RESUMO MECÂNICA II P1
19
RESUMO MECÂNICA II P1 Autoria: Yan Ichihara de Paula • INTRODUÇÃO Antes de tudo, há um breve comentário sobre essa matéria. Mecânica II, ou, na linguagem popular politécnica, Mecânica B, é uma das matérias mais importantes da graduação, não só para Grande Área da Mecânica, mas sim para o entendimento das aplicações de seus conceitos e acontecimentos físicos na formação de um engenheiro e como ocorre sua utilização na sociedade. Dito isso, seria interessante não estudar essa matéria somente para bitolar para uma prova, mas procurar saber o que o estudo sobre ela implica nas mais diversas situações cotidianas. O simples rolamento de uma bola de boliche, por exemplo, é material de estudo incrível e extenso para a Mecânica Geral. De qualquer forma, espero que esse resumo seja de grande ajuda! :) • REVISÃO MECÂNICA I É válido relembrar algumas fórmulas de Mecânica I: Momento de Força: = + ∑( − ) ∧ = + ( − ) ∧ ∑ Equações da Cinemática: = + ∧ ( − ) = + ̇ ∧ ( − ) + ∧ { ∧ ( − )} ,ó = ∧ , Ω = + ̇ = ̇ + ̇ + ∧
Transcript of RESUMO MECÂNICA II P1

RESUMO MECÂNICA II
P1
Autoria: Yan Ichihara de Paula
• INTRODUÇÃO
Antes de tudo, há um breve comentário sobre essa matéria. Mecânica II,
ou, na linguagem popular politécnica, Mecânica B, é uma das matérias mais
importantes da graduação, não só para Grande Área da Mecânica, mas sim
para o entendimento das aplicações de seus conceitos e acontecimentos
físicos na formação de um engenheiro e como ocorre sua utilização na
sociedade. Dito isso, seria interessante não estudar essa matéria somente para
bitolar para uma prova, mas procurar saber o que o estudo sobre ela implica
nas mais diversas situações cotidianas. O simples rolamento de uma bola de
boliche, por exemplo, é material de estudo incrível e extenso para a Mecânica
Geral.
De qualquer forma, espero que esse resumo seja de grande ajuda! :)
• REVISÃO MECÂNICA I
É válido relembrar algumas fórmulas de Mecânica I:
Momento de Força:
�⃗⃗⃗� 𝒐 = �⃗⃗⃗�
𝒆𝒙𝒕 + ∑(𝑷𝒊 − 𝑶) ∧ �⃗⃗� 𝒊
�⃗⃗⃗� 𝒂 = �⃗⃗⃗�
𝒃 + (𝑩 − 𝑨) ∧ ∑�⃗⃗� 𝒊
Equações da Cinemática:
�⃗⃗� 𝒑 = �⃗⃗� 𝒐 + �⃗⃗⃗� ∧ (𝑷 − 𝑶)
�⃗⃗� 𝒑 = �⃗⃗� 𝒐 + �⃗⃗⃗� ̇ ∧ (𝑷 − 𝑶) + �⃗⃗⃗� ∧ {�⃗⃗⃗� ∧ (𝑷 − 𝑶)}
�⃗⃗� 𝒑,𝒄𝒐𝒓𝒊ó𝒍𝒊𝒔 = 𝟐 �⃗⃗⃗� 𝒂𝒓𝒓 ∧ �⃗⃗� 𝒑,𝒓𝒆𝒍
Ω⃗⃗ = �⃗⃗� 𝑟𝑒𝑙 + �⃗⃗� 𝑎𝑟𝑟
�⃗⃗� ̇ = �⃗⃗⃗� ̇𝒓𝒆𝒍 + �⃗⃗⃗� ̇𝒂𝒓𝒓 + �⃗⃗⃗� 𝒂𝒓𝒓 ∧ �⃗⃗⃗� 𝒓𝒆𝒍
Equações da Dinâmica:
𝒎�⃗⃗� 𝑮 = ∑𝑭𝒊 �⃗⃗⃗� 𝒐 = 𝒎(𝑮 − 𝑶) ∧ �⃗⃗� 𝒐 +
𝒅
𝒅𝒕 {[𝒊 𝒋 �⃗⃗� ] [𝑱]𝒐 [
𝝎𝒙
𝝎𝒚
𝝎𝒛
]}
[𝑱]𝒐 = [
𝑱𝒙𝒙 −𝑱𝒙𝒚 −𝑱𝒙𝒛
−𝑱𝒚𝒙 𝑱𝒚𝒚 −𝑱𝒚𝒛
−𝑱𝒛𝒙 −𝑱𝒛𝒚 𝑱𝒛𝒛
]
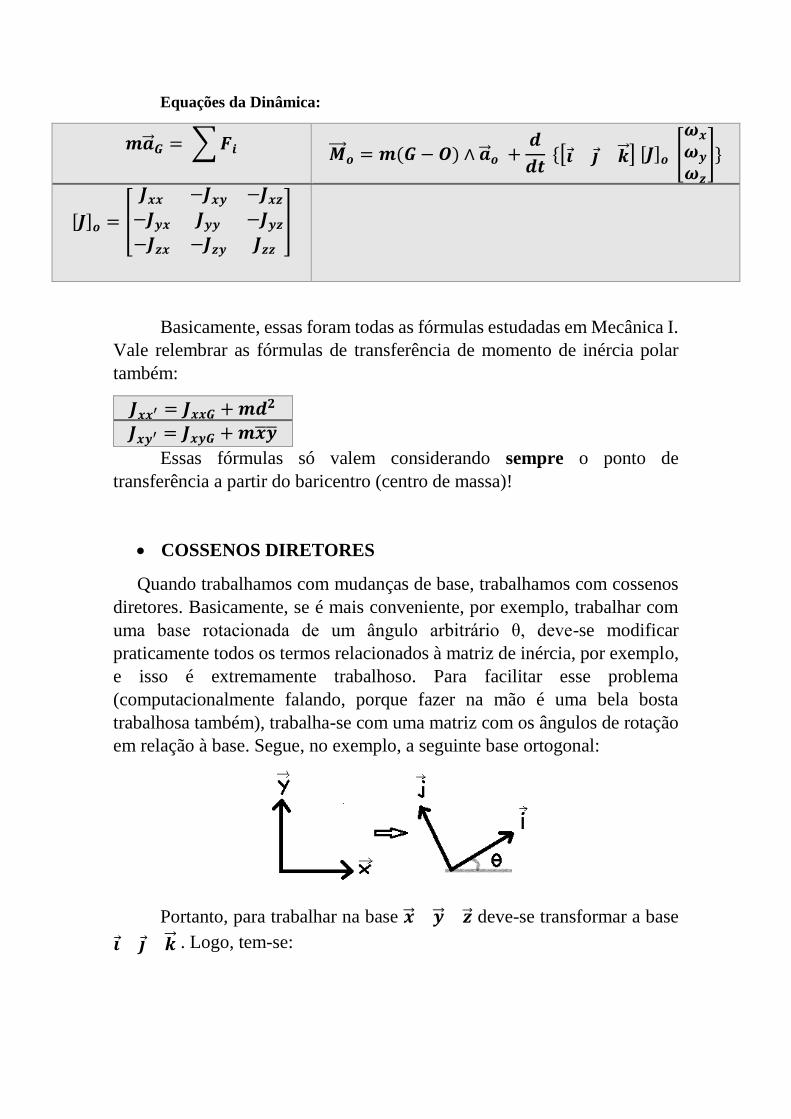
Basicamente, essas foram todas as fórmulas estudadas em Mecânica I.
Vale relembrar as fórmulas de transferência de momento de inércia polar
também:
𝑱𝒙𝒙′ = 𝑱𝒙𝒙𝑮 + 𝒎𝒅𝟐
𝑱𝒙𝒚′ = 𝑱𝒙𝒚𝑮 + 𝒎�̅��̅�
Essas fórmulas só valem considerando sempre o ponto de
transferência a partir do baricentro (centro de massa)!
• COSSENOS DIRETORES
Quando trabalhamos com mudanças de base, trabalhamos com cossenos
diretores. Basicamente, se é mais conveniente, por exemplo, trabalhar com
uma base rotacionada de um ângulo arbitrário θ, deve-se modificar
praticamente todos os termos relacionados à matriz de inércia, por exemplo,
e isso é extremamente trabalhoso. Para facilitar esse problema
(computacionalmente falando, porque fazer na mão é uma bela bosta
trabalhosa também), trabalha-se com uma matriz com os ângulos de rotação
em relação à base. Segue, no exemplo, a seguinte base ortogonal:
Portanto, para trabalhar na base �⃗⃗� �⃗⃗� �⃗� deve-se transformar a base
𝒊 𝒋 �⃗⃗� . Logo, tem-se:

