
1741(391,4)
1609(361,6)
1505(338,2)
1420(319,2)
1349(303,3) –
VPC-B2154D 5000 3502(787,3)
2592(582,7)
2174(488,6)
1918(431,3)
1741(391,4)
1609(361,6)
1505(338,2)
1420(319,2)
1349(303,3)
1289(289,7)
VPC-B2155D 5000 3502(787,3)
2592(582,7)
2174(488,6)
1918(431,3)
1741(391,4)
1609(361,6)
1505(338,2)
1420(319,2)
1349(303,3)
1289(289,7)
VPC-B2156D 5000 3502(787,3)
2592(582,7)
2174(488,6)
1918(431,3)
1741(391,4)
1609(361,6)
1505(338,2)
1420(319,2)
1349(303,3)
1289(289,7)
VPC-B30029 3000 5329(1198,0)
3944(886,6)
3307(743,5)
2919(656,2)
2649(595,6)
2448(550,3) – – – –
VPC-B30039 3000 5329(1198,0)
3944(886,6)
3307(743,5)
2919(656,2)
2649(595,6)
2448(550,3) – – – –
VPC-B30049 3000 5329(1198,0)
3944(886,6)
3307(743,5)
2919(656,2)
2649(595,6)
2448(550,3) – – – –
VPC-B3002A 4000 5329(1198,0)
3944(886,6)
3307(743,5)
2919(656,2)
2649(595,6)
2448(550,3)
2289(514,7)
2160(485,7) – –
VPC-B3003A 3500 5329(1198,0)
3944(886,6)
3307(743,5)
2919(656,2)
2649(595,6)
2448(550,3)
2289(514,7) – – –
VPC-B3004A 3500 5329(1198,0)
3944(886,6)
3307(743,5)
2919(656,2)
2649(595,6)
2448(550,3)
2289(514,7) – – –
VPC-B3004D 4000 5329(1198,0)
3944(886,6)
3307(743,5)
2919(656,2)
2649(595,6)
2448(550,3)
2289(514,7)
2160(485,7) – –
16 Publicação Rockwell Automation VPC-IN001B-PT-P - Abril 2017

Servo-motor de regime contínuo Kinetix VP com tamanho de carcaça de 165 mm, 215 mm e 300 mm
Capacidade de força de carga radial (máxima) para motor com freio
Cat.motor Nº(1)
(1) 1,0 N = 0,225 lb. = 0,102 kgf
Velocidade, máx RPM
RPM
500N (lb.)
1000N (lb.)
1500N (lb.)
2000N (lb.)
2500N (lb.)
3000N (lb.)
3500N (lb.)
4000N (lb.)
4500N (lb.)
5000N (lb.)
VPC-B1652A 4500 2871(645,5)
2279(512,3)
1991(447,6)
1809(406,6)
1679(377,5)
1580(355,2)
1501(337,4)
1436(322,7)
1380(310,3) –
VPC-B1653A 4500 2952(663,7)
2343(526,7)
2047(460,2)
1860(418,1)
1726(388,1)
1625(365,2)
1543(346,9)
1476(331,8)
1419(319,1) –
VPC-B1652D 5000 2871(645,5)
2279(512,3)
1991(447,6)
1809(406,6)
1679(377,5)
1580(355,2)
1501(337,4)
1436(322,7)
1380(310,3)
1333(299,6)
VPC-B1653D 5000 2952(663,7)
2343(526,7)
2047(460,2)
1860(418,1)
1726(388,1)
1625(365,2)
1543(346,9)
1476(331,8)
1419(319,1)
1370(308,0)
VPC-B1654D 5000 3016(678,1)
2394(538,2)
2091(470,2)
1900(427,2)
1764(396,5)
1660(373,2)
1577(354,5)
1508(339,0)
1450(326,0)
1400(314,7)
VPC-B21539 3000 3941(886,1)
3128(703,3)
2733(614,4)
2483(558,2)
2305(518,2)
2169(487,6) – – – –
VPC-B21549 3000 4006(900,6)
3180(714,8)
2778(624,4)
2524(567,3)
2343(526,7)
2205(495,6) – – – –
VPC-B2153A 4500 3941(886,1)
3128(703,3)
2733(614,4)
2483(558,2)
2305(518,2)
2169(487,6)
2060(463,2)
1971(443,0)
1895(426,0) –
VPC-B2154A 4500 4006(900,6)
3180(714,8)
2778(624,4)
2524(567,3)
2343(526,7)
2205(495,6)
2094(470,8)
2003(450,3)
1926(433,0) –
VPC-B2154D 5000 4006(900,6)
3180(714,8)
2778(624,4)
2524(567,3)
2343(526,7)
2205(495,6)
2094(470,8)
2003(450,3)
1926(433,0)
1859(418,0)
VPC-B2155D 5000 4106(923,0)
3259(732,5)
2847(639,9)
2586(581,4)
2401(539,7)
2259(507,9)
2146(482,5)
2053(461,5)
1974(443,7)
1906(428,4)
VPC-B2156D 5000 4106(923,0)
3259(732,5)
2847(639,9)
2586(581,4)
2401(539,7)
2259(507,9)
2146(482,5)
2053(461,5)
1974(443,7)
1906(428,4)
VPC-B30029 3000 5861(1317,7)
4652(1045,9)
4064(913,6)
3692(830,1)
3428(770,6)
3226(725,2) – – – –
VPC-B30039 3000 5990(1346,5)
4754(1068,7)
4153(933,6)
3773(848,3)
3503(787,5)
3296(741,0) – – – –
VPC-B30049 3000 6184(1390,2)
4908(1103,4)
4288(963,9)
3896(875,8)
3616(813,0)
3403(765,1) – – – –
VPC-B3002A 4000 5861(1317,7)
4652(1045,9)
4064(913,6)
3692(830,1)
3428(770,6)
3226(725,2)
3064(688,8)
2931(658,8) – –
VPC-B3003A 3500 5990(1346,5)
4754(1068,7)
4153(933,6)
3773(848,3)
3503(787,5)
3296(741,0)
3131(703,9) – – –
VPC-B3004A 3500 6184(1390,2)
4908(1103,4)
4288(963,9)
3896(875,8)
3616(813,0)
3403(765,1)
3233(726,8) – – –
VPC-B3004D 4000 6184(1390,2)
4908(1103,4)
4288(963,9)
3896(875,8)
3616(813,0)
3403(765,1)
3233(726,8)
3092(695,1) – –
Publicação Rockwell Automation VPC-IN001B-PT-P - Abril 2017 17

Servo-motor de regime contínuo Kinetix VP com tamanho de carcaça de 165 mm, 215 mm e 300 mm
Capacidade de força de carga axial (carga radial máxima) para motor com freio
Cat.motor Nº(1)
(1) 1,0 N = 0,225 lb. = 0,102 kgf
Velocidade, máx RPM
RPM
500N (lb.)
