SCATTER SEARCH APLICADO AO PROBLEMA DE … · a ser realizado e de acordo com as capacidades da SPT...
14
SCATTER SEARCH APLICADO AO PROBLEMA DE OTIMIZAÇÃO DE ITINERÁRIOS DE SONDAS DE PRODUÇÃO TERRESTRE Luciano Lessa Lorenzoni (FAESA) [email protected] Wolfgang Menezes Polycarpo (IFES) [email protected] Os poços de petróleo necessitam de intervenções para um bom funcionamento e máxima produção, porém a partir do momento em que a intervenção é solicitada até o momento em que ela é finalizada, o poço tem sua produção prejudicada. As intervennções são efetuadas com o auxilio de um equipamento chamado de Sonda de Produção Terrestre. Estas sondas possuem um custo muito elevado, sendo, por isso, um recurso restrito. Este trabalho apresenta uma estratégia de resolução do problema de alocação de sondas aos poços, utilizando da meta-heurística Scatter Search, visando encontrar o itinerário de sondas que gere a menor perda de produção. Ao final da implementação o algoritmo criado foi testado e comparado com os implementados por outros autores. Os resultados obtidos foram bastante satisfatórios mostrando a eficiência da estratégia adotada. Palavras-chaves: alocação de sondas de produção terrestre, Otimização Combinatória, Scatter Search XXX ENCONTRO NACIONAL DE ENGENHARIA DE PRODUÇÃO Maturidade e desafios da Engenharia de Produção: competitividade das empresas, condições de trabalho, meio ambiente. São Carlos, SP, Brasil, 12 a15 de outubro de 2010.
Transcript of SCATTER SEARCH APLICADO AO PROBLEMA DE … · a ser realizado e de acordo com as capacidades da SPT...

SCATTER SEARCH APLICADO AO
PROBLEMA DE OTIMIZAÇÃO DE
ITINERÁRIOS DE SONDAS DE
PRODUÇÃO TERRESTRE
Luciano Lessa Lorenzoni (FAESA)
Wolfgang Menezes Polycarpo (IFES)
Os poços de petróleo necessitam de intervenções para um bom
funcionamento e máxima produção, porém a partir do momento em que
a intervenção é solicitada até o momento em que ela é finalizada, o
poço tem sua produção prejudicada. As intervennções são efetuadas
com o auxilio de um equipamento chamado de Sonda de Produção
Terrestre. Estas sondas possuem um custo muito elevado, sendo, por
isso, um recurso restrito. Este trabalho apresenta uma estratégia de
resolução do problema de alocação de sondas aos poços, utilizando da
meta-heurística Scatter Search, visando encontrar o itinerário de
sondas que gere a menor perda de produção. Ao final da
implementação o algoritmo criado foi testado e comparado com os
implementados por outros autores. Os resultados obtidos foram
bastante satisfatórios mostrando a eficiência da estratégia adotada.
Palavras-chaves: alocação de sondas de produção terrestre,
Otimização Combinatória, Scatter Search
XXX ENCONTRO NACIONAL DE ENGENHARIA DE PRODUÇÃO Maturidade e desafios da Engenharia de Produção: competitividade das empresas, condições de trabalho, meio ambiente.
São Carlos, SP, Brasil, 12 a15 de outubro de 2010.

2
1. Introdução
Em qualquer organização, encontrar a forma mais eficiente de operar é algo a ser buscado
continuamente, e para as indústrias petrolíferas isto não é diferente. Como o objetivo de uma
indústria petrolífera é a produção de petróleo, este deve ser explorado em maior quantidade no
menor tempo e da forma menos onerosa possível. Na exploração do petróleo, os poços
necessitam de tempos em tempos de sofrerem intervenções, também chamadas de workover,
tanto com o objetivo de consertar ou prevenir problemas, quanto para estimular/aumentar a
produção. Entre os principais serviços a serem executados durante estas intervenções estão a
completação, limpeza, restauração, estimulação e avaliação que são executadas por máquinas
chamadas Sondas de Produção Terrestre (SPT).
As SPT´s possuem um custo muito elevado não justificando a existência de uma para cada
poço. As SPT’s são unidades móveis podendo assim ser deslocadas de um poço para outro.
