Rede DeviceNet
26
Rede DeviceNet DeviceNet é um rede digital, multi-drop para conexão entre sensores, atuadores e sistema de automação industrial em geral. Ela foi desenvolvida para ter máxima flexibilidade entre equipamentos de campo e interoperabilidade entre diferentes vendedores. Apresentado em 1994 originalmente pela Allen-Bradley, o DeviceNet teve sua tecnologia transferida para a ODVA em 1995. A ODVA (Open DeviceNet Vendor Association ) é uma organização sem fins lucrativos composta por centenas de empresas ao redor do mundo que mantém, divulga e promove o DeviceNet e outras redes baseadas no protocolo CIP (Common Industrial Protocol). Atualmente mais de 300 empresas estão registradas como membros, sendo que mais de 800 oferecem produtos DeviceNet no mundo todo. A rede DeviceNet é classificada no nível de rede chamada devicebus, cuja características principais são: alta velocidade, comunicação a nível de byte englobando comunicação com equipamentos discretos e analógicos e alto poder de diagnostico dos devices da rede (como mostrado na figura 1.1).
-
Upload
alex-tolini -
Category
Documents
-
view
185 -
download
3
Transcript of Rede DeviceNet

Rede DeviceNetDeviceNet é um rede digital, multi-drop para conexão entre sensores,
atuadores e sistema de automação industrial em geral. Ela foi desenvolvida
para ter máxima flexibilidade entre equipamentos de campo e
interoperabilidade entre diferentes vendedores.
Apresentado em 1994 originalmente pela Allen-Bradley, o DeviceNet teve sua
tecnologia transferida para a ODVA em 1995. A ODVA (Open DeviceNet
Vendor Association) é uma organização sem fins lucrativos composta por
centenas de empresas ao redor do mundo que mantém, divulga e promove o
DeviceNet e outras redes baseadas no protocolo CIP (Common Industrial
Protocol). Atualmente mais de 300 empresas estão registradas como membros,
sendo que mais de 800 oferecem produtos DeviceNet no mundo todo.
A rede DeviceNet é classificada no nível de rede chamada devicebus, cuja
características principais são: alta velocidade, comunicação a nível de byte
englobando comunicação com equipamentos discretos e analógicos e alto
poder de diagnostico dos devices da rede (como mostrado na figura 1.1).
Cenários Tecnológicos - Fonte: ATAIDE, F.H. (2004)
A tecnologia DeviceNet é um padrão aberto de automação com objetivo de
transportar 2 tipos principais de informação:
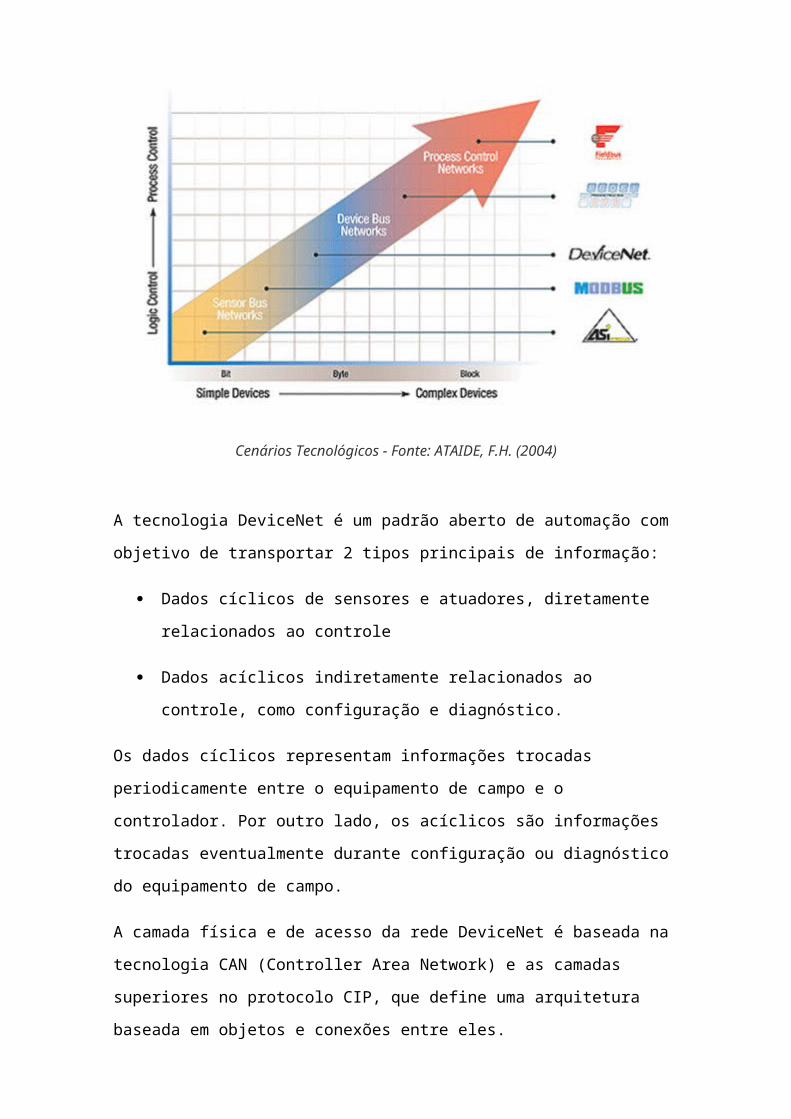
Dados cíclicos de sensores e atuadores, diretamente relacionados ao
controle
Dados acíclicos indiretamente relacionados ao controle, como
configuração e diagnóstico.
Os dados cíclicos representam informações trocadas periodicamente entre o
equipamento de campo e o controlador. Por outro lado, os acíclicos são
informações trocadas eventualmente durante configuração ou diagnóstico do
equipamento de campo.
A camada física e de acesso da rede DeviceNet é baseada na tecnologia CAN
(Controller Area Network) e as camadas superiores no protocolo CIP, que
define uma arquitetura baseada em objetos e conexões entre eles.
O CAN originalmente foi desenvolvido pela BOSCH para o mercado de
automóvel Europeu para substituir os caros chicotes de cabo por um cabo em
rede de baixo custo em automóveis. Como resultado, o CAN tem resposta
rápida e confiabilidade alta para aplicações principalmente nas áreas
automobilística.
Uma rede DeviceNet pode conter até 64 dispositivos onde cada dispositivo
ocupa um nó na rede, endereçados de 0 a 63. Qualquer um destes pode ser
utilizado. Não há qualquer restrição, embora se deva evitar o 63, pois este
costuma ser utilizado para fins de comissionamento.
Um exemplo de rede DeviceNet é mostrada na figura abaixo.