1000N (lb.)
1500N (lb.)
2000N (lb.)
2500N (lb.)
3000N (lb.)
3500N (lb.)
4000N (lb.)
4500N (lb.)
5000N (lb.)
VPC-B1652A 4500 927(208,4)
686(154,2)
575(129,3)
508(114,1)
461(103,6)
426(95,7)
398(89,5)
376(84,4)
357(80,2) –
VPC-B1653A 4500 927(208,4)
686(154,2)
575(129,3)
508(114,1)
461(103,6)
426(95,7)
398(89,5)
376(84,4)
357(80,2) –
VPC-B1652D 5000 927(208,4)
686(154,2)
575(129,3)
508(114,1)
461(103,6)
426(95,7)
398(89,5)
376(84,4)
357(80,2)
341(76,6)
VPC-B1653D 5000 927(208,4)
686(154,2)
575(129,3)
508(114,1)
461(103,6)
426(95,7)
398(89,5)
376(84,4)
357(80,2)
341(76,6)
VPC-B1654D 5000 927(208,4)
686(154,2)
575(129,3)
508(114,1)
461(103,6)
426(95,7)
398(89,5)
376(84,4)
357(80,2)
341(76,6)
VPC-B21539 3000 1196(269,0)
885(199,0)
742(166,9)
655(147,3)
594(133,6)
549(123,5) – – – –
VPC-B21549 3000 1196(269,0)
885(199,0)
742(166,9)
655(147,3)
594(133,6)
549(123,5) – – – –
VPC-B2153A 4500 1196(269,0)
885(199,0)
742(166,9)
655(147,3)
594(133,6)
549(123,5)
514(115,5)
485(109,0)
460(103,5) –
VPC-B2154A 4500 1196(269,0)
885(199,0)
742(166,9)
655(147,3)
594(133,6)
549(123,5)
514(115,5)
485(109,0)
460(103,5) –
VPC-B2154D 5000 1196(269,0)
885(199,0)
742(166,9)
655(147,3)
594(133,6)
549(123,5)
514(115,5)
485(109,0)
460(103,5)
440(98,9)
VPC-B2155D 5000 1196(269,0)
885(199,0)
742(166,9)
655(147,3)
594(133,6)
549(123,5)
514(115,5)
485(109,0)
460(103,5)
440(98,9)
VPC-B2156D 5000 1196(269,0)
885(199,0)
742(166,9)
655(147,3)
594(133,6)
549(123,5)
514(115,5)
485(109,0)
460(103,5)
440(98,9)
VPC-B30029 3000 1820(409,2)
1347(302,8)
1129(253,9)
997(224,1)
905(203,3)
836(187,9) – – – –
VPC-B30039 3000 1820(409,2)
1347(302,8)
1129(253,9)
997(224,1)
905(203,3)
836(187,9) – – – –
VPC-B30049 3000 1820(409,2)
1347(302,8)
1129(253,9)
997(224,1)
905(203,3)
836(187,9) – – – –
VPC-B3002A 4000 1820(409,2)
1347(302,8)
1129(253,9)
997(224,1)
905(203,3)
836(187,9)
782(175,7)
737(165,8) – –
VPC-B3003A 3500 1820(409,2)
1347(302,8)
1129(253,9)
997(224,1)
905(203,3)
836(187,9)
782(175,7) – – –
VPC-B3004A 3500 1820(409,2)
1347(302,8)
1129(253,9)
997(224,1)
905(203,3)
836(187,9)
782(175,7) – – –
VPC-B3004D 4000 1820(409,2)
1347(302,8)
1129(253,9)
997(224,1)
905(203,3)
836(187,9)
782(175,7)
737(165,8) – –
18 Publicação Rockwell Automation VPC-IN001B-PT-P - Abril 2017

Servo-motor de regime contínuo Kinetix VP com tamanho de carcaça de 165 mm, 215 mm e 300 mm
Capacidade de força de carga axial (carga radial zero) para motor com freio
Cat.motor Nº(1)
(1) 1,0 N = 0,225 lb. = 0,102 kgf
Velocidade, máx RPM
RPM
500N (lb.)
1000N (lb.)
1500N (lb.)
2000N (lb.)
2500N (lb.)
3000N (lb.)
3500N (lb.)
4000N (lb.)
4500N (lb.)
5000N (lb.)