Durante uma intervenção a produção do poço fica completa ou parcialmente interrompida.
Sendo as SPT’s um recurso escasso, então há de se criar um itinerário de atendimento dos
poços de modo a minimizar a perda de produção.
O problema de se encontrar o melhor itinerário é conhecido na literatura como Problema de
Otimização de Itinerários de Sondas de Produção Terrestre (POI-SPT). Sendo este um
problema de difícil resolução, devido a sua natureza combinatória, a utilização de métodos
exatos torna-se, dado o porte do problema, inviável. Deste modo, na maioria das vezes a
abordagem de estratégias heurísticas e meta-heurísticas é uma boa opção. Dentre as quais
destacam-se: Têmpera Simulada (PAIVA, 1997), Busca Tabu (MAIA et al., 2002), Algoritmo
Genético e Transgenético (GOUVÊA et al., 2002), Colônia de Formigas (ALOISE et al.,
2002), GRASP (COSTA, 2005), Algoritmo Genético (ALVES & FERREIRA, 2006 e
DOURO & LORENZONI, 2009) e Scatter Search (OLIVEIRA et al., 2007).
Neste trabalho aplicou-se a estratégia meta-heurística Scatter Search (SS) para a resolução do
POI-SPT.
Este trabalho está organizado da seguinte maneira: na seção 2 é formalizado o Problema de
Otimização de Itinerários de Sondas de Produção Terrestre. Na seção 3 é descrito o Scatter
Search com os diversos métodos utilizados na sua implementação. Na seção 4 relatam-se os
experimentos computacionais bem como os resultados e os compara com resultados obtidos
por outros autores, que utilizaram de mesmo banco de dados. Finalizando, temos na seção 5,
as conclusões.
2. O Problema de Otimização de Itinerário de Sondas de Produção Terrestre (POI-SPT)
2.1. Descrição do Problema
De acordo com Aloise et al. (2002) o problema de otimização da alocação de sondas de
produção consiste em encontrar a melhor seqüência de atendimento para as sondas
disponíveis, visando minimizar o tempo de atendimento das solicitações e maximizar a
produção média diária da bacia petrolífera, o que implica em minimizar a perda de vazão pela
espera no atendimento da intervenção solicitada. A decisão de qual sonda alocar a uma
determinada solicitação de serviço depende de fatores como: potencial produtivo do poço,
localização geográfica da sonda em relação ao poço, tempo de intervenção no poço, questões
de risco ambiental e segurança e limitação técnica das sondas em relação ao tipo de
intervenção visto que a frota de sondas pode não ser homogênea. Este tipo de problema é um

3
caso especial do clássico problema dos k-servos sendo portanto classificado como um
problema NP-Árduo (GOLDBARG & LUNA, 2000).
Para um poço entrar na fila de poços que demandam serviços de intervenção, o seu potencial
de produção de petróleo deve estar comprometido. Portanto, a cada poço desta fila está
associado um valor de perda de vazão que indica o quanto aquele poço está deixando de
produzir em unidades de volume por unidade de tempo. Também, a cada poço, está associado
um intervalo de tempo que indica o tempo em que deve acontecer a intervenção, este intervalo
é conhecido como janela de tempo.
O tempo de trabalho de uma SPT, sobre um poço, pode variar de acordo com o tipo de serviço
a ser realizado e de acordo com as capacidades da SPT em utilização. O conjunto de SPT’s foi
considerado homogêneo, o que implica no tempo de trabalho sobre um poço não variar de
acordo com a sonda a ser utilizada. Um aspecto que foi desconsiderado é a imprevisibilidade
do tempo de trabalho, este foi considerado determinístico.
Os custos de transportes, ou seja, de mobilização e desmobilização das sondas, também foram
desconsiderados, pois sendo poços terrestres, geralmente estes se localizam a pequenas
distâncias uns dos outros e o tempo de locomoção é desprezível perto do tempo de trabalho
realizado pela sonda no poço. A seguir uma formulação matemática baseada em Costa (2005)
para o problema.
2.2. Formulação Matemática
Sejam os conjuntos:
N = {1..n} : o conjunto dos n poços clientes, ou seja, poços que estão sujeitos à
intervenção;
M = {1..m} : o conjunto das m sondas disponíveis;
T = {1..hp} : o conjunto dos instantes de tempo no horizonte de planejamento - hp.