𝑥 = cos 𝜃 𝑖 − sin 𝜃 𝑗
𝑦 = sin 𝜃 𝑖 + cos 𝜃 𝑗
Assim, a equação matricial fica:
[𝑥𝑦] = [
cos 𝜃 − sin 𝜃sin 𝜃 cos 𝜃
] [𝑖𝑗]
Portanto, a matriz de cossenos diretores é [cos 𝜃 − sin 𝜃sin 𝜃 cos 𝜃
], que
transforma a base 𝒊 𝒋 �⃗⃗� para �⃗⃗� �⃗⃗� �⃗� .
Trabalhando em uma transformação de coordenadas em z, faz-se
necessário um ângulo a mais, e haveria mais esse ângulo para trabalhar nas
equações de forma análoga à realizada, chegando a:
[𝑥𝑦𝑧] = [𝐶] [
𝑖𝑗𝑘]
Sendo [𝐶] a matriz 3x3 de cossenos diretores.
Dessa forma, como é possível trabalhar com matrizes, as aplicações
de Álgebra Linear são válidas (quem diria, né?) e, a partir de algumas
manipulações algébricas, chega-se a:
[𝑱]𝑂𝑎′𝑏′𝑐′ = [𝐶][𝑱]𝑂𝑎𝑏𝑐[𝐶]𝑇
Tal que [𝐶] é a matriz de cossenos diretores que transforma a base
�⃗⃗� �⃗⃗� �⃗� para a base 𝒂′⃗⃗ ⃗ 𝒃′⃗⃗ ⃗ 𝒄′⃗⃗⃗ .

Observação: um eixo principal é aquele o qual a matriz de inércia
em relação a um ponto contido nele possua produtos inerciais nulos,
sendo, dessa forma, uma matriz diagonal. Matematicamente, é possível
achar essa matriz a partir dos autovetores e autovalores, tal visto em
Álgebra Linear.
EXERCÍCIO RESOLVIDO
Apostila - Dinâmica dos corpos rígidos
A matriz de inércia na base 𝑂𝑥′1𝑥′2 é aquela cuja matriz de cossenos
diretores transforma a base 𝑂𝑥1𝑥2 𝑒𝑚 𝑂𝑥′1𝑥′2.
Portanto, analisando vetorialmente:
𝑥 ′1 = cos 𝜃 𝑥 1 + sin 𝜃 𝑥 2
𝑥 ′2 = −sin 𝜃 𝑥 1 + cos 𝜃 𝑥 2
Matricialmente:
[𝑥′1𝑥′2
] = [cos 𝜃 sin 𝜃−sin 𝜃 cos 𝜃
] [𝑥1
𝑥2]
Portanto, a matriz de cossenos diretores [𝐶] é [cos 𝜃 sin 𝜃−sin 𝜃 cos 𝜃
], e
[𝐶]𝑇 = [cos 𝜃 − sin 𝜃sin 𝜃 cos 𝜃
]
Tem-se, portanto