VPC-B1652A 4500 2713(610,0)
2008(451,5)
1684(378,6)
1486(334,1)
1349(303,3)
1246(280,2)
1166(262,1)
1100(247,3)
1045(235,0) –
VPC-B1653A 4500 2713(610,0)
2008(451,5)
1684(378,6)
1486(334,1)
1349(303,3)
1246(280,2)
1166(262,1)
1100(247,3)
1045(235,0) –
VPC-B1652D 5000 2713(610,0)
2008(451,5)
1684(378,6)
1486(334,1)
1349(303,3)
1246(280,2)
1166(262,1)
1100(247,3)
1045(235,0)
998(224,5)
VPC-B1653D 5000 2713(610,0)
2008(451,5)
1684(378,6)
1486(334,1)
1349(303,3)
1246(280,2)
1166(262,1)
1100(247,3)
1045(235,0)
998(224,5)
VPC-B1654D 5000 2713(610,0)
2008(451,5)
1684(378,6)
1486(334,1)
1349(303,3)
1246(280,2)
1166(262,1)
1100(247,3)
1045(235,0)
998(224,5)
VPC-B21539 3000 3502(787,3)
2592(582,7)
2174(488,6)
1918(431,3)
1741(391,4)
1609(361,6) – – – –
VPC-B21549 3000 3502(787,3)
2592(582,7)
2174(488,6)
1918(431,3)
1741(391,4)
1609(361,6) – – – –
VPC-B2153A 4500 3502(787,3)
2592(582,7)
2174(488,6)
1918(431,3)
1741(391,4)
1609(361,6)
1505(338,2)
1420(319,2)
1349(303,3) –
VPC-B2154A 4500 3502(787,3)
2592(582,7)
2174(488,6)
1918(431,3)
1741(391,4)
1609(361,6)
1505(338,2)
1420(319,2)
1349(303,3) –
VPC-B2154D 5000 3502(787,3)
2592(582,7)
2174(488,6)
1918(431,3)
1741(391,4)
1609(361,6)
1505(338,2)
1420(319,2)
1349(303,3)
1289(289,7)
VPC-B2155D 5000 3502(787,3)
2592(582,7)
2174(488,6)
1918(431,3)
1741(391,4)
1609(361,6)
1505(338,2)
1420(319,2)
1349(303,3)
1289(289,7)
VPC-B2156D 5000 3502(787,3)
2592(582,7)
2174(488,6)
1918(431,3)
1741(391,4)
1609(361,6)
1505(338,2)
1420(319,2)
1349(303,3)
1289(289,7)
VPC-B30029 3000 5329(1198,0)
3944(886,6)
3307(743,5)
2919(656,2)
2649(595,6)
2448(550,3) – – – –
VPC-B30039 3000 5329(1198,0)
3944(886,6)
3307(743,5)
2919(656,2)
2649(595,6)
2448(550,3) – – – –
VPC-B30049 3000 5329(1198,0)
3944(886,6)
3307(743,5)
2919(656,2)
2649(595,6)
2448(550,3) – – – –
VPC-B3002A 4000 5329(1198,0)
3944(886,6)
3307(743,5)
2919(656,2)
2649(595,6)
2448(550,3)
2289(514,7)
2160(485,7) – –
VPC-B3003A 3500 5329(1198,0)
3944(886,6)
3307(743,5)
2919(656,2)
2649(595,6)
2448(550,3)
2289(514,7) – – –
VPC-B3004A 3500 5329(1198,0)
3944(886,6)
3307(743,5)
2919(656,2)
2649(595,6)
2448(550,3)
2289(514,7) – – –
VPC-B3004D 4000 5329(1198,0)
3944(886,6)
3307(743,5)
2919(656,2)
2649(595,6)
2448(550,3)
2289(514,7)
2160(485,7) – –
Publicação Rockwell Automation VPC-IN001B-PT-P - Abril 2017 19

Servo-motor de regime contínuo Kinetix VP com tamanho de carcaça de 165 mm, 215 mm e 300 mm
Motores de regime contínuo Kinetix VP (40.000 horas de duração da fadiga do mancal)
Capacidade de força de carga radial (máxima) para motor sem freio
Cat.motor Nº(1)
(1) 1,0 N = 0,225 lb. = 0,102 kgf
Velocidade, máx RPM
RPM
500N (lb.)
1000N (lb.)
1500N (lb.)
2000N (lb.)
2500N (lb.)
3000N (lb.)
3500N (lb.)
4000N (lb.)
4500N (lb.)
5000N (lb.)
VPC–B1652A 4500 2158(485,2)
1713(385,1)
1496(336,4)
1359(305,6)
1262(283,7)
1188(267,0)
1128(253,6)
1079(242,6)
1037(233,2) –
VPC–B1653A 4500 2279(512,3)
1809(406,6)
1580(355,2)
1436(322,7)
1333(299,6)
1254(281,9)
1191(267,8)
1139(256,2)
1096(246,3) –
VPC–B1652D 5000 2158(485,2)
1713(385,1)
1496(336,4)
1359(305,6)
1262(283,7)
1188(267,0)
1128(253,6)
1079(242,6)
1037(233,2)
1002(225,2)
VPC–B1653D 5000 2279(512,3)
1809(406,6)
1580(355,2)
1436(322,7)
1333(299,6)
1254(281,9)
1191(267,8)
1139(256,2)
1096(246,3)
1058(237,8)
VPC–B1654D 5000 2343(526,7)
1860(418,1)
1625(365,2)
1476(331,8)
1370(308,0)
1289(289,9)
1225(275,4)
1172(263,4)
1126(253,2)
1088(244,5)
VPC–B21539 3000 2987(671,5)
2371(533,0)
2071(465,6)
1882(423,0)
1747(392,7)
1644(369,6) – – – –
VPC–B21549 3000 3066(689,2)
2433(547,0)
2126(477,8)
1931(434,1)
1793(403,0)
1687(379,3) – – – –
VPC–B2153A 4500 2987(671,5)
2371(533,0)
2071(465,6)
1882(423,0)
1747(392,7)
1644(369,6)
1562(351,0)
1494(335,8)
1436(322,8) –
VPC–B2154A 4500 3066(689,2)
2433(547,0)
2126(477,8)
1931(434,1)
1793(403,0)
1687(379,3)
1603(360,3)
1533(344,6)
1474(331,3) –
VPC–B2154D 5000 3066(689,2)
2433(547,0)
2126(477,8)
1931(434,1)
1793(403,0)