Associado a cada poço cliente i ϵ N são pré-estabelecidos os seguintes parâmetros de entrada:
Pi : a perda de vazão dada em m³/unidade de tempo;
di : a data de liberação para inicio dos serviços;
Dfi : a data limite para termino dos serviços;
Δti : o tempo de serviço no poço.
As variáveis de decisão são designadas por iktX , sendo elas binárias, e cujo valor será 1
quando a sonda k inicia a intervenção no instante t no poço i e, assume o valor 0, caso
contrário. O objetivo, expresso em (1), é minimizar a perda de vazão de petróleo em função
do tempo de espera para atendimento e do tempo de atendimento propriamente dito. Assim, o
modelo matemático associado ao problema pode ser formulado como segue.
tkii
t i k
ii XPdttMin (1)
Sujeito a:
NiXt k
tki ,1 (2)
iiitki dttDfTtMkNiX |;;,0 (3)

4
TtMkXt
tki ;,1 (4)
}|;'|;;;{,1'
ijNjttttTtMkNiXXtkjtki (5)
TtMkNiXtki ;;},1,0{ (6)
As restrições em (2) indicam que cada poço i deve ser atendido exatamente uma única vez e
por uma única sonda.
As expressões em (3) referem-se a janela de tempo e garante que todo poço i não poderá
começar a ser atendido por qualquer máquina k após o instante (Dfi - Δti), nem antes de di.
Em (4) e (5) estabelecem-se, respectivamente, que cada sonda k, em cada instante de tempo,
só inicia o serviço em um único poço, e que, quando uma sonda k inicia os trabalhos no poço i
no instante t, ela fica indisponível para iniciar outros trabalhos nos instantes t’ subseqüentes,
compreendido na janela de tempo (t, t + Δti), em todos os outros poços j diferentes de i.
Em (6) as variáveis Xikt são definidas como binárias.
3. Scatter Search
3.1. Descrição da Estratégia
O Scatter Search (SS) foi proposto por Glover (1977) em um estudo heurístico para a
resolução de problemas de programação inteira. Posteriormente o SS foi aplicado à resolução
de inúmeros problemas de diversas áreas. Dentre eles destacamos: roteamento de veículos
(Rochat & Taillard (1995); Belfiore & Yoshizaki (2009)), escalonamento (Reeves & Yamada
(1999); Yamashita et al. 2006)), clusterização (Scheuerer & Wendolsky (2006)) e Alocação
Quadrática (Cung et al. (1996)).
O SS é uma meta-heurística de caráter evolucionário, tendo em comum aos demais métodos
evolucionários, o fato de trabalhar com uma população de soluções e não apenas com uma
solução a cada iteração. Diferentemente do Algoritmo Genético, o SS possui um maior
direcionamento não dependendo apenas de aleatoriedade para as suas operações. Por
exemplo, em vez de se escolher aleatoriamente quais soluções da população serão
combinadas, no SS as soluções a serem combinadas são escolhidas através de um critério
previamente definido. As soluções escolhidas formam um conjunto chamado de Conjunto de
Soluções Referência (RS).
As soluções que são escolhidas para compor o RS são as consideradas melhores. O conceito
de melhor, neste caso, leva em consideração dois aspectos: função objetivo e diversidade. A
diversidade evita que o algoritmo caia em um ótimo local e não consiga sair dele.
O algoritmo para o SS pode ser estruturado, a partir das seguintes rotinas propostas por
Glover (1998):
1 – Método Gerador de soluções: gera as soluções que darão início ao algoritmo. Esse método
deve gerar um número suficiente de elementos que garantam a diversidade das soluções.
2 – Método de Melhoramento: transforma as soluções candidatas em uma ou mais soluções
candidatas melhoradas. O objetivo é gerar soluções de alta qualidade que sejam diferentes
uma das outras em vários níveis.
5
3 – Método de atualização do Conjunto Referência (RS): gera o conjunto buscando as
melhores soluções, onde as melhores soluções correspondem à diversidade e ao seu valor na
função objetivo.