Exemplo de Rede DeviceNet
Características da rede
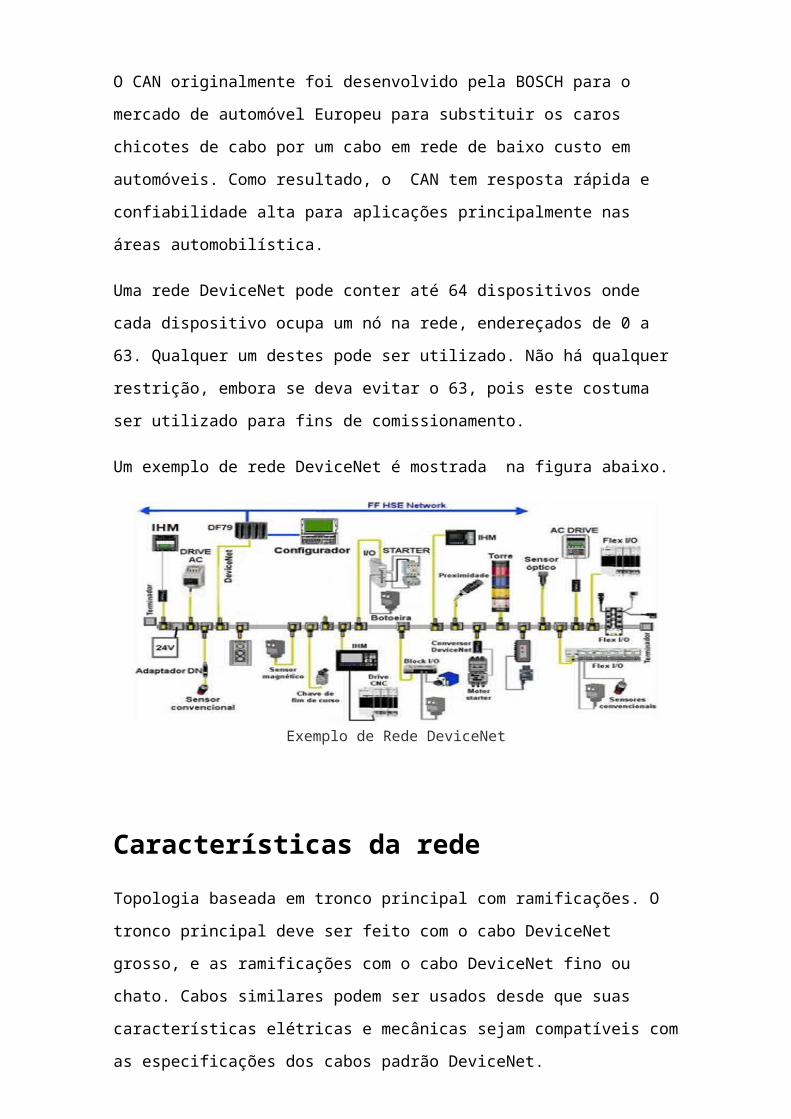
Topologia baseada em tronco principal com ramificações. O tronco principal
deve ser feito com o cabo DeviceNet grosso, e as ramificações com o cabo
DeviceNet fino ou chato. Cabos similares podem ser usados desde que suas
características elétricas e mecânicas sejam compatíveis com as especificações
dos cabos padrão DeviceNet.
Permite o uso de repetidores, bridges, roteadores e gateways.
Suporta até 64 nós, incluindo o mestre, endereçados de 0 a 63 (MAC
ID).
Cabo com 2 pares: um para alimentação de 24V e outro para
comunicação.
Inserção e remoção à quente, sem perturbar a rede.
Suporte para equipamentos alimentados pela rede em 24V ou com fonte
própria.
Uso de conectores abertos ou selados.
Proteção contra inversão de ligações e curto-circuito.
Alta capacidade de corrente na rede (até 16 A).
Uso de fontes de alimentação de prateleira.
Diversas fontes podem ser usadas na mesma rede atendendo às
necessidades da aplicação em termos de carga e comprimento dos
cabos.
Taxa de comunicação selecionável :125,250 e 500 kbps.
Comunicação baseada em conexões de E/S e modelo de pergunta e
resposta.
Diagnóstico de cada equipamento e da rede.
Transporte eficiente de dados de controle discretos e analógicos.
Detecção de endereço duplicado na rede.
Mecanismo de comunicação extremamente robusto a interferências
eletromagnéticas.
Topologias
Topologia é o termo adotado para ilustrar a forma de conexão física entre os
participantes da rede, e exigem vários tipos mas nem todos são aplicáveis
a rede DeviceNet
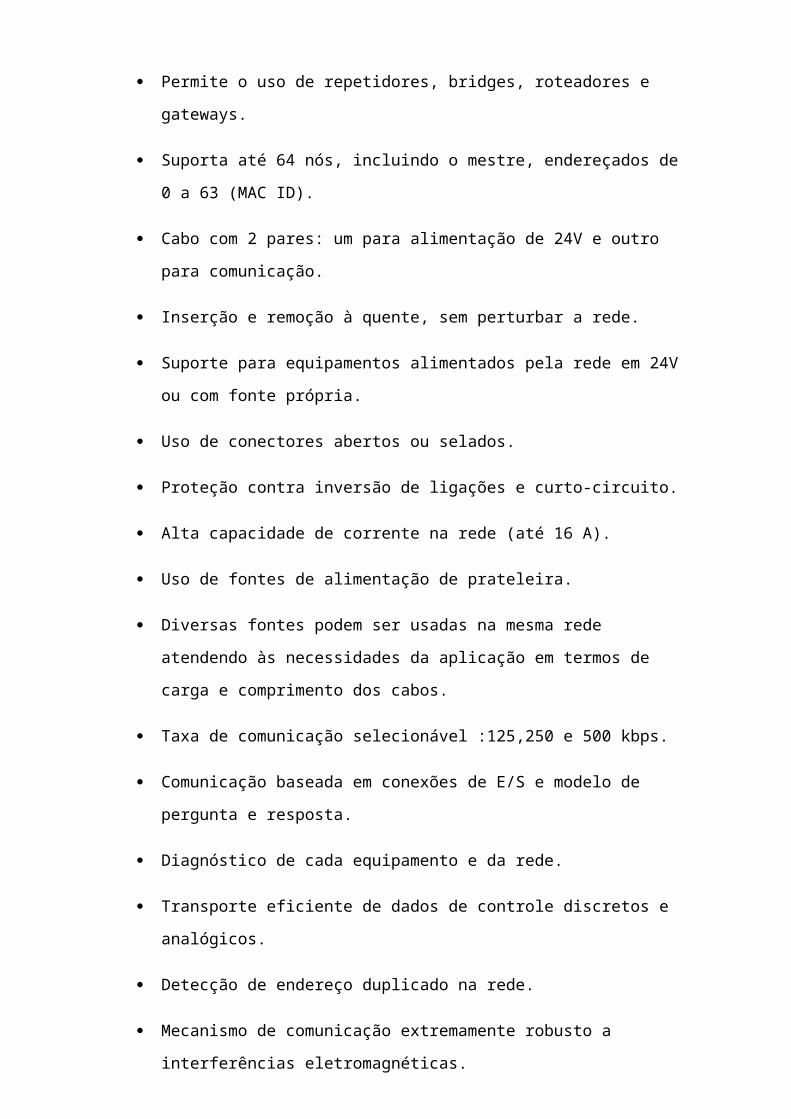
Branch Line
É a configuração básica da rede DeviceNet ,onde existe um cabo
principal,também chamado de linha tronco,e derivações que podem ser
efetuadas por conectores ou caixas de distribuição, utilizando-se cabo de
menor secção para as derivações.
Configuração Branch Line
Tree
A topologia em arvore pode ser executa da utilizando-se caixas de
distribuição onde
o troco principal da rede entra e sai, e as derivações são interligadas aos
equipamentos.