1687(379,3)
1603(360,3)
1533(344,6)
1474(331,3)
1423(319,9)
VPC–B2155D 5000 3128(703,3)
2483(558,2)
2169(487,6)
1971(443,0)
1829(411,3)
1722(387,0)
1635(367,6)
1564(351,6)
1504(338,1)
1452(326,4)
VPC–B2156D 5000 3180(714,8)
2524(567,3)
2205(495,6)
2003(450,3)
1859(418,0)
1750(393,4)
1662(373,7)
1590(357,4)
1529(343,6)
1476(331,8)
VPC–B30029 3000 4526(1017,5)
3592(807,6)
3138(705,5)
2851(641,0)
2647(595,0)
2491(559,9) – – – –
VPC–B30039 3000 4526(1017,5)
3592(807,6)
3138(705,5)
2851(641,0)
2647(595,0)
2491(559,9) – – – –
VPC–B30049 3000 4652(1045,9)
3692(830,1)
3226(725,2)
2931(658,8)
2721(611,6)
2560(575,6) – – – –
VPC–B3002A 4000 4526(1017,5)
3592(807,6)
3138(705,5)
2851(641,0)
2647(595,0)
2491(559,9)
2366(531,9)
2263(508,7) – –
VPC–B3003A 3500 4526(1017,5)
3592(807,6)
3138(705,5)
2851(641,0)
2647(595,0)
2491(559,9)
2366(531,9) – – –
VPC–B3004A 3500 4652(1045,9)
3692(830,1)
3226(725,2)
2931(658,8)
2721(611,6)
2560(575,6)
2432(546,7) – – –
VPC–B3004D 4000 4652(1045,9)
3692(830,1)
3226(725,2)
2931(658,8)
2721(611,6)
2560(575,6)
2432(546,7)
2326(522,9) – –
20 Publicação Rockwell Automation VPC-IN001B-PT-P - Abril 2017

Servo-motor de regime contínuo Kinetix VP com tamanho de carcaça de 165 mm, 215 mm e 300 mm
Capacidade de força de carga axial (carga radial máxima) para motor sem freio
Cat.motor Nº(1)
(1) 1,0 N = 0,225 lb. = 0,102 kgf
Velocidade, máx RPM
RPM
500N (lb.)
1000N (lb.)
1500N (lb.)
2000N (lb.)
2500N (lb.)
3000N (lb.)
3500N (lb.)
4000N (lb.)
4500N (lb.)
5000N (lb.)
VPC-B1652A 4500 686(154,2)
508(114,1)
426(95,7)
376(84,4)
341(76,6)
315(70,8)
294(66,2)
278(62,5)
264(59,4) –
VPC-B1653A 4500 686(154,2)
508(114,1)
426(95,7)
376(84,4)
341(76,6)
315(70,8)
294(66,2)
278(62,5)
264(59,4) –
VPC-B1652D 5000 686(154,2)
508(114,1)
426(95,7)
376(84,4)
341(76,6)
315(70,8)
294(66,2)
278(62,5)
264(59,4)
252(56,7)
VPC-B1653D 5000 686(154,2)
508(114,1)
426(95,7)
376(84,4)
341(76,6)
315(70,8)
294(66,2)
278(62,5)
264(59,4)
252(56,7)
VPC-B1654D 5000 686(154,2)
508(114,1)
426(95,7)
376(84,4)
341(76,6)
315(70,8)
294(66,2)
278(62,5)
264(59,4)
252(56,7)
VPC-B21539 3000 885(199,0)
655(147,3)
549(123,5)
485(109,0)
440(98,9)
406(91,4) – – – –
VPC-B21549 3000 885(199,0)
655(147,3)
549(123,5)
485(109,0)
440(98,9)
406(91,4) – – – –
VPC-B2153A 4500 885(199,0)
655(147,3)
549(123,5)
485(109,0)
440(98,9)
406(91,4)
380(85,4)
359(80,6)
341(76,6) –
VPC-B2154A 4500 885(199,0)
655(147,3)
549(123,5)
485(109,0)
440(98,9)
406(91,4)
380(85,4)
359(80,6)
341(76,6) –
VPC-B2154D 5000 885(199,0)
655(147,3)
549(123,5)
485(109,0)
440(98,9)
406(91,4)
380(85,4)
359(80,6)
341(76,6)
325(73,2)
VPC-B2155D 5000 885(199,0)
655(147,3)
549(123,5)
485(109,0)
440(98,9)
406(91,4)
380(85,4)
359(80,6)
341(76,6)
325(73,2)
VPC-B2156D 5000 885(199,0)
655(147,3)
549(123,5)
485(109,0)
440(98,9)
406(91,4)
380(85,4)
359(80,6)
341(76,6)
325(73,2)
VPC-B30029 3000 1347(302,8)
997(224,1)
836(187,9)
737(165,8)
669(150,5)
618(139,0) – – – –
VPC-B30039 3000 1347(302,8)
997(224,1)
836(187,9)
737(165,8)
669(150,5)
618(139,0) – – – –
VPC-B30049 3000 1347(302,8)
997(224,1)
836(187,9)
737(165,8)
669(150,5)
618(139,0) – – – –
VPC-B3002A 4000 1347(302,8)
997(224,1)
836(187,9)
737(165,8)
669(150,5)
618(139,0)
578(130,0)
546(122,7) – –
VPC-B3003A 3500 1347(302,8)
997(224,1)
836(187,9)
737(165,8)
669(150,5)
618(139,0)
578(130,0) – – –
VPC-B3004A 3500 1347(302,8)
997(224,1)
836(187,9)
737(165,8)
669(150,5)
618(139,0)
578(130,0) – – –
VPC-B3004D 4000 1347(302,8)
997(224,1)
836(187,9)
737(165,8)
669(150,5)
618(139,0)
578(130,0)
546(122,7) – –
Publicação Rockwell Automation VPC-IN001B-PT-P - Abril 2017 21

Servo-motor de regime contínuo Kinetix VP com tamanho de carcaça de 165 mm, 215 mm e 300 mm
Capacidade de força de carga axial (carga radial zero) para motor sem freio
Cat.motor Nº(1)
(1) 1,0 N = 0,225 lb. = 0,102 kgf
Velocidade, máx RPM
RPM
500N (lb.)
1000N (lb.)
1500N (lb.)
2000N (lb.)
2500N (lb.)
3000N (lb.)
3500N (lb.)
4000N (lb.)
4500N (lb.)