4 – Método de geração de subconjuntos: divide o RS em subconjuntos de soluções para
permitir a combinação entre as mesmas.
5 – Método de combinação de soluções: transforma um dado subconjunto de soluções em
uma ou mais novas soluções combinadas.
Uma descrição mais detalhada da meta-heurística Scatter Seacrh pode ser encontrada em
Glover et al. (2000).
3.2. Scatter Search Aplicado ao Problema
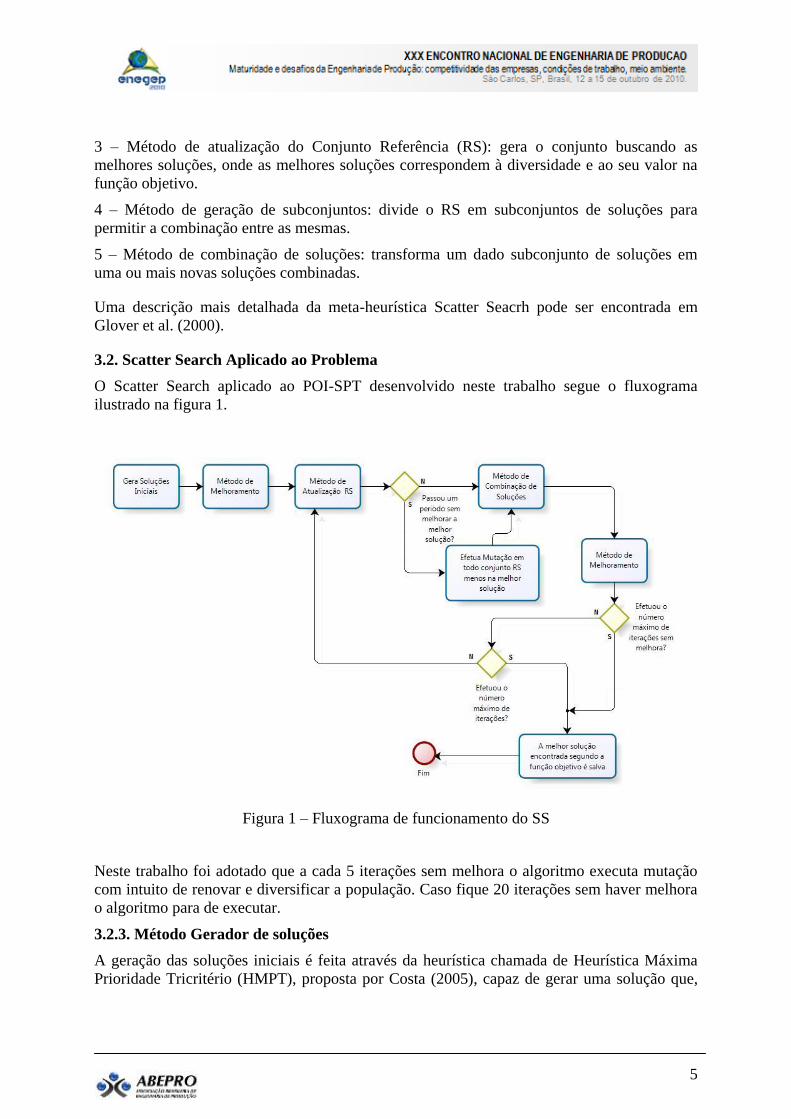
O Scatter Search aplicado ao POI-SPT desenvolvido neste trabalho segue o fluxograma
ilustrado na figura 1.
Figura 1 – Fluxograma de funcionamento do SS
Neste trabalho foi adotado que a cada 5 iterações sem melhora o algoritmo executa mutação
com intuito de renovar e diversificar a população. Caso fique 20 iterações sem haver melhora
o algoritmo para de executar.
3.2.3. Método Gerador de soluções
A geração das soluções iniciais é feita através da heurística chamada de Heurística Máxima
Prioridade Tricritério (HMPT), proposta por Costa (2005), capaz de gerar uma solução que,

6
geralmente, é de boa qualidade. Nesse método, os poços com maior perda de vazão são
alocados primeiro, como segue.
a) ordenam-se os índices indicativos de cada poço de acordo com a perda de vazão, fazendo
com que os índices dos poços com maior perda de vazão fiquem no início;
b) com os índices ordenados, os mesmos são inseridos seqüencialmente nos vetores que
representam cada sonda, de forma que os possuidores de maior perda sempre fiquem à frente.