Configuração Tree
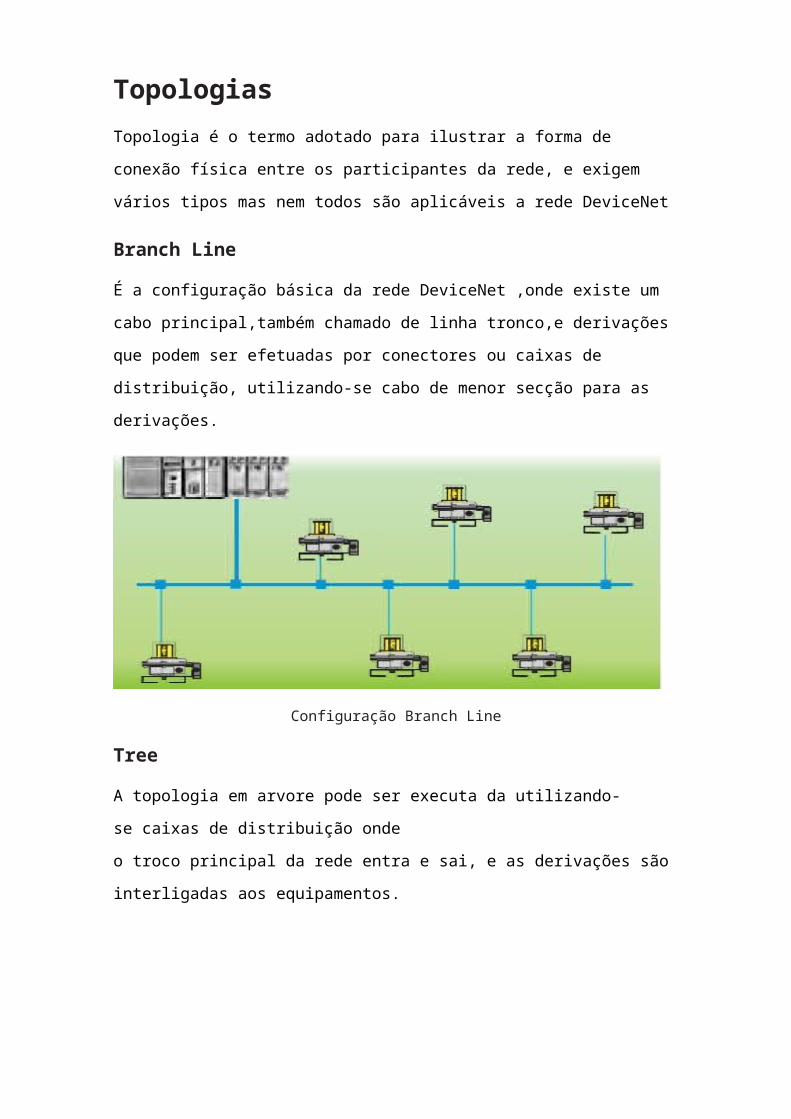
Não existe um limite para o número de derivações, mas somente um
máximo de estações ativas que se comunicam na rede
Line
Nada impede que o cabo principal da rede entre e saia dos equipamentos
formando uma rede em linha, mas deve-se atentar para o detalhe que na
necessidade de substituição de um equipamento causará a interrupção dos
outros equipamentos subseqüentes.
Configuração Line
Star
Esta aplicação não é permitida, além do que não tem muita aplicação prática,
pois não elimina a conexão de cada equipamento ao PLC
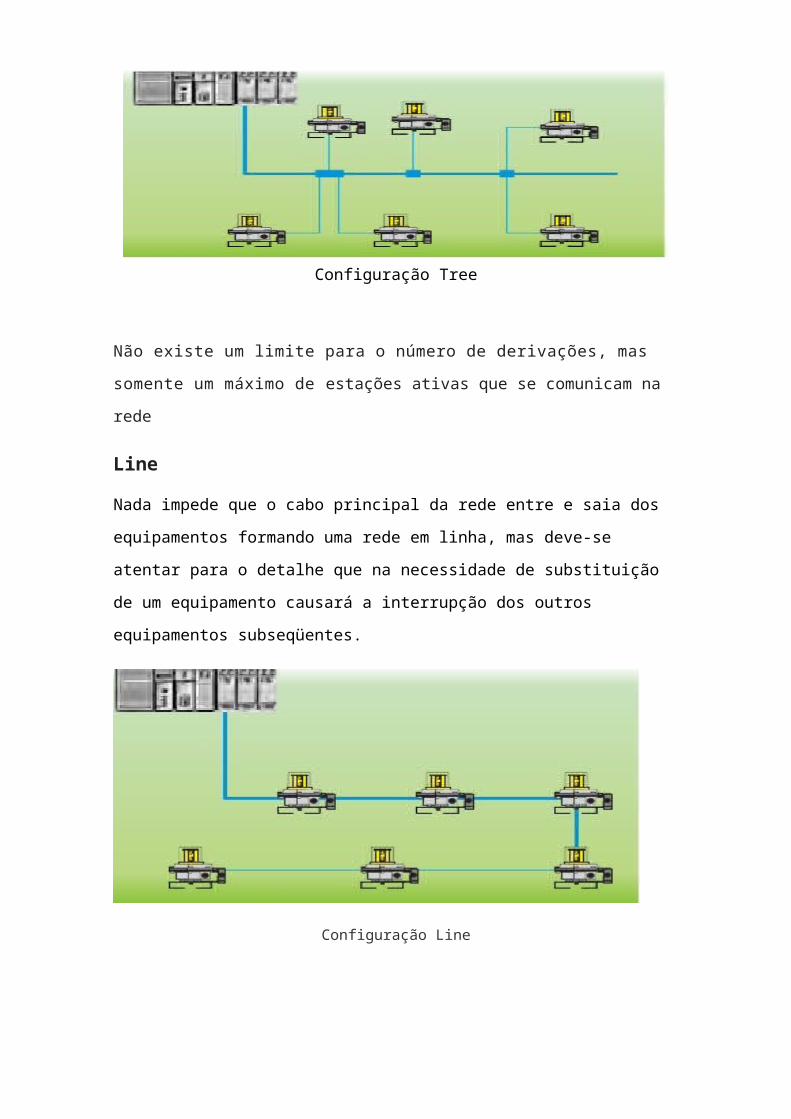
Configuração Star
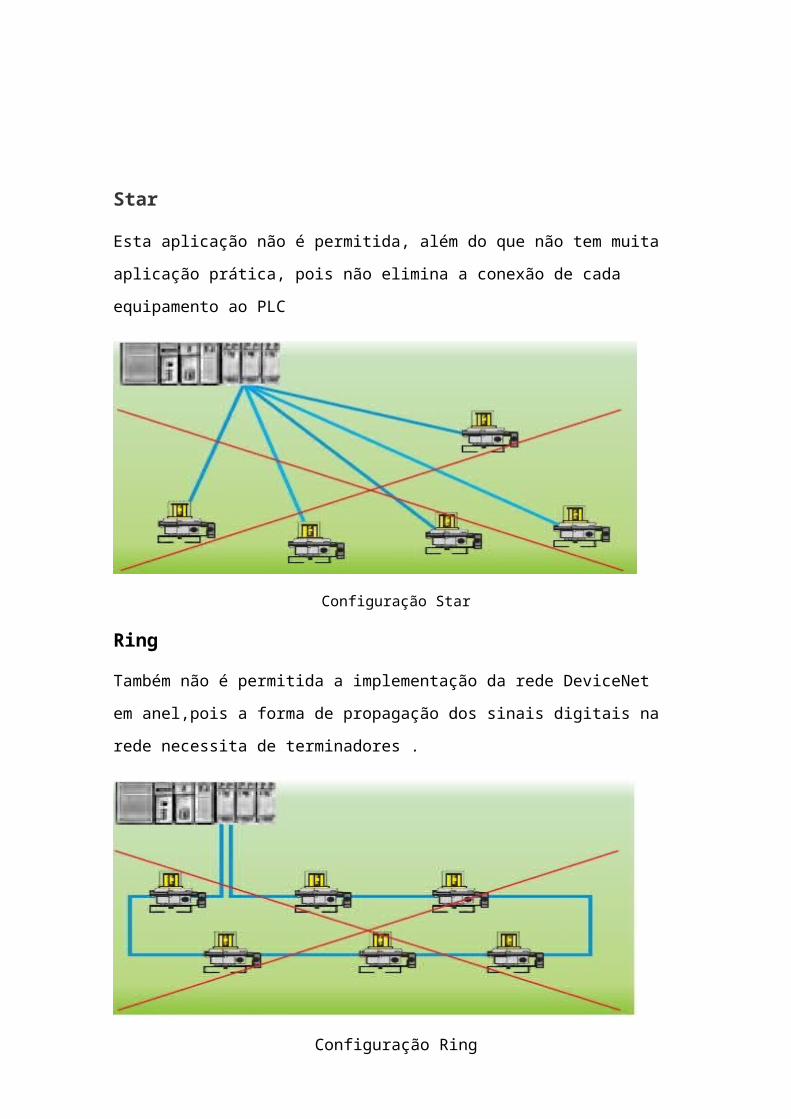
Ring
Também não é permitida a implementação da rede DeviceNet em anel,pois a
forma de propagação dos sinais digitais na rede necessita de terminadores .