5000N (lb.)
VPC-B1652A 4500 2008(451,5)
1486(334,1)
1246(280,2)
1100(247,3)
998(224,5)
922(207,4)
863(194,0)
814(183,0)
774(173,9) –
VPC-B1653A 4500 2008(451,5)
1486(334,1)
1246(280,2)
1100(247,3)
998(224,5)
922(207,4)
863(194,0)
814(183,0)
774(173,9) –
VPC-B1652D 5000 2008(451,5)
1486(334,1)
1246(280,2)
1100(247,3)
998(224,5)
922(207,4)
863(194,0)
814(183,0)
774(173,9)
739(166,1)
VPC-B1653D 5000 2008(451,5)
1486(334,1)
1246(280,2)
1100(247,3)
998(224,5)
922(207,4)
863(194,0)
814(183,0)
774(173,9)
739(166,1)
VPC-B1654D 5000 2008(451,5)
1486(334,1)
1246(280,2)
1100(247,3)
998(224,5)
922(207,4)
863(194,0)
814(183,0)
774(173,9)
739(166,1)
VPC-B21539 3000 2592(582,7)
1918(431,3)
1609(361,6)
1420(319,2)
1289(289,7)
1191(267,7) – – – –
VPC-B21549 3000 2592(582,7)
1918(431,3)
1609(361,6)
1420(319,2)
1289(289,7)
1191(267,7) – – – –
VPC-B2153A 4500 2592(582,7)
1918(431,3)
1609(361,6)
1420(319,2)
1289(289,7)
1191(267,7)
1114(250,3)
1051(236,2)
998(224,4) –
VPC-B2154A 4500 2592(582,7)
1918(431,3)
1609(361,6)
1420(319,2)
1289(289,7)
1191(267,7)
1114(250,3)
1051(236,2)
998(224,4) –
VPC-B2154D 5000 2592(582,7)
1918(431,3)
1609(361,6)
1420(319,2)
1289(289,7)
1191(267,7)
1114(250,3)
1051(236,2)
998(224,4)
954(214,4)
VPC-B2155D 5000 2592(582,7)
1918(431,3)
1609(361,6)
1420(319,2)
1289(289,7)
1191(267,7)
1114(250,3)
1051(236,2)
998(224,4)
954(214,4)
VPC-B2156D 5000 2592(582,7)
1918(431,3)
1609(361,6)
1420(319,2)
1289(289,7)
1191(267,7)
1114(250,3)
1051(236,2)
998(224,4)
954(214,4)
VPC-B30029 3000 3944(886,6)
2919(656,2)
2448(550,3)
2160(485,7)
1961(440,8)
1812(407,3) – – – –
VPC-B30039 3000 3944(886,6)
2919(656,2)
2448(550,3)
2160(485,7)
1961(440,8)
1812(407,3) – – – –
VPC-B30049 3000 3944(886,6)
2919(656,2)
2448(550,3)
2160(485,7)
1961(440,8)
1812(407,3) – – – –
VPC-B3002A 4000 3944(886,6)
2919(656,2)
2448(550,3)
2160(485,7)
1961(440,8)
1812(407,3)
1694(380,9)
1599(359,4) – –
VPC-B3003A 3500 3944(886,6)
2919(656,2)
2448(550,3)
2160(485,7)
1961(440,8)
1812(407,3)
1694(380,9) – – –
VPC-B3004A 3500 3944(886,6)
2919(656,2)
2448(550,3)
2160(485,7)
1961(440,8)
1812(407,3)
1694(380,9) – – –
VPC-B3004D 4000 3944(886,6)
2919(656,2)
2448(550,3)
2160(485,7)
1961(440,8)
1812(407,3)
1694(380,9)
1599(359,4) – –
22 Publicação Rockwell Automation VPC-IN001B-PT-P - Abril 2017

Servo-motor de regime contínuo Kinetix VP com tamanho de carcaça de 165 mm, 215 mm e 300 mm
Capacidade de força de carga radial (máxima) para motor com freio
Cat.motor Nº(1)
(1) 1,0 N = 0,225 lb. = 0,102 kgf
Velocidade, máx RPM
RPM
500N (lb.)
1000N (lb.)
1500N (lb.)
2000N (lb.)
2500N (lb.)
3000N (lb.)
3500N (lb.)
4000N (lb.)
4500N (lb.)
5000N (lb.)