Em Costa (2005) pode ser encontrada uma descrição mais detalhada acerca do funcionamento
do HMPT.
Após gerar a primeira solução, novas soluções são criadas a partir de mutações aleatórias
sobre a primeira. Esta mutação é efetuada gerando dois números aleatórios, cada um indica
uma posição do Vetor Solução, que conseqüentemente representa um poço. Estes são trocados
de posição gerando assim uma nova solução. Este processo é repetido n-1 vezes com intuito
de criar uma população de soluções, sendo n o número desejado de soluções iniciais. Neste
trabalho são trocados mais do que dois poços de posição, foi adotado um número de trocas
que modifique 10% da solução.
Na Figura 2 tem-se uma representação da solução para o problema considerando 3 sondas e 8
poços.
Figura 2 – Exemplo de representação de solução
Na figura 3 está representado como se gera uma nova solução a partir de uma solução já
existente utilizando de mutação. Utilizando como solução “mãe”, a solução representada na
figura 2.

7
Figura 3 – Mutação
3.2.4. Método de Melhoramento
Neste trabalho foi utilizada uma técnica chamada de Melhor Troca. Esta técnica é descrita
segundo Goldbarg e Luna (2000) como uma estratégia de melhoria partindo de um ciclo
hamiltoniano.
Partindo da idéia de que neste trabalho o formato do Vetor Solução é dado por {Poços
atendidos pela Sonda 1, Poços atendidos pela Sonda 2,..., Poços atendidos pela Sonda N},
para um conjunto de poços sendo atendido por N sondas, a técnica de Melhor Troca pode ser
descrita pela a execução dos seguintes passos:
a) seleciona-se o primeiro índice do Vetor Solução, ou seja, o primeiro poço atendido pela
Sonda 1;
b) do índice seguinte ao selecionado até o último índice são feitas trocas de posição entre eles
e armazena-se o valor do custo para o novo conjunto elaborado, caso esse seja menor que o
atual, a posição de troca é então guardada como a melhor posição de troca e atualiza-se o
valor do custo para comparação;
c) ao final, caso seja estabelecida uma posição de troca melhor que a inicial, a troca é então
efetuada e o algoritmo é repetido para próximo índice do conjunto, conforme a etapa (a), até
que seja atingido o final do Vetor Solução;
d) caso ocorra alguma melhoria da solução ao final da execução das etapas anteriores, estas
são repetidas até que não ocorra mais nenhuma melhoria.
A adição da etapa (d) e o formato do Vetor Solução são adaptações desenvolvidas neste
trabalho sobre a técnica de Melhor Troca, descrita por Douro e Lorenzoni (2009). Porém a
adição da etapa (d) eleva o custo computacional de forma considerável, devido a este
inconveniente o algoritmo aplica a técnica de melhor troca com a etapa (d) apenas nas n
melhores soluções criadas durante a etapa de combinação, no restante é aplicado à técnica de
melhor troca sem a etapa (d). O valor de n adotado é igual ao número de soluções que

8
compõem o conjunto RS. A figura 4 esquematiza o método de melhor troca adaptado descrito
neste trabalho.
Figura 4 – Fluxograma de execução do Método de Melhor Troca
3.2.5. Método de atualização do Conjunto Referência (RS)
Neste trabalho, o conjunto referência foi preenchido pelas melhores soluções encontradas, e
por algumas soluções escolhidas de forma aleatória. O algoritmo foi construído de forma a
impedir que duas ou mais soluções iguais fossem salvas no conjunto RS. As soluções
adicionadas de forma aleatória têm como objetivo gerar certa diversidade dentro do conjunto
RS.
3.2.6. Método de geração de subconjuntos
Todas as soluções do conjunto RS foram combinadas dois a dois.
3.2.7. Método de combinação de soluções
O método utilizado para combinar as soluções foi o de cruzamento por permutação que foi
escolhido por ser de fácil implementação e por não possuir custo computacional elevado. Ele
consiste em gerar um número aleatório que será entendido como uma posição do Vetor
Solução, o poço que está localizado nesta posição da solução 1 é trocado com o poço que está
localizado nesta mesma posição na solução 2. Por exemplo, considere as duas soluções
representadas na figura 5.