Configuração Ring
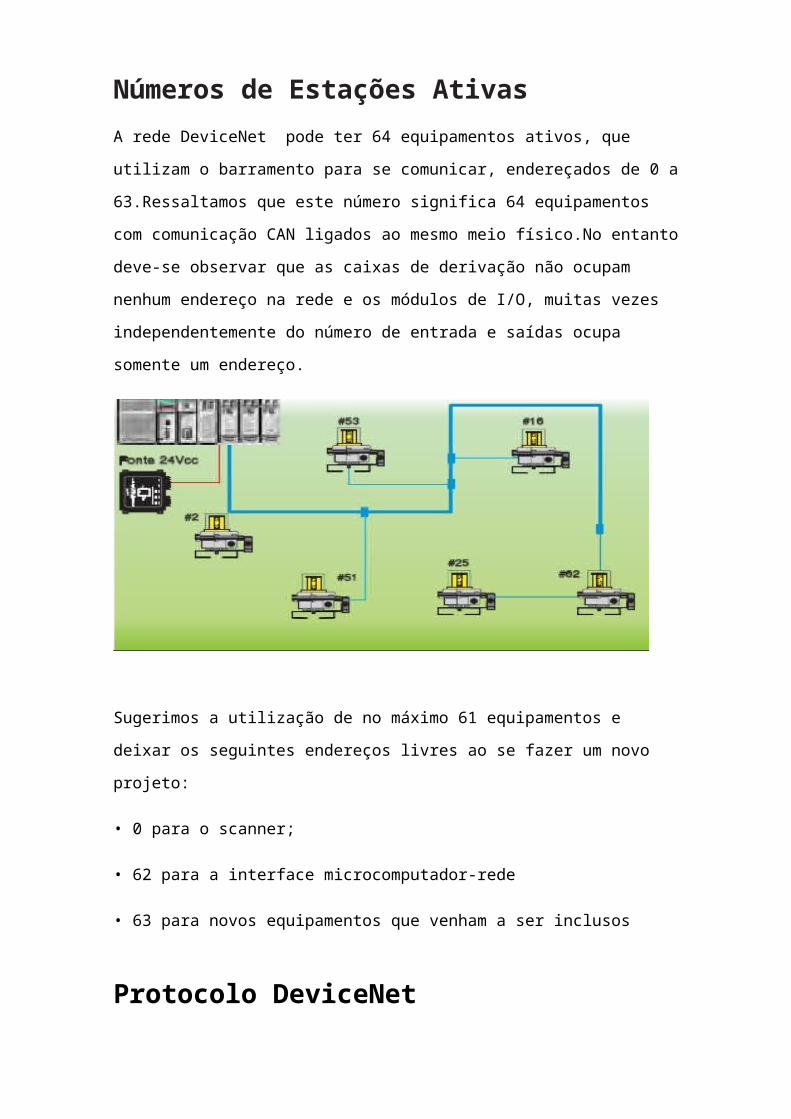
Números de Estações Ativas
A rede DeviceNet pode ter 64 equipamentos ativos, que utilizam o barramento
para se comunicar, endereçados de 0 a 63.Ressaltamos que este número
significa 64 equipamentos com comunicação CAN ligados ao mesmo meio
físico.No entanto deve-se observar que as caixas de derivação não ocupam
nenhum endereço na rede e os módulos de I/O, muitas vezes
independentemente do número de entrada e saídas ocupa somente um
endereço.
Sugerimos a utilização de no máximo 61 equipamentos e deixar os seguintes
endereços livres ao se fazer um novo projeto:
• 0 para o scanner;
• 62 para a interface microcomputador-rede
• 63 para novos equipamentos que venham a ser inclusos
Protocolo DeviceNet
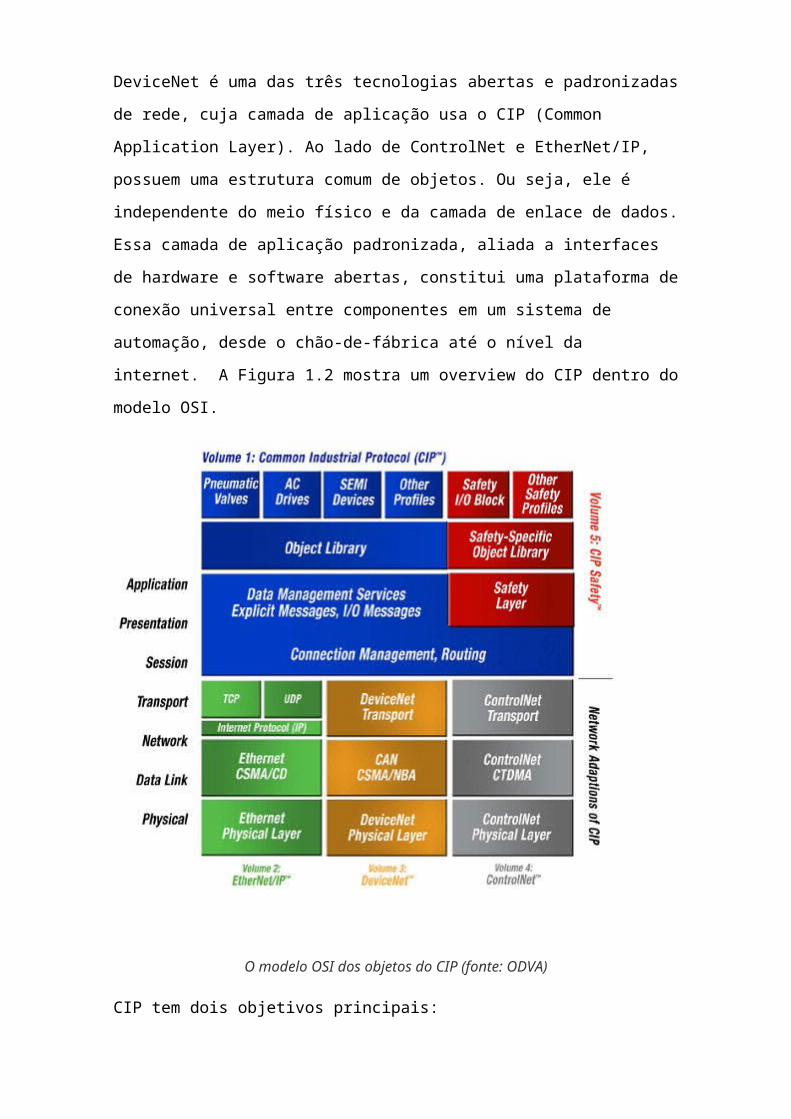
DeviceNet é uma das três tecnologias abertas e padronizadas de rede, cuja
camada de aplicação usa o CIP (Common Application Layer). Ao lado de
ControlNet e EtherNet/IP, possuem uma estrutura comum de objetos. Ou seja,
ele é independente do meio físico e da camada de enlace de dados. Essa
camada de aplicação padronizada, aliada a interfaces de hardware e software
abertas, constitui uma plataforma de conexão universal entre componentes em
um sistema de automação, desde o chão-de-fábrica até o nível da internet. A
Figura 1.2 mostra um overview do CIP dentro do modelo OSI.