VPC-B1652A 4500 2279(512,3)
1809(406,6)
1580(355,2)
1436(322,7)
1333(299,6)
1254(281,9)
1191(267,8)
1139(256,2)
1096(246,3) –
VPC-B1653A 4500 2343(526,7)
1860(418,1)
1625(365,2)
1476(331,8)
1370(308,0)
1289(289,9)
1225(275,4)
1172(263,4)
1126(253,2) –
VPC-B1652D 5000 2279(512,3)
1809(406,6)
1580(355,2)
1436(322,7)
1333(299,6)
1254(281,9)
1191(267,8)
1139(256,2)
1096(246,3)
1058(237,8)
VPC-B1653D 5000 2343(526,7)
1860(418,1)
1625(365,2)
1476(331,8)
1370(308,0)
1289(289,9)
1225(275,4)
1172(263,4)
1126(253,2)
1088(244,5)
VPC-B1654D 5000 2394(538,2)
1900(427,2)
1660(373,2)
1508(339,0)
1400(314,7)
1317(296,2)
1251(281,3)
1197(269,1)
1151(258,7)
1111(249,8)
VPC-B21539 3000 3128(703,3)
2483(558,2)
2169(487,6)
1971(443,0)
1829(411,3)
1722(387,0) – – – –
VPC-B21549 3000 3180(714,8)
2524(567,3)
2205(495,6)
2003(450,3)
1859(418,0)
1750(393,4) – – – –
VPC-B2153A 4500 3128(703,3)
2483(558,2)
2169(487,6)
1971(443,0)
1829(411,3)
1722(387,0)
1635(367,6)
1564(351,6)
1504(338,1) –
VPC-B2154A 4500 3180(714,8)
2524(567,3)
2205(495,6)
2003(450,3)
1859(418,0)
1750(393,4)
1662(373,7)
1590(357,4)
1529(343,6) –
VPC-B2154D 5000 3180(714,8)
2524(567,3)
2205(495,6)
2003(450,3)
1859(418,0)
1750(393,4)
1662(373,7)
1590(357,4)
1529(343,6)
1476(331,8)
VPC-B2155D 5000 3259(732,5)
2586(581,4)
2259(507,9)
2053(461,5)
1906(428,4)
1793(403,1)
1703(382,9)
1629(366,3)
1567(352,2)
1512(340,0)
VPC-B2156D 5000 3259(732,5)
2586(581,4)
2259(507,9)
2053(461,5)
1906(428,4)
1793(403,1)
1703(382,9)
1629(366,3)
1567(352,2)
1512(340,0)
VPC-B30029 3000 4652(1045,9)
3692(830,1)
3226(725,2)
2931(658,8)
2721(611,6)
2560(575,6) – – – –
VPC-B30039 3000 4754(1068,7)
3773(848,3)
3296(741,0)
2995(673,3)
2780(625,0)
2616(588,2) – – – –
VPC-B30049 3000 4908(1103,4)
3896(875,8)
3403(765,1)
3092(695,1)
2870(645,3)
2701(607,2) – – – –
VPC-B3002A 4000 4652(1045,9)
3692(830,1)
3226(725,2)
2931(658,8)
2721(611,6)
2560(575,6)
2432(546,7)
2326(522,9) – –
VPC-B3003A 3500 4754(1068,7)
3773(848,3)
3296(741,0)
2995(673,3)
2780(625,0)
2616(588,2)
2485(558,7) – – –
VPC-B3004A 3500 4908(1103,4)
3896(875,8)
3403(765,1)
3092(695,1)
2870(645,3)
2701(607,2)
2566(576,8) – – –
VPC-B3004D 4000 4908(1103,4)
3896(875,8)
3403(765,1)
3092(695,1)
2870(645,3)
2701(607,2)
2566(576,8)
2454(551,7) – –
Publicação Rockwell Automation VPC-IN001B-PT-P - Abril 2017 23

Servo-motor de regime contínuo Kinetix VP com tamanho de carcaça de 165 mm, 215 mm e 300 mm
Capacidade de força de carga axial (carga radial máxima) para motor com freio
Cat.motor Nº(1)
(1) 1,0 N = 0,225 lb. = 0,102 kgf
Velocidade, máx RPM
RPM
500N (lb.)
1000N (lb.)
1500N (lb.)
2000N (lb.)
2500N (lb.)
3000N (lb.)
3500N (lb.)
4000N (lb.)
4500N (lb.)
5000N (lb.)
VPC-B1652A 4500 686(154,2)
508(114,1)
426(95,7)
376(84,4)
341(76,6)
315(70,8)
294(66,2)
278(62,5)
264(59,4) –
VPC-B1653A 4500 686(154,2)
508(114,1)
426(95,7)
376(84,4)
341(76,6)
315(70,8)
294(66,2)
278(62,5)
264(59,4) –
VPC-B1652D 5000 686(154,2)
508(114,1)
426(95,7)
376(84,4)
341(76,6)
315(70,8)
294(66,2)
278(62,5)
264(59,4)
252(56,7)
VPC-B1653D 5000 686(154,2)
508(114,1)
426(95,7)
376(84,4)
341(76,6)
315(70,8)
294(66,2)
278(62,5)
264(59,4)
252(56,7)
VPC-B1654D 5000 686(154,2)
508(114,1)
426(95,7)
376(84,4)
341(76,6)
315(70,8)
294(66,2)
278(62,5)
264(59,4)
252(56,7)
VPC-B21539 3000 885(199,0)
655(147,3)
549(123,5)
485(109,0)
440(98,9)
406(91,4) – – – –
VPC-B21549 3000 885(199,0)
655(147,3)
549(123,5)
485(109,0)
440(98,9)
406(91,4) – – – –
VPC-B2153A 4500 885(199,0)
655(147,3)
549(123,5)
485(109,0)
440(98,9)
406(91,4)
380(85,4)
359(80,6)
341(76,6) –
VPC-B2154A 4500 885(199,0)
655(147,3)
549(123,5)
485(109,0)
440(98,9)
406(91,4)
380(85,4)
359(80,6)
341(76,6) –
VPC-B2154D 5000 885(199,0)
655(147,3)
549(123,5)
485(109,0)
440(98,9)
406(91,4)
380(85,4)
359(80,6)
341(76,6)
325(73,2)
VPC-B2155D 5000 885(199,0)
655(147,3)
549(123,5)
485(109,0)
440(98,9)
406(91,4)
380(85,4)
359(80,6)
341(76,6)
325(73,2)
VPC-B2156D 5000 885(199,0)
655(147,3)
549(123,5)
485(109,0)
440(98,9)
406(91,4)
380(85,4)
359(80,6)
341(76,6)
325(73,2)
VPC-B30029 3000 1347(302,8)
997(224,1)
836(187,9)
737(165,8)
669(150,5)
618(139,0) – – – –
VPC-B30039 3000 1347(302,8)
997(224,1)
836(187,9)
737(165,8)
669(150,5)
618(139,0) – – – –
VPC-B30049 3000 1347(302,8)
997(224,1)
836(187,9)
737(165,8)
669(150,5)
618(139,0) – – – –
VPC-B3002A 4000 1347(302,8)
997(224,1)
836(187,9)
737(165,8)
669(150,5)
618(139,0)
578(130,0)
546(122,7) – –
VPC-B3003A 3500 1347(302,8)
997(224,1)
836(187,9)
737(165,8)
669(150,5)
618(139,0)
578(130,0) – – –
VPC-B3004A 3500 1347(302,8)
997(224,1)
836(187,9)
737(165,8)
669(150,5)
618(139,0)
578(130,0) – – –
VPC-B3004D 4000 1347(302,8)
997(224,1)
836(187,9)
737(165,8)
669(150,5)
618(139,0)
578(130,0)
546(122,7) – –
24 Publicação Rockwell Automation VPC-IN001B-PT-P - Abril 2017

Servo-motor de regime contínuo Kinetix VP com tamanho de carcaça de 165 mm, 215 mm e 300 mm
Capacidade de força de carga axial (carga radial zero) para motor com freio
Cat.motor Nº(1)
(1) 1,0 N = 0,225 lb. = 0,102 kgf
Velocidade, máx RPM
RPM
500N (lb.)