9
Figura 5 – Soluções a serem cruzadas
Para as soluções da figura 5 temos os vetores solução dados por Solução 1: { 6 3 7 1 4 2 8 5}
e Solução 2: { 3 4 2 7 5 6 8 1}. Se o número gerado for 4, os poços referentes a 4ª posição de
cada vetor solução são trocados, neste caso o poço 1 da Solução 1 será trocado de posição
com o poço 7 da Solução 2. Ao final, as soluções criadas são corrigidas para eliminar
repetições, este processo está representado na figura 6.
Figura 6 - Cruzamento
Este processo poder ser repetido inúmeras vezes. Neste trabalho foi definido que seria
permutado apenas 10% da solução, logo para uma instância com 100 poços este processo
seria repetido 10 vezes.
O tamanho da população adotada depende da etapa de combinação e do número de soluções
do conjunto RS. O número de soluções criadas durante a etapa de combinação = e o
tamanho da população considerado é igual a .
4. Experimentos computacionais

10
O algoritmo foi implementado em linguagem C utilizando o compilador gratuito DEV-C++.
A máquina utilizada foi um notebook DELL VOSTRO 1310 com processador Intel Core 2
Duo de 1.8GHz com 2 Gb de memória e sistema operacional Windows Vista.
Os experimentos foram realizados com a massa de dados gerada e disponibilizada por Costa
(2005). Essa massa de dados possui instâncias com 25, 50, 75, 100 e 125 poços e com 1, 2, 4,
6, 8 e 10 sondas, sendo que para cada grupo de poços foram gerados 10 conjuntos, sendo estes
nomeados com as letras de A até J, o que totaliza 300 instâncias. As instâncias foram
nomeadas da seguinte forma: PNEx-S onde N corresponde ao número de poços, S ao número
de sondas e Ex ao conjunto de exemplos. Assim, P25A-6 corresponde a uma instância do
problema A com 25 poços e 6 sondas. Assim como em Costa (2005),neste trabalho,
analisamos apenas os resultados dos conjuntos A, para 2, 4, 6, 8 e 10 sondas.
O algoritmo SS desenvolvido neste trabalho, foi comparado com duas heurísticas propostas
por Costa (2005), sendo estas a Heurística de Máxima Prioridade Tricritério (HMPT) e a
Heurística de Montagem Dinâmica (HMD). Além destas duas heurísticas, o SS foi comparado
com um algoritmo GRASP, também proposto por Costa (2005), e com o algoritmo AG-2opt,
proposto por Douro e Lorenzoni (2009). A escolha destes trabalhos para comparação é devido
ao fato de utilizarem a mesma massa de dados.
Para análise do algoritmo criado neste trabalho iremos analisar os resultados obtidos a partir
da seguinte calibração: o número máximo de iterações é 60, o conjunto RS composto por 6
soluções das quais 2 são escolhidas de forma aleatória. Sendo que apenas 10% da solução se
altera quando aplicado o método de cruzamento.
Os resultados obtidos são apresentados na tabela 1, onde na coluna Perda da Melhor
Heurística temos o melhor resultado obtido por Costa (2005) dentre todas as heurísticas
implementadas (HMPT e HMD) em seu trabalho, na coluna GRASP indica os resultados
obtidos por Costa (2005) para a referida técnica, na coluna AG-2opt indica os resultados
obtidos por Douro e Lorenzoni (2009) utilizando da meta-heurística Algoritmo Genético. Na
coluna SS temos a média dos resultados obtidos em cinco execuções do algoritmo
desenvolvido neste trabalho.