O modelo OSI dos objetos do CIP (fonte: ODVA)
CIP tem dois objetivos principais:
Transporte de dados de controle dos dispositivos de I/O.
Transporte de informações de configuração e diagnóstico do sistema
sendo controlado. Um nó DeviceNet é então modelado por um conjunto
de objetos CIP, os quais encapsulam dados e serviços e determinam
assim seu comportamento.
O Modelo de Objeto
Um nó DeviceNet é modelado como uma coleção de objetos. Um objeto
proporciona uma representação abstrata de um componente particular dentro
de um produto. Um exemplo de objeto e uma classe de objeto têm atributos
(dados), fornecem serviços (métodos ou procedimentos), e implementa
comportamentos. Atributos, exemplos, classe e endereço de nó (0-63) são
endereçados por número.
Existem objetos obrigatórios (todo dispositivo deve conter) e objetos opcionais.
Objetos opcionais são aqueles que moldam o dispositivo conforme a categoria
(chamado de perfil) a que pertencem, tais como: AC/DC Drive, leitor de código
de barras ou válvula pneumática. Por serem diferentes, cada um destes
conterá um conjunto também diferente de objetos.
A camada de link de dados (Data link layer)
Devicenet utiliza o padrão CAN na camada de link de dados.O mínimo
overhead requerido pelo protocolo CAN no data link layer faz o DeviceNet
eficiente no tratamento de mensagens. Frame de dados DeviceNet utiliza
somente o tipo de frame de dados do protocolo CAN (dentre outros existentes
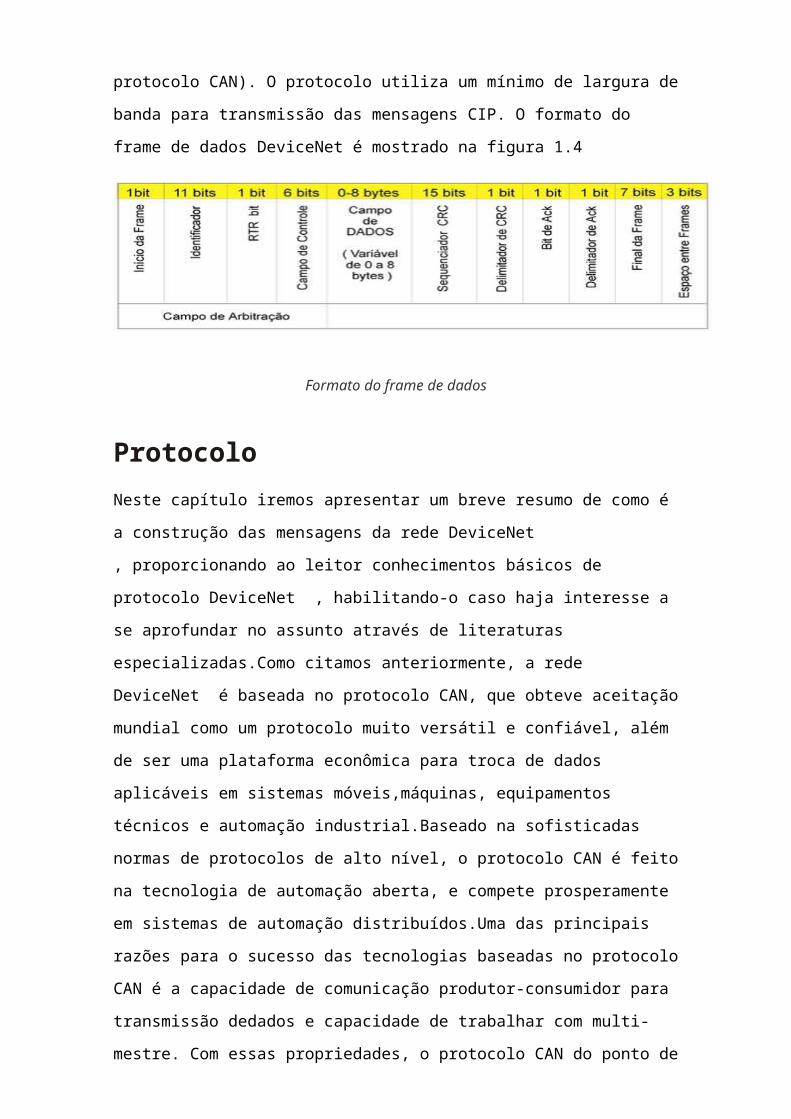
no protocolo CAN). O protocolo utiliza um mínimo de largura de banda para
transmissão das mensagens CIP. O formato do frame de dados DeviceNet é
mostrado na figura 1.4
Formato do frame de dados
Protocolo
Neste capítulo iremos apresentar um breve resumo de como é a construção
das mensagens da rede DeviceNet , proporcionando ao leitor
conhecimentos básicos de protocolo DeviceNet , habilitando-o caso haja
interesse a se aprofundar no assunto através de literaturas
especializadas.Como citamos anteriormente, a rede DeviceNet é baseada no
protocolo CAN, que obteve aceitação mundial como um protocolo muito versátil
e confiável, além de ser uma plataforma econômica para troca de dados
aplicáveis em sistemas móveis,máquinas, equipamentos técnicos e
automação industrial.Baseado na sofisticadas normas de protocolos de
alto nível, o protocolo CAN é feito na tecnologia de automação aberta, e
compete prosperamente em sistemas de automação distribuídos.Uma das
principais razões para o sucesso das tecnologias baseadas no protocolo CAN é
a capacidade de comunicação produtor-consumidor para transmissão dedados
e capacidade de trabalhar com multi-mestre. Com essas propriedades, o
protocolo CAN do ponto de vista técnico é muito atrativo para ser usado em
sistemas distribuídos
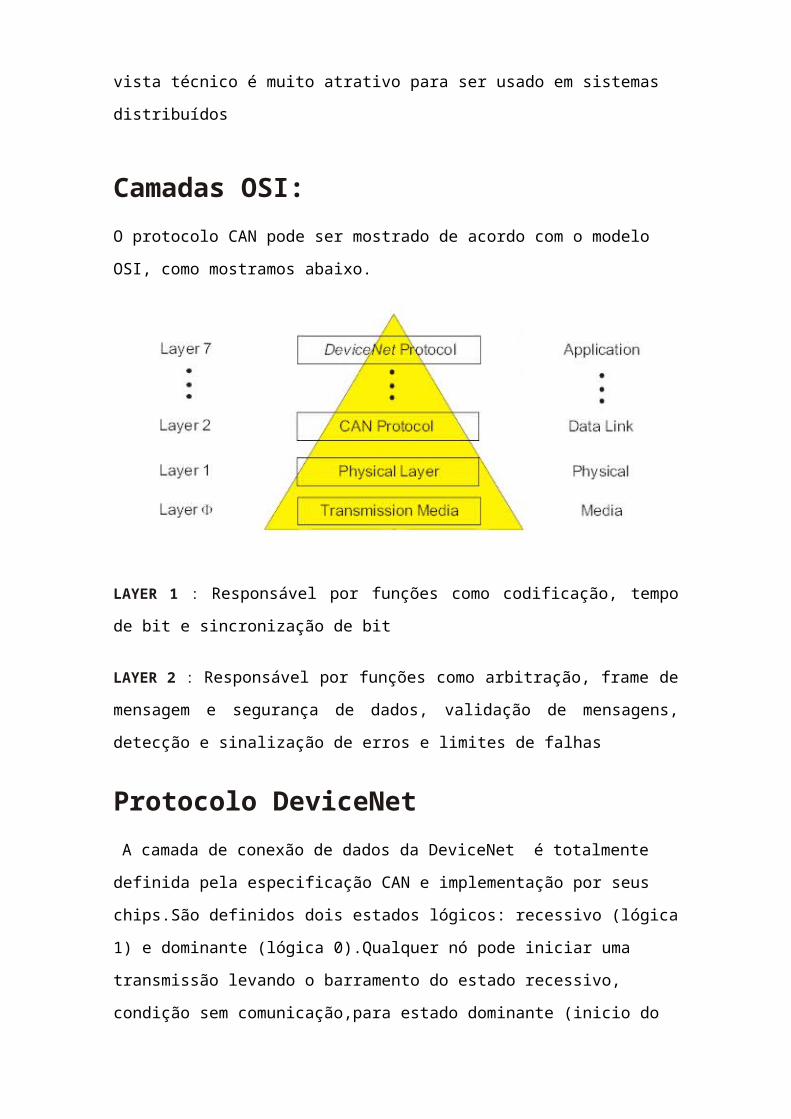
Camadas OSI:
O protocolo CAN pode ser mostrado de acordo com o modelo OSI, como
mostramos abaixo.