1000N (lb.)
1500N (lb.)
2000N (lb.)
2500N (lb.)
3000N (lb.)
3500N (lb.)
4000N (lb.)
4500N (lb.)
5000N (lb.)
VPC-B1652A 4500 2008(451,5)
1486(334,1)
1246(280,2)
1100(247,3)
998(224,5)
922(207,4)
863(194,0)
814(183,0)
774(173,9) –
VPC-B1653A 4500 2008(451,5)
1486(334,1)
1246(280,2)
1100(247,3)
998(224,5)
922(207,4)
863(194,0)
814(183,0)
774(173,9) –
VPC-B1652D 5000 2008(451,5)
1486(334,1)
1246(280,2)
1100(247,3)
998(224,5)
922(207,4)
863(194,0)
814(183,0)
774(173,9)
739(166,1)
VPC-B1653D 5000 2008(451,5)
1486(334,1)
1246(280,2)
1100(247,3)
998(224,5)
922(207,4)
863(194,0)
814(183,0)
774(173,9)
739(166,1)
VPC-B1654D 5000 2008(451,5)
1486(334,1)
1246(280,2)
1100(247,3)
998(224,5)
922(207,4)
863(194,0)
814(183,0)
774(173,9)
739(166,1)
VPC-B21539 3000 2592(582,7)
1918(431,3)
1609(361,6)
1420(319,2)
1289(289,7)
1191(267,7) – – – –
VPC-B21549 3000 2592(582,7)
1918(431,3)
1609(361,6)
1420(319,2)
1289(289,7)
1191(267,7) – – – –
VPC-B2153A 4500 2592(582,7)
1918(431,3)
1609(361,6)
1420(319,2)
1289(289,7)
1191(267,7)
1114(250,3)
1051(236,2)
998(224,4) –
VPC-B2154A 4500 2592(582,7)
1918(431,3)
1609(361,6)
1420(319,2)
1289(289,7)
1191(267,7)
1114(250,3)
1051(236,2)
998(224,4) –
VPC-B2154D 5000 2592(582,7)
1918(431,3)
1609(361,6)
1420(319,2)
1289(289,7)
1191(267,7)
1114(250,3)
1051(236,2)
998(224,4)
954(214,4)
VPC-B2155D 5000 2592(582,7)
1918(431,3)
1609(361,6)
1420(319,2)
1289(289,7)
1191(267,7)
1114(250,3)
1051(236,2)
998(224,4)
954(214,4)
VPC-B2156D 5000 2592(582,7)
1918(431,3)
1609(361,6)
1420(319,2)
1289(289,7)
1191(267,7)
1114(250,3)
1051(236,2)
998(224,4)
954(214,4)
VPC-B30029 3000 3944(886,6)
2919(656,2)
2448(550,3)
2160(485,7)
1961(440,8)
1812(407,3) – – – –
VPC-B30039 3000 3944(886,6)
2919(656,2)
2448(550,3)
2160(485,7)
1961(440,8)
1812(407,3) – – – –
VPC-B30049 3000 3944(886,6)
2919(656,2)
2448(550,3)
2160(485,7)
1961(440,8)
1812(407,3) – – – –
VPC-B3002A 4000 3944(886,6)
2919(656,2)
2448(550,3)
2160(485,7)
1961(440,8)
1812(407,3)
1694(380,9)
1599(359,4) – –
VPC-B3003A 3500 3944(886,6)
2919(656,2)
2448(550,3)
2160(485,7)
1961(440,8)
1812(407,3)
1694(380,9) – – –
VPC-B3004A 3500 3944(886,6)
2919(656,2)
2448(550,3)
2160(485,7)
1961(440,8)
1812(407,3)
1694(380,9) – – –
VPC-B3004D 4000 3944(886,6)
2919(656,2)
2448(550,3)
2160(485,7)
1961(440,8)
1812(407,3)
1694(380,9)
1599(359,4) – –
Publicação Rockwell Automation VPC-IN001B-PT-P - Abril 2017 25

Servo-motor de regime contínuo Kinetix VP com tamanho de carcaça de 165 mm, 215 mm e 300 mm
Classificações ambientais
Cabos de motor simples série 2090Cabos de motor único cód. cat. 2090 são necessários para servo-motores com VPC-Bxxxxx-Q. O -Q no número de catálogo especifica motores que são equipados com sensor de realimentação de Hiperface DSL. Cabos para motor único são projetados para isolar efetivamente a alimentação, e os sinais de realimentação ou freio no cabo. Os cabos de motor único estão disponíveis em comprimentos de cabo padrão, e fornecem terminações de blindagem e ambientais.
Entre em contato com o escritório de vendas Rockwell Automation mais próximo ou consulte Kinetix Motion Accessories Technical Data, publicação KNX-TD004, para obter informações sobre os cabos de motor único da série 2090 disponíveis.
Kits de vedação do eixoKits de substituição de vedação do eixo estão disponíveis para instalação em campo. As vedações do eixo são feitas de nitrilo e os kits incluem um lubrificante para reduzir o desgaste.
Códigos de catálogo do kit de vedação do eixo opcional
Atributo Valor
Temperatura, operação –20 a +40 °C (–4 a +104 °F) (3)
(3) Para obter essa classificação térmica, monte o motor em uma superfície com dissipação de calor equivalente ao tamanho de um dissipador de alumínio, conforme listado aqui: Carcaças de 165 mm e 215 mm, 304,8 x 304,8 x 12,7 mm (12 x 12 x 0,5 pol.)Carcaça de 300 mm, 533,4 x 533,4 x 25,4 mm (21 x 21 x 1 pol.)