[𝑱]𝑂𝑥′1𝑥′2 = [cos 𝜃 sin 𝜃−sin 𝜃 cos 𝜃
] [𝐼11 𝐼12
𝐼21 𝐼22]𝑂𝑥1𝑥2
[cos 𝜃 − sin 𝜃sin 𝜃 cos 𝜃
] =
= [cos 𝜃 sin 𝜃−sin 𝜃 cos 𝜃
] [𝐼11 cos 𝜃 + 𝐼12 sin 𝜃 −𝐼11 sin 𝜃 + 𝐼12 cos 𝜃𝐼21 cos 𝜃 + 𝐼22 sin 𝜃 −𝐼21 sin 𝜃 + 𝐼22 cos 𝜃
] =
= [𝐼11 cos2 𝜃 + 𝐼12 cos 𝜃 sin 𝜃 + 𝐼21 sin 𝜃 cos 𝜃 + 𝐼22 sin2 𝜃 −𝐼11 cos 𝜃 sin 𝜃 + 𝐼12 cos2 𝜃 −𝐼21 sin2 𝜃 + 𝐼22 sin 𝜃 cos 𝜃
−𝐼11 sin 𝜃 cos 𝜃 − 𝐼12 sin2 𝜃 + 𝐼21 cos2 𝜃 + 𝐼22 cos 𝜃 sin 𝜃 𝐼11 sin2 𝜃 − 𝐼12 sin 𝜃 cos 𝜃 −𝐼21 cos 𝜃 sin 𝜃 + 𝐼22 cos2 𝜃]
Como, pelas propriedades dos produtos de inércia, 𝐼12 = 𝐼21, tem-se
= [𝐼11 cos2 𝜃 + 2𝐼12 cos 𝜃 sin 𝜃 + 𝐼22 sin2 𝜃 −𝐼11 cos 𝜃 sin 𝜃 + 𝐼12 cos 2𝜃 + 𝐼22 sin 𝜃 cos 𝜃
−𝐼11 sin 𝜃 cos 𝜃 + 𝐼12 cos 2𝜃 + 𝐼22 cos 𝜃 sin 𝜃 𝐼11 sin2 𝜃 − 2𝐼12 sin 𝜃 cos 𝜃 + 𝐼22 cos2 𝜃]
Para que o sistema esteja em um eixo principal, os produtos de inércia
têm que se anular, logo:
−𝐼11 cos 𝜃 sin 𝜃 + 𝐼12 cos 2𝜃 + 𝐼22 sin 𝜃 cos 𝜃 = 0
𝐼12 cos 2𝜃 = sin 𝜃 cos 𝜃 (𝐼11 − 𝐼22)
𝐼12 cos 2𝜃 =sin 2𝜃
2(𝐼11 − 𝐼22) → tan 2𝜃 =
2𝐼12
𝐼11 − 𝐼22
𝜃 =1
2𝑎𝑟𝑐𝑡𝑔 (
2𝐼12
𝐼11 − 𝐼22)
Nota: Cossenos diretores é um assunto que se utiliza bastante na
montagem de mecanismos, sendo, dessa forma, extremamente útil e
passível de aprofundamento. Nas provas, não há questões inteiras sobre
isso, mas, sim, itens que você precise utilizá-lo.
• MOMENTO DA QUANTIDADE DE MOVIMENTO / QUANTIDADE DE
MOVIMENTO ANGULAR
O momento da quantidade de movimento está relacionado à inércia de
um corpo devido à rotação, sendo, portanto, uma grandeza vetorial. Define-
se como:
�⃗⃗� 𝑜 = (𝑮 − 𝑶) ∧ 𝑚�⃗� 𝒐 + [𝒊 𝒋 �⃗⃗� ] [𝑱]𝒐 [
𝝎𝒙
𝝎𝒚
𝝎𝒛
]
Além disso, sabendo a quantidade de movimento angular de um pólo, é
possível encontrar a quantidade de movimento angular em outro pólo, pela
equação:

�⃗⃗� 𝑏 = �⃗⃗� 𝑎 + (𝐴 − 𝐵) ∧ 𝑚�⃗� 𝒂
É possível demonstrar, a partir da primeira equação, o Teorema do
Momento da Quantidade de Movimento, pelo qual obtemos
𝑑�⃗⃗� 𝑜𝑑𝑡
=𝑑
𝑑𝑡{(𝑮 − 𝑶) ∧ 𝑚�⃗� 𝒐 + [𝒊 𝒋 �⃗⃗� ] [𝑱]𝒐 [
𝝎𝒙
𝝎𝒚
𝝎𝒛
]}
Chega-se, pelo teorema, na fórmula estudada em Mecânica I (mágica):
𝑑�⃗⃗� 𝑜𝑑𝑡
= �⃗⃗� 𝑜 = 𝒎(𝑮 − 𝑶) ∧ �⃗⃗� 𝒐 +𝒅
𝒅𝒕 {[𝒊 𝒋 �⃗⃗� ] [𝑱]𝒐 [
𝝎𝒙
𝝎𝒚
𝝎𝒛
]}
O termo 𝒅
𝒅𝒕 {[𝒊 𝒋 �⃗⃗� ] [𝑱]𝒐 [
𝝎𝒙
𝝎𝒚
𝝎𝒛
]} pode ser desmembrado (vide Cálculo
I pela regra da cadeia) em:
[𝒊 ̇ 𝑗 ̇ �⃗� ̇][𝑱]𝒐 [
𝝎𝒙
𝝎𝒚
𝝎𝒛
] + [𝒊 𝒋 �⃗⃗� ] [�̇�]𝒐 [
𝝎𝒙
𝝎𝒚
𝝎𝒛
] + [𝒊 𝒋 �⃗⃗� ] [𝑱]𝒐 [
�̇�𝒙
�̇�𝒚
�̇�𝒛
]
Dependendo do exercício, podem ser aplicadas simplificações como
1. A base 𝒊 𝒋 �⃗⃗� não varia com o tempo, portanto, o termo
[𝒊 ̇ 𝑗 ̇ �⃗� ̇] é nulo.
2. [𝑱]𝒐 é fixa, portanto, o termo [�̇�]𝒐 é nulo.
3. Não há aceleração angular, logo o termo [
�̇�𝒙
�̇�𝒚
�̇�𝒛
] é nulo.
Deve-se observar sempre, por exemplo, se uma base é solidária a um
corpo, e, portanto, nesse referencial a matriz de inércia [𝑱]𝒐 não varia com o
tempo, o que é extremamente conveniente na maioria dos casos. Entretanto,
vale lembrar que a base 𝒊 𝒋 �⃗⃗� vai variar nesse caso.

EXERCÍCIO RESOLVIDO
P1 2015 – Questão 3
a) Primeiramente, deve-se avaliar a base conveniente a ser utilizada.
Como a quantidade de movimento angular será obtida no pólo B, é
interessante utilizar a base solidária ao corpo. Portanto, todos os
parâmetros de interesse devem ser avaliados nessa base. Assim:
Ω⃗⃗ = −Ωcos 𝜃 𝑗 + Ω sin 𝜃 �⃗�
Portanto,
Ω⃗⃗ 𝑎𝑏𝑠 = 𝜔𝑗 − Ω cos 𝜃 𝑗 + Ω sin 𝜃 �⃗� = (𝜔 − Ωcos 𝜃)𝑗 + Ω sin 𝜃 �⃗�
b) Observando o disco, no pólo B, tem-se:
�⃗⃗� 𝑏 = (𝑮 − 𝑩) ∧ 𝑚�⃗� 𝒃 + [𝒊 𝒋 �⃗⃗� ] [𝑱]𝒃 [
𝝎𝒙
𝝎𝒚
𝝎𝒛
]
Porém, 𝐵 ≡ 𝐺 do disco, então:
�⃗⃗� 𝐺 = [𝒊 𝒋 �⃗⃗� ] [𝑱]𝑮 [
𝝎𝒙
𝝎𝒚
𝝎𝒛
]
�⃗⃗� 𝐺 = [𝒊 𝒋 �⃗⃗� ]
[ 𝑚𝑅2
40 0
0𝑚𝑅2
20
0 0𝑚𝑅2
4 ]
[0
𝜔 − Ω cos 𝜃Ω sin 𝜃
]
�⃗⃗� 𝐺 =𝑚𝑅2
2(𝜔 − Ωcos 𝜃)𝒋 +
𝑚𝑅2
4Ω sin 𝜃 �⃗⃗�

c) A quantidade de movimento angular no pólo A é obtida a partir da
fórmula de transmissão de quantidade de movimento angular.
Assim:
�⃗⃗� 𝐴 = �⃗⃗� 𝐵 + (𝐵 − 𝐴) ∧ 𝑚�⃗� 𝑩
Antes de tudo, precisa-se achar a velocidade absoluta no ponto B.
A velocidade �⃗� 𝐴 na base de coordenadas conveniente, é
�⃗� 𝐴 = −𝑽 cos 𝜃 𝒋 + 𝑽 sin 𝜃 �⃗⃗�
Portanto, por Poisson:
�⃗� 𝐵 = �⃗� 𝐴 + Ω⃗⃗ 𝑎𝑏𝑠 ∧ (𝐵 − 𝐴)
�⃗� 𝐵 = −𝑉 cos 𝜃 𝒋 + 𝑉 sin 𝜃 �⃗⃗� + (−Ωcos 𝜃 𝑗 + Ωsin 𝜃 �⃗� ) ∧ (𝐿𝑗 )
�⃗� 𝐵 = −ΩL sin 𝜃 𝒊 − 𝑉 cos 𝜃 𝒋 + 𝑉 sin 𝜃 �⃗⃗�
Agora, aplicando a fórmula de transferência de quantidade de
movimento angular:
�⃗⃗� 𝐴 = �⃗⃗� 𝐵 + (𝐿𝑗 ) ∧ 𝑚(−ΩL sin 𝜃 𝒊 − 𝑉 cos 𝜃 𝒋 + 𝑉 sin 𝜃 �⃗⃗� )
�⃗⃗� 𝐴 = 𝑚𝑅2
2(𝜔 − Ωcos 𝜃)𝒋 +
𝑚𝑅2
4Ω sin 𝜃 �⃗⃗� + 𝑚𝐿𝑉 sin 𝜃 𝒊
+ 𝑚ΩL2 sin 𝜃 �⃗⃗�
Assim:
�⃗⃗� 𝐴 = 𝑚𝐿𝑉 sin 𝜃 𝒊 + 𝑚𝑅2
2(𝜔 − Ωcos 𝜃)𝒋
+ (𝑚𝑅2
4Ω sin 𝜃 + 𝑚ΩL2 sin 𝜃) �⃗⃗�

P1 2015 – Questão 2
a) Primeiramente, deve-se avaliar o que está ocorrendo.
O cilindro dentro do vagão está girando no eixo AB em relação ao vagão,
e o vagão está girando em torno de um centro de rotação instantâneo cujo
raio é R.
Portanto, tem-se �⃗⃗� 𝑟𝑒𝑙 = 𝝎𝒙𝒊 e �⃗⃗� 𝑎𝑟𝑟 = �̇��⃗⃗� . Pela equação da cinemática:
�⃗� 𝑮 = �⃗� 𝒐 + �⃗⃗� 𝑎𝑟𝑟 ∧ (𝑮 − 𝑶) → 𝑉𝒊 = 0 + �̇��⃗⃗� ∧ (−𝑹𝒋 ) → 𝑉𝒊 = �̇�𝑹𝒊
𝑉
𝑅= �̇� → �⃗⃗� 𝑎𝑟𝑟 =
𝑉
𝑅�⃗⃗�
Logo,
Ω⃗⃗ = �⃗⃗� 𝑟𝑒𝑙 + �⃗⃗� 𝑎𝑟𝑟 → Ω⃗⃗ = 𝝎𝒙𝒊 + 𝑉
𝑅�⃗⃗�
b) Agora já se tem aplicação de conceitos de Mecânica II.
Tem-se:
�⃗⃗� 𝑜 = (𝑮 − 𝑶) ∧ 𝑚�⃗� 𝒐 + [𝒊 𝒋 �⃗⃗� ] [𝑱]𝒐 [
Ω𝒙
Ω𝒚
Ω𝒛
]
Porém, há simplificações que ocorrem, pois 𝑂 ≡ 𝐺, logo o primeiro
termo se anula. O ponto G é um eixo central do corpo girante, e, portanto,
os produtos inerciais são nulos. Assim, chega-se a:
�⃗⃗� 𝐺 = [𝒊 𝒋 �⃗⃗� ] [
𝐽𝐺𝑥 0 00 𝐽𝐺𝑦 0
0 0 𝐽𝐺𝑧
] [
𝝎𝒙
0𝑉
𝑅
]