LAYER 1 : Responsável por funções como codificação, tempo de bit e
sincronização de bit
LAYER 2 : Responsável por funções como arbitração, frame de mensagem e
segurança de dados, validação de mensagens, detecção e sinalização de erros
e limites de falhas
Protocolo DeviceNet
A camada de conexão de dados da DeviceNet é totalmente definida pela
especificação CAN e implementação por seus chips.São definidos dois estados
lógicos: recessivo (lógica 1) e dominante (lógica 0).Qualquer nó pode iniciar
uma transmissão levando o barramento do estado recessivo, condição sem
comunicação,para estado dominante (inicio do frame). Alguns tipos de frames
(mensagens) são definidos pelo protocolo CAN:
• Data Frame
• Overload Frame
• Remote Frame
• Error Frame
A protocolo DeviceNet utiliza somente o “ data frame ”, e os demais frames
não foram implementados.
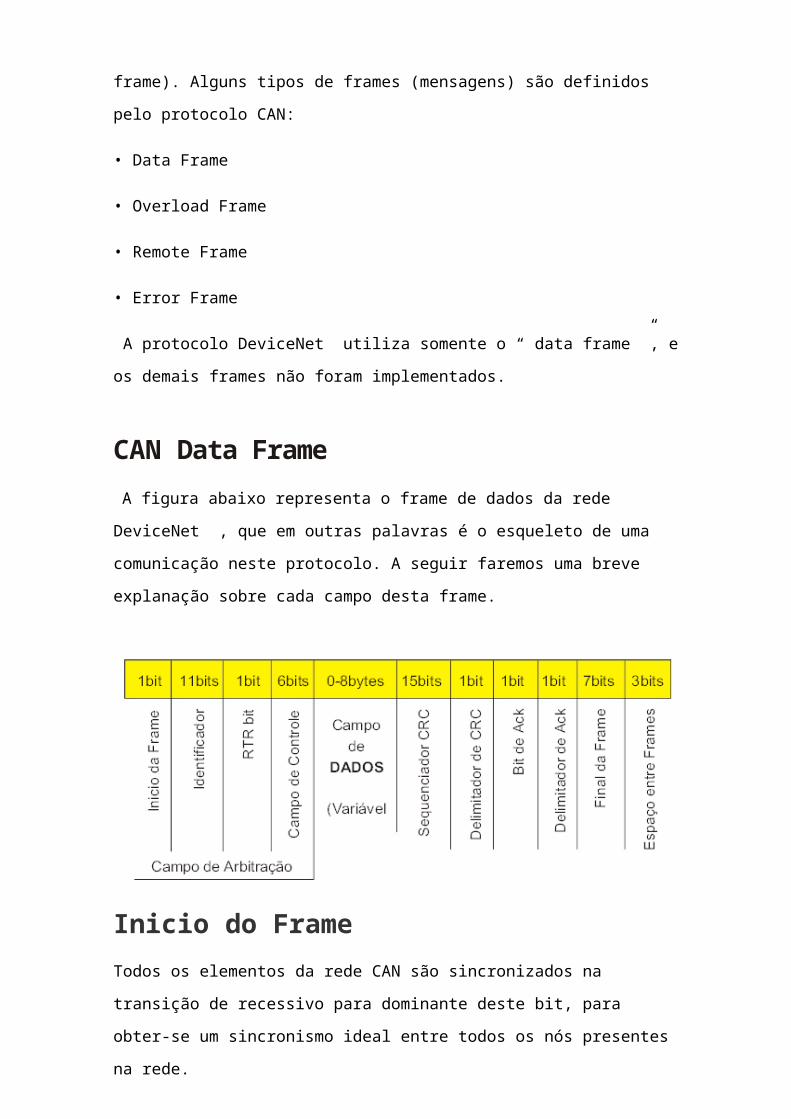
CAN Data Frame
A figura abaixo representa o frame de dados da rede DeviceNet , que em
outras palavras é o esqueleto de uma comunicação neste protocolo. A seguir
faremos uma breve explanação sobre cada campo desta frame.
Inicio do Frame
Todos os elementos da rede CAN são sincronizados na transição de recessivo
para dominante deste bit, para obter-se um sincronismo ideal entre todos os
nós presentes na rede.
Campo de Arbitração
O identificador e o bit RTR (Requisição de Transmissão Remota) formam o
campo de arbitração. O campo de arbitração é utilizado para facilitar o acesso
ao meio de transmissão. Como a rede DeviceNet não utiliza o bit RTR ele não
é considerado para determinar a prioridade de acesso. Quando um
equipamento transmite, ele também monitora (o outro equipamento envolvido
na comunicação retorna o bit que recebeu) o que foi enviado para confirmar
que é o mesmo bit, isto leva a detecção de transmissões simultâneas.
Se um determinado nó transmite um bit recessivo e recebe um bit dominante
enquanto estiver enviando o campo de arbitração, ele encerra a transmissão. O
vencedor com relação a arbitração entre dois nós transmitindo
simultaneamente é o com menor numero nos 11 bits do identificador. O
protocolo CAN também define no campo de dados um identificador com 29
bits, porém este tipo não é utilizado na rede DeviceNet.
Campo de Controle
Contém dois bits fixos e um campo com comprimento de 4 bits. O comprimento
deve ser algum numero entre 0 a 8 representando o numero de bytes no
campo dedados. O numero de bytes 0-8 é ideal para equipamentos com
pequeno numero de I/O que precisam ser enviados freqüentemente.
Seqüência de CRC
O campo de CRC é uma palavra de check-up com redundância cíclica usado
pelo controlador CAN para detectar erros de frame. Ele é computado pelos bits
anteriormente enviados.
Bit de Ack
Um bit dominante neste campo significa que pelo menos um receptor recebeu
a transmissão.
Final da Frame
Os bits recessivos do final da mensagem encerram o data frame.
Espaço entre Frames
O espaçamento entre frames é gerado por três bits recessivos (nível lógico1),
condição que é mantida sempre que não houver mensagens sendo
transmitidas.
Arbitração e Controle
Se dois ou mais nós tentam acessar a rede simultaneamente, o mecanismo de
arbitração resolve o conflito causado pela colisão dos dados (determinando um
vencedor) sem perda dos bits já transmitidos pelo nó de maior prioridade, pois
este possui os bits mais significativos do campo de arbitração em nível lógico
dominante. A rede Ethernet perde em eficiência, se comparada com a rede
CAN, pois no caso de colisão de dados determina-se a retransmissão total do
frame, perdendo-se os bits já transmitidos.