Melhor
Heurística
GRASP AG-2opt SS
Conjunto Perda Perda Tempo
(s) Perda
Tempo
(s) Perda
Tempo
(s)
P25A-2 16421 17737 00:01:24 16329 00:00:04 16329 00:00:01
P25A-4 10348 10825 00:01:28 10312 00:00:05 10312 00:00:01
P25A-6 8555 8897 00:01:28 8499 00:00:02 8498,6 00:00:01

11
P25A-8 7735 7939 00:01:27 7736 00:00:01 7733 00:00:01
P25A-10 7329 7470 00:01:29 7325 00:00:01 7322 00:00:01
P50A-2 66920 81986 00:19:36 66907 00:00:14 66906,6 00:00:07
P50A-4 37936 43451 00:20:24 37896 00:00:15 37900,8 00:00:08
P50A-6 28485 33635 00:19:03 28353 00:00:05 28350 00:00:08
P50A-8 23839 26910 00:20:00 23788 00:00:16 23795 00:00:08
P50A-10 21409 23770 00:20:07 21351 00:00:10 21352,2 00:00:07
P75A-2 187358 239459 01:23:50 187240 00:00:36 187242,6 00:00:57
P75A-4 103364 137715 01:13:55 103218 00:00:27 103221,2 00:00:27
P75A-6 75871 97572 01:30:44 75524 00:00:25 75516,4 00:00:35
P75A-8 62179 78165 01:22:44 61916 00:00:18 61897,4 00:00:31
P75A-10 54099 66270 01:26:01 53889 00:00:29 53892,8 00:00:27
P100A-2 299093 405969 03:09:37 299051 00:01:01 299057,6 00:01:30
P100A-4 160016 209626 02:59:46 159983 00:00:48 159978,2 00:01:38
P100A-6 114456 148148 02:59:45 114275 00:02:16 114316,4 00:01:04
P100A-8 91954 115852 03:05:01 91769 00:02:21 91790,4 00:00:58
P100A-
10 78541
96243 03:01:58 78402 00:00:58 78400,4 00:00:51
P125A-2 380631 534998 05:38:07 380523 00:02:26 380541,6 00:02:55
P125A-4 200408 265171 05:37:12 200368 00:01:00 200349,6 00:02:59
P125A-6 140648 188746 05:34:10 140550 00:02:24 140559,2 00:01:57
P125A-8 111015 145440 05:37:49 110844 00:01:06 110839,2 00:02:14
P125A-
10 93280
122438 05:48:08 93078 00:02:44 93093,6 00:01:36
Tabela 1 – Resultados
No gráfico da figura 7 está representado o desvio percentual do AG-2opt e SS em relação às
heurísticas desenvolvidas por Costa (2005). O desvio é dado por ((Perda obtida - Perda das
heurísticas) / Perda das heurísticas) x 100%. Por meio deste gráfico, pode se observar que em
nenhuma das instâncias o SS obteve resultado inferior a heurística AG-2opt.

12
Figura 7 – Desvio em relação a Melhor Heurística
A média dos desvios encontrados foram calculados, sendo o desvio médio do AG-2opt e SS
respectivamente -0,208% e -0,209%. O gráfico da figura 8 ilustra a média do desvio obtido
pelos 2 algoritmos comparados (AG-2opt e SS) em relação ao resultado ótimo encontrado
pelo solver CPLEX 9.0 para instâncias de 25 poços. O CPLEX encontra sempre o resultado
ótimo, porém possui um custo computacional muito elevado, os resultados podem ser
encontrados em Costa (2005). O gráfico da figura 8 mostra que SS obteve em média
resultados melhores que o AG-2opt para instâncias de 25 poços.
Figura 5 – Desvio Percentual em relação ao CPLEX 9.0

13
5. Conclusões
Este trabalho demonstrou a eficiência do Scatter Search em conjunto com a técnica de Melhor
Troca para POI-SPT. Os resultados obtidos pelo SS para instâncias artificiais mostraram-se
muito bons em comparação aos encontrados por outras heurísticas e meta-heurísticas. O
algoritmo quando executado diversas vezes para uma mesma instância e calibração, obteve
resultados sempre muito próximos mostrando a sua robustez mesmo com o número máximo
de iterações reduzido. O aumento do número de poços ou sondas não desencadeou uma perda
de eficiência do algoritmo. O tempo computacional mostrou-se baixo quando comparado ao
GRASP e próximo quando comparado ao AG-2opt.
Para trabalhos futuros pretende-se melhorar o desempenho do algoritmo a partir de um
refinamento da calibração dos parâmetros do algoritmo. Pretende-se ainda utilizar/buscar
instâncias reais para a avaliação do algoritmo.