�⃗⃗� 𝐺 = 𝐽𝐺𝑥𝝎𝒙𝒊 + 𝐽𝐺𝑧
𝑉
𝑅�⃗⃗�
c) Agora a parte mais complicada. Aqui é uma junção de dinâmica de
Mecânica I e do que vimos agora. Como em A é uma articulação, há
reação nas três direções, já em B, como é um anel, só há reação em y
e z. De Mecânica I:
Sendo assim, tem-se
𝒎�⃗⃗� 𝑮 = ∑𝐹𝑖
{
𝑀𝑎𝑧 = 𝑍𝑎 + 𝑍𝑏 − 𝑃𝑀𝑎𝑦 = 𝑌𝑎 + 𝑌𝑏
𝑀𝑎𝑥 = 𝑋𝑎
�⃗⃗� 𝐺 = �⃗⃗� 𝒐 + �⃗⃗� ̇𝑎𝑟𝑟 ∧ (𝐺 − 𝑶) + �⃗⃗� 𝑎𝑟𝑟 ∧ {�⃗⃗� 𝑎𝑟𝑟 ∧ (𝐺 − 𝑶)}
�⃗⃗� 𝒐 = 0⃗ , �⃗⃗� ̇𝑎𝑟𝑟 = 0⃗ , �⃗⃗� 𝑎𝑟𝑟 = 𝑉
𝑅 �⃗⃗�
�⃗⃗� 𝐺 =𝑉
𝑅 �⃗⃗� ∧ {
𝑉
𝑅 �⃗⃗� ∧ (−𝑅𝒋 )} =
𝑉
𝑅 �⃗⃗� ∧ 𝑉𝒊 =
𝑉2
𝑅 𝒋
Conclui-se que �⃗⃗� 𝑧 = �⃗⃗� 𝑥 = 0⃗ → 𝑍𝑎 + 𝑍𝑏 = 𝑃 e 𝑋𝑎 = 0
�⃗⃗� 𝑦 = 𝑉2
𝑅 𝒋 → 𝑌𝑎 + 𝑌𝑏 =
𝑀𝑉2
𝑅
Agora, a parte de Mecânica II:
𝑑�⃗⃗� 𝐺𝑑𝑡
= �⃗⃗� 𝐺
�⃗⃗� 𝐺 = 𝐽𝐺𝑥𝝎𝒙𝒊 + 𝐽𝐺𝑧
𝑉
𝑅�⃗⃗� →
𝑑�⃗⃗� 𝐺𝑑𝑡
= 𝐽𝐺𝑥�̇�𝒙𝒊 + 𝐽𝐺𝑥𝝎𝒙𝑖 ̇ + 𝐽𝐺𝑧
�̇�
𝑅�⃗⃗� + 𝐽𝐺𝑧
𝑉
𝑅�⃗� ̇
�̇�𝒙 = 0, �̇� = 0 → 𝑑�⃗⃗� 𝐺𝑑𝑡
= 𝐽𝐺𝑥𝝎𝒙𝑖 ̇ + 𝐽𝐺𝑧
𝑉
𝑅�⃗� ̇

Lembrando que:
𝑖 ̇ = �⃗⃗� 𝑎𝑟𝑟 ∧ 𝒊 = 𝑉
𝑅 �⃗⃗� ∧ 𝒊 =
𝑉
𝑅𝒋
�⃗� ̇ = �⃗⃗� 𝑎𝑟𝑟 ∧ �⃗� = 𝑉
𝑅 �⃗⃗� ∧ �⃗� = 0⃗
Logo:
𝑑�⃗⃗� 𝐺𝑑𝑡
= 𝐽𝐺𝑥𝝎𝒙
𝑉
𝑅𝒋
Agora, calculando os momentos:
𝑀𝐺𝑦 = 𝑍𝑎𝐿 − 𝑍𝑏𝐿
𝑀𝐺𝑧 = −𝑌𝑎𝐿 + 𝑌𝑏𝐿, e 𝑀𝐺𝑥 = 0
Assim, pela equação do teorema 𝐽𝐺𝑥𝝎𝒙𝑉
𝑅𝒋 = 𝑀𝐺𝑥𝒊 + 𝑀𝐺𝑦𝒋 + 𝑀𝐺𝑧�⃗� ,
𝑀𝐺𝑥 = 𝑀𝐺𝑧 = 0, tem-se −𝑌𝑎𝐿 + 𝑌𝑏𝐿 = 0 → 𝑌𝑎 = 𝑌𝑏
𝐽𝐺𝑥𝝎𝒙𝑉
𝑅= 𝑍𝑎𝐿 − 𝑍𝑏𝐿 → 𝐽𝐺𝑥𝝎𝒙
𝑉
𝑅𝐿= 𝑍𝑎 − 𝑍𝑏
Das equações anteriores:
2𝑌𝑎 = 𝑀𝑉2
𝑅 → 𝑌𝑎 =
𝑀𝑉2
2𝑅 → 𝑌𝑏 =
𝑀𝑉2
2𝑅
{𝑍𝑎 − 𝑍𝑏 = 𝐽𝐺𝑥𝝎𝒙
𝑉
𝑅𝐿𝑍𝑎 + 𝑍𝑏 = 𝑃 = 𝑀𝑔
Dessa forma:
𝑍𝑎 =𝐽𝐺𝑥𝝎𝒙𝑉 + 𝑀𝑔𝑅𝐿
2𝑅𝐿
𝑍𝑏 =𝑀𝑔𝑅𝐿 − 𝐽𝐺𝑥𝝎𝒙𝑉
2𝑅𝐿
Como a questão quer a reação nos mancais, e não no corpo, as reações
são:
𝑋𝑎′ = 0, 𝑌𝑎
′ = −𝑀𝑉2
2𝑅, 𝑌𝑏
′ = −𝑀𝑉2
2𝑅, 𝑍𝑎
′ = −𝐽𝐺𝑥𝝎𝒙𝑉+𝑀𝑔𝑅𝐿
2𝑅𝐿
𝑒 𝑍𝑏′ = −
𝑀𝑔𝑅𝐿 − 𝐽𝐺𝑥𝝎𝒙𝑉
2𝑅𝐿

Na resolução da prova o corretor confunde os sinais da base xy utilizada
no cálculo dos momentos, o que conduz a uma solução errada.
• BALANCEAMENTO
Balanceamento é um método de estabelecer parâmetros para que o seu
corpo mantenha um equilíbrio centrado no eixo de rotação principal.
Sendo assim, para o equilíbrio estático, é necessário que o corpo tenha
seu centro de massa no eixo de rotação principal, e, para o equilíbrio
dinâmico, é necessário que a matriz de inércia seja diagonal, ou seja, que
todos os produtos inerciais sejam nulos. Em geral, é necessário que ambos
os equilíbrios estático e dinâmico sejam satisfeitos. Perceba que, em
geral, são utilizados pesos no sistema (no mínimo dois) para que esses
equilíbrios sejam satisfeitos, e, como os pesos são arbitrários, há mais
incógnitas que a quantidade de equações, e, na maioria das questões, uma
simples análise lógica é suficiente para a resolução do problema, pois a
posição geralmente é dada.
Em outras palavras, balancear um sistema é fazer com que ele
independa de fatores inerciais de rotação, ou seja, independer de 𝜔2 e �̇�,
e, portanto, as reações vinculares nos apoios do eixo são nulas.
Esse assunto é mais fácil de explicar utilizando exercícios.
EXERCÍCIO RESOLVIDO
P1 2015 – Questão 1
Para que as reações dinâmicas nos vínculos A e B se anulem, é
necessário balancear o sistema. Para tanto, é necessário que sejam satisfeitas
as condições de centro de massa no eixo principal e produtos inerciais sejam
zero. Desconsidera-se a massa da barra AB.