Erros de Comunicação
O protocolo CAN utiliza vários tipos de detecção de erros e falhas incluindo
CRC e retransmissões automáticas. Estes métodos, que são transparentes
para a aplicação, previnem contra erros de comunicação causados
principalmente por perturbações eletromagnéticas. Abaixo exemplificamos os
principais erros detectados pela rede DeviceNet
CRC Error
O nó transmissor sempre executa uma rotina de cálculos para cada mensagem
englobando todos os bits anteriores ao CRC, obtendo um resultado em 15 bits
representativo e diferente para cada mensagem, então este valor é enviado no
campo CRC do frame transmitido. Equipamento que recebe o frame de dados
executa inversamente a mesma seqüência de cálculos, e compara o valor
obtido com o valor lido no frame recebido, se os valores forem os mesmos
indica que a transmissão foi corretamente recebida, caso contrário ocorre o
erro de CRC e então a retransmissão da mensagem é solicitada.
Ack Error
Quando o nó transmissor chega ao bit de Ack, mantém no estado recessivo
(nível lógico 1) e se pelo menos um nós da rede receber a mensagem, força o
bit de Ack para o nível dominante (nível lógico 0).Como o transmissor não
forçou o bit para 0, como ele mesmo monitora também o barramento e
descobre que o bit está em 0 indicando que pelos menos um dos nós da rede
leu sua mensagem.Caso o transmissor encontre o bit de Ack em nível 1
(recessivo) indica que ninguém leu sua mensagem então providencia
imediatamente sua retransmissão.
Form Error
Ocorre quando qualquer bit do “cabeçalho” ou “rodapé”, bits antes e depois dos
dados da mensagem, que contenham um formato não esperado pelo receptor
da mensagem.
Bit 1 Error
Detectado pelo próprio transmissor da mensagem, quando ele envia um bit
recessivo e encontra um bit dominante via sua monitoração do barramento, a
mensagem então é retransmitida.
Bit 0 Error
Analogamente ao anterior, mas com o transmissor enviando um bit dominante
e encontra no barramento um bit recessivo.
Stuff Error
Ocorre sempre que são detectados 6 bits consecutivos com a mesma
“polaridade”até o CRC da mensagem, então ela é retransmitida.
Modos de Comunicação
O protocolo DeviceNet possui dois tipos básicos de mensagens, cyclic I/O e
explicit message. Cada um deles é adequado a um determinado tipo de dado,
conforme descrito abaixo:
Cyclic I/O: tipo de telegrama síncrono dedicado à movimentação de
dados prioritários entre um produtor e um ou mais consumidores.
Dividem-se de acordo com o método de troca de dados. Os principais
são:
Polled: método de comunicação em que o mestre envia um telegrama a
cada um dos escravos da sua lista (scan list). Assim que recebe a
solicitação, o escravo responde prontamente a solicitação do mestre.
Este processo é repetido até que todos sejam consultados, reiniciando o
ciclo.
Bit-strobe: método de comunicação onde o mestre envia para a rede um
telegrama contendo 8 bytes de dados. Cada bit destes 8 bytes
representa um escravo que, se endereçado, responde de acordo com o
programado.
Change of State: método de comunicação onde a troca de dados entre
mestre e escravo ocorre apenas quando houver mudanças nos valores
monitorados/controlados, até um certo limite de tempo. Quando este
limite é atingido, a transmissão e recepção ocorrerão mesmo que não
tenha havido alterações. A configuração desta variável de tempo é feita
no programa de configuração da rede.
Cyclic: outro método de comunicação muito semelhante ao anterior. A
única diferença fica por conta da produção e consumo de mensagens.
Neste tipo, toda troca de dados ocorre em intervalos regulares de tempo,
independente de terem sido alterados ou não. Este período também é
ajustado no software de configuração de rede.
Explicit Message: tipo de telegrama de uso geral e não prioritário.
Utilizado principalmente em tarefas assíncronas tais como
parametrização e configuração do equipamento.
Arquivo de Configuração
Todo nodo DeviceNet possui um arquivo de configuração associado, chamado
EDS (Electronic Data Sheet). Este arquivo contém informações importantes
sobre o funcionamento do dispositivo e deve ser registrado no software de
configuração de rede.
Camada Física e Meio de Transmissão
DeviceNet usa uma topologia de rede do tipo tronco/derivação que permite que
tanto a fiação de sinal quanto de alimentação estejam presentes no mesmo
cabo. Esta alimentação, fornecida por uma fonte conectada diretamente na
rede, e possui as seguintes características:
24Vdc;
Saída DC isolada da entrada AC;
Capacidade de corrente compatível com os equipamentos instalados.
O tamanho total da rede varia de acordo com a taxa de transmissão
(125,250, 500Kbps)
Topologia da rede
As especificações do DeviceNet definem a topologia e os componentes
admissíveis. A variedade de topologia possíveis é mostrada na figura à seguir.
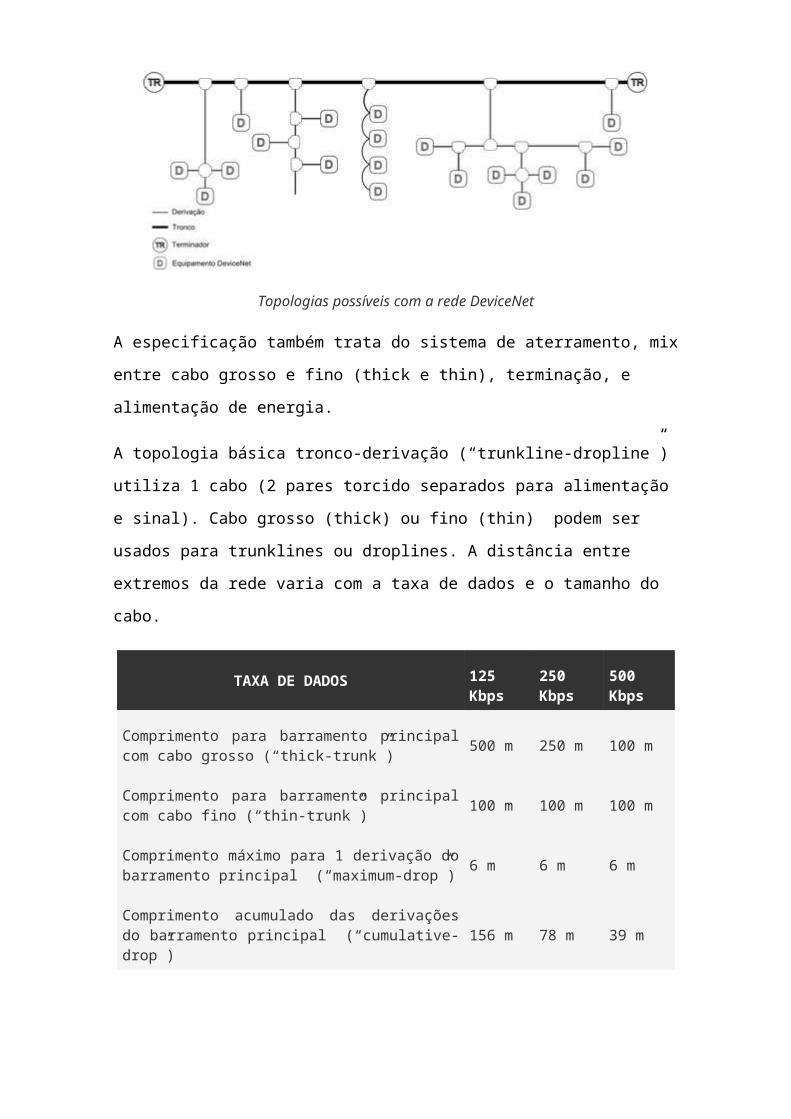
Topologias possíveis com a rede DeviceNet
A especificação também trata do sistema de aterramento, mix entre cabo
grosso e fino (thick e thin), terminação, e alimentação de energia.