Referências
ALOISE, D., NORONHA, T. F., MAIA, R. S., BITTENCOURT, V. G. & ALOISE, D. J.
Heurísticas de colônia de formigas com path-relinkink para o problema de otimização da
alocação de sondas de produção terrestre – SPT. In: XXXIV Simpósio Brasileiro de Pesquisa
Operacional, 2002, Rio de Janeiro.
ALVES, V.R.M. & FERREIRA, V. Algoritmo genético para a solução do problema de
roteamento e seqüenciamento de sondas de manutenção. In: XXXVIII Simpósio Brasileiro de
Pesquisa Operacional, 2006, Goiânia.
BELFIORE, P. & YOSHIZAKI, H.T.Y. Scatter search for a real-life heterogeneous fleet
vehicle routing problem with time windows and split deliveries. European Journal of
Operational Research, 199 (3), p.750-758, 2009.
COSTA, L. R. Soluções para o Problema de Otimização de Itinerário de Sondas. 2005.
Dissertação – Programa de Pós-Graduação de Engenharia da Universidade Federal do Rio de
Janeiro. Rio de Janeiro, 2005.
CUNG, V-D.; MAUTOR, T.; MICHELON, P. & TAVARES, A. A Scatter Search based
approach for the Quadratic Assignment problem. In T. Bäck, Z.; Michalewicz, X. Yao (eds.),
Proceedings of ICEC´97, IEEE Press, p.165-170, 1996.
DOURO, R. & LORENZONI, L. L. Um Algoritmo Genético-2opt Aplicado ao Problema de
Otimização de Itinerário de Sondas de Produção Terrestre. In: XLI Simpósio Brasileiro de
Pesquisa Operacional, 2009, Porto Seguro.
GLOVER, F. A template for scatter search and path relinking. In Hao, J.-K., Lutton, E.,
Ronald, E.,Schoenauer, M. and Snyers D. (eds.), Artificial Evolution Lecture Notes in
Computer Science, Springer, 1363,p.13-54, 1998.
GOLDBARG, M. C. & LUNA, H. P. L. Otimização combinatória e programação Linear:
Modelos e Algoritmos. Rio de Janeiro: Campus, 2000.

14
GOUVÊA, E. F., GOLDBARG, M. C. & COSTA, W. E. Algoritmos de evolucionários na
solução do problema de otimização do emprego de sondas de produção em poços de petróleo.
In: XXXIV Simpósio Brasileiro de Pesquisa Operacional, 2002, Rio de Janeiro.
MAIA, R. S., GONZAGA, C. M., LIMA, F. C. & BITTENCOURT, V., G. Otimização
das intervenções em poços de petróleo por sondas de produção terrestre: Busca Tabu SPT.
In: XXXIV Simpósio Brasileiro de Pesquisa Operacional, 2002, Rio de Janeiro.
OLIVEIRA, E. F. Scatter Search aplicado ao problema de otimização da alocação de
sondas de produção em poços de petróleo. In: XXVII ENEGEP Encontro Nacional de
Engenharia de Produção, Foz do Iguaçu, 2007.
PAIVA, R.O. Otimização do itinerário de Sondas de intervenção com quantificação de
perdas através de simuladores de reservatórios. Dissertação de Mestrado - Unicamp,
Campinas, SP, Brasil, 1997.
REEVES, C.R.; YAMADA, T. Goal-oriented path tracing methods. In D. Corne, M.
Dorigo, and Fred Glover, editors, New Ideas in Optimization, McGraw-Hill, p.341-355, 1999.
ROCHAT, Y. & TAILLARD, E.D. Probabilistic diversification and intensification in Local
Search for Vehicle Routing. Journal of Heuristics Vol. 22, p.158-166, 1995.
SCHEUERER, S. & WENDOLSKY, R. A Scatter search heuristicfor the capacitated
clustering problem. European Journal of Operational Research, Vol. 169, n.2, p.533-547,
2006.
YAMASHITA, D.S.; ARMENTANO, V.A. & LAGUNA, M. Scatter search for project
scheduling with resource availability cost. European Journal of Operational Research, Vol.
169, n.2, p.623-637, 2006.