Assim, o centro de massa tem necessariamente que estar em um ponto
(0, 0, 𝑧). Portanto, tem-se duas equações para o eixo x e o y. No sistema
dado, o centro de massa na coordenada x já é zero, logo deve-se satisfazer a
condição em y:
𝑦𝐺 = −
2𝑚𝐿2
+ 𝑚𝑦1 + 𝑚𝑦2
2𝑚 + 𝑚 + 𝑚= 0 → −𝑚𝐿 + 𝑚𝑦1 + 𝑚𝑦2 = 0
Os produtos de inércia em x são zero, pois, o sistema é plano, portanto
deve-se avaliar o produto de inércia de yz. Assim:
𝐽𝑦𝑧 = 2𝑚 (−𝐿
2) ∙ 𝐿 + 𝑚
𝐿
2∙ 𝑦2 + 𝑚
5𝐿
4∙ 𝑦1 = 0
Assim, tem-se
{
𝑦1 + 𝑦2 = 𝐿5𝑦1
4+
𝑦2
2= 𝐿
Logo, chega-se a:
𝑦1 =2𝐿
3 𝑒 𝑦2 =
𝐿
3
P1 2016 – Questão 1
Para balancear o sistema, é necessário que o centro de massa esteja no
eixo principal (0, 0, z), portanto no eixo z, e que os produtos de inércia sejam
zero. O sistema Axyz é solidário ao corpo, portanto, no eixo y, o centro de
massa está na coordenada zero, deve-se avaliar o eixo x. Assim:

𝑥𝐶𝑀 = 𝑚 ∙ 0 + 𝑚1𝑥1 + 𝑚 ∙ 𝐿 + 𝑚 ∙
𝐿2
+ 𝑚 ∙ 0 + 𝑚2𝑥2
𝑚 + 𝑚 + 𝑚 + 𝑚 + 𝑚1 + 𝑚2= 0
→ 𝑚1𝑥1 + 𝑚2𝑥2 = −3𝑚𝐿
2
Agora, os produtos de inércia devem ser anulados. Como o sistema
inercial está no zero do eixo y, os produtos de inércia do mesmo são zero.
Portanto, deve-se avaliar o produto de inércia em xz.
𝐽𝑥𝑧 = 𝑚 ∙ 0 ∙ 0 + 𝑚𝐿 ∙𝐿
2+ 𝑚
𝐿
2∙ 𝐿 + 𝑚 ∙ 0 ∙ 3𝐿 + 𝑚1𝑥1 ∙ 0 + 𝑚2𝑥23𝐿 = 0
→ 𝑚2𝑥23𝐿 = −𝑚𝐿2 → 𝑚2𝑥2 = −𝑚𝐿
3
Chega-se a um sistema de 4 incógnitas e 2 equações, e agora vale a
indução lógica baseada no problema: o enunciado limitou as posições das
massas nas periferias do disco. Portanto, como o valor da massa 𝑚2 só pode
ser positivo, a única forma de a equação ser satisfeita é se o valor de 𝑥2 for
negativo. Logo, por essas duas condições, infere-se que 𝑥2 = −𝑅.
Assim: 𝑚2(−𝑅) = −𝑚𝐿
3→ 𝑚2 =
𝑚𝐿
3𝑅
Voltando à primeira equação,
𝑚1𝑥1 + 𝑚2𝑥2 = −3𝑚𝐿
2→ 𝑚1𝑥1 −
𝑚𝐿
3= −
3𝑚𝐿
2
𝑚1𝑥1 = −7𝑚𝐿
6
Analogamente ao caso anterior, a condição equacional determina que
𝑥1 é negativo e, pelo enunciado, pertencente à periferia do disco.
Portanto 𝑥1 = −𝑅 e 𝑚1 = 7𝑚𝐿
6𝑅
Conclui-se, assim, que a massa 𝑚1 = 7𝑚𝐿
6𝑅 deve ser posta no ponto
(−𝑅, 0, 0) e a massa 𝑚2 =𝑚𝐿
3𝑅 deve ser posta no ponto (−𝑅, 0, 3𝐿).
• COORDENADAS GENERALIZADAS
Coordenadas generalizadas não é propriamente um assunto, e sim um
objeto de estudo da mecânica analítica. Ela é um instrumento para que se
encontre uma equação diferencial e, dessa forma, encontrar uma solução