A topologia básica tronco-derivação (“trunkline-dropline”) utiliza 1 cabo (2 pares
torcido separados para alimentação e sinal). Cabo grosso (thick) ou fino (thin)
podem ser usados para trunklines ou droplines. A distância entre extremos da
rede varia com a taxa de dados e o tamanho do cabo.
TAXA DE DADOS 125 Kbps
250 Kbps
500 Kbps
Comprimento para barramento principal com cabo grosso (“thick-trunk”)
500 m 250 m 100 m
Comprimento para barramento principal com cabo fino (“thin-trunk”)
100 m 100 m 100 m
Comprimento máximo para 1 derivação do barramento principal (“maximum-drop”)
6 m 6 m 6 m
Comprimento acumulado das derivações do barramento principal (“cumulative-drop”)
156 m 78 m 39 m
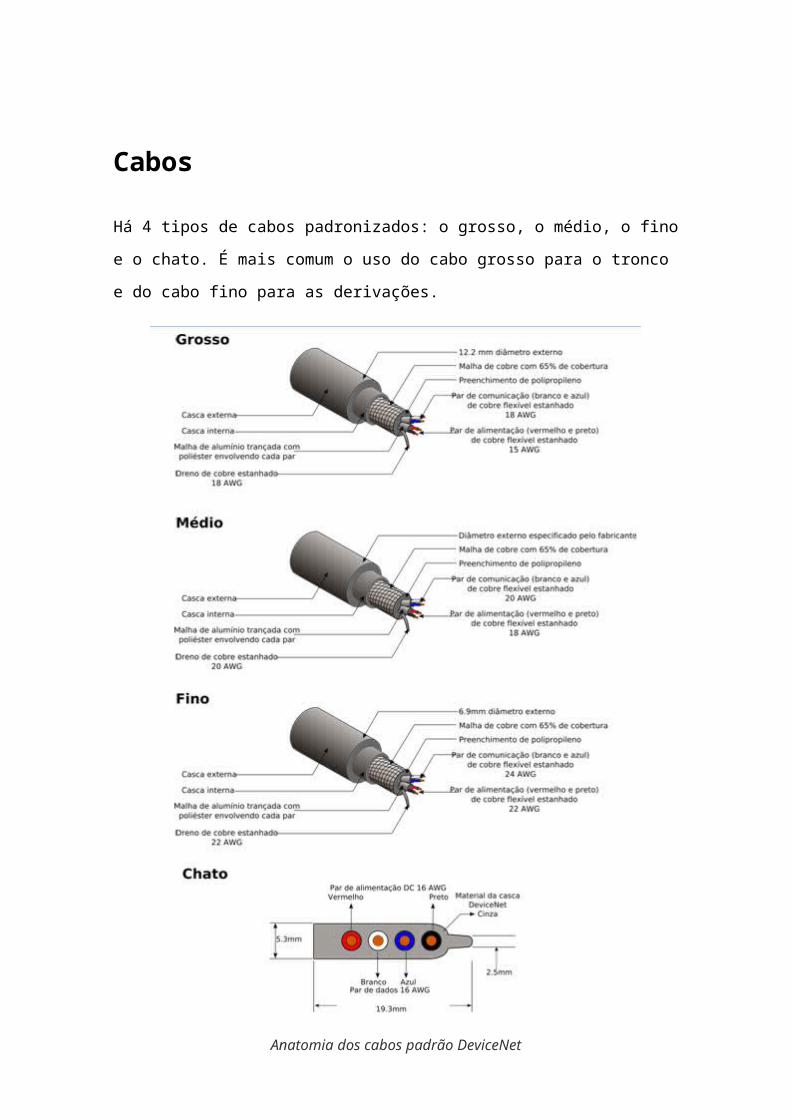
Cabos
Há 4 tipos de cabos padronizados: o grosso, o médio, o fino e o chato. É mais
comum o uso do cabo grosso para o tronco e do cabo fino para as derivações.
Anatomia dos cabos padrão DeviceNet
Os cabos DeviceNet mais usados (fino e grosso) possuem 5 condutores
identificados e utilizados de acordo com a tabela seguinte:
Cor do fio SinalCabo
redondoCabo chato
Branco CAN_H Sinal DN Sinal DN
Azul CAN_L Sinal DN Sinal DN
Fio nu Dreno Blindagem Não usado
Preto V- Alimentação Alimentação
Vermelho V+ Alimentação Alimentação
Esquema de cores dos cabos DeviceNet
Vista dos componentes do cabo padrão DeviceNet
Pontos de alimentação (“Power Taps”) podem ser acrescentados em qualquer
ponto da rede tornando possível a redundância da alimentação na rede. A
corrente no “Trunkline” é 8 amps (com cabo grosso “thick”). No cabo tipo “thin”
a corrente máxima é de 3 amps. Uma opção opto-isolado de projeto permite
dispositivos energizados externamente (por ex.: partidas de drivers AC e
válvulas solenóides) compartilhar o mesmo cabo do bus. Outras redes
baseadas em CAN permitem somente uma única fonte de alimentação para a
rede inteira.
Os dispositivos podem ser alimentados diretamente da rede e comunicam-se
com o mesmo cabo. Nós podem ser removido ou inseridos da rede sem
desligar a rede.
ConectoresHá três tipos básicos de conectores: o aberto, o selado mini e o selado micro.
O uso de um ou de outro depende da conveniência e das características do
equipamento ou da conexão que deve ser feita. Veja nas figuras seguintes a
codificação dos fios em cada tipo.
Conector aberto (open style)
Conector selado mini Conector selado micro
Terminadores da rede
As terminações na rede DeviceNet ajudam a minimizar as reflexões na
comunicação e são essenciais para o funcionamento da rede. Os resistores de
terminação (121W, 1%, ¼ W) devem ser colocados nas extremidades do
tronco, entre os fios CAN_H e CAN_L (branco e azul).
Não coloque o terminador dentro de um equipamento ou em conector que ao
ser removido também remova o terminador causando uma falha geral na rede.
Deixe os terminadores sempre independentes e isolados nas extremidades do
tronco, de preferência dentro de caixas protetoras ou caixas de passagem.
Para verificar se as terminações estão presentes na rede, meça a resistência
entre os fios CAN_H e CAN_L (branco e azul) com a rede desenergizada: a
resistência medida deve estar entre 50 e 60 Ohms.
- Ligação dos resistores de terminação
Derivadores “TAPS”
Existem vários tipos de derivadores “TAPS” para serem conectados em uma
rede do tipo DeviceNet. Estes derivadores permitem ligar os vários elementos
da rede. Classificam-se como:
Derivação T “T-Port TAP “
O derivador “T-Port” conecta um dispositivo simples ou uma linha de derivação “drop line” através de um conector estilo plug-rápido.
Derivação de dispositivo “Device-Port”
“DevicePort” são componentes selados que conectam ao “trunk line” via “drop line” através de conectores de desconexão rápida somente dispositivos compatíveis a rede DeviceNet. Existem DevicePort para conectar 4 ou 8 dispositivos.
Derivação tipo box “DeviceBox”
“DeviceBox” são elementos passivos que conectam diretamente os dispositivos DeviceNet no “Trunk Line” através de conexões de terminais para até 8 nós. Eles possuem tampa removível selada que permite montagem em máquina ou no chão de fábrica.
Derivação de Alimentação “PowerTap”
O “PowerTap” possue proteção de sobre corrente para o cabo tipo “thick” (grosso). Com proteção a diodo é possível utilizar vários “PowerTaps” permitindo assim o uso de várias fontes de alimentação.