Temperatura, armazenamento –30 a +40 °C (–22 a +104 °F)
Umidade relativa, armazenamento 5 a 90% sem condensação
Atmosfera, armazenamento Não corrosivo
Classificação IP (1) do motor com vedação do eixo (2) e uso de conectores de cabos vedados ambientalmente
(1) Classificação IP refere-se ao Código de Proteção Internacional.(2) A vedação do eixo cód. Cat. VPC é necessário para fornecer a classificação IP especificada para o motor. Uma classificação do nível do sistema também é dependente na classificação IP do cabo. Consulte Recursos adicionais na
página 27 para obter informações sobre instruções de instalação da substituição da vedação do eixo.
IP65 – protegidos contra poeira e de pulverização com jato de baixa pressão de todas as direções
IMPORTANTEAs vedações de eixo estão sujeitas a desgaste e precisam de inspeção e substituição periódicas. A substituição é recomendada a cada 3 meses, sem exceder 12 meses, dependendo do uso.
Cat. motor Nº Cat. do kit de vedação de eixo Nº
VPC-B165xx MPL-SSN-A6B6
VPC-B215xx VPL-SS-X256
VPC-B300xx VPC-SSN-F300
26 Publicação Rockwell Automation VPC-IN001B-PT-P - Abril 2017

Servo-motor de regime contínuo Kinetix VP com tamanho de carcaça de 165 mm, 215 mm e 300 mm
Recursos adicionais Estes documentos contêm informações sobre os produtos relacionados da Rockwell Automation.
É possível visualizar ou baixar publicações em http://www.rockwellautomation.com/global/literature-library/overview.page. Para pedir cópias impressas da documentação técnica, entre em contato com seu distribuidor local -ou representante de vendas.
Recurso Descrição
Kinetix Rotary Motion Specifications Technical Data, publicação KNX-TD001 Fornece especificações de produto para motores rotativos Allen-Bradley®, com diagramas de desempenho, ambientais, certificações, força de carga e dimensões.
Kinetix Motion Accessories Specifications, publicação KNX-TD004 Fornece especificações de produto e dimensões para acessórios de servo-drives Allen-Bradley.
Servo-drives Kinetix 5700 Manual do usuário, publicação 2198-UM002 Fornece informações sobre como instalar, configurar, partida e localização de falhas dos sistemas de servo-drive Kinetix 5700.
Kinetix 5700 Drive System Design Guide, publicação KNX-RM010 Fornece informações sobre os componentes do sistema de acionamento e itens acessórios necessários para a combinação inversor/motor do Kinetix 5700.
Kits de vedação do eixo Instruções de instalação, publicação 2090-IN012 Fornece informações sobre a instalação de uma vedação do eixo neste e em outros servo-motores da Allen-Bradley.
Kinetix VP Continuous Duty Motor Fan Kits Installation Instructions, publicação VPC-IN002 Fornece informações sobre a instalação do kit de substituição do ventilador para cód. Cat. VPC servo-motores.
Site de certificações de produto, http://www.rockwellautomation.com/global/certification/overview.page. Fornece declarações de conformidade, certificados e outros detalhes de certificação.
Allen-Bradley Industrial Automation Glossary, publicação AG-7.1 Um glossário de termos e abreviações usados em automação industrial.
System Design for Control of Electrical Noise Reference Manual, publicação GMC-RM001 Fornece informações, técnicas e exemplos projetados para minimizar as falhas no sistema causadas por ruídos elétricos.
Publicação Rockwell Automation VPC-IN001B-PT-P - Abril 2017 27

A Rockwell Automation mantém informações atuais ambientais do produto em seu site em http://www.rockwellautomation.com/rockwellautomation/about-us/sustainability-ethics/product-environmental-compliance.page.
Suporte da Rockwell AutomationUse os recursos a seguir para acessar informações de suporte.
Comentários sobre a documentaçãoSeus comentários irão nos ajudar a melhorar a documentação. Caso tenha sugestões sobre como melhorar este documento, preencha o formulário Como estamos nos saindo? em http://literature.rockwellautomation.com/idc/groups/literature/documents/du/ra-du002_-en-e.pdf.
Centro de suporte técnicoArtigos da Knowledgebase, vídeos tutoriais, perguntas frequentes, bate-papo, fórum do usuário e notificações de atualizações do produto.
https://rockwellautomation.custhelp.com/
Números de telefone do suporte técnico local Localize o número de telefone para seu país. http://www.rockwellautomation.com/global/support/get-support-now.page
Códigos de discagem diretaEncontre o código de discagem direta para seu produto. Use o código para que sua chamada vá diretamente para o engenheiro de suporte técnico.
http://www.rockwellautomation.com/global/support/direct-dial.page
Literature Library Instruções de instalação, manuais, folhetos e dados técnicos. http://www.rockwellautomation.com/global/literature-library/overview.page
Compatibilidade do produto e centro de download (PCDC)
Obtenha ajuda para saber como os produtos interagem, consulte recursos e capacidades e encontre o firmware associado. http://www.rockwellautomation.com/global/support/pcdc.page
Allen-Bradley, Kinetix, Rockwell Automation e Rockwell Software são marcas comerciais da Rockwell Automation, Inc.As marcas comerciais que não pertencem à Rockwell Automation são propriedade de suas respectivas empresas.
Publicação VPC-IN001B-PT-P - Abril 2017 © 2017 Rockwell Automation, Inc. Todos os direitos reservados. Impresso nos E.U.A.









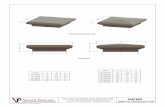
![€¦ · ]Pv À ]vP Ç}µ µ ]v µ ]vP Z } }v }( Ç}µ Z}] X }u vÇ vu vv}µv µ ]vP } vP À v }( Ç}µ Z} v } X](https://static.fdocumentos.tips/doc/165x107/601a8da571e71f73f95610f0/pv-vp-v-vp-z-v-z-x-u-v-vu-vvv-vp-vp.jpg)