matemática que descreva apropriadamente esse movimento, seja através de
aproximações numéricas ou de soluções exatas. Assim, em matérias futuras
da sua graduação, esse recurso será mais aprofundado, enquanto que, nessa
matéria, o encontro da equação diferencial que rege o movimento é suficiente
para o entendimento dos assuntos que seguirão.
Considere os seguintes casos:
Perceba que, no primeiro caso, para descrever completamente o
sistema do disco num apoio simples, é necessário somente uma coordenada
angular 𝜃, de forma que, com os parâmetros generalizados 𝜃, �̇� 𝑒 �̈�, o sistema
é perfeitamente descrito. Sendo assim, a coordenada generalizada 𝜃 é
suficiente para descrever o sistema. Por outro lado, no segundo caso, a
utilização de apenas a coordenada generalizada 𝜃 é insuficiente para
descrever o sistema, pois, além da possibilidade do disco girar, ele também
pode descer ou subir, devido à mola que o prende. Portanto, há uma outra
variável 𝑦, independente de 𝜃, que é necessária para a descrição do sistema.
Portanto, é necessário utilizar os parâmetros 𝑦, �̇� 𝑒 �̈�.
Sendo assim, no segundo caso, com as coordenadas generalizadas 𝜃 e
𝑦, o sistema é perfeitamente descrito.
Claramente se utilizou uma indução física para saber quantas
coordenadas foram necessárias para solucionar o sistema, porém, em
matérias futuras, em que os mecanismos ficam mais complicados, haverá
métodos para que se determine o mínimo de coordenadas generalizadas para
descrever o movimento devidamente.
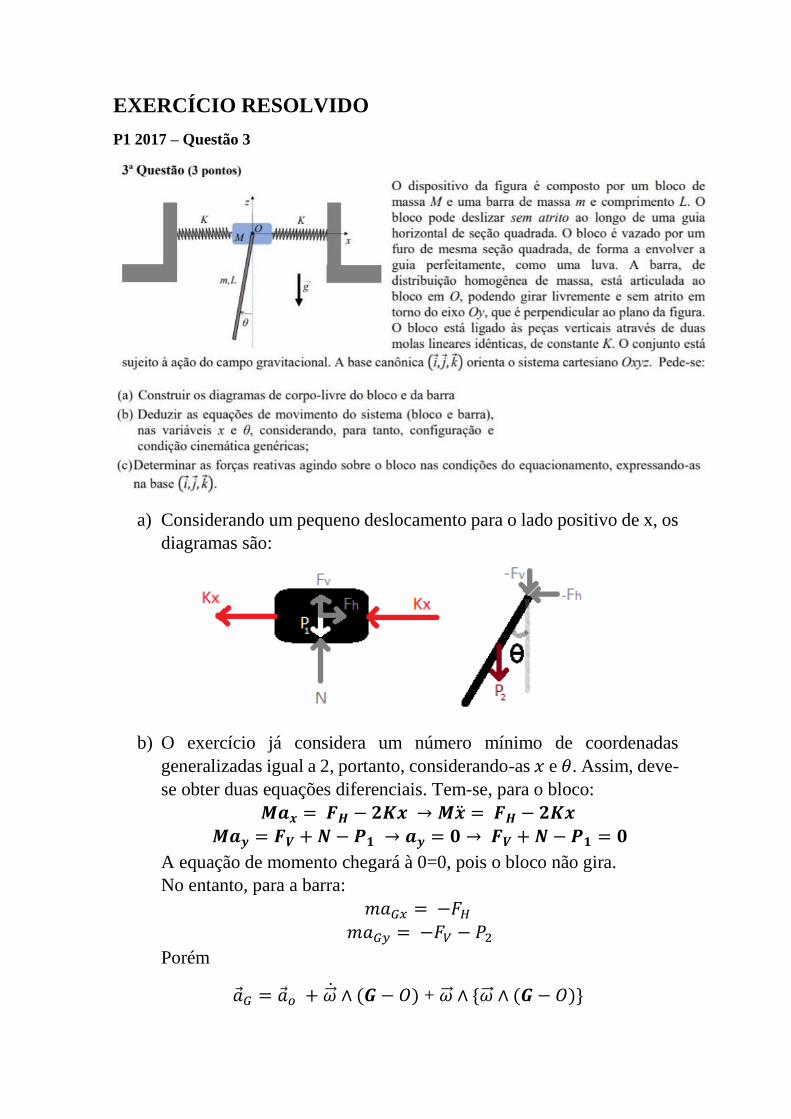
EXERCÍCIO RESOLVIDO
P1 2017 – Questão 3
a) Considerando um pequeno deslocamento para o lado positivo de x, os
diagramas são:
b) O exercício já considera um número mínimo de coordenadas
generalizadas igual a 2, portanto, considerando-as 𝑥 e 𝜃. Assim, deve-
se obter duas equações diferenciais. Tem-se, para o bloco:
𝑴𝒂𝒙 = 𝑭𝑯 − 𝟐𝑲𝒙 → 𝑴�̈� = 𝑭𝑯 − 𝟐𝑲𝒙
𝑴𝒂𝒚 = 𝑭𝑽 + 𝑵 − 𝑷𝟏 → 𝒂𝒚 = 𝟎 → 𝑭𝑽 + 𝑵 − 𝑷𝟏 = 𝟎
A equação de momento chegará à 0=0, pois o bloco não gira.
No entanto, para a barra:
𝑚𝑎𝐺𝑥 = −𝐹𝐻
𝑚𝑎𝐺𝑦 = −𝐹𝑉 − 𝑃2
Porém
𝑎 𝐺 = 𝑎 𝑜 + �⃗⃗� ̇ ∧ (𝑮 − 𝑂) + �⃗⃗� ∧ {�⃗⃗� ∧ (𝑮 − 𝑂)}

Portanto, como 𝑎 𝑜 = �̈�𝒊 , �⃗⃗� ̇ = �̈�𝒋 , �⃗⃗� = �̇�𝒋 e (𝑮 − 𝑂) =
−𝑳
𝟐(𝐬𝐢𝐧𝜽 𝒊 + 𝐜𝐨𝐬𝜽 �⃗⃗� ), tem-se:
𝑎 𝐺 = �̈�𝒊 + �̈�𝒋 ∧ −𝑳
𝟐(𝐬𝐢𝐧𝜽 𝒊 + 𝐜𝐨𝐬𝜽 �⃗⃗� ) + �̇�𝒋 ∧ {�̇�𝒋 ∧ −
𝑳
𝟐(𝐬𝐢𝐧𝜽 𝒊 +
𝐜𝐨𝐬𝜽 �⃗⃗� )}
𝑎 𝐺 = �̈�𝒊 + �̈�𝑳
𝟐𝐬𝐢𝐧𝜽 �⃗⃗� − �̈�
𝑳
𝟐𝐜𝐨𝐬𝜽 𝒊 + �̇�𝟐
𝑳
𝟐𝐬𝐢𝐧𝜽 𝒊 + �̇�𝟐
𝑳
𝟐𝐜𝐨𝐬𝜽 �⃗⃗�
𝑎 𝐺 = (�̈� − �̈�𝑳
𝟐𝐜𝐨𝐬𝜽 + �̇�𝟐
𝑳
𝟐𝐬𝐢𝐧𝜽) 𝒊 + (�̈�
𝑳
𝟐𝐬𝐢𝐧𝜽 + �̇�𝟐
𝑳
𝟐𝐜𝐨𝐬𝜽) �⃗⃗�
Portanto, tem-se:
𝒎(�̈� − �̈�𝑳
𝟐𝐜𝐨𝐬𝜽 + �̇�𝟐
𝑳
𝟐𝐬𝐢𝐧𝜽) = −𝑭𝑯
𝒎(�̈�𝑳
𝟐𝐬𝐢𝐧𝜽 + �̇�𝟐
𝑳
𝟐𝐜𝐨𝐬𝜽) = −𝑭𝑽 − 𝑷𝟐
Agora, pela equação de momento, é conveniente aplicar no pólo O:
�⃗⃗� 𝑜 = 𝑚(𝐺 − 𝑶) ∧ 𝑎 𝑜 +𝑑
𝑑𝑡 {[𝑖 𝑗 �⃗� ] [𝐽]𝑜 [
𝜔𝑥
𝜔𝑦
𝜔𝑧
]}
�⃗⃗� 𝑜 = −𝑚𝑳
𝟐(𝐬𝐢𝐧𝜽 𝒊 + 𝐜𝐨𝐬𝜽 �⃗⃗� ) ∧ �̈�𝑖 +
𝑑
𝑑𝑡 {[𝑖 𝑗 �⃗� ] [𝐽]𝑜 [
𝜔𝑥
𝜔𝑦
𝜔𝑧
]}
�⃗⃗� 𝑜 = −𝑚𝑳
𝟐�̈� 𝐜𝐨𝐬𝜽 𝑗 +
𝑑
𝑑𝑡 {[𝑖 𝑗 �⃗� ] [𝐽]𝑜 [
𝜔𝑥
𝜔𝑦
𝜔𝑧
]}
Tem-se, também:
[𝑖 𝑗 �⃗� ] [𝐽]𝑜 [
𝜔𝑥
𝜔𝑦
𝜔𝑧
] = [𝑖 𝑗 �⃗� ] [
𝑱𝑶𝒙𝒙 𝟎 −𝑱𝑶𝒙𝒛
𝟎 𝑱𝑶𝒚𝒚 𝟎
−𝑱𝑶𝒛𝒙 𝟎 𝑱𝑶𝒛𝒛
] [𝟎�̇�𝟎]
= 𝑱𝑶𝒚𝒚�̇�𝒋
Note que 𝑱𝑶𝒚𝒚 não varia com o tempo, nem 𝒋 .
Logo, 𝑑
𝑑𝑡 {[𝑖 𝑗 �⃗� ] [𝐽]𝑜 [
𝜔𝑥
𝜔𝑦
𝜔𝑧
]} = 𝑑
𝑑𝑡(𝑱𝑶𝒚𝒚�̇�𝒋 ) = 𝑱𝑶𝒚𝒚�̈�𝒋 =
𝒎𝑳𝟐
𝟑�̈�𝒋
Assim, calculando o momento �⃗⃗� 𝑜 no corpo:

�⃗⃗� 𝑜 = �⃗⃗� 𝑒𝑥𝑡 + ∑(𝑃𝑖 − 𝑂) ∧ 𝐹 𝑖 = −𝑳
𝟐(𝐬𝐢𝐧𝜽 𝒊 + 𝐜𝐨𝐬𝜽 �⃗⃗� ) ∧ −𝒎𝒈�⃗⃗�
�⃗⃗� 𝑜 = −𝒎𝒈𝑳
𝟐𝐬𝐢𝐧𝜽 𝒋 = (
𝒎𝑳𝟐
𝟑�̈� −
𝑚𝑳
𝟐𝐜𝐨𝐬𝜽) 𝑗
𝒎𝑳
𝟑�̈� +
𝒎𝒈
𝟐𝐬𝐢𝐧𝜽 −
𝑚
𝟐�̈� 𝐜𝐨𝐬𝜽 = 𝟎
De imediato, já se encontrou uma equação diferencial que rege o
movimento da barra. A outra equação diferencial deve ser encontrada a partir
das equações obtidas anteriormente, para definir o movimento do bloco.
Logo,
𝑭𝑯 = −𝒎(�̈� − �̈�𝑳
𝟐𝐜𝐨𝐬𝜽 + �̇�𝟐
𝑳
𝟐𝐬𝐢𝐧𝜽)
𝑭𝑽 = −𝒎(�̈�𝑳
𝟐𝐬𝐢𝐧𝜽 + �̇�𝟐
𝑳
𝟐𝐜𝐨𝐬𝜽) − 𝒎𝒈
Encontrada as forças reativas, volta-se para a equação do bloco:
𝑴�̈� = 𝑭𝑯 − 𝟐𝑲𝒙
𝑴�̈� = −𝒎(�̈� − �̈�𝑳
𝟐𝐜𝐨𝐬𝜽 + �̇�𝟐
𝑳
𝟐𝐬𝐢𝐧𝜽) − 𝟐𝑲𝒙
𝑴�̈� + 𝒎(�̈� − �̈�𝑳
𝟐𝐜𝐨𝐬𝜽 + �̇�𝟐
𝑳
𝟐𝐬𝐢𝐧𝜽) + 𝟐𝑲𝒙 = 𝟎
(𝑴 + 𝒎)�̈� − 𝒎�̈�𝑳
𝟐𝐜𝐨𝐬𝜽 + 𝒎�̇�𝟐
𝑳
𝟐𝐬𝐢𝐧𝜽 + 𝟐𝑲𝒙 = 𝟎
Portanto, tem-se a outra equação diferencial que rege o movimento.
Assim, o movimento do sistema é descrito completamente pelas duas
equações diferenciais:
{
𝒎𝑳
𝟑�̈� +
𝒎𝒈
𝟐𝐬𝐢𝐧𝜽 −
𝑚
𝟐�̈� 𝐜𝐨𝐬𝜽 = 𝟎
(𝑴 + 𝒎)�̈� − 𝒎�̈�𝑳
𝟐𝐜𝐨𝐬𝜽 + 𝒎�̇�𝟐
𝑳
𝟐𝐬𝐢𝐧𝜽 + 𝟐𝑲𝒙 = 𝟎
c) As forças reativas 𝑭𝑯 e 𝑭𝑽 já foram obtidas anteriormente, faltando
encontrar a força normal.
Assim, tem-se o valor da força normal, tal que:
𝑵 = 𝑷𝟏 − 𝑭𝑽

𝑵 = 𝑴𝒈 + 𝒎(�̈�𝑳
𝟐𝐬𝐢𝐧𝜽 + �̇�𝟐
𝑳
𝟐𝐜𝐨𝐬𝜽) + 𝒎𝒈
𝑵 = (𝑴 + 𝒎)𝒈 + 𝒎(�̈�𝑳
𝟐𝐬𝐢𝐧𝜽 + �̇�𝟐
𝑳
𝟐𝐜𝐨𝐬𝜽)
Obs.: Embora eu tenho escolhido os sentidos contrários das forças
reativas em relação a resolução da prova, as equações diferenciais
obtidas devem ser as mesmas, independente da orientação que se
escolha!
Além dos assuntos estudados nesse material, todas as provas possuem
uma questão extra (às vezes uma questão sem ser extra) baseada em
conteúdos vistos em palestras ou materiais de programação relacionadas
ao que foi comentado em sala pelos professores. Vale a pena prestar
atenção ao que é dito, por exemplo, sobre momento giroscópico, ou a
compreensão de um movimento complexo baseado no programa SciLab.
Colaborem com os amiguinhos compartilhando suas anotações gente,
vamos parar de ser egoístas!
A P1 de MecB é bem escrotinha, não por ser difícil, mas por ser
estupidamente trabalhosa, e dessa forma não dá tempo de terminá-la sem
estar muito treinado para fazê-la (quase uma fuvest, real). Porém, não
desanime, a correção das provas é mais justa do que em MecA, apenas
certifique-se de ir fazendo o passo a passo com clareza, até para você não
se confundir também.
Espero que esse resumo tenha ajudado! :3